2024年 第50卷 第9期
2024, 50(9): 1671-1703.
doi: 10.16383/j.aas.c230368
cstr: 32138.14.j.aas.c230368
摘要:
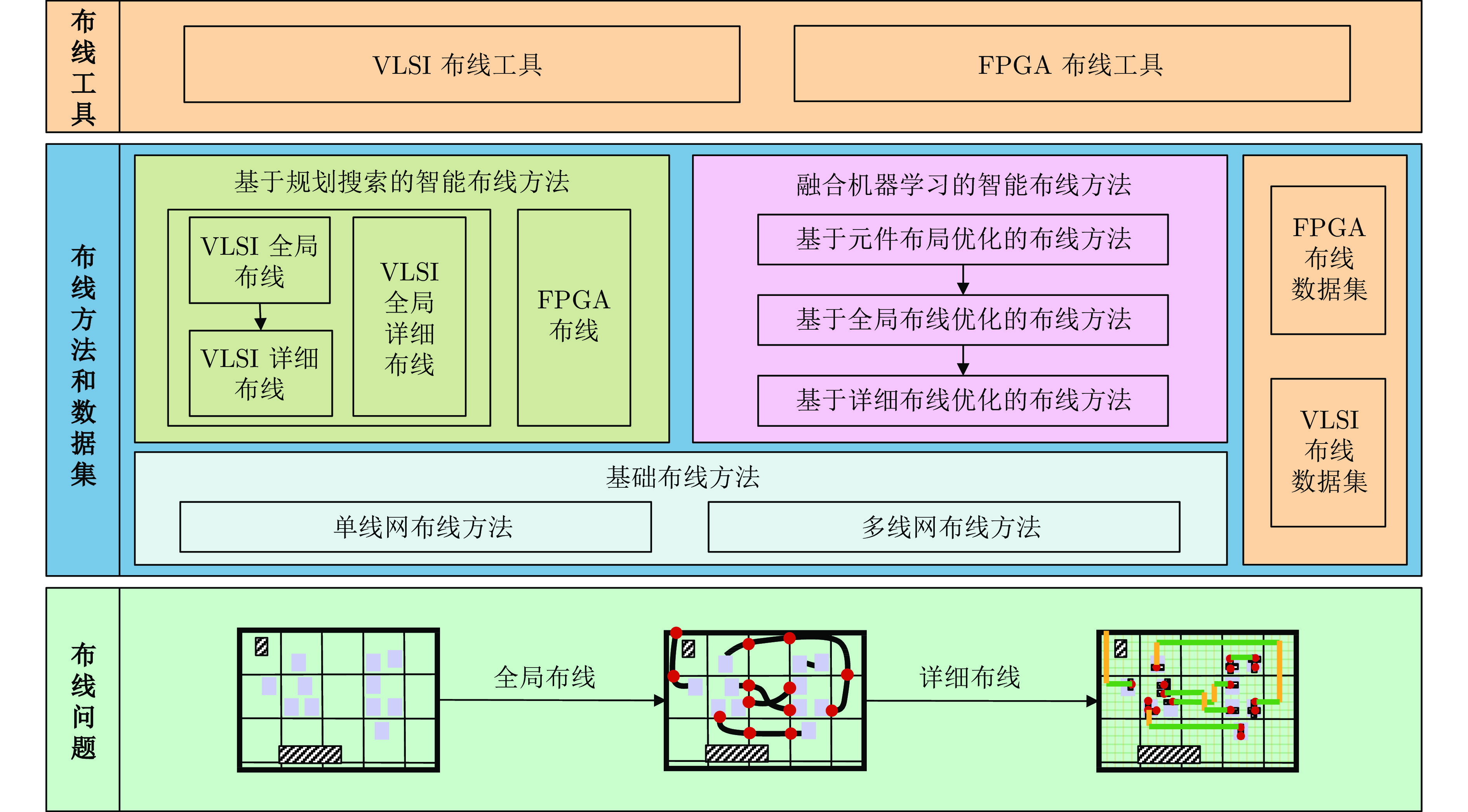
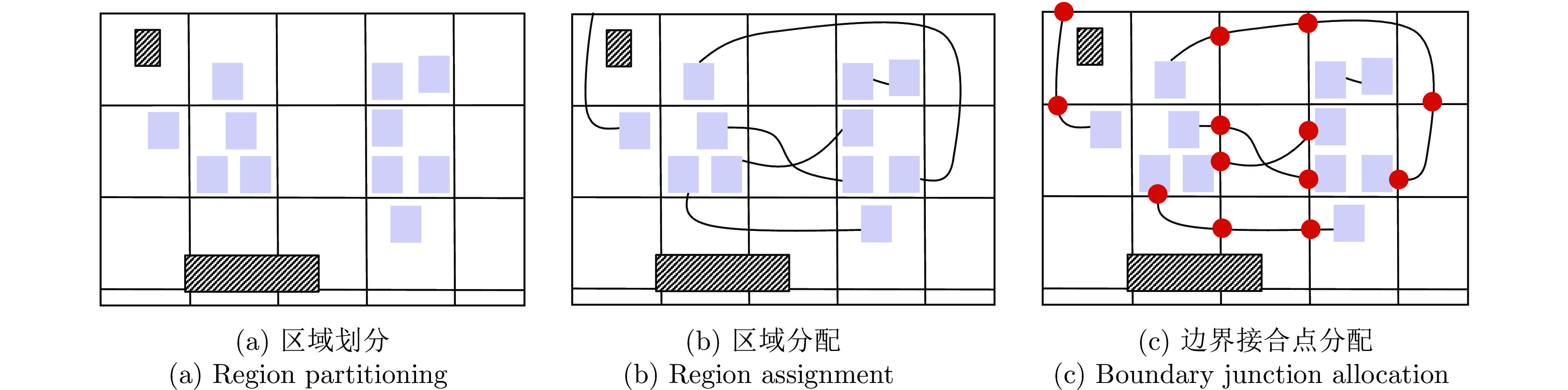
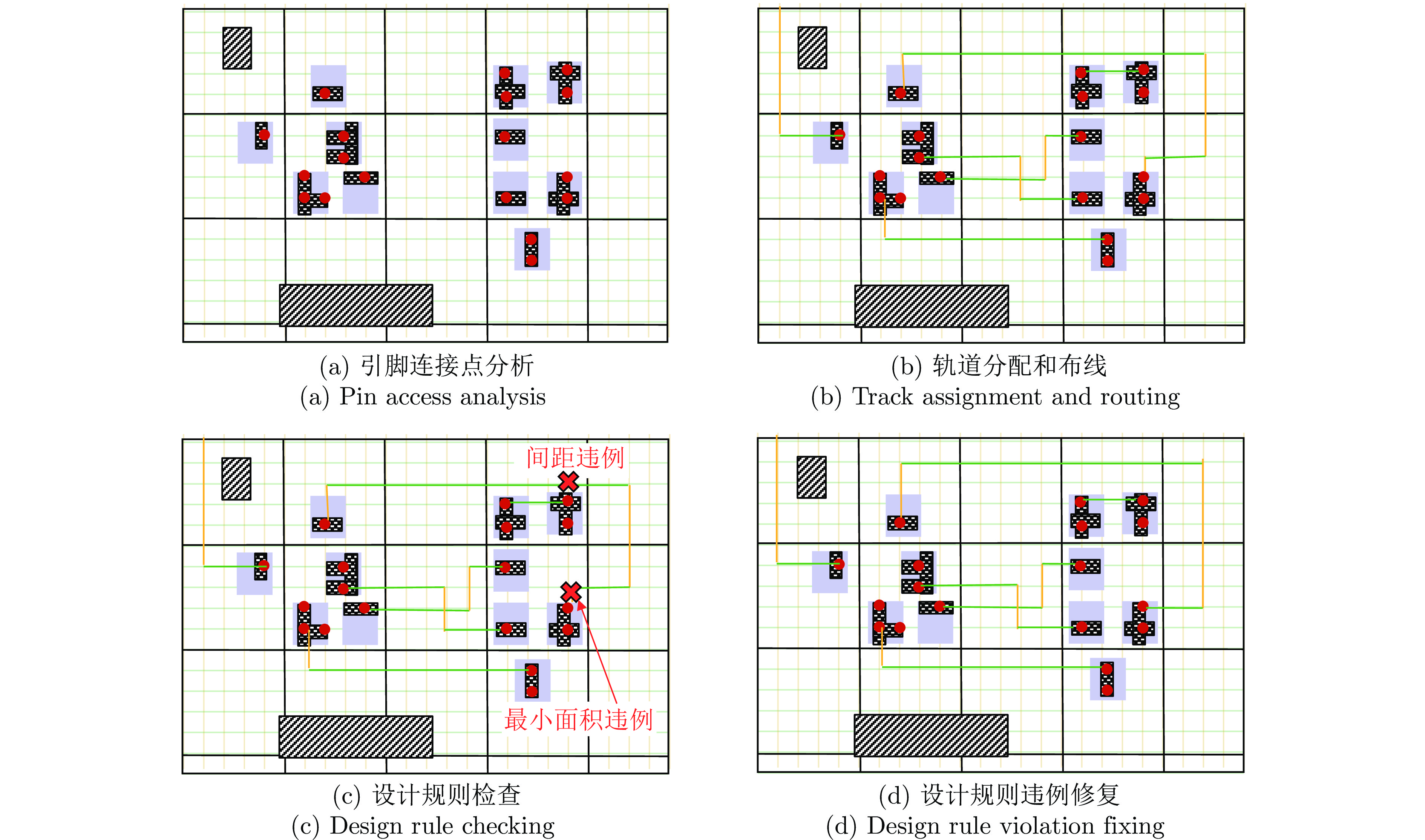
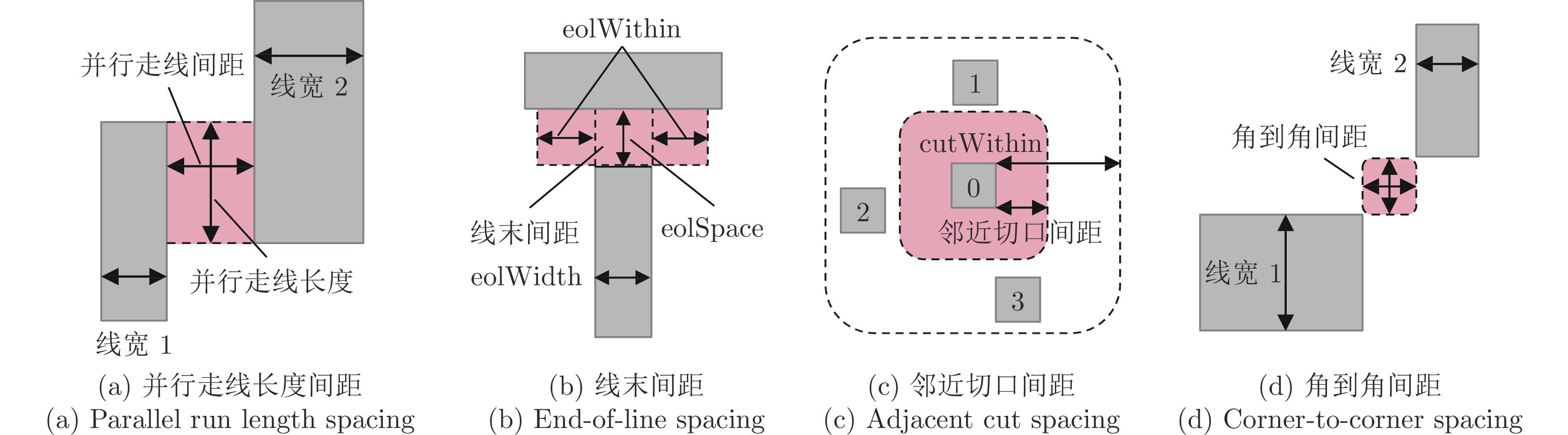
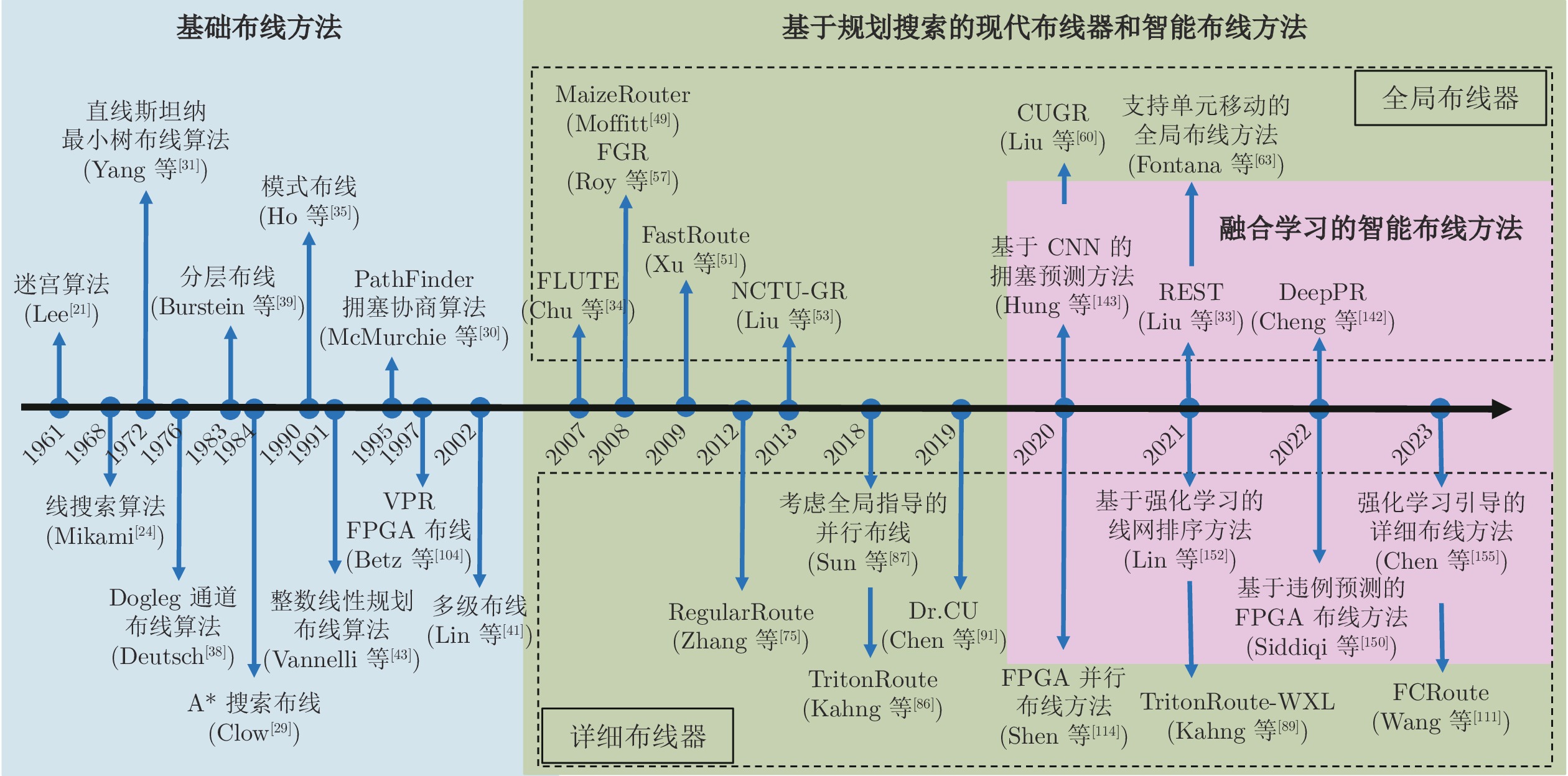
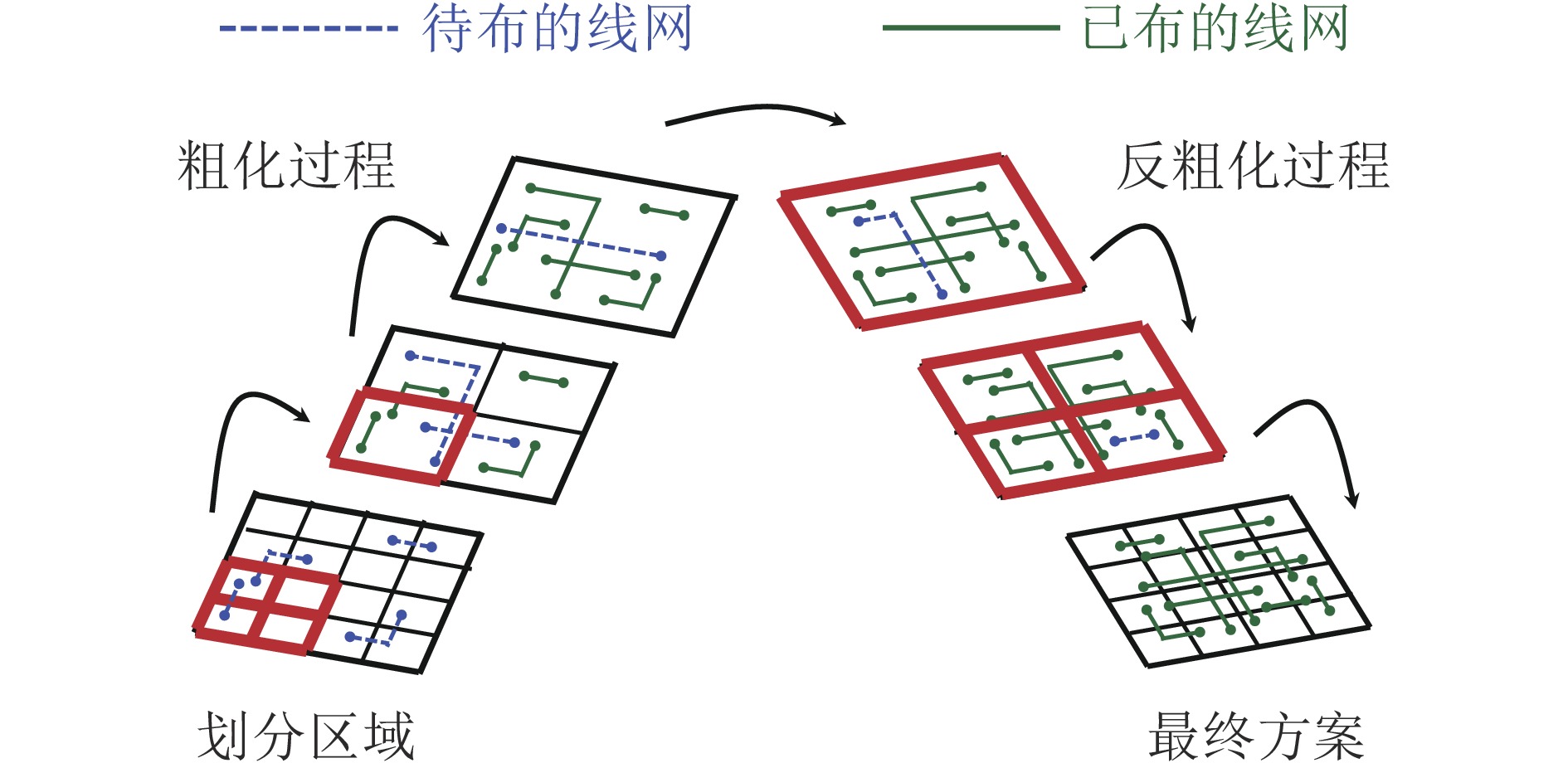
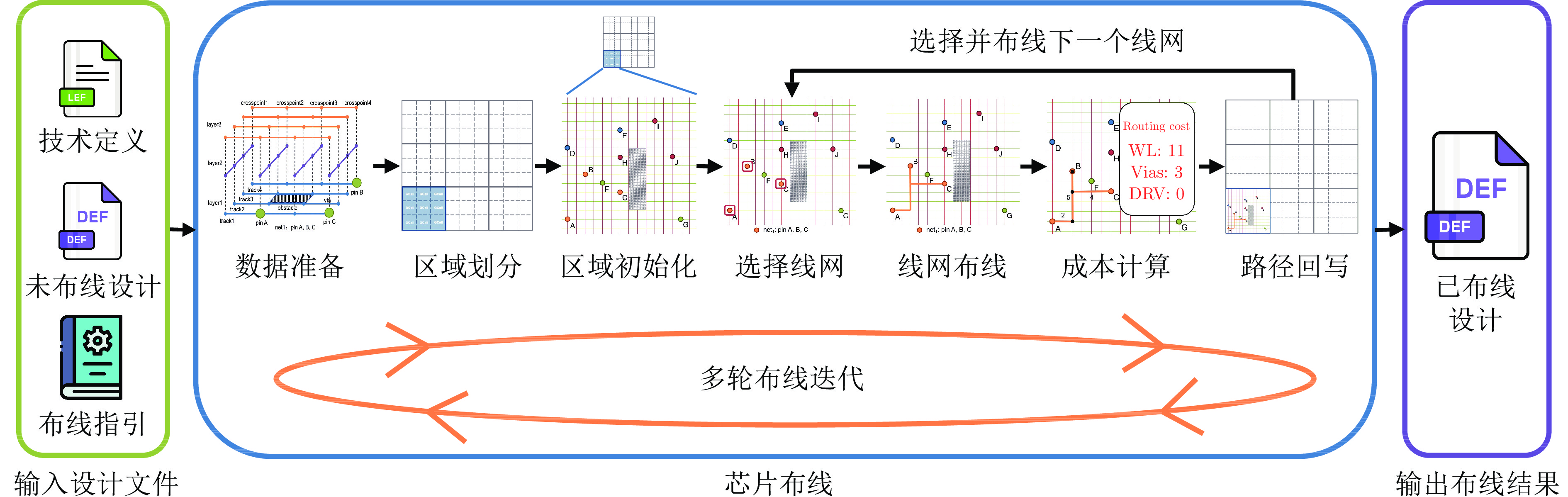
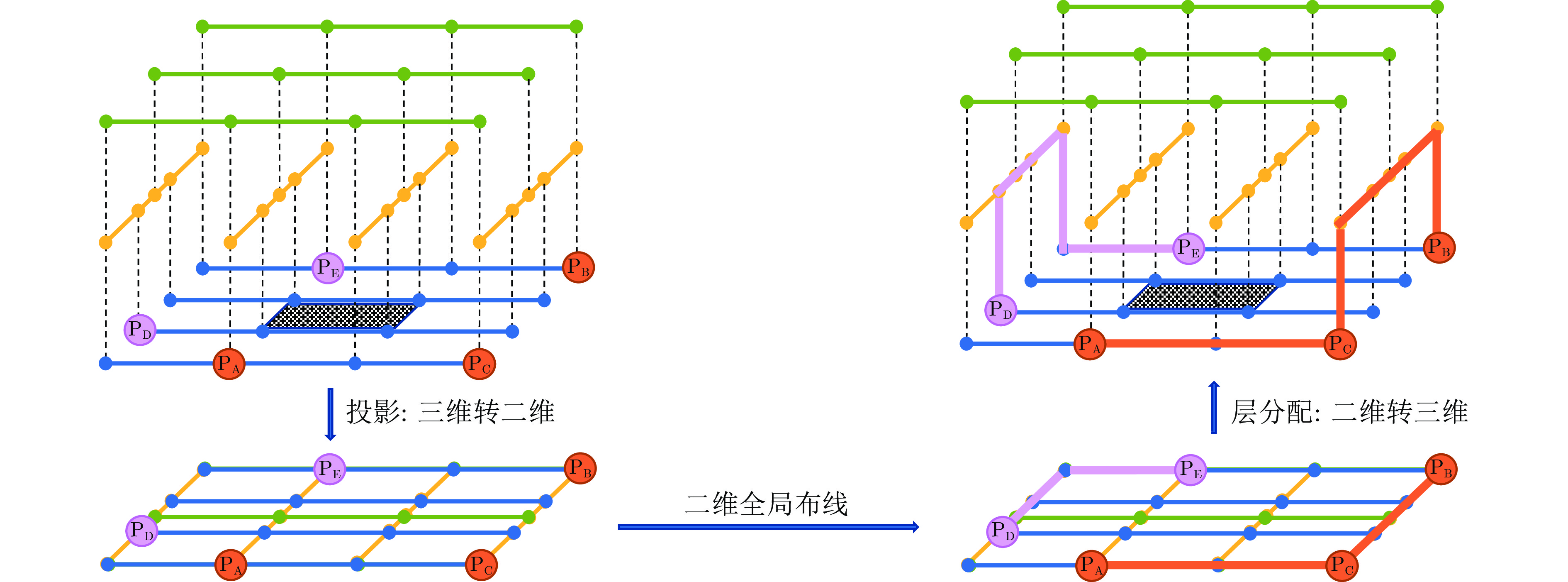
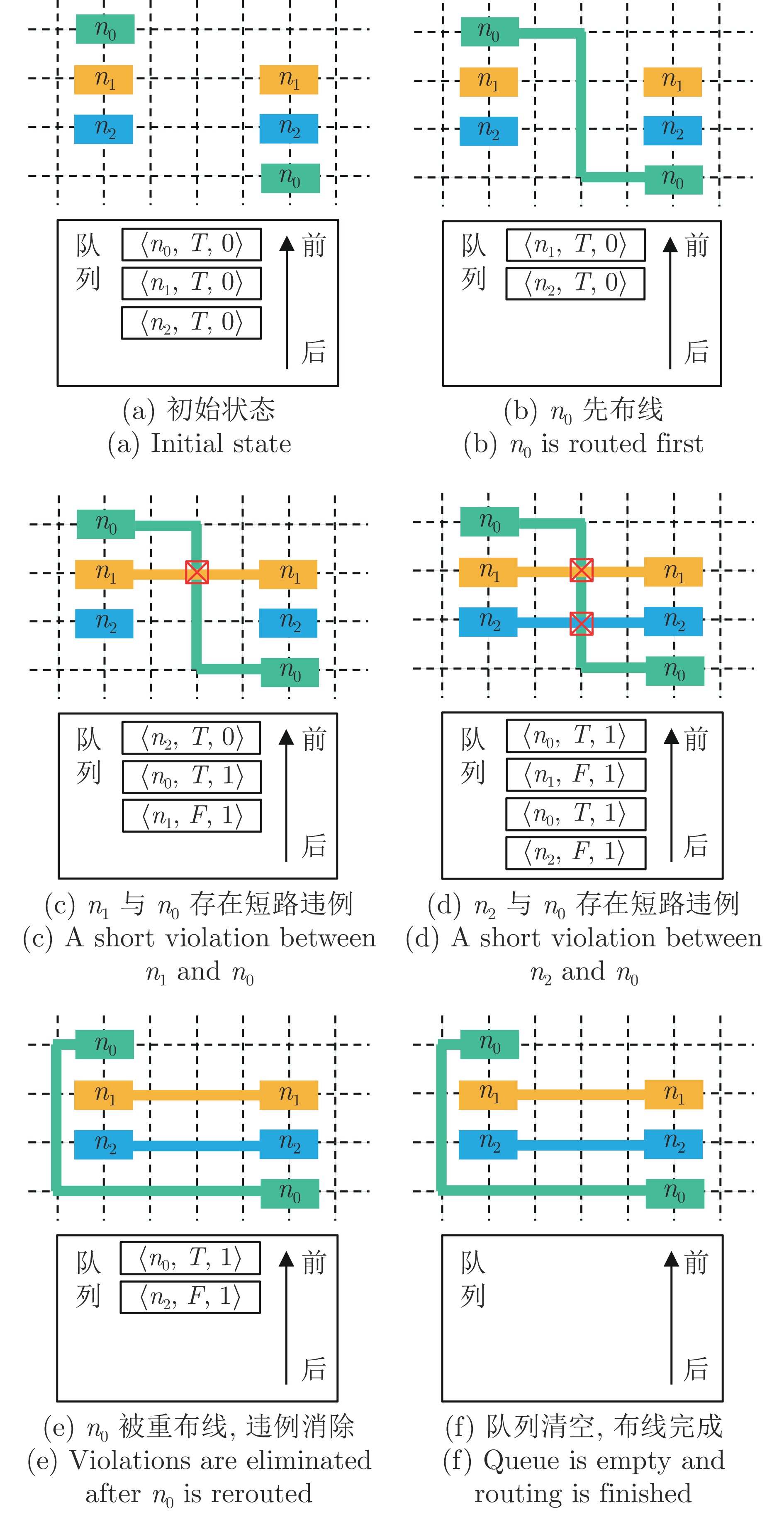
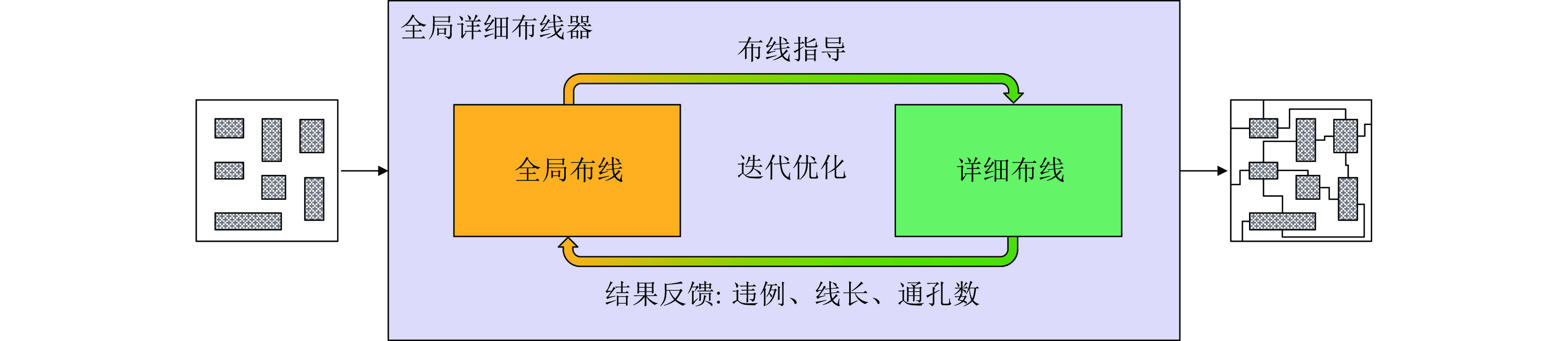
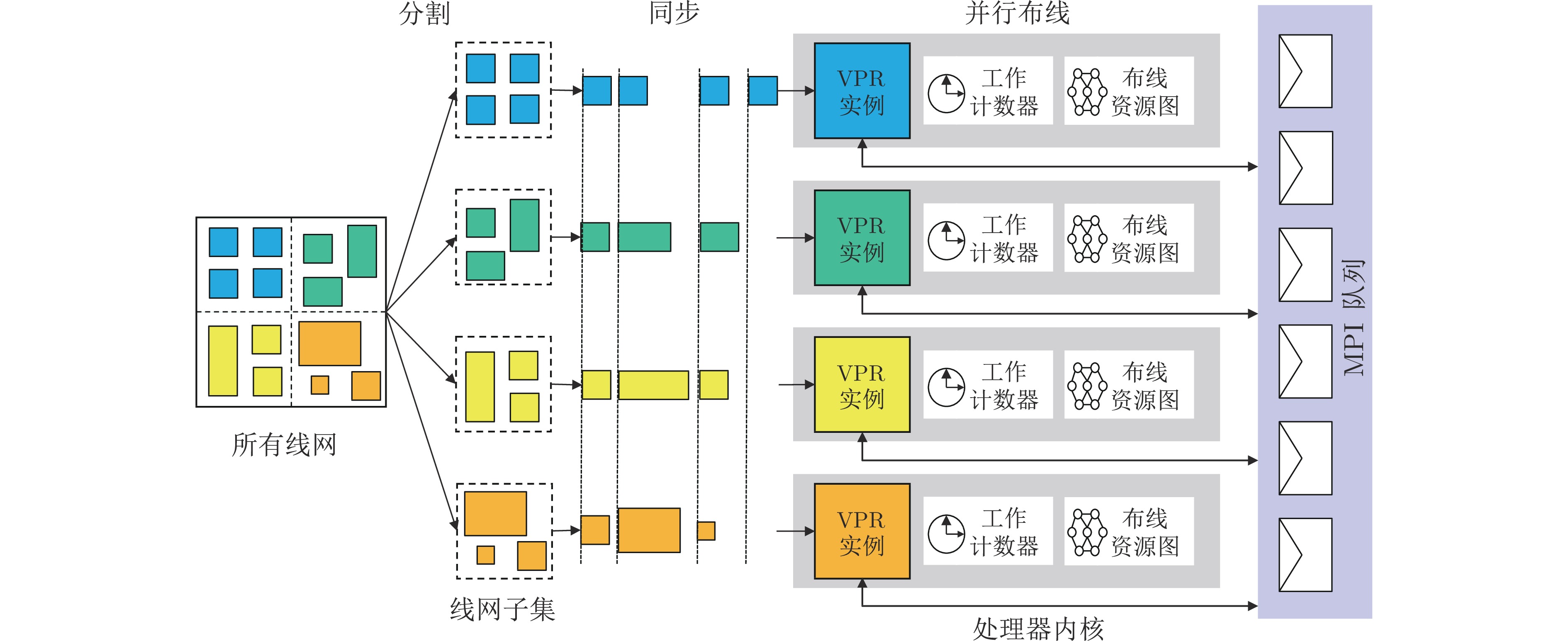
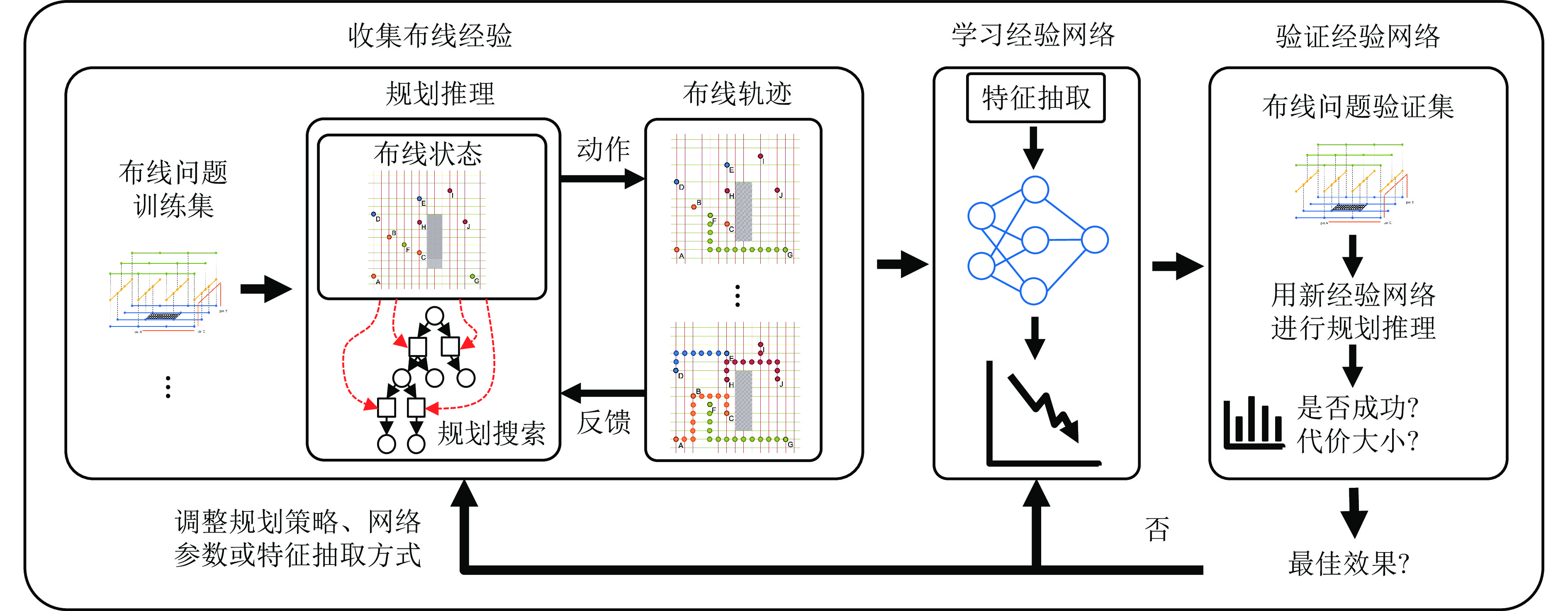
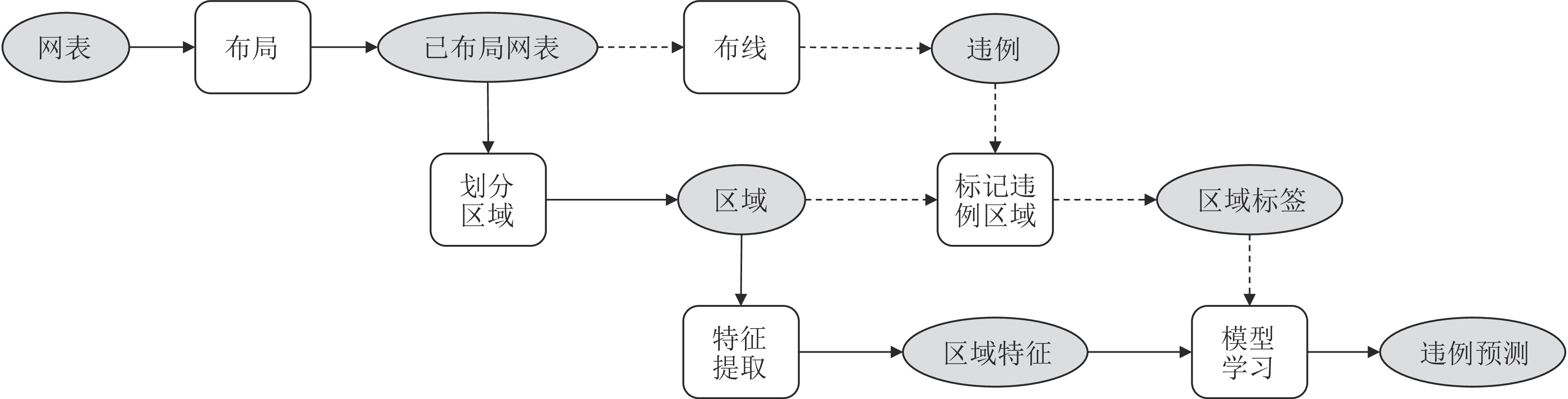
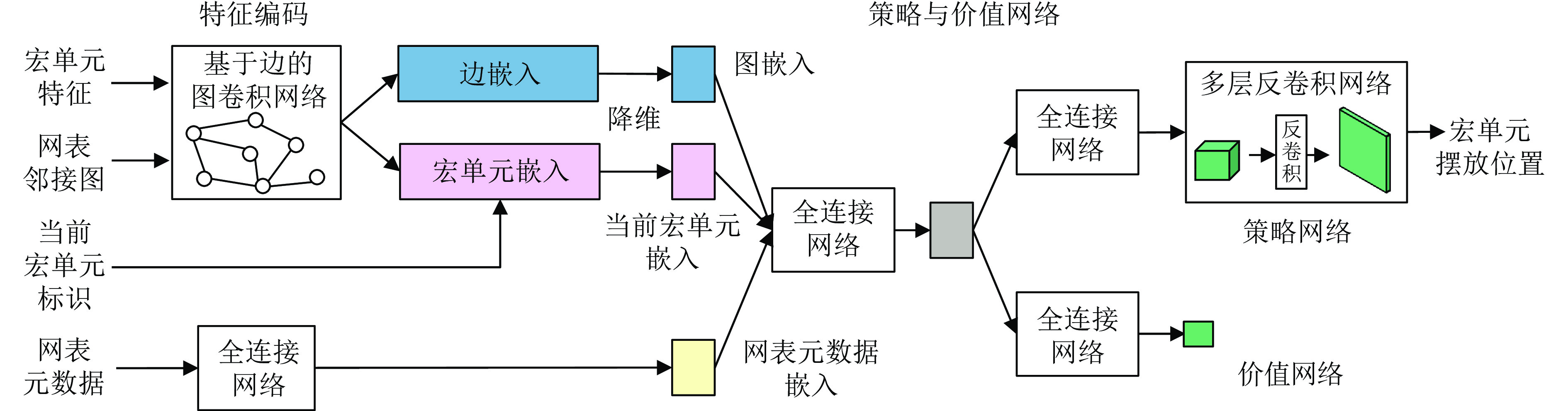
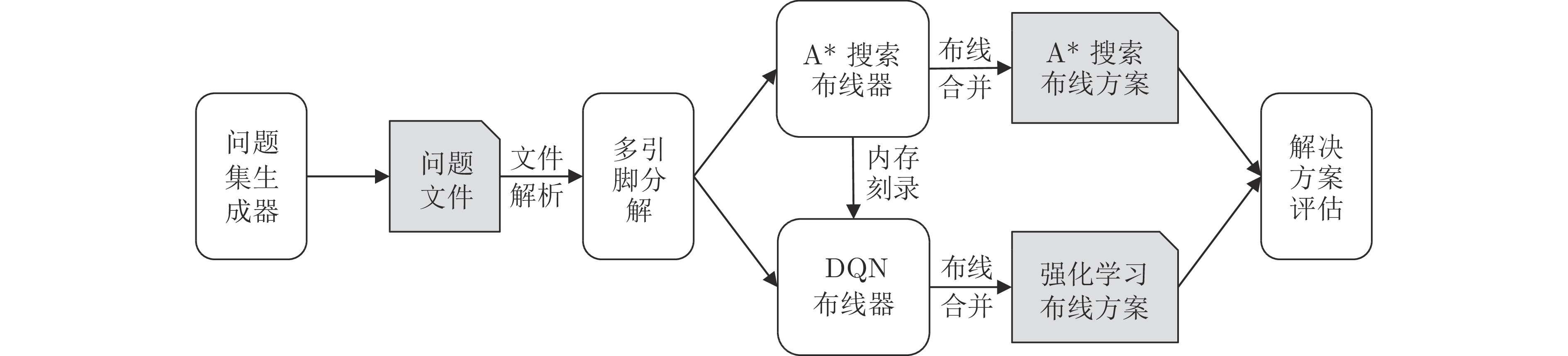
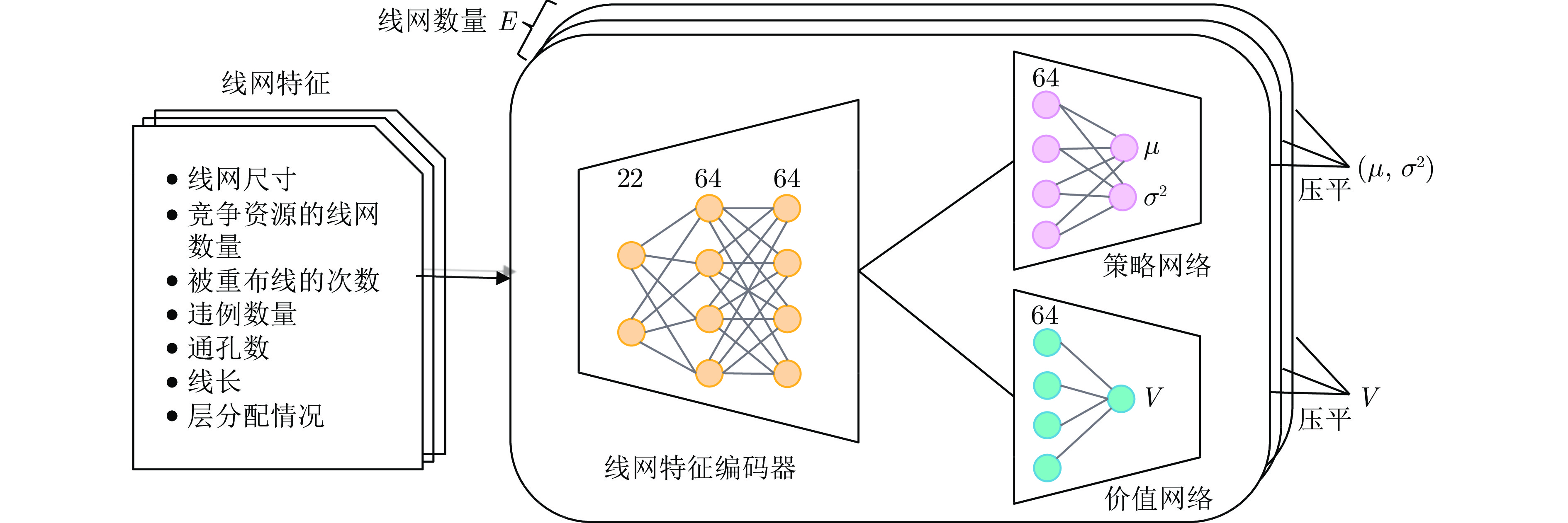
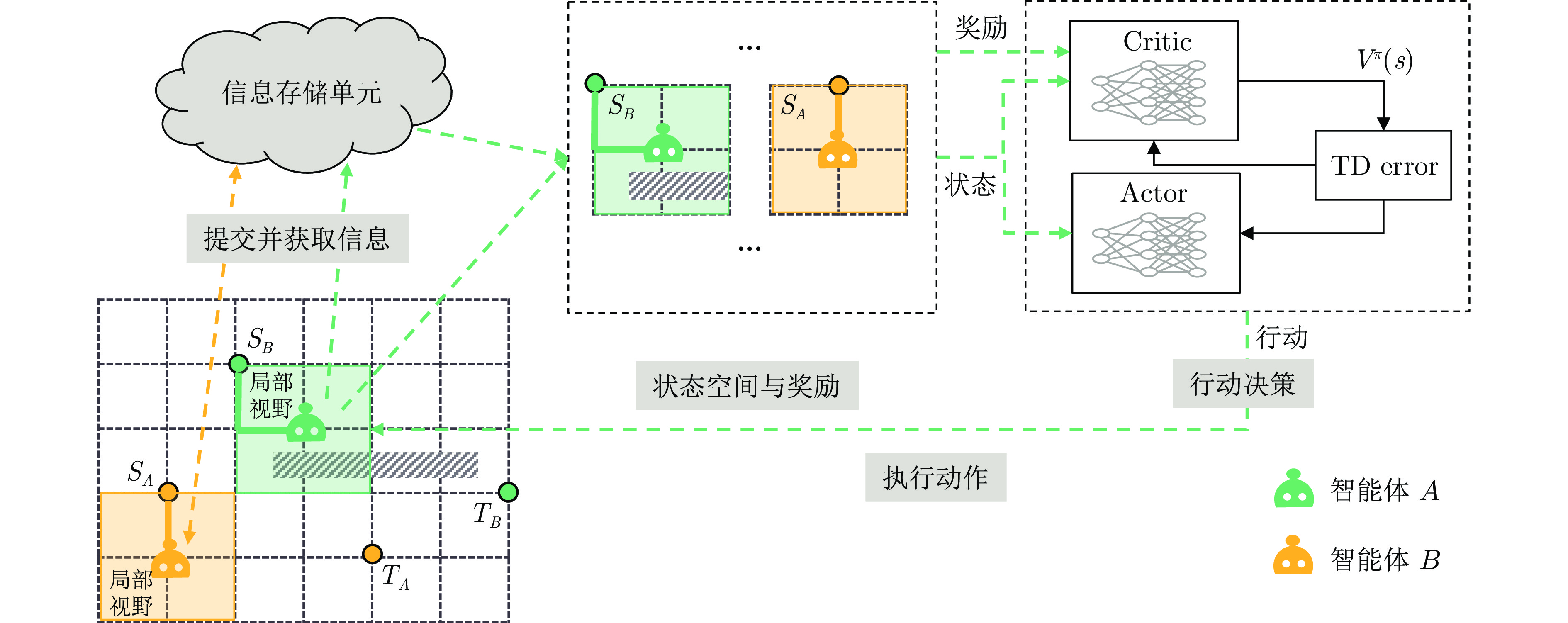
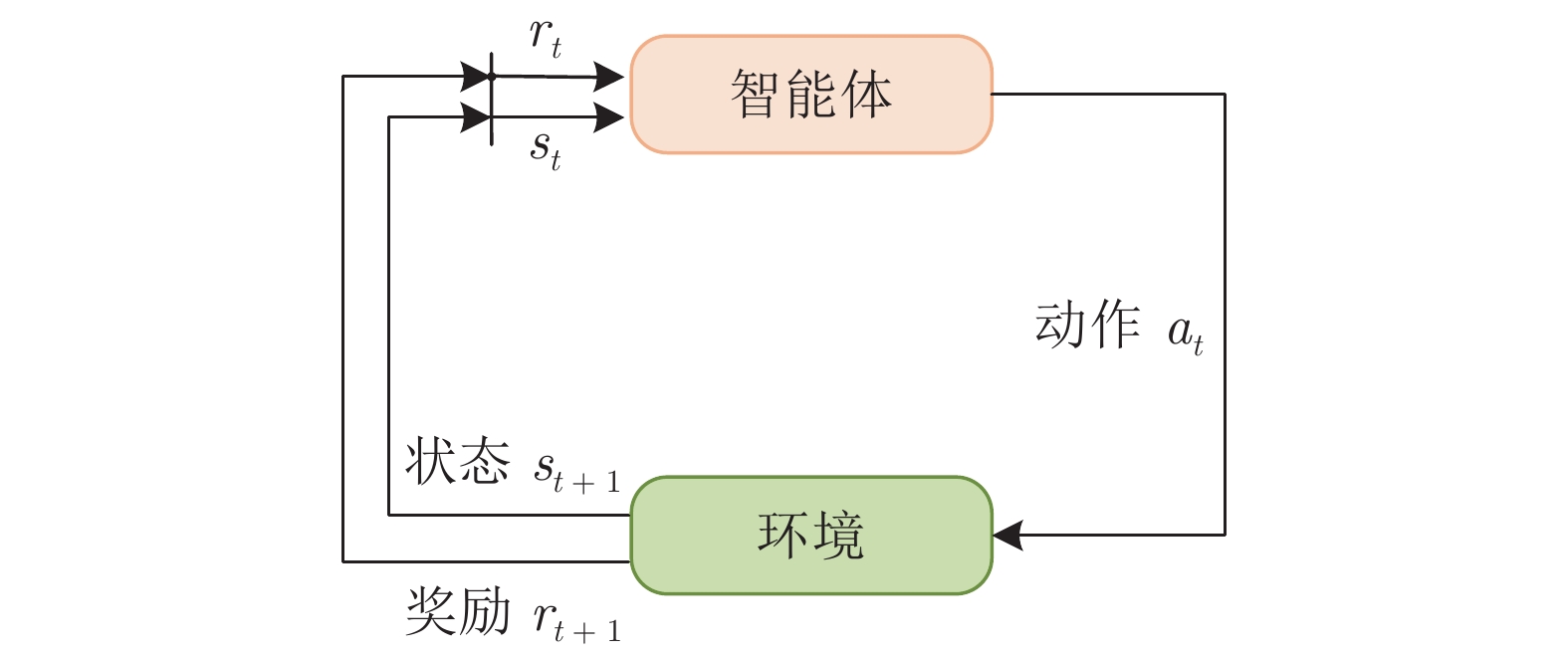
布线是芯片设计自动化流程中至关重要且特别耗时的一环, 直接影响最终产品的面积、成本、功耗、速度和可靠性, 研究智能布线算法对提高芯片布线效率和优化芯片布线效果具有重要意义. 芯片布线问题是一个多目标、多约束的NP困难问题. 即使已有几十年的研究历史, 目前仍存在大量未突破的问题和空间. 随着制造工艺的不断发展, 布线规则、约束和目标也持续调整和增加, 使得布线选择极其困难. 因此, 对芯片设计自动化中自动布线的前沿研究进行了全面归纳与分析, 以帮助科研人员全面了解该领域的研究进展和方向, 助力智能布线算法的研究和发展. 具体而言, 首先阐述芯片布线的问题背景, 然后分别介绍全局布线(Global routing, GR) 和详细布线(Detailed routing, DR)的任务定义和目标、过程特点、难点和挑战、评估方法; 接着详述和分析各布线方法, 重点论述基于规划搜索的布线方法和基于机器学习的布线方法的最新研究成果、优缺点及其应用环节; 然后介绍公开数据集和开源布线工具; 最后总结现有方法在实际应用中存在的局限性, 并对自动布线未来的发展趋势和潜在研究方向进行展望.
布线是芯片设计自动化流程中至关重要且特别耗时的一环, 直接影响最终产品的面积、成本、功耗、速度和可靠性, 研究智能布线算法对提高芯片布线效率和优化芯片布线效果具有重要意义. 芯片布线问题是一个多目标、多约束的NP困难问题. 即使已有几十年的研究历史, 目前仍存在大量未突破的问题和空间. 随着制造工艺的不断发展, 布线规则、约束和目标也持续调整和增加, 使得布线选择极其困难. 因此, 对芯片设计自动化中自动布线的前沿研究进行了全面归纳与分析, 以帮助科研人员全面了解该领域的研究进展和方向, 助力智能布线算法的研究和发展. 具体而言, 首先阐述芯片布线的问题背景, 然后分别介绍全局布线(Global routing, GR) 和详细布线(Detailed routing, DR)的任务定义和目标、过程特点、难点和挑战、评估方法; 接着详述和分析各布线方法, 重点论述基于规划搜索的布线方法和基于机器学习的布线方法的最新研究成果、优缺点及其应用环节; 然后介绍公开数据集和开源布线工具; 最后总结现有方法在实际应用中存在的局限性, 并对自动布线未来的发展趋势和潜在研究方向进行展望.

2024, 50(9): 1704-1723.
doi: 10.16383/j.aas.c230081
cstr: 32138.14.j.aas.c230081
摘要:
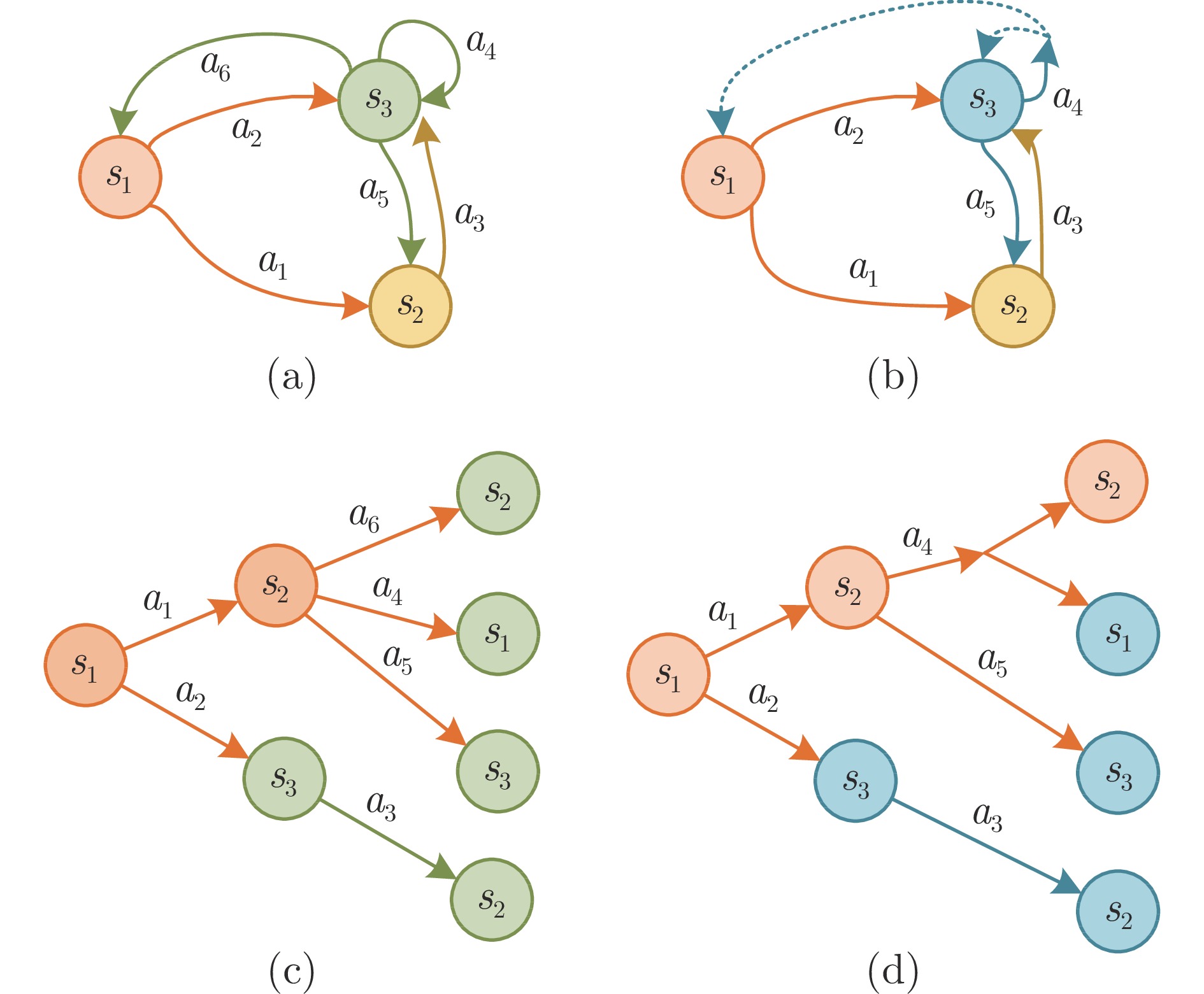
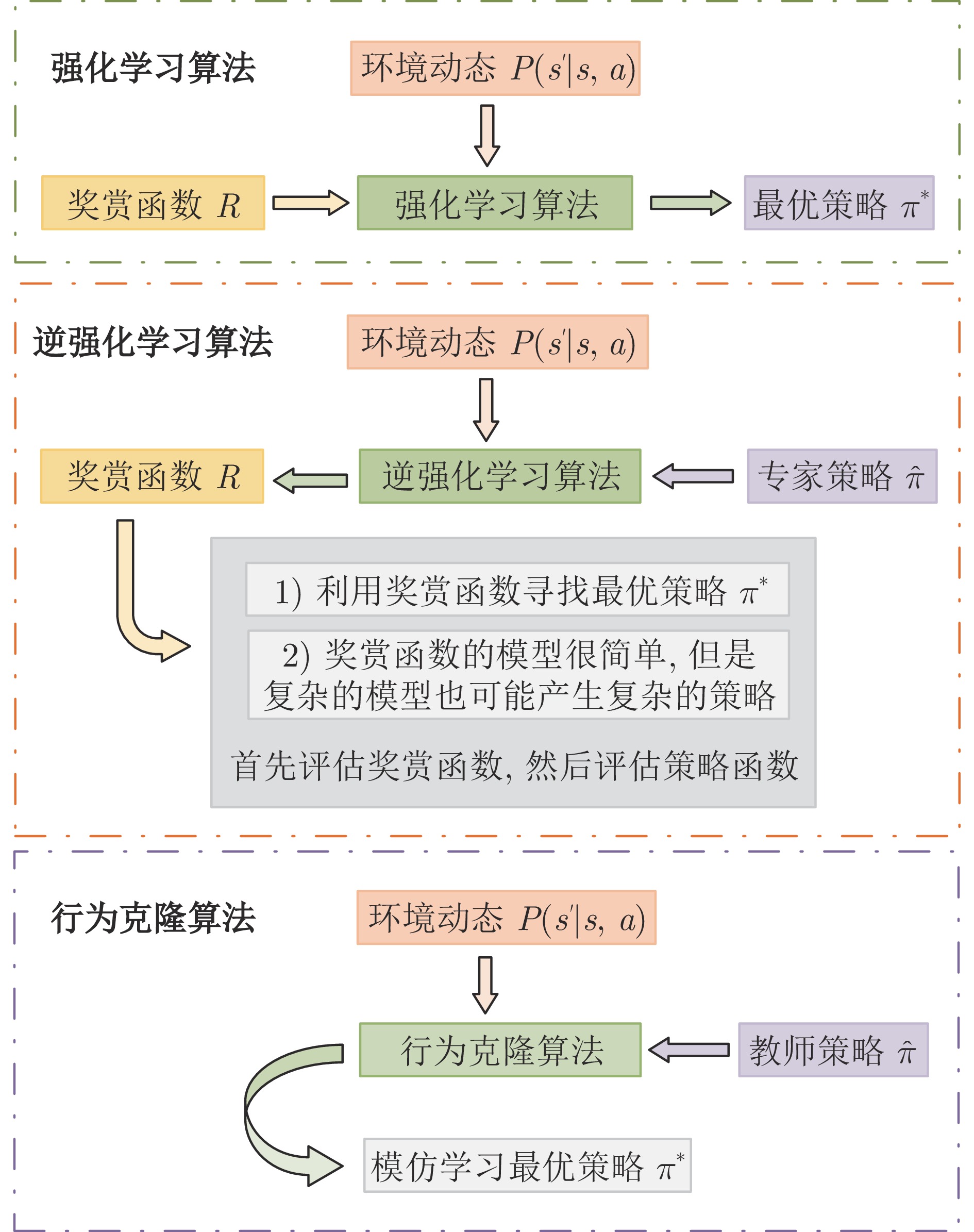
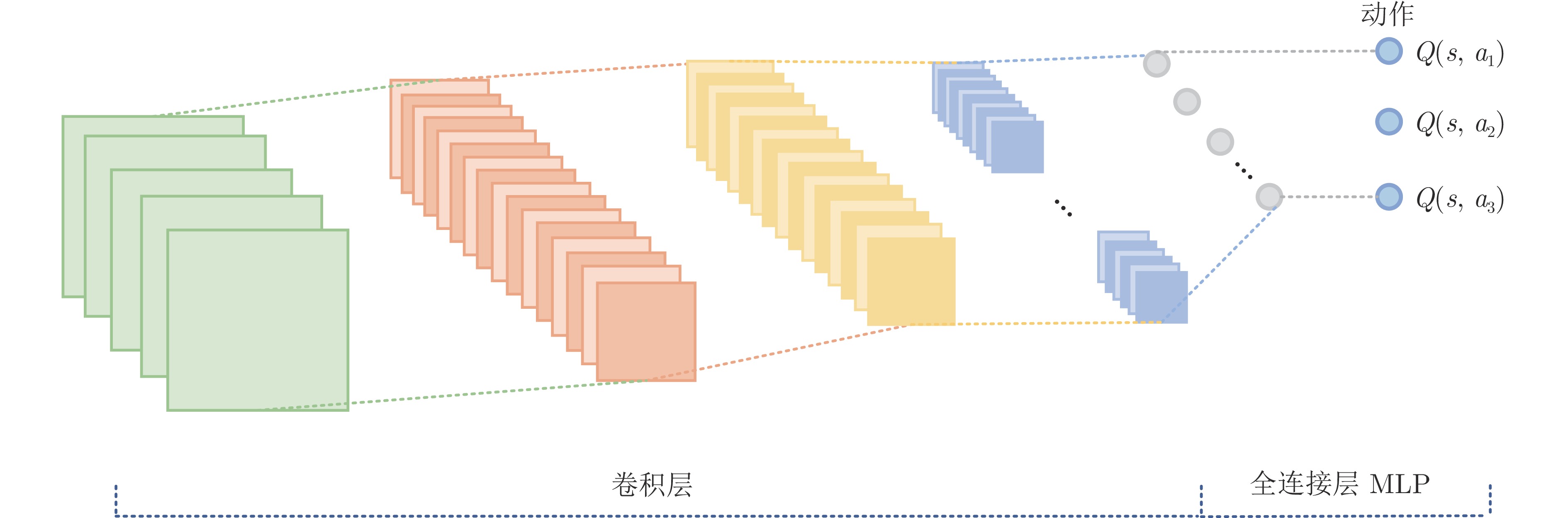
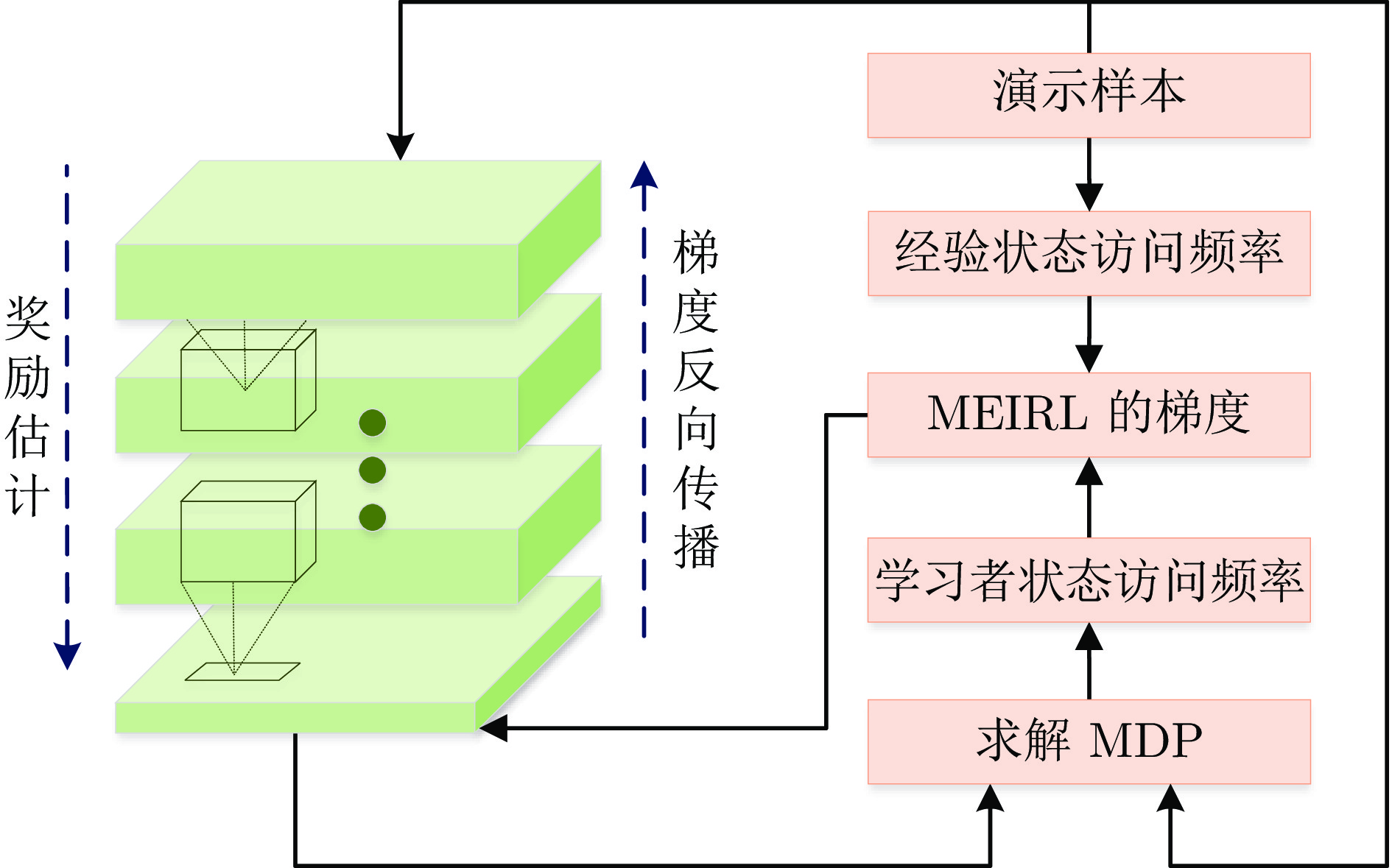
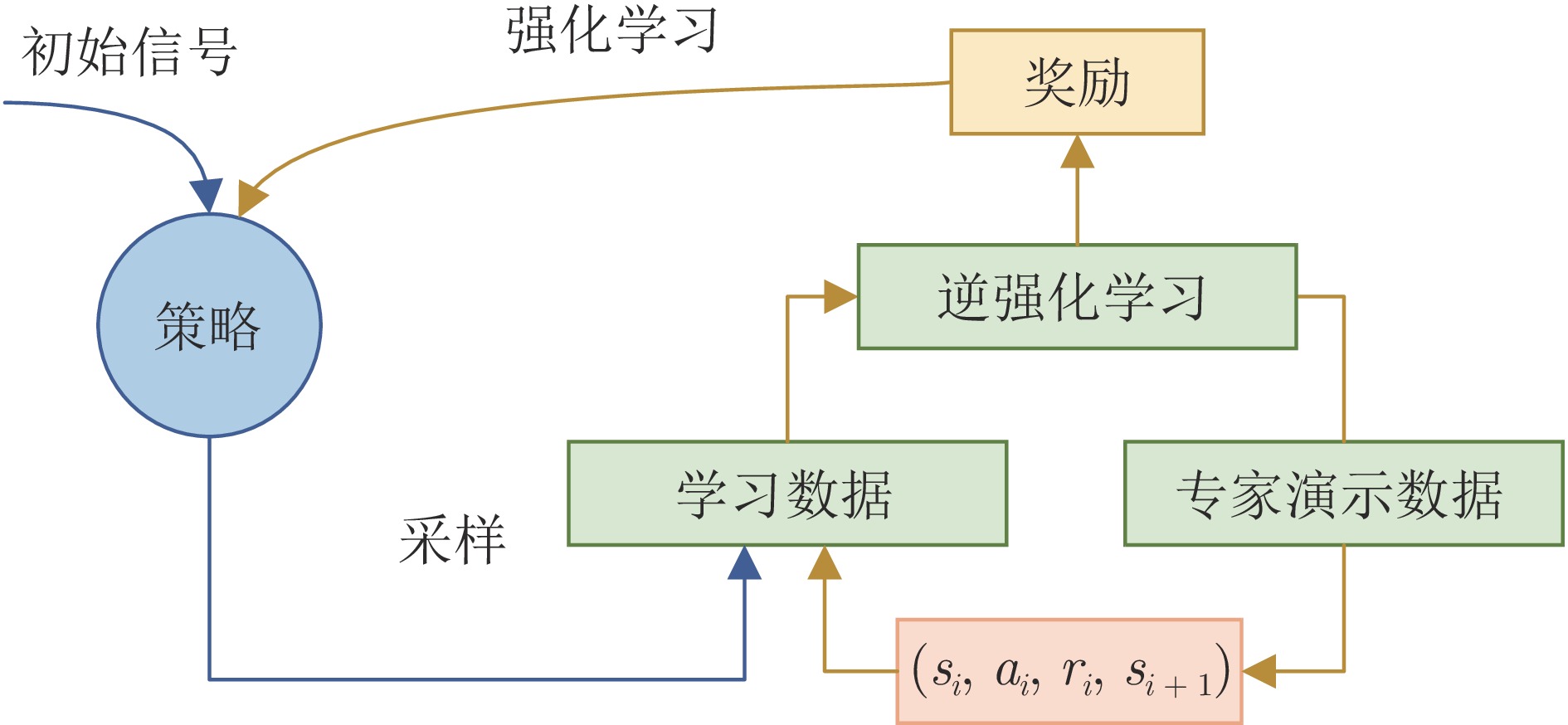
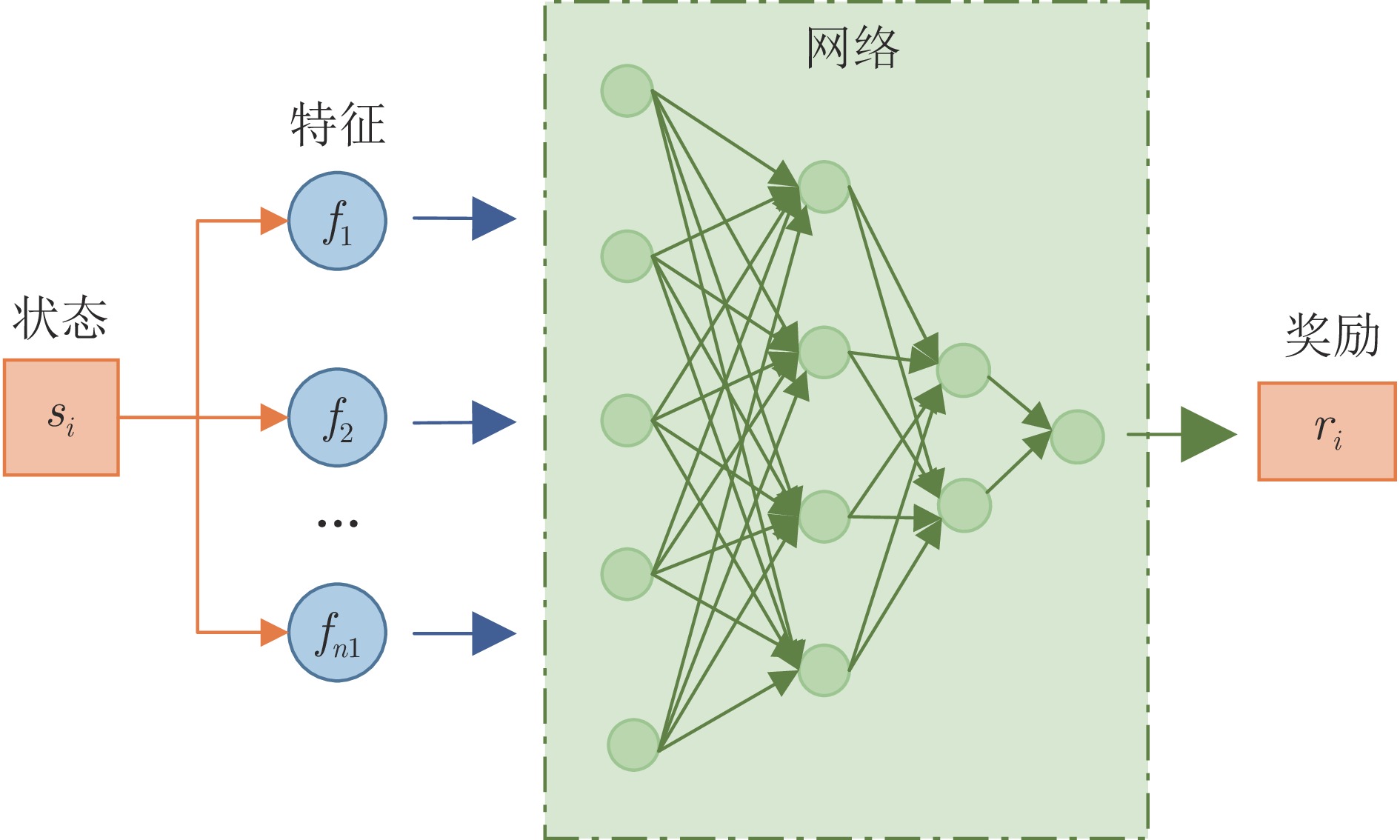
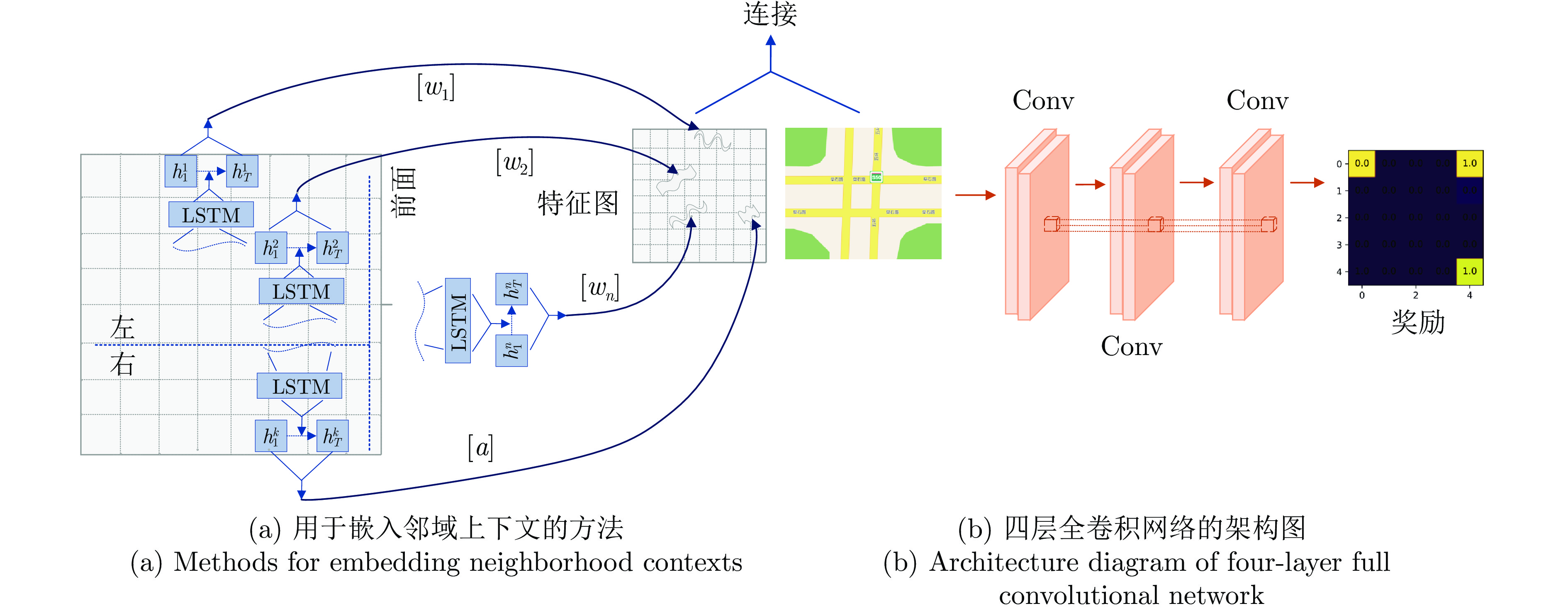
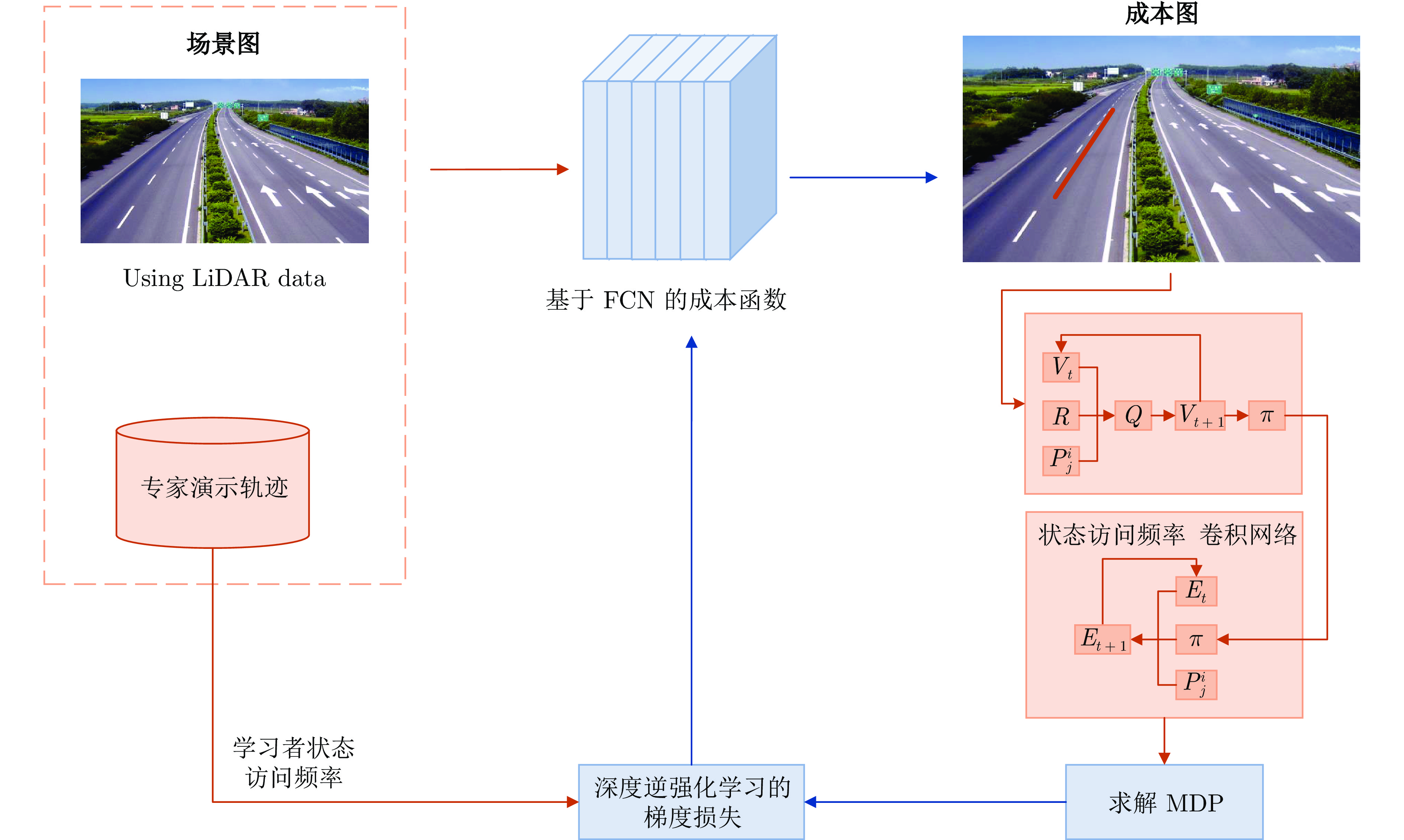
随着高维特征表示与逼近能力的提高, 强化学习(Reinforcement learning, RL)在博弈与优化决策、智能驾驶等现实问题中的应用也取得显著进展. 然而强化学习在智能体与环境的交互中存在人工设计奖励函数难的问题, 因此研究者提出了逆强化学习(Inverse reinforcement learning, IRL)这一研究方向. 如何从专家演示中学习奖励函数和进行策略优化是一个重要的研究课题, 在人工智能领域具有十分重要的研究意义. 本文综合介绍了逆强化学习算法的最新进展, 首先介绍了逆强化学习在理论方面的新进展, 然后分析了逆强化学习面临的挑战以及未来的发展趋势, 最后讨论了逆强化学习的应用进展和应用前景.
随着高维特征表示与逼近能力的提高, 强化学习(Reinforcement learning, RL)在博弈与优化决策、智能驾驶等现实问题中的应用也取得显著进展. 然而强化学习在智能体与环境的交互中存在人工设计奖励函数难的问题, 因此研究者提出了逆强化学习(Inverse reinforcement learning, IRL)这一研究方向. 如何从专家演示中学习奖励函数和进行策略优化是一个重要的研究课题, 在人工智能领域具有十分重要的研究意义. 本文综合介绍了逆强化学习算法的最新进展, 首先介绍了逆强化学习在理论方面的新进展, 然后分析了逆强化学习面临的挑战以及未来的发展趋势, 最后讨论了逆强化学习的应用进展和应用前景.




2024, 50(9): 1724-1735.
doi: 10.16383/j.aas.c230656
cstr: 32138.14.j.aas.c230656
摘要:
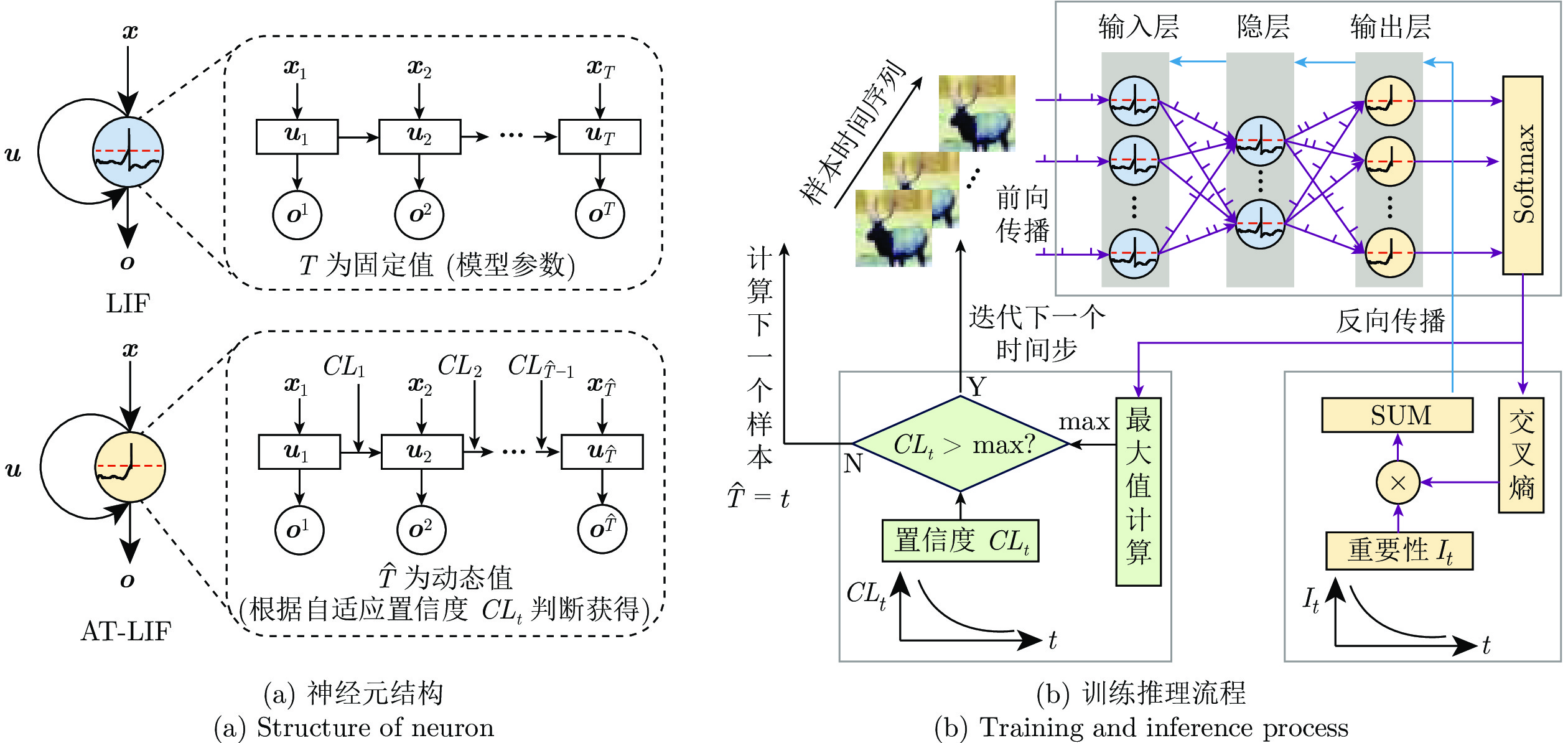
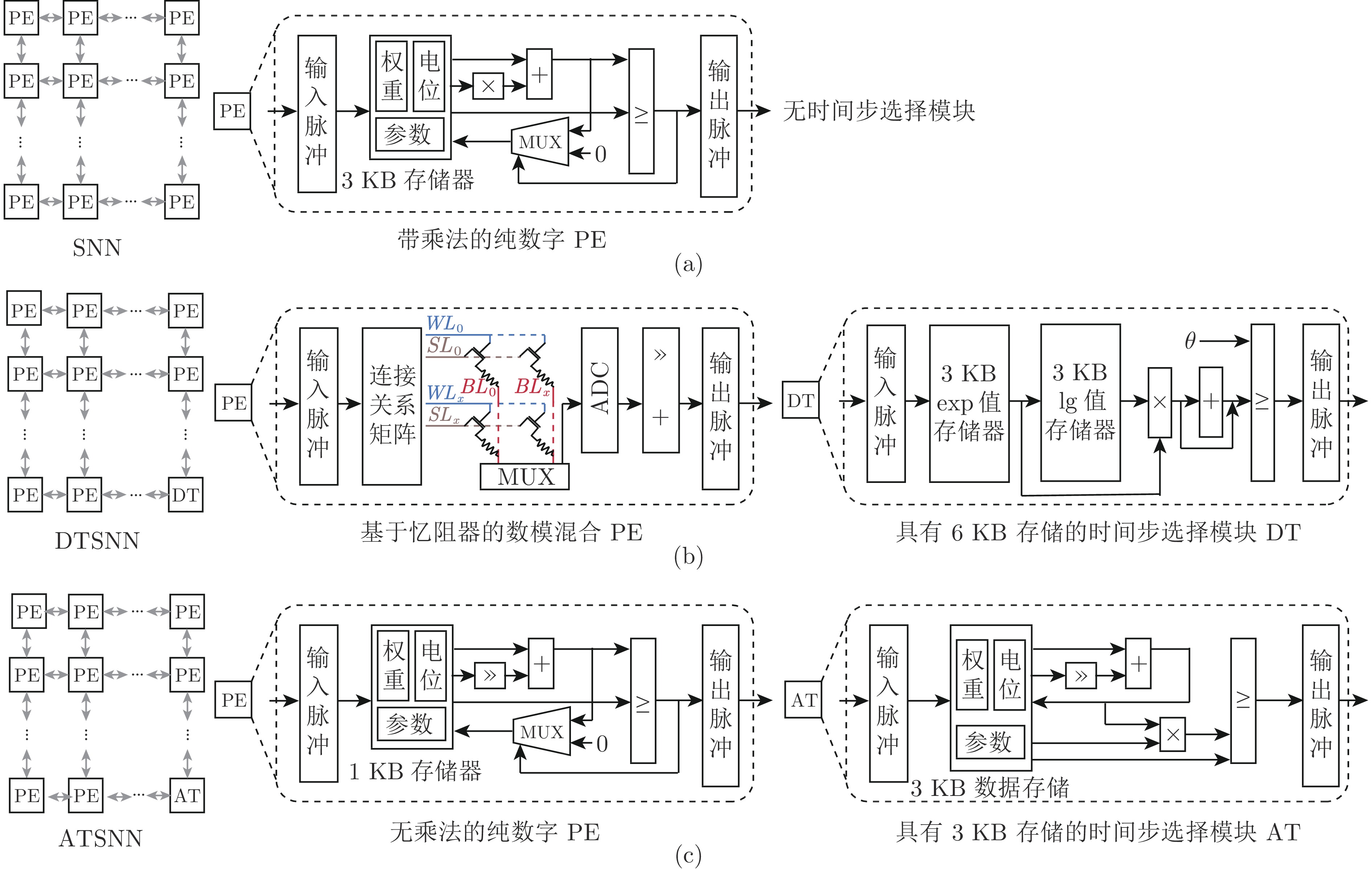
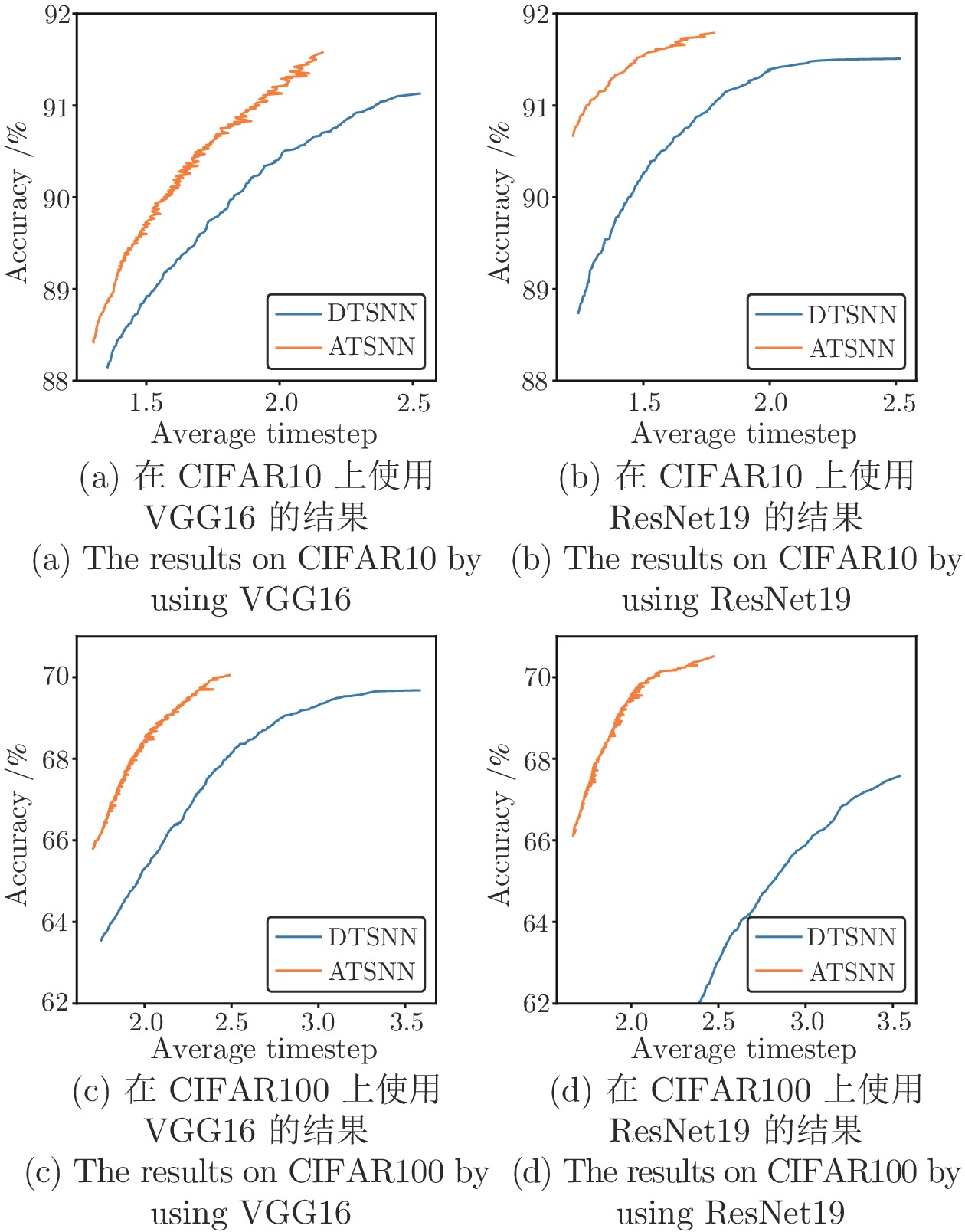
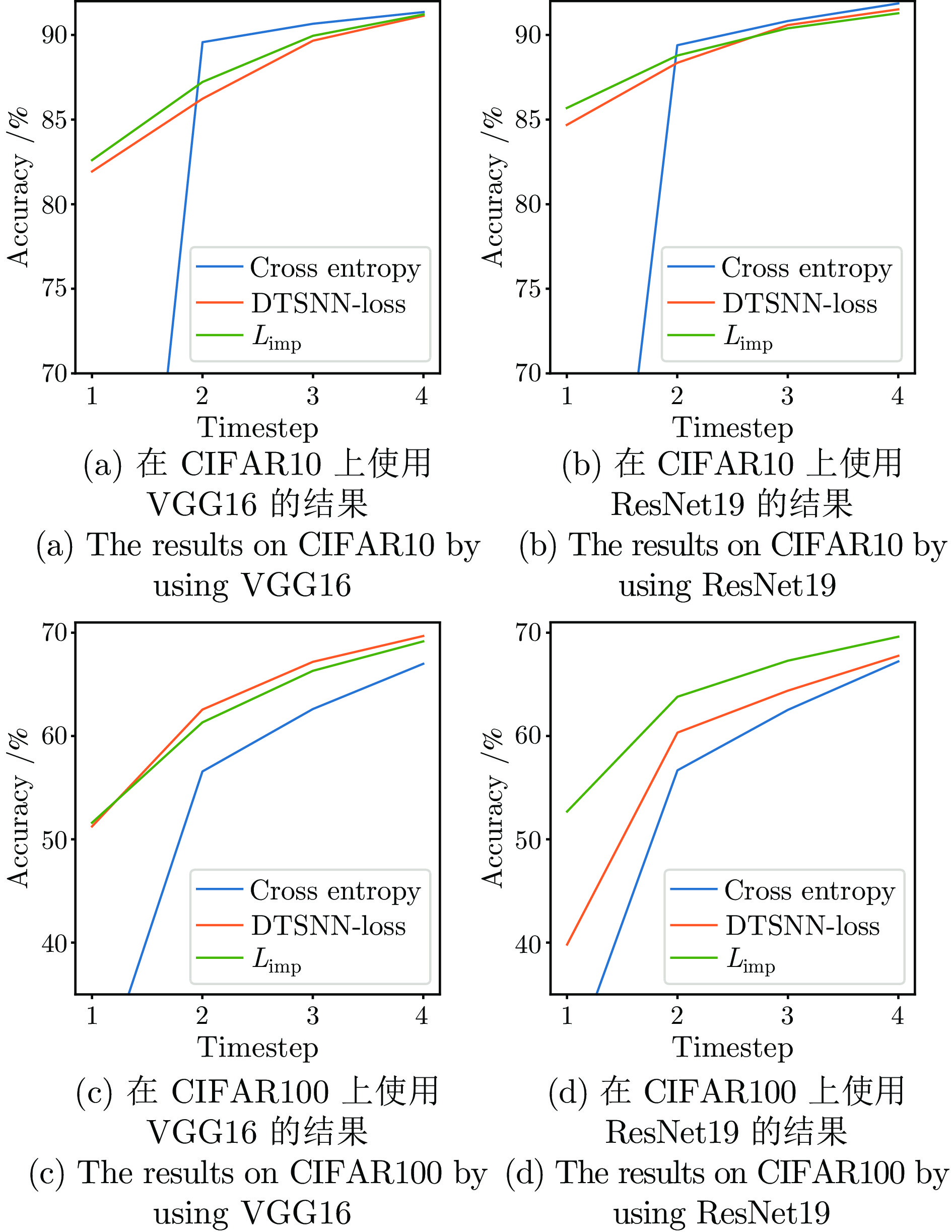
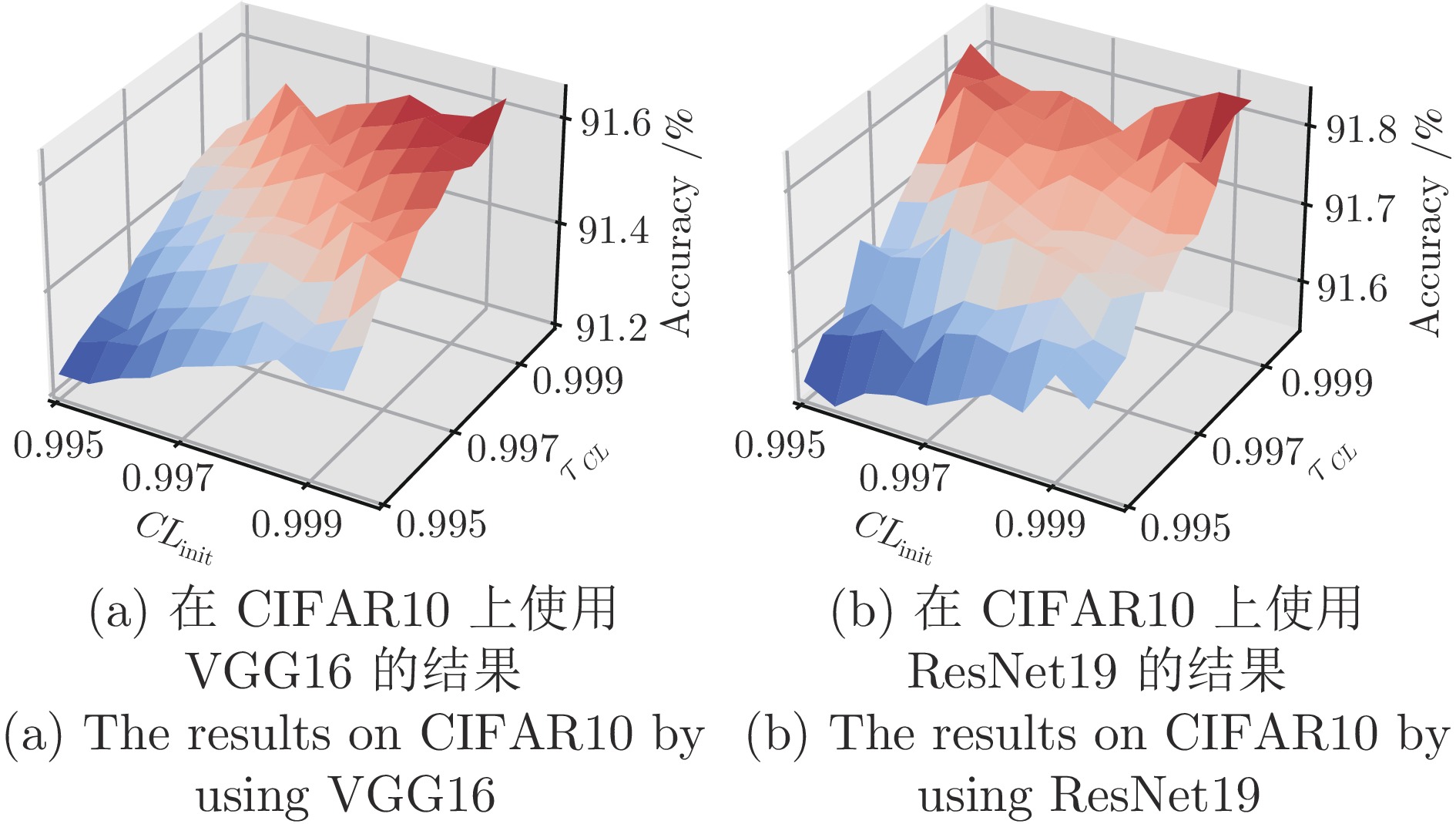
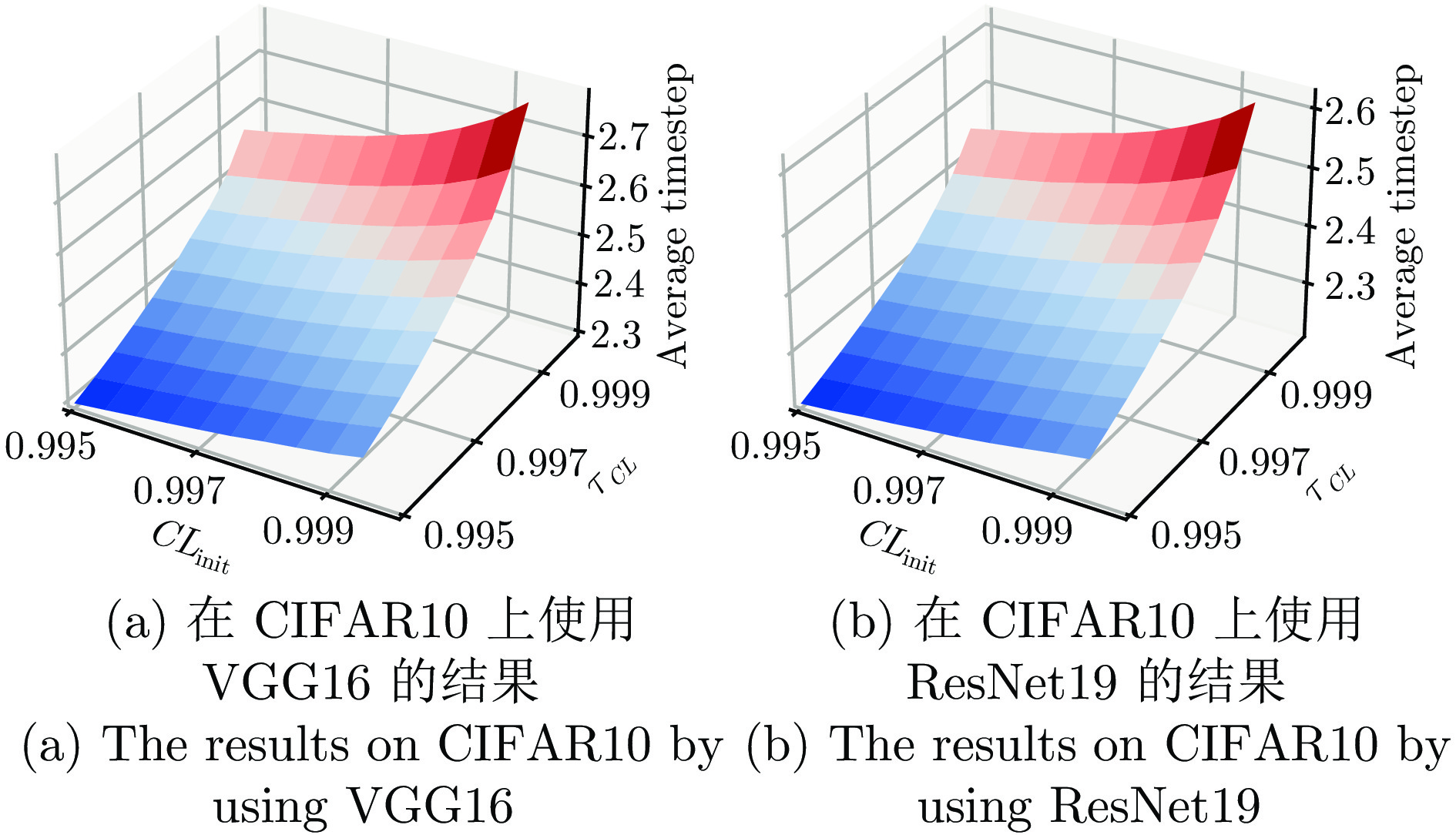
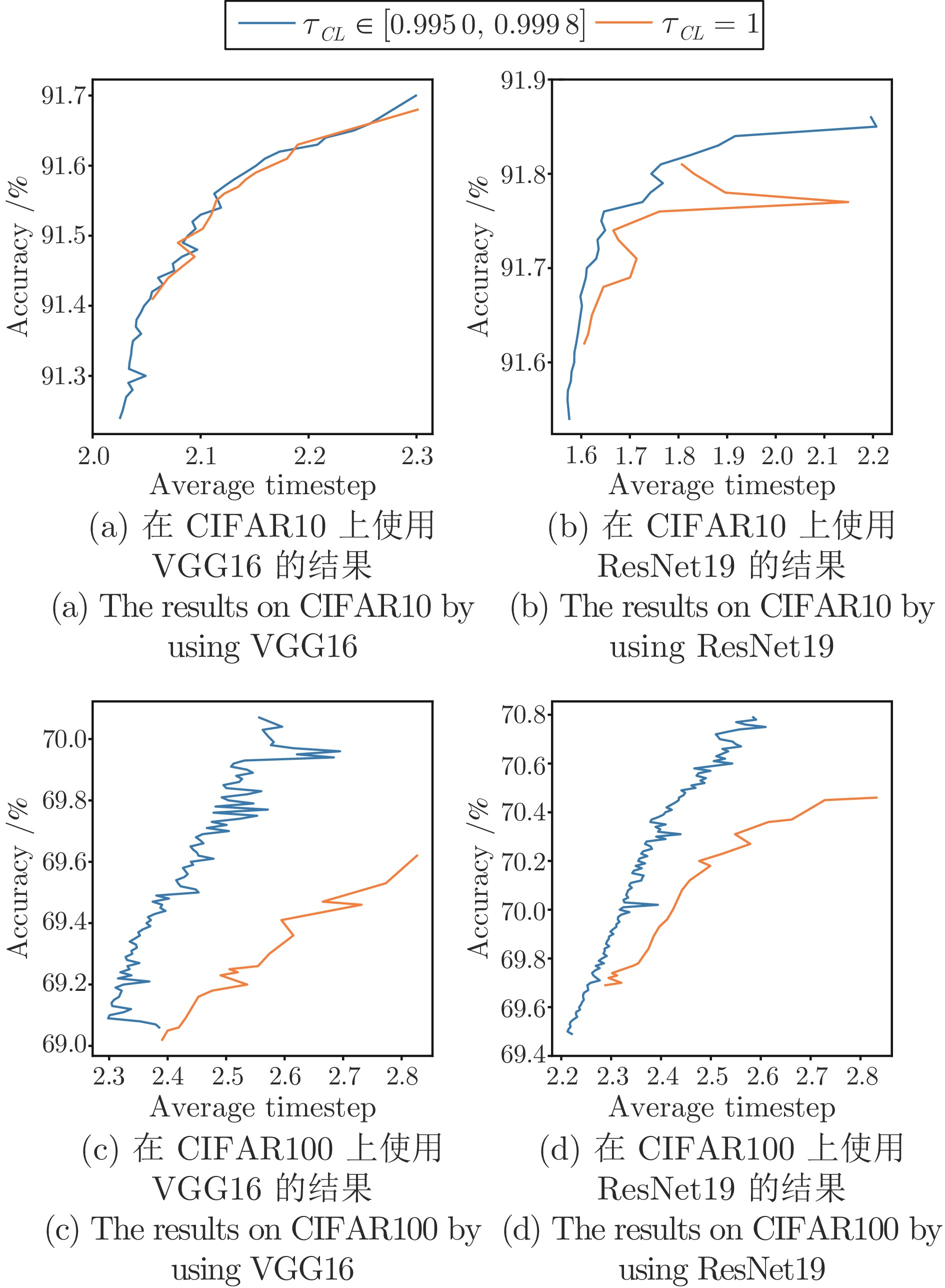
脉冲神经网络(Spiking neural network, SNN)由于具有相对人工神经网络(Artifcial neural network, ANN)更低的计算能耗而受到广泛关注. 然而, 现有SNN大多基于同步计算模式且往往采用多时间步的方式来模拟动态的信息整合过程, 因此带来了推理延迟增大和计算能耗增高等问题, 使其在边缘智能设备上的高效运行大打折扣. 针对这个问题, 本文提出一种自适应时间步脉冲神经网络(Adaptive timestep improved spiking neural network, ATSNN)算法. 该算法可以根据不同样本特征自适应选择合适的推理时间步, 并通过设计一个时间依赖的新型损失函数来约束不同计算时间步的重要性. 与此同时, 针对上述ATSNN特点设计一款低能耗脉冲神经网络加速器, 支持ATSNN算法在VGG和ResNet等成熟框架上的应用部署. 在CIFAR10、CIFAR100、CIFAR10-DVS等标准数据集上软硬件实验结果显示, 与当前固定时间步的SNN算法相比, ATSNN算法的精度基本不下降, 并且推理延迟减少36.7% ~ 58.7%, 计算复杂度减少33.0% ~ 57.0%. 在硬件模拟器上的运行结果显示, ATSNN的计算能耗仅为GPU RTX 3090Ti的4.43% ~ 7.88%. 显示出脑启发神经形态软硬件的巨大优势.
脉冲神经网络(Spiking neural network, SNN)由于具有相对人工神经网络(Artifcial neural network, ANN)更低的计算能耗而受到广泛关注. 然而, 现有SNN大多基于同步计算模式且往往采用多时间步的方式来模拟动态的信息整合过程, 因此带来了推理延迟增大和计算能耗增高等问题, 使其在边缘智能设备上的高效运行大打折扣. 针对这个问题, 本文提出一种自适应时间步脉冲神经网络(Adaptive timestep improved spiking neural network, ATSNN)算法. 该算法可以根据不同样本特征自适应选择合适的推理时间步, 并通过设计一个时间依赖的新型损失函数来约束不同计算时间步的重要性. 与此同时, 针对上述ATSNN特点设计一款低能耗脉冲神经网络加速器, 支持ATSNN算法在VGG和ResNet等成熟框架上的应用部署. 在CIFAR10、CIFAR100、CIFAR10-DVS等标准数据集上软硬件实验结果显示, 与当前固定时间步的SNN算法相比, ATSNN算法的精度基本不下降, 并且推理延迟减少36.7% ~ 58.7%, 计算复杂度减少33.0% ~ 57.0%. 在硬件模拟器上的运行结果显示, ATSNN的计算能耗仅为GPU RTX 3090Ti的4.43% ~ 7.88%. 显示出脑启发神经形态软硬件的巨大优势.
2024, 50(9): 1736-1746.
doi: 10.16383/j.aas.c210095
cstr: 32138.14.j.aas.c210095
摘要:
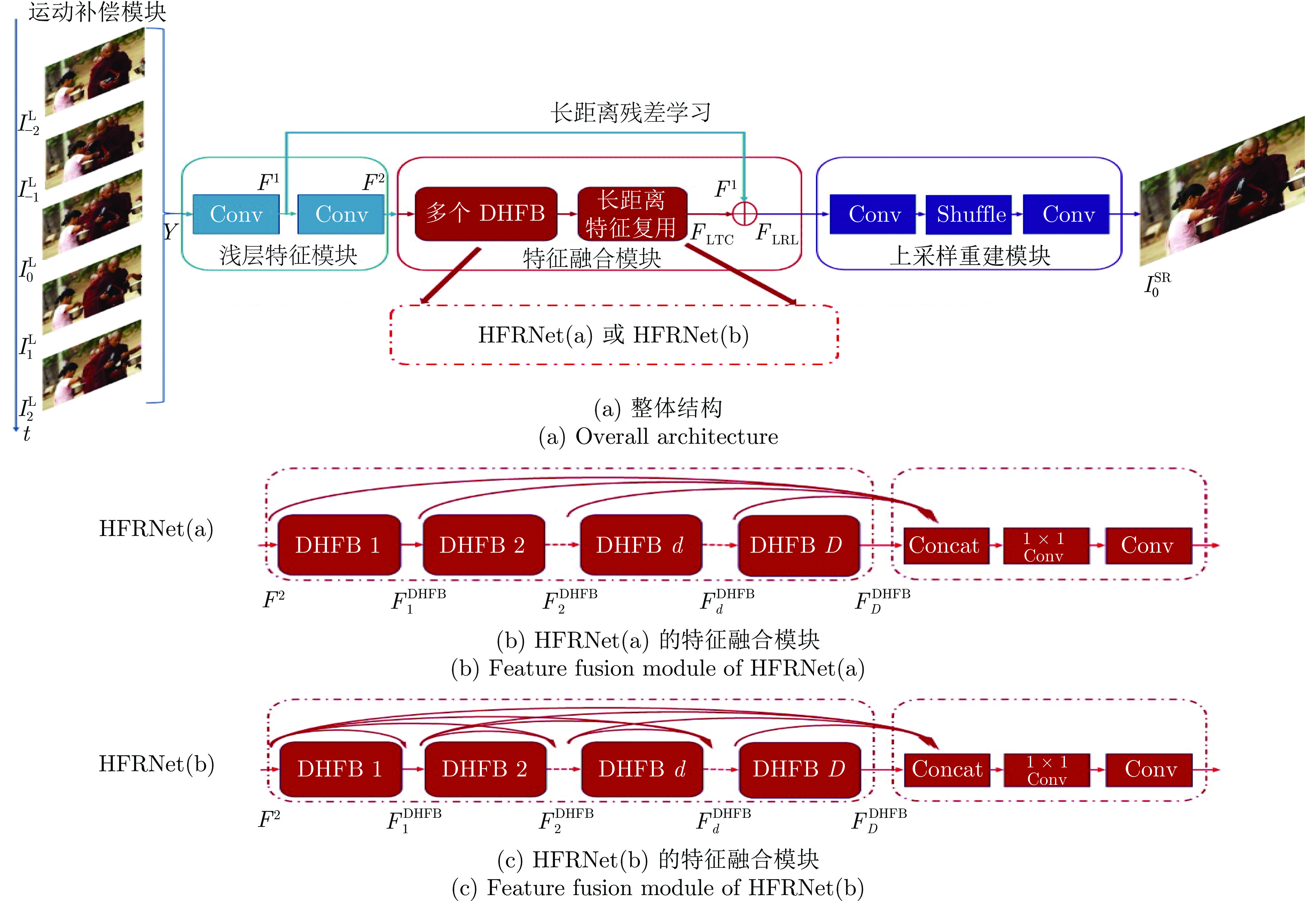
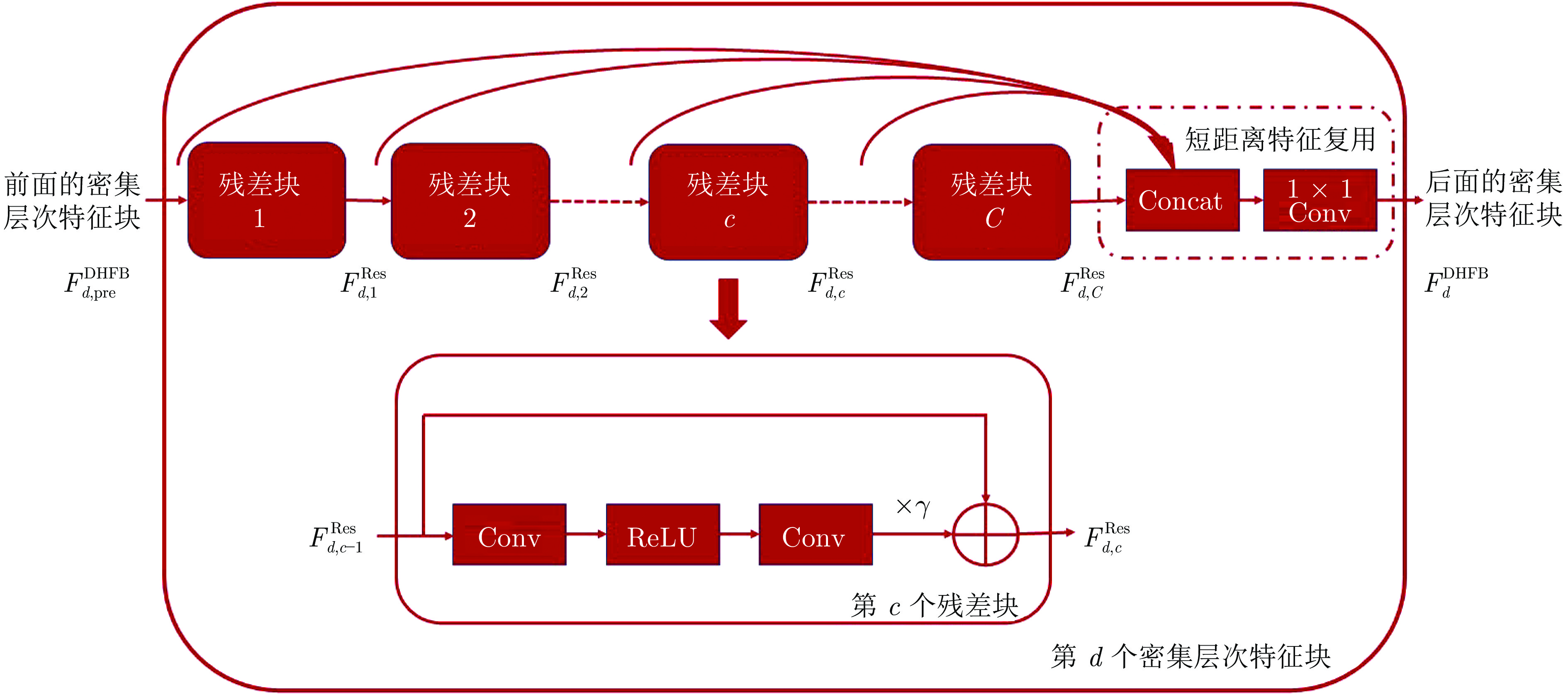
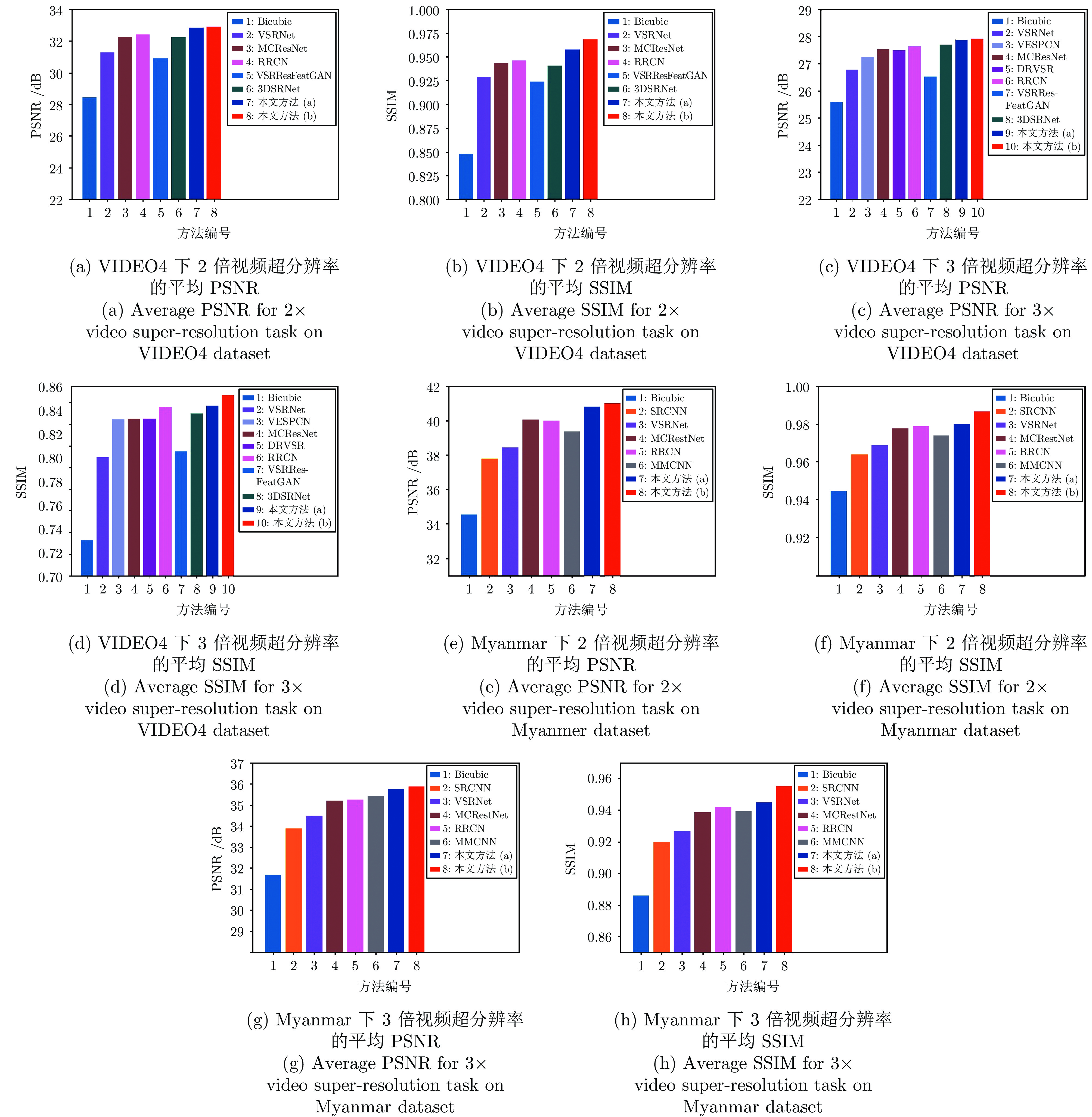
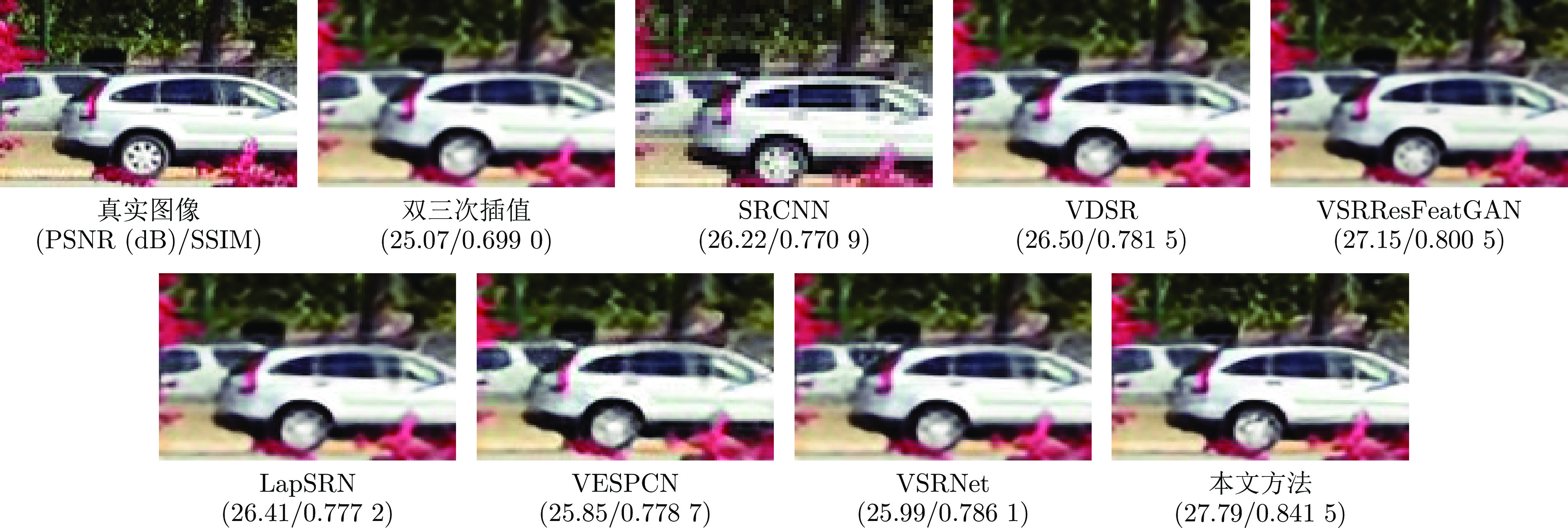
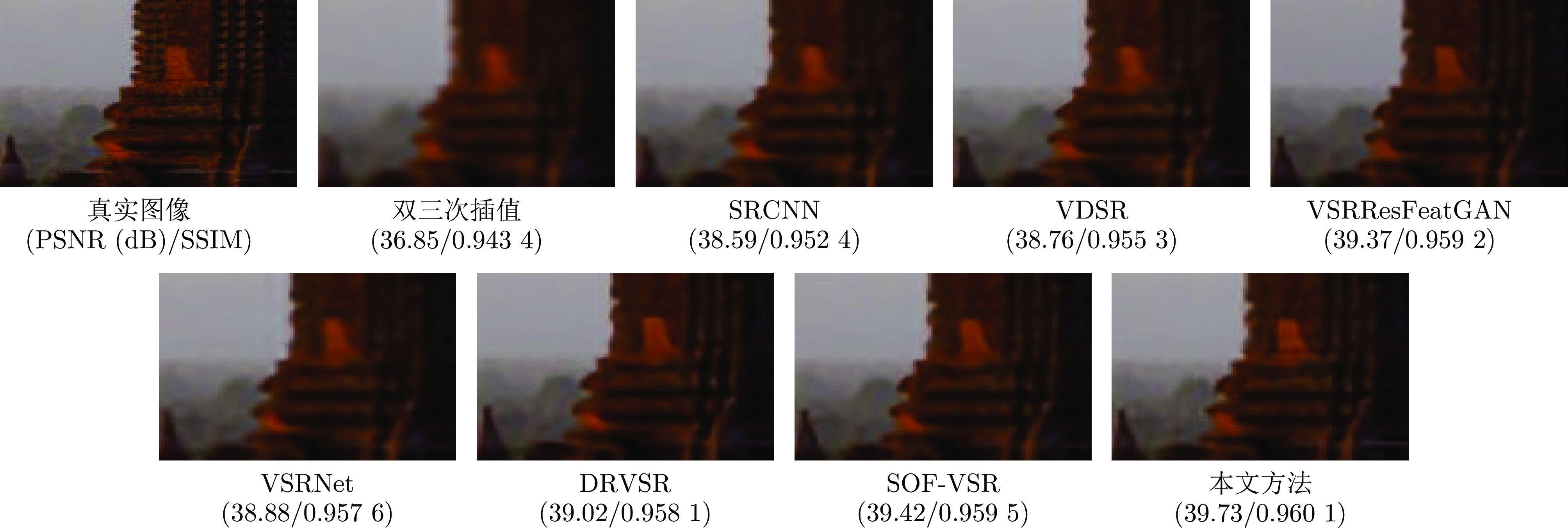
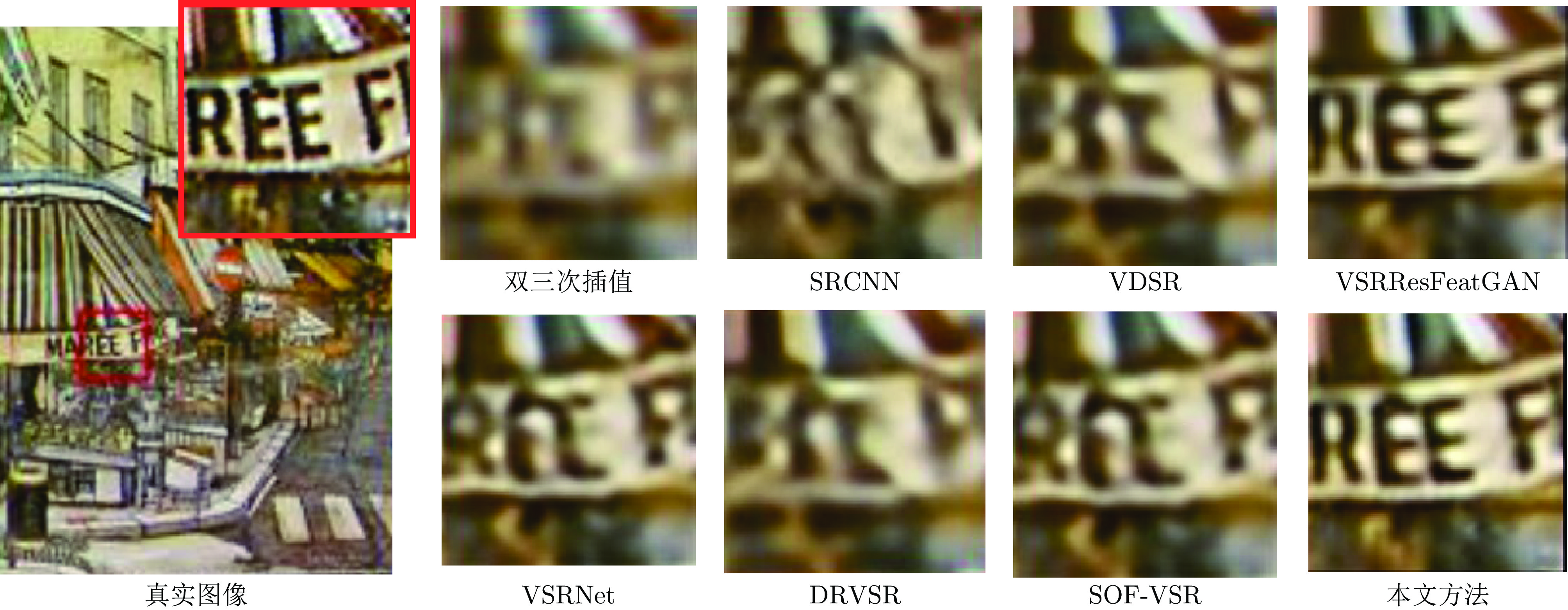
当前的深度卷积神经网络方法, 在视频超分辨率任务上实现的性能提升相对于图像超分辨率任务略低, 部分原因是它们对层次结构特征中的某些关键帧间信息的利用不够充分. 为此, 提出一个称作层次特征复用网络(Hierarchical feature reuse network, HFRNet)的结构, 用以解决上述问题. 该网络保留运动补偿帧的低频内容, 并采用密集层次特征块(Dense hierarchical feature block, DHFB)自适应地融合其内部每个残差块的特征, 之后用长距离特征复用融合多个DHFB间的特征, 从而促进高频细节信息的恢复. 实验结果表明, 提出的方法在定量和定性指标上均优于当前的方法.
当前的深度卷积神经网络方法, 在视频超分辨率任务上实现的性能提升相对于图像超分辨率任务略低, 部分原因是它们对层次结构特征中的某些关键帧间信息的利用不够充分. 为此, 提出一个称作层次特征复用网络(Hierarchical feature reuse network, HFRNet)的结构, 用以解决上述问题. 该网络保留运动补偿帧的低频内容, 并采用密集层次特征块(Dense hierarchical feature block, DHFB)自适应地融合其内部每个残差块的特征, 之后用长距离特征复用融合多个DHFB间的特征, 从而促进高频细节信息的恢复. 实验结果表明, 提出的方法在定量和定性指标上均优于当前的方法.
2024, 50(9): 1747-1760.
doi: 10.16383/j.aas.c210387
cstr: 32138.14.j.aas.c210387
摘要:
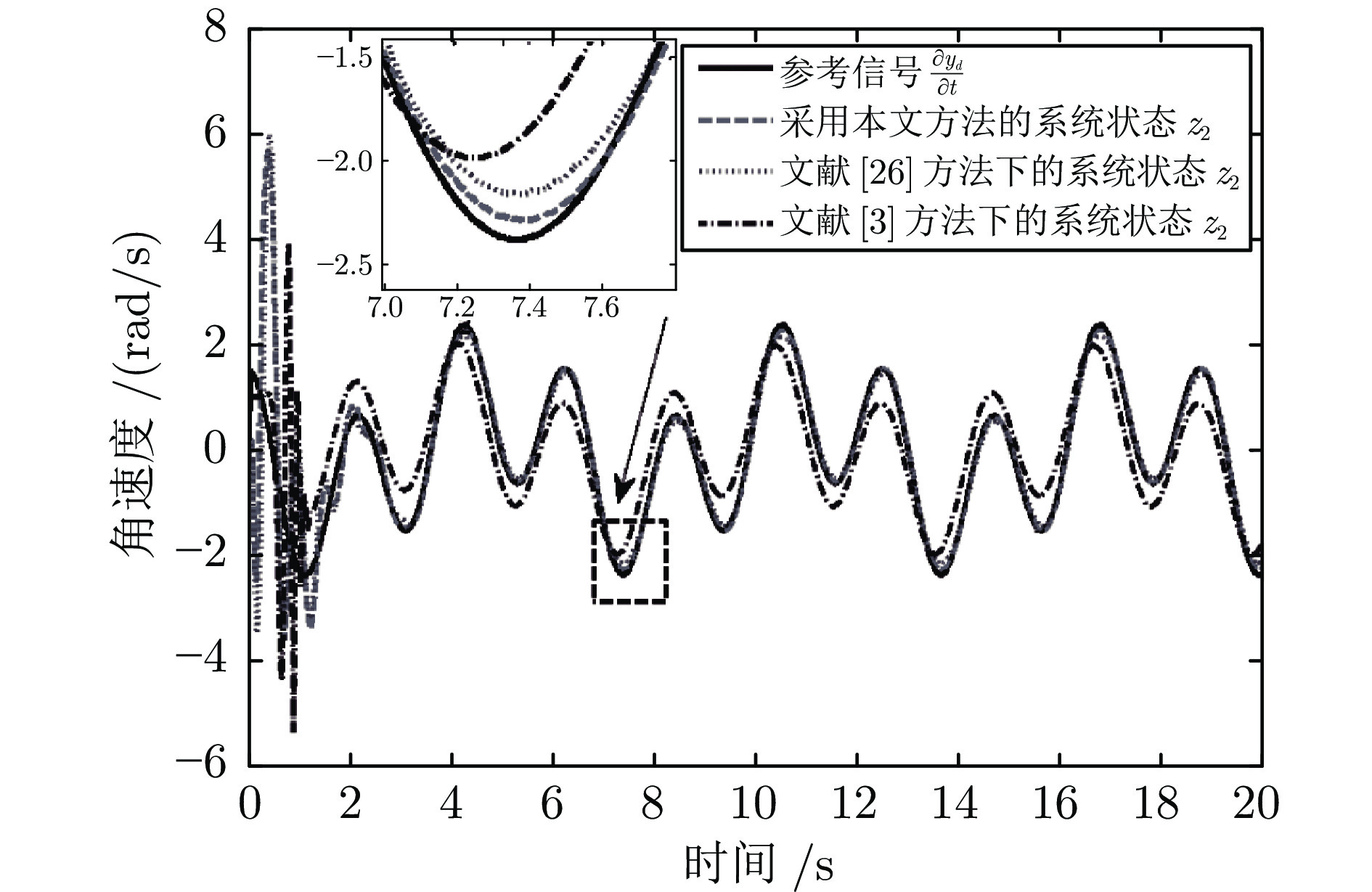
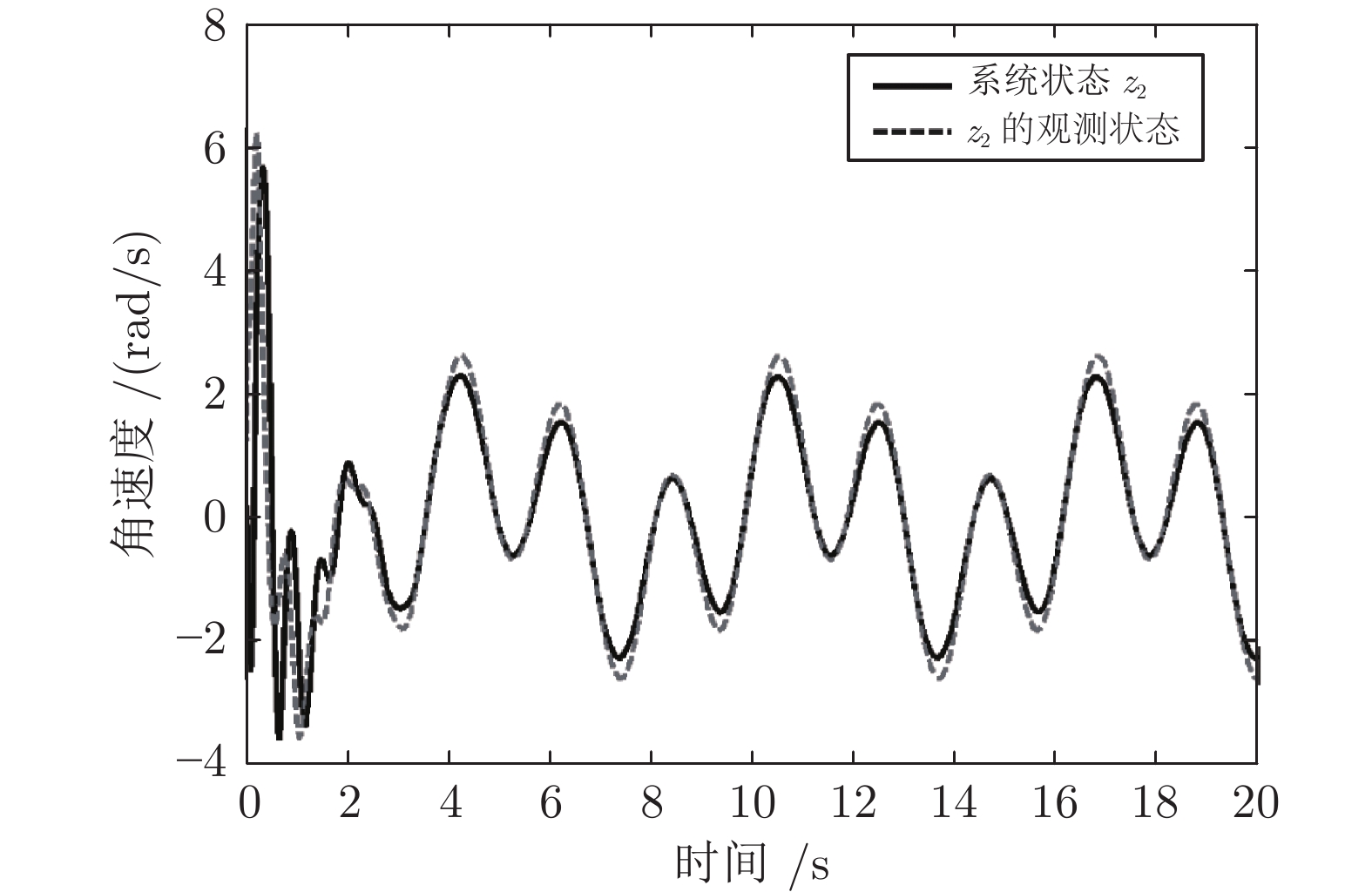
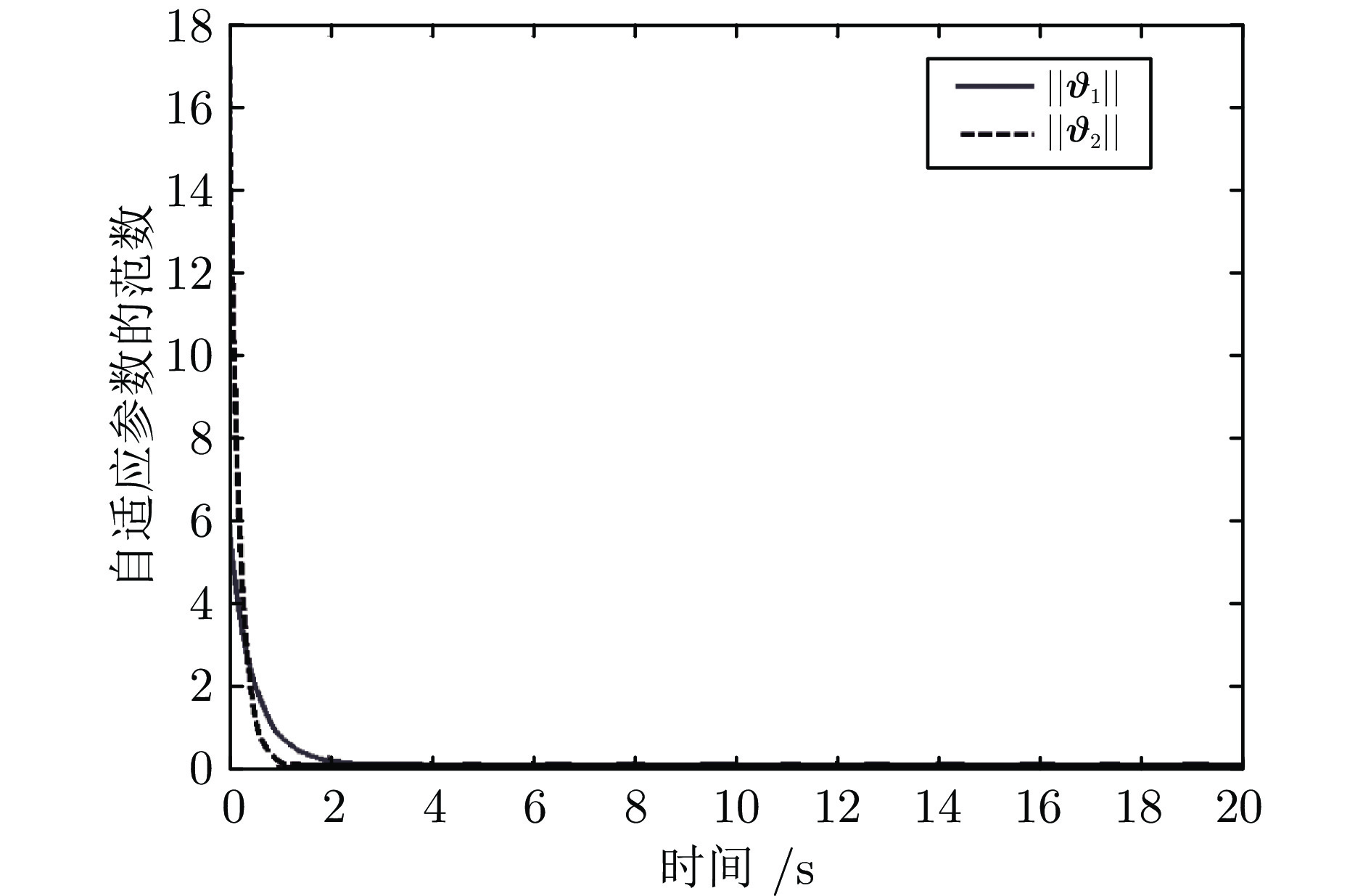
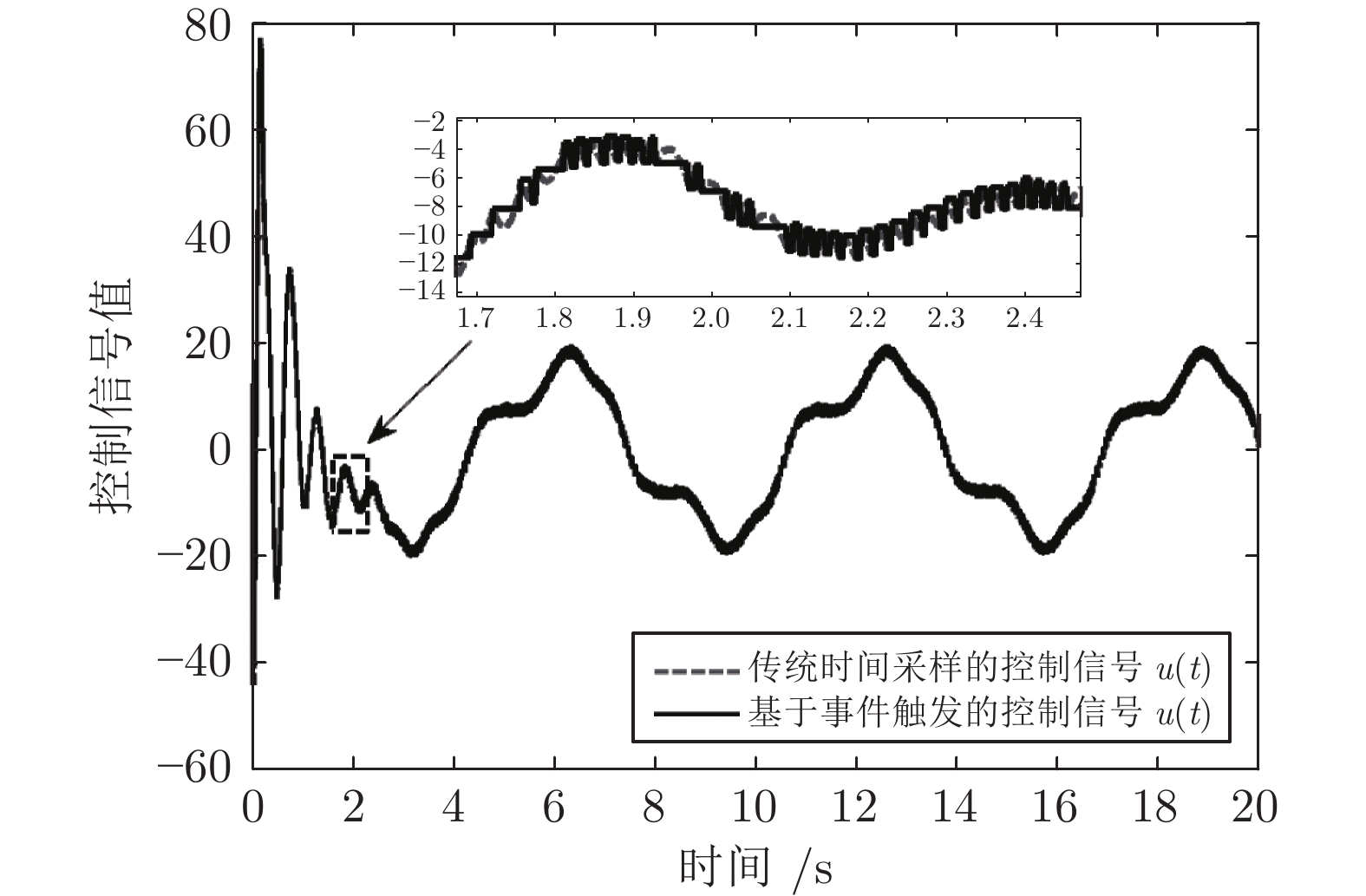
针对一类具有外部扰动的非线性系统, 提出了一种自适应模糊跟踪控制方法. 首先, 利用模糊逻辑系统逼近系统未知的非线性函数, 并设计了一个模糊状态观测器来估计系统的不可测状态. 其次, 通过指定性能函数, 使系统的跟踪误差能够约束在指定范围内. 然后, 利用Backsteping方法结合包含对数函数的Lyapunov泛函, 设计了一个基于事件触发条件的自适应模糊控制器. 基于Lyapunov稳定性理论和\begin{document}$\tanh$\end{document}
针对一类具有外部扰动的非线性系统, 提出了一种自适应模糊跟踪控制方法. 首先, 利用模糊逻辑系统逼近系统未知的非线性函数, 并设计了一个模糊状态观测器来估计系统的不可测状态. 其次, 通过指定性能函数, 使系统的跟踪误差能够约束在指定范围内. 然后, 利用Backsteping方法结合包含对数函数的Lyapunov泛函, 设计了一个基于事件触发条件的自适应模糊控制器. 基于Lyapunov稳定性理论和

2024, 50(9): 1761-1771.
doi: 10.16383/j.aas.c230622
cstr: 32138.14.j.aas.c230622
摘要:
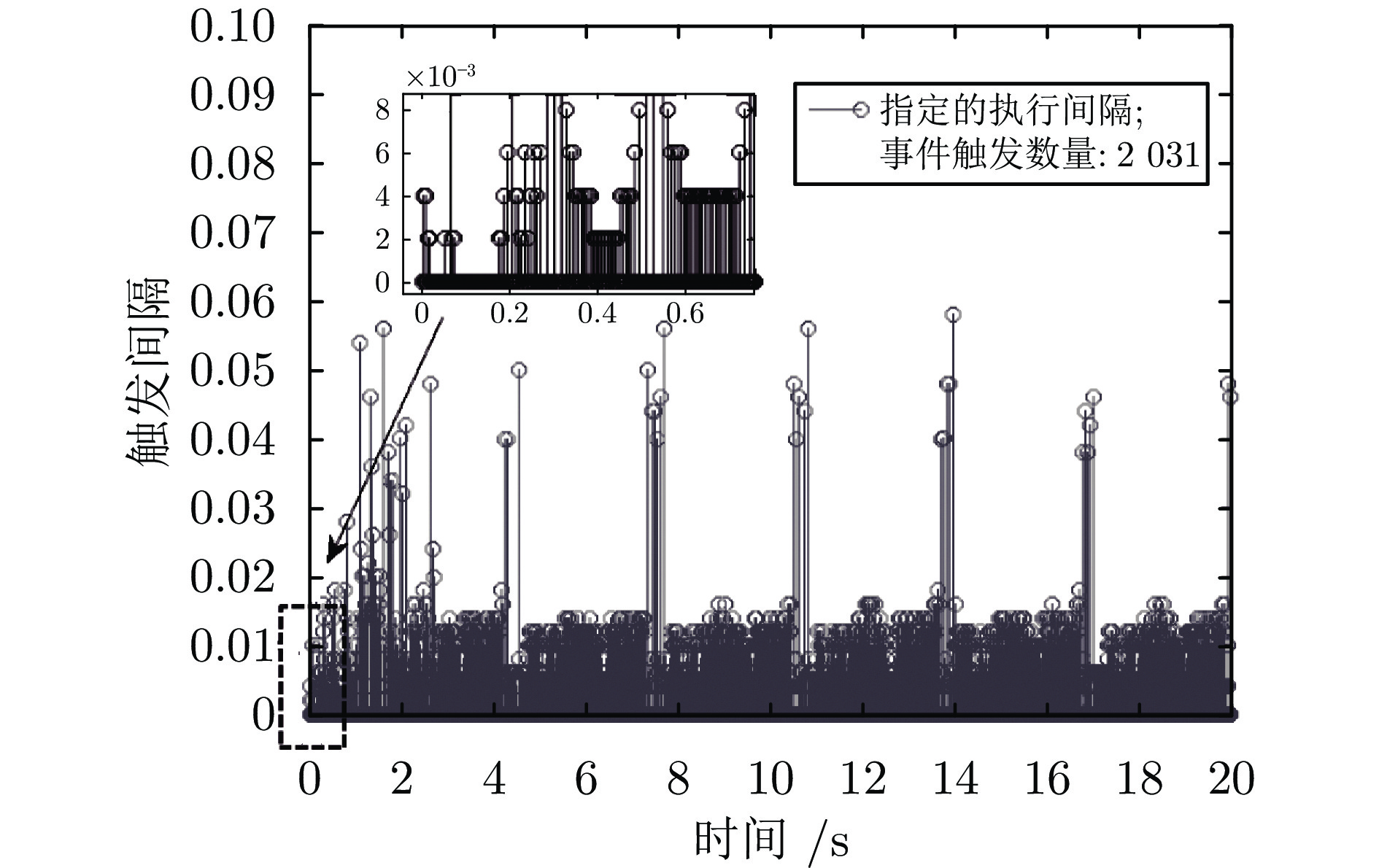
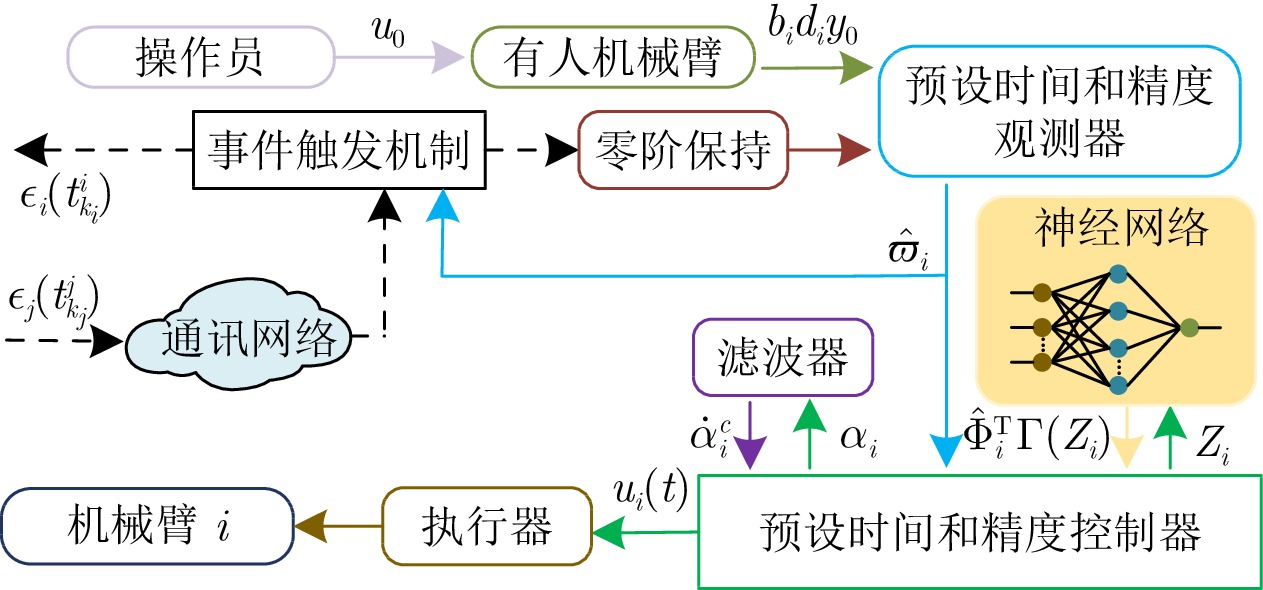
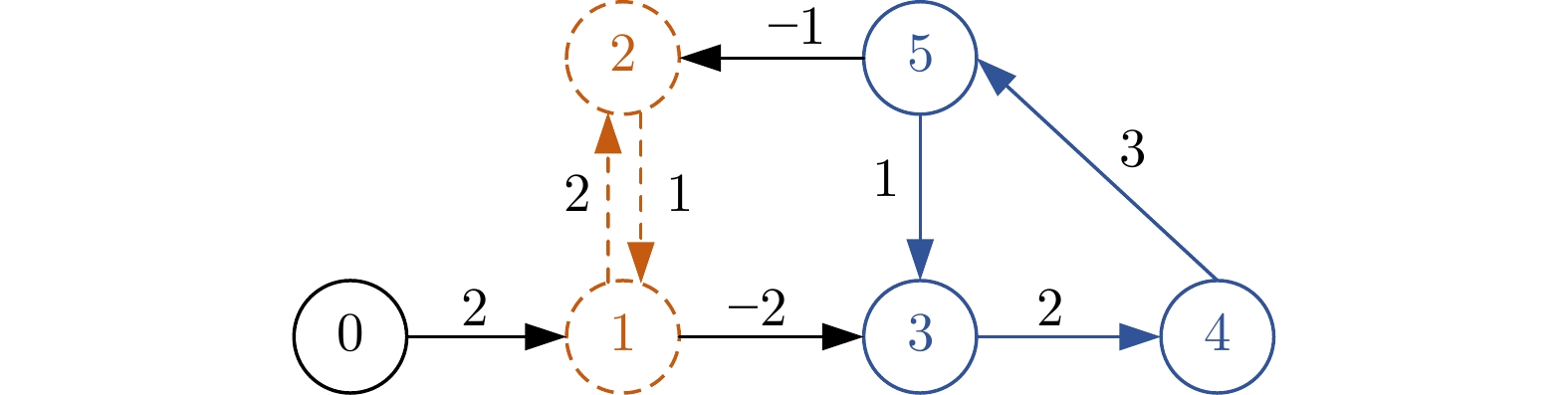
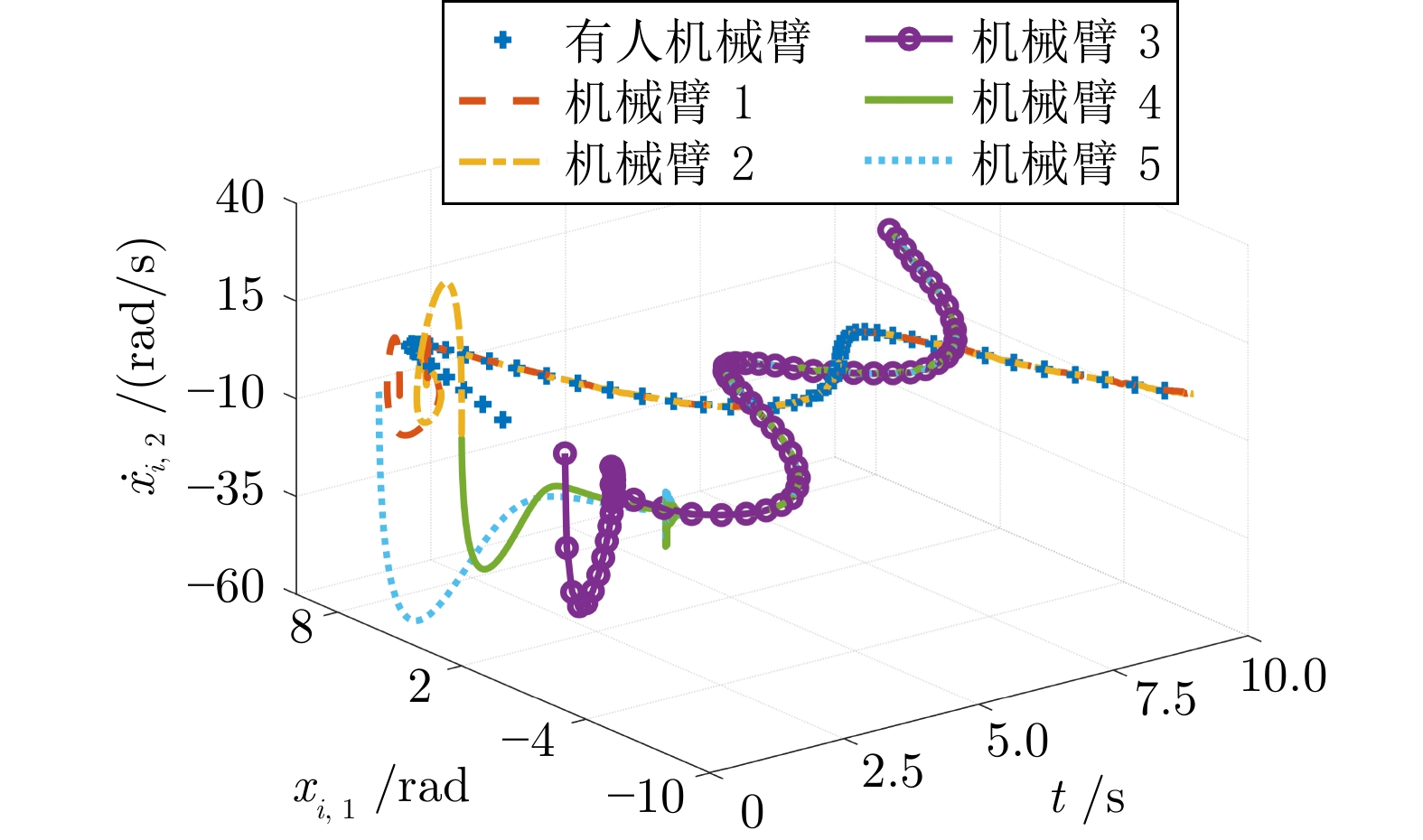
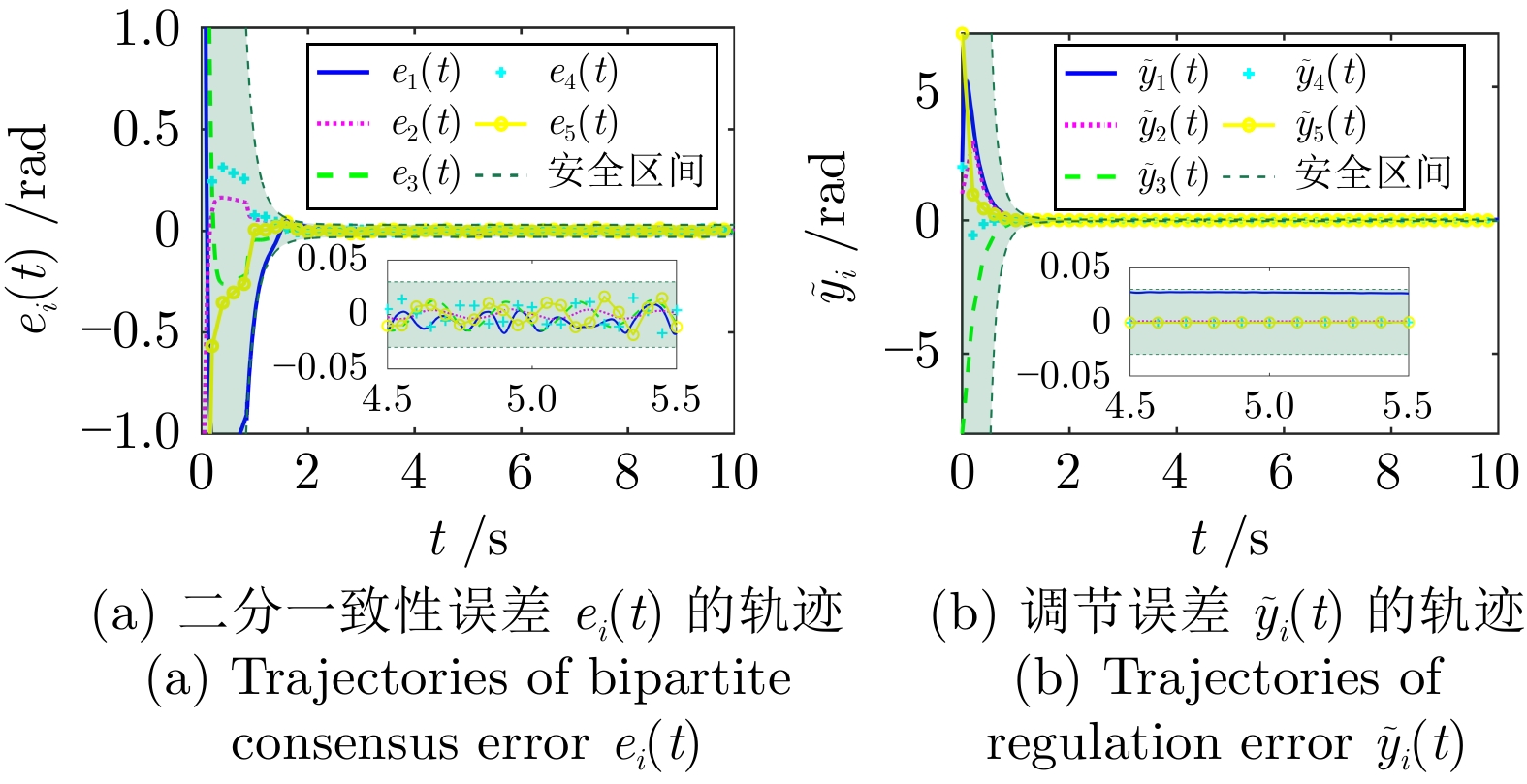
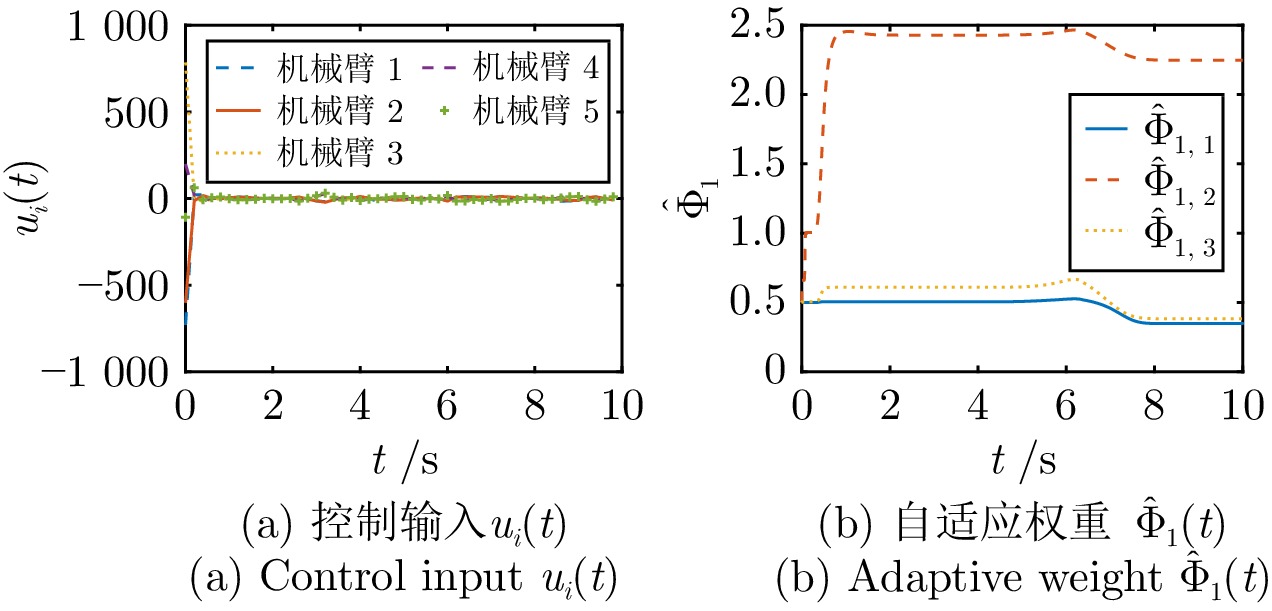
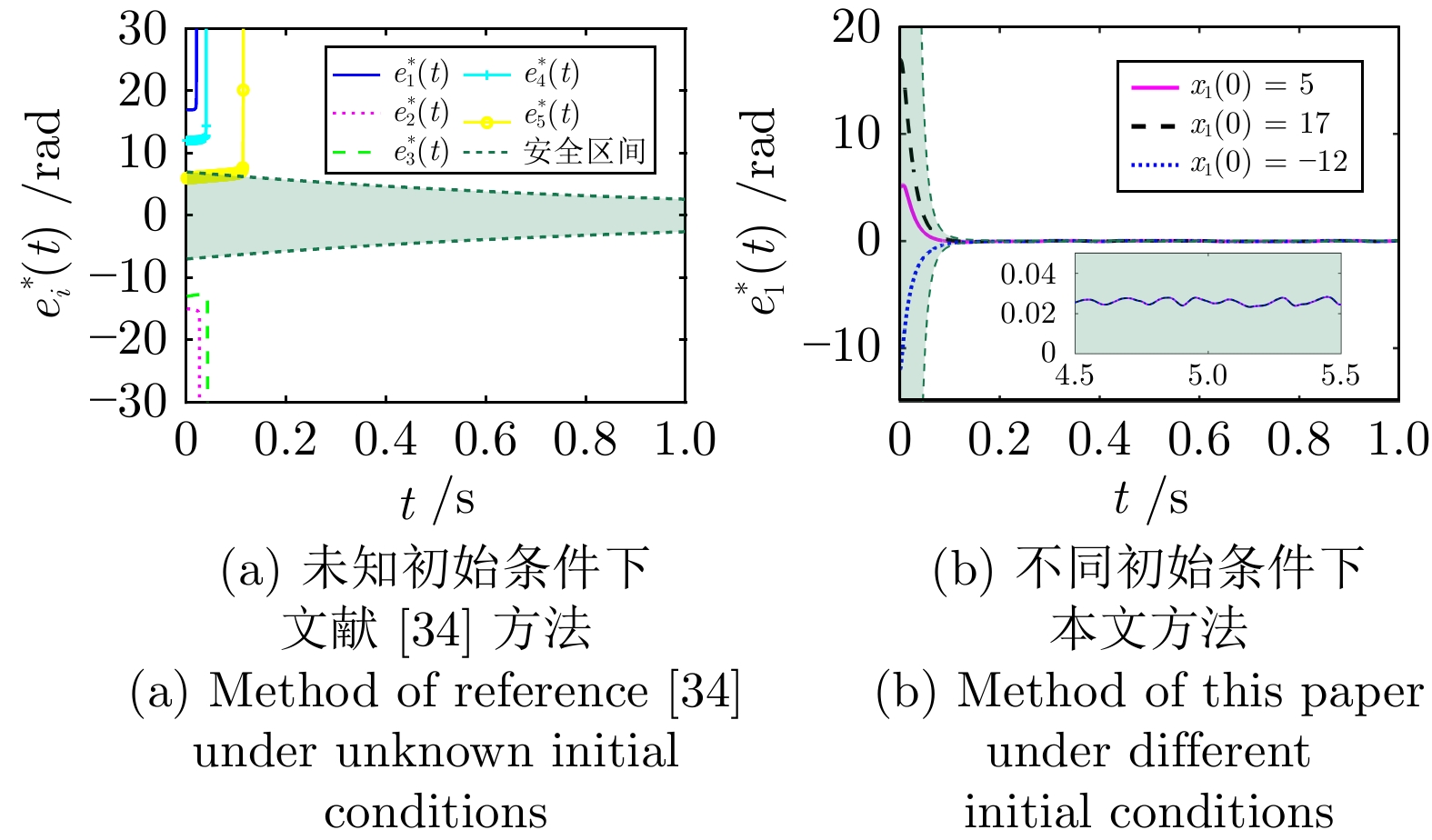
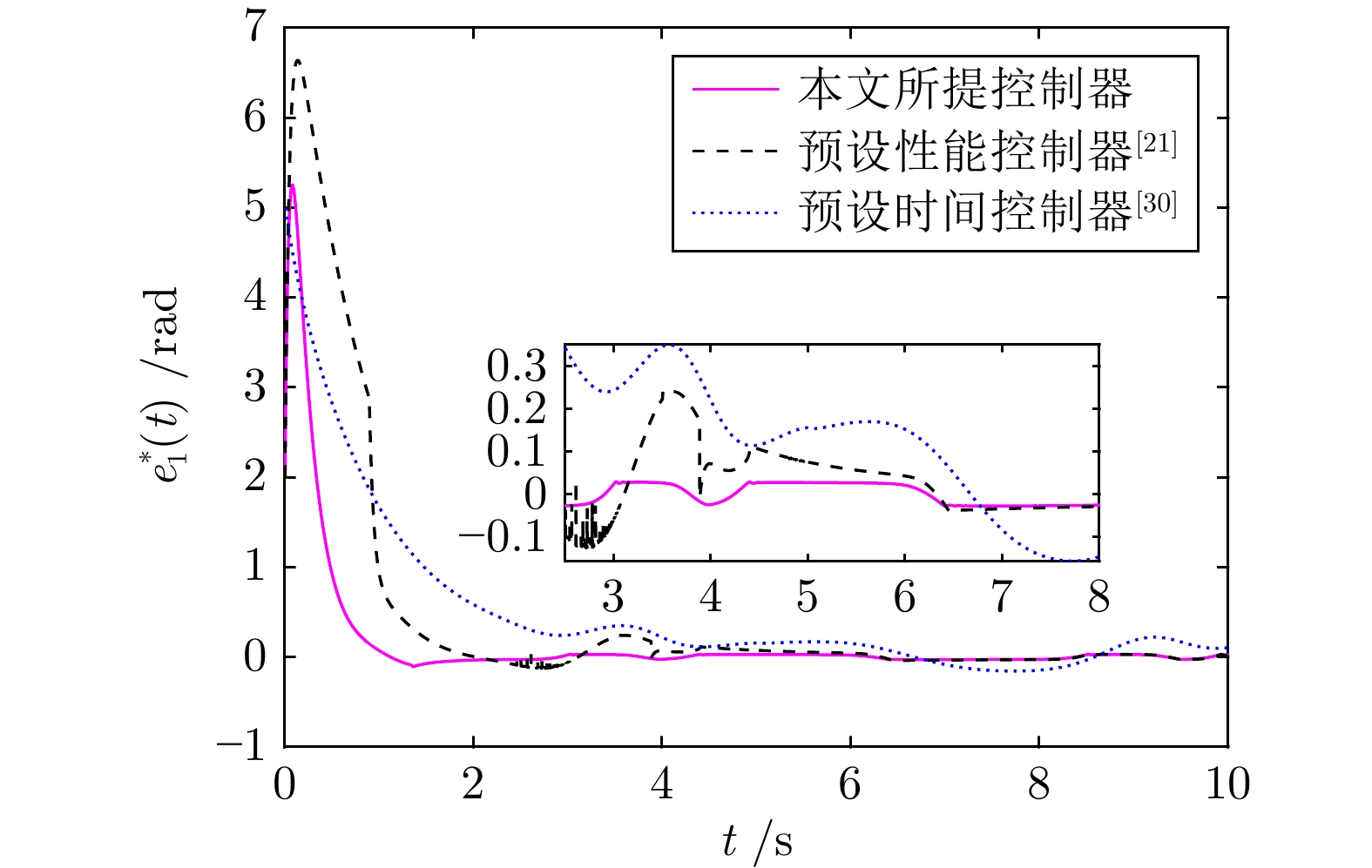
研究通讯拓扑为符号有向图的人在环多机械臂系统的预设性能二分一致性跟踪控制问题. 为在预设时间内收敛到预设精度, 提出一种基于观测器的预设性能控制策略. 首先, 设计预设时间和精度的观测器以估计领导者的输出信息, 通过合作/竞争信息交互实现观测器输出的二分一致性. 该观测器不需要领导机械臂的输入信息及输出信息的高阶导数, 并通过无芝诺行为的事件触发机制降低不同机械臂间的通讯负担. 其次, 通过反步法及误差转化法将有约束的机械臂输出跟踪问题转化为无约束的误差系统稳定性问题, 进而基于观测器输出设计机械臂的输出调节控制器. 值得一提的是, 设计的控制策略不需要系统初始状态的先验知识且避免了预设时刻控制增益无穷大的现象, 增强了系统的可靠性. 最后, 仿真结果表明所提控制策略的可行性及优越性.
研究通讯拓扑为符号有向图的人在环多机械臂系统的预设性能二分一致性跟踪控制问题. 为在预设时间内收敛到预设精度, 提出一种基于观测器的预设性能控制策略. 首先, 设计预设时间和精度的观测器以估计领导者的输出信息, 通过合作/竞争信息交互实现观测器输出的二分一致性. 该观测器不需要领导机械臂的输入信息及输出信息的高阶导数, 并通过无芝诺行为的事件触发机制降低不同机械臂间的通讯负担. 其次, 通过反步法及误差转化法将有约束的机械臂输出跟踪问题转化为无约束的误差系统稳定性问题, 进而基于观测器输出设计机械臂的输出调节控制器. 值得一提的是, 设计的控制策略不需要系统初始状态的先验知识且避免了预设时刻控制增益无穷大的现象, 增强了系统的可靠性. 最后, 仿真结果表明所提控制策略的可行性及优越性.


2024, 50(9): 1772-1784.
doi: 10.16383/j.aas.c220774
cstr: 32138.14.j.aas.c220774
摘要:
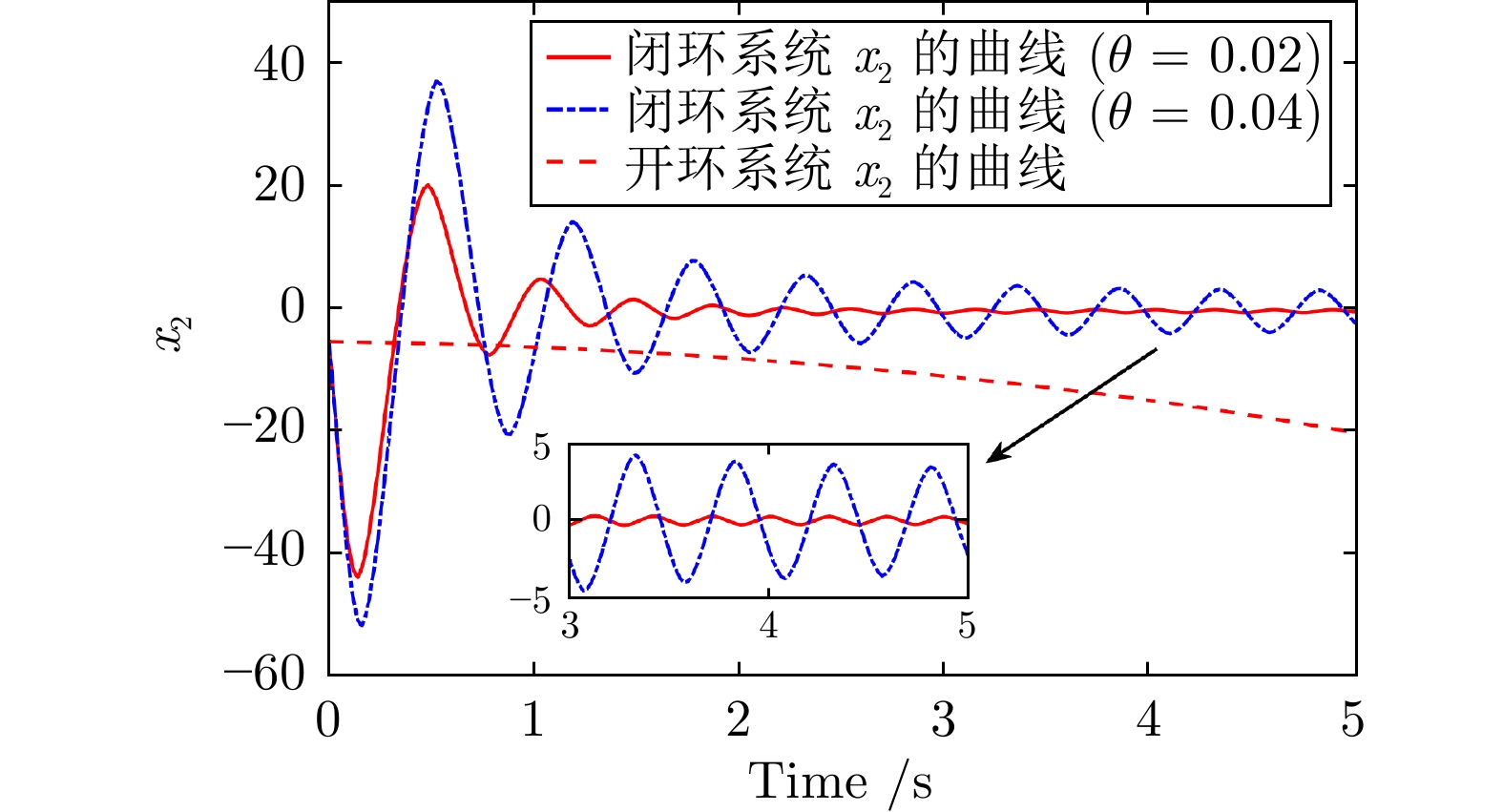
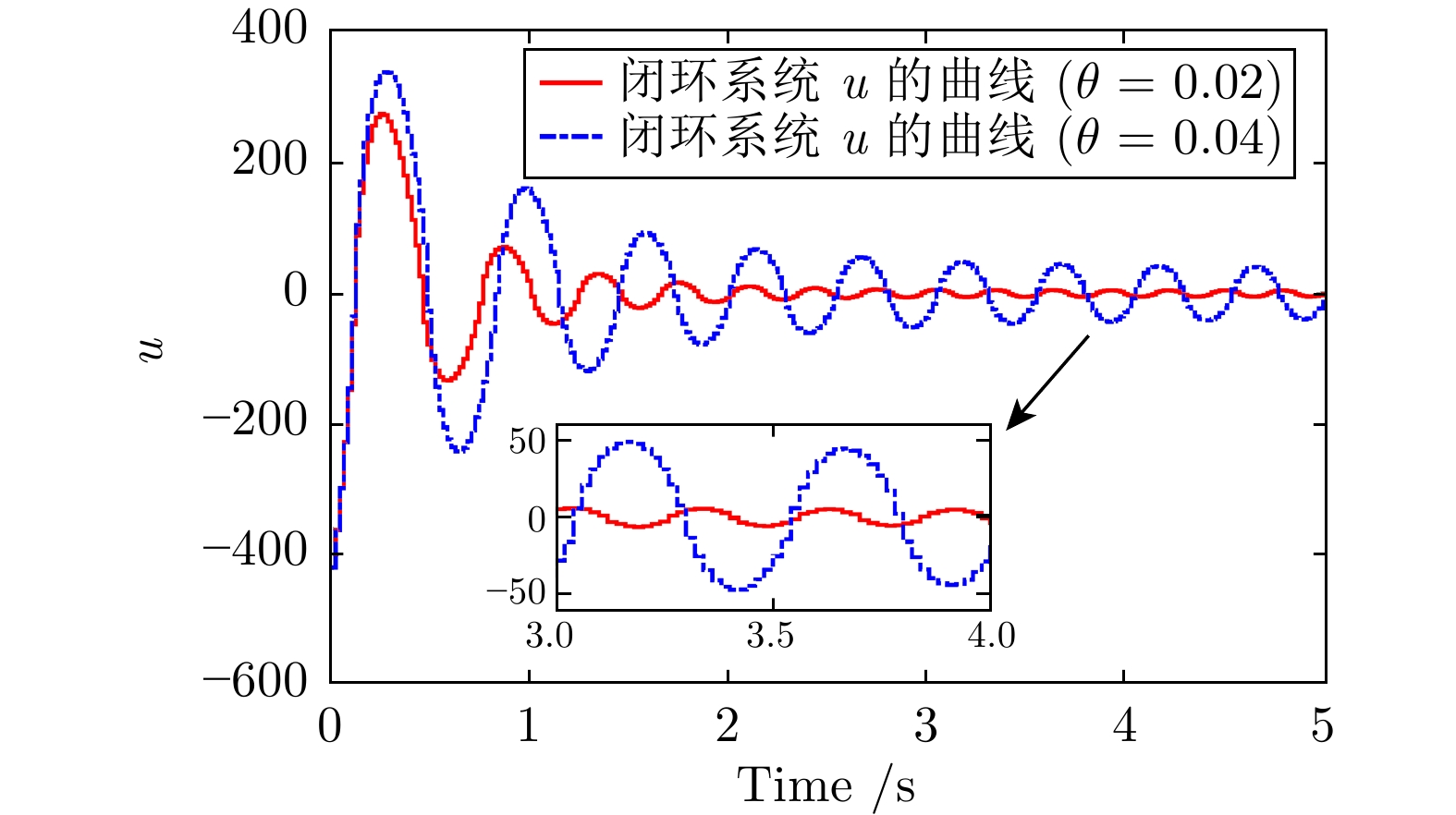
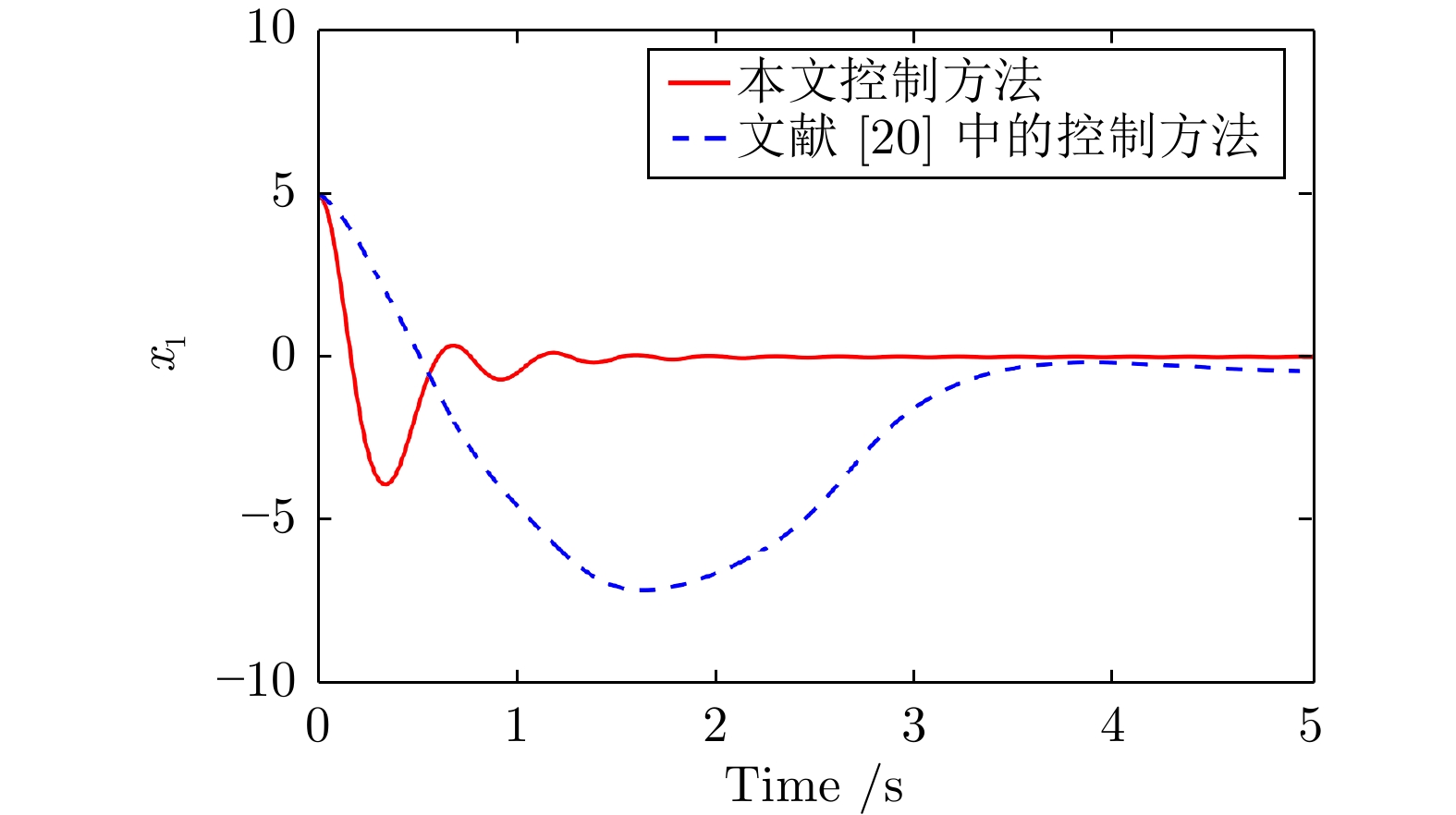
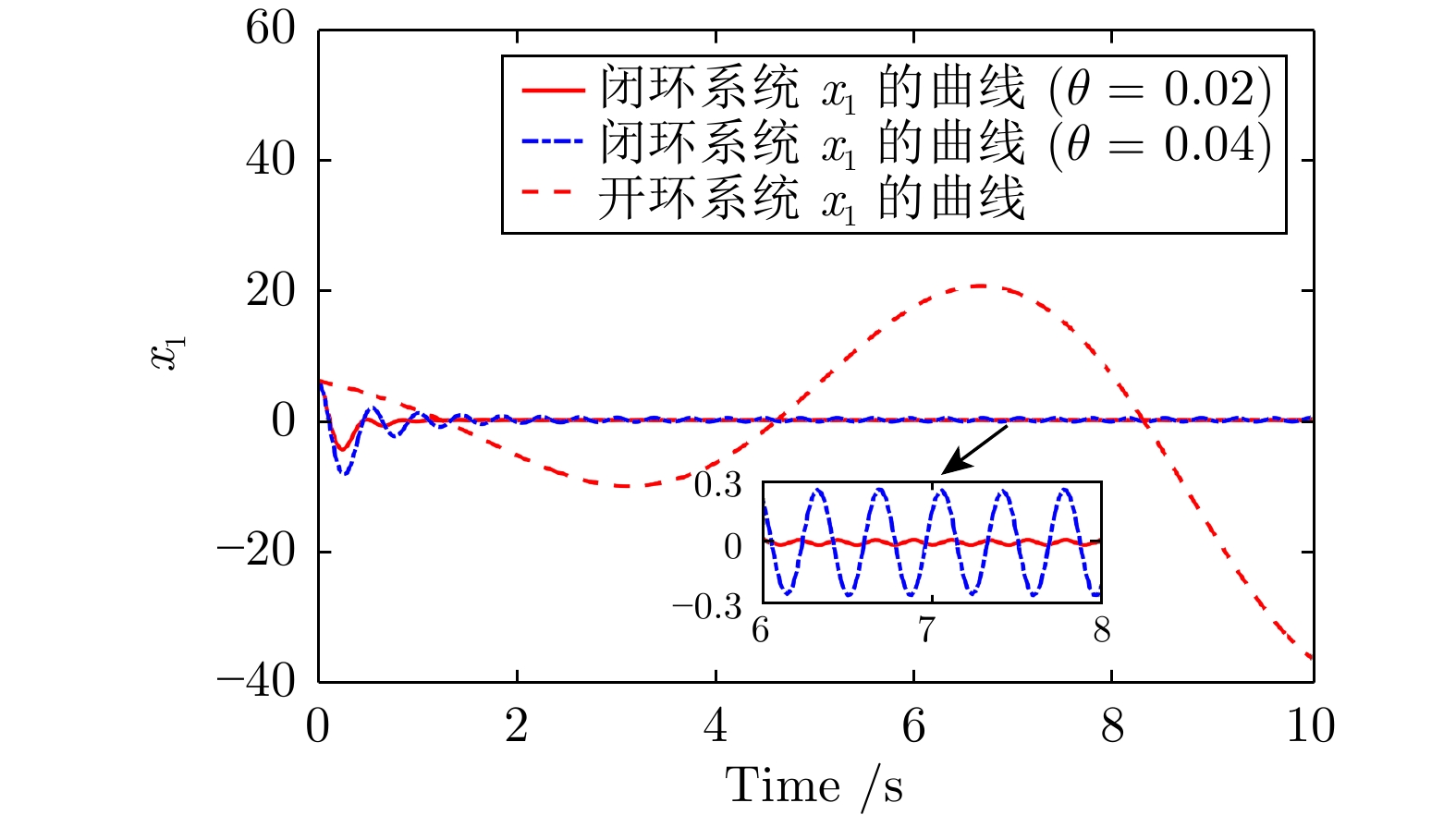
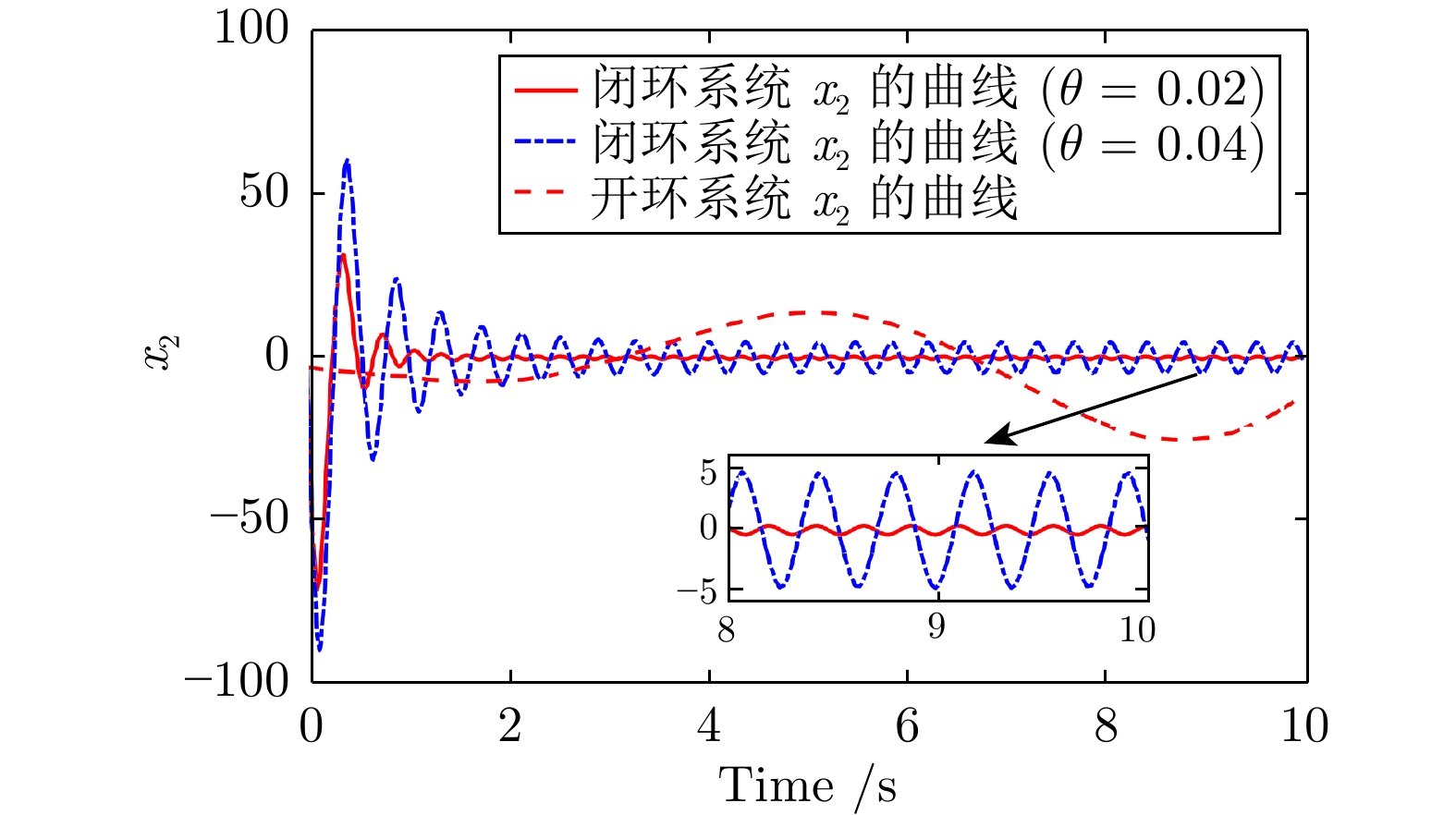
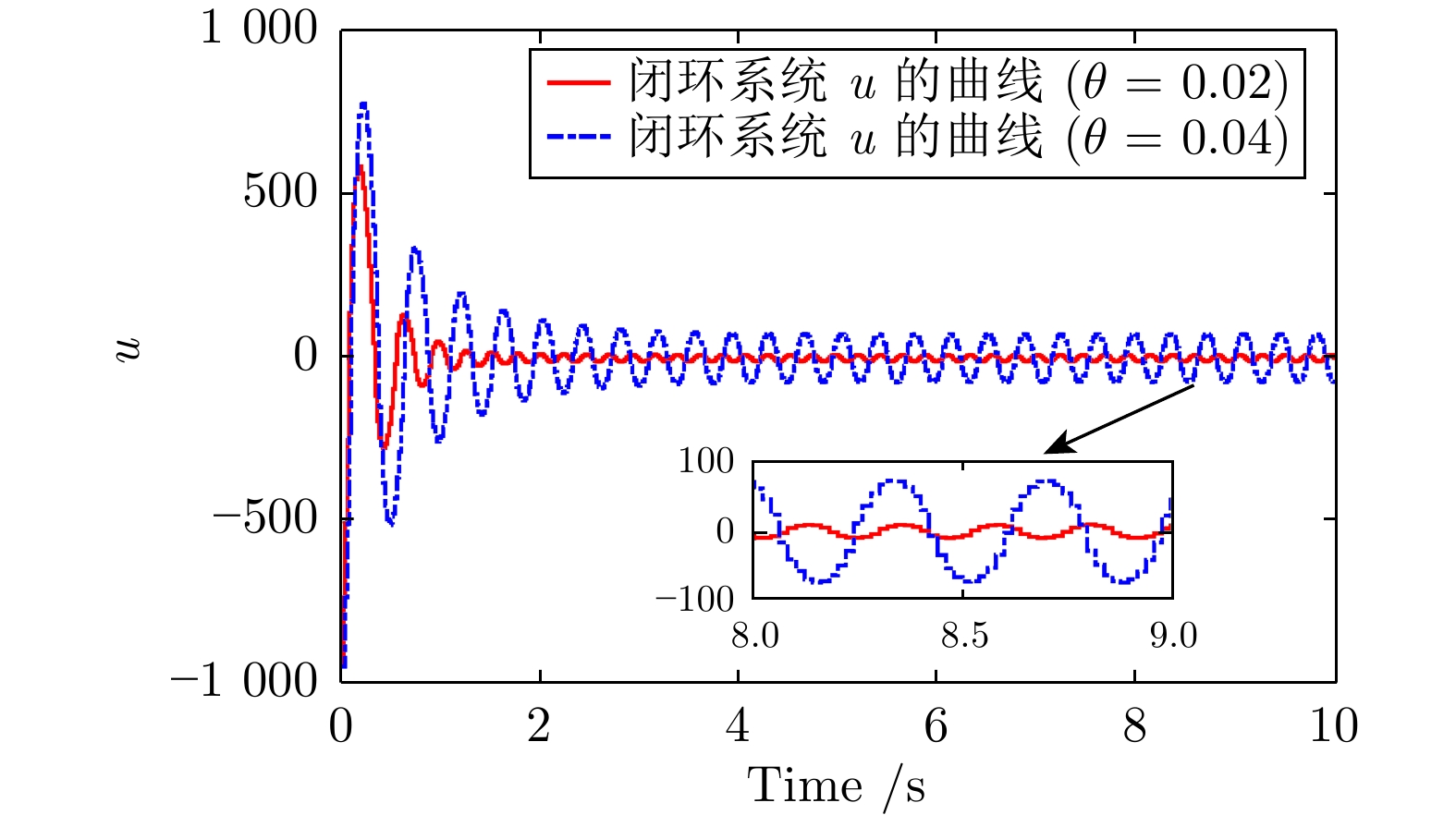
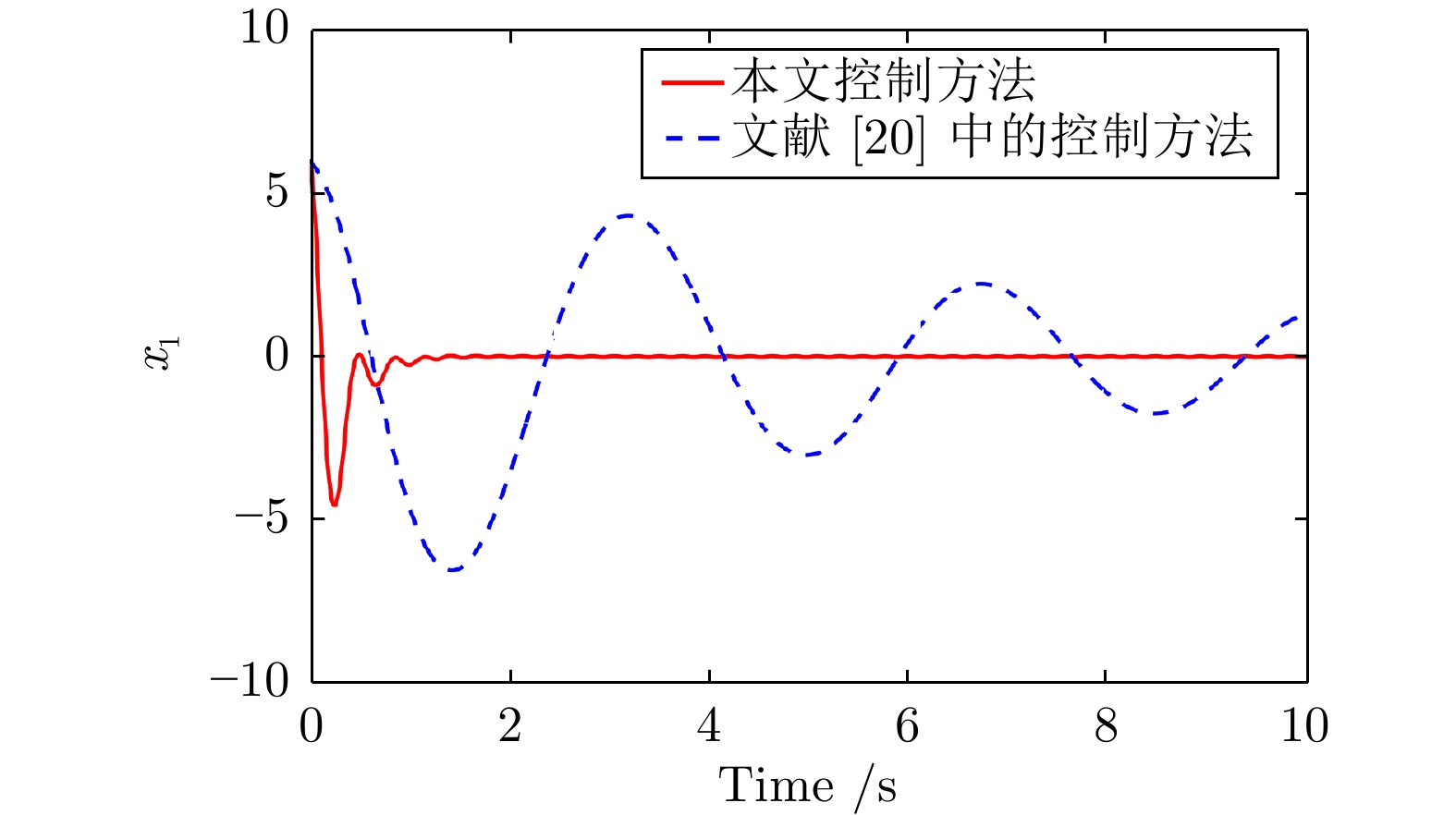
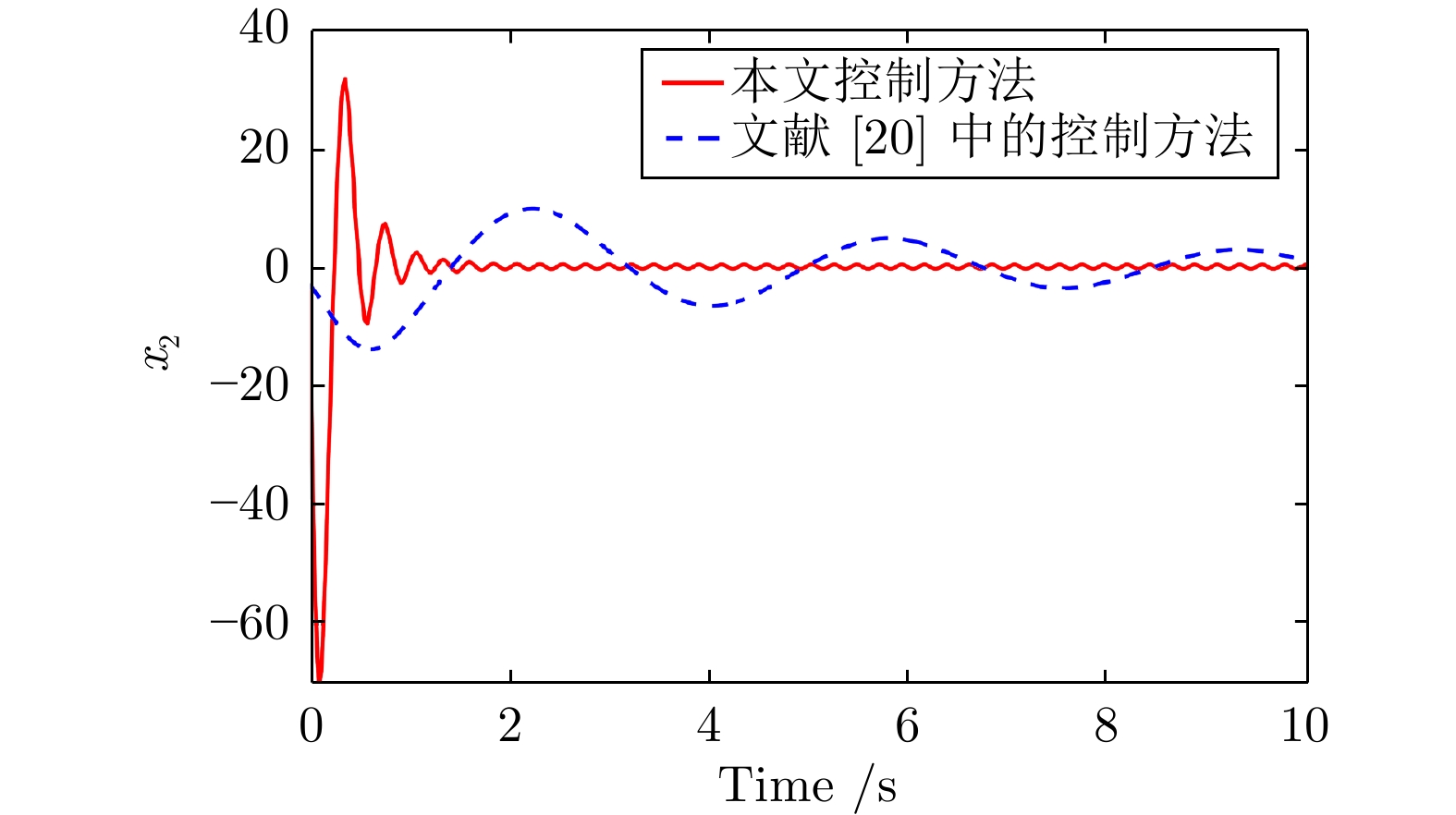
针对含有输入时滞和低阶非线性项的非线性系统, 提出一种基于采样机制的无记忆输出反馈控制方法. 该方法移除了传统预测控制方法预测映射难以确定的限制, 同时避免了时滞依赖方法对过去时刻状态信息的依赖性, 在实际中更易实现. 首先, 根据系统输出在采样时刻的信息, 利用加幂积分技术和齐次占优思想设计了无记忆输出反馈采样控制器. 然后, 利用齐次系统理论提出了闭环系统的稳定性条件. 最后, 仿真结果验证了所提方法的有效性和优越性.
针对含有输入时滞和低阶非线性项的非线性系统, 提出一种基于采样机制的无记忆输出反馈控制方法. 该方法移除了传统预测控制方法预测映射难以确定的限制, 同时避免了时滞依赖方法对过去时刻状态信息的依赖性, 在实际中更易实现. 首先, 根据系统输出在采样时刻的信息, 利用加幂积分技术和齐次占优思想设计了无记忆输出反馈采样控制器. 然后, 利用齐次系统理论提出了闭环系统的稳定性条件. 最后, 仿真结果验证了所提方法的有效性和优越性.


2024, 50(9): 1785-1793.
doi: 10.16383/j.aas.c210664
cstr: 32138.14.j.aas.c210664
摘要:
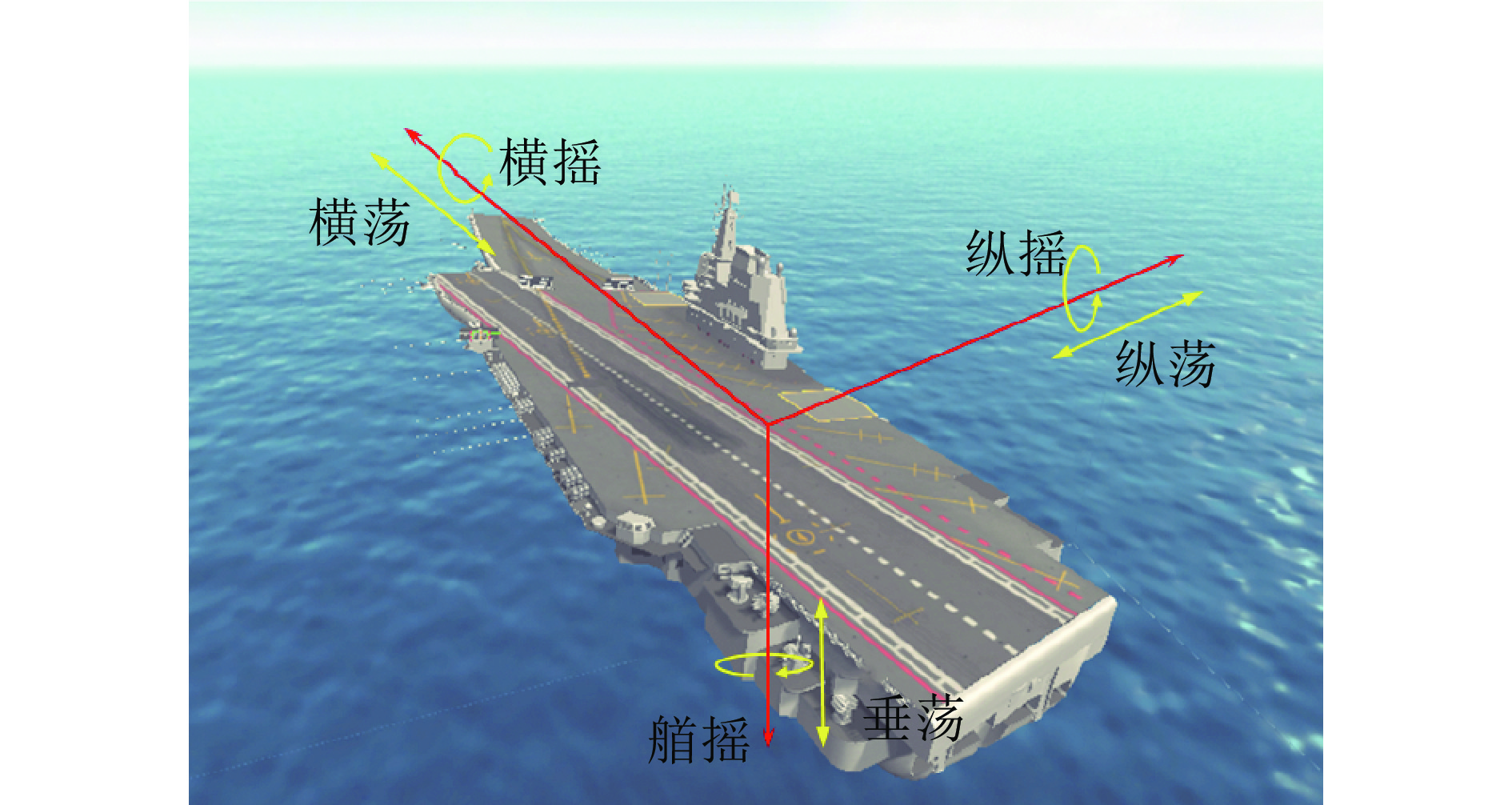
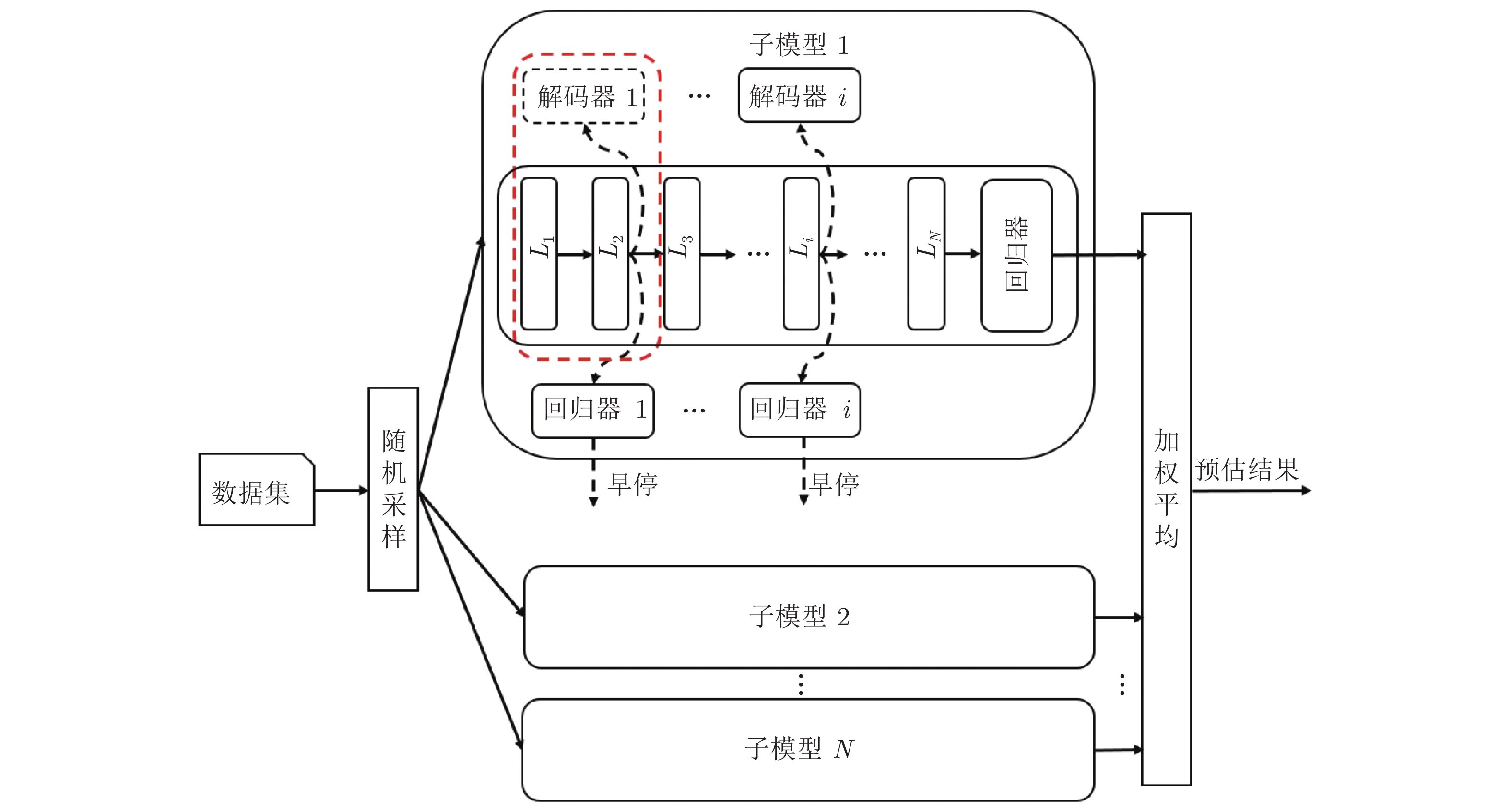
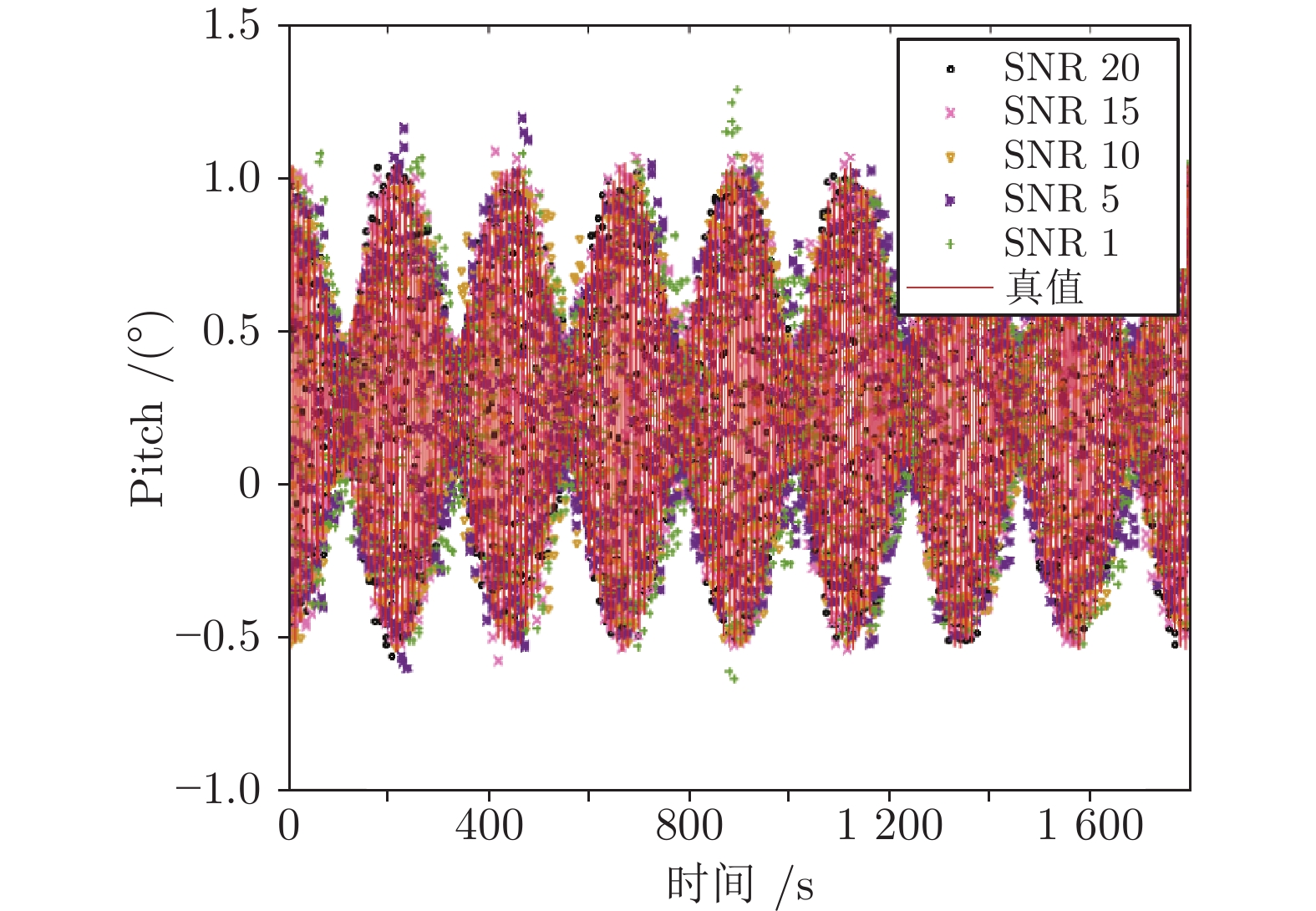
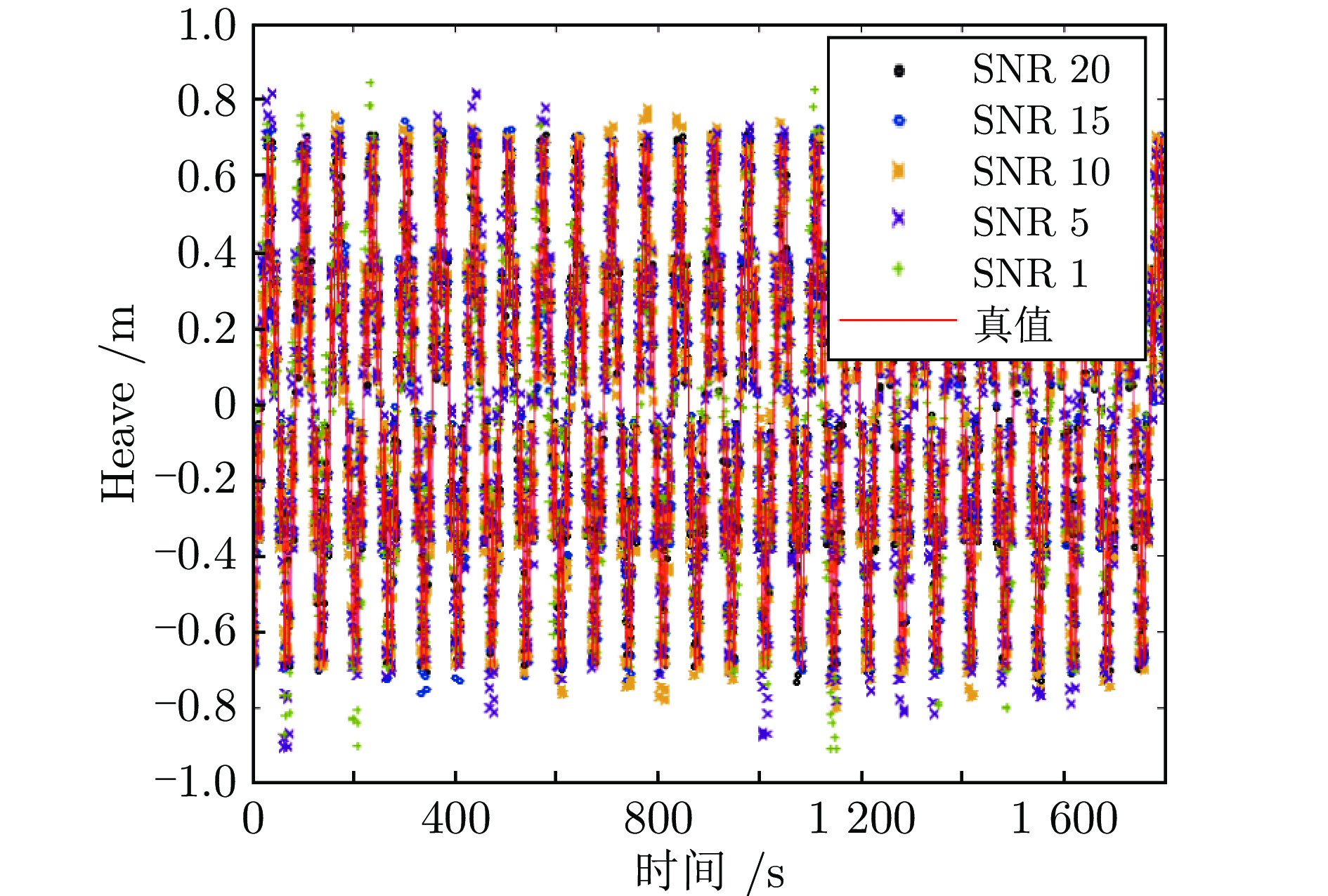
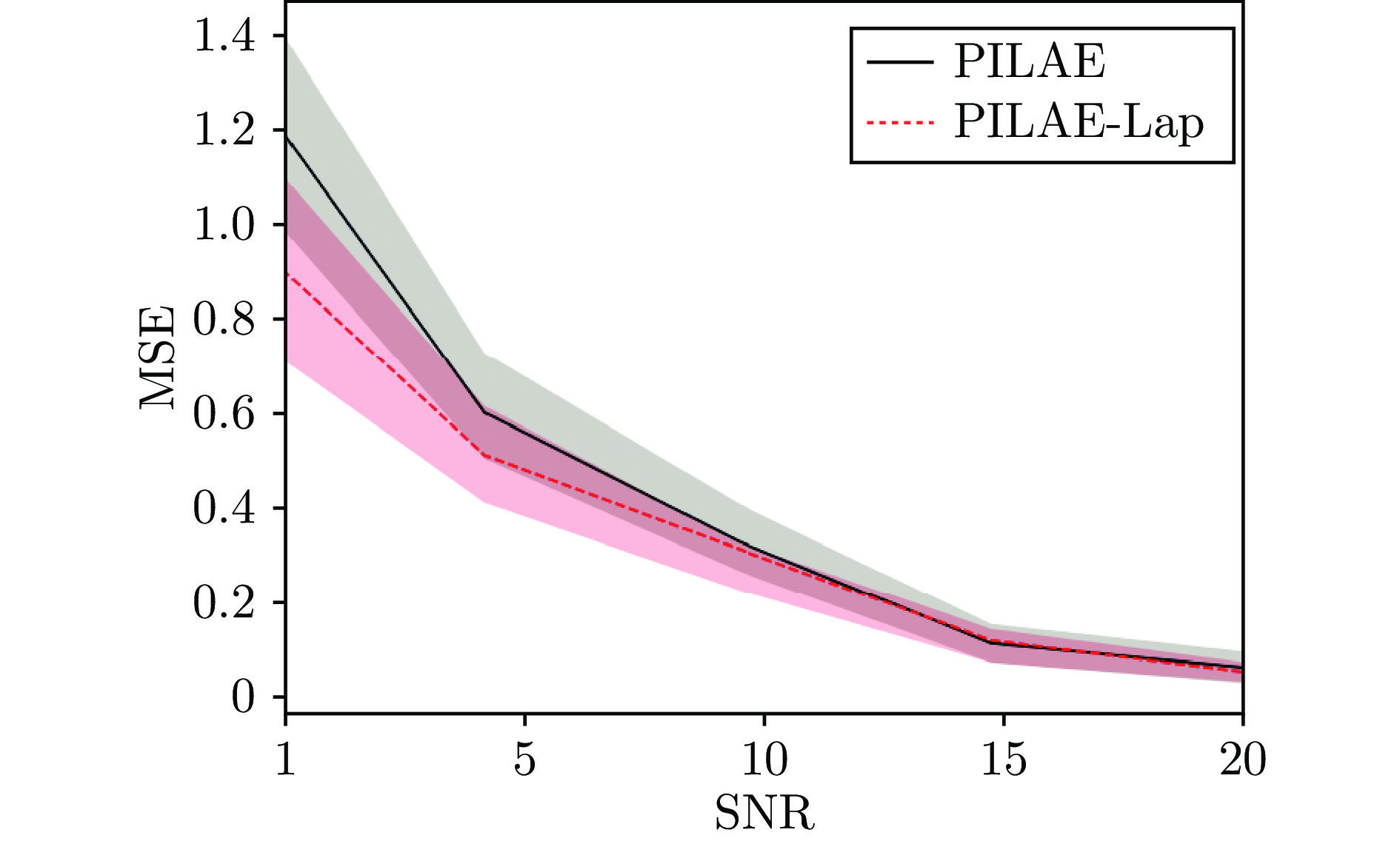
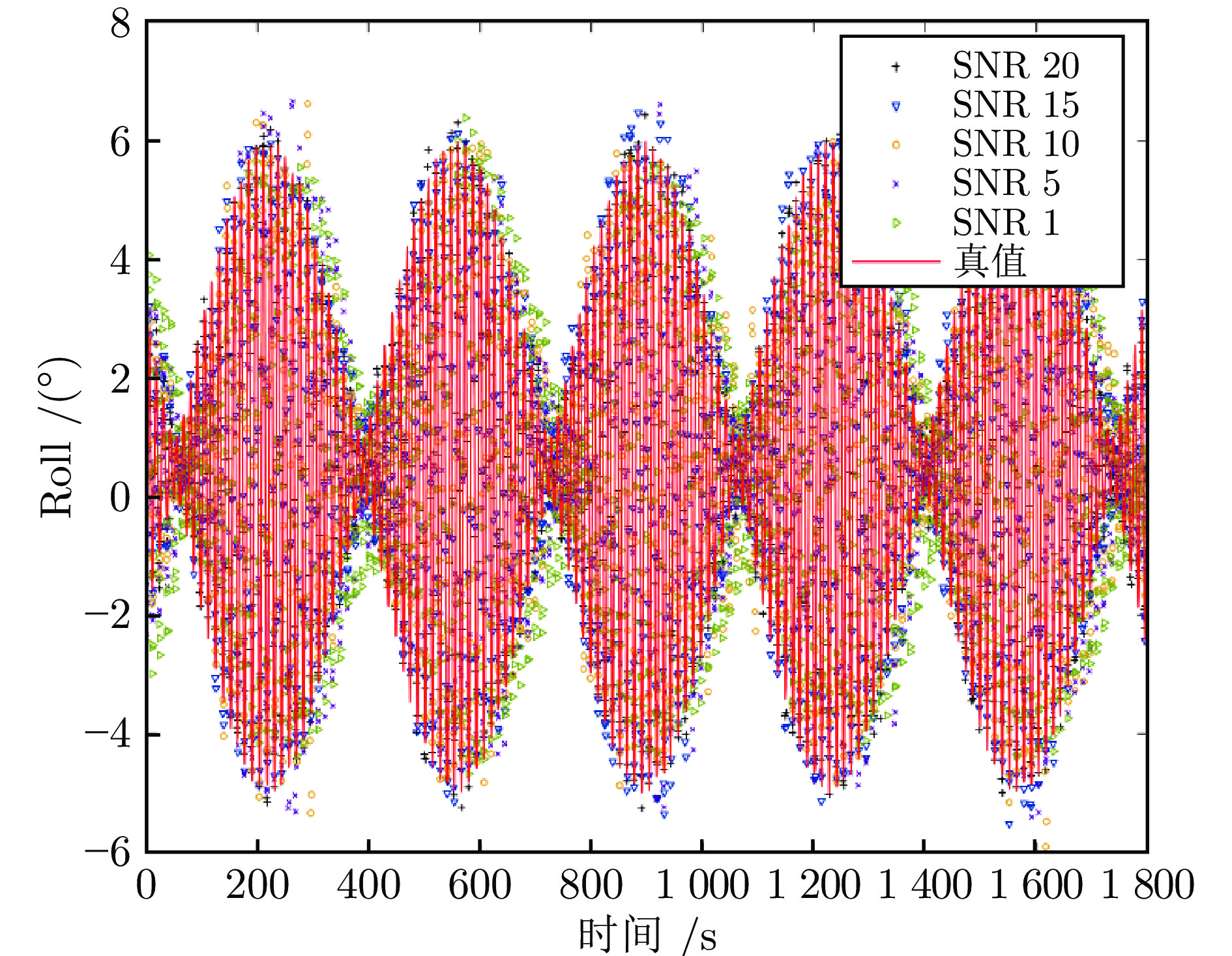
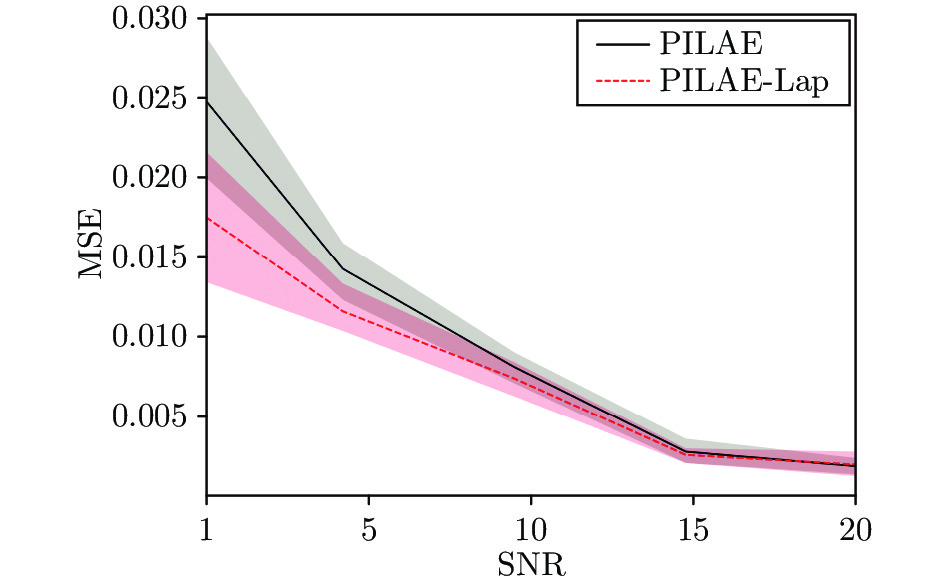
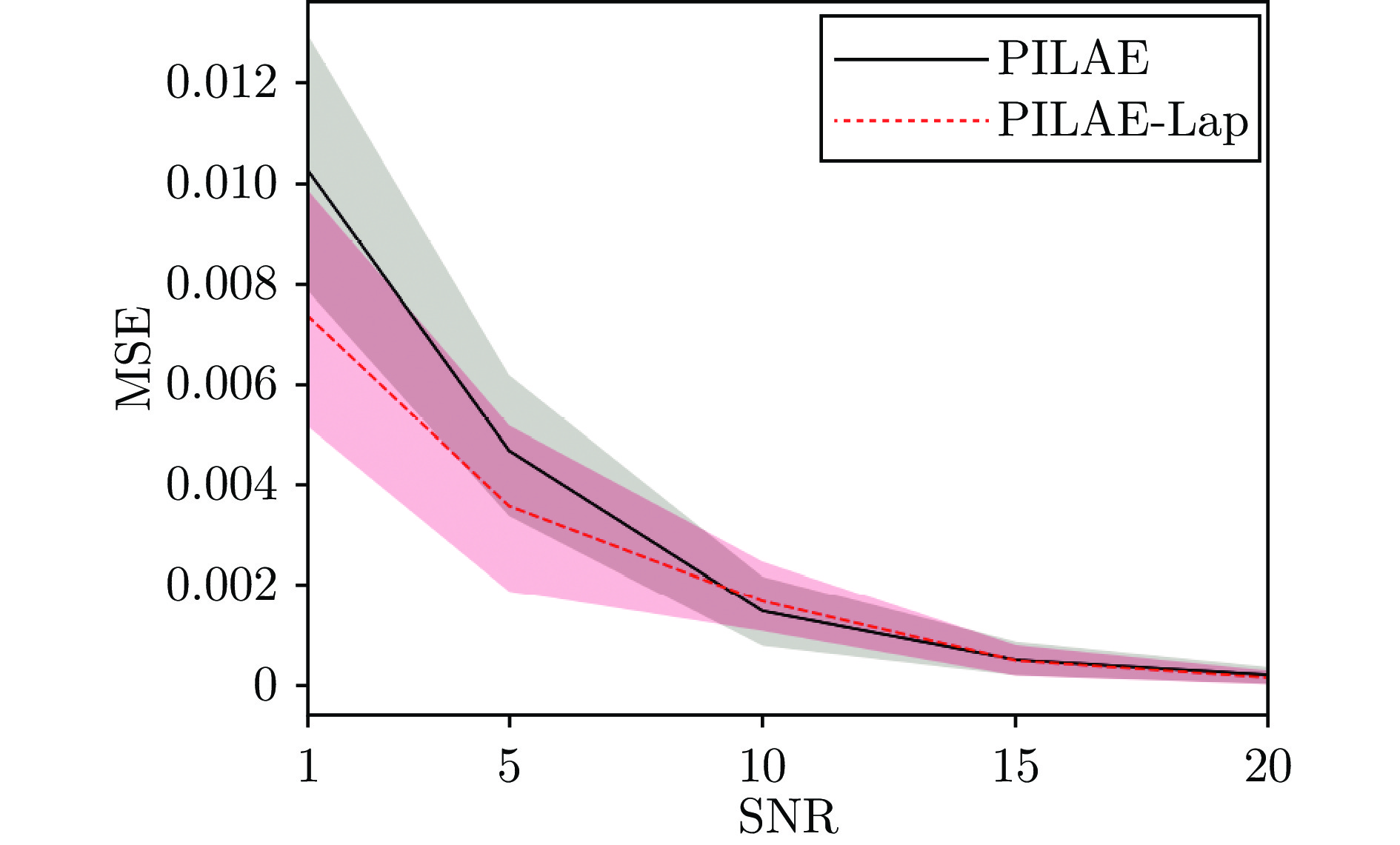
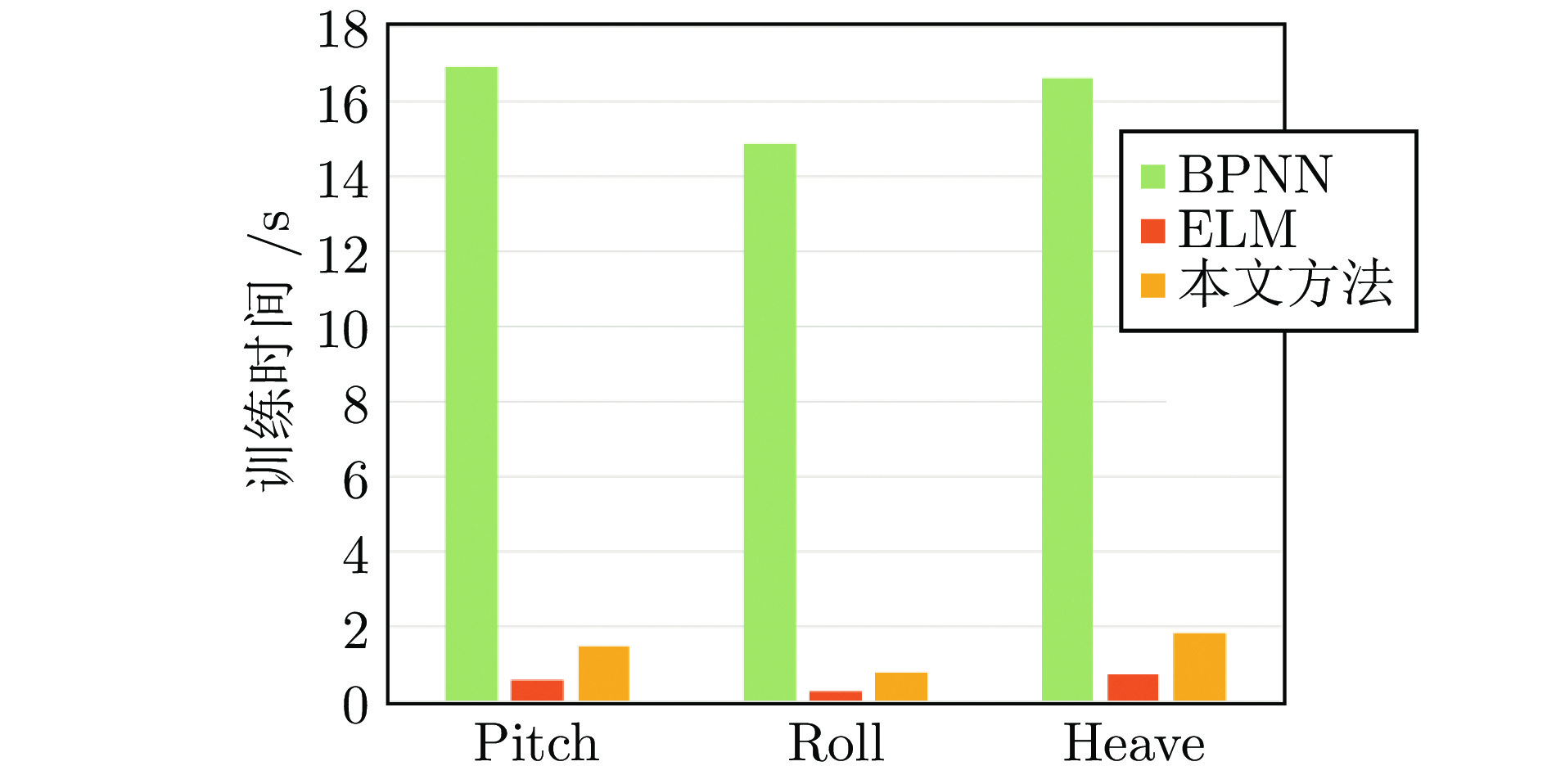
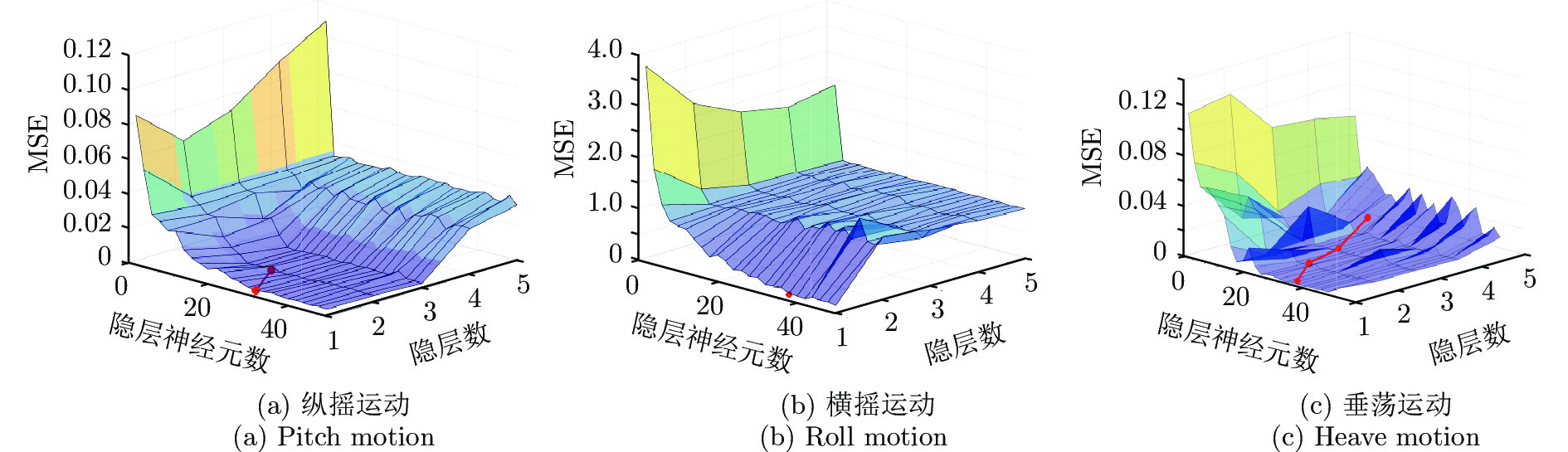
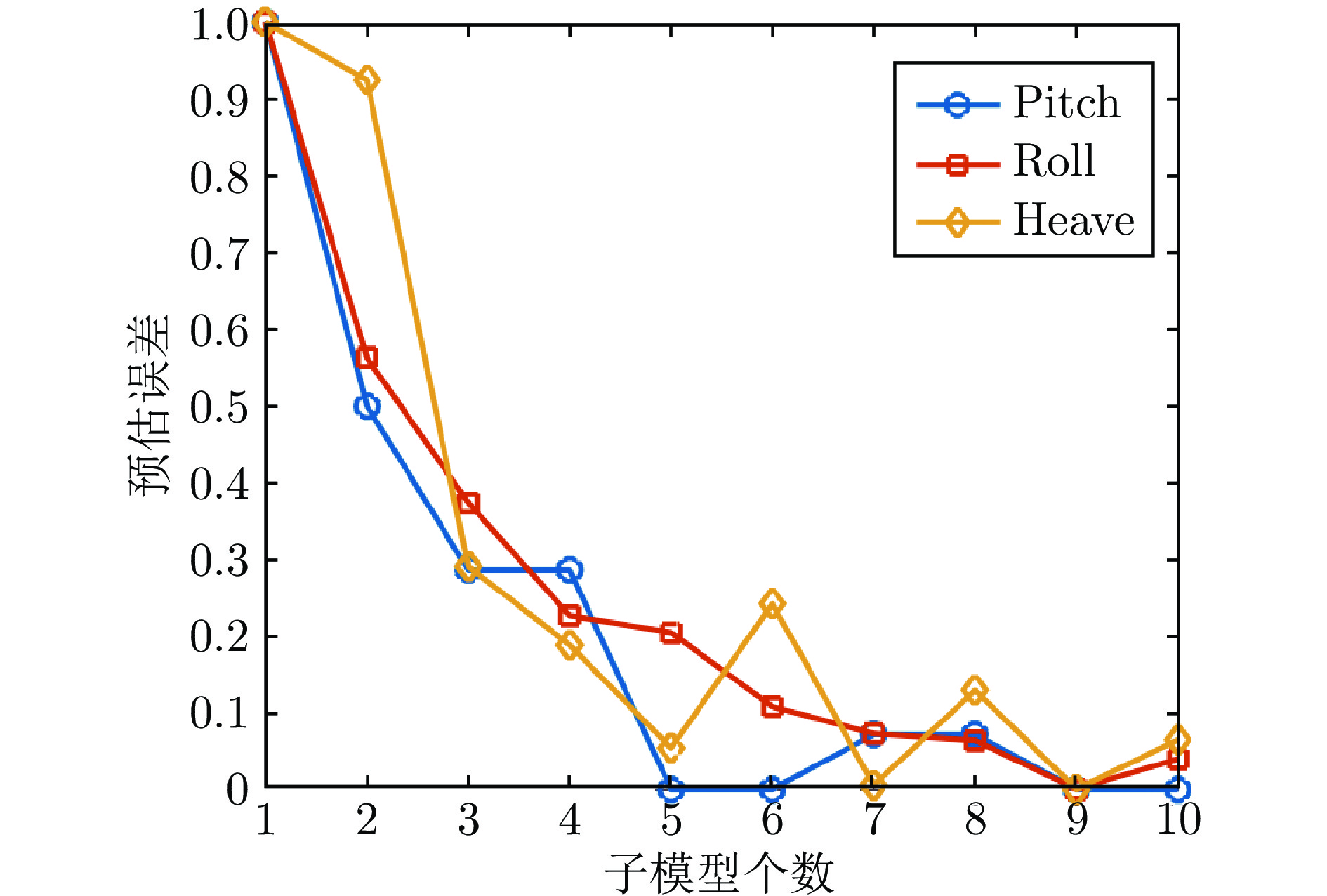
航母甲板在风、浪、流等因素影响下做六自由度不规则运动, 影响舰载机着舰精度. 航母甲板运动预估与补偿是自动着舰系统的重要功能之一, 也是提高舰载机着舰安全性与成功率的关键技术之一. 为此, 提出一种面向甲板运动预估的鲁棒学习模型, 通过基本构建单元自适应演化出复杂学习系统. 构建单元的训练采用非梯度的伪逆学习策略, 提高了训练效率, 简化了学习控制超参数调优; 构建单元的架构设计采用数据驱动的策略, 简化了架构超参数调优; 采用图拉普拉斯正则化方法提高了模型对噪声和意外扰动的鲁棒性. 通过某型航母在中等海况条件下以典型航速巡航时的仿真实验, 验证了所提方法在甲板纵摇、横摇以及垂荡运动预估问题中的有效性及鲁棒性.
航母甲板在风、浪、流等因素影响下做六自由度不规则运动, 影响舰载机着舰精度. 航母甲板运动预估与补偿是自动着舰系统的重要功能之一, 也是提高舰载机着舰安全性与成功率的关键技术之一. 为此, 提出一种面向甲板运动预估的鲁棒学习模型, 通过基本构建单元自适应演化出复杂学习系统. 构建单元的训练采用非梯度的伪逆学习策略, 提高了训练效率, 简化了学习控制超参数调优; 构建单元的架构设计采用数据驱动的策略, 简化了架构超参数调优; 采用图拉普拉斯正则化方法提高了模型对噪声和意外扰动的鲁棒性. 通过某型航母在中等海况条件下以典型航速巡航时的仿真实验, 验证了所提方法在甲板纵摇、横摇以及垂荡运动预估问题中的有效性及鲁棒性.
2024, 50(9): 1794-1803.
doi: 10.16383/j.aas.c240018
cstr: 32138.14.j.aas.c240018
摘要:
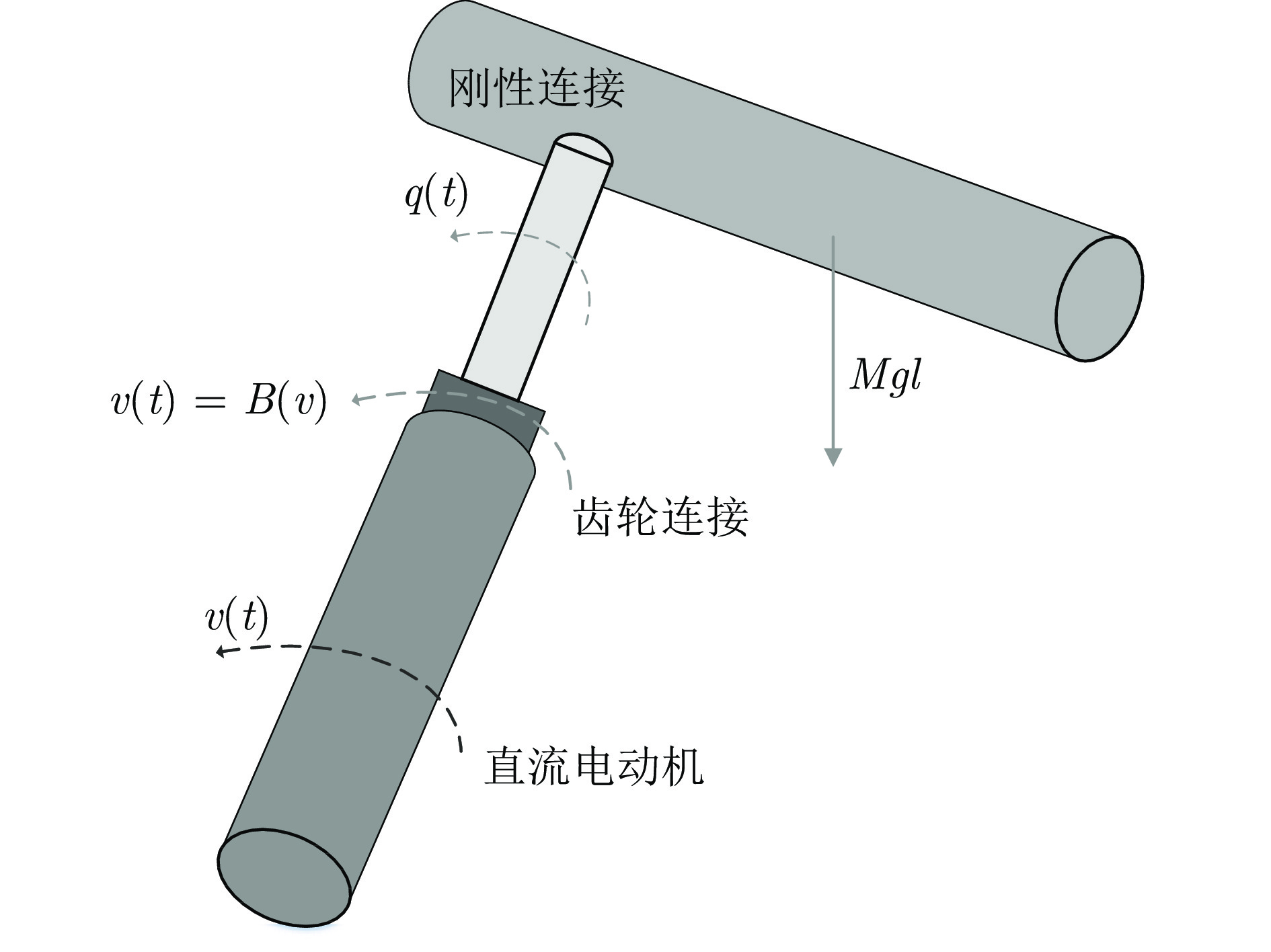
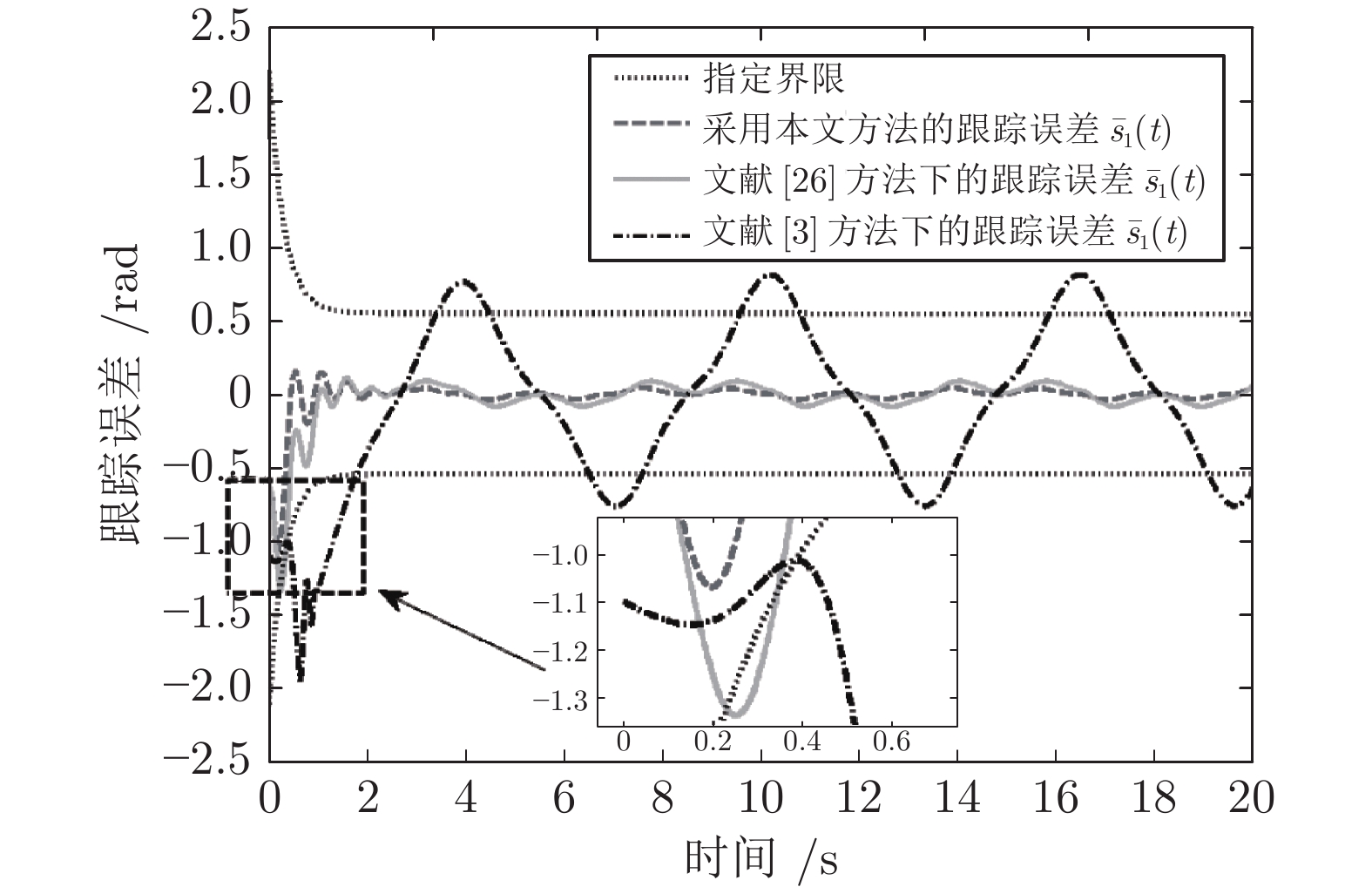
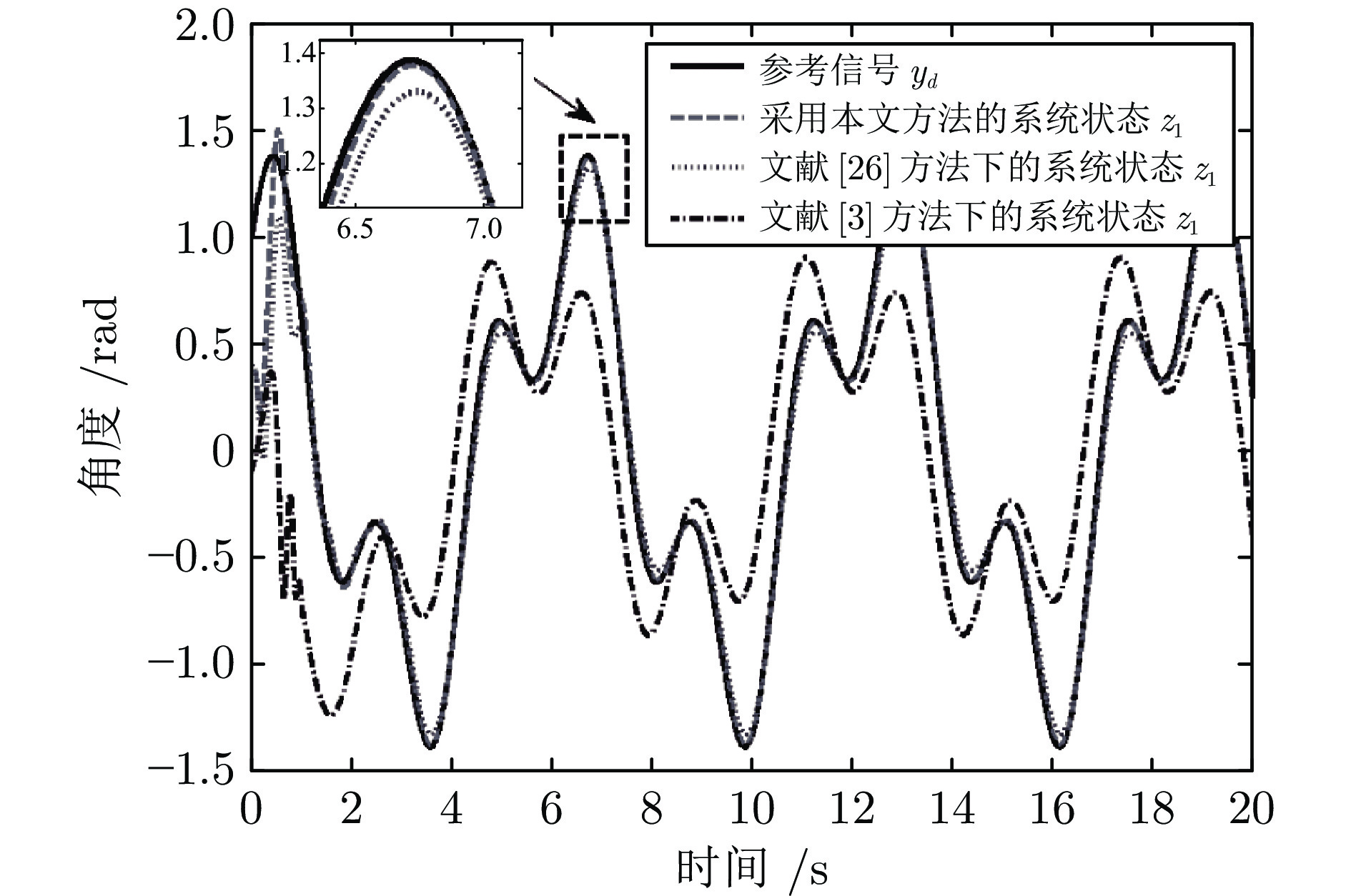
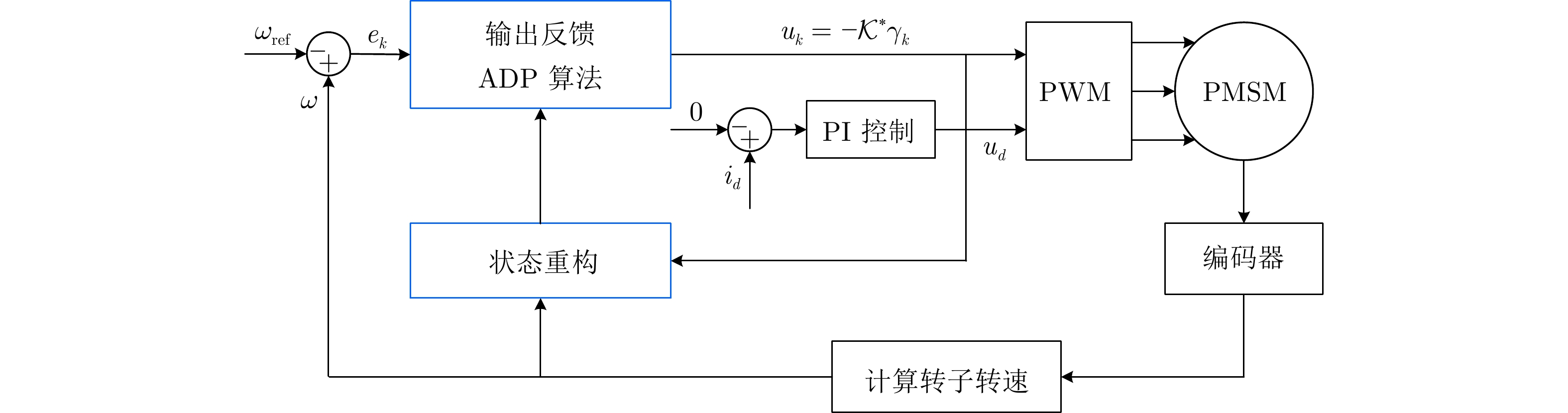
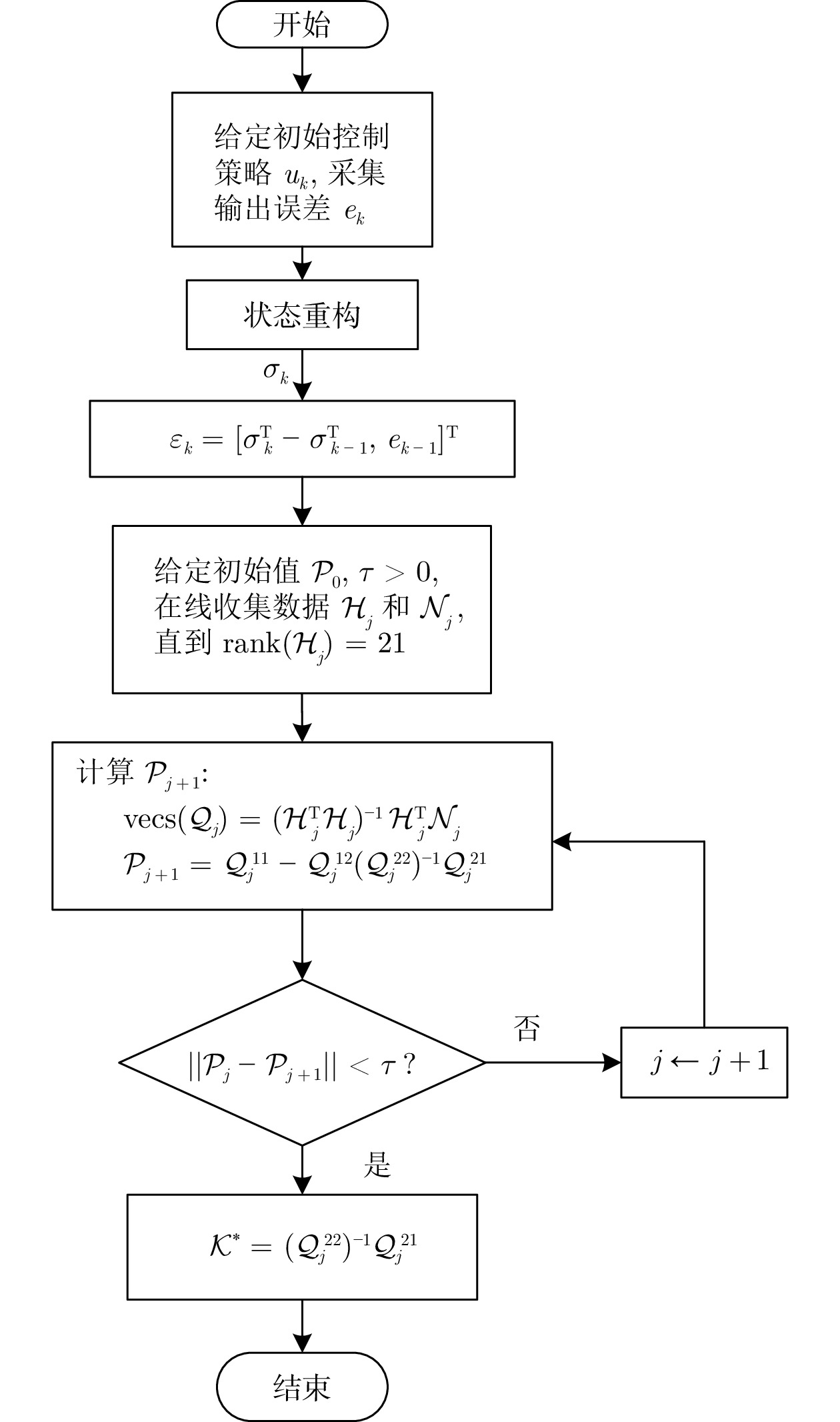
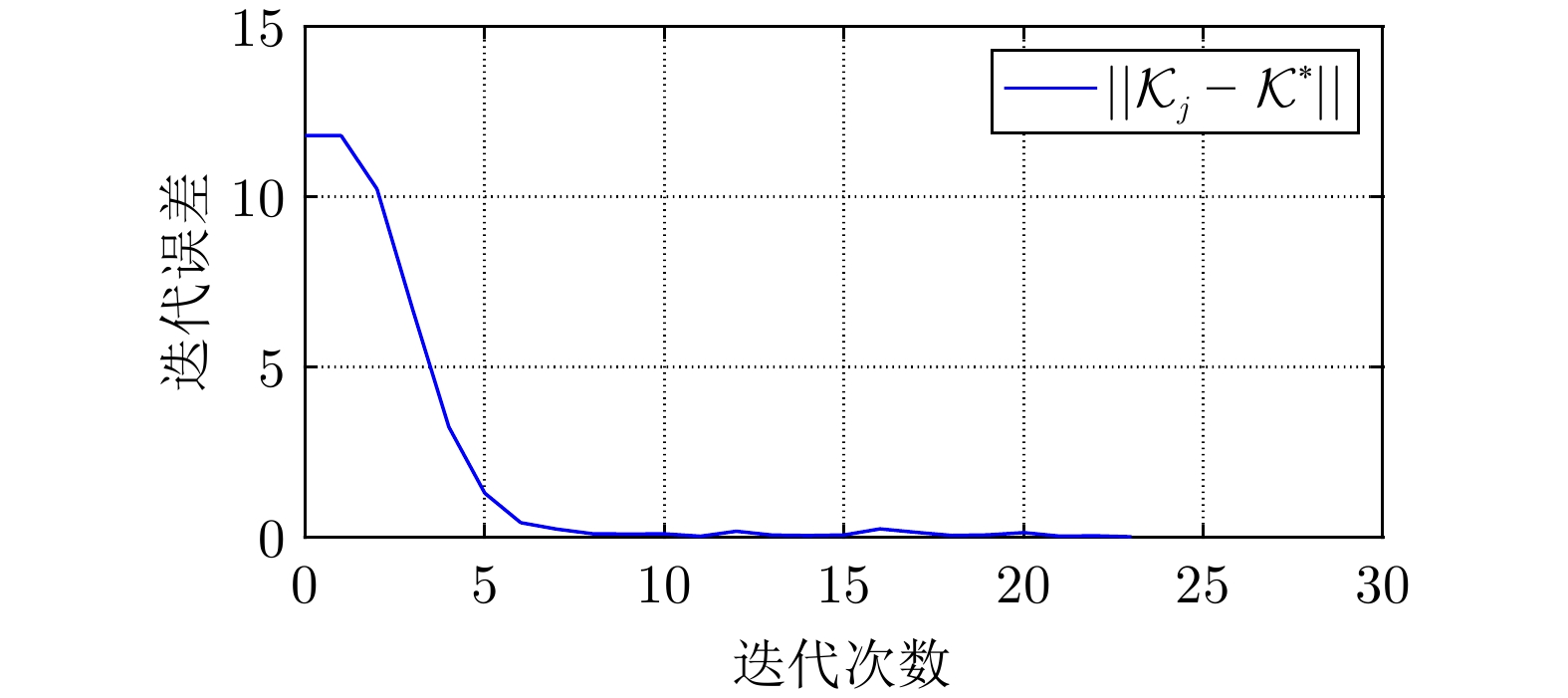
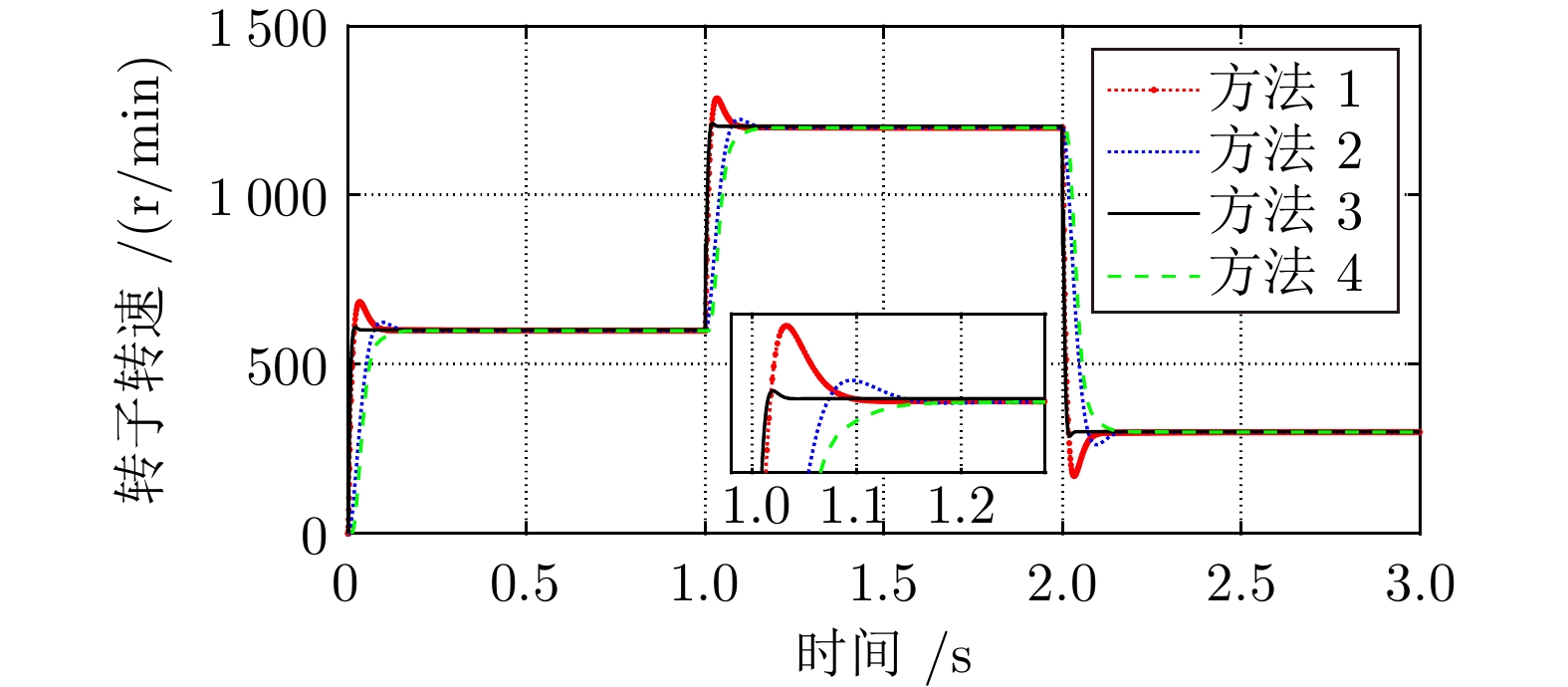
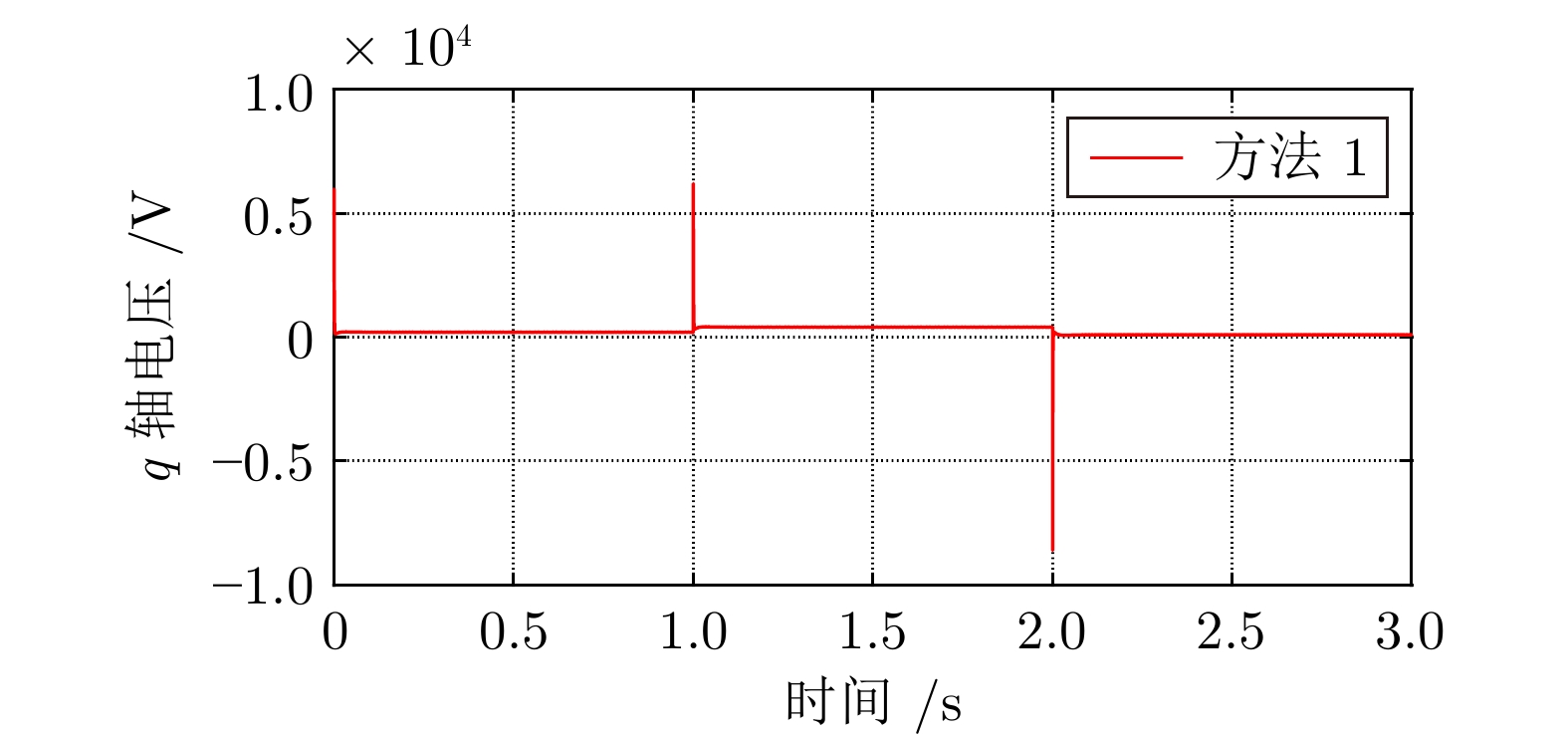
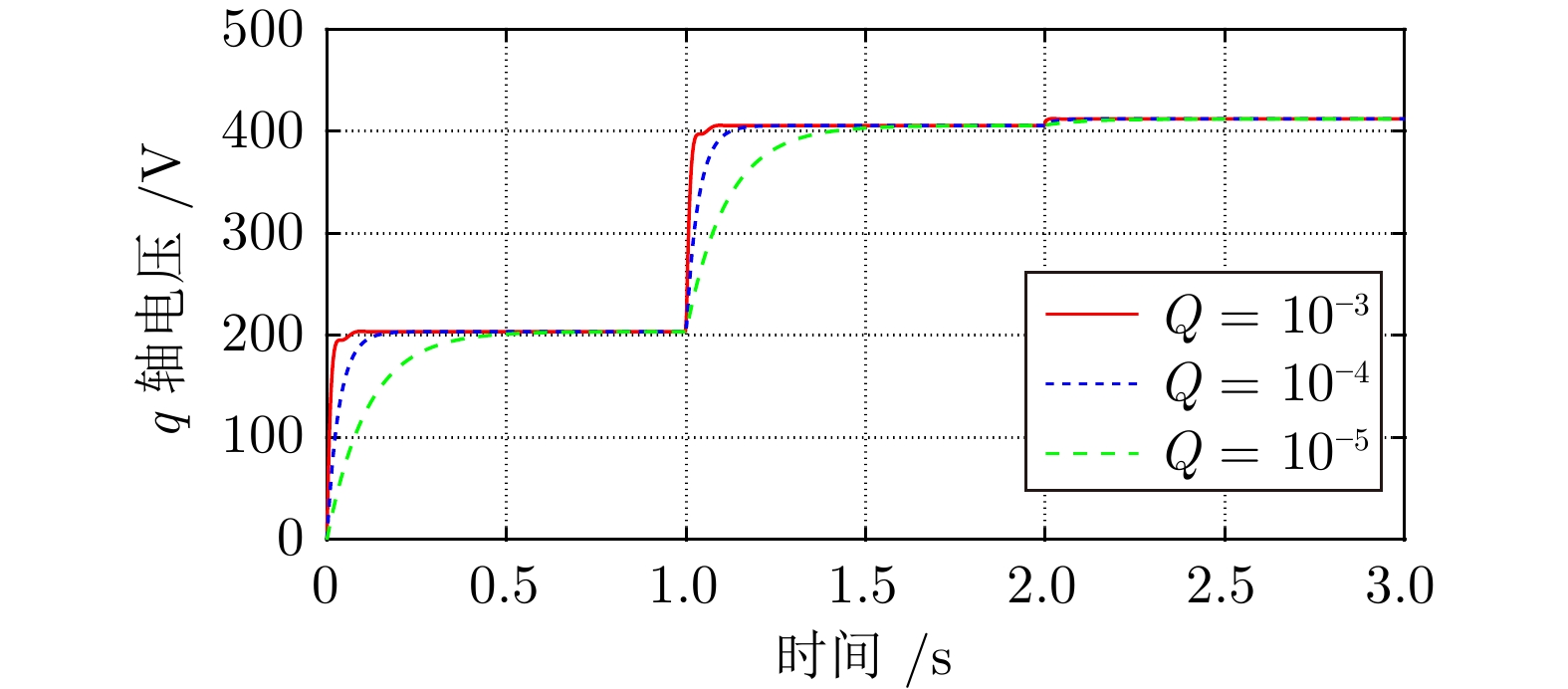
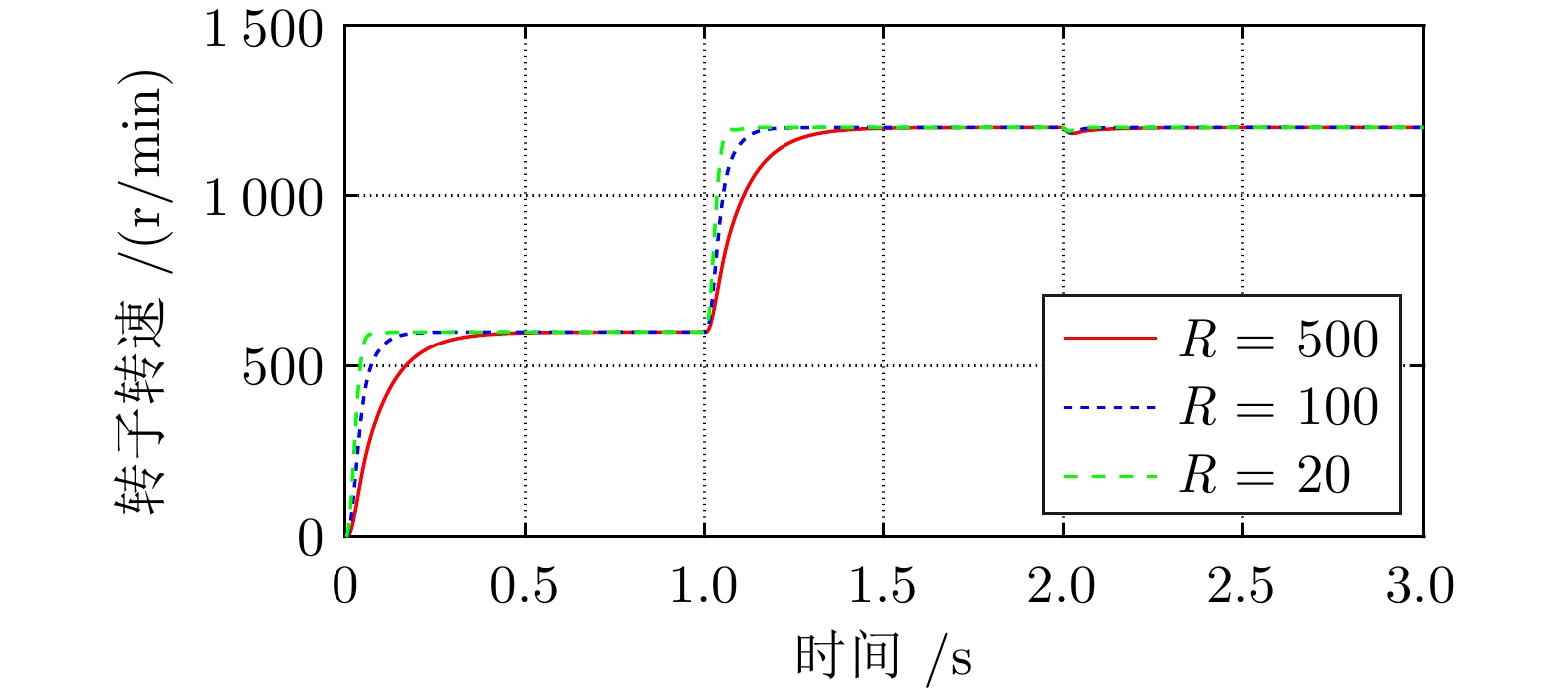
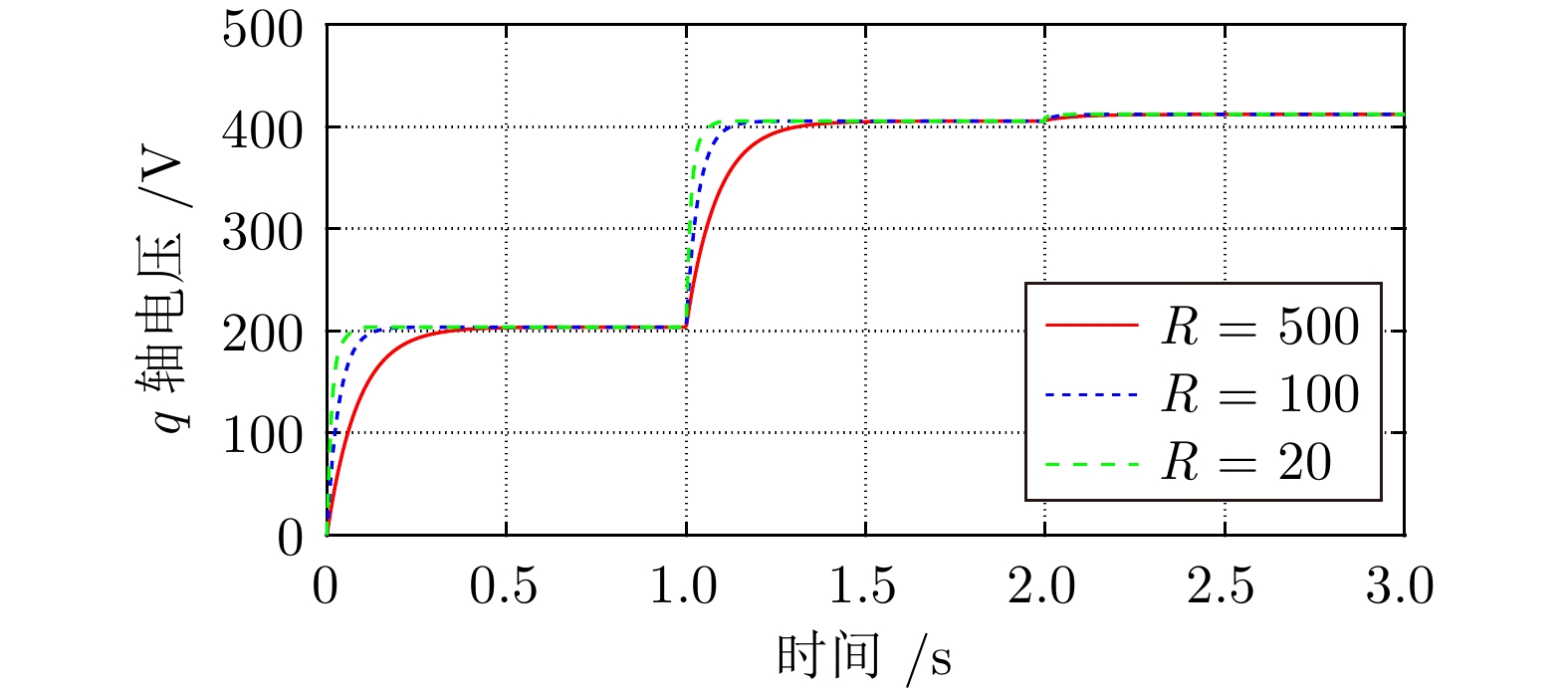
针对永磁同步电动机(Permanent magnet synchronous motor, PMSM)模型参数未知以及电枢电流和负载转矩无法直接测量的问题, 设计一种基于自适应动态规划(Adaptive dynamic programming, ADP)的输出反馈控制方案, 实现PMSM最优速度跟踪控制. 首先, 根据PMSM内部特性确定其数学模型的结构, 构建与原始系统相对应的辅助系统, 引入新的线性二次指标来实现速度最优跟踪调节. 其次, 设计一种嵌入式观测器, 该观测器能够在系统模型未知情况下用可测量数据重构系统全部状态. 此外, 提出一种离线策略的ADP方法逼近最优控制增益的解. 最后, 仿真结果验证所提控制方案在模型参数未知以及电枢电流和负载转矩不可测量的情况下, 实现了精确的速度跟踪性能和良好的瞬态响应, 同时降低了电压的冲击.
针对永磁同步电动机(Permanent magnet synchronous motor, PMSM)模型参数未知以及电枢电流和负载转矩无法直接测量的问题, 设计一种基于自适应动态规划(Adaptive dynamic programming, ADP)的输出反馈控制方案, 实现PMSM最优速度跟踪控制. 首先, 根据PMSM内部特性确定其数学模型的结构, 构建与原始系统相对应的辅助系统, 引入新的线性二次指标来实现速度最优跟踪调节. 其次, 设计一种嵌入式观测器, 该观测器能够在系统模型未知情况下用可测量数据重构系统全部状态. 此外, 提出一种离线策略的ADP方法逼近最优控制增益的解. 最后, 仿真结果验证所提控制方案在模型参数未知以及电枢电流和负载转矩不可测量的情况下, 实现了精确的速度跟踪性能和良好的瞬态响应, 同时降低了电压的冲击.
2024, 50(9): 1804-1817.
doi: 10.16383/j.aas.c210012
cstr: 32138.14.j.aas.c210012
摘要:
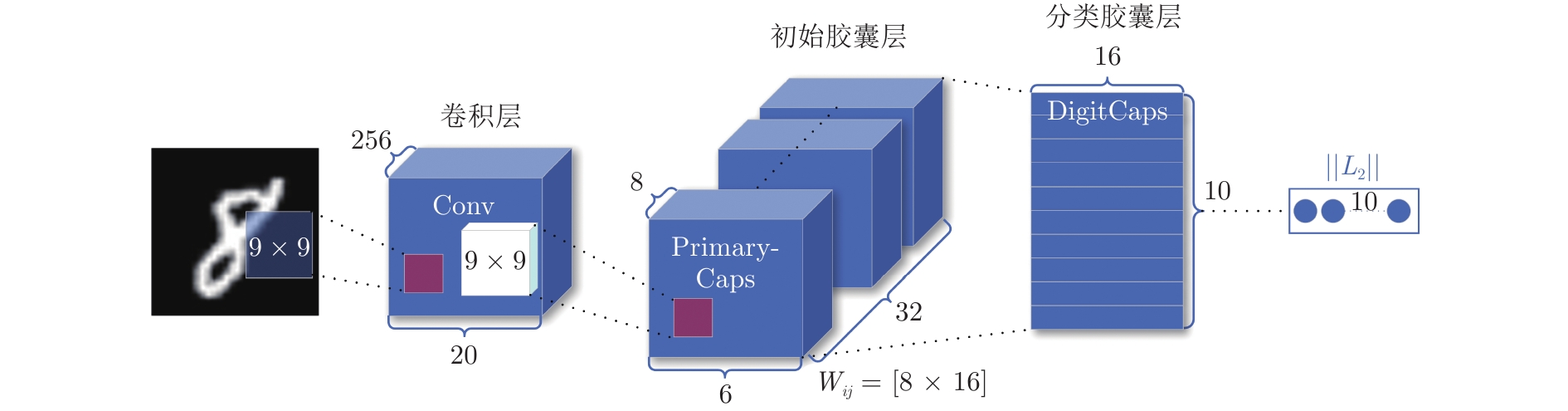
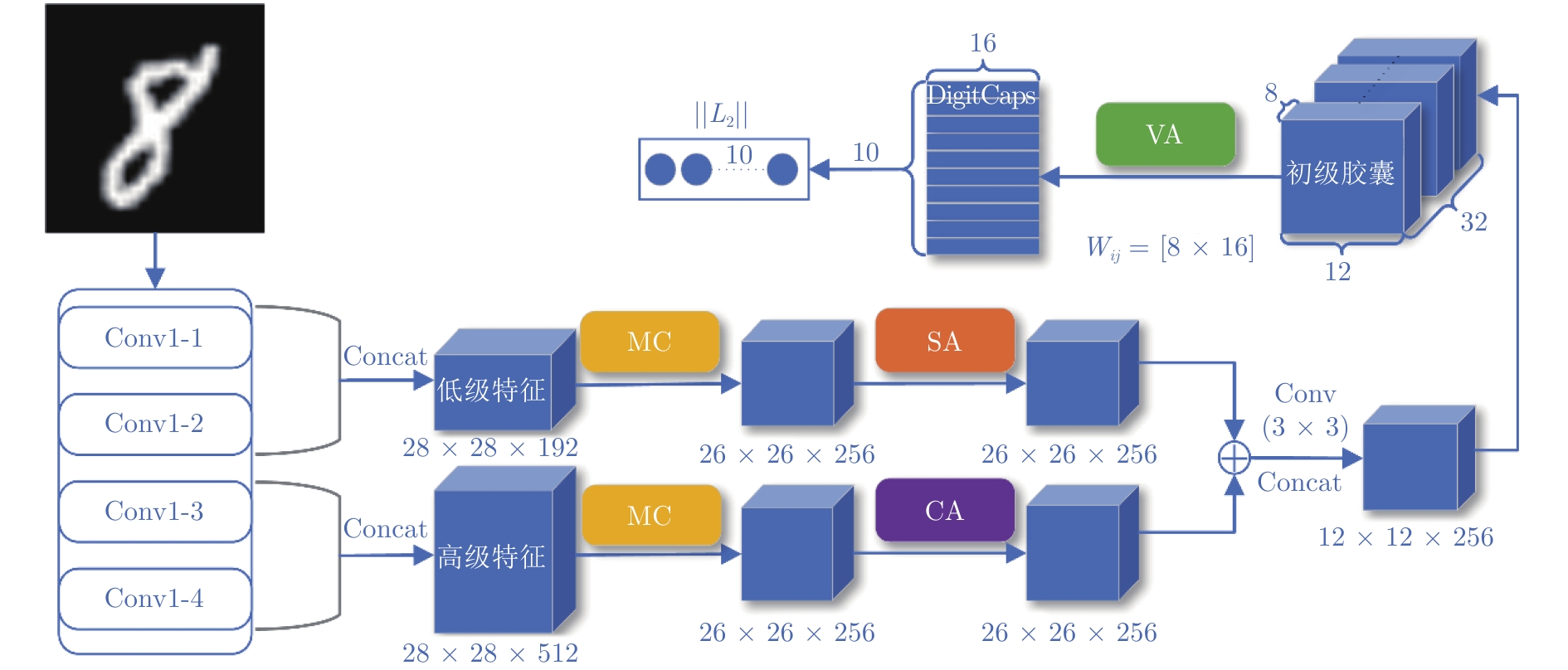
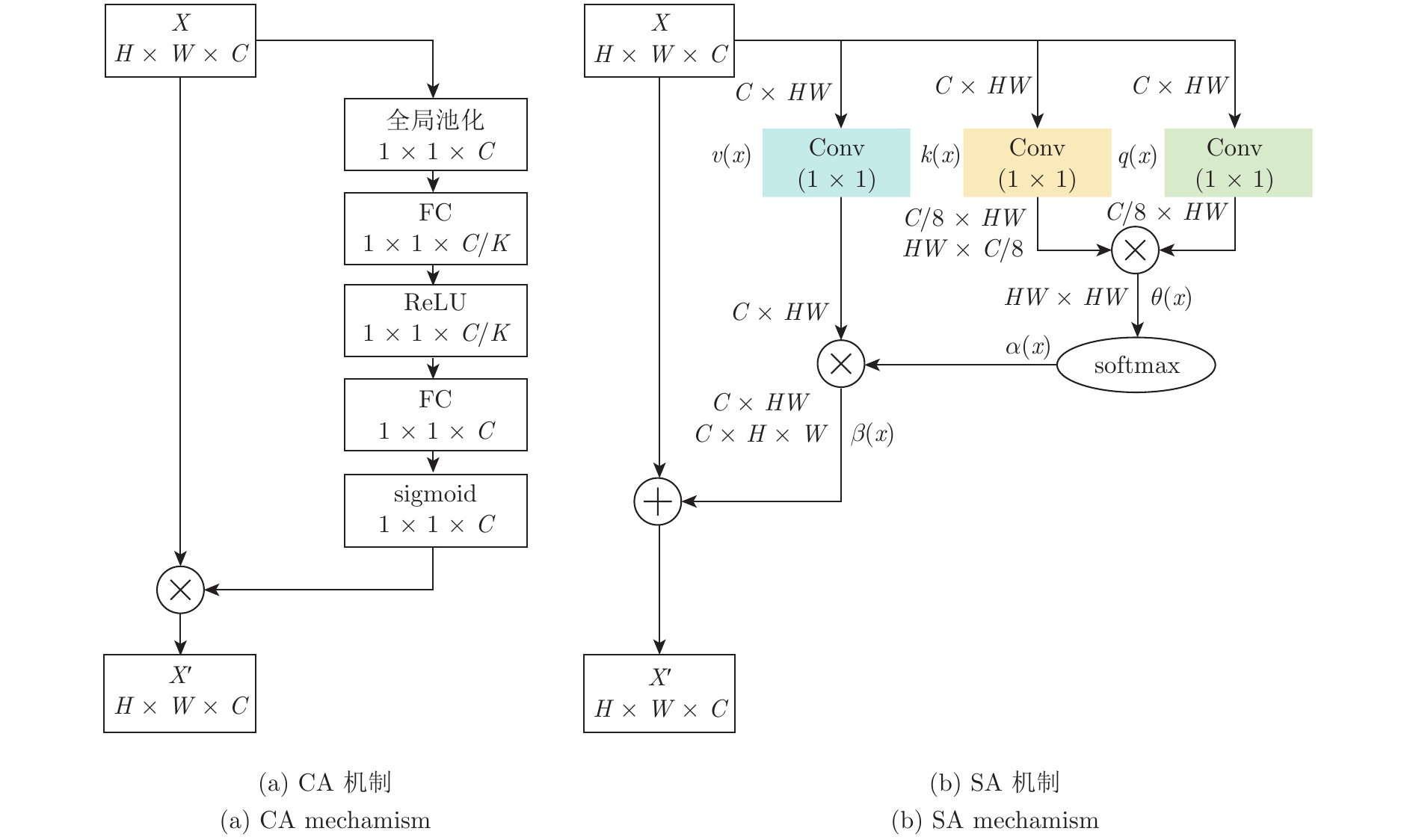
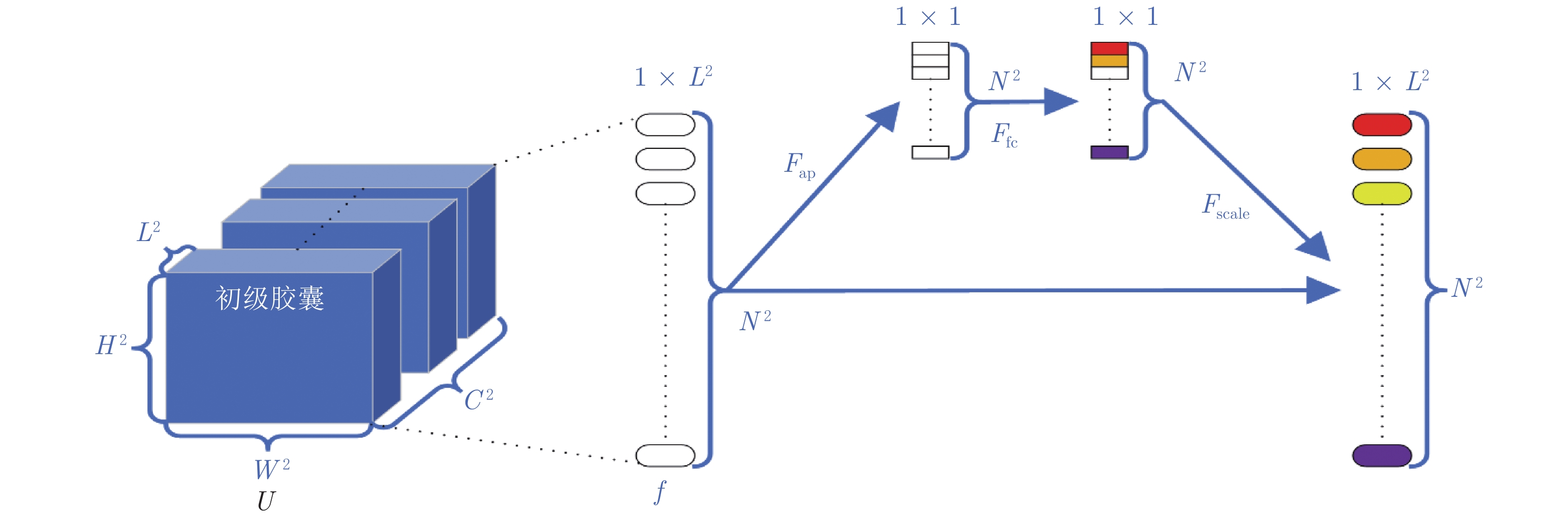
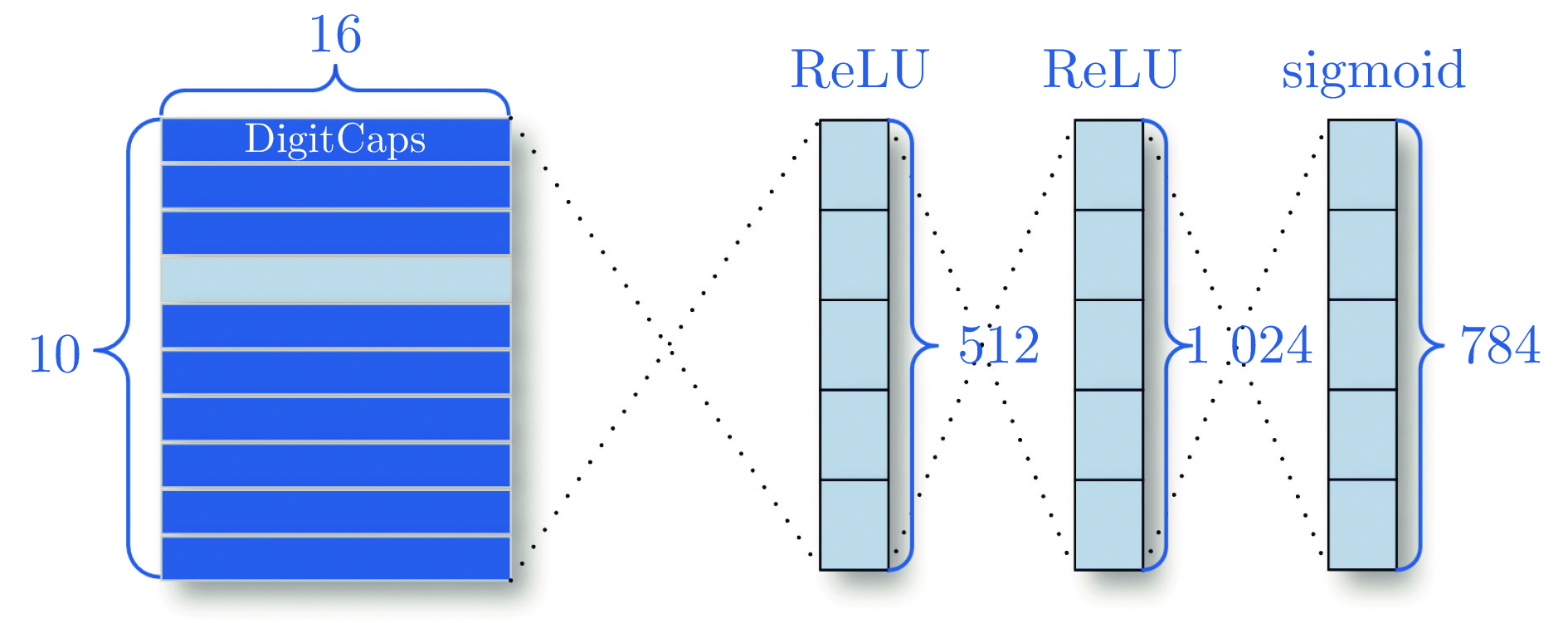
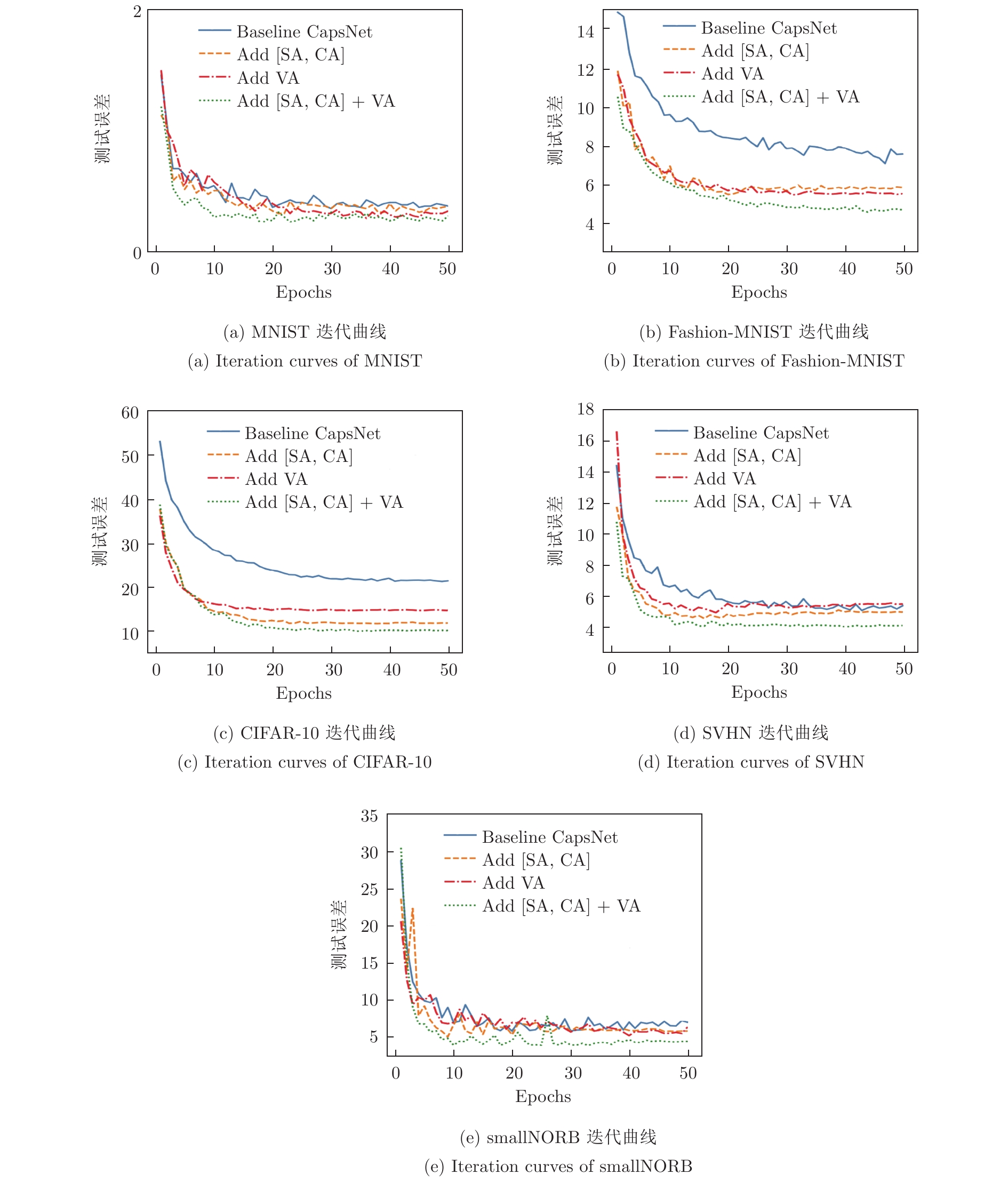
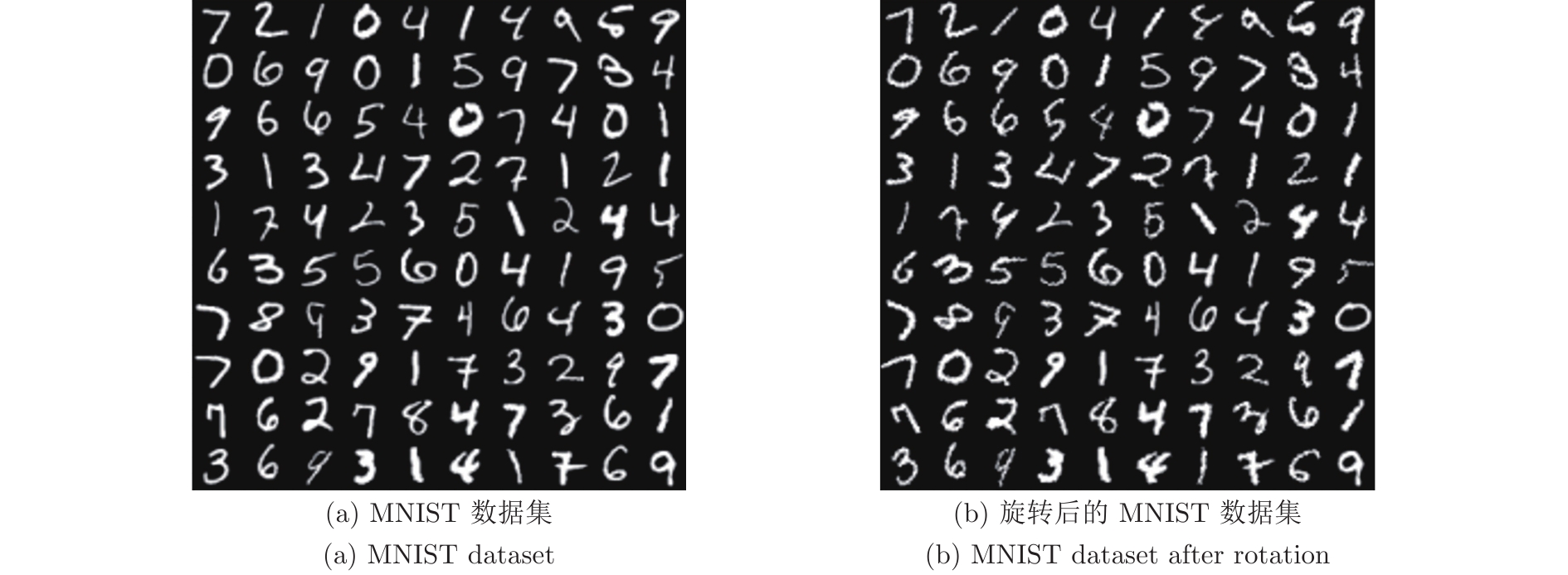
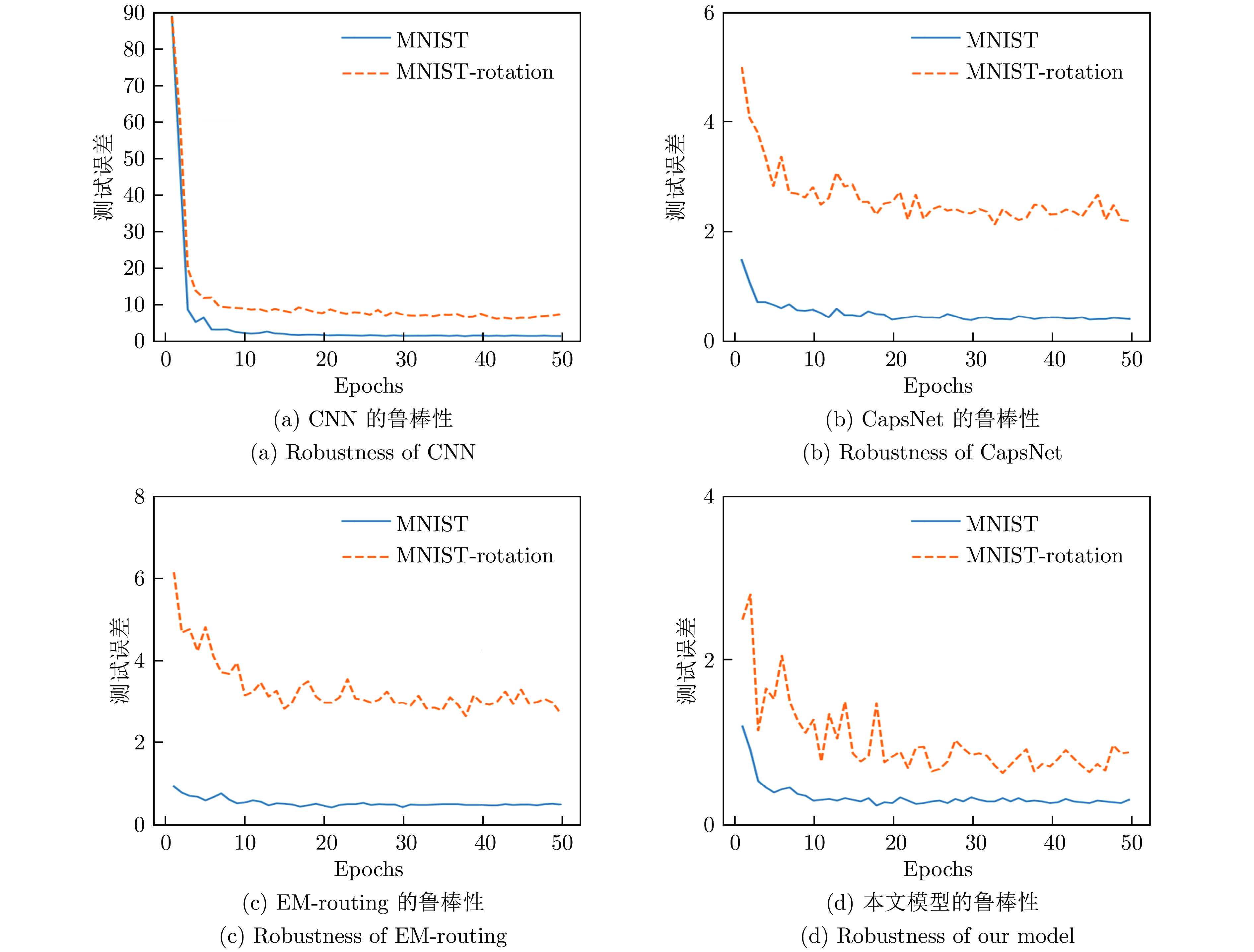
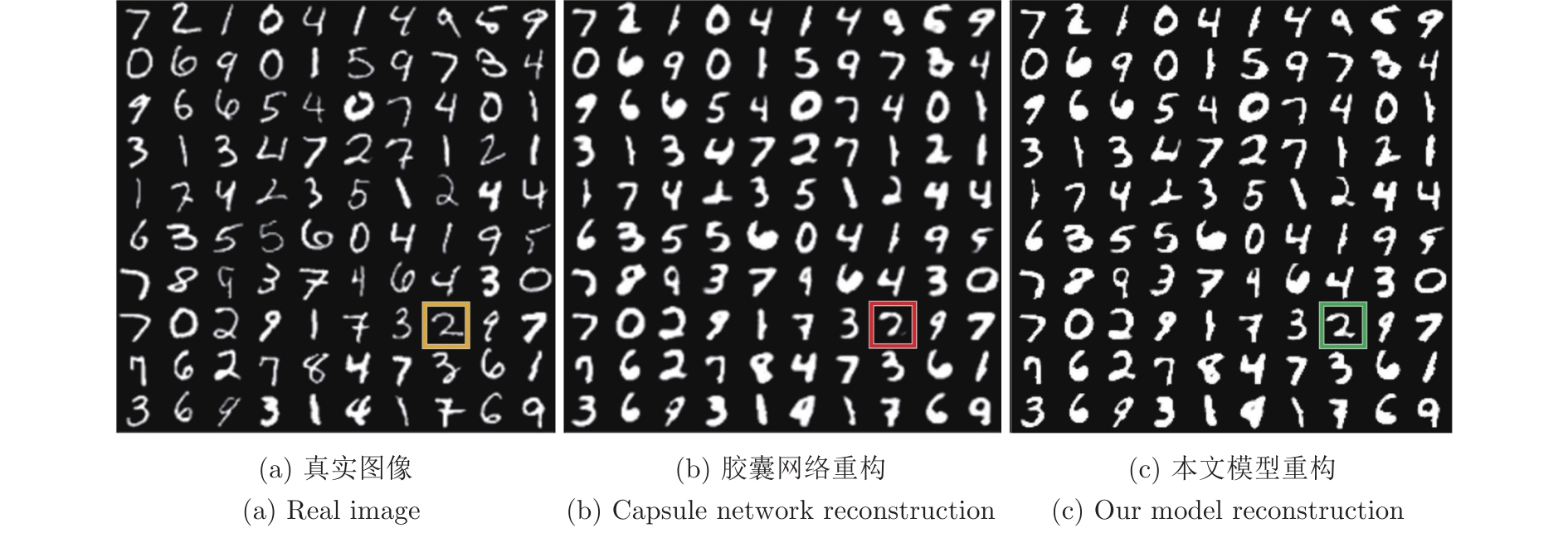
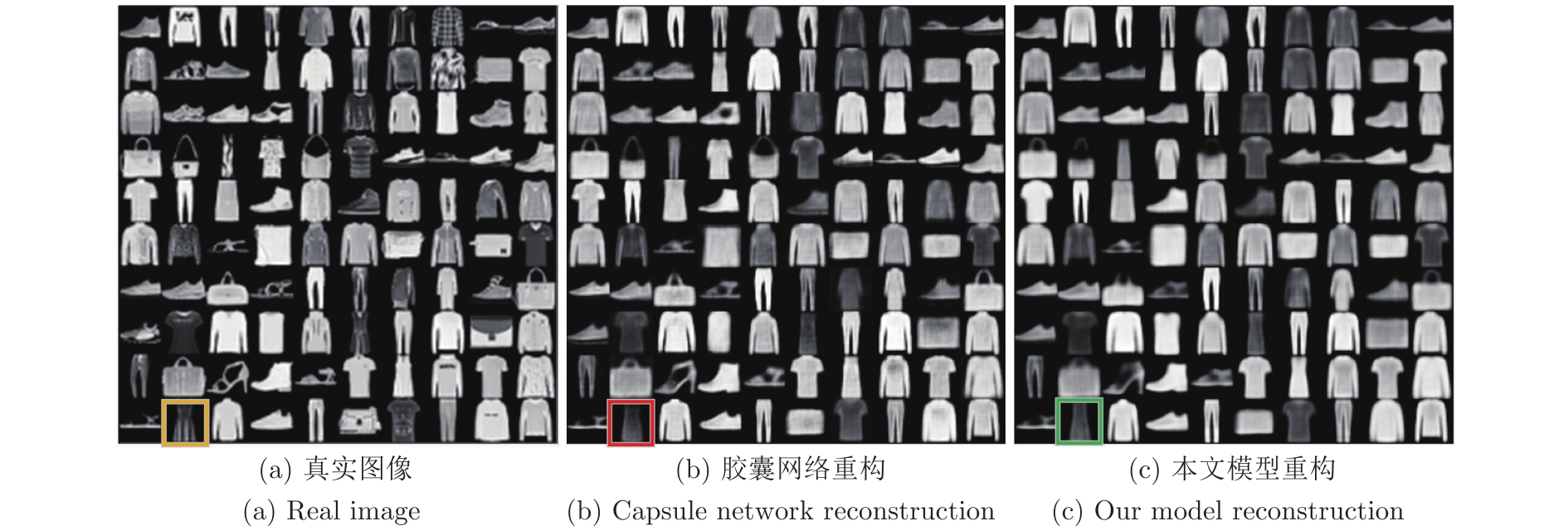
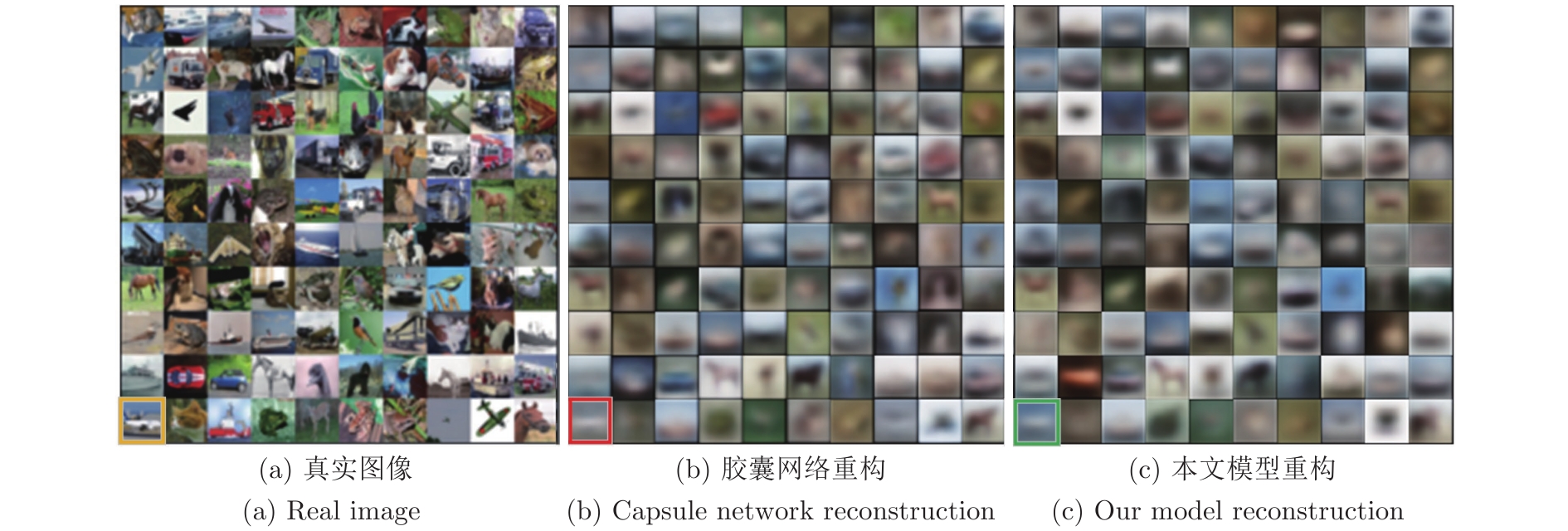
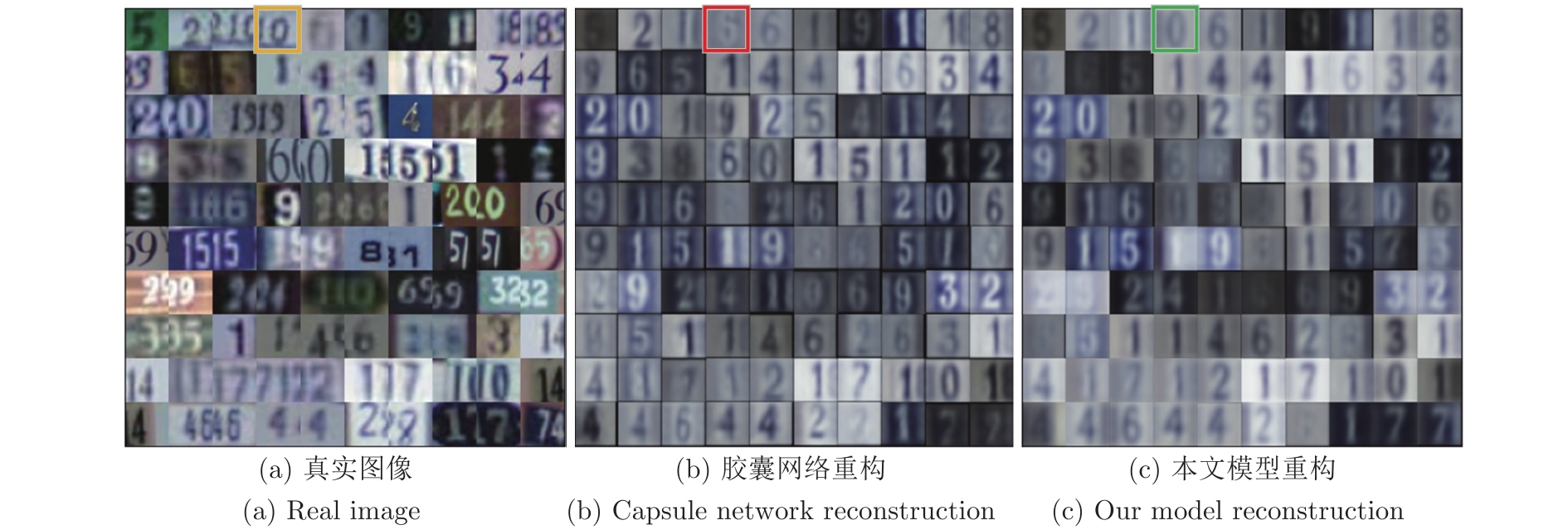
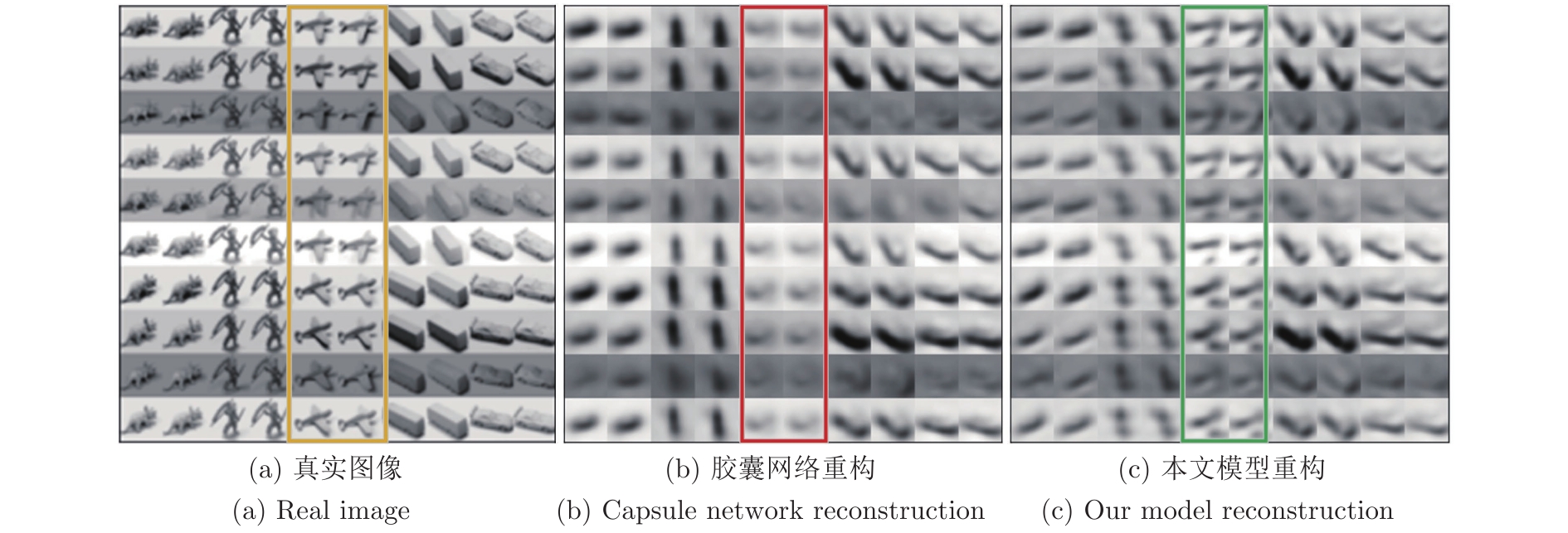
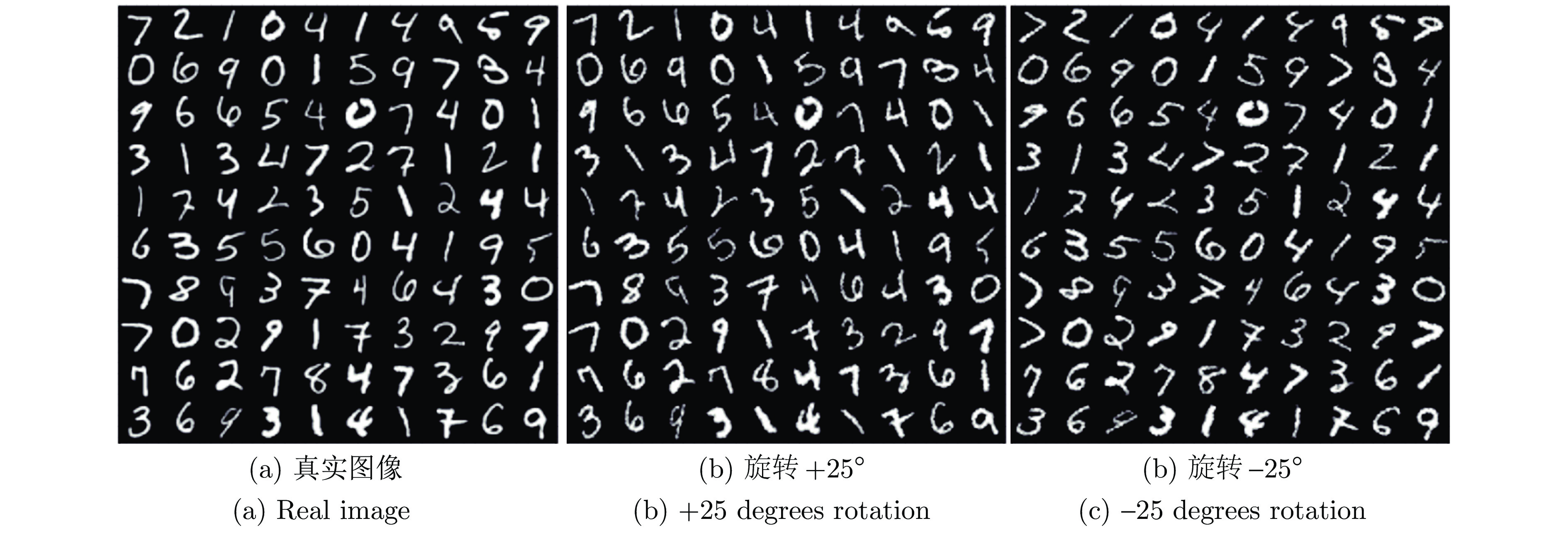
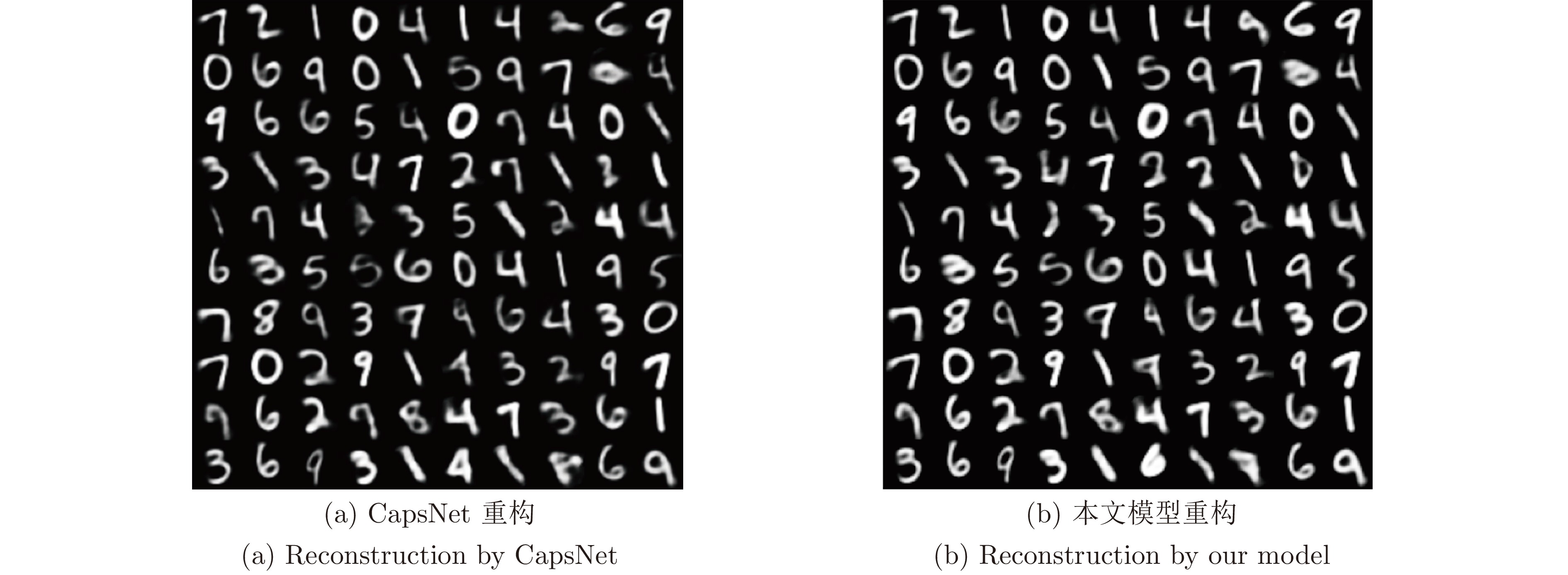
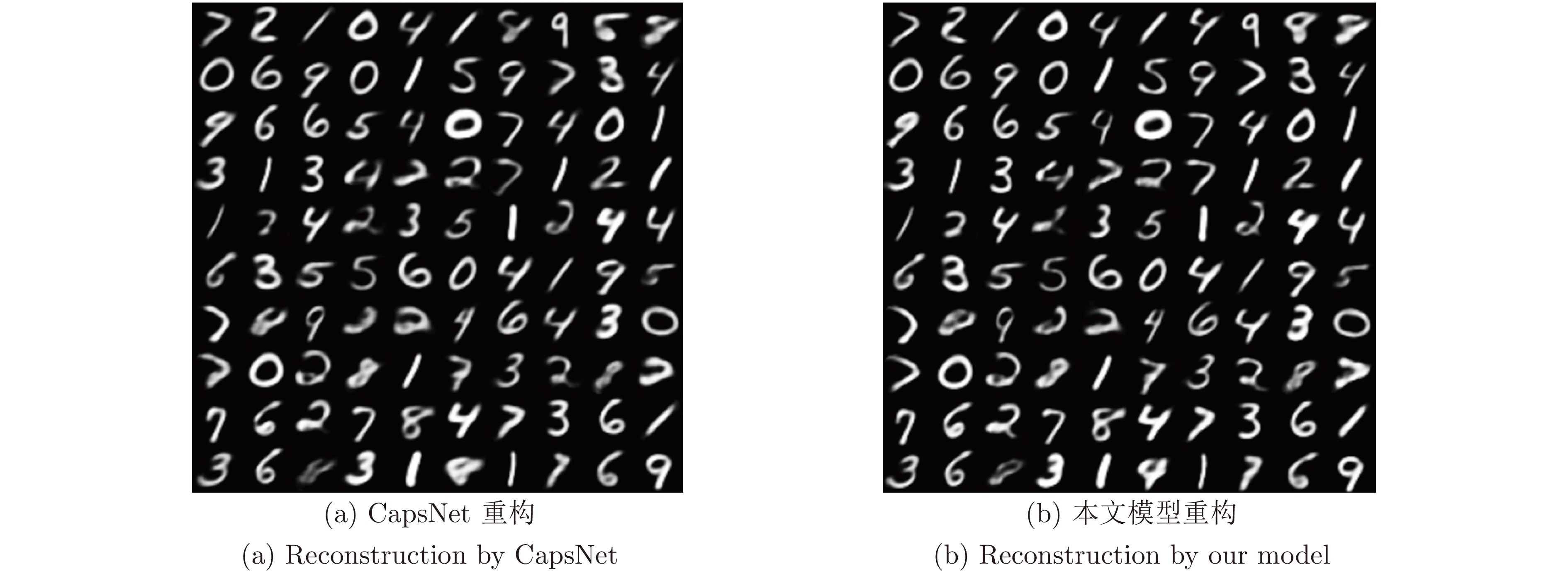
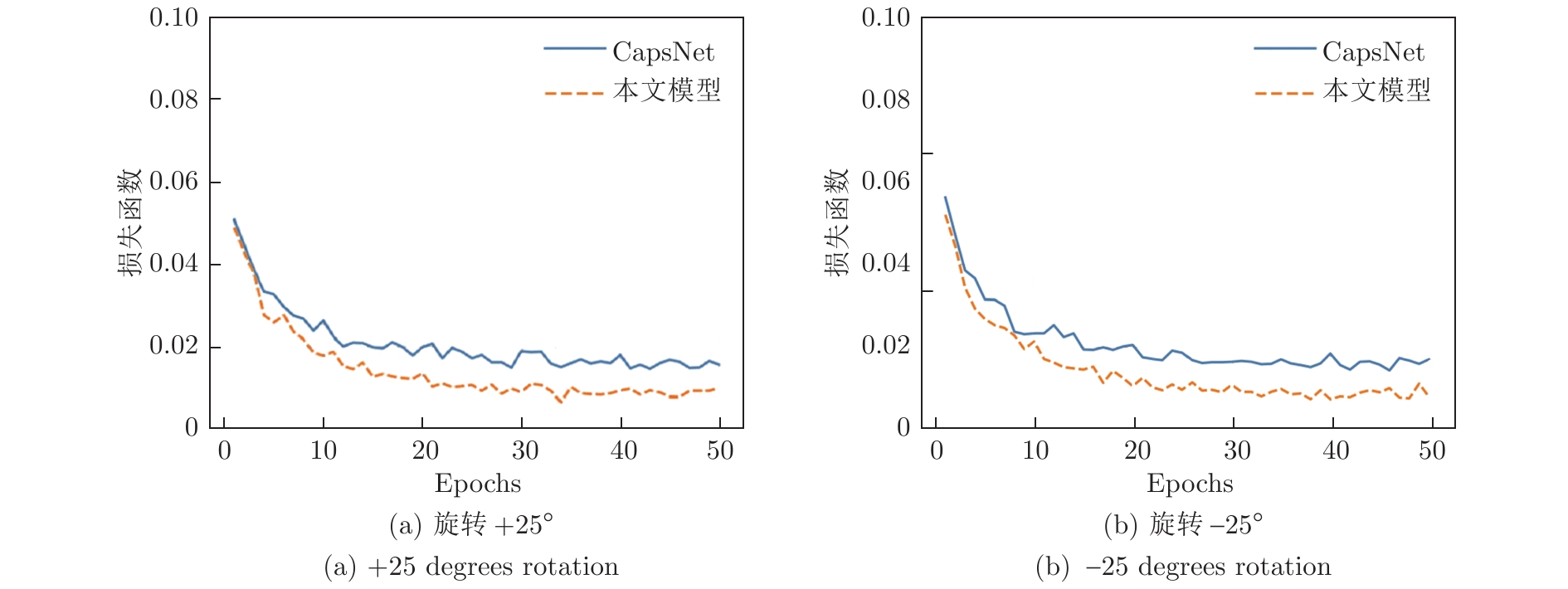
针对传统的胶囊网络(Capsule network, CapsNet)特征提取不充分的问题, 提出一种图像分类的多阶段注意力胶囊网络模型. 首先, 在卷积层对低层特征和高层特征分别采用注意力(Spatial attention, SA)和通道注意力(Channel attention, CA)来提取有效特征; 然后, 提出基于向量的注意力(Vector attention, VA)机制作用于动态路由层, 增加对重要胶囊的关注, 进而提高低层胶囊对高层胶囊预测的准确性; 最后, 在五个公共数据集上进行图像分类的对比实验. 结果表明, 所提出的CapsNet模型在分类精度和鲁棒性上优于其他胶囊网络模型, 在仿射变换图像重构方面也表现良好.
针对传统的胶囊网络(Capsule network, CapsNet)特征提取不充分的问题, 提出一种图像分类的多阶段注意力胶囊网络模型. 首先, 在卷积层对低层特征和高层特征分别采用注意力(Spatial attention, SA)和通道注意力(Channel attention, CA)来提取有效特征; 然后, 提出基于向量的注意力(Vector attention, VA)机制作用于动态路由层, 增加对重要胶囊的关注, 进而提高低层胶囊对高层胶囊预测的准确性; 最后, 在五个公共数据集上进行图像分类的对比实验. 结果表明, 所提出的CapsNet模型在分类精度和鲁棒性上优于其他胶囊网络模型, 在仿射变换图像重构方面也表现良好.
2024, 50(9): 1818-1830.
doi: 10.16383/j.aas.c230634
cstr: 32138.14.j.aas.c230634
摘要:
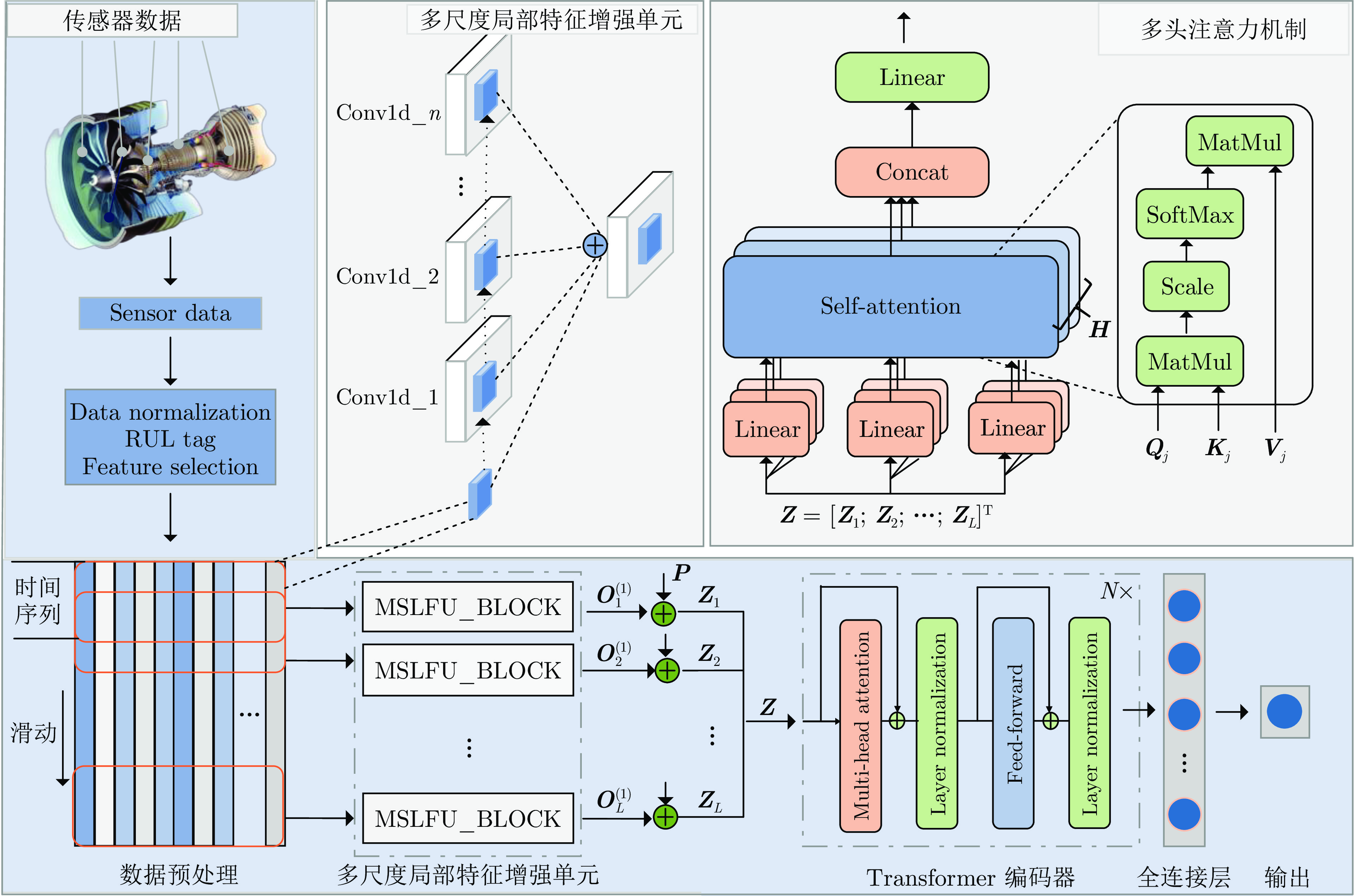
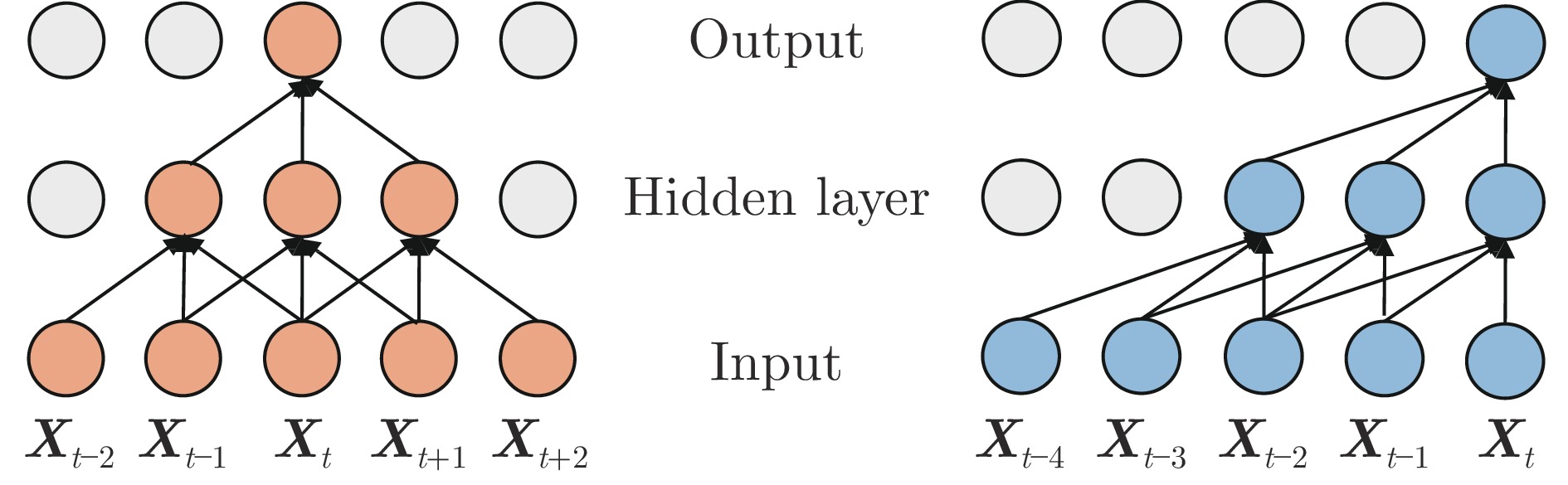
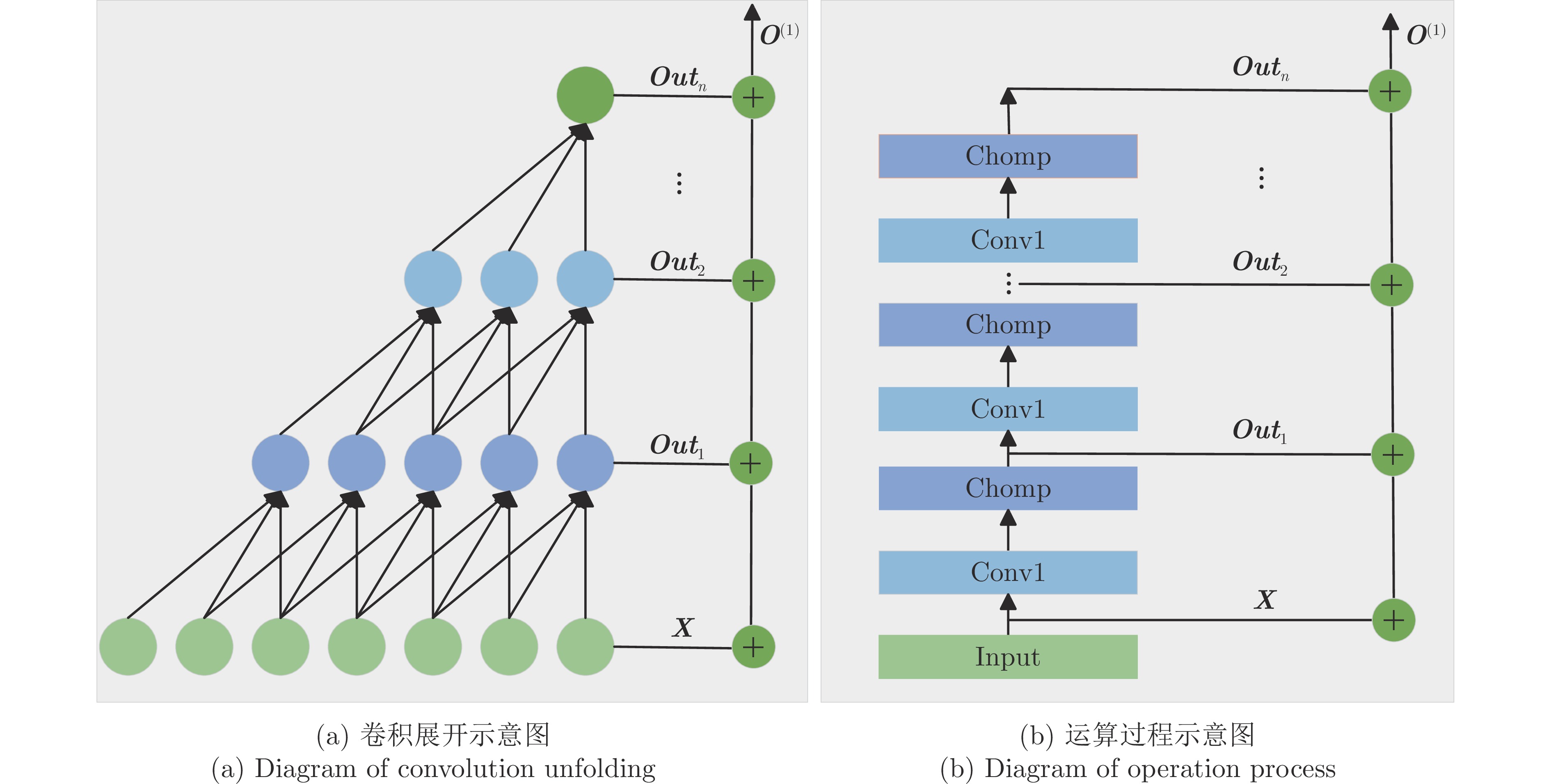
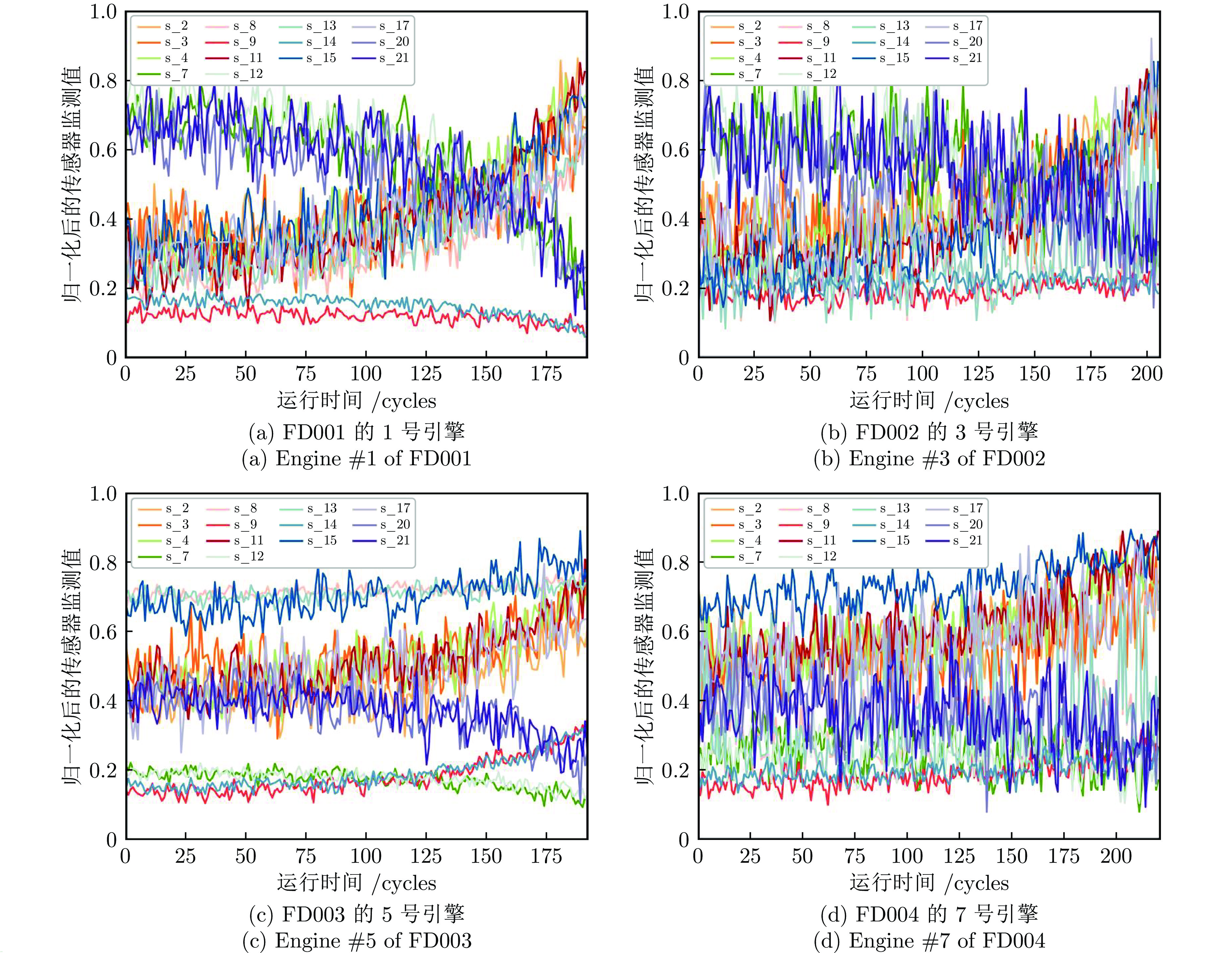
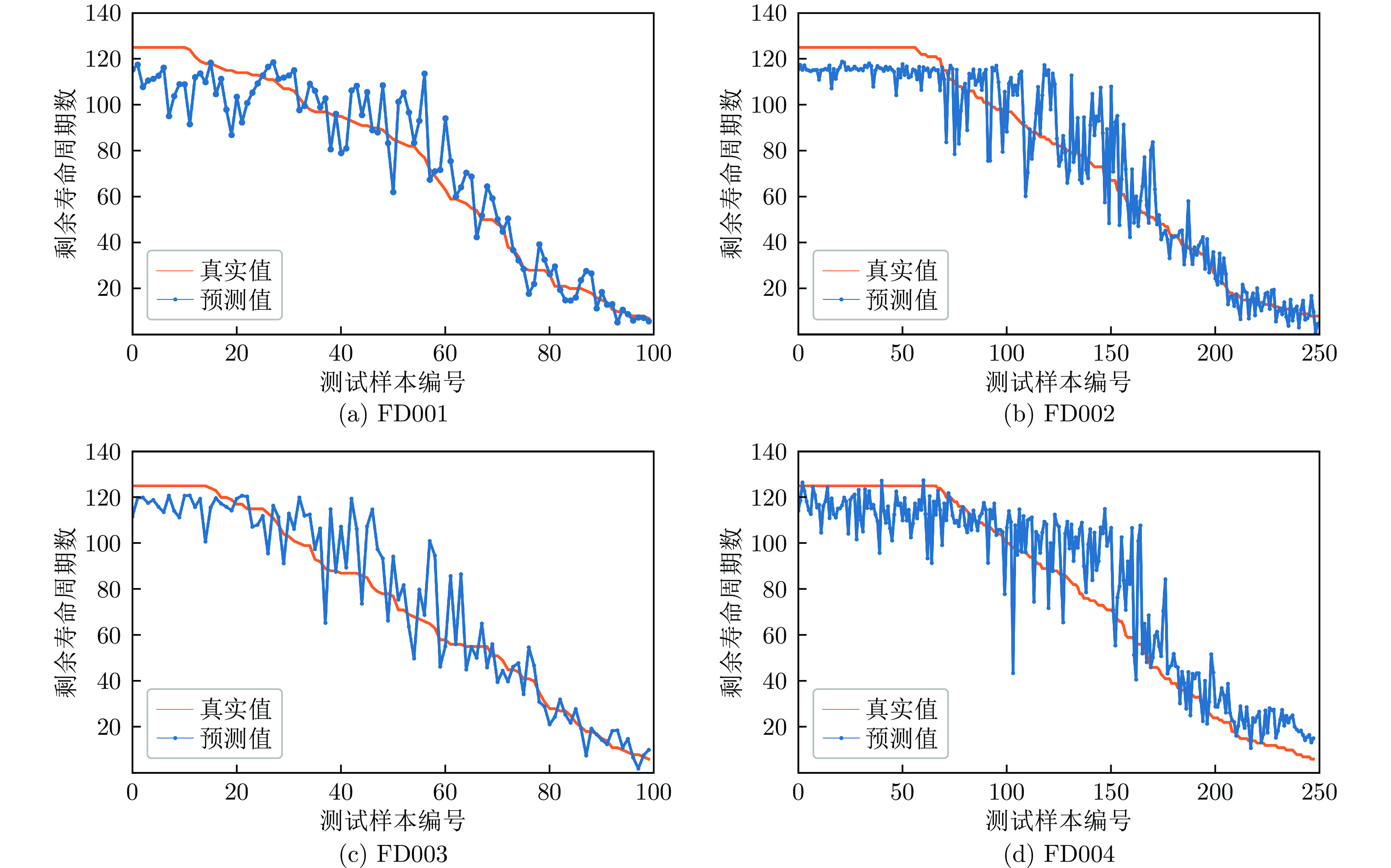
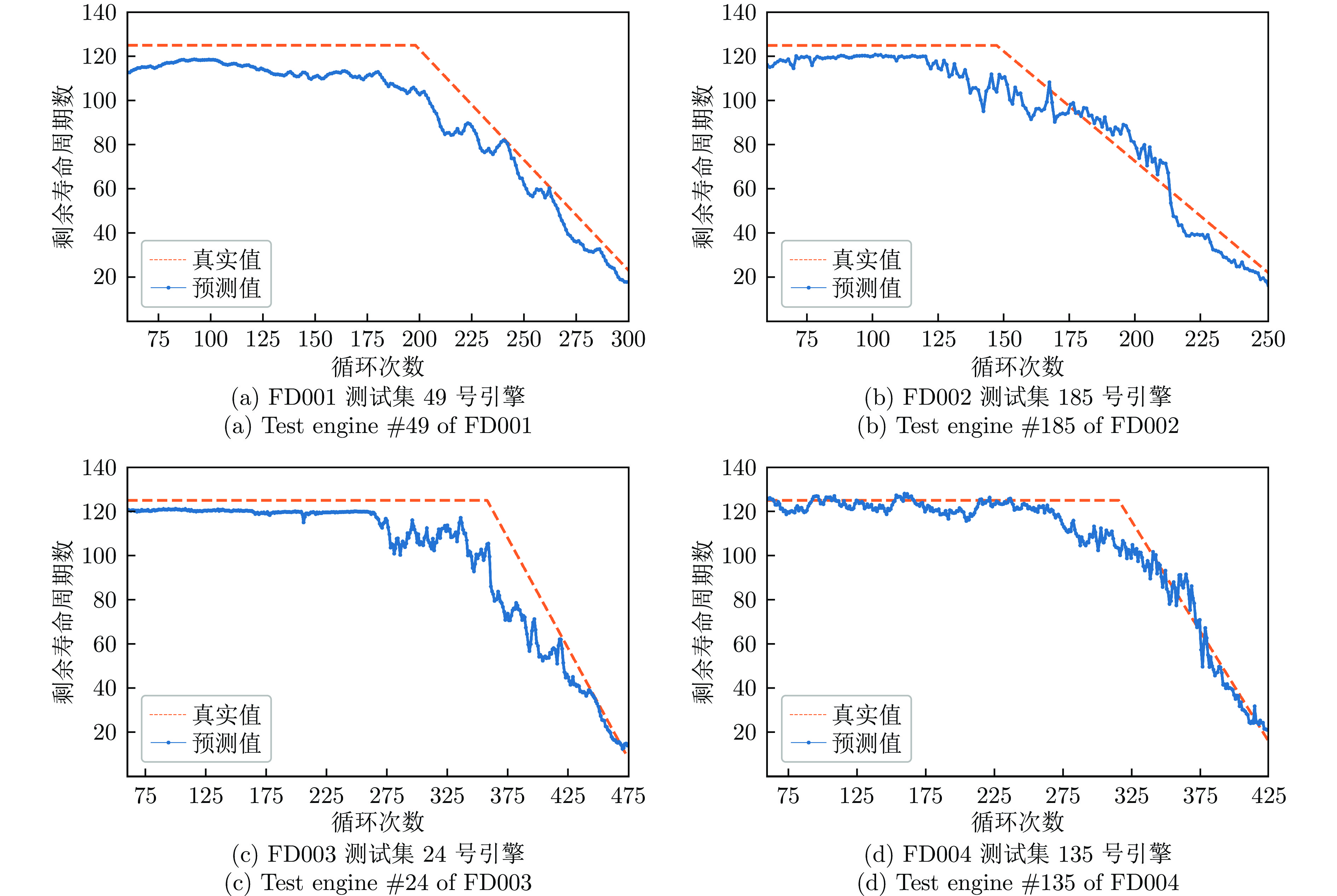
飞机发动机剩余寿命(Remaining useful life, RUL)的准确预测对确保其安全性和可靠性至关重要. 在基于多传感器检测数据预测时, 需解决局部特征提取问题以全面捕捉设备在不同时间尺度下的退化趋势, 并需解决时间序列中各元素之间长期依赖性的全局学习问题. 因此, 提出了结合多尺度局部特征增强单元(Multi-sacle local feature enhancement unit, MSLFU_BLOCK)和Transformer编码器的预测模型, 称之为MS_Transformer. MSLFU_BLOCK利用堆叠的因果卷积逐层从时间序列数据中提取多尺度局部信息, 同时避免了传统卷积计算中固有的未来数据泄漏问题. 随后, Transformer编码器通过其自注意机制进一步捕获时间序列数据中的短期和长期依赖关系. 通过将多尺度局部特征增强单元与Transformer编码器相结合, 提出的MS_Transformer全面捕捉了时间序列数据中的局部和全局模式. 在广泛使用的C-MAPSS基准数据集上进行的消融和预测实验验证了模型的合理性和有效性. 与13个先进预测模型的比较分析表明, MS_Transformer模型在操作条件更复杂的FD002和FD004数据集上的RMSE和Score指标优于其他模型, 同时在四个数据集上的平均性能最优. 该研究为发动机剩余寿命预测提供了更为可靠的解决方案.
飞机发动机剩余寿命(Remaining useful life, RUL)的准确预测对确保其安全性和可靠性至关重要. 在基于多传感器检测数据预测时, 需解决局部特征提取问题以全面捕捉设备在不同时间尺度下的退化趋势, 并需解决时间序列中各元素之间长期依赖性的全局学习问题. 因此, 提出了结合多尺度局部特征增强单元(Multi-sacle local feature enhancement unit, MSLFU_BLOCK)和Transformer编码器的预测模型, 称之为MS_Transformer. MSLFU_BLOCK利用堆叠的因果卷积逐层从时间序列数据中提取多尺度局部信息, 同时避免了传统卷积计算中固有的未来数据泄漏问题. 随后, Transformer编码器通过其自注意机制进一步捕获时间序列数据中的短期和长期依赖关系. 通过将多尺度局部特征增强单元与Transformer编码器相结合, 提出的MS_Transformer全面捕捉了时间序列数据中的局部和全局模式. 在广泛使用的C-MAPSS基准数据集上进行的消融和预测实验验证了模型的合理性和有效性. 与13个先进预测模型的比较分析表明, MS_Transformer模型在操作条件更复杂的FD002和FD004数据集上的RMSE和Score指标优于其他模型, 同时在四个数据集上的平均性能最优. 该研究为发动机剩余寿命预测提供了更为可靠的解决方案.
2024, 50(9): 1831-1853.
doi: 10.16383/j.aas.c210223
cstr: 32138.14.j.aas.c210223
摘要:
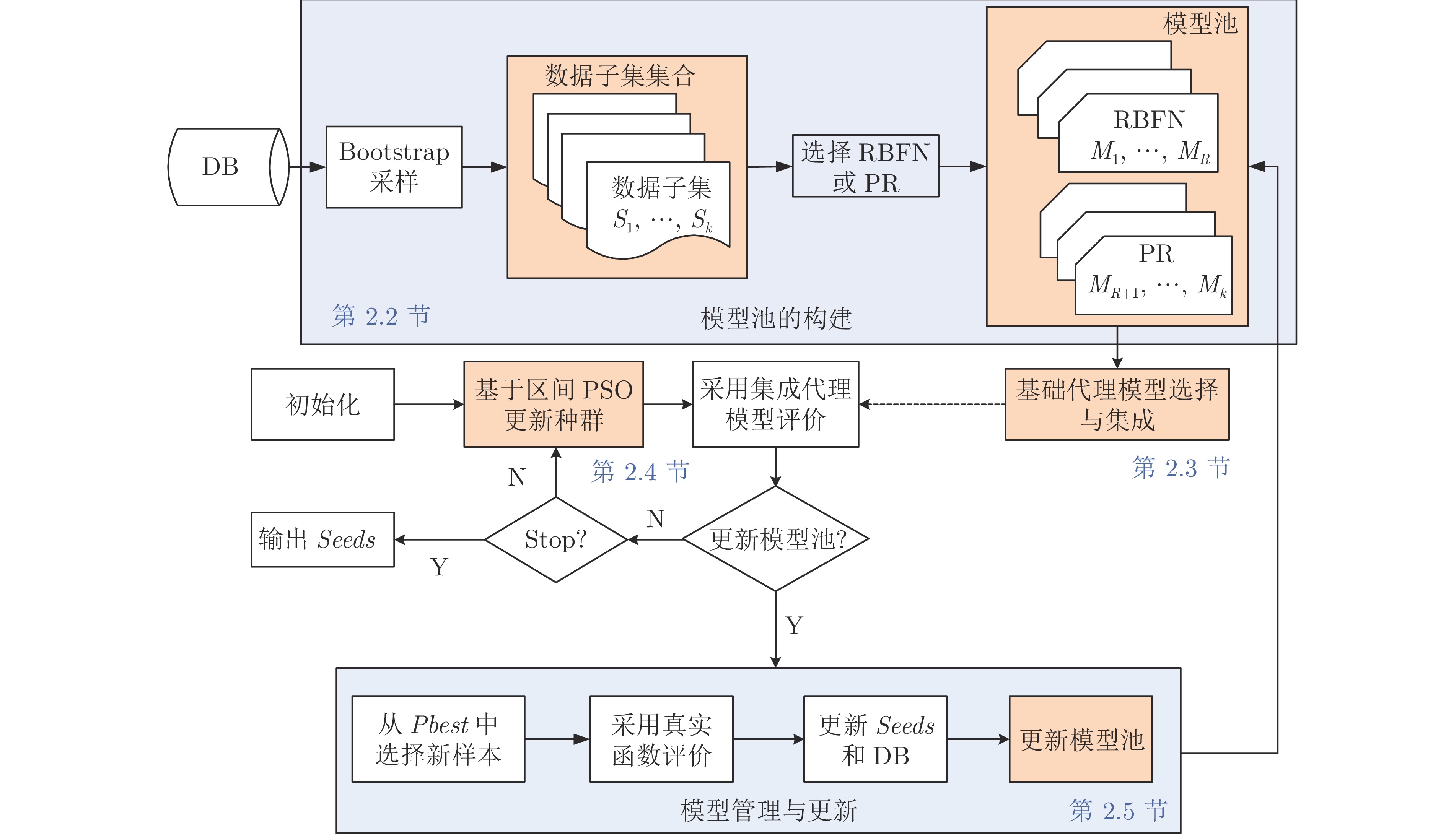
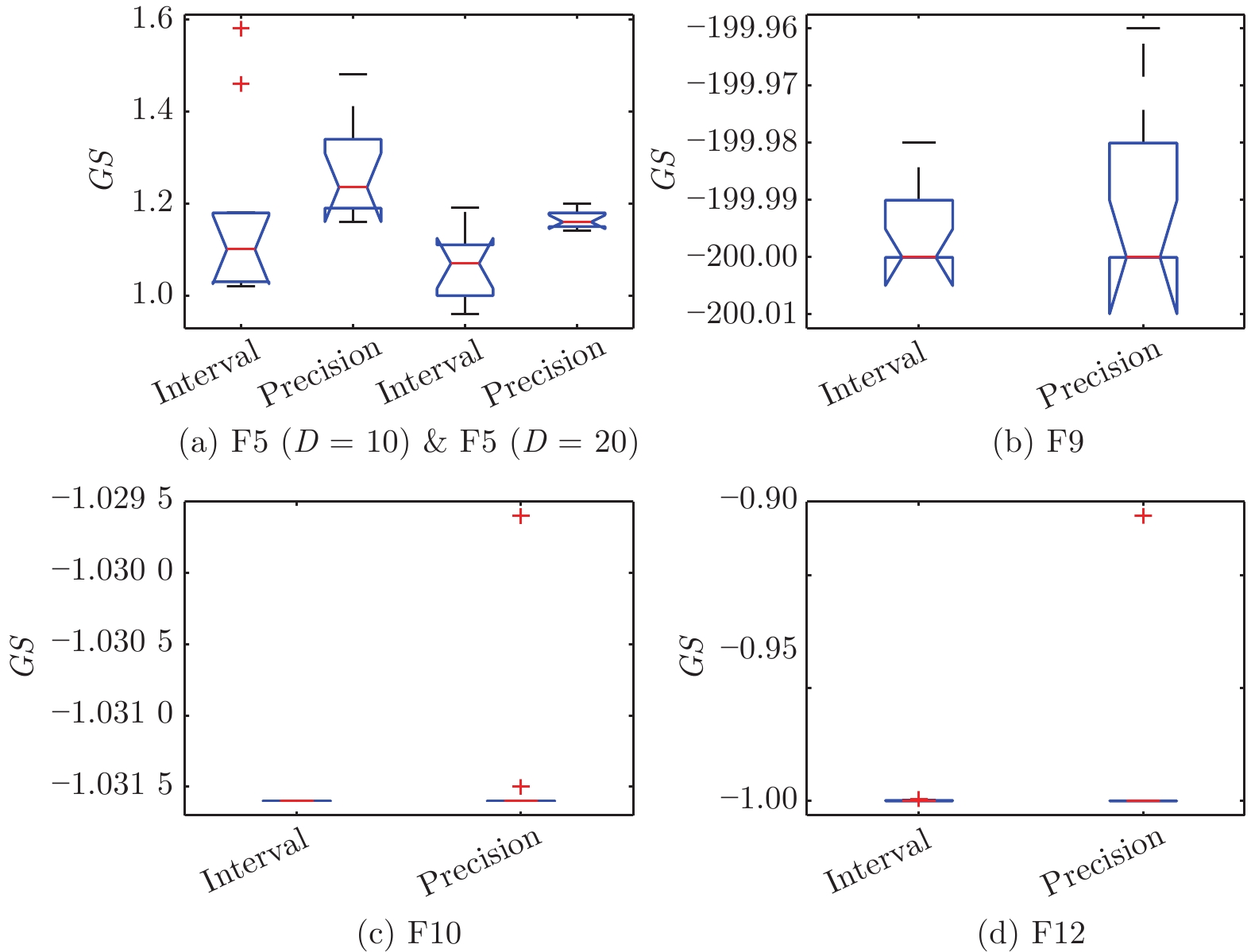
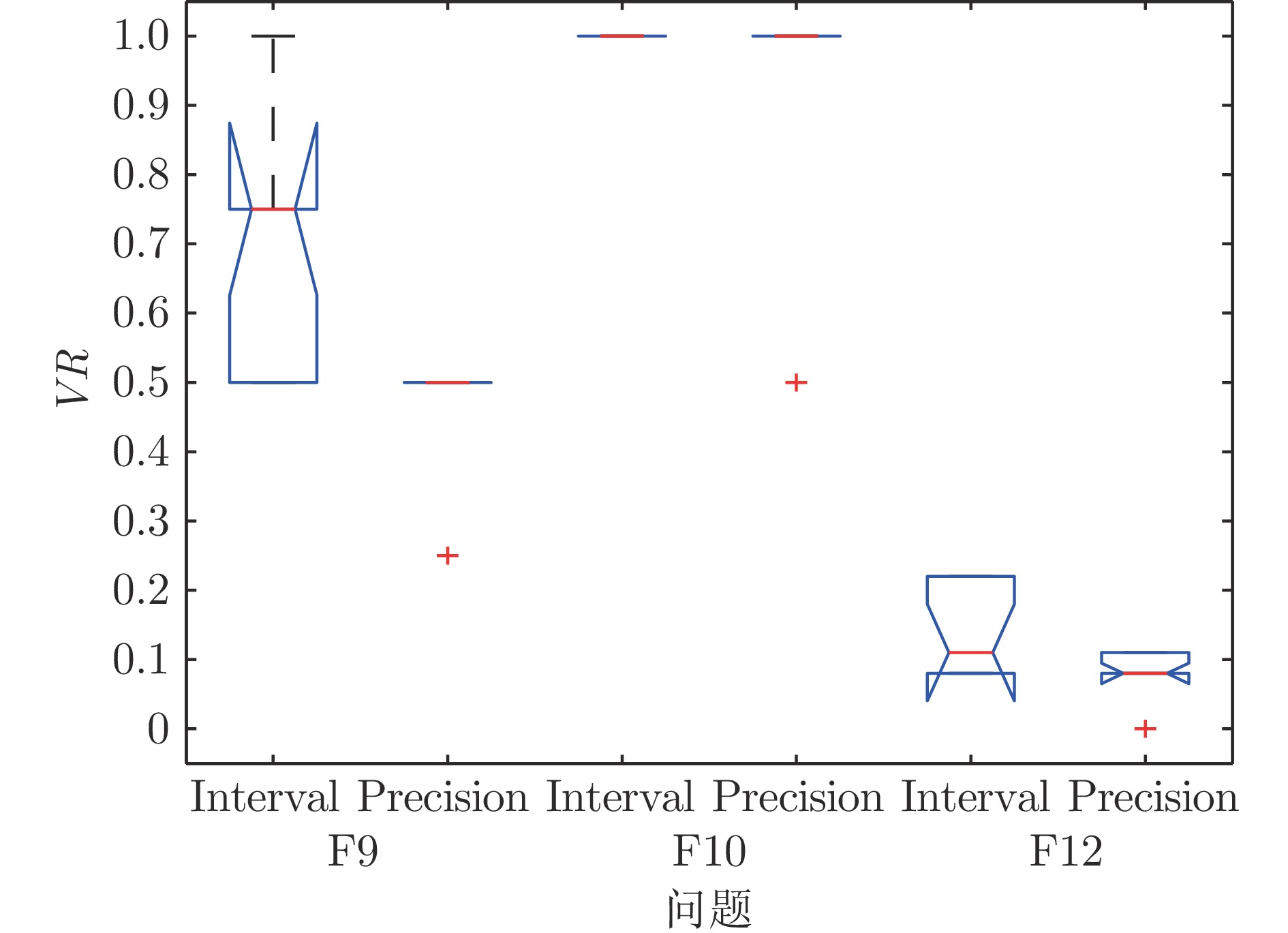
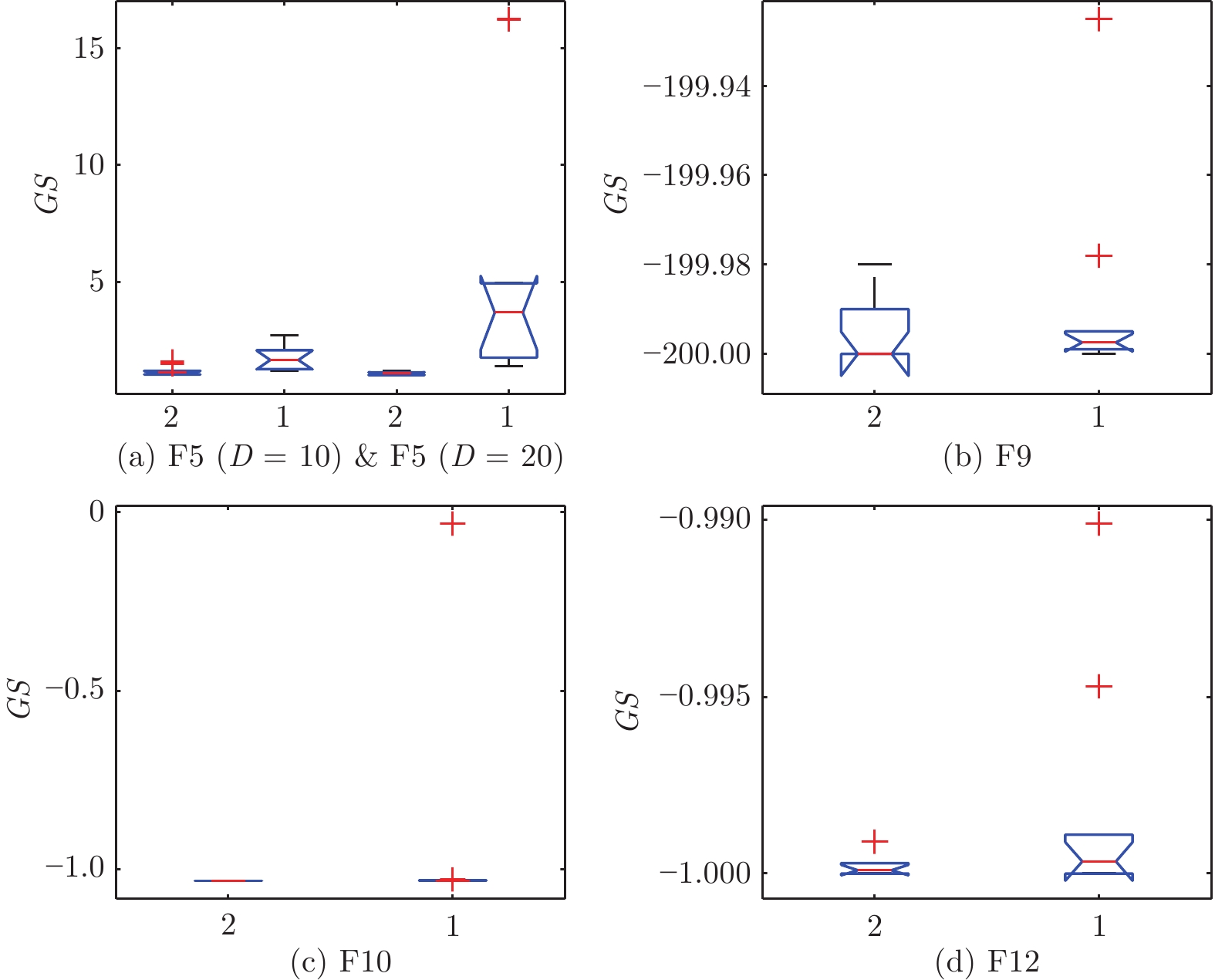
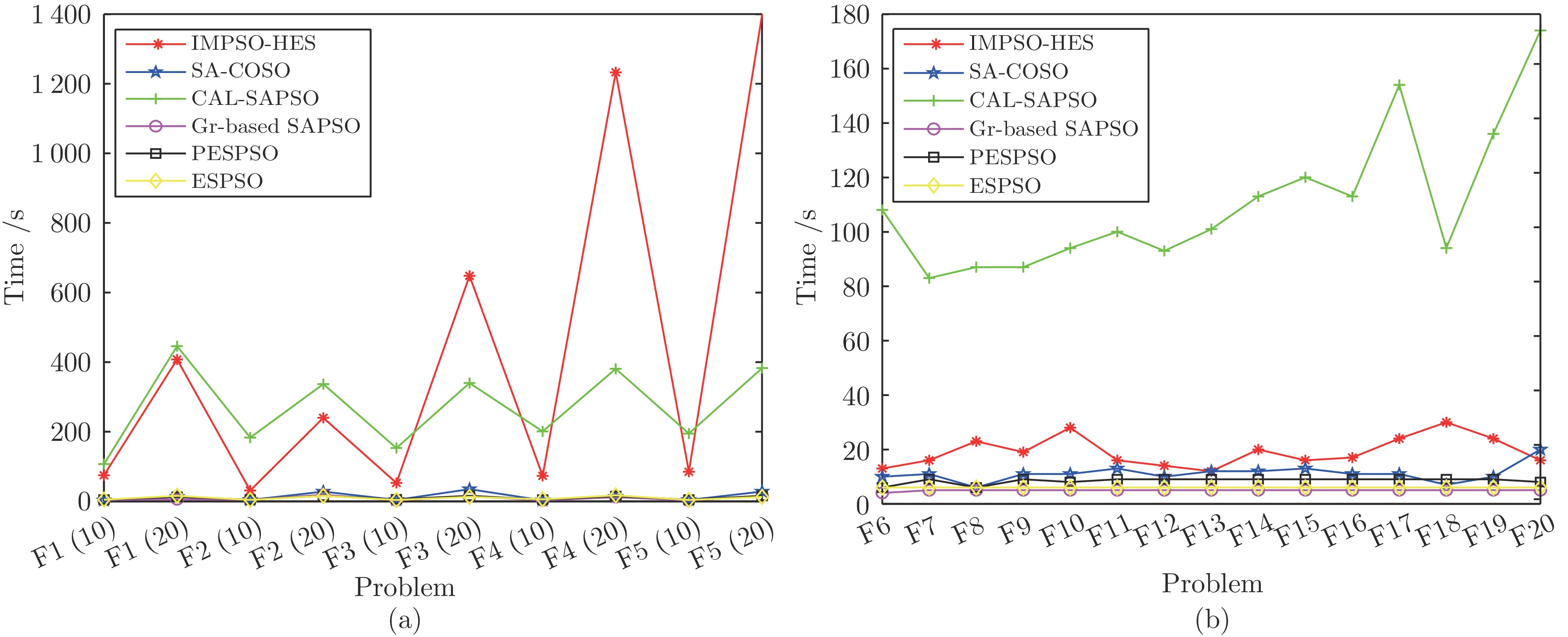
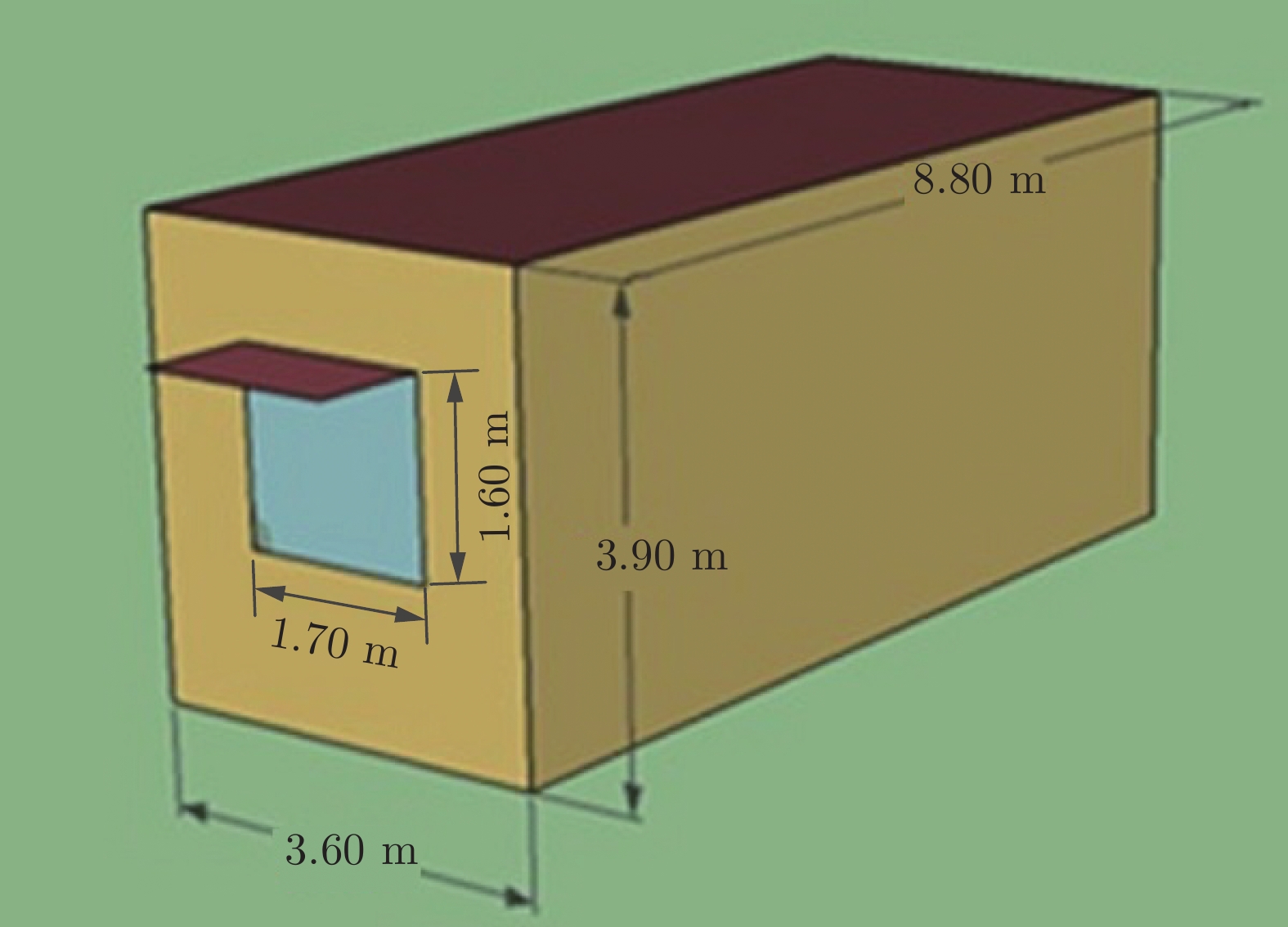
现实生活中的很多黑盒优化问题可归为高计算代价的多模态优化问题(Multimodal optimization problem, MMOP), 即昂贵多模态优化问题(Expensive MMOP, EMMOP). 在处理该类问题时, 决策者希望以尽量少的计算代价(即尽量少的真实函数评价次数)找到多个高质量的最优解. 然而, 已有代理辅助的进化优化算法(Surrogate-assisted evolutionary algorithm, SAEA)很少考虑问题的多模态属性, 运行一次仅可获得问题的一个最优解. 鉴于此, 研究一种异构集成代理辅助的区间多模态粒子群优化(Interval multimodal particle swarm optimization algorithm assisted by heterogeneous ensemble surrogate, IMPSO-HES)算法. 首先, 借助异构集成的思想构建一个由多个基础代理模型组成的模型池; 随后, 依据待评价粒子与已发现模态之间的匹配关系, 从模型池中自主选择部分基础代理模型进行集成, 并使用集成后的代理模型预测该粒子的适应值. 进一步, 为节约代理模型管理的代价, 设计一种增量式的代理模型管理策略; 为减少代理模型预测误差对算法性能的影响, 首次将区间排序关系引入到进化过程中. 将所提算法与当前流行的5种代理辅助进化优化算法和7 种最先进的多模态优化算法进行对比, 在20个测试函数和1个建筑节能实际问题上的实验结果表明, 所提算法可以在较少计算代价下获得问题的多个高竞争最优解.
现实生活中的很多黑盒优化问题可归为高计算代价的多模态优化问题(Multimodal optimization problem, MMOP), 即昂贵多模态优化问题(Expensive MMOP, EMMOP). 在处理该类问题时, 决策者希望以尽量少的计算代价(即尽量少的真实函数评价次数)找到多个高质量的最优解. 然而, 已有代理辅助的进化优化算法(Surrogate-assisted evolutionary algorithm, SAEA)很少考虑问题的多模态属性, 运行一次仅可获得问题的一个最优解. 鉴于此, 研究一种异构集成代理辅助的区间多模态粒子群优化(Interval multimodal particle swarm optimization algorithm assisted by heterogeneous ensemble surrogate, IMPSO-HES)算法. 首先, 借助异构集成的思想构建一个由多个基础代理模型组成的模型池; 随后, 依据待评价粒子与已发现模态之间的匹配关系, 从模型池中自主选择部分基础代理模型进行集成, 并使用集成后的代理模型预测该粒子的适应值. 进一步, 为节约代理模型管理的代价, 设计一种增量式的代理模型管理策略; 为减少代理模型预测误差对算法性能的影响, 首次将区间排序关系引入到进化过程中. 将所提算法与当前流行的5种代理辅助进化优化算法和7 种最先进的多模态优化算法进行对比, 在20个测试函数和1个建筑节能实际问题上的实验结果表明, 所提算法可以在较少计算代价下获得问题的多个高竞争最优解.

2024, 50(9): 1854-1865.
doi: 10.16383/j.aas.c210324
cstr: 32138.14.j.aas.c210324
摘要:
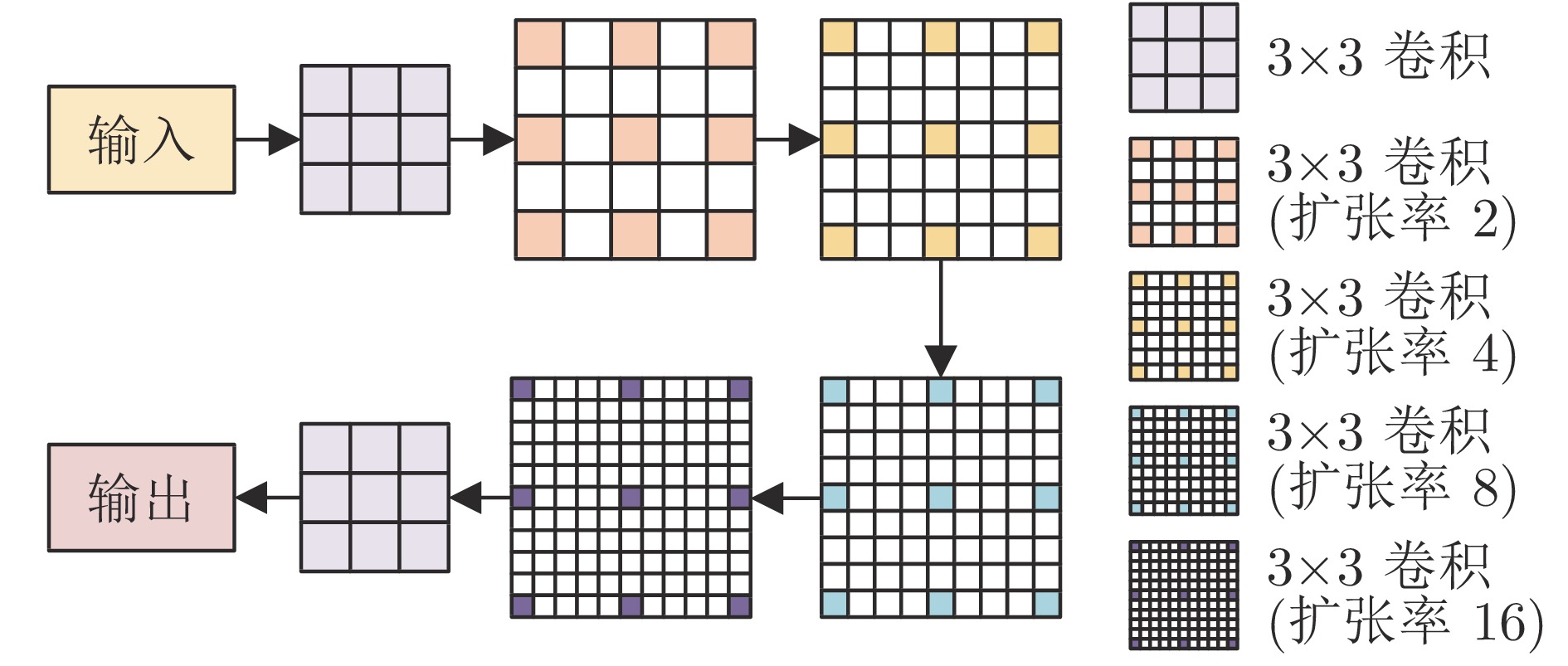
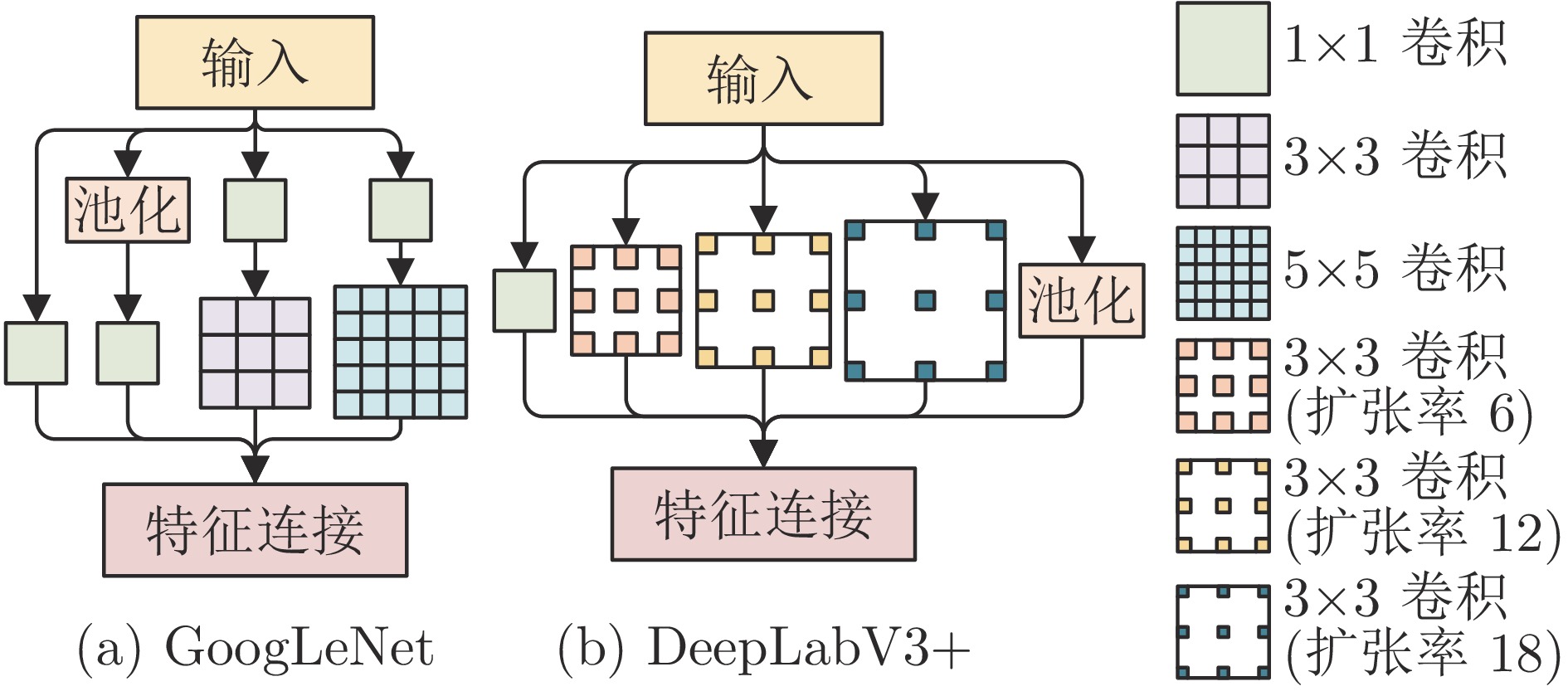
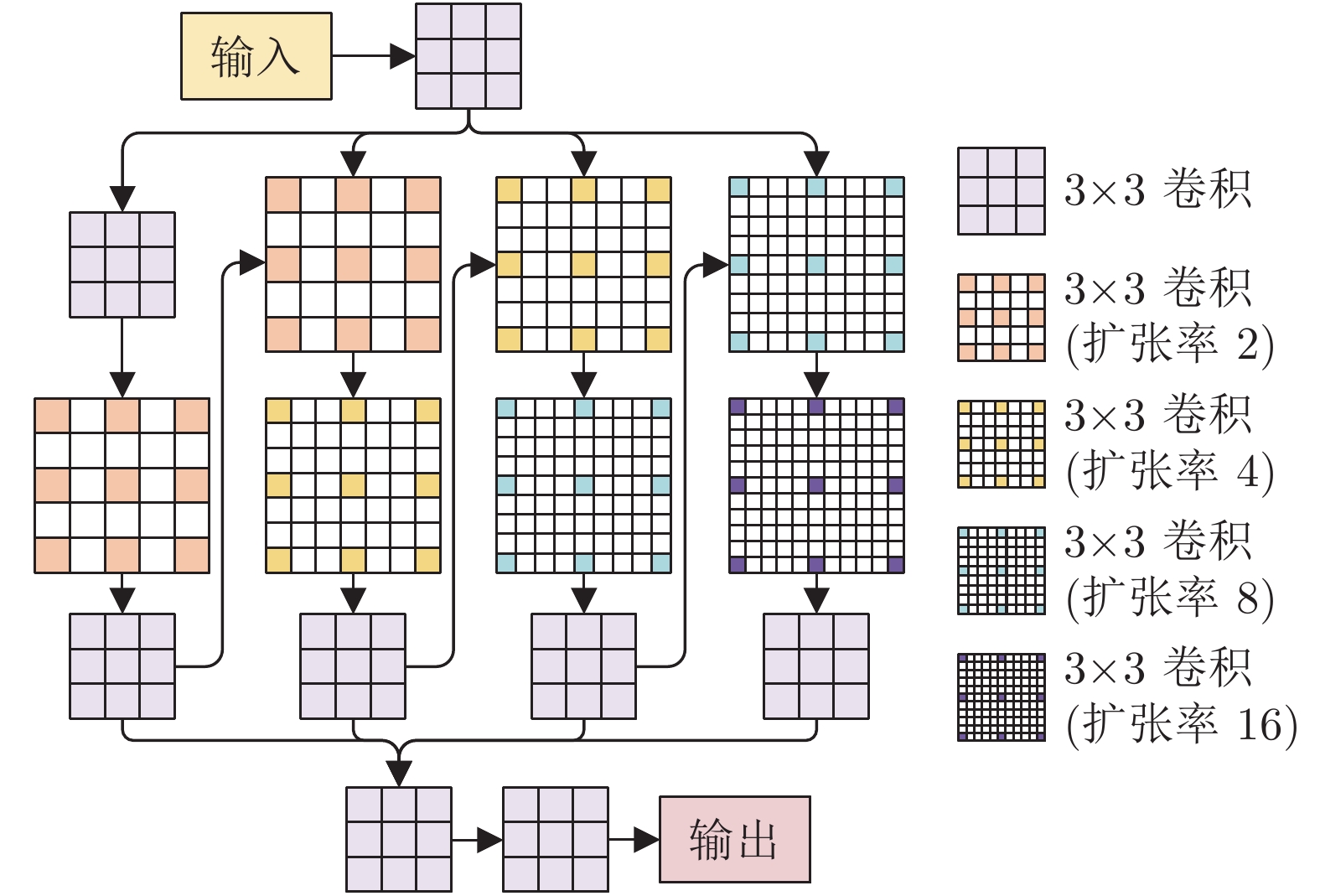
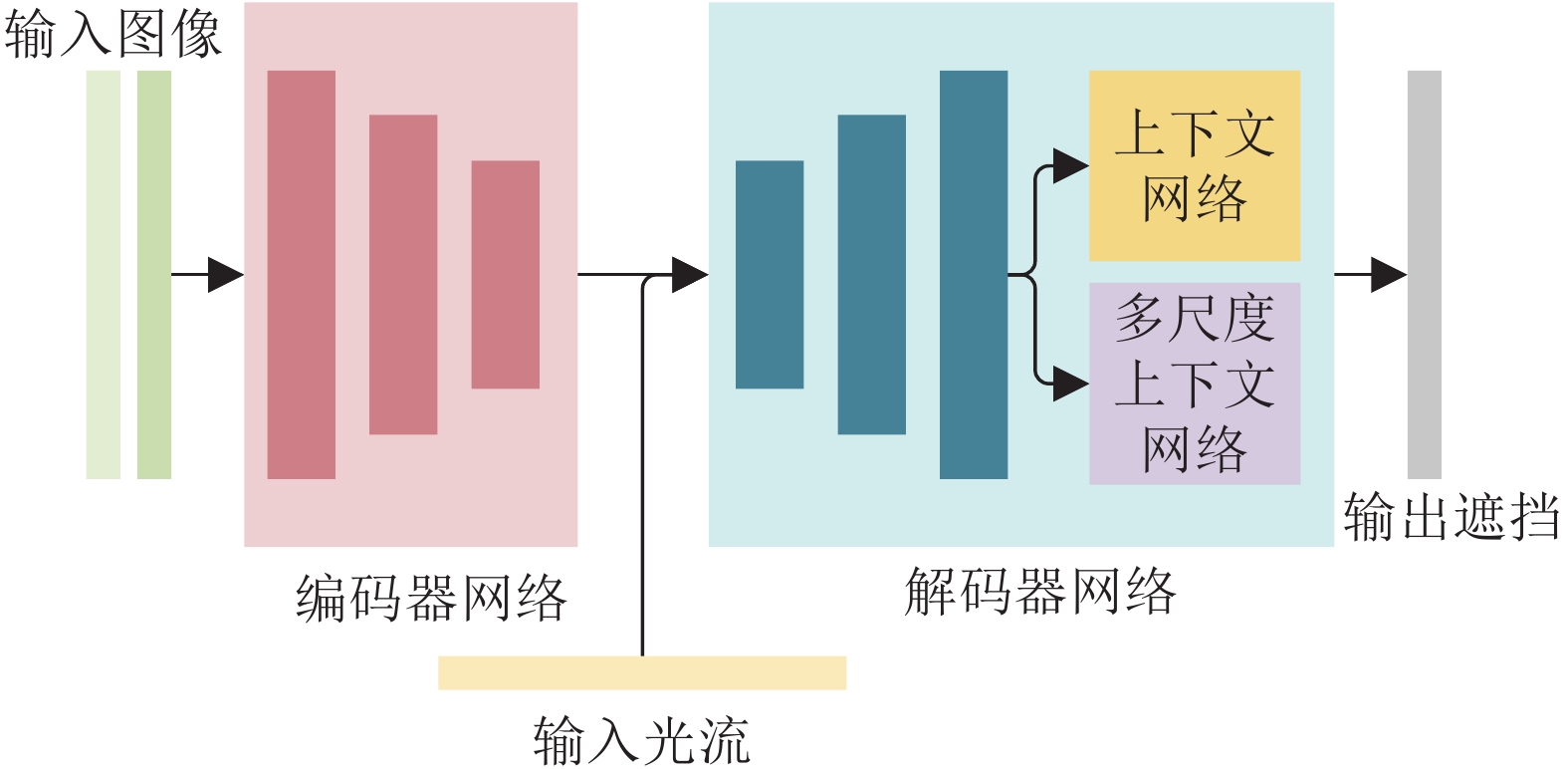
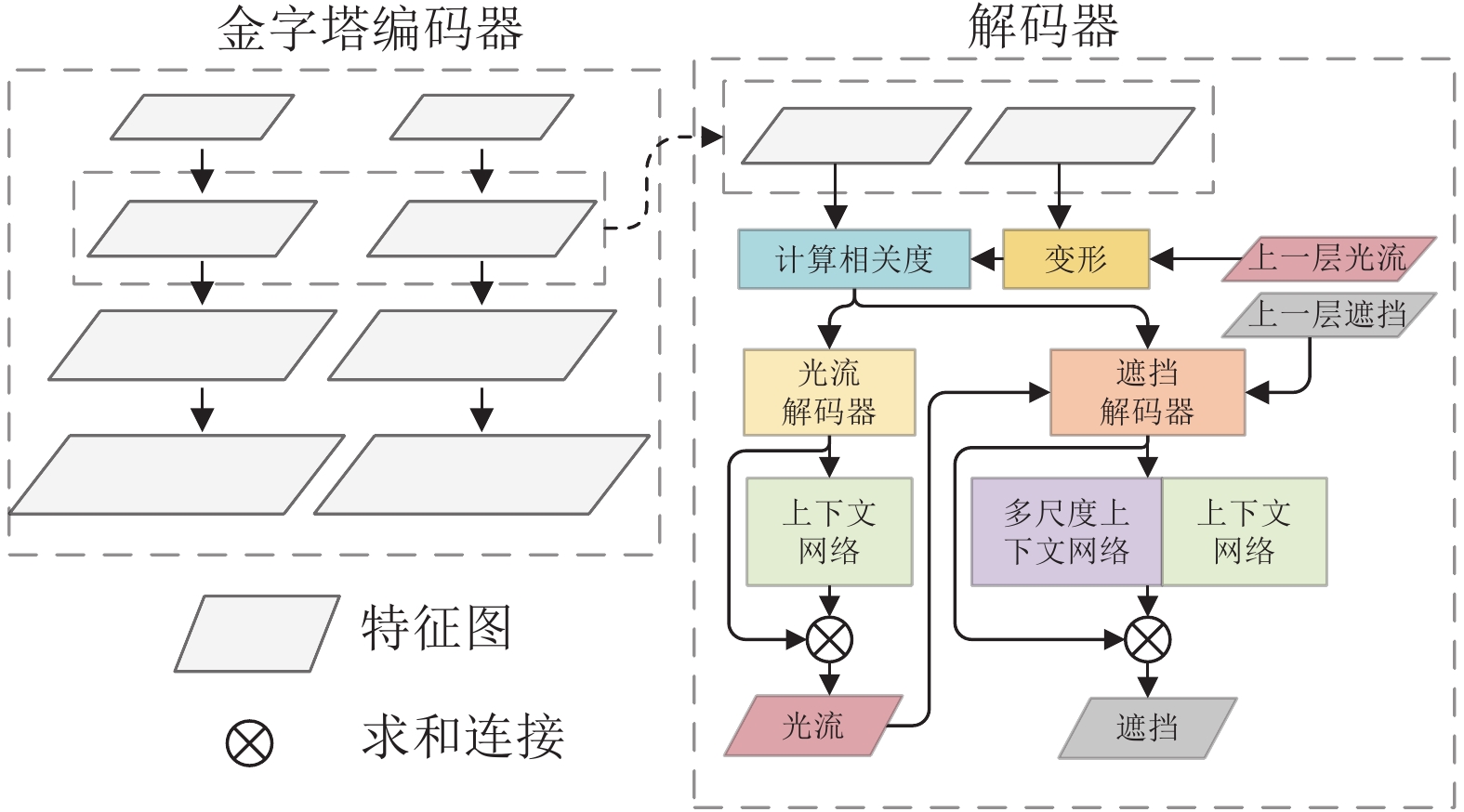
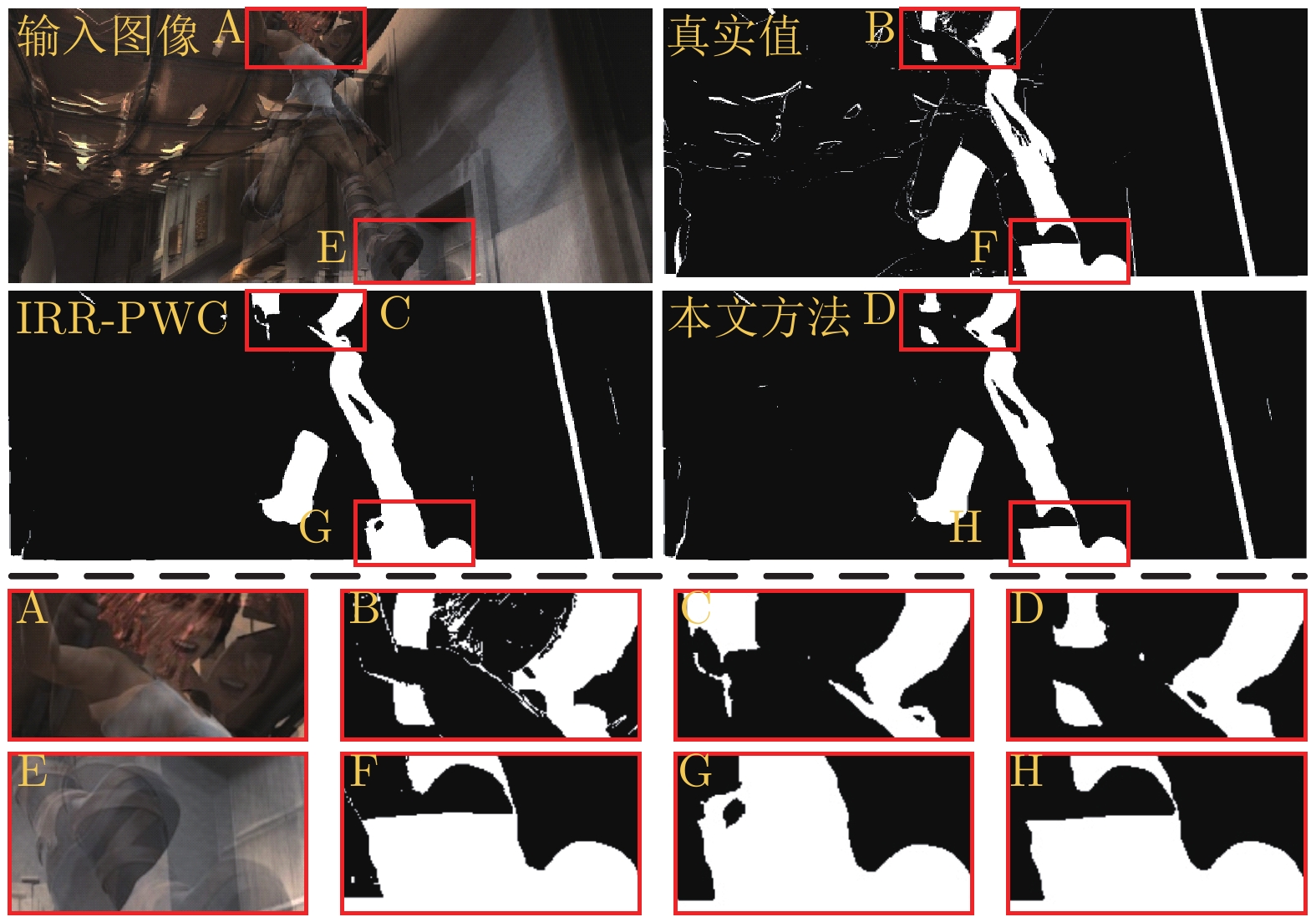
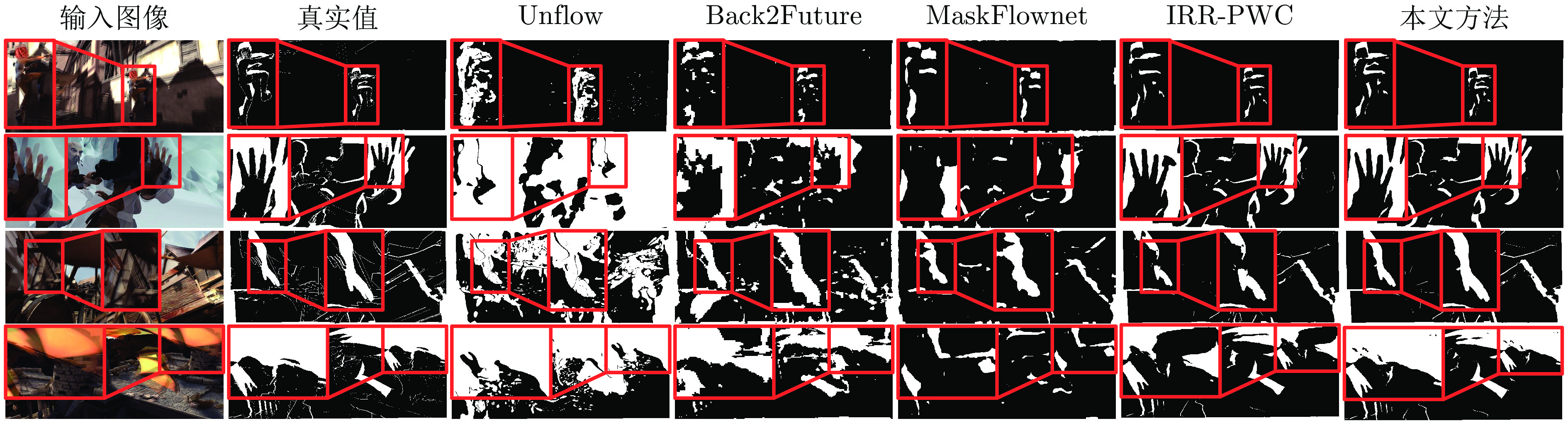
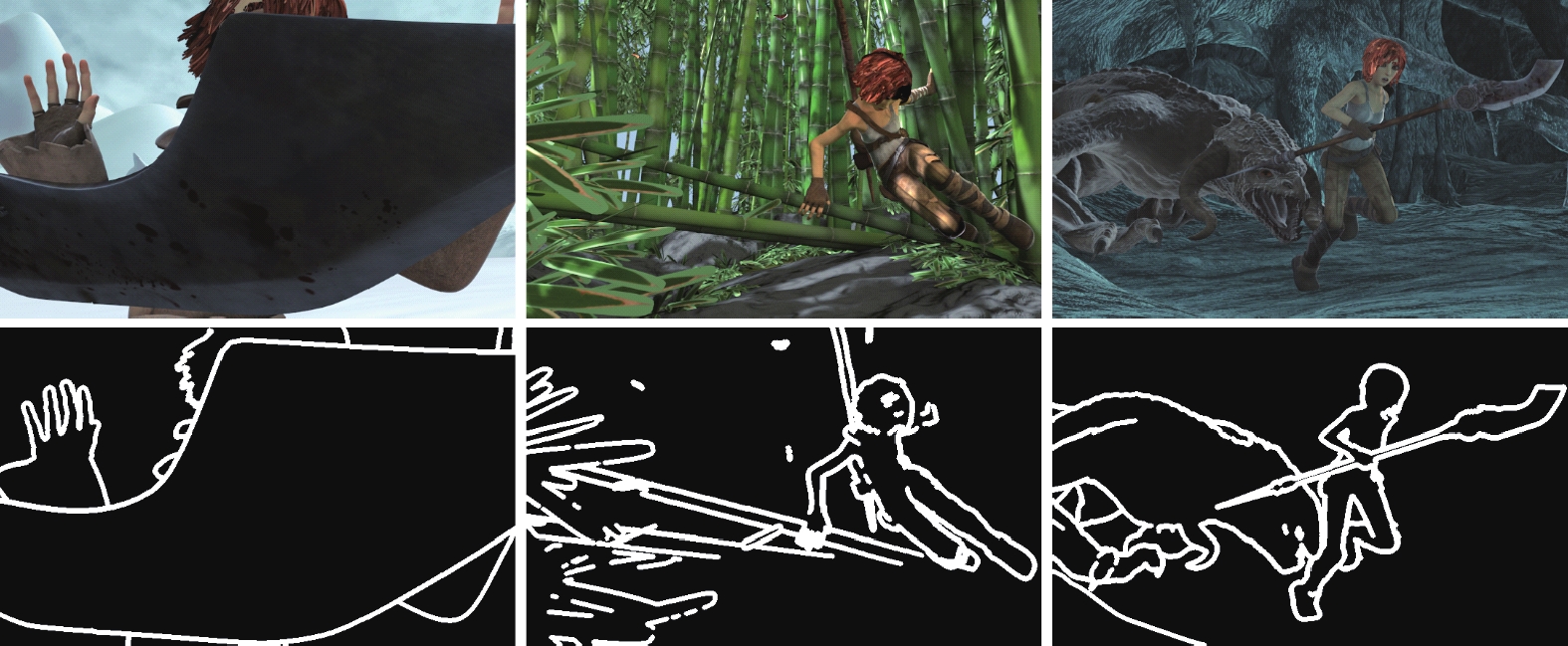
针对非刚性运动和大位移场景下运动遮挡检测的准确性与鲁棒性问题, 提出一种基于光流与多尺度上下文的图像序列运动遮挡检测方法. 首先, 设计基于扩张卷积的多尺度上下文信息聚合网络, 通过图像序列多尺度上下文信息获取更大范围的图像特征; 然后, 采用特征金字塔构建基于多尺度上下文与光流的端到端运动遮挡检测网络模型, 利用光流优化非刚性运动和大位移区域的运动检测遮挡信息; 最后, 构造基于运动边缘的网络模型训练损失函数, 获取准确的运动遮挡边界. 分别采用MPI-Sintel和KITTI测试数据集对所提方法与现有的代表性方法进行实验对比与分析. 实验结果表明, 所提方法能够有效提高运动遮挡检测的准确性和鲁棒性, 尤其在非刚性运动和大位移等困难场景下具有更好的遮挡检测鲁棒性.
针对非刚性运动和大位移场景下运动遮挡检测的准确性与鲁棒性问题, 提出一种基于光流与多尺度上下文的图像序列运动遮挡检测方法. 首先, 设计基于扩张卷积的多尺度上下文信息聚合网络, 通过图像序列多尺度上下文信息获取更大范围的图像特征; 然后, 采用特征金字塔构建基于多尺度上下文与光流的端到端运动遮挡检测网络模型, 利用光流优化非刚性运动和大位移区域的运动检测遮挡信息; 最后, 构造基于运动边缘的网络模型训练损失函数, 获取准确的运动遮挡边界. 分别采用MPI-Sintel和KITTI测试数据集对所提方法与现有的代表性方法进行实验对比与分析. 实验结果表明, 所提方法能够有效提高运动遮挡检测的准确性和鲁棒性, 尤其在非刚性运动和大位移等困难场景下具有更好的遮挡检测鲁棒性.


2024, 50(9): 1866-1876.
doi: 10.16383/j.aas.c220690
cstr: 32138.14.j.aas.c220690
摘要:
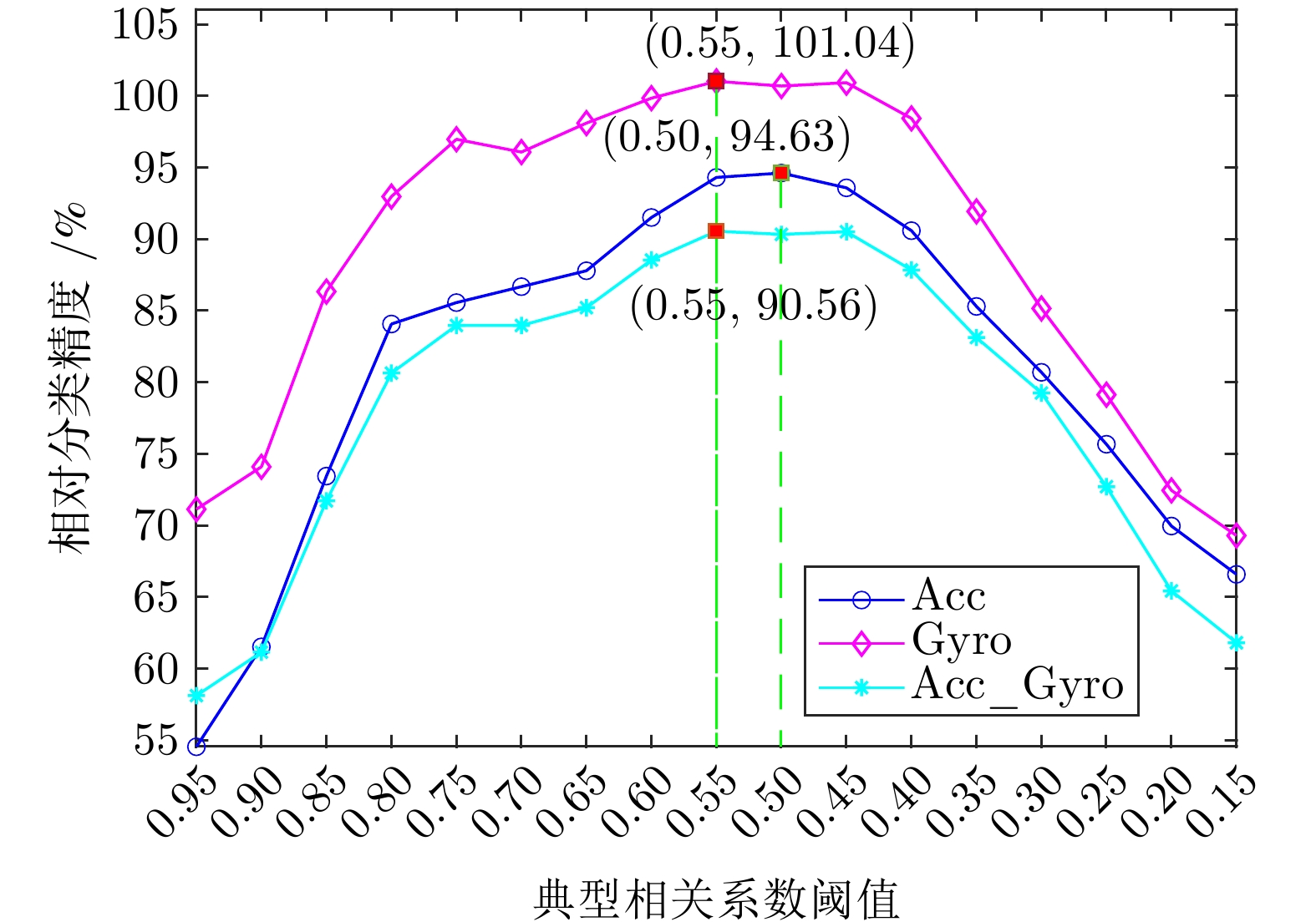
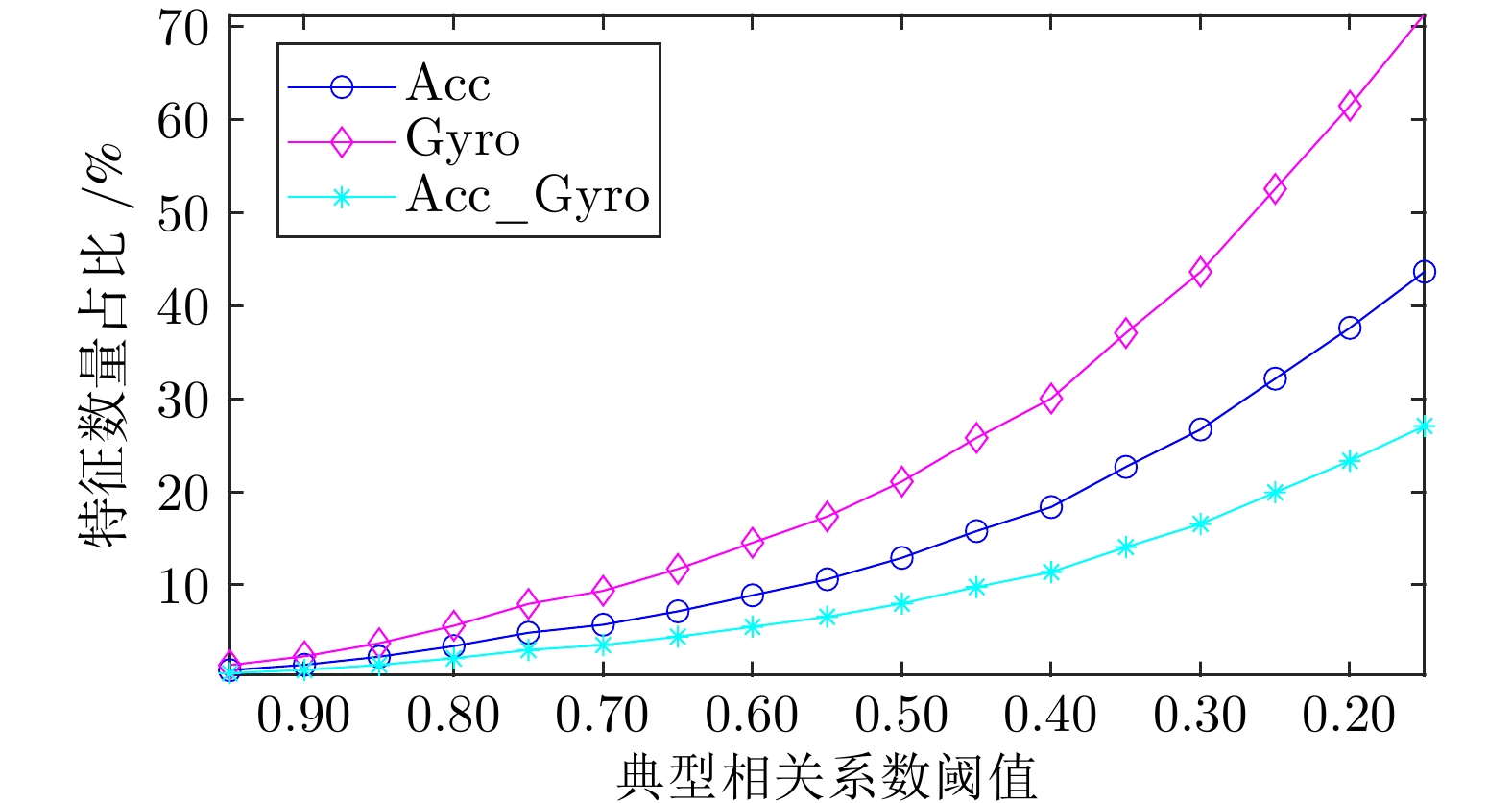
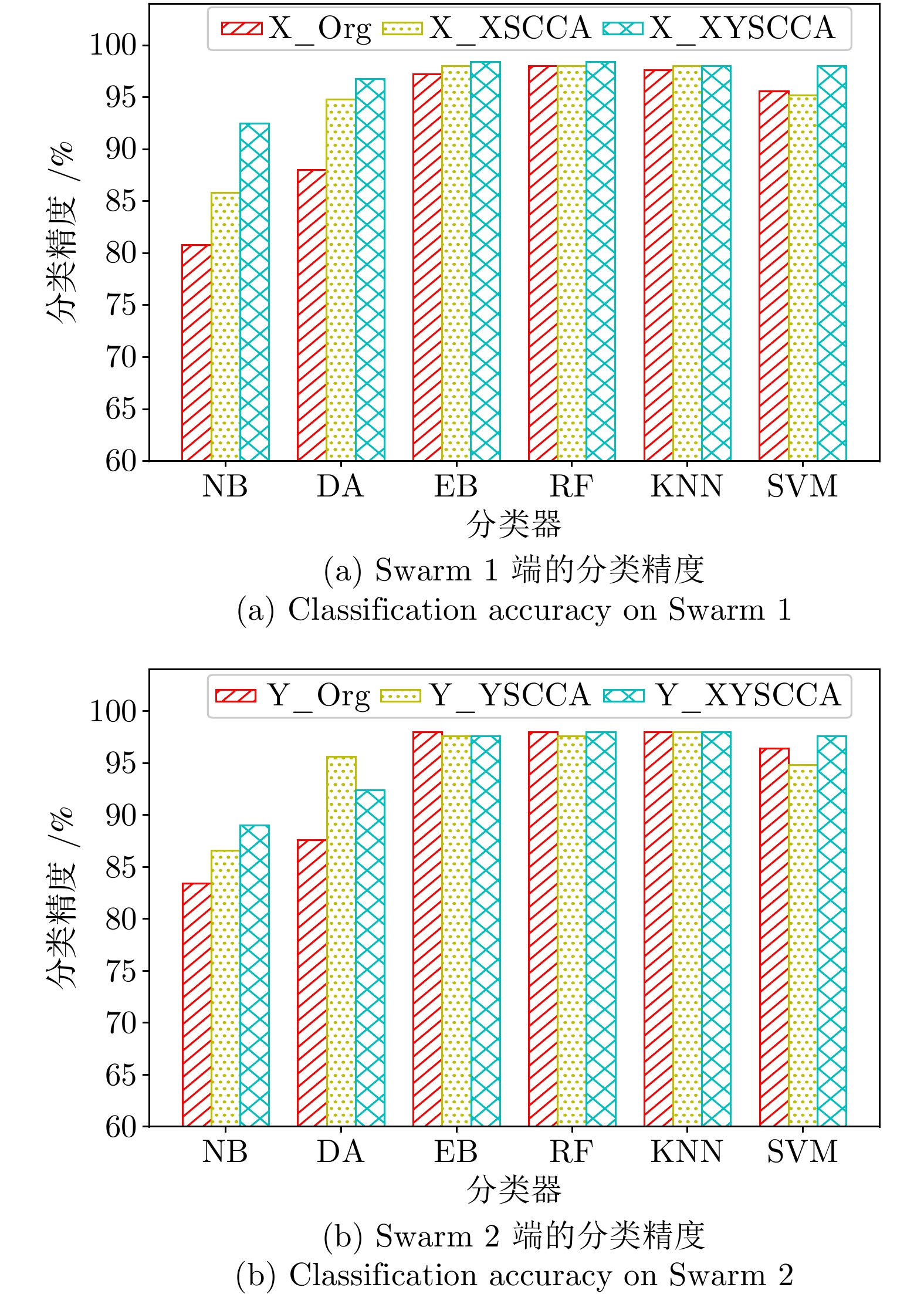
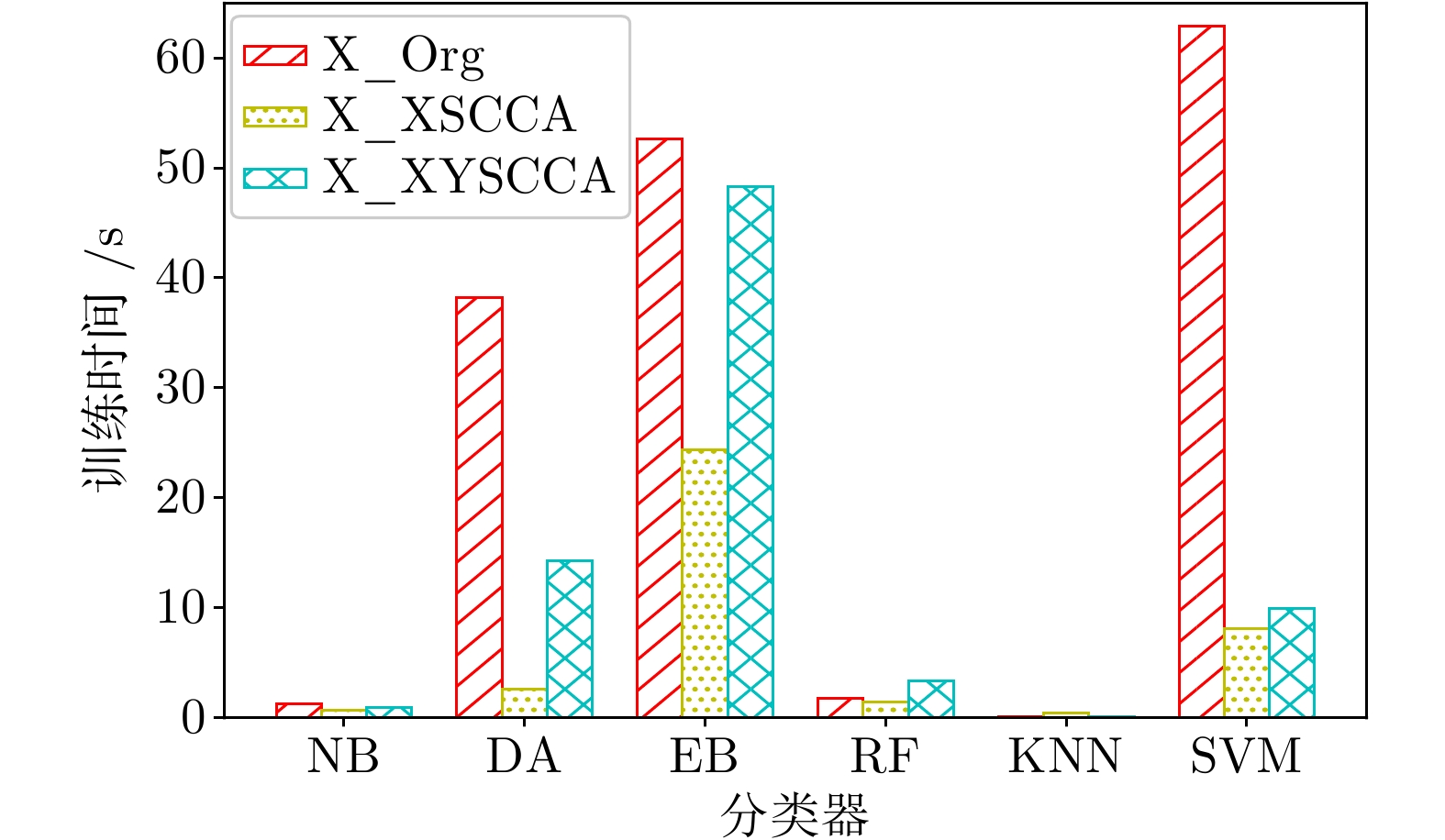
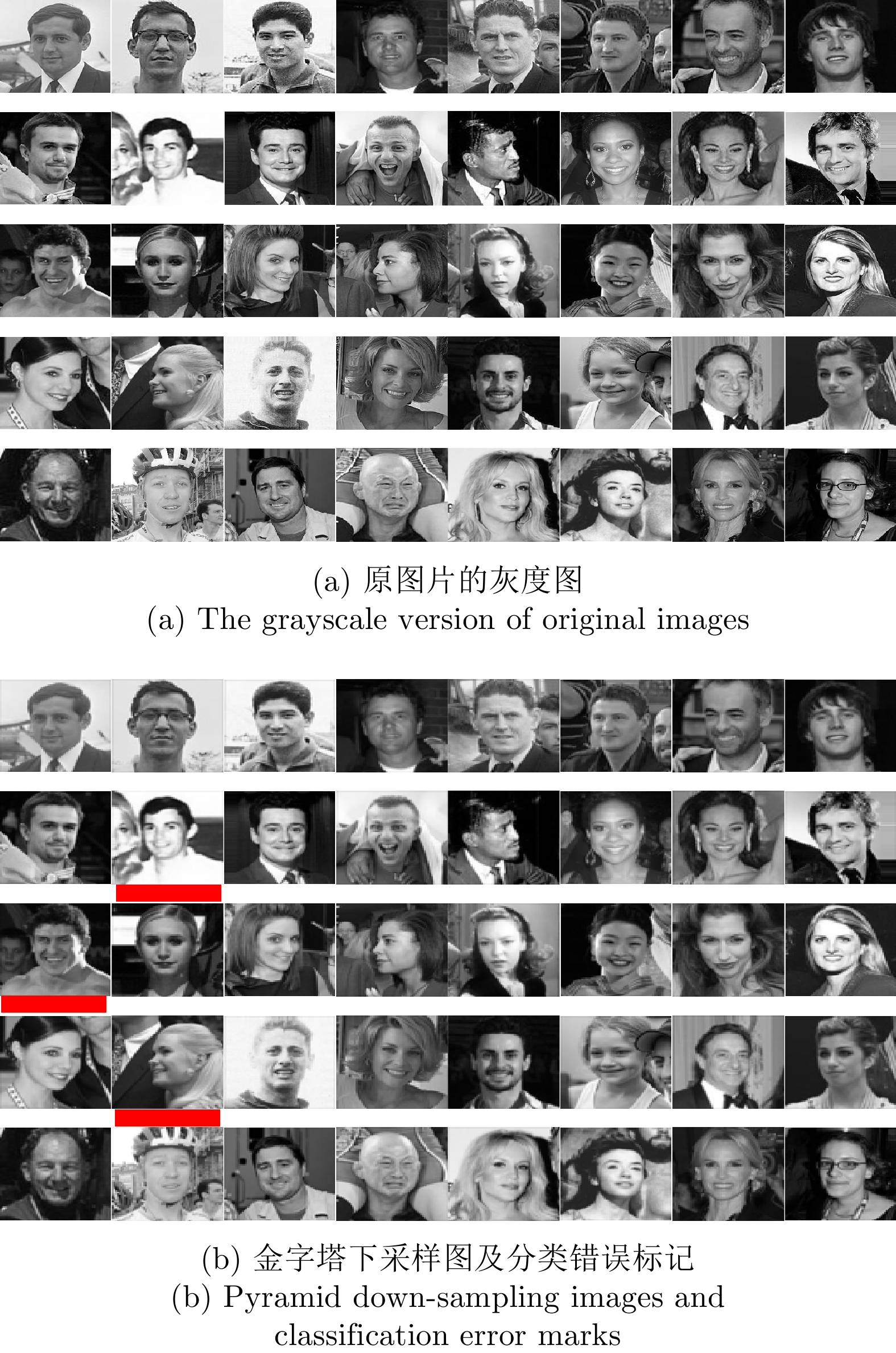
联邦学习(Federated learning, FL)在解决人工智能(Artificial intelligence, AI)面临的隐私泄露和数据孤岛问题方面具有显著优势. 针对联邦学习的已有研究未考虑联邦数据之间的关联性和高维性问题, 提出一种基于联邦数据相关性的去中心化联邦降维方法. 该方法基于Swarm学习(Swarm learning, SL)思想, 通过分离耦合特征, 构建典型相关分析(Canonical correlation analysis, CCA)的Swarm联邦框架, 以提取Swarm节点的低维关联特征. 为保护协作参数的隐私安全, 还构建一种随机扰乱策略来隐藏Swarm特征隐私. 在真实数据集上的实验验证了所提方法的有效性.
联邦学习(Federated learning, FL)在解决人工智能(Artificial intelligence, AI)面临的隐私泄露和数据孤岛问题方面具有显著优势. 针对联邦学习的已有研究未考虑联邦数据之间的关联性和高维性问题, 提出一种基于联邦数据相关性的去中心化联邦降维方法. 该方法基于Swarm学习(Swarm learning, SL)思想, 通过分离耦合特征, 构建典型相关分析(Canonical correlation analysis, CCA)的Swarm联邦框架, 以提取Swarm节点的低维关联特征. 为保护协作参数的隐私安全, 还构建一种随机扰乱策略来隐藏Swarm特征隐私. 在真实数据集上的实验验证了所提方法的有效性.