

Unsupervised Change Detection Based on Fuzzy Integral Considering Conflict Analysis
-
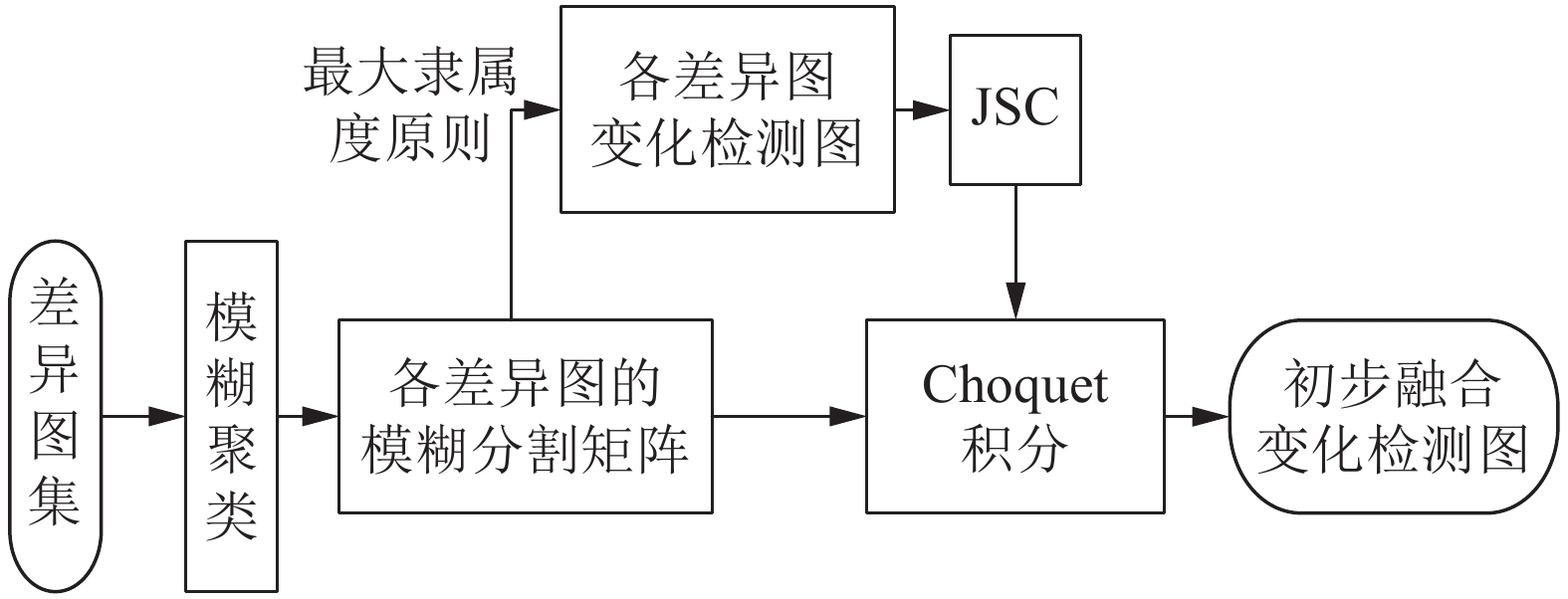
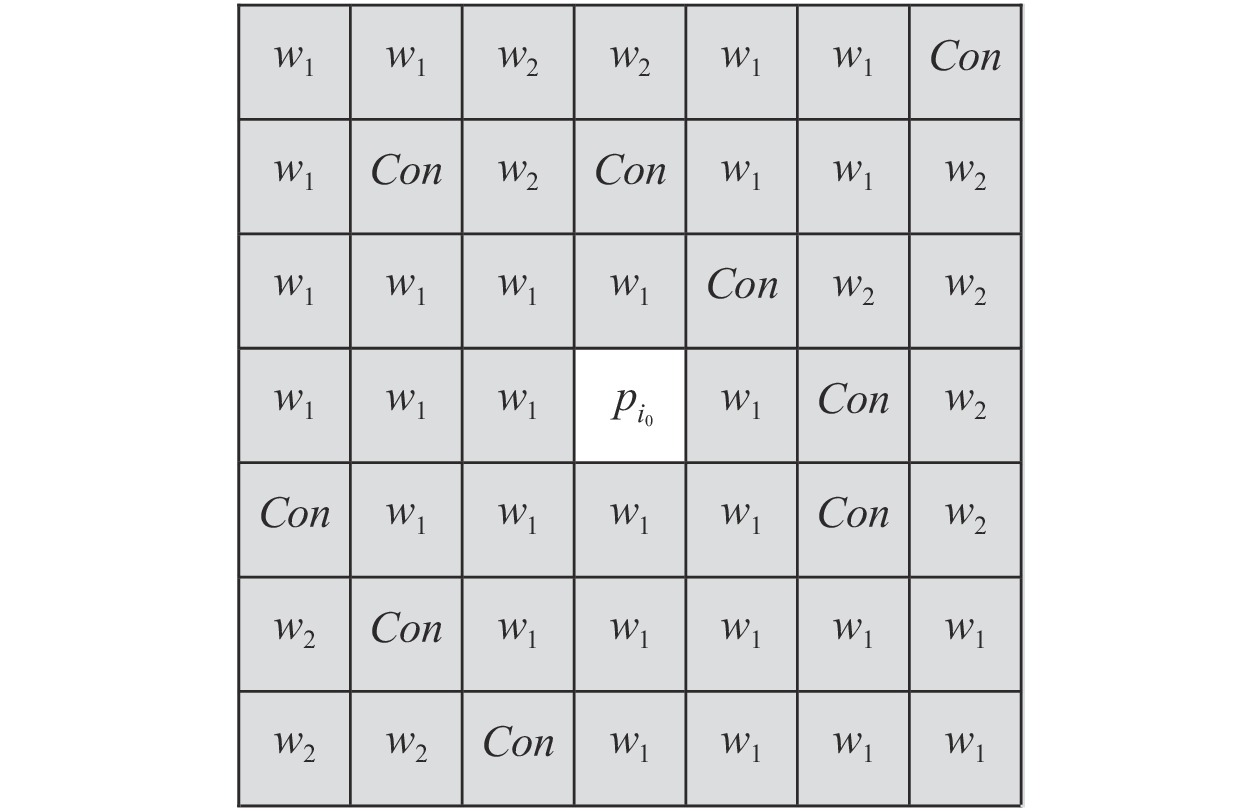
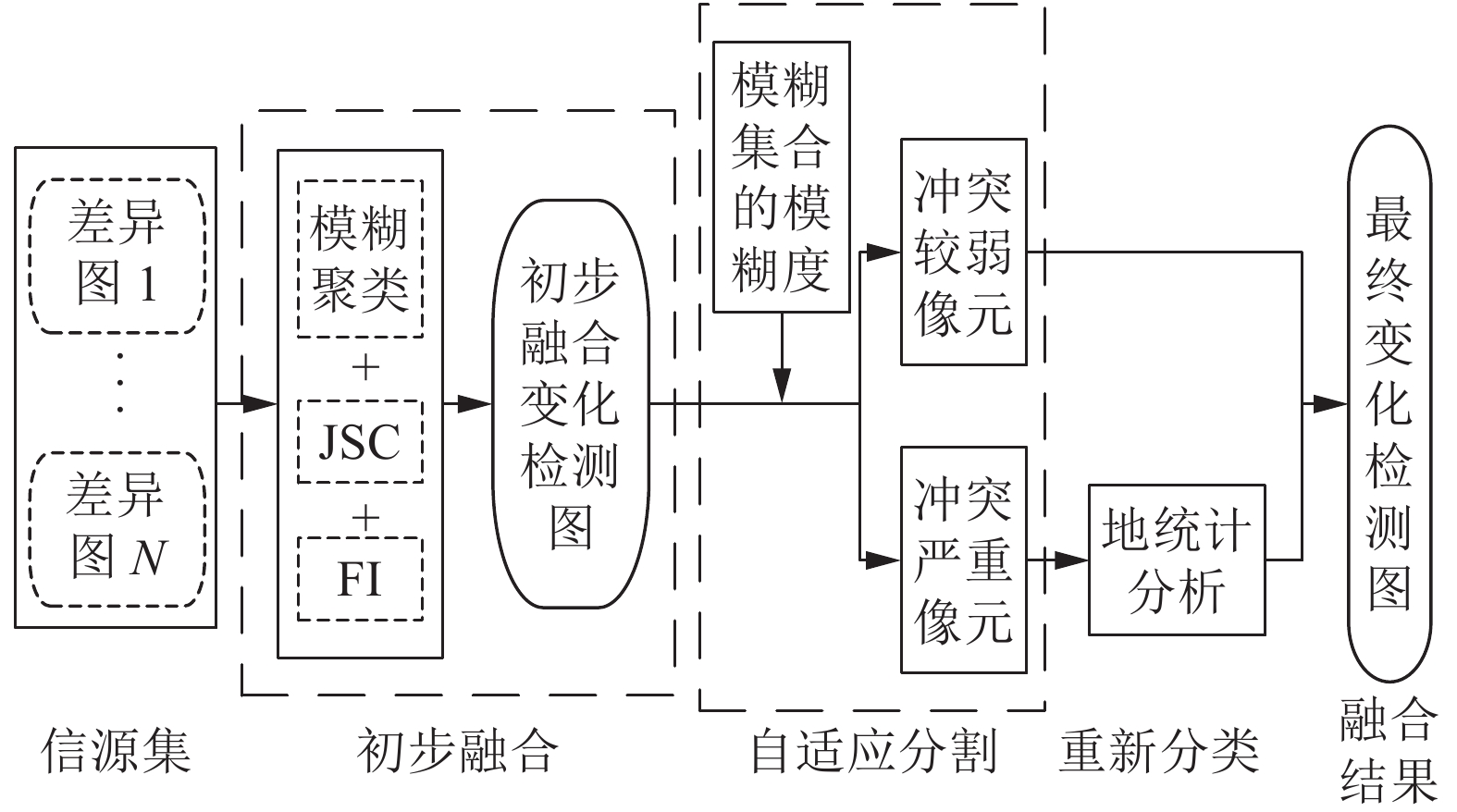
摘要: 以模糊积分(Fuzzy integral, FI)为基础, 提出一种顾及冲突分析(Conflict analysis, CA)的全自动遥感变化检测方法CA-based FI, CAFI). CAFI首先选取典型的对比算子, 生成信息互补的差异图(Difference image, DI)集; 其次利用模糊聚类、杰卡德相似系数和FI对差异图进行决策级融合, 得到初步融合变化检测图; 然后通过模糊集理论计算像元的信息冲突程度, 将初步融合检测结果自适应地划分为冲突严重区域和冲突较弱区域; 最后, 对冲突较弱的像元, 将其初步融合结果作为最终检测结果, 对易产生融合错误的冲突严重像元, 利用地统计分析对其重新分类. CAFI能够集成不同信息优势的同时, 很大程度地解决FI融合过程中的信息冲突问题. 三组真实遥感数据的实验结果验证了CAFI的有效性和鲁棒性.Abstract: This paper presents an automatic change detection method incorporating conflict analysis (CA) based on fuzzy integral (CAFI) for multitemporal remote sensing images. First, a difference image (DI) set with complementary information is generated by selecting typical comparison operators. Second, the DIs are fused in decision level by fuzzy clustering, Jaccard similarity coefficient and fuzzy integral, and a preliminary change detection map is obtained. Third, the preliminary map is adaptively partitioned into two regions — strongly conflicting region and weakly conflicting region — by computing the information conflict degree of each pixel with fuzzy set theory. Finally, for the weakly conflicting pixels, their preliminary detecting results are taken as the final results; and the strongly conflicting pixels likely to be misclassified are reclassified based on geostatistical analysis. CAFI can integrate the advantages of different DI images and resolve the FI conflicting situations largely. Experimental results on three real remote sensing images verify the effectiveness and robustness of the proposed technique.
-
Key words:
- Remote sensing /
- unsupervised /
- change detection /
- fuzzy integral (FI) /
- conflict analysis (CA)
-
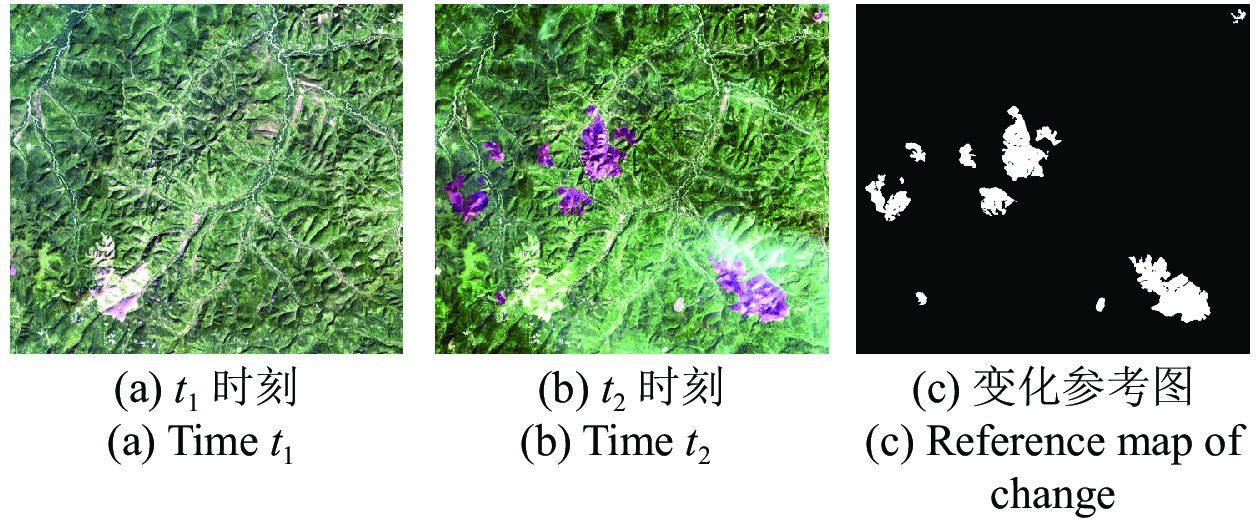
图 4 实验1中使用的遥感影像及其变化参考图
Fig. 4 The remote sensing images used in Experiment 1 and its reference map
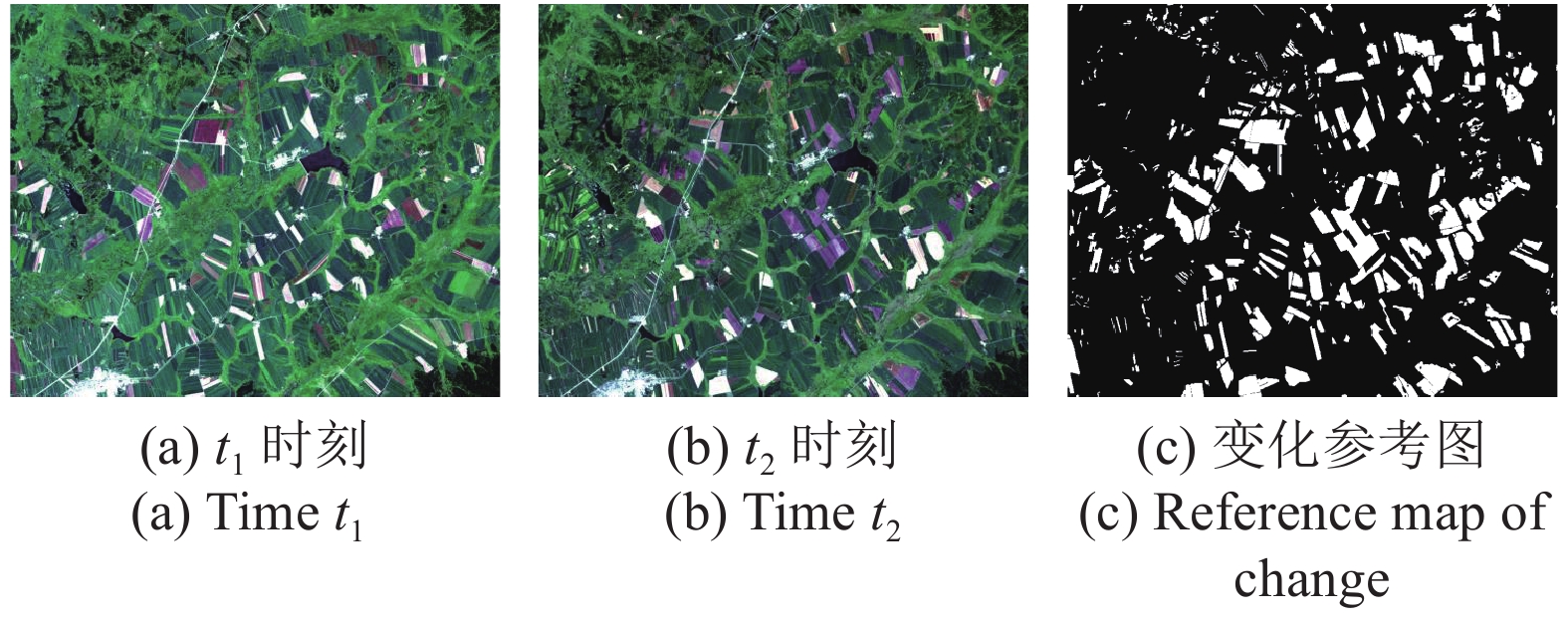
图 5 实验2中使用的遥感影像及其变化参考图
Fig. 5 The remote sensing images used in Experiment 2 and its reference map

图 6 实验3中使用的遥感影像及其变化参考图
Fig. 6 The remote sensing images used in Experiment 3 and its reference map
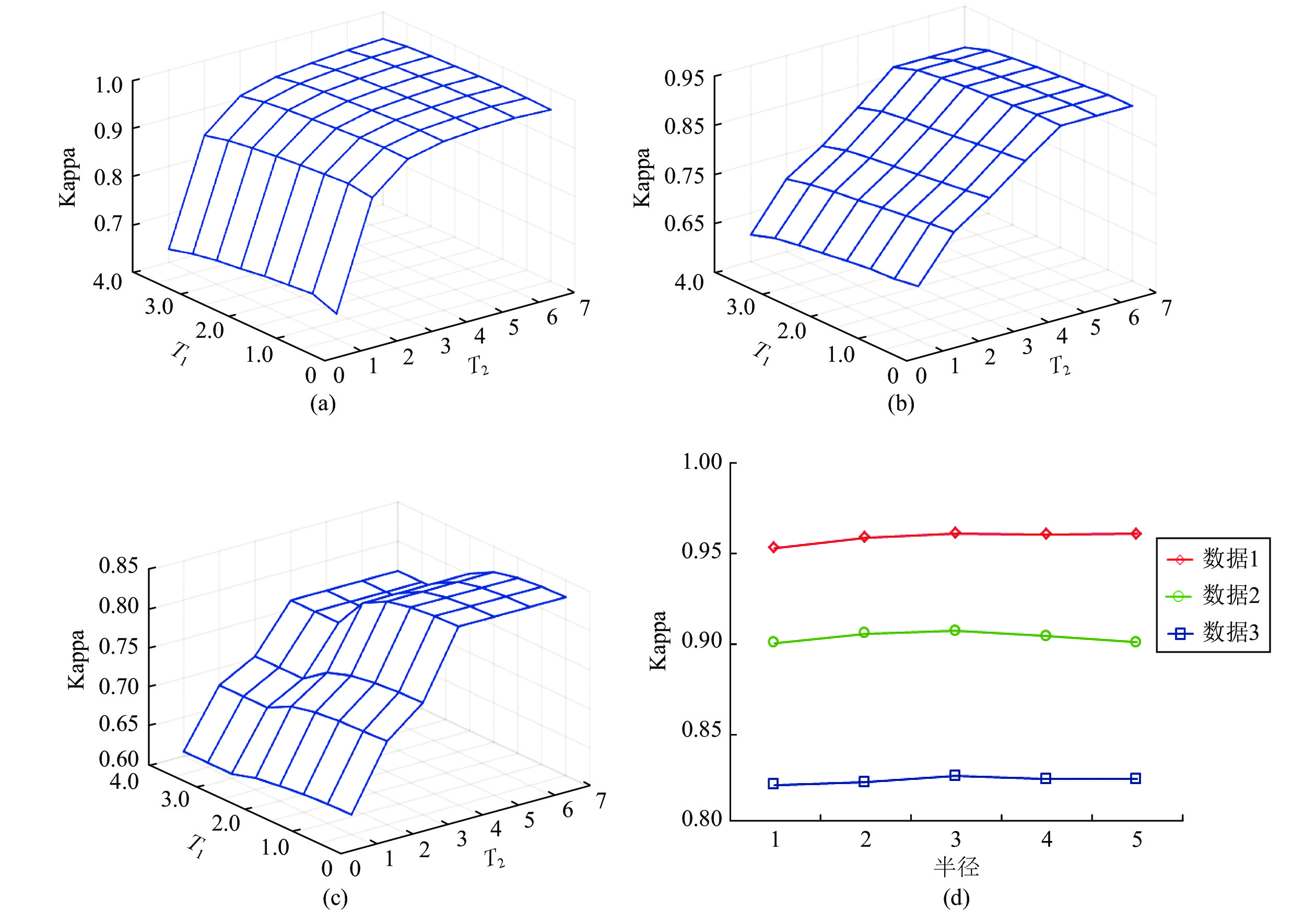
图 7 参数分析图 ((a) ~ (c) Kappa系数随参数
$T_1$ 和$T_2$ 的变化曲面; (d) Kappa系数随半径$r$ 的变化曲线)Fig. 7 Diagram of parameter analysis ((a) ~ (c) changing surface of Kappa coefficients with parameters
$T_1$ and$T_2$ and (d) relationships between KC and radius$r$ for the three datasets)
图 8 通过CVA、SCM、PCA和SGD得到的第1组实验数据的4组差异图
Fig. 8 The four difference images obtained by CVA, SCM, PCA, and SGD on Dataset 1
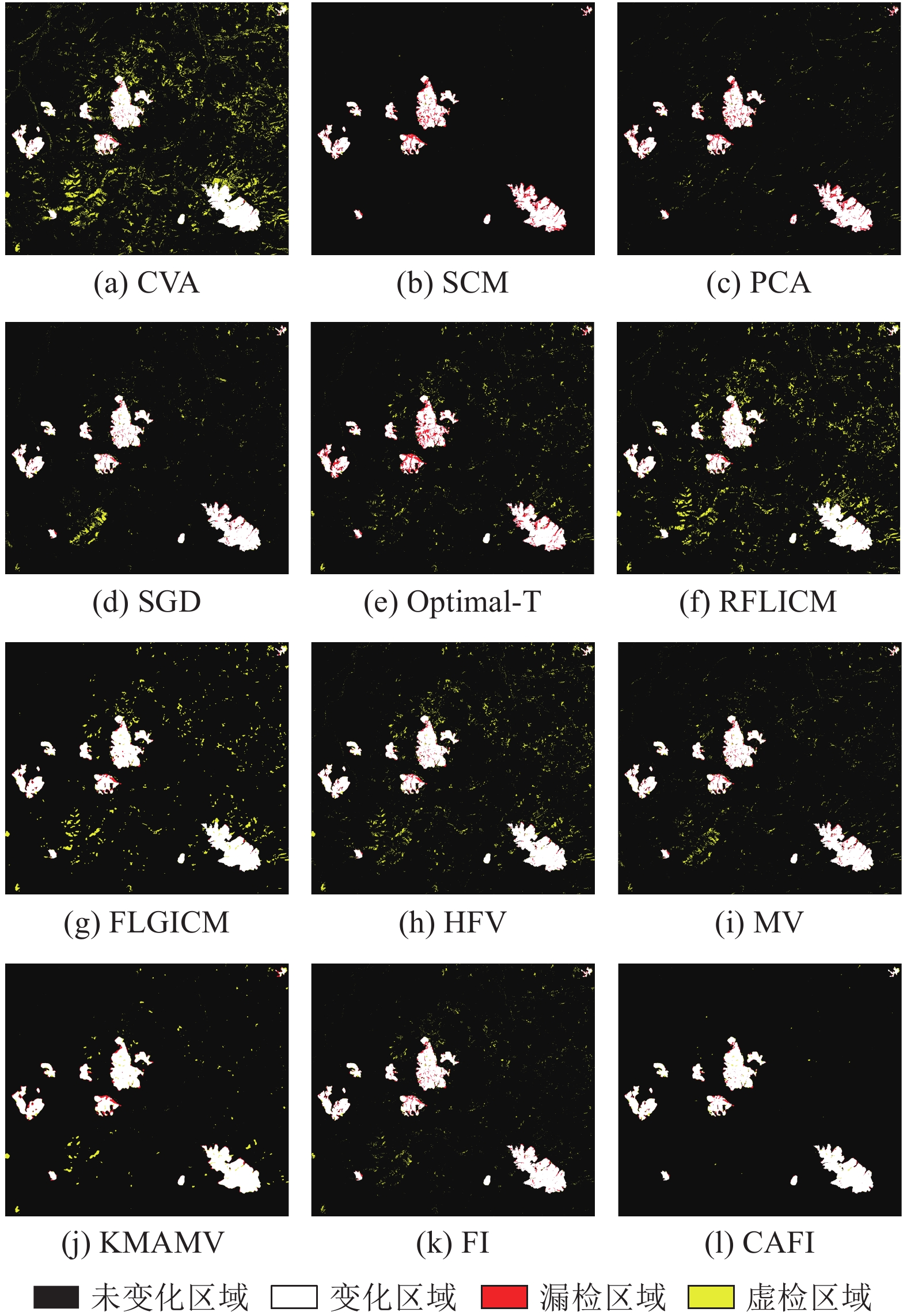
图 9 不同检测技术对第1组实验数据的变化检测结果
Fig. 9 Change detection results obtained by different methods on Dataset 1

图 10 不同检测技术对第2组实验数据的变化检测结果
Fig. 10 Change detection results obtained by different methods on Dataset 2

图 11 不同检测技术对第3组实验数据的变化检测结果
Fig. 11 Change detection results obtained by different methods on Dataset 3

图 12 影像块A及其变化检测结果
Fig. 12 Image blocks A and its change detection results on Dataset 3

图 13 影像块F 及其变化检测结果
Fig. 13 Image blocks F and its change detection results on Dataset 3
表 1 波谱曲线的变化类型
Table 1 The change categories of spectral curve
变化类型 具有性质 1 a 2 b 3 c 4 a, b 5 a, c 6 b, c 7 a, b, c  下载: 导出CSV
下载: 导出CSV
表 2 第1组实验数据变化检测结果的定量分析指标
Table 2 Quantitative analysis indices for change detection results on Dataset 1
方法 MD FA OE Kappa CVA 3 400 87 835 91 235 0.6037 SCM 12 280 1 174 13 454 0.9067 PCA 11 534 7 989 19 523 0.8708 SGD 5 521 12 956 18 477 0.8852 Optimal-T 13 994 19 215 33 209 0.7911 RFLICM 4 356 53 102 57 458 0.7099 FLGICM 4 000 28 412 32 412 0.8161 HFV 4 594 31 556 36 150 0.7975 MV 5 703 16 354 22 057 0.8654 KMAMV 5 454 10 220 15 674 0.9011 FI 5 884 12 379 18 263 0.8859 CAFI 3 331 2 607 5 938 0.9613
下载: 导出CSV
表 3 第2组实验数据变化检测结果的定量分析指标
Table 3 Quantitative analysis indices for change detection results on Dataset 2
方法 MD FA OE Kappa CVA 14 854 20 301 35 155 0.8335 SCM 34 319 1 758 36 077 0.8047 PCA 41 724 3 681 45 405 0.7491 SGD 15 270 14 635 29 905 0.8555 Optimal-T 19 353 13 199 32 552 0.8397 RFLICM 15 676 16 389 32 065 0.8458 FLGICM 18 401 8 839 27 240 0.8643 HFV 14 223 14 172 28 395 0.8631 MV 14 386 14 425 28 811 0.8611 KMAMV 17 222 10 442 27 664 0.8635 FI 23 540 3 695 27 235 0.8593 CAFI 11 976 7 009 18 985 0.9069
下载: 导出CSV
表 4 第3组实验数据变化检测结果的定量分析指标
Table 4 Quantitative analysis indices for change detection results on Dataset 3
方法 MD FA OE Kappa CVA 98 603 42 243 140 846 0.7462 SCM 149 608 6 455 156 063 0.7037 PCA 137 465 14 987 152 452 0.7142 SGD 86 756 53 509 140 265 0.7506 Optimal-T 70 010 62 914 132 924 0.7671 RFLICM 101 180 37 026 138 206 0.7498 FLGICM 147 678 17 094 164 772 0.6896 HFV 93 148 33 121 126 269 0.7719 MV 93 986 39 105 133 091 0.7603 KMAMV 114 737 26 485 141 222 0.7406 FI 111 342 12 559 123 901 0.7710 CAFI 67 261 30 538 97 799 0.8257
下载: 导出CSV
表 5 实验2中的冲突严重像元的变化检测结果
Table 5 Change detection results on strongly conflicting pixels in Experiment 2
方法 $OE$ $Con_{OE}$ $P_{Con_{OE} }\;({\text{%} })$ ${Con_A}\;({\text{%} })$ CVA 35 155 27 086 77.04 69.03 SCM 36 077 19 837 54.99 77.32 PCA 45 405 18 747 41.29 78.56 SGD 29 905 22 088 73.86 74.75 Optimal-T 32 552 23 135 71.07 73.55 RFLICM 32 065 23 684 73.86 72.92 FLGICM 27 240 18 291 67.15 79.09 HFV 28 395 20 857 73.45 76.15 MV 28 811 21 724 75.40 75.16 KMAMV 27 664 18 913 68.37 78.38 FI 27 235 20 779 76.29 76.24 CAFI 18 985 12 529 — 85.68
下载: 导出CSV
-
[1] 冯文卿, 眭海刚, 涂继辉, 孙开敏, 黄伟明. 高分辨率遥感影像的随机森林变化检测方法. 测绘学报, 2017, 46(11): 1880-1890. doi: 10.11947/j.AGCS.2017.20170074Feng Wen-Qing, Sui Hai-Gang, Tu Ji-Hui, Sun Kai-Min, Huang Wei-Ming. Change detection method for high resolution remote sensing images using random forest. Acta Geodaetica et Cartographica Sinica, 2017, 46(11): 1880-1890 doi: 10.11947/j.AGCS.2017.20170074 [2] Lu D, Mausel P, Brondizio E, Moran E. Change detection techniques. International Journal of Remote Sensing, 2004, 25(12): 2365-2401 doi: 10.1080/0143116031000139863 [3] Zhang C, Li G, Cui W. High-resolution remote sensing image change detection by statistical-object-based method. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2018, 11(7): 2440-2447 doi: 10.1109/JSTARS.2018.2817121 [4] 李炜明, 吴毅红, 胡占义. 视角和光照显著变化时的变化检测方法研究. 自动化学报, 2009, 35(5): 449-461Li Wei-Ming, Wu Yi-Hong, Hu Zhan-Yi. Urban change detection under large view and illumination variations. Acta Automatica Sinica, 2009, 35(5): 449-461 [5] 罗湾, 林伟, 张红波. 热含量不变量的SAR图像点特征变化检测. 自动化学报, 2014, 40(6): 1126-1134Luo Wan, Lin Wei, Zhang Hong-Bo. A change detection method of SAR image using point signature based on heat content invariants. Acta Automatica Sinica, 2014, 40(6): 1126-1134 [6] Liu Z G, Li G, Mercier G, He Y, Pan Q. Change detection in heterogenous remote sensing images via homogeneous pixel transformation. IEEE Transactions on Image Processing, 2018, 27(4): 1822-1834 doi: 10.1109/TIP.2017.2784560 [7] 苏娟, 王贵锦, 林行刚, 刘代志. 基于多时相遥感图像的人造目标变化检测算法. 自动化学报, 2008, 34(9): 1040-1046Su Juan, Wang Gui-Jin, Lin Xing-Gang, Liu Dai-Zhi. A change detection algorithm for man-made objects based on multi-temporal remote sensing images. Acta Automatica Sinica, 2008, 34(9): 1040-1046 [8] Le Hegarat-Mascle S, Seltz R. Automatic change detection by evidential fusion of change indices. Remote Sensing of Environment, 2004, 91(3-4): 390-404 doi: 10.1016/j.rse.2004.04.001 [9] Du P J, Liu S C, Gamba P, Tan K, Xia J S. Fusion of difference images for change detection over urban areas. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2012, 5(4): 1076-1086 doi: 10.1109/JSTARS.2012.2200879 [10] Gong M, Zhou Z, Ma J. Change detection in synthetic aperture radar images based on image fusion and fuzzy clustering. IEEE Transactions on Image Processing, 2012, 21(4): 2141-2151 doi: 10.1109/TIP.2011.2170702 [11] Zheng Y G, Zhang X R, Hou B, Liu G C. Using combined difference image and k-means clustering for SAR image change detection. IEEE Geoscience and Remote Sensing Letters, 2014, 11(3): 691-695 doi: 10.1109/LGRS.2013.2275738 [12] Jia L, Li M, Zhang P, Wu Y, An L, Song W Y. Remote-sensing image change detection with fusion of multiple wavelet kernels. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2016, 9(8): 3405-3418 doi: 10.1109/JSTARS.2015.2508043 [13] Zhuang H F, Deng K Z, Fan H D, Yu M. Strategies combining spectral angle mapper and change vector analysis to unsupervised change detection in multispectral images. IEEE Geoscience and Remote Sensing Letters, 2016, 13(5): 681-685 doi: 10.1109/LGRS.2016.2536058 [14] Luo H, Liu C, Wu C, Guo X. Urban change detection based on Dempster-Shafer theory for multitemporal very high-resolution imagery. Remote Sensing, 2018, 10(7) [15] Zhang Y, Peng D, Huang X. Object-based change detection for VHR images based on multiscale uncertainty analysis. IEEE Geoscience and Remote Sensing Letters, 2018, 15(1): 13-17 doi: 10.1109/LGRS.2017.2763182 [16] 霍春雷, 程健, 卢汉清, 周志鑫. 基于多尺度融合的对象级变化检测新方法. 自动化学报, 2008, 34(3): 251-257Huo Chun-Lei, Cheng Jian, Lu Han-Qing, Zhou Zhi-Xin. Object-level change detection based on multiscale fusion. Acta Automatica Sinica, 2008, 34(3): 251-257 [17] Nemmour H, Chibani Y. Multiple support vector machines for land cover change detection: An application for mapping urban extensions. ISPRS Journal of Photogrammetry and Remote Sensing, 2006, 61(2): 125-133 doi: 10.1016/j.isprsjprs.2006.09.004 [18] Hao M, Tan M, Zhang H. A change detection framework by fusing threshold and clustering methods for optical medium resolution remote sensing images. European Journal of Remote Sensing, 2019, 52(1): 96-106 doi: 10.1080/22797254.2018.1561156 [19] Carvalho O A, Guimaraes R F, Gillespie A R, Silva N C, Gomes R a T. A new approach to change vector analysis using distance and similarity measures. Remote Sensing, 2011, 3(11): 2473-2493 doi: 10.3390/rs3112473 [20] Chen J, Lu M, Chen X, Chen J, Chen L. A spectral gradient difference based approach for land cover change detection. ISPRS Journal of Photogrammetry and Remote Sensing, 2013, 85: 1-12 doi: 10.1016/j.isprsjprs.2013.07.009 [21] Torra V, Narukawa Y. The interpretation of fuzzy integrals and their application to fuzzy systems. International Journal of Approximate Reasoning, 2006, 41(1): 43-58 doi: 10.1016/j.ijar.2005.08.001 [22] Shao P, Shi W Z, He P F, Hao M, Zhang X K. Novel approach to unsupervised change detection based on a robust semi-supervised FCM clustering algorithm. Remote Sensing, 2016, 8(3) [23] Yan W, Shi S, Pan L, Gang Z, Wang L. Unsupervised change detection in SAR images based on frequency difference and a modified fuzzy c-means clustering. International Journal of Remote Sensing, 2018, 39(10): 3055-3075 doi: 10.1080/01431161.2018.1434325 [24] Bovolo F, Bruzzone L, Marconcini M. A novel approach to unsupervised change detection based on a semisupervised SVM and a similarity measure. IEEE Transactions on Geoscience and Remote Sensing, 2008, 46(7): 2070-2082 doi: 10.1109/TGRS.2008.916643 [25] 张先鹏, 陈帆, 和红杰. 结合多种特征的高分辨率遥感影像阴影检测. 自动化学报, 2016, 42(2): 290-298Zhang Xian-Peng, Chen Fan, He Hong-jie. Shadow detection in high resolution remote sensing images using multiple features. Acta Automatica Sinica, 2016, 42(2): 290-298 [26] 王建明, 史文中, 邵攀. 自适应距离和模糊拓扑优化的模糊聚类SAR影像变化检测. 测绘学报, 2018, 47(5): 611-619 doi: 10.11947/j.AGCS.2018.20160607Wang Jian-Ming, Shi Wen-Zhong, Shao Pan. Change detection method for SAR image using adaptive distance- and fuzzy topology optimization-based Fuzzy Clustering Acta Geodaetica et Cartographica Sinica, 2018, 47(5): 611-619 doi: 10.11947/j.AGCS.2018.20160607 [27] Chiang J-L, Liou J-J, Wei C, Cheng K-S. A feature-space indicator kriging approach for remote sensing image classification. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(7): 4046-4055 doi: 10.1109/TGRS.2013.2279118 [28] 刘爱利, 王培法, 丁园圆. 地统计学概论. 科学出版社, 2012.Liu Ai-Li, Wang Pei-Fa, Ding Yuan-Yuan. Introduction to Geostatistics. Beijing: Science Press, 2012. [29] Lv Z Y, Liu T F, Shi C, Benediktsson J A, Du H J. Novel land cover change detection method based on K-Means clustering and adaptive majority voting using bitemporal remote sensing images. IEEE Access, 2019, 7: 34425-34437 doi: 10.1109/Access.6287639 [30] Hao M, Zhang H, Li Z, Chen B. Unsupervised change detection using a novel fuzzy c-means clustering simultaneously incorporating local and global information. Multimedia Tools and Applications, 2017, 76(19): 20081-20098 doi: 10.1007/s11042-017-4354-1 [31] Zanetti M, Bruzzone L. A theoretical framework for change detection based on a compound multiclass statistical model of the difference image. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56(2): 1129-1143 doi: 10.1109/TGRS.2017.2759663 -

 下载:
下载:









计量
- 文章访问数: 965
- HTML全文浏览量: 311
- PDF下载量: 109
- 被引次数: 0
