2026年 第52卷 第2期
2026, 52(2): 194-209.
doi: 10.16383/j.aas.c250369
cstr: 32138.14.j.aas.c250369
摘要:
随着低空立体交通系统进程的加速推进, 空中、地面与水面三维异构交通平台的协同愈加关键. 智能调度与资源优化的深度融合, 正逐步成为智慧城市建设与应急响应体系中不可或缺的核心支撑力量. 本文围绕多模式协同调度的研究热点展开综述. 首先, 综合回顾无人机、无人车与无人艇在多源信息融合、环境感知与自适应决策方面的协同机制. 其次, 从任务分解、路径规划、协同控制与系统调度四个层面, 总结强化学习、图优化、进化算法等在复杂动态环境下的典型调度方法. 进一步地, 梳理集中式、分布式与混合式控制架构下的任务分配与通信策略, 并分析传感器数据、仿真数据与运行大数据在调度优化中的作用. 最后, 探讨当前低空立体交通系统在资源分配、安全保障与跨域协同中的关键挑战, 并展望基于大数据驱动与智能增强的低空立体交通系统未来发展路径.
随着低空立体交通系统进程的加速推进, 空中、地面与水面三维异构交通平台的协同愈加关键. 智能调度与资源优化的深度融合, 正逐步成为智慧城市建设与应急响应体系中不可或缺的核心支撑力量. 本文围绕多模式协同调度的研究热点展开综述. 首先, 综合回顾无人机、无人车与无人艇在多源信息融合、环境感知与自适应决策方面的协同机制. 其次, 从任务分解、路径规划、协同控制与系统调度四个层面, 总结强化学习、图优化、进化算法等在复杂动态环境下的典型调度方法. 进一步地, 梳理集中式、分布式与混合式控制架构下的任务分配与通信策略, 并分析传感器数据、仿真数据与运行大数据在调度优化中的作用. 最后, 探讨当前低空立体交通系统在资源分配、安全保障与跨域协同中的关键挑战, 并展望基于大数据驱动与智能增强的低空立体交通系统未来发展路径.
2026, 52(2): 210-229.
doi: 10.16383/j.aas.c250386
cstr: 32138.14.j.aas.c250386
摘要:
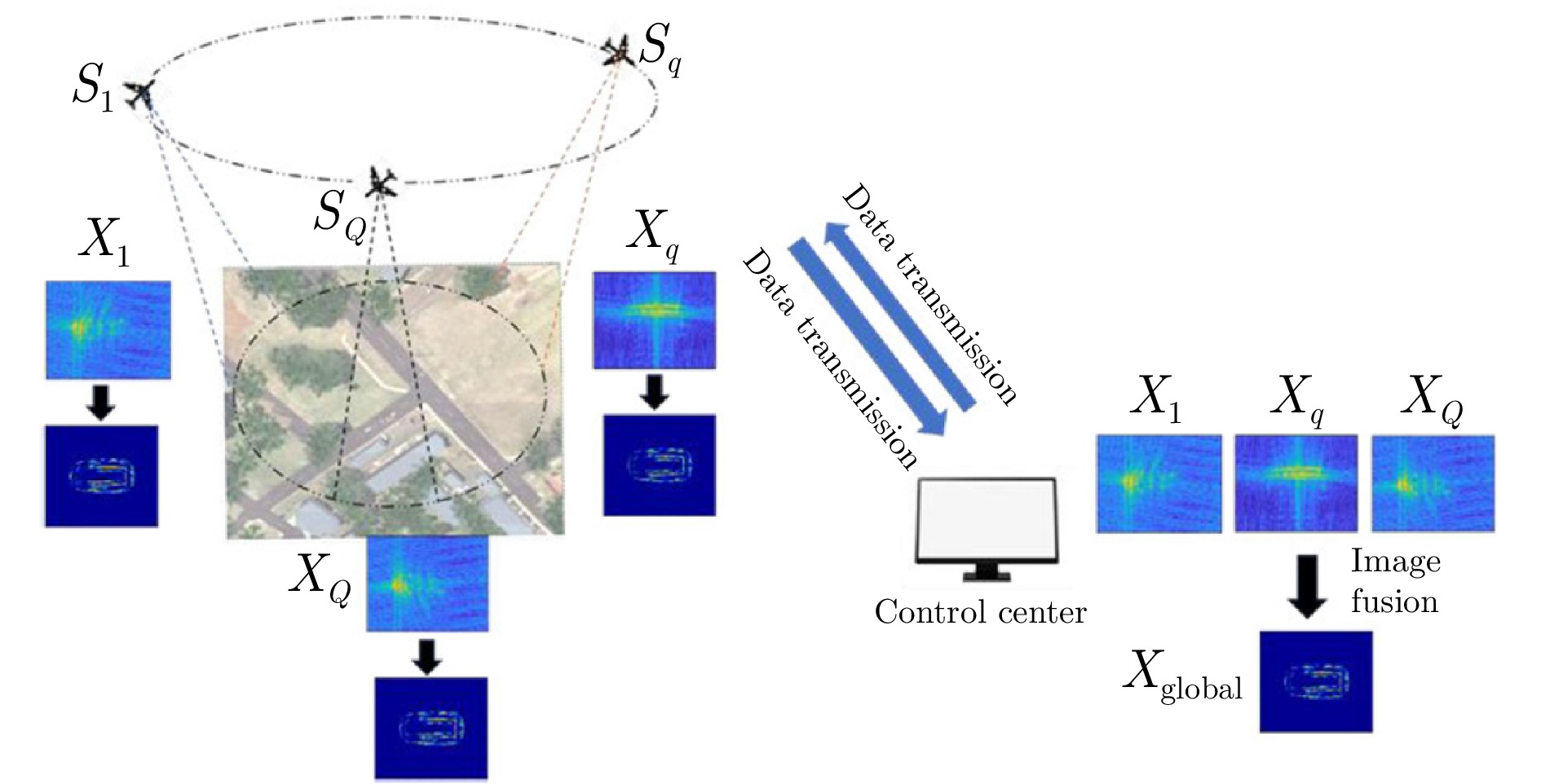
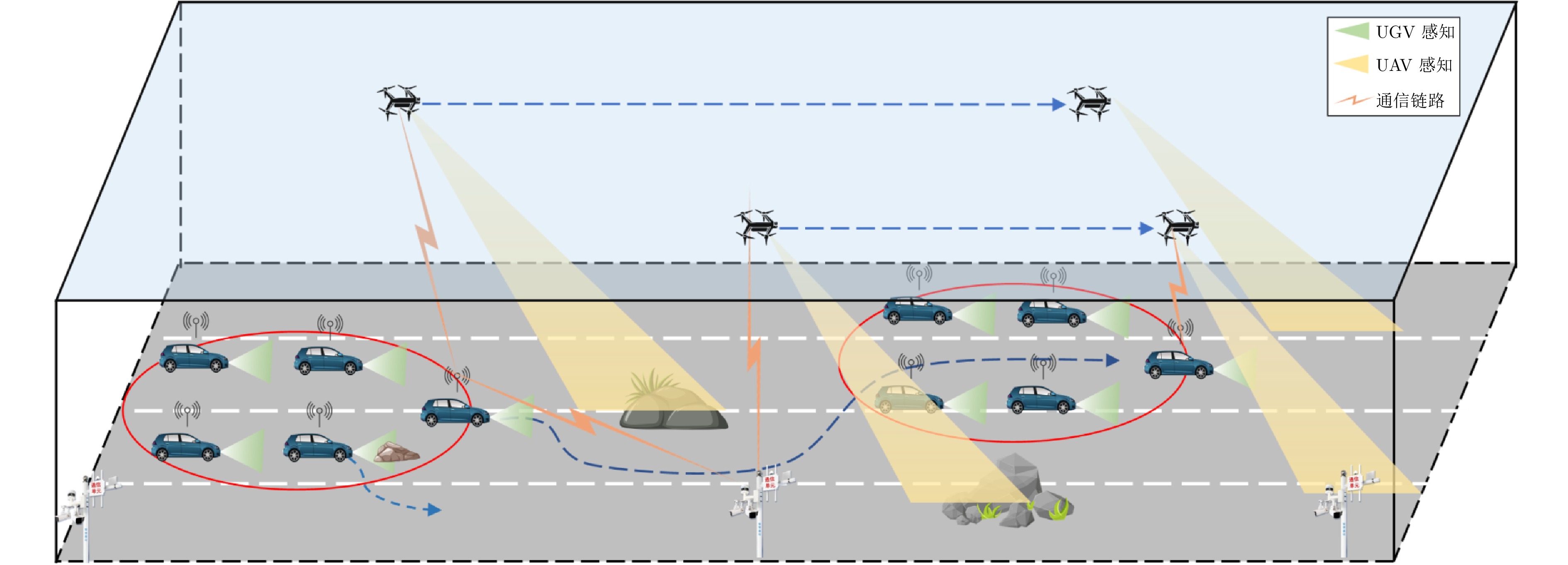
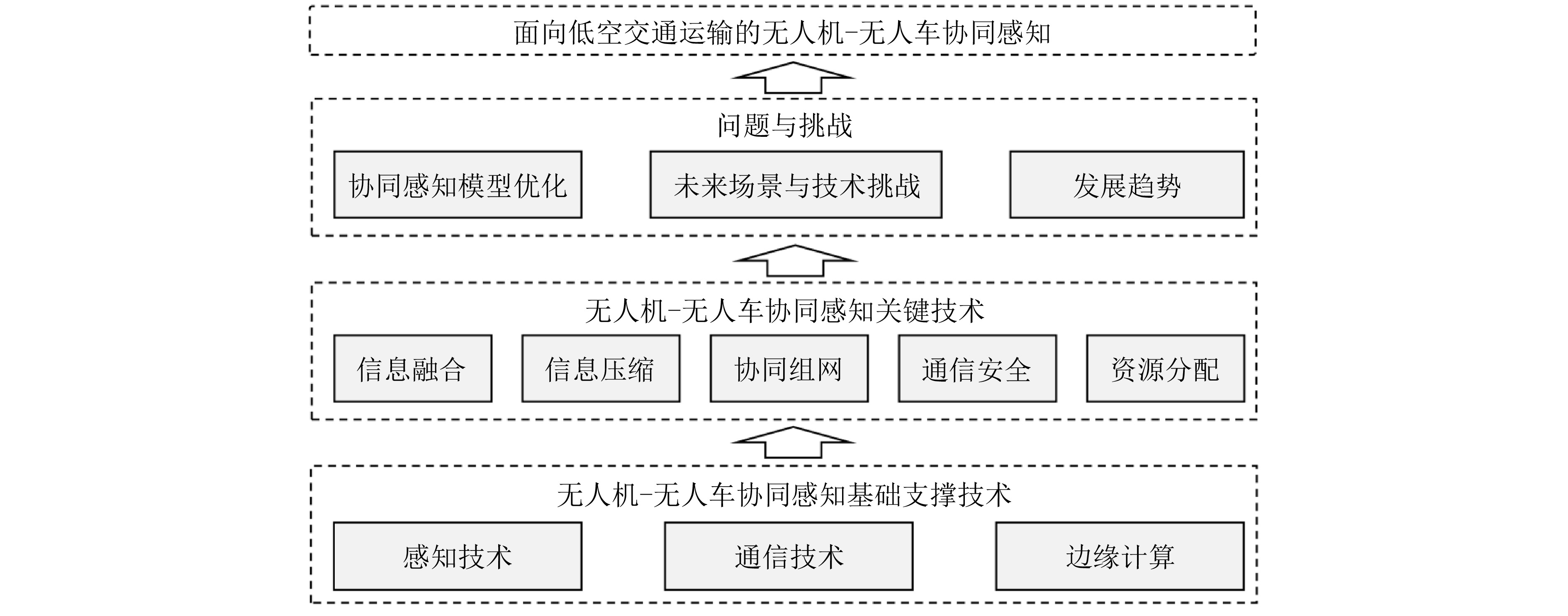
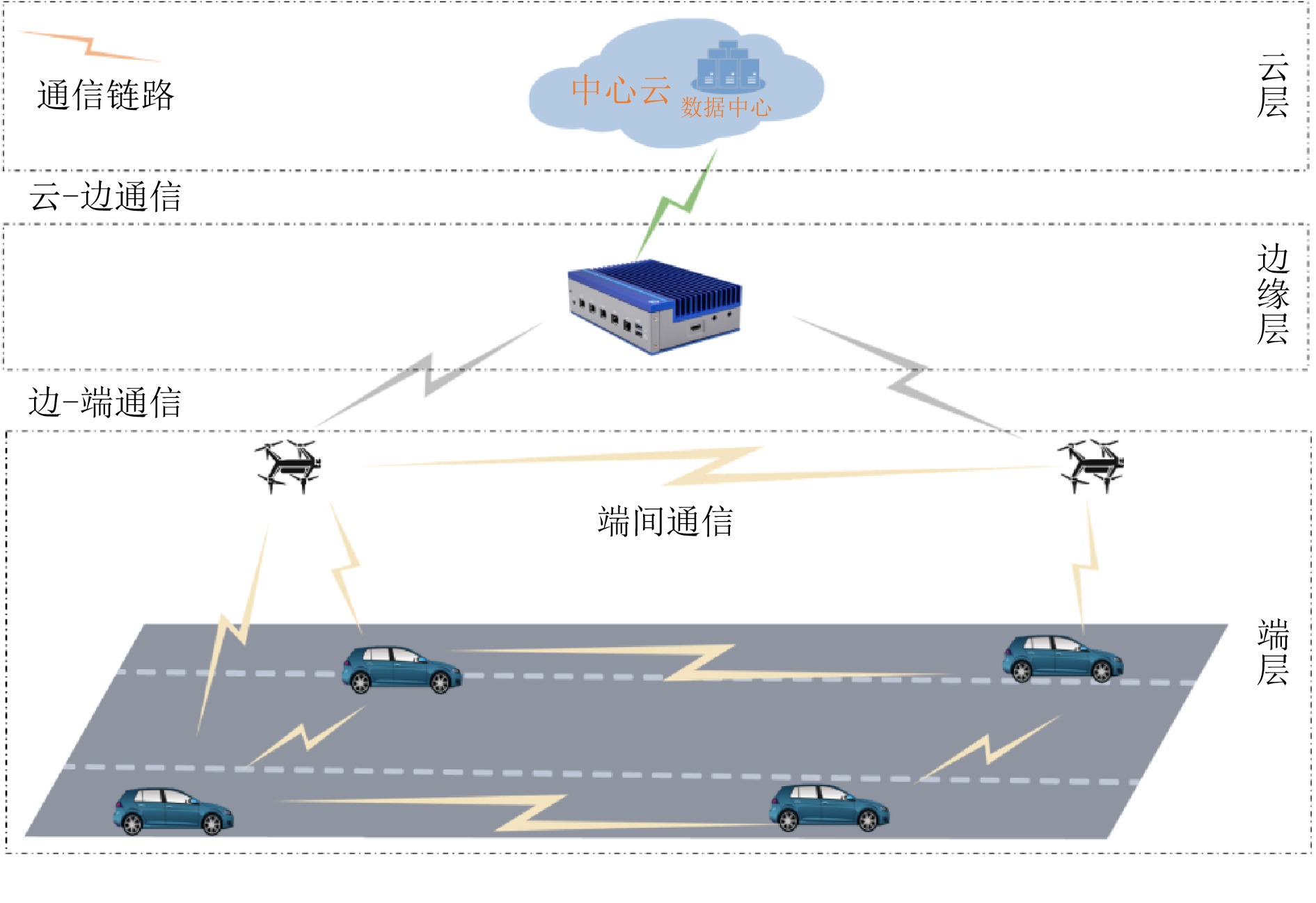
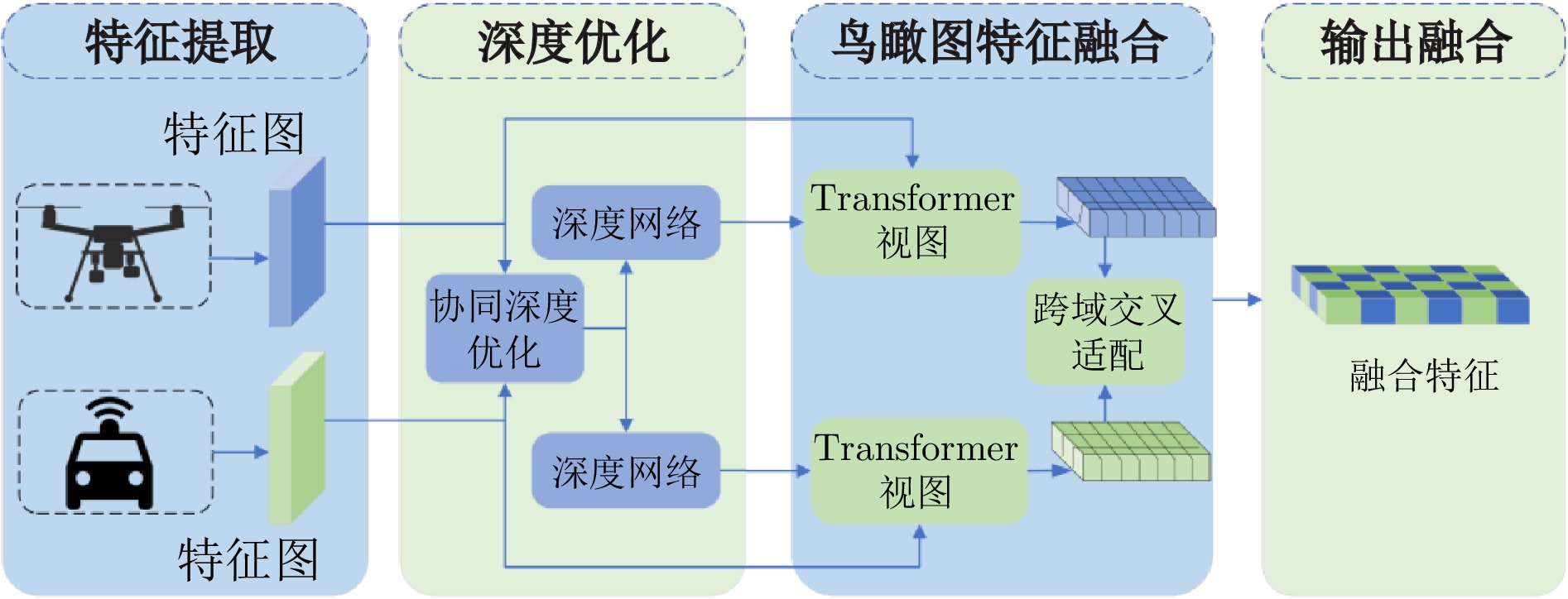
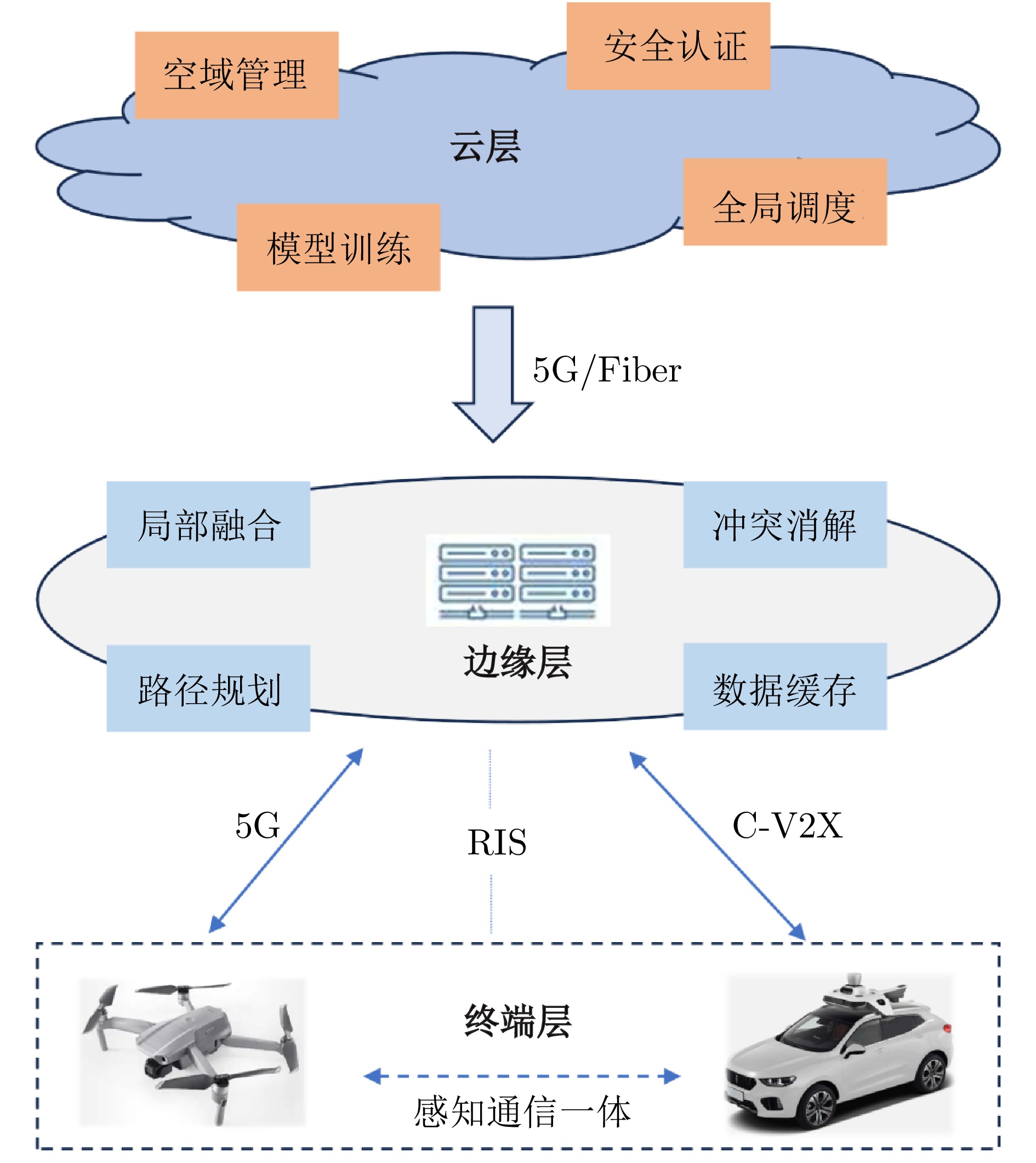
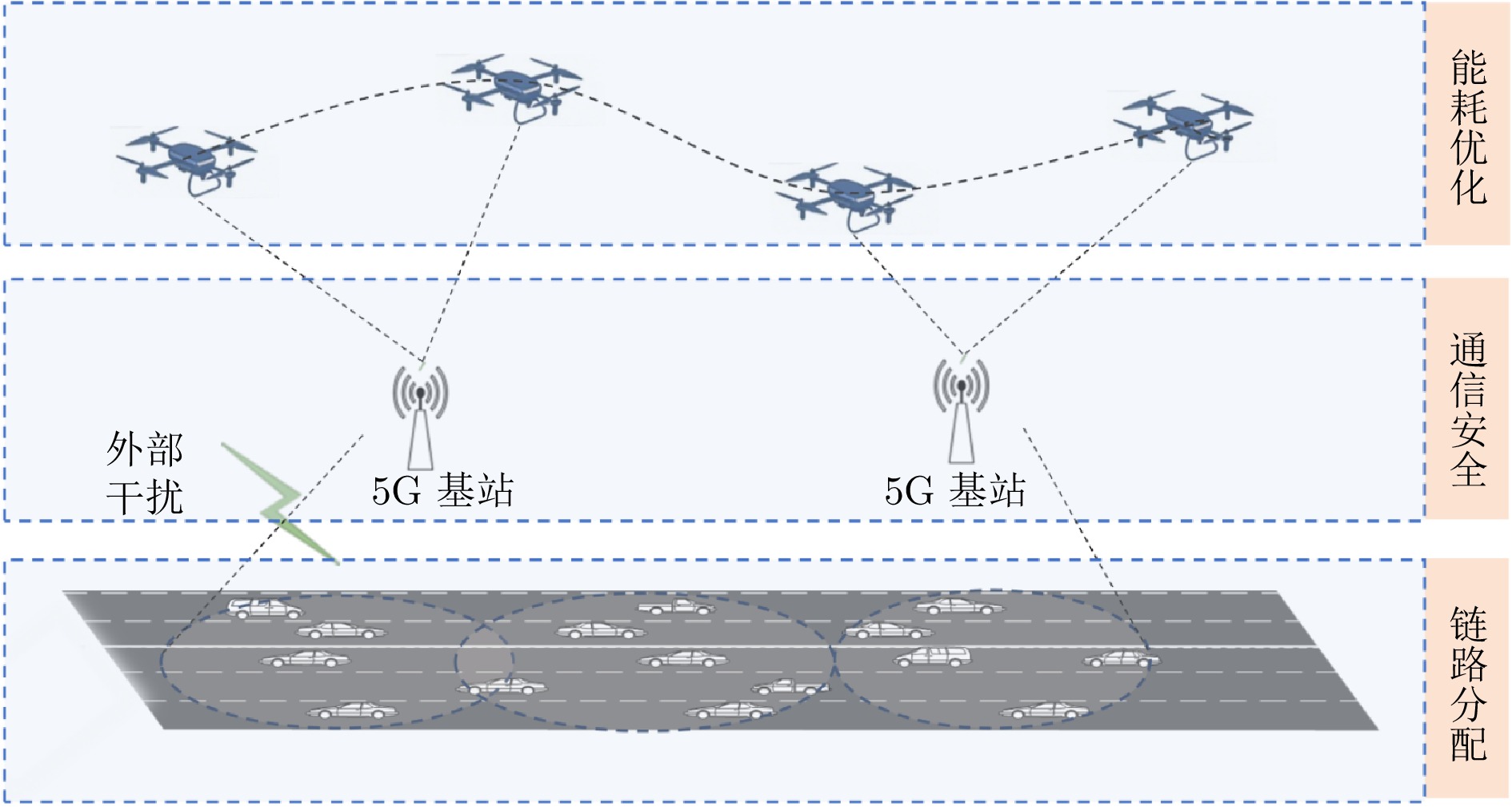
随着低空经济的兴起与智能交通的发展, 低空交通运输作为空地一体化的新兴交通系统, 对环境感知、通信与计算能力提出更高要求. 本文旨在全面阐述面向低空交通运输的无人机−无人车协同感知关键技术及发展趋势. 系统梳理协同感知的三类基础支撑技术, 包括基于LiDAR、视觉与多传感器融合的感知方法, C-V2X、5G、Wi-Fi等通信技术, 以及端−边−云协作的边缘计算架构. 在此基础上, 进一步总结协同感知信息融合、感知信息压缩与传输、协同组网、通信安全及资源分配等关键技术研究进展. 最后, 分析当前无人机−无人车协同感知系统在感知模型优化、未来应用场景等方面的挑战, 并对该领域的未来发展趋势进行探讨与展望, 以期为低空交通运输中多智能体协同感知系统的研究与落地应用提供参考.
随着低空经济的兴起与智能交通的发展, 低空交通运输作为空地一体化的新兴交通系统, 对环境感知、通信与计算能力提出更高要求. 本文旨在全面阐述面向低空交通运输的无人机−无人车协同感知关键技术及发展趋势. 系统梳理协同感知的三类基础支撑技术, 包括基于LiDAR、视觉与多传感器融合的感知方法, C-V2X、5G、Wi-Fi等通信技术, 以及端−边−云协作的边缘计算架构. 在此基础上, 进一步总结协同感知信息融合、感知信息压缩与传输、协同组网、通信安全及资源分配等关键技术研究进展. 最后, 分析当前无人机−无人车协同感知系统在感知模型优化、未来应用场景等方面的挑战, 并对该领域的未来发展趋势进行探讨与展望, 以期为低空交通运输中多智能体协同感知系统的研究与落地应用提供参考.
2026, 52(2): 230-239.
doi: 10.16383/j.aas.c250396
cstr: 32138.14.j.aas.c250396
摘要:
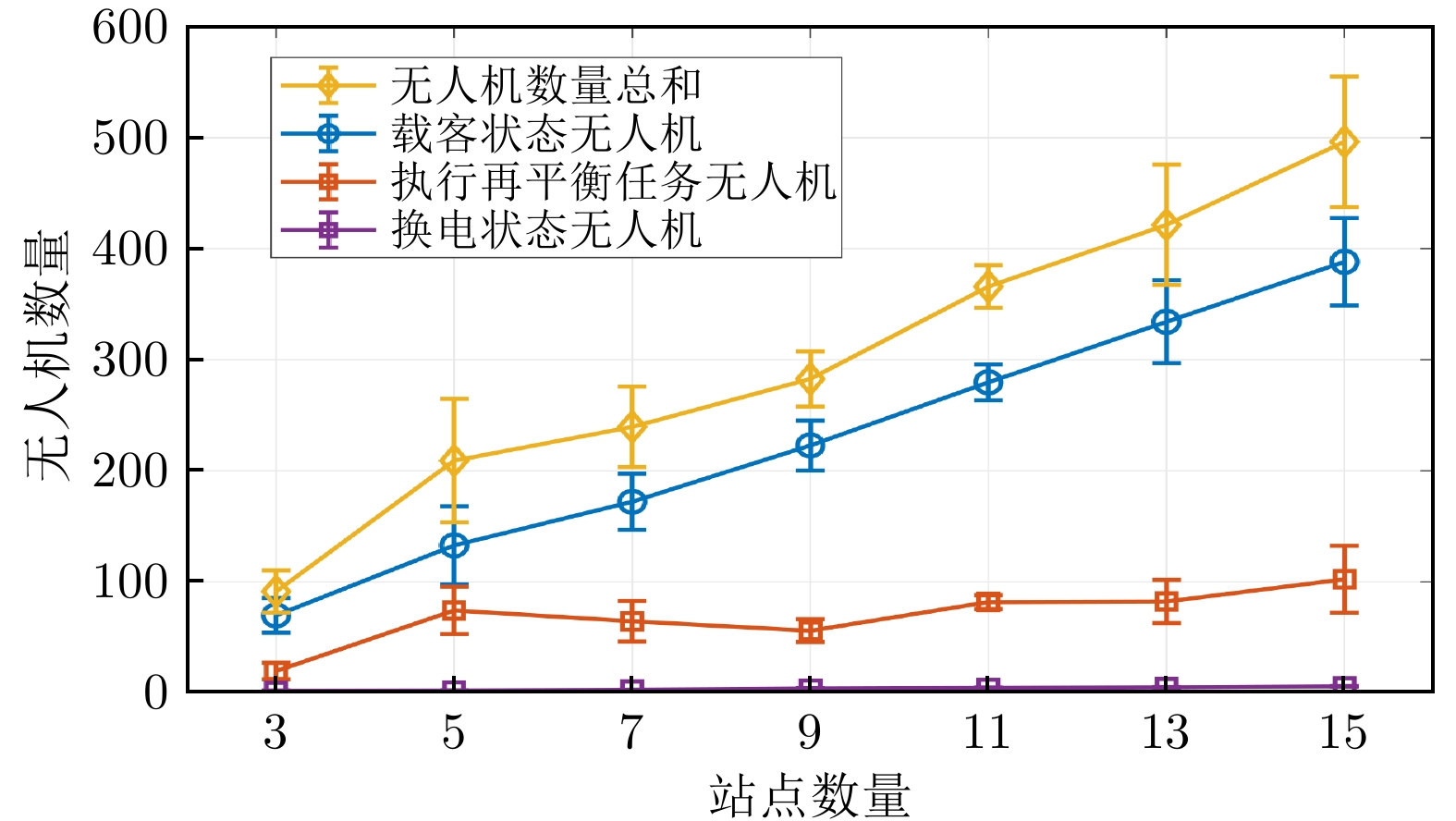
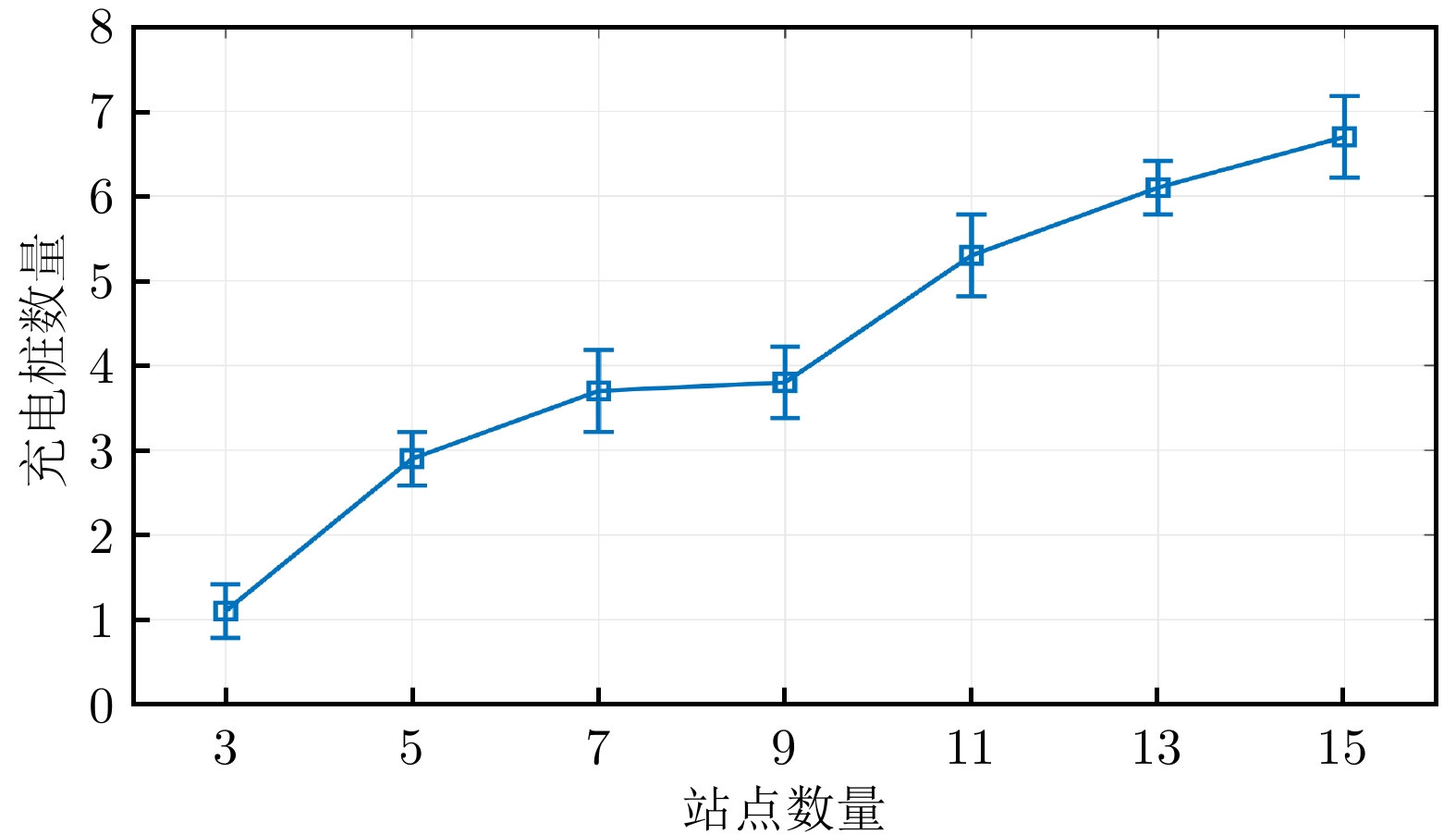
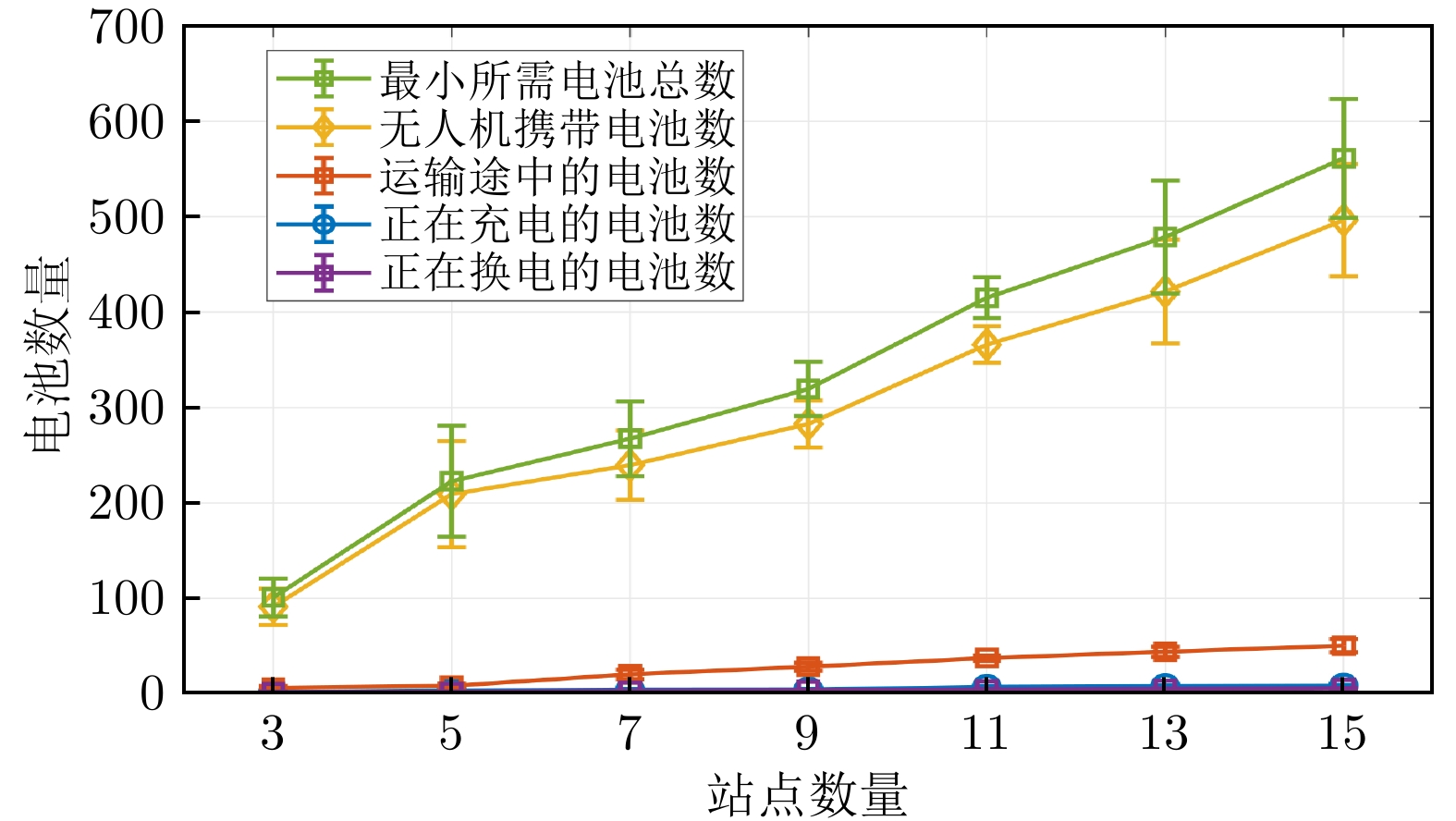
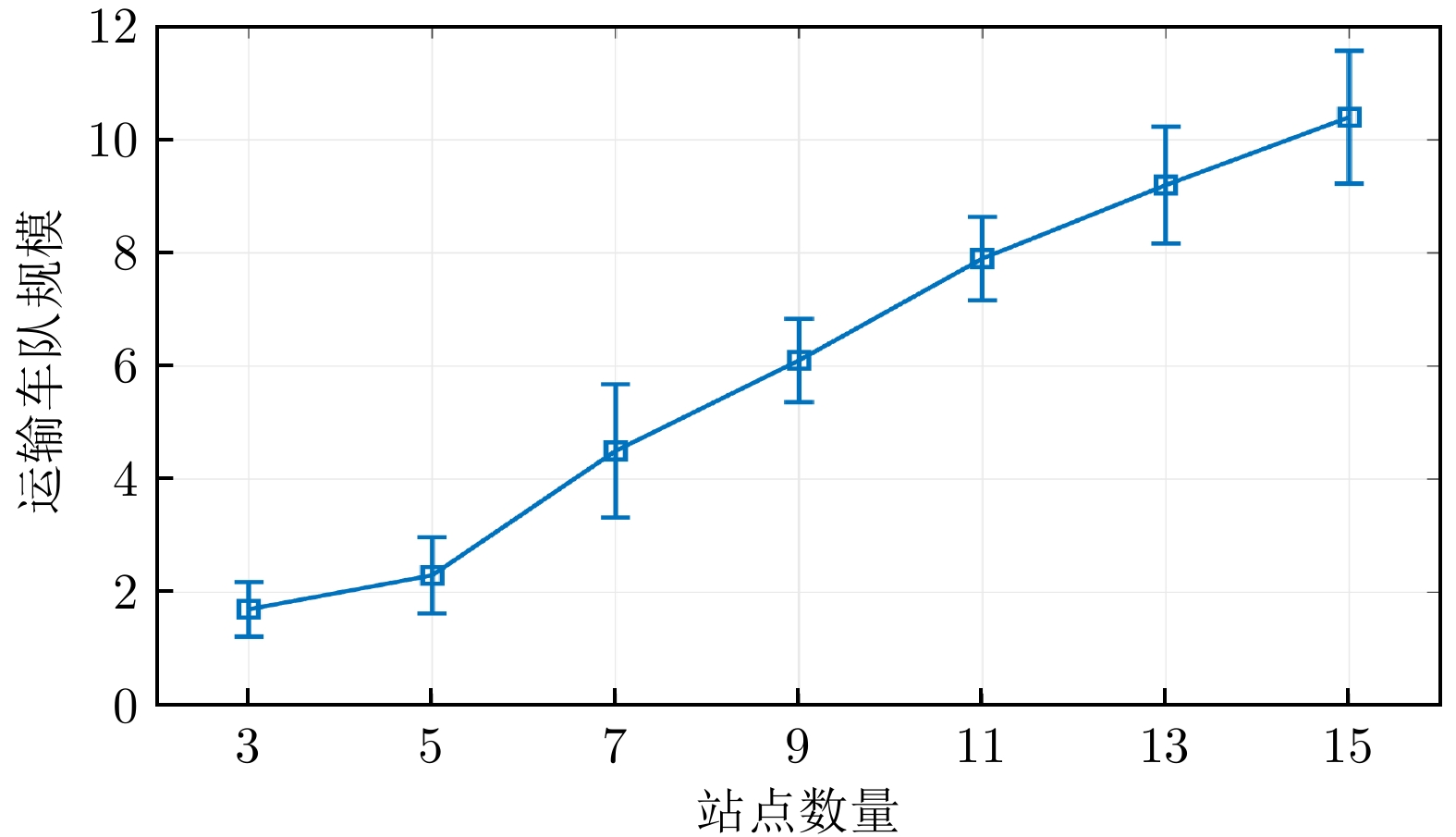
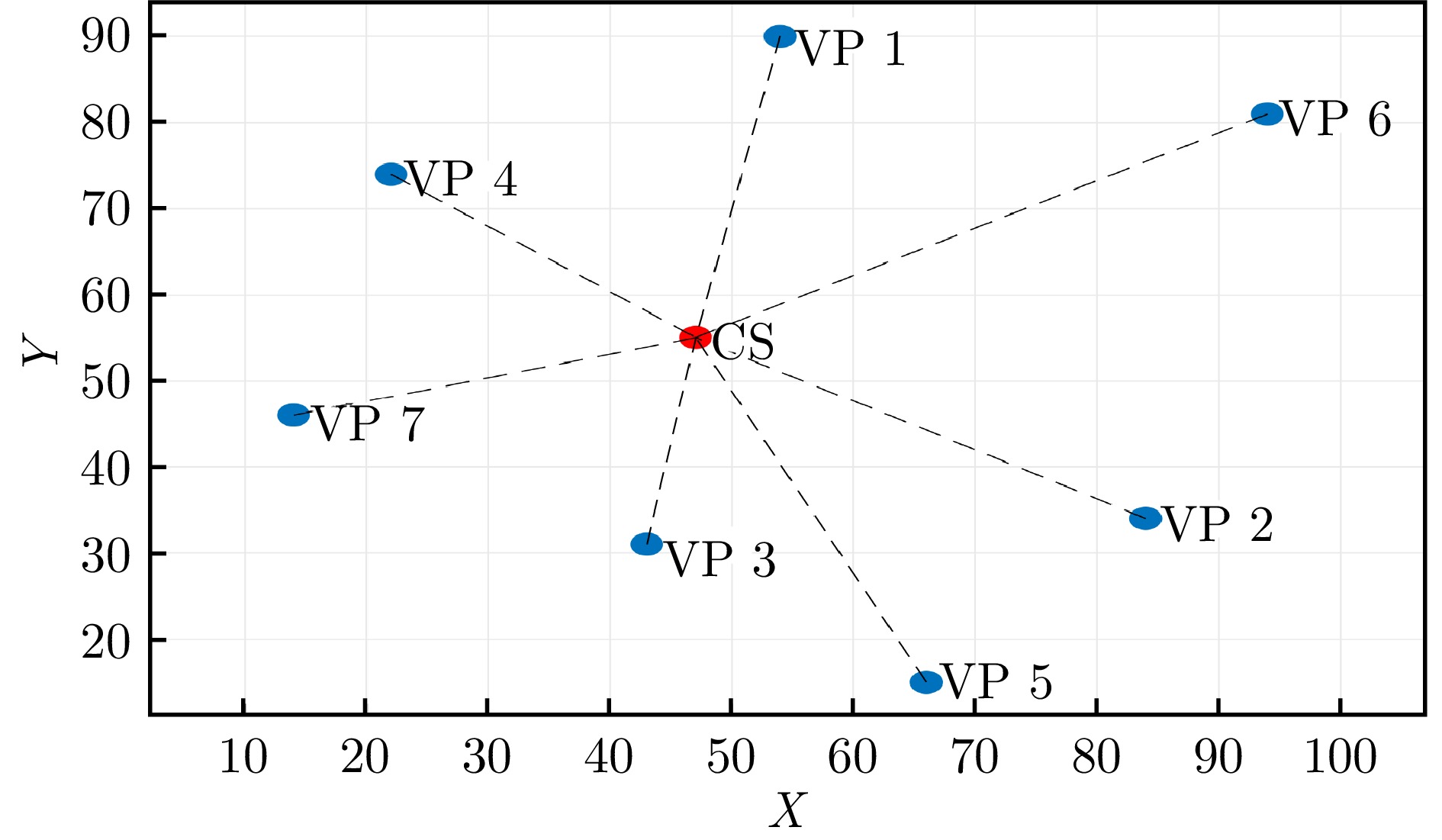
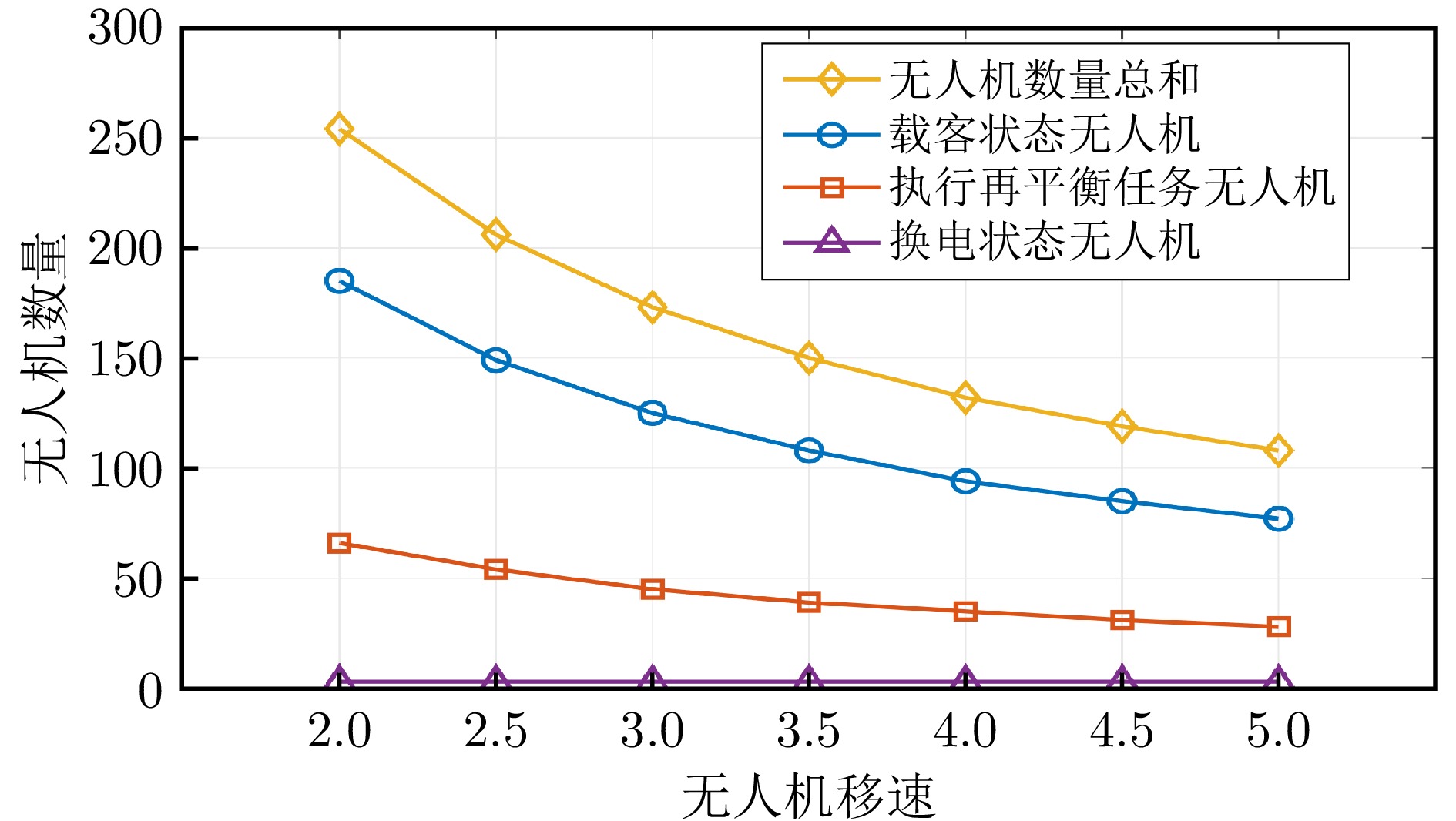
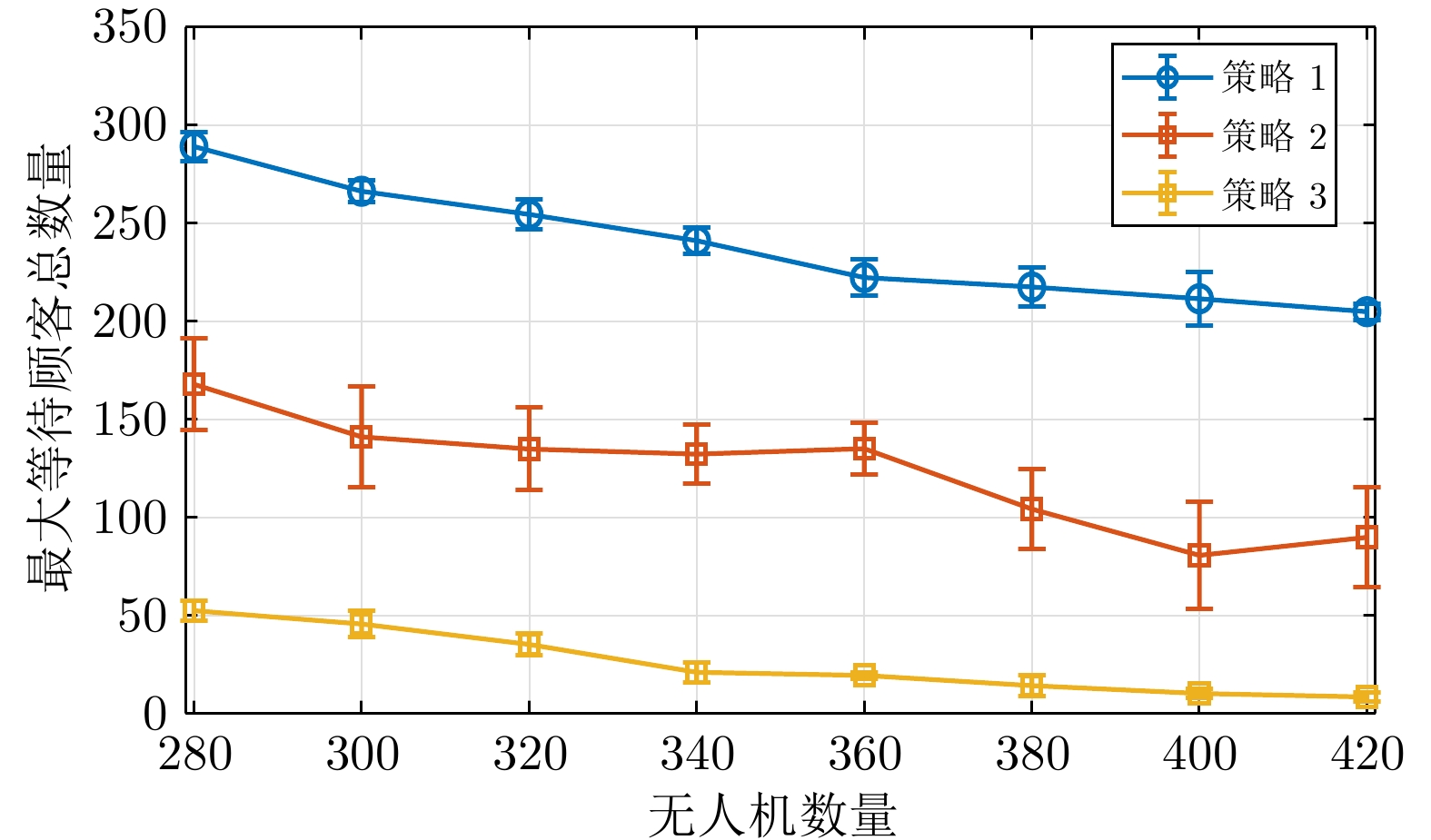
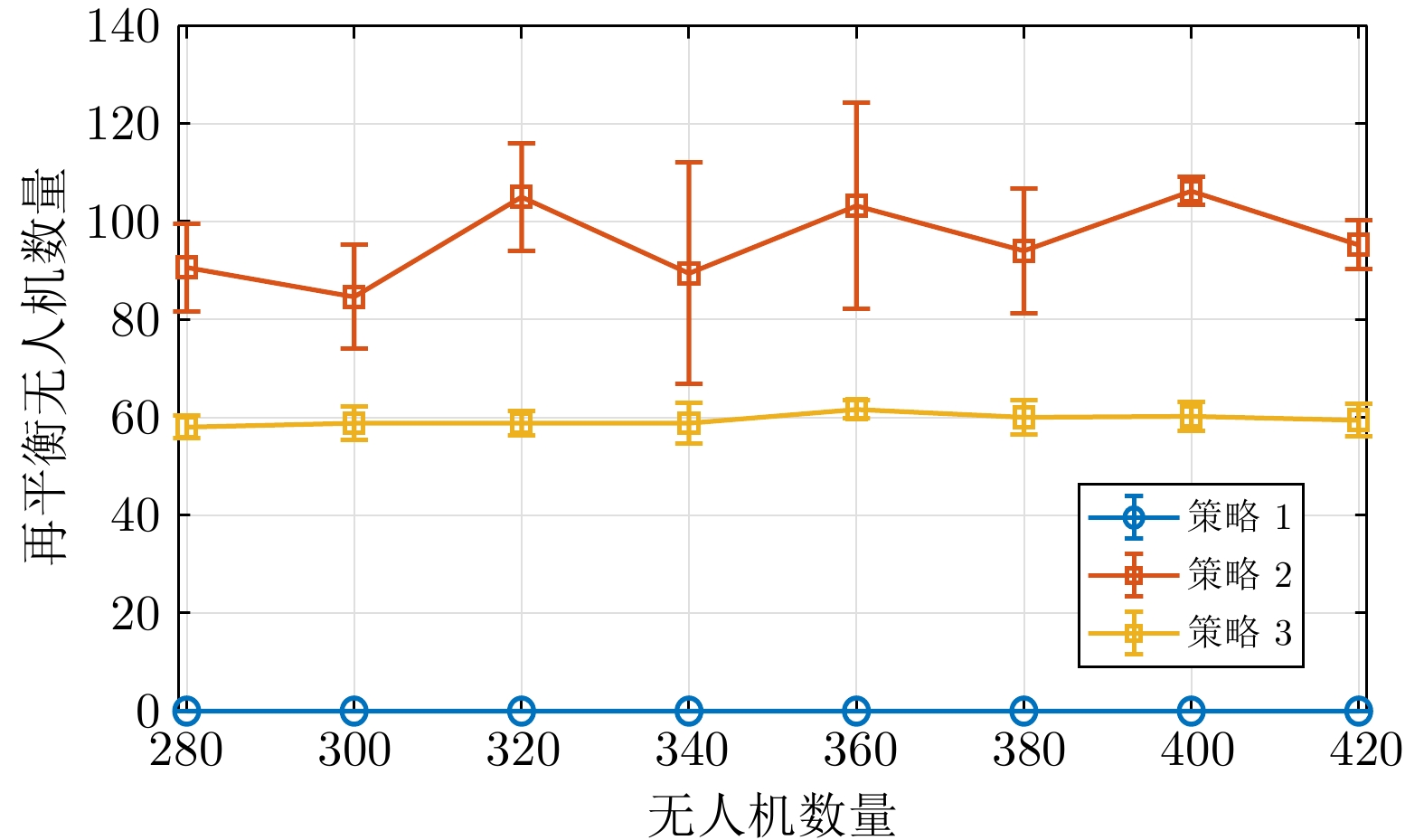
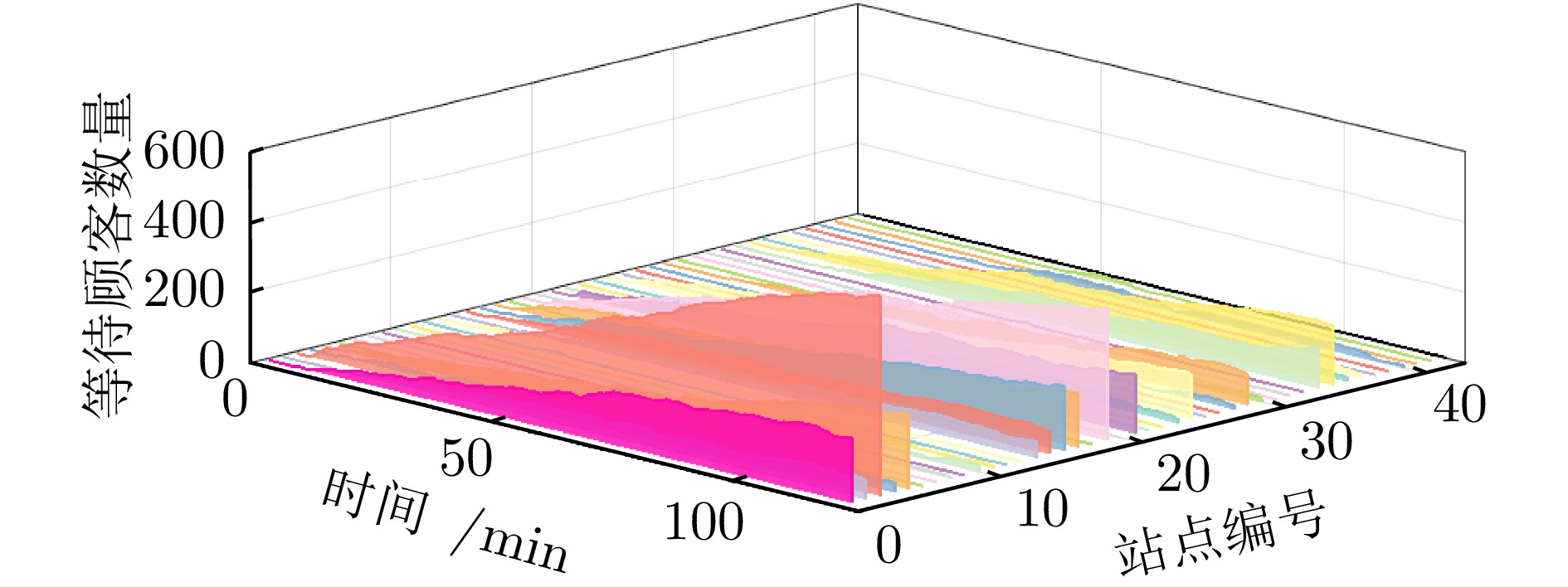
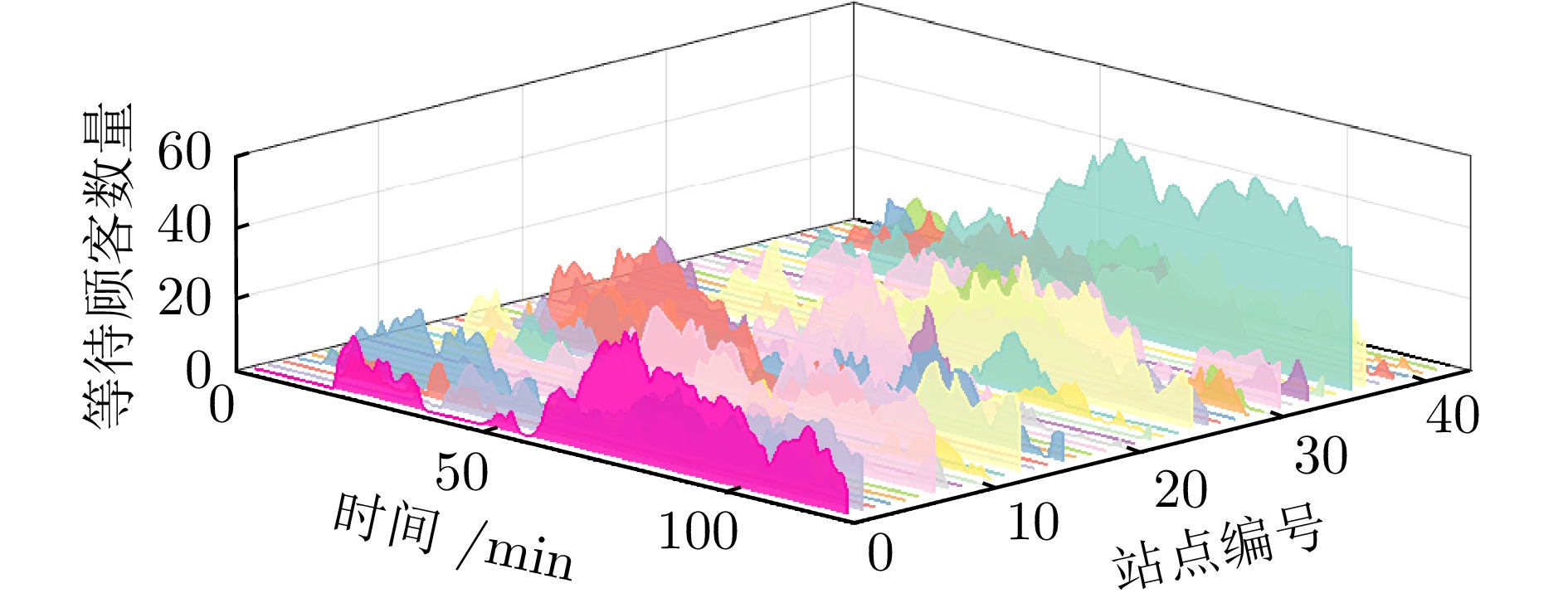
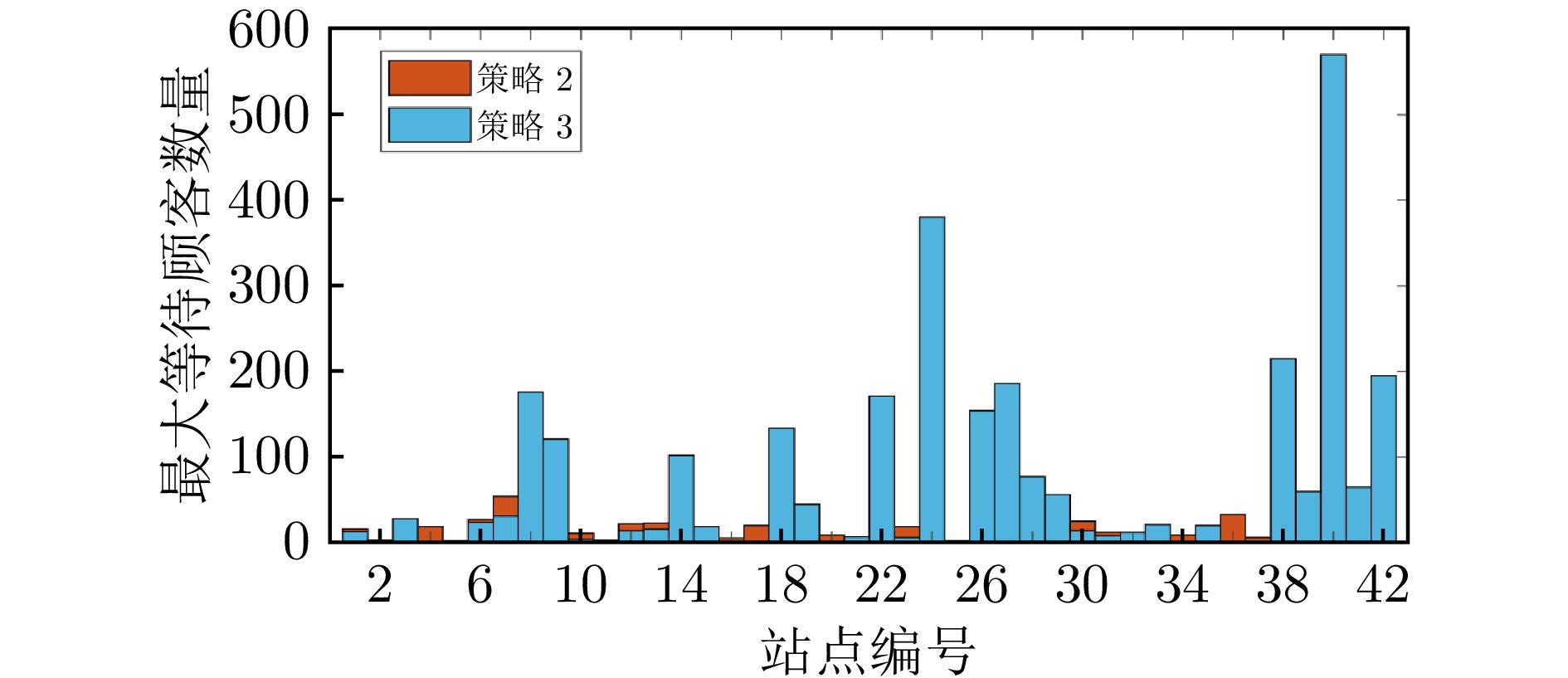
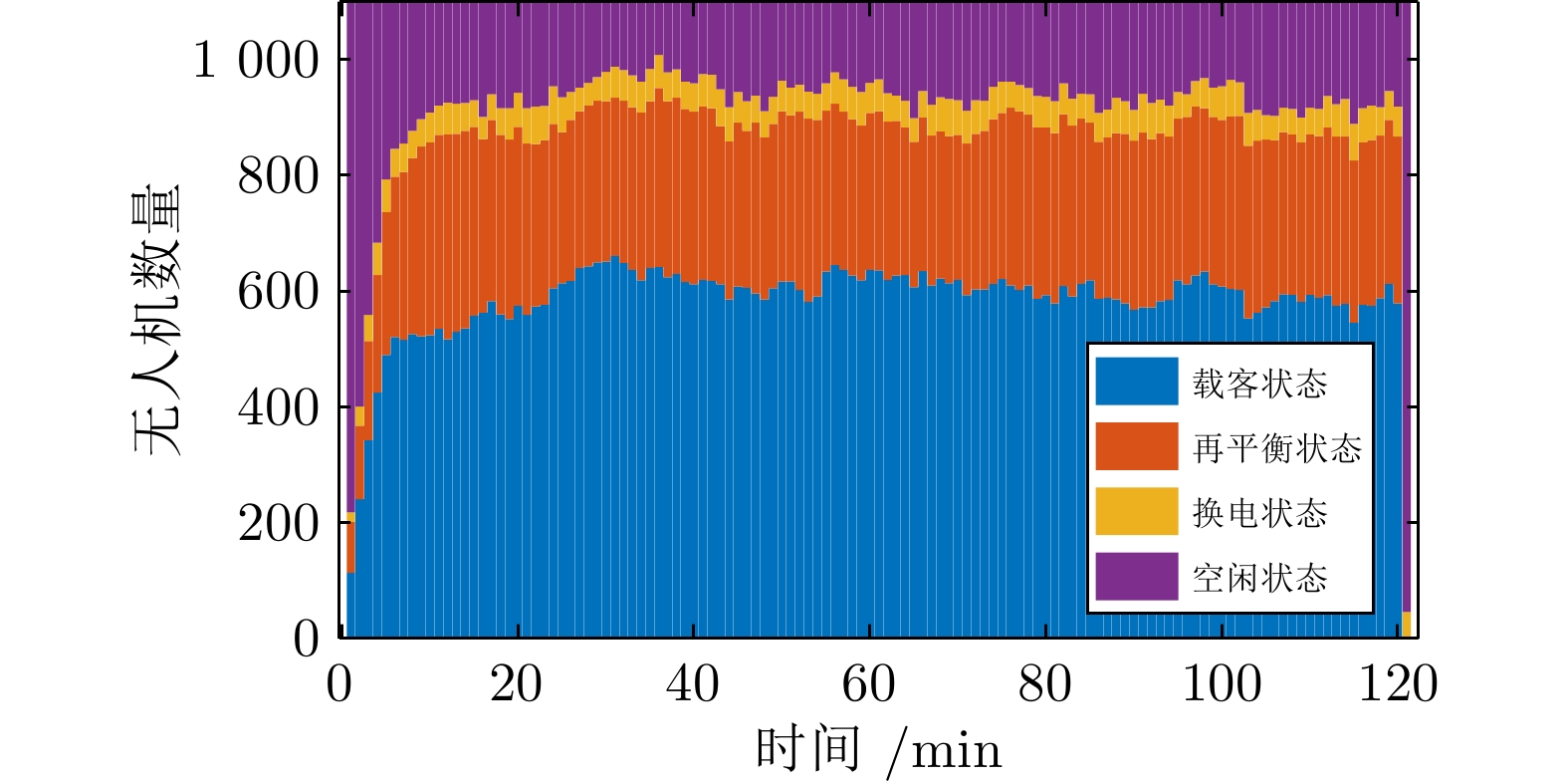
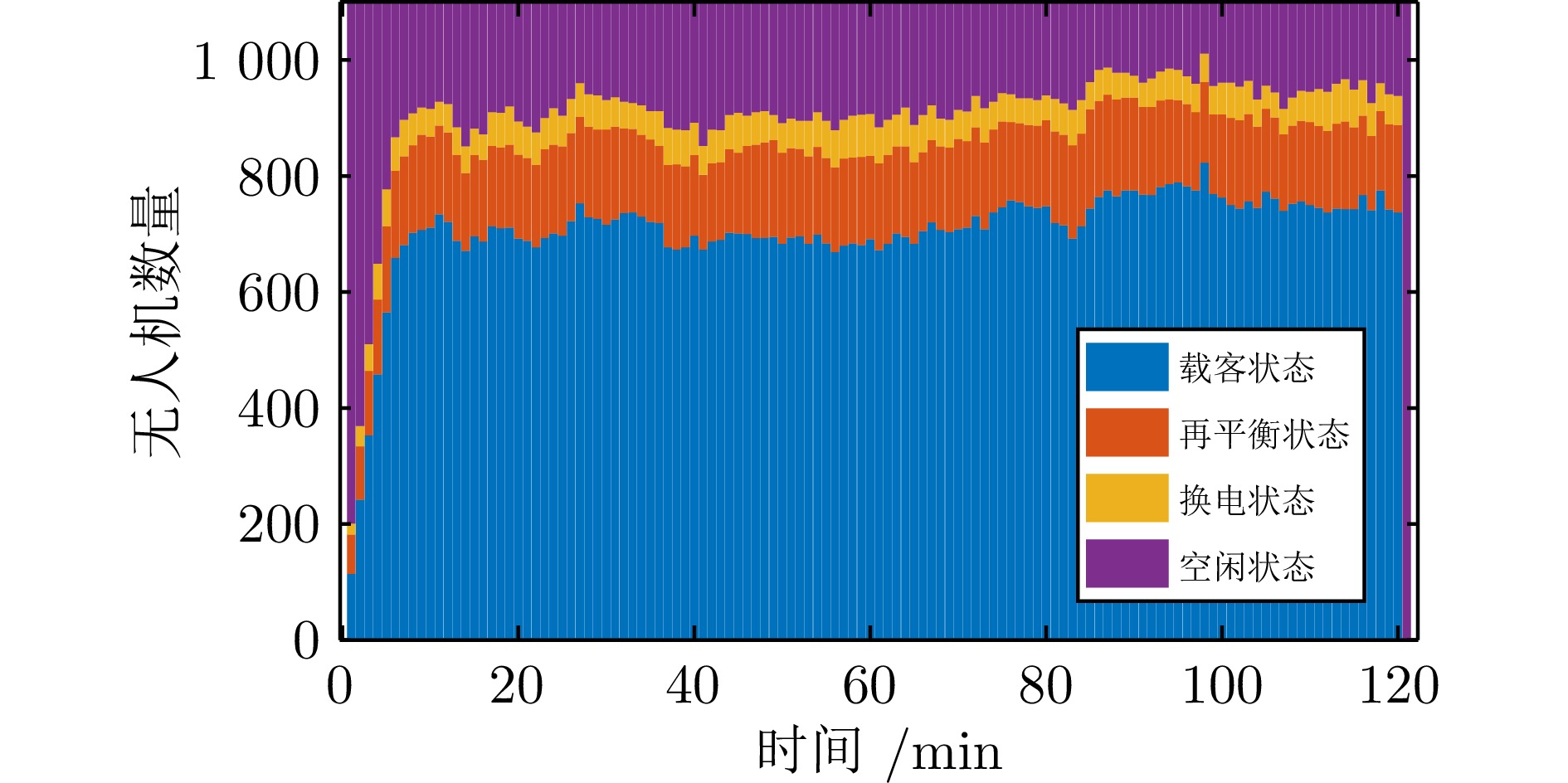
针对城市空中交通系统, 提出一种优化方法以同时确定满足乘客需求的最小系统规模和最佳系统再平衡策略. 研究构建流体模型与多服务器M/M/s排队模型的联合框架, 描述乘客、飞行器与电池在站点间迁移、换电及充电过程. 在该模型框架下对飞行器和电池数量的适定性进行证明, 并给出系统供需均衡时的必要条件. 在此基础上, 通过线性规划求解系统供需均衡下的再平衡分配率与最小机队规模, 并计算最优充电站位置、电池数量及电池运输车数量. 数值仿真分析了影响系统规模的因素, 实例验证证明了所提再平衡方法的有效性.
针对城市空中交通系统, 提出一种优化方法以同时确定满足乘客需求的最小系统规模和最佳系统再平衡策略. 研究构建流体模型与多服务器M/M/s排队模型的联合框架, 描述乘客、飞行器与电池在站点间迁移、换电及充电过程. 在该模型框架下对飞行器和电池数量的适定性进行证明, 并给出系统供需均衡时的必要条件. 在此基础上, 通过线性规划求解系统供需均衡下的再平衡分配率与最小机队规模, 并计算最优充电站位置、电池数量及电池运输车数量. 数值仿真分析了影响系统规模的因素, 实例验证证明了所提再平衡方法的有效性.
2026, 52(2): 240-253.
doi: 10.16383/j.aas.c250423
cstr: 32138.14.j.aas.c250423
摘要:
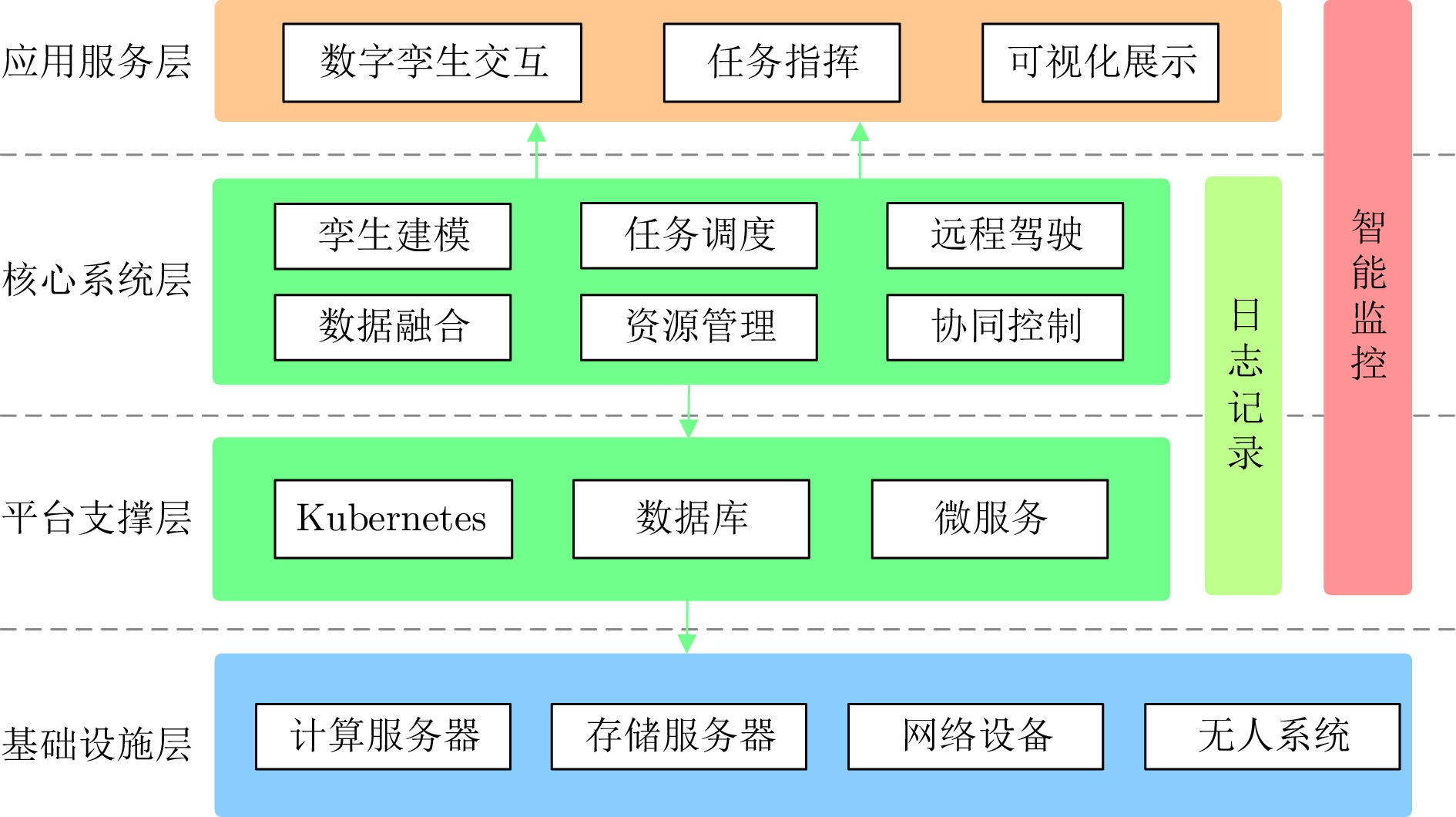
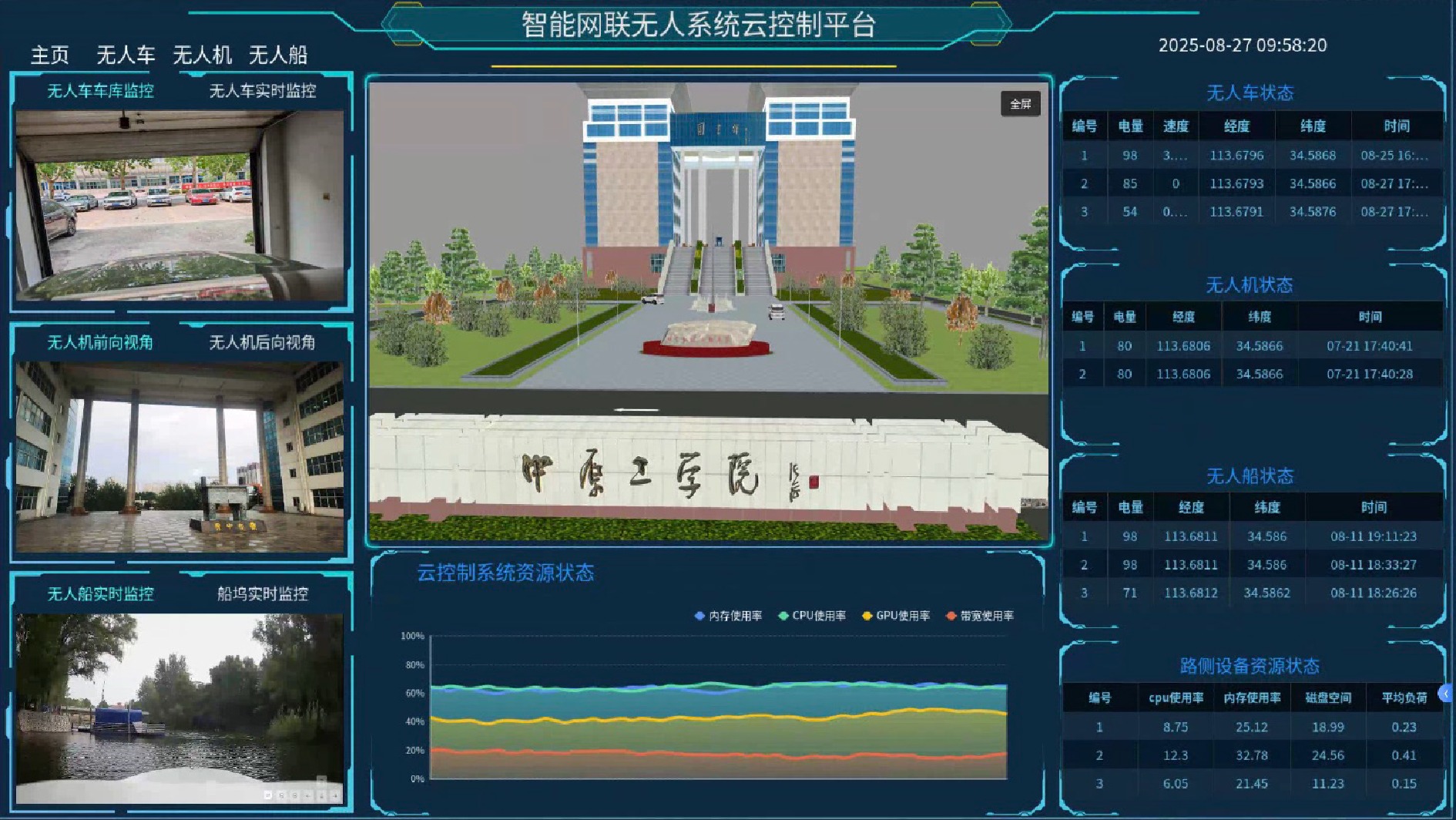
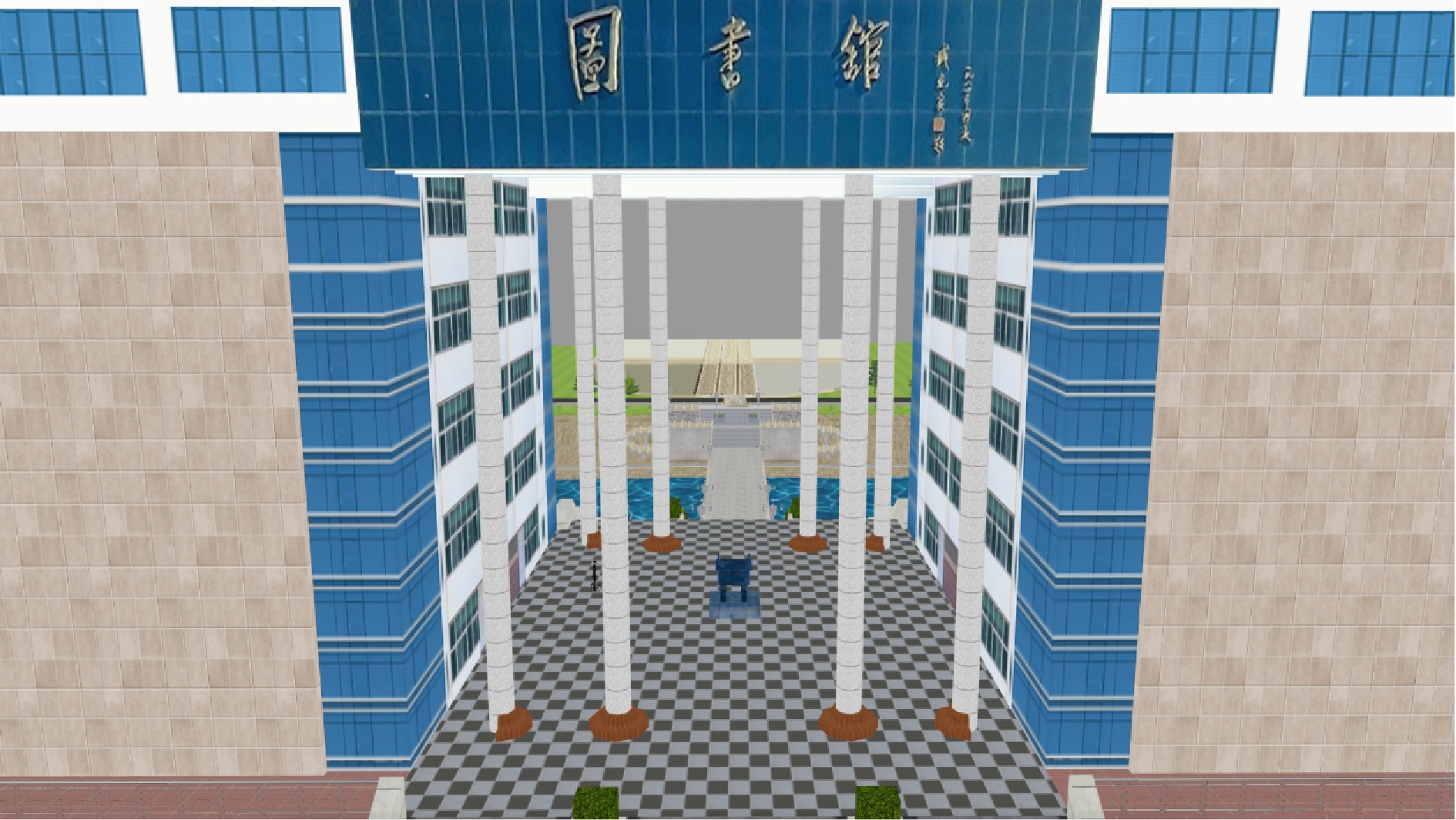
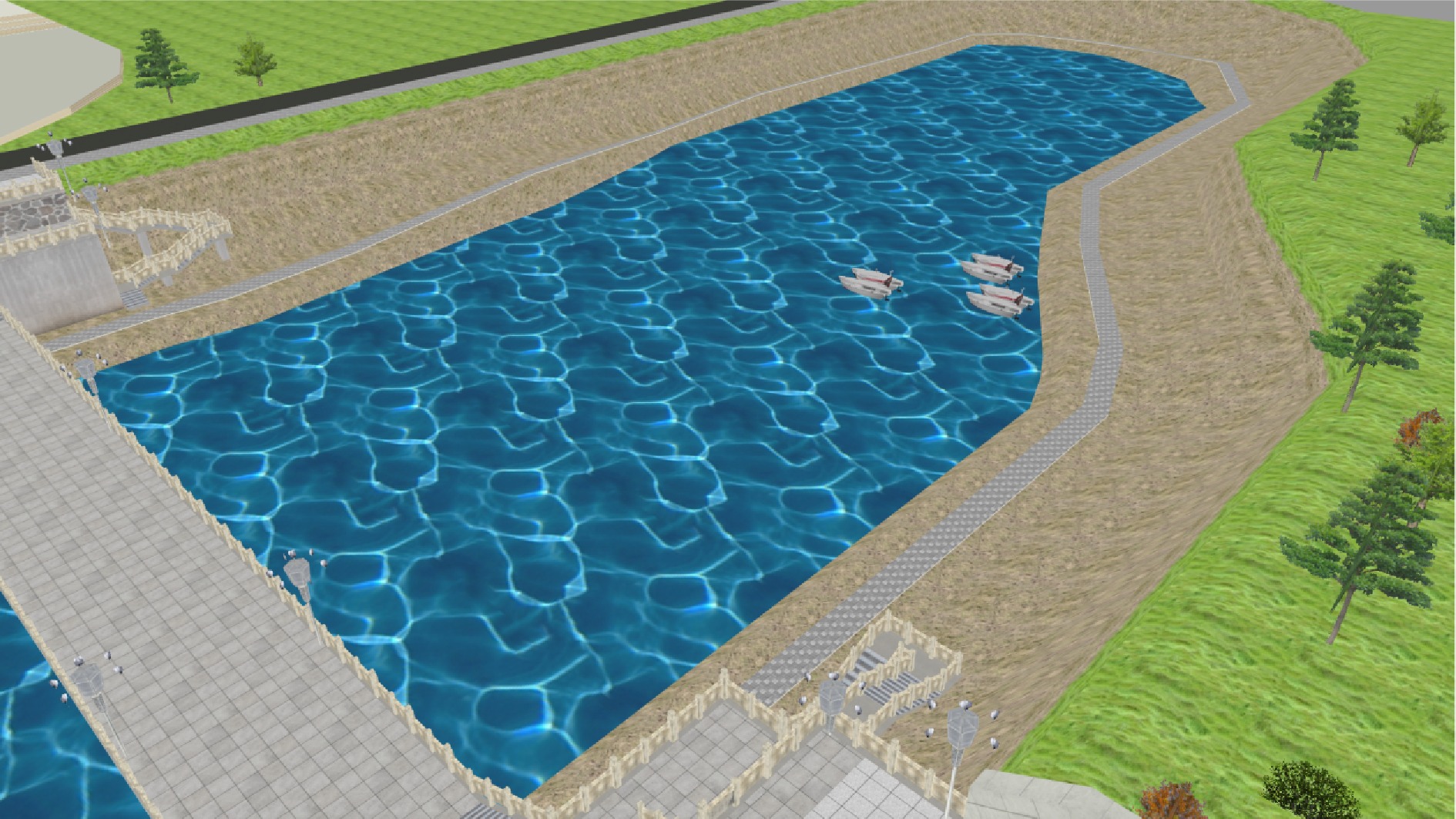
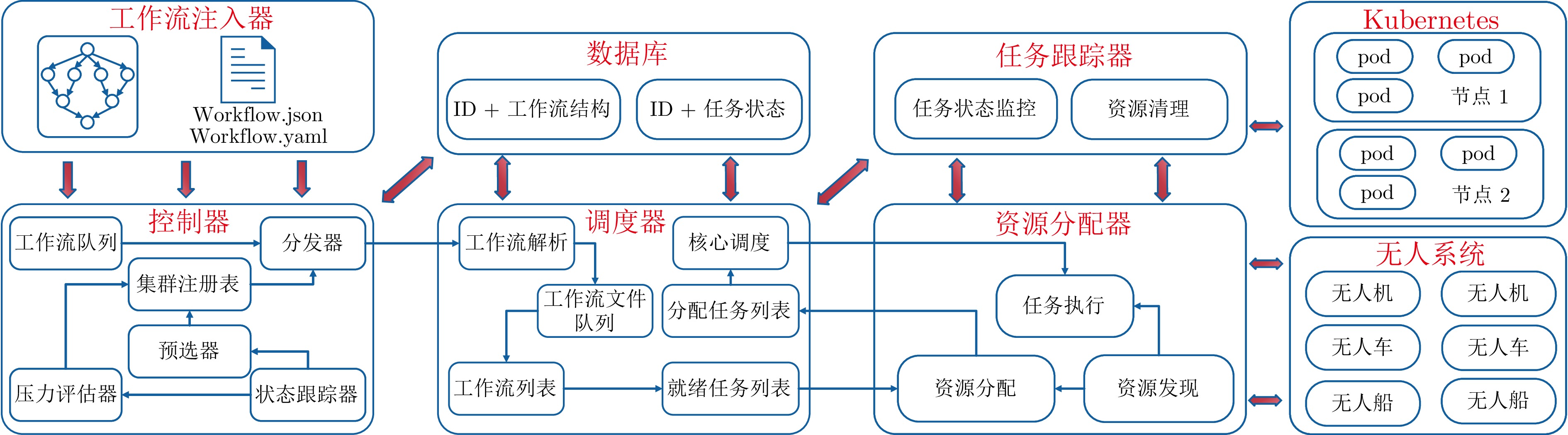
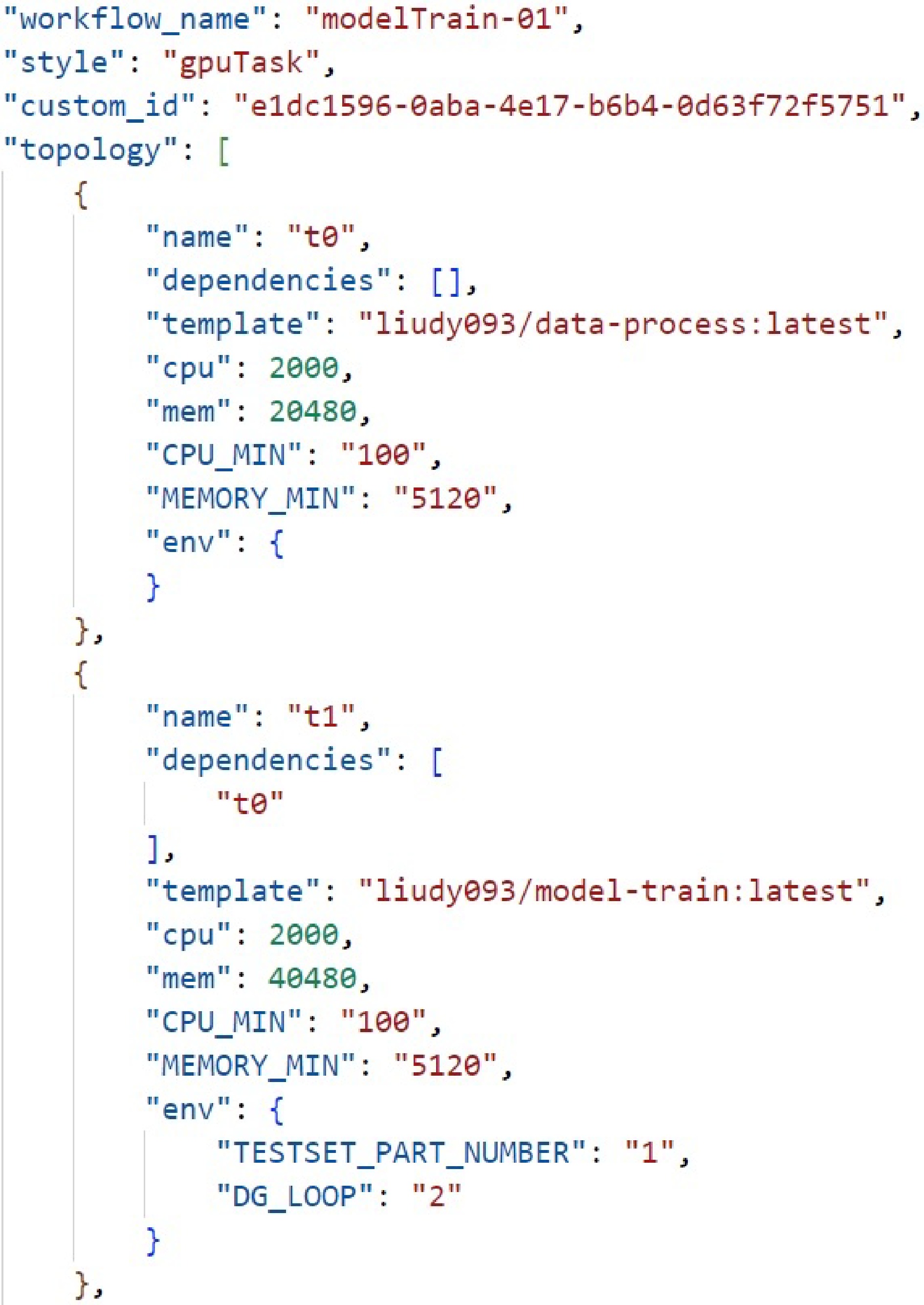
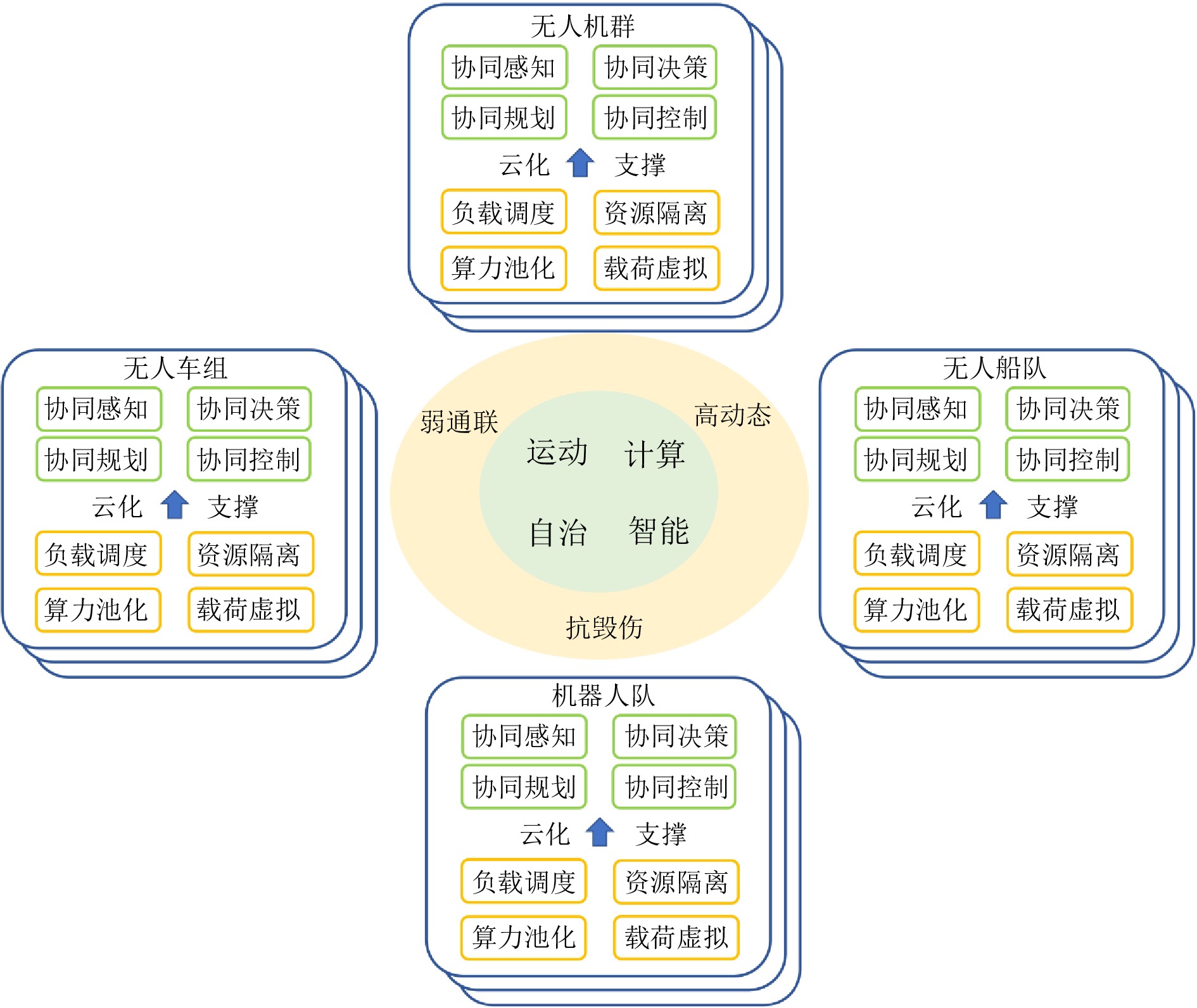
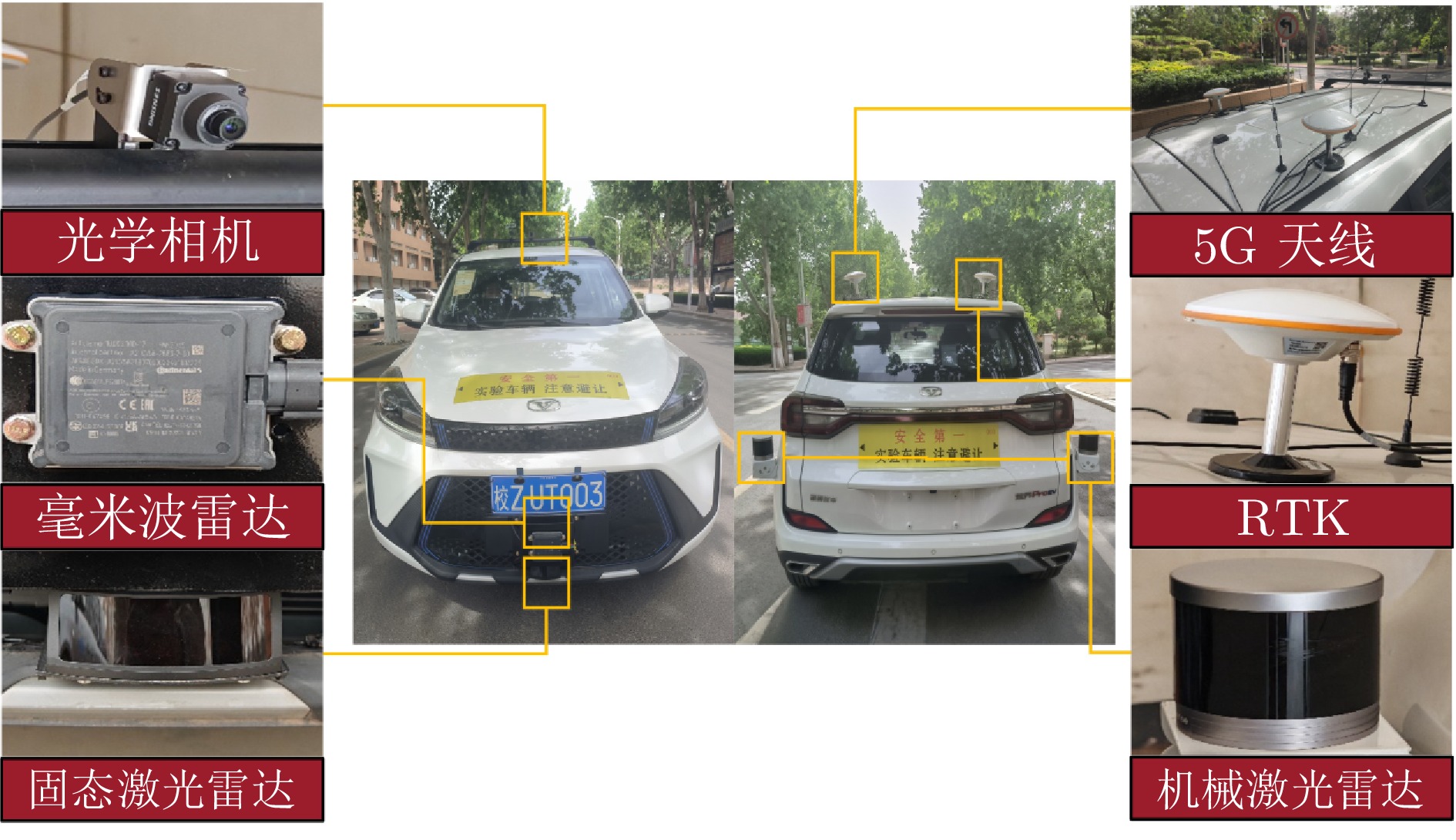
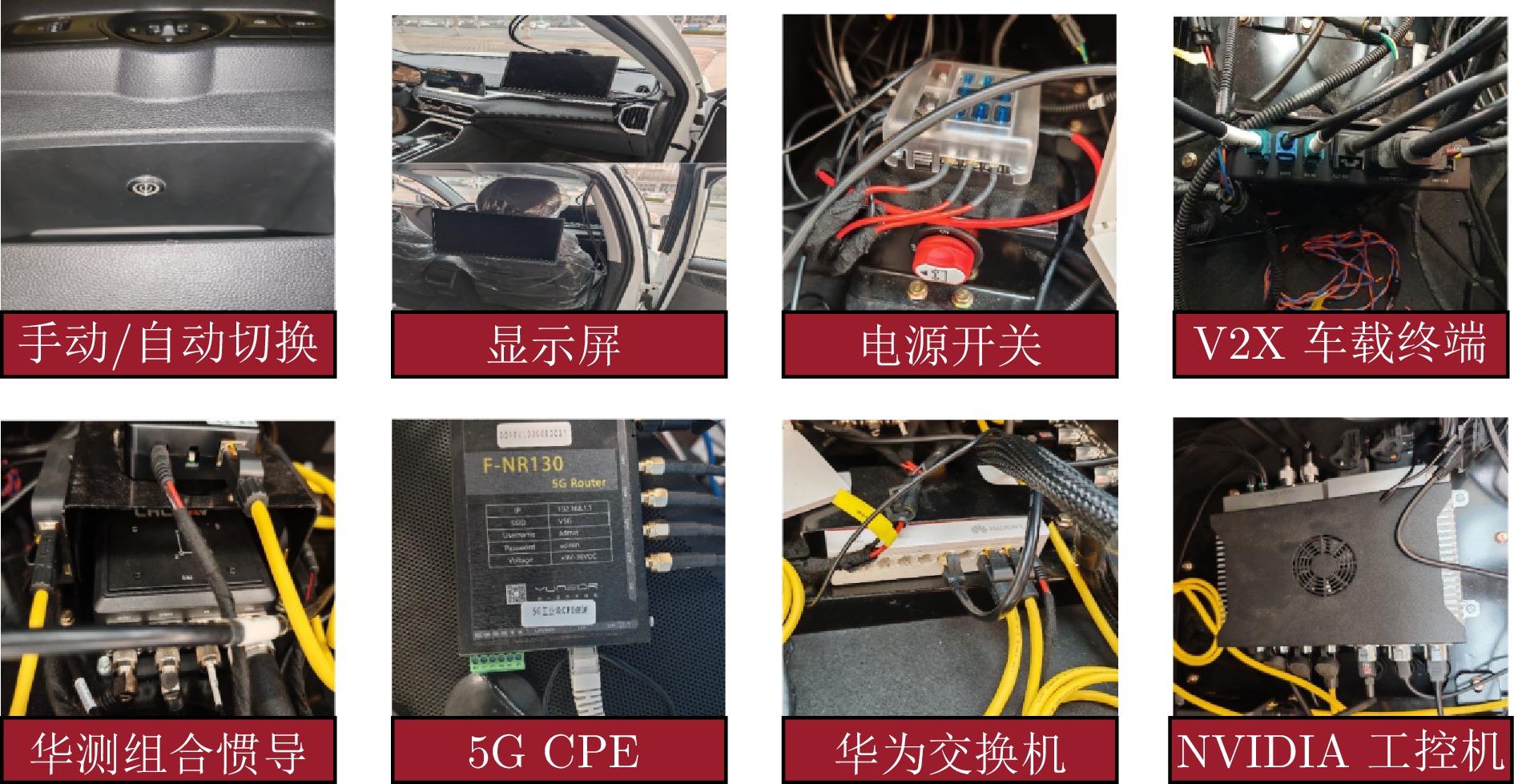
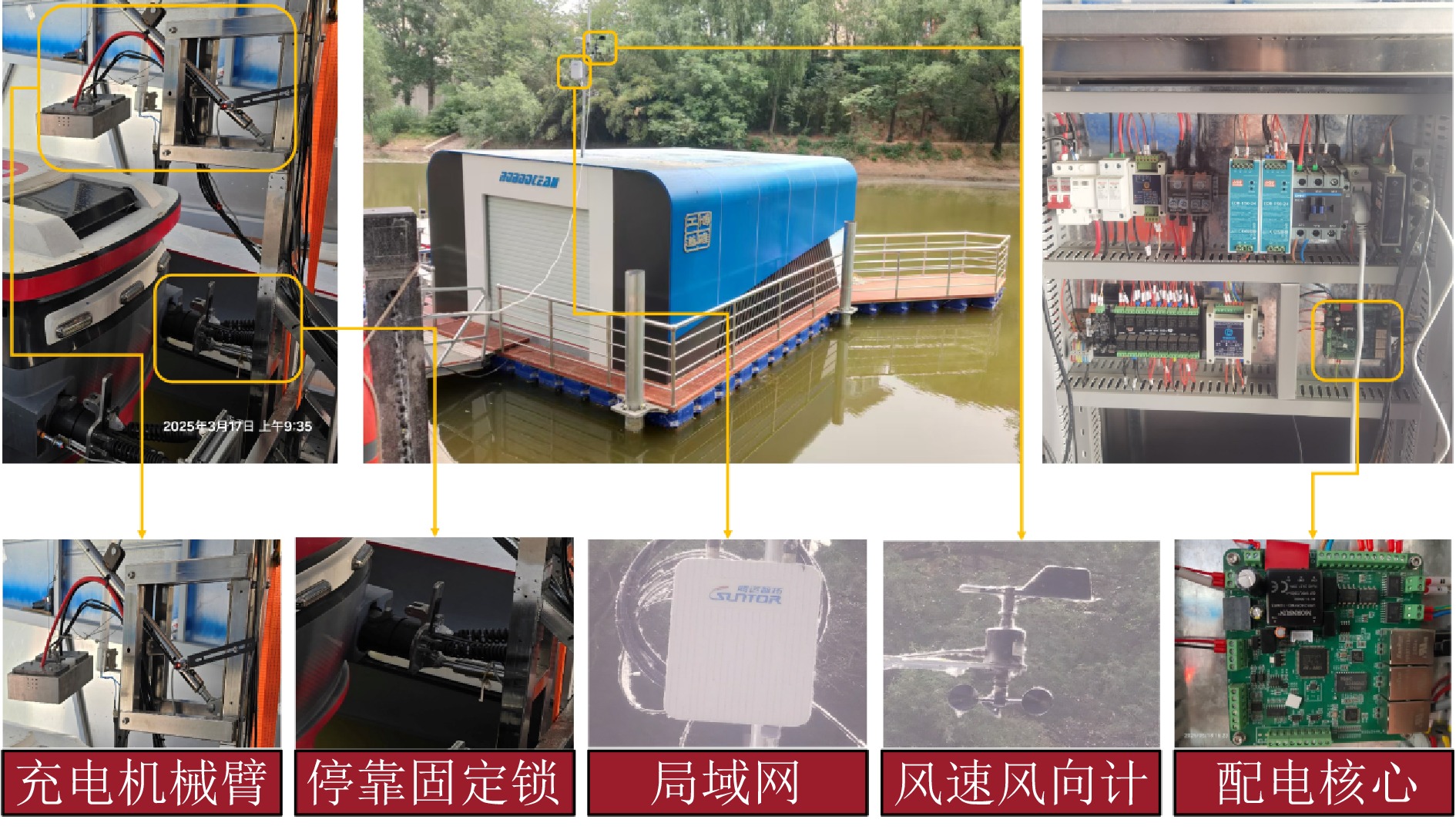
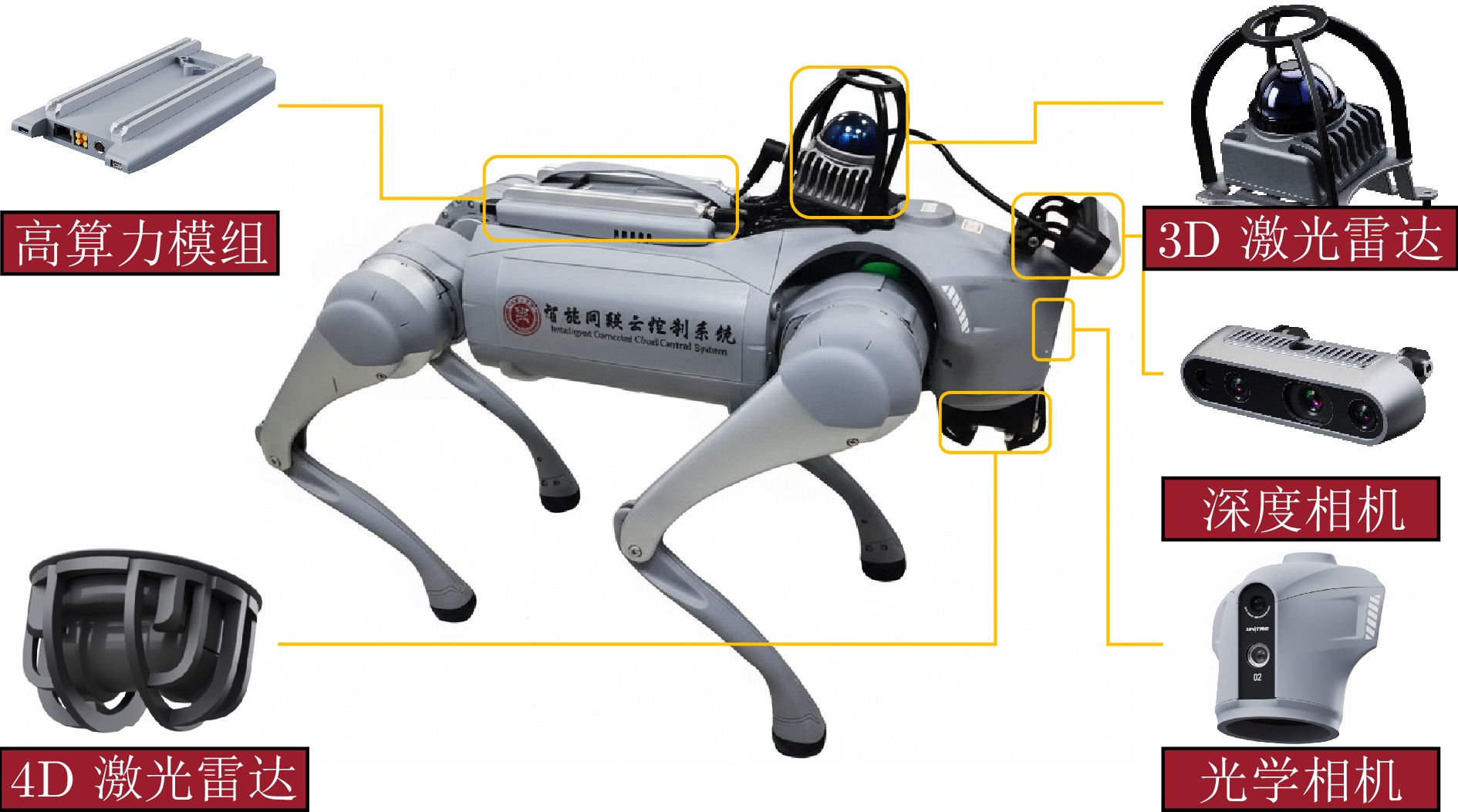
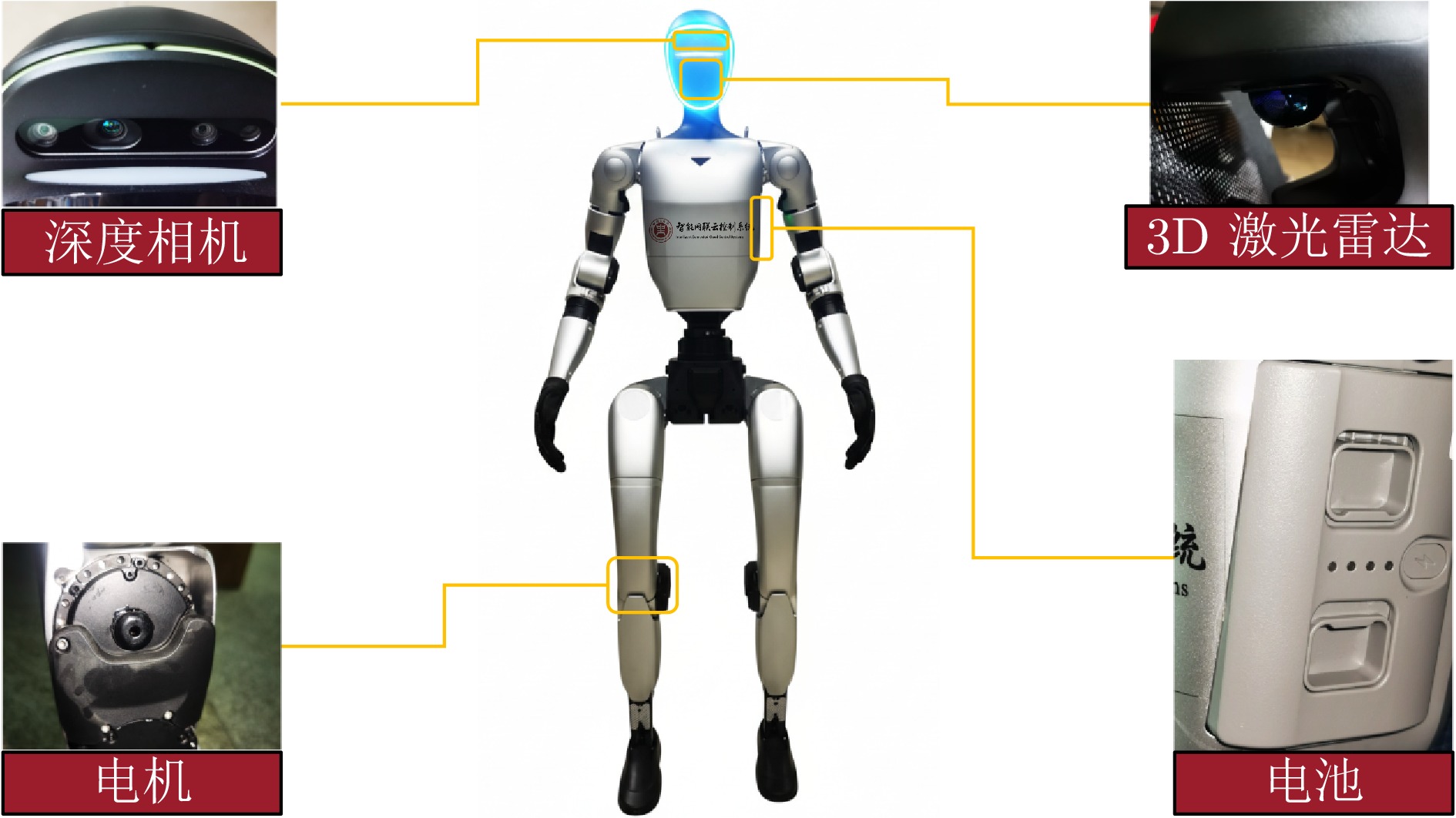
针对智慧城市中无人系统因通信架构不统一、任务调度效率低下及数字孪生技术难以支撑实时全局决策所导致的跨域协同难题, 融合云控制系统理论与数字孪生技术, 基于云网边端协同云控制架构, 构建智能网联无人系统云控制平台及关键理论与技术体系. 该体系涵盖云控制系统综合建模、模型−数据联合驱动控制、多运动体跨域协同云控制等关键理论, 研究数字孪生系统、容器化云工作流调度系统、动态云控制系统、远程驾驶系统等关键技术. 在校园场景下部署无人机、无人车、无人船、机器人等异构无人系统, 形成空基、地基、海(水)基动态云并实现跨域协同, 结果验证了所提理论体系的可行性与有效性, 为未来智慧城市发展与跨域无人系统协同应用提供理论支撑与技术路径.
针对智慧城市中无人系统因通信架构不统一、任务调度效率低下及数字孪生技术难以支撑实时全局决策所导致的跨域协同难题, 融合云控制系统理论与数字孪生技术, 基于云网边端协同云控制架构, 构建智能网联无人系统云控制平台及关键理论与技术体系. 该体系涵盖云控制系统综合建模、模型−数据联合驱动控制、多运动体跨域协同云控制等关键理论, 研究数字孪生系统、容器化云工作流调度系统、动态云控制系统、远程驾驶系统等关键技术. 在校园场景下部署无人机、无人车、无人船、机器人等异构无人系统, 形成空基、地基、海(水)基动态云并实现跨域协同, 结果验证了所提理论体系的可行性与有效性, 为未来智慧城市发展与跨域无人系统协同应用提供理论支撑与技术路径.






2026, 52(2): 254-266.
doi: 10.16383/j.aas.c250434
cstr: 32138.14.j.aas.c250434
摘要:
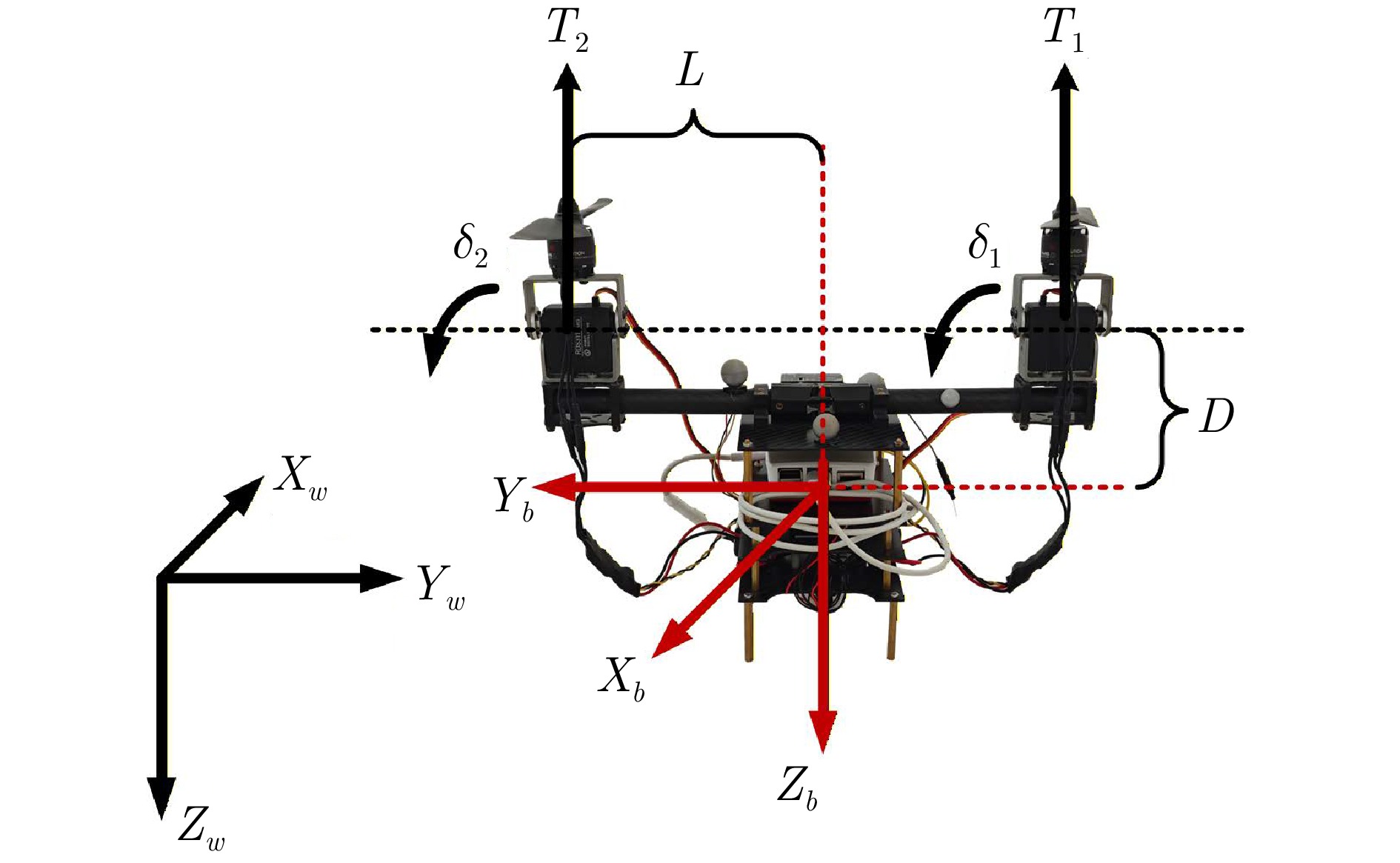
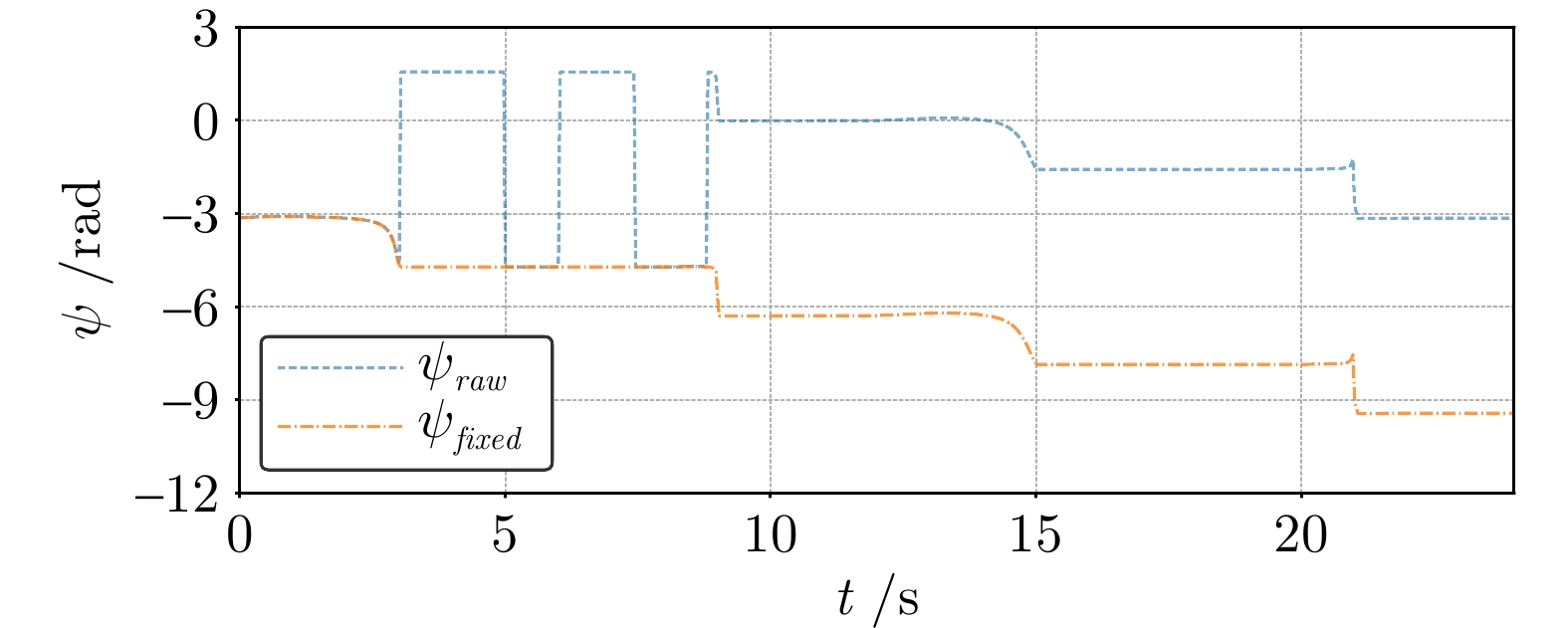
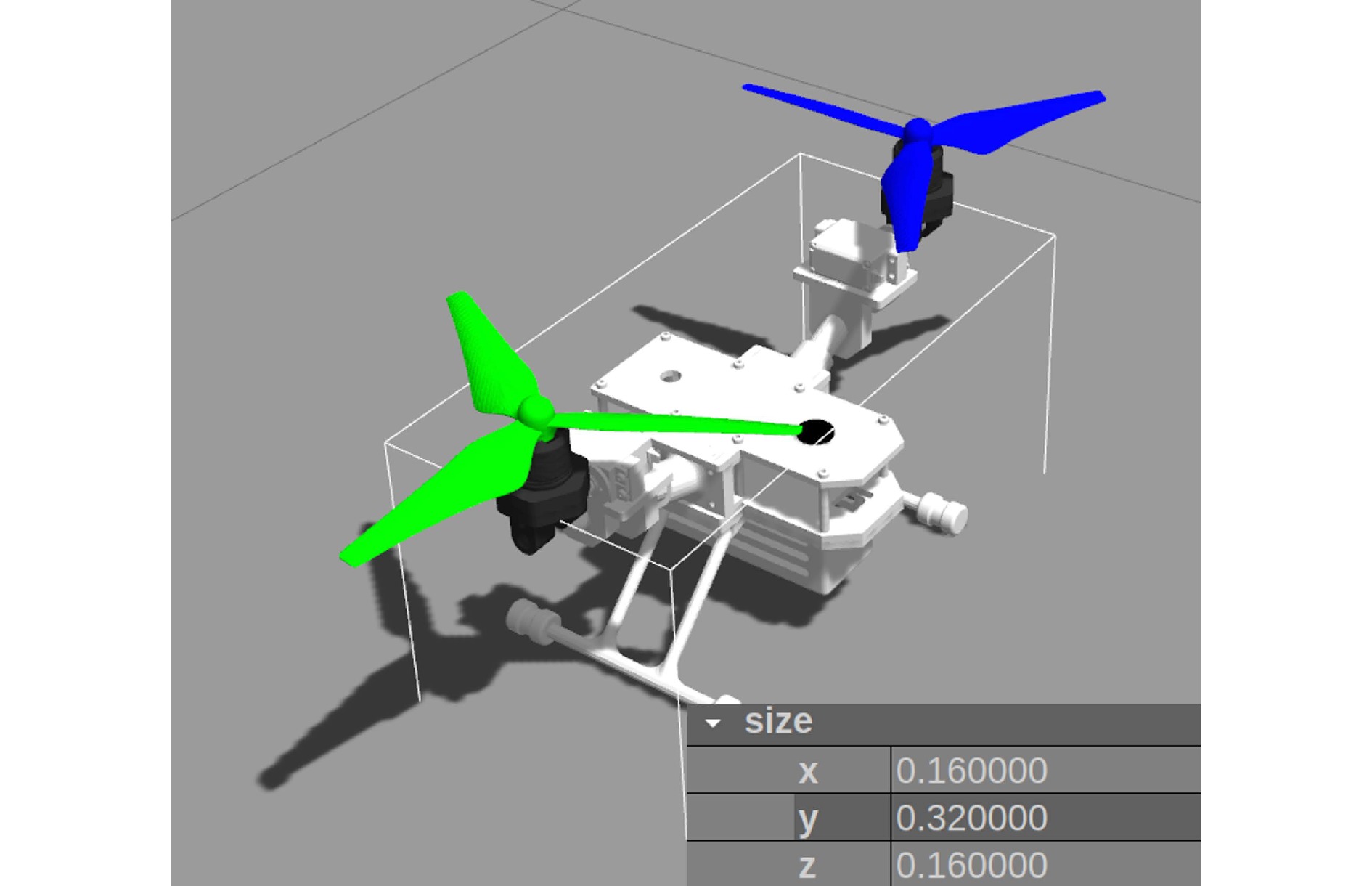
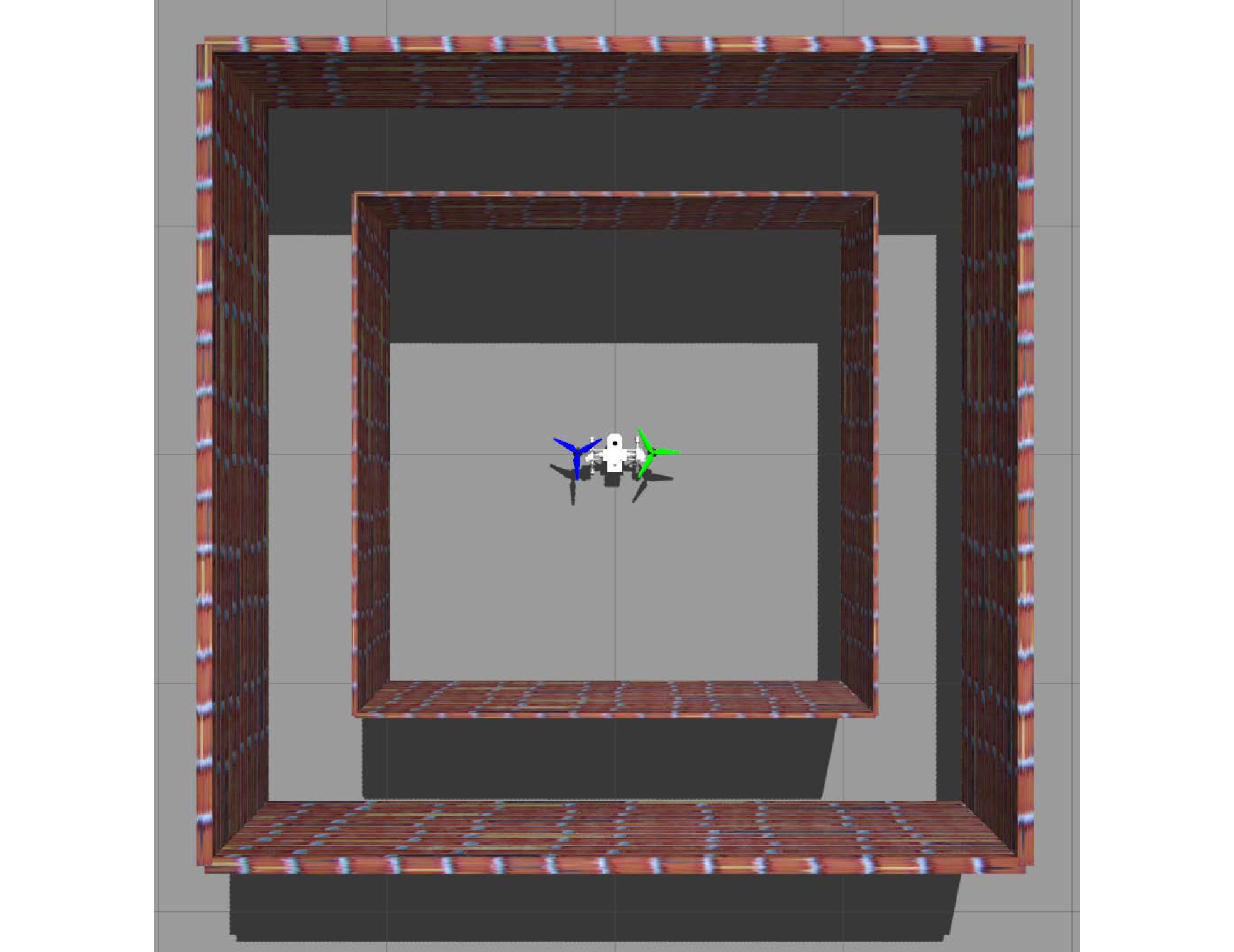
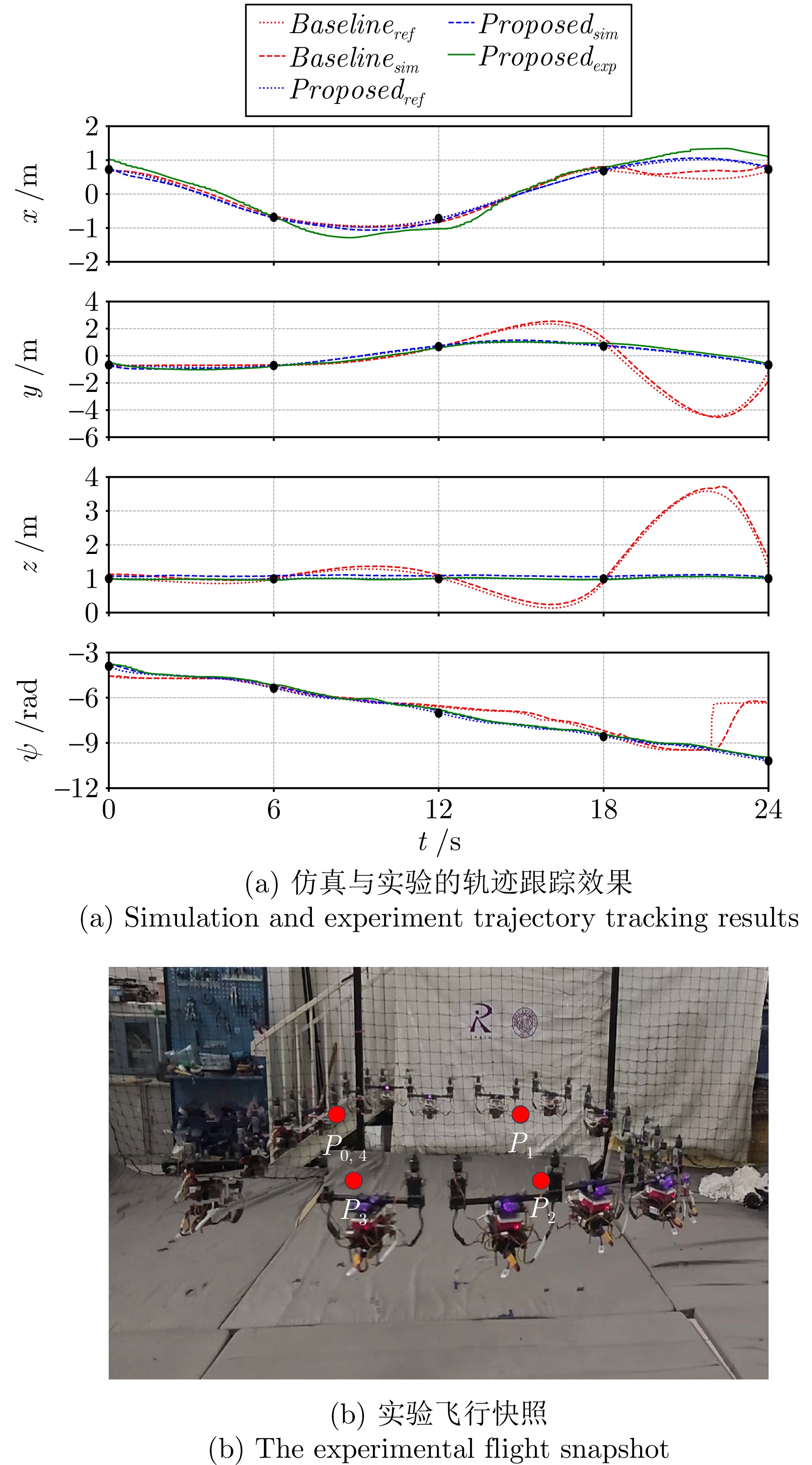
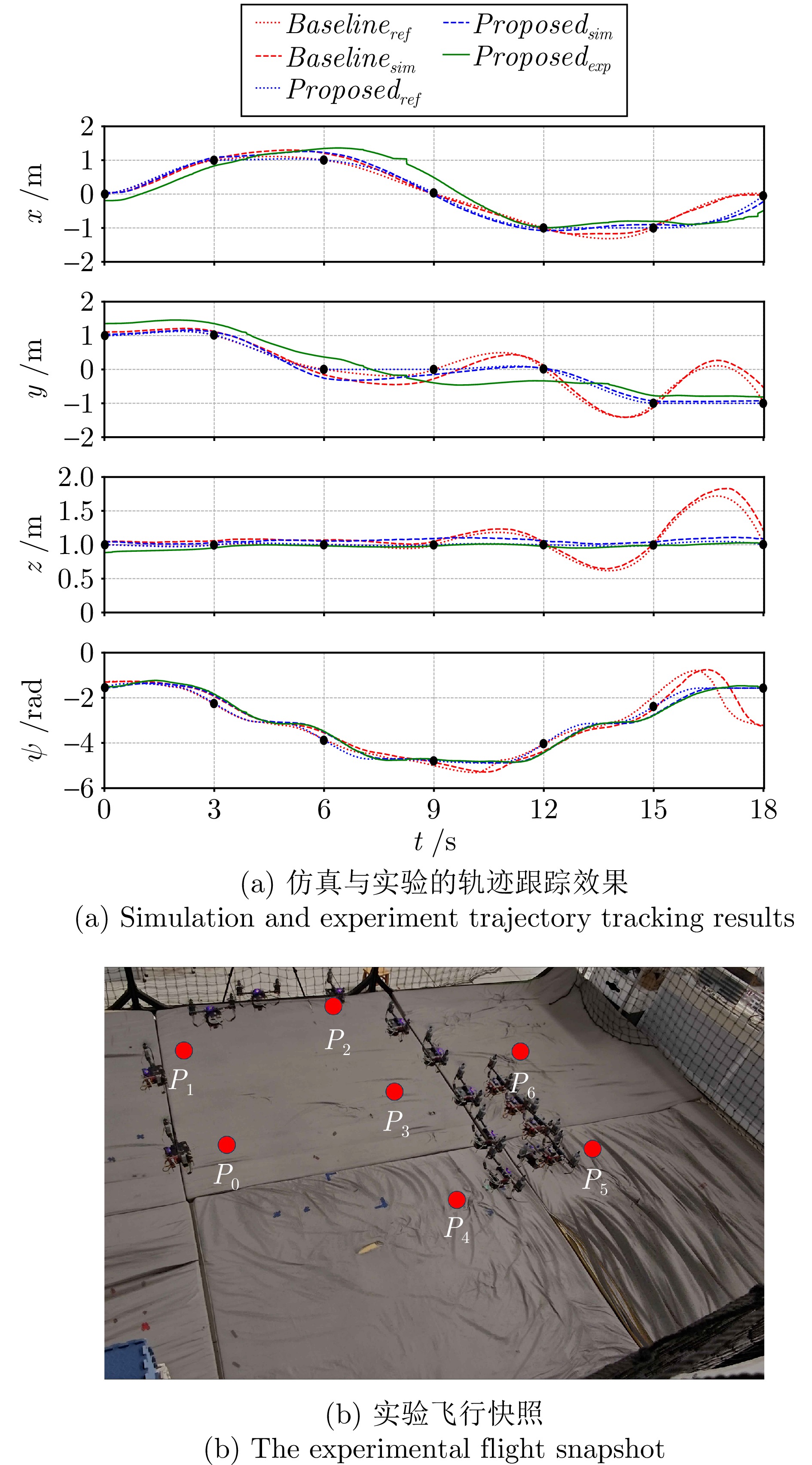
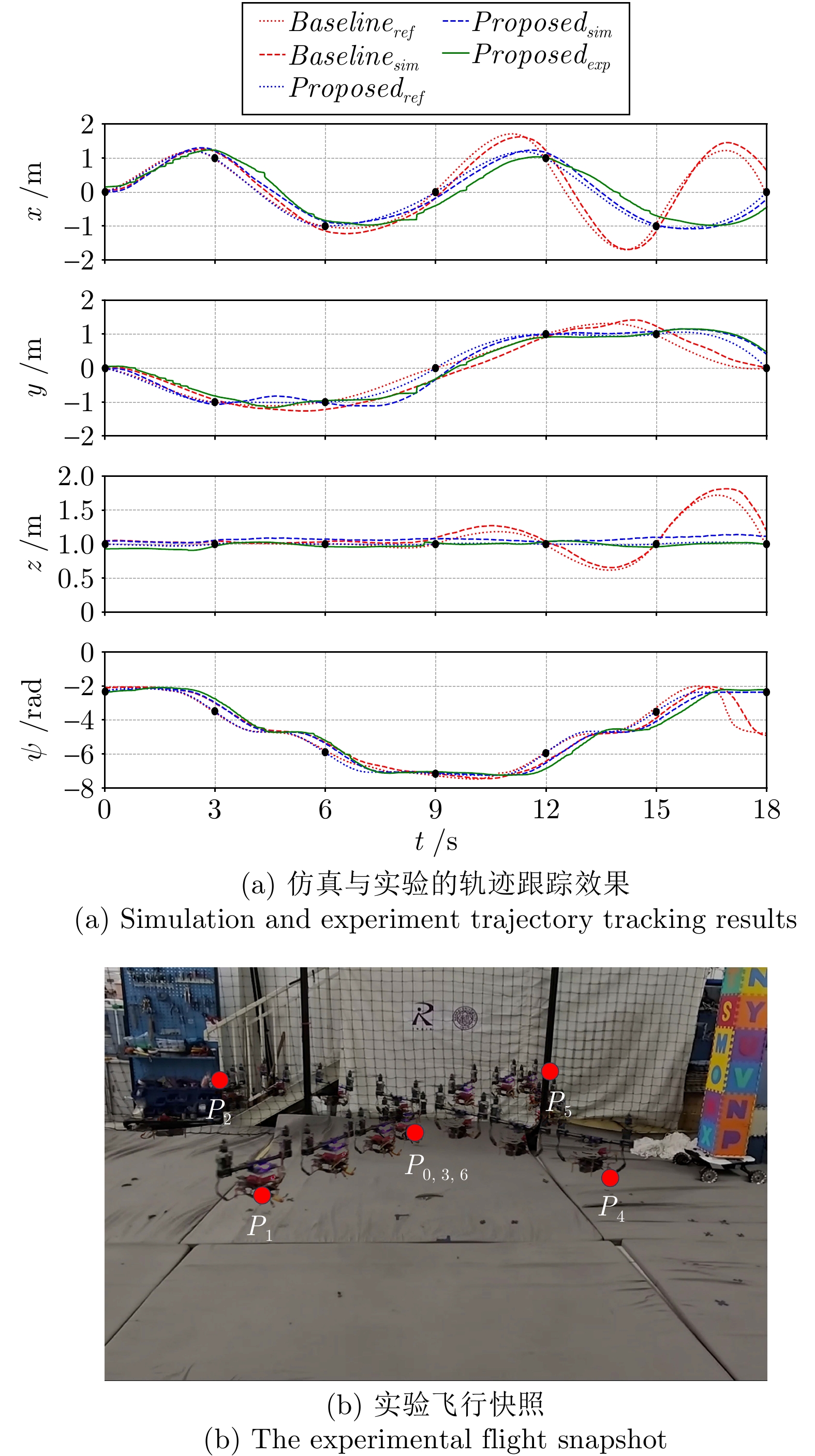
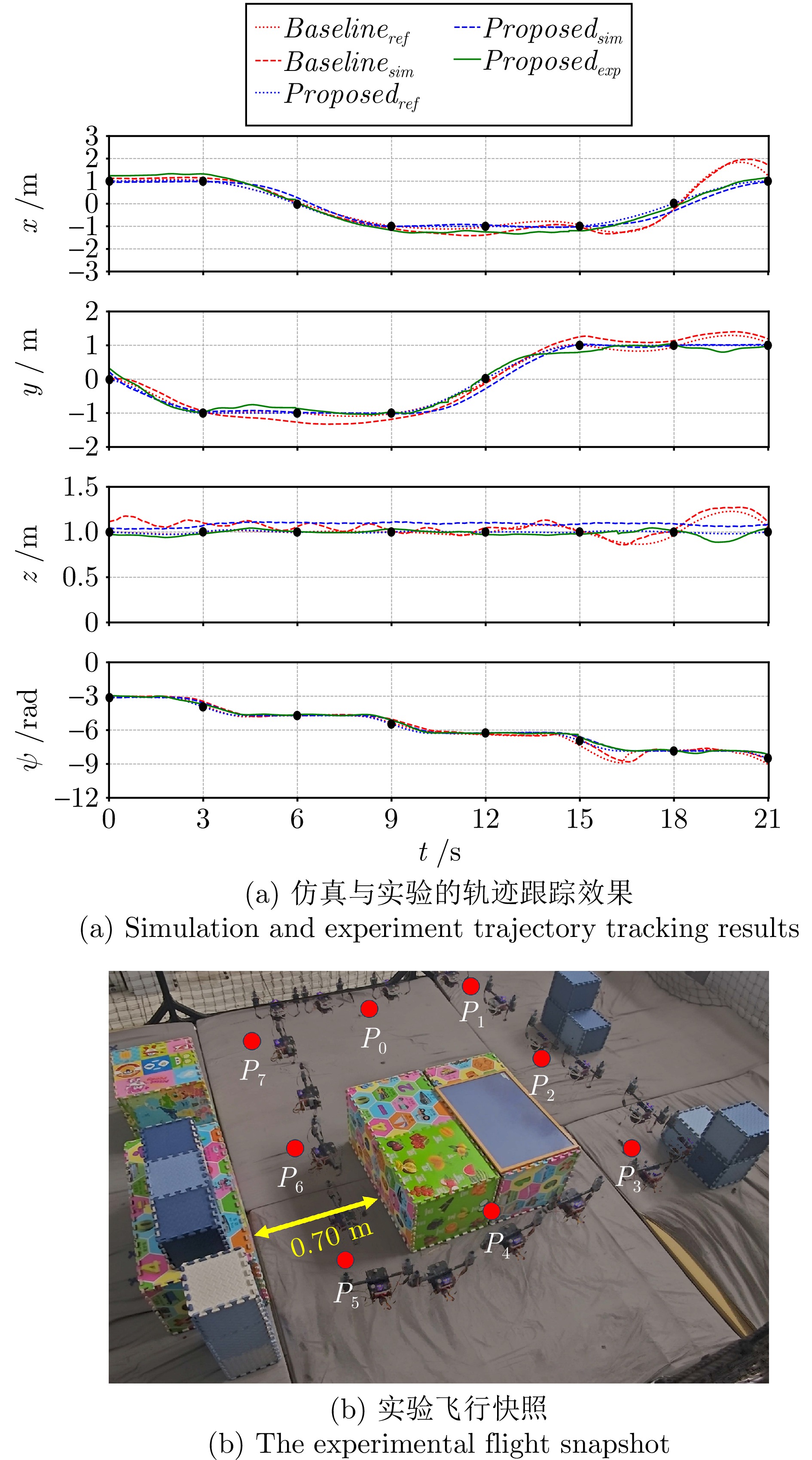
传统多旋翼无人机广泛应用于工业检测、物资运输和灾后搜救等任务. 然而在狭窄空间内, 其飞行往往受到机体尺寸和姿态调节能力的限制, 影响通行效率与飞行安全性. 为此, 面向串联倾转双旋翼无人机平台, 提出一种针对受限环境下考虑方向约束并基于平面速度分量计算偏航角的轨迹生成策略. 该方法改进了最小二阶加速度(SNAP)轨迹生成方法, 实现对位置与偏航轨迹的协调优化, 并设计最短偏航路径算法和航点附近插值平滑算法来提升飞行过程的平滑性与安全性. 将所提方法与不考虑偏航方向约束的最小SNAP方法进行对比, 结果表明改进后的最小SNAP方法更加适用于双旋翼无人机平台. 进一步通过丰富的实验验证了所提方法的有效性与适用性.
传统多旋翼无人机广泛应用于工业检测、物资运输和灾后搜救等任务. 然而在狭窄空间内, 其飞行往往受到机体尺寸和姿态调节能力的限制, 影响通行效率与飞行安全性. 为此, 面向串联倾转双旋翼无人机平台, 提出一种针对受限环境下考虑方向约束并基于平面速度分量计算偏航角的轨迹生成策略. 该方法改进了最小二阶加速度(SNAP)轨迹生成方法, 实现对位置与偏航轨迹的协调优化, 并设计最短偏航路径算法和航点附近插值平滑算法来提升飞行过程的平滑性与安全性. 将所提方法与不考虑偏航方向约束的最小SNAP方法进行对比, 结果表明改进后的最小SNAP方法更加适用于双旋翼无人机平台. 进一步通过丰富的实验验证了所提方法的有效性与适用性.

2026, 52(2): 267-283.
doi: 10.16383/j.aas.c250420
cstr: 32138.14.j.aas.c250420
摘要:
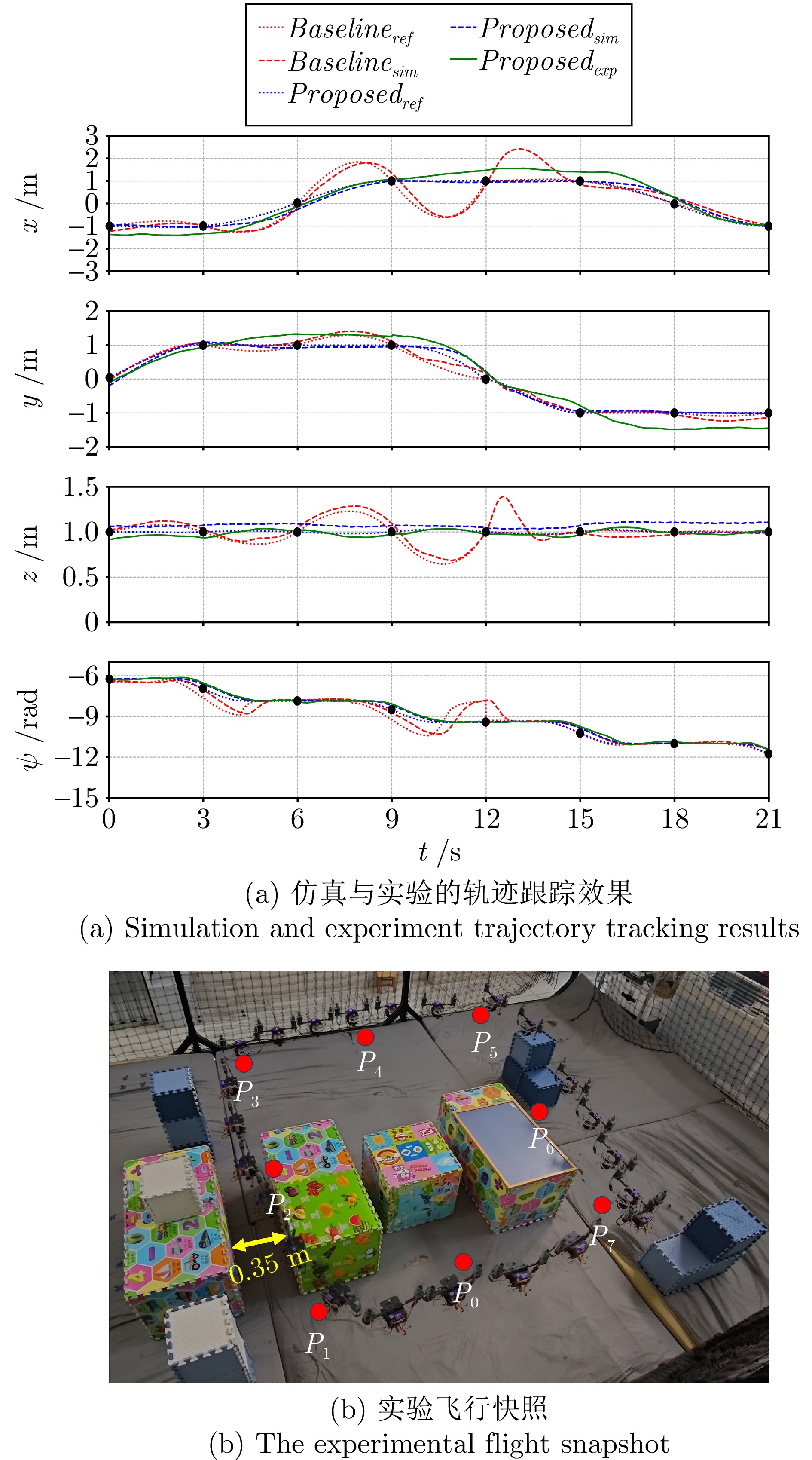
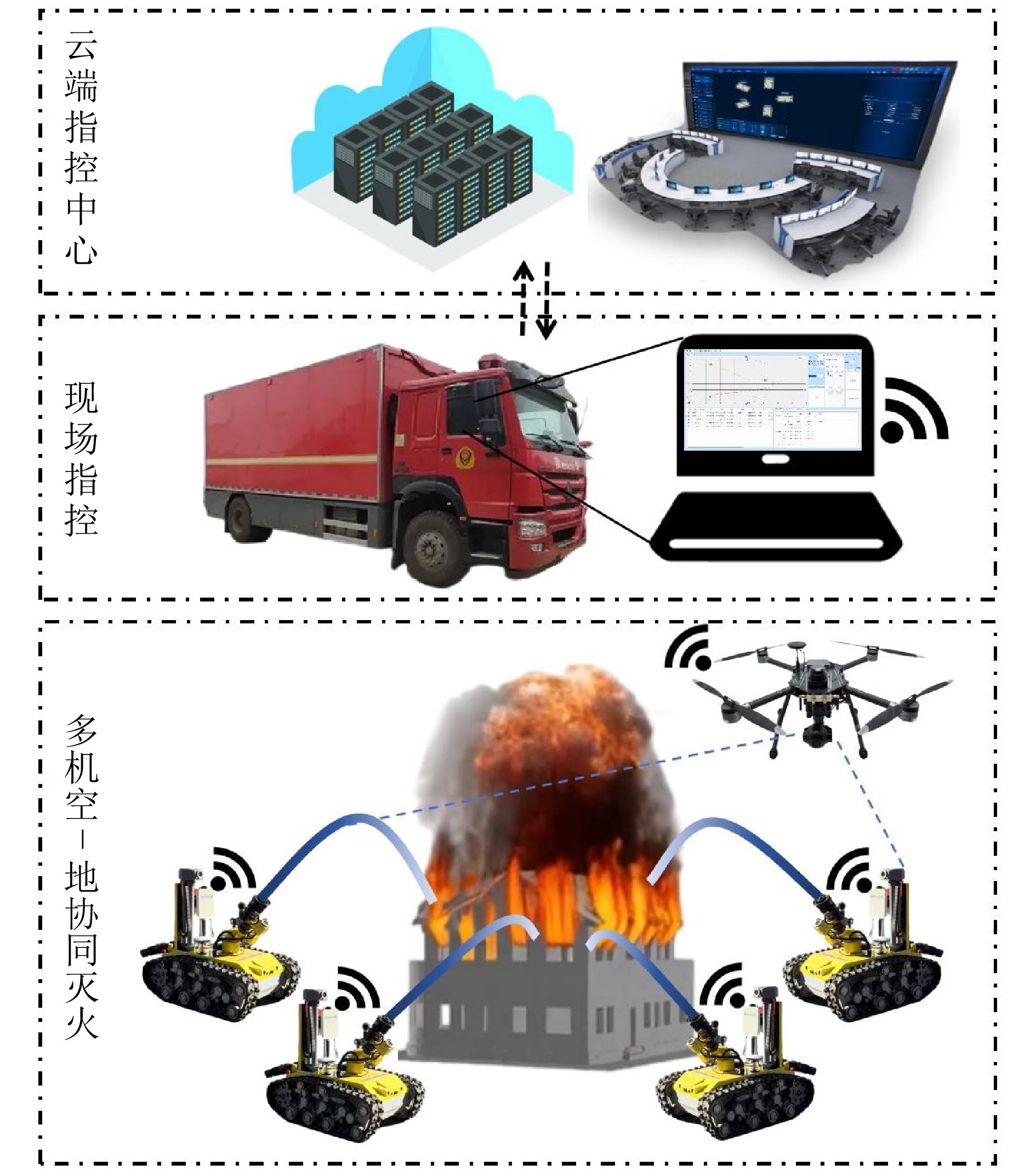
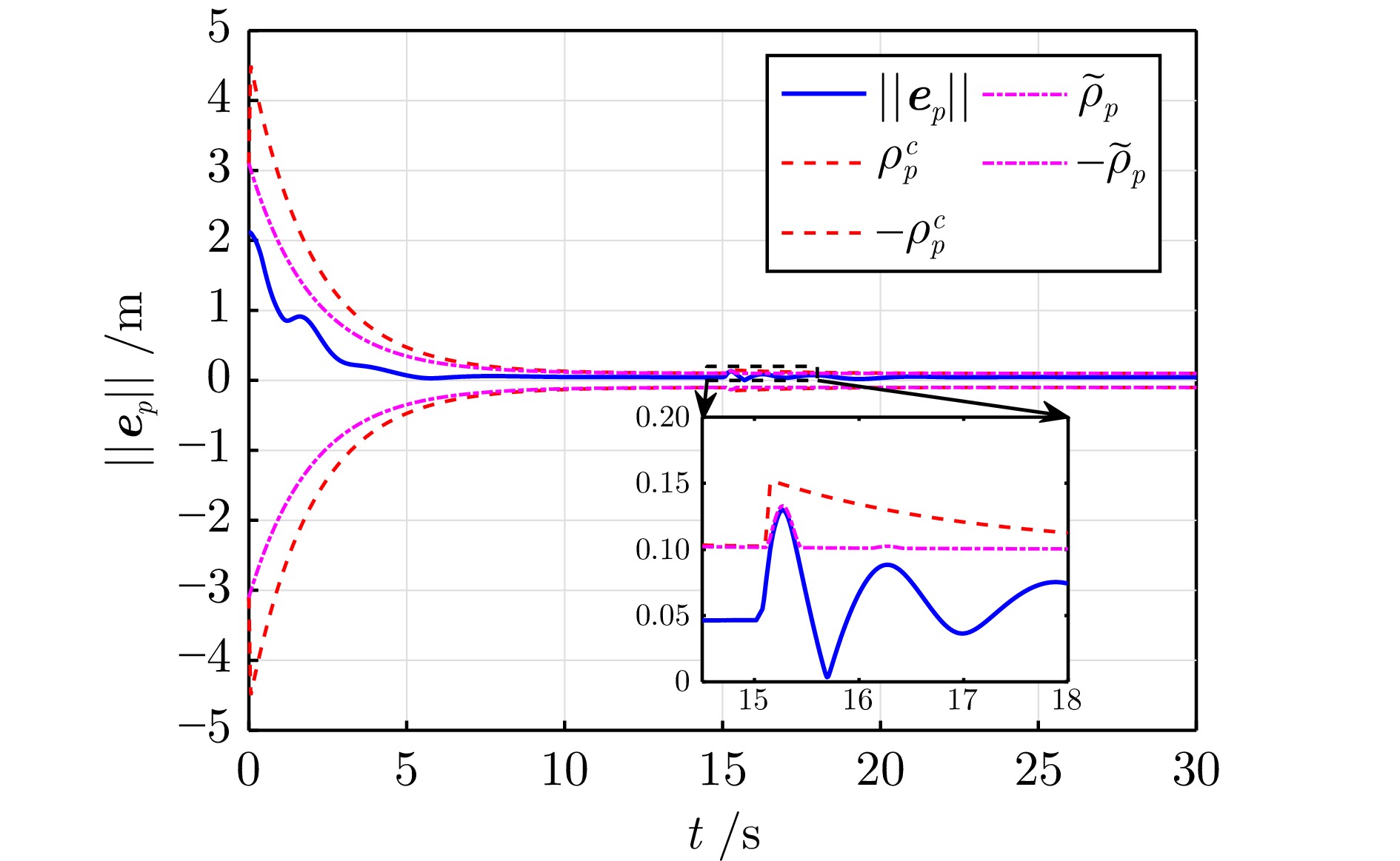
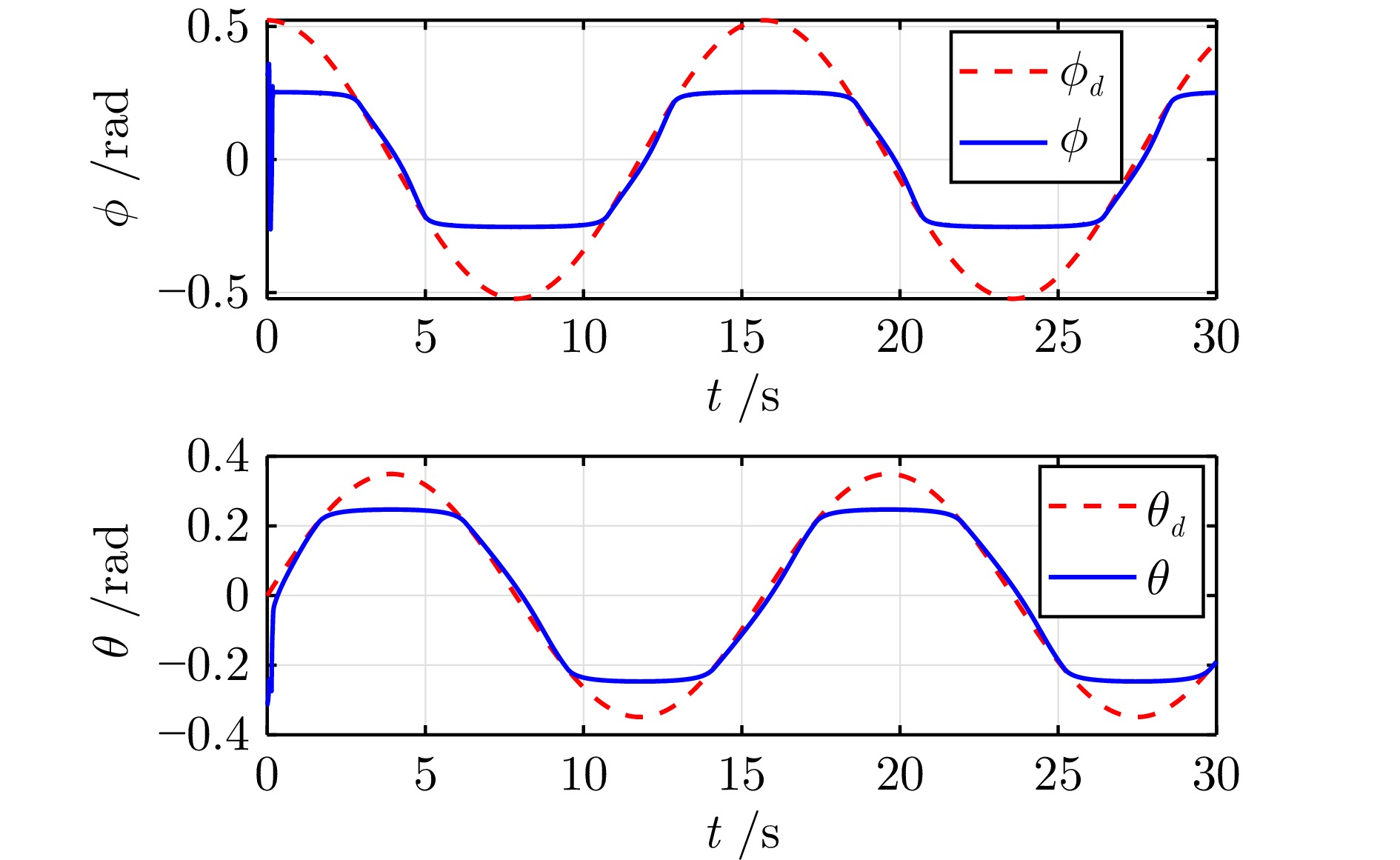
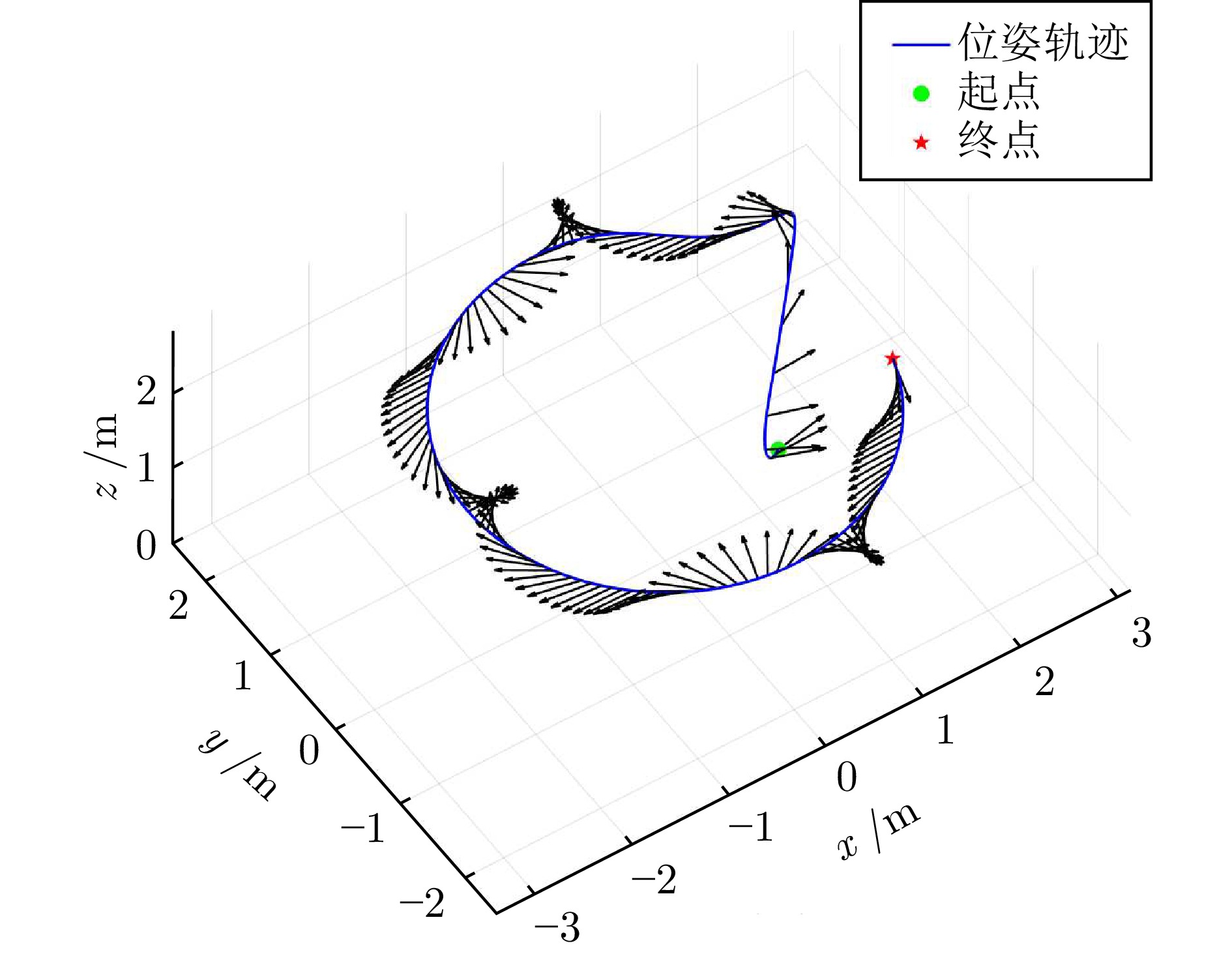
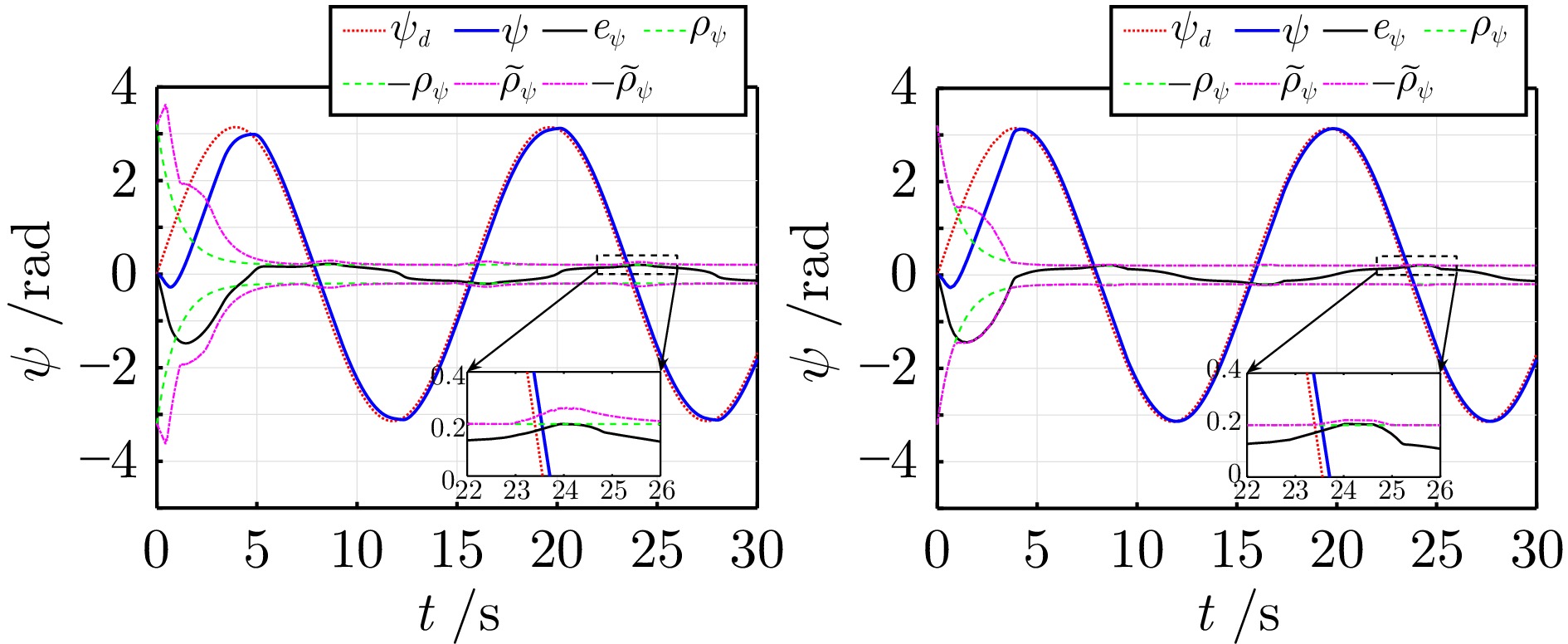
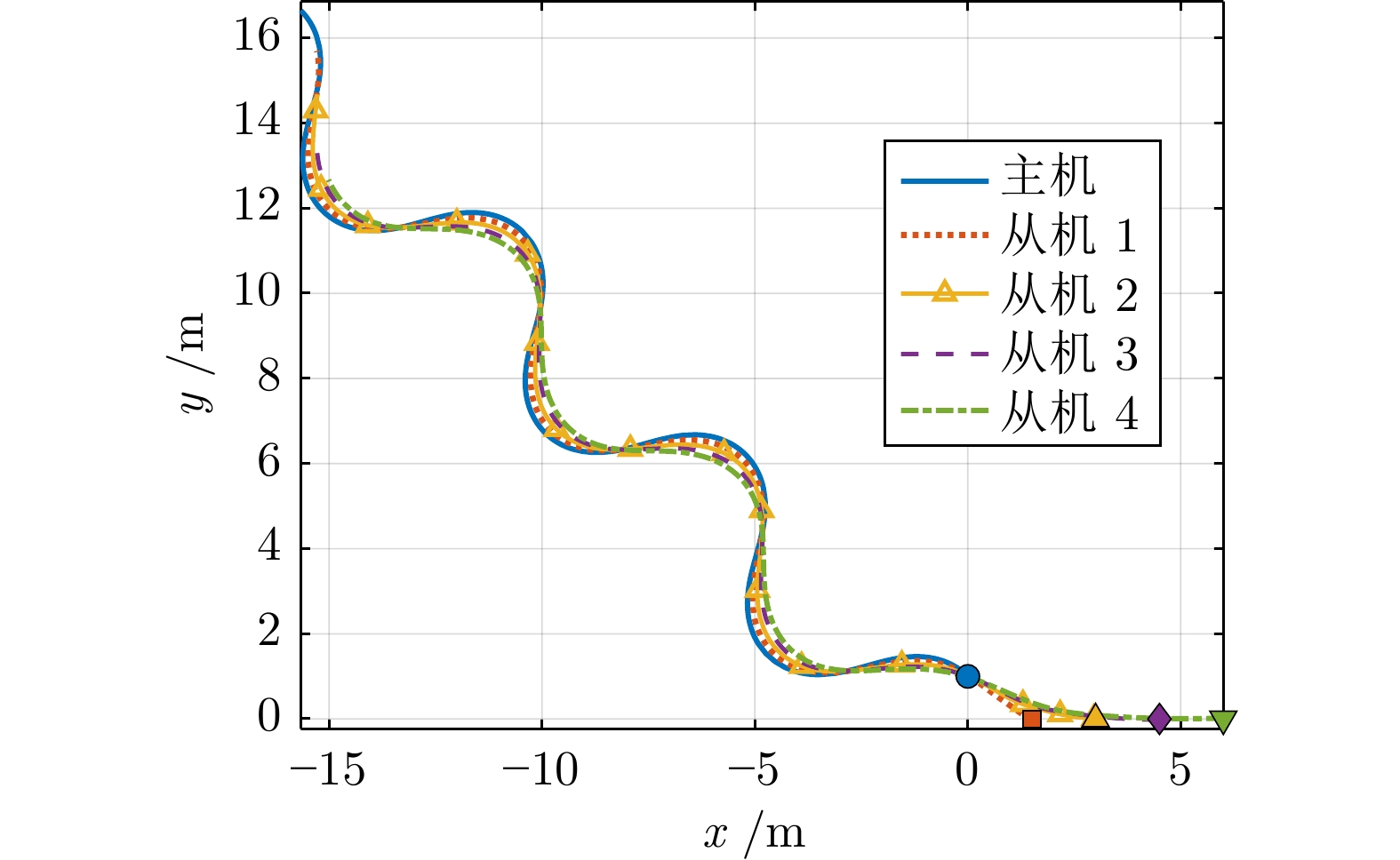
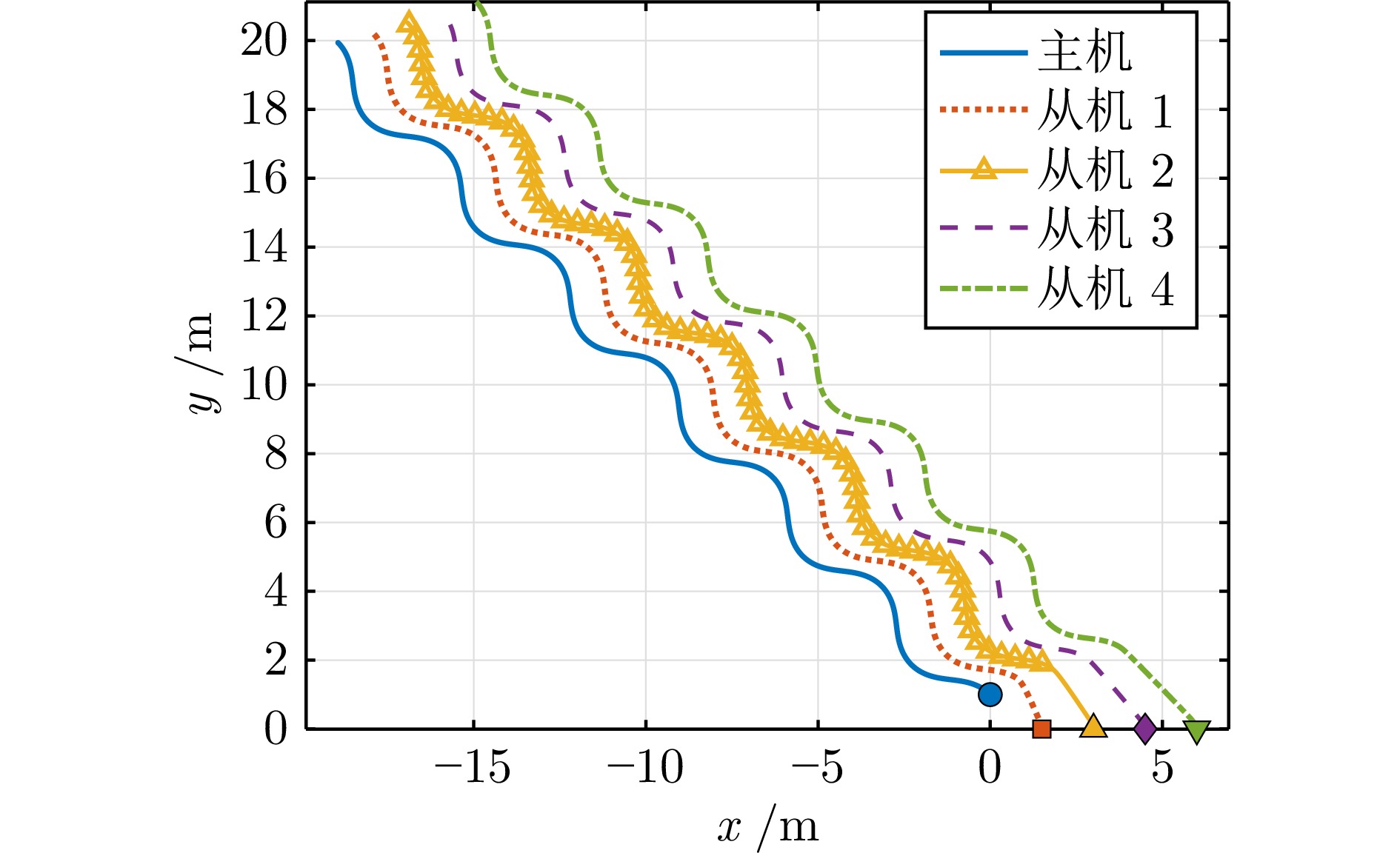
复杂火灾场景下传统消防手段存在全局感知能力不足、协同能力弱等问题, 因此提出一种基于无人机空中引导的多消防机器人协同作业系统. 通过构建空−地异构协同架构, 融合无人机全局态势感知与地面消防机器人精准作业能力, 实现火灾动态环境下的高效协同灭火. 通过融合先验地图、高空侦察信息和多视角观测信息, 构建适用于灭火指控的多图层火场地图, 在保障关键信息获取的同时兼顾建图效率. 同时结合水柱轨迹模型、多视角观测信息及结构层数据, 实现水柱轨迹和落点的准确检测. 然后设计队列式与多形态主从编队模式, 配合快速队形重构算法生成编队参考信号. 进而, 基于提出的柔性预定性能函数设计无人机位姿矢量控制器, 以及基于改进视距导引法设计多消防机器人编队控制器. 最后, 开展空−地多机协同控制算法的仿真验证, 并将系统集成到开诚RXB-MC80BD消防机器人上进行应用测试.
复杂火灾场景下传统消防手段存在全局感知能力不足、协同能力弱等问题, 因此提出一种基于无人机空中引导的多消防机器人协同作业系统. 通过构建空−地异构协同架构, 融合无人机全局态势感知与地面消防机器人精准作业能力, 实现火灾动态环境下的高效协同灭火. 通过融合先验地图、高空侦察信息和多视角观测信息, 构建适用于灭火指控的多图层火场地图, 在保障关键信息获取的同时兼顾建图效率. 同时结合水柱轨迹模型、多视角观测信息及结构层数据, 实现水柱轨迹和落点的准确检测. 然后设计队列式与多形态主从编队模式, 配合快速队形重构算法生成编队参考信号. 进而, 基于提出的柔性预定性能函数设计无人机位姿矢量控制器, 以及基于改进视距导引法设计多消防机器人编队控制器. 最后, 开展空−地多机协同控制算法的仿真验证, 并将系统集成到开诚RXB-MC80BD消防机器人上进行应用测试.

2026, 52(2): 284-295.
doi: 10.16383/j.aas.c250415
cstr: 32138.14.j.aas.c250415
摘要:
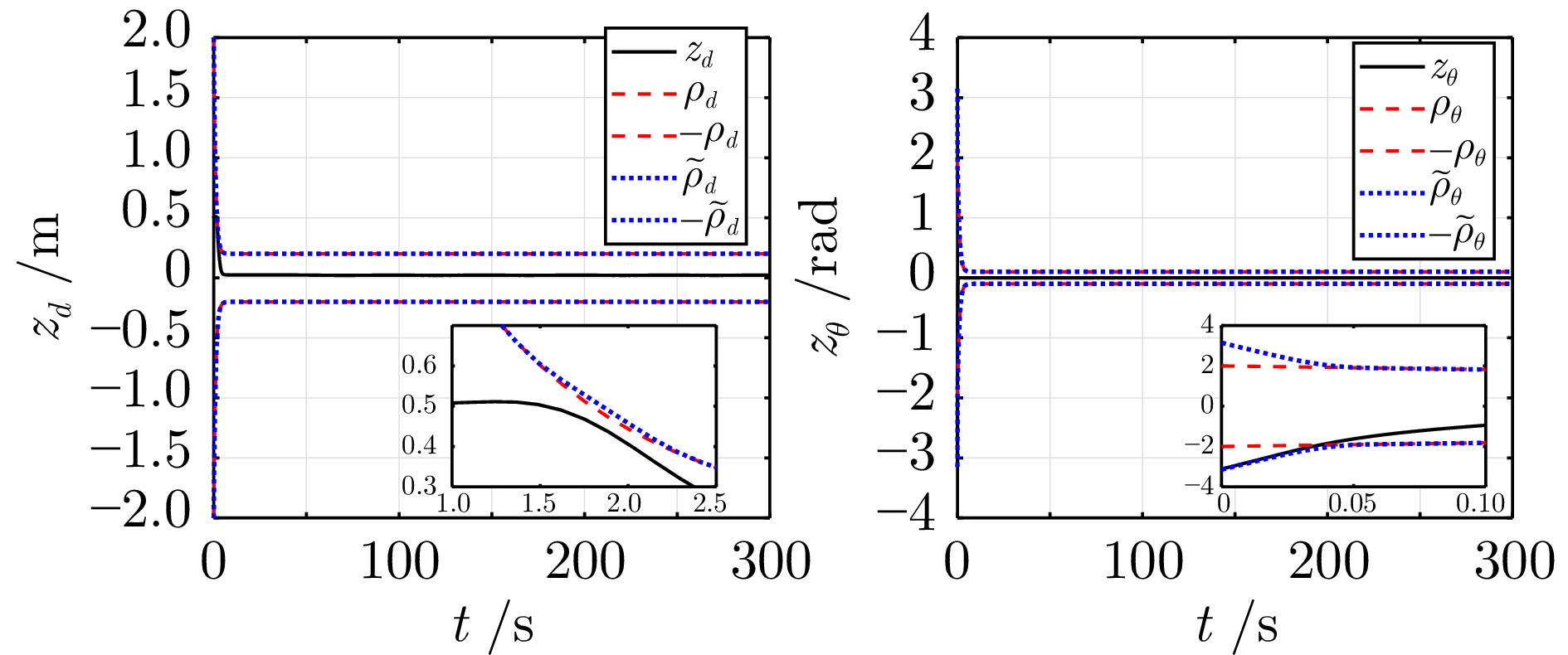
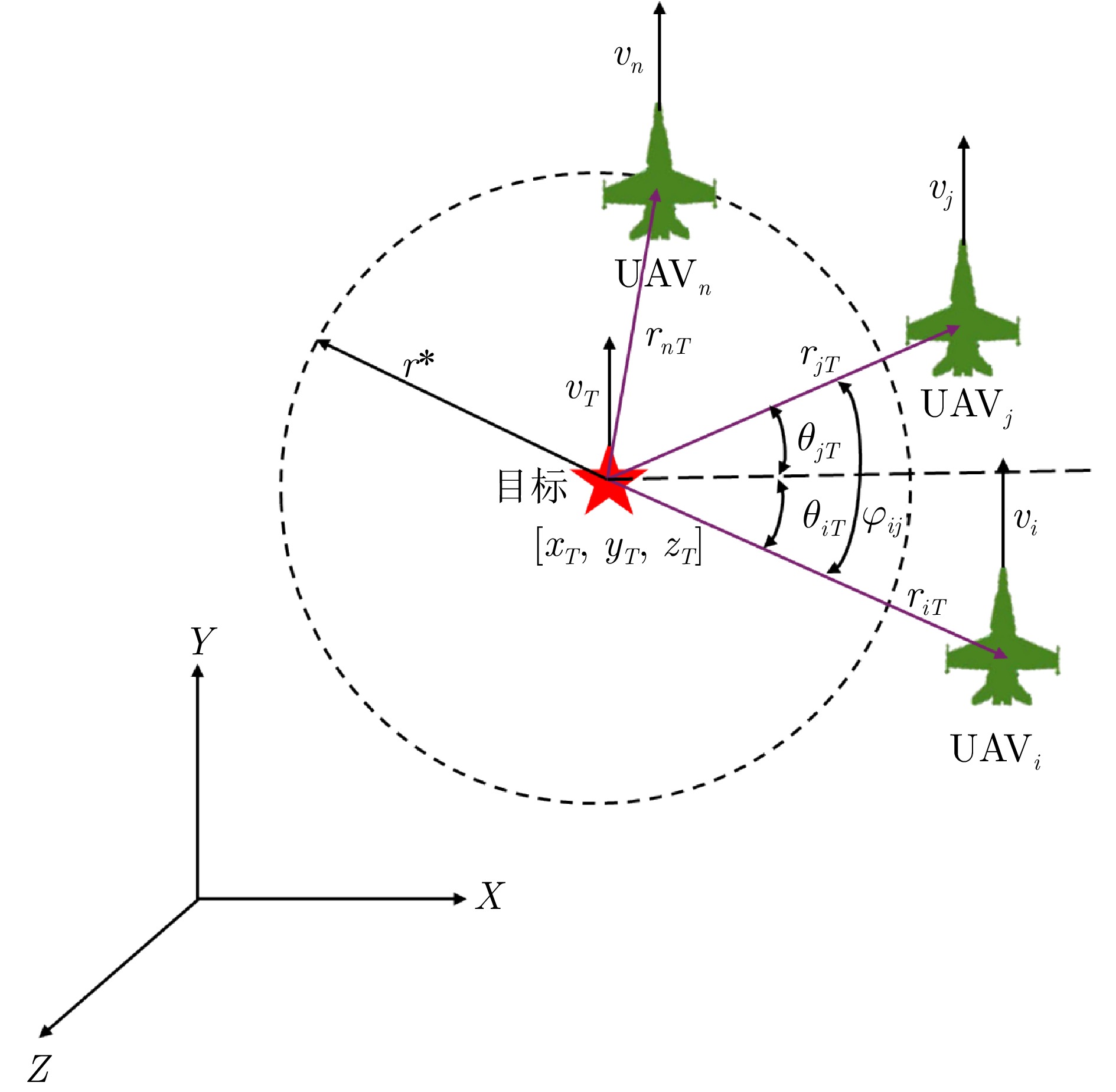
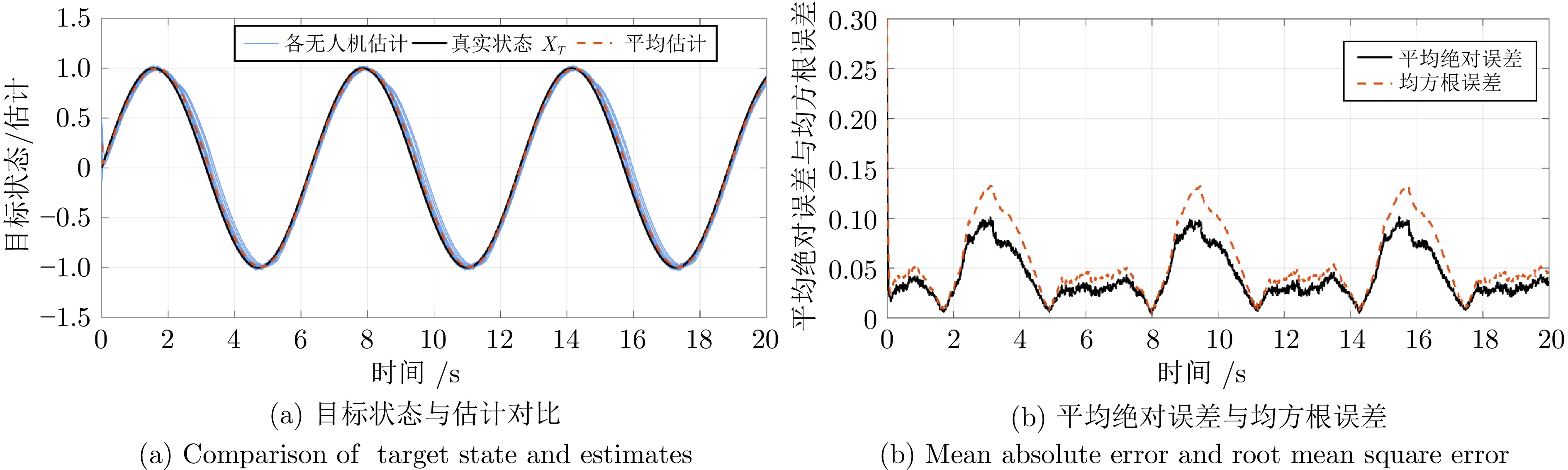
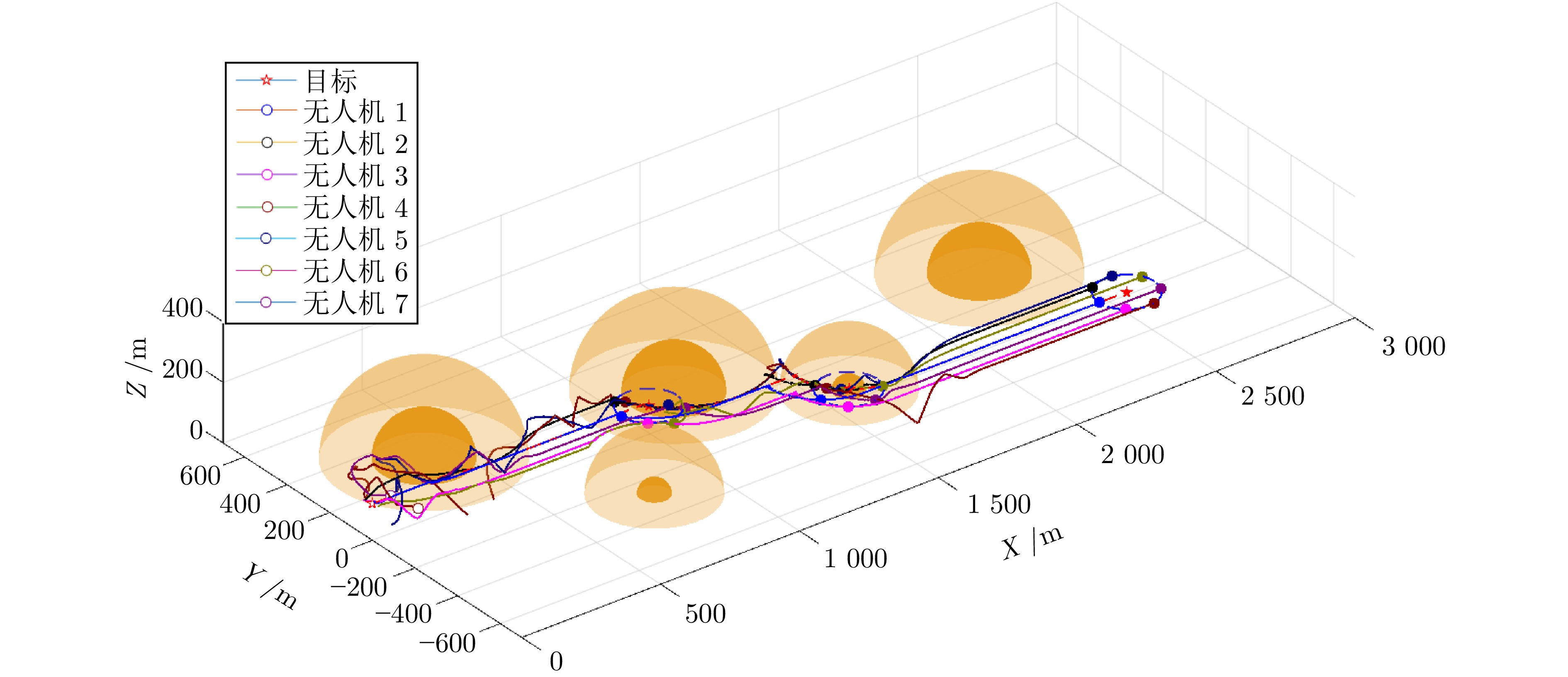
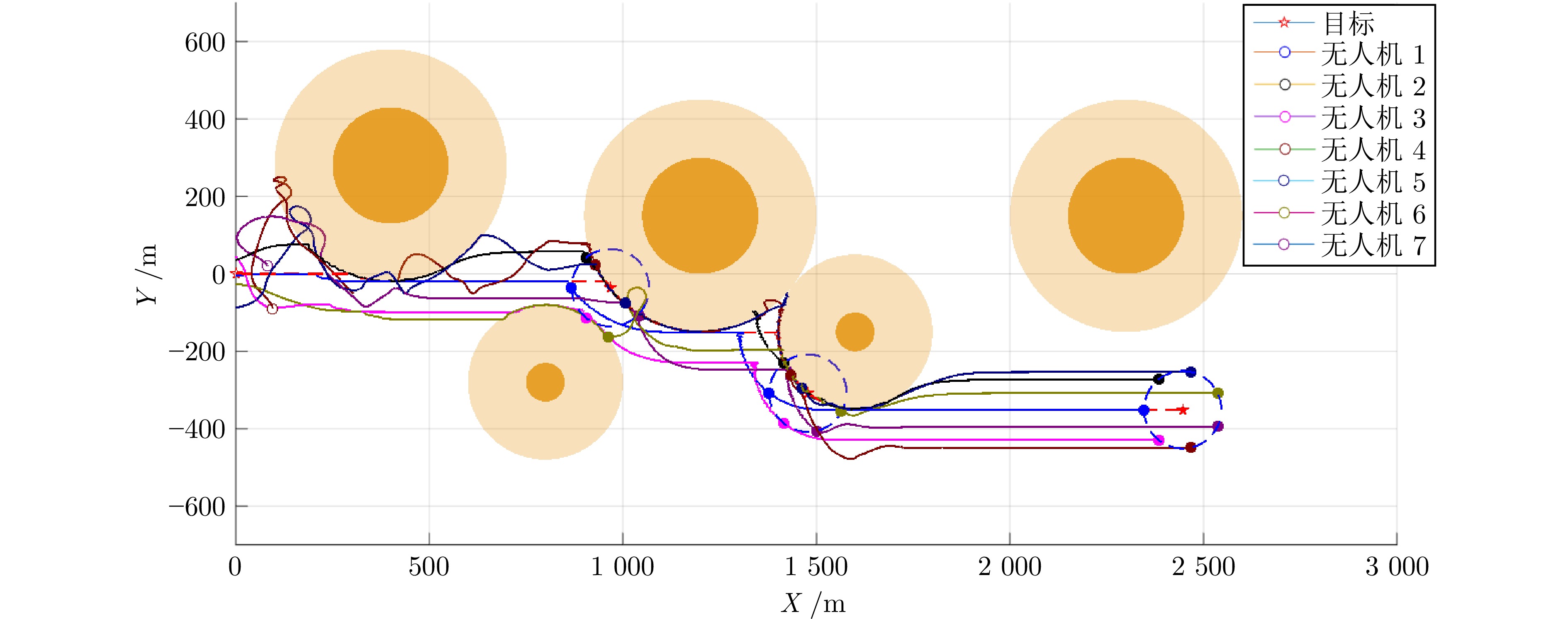
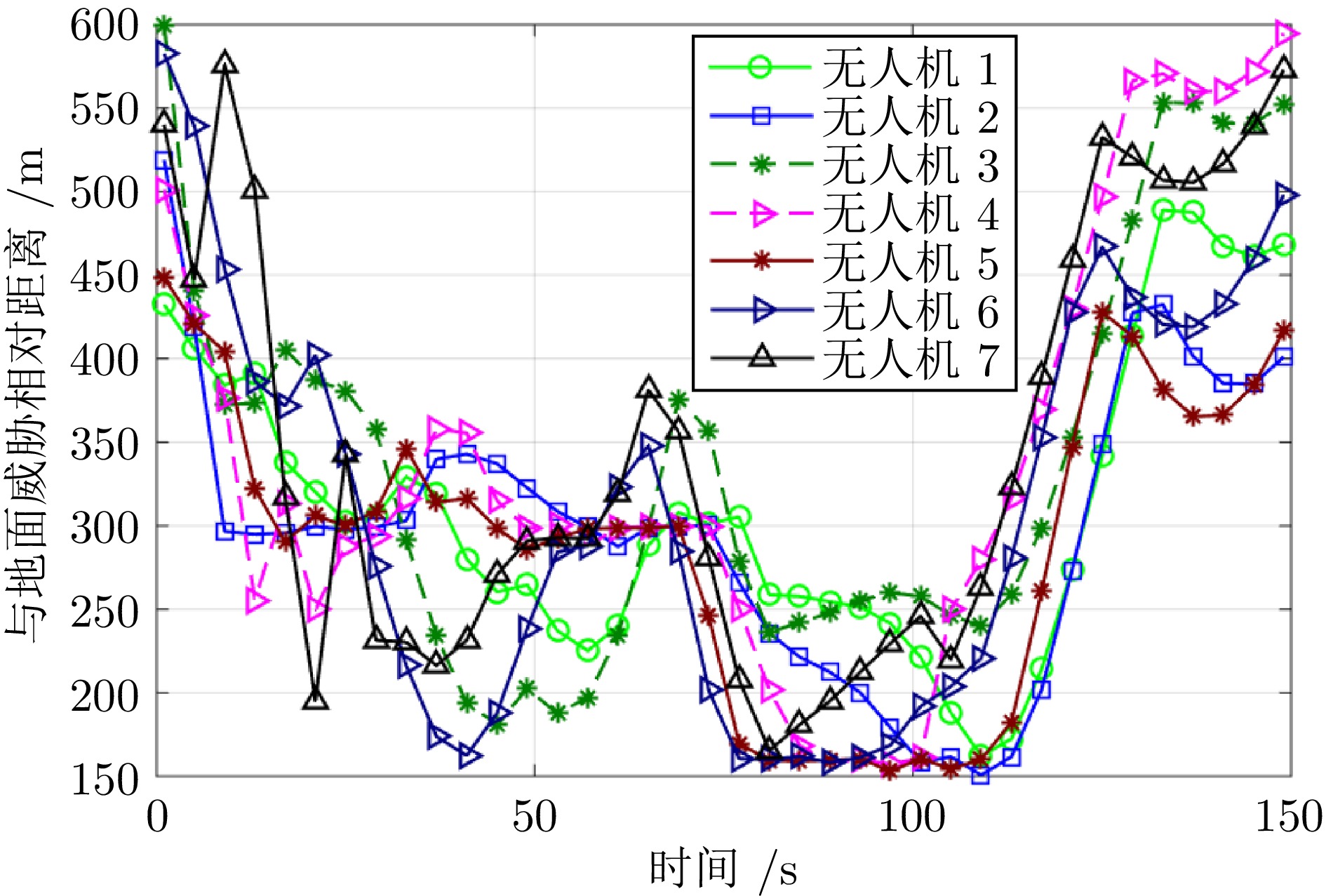
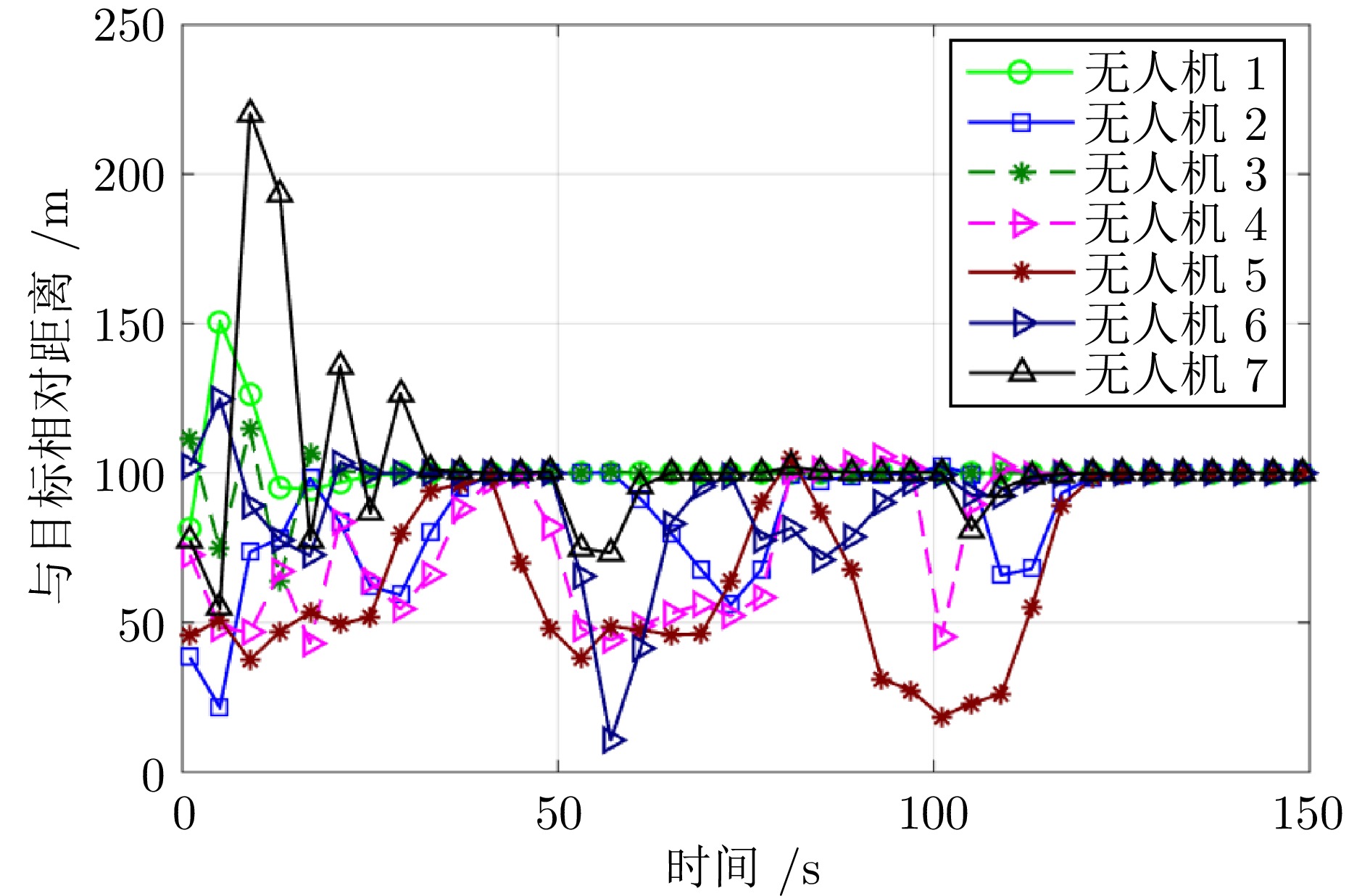
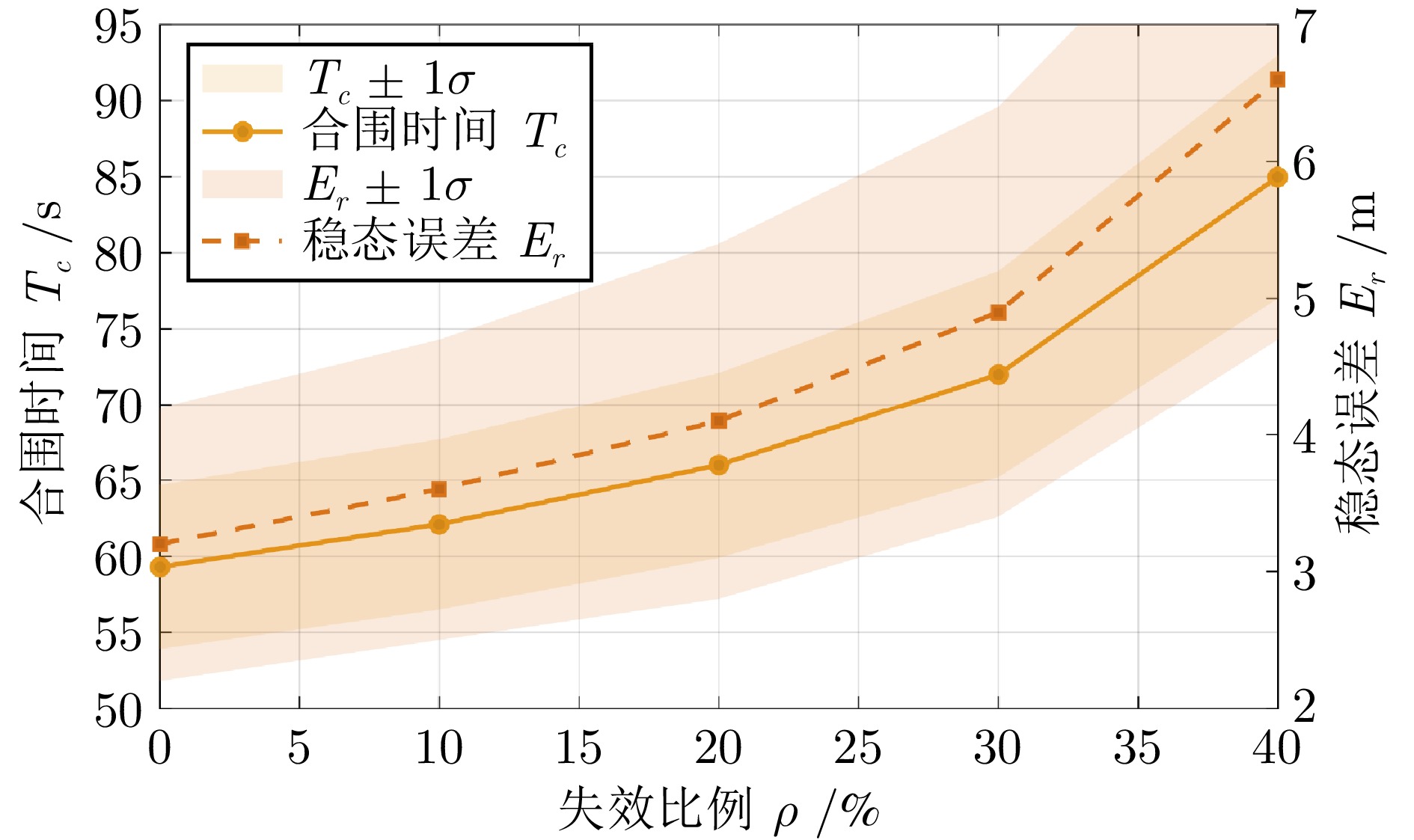
面向感知、通信受限且存在环境障碍的移动目标合围控制, 提出一种基于社会化协同的控制策略. 首先, 借鉴生物集群社会化行为, 构建协同响应模型与层级交互机制; 在拓扑切换与丢包条件下, 显式建模受限信息流, 以驱动集群实现目标合围. 其次, 提出强引导式任务——避碰并行协同控制, 在优先保障飞行安全的前提下实现鲁棒合围控制. 再次, 设计一致性目标状态观测器, 对目标位置与速度进行稳健估计. 最后, 仿真结果表明, 所提方法在障碍环境以及感知、通信受限条件下能够实现稳定合围, 并表现出较好的鲁棒性.
面向感知、通信受限且存在环境障碍的移动目标合围控制, 提出一种基于社会化协同的控制策略. 首先, 借鉴生物集群社会化行为, 构建协同响应模型与层级交互机制; 在拓扑切换与丢包条件下, 显式建模受限信息流, 以驱动集群实现目标合围. 其次, 提出强引导式任务——避碰并行协同控制, 在优先保障飞行安全的前提下实现鲁棒合围控制. 再次, 设计一致性目标状态观测器, 对目标位置与速度进行稳健估计. 最后, 仿真结果表明, 所提方法在障碍环境以及感知、通信受限条件下能够实现稳定合围, 并表现出较好的鲁棒性.
2026, 52(2): 296-308.
doi: 10.16383/j.aas.c250429
cstr: 32138.14.j.aas.c250429
摘要:
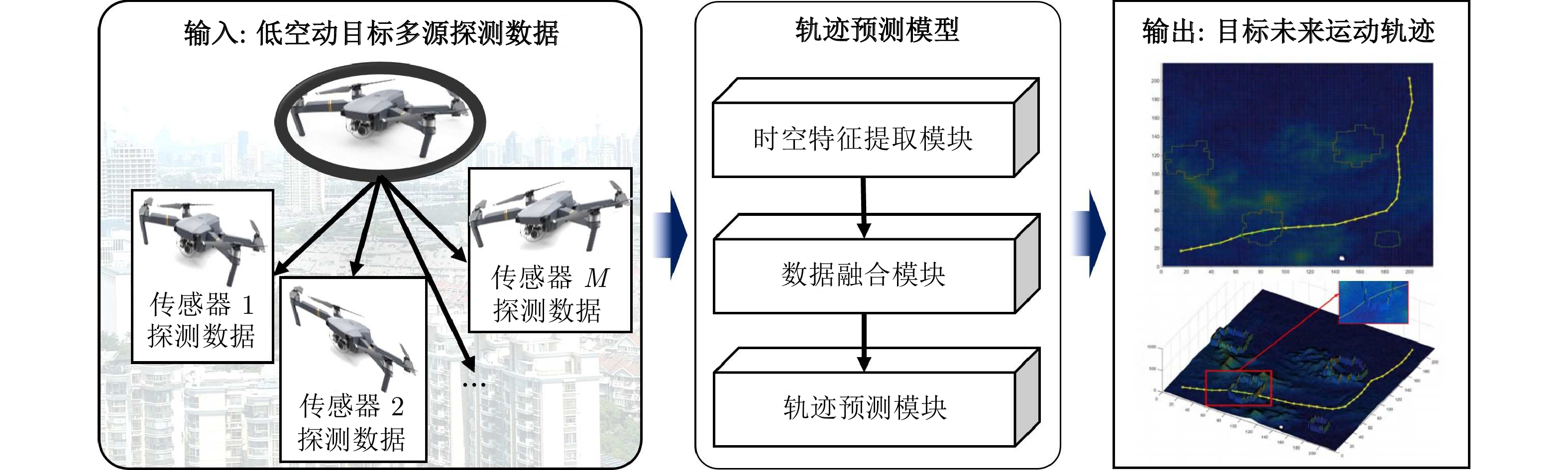
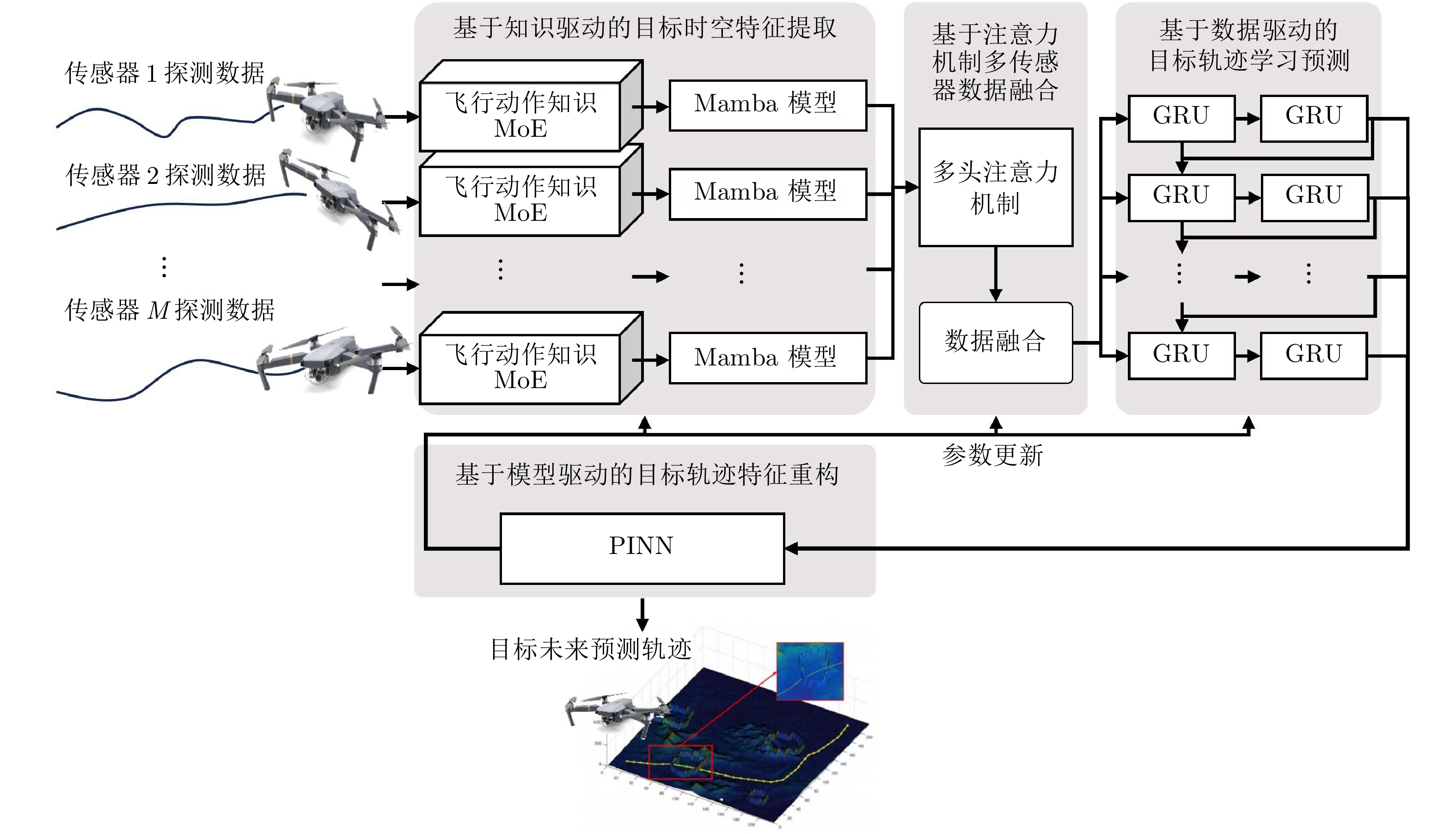
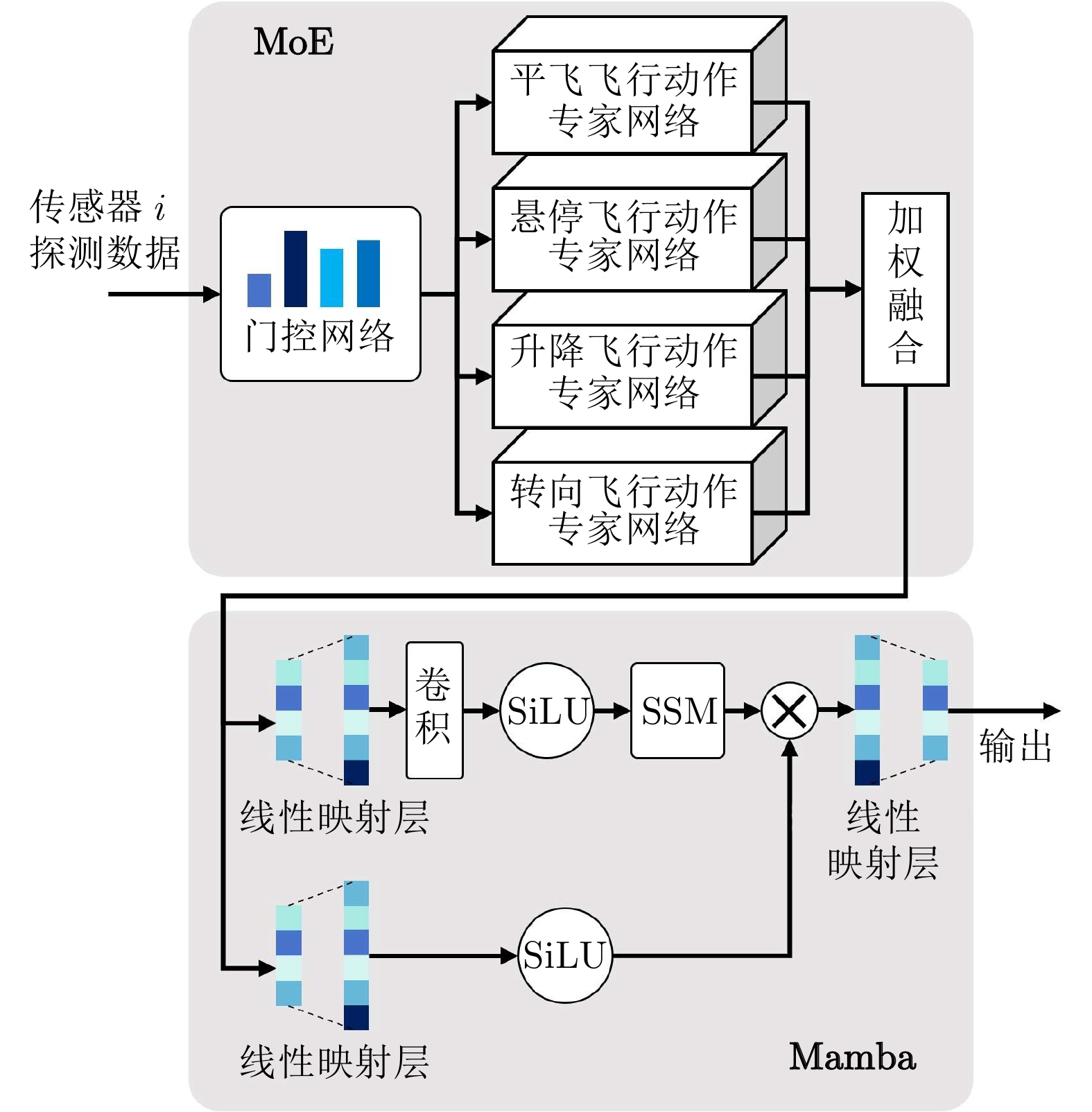
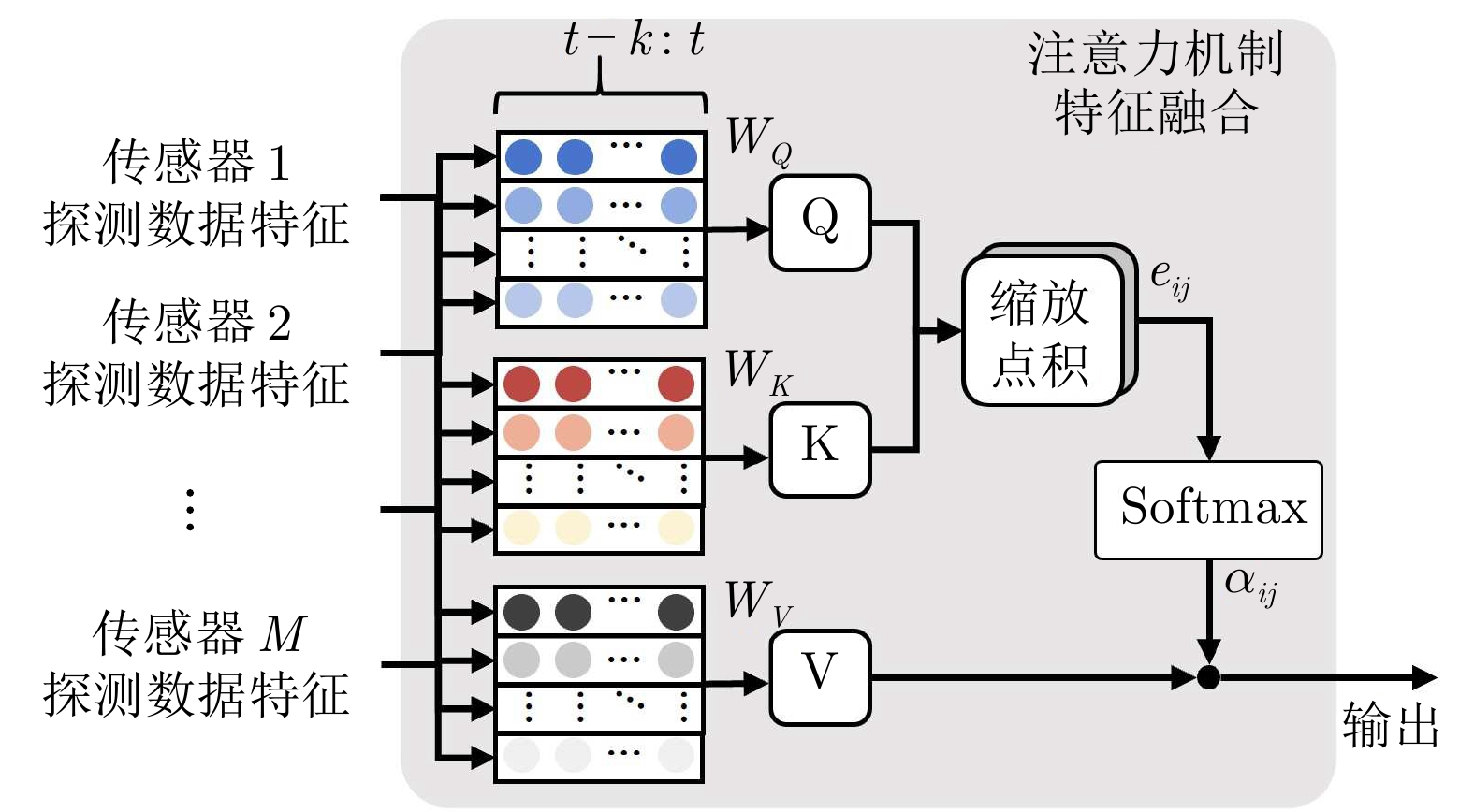
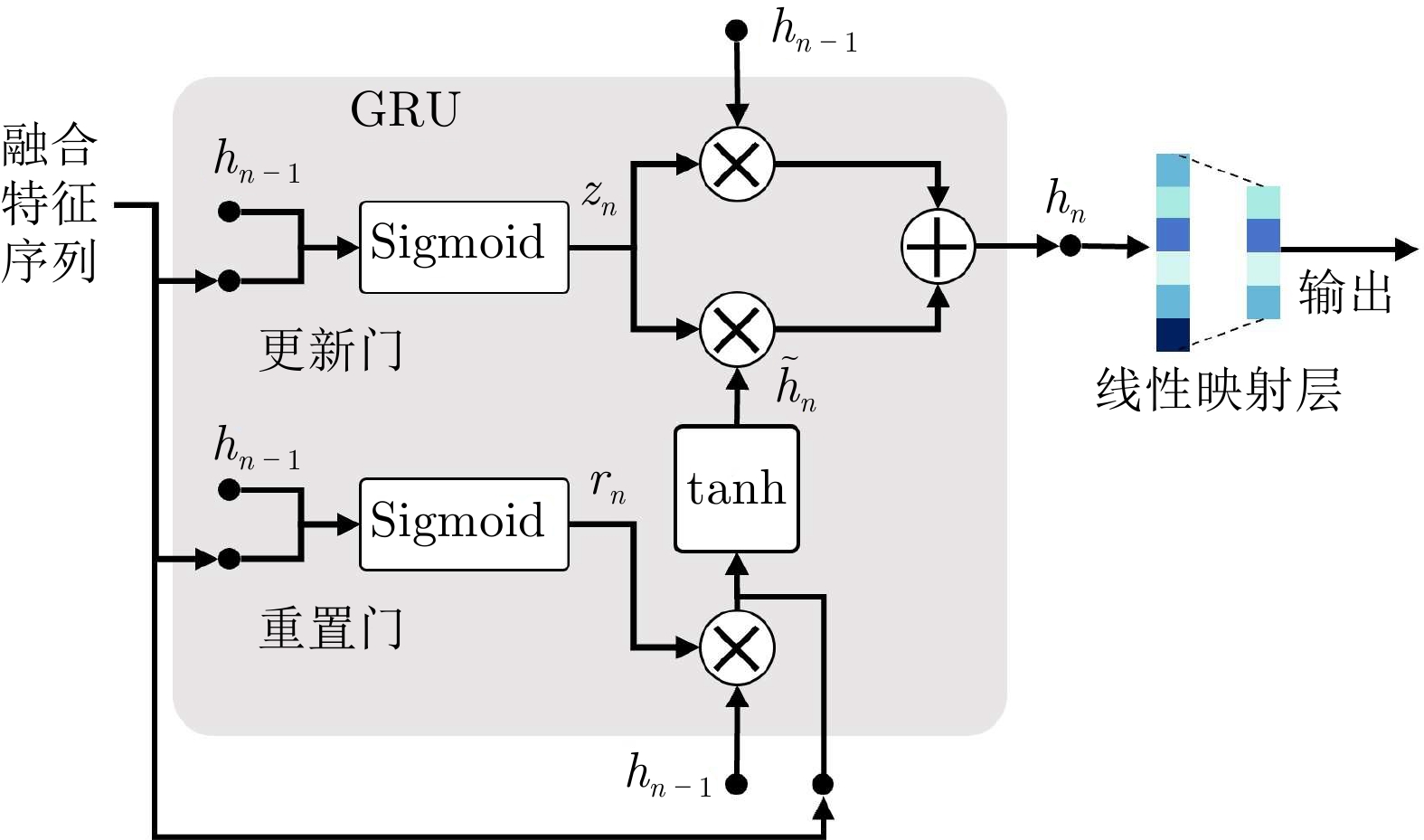
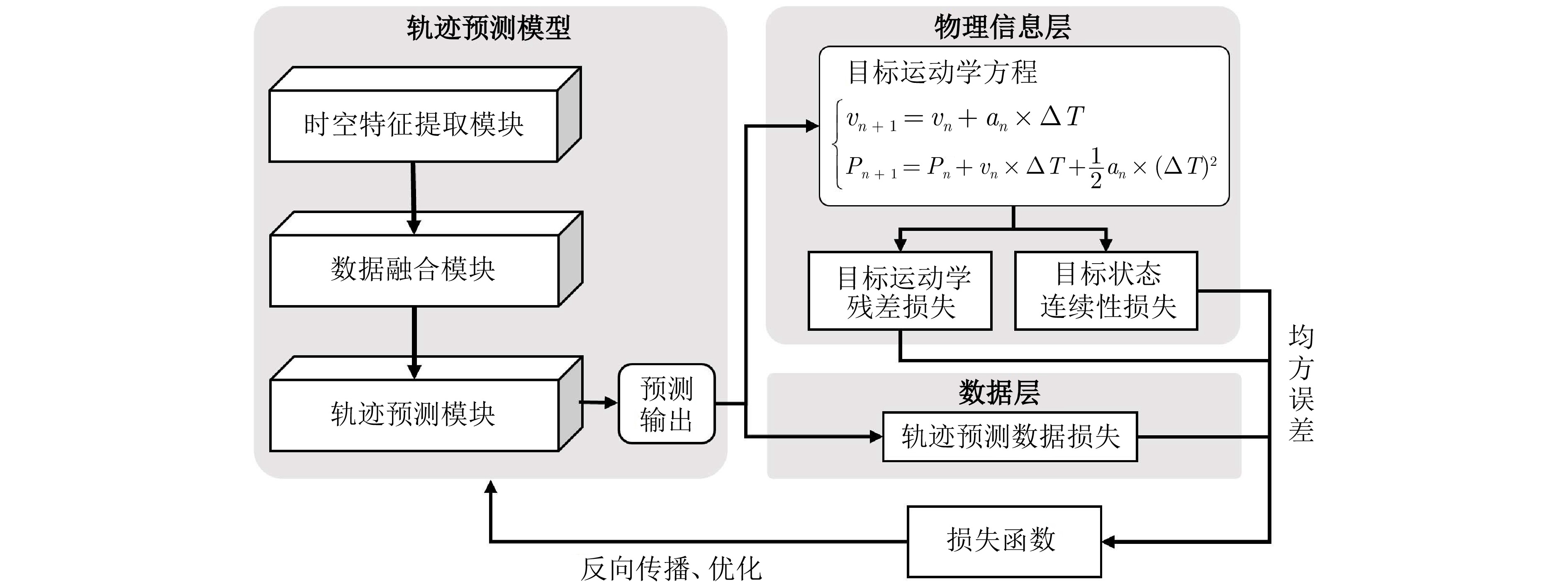
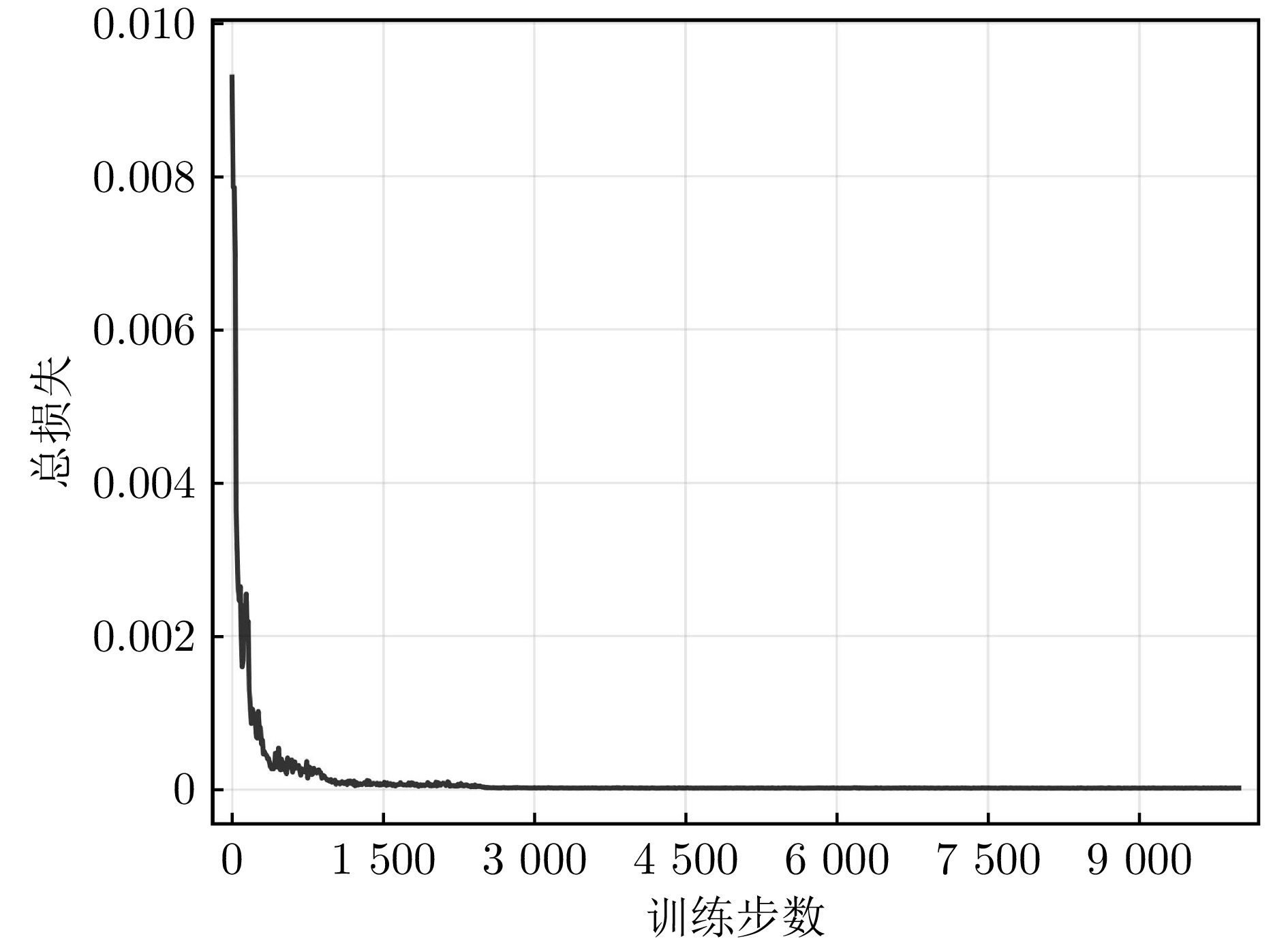
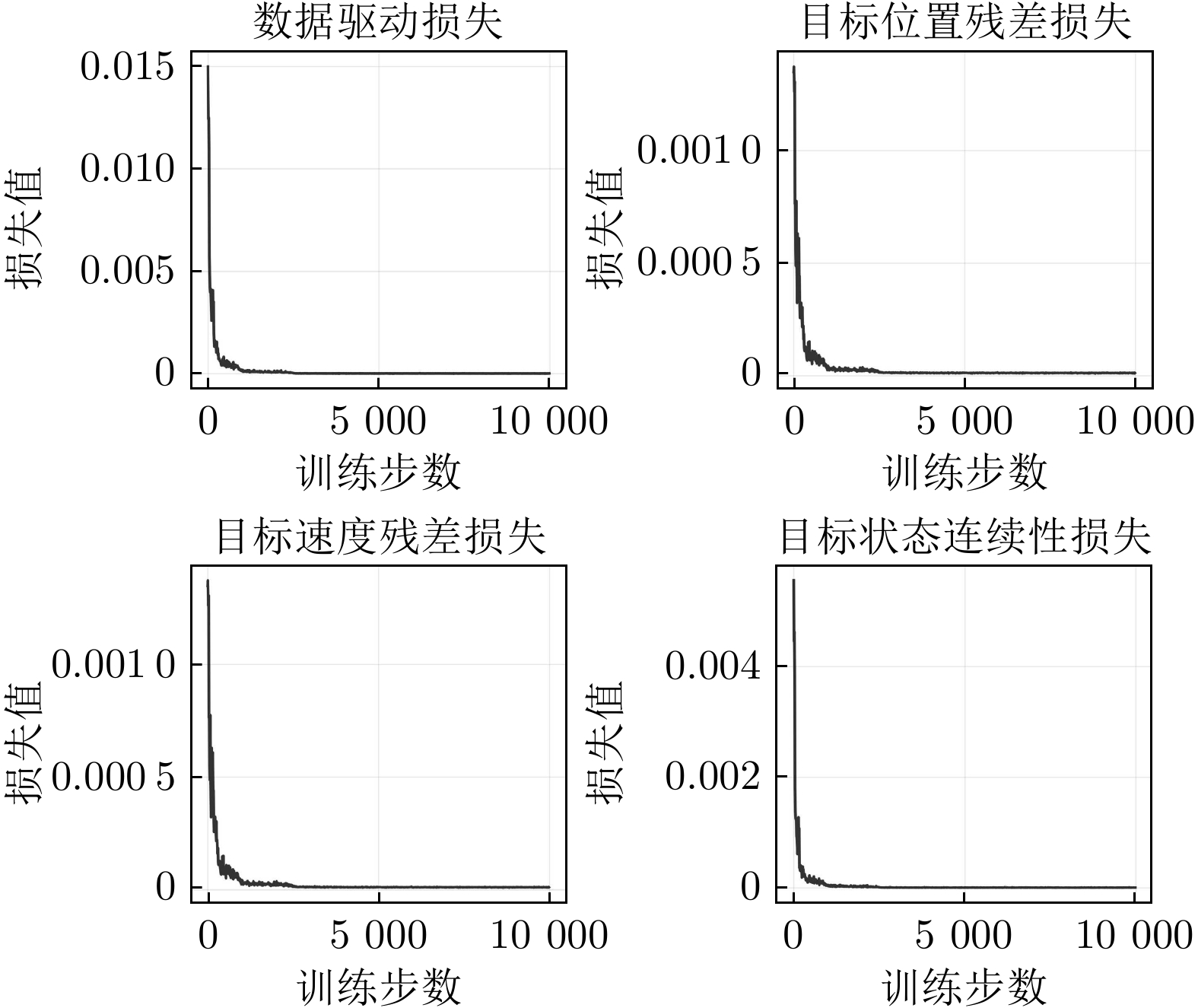
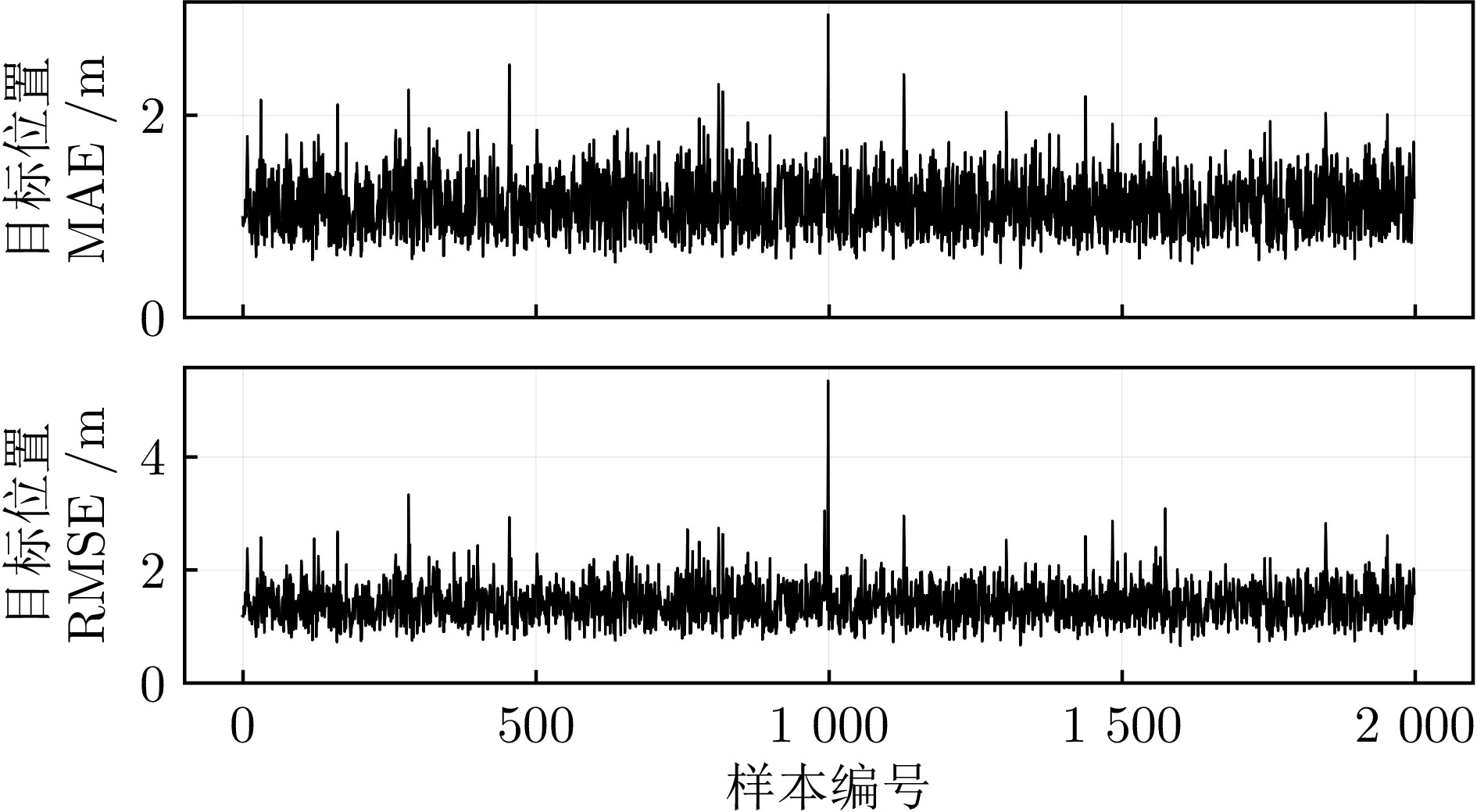
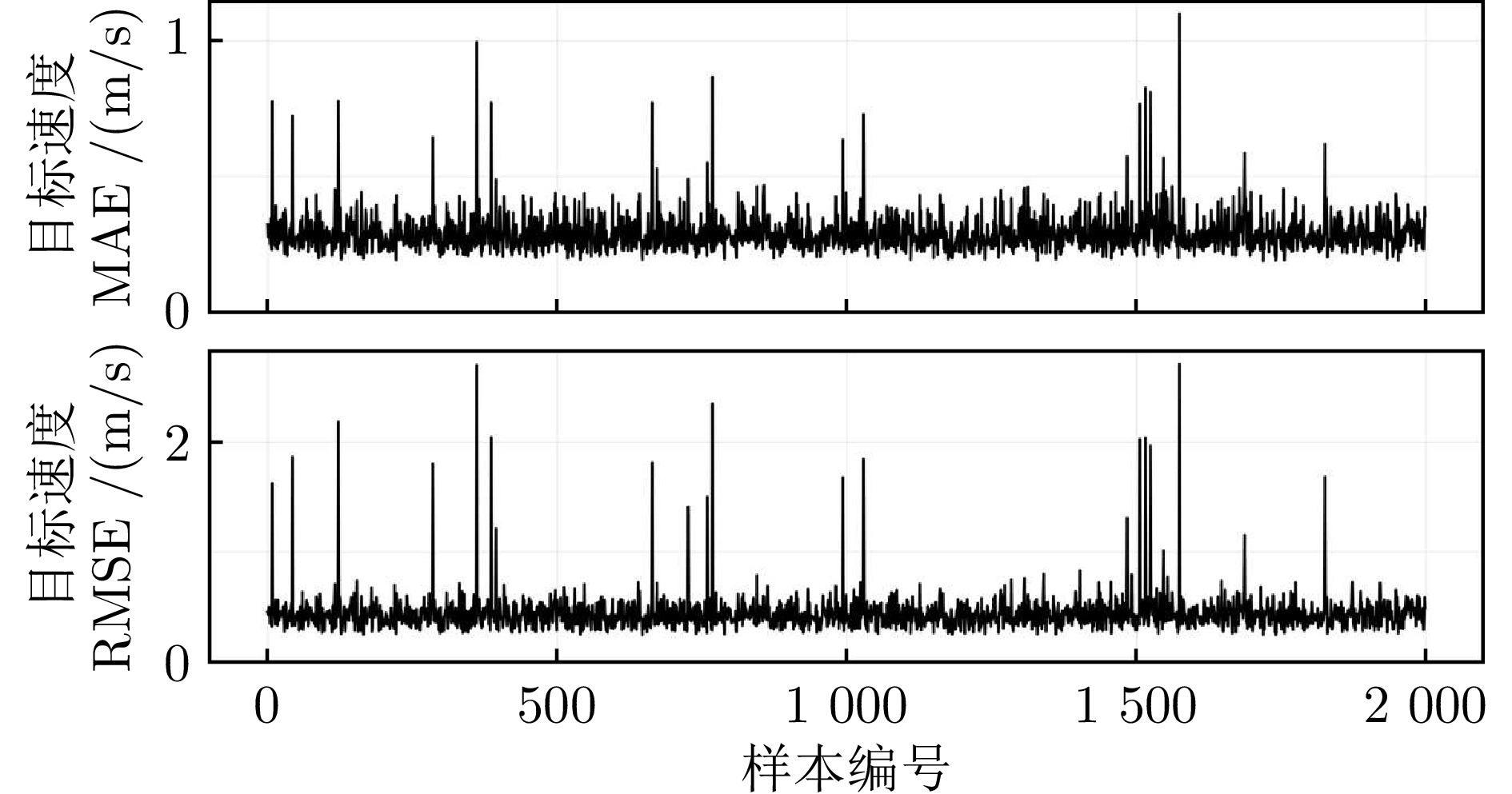
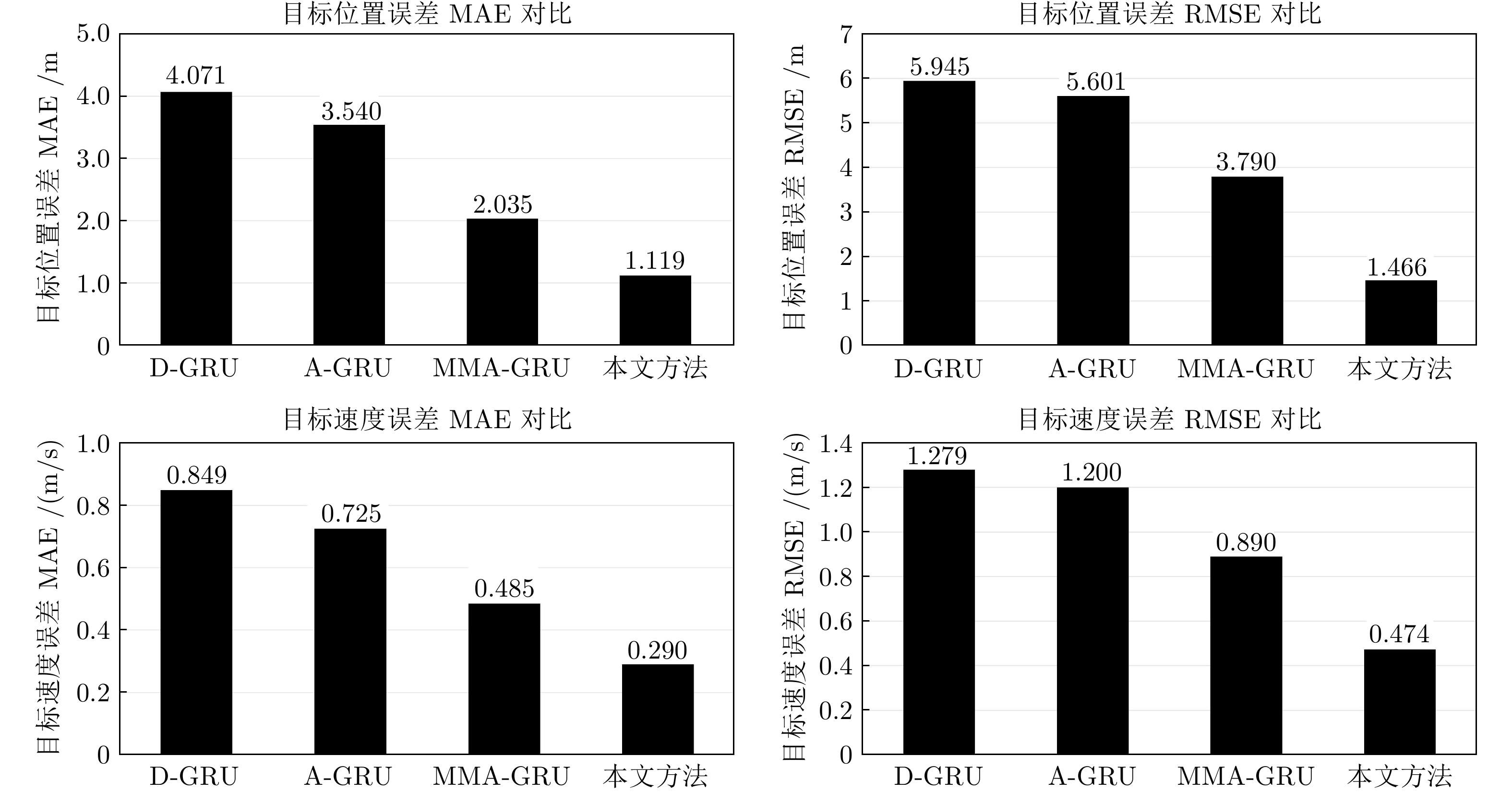
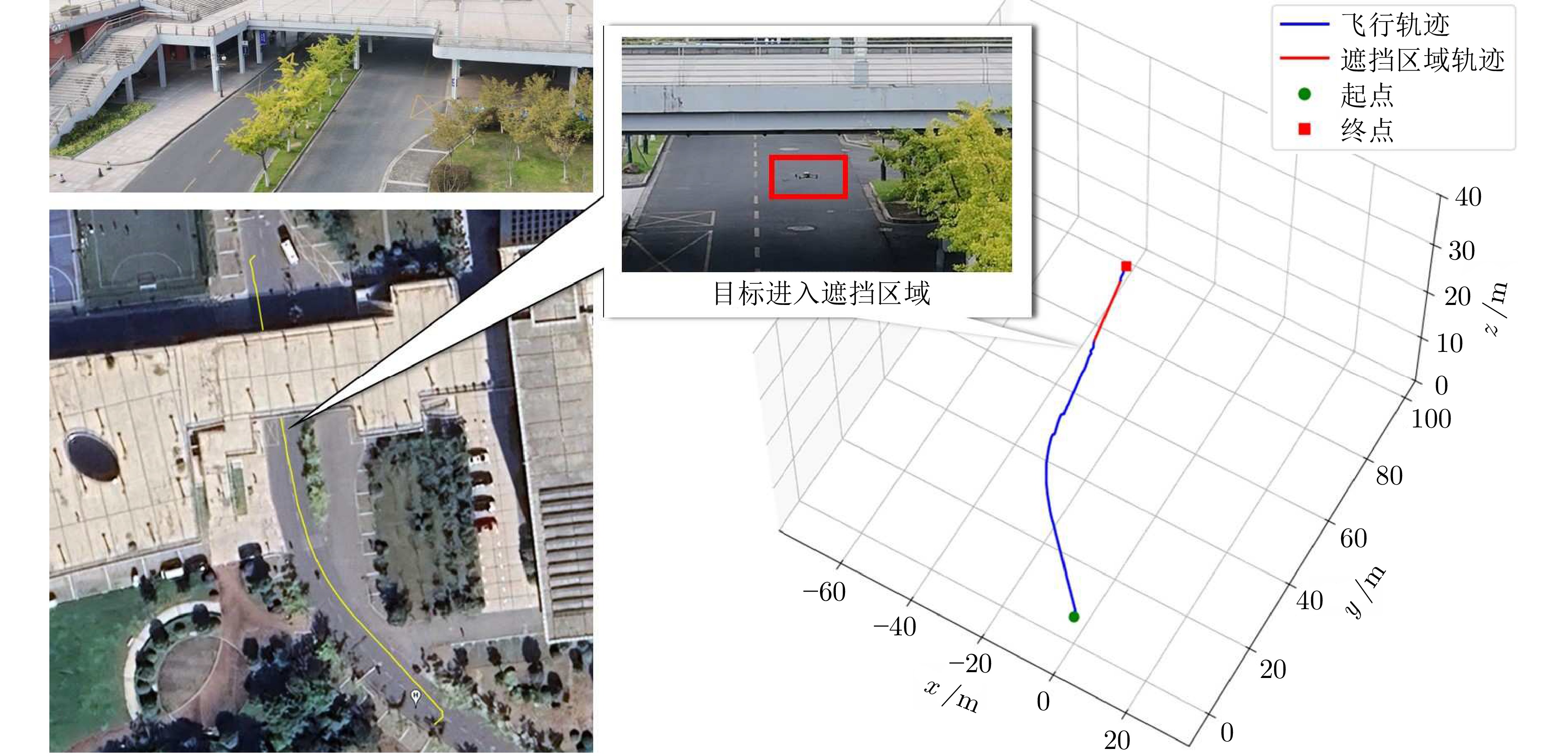
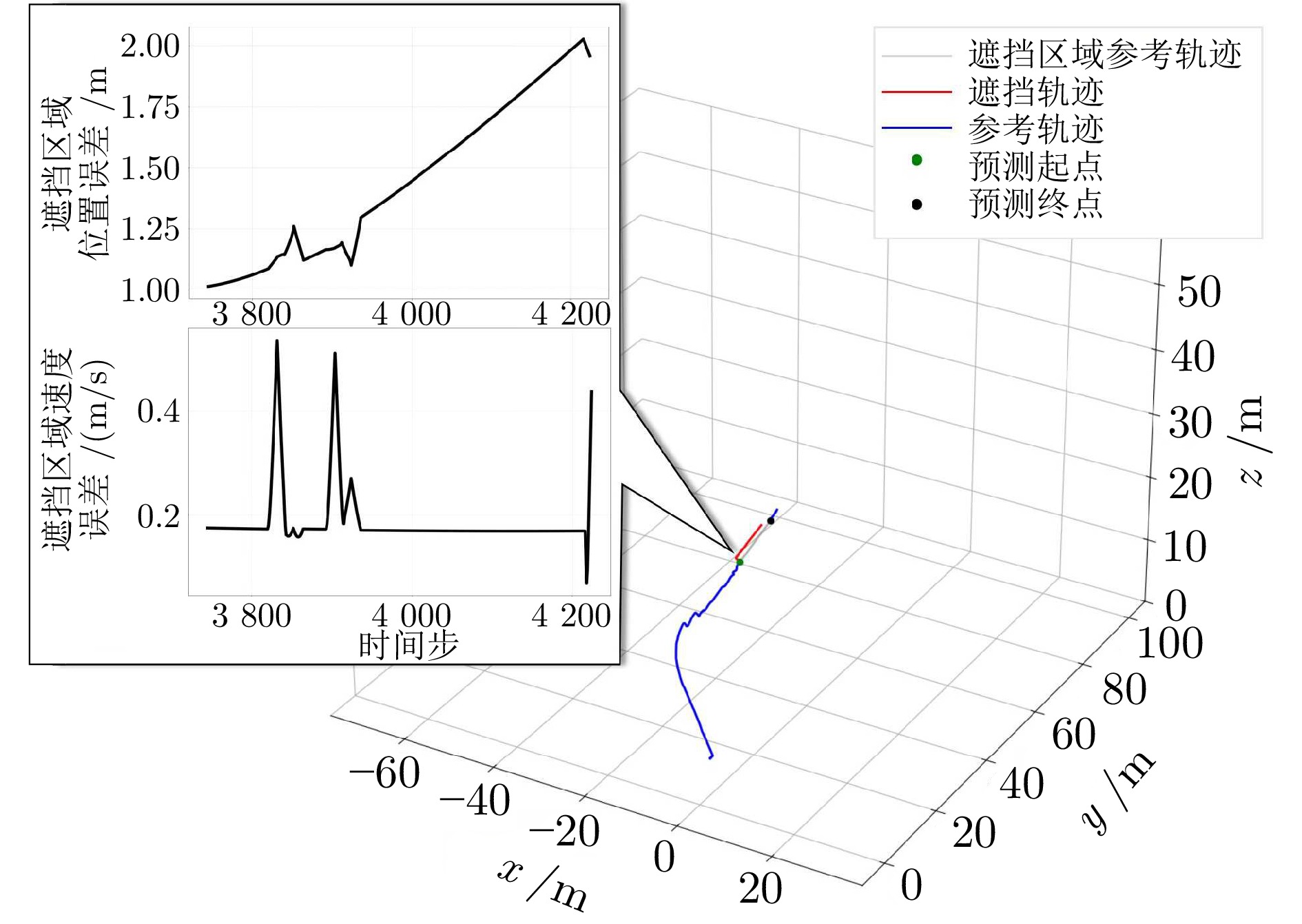
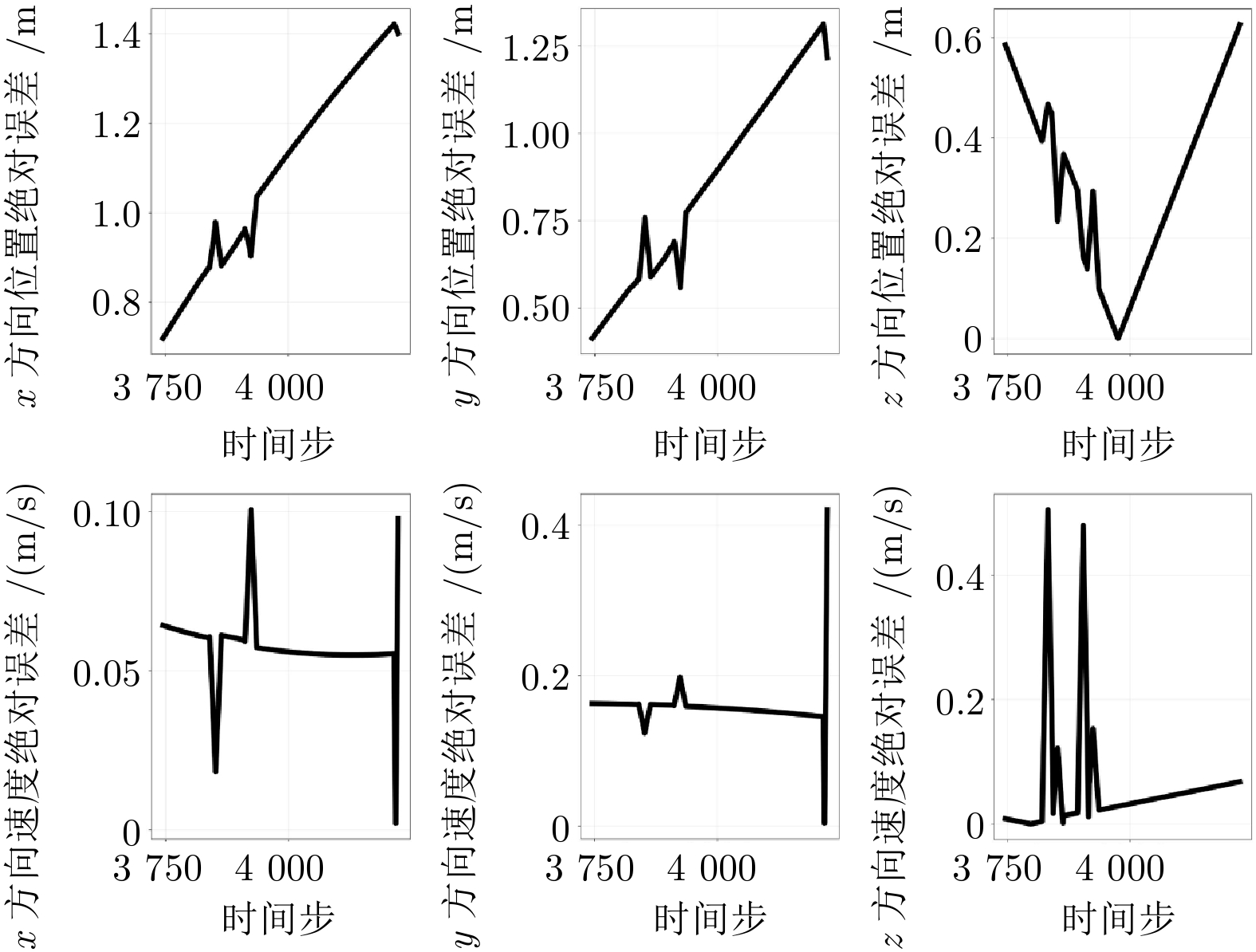
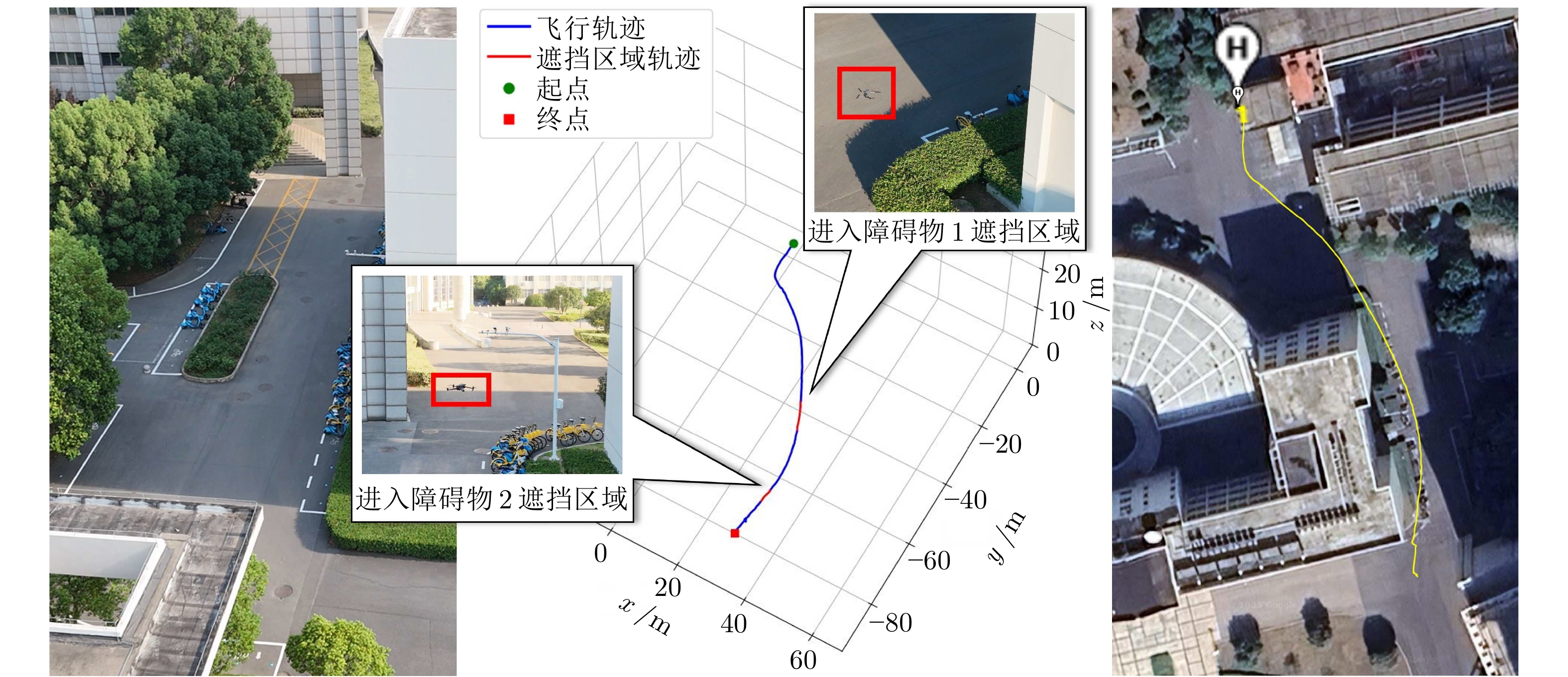
针对低空环境下动目标轨迹预测问题, 提出一种知识−数据−模型驱动的动目标轨迹融合预测框架. 基于低空飞行器运动特征构建飞行知识混合专家模型, 通过将多源传感器数据输入至各飞行知识专家模块, 实现目标机动模态的精细化识别, 并使用Mamba模型提取时空关联特征; 设计权值自适应调节机制, 利用注意力机制动态融合多源感知数据, 解决传感器时空异步问题; 采用门控循环单元建模长期时序依赖关系, 根据目标历史飞行数据生成初步预测轨迹; 基于低空目标运动学方程构建物理信息神经网络, 通过动态权衡数据驱动损失与物理约束损失, 矫正数据驱动偏差, 确保预测轨迹满足运动学约束并有效抑制多步预测误差累积. 数值仿真及实验验证结果表明, 所提出的知识−数据−模型驱动的动目标轨迹融合预测方法, 能够有效预测低空目标飞行轨迹.
针对低空环境下动目标轨迹预测问题, 提出一种知识−数据−模型驱动的动目标轨迹融合预测框架. 基于低空飞行器运动特征构建飞行知识混合专家模型, 通过将多源传感器数据输入至各飞行知识专家模块, 实现目标机动模态的精细化识别, 并使用Mamba模型提取时空关联特征; 设计权值自适应调节机制, 利用注意力机制动态融合多源感知数据, 解决传感器时空异步问题; 采用门控循环单元建模长期时序依赖关系, 根据目标历史飞行数据生成初步预测轨迹; 基于低空目标运动学方程构建物理信息神经网络, 通过动态权衡数据驱动损失与物理约束损失, 矫正数据驱动偏差, 确保预测轨迹满足运动学约束并有效抑制多步预测误差累积. 数值仿真及实验验证结果表明, 所提出的知识−数据−模型驱动的动目标轨迹融合预测方法, 能够有效预测低空目标飞行轨迹.
2026, 52(2): 309-321.
doi: 10.16383/j.aas.c250535
cstr: 32138.14.j.aas.c250535
摘要:
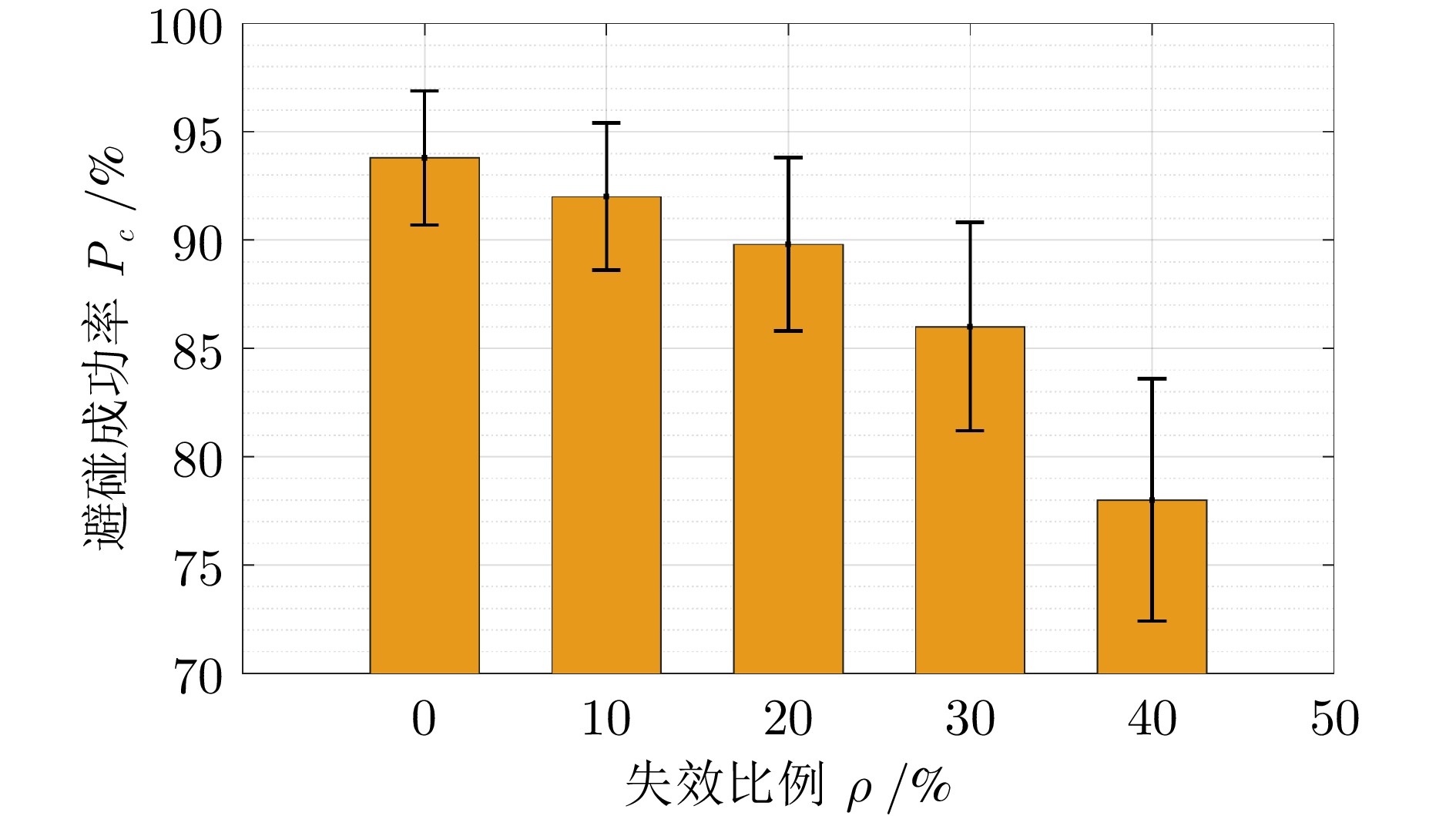
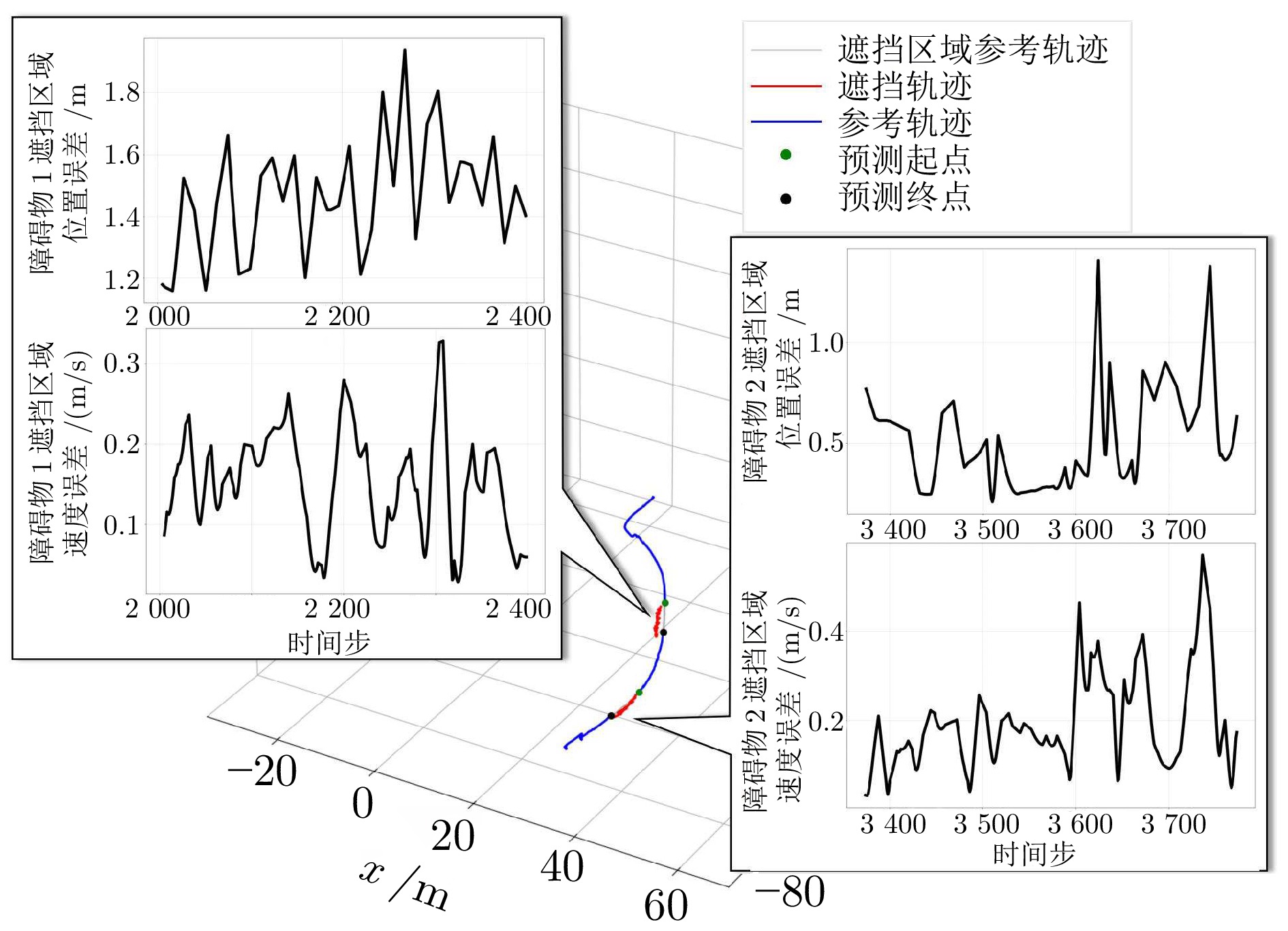
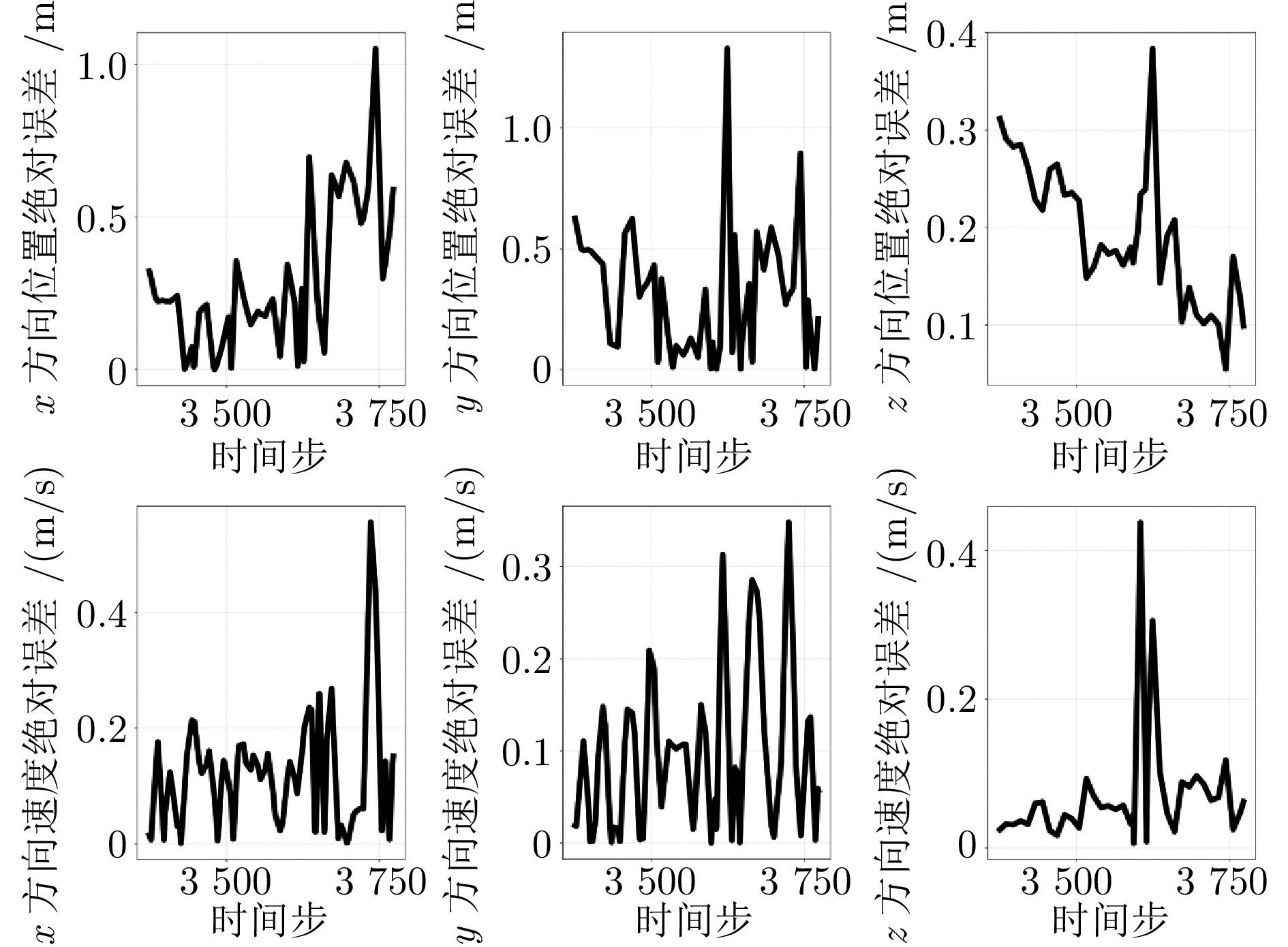
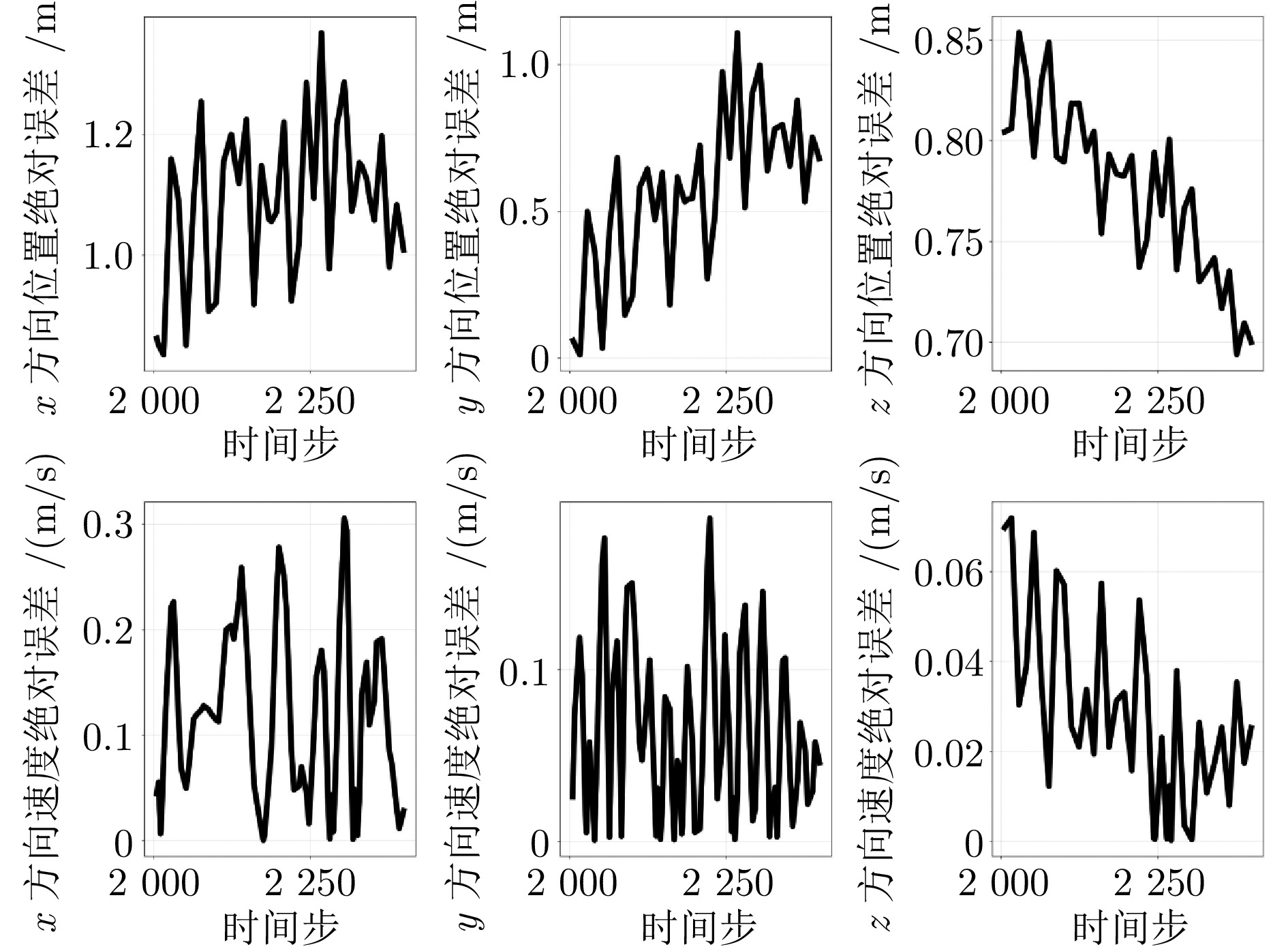
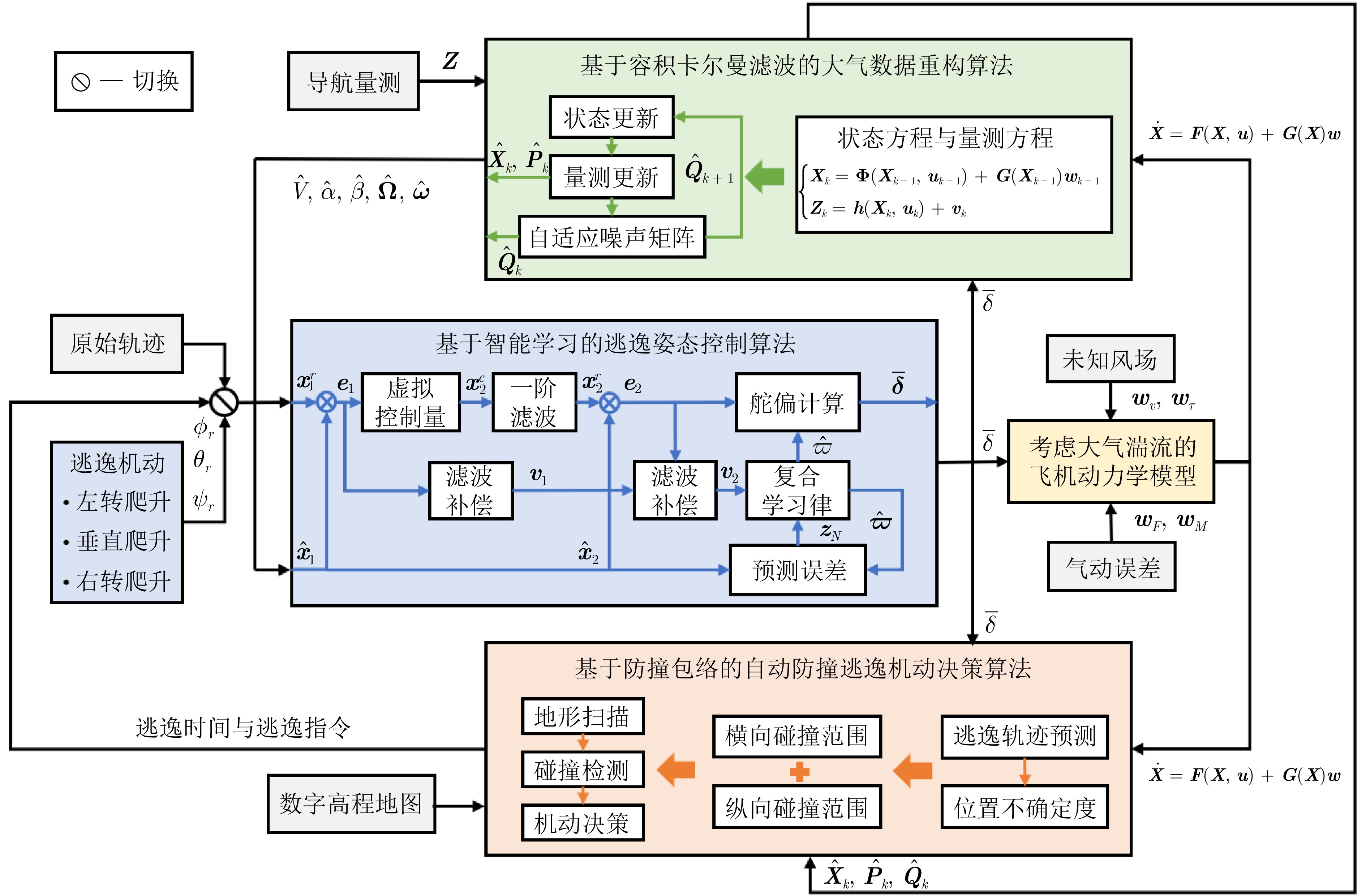
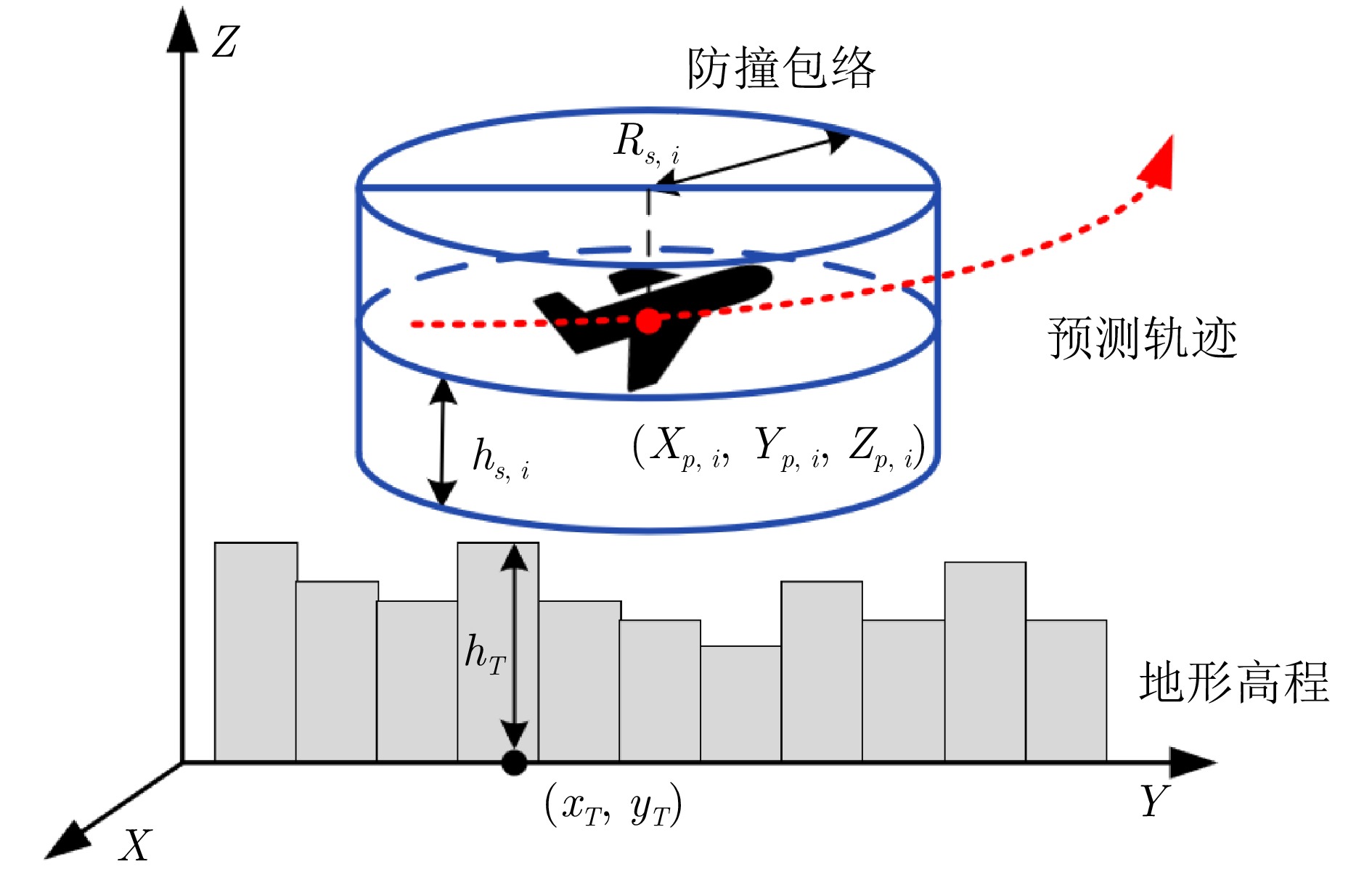
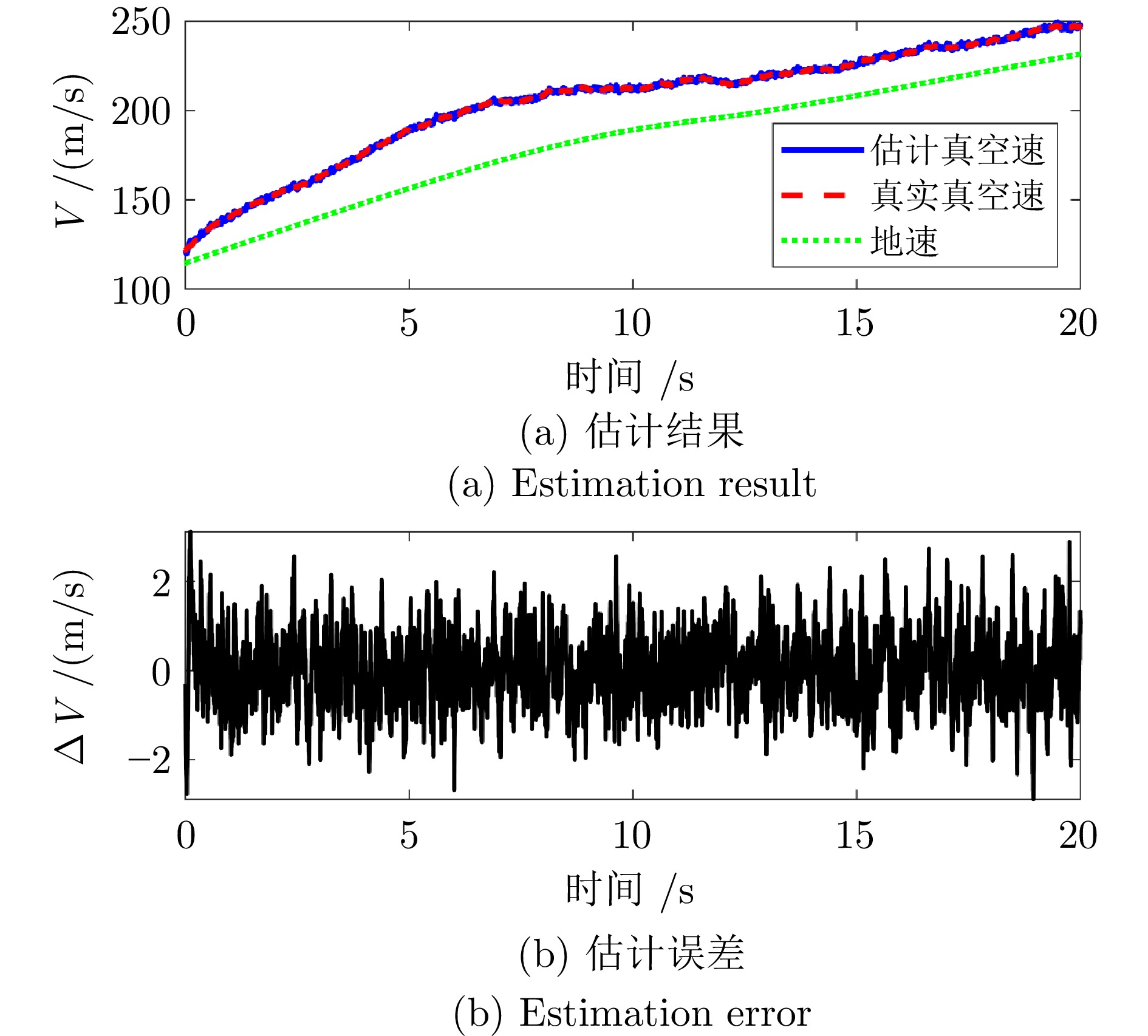
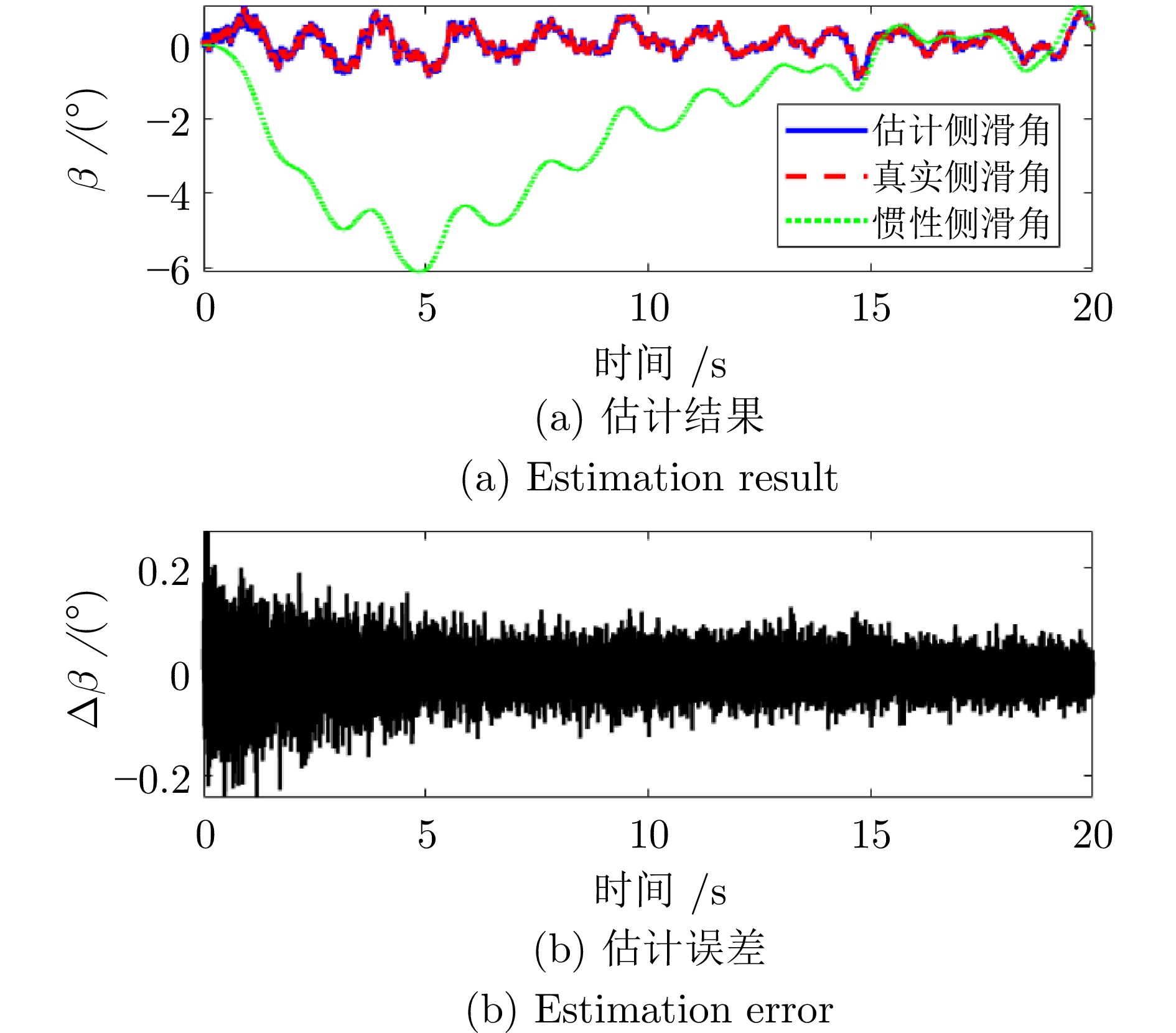
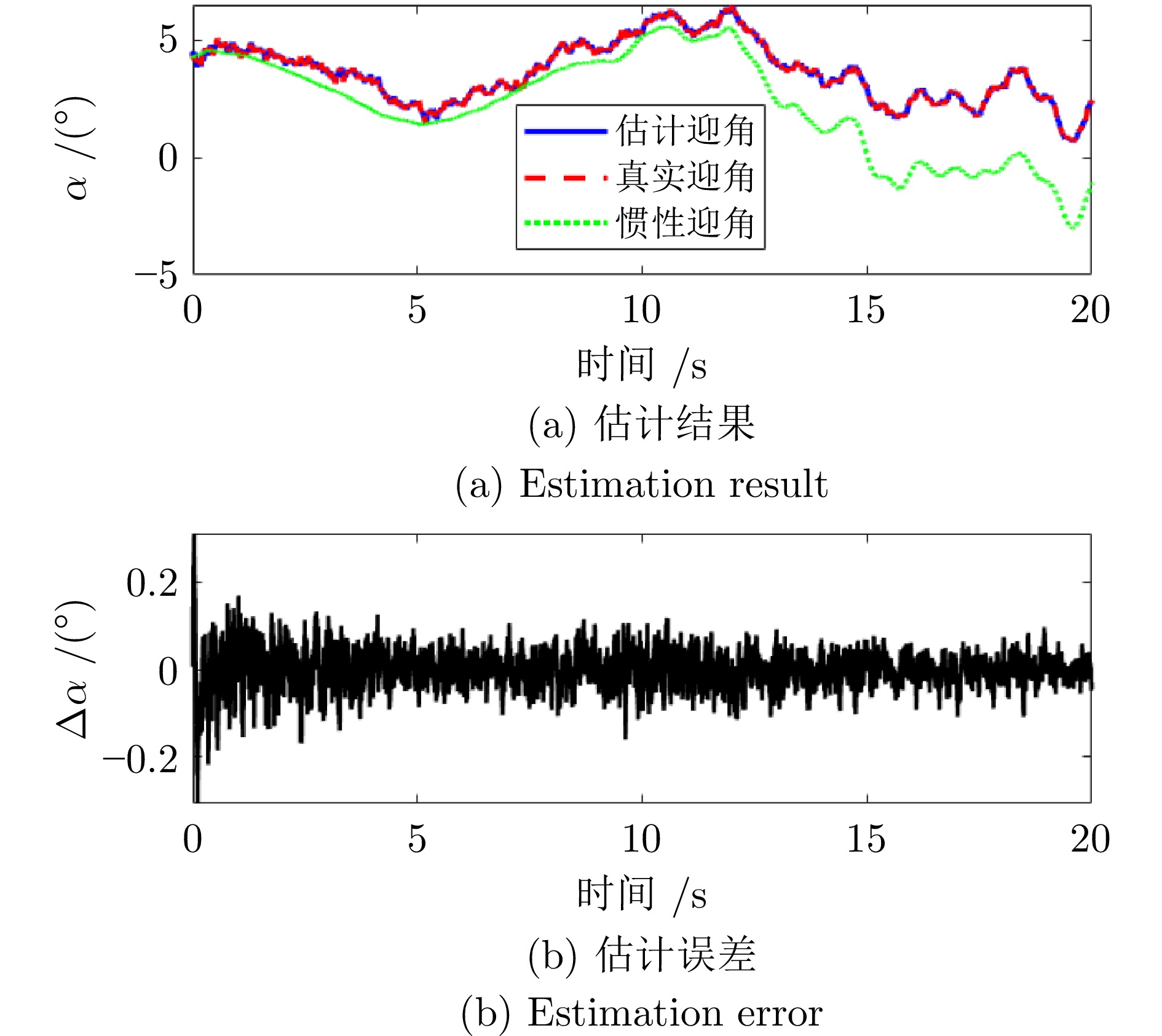
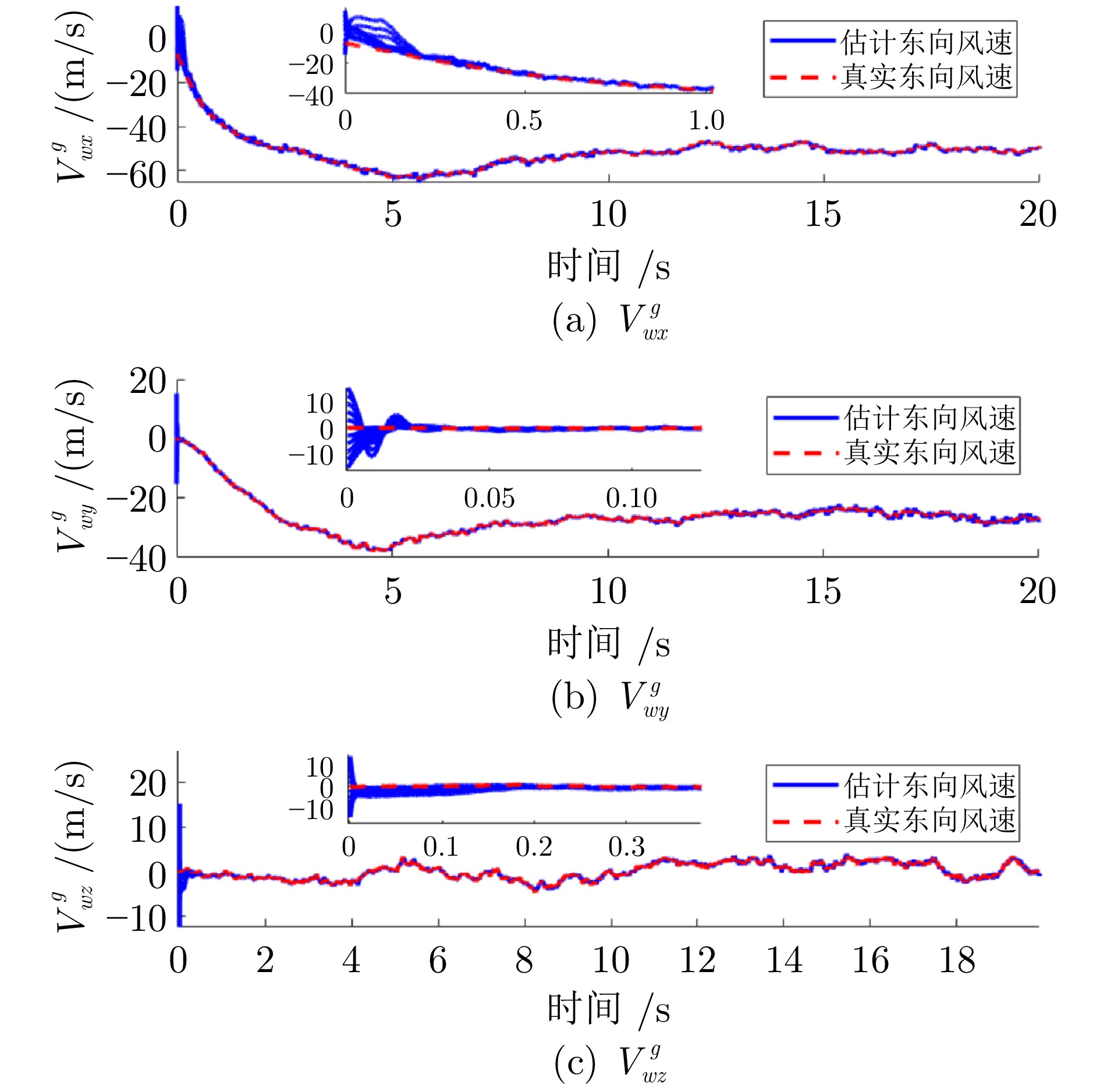
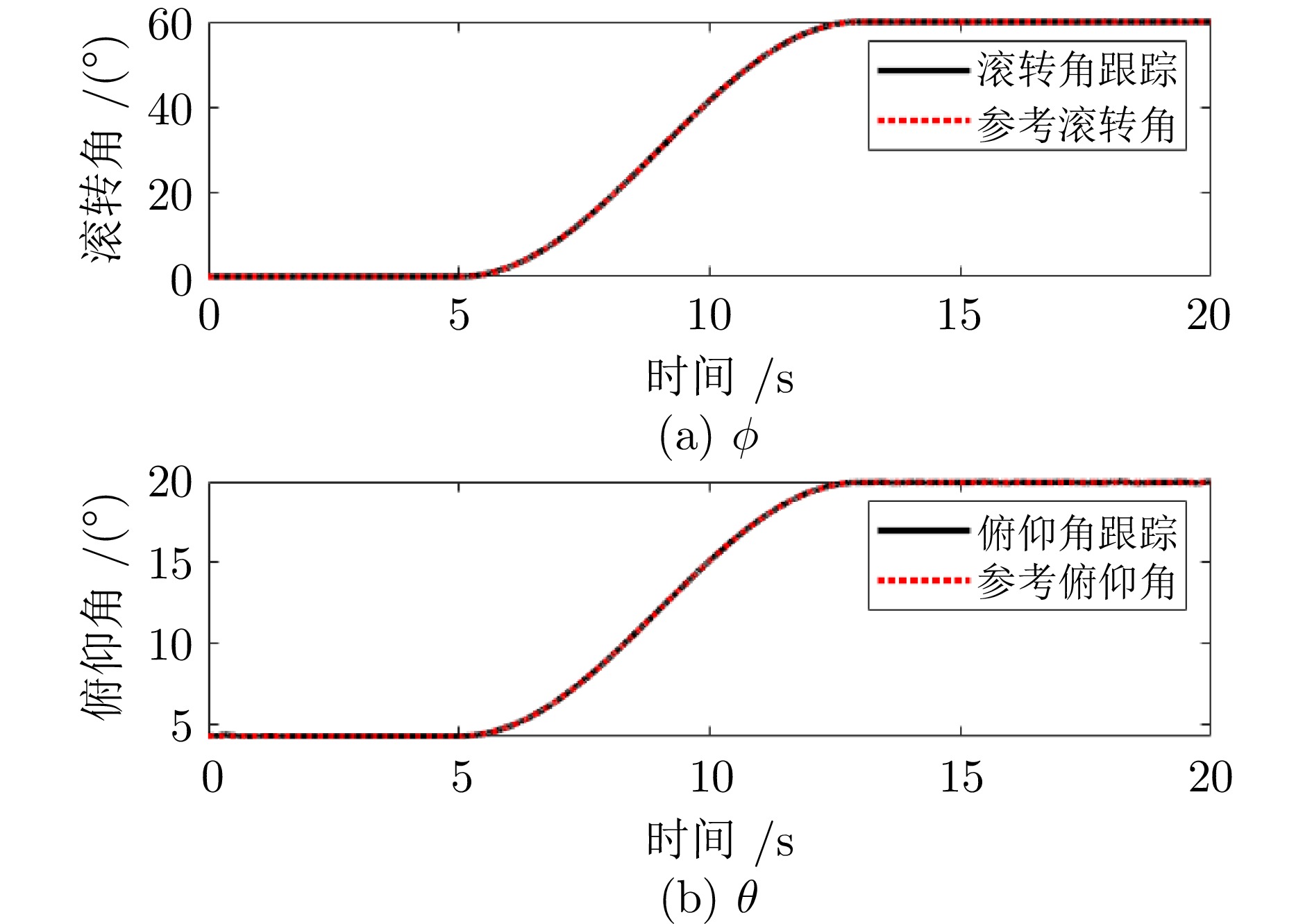
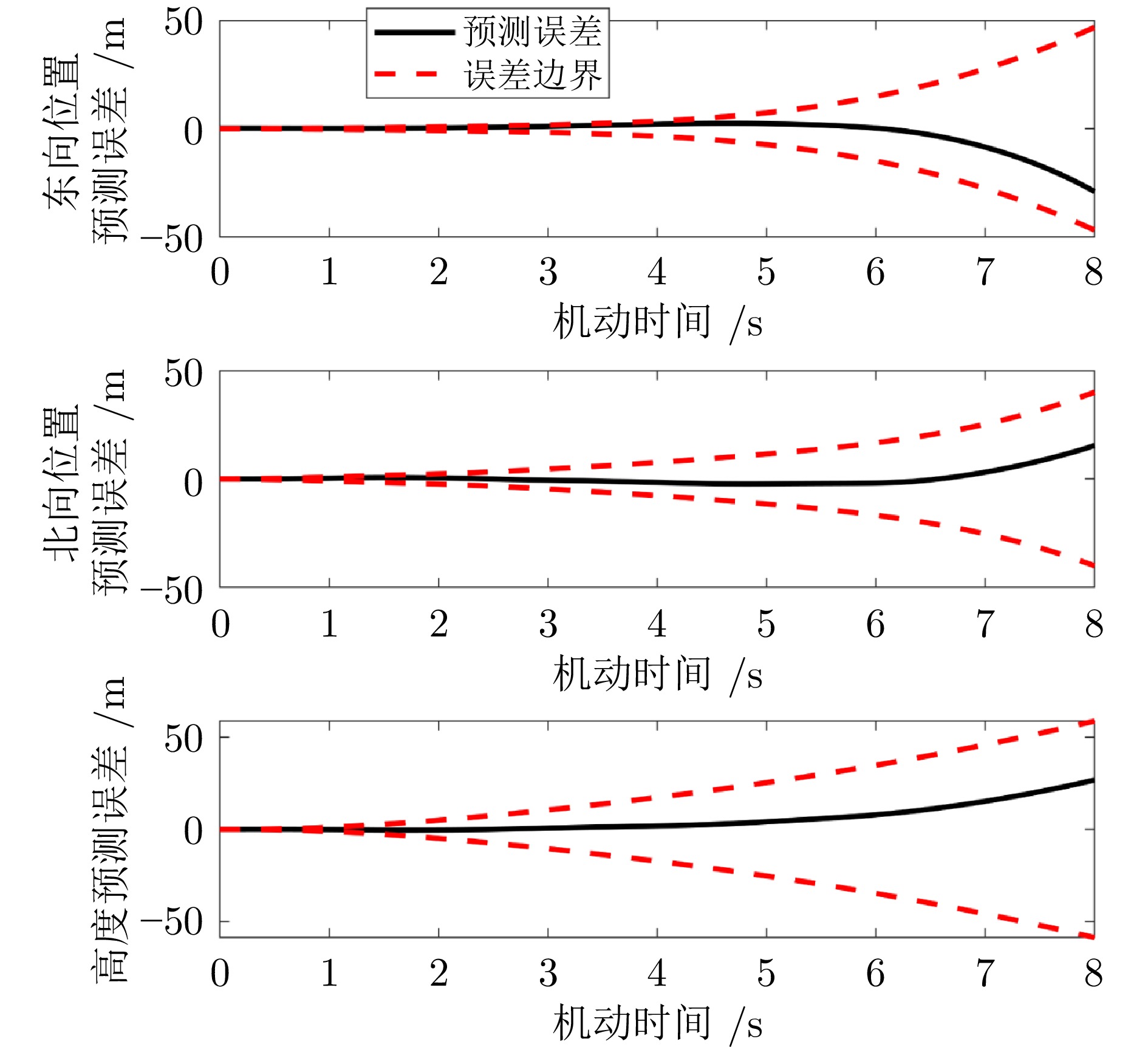
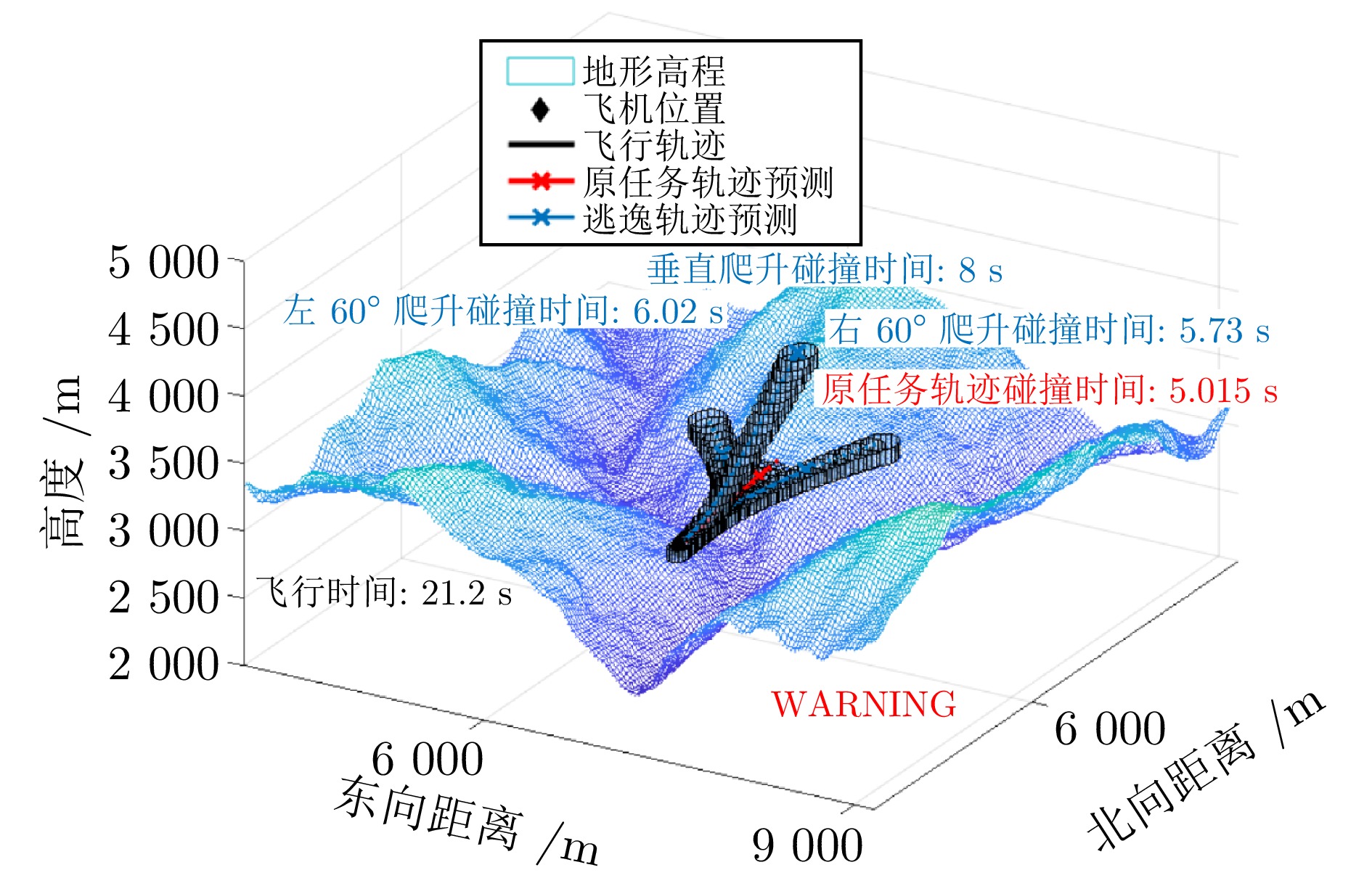
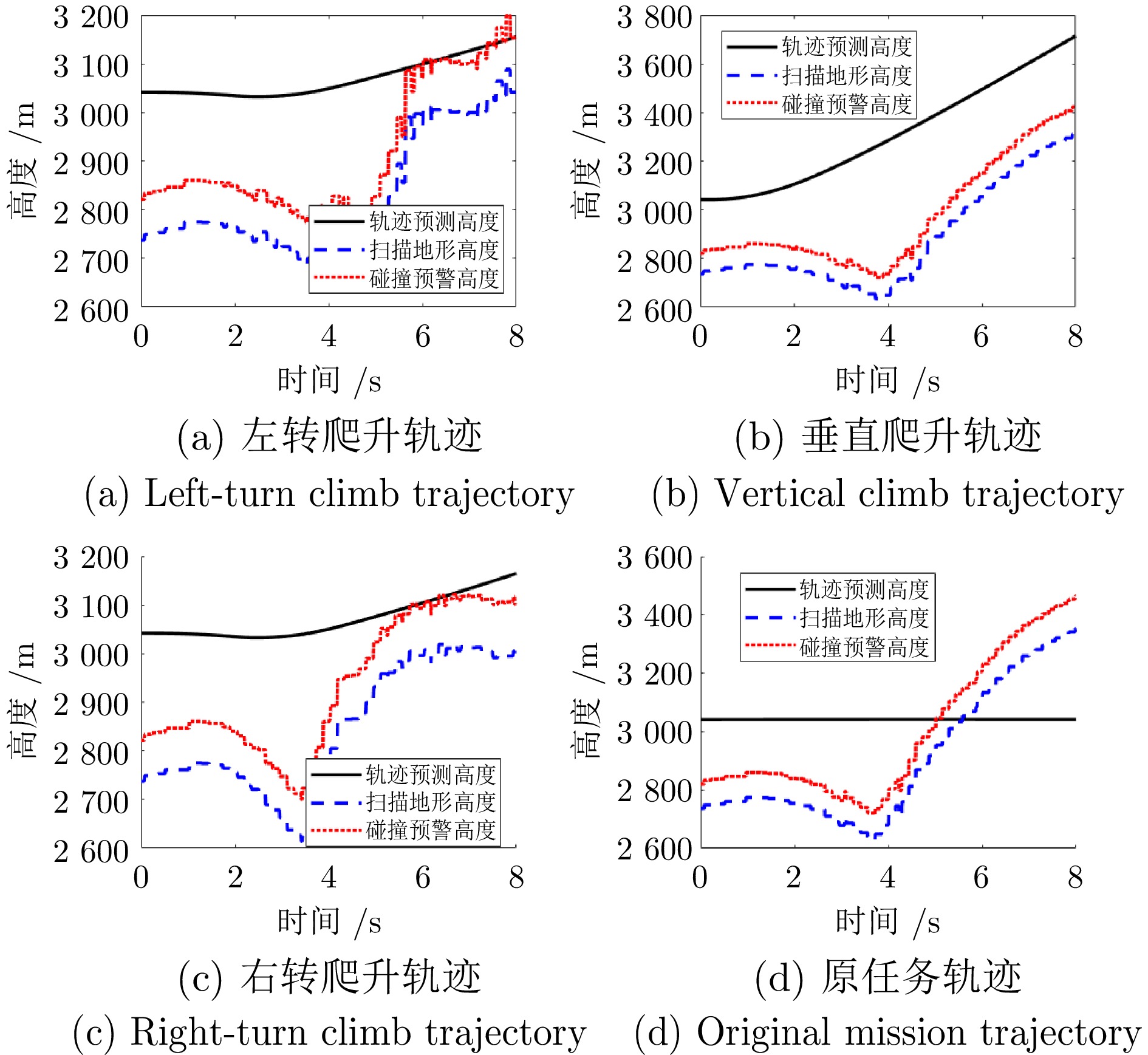
面向低空经济发展中无人飞行器对复杂空域安全飞行的需求, 系统考虑大气传感器在强风干扰下的失效问题, 并提出一种基于传感重构的高可靠自动防撞策略. 首先, 建立含湍流扰动的飞行器动力学模型, 采用自适应容积卡尔曼滤波融合导航量测与控制信号, 实现真空速与气流角等状态的鲁棒在线重构; 其次, 针对逃逸阶段的模型失配与噪声扰动, 设计智能学习自适应控制律补偿状态估计误差, 实现逃逸姿态指令稳定跟踪; 最后, 构建滤波协方差驱动的动态防撞包络, 结合控制系统模型量化轨迹预测不确定度, 完成地形碰撞检测, 并生成多逃逸轨迹择优避障指令. 仿真结果表明, 在突风与强湍流条件下, 可实现气流角精确重构及鲁棒防撞告警与改出控制, 相关技术可为低空无人飞行器防撞系统设计提供可靠的解决方案.
面向低空经济发展中无人飞行器对复杂空域安全飞行的需求, 系统考虑大气传感器在强风干扰下的失效问题, 并提出一种基于传感重构的高可靠自动防撞策略. 首先, 建立含湍流扰动的飞行器动力学模型, 采用自适应容积卡尔曼滤波融合导航量测与控制信号, 实现真空速与气流角等状态的鲁棒在线重构; 其次, 针对逃逸阶段的模型失配与噪声扰动, 设计智能学习自适应控制律补偿状态估计误差, 实现逃逸姿态指令稳定跟踪; 最后, 构建滤波协方差驱动的动态防撞包络, 结合控制系统模型量化轨迹预测不确定度, 完成地形碰撞检测, 并生成多逃逸轨迹择优避障指令. 仿真结果表明, 在突风与强湍流条件下, 可实现气流角精确重构及鲁棒防撞告警与改出控制, 相关技术可为低空无人飞行器防撞系统设计提供可靠的解决方案.
2026, 52(2): 322-334.
doi: 10.16383/j.aas.c250439
cstr: 32138.14.j.aas.c250439
摘要:
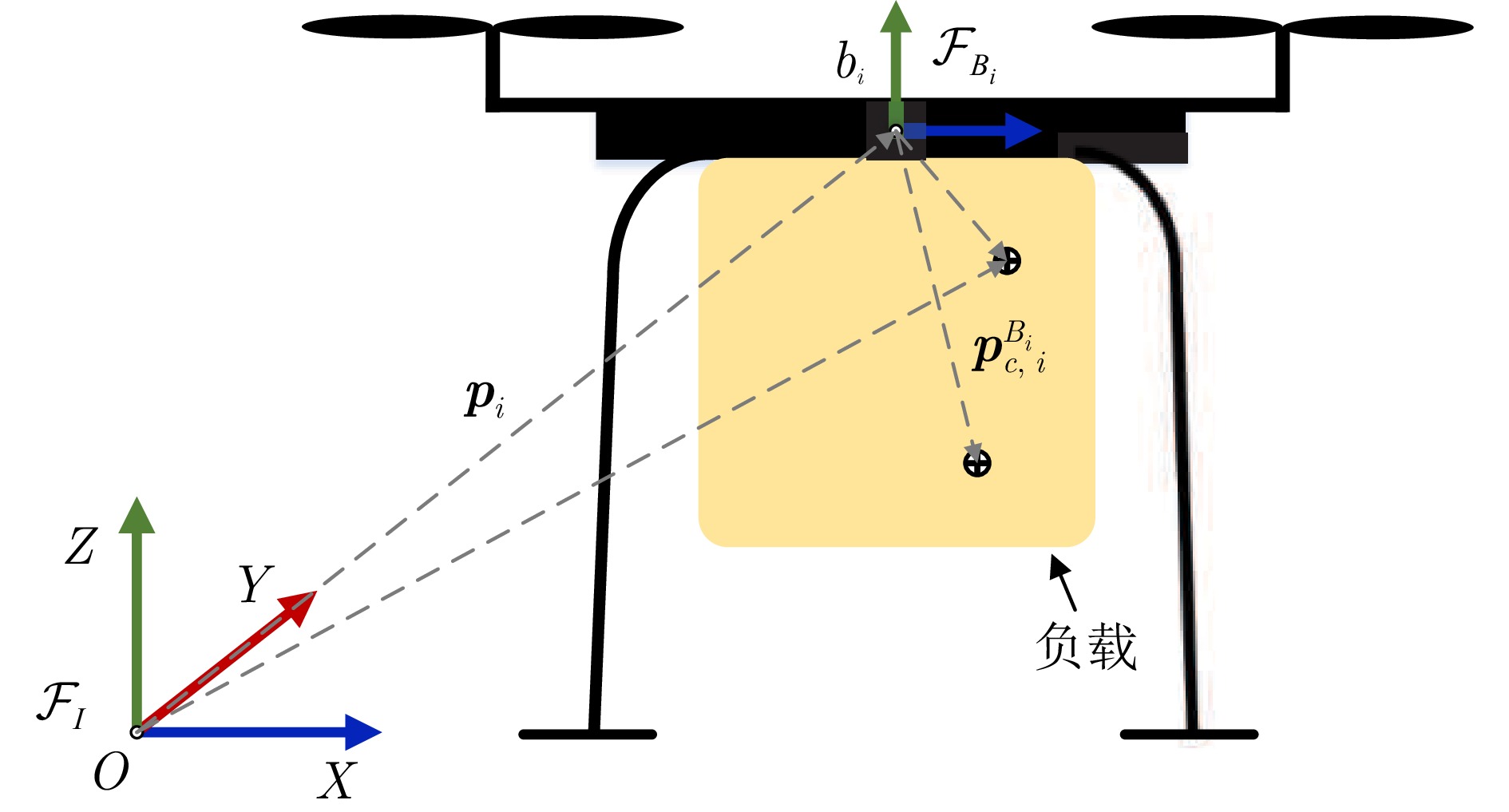
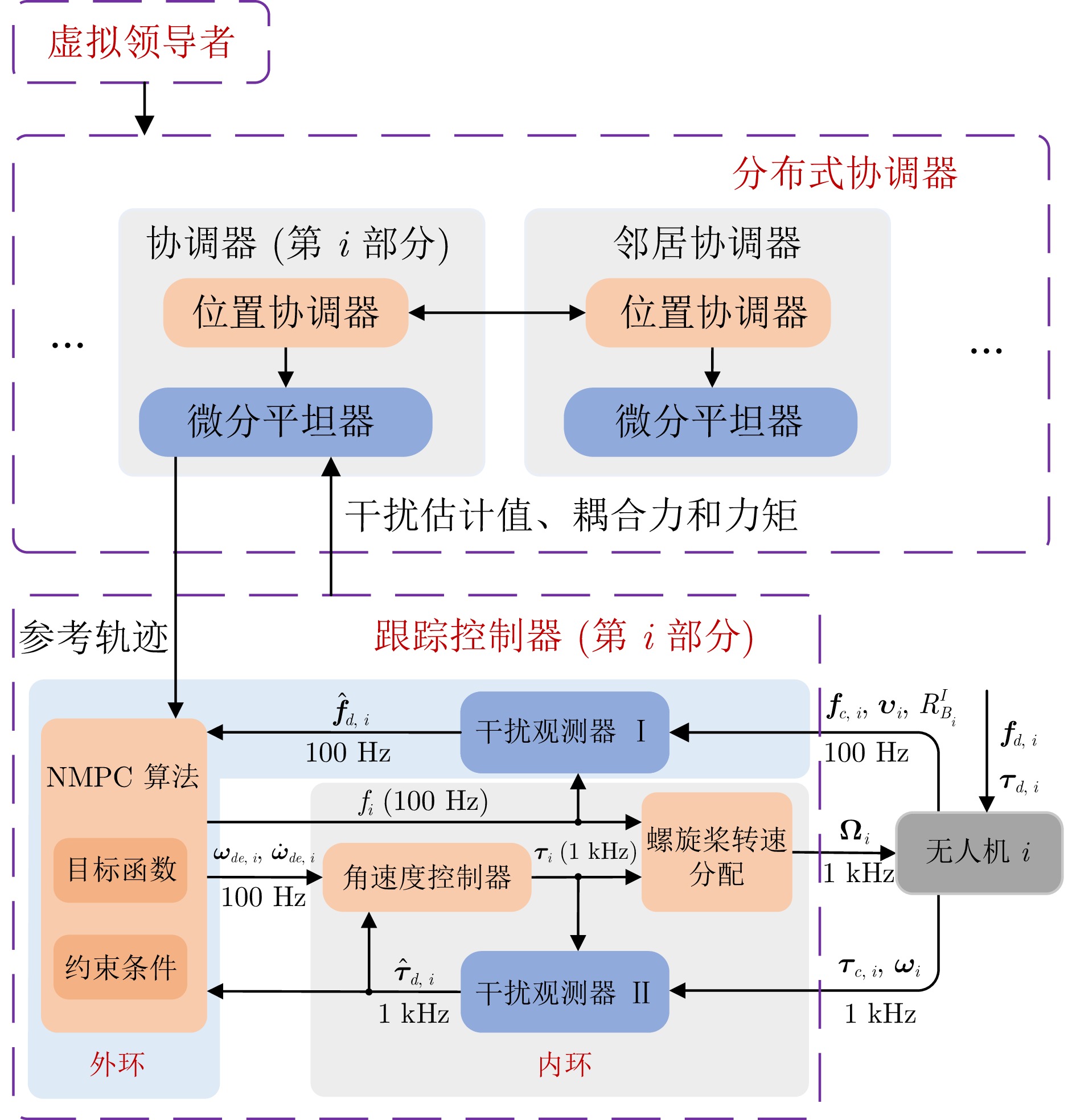
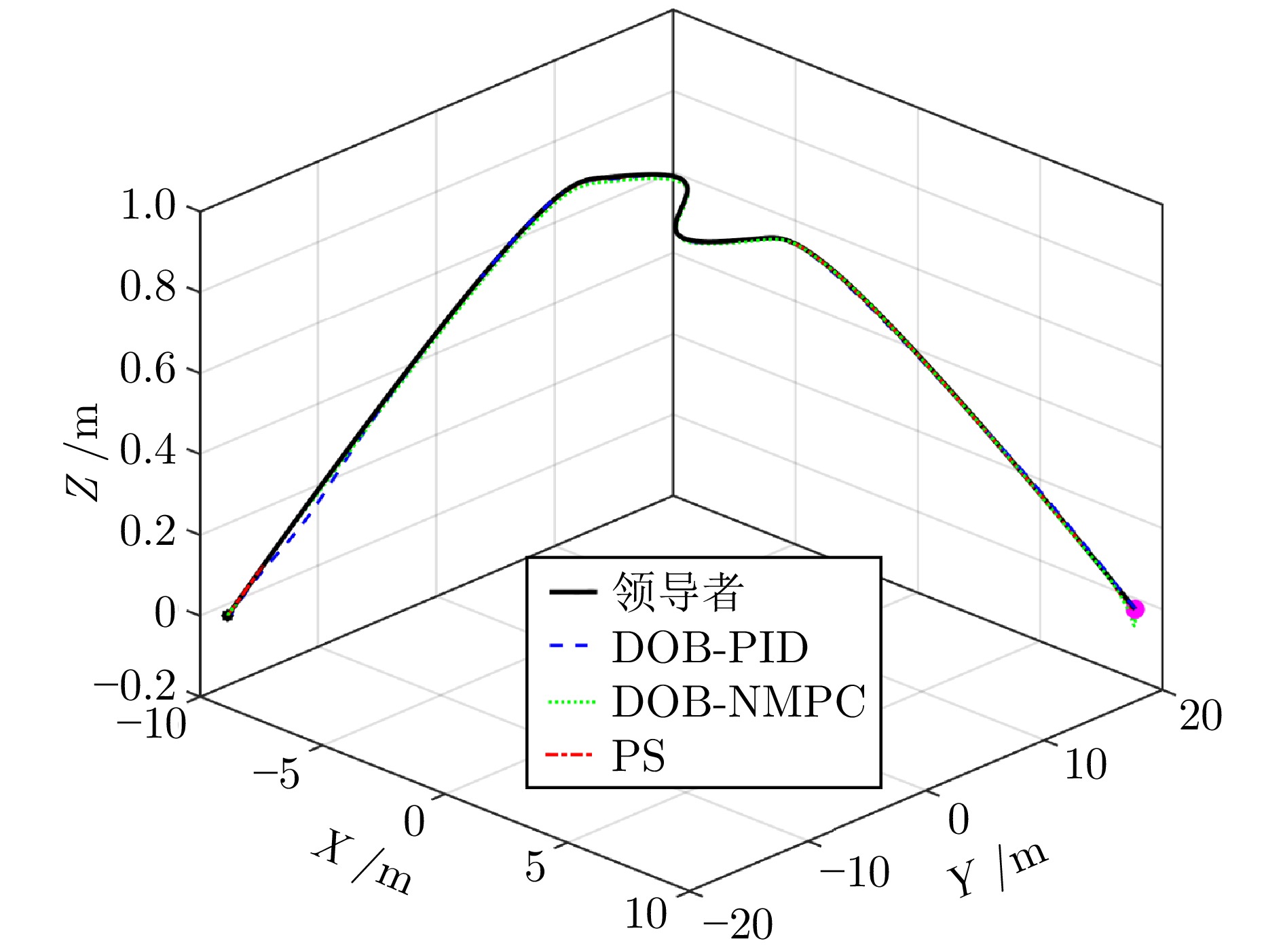
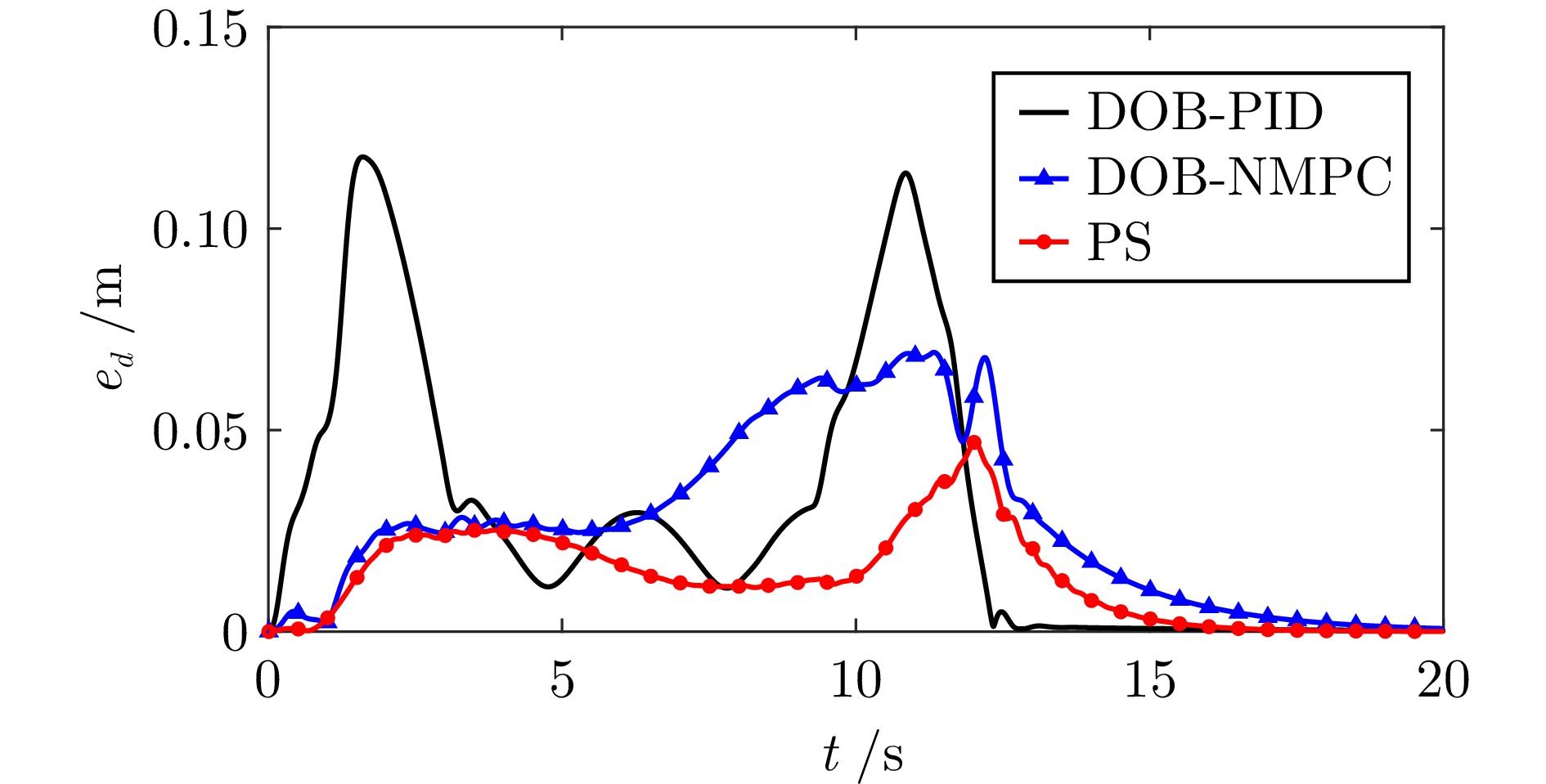
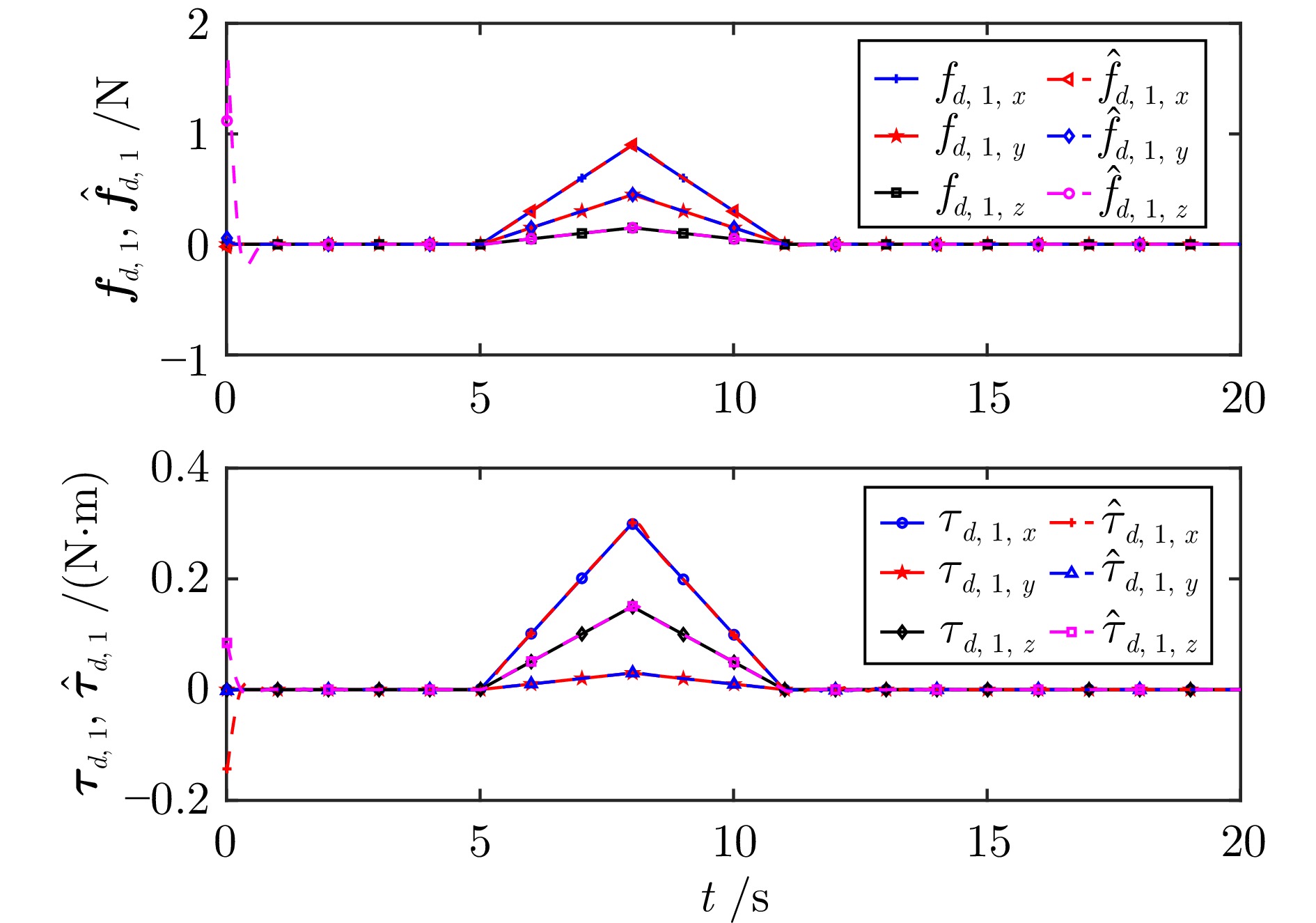
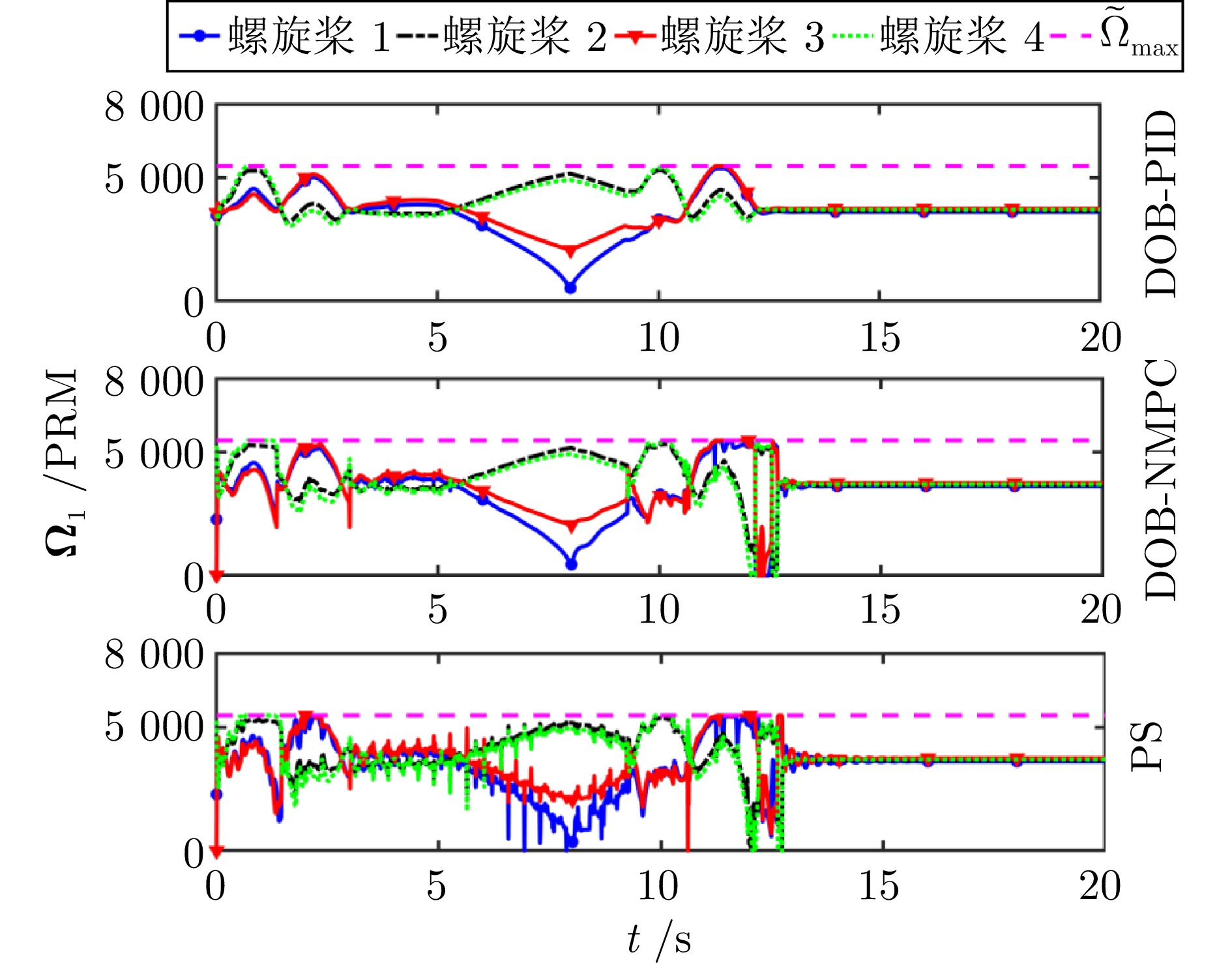
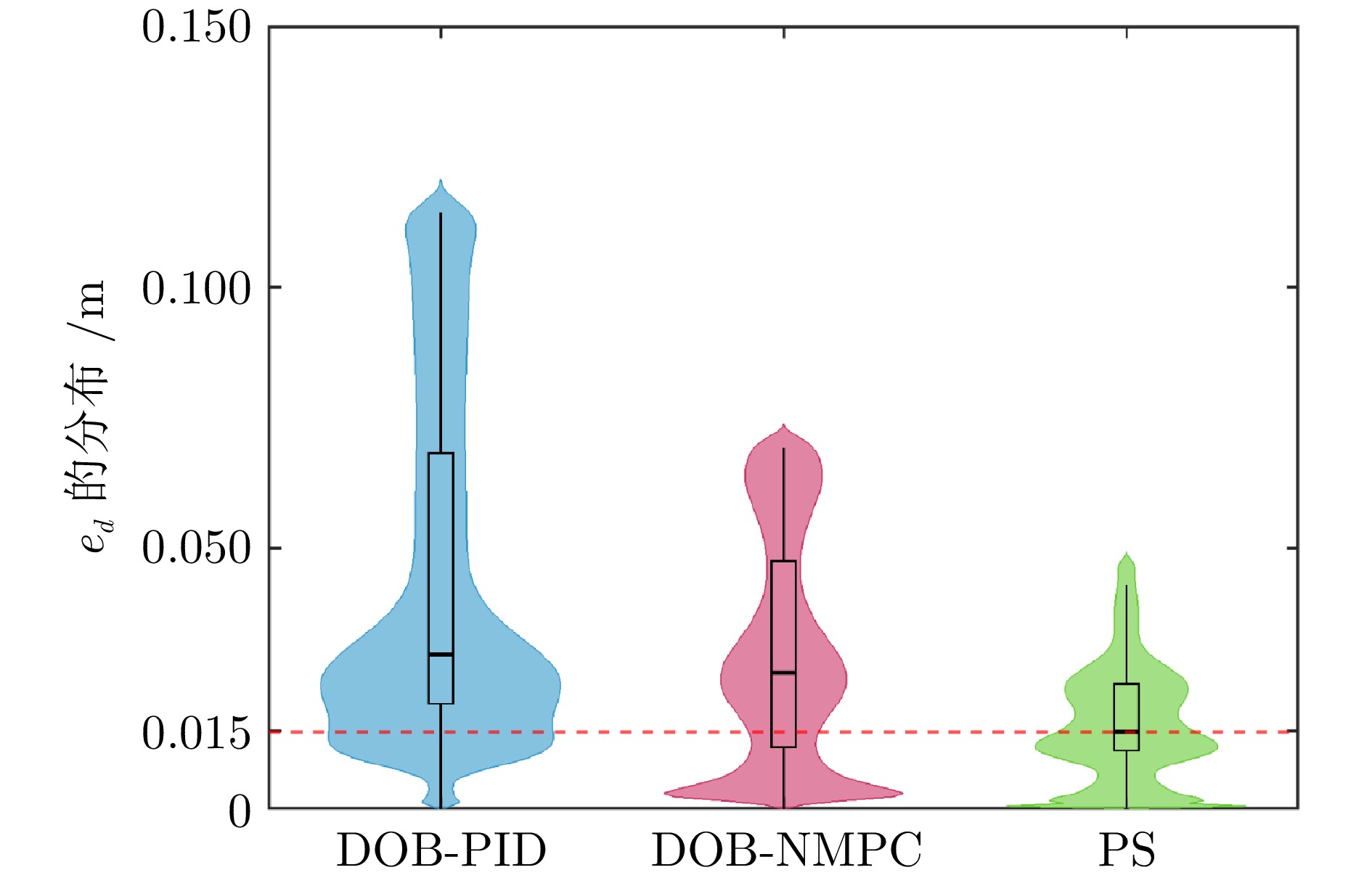
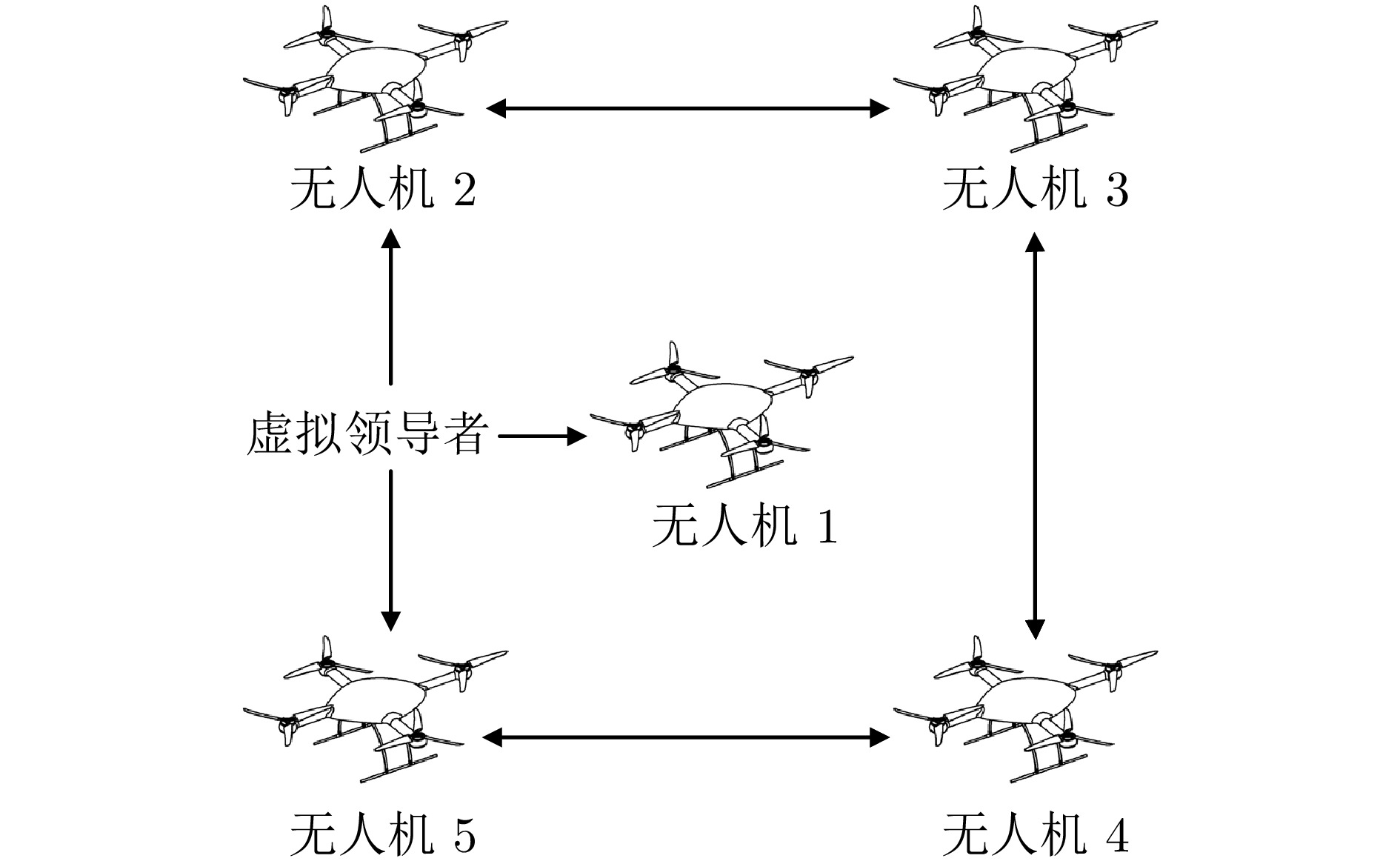
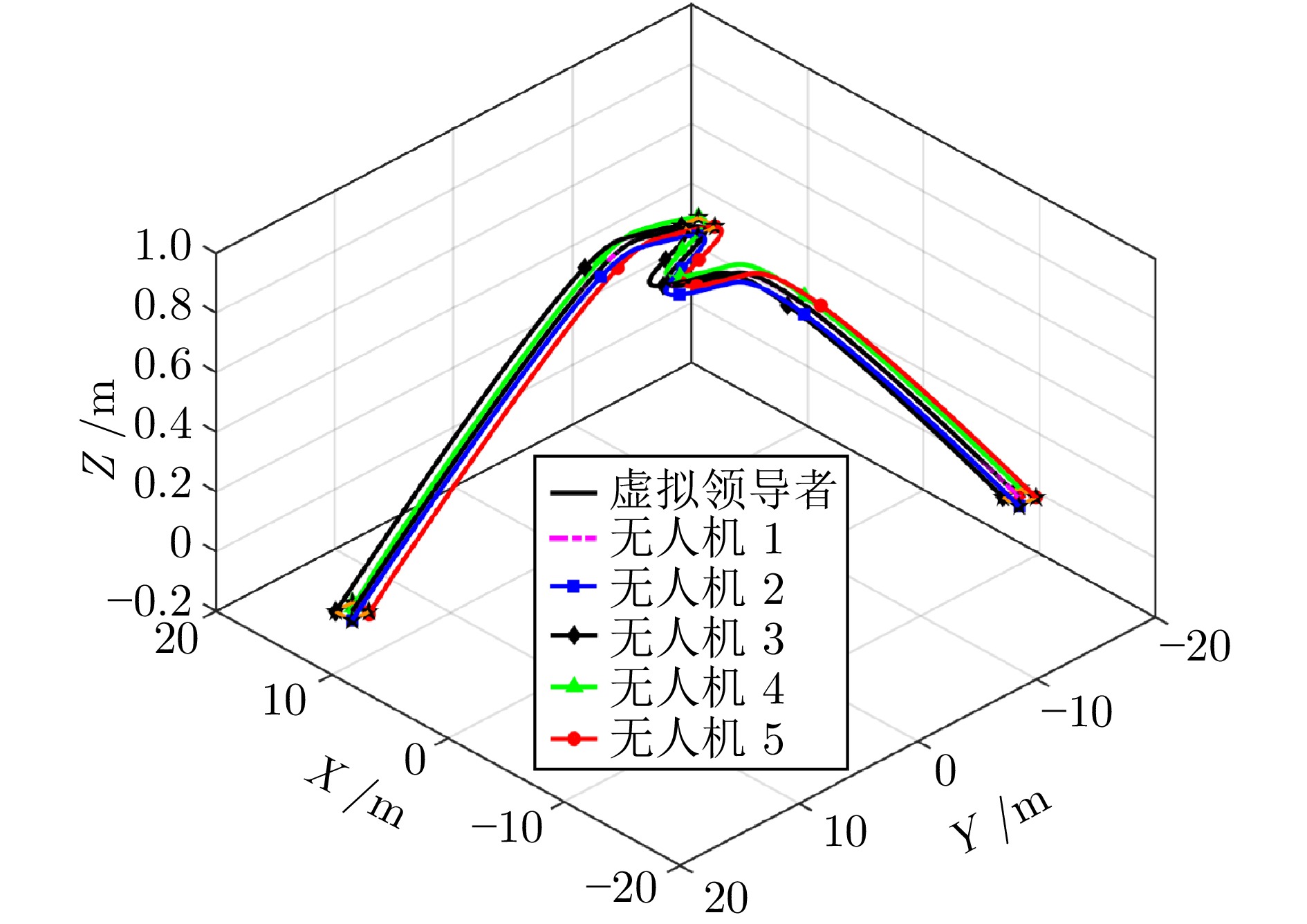
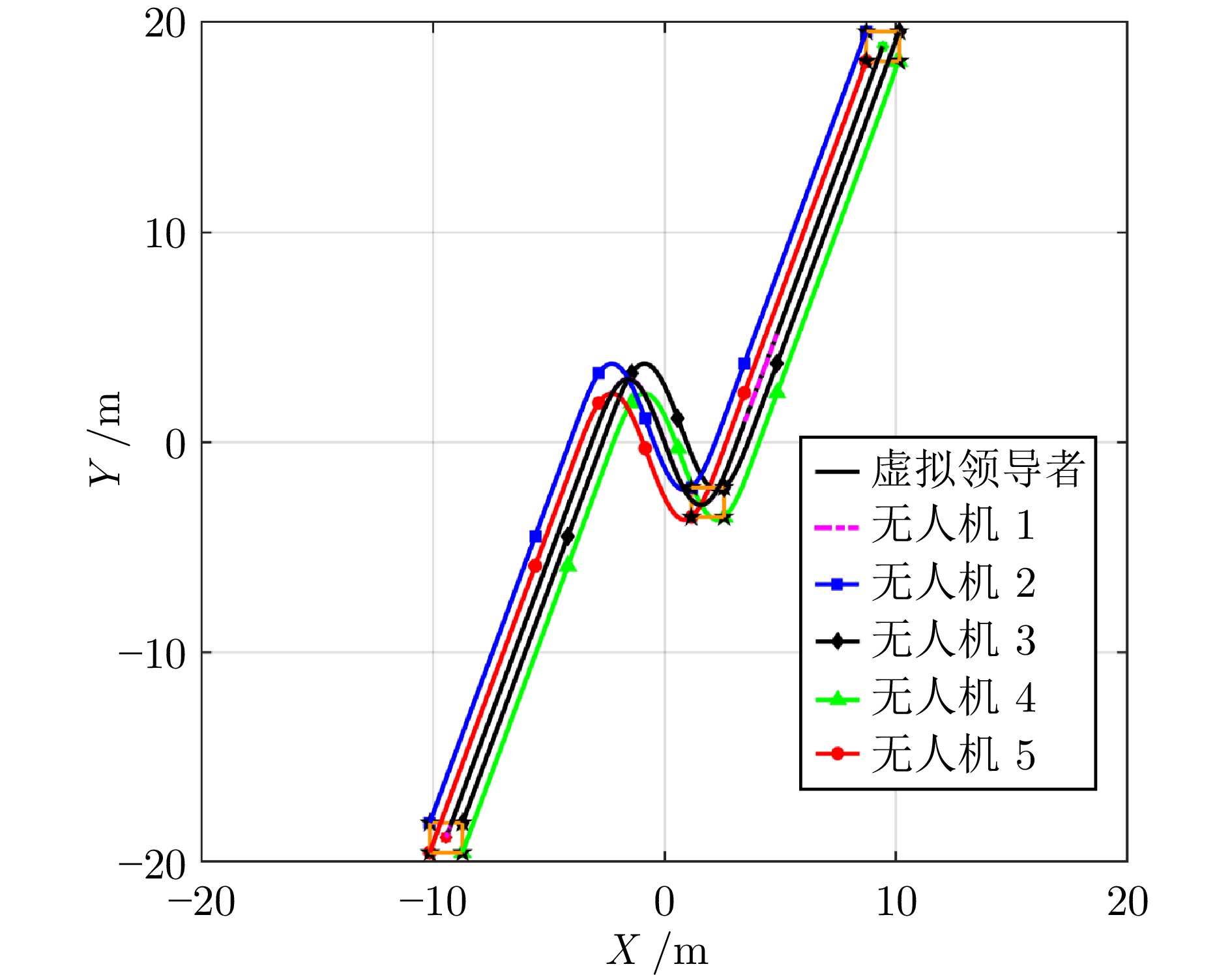
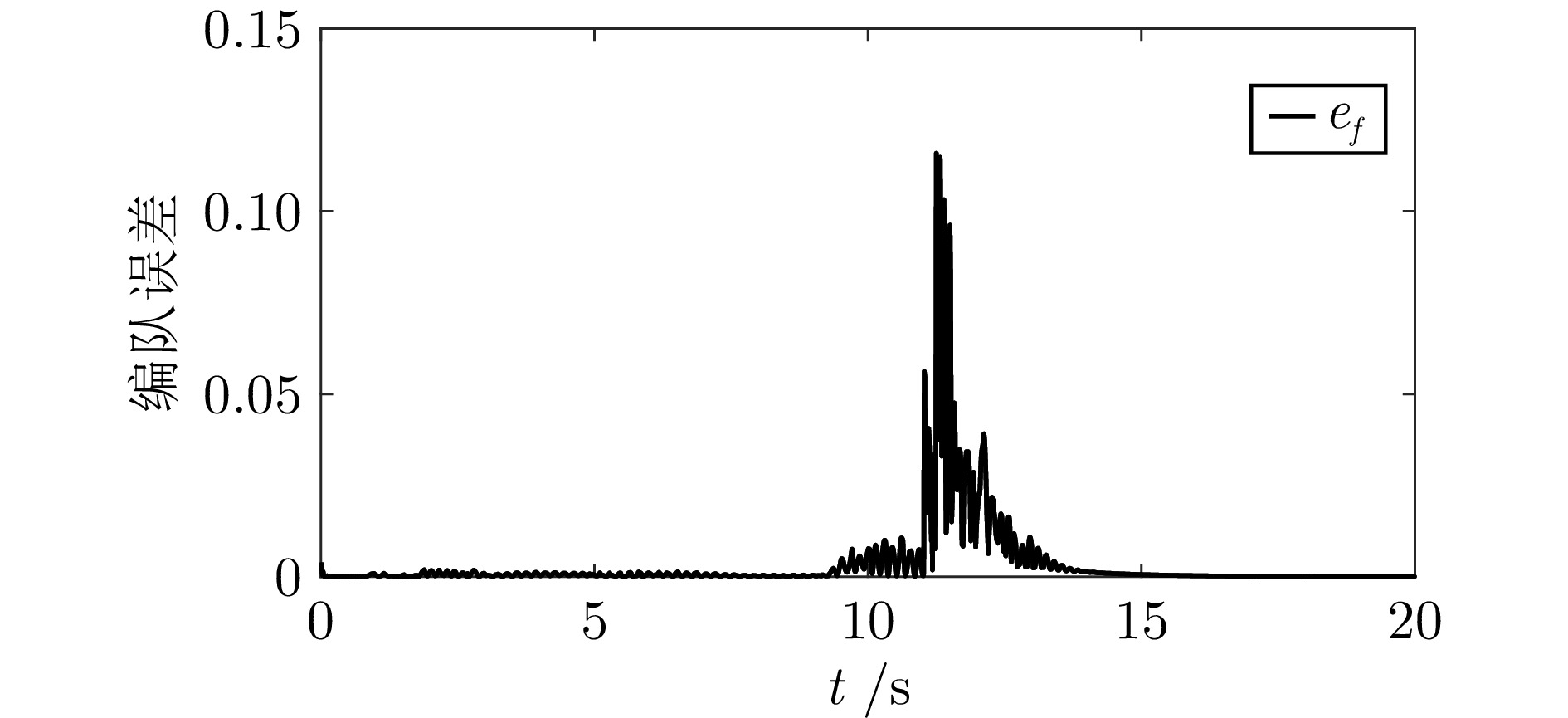
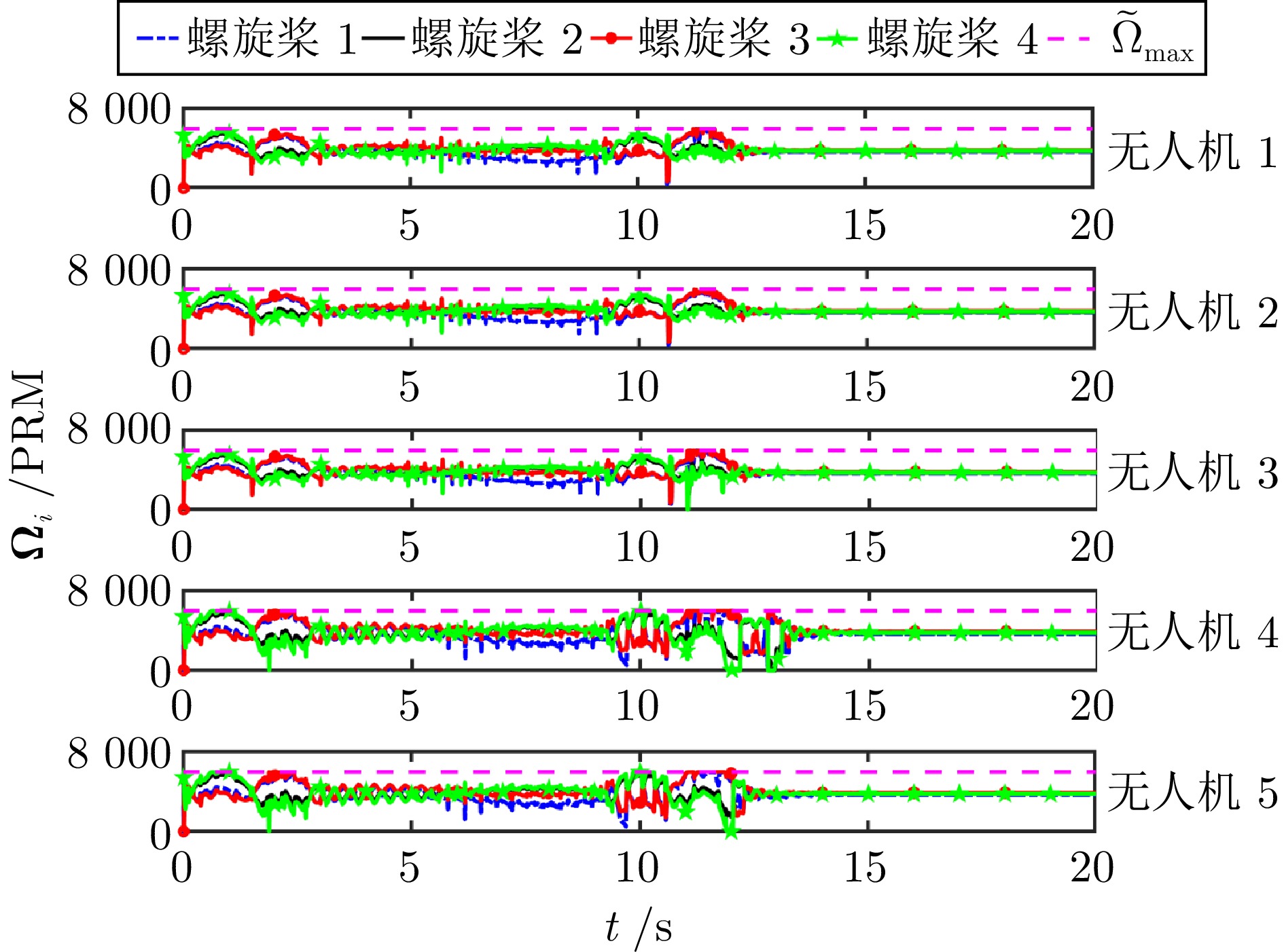
多四旋翼无人机协同编队运输技术因其高容错性和强灵活性等特点, 近年来受到广泛关注. 针对受到螺旋桨转速约束和外界环境干扰影响的多四旋翼无人机系统, 提出一种分层控制方案以实现多无人机协同编队运输. 该方案设计主要包含分布式协调器设计和跟踪控制器设计. 在分布式协调器中, 位置协调器基于虚拟领导者的位置、速度等信息生成各带载无人机的期望位置, 然后由微分平坦器输出无人机的期望无偏轨迹; 跟踪控制器采用非线性模型预测控制、角速度控制以及螺旋桨转速分配算法相结合的策略, 为各带载无人机生成合理的螺旋桨转速指令, 确保无人机精确跟踪其期望轨迹. 在所提方案作用下, 多带载无人机能维持期望编队队形并跟踪虚拟领导者, 从而实现多无人机协同编队运输. 特别地, 当省略位置协调器时, 该方案可简化为单无人机轨迹跟踪控制器. 数值仿真包括单机轨迹跟踪和多机协同运输两个场景, 结果表明, 在单机跟踪任务中, 所提方案展现出良好的跟踪精度; 在多机运输场景下, 多无人机系统能够有效实现协同编队运输.
多四旋翼无人机协同编队运输技术因其高容错性和强灵活性等特点, 近年来受到广泛关注. 针对受到螺旋桨转速约束和外界环境干扰影响的多四旋翼无人机系统, 提出一种分层控制方案以实现多无人机协同编队运输. 该方案设计主要包含分布式协调器设计和跟踪控制器设计. 在分布式协调器中, 位置协调器基于虚拟领导者的位置、速度等信息生成各带载无人机的期望位置, 然后由微分平坦器输出无人机的期望无偏轨迹; 跟踪控制器采用非线性模型预测控制、角速度控制以及螺旋桨转速分配算法相结合的策略, 为各带载无人机生成合理的螺旋桨转速指令, 确保无人机精确跟踪其期望轨迹. 在所提方案作用下, 多带载无人机能维持期望编队队形并跟踪虚拟领导者, 从而实现多无人机协同编队运输. 特别地, 当省略位置协调器时, 该方案可简化为单无人机轨迹跟踪控制器. 数值仿真包括单机轨迹跟踪和多机协同运输两个场景, 结果表明, 在单机跟踪任务中, 所提方案展现出良好的跟踪精度; 在多机运输场景下, 多无人机系统能够有效实现协同编队运输.
2026, 52(2): 335-348.
doi: 10.16383/j.aas.c250319
cstr: 32138.14.j.aas.c250319
摘要:
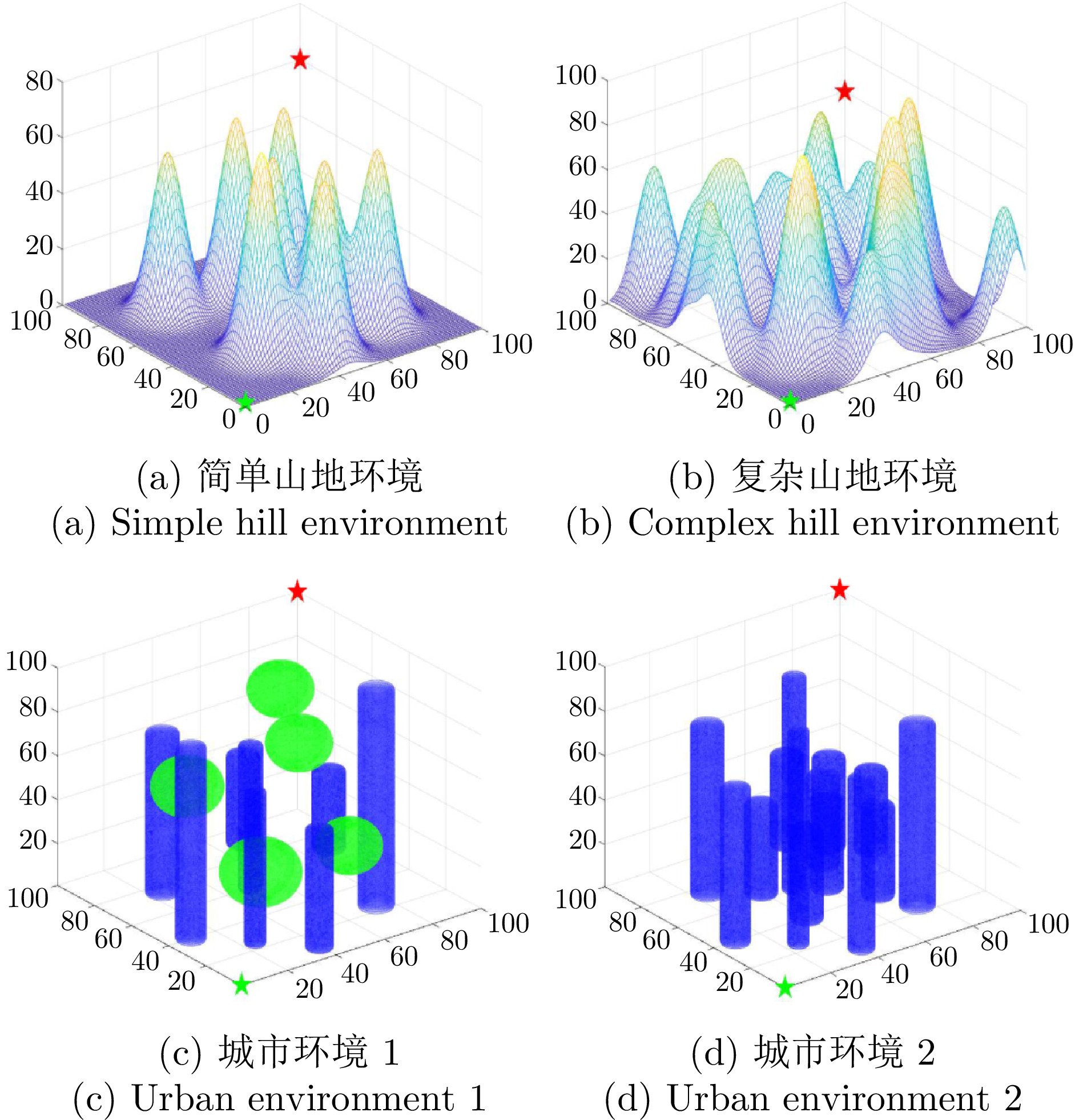
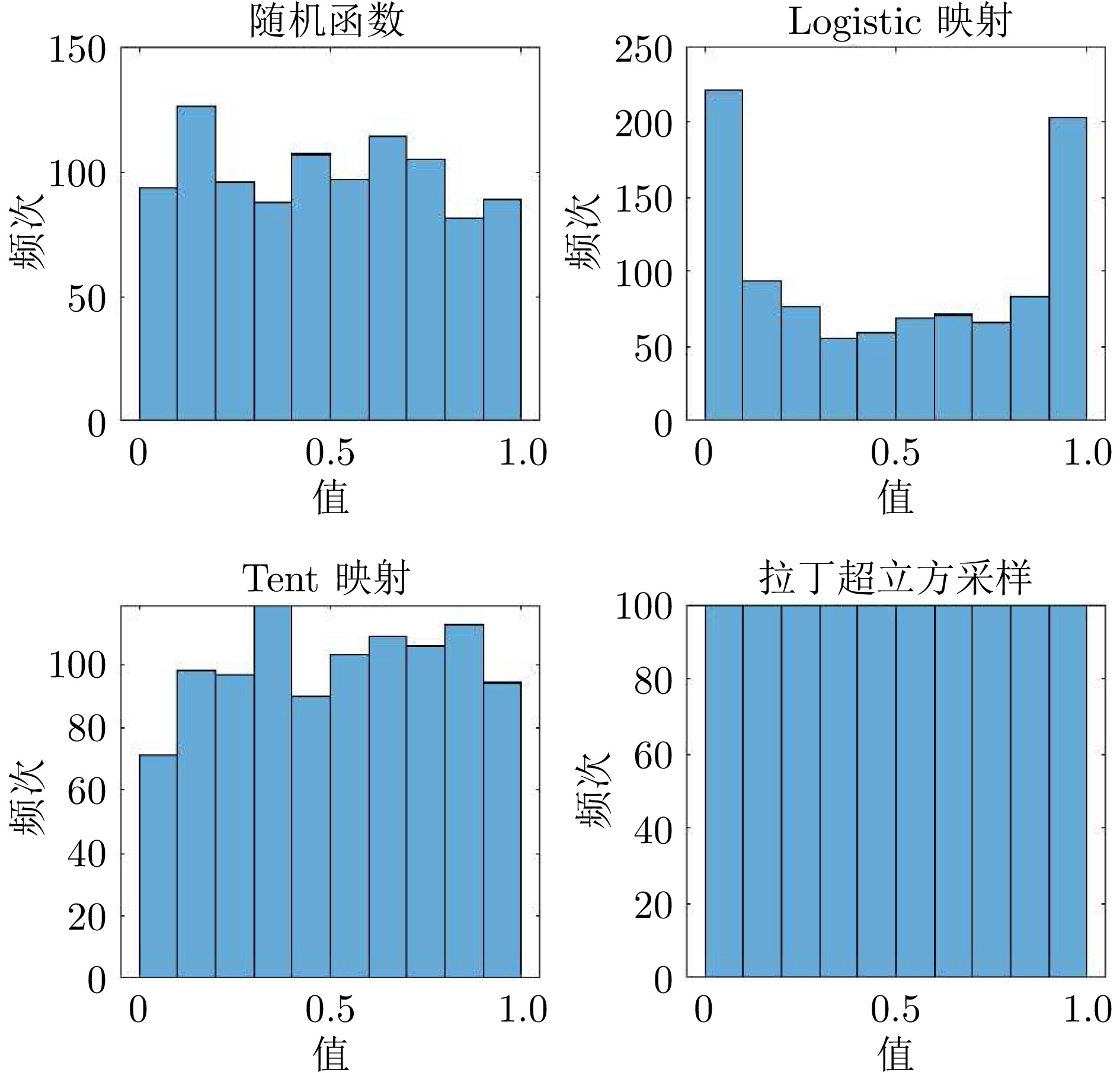
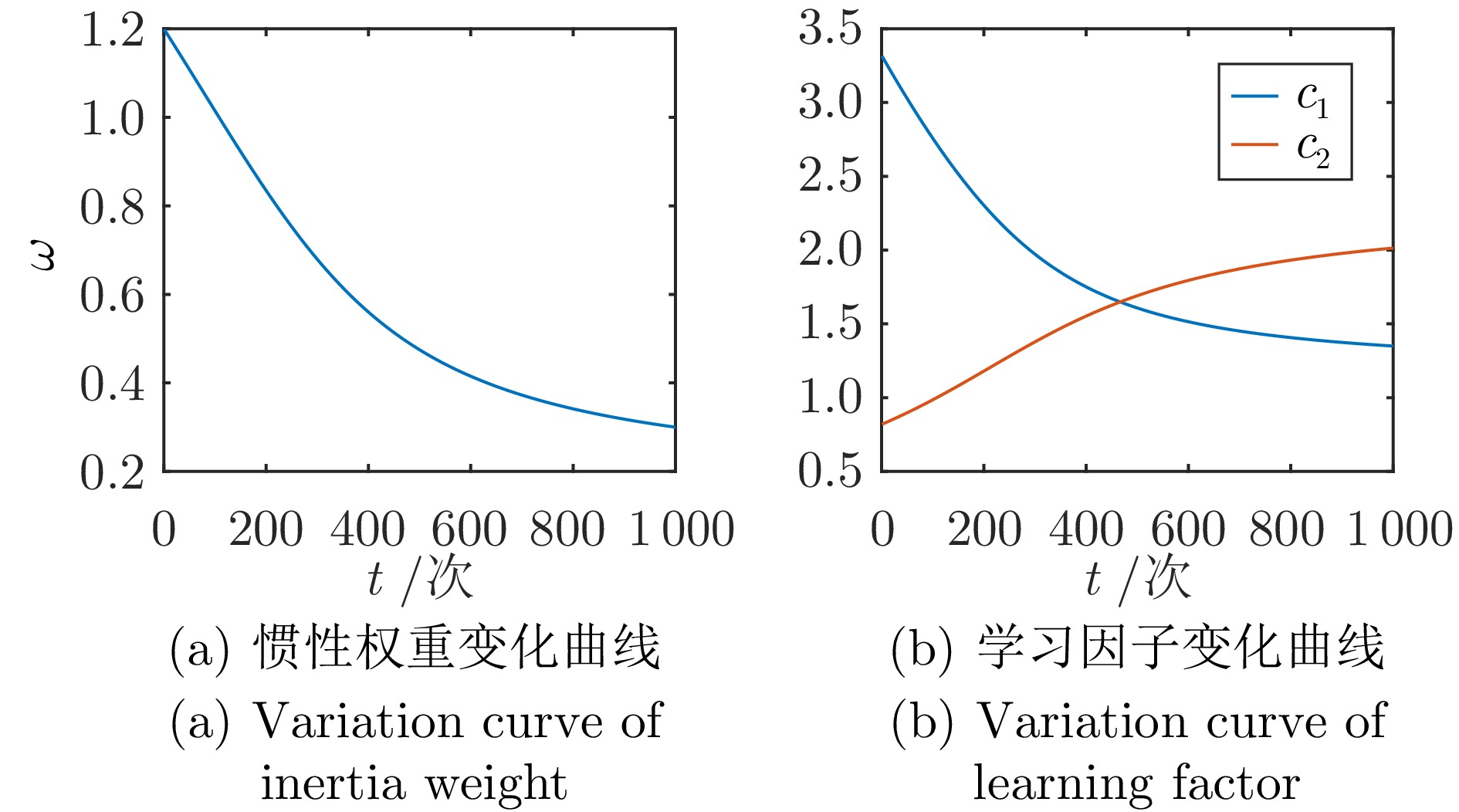
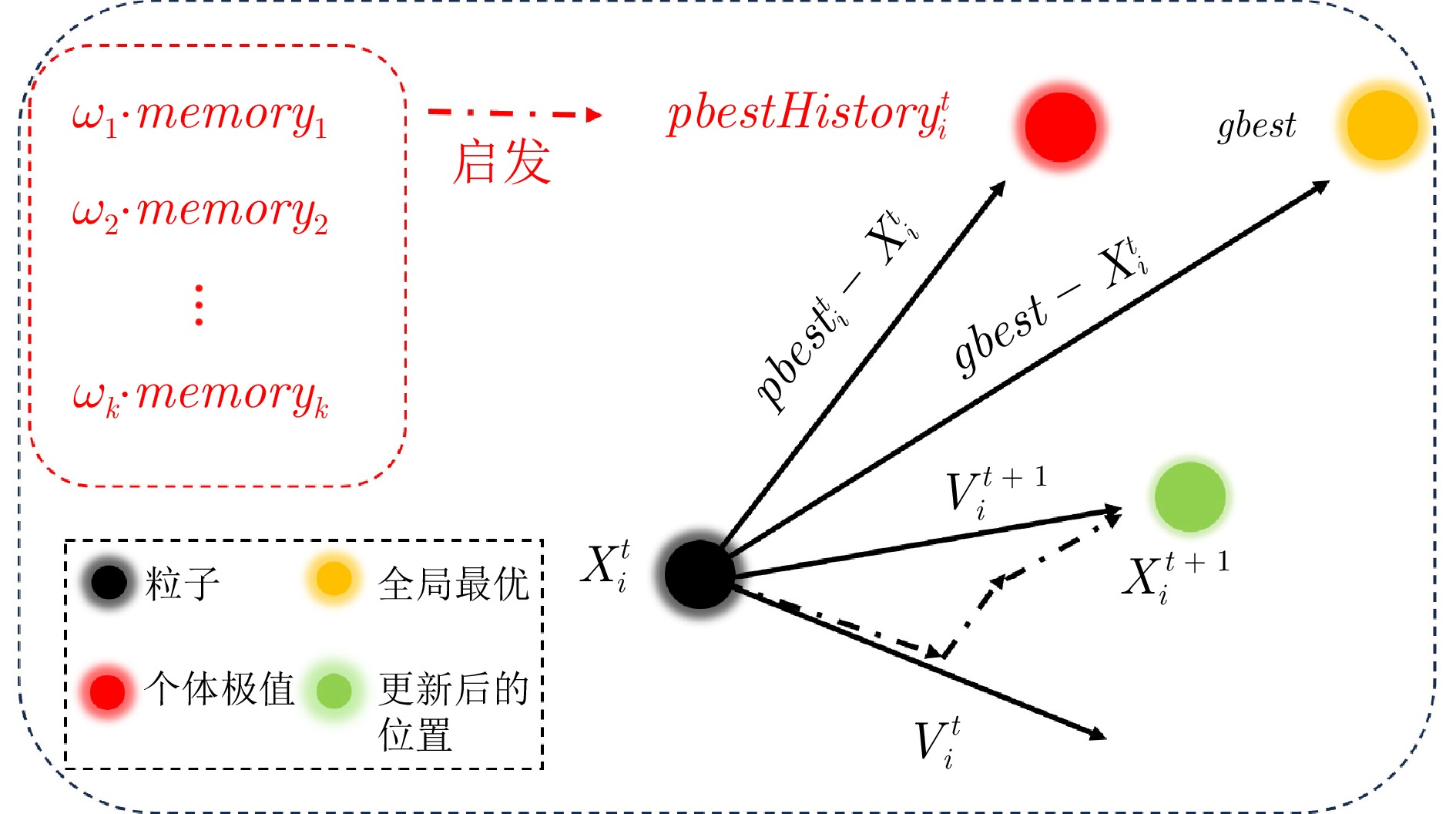
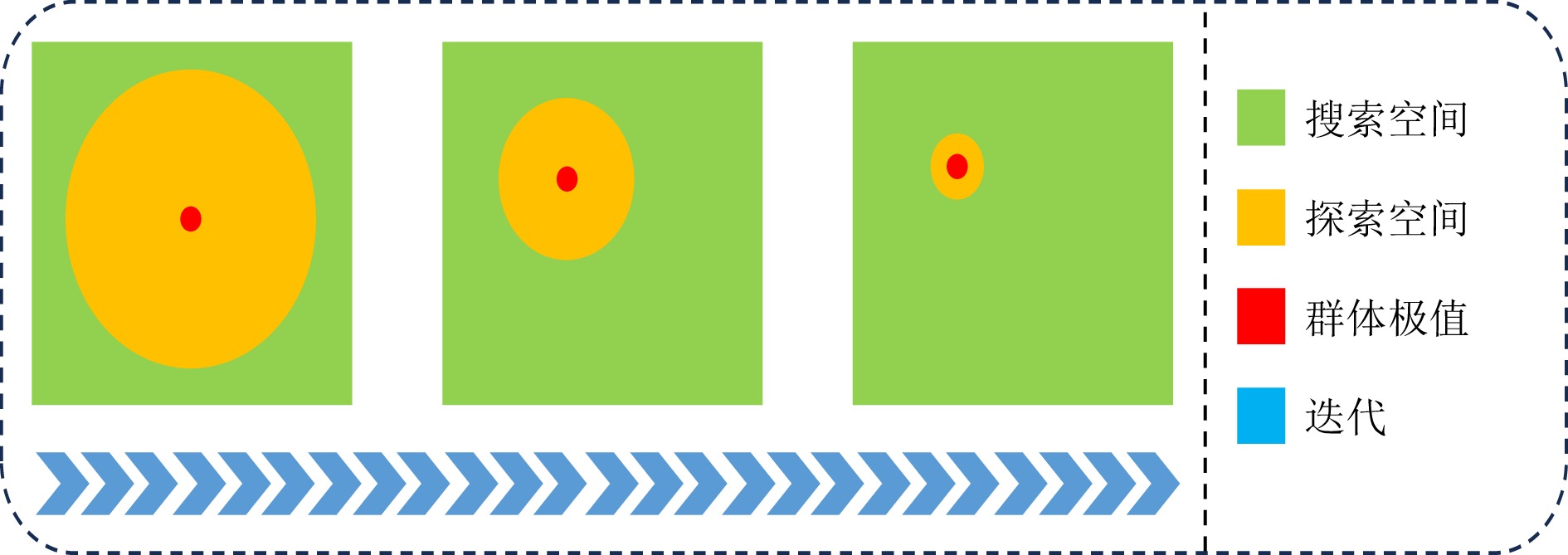
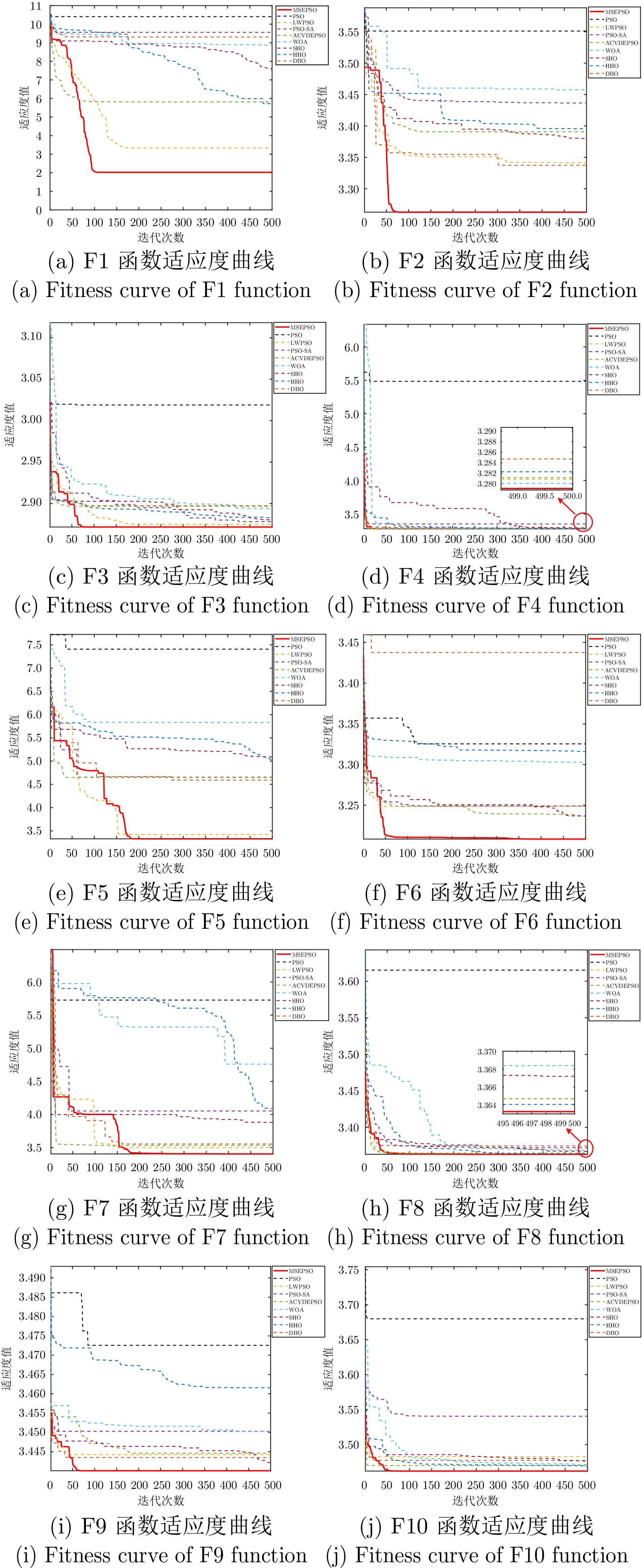
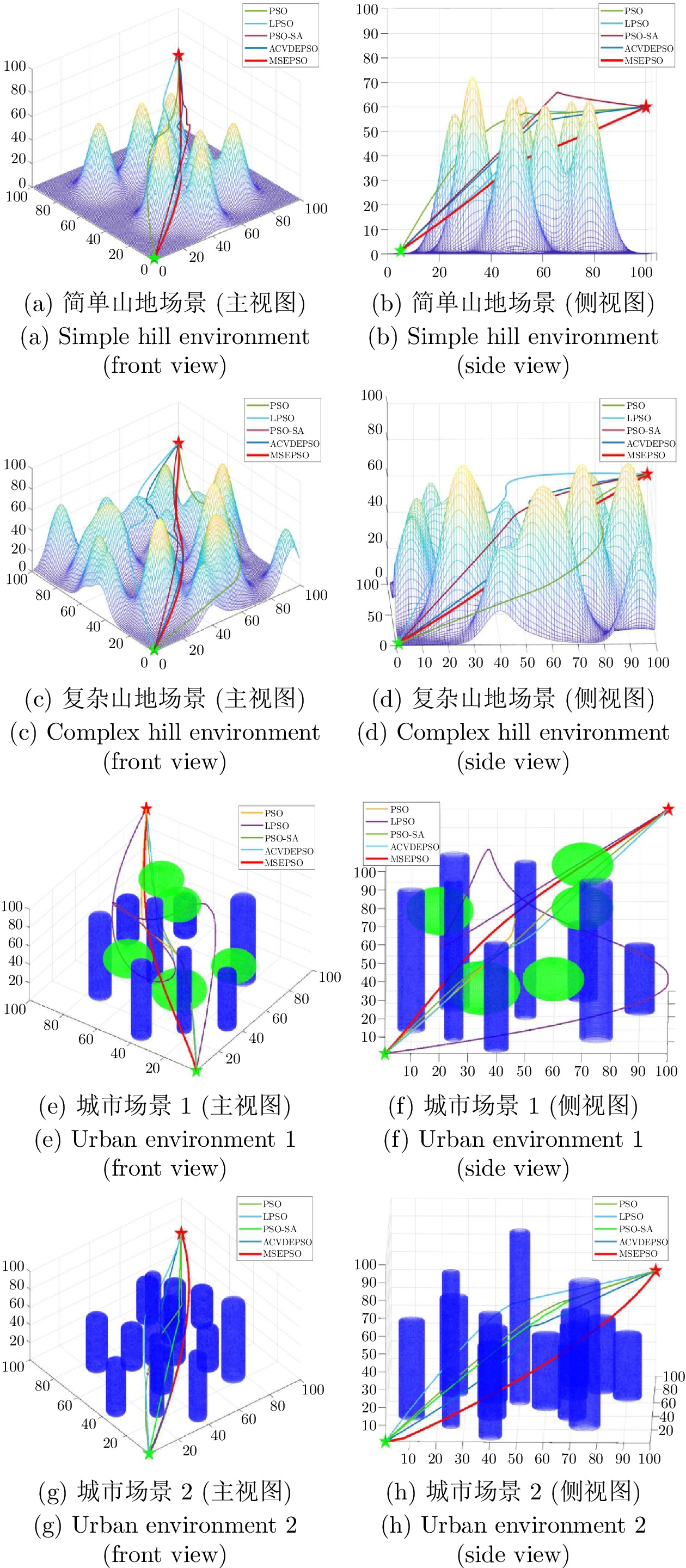
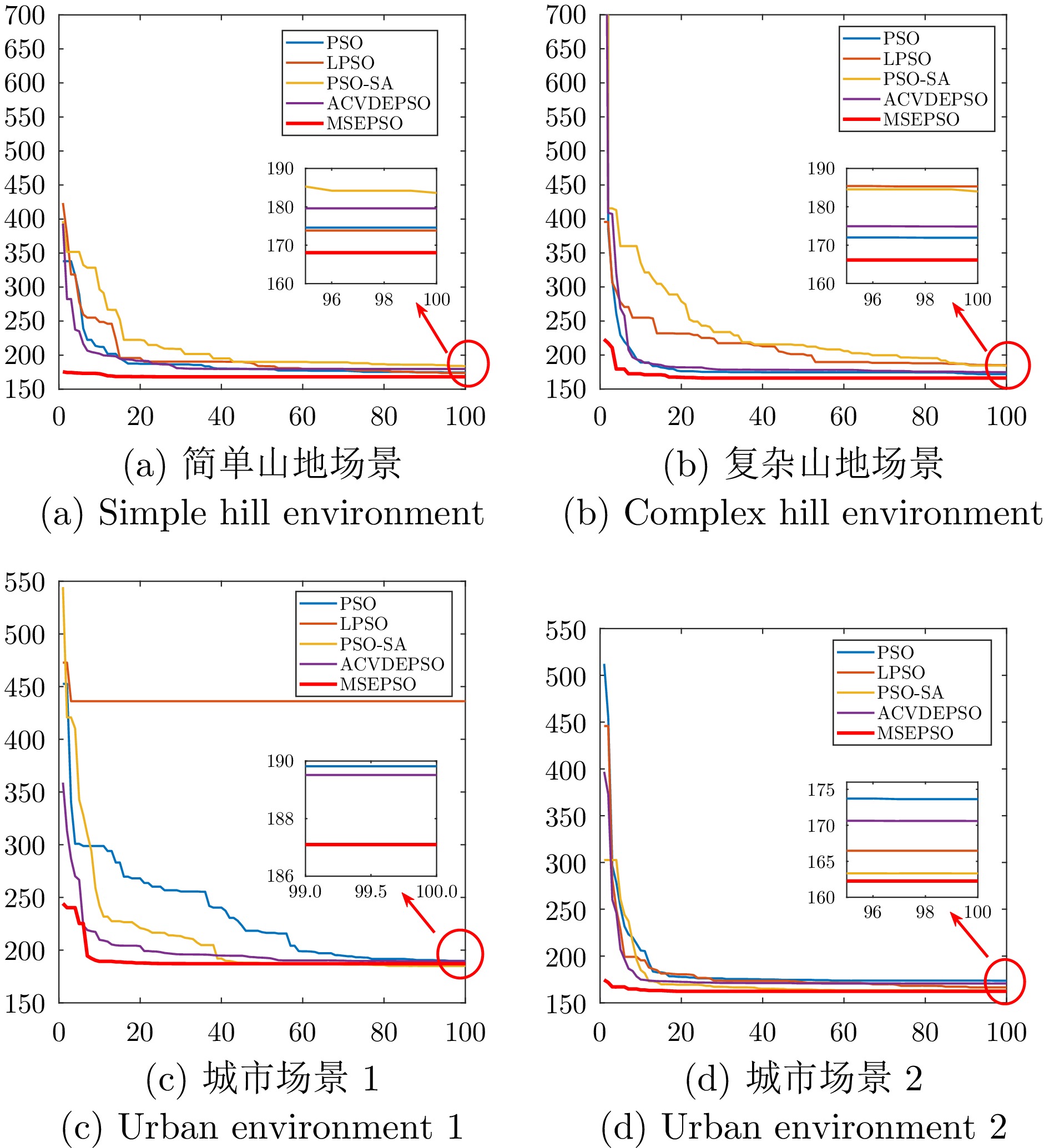
针对无人机在三维多障碍物场景下路径规划存在的收敛精度低、稳定性不足等问题, 提出一种多策略进化粒子群算法(MSEPSO). 在初始化阶段, 针对粒子群算法对粒子初始位置敏感的问题, 采用拉丁超立方采样优化粒子初始分布, 提高种群多样性; 在进化阶段, 设计“平衡−记忆−增强”进化框架, 即利用非线性迭代策略来平衡全局开发和局部搜索, 采用个体历史记忆启发机制增强算法的全局开发能力, 并引入进化粒子, 增强种群对于群体极值附近空间的探索能力, 降低算法陷入局部最优的概率. 在CEC2020测试函数集上与山地/城市场景下的对比实验结果表明, MSEPSO展现出稳定的寻优性能, 可以规划长度更短、平滑度更高的安全路径.
针对无人机在三维多障碍物场景下路径规划存在的收敛精度低、稳定性不足等问题, 提出一种多策略进化粒子群算法(MSEPSO). 在初始化阶段, 针对粒子群算法对粒子初始位置敏感的问题, 采用拉丁超立方采样优化粒子初始分布, 提高种群多样性; 在进化阶段, 设计“平衡−记忆−增强”进化框架, 即利用非线性迭代策略来平衡全局开发和局部搜索, 采用个体历史记忆启发机制增强算法的全局开发能力, 并引入进化粒子, 增强种群对于群体极值附近空间的探索能力, 降低算法陷入局部最优的概率. 在CEC2020测试函数集上与山地/城市场景下的对比实验结果表明, MSEPSO展现出稳定的寻优性能, 可以规划长度更短、平滑度更高的安全路径.
2026, 52(2): 349-362.
doi: 10.16383/j.aas.c250438
cstr: 32138.14.j.aas.c250438
摘要:
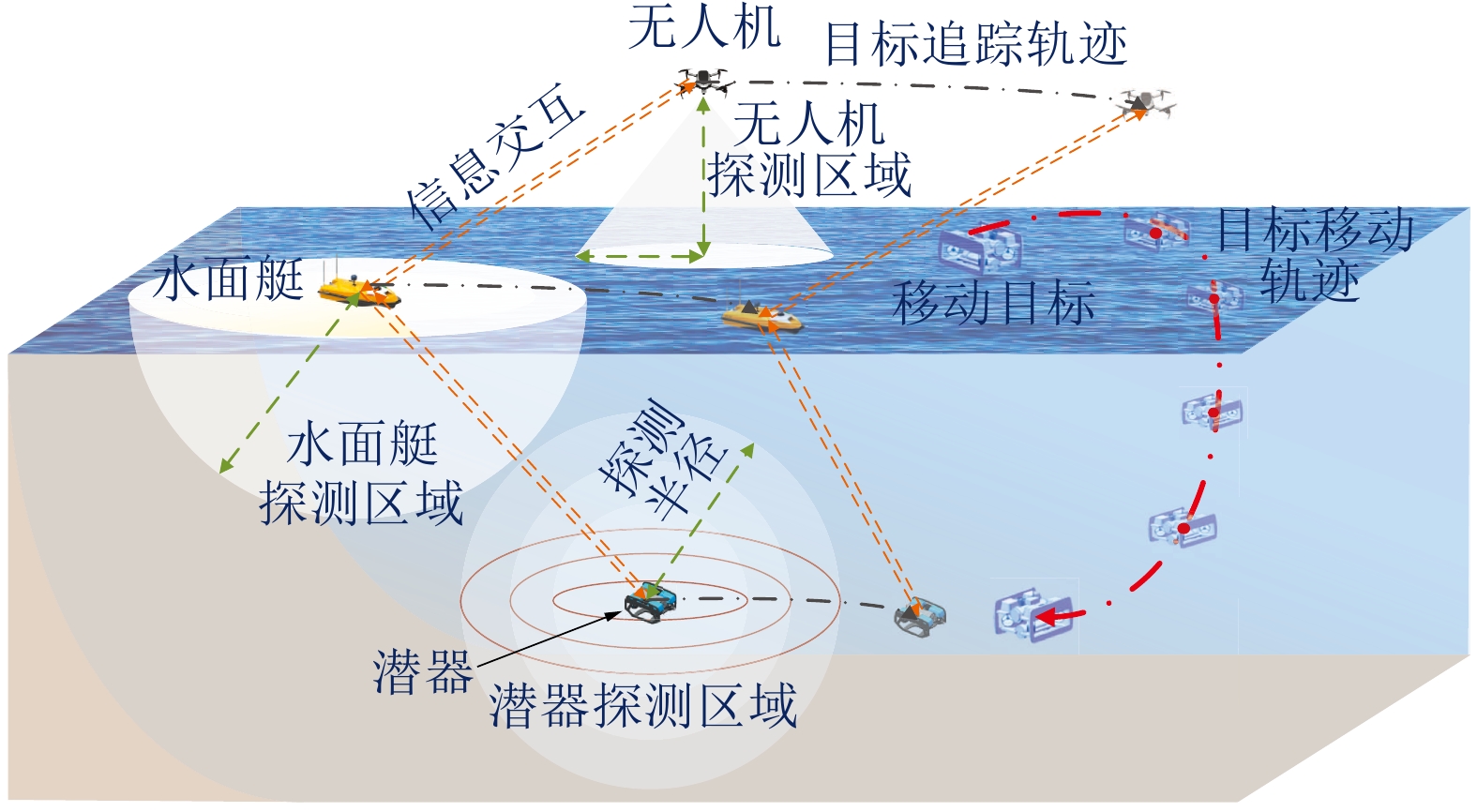
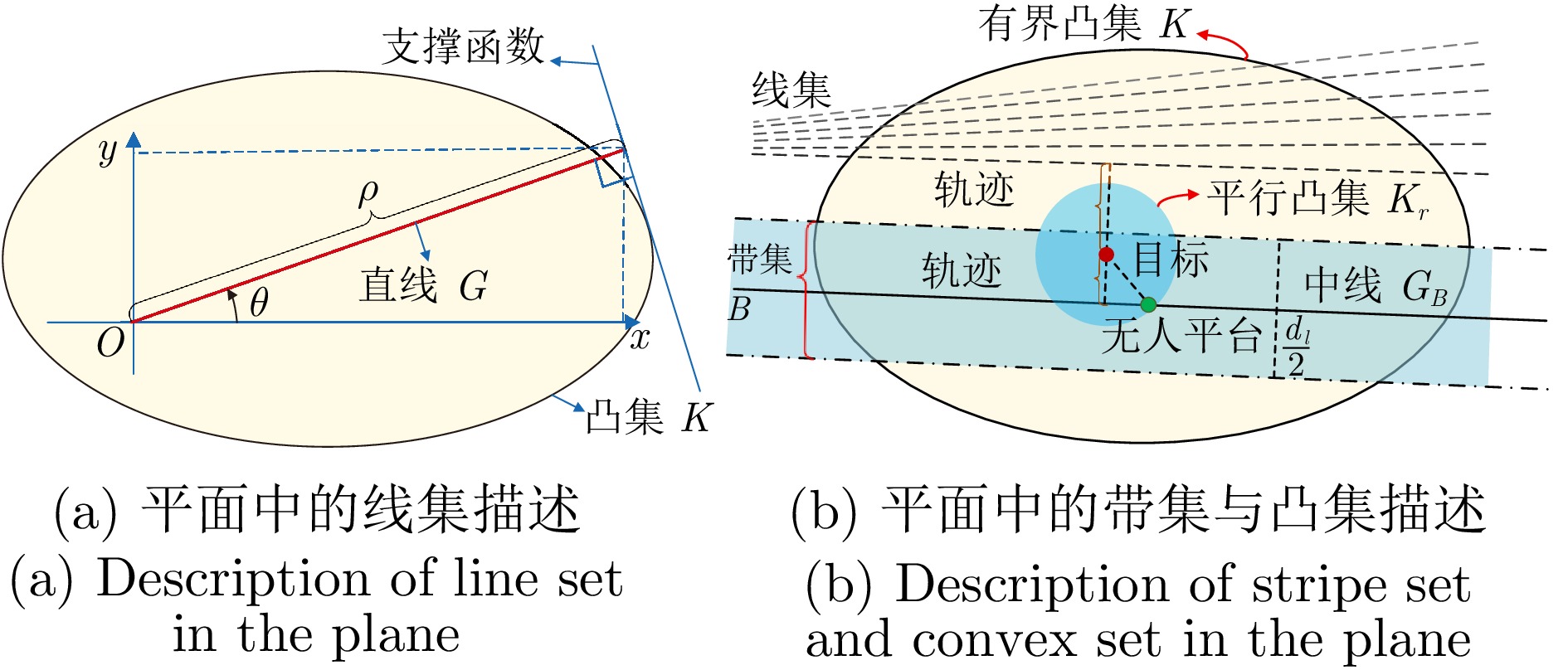
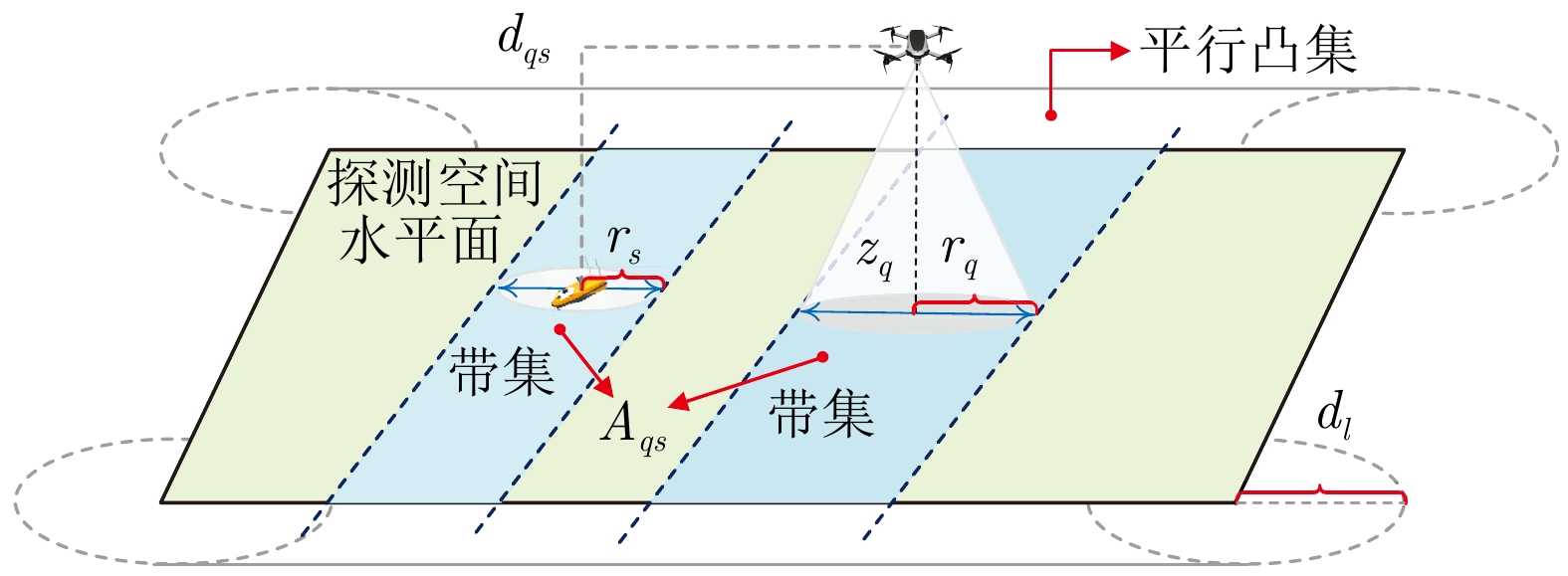
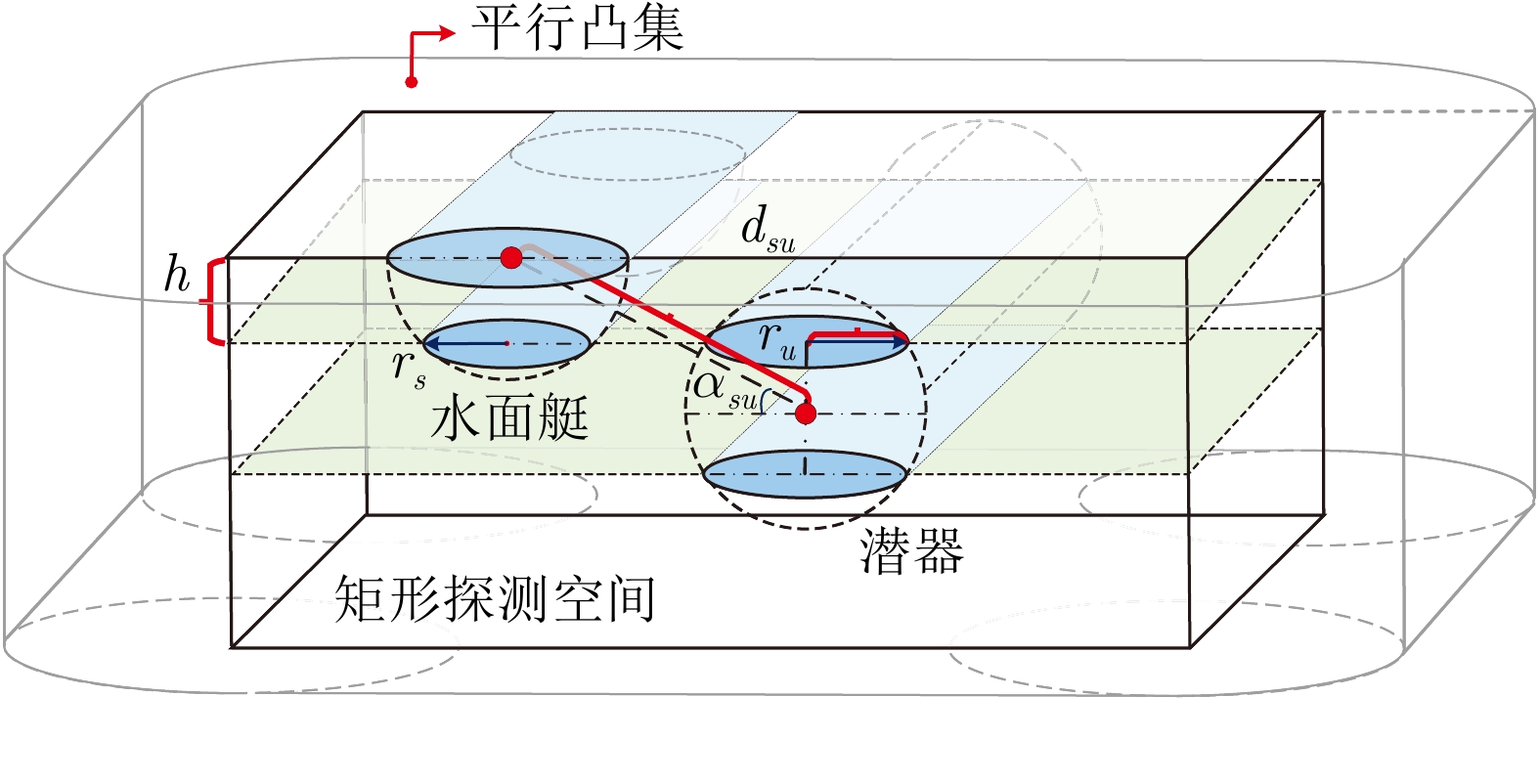
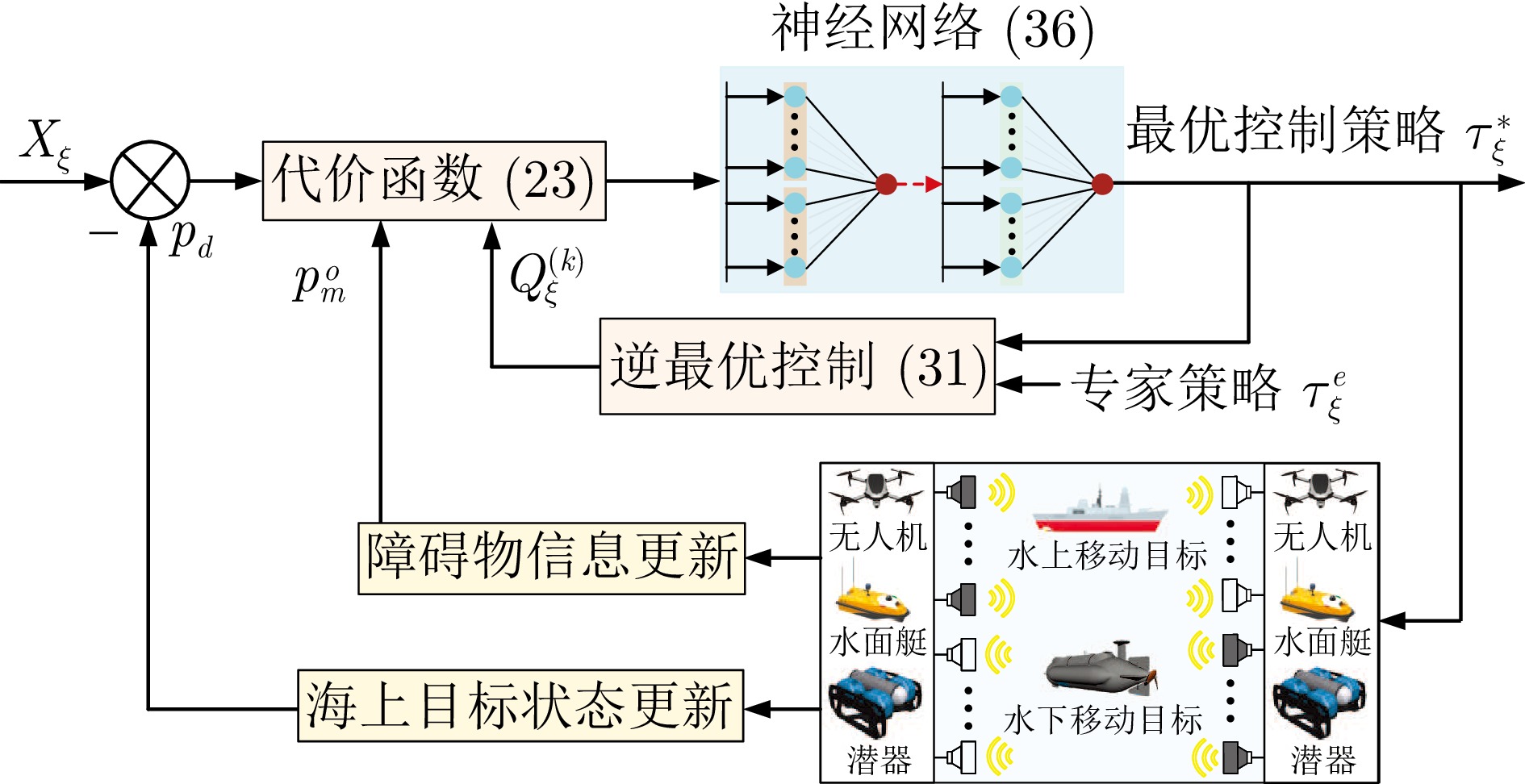
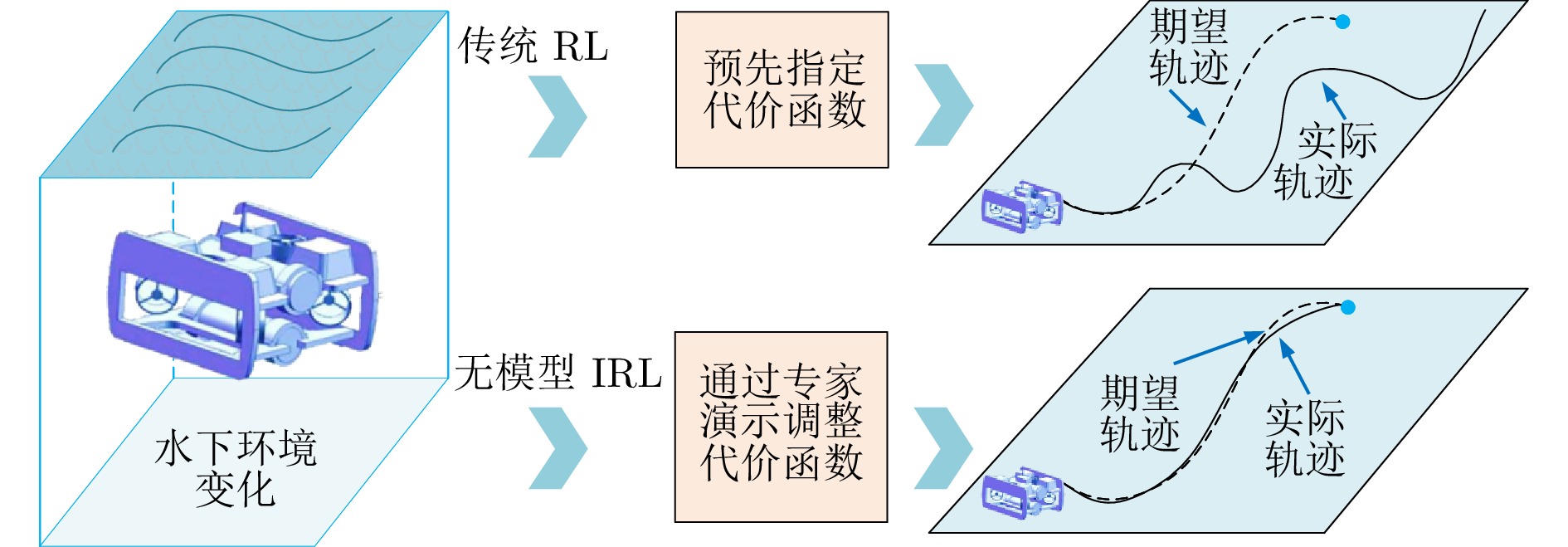
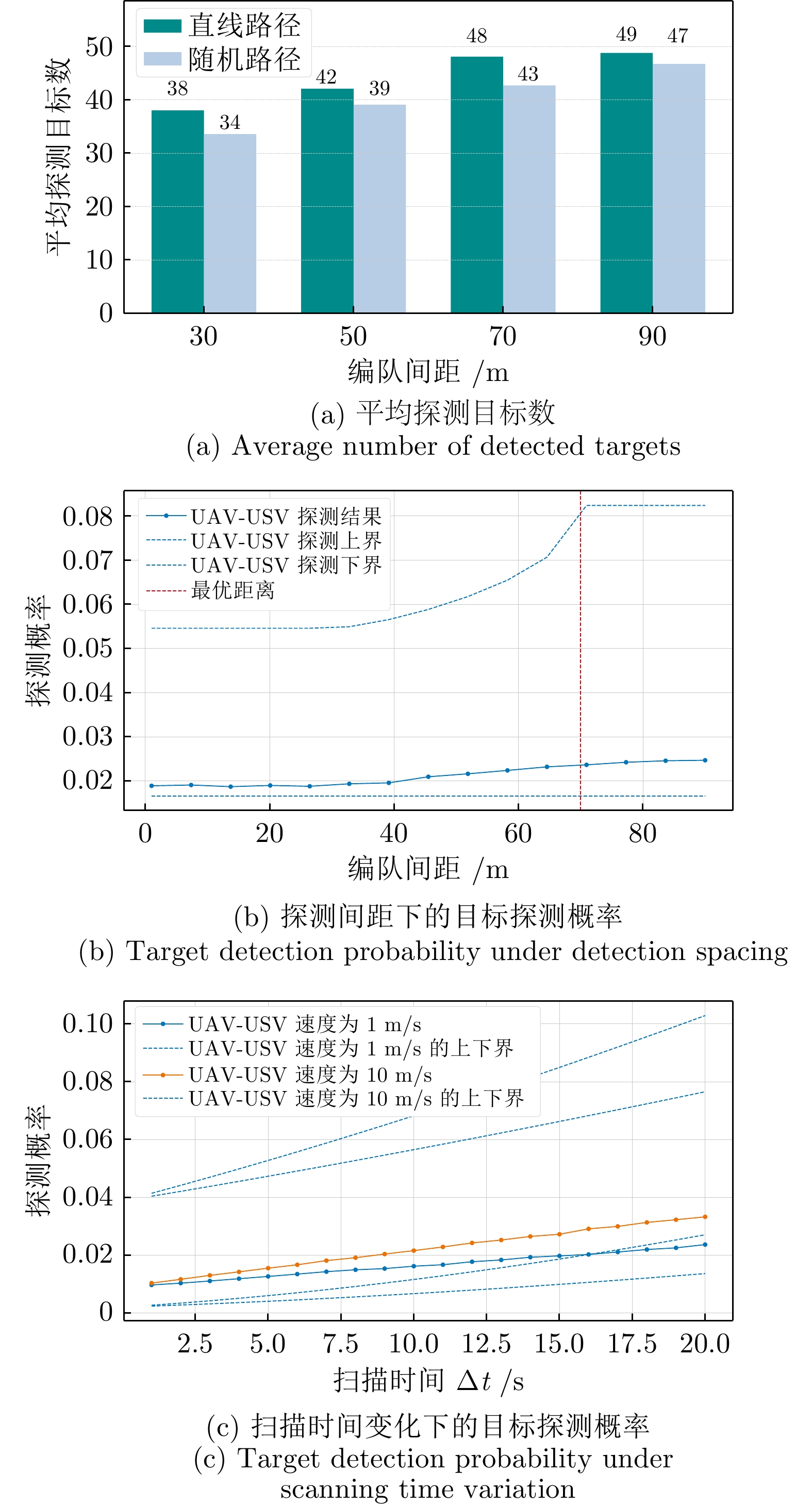
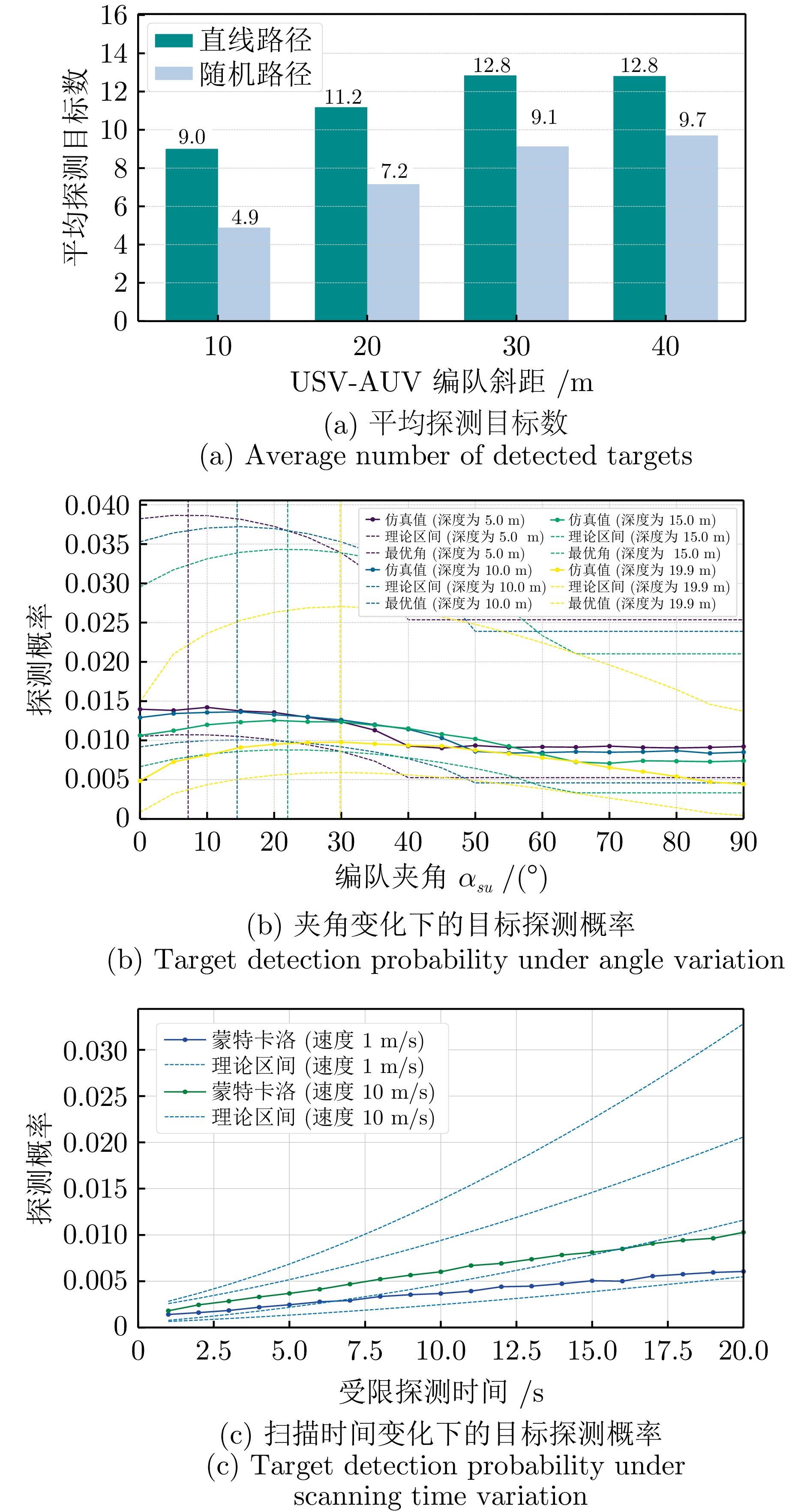
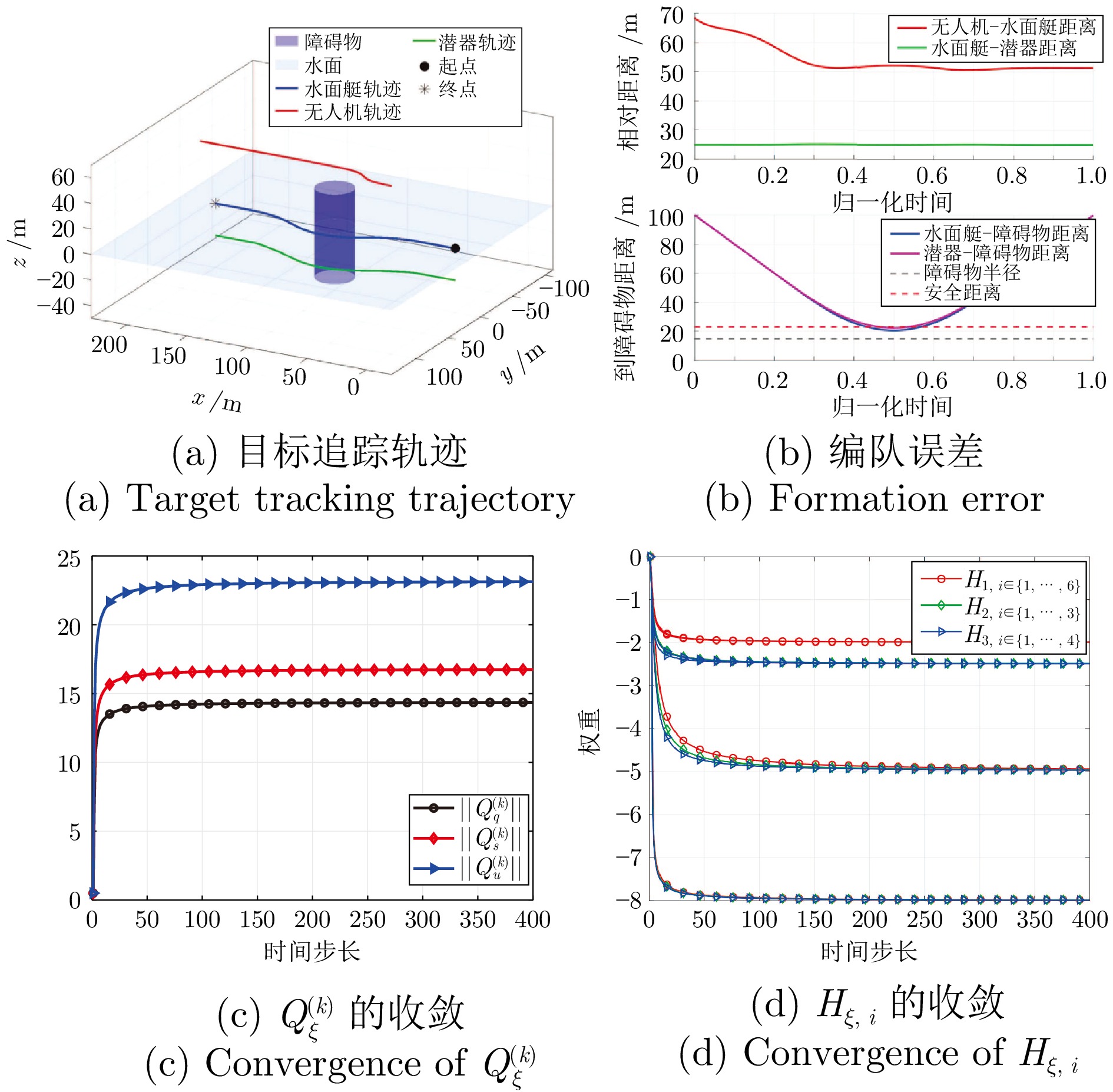
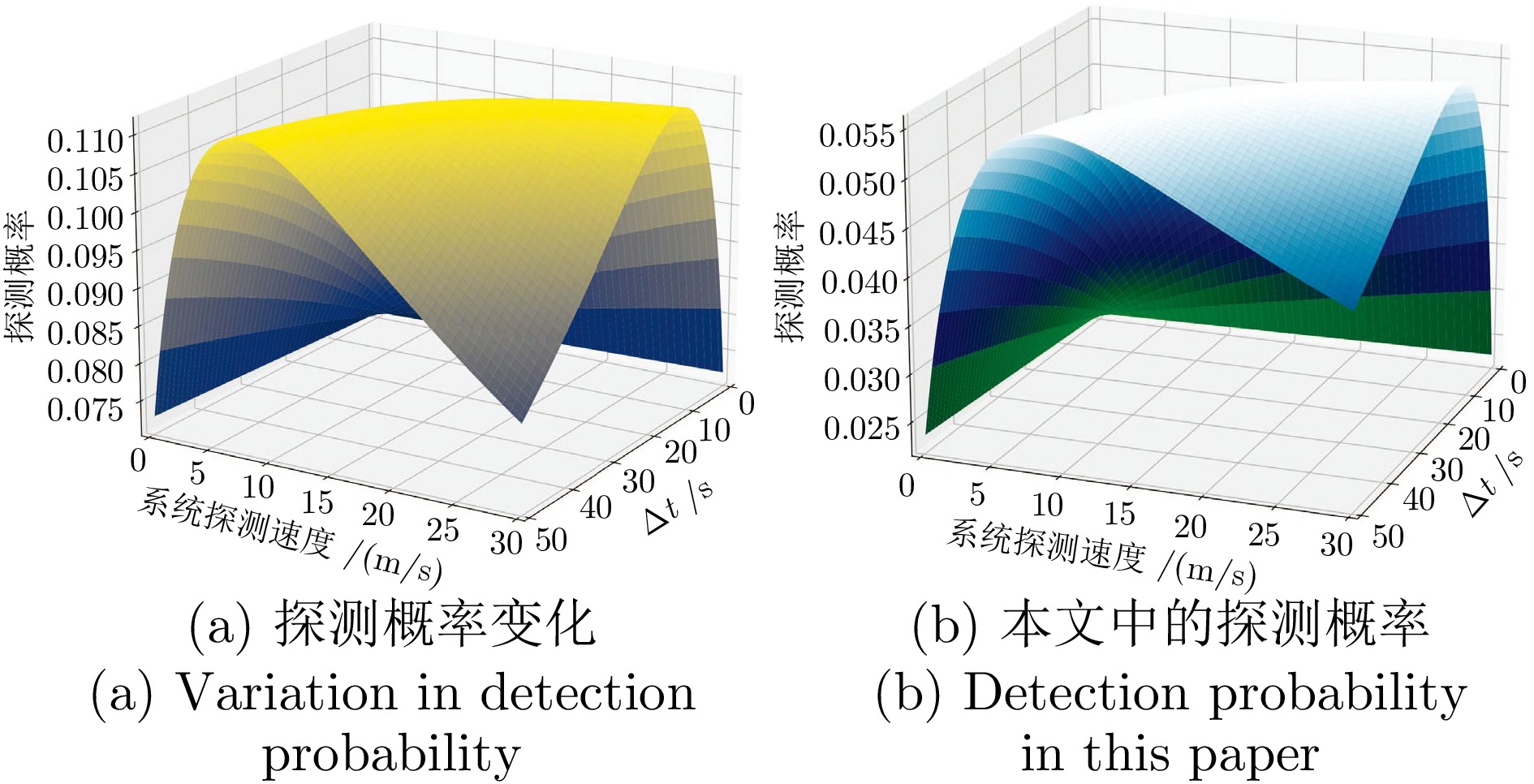
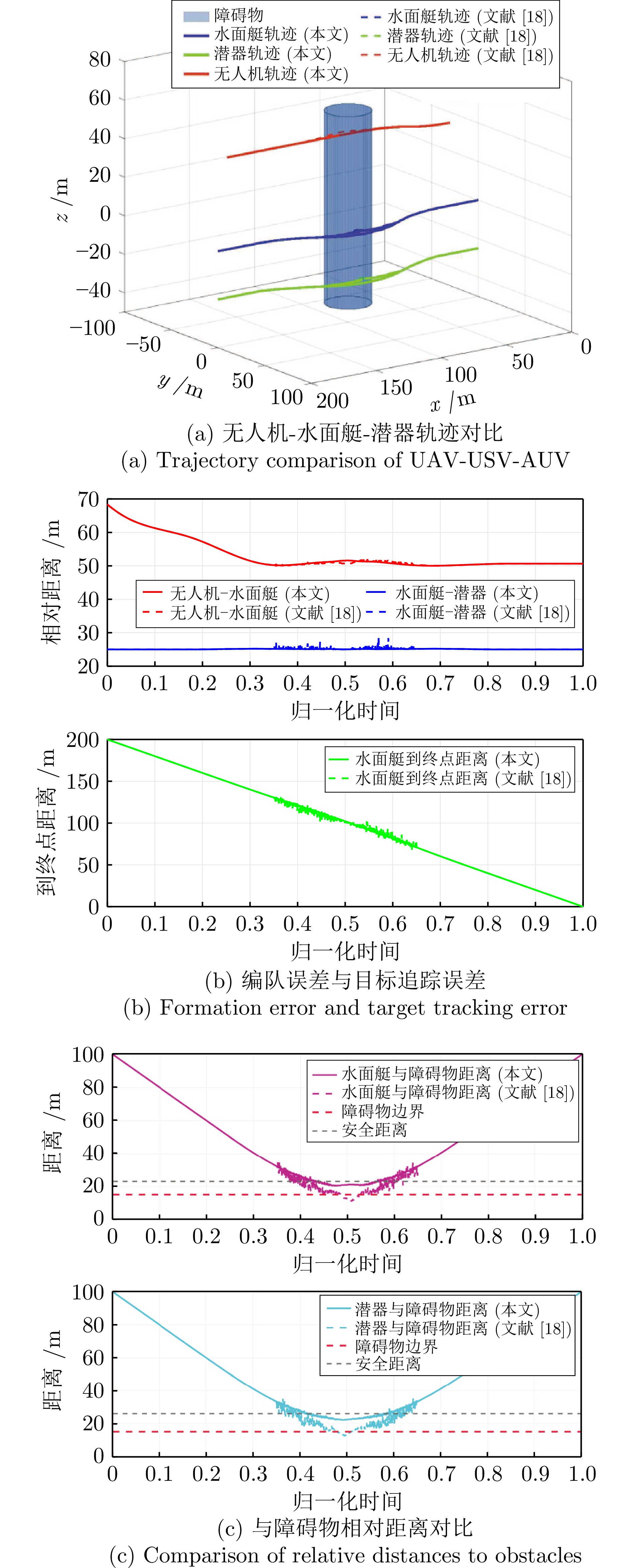
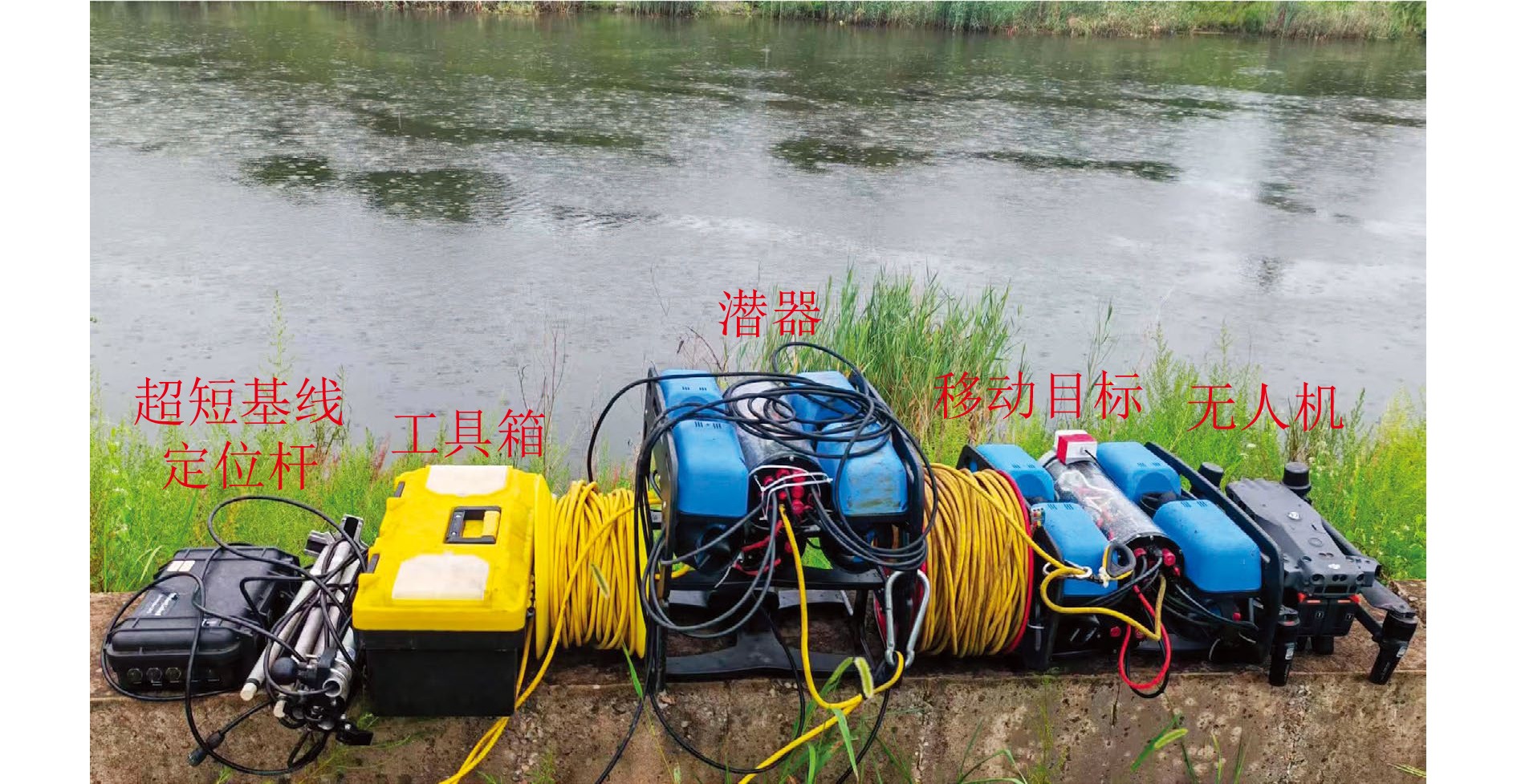
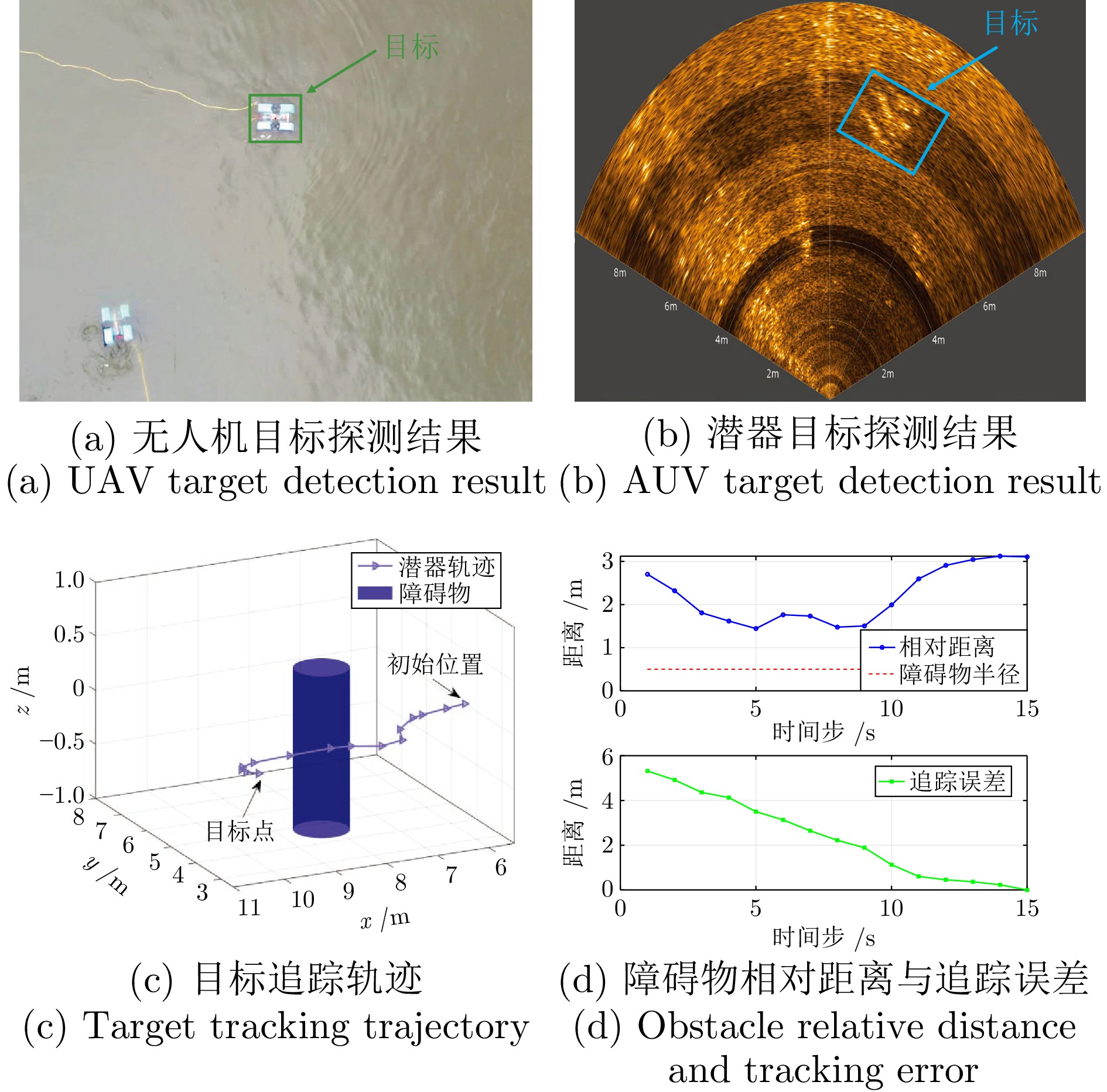
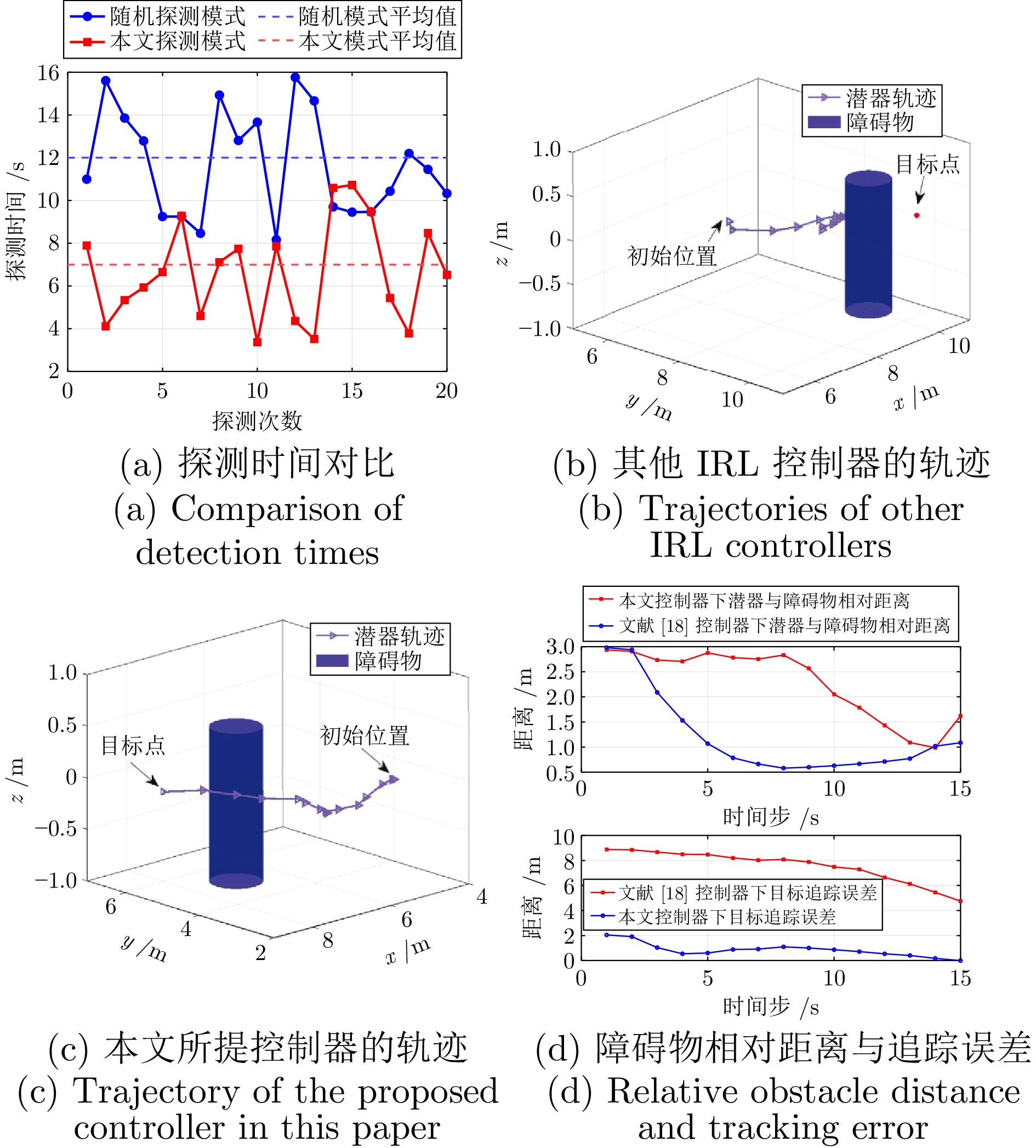
提出一种基于空−海−潜跨域无人平台协同的海上目标探测追踪策略. 首先, 构建无人机−水面艇−潜器协同的海上跨域无人系统. 然后, 针对海上目标的高机动性以及无人平台自身约束, 采用测度理论解析无人机−水面艇−潜器最佳探测编队队形, 实现目标探测概率最大化; 当探测到目标后, 设计基于逆强化学习的无人机−水面艇−潜器编队控制器, 实现障碍物环境下水面/水下目标的可靠有效追踪. 最后, 通过仿真与实验验证了所提方法的有效性. 结果表明, 所提探测模式可以实现有限时间内移动目标探测概率最大化, 同时所提逆强化学习编队控制器可以在保持队形稳定的基础上, 结合动态避障策略, 实现复杂环境下跨域无人平台安全协同追踪.
提出一种基于空−海−潜跨域无人平台协同的海上目标探测追踪策略. 首先, 构建无人机−水面艇−潜器协同的海上跨域无人系统. 然后, 针对海上目标的高机动性以及无人平台自身约束, 采用测度理论解析无人机−水面艇−潜器最佳探测编队队形, 实现目标探测概率最大化; 当探测到目标后, 设计基于逆强化学习的无人机−水面艇−潜器编队控制器, 实现障碍物环境下水面/水下目标的可靠有效追踪. 最后, 通过仿真与实验验证了所提方法的有效性. 结果表明, 所提探测模式可以实现有限时间内移动目标探测概率最大化, 同时所提逆强化学习编队控制器可以在保持队形稳定的基础上, 结合动态避障策略, 实现复杂环境下跨域无人平台安全协同追踪.