2021年 第47卷 第10期
2021, 47(10): 2301-2320.
doi: 10.16383/j.aas.2021.y000003
摘要:
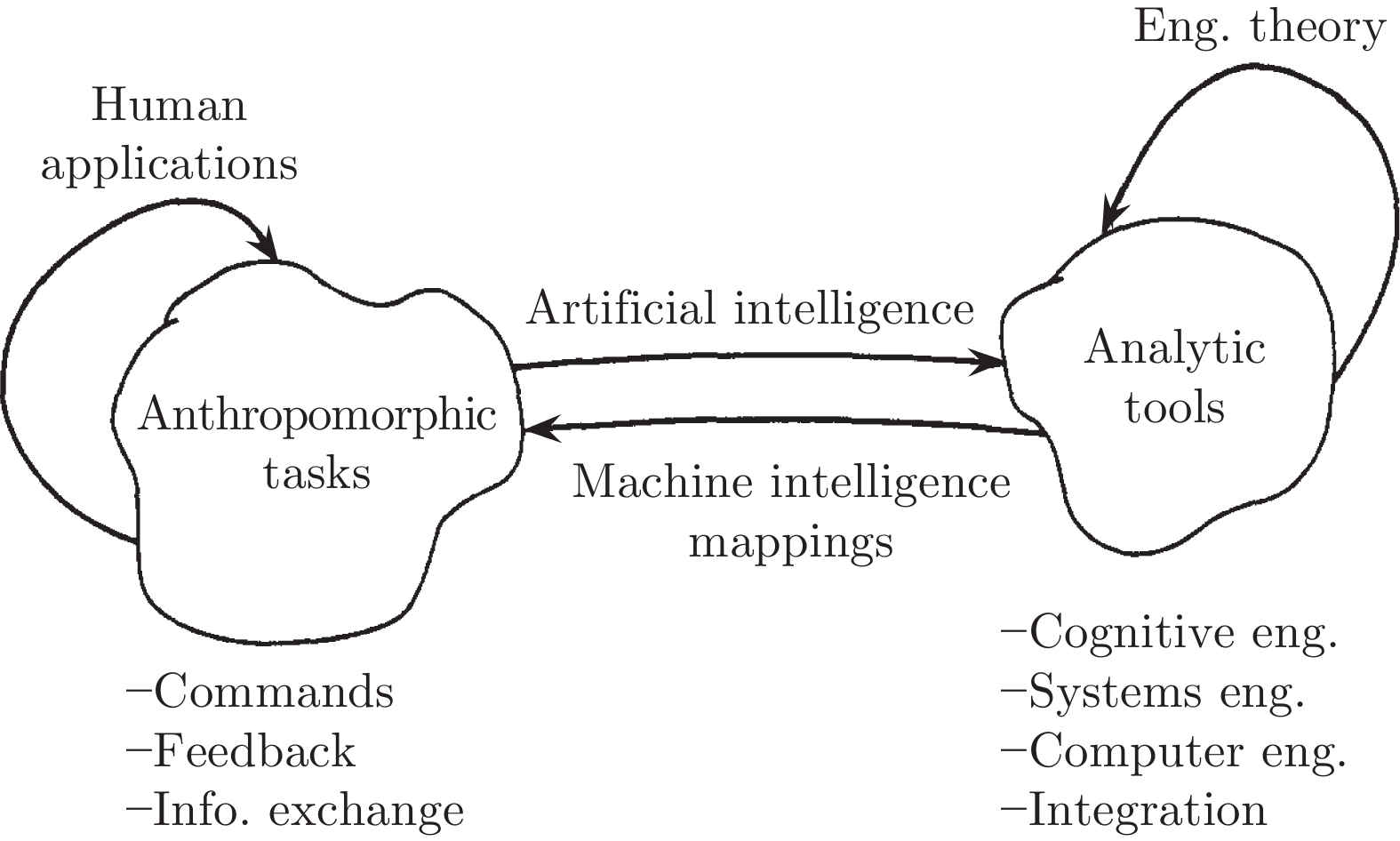
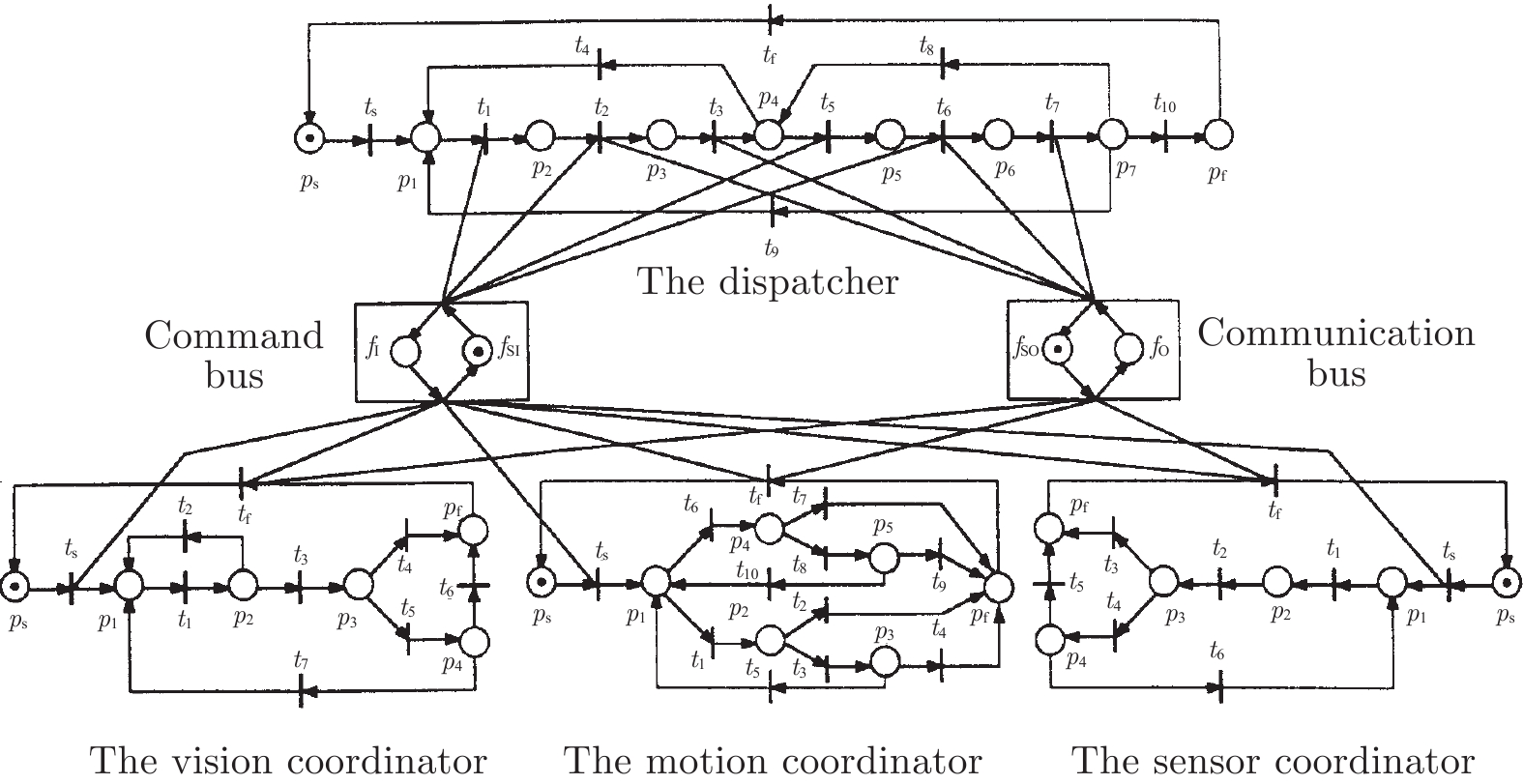
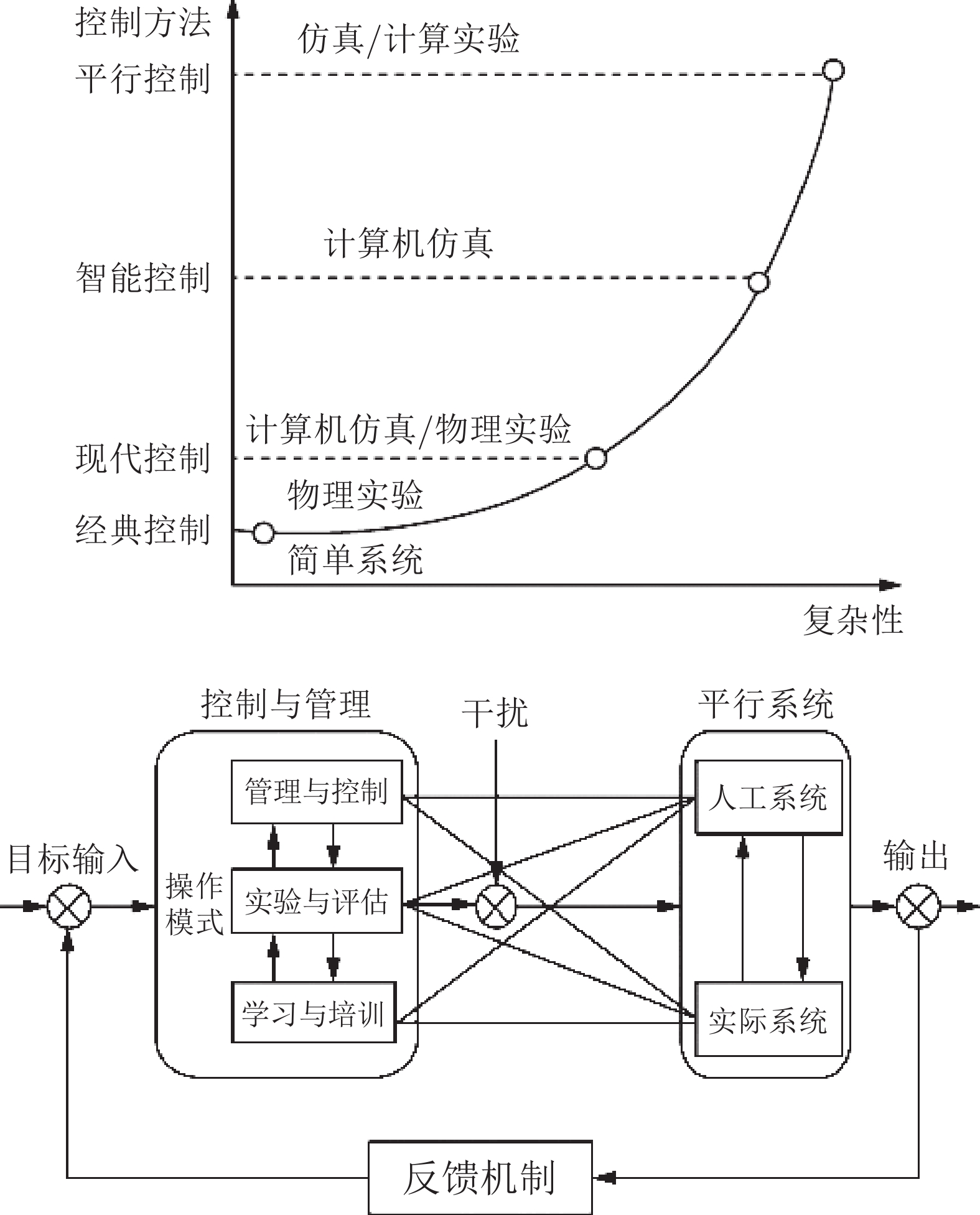
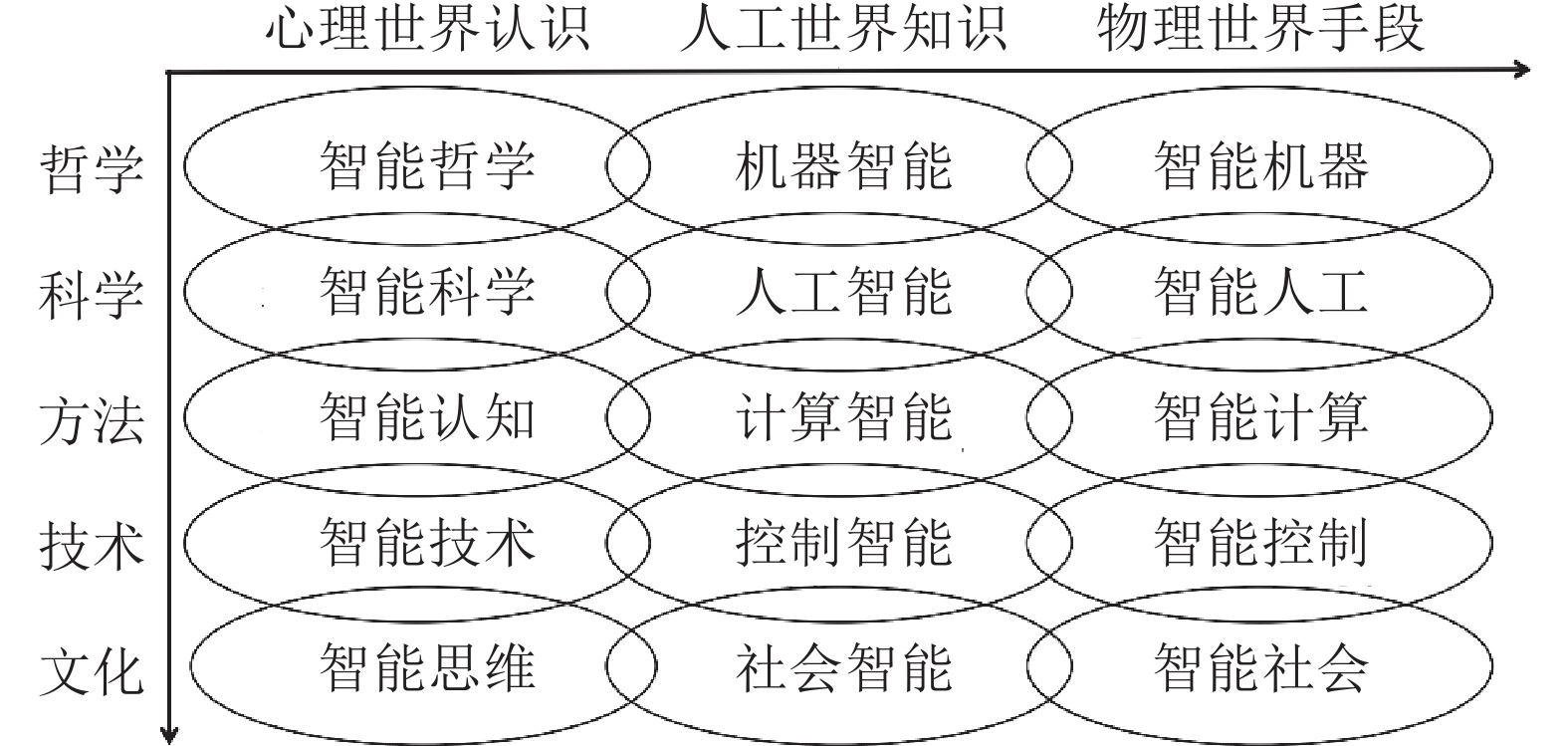
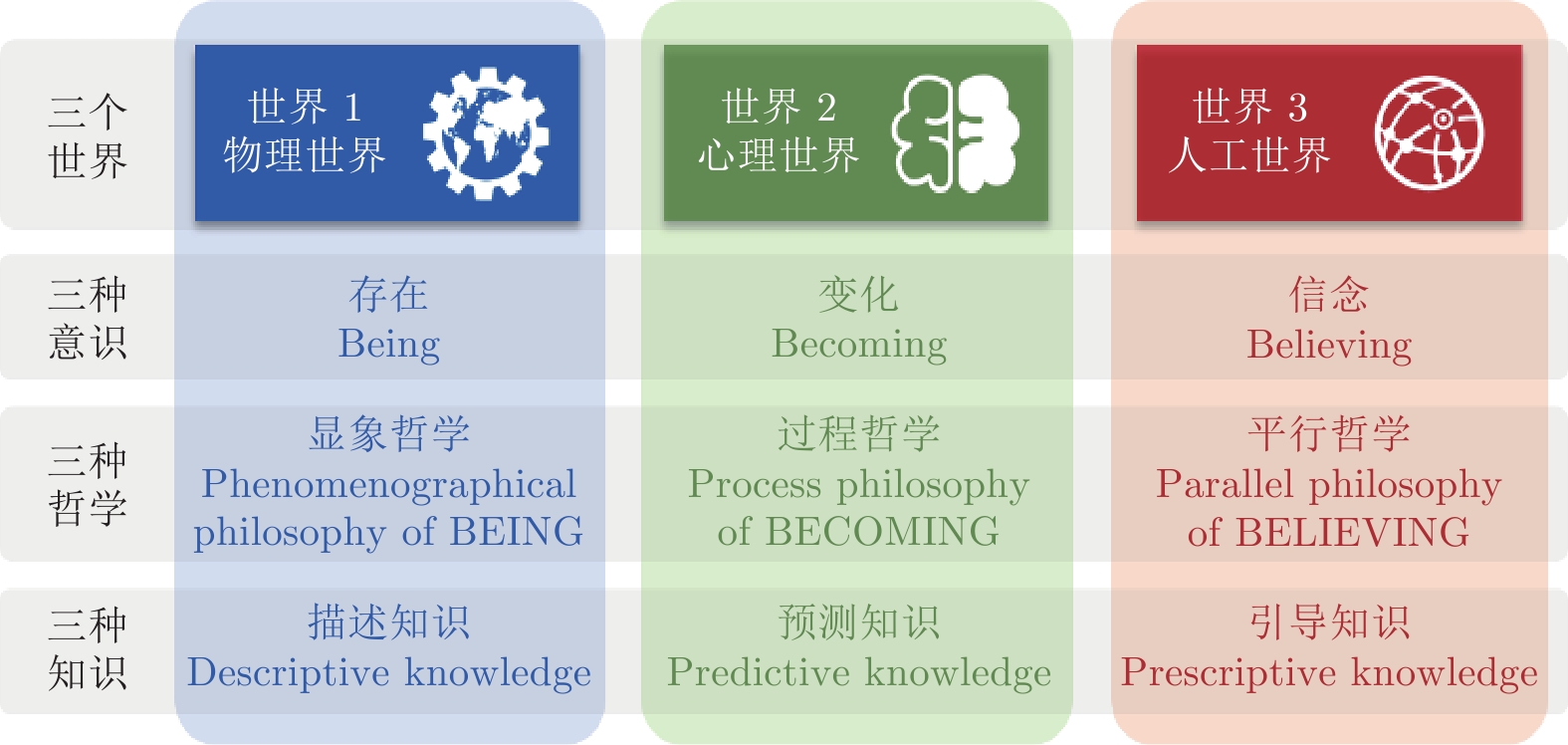
本文从智能的起源与目标开始讨论, 重新梳理人工智能史前的历史进程. 在此背景之下, 回顾智能控制从学习控制到平行控制的演化过程, 进而展望未来的控制智能从平行智能到知识自动化的可能发展途径. 前事不忘, 后事之师, 谨以此文纪念傅京孙与萨里迪斯教授开创并推动“智能控制”这一多学科交叉研究领域五十周年和二位开拓者诞辰九十周年.
本文从智能的起源与目标开始讨论, 重新梳理人工智能史前的历史进程. 在此背景之下, 回顾智能控制从学习控制到平行控制的演化过程, 进而展望未来的控制智能从平行智能到知识自动化的可能发展途径. 前事不忘, 后事之师, 谨以此文纪念傅京孙与萨里迪斯教授开创并推动“智能控制”这一多学科交叉研究领域五十周年和二位开拓者诞辰九十周年.
















2021, 47(10): 2321-2340.
doi: 10.16383/j.aas.c210166
摘要:
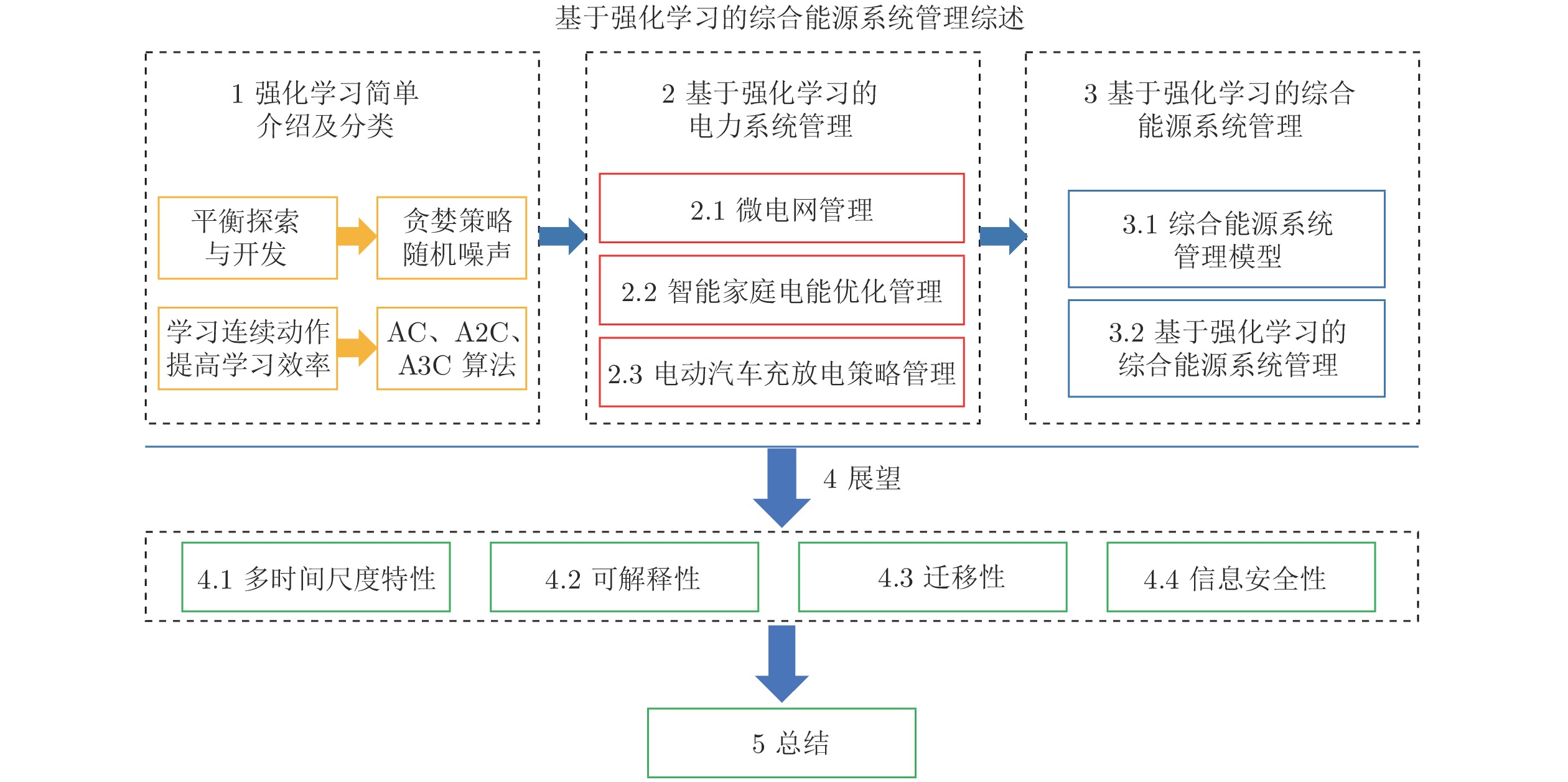
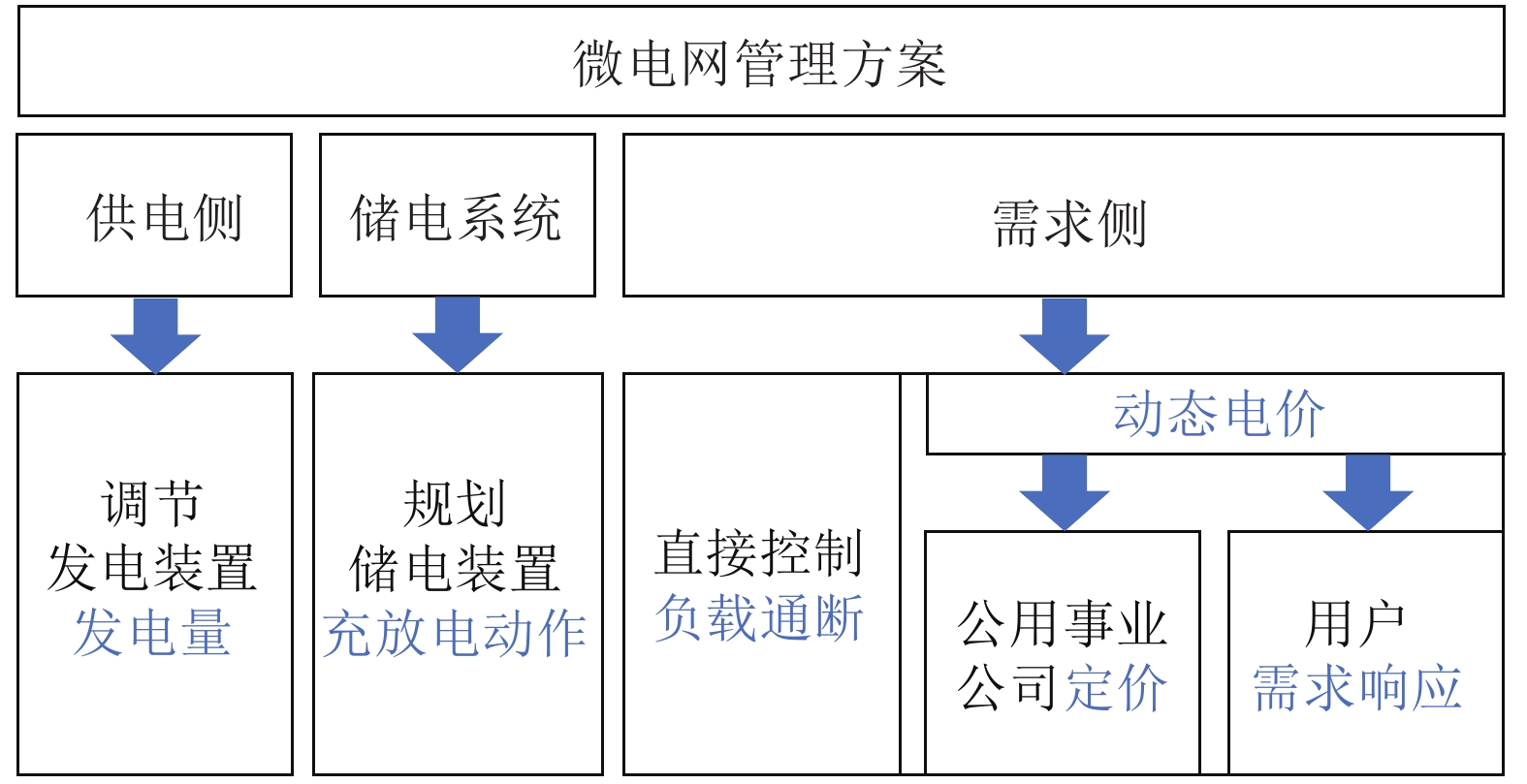
为了满足日益增长的能源需求并减少对环境的破坏, 节能成为全球经济和社会发展的一项长远战略方针, 加强能源管理能够提高能源利用效率、促进节能减排. 然而, 可再生能源和柔性负载的接入使得综合能源系统(Integrated energy system, IES)发展成为具有高度不确定性的复杂动态系统, 给现代化能源管理带来巨大的挑战. 强化学习(Reinforcement learning, RL)作为一种典型的交互试错型学习方法, 适用于求解具有不确定性的复杂动态系统优化问题, 因此在综合能源系统管理问题中得到广泛关注. 本文从模型和算法的层面系统地回顾了利用强化学习求解综合能源系统管理问题的现有研究成果, 并从多时间尺度特性、可解释性、迁移性和信息安全性4个方面提出展望.
为了满足日益增长的能源需求并减少对环境的破坏, 节能成为全球经济和社会发展的一项长远战略方针, 加强能源管理能够提高能源利用效率、促进节能减排. 然而, 可再生能源和柔性负载的接入使得综合能源系统(Integrated energy system, IES)发展成为具有高度不确定性的复杂动态系统, 给现代化能源管理带来巨大的挑战. 强化学习(Reinforcement learning, RL)作为一种典型的交互试错型学习方法, 适用于求解具有不确定性的复杂动态系统优化问题, 因此在综合能源系统管理问题中得到广泛关注. 本文从模型和算法的层面系统地回顾了利用强化学习求解综合能源系统管理问题的现有研究成果, 并从多时间尺度特性、可解释性、迁移性和信息安全性4个方面提出展望.
2021, 47(10): 2341-2363.
doi: 10.16383/j.aas.c190859
摘要:
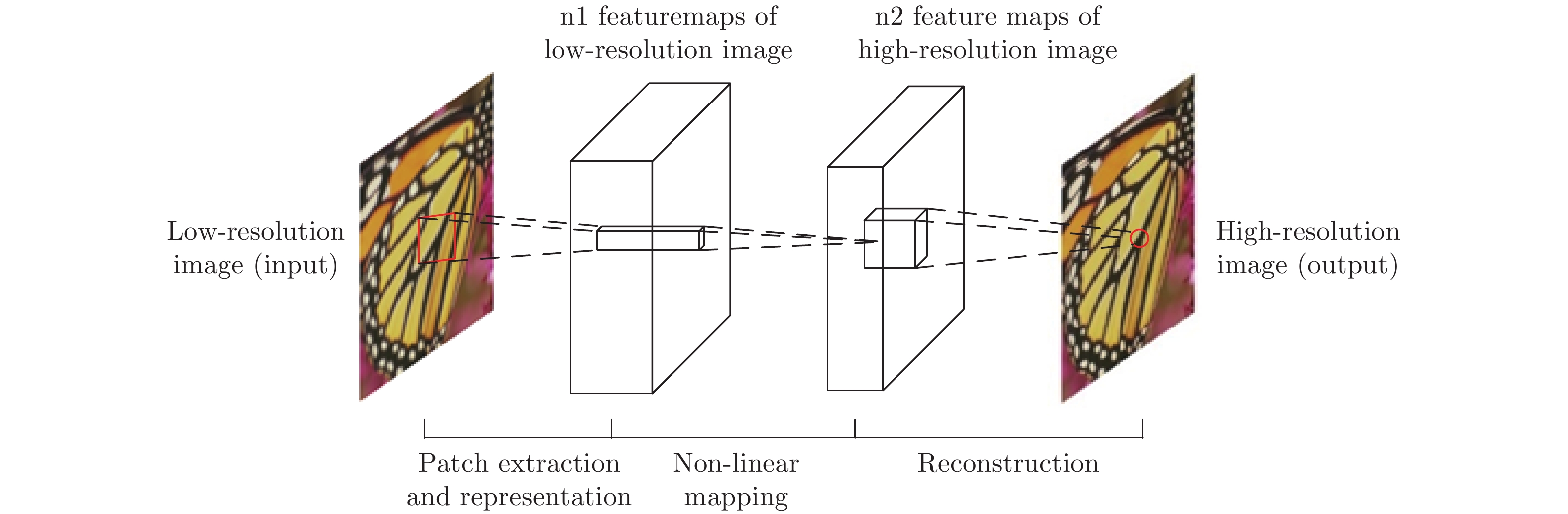
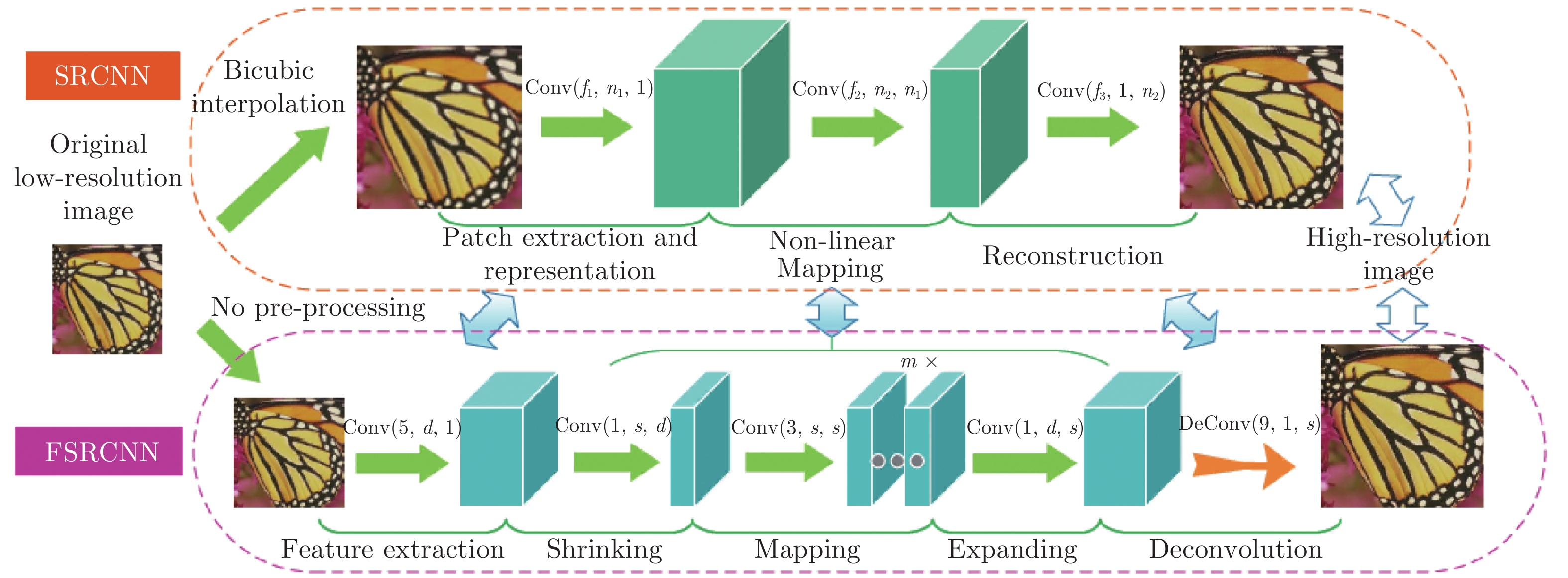
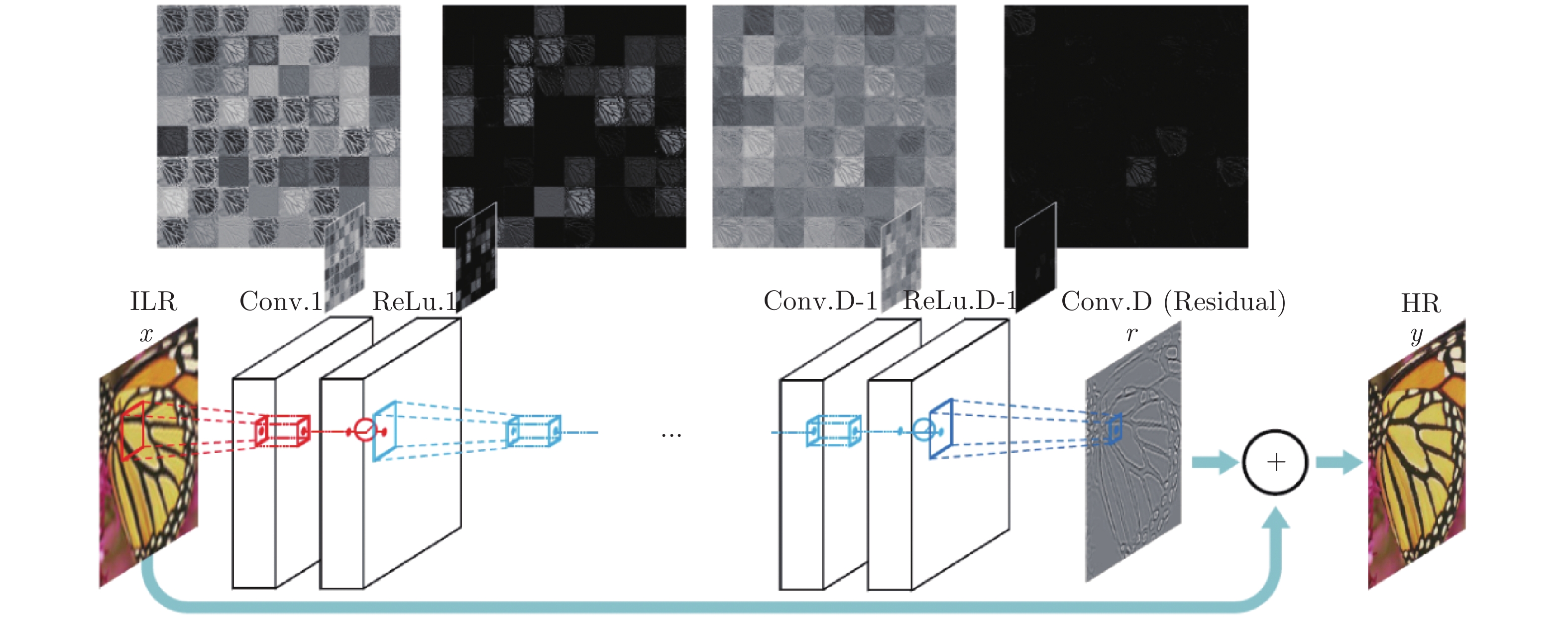
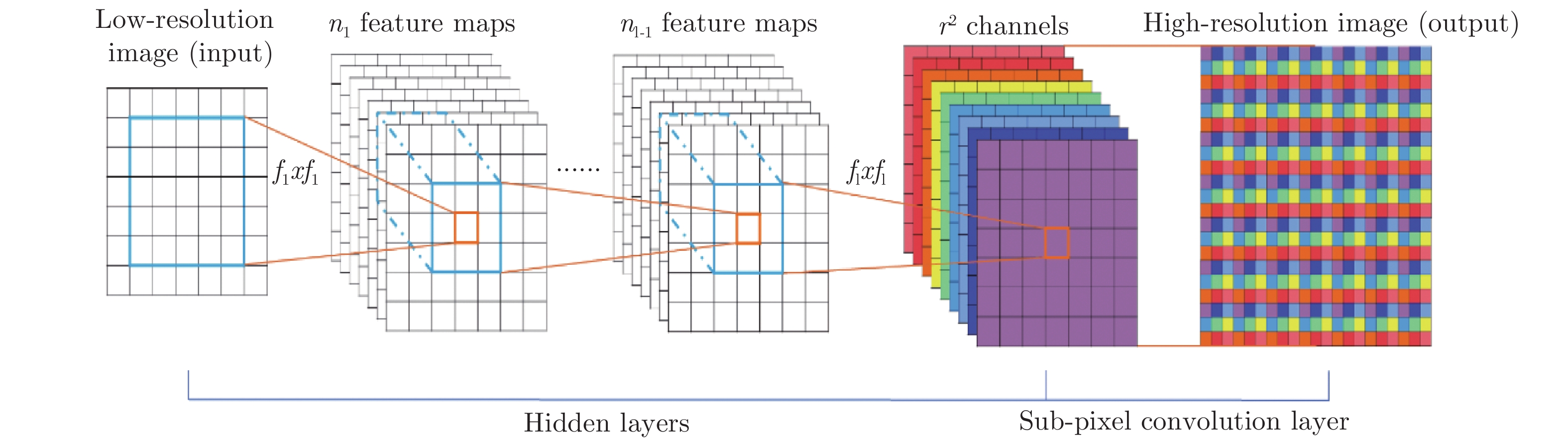
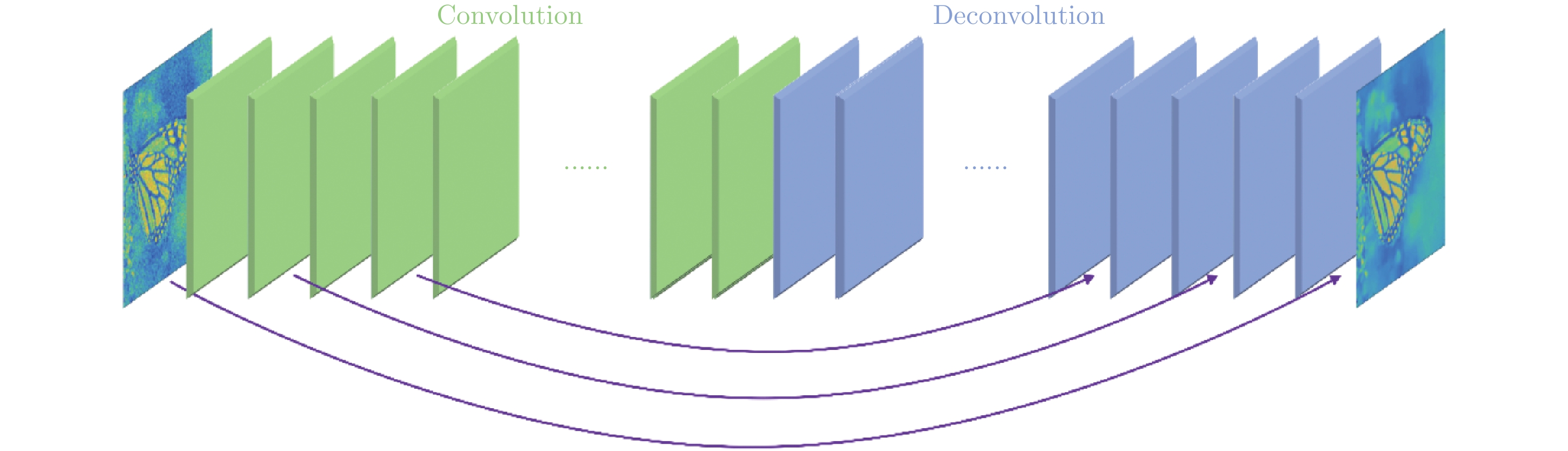
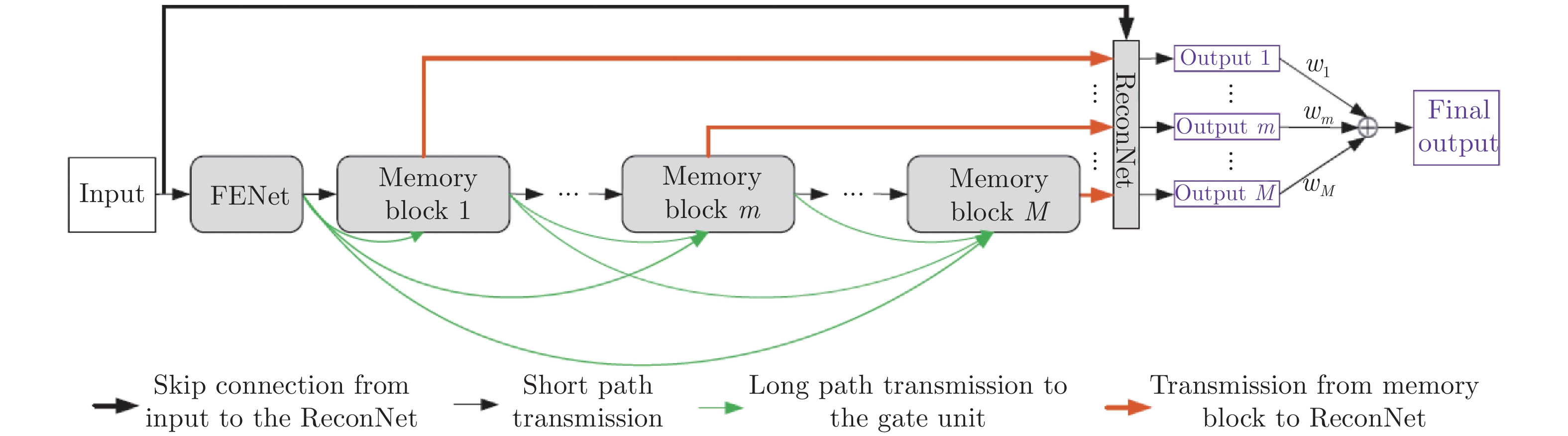
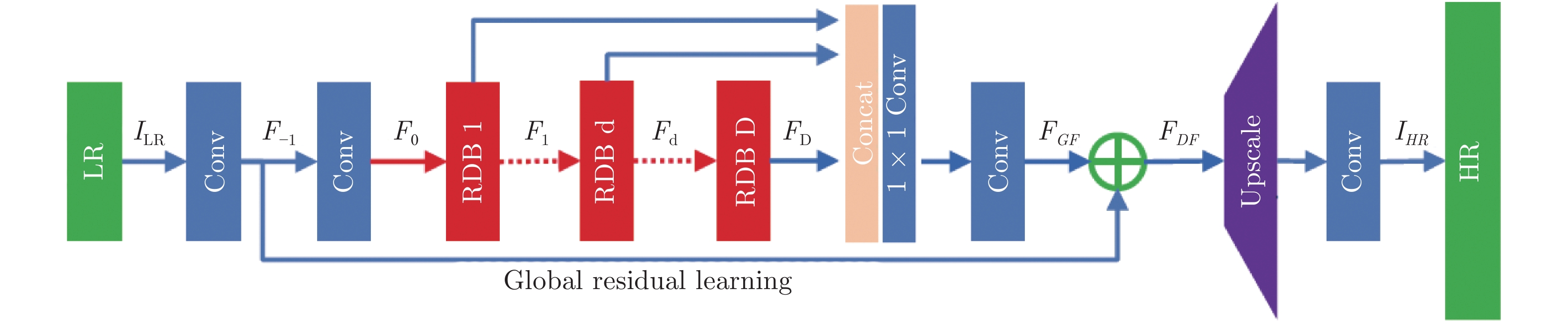
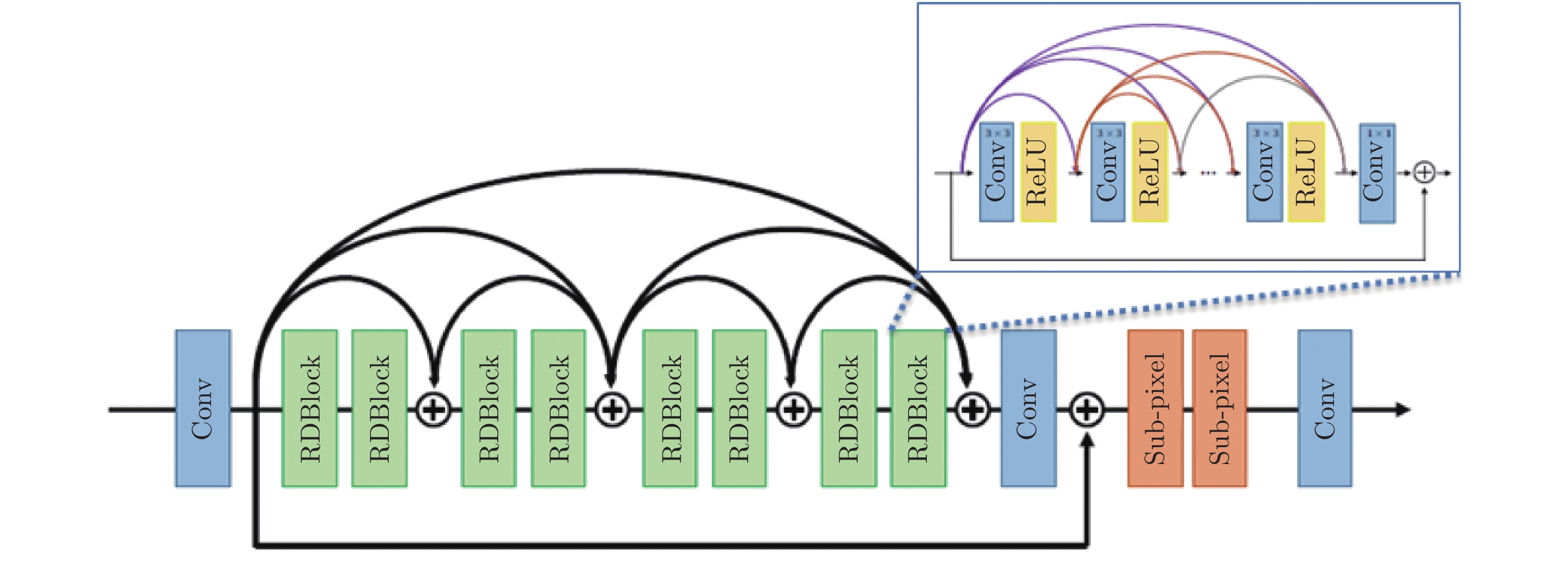
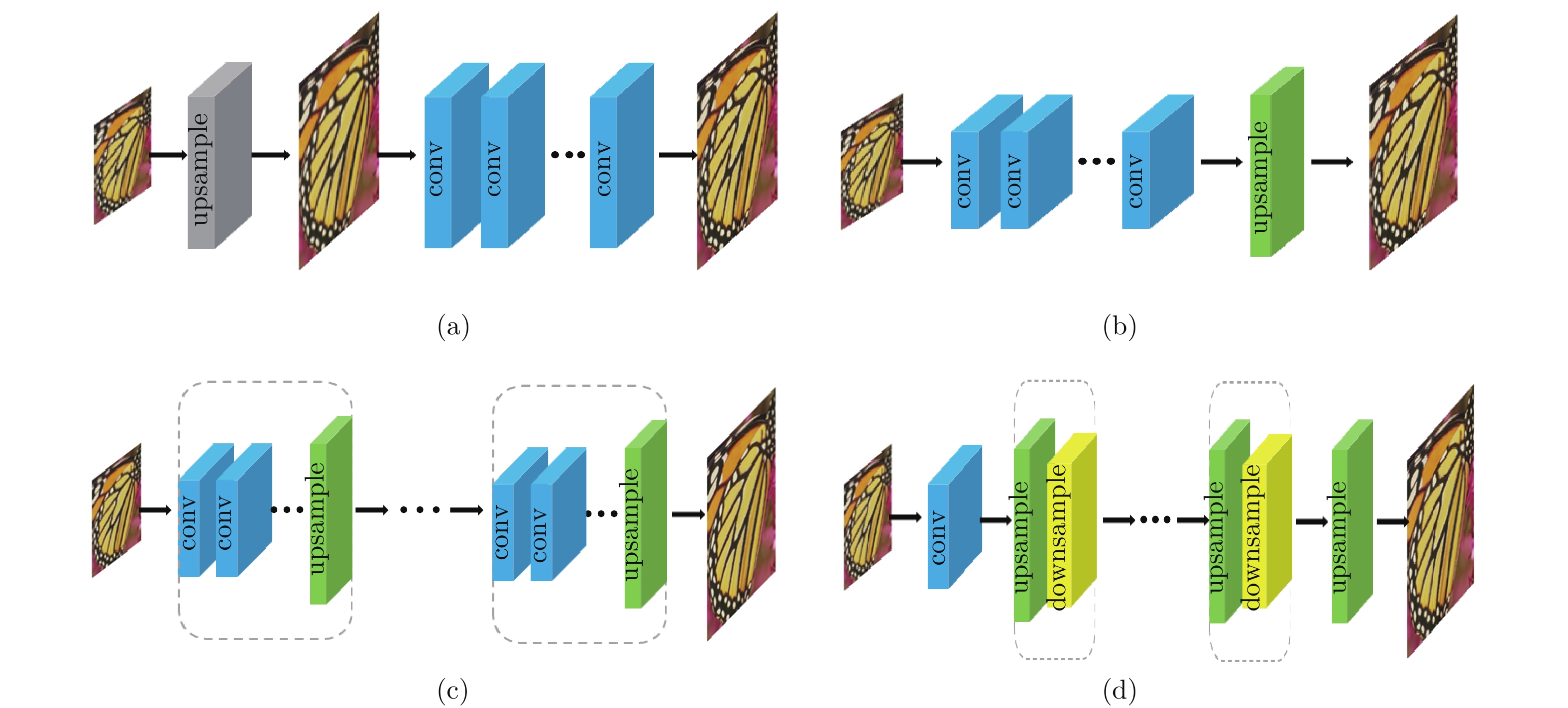
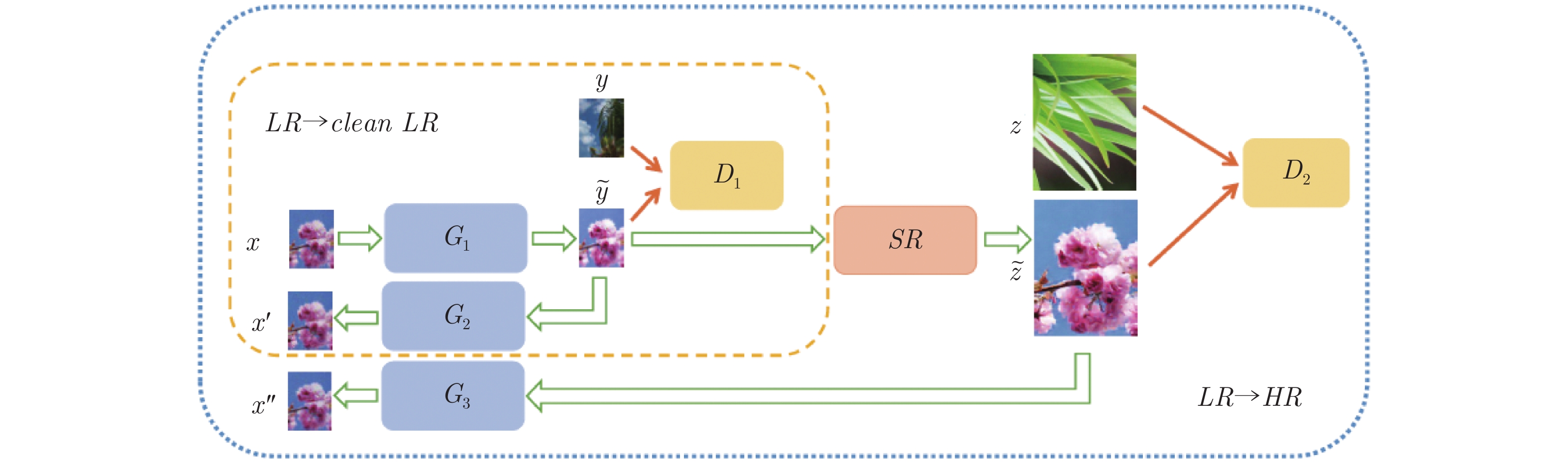
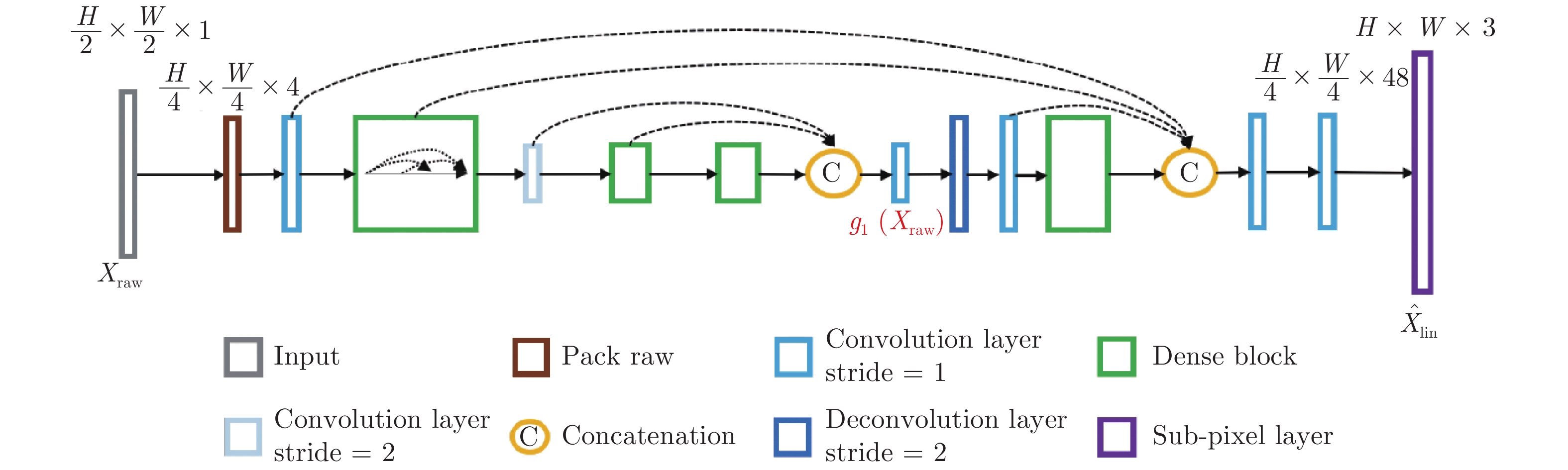
单幅图像超分辨率(Single image super-resolution, SISR)重建是计算机视觉领域上的一个重要问题, 在安防视频监控、飞机航拍以及卫星遥感等方面具有重要的研究意义和应用价值. 近年来, 深度学习在图像分类、检测、识别等诸多领域中取得了突破性进展, 也推动着图像超分辨率重建技术的发展. 本文首先介绍单幅图像超分辨率重建的常用公共图像数据集; 然后, 重点阐述基于深度学习的单幅图像超分辨率重建方向的创新与进展; 最后, 讨论了单幅图像超分辨率重建方向上存在的困难和挑战, 并对未来的发展趋势进行了思考与展望.
单幅图像超分辨率(Single image super-resolution, SISR)重建是计算机视觉领域上的一个重要问题, 在安防视频监控、飞机航拍以及卫星遥感等方面具有重要的研究意义和应用价值. 近年来, 深度学习在图像分类、检测、识别等诸多领域中取得了突破性进展, 也推动着图像超分辨率重建技术的发展. 本文首先介绍单幅图像超分辨率重建的常用公共图像数据集; 然后, 重点阐述基于深度学习的单幅图像超分辨率重建方向的创新与进展; 最后, 讨论了单幅图像超分辨率重建方向上存在的困难和挑战, 并对未来的发展趋势进行了思考与展望.












2021, 47(10): 2364-2375.
doi: 10.16383/j.aas.c190563
摘要:
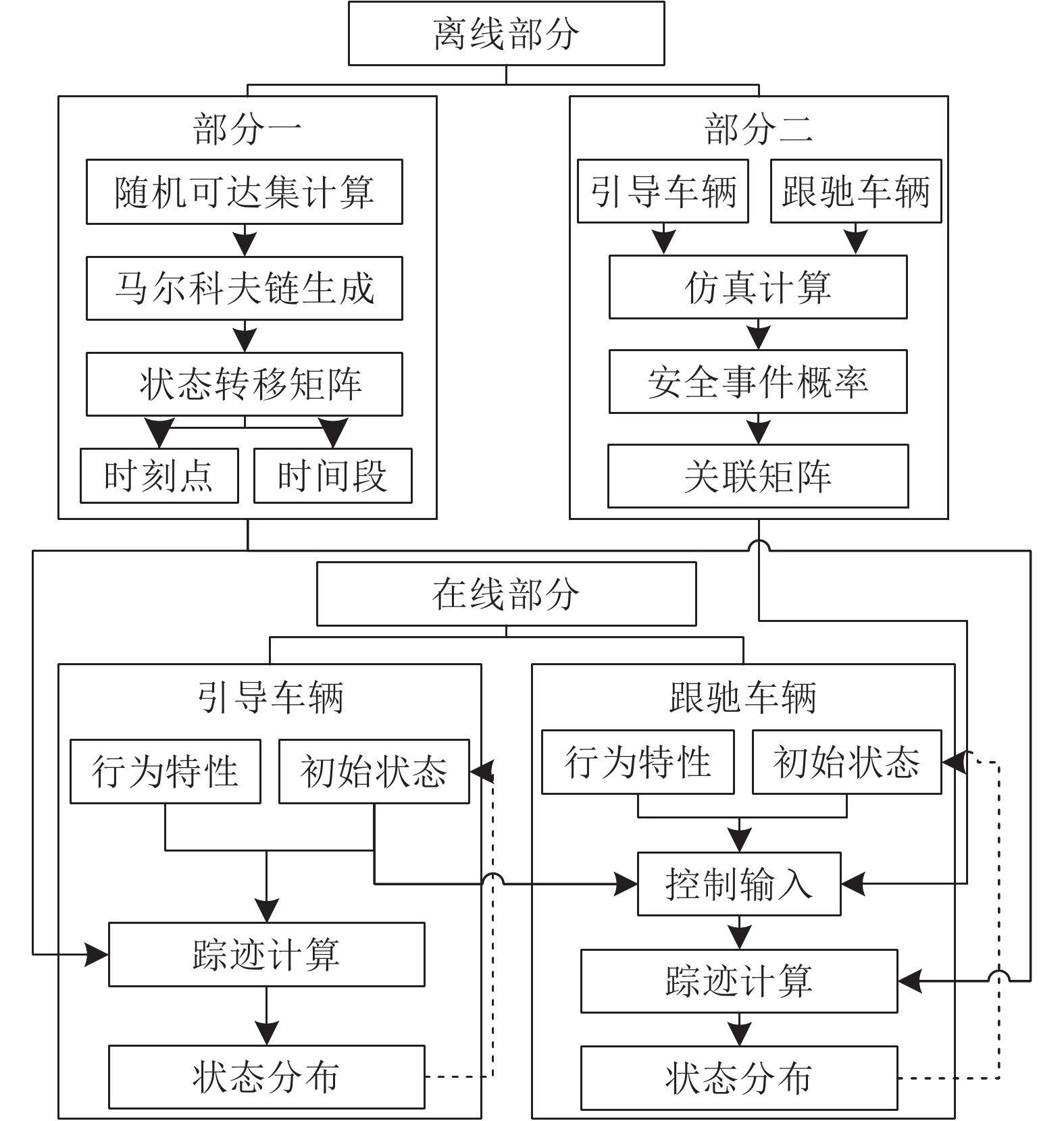
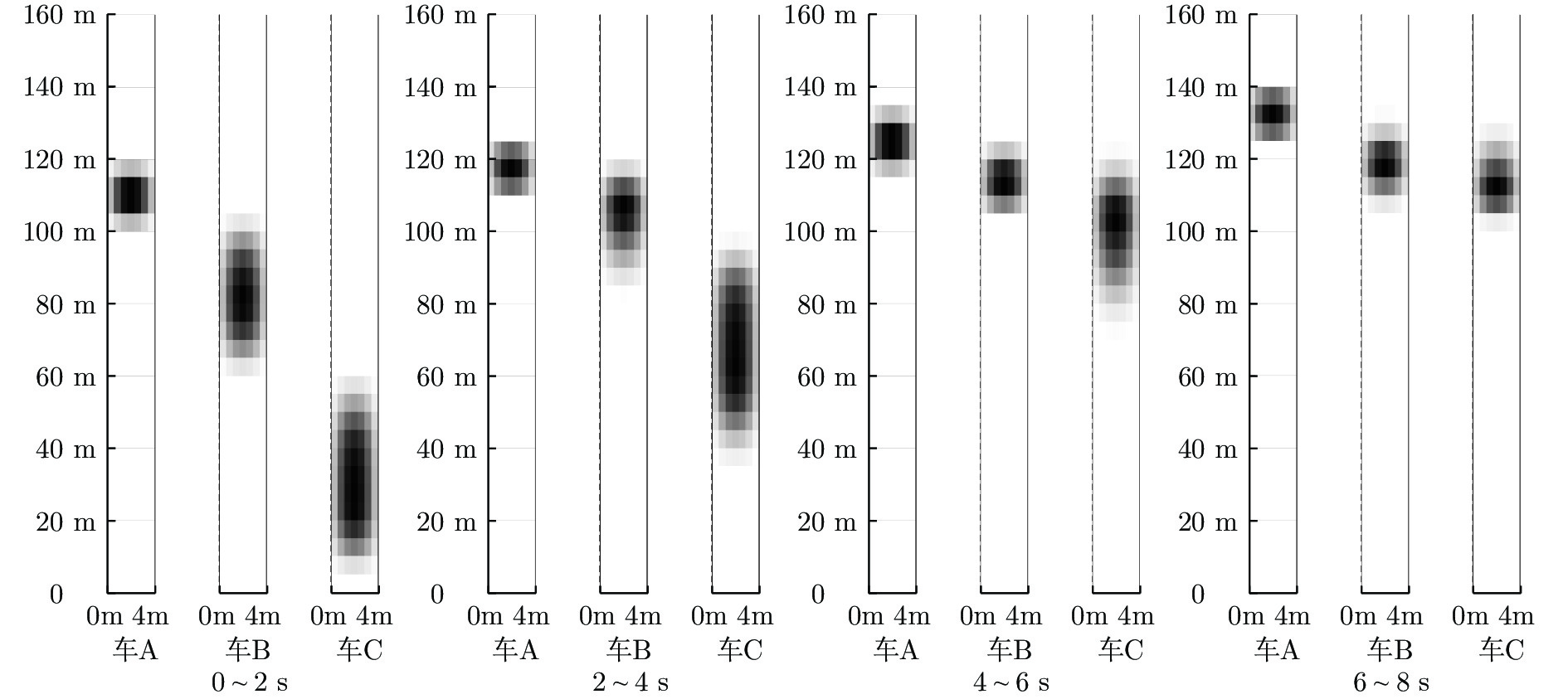
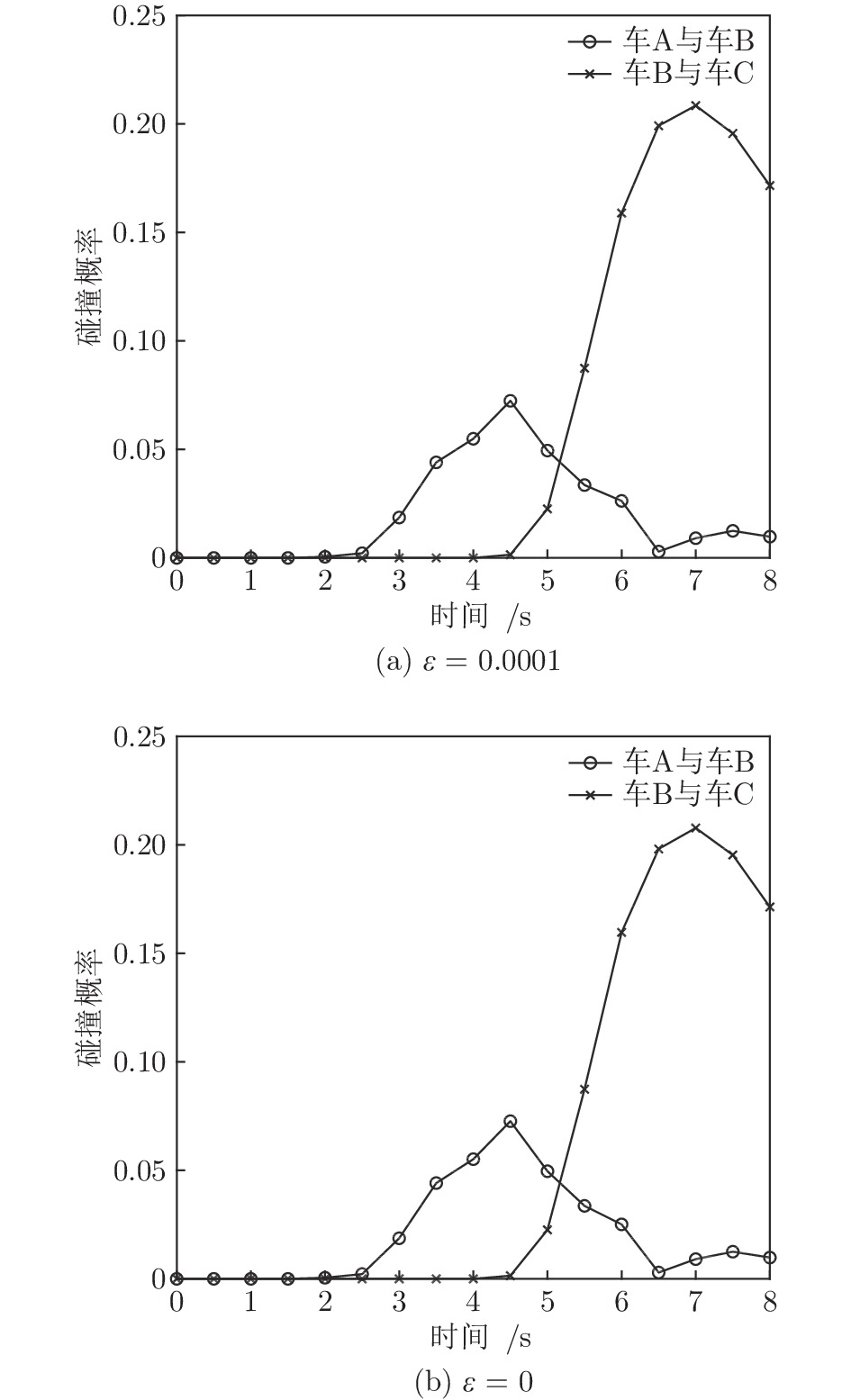
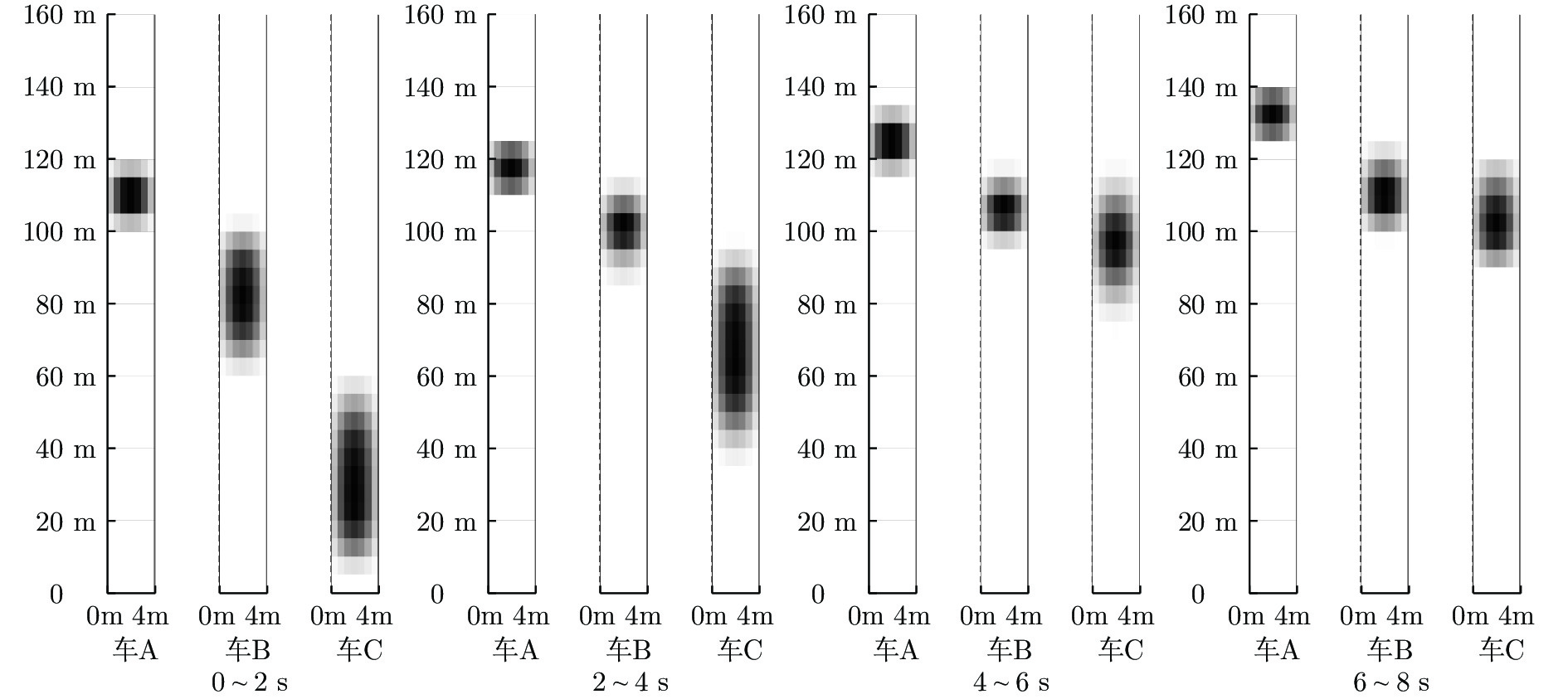
由于传统车辆跟驰建模预测方法无法遍历车辆所有可能的系统输入与运行状态的不确定性, 因而不足以从理论上保证对周边车辆安全跟驰行为预测的完整性与可信性. 为此提出车辆安全跟驰模式预测的形式化建模方法. 该方法利用随机可达集的遍历表现特征实现对周边车辆行为预测的不确定性表述, 并通过马尔科夫链逼近可达集的方式表达系统行为状态变化的随机性, 从而完成对周边车辆跟驰行为状态变化的精确概率预估. 为了表达跟驰情形中车辆之间的行为关联影响以及提高在线计算效率, 离线构建了关联车辆在状态及控制输入之间的安全关联矩阵, 描述周边车辆的安全跟驰控制输入选择规律, 并综合相关车辆的当前状态信息, 达到对周边车辆安全跟驰行为的在线分析与预估. 数值验证不仅表明提出的建模方法完备地表述了周边车辆所有的安全跟驰行为及过程, 显著提高了预测的精确度, 也论证了该方法对车辆跟驰控制策略建模分析与安全验证的有效性.
由于传统车辆跟驰建模预测方法无法遍历车辆所有可能的系统输入与运行状态的不确定性, 因而不足以从理论上保证对周边车辆安全跟驰行为预测的完整性与可信性. 为此提出车辆安全跟驰模式预测的形式化建模方法. 该方法利用随机可达集的遍历表现特征实现对周边车辆行为预测的不确定性表述, 并通过马尔科夫链逼近可达集的方式表达系统行为状态变化的随机性, 从而完成对周边车辆跟驰行为状态变化的精确概率预估. 为了表达跟驰情形中车辆之间的行为关联影响以及提高在线计算效率, 离线构建了关联车辆在状态及控制输入之间的安全关联矩阵, 描述周边车辆的安全跟驰控制输入选择规律, 并综合相关车辆的当前状态信息, 达到对周边车辆安全跟驰行为的在线分析与预估. 数值验证不仅表明提出的建模方法完备地表述了周边车辆所有的安全跟驰行为及过程, 显著提高了预测的精确度, 也论证了该方法对车辆跟驰控制策略建模分析与安全验证的有效性.





2021, 47(10): 2376-2385.
doi: 10.16383/j.aas.c180705
摘要:
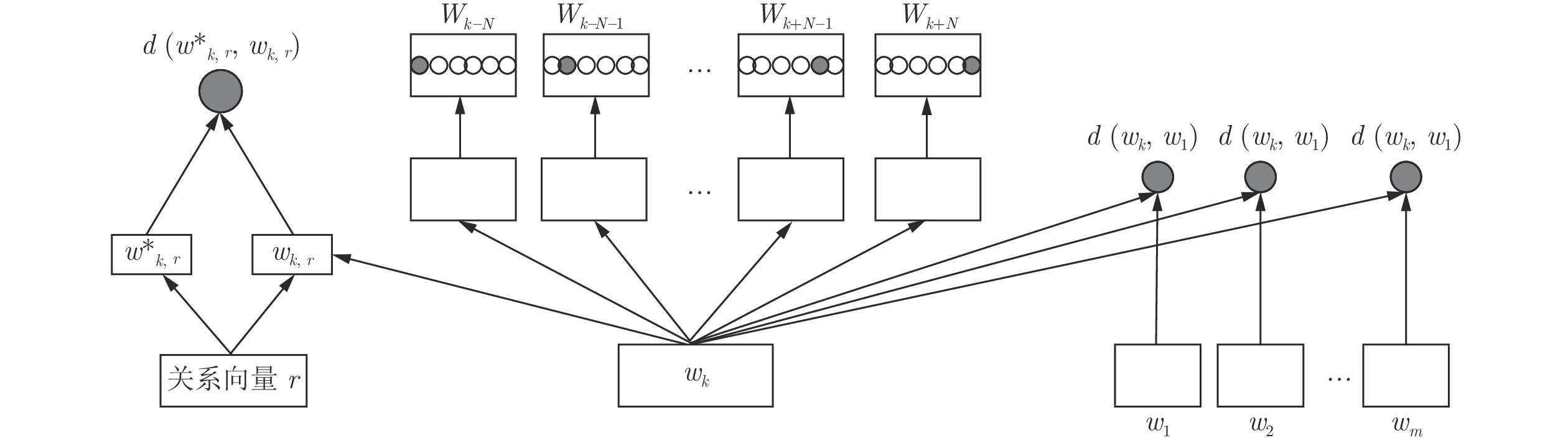
本文针对现有方法不能很好结合文本信息和知识库信息的问题, 提出一种基于关系指数和表示学习的领域集成实体链接方法.首先, 本文构建了特定领域知识库; 其次, 运用表示学习从文本信息中得到的向量表示计算实体指称项的上下文、主题关键词、扩展词三个特征的相似度; 然后, 利用知识库中的关系信息计算候选实体的关系指数; 最后, 将这三种相似度及关系指数相融合, 用于实体链接. 实验结果表明, 相较于现有方法, 本文方法能够有效地提高F1值, 并且该方法不需要标注语料, 更加简单高效, 适应于缺少标注语料的特定领域.
本文针对现有方法不能很好结合文本信息和知识库信息的问题, 提出一种基于关系指数和表示学习的领域集成实体链接方法.首先, 本文构建了特定领域知识库; 其次, 运用表示学习从文本信息中得到的向量表示计算实体指称项的上下文、主题关键词、扩展词三个特征的相似度; 然后, 利用知识库中的关系信息计算候选实体的关系指数; 最后, 将这三种相似度及关系指数相融合, 用于实体链接. 实验结果表明, 相较于现有方法, 本文方法能够有效地提高F1值, 并且该方法不需要标注语料, 更加简单高效, 适应于缺少标注语料的特定领域.

2021, 47(10): 2386-2401.
doi: 10.16383/j.aas.c200185
摘要:
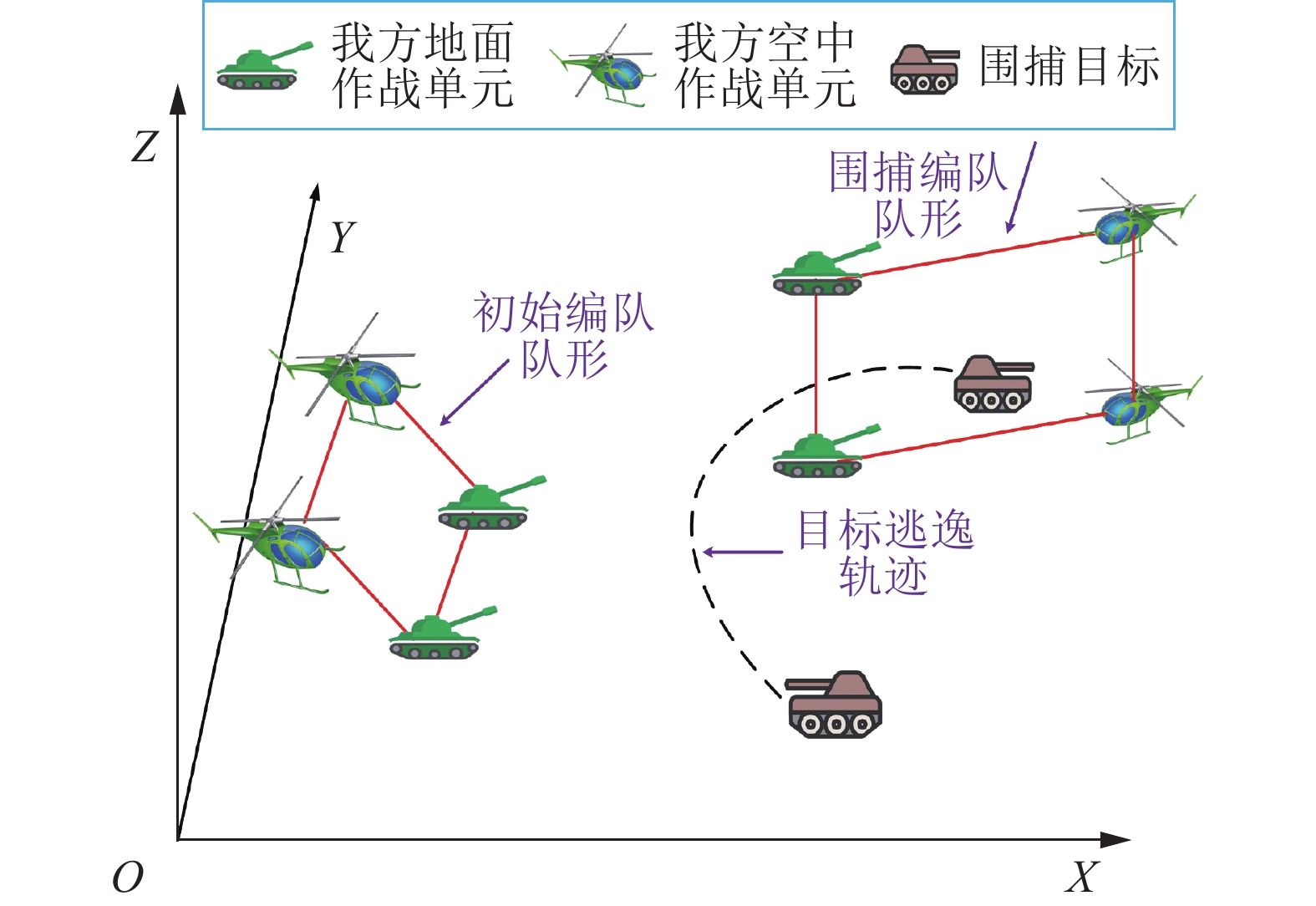
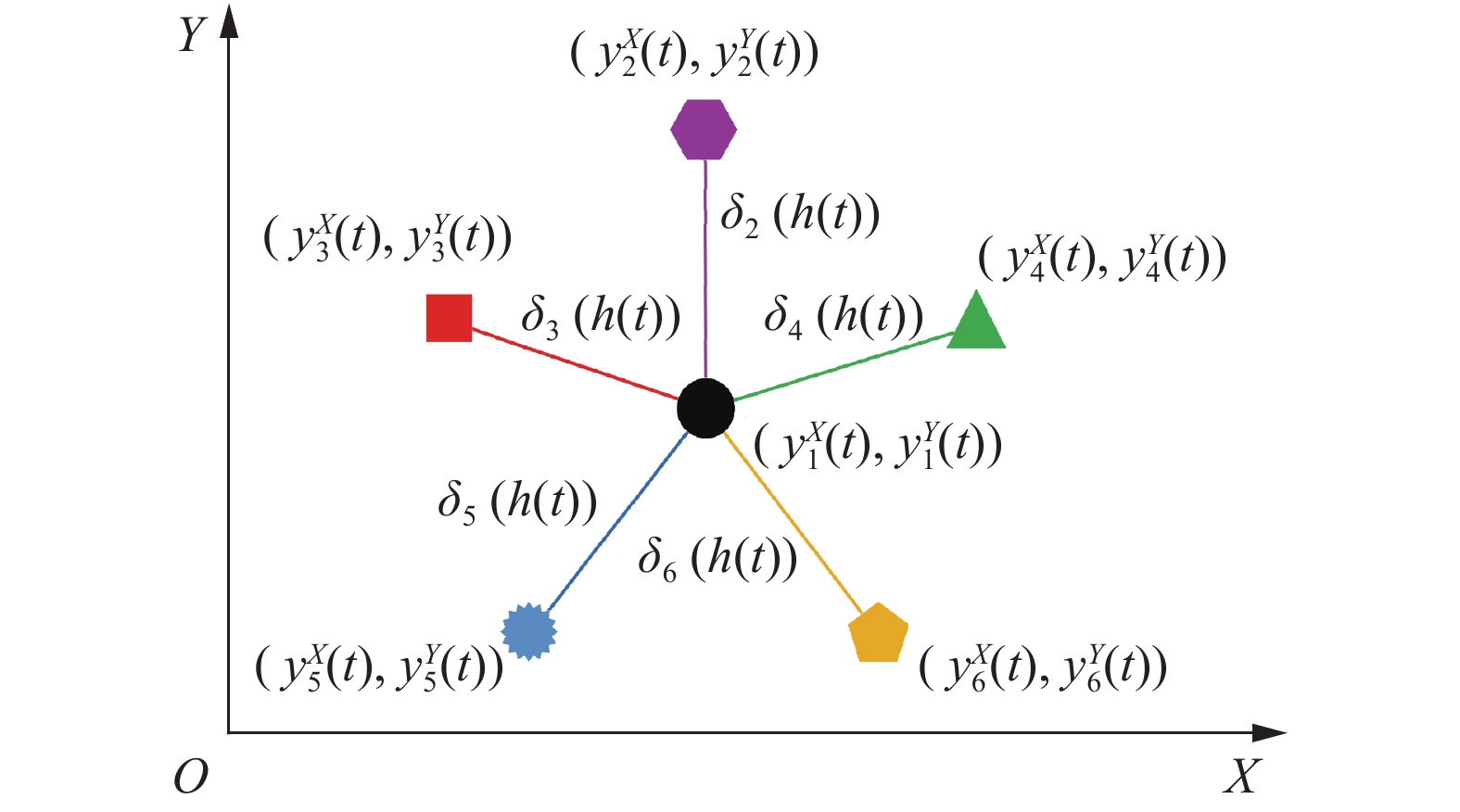
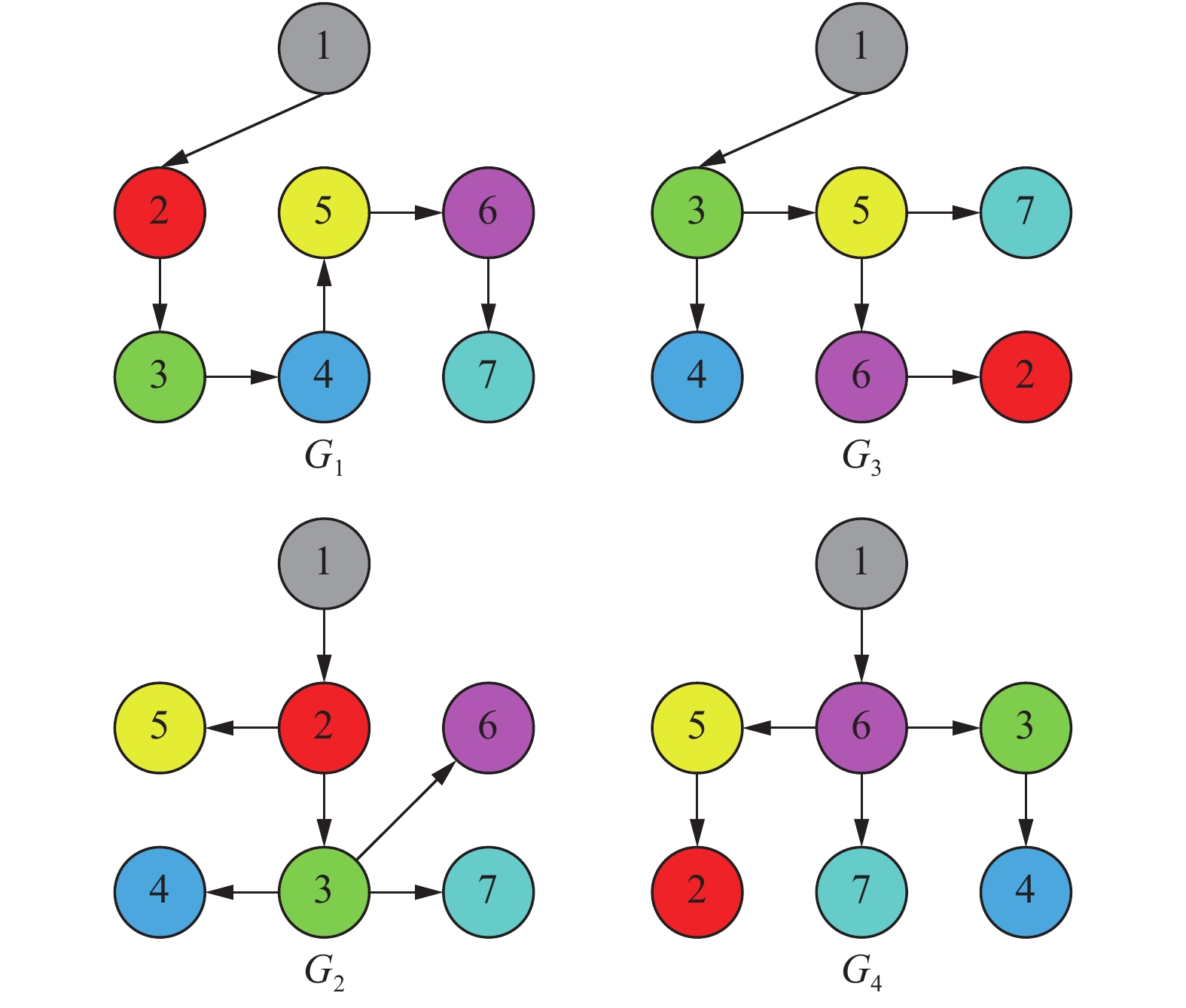
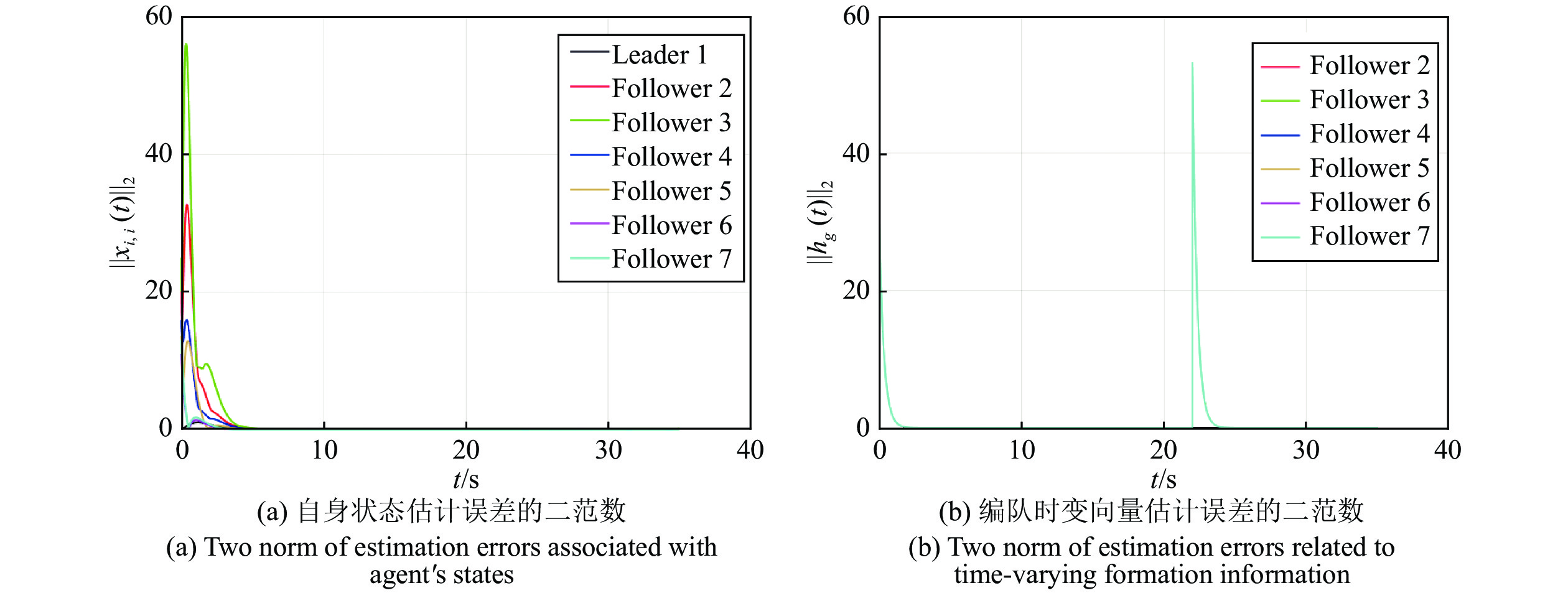
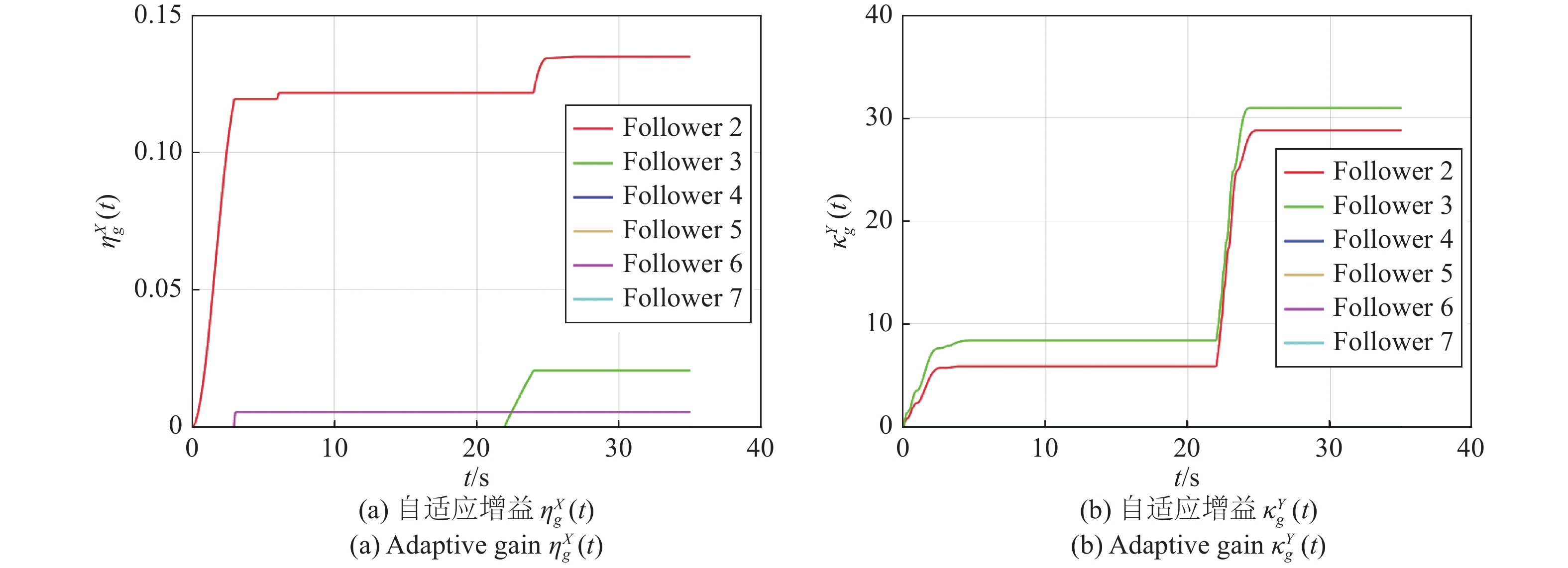
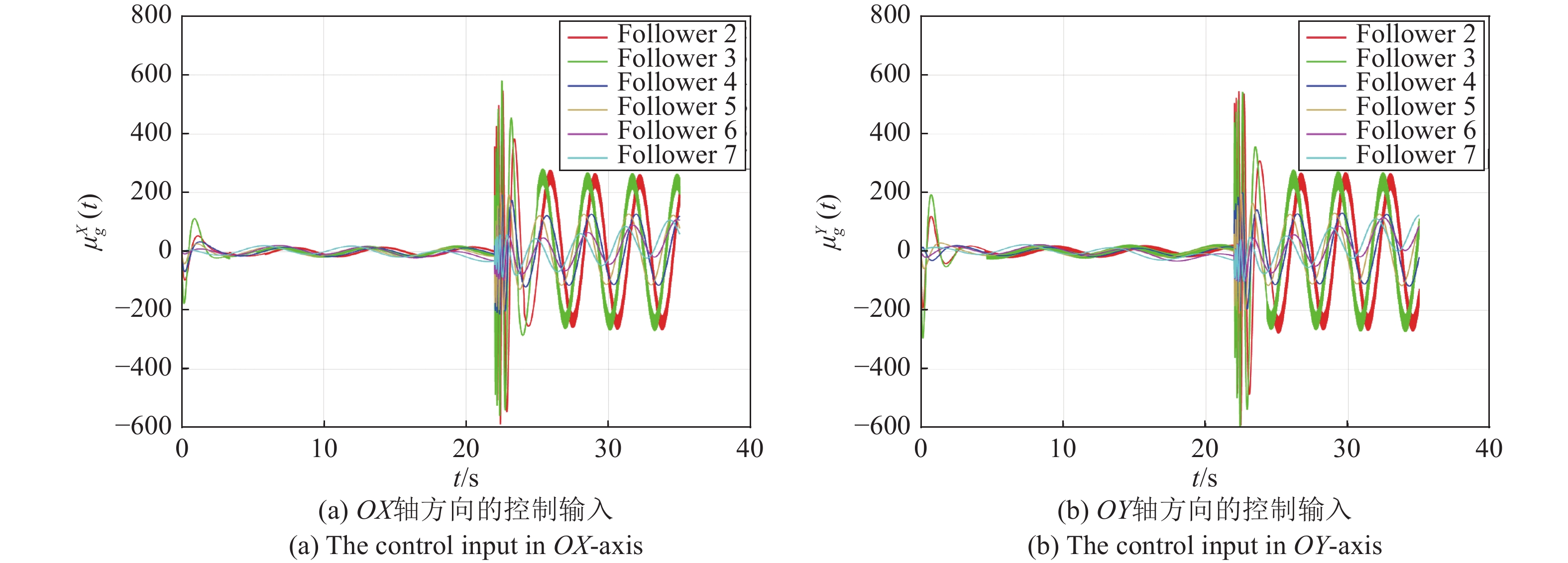
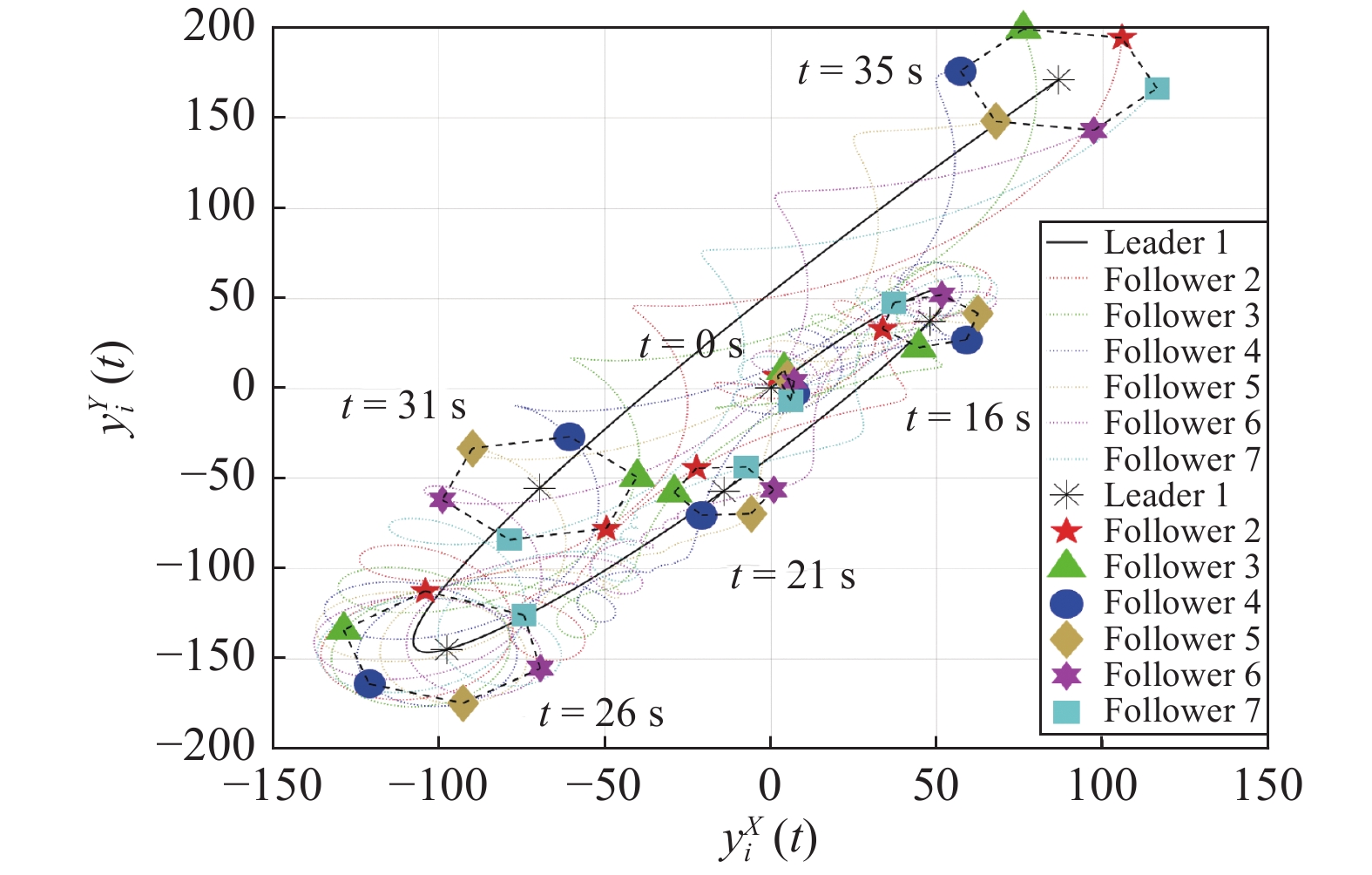
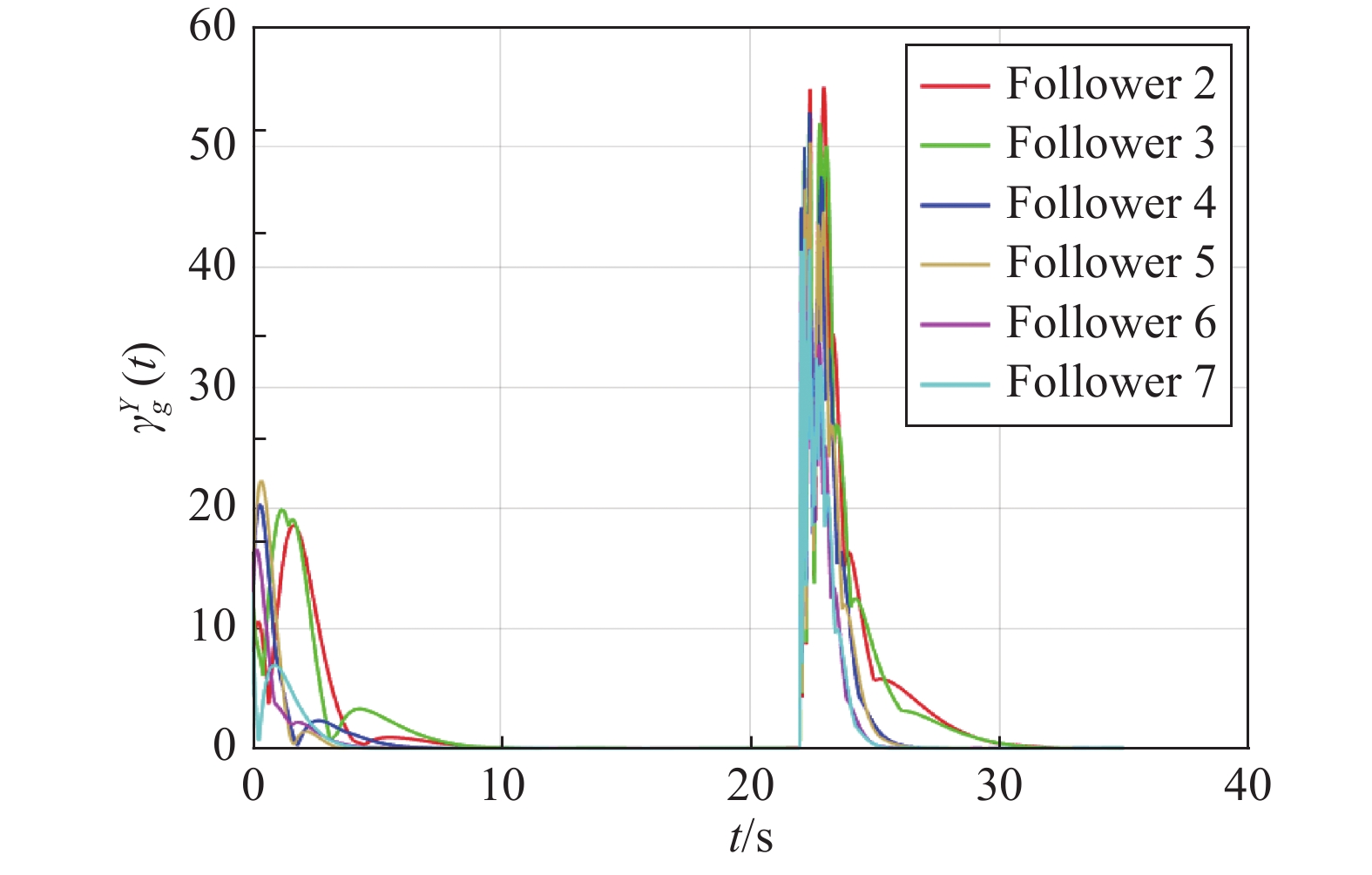
提出了一种能够解决高阶异构集群系统输出时变编队跟踪问题的控制方法. 集群系统中的智能体分为领导者和跟随者, 领导者和跟随者的动力学模型可以完全不同. 跟随者的输出在跟踪领导者输出的同时保持时变编队实现协同运动. 考虑了领导者存在已知或未知控制输入、领导者和跟随者均存在未知扰动、有向通信拓扑存在切换等多种因素并存的情况, 结合观测器理论、自适应控制理论和滑模控制理论设计了完全分布式的输出时变编队跟踪控制协议, 摆脱了对领导者控制输入上界值、与通信拓扑相关的拉普拉斯矩阵的特征值以及时变编队函数等全局信息的依赖. 利用Lyapunov理论证明了在有向拓扑切换条件下异构集群系统的闭环稳定性. 最后通过数值仿真对理论结果的有效性进行了验证.
提出了一种能够解决高阶异构集群系统输出时变编队跟踪问题的控制方法. 集群系统中的智能体分为领导者和跟随者, 领导者和跟随者的动力学模型可以完全不同. 跟随者的输出在跟踪领导者输出的同时保持时变编队实现协同运动. 考虑了领导者存在已知或未知控制输入、领导者和跟随者均存在未知扰动、有向通信拓扑存在切换等多种因素并存的情况, 结合观测器理论、自适应控制理论和滑模控制理论设计了完全分布式的输出时变编队跟踪控制协议, 摆脱了对领导者控制输入上界值、与通信拓扑相关的拉普拉斯矩阵的特征值以及时变编队函数等全局信息的依赖. 利用Lyapunov理论证明了在有向拓扑切换条件下异构集群系统的闭环稳定性. 最后通过数值仿真对理论结果的有效性进行了验证.



2021, 47(10): 2402-2411.
doi: 10.16383/j.aas.c200001
摘要:
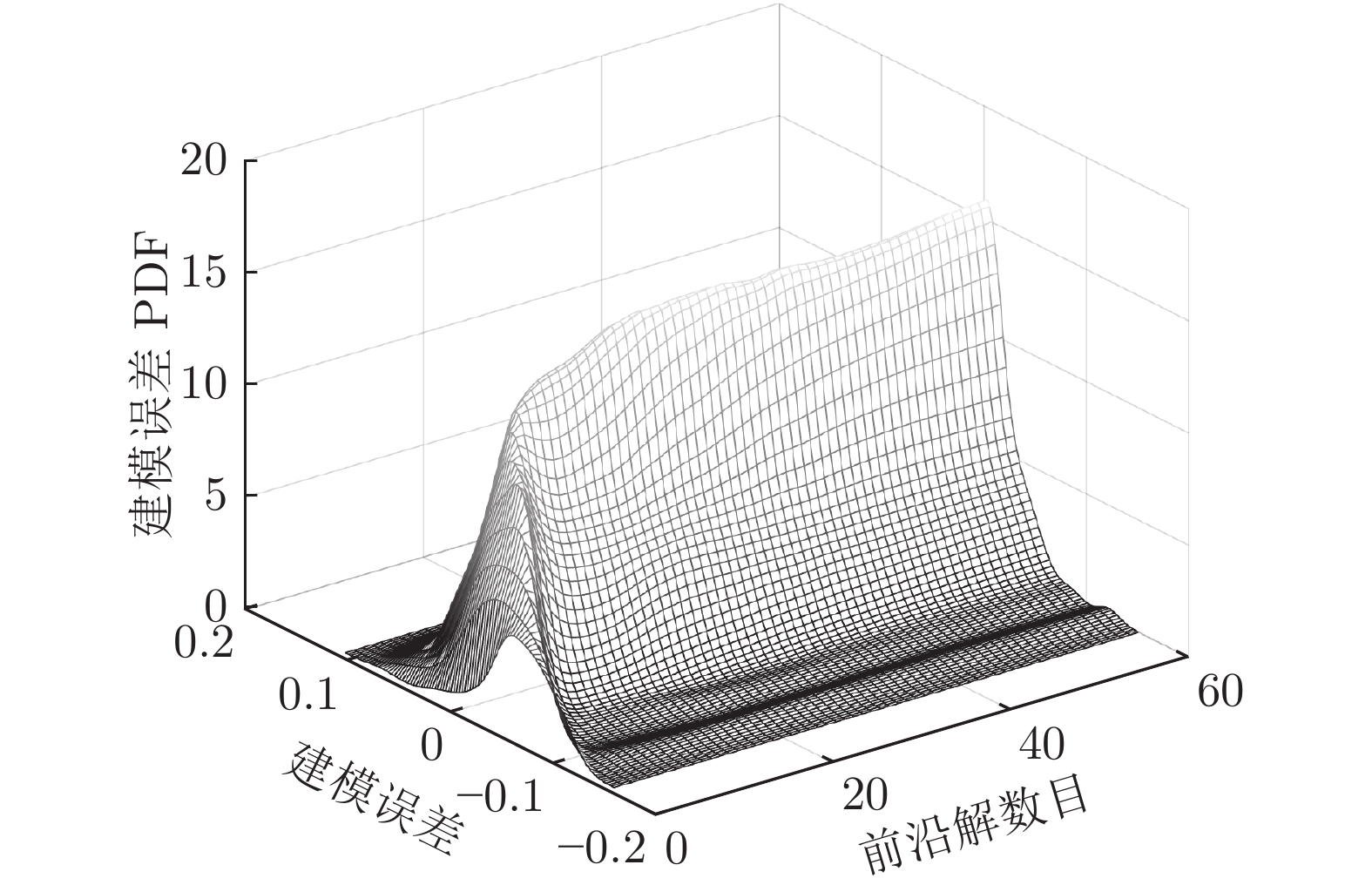
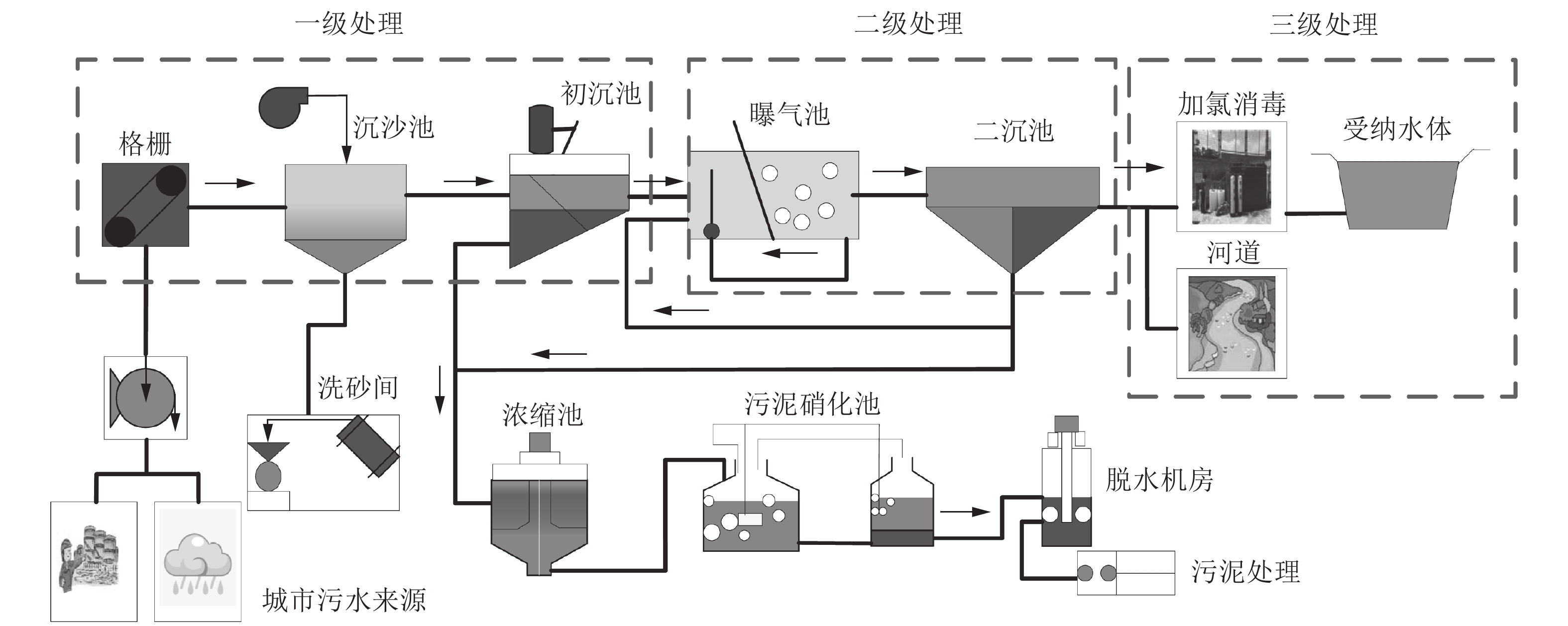
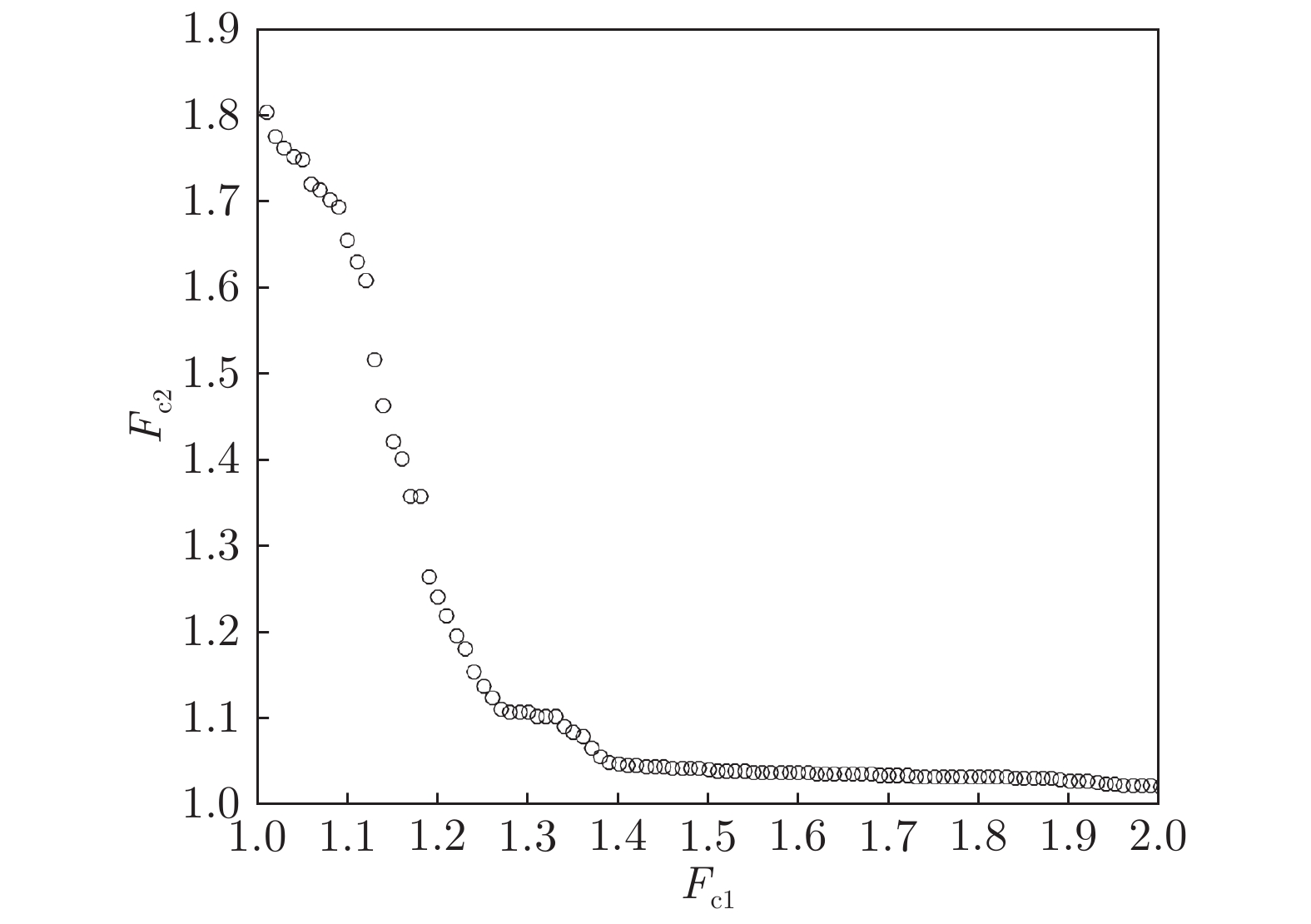
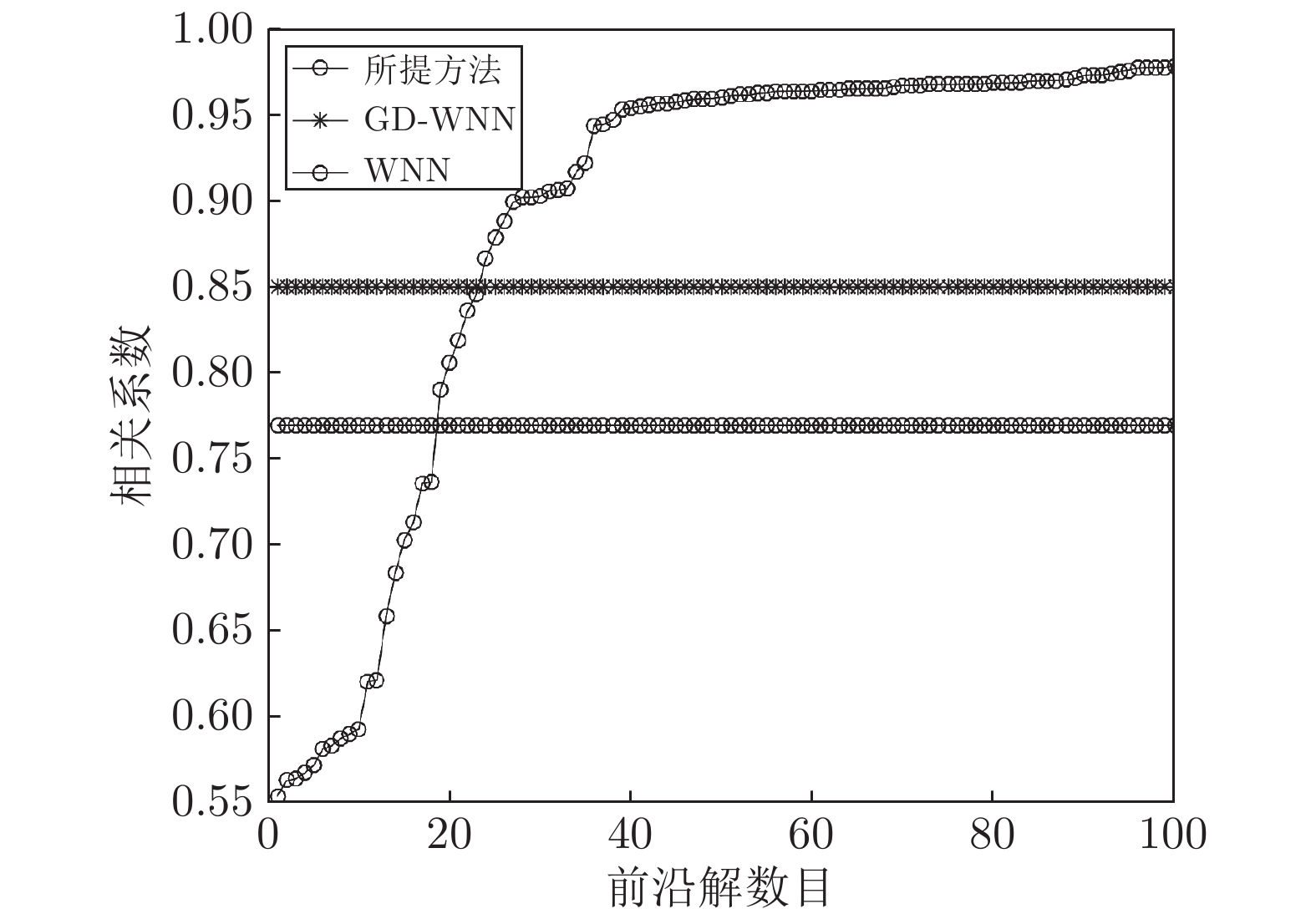
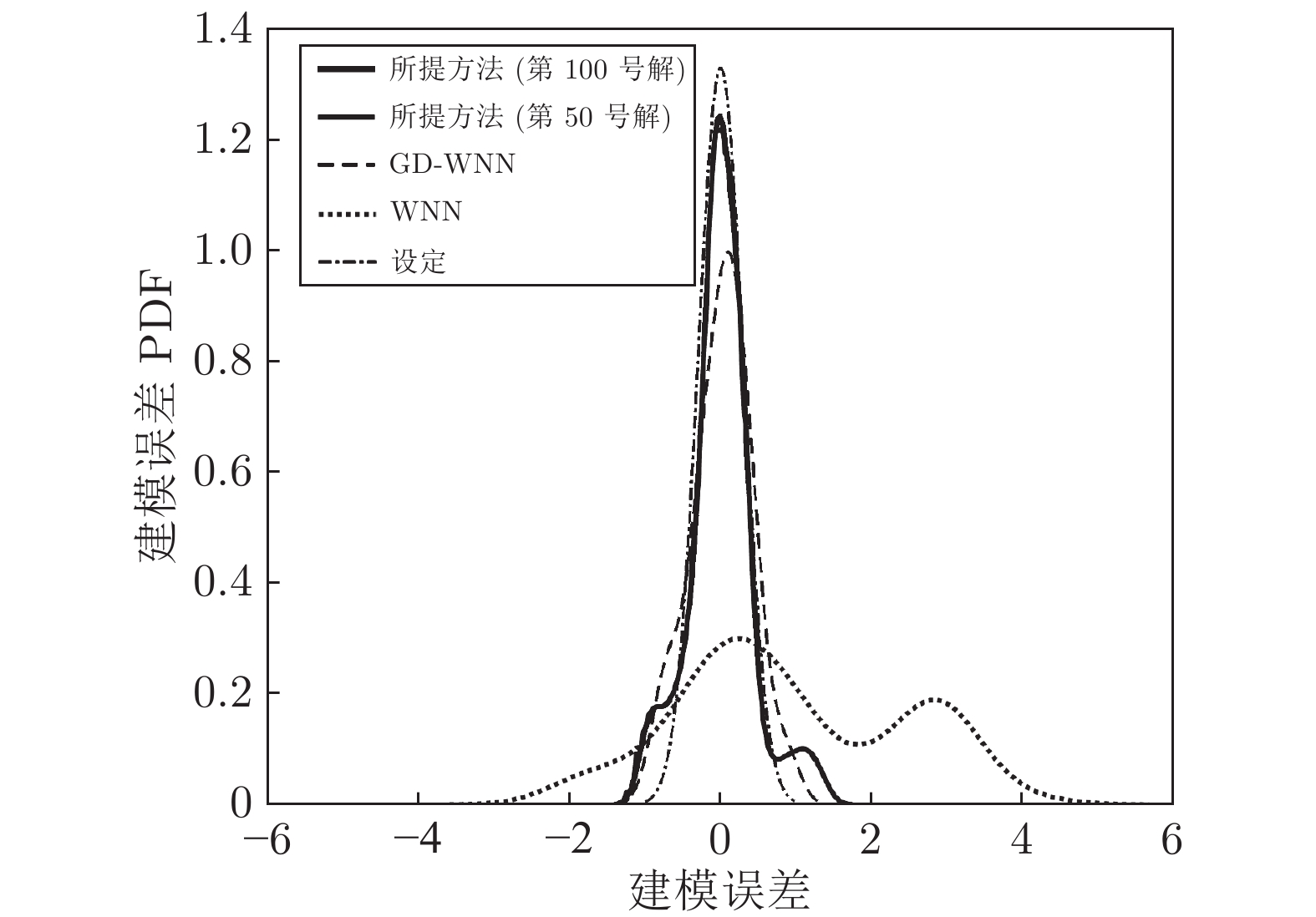
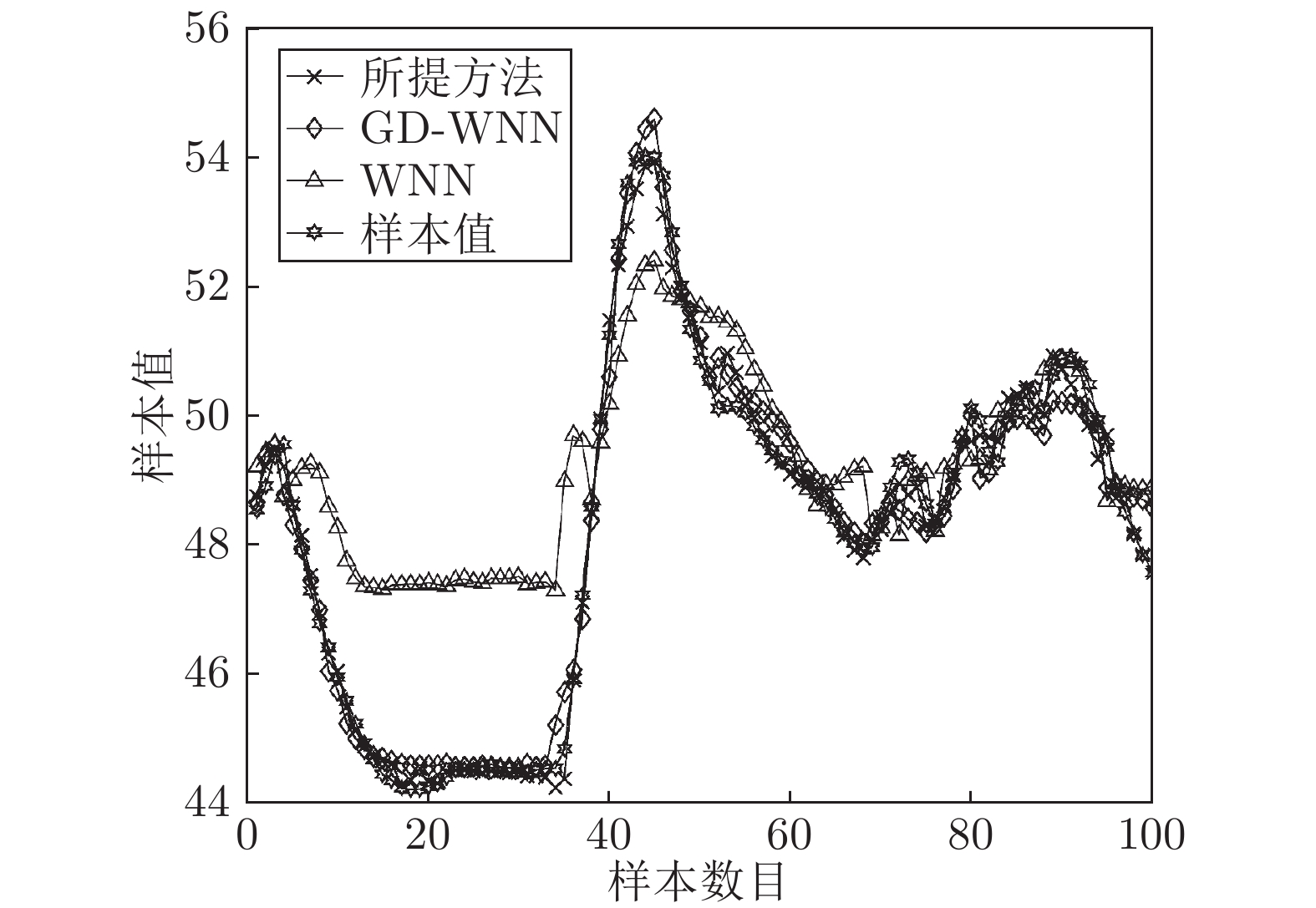
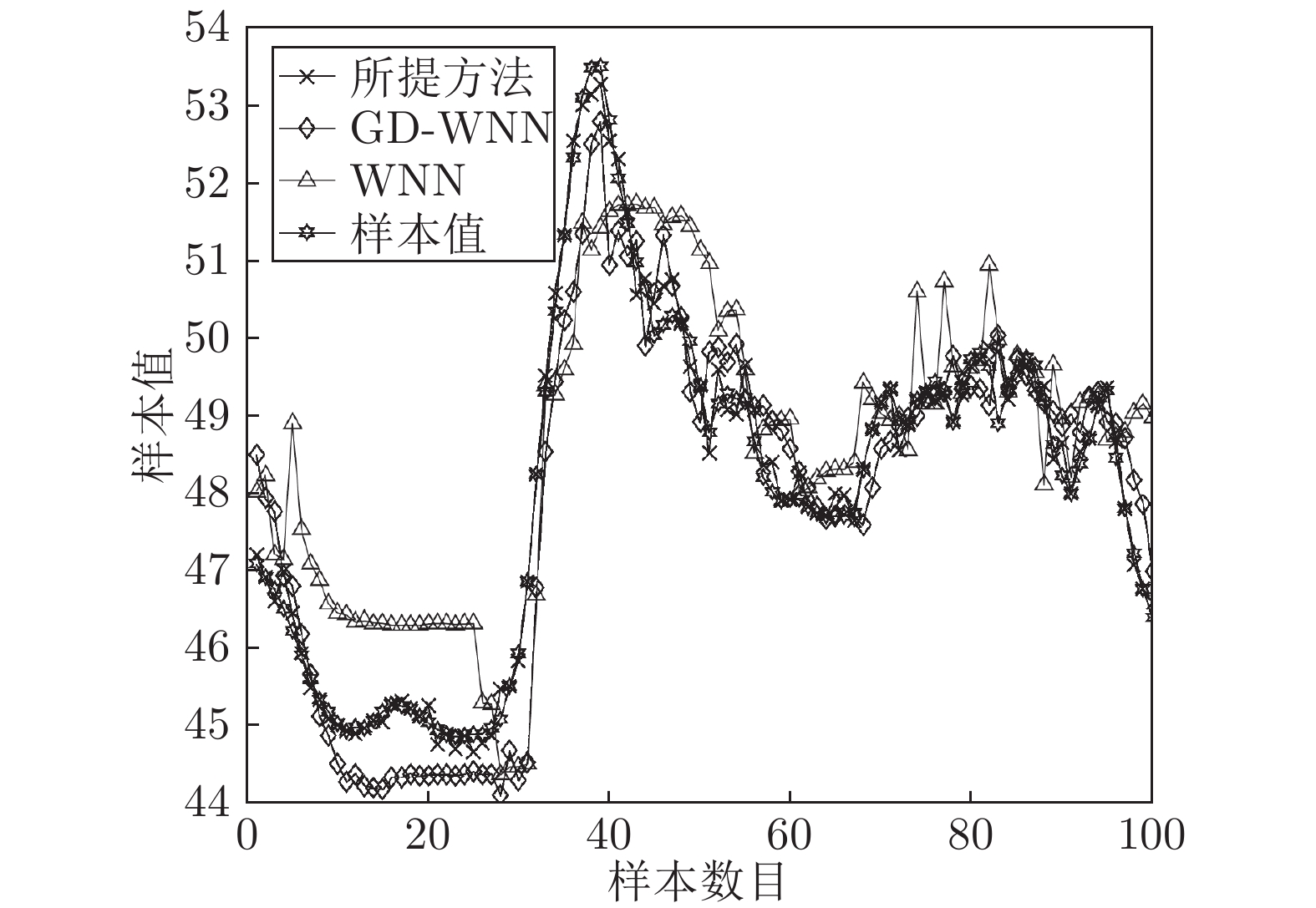
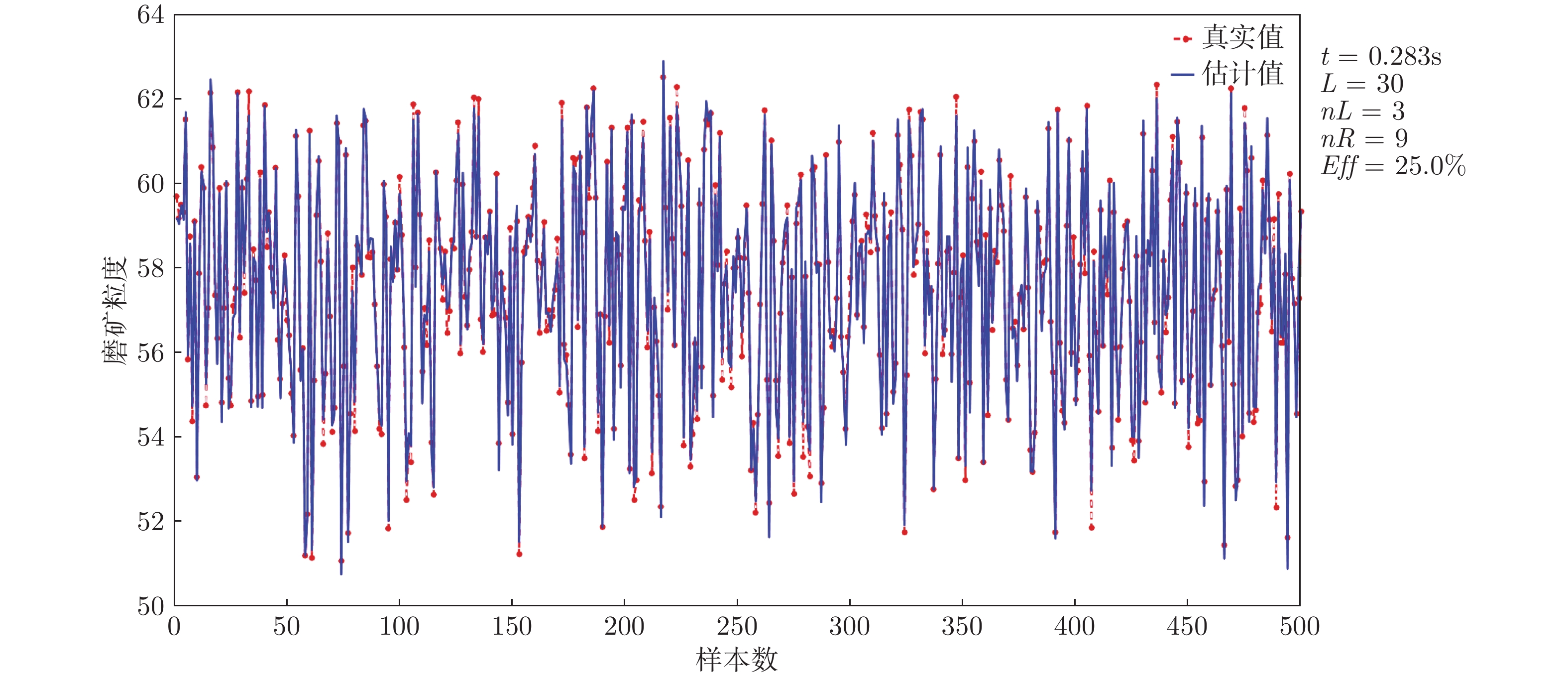
本文提出一种新的数据驱动建模思路及方法, 即面向建模误差概率密度函数(Probability density function, PDF)形状与趋势拟合优度(相似度)的动态过程多目标优化建模方法. 首先, 针对均方根误差(Root mean square error, RMSE)等常规一维性能指标不能完全刻画建模误差在时间和空间二维随机动态特性的问题, 引入PDF指标来对动态过程的建模误差在时间和空间进行二维尺度的全面刻画和评价, 并采用核密度估计技术对关于时间的建模误差序列的PDF进行估计; 其次, 为了刻画动态过程数据建模的拟合趋势, 进一步引入趋势拟合优度指标, 从而构造综合描述数据建模误差PDF形状与趋势拟合相似性的多目标性能指标; 在此基础上, 采用NSGA-II算法优化数据模型的参数集, 获取一大类满足上述多目标性能优化的智能模型参数解. 数值仿真及工业数据验证表明, 所提方法的建模误差PDF逼近设定的期望PDF, 并且模型输出与样本数据拟合趋势接近, 好于常规最小化一维RMSE指标的数据建模方法.
本文提出一种新的数据驱动建模思路及方法, 即面向建模误差概率密度函数(Probability density function, PDF)形状与趋势拟合优度(相似度)的动态过程多目标优化建模方法. 首先, 针对均方根误差(Root mean square error, RMSE)等常规一维性能指标不能完全刻画建模误差在时间和空间二维随机动态特性的问题, 引入PDF指标来对动态过程的建模误差在时间和空间进行二维尺度的全面刻画和评价, 并采用核密度估计技术对关于时间的建模误差序列的PDF进行估计; 其次, 为了刻画动态过程数据建模的拟合趋势, 进一步引入趋势拟合优度指标, 从而构造综合描述数据建模误差PDF形状与趋势拟合相似性的多目标性能指标; 在此基础上, 采用NSGA-II算法优化数据模型的参数集, 获取一大类满足上述多目标性能优化的智能模型参数解. 数值仿真及工业数据验证表明, 所提方法的建模误差PDF逼近设定的期望PDF, 并且模型输出与样本数据拟合趋势接近, 好于常规最小化一维RMSE指标的数据建模方法.





2021, 47(10): 2412-2426.
doi: 10.16383/j.aas.c190626
摘要:
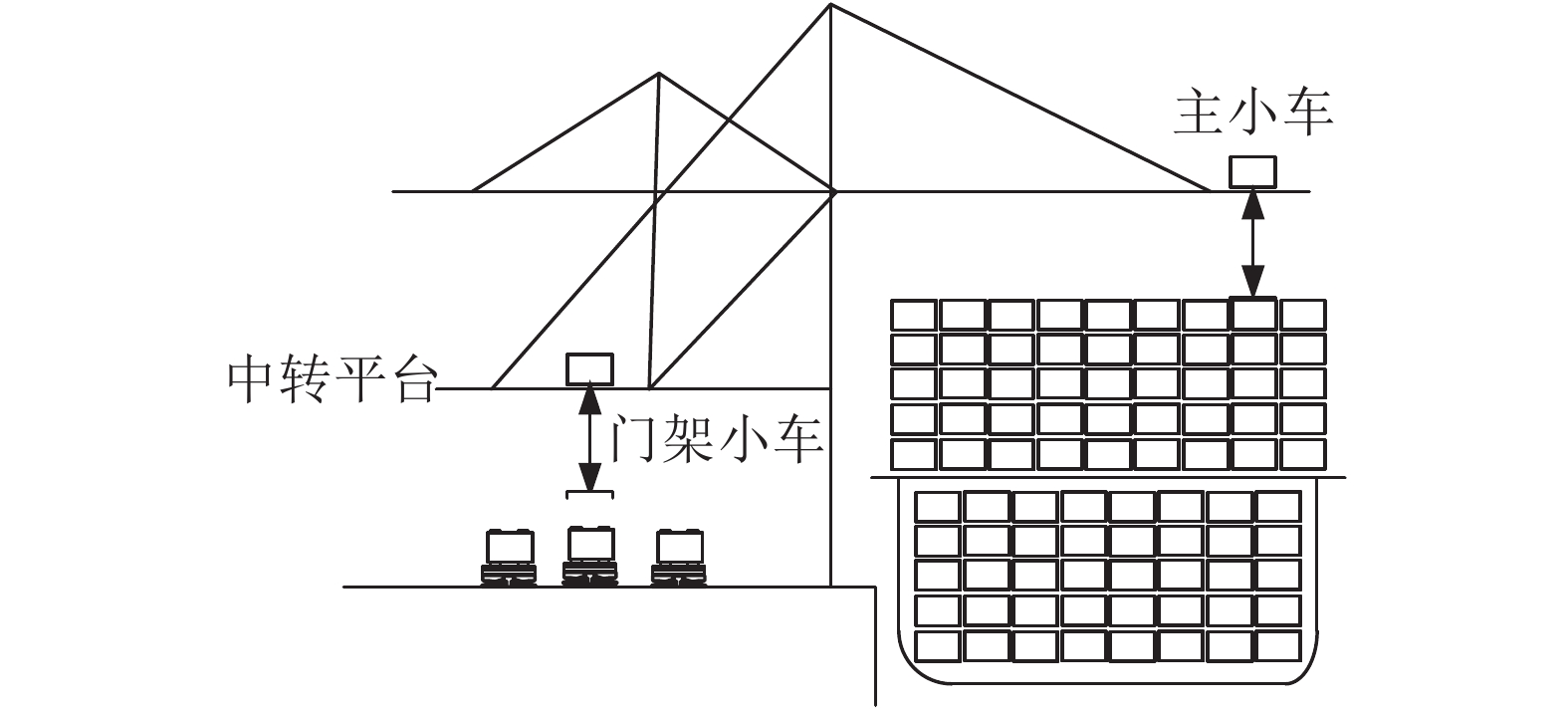
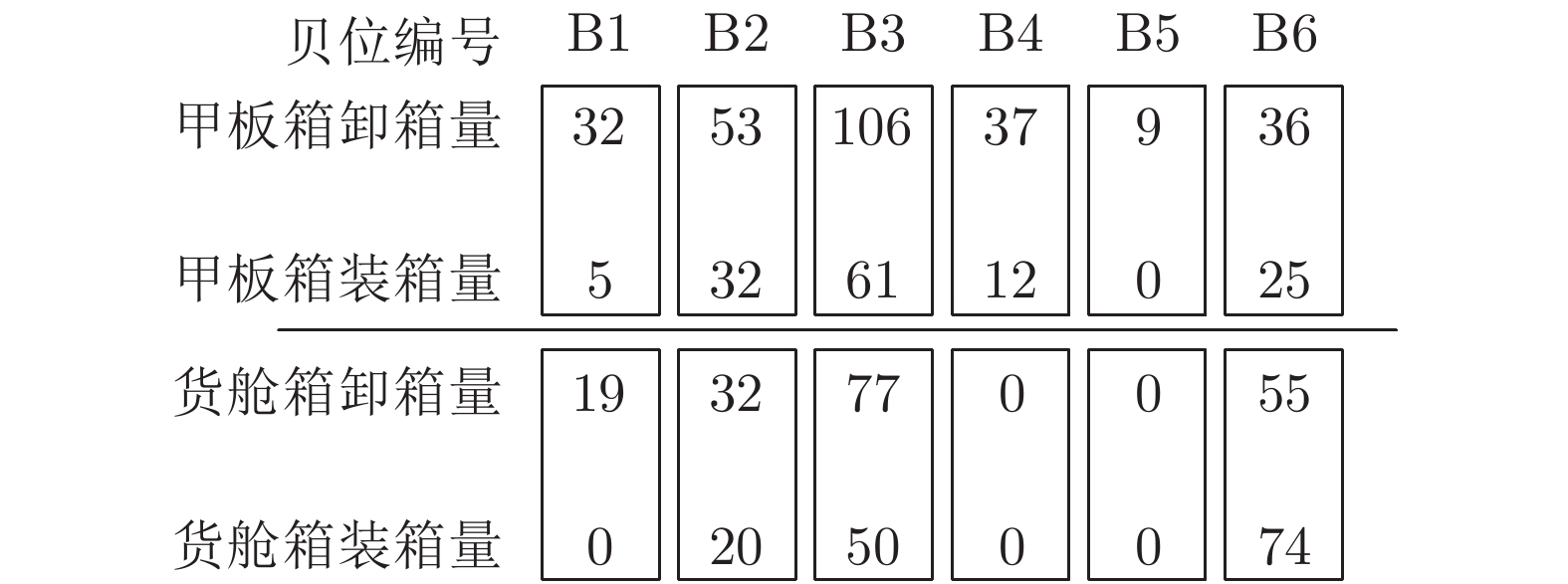
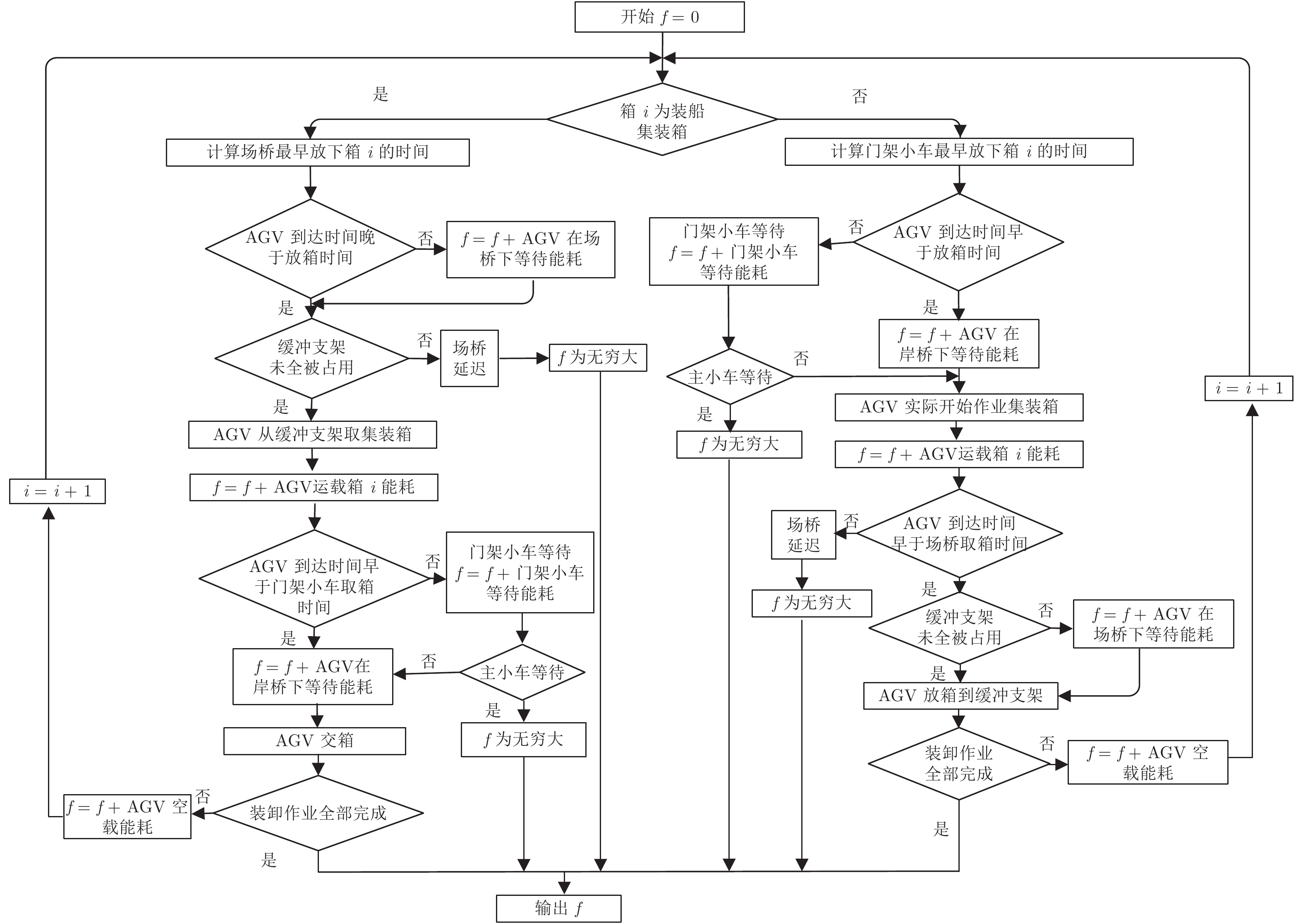
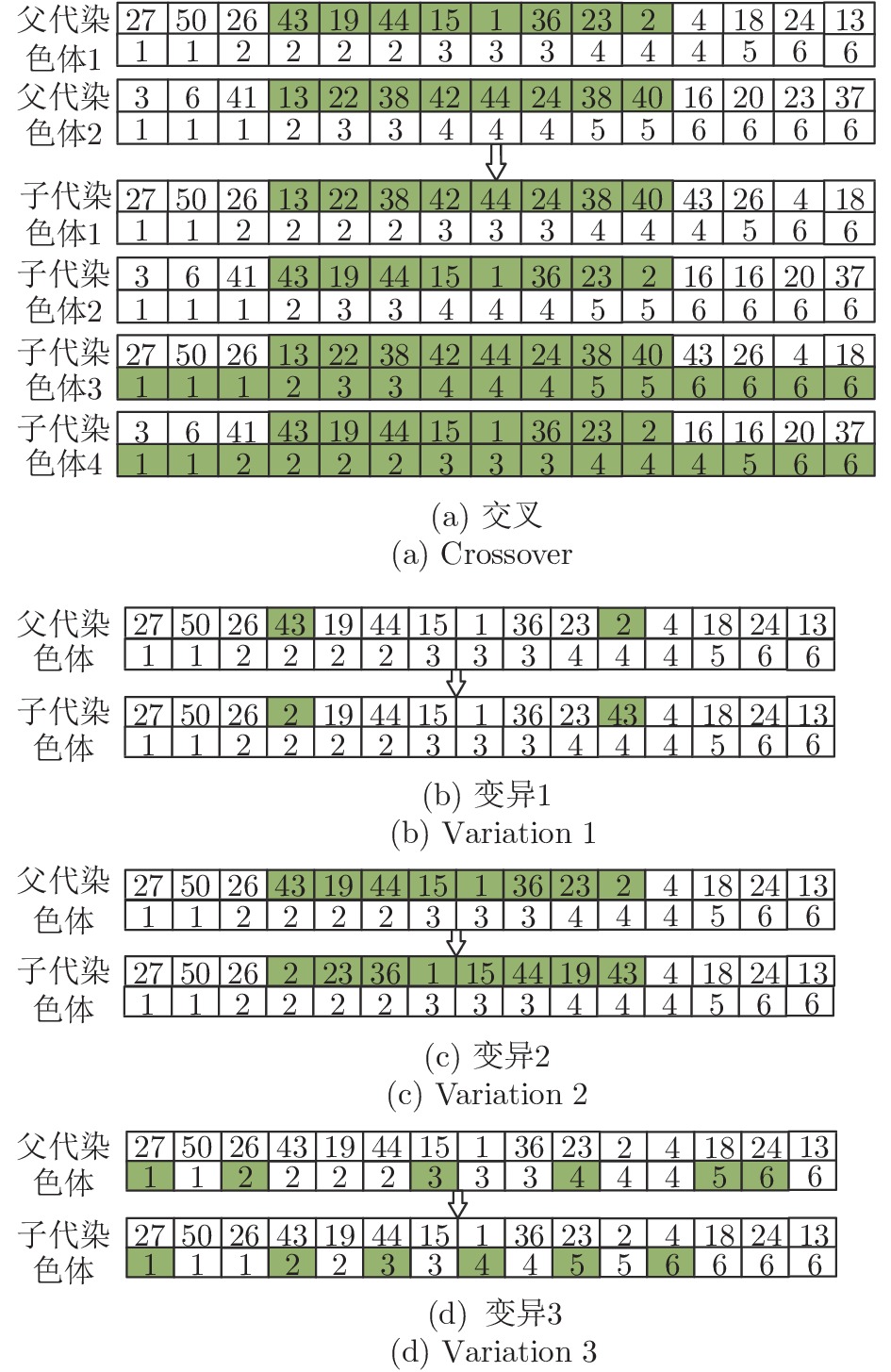
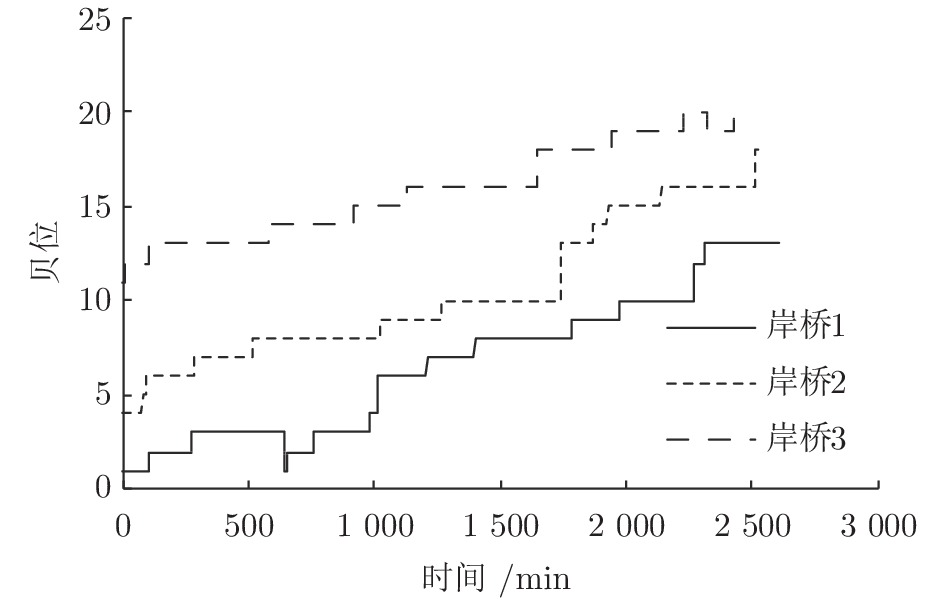
合理调度集装箱码头的装卸设备以减少生产过程中的能耗, 对实现其低碳绿色化发展具有重要意义. 针对集装箱码头向自动化发展过程中的双小车岸桥与AGV (Automated guided vehicle)联合配置及调度问题, 考虑AGV续航时间、双小车岸桥中转平台容量和堆场缓冲支架容量约束, 以岸桥的能耗最小为第一阶段模型的优化目标, 以AGV运输过程的能耗最小为第二阶段目标建立两阶段优化模型; 设计枚举法求解第一阶段模型, 改进遗传算法求解第二阶段优化模型. 以洋山四期自动化集装箱码头为例进行实验分析, 针对不同船舶在港总装卸时间和AGV配置原则进行实验, 验证了模型和算法的有效性, 结果表明以最小化能耗为目标的双小车岸桥与AGV联合调度可在岸桥主小车不延误的前提下, 显著减少AGV的配置数量.
合理调度集装箱码头的装卸设备以减少生产过程中的能耗, 对实现其低碳绿色化发展具有重要意义. 针对集装箱码头向自动化发展过程中的双小车岸桥与AGV (Automated guided vehicle)联合配置及调度问题, 考虑AGV续航时间、双小车岸桥中转平台容量和堆场缓冲支架容量约束, 以岸桥的能耗最小为第一阶段模型的优化目标, 以AGV运输过程的能耗最小为第二阶段目标建立两阶段优化模型; 设计枚举法求解第一阶段模型, 改进遗传算法求解第二阶段优化模型. 以洋山四期自动化集装箱码头为例进行实验分析, 针对不同船舶在港总装卸时间和AGV配置原则进行实验, 验证了模型和算法的有效性, 结果表明以最小化能耗为目标的双小车岸桥与AGV联合调度可在岸桥主小车不延误的前提下, 显著减少AGV的配置数量.





2021, 47(10): 2427-2437.
doi: 10.16383/j.aas.c190411
摘要:
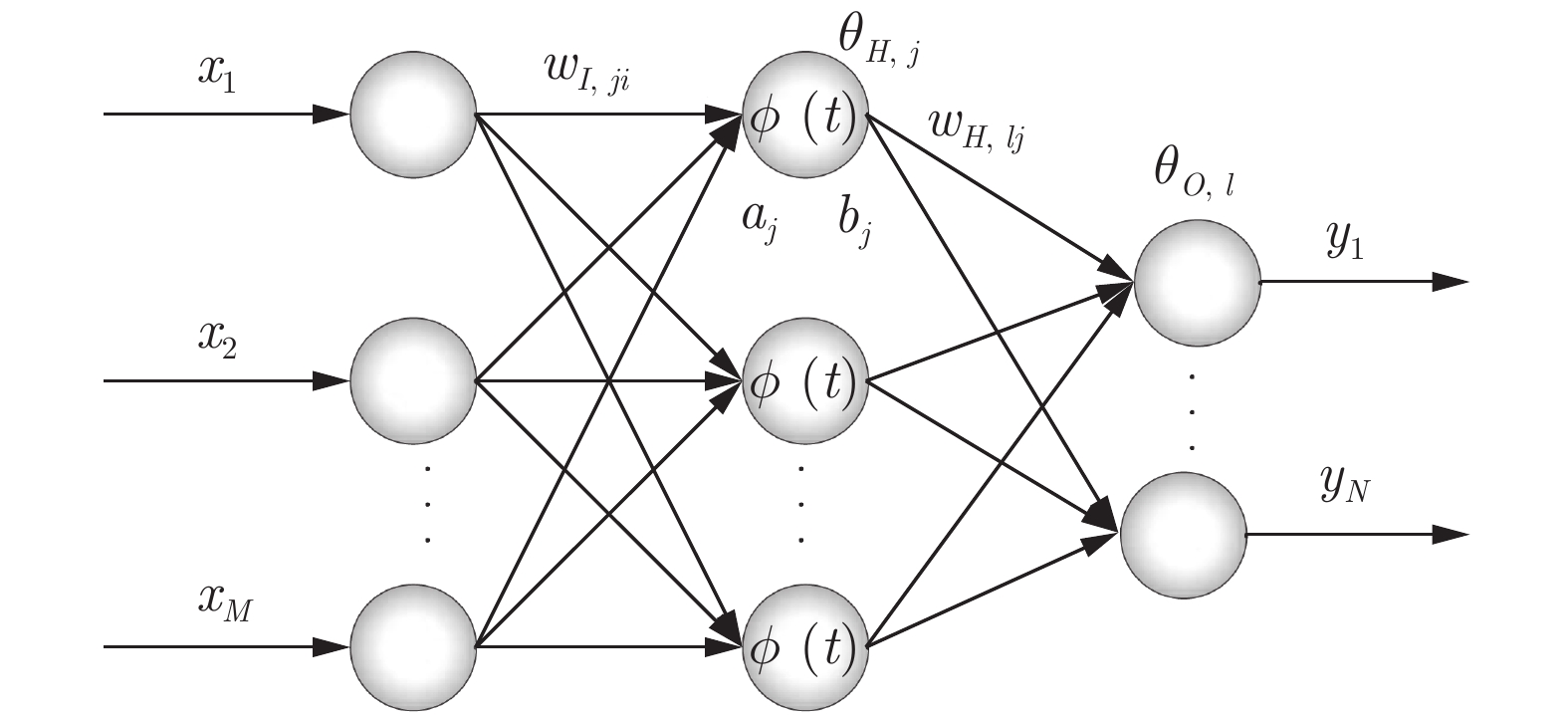
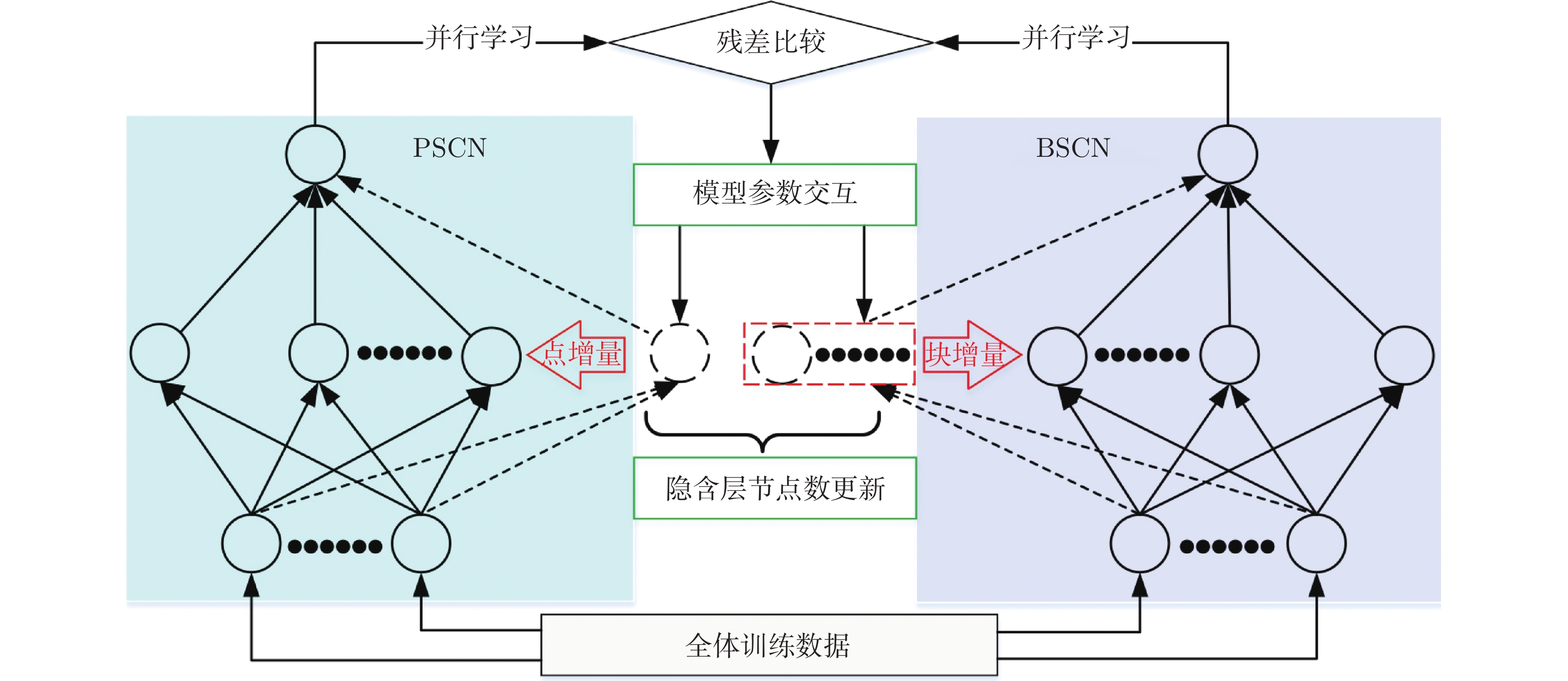
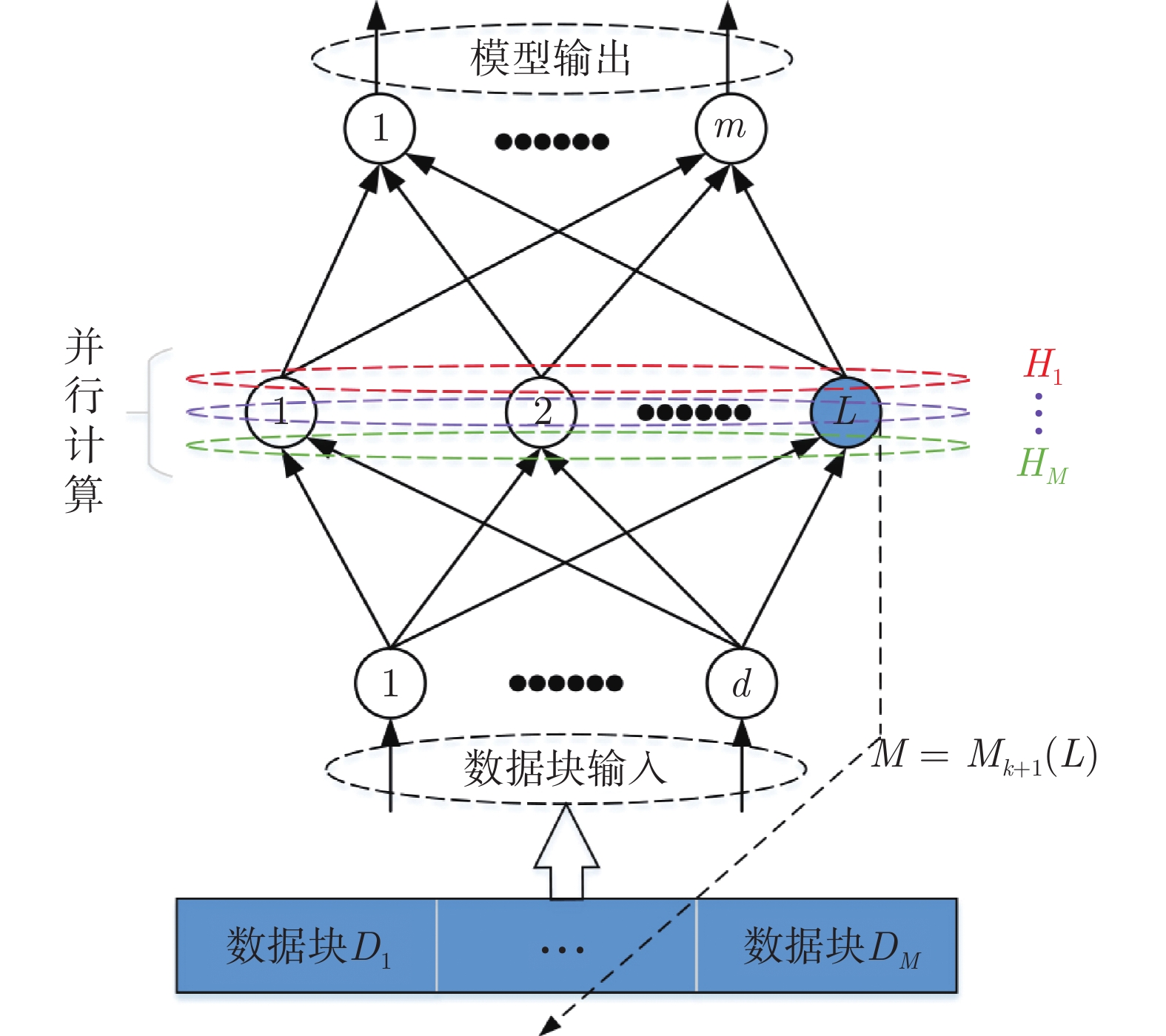
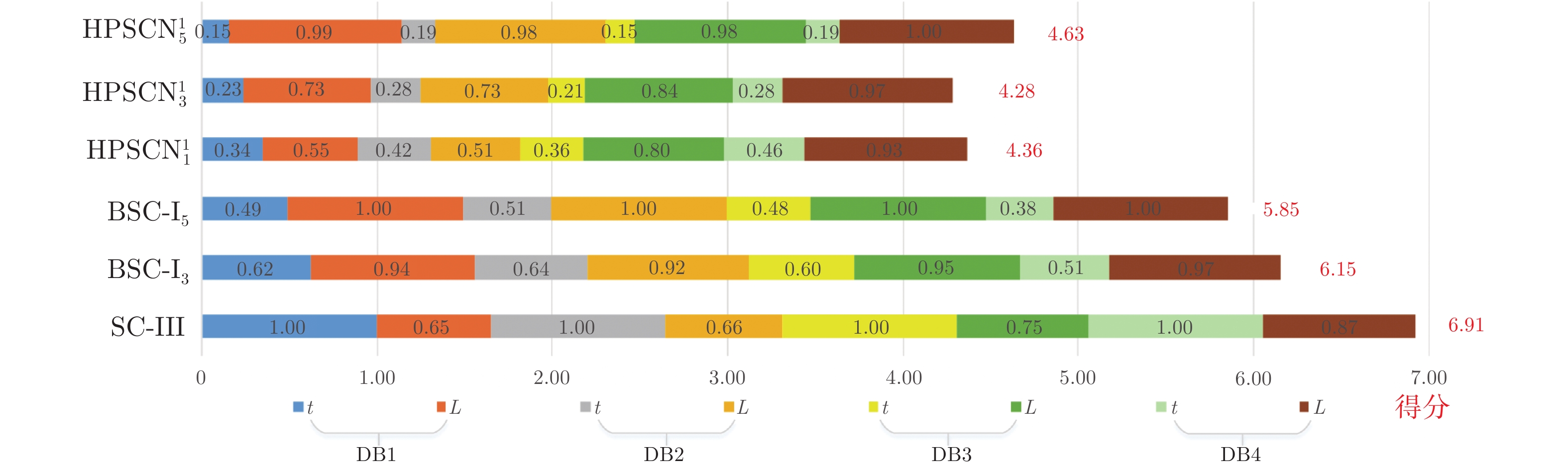
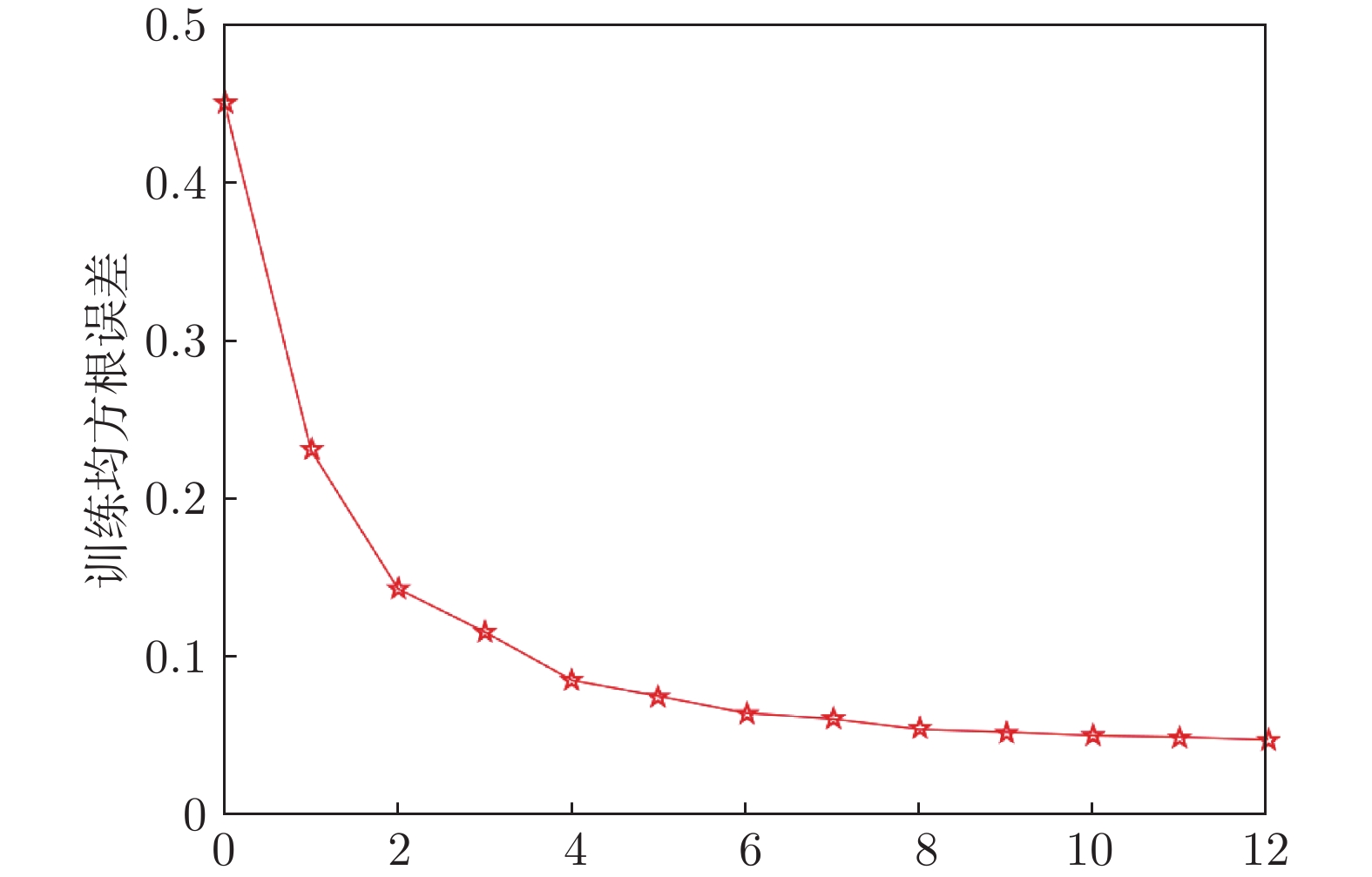
随机配置网络(Stochastic configuration networks, SCNs)在增量构建过程引入监督机制来分配隐含层参数以确保其无限逼近特性, 具有易于实现、收敛速度快、泛化性能好等优点. 然而, 随着数据量的不断扩大, SCNs的建模任务面临一定的挑战性. 为了提高神经网络算法在大数据建模中的综合性能, 本文提出了一种混合并行随机配置网络(Hybrid parallel stochastic configuration networks, HPSCNs)架构, 即: 模型与数据混合并行的增量学习方法. 所提方法由不同构建方式的左右两个SCNs模型组成, 以快速准确地确定最佳隐含层节点, 其中左侧采用点增量网络(PSCN), 右侧采用块增量网络(BSCN); 同时每个模型建立样本数据的动态分块方法, 从而加快候选“节点池”的建立、降低计算量. 所提方法首先通过大规模基准数据集进行了对比实验, 然后应用在一个实际工业案例上, 表明其有效性.
随机配置网络(Stochastic configuration networks, SCNs)在增量构建过程引入监督机制来分配隐含层参数以确保其无限逼近特性, 具有易于实现、收敛速度快、泛化性能好等优点. 然而, 随着数据量的不断扩大, SCNs的建模任务面临一定的挑战性. 为了提高神经网络算法在大数据建模中的综合性能, 本文提出了一种混合并行随机配置网络(Hybrid parallel stochastic configuration networks, HPSCNs)架构, 即: 模型与数据混合并行的增量学习方法. 所提方法由不同构建方式的左右两个SCNs模型组成, 以快速准确地确定最佳隐含层节点, 其中左侧采用点增量网络(PSCN), 右侧采用块增量网络(BSCN); 同时每个模型建立样本数据的动态分块方法, 从而加快候选“节点池”的建立、降低计算量. 所提方法首先通过大规模基准数据集进行了对比实验, 然后应用在一个实际工业案例上, 表明其有效性.
2021, 47(10): 2438-2448.
doi: 10.16383/j.aas.c190820
摘要:
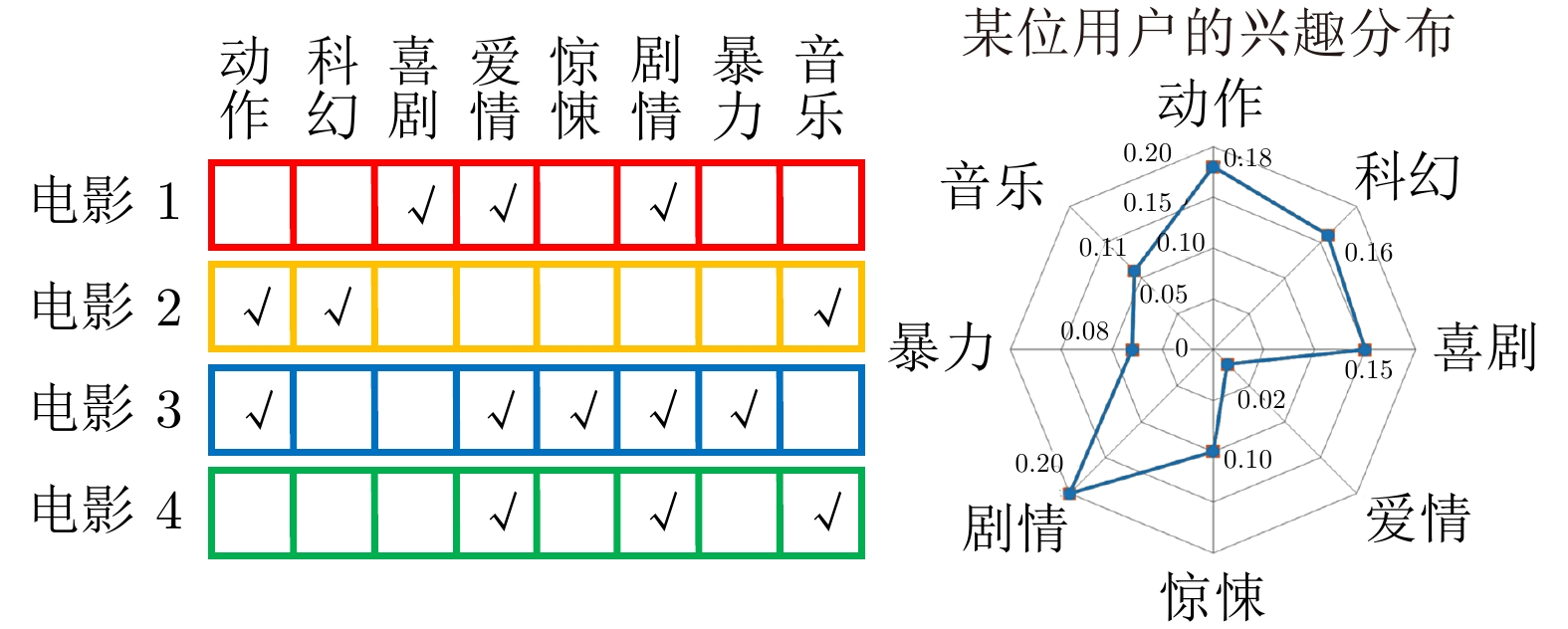
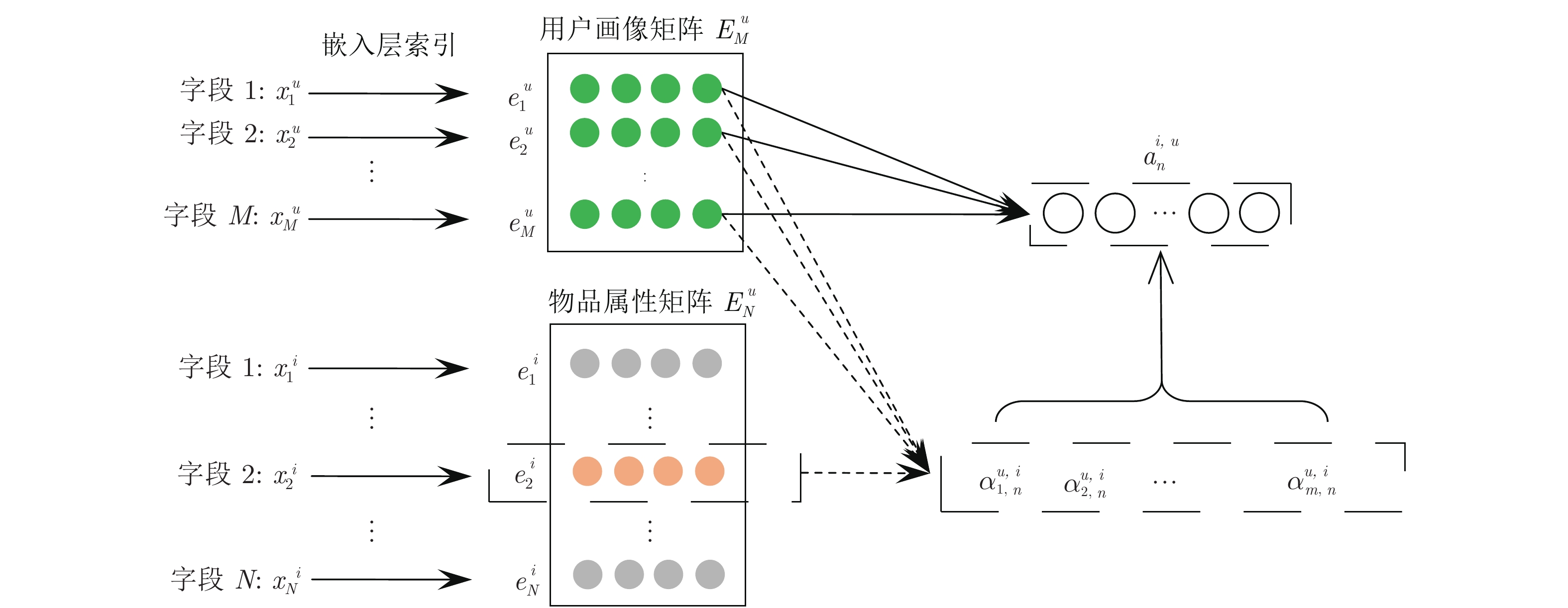
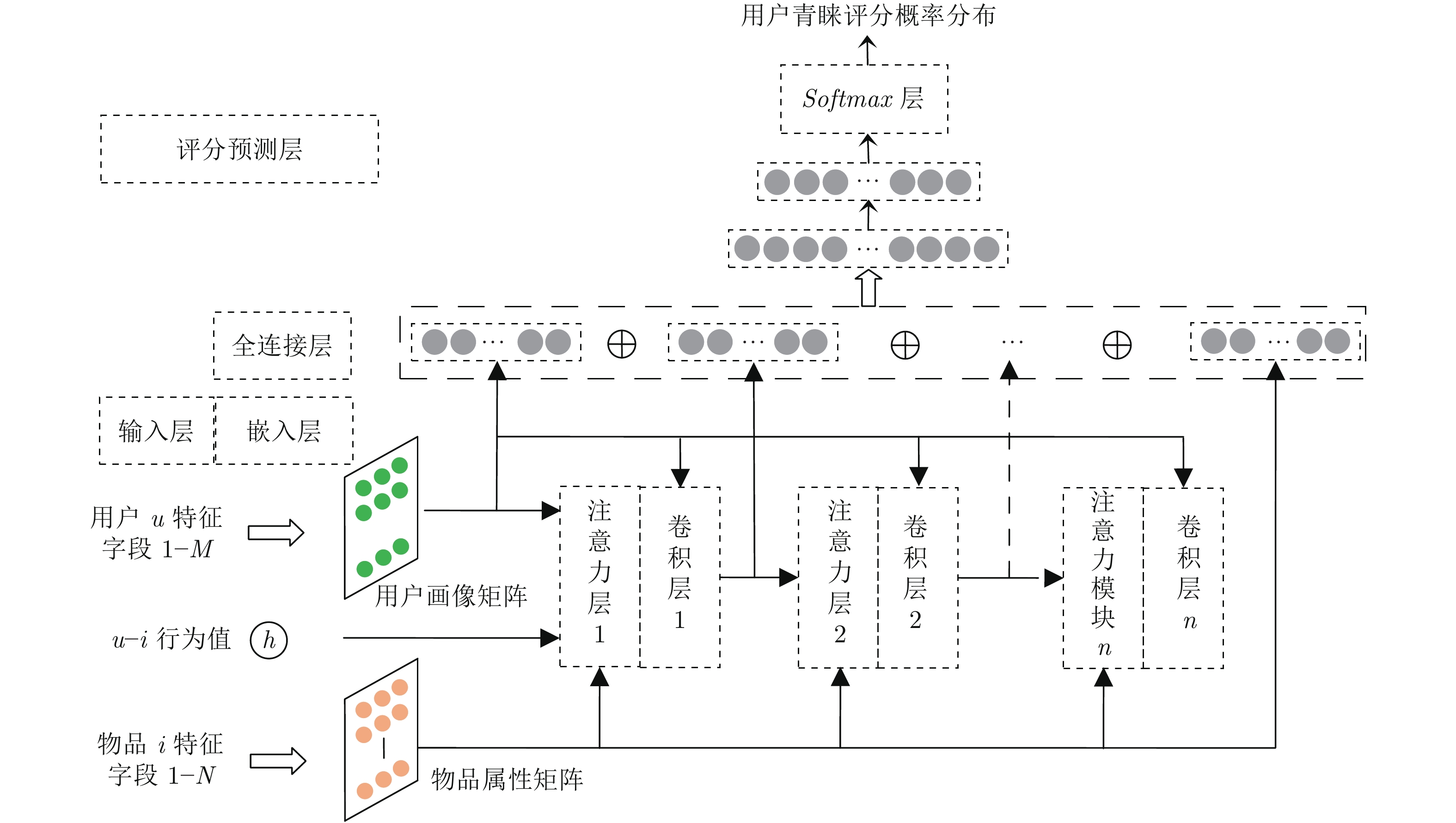
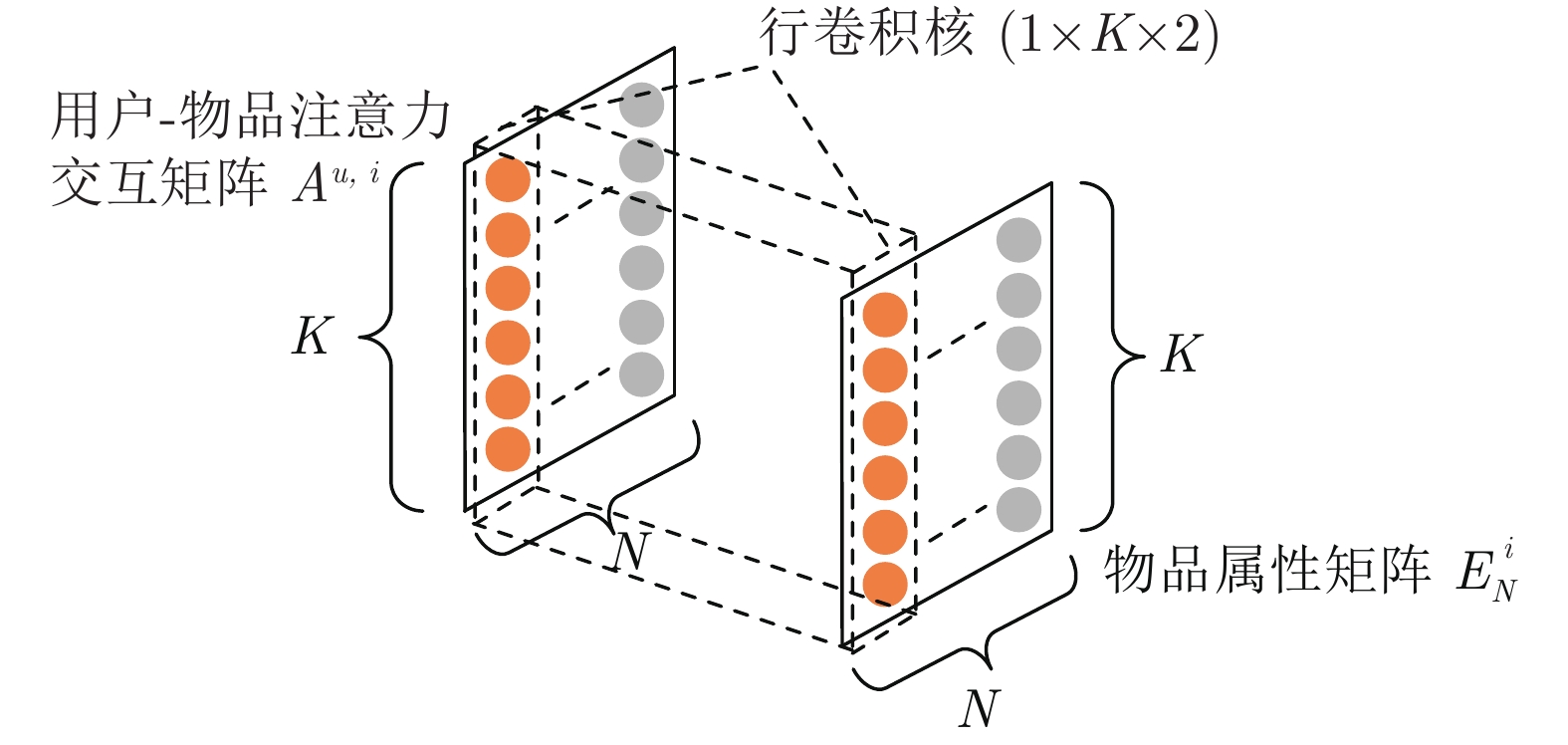
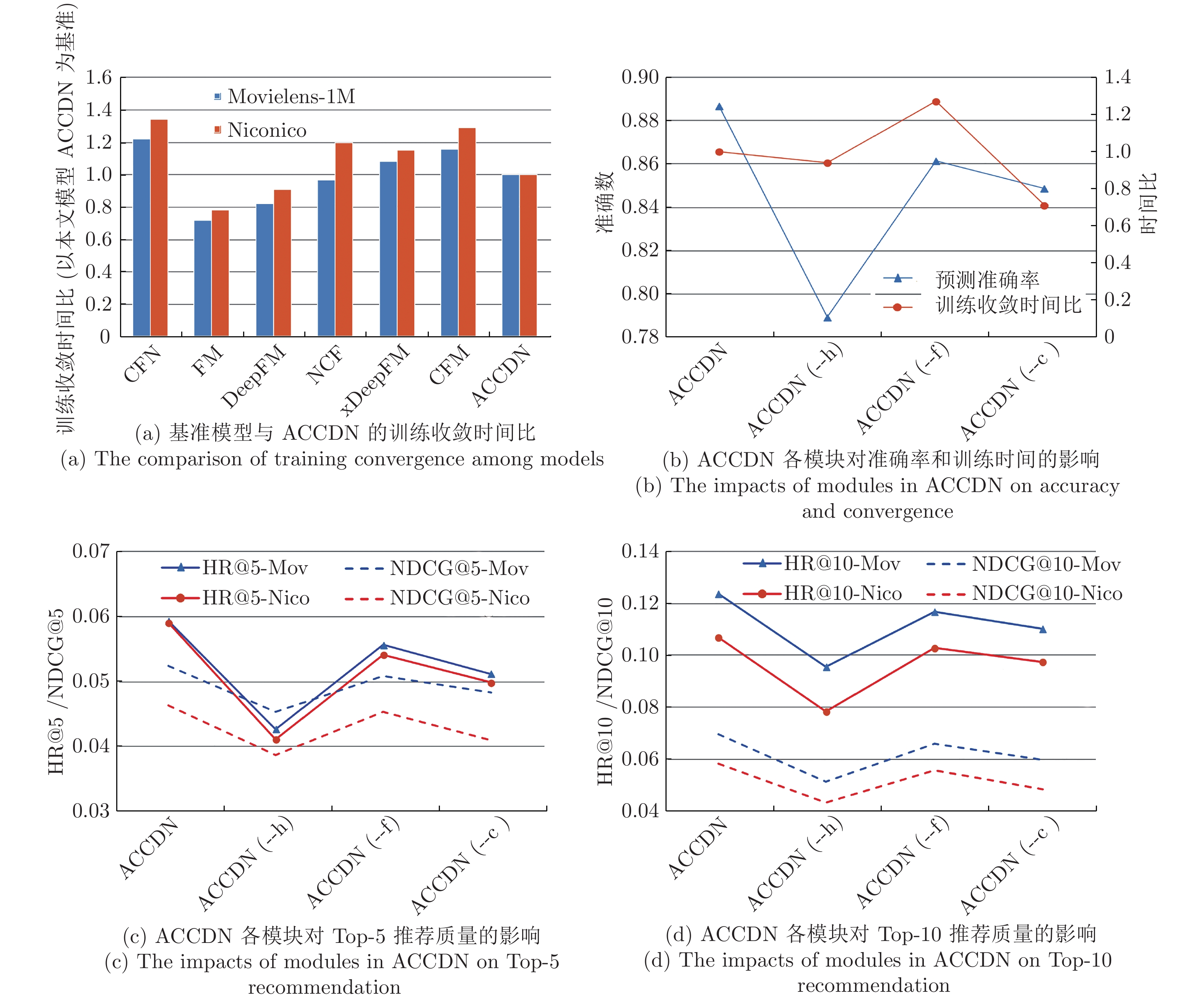
一直以来, 各种推荐系统关注于如何挖掘用户与物品特征间的潜在关联, 特征信息的充分利用有利于用户到物品的精准匹配. 基于矩阵分解和分解机的推荐算法是该领域的主流, 前者学习用户历史行为而后者分析对象特征关系, 但都难以兼顾用户行为与个体特征. 而近年来, 深度神经网络凭借其强大的特征学习能力和灵活可变的结构被应用到了推荐系统领域. 鉴于此, 本文提出了一种基于注意力机制的协同卷积动态推荐网络(Attentionbased collaborative convolutional dynamic network, ACCDN), 它通过注意力机制实现用户历史行为、用户画像与物品属性的多重交互, 再通过卷积网络逐层捕捉更高阶的特征交互. 网络同时接受不同组块输出的低阶至高阶信息, 最后给出用户对指定物品青睐评分概率的预估. 而且本文还提出了一种基于无参时间衰减的用户兴趣标签来量化用户关注的变化. 通过比较若干先进模型在两个现实数据集的表现, 本文设计的动态推荐模型不但能够缓解推荐时滞性, 还能明显提高推荐质量, 为用户带来更好的个性化服务体验.
一直以来, 各种推荐系统关注于如何挖掘用户与物品特征间的潜在关联, 特征信息的充分利用有利于用户到物品的精准匹配. 基于矩阵分解和分解机的推荐算法是该领域的主流, 前者学习用户历史行为而后者分析对象特征关系, 但都难以兼顾用户行为与个体特征. 而近年来, 深度神经网络凭借其强大的特征学习能力和灵活可变的结构被应用到了推荐系统领域. 鉴于此, 本文提出了一种基于注意力机制的协同卷积动态推荐网络(Attentionbased collaborative convolutional dynamic network, ACCDN), 它通过注意力机制实现用户历史行为、用户画像与物品属性的多重交互, 再通过卷积网络逐层捕捉更高阶的特征交互. 网络同时接受不同组块输出的低阶至高阶信息, 最后给出用户对指定物品青睐评分概率的预估. 而且本文还提出了一种基于无参时间衰减的用户兴趣标签来量化用户关注的变化. 通过比较若干先进模型在两个现实数据集的表现, 本文设计的动态推荐模型不但能够缓解推荐时滞性, 还能明显提高推荐质量, 为用户带来更好的个性化服务体验.

2021, 47(10): 2449-2463.
doi: 10.16383/j.aas.c190079
摘要:
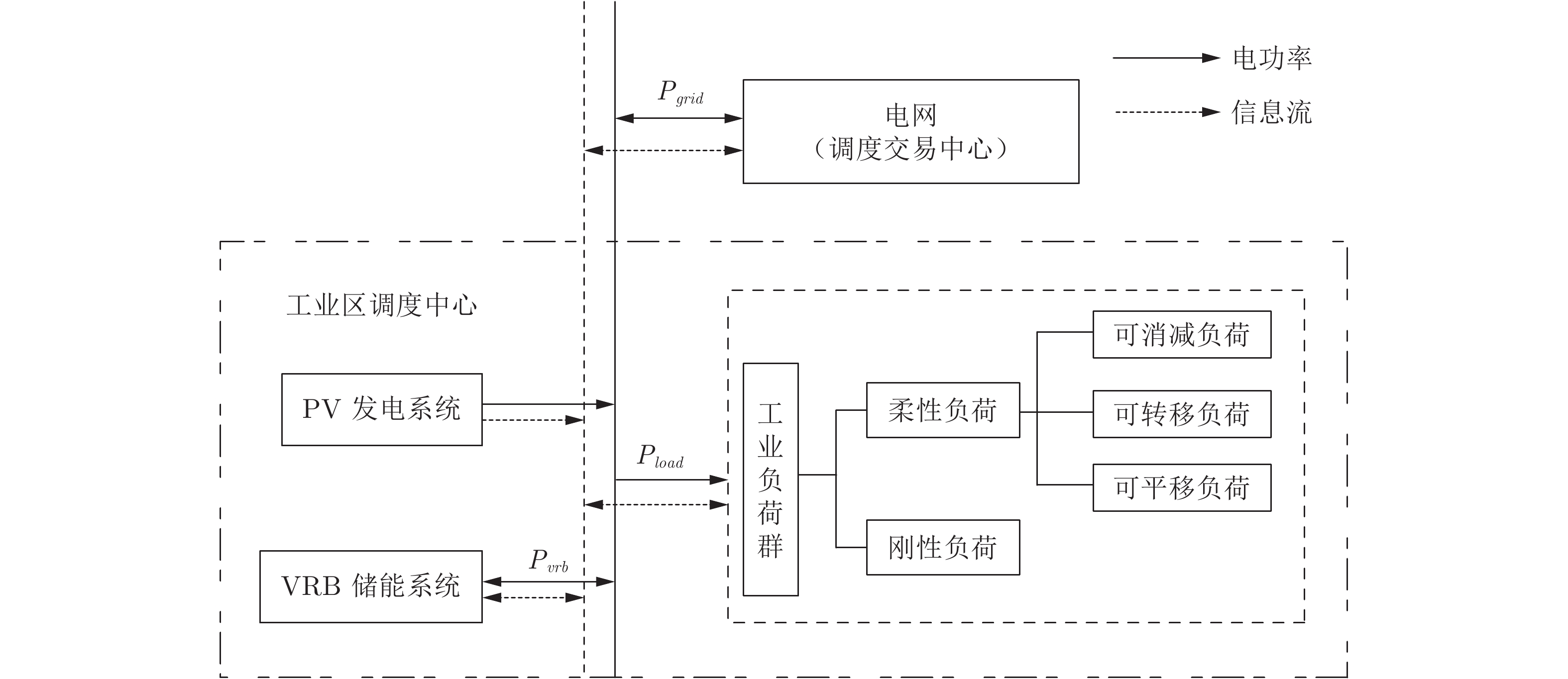
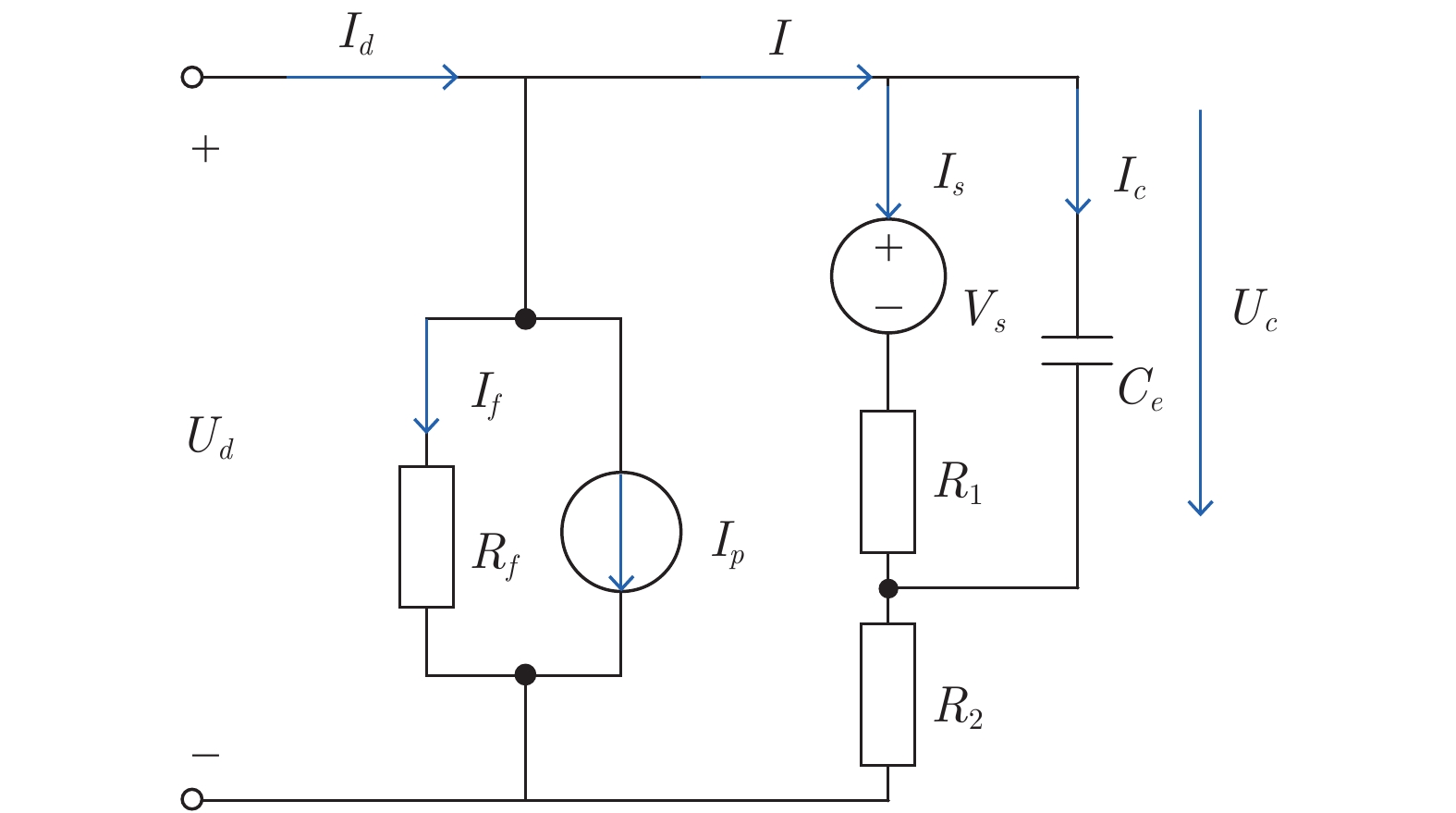
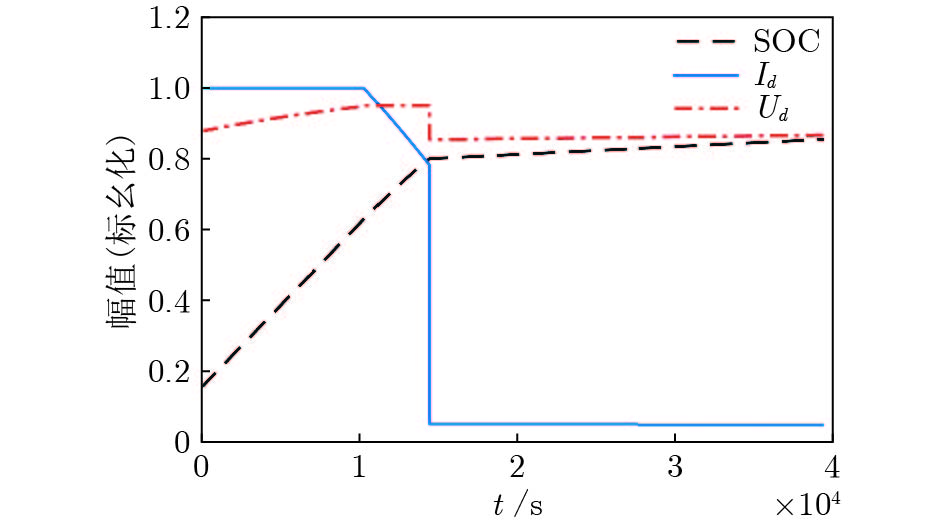
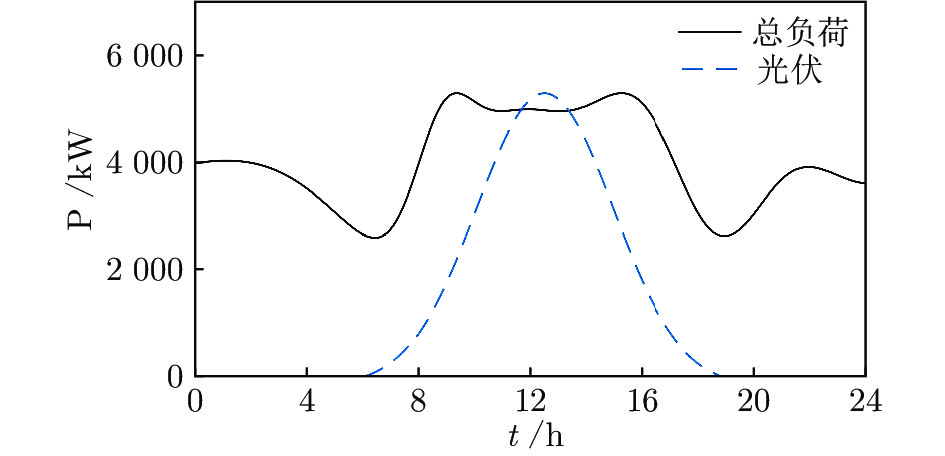
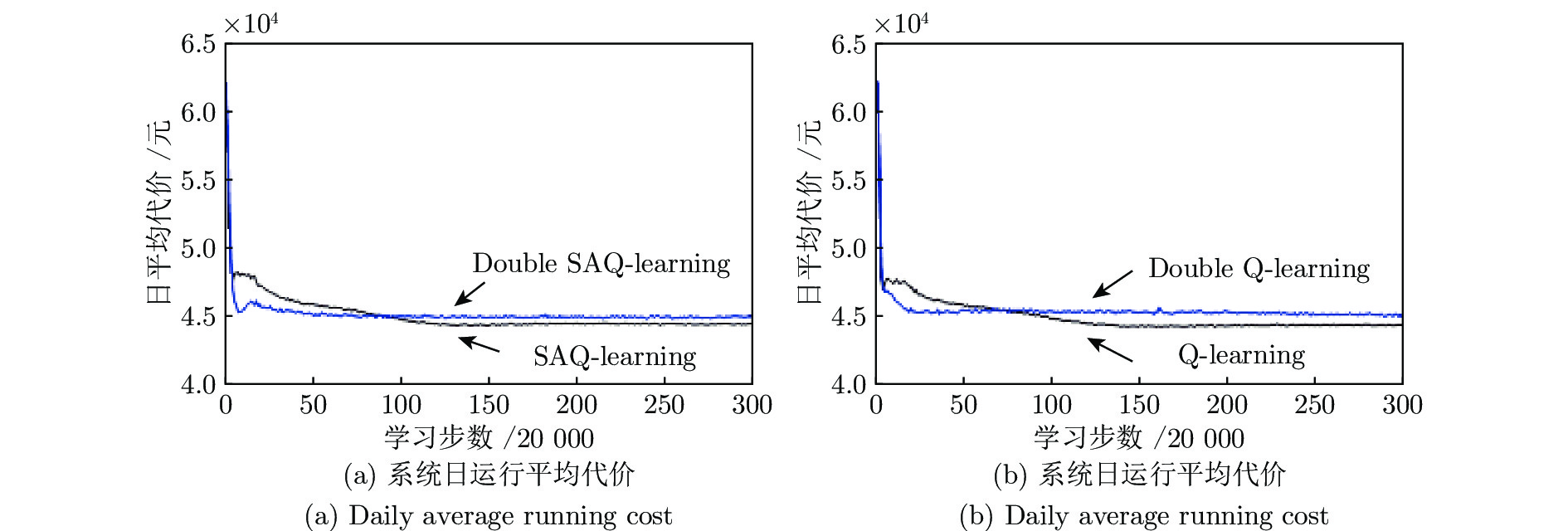
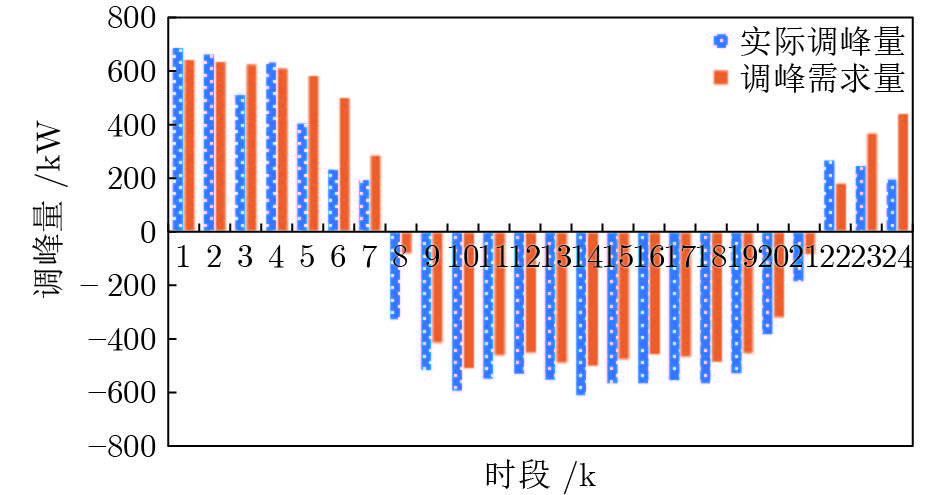
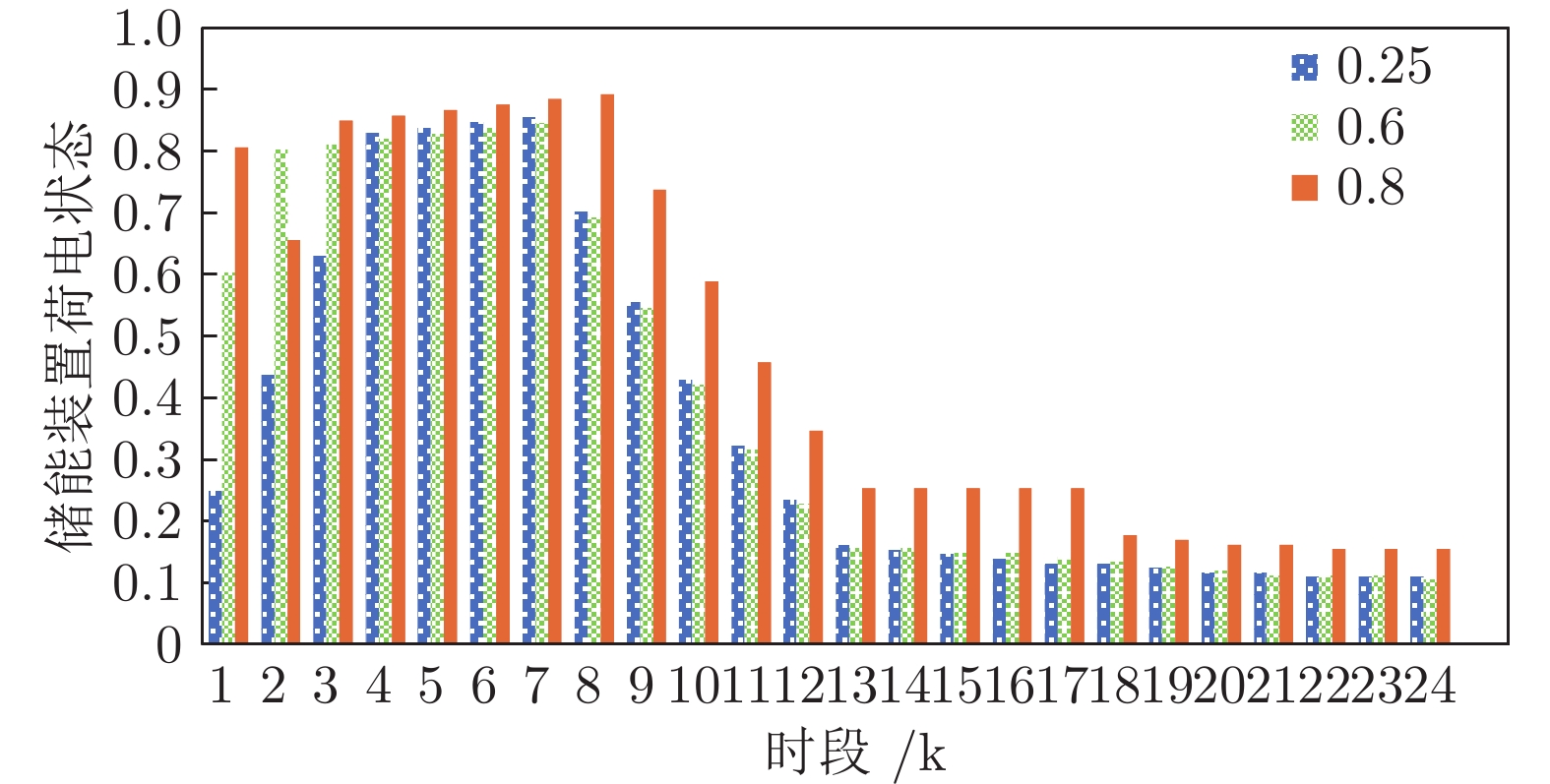
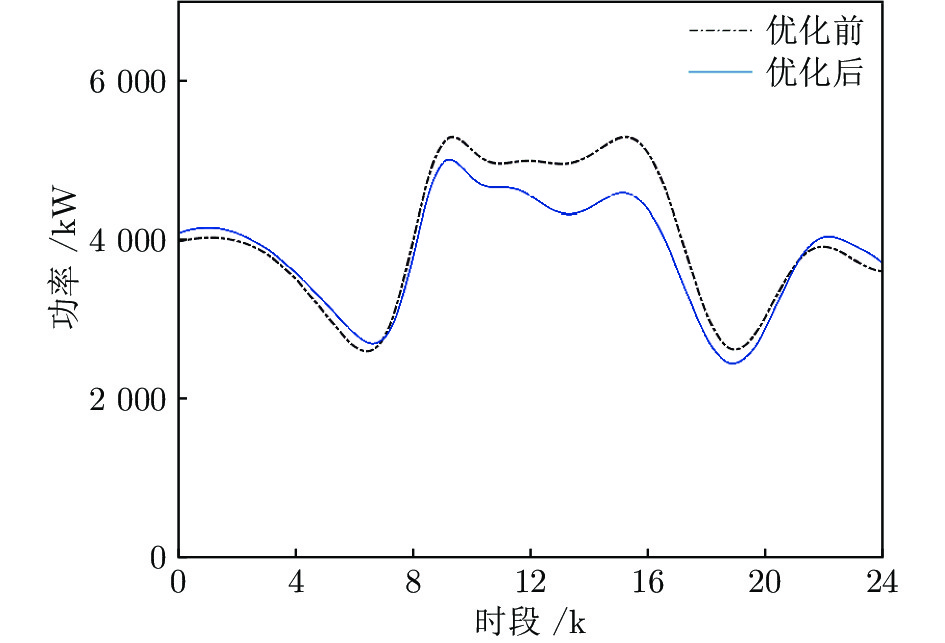
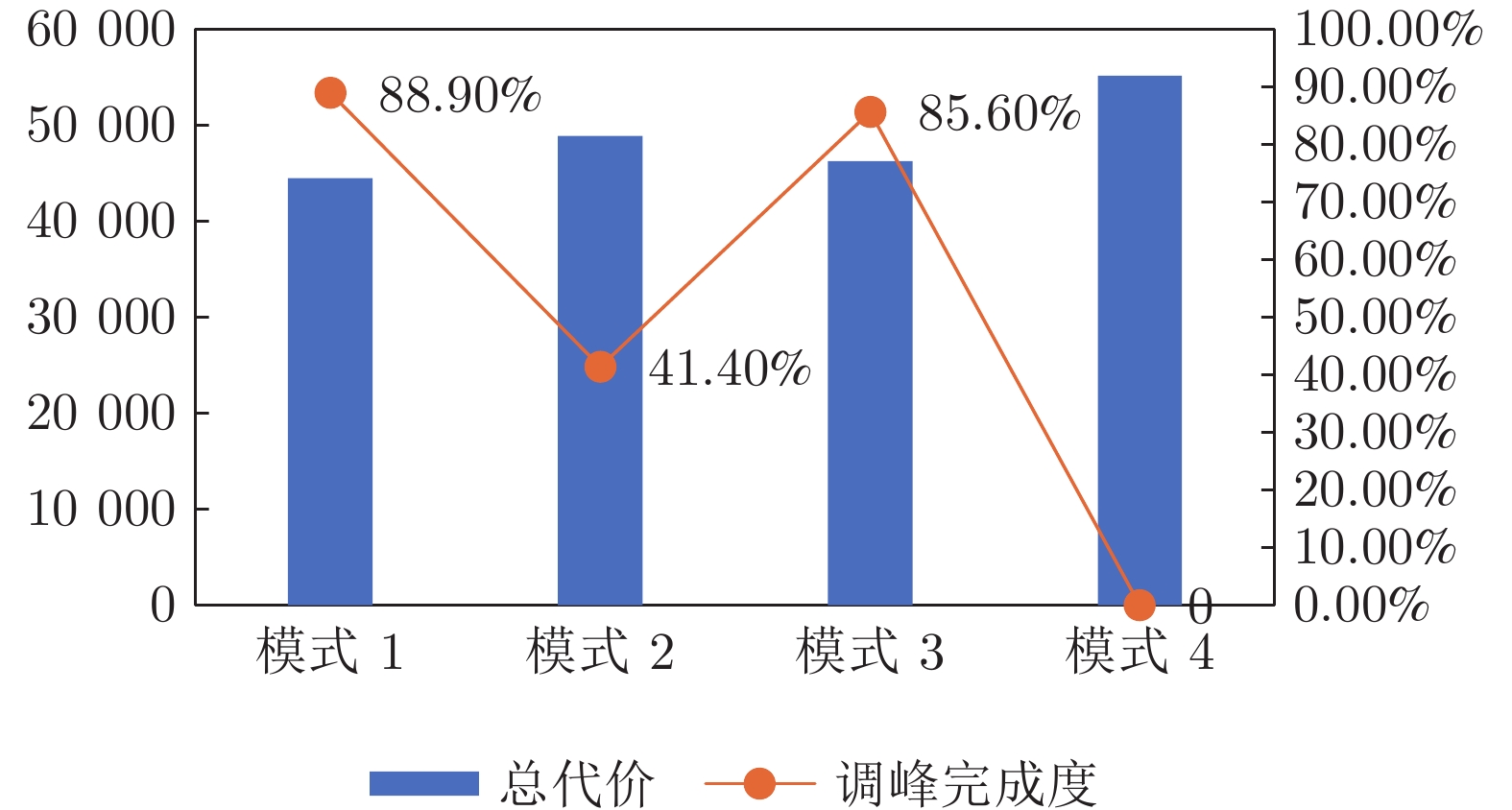
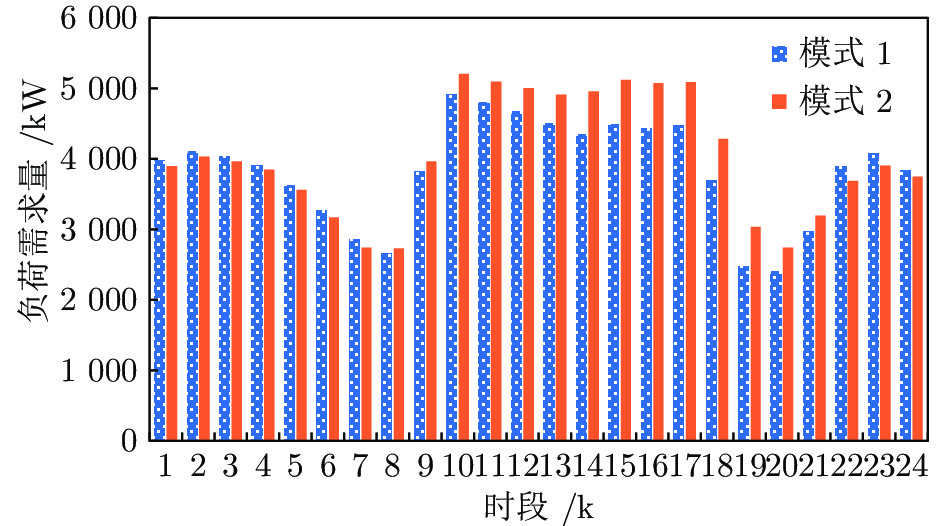
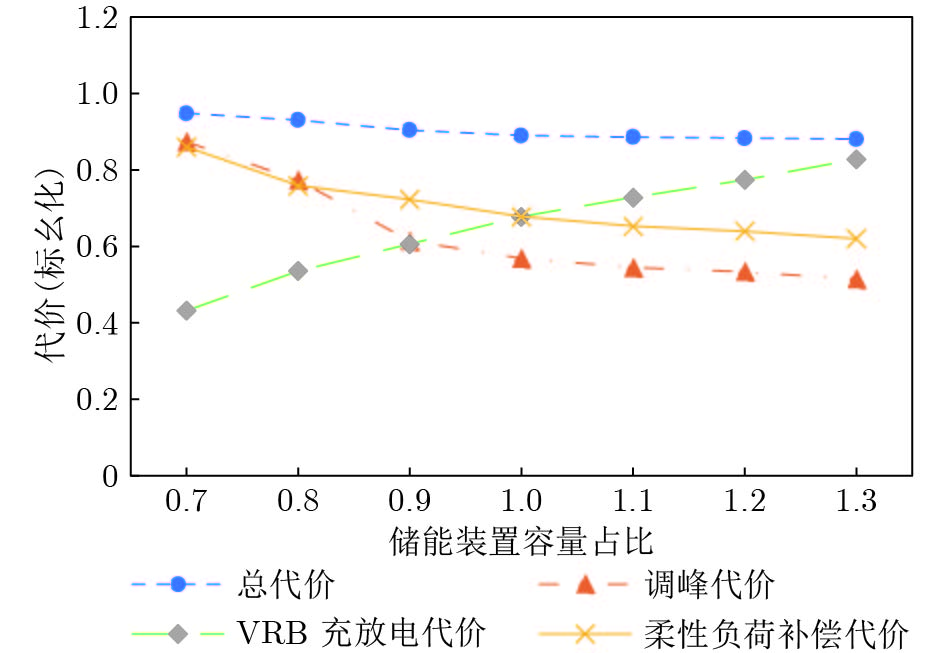
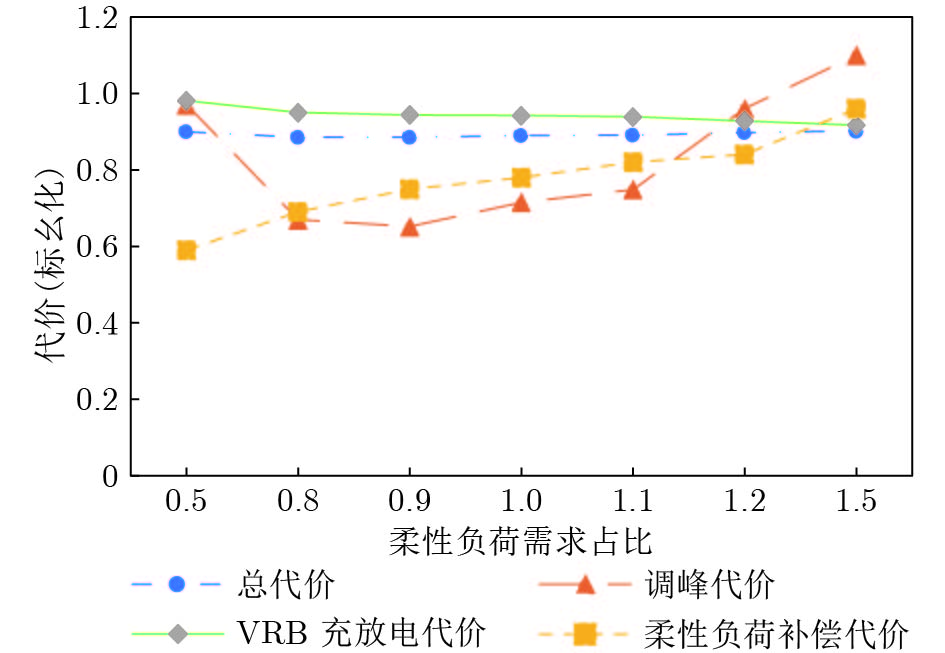
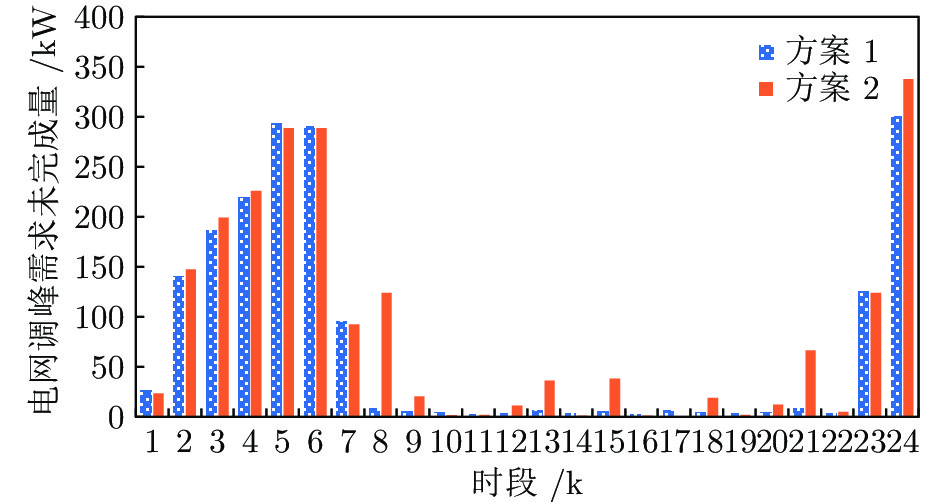
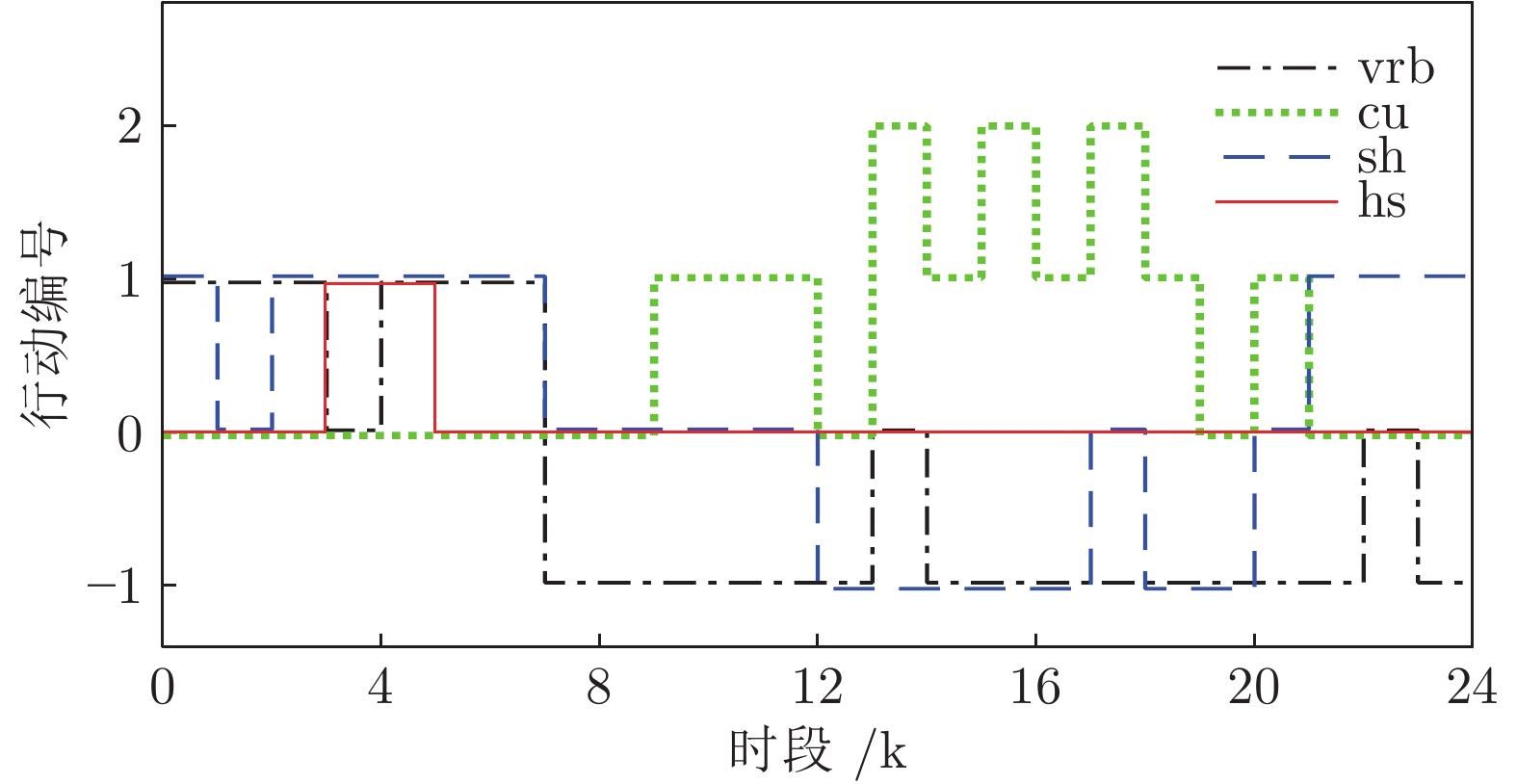
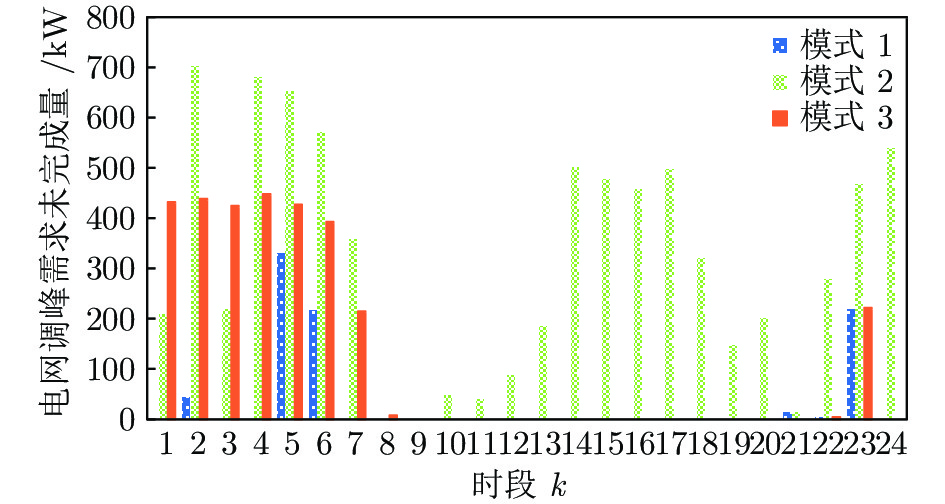
本文针对含光伏(Photovoltaic, PV)、全钒液流电池(Vanadium redox battery, VRB)储能装置与多类型柔性负荷的工业园区主动配电系统, 研究在考虑源荷随机性情况下该系统的动态经济调度问题. 首先, 将PV出力、多类型负荷需求和电网调峰需求的随机动态变化近似描述为连续马尔科夫过程, 并根据系统内VRB的充放电特性对储能系统进行建模; 然后, 以各决策时刻下PV出力、负荷需求、调峰需求以及储能荷电状态(State of charge, SOC)的离散等级为状态, 以储能充放电及多类型柔性负荷调整方案为行动, 在系统功率平衡等相关约束下, 以应对电网调峰需求和提高系统经济运行水平为目标, 将工业园区主动配电网系统动态经济调度优化问题建立成随机动态规划模型; 最后, 引入强化学习方法进行策略求解. 算例仿真结果表明所得策略可有效提高系统经济运行效益, 并在一定程度上满足电网调峰需求.
本文针对含光伏(Photovoltaic, PV)、全钒液流电池(Vanadium redox battery, VRB)储能装置与多类型柔性负荷的工业园区主动配电系统, 研究在考虑源荷随机性情况下该系统的动态经济调度问题. 首先, 将PV出力、多类型负荷需求和电网调峰需求的随机动态变化近似描述为连续马尔科夫过程, 并根据系统内VRB的充放电特性对储能系统进行建模; 然后, 以各决策时刻下PV出力、负荷需求、调峰需求以及储能荷电状态(State of charge, SOC)的离散等级为状态, 以储能充放电及多类型柔性负荷调整方案为行动, 在系统功率平衡等相关约束下, 以应对电网调峰需求和提高系统经济运行水平为目标, 将工业园区主动配电网系统动态经济调度优化问题建立成随机动态规划模型; 最后, 引入强化学习方法进行策略求解. 算例仿真结果表明所得策略可有效提高系统经济运行效益, 并在一定程度上满足电网调峰需求.





2021, 47(10): 2464-2471.
doi: 10.16383/j.aas.c190830
摘要:
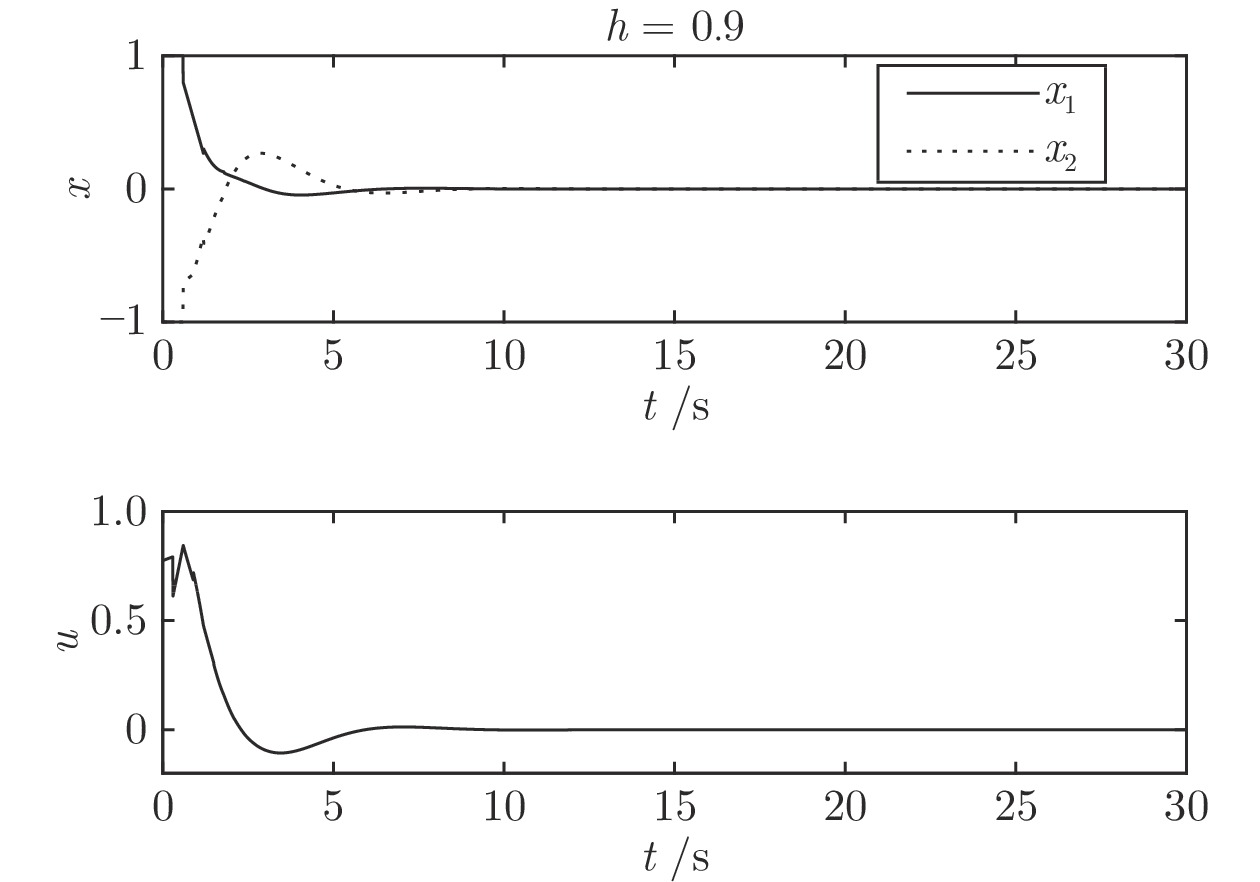
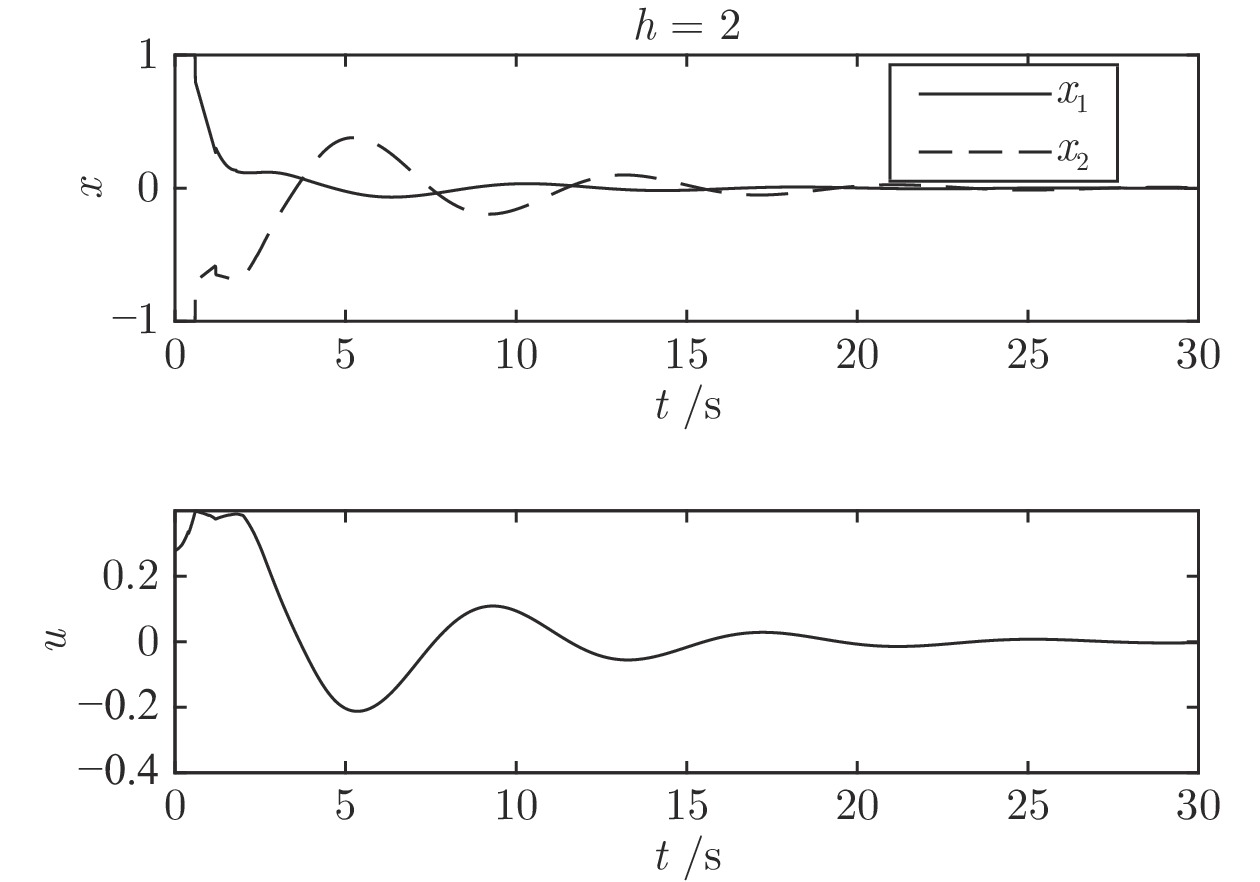
本文研究同时具有输入和状态时滞的控制系统的输入时滞补偿问题. 通过建立嵌套−伪预估器反馈方法预测系统未来的状态, 使得任意大但有界的输入时滞得到完全补偿. 不同于传统的预估器反馈利用开环系统预测系统未来的状态, 嵌套−伪预估器反馈则是利用闭环系统嵌套地预测系统未来的状态. 依据积分时滞系统的稳定性, 给出了保证闭环系统渐近稳定的充要条件. 最后, 采用数值仿真验证所提出方法的有效性.
本文研究同时具有输入和状态时滞的控制系统的输入时滞补偿问题. 通过建立嵌套−伪预估器反馈方法预测系统未来的状态, 使得任意大但有界的输入时滞得到完全补偿. 不同于传统的预估器反馈利用开环系统预测系统未来的状态, 嵌套−伪预估器反馈则是利用闭环系统嵌套地预测系统未来的状态. 依据积分时滞系统的稳定性, 给出了保证闭环系统渐近稳定的充要条件. 最后, 采用数值仿真验证所提出方法的有效性.

2021, 47(10): 2472-2483.
doi: 10.16383/j.aas.c190628
摘要:
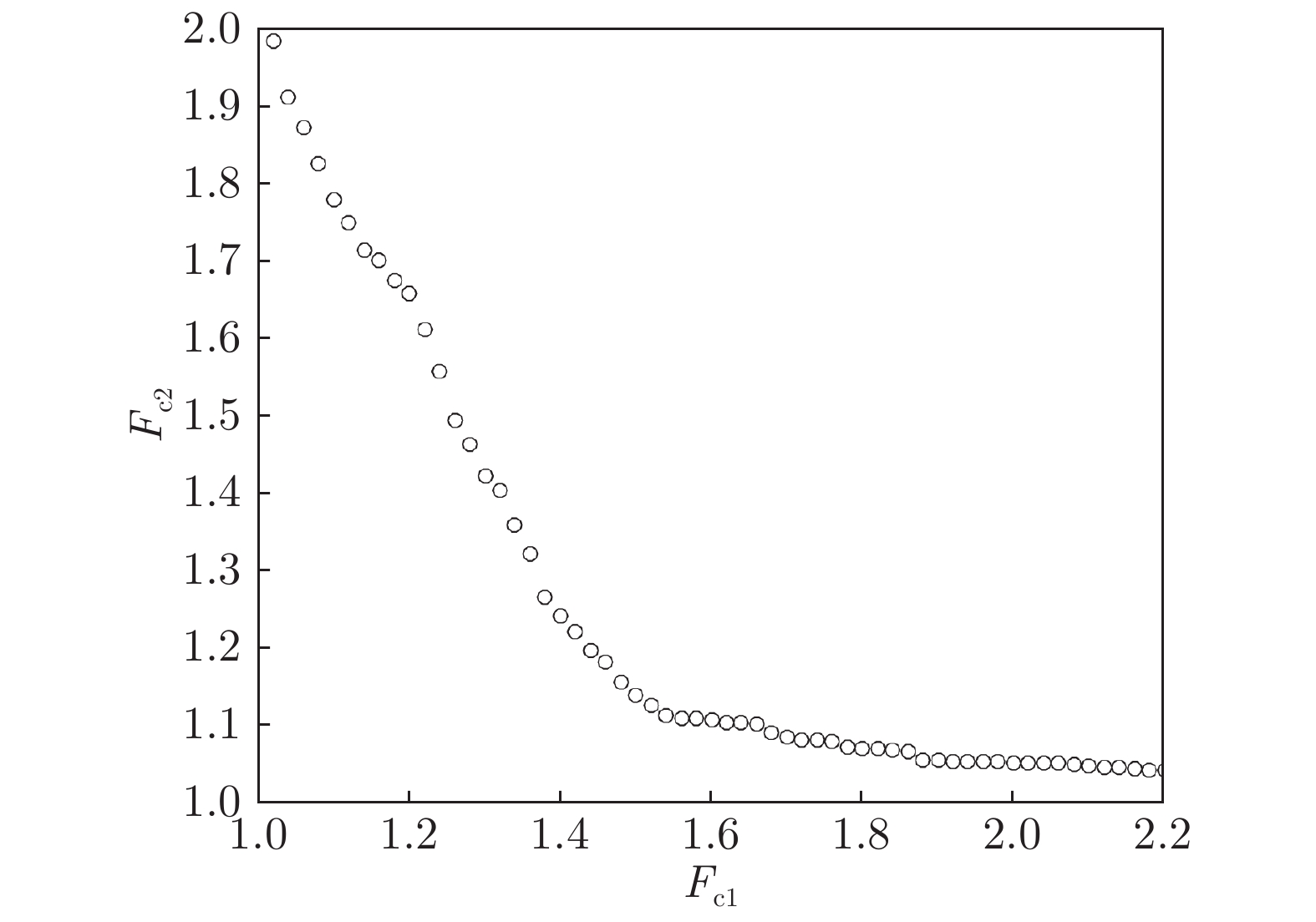
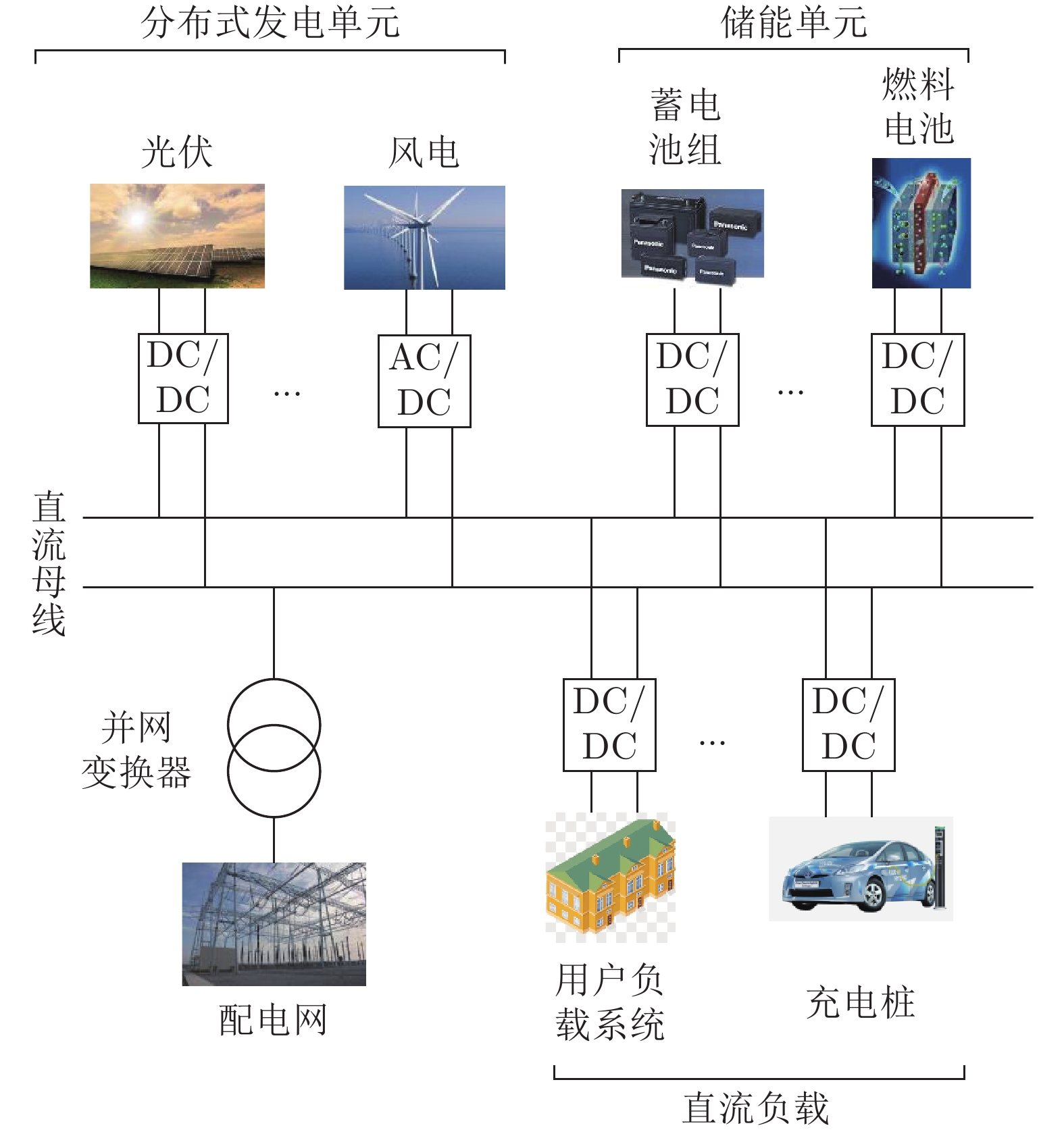
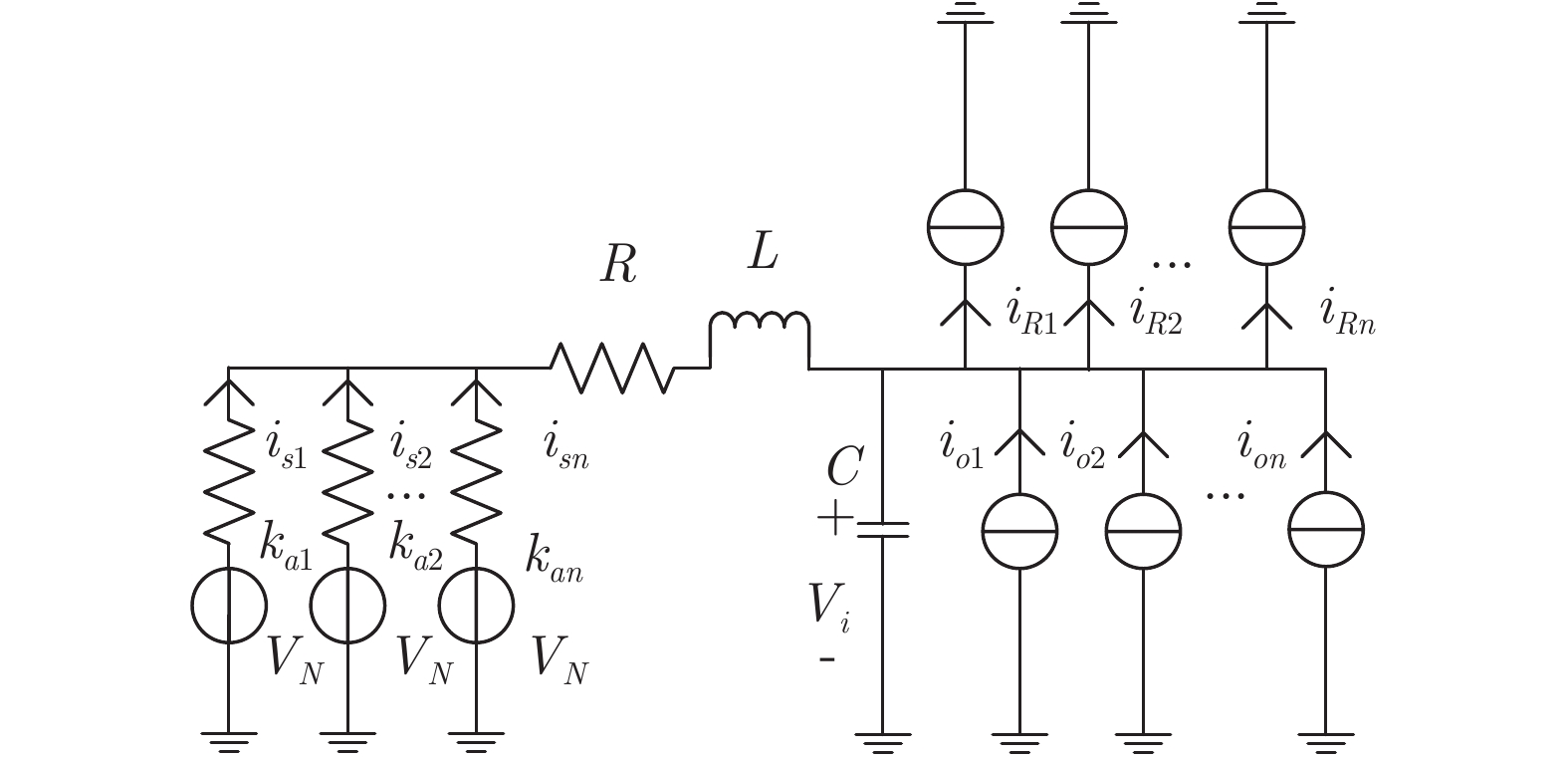
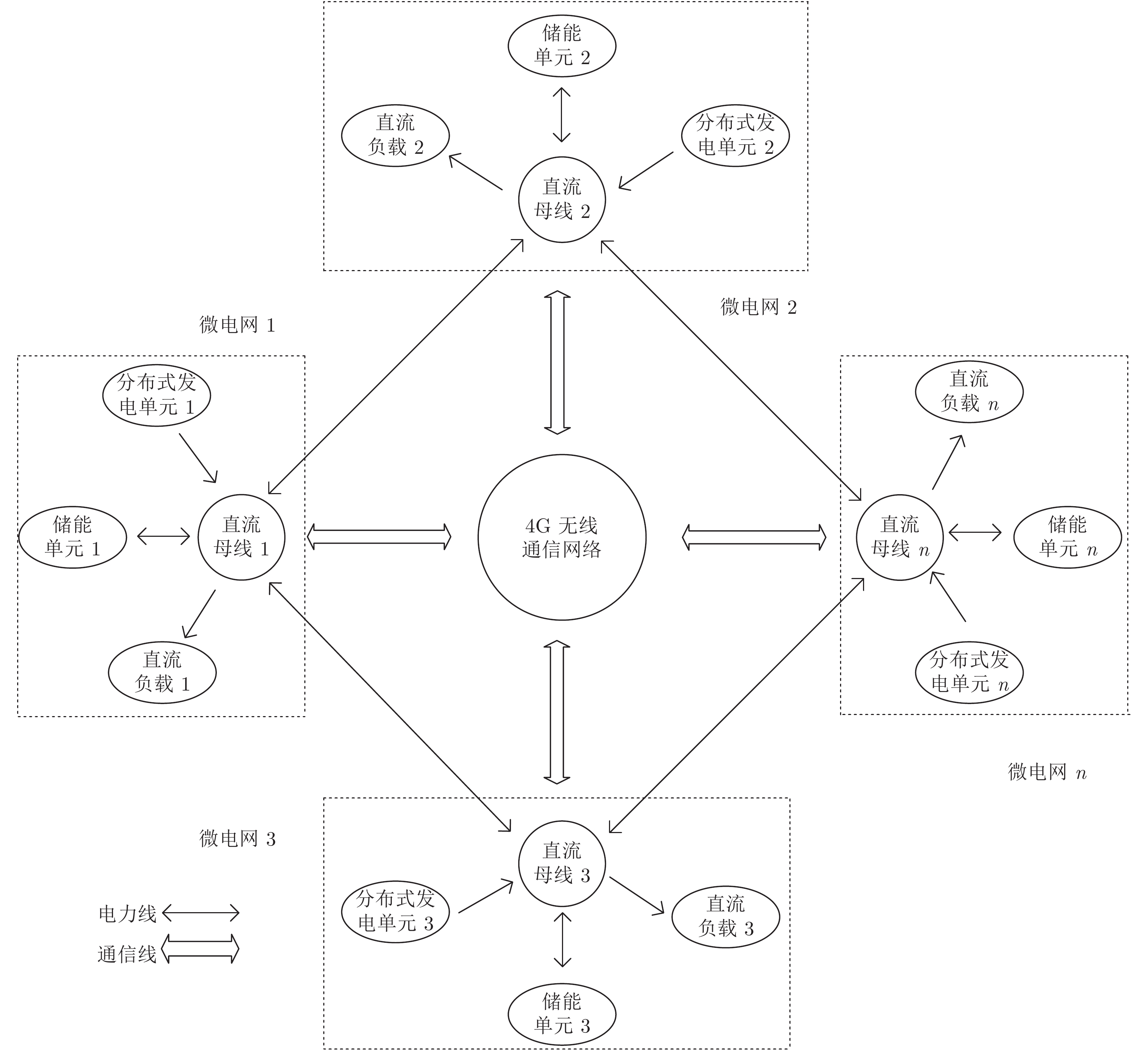
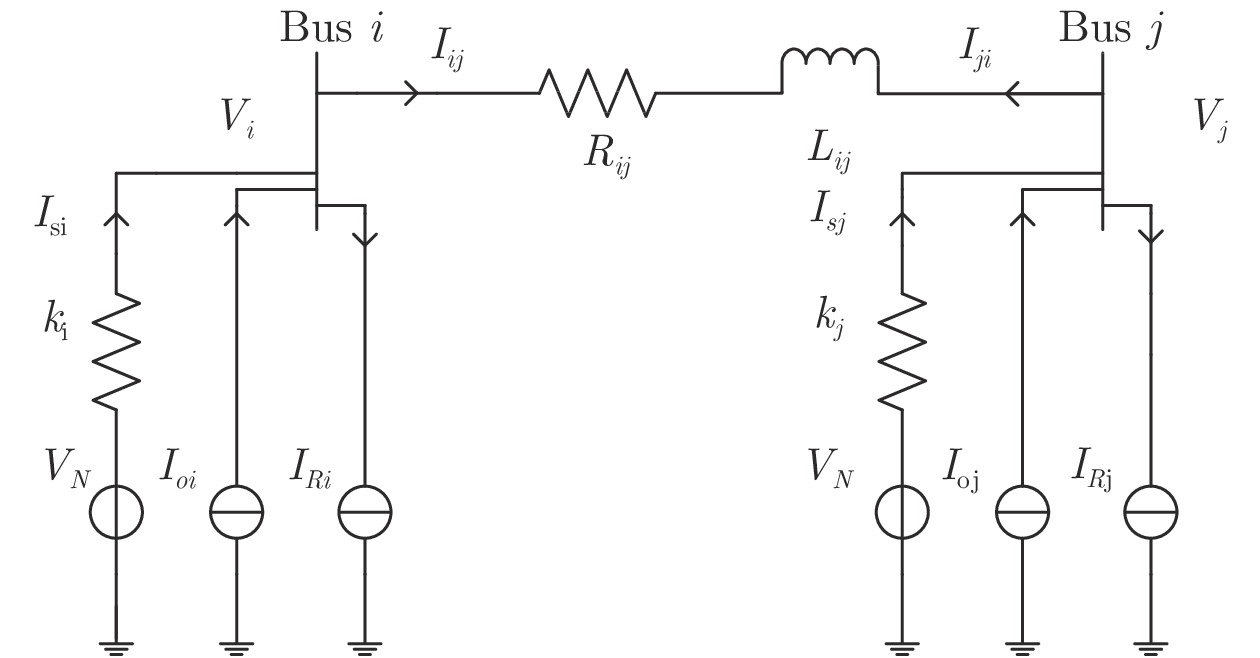
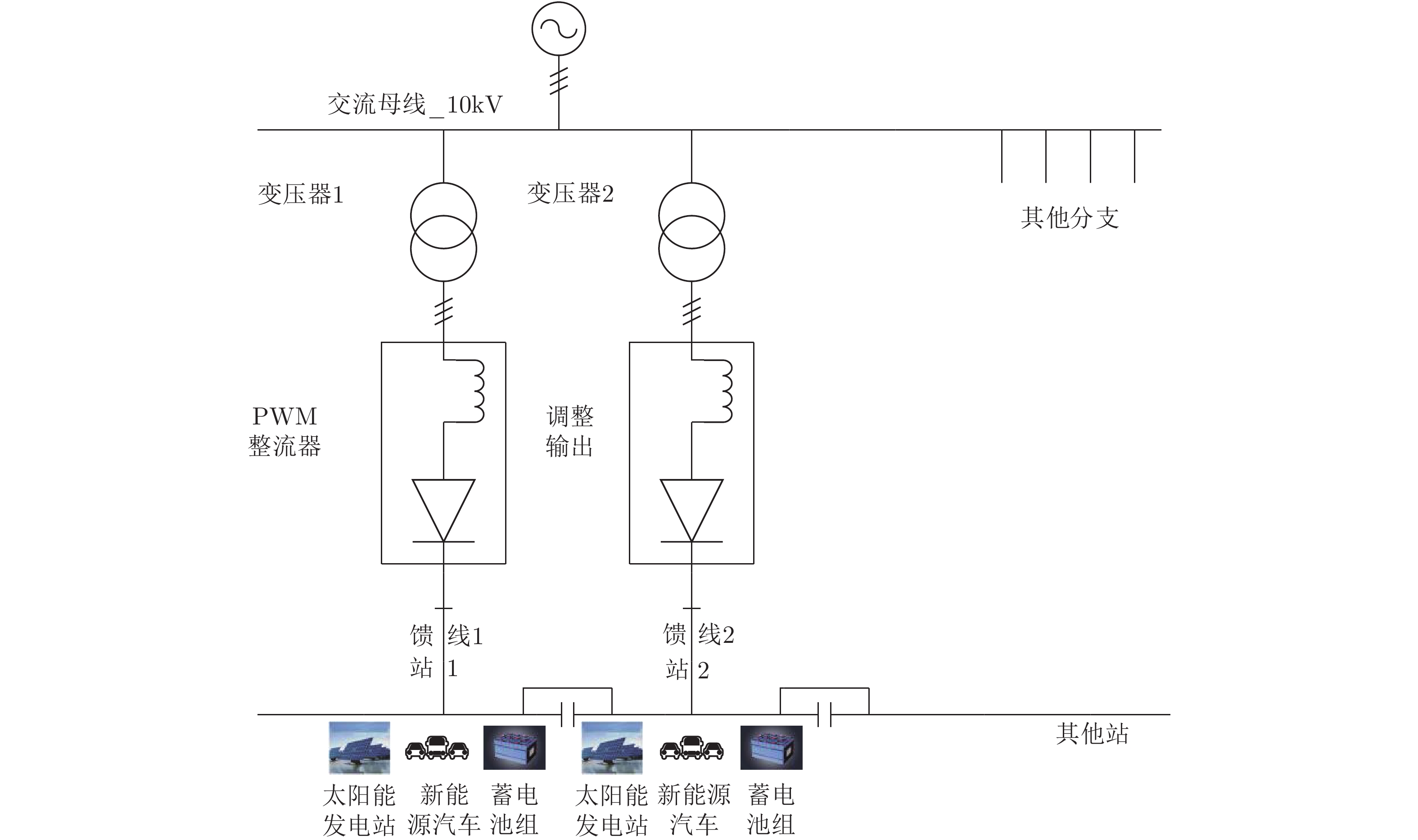
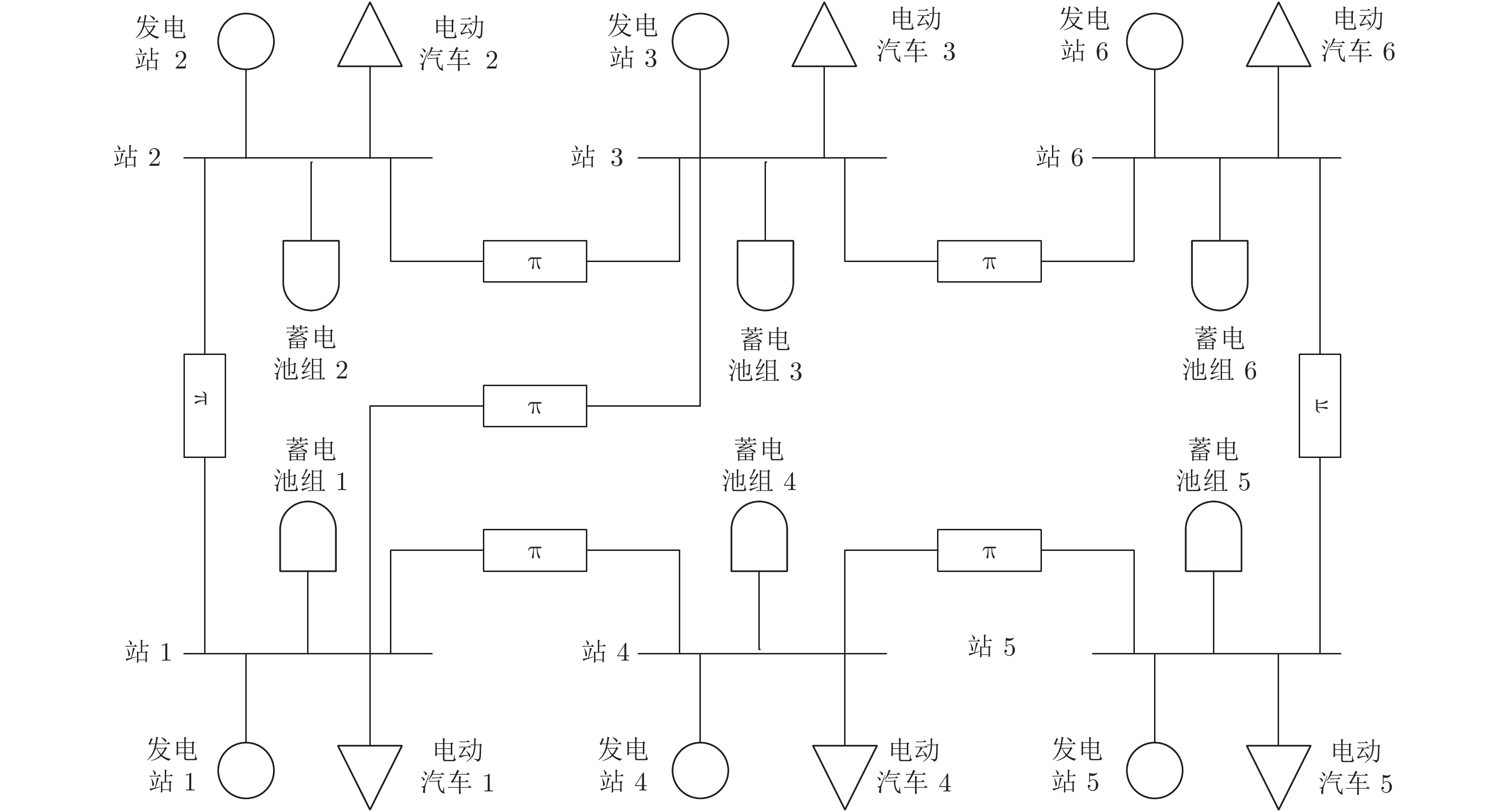
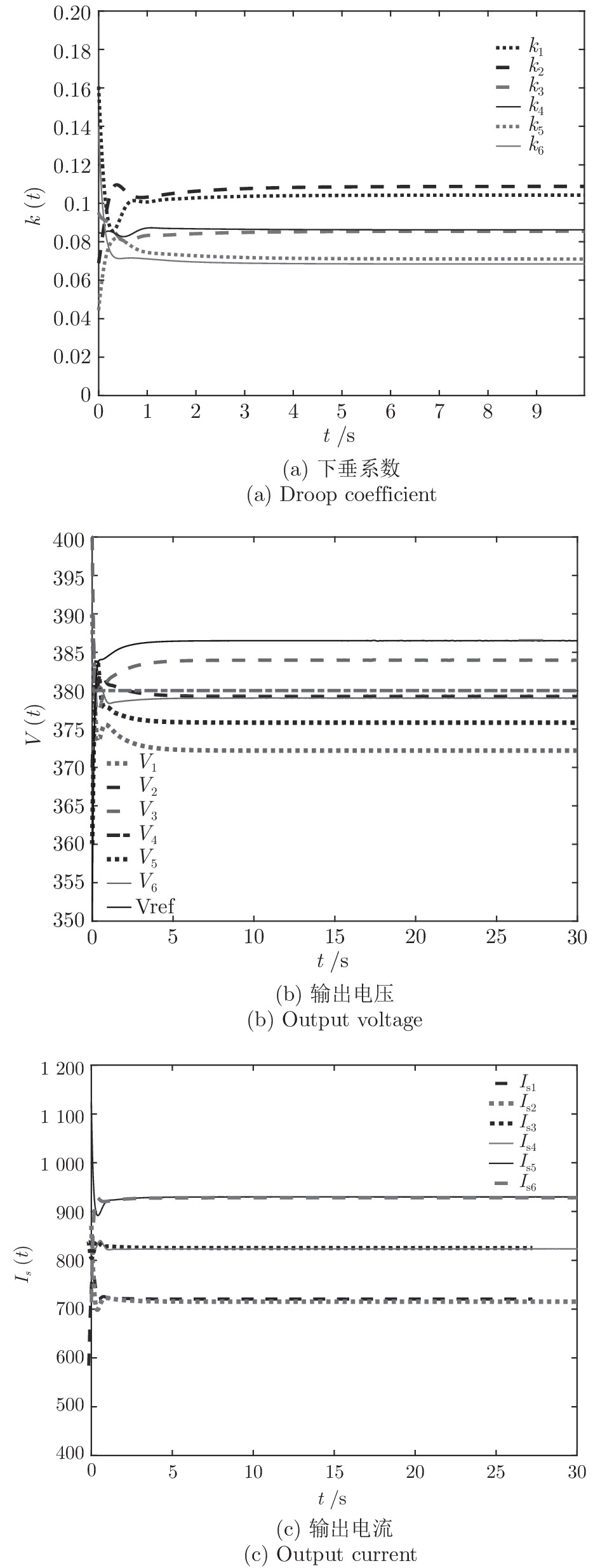
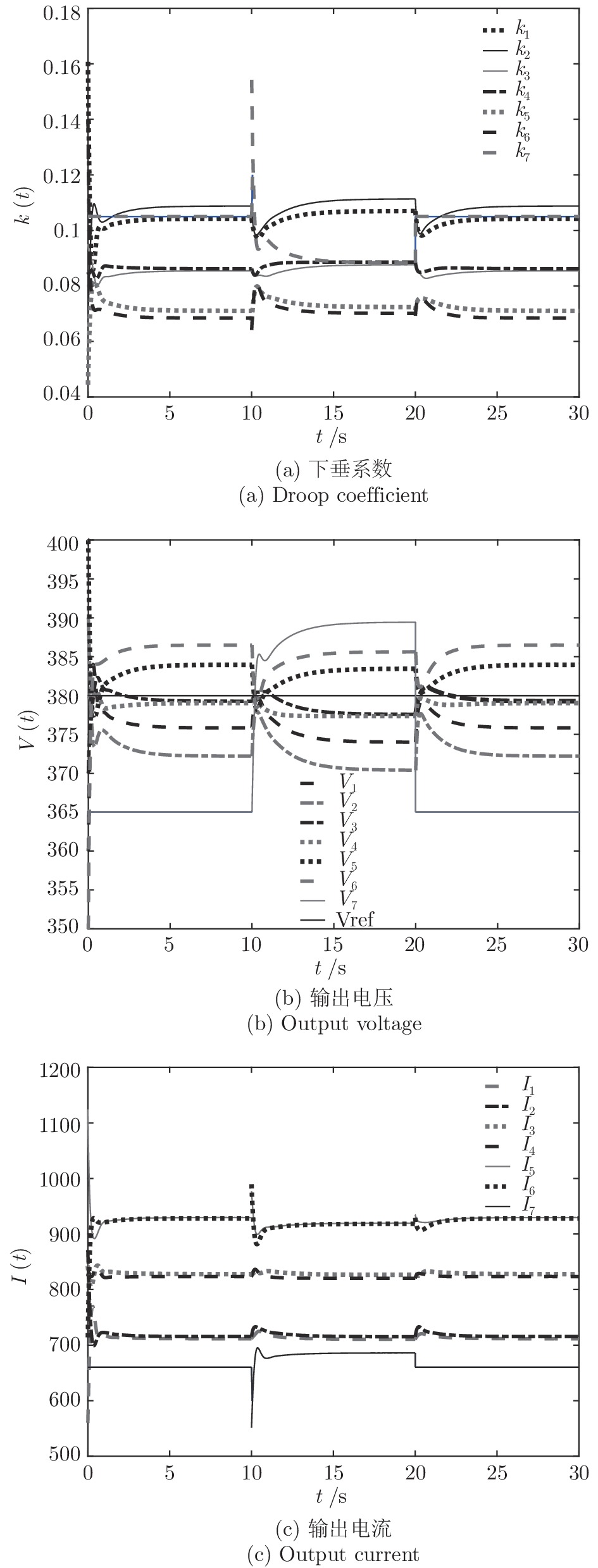
本文研究了分布式控制策略下直流微电网的负荷分配和电压平衡问题. 给出一种新的基于分布式策略的下垂控制器设计方法, 能够在统一的框架下实现直流微电网负载共享和电压平衡. 首先,将直流微电网的负载共享和电压平衡问题转化为多目标优化问题, 其性能指标与微源的容量密切相关. 然后, 通过求解多目标优化问题获得实现负载共享和电压平衡的集中式控制策略, 并给出下垂控制器的设计方法. 为了降低系统的通信负担, 给出一种新的只需与邻居节点交换信息的分布式控制策略, 通过理论分析可知该分布式控制策略能够收敛到多目标优化问题的最优解. 最后, 通过对新能源汽车充换电站系统的仿真验证了本文提出的方法的有效性.
本文研究了分布式控制策略下直流微电网的负荷分配和电压平衡问题. 给出一种新的基于分布式策略的下垂控制器设计方法, 能够在统一的框架下实现直流微电网负载共享和电压平衡. 首先,将直流微电网的负载共享和电压平衡问题转化为多目标优化问题, 其性能指标与微源的容量密切相关. 然后, 通过求解多目标优化问题获得实现负载共享和电压平衡的集中式控制策略, 并给出下垂控制器的设计方法. 为了降低系统的通信负担, 给出一种新的只需与邻居节点交换信息的分布式控制策略, 通过理论分析可知该分布式控制策略能够收敛到多目标优化问题的最优解. 最后, 通过对新能源汽车充换电站系统的仿真验证了本文提出的方法的有效性.


2021, 47(10): 2484-2493.
doi: 10.16383/j.aas.c180739
摘要:
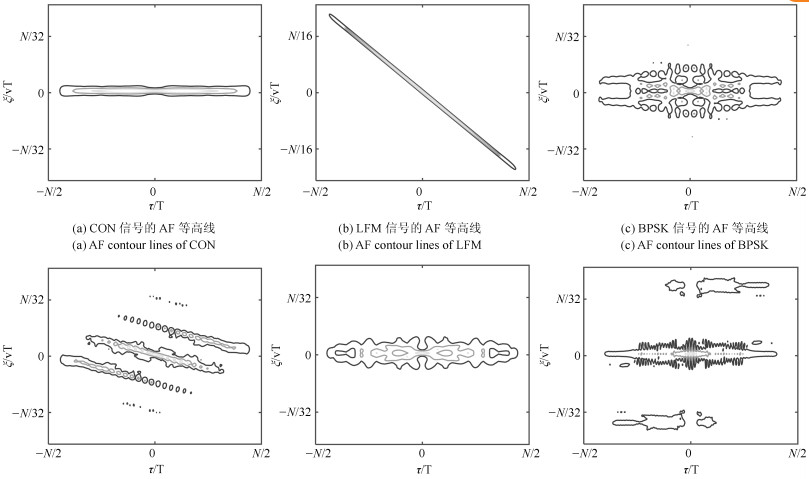
雷达辐射源信号分选是电子侦察系统、威胁告警系统的关键步骤.针对现有基于模糊函数的复杂体制雷达辐射源信号分选方法信息利用率低、易受噪声影响等问题, 提出一种基于模糊函数等高线的分选新方法; 首先, 对信号的模糊函数进行高斯平滑处理并绘制其等高线作为进一步的特征提取对象; 其次, 从图像处理的角度提取正外接矩和方向角作为雷达信号分选的特征向量; 最后, 用核模糊C均值聚类算法对特征向量进行分选.仿真实验表明, 所提方法在8 dB以上的固定信噪比环境下分选6类典型信号的成功率均为100 %, 即使在0 dB环境下, 分选成功率也保持在89.04 %以上; 在0 ~ 20 dB动态信噪比环境下分选成功率达到96.36 %.实测数据验证, 所提特征提高了5种外场辐射源信号的分选效果, 可作为经典5参数的有效补充. 此外, 所提特征还具备较低的计算量, 提取单个信号特征的耗时仅为0.24 s, 具有一定的工程价值.
雷达辐射源信号分选是电子侦察系统、威胁告警系统的关键步骤.针对现有基于模糊函数的复杂体制雷达辐射源信号分选方法信息利用率低、易受噪声影响等问题, 提出一种基于模糊函数等高线的分选新方法; 首先, 对信号的模糊函数进行高斯平滑处理并绘制其等高线作为进一步的特征提取对象; 其次, 从图像处理的角度提取正外接矩和方向角作为雷达信号分选的特征向量; 最后, 用核模糊C均值聚类算法对特征向量进行分选.仿真实验表明, 所提方法在8 dB以上的固定信噪比环境下分选6类典型信号的成功率均为100 %, 即使在0 dB环境下, 分选成功率也保持在89.04 %以上; 在0 ~ 20 dB动态信噪比环境下分选成功率达到96.36 %.实测数据验证, 所提特征提高了5种外场辐射源信号的分选效果, 可作为经典5参数的有效补充. 此外, 所提特征还具备较低的计算量, 提取单个信号特征的耗时仅为0.24 s, 具有一定的工程价值.




2021, 47(10): 2494-2500.
doi: 10.16383/j.aas.c190551
摘要:
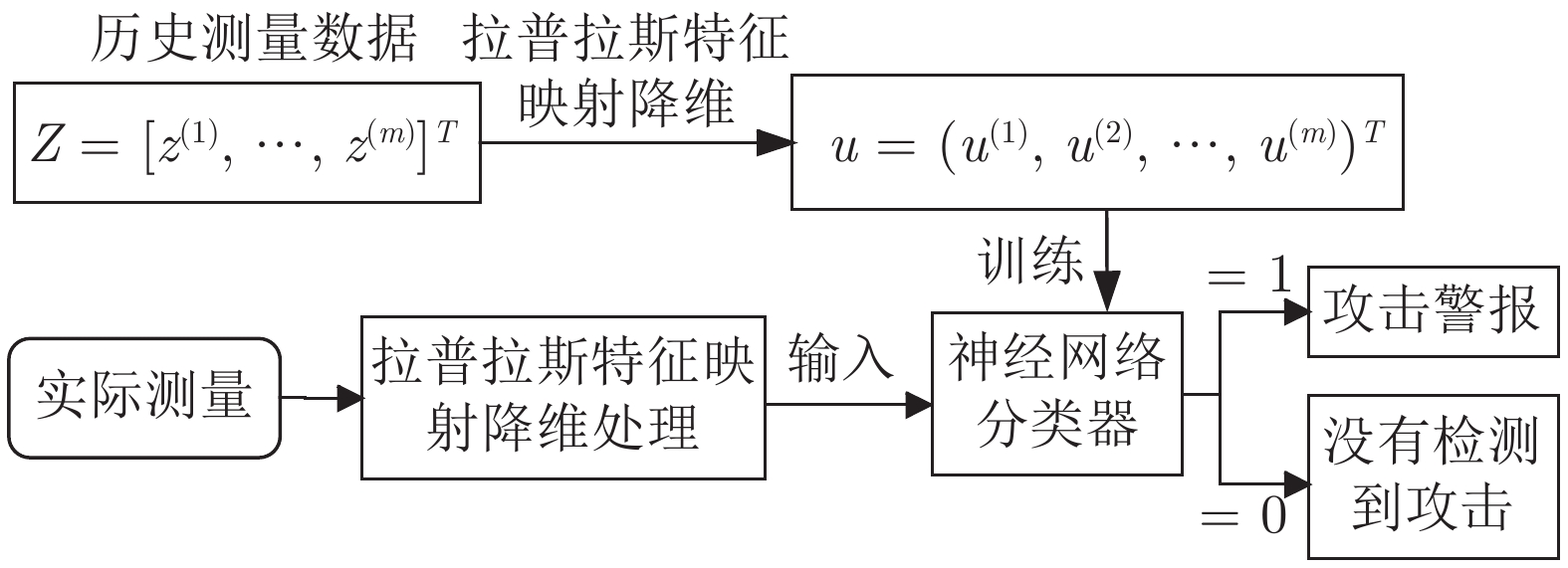
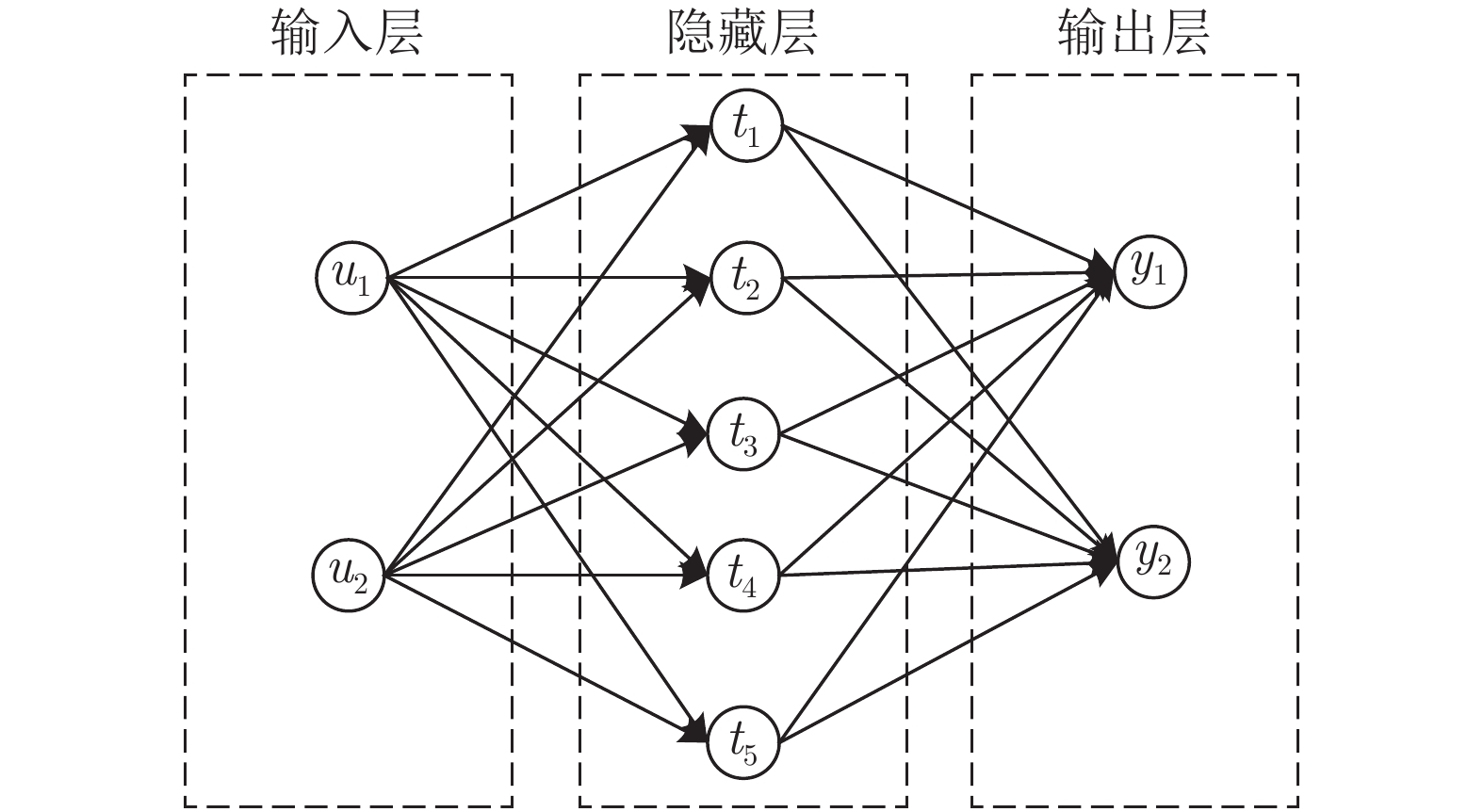
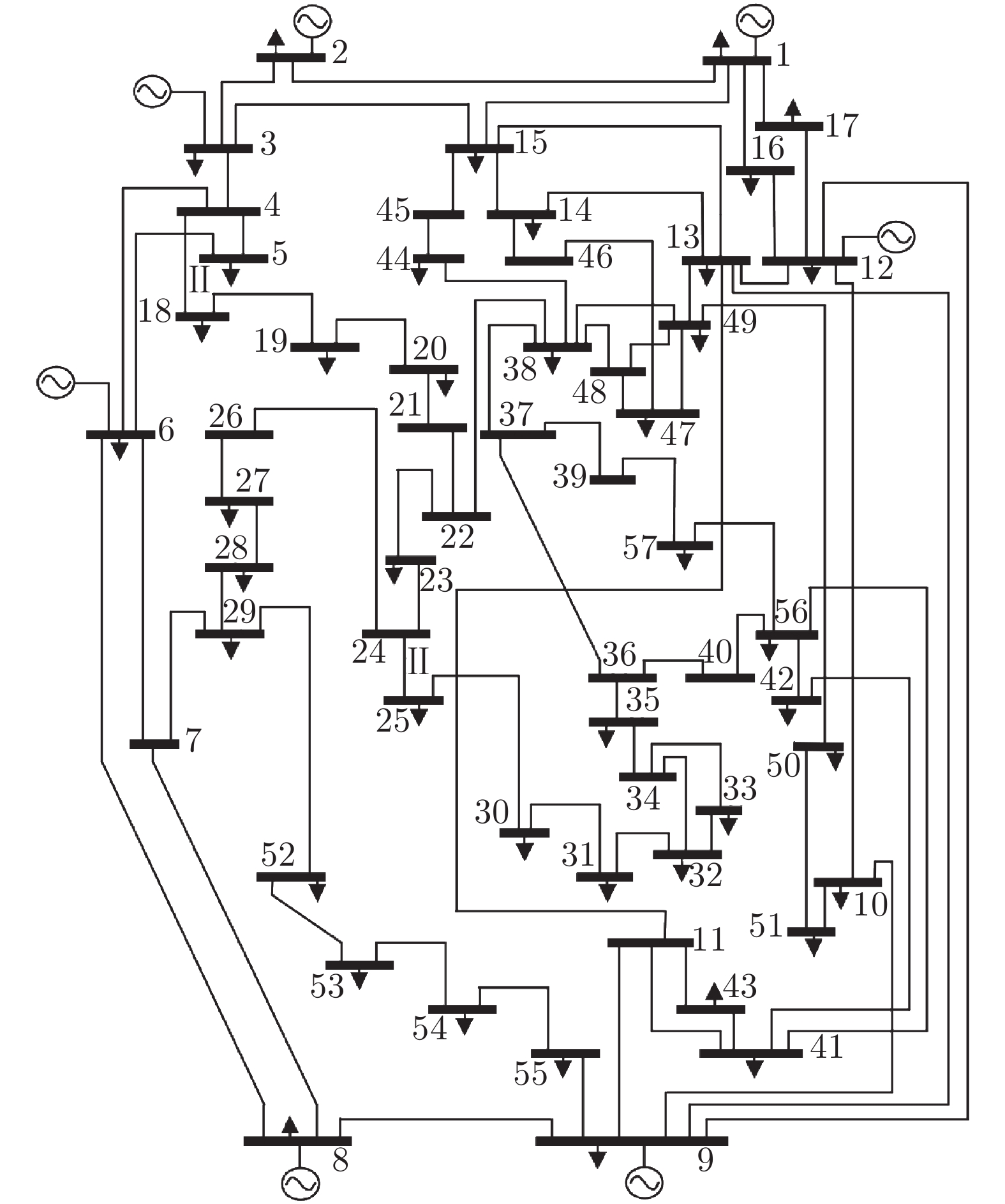
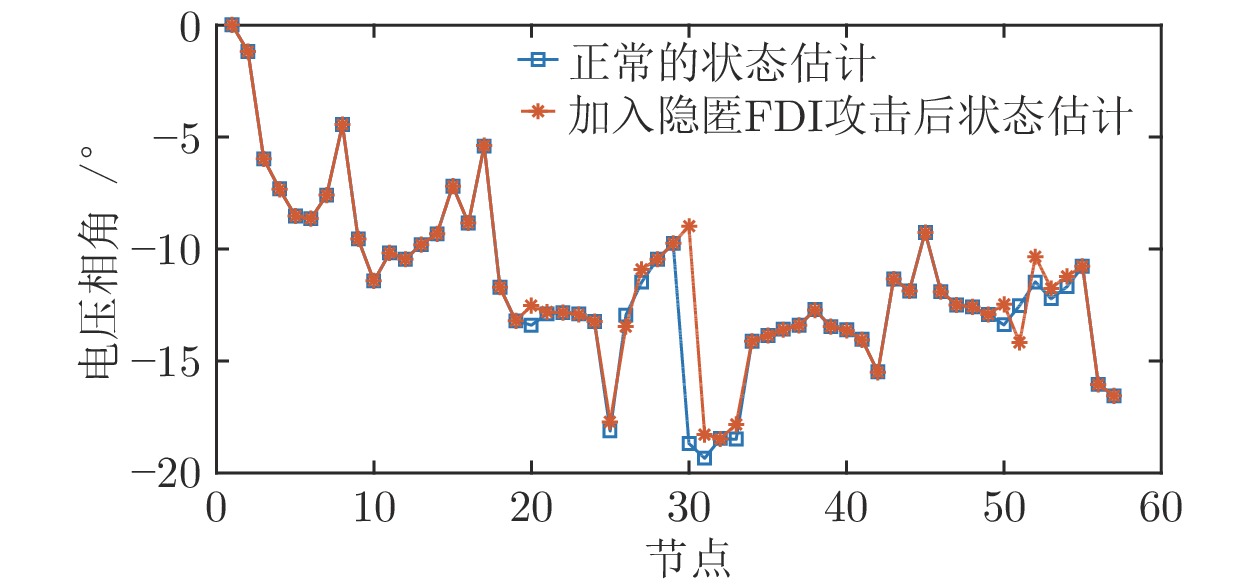
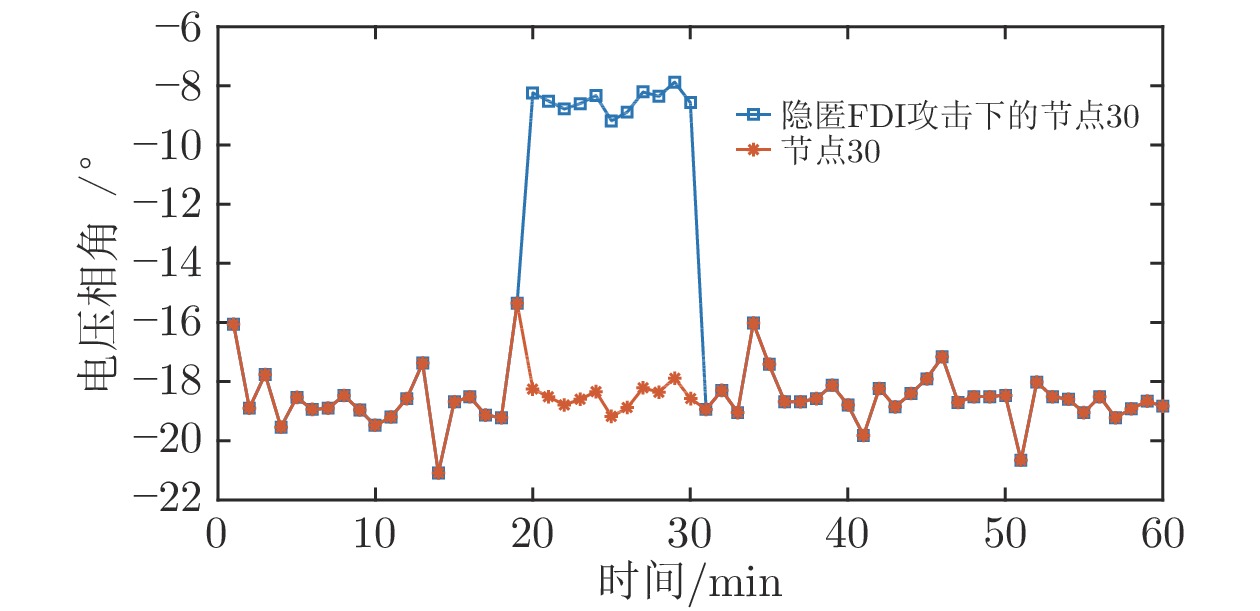
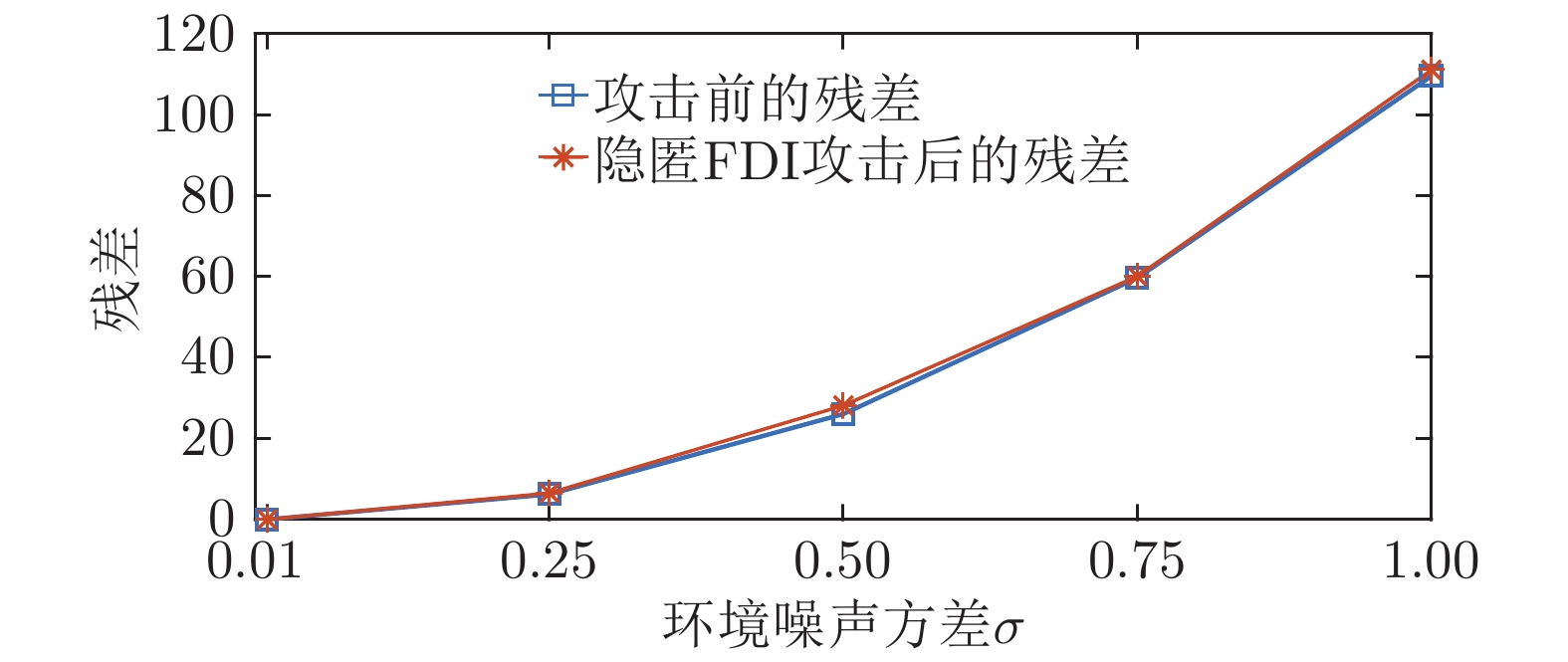
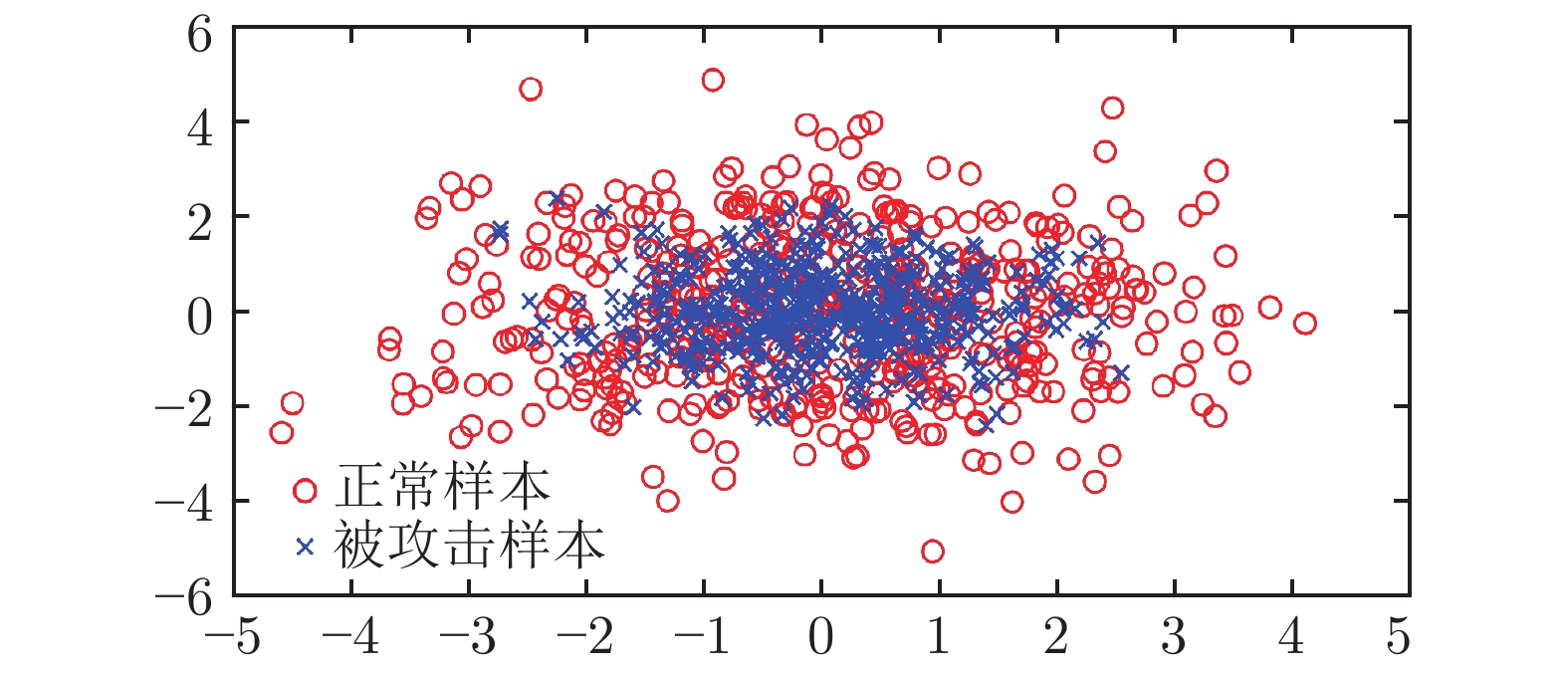
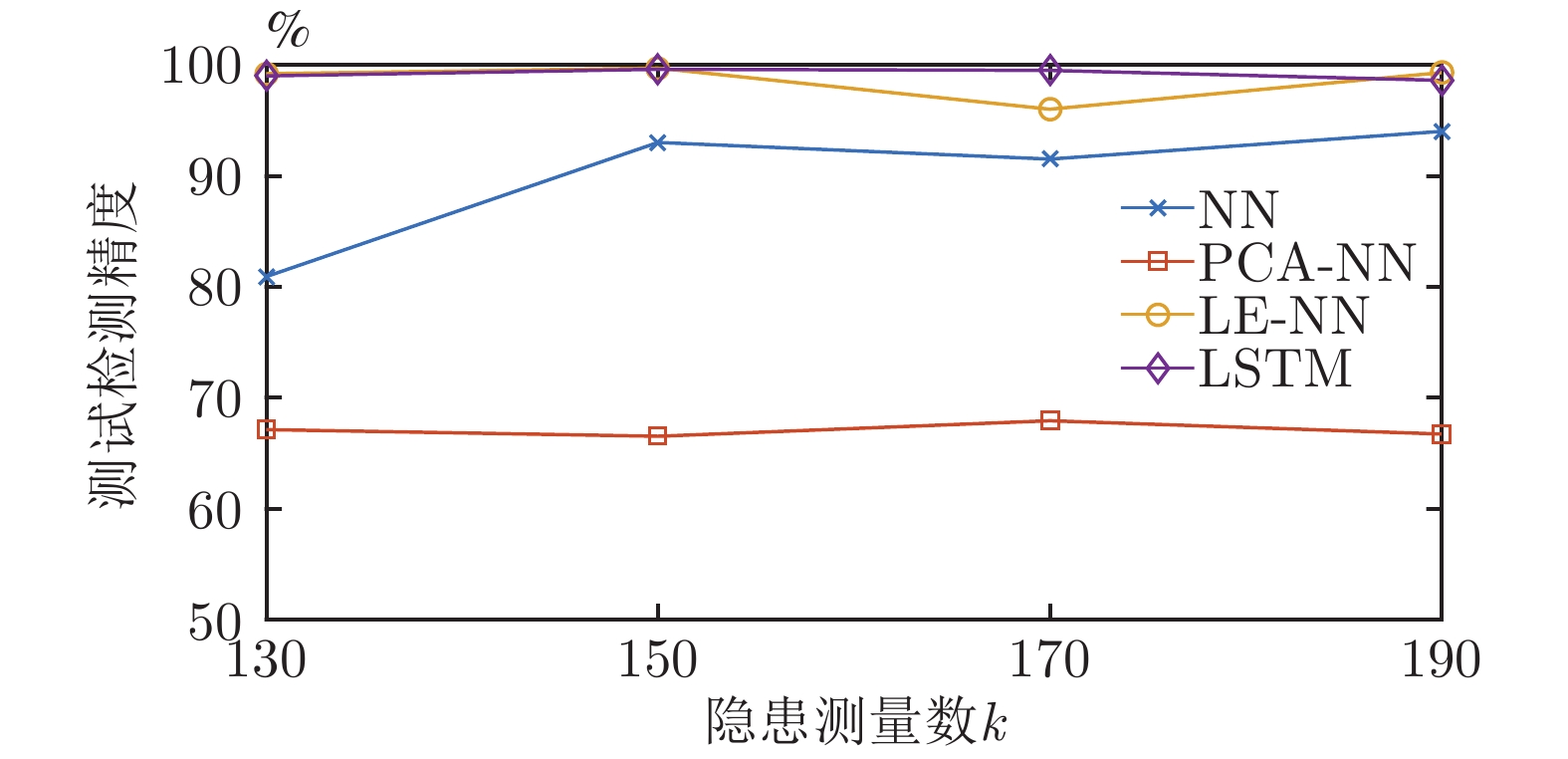
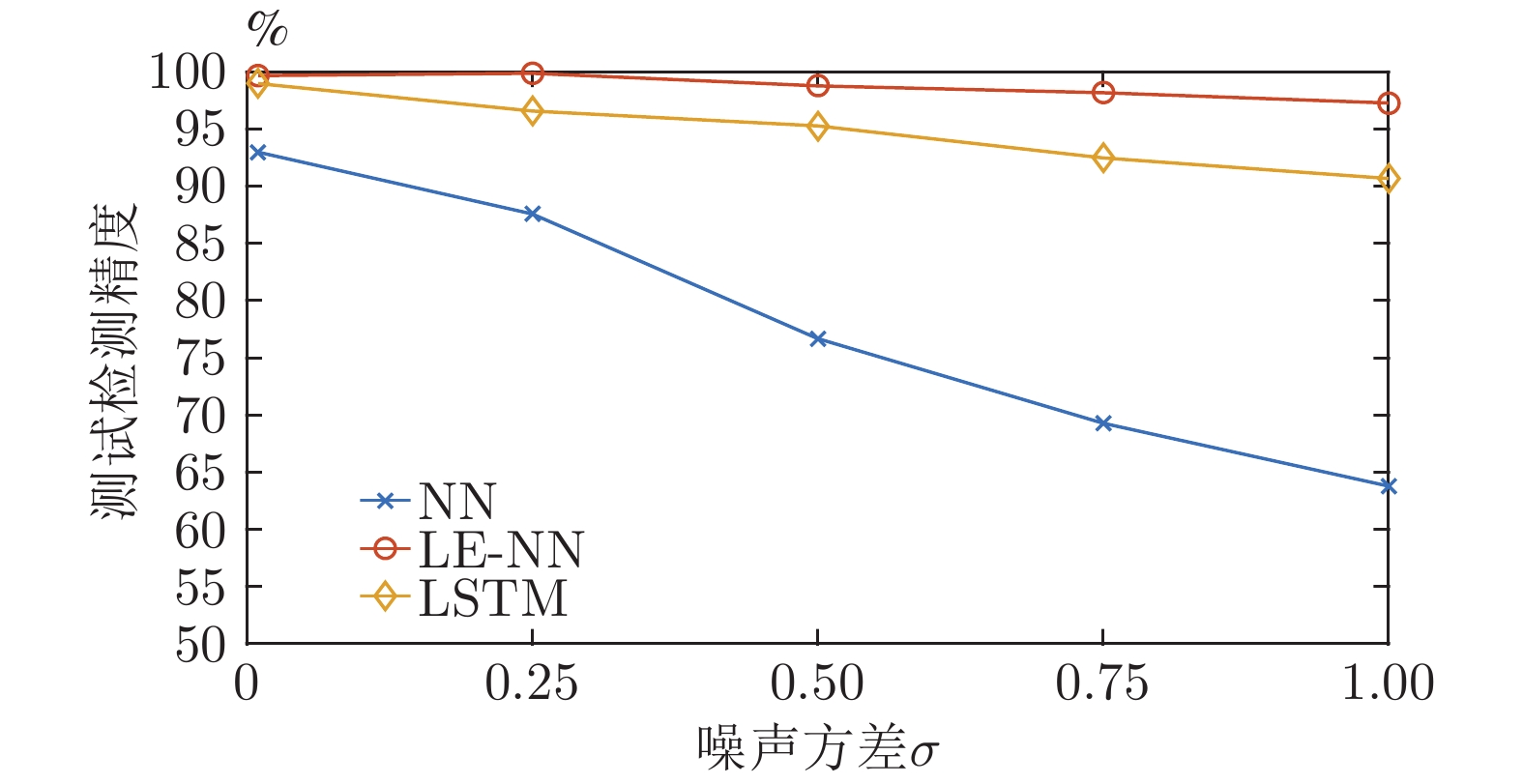
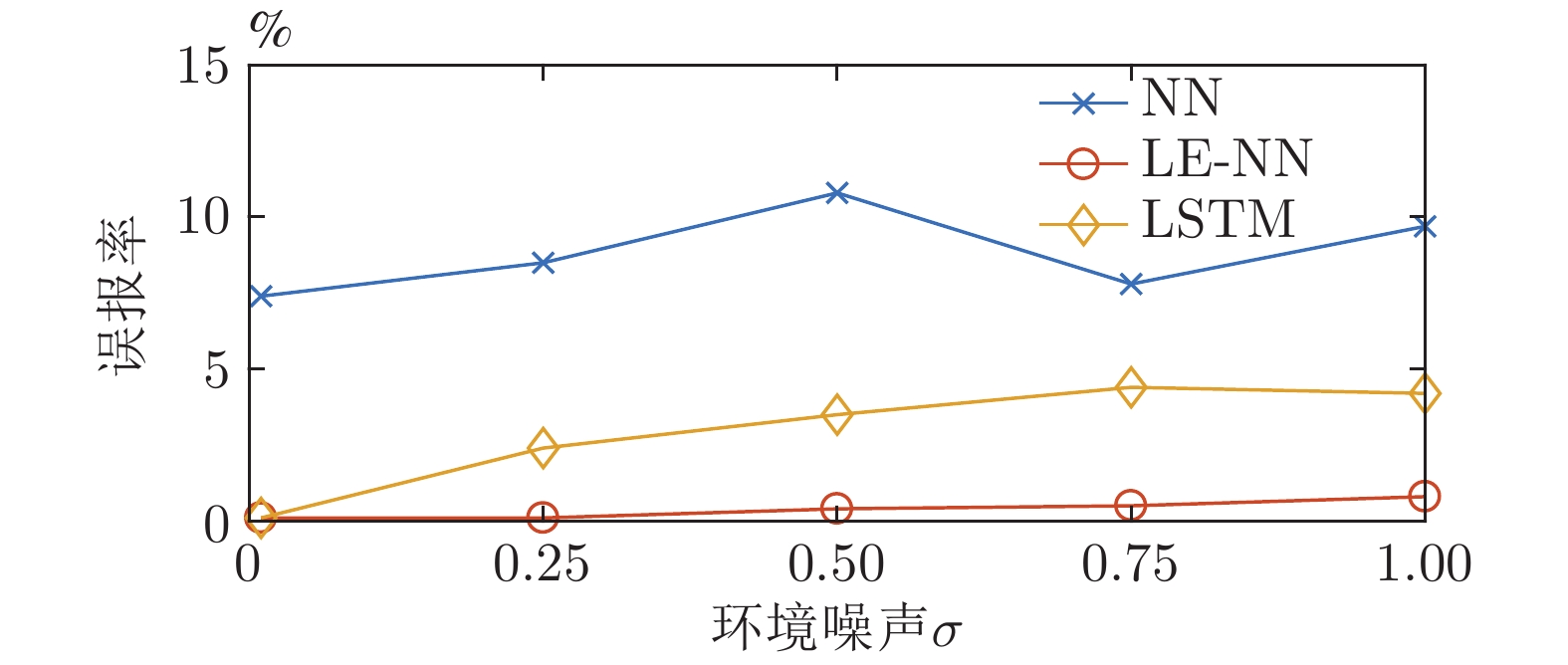
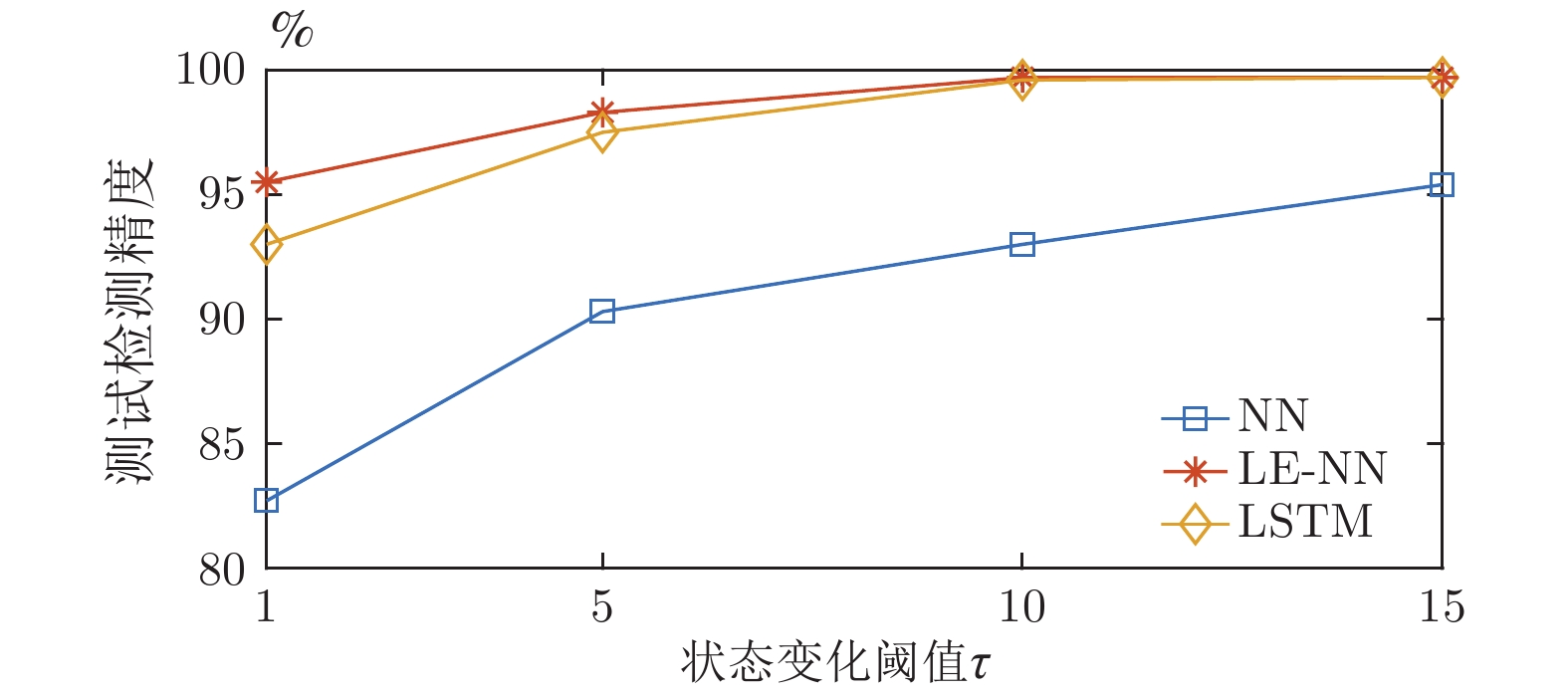
智能电网中的隐匿虚假数据入侵(False data injection, FDI)攻击能够绕过坏数据检测机制, 导致控制中心做出错误的状态估计, 进而干扰电力系统的正常运行. 由于电网系统具有复杂的拓扑结构, 故基于传统机器学习的攻击信号检测方法存在维度过高带来的过拟合问题, 而深度学习检测方法则存在训练时间长、占用大量计算资源的问题. 为此, 针对智能电网中的隐匿FDI攻击信号, 提出了基于拉普拉斯特征映射降维的神经网络检测学习算法, 不仅降低了陷入过拟合的风险, 同时也提高了隐匿FDI攻击检测学习算法的泛化能力. 最后, 在IEEE57-Bus电力系统模型中验证了所提方法的优点和有效性.
智能电网中的隐匿虚假数据入侵(False data injection, FDI)攻击能够绕过坏数据检测机制, 导致控制中心做出错误的状态估计, 进而干扰电力系统的正常运行. 由于电网系统具有复杂的拓扑结构, 故基于传统机器学习的攻击信号检测方法存在维度过高带来的过拟合问题, 而深度学习检测方法则存在训练时间长、占用大量计算资源的问题. 为此, 针对智能电网中的隐匿FDI攻击信号, 提出了基于拉普拉斯特征映射降维的神经网络检测学习算法, 不仅降低了陷入过拟合的风险, 同时也提高了隐匿FDI攻击检测学习算法的泛化能力. 最后, 在IEEE57-Bus电力系统模型中验证了所提方法的优点和有效性.