2021年 第47卷 第9期
2021, 47(9): 2061-2077.
doi: 10.16383/j.aas.c200128
摘要:
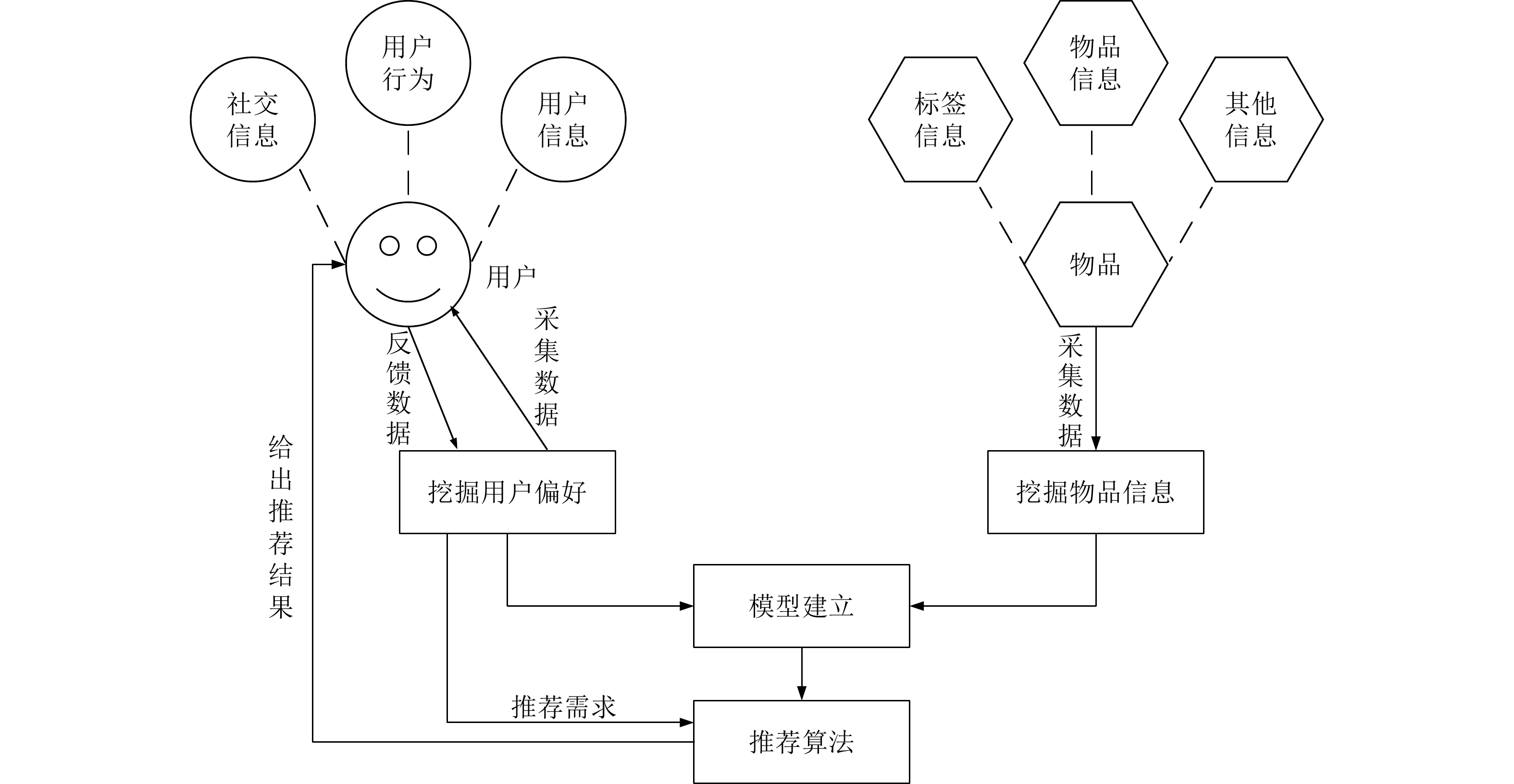
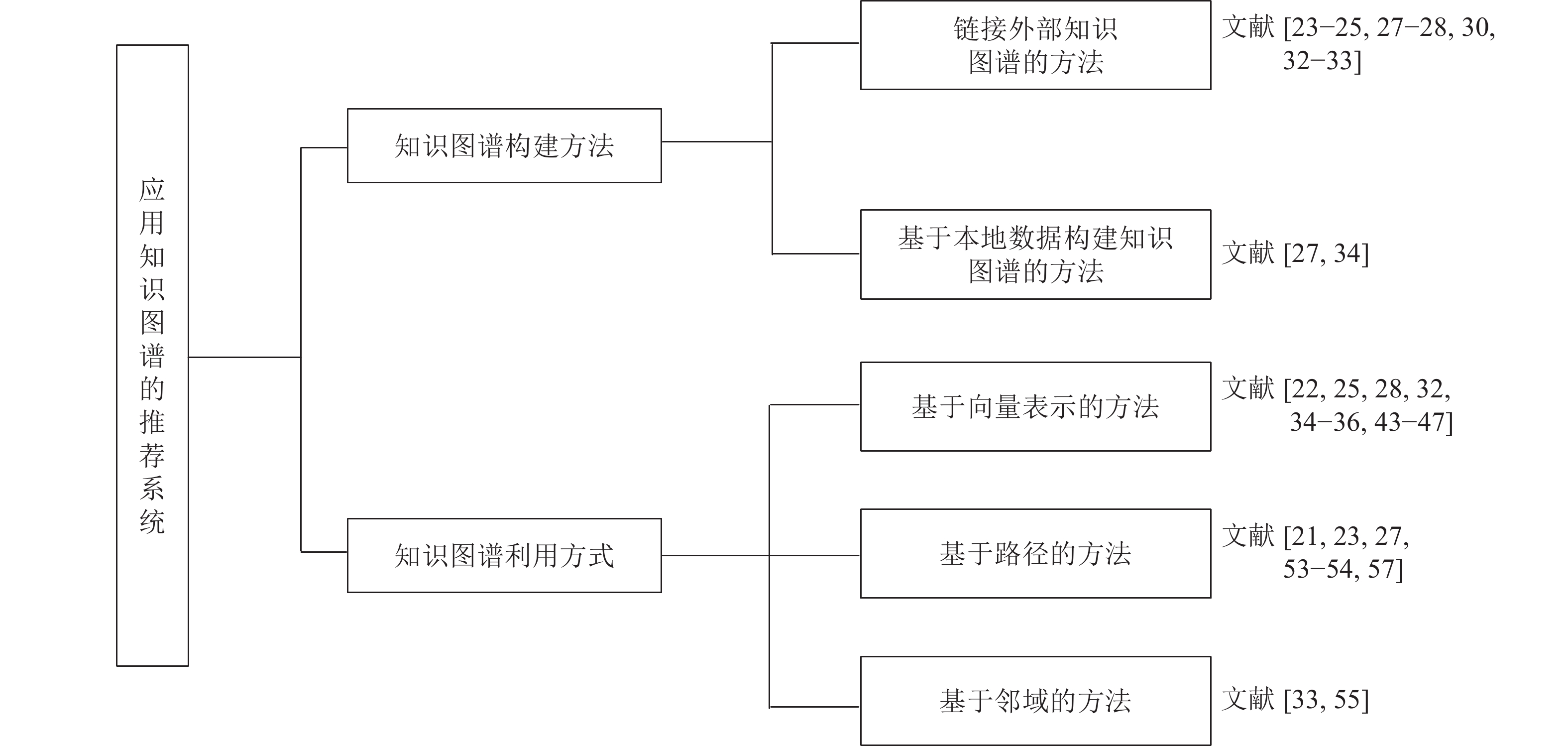
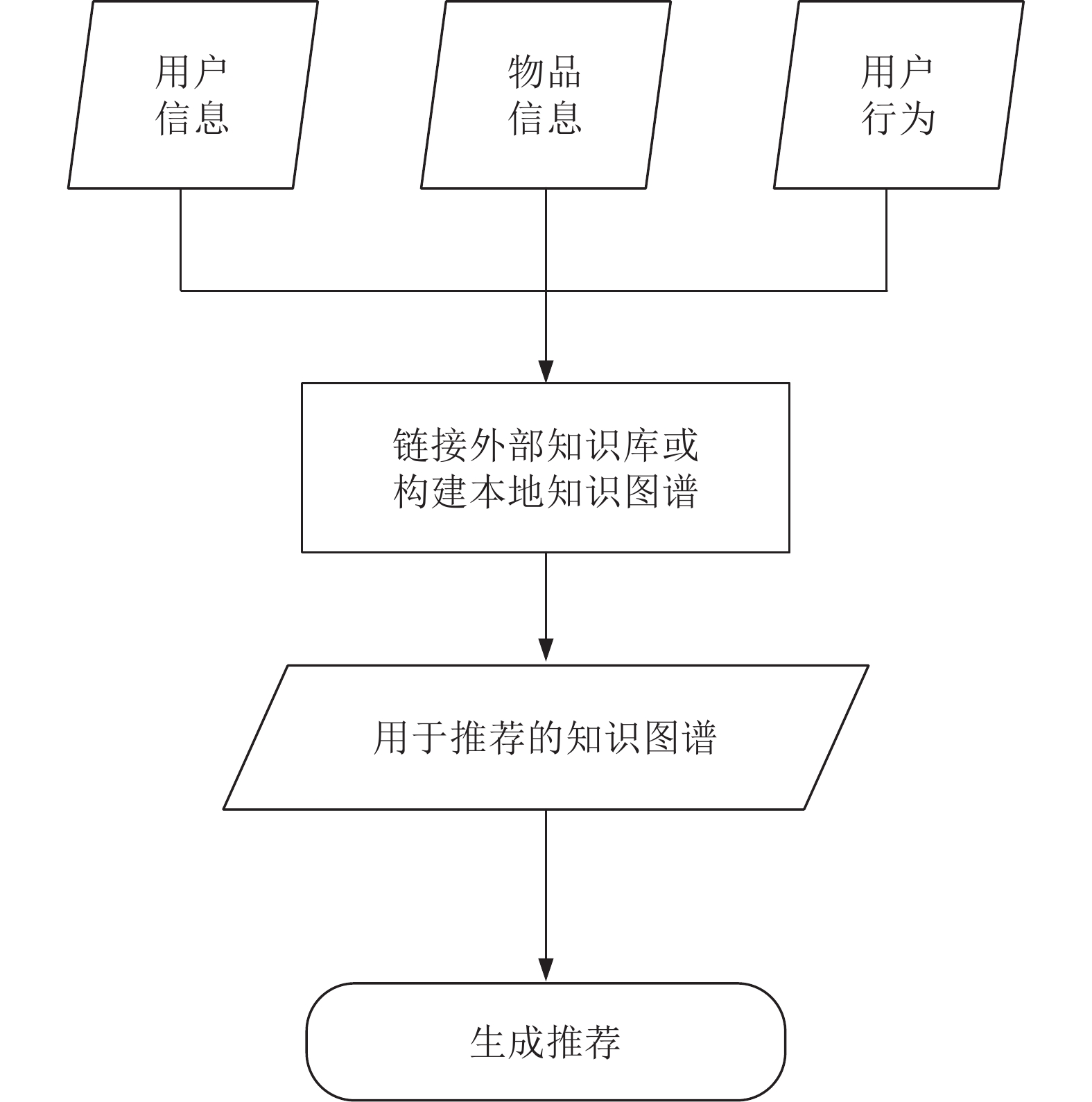
数据稀疏和冷启动是当前推荐系统面临的两大挑战. 以知识图谱为表现形式的附加信息能够在某种程度上缓解数据稀疏和冷启动带来的负面影响, 进而提高推荐的准确度. 本文综述了最近提出的应用知识图谱的推荐方法和系统, 并依据知识图谱来源与构建方法、推荐系统利用知识图谱的方式, 提出了应用知识图谱的推荐方法和系统的分类框架, 进一步分析了本领域的研究难点. 本文还给出了文献中常用的数据集. 最后讨论了未来有价值的研究方向.
数据稀疏和冷启动是当前推荐系统面临的两大挑战. 以知识图谱为表现形式的附加信息能够在某种程度上缓解数据稀疏和冷启动带来的负面影响, 进而提高推荐的准确度. 本文综述了最近提出的应用知识图谱的推荐方法和系统, 并依据知识图谱来源与构建方法、推荐系统利用知识图谱的方式, 提出了应用知识图谱的推荐方法和系统的分类框架, 进一步分析了本领域的研究难点. 本文还给出了文献中常用的数据集. 最后讨论了未来有价值的研究方向.
2021, 47(9): 2078-2089.
doi: 10.16383/j.aas.c190455
摘要:
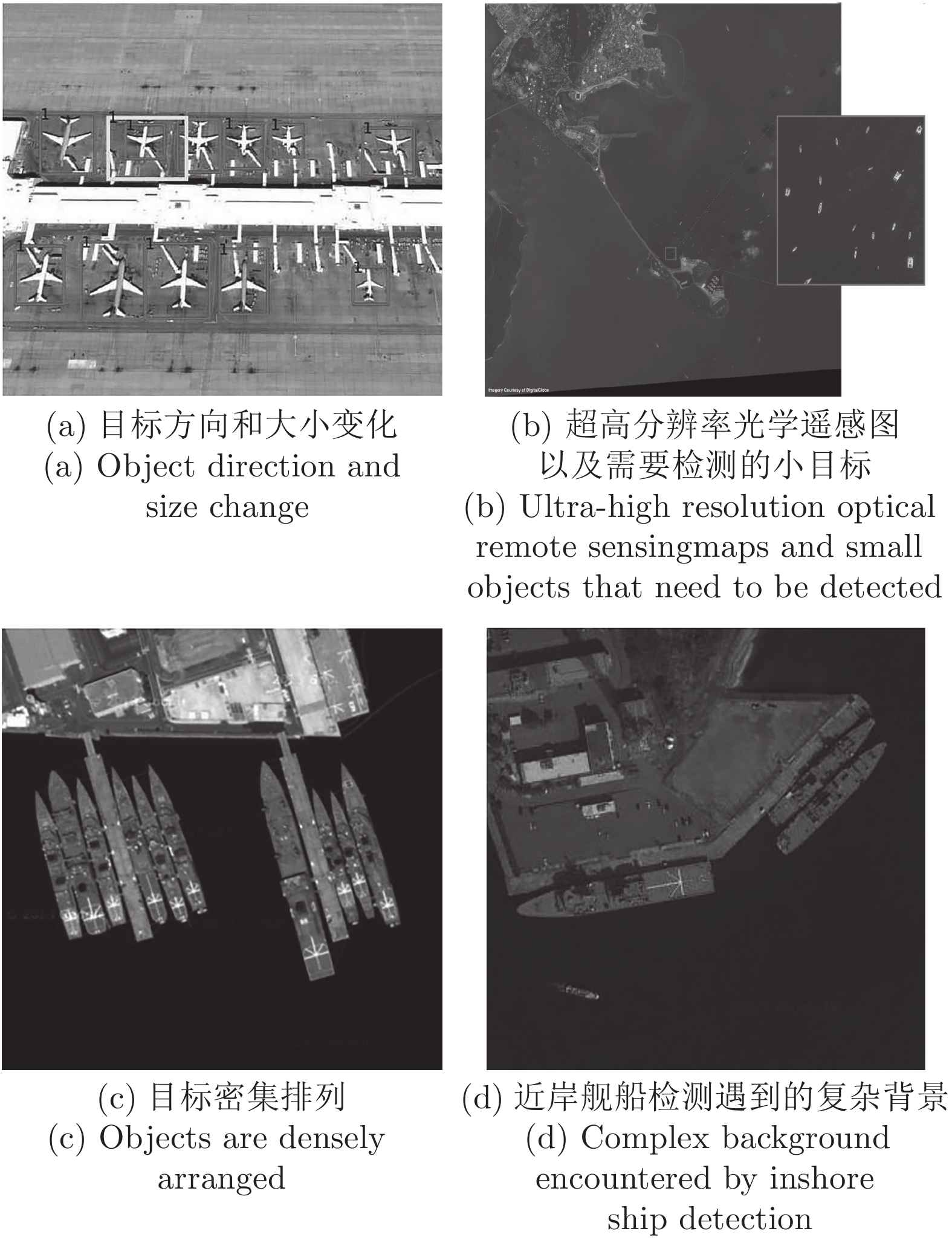
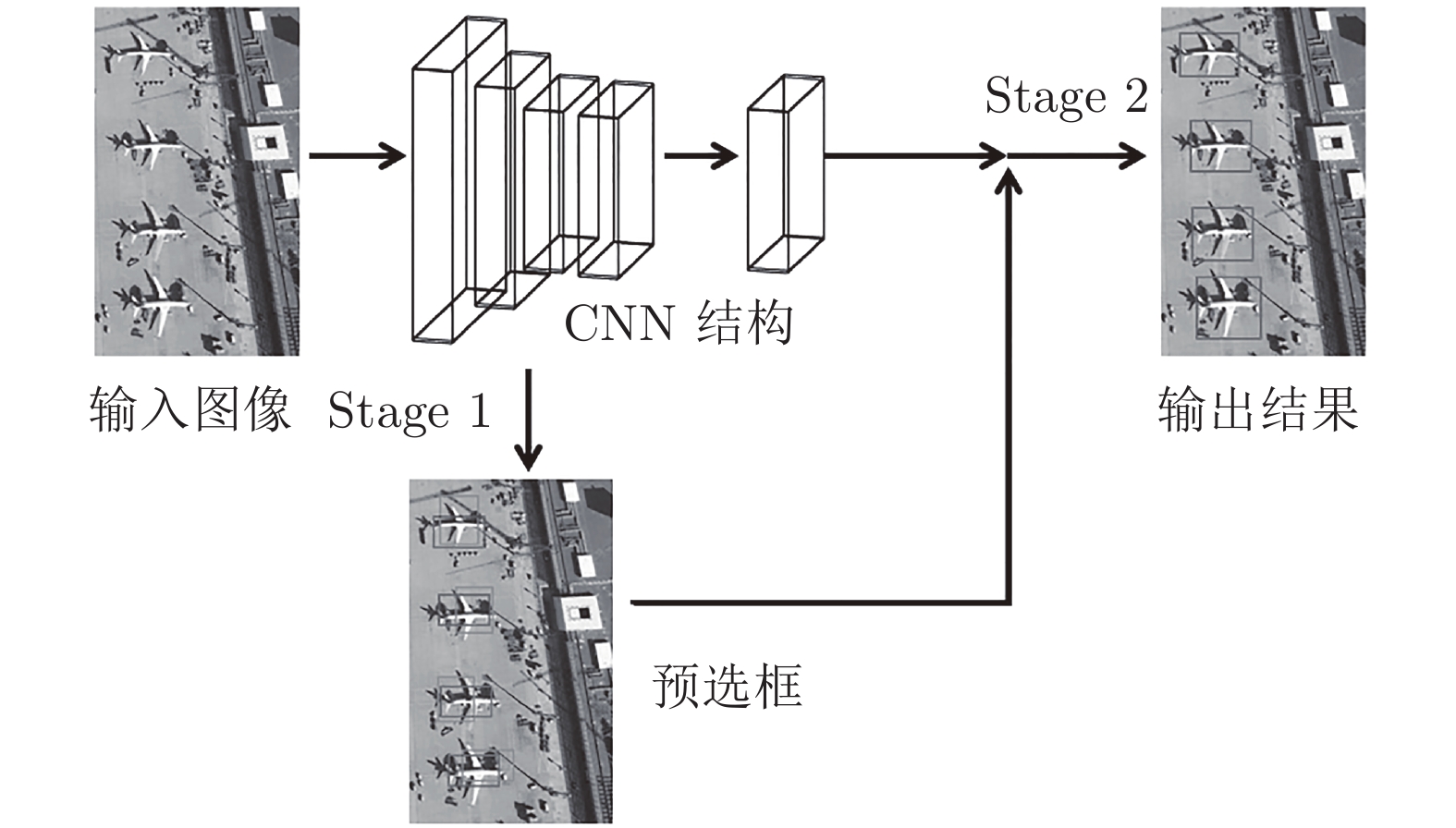
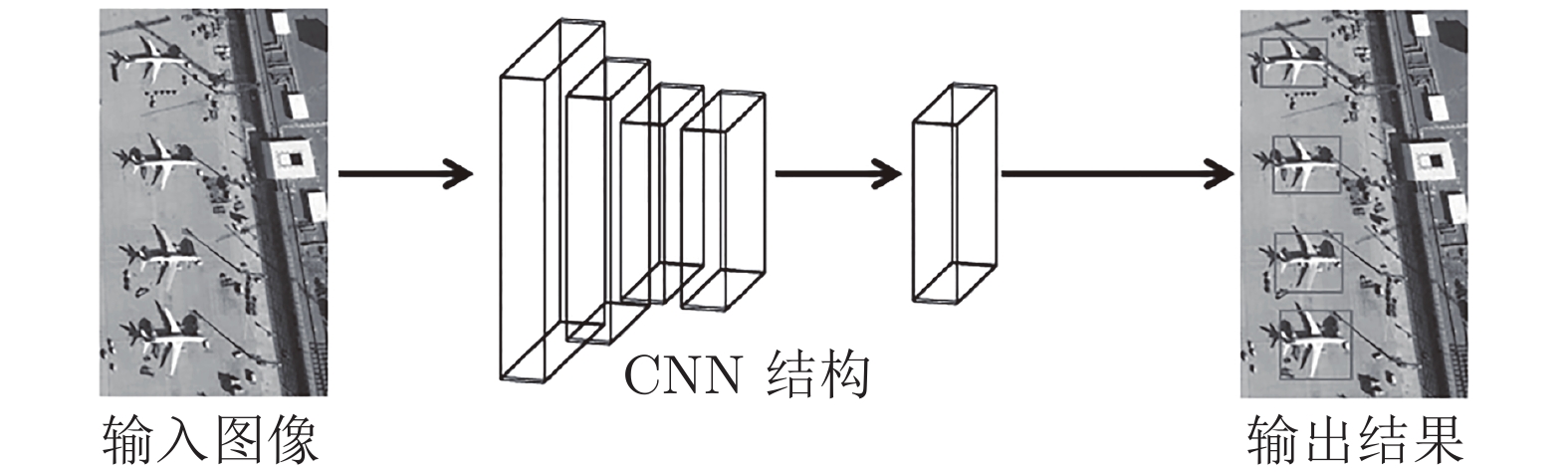
光学遥感图像的目标检测 (Optical remote sensing images object detection, ORSIOD) 是航空和卫星图像分析领域的一个基本但具有挑战性的问题, 近年来受到广泛关注. 本文从如下几个方面介绍了基于深度学习的光学遥感图像目标检测的研究现状. 首先对光学遥感图像目标检测的主要难点进行了介绍, 接着对现有基于深度学习的目标检测算法进行概括, 并以光学遥感图像目标检测的难点为驱动分析对比了不同的基于深度学习的光学遥感图像目标检测方法的优缺点, 最后对未来的发展趋势进行了详细的分析.
光学遥感图像的目标检测 (Optical remote sensing images object detection, ORSIOD) 是航空和卫星图像分析领域的一个基本但具有挑战性的问题, 近年来受到广泛关注. 本文从如下几个方面介绍了基于深度学习的光学遥感图像目标检测的研究现状. 首先对光学遥感图像目标检测的主要难点进行了介绍, 接着对现有基于深度学习的目标检测算法进行概括, 并以光学遥感图像目标检测的难点为驱动分析对比了不同的基于深度学习的光学遥感图像目标检测方法的优缺点, 最后对未来的发展趋势进行了详细的分析.
2021, 47(9): 2090-2102.
doi: 10.16383/j.aas.c190319
摘要:
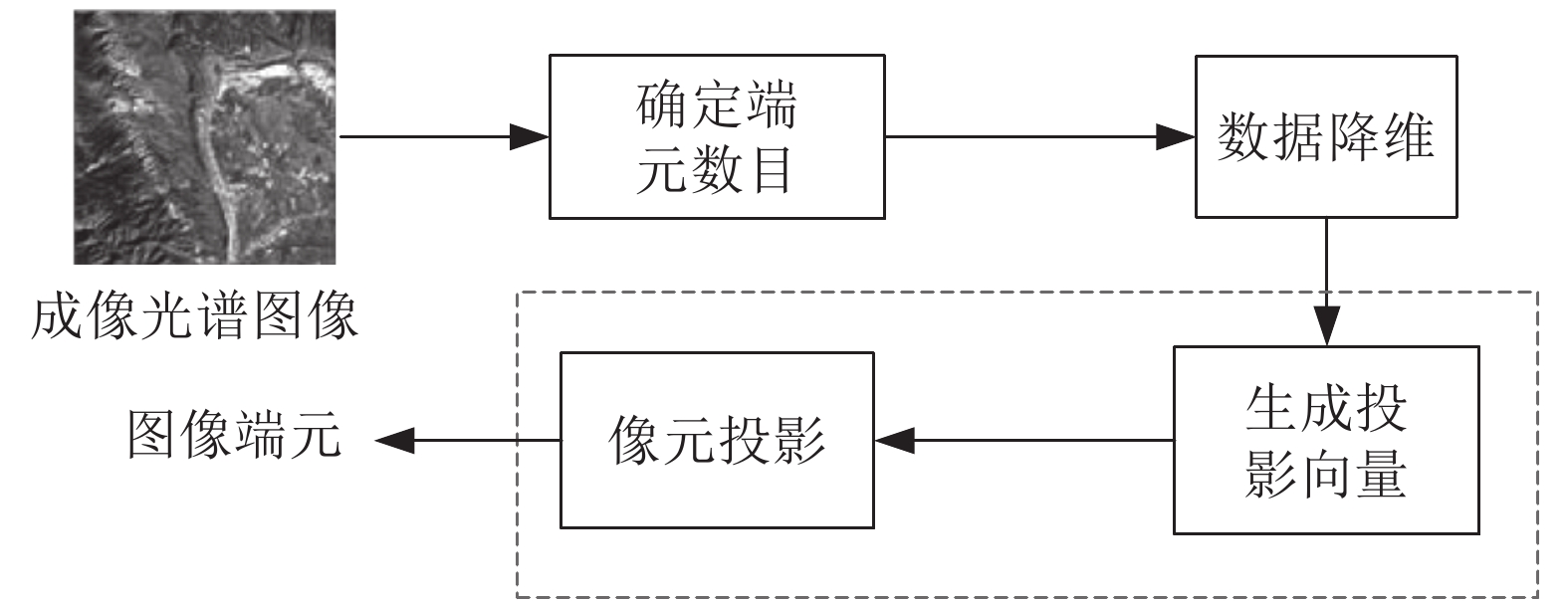
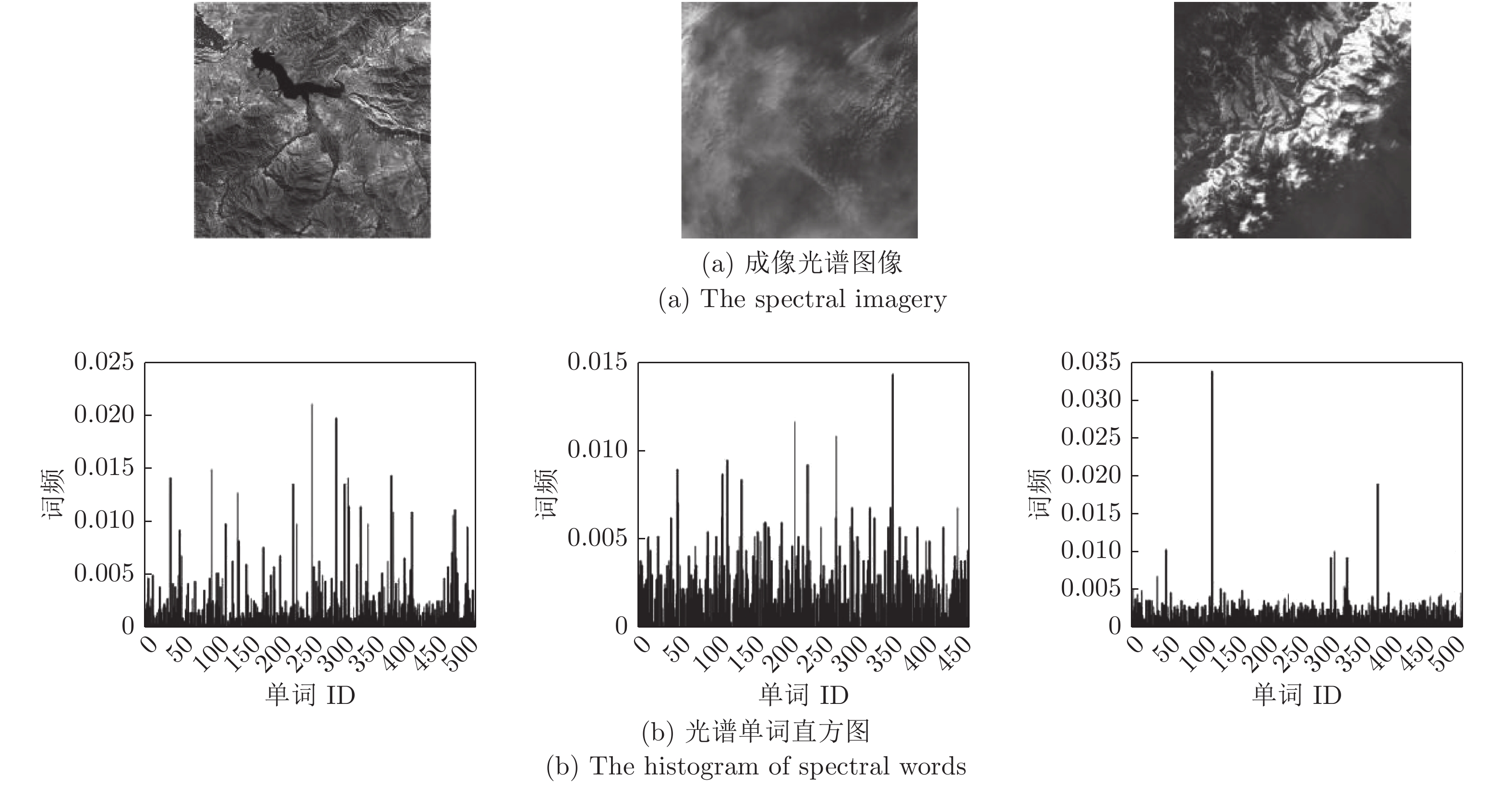
随着遥感对地观测技术的飞速发展, 成像光谱图像呈现指数增长, 特别是人工智能技术和高性能计算的加速崛起, 进一步推动了成像光谱大数据时代的到来. 因此, 如何高效地组织和管理海量的成像光谱图像数据成为一个亟待解决的实际应用问题. 然而, 网络时代的开放性与共享性, 使得网络信息安全问题日益突出, 特别是含有重要信息的成像光谱图像应具有严格的保密性, 确保检索过程中不发生失泄密事件. 本文总结了近年来成像光谱图像安全检索的主要技术, 包括特征提取与表示、特征降维、加密域安全检索技术和性能评价准则, 最后对成像光谱图像安全检索技术进行了总结与展望.
随着遥感对地观测技术的飞速发展, 成像光谱图像呈现指数增长, 特别是人工智能技术和高性能计算的加速崛起, 进一步推动了成像光谱大数据时代的到来. 因此, 如何高效地组织和管理海量的成像光谱图像数据成为一个亟待解决的实际应用问题. 然而, 网络时代的开放性与共享性, 使得网络信息安全问题日益突出, 特别是含有重要信息的成像光谱图像应具有严格的保密性, 确保检索过程中不发生失泄密事件. 本文总结了近年来成像光谱图像安全检索的主要技术, 包括特征提取与表示、特征降维、加密域安全检索技术和性能评价准则, 最后对成像光谱图像安全检索技术进行了总结与展望.







2021, 47(9): 2103-2119.
doi: 10.16383/j.aas.c190260
摘要:
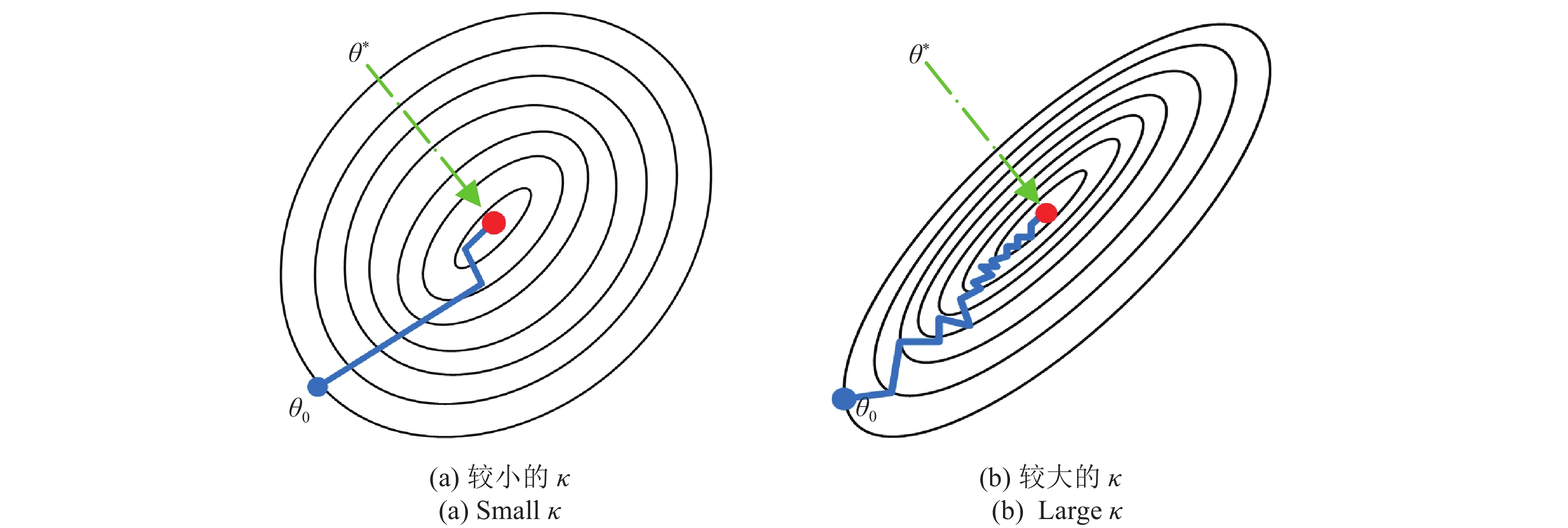
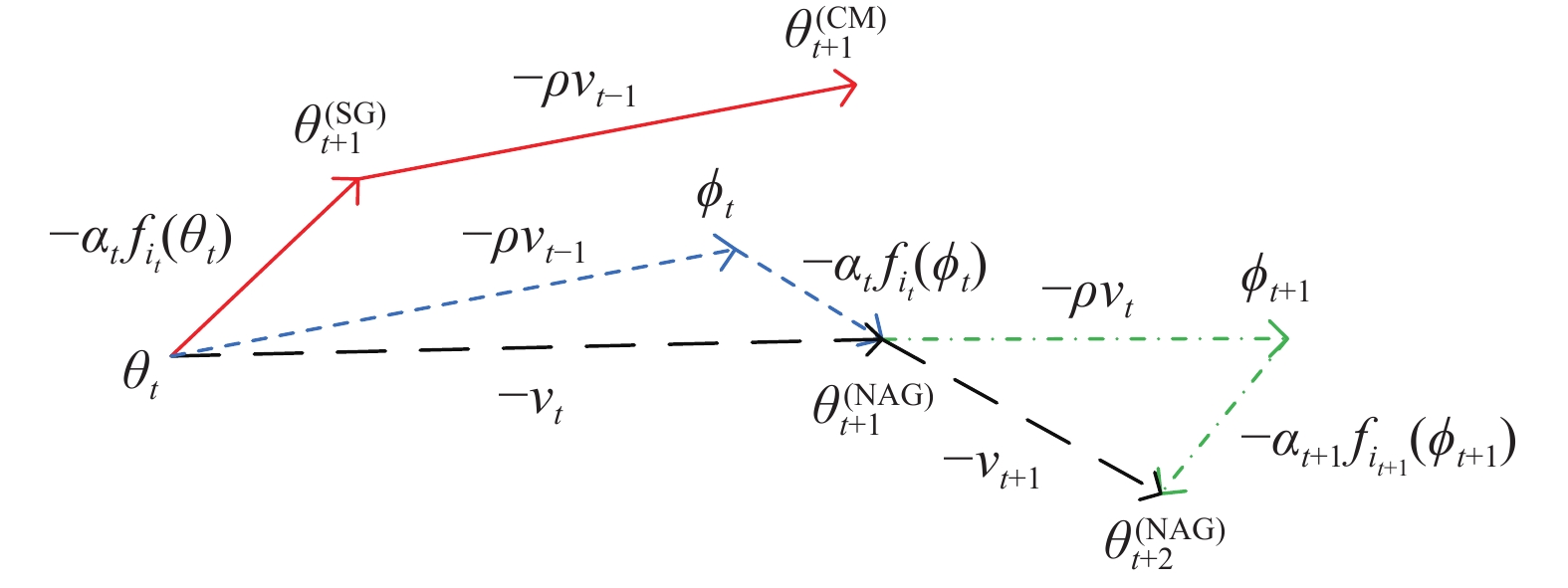
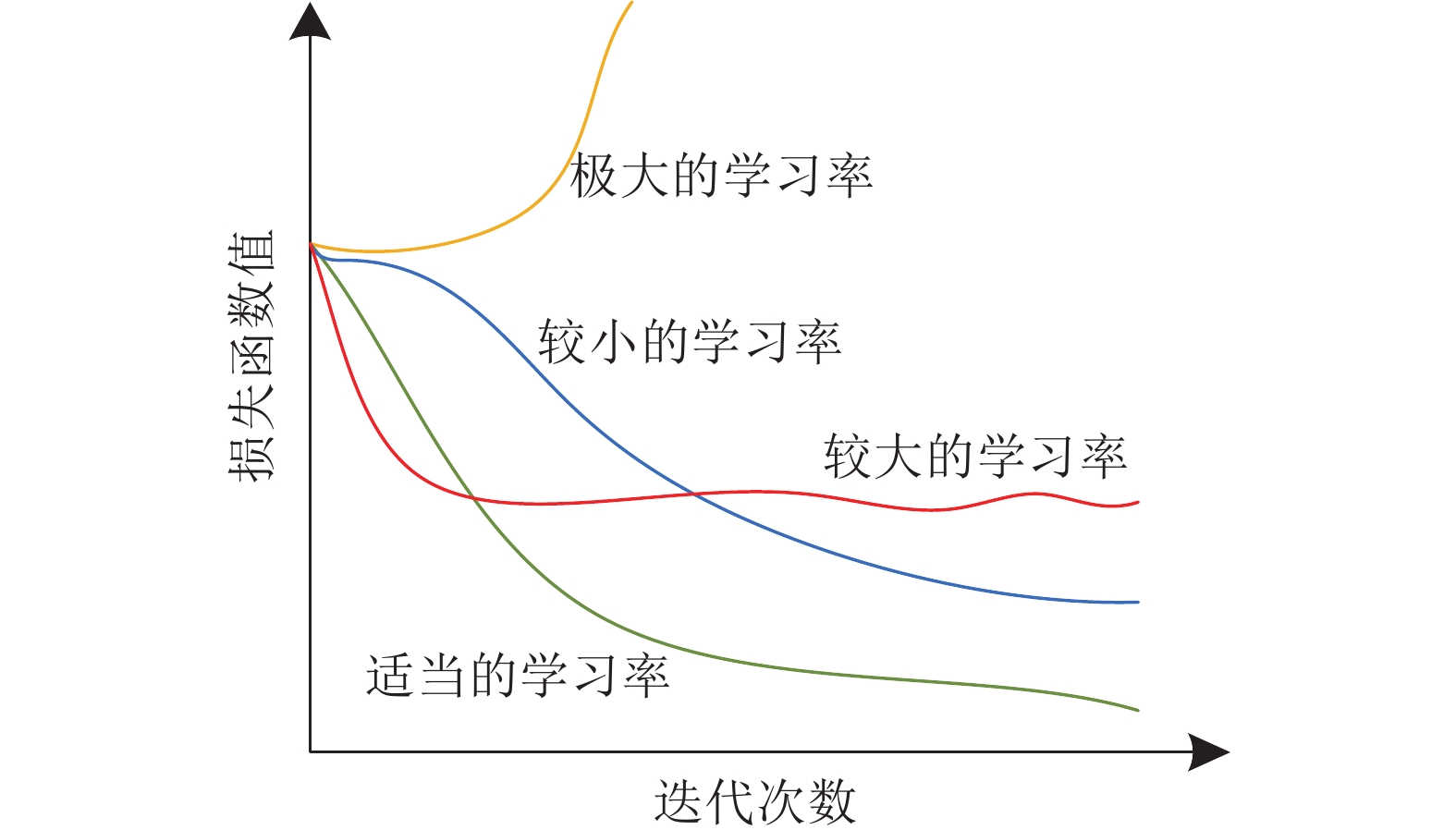
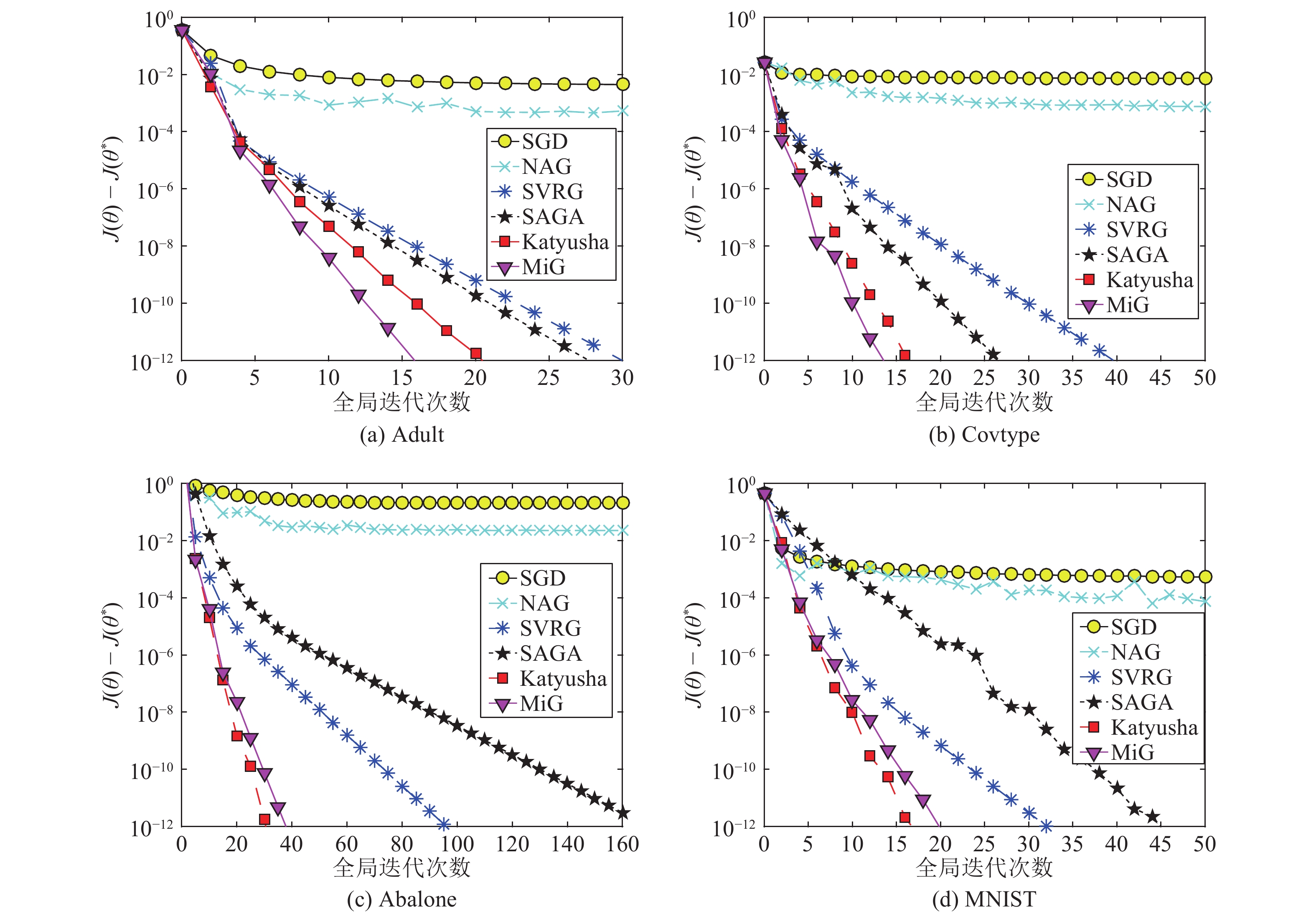
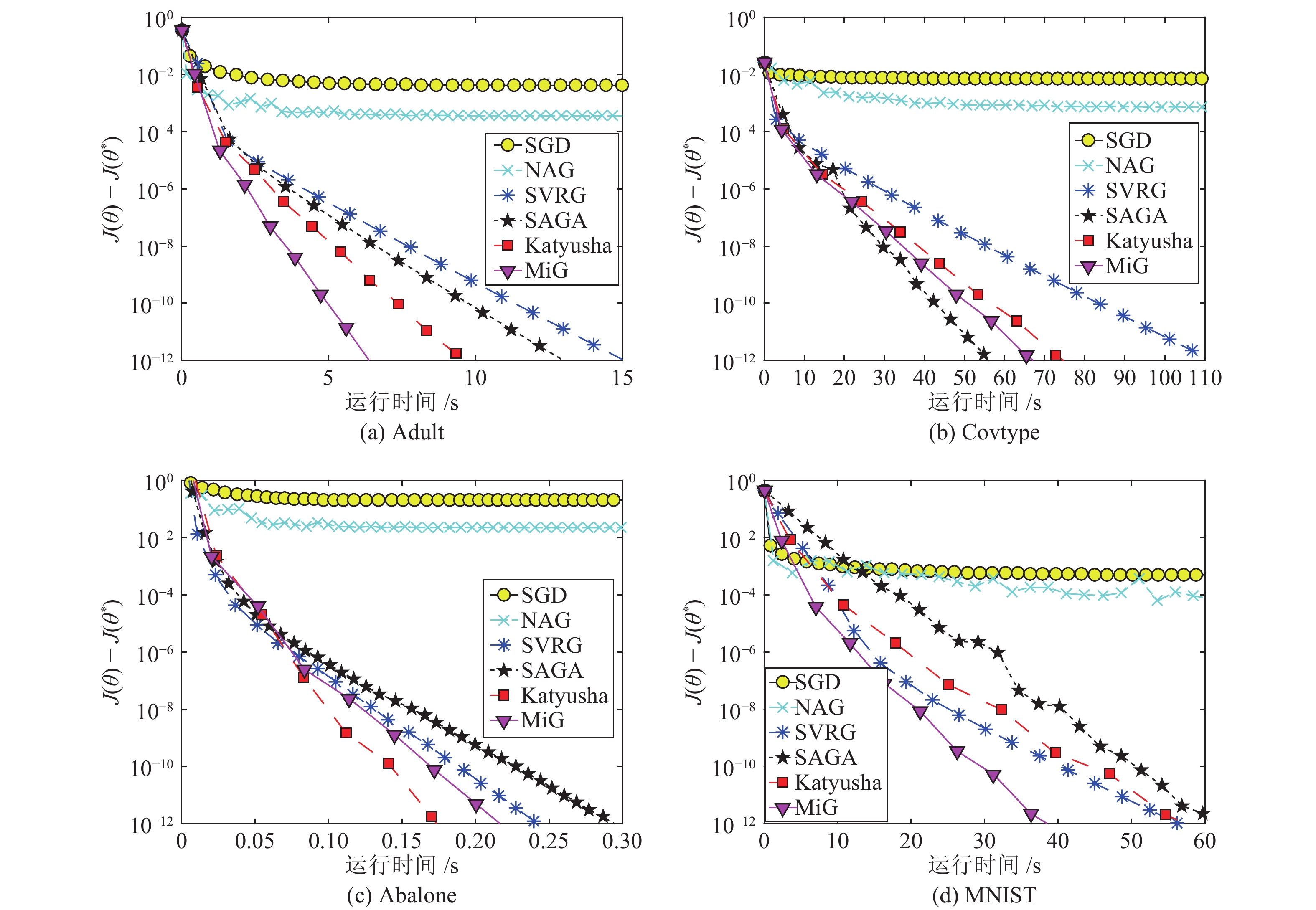
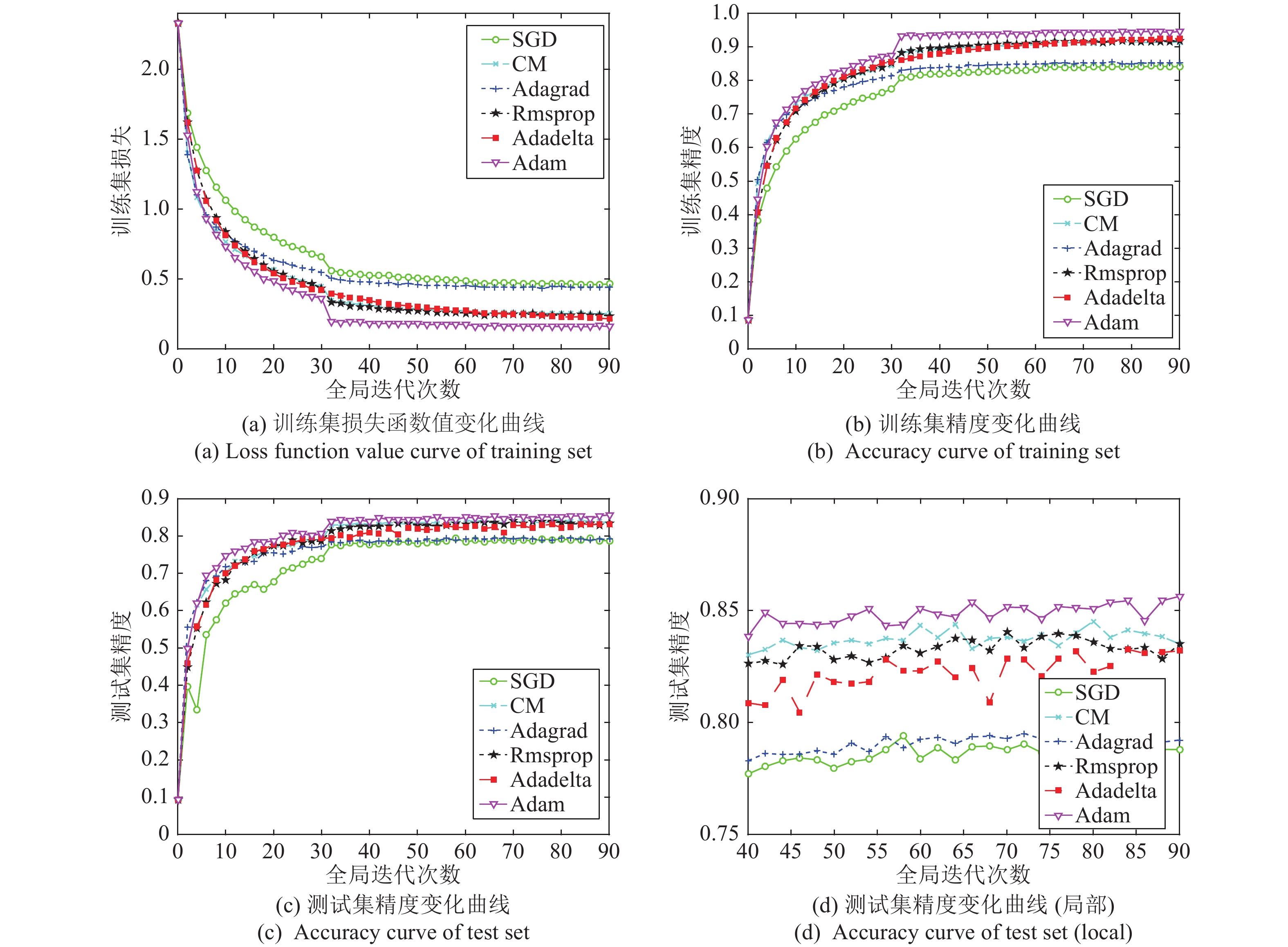
在机器学习领域中, 梯度下降算法是求解最优化问题最重要、最基础的方法. 随着数据规模的不断扩大, 传统的梯度下降算法已不能有效地解决大规模机器学习问题. 随机梯度下降算法在迭代过程中随机选择一个或几个样本的梯度来替代总体梯度, 以达到降低计算复杂度的目的. 近年来, 随机梯度下降算法已成为机器学习特别是深度学习研究的焦点. 随着对搜索方向和步长的不断探索, 涌现出随机梯度下降算法的众多改进版本, 本文对这些算法的主要研究进展进行了综述. 将随机梯度下降算法的改进策略大致分为动量、方差缩减、增量梯度和自适应学习率等四种. 其中, 前三种主要是校正梯度或搜索方向, 第四种对参数变量的不同分量自适应地设计步长. 着重介绍了各种策略下随机梯度下降算法的核心思想、原理, 探讨了不同算法之间的区别与联系. 将主要的随机梯度下降算法应用到逻辑回归和深度卷积神经网络等机器学习任务中, 并定量地比较了这些算法的实际性能. 文末总结了本文的主要研究工作, 并展望了随机梯度下降算法的未来发展方向.
在机器学习领域中, 梯度下降算法是求解最优化问题最重要、最基础的方法. 随着数据规模的不断扩大, 传统的梯度下降算法已不能有效地解决大规模机器学习问题. 随机梯度下降算法在迭代过程中随机选择一个或几个样本的梯度来替代总体梯度, 以达到降低计算复杂度的目的. 近年来, 随机梯度下降算法已成为机器学习特别是深度学习研究的焦点. 随着对搜索方向和步长的不断探索, 涌现出随机梯度下降算法的众多改进版本, 本文对这些算法的主要研究进展进行了综述. 将随机梯度下降算法的改进策略大致分为动量、方差缩减、增量梯度和自适应学习率等四种. 其中, 前三种主要是校正梯度或搜索方向, 第四种对参数变量的不同分量自适应地设计步长. 着重介绍了各种策略下随机梯度下降算法的核心思想、原理, 探讨了不同算法之间的区别与联系. 将主要的随机梯度下降算法应用到逻辑回归和深度卷积神经网络等机器学习任务中, 并定量地比较了这些算法的实际性能. 文末总结了本文的主要研究工作, 并展望了随机梯度下降算法的未来发展方向.


2021, 47(9): 2120-2131.
doi: 10.16383/j.aas.c200021
摘要:
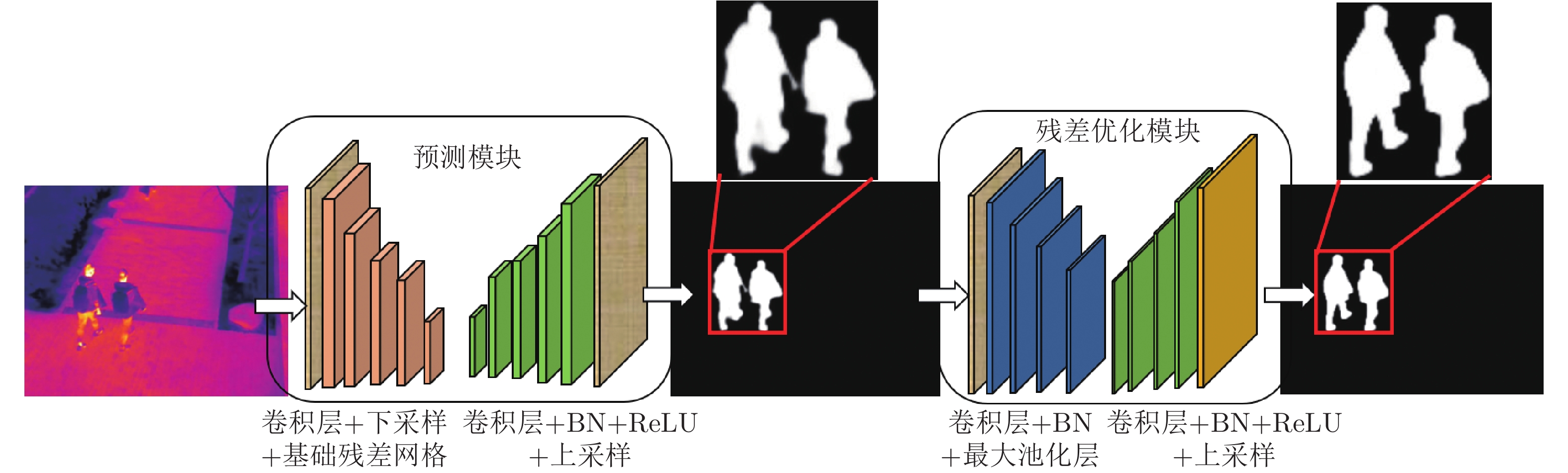
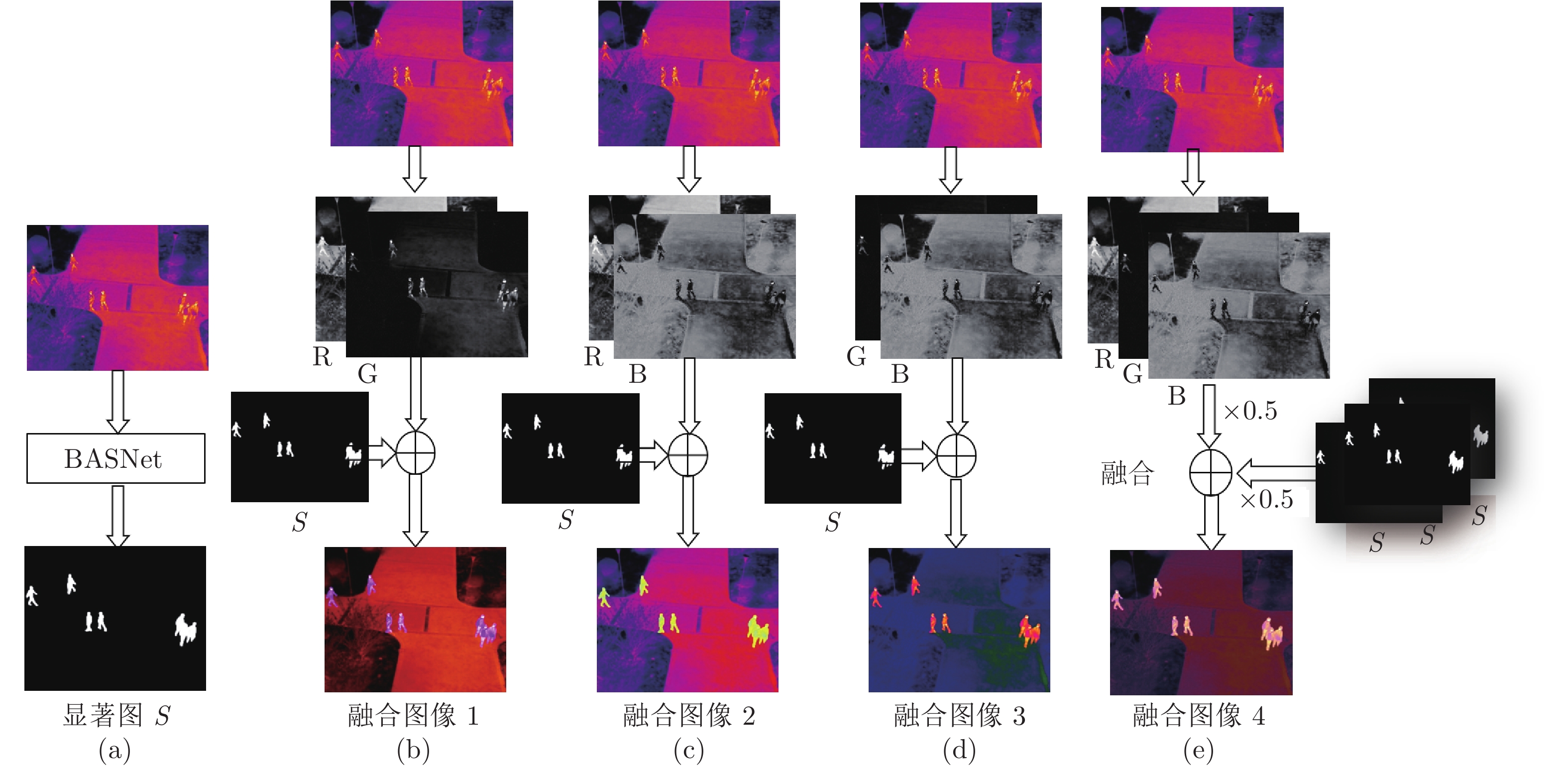
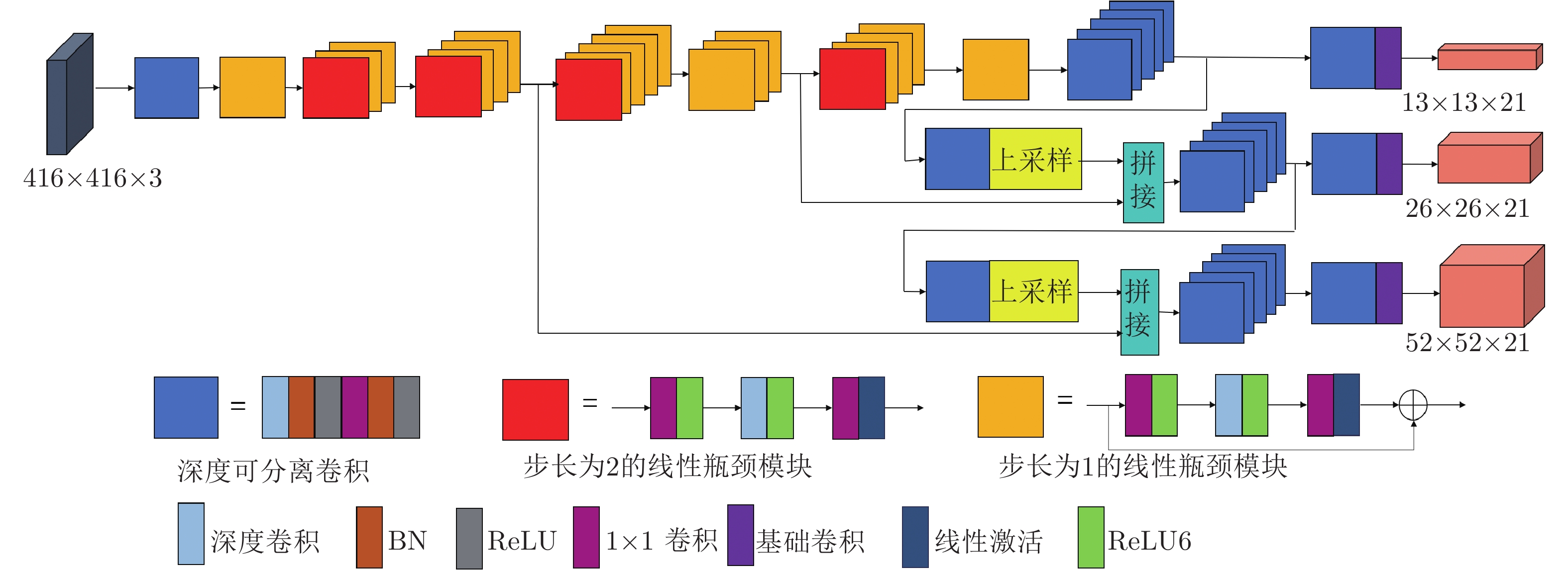
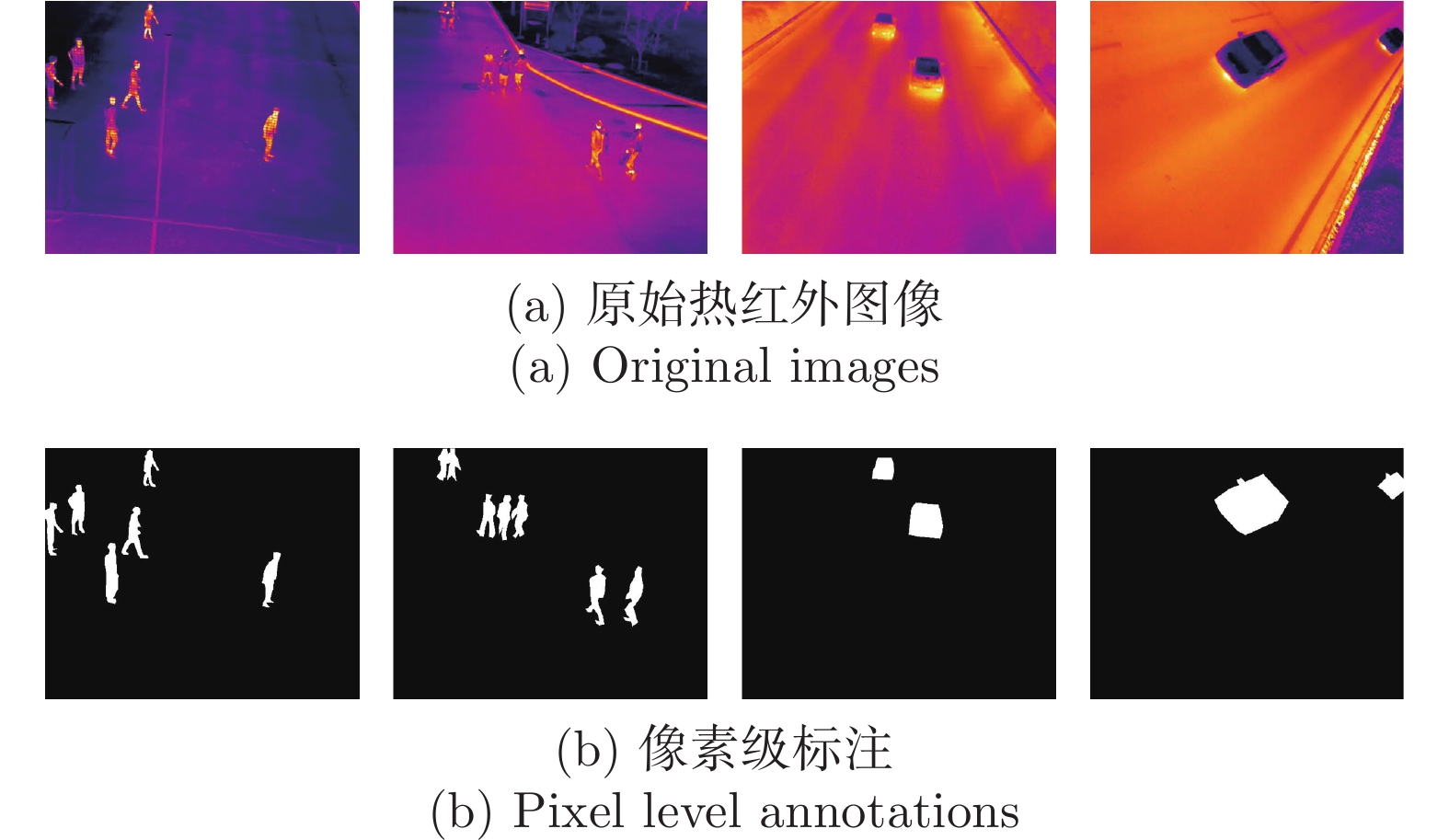
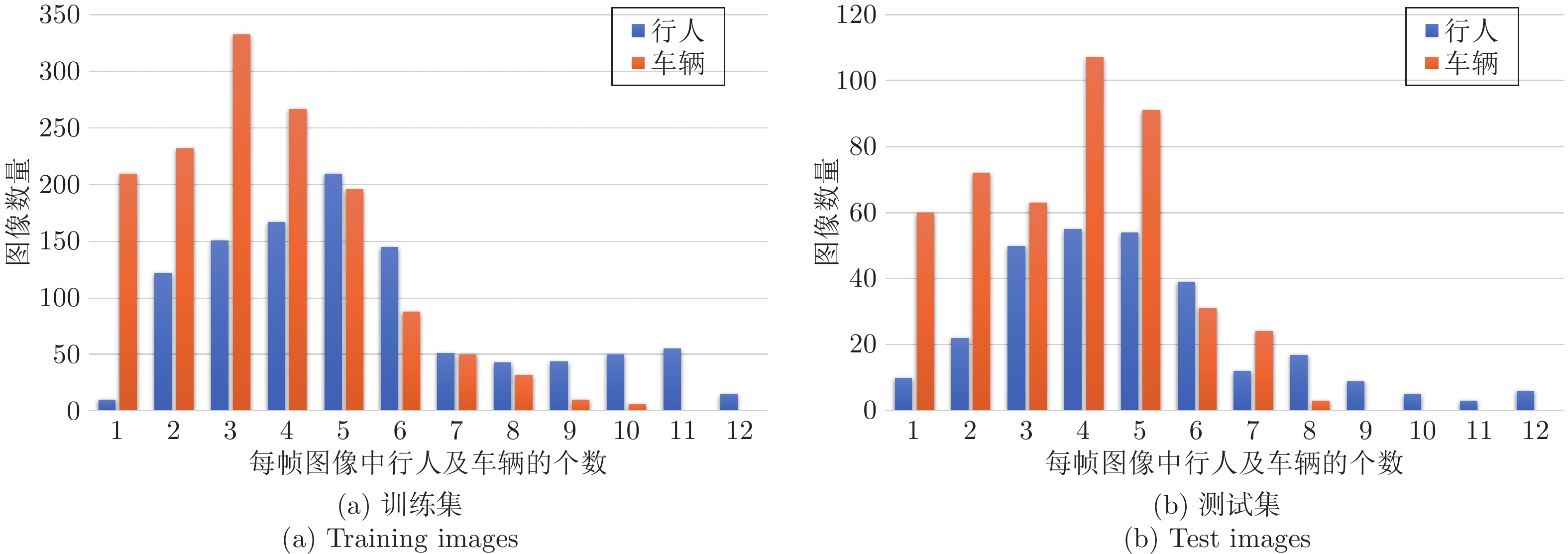
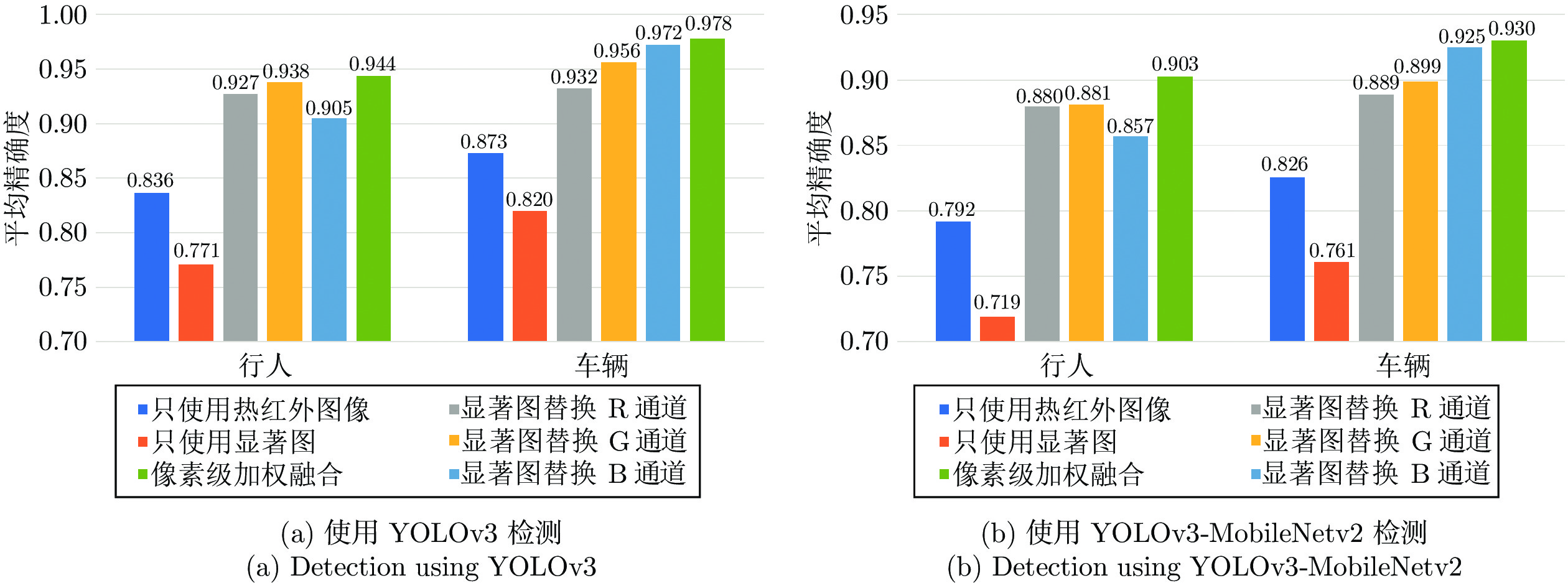
利用无人机载的热红外图像开展行人及车辆检测, 在交通监控、智能安防、防灾应急等领域中, 具有巨大的应用潜力. 热红外图像能够在夜间或者光照条件不理想的情况对场景目标清晰成像, 但也往往存在对比度低、纹理特征弱的缺点. 为此, 本文提出使用热红外图像的显著图来进行图像增强, 作为目标检测器的注意力机制, 并研究仅使用热红外图像和其显著图提高目标检测性能的方法. 此外, 针对无人机内存不足、算力有限的特点, 设计使用轻量化网络YOLOv3-MobileNetv2作为目标检测模型. 在实验中, 本文训练了YOLOv3网络作为检测的评价基准网络. 使用BASNet生成显著图, 通过通道替换和像素级加权融合两种方案将热红外图像与其对应的显著图进行融合增强, 比较了不同方案下YOLOv3-MobileNetv2模型的检测性能. 统计结果显示, 行人及车辆的平均精确度(Average precision, AP)相对于基准分别提升了6.7%和5.7%, 同时检测速度提升了60%, 模型大小降低了58%. 该算法模型为开拓无人机载热红外图像的应用领域提供了可靠的技术支撑.
利用无人机载的热红外图像开展行人及车辆检测, 在交通监控、智能安防、防灾应急等领域中, 具有巨大的应用潜力. 热红外图像能够在夜间或者光照条件不理想的情况对场景目标清晰成像, 但也往往存在对比度低、纹理特征弱的缺点. 为此, 本文提出使用热红外图像的显著图来进行图像增强, 作为目标检测器的注意力机制, 并研究仅使用热红外图像和其显著图提高目标检测性能的方法. 此外, 针对无人机内存不足、算力有限的特点, 设计使用轻量化网络YOLOv3-MobileNetv2作为目标检测模型. 在实验中, 本文训练了YOLOv3网络作为检测的评价基准网络. 使用BASNet生成显著图, 通过通道替换和像素级加权融合两种方案将热红外图像与其对应的显著图进行融合增强, 比较了不同方案下YOLOv3-MobileNetv2模型的检测性能. 统计结果显示, 行人及车辆的平均精确度(Average precision, AP)相对于基准分别提升了6.7%和5.7%, 同时检测速度提升了60%, 模型大小降低了58%. 该算法模型为开拓无人机载热红外图像的应用领域提供了可靠的技术支撑.


2021, 47(9): 2132-2142.
doi: 10.16383/j.aas.c200802
摘要:
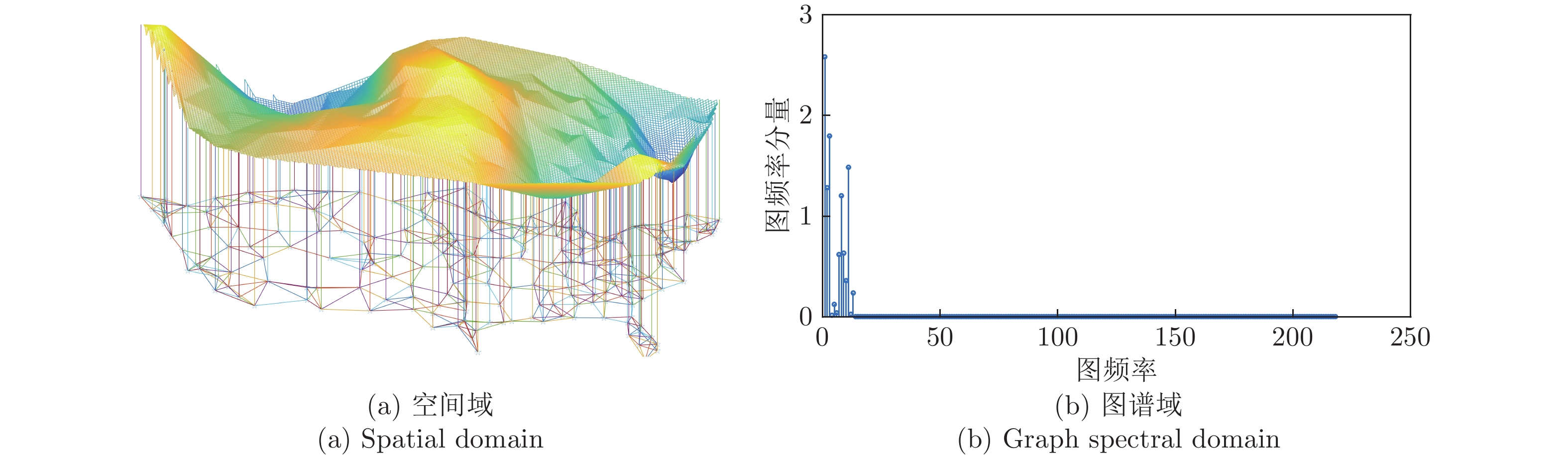
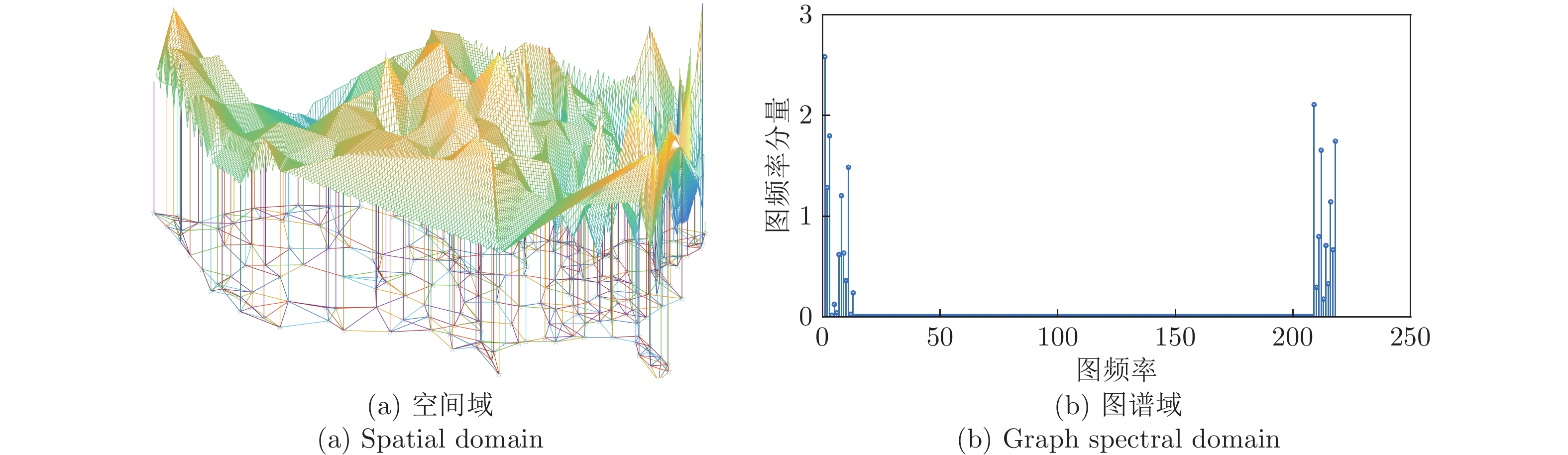
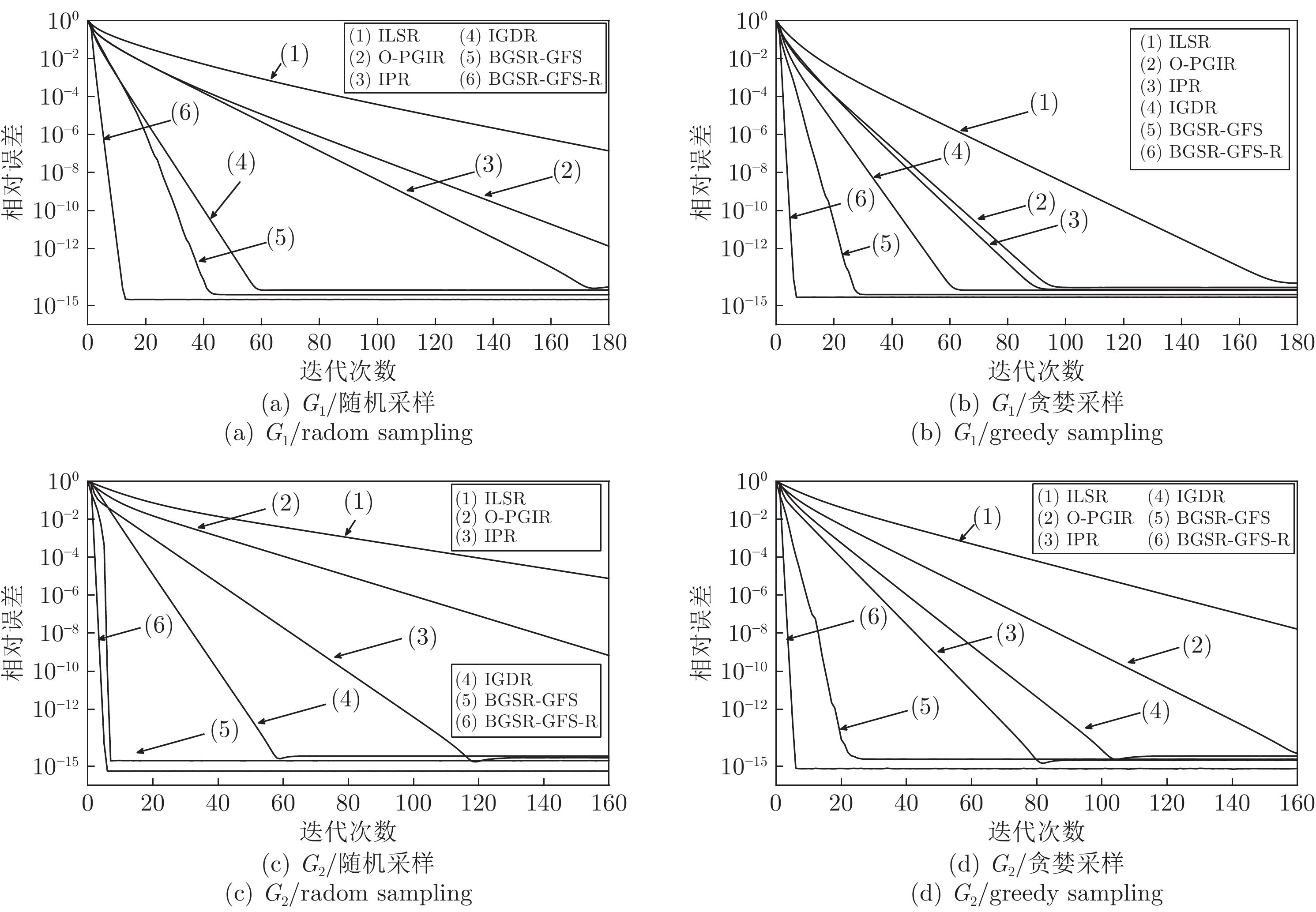
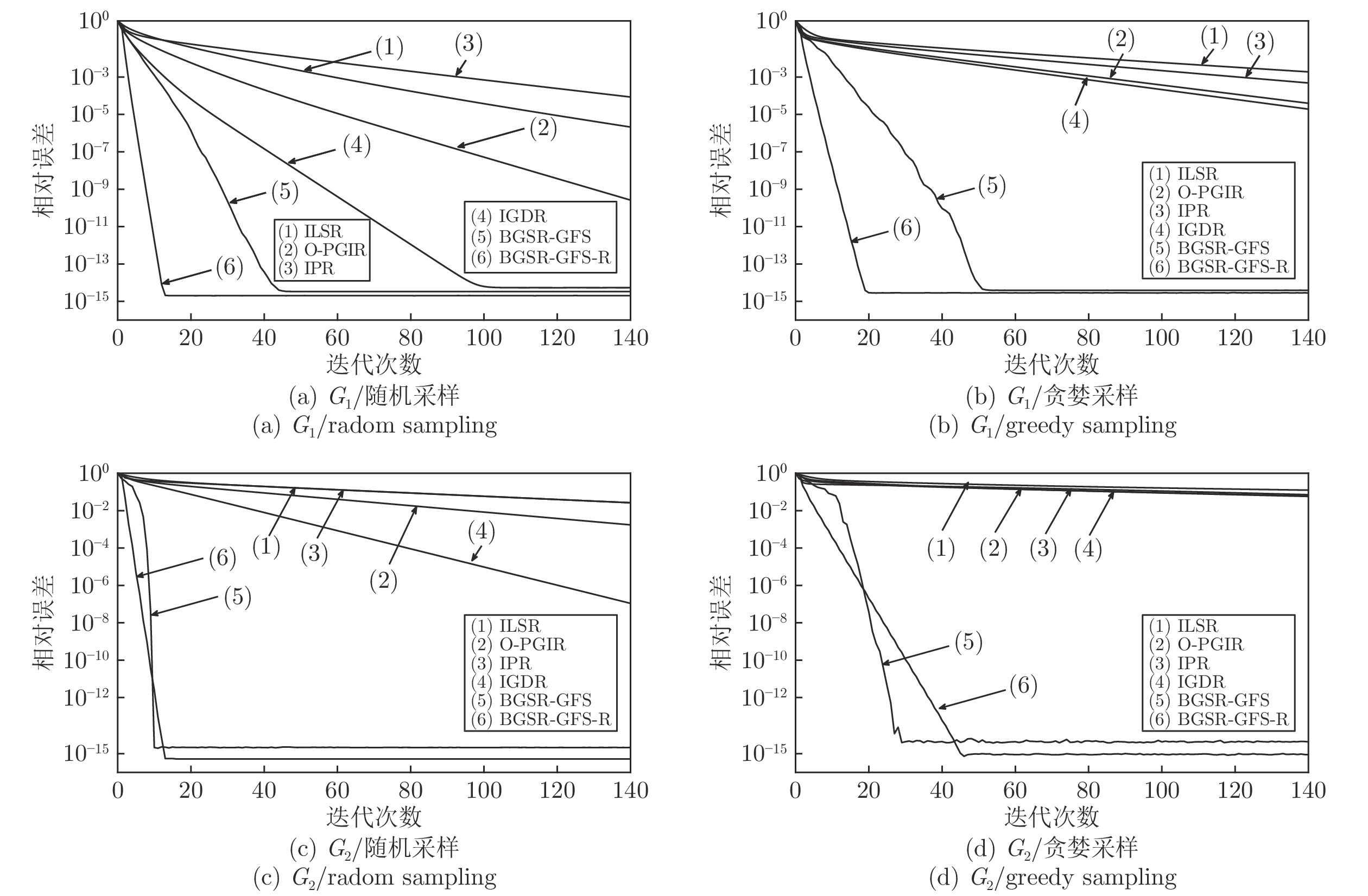
针对带限图信号的重构问题, 本文提出了基于图谱域移位的带限图信号重构模型, 该模型将图带限分量的恒等不变特性建模为最小二乘问题. 基于所提出的重构模型, 本文设计了基于谱移位的重构算法和基于残差谱移位的重构算法. 相比于其他重构算法, 两种新算法提升了迭代效率和重构精度. 此外, 本文算法还适用于分段带限图信号的重构问题, 并且具有良好的迭代效率和重构精度.通过实验仿真表明, 相比于目前其他的带限图信号重构算法, 新算法的迭代效率提升约70%和重构精度提升约60%.
针对带限图信号的重构问题, 本文提出了基于图谱域移位的带限图信号重构模型, 该模型将图带限分量的恒等不变特性建模为最小二乘问题. 基于所提出的重构模型, 本文设计了基于谱移位的重构算法和基于残差谱移位的重构算法. 相比于其他重构算法, 两种新算法提升了迭代效率和重构精度. 此外, 本文算法还适用于分段带限图信号的重构问题, 并且具有良好的迭代效率和重构精度.通过实验仿真表明, 相比于目前其他的带限图信号重构算法, 新算法的迭代效率提升约70%和重构精度提升约60%.


2021, 47(9): 2143-2153.
doi: 10.16383/j.aas.c200359
摘要:
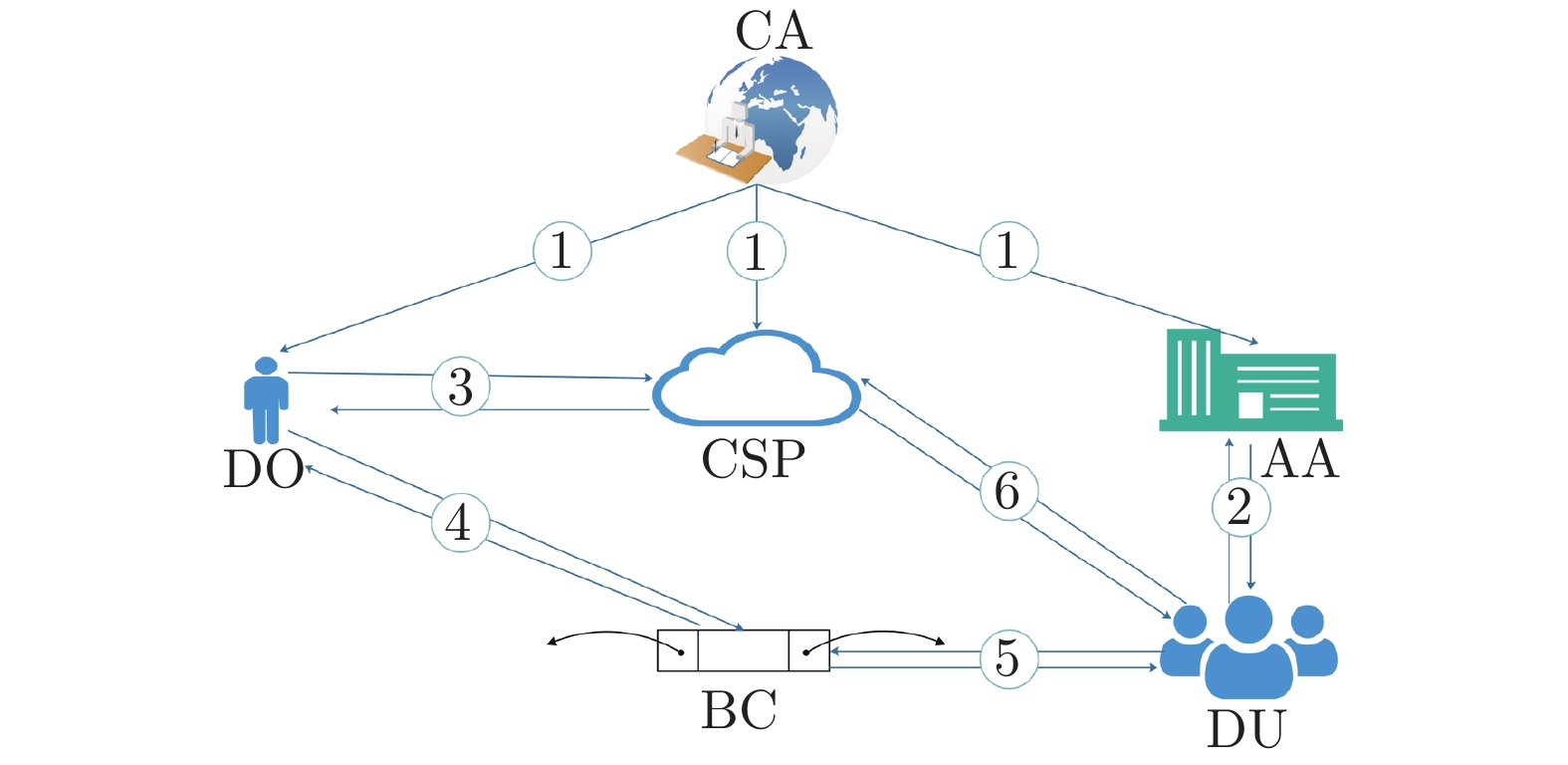
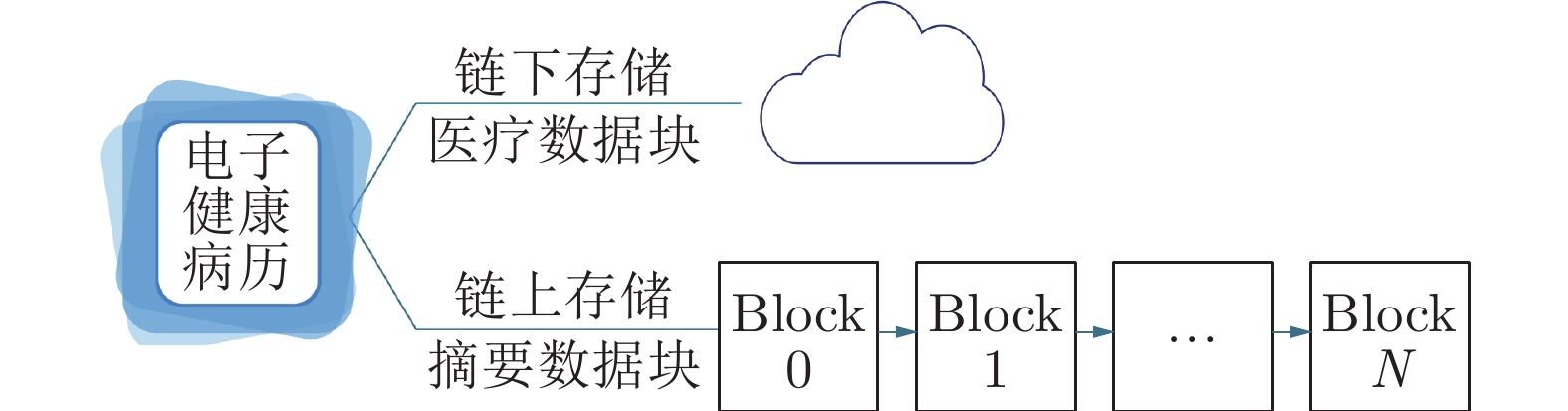
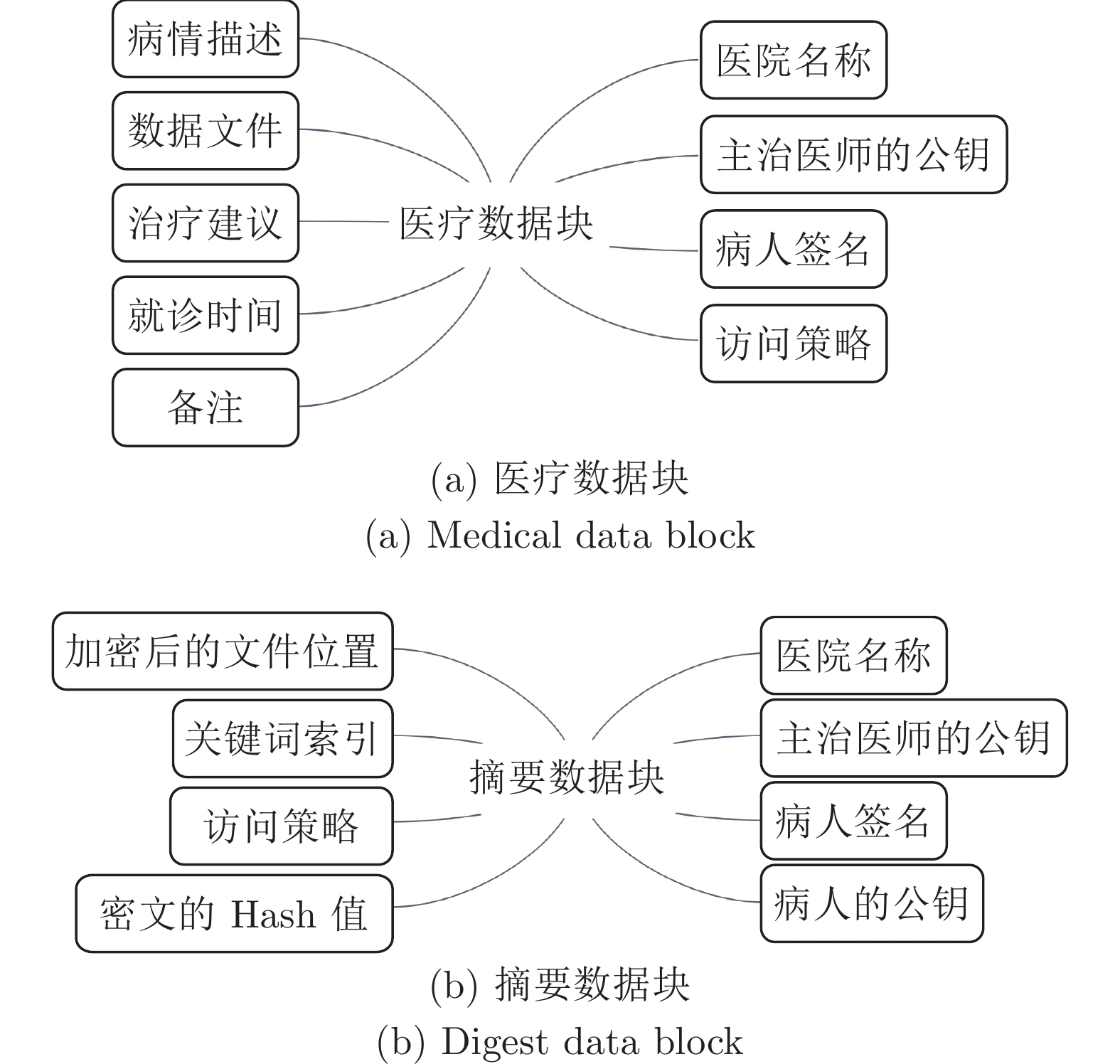
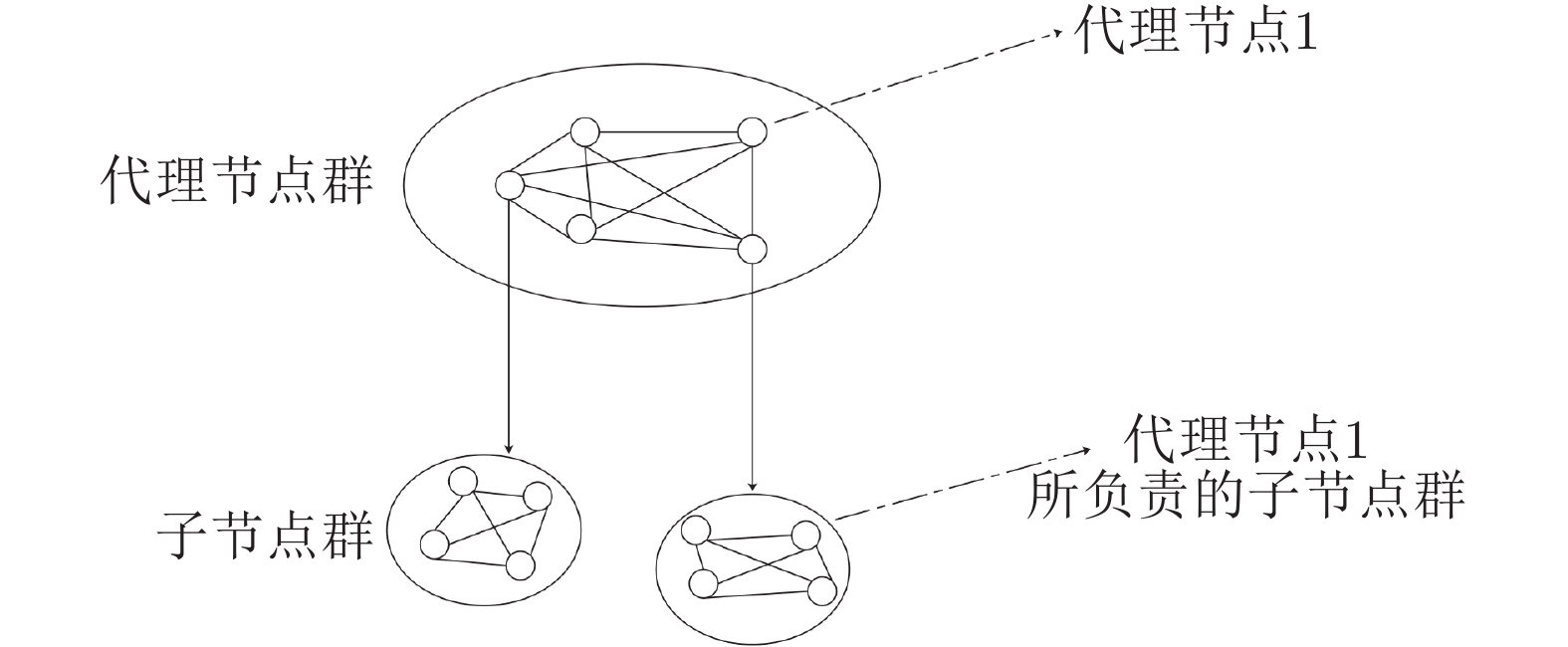
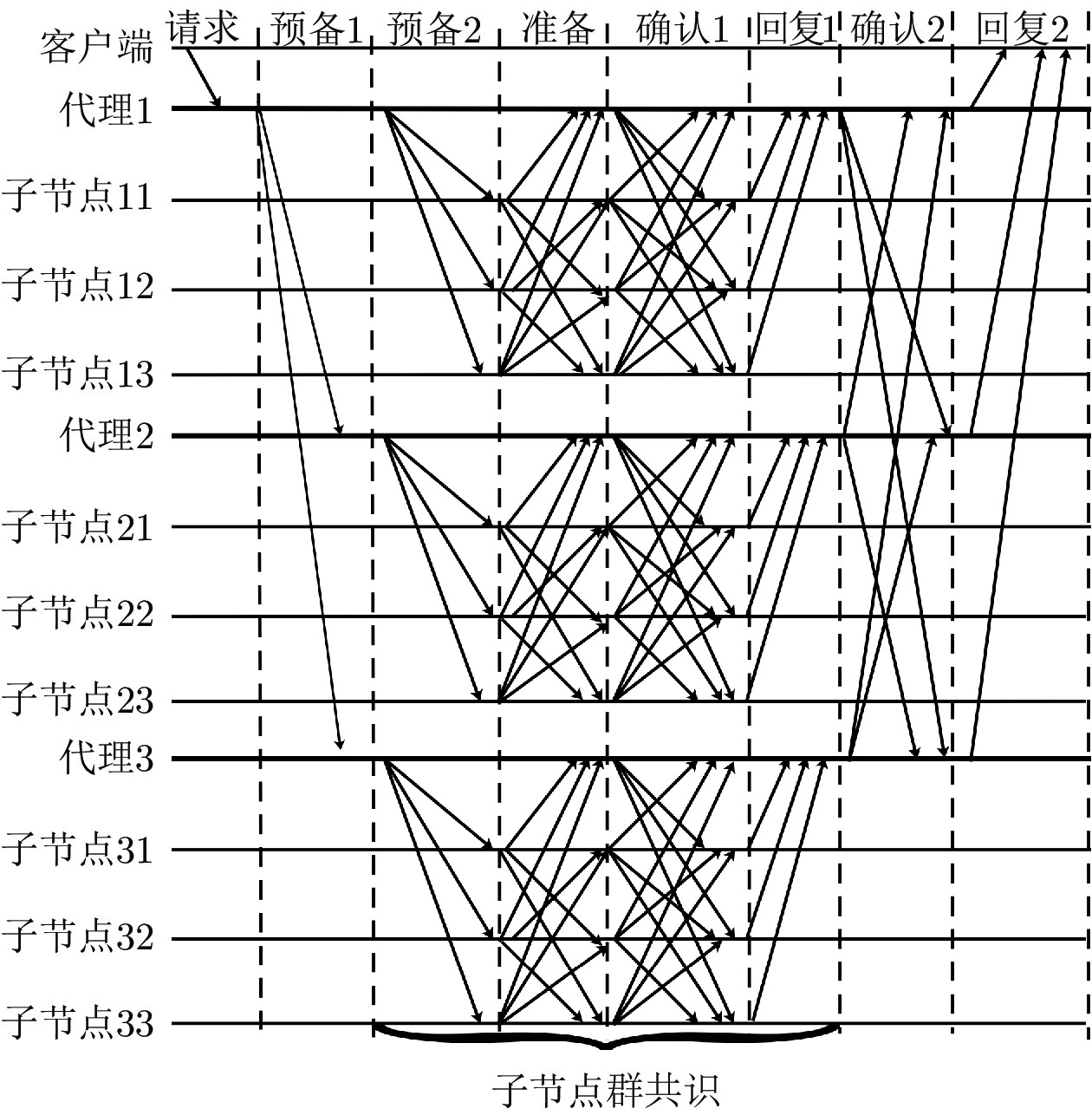
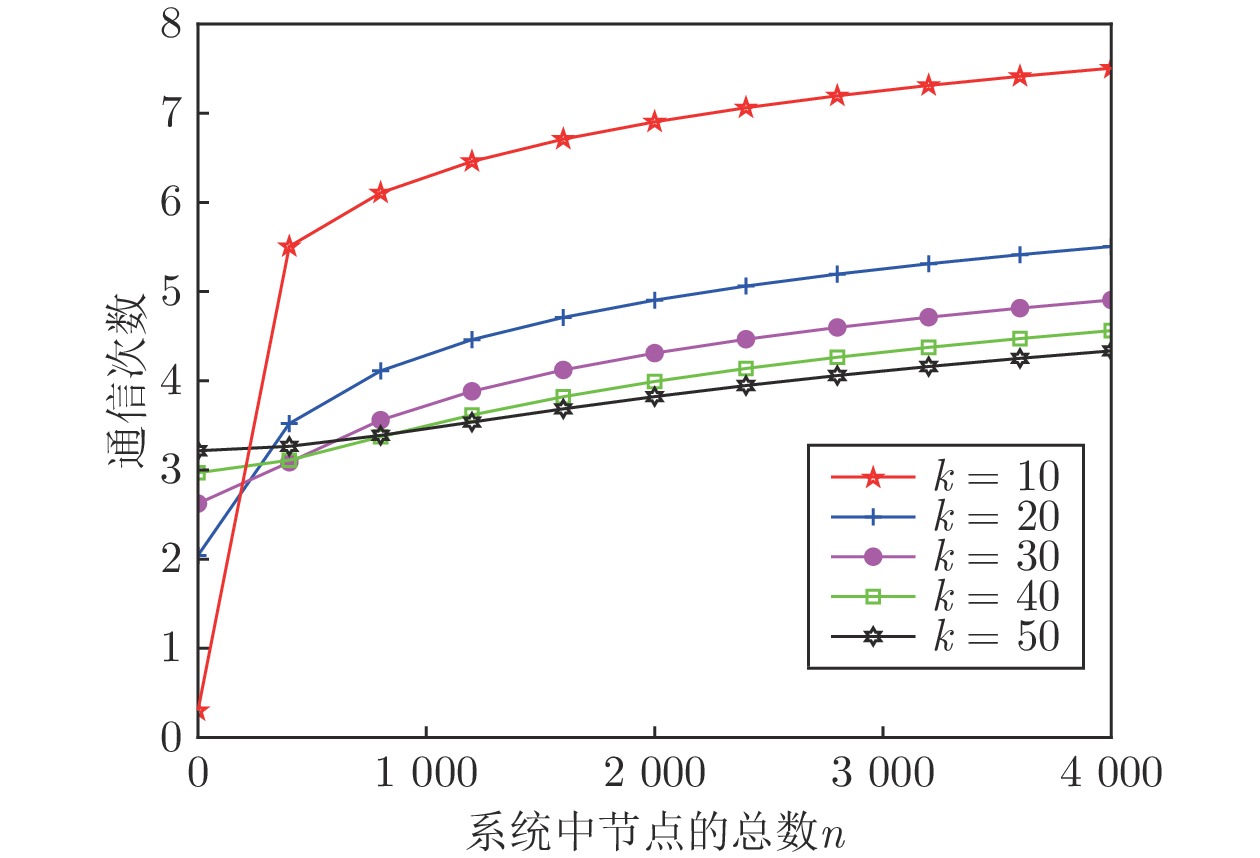
电子医疗病历共享能够提高医疗诊断的准确性, 促进公共医疗领域的发展. 针对目前普遍存在的不同医院之间病历共享困难、病人无法掌握其病历的使用情况等问题, 本文提出了病人可控、云链协同的病历共享模型. 各级医院组成联盟区块链, 病历数据实行链上、链下混合存储. 病历共享模型利用聚类算法, 改进实用拜占庭共识算法, 使得各节点可以更高效地达成共识. 将基于属性的加密方案与多关键词加密方案结合进行病历加密, 实现了数据可控共享, 病人可自主定义访问策略, 同时用户可以对加密病历进行安全、精确检索. 考虑到用户属性的动态更新, 本文设计了属性更新子协议. 最后评估了模型的安全性和性能, 并分析了模型的优劣势.
电子医疗病历共享能够提高医疗诊断的准确性, 促进公共医疗领域的发展. 针对目前普遍存在的不同医院之间病历共享困难、病人无法掌握其病历的使用情况等问题, 本文提出了病人可控、云链协同的病历共享模型. 各级医院组成联盟区块链, 病历数据实行链上、链下混合存储. 病历共享模型利用聚类算法, 改进实用拜占庭共识算法, 使得各节点可以更高效地达成共识. 将基于属性的加密方案与多关键词加密方案结合进行病历加密, 实现了数据可控共享, 病人可自主定义访问策略, 同时用户可以对加密病历进行安全、精确检索. 考虑到用户属性的动态更新, 本文设计了属性更新子协议. 最后评估了模型的安全性和性能, 并分析了模型的优劣势.
2021, 47(9): 2154-2169.
doi: 10.16383/j.aas.c190035
摘要:
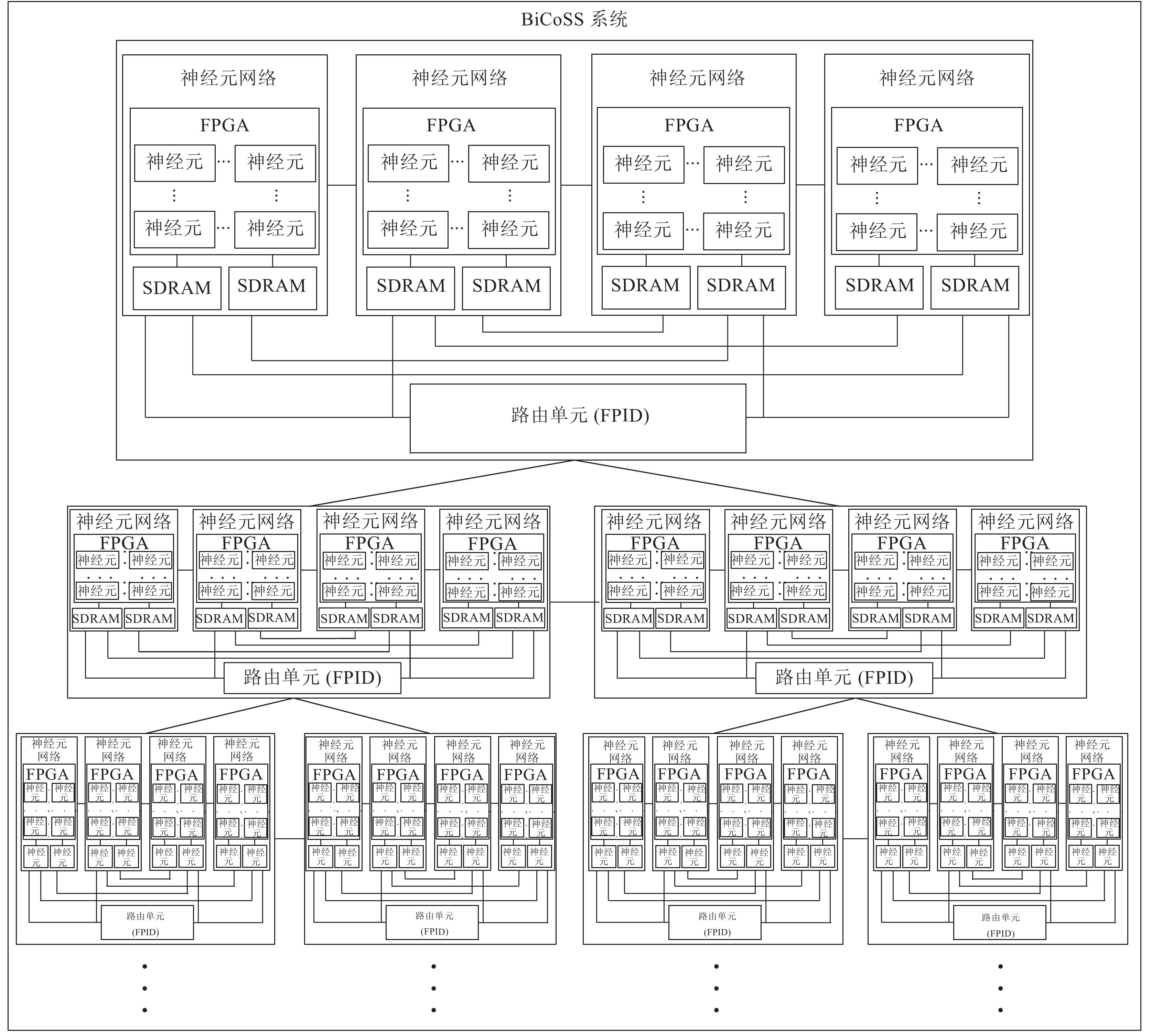
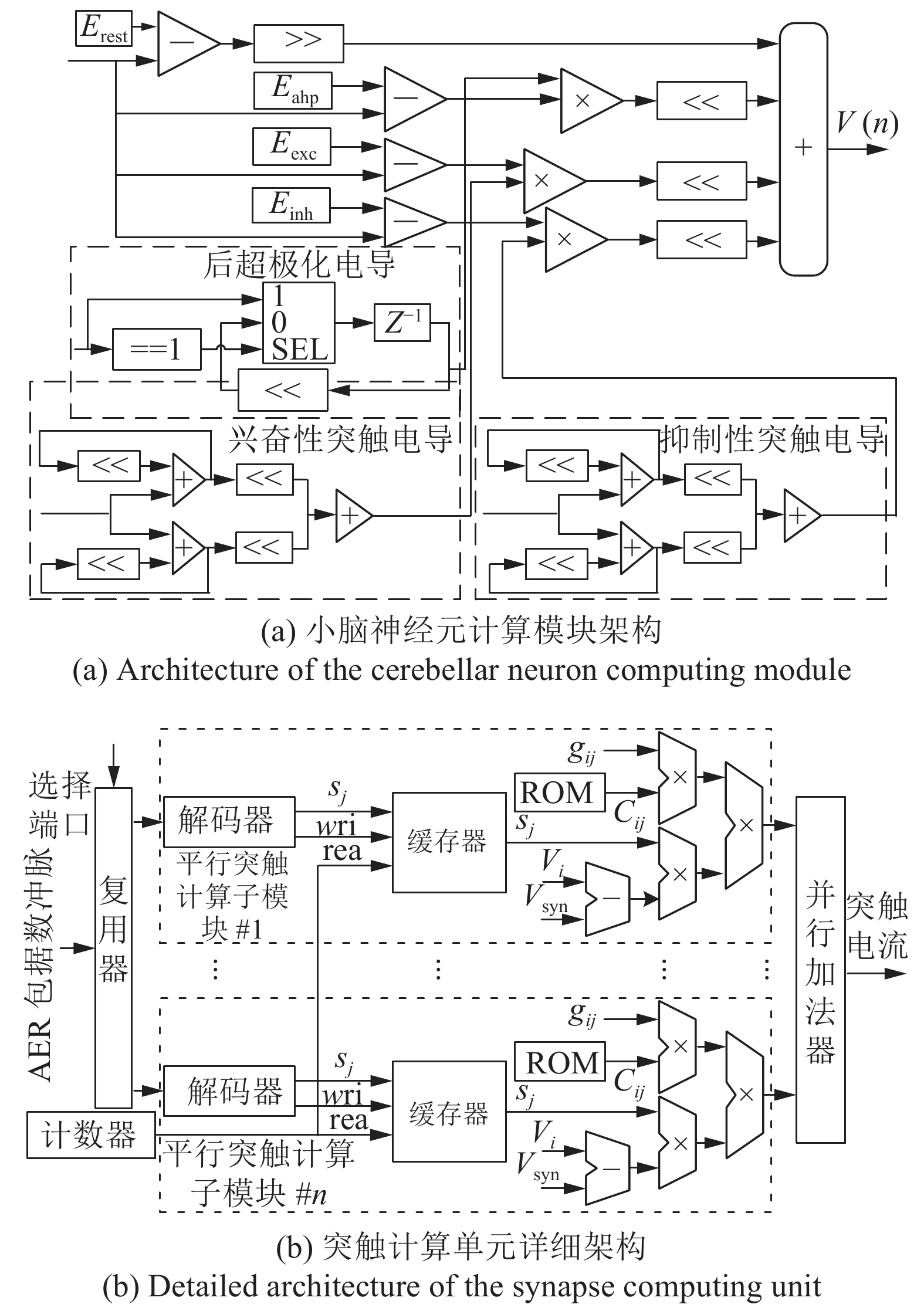
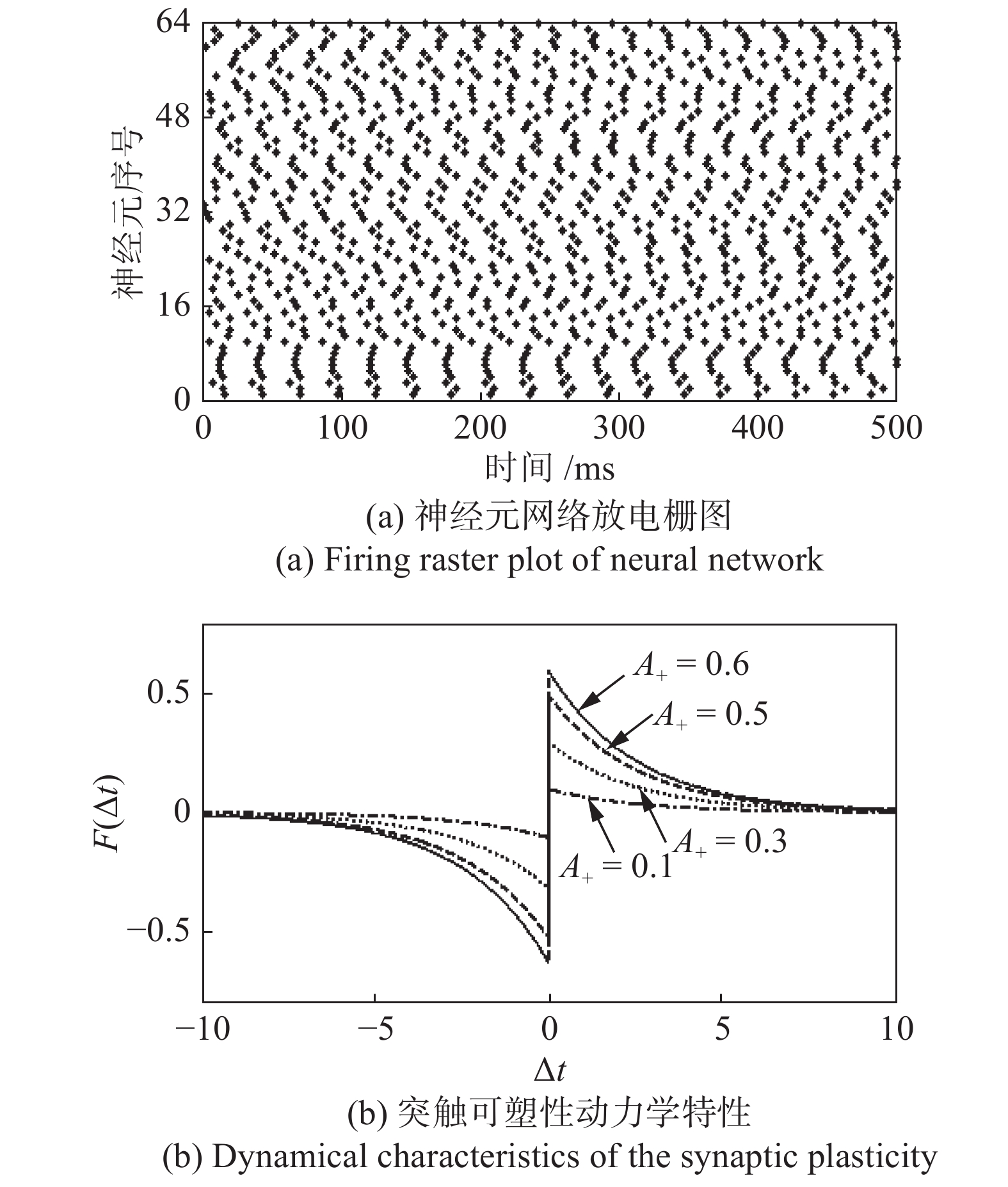
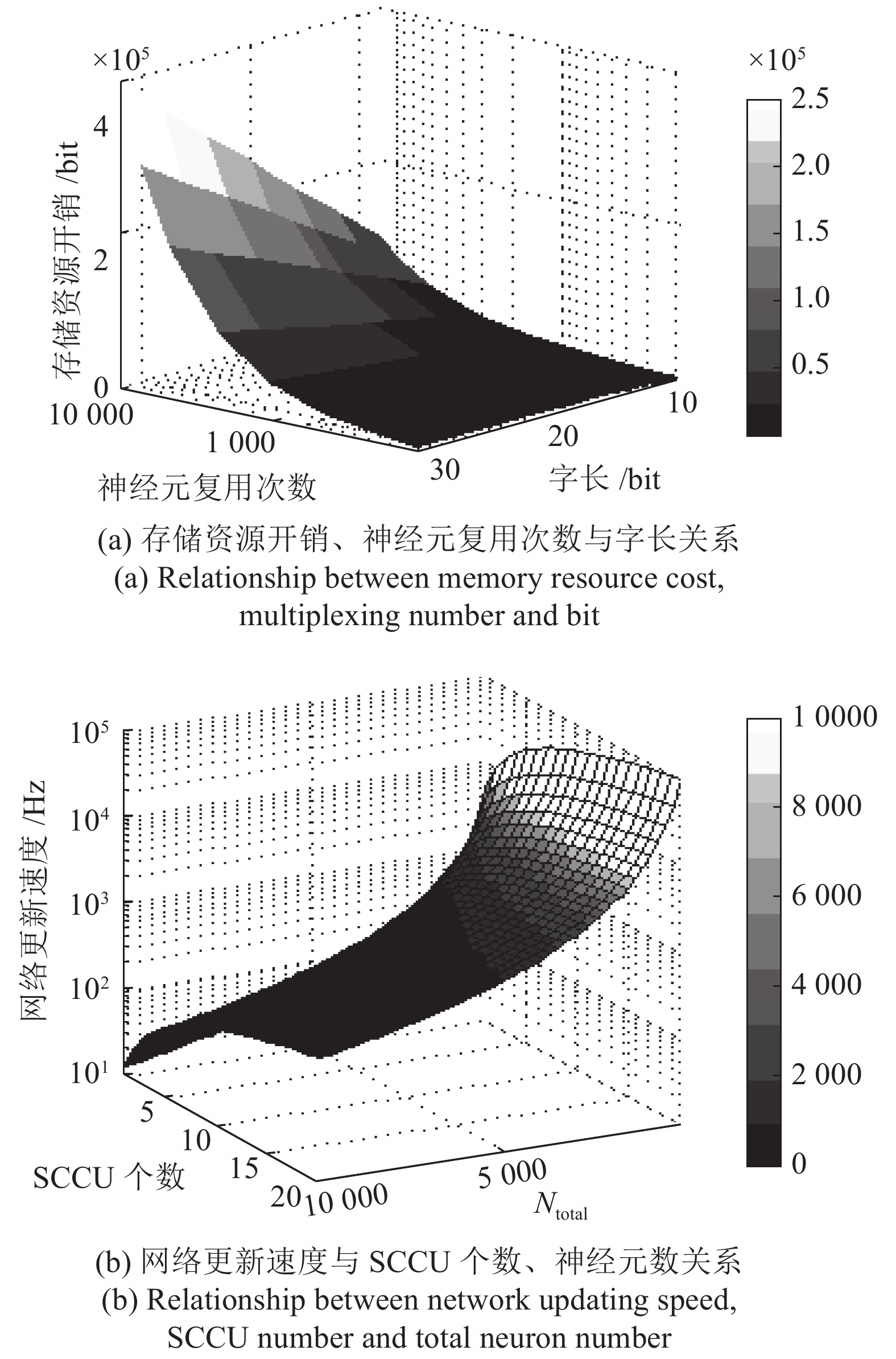
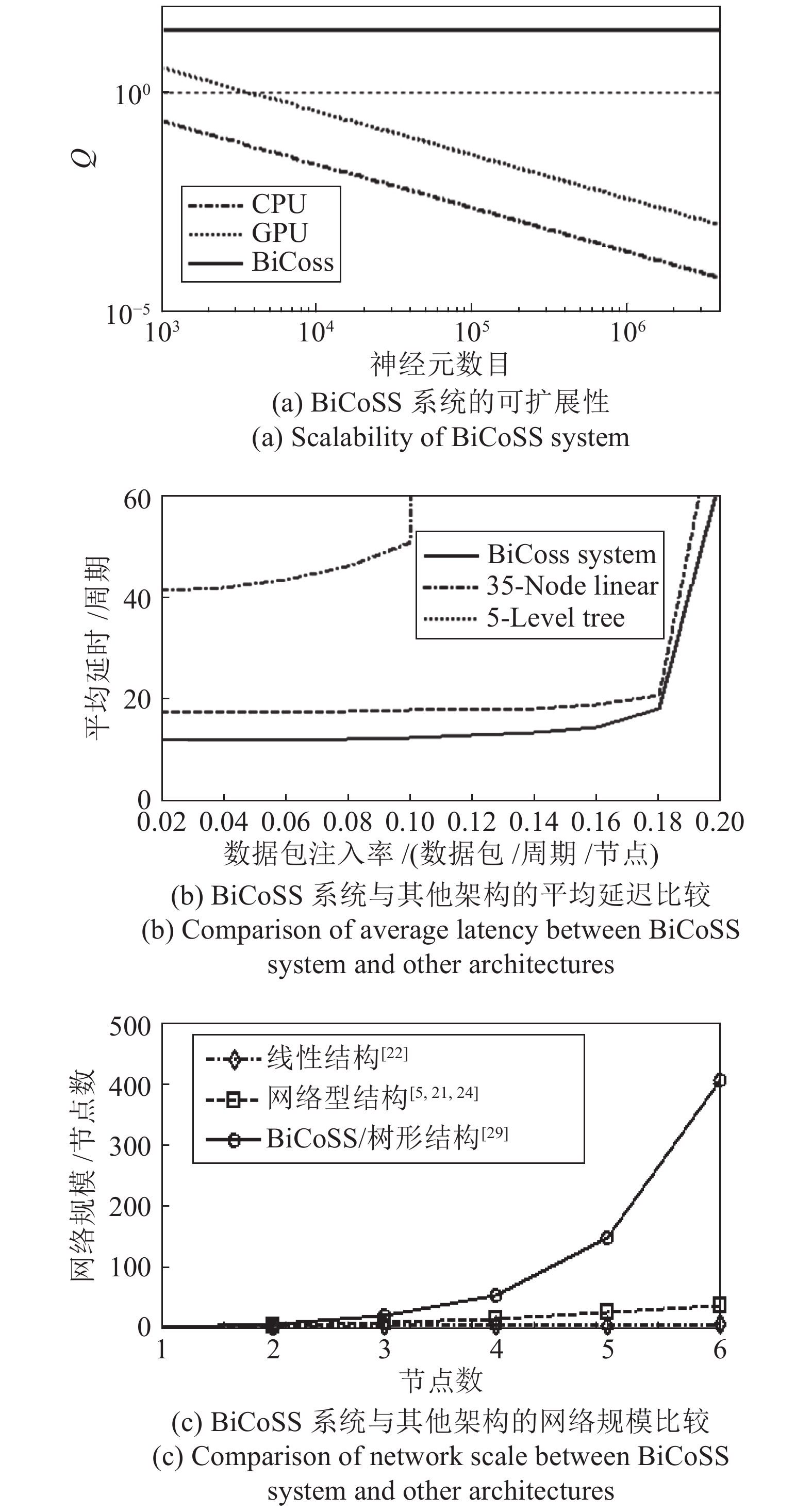
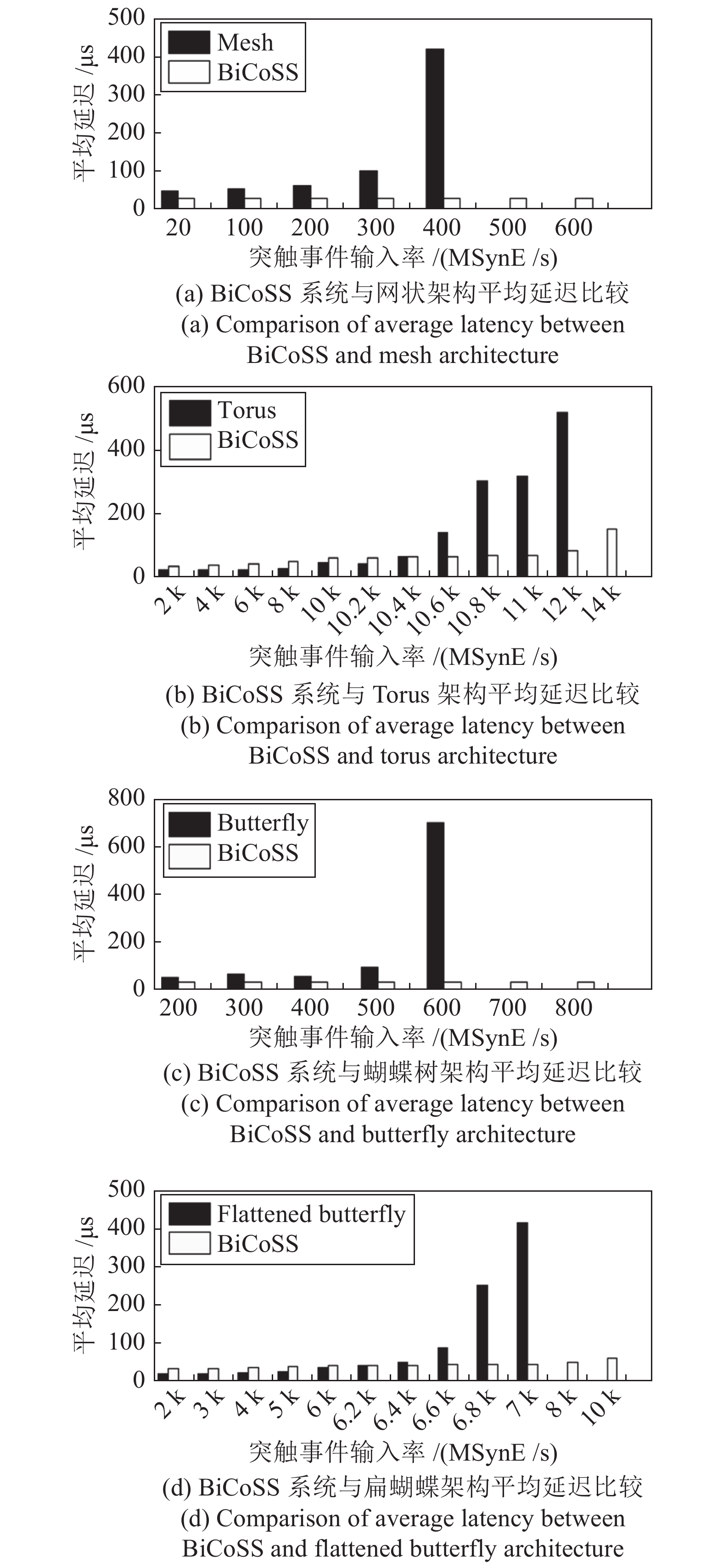
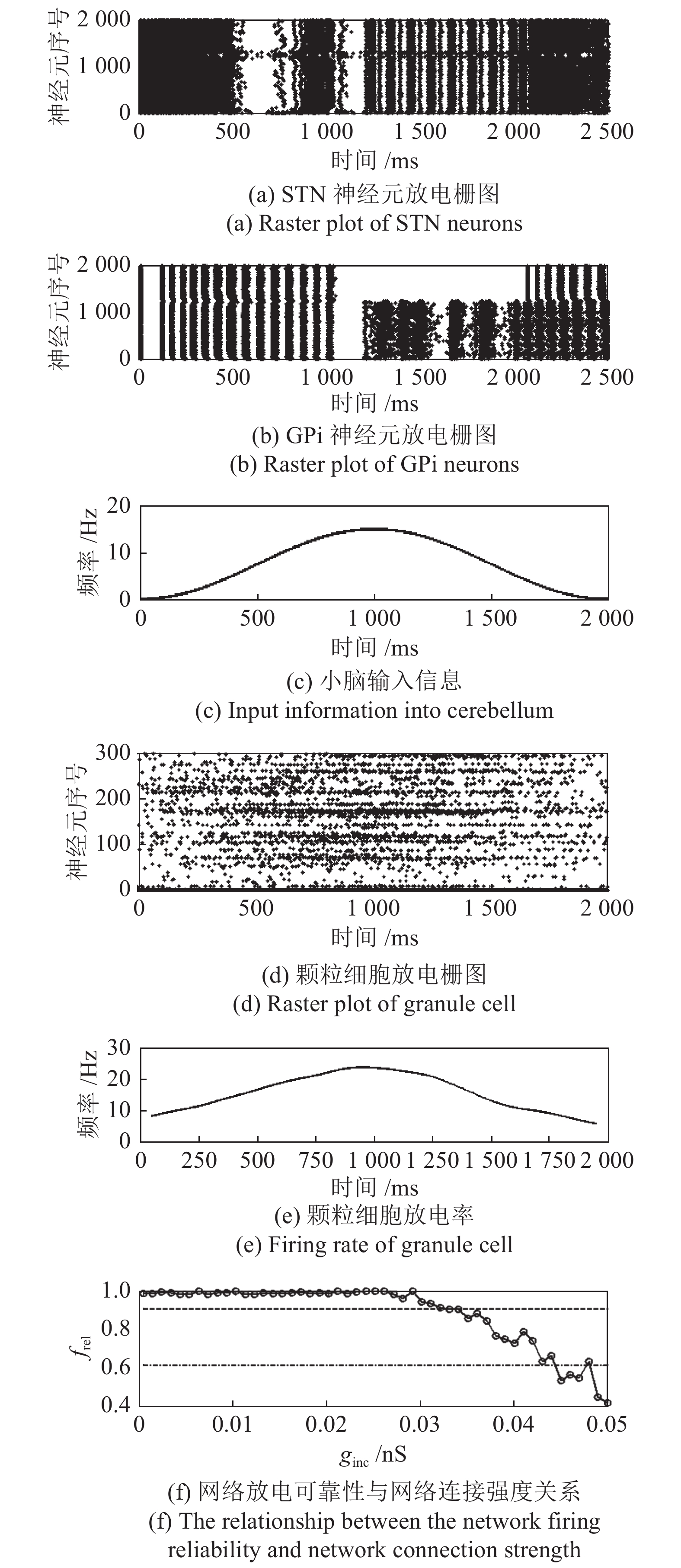
人脑具有协同多种认知功能的能力与极强的自主学习能力, 随着脑与神经科学的快速发展, 亟需计算结构模拟人脑的、性能更强大的计算平台进行人脑智能与认知行为机制的进一步探索. 受人脑神经机制的启发, 本文提出了基于神经认知计算架构的众核类脑计算系统BiCoSS, 该系统以并行计算的现场可编程门阵列(Field-programmable gate array, FPGA)为核心处理器, 以地址事件表达的神经放电作为信息传递载体, 以具有认知计算功能的神经元作为信息处理单元, 实现了四百万神经元数量级大规模神经元网络认知行为的实时计算, 填补了从细胞动力学层面理解人脑认知功能的鸿沟. 实验结果从计算能力、计算效率、功耗、通信效率、可扩展性等方面显示了BiCoSS系统的优越性能. BiCoSS通过人脑信息处理的计算架构以更贴近神经科学本质的模式实现了类脑智能; 同时, BiCoSS为神经认知和类脑计算的研究和应用提供了新的有效手段.
人脑具有协同多种认知功能的能力与极强的自主学习能力, 随着脑与神经科学的快速发展, 亟需计算结构模拟人脑的、性能更强大的计算平台进行人脑智能与认知行为机制的进一步探索. 受人脑神经机制的启发, 本文提出了基于神经认知计算架构的众核类脑计算系统BiCoSS, 该系统以并行计算的现场可编程门阵列(Field-programmable gate array, FPGA)为核心处理器, 以地址事件表达的神经放电作为信息传递载体, 以具有认知计算功能的神经元作为信息处理单元, 实现了四百万神经元数量级大规模神经元网络认知行为的实时计算, 填补了从细胞动力学层面理解人脑认知功能的鸿沟. 实验结果从计算能力、计算效率、功耗、通信效率、可扩展性等方面显示了BiCoSS系统的优越性能. BiCoSS通过人脑信息处理的计算架构以更贴近神经科学本质的模式实现了类脑智能; 同时, BiCoSS为神经认知和类脑计算的研究和应用提供了新的有效手段.




2021, 47(9): 2170-2181.
doi: 10.16383/j.aas.c190087
摘要:
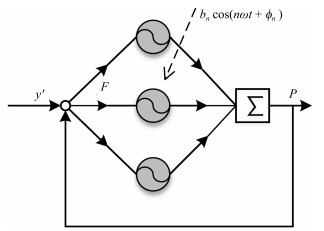
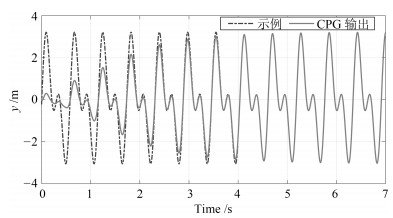
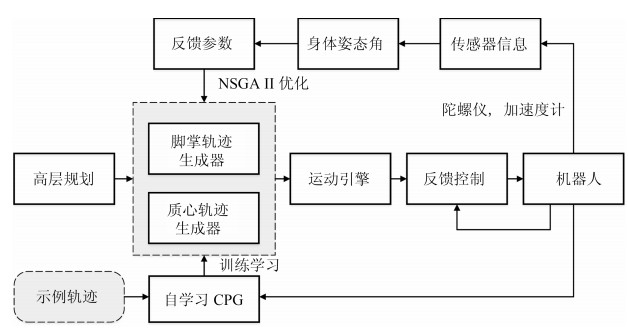
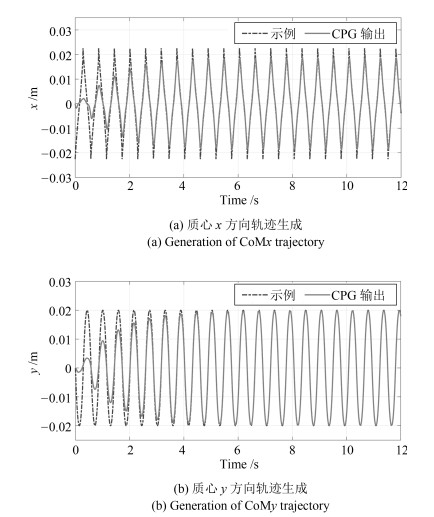
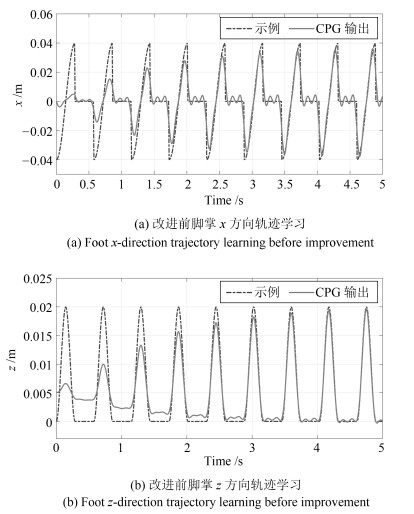
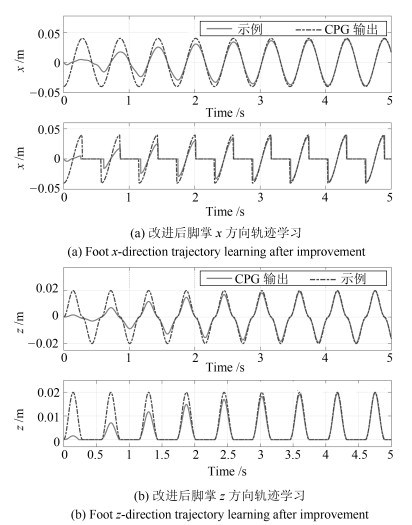
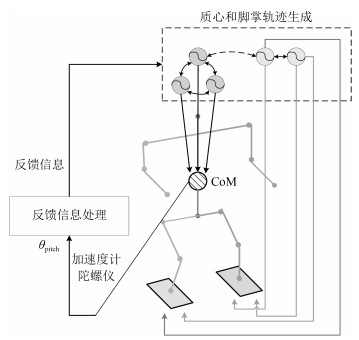
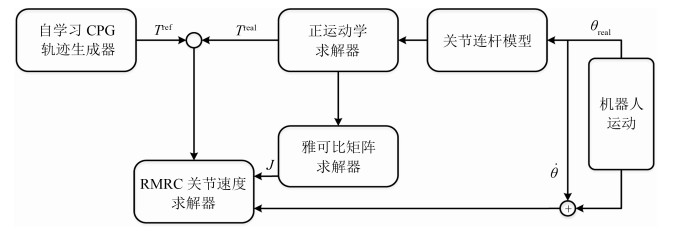
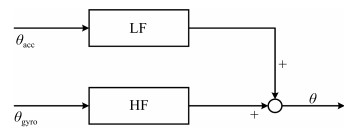
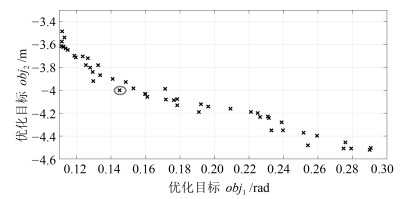
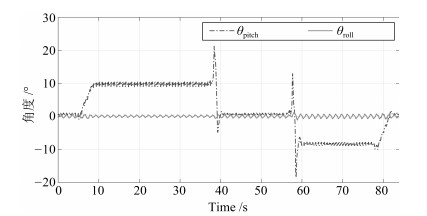
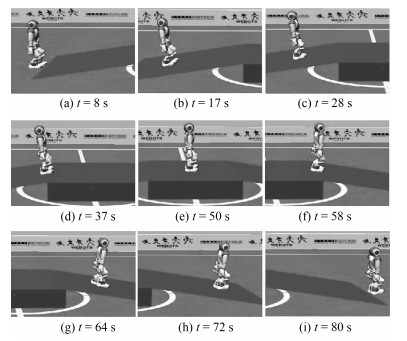
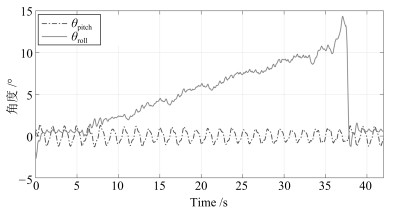
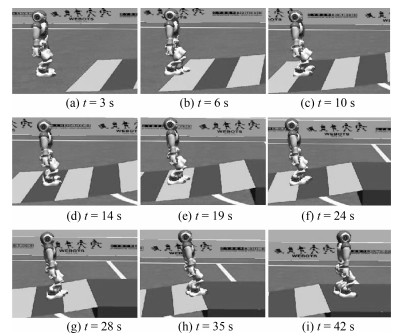
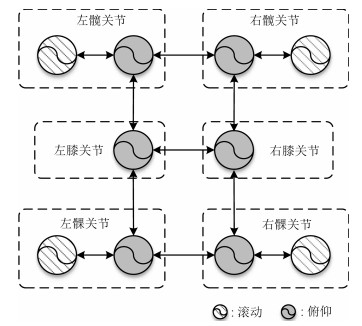
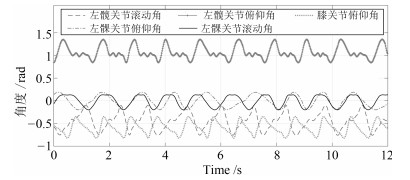
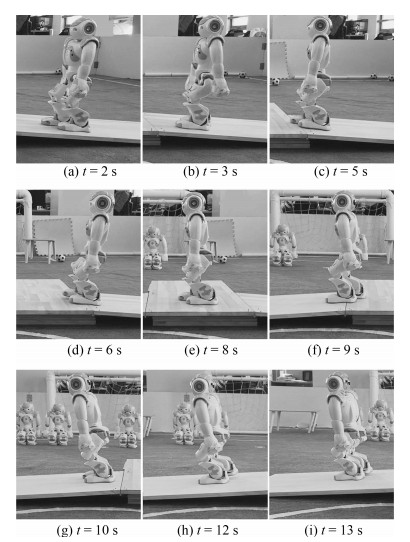
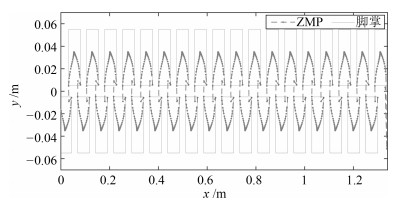
为了克服传统中枢模式发生器(Central pattern generator, CPG)关节空间控制方法的复杂性和局限性, 本文基于自学习中枢模式发生器模型, 提出了一套在线调制和融合多传感器信息的仿人机器人环境自适应行走控制方法.算法难点在于如何在机器人的工作空间将自学习CPG用于工作空间轨迹生成, 并使CPG参数直接和步态模式相关联.本文提出了利用自学习CPG来学习和实时生成机器人质心轨迹和脚掌轨迹的方法, 在线调节机器人步长、抬腿高度和步行速度等关键参数.参考生物反射行为, 利用传感反馈信息激发CPG以产生具有环境适应性的工作空间轨迹, 提升行走质量. 控制系统的参数通过优化算法来进一步改善行走性能.相比于传统的CPG关节空间法, 本文所采用的自学习CPG工作空间法不仅极大简化了CPG网络结构而且提高了仿人机器人行走的适应性.最后, 通过仿人机器人坡面适应性行走的仿真和实验, 验证了所提出控制策略的可行性和有效性.
为了克服传统中枢模式发生器(Central pattern generator, CPG)关节空间控制方法的复杂性和局限性, 本文基于自学习中枢模式发生器模型, 提出了一套在线调制和融合多传感器信息的仿人机器人环境自适应行走控制方法.算法难点在于如何在机器人的工作空间将自学习CPG用于工作空间轨迹生成, 并使CPG参数直接和步态模式相关联.本文提出了利用自学习CPG来学习和实时生成机器人质心轨迹和脚掌轨迹的方法, 在线调节机器人步长、抬腿高度和步行速度等关键参数.参考生物反射行为, 利用传感反馈信息激发CPG以产生具有环境适应性的工作空间轨迹, 提升行走质量. 控制系统的参数通过优化算法来进一步改善行走性能.相比于传统的CPG关节空间法, 本文所采用的自学习CPG工作空间法不仅极大简化了CPG网络结构而且提高了仿人机器人行走的适应性.最后, 通过仿人机器人坡面适应性行走的仿真和实验, 验证了所提出控制策略的可行性和有效性.




2021, 47(9): 2182-2193.
doi: 10.16383/j.aas.c190499
摘要:
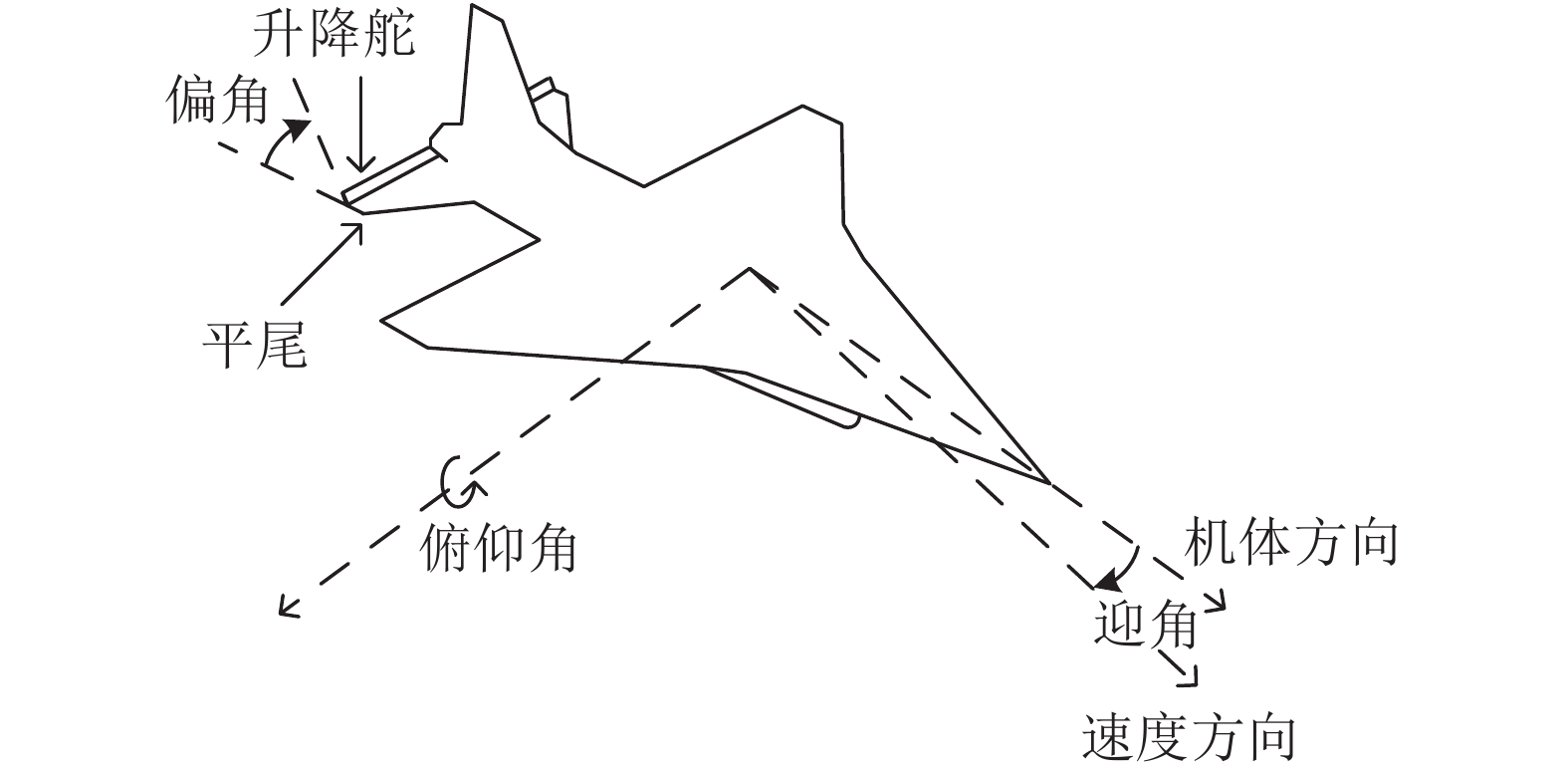
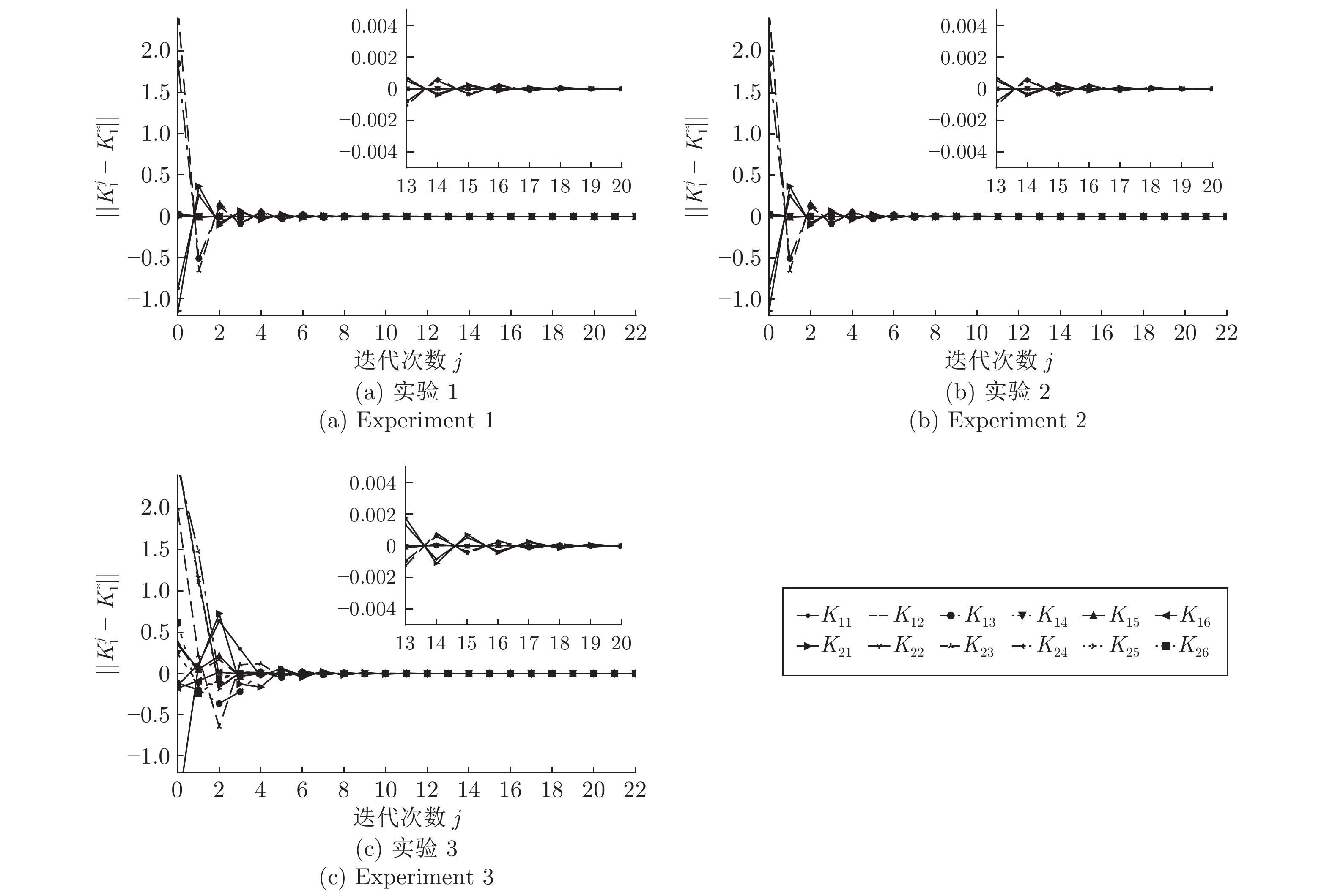
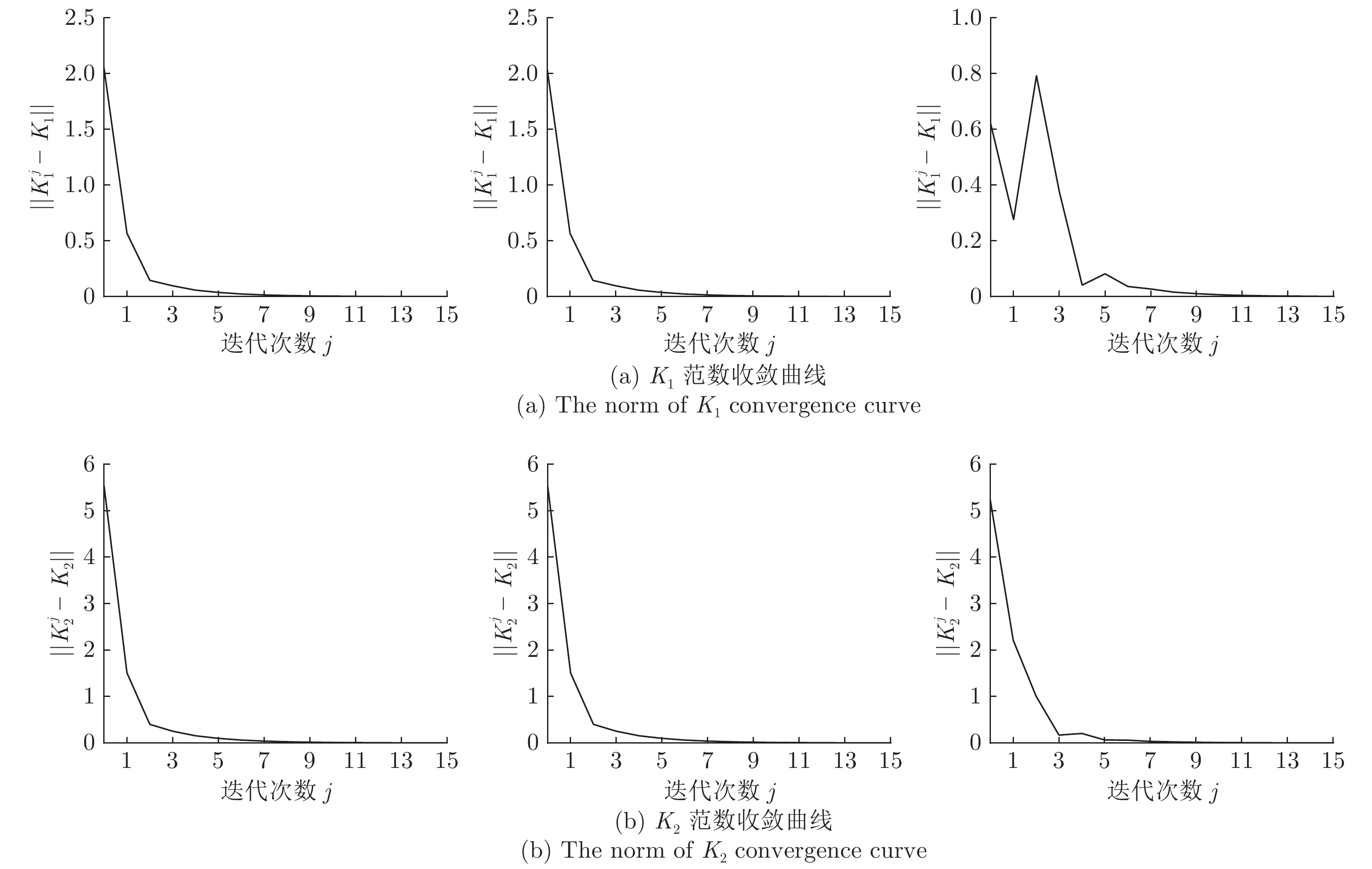
针对模型未知的线性离散系统在扰动存在条件下的调节控制问题, 提出了一种基于Off-policy的输入输出数据反馈的H∞控制方法. 本文从状态反馈在线学习算法出发, 针对系统运行过程中状态数据难以测得的问题, 通过引入增广数据向量将状态反馈策略迭代在线学习算法转化为输入输出数据反馈在线学习算法. 更进一步, 通过引入辅助项的方法将输入输出数据反馈策略迭代在线学习算法转化为无模型输入输出数据反馈Off-policy学习算法. 该算法利用历史输入输出数据实现最优输出反馈策略的学习, 同时克服了On-policy算法需要频繁与实际环境进行交互这一缺点. 除此之外, 与On-policy算法相比, Off-policy学习算法具有克服学习噪声的影响, 使学习结果收敛于理论最优值这一优点. 最终, 通过仿真实验验证了学习算法的收敛性.
针对模型未知的线性离散系统在扰动存在条件下的调节控制问题, 提出了一种基于Off-policy的输入输出数据反馈的H∞控制方法. 本文从状态反馈在线学习算法出发, 针对系统运行过程中状态数据难以测得的问题, 通过引入增广数据向量将状态反馈策略迭代在线学习算法转化为输入输出数据反馈在线学习算法. 更进一步, 通过引入辅助项的方法将输入输出数据反馈策略迭代在线学习算法转化为无模型输入输出数据反馈Off-policy学习算法. 该算法利用历史输入输出数据实现最优输出反馈策略的学习, 同时克服了On-policy算法需要频繁与实际环境进行交互这一缺点. 除此之外, 与On-policy算法相比, Off-policy学习算法具有克服学习噪声的影响, 使学习结果收敛于理论最优值这一优点. 最终, 通过仿真实验验证了学习算法的收敛性.
2021, 47(9): 2194-2204.
doi: 10.16383/j.aas.c200009
摘要:
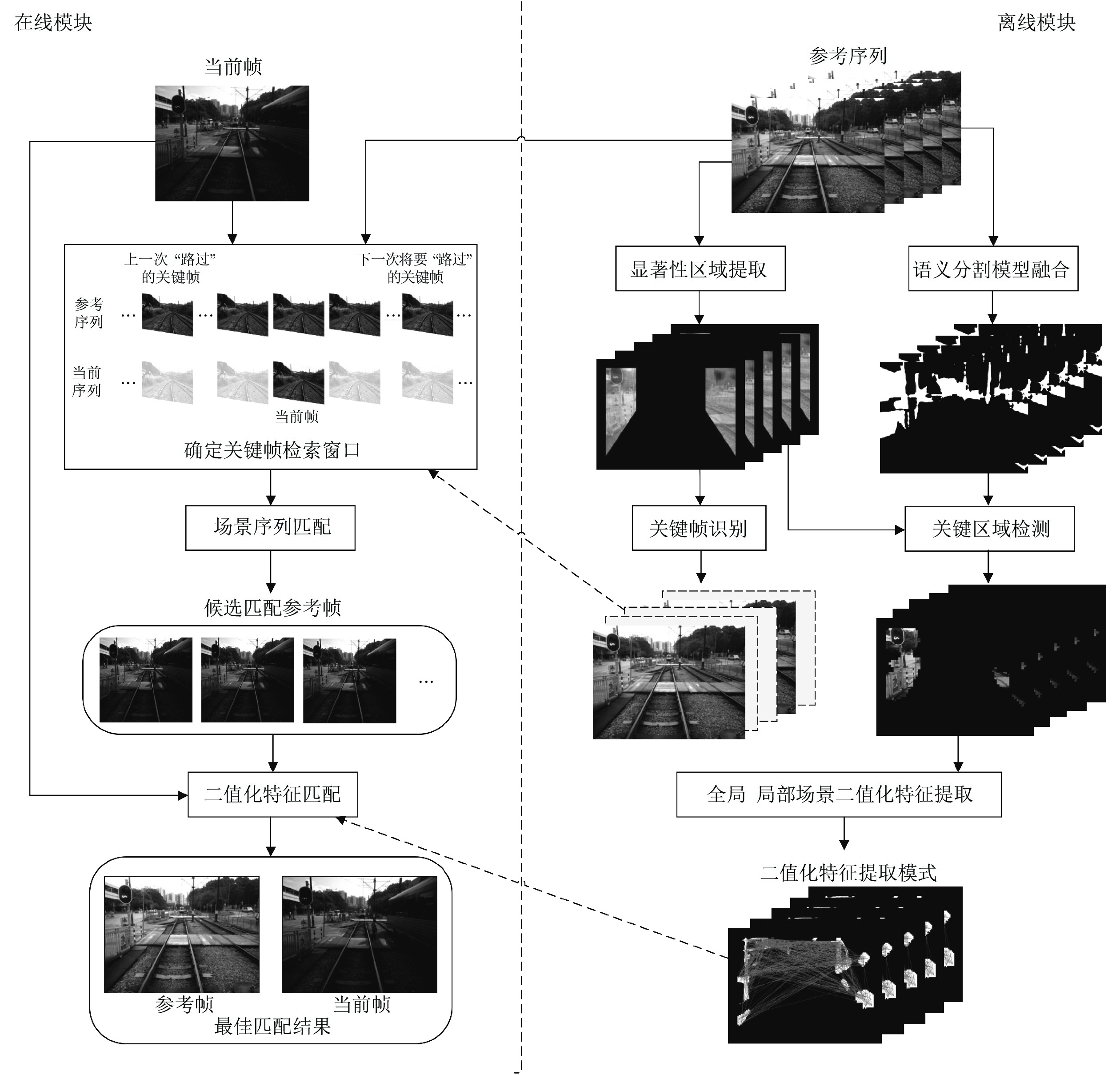
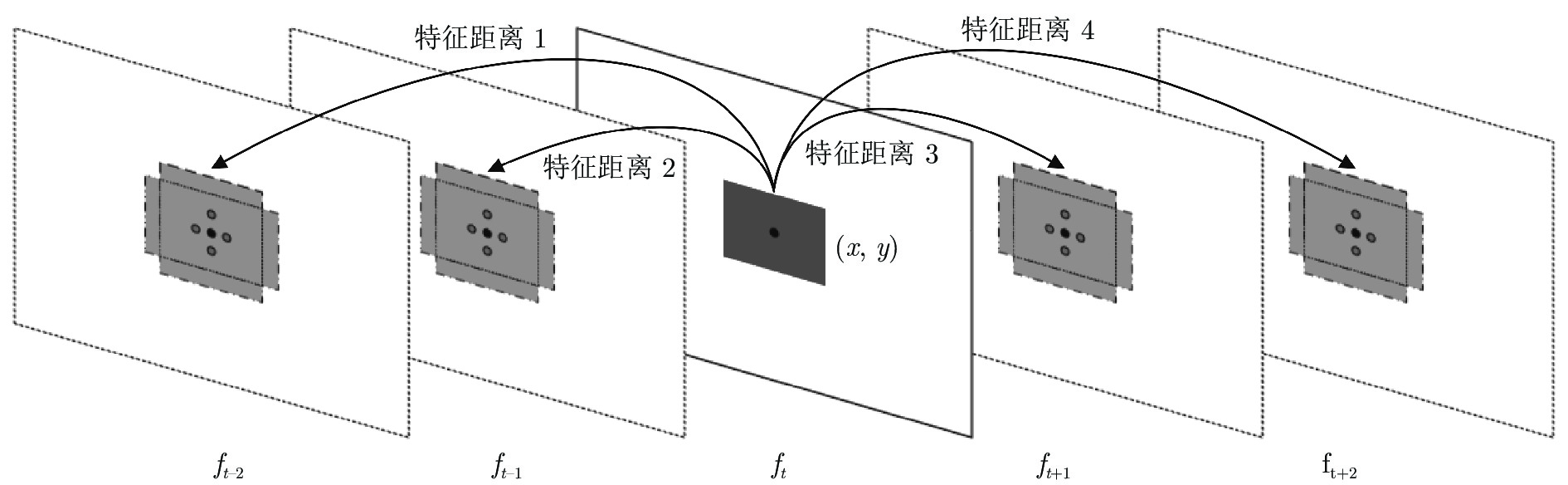
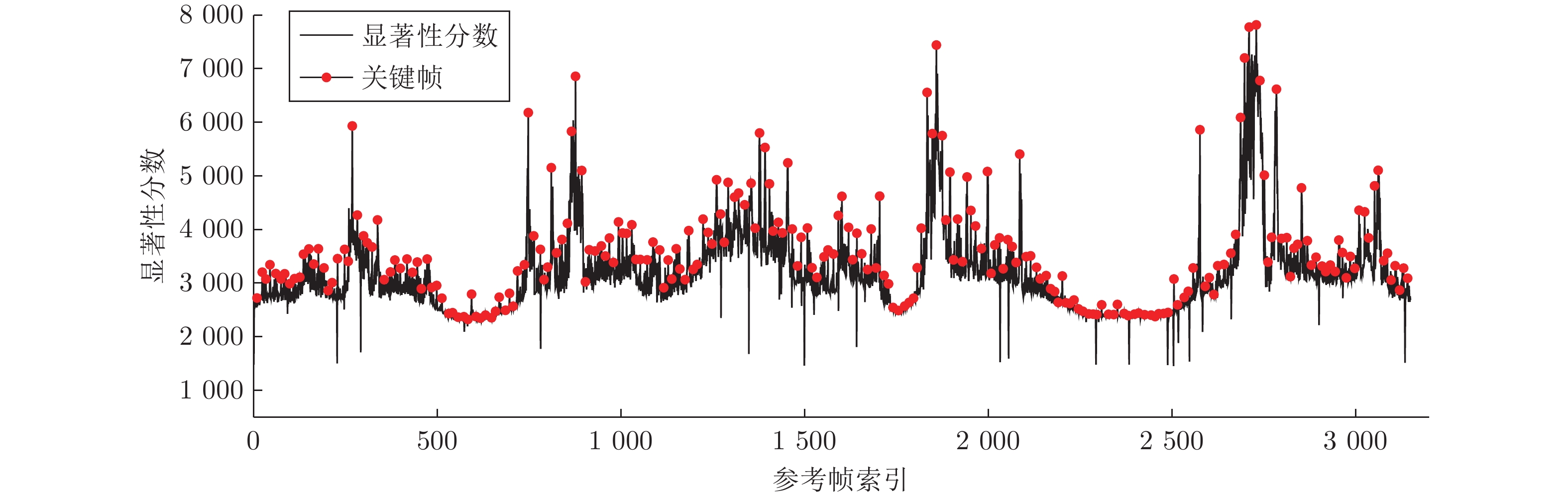
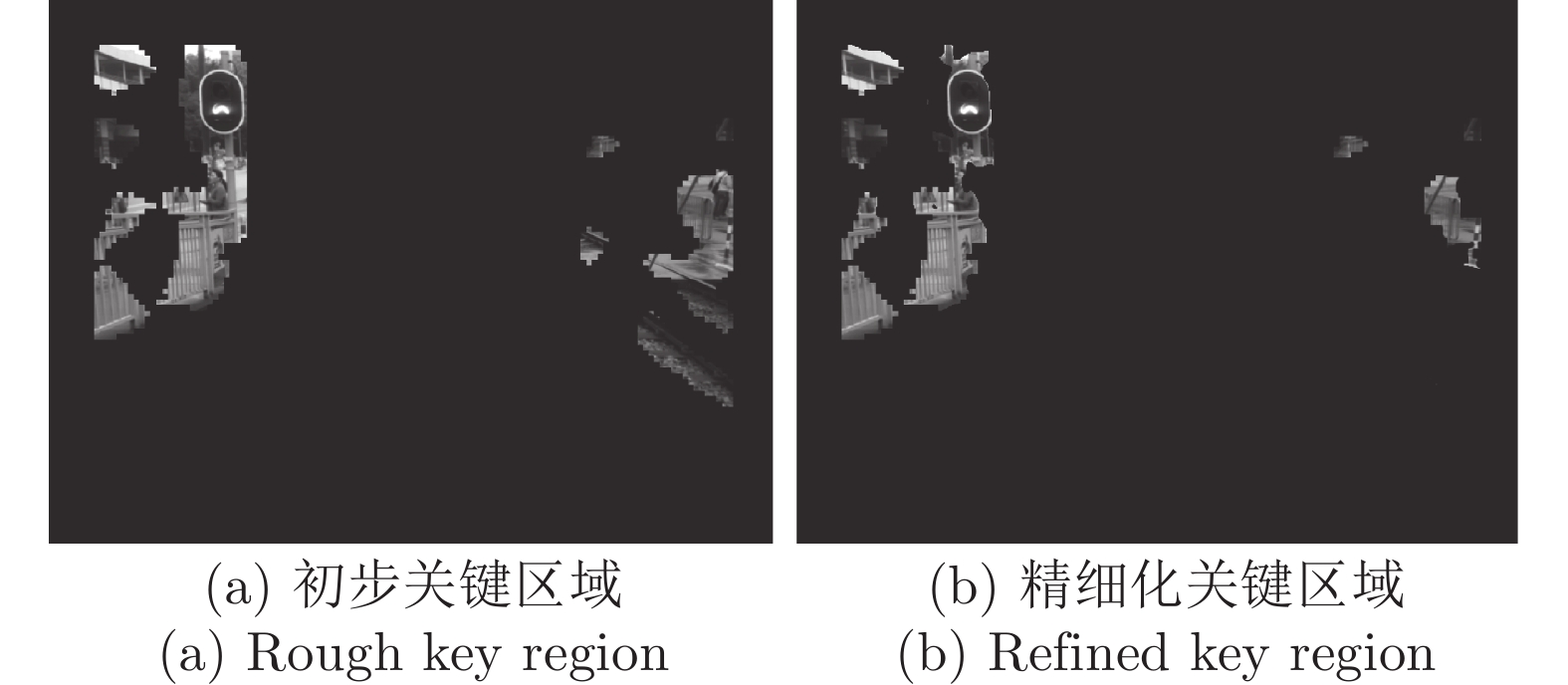
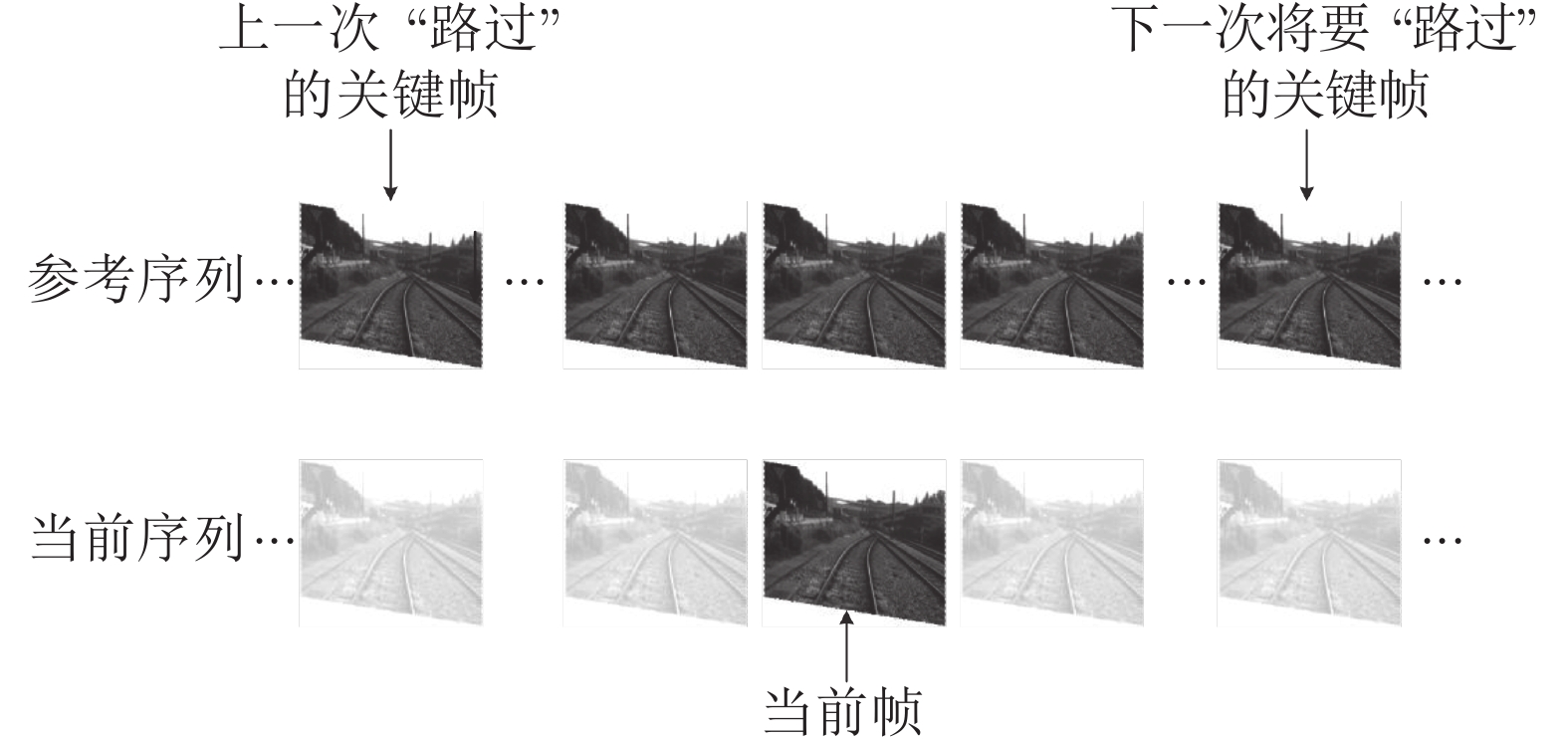
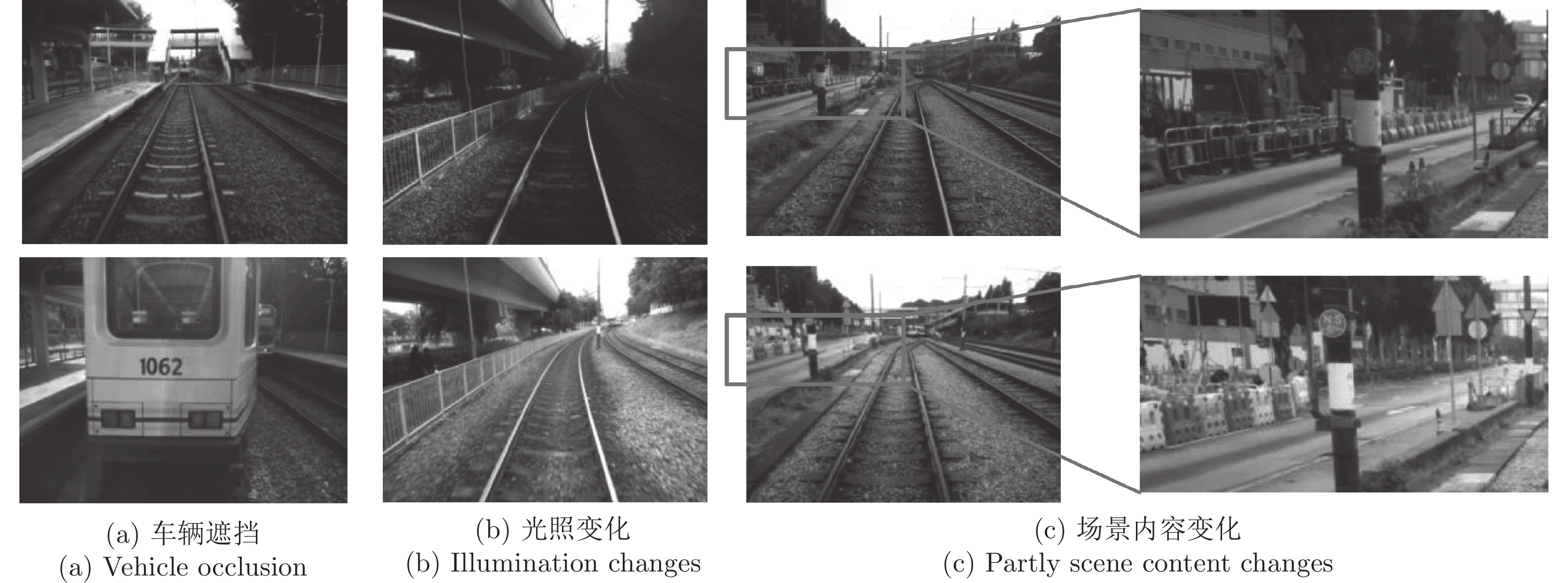
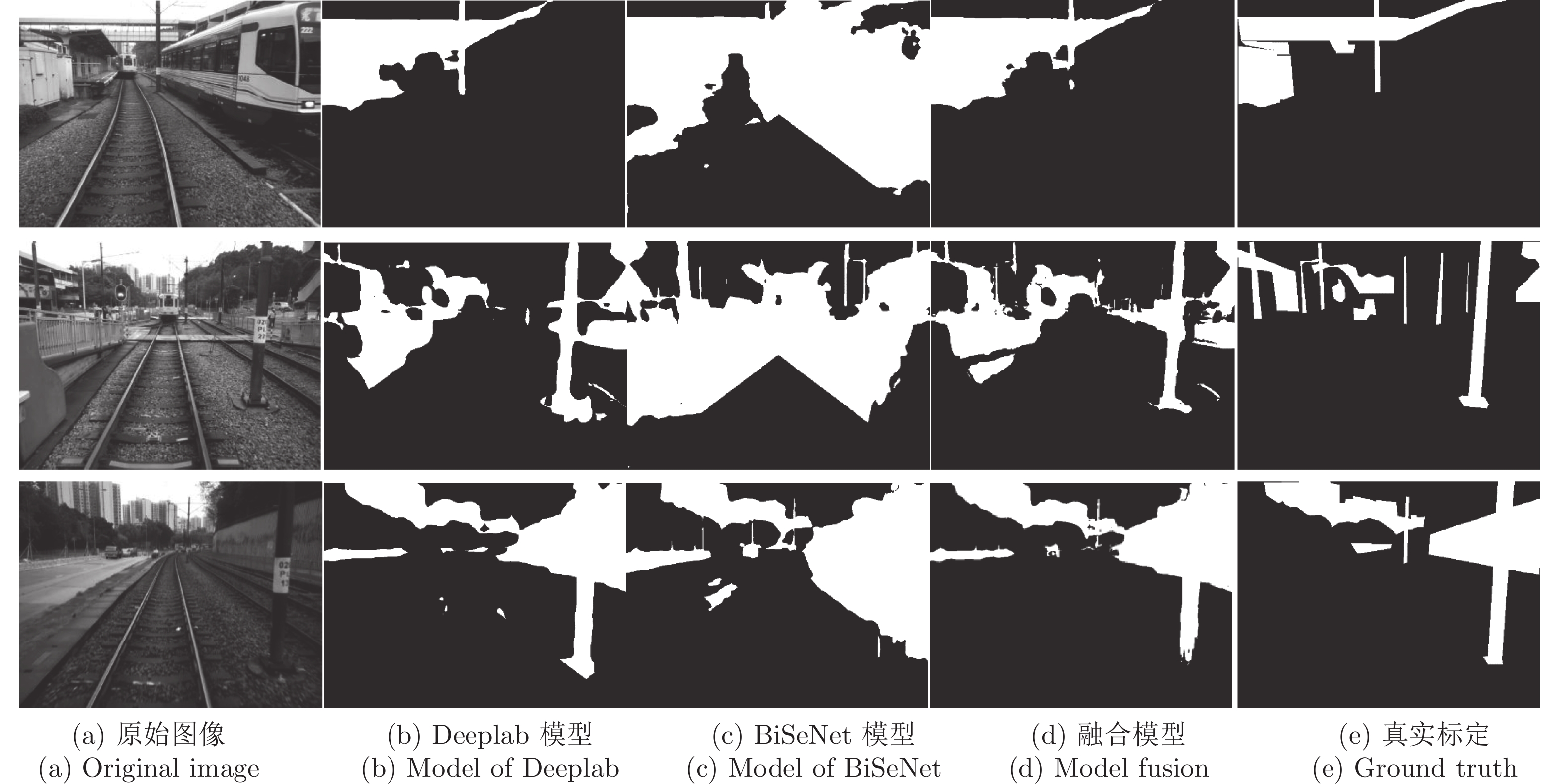
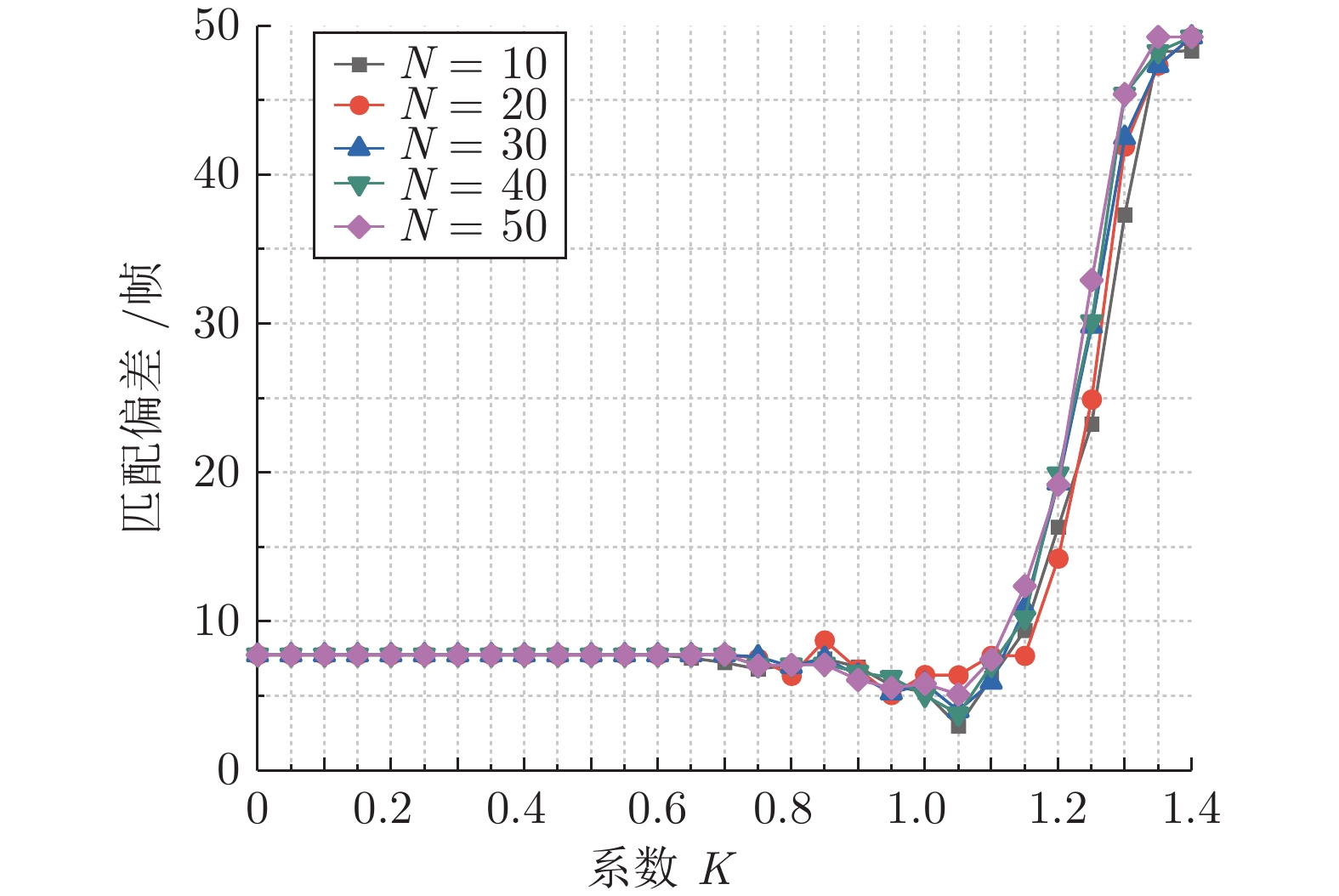
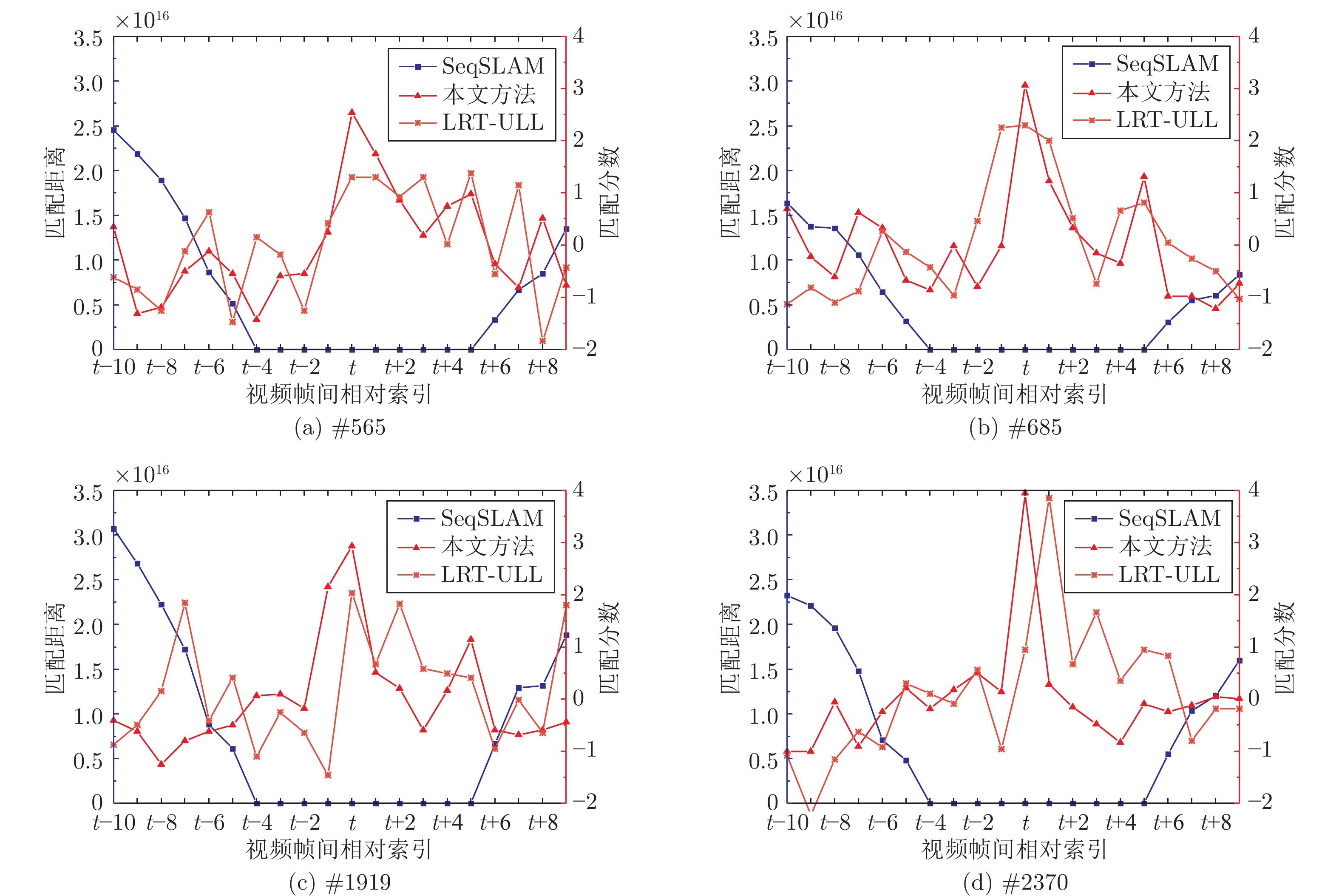
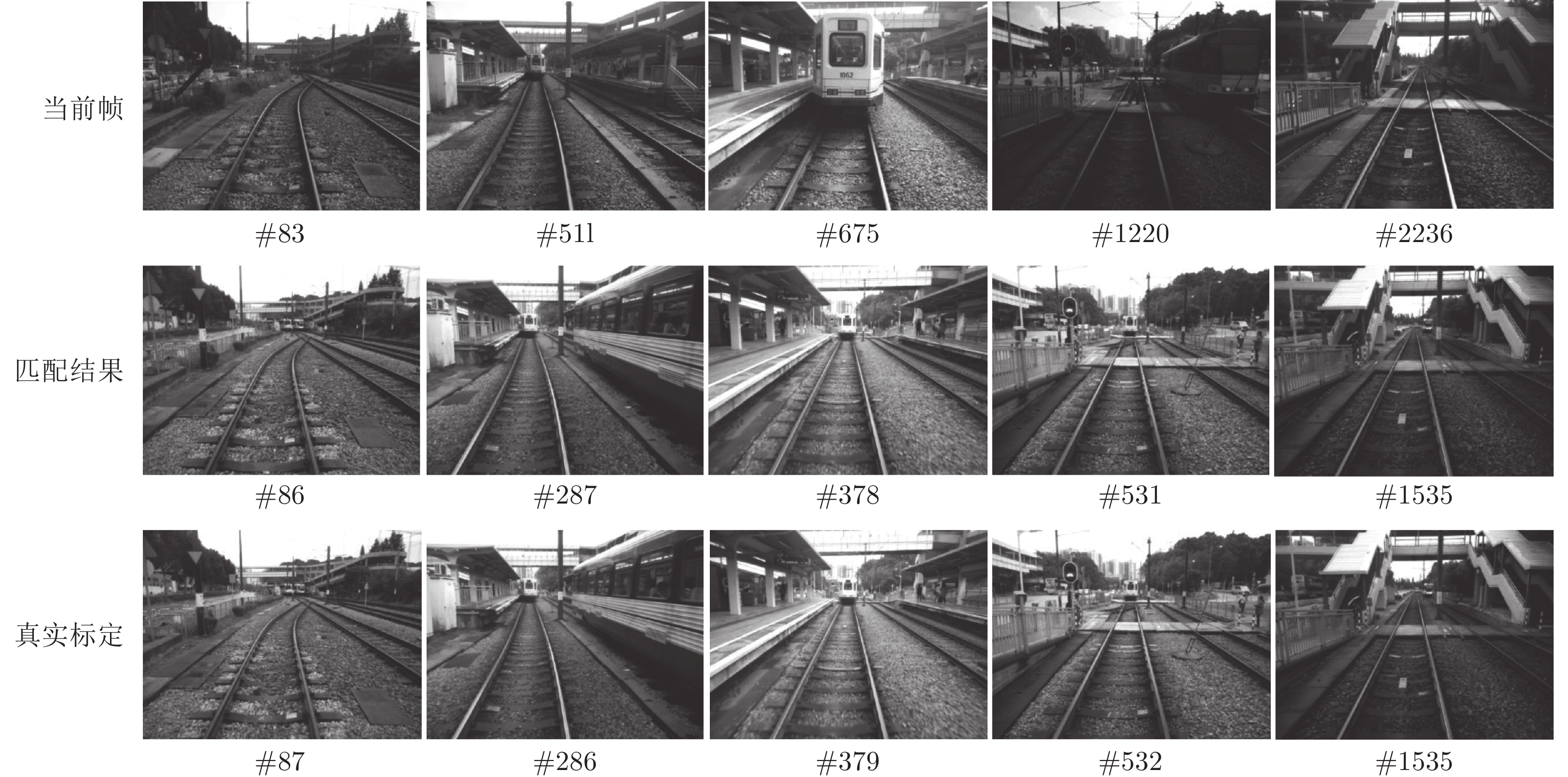
轻轨作为城市公共交通系统的重要组成部分, 对其实现智能化的管理势在必行. 针对城市轻轨定位系统要求精度高、实时强且易于安装等特点, 本文提出一种基于全局−局部场景特征与关键帧检索的定位方法. 该方法在语义信息的指导下, 从单目相机获取的参考帧中提取区别性高的区域作为关键区域. 并结合像素点位置线索利用无监督学习的方式筛选关键区域中描述力强的像素对生成二值化特征提取模式, 不仅能够提升匹配精度还显著提高了在线模块场景特征提取与匹配的速度. 其次, 以场景显著性分数为依据获取的关键帧避免了具有相似外观的场景给定位带来的干扰, 并能辅助提高场景在线匹配的精度与效率. 本文使用公开测试数据集以及具有挑战性的轻轨数据集进行测试. 实验结果表明, 本系统在满足实时性要求的同时, 其定位准确率均可达到90%以上.
轻轨作为城市公共交通系统的重要组成部分, 对其实现智能化的管理势在必行. 针对城市轻轨定位系统要求精度高、实时强且易于安装等特点, 本文提出一种基于全局−局部场景特征与关键帧检索的定位方法. 该方法在语义信息的指导下, 从单目相机获取的参考帧中提取区别性高的区域作为关键区域. 并结合像素点位置线索利用无监督学习的方式筛选关键区域中描述力强的像素对生成二值化特征提取模式, 不仅能够提升匹配精度还显著提高了在线模块场景特征提取与匹配的速度. 其次, 以场景显著性分数为依据获取的关键帧避免了具有相似外观的场景给定位带来的干扰, 并能辅助提高场景在线匹配的精度与效率. 本文使用公开测试数据集以及具有挑战性的轻轨数据集进行测试. 实验结果表明, 本系统在满足实时性要求的同时, 其定位准确率均可达到90%以上.

2021, 47(9): 2205-2213.
doi: 10.16383/j.aas.c180276
摘要:
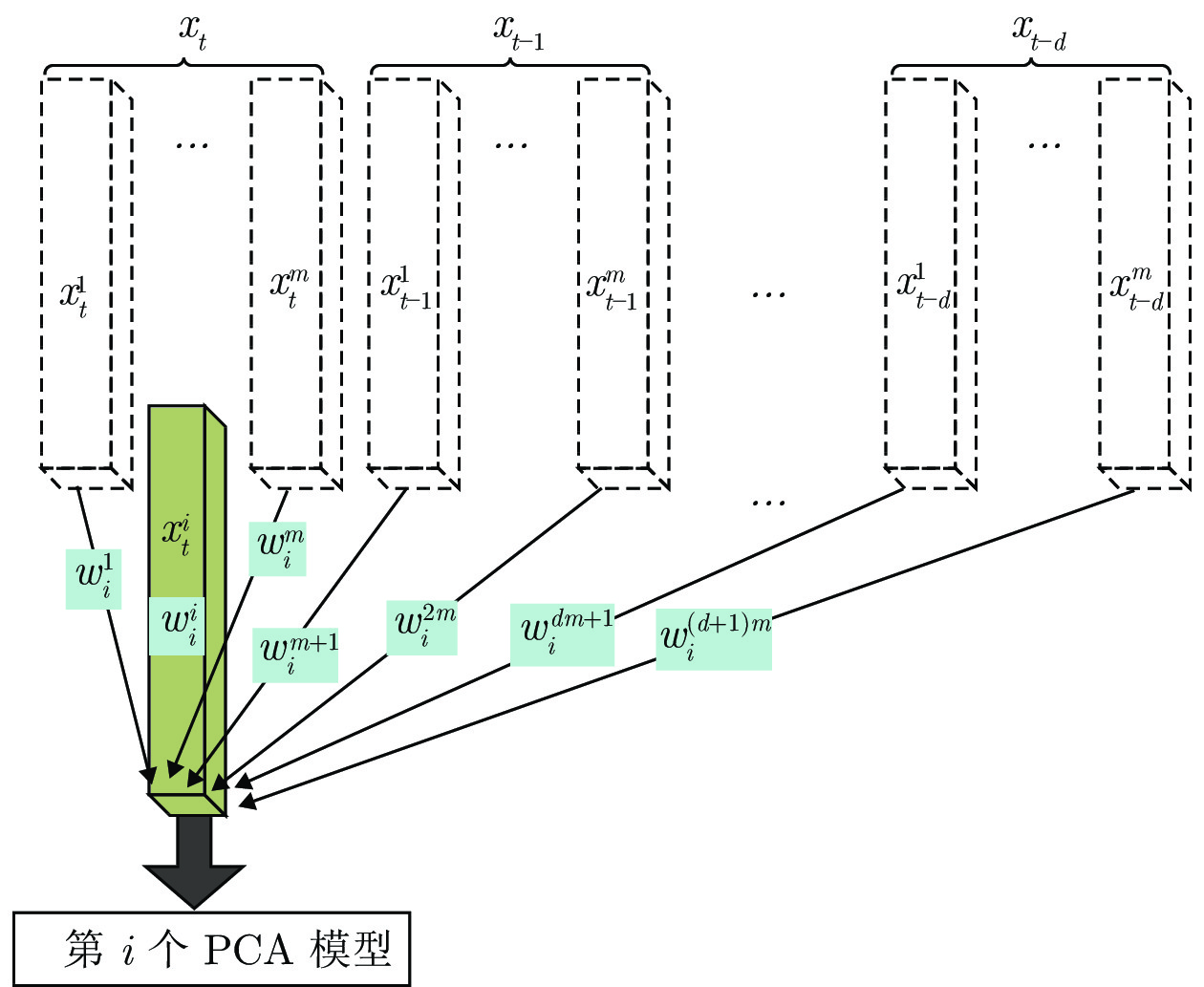
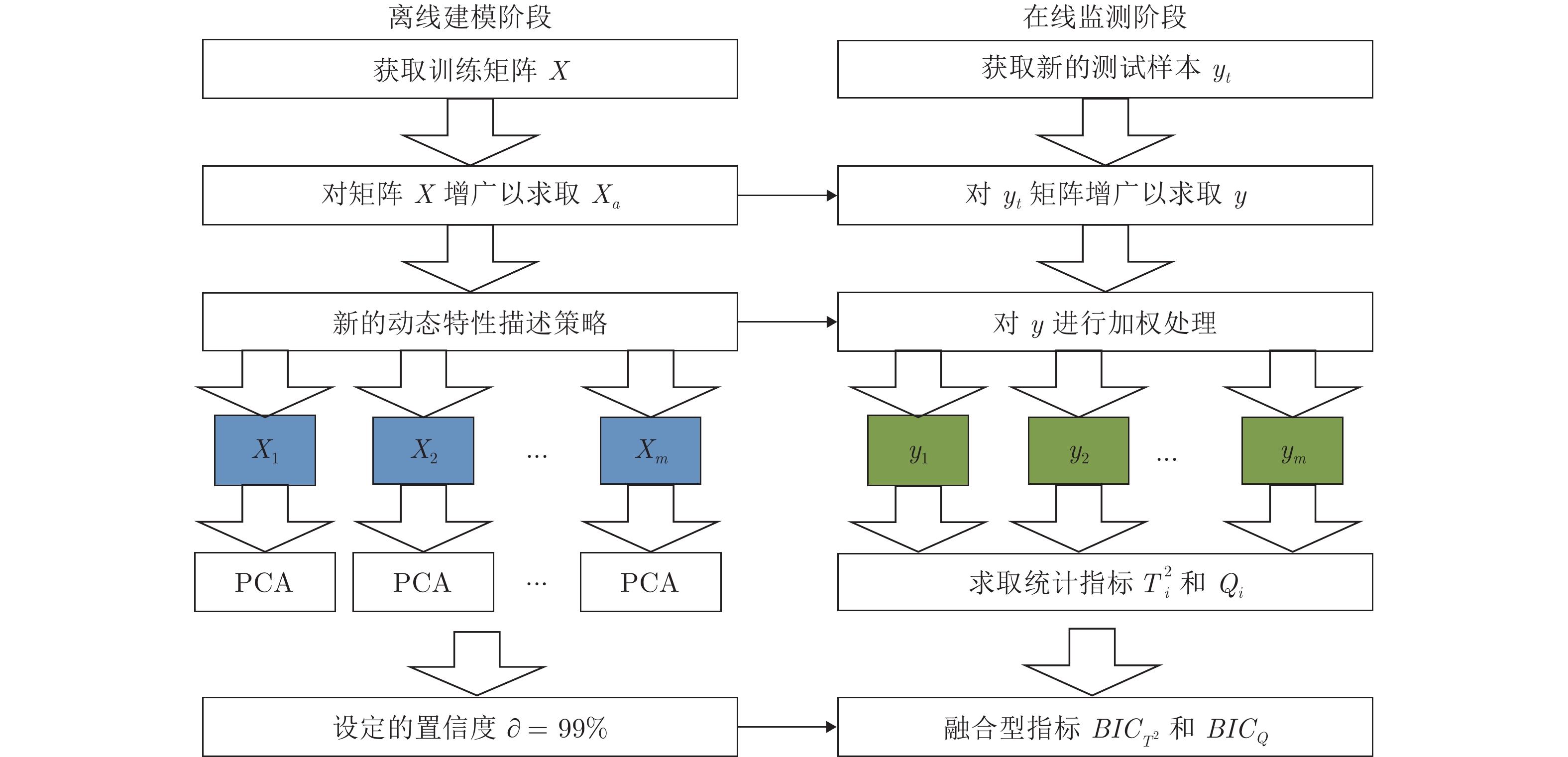
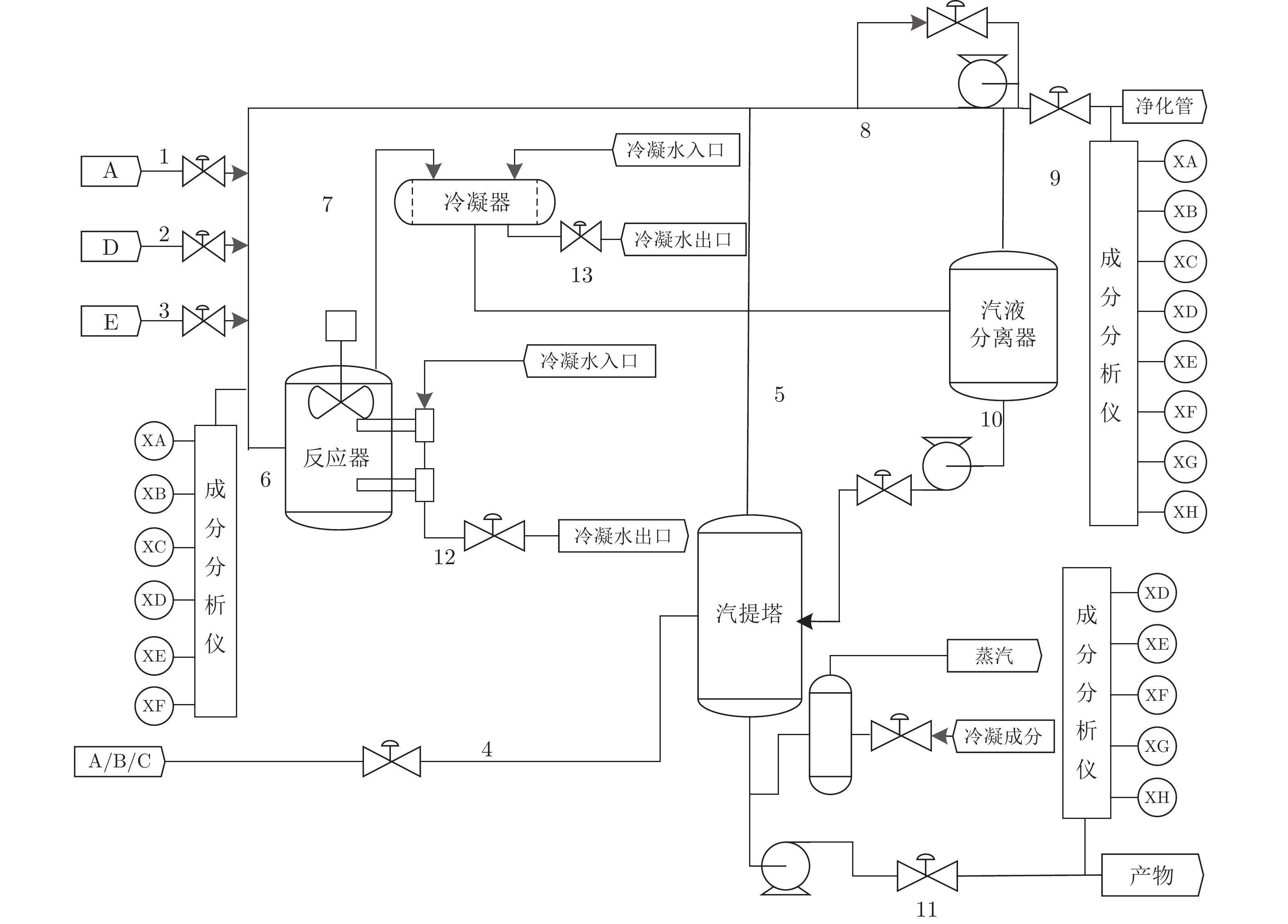
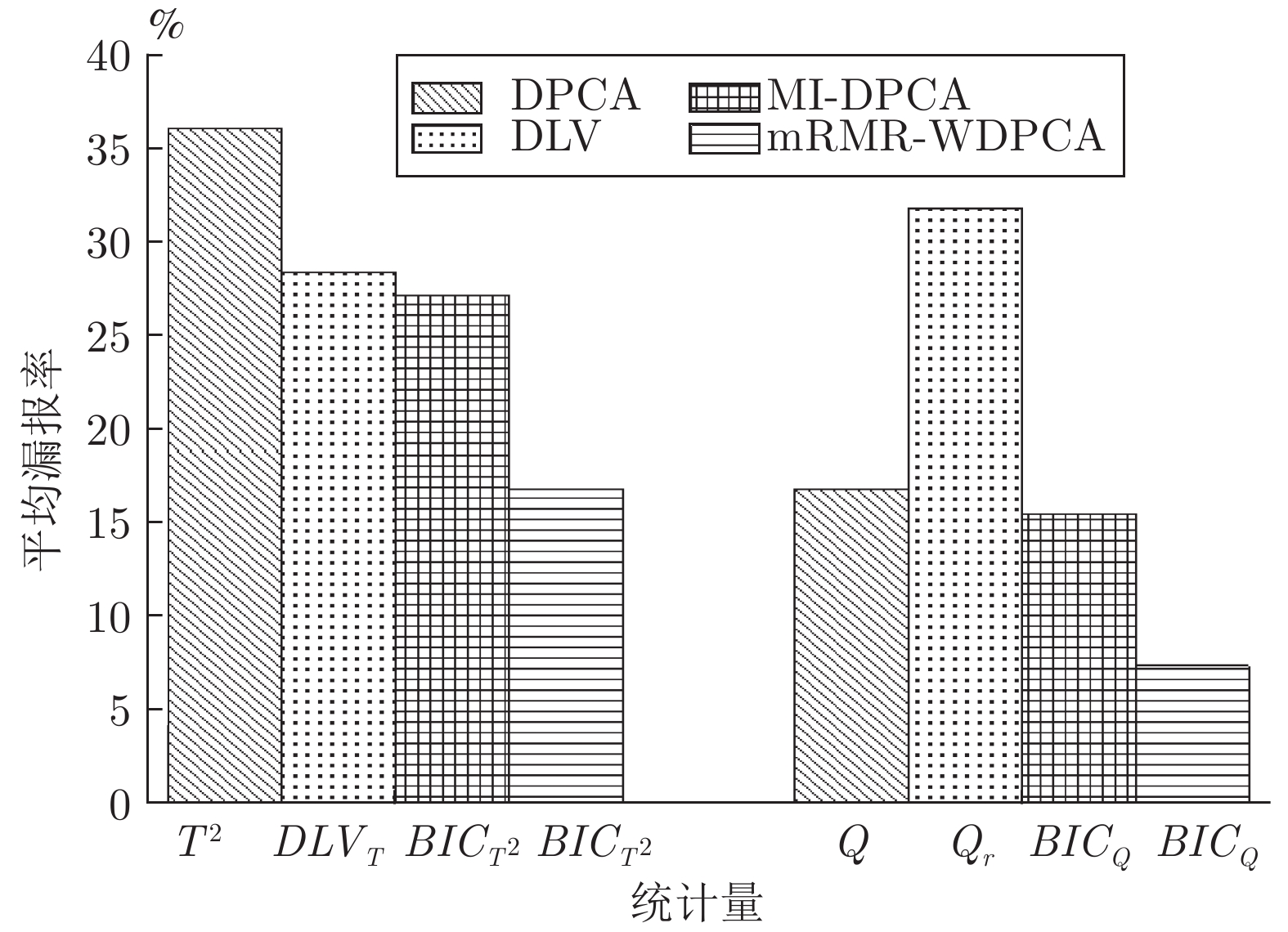
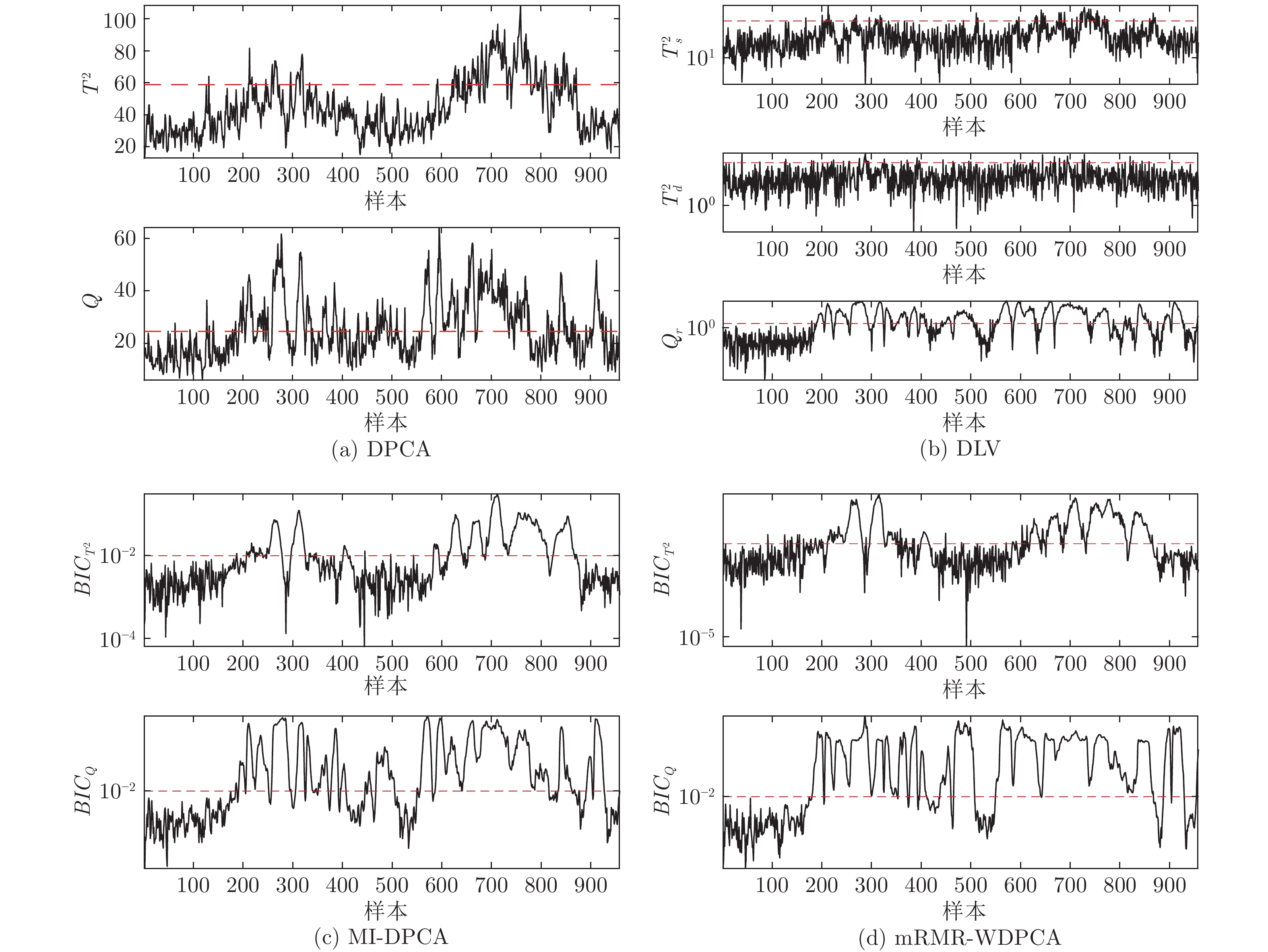
现代工业生产过程往往具有复杂的动态特性: 不同测量变量间会存在不同的时序相关性, 且变量间的相互影响会反映在不同的采样时刻上. 现有的动态过程监测模型往往不能充分挖掘变量间的动态特性, 其故障检测效果也有待进一步提高. 在此背景下, 本文提出一种基于动态特性描述的变量加权型分散式故障检测方法. 利用最大相关最小冗余(Minimal redundancy maximal relevance, mRMR) 算法更准确地描述动态过程变量间的相关性关系, 并利用该相关性的值对原始增广矩阵进行加权处理, 且不同延迟变量对当前测量值的影响大小就通过权值来体现, 因此能更加全面地刻画该测量值的动态特性. 最后建立一种融合mRMR算法, 贝叶斯推理以及动态主成分分析(Dynamic principal componemt amalysis, DPCA)模型的新的分布式建模策略, 提高了模型的容错能力和泛化能力, 取得了更好的故障检测结果.
现代工业生产过程往往具有复杂的动态特性: 不同测量变量间会存在不同的时序相关性, 且变量间的相互影响会反映在不同的采样时刻上. 现有的动态过程监测模型往往不能充分挖掘变量间的动态特性, 其故障检测效果也有待进一步提高. 在此背景下, 本文提出一种基于动态特性描述的变量加权型分散式故障检测方法. 利用最大相关最小冗余(Minimal redundancy maximal relevance, mRMR) 算法更准确地描述动态过程变量间的相关性关系, 并利用该相关性的值对原始增广矩阵进行加权处理, 且不同延迟变量对当前测量值的影响大小就通过权值来体现, 因此能更加全面地刻画该测量值的动态特性. 最后建立一种融合mRMR算法, 贝叶斯推理以及动态主成分分析(Dynamic principal componemt amalysis, DPCA)模型的新的分布式建模策略, 提高了模型的容错能力和泛化能力, 取得了更好的故障检测结果.

2021, 47(9): 2214-2225.
doi: 10.16383/j.aas.c190066
摘要:
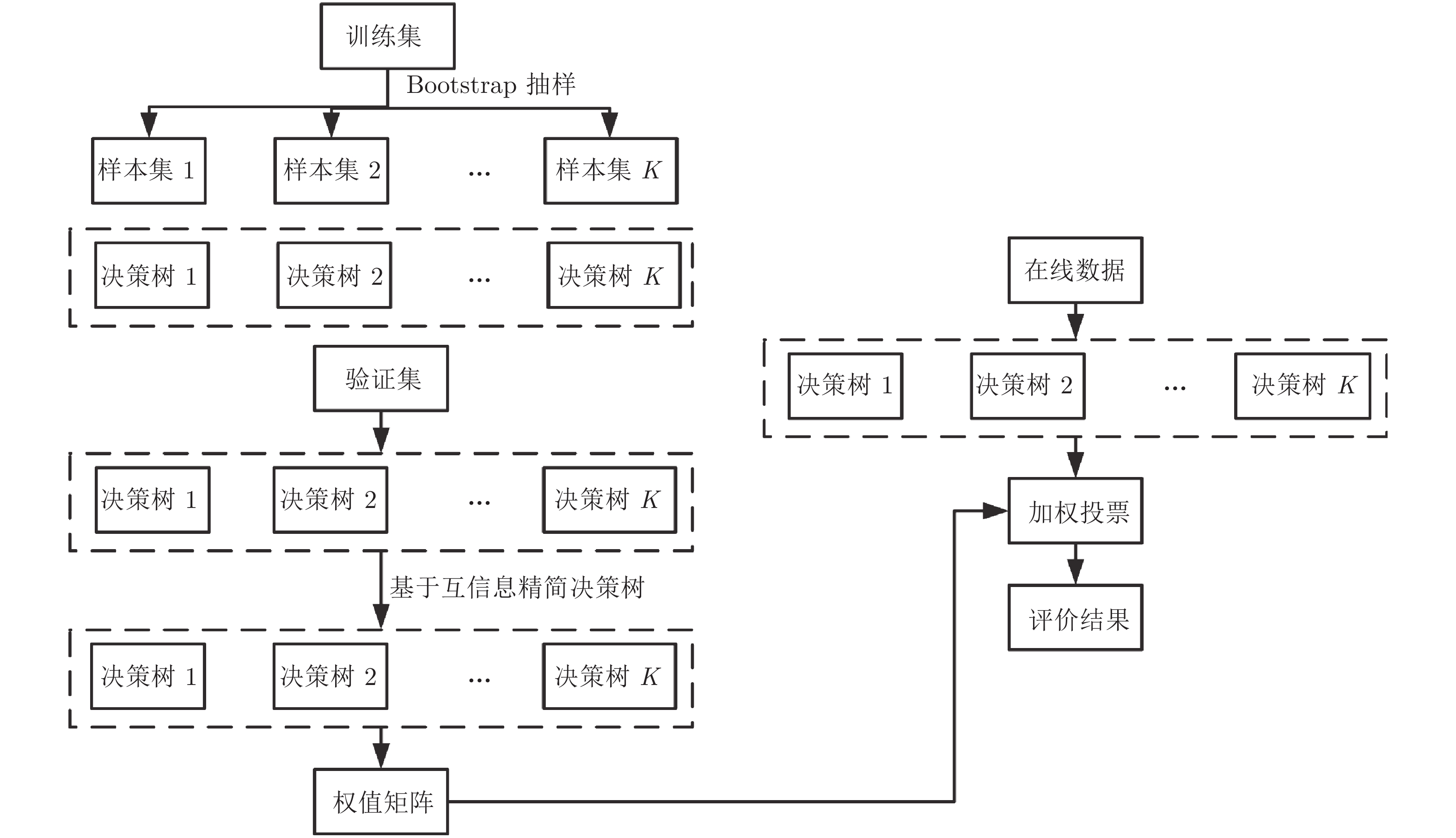
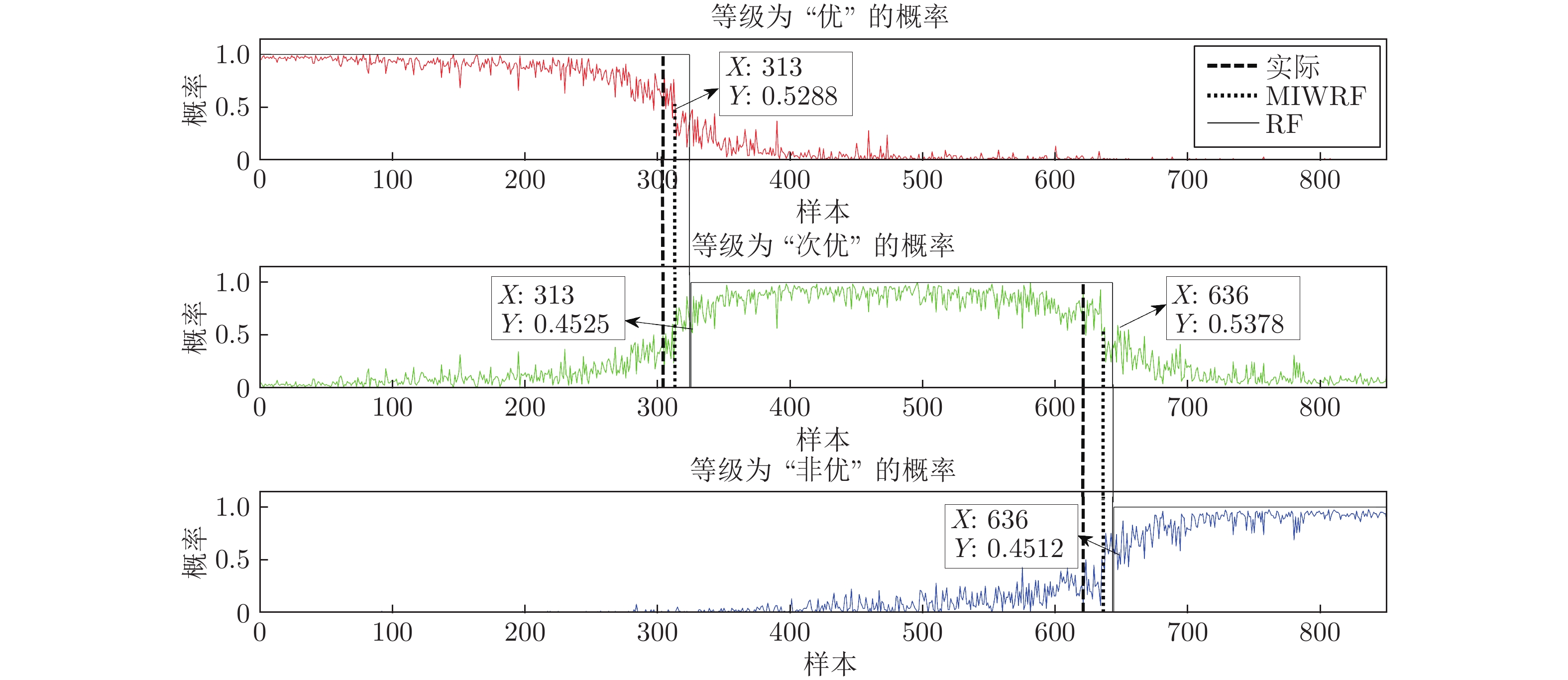
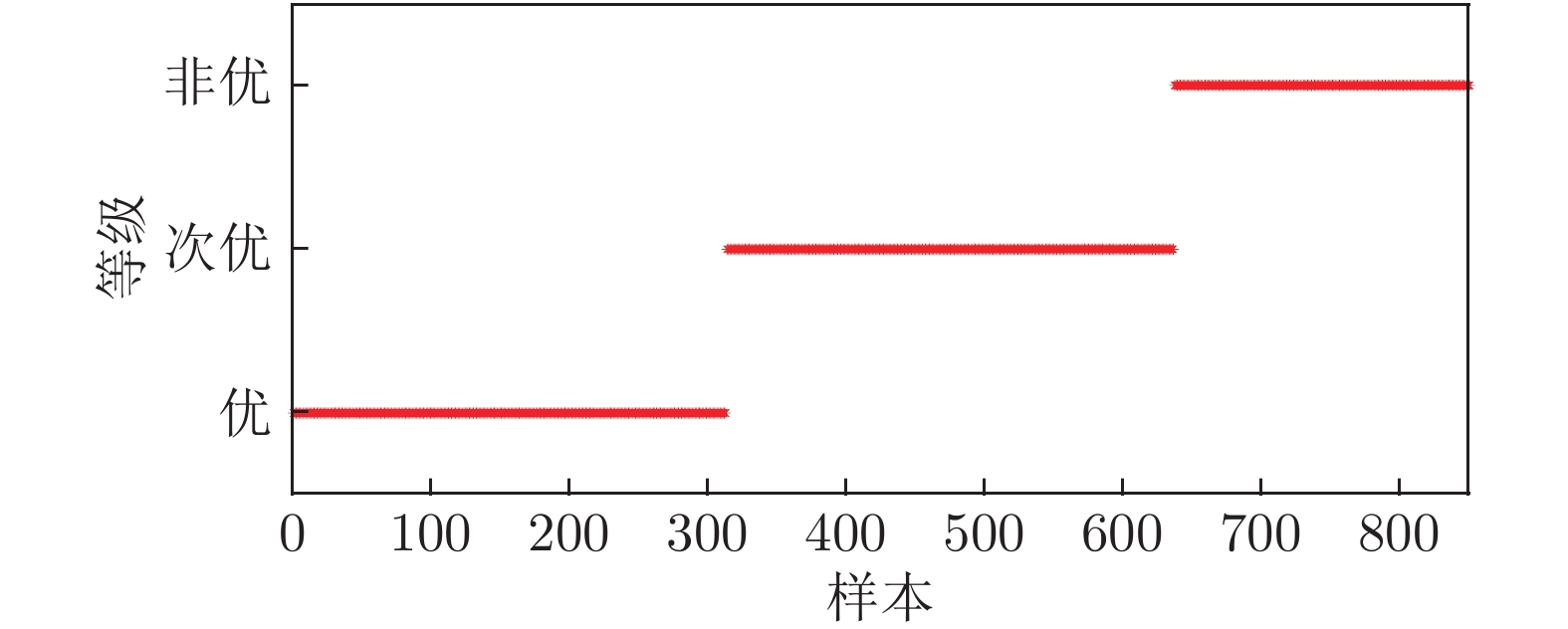
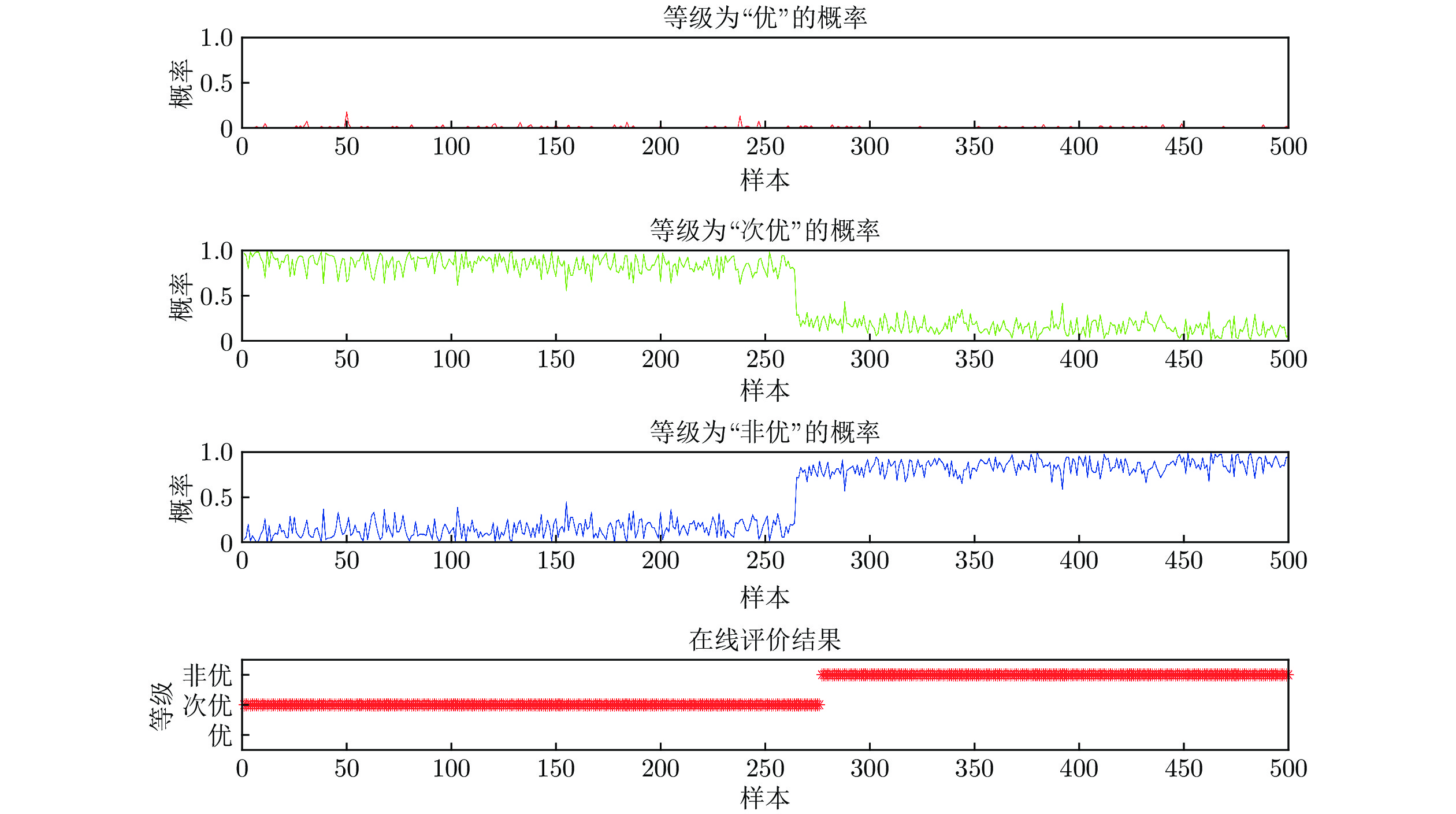
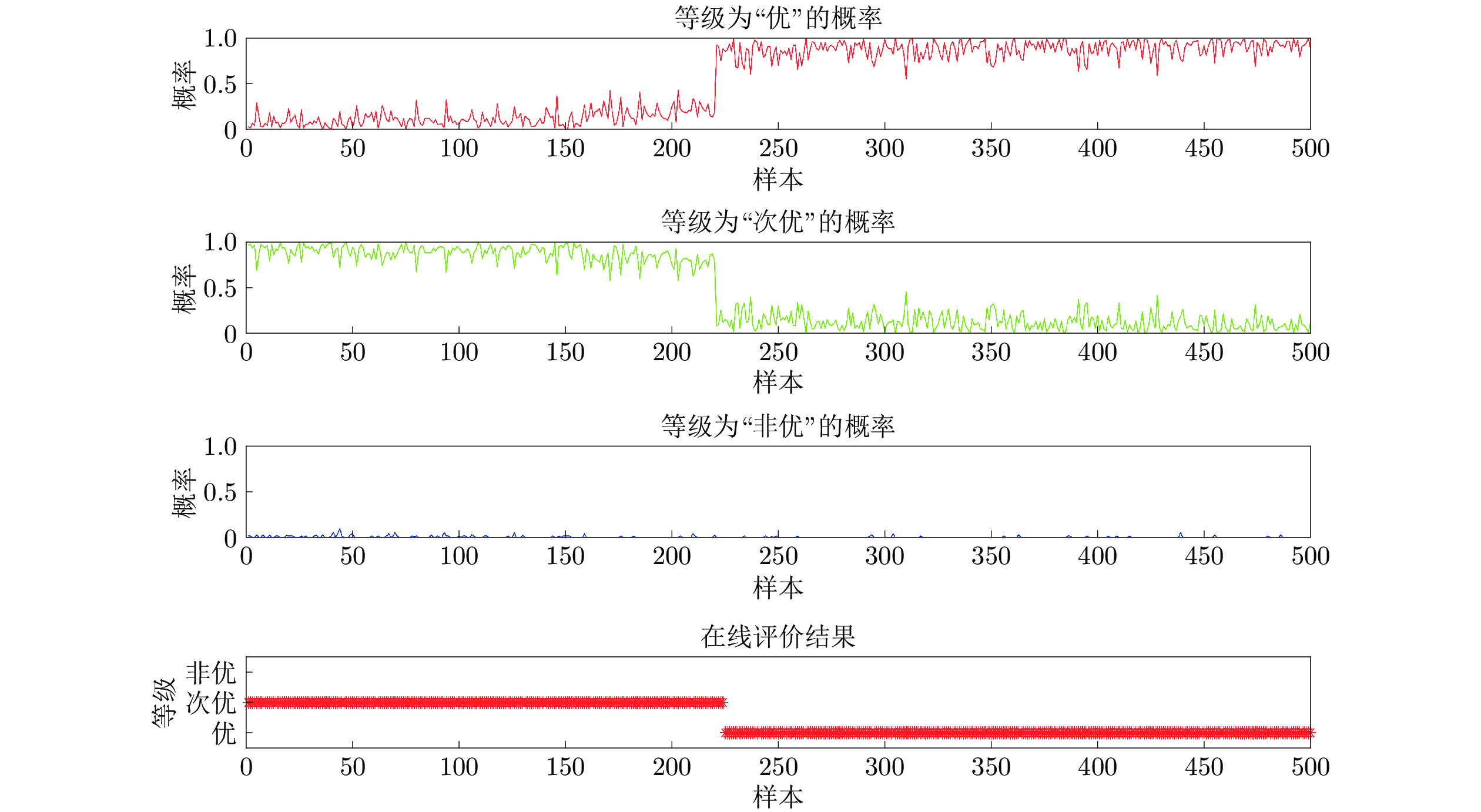
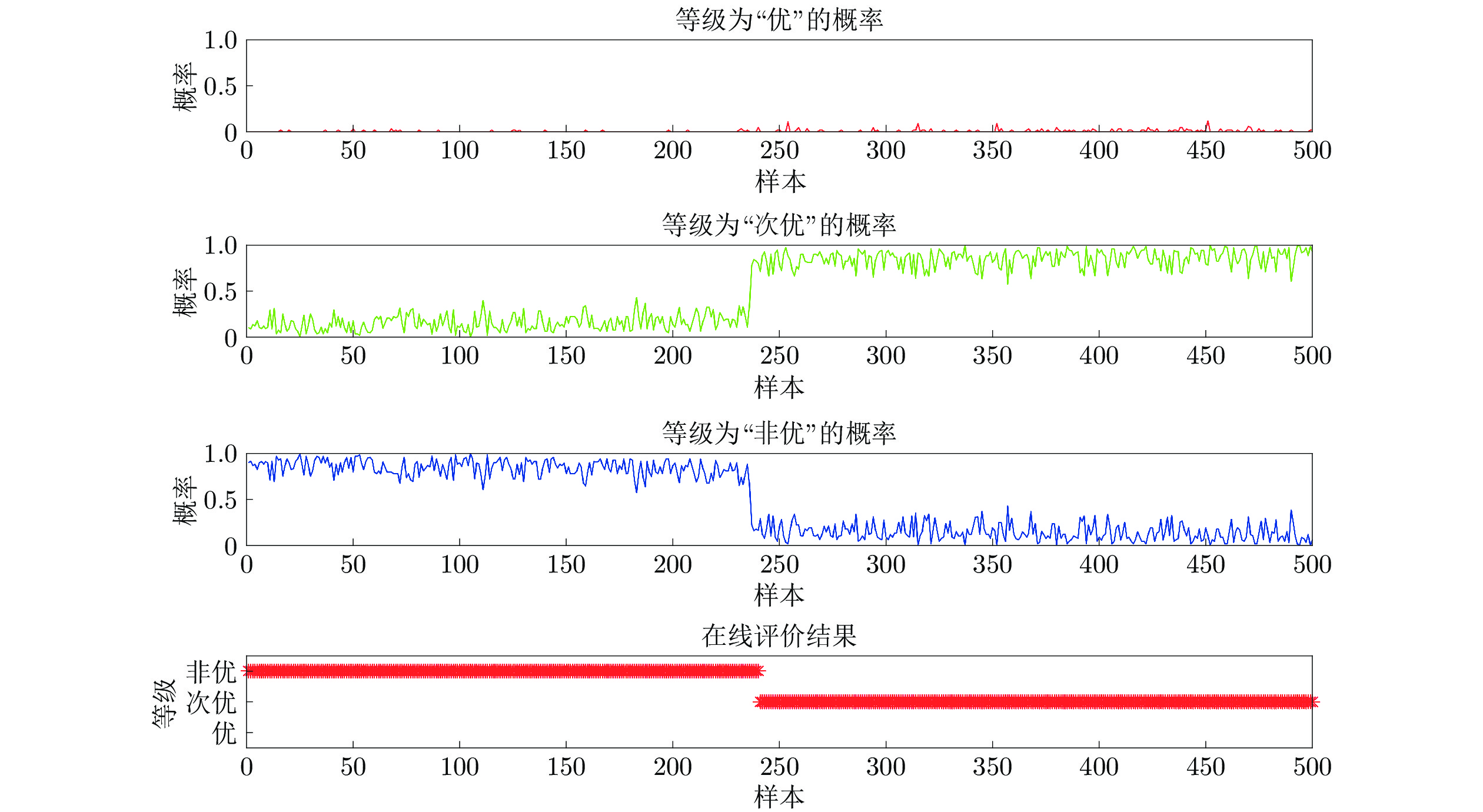
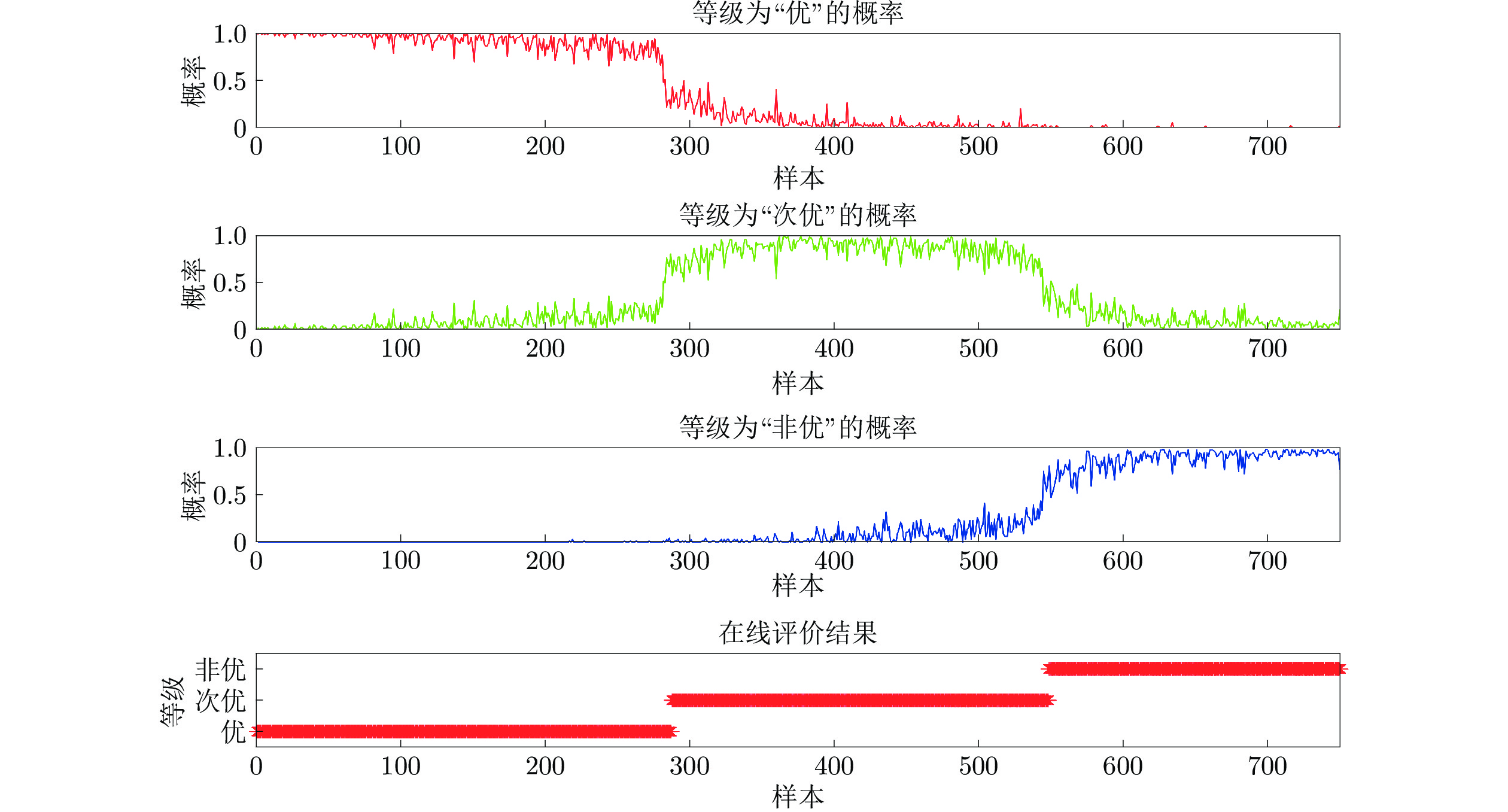
运行状态评价是指在过程正常生产的前提下, 进一步判断生产过程运行状态的优劣. 针对复杂工业过程定量信息与定性信息共存的情况, 本文提出了一种基于随机森林的工业过程运行状态评价方法. 针对随机森林中决策树信息存在冗余的问题, 基于互信息将传统随机森林中的决策树进行分组, 并选出每组中最优的决策树组成新的随机森林. 同时为了强化评价精度高的决策树和弱化评价精度低的决策树对最终评价结果的影响, 使用加权投票机制取代传统众数投票方法, 最终构成一种基于互信息的加权随机森林算法(Mutual information weighted random forest, MIWRF). 对于在线评价, 本文通过计算在线数据处于各个等级的概率, 并且结合提出的在线评价策略, 判定当前样本运行状态等级. 为了验证所提算法的有效性, 将所提方法应用于湿法冶金浸出过程, 实验结果表明, 相对于传统随机森林算法, MIWRF 降低了模型的复杂度, 同时提高了运行状态评价精度.
运行状态评价是指在过程正常生产的前提下, 进一步判断生产过程运行状态的优劣. 针对复杂工业过程定量信息与定性信息共存的情况, 本文提出了一种基于随机森林的工业过程运行状态评价方法. 针对随机森林中决策树信息存在冗余的问题, 基于互信息将传统随机森林中的决策树进行分组, 并选出每组中最优的决策树组成新的随机森林. 同时为了强化评价精度高的决策树和弱化评价精度低的决策树对最终评价结果的影响, 使用加权投票机制取代传统众数投票方法, 最终构成一种基于互信息的加权随机森林算法(Mutual information weighted random forest, MIWRF). 对于在线评价, 本文通过计算在线数据处于各个等级的概率, 并且结合提出的在线评价策略, 判定当前样本运行状态等级. 为了验证所提算法的有效性, 将所提方法应用于湿法冶金浸出过程, 实验结果表明, 相对于传统随机森林算法, MIWRF 降低了模型的复杂度, 同时提高了运行状态评价精度.

2021, 47(9): 2226-2237.
doi: 10.16383/j.aas.c190074
摘要:
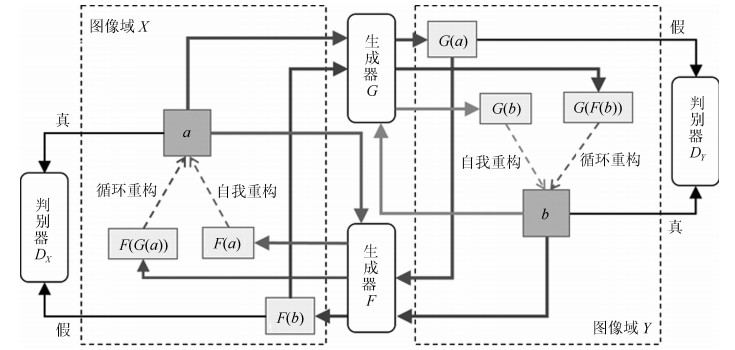
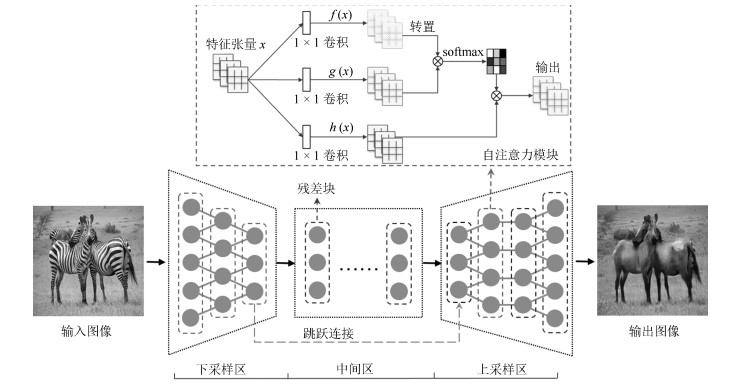
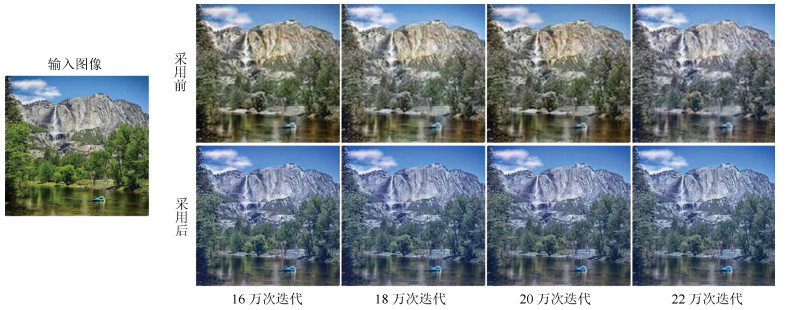
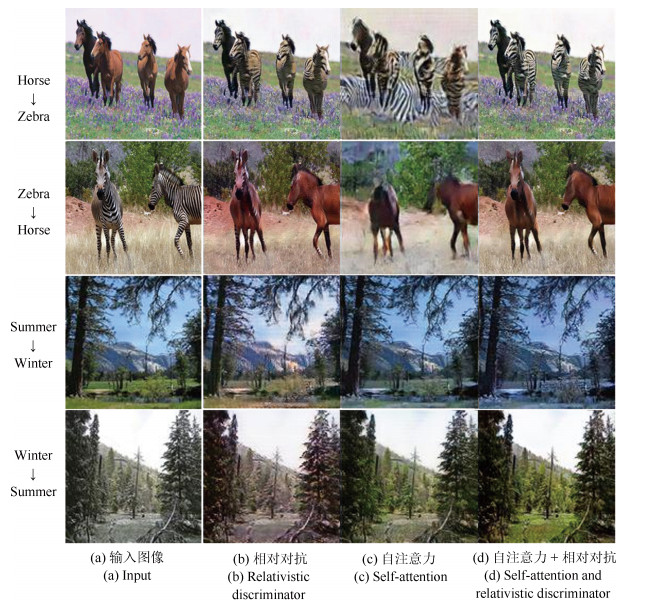
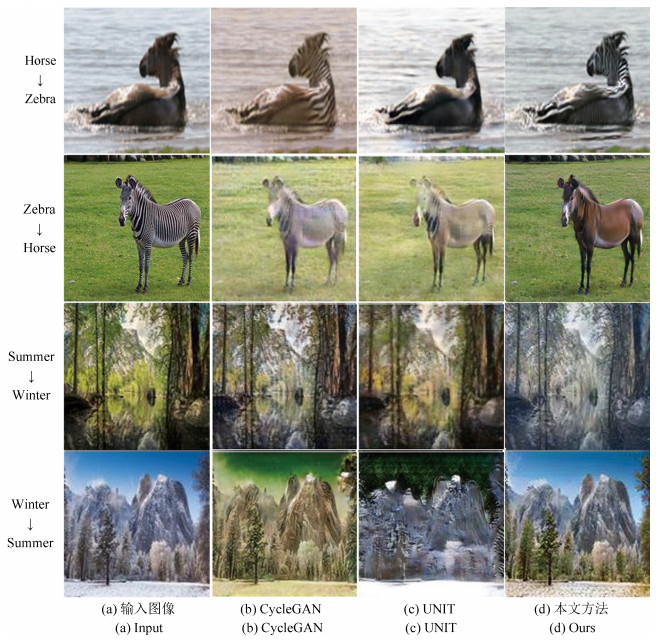
无监督图像翻译使用非配对训练数据能够完成图像中对象变换、季节转移、卫星与路网图相互转换等多种图像翻译任务.针对基于生成对抗网络(Generative adversarial network, GAN)的无监督图像翻译中训练过程不稳定、无关域改变较大而导致翻译图像细节模糊、真实性低的问题, 本文基于对偶学习提出一种融合自注意力机制和相对鉴别的无监督图像翻译方法.首先, 生成器引入自注意力机制加强图像生成过程中像素间远近距离的关联关系, 在低、高卷积层间增加跳跃连接, 降低无关图像域特征信息损失.其次, 判别器使用谱规范化防止因鉴别能力突变造成的梯度消失, 增强训练过程中整体模型的稳定性.最后, 在损失函数中基于循环重构增加自我重构一致性约束条件, 专注目标域的转变, 设计相对鉴别对抗损失指导生成器和判别器之间的零和博弈, 完成无监督的图像翻译.在Horse & Zebra、Summer & Winter以及AerialPhoto & Map数据集上的实验结果表明:相较于现有GAN的图像翻译方法, 本文能够建立更真实的图像域映射关系, 提高了生成图像的翻译质量.
无监督图像翻译使用非配对训练数据能够完成图像中对象变换、季节转移、卫星与路网图相互转换等多种图像翻译任务.针对基于生成对抗网络(Generative adversarial network, GAN)的无监督图像翻译中训练过程不稳定、无关域改变较大而导致翻译图像细节模糊、真实性低的问题, 本文基于对偶学习提出一种融合自注意力机制和相对鉴别的无监督图像翻译方法.首先, 生成器引入自注意力机制加强图像生成过程中像素间远近距离的关联关系, 在低、高卷积层间增加跳跃连接, 降低无关图像域特征信息损失.其次, 判别器使用谱规范化防止因鉴别能力突变造成的梯度消失, 增强训练过程中整体模型的稳定性.最后, 在损失函数中基于循环重构增加自我重构一致性约束条件, 专注目标域的转变, 设计相对鉴别对抗损失指导生成器和判别器之间的零和博弈, 完成无监督的图像翻译.在Horse & Zebra、Summer & Winter以及AerialPhoto & Map数据集上的实验结果表明:相较于现有GAN的图像翻译方法, 本文能够建立更真实的图像域映射关系, 提高了生成图像的翻译质量.


2021, 47(9): 2238-2249.
doi: 10.16383/j.aas.c190183
摘要:
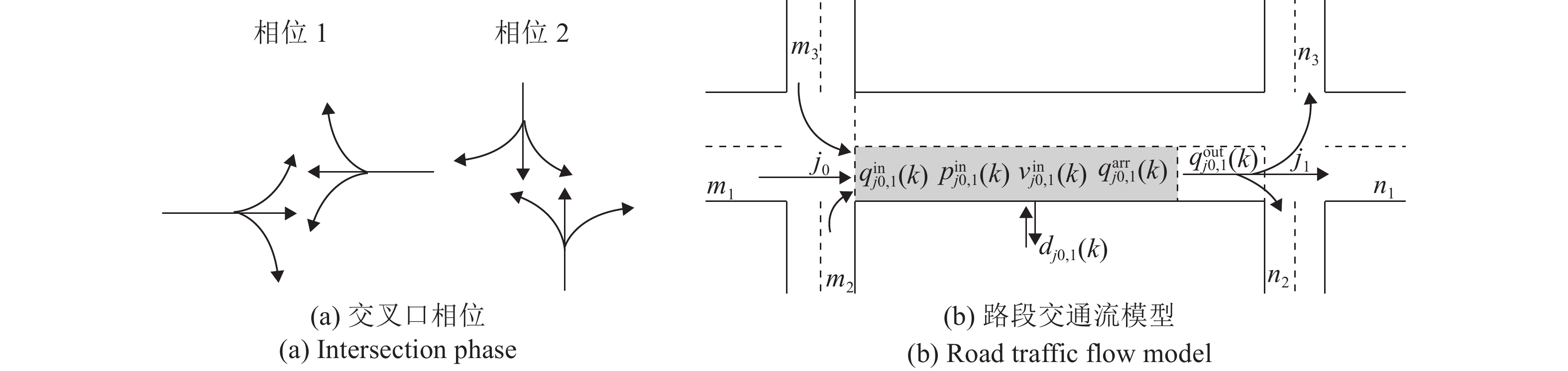
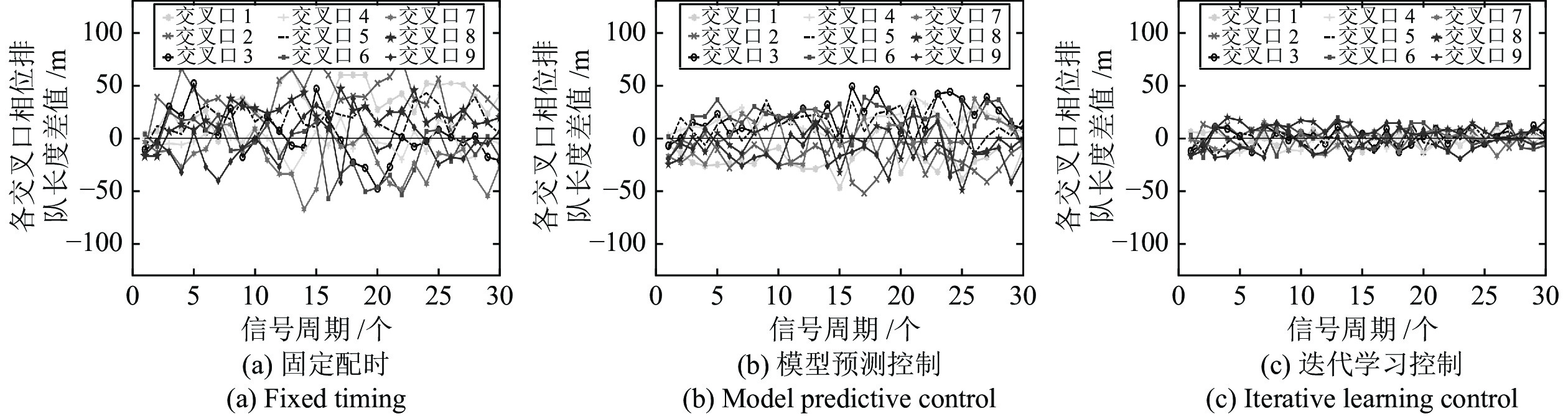
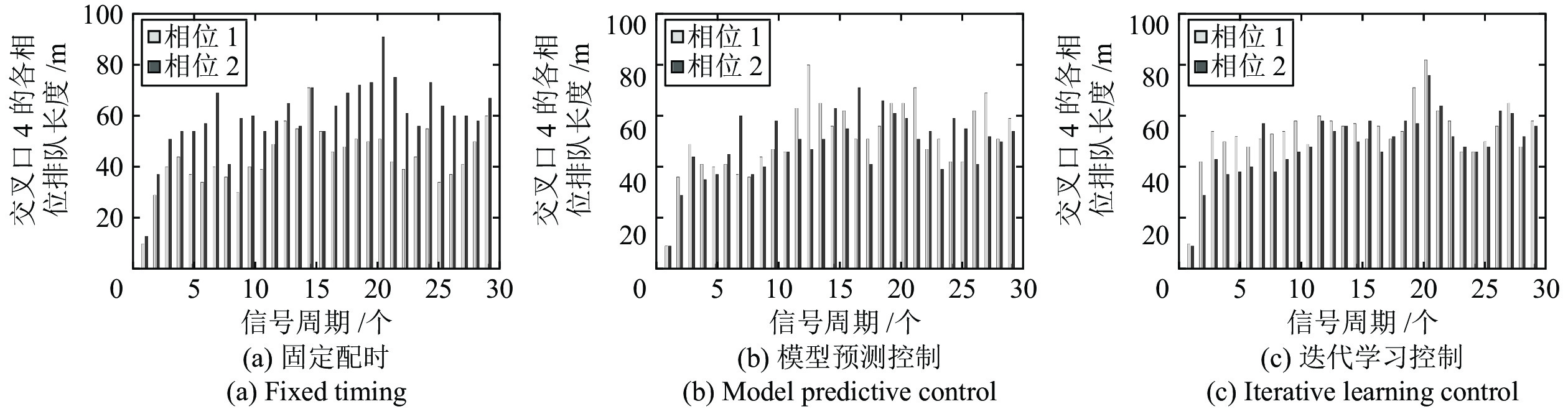
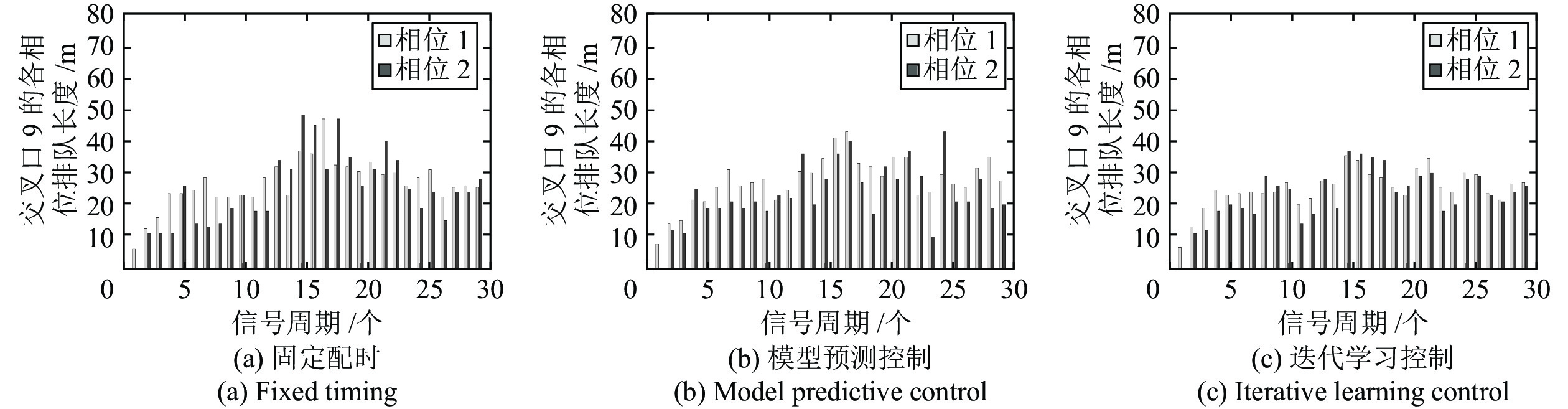
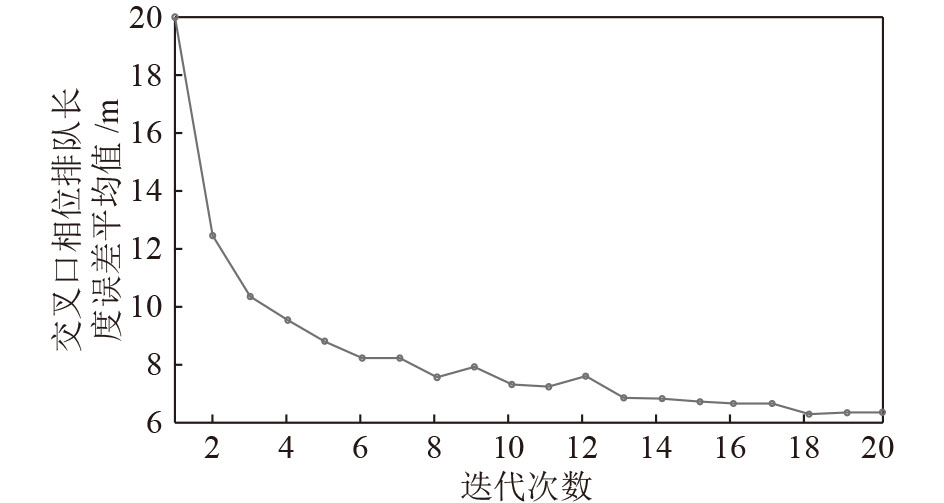
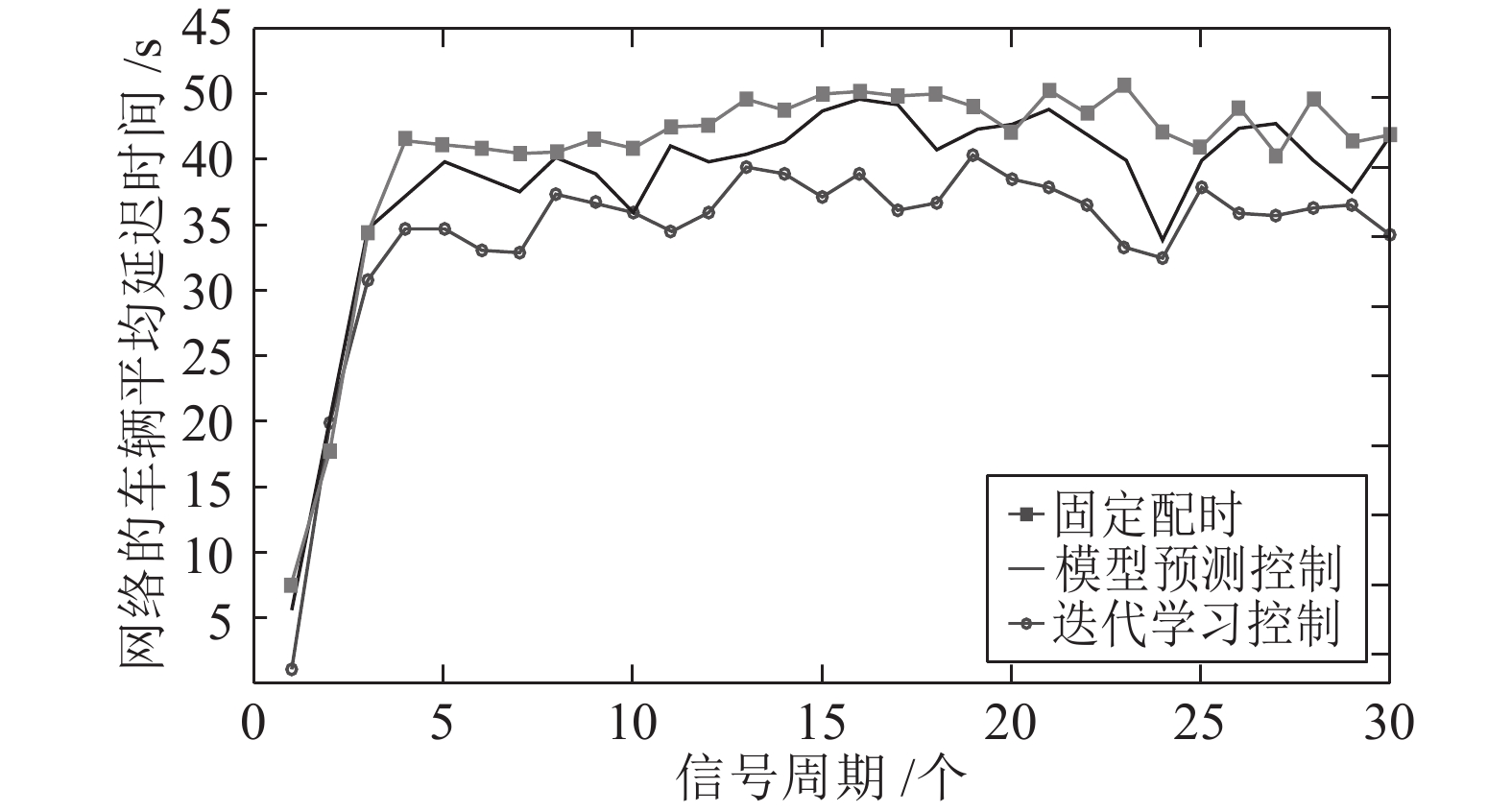
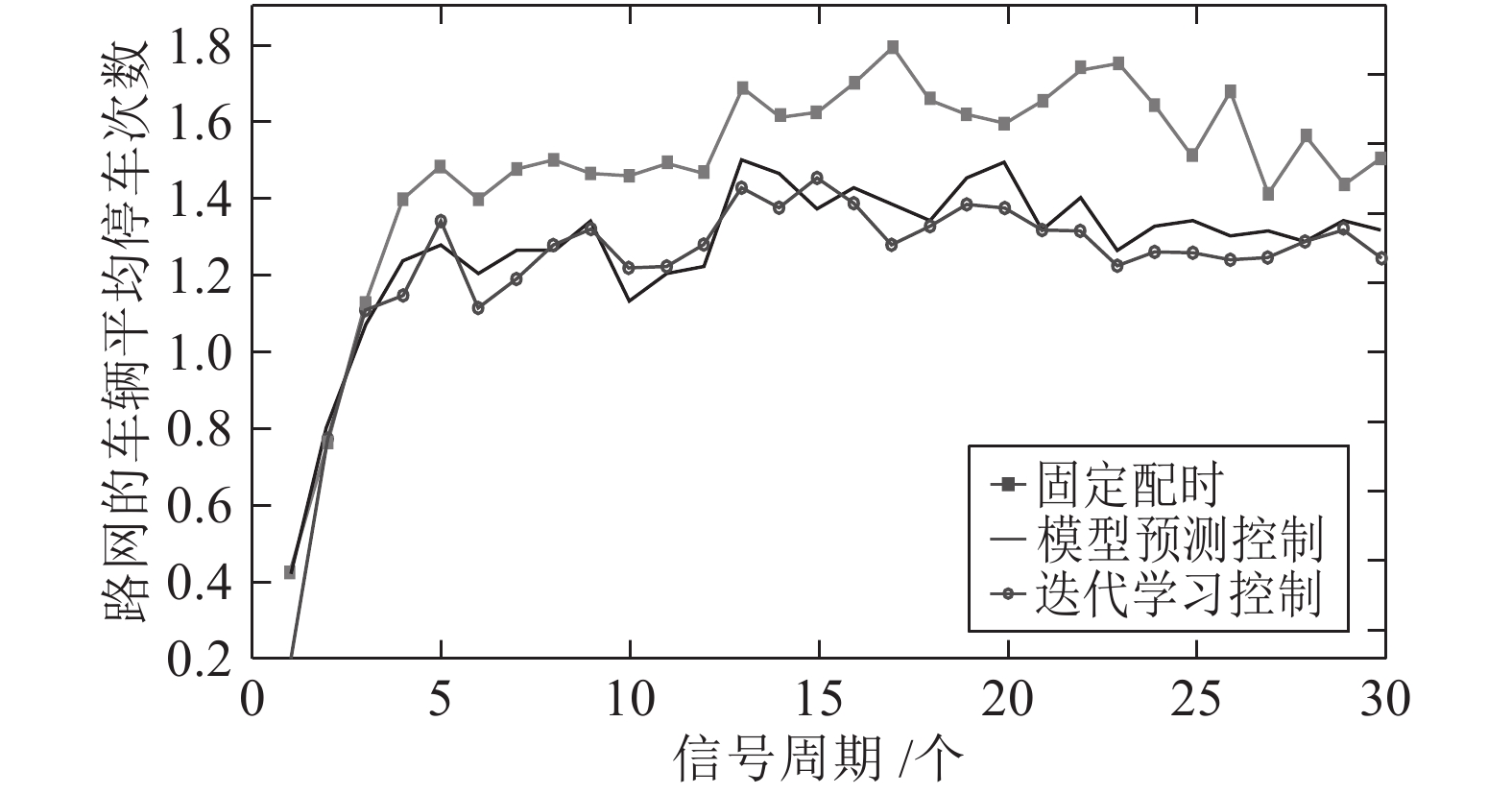
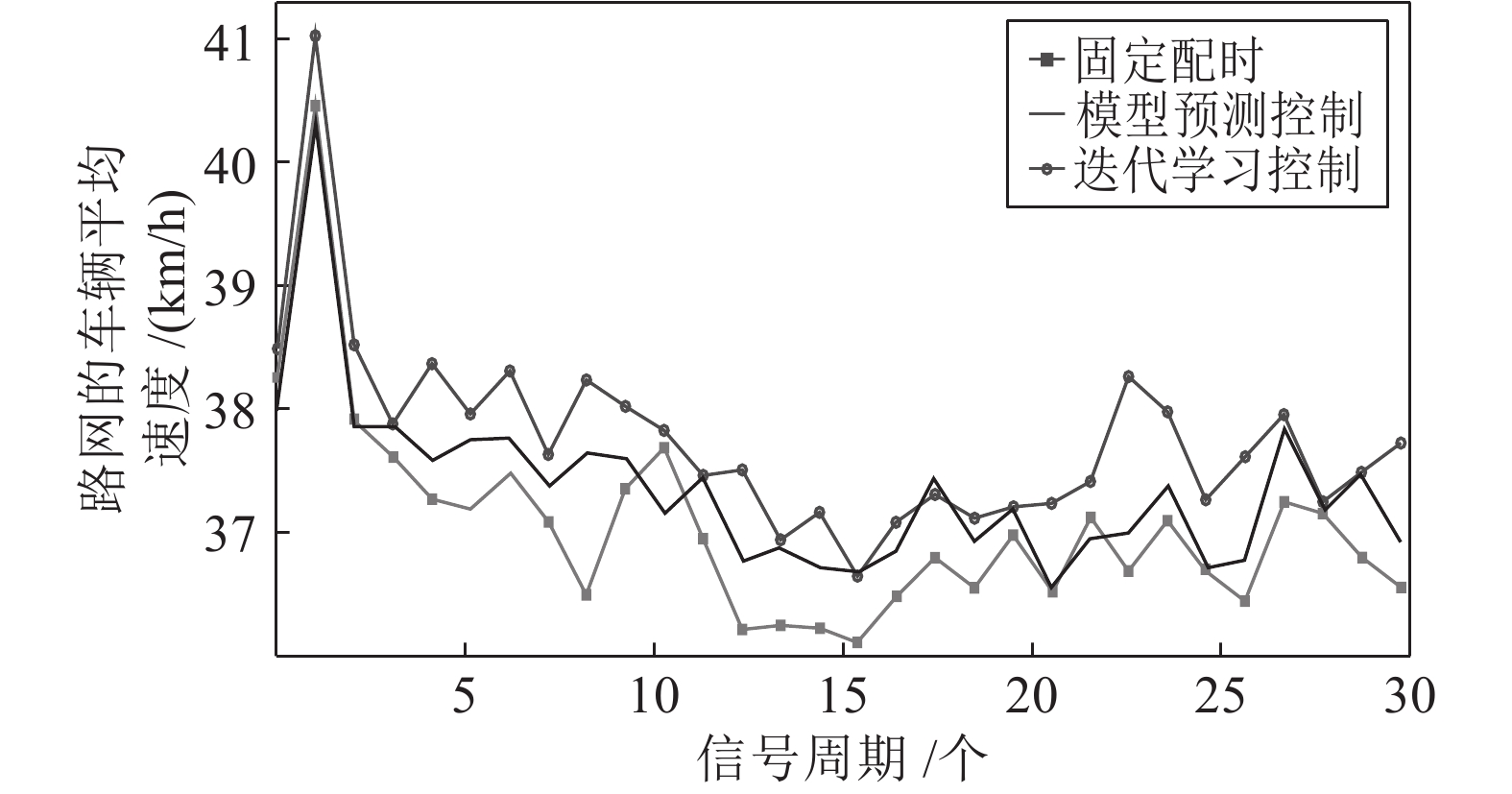
现实中城市交通流的运行具有很强的非线性特性, 采用简单的线性模型难以全面描述交通流的实际运行过程. 本文在考虑城市交通流非线性动态特性的基础上, 提出了一种非线性交通流排队模型, 并基于宏观交通流固有的周期性特征, 设计了交叉口信号的迭代学习控制策略. 通过对交叉口信号的迭代学习控制, 使交叉口各进口道的车辆排队长度尽可能趋于均衡, 提高交叉口信号有效绿灯时间的利用率, 从而提高路网的通行效率. 最后通过严格的数学推导证明了该方法的收敛性, 仿真研究及实验结果验证了所提方法的有效性.
现实中城市交通流的运行具有很强的非线性特性, 采用简单的线性模型难以全面描述交通流的实际运行过程. 本文在考虑城市交通流非线性动态特性的基础上, 提出了一种非线性交通流排队模型, 并基于宏观交通流固有的周期性特征, 设计了交叉口信号的迭代学习控制策略. 通过对交叉口信号的迭代学习控制, 使交叉口各进口道的车辆排队长度尽可能趋于均衡, 提高交叉口信号有效绿灯时间的利用率, 从而提高路网的通行效率. 最后通过严格的数学推导证明了该方法的收敛性, 仿真研究及实验结果验证了所提方法的有效性.

2021, 47(9): 2250-2263.
doi: 10.16383/j.aas.c190047
摘要:
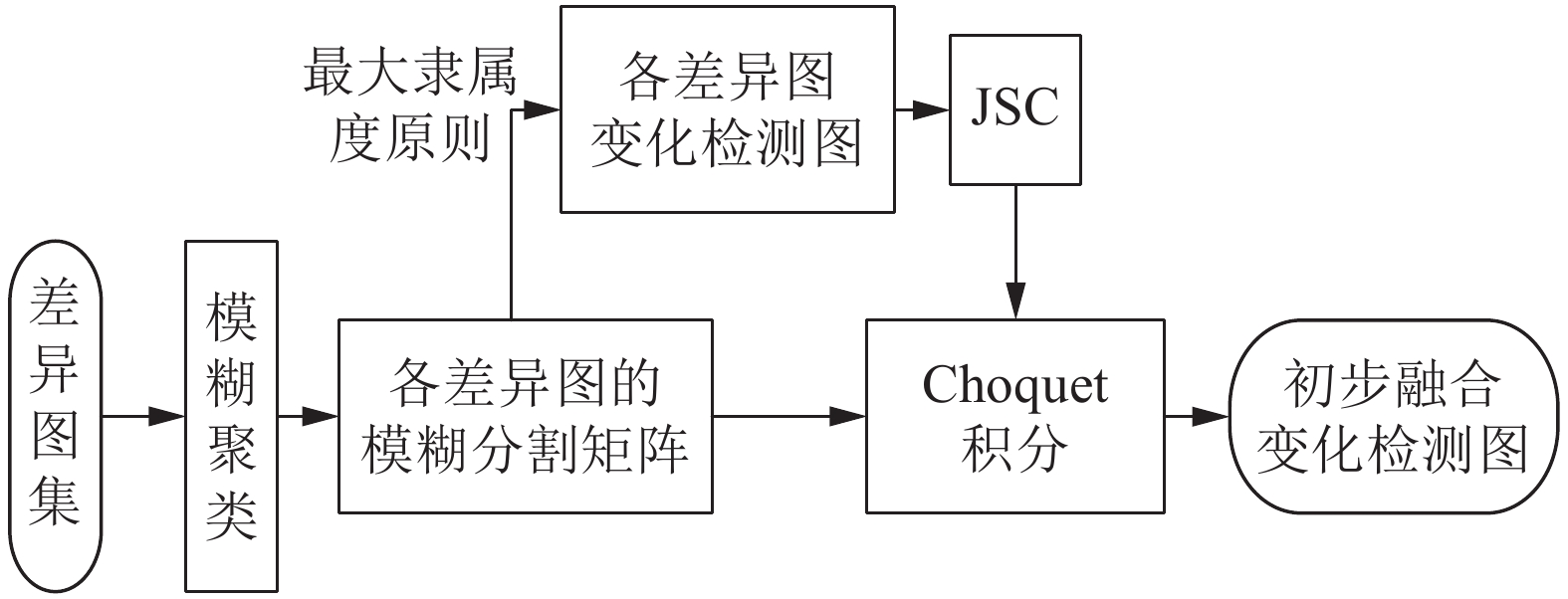
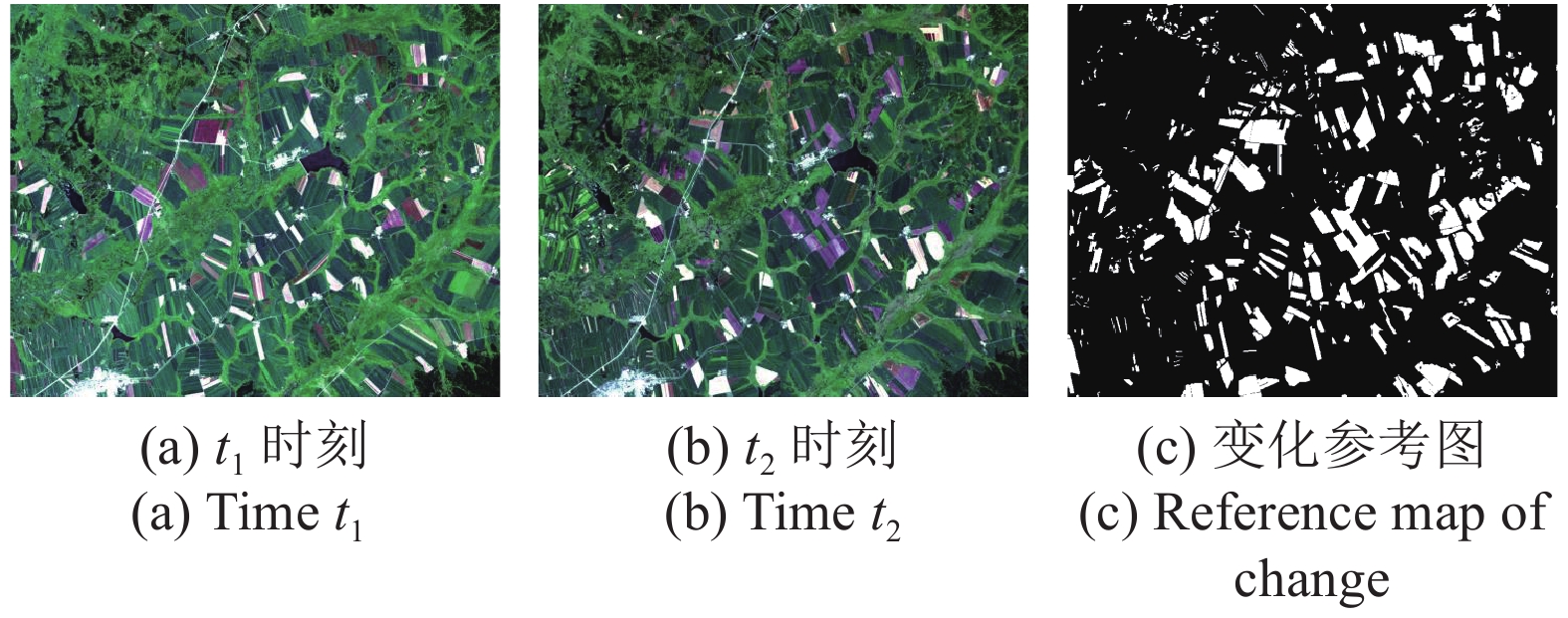
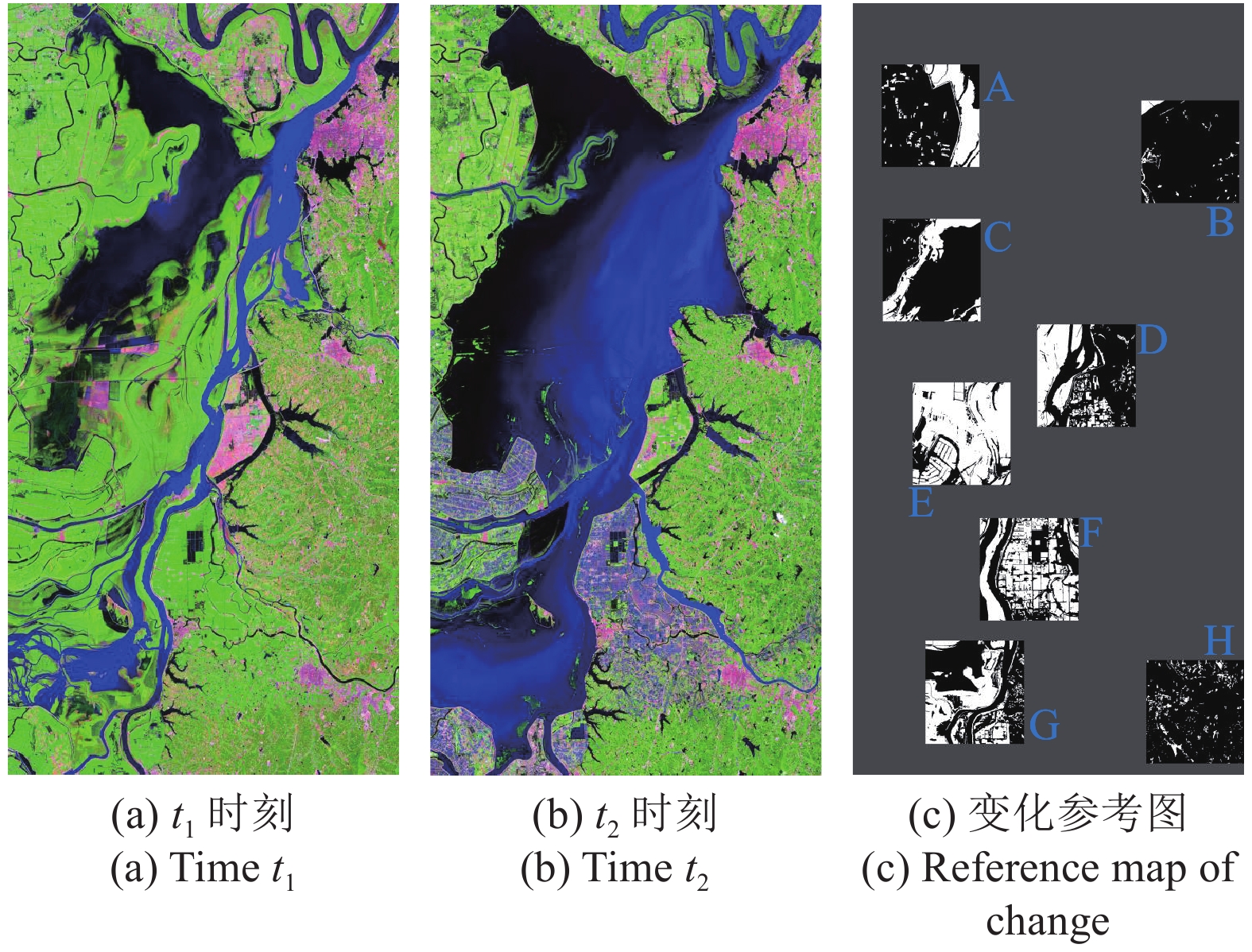
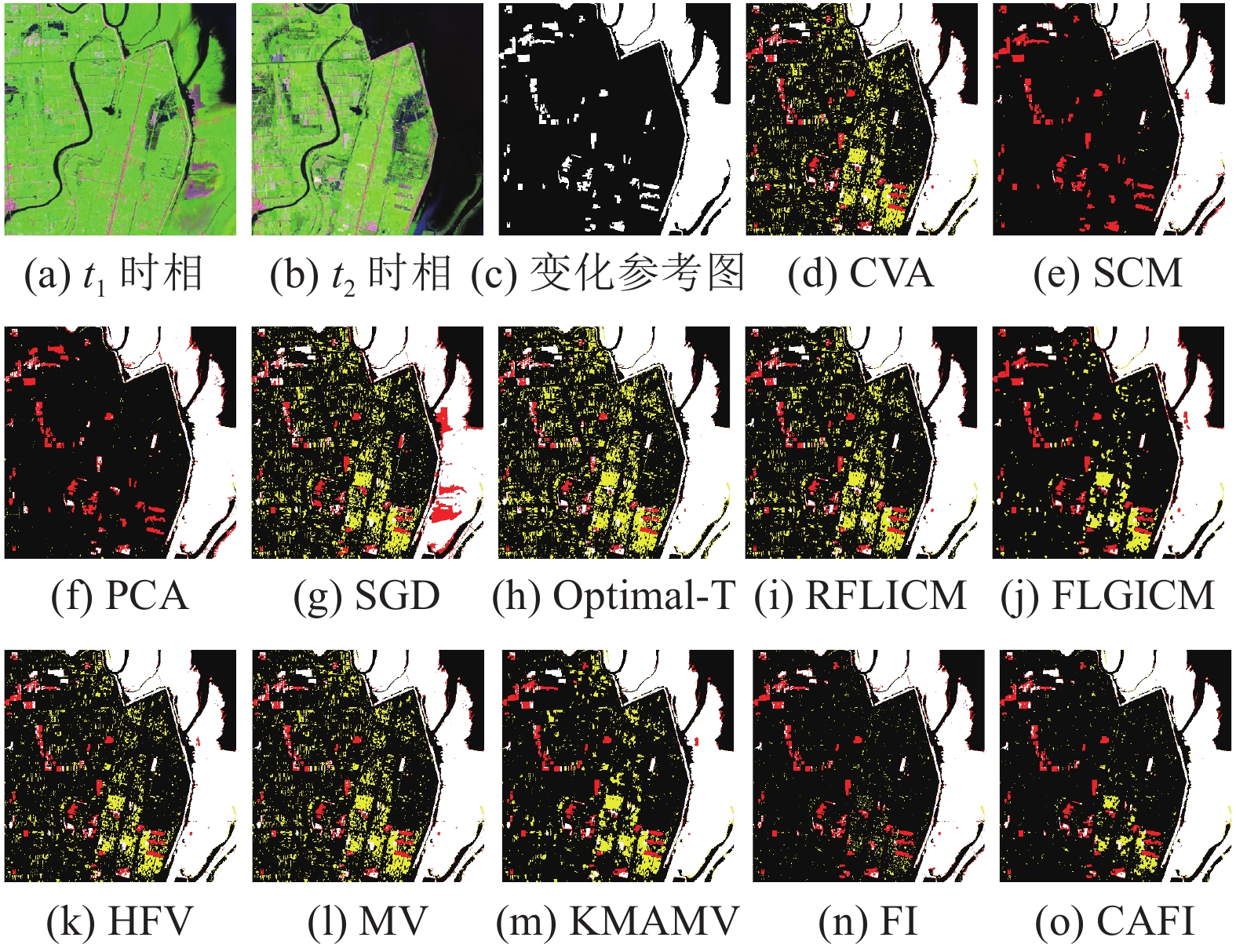
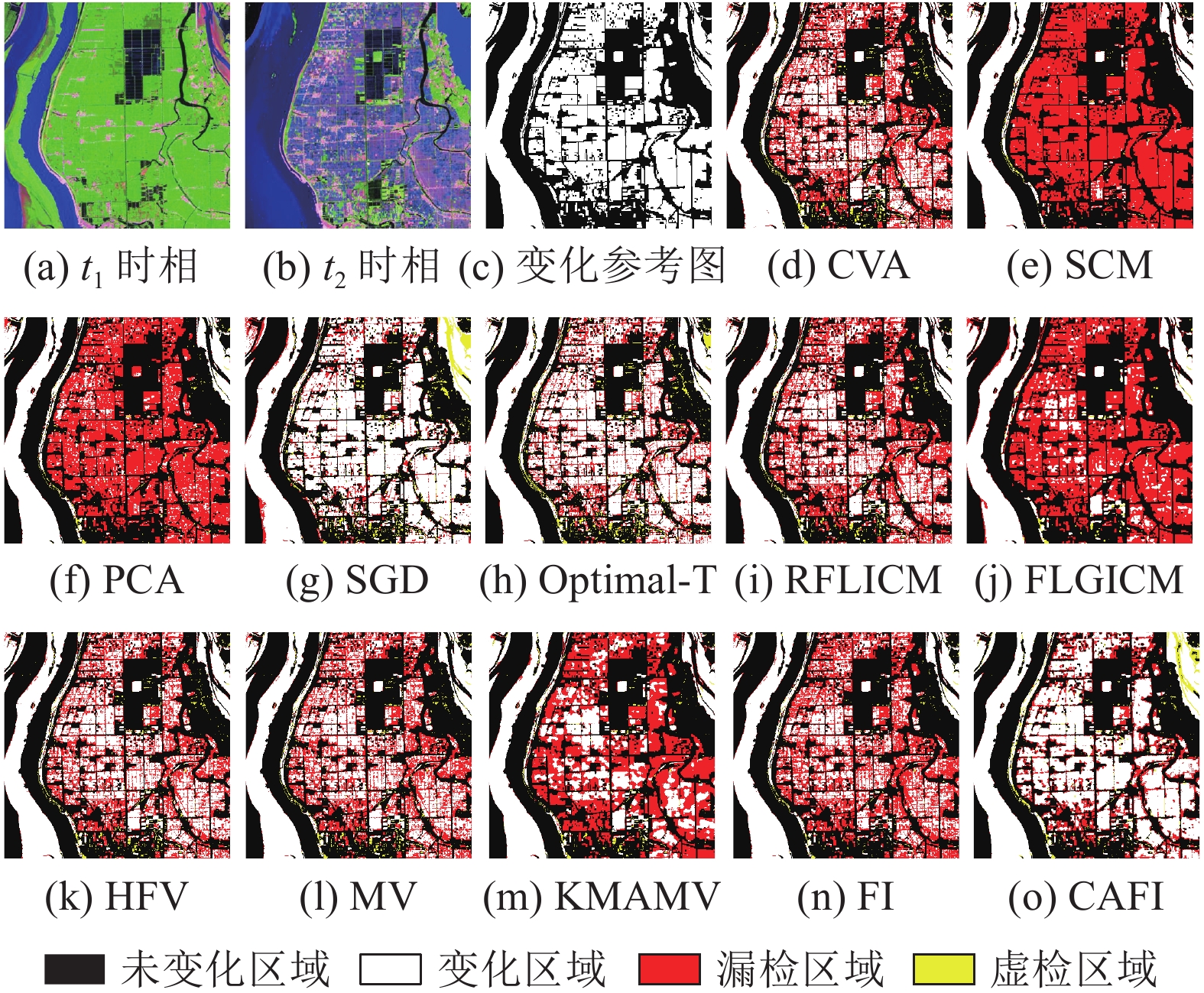
以模糊积分(Fuzzy integral, FI)为基础, 提出一种顾及冲突分析(Conflict analysis, CA)的全自动遥感变化检测方法CA-based FI, CAFI). CAFI首先选取典型的对比算子, 生成信息互补的差异图(Difference image, DI)集; 其次利用模糊聚类、杰卡德相似系数和FI对差异图进行决策级融合, 得到初步融合变化检测图; 然后通过模糊集理论计算像元的信息冲突程度, 将初步融合检测结果自适应地划分为冲突严重区域和冲突较弱区域; 最后, 对冲突较弱的像元, 将其初步融合结果作为最终检测结果, 对易产生融合错误的冲突严重像元, 利用地统计分析对其重新分类. CAFI能够集成不同信息优势的同时, 很大程度地解决FI融合过程中的信息冲突问题. 三组真实遥感数据的实验结果验证了CAFI的有效性和鲁棒性.
以模糊积分(Fuzzy integral, FI)为基础, 提出一种顾及冲突分析(Conflict analysis, CA)的全自动遥感变化检测方法CA-based FI, CAFI). CAFI首先选取典型的对比算子, 生成信息互补的差异图(Difference image, DI)集; 其次利用模糊聚类、杰卡德相似系数和FI对差异图进行决策级融合, 得到初步融合变化检测图; 然后通过模糊集理论计算像元的信息冲突程度, 将初步融合检测结果自适应地划分为冲突严重区域和冲突较弱区域; 最后, 对冲突较弱的像元, 将其初步融合结果作为最终检测结果, 对易产生融合错误的冲突严重像元, 利用地统计分析对其重新分类. CAFI能够集成不同信息优势的同时, 很大程度地解决FI融合过程中的信息冲突问题. 三组真实遥感数据的实验结果验证了CAFI的有效性和鲁棒性.





2021, 47(9): 2264-2275.
doi: 10.16383/j.aas.c190046
摘要:
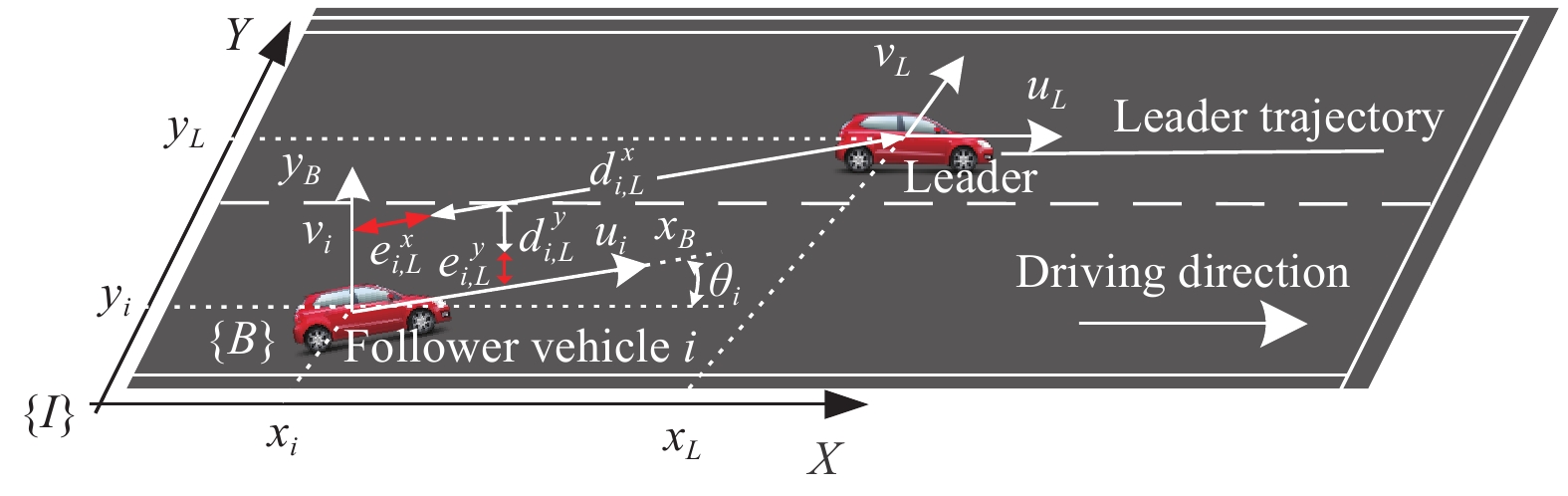
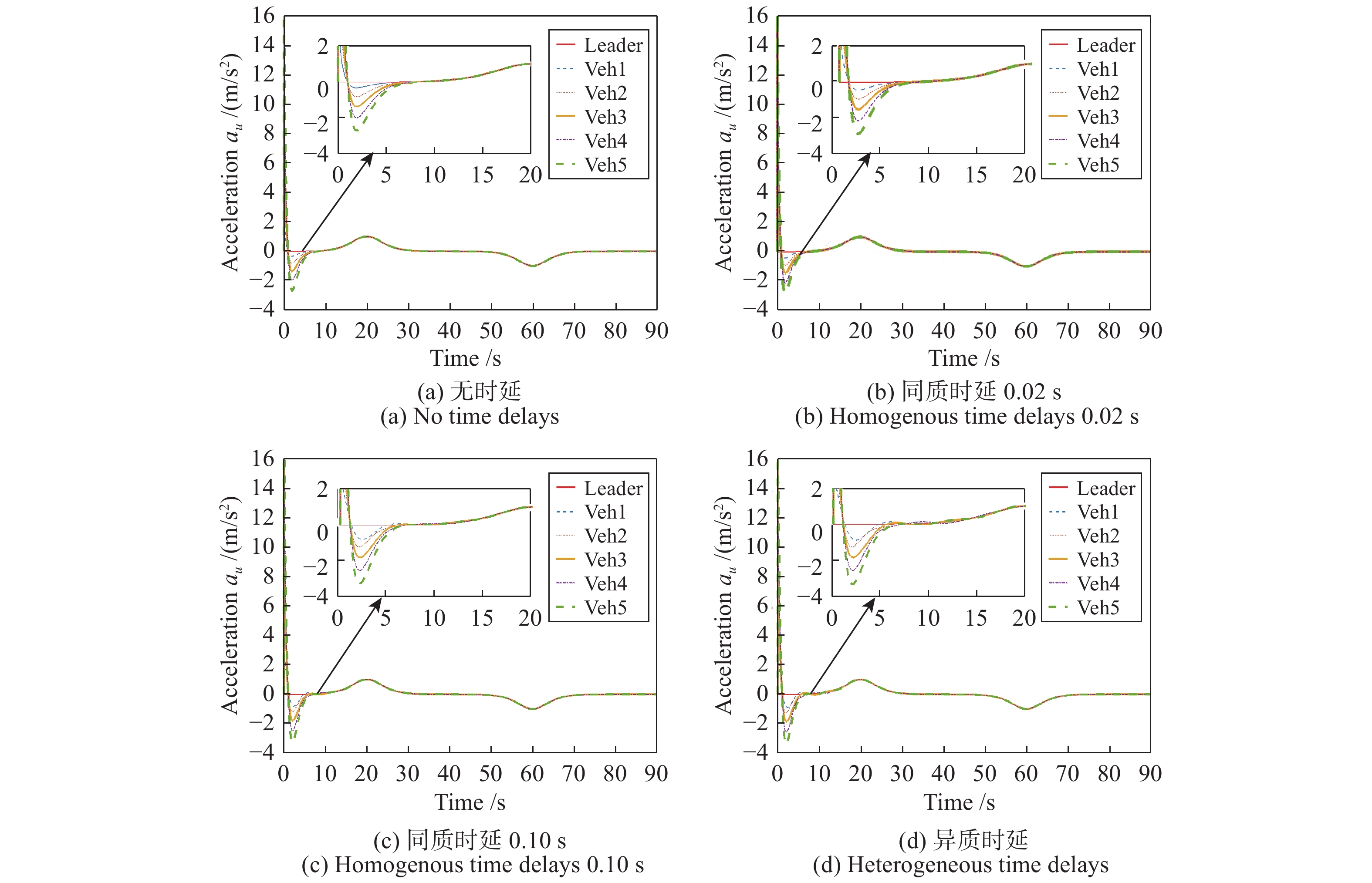
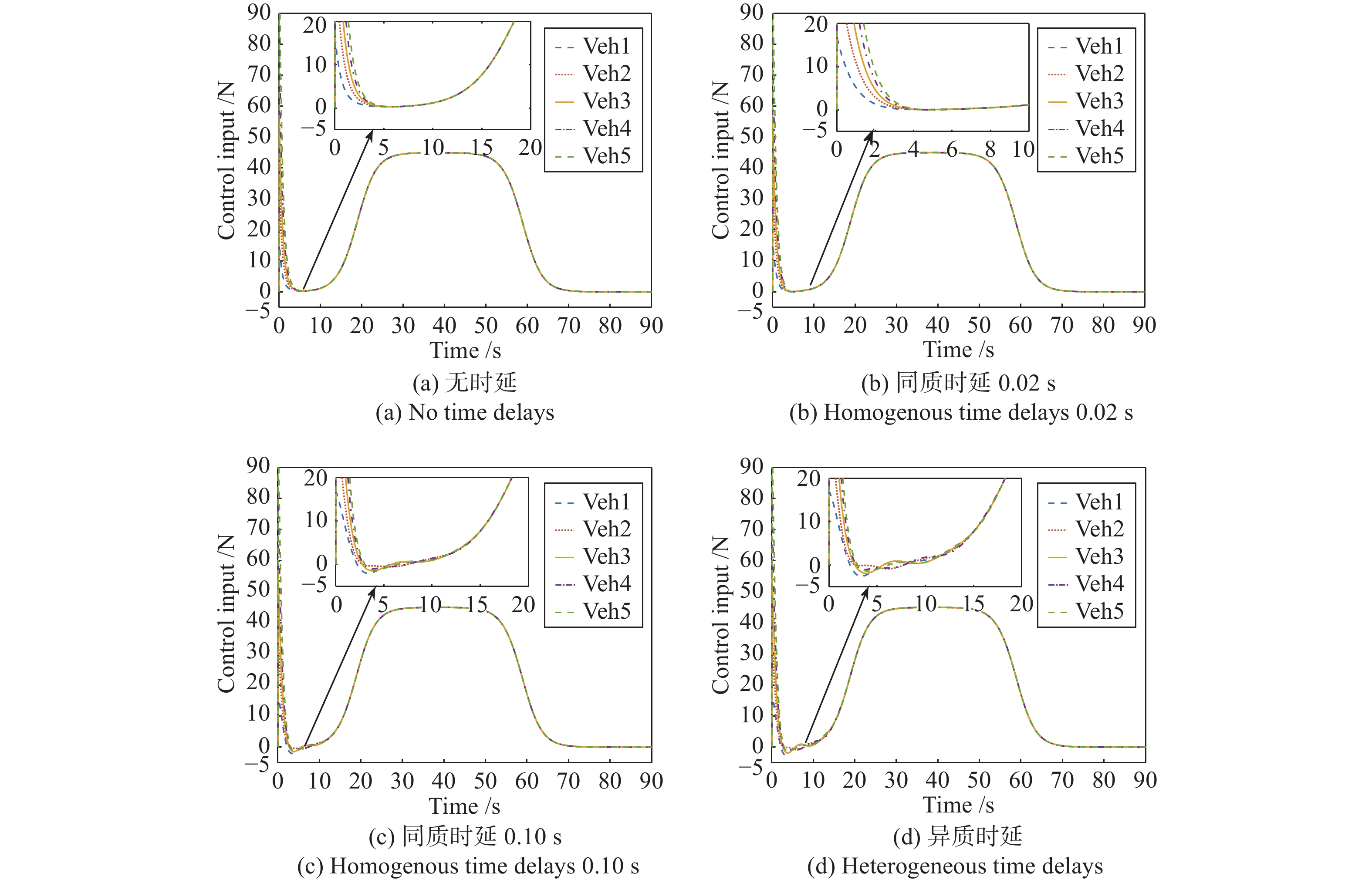
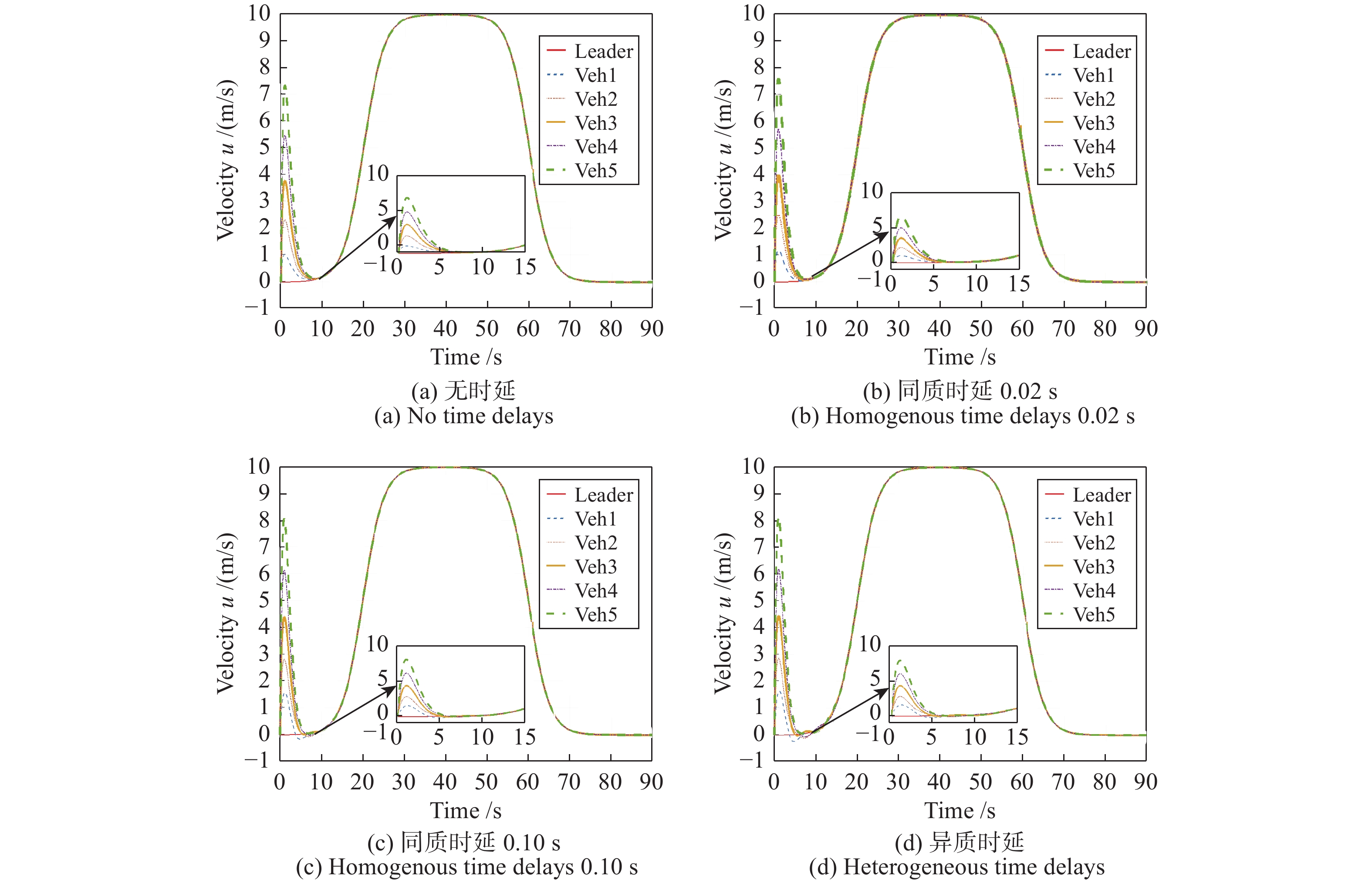
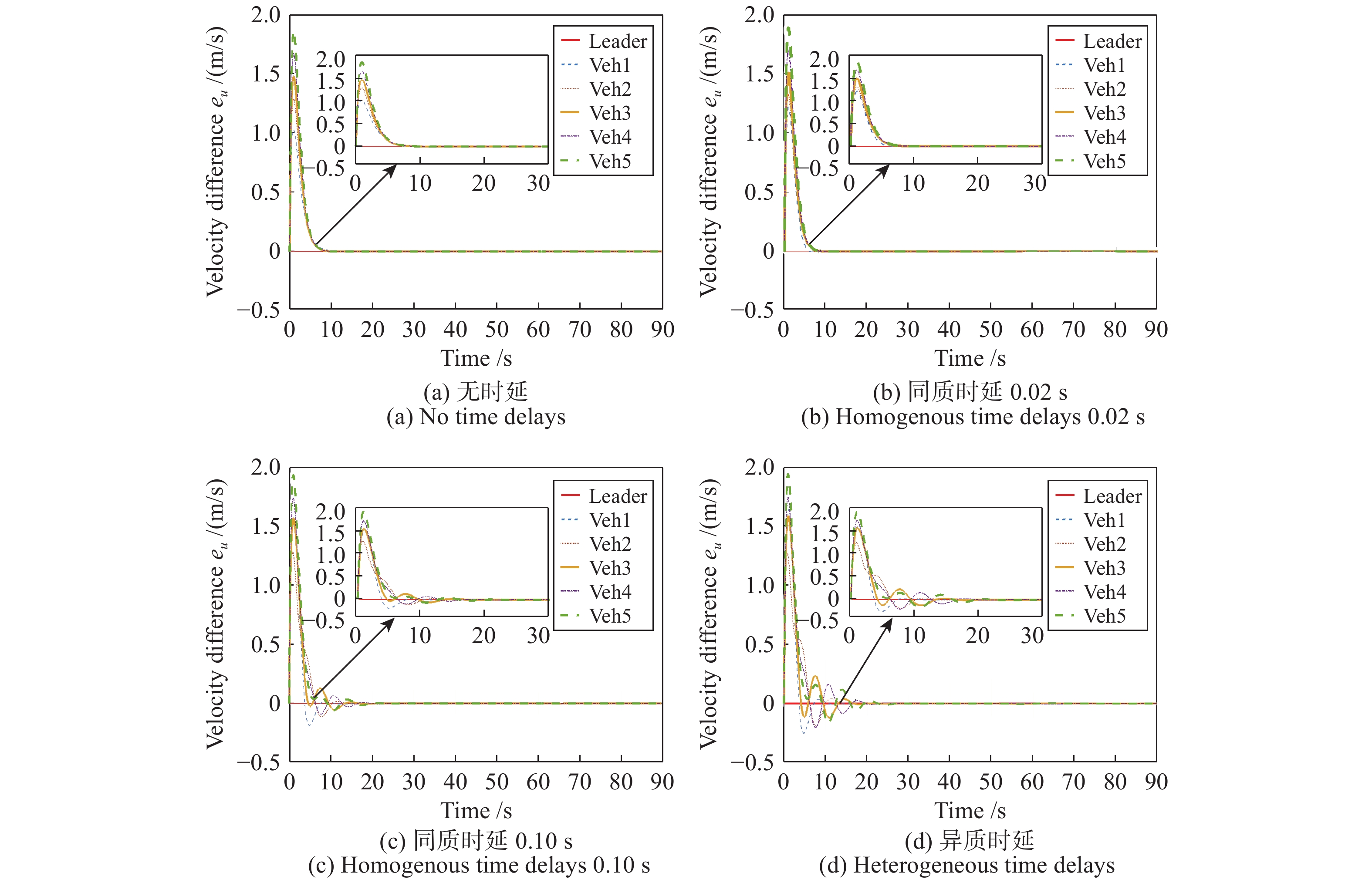
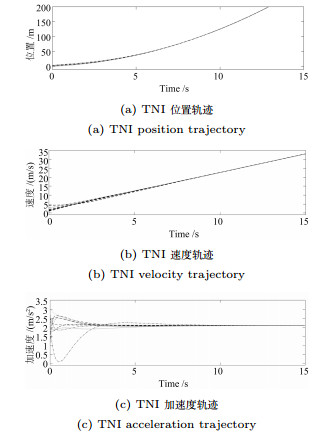
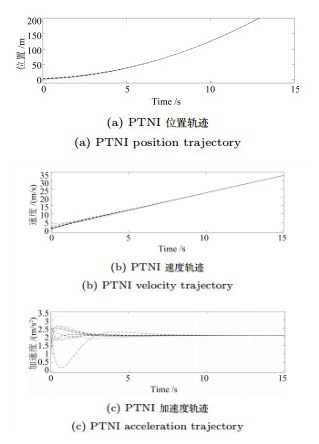
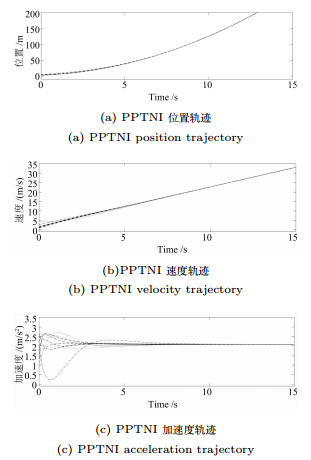
针对智能网联车辆轨迹跟踪问题, 本文通过考虑车辆跟驰作用和车车通信过程中存在的通信时延, 提出了一种分布式非线性轨迹跟踪控制器. 具体来讲, 首先, 提出一种双向领导跟随通信拓扑来描述智能网联环境下车辆间的通信连接. 其次, 考虑车辆跟驰作用和通信时延, 设计一种分布式非线性轨迹跟踪控制器. 然后, 使用Lyapunov方法证明了所设计控制器的稳定性. 最后, 考虑速度干扰作用于领导者车辆, 针对无时延、同质时延和异质时延等三种场景进行数值仿真实验. 仿真结果表明: 本文所设计的控制器不仅保证了车辆位置跟踪误差收敛到原点, 而且车辆运动规律符合交通流理论, 即无负位置跟踪误差和负速度现象.
针对智能网联车辆轨迹跟踪问题, 本文通过考虑车辆跟驰作用和车车通信过程中存在的通信时延, 提出了一种分布式非线性轨迹跟踪控制器. 具体来讲, 首先, 提出一种双向领导跟随通信拓扑来描述智能网联环境下车辆间的通信连接. 其次, 考虑车辆跟驰作用和通信时延, 设计一种分布式非线性轨迹跟踪控制器. 然后, 使用Lyapunov方法证明了所设计控制器的稳定性. 最后, 考虑速度干扰作用于领导者车辆, 针对无时延、同质时延和异质时延等三种场景进行数值仿真实验. 仿真结果表明: 本文所设计的控制器不仅保证了车辆位置跟踪误差收敛到原点, 而且车辆运动规律符合交通流理论, 即无负位置跟踪误差和负速度现象.




2021, 47(9): 2276-2284.
doi: 10.16383/j.aas.c190121
摘要:
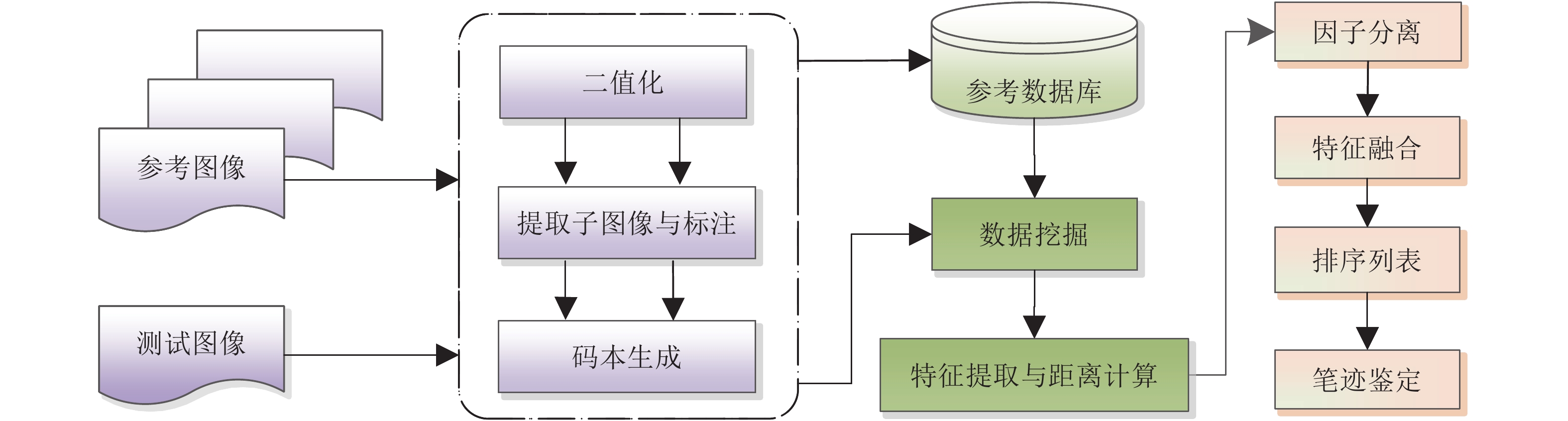
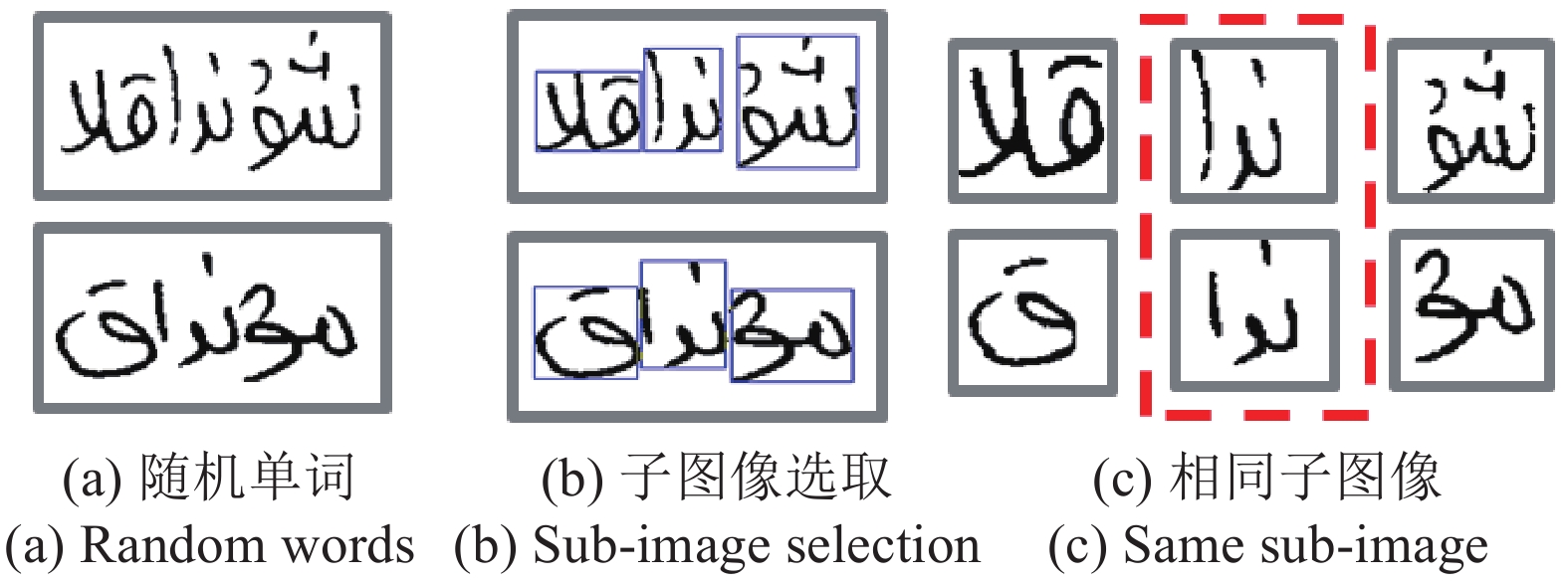
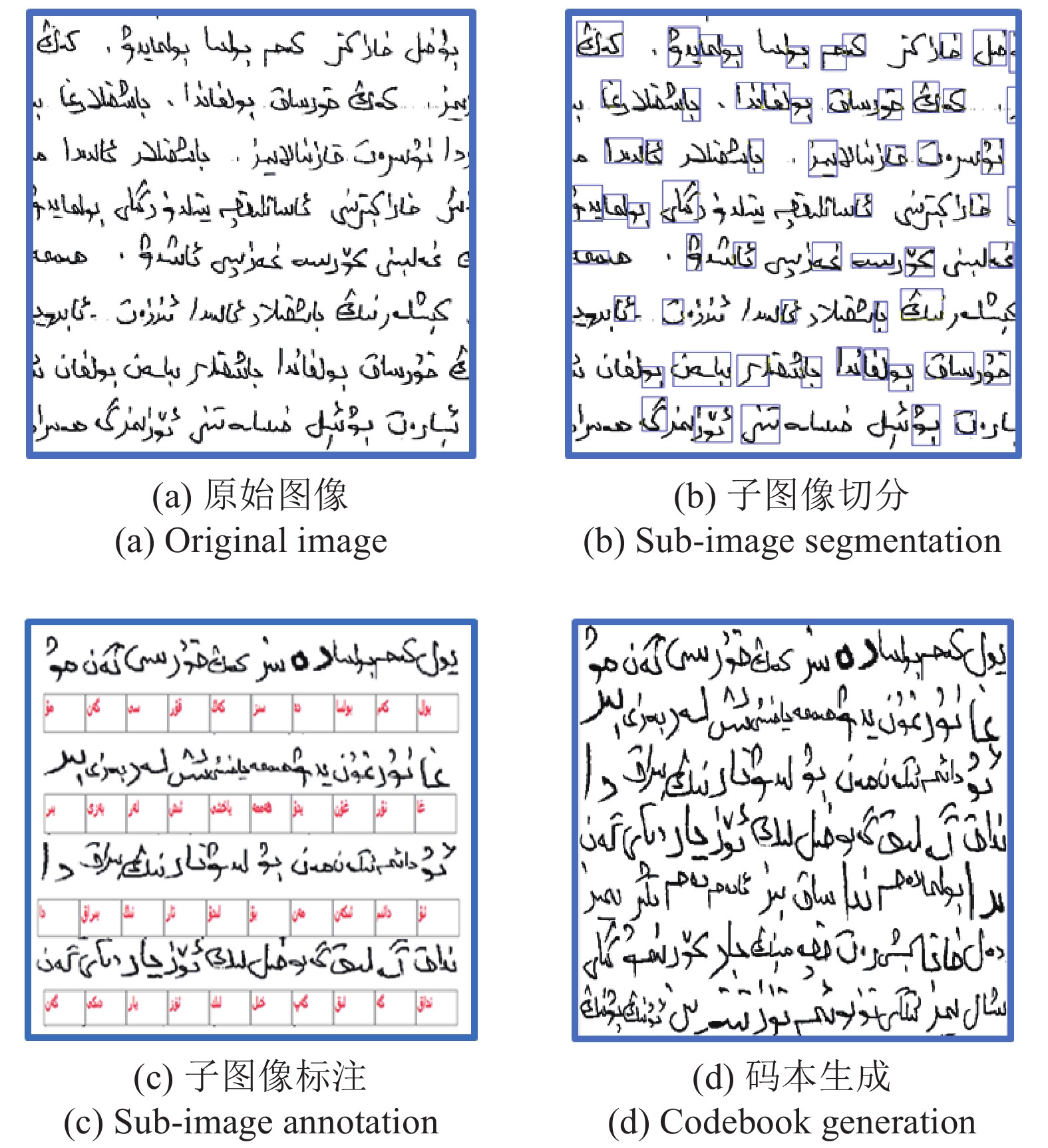
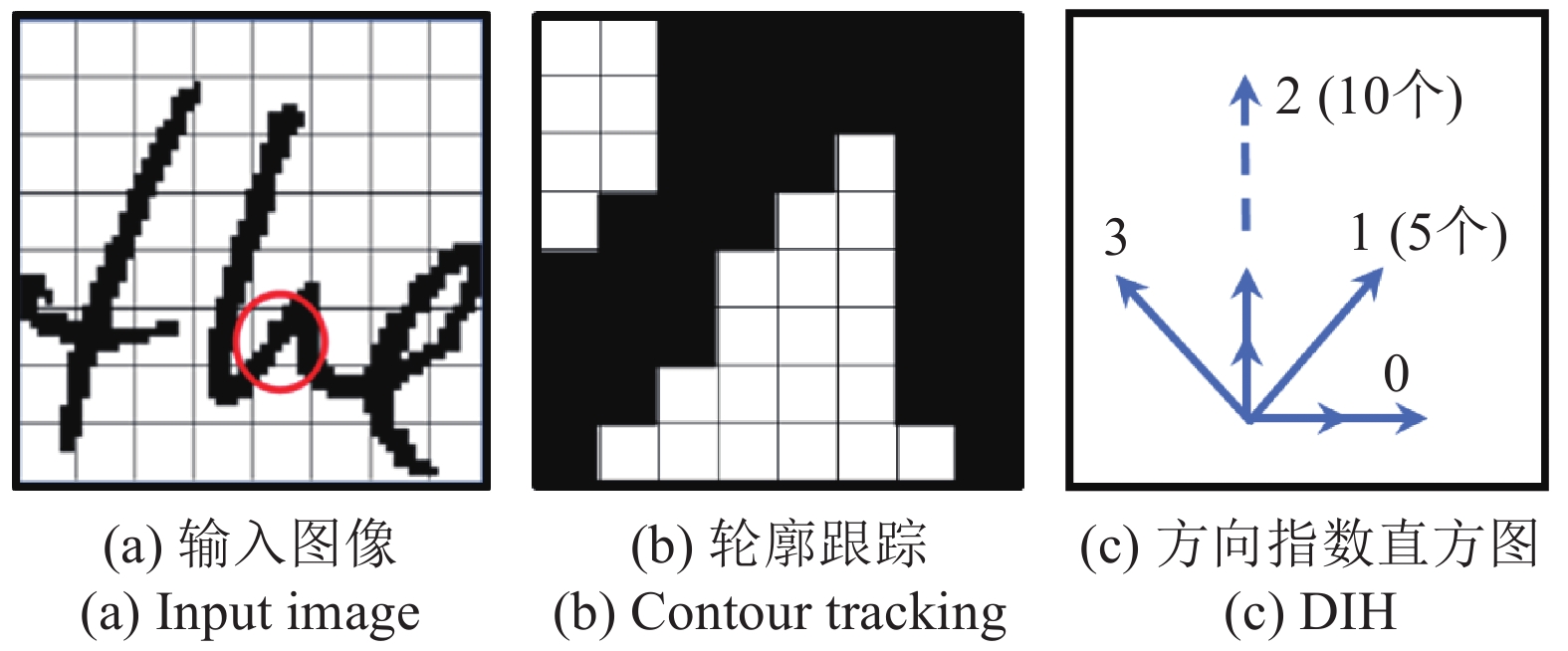
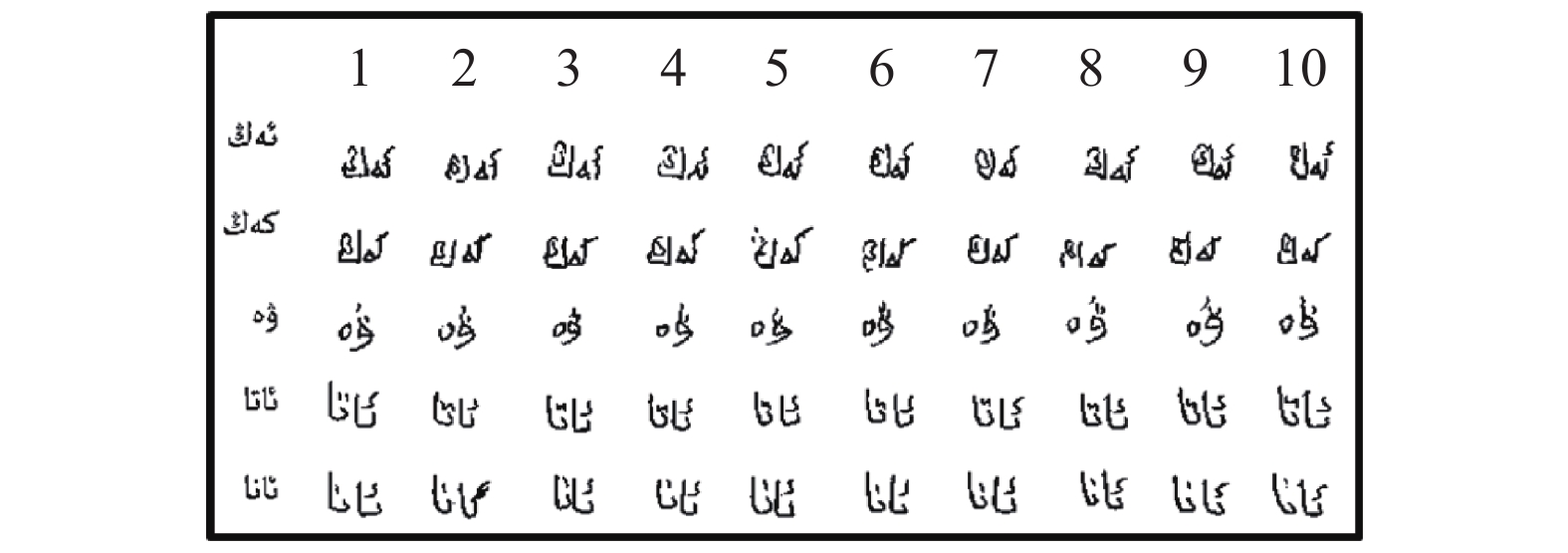
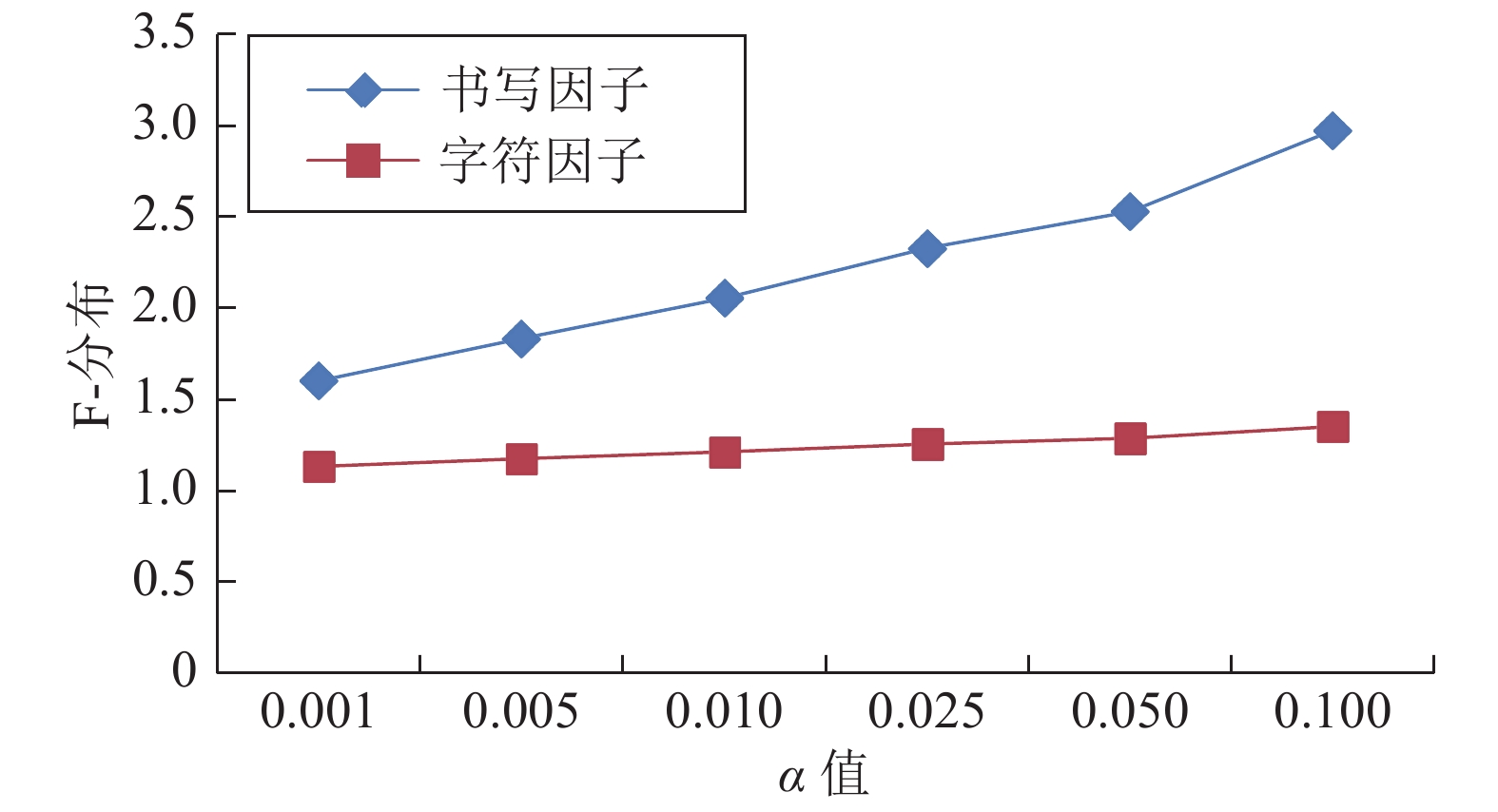
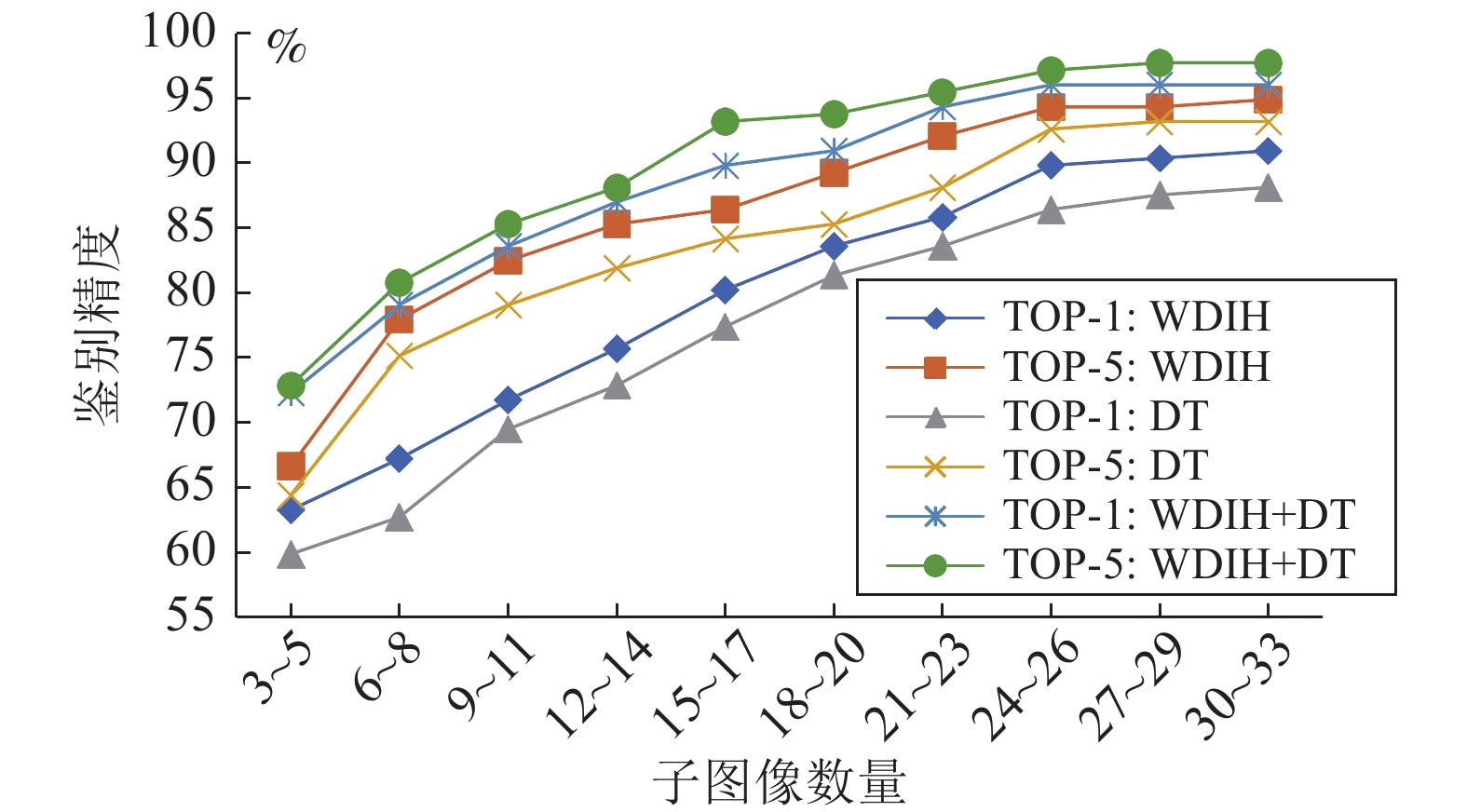
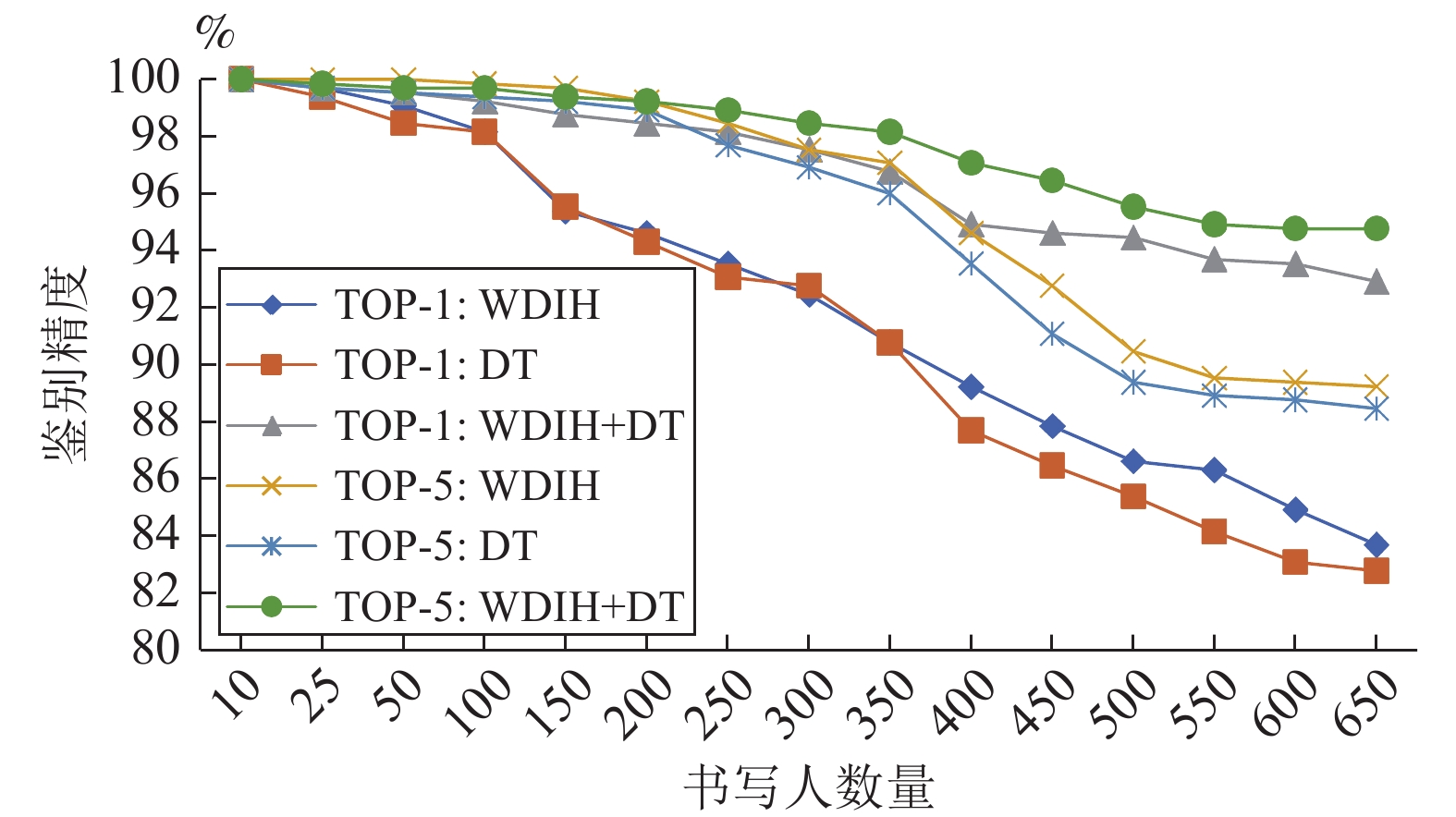
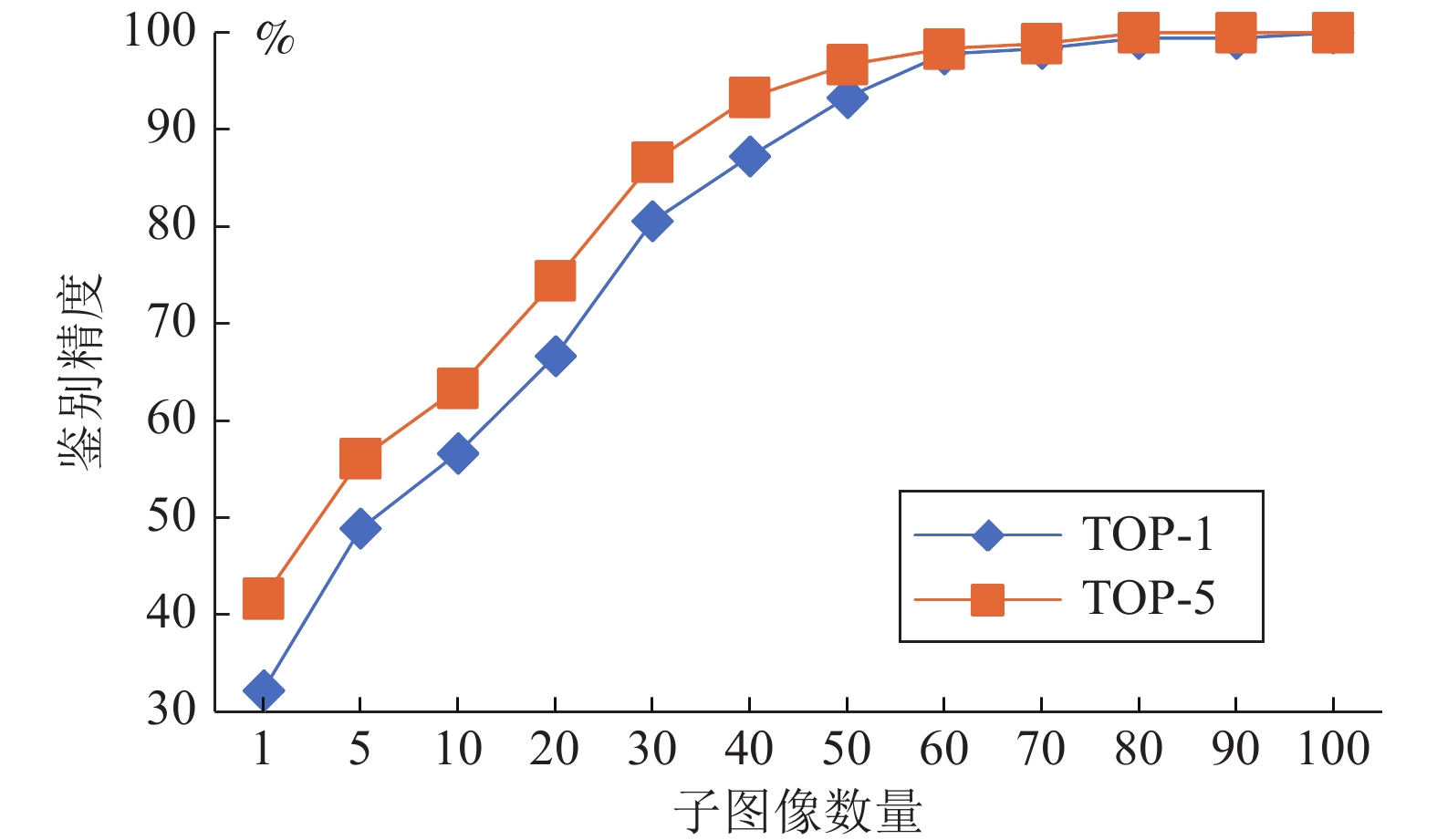
针对已有的笔迹鉴别方法对笔迹版式的要求比较严格、训练过程耗时、对内容不受限制的小样本数据情况下鉴别性能较低等问题, 提出了基于混合码本与因子分析的文本独立笔迹鉴别算法. 该算法提取写作时常用的子图像, 并用描述符标注“代码”建立“码本”. 在特征提取层, 分别采用加权的方向指数直方图法和距离变换法, 对于具有相同描述符的“代码”计算特征距离. 把影响特征距离的因素分为书写因子和字符因子, 对码本中的每个书写模式进行双因子方差分析. 在IAM和Firemaker这两个标准数据集上的实验结果证明, 相比目前国内外的先进已有方法, 本文提出的算法在精度和速度方面有一定的优势, 具有一定的推广价值, 适合处理多语种的笔迹鉴别问题.
针对已有的笔迹鉴别方法对笔迹版式的要求比较严格、训练过程耗时、对内容不受限制的小样本数据情况下鉴别性能较低等问题, 提出了基于混合码本与因子分析的文本独立笔迹鉴别算法. 该算法提取写作时常用的子图像, 并用描述符标注“代码”建立“码本”. 在特征提取层, 分别采用加权的方向指数直方图法和距离变换法, 对于具有相同描述符的“代码”计算特征距离. 把影响特征距离的因素分为书写因子和字符因子, 对码本中的每个书写模式进行双因子方差分析. 在IAM和Firemaker这两个标准数据集上的实验结果证明, 相比目前国内外的先进已有方法, 本文提出的算法在精度和速度方面有一定的优势, 具有一定的推广价值, 适合处理多语种的笔迹鉴别问题.

2021, 47(9): 2285-2291.
doi: 10.16383/j.aas.c180826
摘要:
针对多智能体一致性算法中的通信问题, 提出了一种近邻原则, 即利用部分二阶和部分三阶邻居信息, 在固定无向连通拓扑图的基础上, 应用于三阶多智能体系统.通过MATLAB仿真, 将所提出的算法与经典的三阶一致性算法进行比较, 仿真结果表明该算法能够使系统达到一致, 并且提高了系统的收敛速度, 减少了系统通讯量.
针对多智能体一致性算法中的通信问题, 提出了一种近邻原则, 即利用部分二阶和部分三阶邻居信息, 在固定无向连通拓扑图的基础上, 应用于三阶多智能体系统.通过MATLAB仿真, 将所提出的算法与经典的三阶一致性算法进行比较, 仿真结果表明该算法能够使系统达到一致, 并且提高了系统的收敛速度, 减少了系统通讯量.
2021, 47(9): 2292-2300.
doi: 10.16383/j.aas.c190045
摘要:
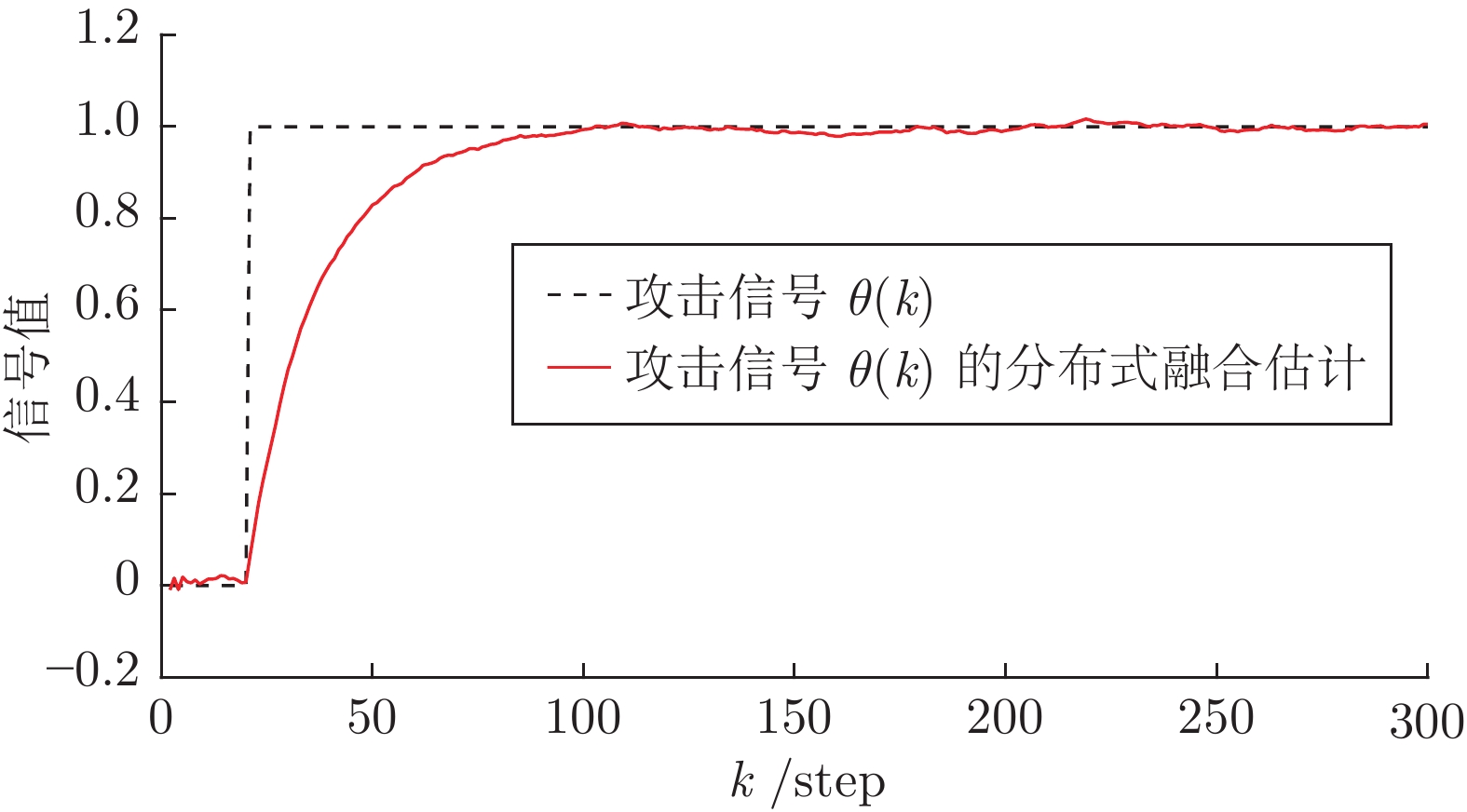
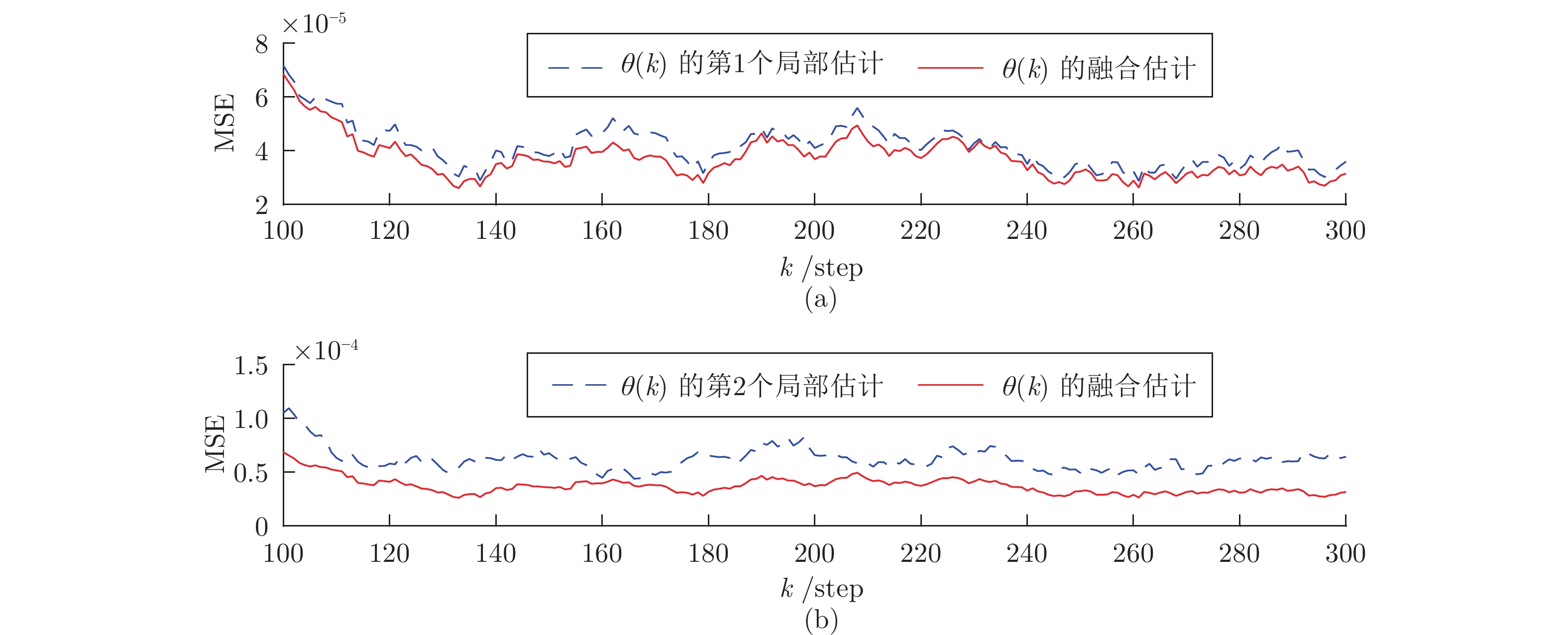
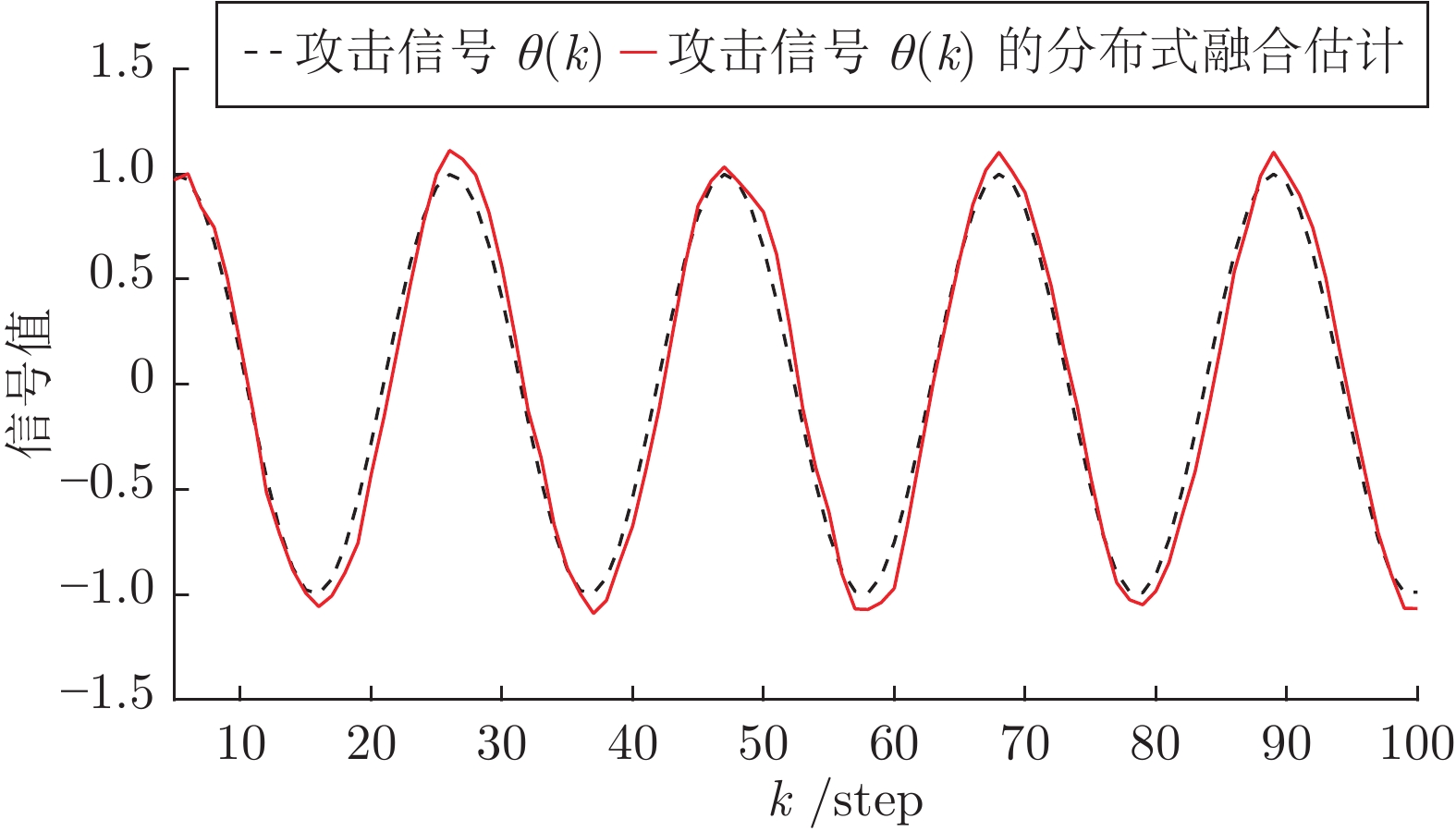
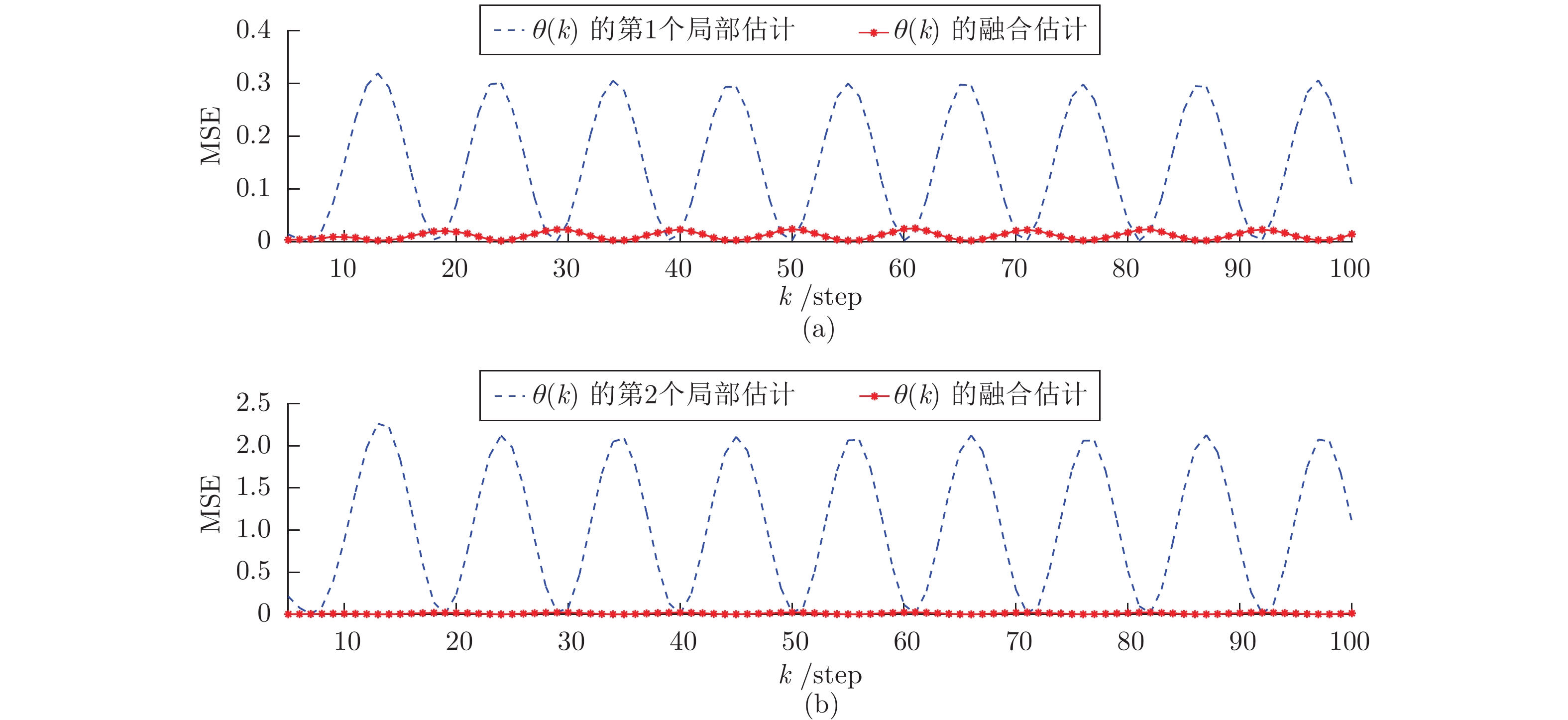
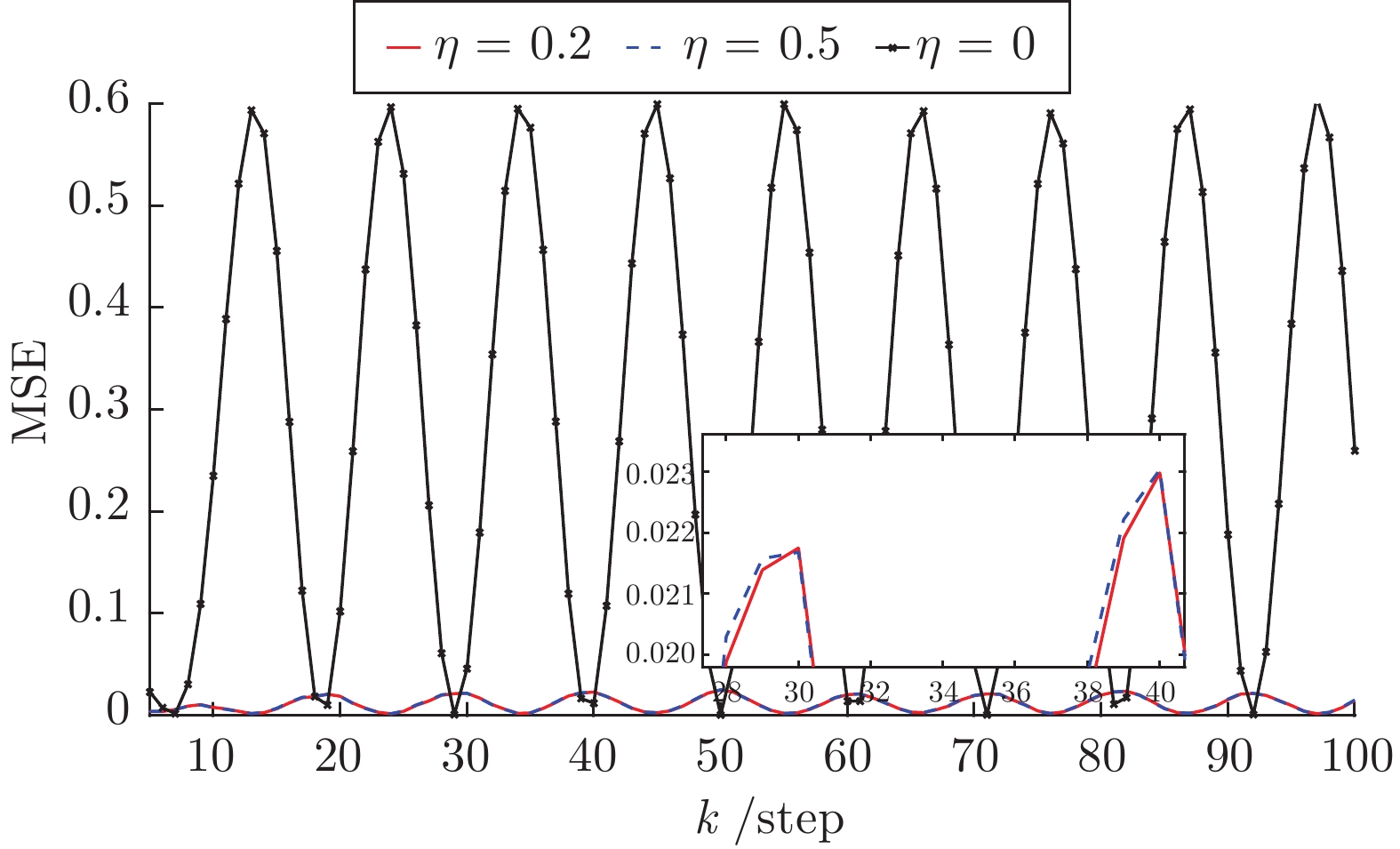
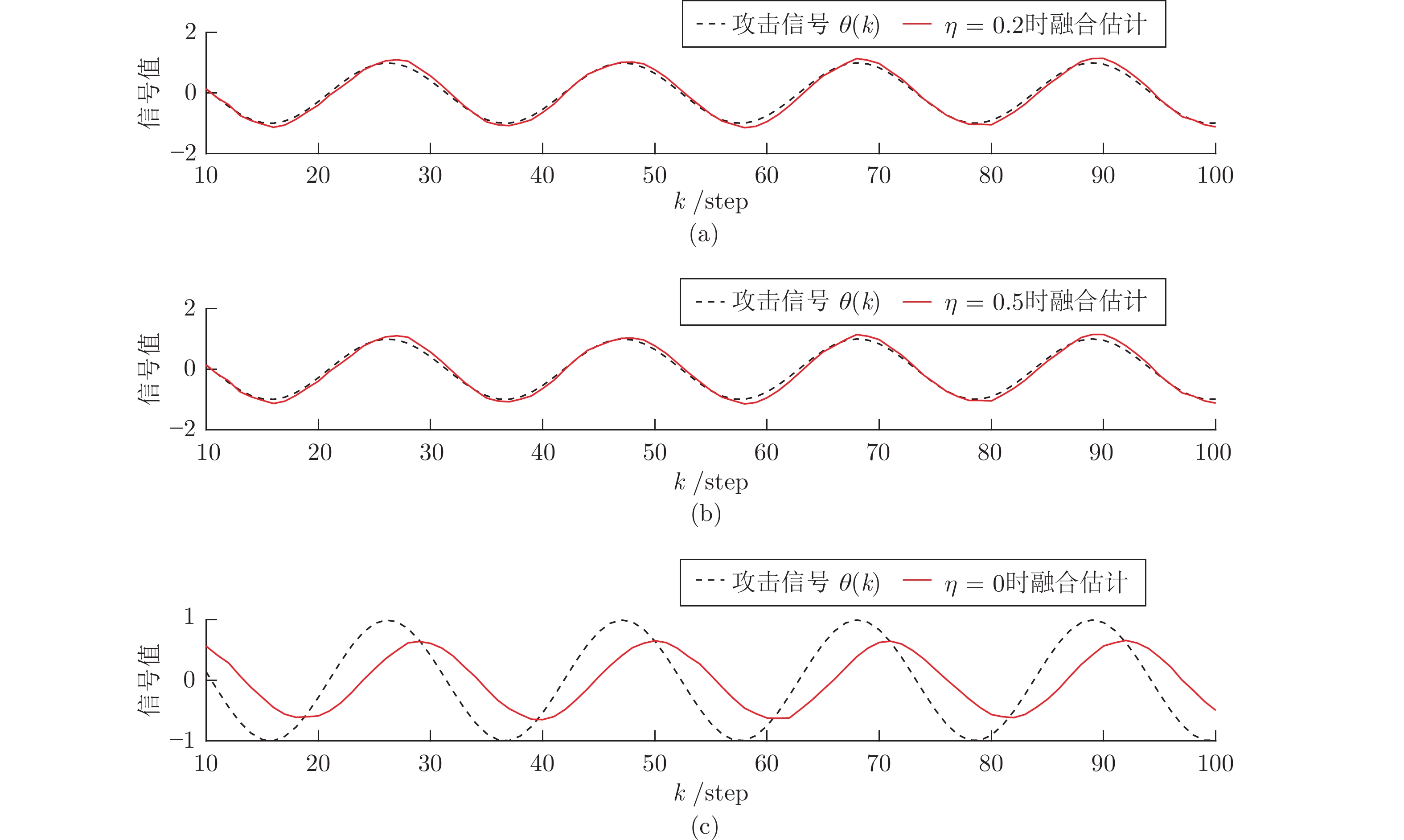
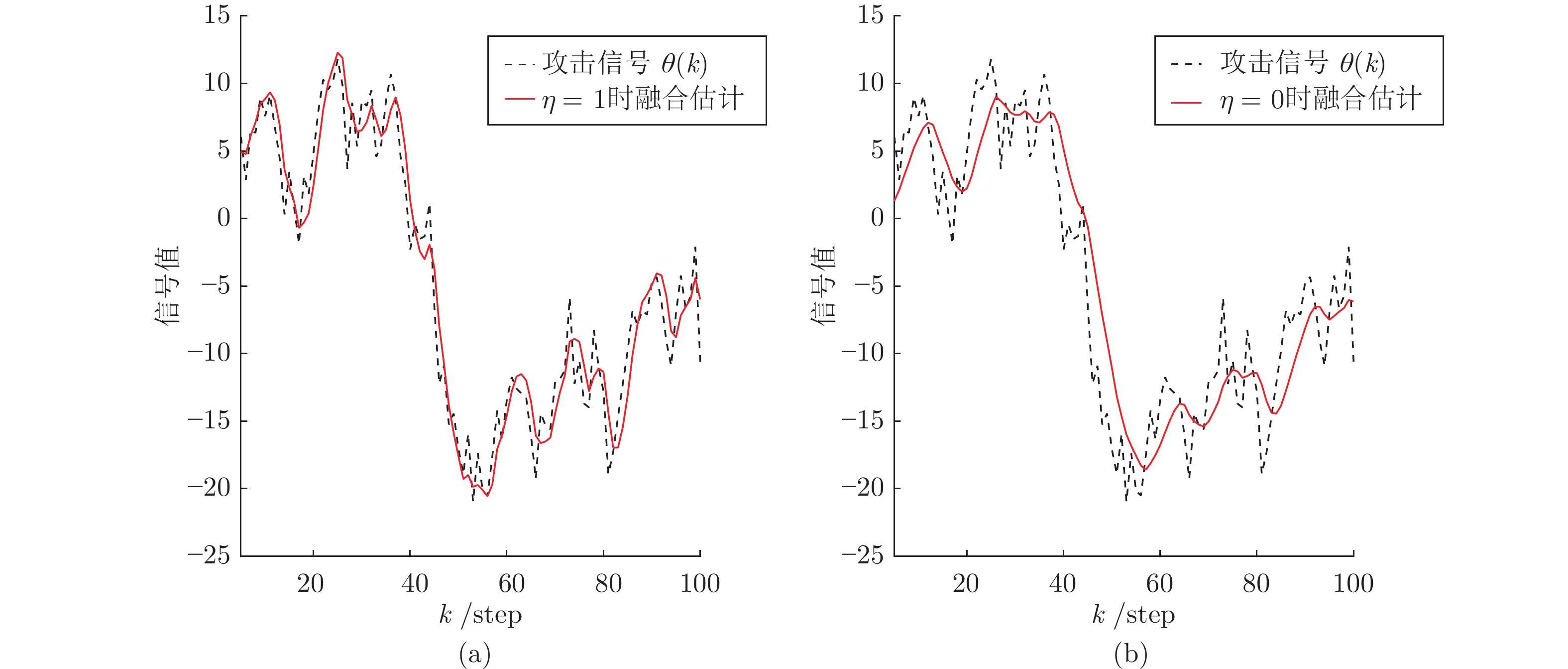
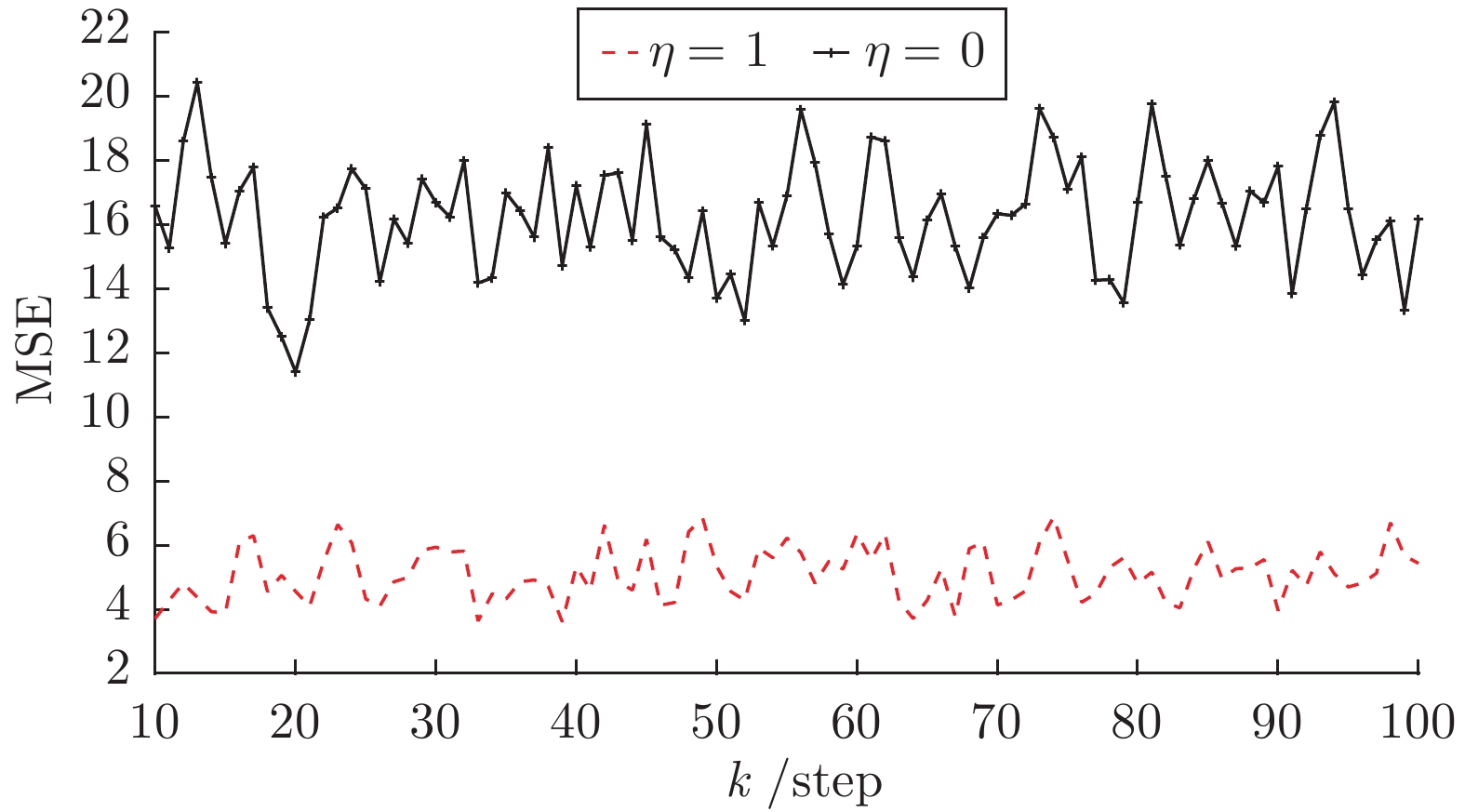
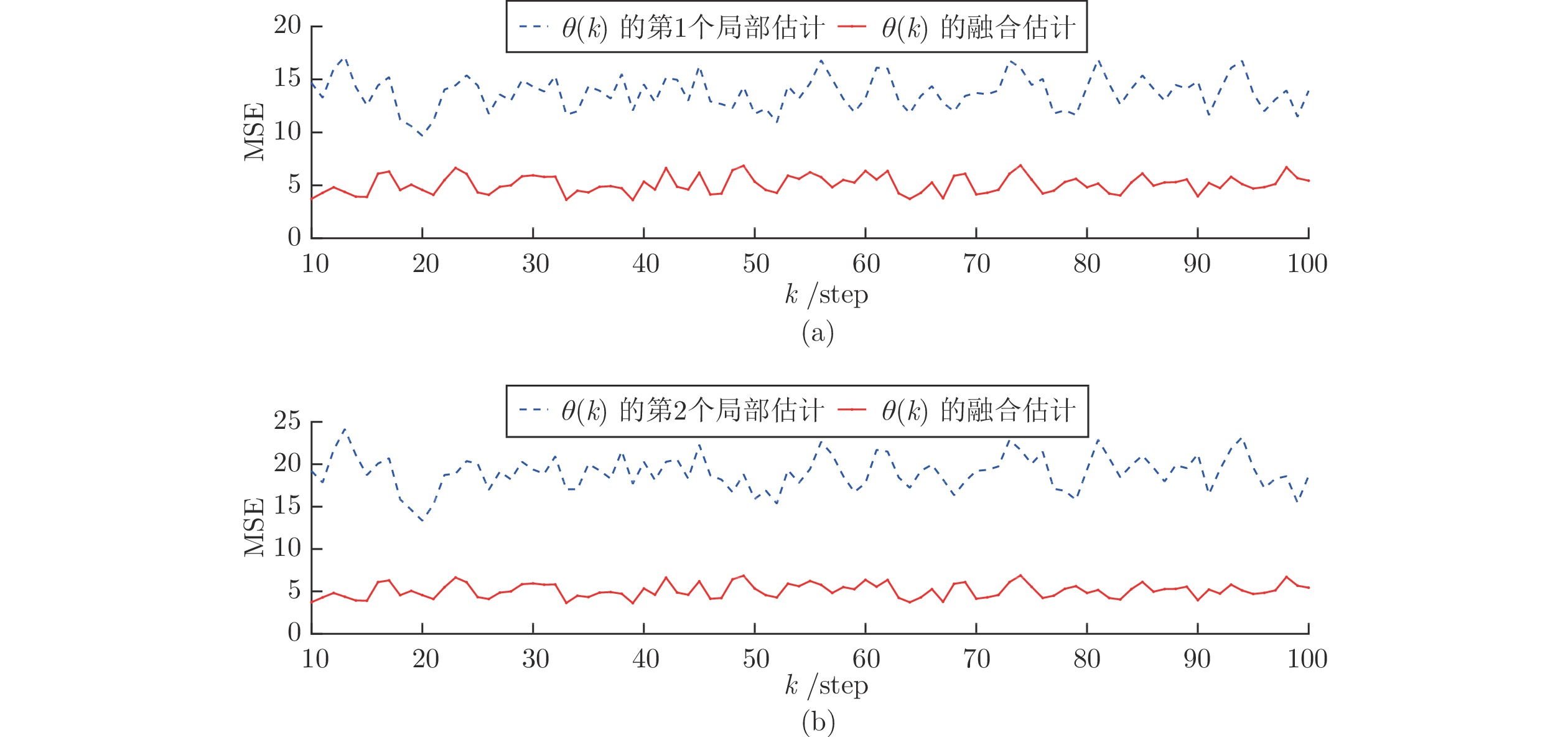
研究了信息物理系统中假数据注入(False data injection, FDI)攻击信号的检测问题. 在分布式融合框架下, 首先将FDI攻击信号建模为信息物理系统模型中的未知输入, 从而使得攻击信号的检测问题转化为对FDI攻击信号的实时估计问题. 其次, 在每个传感器端设计基于自适应卡尔曼滤波的FDI攻击信号的局部估计器; 在融合中心端引入补偿因子, 设计分布式信息融合准则以导出攻击信号的融合估计器. 特别地, 当FDI攻击信号是时变情况时, 融合过程中补偿因子的引入可以大大提高对攻击信号的估计精度. 最后, 通过两个仿真算例验证所提算法的有效性.
研究了信息物理系统中假数据注入(False data injection, FDI)攻击信号的检测问题. 在分布式融合框架下, 首先将FDI攻击信号建模为信息物理系统模型中的未知输入, 从而使得攻击信号的检测问题转化为对FDI攻击信号的实时估计问题. 其次, 在每个传感器端设计基于自适应卡尔曼滤波的FDI攻击信号的局部估计器; 在融合中心端引入补偿因子, 设计分布式信息融合准则以导出攻击信号的融合估计器. 特别地, 当FDI攻击信号是时变情况时, 融合过程中补偿因子的引入可以大大提高对攻击信号的估计精度. 最后, 通过两个仿真算例验证所提算法的有效性.