

-
摘要: 为了克服传统中枢模式发生器(Central pattern generator, CPG)关节空间控制方法的复杂性和局限性, 本文基于自学习中枢模式发生器模型, 提出了一套在线调制和融合多传感器信息的仿人机器人环境自适应行走控制方法.算法难点在于如何在机器人的工作空间将自学习CPG用于工作空间轨迹生成, 并使CPG参数直接和步态模式相关联.本文提出了利用自学习CPG来学习和实时生成机器人质心轨迹和脚掌轨迹的方法, 在线调节机器人步长、抬腿高度和步行速度等关键参数.参考生物反射行为, 利用传感反馈信息激发CPG以产生具有环境适应性的工作空间轨迹, 提升行走质量. 控制系统的参数通过优化算法来进一步改善行走性能.相比于传统的CPG关节空间法, 本文所采用的自学习CPG工作空间法不仅极大简化了CPG网络结构而且提高了仿人机器人行走的适应性.最后, 通过仿人机器人坡面适应性行走的仿真和实验, 验证了所提出控制策略的可行性和有效性.
-
关键词:
- 仿人机器人 /
- 自学习中枢模式发生器 /
- 适应性行走 /
- 轨迹生成
Abstract: To overcome the complexities and limitations of the joint-space CPG (central pattern generator)-inspired control methods, a novel CPG inspired workspace control strategy is presented in this work, where humanoid adaptive workspace trajectories is generated online through the self-learning CPG (SL-CPG). The challenge of this work is that how to generate the workspace trajectory of the humanoid robot in the workspace via SL-CPG and how to directly connect the SL-CPG parameters with the walking gait mode. In this paper, a novel method to generate the foot trajectory and center of mass (CoM) trajectory by using two sets of SL-SPG is proposed, and in this way some key parameters such as robot step size, leg height, and walking speed can be adjusted online. The resultant workspace trajectories can be adjusted by the sensory information, which mimics the vestibular reflex of animals. Furthermore, an evolutionary algorithm is developed to tune the control system parameters to improve the walking performance. Compared with the traditional CPG joint-space methods, the SL-CPG workspace method adopted in this paper not only greatly simplifies the CPG network structure but also improves the adaptability of humanoid robot walking. Finally, the applicability of the proposed control strategy is demonstrated through simulations and experiments focusing on the humanoid robots gait pattern adaptation over sloped terrain.-
Key words:
- Humanoid robot /
- self-learning central pattern generator (SL-CPG) /
- adaptive walking /
- trajectory generation
1) 本文责任编委 刘艳军 -
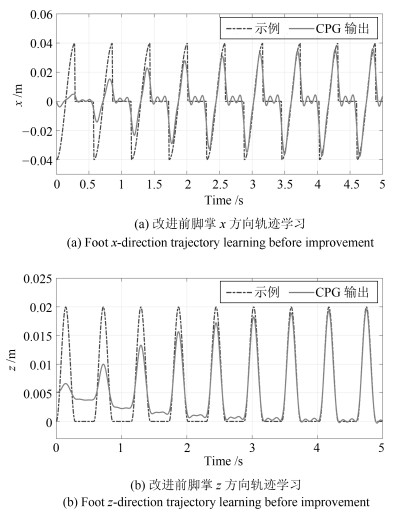
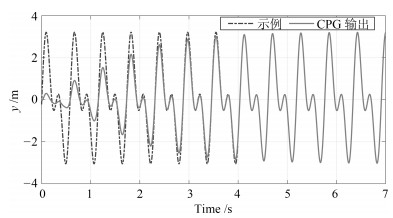
图 6 CPG模型改进前脚掌$x$方向和$z$方向轨迹学习结果
Fig. 6 The learning results of the $x$ and $z$ direction foot trajectories before CPG model improved
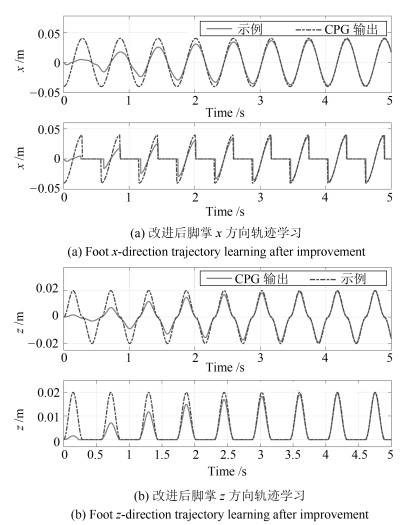
图 7 CPG模型改进后脚掌$x$方向和$z$方向轨迹学习结果
Fig. 7 The learning results of the $x$ and $z$ direction foot trajectories after CPG model improved
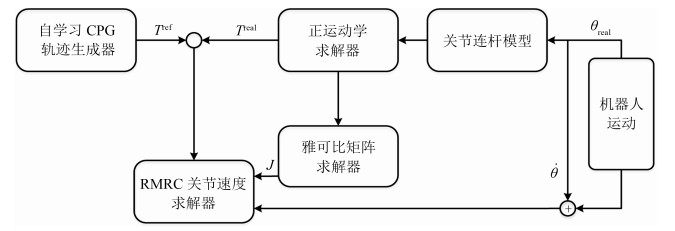
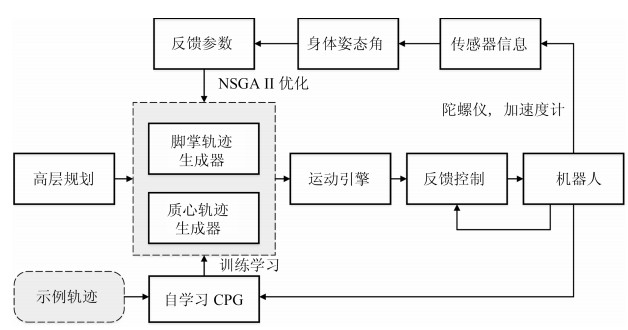
图 9 基于微分逆运动学的机器人运动控制引擎设计框图
Fig. 9 Block diagram of robot motion control engine based on differential inverse kinematics
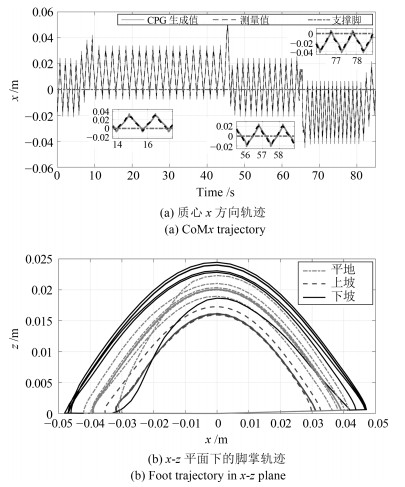
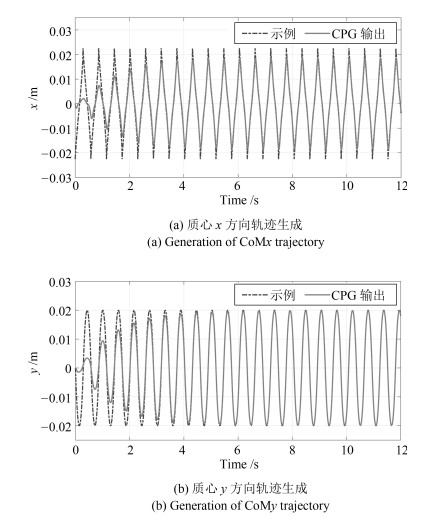
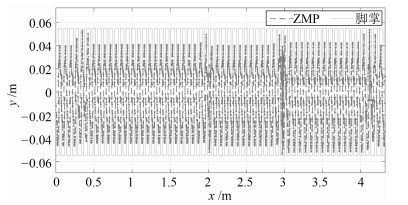
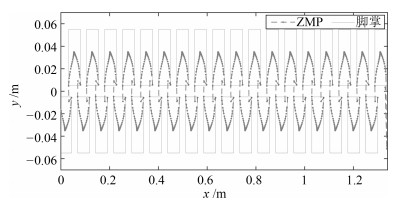
图 13 自学习CPG在线生成的质心CoM$x$和脚掌轨迹
Fig. 13 Online generated CoM$x$ and foot trajectory by SL-CPG
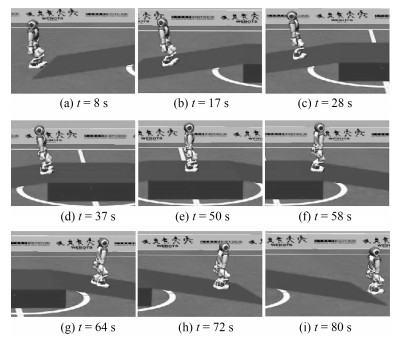
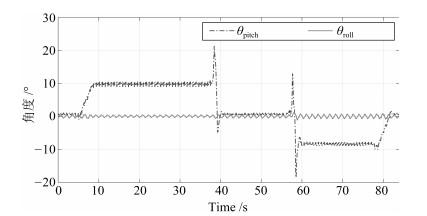
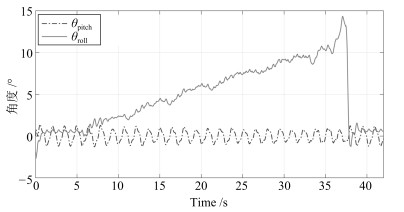
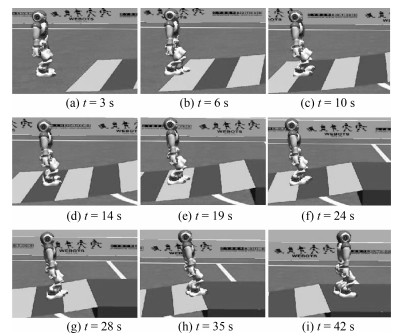
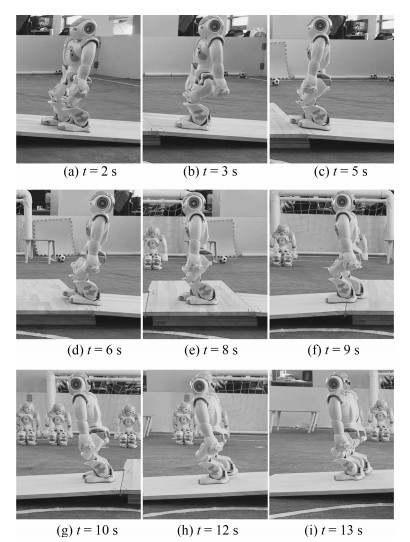
图 15 坡面行走仿真截图
Fig. 15 Snapshots of d slope terrain adaptive walking simulation experiment
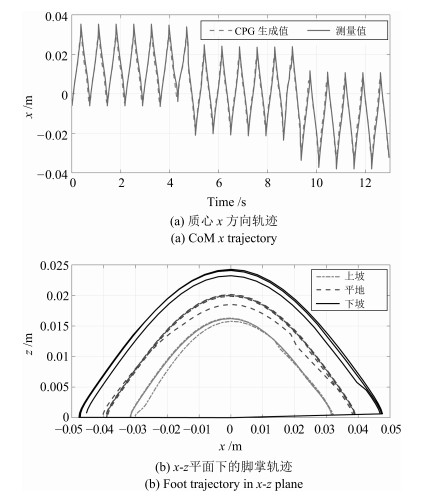
图 21 自学习CPG在线生成的质心CoM$x$和脚掌轨迹
Fig. 21 Online generated CoM$x$ and foot trajectory by SL-CPG
表 1 最优参数集
Table 1 Optimal parameters set
参数 值 $ K_a $ 0.0137 $ K_{{\rm CoM}_x} $ 0.0384 $ K_{{\rm Foot}x} $ 0.0365 $ K_{{\rm Foot}z} $ 0.0401 $ K_{\omega} $ 0.0212 $ K_{\rm sw} $ 0.4813 $ K_{\rm sup} $ 0.4677  下载: 导出CSV
下载: 导出CSV
-
[1] 田彦涛, 孙中波, 李宏扬, 王静. 动态双足机器人的控制与优化研究进展. 自动化学报, 2016, 42(8): 1142-1157 doi: 10.16383/j.aas.2016.c150821Tian Yan-Tao, Sun Zhong-Bo, Li Hong-Yang, Wang Jing. A review of optimal and control strategies for dynamic walking bipedal robots. Acta Automatica Sinica, 2016, 42(8): 1142-1157 doi: 10.16383/j.aas.2016.c150821 [2] Vukobratović M, Borovac B. Zero-moment point-thirty five years of its life. International Journal of Humanoid Robotics, 2004, 1(1): 157-173 doi: 10.1142/S0219843604000083 [3] Huang Q, Yokoi K, Kajita S, Kaneko K, Arai H, Koyachi N, et al. Planning walking patterns for a biped robot. IEEE Transactions on Robotics and Automation, 2001, 17(3): 280 -289 doi: 10.1109/70.938385 [4] Hu K, Ott C, Lee D. Learning and generalization of compensative zero-moment point trajectory for biped walking. IEEE Transactions on Robotics, 2016, 32(3): 717-725 doi: 10.1109/TRO.2016.2553677 [5] Kim S, Hirota K, Nozaki T, Murakami T. Human motion analysis and its application to walking stabilization with COG and ZMP. IEEE Transactions on Industrial Informatics, 2018, 14(11): 5178-5186 doi: 10.1109/TII.2018.2830341 [6] Monje C A, Martinez S, Pierro P, Balaguer C. Whole-body balance control of a humanoid robot in real time based on ZMP stability regions approach. Cybernetics and Systems, 2018, 49(7-8): 521-538 doi: 10.1080/01969722.2018.1552858 [7] Park S, Oh J. Real-time continuous ZMP pattern generation of a humanoid robot using an analytic method based on capture point. Advanced Robotics, 2019, 33(1): 33-48 doi: 10.1080/01691864.2018.1556117 [8] 罗林聪, 侯增广, 王卫群, 彭亮. 一种基于非线性振荡器的步态轨迹自适应算法. 自动化学报, 2016, 42(12): 1951-1959 doi: 10.16383/j.aas.2016.c160205Luo Lin-Cong, Hou Zeng-Guang, Wang Wei-Qun, Peng Liang. A gait trajectory adaptation algorithm based on nonlinear oscillator. Acta Automatica Sinica, 2016, 42(12): 1951-1959 doi: 10.16383/j.aas.2016.c160205 [9] Duysens J, Van de Crommert H W A A. Neural control of locomotion, Part 1: The central pattern generator from cats to humans. Gait and Posture, 1998, 7(2): 131-141 doi: 10.1016/S0966-6362(97)00042-8 [10] Grillner S, Ekeberg Ö, El Manira A, Lansner A, Parker D, Tegnér J, et al. Intrinsic function of a neuronal network——A vertebrate central pattern generator. Brain Research Reviews, 1998, 26(2-3): 184-197 doi: 10.1016/S0165-0173(98)00002-2 [11] Ijspeert A J. Central pattern generators for locomotion control in animals and robots: A review. Neural Networks, 2008, 21(4): 642-653 doi: 10.1016/j.neunet.2008.03.014 [12] Wu Q D, Liu C J, Zhang J Q, Chen Q J. Survey of locomotion control of legged robots inspired by biological concept. Science in China Series F: Information Sciences, 2009, 52(10): 1715-1729 doi: 10.1007/s11432-009-0169-7 [13] Yu J Z, Tan M, Chen J, Zhang J W. A survey on CPG-inspired control models and system implementation. IEEE Transactions on Neural Networks and Learning Systems, 2014, 25(3): 441-456 doi: 10.1109/TNNLS.2013.2280596 [14] Ijspeert A J. A connectionist central pattern generator for the aquatic and terrestrial gaits of a simulated salamander. Biological Cybernetics, 2001, 84(5): 331-348 doi: 10.1007/s004220000211 [15] Zhong B, Zhang S W, Xu M, Zhou Y C, Fang T, Li W H. On a CPG-based hexapod robot: AmphiHex-Ⅱ with variable stiffness legs. IEEE/ASME Transactions on Mechatronics, 2018, 23(2): 542-551 doi: 10.1109/TMECH.2018.2800776 [16] Wang W, Gu D B, Xie G M. Autonomous optimization of swimming gait in a fish robot with multiple onboard sensors. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(5): 891-903 doi: 10.1109/TSMC.2017.2683524 [17] Fukui T, Fujisawa H, Otaka K, Fukuoka Y. Autonomous gait transition and galloping over unperceived obstacles of a quadruped robot with CPG modulated by vestibular feedback. Robotics and Autonomous Systems, 2019, 111: 1-19 doi: 10.1016/j.robot.2018.10.002 [18] Zhu M Z, Xu W L, Cheng L K. Esophageal peristaltic control of a soft-bodied swallowing robot by the central pattern generator. IEEE/ASME Transactions on Mechatronics, 2017, 22(1): 91-98 doi: 10.1109/TMECH.2016.2609465 [19] Yu J Z, Wu Z X, Wang M, Tan M. CPG network optimization for a biomimetic robotic fish via PSO. IEEE Transactions on Neural Networks and Learning Systems, 2016, 27(9): 1962-1968 doi: 10.1109/TNNLS.2015.2459913 [20] Liu C J, Xia L, Zhang C Z, Chen Q J. Multi-layered CPG for adaptive walking of quadruped robots. Journal of Bionic Engineering, 2018, 15(2): 341-355 doi: 10.1007/s42235-018-0026-8 [21] Manzoor S, Cho Y G, Choi Y. Neural oscillator based CPG for various rhythmic motions of modular snake robot with active joints. Journal of Intelligent and Robotic Systems, 2019, 94(3): 641-654 http://www.onacademic.com/detail/journal_1000040400458310_704d.html [22] Righetti L, Ijspeert A J. Programmable central pattern generators: An application to biped locomotion control. In: Proceedings of the 2006 IEEE International Conference on Robotics and Automation. Orlando, Florida, USA: IEEE, 2006. 1585-1590 [23] Hu Y H, Liang J H, Wang T M. Parameter synthesis of coupled nonlinear oscillators for CPG-based robotic locomotion. IEEE Transactions on Industrial Electronics, 2014, 61(11): 6183-6191 doi: 10.1109/TIE.2014.2308150 [24] Kaluza P, Cioacǎ T. Phase oscillator neural network as artificial central pattern generator for robots. Neurocomputing, 2012, 97: 115-124 doi: 10.1016/j.neucom.2012.05.019 [25] Crespi A, Ijspeert A J. Online optimization of swimming and crawling in an amphibious snake robot. IEEE Transactions on Robotics, 2008, 24(1): 75-87 doi: 10.1109/TRO.2008.915426 [26] Matsuoka K. Mechanisms of frequency and pattern control in the neural rhythm generators. Biological Cybernetics, 1987, 56(5): 345-353 [27] Liu C J, Chen Q J, Wang D W. CPG-inspired workspace trajectory generation and adaptive locomotion control for quadruped robots. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2011, 41(3): 867- 880 doi: 10.1109/TSMCB.2010.2097589 [28] Fukuoka Y, Kimura H, Cohen A H. Adaptive dynamic walking of a quadruped robot on irregular terrain based on biological concepts. The International Journal of Robotics Research, 2003, 22(3-4): 187-202 doi: 10.1177/0278364903022003004 [29] Righetti L, Buchli J, Ijspeert A J. Dynamic Hebbian learning in adaptive frequency oscillators. Physica D: Nonlinear Phenomena, 2006, 216(2): 269-281 doi: 10.1016/j.physd.2006.02.009 [30] Righetti L, Buchli J, Ijspeert A J. From dynamic Hebbian learning for oscillators to adaptive central pattern generators. In: Proceedings of the 3rd International Symposium on Adaptive Motion in Animals and Machines. Ilmenau, Germany: Verlag ISLE, 2005. [31] Sugimoto N, Morimoto J. Phase-dependent trajectory optimization for CPG-based biped walking using path integral reinforcement learning. In: Proceedings of the 11th IEEE-RAS International Conference on Humanoid Robots. Bled, Slovenia: IEEE, 2011. 255-260 [32] Saputra A A, Botzheim J, Sulistijono I A, Kubota N. Biologically inspired control system for 3-D locomotion of a humanoid biped robot. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2016, 46(7): 898-911 doi: 10.1109/TSMC.2015.2497250 [33] Nassour J, Hénaff P, Benouezdou F, Cheng G. Multi-layered multi-pattern CPG for adaptive locomotion of humanoid robots. Biological Cybernetics, 2014, 108(3): 291-303 doi: 10.1007/s00422-014-0592-8 [34] Kim J J, Lee J J. Gait adaptation method of biped robot for various terrains using central pattern generator (CPG) and learning mechanism. In: Proceedings of the 2007 International Conference on Control, Automation and Systems. Seoul, Korea (South): IEEE, 2007. 10-14 [35] Aoi S, Tsuchiya K. Locomotion control of a biped robot using nonlinear oscillators. Autonomous Robots, 2005, 19(3): 219-232 doi: 10.1007/s10514-005-4051-1 [36] Nakamura Y, Mori T, Sato M A, Ishii S. Reinforcement learning for a biped robot based on a CPG-actor-critic method. Neural Networks, 2007, 20(6): 723-735 doi: 10.1016/j.neunet.2007.01.002 [37] Shafii N, Lau N, Reis L P. Learning to walk fast: Optimized hip height movement for simulated and real humanoid robots. Journal of Intelligent and Robotic Systems, 2015, 80(3-4): 555-571 doi: 10.1007/s10846-015-0191-5 [38] Matsubara T, Morimoto J, Nakanishi J, Sato M A, Doya K. Learning CPG-based biped locomotion with a policy gradient method. Robotics and Autonomous Systems, 2006, 54(11): 911-920 doi: 10.1016/j.robot.2006.05.012 [39] Liu C J, Wang D W, Chen Q J. Central pattern generator inspired control for adaptive walking of biped robots. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2013, 43(5): 1206-1215 doi: 10.1109/TSMC.2012.2235426 [40] Tran D H, Hamker F, Nassour J. A humanoid robot learns to recover perturbation during swinging motion. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2020, 50(10): 3701-3712 doi: 10.1109/TSMC.2018.2884619 [41] Kalani H, Akbarzadeh A, Nabavi S N, Moghimi S. Dynamic modeling and CPG-based trajectory generation for a masticatory rehab robot. Intelligent Service Robotics, 2018, 11(2): 187-205 doi: 10.1007/s11370-017-0245-6 [42] Chopra N, Spong M W. On synchronization of Kuramoto oscillators. In: Proceedings of the 44th IEEE Conference on Decision and Control. Seville, Spain: IEEE, 2005. 3916- 3922 [43] Chiaverini S. Singularity-robust task-priority redundancy resolution for real-time kinematic control of robot manipulators. IEEE Transactions on Robotics and Automation, 1997, 13(3): 398-410 doi: 10.1109/70.585902 [44] Deb K, Pratap A, Agarwal S, Meyarivan T. A fast and elitist multiobjective genetic algorithm: NSGA-Ⅱ. IEEE Transactions on Evolutionary Computation, 2002, 6(2): 182-197 doi: 10.1109/4235.996017 -

 下载:
下载:


计量
- 文章访问数: 1347
- HTML全文浏览量: 500
- PDF下载量: 247
- 被引次数: 0
