

Adaptive Neural Output Feedback Trajectory Tracking Control for USVs Under False-data-injection Attacks
-
摘要: 本文主要研究网络环境下无人水面船舶 (Unmanned surface vessels, USVs) 遭受虚假数据注入式 (False-data-injection, FDI) 攻击的跟踪控制问题. 其中, 内部和外部不确定以及输入饱和约束等实际因素均考虑在设计中. 在控制设计过程中, 为避免将船舶速度的攻击信号引入闭环系统, 采用分类重构思想, 构造一种新的神经网络 (Neural network, NN) 状态观测器, 同时重构船舶速度和攻击信号. 进一步, 在backstepping 设计框架下, 利用重构的攻击信号补偿USVs 运动学通道因虚假数据注入式攻击引起的非匹配不确定项. 在动力学设计通道中, 利用自适应神经技术和单参数学习法, 重构由内部和外部不确定组成的复合不确定部分, 进而提出自适应神经输出反馈控制方案. 理论分析表明, 即便在FDI 攻击、内外不确定以及执行器饱和约束的情况下, 所提控制方案仍能迫使USVs 跟踪给定的参考轨迹. 同时, 仿真和比较结果证实了所提控制方案的有效性和优越性.Abstract: This paper investigates the tracking control issue of unmanned surface vessels (USVs) under the attack of false-data-injection (FDI) in the network environment, and these actual factors such as internal and external uncertainties and input saturation constraints are also considered in the design. In the control design, to avoid FDI attack signals from the velocity channel being introduced into the closed-loop system, the idea of classification reconstruction is developed. Based on this idea, a novel neural network (NN) state observer is constructed to reconstruct vessels velocity and FDI attack signals. Furthermore, under the backstepping design framework, utilizing the reconstructed attack signals to compensate the mismatched uncertainties in USVs kinematic channel, which is caused by false-data-injection attacks. In the dynamic design channel, adaptive neural technology and single parameter learning method are used to reconstruct the lumped uncertain parts, which consist of internal and external uncertainties, and then the adaptive neural output feedback control scheme is proposed. The theoretical analysis shows that the proposed control scheme can make USVs track a given reference trajectory, even in the presence of FDI attacks, internal and external uncertainties, and actuator saturation constraints. At the same time, the simulation and comparison results illustrate the effectiveness and superiority of the proposed control scheme.
-
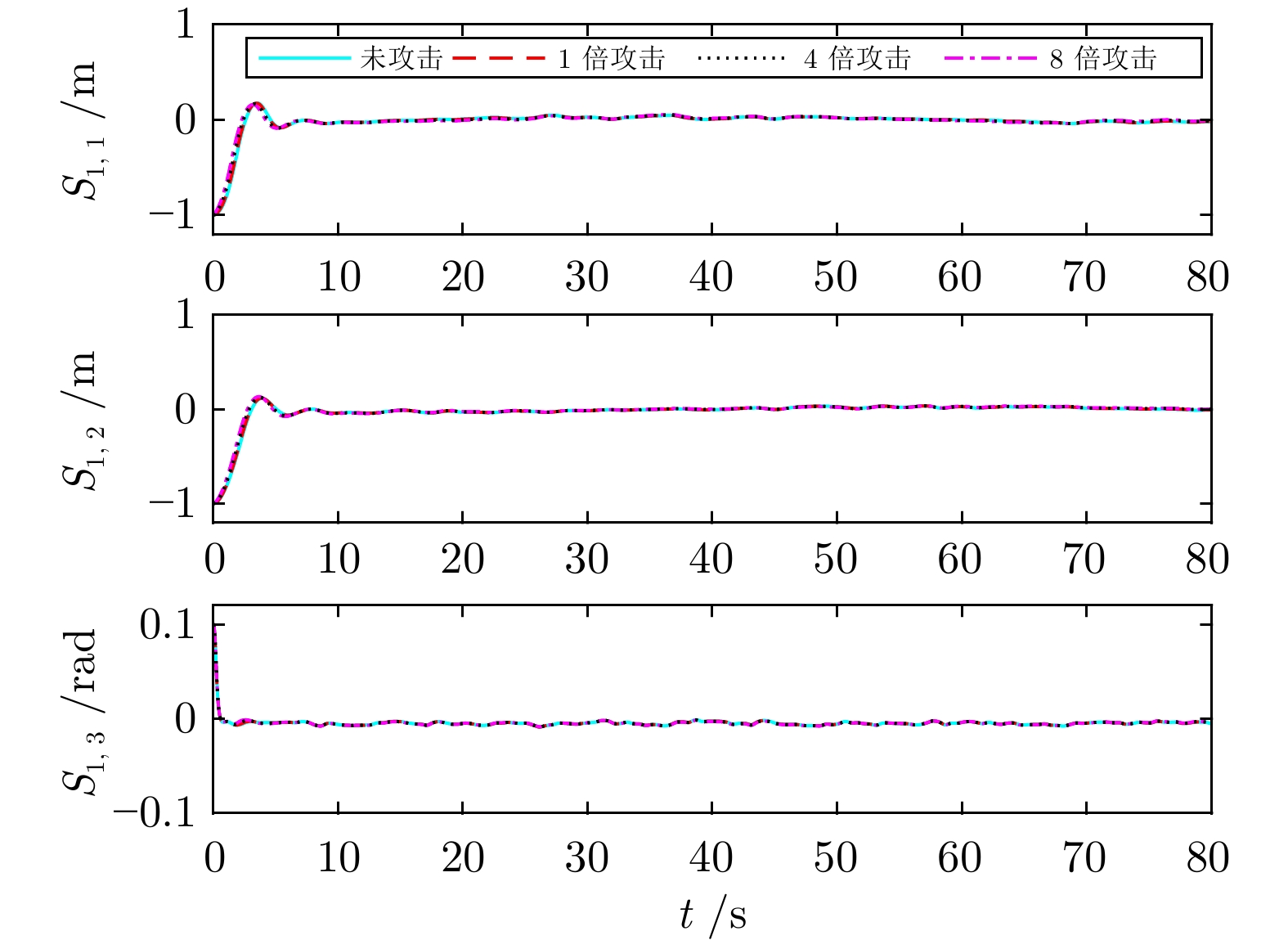
图 3 轨迹误差${{\boldsymbol{S}}}_1$对比图
Fig. 3 Comparison chart of trajectory errors ${{\boldsymbol{S}}}_1$
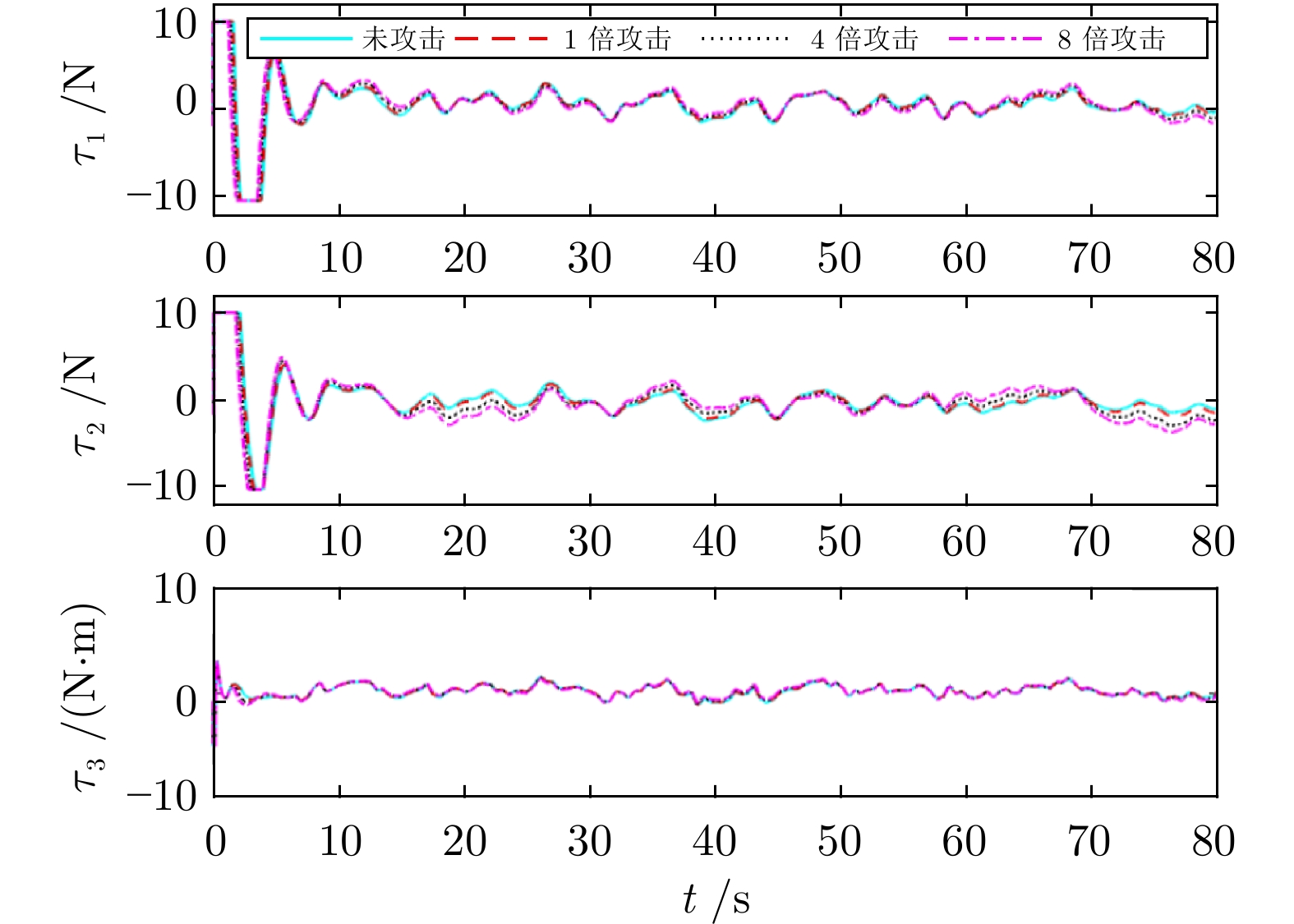
图 4 控制输入${\boldsymbol {\tau}}$对比图
Fig. 4 Comparison chart of control inputs${\boldsymbol {\tau}}$
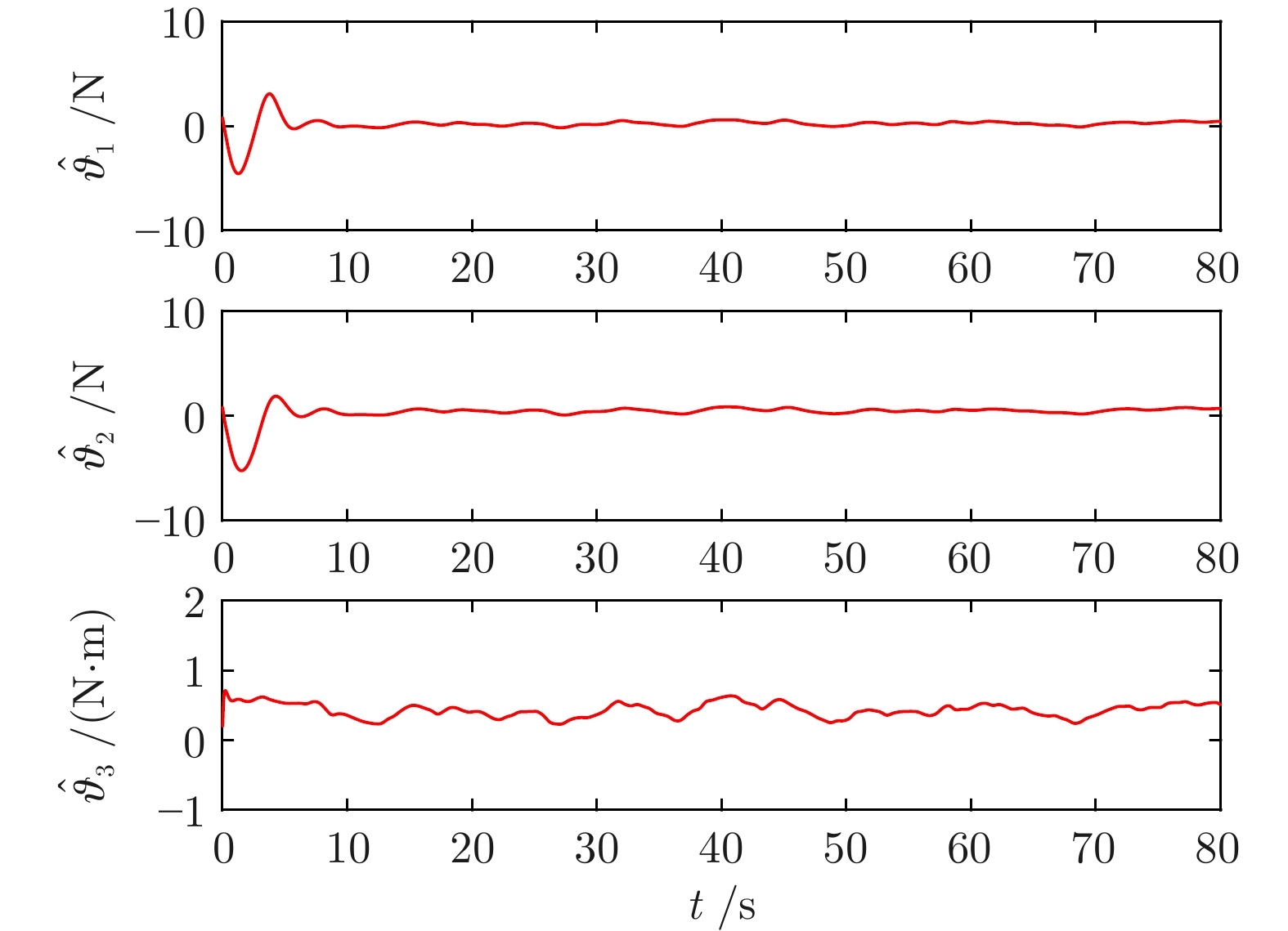
图 5 参数估计值$\hat{{\boldsymbol{\vartheta}}}$
Fig. 5 Parameter estimation values$\hat{{\boldsymbol{\vartheta}}}$
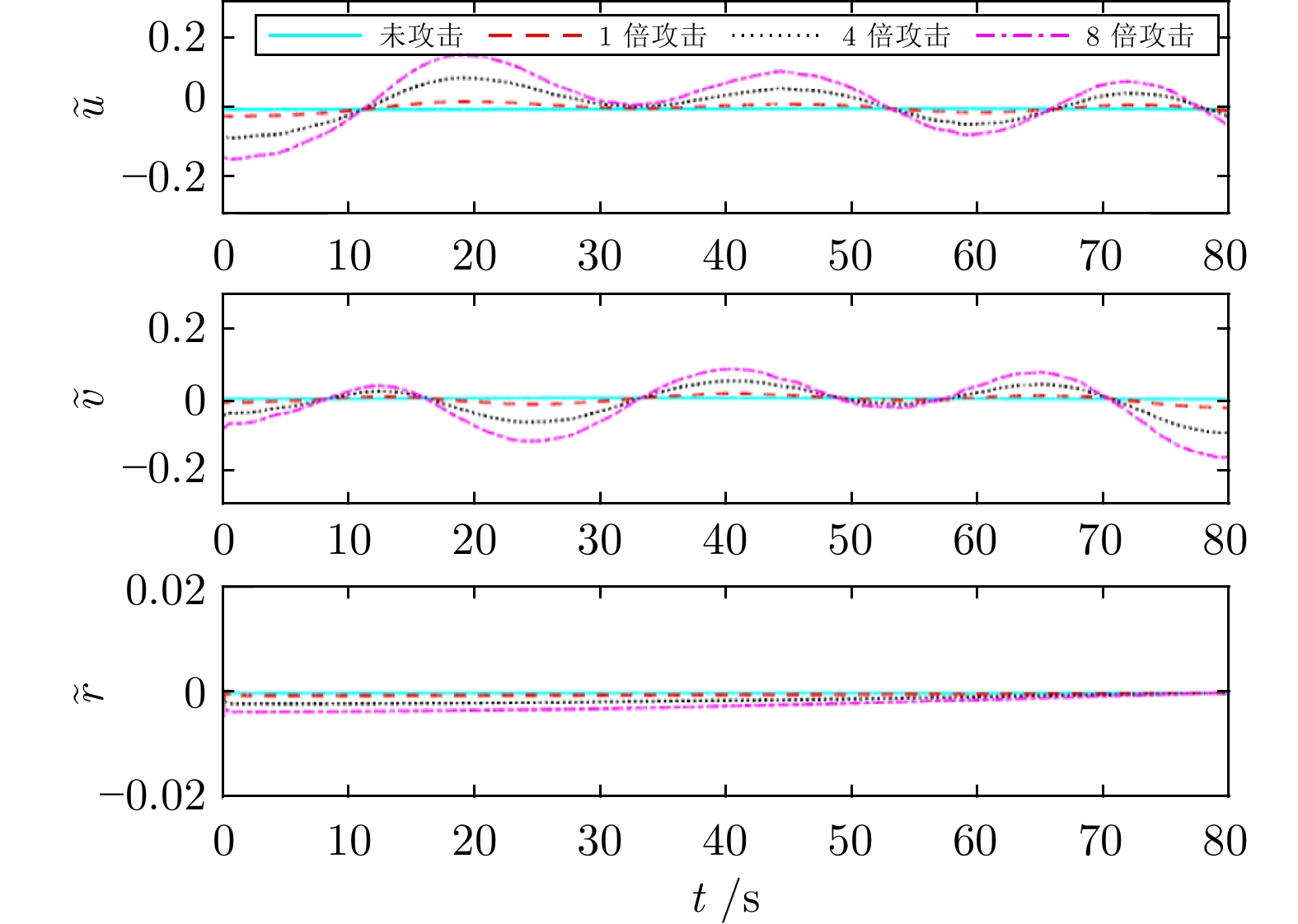
图 6 速度估计误差$\tilde{{{\boldsymbol{v}}}}$对比
Fig. 6 Comparison of velocity estimation errors$\tilde{{{\boldsymbol{v}}}}$
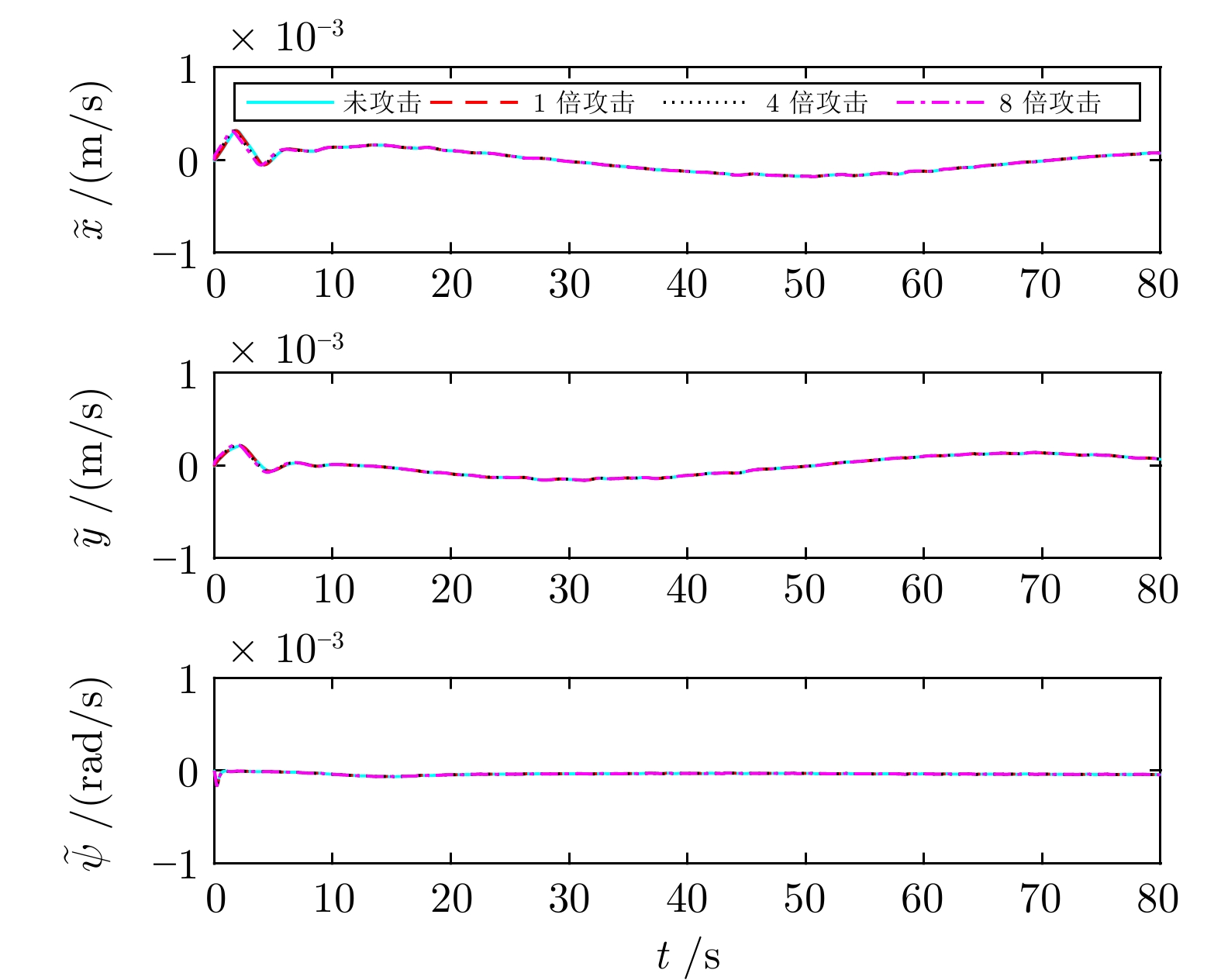
图 7 位置估计误差$\tilde{{\boldsymbol{\eta}}}$对比
Fig. 7 Comparison of position estimation errors$\tilde{{\boldsymbol{\eta}}}$
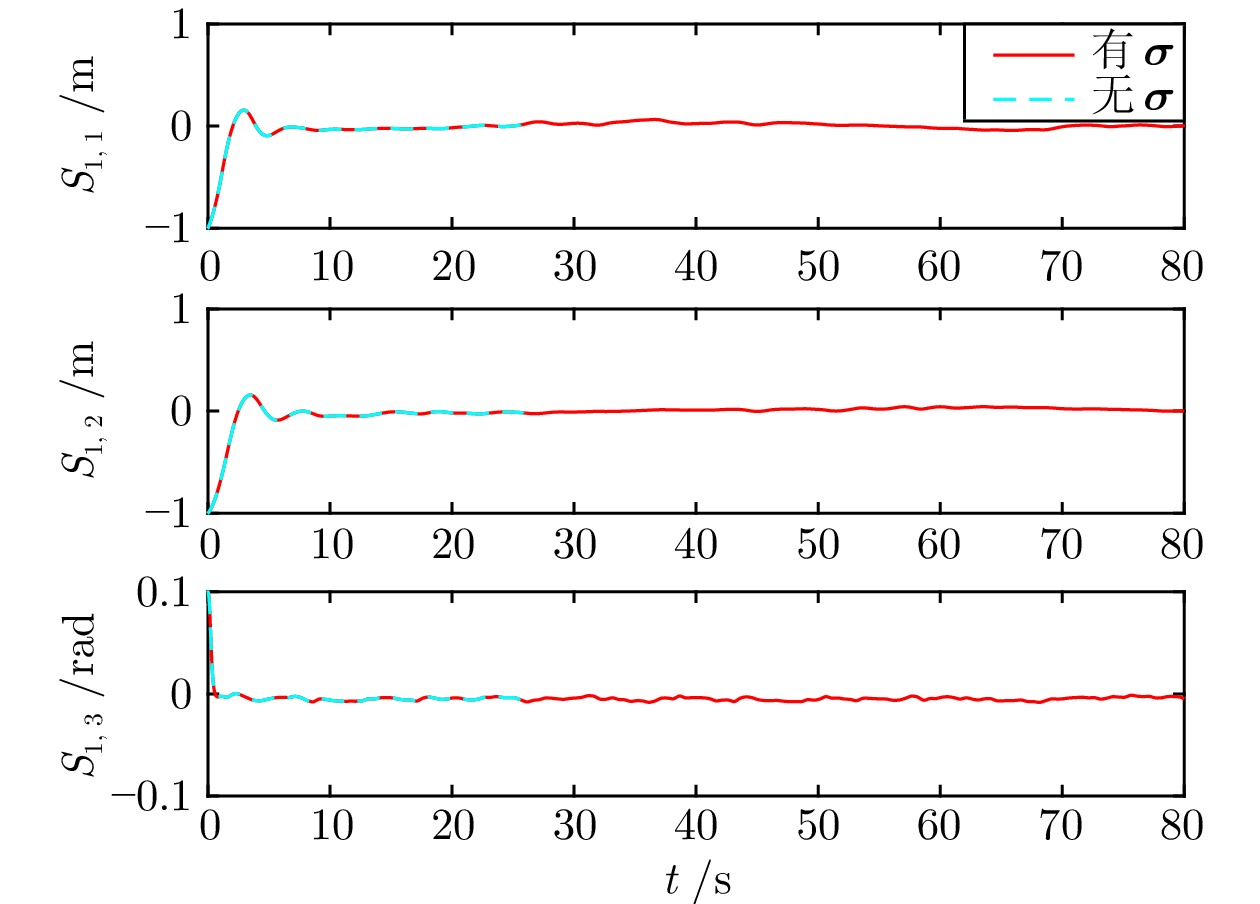
图 8 有无${\boldsymbol{\sigma}}$时${{\boldsymbol{S}}}_1$对比
Fig. 8 Comparison of${{\boldsymbol{S}}}_1$with or without${\boldsymbol{\sigma}}$
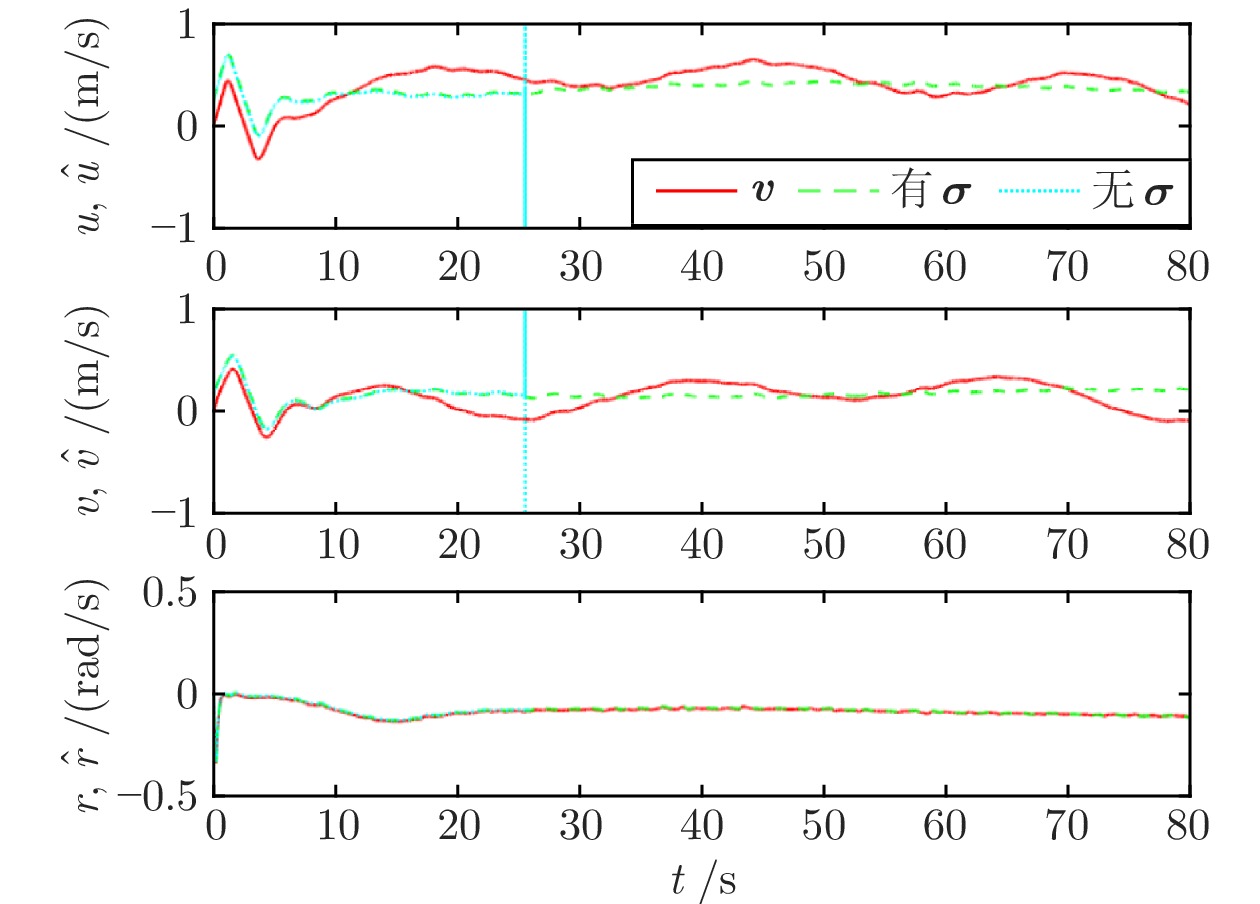
图 9 有无${\boldsymbol{\sigma}}$时$\hat{{{\boldsymbol{v}}}}$对比
Fig. 9 Comparison of$\hat{{{\boldsymbol{v}}}}$with or without${\boldsymbol{\sigma}}$
表 1 设计参数及初始值
Table 1 Design parameters and initial values
指标 项式 数值 观测器 $ k $ 12 $ k_1 $ 0.1 $ k_2 $ 210 $ k_w $ 0.1 $ k_o $ 6 ${\boldsymbol{\Lambda}}_o$ 10$ \times $diag{8, 8, 2} 控制律 $ {\boldsymbol {c}}_1 $ diag{1.3, 1.4, 5.0} $ {\boldsymbol {c}}_2 $ 5$ \times $diag{9, 8, 10} $\omega_f$ 30 $ {\boldsymbol{\Lambda}}_c $ diag{5, 5, 5} $ {\boldsymbol {k}}_c $ 0.1$ \times $diag{1, 1, 1} $ {\boldsymbol{\varsigma}} $ diag{0.01, 0.01, 0.01} 环境扰动 $ {\boldsymbol{\wp}} $ diag{−2, −2, −2} $ {\boldsymbol{\Upsilon}} $ 2 × [1.5, 1.5, 1.0]T 输入饱和限制 $ {\boldsymbol{\kappa}} $ [0.9, 0.9, 0.9]T $ {\boldsymbol{\tau}}_{m} $ [10, 10, 5]T $Q_0$ 0.3 $ {\boldsymbol {k}}_Q $ diag{3, 2, 1} $ {\boldsymbol {k}}_{w_\tau} $ diag{10, 10, 10} 初始值 $ {\boldsymbol{\eta}}(0) $ [−1.0, −1.0, 0.1]T $ \hat{{\boldsymbol{\eta}}}(0) $ [−1.0, −1.0, 0.1]T $ {\boldsymbol {v}}(0) $ [0, 0, 0]T $ {\boldsymbol {S}}(0) $ [0.02, 0.02, 0.01]T $ \hat{\boldsymbol W}_o(0) $ [0.1, 0.1, 0.2]T $ \hat{\boldsymbol W}_c(0) $ [0.1, 0.1, 0.2]T  下载: 导出CSV
下载: 导出CSV
表 2 不同攻击下的控制性能对比
Table 2 Comparison of control performance under different attacks
指标 项式 未攻击 1 倍攻击 4 倍攻击 8 倍攻击 $\int_{0}^{t}\frac{\tau_i(t_f)}{t_f\;+\;0.001}{\rm d}t_f$ $ \tau_1 $ 1.524 1.522 1.535 1.605 $ \tau_2 $ 1.245 1.270 1.428 1.742 $ \tau_3 $ 0.476 0.477 0.484 0.495 $ \int_{0}^{t}|S_{1,i}|{\rm d}t_f $ $ S_{1,1} $ 3.334 3.263 3.097 2.986 $ S_{1,2} $ 3.333 3.302 3.235 3.191 $ S_{1,3} $ 0.412 0.412 0.413 0.412 $\int_{0}^{t}| \tilde{v}_i|{\rm d}t_f$ $ \tilde{v}_1 $ 0.072 0.758 3.052 6.108 $ \tilde{v}_2 $ 0.074 0.632 2.519 5.065 $ \tilde{v}_3 $ 0.008 0.018 0.093 0.193
下载: 导出CSV
-
[1] Bai X E, Li B H, Xu X F, Xiao Y J. A review of current research and advances in unmanned surface vehicles. Journal of Marine Science and Application, 2022, 21: 47−58 doi: 10.1007/s11804-022-00276-9 [2] 马勇, 王雯琦, 严新平. 面向新一代航运系统的船舶智能航行技术研究进展. 中国科学: 技术科学, 2023, 53(11): 1795−1806 doi: 10.1360/SST-2023-0117Ma Yong, Wang Wen-Qi, Yan Xin-Ping. Research progress of vessel intelligent navigation technology for the new generation of waterborne transportation system. SCIENTIA SINICA Technologica, 2023, 53(11): 1795−1806 doi: 10.1360/SST-2023-0117 [3] Qiao Y Y, Yin J X, Wang W, Duarte F, Yang J, Ratti C. Survey of deep learning for autonomous surface vehicles in marine environments. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(4): 3678−3701 doi: 10.1109/TITS.2023.3235911 [4] Swaszek P F, Hartnett R J, Kempe M V, Johnson G W. Analysis of a simple, multi-receiver GPS spoof detector. In: Proceedings of the International Technical Meeting of the Institute of Navigation. San Diego, USA: ION, 2013. 884−892 [5] Zhao Y J, Qi X, Ma Y, Li Z X, Malekian R, Sotelo M A. Path following optimization for an underactuated USV using smoothly-convergent deep reinforcement learning. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(10): 6208−6220 doi: 10.1109/TITS.2020.2989352 [6] Hu S L, Chen X L, Li J R, Xie X P. Observer-based resilient controller design for networked stochastic systems under coordinated DoS and FDI attacks. IEEE Transactions on Control of Network Systems, DOI: 10.1109/TCNS.2023.3314578 [7] Chen W, Ding D R, Dong H L, Wei G L. Distributed resilient filtering for power systems subject to denial-of-service attacks. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(8): 1688−1697 doi: 10.1109/TSMC.2019.2905253 [8] Deng C, Wen C Y. MAS-based distributed resilient control for a class of cyber-physical systems with communication delays under DoS attacks. IEEE Transactions on Cybernetics, 2021, 51(5): 2347−2358 doi: 10.1109/TCYB.2020.2972686 [9] Huang J S, Zhao L, Wang Q G. Adaptive control of a class of strict feedback nonlinear systems under replay attacks. ISA Transactions, 2020, 107: 134−142 doi: 10.1016/j.isatra.2020.08.001 [10] Franzè G, Tedesco F, Lucia W. Resilient control for cyber-physical systems subject to replay attacks. IEEE Control Systems Letters, 2019, 3(4): 984−989 doi: 10.1109/LCSYS.2019.2920507 [11] Ding D R, Han Q L, Xiang Y, Ge X H, Zhang X M. A survey on security control and attack detection for industrial cyber-physical systems. Neurocomputing, 2018, 275: 1674−1683 doi: 10.1016/j.neucom.2017.10.009 [12] Ding D R, Wang Z D, Ho D W C, Wei G L. Observer-based event-triggering consensus control for multiagent systems with lossy sensors and cyber-attacks. IEEE Transactions on Cybernetics, 2017, 47(8): 1936−1947 doi: 10.1109/TCYB.2016.2582802 [13] Zhang Q, He D K. Adaptive neural control of nonlinear cyber-physical systems against randomly occurring false data injection attacks. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023, 53(4): 2444−2455 doi: 10.1109/TSMC.2022.3212391 [14] Yoo S J. Neural-network-based adaptive resilient dynamic surface control against unknown deception attacks of uncertain nonlinear time-delay cyber-physical systems. IEEE Transactions on Neural Networks and Learning Systems, 2020, 31(10): 4341−4353 doi: 10.1109/TNNLS.2019.2955132 [15] Ye D, Zhang T Y. Summation detector for false data-injection attack in cyber-physical systems. IEEE Transactions on Cybernetics, 2020, 50(6): 2338−2345 doi: 10.1109/TCYB.2019.2915124 [16] Sargolzaei A, Allen B C, Crane C D, Dixon W E. Lyapunov-based control of a nonlinear multiagent system with a time-varying input delay under false-data-injection attacks. IEEE Transactions on Industrial Informatics, 2022, 18(4): 2693−2703 doi: 10.1109/TII.2021.3106009 [17] Ren X X, Yang G H. Adaptive control for nonlinear cyber-physical systems under false data injection attacks through sensor networks. International Journal of Robust and Nonlinear Control, 2020, 30(1): 65−79 doi: 10.1002/rnc.4749 [18] Janaideh M A, Hammad E, Farraj A, Kundur D. Mitigating attacks with nonlinear dynamics on actuators in cyber-physical mechatronic systems. IEEE Transactions on Industrial Informatics, 2019, 15(9): 4845−4856 doi: 10.1109/TII.2019.2899933 [19] Nakao M, Ohnishi K, Miyachi K. A robust decentralized joint control based on interference estimation. In: Proceedings of the IEEE International Conference on Robotics and Automation. Raleigh, USA: IEEE, 1987. 326−331 [20] Lu A Y, Yang G H. Secure state estimation for cyber-physical systems under sparse sensor attacks via a switched Luenberger observer. Information Sciences, 2017, 417: 454−464 doi: 10.1016/j.ins.2017.07.029 [21] 张国庆, 黄晨峰, 吴晓雪. 考虑伺服系统增益不确定的船舶动力定位自适应有限时间控制. 自动化学报, 2018, 44(10): 1907−1912 doi: 10.16383/j.aas.2017.c170111Zhang Guo-Qing, Huang Chen-Feng, Wu Xiao-Xue. Adaptive finite time dynamic positioning control of fully-actuated ship with servo system uncertainties. Acta Automatica Sinica, 2018, 44(10): 1907−1912 doi: 10.16383/j.aas.2017.c170111 [22] Guo G, Zhang P F. Asymptotic stabilization of USVs with actuator dead-zones and yaw constraints based on fixed-time disturbance observer. IEEE Transactions on Vehicular Technology, 2020, 69(1): 302−316 doi: 10.1109/TVT.2019.2955020 [23] Hu X, Wei X J, Kao Y G, Han J. Robust synchronization for under-actuated vessels based on disturbance observer. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(6): 5470−5479 doi: 10.1109/TITS.2021.3054177 [24] Zhu G B, Du J L. Global robust adaptive trajectory tracking control for surface ships under input saturation. IEEE Journal of Oceanic Engineering, 2020, 45(2): 442−450 doi: 10.1109/JOE.2018.2877895 [25] 沈智鹏, 张晓玲. 基于非线性增益递归滑模的船舶轨迹跟踪动态面自适应控制. 自动化学报, 2018, 44(10): 1833−1841Shen Zhi-Peng, Zhang Xiao-Ling. Recursive sliding-mode dynamic surface adaptive control for ship trajectory tracking with nonlinear gains. Acta Automatica Sinica, 2018, 44(10): 1833−1841 [26] Wu C, Zhu G B, Lu J S. Indirect adaptive neural tracking control of USVs under injection and deception attacks. Ocean Engineering, 2023, 270: Article No. 113641 doi: 10.1016/j.oceaneng.2023.113641 [27] Zhu G B, Ma Y, Hu S L. Event-triggered adaptive PID fault-tolerant control of underactuated ASVs under saturation constraint. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023, 53(8): 4922−4933 doi: 10.1109/TSMC.2023.3256538 [28] Ma J W, Wang H Q, Qiao J F. Adaptive neural fixed-time tracking control for high-order nonlinear systems. IEEE Transactions on Neural Networks and Learning Systems, 2024, 35(1): 708−717 doi: 10.1109/TNNLS.2022.3176625 [29] Liu L, Wang D, Peng Z H, Han Q L. Distributed path following of multiple underactuated autonomous surface vehicles based on data-driven neural predictors via integral concurrent learning. IEEE Transactions on Neural Networks and Learning Systems, 2021, 32(12): 5334−5344 doi: 10.1109/TNNLS.2021.3100147 [30] Deng Y J, Zhang X K. Event-triggered composite adaptive fuzzy output-feedback control for path following of autonomous surface vessels. IEEE Transactions on Fuzzy Systems, 2021, 29(9): 2701−2713 doi: 10.1109/TFUZZ.2020.3006562 [31] Zhu G B, Ma Y, Li Z X, Malekian R, Sotelo M. Event-triggered adaptive neural fault-tolerant control of underactuated MSVs with input saturation. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 7045−7057 doi: 10.1109/TITS.2021.3066461 [32] Yu S L, Lu J S, Zhu G B, Yang S J. Event-triggered finite-time tracking control of underactuated MSVs based on neural network disturbance observer. Ocean Engineering, 2022, 253: Article No. 111169 doi: 10.1016/j.oceaneng.2022.111169 [33] Zhao K, Chen L, Chen C L P. Event-based adaptive neural control of nonlinear systems with deferred constraint. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(10): 6273−6282 doi: 10.1109/TSMC.2022.3143359 [34] Loueipour M, Keshmiri M, Danesh M, Mojiri M. Wave filtering and state estimation in dynamic positioning of marine vessels using position measurement. IEEE Transactions on Instrumentation and Measurement, 2015, 64(12): 3253−3261 doi: 10.1109/TIM.2015.2459551 [35] Fossen T I, Perez T. Kalman filtering for positioning and heading control of ships and offshore rigs. IEEE Control Systems Magazine, 2009, 29(6): 32−46 doi: 10.1109/MCS.2009.934408 [36] Chen M, Ge S S, How B V E, Choo Y S. Robust adaptive position mooring control for marine vessels. IEEE Transactions on Control Systems Technology, 2013, 21(2): 395−409 doi: 10.1109/TCST.2012.2183676 [37] Peng Z H, Liu L, Wang J. Output-feedback flocking control of multiple autonomous surface vehicles based on data-driven adaptive extended state observers. IEEE Transactions on Cybernetics, 2021, 51(9): 4611−4622 doi: 10.1109/TCYB.2020.3009992 [38] Zhang J Q, Yu S H, Yan Y. Fixed-time output feedback trajectory tracking control of marine surface vessels subject to unknown external disturbances and uncertainties. ISA Transactions, 2019, 93: 145−155 doi: 10.1016/j.isatra.2019.03.007 [39] Zhu G B, Ma Y, Li Z X, Malekian R, Sotelo M. Adaptive neural output feedback control for MSVs with predefined performance. IEEE Transactions on Vehicular Technology, 2021, 70(4): 2994−3006 doi: 10.1109/TVT.2021.3063687 [40] Park B S, Kwon J W, Kim H. Neural network-based output feedback control for reference tracking of underactuated surface vessels. Automatica, 2017, 77: 353−359 doi: 10.1016/j.automatica.2016.11.024 [41] Wen C Y, Zhou J, Liu Z T, Su H Y. Robust adaptive control of uncertain nonlinear systems in the presence of input saturation and external disturbance. IEEE Transactions on Automatic Control, 2011, 56(7): 1672−1678 doi: 10.1109/TAC.2011.2122730 [42] Zheng Z W, Lau G K, Xie L H. Event-triggered control for a saturated nonlinear system with prescribed performance and finite-time convergence. International Journal of Robust and Nonlinear Control, 2018, 28(17): 5312−5325 doi: 10.1002/rnc.4314 [43] Lu J S, Yu S L, Zhu G B, Zhang Q, Chen C, Zhang J W. Robust adaptive tracking control of UMSVs under input saturation: A single-parameter learning approach. Ocean Engineering, 2021, 234: Article No. 108791 doi: 10.1016/j.oceaneng.2021.108791 [44] Deng H, Krstic M. Stochastic nonlinear stabilization——I: A backstepping design. Systems and Control Letters, 1997, 32(3): 143−150 doi: 10.1016/S0167-6911(97)00068-6 -

 下载:
下载:

计量
- 文章访问数: 1143
- HTML全文浏览量: 520
- PDF下载量: 241
- 被引次数: 0
