2024年 第50卷 第8期
2024, 50(8): 1485-1501.
doi: 10.16383/j.aas.c230705
摘要:
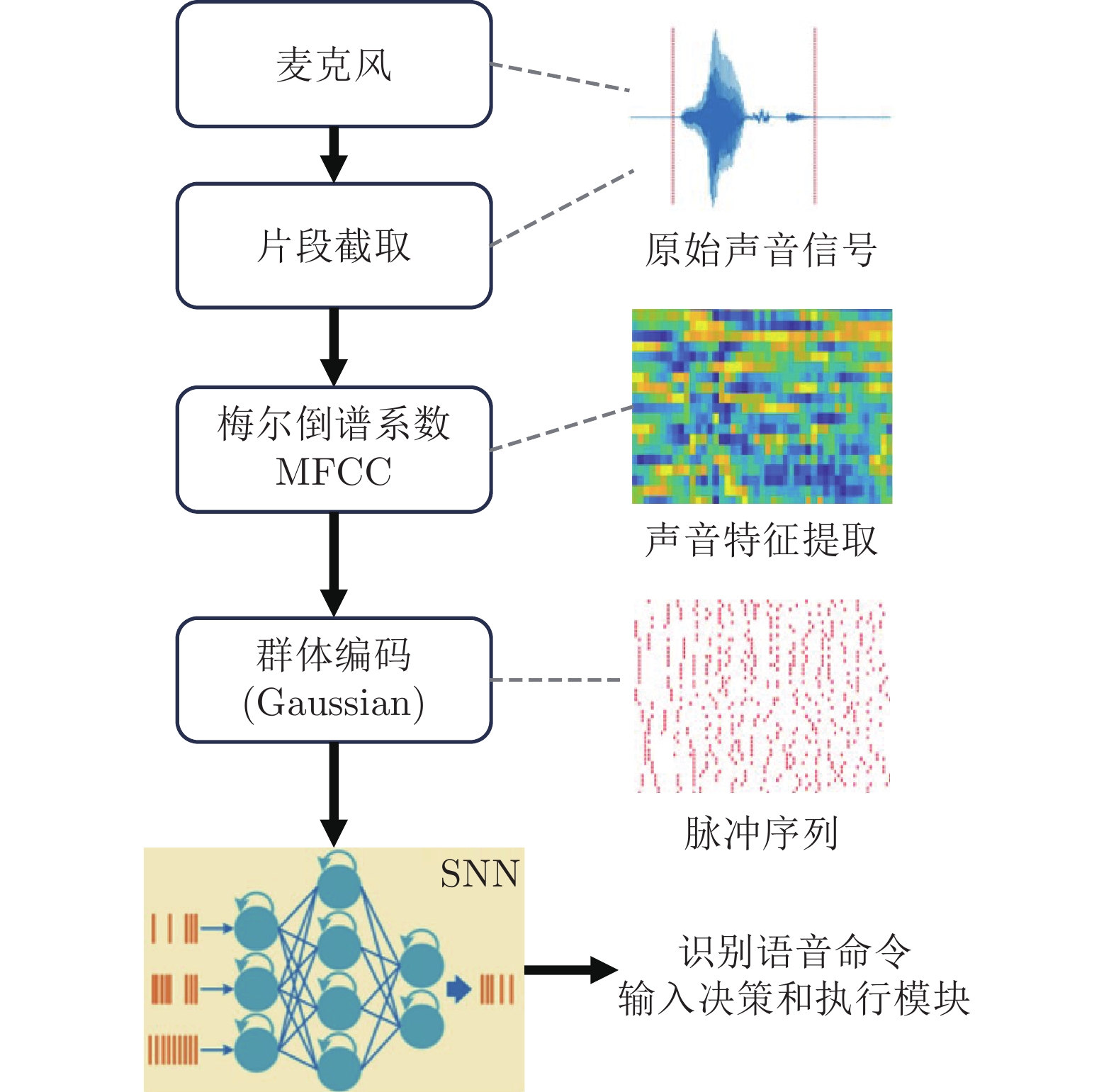
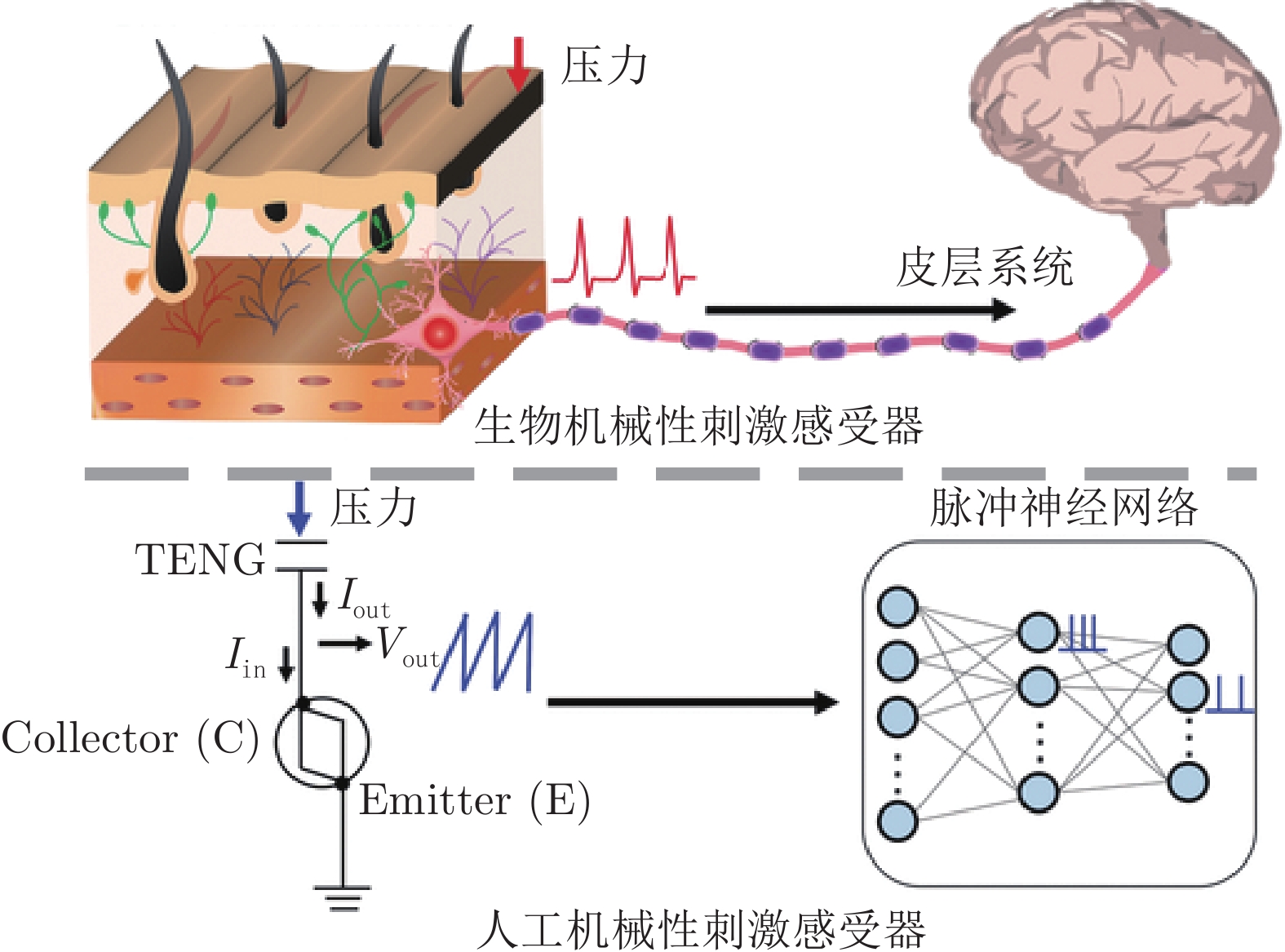
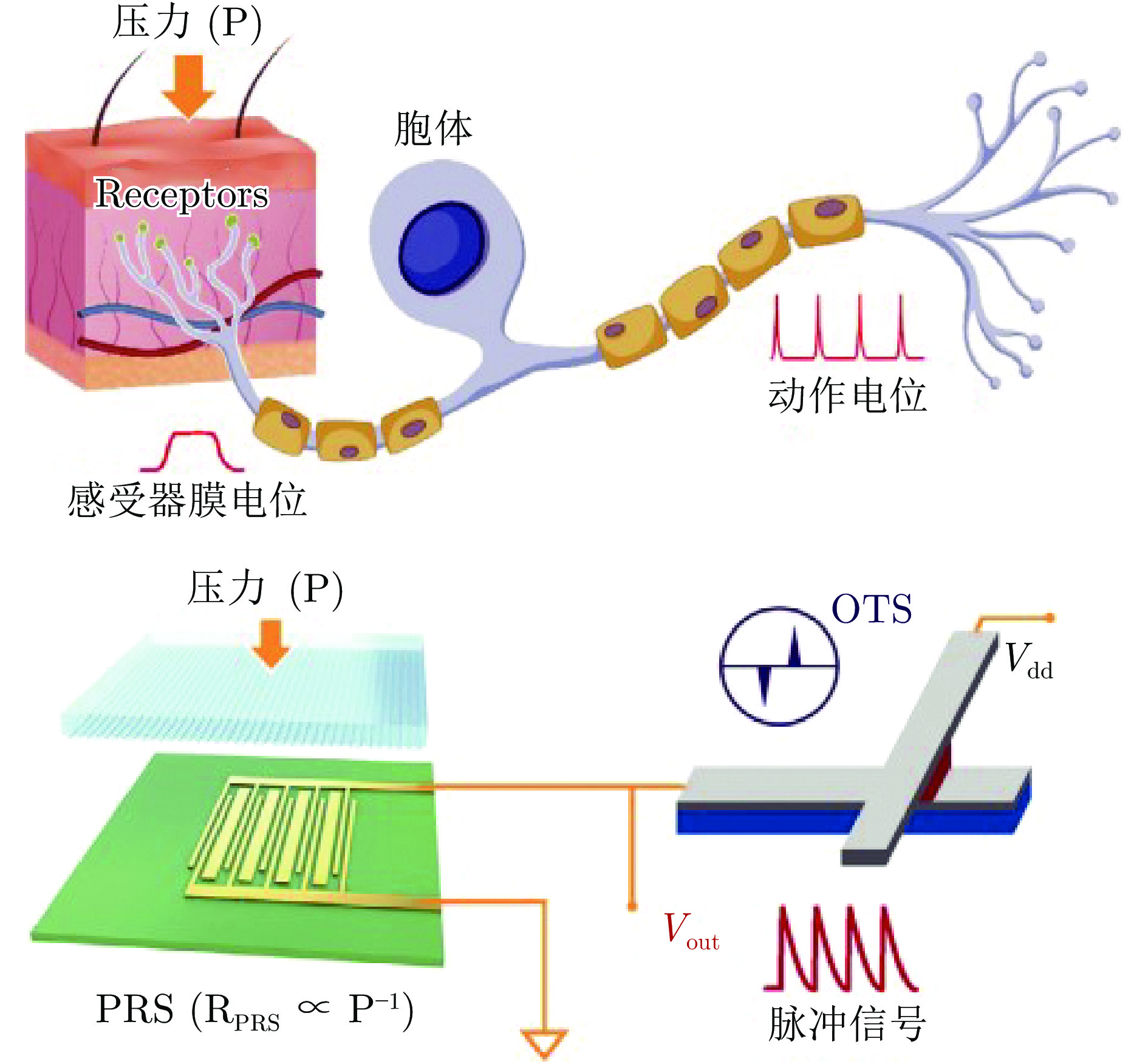
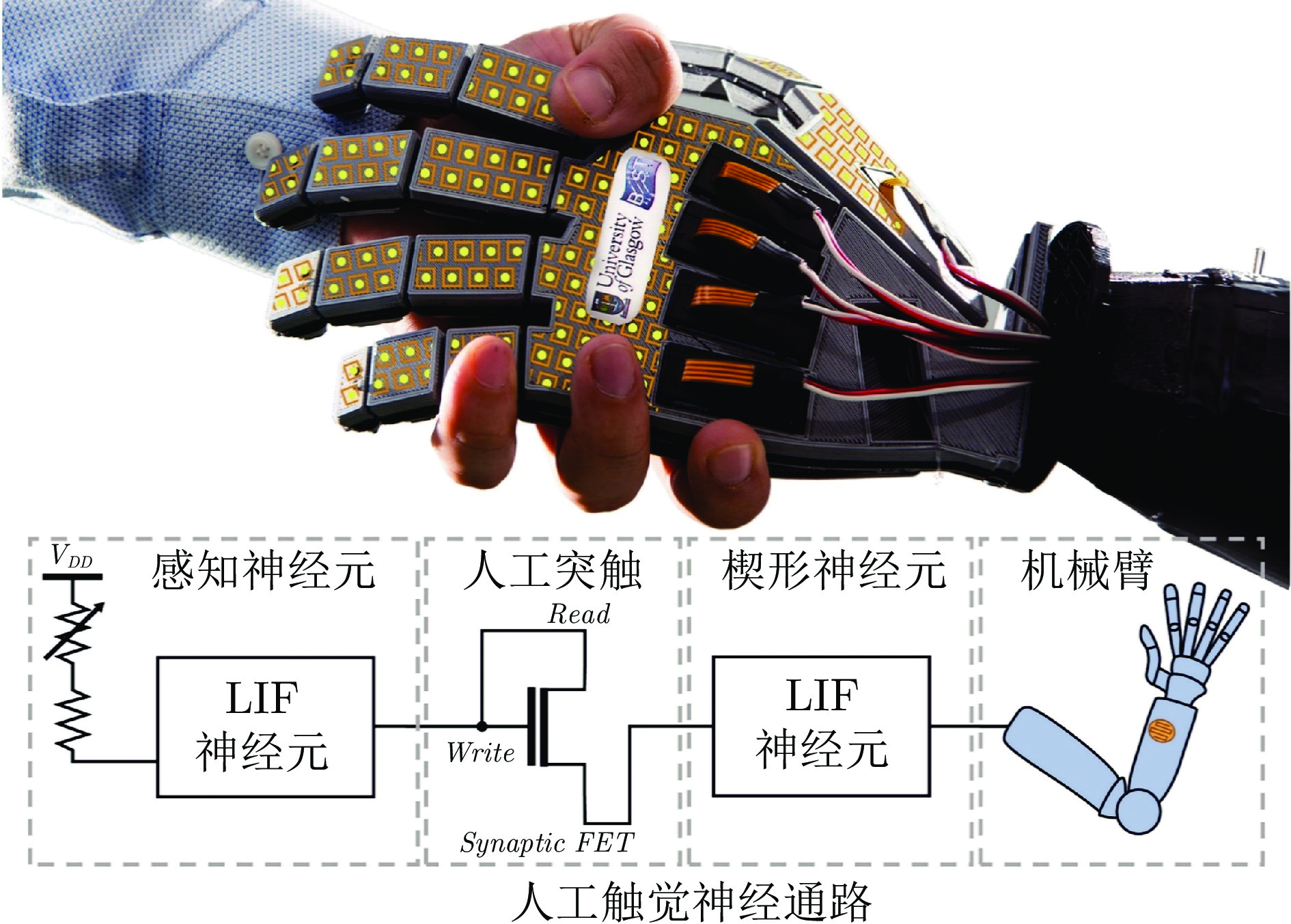
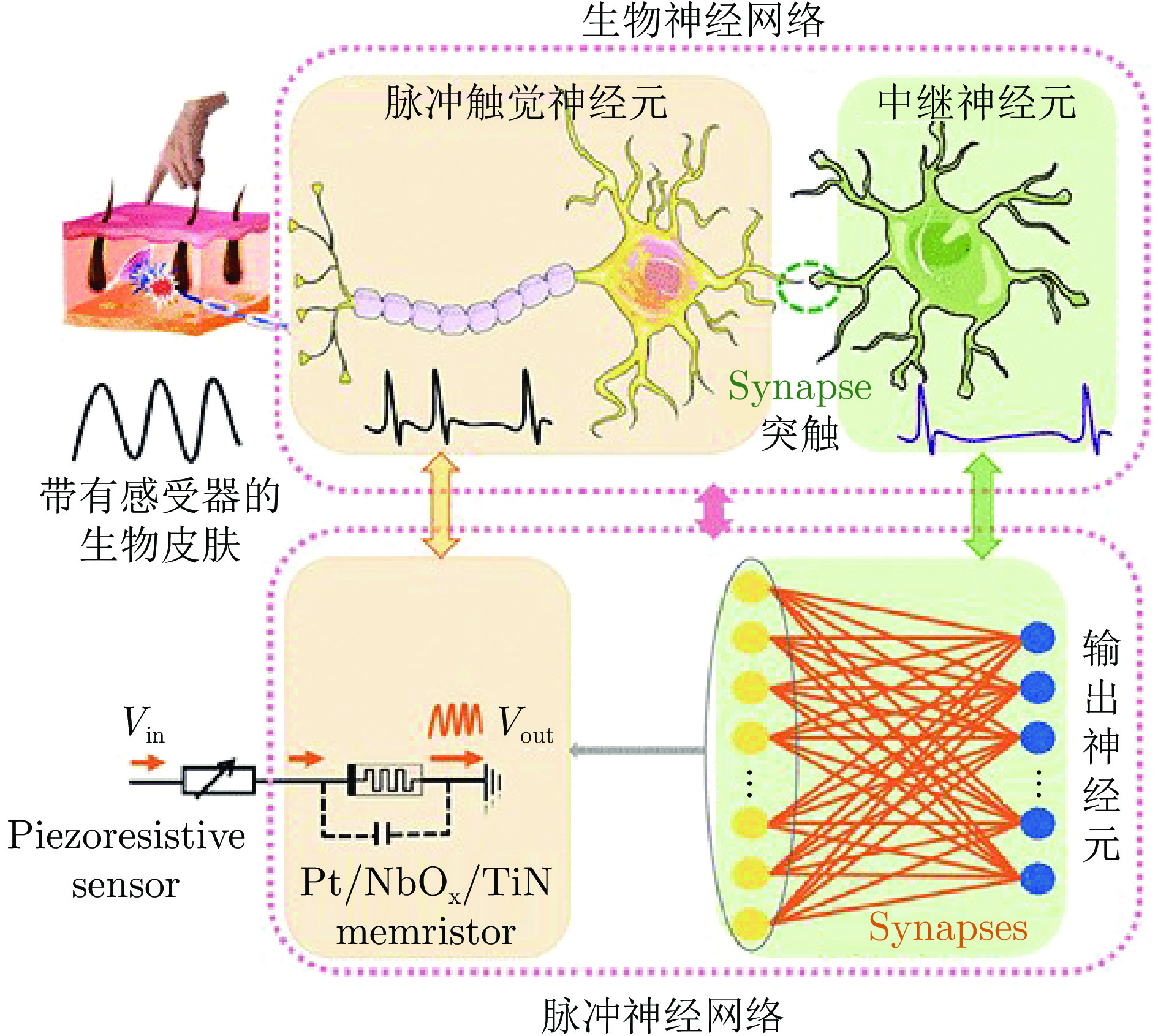
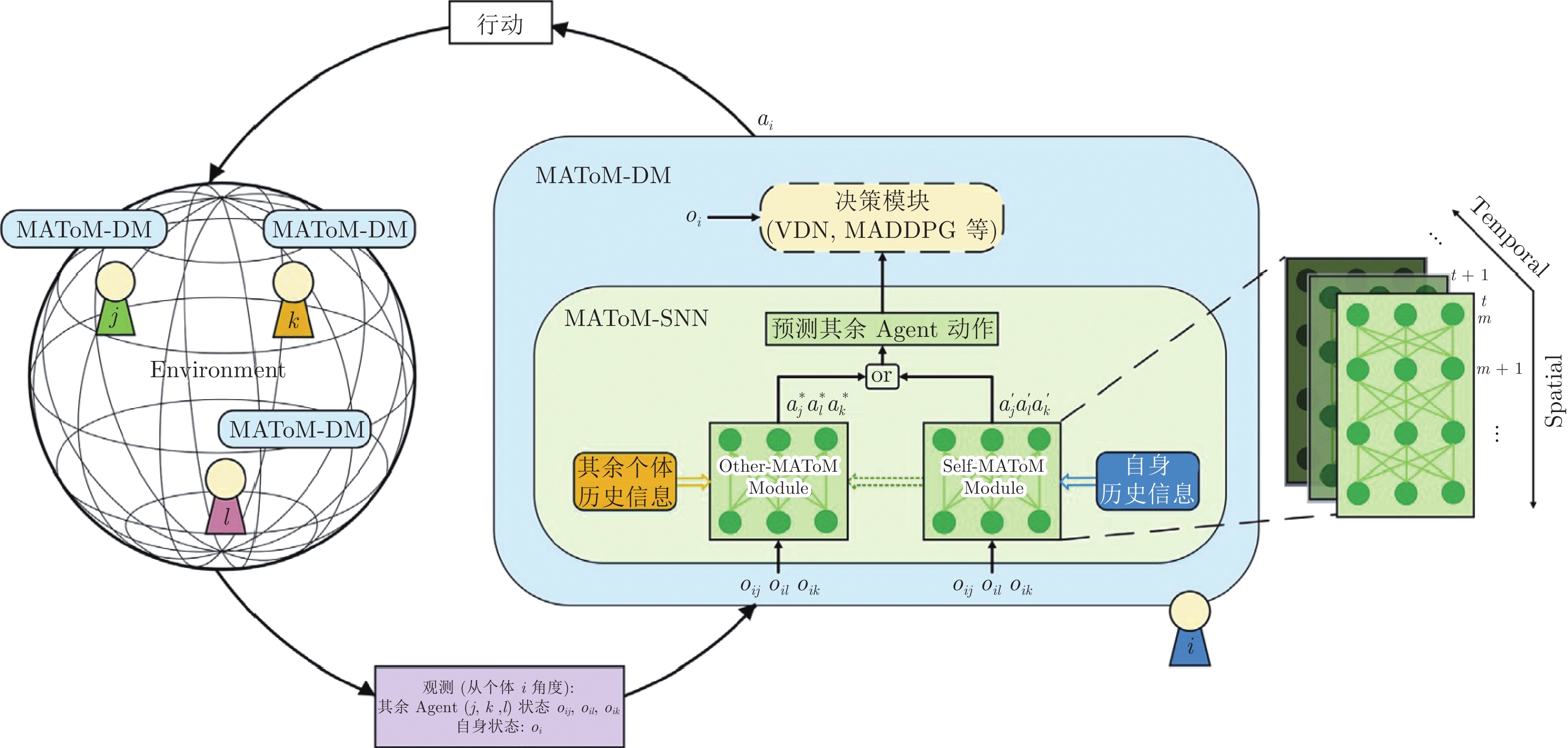
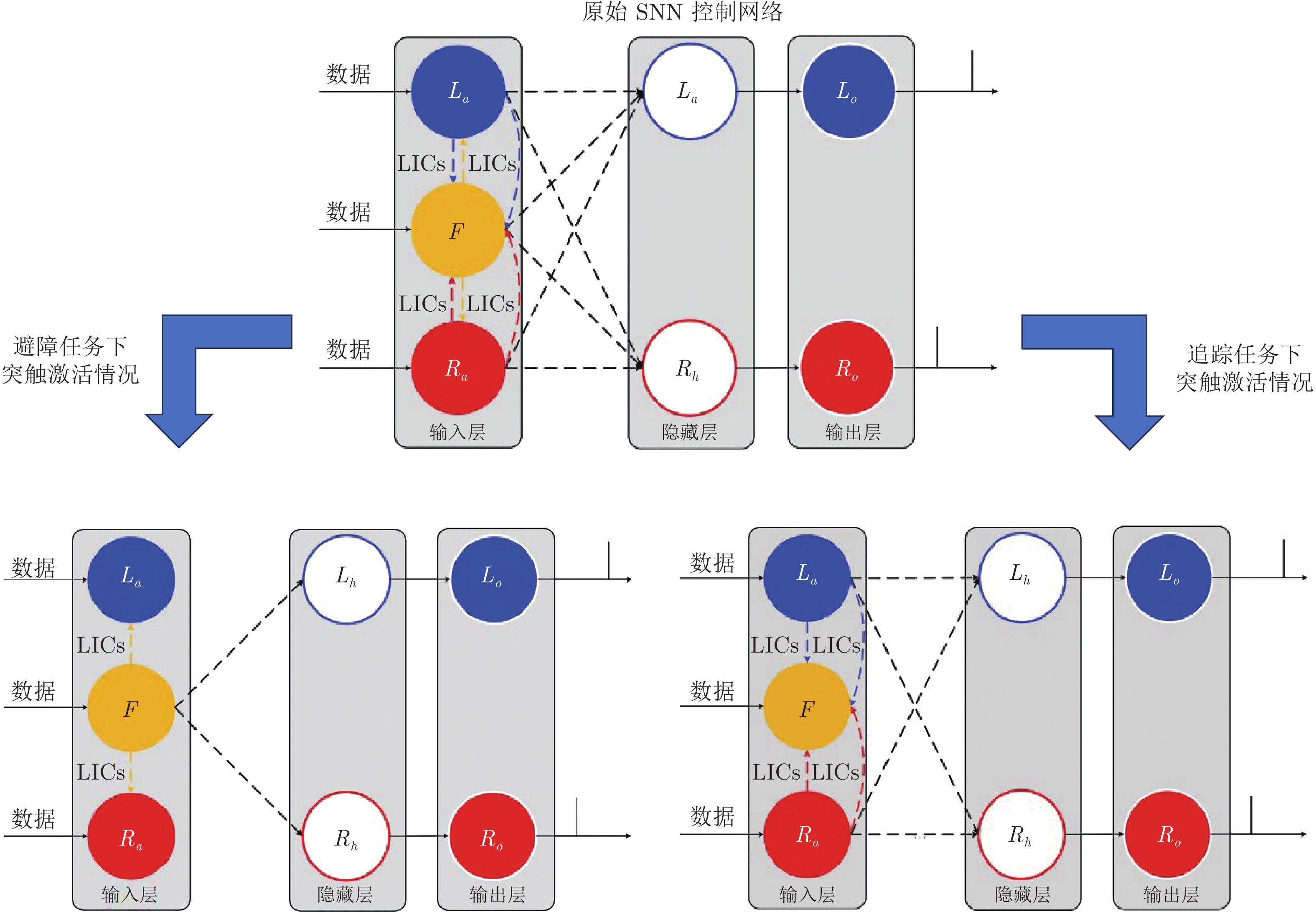
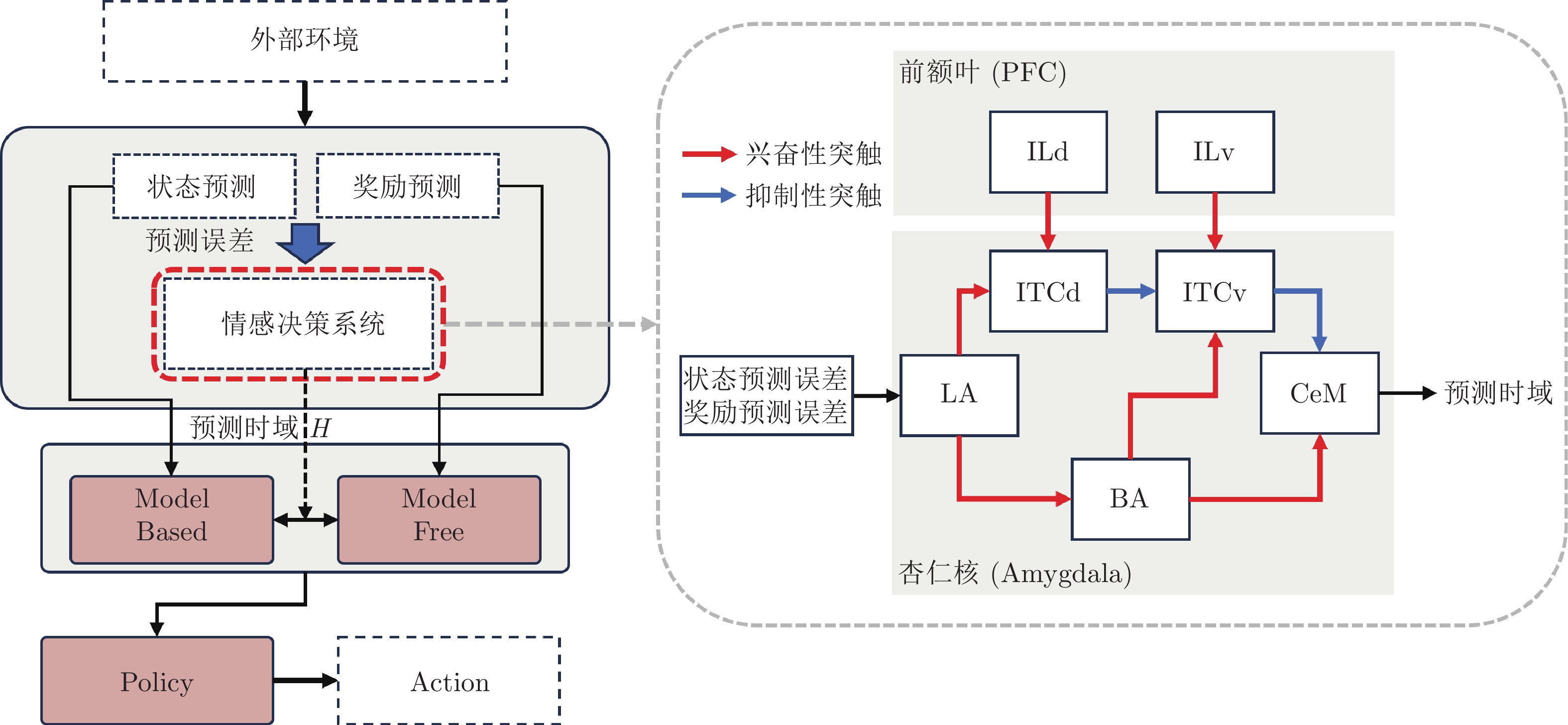
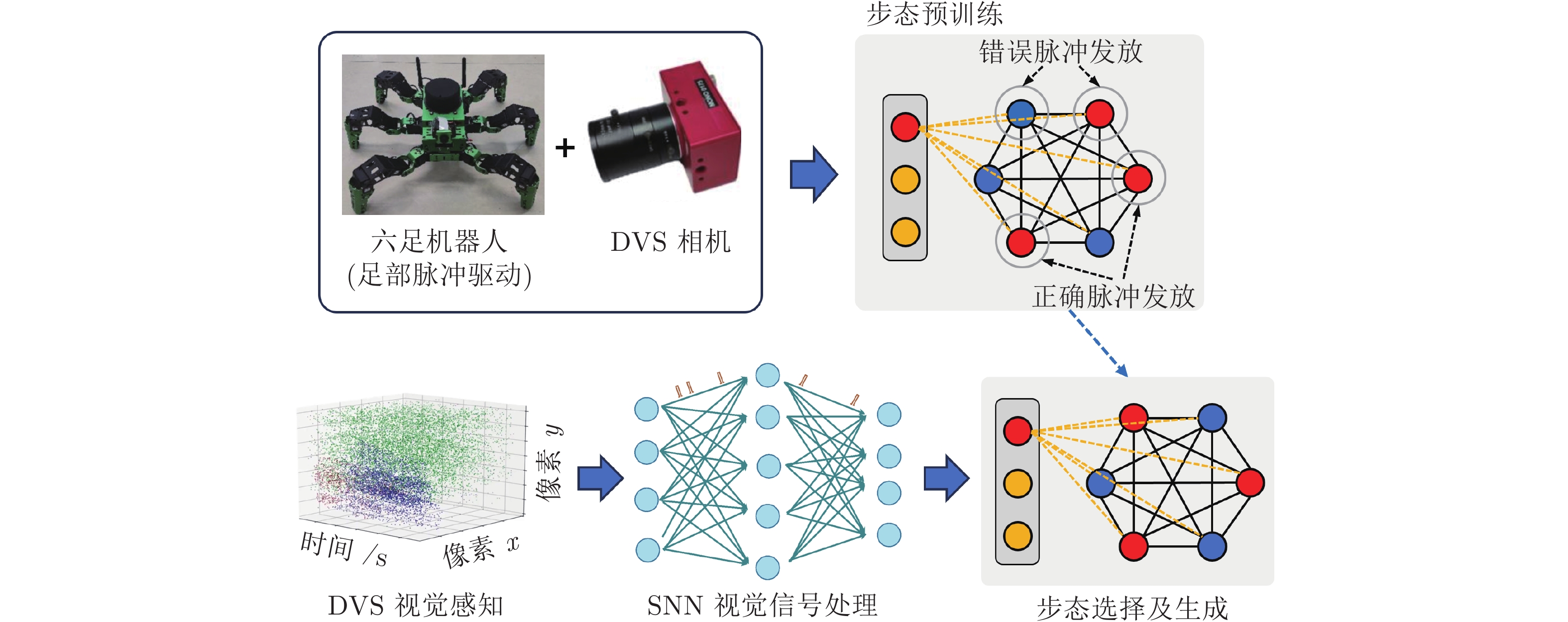
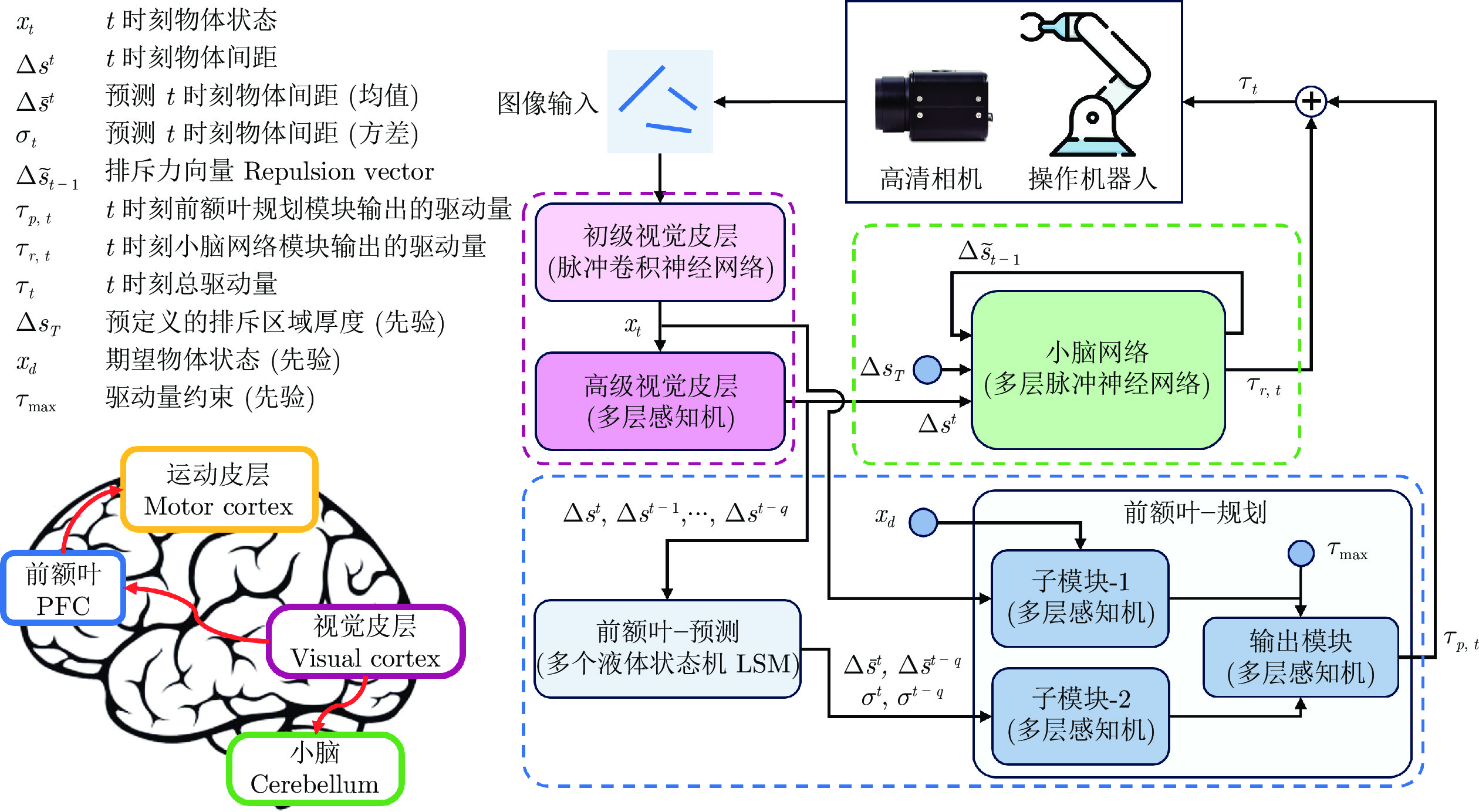
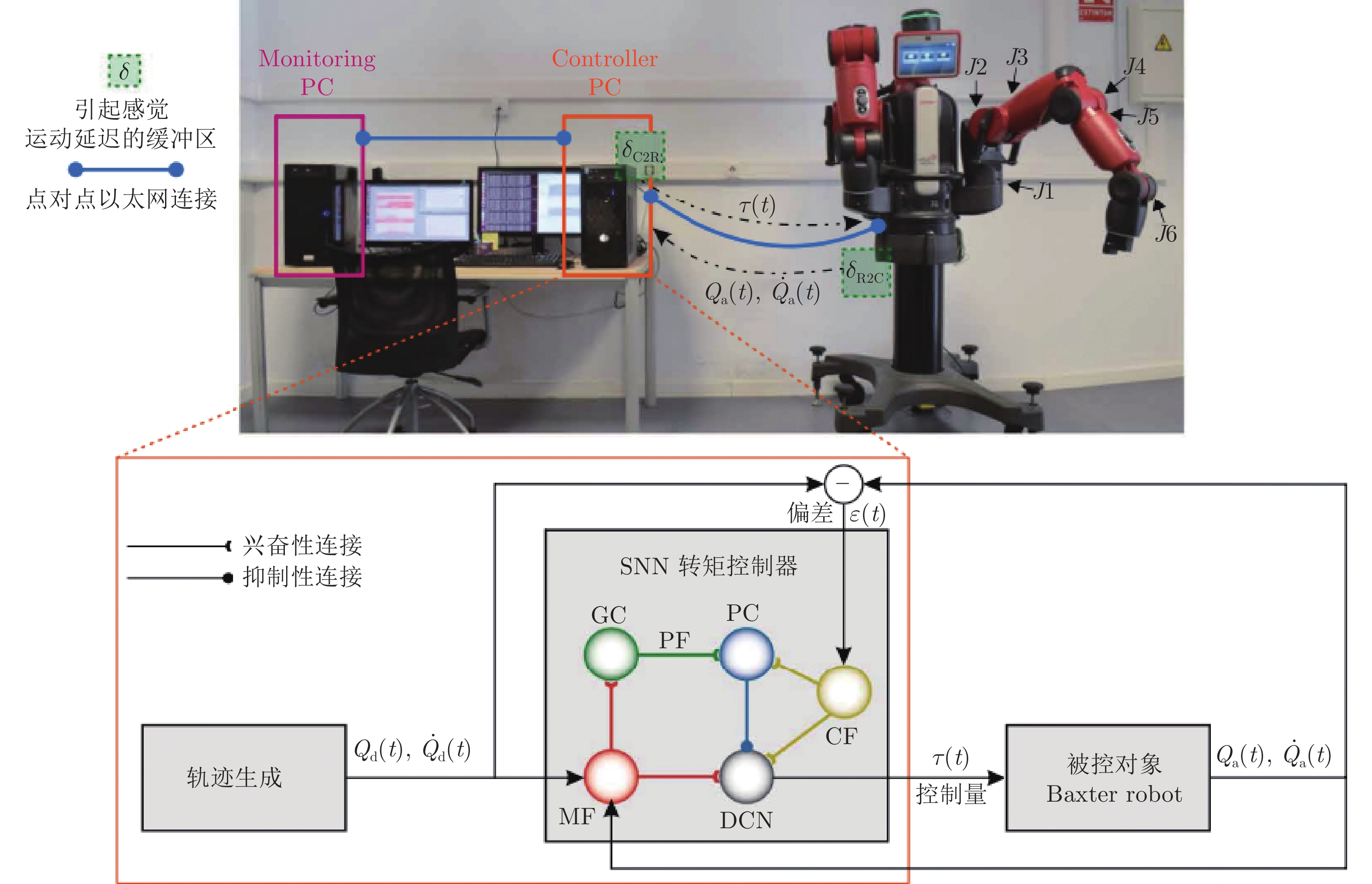
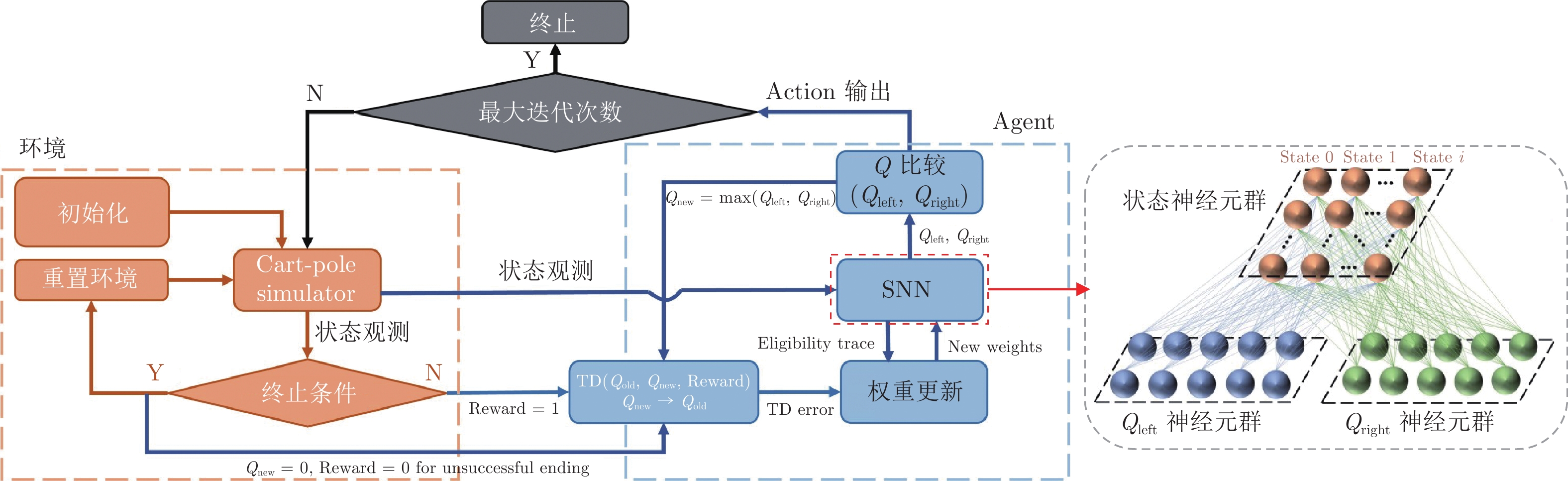
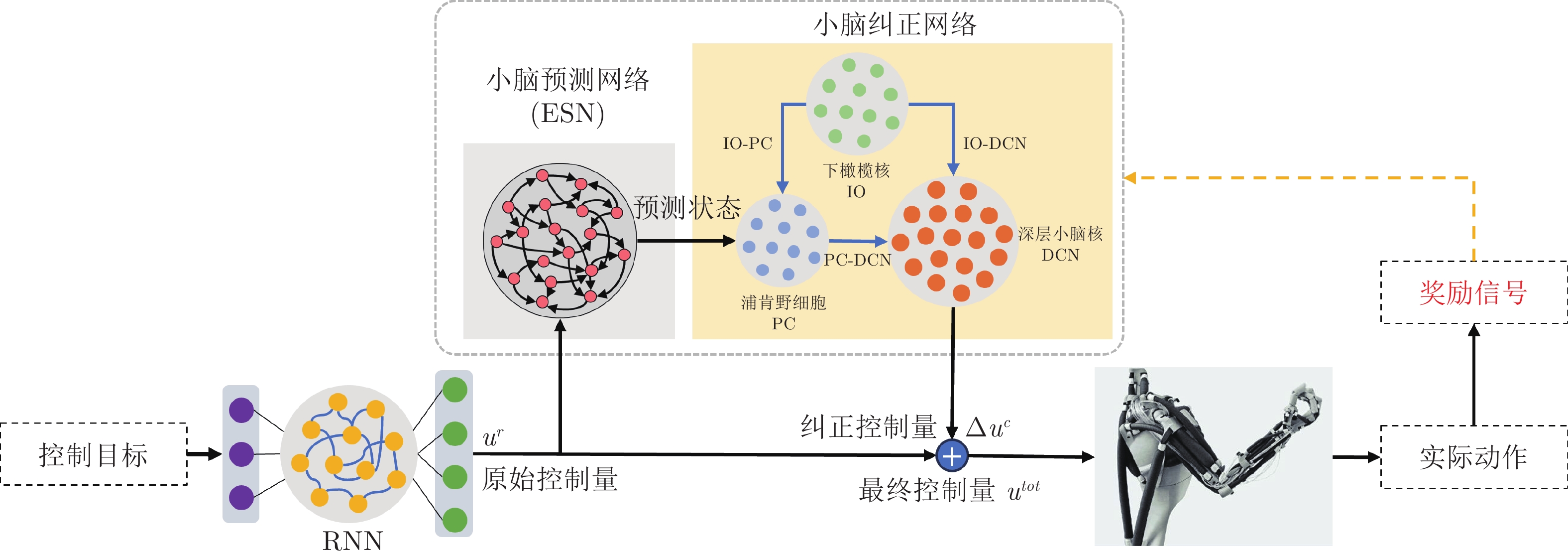
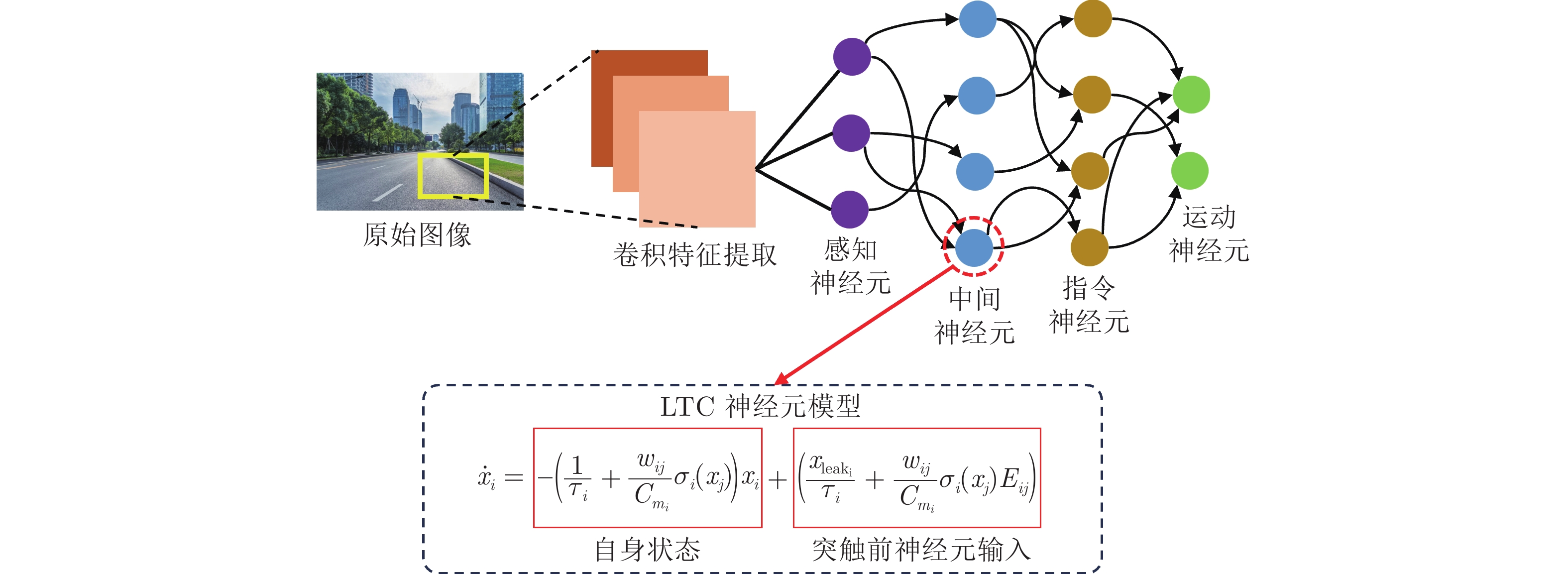
传统机器人经过长时间的研究和发展, 已经在生产和生活的多个领域得到了广泛的应用, 但在复杂多变的环境中依然缺乏与真实生物类似的灵活性、稳定性和适应能力. 类脑智能作为一种新型的机器智能, 使用计算建模的方法模拟生物神经系统的各类特性, 进而实现对各类信息的推理和决策, 近年来受到了学术界的广泛关注. 鉴于此, 综述了国内外面向机器人系统的类脑智能研究现状, 并对类脑智能方法在机器人感知、决策和控制三个研究方向的成果进行了整理、归纳和分析, 最后从软硬件层面分别指出了机器人类脑智能目前存在的主要问题和未来的发展方向.
传统机器人经过长时间的研究和发展, 已经在生产和生活的多个领域得到了广泛的应用, 但在复杂多变的环境中依然缺乏与真实生物类似的灵活性、稳定性和适应能力. 类脑智能作为一种新型的机器智能, 使用计算建模的方法模拟生物神经系统的各类特性, 进而实现对各类信息的推理和决策, 近年来受到了学术界的广泛关注. 鉴于此, 综述了国内外面向机器人系统的类脑智能研究现状, 并对类脑智能方法在机器人感知、决策和控制三个研究方向的成果进行了整理、归纳和分析, 最后从软硬件层面分别指出了机器人类脑智能目前存在的主要问题和未来的发展方向.

2024, 50(8): 1502-1516.
doi: 10.16383/j.aas.c230457
摘要:
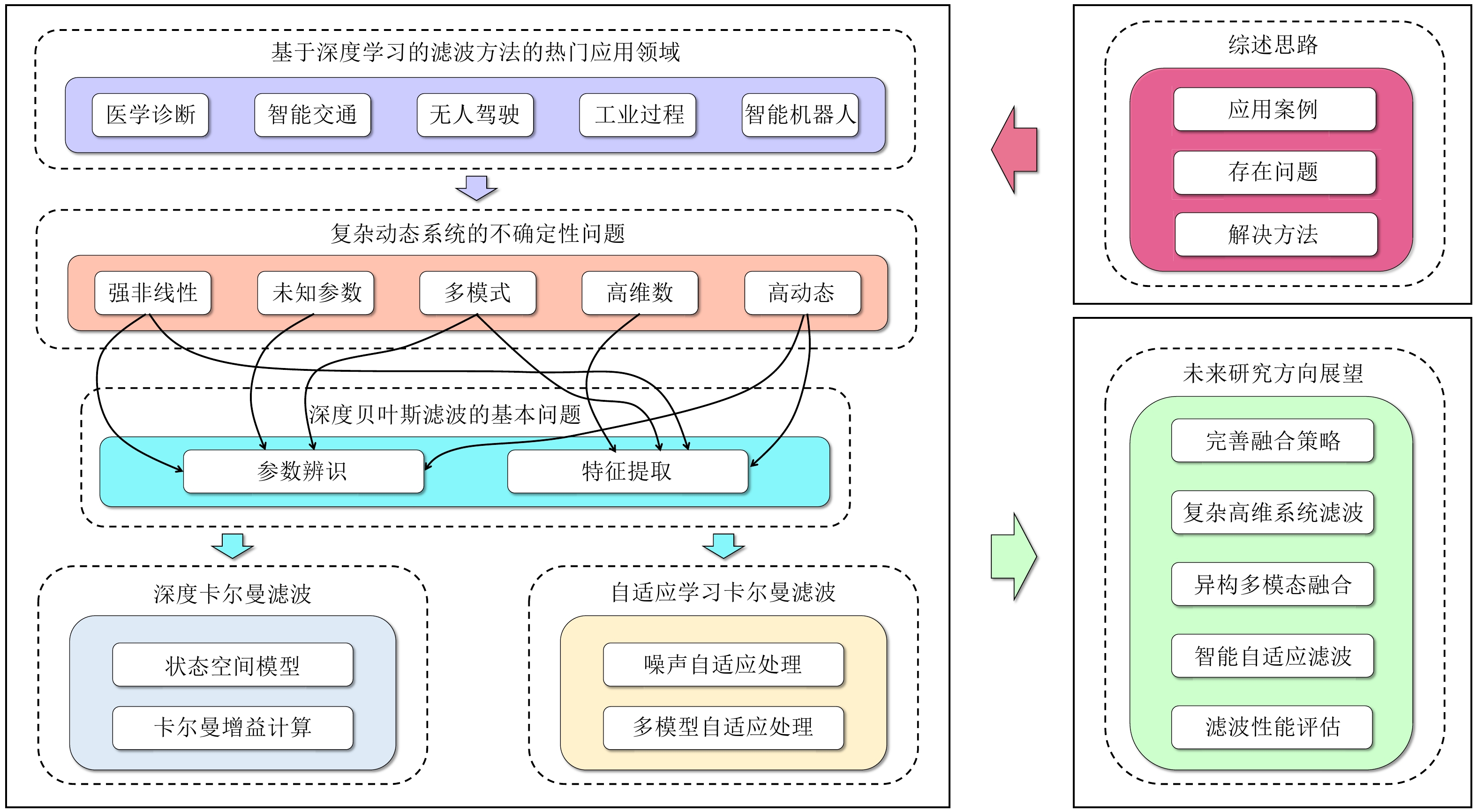
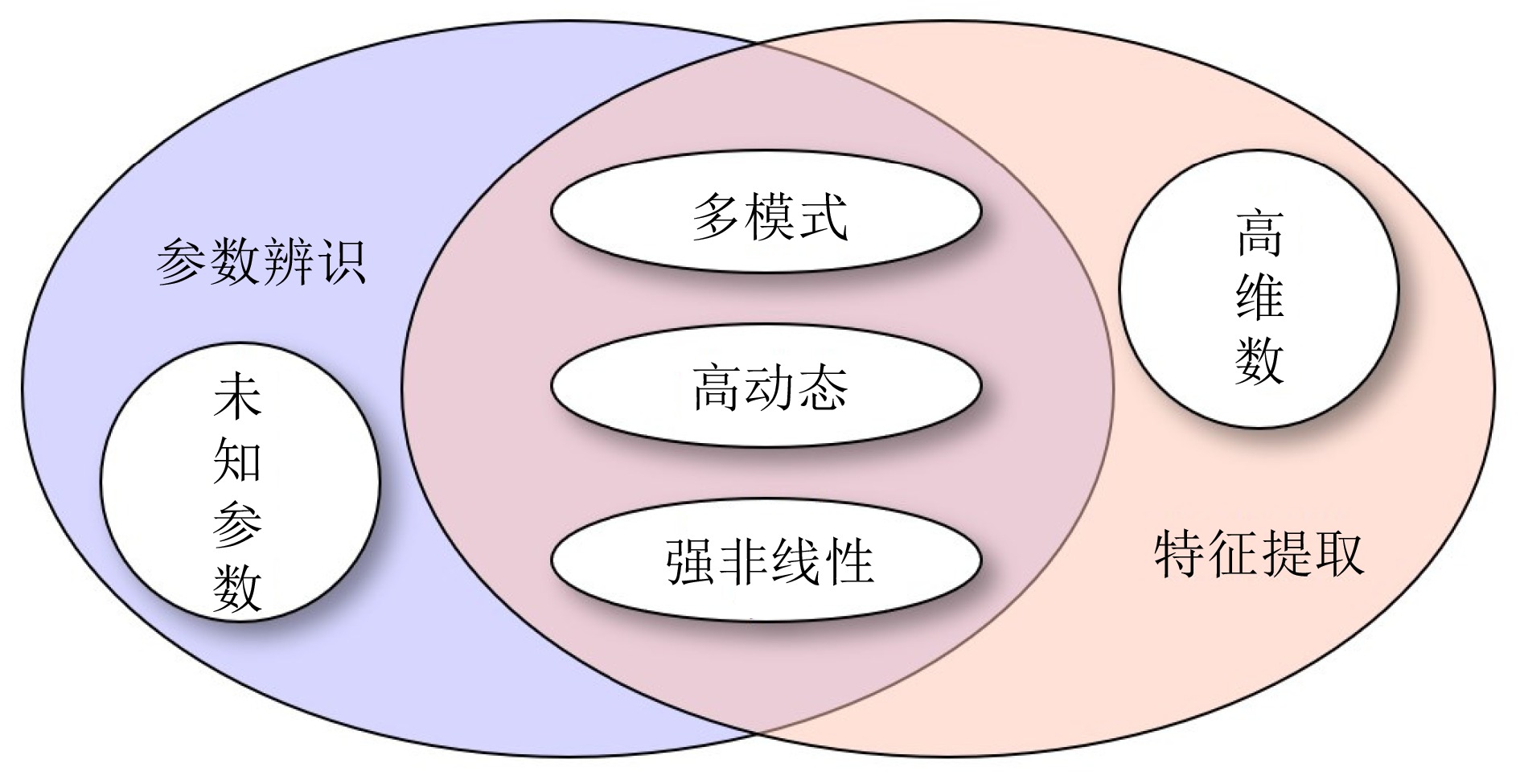
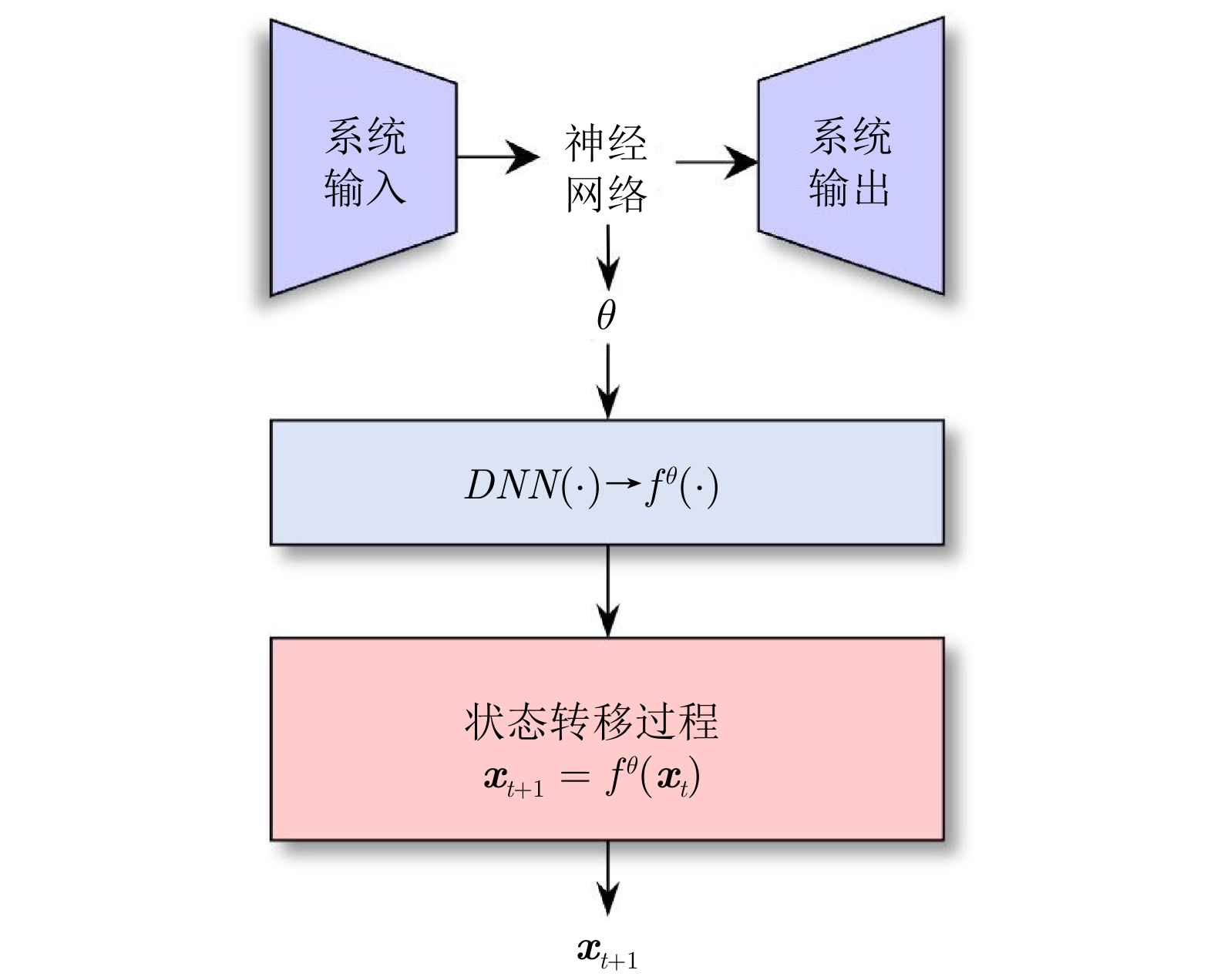
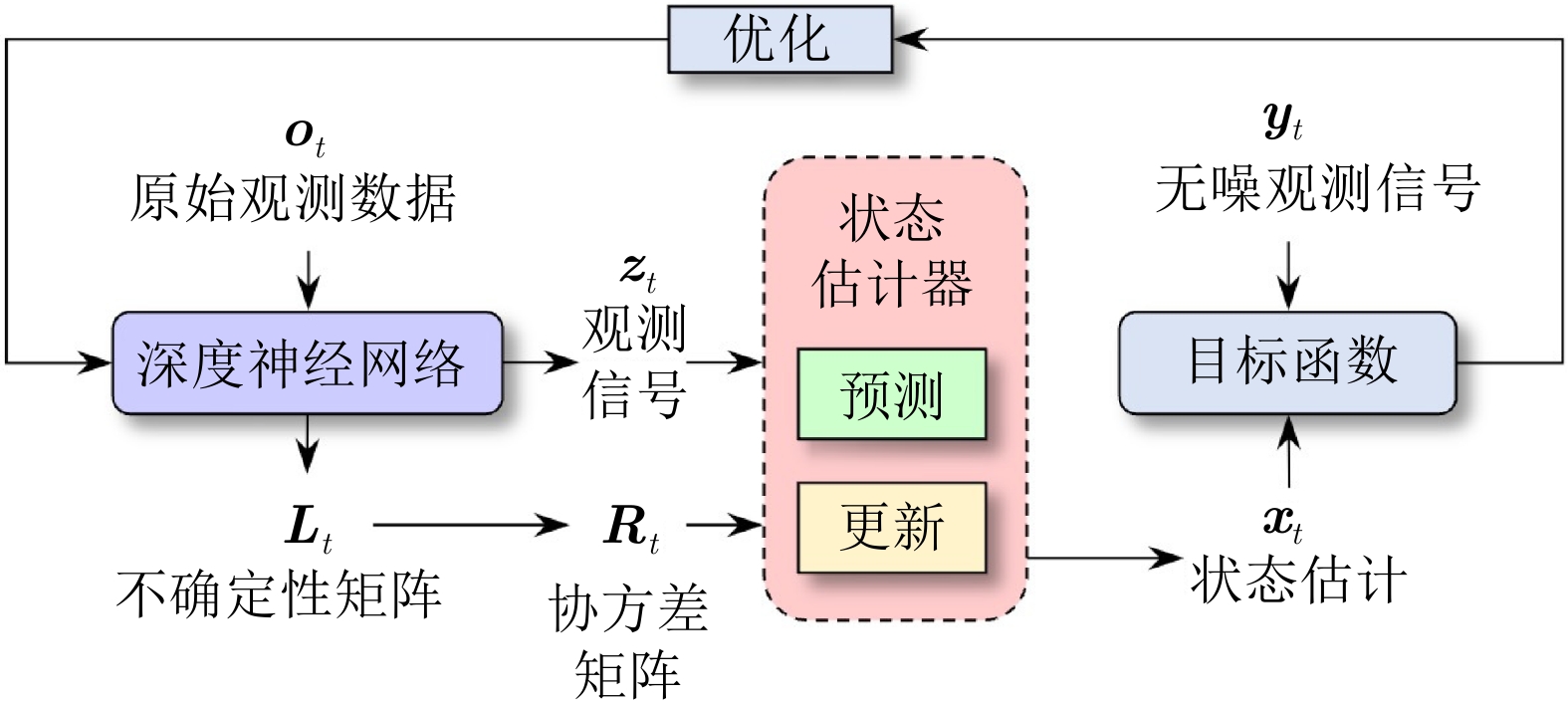
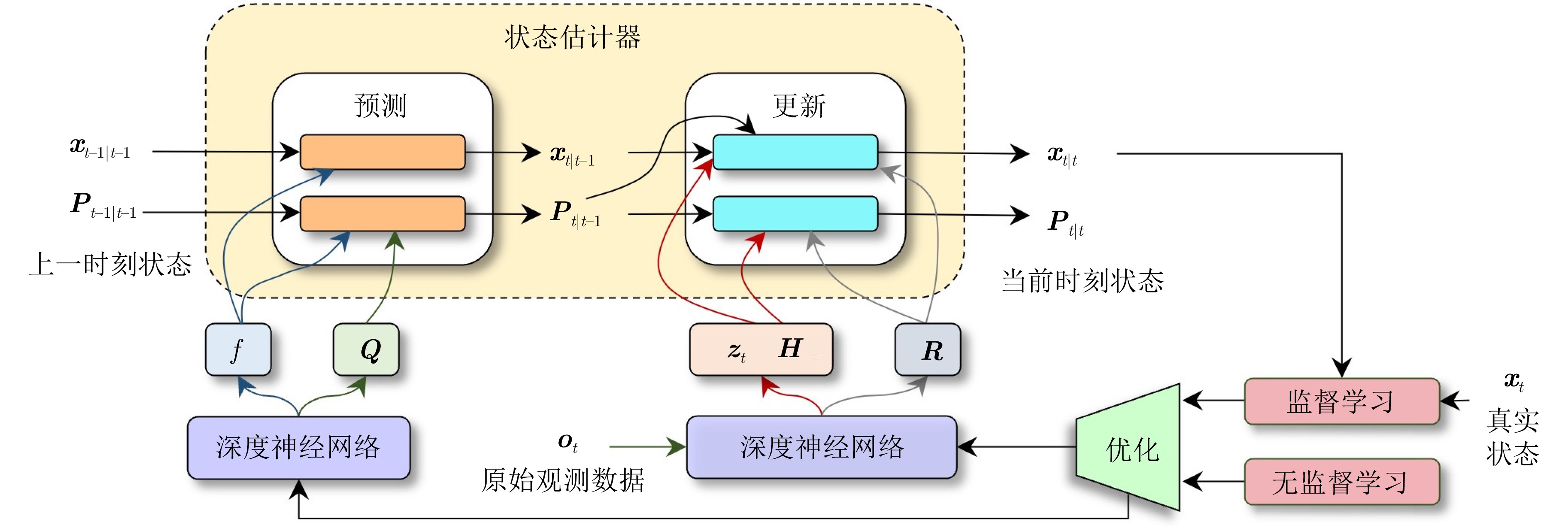
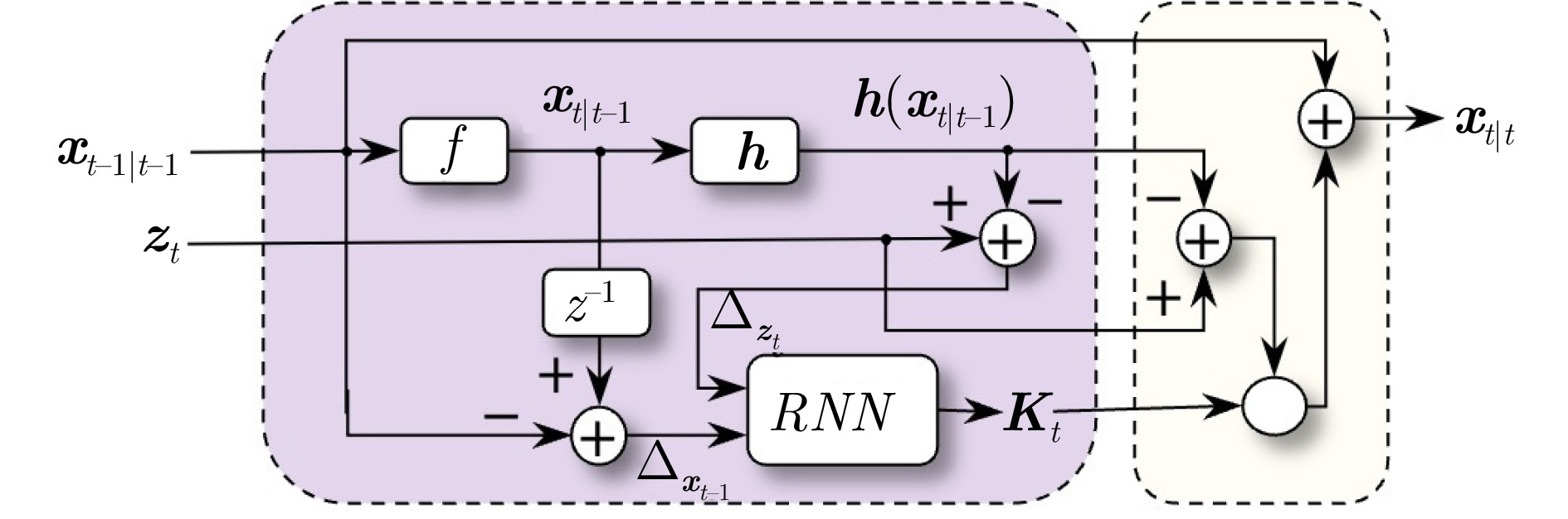
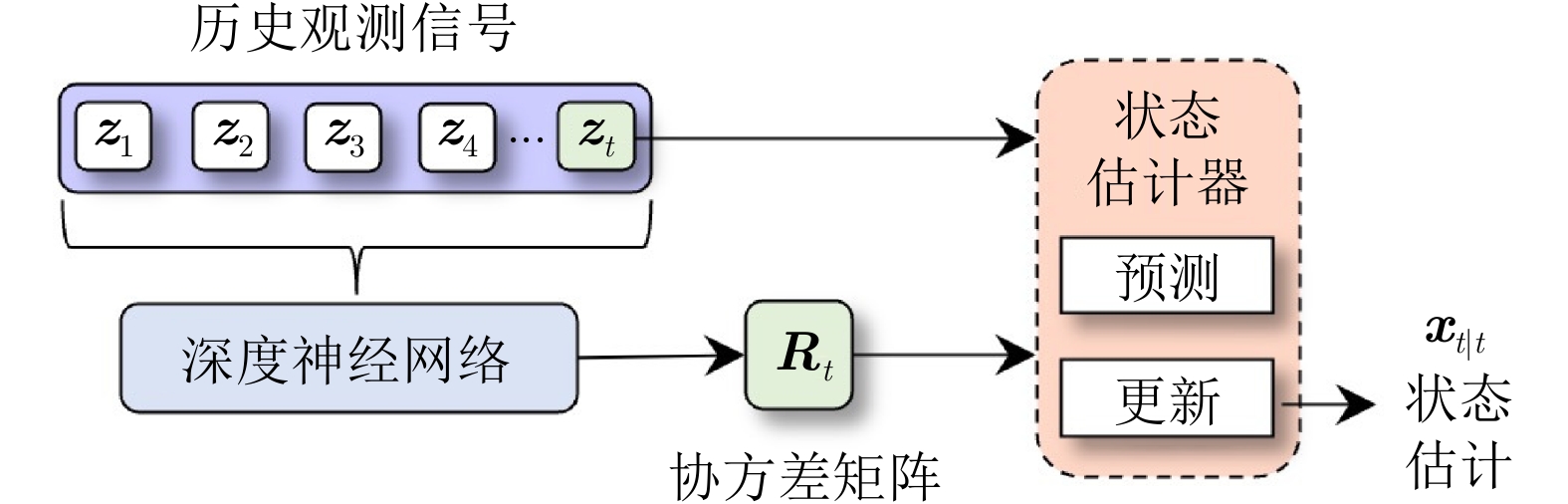
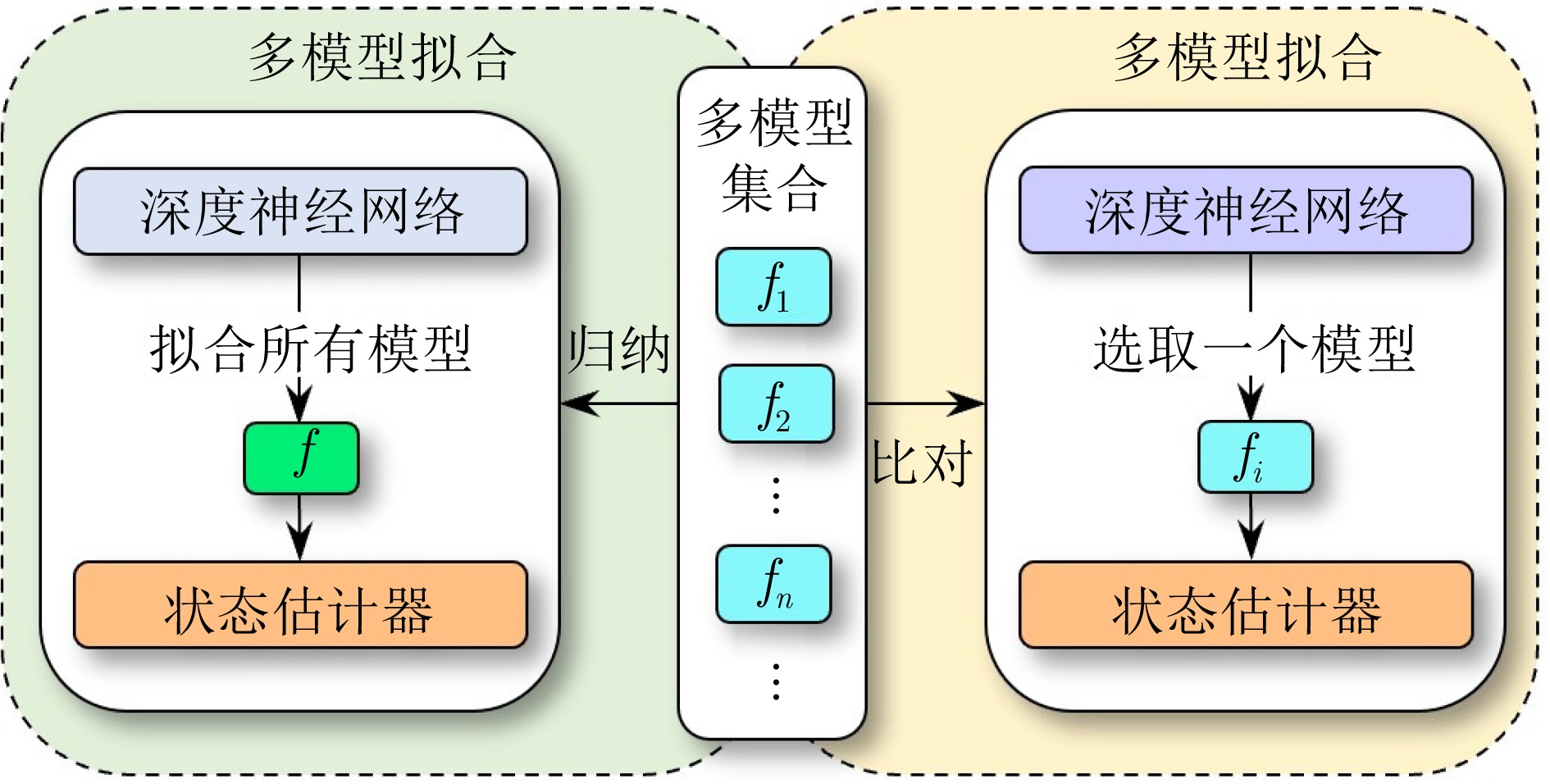
当前动态系统呈现大型化、复杂化的趋势, 基于贝叶斯滤波的动态系统状态估计遇到一系列新的挑战. 随着深度学习在特征提取与模式识别等方面的优势与潜力不断显现, 深度学习与传统贝叶斯滤波相结合的研究也随之兴起. 为此, 梳理了不同领域融合深度学习的贝叶斯滤波方法的应用案例, 从中剖析不同类型动态系统下贝叶斯滤波存在的局限性和共性难题. 在此基础上, 总结了当前贝叶斯滤波存在的几类不确定性问题, 以深度学习的视角将这些问题归纳为特征提取和参数辨识两大基本问题, 进而介绍深度学习为贝叶斯滤波所提供的解决方案. 其次, 归纳整理了两类深度学习与贝叶斯滤波结合的具体方法, 着重介绍了深度卡尔曼滤波和融合深度学习的自适应卡尔曼滤波. 最后, 综合考虑深度学习方法和贝叶斯滤波方法的优势, 讨论了融合深度学习的贝叶斯滤波方法的开放问题和未来研究方向.
当前动态系统呈现大型化、复杂化的趋势, 基于贝叶斯滤波的动态系统状态估计遇到一系列新的挑战. 随着深度学习在特征提取与模式识别等方面的优势与潜力不断显现, 深度学习与传统贝叶斯滤波相结合的研究也随之兴起. 为此, 梳理了不同领域融合深度学习的贝叶斯滤波方法的应用案例, 从中剖析不同类型动态系统下贝叶斯滤波存在的局限性和共性难题. 在此基础上, 总结了当前贝叶斯滤波存在的几类不确定性问题, 以深度学习的视角将这些问题归纳为特征提取和参数辨识两大基本问题, 进而介绍深度学习为贝叶斯滤波所提供的解决方案. 其次, 归纳整理了两类深度学习与贝叶斯滤波结合的具体方法, 着重介绍了深度卡尔曼滤波和融合深度学习的自适应卡尔曼滤波. 最后, 综合考虑深度学习方法和贝叶斯滤波方法的优势, 讨论了融合深度学习的贝叶斯滤波方法的开放问题和未来研究方向.
2024, 50(8): 1517-1538.
doi: 10.16383/j.aas.c220090
摘要:
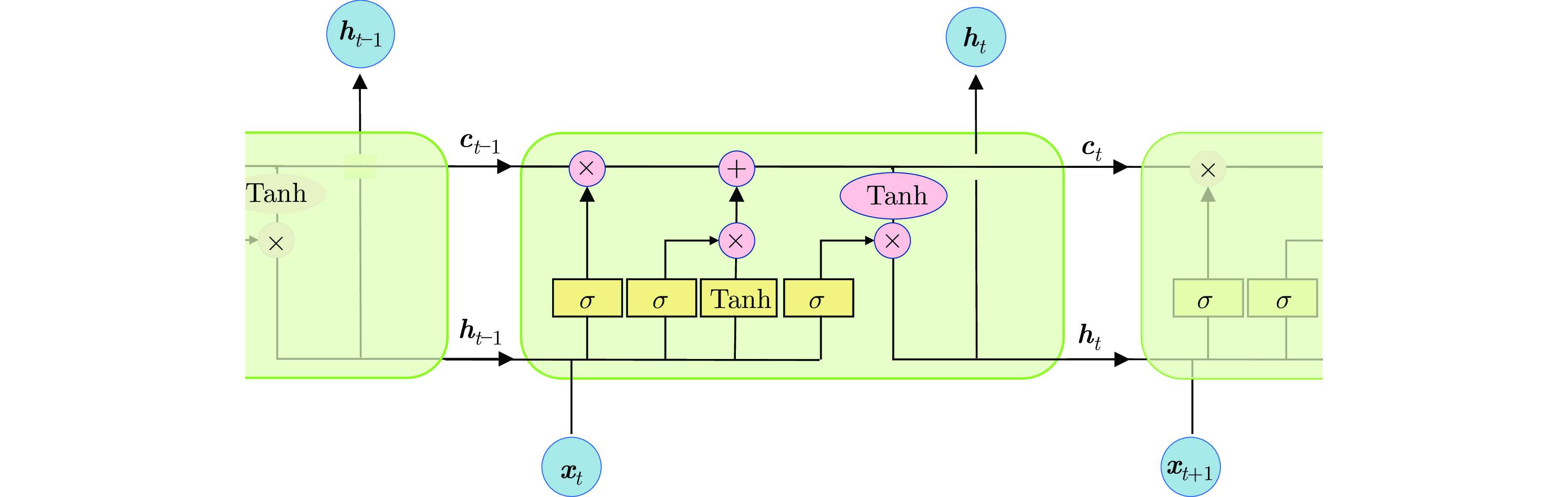
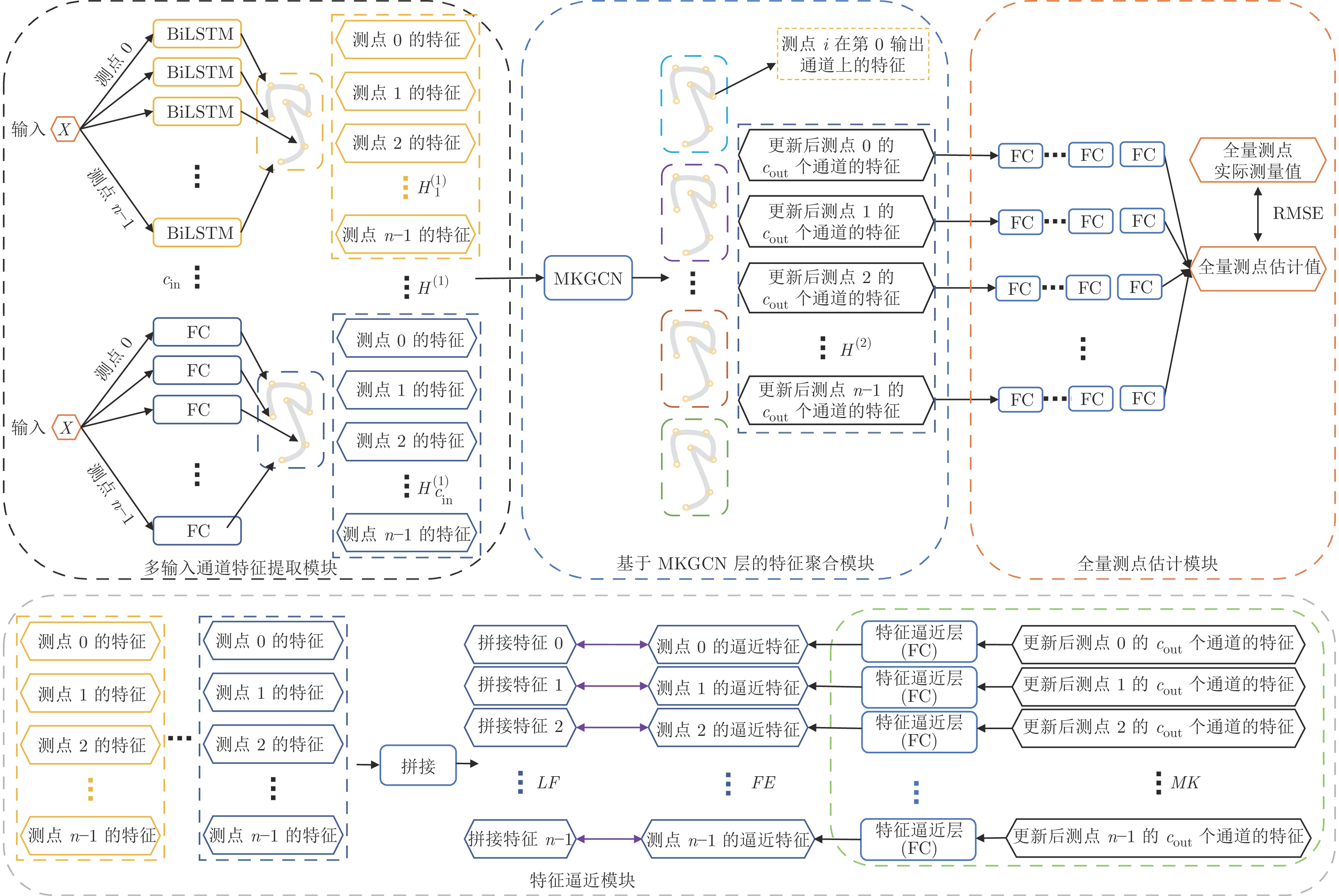
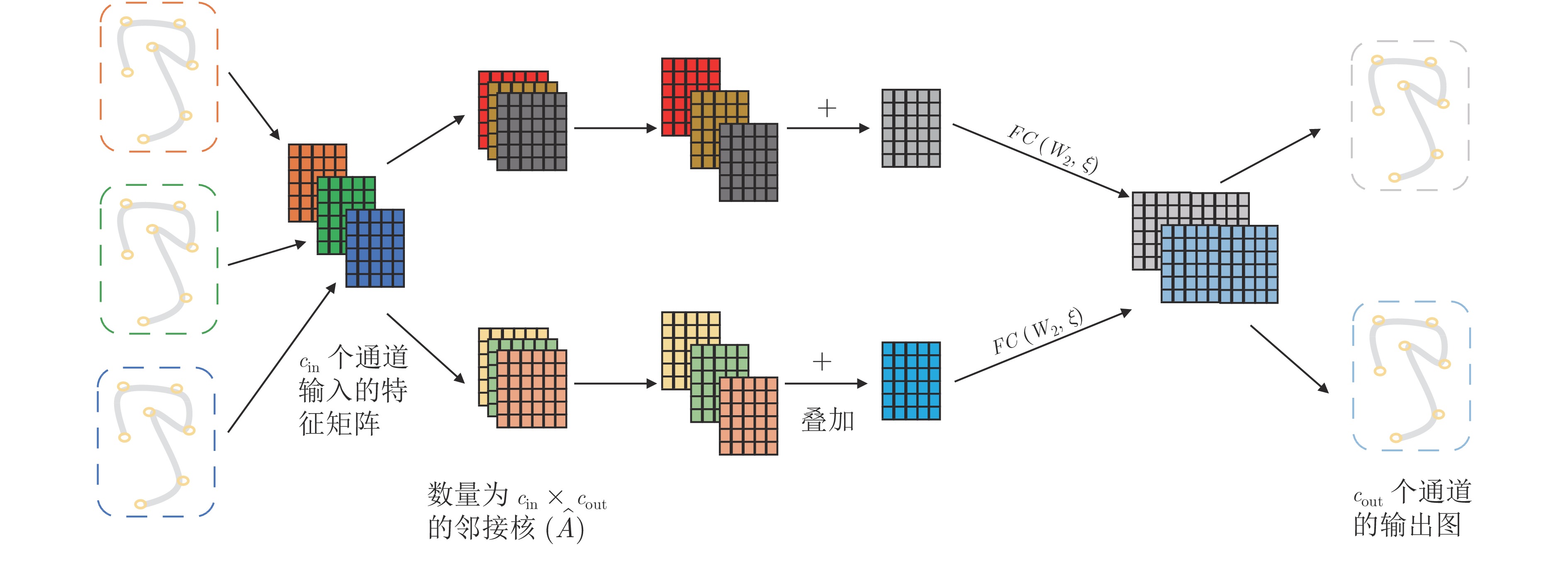
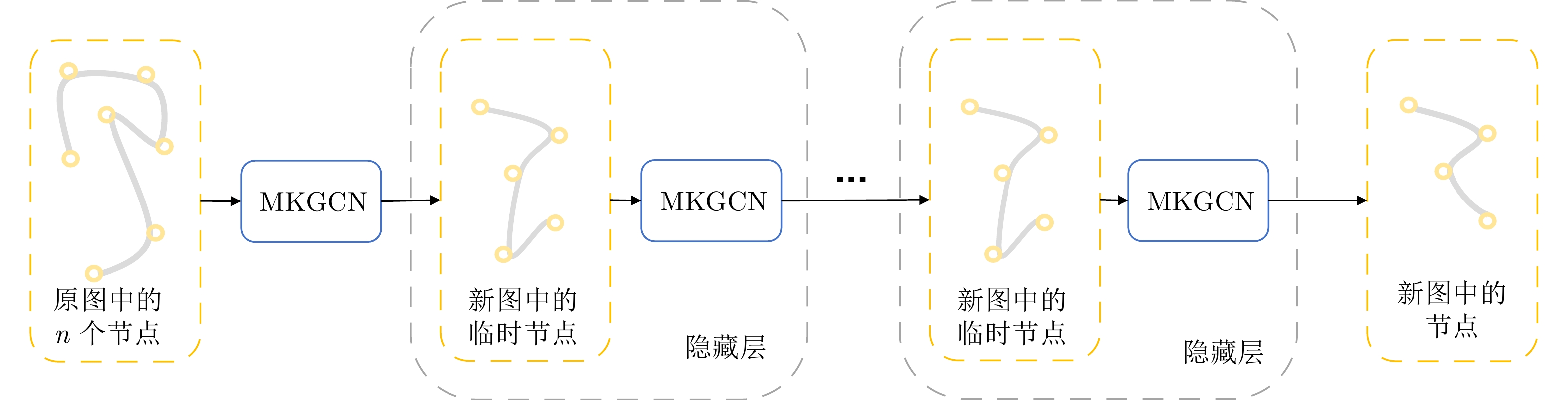
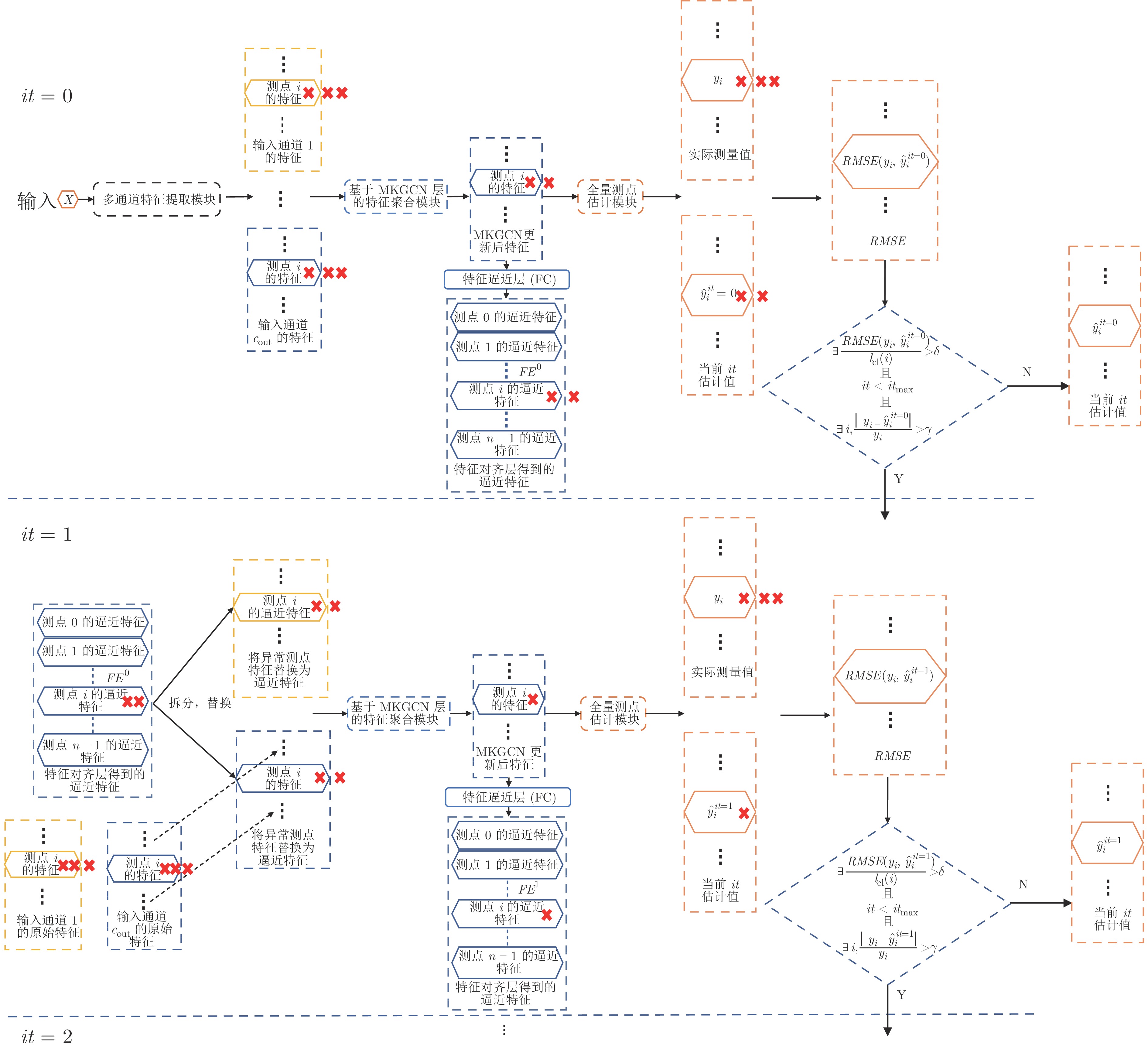
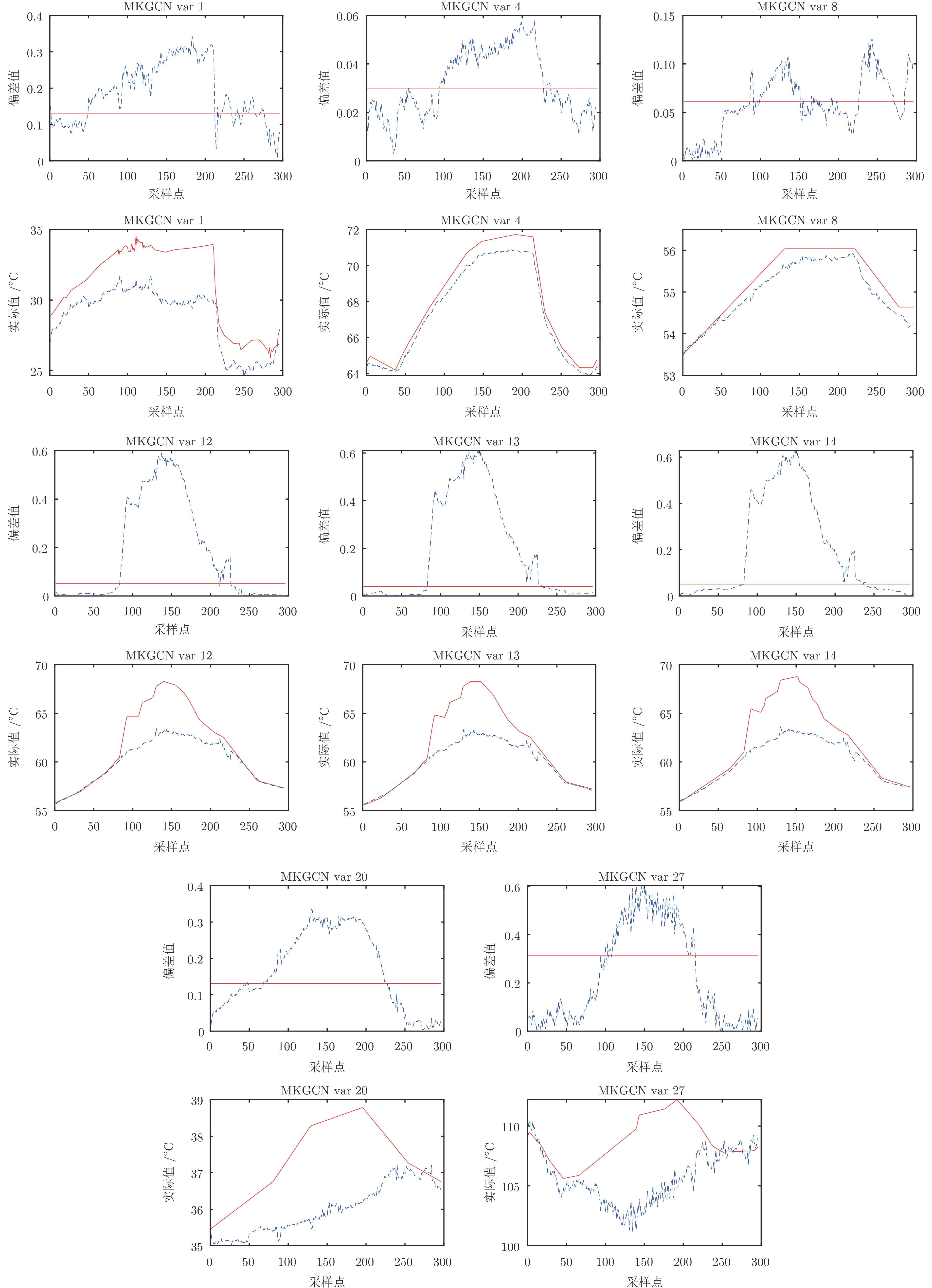
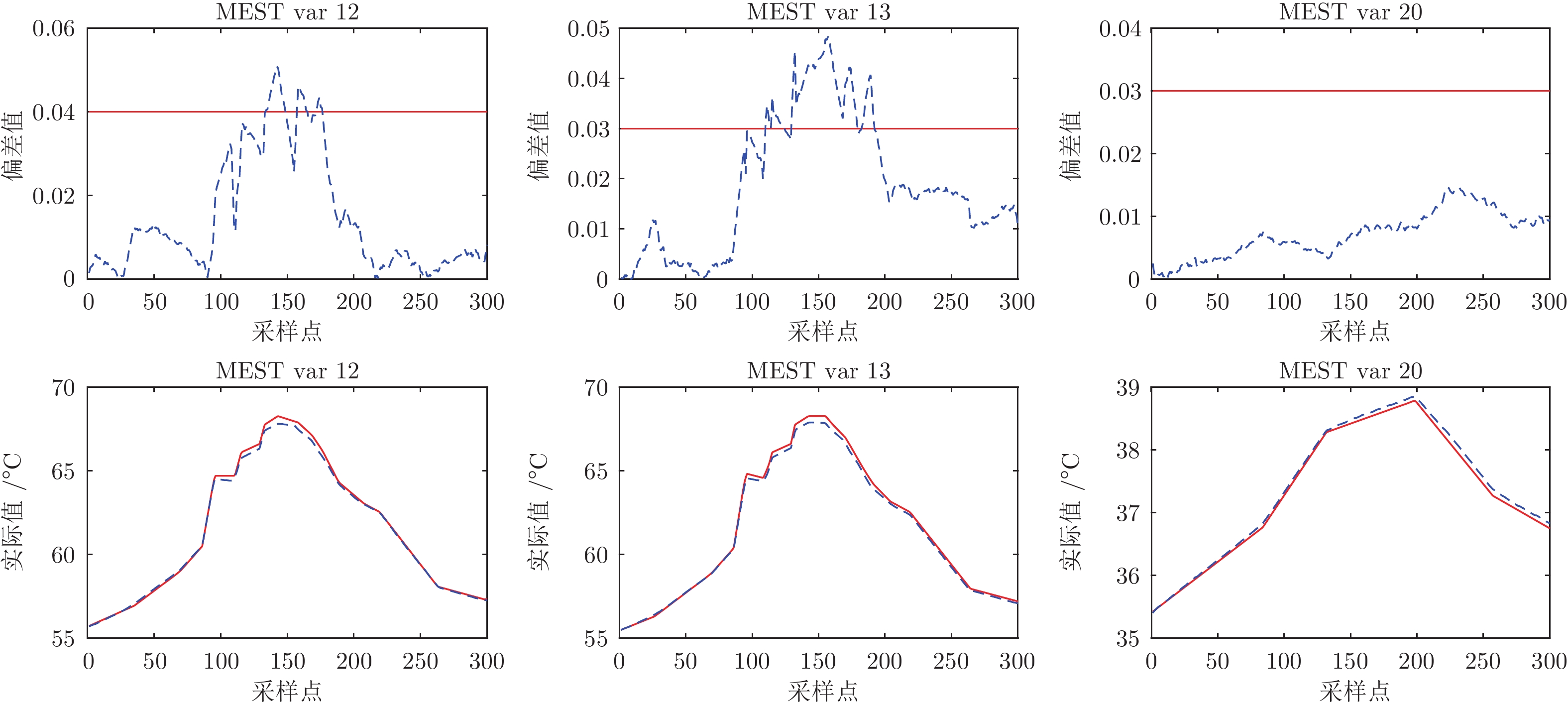
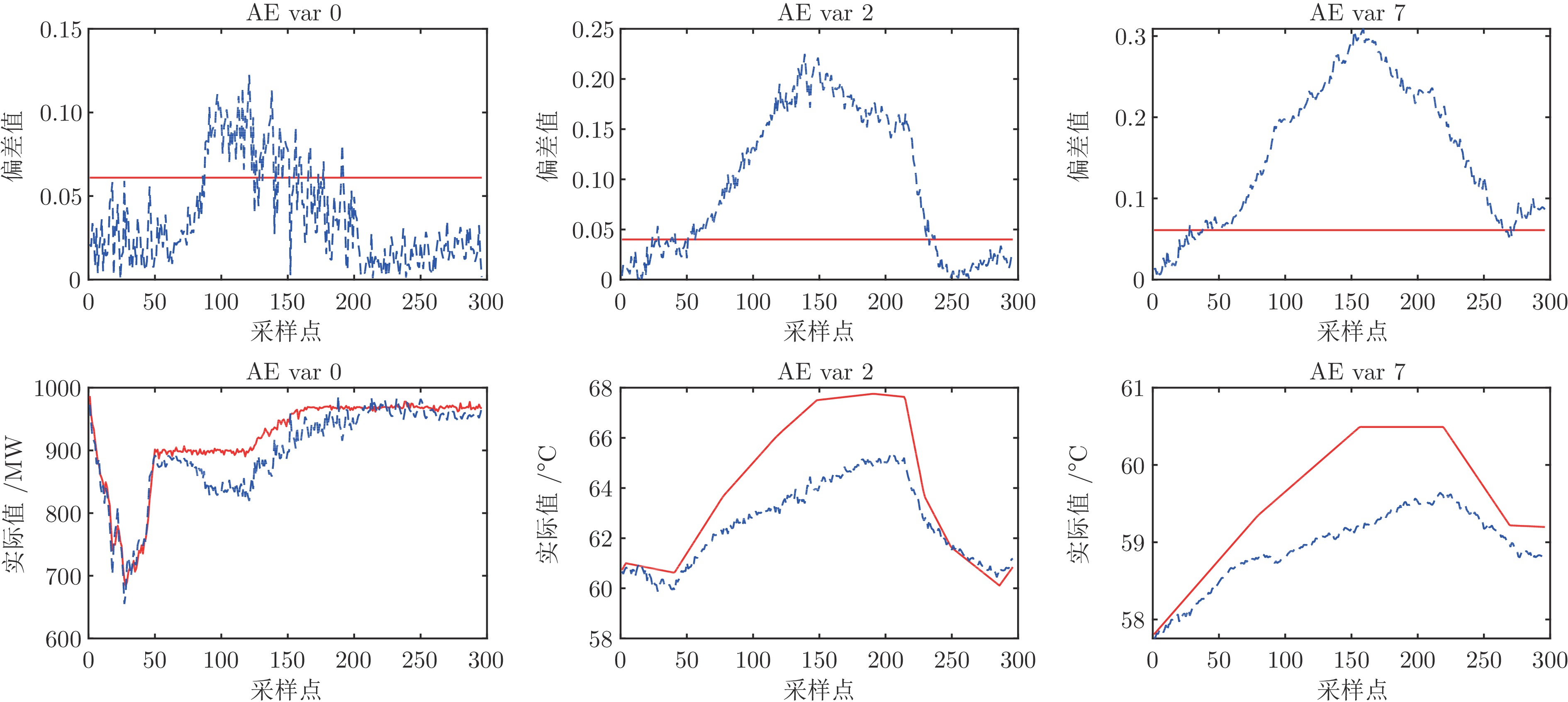
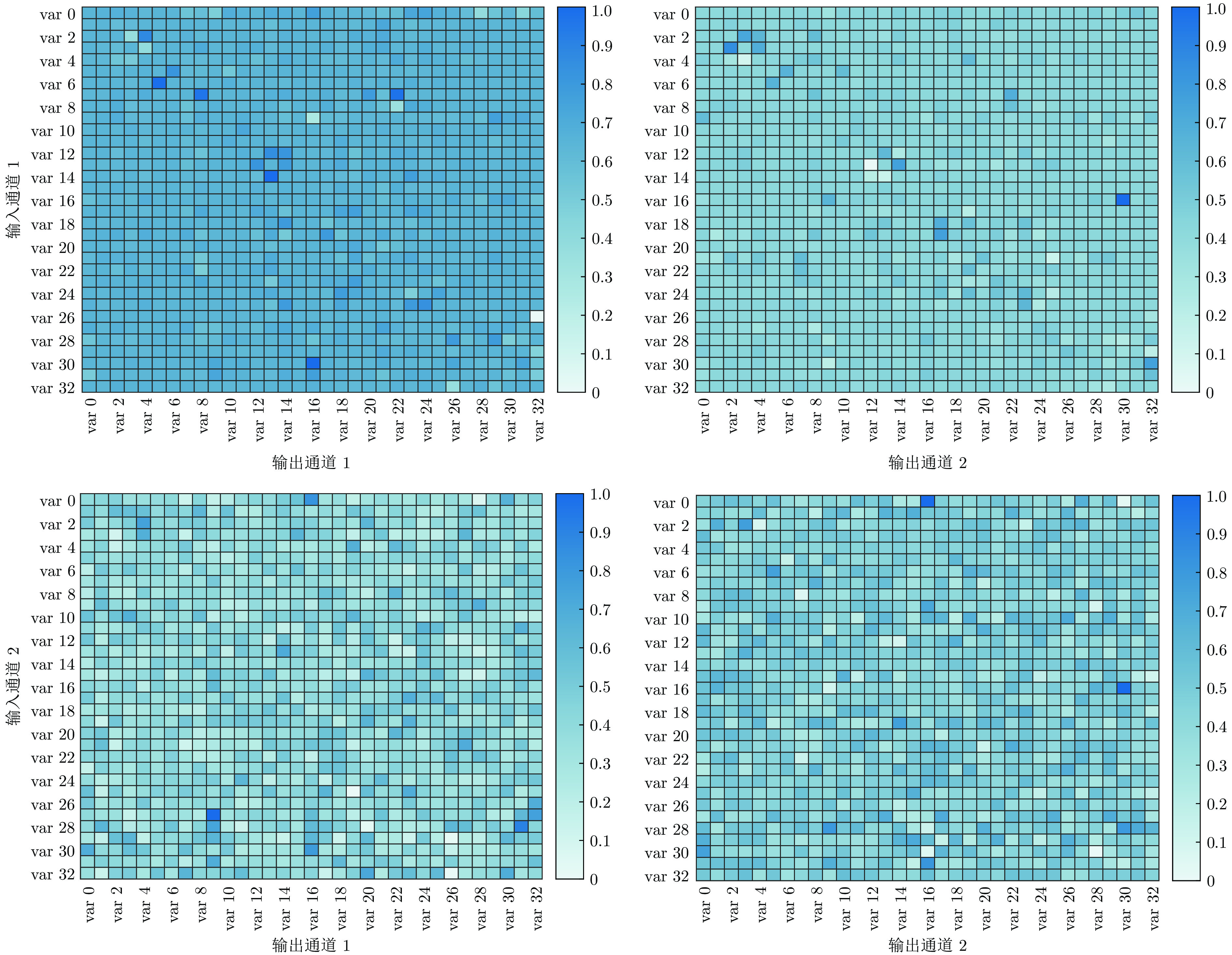
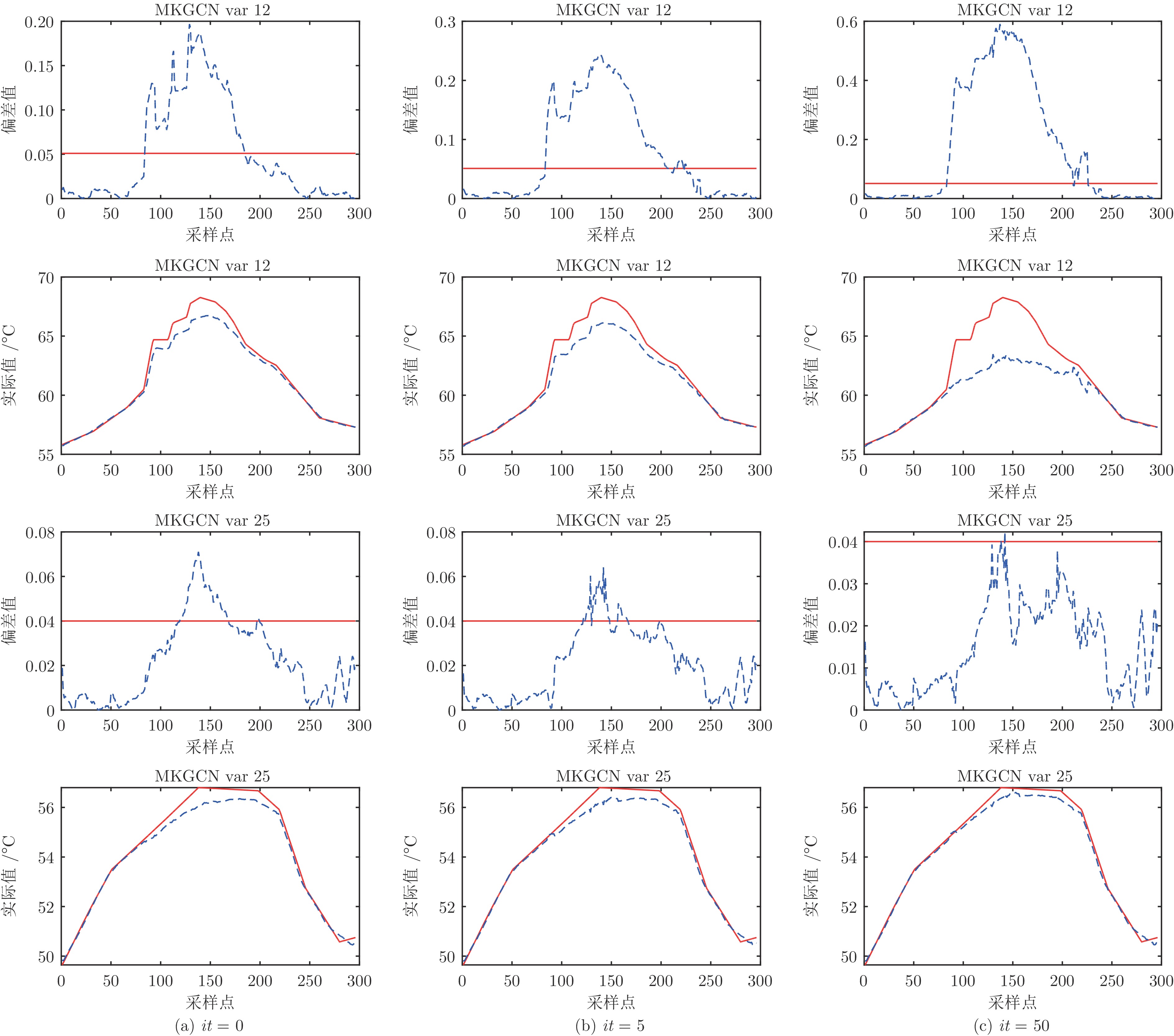
实际工业场景中, 需要在生产过程中收集大量测点的数据, 从而掌握生产过程运行状态. 传统的过程监测方法通常仅评估运行状态整体的异常与否, 或对运行状态进行分级评估, 这种方式并不会直接定位故障部位, 不利于故障的高效检修. 为此, 提出一种基于全量测点估计的监测模型, 根据全量测点估计值与实际值的偏差定义监测指标, 从而实现全量测点的分别精准监测. 为克服原有的基于工况估计的监测方法监测不全面且对测点间耦合关系建模不充分的问题, 提出多核图卷积网络(Multi-kernel graph convolutional network, MKGCN), 通过将全量传感器测点视为一张全量测点图, 显式地对测点间耦合关系进行建模, 从而实现全量传感器测点的同步工况估计. 此外, 面向在线监测场景, 设计基于特征逼近的自迭代方法, 从而克服在异常情况下由于测点间强耦合导致的部分测点估计值异常的问题. 所提出的方法在电厂百万千瓦超超临界机组中引风机的实际数据上进行验证, 结果显示, 与其他典型方法相比, 所提出的监测方法能够更精准地检测出发生故障的测点.
实际工业场景中, 需要在生产过程中收集大量测点的数据, 从而掌握生产过程运行状态. 传统的过程监测方法通常仅评估运行状态整体的异常与否, 或对运行状态进行分级评估, 这种方式并不会直接定位故障部位, 不利于故障的高效检修. 为此, 提出一种基于全量测点估计的监测模型, 根据全量测点估计值与实际值的偏差定义监测指标, 从而实现全量测点的分别精准监测. 为克服原有的基于工况估计的监测方法监测不全面且对测点间耦合关系建模不充分的问题, 提出多核图卷积网络(Multi-kernel graph convolutional network, MKGCN), 通过将全量传感器测点视为一张全量测点图, 显式地对测点间耦合关系进行建模, 从而实现全量传感器测点的同步工况估计. 此外, 面向在线监测场景, 设计基于特征逼近的自迭代方法, 从而克服在异常情况下由于测点间强耦合导致的部分测点估计值异常的问题. 所提出的方法在电厂百万千瓦超超临界机组中引风机的实际数据上进行验证, 结果显示, 与其他典型方法相比, 所提出的监测方法能够更精准地检测出发生故障的测点.

2024, 50(8): 1539-1549.
doi: 10.16383/j.aas.c230688
摘要:
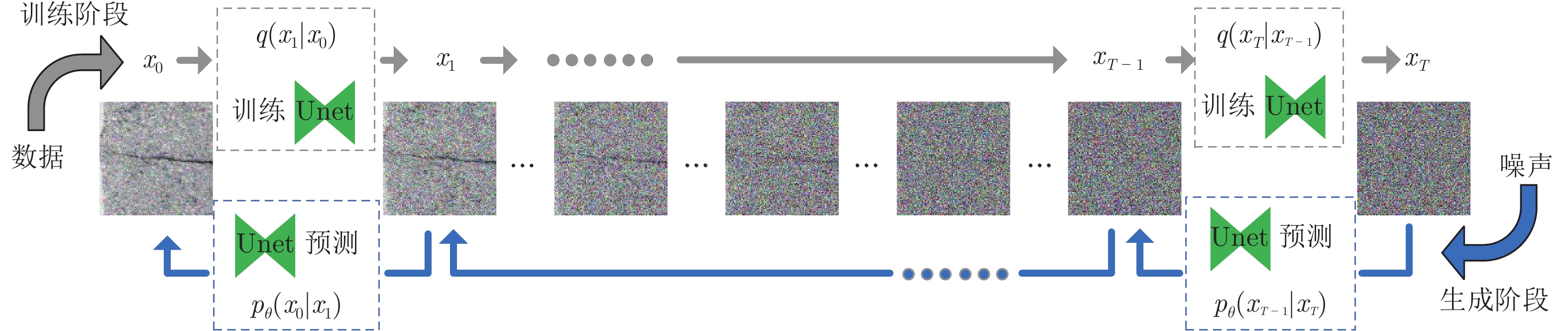
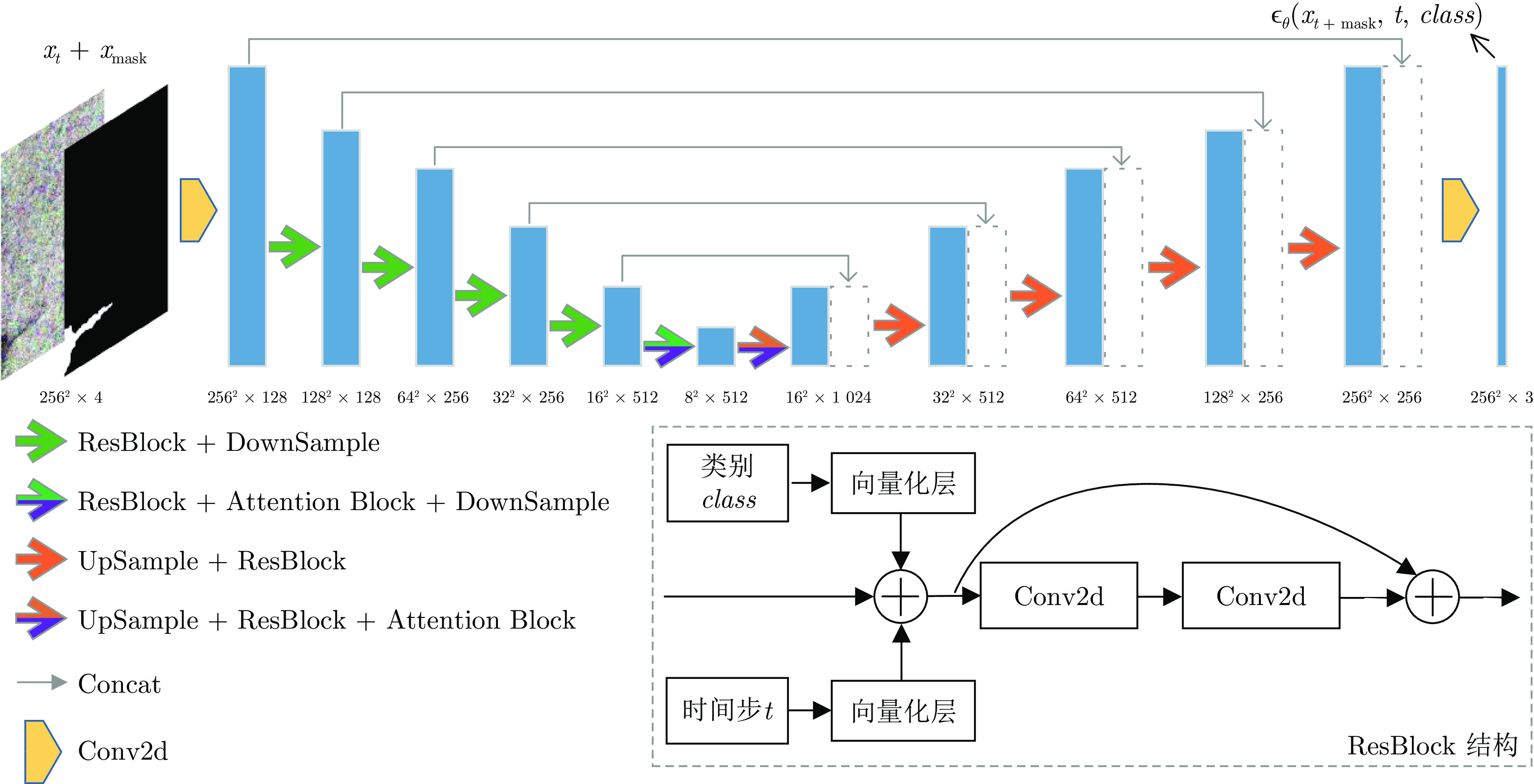
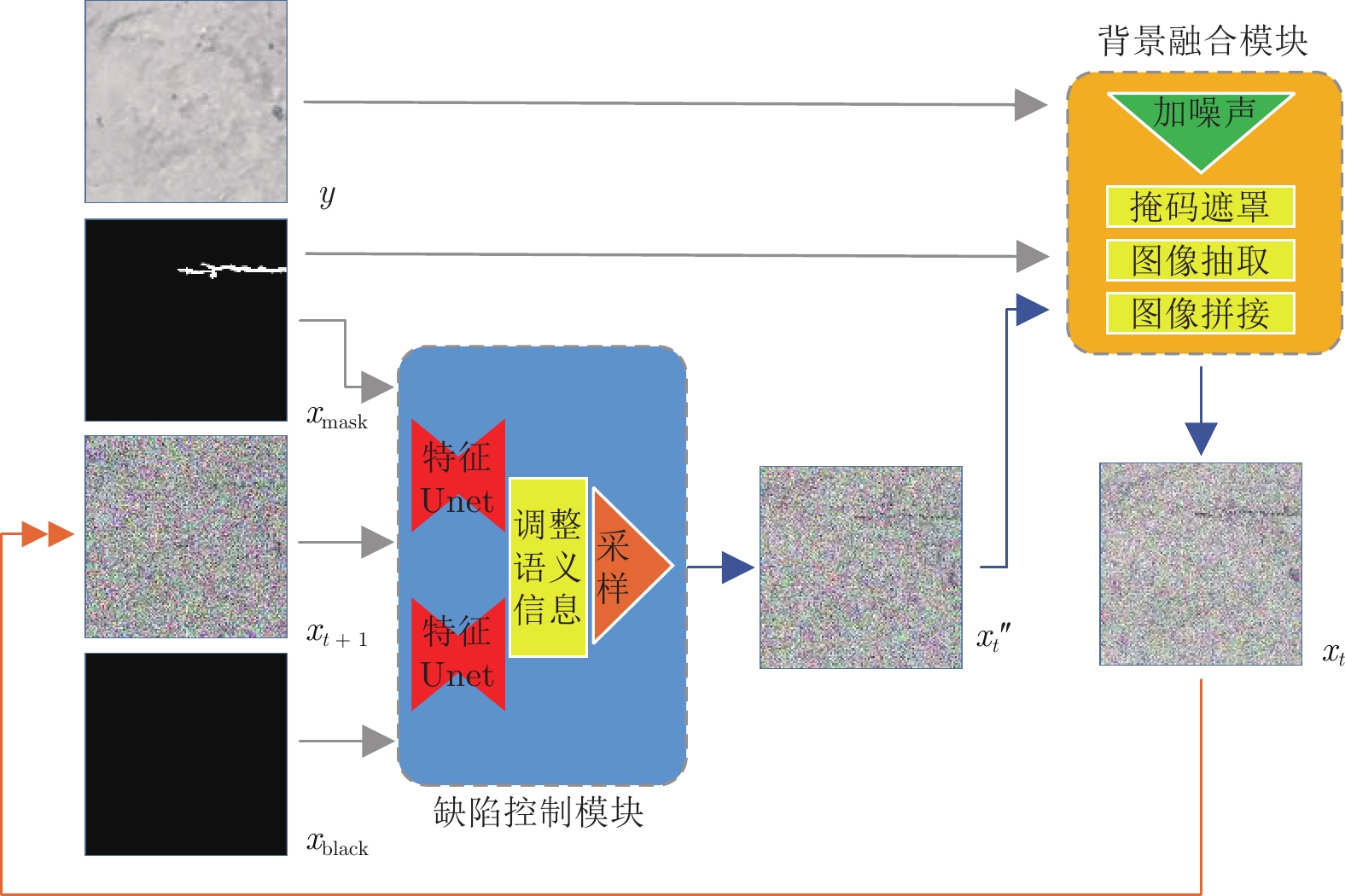
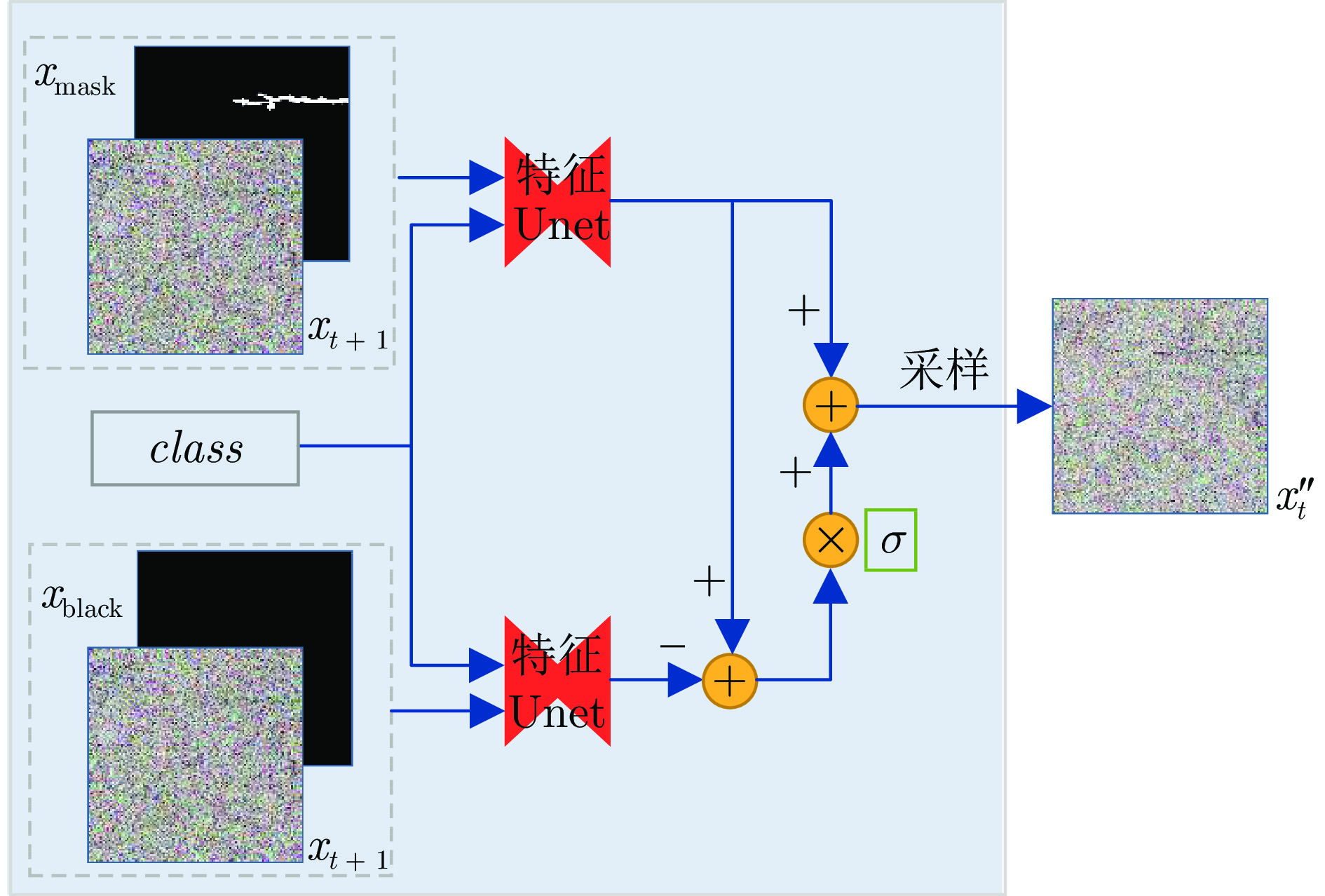
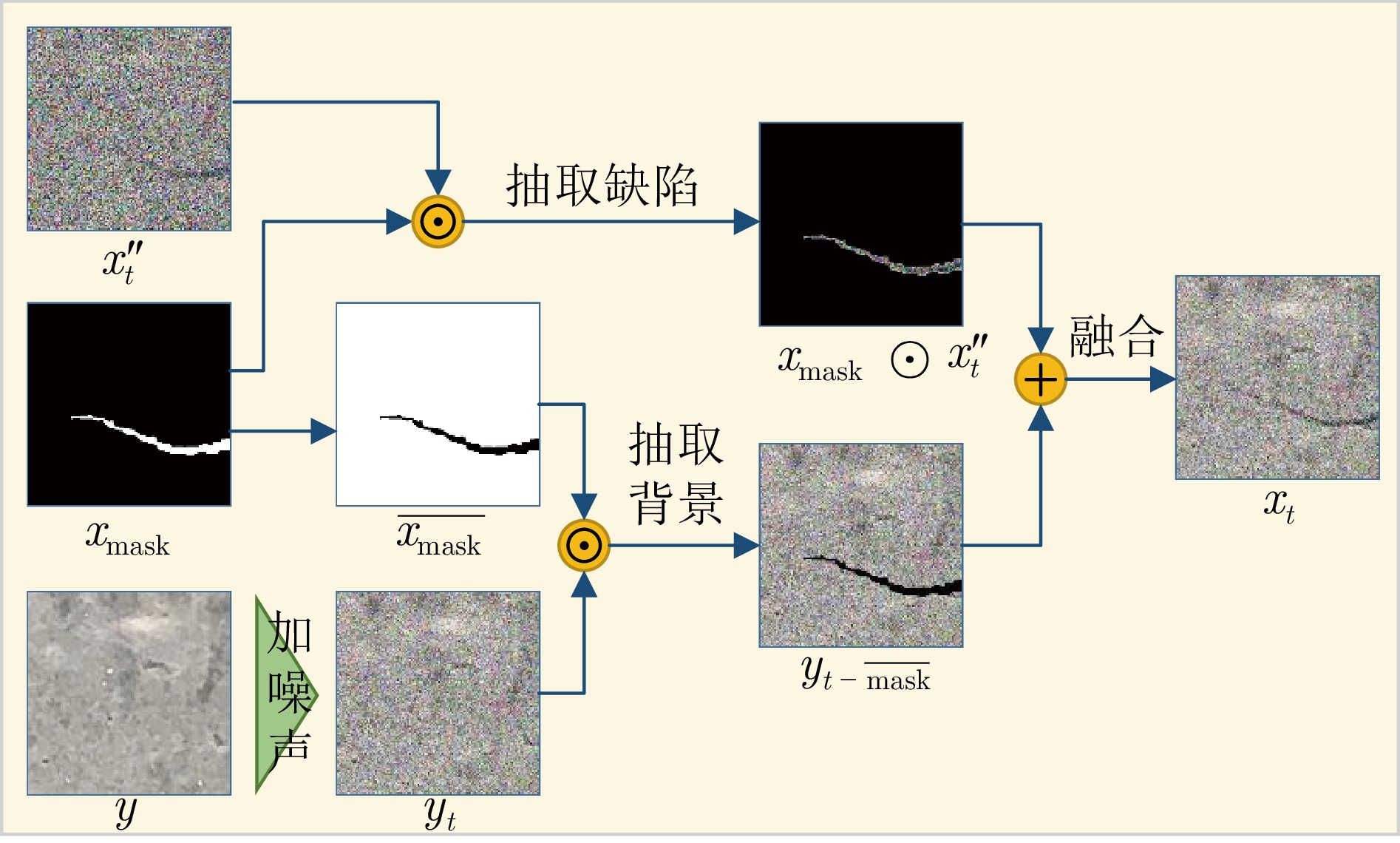
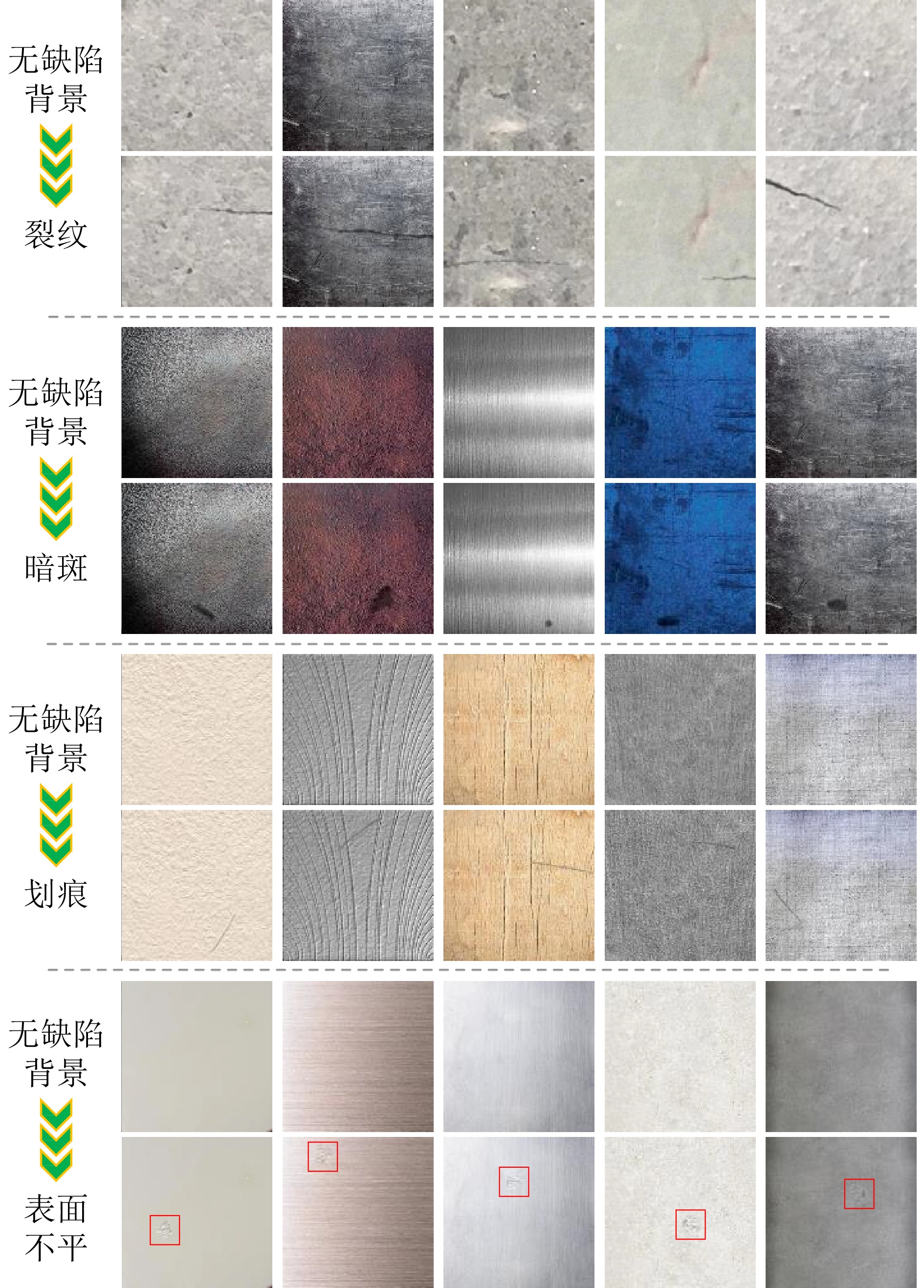
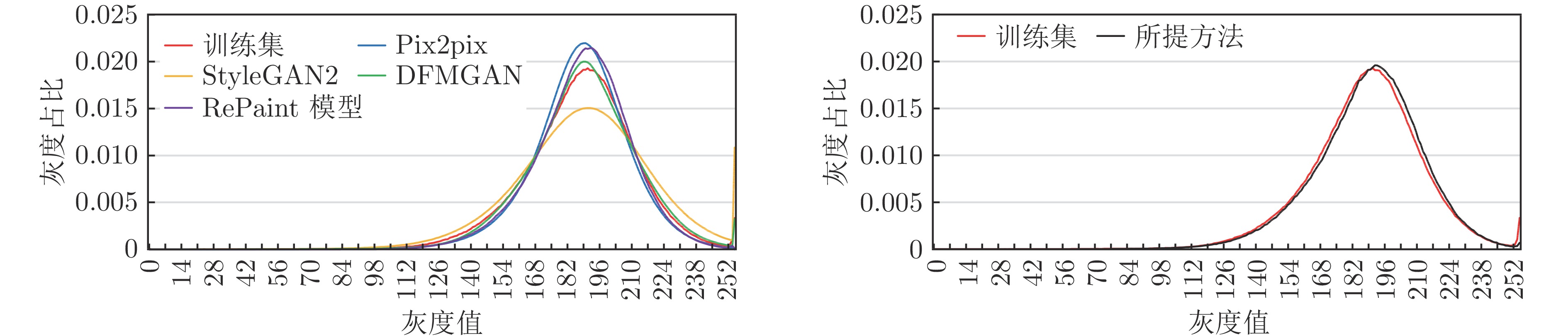
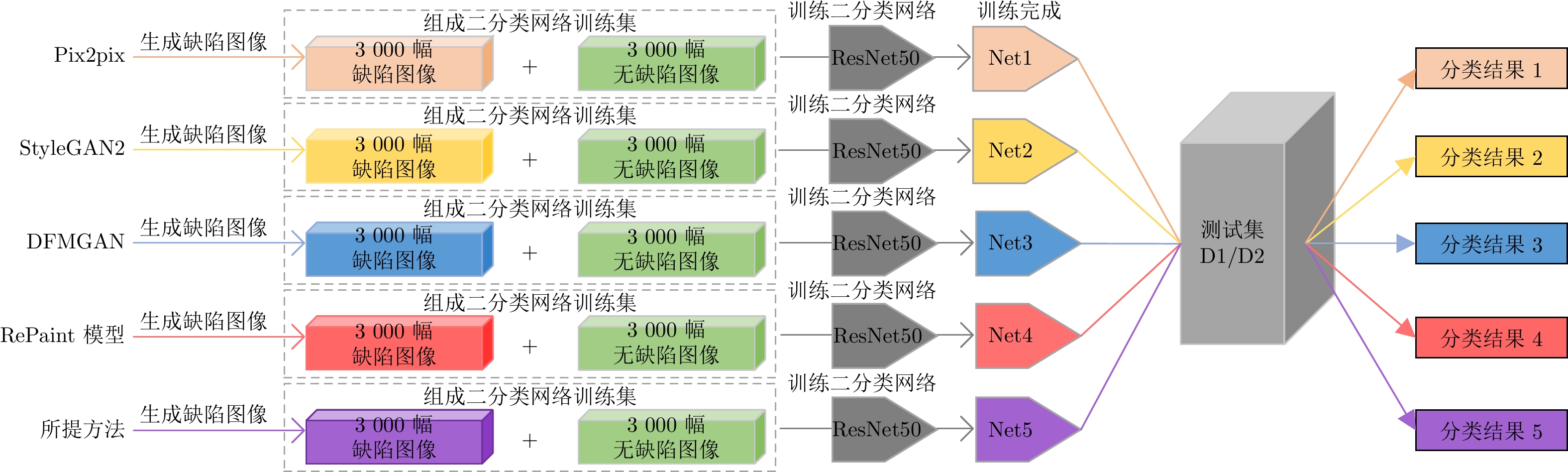
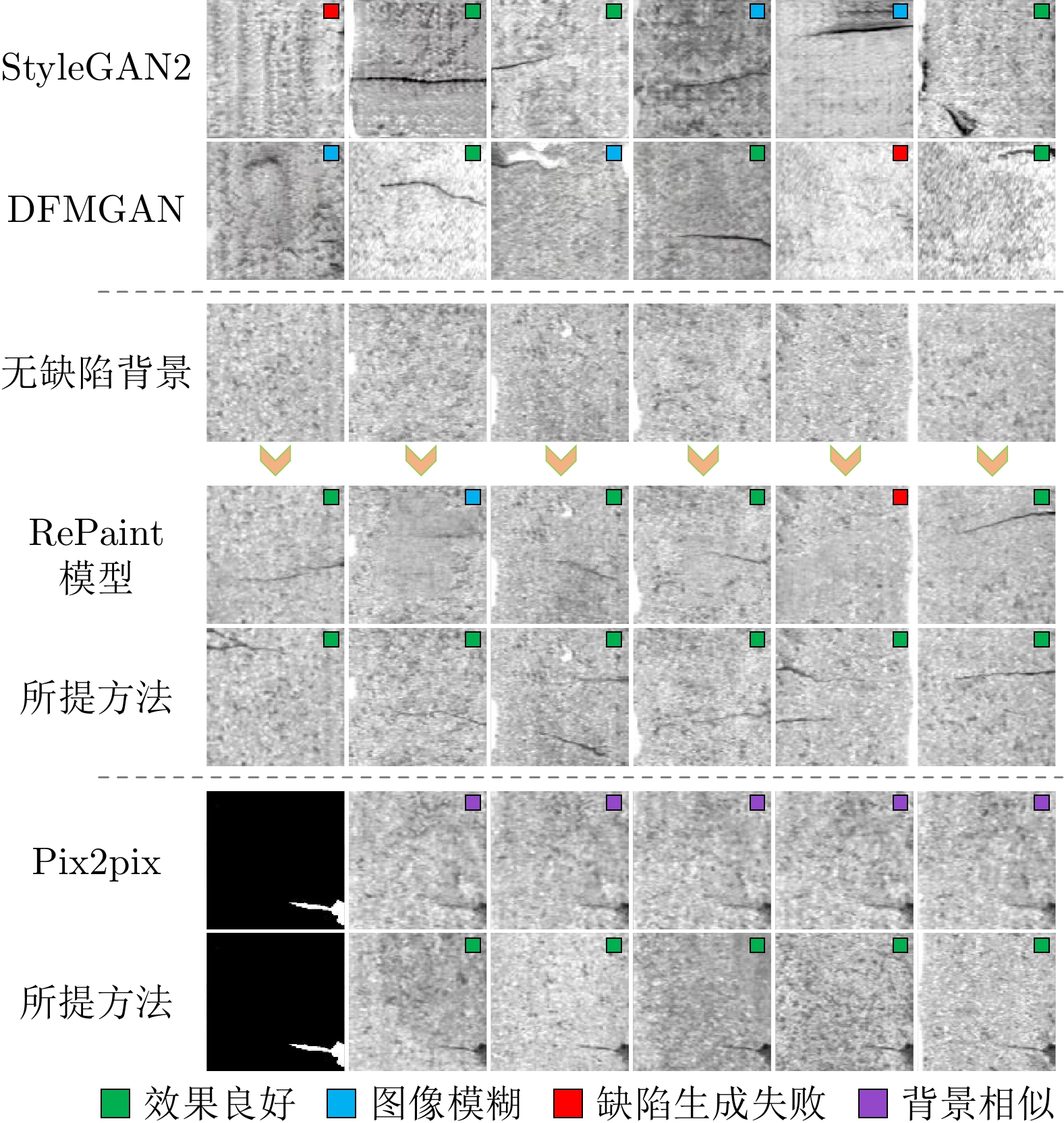
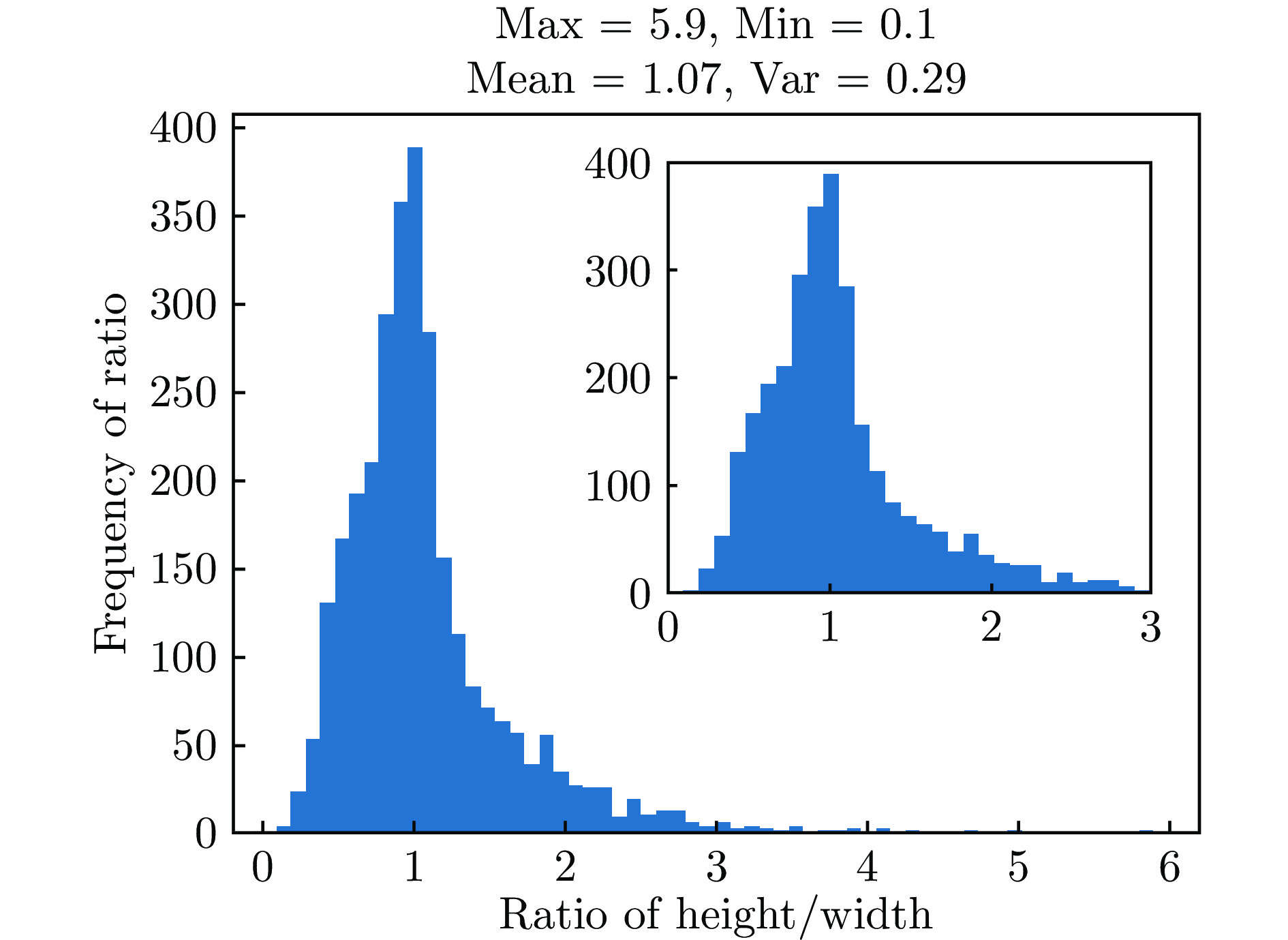
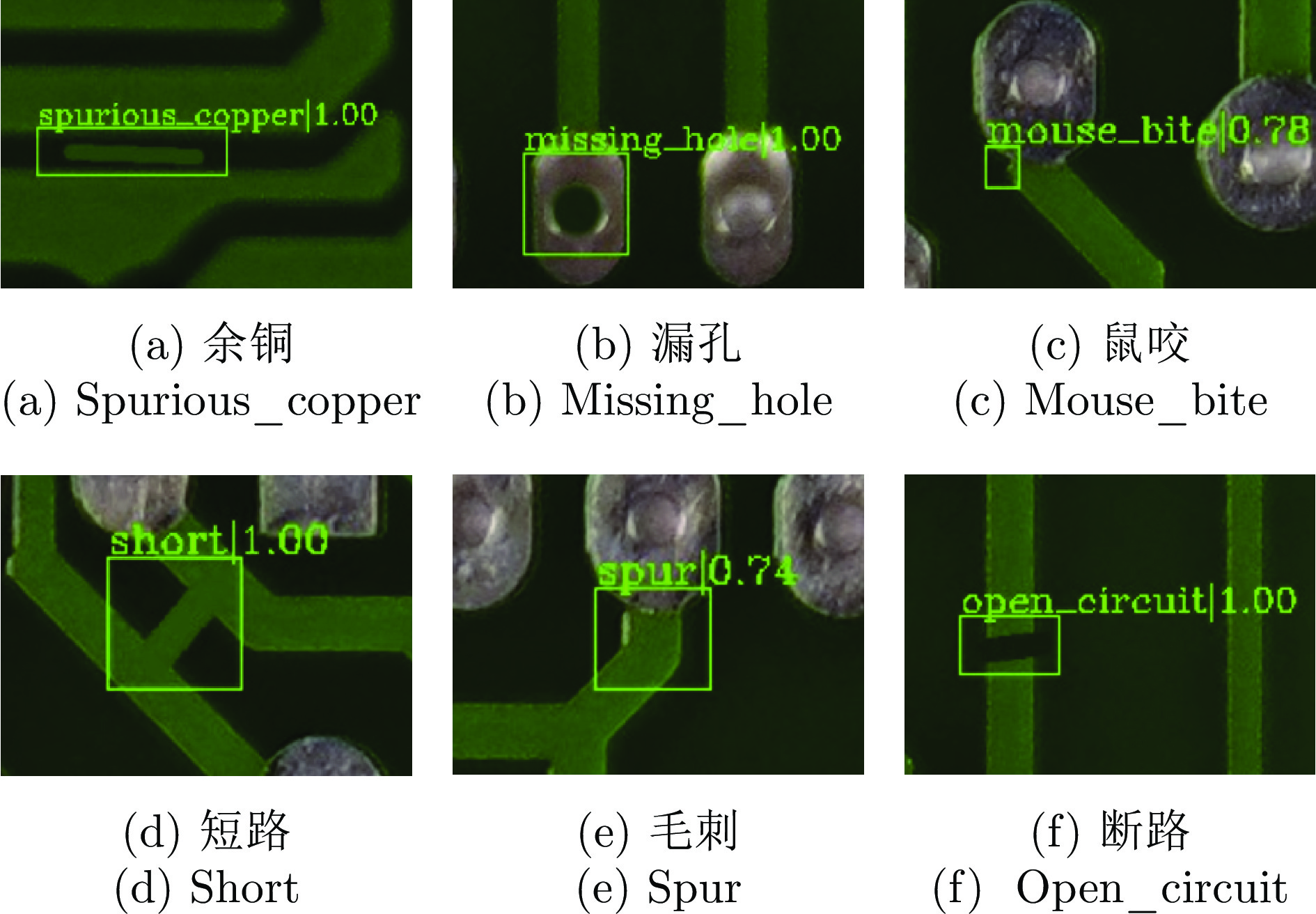
基于深度学习的表面缺陷检测技术是工业上的一项重要应用, 而缺陷图像数据集质量对缺陷检测性能有重要影响. 为解决实际工业生产过程中缺陷样本获取成本高、缺陷数据量少的痛点, 提出了一种基于去噪扩散概率模型(Denoising diffusion probabilistic model, DDPM)的缺陷图像生成方法. 该方法在训练过程中加强了模型对缺陷部位和无缺陷背景的差异化学习. 在生成过程中通过缺陷控制模块对生成缺陷的类别、形态、显著性等特征进行精准控制, 通过背景融合模块, 能将缺陷在不同的无缺陷背景上进行迁移, 大大降低新背景上缺陷样本的获取难度. 实验验证了该模型的缺陷控制和缺陷迁移能力, 其生成结果能有效扩充训练数据集, 提升下游缺陷检测任务的准确率.
基于深度学习的表面缺陷检测技术是工业上的一项重要应用, 而缺陷图像数据集质量对缺陷检测性能有重要影响. 为解决实际工业生产过程中缺陷样本获取成本高、缺陷数据量少的痛点, 提出了一种基于去噪扩散概率模型(Denoising diffusion probabilistic model, DDPM)的缺陷图像生成方法. 该方法在训练过程中加强了模型对缺陷部位和无缺陷背景的差异化学习. 在生成过程中通过缺陷控制模块对生成缺陷的类别、形态、显著性等特征进行精准控制, 通过背景融合模块, 能将缺陷在不同的无缺陷背景上进行迁移, 大大降低新背景上缺陷样本的获取难度. 实验验证了该模型的缺陷控制和缺陷迁移能力, 其生成结果能有效扩充训练数据集, 提升下游缺陷检测任务的准确率.


2024, 50(8): 1550-1564.
doi: 10.16383/j.aas.c210467
摘要:
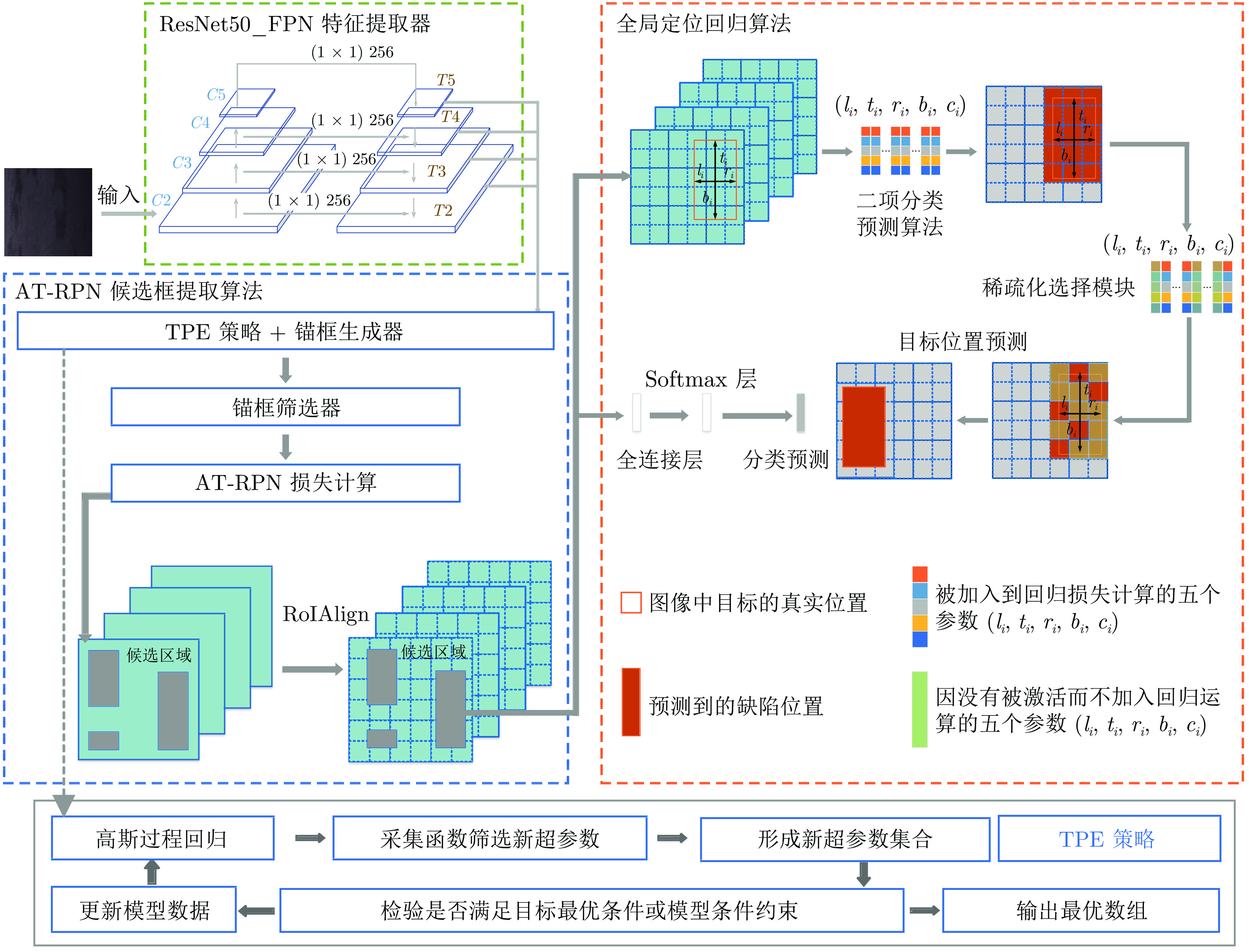
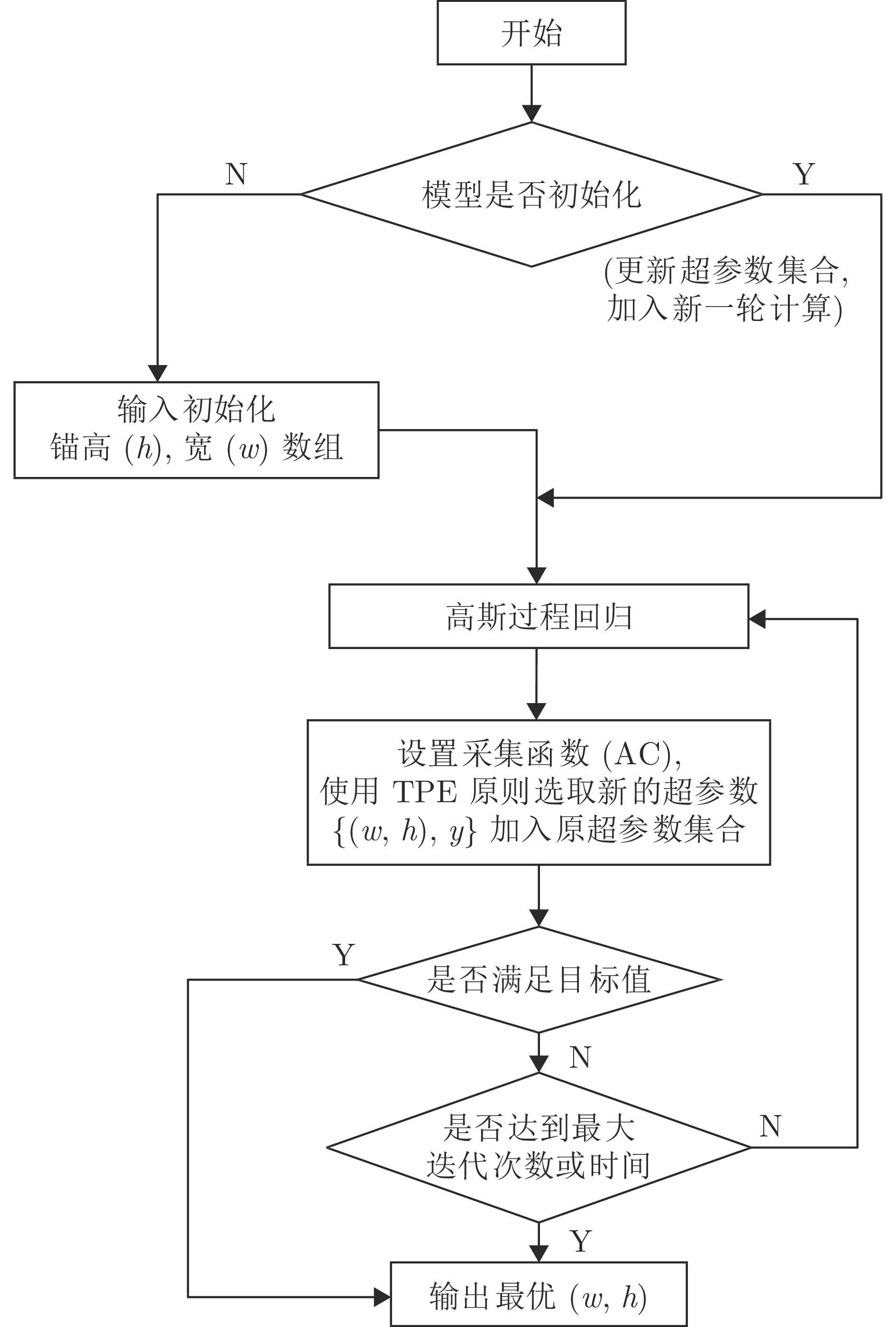
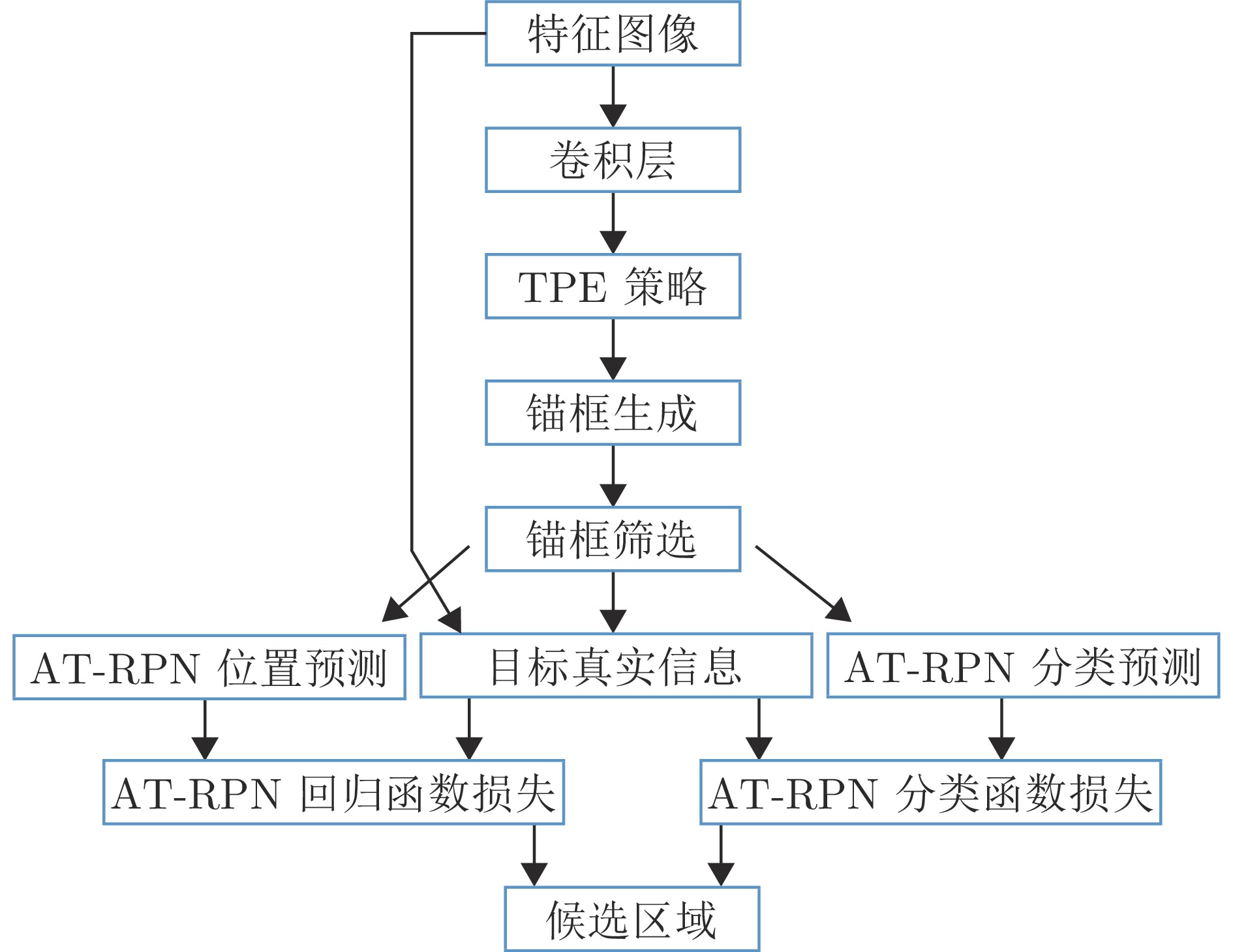
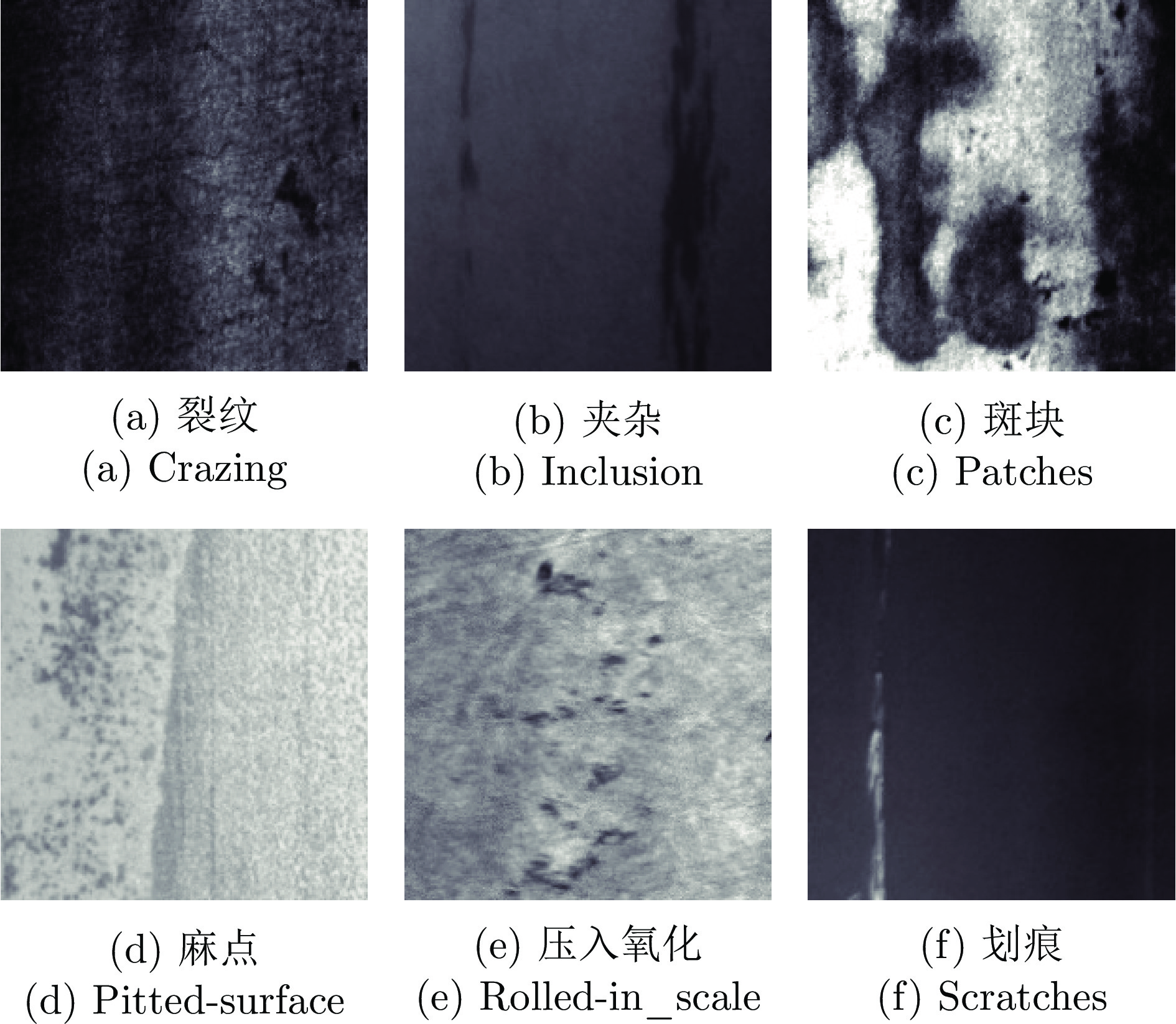
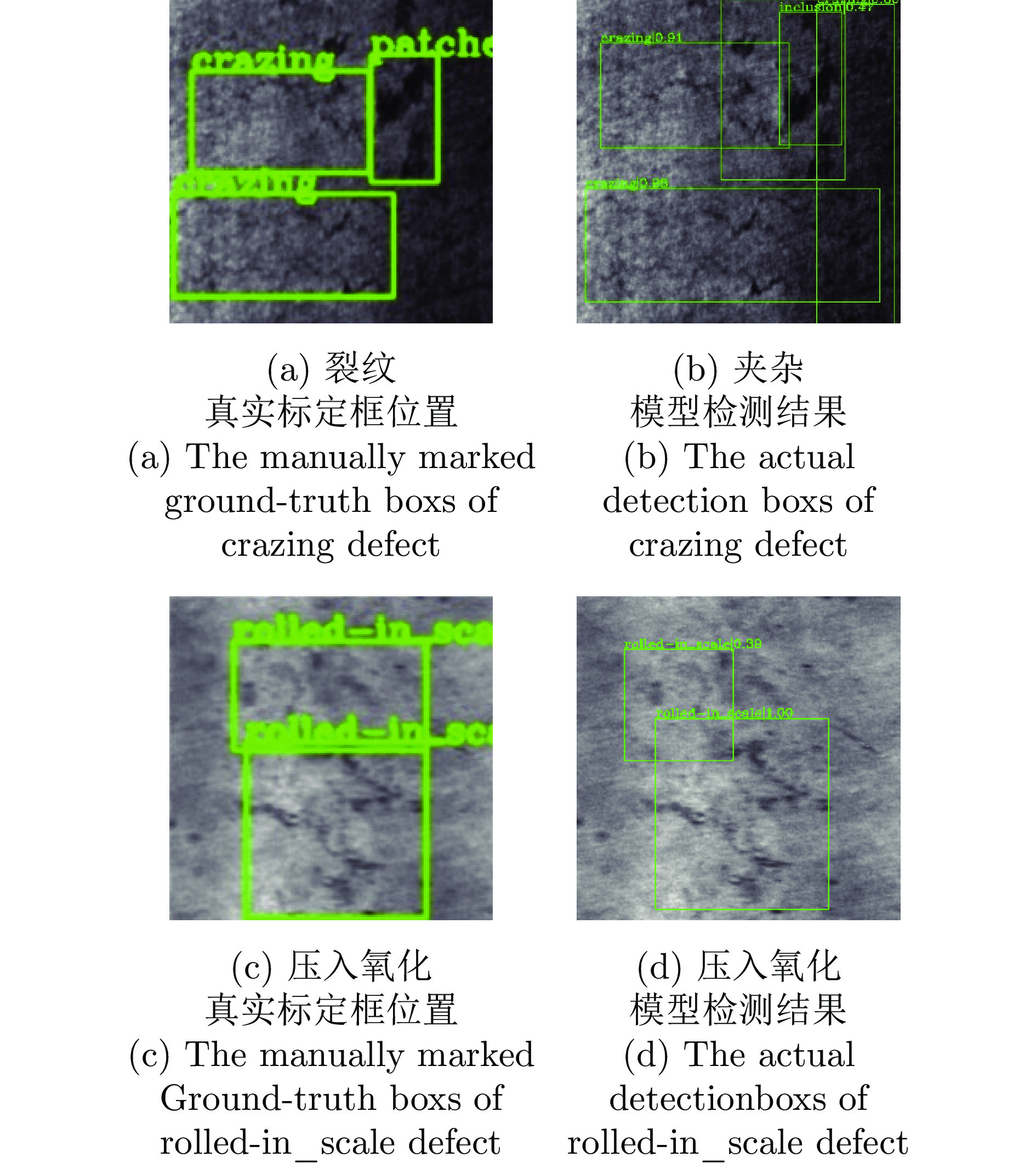
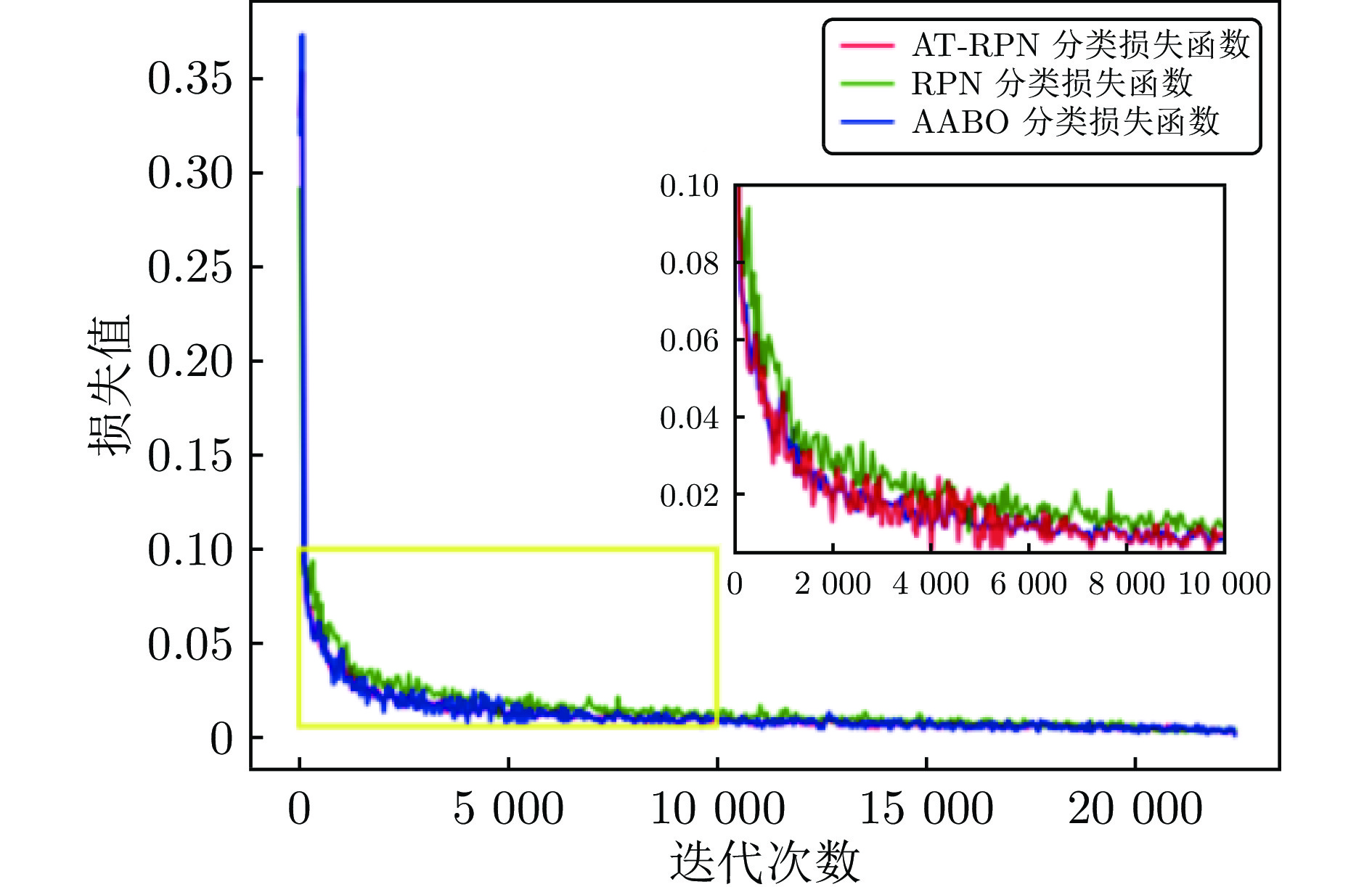
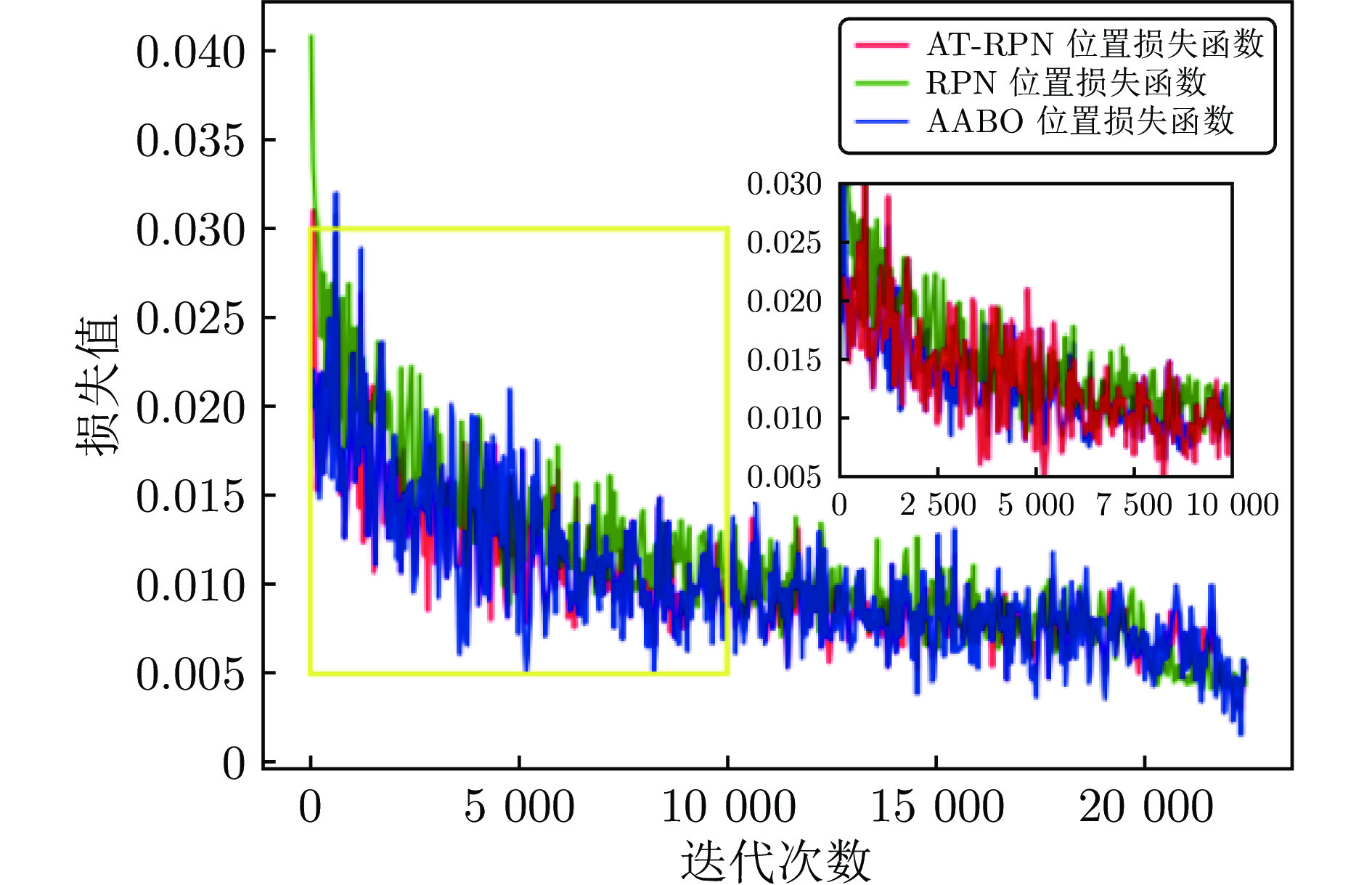
针对热轧带钢表面缺陷检测存在的智能化水平低、检测精度低和检测速度慢等问题, 提出了一种基于自适应全局定位网络(Adaptive global localization network, AGLNet)的深度学习缺陷检测算法. 首先, 引入一种残差网络(Residual network, ResNet)与特征金字塔网络(Feature pyramid network, FPN)集成的特征提取结构, 减少缺陷语义信息在层级传递间的消失; 其次, 提出基于TPE (Tree-structure Parzen estimation)的自适应树型候选框提取网络(Adaptive tree-structure region proposal extraction network, AT-RPN), 无需先验知识的积累, 避免了人为调参的训练模式; 最后, 引入全局定位回归算法, 以全局定位的模式在复杂的缺陷检测中实现缺陷更精确定位. 本文实现一种快速、准确、更智能化、更适用于实际应用的热轧带钢表面缺陷的算法. 实验结果表明, AGLNet在NEU-DET热轧带钢表面缺陷数据集上的检测速度保持在11.8帧/s, 平均精度达到79.90 %, 优于目前其他深度学习带钢表面缺陷检测算法. 另外, 该算法还具备较强的泛化能力.
针对热轧带钢表面缺陷检测存在的智能化水平低、检测精度低和检测速度慢等问题, 提出了一种基于自适应全局定位网络(Adaptive global localization network, AGLNet)的深度学习缺陷检测算法. 首先, 引入一种残差网络(Residual network, ResNet)与特征金字塔网络(Feature pyramid network, FPN)集成的特征提取结构, 减少缺陷语义信息在层级传递间的消失; 其次, 提出基于TPE (Tree-structure Parzen estimation)的自适应树型候选框提取网络(Adaptive tree-structure region proposal extraction network, AT-RPN), 无需先验知识的积累, 避免了人为调参的训练模式; 最后, 引入全局定位回归算法, 以全局定位的模式在复杂的缺陷检测中实现缺陷更精确定位. 本文实现一种快速、准确、更智能化、更适用于实际应用的热轧带钢表面缺陷的算法. 实验结果表明, AGLNet在NEU-DET热轧带钢表面缺陷数据集上的检测速度保持在11.8帧/s, 平均精度达到79.90 %, 优于目前其他深度学习带钢表面缺陷检测算法. 另外, 该算法还具备较强的泛化能力.

2024, 50(8): 1565-1576.
doi: 10.16383/j.aas.c220889
摘要:
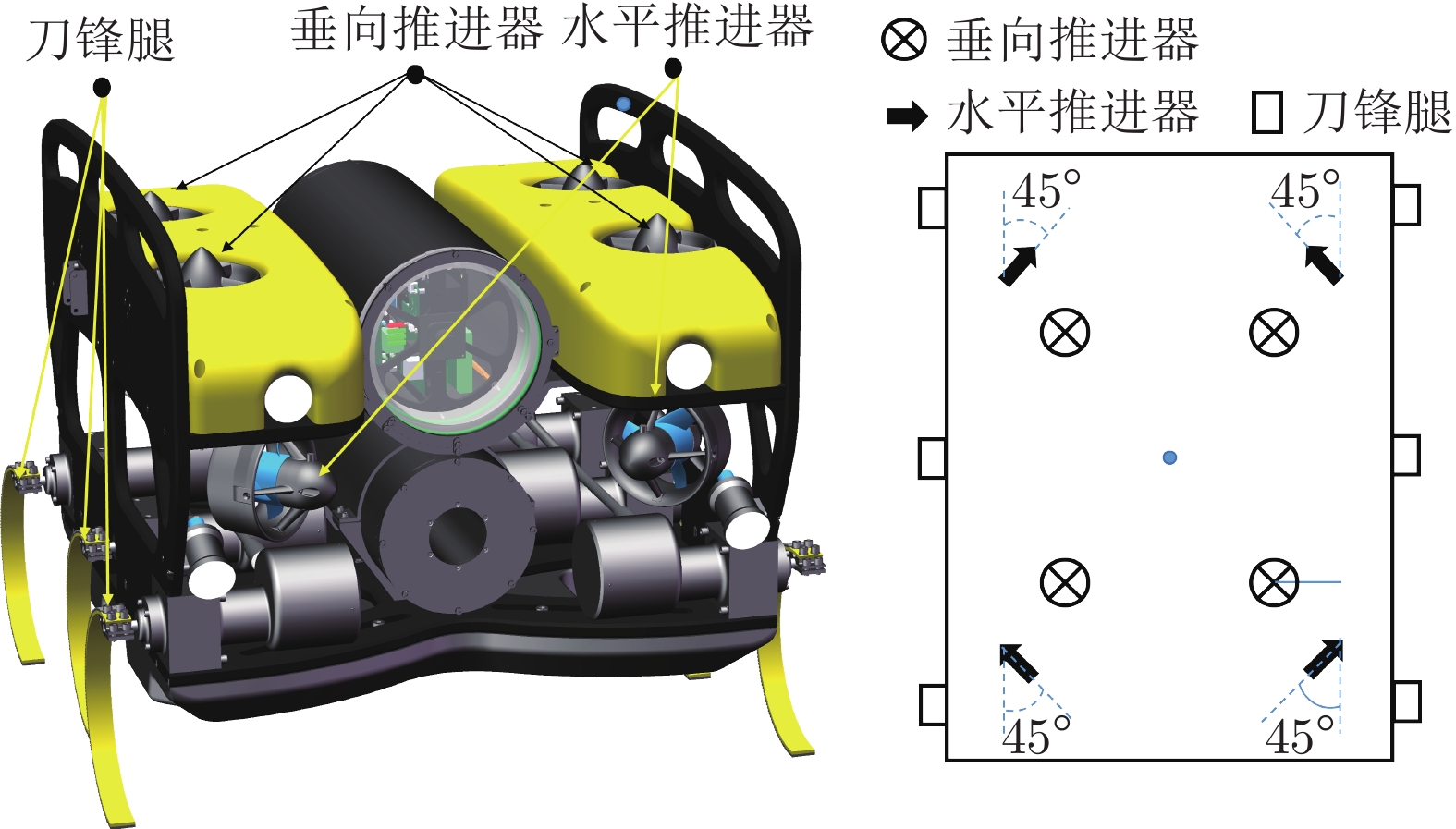
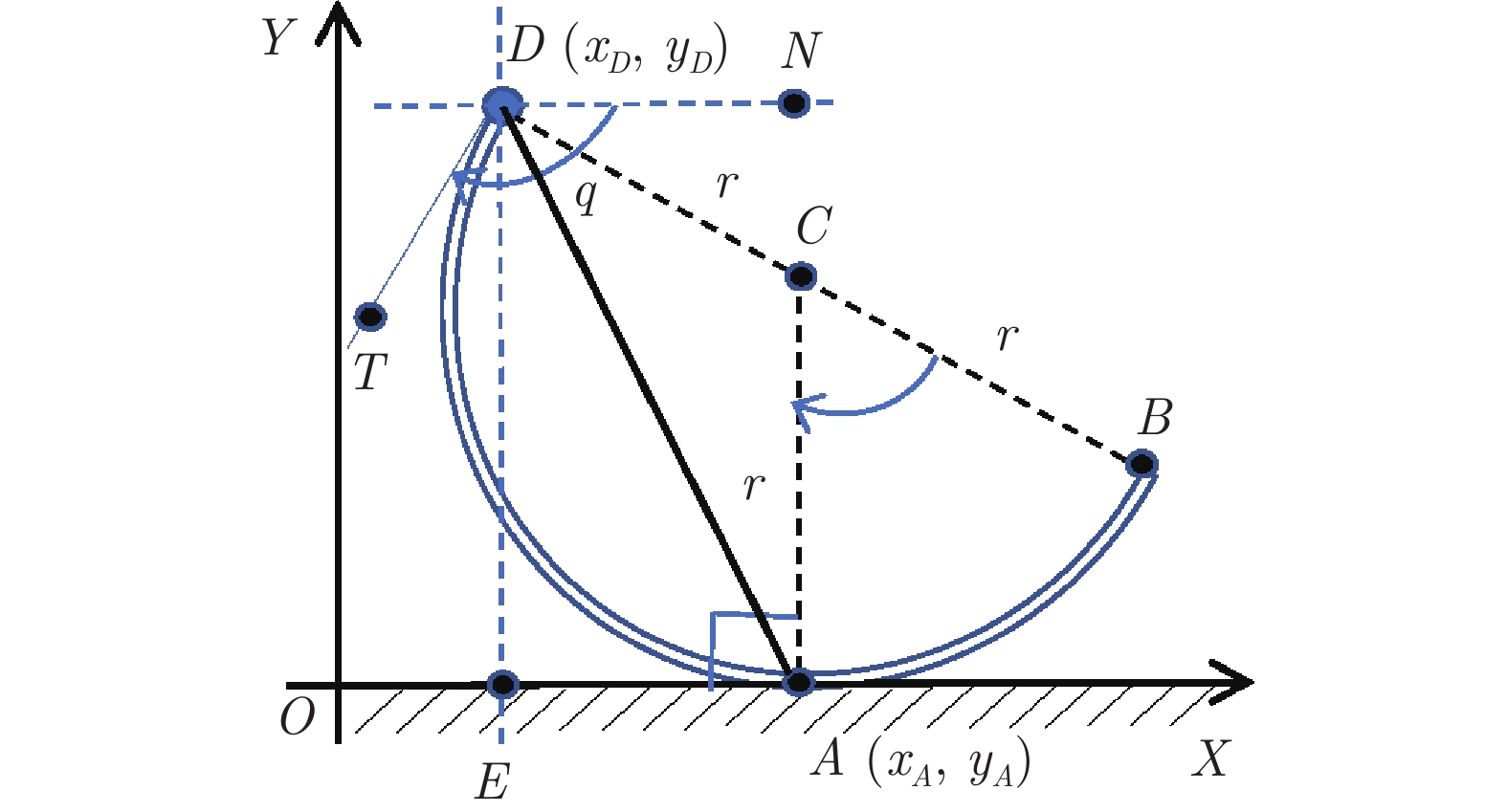
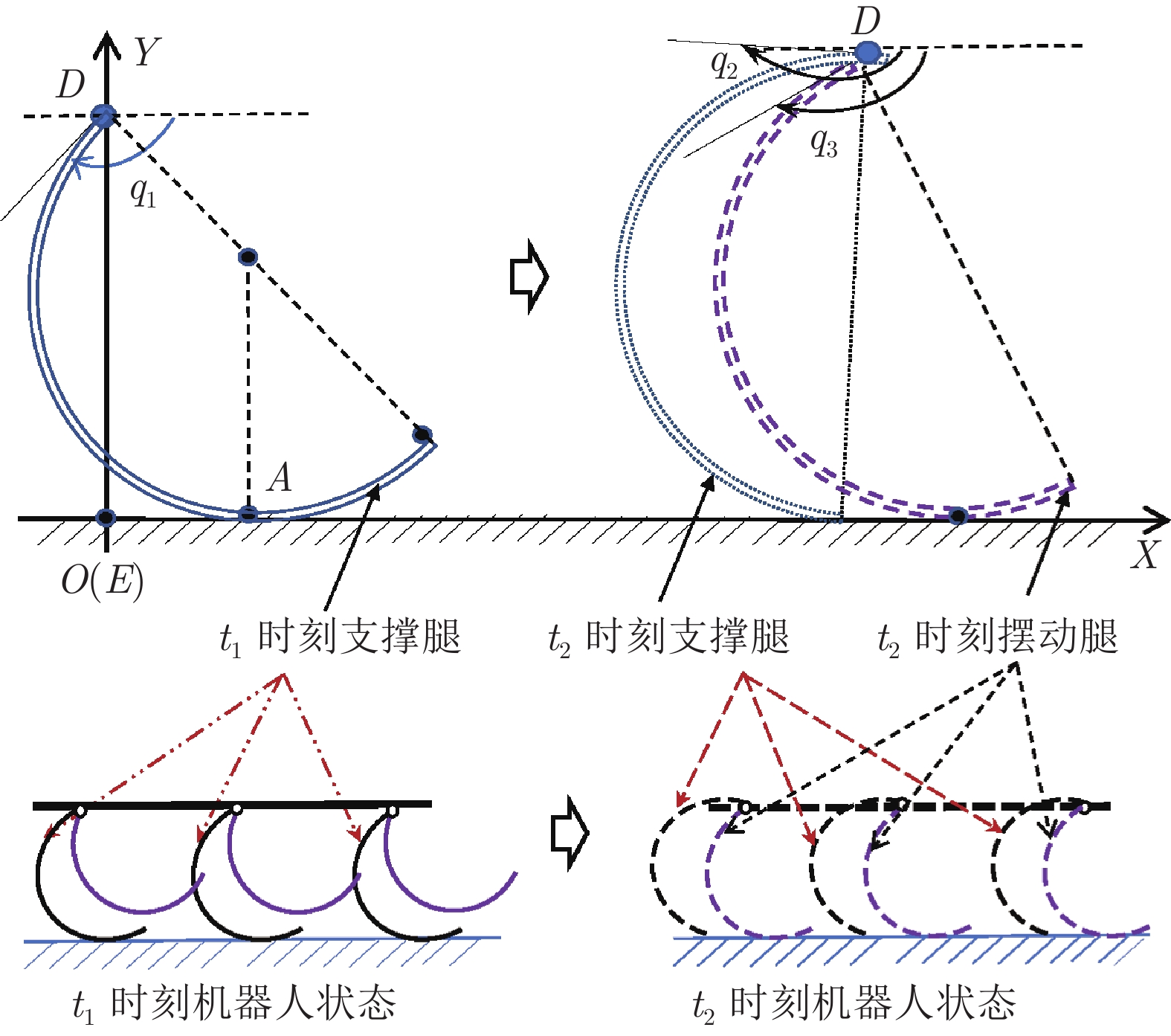
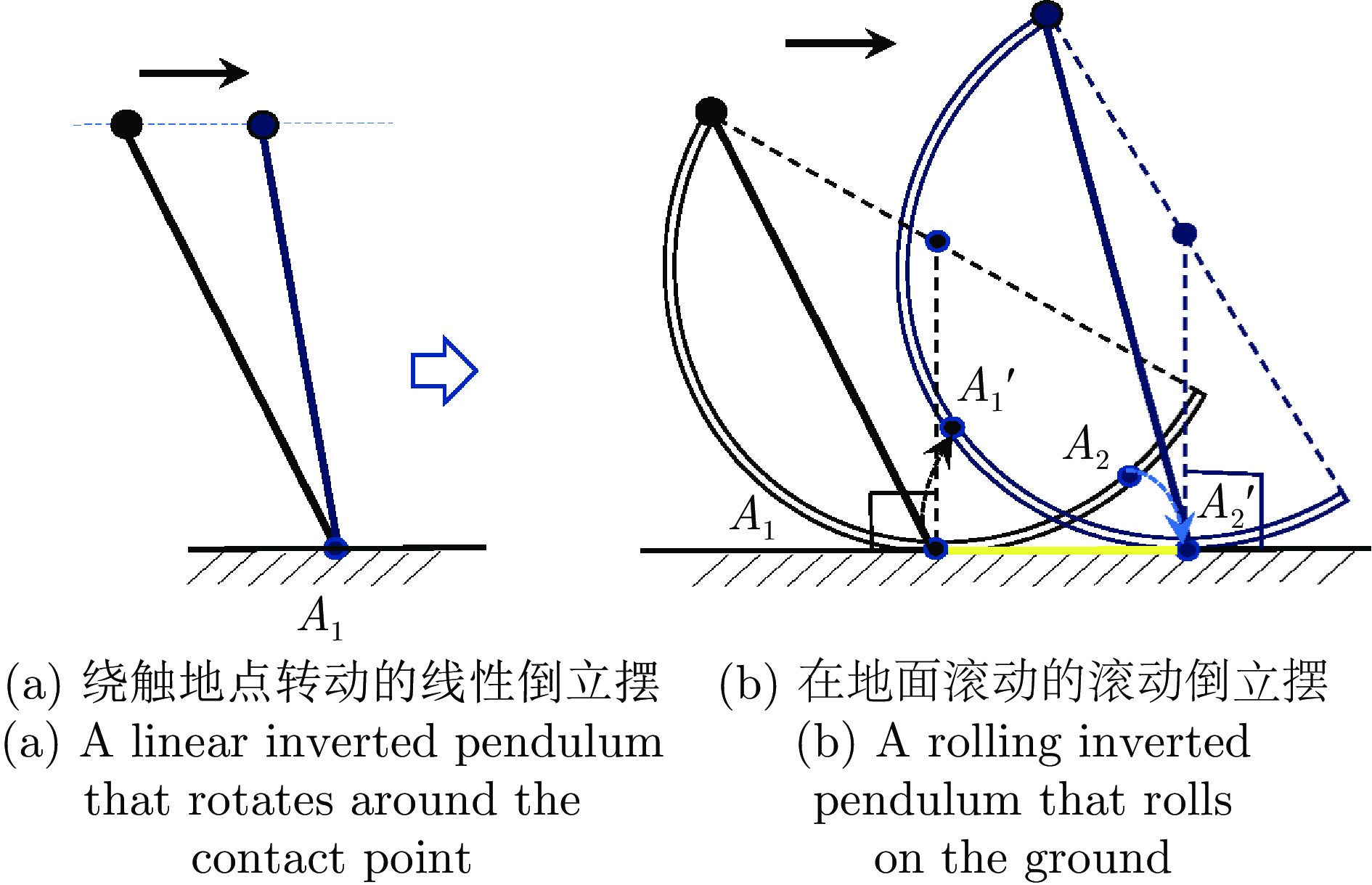
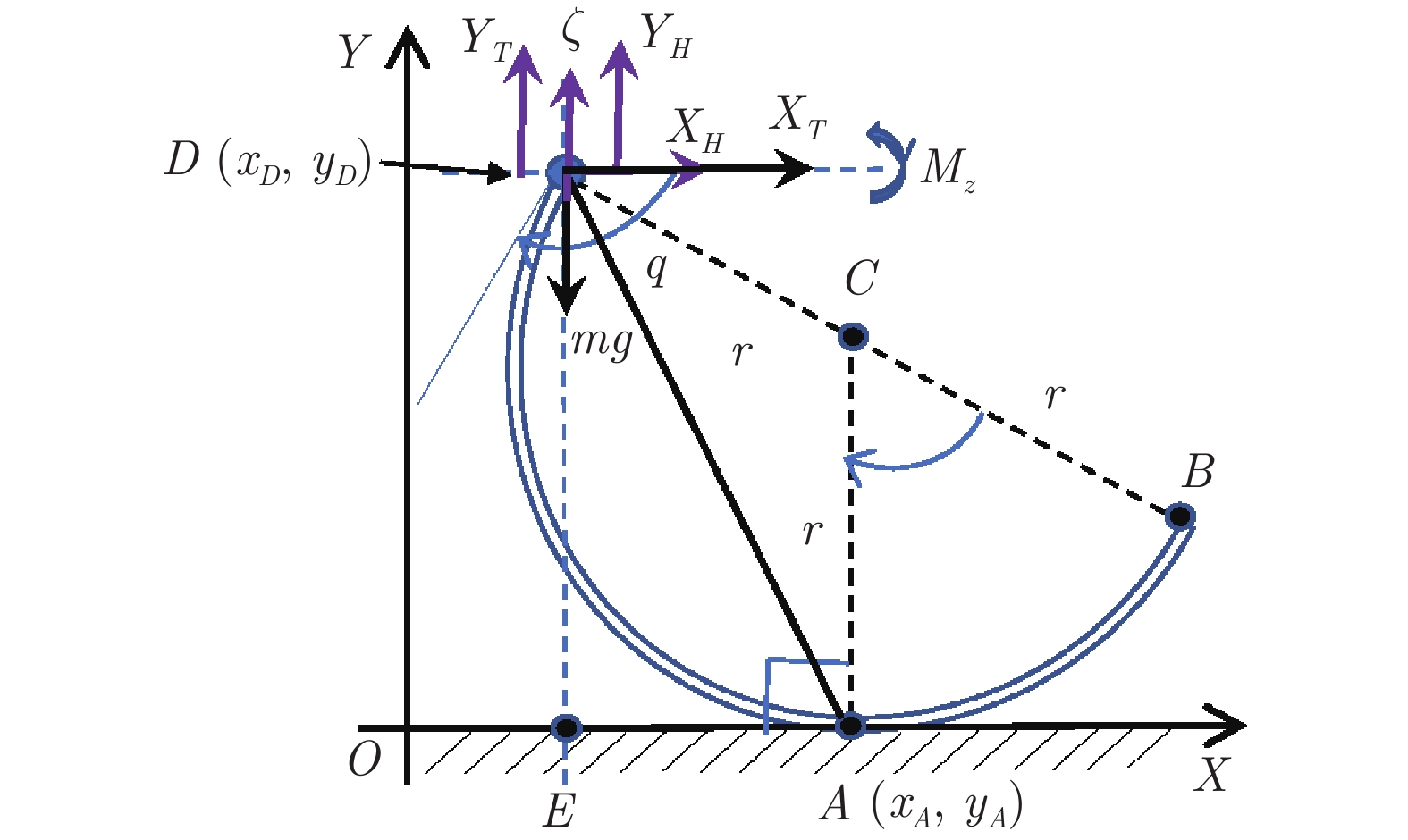
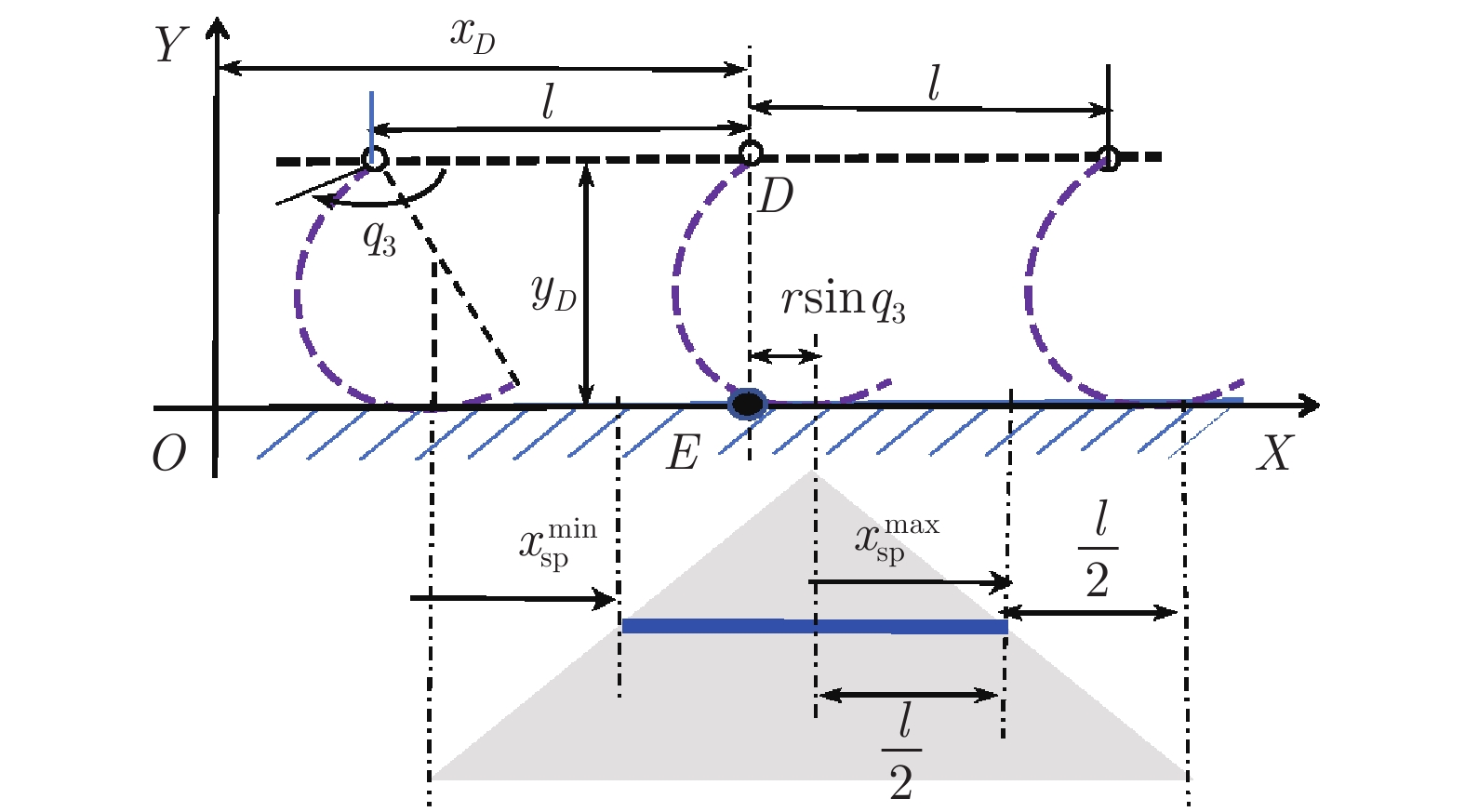
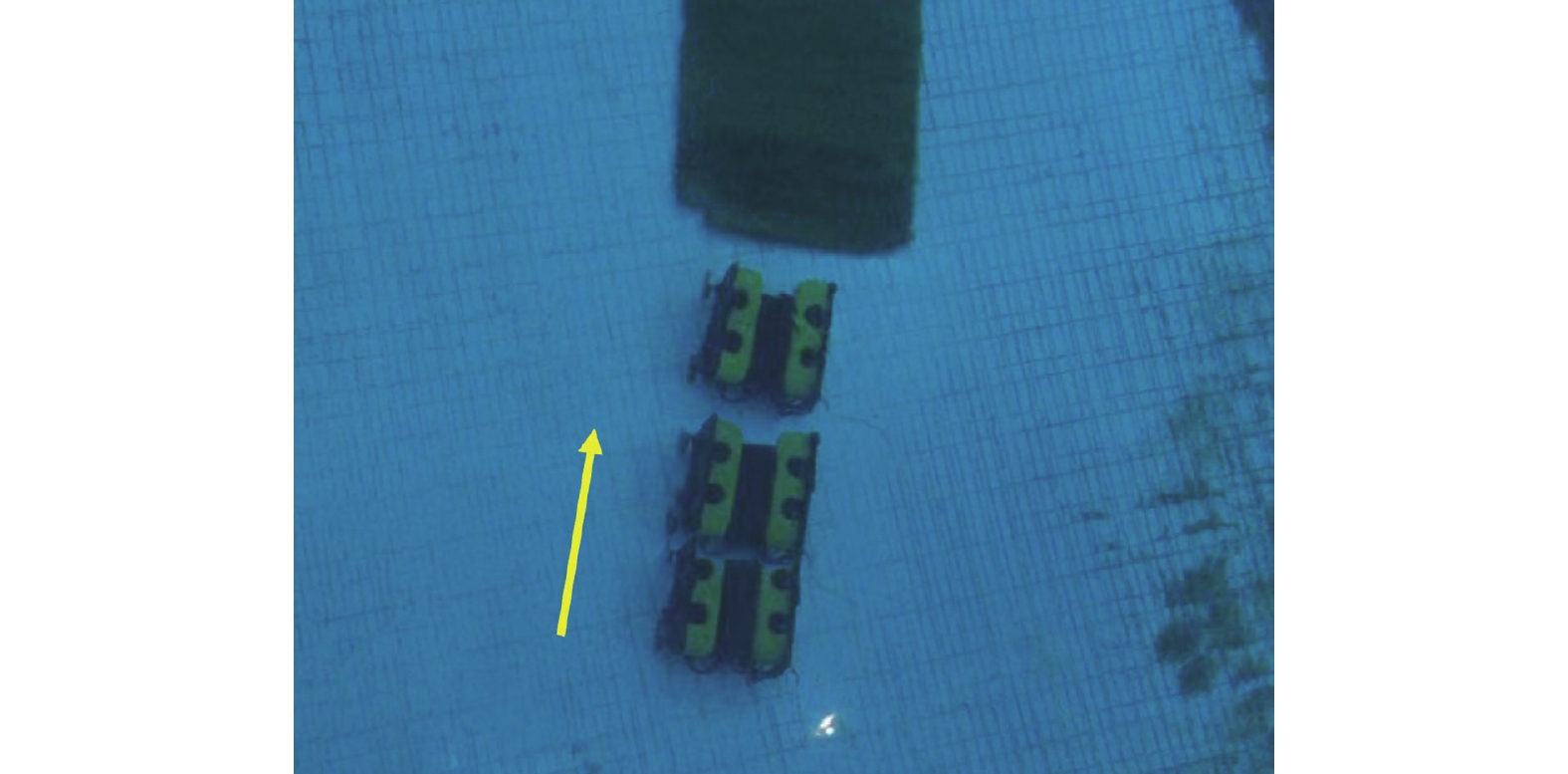
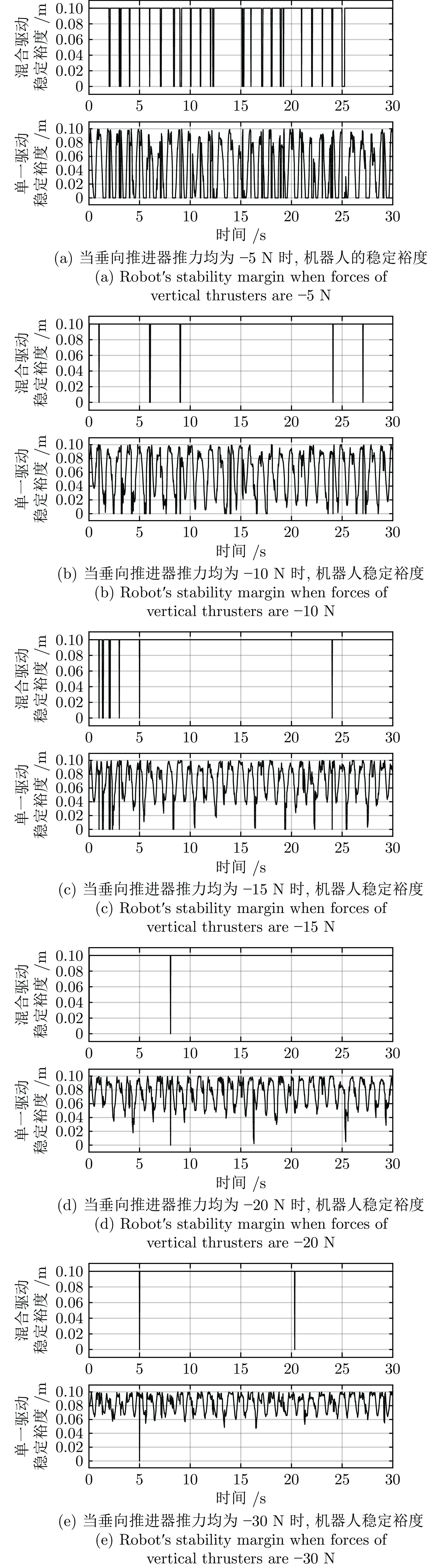
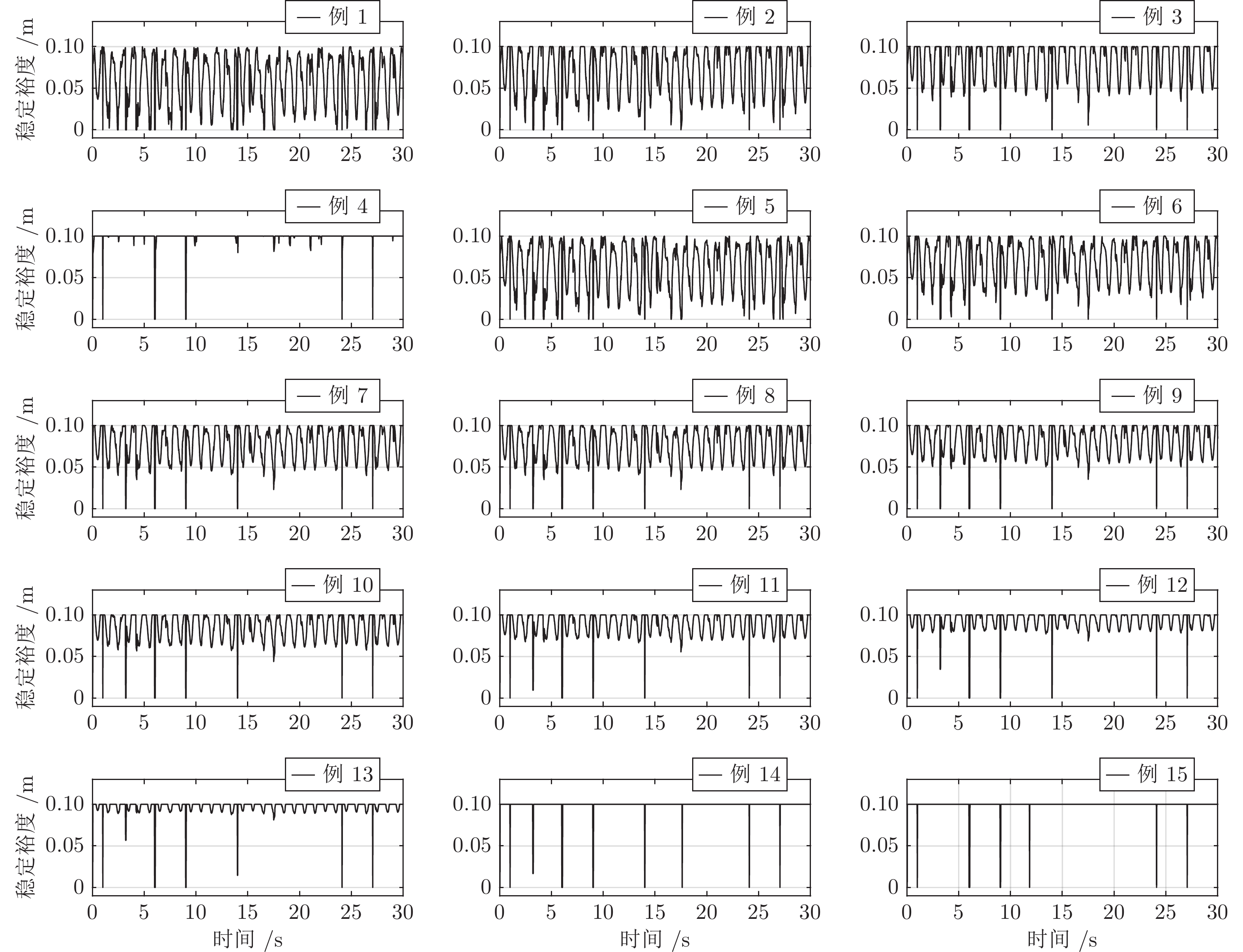
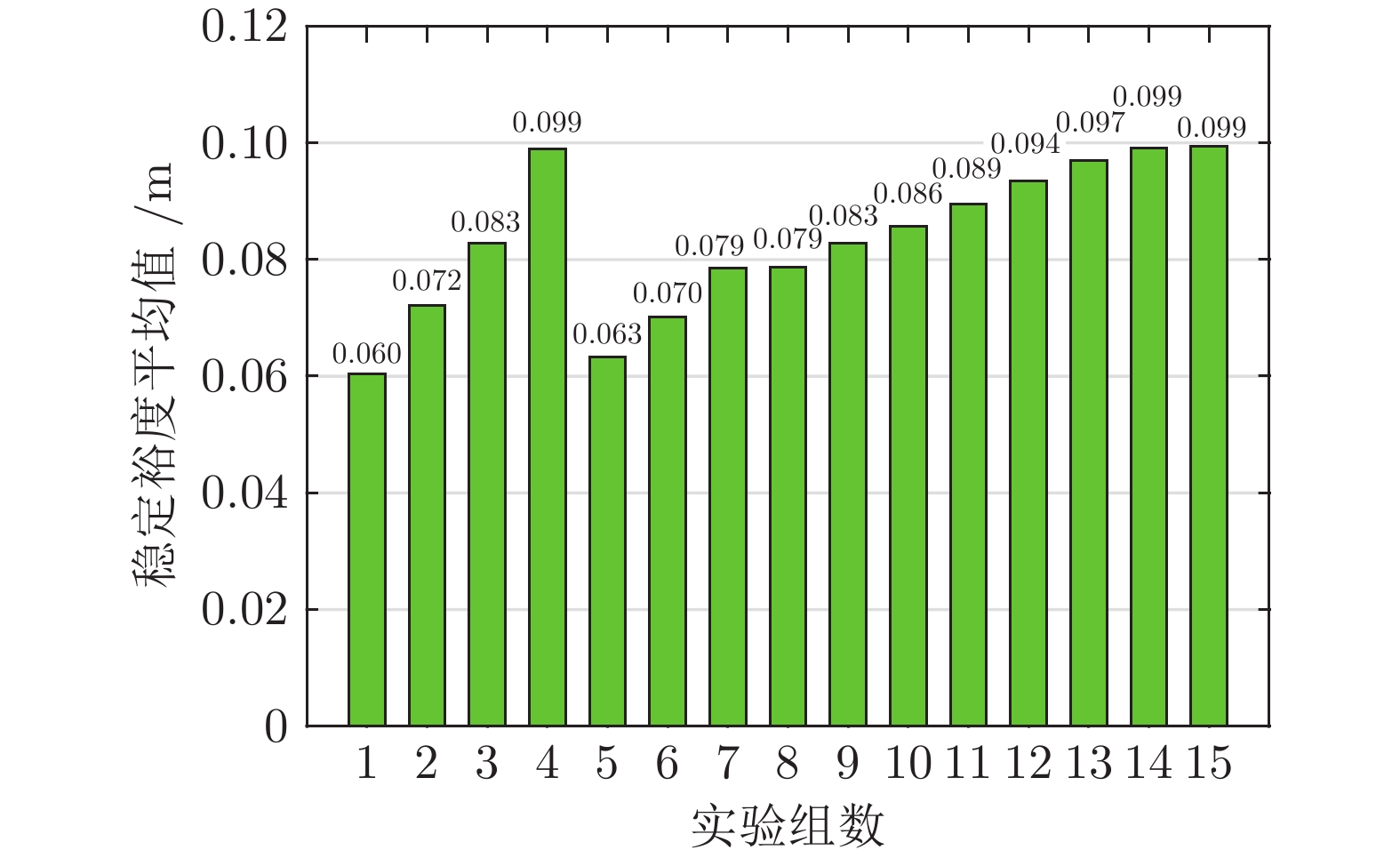
由8个推进器和6条刀锋腿混合驱动的水下机器人可在水底或水下结构物表面上行走. 所提方法旨在研究这类机器人运动稳定性的评判准则, 即稳定性判据. 现有的稳定性判据多集中于同一机构(腿)驱动的陆地机器人, 未涉及混合驱动的水下刀锋腿机器人. 针对该问题, 提出了基于捕获点理论的混合驱动水下刀锋腿机器人稳定性判据. 首先, 在建立混合驱动水下滚动倒立摆模型的基础上, 利用机器人运动状态预测摆动腿和支撑腿切换瞬间机器人的动能; 然后, 根据推进器所能提供的推力范围, 计算迫使机器人静止的捕获点变化范围, 即获取捕获域; 最后, 根据捕获域与支撑域的空间关系, 判断机器人是否稳定, 并计算机器人的稳定裕度. 水下实验结果表明, 所提出的稳定性判据具有较好的充要性和普适性.
由8个推进器和6条刀锋腿混合驱动的水下机器人可在水底或水下结构物表面上行走. 所提方法旨在研究这类机器人运动稳定性的评判准则, 即稳定性判据. 现有的稳定性判据多集中于同一机构(腿)驱动的陆地机器人, 未涉及混合驱动的水下刀锋腿机器人. 针对该问题, 提出了基于捕获点理论的混合驱动水下刀锋腿机器人稳定性判据. 首先, 在建立混合驱动水下滚动倒立摆模型的基础上, 利用机器人运动状态预测摆动腿和支撑腿切换瞬间机器人的动能; 然后, 根据推进器所能提供的推力范围, 计算迫使机器人静止的捕获点变化范围, 即获取捕获域; 最后, 根据捕获域与支撑域的空间关系, 判断机器人是否稳定, 并计算机器人的稳定裕度. 水下实验结果表明, 所提出的稳定性判据具有较好的充要性和普适性.

2024, 50(8): 1577-1588.
doi: 10.16383/j.aas.c230379
摘要:
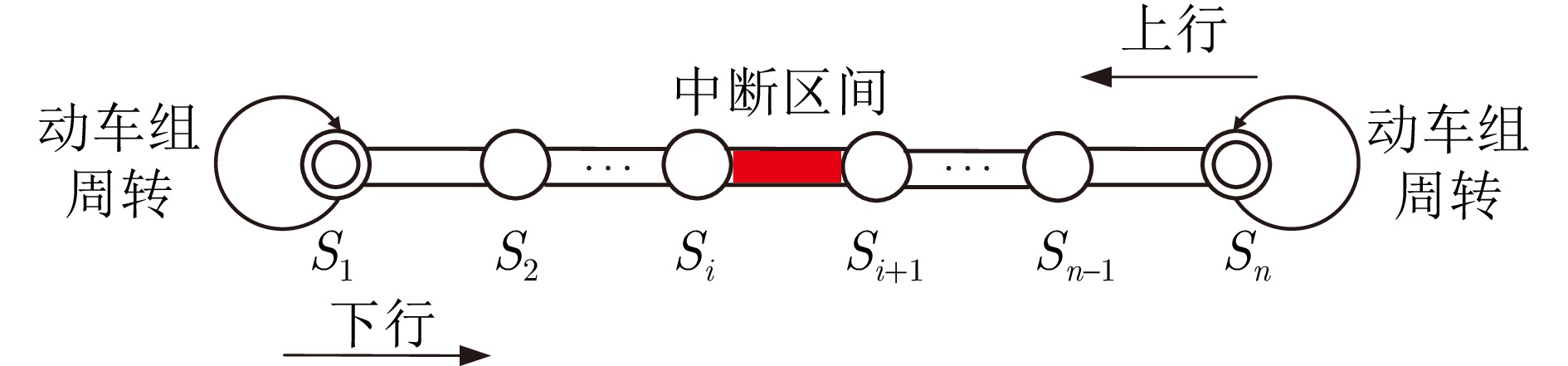
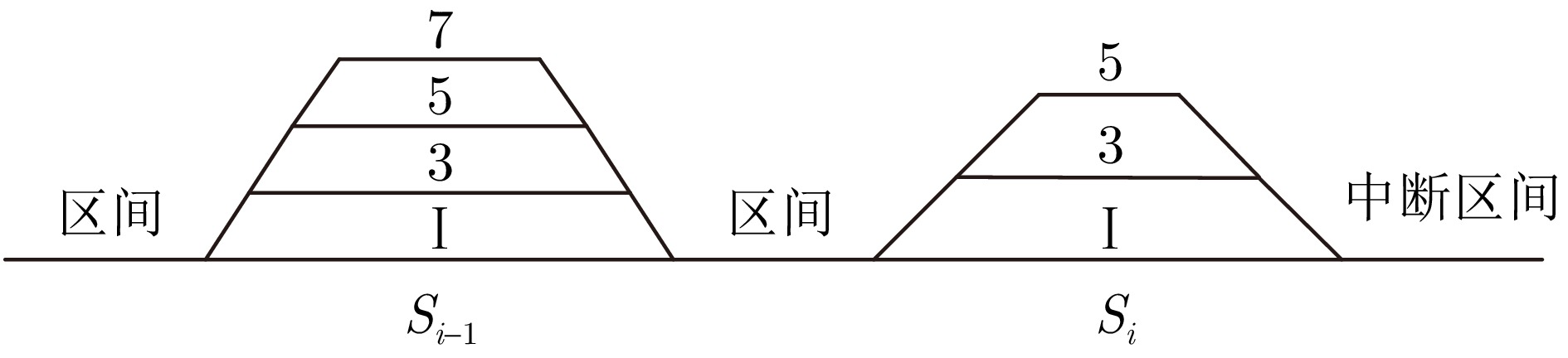
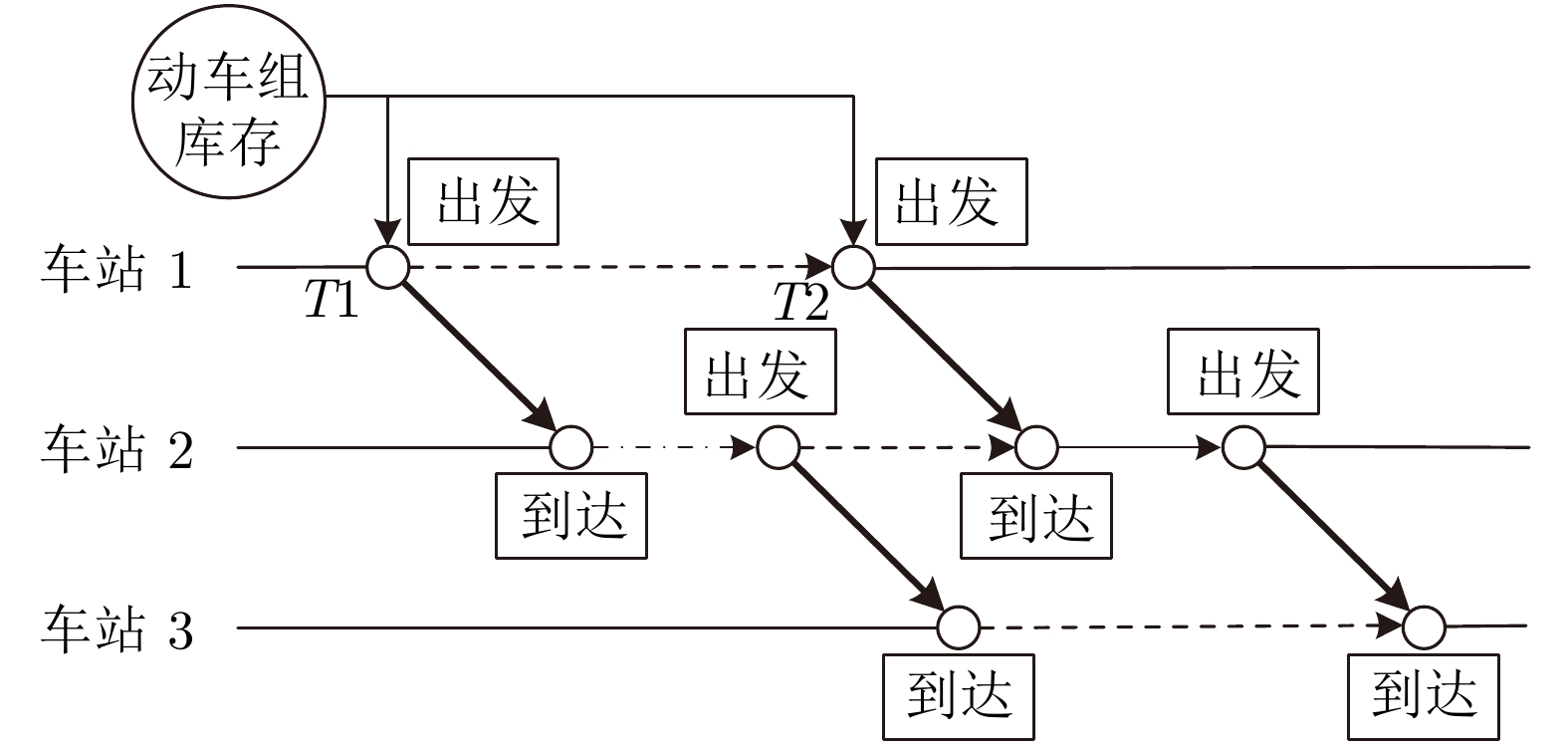
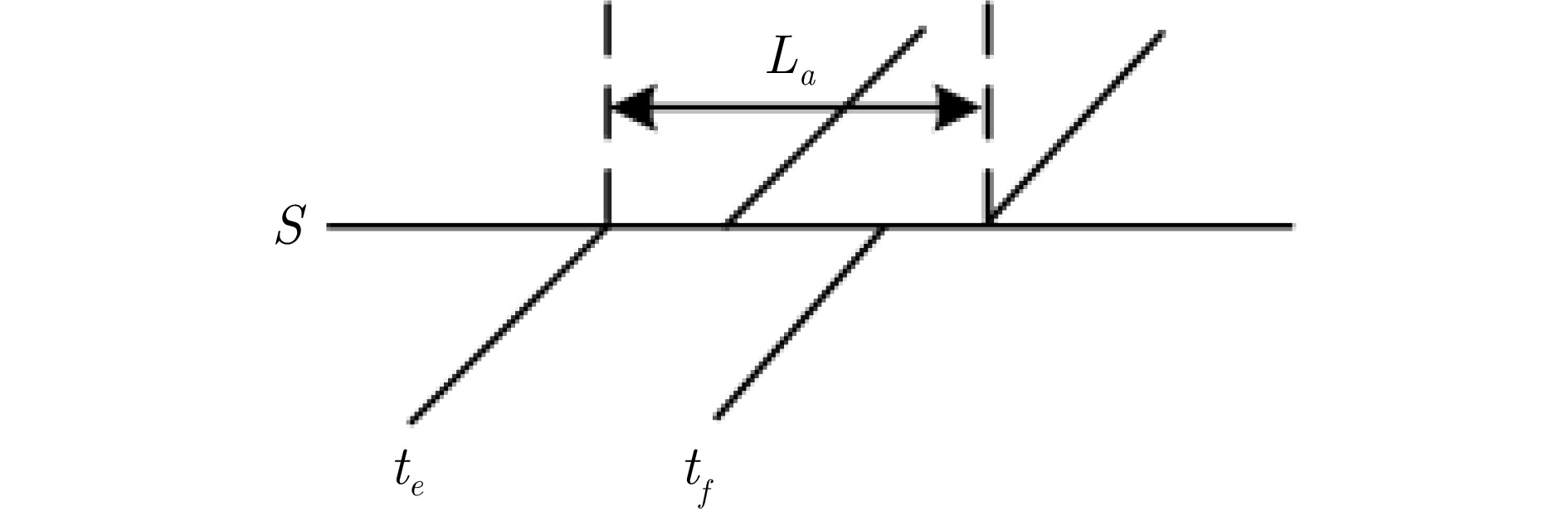
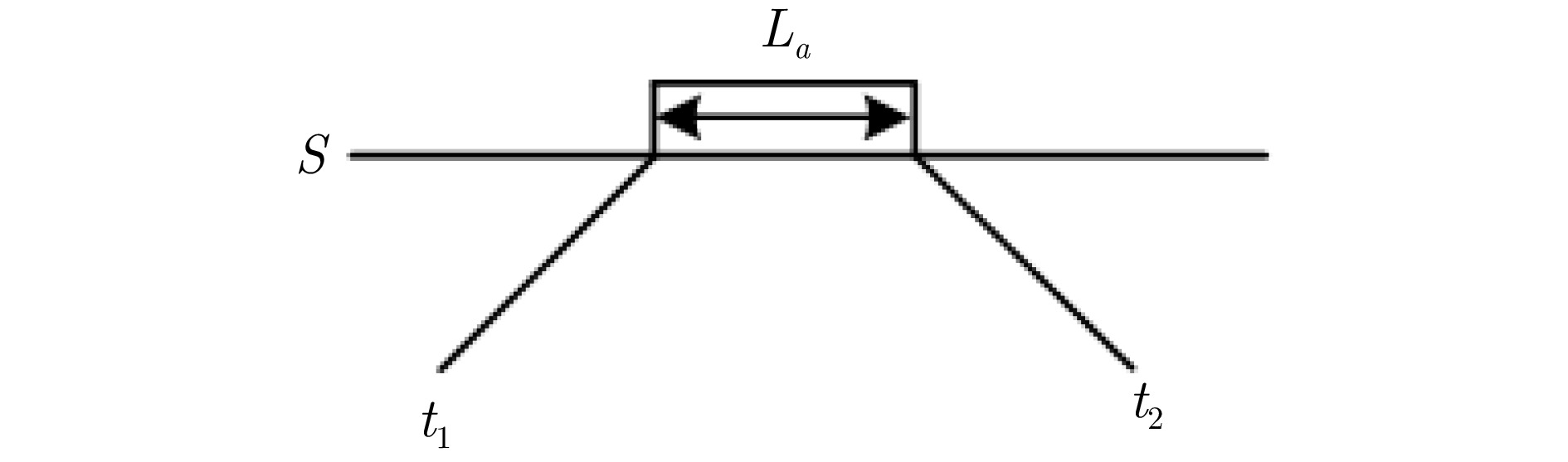
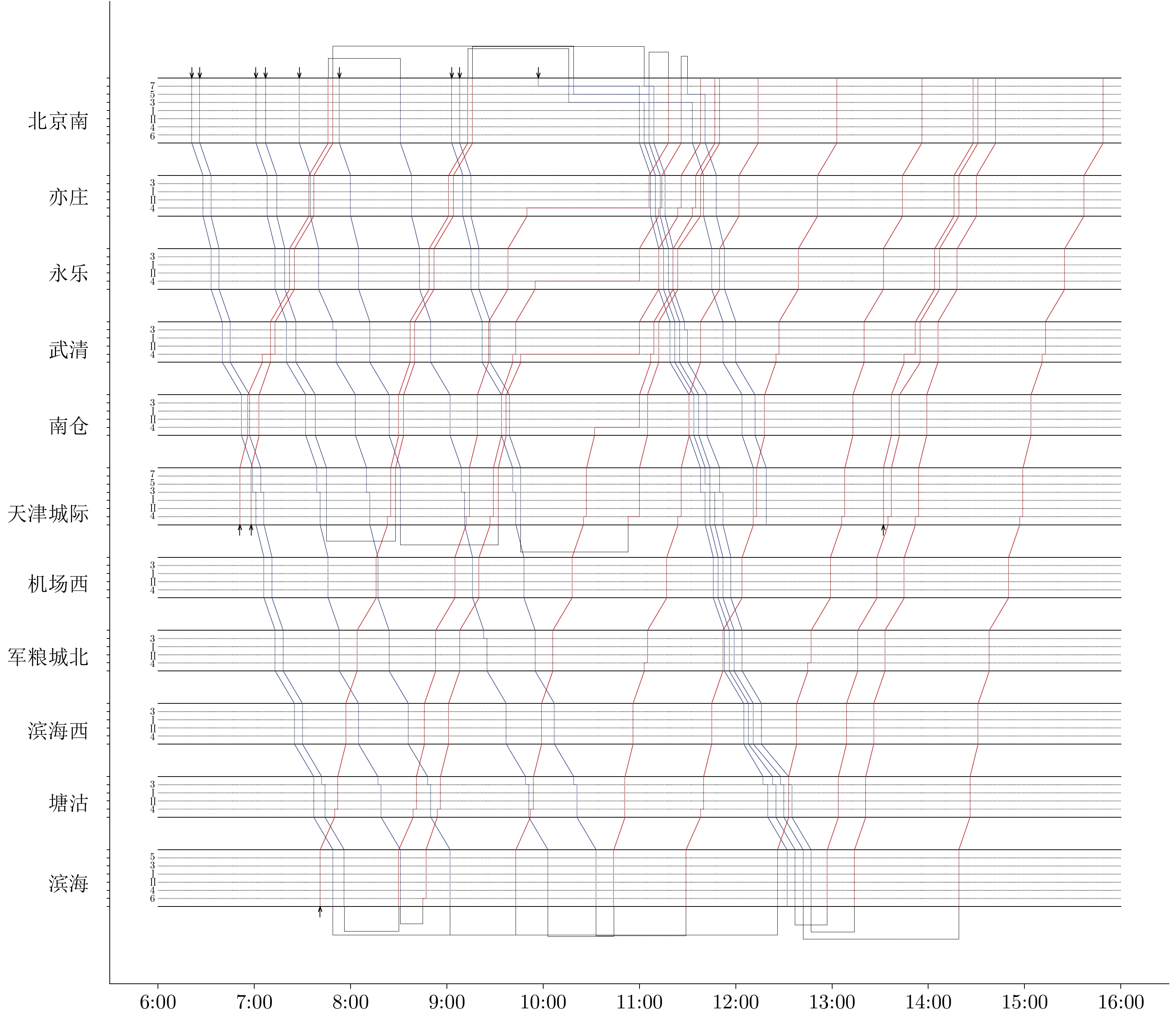
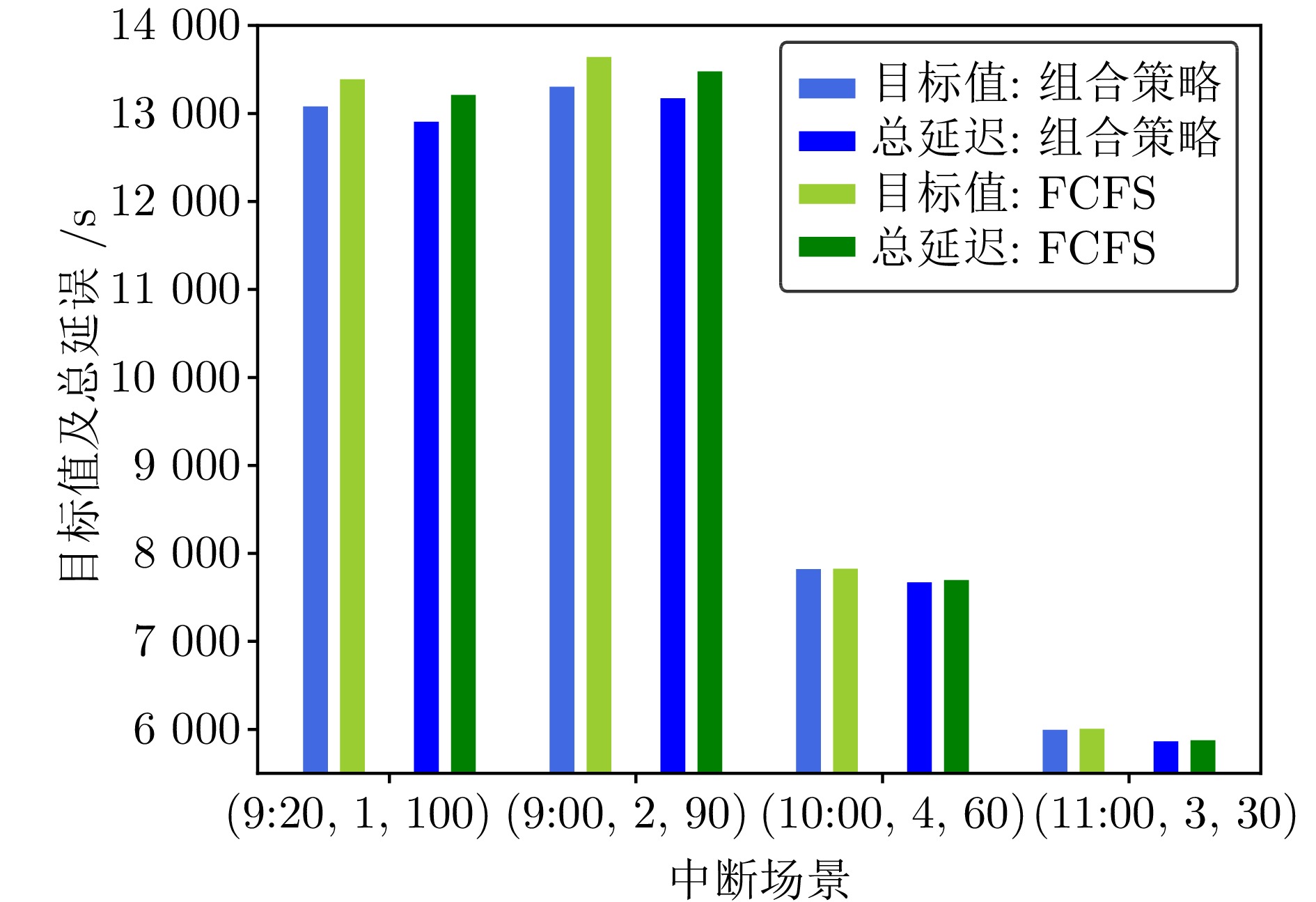
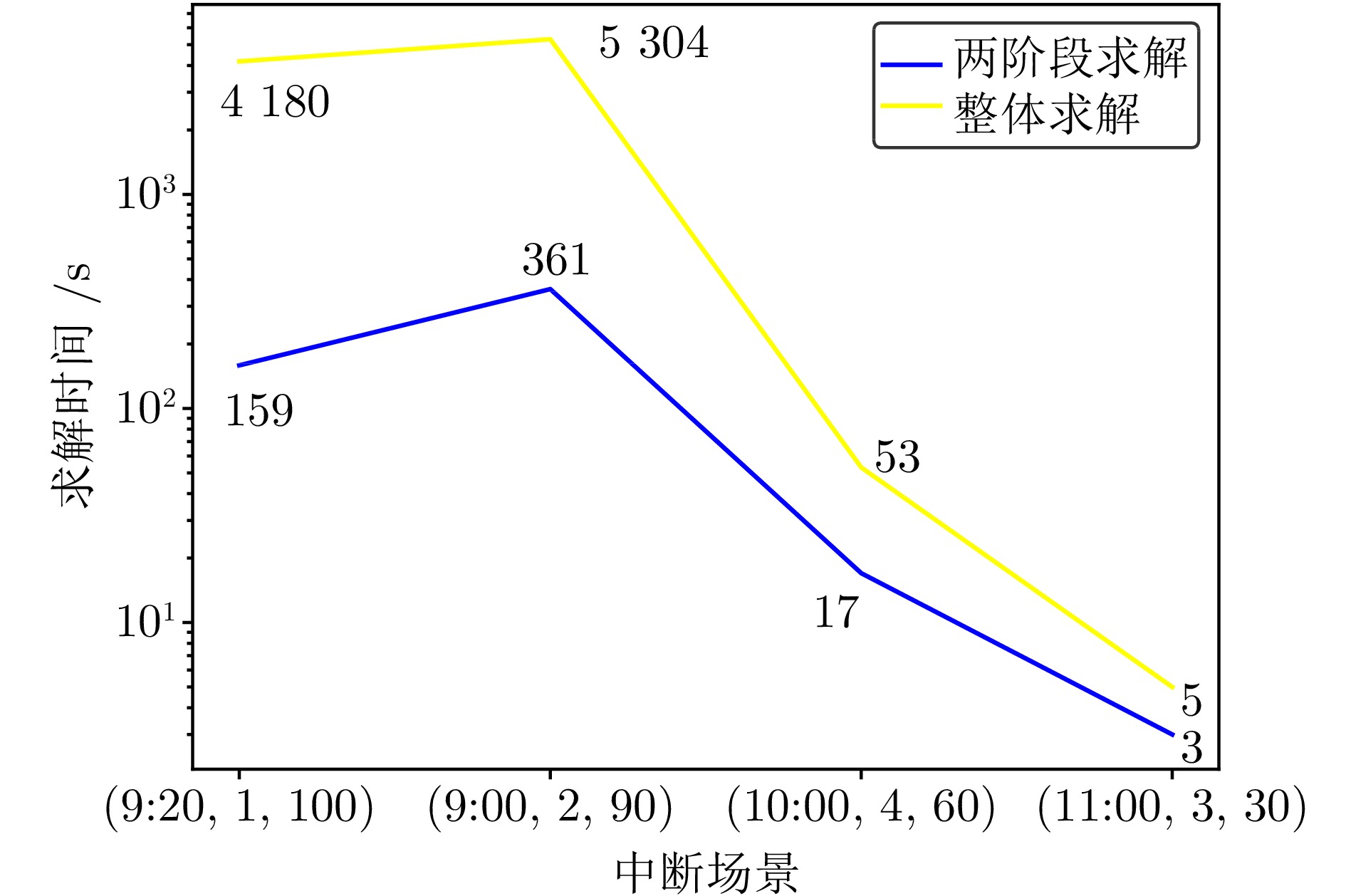
随着我国高速铁路快速发展, “八纵八横”高铁路网加密成型, 呈现出运行环境复杂、行车密度高及长交路跨线运营等典型特征. 一旦遭受大风、红光带、接触网挂异物和设备故障等突发事件, 则将导致列车偏离运行计划, 进而影响到发线运用和动车组(Eletric multiple units, EMU)周转计划. 如何在调整运行图的同时保证动车组和到发线运用的可行性是提高列车运行调整效率的关键. 针对区间双向中断场景下到发线运用冲突和动车组接续计划失效问题, 采用取消列车、变更列车到发时刻、更换到发线、备用动车组接续等策略对运行图、动车组和到发线运用计划进行调整. 基于事件−活动网络建立考虑动车组接续和到发线运用的列车运行协同调整模型, 设计两阶段求解方法对模型求解. 运用京津城际实际数据对模型和方法进行仿真验证, 结果表明相比于先到先服务(First come, first served, FCFS)策略, 多计划协同调整策略能有效降低列车晚点时间. 与整体求解方法相比, 两阶段求解方法能够保证模型求得解的质量且有效提高模型求解效率.
随着我国高速铁路快速发展, “八纵八横”高铁路网加密成型, 呈现出运行环境复杂、行车密度高及长交路跨线运营等典型特征. 一旦遭受大风、红光带、接触网挂异物和设备故障等突发事件, 则将导致列车偏离运行计划, 进而影响到发线运用和动车组(Eletric multiple units, EMU)周转计划. 如何在调整运行图的同时保证动车组和到发线运用的可行性是提高列车运行调整效率的关键. 针对区间双向中断场景下到发线运用冲突和动车组接续计划失效问题, 采用取消列车、变更列车到发时刻、更换到发线、备用动车组接续等策略对运行图、动车组和到发线运用计划进行调整. 基于事件−活动网络建立考虑动车组接续和到发线运用的列车运行协同调整模型, 设计两阶段求解方法对模型求解. 运用京津城际实际数据对模型和方法进行仿真验证, 结果表明相比于先到先服务(First come, first served, FCFS)策略, 多计划协同调整策略能有效降低列车晚点时间. 与整体求解方法相比, 两阶段求解方法能够保证模型求得解的质量且有效提高模型求解效率.
2024, 50(8): 1589-1600.
doi: 10.16383/j.aas.c230699
摘要:
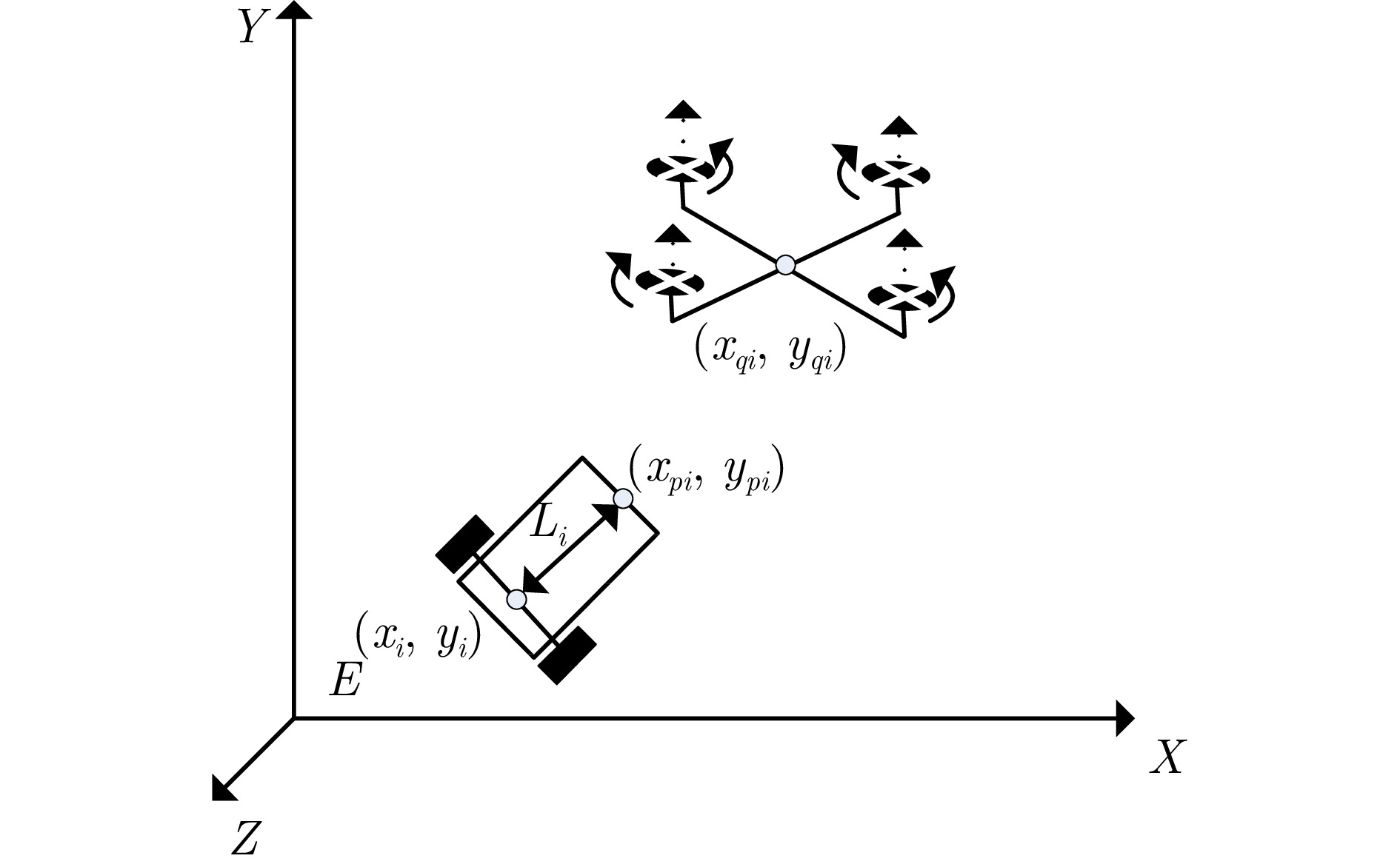
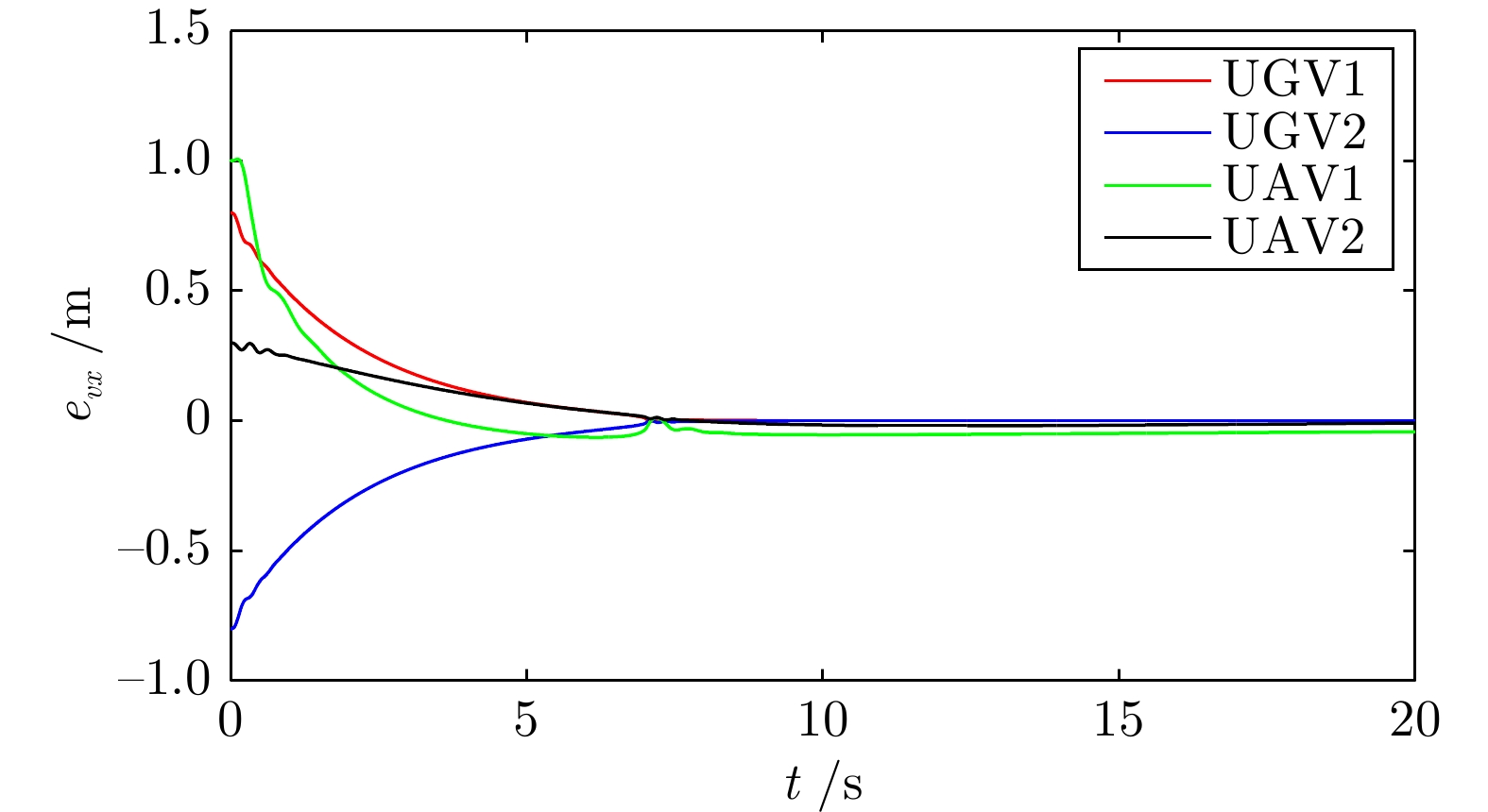
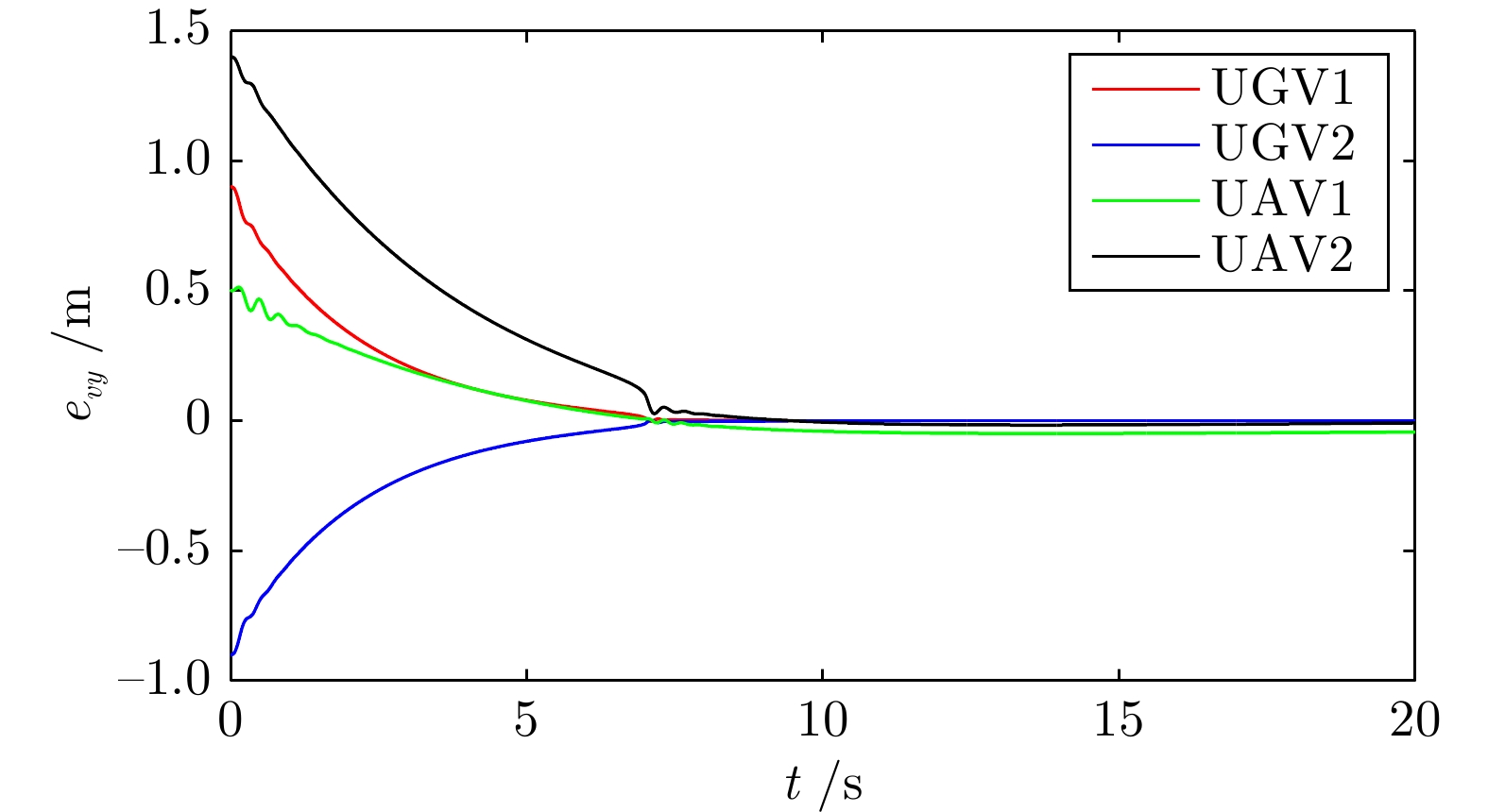
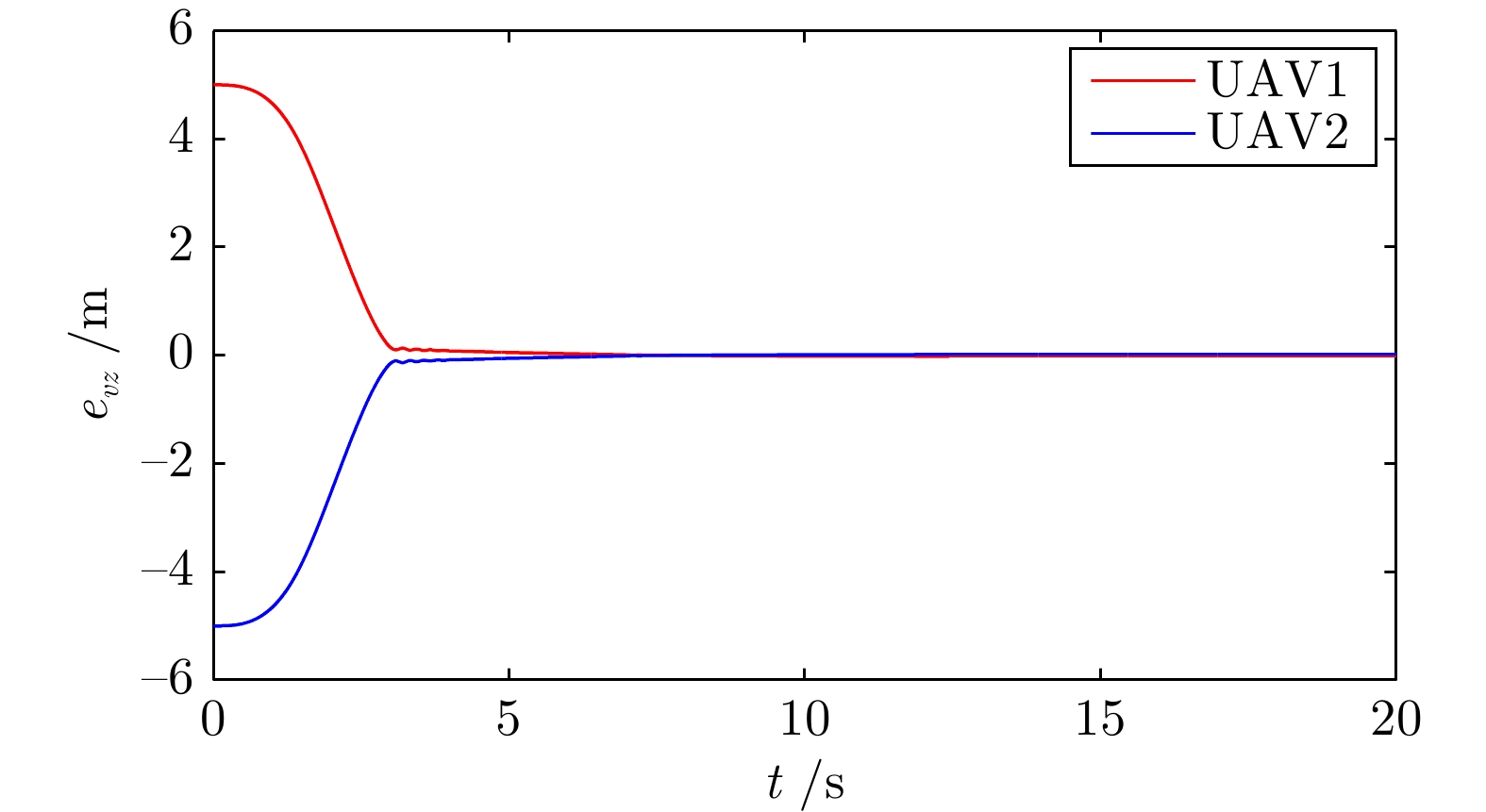
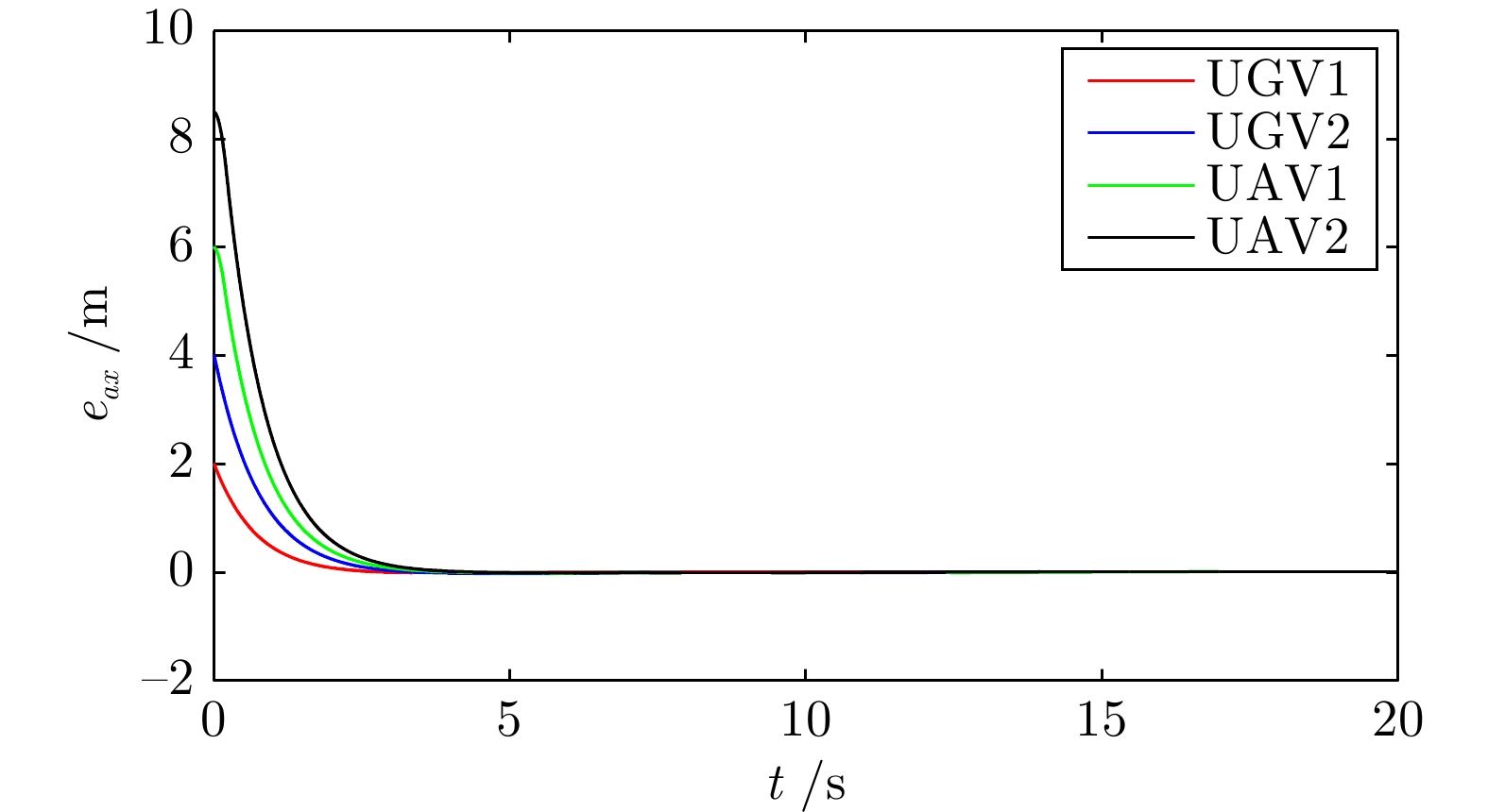
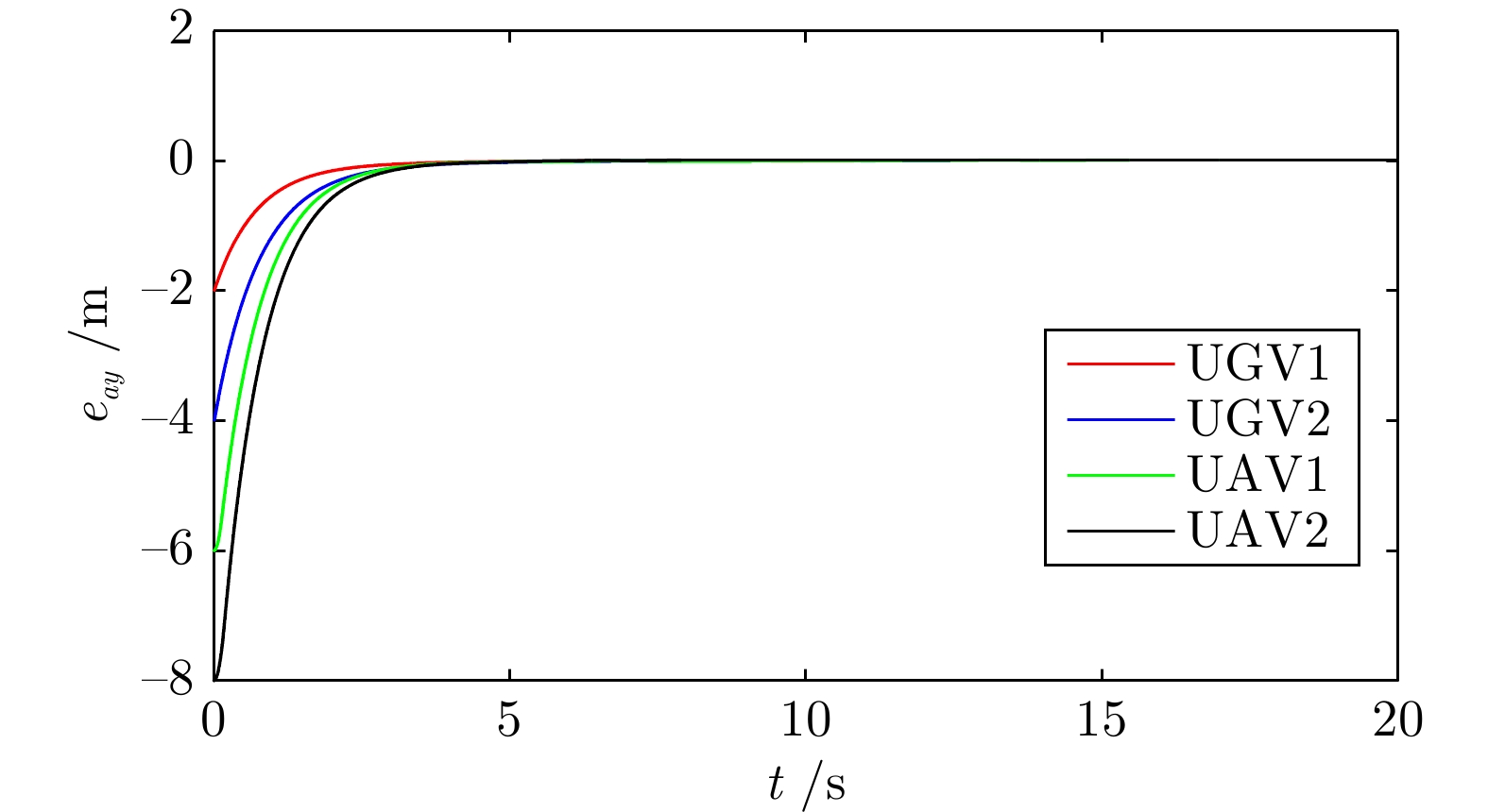
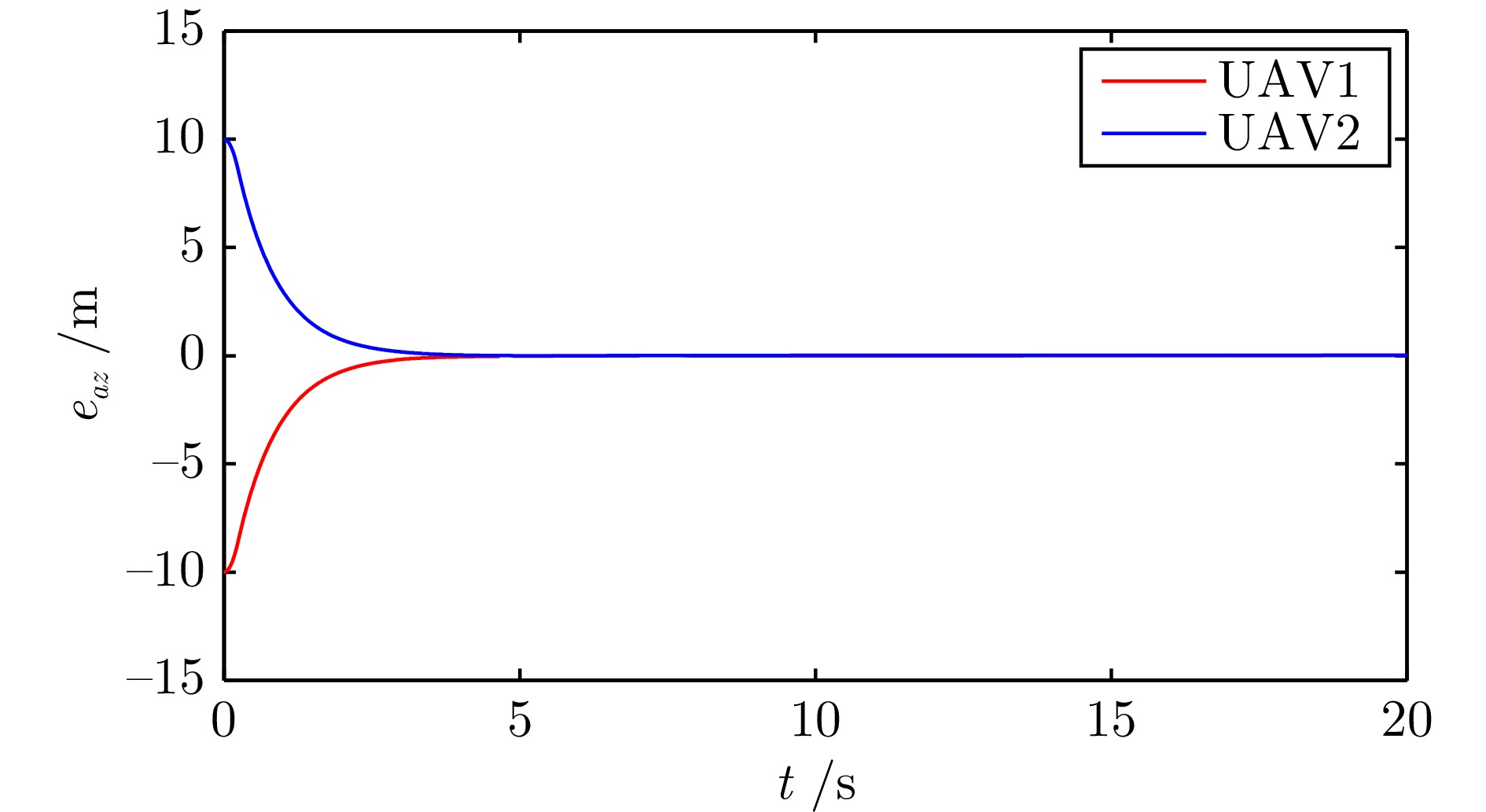
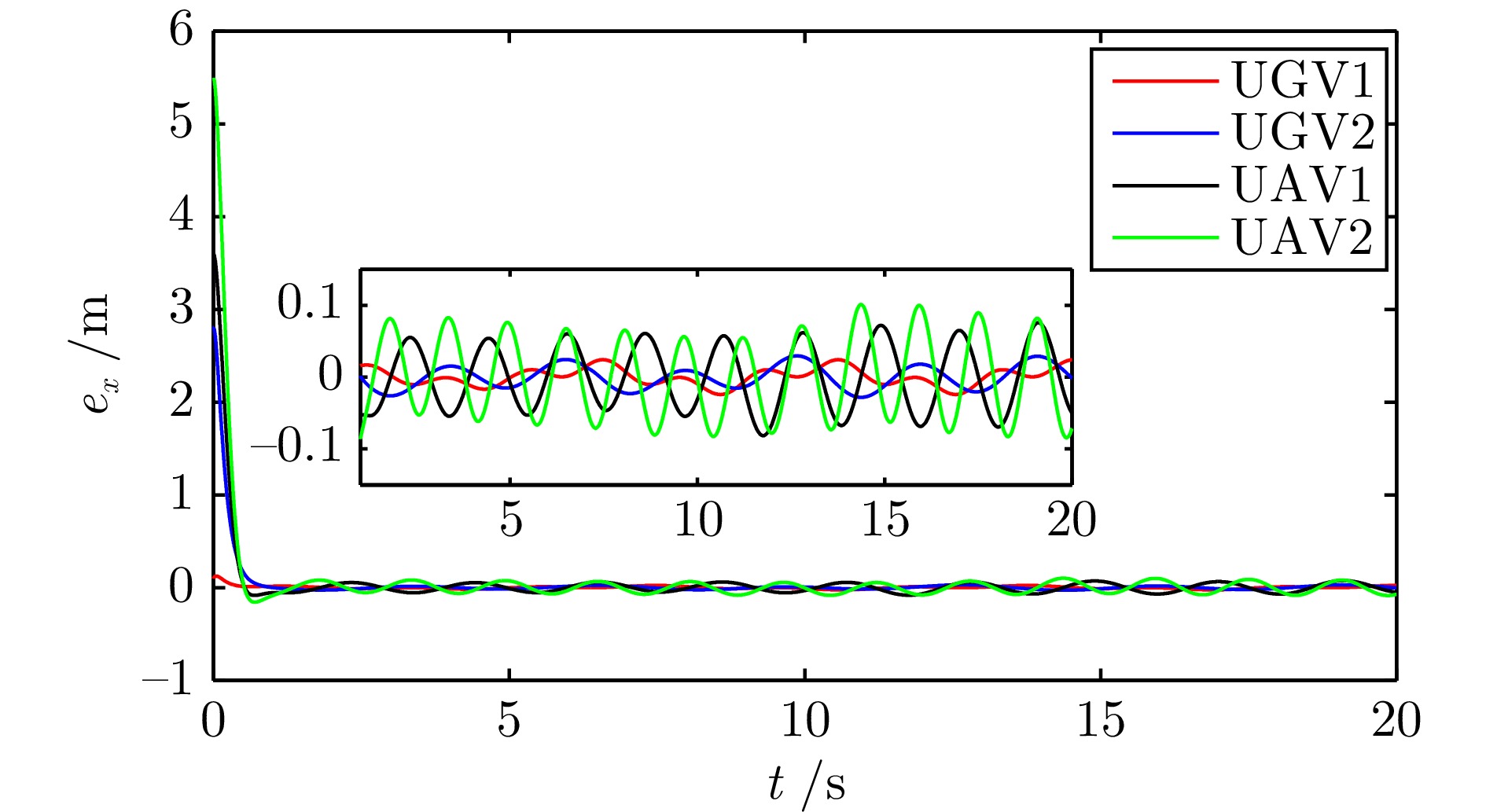
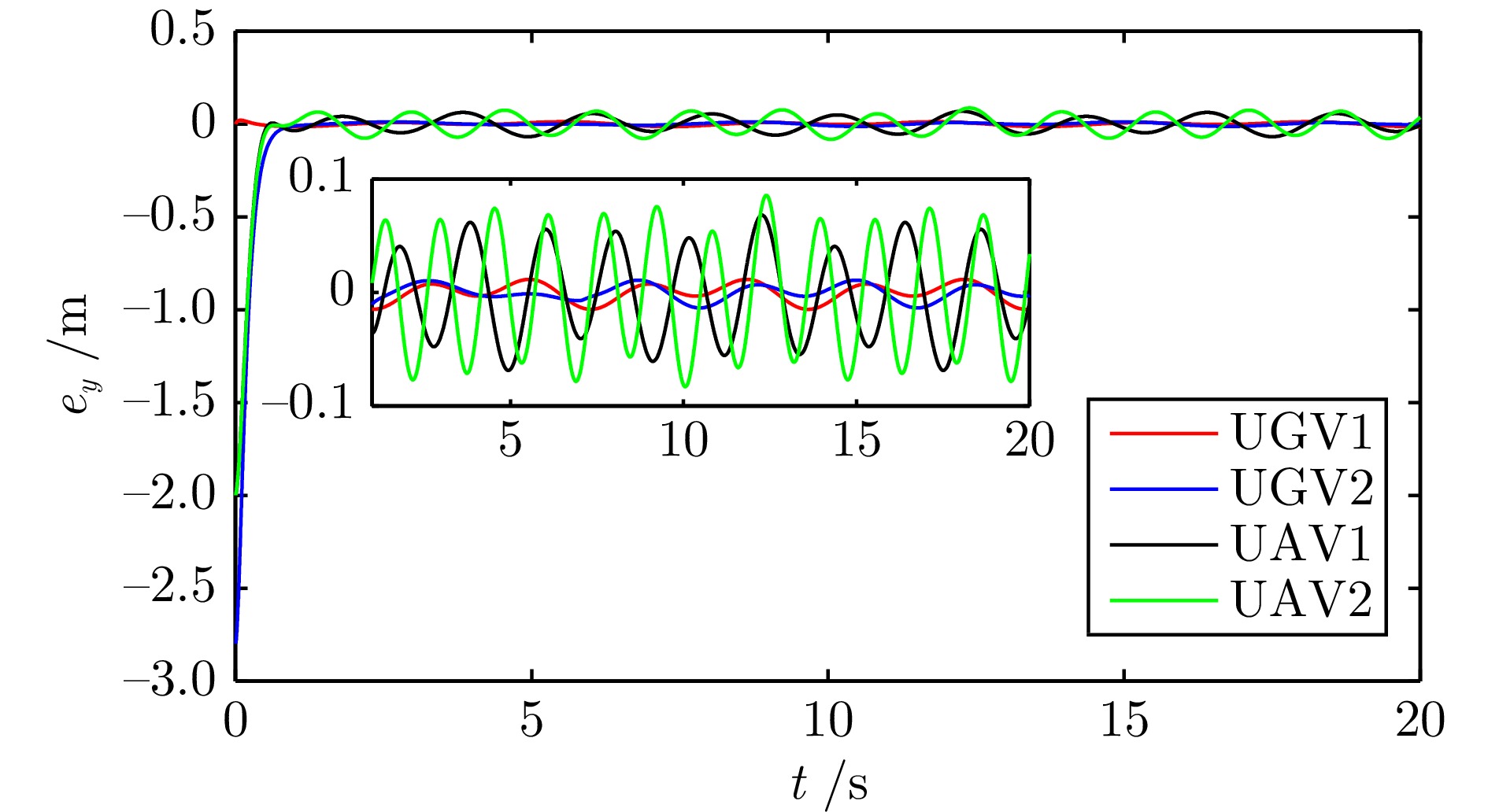
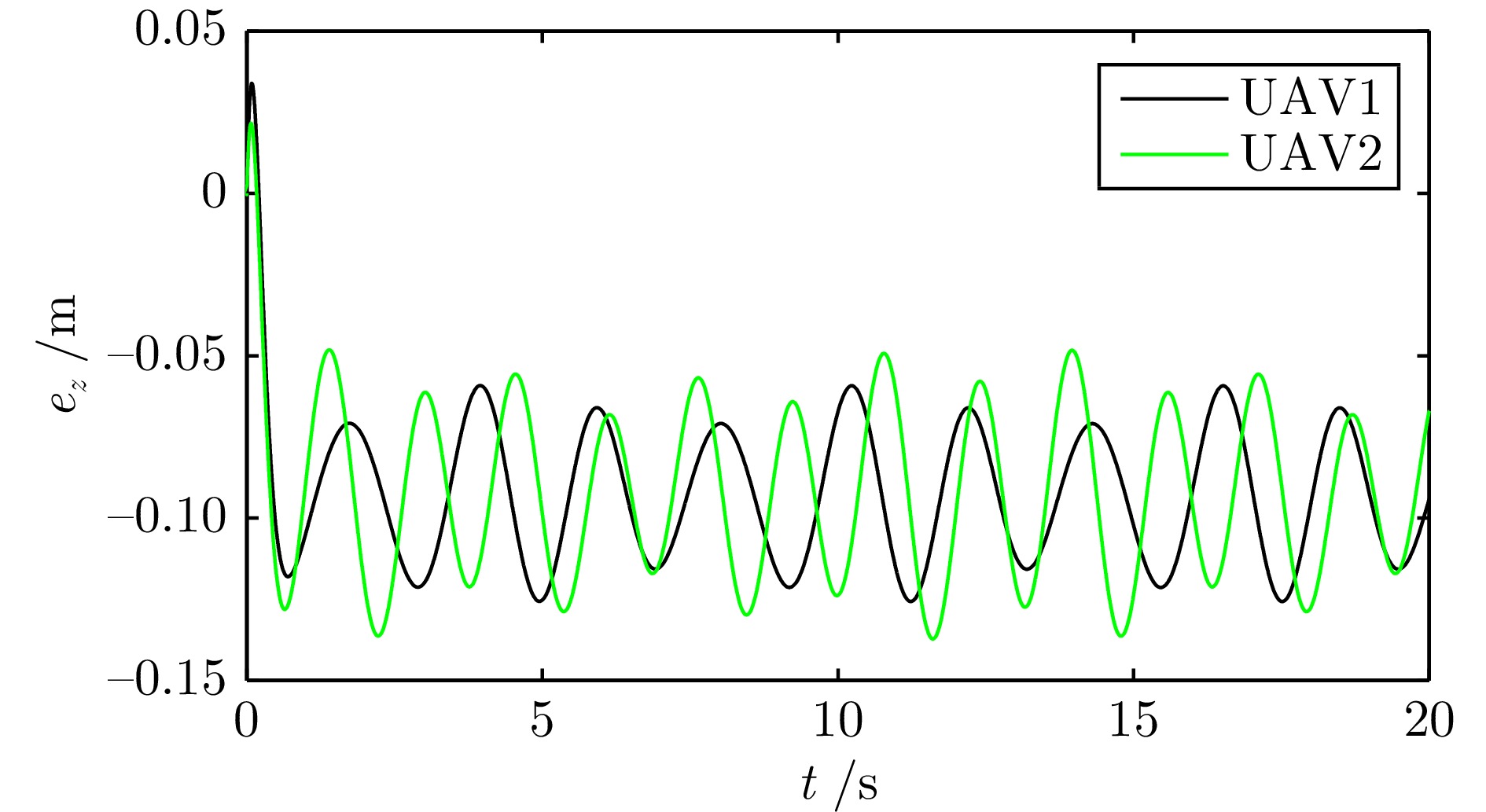
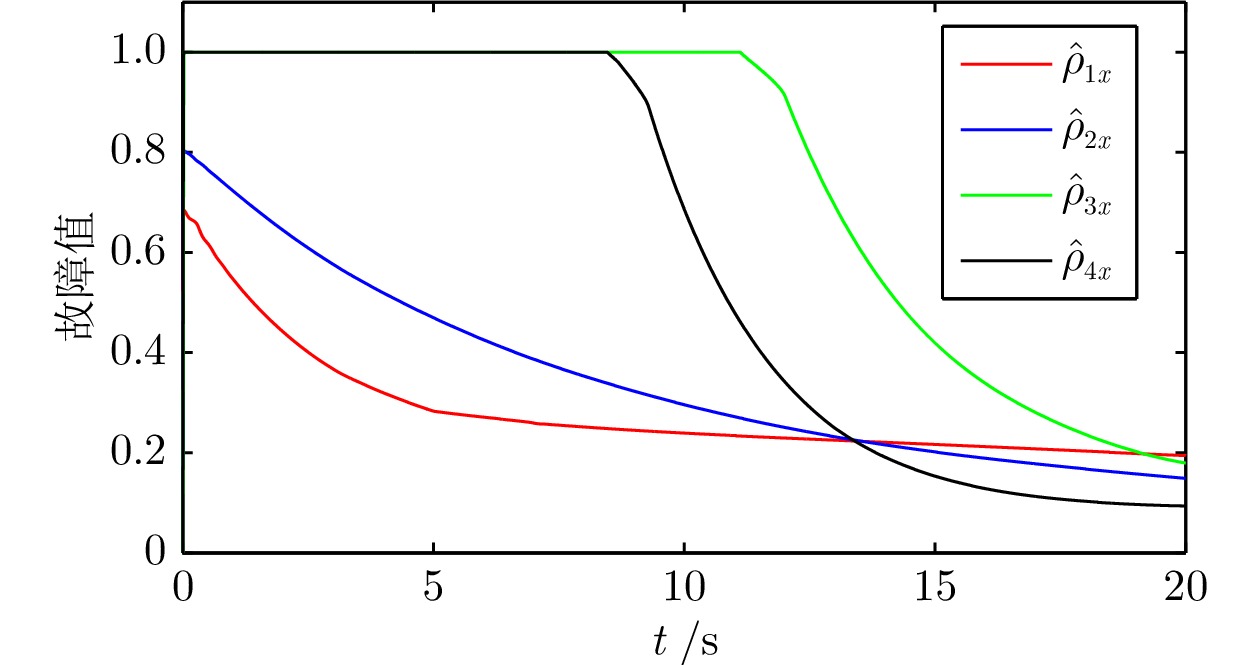
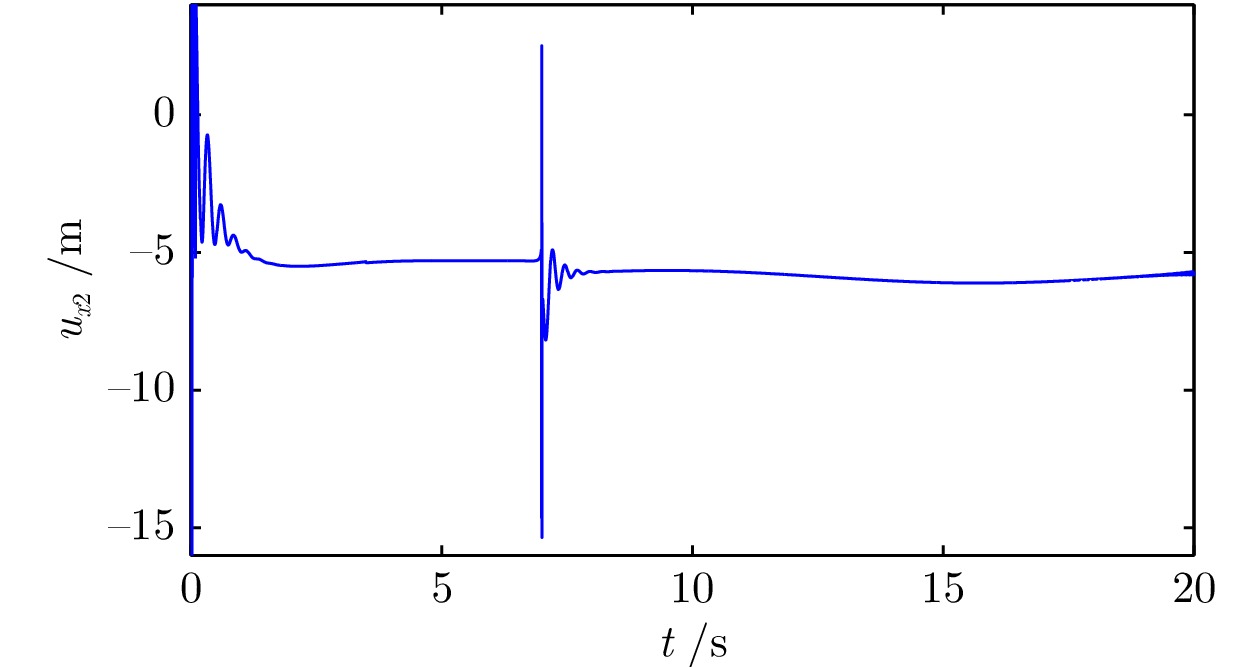
研究了发生执行器故障的无人机−无人车异构编队系统的层级预设时间最优编队控制问题. 以保容错性能和收敛速度的优化控制为研究主线, 以层级控制、图博弈理论和预设时间控制为技术基础, 构建了一种预设时间最优容错控制算法. 虚拟层设计了基于一致性跟踪误差和能量消耗的二次型性能指标函数, 借助耦合哈密顿−雅克比−贝尔曼(Hanmilton-Jacobi-Bellman, HJB)方程和强化学习求解近似最优控制策略, 实现多智能体的同步最优控制和交互纳什均衡. 实际控制层基于最优信号并利用滑模控制和自适应技术, 设计了预设时间容错跟踪控制器, 实现对最优编队轨迹的有限时间跟踪. 在保证全局收敛时间完全不依赖于系统的初始状态和控制器参数的同时, 也有效实现对执行器故障参数的逼近. 最后, 通过仿真实验验证了所提控制策略的有效性.
研究了发生执行器故障的无人机−无人车异构编队系统的层级预设时间最优编队控制问题. 以保容错性能和收敛速度的优化控制为研究主线, 以层级控制、图博弈理论和预设时间控制为技术基础, 构建了一种预设时间最优容错控制算法. 虚拟层设计了基于一致性跟踪误差和能量消耗的二次型性能指标函数, 借助耦合哈密顿−雅克比−贝尔曼(Hanmilton-Jacobi-Bellman, HJB)方程和强化学习求解近似最优控制策略, 实现多智能体的同步最优控制和交互纳什均衡. 实际控制层基于最优信号并利用滑模控制和自适应技术, 设计了预设时间容错跟踪控制器, 实现对最优编队轨迹的有限时间跟踪. 在保证全局收敛时间完全不依赖于系统的初始状态和控制器参数的同时, 也有效实现对执行器故障参数的逼近. 最后, 通过仿真实验验证了所提控制策略的有效性.

2024, 50(8): 1601-1619.
doi: 10.16383/j.aas.c230625
摘要:
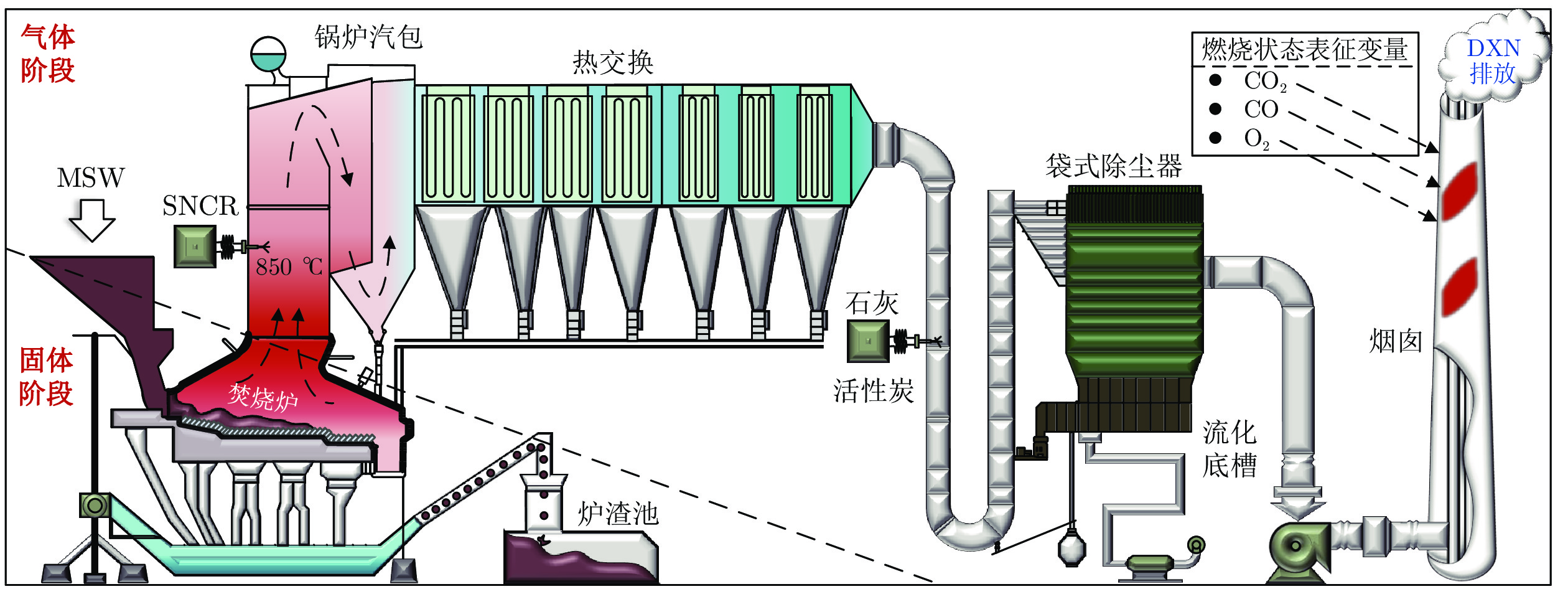
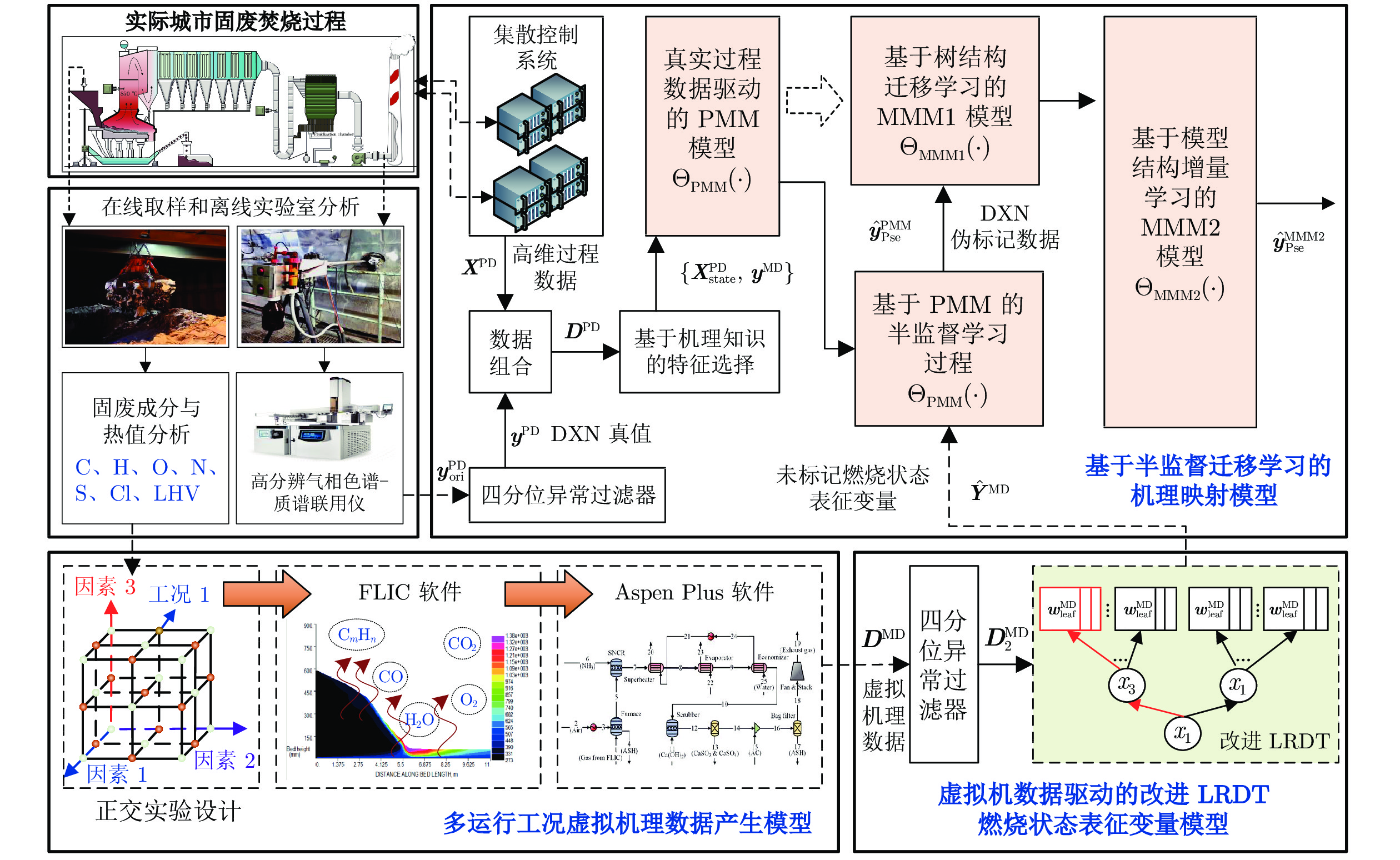
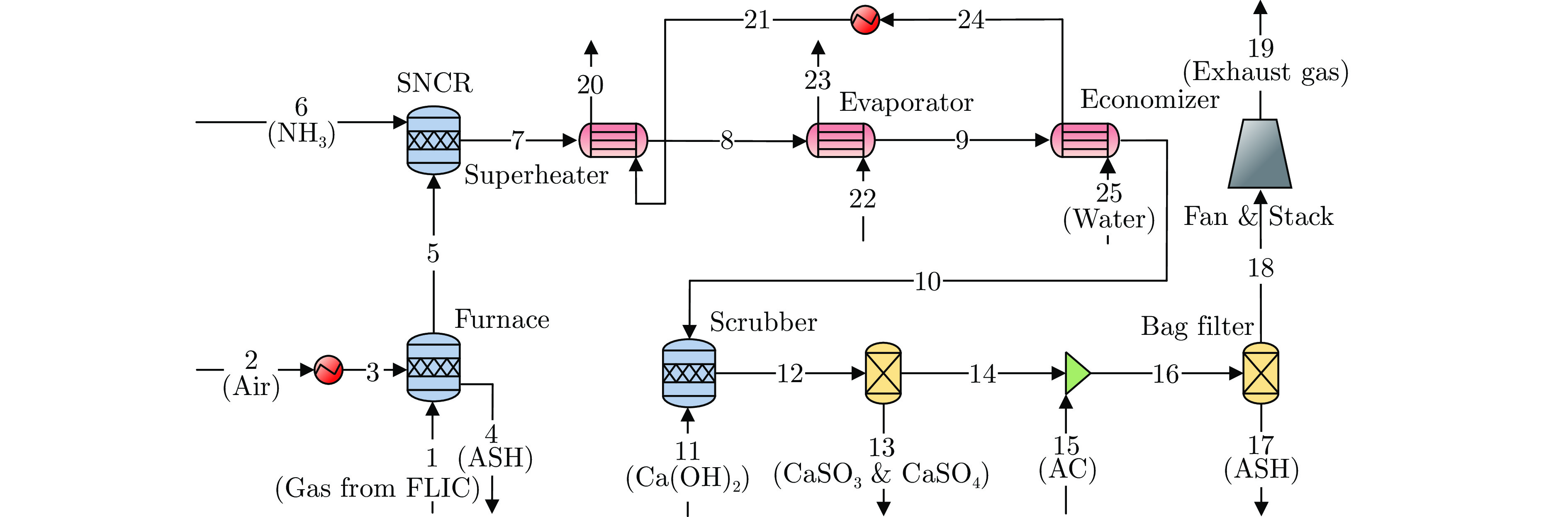
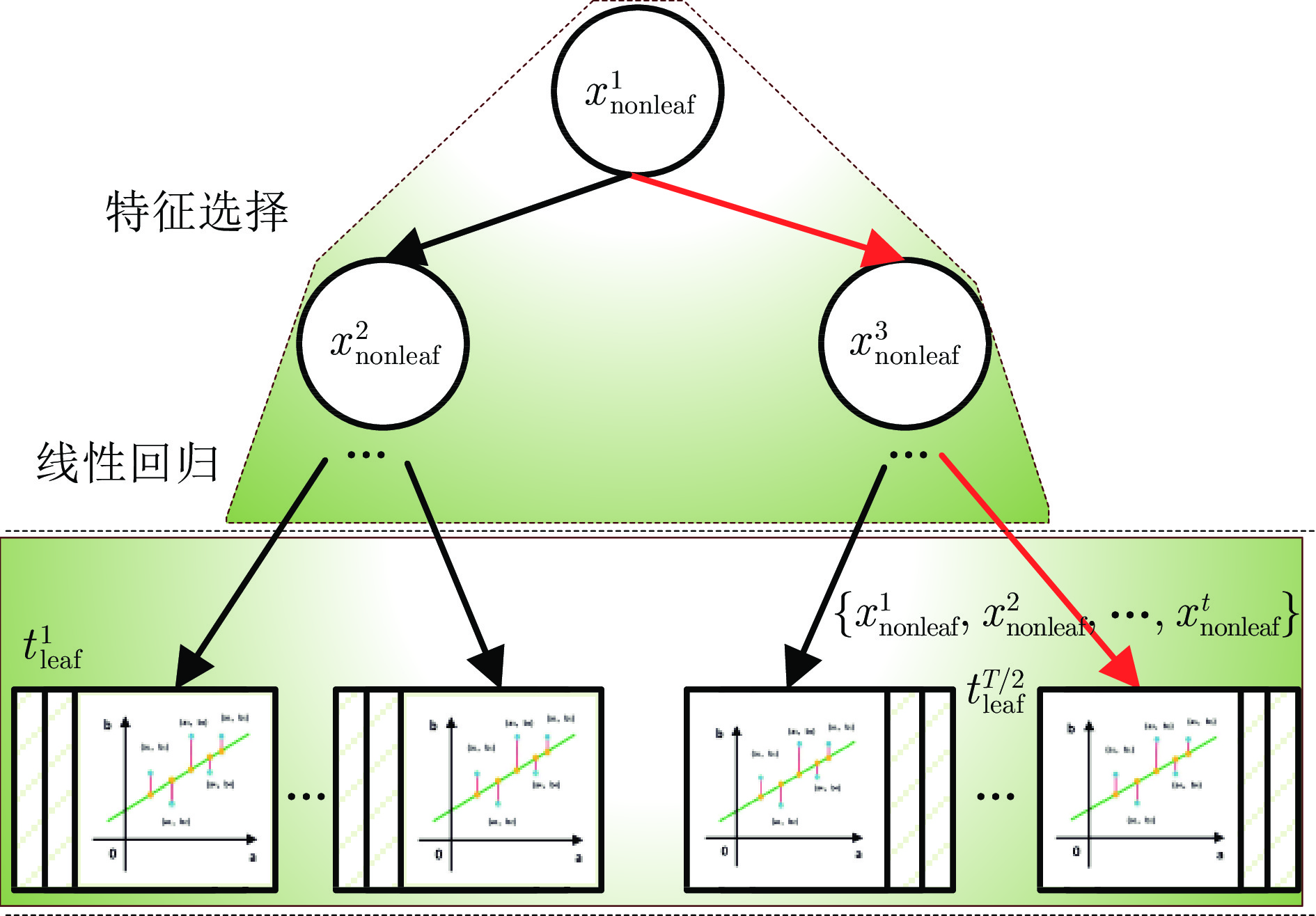
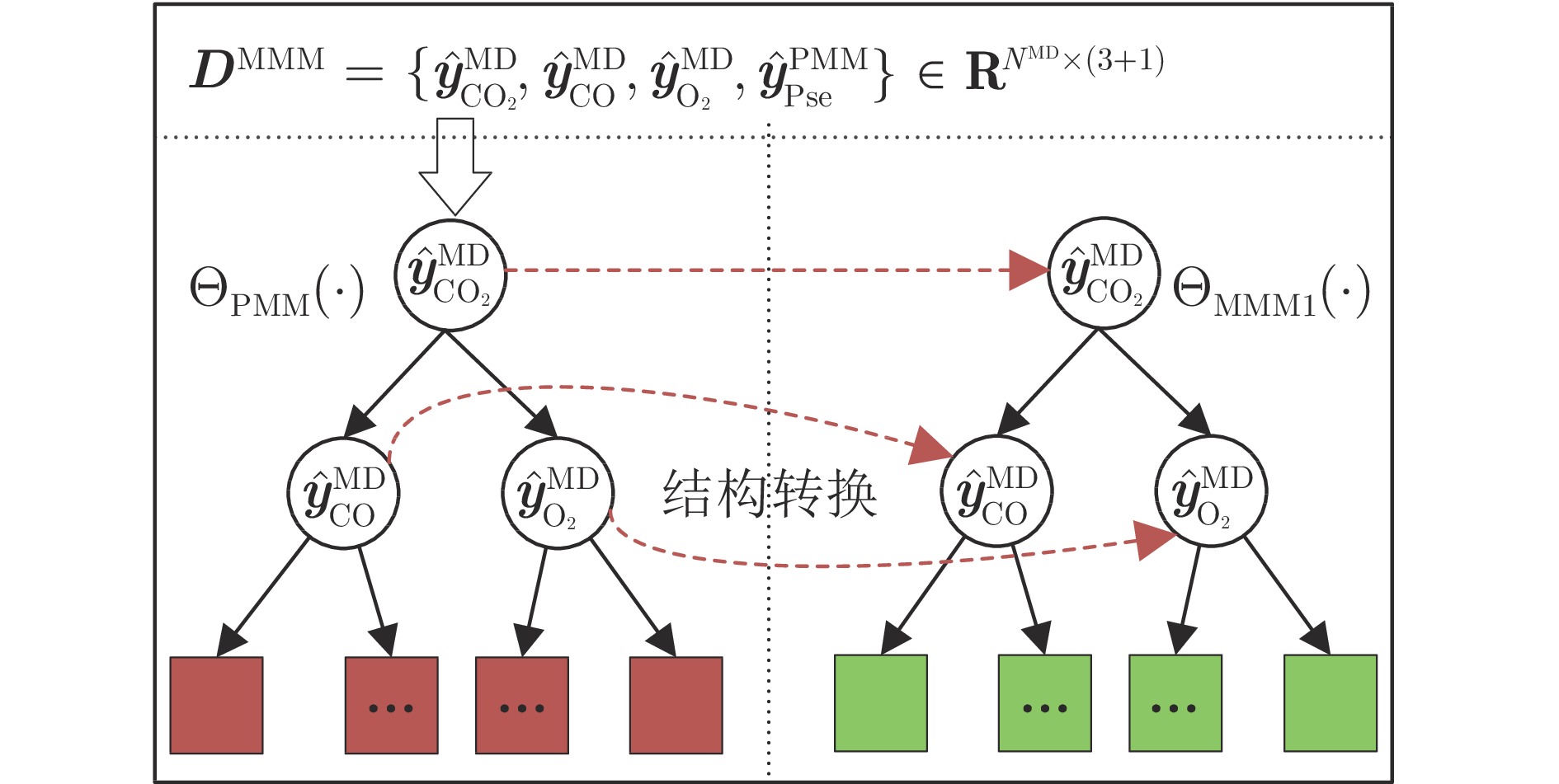
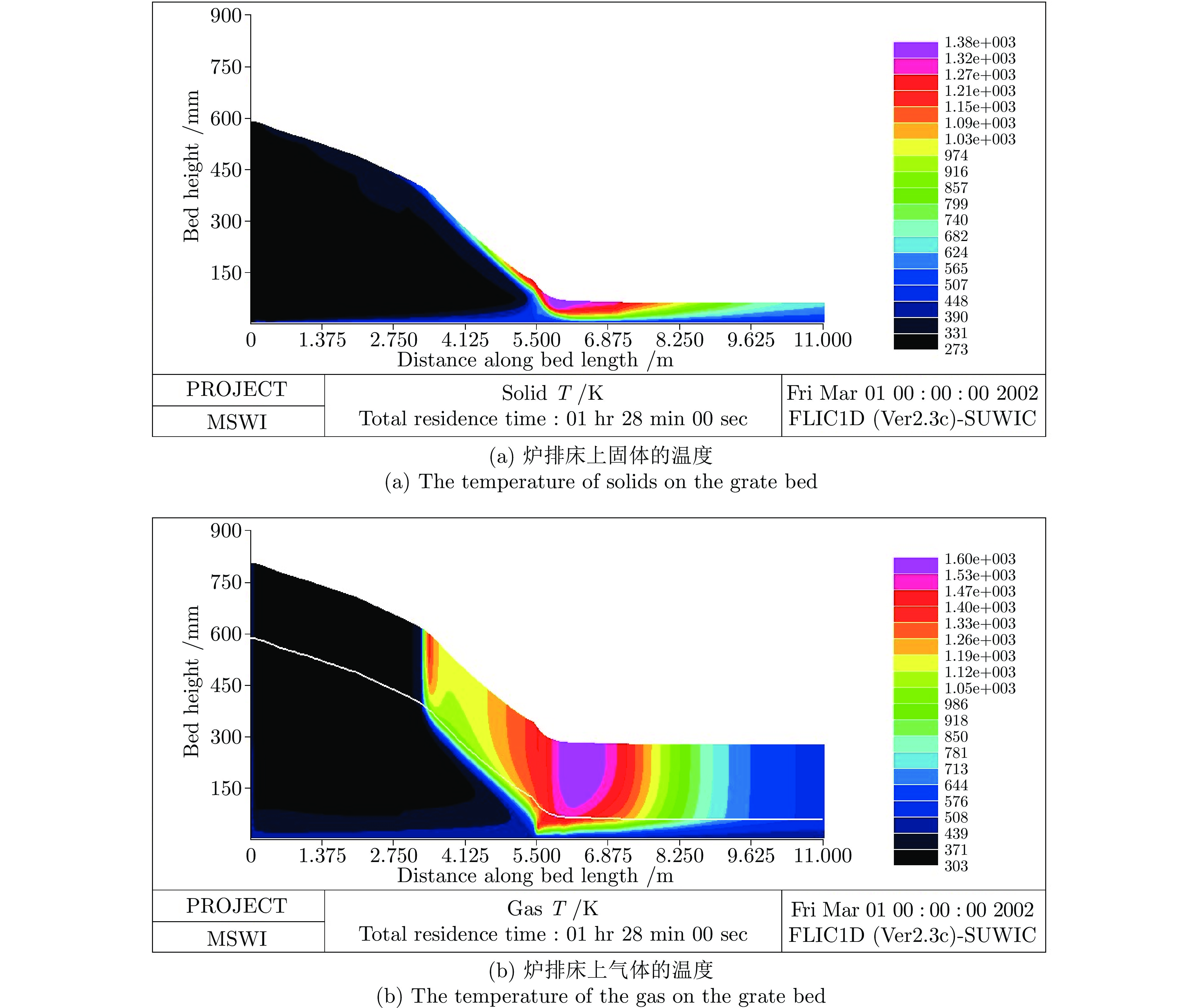
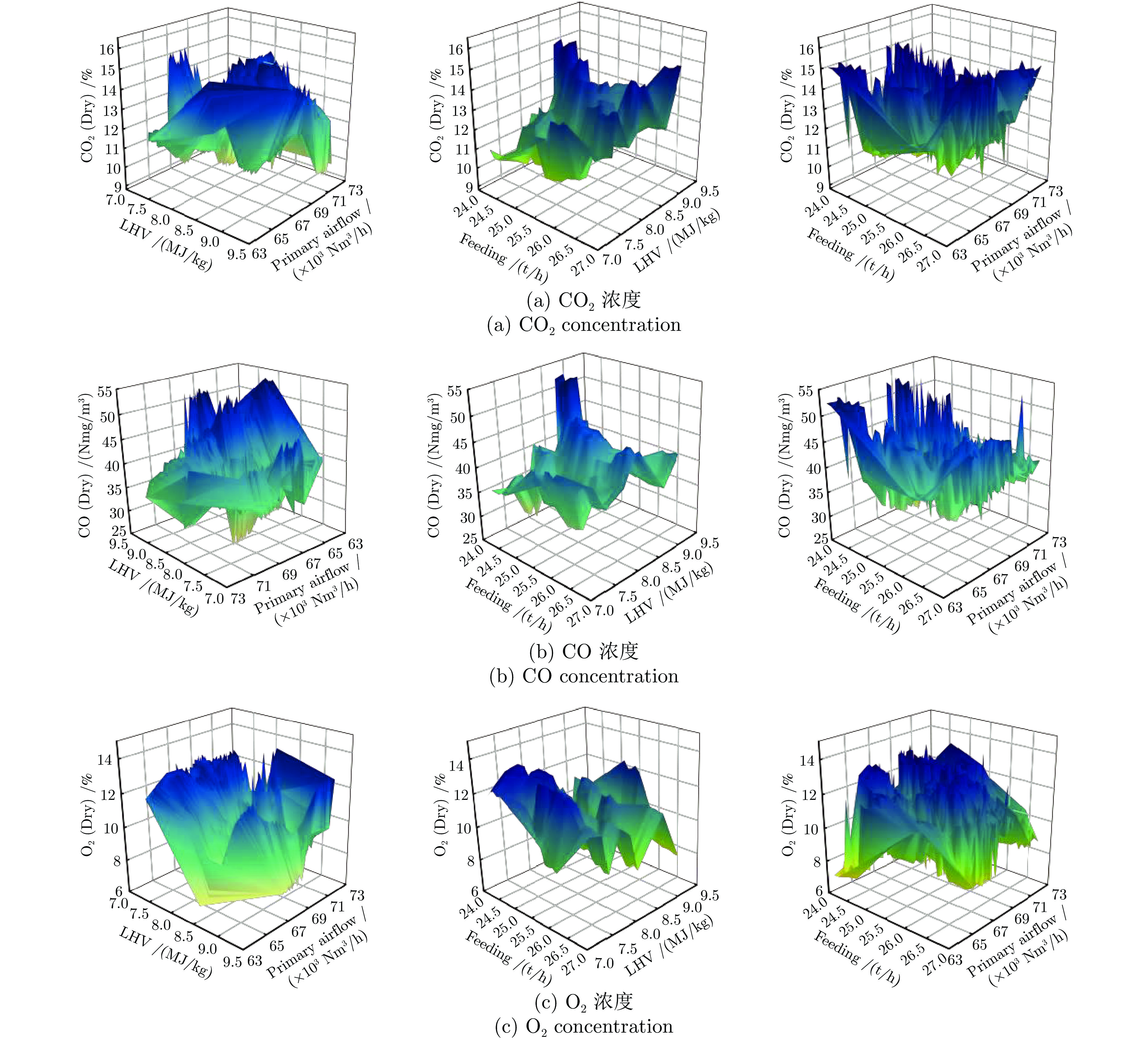
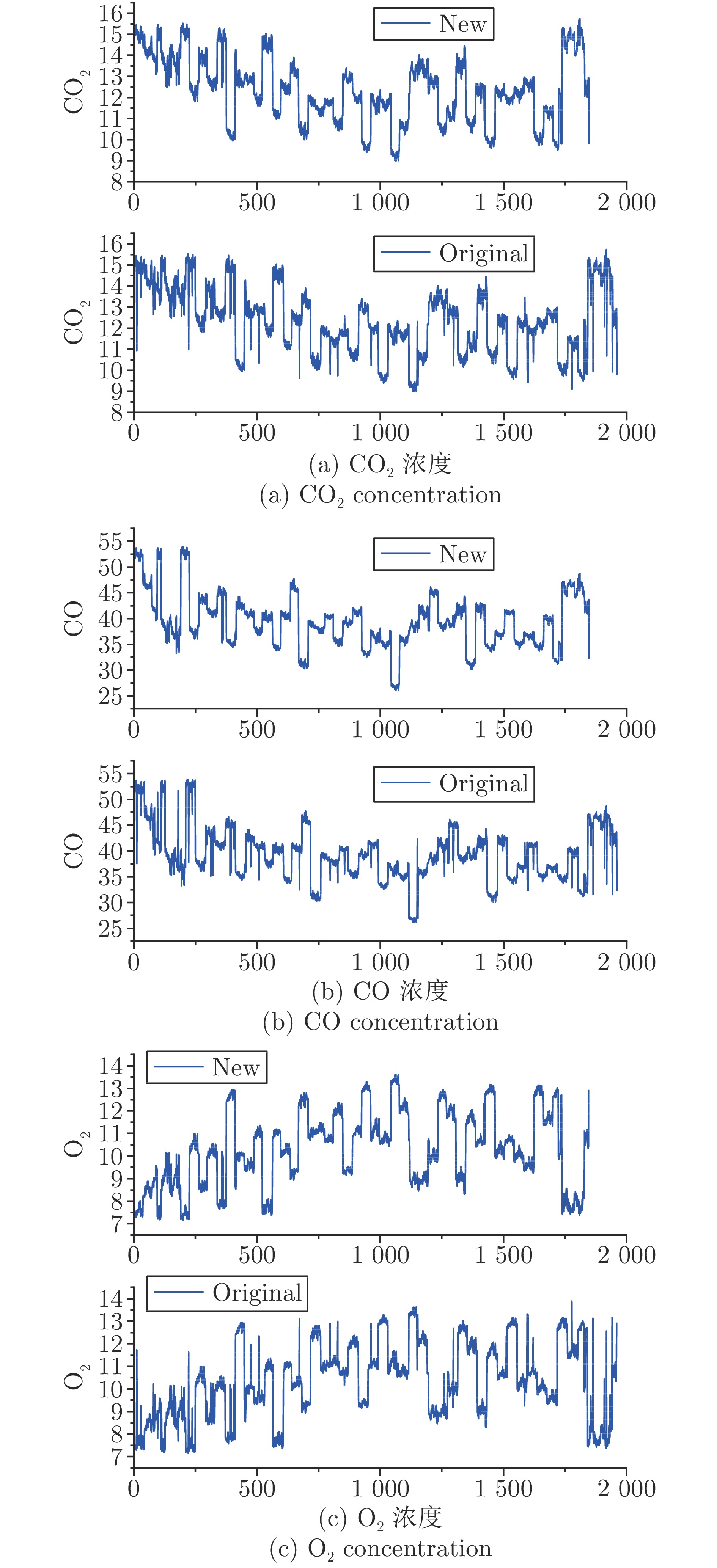
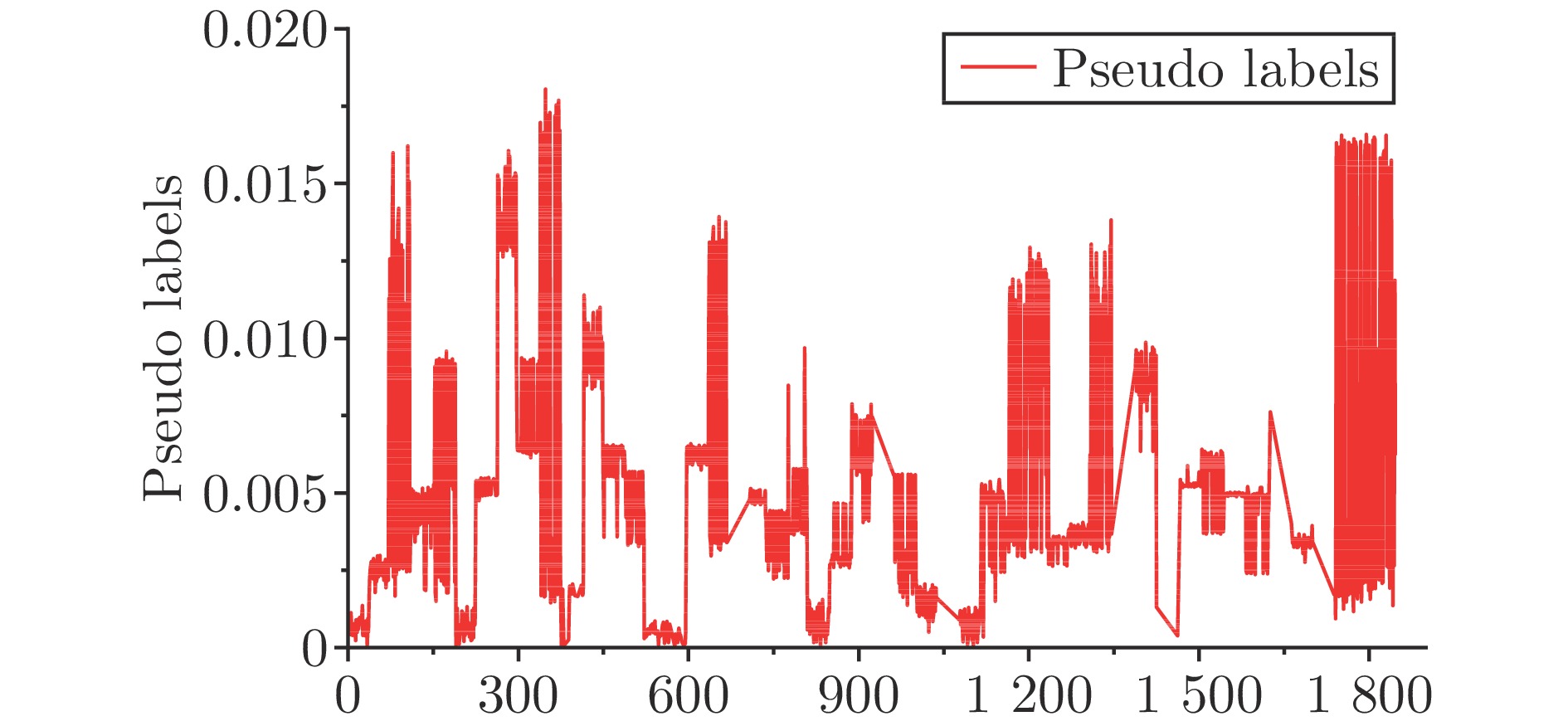
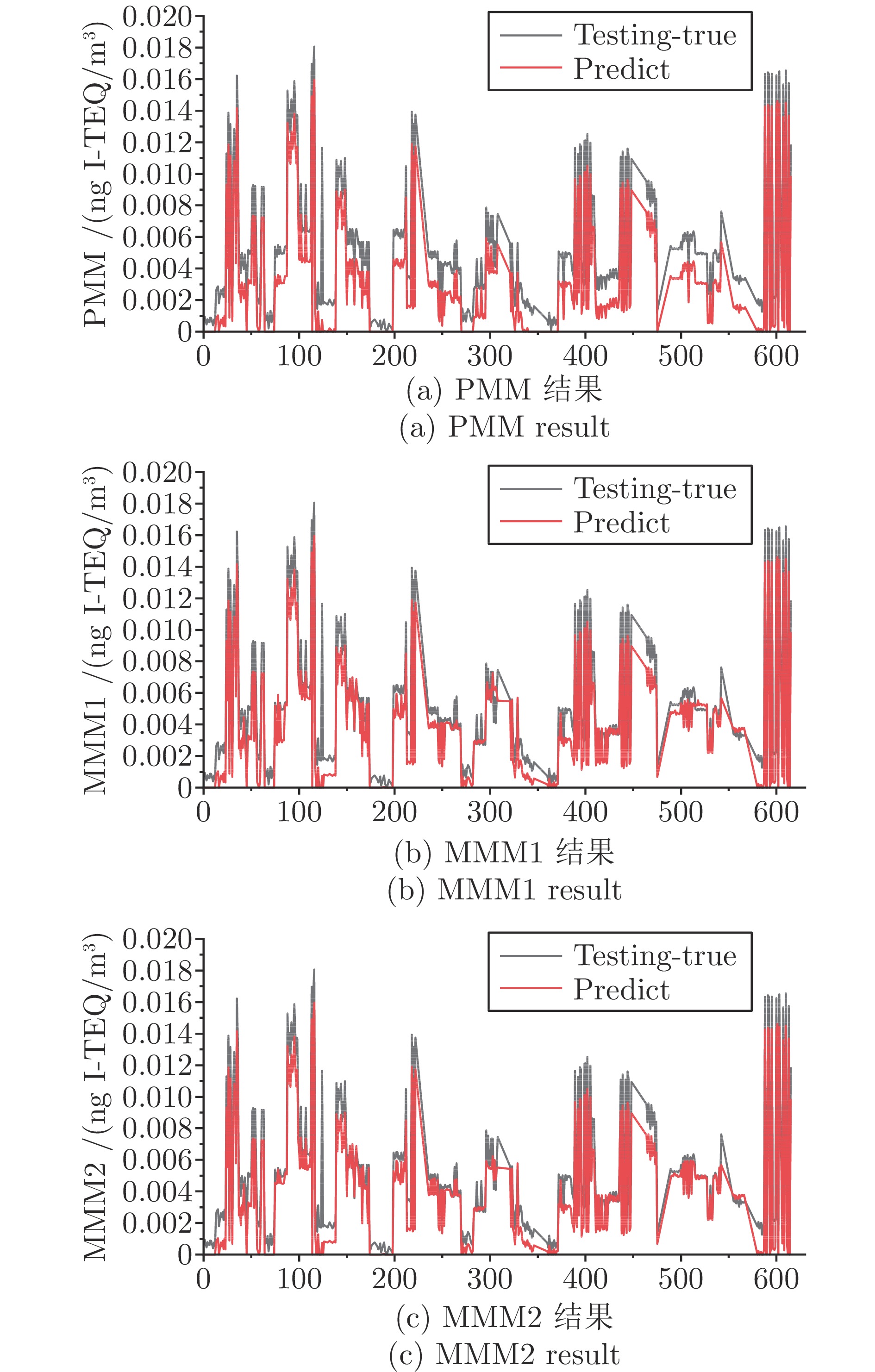
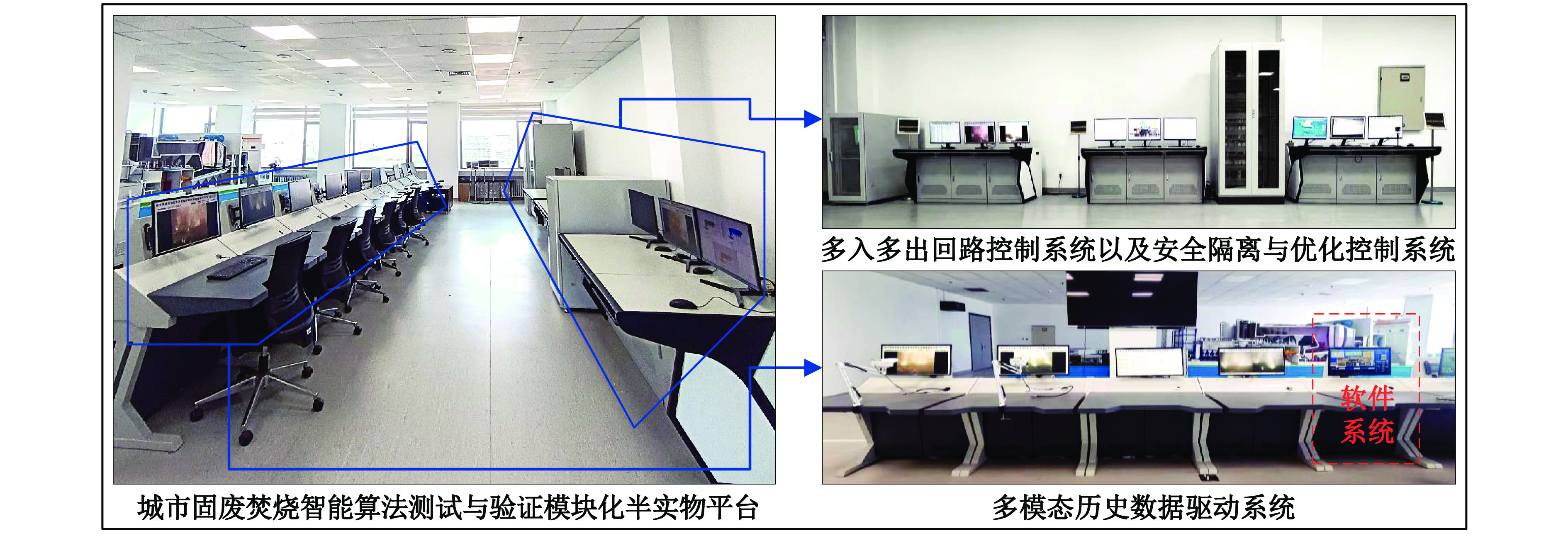
城市固废焚烧(Municipal solid waste incineration, MSWI)过程是“世纪之毒”二噁英(Dioxin, DXN)的重要排放源之一. 截止目前为止, DXN的演化机理和实时检测仍是尚未解决的难题. 现有研究主要基于离线化验数据构建数据驱动模型, DXN的检测未有效结合燃烧过程机理. 针对该问题, 本文提出基于仿真机理和改进线性回归决策树(Linear regression decision tree, LRDT)的DXN排放建模. 首先, 采用基于床层固废燃烧模拟软件FLIC (Fluid dynamic incinerator code)和过程工程先进系统软件(Advanced system for process engineering Plus, Aspen Plus)耦合的数值仿真模型, 获取蕴含多运行工况的虚拟机理数据; 接着, 利用虚拟机理数据构建基于改进LRDT的CO2、CO和O2燃烧状态表征变量模型; 然后, 以真实CO2、CO、O2作为输入和以DXN真值作为输出, 构建多入单出LRDT的过程映射模型(Process mapping model, PMM), 再利用该模型进行半监督学习和结构迁移得到机理映射模型1 (Mechanism mapping models1, MMM1); 最后, 通过结构增量学习获得基于半监督迁移学习的MMM2模型. 在实验室的半实物平台和北京某MSWI厂的边侧验证平台对所提方法进行了工业应用验证. 实验结果证明了所提方法与研发的软测量系统可有效实现二噁英排放浓度在线检测.
城市固废焚烧(Municipal solid waste incineration, MSWI)过程是“世纪之毒”二噁英(Dioxin, DXN)的重要排放源之一. 截止目前为止, DXN的演化机理和实时检测仍是尚未解决的难题. 现有研究主要基于离线化验数据构建数据驱动模型, DXN的检测未有效结合燃烧过程机理. 针对该问题, 本文提出基于仿真机理和改进线性回归决策树(Linear regression decision tree, LRDT)的DXN排放建模. 首先, 采用基于床层固废燃烧模拟软件FLIC (Fluid dynamic incinerator code)和过程工程先进系统软件(Advanced system for process engineering Plus, Aspen Plus)耦合的数值仿真模型, 获取蕴含多运行工况的虚拟机理数据; 接着, 利用虚拟机理数据构建基于改进LRDT的CO2、CO和O2燃烧状态表征变量模型; 然后, 以真实CO2、CO、O2作为输入和以DXN真值作为输出, 构建多入单出LRDT的过程映射模型(Process mapping model, PMM), 再利用该模型进行半监督学习和结构迁移得到机理映射模型1 (Mechanism mapping models1, MMM1); 最后, 通过结构增量学习获得基于半监督迁移学习的MMM2模型. 在实验室的半实物平台和北京某MSWI厂的边侧验证平台对所提方法进行了工业应用验证. 实验结果证明了所提方法与研发的软测量系统可有效实现二噁英排放浓度在线检测.



2024, 50(8): 1620-1630.
doi: 10.16383/j.aas.c230637
摘要:
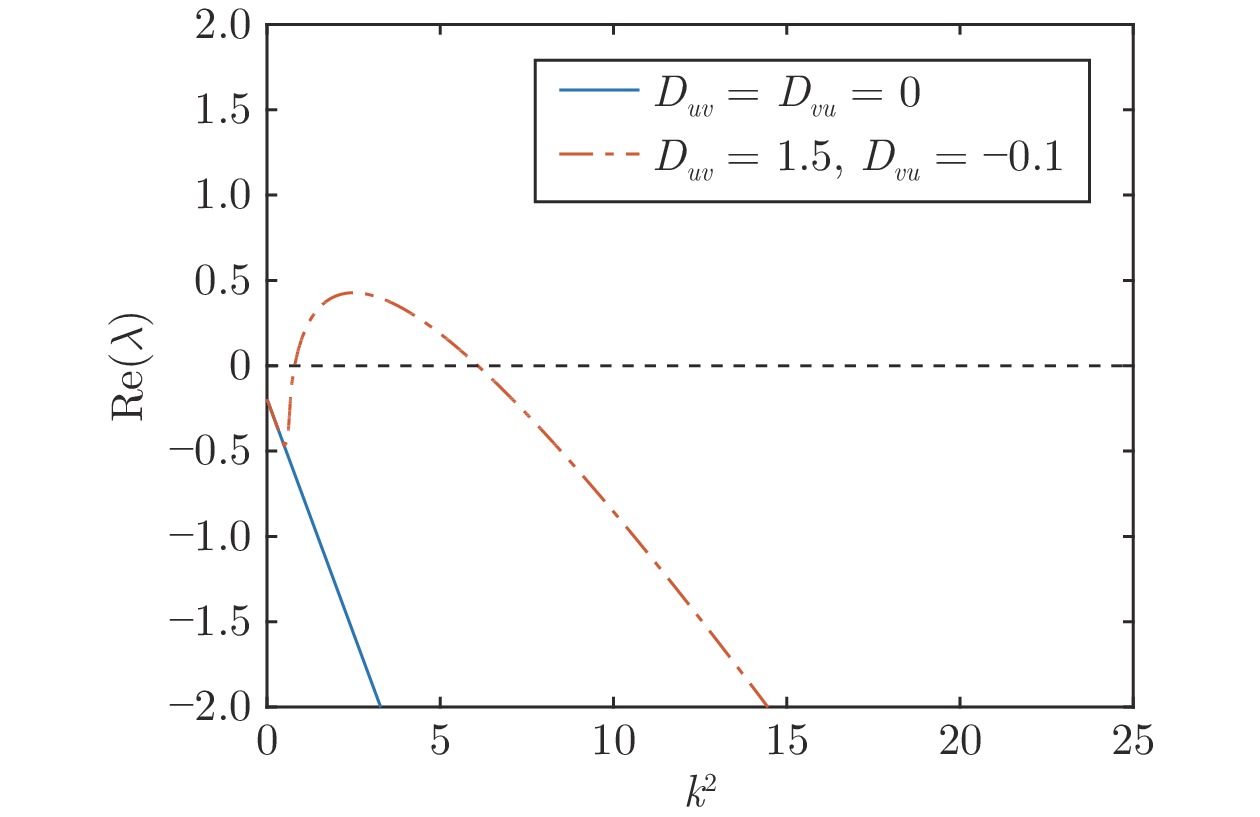
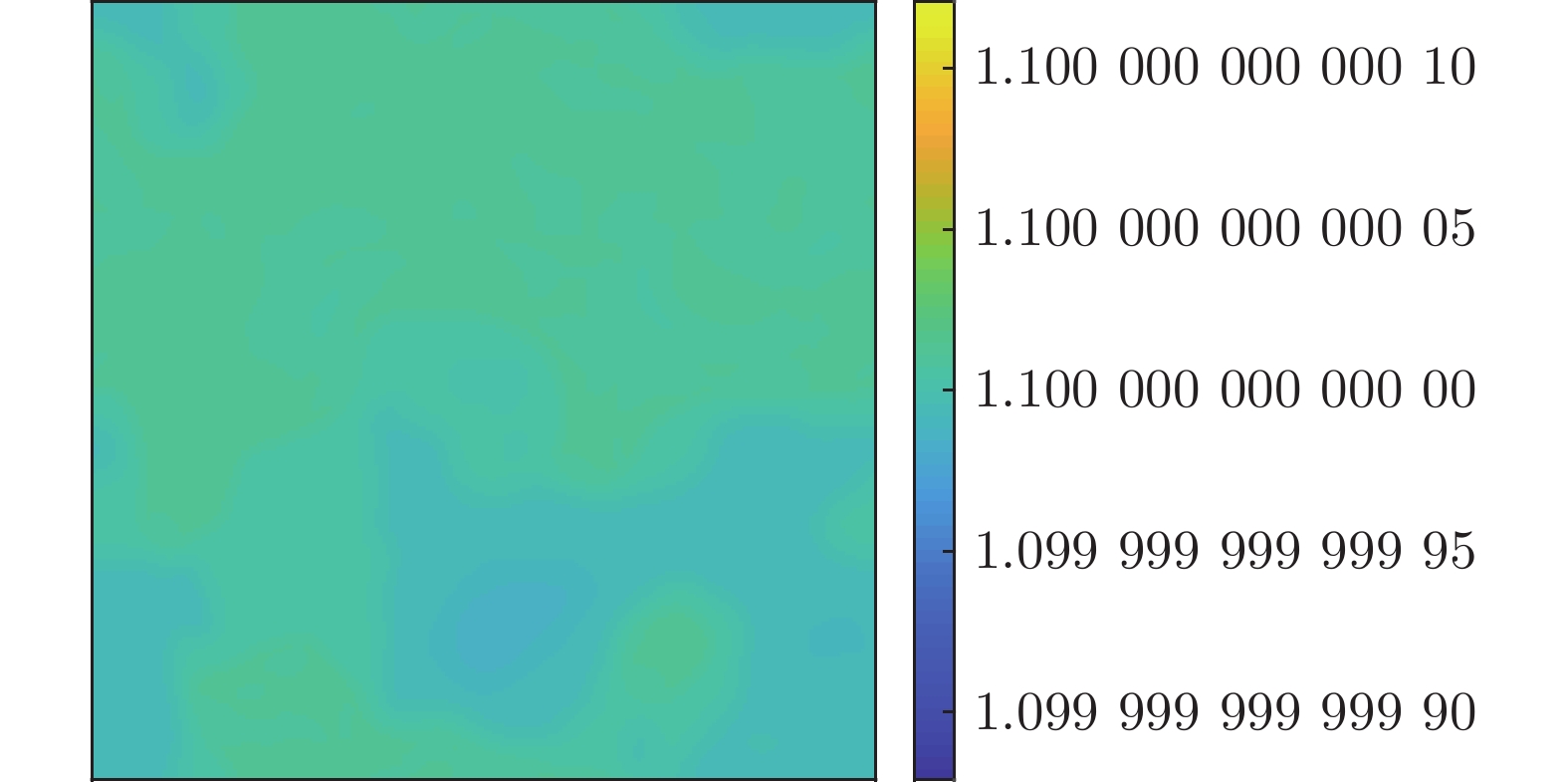
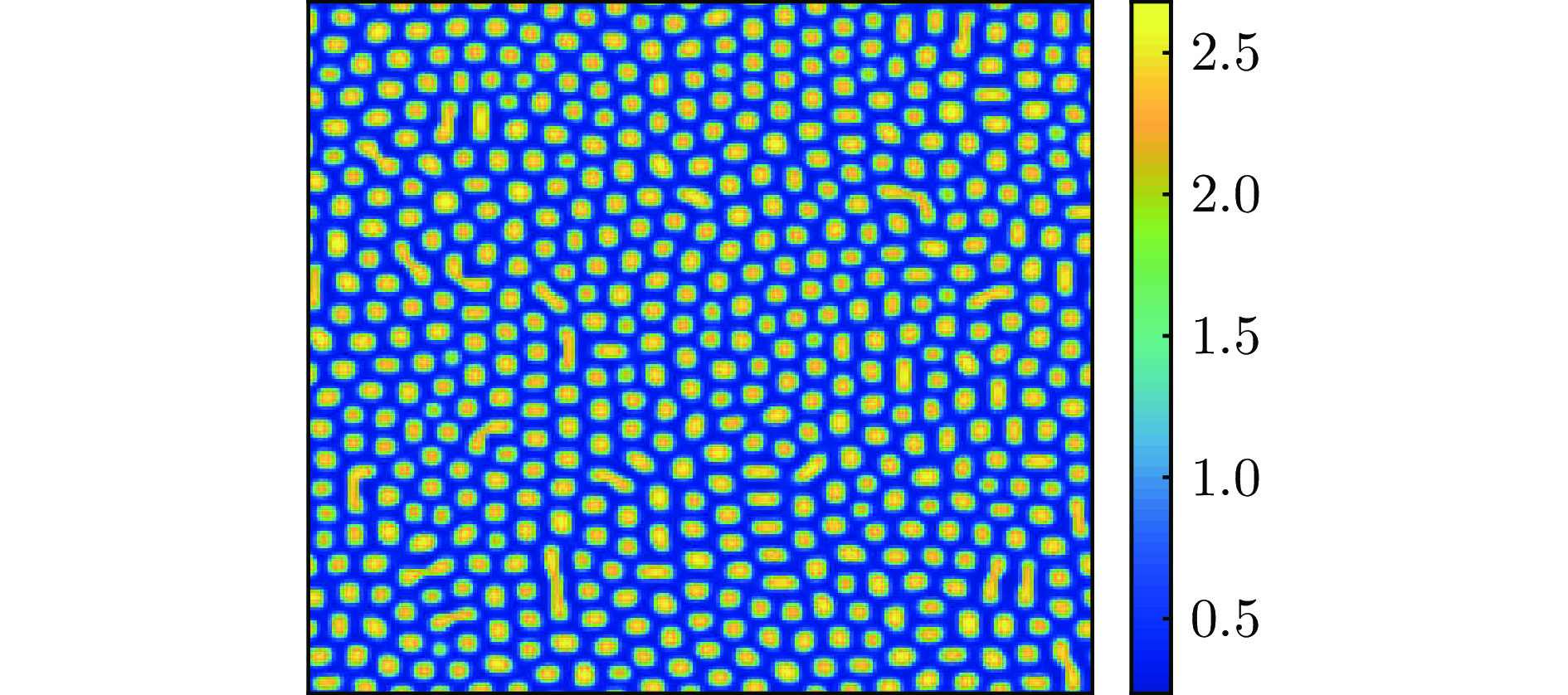
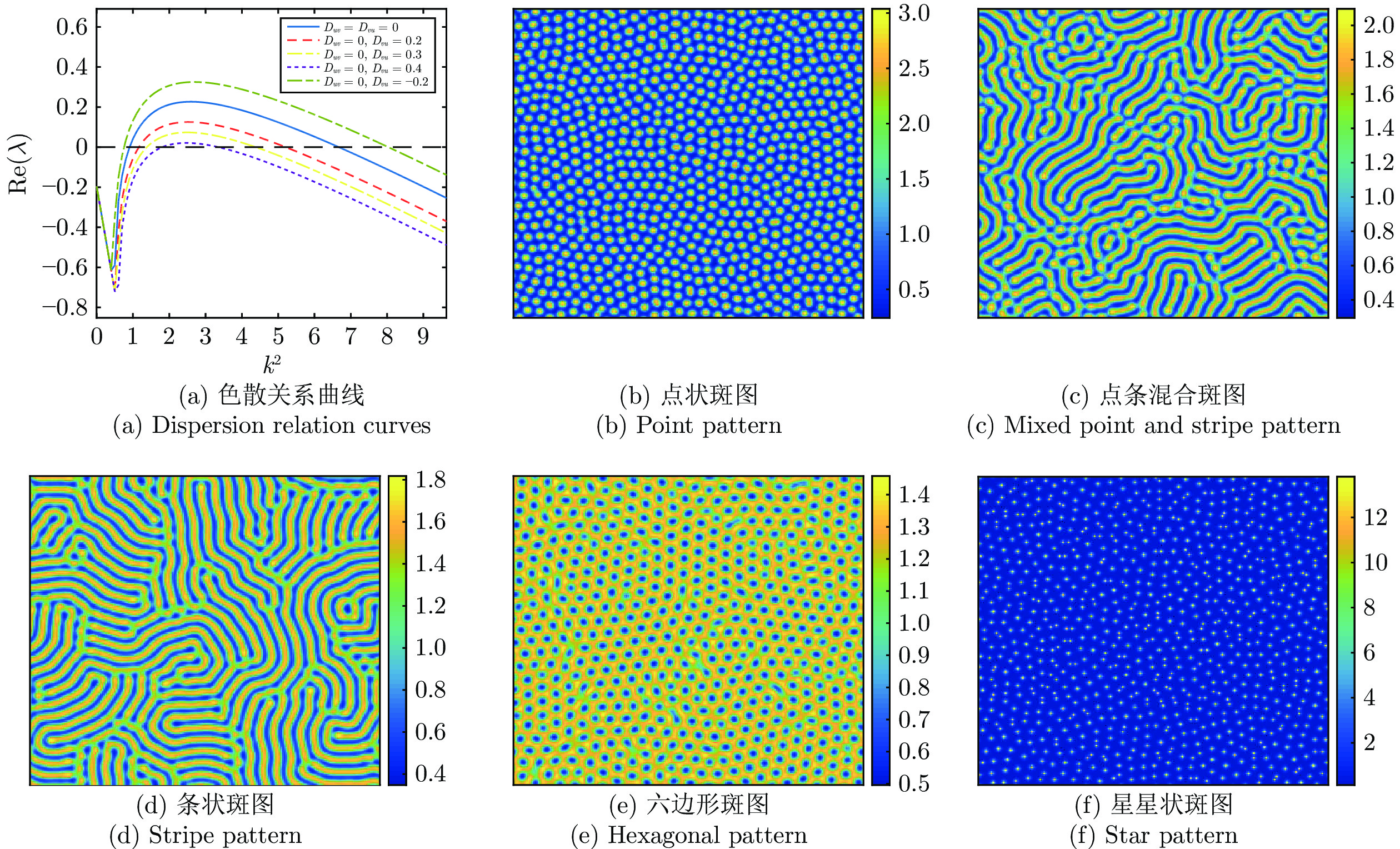
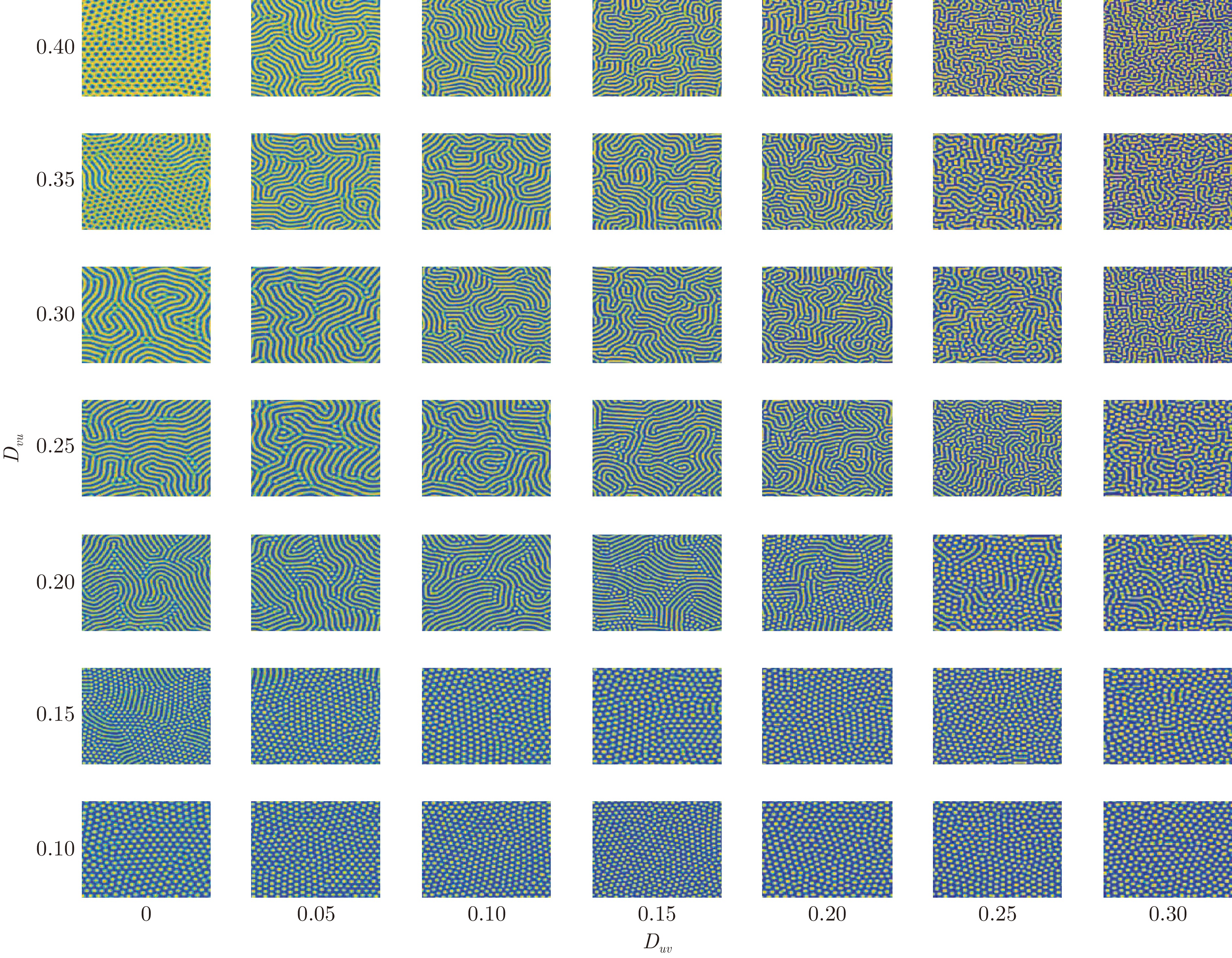
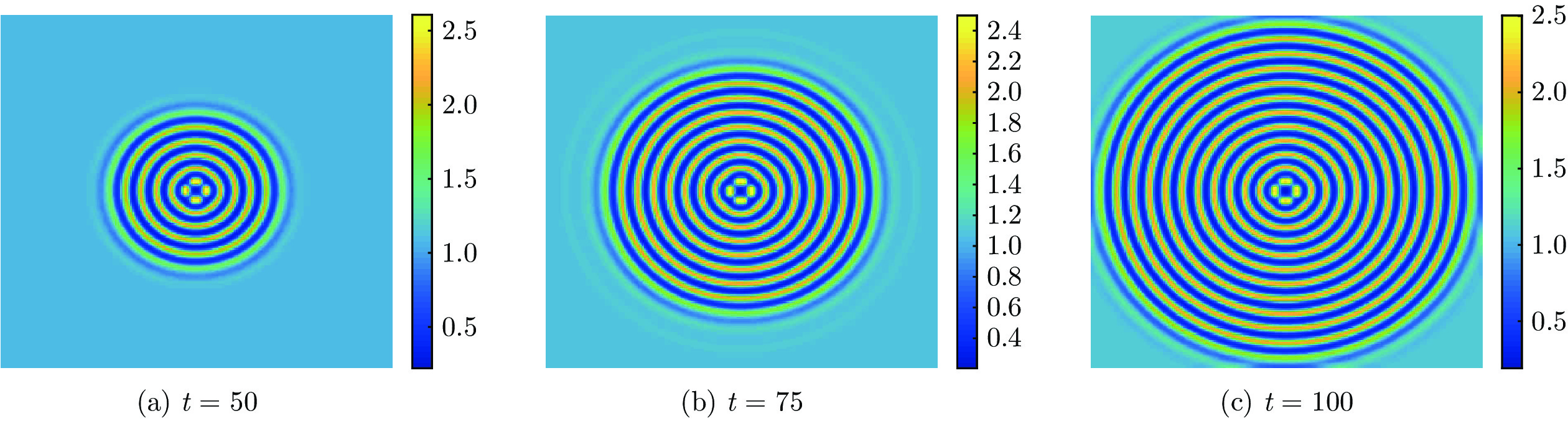
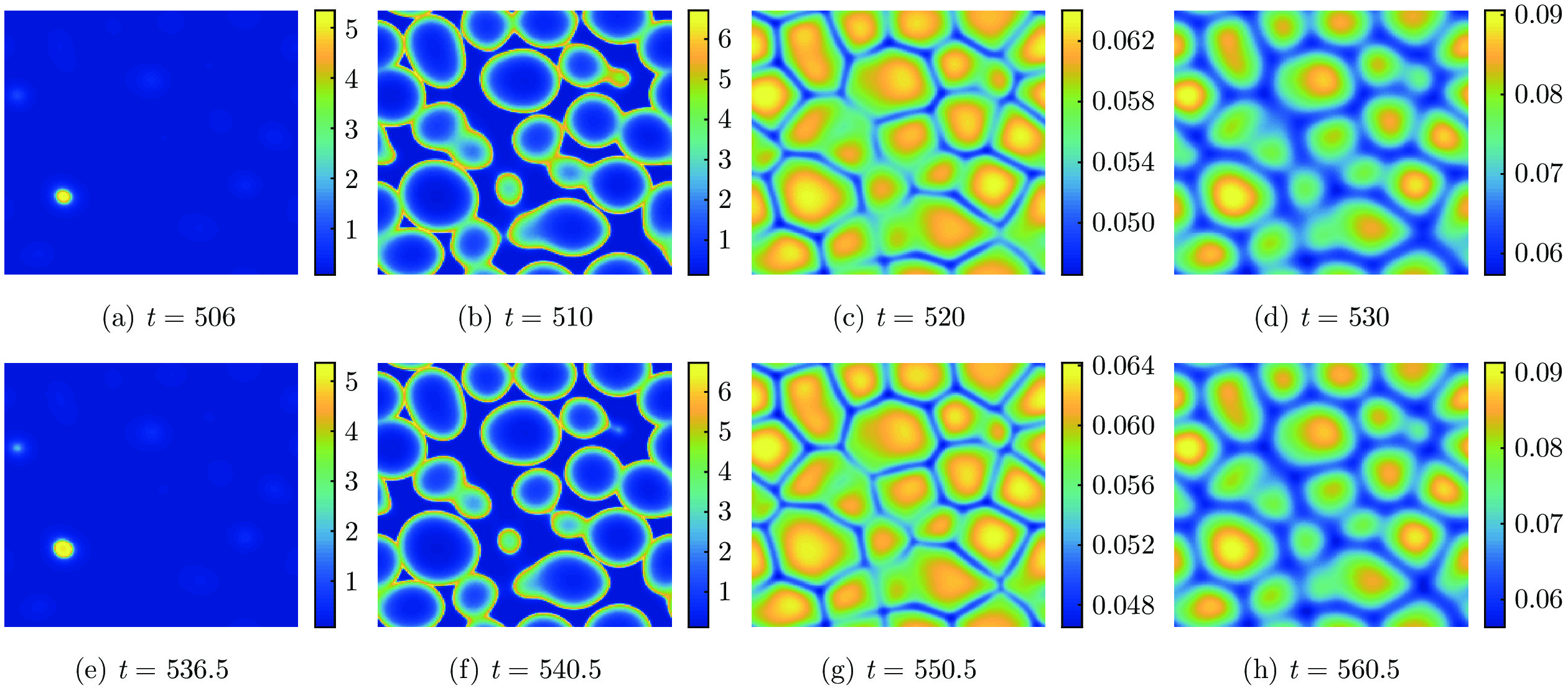
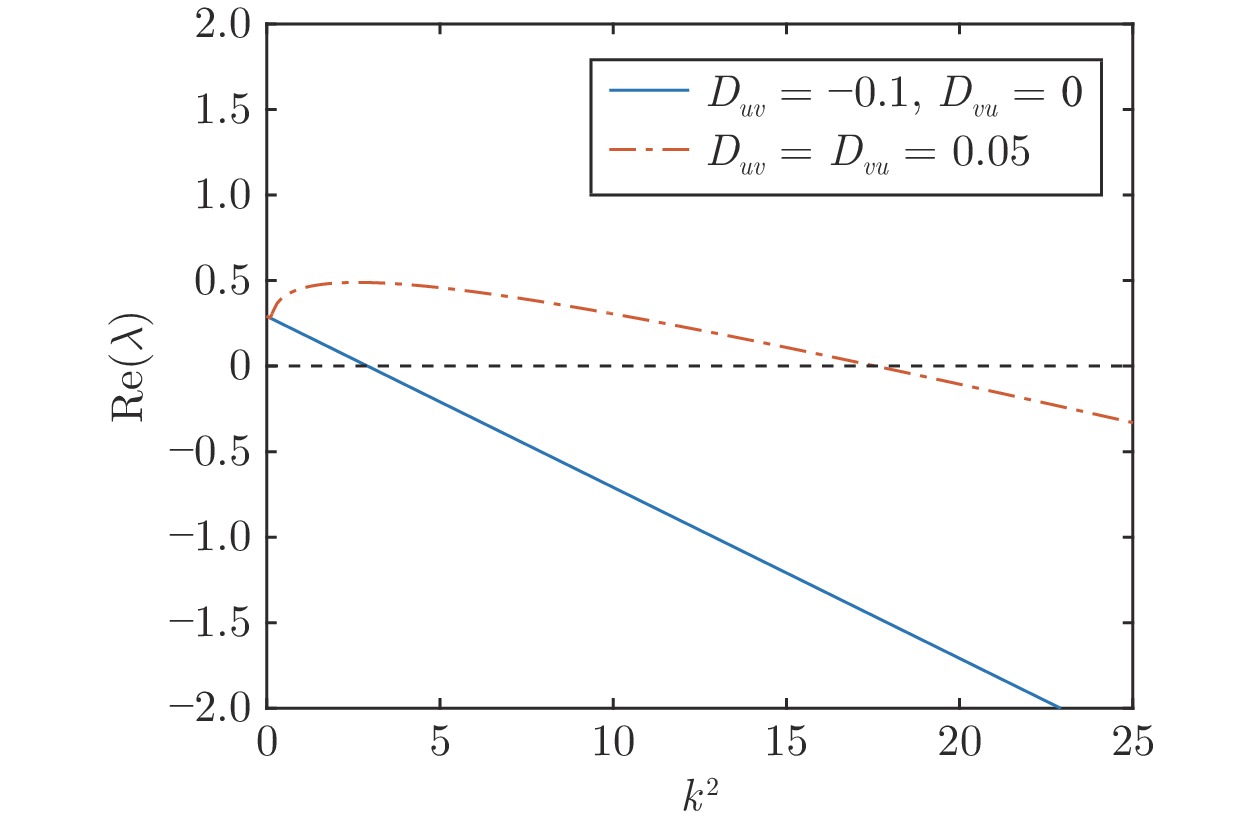
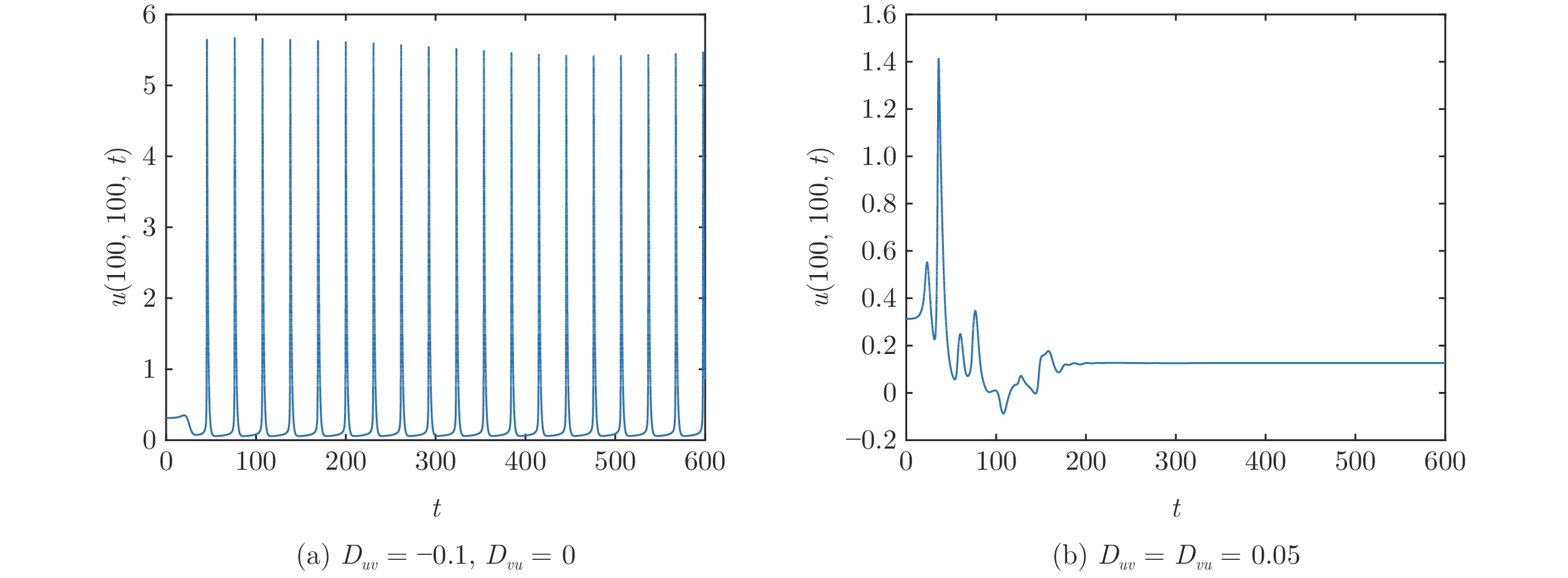
Schnakenberg系统是一类典型的化学反应扩散控制系统. 目前国内外研究仅局限于Schnakenberg系统的Turing不稳定与分岔, 而关于其化学斑图演化机理的报道较少. 斑图机理分析可以准确揭示化学反应中自组织现象的产生和空间模式的演化规律. 本文研究交叉扩散驱动下Schnakenberg系统斑图的结构蜕变、演化速度及时间依赖性, 重点探讨交叉扩散对其动力学与斑图演化的响应机制. 研究发现, 当自扩散诱导的系统稳定时, 交叉扩散可以激发斑图的产生; 当自扩散诱导的系统不稳定时, 交叉扩散可以实现斑图结构的蜕变; 对于环波结构, 不同组分的交叉扩散可以影响其演化速度; 对于时间依赖性, 交叉扩散可以激发随时间周期变化的斑图产生, 并可将此类斑图转换为随时间相对稳定的斑图. 因此, 交叉扩散对于Schnakenberg系统的斑图产生、蜕变、演化速度及时间依赖性都起着至关重要的作用.
Schnakenberg系统是一类典型的化学反应扩散控制系统. 目前国内外研究仅局限于Schnakenberg系统的Turing不稳定与分岔, 而关于其化学斑图演化机理的报道较少. 斑图机理分析可以准确揭示化学反应中自组织现象的产生和空间模式的演化规律. 本文研究交叉扩散驱动下Schnakenberg系统斑图的结构蜕变、演化速度及时间依赖性, 重点探讨交叉扩散对其动力学与斑图演化的响应机制. 研究发现, 当自扩散诱导的系统稳定时, 交叉扩散可以激发斑图的产生; 当自扩散诱导的系统不稳定时, 交叉扩散可以实现斑图结构的蜕变; 对于环波结构, 不同组分的交叉扩散可以影响其演化速度; 对于时间依赖性, 交叉扩散可以激发随时间周期变化的斑图产生, 并可将此类斑图转换为随时间相对稳定的斑图. 因此, 交叉扩散对于Schnakenberg系统的斑图产生、蜕变、演化速度及时间依赖性都起着至关重要的作用.


2024, 50(8): 1631-1645.
doi: 10.16383/j.aas.c230049
摘要:
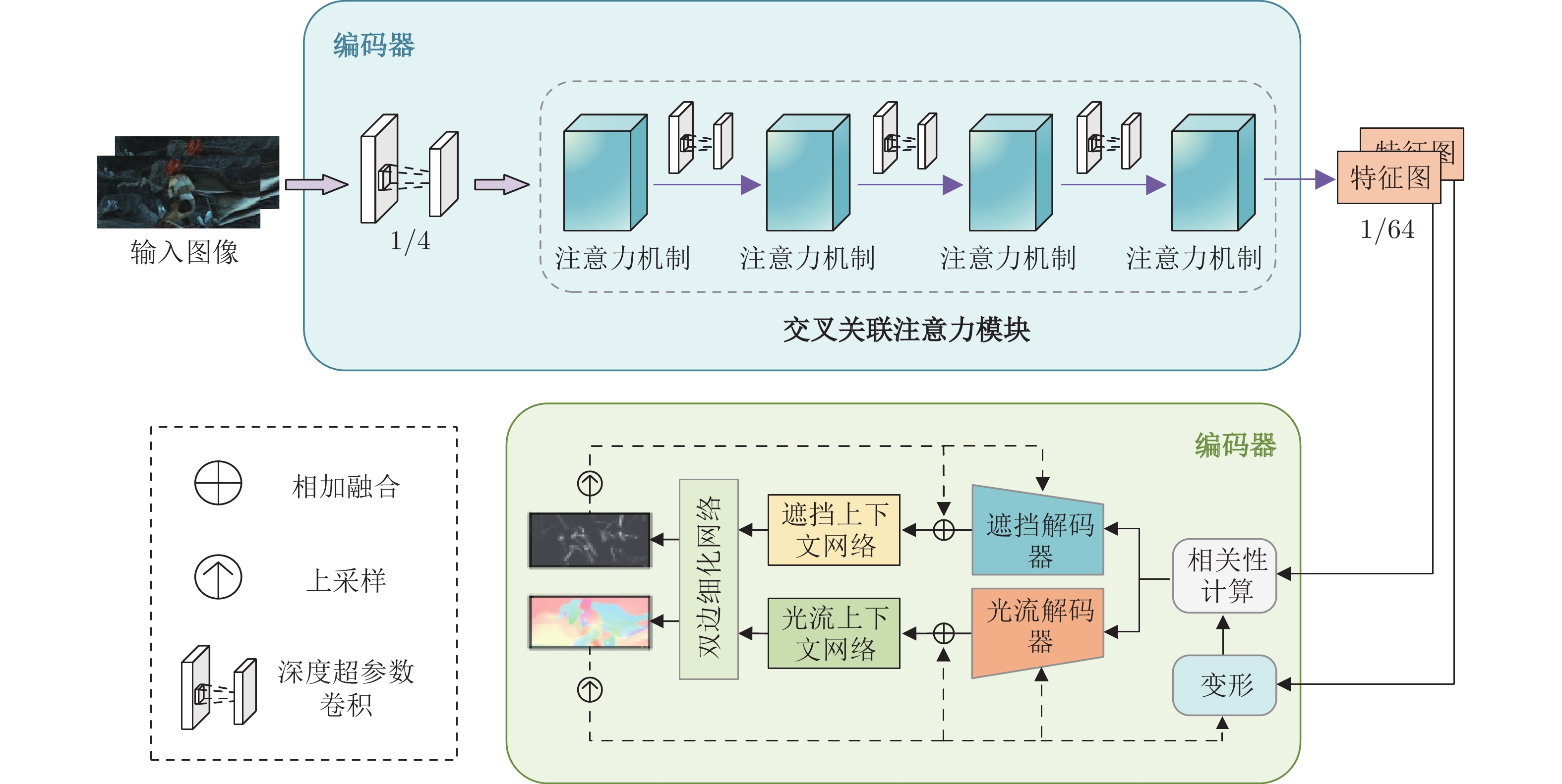
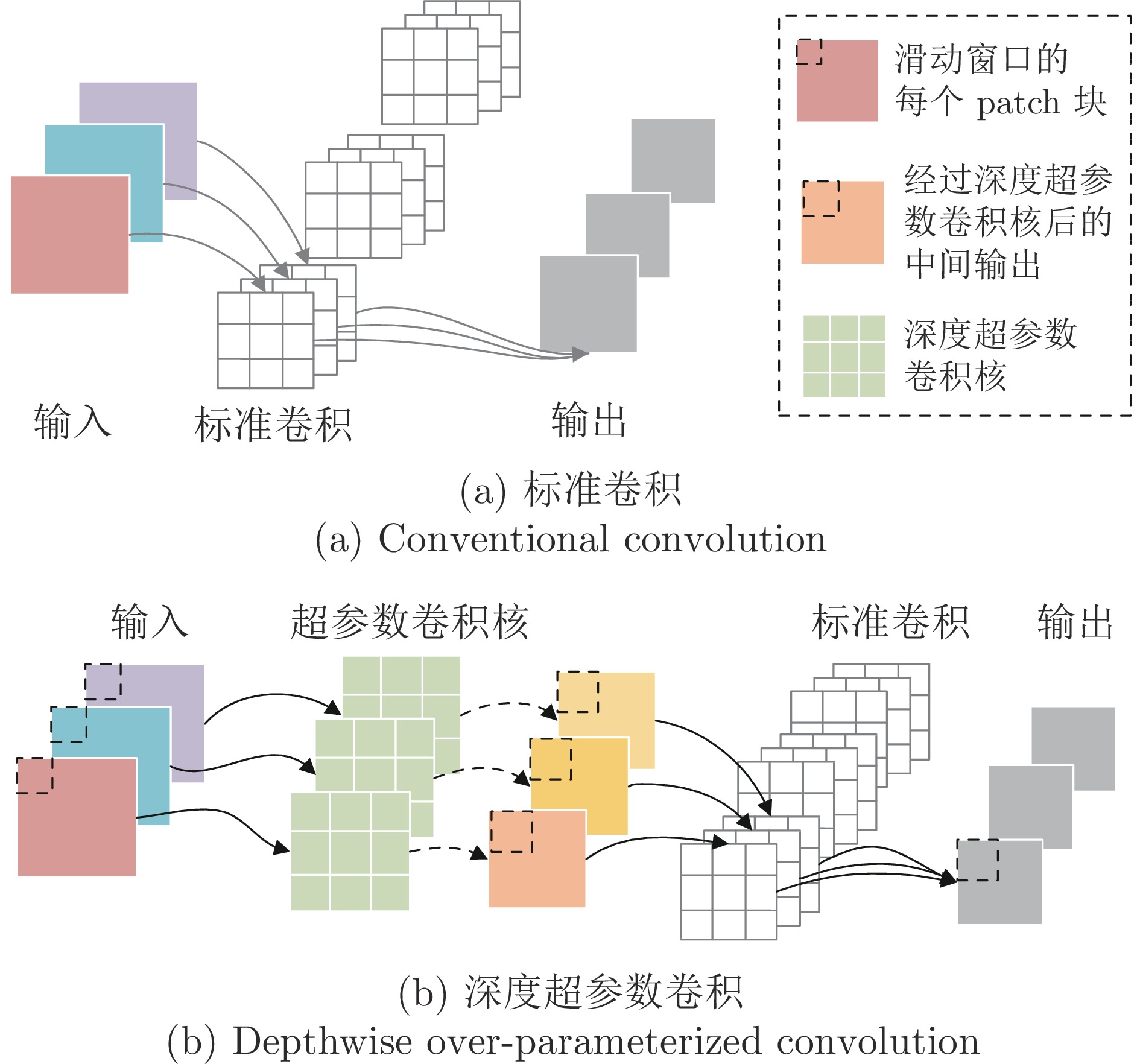
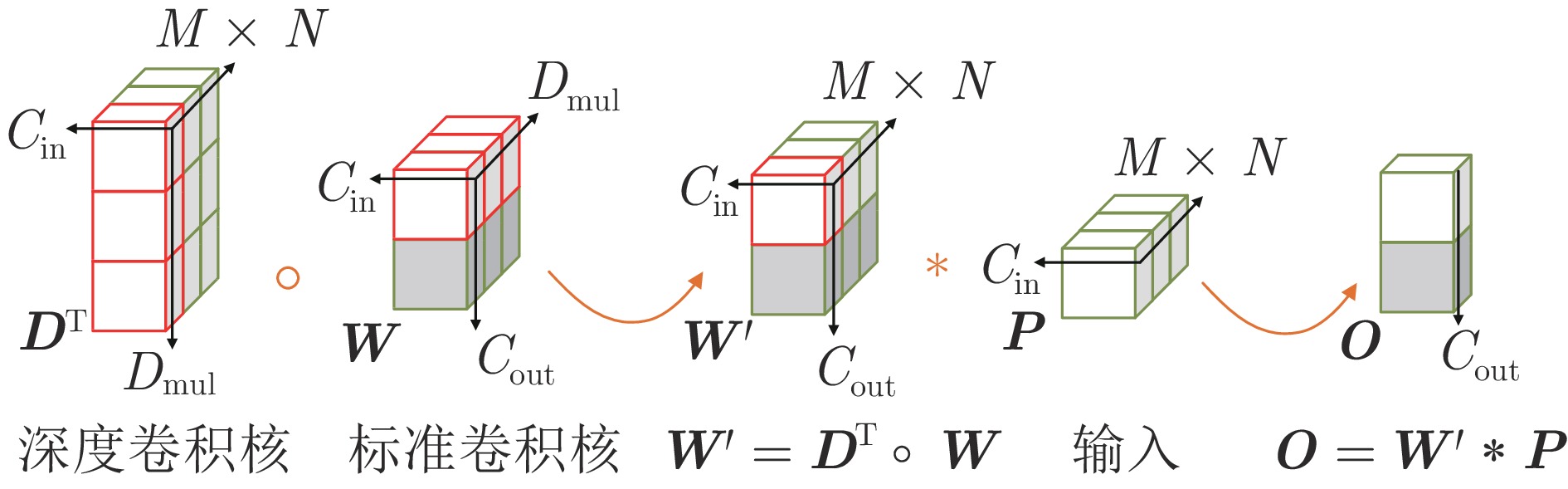
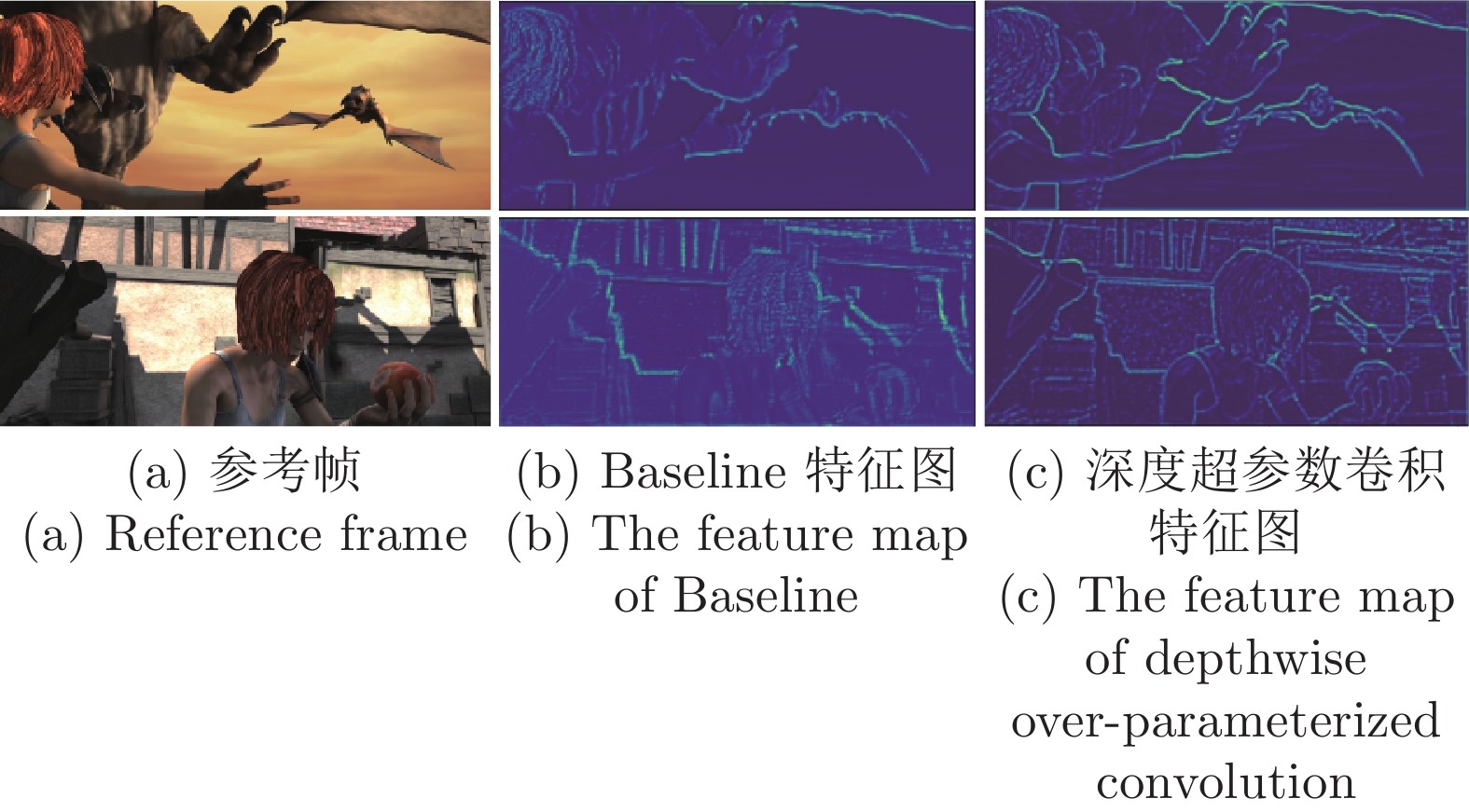
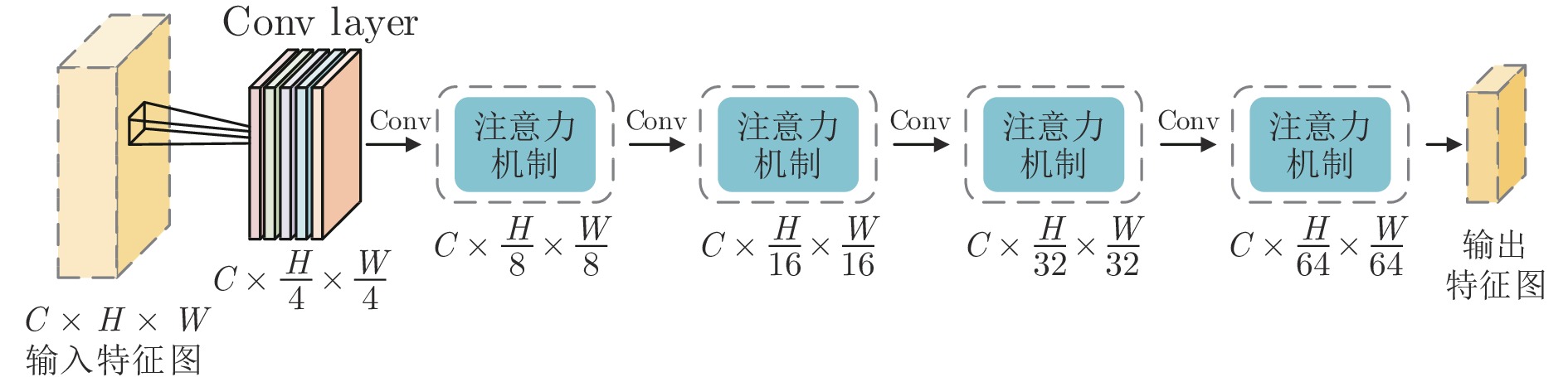
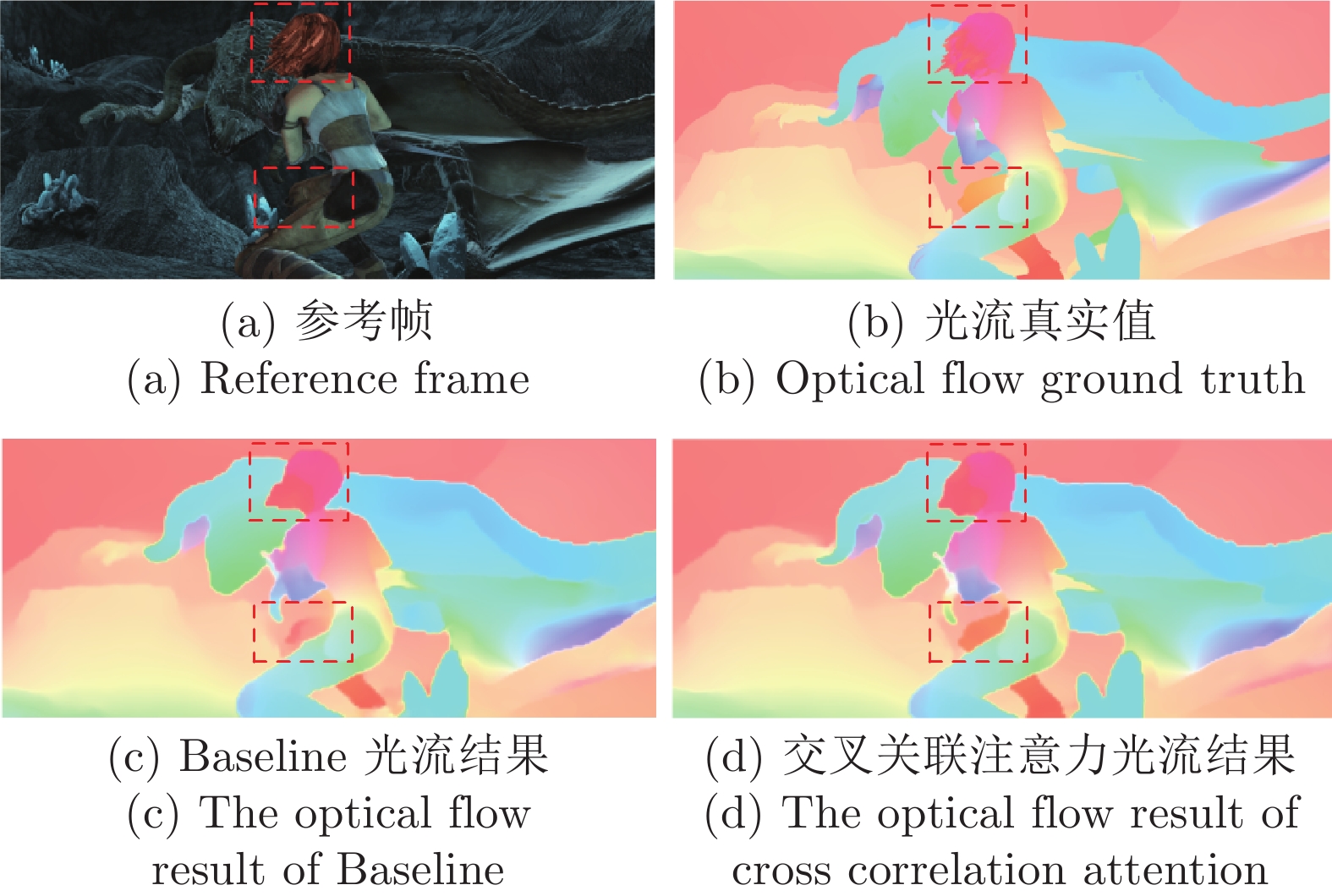
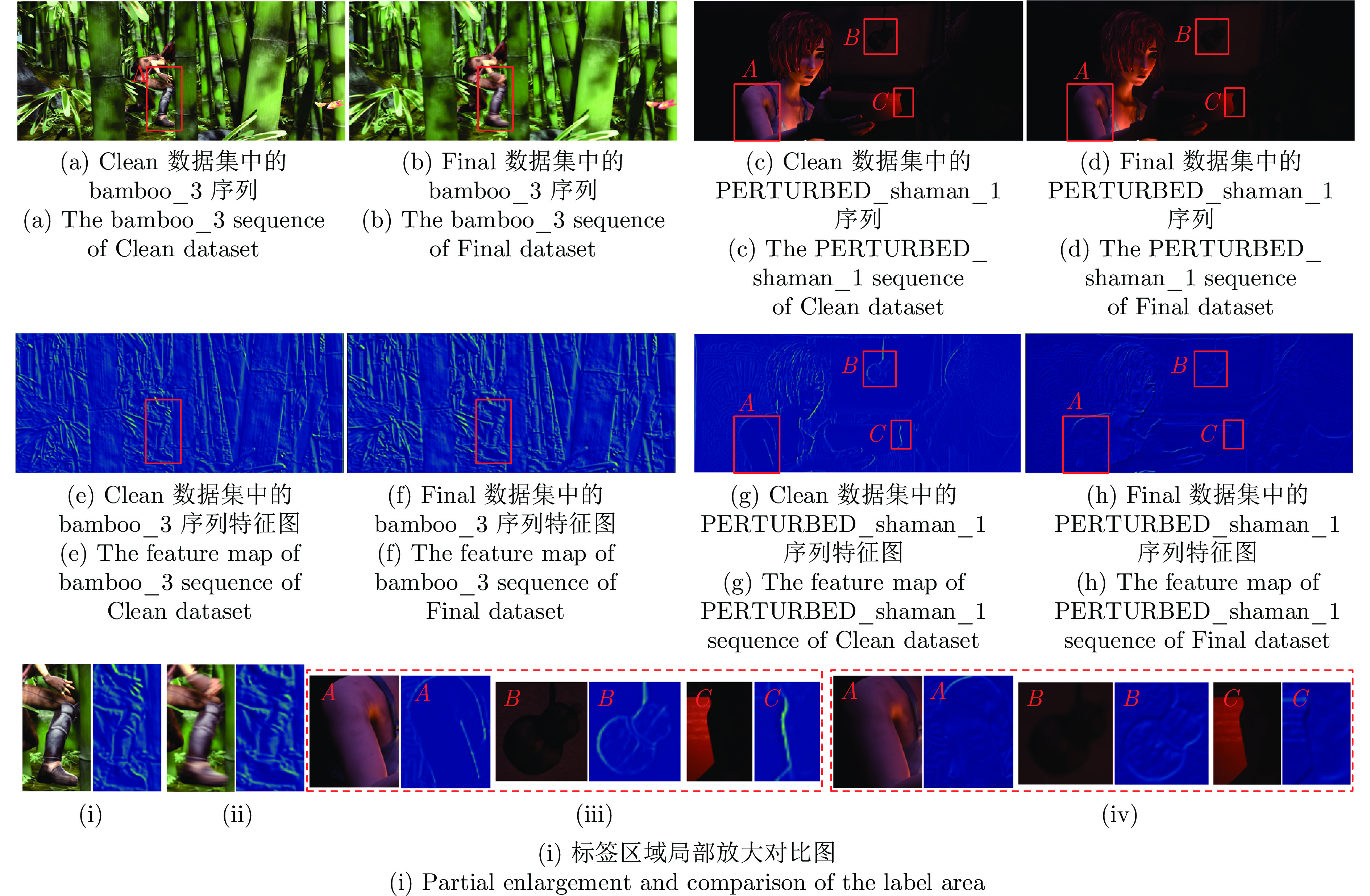
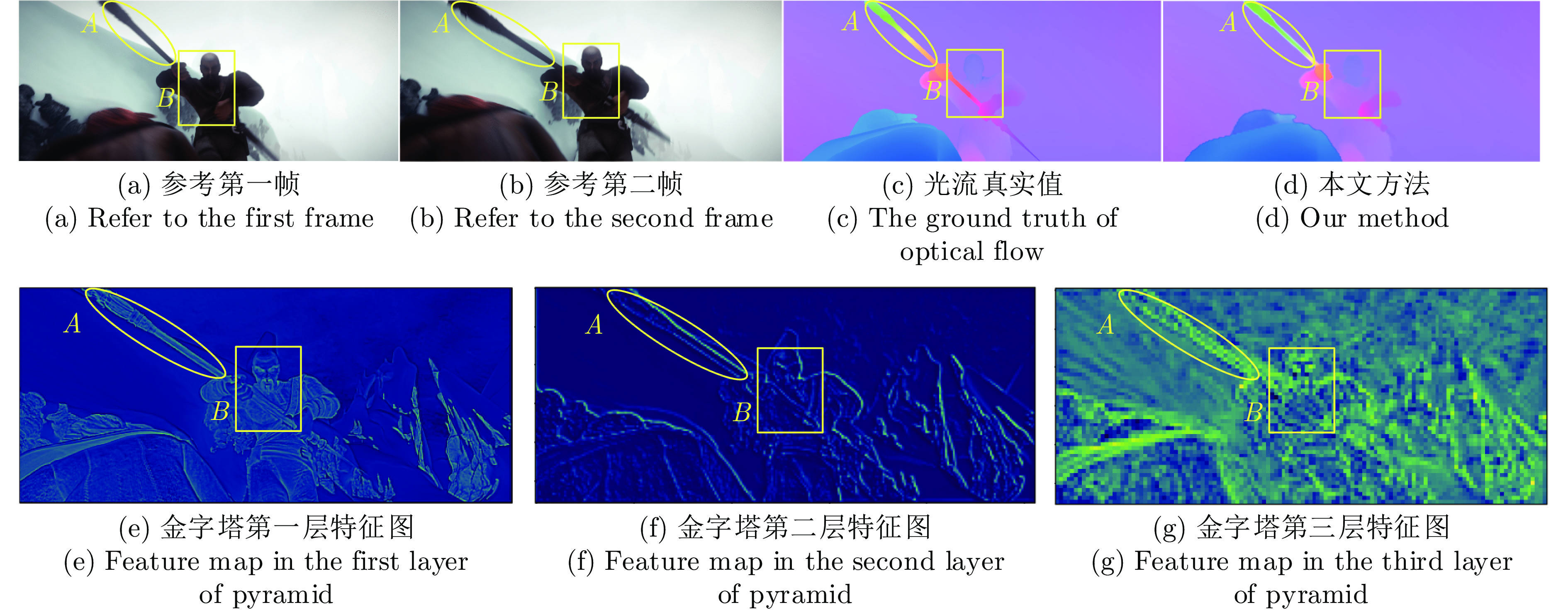
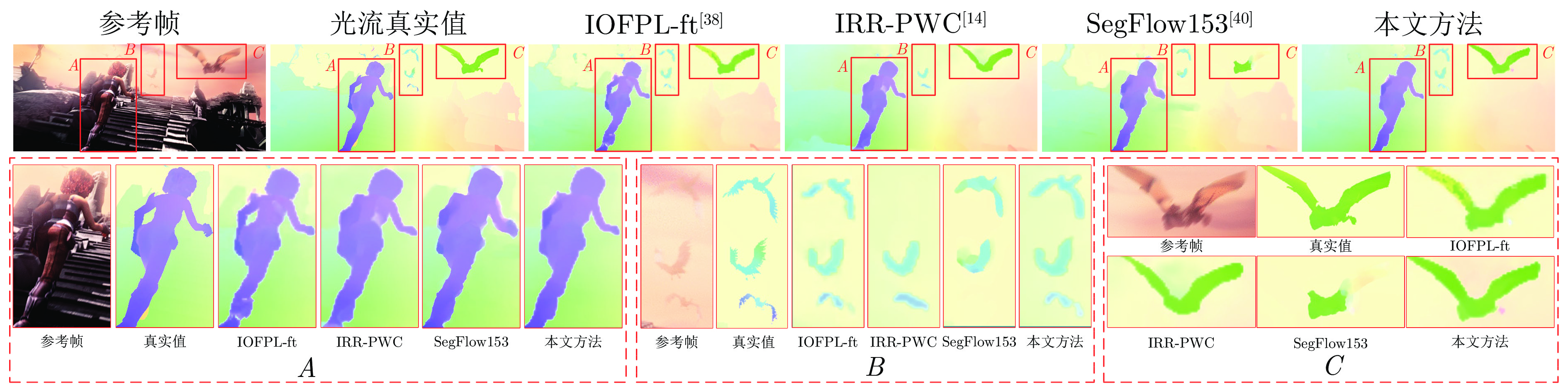
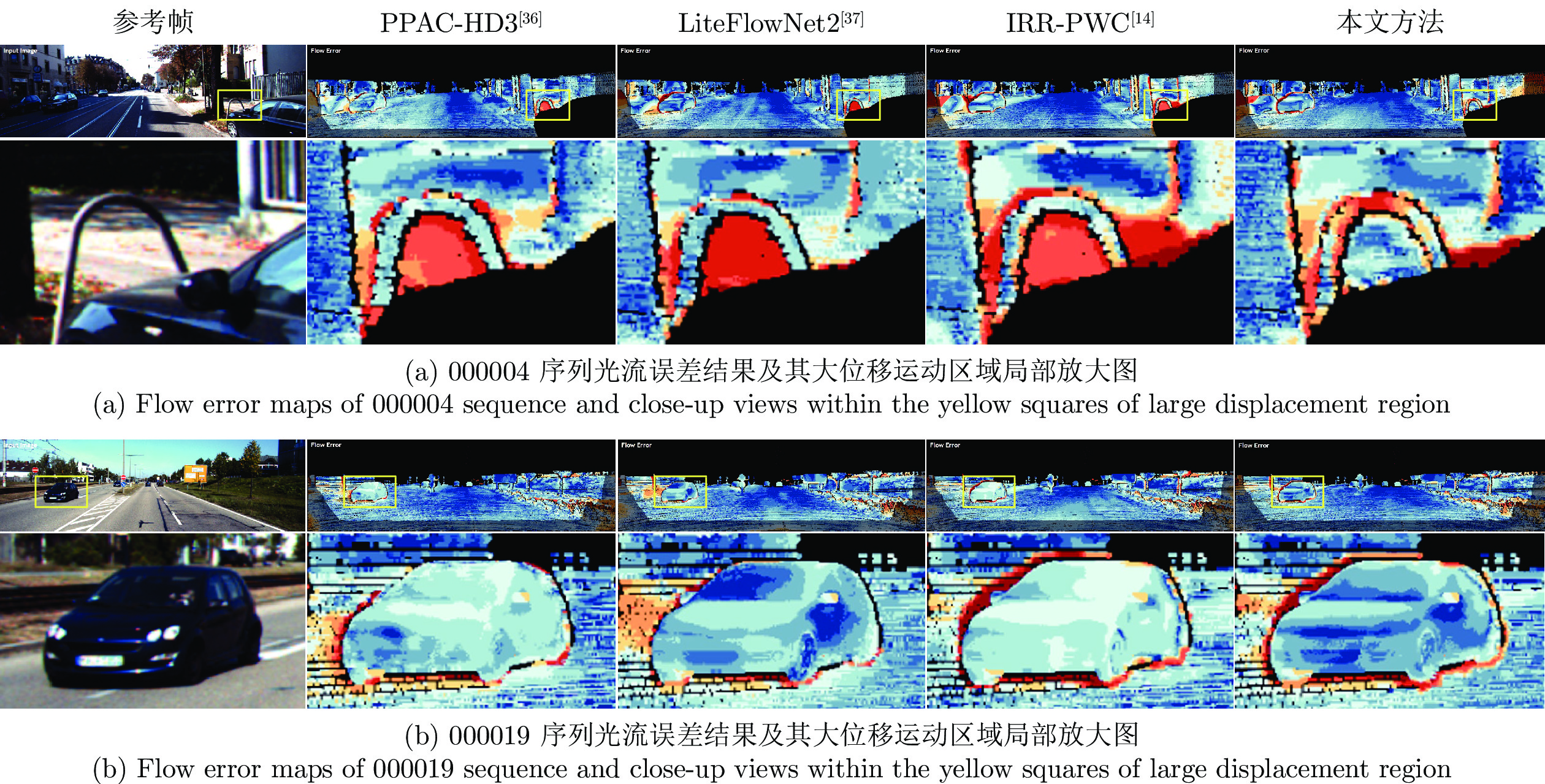
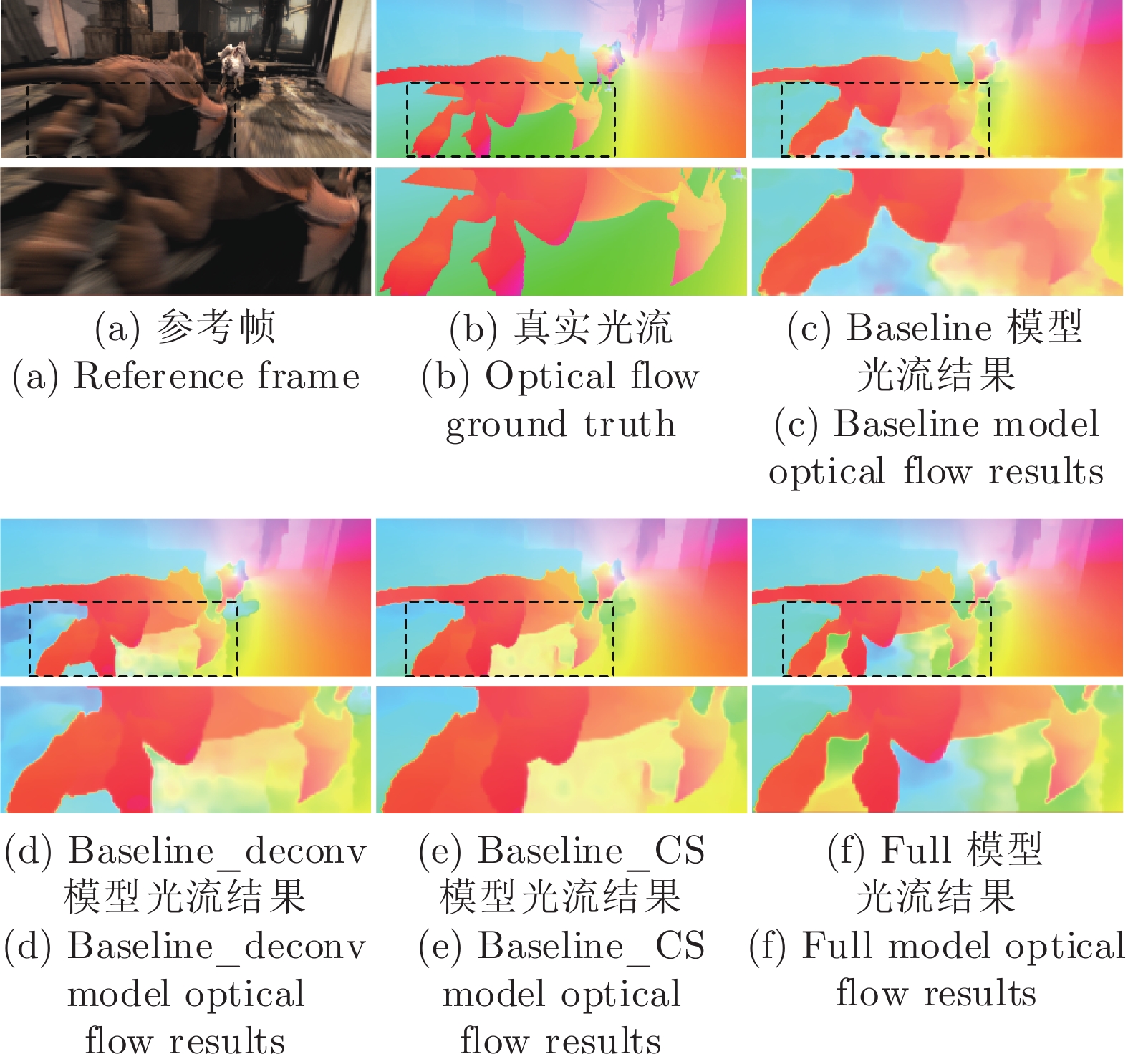
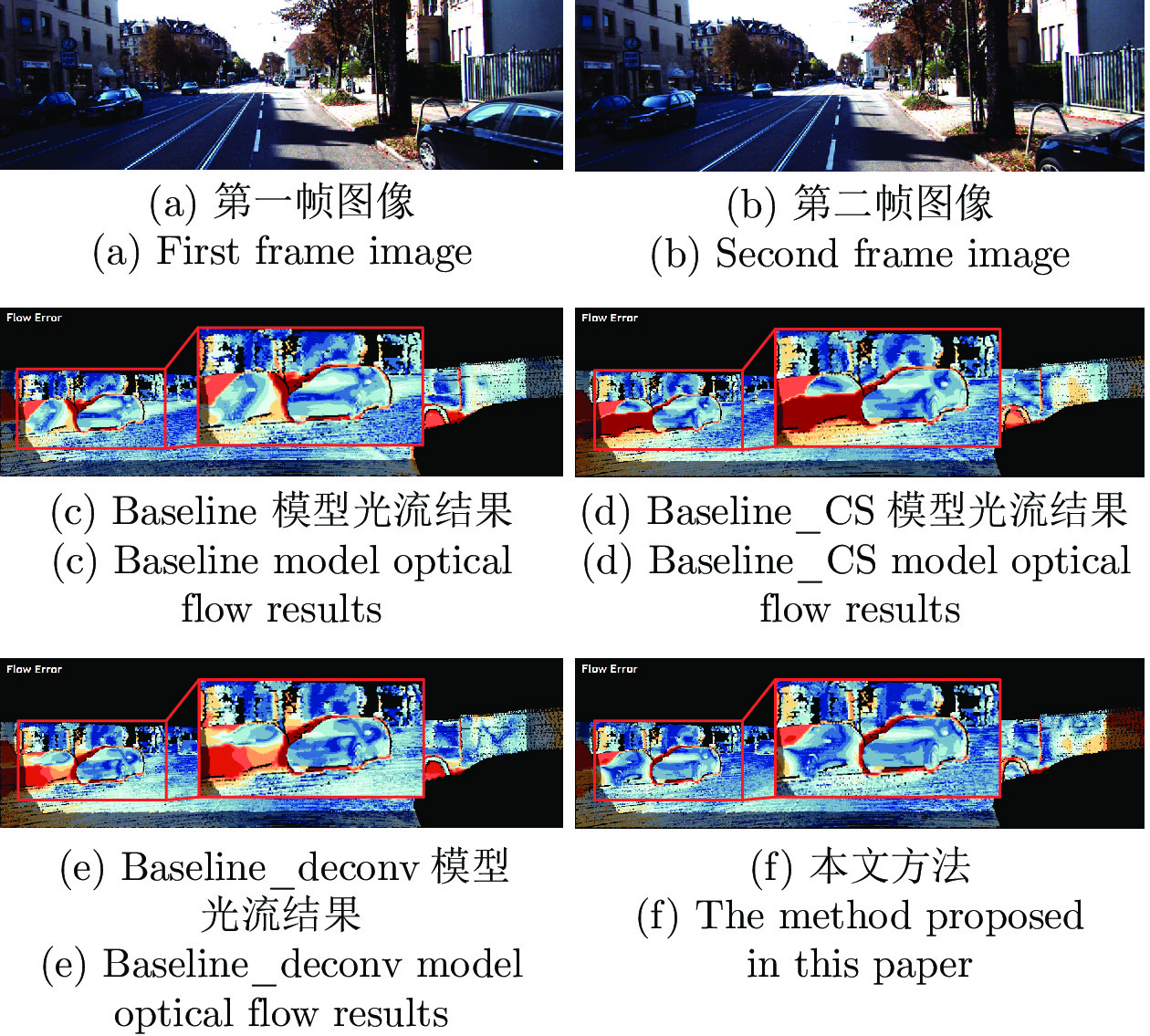
针对现有深度学习光流估计模型在大位移场景下的准确性和鲁棒性问题, 提出了一种联合深度超参数卷积和交叉关联注意力的图像序列光流估计方法. 首先, 通过联合深层卷积和标准卷积构建深度超参数卷积以替代普通卷积, 提取更多特征并加快光流估计网络训练的收敛速度, 在不增加网络推理量的前提下提高光流估计的准确性; 然后, 设计基于交叉关联注意力的特征提取编码网络, 通过叠加注意力层数获得更大的感受野, 以提取多尺度长距离上下文特征信息, 增强大位移场景下光流估计的鲁棒性; 最后, 采用金字塔残差迭代模型构建联合深度超参数卷积和交叉关联注意力的光流估计网络, 提升光流估计的整体性能. 分别采用MPI-Sintel和KITTI测试图像集对本文方法和现有代表性光流估计方法进行综合对比分析, 实验结果表明本文方法取得了较好的光流估计性能, 尤其在大位移场景下具有更好的估计准确性与鲁棒性.
针对现有深度学习光流估计模型在大位移场景下的准确性和鲁棒性问题, 提出了一种联合深度超参数卷积和交叉关联注意力的图像序列光流估计方法. 首先, 通过联合深层卷积和标准卷积构建深度超参数卷积以替代普通卷积, 提取更多特征并加快光流估计网络训练的收敛速度, 在不增加网络推理量的前提下提高光流估计的准确性; 然后, 设计基于交叉关联注意力的特征提取编码网络, 通过叠加注意力层数获得更大的感受野, 以提取多尺度长距离上下文特征信息, 增强大位移场景下光流估计的鲁棒性; 最后, 采用金字塔残差迭代模型构建联合深度超参数卷积和交叉关联注意力的光流估计网络, 提升光流估计的整体性能. 分别采用MPI-Sintel和KITTI测试图像集对本文方法和现有代表性光流估计方法进行综合对比分析, 实验结果表明本文方法取得了较好的光流估计性能, 尤其在大位移场景下具有更好的估计准确性与鲁棒性.


2024, 50(8): 1646-1659.
doi: 10.16383/j.aas.c210356
摘要:
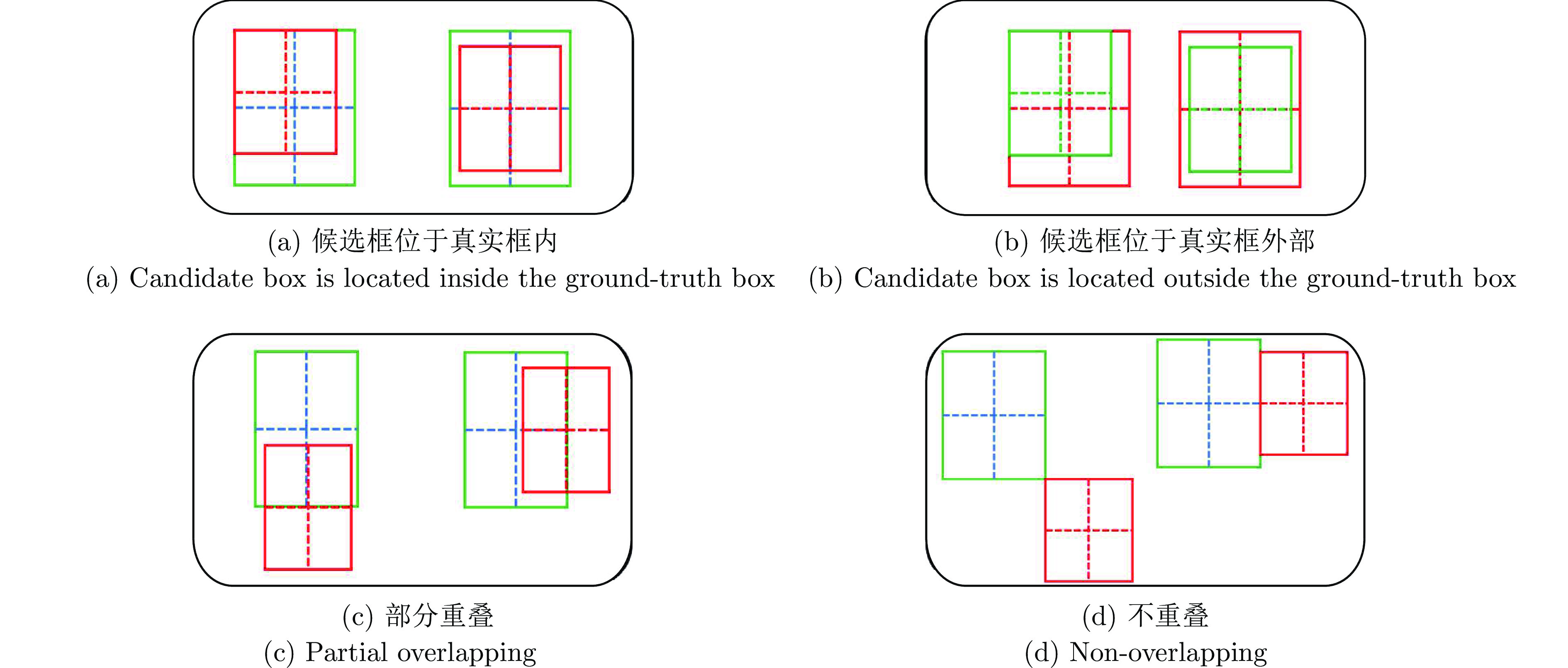
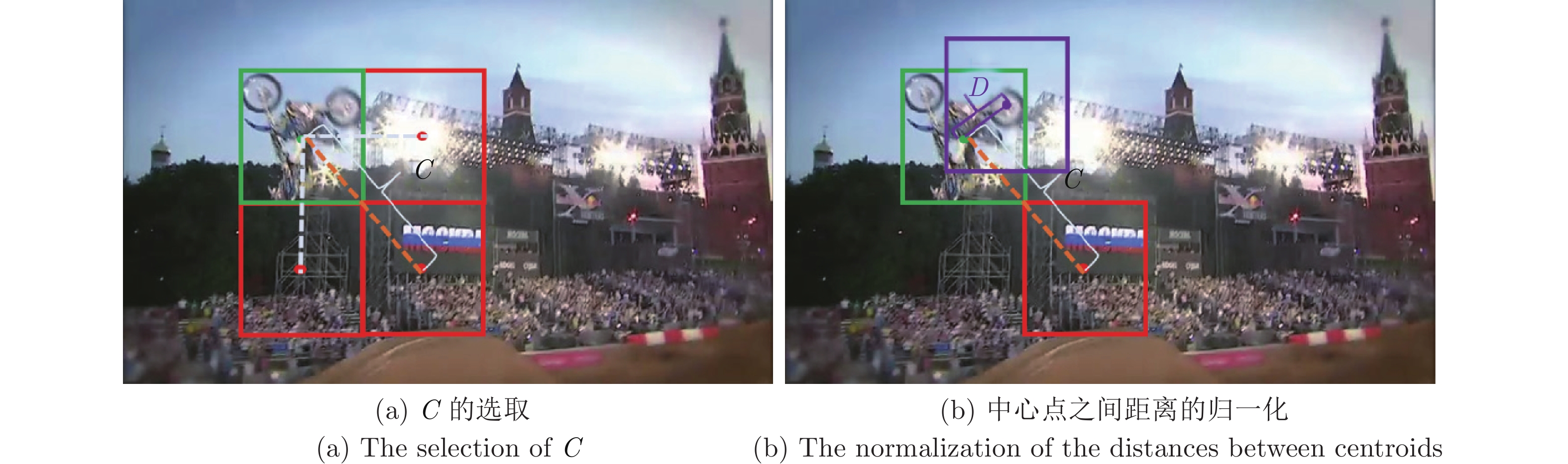
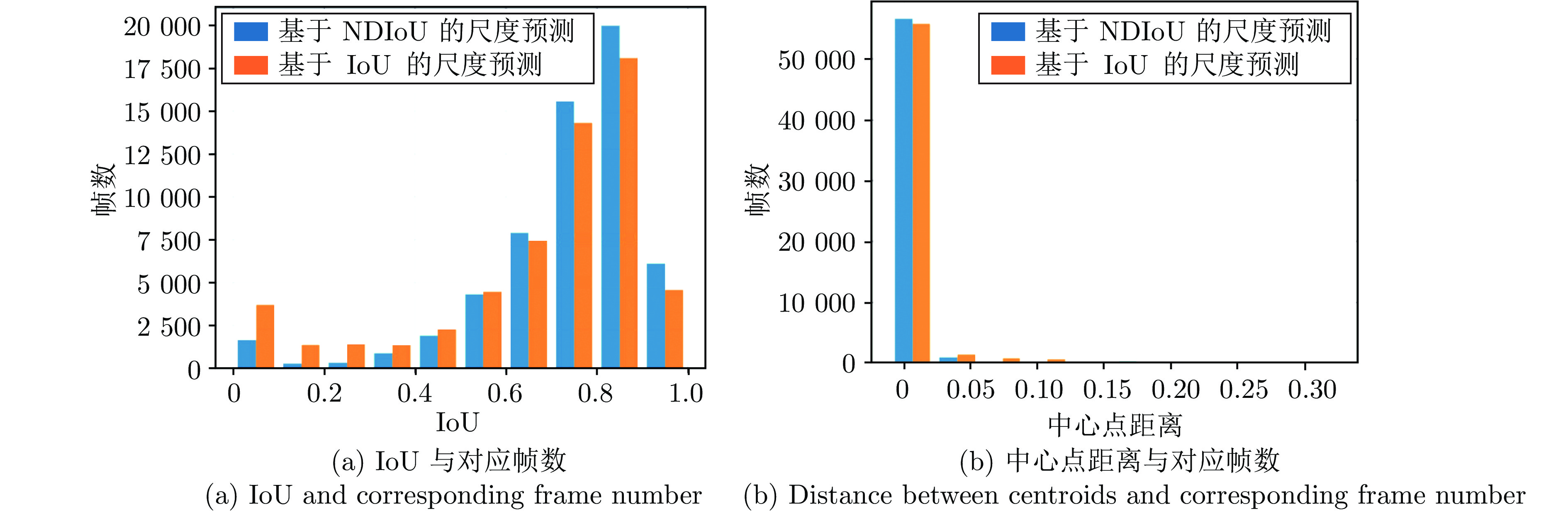
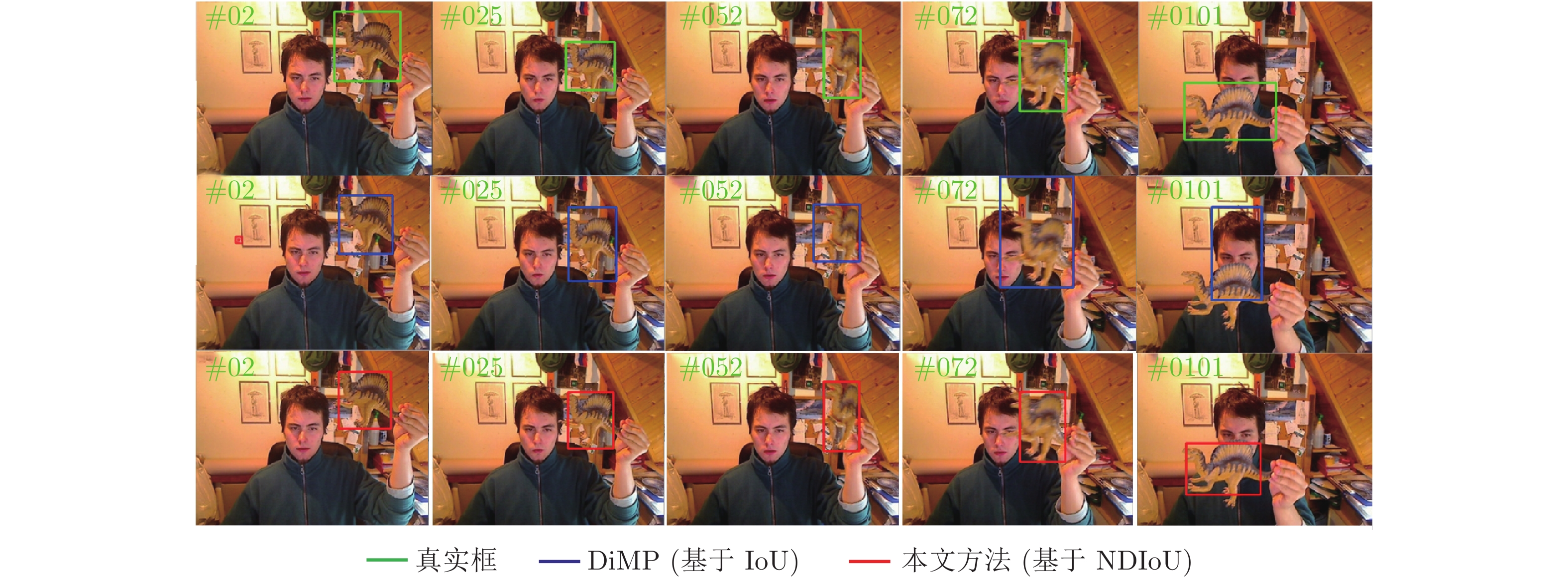
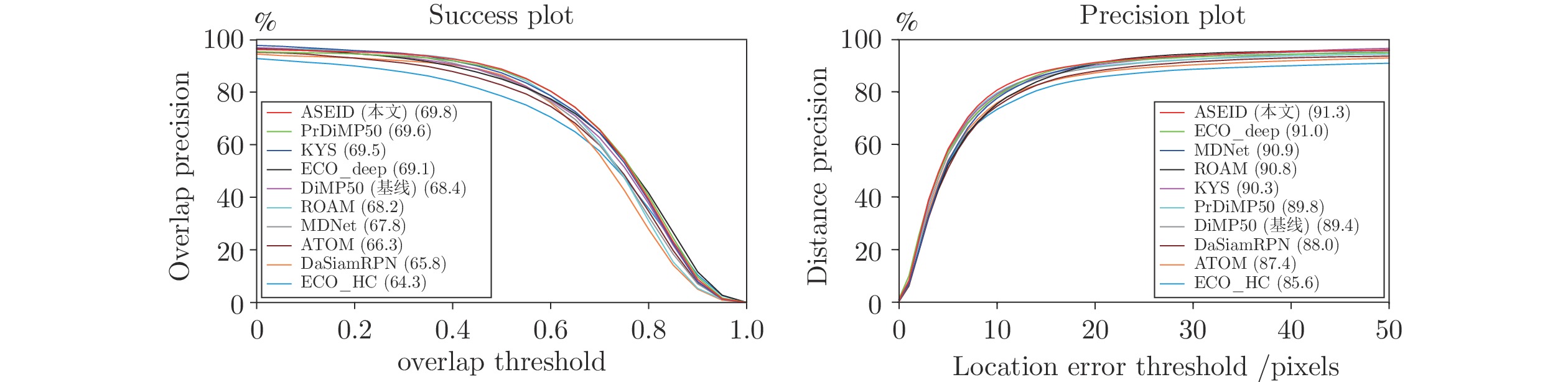
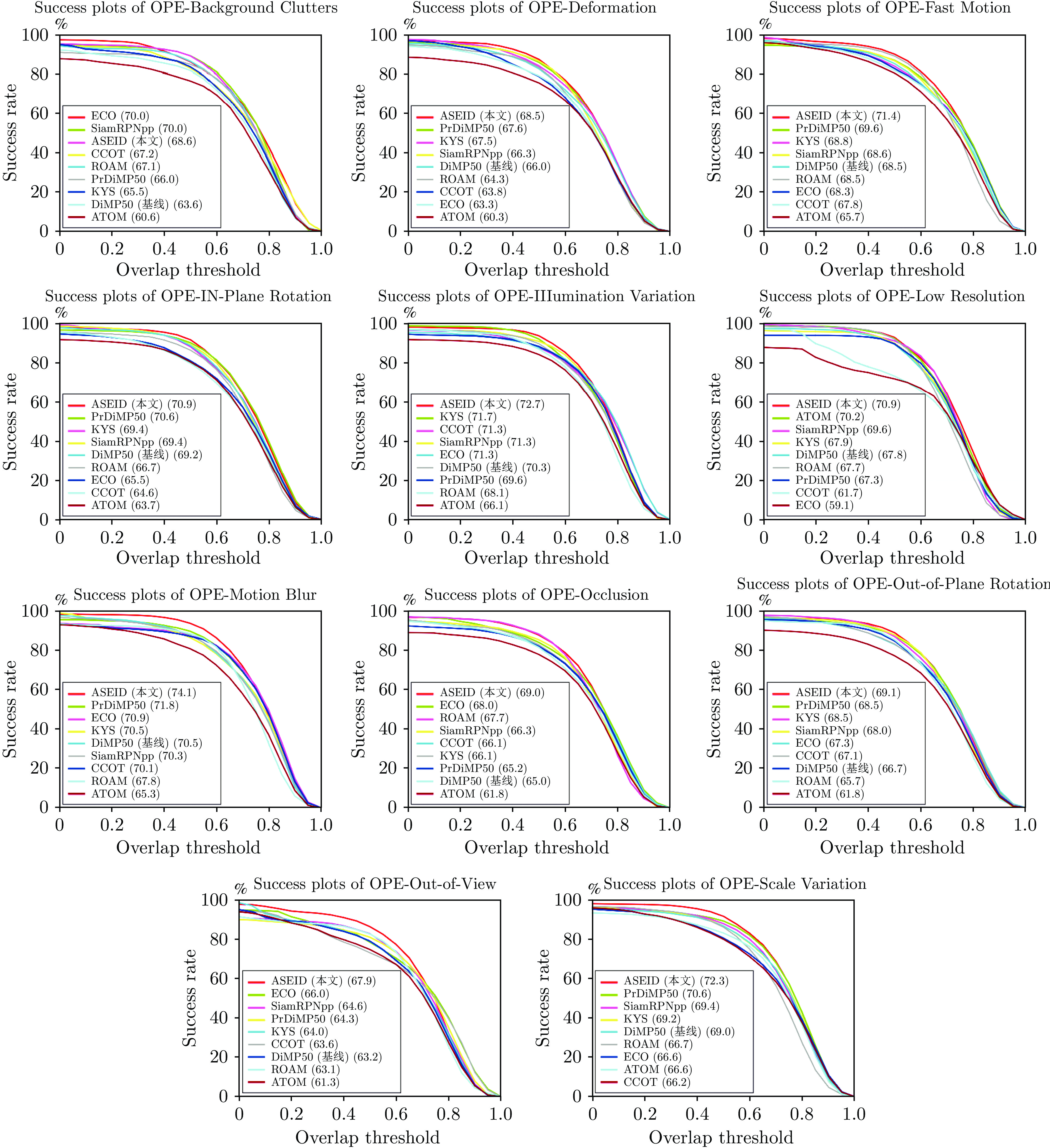
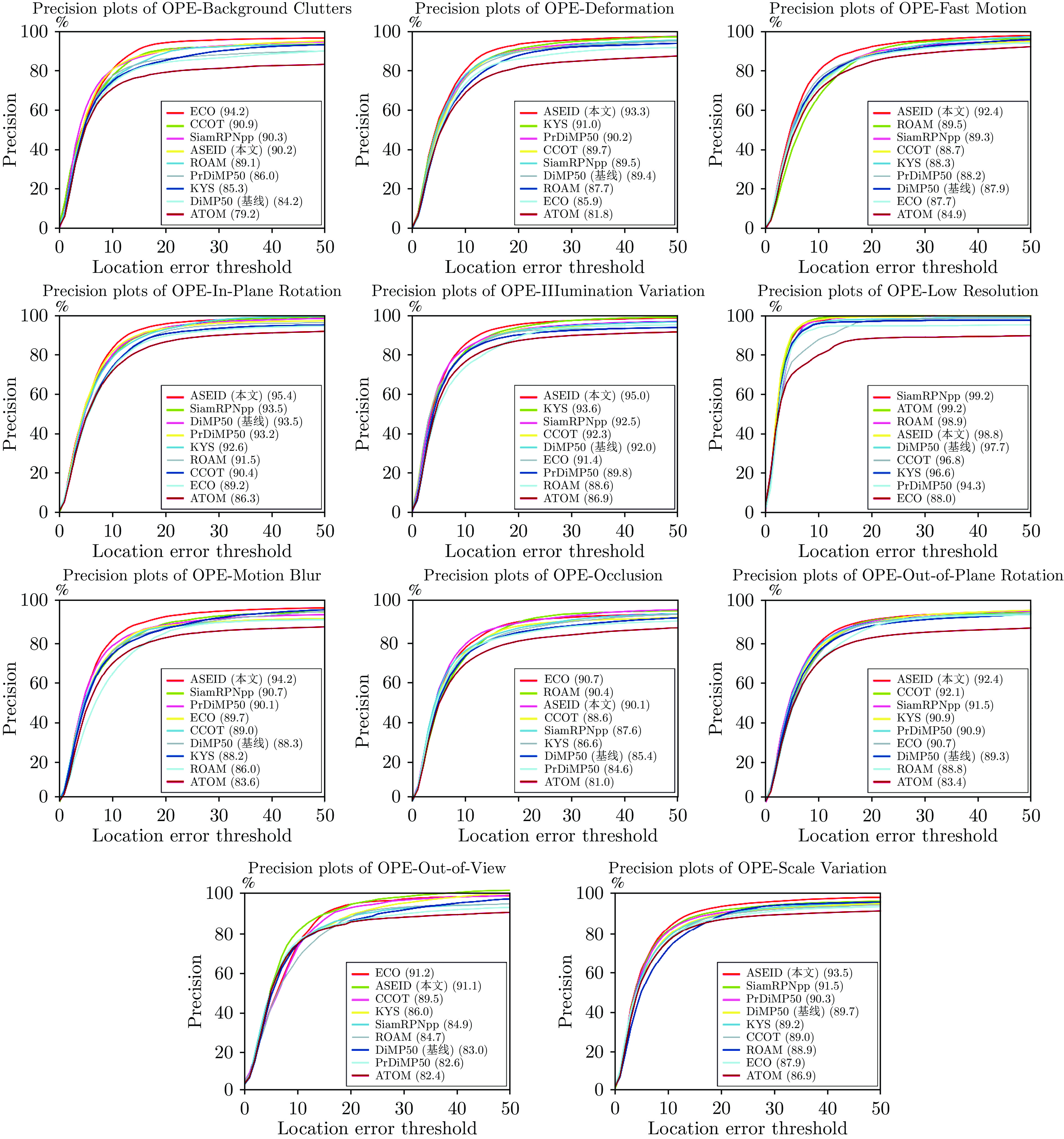
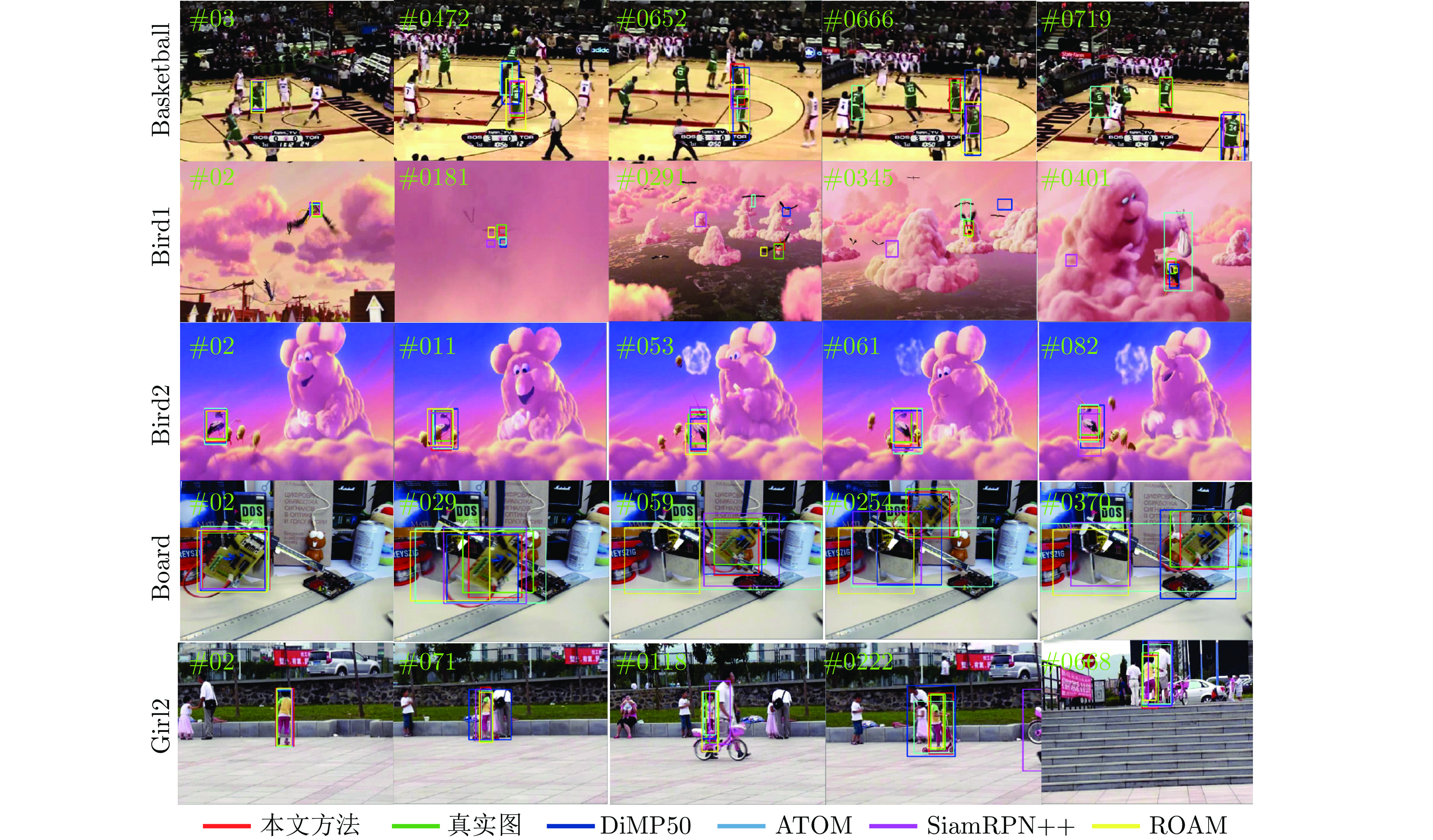
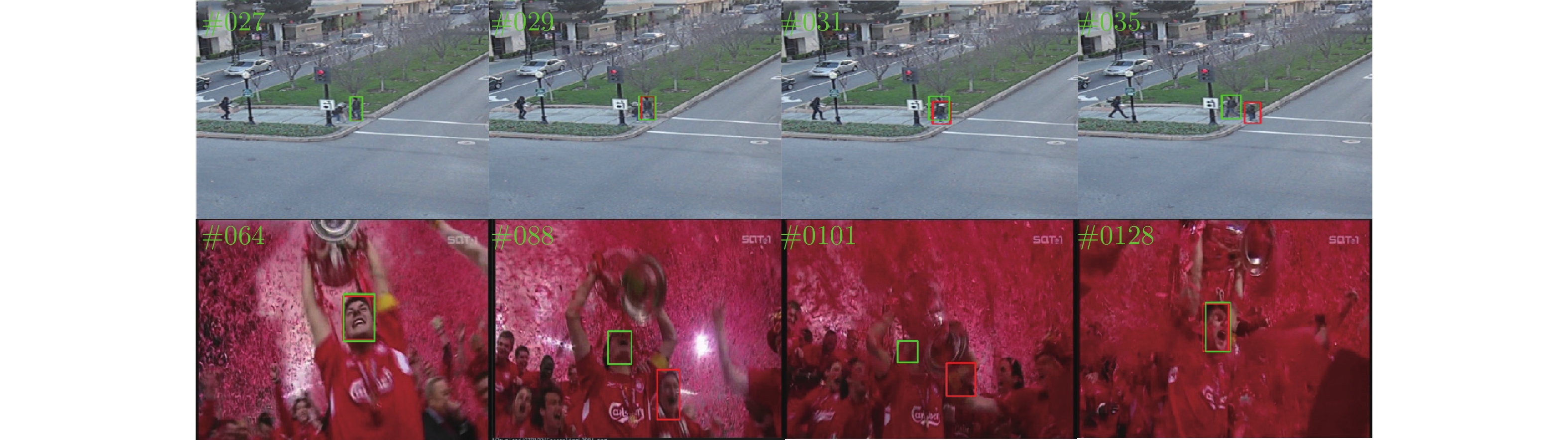
通过分析基于交并比(Intersection over union, IoU)预测的尺度估计模型的梯度更新过程, 发现其在训练和推理过程仅将IoU作为度量, 缺乏对预测框和真实目标框中心点距离的约束, 导致外观模型更新过程中模板受到污染, 前景和背景分类时定位出现偏差. 基于此发现, 构建了一种结合IoU和中心点距离的新度量NDIoU (Normalization distance IoU), 在此基础上提出一种新的尺度估计方法, 并将其嵌入判别式跟踪框架. 即在训练阶段以NDIoU为标签, 设计了具有中心点距离约束的损失函数监督网络的学习, 在线推理期间通过最大化NDIoU微调目标尺度, 以帮助外观模型更新时获得更加准确的样本. 在七个数据集上与相关主流方法进行对比, 所提方法的综合性能优于所有对比算法. 特别是在GOT-10k数据集上, 所提方法的AO、\begin{document}$S{R}_{0.50}$\end{document} \begin{document}$ S{R}_{0.75} $\end{document}
通过分析基于交并比(Intersection over union, IoU)预测的尺度估计模型的梯度更新过程, 发现其在训练和推理过程仅将IoU作为度量, 缺乏对预测框和真实目标框中心点距离的约束, 导致外观模型更新过程中模板受到污染, 前景和背景分类时定位出现偏差. 基于此发现, 构建了一种结合IoU和中心点距离的新度量NDIoU (Normalization distance IoU), 在此基础上提出一种新的尺度估计方法, 并将其嵌入判别式跟踪框架. 即在训练阶段以NDIoU为标签, 设计了具有中心点距离约束的损失函数监督网络的学习, 在线推理期间通过最大化NDIoU微调目标尺度, 以帮助外观模型更新时获得更加准确的样本. 在七个数据集上与相关主流方法进行对比, 所提方法的综合性能优于所有对比算法. 特别是在GOT-10k数据集上, 所提方法的AO、

2024, 50(8): 1660-1670.
doi: 10.16383/j.aas.c230777
摘要:
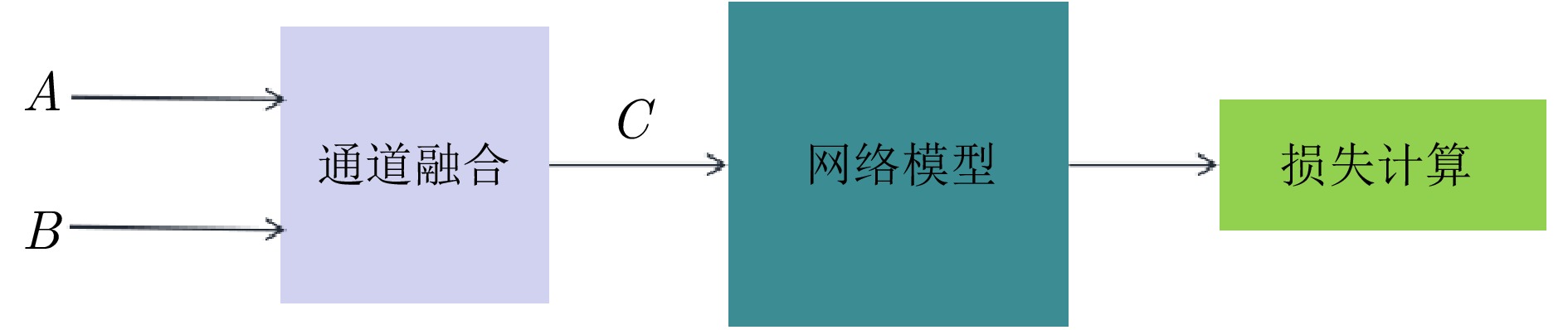
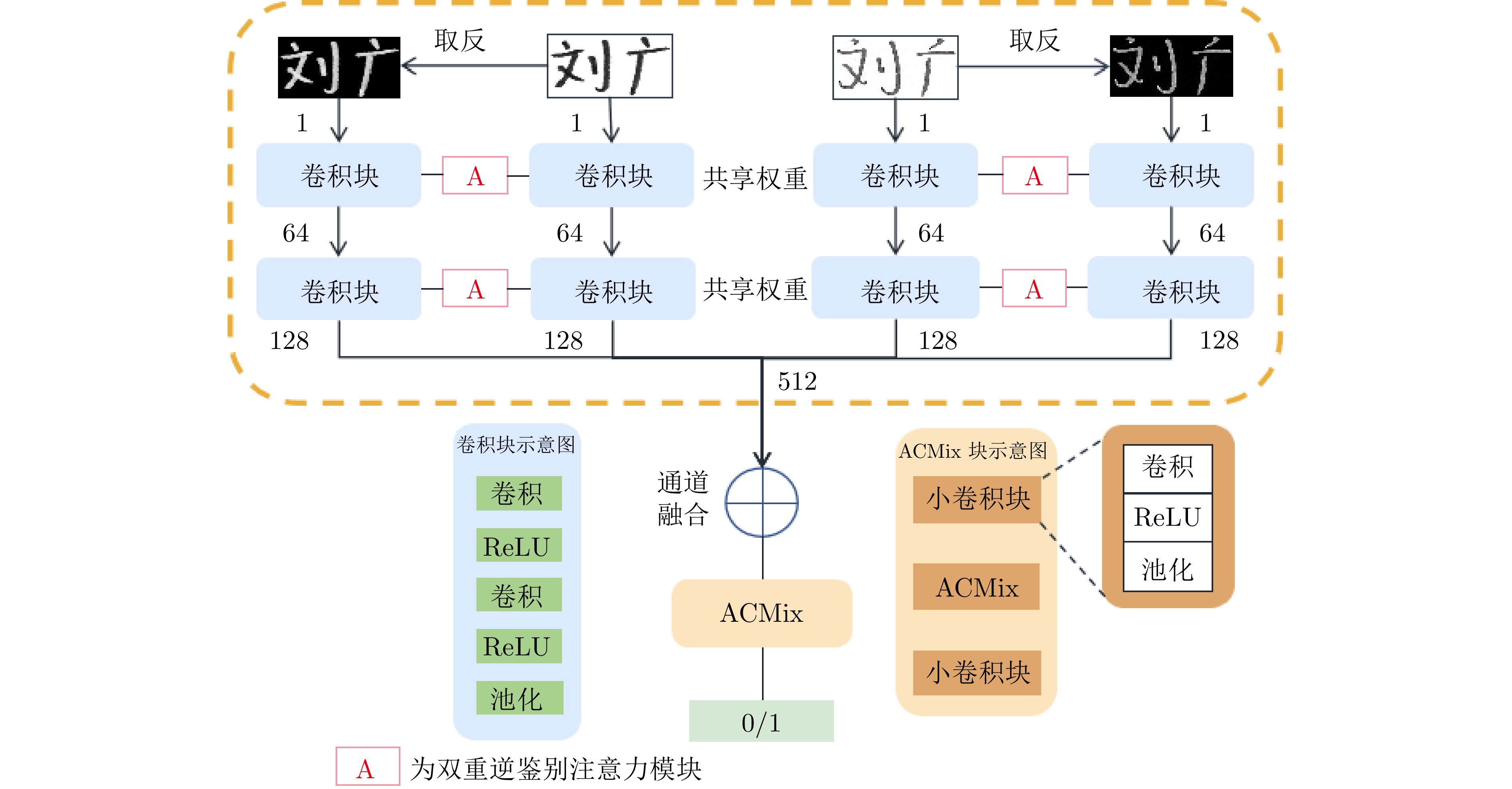
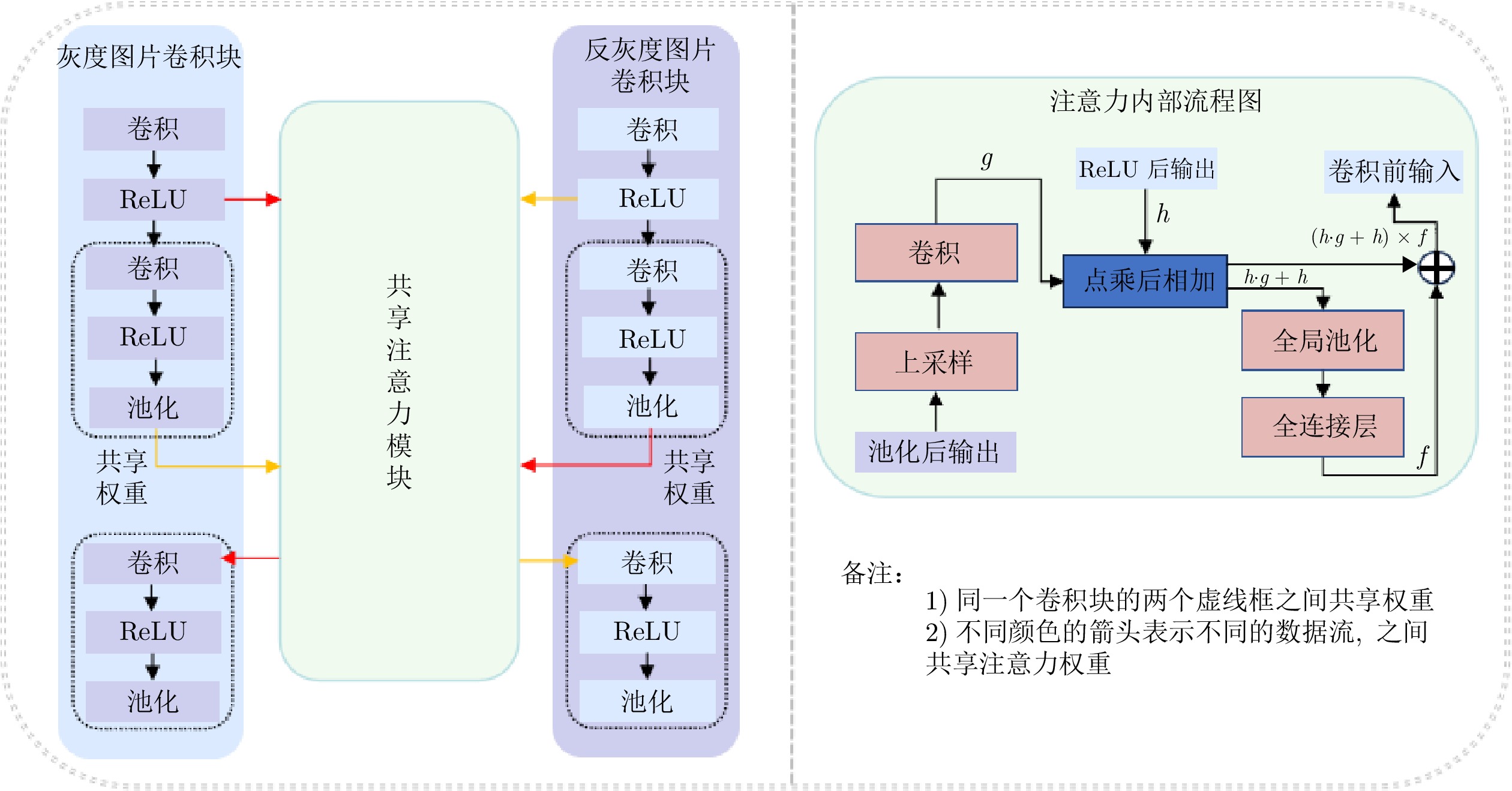
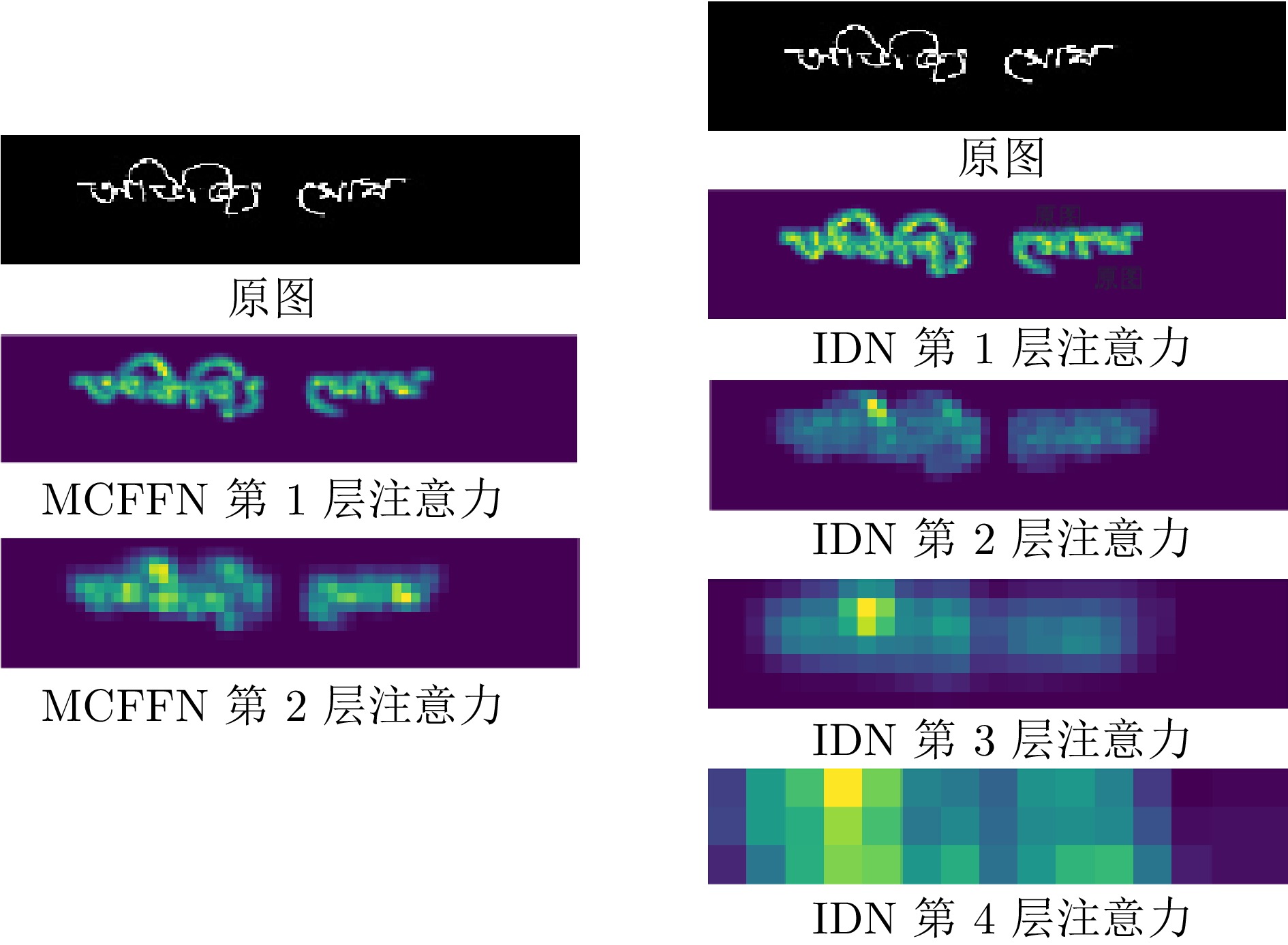
脱机签名验证模型因其具有判断签名是否伪造的能力而备受关注. 当今大多数脱机签名验证模型可分为深度度量学习方法和双通道判别方法. 大部分深度度量学习方法利用孪生网络生成每张图片的细节特征向量, 采用欧氏距离法判断相似度, 但是欧氏距离仅考虑两个点之间的绝对距离, 而容易忽视点的方向、缩放的信息, 不会考虑数据之间的相关性, 因此无法捕获特征向量内部之间的关系; 而双通道判别方法在网络训练前就进行特征的判别, 更能判断不同图像的相似性, 但此时图像的细节特征不够清晰, 大量特征丢失. 针对双通道判别方法中特征消失过多的问题, 提出了一种面向独立于书写者场景的手写签名离线验证模型MCFFN (Multi-channel feature fusion network). 在 CEDAR、BHSig-B、BHSig-H 和 ChiSig 四个不同语言的签名数据集上测试了所提出的方法, 实验证明了所提方法的优势和潜力.
脱机签名验证模型因其具有判断签名是否伪造的能力而备受关注. 当今大多数脱机签名验证模型可分为深度度量学习方法和双通道判别方法. 大部分深度度量学习方法利用孪生网络生成每张图片的细节特征向量, 采用欧氏距离法判断相似度, 但是欧氏距离仅考虑两个点之间的绝对距离, 而容易忽视点的方向、缩放的信息, 不会考虑数据之间的相关性, 因此无法捕获特征向量内部之间的关系; 而双通道判别方法在网络训练前就进行特征的判别, 更能判断不同图像的相似性, 但此时图像的细节特征不够清晰, 大量特征丢失. 针对双通道判别方法中特征消失过多的问题, 提出了一种面向独立于书写者场景的手写签名离线验证模型MCFFN (Multi-channel feature fusion network). 在 CEDAR、BHSig-B、BHSig-H 和 ChiSig 四个不同语言的签名数据集上测试了所提出的方法, 实验证明了所提方法的优势和潜力.