

A Stability Criterion for Hybrid-driven Underwater Bladed Legged Robot Based on Capture Point Theory
-
摘要: 由8个推进器和6条刀锋腿混合驱动的水下机器人可在水底或水下结构物表面上行走. 所提方法旨在研究这类机器人运动稳定性的评判准则, 即稳定性判据. 现有的稳定性判据多集中于同一机构(腿)驱动的陆地机器人, 未涉及混合驱动的水下刀锋腿机器人. 针对该问题, 提出了基于捕获点理论的混合驱动水下刀锋腿机器人稳定性判据. 首先, 在建立混合驱动水下滚动倒立摆模型的基础上, 利用机器人运动状态预测摆动腿和支撑腿切换瞬间机器人的动能; 然后, 根据推进器所能提供的推力范围, 计算迫使机器人静止的捕获点变化范围, 即获取捕获域; 最后, 根据捕获域与支撑域的空间关系, 判断机器人是否稳定, 并计算机器人的稳定裕度. 水下实验结果表明, 所提出的稳定性判据具有较好的充要性和普适性.Abstract: The underwater bladed legged robot hybrid-driven by 8 thrusters and 6 blade legs can walk on seafloor and the surface of underwater structure. This paper aims at investigating the evaluation criteria of the motion stability of this kind of robot, where the evaluation criteria is called as stability criterion. The existing stability criterions mainly focus on the robot that is driven by single mechanisms (legs), and not consider the hybrid-driven underwater bladed legged robot. Using capture point theory, we propose a stability criterion for hybrid-driven underwater bladed legged robot. Firstly, a hybrid-driven rolling inverted pendulum model that can reflect the dynamic characteristics of the robot is proposed, and the kinetic energy of the robot that the swinging legs are just touching the ground is predicted. Then, according to the maximum and minimum thrusts of the thrusters, we calculate the variation range of the expected capture point that can enforce the kinetic energy of the robot becoming zero, and the variation range is called as capture domain. Finally, the spatial relationship between the capture domain and the support domain can be employed to judge whether the robot is stable, and calculate the stability margin of the robot. Underwater experimental results show that the proposed stability criterion has better sufficiency and universality.
-
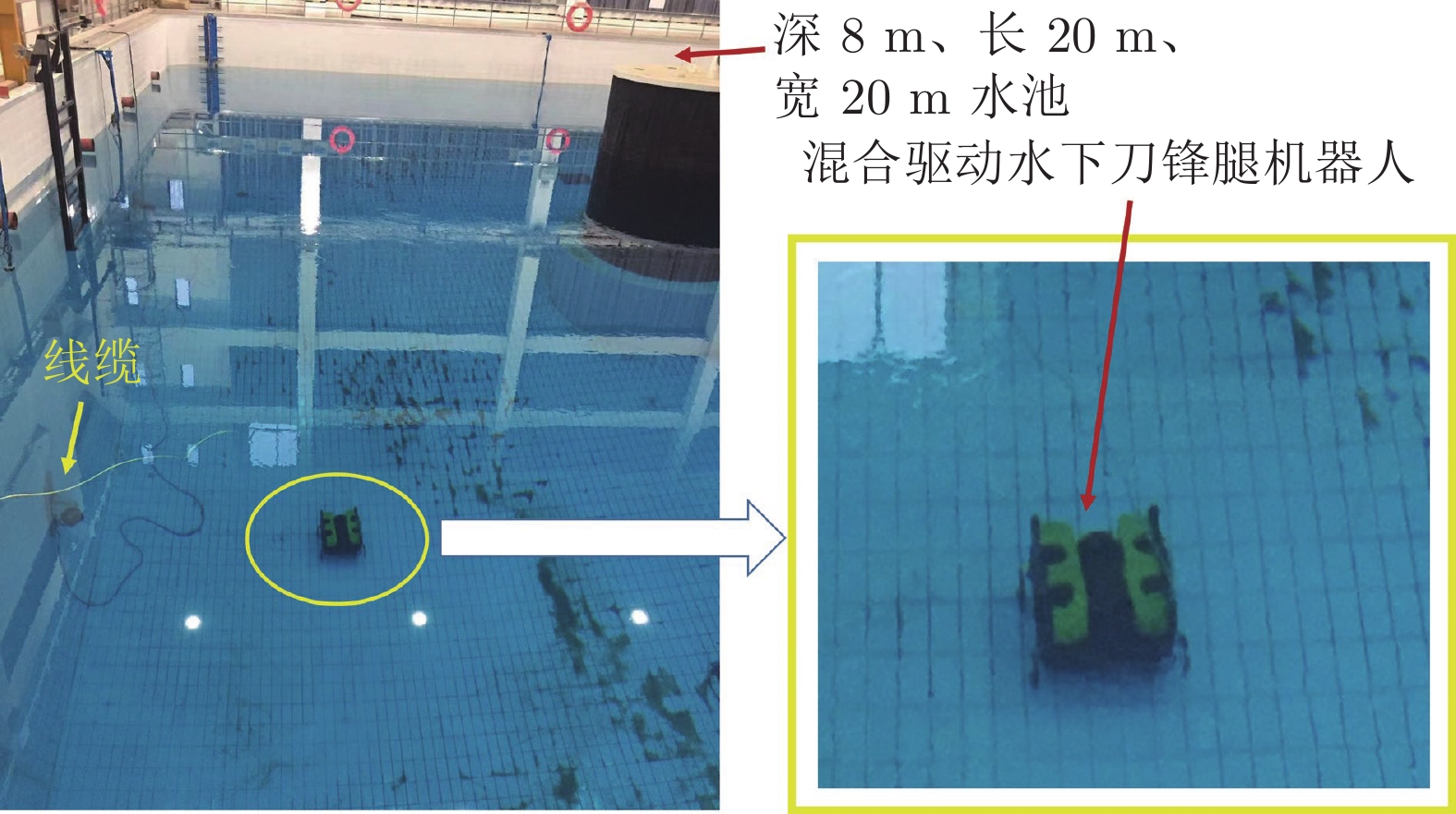
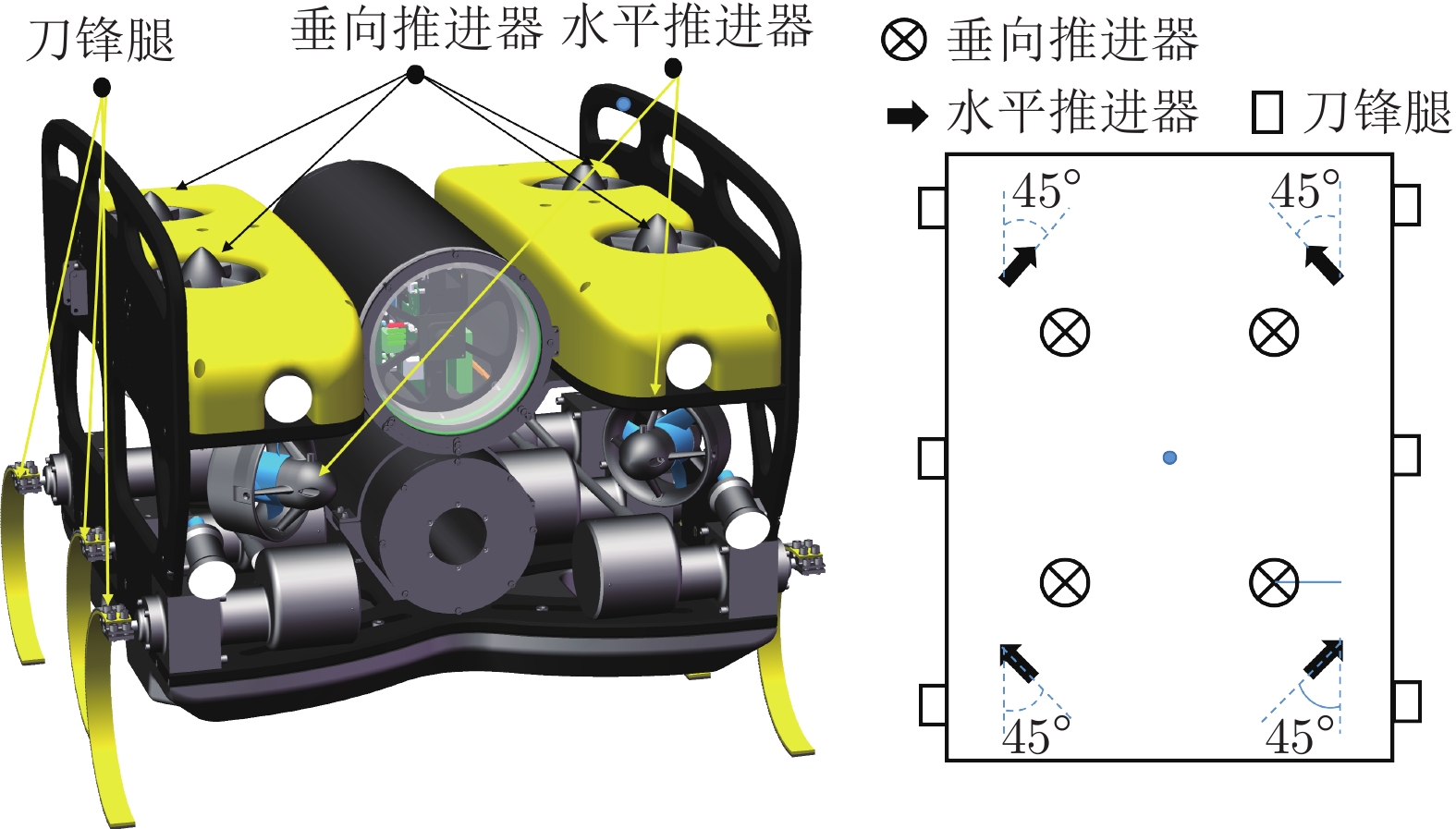
由推进器和刀锋腿混合驱动的水下机器人具备水中巡游、海底行走和壁面攀爬等多种运动模态[1], 以及大范围巡游和小范围贴壁精细作业能力, 具有广阔的应用前景. 因此, 我们研制了由8 个推进器和6条刀锋腿混合驱动的水下机器人, 如图1所示. 这8个推进器皆内嵌于机器人本体, 其中, 4个垂向推进器垂直布置, 4个水平推进器以$ {{45}^{\circ }} $角矢量布置; 6条刀锋腿的髋关节与机器人本体左右两侧的6个驱动电机连接.
步态规划旨在生成腿的期望角度, 控制的目的是确保机器人的运动状态能收敛于期望值. 在设计步态规划与控制方法时, 为使其具备可解释性和可迁移性, 需明确机器人运动稳定性的评判准则[2]. 不同于常见的非线性系统, 腿式机器人是一个混杂系统, 通常没有固定的平衡点. 这将导致传统控制理论中稳定性判据无法直接使用[3]. 如果系统是稳定的, 那么当干扰消失后, 系统在自身作用下具备回到正常工作状态的能力. 对腿式机器人而言, 稳定运动状态就是机器人以不摔倒的方式行走.
与常见腿式机器人不同, 水下刀锋腿机器人行走时, 腿是在地面滚动的, 并非绕支撑点转动; 且水下刀锋腿机器人由推进器和腿混合驱动, 并不仅依靠腿驱动. 因此, 如何融合刀锋腿滚动特性和混合驱动因素, 设计图1所示的水下刀锋腿机器人稳定性判据, 是一项有意义的研究课题.
文献[4]和文献[5]利用拉格朗日方法, 建立了含滚动特性的陆地刀锋腿机器人倒立摆模型. Calisti等[6]在分析绕支撑点转动的水下腿式机器人所受的流体力和惯性力的基础上, 首次提出描述机器人纵向运动的水下线性倒立摆模型. Picardi等[7]提出含侧向运动的水下线性倒立摆模型. 上述模型未同时考虑刀锋腿的滚动特性和混合驱动因素, 难以直接用于描述水下刀锋腿机器人的运动.
现有腿式机器人的稳定性判据包括以下三种: 零力矩点(Zero moment point, ZMP)判据[8]、基于庞加莱回归映射的判据[9-11]和利用不等式约束构建稳定空间的判据[12-15].
Vukobratovi等[8]首次提出了ZMP判据, 其通过评判ZMP是否落在支撑域内来判断机器人是否稳定. 因ZMP判据物理意义直观、易于实现, 已广泛用于评判腿式机器人的稳定性, 以及指导步态规划与控制的设计[16-17]. 但ZMP判据的本质是腿式机器人不发生翻转运动的约束条件[2], 其仅利用了支撑腿各关节的角度、角速度和角加速度信息, 充分性较差, 无法用于判断动态行走腿式机器人的稳定性.
基于庞加莱回归映射的判据是将周期性轨道的稳定性判据问题简化为某固定点的稳定性判据问题[9]. Grizzle等[10]建立了一个含冲击效应的3自由度人形机器人混杂动力学模型, 并对比分析了该机器人的稳定性. 针对庞加莱回归映射无法评判非周期行走机器人的稳定性问题, Fu等[11]创新性地提出了截面映射稳定性判据, 其不仅适用于动态行走系统, 还适用于非周期性系统.
Hirukawa等[12]在ZMP判据的基础上, 提出了一种普适性更好的稳定性判据, 其通过分析由腿式机器人重力、惯性力以及重心处的力矩共同组成的广义ZMP是否在由多接触点所组成的多面体内, 判断腿式机器人是否稳定. 在此基础上, Harada等[13]还分析了在崎岖壁面行走的带操作臂人形机器人稳定性. Audren等[14]研究了腿式机器人攀爬崎岖面的稳定空间构建问题, 在分析机器人本体静态力学约束和支撑腿摩擦力约束的基础上, 利用搜索策略, 提出了一种多足机器人静态稳定质心域的生成方法.
上述三类稳定性判据适用于分析由单一驱动机构(腿)驱动的陆上机器人稳定性, 难用于判断混合驱动机器人的稳定性.
Pratt等[18]首次提出了捕获点, 即迫使腿式机器人轨道能量为零的支撑点. 当无法通过调节步态来确保捕获点位于支撑腿所构成的支撑域内时, 腿式机器人会发生摔倒. 目前, 捕获点理论多用于指导腿式机器人在外力扰动下防跌倒控制与步态规划方法的设计[19-23]. 不同于ZMP, 捕获点的推导除依靠支撑腿运动信息外, 还需依赖摆动腿的运动信息. 因此, 结合捕获点理论, 可提出比传统ZMP稳定性判据更充要和更普适的判据.
综上, 混合驱动水下刀锋腿机器人稳定性判据的研究难点在于: 1) 如何融入刀锋腿的滚动特性, 揭示水下刀锋腿机器人的运动规律; 2) 阐明推进器推力大小是如何改变水下刀锋腿机器人行走稳定性的; 3) 如何融合摆动腿运动信息, 以提高稳定性判据的普适性和充要性.
针对上述难点, 本文提出了混合驱动水下刀锋腿机器人稳定性判据, 主要贡献包括: 1) 建立了混合驱动水下滚动倒立摆模型, 来描述这类机器人的运动规律; 2) 在仅由刀锋腿驱动的机器人的捕获点概念基础上, 引入了捕获域概念, 并推导了推进器推力大小与捕获域的数学关系; 3) 根据捕获域与支撑域的空间关系, 提出了混合驱动水下刀锋腿机器人稳定裕度生成方法.
1. 滚动倒立摆模型的建立
本节介绍一些基本假设和定义, 并在陆地滚动倒立摆模型的基础上推导混合驱动水下倒立摆模型.
1.1 基本假设与基本定义
由6条刀锋腿和8个推进器混合驱动的水下机器人运动体数量较多, 如不进行适当简化, 动力学方程极其复杂, 很难用于分析. 为此, 本文给出如下基本假设:
1) 忽略刀锋腿的质量, 且假设机器人的质量集中于6条刀锋腿髋关节所构成平面的中心;
2) 假设6条刀锋腿均为刚体, 且形状均为标准的半圆;
3) 机器人采用交替触地的方式行走, 即一组腿离地时, 另一组腿刚触地, 假设每组腿内的刀锋腿旋转角度和转速均相同;
4) 假设机器人浮力与重力相等, 且重心与浮心重合.
由于6条刀锋腿质量之和约占机器人总重的3%, 其对机器人动力学影响较小, 可以忽略不计. 同时, 在总体设计时, 需尽量保证浮心与重心在侧平面的投影点是重合的, 以及质量集中于机器人本体的几何中心, 即6个髋关节所构成平面的中心. 此外, 本文刀锋腿由坚硬的钢制作而成, 其形变量极其微小. 因此, 有理由认为刀锋腿是刚体.
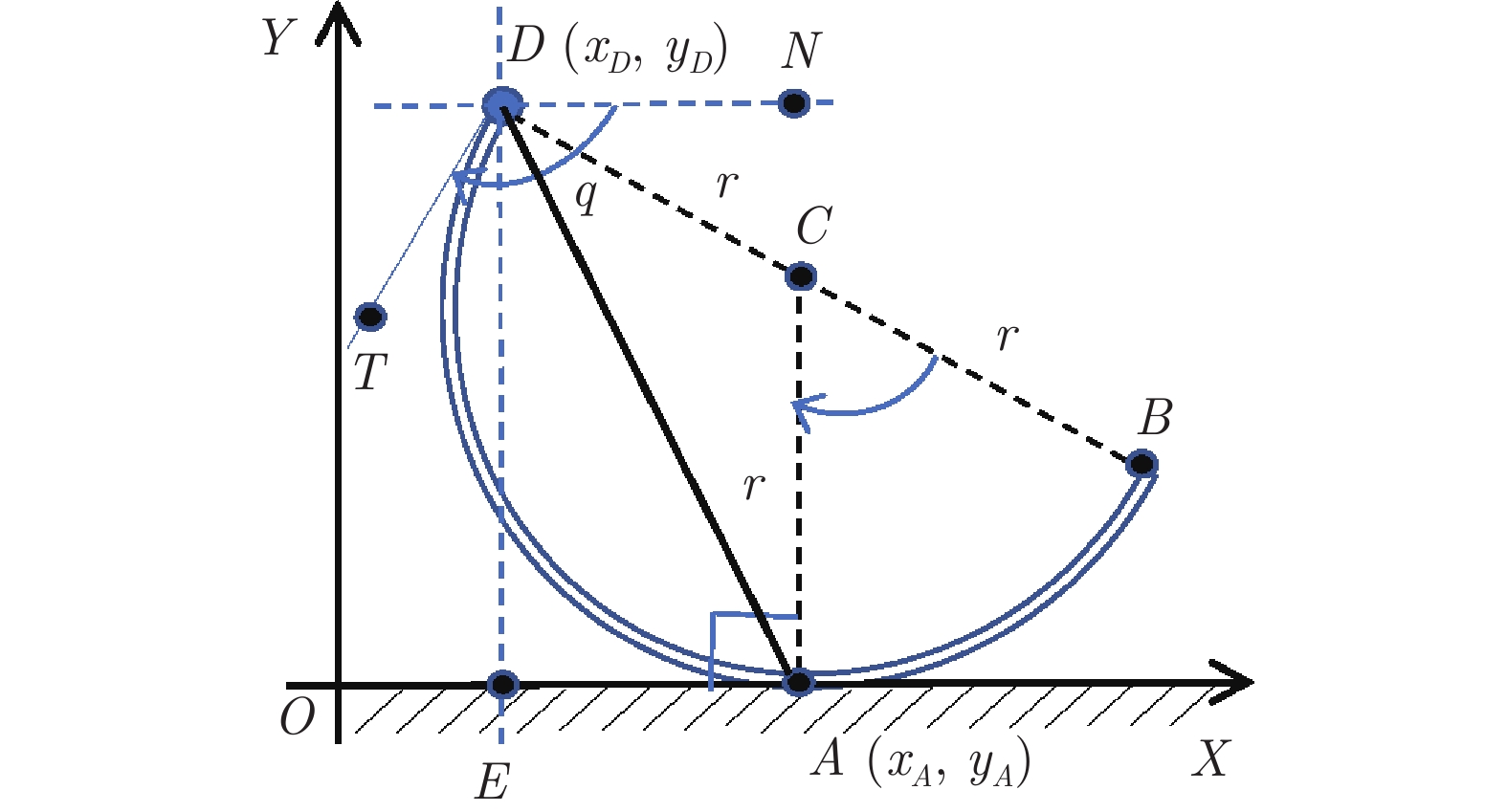
基于上述假设, 可将所有支撑腿折合成一条虚拟支撑腿, 其中, 虚拟支撑腿的髋关节与重心相连. 因此, 可将该机器人抽象为一个半圆形虚拟支撑腿和机器人质点组成的倒立摆, 如图2所示.
定义与地面固连的惯性坐标系为$ XOY $, 以描述水下刀锋腿机器人的纵平面运动, 并定义$ X $轴和$ Y $ 轴方向分别为前向和垂向.
如图2所示, $ D $点为机器人的重心, $ A $点为刀锋腿的触地点, $ \left( {{x}_{D}},{{y}_{D}} \right) $和$ \left( {{x}_{A}},{{y}_{A}} \right) $分别为$ D $点和$ A $点的坐标值, 其中, $ {{y}_{A}}= 0 $, $ C $点为半圆形刀锋腿的圆心, $ E $点为$ D $点在$ X $轴上的投影点. 此外, 机器人的质量为$ m $, 刀锋腿的旋转角度和半径分别为$ q $和 $ r $, 其中, $ q=\angle NDT $, 线段$ DT $与线段$ DB $垂直, 线段$ DN $与$ X $轴平行.
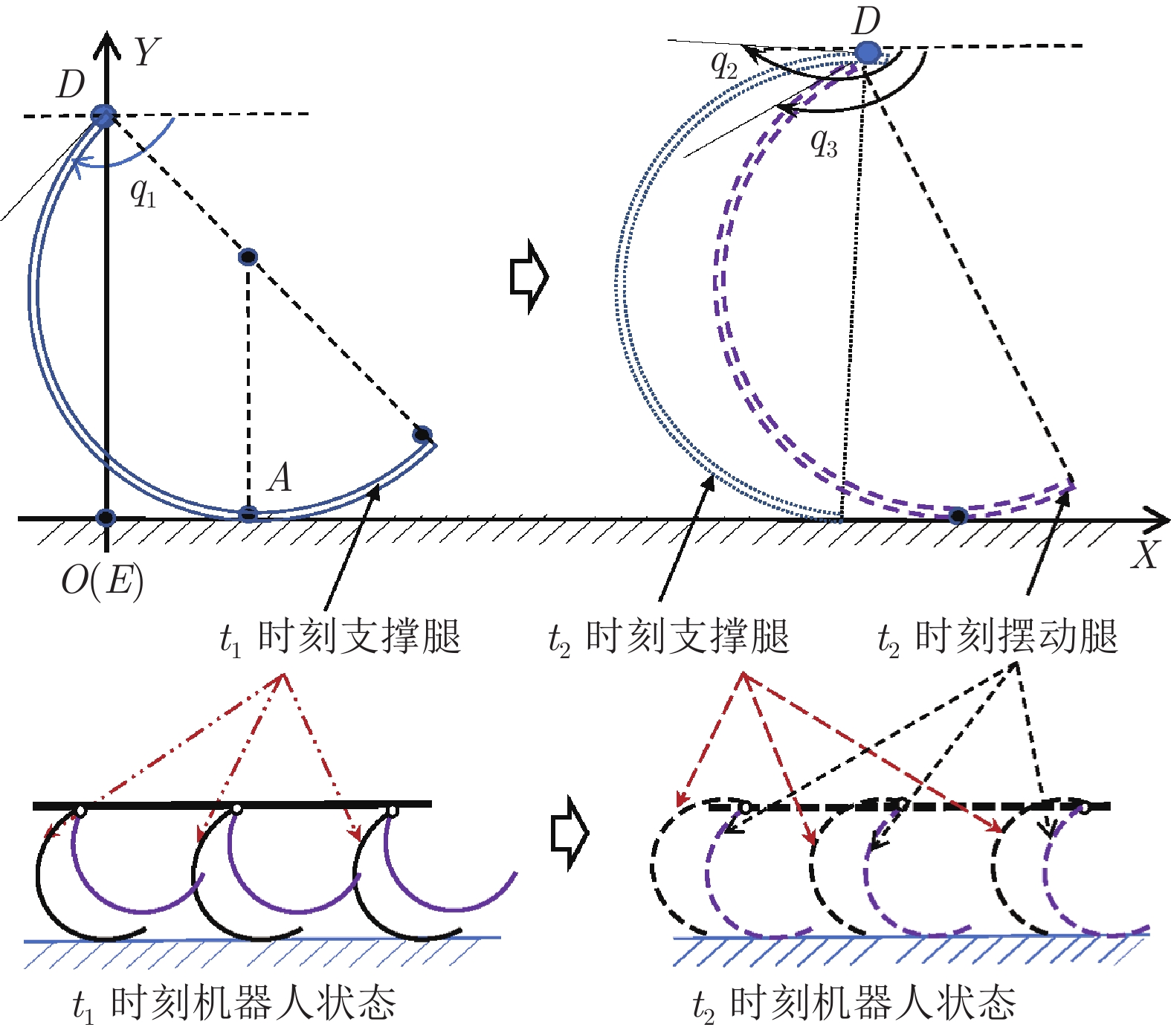
本文捕获点的推导步骤包含以下两步: 1)利用水下刀锋腿机器人当前时刻运动状态和运动模型, 推导支撑腿切换为摆动腿时机器人的动能; 2)利用该动能, 计算迫使机器人静止的捕获点. 为了更好地描述该运动过程, 本文定义了$ t_1 $和$ t_2 $两个时刻, 其中, $ t_1 $时刻为当前时刻, $ t_2 $时刻为$ t_1 $时刻下的支撑腿滚动一段时间后切换为摆动腿的时刻.
如图3所示, 定义$ t_1 $时刻机器人重心的前向坐标值为零, 即其投影与坐标原点重合. 同时, 定义$ q_1 $为$ t_1 $时刻支撑腿的旋转角度, $ q_2 $和$ q_3 $分别为$ t_2 $时刻支撑腿和摆动腿的旋转角度.
1.2 陆地滚动倒立摆模型
本部分将建立反映陆地刀锋腿机器人动力学特性的滚动倒立摆模型, 旨在为后续混合驱动水下滚动倒立摆模型的建立奠定基础.
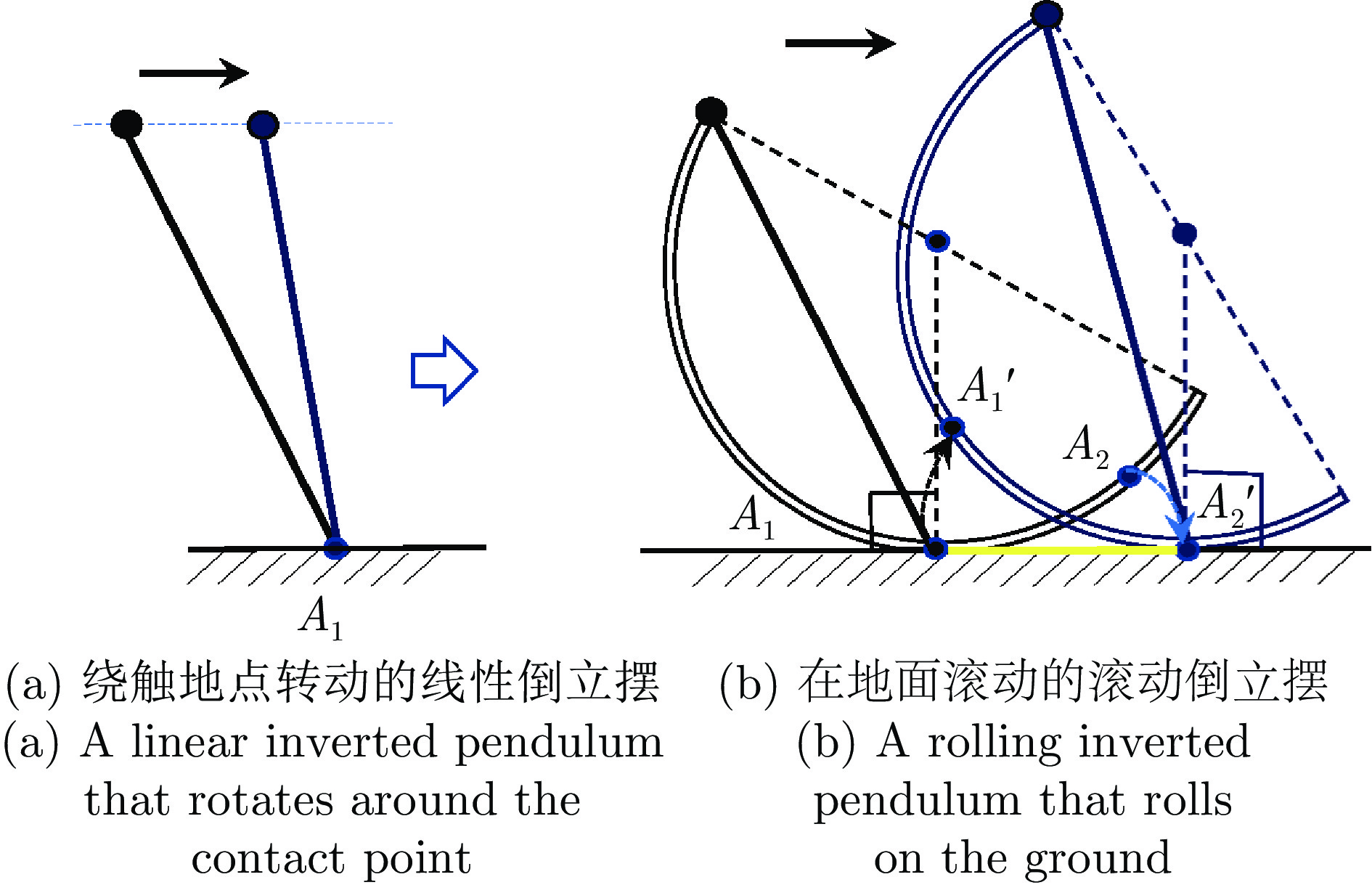
如图4(a)所示, 常见腿式机器人可简化为线性倒立摆, 其触地点在支撑阶段是固定的. 不同于线性倒立摆, 滚动倒立摆在地面滚动, 其触地点是变化的. 如图4(b)所示, 触地点由$ A_1 $点滚动至$ A_2 $ 点. 线性倒立摆不能反映刀锋腿机器人的运动特性. 因此, 需借助滚动倒立摆, 建立包含半圆形刀锋腿滚动特性的动力学模型.
陆地刀锋腿机器人可简化为滚动倒立摆, 其动力学模型可表示为
$$ {{\ddot{x}}_{D}}=\frac{{{{\ddot{y}}}_{D}}+g}{{{y}_{D}}}\left( {{x}_{D}}-{{x}_{A}} \right) $$ (1) 其中, $ g $为重力加速度, $ x_A $, $ x_D $, $ y_D $分别为
$$ \begin{array}{l} \left\{ \begin{aligned} &{{x}_{A}} =r\left( q-{{q}_{{1}}} \right) \\ &{{x}_{D}} =r\left( q-{{q}_{{1}}} \right)-r\sin q \\ &{{y}_{D}} =r-r\cos q \end{aligned} \right. \end{array} $$ (2) 相对于重力加速度$ g $, 陆地刀锋腿机器人的垂向加速度是一个小量, 可近似地认为$ {{\ddot{y}}_{D}}+g=g $. 因此, 式(1)可进一步简化为
$$ {{\ddot{x}}_{D}}=\frac{g}{{{y}_{D}}}\left( {{x}_{D}}-{{x}_{A}} \right) $$ (3) 将式(2)代入式(3), 可得
$$ {{\ddot{x}}_{D}}=\frac{g}{r-r\cos q}\left( -r\sin q \right) = -\frac{g\sin q}{1-\cos q} $$ (4) 不同于文献[4-5]中的陆地刀锋腿机器人动力学模型, 本文所提出的滚动倒立摆模型形式简洁、物理意义直观, 便于后续捕获域的推导.
1.3 混合驱动水下滚动倒立摆模型
基于陆地滚动倒立摆模型, 本部分将建立反映水下刀锋腿机器人动力学特性的混合驱动滚动倒立摆模型.
作用于水下刀锋腿机器人的力包括: 重浮力、流体力和推进器推力. 为便于描述, 定义流体力的前向和垂向分量分别为前向和垂向流体力, 并定义推进器推力的前向和垂向分量分别为前向推力和垂向推力. 具体地, 图5给出了作用于机器人质心处的外力, 包括重力$ mg $、浮力$ \zeta $、垂向推力$ {{Y}_{T}} $、垂向流体力$ {{Y}_{H}} $、前向推力$ {{X}_{T}} $和推进器所产生的俯仰力矩$ {{M}_{z}} $和前向流体力$ {{X}_{H}} $.
 图 5 混合驱动水下刀锋腿机器人的受力分析Fig. 5 Forces analysis of the hybrid-driven underwater bladed legged robot
图 5 混合驱动水下刀锋腿机器人的受力分析Fig. 5 Forces analysis of the hybrid-driven underwater bladed legged robot在陆地滚动倒立摆的基础上, 将水下刀锋腿机器人简化为水下滚动倒立摆, 其动力学模型可表示为
$$ {{\ddot{x}}_{D}}=\frac{{{{\ddot{y}}}_{D}}+{{a}_{Hy}}+{{a}_{Ty}}}{{{y}_{D}}}\left( {{x}_{D}}-{{x}_{A}}-{{x}_{a}} \right) $$ (5) 其中, ${{a}_{Ty}}=-{{{Y}_{T}}}/{m}$为垂向推力$ {{Y}_{T}} $作用下所产生的垂向加速度, ${{a}_{Hy}}=-{{{Y}_{H}}}/{m}$为在垂向流体力$ {{Y}_{H}} $作用下所产生的垂向加速度, $ {{x}_{A}} $, $ {{x}_{D}} $, $ {{y}_{D}} $可分别表示为
$$ \begin{array}{l} \left\{ \begin{aligned} &{{x}_{A}} =r\left( \pi -{{q}_{{1}}} \right)-r\left( \pi -q \right)=r\left( q-{{q}_{{1}}} \right) \\ &{{x}_{D}} =r\left( q-{{q}_{{1}}} \right)-r\sin q \\ &{{y}_{D}} =r-r\cos q \end{aligned} \right. \end{array} $$ (6) 其中, $ {{x}_{a}} $为在前向推力、推进器所产生的俯仰力矩和前向流体力共同作用下前向零力矩点坐标值的偏移量, 其可表示为
$$ {{x}_{a}}=\frac{{{M}_{z}}-{{y}_{D}}{{X}_{T}}-{{y}_{D}}{{X}_{H}}}{{{F}_{y}}} $$ (7) 其中, $ {{F}_{y}}=-{{Y}_{T}}-{{Y}_{H}}+m{{\ddot{y}}_{D}} $ 为地面施加于支撑腿的垂向反作用力.
将式(6)代入式(5), 可推导出混合驱动水下滚动倒立摆模型为
$$ {{\ddot{x}}_{D}}=\frac{{{{\ddot{y}}}_{D}}+{{a}_{Hy}}+{{a}_{Ty}}}{r-r\cos q}\left( -r\sin q-{{x}_{a}} \right) $$ (8) 令$ {{a}_{y}}={{\ddot{y}}_{D}}+{{a}_{Hy}}+{{a}_{Ty}} $, 式(8)可重写为
$$ {{\ddot{x}}_{D}}=-\frac{{{a}_{y}}\sin q}{1-\cos q}-\frac{{{a}_{y}}{{x}_{a}}}{r-r\cos q} $$ (9) 2. 基于捕获点理论的稳定性判据
本节在计算$ {{t}_{2}} $时刻水下刀锋腿机器人动能的基础上, 利用捕获点理论, 解算捕获域. 然后, 根据支撑域与捕获域的空间关系, 求解稳定裕度.
2.1 $ {{t}_{2}} $时刻水下刀锋腿机器人的动能
本节将推导支撑腿离地时$( {{t}_{2}} $时刻)水下刀锋腿机器人动能, 旨在为后续捕获域的解算提供基础.
在$ {{t}_{1}} $时刻动能与驱动力作用下, 机器人通常会继续向前运动. 值得注意的是, $ {{t}_{2}} $时刻机器人的前向速度将直接影响捕获点坐标值. 因此, 本节将计算仅与前向速度相关的机器人动能. 此外, 本文旨在分析$ {{t}_{1}} $时刻运动状态与驱动力作用下机器人的稳定性. $ {{t}_{1}} $至$ {{t}_{2}} $时刻中作用于机器人的驱动力恒定, 即此过程中的$ a_y $和$ x_a $分别等于$ a_y(t_1) $ 和$ x_a(t_1) $.
因此, $ {{t}_{2}} $时刻机器人动能可表示为
$$ \begin{split} E\left( {{t}_{2}} \right)=\;& E\left( {{t}_{1}} \right)+\int_{{{x}_{D}}\left( {{t}_{1}} \right)}^{{{x}_{D}}\left( {{t}_{2}} \right)}{m{{{\ddot{x}}}_{D}}{\rm {d}}{{x}_{D}}} =\\ & E\left( {{t}_{1}} \right)-m{{a}_{y}}(t_1)\int_{{{x}_{D}}\left( {{t}_{1}} \right)}^{{{x}_{D}}\left( {{t}_{2}} \right)}{\frac{\sin q}{1-\cos q}{\rm {d}}{{x}_{D}}}\;- \\ &\frac{m{{a}_{y}(t_1)}}{r}\int_{{{x}_{D}}\left( {{t}_{1}} \right)}^{{{x}_{D}}\left( {{t}_{2}} \right)}{\frac{{{x}_{a}(t_1)}}{1-\cos q}{\rm {d}}{{x}_{D}}}\\[-15pt] \end{split} $$ (10) 其中, $ {{x}_{D}}\left( {{t}_{1}} \right) $和$ {{x}_{D}}\left( {{t}_{2}} \right) $分别为机器人重心在$ t_1 $和$ t_2 $时刻的前向坐标值, $ E\left( {{t}_{1}} \right)=\frac{1}{2}m\dot{x}_{D}^{2}\left( {{t}_{1}} \right) $为$ {{t}_{1}} $时刻机器人动能.
根据式(6), 可推导出${\rm{ d}}{{x}_{D}} $, $ {{x}_{D}}\left( {{t}_{1}} \right) $和$ {{x}_{D}}\left( {{t}_{2}} \right) $分别为
$$ \begin{array}{l} \left\{ \begin{aligned} &{\rm {d}}{{x}_{D}}=r\left( 1-\cos q \right){\rm {d}}q \\ &{{x}_{D}}\left( {{t}_{1}} \right)=-r\sin {{q}_{{1}}} \\ &{{x}_{D}}\left( {{t}_{2}} \right)=r\left( {{q}_{{2}}}-{{q}_{{1}}} \right)-r\sin {{q}_{2}} \end{aligned} \right. \end{array} $$ (11) 将式(6)和式(11)代入式(10), 可推导出$ {{t}_{2}} $时刻机器人动能为
$$ \begin{split} &E\left( {{t}_{2}} \right)=\\ &\;\;\;\frac{m{{a}_{y}(t_1)}r\left( {{X}_{T}(t_1)}+{{X}_{H}(t_1)} \right)\left( {{q}_{2}}-{{q}_{1}} \right)}{{{F}_{y}(t_1)}}\;+ \\ &\;\;\;\frac{m{{a}_{y}(t_1)}r\left( {{X}_{T}(t_1)}+{{X}_{H}(t_1)} \right)\left( -\sin {{q}_{2}}+\sin {{q}_{1}} \right)}{{{F}_{y}(t_1)}} \;+ \\ &\;\;\;m{a}_{y}(t_1)r\left( \cos {{q}_{2}}-\cos {{q}_{1}} \right)\;-\\ &\;\;\;\frac{m{{a}_{y}(t_1)}{{M}_{z}(t_1)}\left( {{q}_{2}}-{{q}_{1}} \right)}{{{F}_{y}(t_1)}} +E\left( {{t}_{1}} \right) \\[-15pt] \end{split} $$ (12) 其中, 除$ {{q}_{2}} $外, 其余项均为$ {{t}_{1}} $时刻机器人的运动状态和外力, 均可通过传感器直接获取.
2.2 支撑域和捕获域的求解
本部分将推导混合驱动水下刀锋腿机器人的支撑域和捕获域.
在支撑域推导方面, 在$ {{t}_{2}} $时刻, 即摆动腿刚变为支撑腿时, 利用刚变为支撑腿与地面的多个触地点位置, 来共同确定支撑域.
刚触地的摆动腿旋转角度$ {{q}_{3}} $可从步态规划的结果中获取. 在$ {{t}_{2}} $时刻机器人质心高度$ {{y}_{D}(t_2)} $可表示为
$$ \begin{array}{l} {{y}_{D}(t_2)}=r-r\cos {{q}_{3}} \end{array} $$ (13) $ {{t}_{2}} $时刻机器人重心前向坐标值$ {{x}_{D}}\left( {{t}_{2}} \right) $可表示为
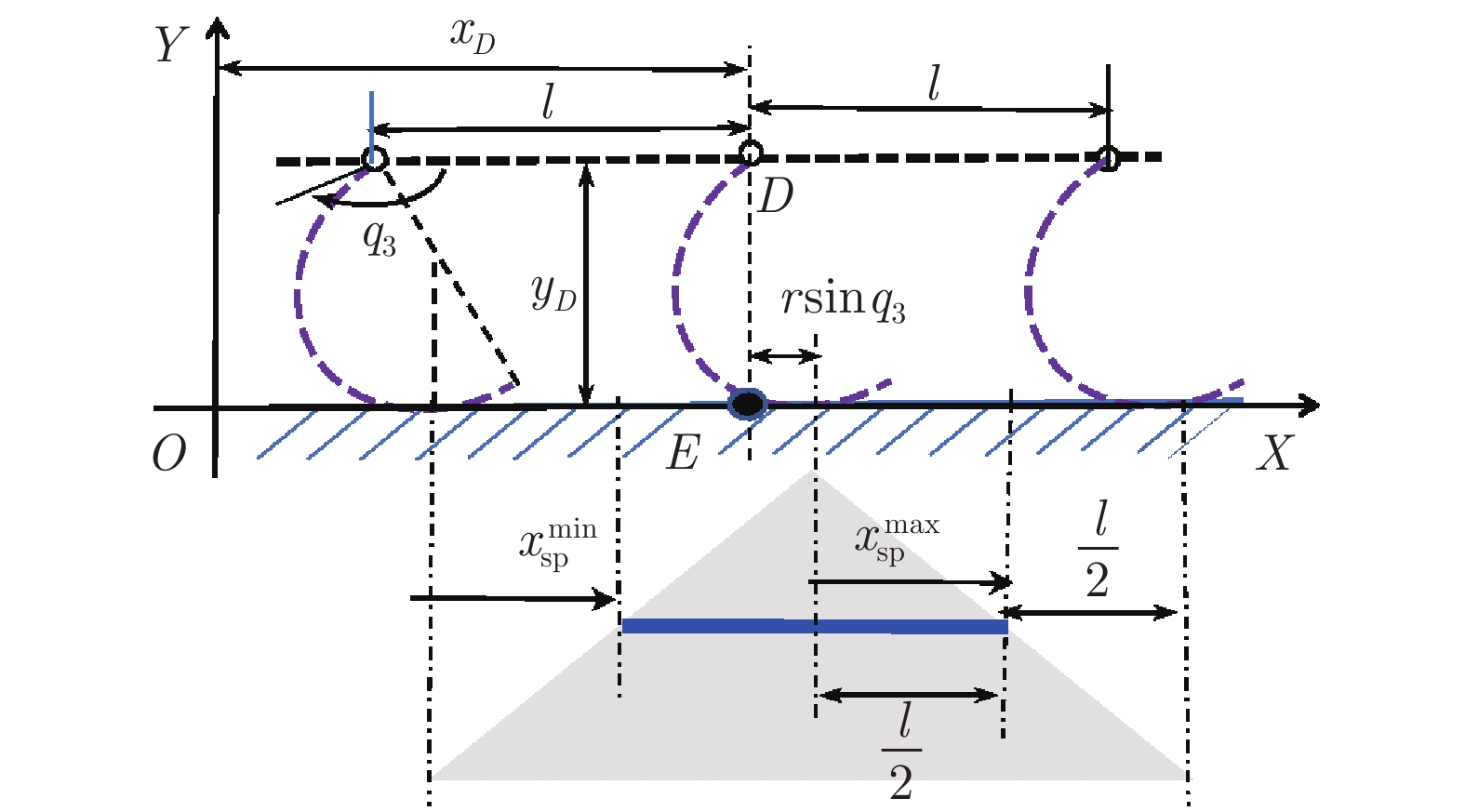
$$ \begin{array}{l} {{x}_{D}}\left( {{t}_{2}} \right)=r\left( {{q}_{1}}-{{q}_{2}} \right)-r\sin {{q}_{2}} \end{array} $$ (14) 这类机器人的典型行走步态包括: 三足步态、四足步态和波动步态等. 当以不同步态行走时, 这类机器人在$ {{t}_{2}} $时刻会形成不同的支撑域. 如图6所示, 为便于描述, 本文以经典的三足步态为例描述了机器人在$ {{t}_{2}} $时刻的支撑域. 图6中$x_{{\rm{sp}}}^{\min }$和$x_{{\rm{sp}}}^{\max }$分别为支撑域最小和最大边界的坐标值, 其可分别推导为
$$ \begin{array}{l} \left\{ \begin{aligned} &x_{{\rm{sp}}}^{\min } ={{x}_{D}}\left( {{t}_{2}} \right)+r\sin {{q}_{3}}-\frac{l}{2} \\ &x_{{\rm{sp}}}^{\max } ={{x}_{D}}\left( {{t}_{2}} \right)+r\sin {{q}_{3}}+\frac{l}{2} \end{aligned} \right. \end{array} $$ (15) 其中, $ l $为两个相邻髋关节之间的距离.
在捕获域推导方面, 利用$ {{t}_{2}} $时刻机器人的动能和$ t_1 $时刻推进器所能提供的推力上界和下界来共同推导捕获域.
捕获点可迫使腿式机器人静止. 当仅由腿驱动的腿式机器人在行走时, 存在且仅存在唯一的捕获点. 本文中机器人由刀锋腿和推进器共同驱动. 在推进器的驱动下, 这类机器人在前向某个范围内存在大量迫使机器人保持平衡的捕获点. 这些范围内的所有捕获点组成了捕获域.
前向流体力、前向推力以及推进器所产生的俯仰力矩均会改变机器人捕获点的坐标值. 本文旨在探究不同推力作用下机器人的捕获点.
利用式(5)中的水下滚动倒立摆模型, 在捕获点$ {{x}_{{\rm{cp}}}} $驱动下, 混合驱动水下刀锋腿机器人的动力学模型为
$$ \ddot{x}=\frac{{{F}_{y}(t_1)}\left( x_{{\rm{cp}}}^{0}-{{x}_{{\rm{cp}}}} \right)}{m{{y}_{D}(t_2)}}+\frac{{{y}_{D}(t_2)}{{X}_{T}(t_1)}-{{M}_{z}(t_1)}}{m{{y}_{D}(t_2)}} $$ (16) 其中, $x_{{\rm{cp}}}^{0}$为前向流体力引起的捕获点坐标值的偏移量, 其可表示为
$$ x_{{\rm{cp}}}^{0}=\frac{{{y}_{D}(t_2)}{{X}_{H}(t_1)}}{{{F}_{y}(t_1)}} $$ (17) 当机器人静止时, 捕获点坐标值与机器人重心在$ X $轴上的投影重合. 因此, 需保证以下等式成立
$$ \int_{x_{{\rm{cp}}}^{0}}^{{{x}_{{\rm{cp}}}}}{m\ddot{x}{\rm{d}}x}=E\left( {{t}_{2}} \right) $$ (18) 将式(16)代入式(18), 并求积分, 可推导捕获点与推力之间的数学关系为
$$ \begin{split} &\frac{{{F}_{y}(t_1)}}{2{{y}_{D}(t_2)}}{{\left( {{x}_{{\rm{cp}}}}-x_{{\rm{cp}}}^{0} \right)}^{2}} \;-\\ &\qquad\frac{{{y}_{D}(t_2)}{{X}_{T}(t_1)}-{{M}_{z}(t_1)}}{{{y}_{D}(t_2)}}\left( {{x}_{{\rm{cp}}}}-x_{{\rm{cp}}}^{0} \right) +E\left( {{t}_{2}} \right)=0 \end{split} $$ (19) 式(19)可重写为
$$ a{{\left( {{x}_{{\rm{cp}}}}-x_{{\rm{cp}}}^{0} \right)}^{2}}+b\left( {{x}_{{\rm{cp}}}}-x_{{\rm{cp}}}^{0} \right)+c=0 $$ (20) 其中, $a = {{{F}_{y}(t_1)}}/({2{{y}_{D}(t_2)}} ),$ $b=({{M}_{z}(t_1)}-{{y}_{D}(t_2)}\times {{X}_{T}(t_1)})/ {{{y}_{D}(t_2)}},$ $c= E\left( {{t}_{2}} \right) $.
进一步地, 机器人捕获点${{x}_{{\rm{cp}}}}$可计算为
$$ {{x}_{{\rm{cp}}}} = x_{{\rm{cp}}}^{0}+\frac{-b+\sqrt{b^2-4ac}}{2a} $$ (21) 接下来, 将结合$ {{t}_{1}} $时刻推进器推力大小和机器人运动状态, 初步分析其稳定性.
1) 当$b^2-4ac < 0$时, 表明$\sqrt{b^2-4ac}$无实数解, 无法寻找到合适的捕获点$ {{x}_{{\rm{cp}}}} $使该机器人保持稳定, 即机器人不稳定.
2) 当$a={{{F}_{y}(t_1)}}/({2{{y}_{D}(t_2 )}} )< 0$时, 机器人不稳定. 由于$ {{y}_{D}(t_2)} $是机器人重心相对地面的高度, 其始终大于零, 则表明${{F}_{y}(t_1)}=m{{\ddot{y}}_{D}(t_1)}-{{Y}_{T}(t_1)}- {{Y}_{H}(t_1)}$ 小于零. 发生这种情况的原因是: $ t_1 $时刻机器人所产生的垂向推力不足以抵抗机器人垂向惯性力$ m{{\ddot{y}}_{D}(t_1)} $和垂向流体力$ {{Y}_{H}(t_1)} $, 致使刀锋腿与地面无相互作用力, 进而导致机器人不稳定.
3) 当$b^2-4ac\ge 0 $且$a\ge 0 $时, 机器人可能稳定, 也可能不稳定. 具体地, 需根据捕获点是否在支撑域内来进一步判断.
实际上, 推进器所能提供的推力值通常是有界的, 即$ {{T}_{i}}\in \left[ T_{i}^{\min },T_{i}^{\max } \right] $, 其中, $ T_{i}^{\min } $和$ T_{i}^{\max } $分别为第$ i $个推进器所能提供推力值的下界和上界, $ i= 1,\cdots ,8 $. 由于式(21)中的变量$ a $和$ b $与$ {{X}_{T}} $, $ {{M}_{z}} $和$ {{Y}_{T}} $相关, 且$ {{X}_{T}} $, $ {{M}_{z}} $和$ {{Y}_{T}} $由8个推进器推力大小共同决定. 因此, 式(21) 中的八元函数${{x}_{{\rm{cp}}}}$由8个推进器推力值共同决定.
本文利用能处理约束优化问题的最优化方法计算式(21)中的八元函数${{x}_{{\rm{cp}}}}=x_{{\rm{cp}}}^{0}+\frac{-b+\sqrt{b^2-4ac}}{2a}$的最小最大值, 其分别记为$\bar{x}_{{\rm{cp}}}^{\min}$ 和$\bar{x}_{{\rm{cp}}}^{\max}$. 值得注意的是, $ {{x}_{{\rm{cp}}}} $ 的最小最大值$\bar{x}_{{\rm{cp}}}^{\min}$和$\bar{x}_{{\rm{cp}}}^{\max}$是相对于$ {{t}_{{2}}} $时刻机器人质心的前向位移. 因此, 在推进器作用下, 机器人在$ XOY $坐标系下的捕获域可推导为$\left[ x_{{\rm{cp}}}^{\min },x_{{\rm{cp}}}^{\max }\right]$, 其中, $x_{{\rm{cp}}}^{\min }$ 和$x_{{\rm{cp}}}^{\max}$ 可表示为
$$ \begin{array}{l} x_{{\rm{cp}}}^{\min }=\bar{x}_{{\rm{cp}}}^{\min }+{{x}_{D}}\left( {{t}_{2}} \right),\; x_{{\rm{cp}}}^{\max }=\bar{x}_{{\rm{cp}}}^{\max }+{{x}_{D}}\left( {{t}_{2}} \right) \end{array} $$ (22) 2.3 稳定裕度的求解
根据捕获点与支撑域的空间关系可判断$ {{t}_{1}} $时刻水下刀锋腿机器人是否稳定, 以及稳定裕度.
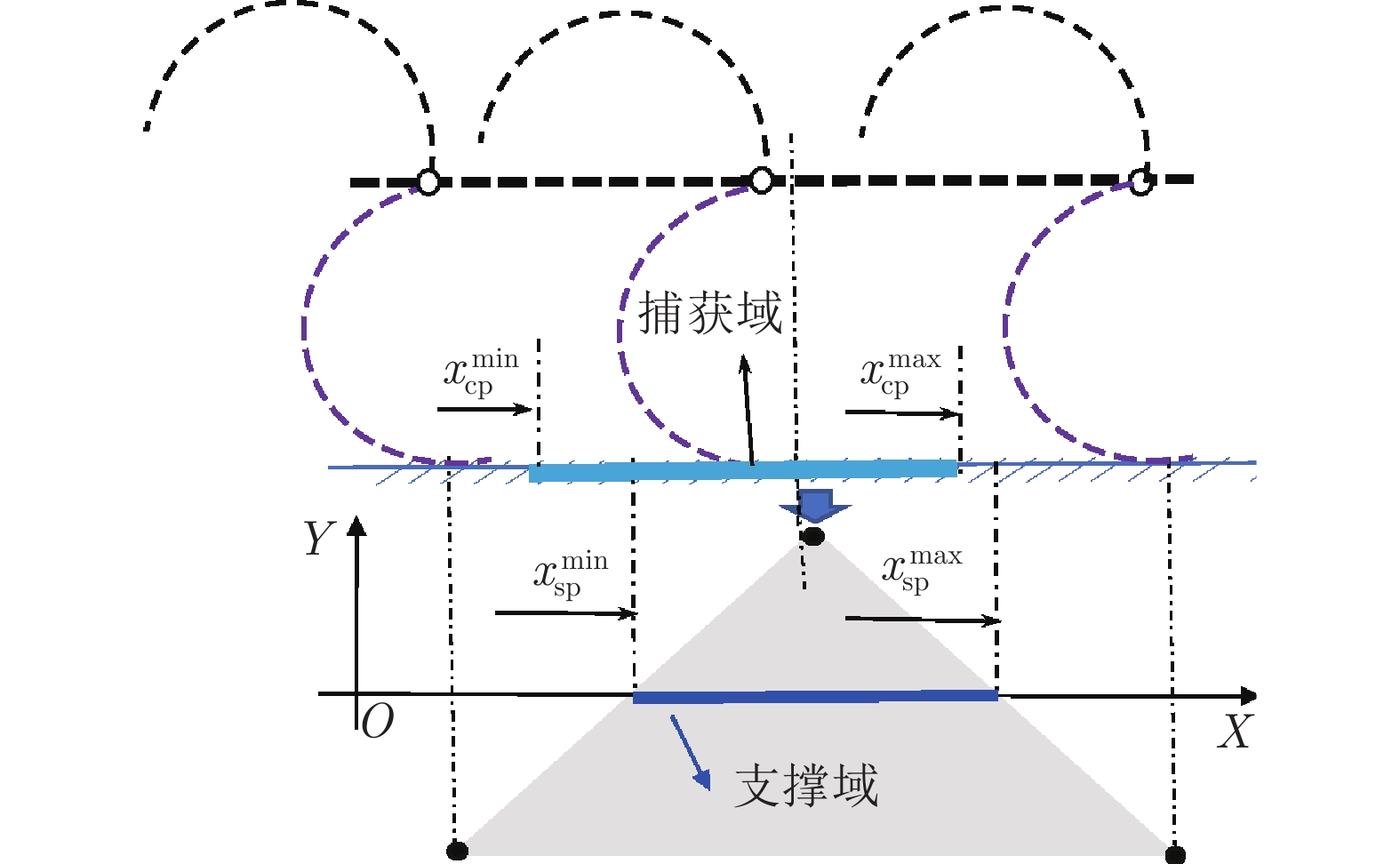
如图7所示, 利用支撑域$ \left[ x_{{\rm{sp}}}^{\min },x_{{\rm{sp}}}^{\max } \right] $与捕获域$ \left[ x_{{\rm{cp}}}^{\min },x_{{\rm{cp}}}^{\max } \right] $的空间关系来判断机器人的稳定性, 即:
1) 当支撑域与捕获域没有重叠时, 表明机器人在当前运动状态下是不稳定的, 即推进器和刀锋腿不能阻止机器人的摔倒.
2) 当支撑域与捕获域有重叠时, 表明机器人在当前运动状态下是稳定的, 即推进器和刀锋腿能保证当前运动状态下的机器人不会摔倒. 稳定裕度$ \gamma $为与支撑域重合部分的捕获域内的捕获点到支撑域边界的最大距离的最小值.
图8给出了支撑域与捕获域的4类重叠情况. 接下来, 将介绍4类重叠情况下稳定裕度的推导方法.
 图 8 支撑域与捕获域之间的4类重叠情况Fig. 8 Four types of overlap between support domain and capture domain
图 8 支撑域与捕获域之间的4类重叠情况Fig. 8 Four types of overlap between support domain and capture domain1) 当$ x_{{\rm{sp}}}^{\max }\ge x_{{\rm{cp}}}^{\max } $且$ x_{{\rm{sp}}}^{\min }\ge x_{{\rm{cp}}}^{\min } $时, 支撑域与捕获域的重叠情况如图8(a)所示. 其中, 捕获域内的捕获点到支撑域边界的最大距离分别为$(x_{{\rm{sp}}}^{\max }- x_{{\rm{sp}}}^{\min })/{2}$ 和$ x_{{\rm{cp}}}^{\max }-x_{{\rm{sp}}}^{\min } $. 通过求二者的最小值即可获取机器人的稳定裕度.
2) 当$ x_{{\rm{sp}}}^{\max }\ge x_{{\rm{cp}}}^{\max } $且$ x_{{\rm{sp}}}^{\min }<x_{{\rm{cp}}}^{\min } $ 时, 支撑域与捕获域重叠情形如图8(b)所示. 其中, 捕获域内的捕获点到支撑域边界的最大距离分别为$( x_{{\rm{sp}}}^{\max }- x_{{\rm{sp}}}^{\min })/{2}$, $ x_{{\rm{cp}}}^{\max }-x_{{\rm{sp}}}^{\min } $和$ x_{{\rm{sp}}}^{\max }-x_{{\rm{cp}}}^{\min } $. 通过求三者的最小值即可获取稳定裕度.
3) 当$x_{{\rm{sp}}}^{\max } < x_{{\rm{cp}}}^{\max }$且$x_{{\rm{sp}}}^{\min }\ge x_{{\rm{cp}}}^{\min }$ 时, 支撑域与捕获域重叠情形如图8(c)所示. 其中, 由于支撑域在捕获域内, 因此捕获域内的捕获点到支撑域边界的最大距离仅为$({x_{{\rm{sp}}}^{\max }-x_{{\rm{sp}}}^{\min }})/{2}$, 即机器人的稳定裕度.
4) 当$ x_{{\rm{sp}}}^{\max }<x_{{\rm{cp}}}^{\max } $且$ x_{{\rm{sp}}}^{\min }<x_{{\rm{cp}}}^{\min } $时, 支撑域与捕获域重叠情形如图8(d)所示. 其中, 捕获域内的捕获点到支撑域边界的最大距离分别为$(x_{{\rm{sp}}}^{\max }- x_{{\rm{sp}}}^{\min })/{2}$和$ x_{{\rm{sp}}}^{\max }-x_{{\rm{cp}}}^{\min } $. 通过求二者的最小值可获取稳定裕度.
综上, $ {{t}_{{1}}} $时刻混合驱动水下刀锋腿机器人的稳定裕度$ \gamma $可表示为
$$ \begin{array}{l} \gamma = \left\{ \begin{aligned} &\min \left( \frac{x_{{\rm{sp}}}^{\max }-x_{{\rm{sp}}}^{\min }}{2},x_{{\rm{cp}}}^{\max }-x_{{\rm{sp}}}^{\min } \right), \\ & \qquad \qquad\qquad\qquad x_{{\rm{sp}}}^{\max }\ge x_{{\rm{cp}}}^{\max } \;且\; x_{{\rm{sp}}}^{\min }\ge x_{{\rm{cp}}}^{\min } \\ &\min \left( \frac{x_{{\rm{sp}}}^{\max }-x_{{\rm{sp}}}^{\min }}{2},x_{{\rm{cp}}}^{\max }-x_{{\rm{sp}}}^{\min },x_{{\rm{sp}}}^{\max }-x_{{\rm{cp}}}^{\min } \right) , \\ &\qquad\qquad\qquad\qquad x_{{\rm{sp}}}^{\max }\ge x_{{\rm{cp}}}^{\max } \;且\; x_{{\rm{sp}}}^{\min }<x_{{\rm{cp}}}^{\min } \\ &\frac{x_{{\rm{sp}}}^{\max }-x_{{\rm{sp}}}^{\min }}{2}, \quad \;x_{{\rm{sp}}}^{\max }<x_{{\rm{cp}}}^{\max }\; 且\; x_{{\rm{sp}}}^{\min }\ge x_{{\rm{cp}}}^{\min } \\ &\min \left( \frac{x_{{\rm{sp}}}^{\max }-x_{{\rm{sp}}}^{\min }}{2},x_{{\rm{sp}}}^{\max }-x_{{\rm{cp}}}^{\min } \right), \\ &\qquad\qquad \qquad\qquad x_{{\rm{sp}}}^{\max }<x_{{\rm{cp}}}^{\max }\;且\;x_{{\rm{sp}}}^{\min }<x_{{\rm{cp}}}^{\min } \end{aligned} \right. \end{array} $$ (23) 本文所提出的基于捕获点理论的混合驱动水下刀锋腿机器人稳定性判据框图如图9所示.
 图 9 混合驱动水下刀锋腿机器人稳定性判据框图Fig. 9 Block diagram of stability criterion for hybrid-driven underwater bladed legged robot
图 9 混合驱动水下刀锋腿机器人稳定性判据框图Fig. 9 Block diagram of stability criterion for hybrid-driven underwater bladed legged robot3. 实验与结果分析
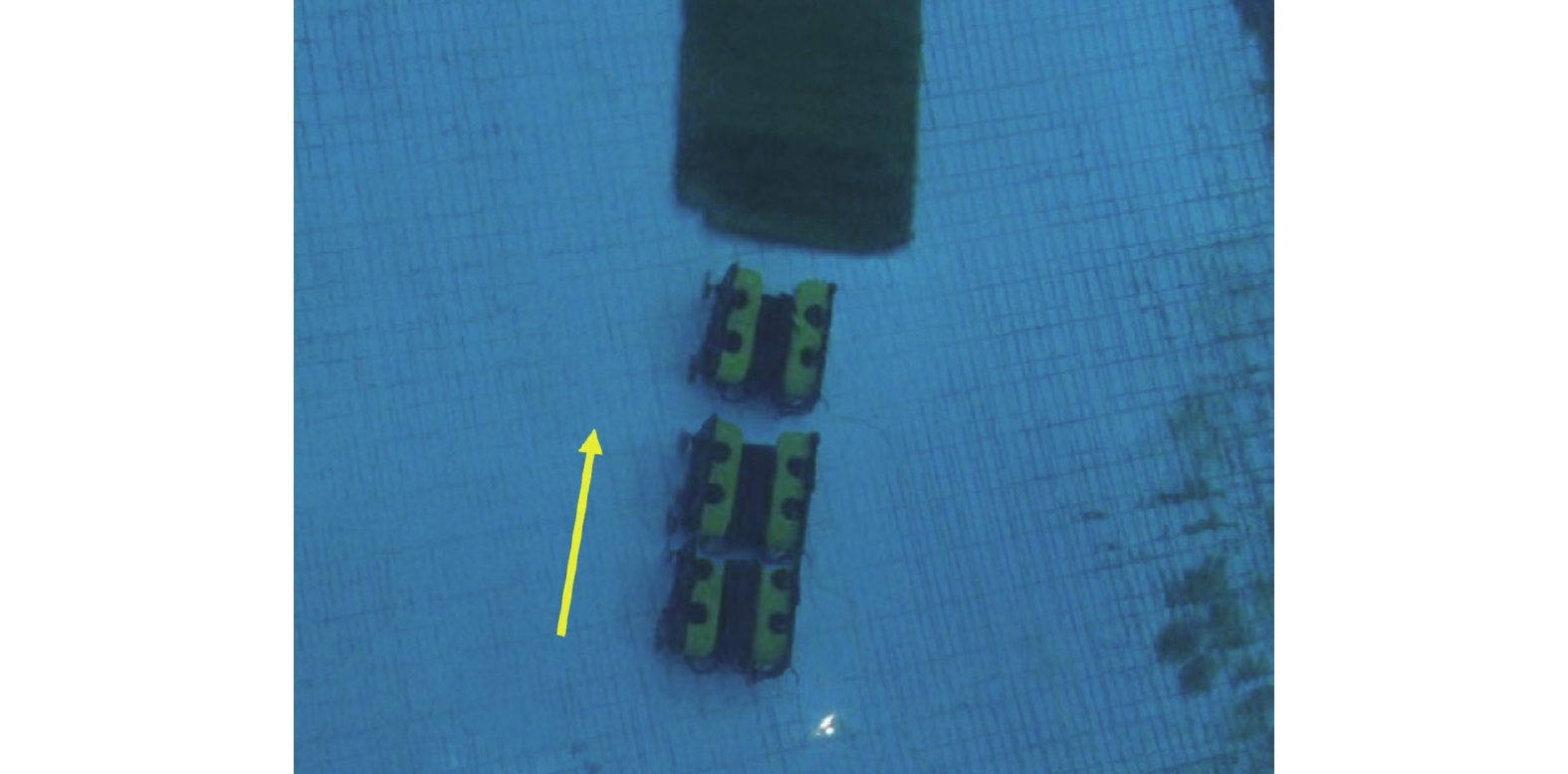
如图10和图11所示, 本节将在深8 m、长20 m、宽20 m的水池池底对所提出的稳定性判据进行实验验证. 水下刀锋腿机器人系统的上位机通过线缆发送运动指令, 并传输机器人运动状态, 以实现监控. 机器人在推进器的驱动下贴于池底, 并利用刀锋腿实现池底行走.
本节利用文献[24]中由6个Hopf振荡器组成的闭环CPG步态规划方法, 生成刀锋腿的期望角度, 并利用PD控制器使刀锋腿角度稳定地收敛于期望值. 其中, 一条刀锋腿分配一个振荡器, 通过设置各振荡器之间的相位差实现以三足步态的方式行走; 并根据航向误差自适应调节各支撑腿的触地角, 以跟踪期望航向. 振荡器的收敛因子设为1, 输出幅值设为1, 振荡频率设为1.57 Hz, 航向控制系数$ k_\psi= 10 $, 初始支撑角设为${\pi}/{6}$, PD控制器中的比例和微分参数分别设为50和0.1. 本节将开展多组如图11所示的池底定向行走实验.
该机器人的重量$ m=37 $kg, 刀锋腿的半径$ r=0.085 $m, 相邻两个髋关节之间的距离$ l=0.2 $m. 各推进器所能提供推力上界和下界分别为30 N和$-30 \,{\rm{N}}$, 即$ T_{i}^{\min }=-30\, {\rm{N}} $、$ T_{i}^{\max }=30 \, {\rm{N}}$ $( i = 1,\cdots ,8 ).$ 在$ {{t}_{2}} $时刻, 因支撑角的初始值为${\pi }/{{6}}$, 则刚离地的支撑腿旋转角度$ {{q}_{2}}=\frac{13}{12}\pi $, 刚触地的摆动腿旋转角度$ {{q}_{3}}=\frac{11}{12}\pi $.
接下来, 将分析5组不同垂推推力下机器人的稳定性, 以及推进器推力上下界互异下的机器人稳定性. 前者主要根据5组不同实验来验证所提稳定性判据的有效性; 后者旨在探究推进器推力上下界是如何改变机器人稳定裕度.
3.1 垂推推力互异下的稳定性分析
本节在收集5组实验(垂推推力分别为$-5\;{\rm{N}}$, $-10\;{\rm{N}} $, $-15\;{\rm{N}} $, $-20\;{\rm{N}} $, $-30\;{\rm{N}}) $中的混合驱动水下刀锋腿机器人运动状态的基础上, 设置两类不同的推进器推力上下界, 以实现混合驱动和单一驱动两类驱动方式. 单一驱动方式是仅依靠刀锋腿驱动机器人在池底行走, 推进器仅提供恒定的垂向力, 其能提供推力的上下界是相等的, 即$ T_{i}^{\min }=T_{i}^{\max }={{T}_{i}} $. 混合驱动方式中的推进器所能产生的推力上下界分别为30 N和−30 N, 即$ T_{i}^{\max }=30 $N、$ T_{i}^{\min }=-30 $N.
图12(a) ~ 12(e)分别为5组不同实验的机器人稳定裕度. 值得注意的是, 当机器人不稳定时, 其稳定裕度设定为零. 图13为5组实验中的机器人稳定裕度平均值. 由图12可知, 相较于单一驱动水下刀锋腿机器人, 混合驱动水下刀锋腿机器人出现不稳定状态(稳定裕度为零)的频次更少. 由图13可知, 混合驱动水下刀锋腿机器人稳定裕度平均值远大于单一驱动水下刀锋腿机器人, 且随着作用于单一驱动水下刀锋腿机器人的垂向力越大, 其稳定裕度平均值越大.
 图 12 5 组互异垂推推力的水下刀锋腿机器人稳定裕度Fig. 12 Stability margin of underwater bladed legged robot in five kinds of different vertical thrusters
图 12 5 组互异垂推推力的水下刀锋腿机器人稳定裕度Fig. 12 Stability margin of underwater bladed legged robot in five kinds of different vertical thrusters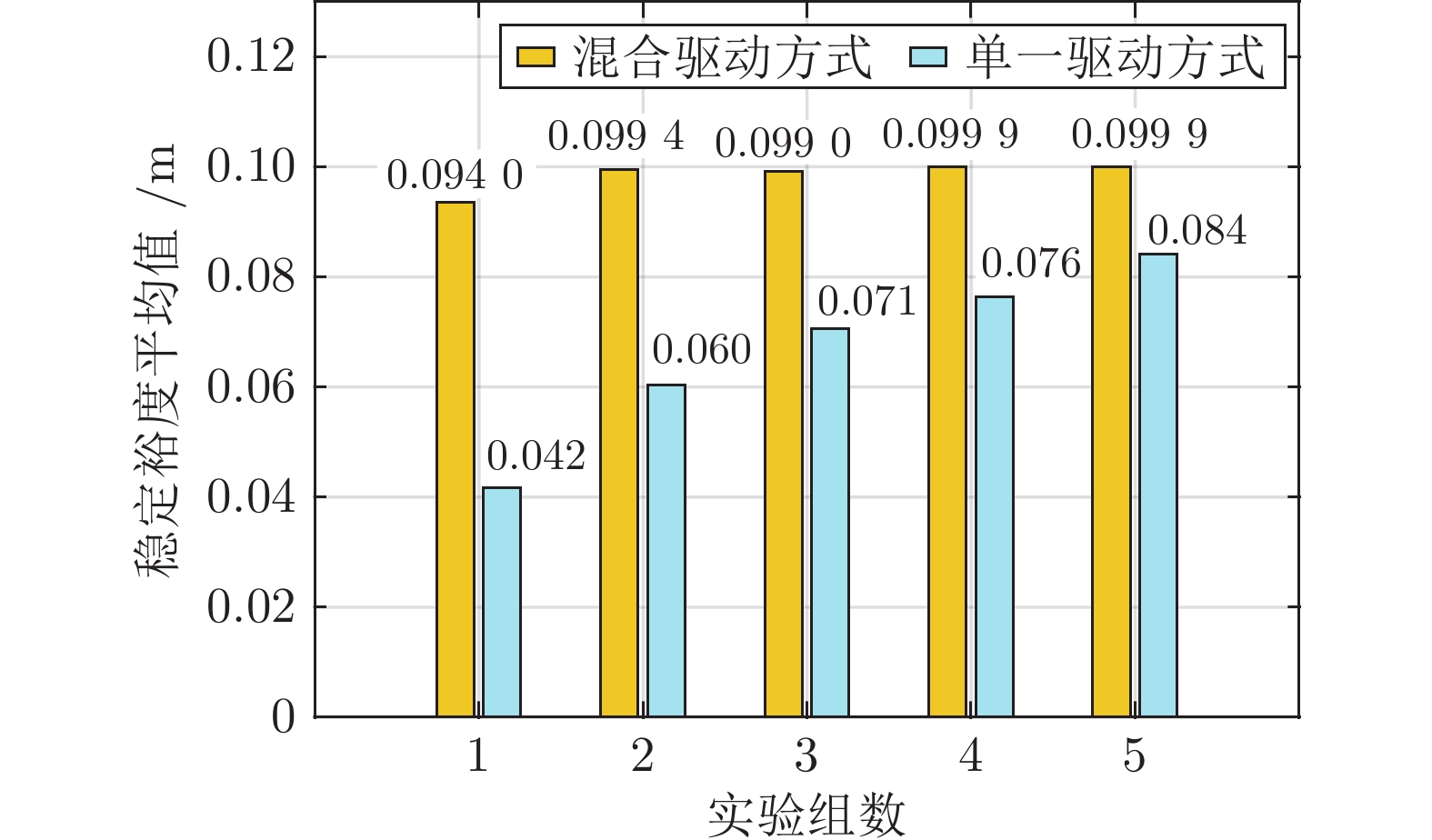 图 13 5组实验中水下刀锋腿机器人稳定裕度平均值Fig. 13 Average stability margin of underwater bladed legged robot in five experiments
图 13 5组实验中水下刀锋腿机器人稳定裕度平均值Fig. 13 Average stability margin of underwater bladed legged robot in five experiments由实验结果可得出以下两点结论:
1) 当刀锋腿施加在池底的压力越大, 水下刀锋腿机器人越稳定, 这与实际经验相符, 进而验证了本文所提出稳定性判据的有效性;
2) 相较于单一驱动方式, 混合驱动方式能保证水下刀锋腿机器人具有更好的稳定性.
3.2 推进器推力上下界互异下的稳定性分析
接下来, 将研究推进器推力上下界是如何改变混合驱动水下刀锋腿机器人的稳定裕度. 本部分在利用第2组实验(4个垂推均为 −10 N)的水下机器人运动状态信息的基础上, 开展了面向15组互异推力上下界的实验. 这15组互异推力上下界的设置如表1所示. 图14分别为15组不同推力上下界的水下刀锋腿机器人稳定裕度. 图15为15组实验中的水下刀锋腿机器人稳定裕度平均值. 通过分析实验结果, 可发现如下规律:
表 1 15组实验中推力上下界(N)Table 1 Upper and lower bounds of thrust in 15 groups of experiments (N)实例 垂向推进器
推力上界垂向推进器
推力下界水平推进器
推力上界水平推进器
推力下界1 −10 −10 0 0 2 −10 −10 1 −1 3 −10 −10 2 −2 4 −10 −10 5 −5 5 −9 −11 0 0 6 −6 −14 0 0 7 0 −20 0 0 8 30 −20 0 0 9 30 −25 0 0 10 30 −30 0 0 11 30 −40 0 0 12 30 −60 0 0 13 30 −100 0 0 14 30 −30 5 −5 15 30 −30 30 −30 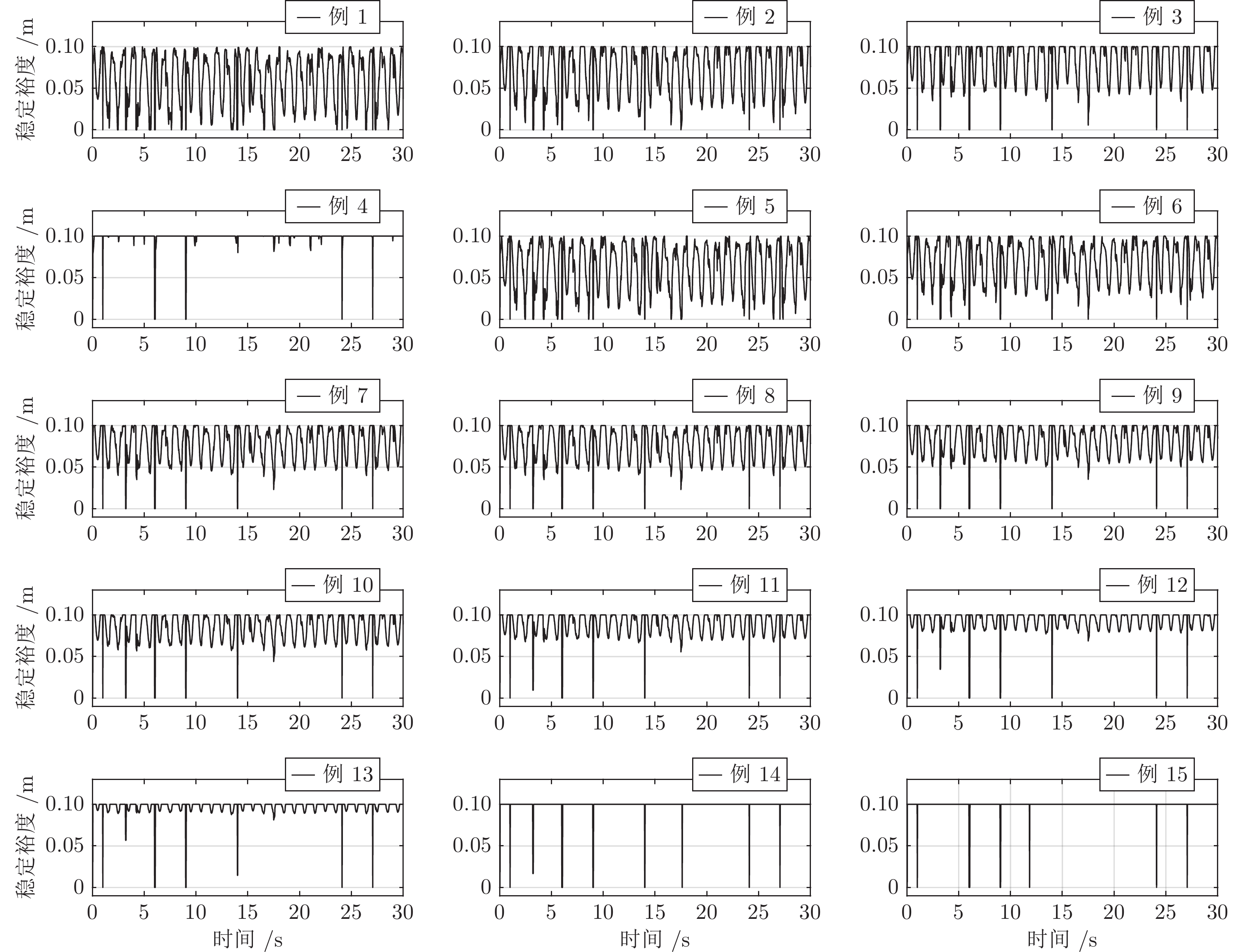 图 14 15组互异推力上下界的稳定裕度Fig. 14 Stability margin under fifteen different upper and lower bounds of thrust
图 14 15组互异推力上下界的稳定裕度Fig. 14 Stability margin under fifteen different upper and lower bounds of thrust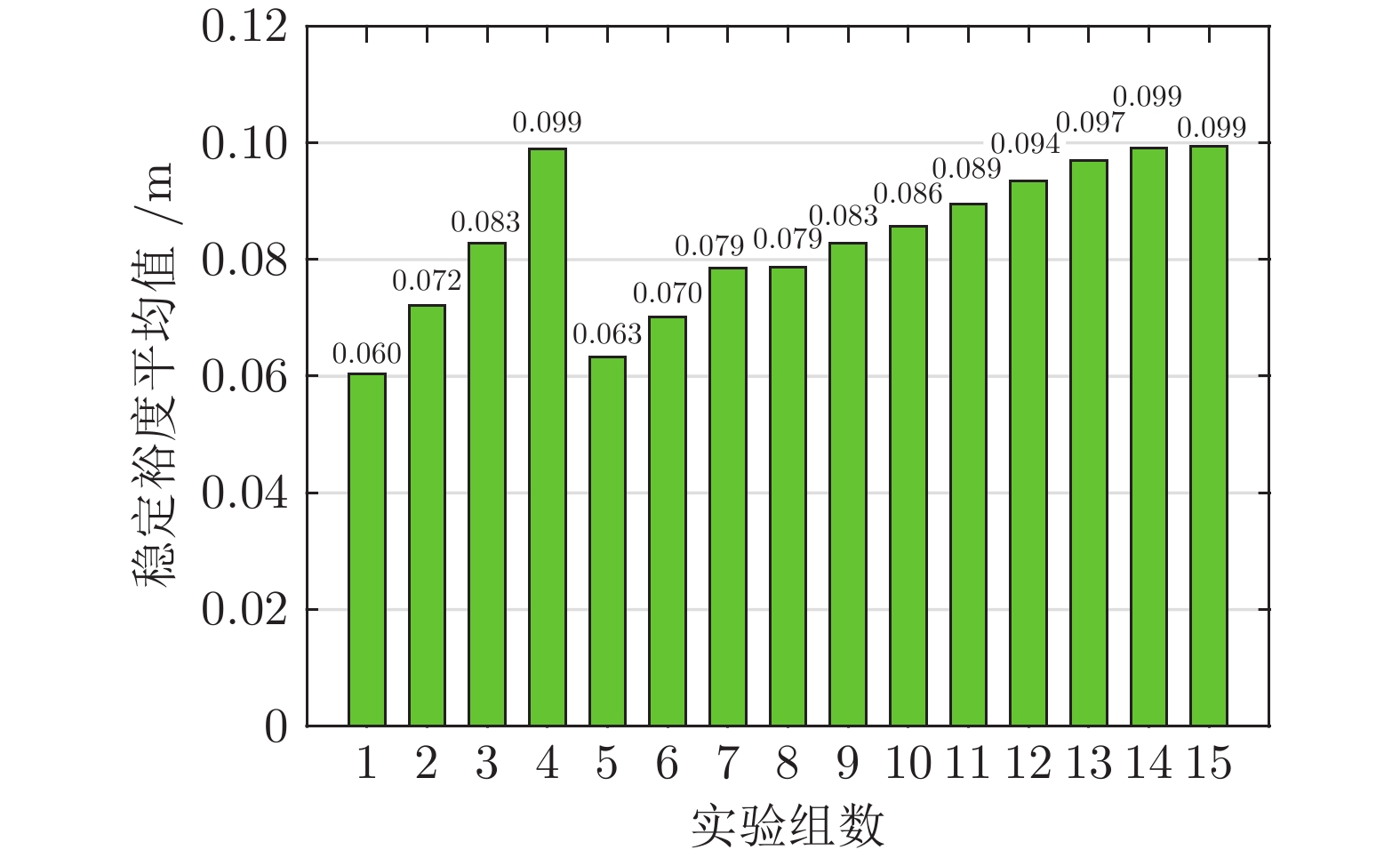 图 15 15组互异推力上下界的稳定裕度平均值Fig. 15 Average value of stability margin under 15 groups of different thrust upper and lower bounds
图 15 15组互异推力上下界的稳定裕度平均值Fig. 15 Average value of stability margin under 15 groups of different thrust upper and lower bounds1) 根据第1 ~ 4组实例中稳定裕度平均值数据可知, 当水平推进器推力上下界仅由0 N提高至5 N 时, 机器人的稳定裕度由0.06 m迅速提升至0.099 m. 这表明改变水平推进器推力上下界能显著提高水下刀锋腿机器人的行走稳定性.
2) 由第8 ~ 13组实例中稳定裕度平均值数据可知, 当垂向推进器推力下界由 −20 N变为 −100 N过程中, 机器人的稳定裕度由0.079 m缓慢地提升至0.097 m. 这表明当减小垂向推进器推力下界时, 尽管能提高机器人的稳定性, 但效果远不如改变水平推进器推力上下界.
3) 由第7组和第8组实例中稳定裕度平均值数据可知, 当将垂向推进器推力上界由0 N增至30 N时, 几乎无法改变水下刀锋腿机器人的稳定裕度. 这表明垂向推进器推力上界将无助于提升水下刀锋腿机器人的稳定性.
4) 由第14组和第15组实例中稳定裕度平均值数据可知, 当将水平推进器推力上界由5 N增至30 N以及下界由 −5 N减至 −30 N时, 稳定裕度平均值几乎没有变化. 这表明水平推进器推力上界5 N和下界 −5 N已能确保第2组实验中水下刀锋腿机器人的行走稳定性, 不需要再设计更大的推力上界和更小的推力下界来增强机器人的稳定性.
上述4个规律均符合实际经验, 进一步佐证了本文所提稳定性判据的有效性.
4. 结束语
针对现有稳定性判据方法无法用于判断混合驱动水下刀锋腿机器人稳定性的问题, 本文建立了混合驱动水下倒立摆模型, 在此基础上, 提出了基于捕获点理论的稳定性判据方法, 并通过水下实验验证了该方法的有效性.
本文所设计的稳定性判据具有以下三个方面的潜在应用价值:
1) 为腿式机器人提供了一种普适性和充要性更好的稳定性判据. 在充要性方面, ZMP判据仅依靠支撑腿各关节的运动信息, 判定动态行走的机器人是不稳定的. 但动态行走的机器人并非都是不稳定的. 本文所提出的稳定性判据除依赖支撑腿各关节的运动信息外, 还需依靠摆动腿各关节的运动信息, 可用于评判静态行走和动态行走机器人的稳定性, 具有更好的充分性. 在普适性方面, 不同于基于庞加莱回归映射的判据, 其仅适用于周期性行走的机器人, 但所提出的稳定性判据适用于非周期性运动的机器人. 此外, 所提出的判据除了适用于混合驱动腿式机器人外, 还可推广至评判与外界产生交互力的腿式机器人稳定性, 例如带机械臂的腿式机器人.
2) 为解释混合驱动腿式机器人的复杂运动提供了一种新方法, 也为这类机器人控制与规划的设计提供了一种新思路. 具体地, 在设计控制与规划方法时, 利用理论模型和虚拟仿真平台, 获取控制规划器作用下的机器人运动状态来判定机器人的稳定性, 并衡量控制与规划方法的优劣. 在此基础上, 指导控制与规划参数的选取, 以减少试探性实物实验的次数. 此外, 可将所提出的判据作为一个约束条件, 利用优化策略, 生成满足稳定性的最优步态和控制律.
3) 为混合驱动水下腿式机器人的总体设计提供有益参考. 这类机器人的总体设计步骤包括: 依据任务需求, 设置重量、最大行走速度等技术指标; 根据重量和最大行走速度, 设计机器人外形; 选取合适的驱动机构, 包括推进器和刀锋腿驱动电机. 机器人外形和行走速度均能决定流体力的大小, 具体包括阻力和颠覆力矩, 且机器人的惯性力取决于机器人重量和行走速度的变化率. 这些力与力矩均会影响机器人动能, 进而直接改变捕获域大小, 最终改变机器人的稳定裕度. 本文所提的稳定性判据阐明了机器人外形、重量、行走速度和推力等因素是如何改变机器人稳定性的. 因此, 该判据能用于指导选取合适的外形、重量、行走速度和推进器推力上下界, 进而确定满足任务需求的混合驱动水下腿式机器人总体方案.
-
图 5 混合驱动水下刀锋腿机器人的受力分析
Fig. 5 Forces analysis of the hybrid-driven underwater bladed legged robot
图 8 支撑域与捕获域之间的4类重叠情况
Fig. 8 Four types of overlap between support domain and capture domain
图 9 混合驱动水下刀锋腿机器人稳定性判据框图
Fig. 9 Block diagram of stability criterion for hybrid-driven underwater bladed legged robot
图 12 5 组互异垂推推力的水下刀锋腿机器人稳定裕度
Fig. 12 Stability margin of underwater bladed legged robot in five kinds of different vertical thrusters
图 13 5组实验中水下刀锋腿机器人稳定裕度平均值
Fig. 13 Average stability margin of underwater bladed legged robot in five experiments
图 14 15组互异推力上下界的稳定裕度
Fig. 14 Stability margin under fifteen different upper and lower bounds of thrust
图 15 15组互异推力上下界的稳定裕度平均值
Fig. 15 Average value of stability margin under 15 groups of different thrust upper and lower bounds
表 1 15组实验中推力上下界(N)
Table 1 Upper and lower bounds of thrust in 15 groups of experiments (N)
实例 垂向推进器
推力上界垂向推进器
推力下界水平推进器
推力上界水平推进器
推力下界1 −10 −10 0 0 2 −10 −10 1 −1 3 −10 −10 2 −2 4 −10 −10 5 −5 5 −9 −11 0 0 6 −6 −14 0 0 7 0 −20 0 0 8 30 −20 0 0 9 30 −25 0 0 10 30 −30 0 0 11 30 −40 0 0 12 30 −60 0 0 13 30 −100 0 0 14 30 −30 5 −5 15 30 −30 30 −30  下载: 导出CSV
下载: 导出CSV
-
[1] Ma F, Yan W, Chen L, Cui R. CPG-based motion planning of hybrid underwater hexapod robot for wall climbing and transition. IEEE Robotics and Automation Letters, 2022, 7(4): 12299−12306 doi: 10.1109/LRA.2022.3216233 [2] 陈恳, 付成龙. 仿人机器人理论与技术. 清华大学出版社, 2010. 56−64Chen Ken, Fu Cheng-Long. Humanoid Robot Theory and Technology. Beijing: Tsinghua University Press, 2010. 56−64 [3] 田彦涛, 孙中波, 李宏扬, 王静. 动态双足机器人的控制与优化研究进展. 自动化学报, 2016, 42(8): 1142−1157 doi: 10.16383/j.aas.2016.c150821Tian Yan-Tao, Sun Zhong-Bo, Li Hong-Yang, Wang Jing. A review of optimal and control strategies for dynamic walking bipedal robots. Acta Automatica Sinica, 2016, 42(8): 1142−1157 doi: 10.16383/j.aas.2016.c150821 [4] Hu C J, Huang C K, Lin P C. A torque-actuated dissipative spring loaded inverted pendulum model with rolling contact and its use as the template for design and dynamic behavior generation on a hexapod robot. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Seattle, Washington, USA: IEEE, 2015. 5177−5183 [5] Lu W, Yu M, Lin P. Clock-torqued rolling SLIP model and its application to variable-speed running in a hexapod robot. IEEE Transactions on Robotics, 2018, 34(6): 1643−1650 doi: 10.1109/TRO.2018.2862903 [6] Calisti M, Laschi C. Morphological and control criteria for self-stable underwater hopping. Bioinspiration and Biomimetics, 2018, 13: Article No. 016001 [7] Picardi G, Lovecchio R, Calisti M. Towards autonomous area inspection with a bio-inspired underwater legged robot. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Prague, Czech Republic: IEEE, 2021. 930−935 [8] Vukobratovi M, Borovac B. Zero-moment point-thirty five years of its life. International Journal of Humanoid Robotics, 2004, 1(1): 157−173 doi: 10.1142/S0219843604000083 [9] Guckenheimer J, Holmes P. Nonlinear oscillations, dynamical systems, and bifurcations of vector fields. Springer Science and Business Media, 2013. 8−32 [10] Grizzle J W, Abba G, Plestan F. Asymptotically stable walking for biped robots: Analysis via systems with impulse effects. IEEE Transactions on Automatic Control, 2001, 46(1): 51−64 doi: 10.1109/9.898695 [11] Fu C, Chen K. Section-map stability criterion for biped robots part I: Theory. In: Proceedings of the IEEE International Conference on Mechatronics and Automation (ICMA). Harbin, China: IEEE, 2007. 1529−1534 [12] Hirukawa H, Hattori S, Harada K, Kajita S, Kaneko K, Kanehiro F, et al. A universal stability criterion of the foot contact of legged robots-adios ZMP. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Orlando, USA: IEEE, 2006. 1976−1983 [13] Harada K, Kajita S, Kaneko K, Hirukawa H. Dynamics and balance of a humanoid robot during manipulation tasks. IEEE Transactions on Robotics, 2006, 22(3): 568−575 doi: 10.1109/TRO.2006.870649 [14] Audren H, Kheddar A. 3-D robust stability polyhedron in multicontact. IEEE Transactions on Robotics, 2018, 34(2): 388−403 doi: 10.1109/TRO.2022.3186804 [15] Jenelten F, Grandia R, Farshidian F, Hutter M. TAMOLS: Terrain-aware motion optimization for legged systems. IEEE Transactions on Robotics, 2022, 38(6): 3395−3413 doi: 10.1109/TRO.2017.2786683 [16] Winkler W, Farshidian F, Pardo D, Neunert M, Buchli J. Fast trajectory optimization for legged robots using vertex-based zmp constraints. IEEE Robotics and Automation Letters, 2017, 2(4): 2201−2208 doi: 10.1109/LRA.2017.2723931 [17] Viragh Y, Bjelonic M, Bellicoso C, Jenelten F, Hutter M. Trajectory optimization for wheeled-legged quadrupedal robots using linearized zmp constraints. IEEE Robotics and Automation Letters, 2019, 4(2): 1633−1640 doi: 10.1109/LRA.2019.2896721 [18] Pratt J, Koolen T, Boer T, Rebula J, Cotton S, Carff J, et al. Capturability-based analysis and control of legged locomotion, Part 2: Application to M2V2, a lower-body humanoid. The International Journal of Robotics Research, 2012, 31(10): 1117−1133 doi: 10.1177/0278364912452762 [19] 刘飞, 陈小平. 基于轨道能量模型的步行机器人平衡恢复方法. 机器人, 2011, 33(2): 244−250 doi: 10.3724/SP.J.1218.2011.00244Liu Fei, Chen Xiao-Ping. Balance recovery method of walking robot based on orbital energy model. ROBOT, 2011, 33(2): 244−250 doi: 10.3724/SP.J.1218.2011.00244 [20] Liu J, Chen H, Wensing P M, Zhang W. Instantaneous capture input for balancing the variable height inverted pendulum. IEEE Robotics and Automation Letters, 2021, 6(4): 7421−7428 doi: 10.1109/LRA.2021.3097074 [21] Caron S, Escande A, Lanari L, Mallein B. Capturability-based pattern generation for walking with variable height. IEEE Transactions on Robotics, 2019, 36(2): 517−536 [22] Koolen T, De Boer T, Rebula J, Goswami A, Pratt J. Capturability-based analysis and control of legged locomotion, Part 1: Theory and application to three simple gait models. The International Journal of Robotics Research, 2012, 31(9): 1094−1113 doi: 10.1177/0278364912452673 [23] Liu J, Chen H, Wensing P M, Zhang W. Quadruped capturability and push recovery via a switched-systems characterization of dynamic balance. IEEE Transactions on Robotics, 2023, 39(3): 2111−2130 doi: 10.1109/TRO.2023.3240622 [24] 严卫生, 陈乐鹏, 崔荣鑫, 许晖, 张守旭, 马飞宇. 一种水下机器人定向和稳定行走方法, 中国专利, ZL202110837326.X, 2022-11-22Yan Wei-Sheng, Chen Le-Peng, Cui Rong-Xin, Xu Hui, Zhang Shou-Xu, Ma Fei-Yu. A Directional and Stable Walking Method for Underwater Robots, China Patent ZL202110837326.X, November 22, 2022 -

 下载:
下载:
计量
- 文章访问数: 3933
- HTML全文浏览量: 213
- PDF下载量: 116
- 被引次数: 0
