2024年 第50卷 第7期
2024, 50(7): 1261-1283.
doi: 10.16383/j.aas.c230039
摘要:
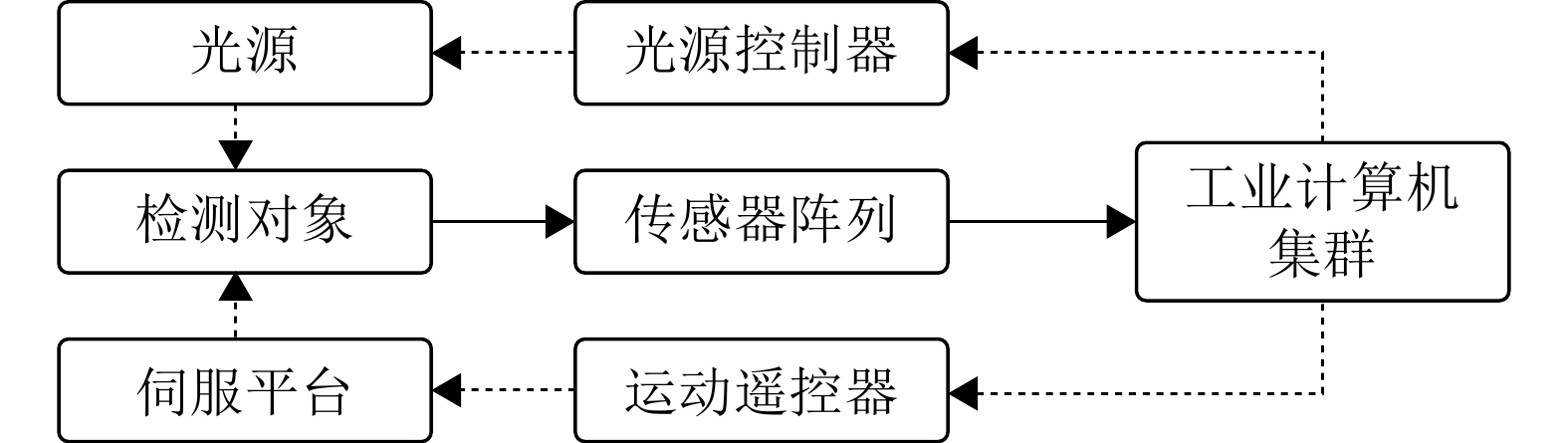
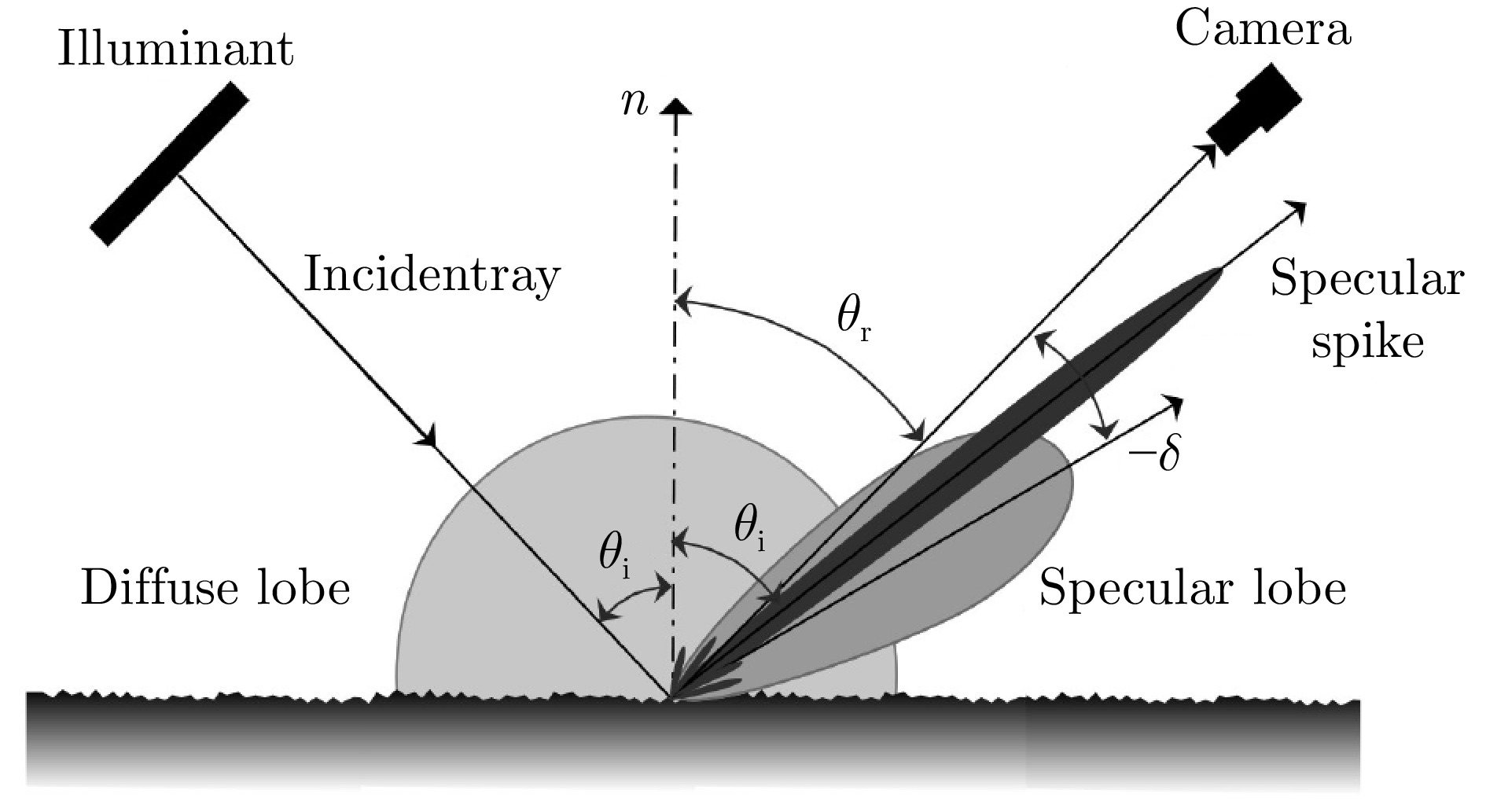
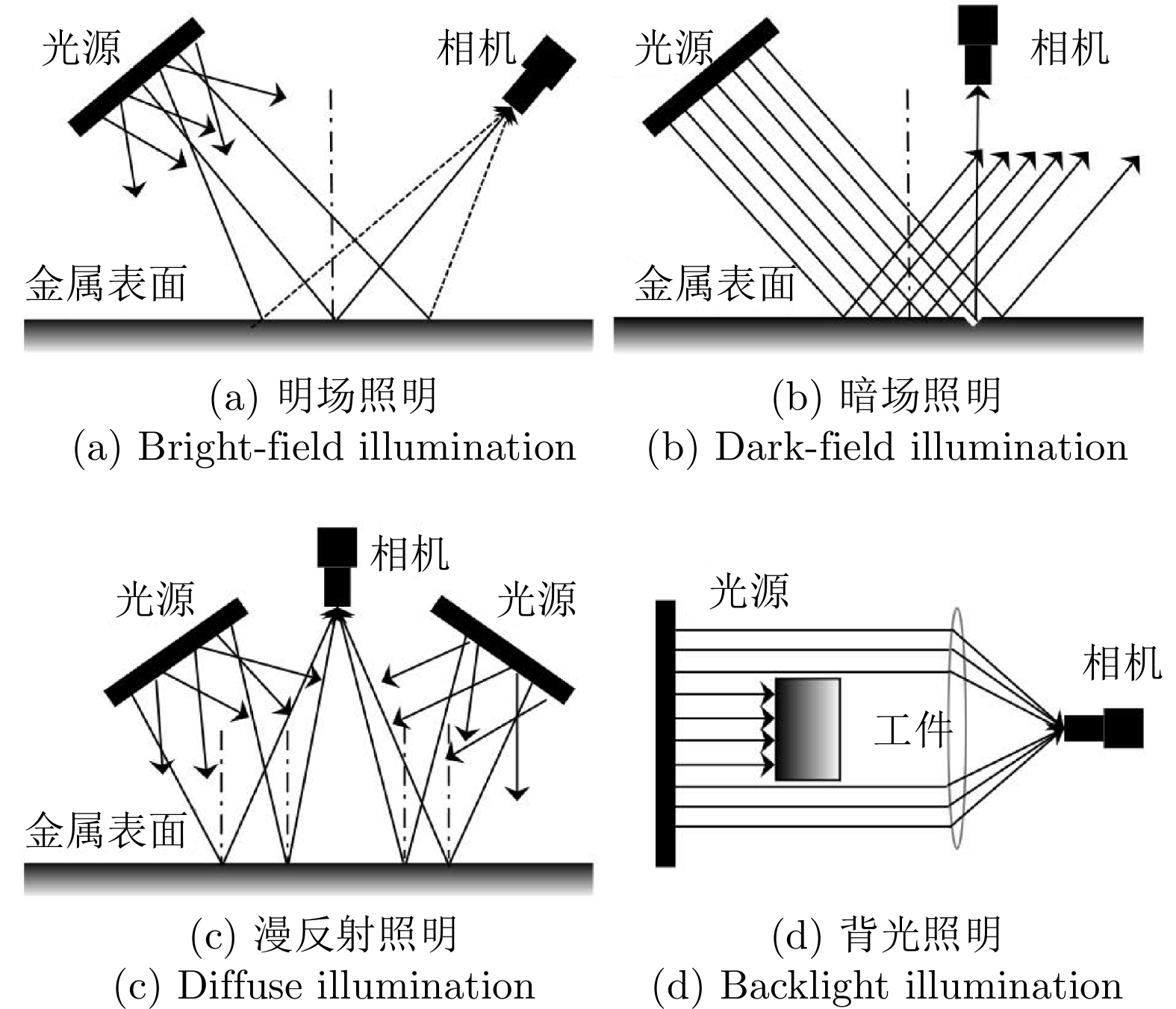
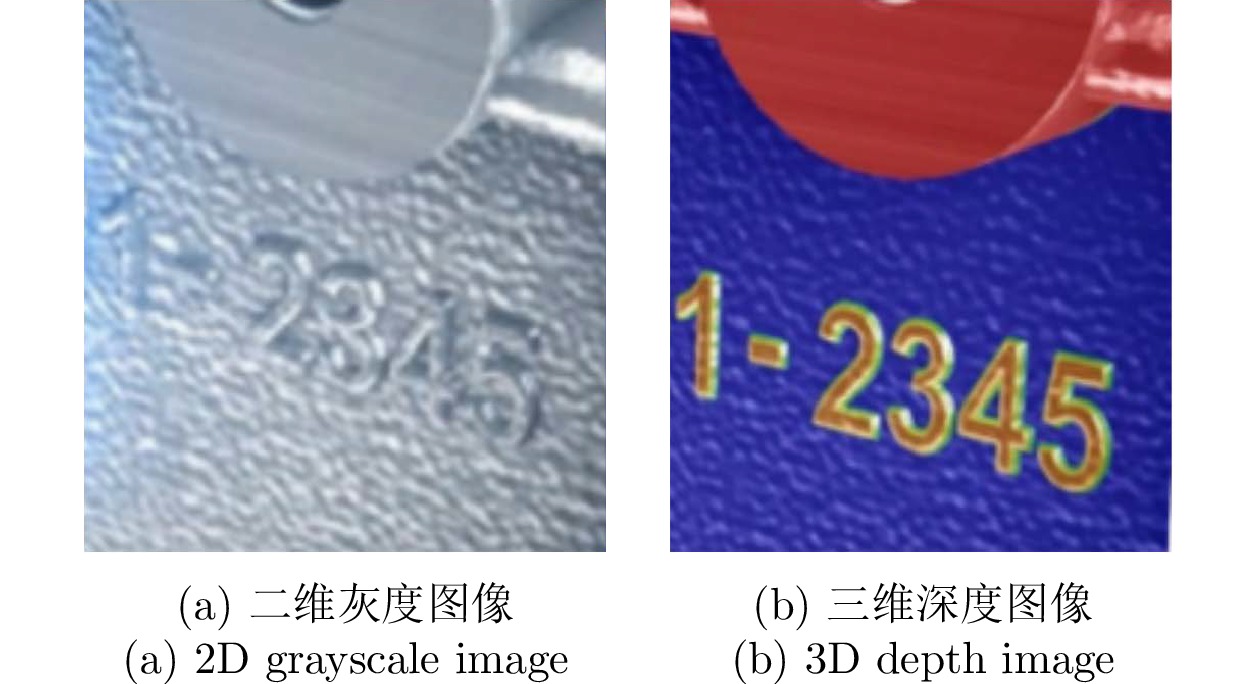
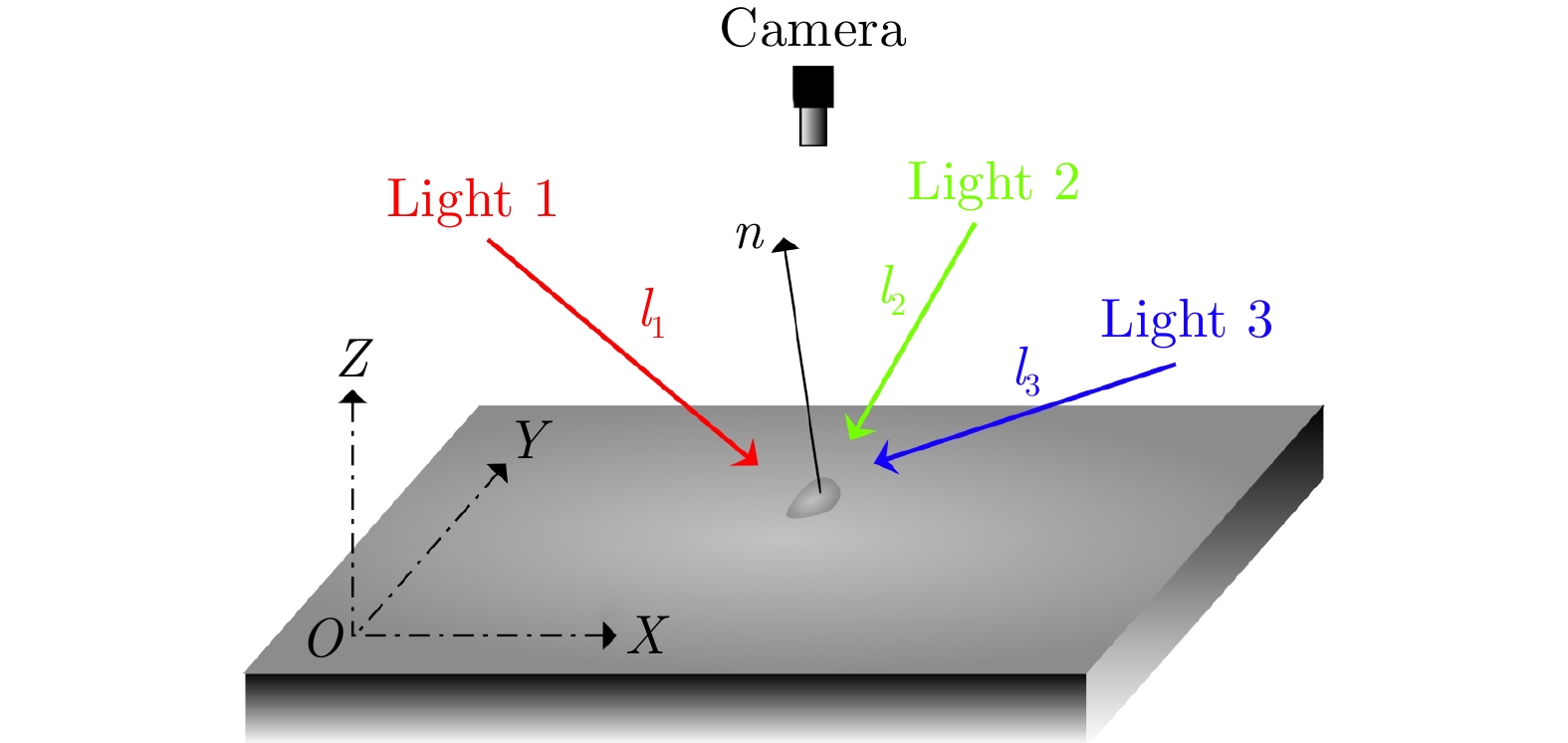
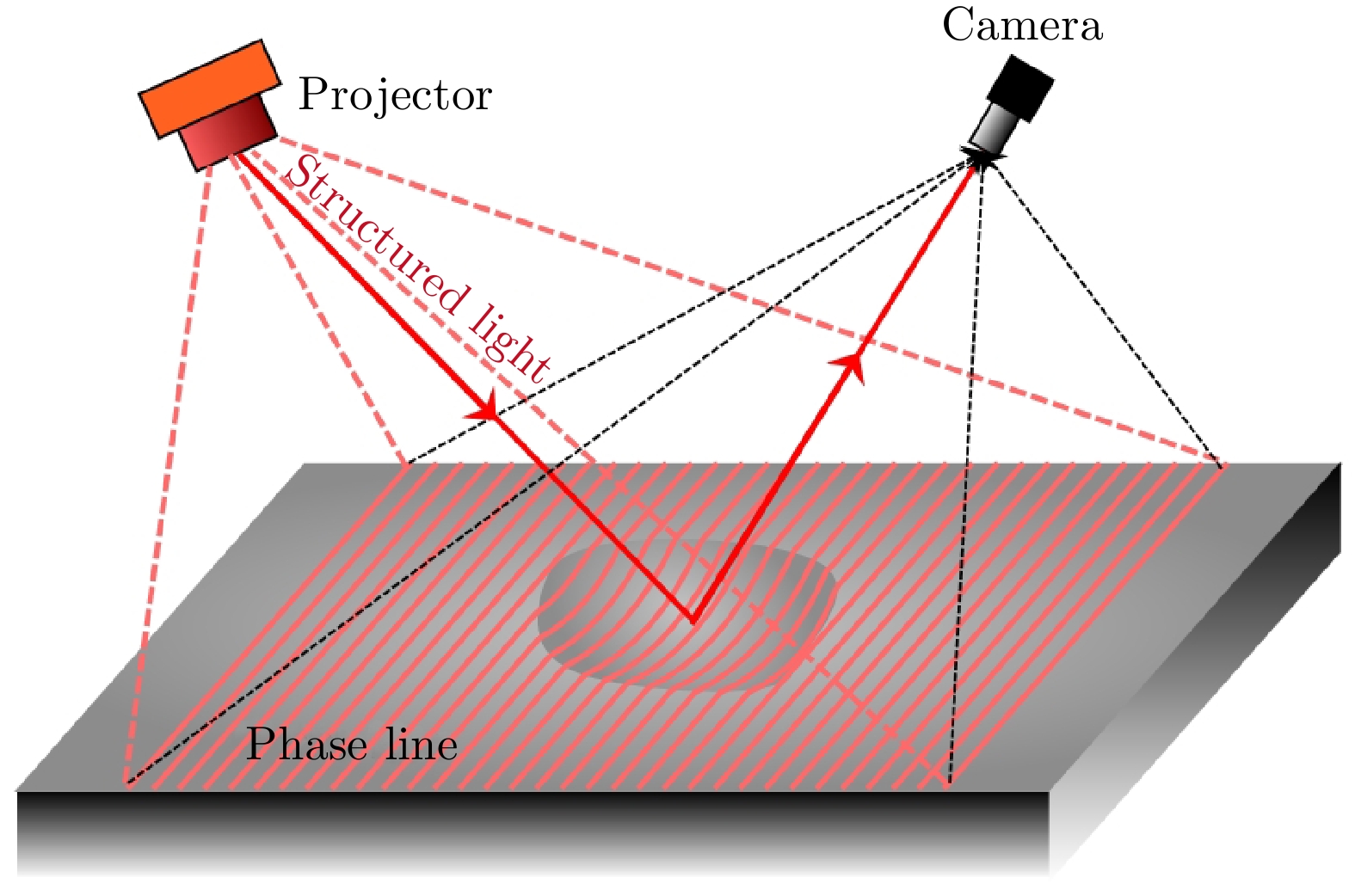
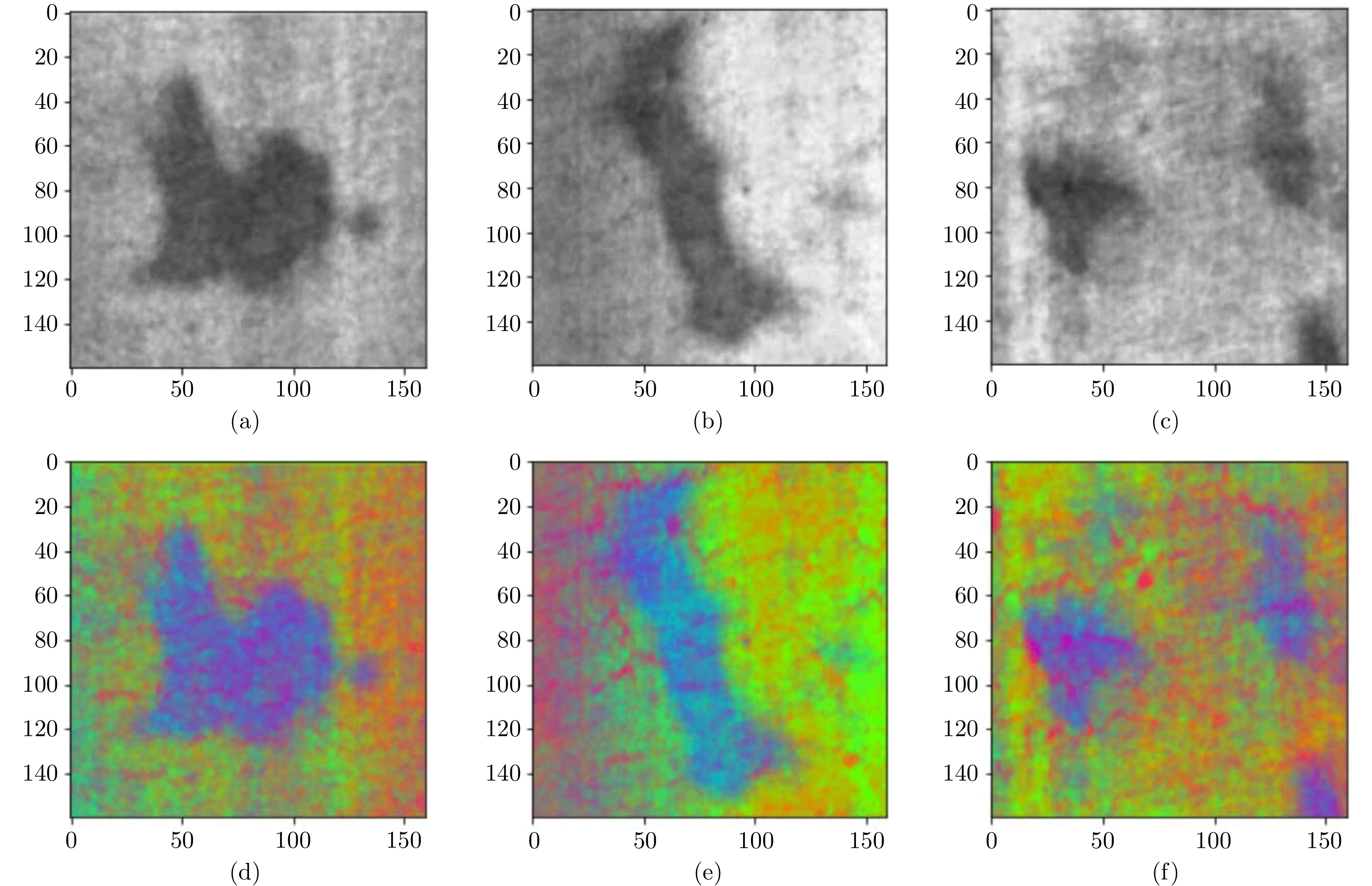
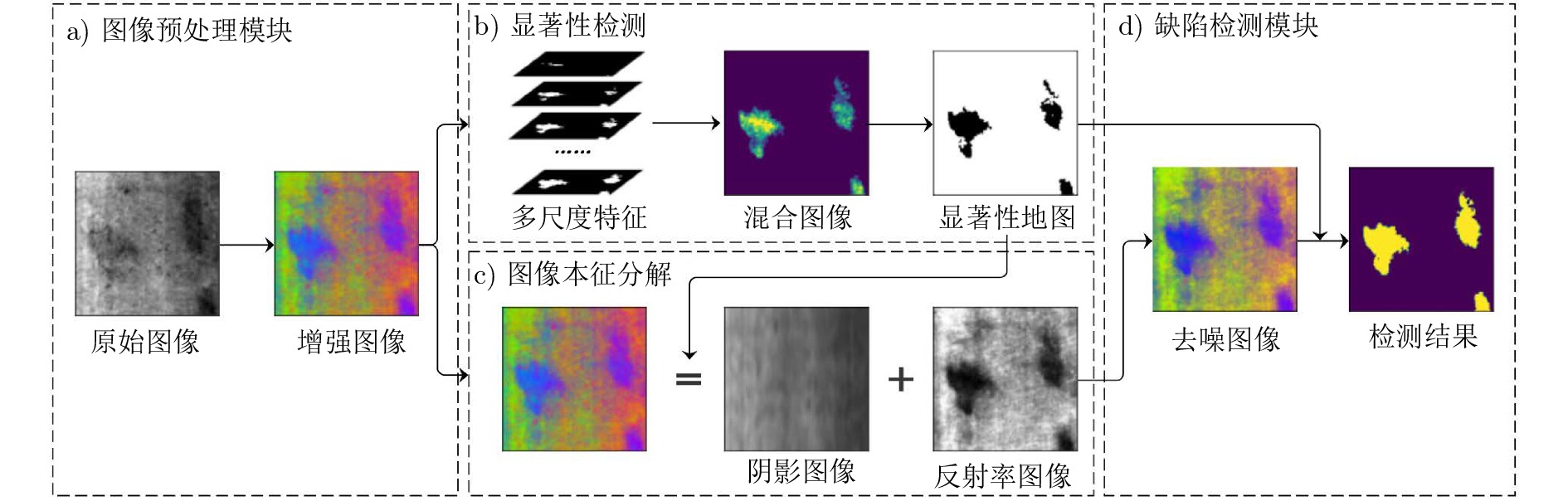
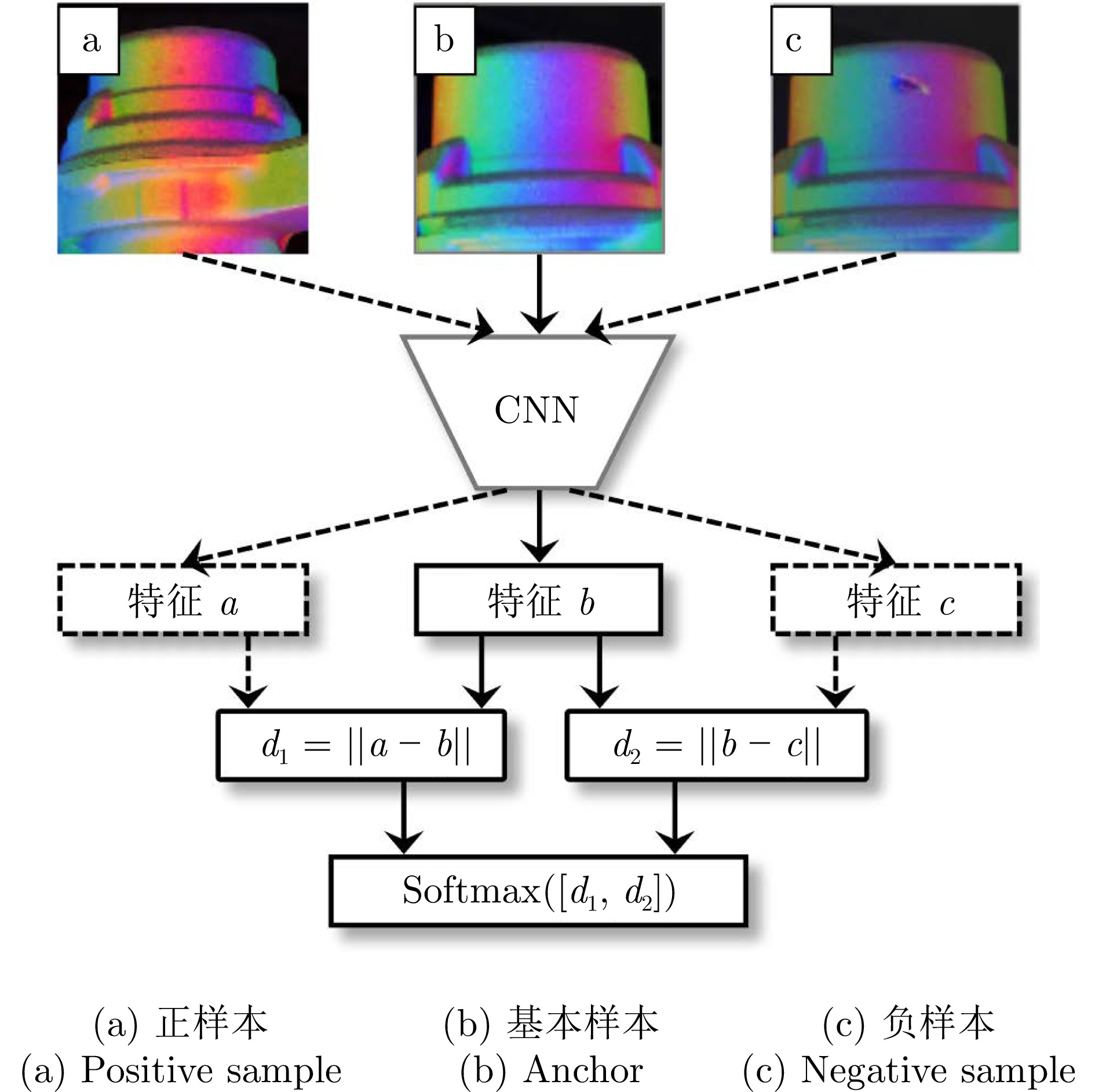
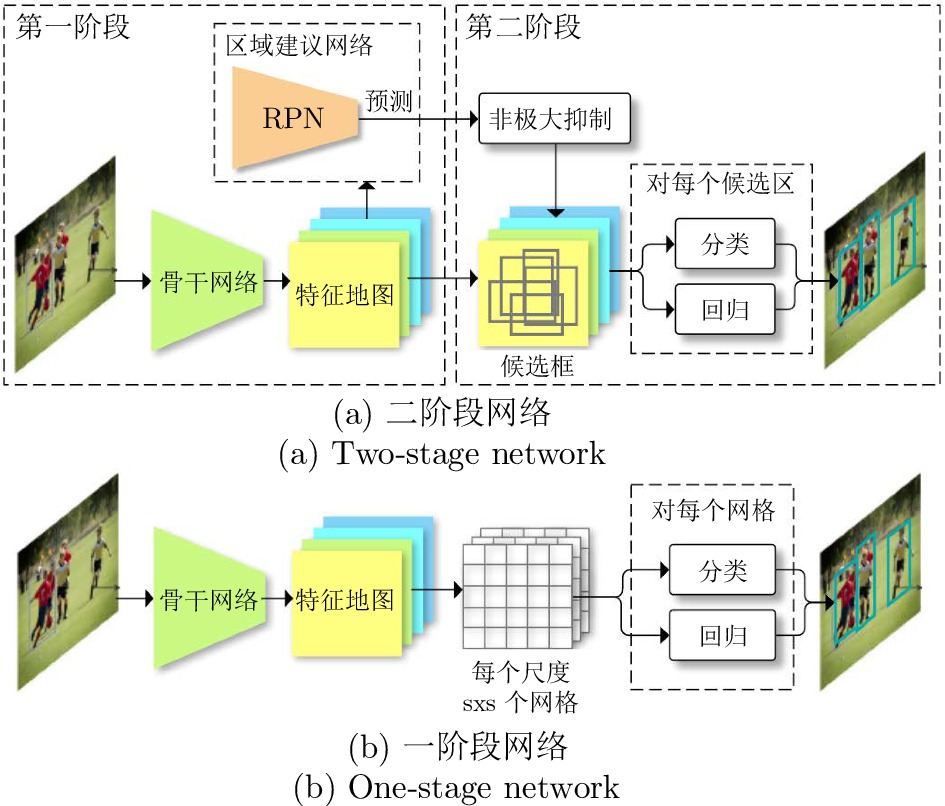
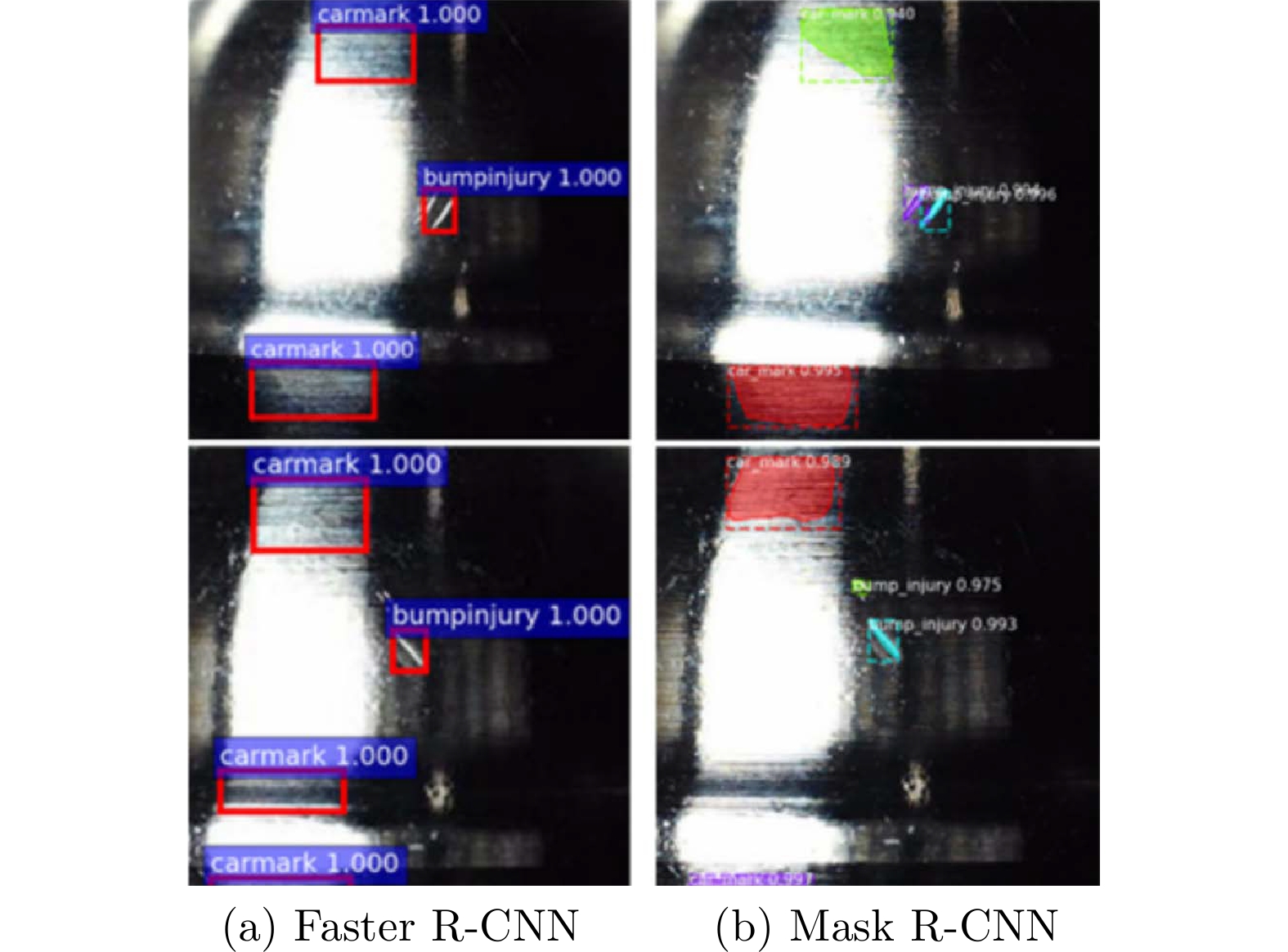
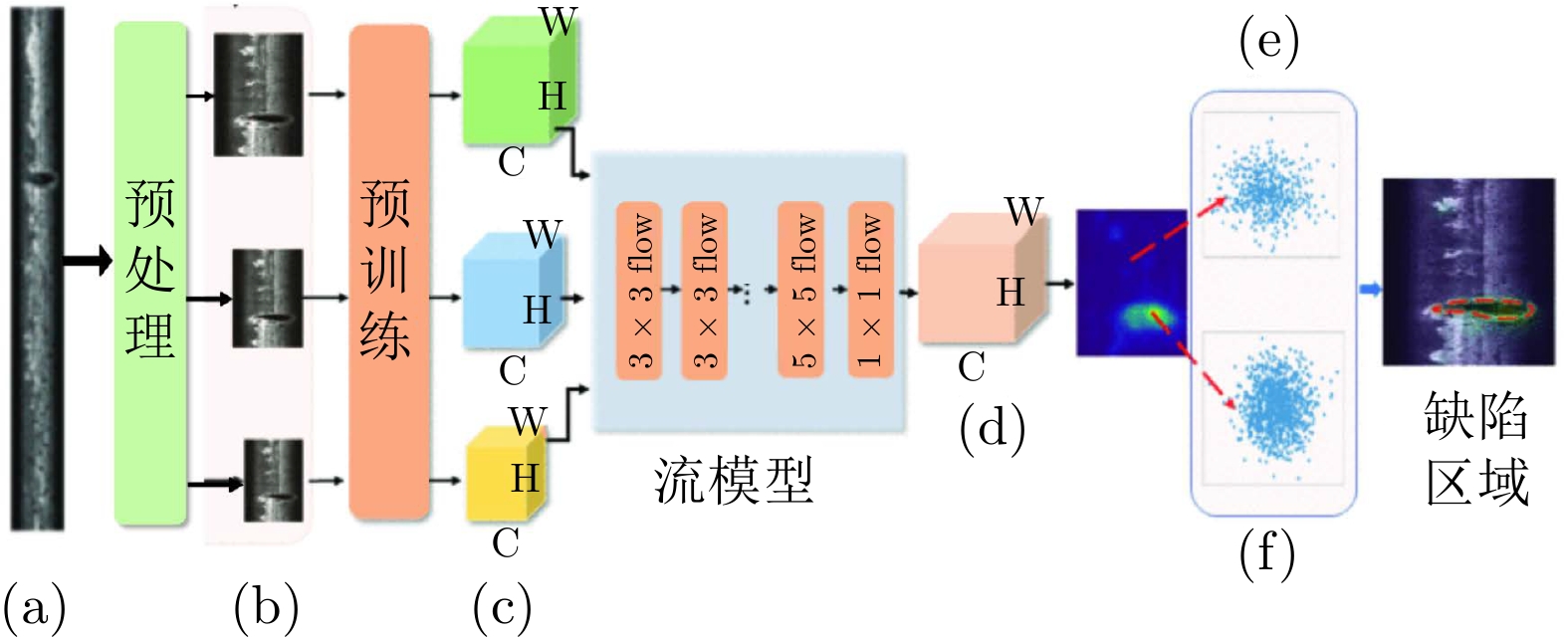
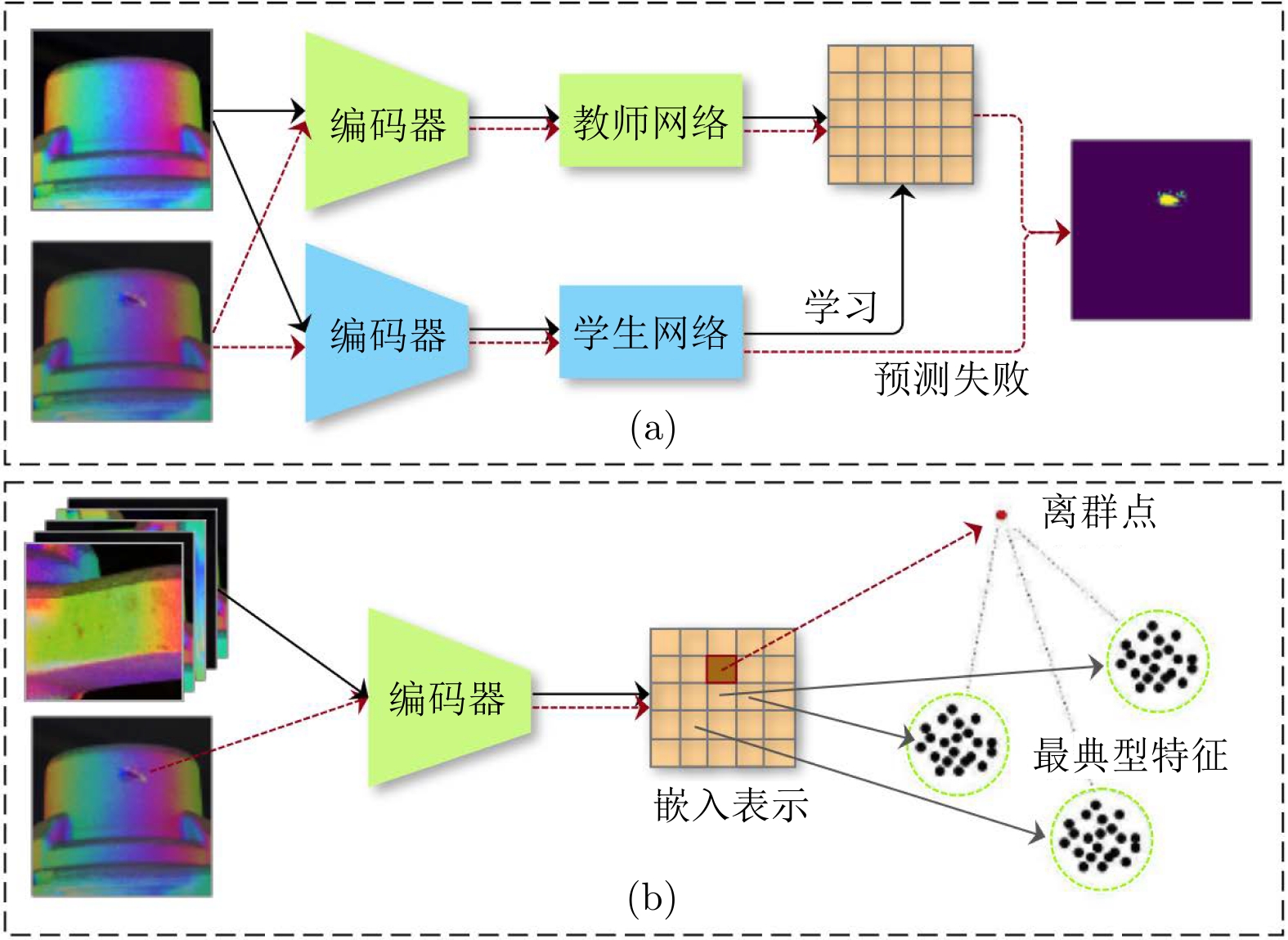
针对平面及三维结构金属材料的工业表面缺陷检测, 概述了视觉检测技术的基本原理和研究现状, 并总结出视觉自动检测系统的关键技术包括光学成像技术、图像预处理技术与缺陷检测器. 首先介绍了如何根据检测对象的光学特性选择合适的二维、三维光学成像技术; 其次介绍了图像降噪、特征提取、图像分割和拼接等预处理技术的重要作用; 然后根据缺陷检测器的实现原理将其分为模板匹配、图像分类、图像语义分割、目标检测和图像异常检测五类, 并对其中的经典算法进行了归纳分析. 最后, 探讨了工业场景下金属表面缺陷检测技术实施中的关键问题, 并对该技术的发展趋势进行了展望.
针对平面及三维结构金属材料的工业表面缺陷检测, 概述了视觉检测技术的基本原理和研究现状, 并总结出视觉自动检测系统的关键技术包括光学成像技术、图像预处理技术与缺陷检测器. 首先介绍了如何根据检测对象的光学特性选择合适的二维、三维光学成像技术; 其次介绍了图像降噪、特征提取、图像分割和拼接等预处理技术的重要作用; 然后根据缺陷检测器的实现原理将其分为模板匹配、图像分类、图像语义分割、目标检测和图像异常检测五类, 并对其中的经典算法进行了归纳分析. 最后, 探讨了工业场景下金属表面缺陷检测技术实施中的关键问题, 并对该技术的发展趋势进行了展望.


2024, 50(7): 1284-1304.
doi: 10.16383/j.aas.c230557
摘要:
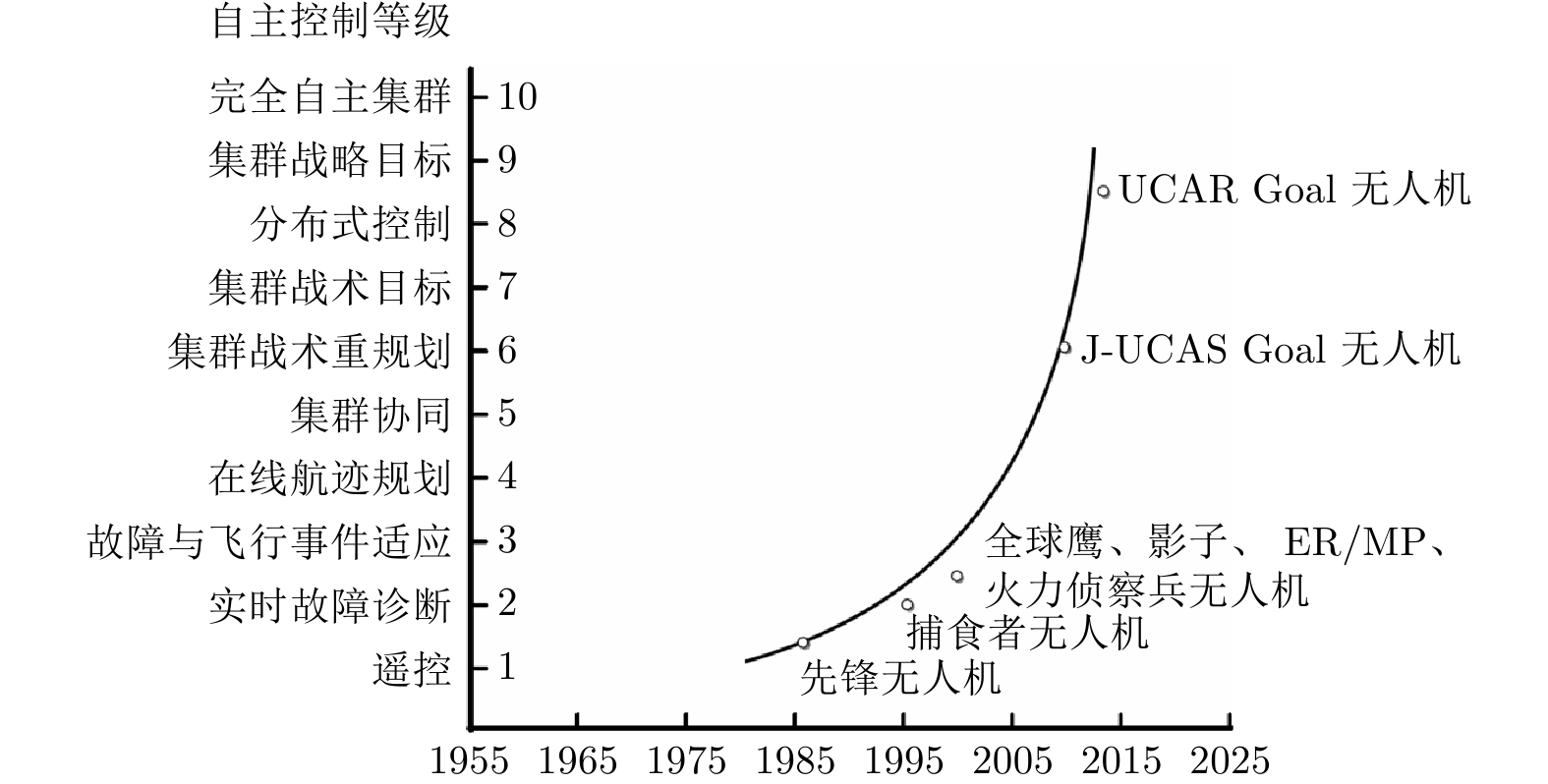
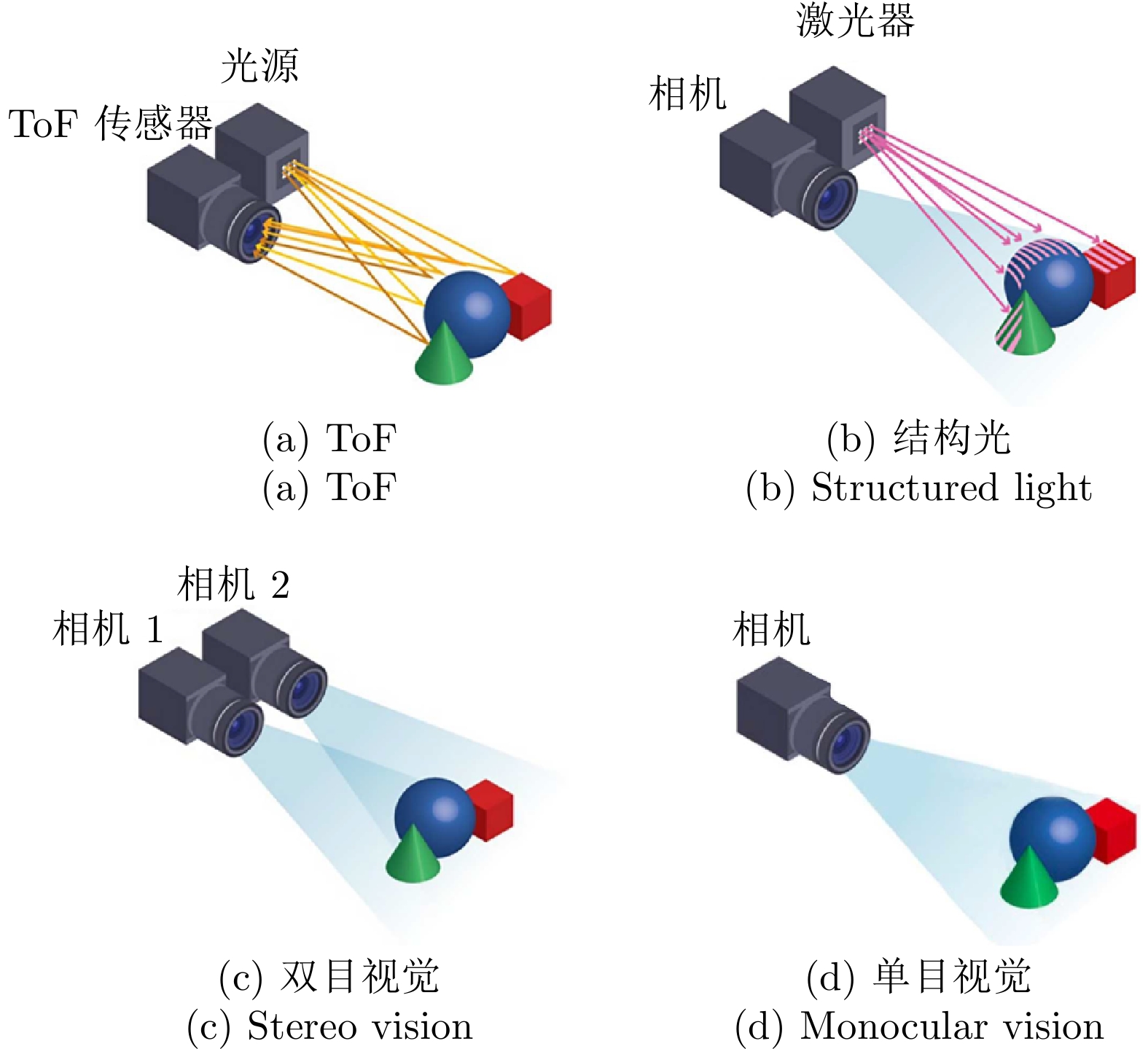
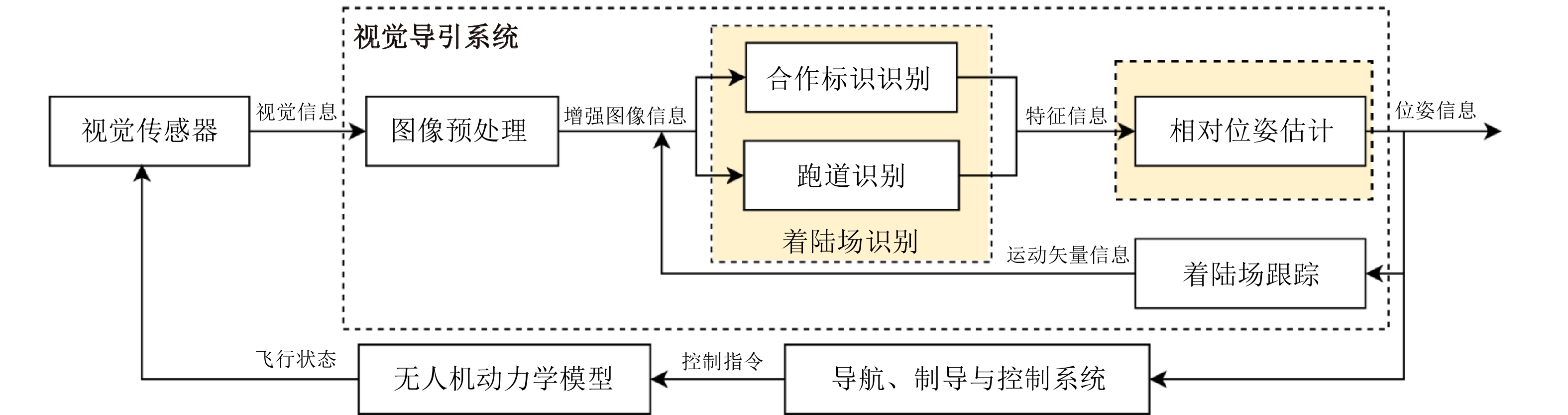
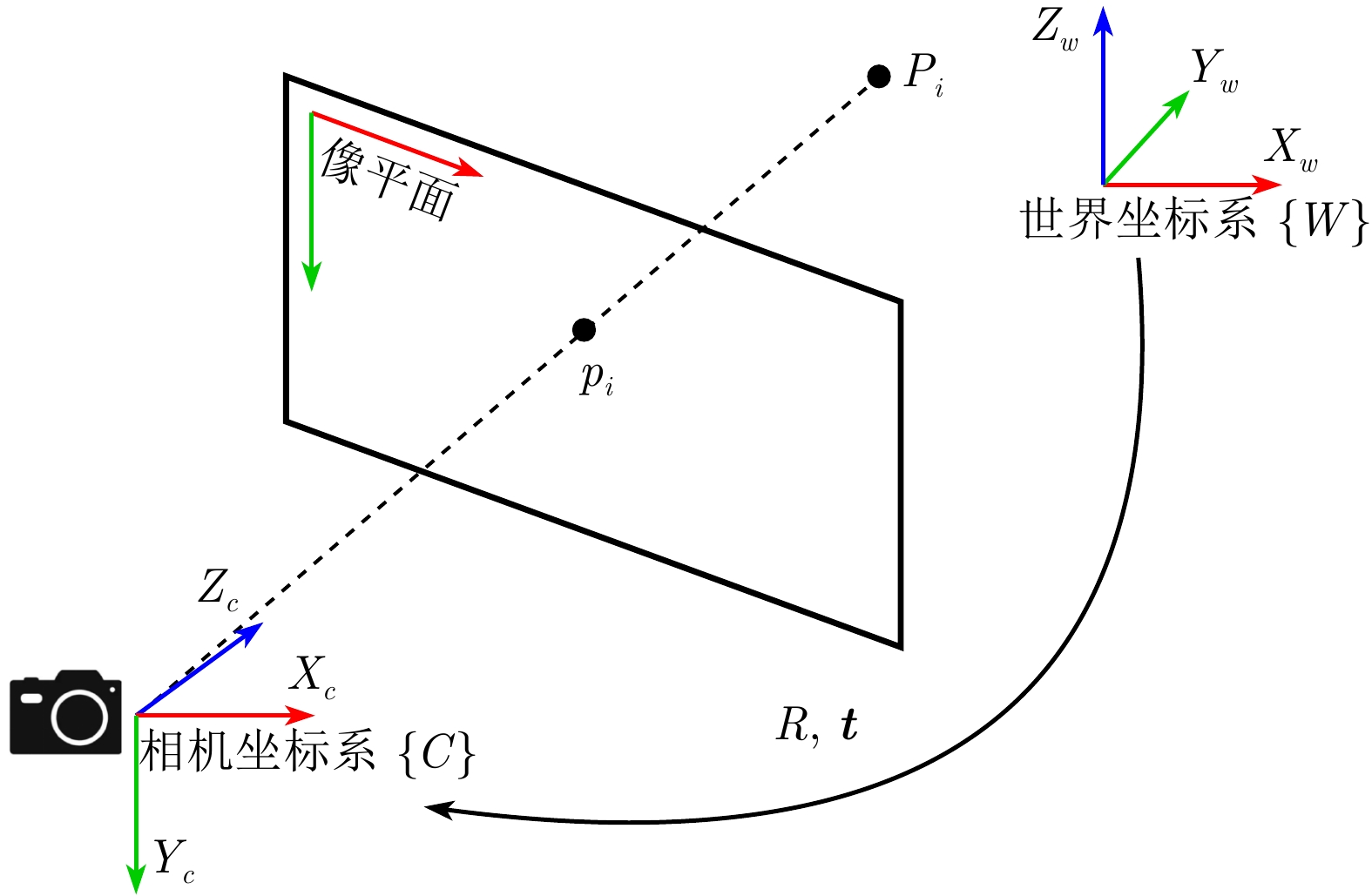
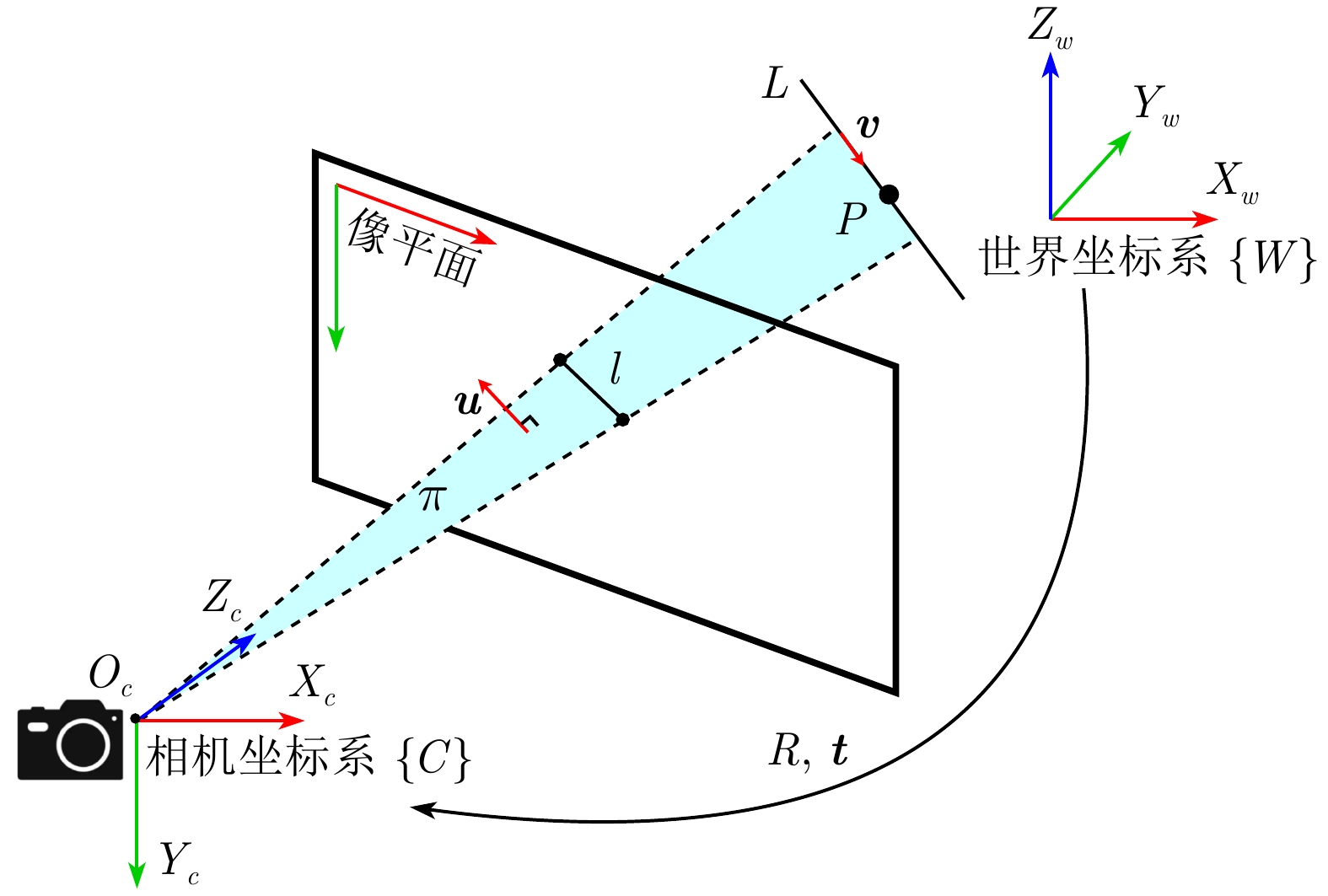
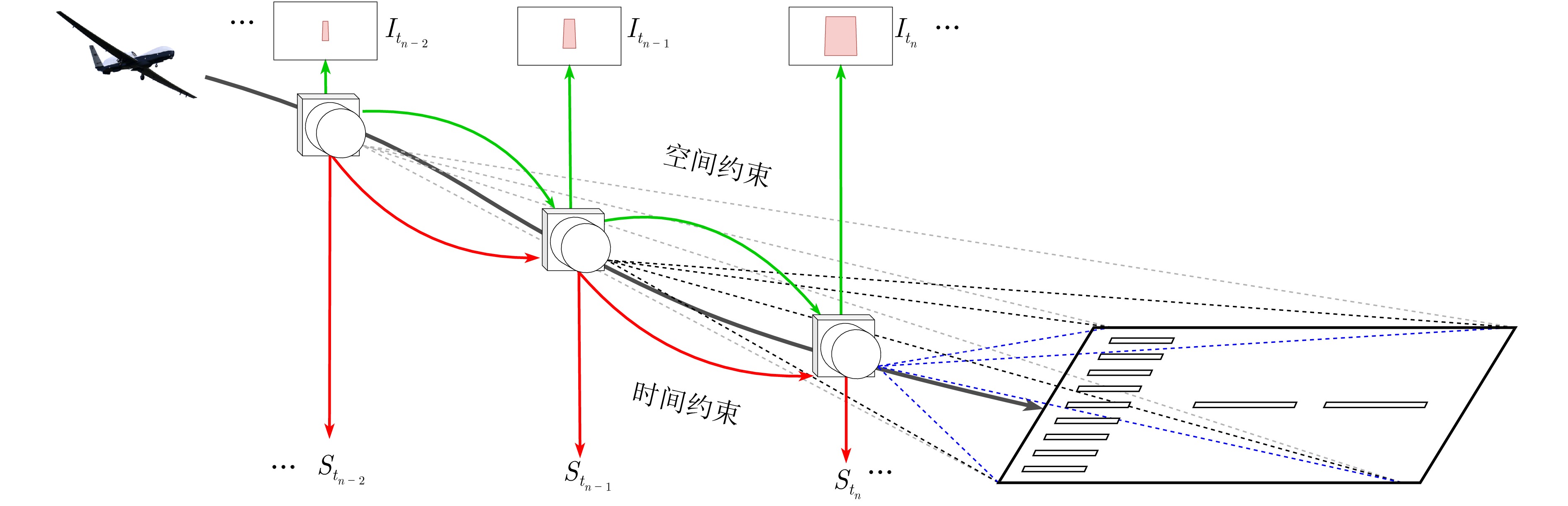
自主着陆技术是制约无人机 (Unmanned aerial vehicle, UAV) 自主性等级提升中极具挑战性的一项技术. 立足于未来基于视觉的无人机自主着陆技术的发展需求, 围绕其中的核心问题——着陆场检测与位姿估计, 对近十年来国内外无人机自主着陆领域中基于视觉的着陆场检测与位姿估计方法研究进展进行总结. 首先, 在分析无人机自主着陆应用需求的基础上, 指出机器视觉在无人机自主着陆领域的应用优势, 并凝练出存在的科学问题; 其次, 按不同应用场景划分对着陆场检测算法进行梳理; 然后, 分别对纯视觉、多源信息融合的位姿估计技术研究成果进行归纳; 最后, 总结该领域有待进一步解决的难点, 并对未来的技术发展趋势进行展望.
自主着陆技术是制约无人机 (Unmanned aerial vehicle, UAV) 自主性等级提升中极具挑战性的一项技术. 立足于未来基于视觉的无人机自主着陆技术的发展需求, 围绕其中的核心问题——着陆场检测与位姿估计, 对近十年来国内外无人机自主着陆领域中基于视觉的着陆场检测与位姿估计方法研究进展进行总结. 首先, 在分析无人机自主着陆应用需求的基础上, 指出机器视觉在无人机自主着陆领域的应用优势, 并凝练出存在的科学问题; 其次, 按不同应用场景划分对着陆场检测算法进行梳理; 然后, 分别对纯视觉、多源信息融合的位姿估计技术研究成果进行归纳; 最后, 总结该领域有待进一步解决的难点, 并对未来的技术发展趋势进行展望.
2024, 50(7): 1305-1314.
doi: 10.16383/j.aas.c210903
摘要:
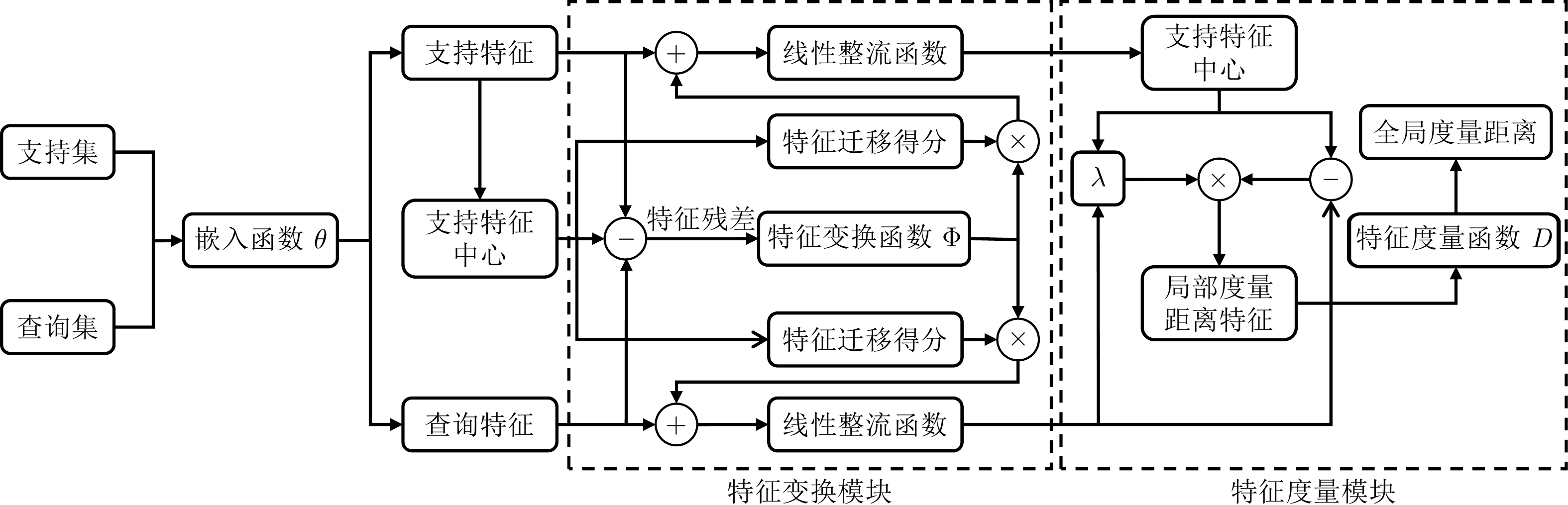
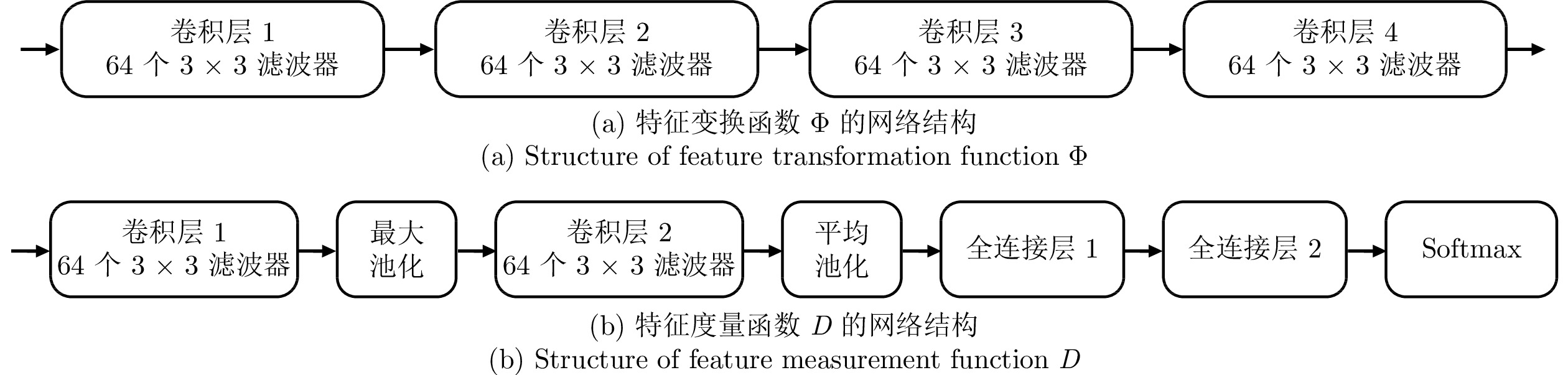
在小样本分类任务中, 每个类别可供训练的样本数量非常有限. 因此在特征空间中同类样本分布稀疏, 异类样本间边界模糊. 提出一种新的基于特征变换和度量网络(Feature transformation and metric networks, FTMN)的小样本学习算法用于小样本分类任务. 算法通过嵌入函数将样本映射到特征空间, 并计算输入该样本与所属类别中心的特征残差. 构造一个特征变换函数对该残差进行学习, 使特征空间内的样本特征经过该函数后向同类样本中心靠拢. 利用变换后的样本特征更新类别中心, 使各类别中心间的距离增大. 算法进一步构造了一种新的度量函数, 对样本特征中每个局部特征点的度量距离进行联合表达, 该函数能够同时对样本特征间的夹角和欧氏距离进行优化. 算法在小样本分类任务常用数据集上的优秀表现证明了算法的有效性和泛化性.
在小样本分类任务中, 每个类别可供训练的样本数量非常有限. 因此在特征空间中同类样本分布稀疏, 异类样本间边界模糊. 提出一种新的基于特征变换和度量网络(Feature transformation and metric networks, FTMN)的小样本学习算法用于小样本分类任务. 算法通过嵌入函数将样本映射到特征空间, 并计算输入该样本与所属类别中心的特征残差. 构造一个特征变换函数对该残差进行学习, 使特征空间内的样本特征经过该函数后向同类样本中心靠拢. 利用变换后的样本特征更新类别中心, 使各类别中心间的距离增大. 算法进一步构造了一种新的度量函数, 对样本特征中每个局部特征点的度量距离进行联合表达, 该函数能够同时对样本特征间的夹角和欧氏距离进行优化. 算法在小样本分类任务常用数据集上的优秀表现证明了算法的有效性和泛化性.
2024, 50(7): 1315-1332.
doi: 10.16383/j.aas.c210673
摘要:
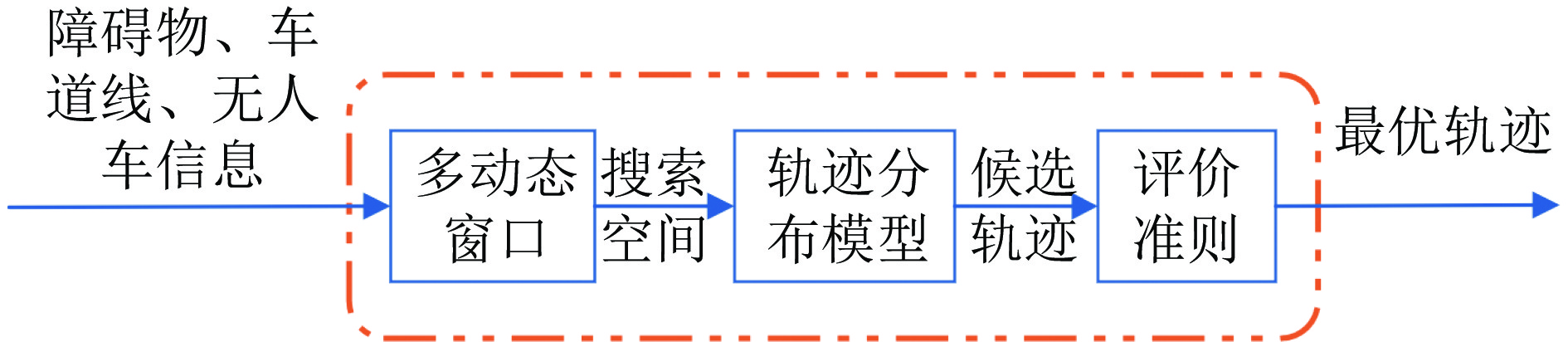
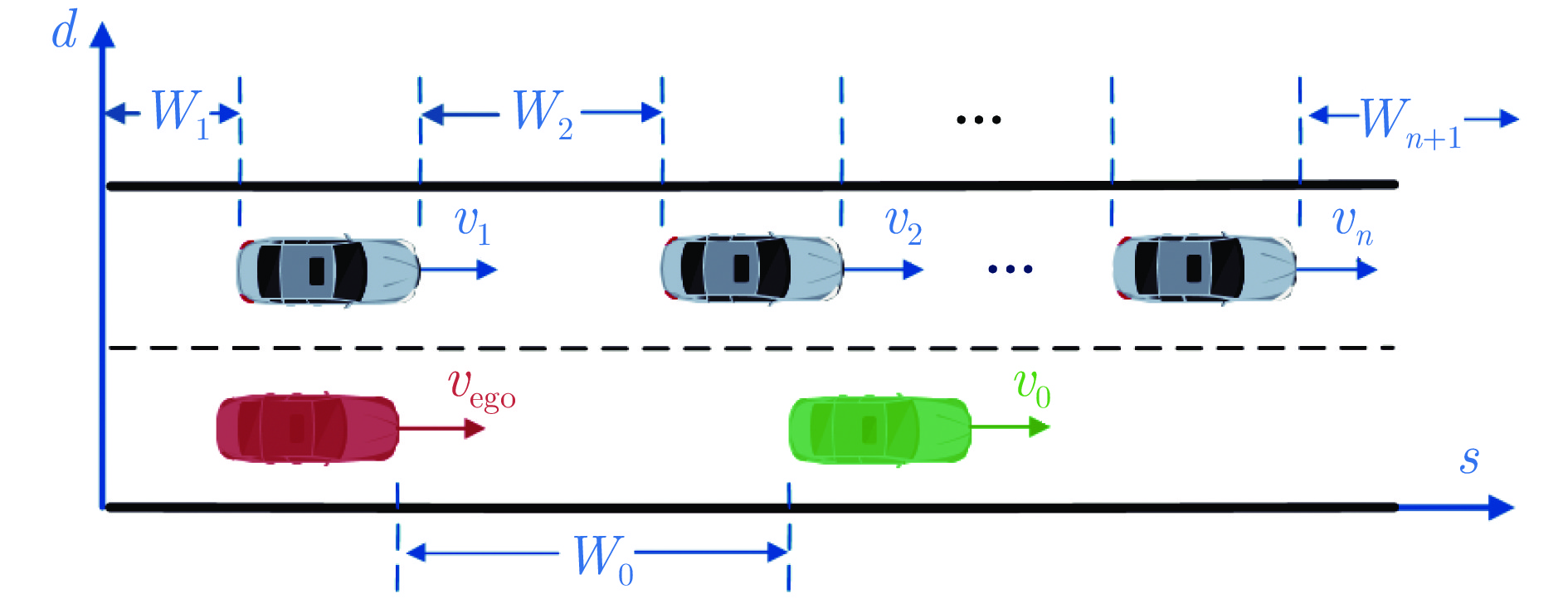
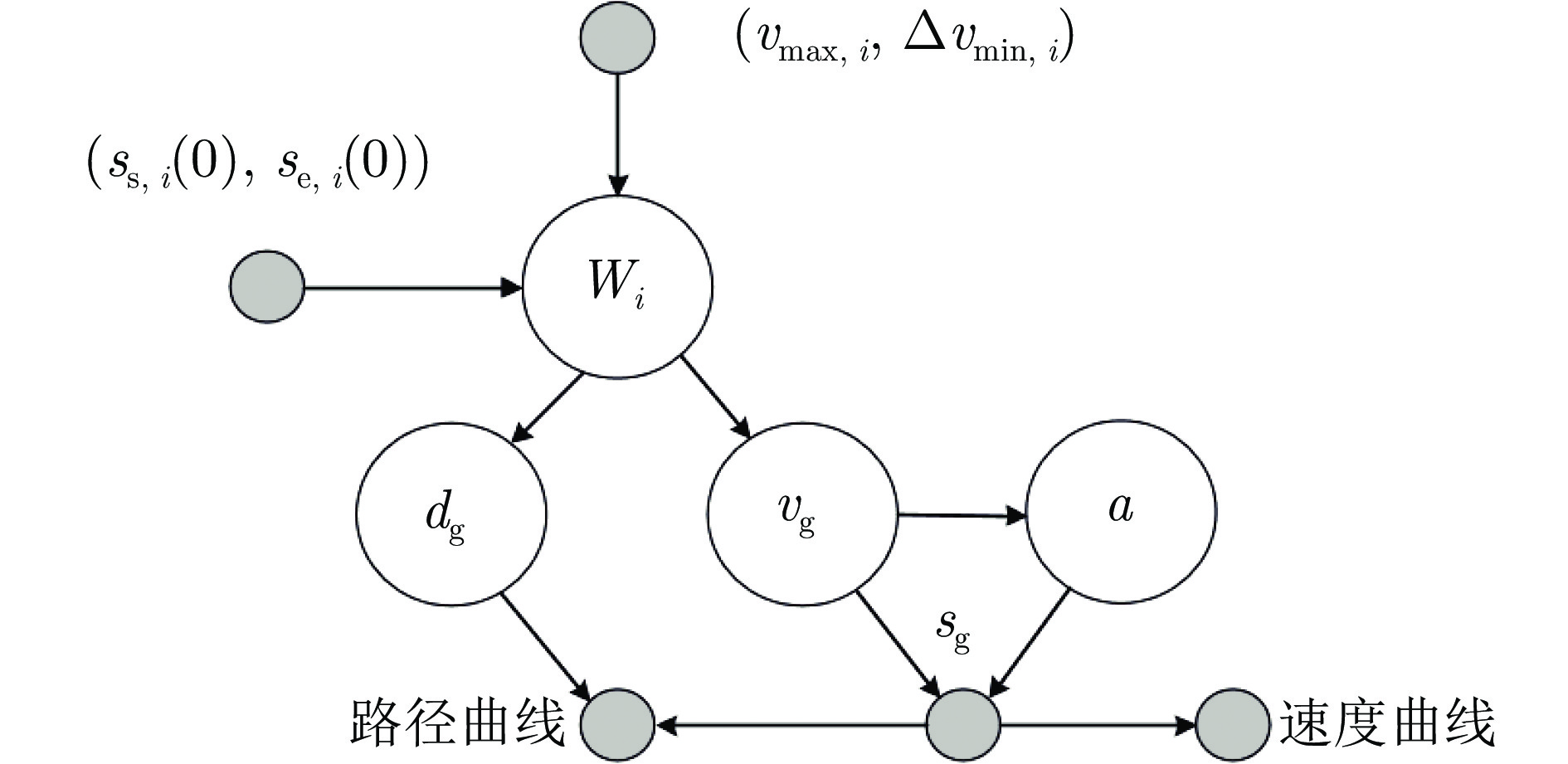
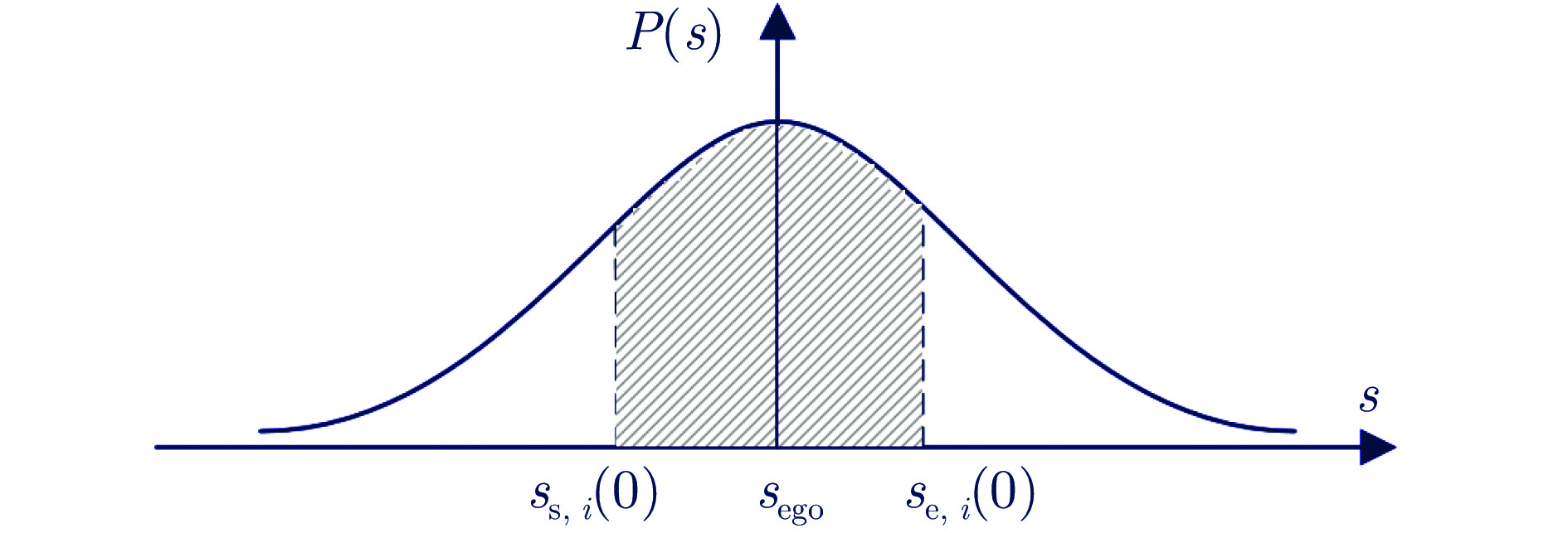
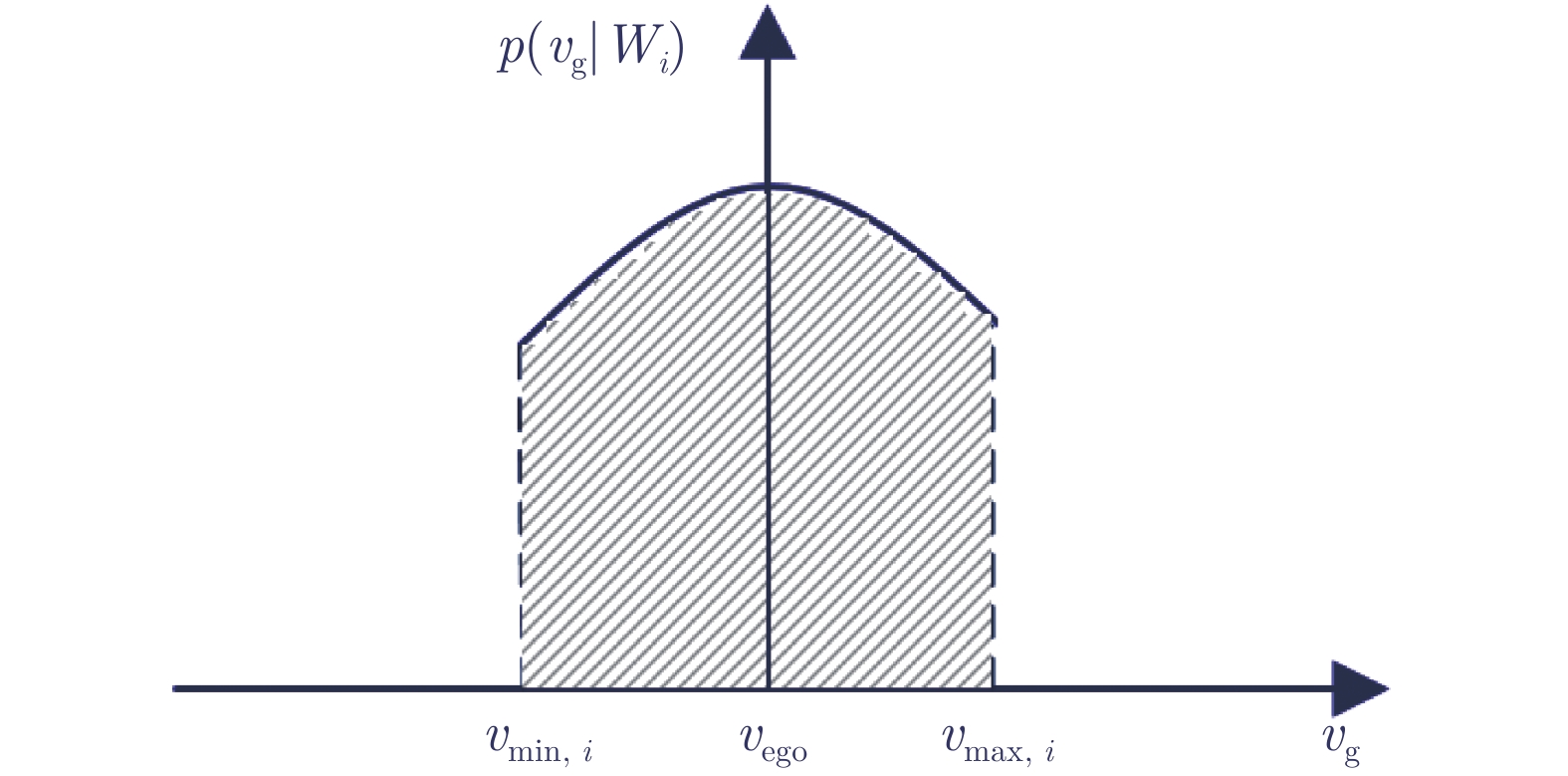
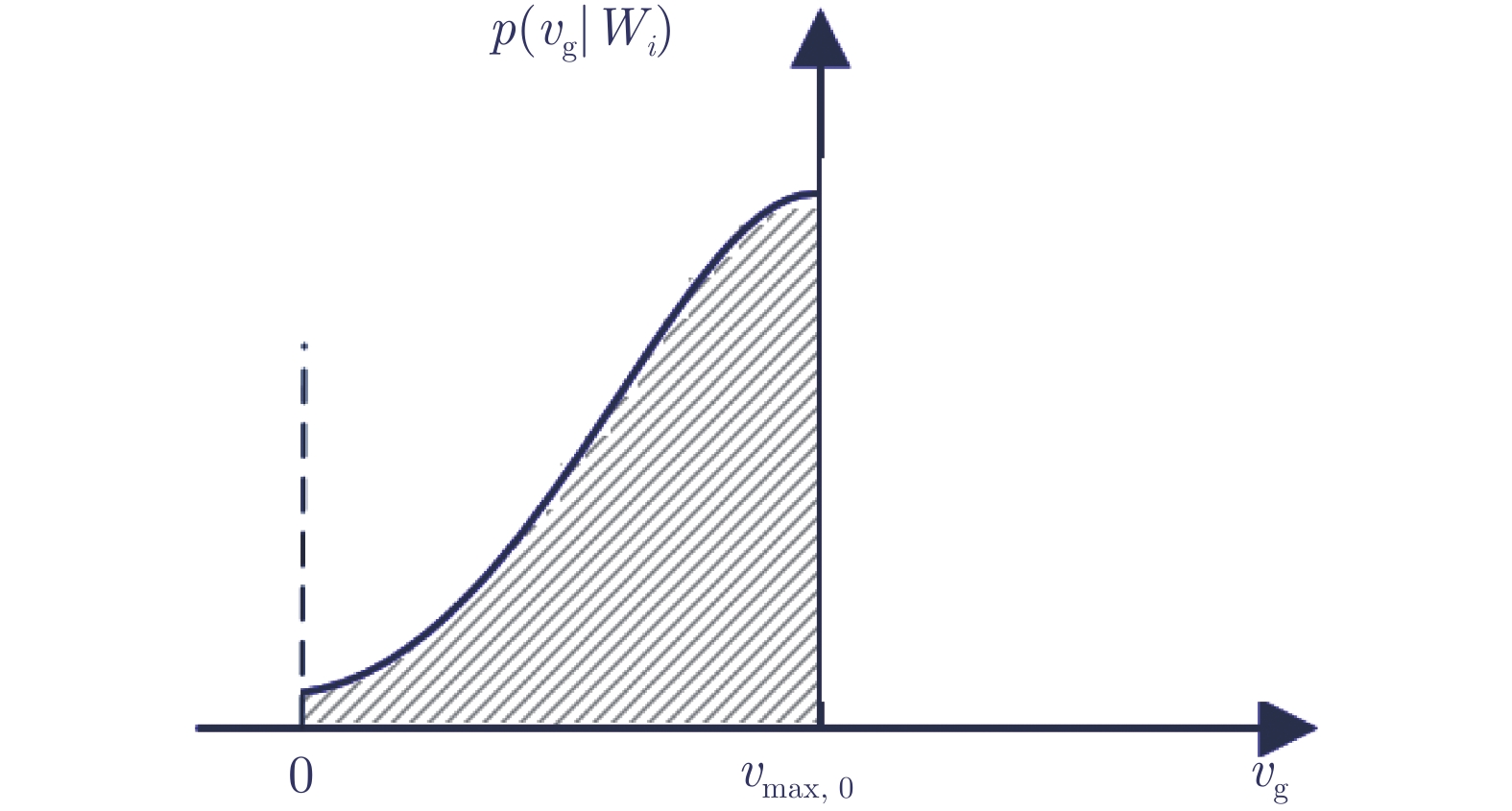
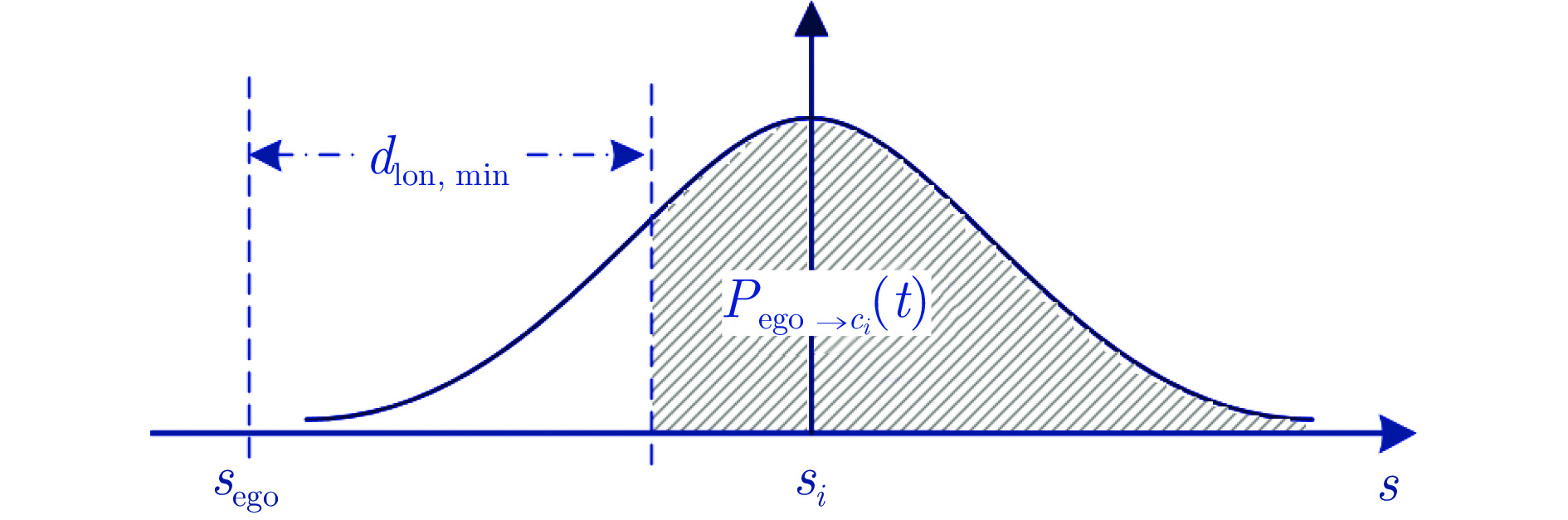
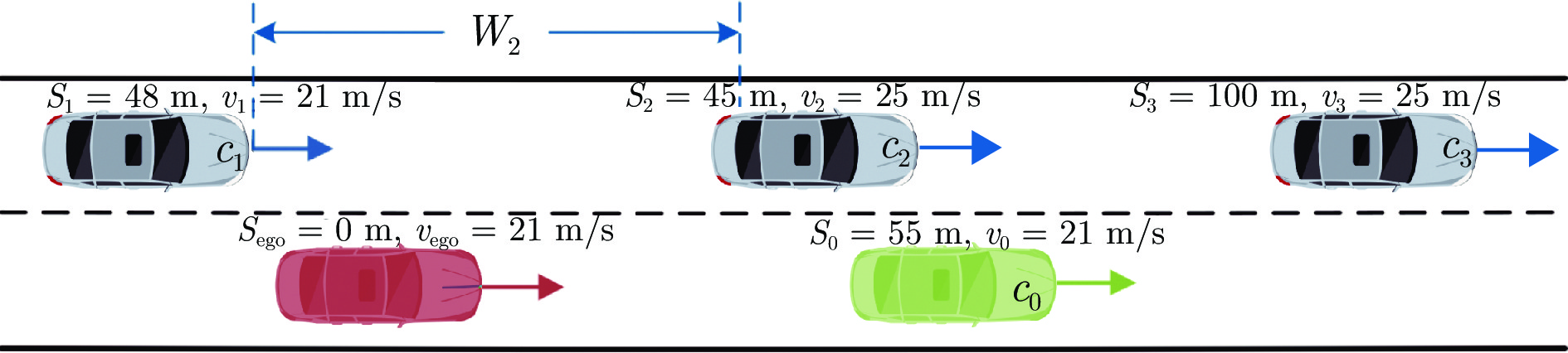
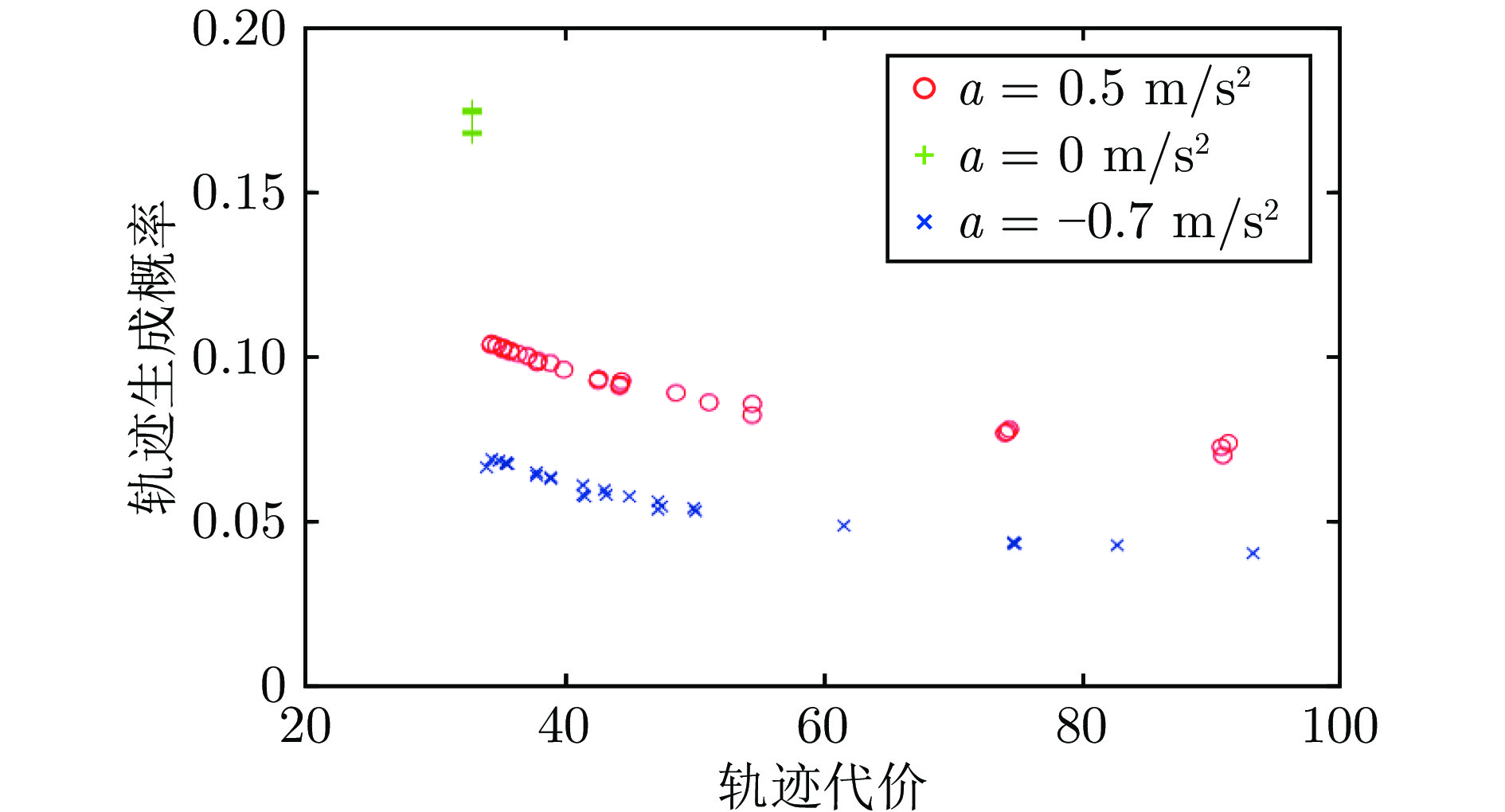
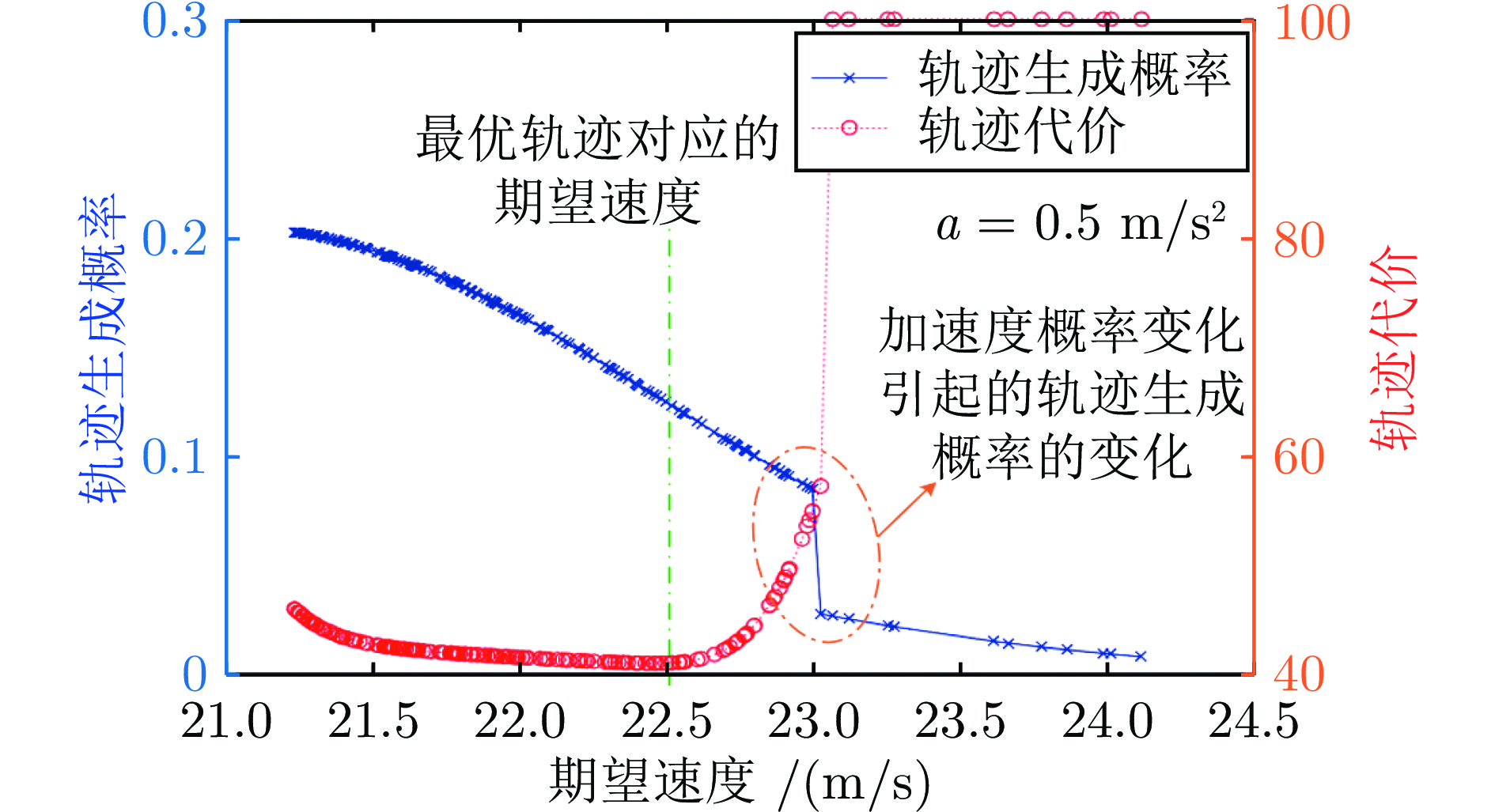
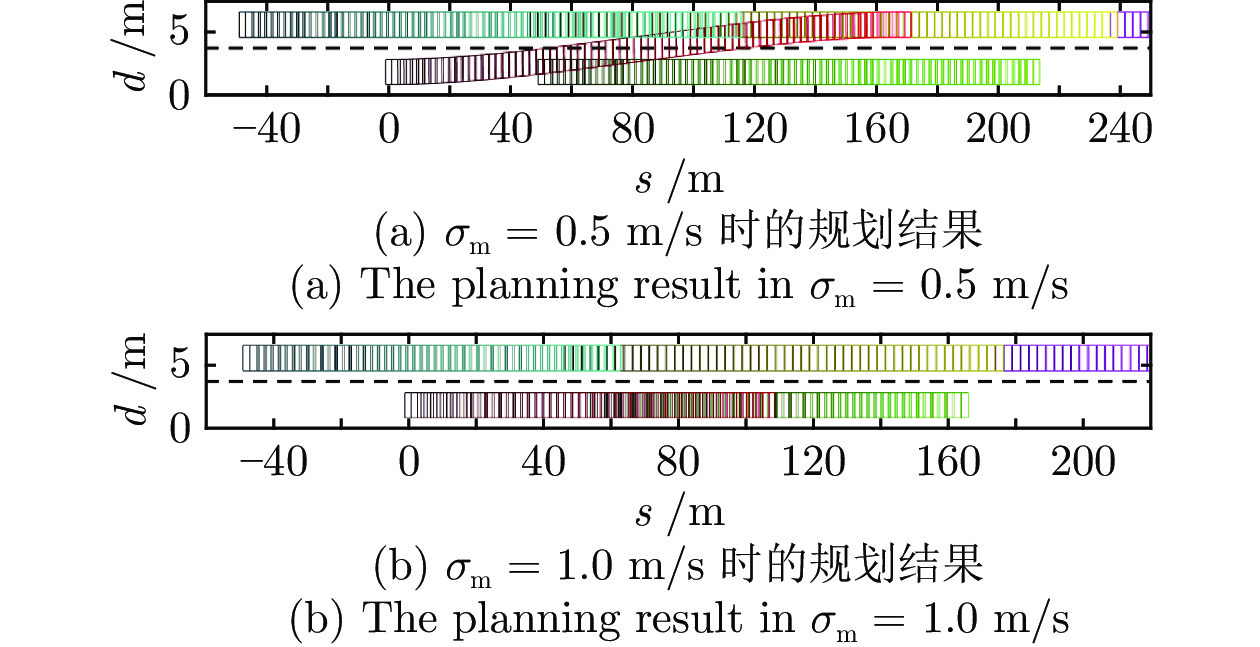
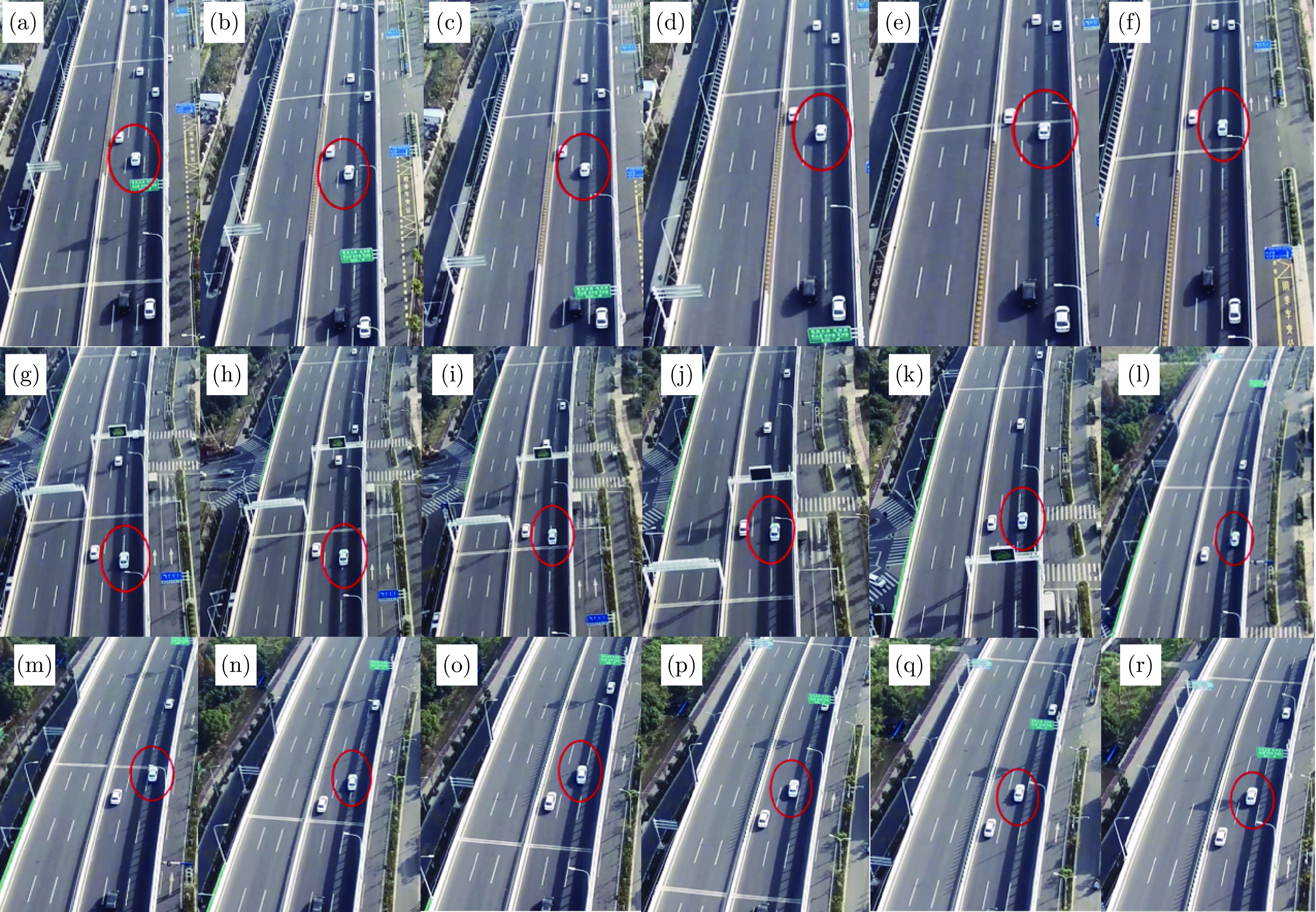
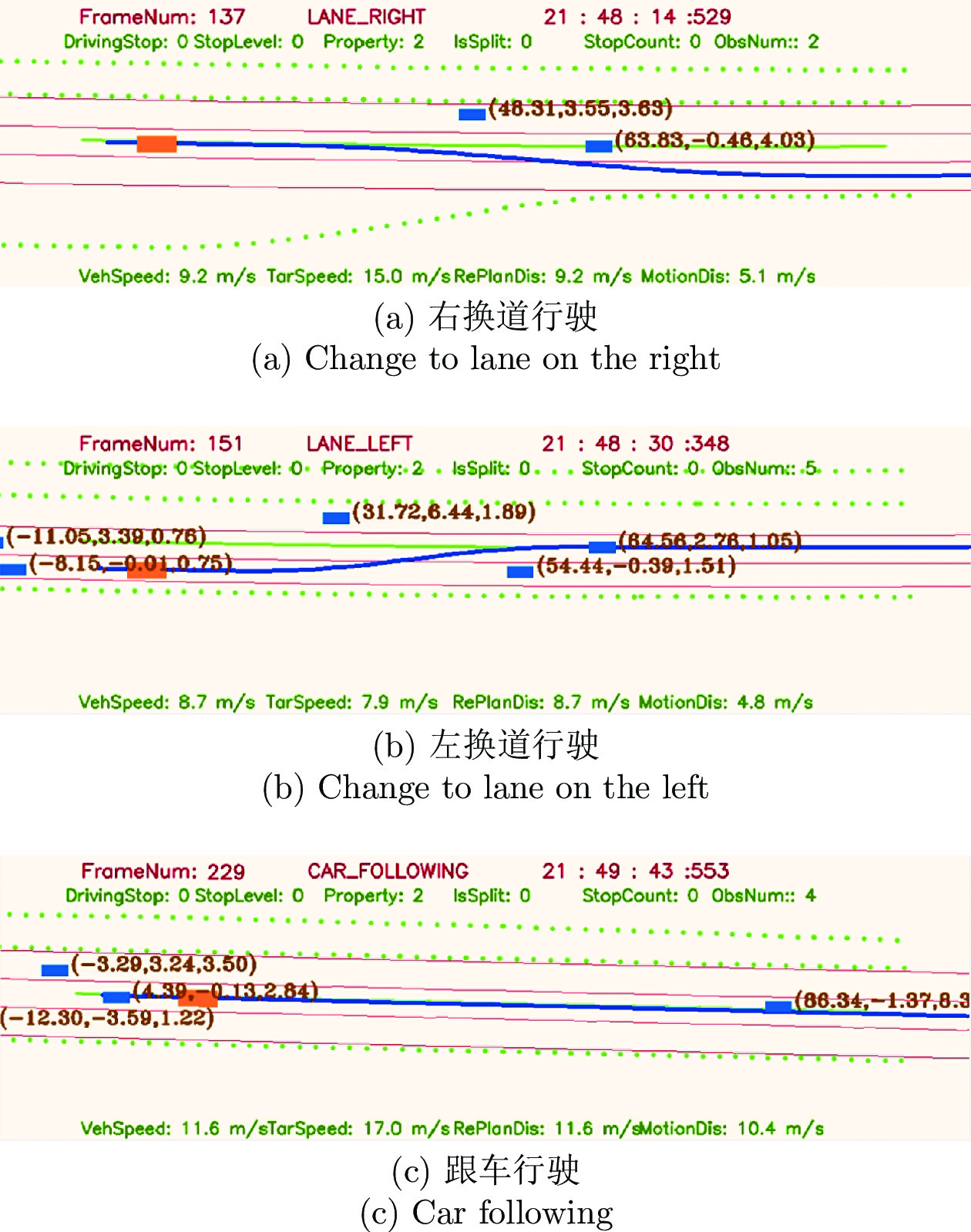
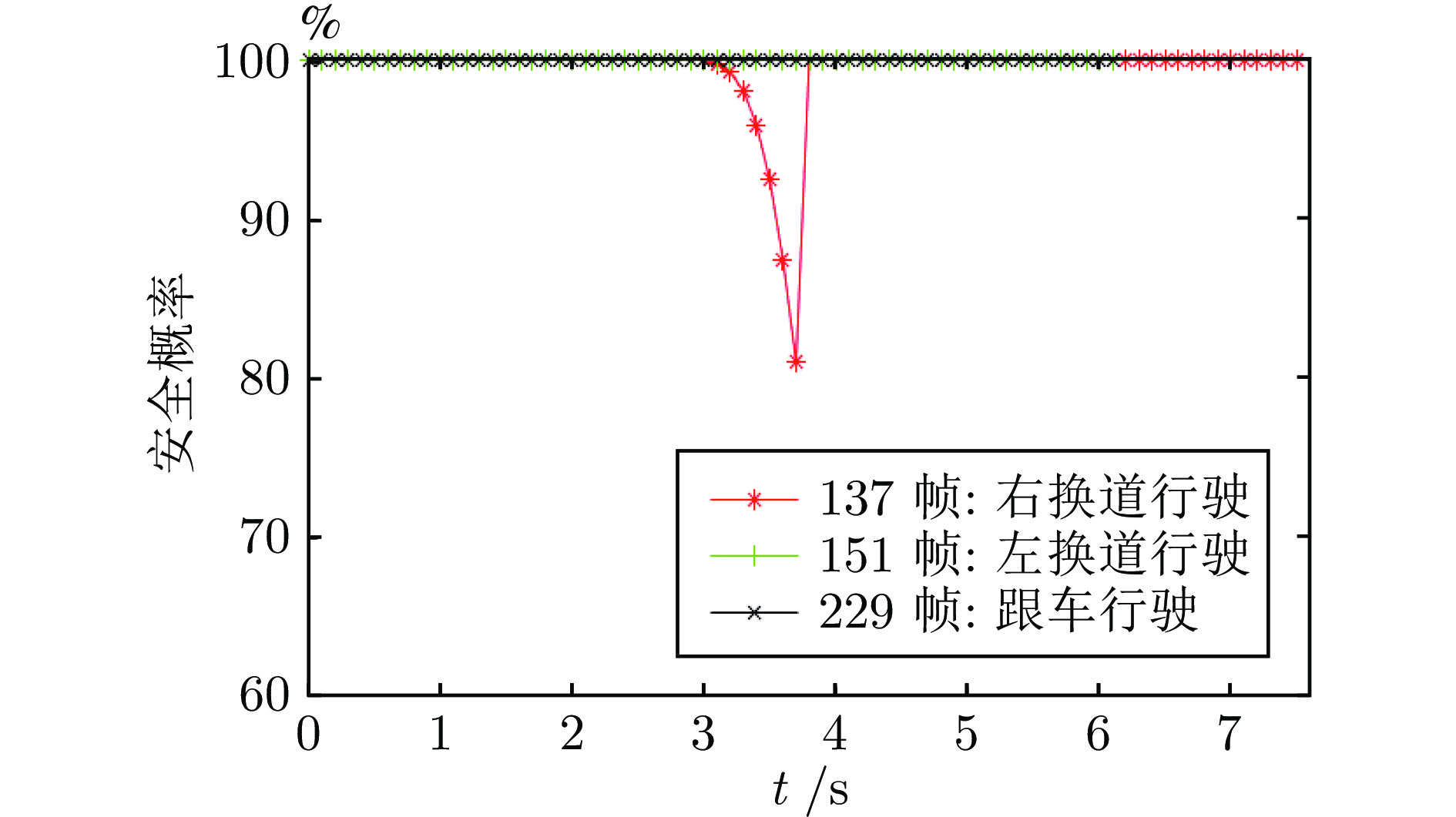
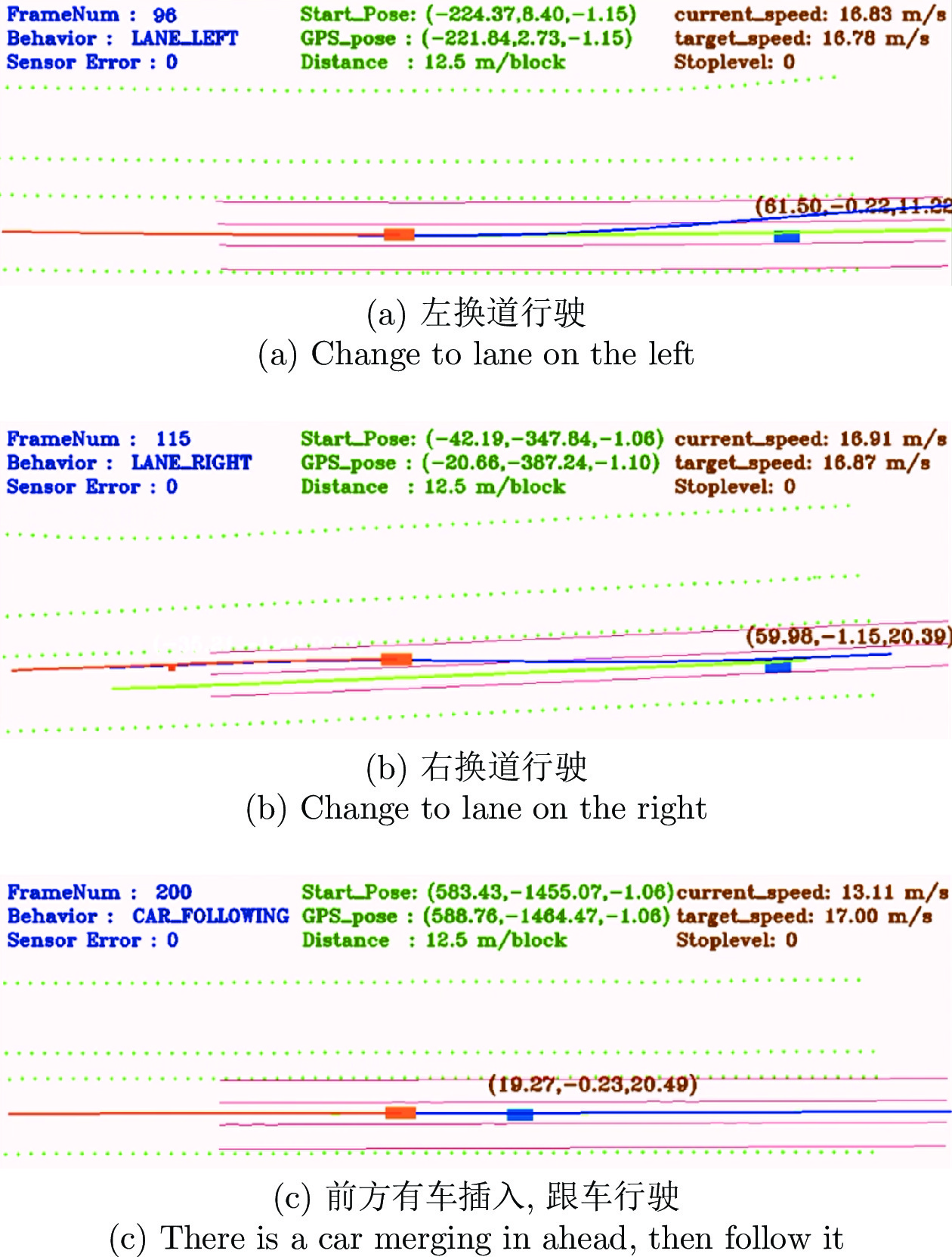
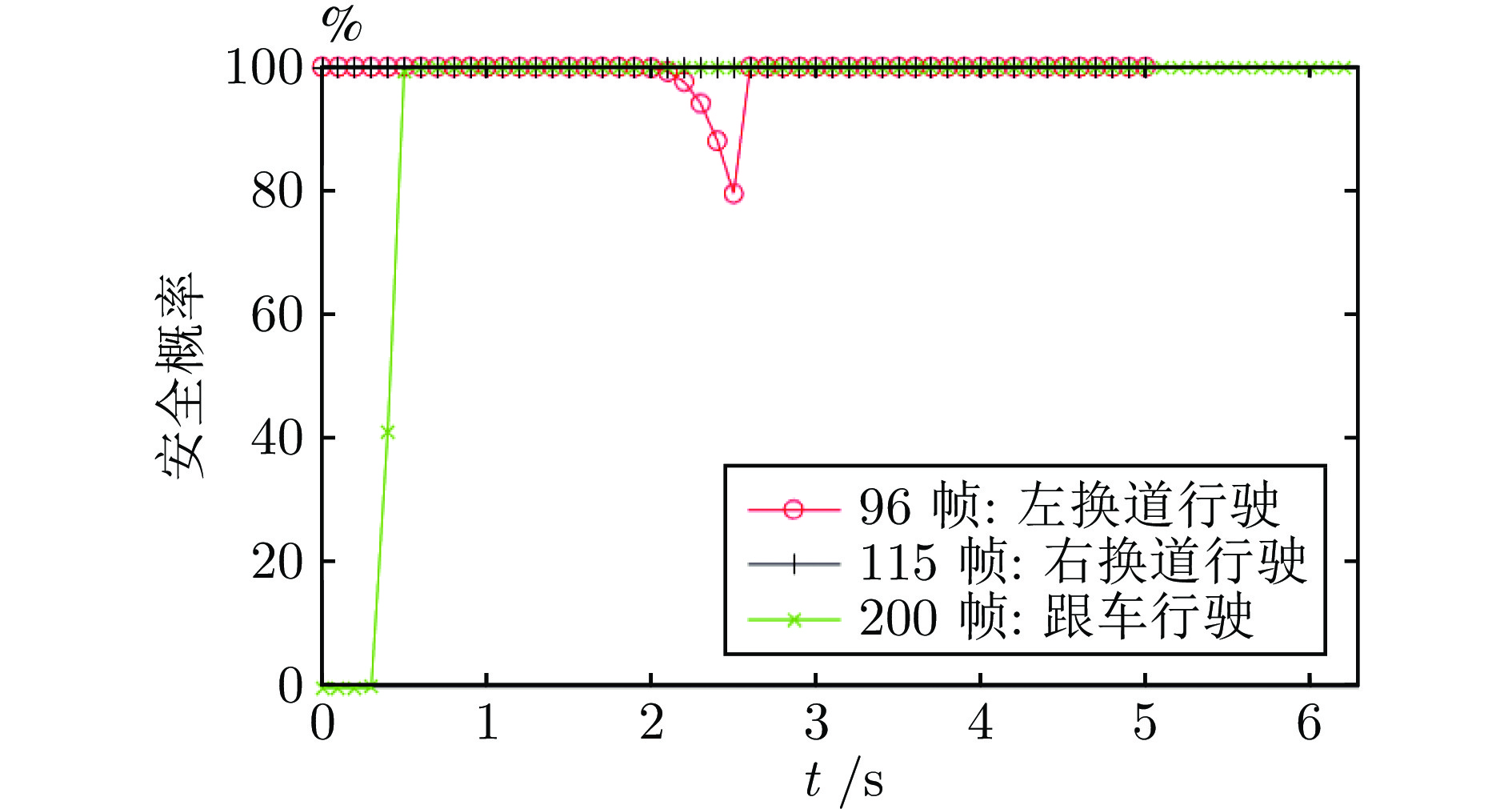
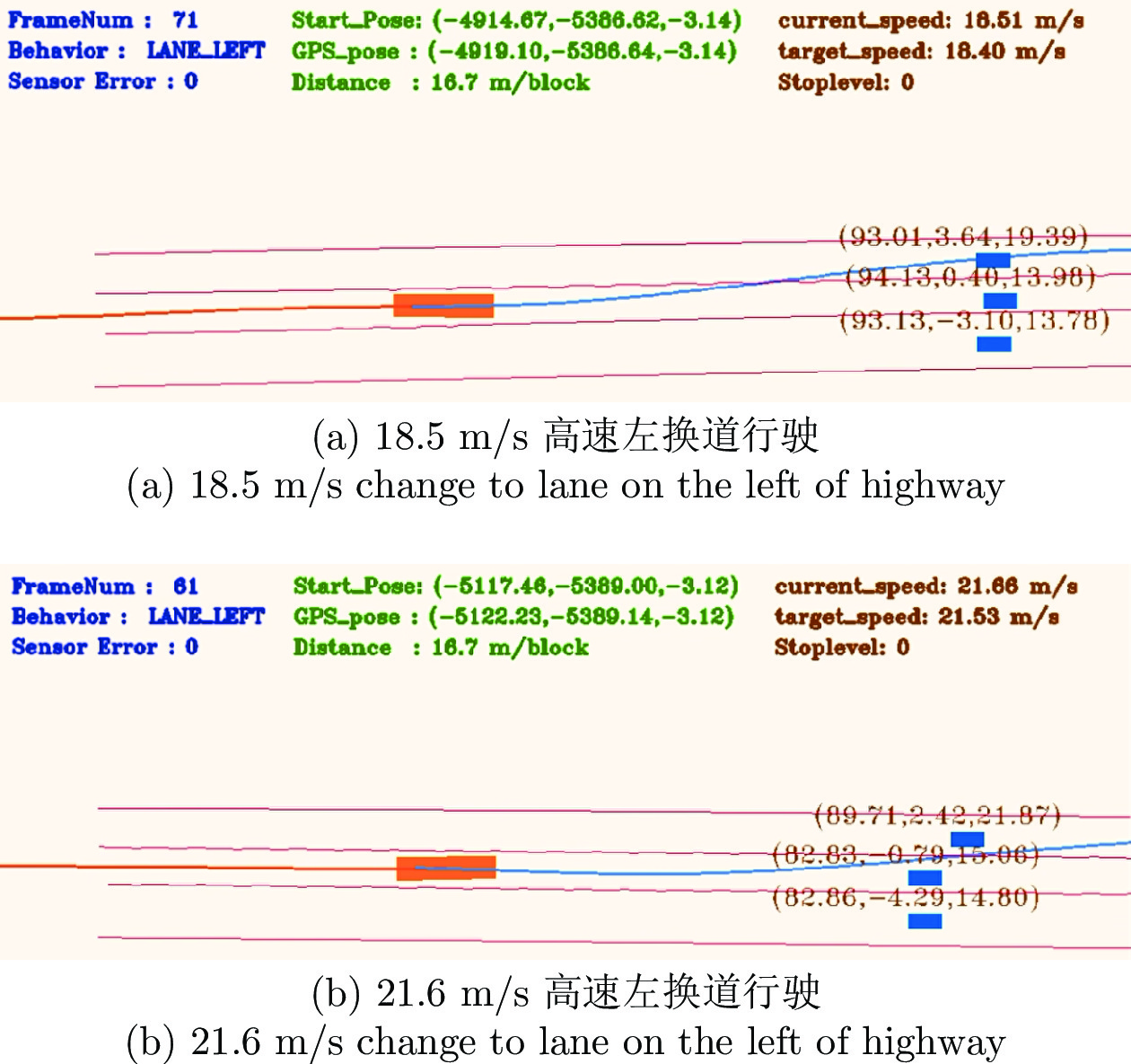
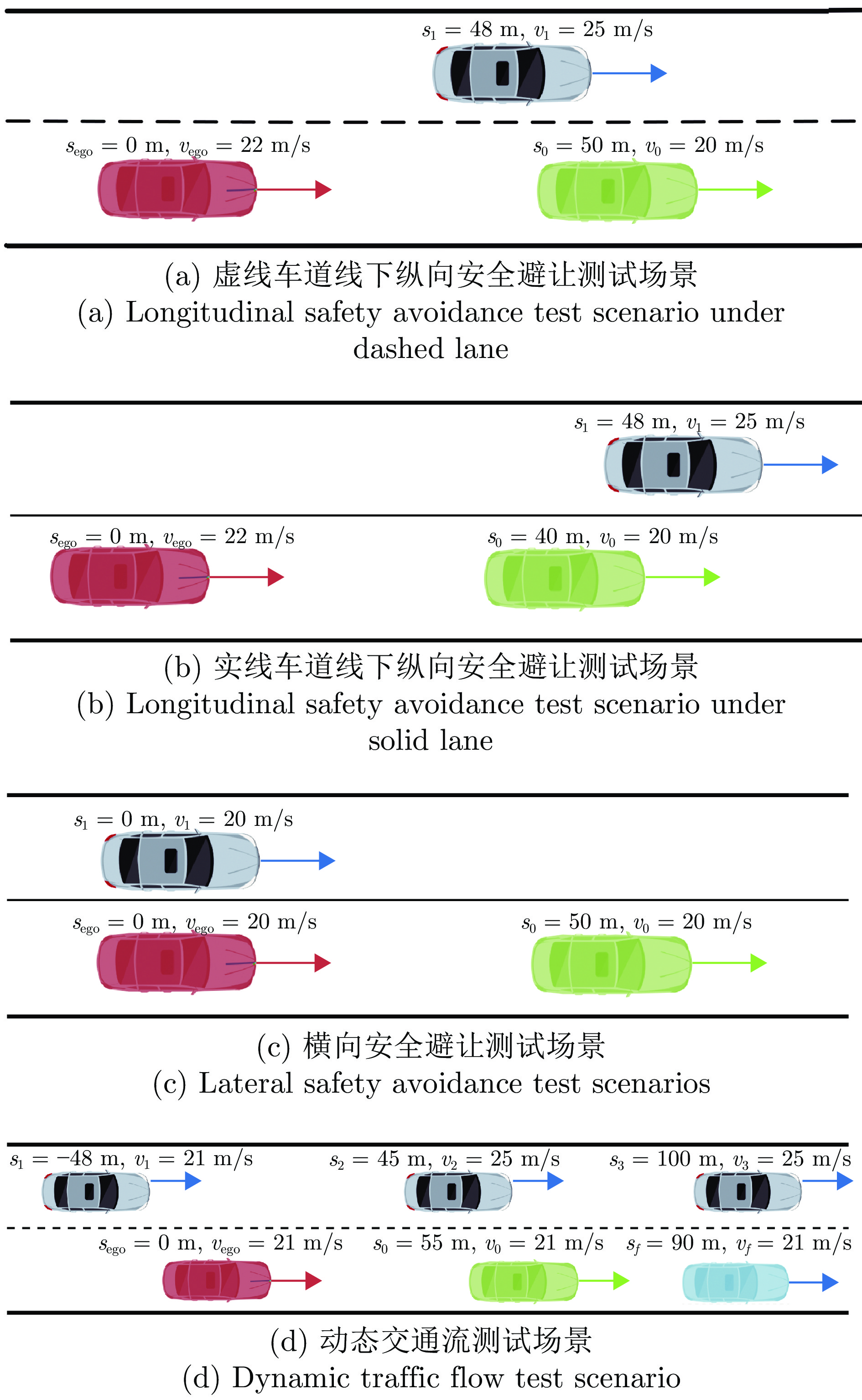
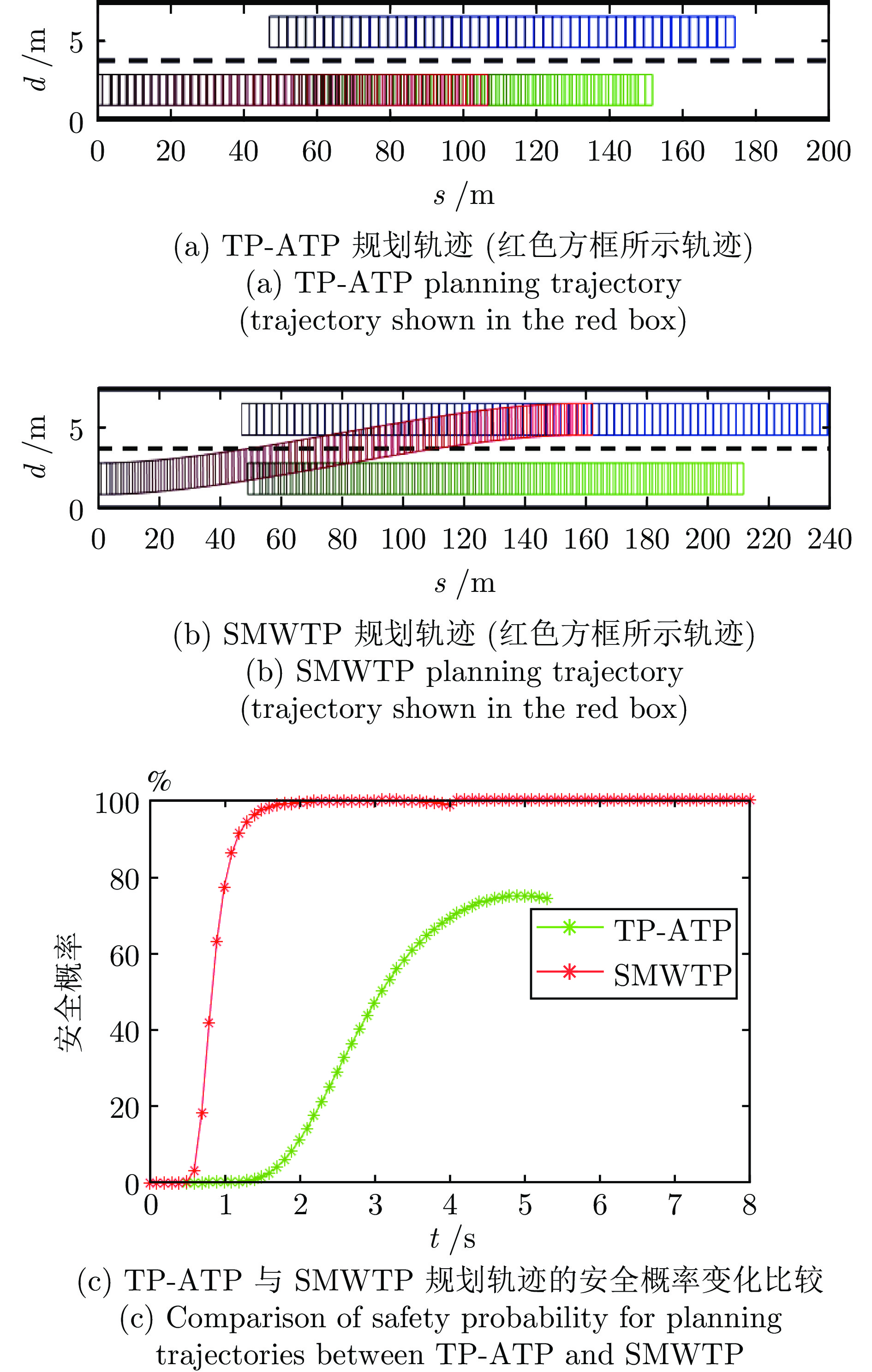
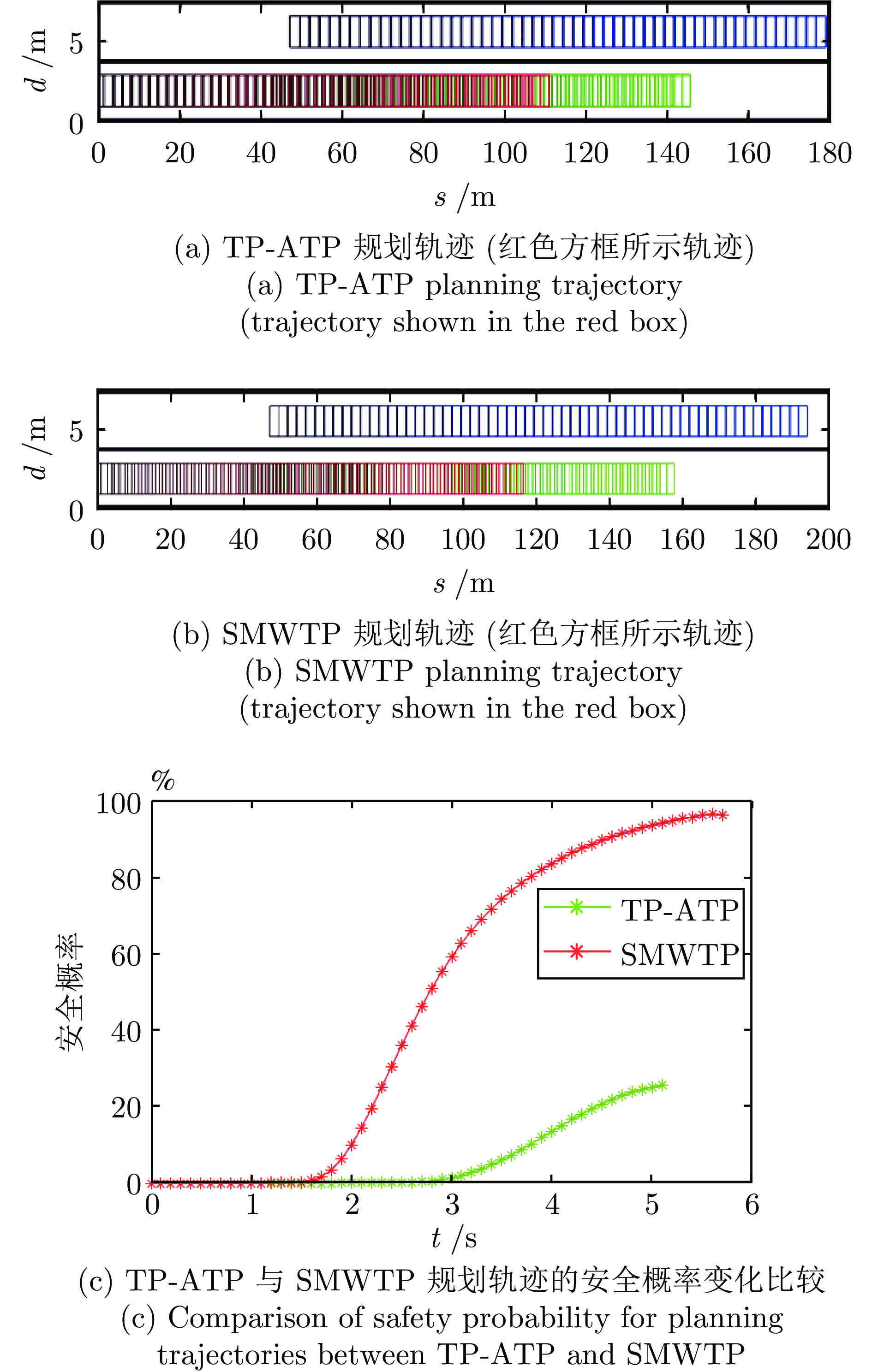
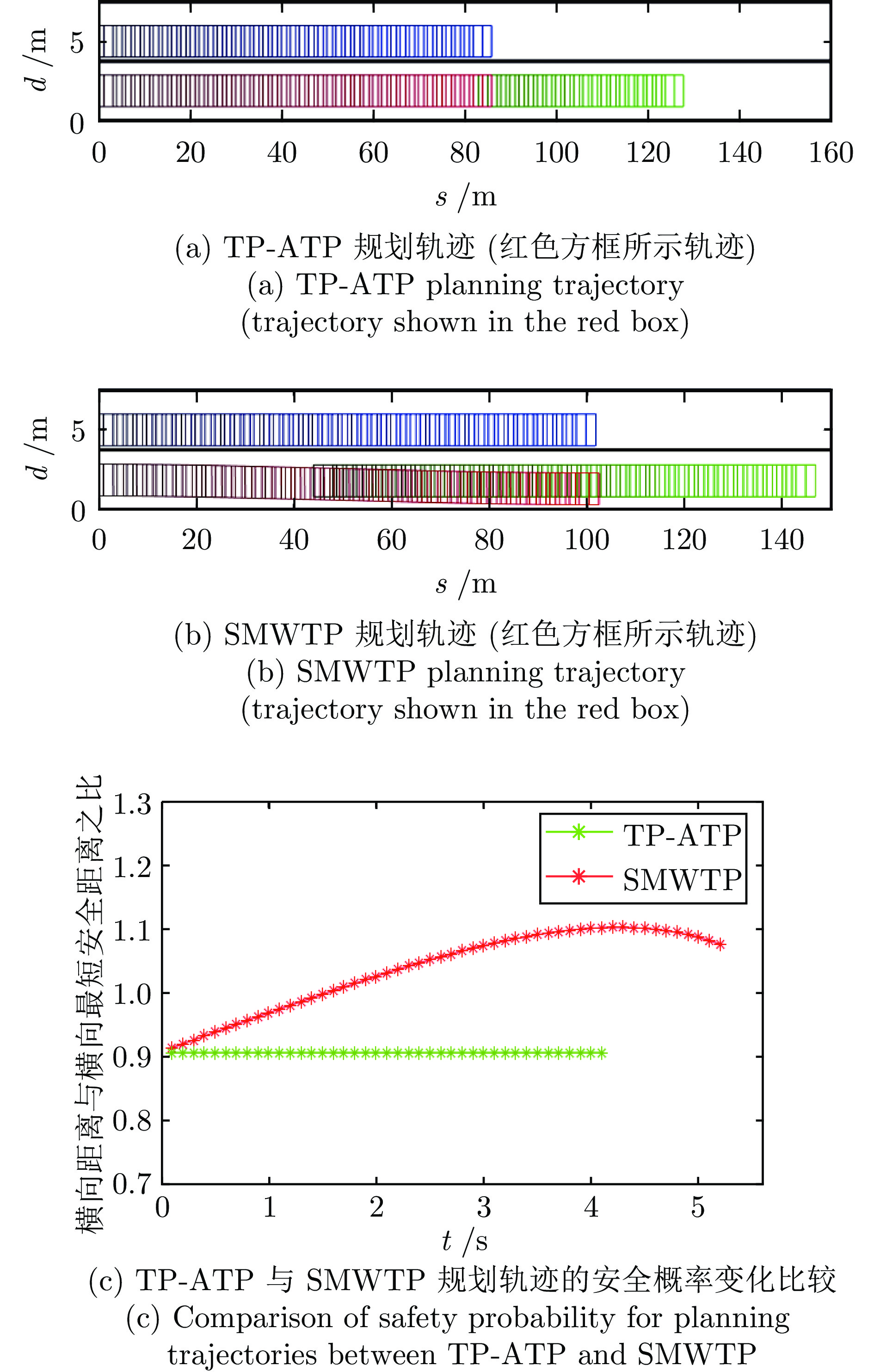
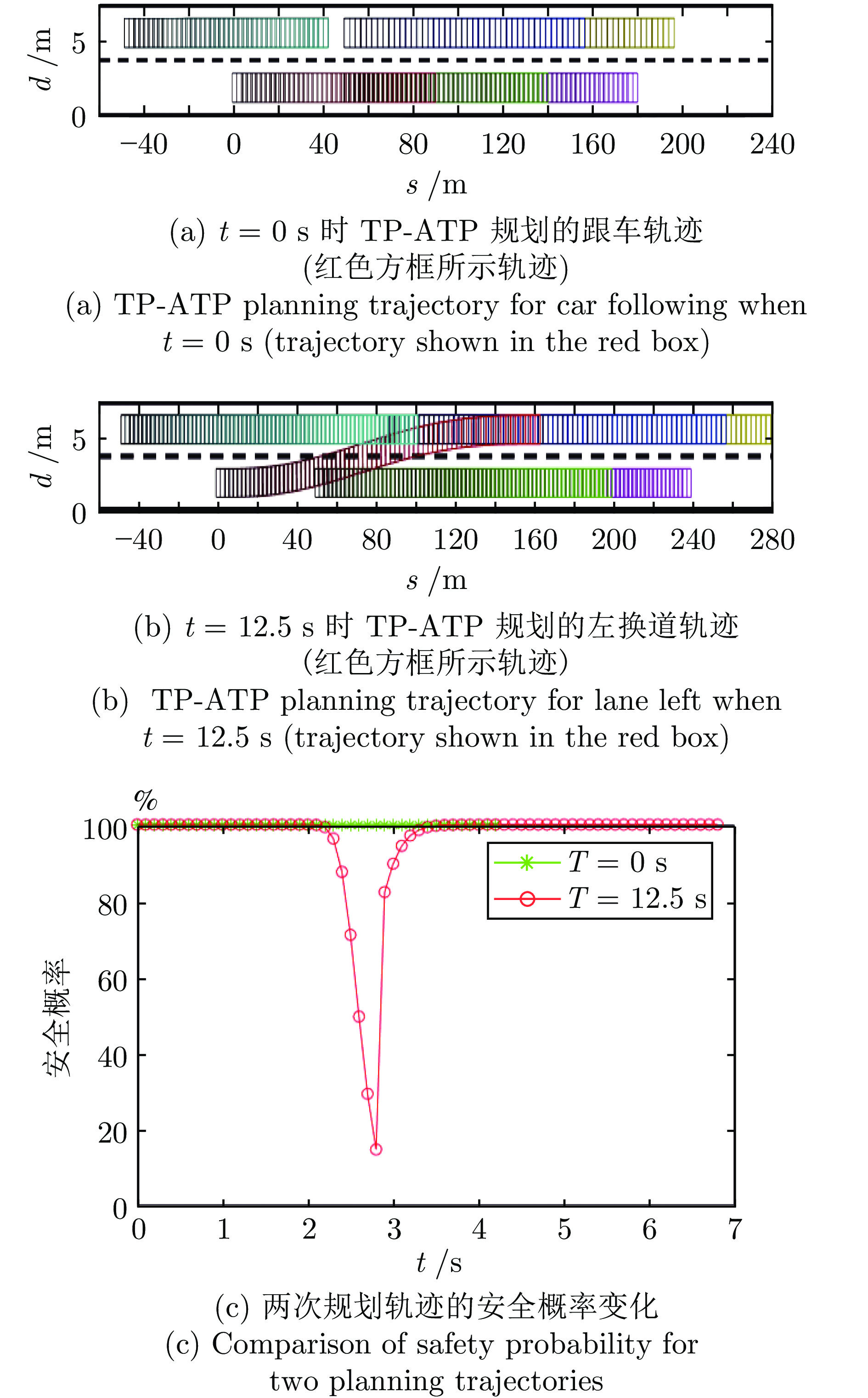
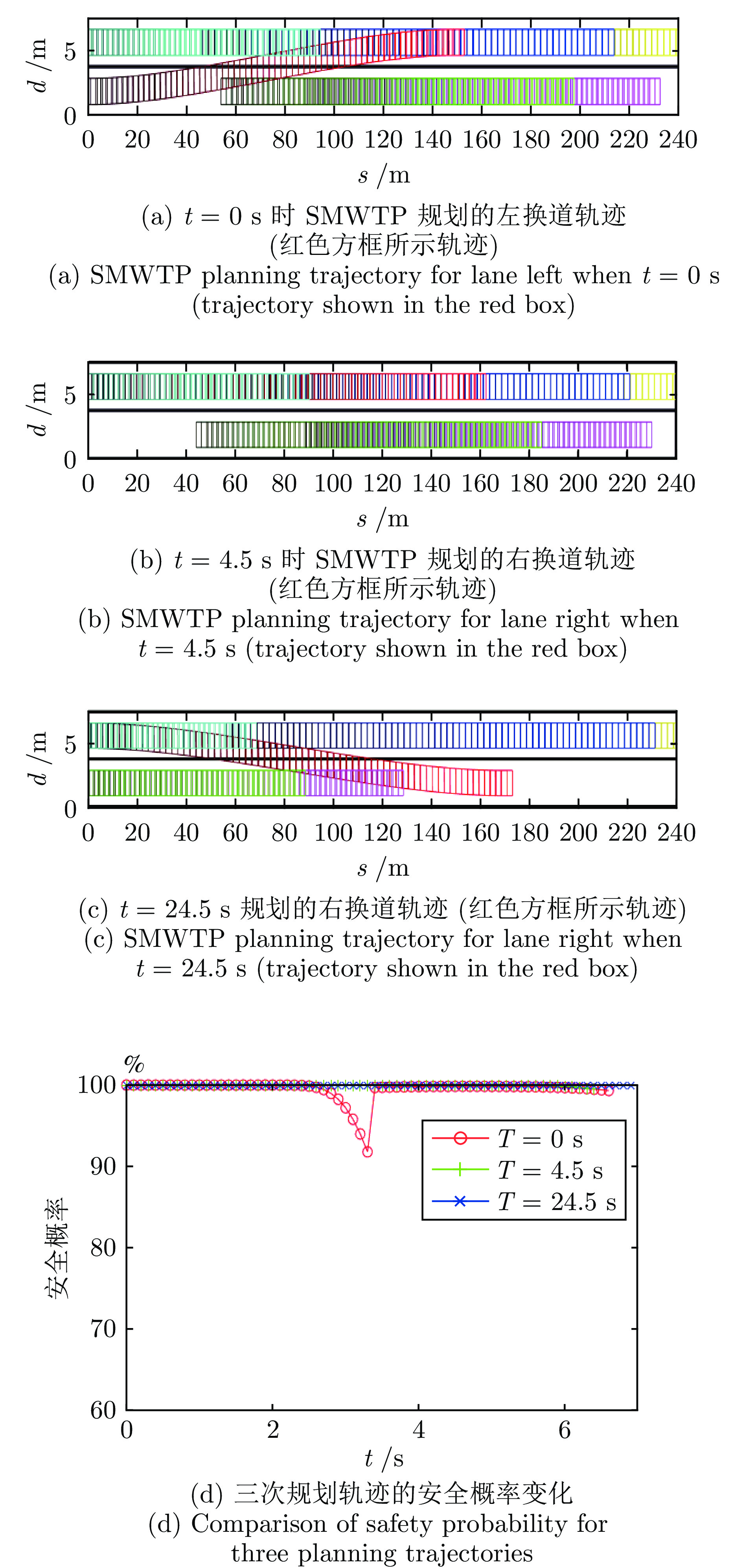
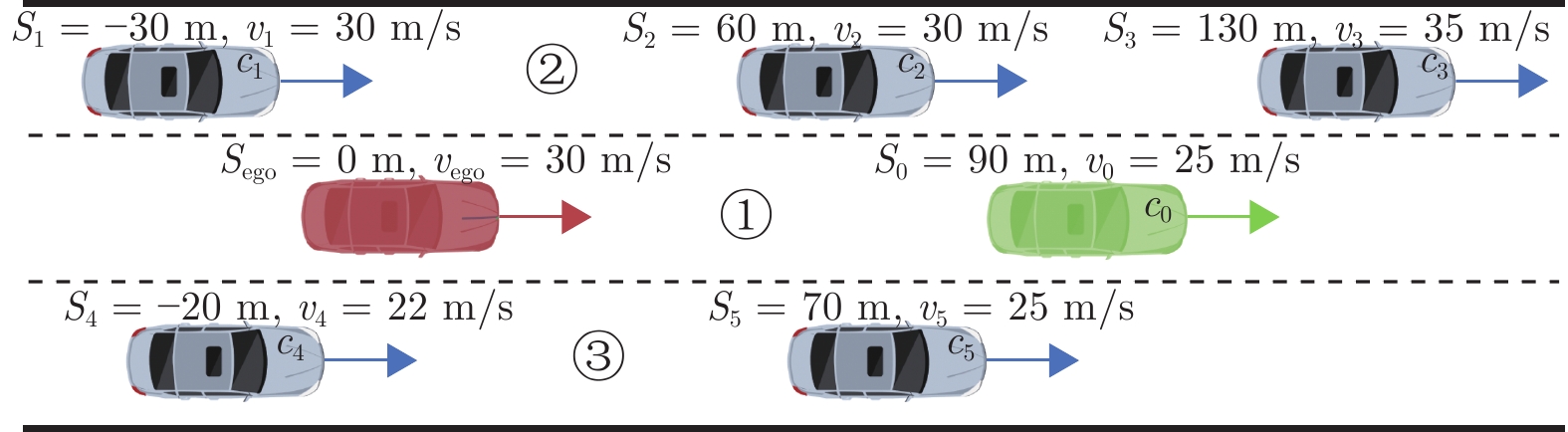
高速公路无人驾驶轨迹规划面临着实时性强、安全性高的挑战. 为此, 提出一种分层抽样多动态窗口的轨迹规划算法(Stratified sampling based multi-dynamic window trajectory planner, SMWTP). 首先, 用多动态窗口表征可行轨迹的搜索空间, 并基于贝叶斯网络构建轨迹概率分布模型. 其次, 采用先速度后路径的分层抽样策略生成符合动态场景约束的候选轨迹集合. 最后, 利用引入障碍车辆速度估计不确定性的责任敏感安全模型(Responsibility sensitive safety, RSS)从中选择最优轨迹. 大量仿真实验和实际交通场景测试验证了算法的有效性, 对比实验结果表明, 所提算法性能显著优于人工势场最优轨迹规划算法和多动态窗口模拟退火轨迹规划算法.
高速公路无人驾驶轨迹规划面临着实时性强、安全性高的挑战. 为此, 提出一种分层抽样多动态窗口的轨迹规划算法(Stratified sampling based multi-dynamic window trajectory planner, SMWTP). 首先, 用多动态窗口表征可行轨迹的搜索空间, 并基于贝叶斯网络构建轨迹概率分布模型. 其次, 采用先速度后路径的分层抽样策略生成符合动态场景约束的候选轨迹集合. 最后, 利用引入障碍车辆速度估计不确定性的责任敏感安全模型(Responsibility sensitive safety, RSS)从中选择最优轨迹. 大量仿真实验和实际交通场景测试验证了算法的有效性, 对比实验结果表明, 所提算法性能显著优于人工势场最优轨迹规划算法和多动态窗口模拟退火轨迹规划算法.

2024, 50(7): 1333-1344.
doi: 10.16383/j.aas.c230567
摘要:
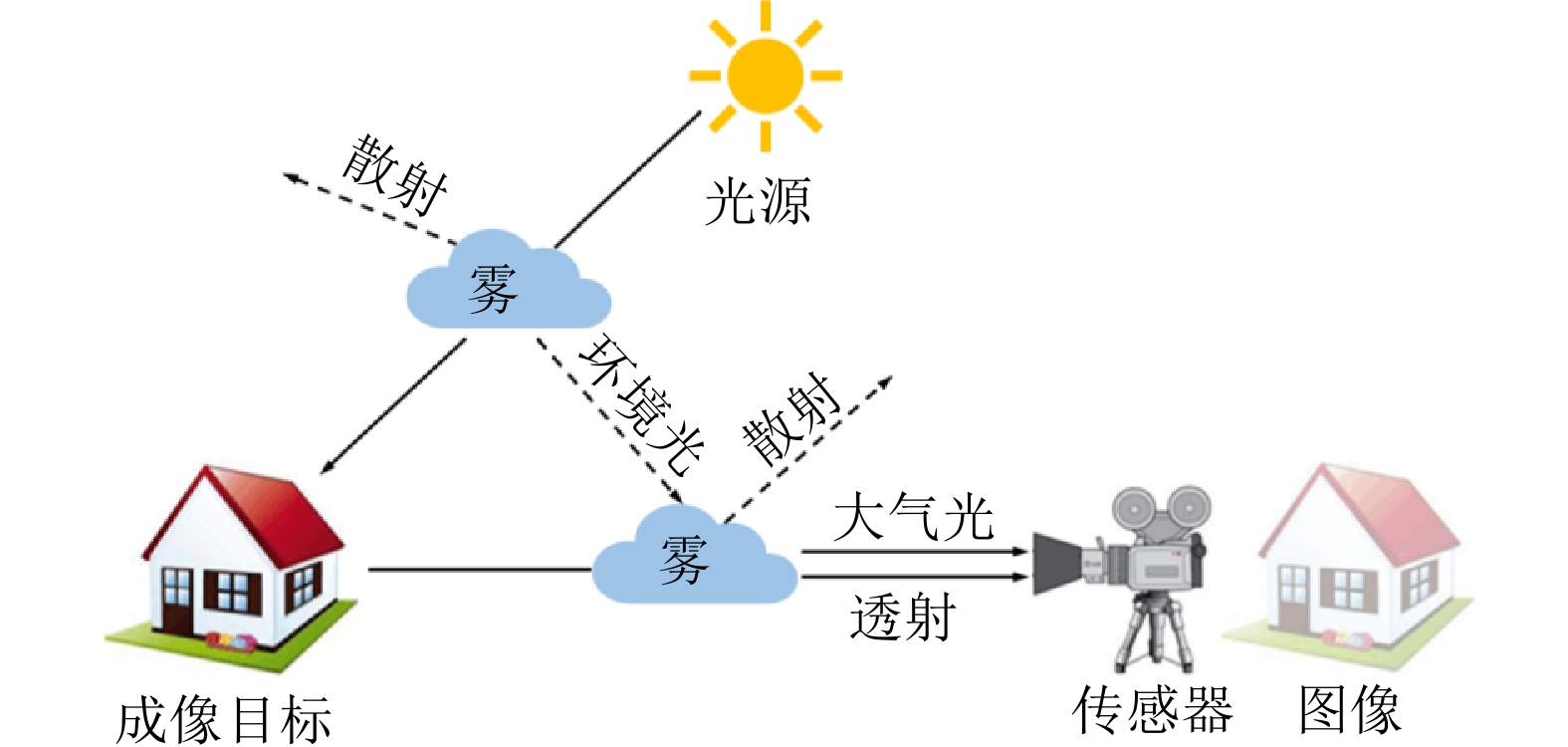
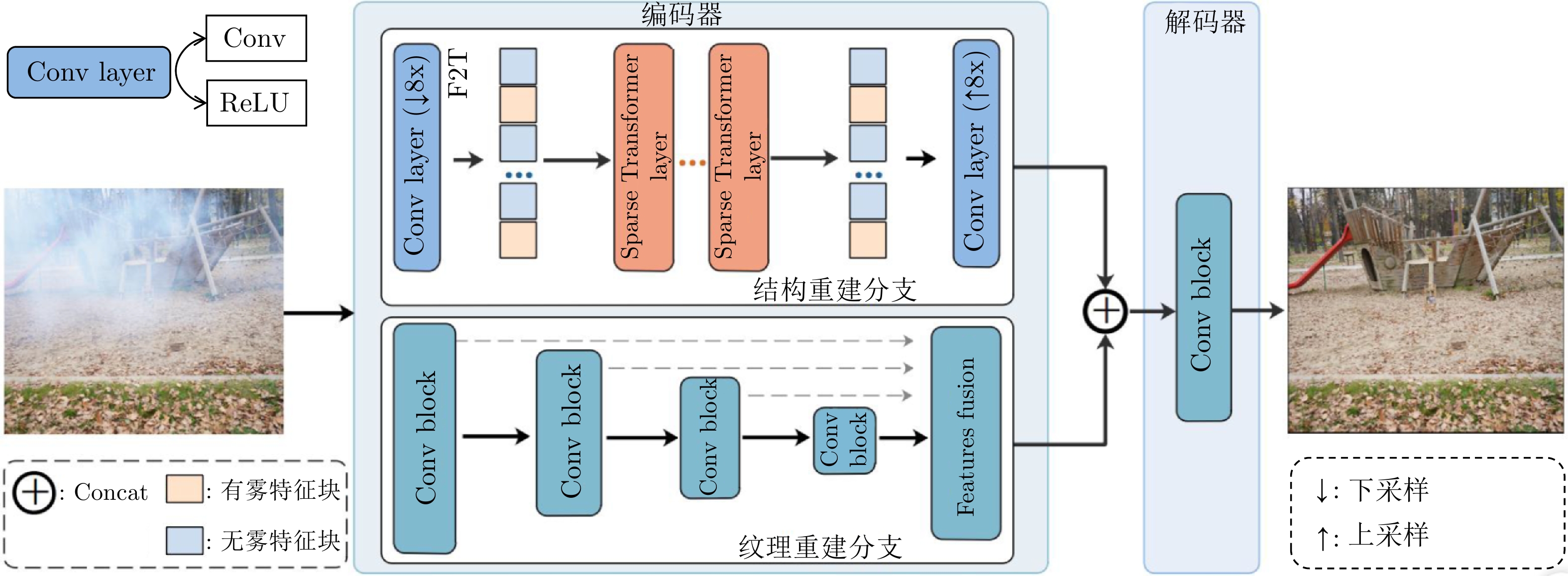
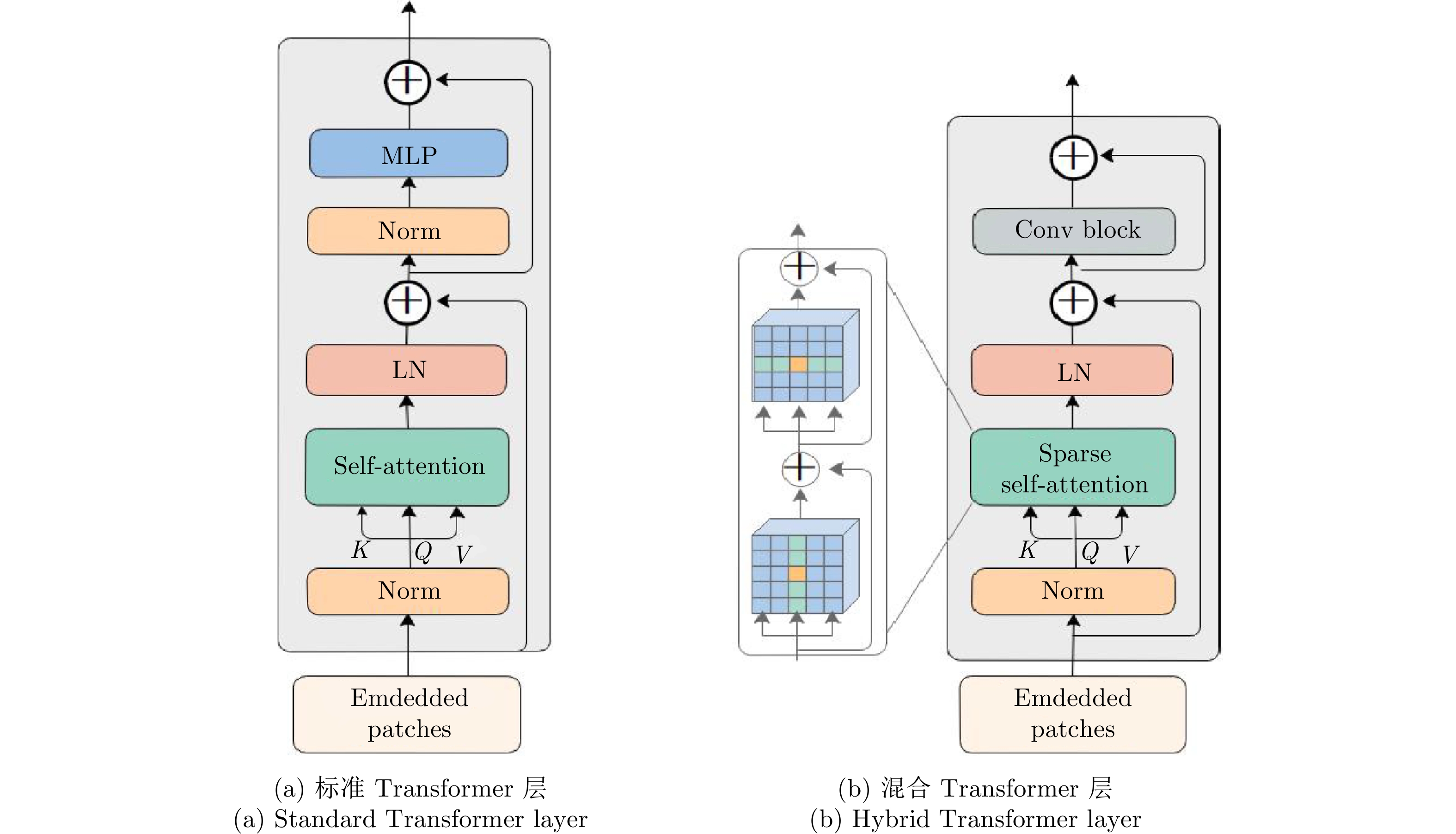
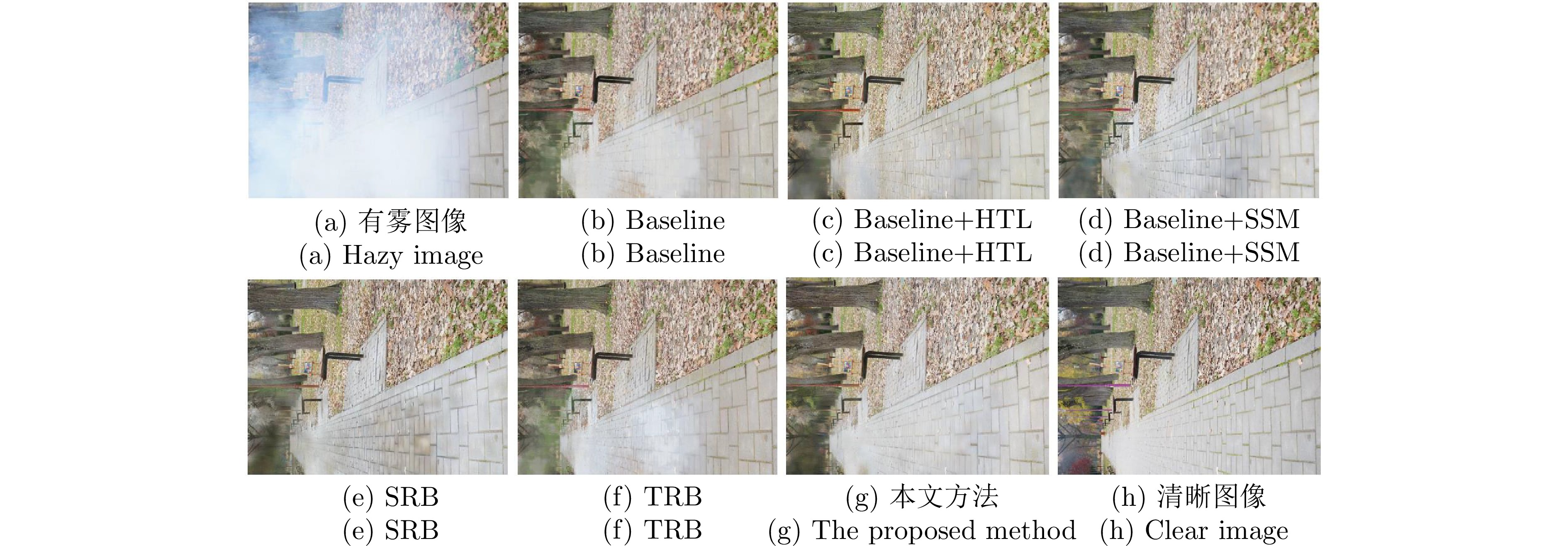
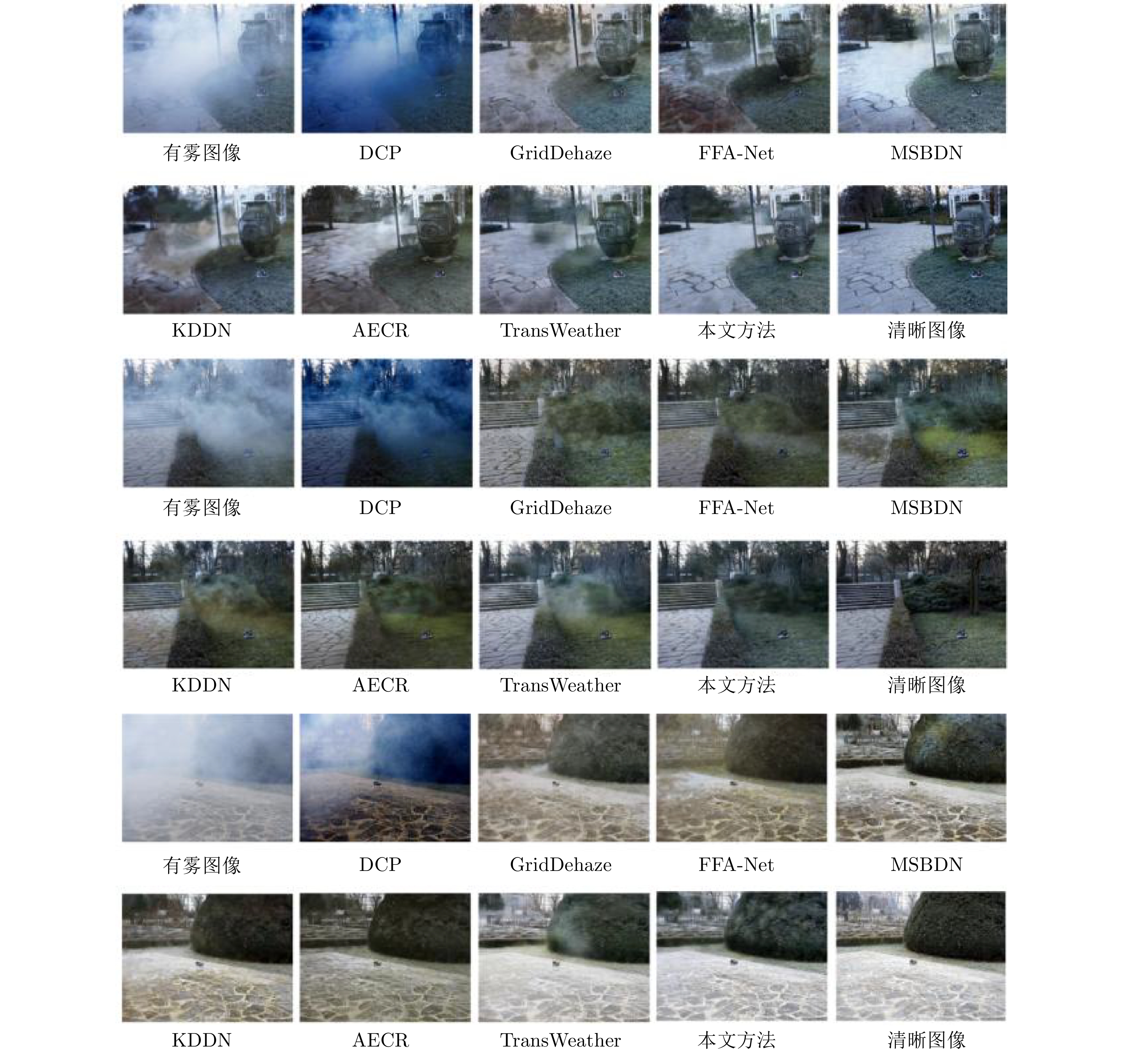
近年来, 基于卷积神经网络(Convolutional neural network, CNN) 的图像去雾方法在合成数据集上取得了显著的进展, 但由于真实场景中存在雾分布不均的问题, 卷积运算的局部感受野难以有效捕获到上下文指导信息, 从而导致全局结构信息丢失. 因此, 真实场景下的图像去雾任务面临着巨大的挑战. 考虑到Transformer具有捕获长距离语义信息依赖关系的优势, 有利于引导全局结构信息重建. 然而, 标准Transformer结构的高计算复杂度阻碍了其在图像恢复中的应用. 针对上述提到的问题, 提出一个由Transformer和卷积神经网络组成的双分支协同非均匀图像去雾网络Dehazeformer. Transformer分支用于提取全局结构信息, 同时设计稀疏自注意力模块(Sparse self-attention modules, SSM) 以降低计算复杂度. 卷积神经网络分支用于获取局部信息, 从而恢复纹理细节. 在真实非均匀有雾场景下的实验结果表明, 该方法不管是在客观评价还是在主观视觉效果方面均达到优异的性能.
近年来, 基于卷积神经网络(Convolutional neural network, CNN) 的图像去雾方法在合成数据集上取得了显著的进展, 但由于真实场景中存在雾分布不均的问题, 卷积运算的局部感受野难以有效捕获到上下文指导信息, 从而导致全局结构信息丢失. 因此, 真实场景下的图像去雾任务面临着巨大的挑战. 考虑到Transformer具有捕获长距离语义信息依赖关系的优势, 有利于引导全局结构信息重建. 然而, 标准Transformer结构的高计算复杂度阻碍了其在图像恢复中的应用. 针对上述提到的问题, 提出一个由Transformer和卷积神经网络组成的双分支协同非均匀图像去雾网络Dehazeformer. Transformer分支用于提取全局结构信息, 同时设计稀疏自注意力模块(Sparse self-attention modules, SSM) 以降低计算复杂度. 卷积神经网络分支用于获取局部信息, 从而恢复纹理细节. 在真实非均匀有雾场景下的实验结果表明, 该方法不管是在客观评价还是在主观视觉效果方面均达到优异的性能.

2024, 50(7): 1345-1362.
doi: 10.16383/j.aas.c230674
摘要:
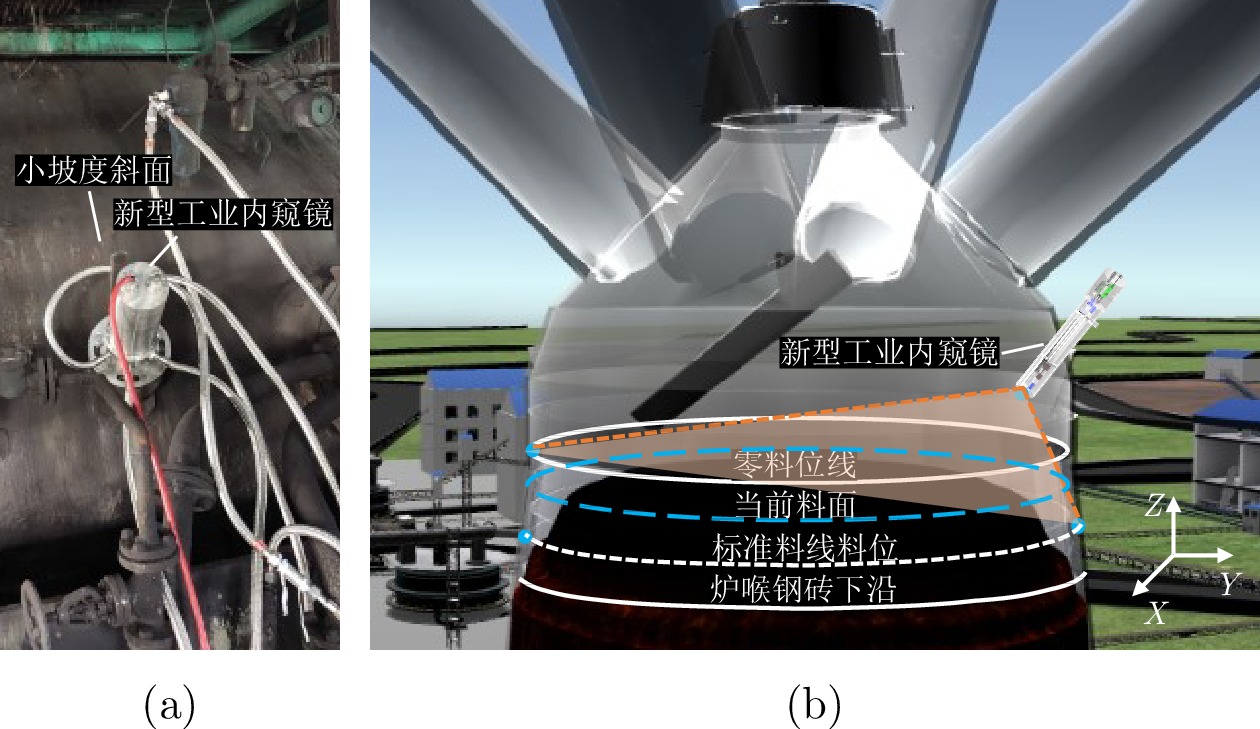
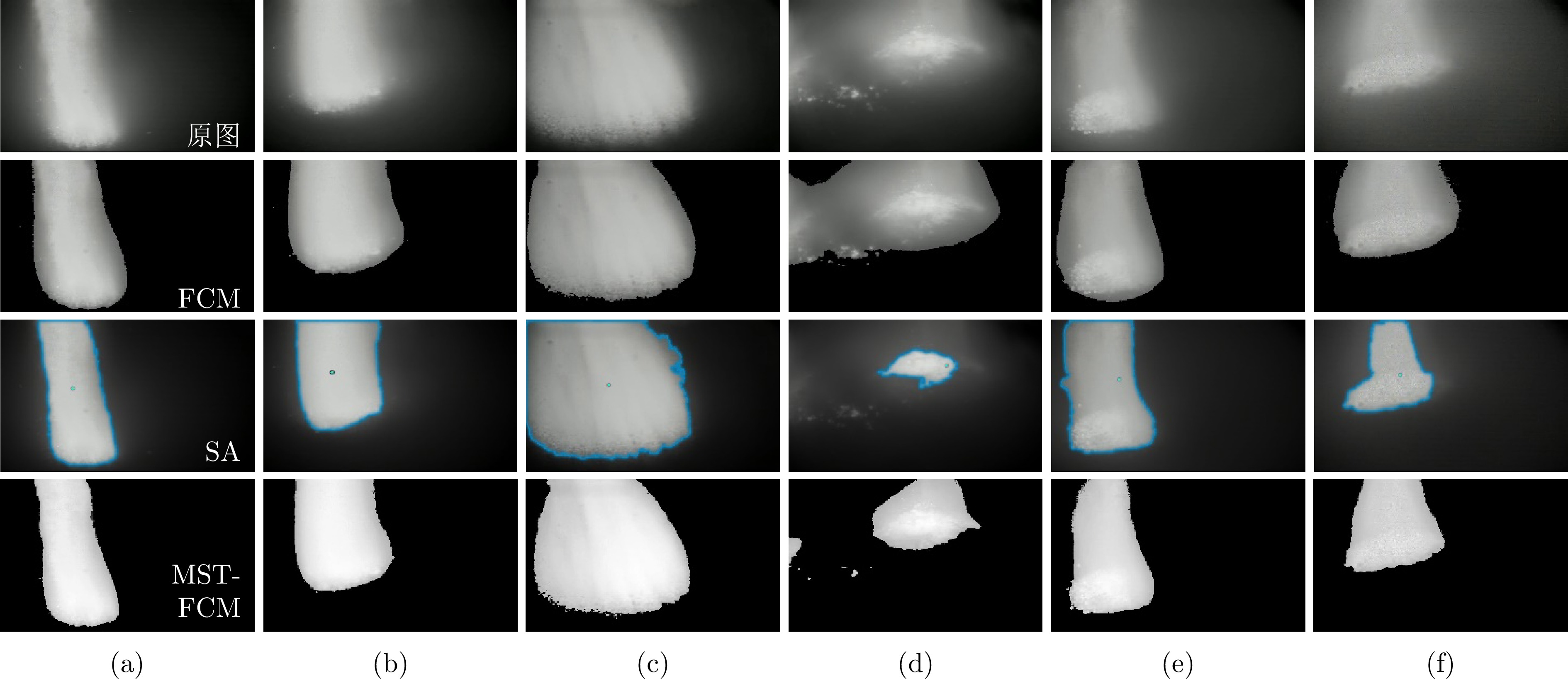
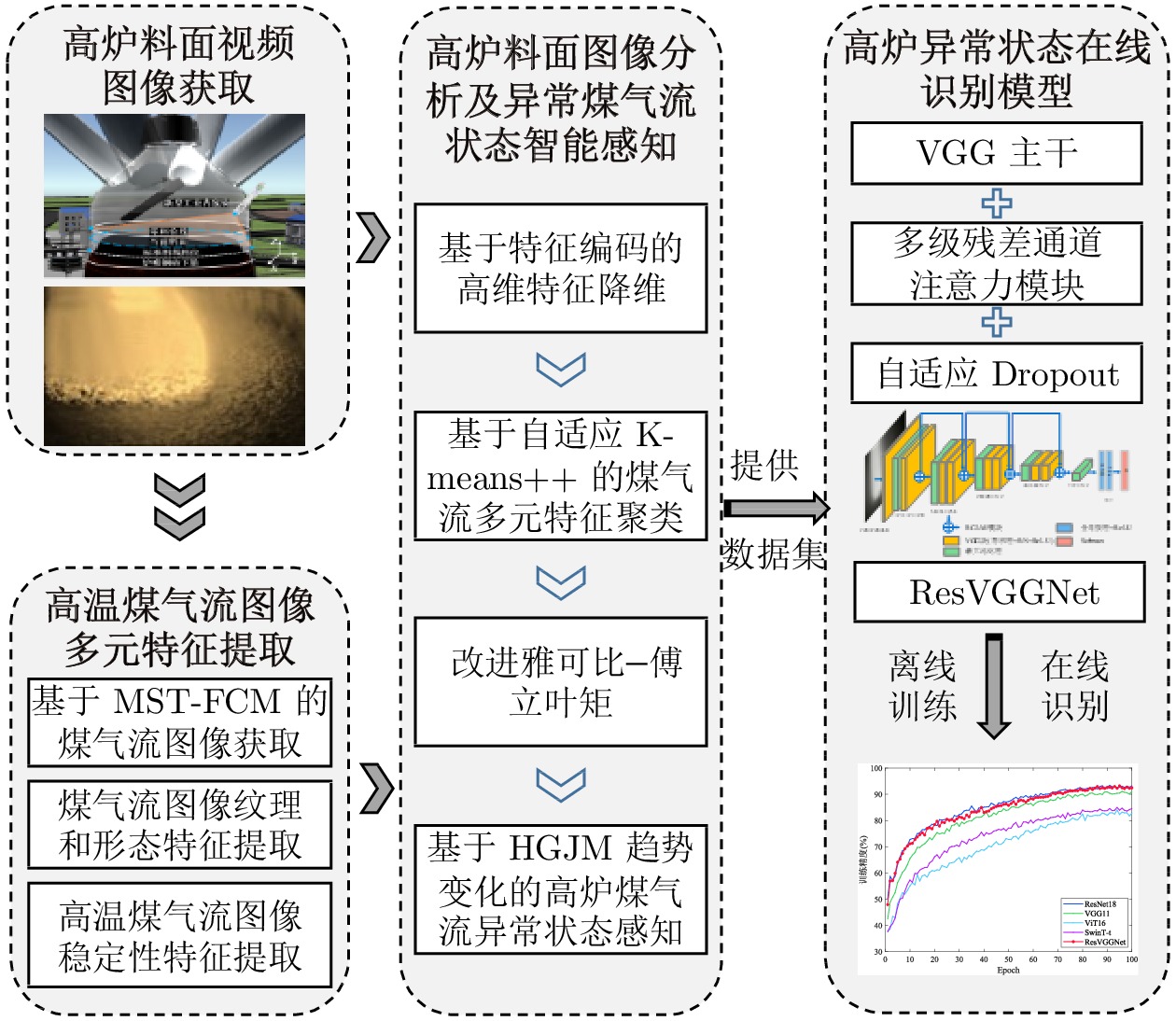
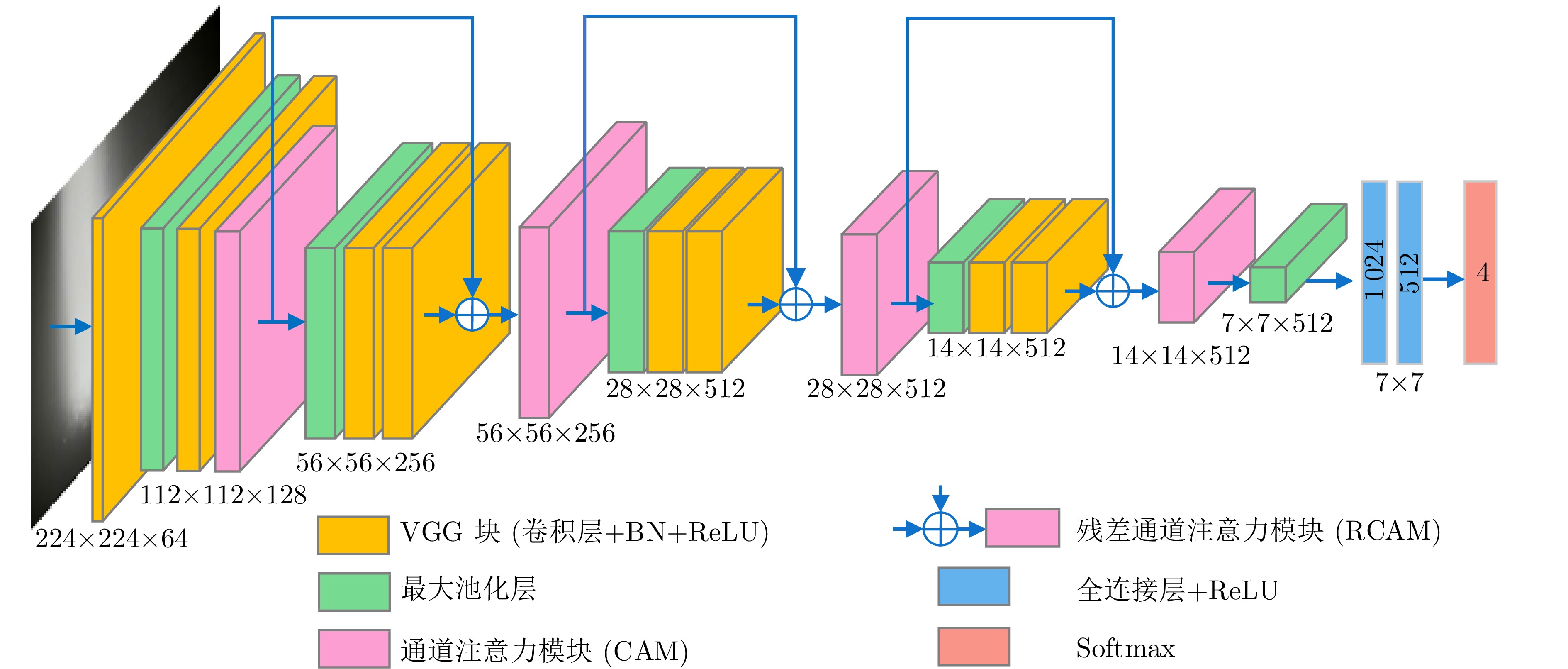
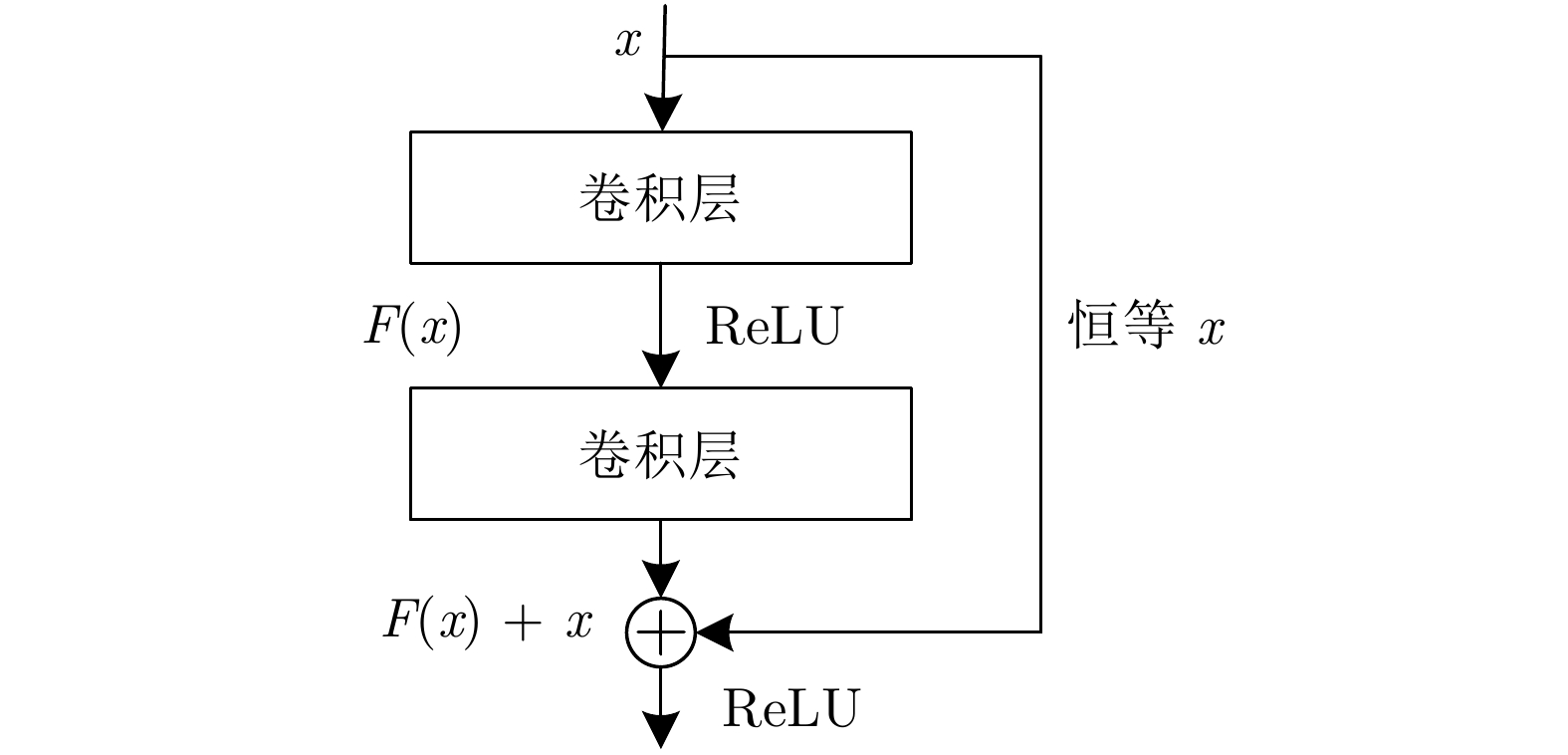
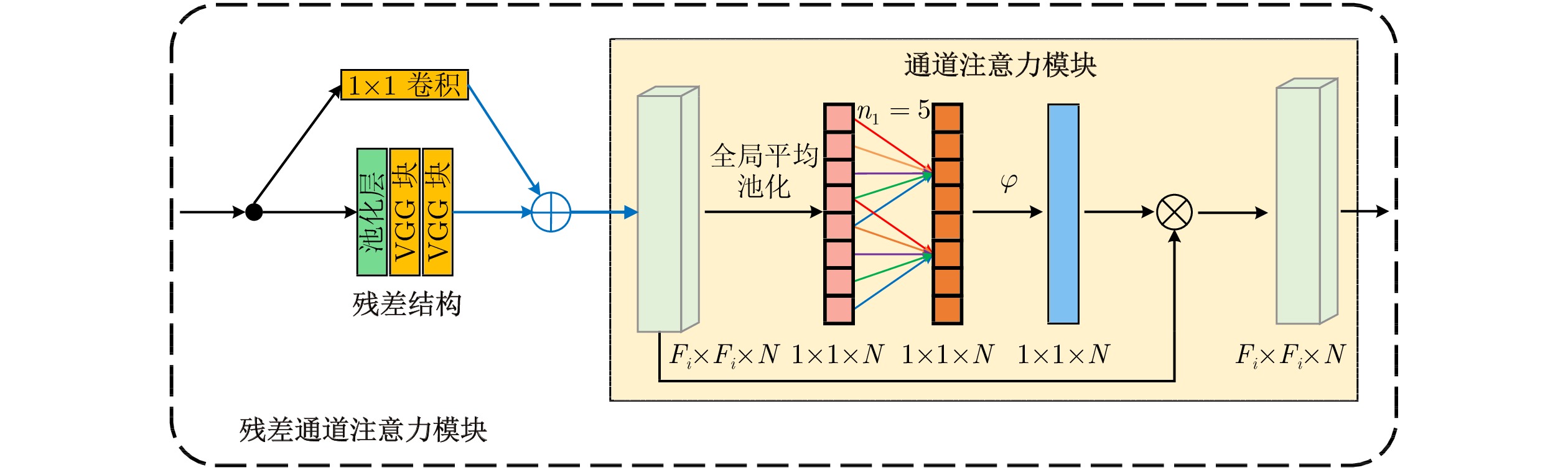
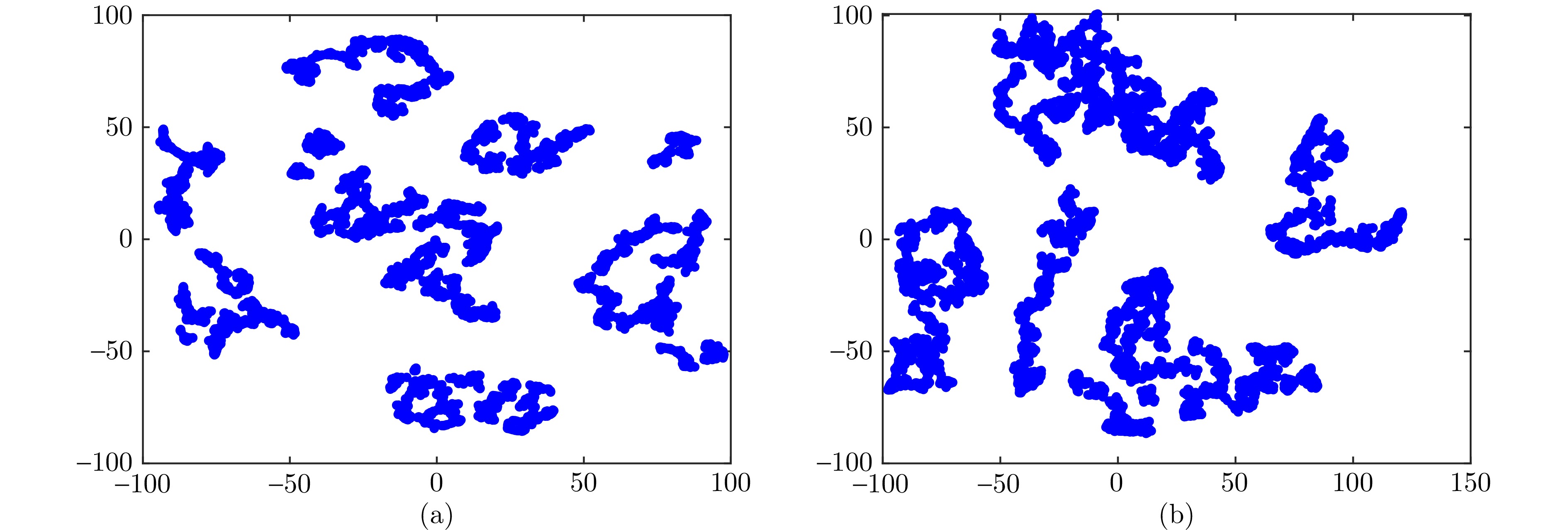
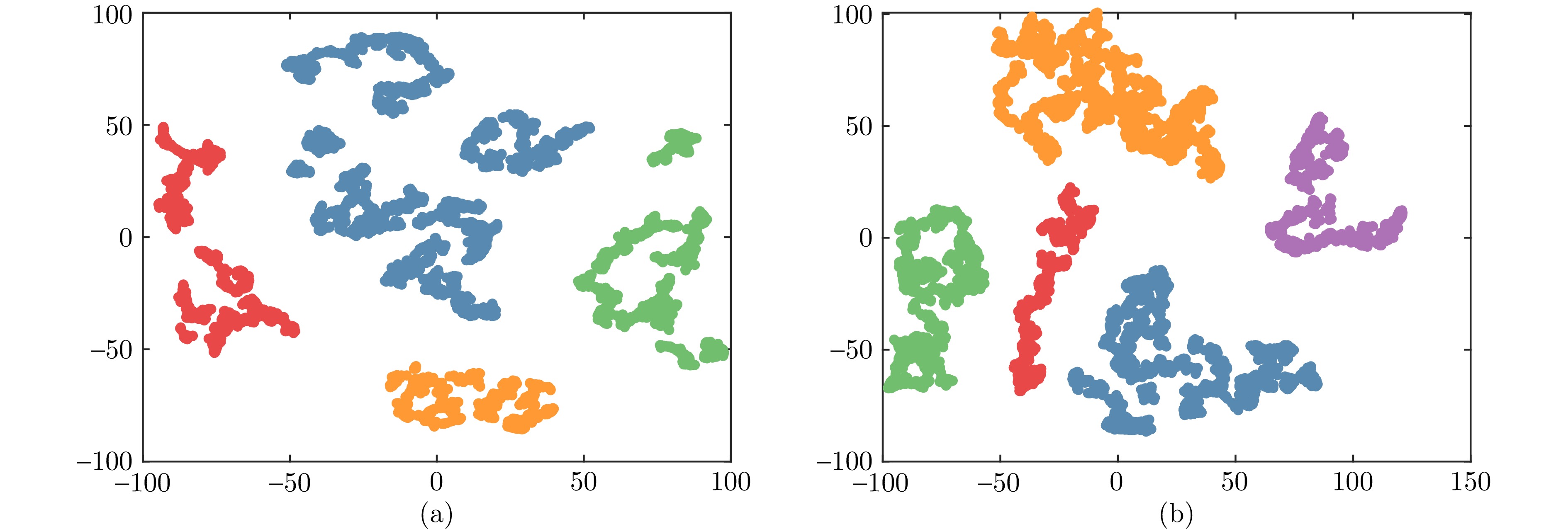
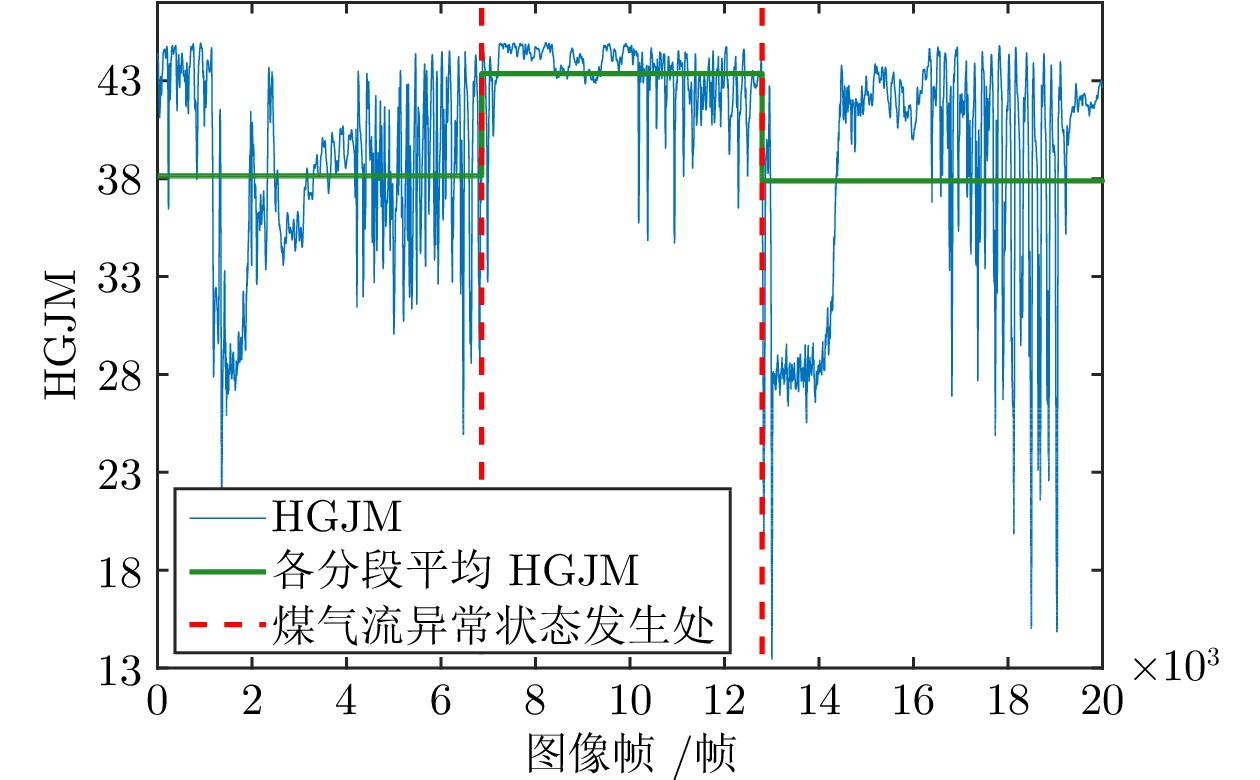
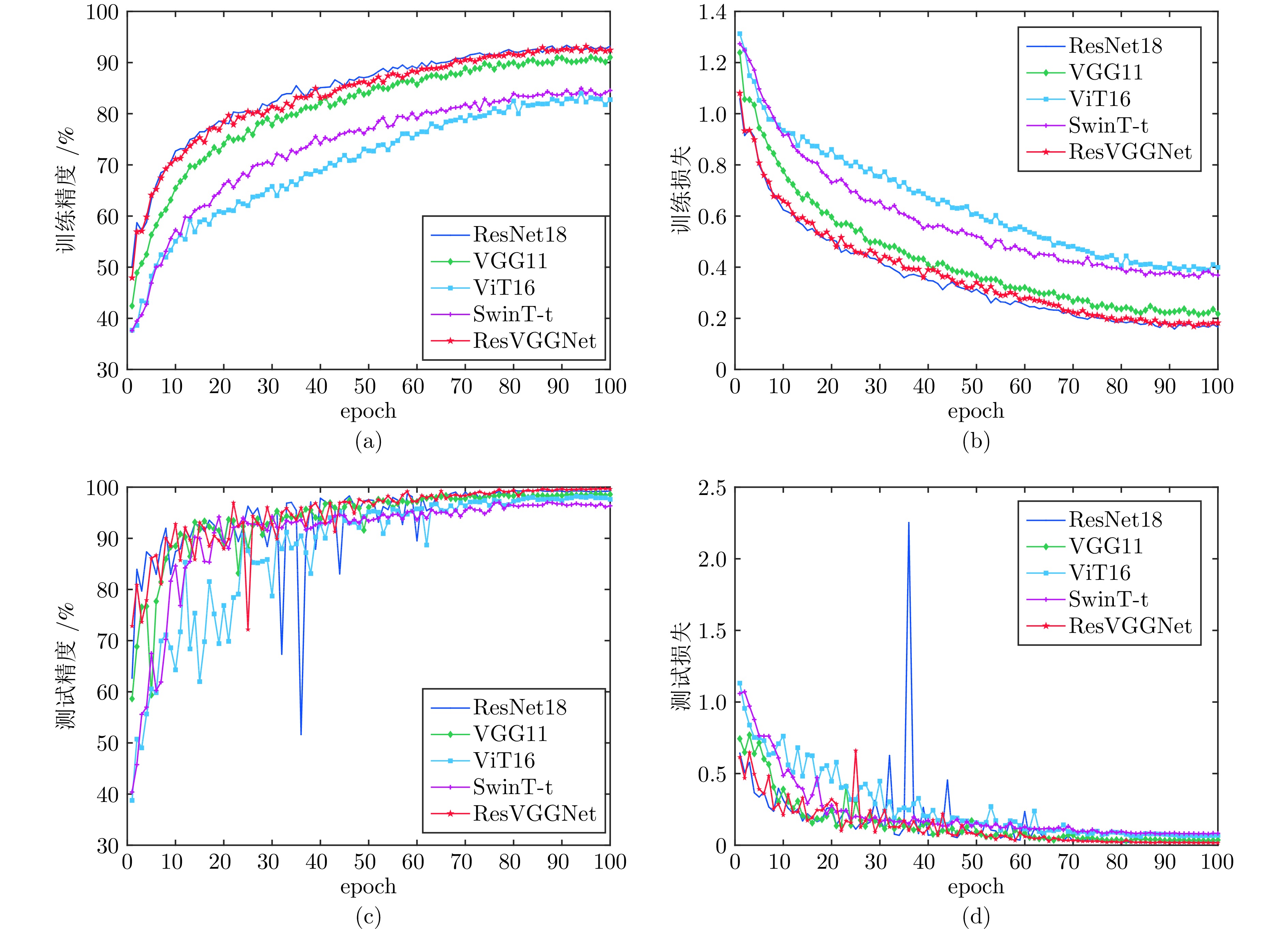
智能感知、精准识别高炉(Blast furnace, BF)异常状态对高炉调控优化和稳定运行至关重要, 但高炉内部的黑箱状态致使传统检测方法难以直接感知并准确识别多种高炉异常状态. 新型工业内窥镜可获取大量料面视频图像, 为直接观测炉内运行状态提供了全新的手段. 基于此, 提出一种基于料面视频图像分析的高炉异常状态智能感知与识别方法. 首先, 提出基于多尺度纹理模糊C均值(Multi-scale texture fuzzy C-means, MST-FCM)聚类的高温煤气流区域提取方法, 准确获取煤气流图像, 并提取煤气流图像多元特征; 其次, 提出基于特征编码的高维特征降维方法, 结合自适应K-means++ 算法, 实现煤气流异常状态的粗粒度感知; 在此基础上, 通过改进雅可比−傅立叶矩(Jacobi-Fourier moments, JFM) 提取煤气流图像深层特征变化趋势, 进而提出细粒度煤气流异常状态感知方法; 最后, 基于煤气流异常状态感知结果, 结合料面视频图像, 提出多级残差通道注意力模块(Multi-level residual channel attention module, MRCAM), 建立高炉异常状态识别模型ResVGGNet, 实现高炉煤气流异常、塌料和悬料的精准在线识别. 实验结果表明, 所提方法能准确识别不同的高炉异常状态且识别速度快, 可为高炉平稳运行提供重要保障.
智能感知、精准识别高炉(Blast furnace, BF)异常状态对高炉调控优化和稳定运行至关重要, 但高炉内部的黑箱状态致使传统检测方法难以直接感知并准确识别多种高炉异常状态. 新型工业内窥镜可获取大量料面视频图像, 为直接观测炉内运行状态提供了全新的手段. 基于此, 提出一种基于料面视频图像分析的高炉异常状态智能感知与识别方法. 首先, 提出基于多尺度纹理模糊C均值(Multi-scale texture fuzzy C-means, MST-FCM)聚类的高温煤气流区域提取方法, 准确获取煤气流图像, 并提取煤气流图像多元特征; 其次, 提出基于特征编码的高维特征降维方法, 结合自适应K-means++ 算法, 实现煤气流异常状态的粗粒度感知; 在此基础上, 通过改进雅可比−傅立叶矩(Jacobi-Fourier moments, JFM) 提取煤气流图像深层特征变化趋势, 进而提出细粒度煤气流异常状态感知方法; 最后, 基于煤气流异常状态感知结果, 结合料面视频图像, 提出多级残差通道注意力模块(Multi-level residual channel attention module, MRCAM), 建立高炉异常状态识别模型ResVGGNet, 实现高炉煤气流异常、塌料和悬料的精准在线识别. 实验结果表明, 所提方法能准确识别不同的高炉异常状态且识别速度快, 可为高炉平稳运行提供重要保障.

2024, 50(7): 1363-1372.
doi: 10.16383/j.aas.c220893
摘要:
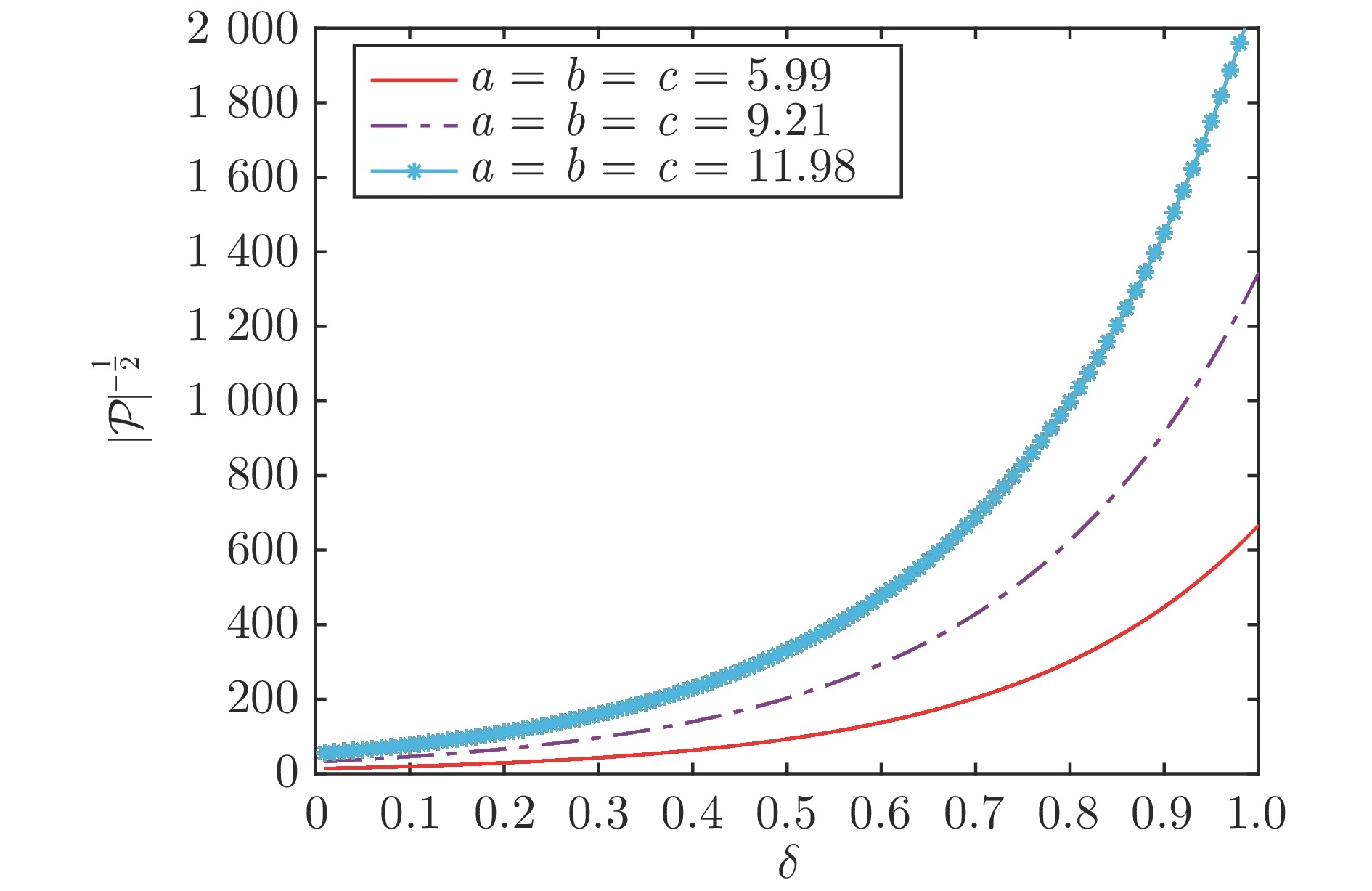
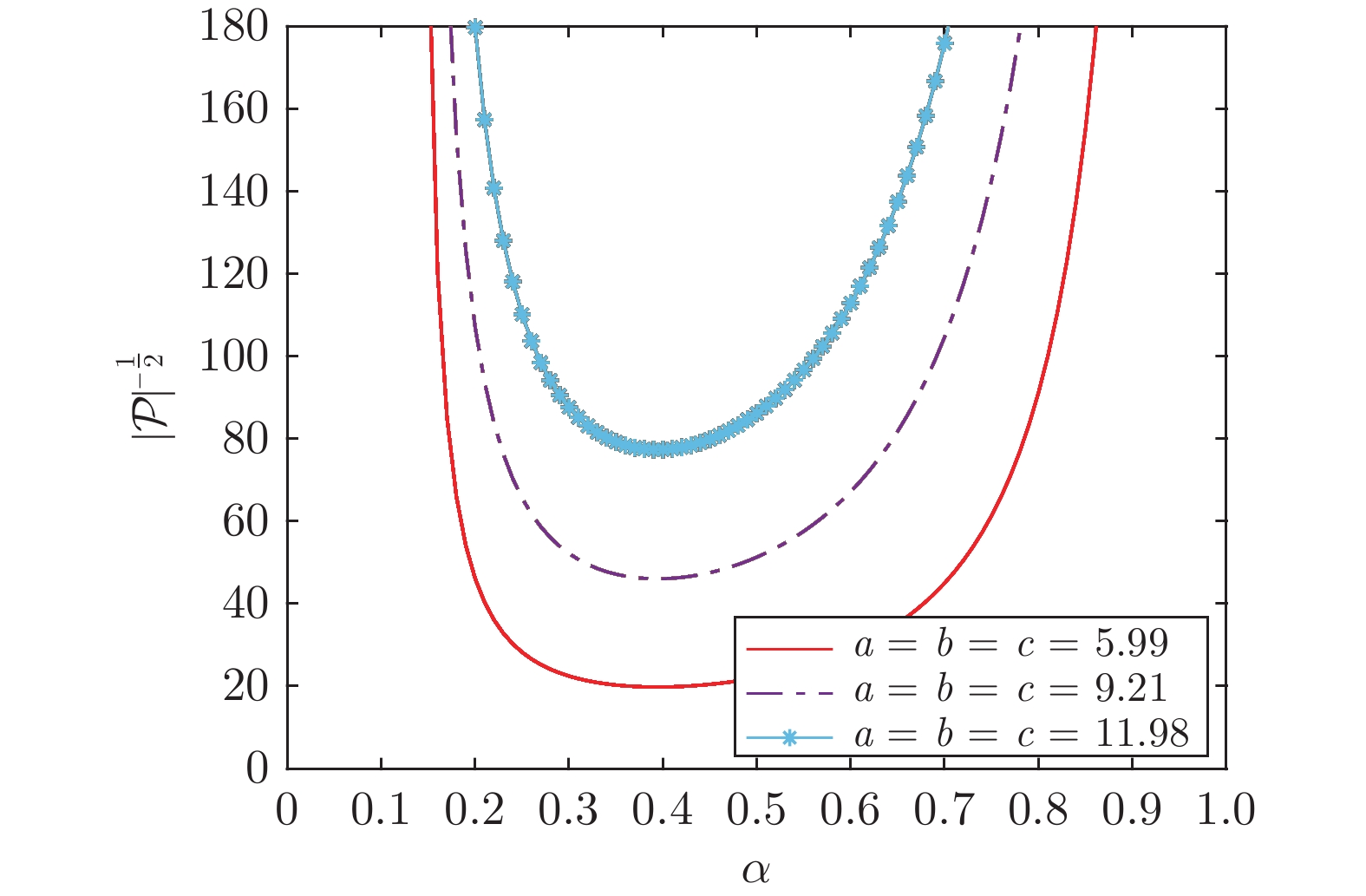
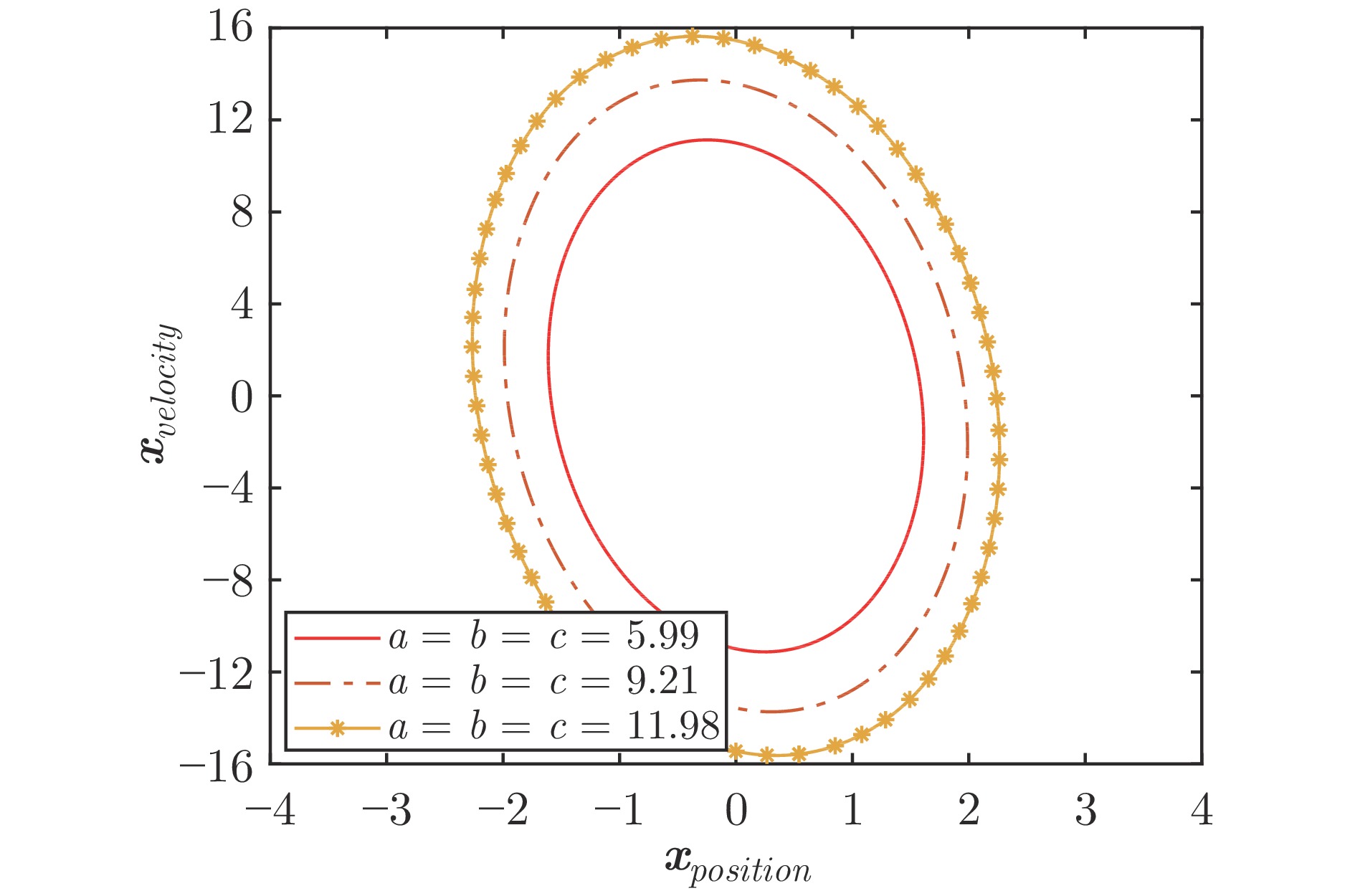
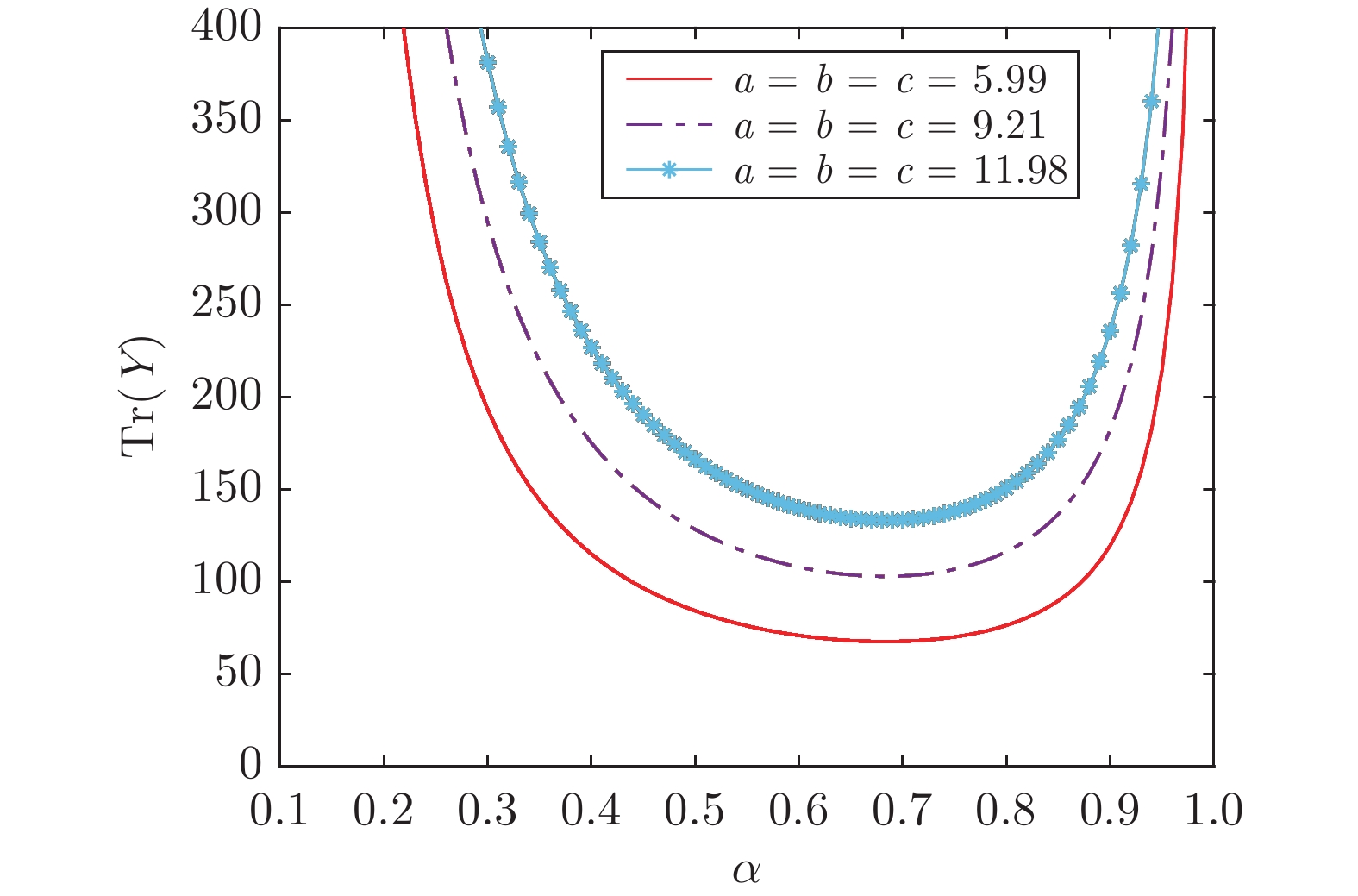
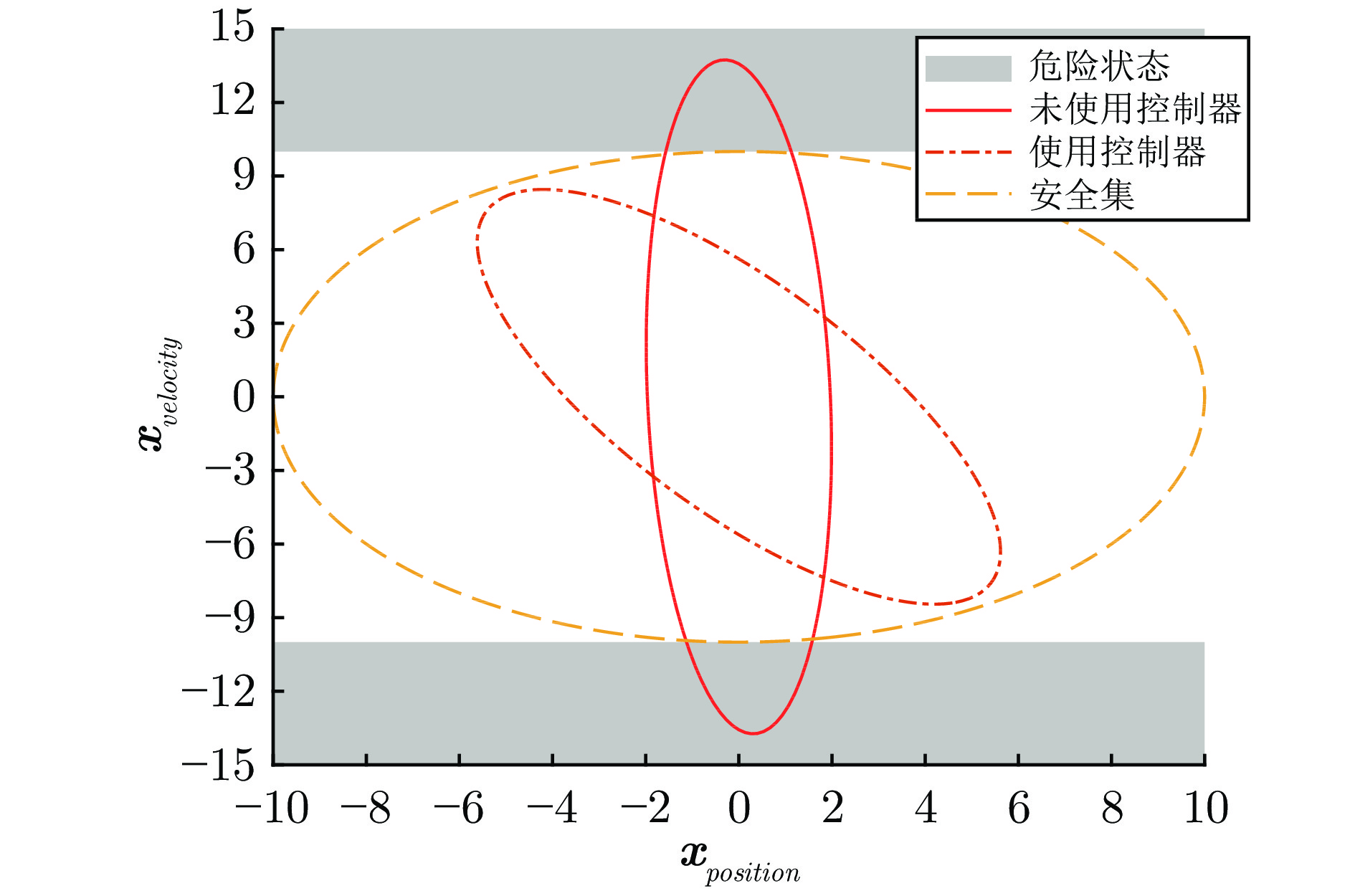
研究了受到隐蔽攻击的信息物理系统(Cyber-physical system, CPS)安全控制问题. 采用KL (Kullback-Leibler)散度描述攻击的隐蔽性, 并设计动态输出反馈控制器, 使系统可达集始终保持在安全区域内, 其中可达集定义为系统状态以一定概率属于的集合. 首先, 给出隐蔽攻击下检测器残差所在范围的一个外椭球近似集; 其次, 根据该近似集和噪声的范围给出控制器参数与系统椭球形不变可达集的关系; 然后, 通过设计可逆线性变换并构造凸优化问题, 求解安全控制器参数和相应的不变可达集; 最后, 使用弹簧−质量−阻尼系统进行仿真, 验证了所提控制方法的有效性.
研究了受到隐蔽攻击的信息物理系统(Cyber-physical system, CPS)安全控制问题. 采用KL (Kullback-Leibler)散度描述攻击的隐蔽性, 并设计动态输出反馈控制器, 使系统可达集始终保持在安全区域内, 其中可达集定义为系统状态以一定概率属于的集合. 首先, 给出隐蔽攻击下检测器残差所在范围的一个外椭球近似集; 其次, 根据该近似集和噪声的范围给出控制器参数与系统椭球形不变可达集的关系; 然后, 通过设计可逆线性变换并构造凸优化问题, 求解安全控制器参数和相应的不变可达集; 最后, 使用弹簧−质量−阻尼系统进行仿真, 验证了所提控制方法的有效性.
2024, 50(7): 1373-1388.
doi: 10.16383/j.aas.c211233
摘要:
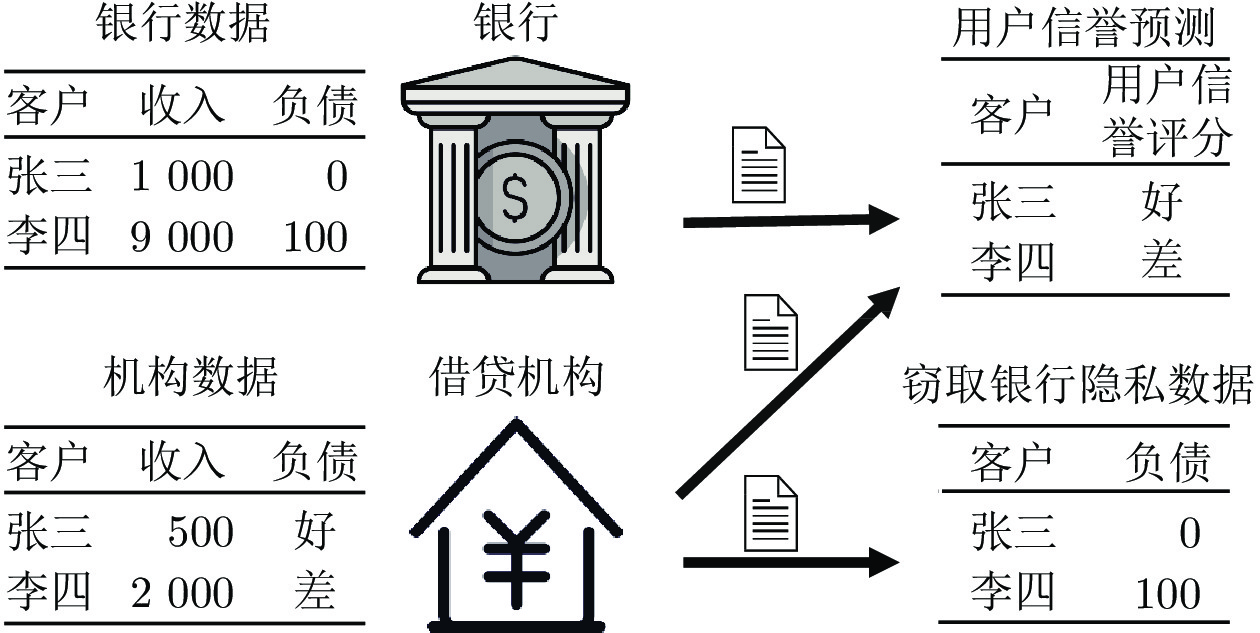
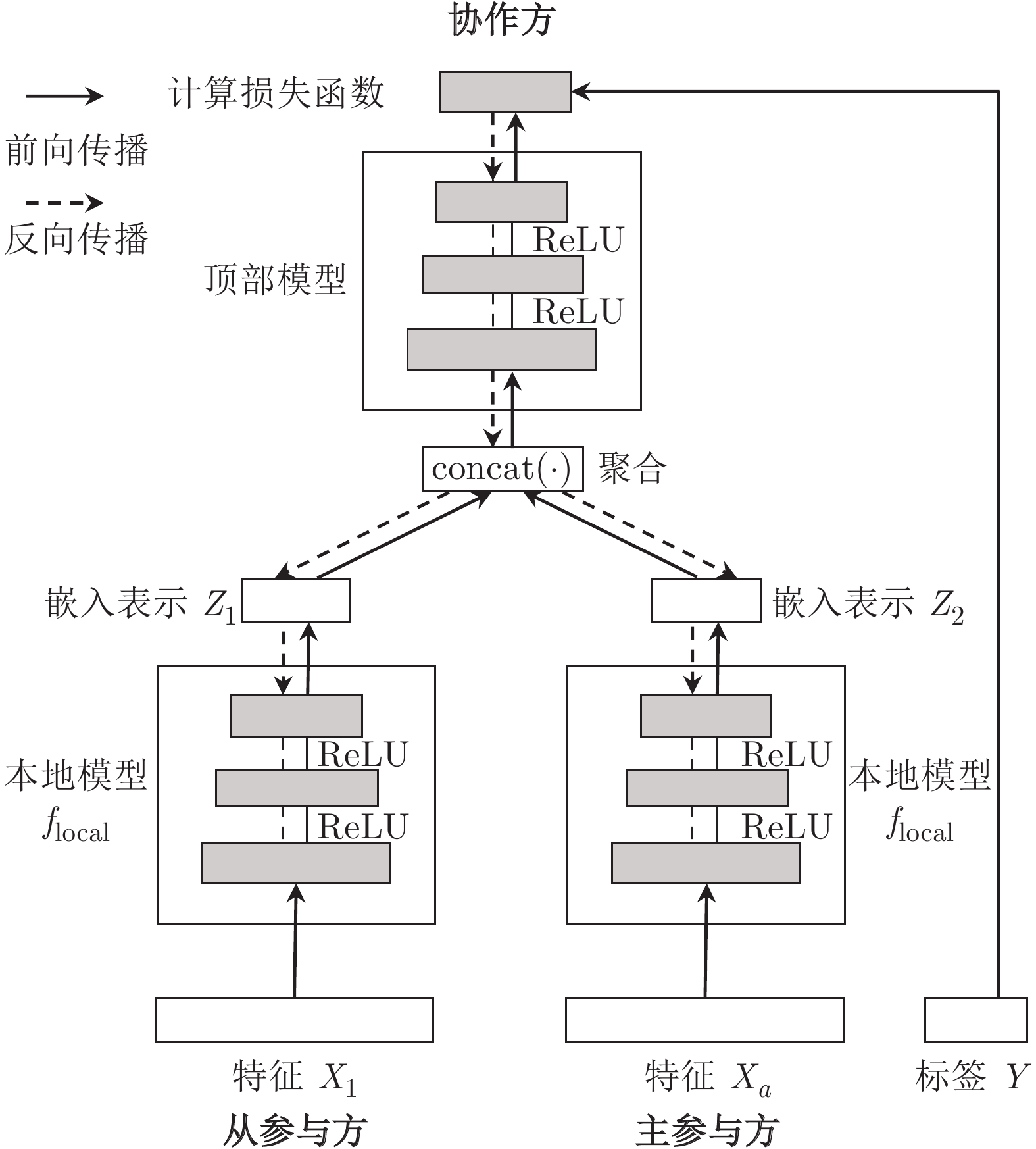
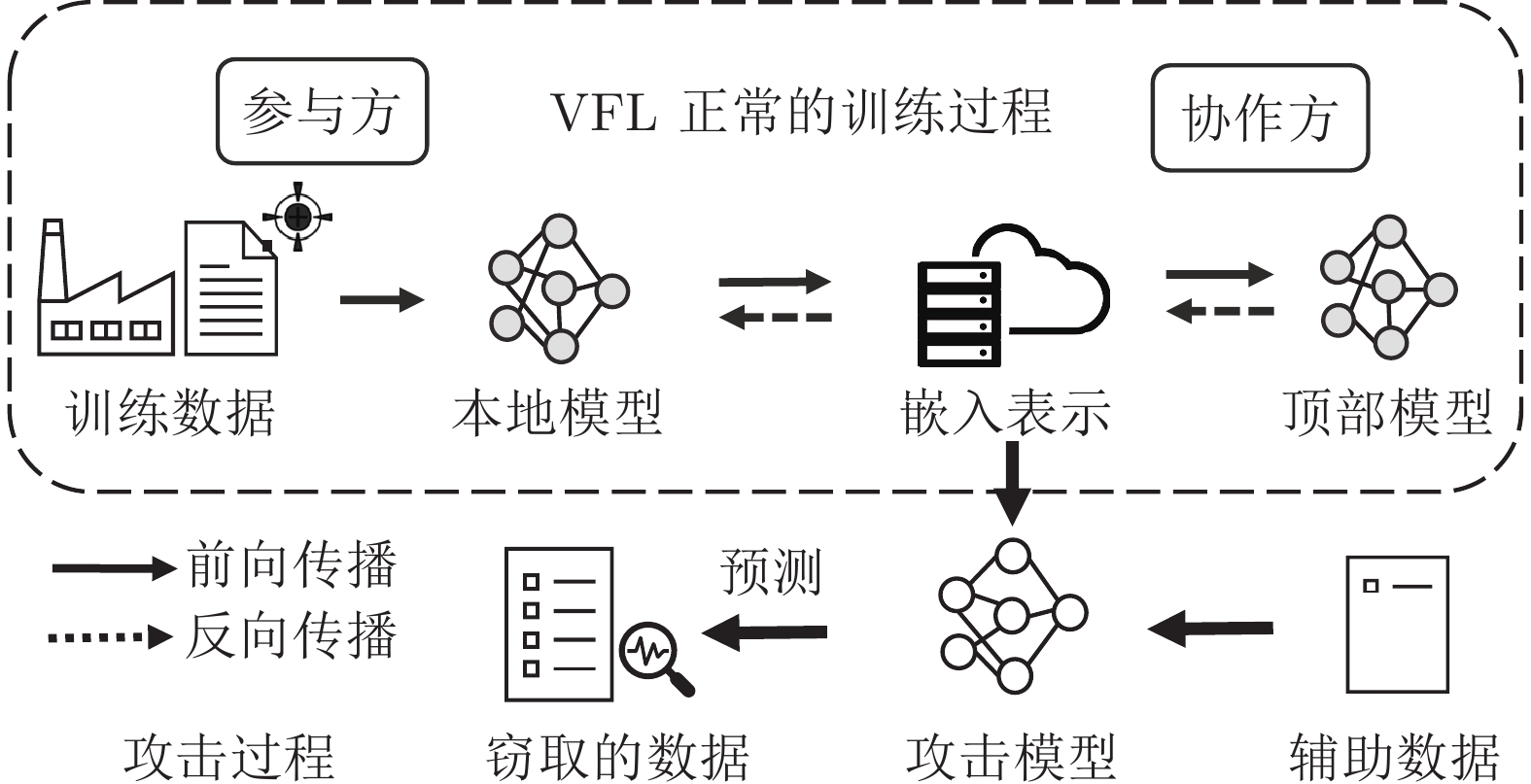
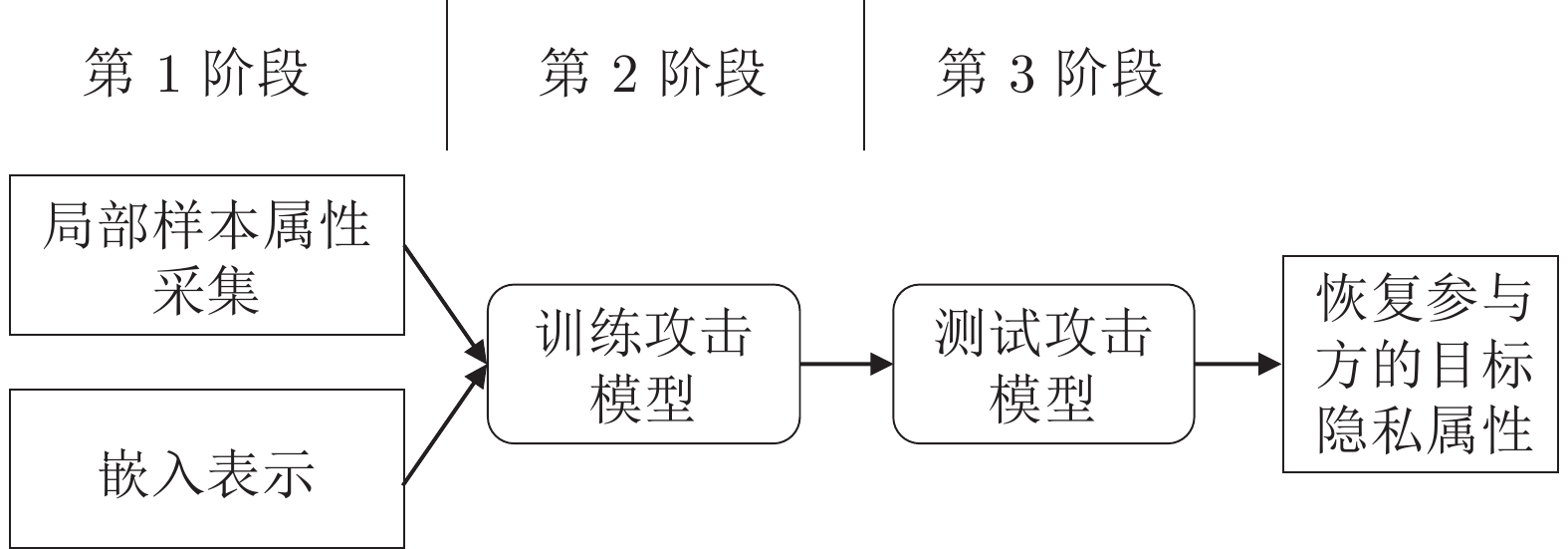
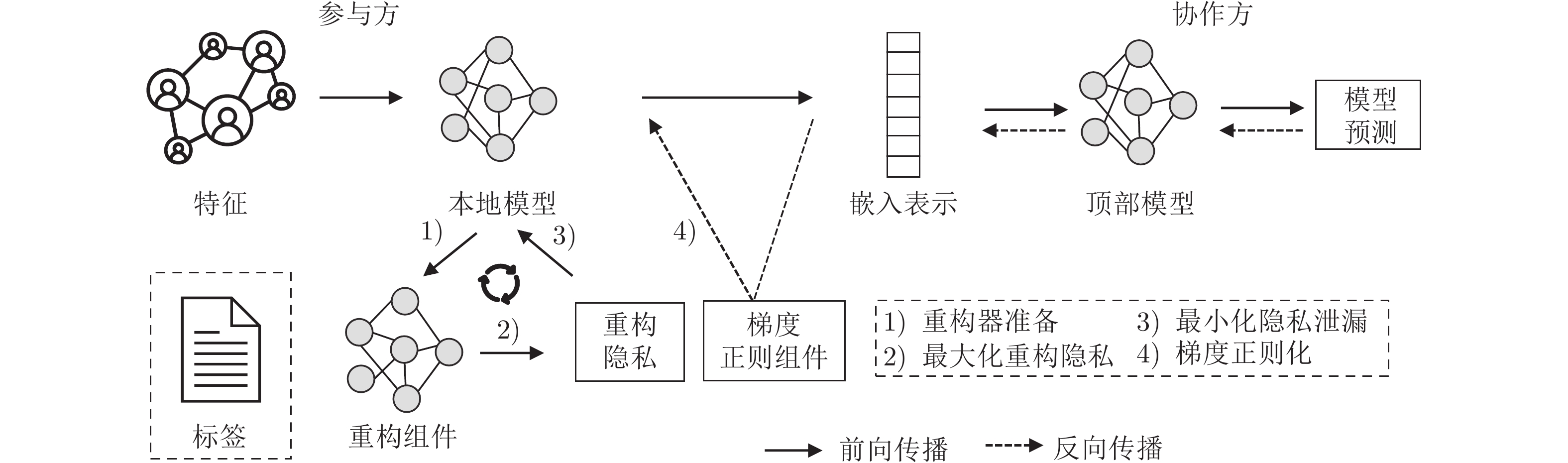
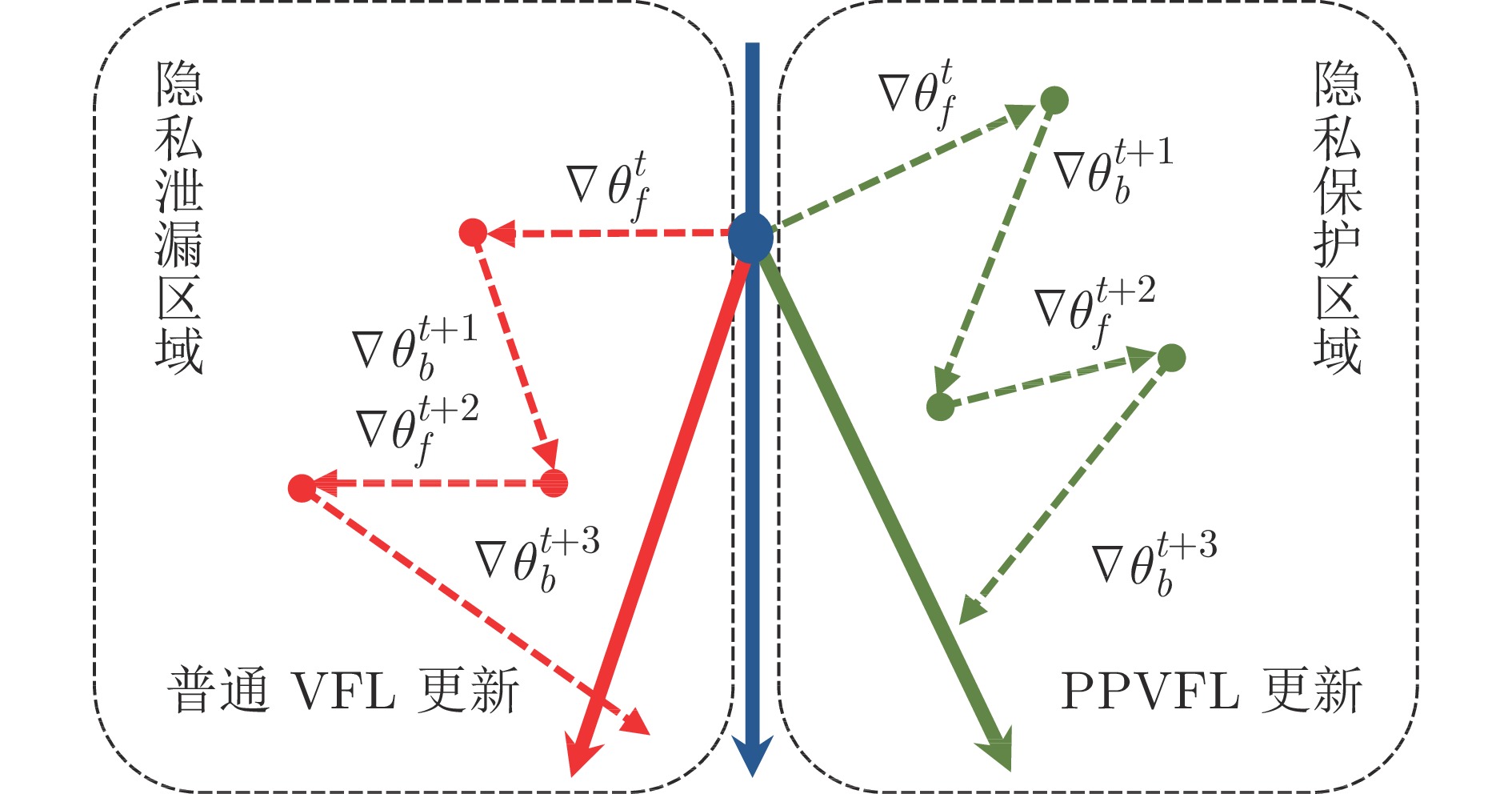
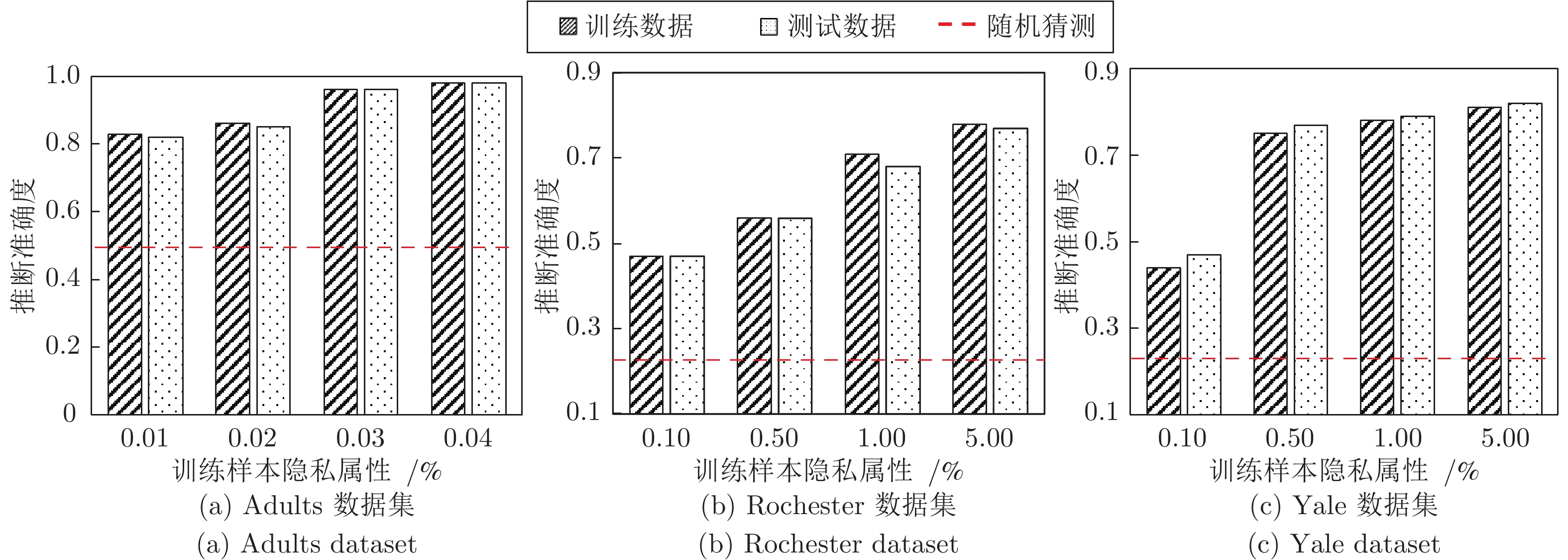
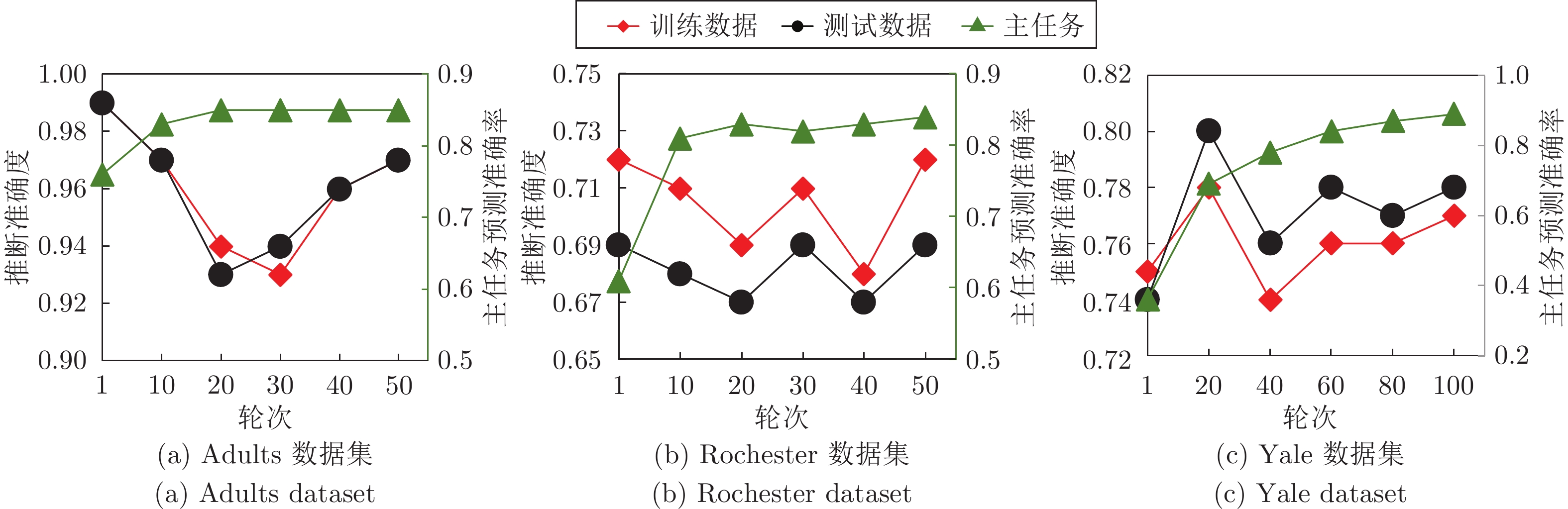
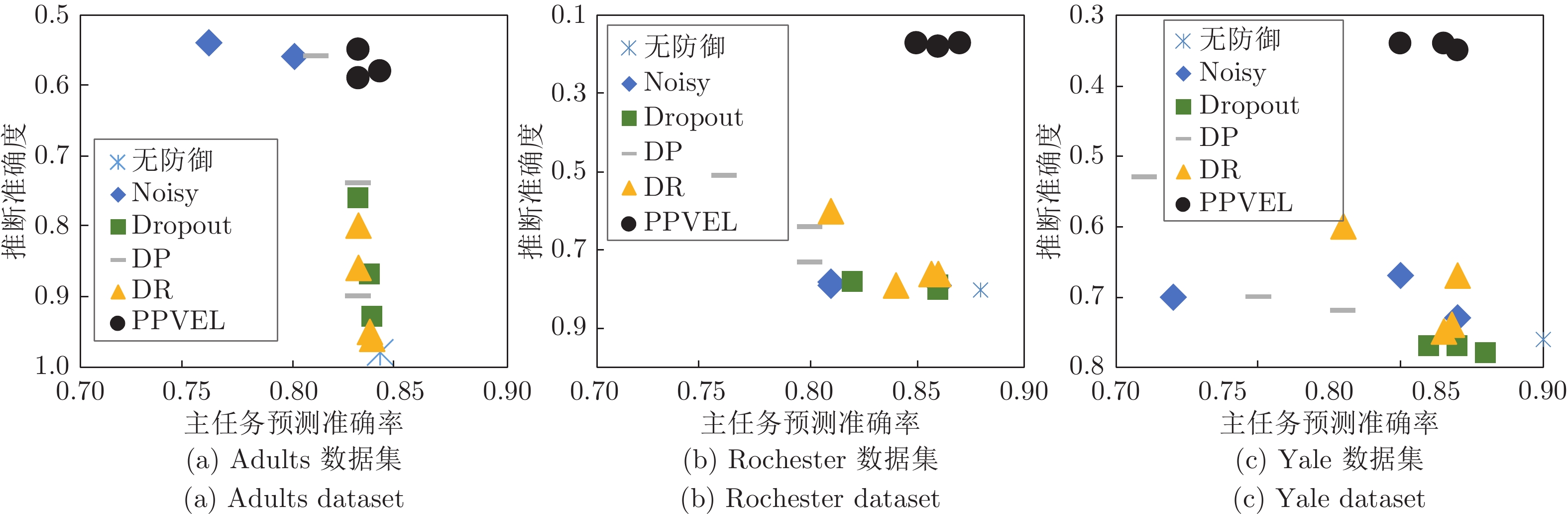
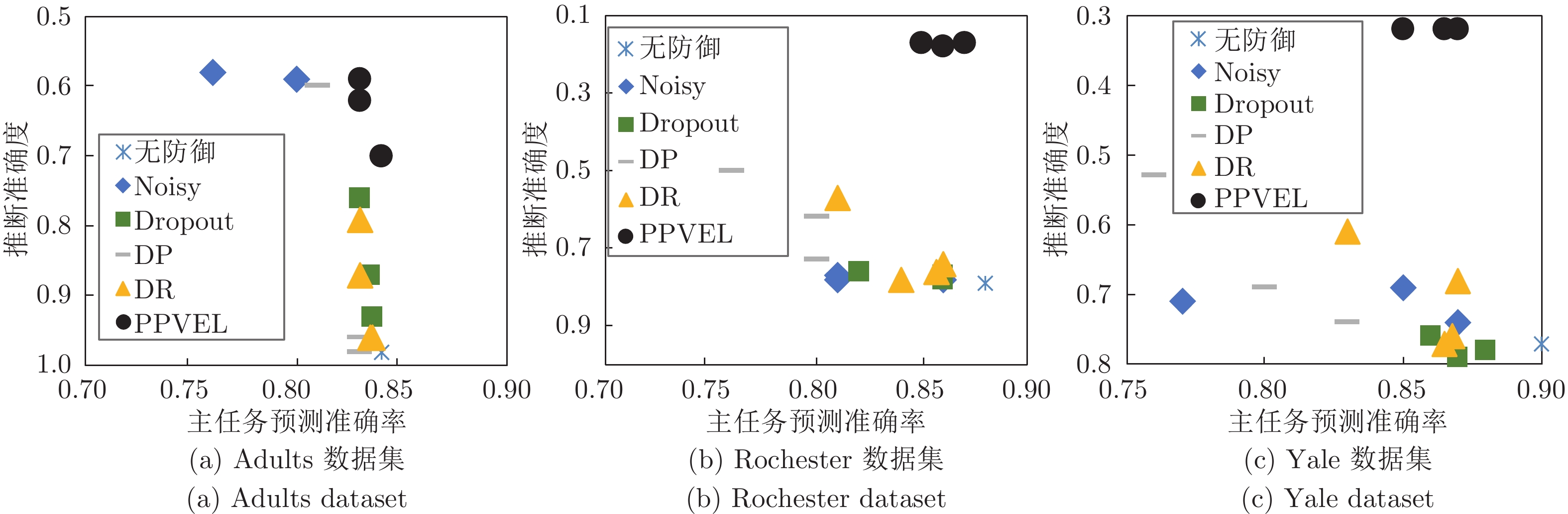
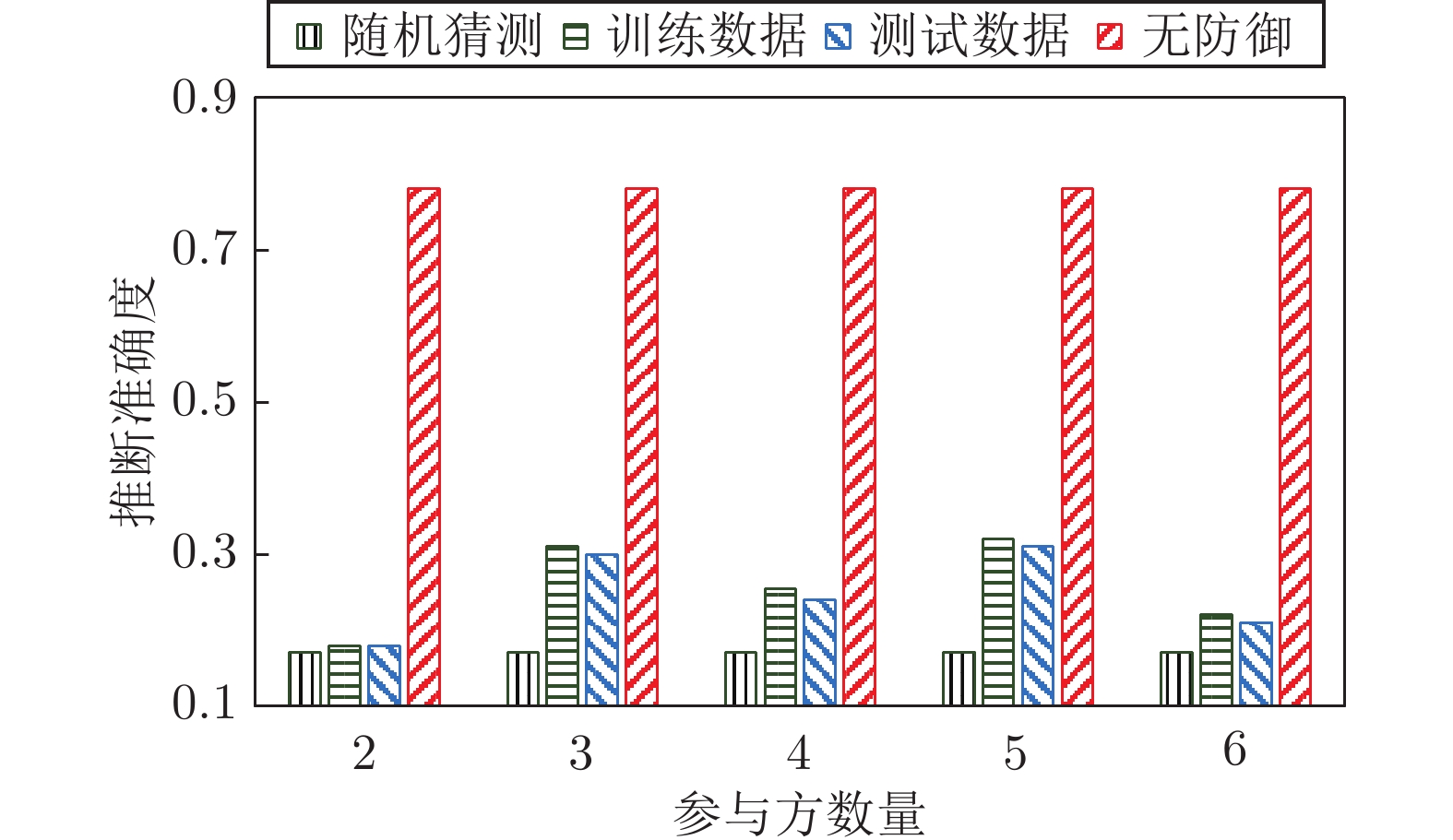
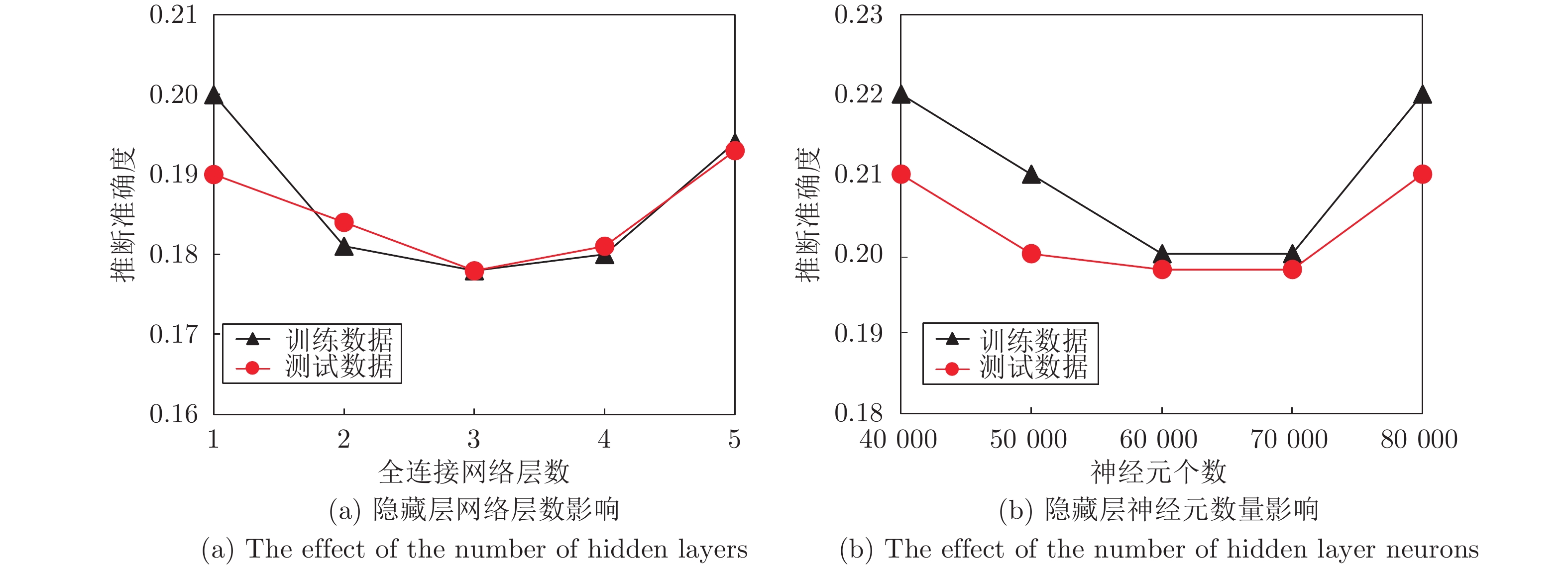
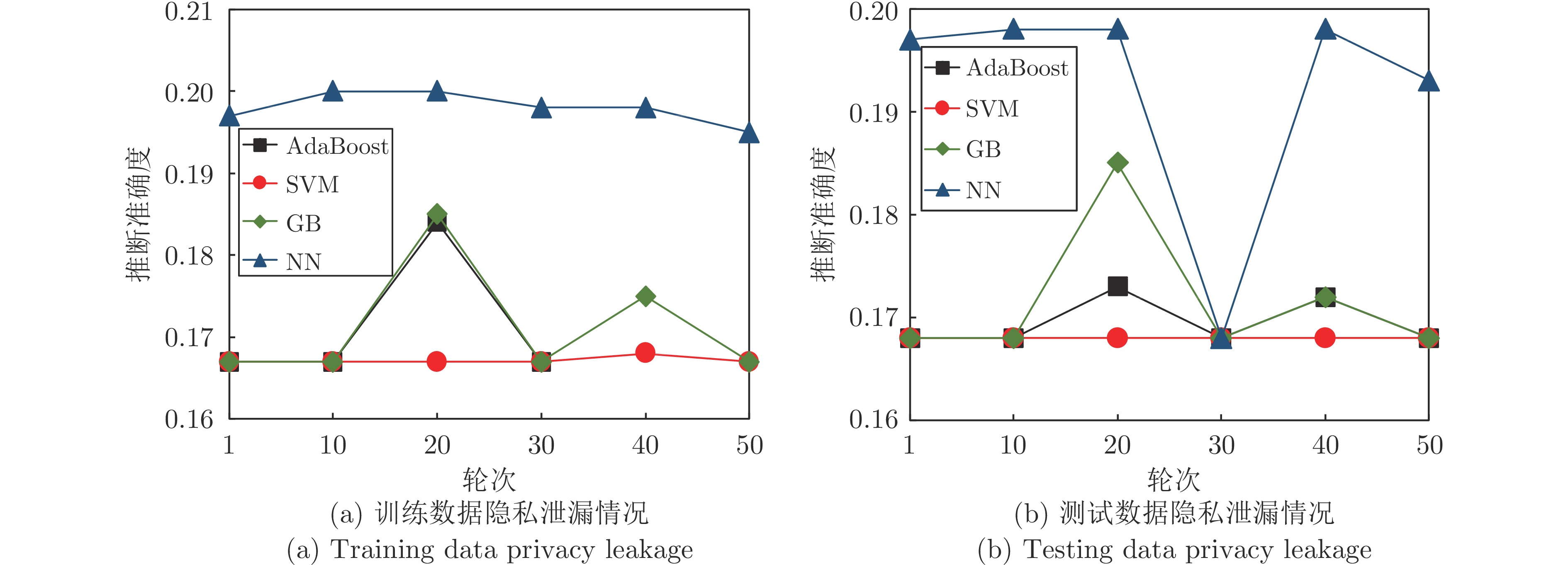
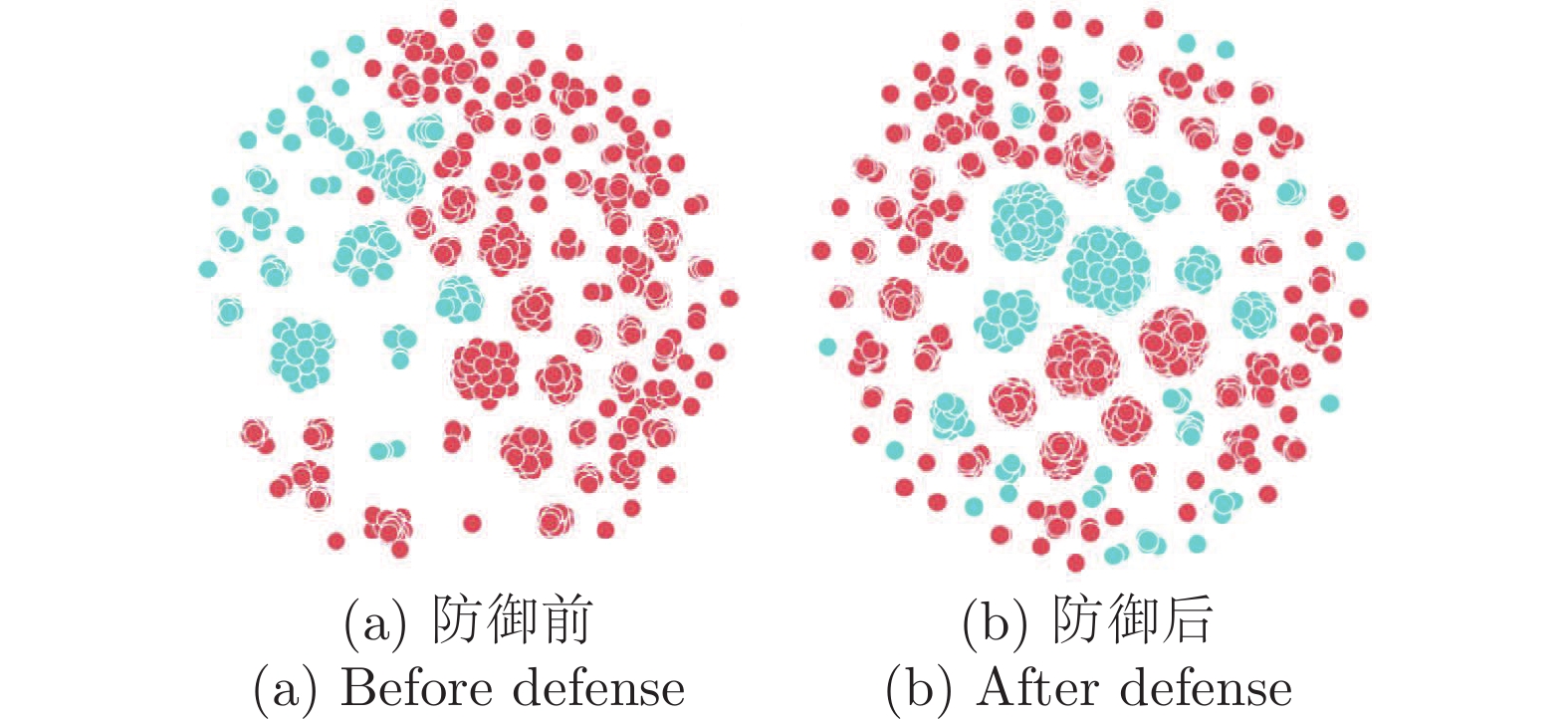
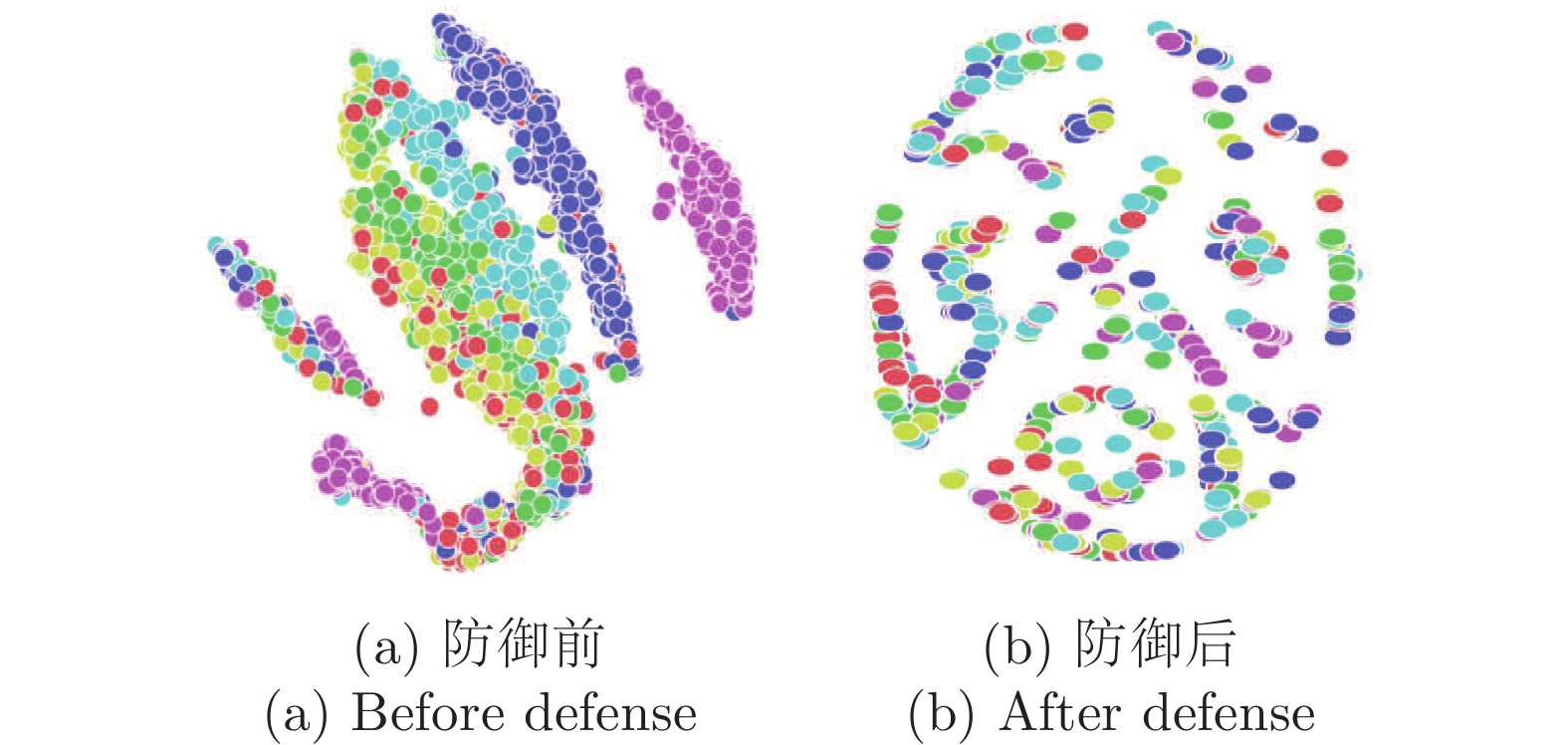
纵向联邦学习(Vertical federated learning, VFL)是一种新兴的分布式机器学习技术, 在保障隐私性的前提下, 利用分散在各个机构的数据实现机器学习模型的联合训练. 纵向联邦学习被广泛应用于工业互联网、金融借贷和医疗诊断等诸多领域中, 因此保证其隐私安全性具有重要意义. 首先, 针对纵向联邦学习协议中由于参与方交换的嵌入表示造成的隐私泄漏风险, 研究由协作者发起的通用的属性推断攻击. 攻击者利用辅助数据和嵌入表示训练一个攻击模型, 然后利用训练完成的攻击模型窃取参与方的隐私属性. 实验结果表明, 纵向联邦学习在训练推理阶段产生的嵌入表示容易泄漏数据隐私. 为了应对上述隐私泄漏风险, 提出一种基于最大−最小策略的纵向联邦学习隐私保护方法(Privacy preservation method for vertical federated learning based on max-min strategy, PPVFL), 其引入梯度正则组件保证训练过程主任务的预测性能, 同时引入重构组件掩藏参与方嵌入表示中包含的隐私属性信息. 最后, 在钢板缺陷诊断工业场景的实验结果表明, 相比于没有任何防御方法的VFL, 隐私保护方法将攻击推断准确度从95%下降到55%以下, 接近于随机猜测的水平, 同时主任务预测准确率仅下降2%.
纵向联邦学习(Vertical federated learning, VFL)是一种新兴的分布式机器学习技术, 在保障隐私性的前提下, 利用分散在各个机构的数据实现机器学习模型的联合训练. 纵向联邦学习被广泛应用于工业互联网、金融借贷和医疗诊断等诸多领域中, 因此保证其隐私安全性具有重要意义. 首先, 针对纵向联邦学习协议中由于参与方交换的嵌入表示造成的隐私泄漏风险, 研究由协作者发起的通用的属性推断攻击. 攻击者利用辅助数据和嵌入表示训练一个攻击模型, 然后利用训练完成的攻击模型窃取参与方的隐私属性. 实验结果表明, 纵向联邦学习在训练推理阶段产生的嵌入表示容易泄漏数据隐私. 为了应对上述隐私泄漏风险, 提出一种基于最大−最小策略的纵向联邦学习隐私保护方法(Privacy preservation method for vertical federated learning based on max-min strategy, PPVFL), 其引入梯度正则组件保证训练过程主任务的预测性能, 同时引入重构组件掩藏参与方嵌入表示中包含的隐私属性信息. 最后, 在钢板缺陷诊断工业场景的实验结果表明, 相比于没有任何防御方法的VFL, 隐私保护方法将攻击推断准确度从95%下降到55%以下, 接近于随机猜测的水平, 同时主任务预测准确率仅下降2%.
2024, 50(7): 1389-1401.
doi: 10.16383/j.aas.c211246
摘要:
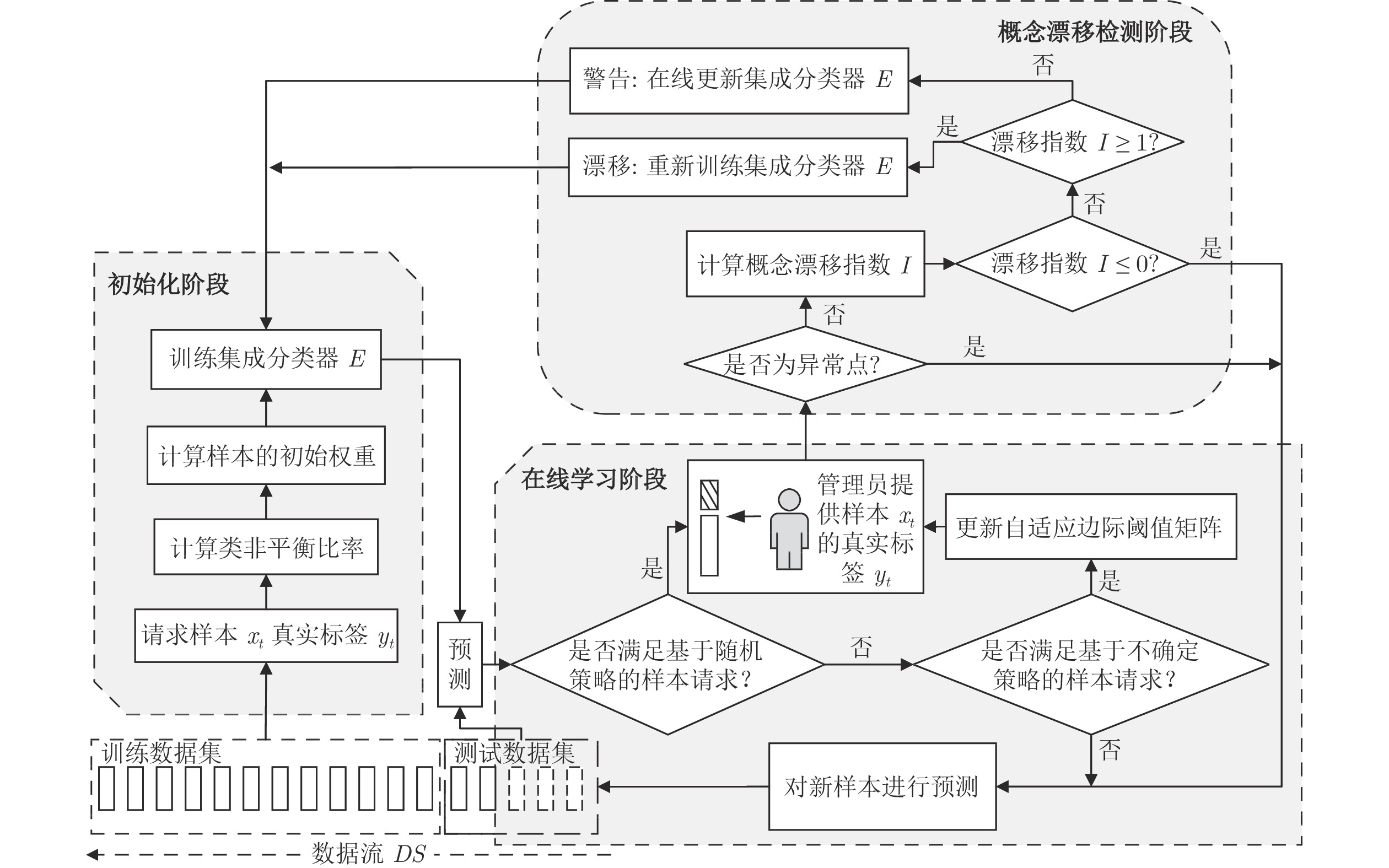
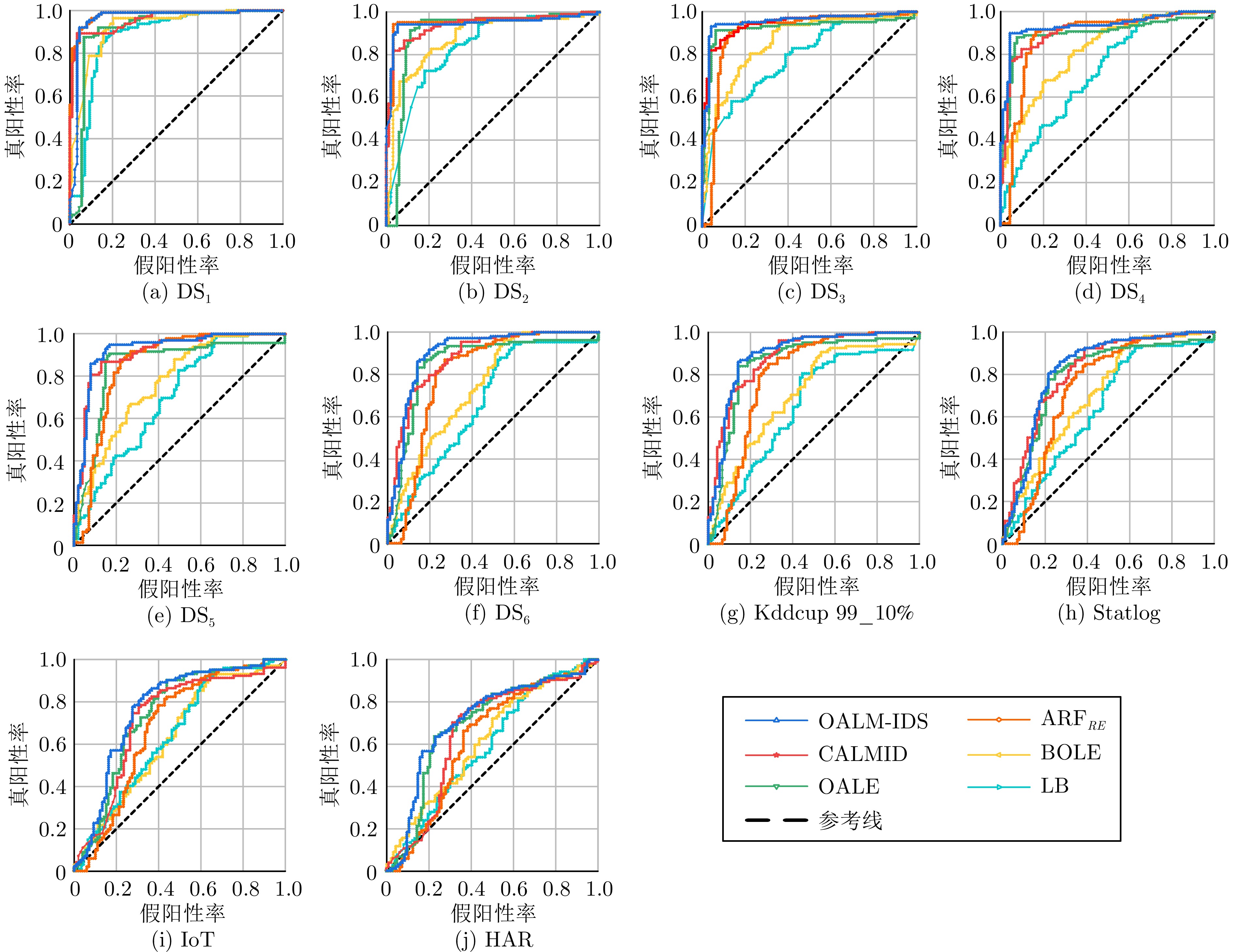
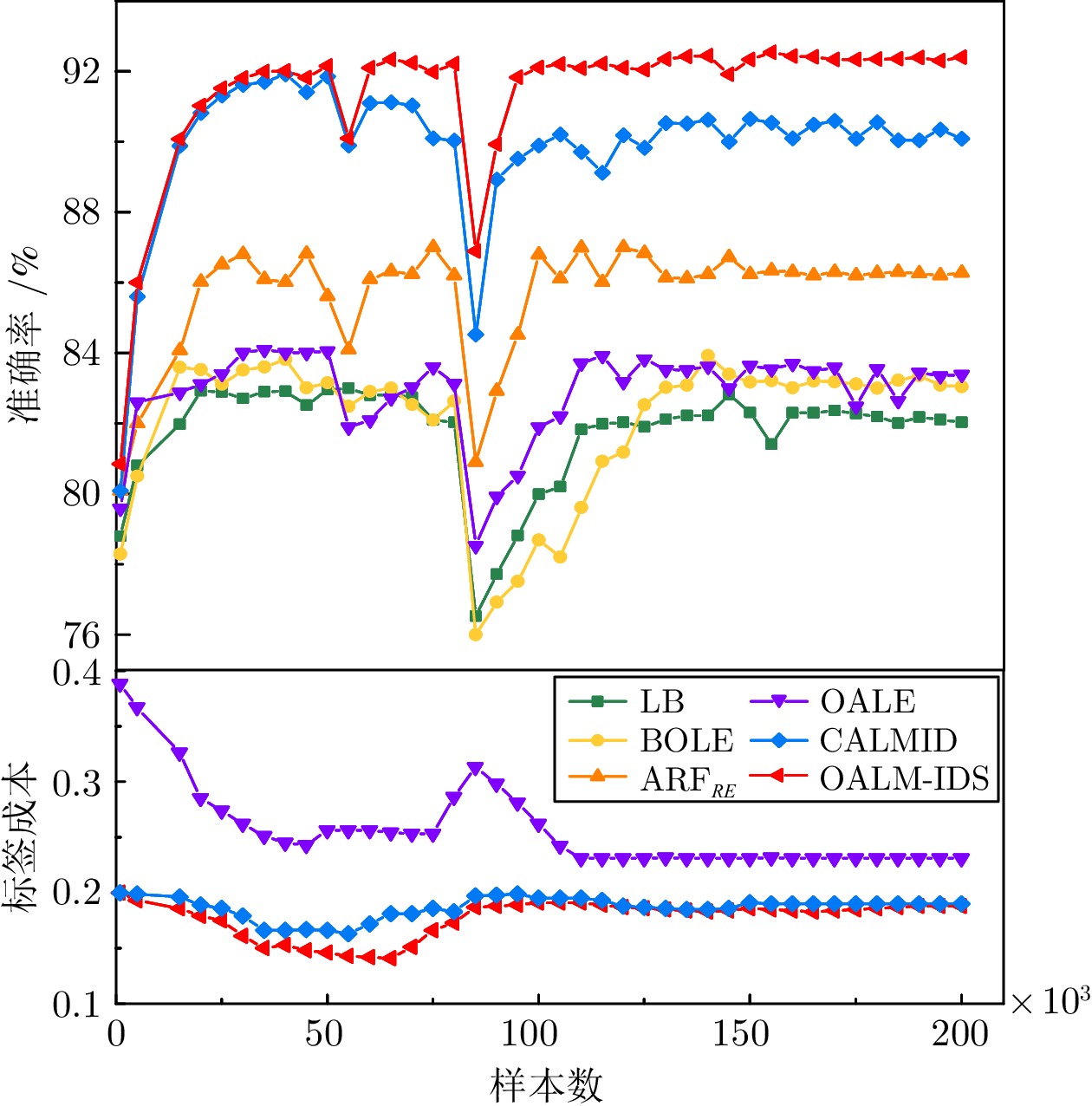
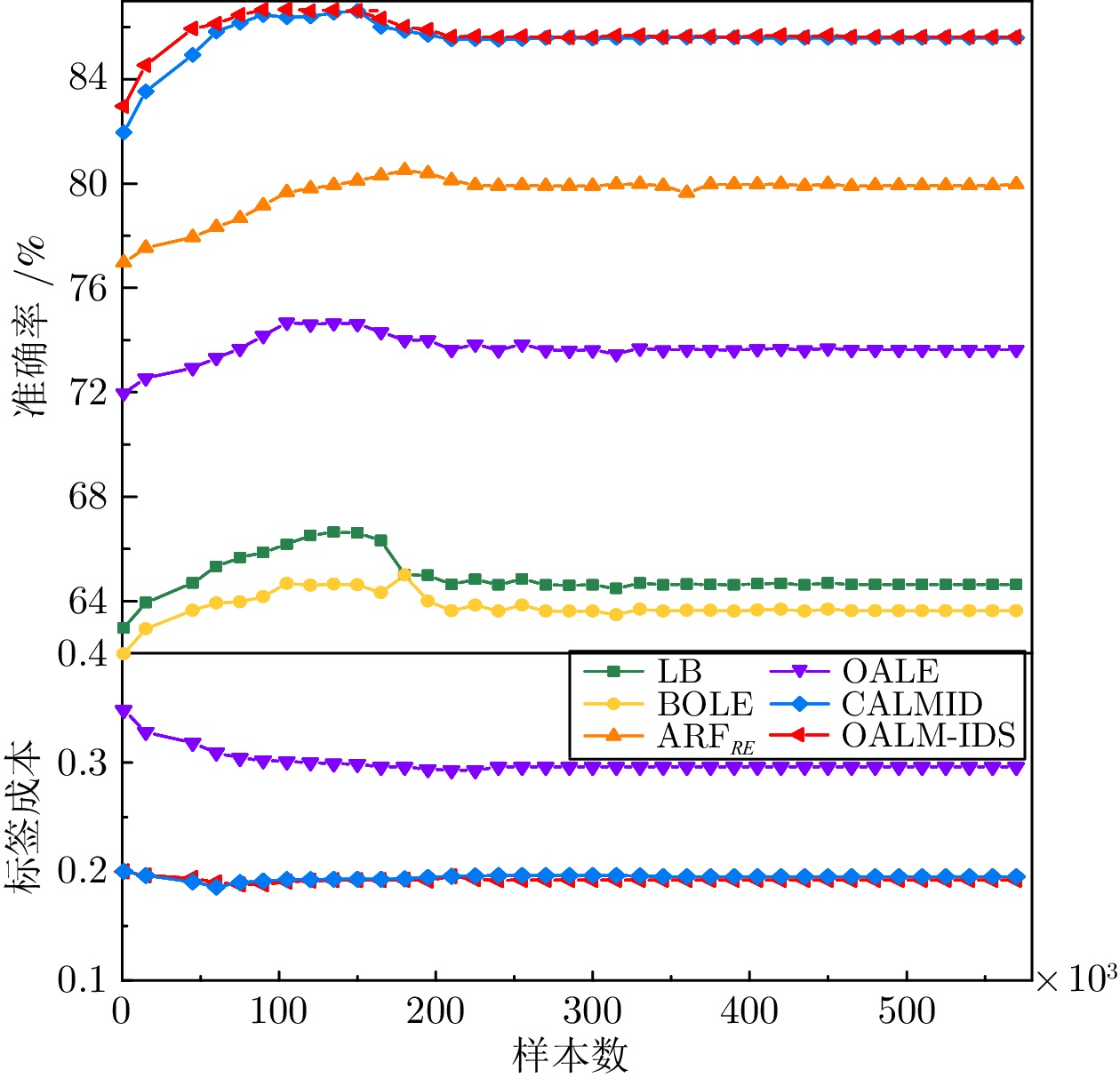
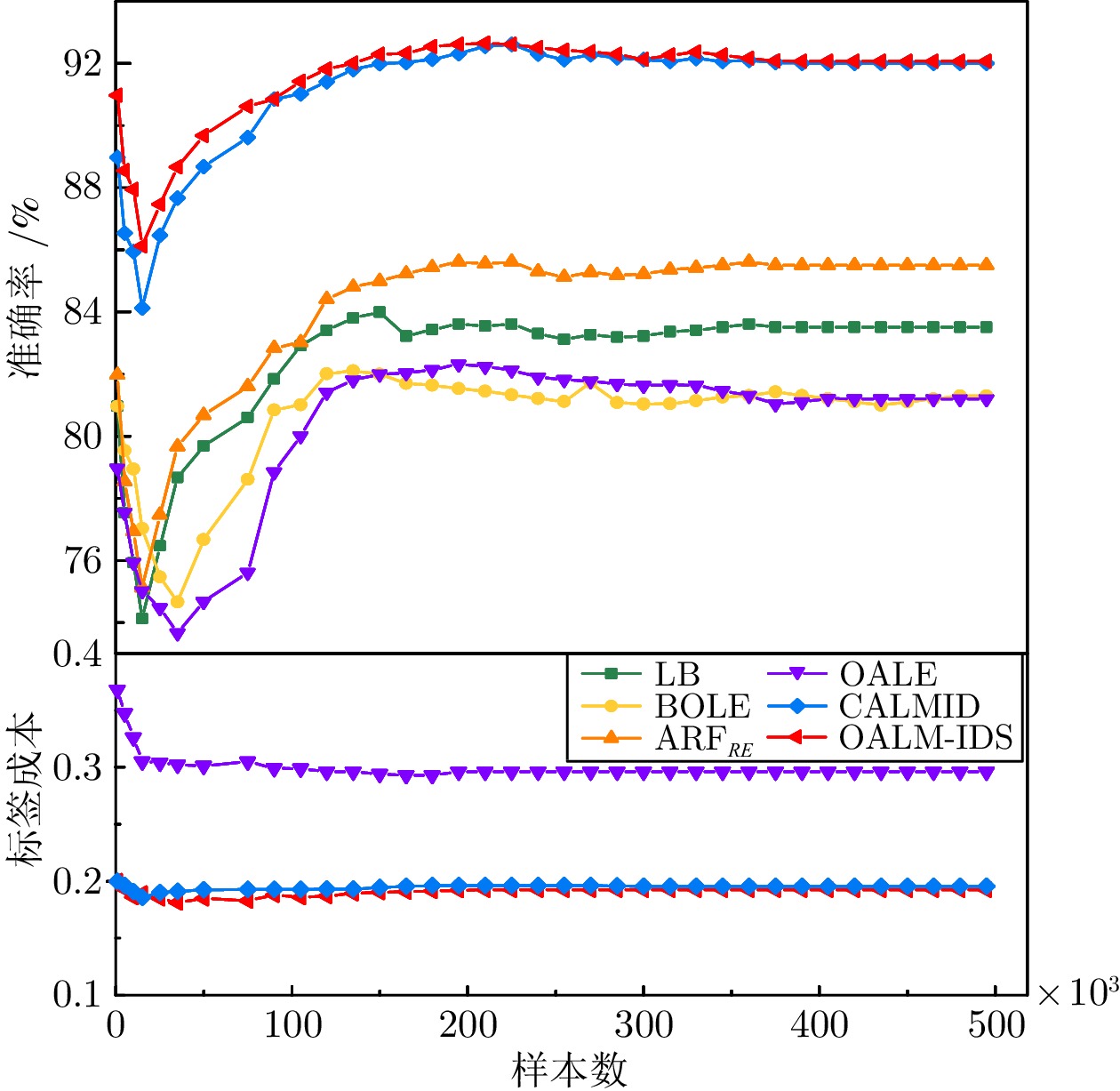
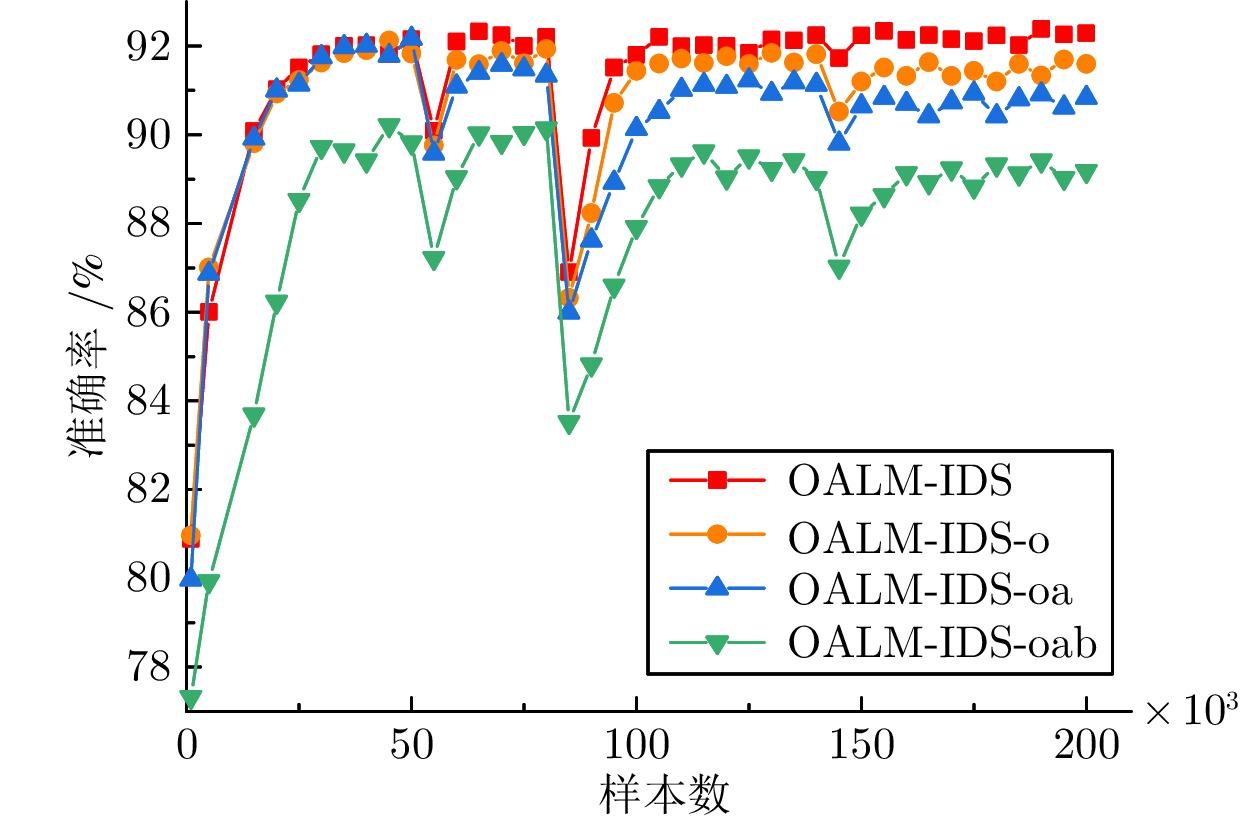
数据流分类是数据流挖掘领域一项重要研究任务, 目标是从不断变化的海量数据中捕获变化的类结构. 目前, 几乎没有框架可以同时处理数据流中常见的多类非平衡、概念漂移、异常点和标记样本成本高昂问题. 基于此, 提出一种非平衡数据流在线主动学习方法(Online active learning method for imbalanced data stream, OALM-IDS). AdaBoost是一种将多个弱分类器经过迭代生成强分类器的集成分类方法, AdaBoost.M2引入了弱分类器的置信度, 此类方法常用于静态数据. 定义了基于非平衡比率和自适应遗忘因子的训练样本重要性度量, 从而使AdaBoost.M2方法适用于非平衡数据流, 提升了非平衡数据流集成分类器的性能. 提出了边际阈值矩阵的自适应调整方法, 优化了标签请求策略. 将概念漂移程度融入模型构建过程中, 定义了基于概念漂移指数的自适应遗忘因子, 实现了漂移后的模型重构. 在6个人工数据流和4个真实数据流上的对比实验表明, 提出的非平衡数据流在线主动学习方法的分类性能优于其他5种非平衡数据流学习方法.
数据流分类是数据流挖掘领域一项重要研究任务, 目标是从不断变化的海量数据中捕获变化的类结构. 目前, 几乎没有框架可以同时处理数据流中常见的多类非平衡、概念漂移、异常点和标记样本成本高昂问题. 基于此, 提出一种非平衡数据流在线主动学习方法(Online active learning method for imbalanced data stream, OALM-IDS). AdaBoost是一种将多个弱分类器经过迭代生成强分类器的集成分类方法, AdaBoost.M2引入了弱分类器的置信度, 此类方法常用于静态数据. 定义了基于非平衡比率和自适应遗忘因子的训练样本重要性度量, 从而使AdaBoost.M2方法适用于非平衡数据流, 提升了非平衡数据流集成分类器的性能. 提出了边际阈值矩阵的自适应调整方法, 优化了标签请求策略. 将概念漂移程度融入模型构建过程中, 定义了基于概念漂移指数的自适应遗忘因子, 实现了漂移后的模型重构. 在6个人工数据流和4个真实数据流上的对比实验表明, 提出的非平衡数据流在线主动学习方法的分类性能优于其他5种非平衡数据流学习方法.
2024, 50(7): 1402-1416.
doi: 10.16383/j.aas.c230297
摘要:
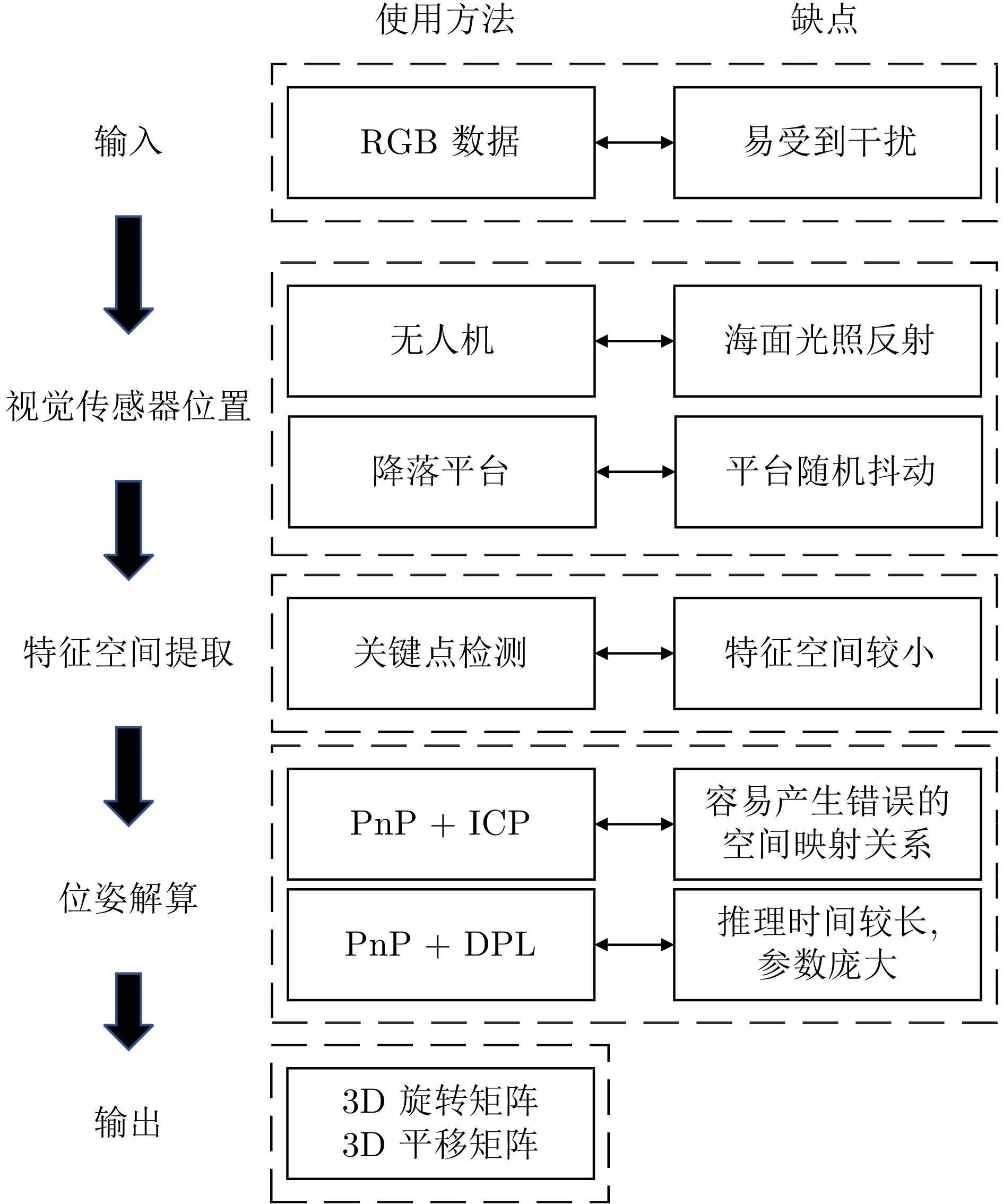
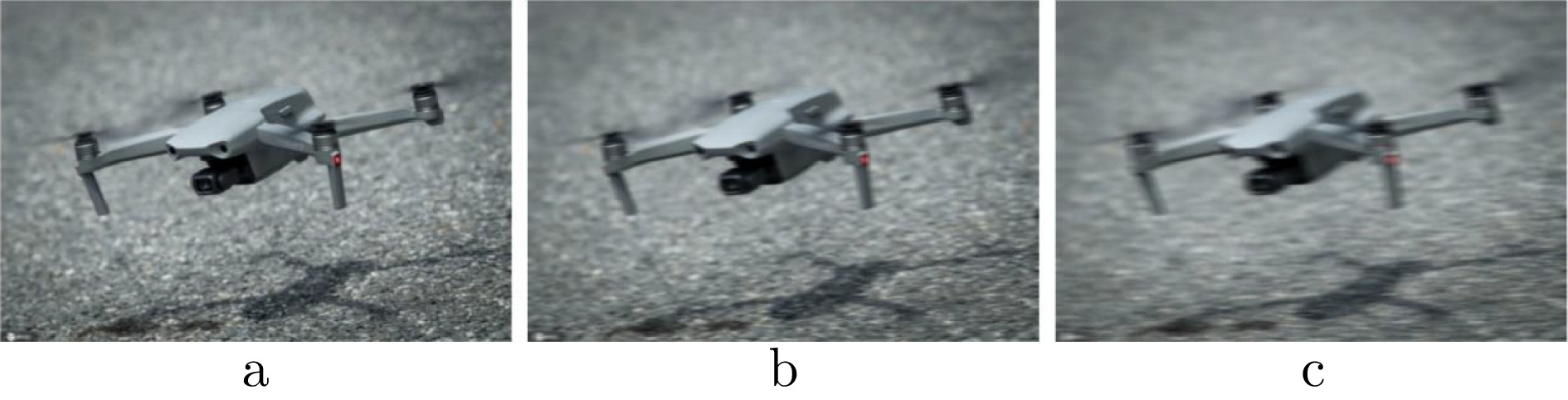
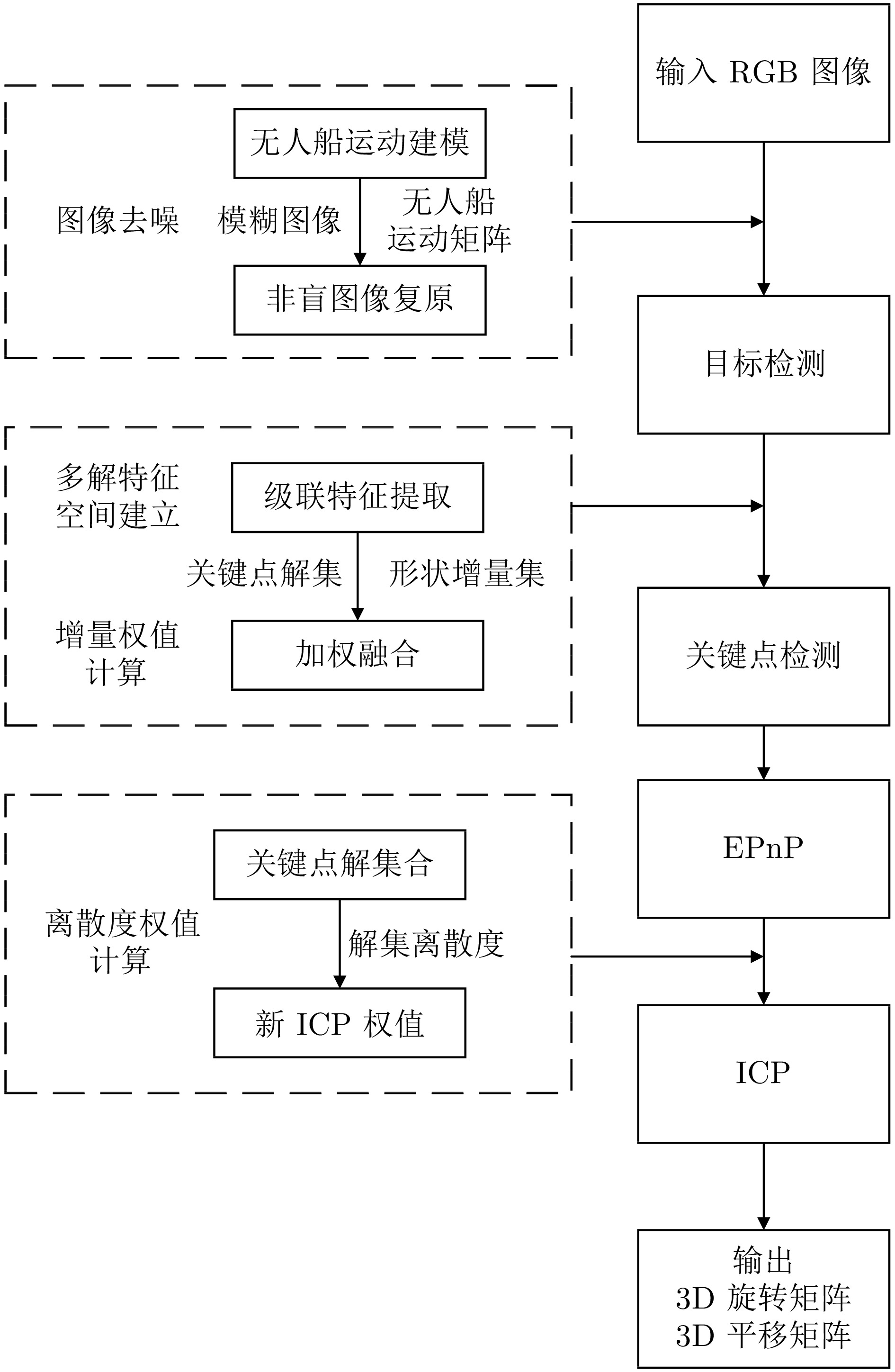
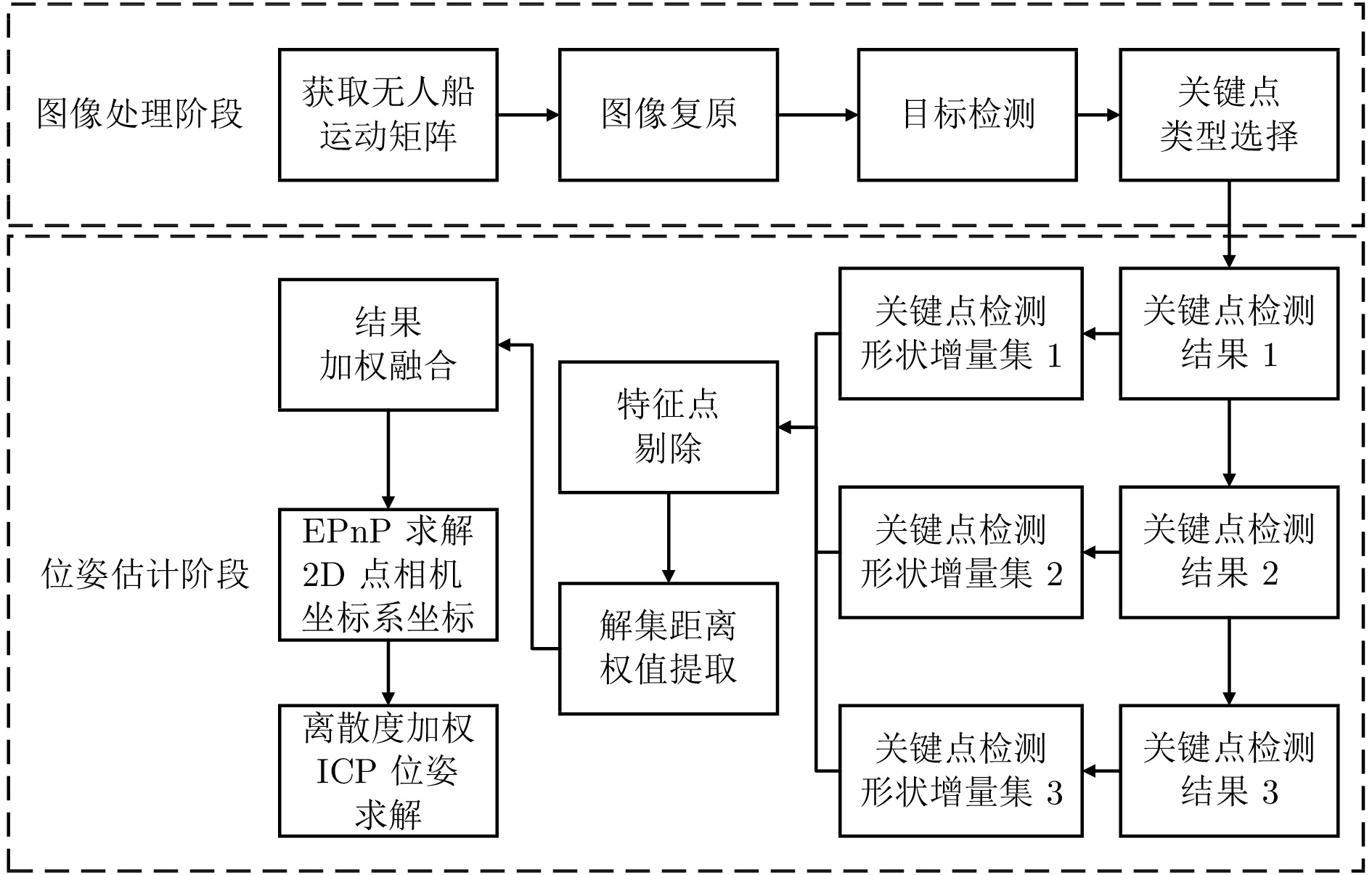
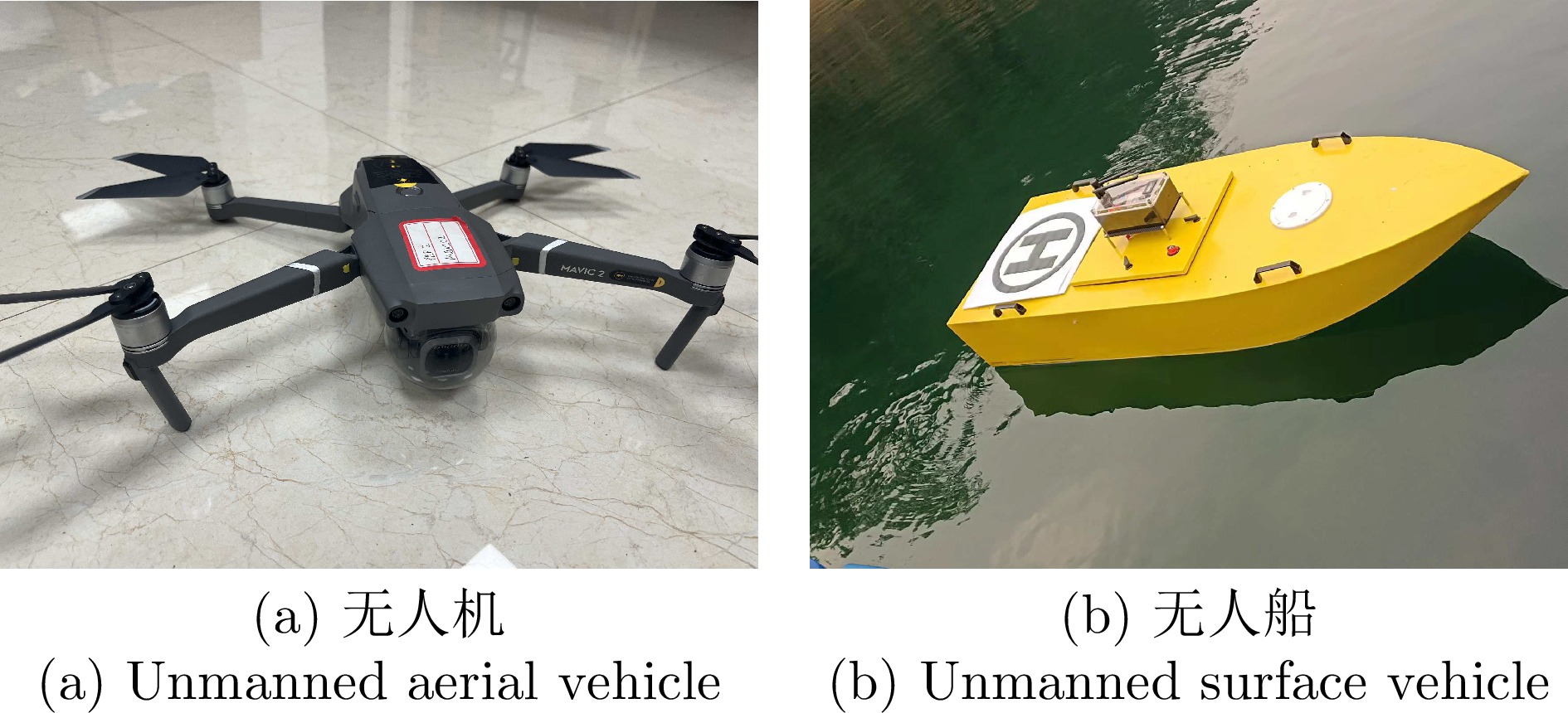
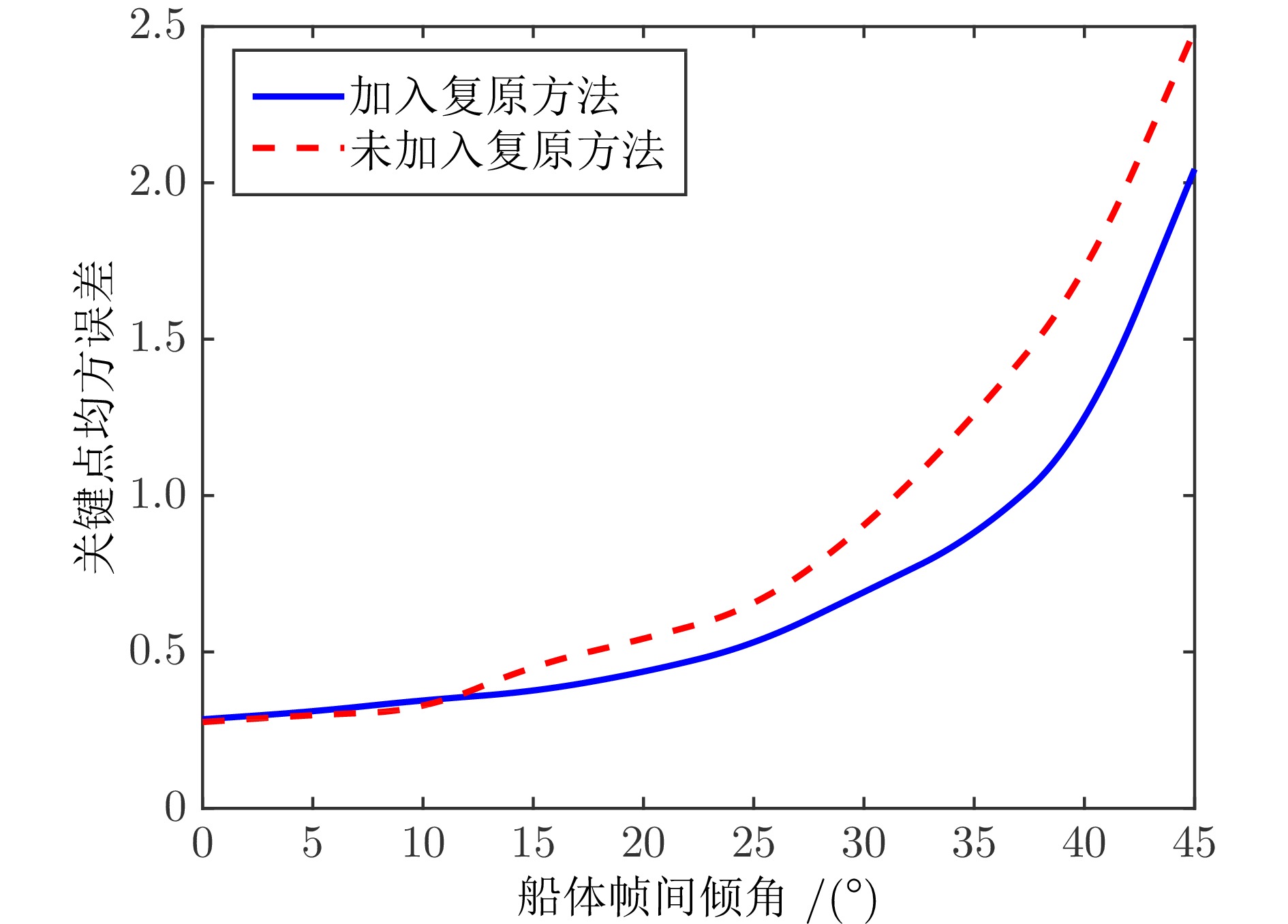
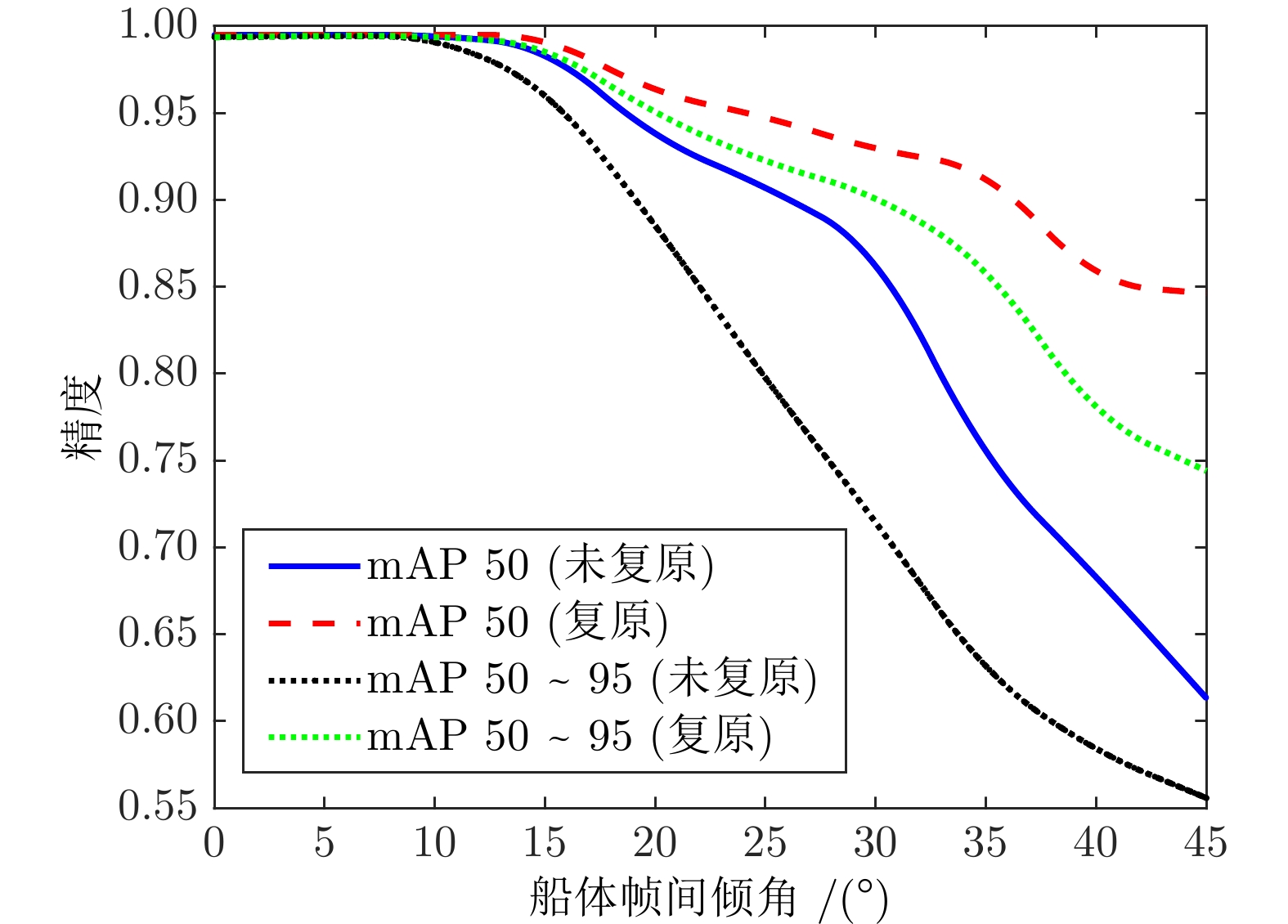
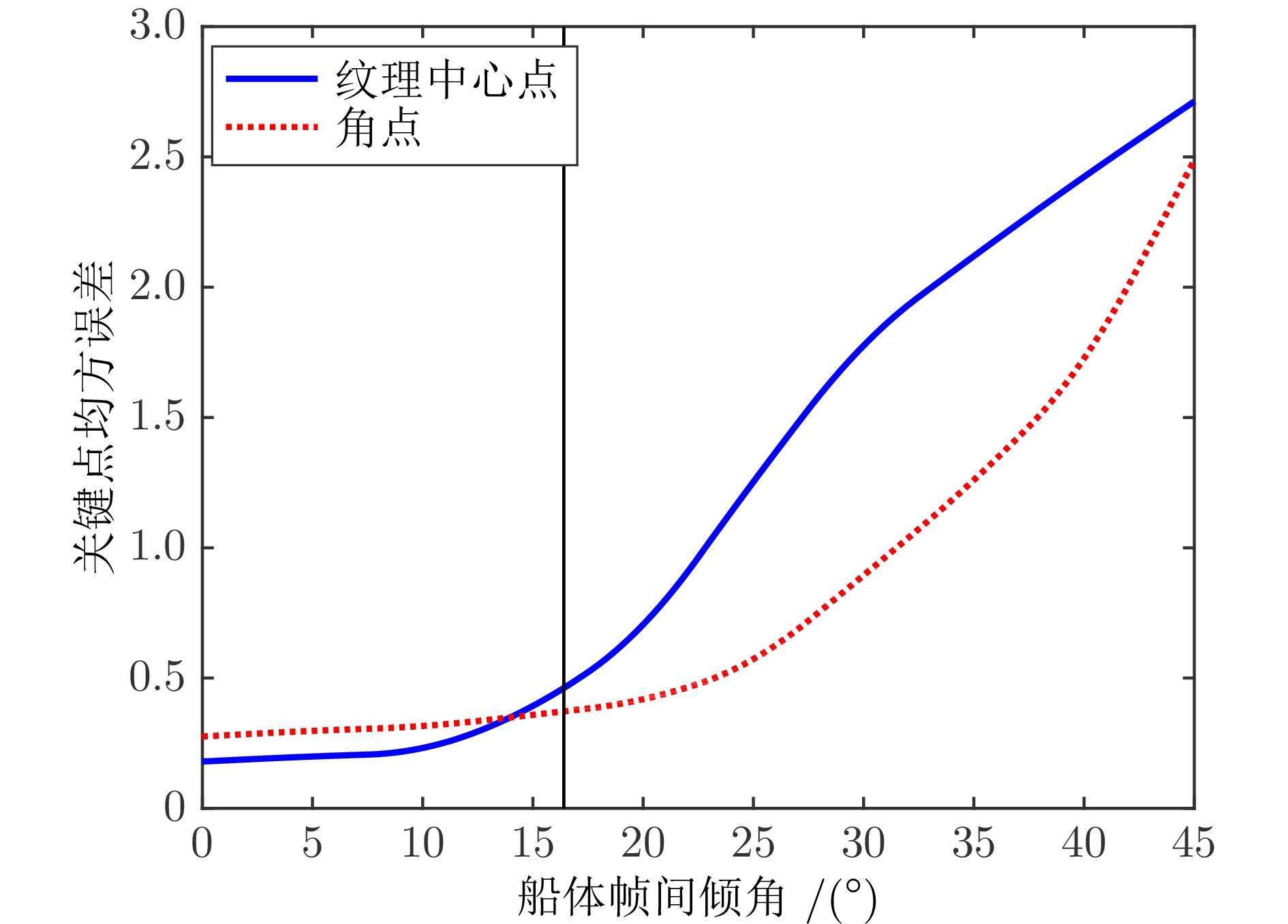
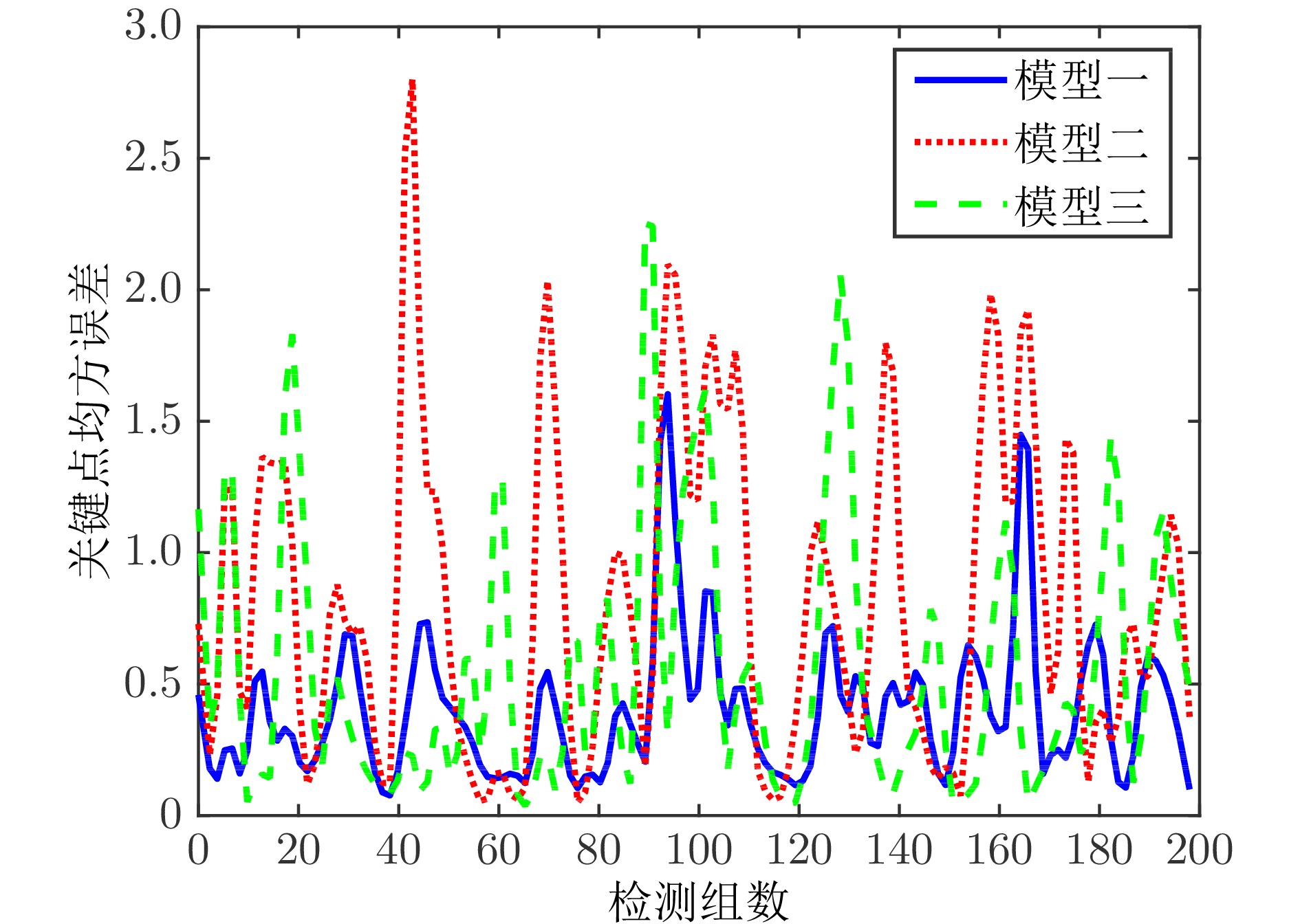
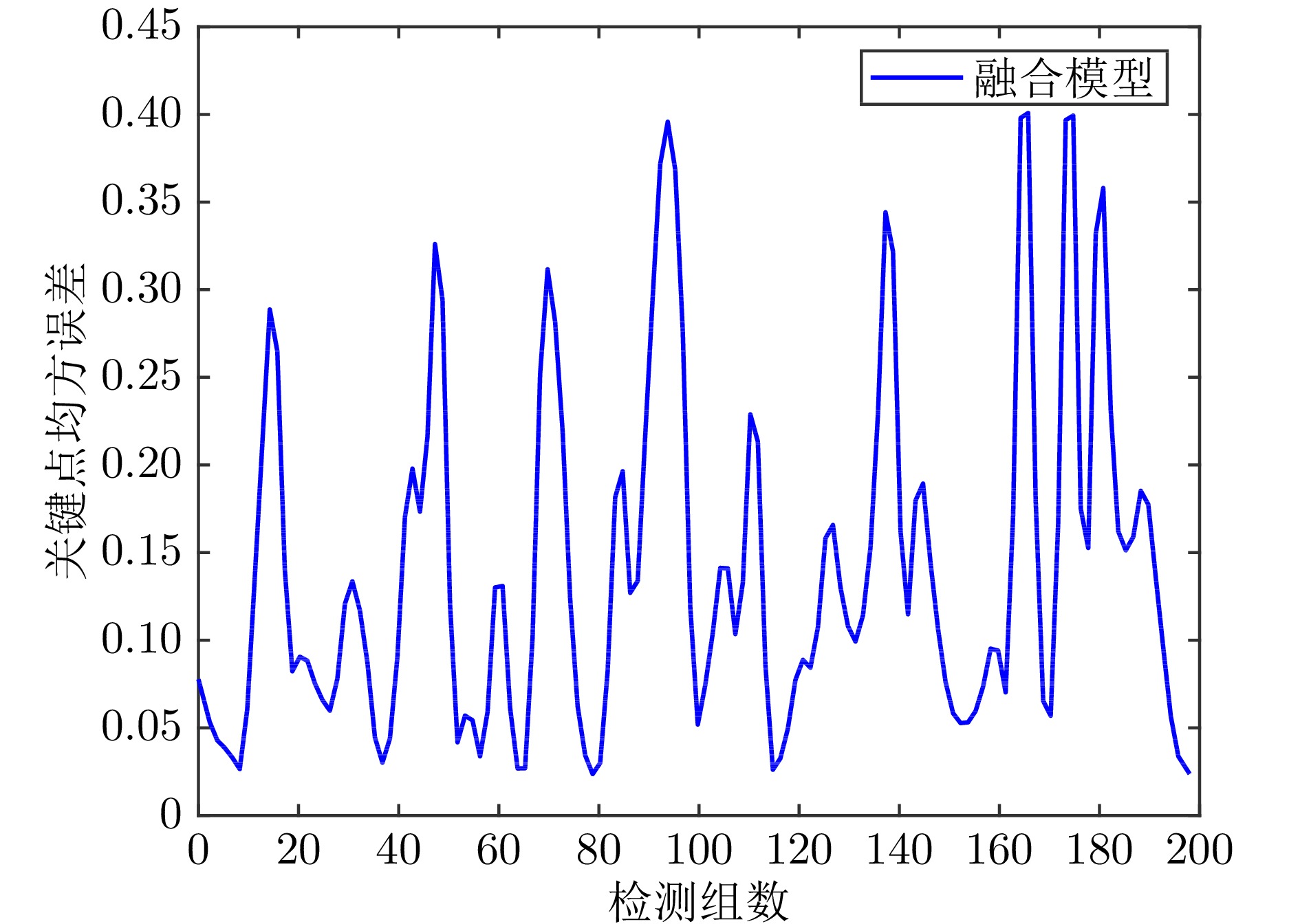
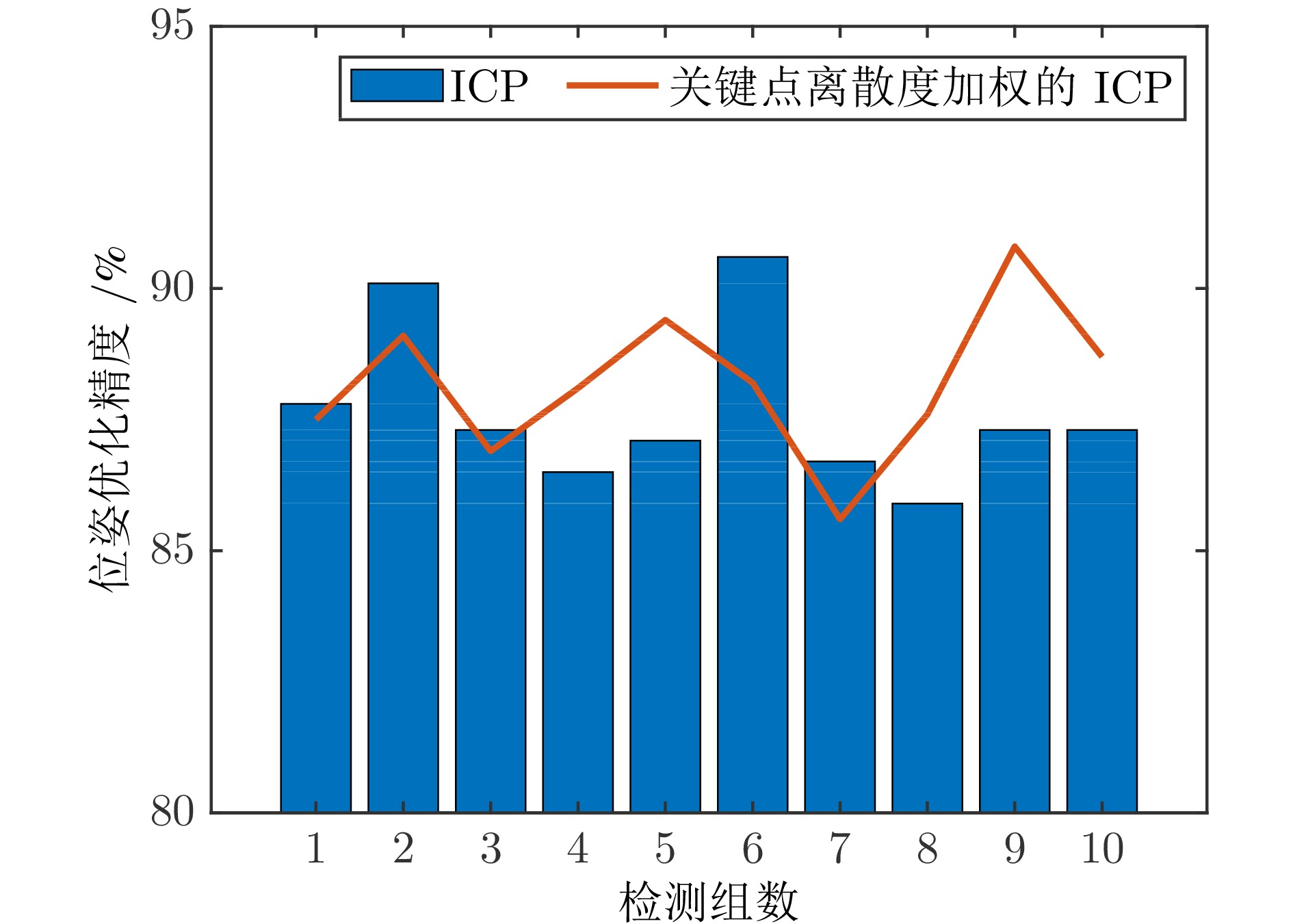
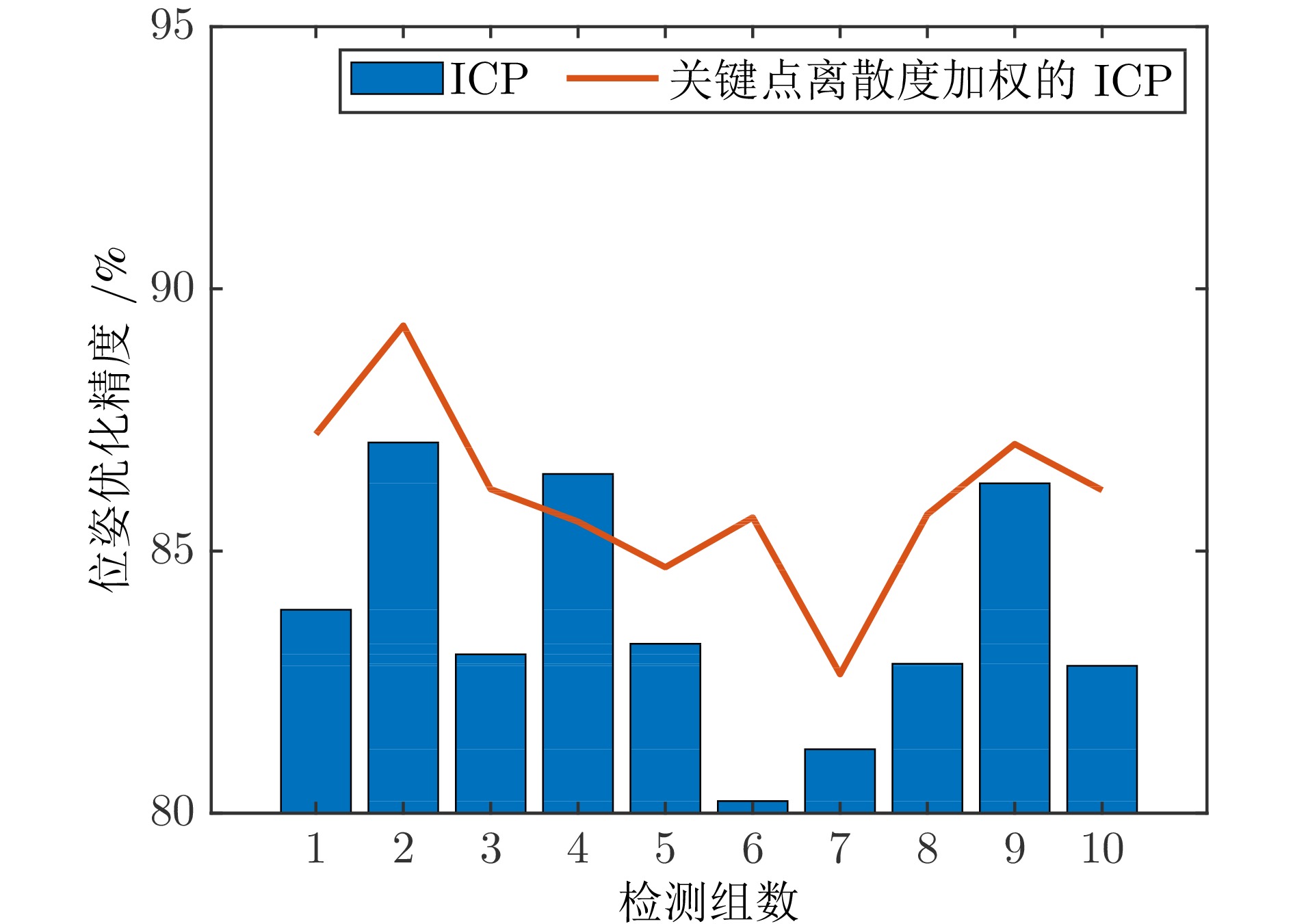
针对无人机降落阶段中无人船受水面波浪影响导致图像产生运动模糊以及获取无人机相对位姿精度低且鲁棒性差的问题, 提出一种基于多模型关键点加权融合的6D目标位姿估计算法, 以提高位姿估计的精度和鲁棒性. 首先, 基于无人船陀螺仪得到的运动信息设计帧间抖动模型, 通过还原图像信息达到降低图像噪声的目的; 然后, 设计一种多模型的级联回归特征提取算法, 通过多模型检测舰载视觉系统获取的图像, 以增强特征空间的多样性; 同时, 将检测过程中关键点定位形状增量集作为融合权重对模型进行加权融合, 以提高特征空间的鲁棒性; 紧接着, 利用EPnP (Efficient perspective-n-point) 计算关键点相机坐标系坐标, 将PnP (Perspective-n-point) 问题转化为ICP (Iterative closest point) 问题; 最终, 基于关键点解集的离散度为关键点赋权, 使用ICP算法求解位姿以削弱深度信息对位姿的影响. 仿真结果表明, 该算法能够建立一个精度更高的特征空间, 使得位姿解算时特征映射的损失降低, 最终提高位姿解算的精度.
针对无人机降落阶段中无人船受水面波浪影响导致图像产生运动模糊以及获取无人机相对位姿精度低且鲁棒性差的问题, 提出一种基于多模型关键点加权融合的6D目标位姿估计算法, 以提高位姿估计的精度和鲁棒性. 首先, 基于无人船陀螺仪得到的运动信息设计帧间抖动模型, 通过还原图像信息达到降低图像噪声的目的; 然后, 设计一种多模型的级联回归特征提取算法, 通过多模型检测舰载视觉系统获取的图像, 以增强特征空间的多样性; 同时, 将检测过程中关键点定位形状增量集作为融合权重对模型进行加权融合, 以提高特征空间的鲁棒性; 紧接着, 利用EPnP (Efficient perspective-n-point) 计算关键点相机坐标系坐标, 将PnP (Perspective-n-point) 问题转化为ICP (Iterative closest point) 问题; 最终, 基于关键点解集的离散度为关键点赋权, 使用ICP算法求解位姿以削弱深度信息对位姿的影响. 仿真结果表明, 该算法能够建立一个精度更高的特征空间, 使得位姿解算时特征映射的损失降低, 最终提高位姿解算的精度.


2024, 50(7): 1417-1431.
doi: 10.16383/j.aas.c230591
摘要:
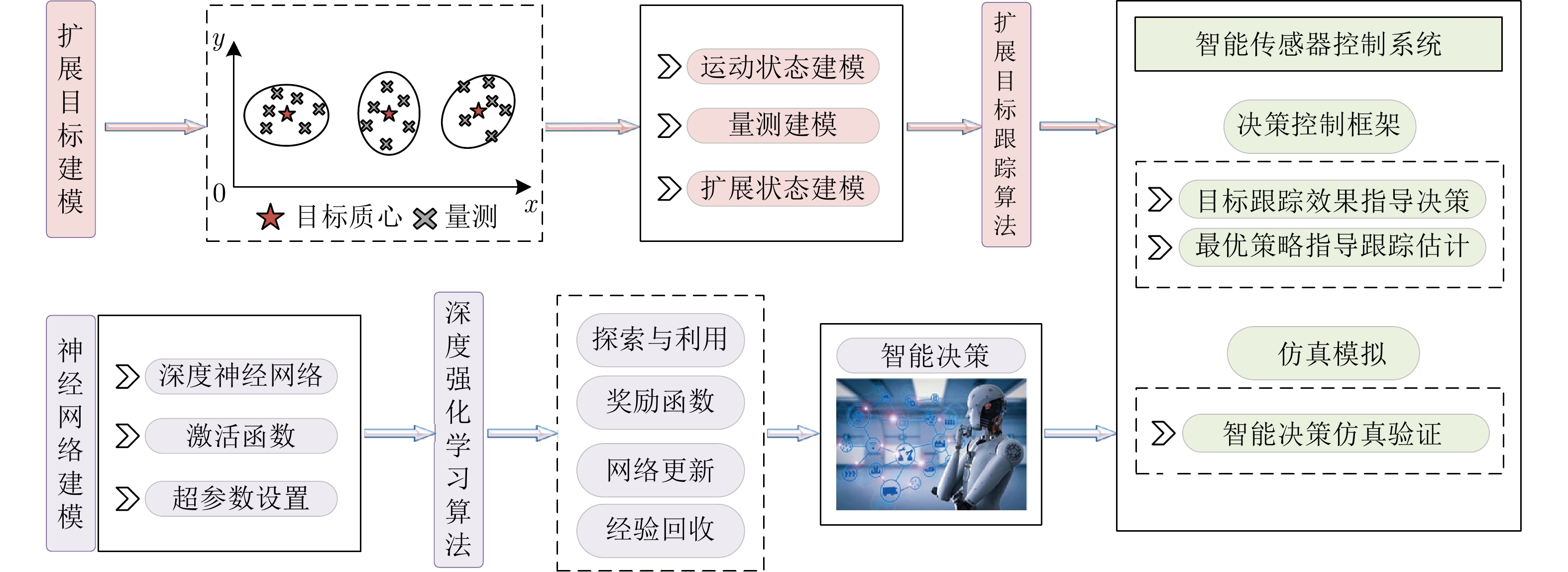
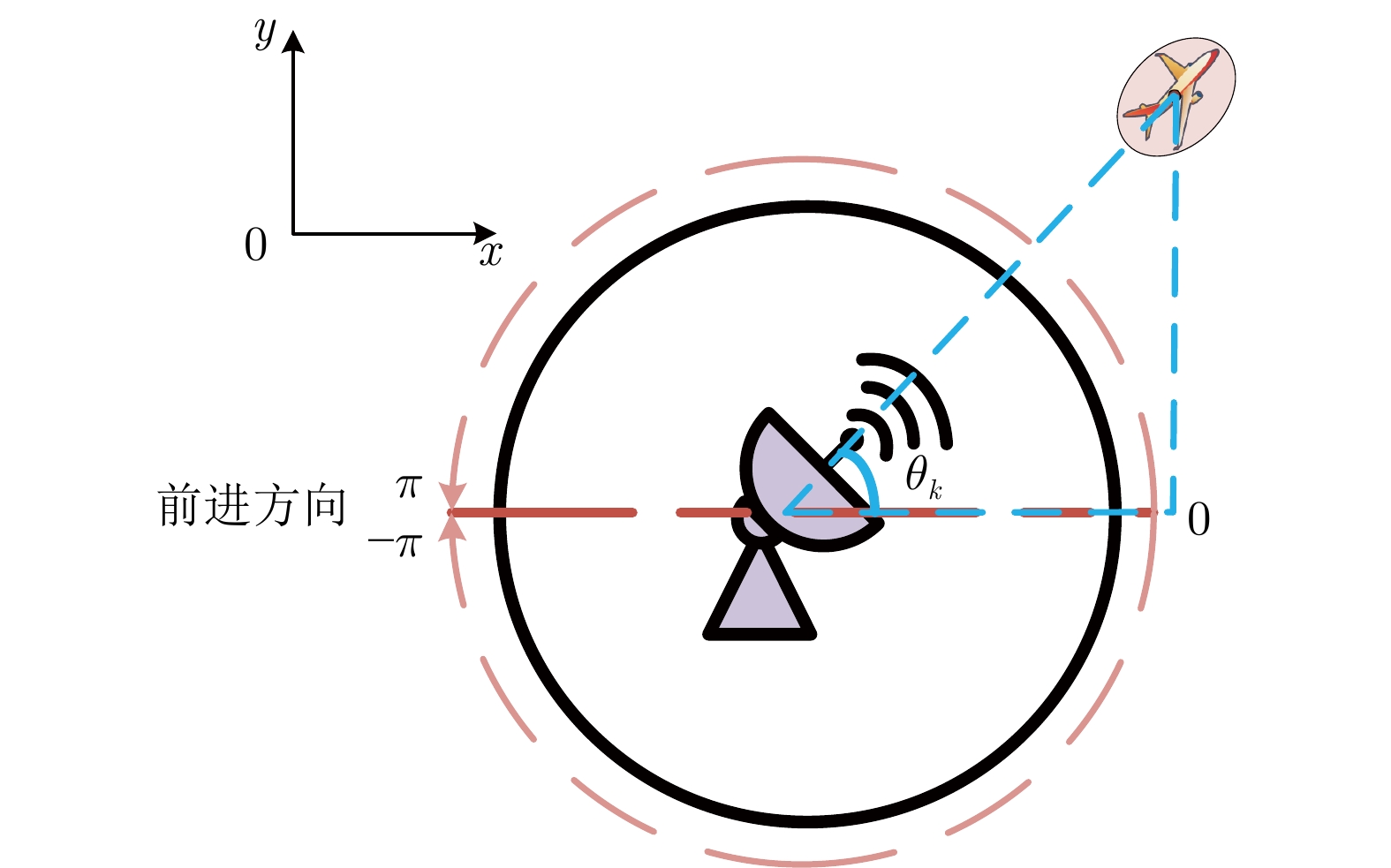
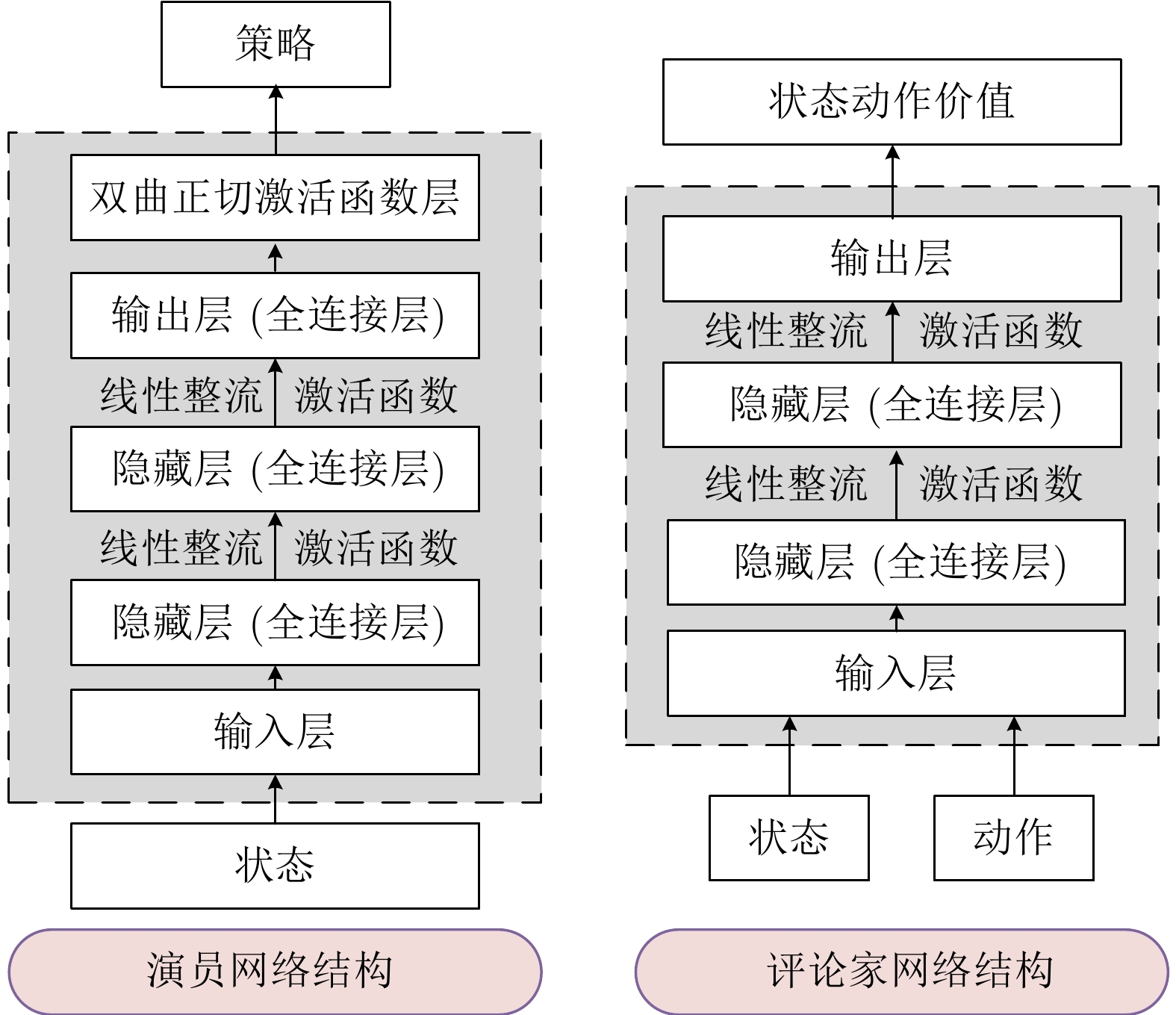
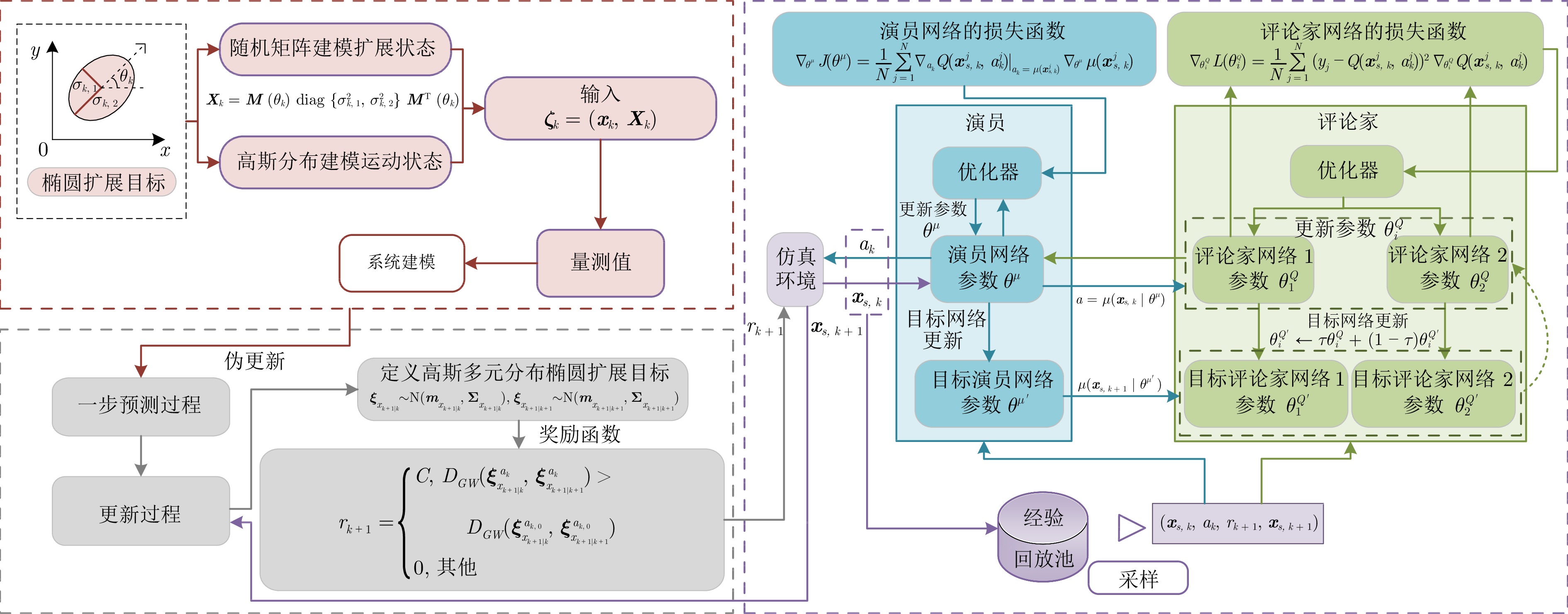
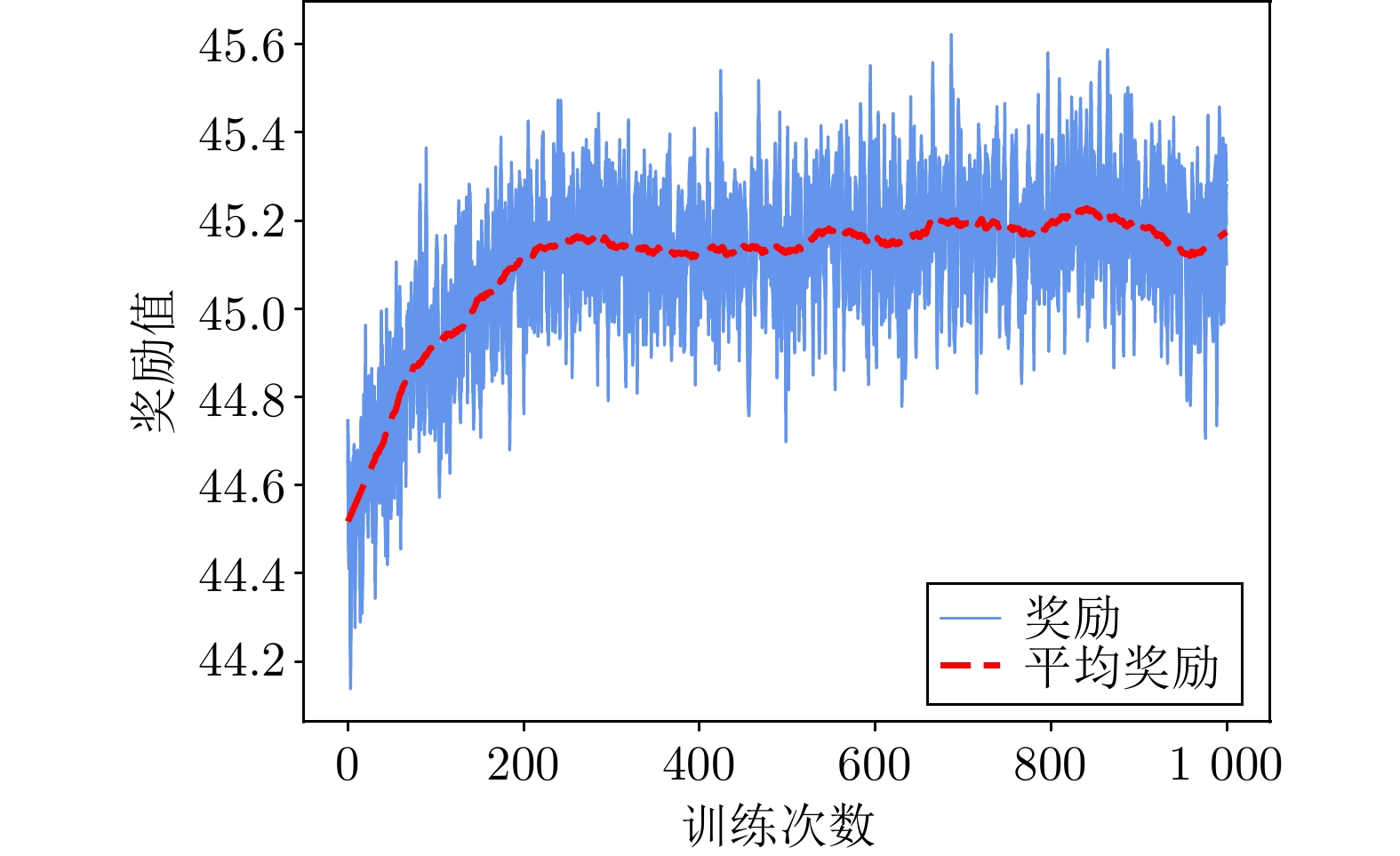
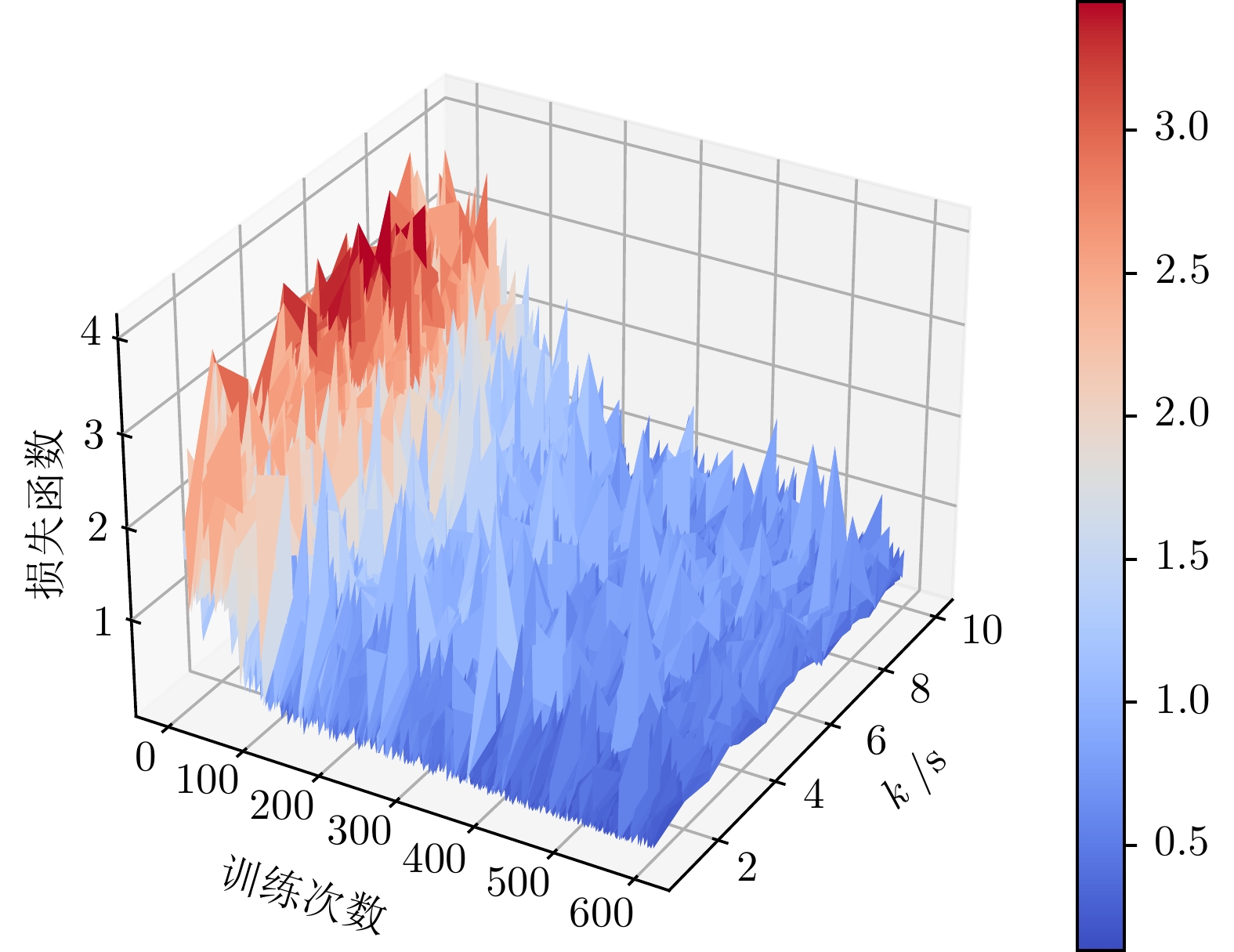
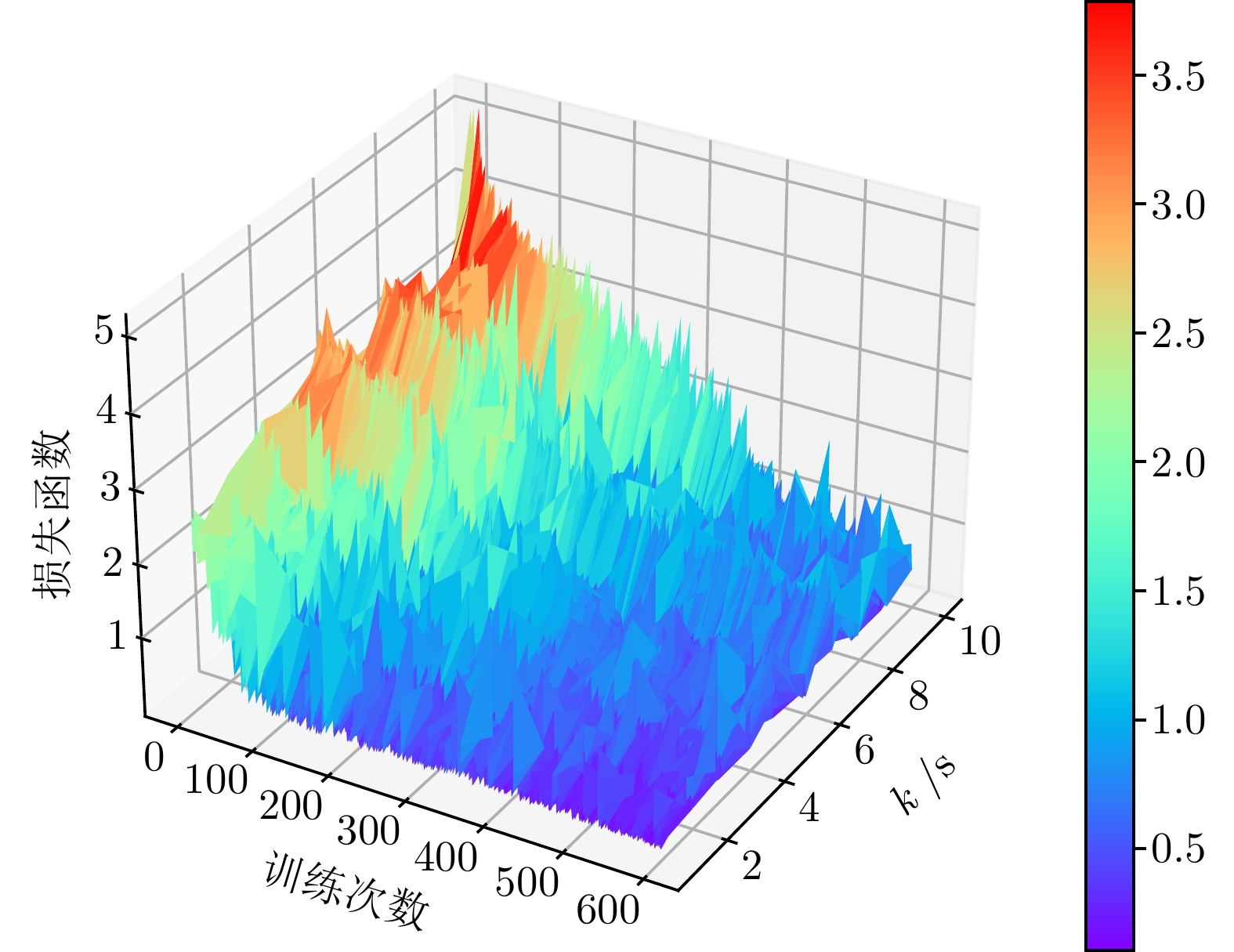
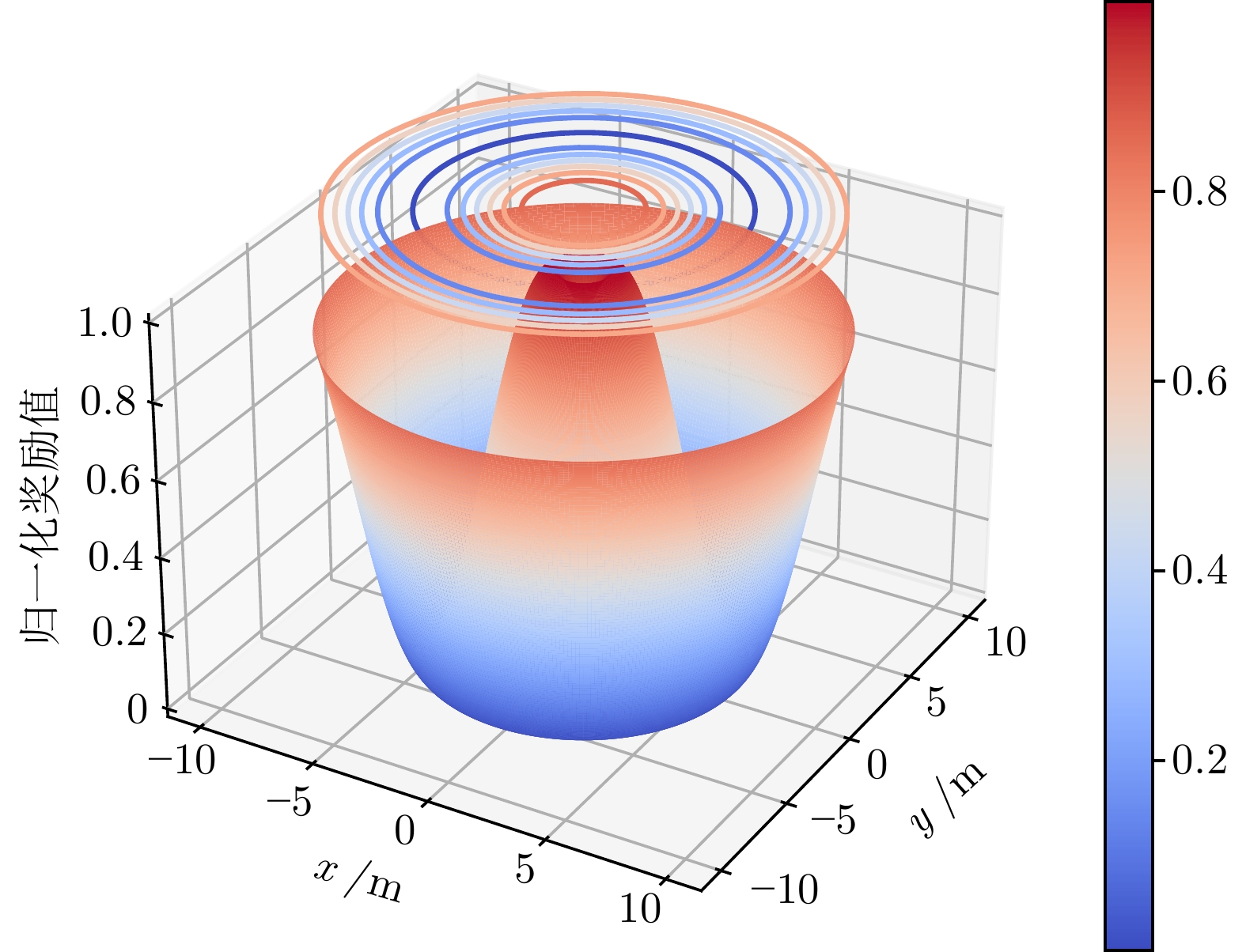
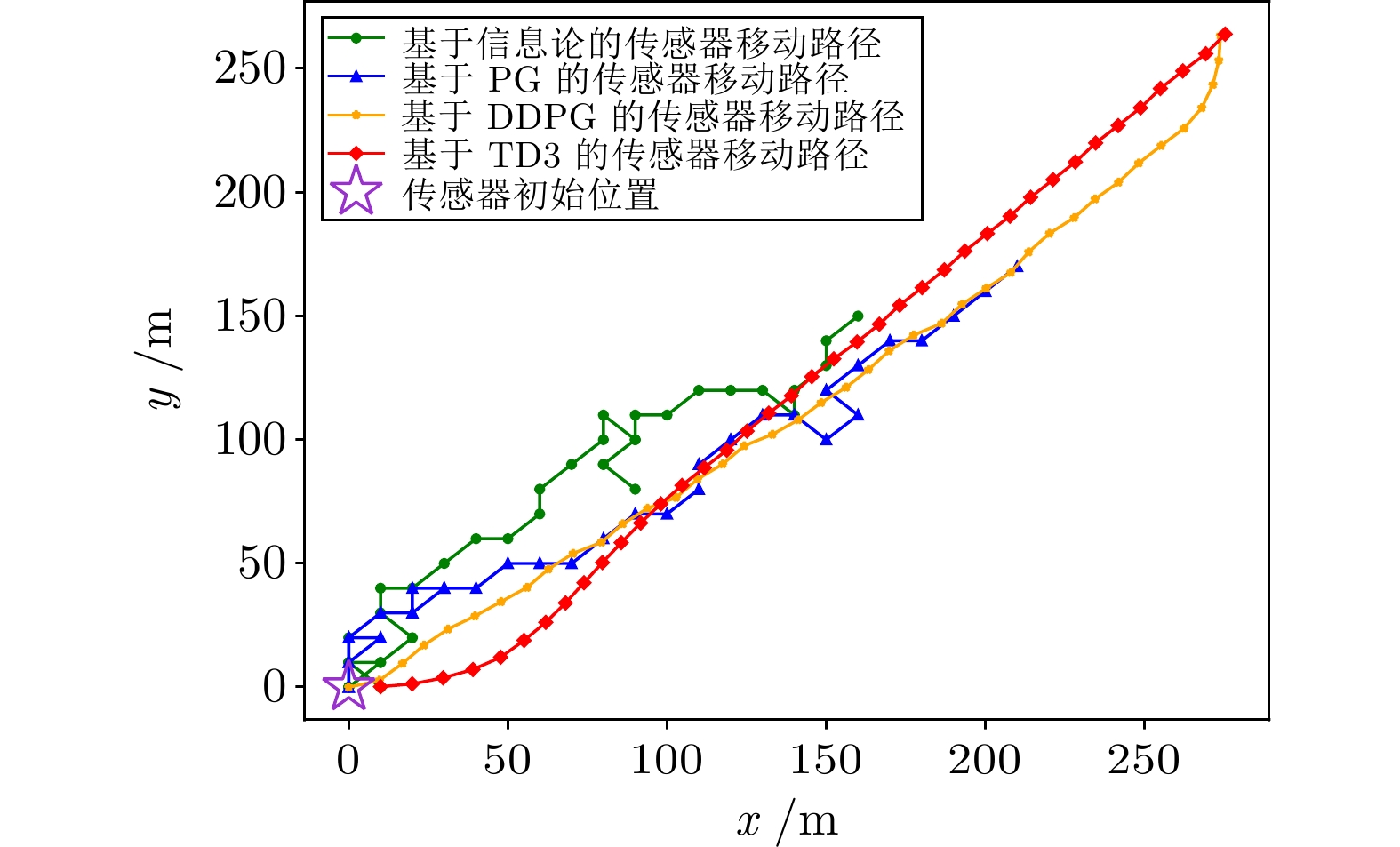
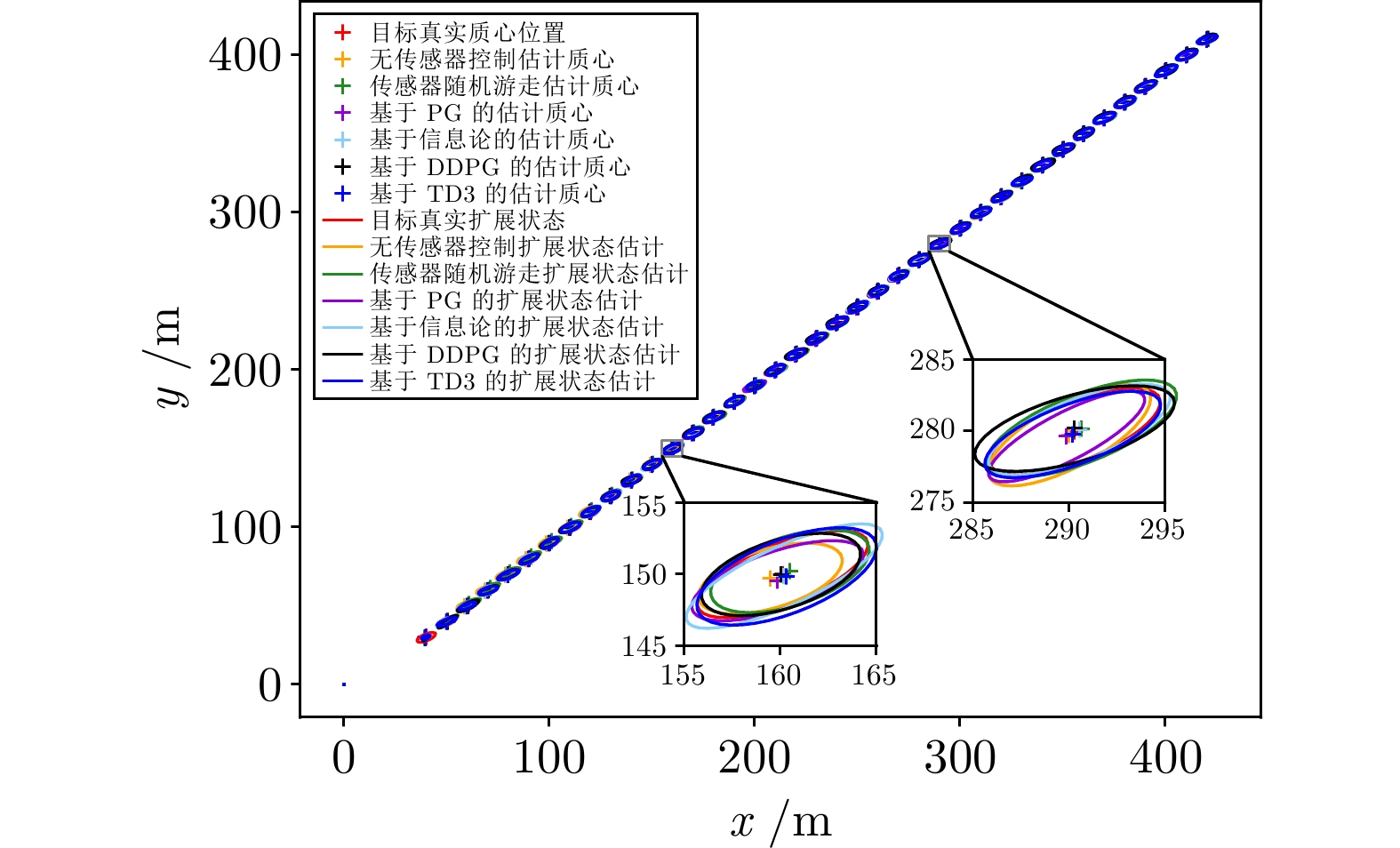
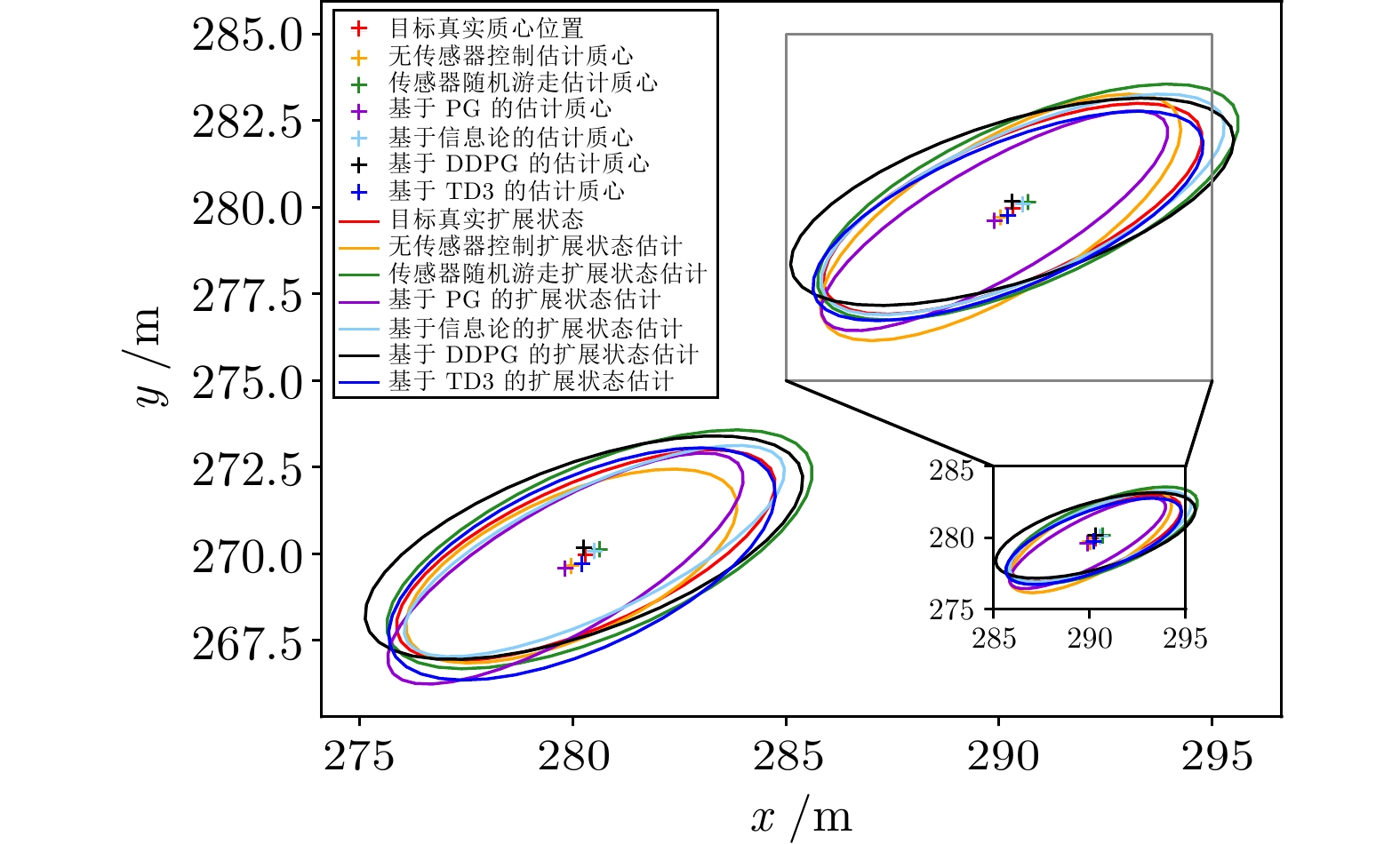
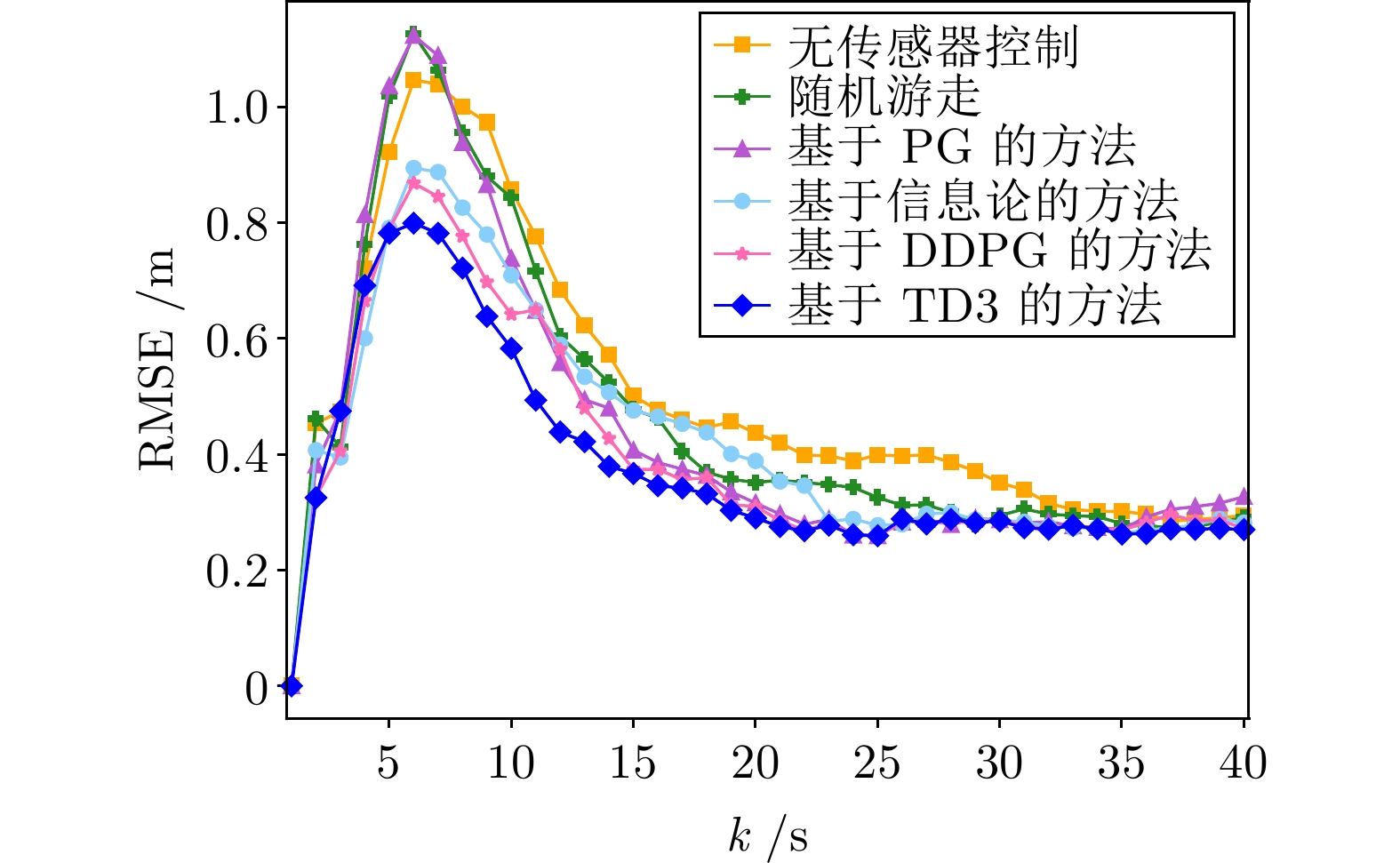
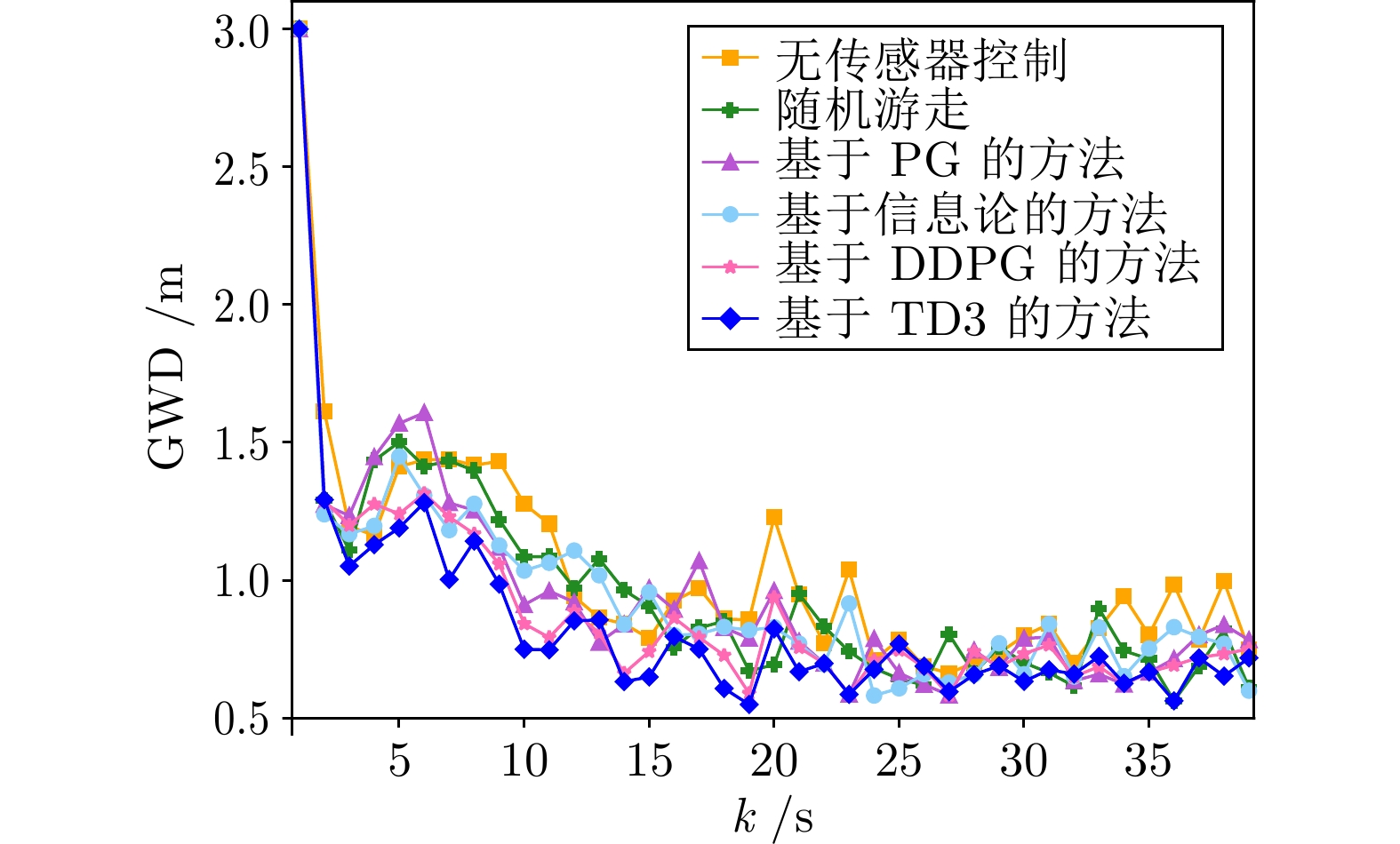
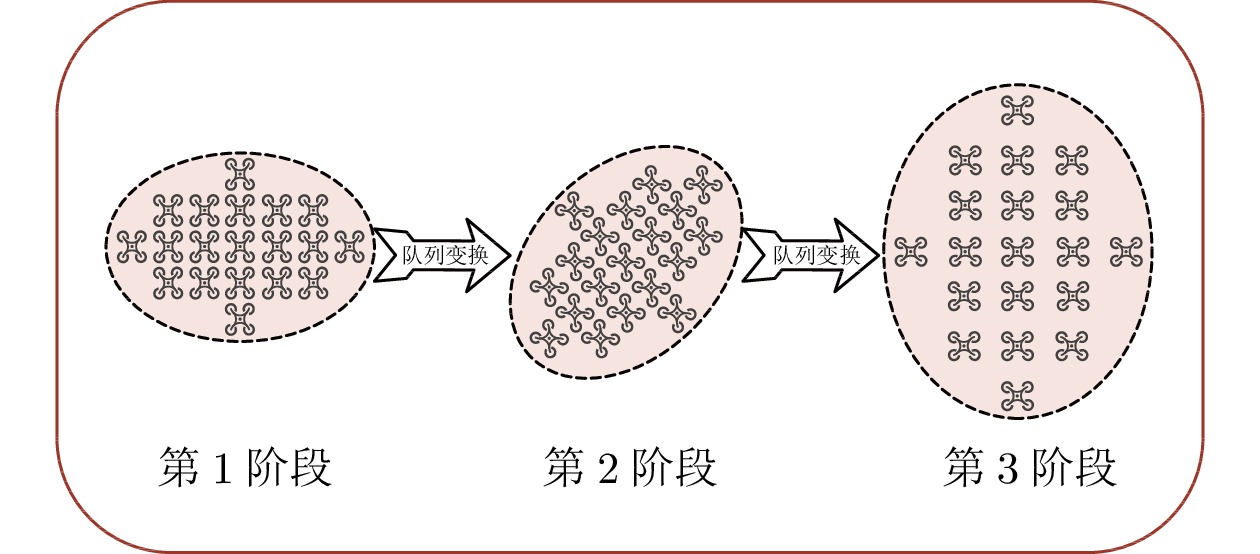
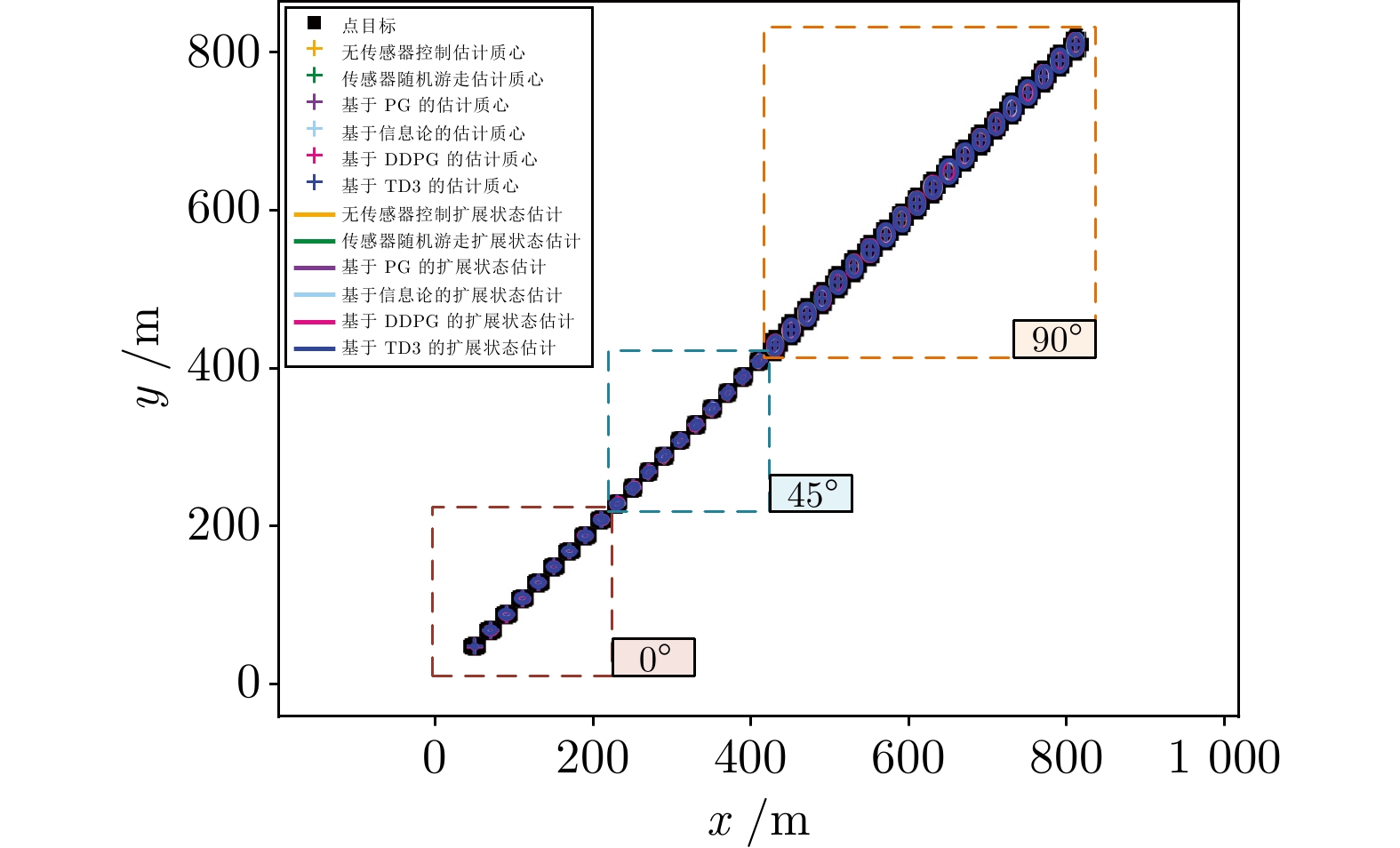
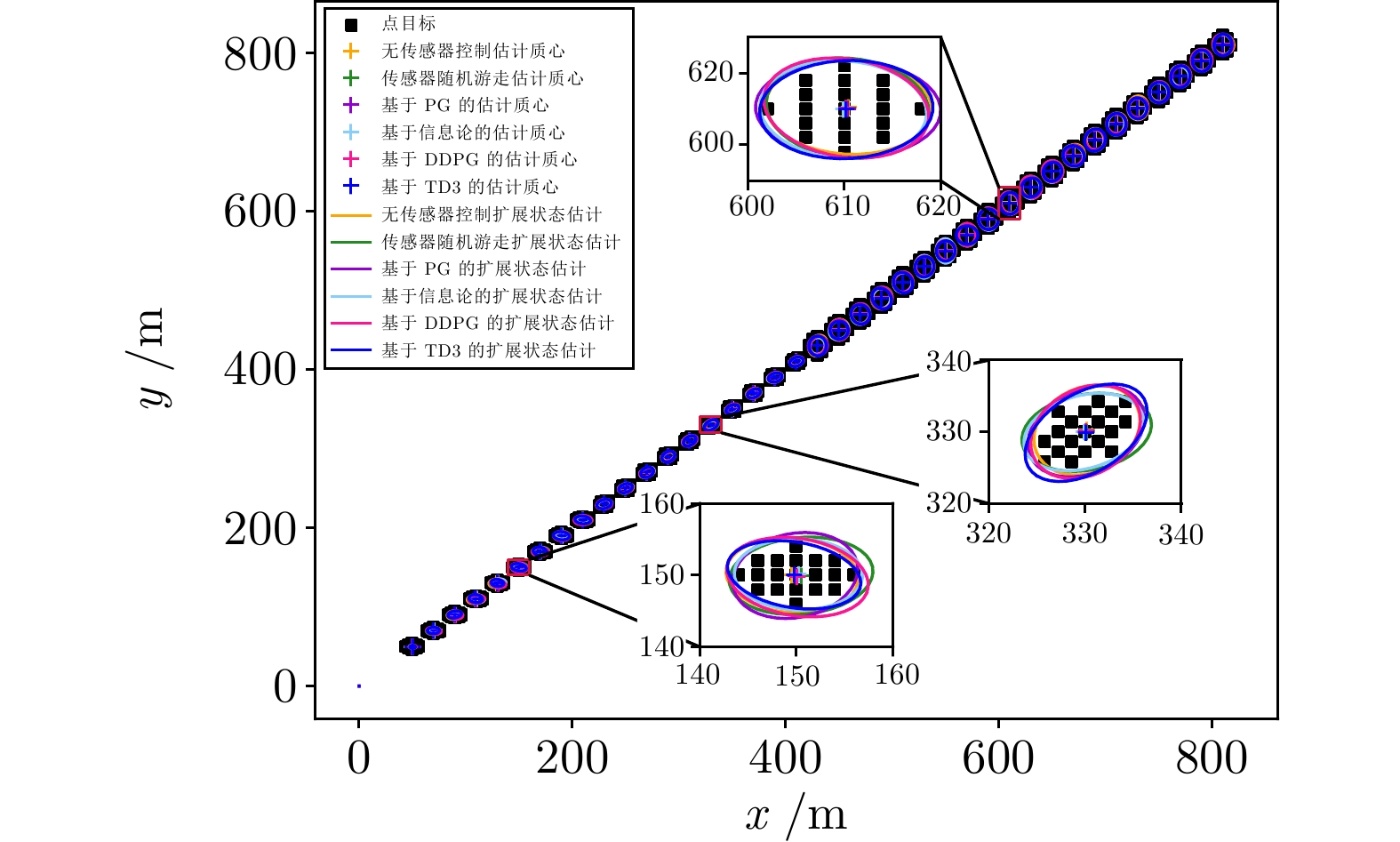
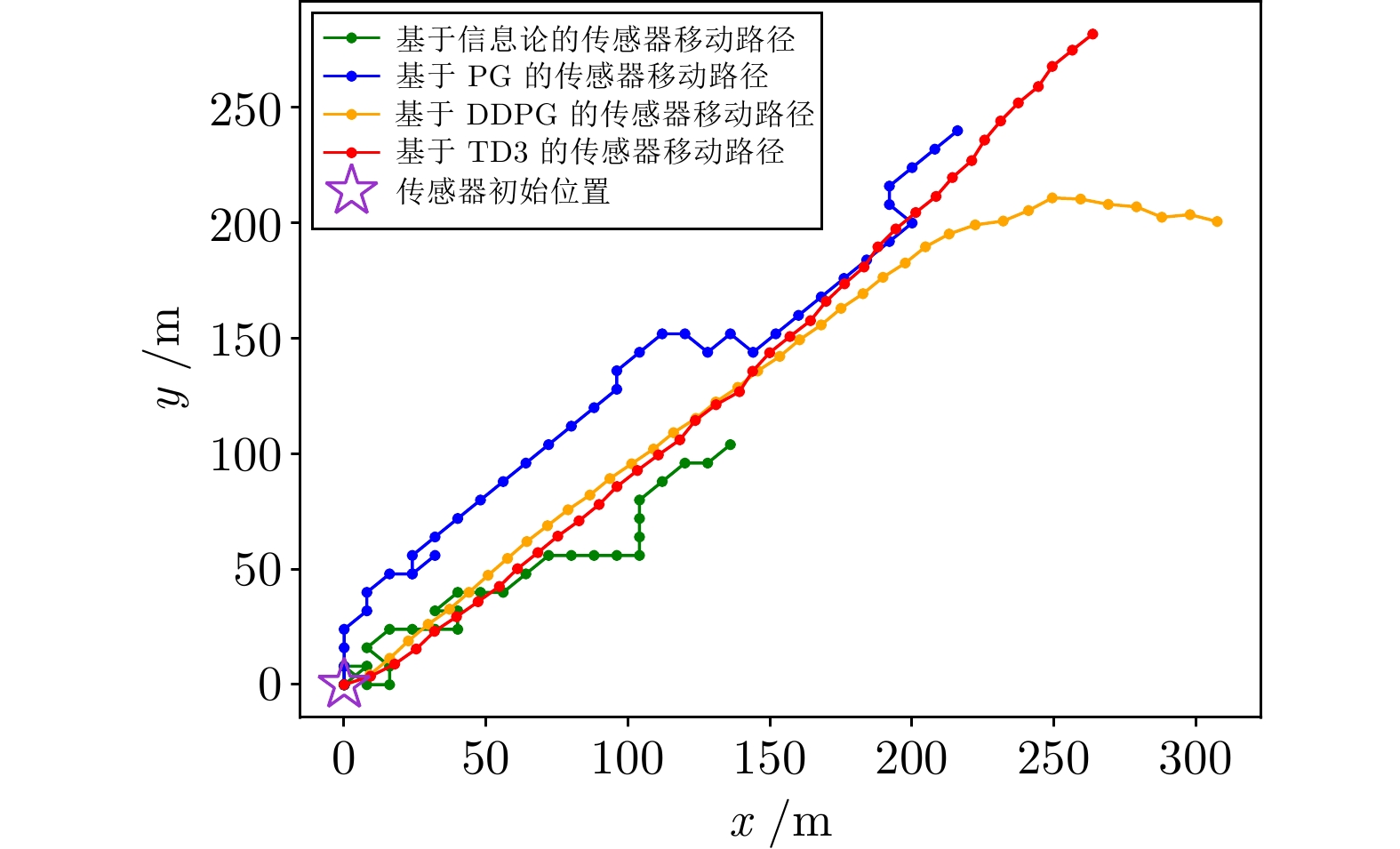
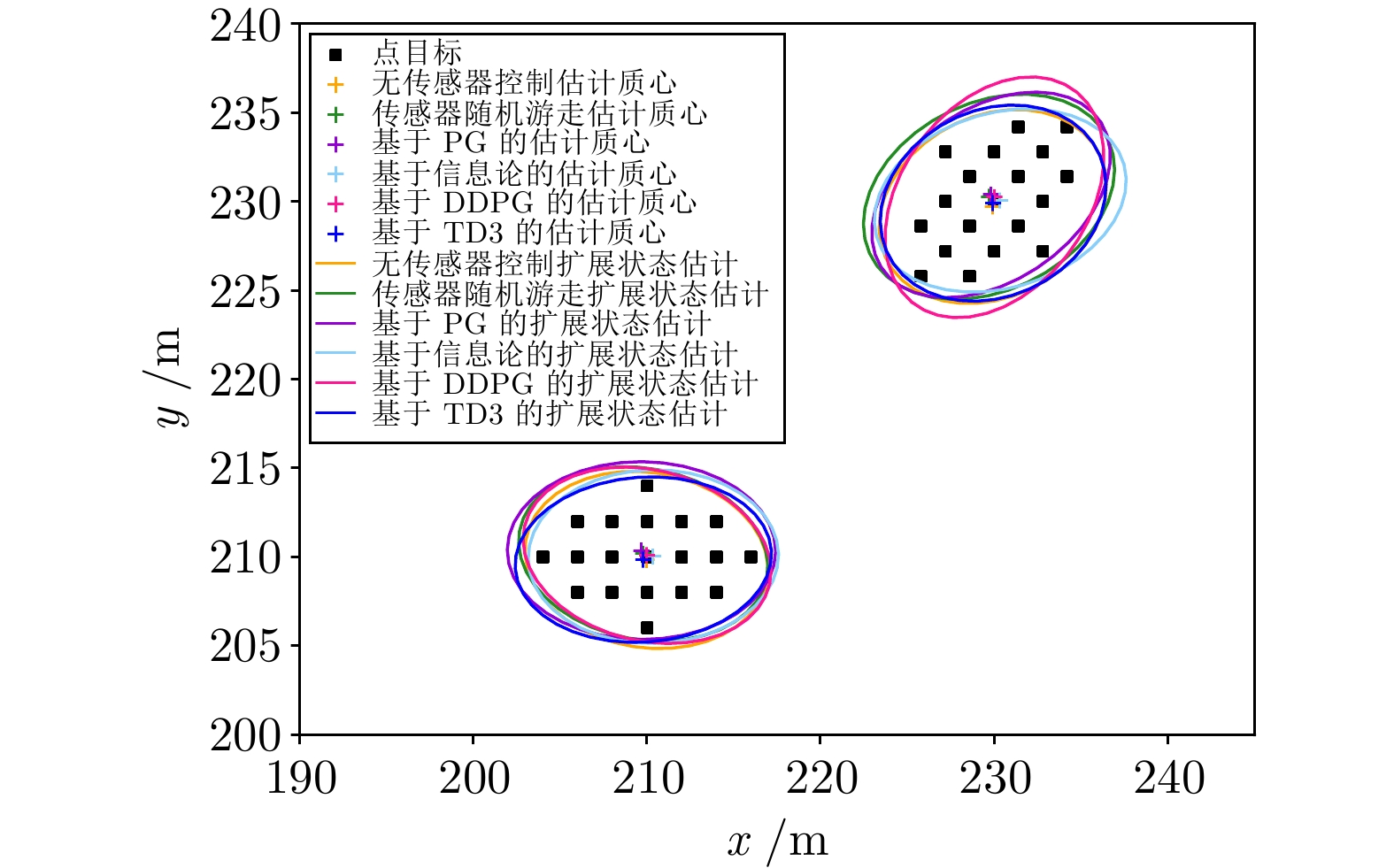
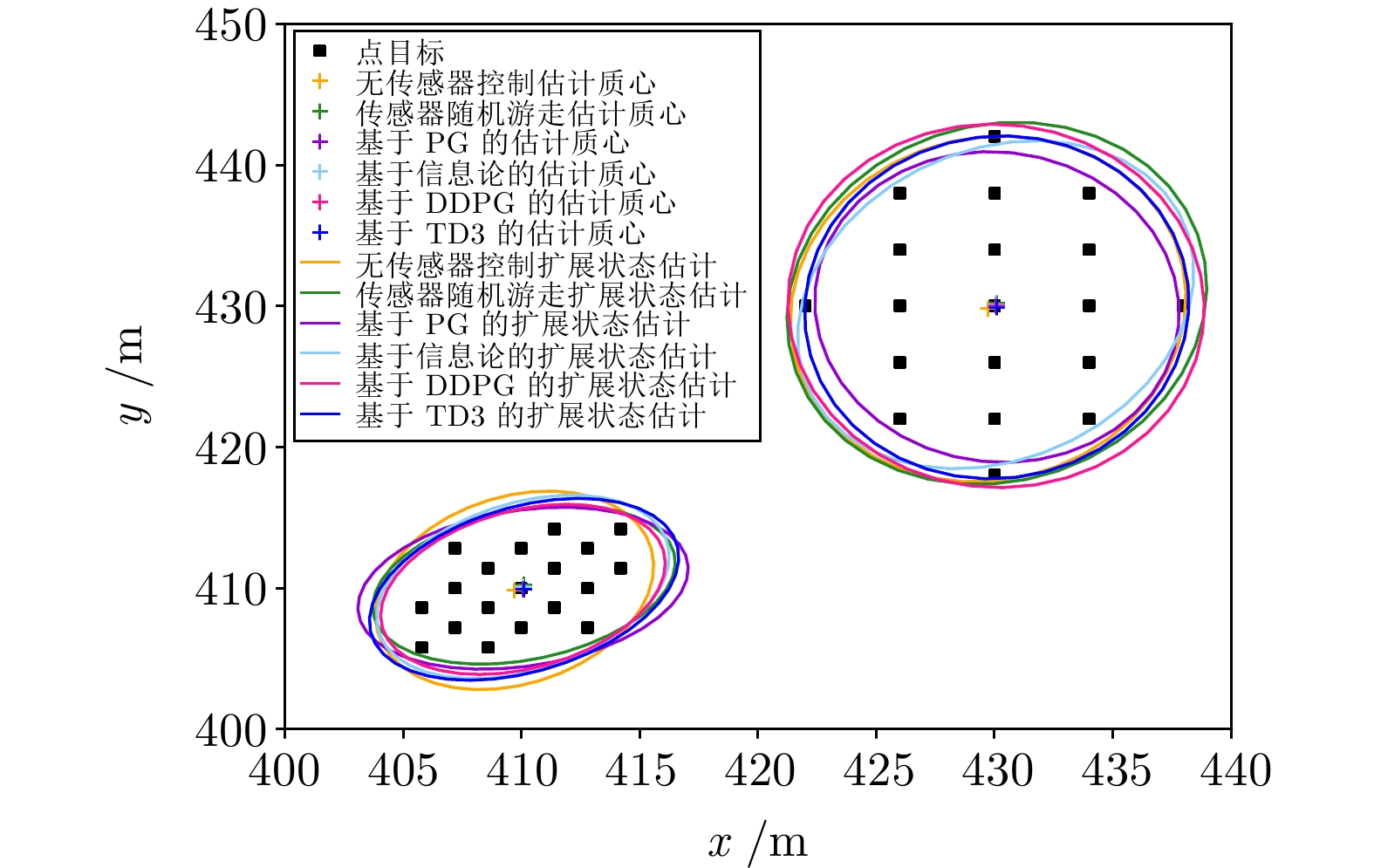
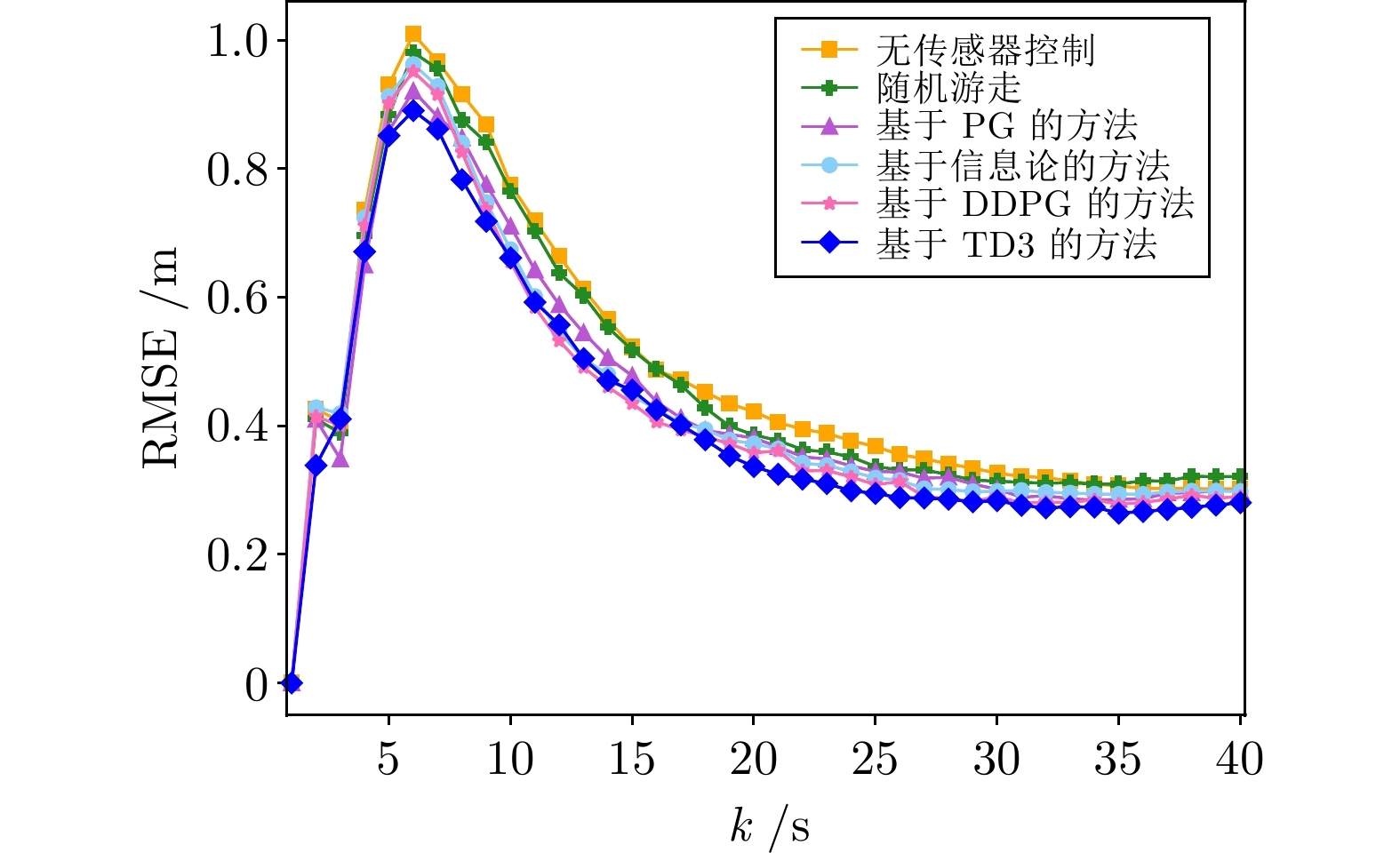
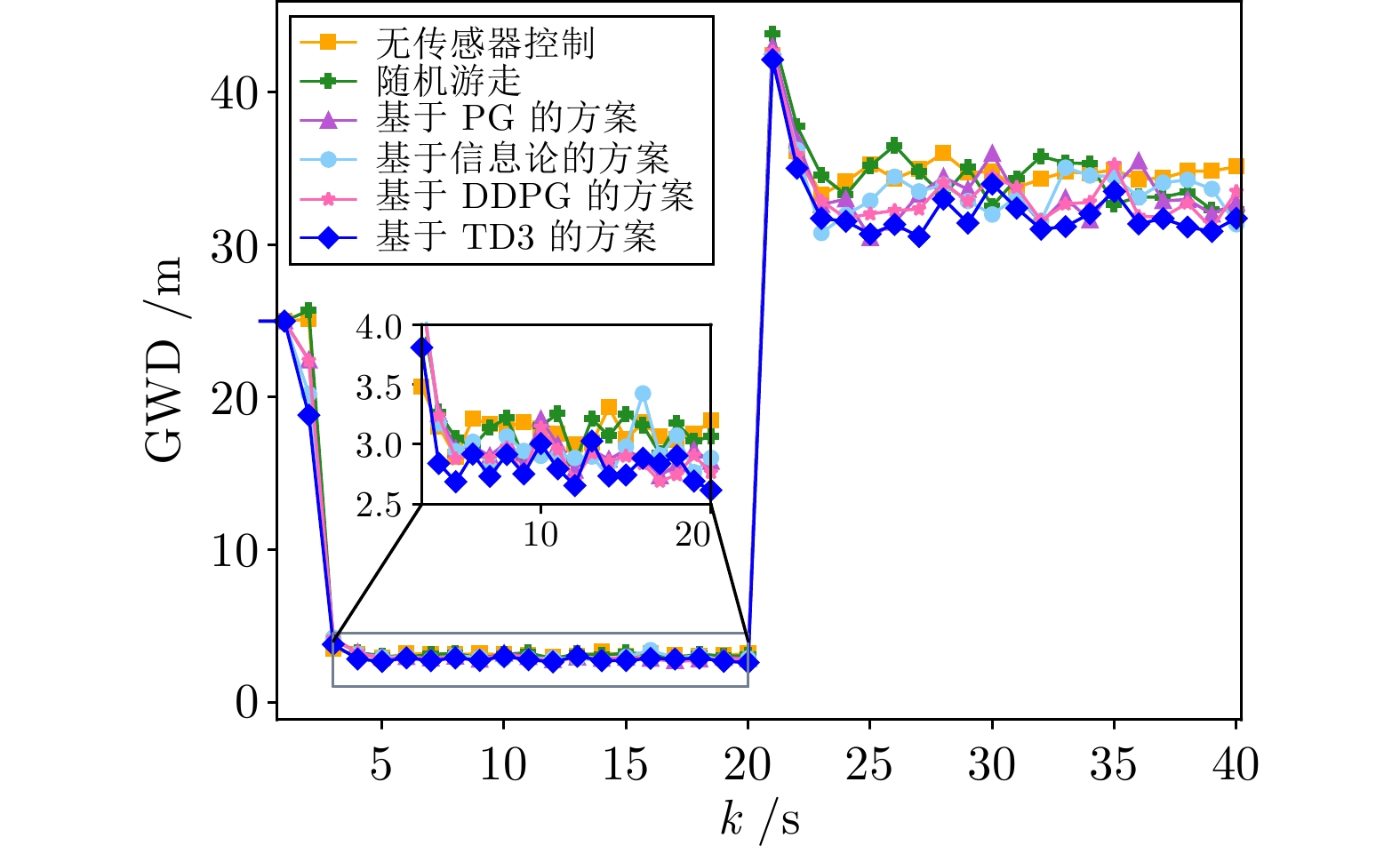
针对扩展目标跟踪(Extended target tracking, ETT)优化中的传感器管理问题, 基于随机矩阵模型(Random matrices model, RMM)建模扩展目标, 提出一种基于深度强化学习(Deep reinforcement learning, DRL)的传感器管理方法. 首先, 在部分可观测马尔科夫决策过程(Partially observed Markov decision process, POMDP)理论框架下, 给出基于双延迟深度确定性策略梯度(Twin delayed deep deterministic policy gradient, TD3)算法的扩展目标跟踪传感器管理的基本方法; 其次, 利用高斯瓦瑟斯坦距离(Gaussian Wasserstein distance, GWD)求解扩展目标先验概率密度与后验概率密度之间的信息增益, 对扩展目标多特征估计信息进行综合评价, 进而以信息增益作为TD3算法奖励函数的构建; 然后, 通过推导出的奖励函数, 进行基于深度强化学习的传感器管理方法的最优决策; 最后, 通过构造扩展目标跟踪优化仿真实验, 验证了所提方法的有效性.
针对扩展目标跟踪(Extended target tracking, ETT)优化中的传感器管理问题, 基于随机矩阵模型(Random matrices model, RMM)建模扩展目标, 提出一种基于深度强化学习(Deep reinforcement learning, DRL)的传感器管理方法. 首先, 在部分可观测马尔科夫决策过程(Partially observed Markov decision process, POMDP)理论框架下, 给出基于双延迟深度确定性策略梯度(Twin delayed deep deterministic policy gradient, TD3)算法的扩展目标跟踪传感器管理的基本方法; 其次, 利用高斯瓦瑟斯坦距离(Gaussian Wasserstein distance, GWD)求解扩展目标先验概率密度与后验概率密度之间的信息增益, 对扩展目标多特征估计信息进行综合评价, 进而以信息增益作为TD3算法奖励函数的构建; 然后, 通过推导出的奖励函数, 进行基于深度强化学习的传感器管理方法的最优决策; 最后, 通过构造扩展目标跟踪优化仿真实验, 验证了所提方法的有效性.
2024, 50(7): 1432-1444.
doi: 10.16383/j.aas.c230381
摘要:
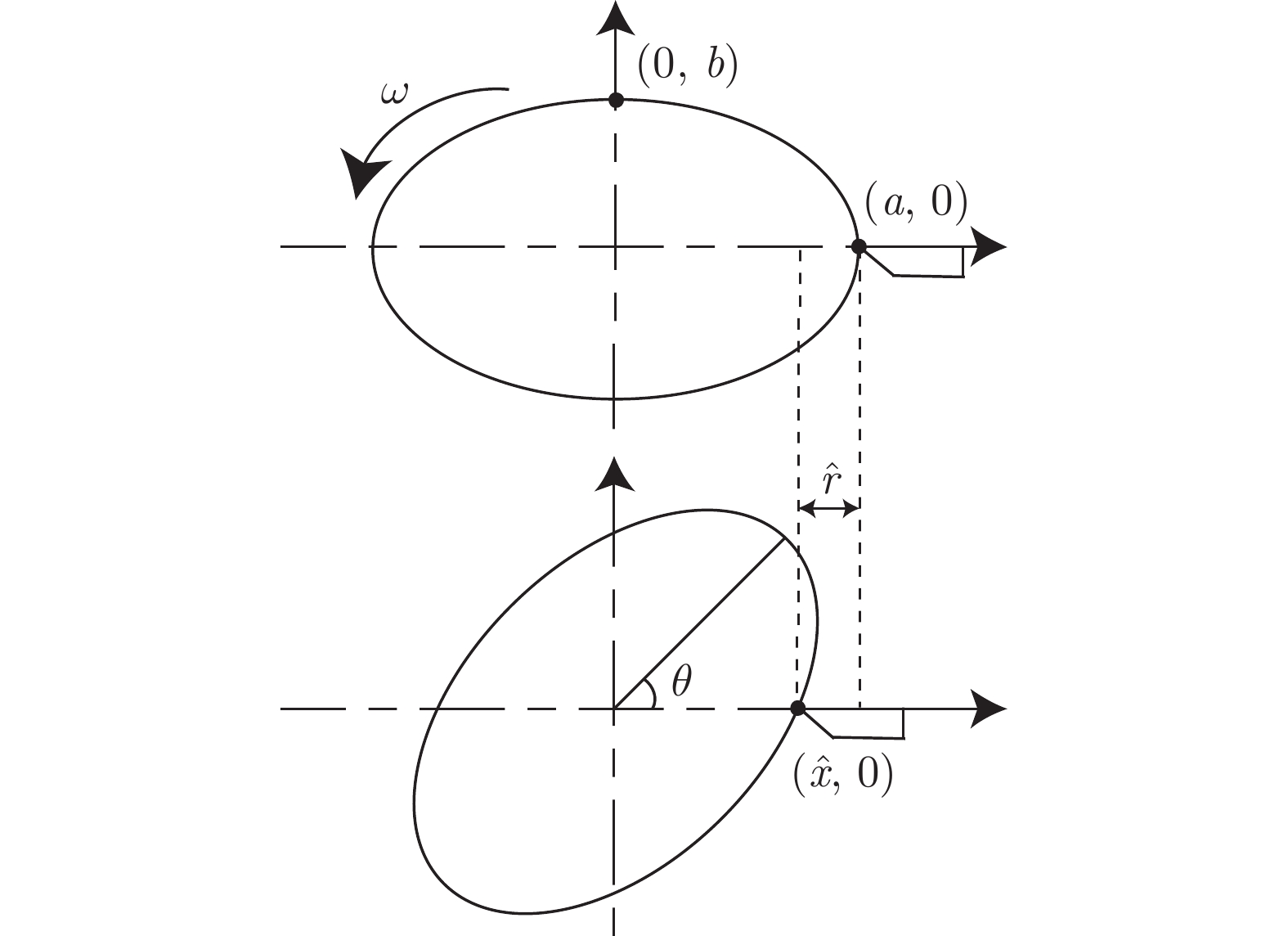
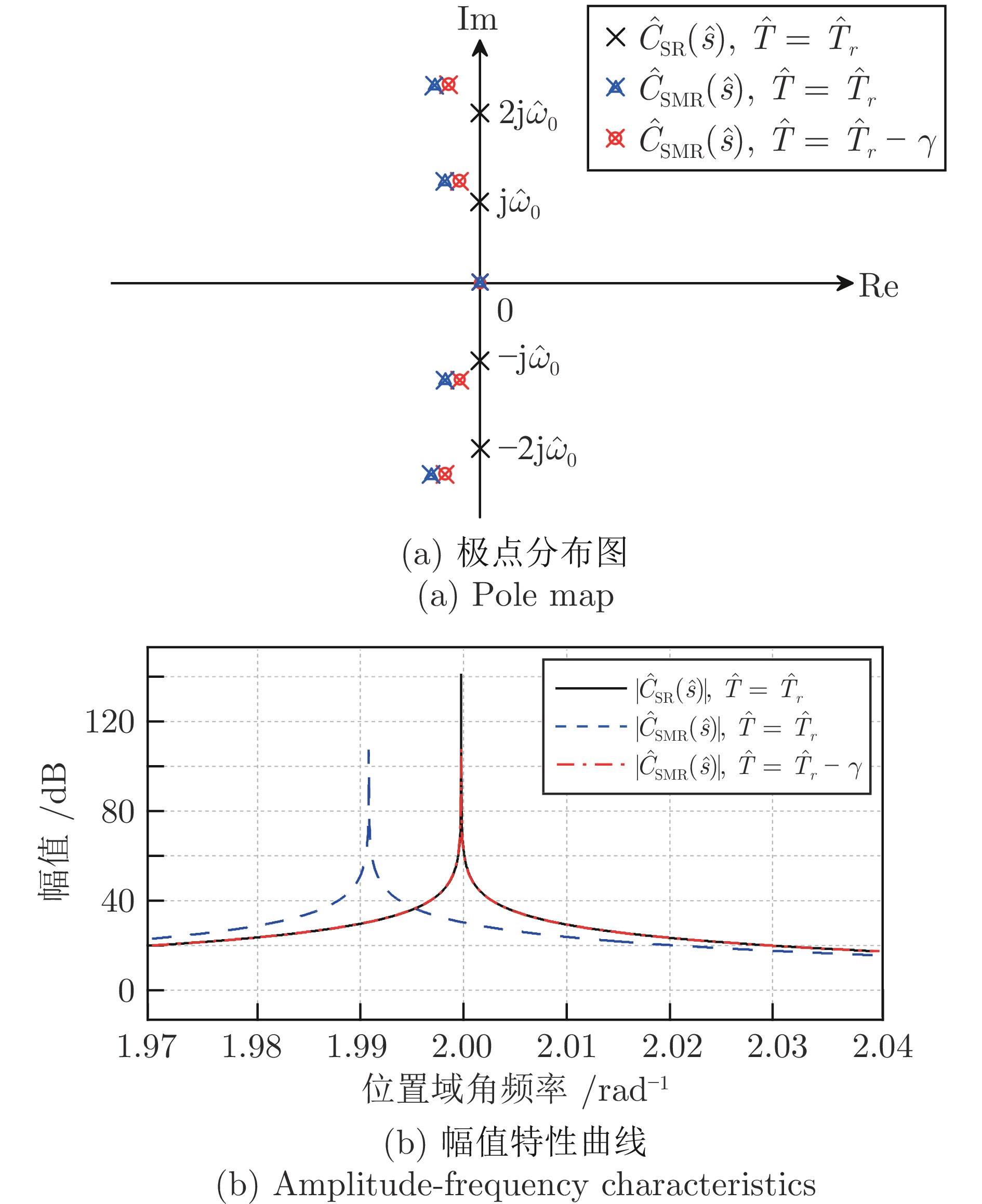
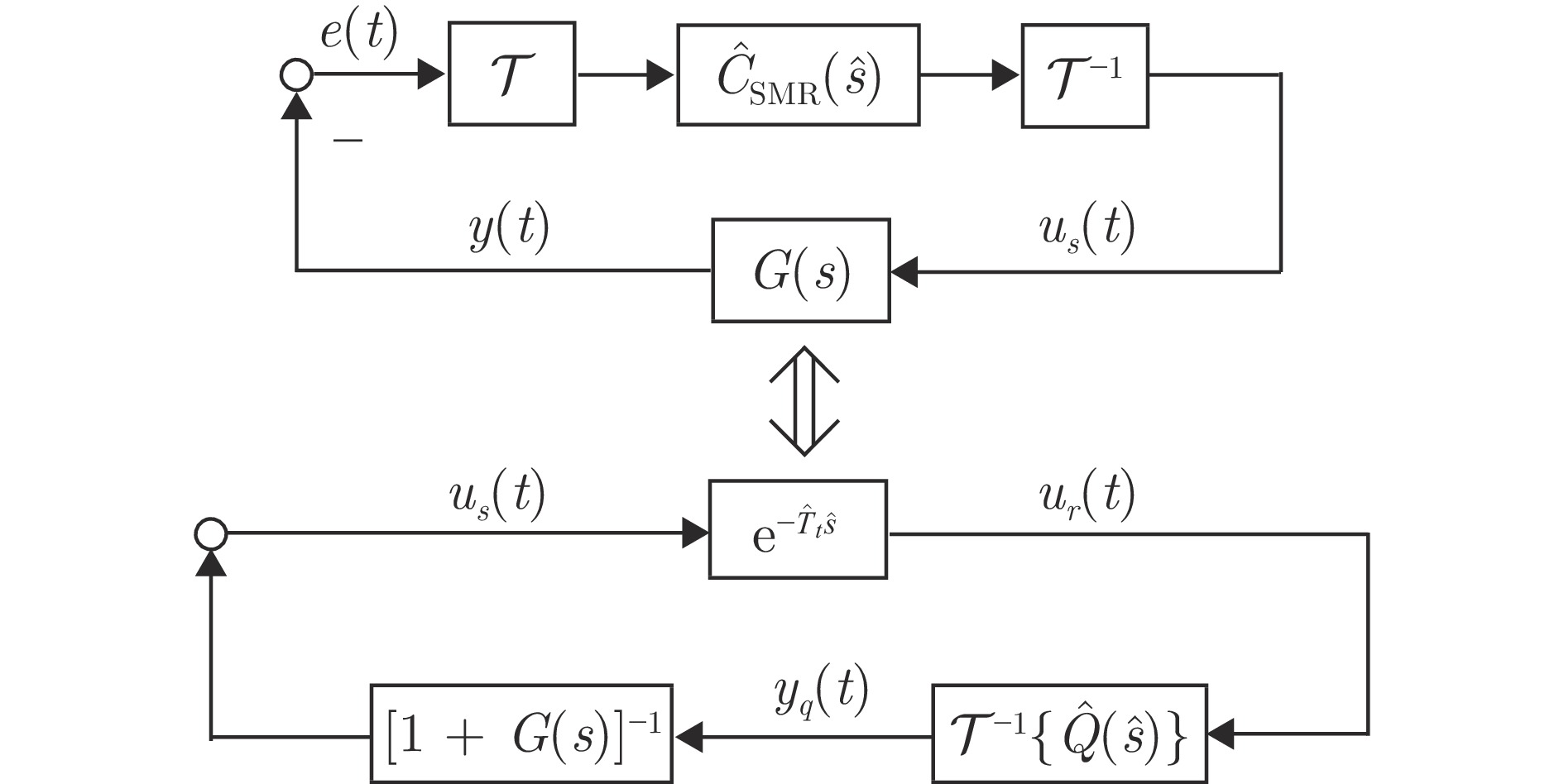
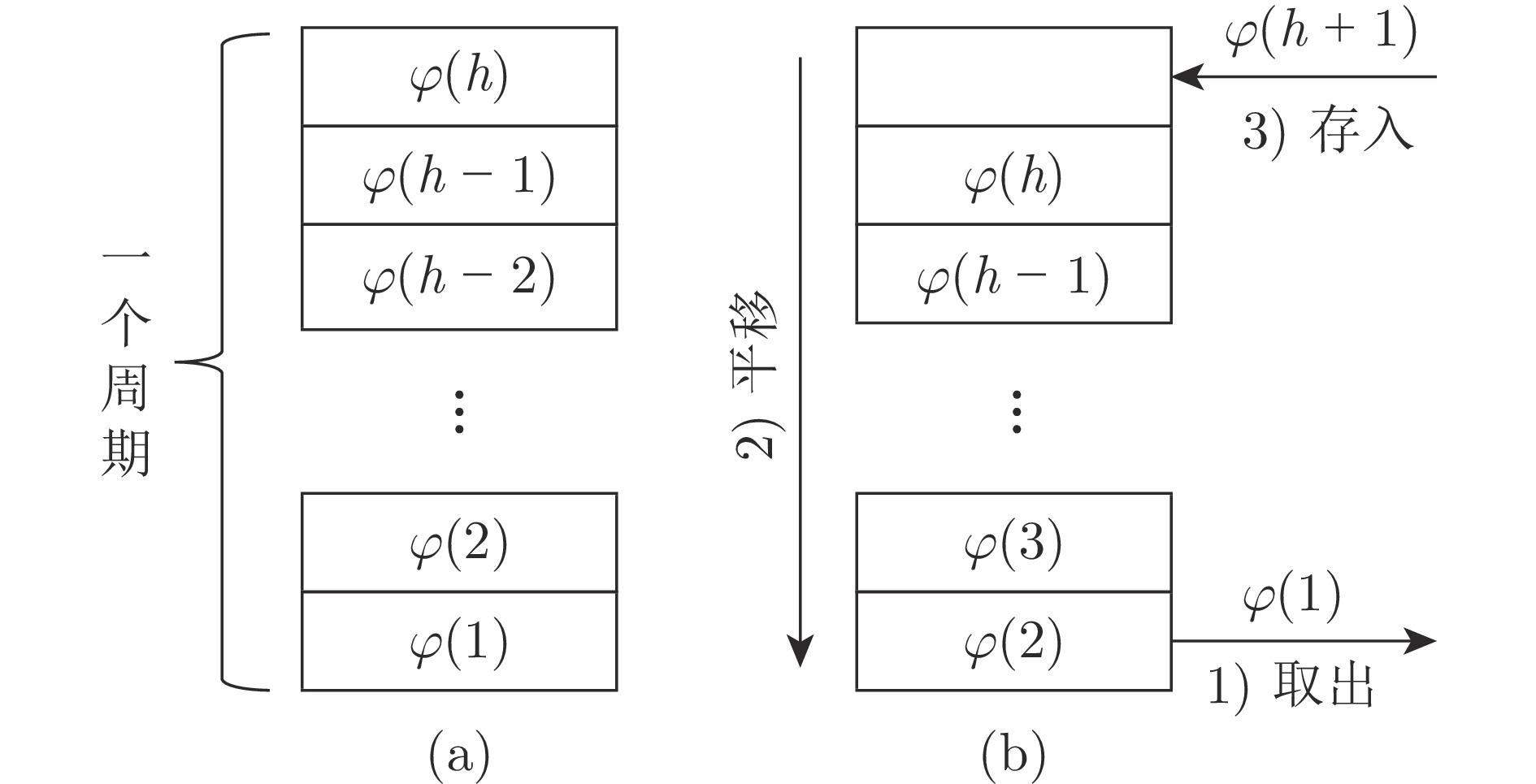
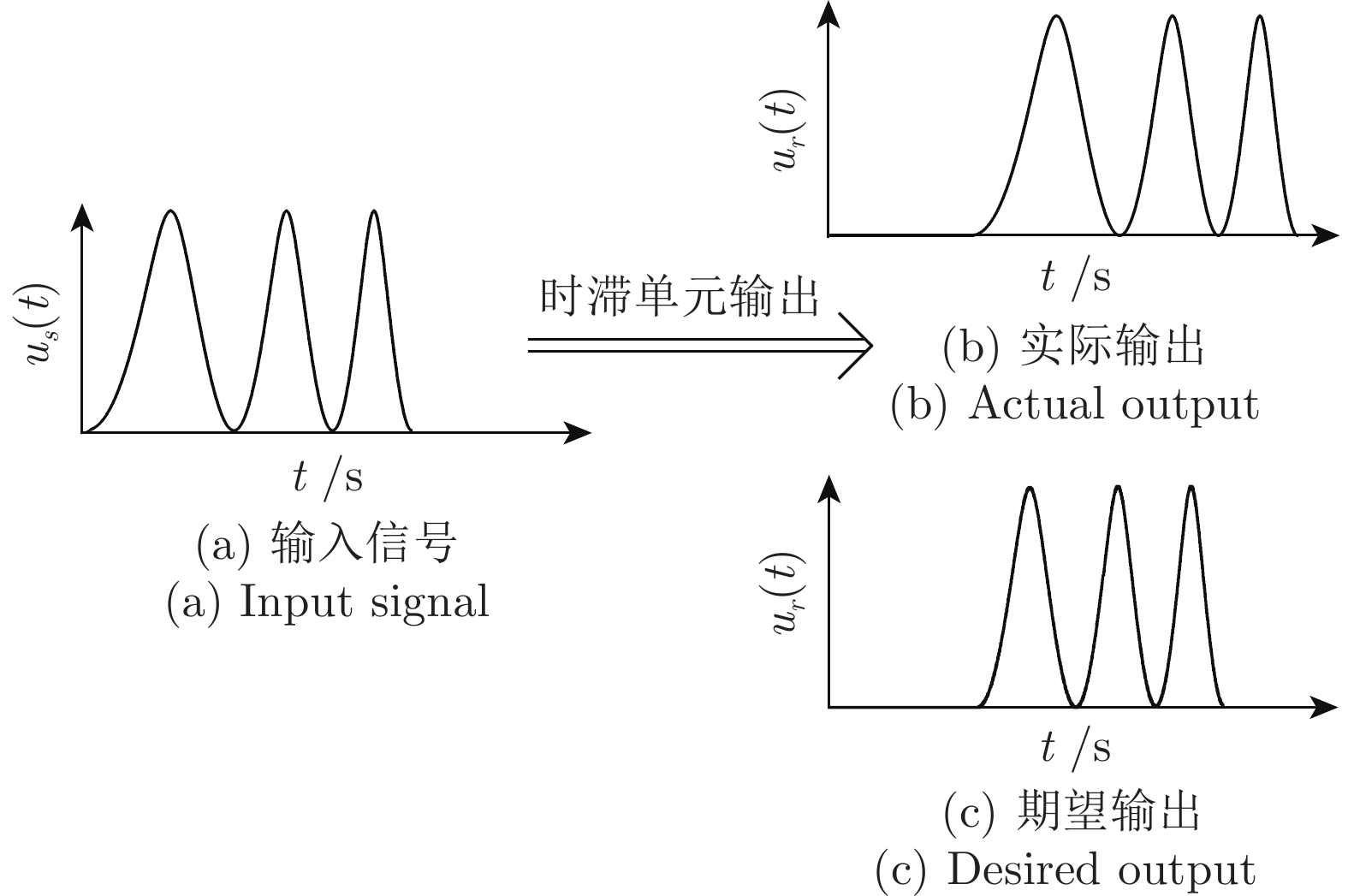
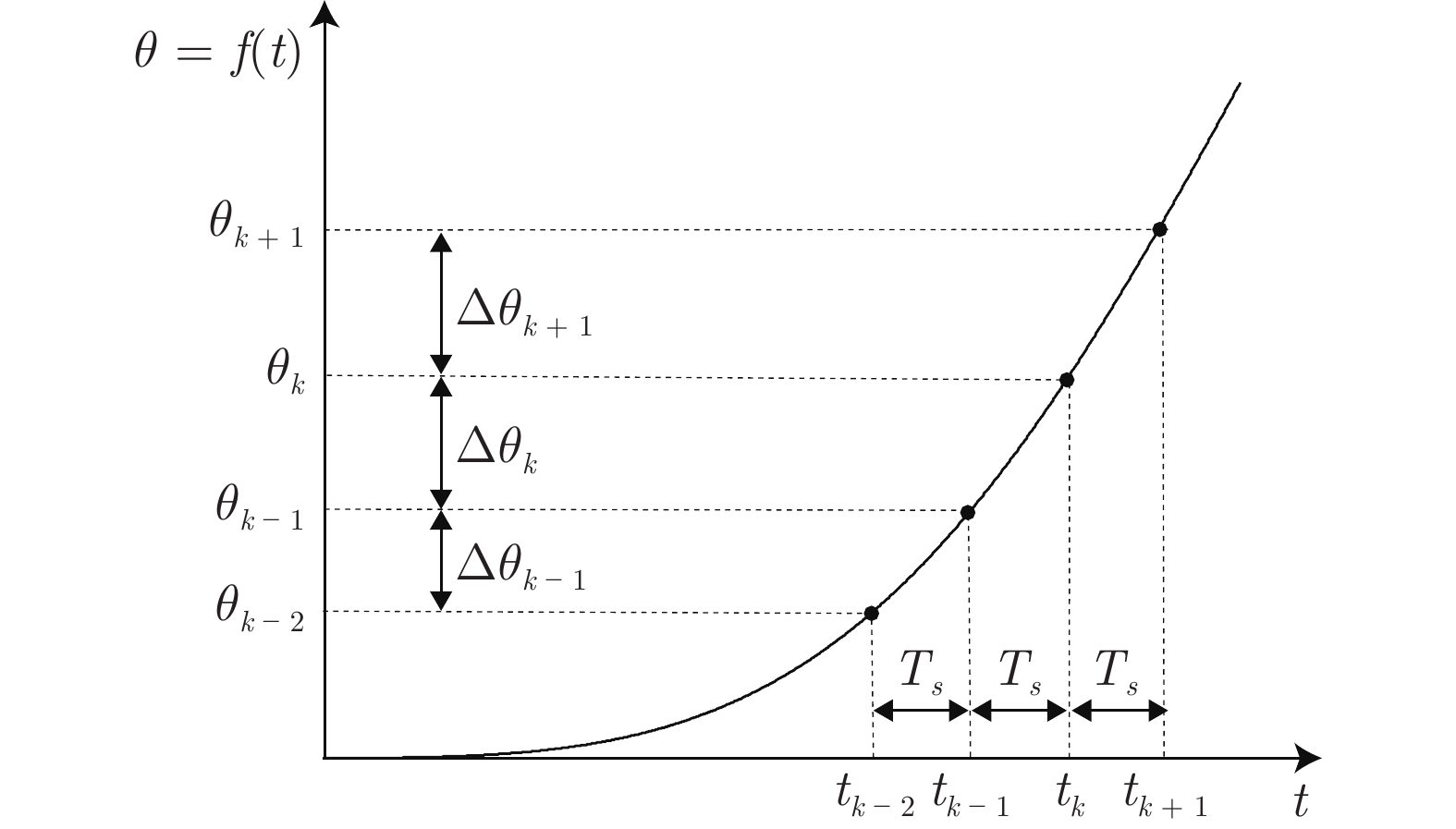
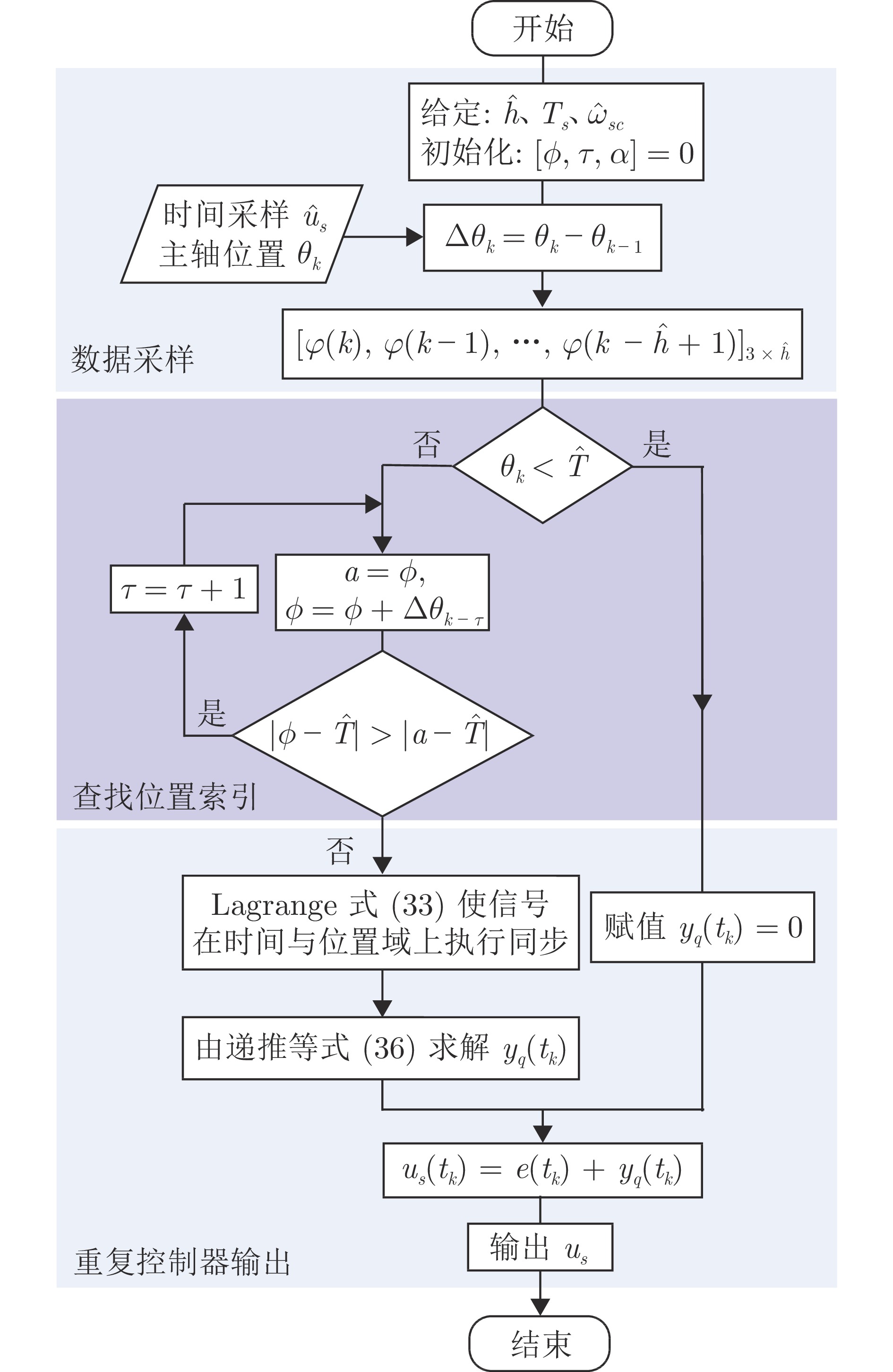
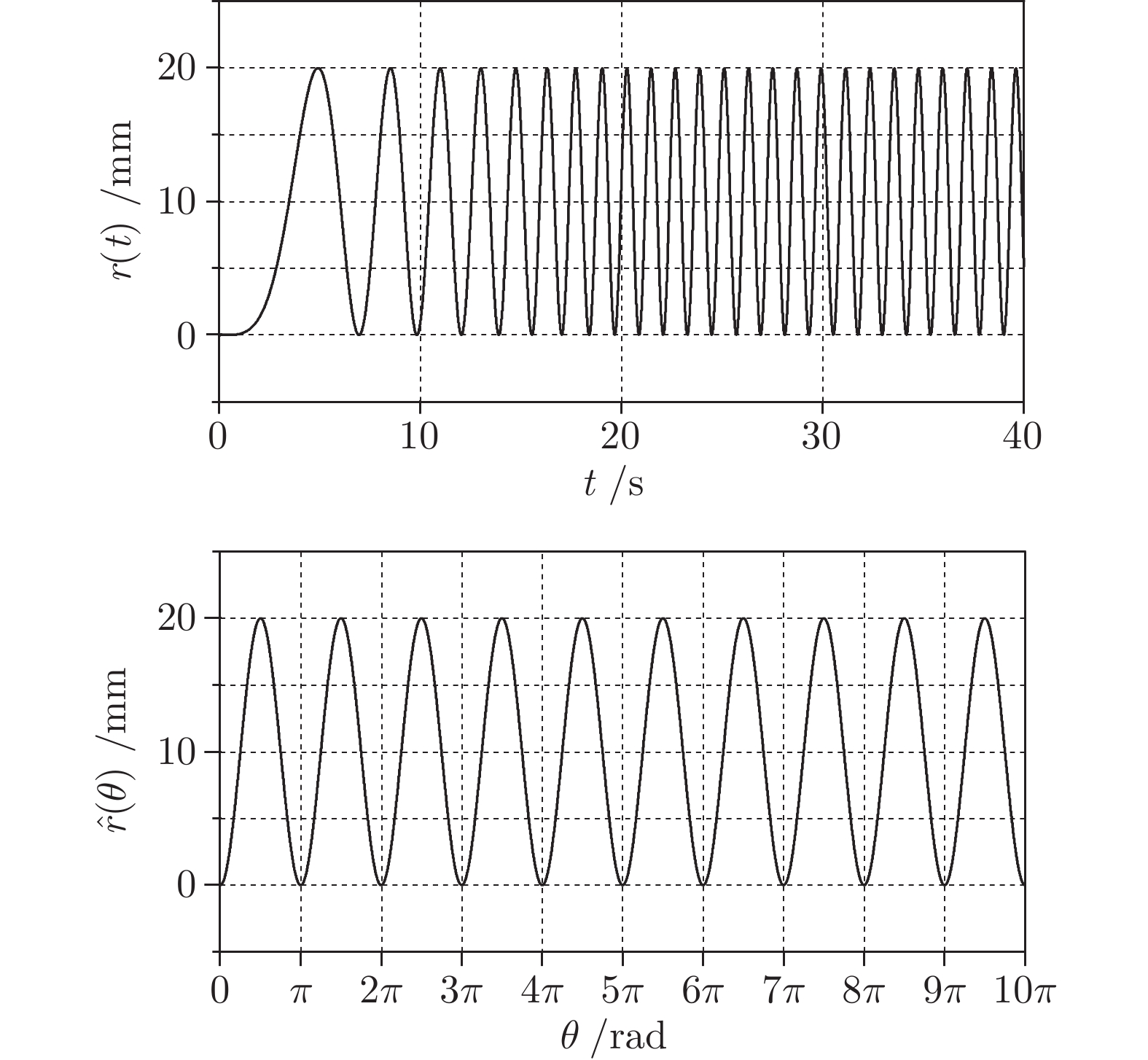
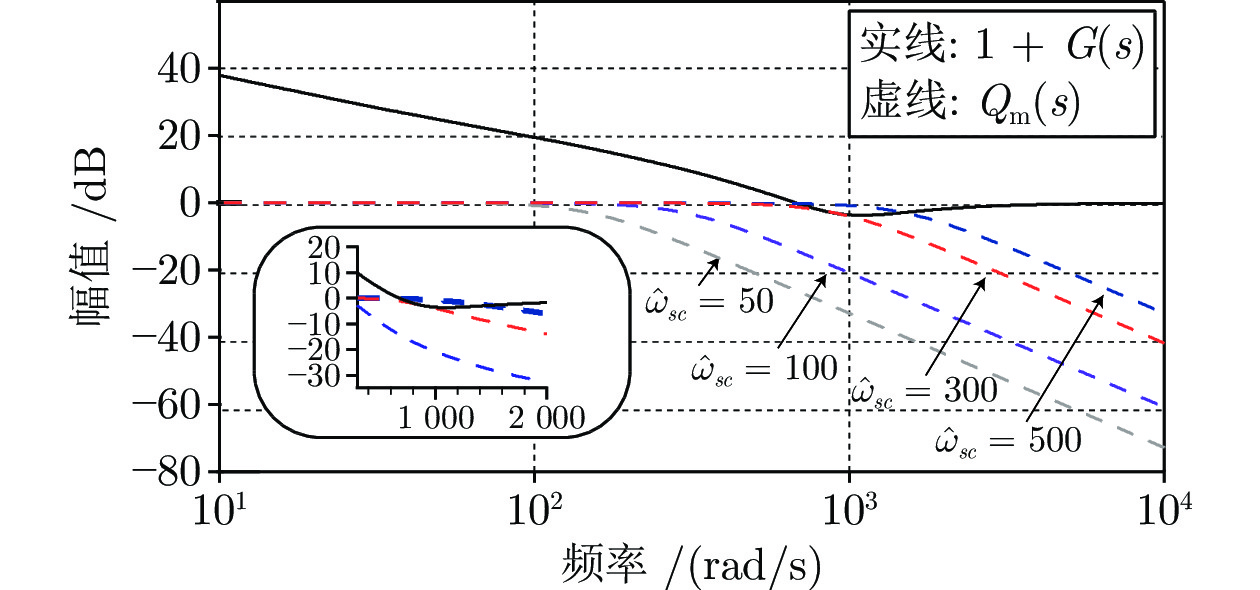
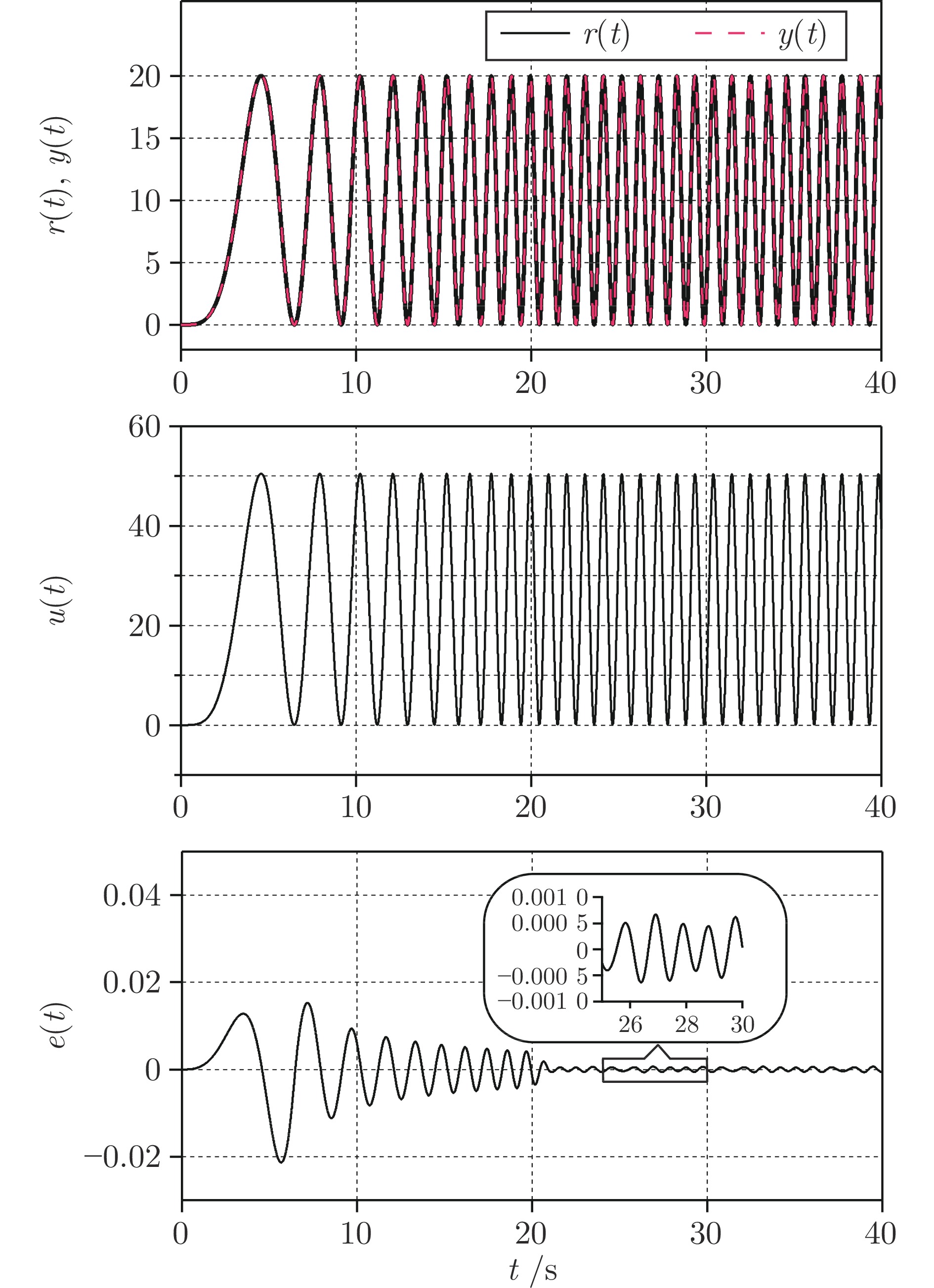
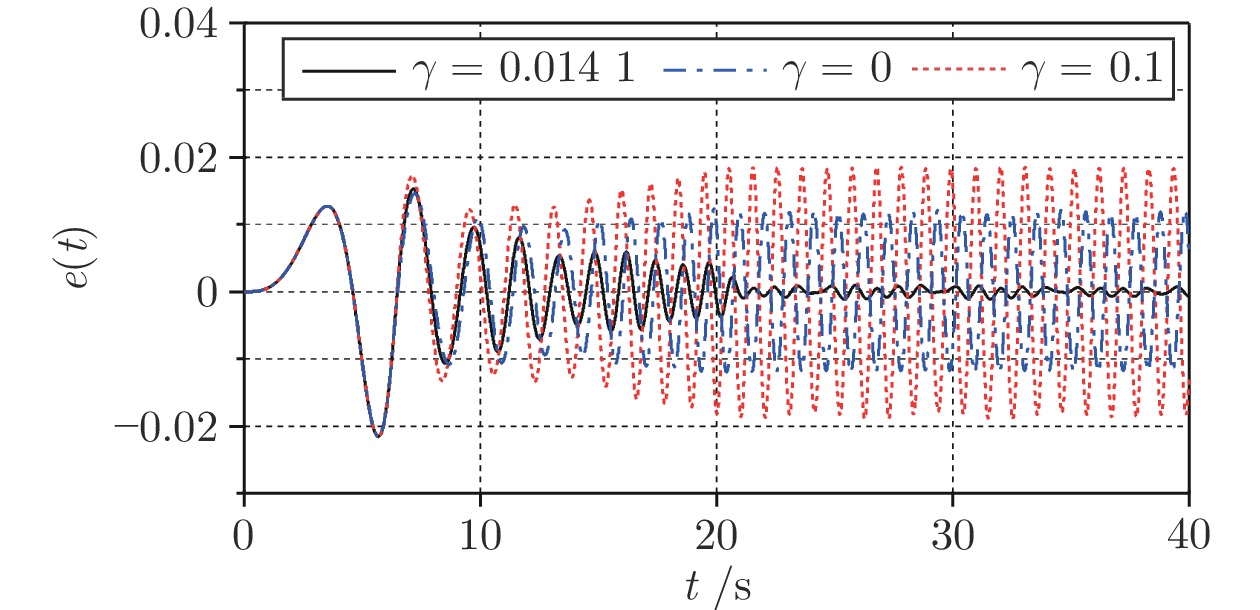
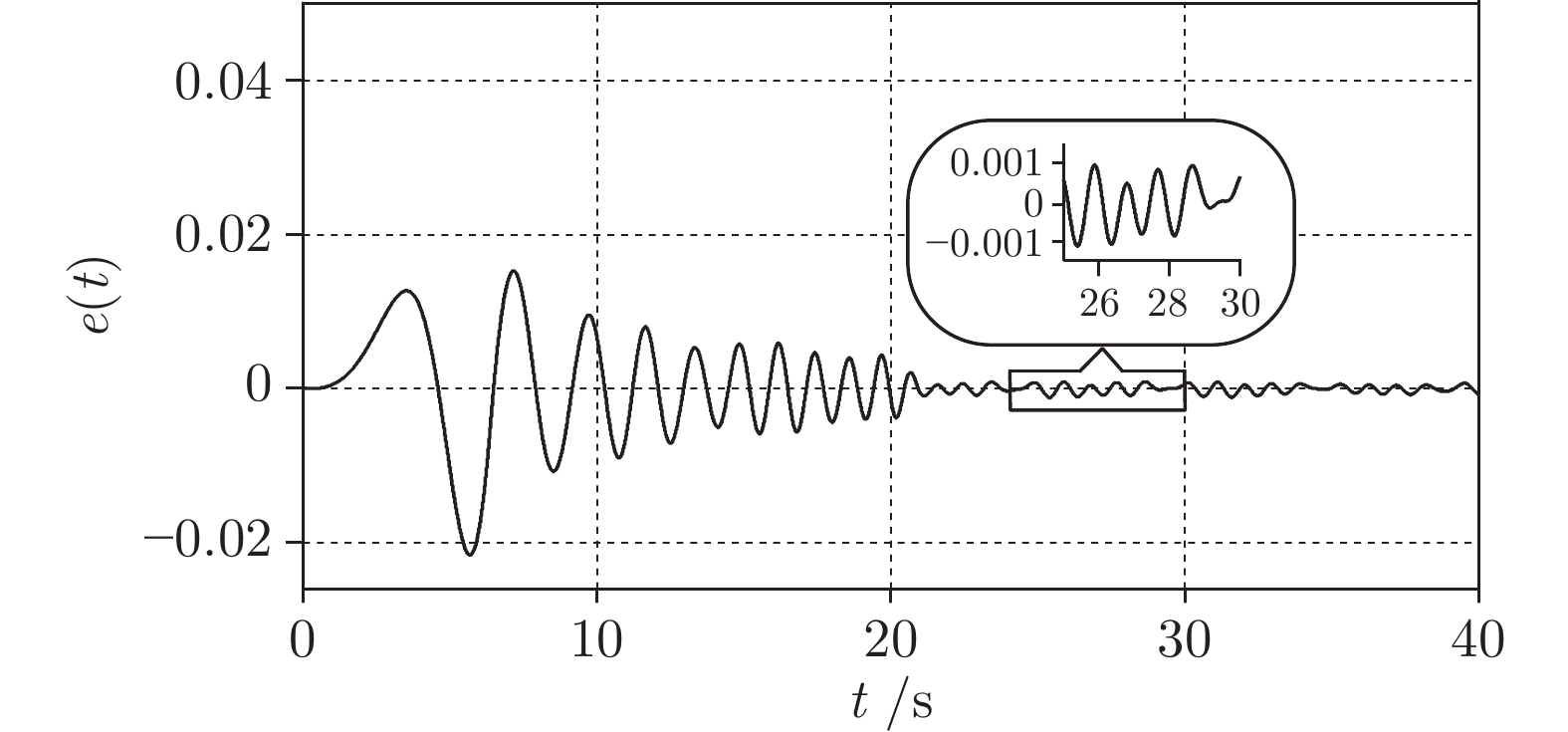
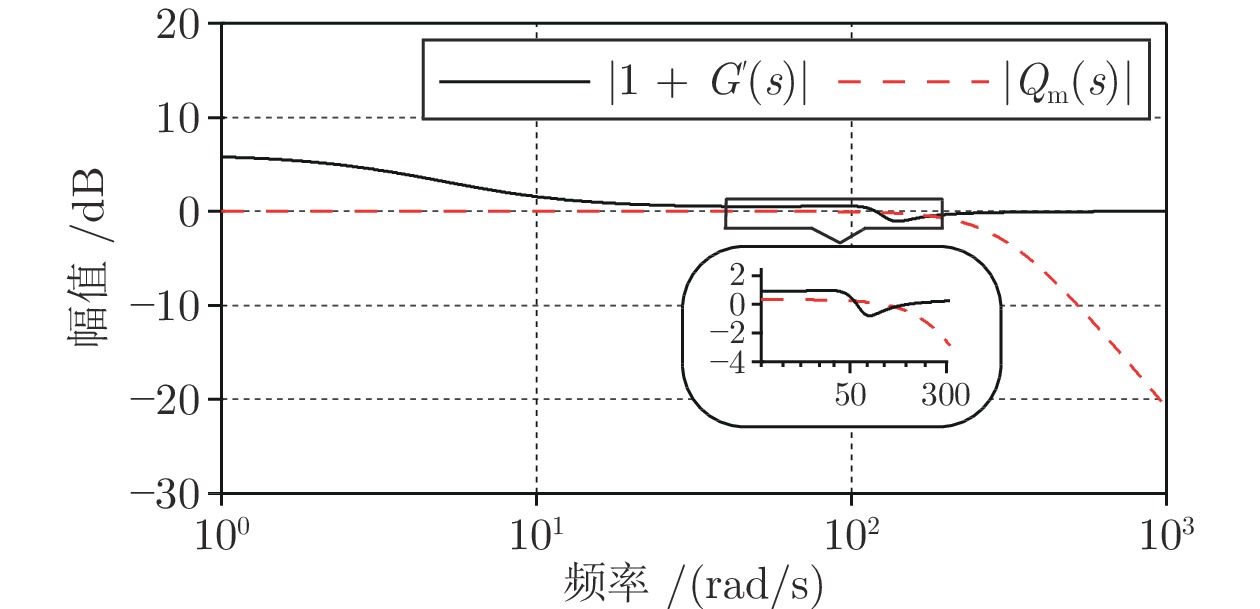
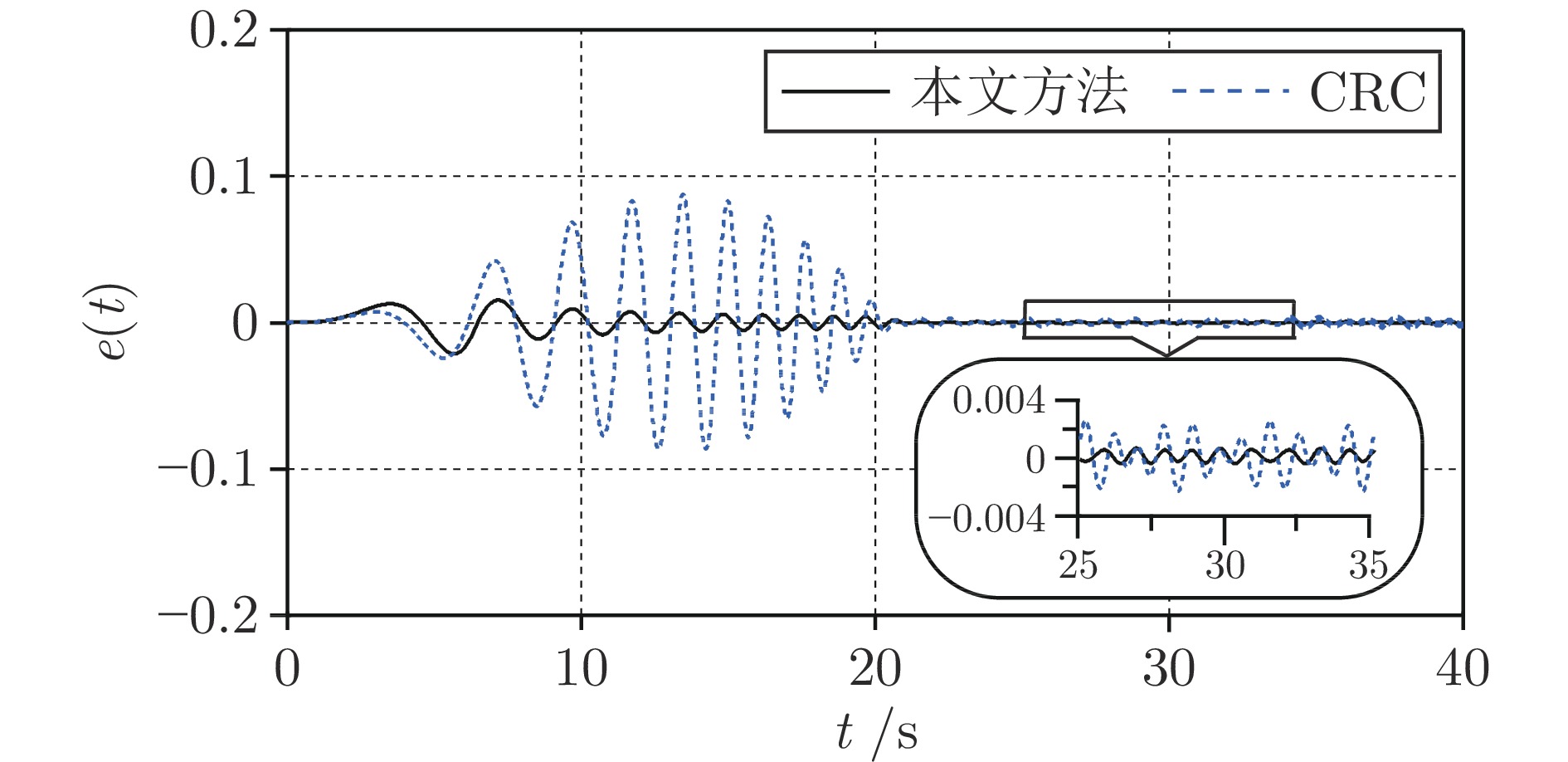
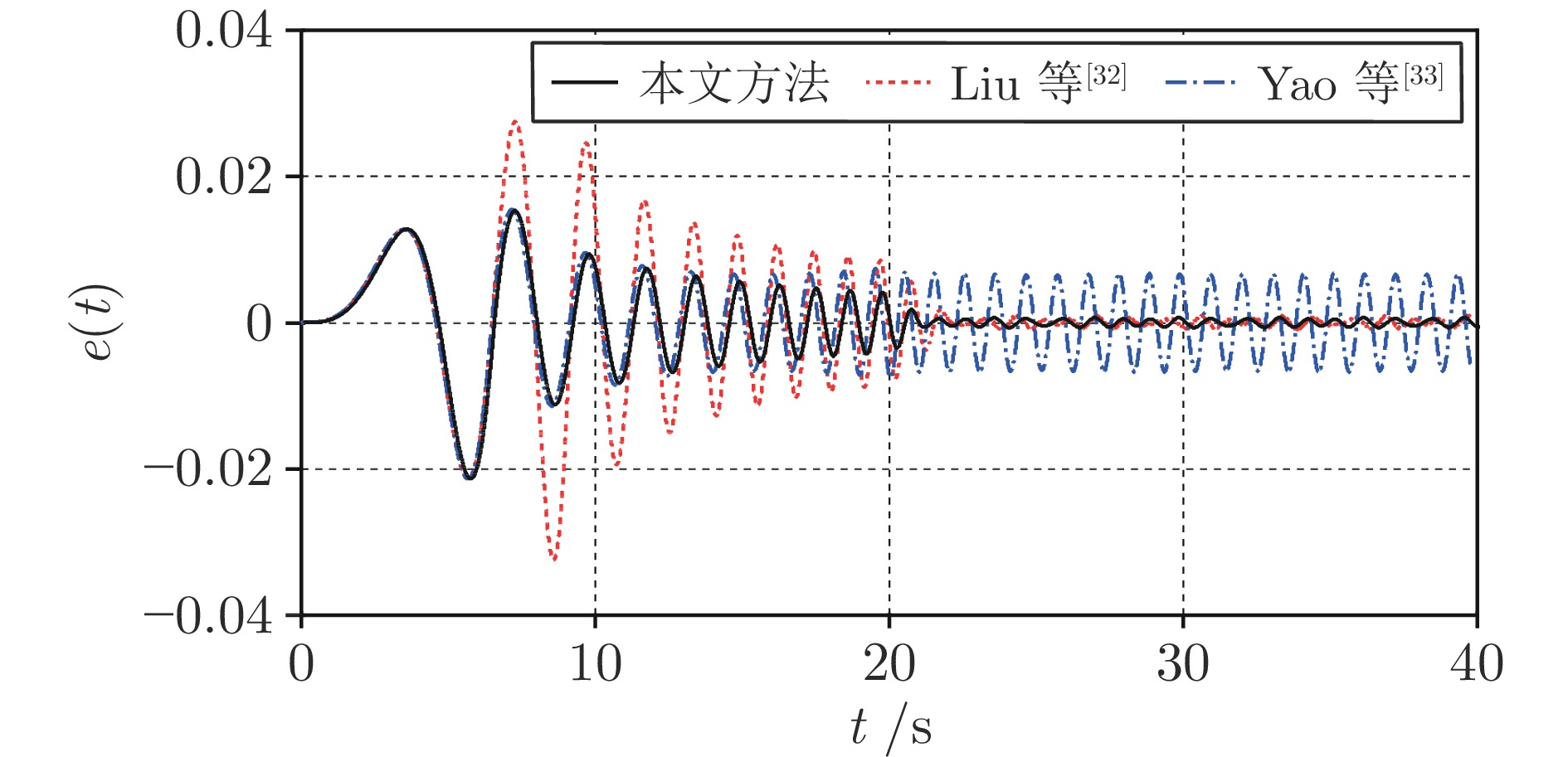
在非圆零件车削过程中, 快速刀具伺服(Fast tool servo, FTS)的运动精度直接影响零件的加工质量. 主轴变速加工使得FTS的参考目标信号周期时变而不确定, 这对实现其渐近跟踪提出了极大的挑战. 本文利用FTS的位置域周期特性, 提出一种基于位置域重复控制和时域速度反馈镇定的FTS系统复合控制设计方法, 并给出位置域改进型重复控制器(Spatial modified repetitive controller, SMRC)的数字实现算法, 实现对时变周期参考目标信号的高精度跟踪. 首先, 建立包含位置相关时变周期参考目标信号内模的SMRC, 并引入位置域相位超前装置对镇定补偿器引起的相位滞后进行补偿, 在此基础上构建复合控制律. 然后应用小增益定理和算子理论, 推导出控制系统的稳定性条件, 在保持系统采样频率不变的条件下, 应用插值法建立SMRC的数字实现算法, 确保位置域重复控制和时域镇定控制器的同步执行. 最后, 通过仿真验证所设计的FTS控制系统具有满意的时变周期跟踪性能和鲁棒性, 并通过与其他位置域重复控制方法的比较, 说明所提方法同时具有更好的暂态和稳态性能.
在非圆零件车削过程中, 快速刀具伺服(Fast tool servo, FTS)的运动精度直接影响零件的加工质量. 主轴变速加工使得FTS的参考目标信号周期时变而不确定, 这对实现其渐近跟踪提出了极大的挑战. 本文利用FTS的位置域周期特性, 提出一种基于位置域重复控制和时域速度反馈镇定的FTS系统复合控制设计方法, 并给出位置域改进型重复控制器(Spatial modified repetitive controller, SMRC)的数字实现算法, 实现对时变周期参考目标信号的高精度跟踪. 首先, 建立包含位置相关时变周期参考目标信号内模的SMRC, 并引入位置域相位超前装置对镇定补偿器引起的相位滞后进行补偿, 在此基础上构建复合控制律. 然后应用小增益定理和算子理论, 推导出控制系统的稳定性条件, 在保持系统采样频率不变的条件下, 应用插值法建立SMRC的数字实现算法, 确保位置域重复控制和时域镇定控制器的同步执行. 最后, 通过仿真验证所设计的FTS控制系统具有满意的时变周期跟踪性能和鲁棒性, 并通过与其他位置域重复控制方法的比较, 说明所提方法同时具有更好的暂态和稳态性能.

2024, 50(7): 1445-1457.
doi: 10.16383/j.aas.c230641
摘要:
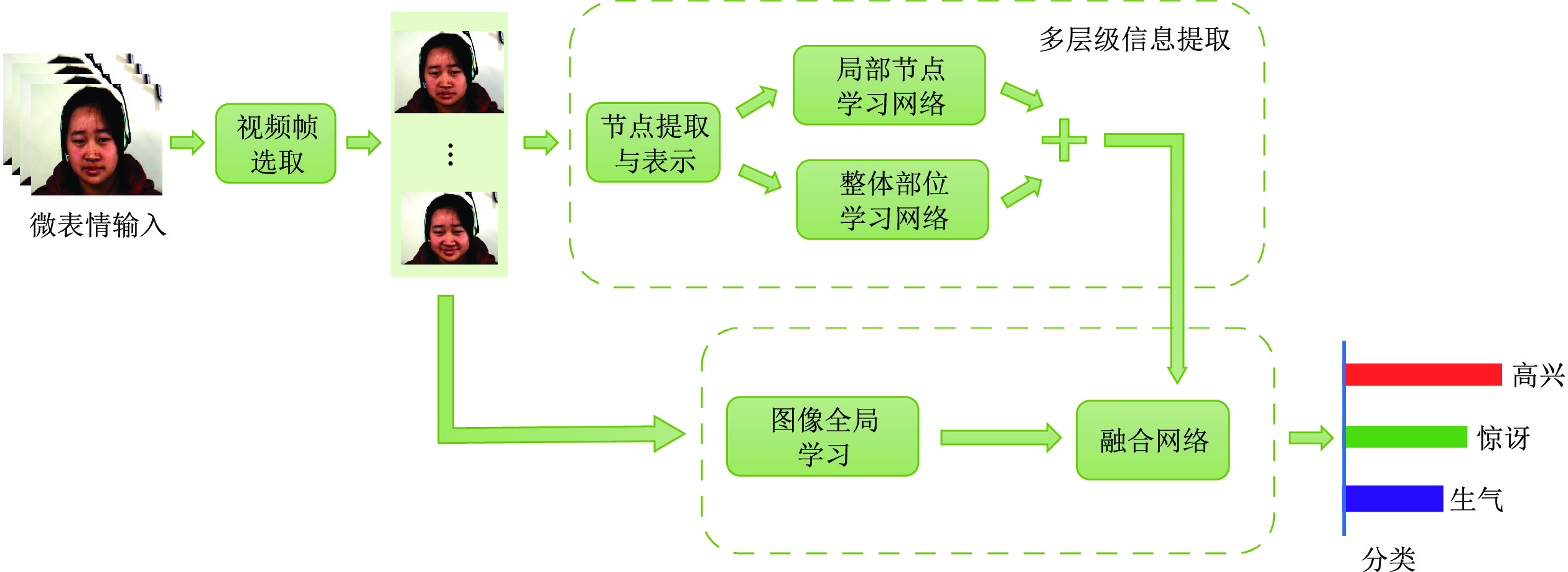
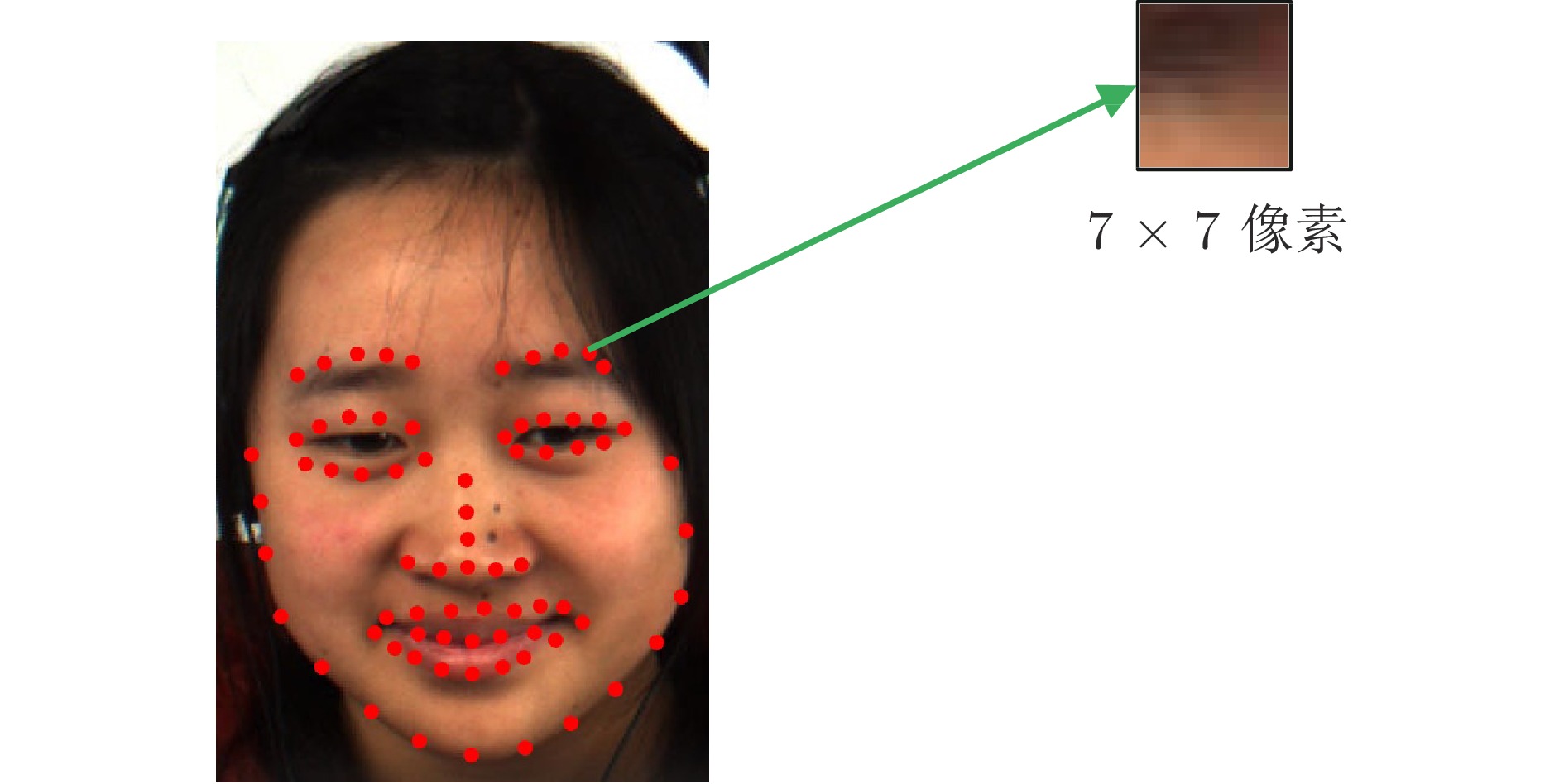
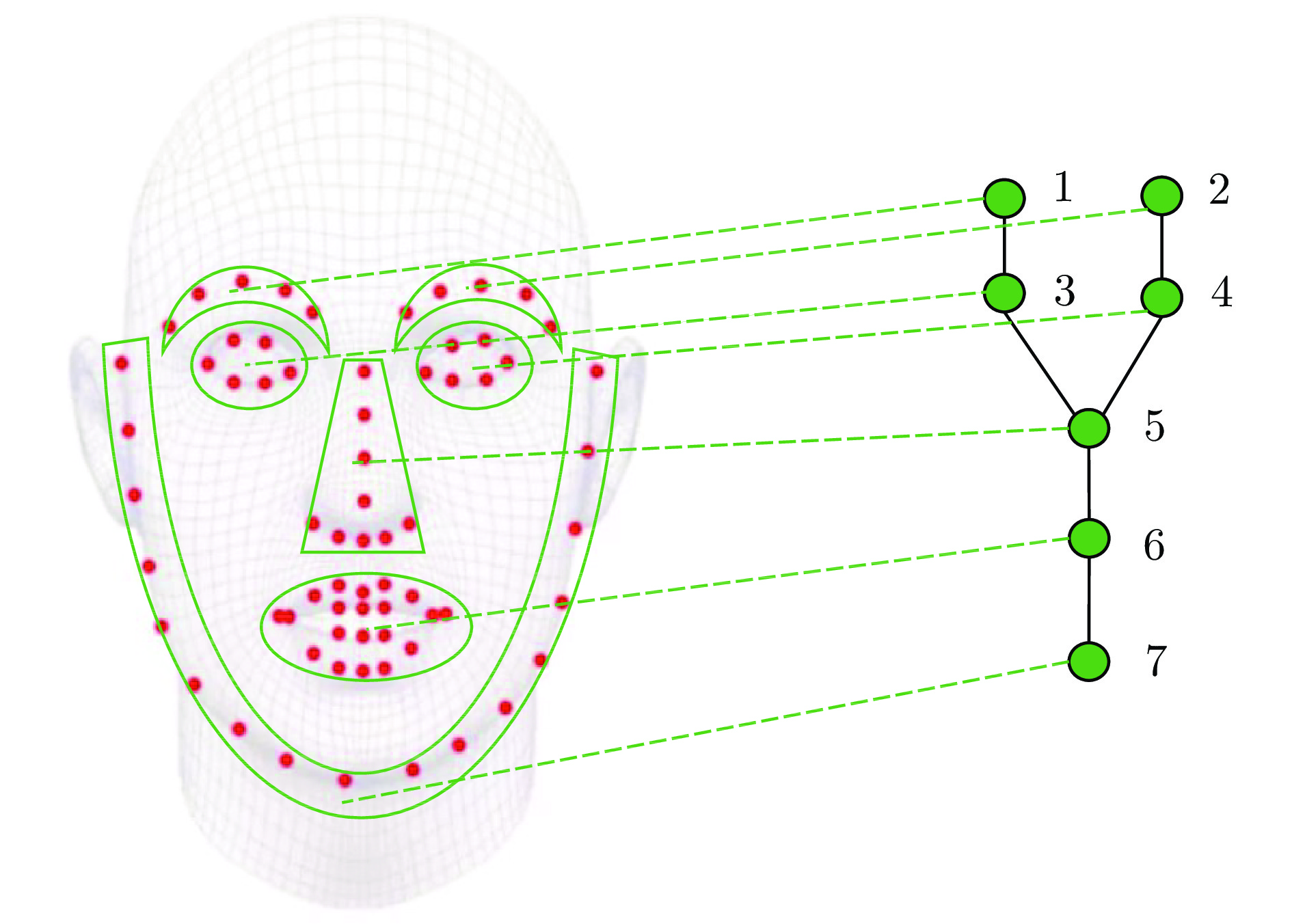
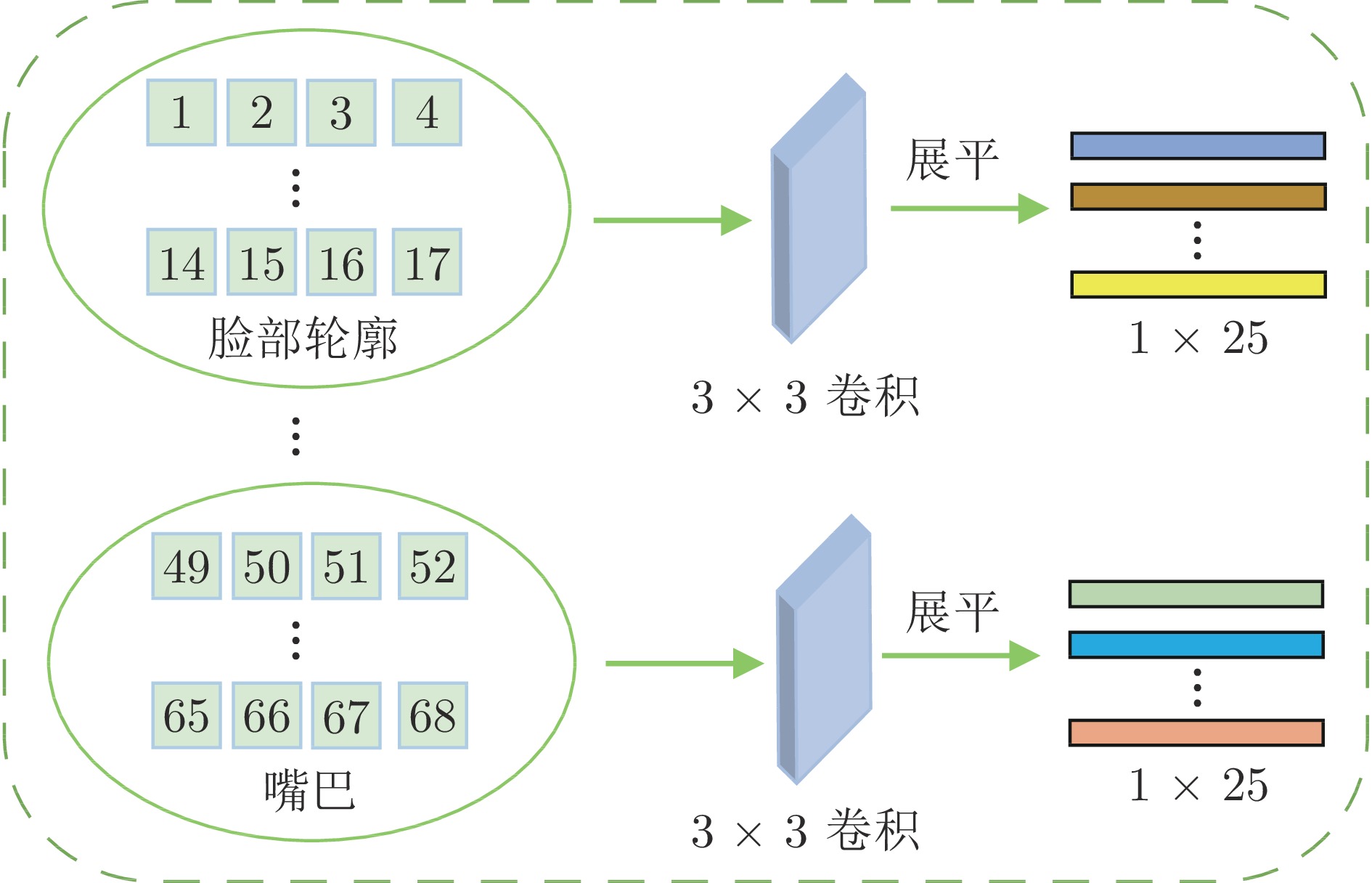
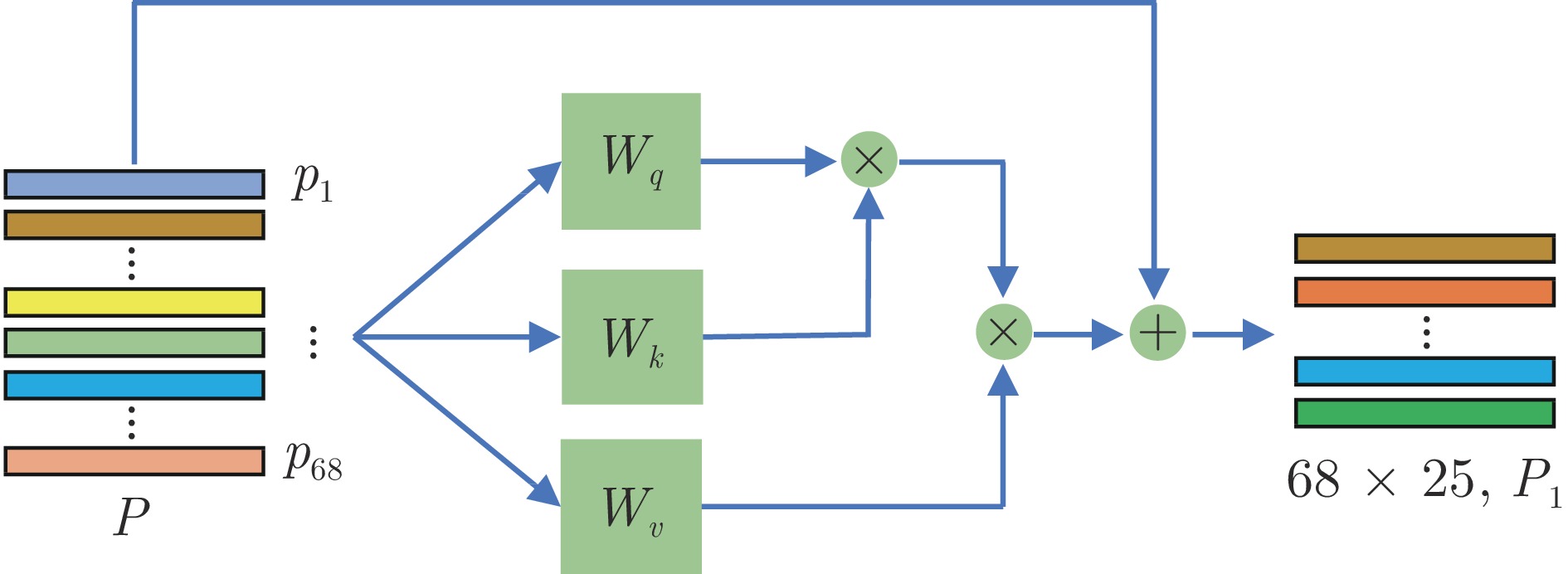
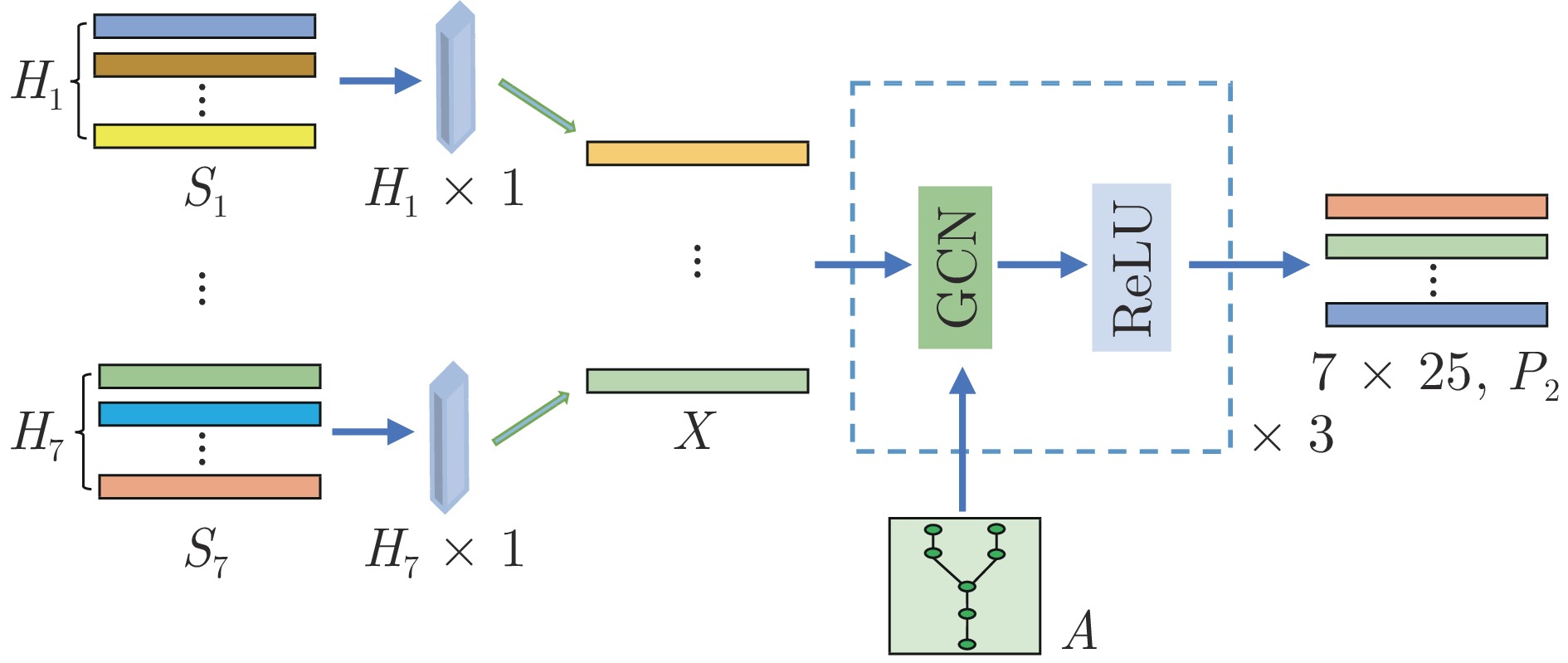
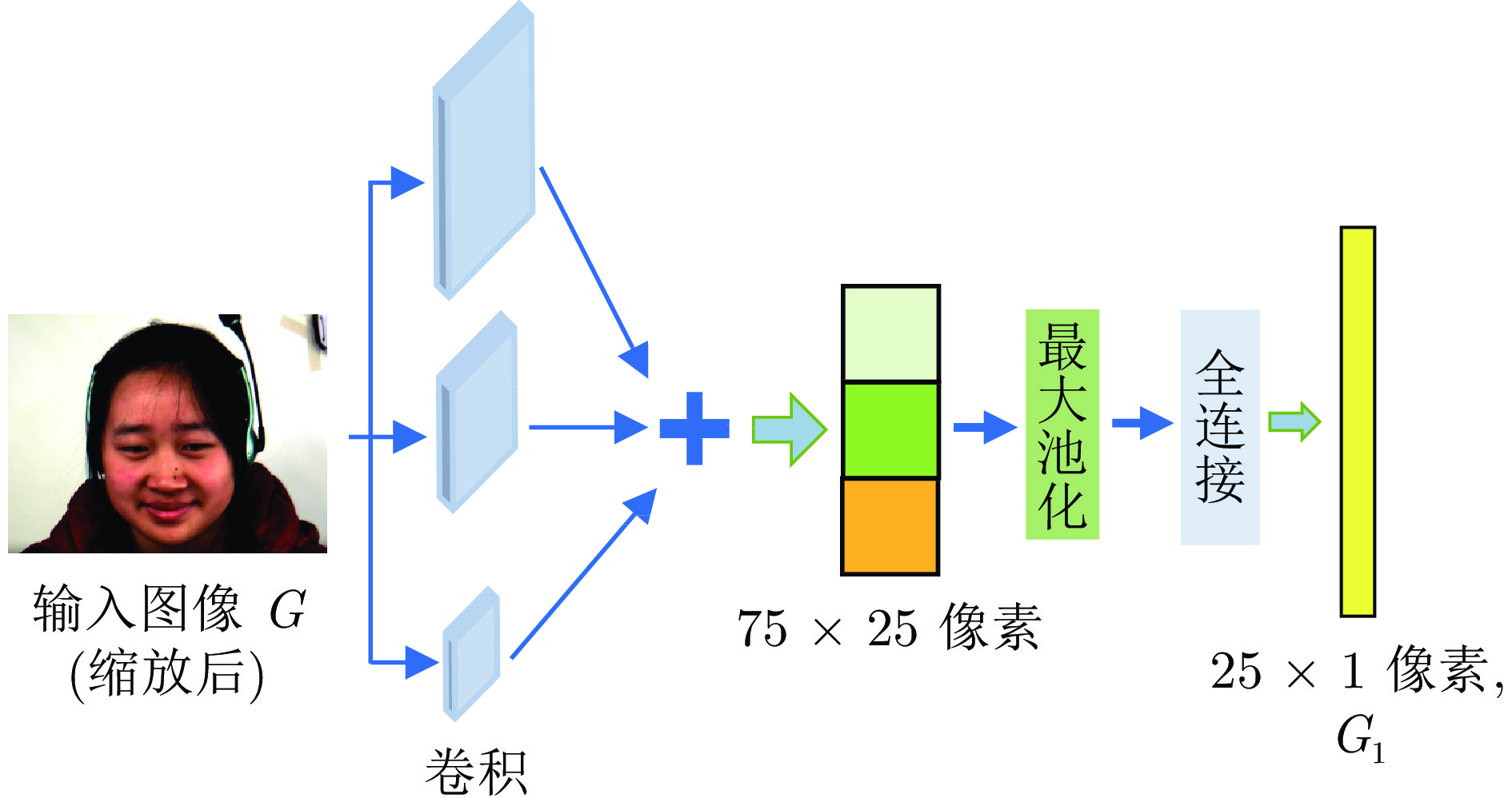
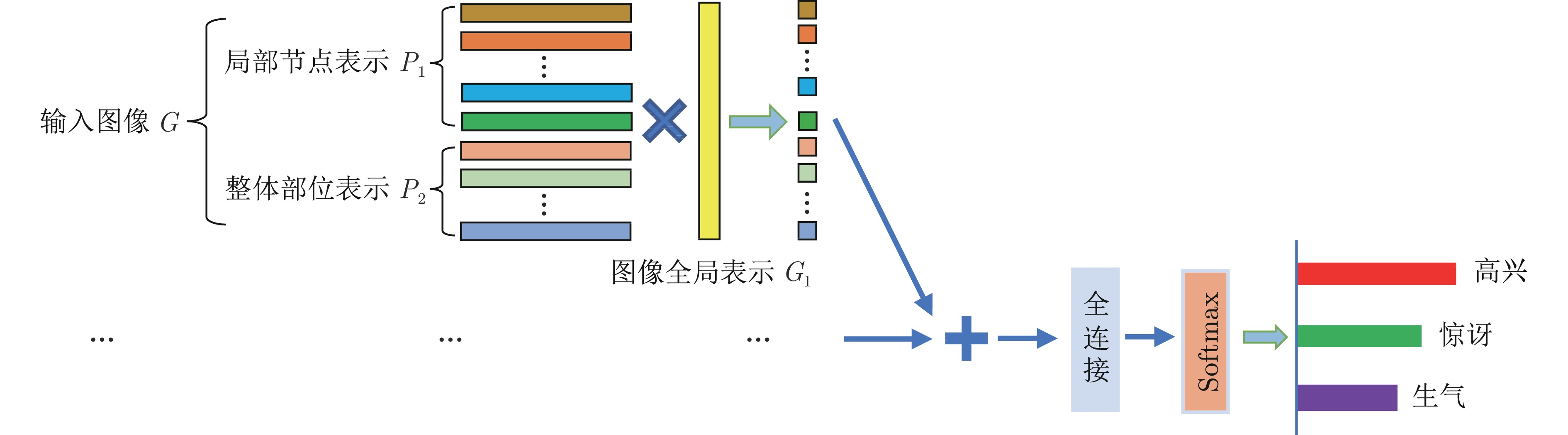
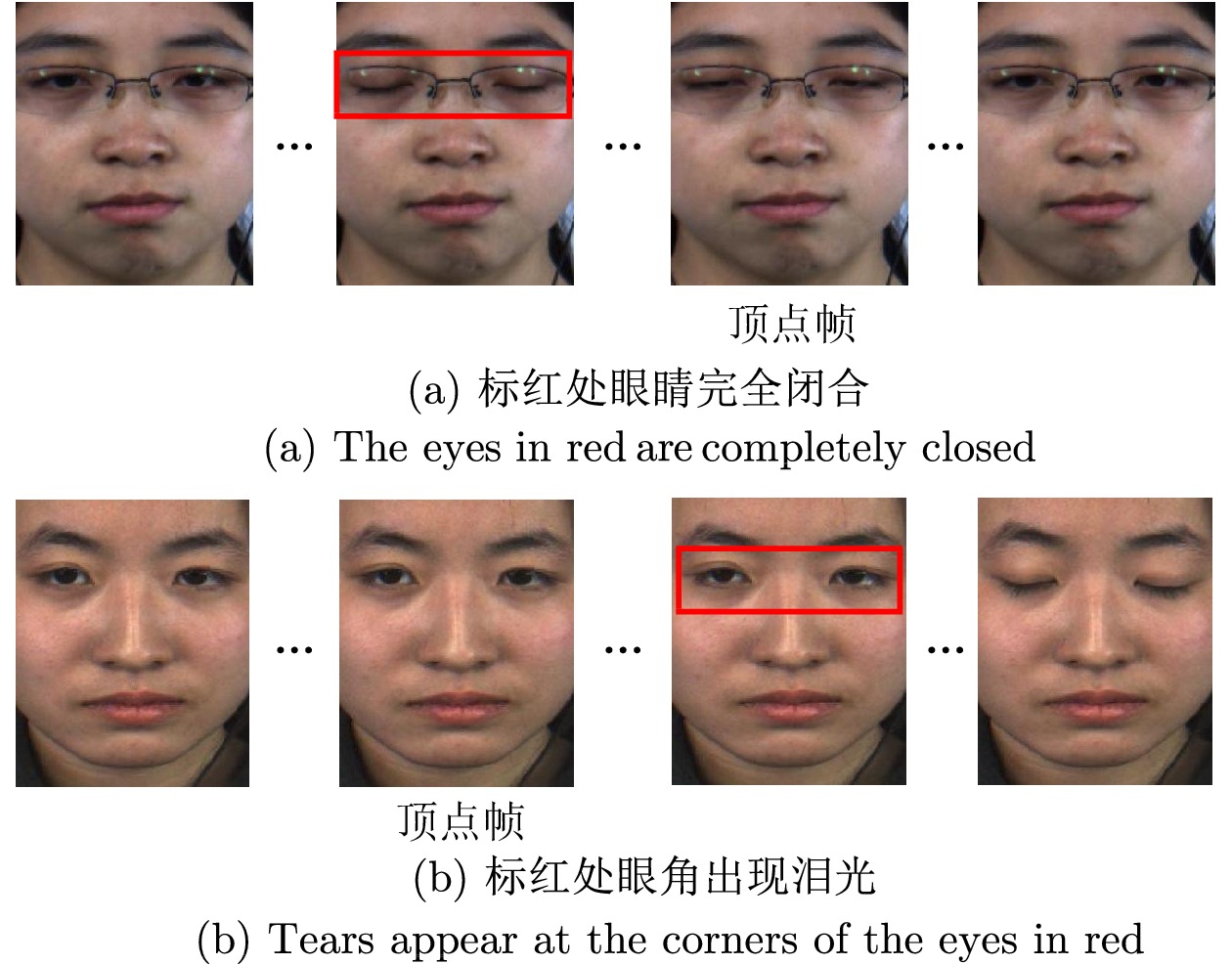
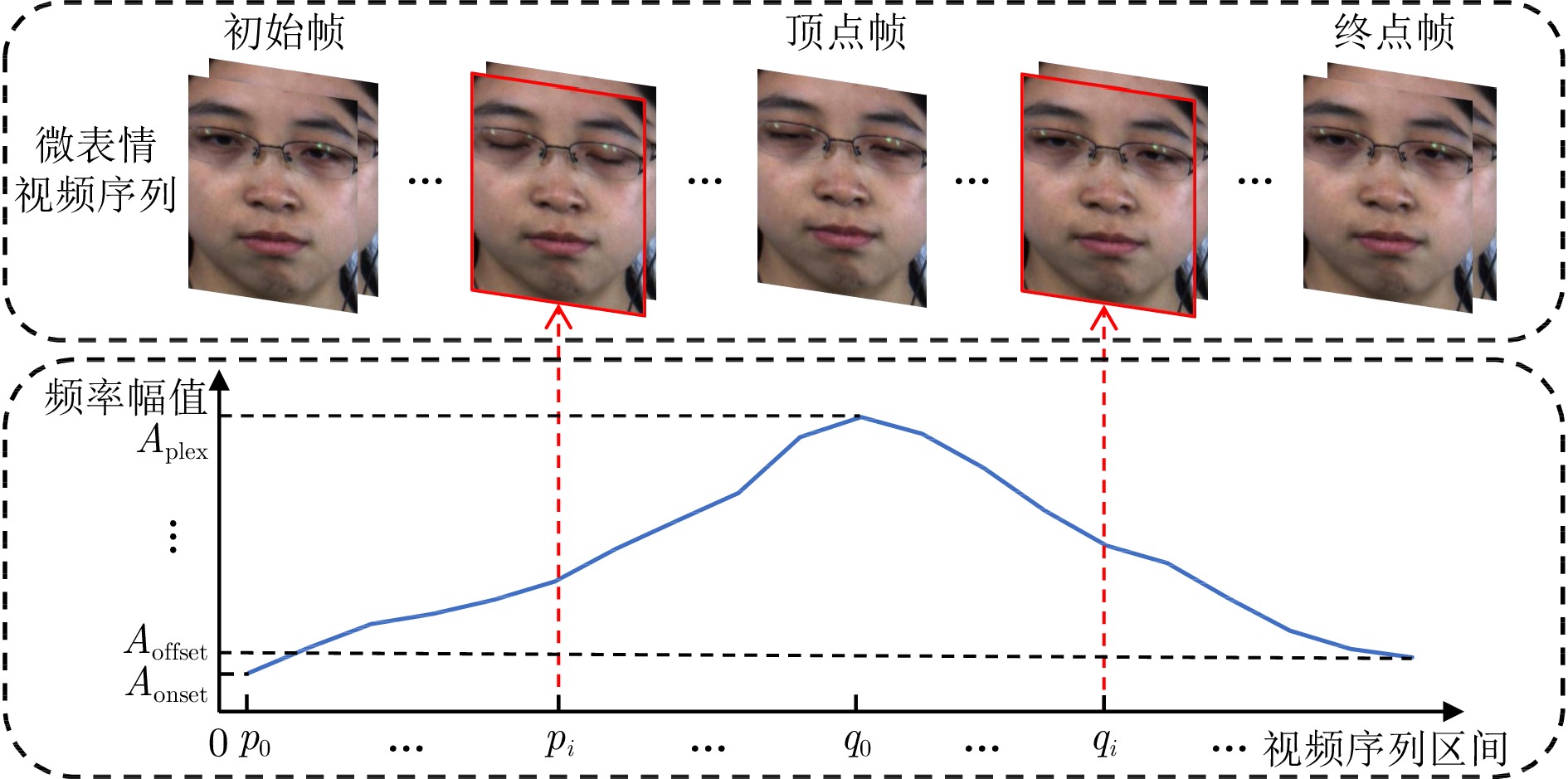
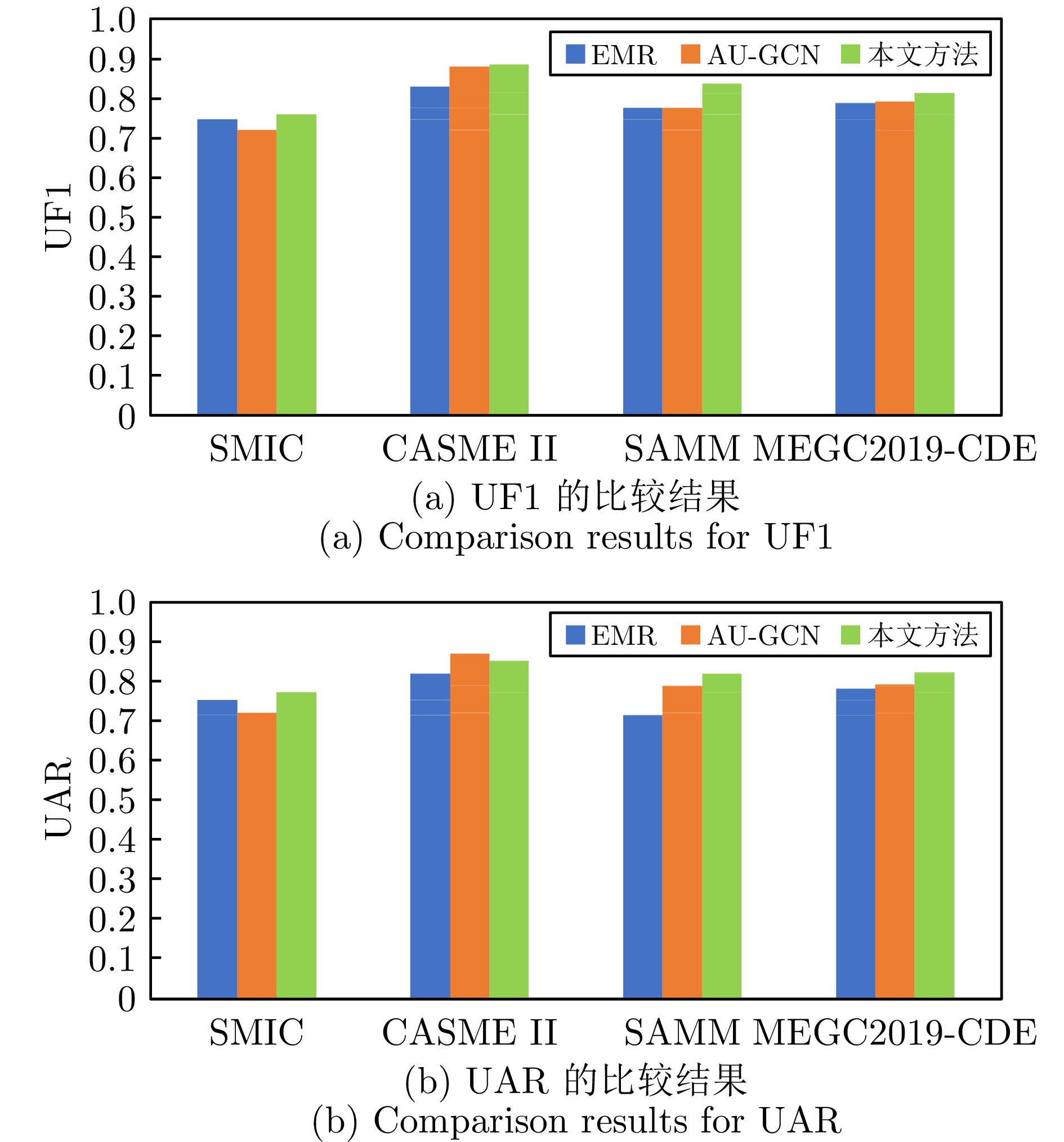
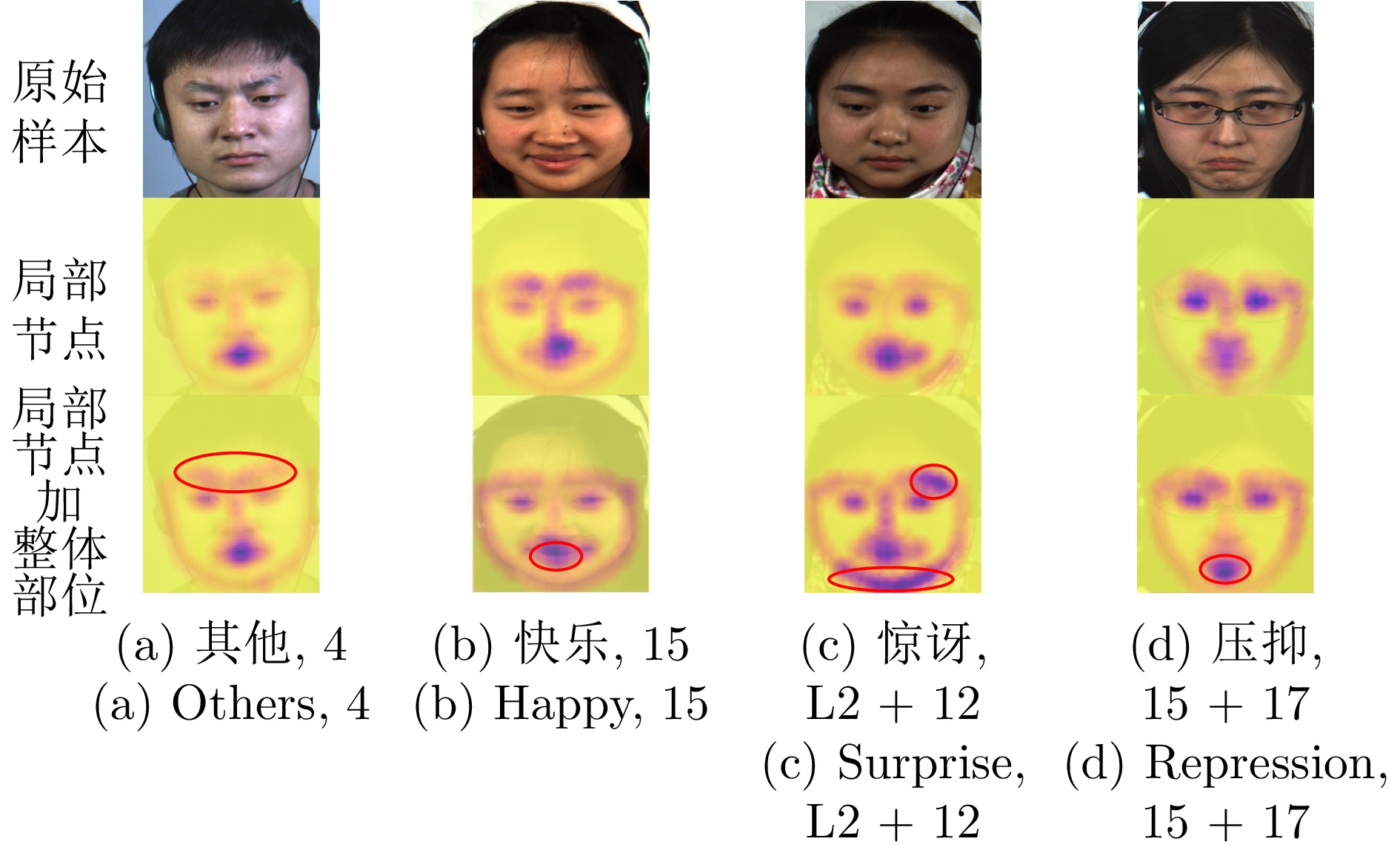
微表情是人类情感表达过程中细微且不自主的表情变化, 实现准确和高效的微表情识别, 对于心理疾病的早期诊断和治疗有重要意义. 现有的微表情识别方法大多未考虑面部产生微表情时各个关键部位间的联系, 难以在小样本图像空间上捕捉到微表情的细微变化, 导致识别率不高. 为此, 提出一种基于多层级信息融合网络的微表情识别方法. 该方法包括一个基于频率幅值的视频帧选取策略, 能从微表情视频中筛选出包含高强度表情信息的图像帧、一个基于自注意力机制和图卷积网络的多层级信息提取网络以及一个引入图像全局信息的融合网络, 能从不同层次捕获人脸微表情的细微变化, 来提高对特定类别的辨识度. 在公开数据集上的实验结果表明, 该方法能有效提高微表情识别的准确率, 与其他先进方法相比, 具有更好的性能.
微表情是人类情感表达过程中细微且不自主的表情变化, 实现准确和高效的微表情识别, 对于心理疾病的早期诊断和治疗有重要意义. 现有的微表情识别方法大多未考虑面部产生微表情时各个关键部位间的联系, 难以在小样本图像空间上捕捉到微表情的细微变化, 导致识别率不高. 为此, 提出一种基于多层级信息融合网络的微表情识别方法. 该方法包括一个基于频率幅值的视频帧选取策略, 能从微表情视频中筛选出包含高强度表情信息的图像帧、一个基于自注意力机制和图卷积网络的多层级信息提取网络以及一个引入图像全局信息的融合网络, 能从不同层次捕获人脸微表情的细微变化, 来提高对特定类别的辨识度. 在公开数据集上的实验结果表明, 该方法能有效提高微表情识别的准确率, 与其他先进方法相比, 具有更好的性能.
2024, 50(7): 1458-1471.
doi: 10.16383/j.aas.c210009
摘要:
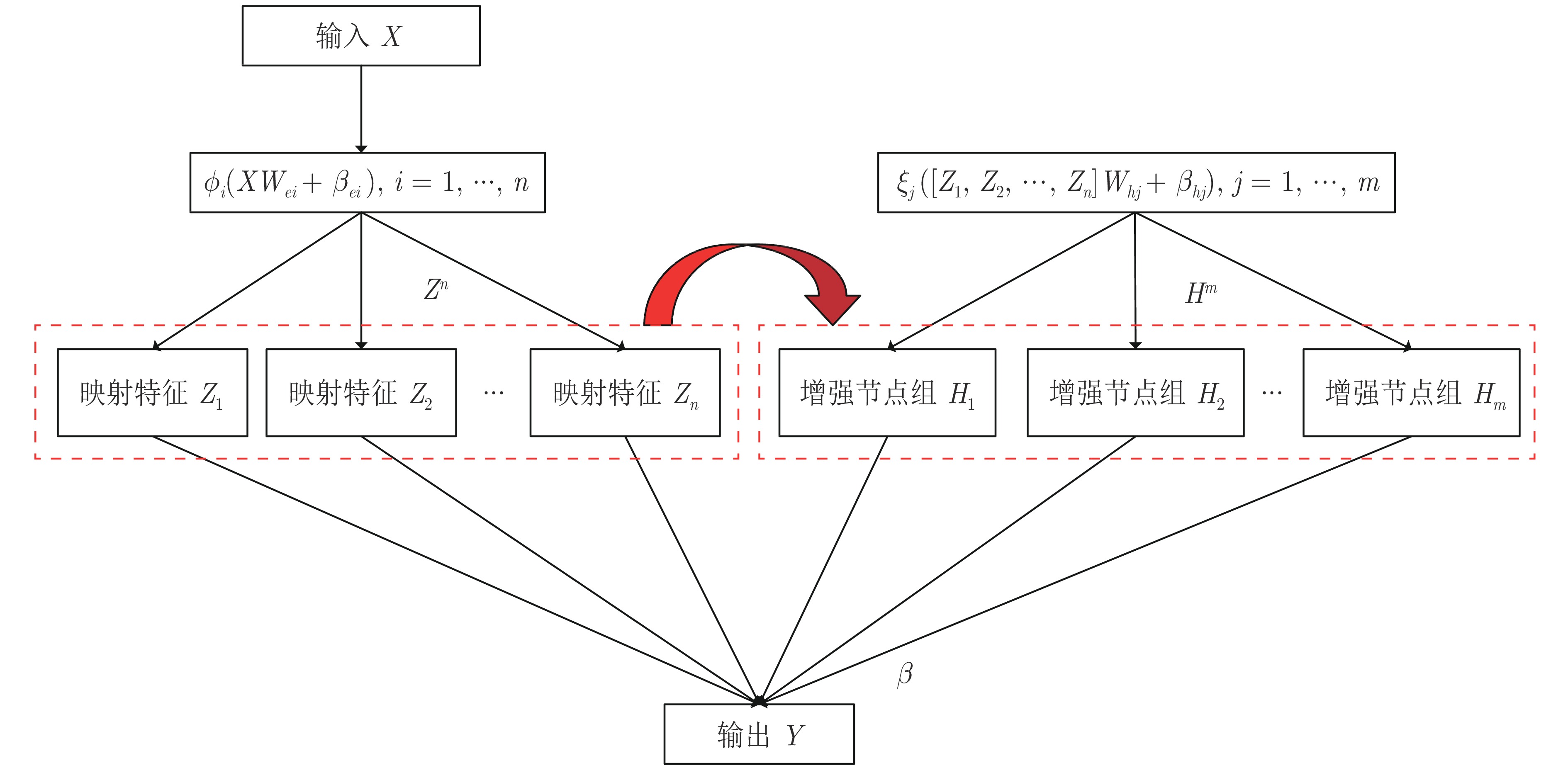
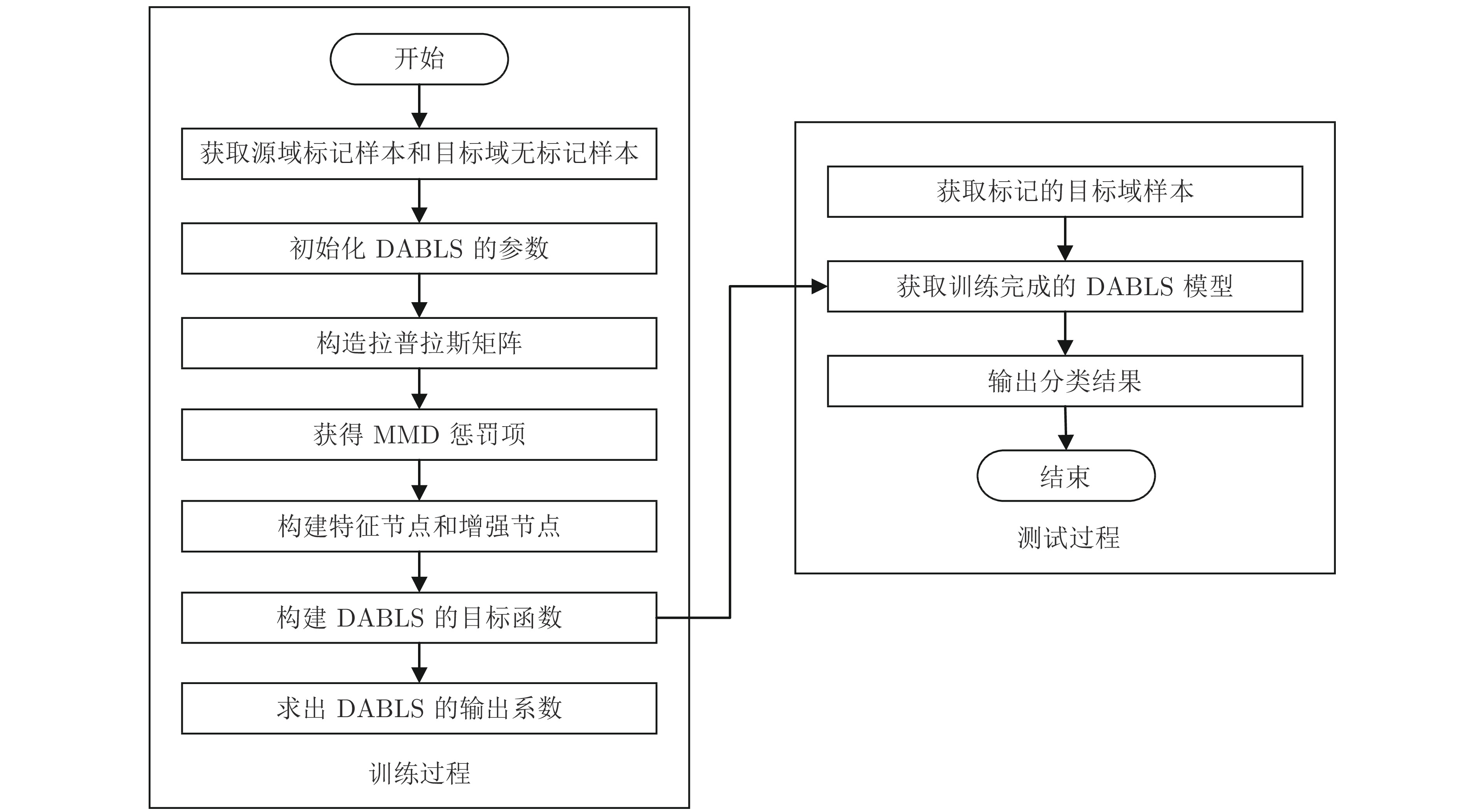
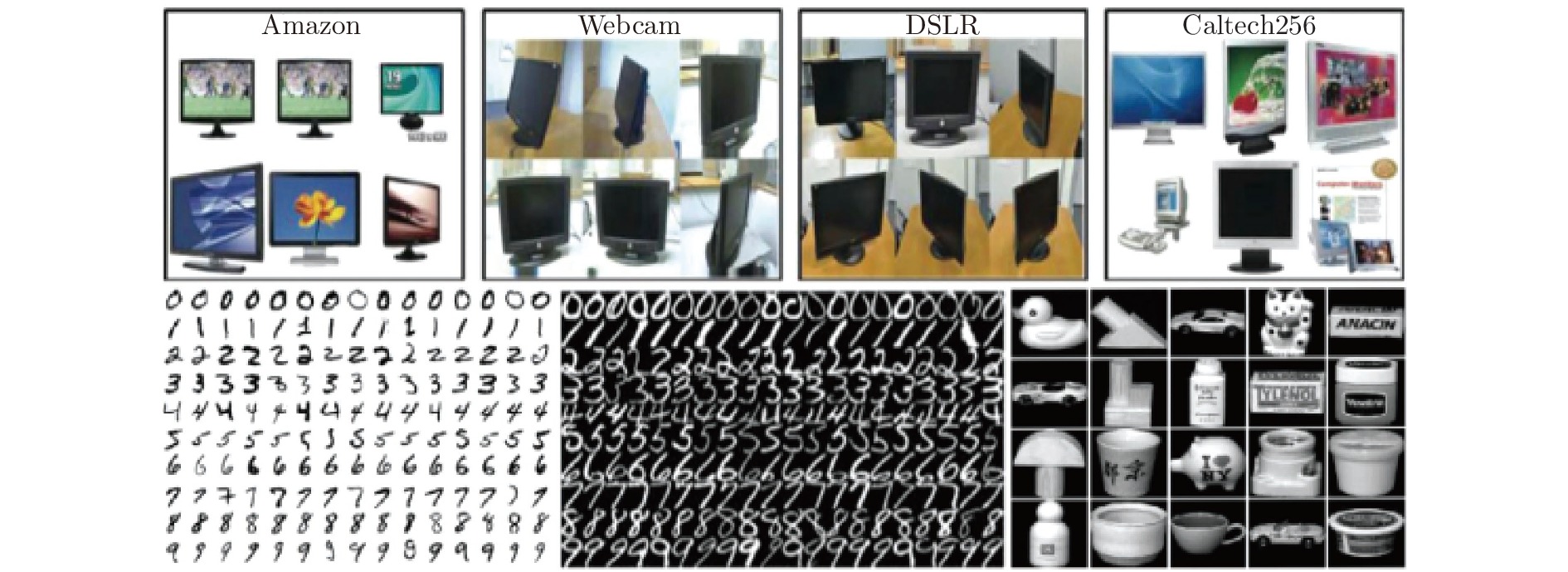
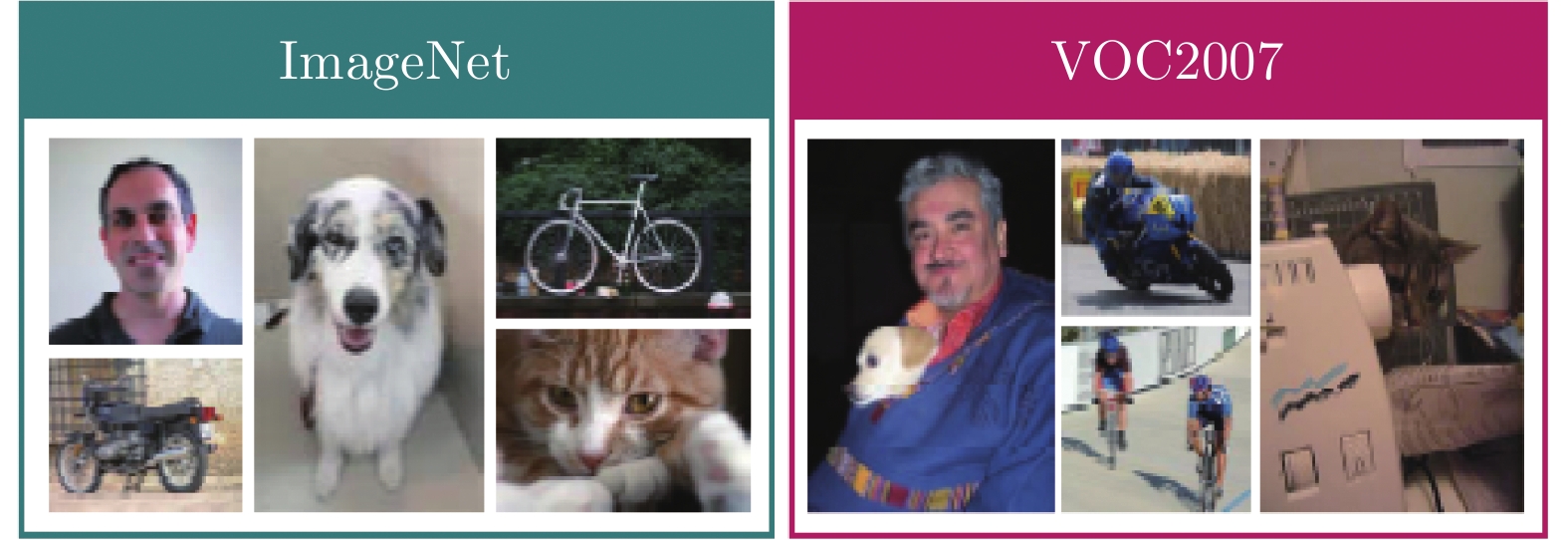
宽度学习系统(Broad learning system, BLS)作为一种基于随机向量函数型网络(Random vector functionallink network, RVFLN)的高效增量学习系统, 具有快速自适应模型结构选择能力和高精度的特点. 但针对目标分类任务中有标签数据匮乏问题, 传统的BLS难以借助相关领域知识来提升目标域的分类效果, 为此提出一种基于流形正则化框架和最大均值差异(Maximum mean discrepancy, MMD)的域适应BLS (Domain adaptive BLS, DABLS)模型, 实现目标域无标签条件下的跨域图像分类. DABLS模型首先构造BLS的特征节点和增强节点, 从源域和目标域数据中有效提取特征; 再利用流形正则化框架构造拉普拉斯矩阵, 以探索目标域数据中的流形特性, 挖掘目标域数据的潜在信息. 然后基于迁移学习方法构建源域数据与目标域数据之间的MMD惩罚项, 以匹配源域和目标域之间的投影均值; 将特征节点、增强节点、MMD惩罚项和拉普拉斯矩阵相结合, 构造目标函数, 并采用岭回归分析法对其求解, 获得输出系数, 从而提高模型的跨域分类性能. 最后在不同图像数据集上进行大量的验证与对比实验, 结果表明DABLS在不同图像数据集上均能获得较好的跨域分类性能, 具有较强的泛化能力和较好的稳定性.
宽度学习系统(Broad learning system, BLS)作为一种基于随机向量函数型网络(Random vector functionallink network, RVFLN)的高效增量学习系统, 具有快速自适应模型结构选择能力和高精度的特点. 但针对目标分类任务中有标签数据匮乏问题, 传统的BLS难以借助相关领域知识来提升目标域的分类效果, 为此提出一种基于流形正则化框架和最大均值差异(Maximum mean discrepancy, MMD)的域适应BLS (Domain adaptive BLS, DABLS)模型, 实现目标域无标签条件下的跨域图像分类. DABLS模型首先构造BLS的特征节点和增强节点, 从源域和目标域数据中有效提取特征; 再利用流形正则化框架构造拉普拉斯矩阵, 以探索目标域数据中的流形特性, 挖掘目标域数据的潜在信息. 然后基于迁移学习方法构建源域数据与目标域数据之间的MMD惩罚项, 以匹配源域和目标域之间的投影均值; 将特征节点、增强节点、MMD惩罚项和拉普拉斯矩阵相结合, 构造目标函数, 并采用岭回归分析法对其求解, 获得输出系数, 从而提高模型的跨域分类性能. 最后在不同图像数据集上进行大量的验证与对比实验, 结果表明DABLS在不同图像数据集上均能获得较好的跨域分类性能, 具有较强的泛化能力和较好的稳定性.
2024, 50(7): 1472-1484.
doi: 10.16383/j.aas.c220984
摘要:
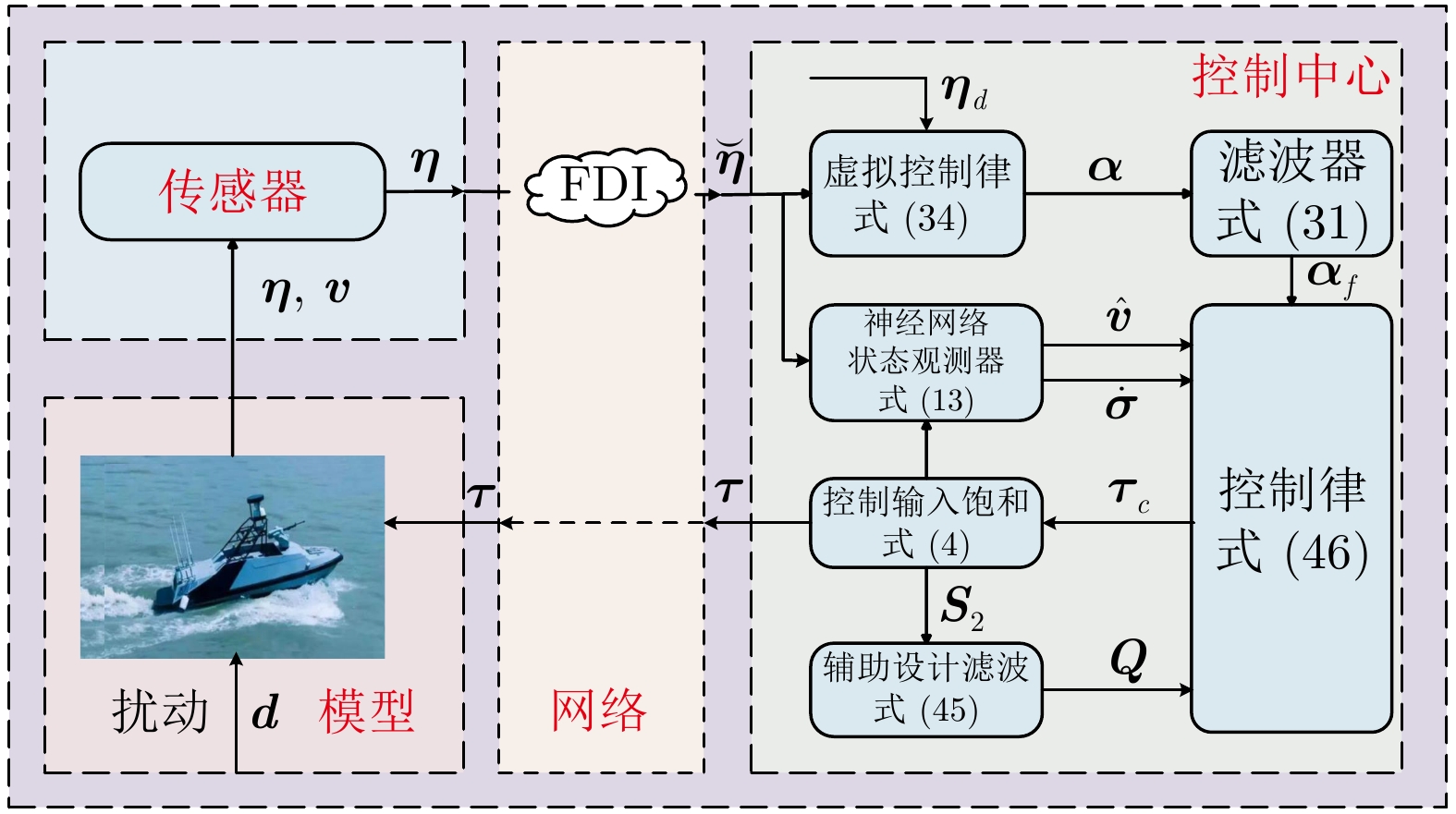
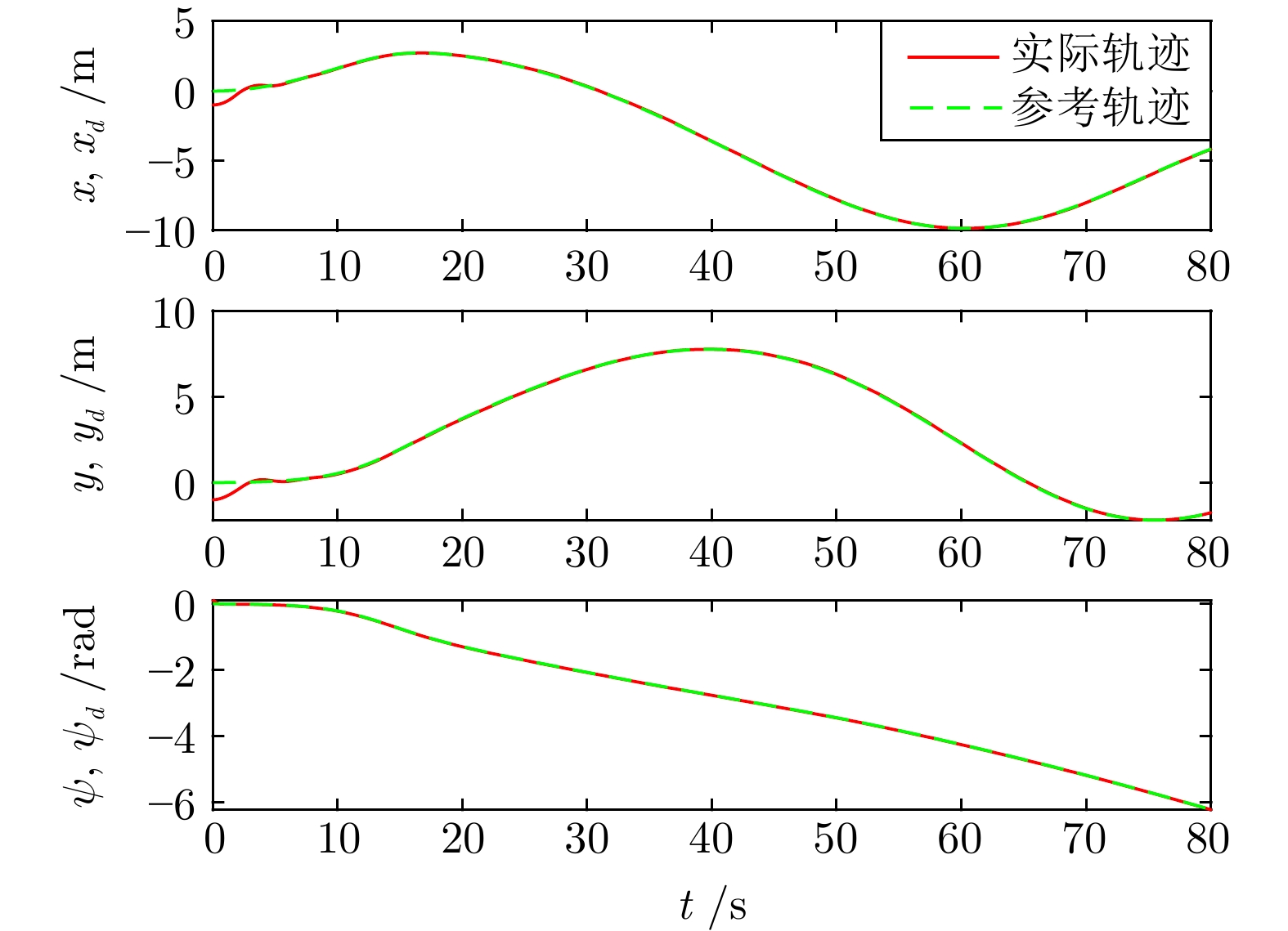
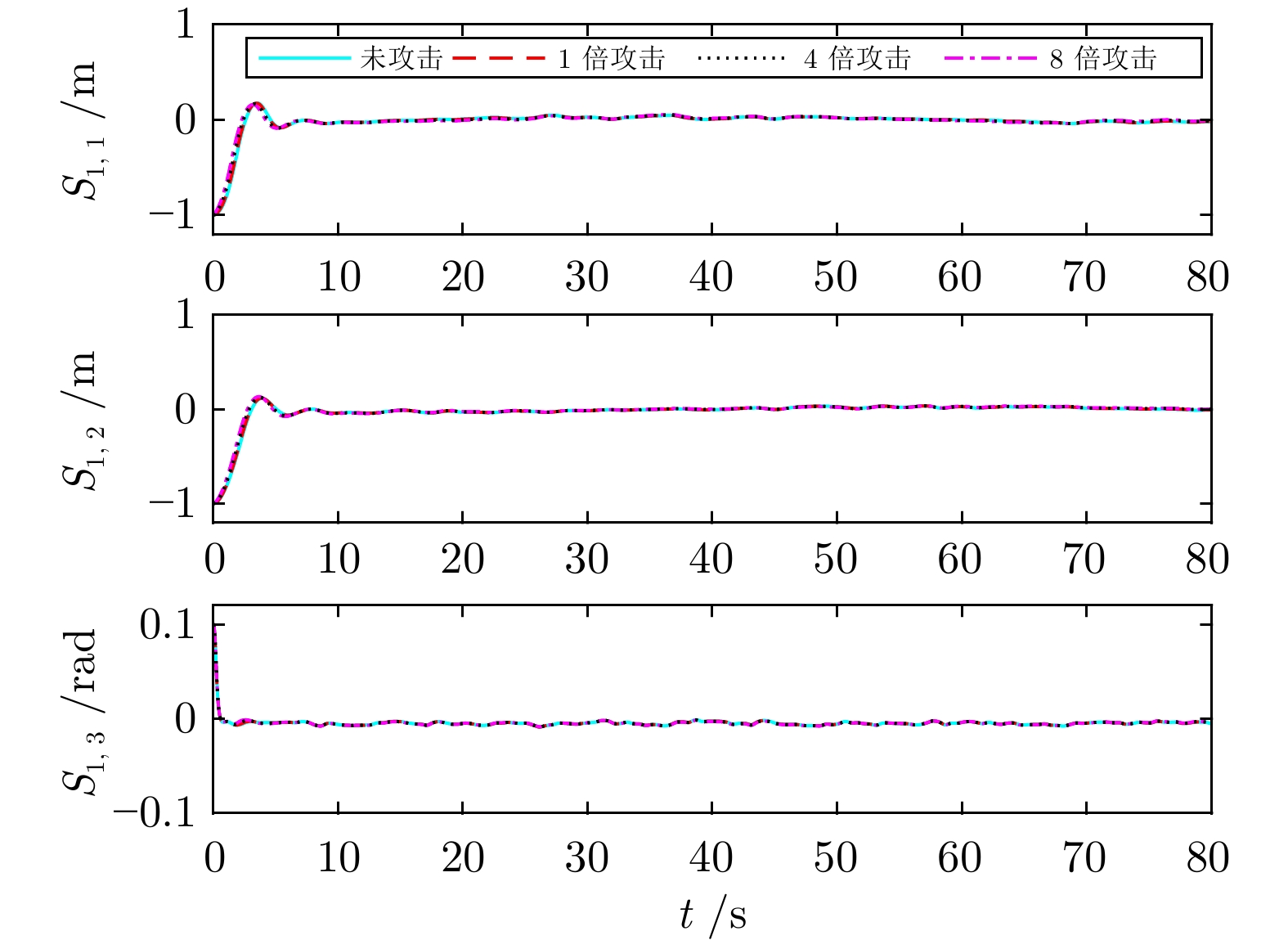
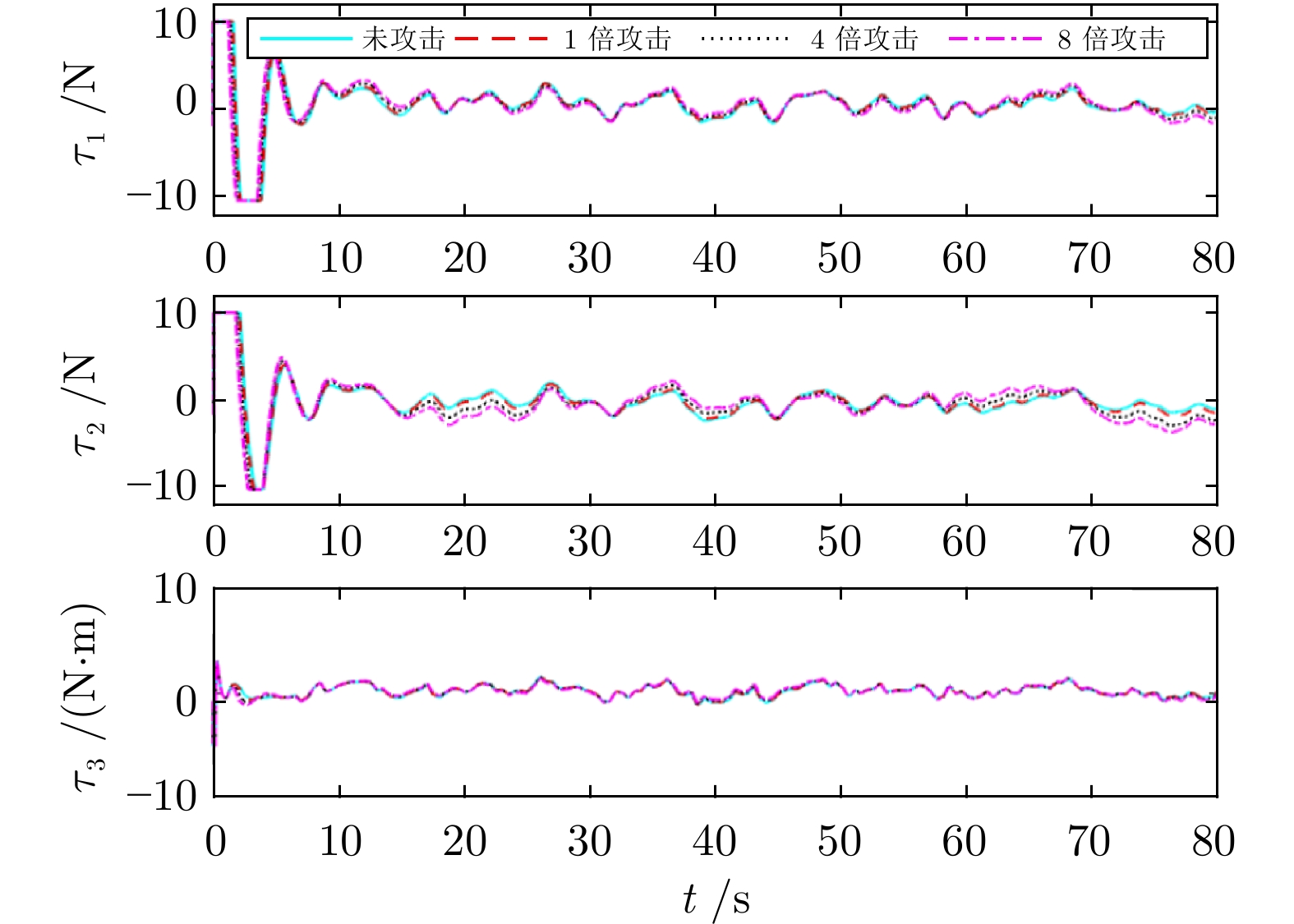
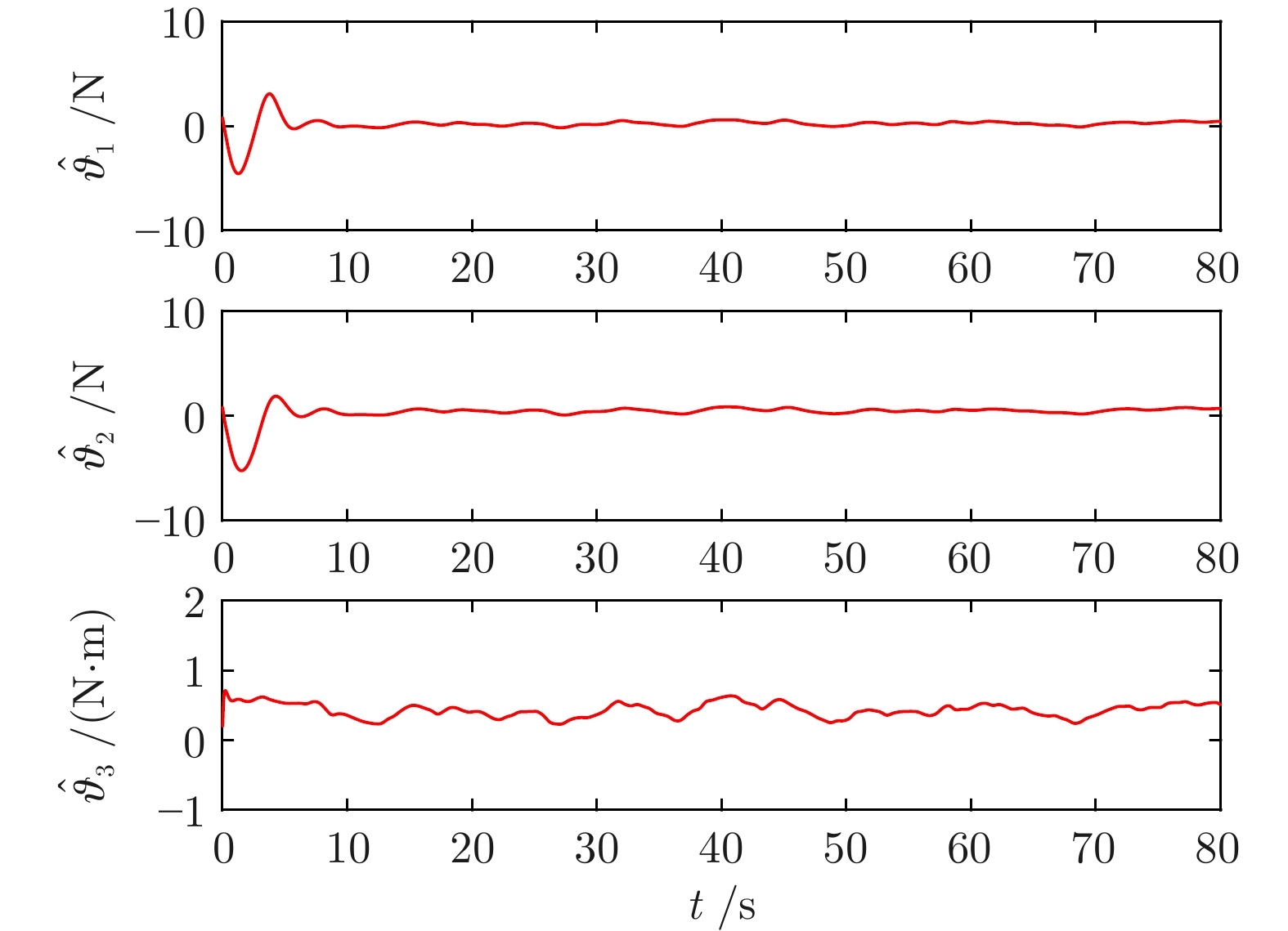
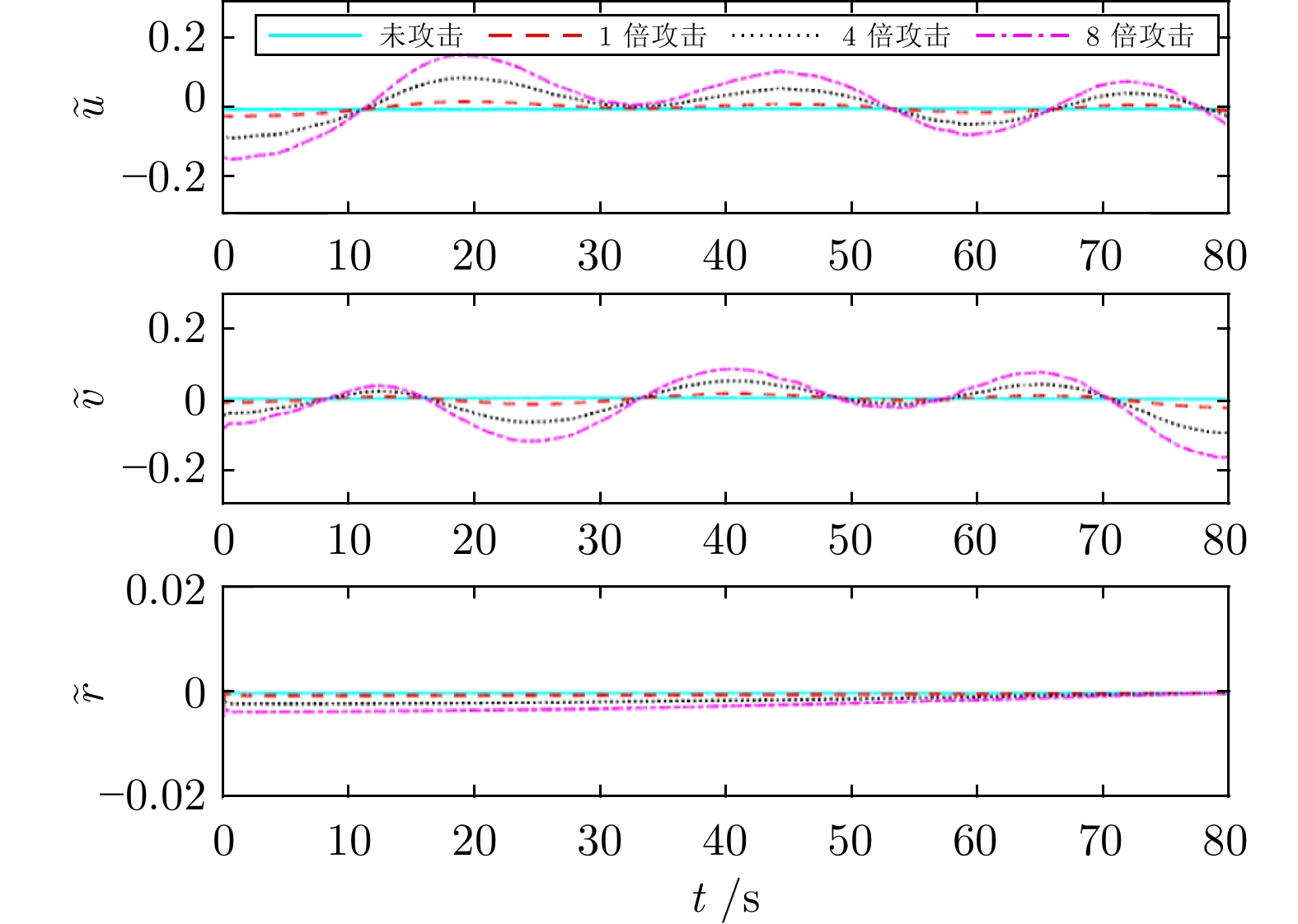
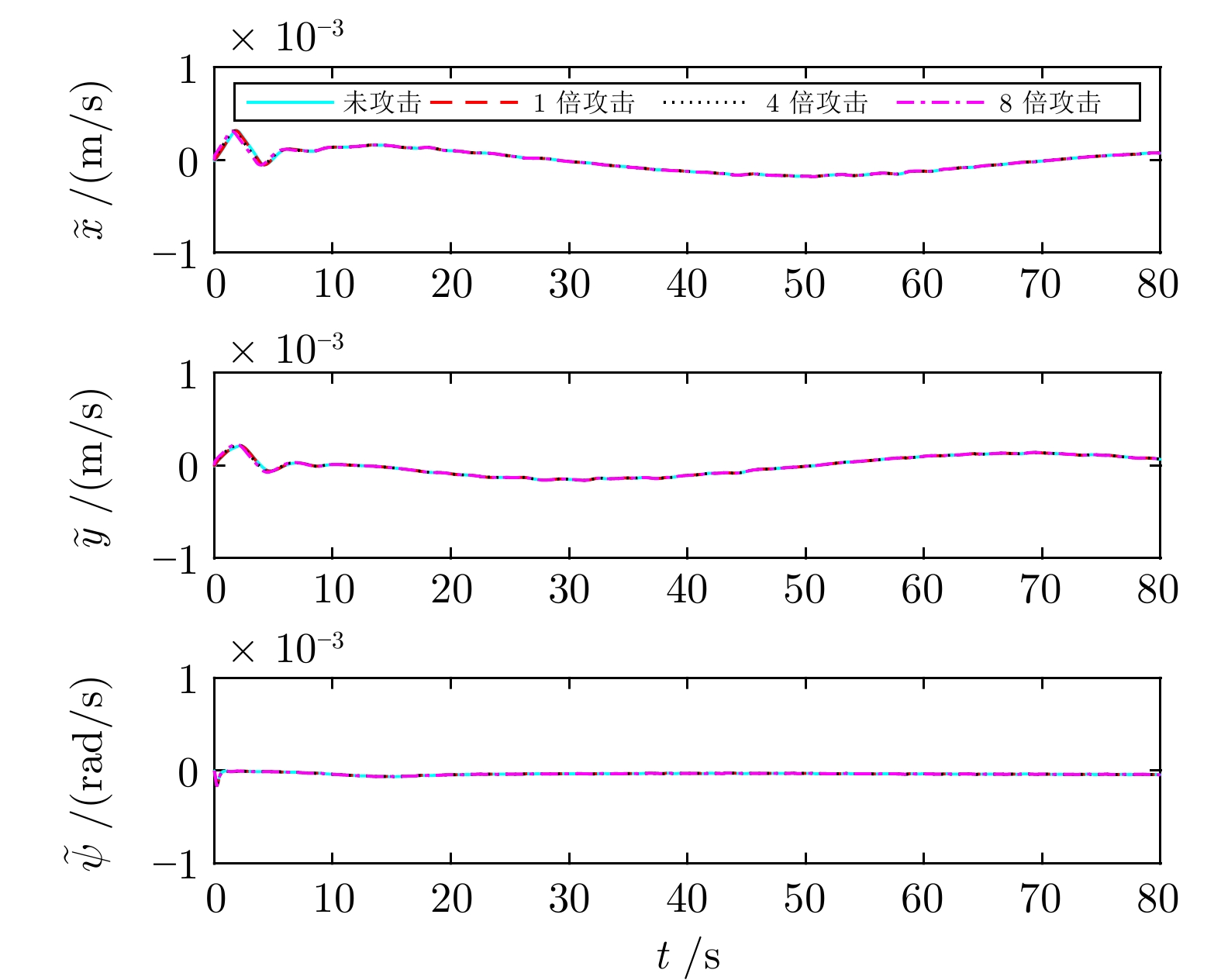
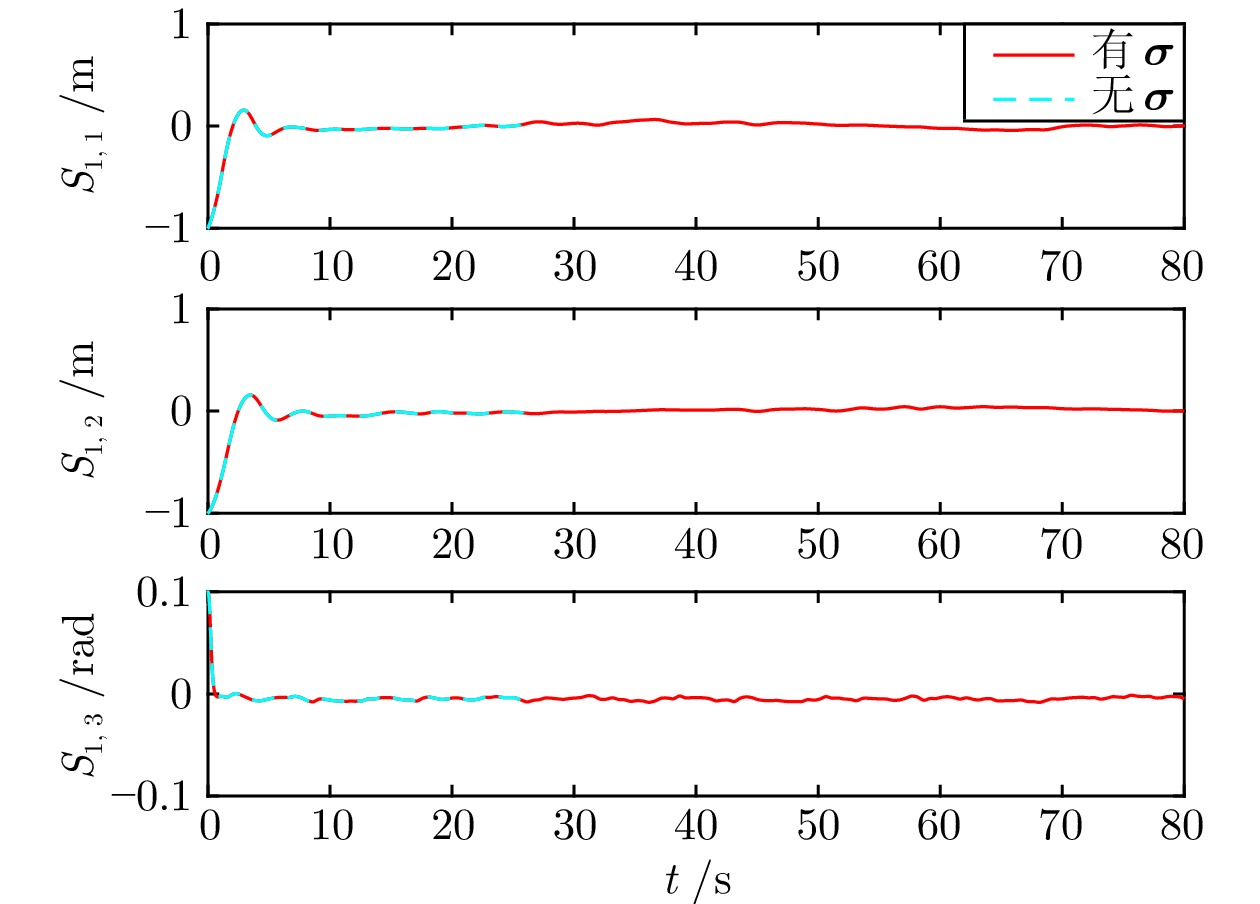
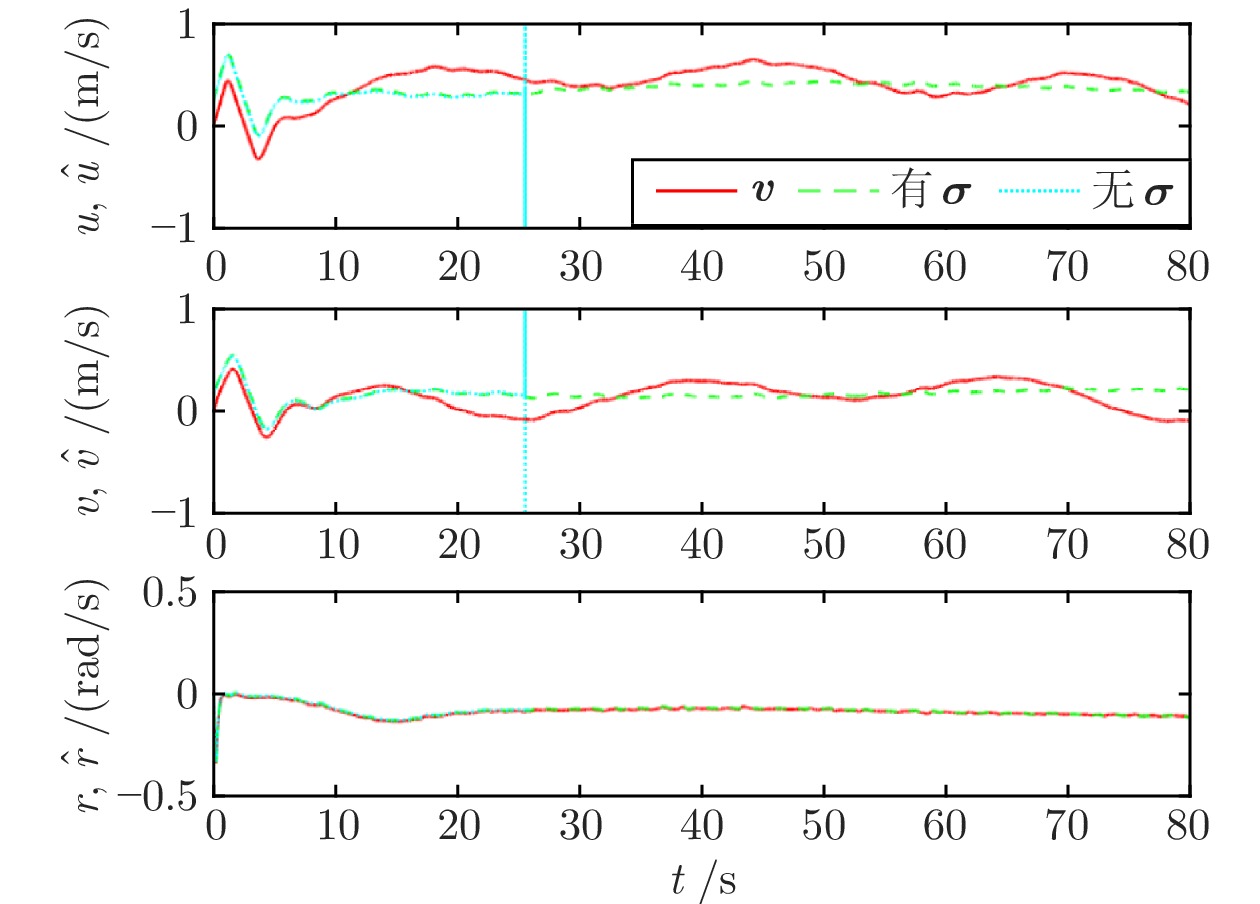
本文主要研究网络环境下无人水面船舶 (Unmanned surface vessels, USVs) 遭受虚假数据注入式 (False-data-injection, FDI) 攻击的跟踪控制问题. 其中, 内部和外部不确定以及输入饱和约束等实际因素均考虑在设计中. 在控制设计过程中, 为避免将船舶速度的攻击信号引入闭环系统, 采用分类重构思想, 构造一种新的神经网络 (Neural network, NN) 状态观测器, 同时重构船舶速度和攻击信号. 进一步, 在backstepping 设计框架下, 利用重构的攻击信号补偿USVs 运动学通道因虚假数据注入式攻击引起的非匹配不确定项. 在动力学设计通道中, 利用自适应神经技术和单参数学习法, 重构由内部和外部不确定组成的复合不确定部分, 进而提出自适应神经输出反馈控制方案. 理论分析表明, 即便在FDI 攻击、内外不确定以及执行器饱和约束的情况下, 所提控制方案仍能迫使USVs 跟踪给定的参考轨迹. 同时, 仿真和比较结果证实了所提控制方案的有效性和优越性.
本文主要研究网络环境下无人水面船舶 (Unmanned surface vessels, USVs) 遭受虚假数据注入式 (False-data-injection, FDI) 攻击的跟踪控制问题. 其中, 内部和外部不确定以及输入饱和约束等实际因素均考虑在设计中. 在控制设计过程中, 为避免将船舶速度的攻击信号引入闭环系统, 采用分类重构思想, 构造一种新的神经网络 (Neural network, NN) 状态观测器, 同时重构船舶速度和攻击信号. 进一步, 在backstepping 设计框架下, 利用重构的攻击信号补偿USVs 运动学通道因虚假数据注入式攻击引起的非匹配不确定项. 在动力学设计通道中, 利用自适应神经技术和单参数学习法, 重构由内部和外部不确定组成的复合不确定部分, 进而提出自适应神经输出反馈控制方案. 理论分析表明, 即便在FDI 攻击、内外不确定以及执行器饱和约束的情况下, 所提控制方案仍能迫使USVs 跟踪给定的参考轨迹. 同时, 仿真和比较结果证实了所提控制方案的有效性和优越性.