

Design and Digital Implementation of Spatial Repetitive Control for Fast Tool Servo System
-
摘要: 在非圆零件车削过程中, 快速刀具伺服(Fast tool servo, FTS)的运动精度直接影响零件的加工质量. 主轴变速加工使得FTS的参考目标信号周期时变而不确定, 这对实现其渐近跟踪提出了极大的挑战. 本文利用FTS的位置域周期特性, 提出一种基于位置域重复控制和时域速度反馈镇定的FTS系统复合控制设计方法, 并给出位置域改进型重复控制器(Spatial modified repetitive controller, SMRC)的数字实现算法, 实现对时变周期参考目标信号的高精度跟踪. 首先, 建立包含位置相关时变周期参考目标信号内模的SMRC, 并引入位置域相位超前装置对镇定补偿器引起的相位滞后进行补偿, 在此基础上构建复合控制律. 然后应用小增益定理和算子理论, 推导出控制系统的稳定性条件, 在保持系统采样频率不变的条件下, 应用插值法建立SMRC的数字实现算法, 确保位置域重复控制和时域镇定控制器的同步执行. 最后, 通过仿真验证所设计的FTS控制系统具有满意的时变周期跟踪性能和鲁棒性, 并通过与其他位置域重复控制方法的比较, 说明所提方法同时具有更好的暂态和稳态性能.Abstract: The motion accuracy of the fast tool servo (FTS) directly affects the machining quality of the non-circular parts. In variable spindle speed machining, the period of the reference signal of the FTS is time-varying and uncertain, which poses a great challenge to achieve its asymptotic tracking. In this paper, we propose a composite control design method based on spatial repetitive control and temporal velocity feedback stabilization for an FTS system, and present a digital implementation algorithm of the spatial modified-repetitive-controller (SMRC) to achieve high-precision tracking of time-varying periodic reference signals. First, an SMRC with the internal mode of the position-dependent time-varying periodic reference input signal is constructed, in which a phase-lead alignment segment is used to compensate for the phase lag caused by the temporal stabilization controller. And based on this, a composite control law is established. Then, the stability criteria of the control system are derived using the small gain theorem and operator theory. A digital implementation algorithm of the SMRC is developed to ensure the synchronous execution of the SMRC and the temporal stabilization controller through a regular fixed time sampling. Finally, simulation results show that the designed FTS control system has satisfactory time-varying-period tracking performance and robustness. A comparison with other spatial repetitive control methods verifies that the proposed method achieves better performance in both transient and steady state aspects.
-
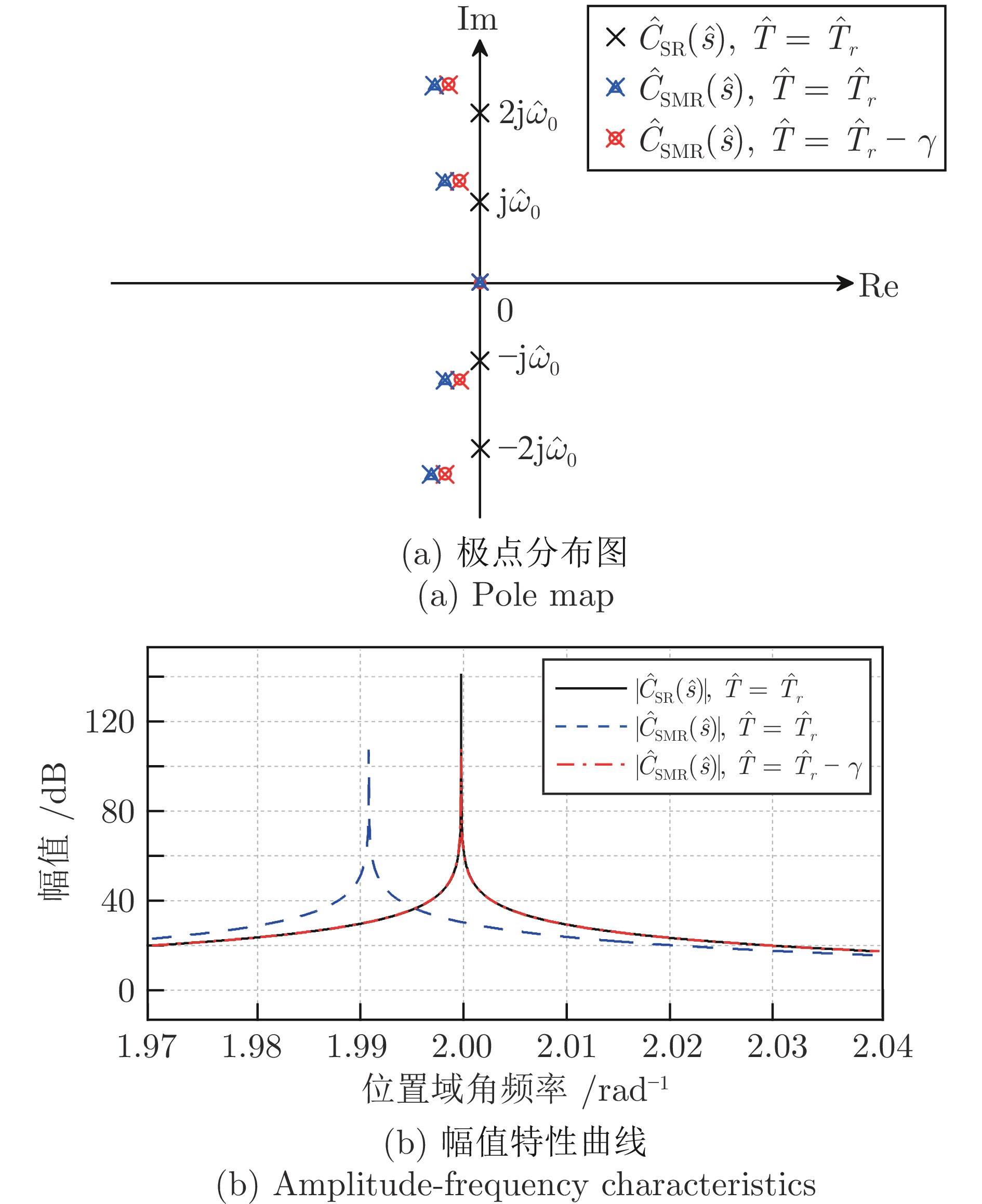
图 3 位置域基本重复控制器和改进型重复控制器的零极点分布图和幅值特性曲线
Fig. 3 Zero-pole map and Amplitude-frequency characteristics of spatial basic repetitive controller and SMRC
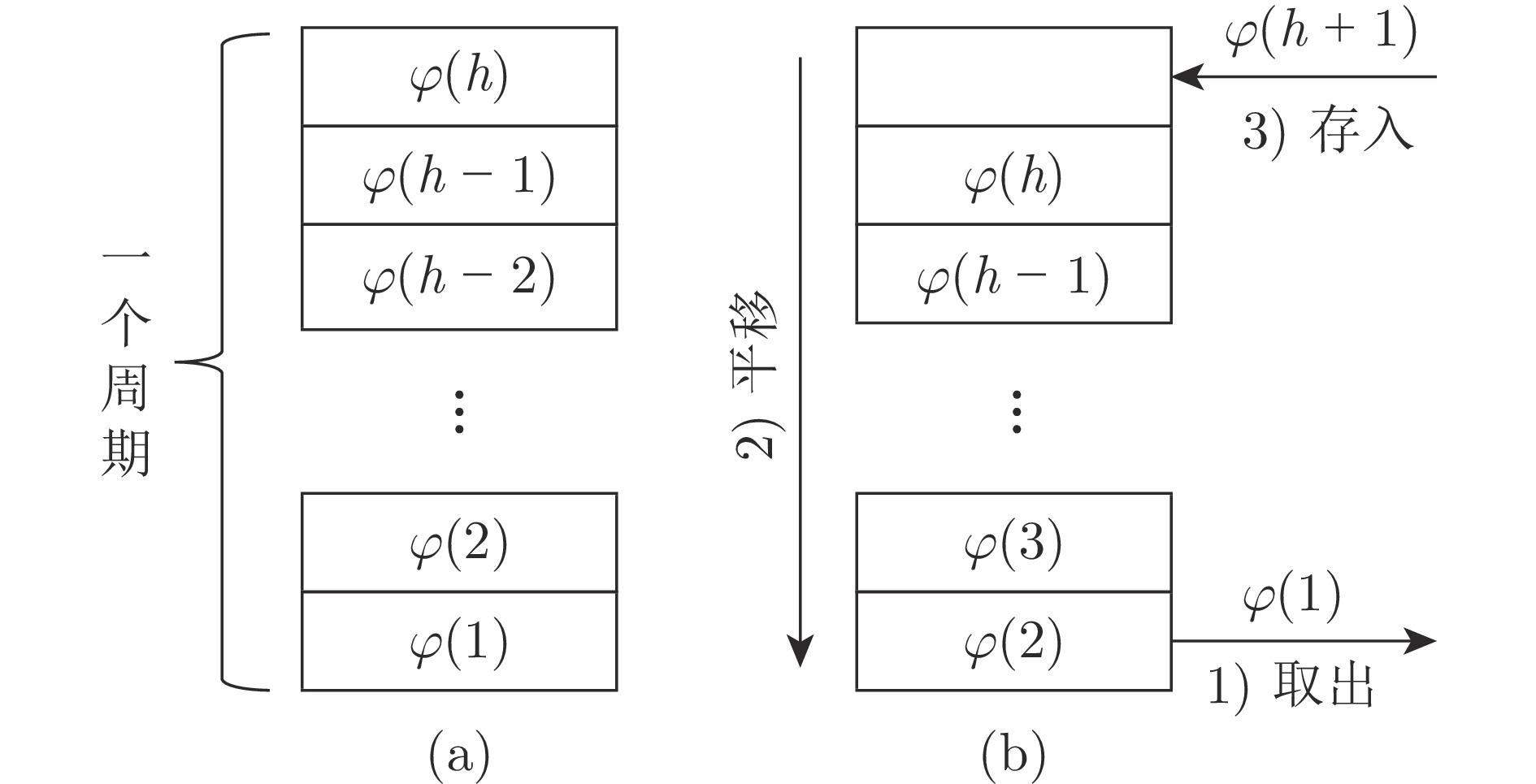
图 5 时域纯时滞环节的数字实现
Fig. 5 Digital implementation of the pure time-delay link in the time domain
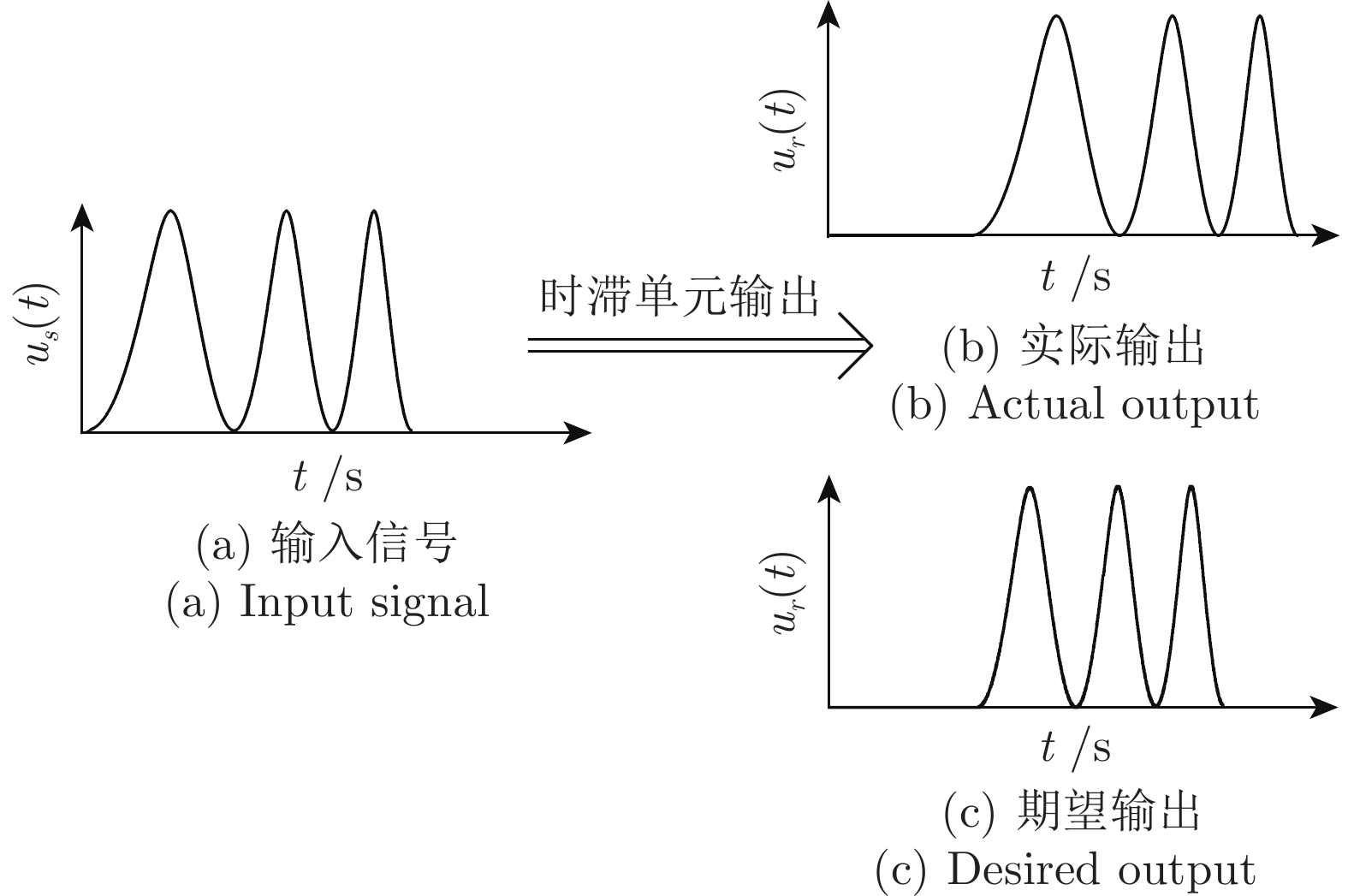
图 6 位置域时滞单元输入输出曲线
Fig. 6 Input and output curves of the delay element in position domain
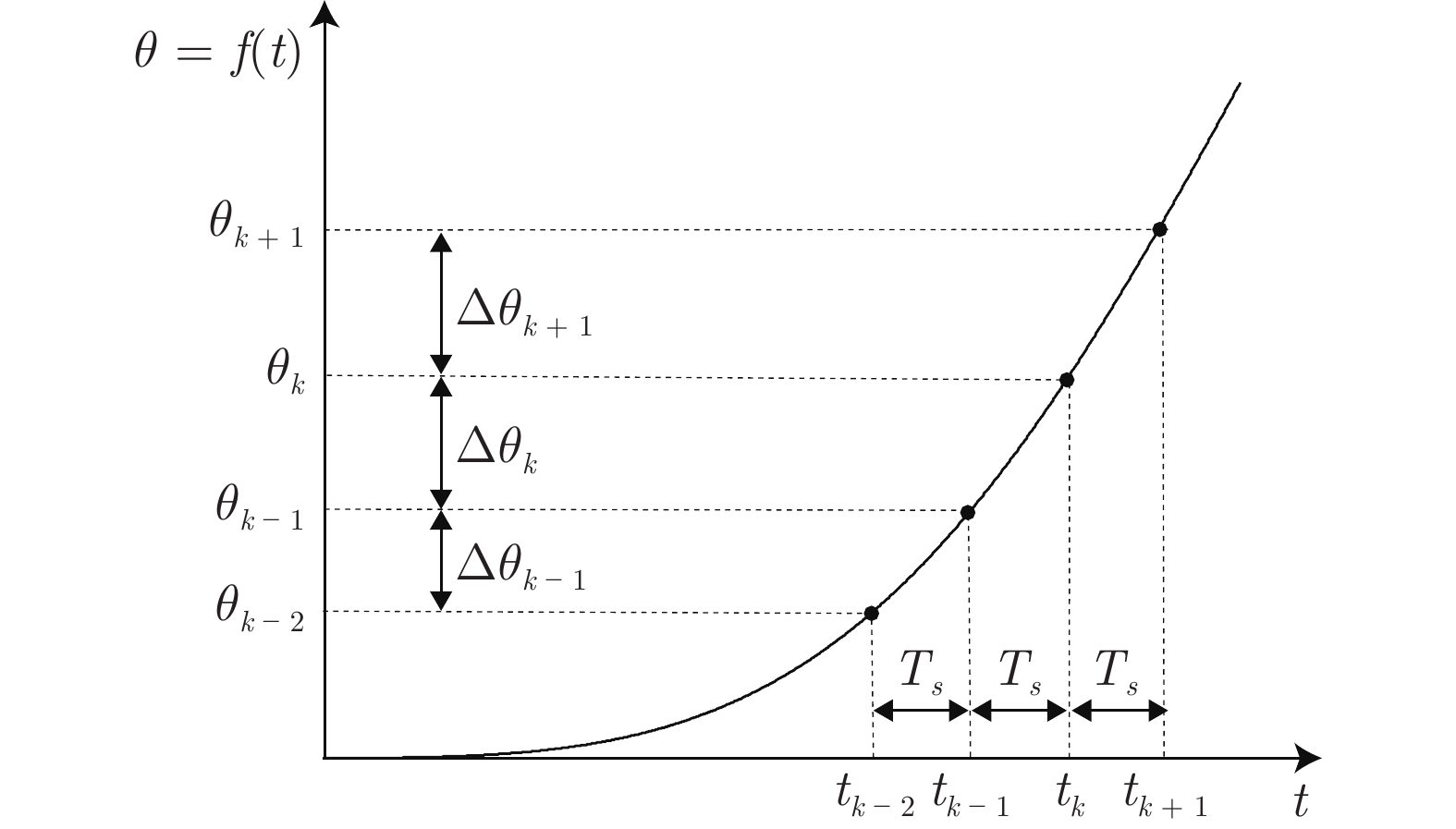
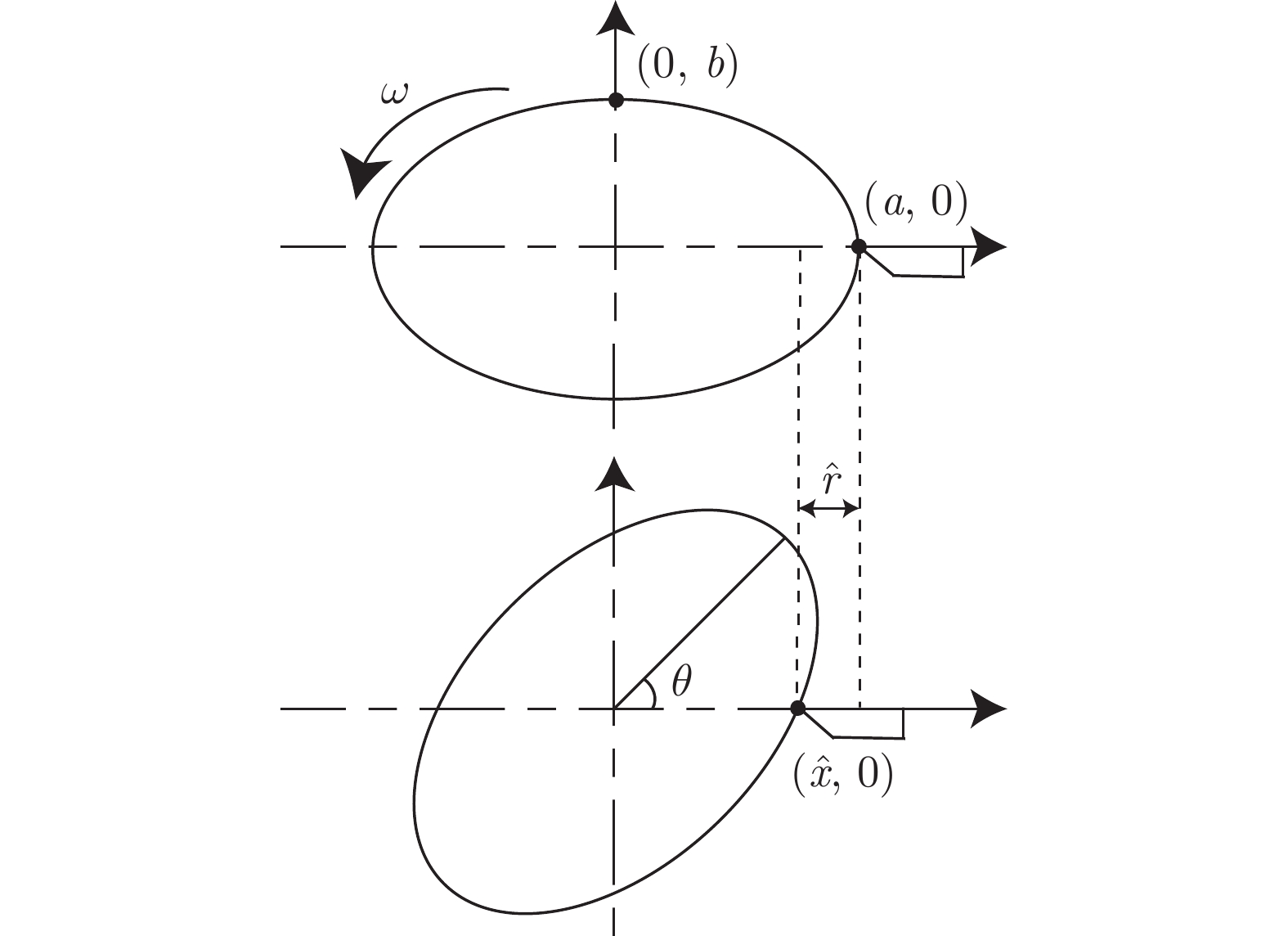
图 7 位置相关周期信号等时采样示意图
Fig. 7 Diagram of isochronous sampling of a position-dependent periodic signal
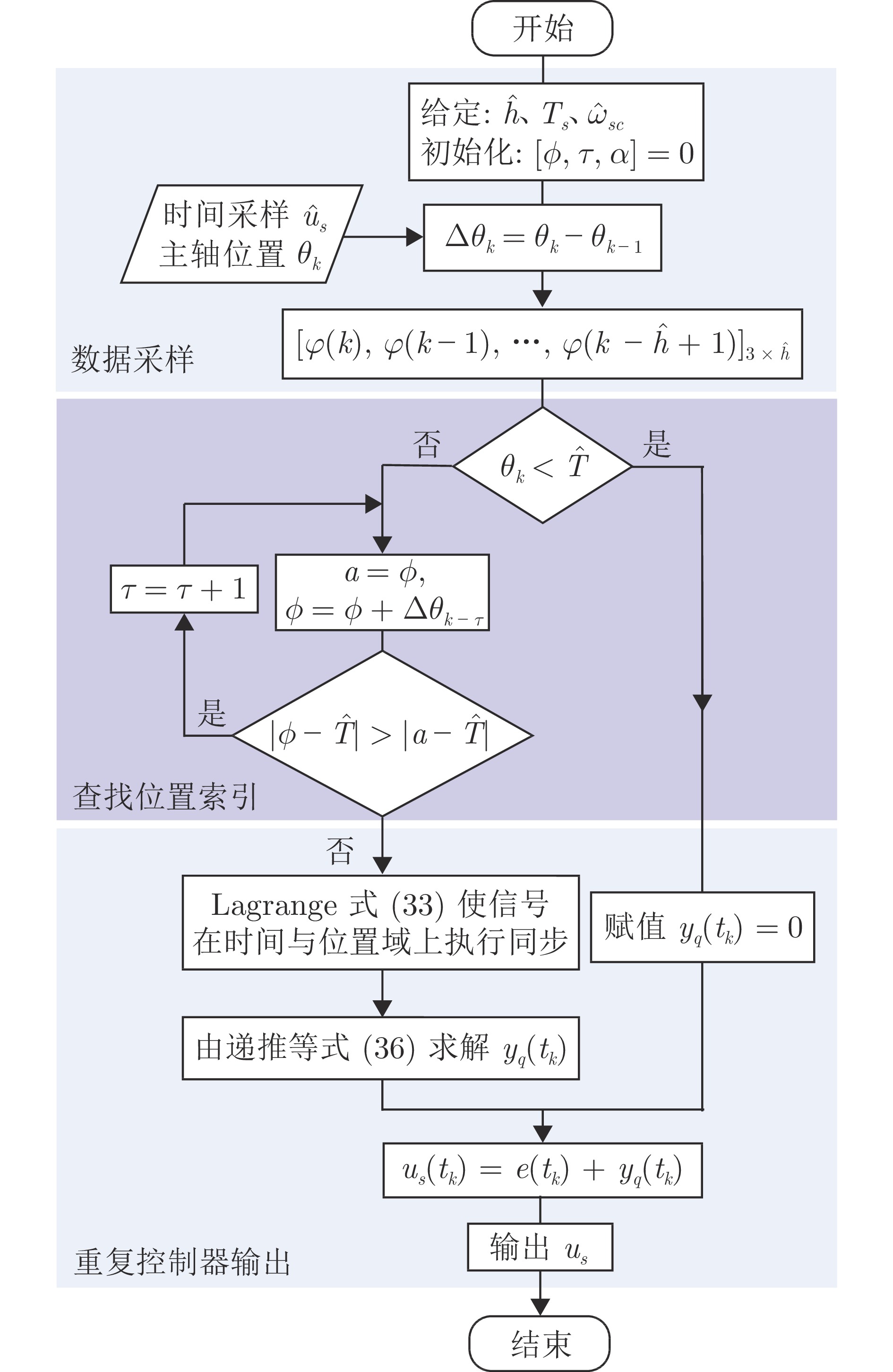
图 8 位置域改进型重复控制器数字实现算法流程图
Fig. 8 Flowchart of the digital implementation algorithm for SMRC
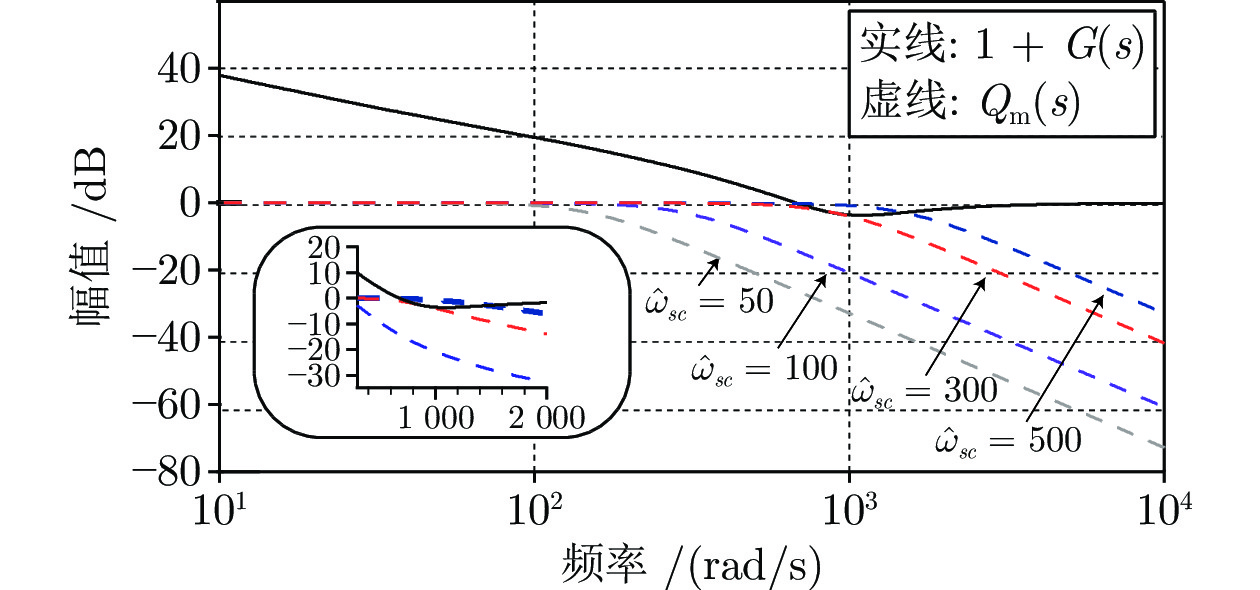
图 10 $Q_{{{\rm m}}}(s)$和$1+G(s)$的伯德图
Fig. 10 Bode plots of $Q_{{{\rm m}}}(s)$ and $1+G(s)$
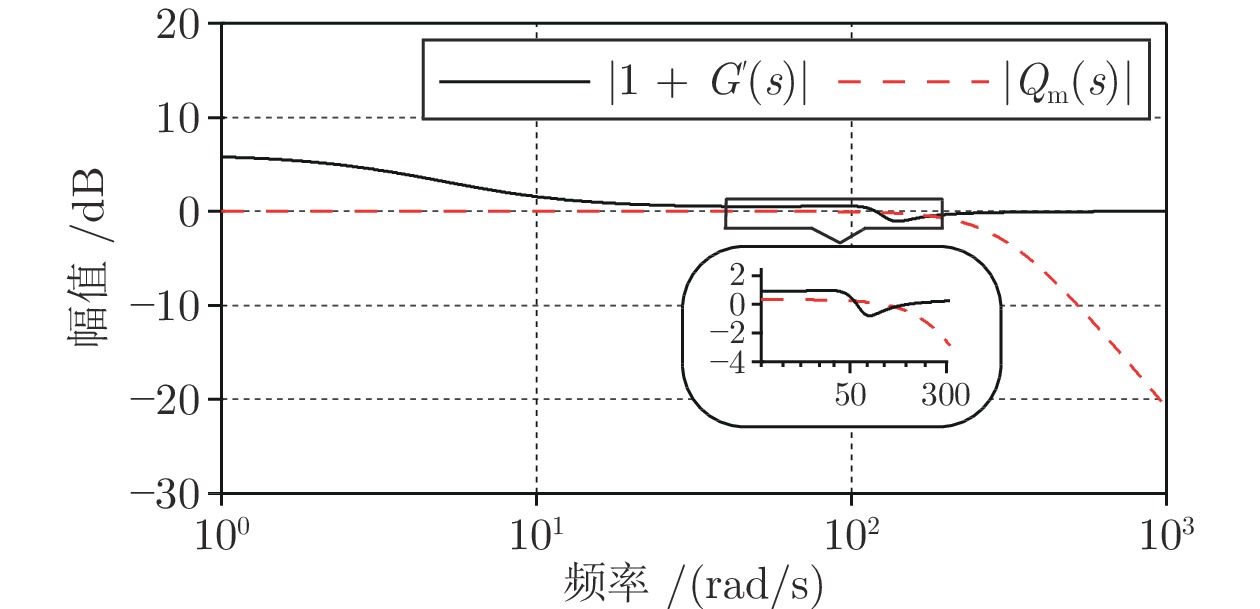
图 14 无速度反馈时的$Q_{{{{\rm{m}}}}}(s)$和$1+G^{\prime}(s)$伯德图
Fig. 14 Bode plots of $Q_{{{{\rm{m}}}}}(s)$ and $1+G^{\prime}(s)$ without velocity feedback
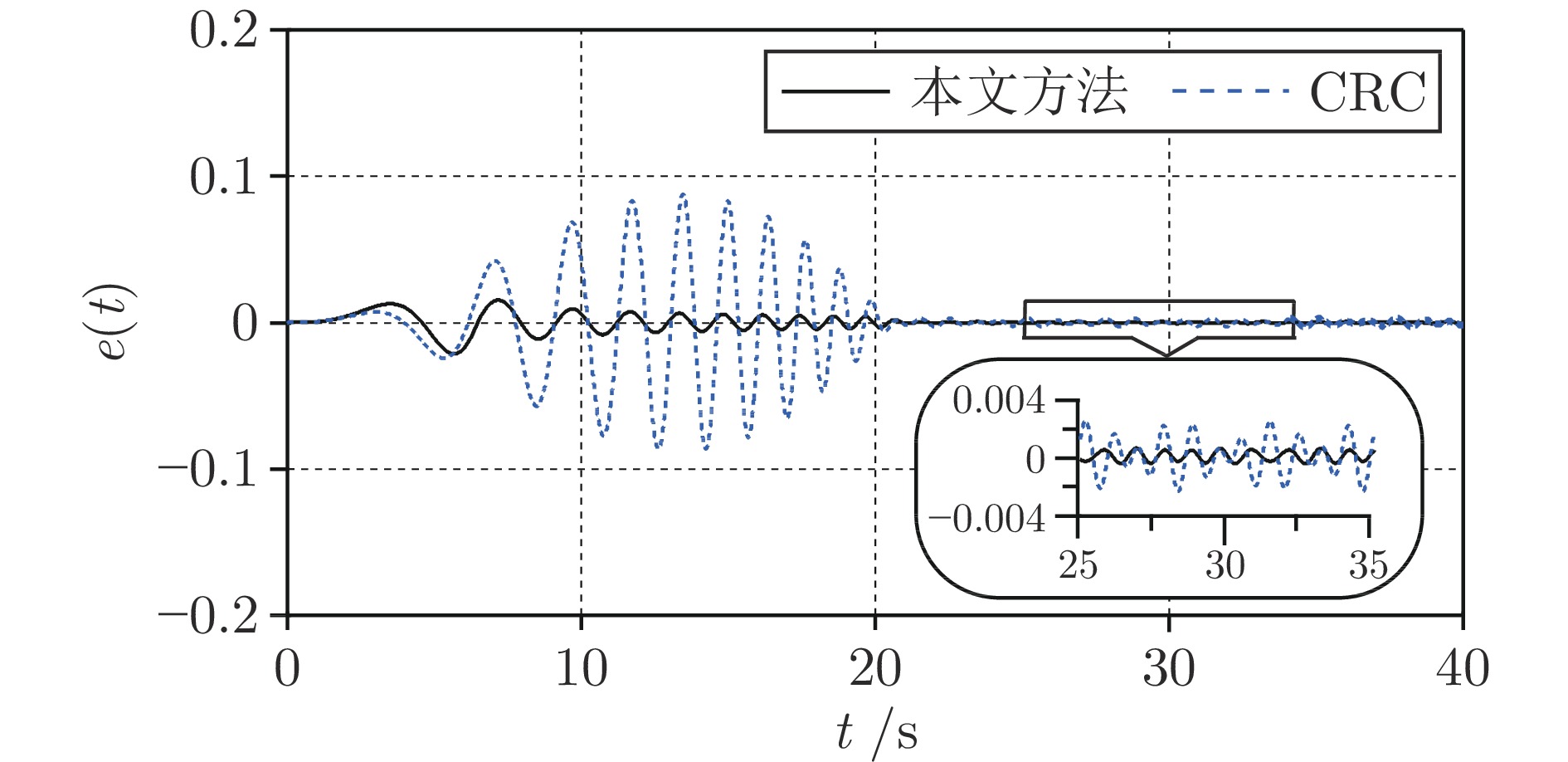
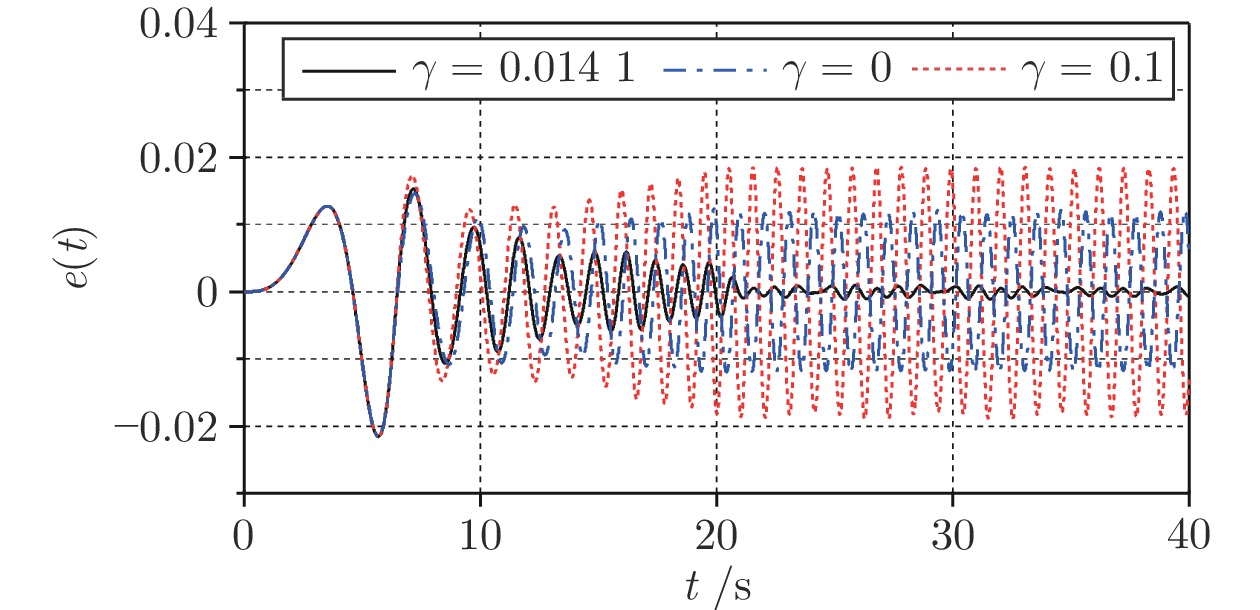
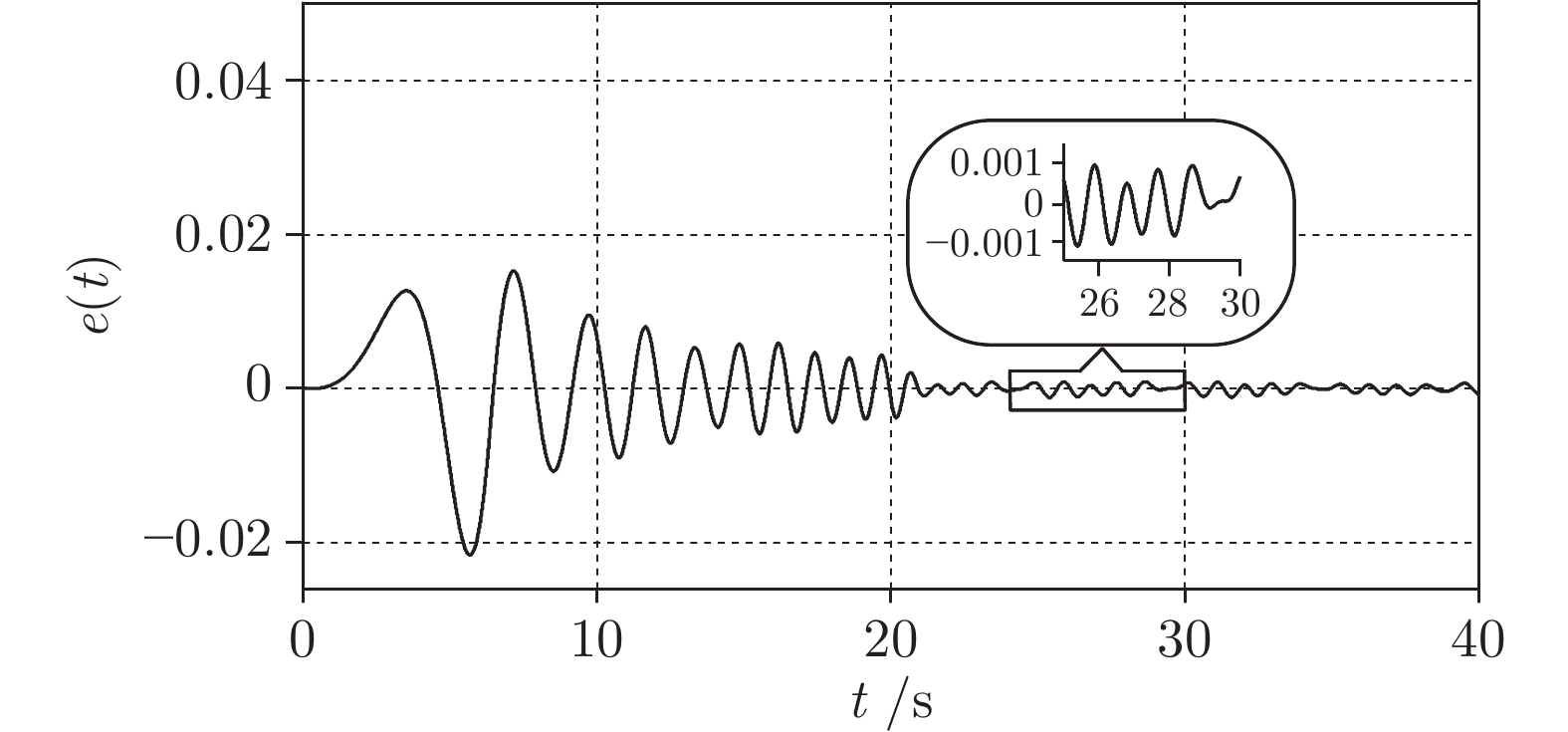
图 15 本文方法与传统定周期时域重复控制方法的对比
Fig. 15 Comparison of our method with the conventional fixed-period time-domain repetitive control method
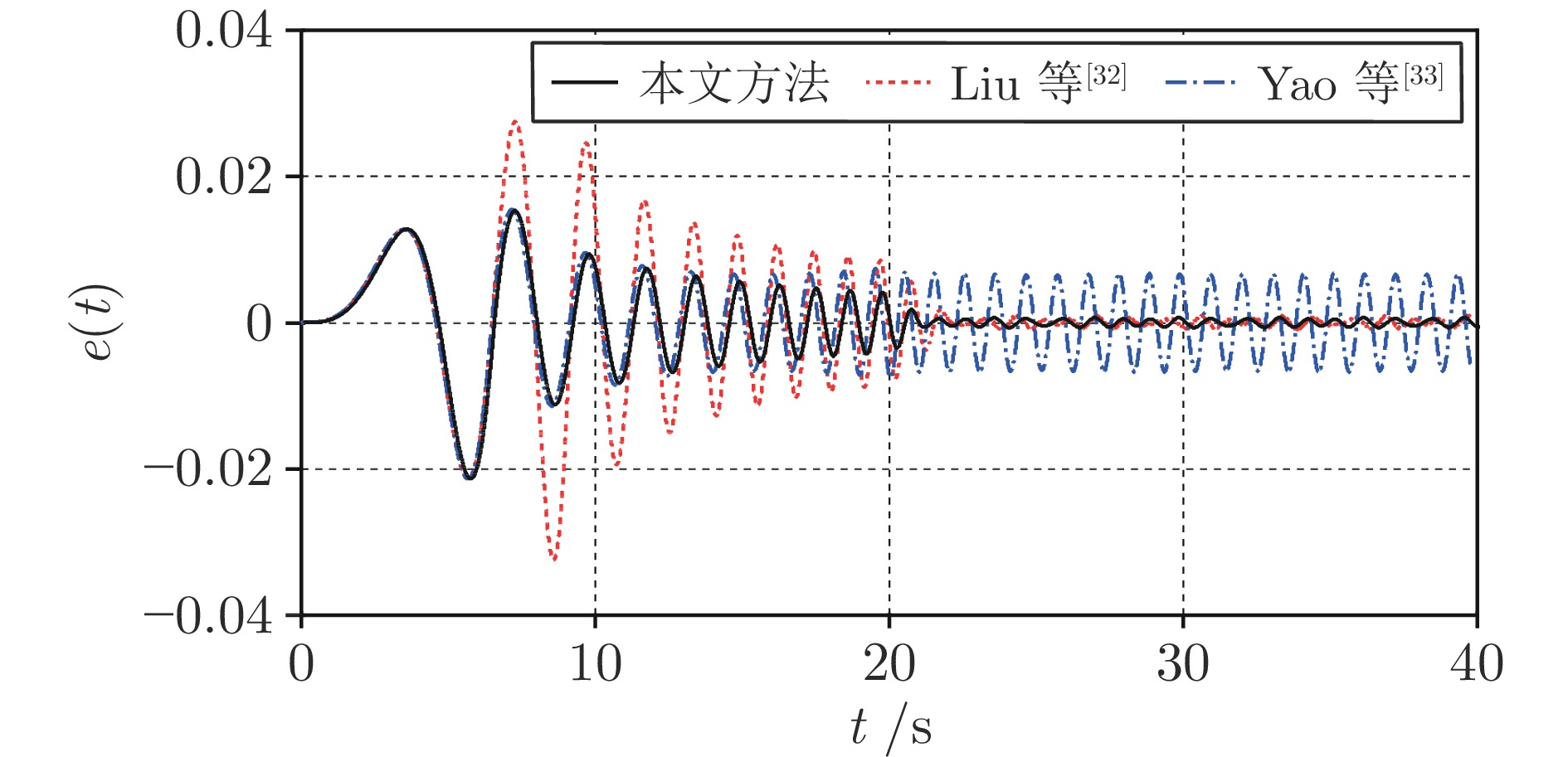
表 1 音圈式直线电机相关参数
Table 1 Parameters of the voice coil type linear motor
参数 符号 单位 数值 弹簧刚度系数 $ K $ ${\rm{N/m }} $ 4 980 阻尼系数 $ C $ ${\rm{N\cdot s\cdot m^{-1}}}$ 14.51 动子质量 $ M $ ${\rm{kg } }$ 0.32 电机力常数 $ K_{m} $ ${\rm{N/A }} $ 12.325 放大器增益 $ K_a $ ${\rm{A/v}} $ 1.6  下载: 导出CSV
下载: 导出CSV
表 2 性能指标对比
Table 2 Comparison of performance indices
控制方法 $\max|e(t)|_{0<t\leq 20}$ $e_{pp}\;(0 < t\leq 20)$ $\max|e(t)|_{t>20} $ $e_{pp}\;(t > 20)$ CRC $8.744\times10^{-2} $ $17.393\times10^{-2} $ $9.707\times10^{-3} $ $1.580\times10^{-2} $ Liu等[32] $3.246\times10^{-2} $ $5.993\times10^{-2} $ $1.006\times10^{-3} $ $1.992\times10^{-3} $ Yao等[33] $2.315\times10^{-2} $ $3.684\times10^{-2} $ $6.737\times10^{-3} $ $1.347\times10^{-2} $ 本文方法 2.315 × 10−2 3.665 × 10−2 6.759 × 10−4 1.334 × 10−3
下载: 导出CSV
-
[1] Zhu Z H, Huang P, To S, Zhu L M, Zhu Z W. Fast-tool-servo-controlled shear-thickening micropolishing. International Journal of Machine Tools & Manufacture, 2023, (184): Article No. 103968 [2] Zhao D P, Zhu Z H, Huang P, Guo P, Zhu L M, Zhu Z W. Development of a piezoelectrically actuated dual-stage fast tool servo. Mechanical Systems and Signal Processing, 2020, 144: Article No. 106873 [3] Ding F, Luo X C, Zhong W B, Chang W L. Design of a new fast tool positioning system and systematic study on its positioning stability. International Journal of Machine Tools and Manufacture, 2019, 142: 54−65 doi: 10.1016/j.ijmachtools.2019.04.008 [4] 吴丹, 赵彤, 陈恳. 快速刀具伺服系统自抗扰控制的研究与实践. 控制理论与应用, 2013, 30(12): 1534−1542Wu Dan, Zhao Tong, Chen Ken. Research and industrial applications of active disturbance rejection control to fast tool servos. Control Theory & Applications, 2013, 30(12): 1534−1542 [5] 吴丹, 王先逵, 易旺民, 高杨. 重复控制及其在变速非圆车削中的应用. 中国机械工程, 2004, 15(5): 446−449Wu Dan, Wang Xian-Kui, Yi Wang-Min, Gao Yang. Repetitive control and its applications to variable spindle speed noncircular turning. China Mechanical Engineering, 2004, 15(5): 446−449 [6] Qin X B, Wan M, Zhang W H, Yang Y. Chatter suppression with productivity improvement by scheduling a C3 continuous feedrate to match spindle speed variation. Mechanical Systems and Signal Processing, 2023, 118: Article No. 110021 [7] Dong X F, Shen X H, Fu Z F. Stability analysis in turning with variable spindle speed based on the reconstructed semi-discretization method. The International Journal of Advanced Manufacturing Technology, 2021, 117(11): 3393−3403 [8] Zhu W L, Yang X, Duan F, Zhu Z W, Ju B F. Design and adaptive terminal sliding mode control of a fast tool servo system for diamond machining of freeform surfaces. IEEE Transactions on Industrial Electronics, 2019, 66(6): 4912−4922 doi: 10.1109/TIE.2017.2786281 [9] Huang W W, Guo P, Hu C X, Zhu L M. High-performance control of fast tool servos with robust disturbance observer and modified H∞ control. Mechatronics, 2022, 84: Article No. 102781 [10] Zhou L, Liao C C, She J H, He Y, Li H Y. Command-filtered backstepping repetitive control for a class of uncertain nonlinear systems based on additive state decomposition. IEEE Transactions on Industrial Electronics, 2023, 70(5): 5150−5160 doi: 10.1109/TIE.2022.3186332 [11] 吴敏, 周兰, 佘锦华, 何勇. 一类不确定线性系统的输出反馈鲁棒重复控制设计. 中国科学: 信息科学, 2010, 40(1): 54−62Wu Min, Zhou Lan, She Jin-Hua, He Yong. Design of robust output-feedback repetitive controller for class of linear systems with uncertainties. Science China Information Sciences, 2010, 40(1): 54−62 [12] Ye J, Liu L G, Xu J B, Shen A W. Frequency adaptive proportional-repetitive control for grid-connected inverters. IEEE Transactions on Industrial Electronics, 2021, 68(9): 7965−7974 doi: 10.1109/TIE.2020.3016247 [13] Lu C J, Zhou B, Meng F S, Chang Q Y. Control scheme based on improved odd-harmonic repetitive control for third-harmonic injection two-stage matrix converter. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2023, 11(4): 3839−3852 doi: 10.1109/JESTPE.2023.3279414 [14] Tian M H, Wang B, Yu Y, Dong Q H, Xu D G. Discrete-time repetitive control-based ADRC for current loop disturbances suppression of PMSM drives. IEEE Transactions on Industrial Informatics, 2022, 18(5): 3138−3149 doi: 10.1109/TII.2021.3107635 [15] Kurniawan E, Harno H G, Wang H, Prakosa J A, Sirenden B H, Septanto H, et al. Robust adaptive repetitive control for unknown linear systems with odd-harmonic periodic disturbances. Science China Information Sciences, 2022, 65(12): Article No. 222202 [16] Huang W W, Zhang X Q, Zhu L M. Band-stop-filter-based repetitive control of fast tool servos for diamond turning of micro-structured functional surfaces. Precision Engineering, 2023, 83: 124−133 doi: 10.1016/j.precisioneng.2023.05.008 [17] Zhou L, Gao D X, She J H. Tracking control for a position-dependent periodic signal in a variable-speed rotational system. Automatica, 2023, 158: Article No. 111282 [18] Steinbuch M, Weiland S, Singh T. Design of noise and period-time robust high-order repetitive control, with application to optical storage. Automatica, 2007, 43(12): 2086−2095 doi: 10.1016/j.automatica.2007.04.011 [19] Zhou K L, Tang C, Chen Y X, Zhang B, Lu W Z. A generic multi-frequency repetitive control scheme for power converters. IEEE Transactions on Industrial Electronics, 2023, 70(12): 12680−12688 doi: 10.1109/TIE.2023.3239855 [20] Wu Y L, Song X D, Li H, Chen B D. Suppression of harmonic current in permanent magnet synchronous motors using improved repetitive controller. Electronics Letters, 2019, 55(1): 47−49 doi: 10.1049/el.2018.7035 [21] Liu Z C, Zhou K L, Yang Y H, Wang J C, Zhang B. Frequency-adaptive virtual variable sampling-based selective harmonic repetitive control of power inverters. IEEE Transactions on Industrial Electronics, 2021, 68(11): 11339−11347 doi: 10.1109/TIE.2020.3031452 [22] Kurniawan E, Cao Z W, Man Z H. Digital design of adaptive repetitive control of linear systems with time-varying periodic disturbances. IET Control Theory & Applications, 2014, 8(17): 1995−2003 [23] Wu C, Nian H, Pang B, Cheng P. Adaptive repetitive control of DFIG-DC system considering stator frequency variation. IEEE Transactions on Power Electronics, 2019, 34(4): 3302−3312 doi: 10.1109/TPEL.2018.2854261 [24] Olm J M, Ramos G A, Costa-Castelló R. Stability analysis of digital repetitive control systems under time-varying sampling period. IET Control Theory & Applications, 2011, 5(1): 29−37 [25] 陈强, 胡如海, 胡轶. 一类非参数不确定运动系统的自适应空间重复学习控制. 高技术通讯, 2022, 32(6): 565−575Chen Qiang, Hu Ru-Hai, Hu Yi. Adaptive spatial repetitive learning control for a class of nonparametric uncertain motion systems. Chinese High Technology Letters, 2022, 32(6): 565−575 [26] Nakano M, She J H, Mastuo Y, Hino T. Elimination of position-dependent disturbances in constant-speed-rotation control systems. Control Engineering Practice, 1996, 4(9): 1241−1248 doi: 10.1016/0967-0661(96)00130-X [27] Huo X, Wang M Y, Liu K Z, Tong X G. Attenuation of position-dependent periodic disturbance for rotary machines by improved spatial repetitive control with frequency alignment. IEEE/ASME Transactions on Mechatronics, 2020, 25(1): 339−348 doi: 10.1109/TMECH.2019.2946675 [28] Chen C L, Chiu G T C. Spatially periodic disturbance rejection with spatially sampled robust repetitive control. Journal of Dynamic Systems, Measurement, and Control, 2008, 130(2): Article No. 021002 [29] Castro R S, Flores J V, Salton A T. Robust discrete-time spatial repetitive controller. IEEE Transactions on Control Systems Technology, 2019, 27(6): 2696−2702 doi: 10.1109/TCST.2018.2866978 [30] Kolluri S, Gorla N B Y, Sapkota R, Panda S K. A new control architecture with spatial comb filter and spatial repetitive controller for circulating current harmonics elimination in a droop-regulated modular multilevel converter for wind farm application. IEEE Transactions on Power Electronics, 2019, 34(11): 10509−10523 doi: 10.1109/TPEL.2019.2897150 [31] Chen C L, Yang Y H. Position-dependent disturbance rejection using spatial-based adaptive feedback linearization repetitive control. International Journal of Robust and Nonlinear Control, 2009, 19(12): 1337−1363 doi: 10.1002/rnc.1382 [32] Liu Q Q, Huo X, Liu K Z, Zhao H. Accurate cycle aligned repetitive control for the rejection of spatially cyclic disturbances. IEEE Transactions on Industrial Electronics, 2022, 69(6): 6173−6181 doi: 10.1109/TIE.2021.3086705 [33] Yao W S, Tsai M C, Yamamoto Y. Implementation of repetitive controller for rejection of position-based periodic disturbances. Control Engineering Practice, 2013, 21(9): 1226−1237 doi: 10.1016/j.conengprac.2013.04.010 [34] Tang M, Gaeta A, Formentini A, Zanchetta P. A fractional delay variable frequency repetitive control for torque ripple reduction in PMSMs. IEEE Transactions on Industry Applications, 2017, 53(6): 5553−5562 doi: 10.1109/TIA.2017.2725824 [35] Mahawan B, Luo Z H. Repetitive control of tracking systems with time-varying periodic references. International Journal of Control, 2000, 73(1): 1−10 doi: 10.1080/002071700219885 [36] 邓中亮, 王先逵. 基于傅里叶级数的非圆截面车削进给运动特征分析. 机械工程学报, 1999, 35(2): 10−14Deng Zhong-Liang, Wang Xian-Kui. Analyses on feed kinematic behaviors in turning of noncircular sectional element based on Fourier series. Chinese Journal of Mechanical Engineering, 1999, 35(2): 10−14 [37] Hara S, Yamamoto Y, Omata T, Nakano M. Repetitive control system: A new type servo system for periodic exogenous signals. IEEE Transactions on Automatic Control, 1988, 33(7): 659−668 doi: 10.1109/9.1274 [38] 黄科元, 周滔滔, 黄守道, 黄庆. 含前馈补偿和微分反馈的数控位置伺服系统. 中国机械工程, 2014, 25(15): 2017−2023Huang Ke-Yuan, Zhou Tao-Tao, Huang Shou-Dao, Huang Qing. CNC position servo system with feedforward compensation and differential feedback. China Mechanical Engineering, 2014, 25(15): 2017−2023 [39] Khalil H K. Nonlinear Systems (Third edition). Upper Saddle River: Patience Hall, 2002. [40] Du Z Q, Zhou Z D, Ai W, Chen Y P. A linear drive system for the dynamic focus module of SLS machines. The International Journal of Advanced Manufacturing Technology, 2007, 32(11): 1211−1217 -

 下载:
下载:


计量
- 文章访问数: 1065
- HTML全文浏览量: 672
- PDF下载量: 142
- 被引次数: 0
