

A Review of Cross-modal Coordination and Intelligent Scheduling for Low-altitude Three-dimensional Transportation
-
摘要: 随着低空立体交通系统进程的加速推进, 空中、地面与水面三维异构交通平台的协同愈加关键. 智能调度与资源优化的深度融合, 正逐步成为智慧城市建设与应急响应体系中不可或缺的核心支撑力量. 本文围绕多模式协同调度的研究热点展开综述. 首先, 综合回顾无人机、无人车与无人艇在多源信息融合、环境感知与自适应决策方面的协同机制. 其次, 从任务分解、路径规划、协同控制与系统调度四个层面, 总结强化学习、图优化、进化算法等在复杂动态环境下的典型调度方法. 进一步地, 梳理集中式、分布式与混合式控制架构下的任务分配与通信策略, 并分析传感器数据、仿真数据与运行大数据在调度优化中的作用. 最后, 探讨当前低空立体交通系统在资源分配、安全保障与跨域协同中的关键挑战, 并展望基于大数据驱动与智能增强的低空立体交通系统未来发展路径.Abstract: As the advancement of low-altitude three-dimensional transportation systems accelerates, the collaboration among aerial, ground, and waterborne heterogeneous transportation platforms becomes increasingly critical. The seamless integration of intelligent scheduling and resource optimization is progressively establishing itself as an indispensable pillar for the development of smart cities and emergency response frameworks. A comprehensive review of the research frontiers in multi-modal collaborative scheduling is provided. Firstly, it comprehensively reviews the collaborative mechanisms of unmanned aerial vehicles, unmanned ground vehicles, and unmanned surface vehicles in multi-source information fusion, environmental perception, and adaptive decision-making. Secondly, this paper synthesizes typical scheduling methodologies in complex dynamic environments, addressing task decomposition, path planning, collaborative control, and system-level scheduling, with a particular focus on reinforcement learning, graph optimization, and evolutionary algorithms. Furthermore, it explores task allocation and communication strategies within centralized, distributed, and hybrid control architectures, and examines the role of sensor data, simulation data, and operational big data in optimization of scheduling processes. Finally, the critical challenges faced by current low-altitude three-dimensional transportation systems in resource allocation, security assurance, and cross-domain collaboration are identified, and insights into the future development trajectories of these systems, underpinned by big data-driven solutions and intelligent enhancement, are offered.
-
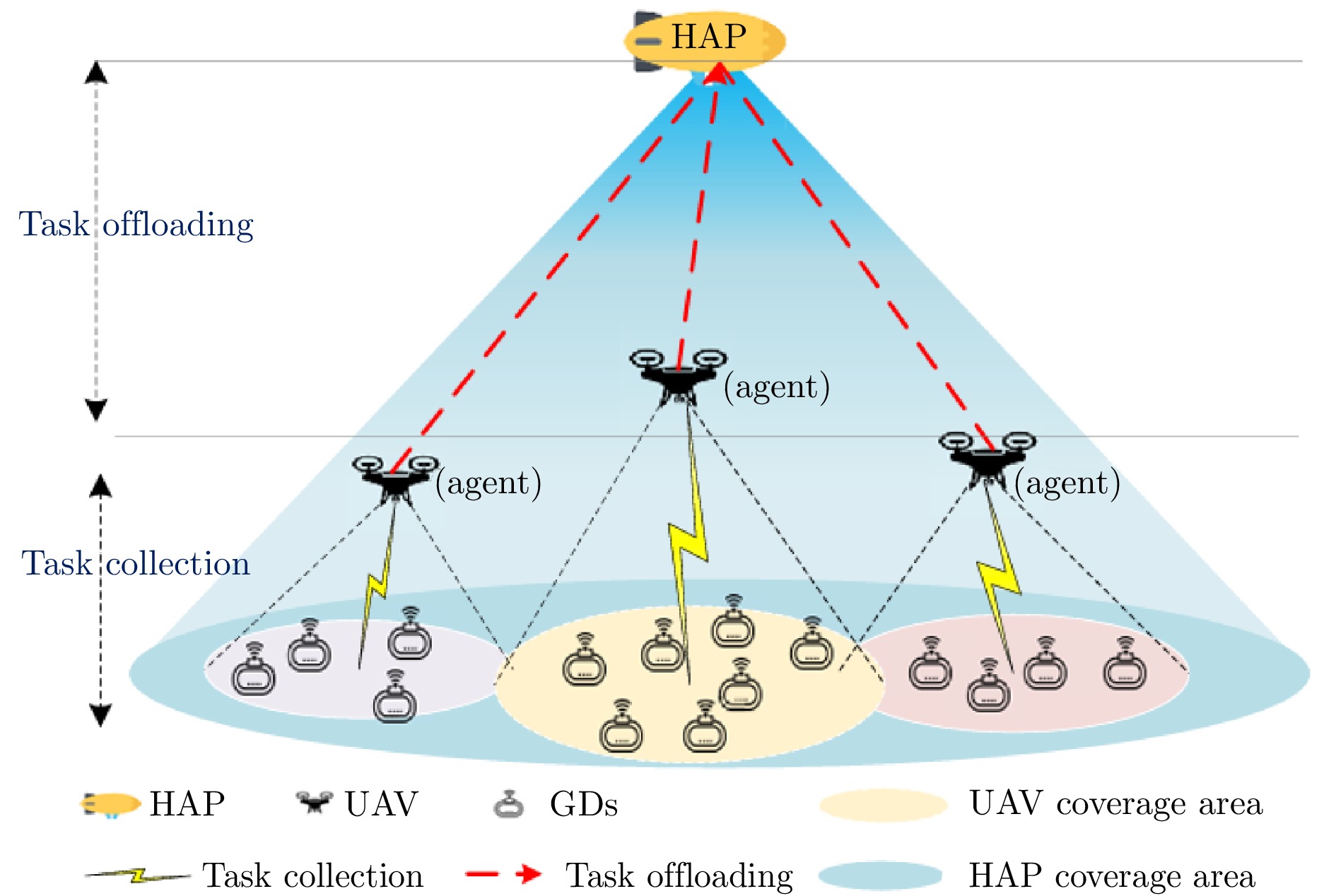
图 1 临时应急空天通信示意图
Fig. 1 Schematic diagram of temporary emergency space-air communication
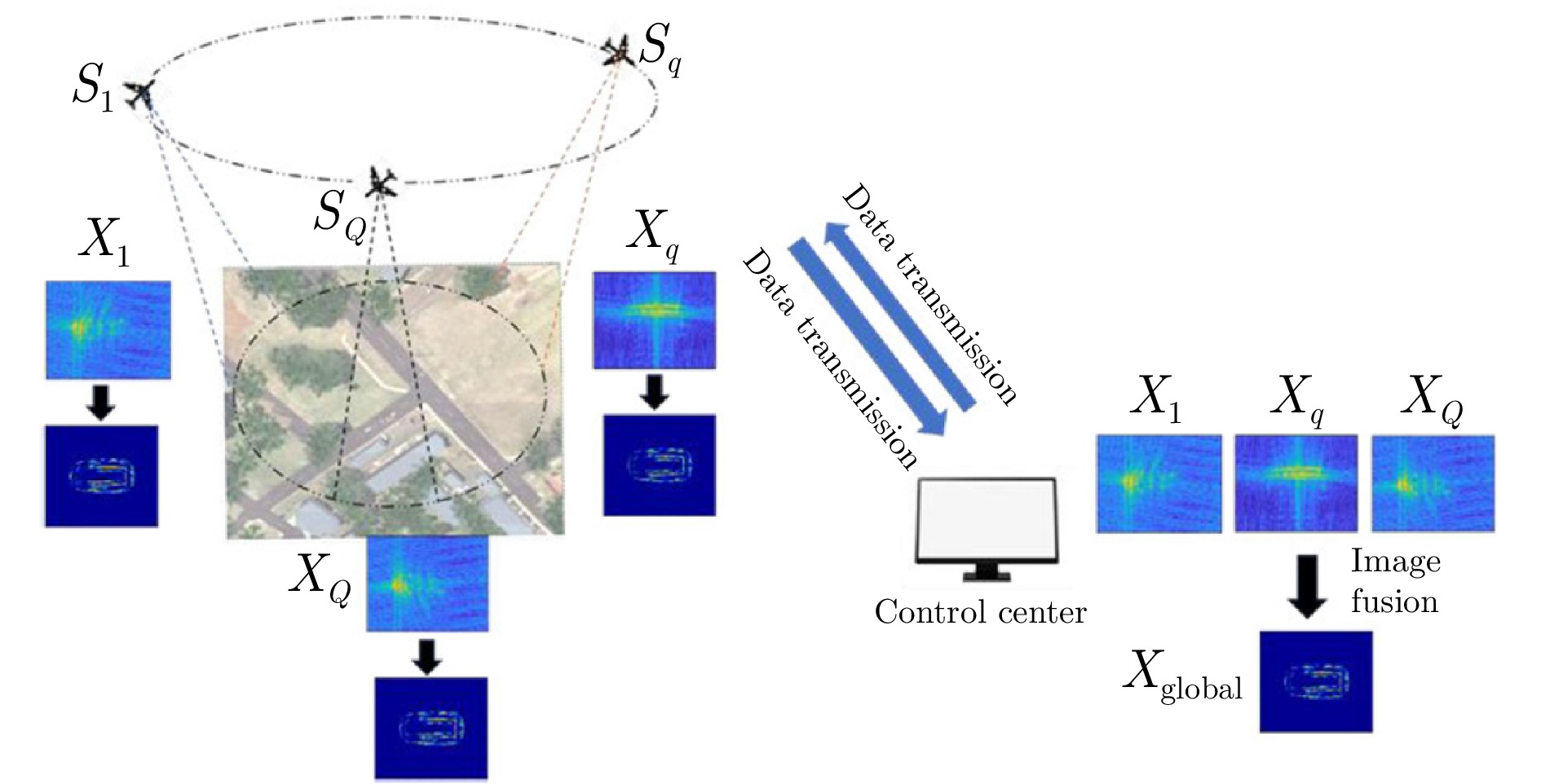
图 2 无人机群SAR多角度观测感知成像过程示意图
Fig. 2 Schematic diagram of multi-angle observation, perception and imaging process of unmanned aerial vehicle swarm SAR
图 3 基于概率视距(line of sight, LoS)信道的无人机辅助多地面终端操作框架示意图
Fig. 3 Schematic diagram of the unmanned aerial vehicle-assisted multi-ground terminal operation framework based on probabilistic line-of-sight (LoS) channels
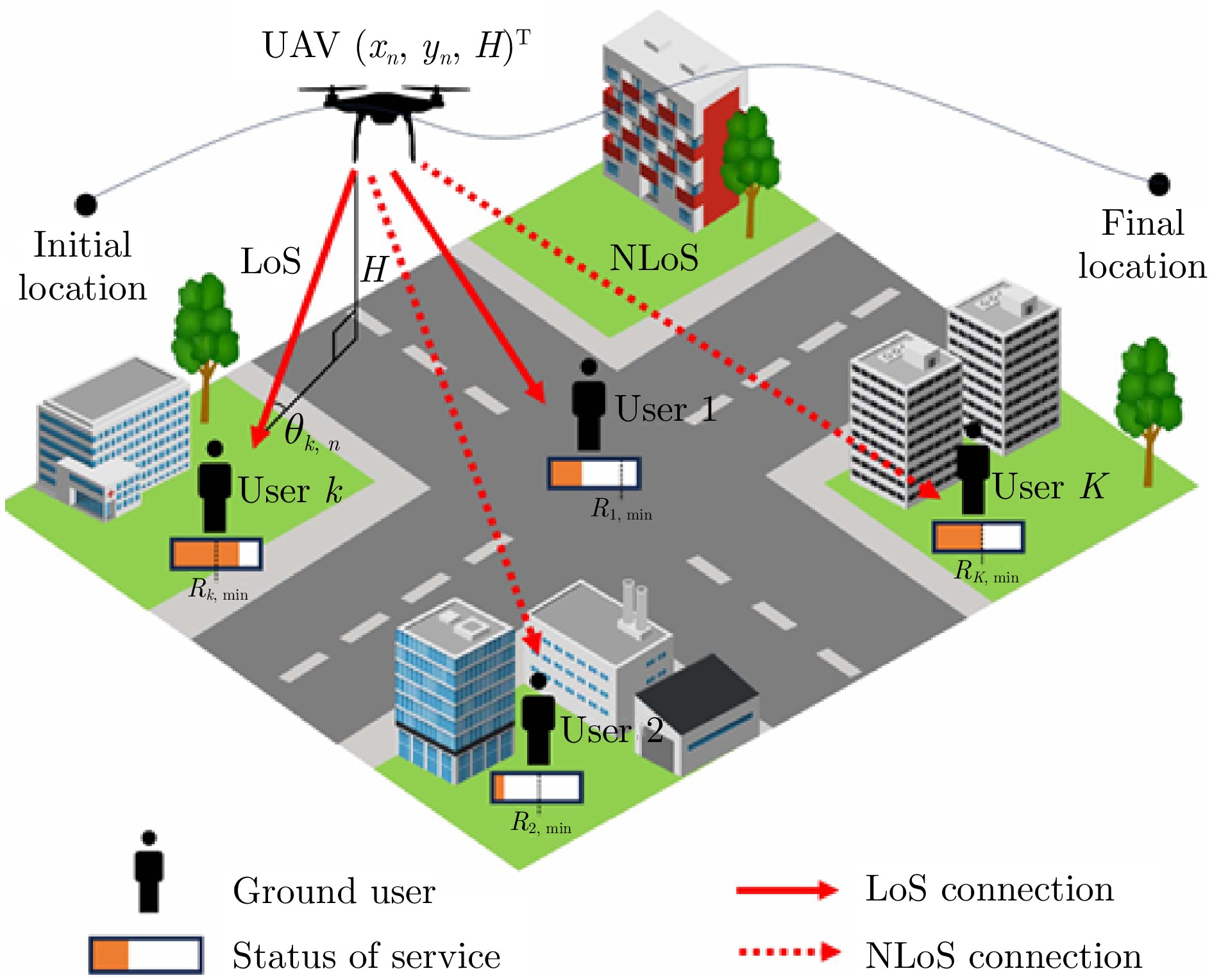
图 4 无人机辅助无线网络中下行数据传输示意图
Fig. 4 Schematic diagram of downlink data transmission in unmanned aerial vehicle-assisted wireless networks
-
[1] 段海滨, 梅宇, 牛轶峰, 李彬, 刘冀川, 王寅, 等. 2024年无人机热点回眸. 科技导报, 2025, 43(1): 143−156 doi: 10.3981/j.issn.1000-7857.2025.01.00010Duan Hai-Bin, Mei Yu, Niu Yi-Feng, Li Bin, Liu Ji-Chuan, Wang Yin, et al. Review of technological hotspots of unmanned aerial vehicle in 2024. Science & Technology Review, 2025, 43(1): 143−156 doi: 10.3981/j.issn.1000-7857.2025.01.00010 [2] 张新钰, 卢毅果, 高鑫, 黄雨宁, 刘华平, 王云鹏, 等. 面向智能网联汽车的车路协同感知技术及发展趋势. 自动化学报, 2025, 51(2): 233−248Zhang Xin-Yu, Lu Yi-Guo, Gao Xin, Huang Yu-Ning, Liu Hua-Ping, Wang Yun-Peng, et al. Vehicle-road collaborative perception technology and development trend for intelligent connected vehicles. Acta Automatica Sinica, 2025, 51(2): 233−248 [3] 袁洋, 段海滨, 魏晨. 无人机/无人艇异构协同固定时间预设性能演化控制. 自动化学报, 2025, 51(5): 1052−1066 doi: 10.16383/j.aas.c240141Yuan Yang, Duan Hai-Bin, Wei Chen. Heterogeneous cooperative fixed-time prescribed performance evolution control for unmanned aerial/surface vehicle. Acta Automatica Sinica, 2025, 51(5): 1052−1066 doi: 10.16383/j.aas.c240141 [4] 吕茂隆, 丁晨博, 韩浩然, 段海滨. 基于深度强化学习的无人机自主感知−规划−控制策略. 自动化学报, 2025, 51(6): 1305−1319Lv Mao-Long, Ding Chen-Bo, Han Hao-Ran, Duan Hai-Bin. Autonomous perception-planning-control strategy based on deep reinforcement learning for unmanned aerial vehicles. Acta Automatica Sinica, 2025, 51(6): 1305−1319 [5] Xin Z C, Liu Y, Xing J P, Huang J, Bian J, Zhang Y. A novel multimodal fusion sensing-based channel prediction method for UAV communications. IEEE Internet of Things Journal, 2025, 12(4): 3948−3960 doi: 10.1109/JIOT.2024.3482410 [6] Sun S P, Qin Z Q, Li P, Yang H J. Cooperative control for an air-water-ground system with an UAV, an USV and an UGV. In: Proceedings of the 8th CAA International Conference on Vehicular Control and Intelligence (CVCI). Chongqing, China: IEEE, 2024. 1−6 [7] Oubbati S O, Alotaibi J, Alromithy F, Atiquzzaman M, Altimania R M. A UAV-UGV cooperative system: Patrolling and energy management for urban monitoring. IEEE Transactions on Vehicular Technology, 2025, 74(9): 13521−13536 doi: 10.1109/TVT.2025.3563971 [8] Ke C, Chen H F, Xie L. Cooperative formation control for the air-sea heterogeneous unmanned system under adaptive switching topology. International Journal of Robust and Nonlinear Control, 2025, 35(13): 5402−5419 doi: 10.1002/rnc.7989 [9] Yang K, Liang X, Chen C, Yu C D, Liu D Y, Li W. Defense penetration strategy for inferior USV based on reach-avoid game under complex target region. Nonlinear Dynamics, 2025, 113(12): 15155−15169 doi: 10.1007/s11071-025-10932-8 [10] Yuan Y, Duan H B, Zeng Z G. Prescribed performance evolution control for quadrotor autonomous shipboard landing. IEEE/CAA Journal of Automatica Sinica, 2024, 11(5): 1151−1162 doi: 10.1109/JAS.2024.124254 [11] 段海滨, 梅宇, 赵彦杰, 霍梦真, 牛轶峰, 王寅, 等. 2023年无人机热点回眸. 科技导报, 2024, 42(1): 217−231 doi: 10.3981/j.issn.1000-7857.2024.01.014Duan Hai-Bin, Mei Yu, Zhao Yan-Jie, Huo Meng-Zhen, Niu Yi-Feng, Wang Yin, et al. Review of technological hotspots of unmanned aerial vehicle in 2023. Science & Technology Review, 2024, 42(1): 217−231 doi: 10.3981/j.issn.1000-7857.2024.01.014 [12] Li Y H, Su H S. ConvMS: Improving convolutional knowledge graph embeddings via integrating information of multiple subspaces. Guidance, Navigation and Control, 2023, 3(1): Article No. 2350001 doi: 10.1142/S2737480723500012 [13] Shen Y H, Chen M, Zheng Z X, Guo H Z. Event-triggered-backstepping-based parallel approaching guidance method for maneuvering target interception. Guidance, Navigation and Control, 2022, 2(1): Article No. 2250005 doi: 10.1142/S2737480722500054 [14] Liang J, Chang Y X, Bi Y, Yue C T, Qu B Y, Liu M N. A new road extraction method from satellite images using genetic programming. Guidance, Navigation and Control, 2024, 4(2): Article No. 2450009 doi: 10.1142/S2737480724500092 [15] Kang H Y, Chang X L, Mišić J, Mišić V B, Fan J C, Liu Y T. Cooperative UAV resource allocation and task offloading in hierarchical aerial computing systems: A MAPPO-based approach. IEEE Internet of Things Journal, 2023, 10(12): 10497−10509 doi: 10.1109/JIOT.2023.3240173 [16] Cong K R, Ma D L, Zhang L, Xia X L, Cheng Y C, Guan H. Longitudinal dynamic envelope solution and transition path optimization based on reachability analysis for fixed-wing VTOL UAVs. Aerospace Science and Technology, 2024, 151: Article No. 109267 doi: 10.1016/j.ast.2024.109267 [17] Yang W L. Distributed robust adaptive practical finite-time formation tracking control of fixed-wing UAVs. Aerospace Science and Technology, 2025, 166: Article No. 110552 doi: 10.1016/j.ast.2025.110552 [18] Tian M M, Wang N, Wang Z K, Fu Z M, Tao F Z. Prescribed-time fault-tolerant tracking control for quadrotor UAV with guaranteed performance. Aerospace Science and Technology, 2025, 161: Article No. 110162 doi: 10.1016/j.ast.2025.110162 [19] Zhong L, Liu Y Y, Deng X J, Wu C, Liu S H, Yang L T. Distributed optimization of multi-role UAV functionality switching and trajectory for security task offloading in UAV-assisted MEC. IEEE Transactions on Vehicular Technology, 2024, 73(12): 19432−19447 doi: 10.1109/TVT.2024.3434354 [20] He Y J, Gan Y H, Cui H X, Guizani M. Fairness-based 3-D multi-UAV trajectory optimization in multi-UAV-assisted MEC system. IEEE Internet of Things Journal, 2023, 10(13): 11383−11395 doi: 10.1109/JIOT.2023.3241087 [21] El-Malek A H A, Aboulhassan M A, Salhab A M, Zummo S A. Performance analysis and optimization of UAV-assisted networks: Single UAV with multiple antennas versus multiple UAVs with single antenna. IEEE Systems Journal, 2023, 17(3): 3468−3479 doi: 10.1109/JSYST.2023.3279335 [22] Bian Y, Hu J B, Zhang P, Wang S, Wang Y Y, Cong J P, et al. Joint trajectory control, power control, and collection schedule in UAV-assisted anti-jamming wireless data collection with imperfect CSI. IEEE Communications Letters, 2024, 28(12): 2839−2843 doi: 10.1109/LCOMM.2024.3488178 [23] Dou Y H, Lian Z X, Wang Y J, Zhang B B, Luo H, Zu C J. Channel modeling and performance analysis of UAV-enabled communications with UAV wobble. IEEE Communications Letters, 2024, 28(12): 2749−2753 doi: 10.1109/LCOMM.2024.3480130 [24] Wei Y K, Lu Y X, Zhao P C, Leng S P, Yang K. Minimizing age of information in UAV-assisted data collection with limited charging facilities. IEEE Wireless Communications Letters, 2024, 13(5): 1463−1467 doi: 10.1109/LWC.2024.3374959 [25] Li S, Jin J, Afrin M, Ge X, Fu J, Tian Y C. Mobility-as-a-resilience-service in internet of robotic things through robust multi-agent deep reinforcement learning. IEEE Internet of Things Journal, 12(23): 49009−49021 [26] Lee Y, Park J, Jung S, Jeon B, Oh D, Kim H J. QP chaser: Polynomial trajectory generation for autonomous aerial tracking. IEEE Transactions on Automation Science and Engineering, 2024, 22: 24177−24194 [27] Mei Z W, Shao X L, Xia Y, Liu J. Enhanced fixed-time collision-free elliptical circumnavigation coordination for UAVs. IEEE Transactions on Aerospace and Electronic Systems, 2024, 60(4): 4257−4270 doi: 10.1109/TAES.2024.3374708 [28] Huang S, Shi J P, Zhu Q, Du Z H, Lv Y, Liu Z G. Multiple UAVs cooperatively circumnavigating a group of non-cooperative targets in a GPS-free environment via a range-only distributed controller. Aerospace Science and Technology, 2025, 158: Article No. 109924 doi: 10.1016/j.ast.2024.109924 [29] Song J R, Tao G, Zang Z, Dong H T, Wang B Y, Gong J W. Isolating trajectory tracking from motion control: A model predictive control and robust control framework for unmanned ground vehicles. IEEE Robotics and Automation Letters, 2023, 8(3): 1699−1706 doi: 10.1109/LRA.2023.3242151 [30] Deng Y X, Wang Y J, Wang H Y, Zuo Z Q. Model predictive lateral control for unmanned ground vehicles with speed coupling: A terminal constraint-free approach. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2024, 54(2): 925−935 doi: 10.1109/TSMC.2023.3320808 [31] Khan S, Guivant J, Li Y H, Liu W C, Li X S. Hybrid model predictive control for unmanned ground vehicles. IEEE Transactions on Intelligent Vehicles, 2024, 9(1): 1537−1546 doi: 10.1109/TIV.2023.3307737 [32] Dong H T, Xi J Q. Model predictive longitudinal motion control for the unmanned ground vehicle with a trajectory tracking model. IEEE Transactions on Vehicular Technology, 2022, 71(2): 1397−1410 doi: 10.1109/TVT.2021.3131314 [33] Wang H Y, Zuo Z Q, Xue W C, Wang Y J, Yang H J. Switching longitudinal and lateral semi-decoupled active disturbance rejection control for unmanned ground vehicles. IEEE Transactions on Industrial Electronics, 2024, 71(3): 3034−3043 doi: 10.1109/TIE.2023.3265048 [34] Li P, Yang H J, Zuo Z Q, Cheng F Y. Dual closed-loop finite-time control for lateral trajectory tracking of unmanned ground vehicles under velocity-varying motion. IEEE Transactions on Intelligent Vehicles, 2024, 9(10): 6137−6147 doi: 10.1109/TIV.2024.3363047 [35] Hu Z Q, Yuan J, Gao Y X, Wang B R, Zhang X B. NALO-VOM: Navigation-oriented LiDAR-guided monocular visual odometry and mapping for unmanned ground vehicles. IEEE Transactions on Intelligent Vehicles, 2024, 9(1): 2612−2623 doi: 10.1109/TIV.2023.3303355 [36] Wu Y Q, Li Y Z, Li W H, Li H Y, Lu R Q. Robust lidar-based localization scheme for unmanned ground vehicle via multisensor fusion. IEEE Transactions on Neural Networks and Learning Systems, 2021, 32(12): 5633−5643 doi: 10.1109/TNNLS.2020.3027983 [37] Santoso F, Finn A. A data-driven cyber-physical system using deep-learning convolutional neural networks: Study on false-data injection attacks in an unmanned ground vehicle under fault-tolerant conditions. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023, 53(1): 346−356 doi: 10.1109/TSMC.2022.3170071 [38] Han Z X, Chen P, Zhou B, Yu G Z. Real-time navigation of unmanned ground vehicles in complex terrains with enhanced perception and memory-guided strategies. IEEE Transactions on Vehicular Technology, 2025, 74(3): 3723−3735 doi: 10.1109/TVT.2024.3500002 [39] Zhou X B, Yu X, Zhang Y M, Luo Y Y, Peng X Y. Trajectory planning and tracking strategy applied to an unmanned ground vehicle in the presence of obstacles. IEEE Transactions on Automation Science and Engineering, 2021, 18(4): 1575−1589 doi: 10.1109/TASE.2020.3010887 [40] Wang T, Huang P F, Dong G Q. Modeling and path planning for persistent surveillance by unmanned ground vehicle. IEEE Transactions on Automation Science and Engineering, 2021, 18(4): 1615−1625 doi: 10.1109/TASE.2020.3013288 [41] Khan S, Guivant J. Design and implementation of proximal planning and control of an unmanned ground vehicle to operate in dynamic environments. IEEE Transactions on Intelligent Vehicles, 2023, 8(2): 1787−1799 doi: 10.1109/TIV.2022.3210000 [42] Tang H, Chen Y. Dynamic event-triggered distributed MPC for heterogeneous UAVs-UGVs against DoS attacks. IEEE Transactions on Aerospace and Electronic Systems, 2024, 60(6): 7931−7944 doi: 10.1109/TAES.2024.3422158 [43] Li Y Y, Li Y X. Resilient distributed fixed-time tracking of heterogeneous UAVs-UGVs systems against DoS attacks. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2024, 54(9): 5780−5790 doi: 10.1109/TSMC.2024.3408410 [44] Memon S A, Kim W G, Khan S U, Memon T D, Alsaleem F N, Alhassoon K, et al. Tracking multiple autonomous ground vehicles using motion capture system operating in a wireless network. IEEE Access, 2024, 12: 61780−61794 doi: 10.1109/ACCESS.2024.3394536 [45] Liang H J, Yang S F, Li T S, Zhang H G. Distributed adaptive cooperative control for human-in-the-loop heterogeneous UAV-UGV systems with prescribed performance. IEEE Transactions on Intelligent Vehicles, 2024, 9(11): 6912−6925 doi: 10.1109/TIV.2024.3391176 [46] Li F J, Wang C S, Mikulski D, Wagner J R, Wang Y. Unmanned ground vehicle platooning under cyber attacks: A human-robot interaction framework. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(10): 18113−18128 doi: 10.1109/TITS.2022.3150745 [47] Jiang C, Hu Z, Mourelatos Z P, Gorsich D, Jayakumar P, Fu Y, et al. R2-RRT*: Reliability-based robust mission planning of off-road autonomous ground vehicle under uncertain terrain environment. IEEE Transactions on Automation Science and Engineering, 2022, 19(2): 1030−1046 doi: 10.1109/TASE.2021.3050762 [48] Wang R C, Wang K, Song W J, Fu M Y. Aerial-ground collaborative continuous risk mapping for autonomous driving of unmanned ground vehicle in off-road environments. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(6): 9026−9041 doi: 10.1109/TAES.2023.3312627 [49] Ren Y S, Xie X P, Nguyen A T. Security control of autonomous ground vehicles under DoS attacks via a novel controller with the switching mechanism. IEEE Transactions on Fuzzy Systems, 2024, 32(6): 3669−3681 doi: 10.1109/TFUZZ.2024.3381264 [50] Yu H L, Meier K, Argyle M, Beard R W. Cooperative path planning for target tracking in urban environments using unmanned air and ground vehicles. IEEE/ASME Transactions on Mechatronics, 2015, 20(2): 541−552 doi: 10.1109/TMECH.2014.2301459 [51] Li Y, Dong J X. Fault detection unknown input observer for local nonlinear fuzzy autonomous ground vehicles system based on a joint peak-to-peak analysis and zonotopic analysis threshold. IEEE Transactions on Vehicular Technology, 2025, 74(5): 7226−7236 doi: 10.1109/TVT.2025.3526169 [52] Savkin A V, Huang C. Joint communication and safe 3D path optimization for multi-UAV assisted mobile internet of vehicles on an uneven terrain. IEEE Transactions on Automation Science and Engineering, 2025, 22: 17464−17473 doi: 10.1109/TASE.2024.3373007 [53] Niu G C, Yang Q K, Gao Y F, Pun M O. Vision-based autonomous landing for unmanned aerial and ground vehicles cooperative systems. IEEE Robotics and Automation Letters, 2022, 7(3): 6234−6241 doi: 10.1109/LRA.2021.3101882 [54] Yang B Q, Dong X, Li H Z, Zhang J H, Xiang J W, Li D C, et al. An ultralight air-ground vehicle capable of sustained amphibious maneuverability and bio-inspired modality transition. IEEE Robotics and Automation Letters, 2024, 9(11): 9351−9358 doi: 10.1109/LRA.2024.3460425 [55] Huang H, Wen X L, Niu M B, Miah S, Gao T, Wang H F. Multi-UAVs assisted path planning method for terrain-oriented air-ground collaborative vehicular network architecture. IEEE Transactions on Intelligent Vehicles, 2024, 9(12): 7840−7851 doi: 10.1109/TIV.2024.3402434 [56] Meng Y Z, Liu C, Zhao J, Huang J, Jing G B. Stackelberg game-based anti-disturbance control for unmanned surface vessels via integrative reinforcement learning. Intelligence & Robotics, 2025, 5(1): 88−104 doi: 10.20517/ir.2025.06 [57] Meng X F, Zhang G C, Han B, Liu Y J, Chen M W, Lu R. Finite-time output feedback control of unmanned marine surface vessels with rotatable thrusters and propellers under deception attacks in an IoT environment. Ocean Engineering, 2025, 340: Article No. 122225 doi: 10.1016/j.oceaneng.2025.122225 [58] Liu X, Yan H C, Zhou W X, Wang N, Wang Y Y. Event-triggered optimal tracking control for underactuated surface vessels via neural reinforcement learning. IEEE Transactions on Industrial Informatics, 2024, 20(11): 12837−12847 doi: 10.1109/TII.2024.3424573 [59] Yu Y L, Guo C, Yu H M. Finite-time PLOS-based integral sliding-mode adaptive neural path following for unmanned surface vessels with unknown dynamics and disturbances. IEEE Transactions on Automation Science and Engineering, 2019, 16(4): 1500−1511 doi: 10.1109/TASE.2019.2925657 [60] Jiang L C, Wang C R, Shang X B, Zhang Z. Two-step event-triggered data driven model predictive control for trajectory tracking of unmanned surface vessel under environmental disturbances. IEEE Transactions on Automation Science and Engineering, 2025, 22: 16801−16813 doi: 10.1109/TASE.2025.3579396 [61] Zhao M Z, Li H P. Distributed model predictive contouring control of unmanned surface vessels. IEEE Transactions on Industrial Electronics, 2024, 71(10): 13012−13019 doi: 10.1109/iecon58223.2025.11221255 [62] Du X, Yuan X, Yang B, Zhao X D. Event-triggered trajectory tracking control for unmanned surface vessels with prescribed performance using barrier Lyapunov functions. IEEE Transactions on Fuzzy Systems, 2025, 33(5): 1466−1474 doi: 10.1109/TFUZZ.2025.3525701 [63] Zhang J, Cui Y N, Fan X Z, Ren J. Asynchronous multithreading reinforcement control decision method for unmanned surface vessel. IEEE Internet of Things Journal, 2023, 10(24): 22806−22822 doi: 10.1109/JIOT.2023.3305387 [64] Park H, Lee H, Jeon J, Lee D, Paik K, Kim S. The research on swarm control algorithm of multiple unmanned vessels for formation control and collision avoidance. Journal of the Society of Naval Architects of Korea, 2025, 62(2): 96−106 [65] Liu B, Chen Z Y, Zhang H T, Wang X D, Geng T, Su H S, et al. Collective dynamics and control for multiple unmanned surface vessels. IEEE Transactions on Control Systems Technology, 2020, 28(6): 2540−2547 doi: 10.1109/TCST.2019.2931524 [66] Tang C C, Zhang H T, Wang J. Flexible formation tracking control of multiple unmanned surface vessels for navigating through narrow channels with unknown curvatures. IEEE Transactions on Industrial Electronics, 2023, 70(3): 2927−2938 doi: 10.1109/TIE.2022.3169825 [67] Liu B, Zhang H T, Meng H F, Fu D F, Su H S. Scanning-chain formation control for multiple unmanned surface vessels to pass through water channels. IEEE Transactions on Cybernetics, 2022, 52(3): 1850−1861 doi: 10.1109/TCYB.2020.2997833 [68] Zhou B, Huang B, Su Y M, Zhu C. Interleaved periodic event-triggered communications-based distributed formation control for cooperative unmanned surface vessels. IEEE Transactions on Neural Networks and Learning Systems, 2025, 36(2): 2382−2394 doi: 10.1109/TNNLS.2024.3351218 [69] Jiang X L, Xia G H, Feng Z G, Wu Z G. Nonfragile formation seeking of unmanned surface vehicles: A sliding mode control approach. IEEE Transactions on Network Science and Engineering, 2022, 9(2): 431−444 doi: 10.1109/TNSE.2021.3120552 [70] Hu B B, Zhang H T, Liu B, Meng H F, Chen G R. Distributed surrounding control of multiple unmanned surface vessels with varying interconnection topologies. IEEE Transactions on Control Systems Technology, 2022, 30(1): 400−407 doi: 10.1109/TCST.2021.3057640 [71] Zhang R B, Tang P P, Su Y M, Li X Y, Yang G, Shi C T. An adaptive obstacle avoidance algorithm for unmanned surface vehicle in complicated marine environments. IEEE/CAA Journal of Automatica Sinica, 2014, 1(4): 385−396 doi: 10.1109/jas.2014.7004666 [72] Guo X X, Cui R X, Yan W S. Pursuit-evasion games of marine surface vessels using neural network-based control. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2025, 55(1): 18−27 doi: 10.1109/TSMC.2023.3347044 [73] Yang X F, Wang Q, Hu J B, Xu B, Ding S H, Xiang Z R, et al. Fixed-time generalized super-twisting controller for the trajectory tracking of unmanned surface vehicles in autonomous berthing. IEEE Transactions on Industrial Electronics, 2025, 72(5): 5300−5311 doi: 10.1109/TIE.2024.3468648 [74] Hu B B, Zhang H T. Bearing-only motional target-surrounding control for multiple unmanned surface vessels. IEEE Transactions on Industrial Electronics, 2022, 69(4): 3988−3997 doi: 10.1109/TIE.2021.3076719 [75] Fang X, Zhou J L, Wen G H. Location game of multiple unmanned surface vessels with quantized communications. IEEE Transactions on Circuits and Systems II: Express Briefs, 2022, 69(3): 1322−1326 doi: 10.1109/tcsii.2021.3111733 [76] Li J W, Jiang X, Zhang H, Wu L T, Cao L, Li R H. Multi-joint adaptive control enhanced reinforcement learning for unmanned ship. Ocean Engineering, 2025, 318: Article No. 120121 doi: 10.1016/j.oceaneng.2024.120121 [77] Lu R Z, Wang X T, Ding Y Y, Zhang H T, Zhao F, Zhu L J, et al. Adaptive optimal surrounding control of multiple unmanned surface vessels via actor-critic reinforcement learning. IEEE Transactions on Neural Networks and Learning Systems, 2025, 36(7): 12173−12186 doi: 10.1109/TNNLS.2024.3474289 [78] Duan H B, Yuan Y, Zeng Z G. Distributed robust learning control for multiple unmanned surface vessels with fixed-time prescribed performance. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2024, 54(2): 787−799 doi: 10.1109/TSMC.2023.3321119 [79] Zhang C, Cao C Y, Guo C, Li T S, Guo M Z. Navigation multisensor fault diagnosis approach for an unmanned surface vessel adopted particle-filter method. IEEE Sensors Journal, 2021, 21(23): 27093−27105 doi: 10.1109/JSEN.2021.3122437 [80] Gu N, Wang D, Peng Z H, Li T S, Tong S C. Model-free containment control of underactuated surface vessels under switching topologies based on guiding vector fields and data-driven neural predictors. IEEE Transactions on Cybernetics, 2022, 52(10): 10843−10854 doi: 10.1109/TCYB.2021.3061588 [81] Hu B B, Zhang H T, Liu B, Ding J N, Xu Y F, Luo C S, et al. Coordinated navigation control of cross-domain unmanned systems via guiding vector fields. IEEE Transactions on Control Systems Technology, 2024, 32(2): 550−563 doi: 10.1109/TCST.2023.3323766 [82] Wu Y, Low K H, Lv C. Cooperative path planning for heterogeneous unmanned vehicles in a search-and-track mission aiming at an underwater target. IEEE Transactions on Vehicular Technology, 2020, 69(6): 6782−6787 doi: 10.1109/TVT.2020.2991983 [83] Yan J, Lin J S, Yang X, Chen C L, Guan X P. Cooperation detection and tracking of underwater target via aerial-surface-underwater vehicles. IEEE Transactions on Automatic Control, 2025, 70(2): 1068−1083 doi: 10.1109/TAC.2024.3447976 [84] Shen H, Wen G H, Lv Y Z. Collaborative parameter estimation of multiple unmanned surface vessels: A robust distributed estimator-based approach. IEEE Transactions on Industrial Informatics, 2024, 20(2): 1294−1303 doi: 10.1109/TII.2023.3275658 [85] Huang B, Ren X Q, Zhou B, Zhang Z, Zhou X T, Miao J M. An intermittent anti-competition communication mechanism-based formation maneuvers for internet of unmanned surface vehicles. IEEE Internet of Things Journal, 2025, 12(3): 3234−3247 doi: 10.1109/JIOT.2024.3478784 [86] Liu Z Q, Wang Y L, Han Q L, Yang Y P. Network-based multiple operating points cooperative dynamic positioning of unmanned surface vehicles. IEEE/ASME Transactions on Mechatronics, 2022, 27(6): 5736−5747 doi: 10.1109/TMECH.2022.3188834 [87] Young S H, Mazzuchi T A, Sarkani S. A framework for predicting future system performance in autonomous unmanned ground vehicles. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017, 47(7): 1192−1206 doi: 10.1109/TSMC.2016.2563403 [88] Xu Z S, Han T, Zhou W J, He S M, Xiang J. Trajectory tracking control for differential-driven unmanned surface vessels considering propeller servo loop. IEEE Transactions on Industrial Informatics, 2024, 20(3): 3847−3856 doi: 10.1109/TII.2023.3316256 [89] Li W, Ma Y H, Zhang Y H, Li B X, Shi Y P, Chu L N. A multiangle observation and imaging method for UAV swarm SAR based on consensus constraints. IEEE Sensors Journal, 2025, 25(11): 19776−19793 doi: 10.1109/JSEN.2025.3558894 [90] Sankararao A U G, Rajalakshmi P, Choudhary S. Machine learning-based ensemble band selection for early water stress identification in groundnut canopy using UAV-based hyperspectral imaging. IEEE Geoscience and Remote Sensing Letters, 2023, 20: Article No. 5505805 doi: 10.1109/lgrs.2023.3284675 [91] Zhang J D, Shi Z Y, Zhang A L, Yang Q M, Shi G Q, Wu Y. UAV trajectory prediction based on flight state recognition. IEEE Transactions on Aerospace and Electronic Systems, 2024, 60(3): 2629−2641 doi: 10.1109/TAES.2023.3303854 [92] Luo L B, Wang X Y, Ma J F, Ong Y S. GrpAvoid: Multigroup collision-avoidance control and optimization for UAV swarm. IEEE Transactions on Cybernetics, 2023, 53(3): 1776−1789 doi: 10.1109/TCYB.2021.3132044 [93] Chen J C, Du C L, Lu X, Chen K K. Multi-region coverage path planning for heterogeneous unmanned aerial vehicles systems. In: Proceedings of the IEEE International Conference on Service-Oriented System Engineering (SOSE). San Francisco, USA: IEEE, 2019. 356−361 [94] Zhu L H, Wang Y, Wu Z Q. An adaptive priority allocation for formation UAVs in complex context. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(2): 1002−1015 doi: 10.1109/TAES.2020.3034016 [95] Chen L, Liang H J, Pan Y N, Li T S. Human-in-the-loop consensus tracking control for UAV systems via an improved prescribed performance approach. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(6): 8380−8391 doi: 10.1109/TAES.2023.3304283 [96] Xia W, Zhou Z Y, Jiang W Y, Zhang Y H. Dynamic UAV swarm confrontation: An imitation based on mobile adaptive networks. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(5): 7183−7202 doi: 10.1109/TAES.2023.3288077 [97] Hadi H J, Cao Y, Khan M K, Ahmad N, Hu Y L, Fu C. UAV-NIDD: A dynamic dataset for cybersecurity and intrusion detection in UAV networks. IEEE Transactions on Network Science and Engineering, 2025, 12(4): 2739−2757 doi: 10.1109/TNSE.2025.3553442 [98] Gao Y F, Yuan X P, Yang D C, Hu Y L, Cao Y, Schmeink A. UAV-assisted MEC system with mobile ground terminals: DRL-based joint terminal scheduling and UAV 3D trajectory design. IEEE Transactions on Vehicular Technology, 2024, 73(7): 10164−10180 doi: 10.1109/TVT.2024.3367624 [99] Chu N H, Hoang D T, Nguyen D N, van Huynh N, Dutkiewicz E. Joint speed control and energy replenishment optimization for UAV-assisted IoT data collection with deep reinforcement transfer learning. IEEE Internet of Things Journal, 2023, 10(7): 5778−5793 doi: 10.1109/JIOT.2022.3151201 [100] Savkin A V, Huang C, Ni Q. Joint multi-UAV path planning and LoS communication for mobile-edge computing in IoT networks with RISs. IEEE Internet of Things Journal, 2023, 10(3): 2720−2727 doi: 10.1109/JIOT.2022.3215255 [101] Zhang H G, Tao Y X, Lv X S, Liu Y N. Leader-follower UAV-assisted WSNs for improving data collection rate and shortening flight time. IEEE Sensors Journal, 2023, 23(21): 26597−26607 doi: 10.1109/JSEN.2023.3312733 [102] Nelson W A, Yeduri S R, Jha A, Kumar A, Cenkeramaddi L R. RL-based energy-efficient data transmission over hybrid BLE/LTE/Wi-Fi/LoRa UAV-assisted wireless network. IEEE/ACM Transactions on Networking, 2024, 32(3): 1951−1966 doi: 10.1109/TNET.2023.3332296 [103] Li Q, Shi L Q, Zhang Z J, Zheng G. Resource allocation in UAV-enabled wireless-powered MEC networks with hybrid passive and active communications. IEEE Internet of Things Journal, 2023, 10(3): 2574−2588 doi: 10.1109/JIOT.2022.3214539 [104] Liu C J, Zhong Y L, Wu R L, Ren S Y, Du S, Guo B. Deep reinforcement learning based 3D-trajectory design and task offloading in UAV-enabled MEC system. IEEE Transactions on Vehicular Technology, 2025, 74(2): 3185−3195 doi: 10.1109/TVT.2024.3469977 [105] Zhao B C, Huo M Y, Li Z, Yu Z, Qi N M. Graph-based multi-agent reinforcement learning for large-scale UAVs swarm system control. Aerospace Science and Technology, 2024, 150: Article No. 109166 doi: 10.1016/j.ast.2024.109166 [106] Zhang T X, Wang Y H, Ma Z J, Kong L J. Task assignment in UAV-enabled front jammer swarm: A coalition formation game approach. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(6): 9562−9575 doi: 10.1109/TAES.2023.3323441 [107] Yu H, Yang H C. Causal CSI-based trajectory design and power allocation for UAV-enabled wireless networks under average rate constraints: A constrained reinforcement learning approach. IEEE Transactions on Aerospace and Electronic Systems, 2025, 61(1): 554−567 doi: 10.1109/TAES.2024.3447636 [108] Wu Y, Liang T J, Gou J Z, Tao C G, Wang H F. Heterogeneous mission planning for multiple UAV formations via metaheuristic algorithms. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(4): 3924−3940 doi: 10.1109/TAES.2023.3234455 [109] Duan H B, Zhao J X, Deng Y M, Shi Y H, Ding X L. Dynamic discrete pigeon-inspired optimization for multi-UAV cooperative search-attack mission planning. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(1): 706−720 doi: 10.1109/TAES.2020.3029624 [110] Roberge V, Tarbouchi M, Labonté G. Fast genetic algorithm path planner for fixed-wing military UAV using GPU. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(5): 2105−2117 [111] Wu N, Huang Z Y, Guo J K. Design and implementation of a multi-drone cooperative airspace management system. In: Proceedings of the 3rd International Conference on Smart City Challenges & Outcomes for Urban Transformation (SCOUT). Bhubaneswar, India: IEEE, 2024. 37−41 [112] Gao A, Wang Q Y, Hu Y S, Liang W, Zhang J K. Dynamic role switching scheme with joint trajectory and power control for multi-UAV cooperative secure communication. IEEE Transactions on Wireless Communications, 2024, 23(2): 1260−1275 doi: 10.1109/TWC.2023.3287849 [113] Qamar R A, Sarfraz M, Rahman A, Ghauri S A. Multi-criterion multi-UAV task allocation under dynamic conditions. Journal of King Saud University-Computer and Information Sciences, 2023, 35(9): Article No. 101734 doi: 10.1016/j.jksuci.2023.101734 [114] Wu X L, Yin Y N, Xu L, Wu X J, Meng F H, Zhen R. Multi-UAV task allocation based on improved genetic algorithm. IEEE Access, 2021, 9: 100369−100379 doi: 10.1109/ACCESS.2021.3097094 [115] Zhang D F, Duan H B. Multi-AAV formation search using variable resolution cognitive map and tree-type topologies under limited sensing environments. IEEE Transactions on Aerospace and Electronic Systems, 2025, 61(2): 2734−2751 doi: 10.1109/TAES.2024.3478196 [116] Guo F, Pan Z S, Wu H N, Shao Y B. Collaborative path planning for UAVs based on ISPEA2. In: Proceedings of the 4th International Conference on Digital Data Processing (DDP). New York, USA: IEEE, 2024. 73−80 [117] Lei H X, Yan Y H, Liu J L, Han Q, Li Z G. Hierarchical multi-UAV path planning for urban low altitude environments. IEEE Access, 2024, 12: 162109−162121 doi: 10.1109/ACCESS.2024.3483943 [118] Huang C, Ma H J, Zhou X B, Deng W. Cooperative path planning of multiple unmanned aerial vehicles using cylinder vector particle swarm optimization with gene targeting. IEEE Sensors Journal, 2025, 25(5): 8470−8480 doi: 10.1109/JSEN.2024.3516124 [119] Hu J Q, Wu H S, Zhen R J, Rafik M, Zhou X W. Self-organized search-attack mission planning for UAV swarm based on wolf pack hunting behavior. Journal of Systems Engineering and Electronics, 2021, 32(6): 1463−1476 doi: 10.23919/jsee.2021.000124 [120] Gräfe A, Eickhoff J, Trimpe S. Event-triggered and distributed model predictive control for guaranteed collision avoidance in UAV swarms. IFAC-PapersOnLine, 2022, 55(13): 79−84 doi: 10.1016/j.ifacol.2022.07.239 [121] Javaid S, Saeed N, Qadir Z, Fahim H, He B, Song H B, et al. Communication and control in collaborative UAVs: Recent advances and future trends. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(6): 5719−5739 doi: 10.1109/TITS.2023.3248841 [122] Liang Y X, Zhao M, Liu X, Jiang J, Lu G Y, Jia T. Image splicing compression algorithm based on the extended Kalman filter for unmanned aerial vehicles communication. Drones, 2023, 7(8): Article No. 488 doi: 10.3390/drones7080488 [123] Farooq W, ul Islam S, Khan M A, Rehman S, Gulzari U A, Boudjadar J. UGAVs-MDVR: A cluster-based multicast routing protocol for unmanned ground and aerial vehicles communication in VANET. Applied Sciences, 2022, 12(23): Article No. 11995 doi: 10.3390/app122311995 [124] Yan M, Zhang Y X, Chan C A, Gygax A F, Li C G. Secure task offloading strategy optimization of UAV-aided outdoor mobile high-definition live streaming. Chinese Journal of Aeronautics, 2025, 38(10): Article No. 103454 doi: 10.1016/j.cja.2025.103454 [125] Jin Q G, Hu Q W, Zhao P C, Wang S H, Ai M Y. An improved probabilistic roadmap planning method for safe indoor flights of unmanned aerial vehicles. Drones, 2023, 7(2): Article No. 92 doi: 10.3390/drones7020092 [126] Papaioannou S, Kolios P, Theocharides T, Panayiotou C G, Polycarpou M M. Distributed search planning in 3-D environments with a dynamically varying number of agents. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023, 53(7): 4117−4130 doi: 10.1109/TSMC.2023.3240023 [127] Cheng X, Jiang R, Sang H R, Li G, He B. Trace pheromone-based energy-efficient UAV dynamic coverage using deep reinforcement learning. IEEE Transactions on Cognitive Communications and Networking, 2024, 10(3): 1063−1074 doi: 10.1109/TCCN.2024.3350590 [128] Manzoor S, Shakir M Z, Hasna M O, Qaraqe K A. Mobility-aware federated learning-based proactive UAVs placement in emerging cellular networks. IEEE Transactions on Machine Learning in Communications and Networking, 2024, 2: 1305−1318 doi: 10.1109/TMLCN.2024.3439289 [129] Jha S K, Prakash S, Rathore R S, Mahmud M, Kaiwartya O, Lloret J. Quality-of-service-centric design and analysis of unmanned aerial vehicles. Sensors, 2022, 22(15): Article No. 5477 doi: 10.3390/s22155477 [130] Cho S W, Park J H, Park H J, Kim S. Multi-UAV coverage path planning based on hexagonal grid decomposition in maritime search and rescue. Mathematics, 2022, 10(1): Article No. 83 doi: 10.3390/math10010083 [131] Pehlivanoglu V Y, Pehlivanoǧlu P. An efficient path planning approach for autonomous multi-UAV system in target coverage problems. Aircraft Engineering and Aerospace Technology, 2024, 96(5): 690−706 doi: 10.1108/AEAT-10-2023-0258 [132] Rosas-Carrillo A S, Solís-Santomé A, Silva-Sánchez C, Camacho-Nieto O. UAV path planning using an adaptive strategy for the particle swarm optimization algorithm. Drones, 2025, 9(3): Article No. 170 doi: 10.3390/drones9030170 [133] Liu S Y, Zhou W M, Qin M W, Peng X. Tent-PSO-based unmanned aerial vehicle path planning for cooperative relay networks in dynamic user environments. Sensors, 2025, 25(7): Article No. 2005 doi: 10.3390/s25072005 [134] Zhang D F, Duan H B, Zeng Z G. Leader-follower interactive potential for target enclosing of perception-limited UAV groups. IEEE Systems Journal, 2022, 16(1): 856−867 doi: 10.1109/jsyst.2021.3102297 [135] Qian W C, Yi W J, Yuan S S, Guan J. Control-oriented real-time trajectory planning for heterogeneous UAV formations. Drones, 2025, 9(2): Article No. 78 doi: 10.3390/drones9020078 [136] Yang J, Huang X J. Intelligent route planning method for UAV based on swarm intelligence and deep learning technology. Computing and Informatics, 2024, 43(4): 874−899 doi: 10.31577/cai_2024_4_874 [137] Mousa M, Al-Rubaye S. Intelligent 5G-aided UAV positioning in high-density environments using neural networks for NLOS mitigation. Aerospace, 2025, 12(6): Article No. 543 doi: 10.3390/aerospace12060543 [138] Yusof B Z. Integrating 5G, UAV systems, and NFV technologies: Transformative advancements in secure communication, predictive maintenance, and autonomous navigation across key sectors. Journal of IoT Security and Smart Technologies, 2024, 14(3): 1−18 [139] 高超, 黄郑, 赵轩, 王红星, 龙涛. 基于构型优选的5G集群无人机协同导航方法. 系统仿真学报, 2024, 36(4): 981−990 doi: 10.16182/j.issn1004731x.joss.22-1472Gao Chao, Huang Zheng, Zhao Xuan, Wang Hong-Xing, Long Tao. Collaborative navigation method for 5G cluster UAV based on configuration optimization. Journal of System Simulation, 2024, 36(4): 981−990 doi: 10.16182/j.issn1004731x.joss.22-1472 [140] Alotaibi T, Jambi K, Khemakhem M, Eassa F, Bourennani F. Deep learning-based autonomous navigation of 5G drones in unknown and dynamic environments. Drones, 2025, 9(4): Article No. 249 doi: 10.3390/drones9040249 [141] Dureppagari H K, Saha C, Dhillon H S, Buehrer R M. UAV-based 5G localization for emergency response using signals of opportunity. In: Proceedings of the IEEE International Symposium on Dynamic Spectrum Access Networks (DySPAN). Washington, USA: IEEE, 2024. 63−68 [142] Afifi G, Gadallah Y. Reliable UAV navigation using cellular networks: A deep reinforcement learning approach. In: Proceedings of the IEEE International Black Sea Conference on Communications and Networking (BlackSeaCom). Tbilisi, Georgia: IEEE, 2024. 30−35 [143] Zu X B, Liu R K, Zhao J. High-accuracy carrier phase positioning technology based on CSI in UAV-assisted 5G NR system. In: Proceedings of the 10th International Conference on Communication and Information Processing. Lingshui, China: IEEE, 2024. 63−72 [144] Liu Y Z, Ma Z W, Yang Y Q, Wang M Y, Niu Y F. A framework for visual target navigation for quadcopter based on large language models in unknown environment. In: Proceedings of the 3rd International Conference on Cognitive Computation and Systems (ICCCS). Linyi, China: Springer, 2024. 99−110 [145] Wu R W, Deng J C, Mou M Y, He X Y, Zhang M J, Liu Y, et al. UAV-GeoLoc: A large-vocabulary dataset and geometry-transformed method for UAV geo-localization. IEEE Robotics and Automation Letters, 2025, 10(9): 8978−8985 doi: 10.1109/LRA.2025.3588061 [146] Cladera F, Ravichandran Z, Hughes J, Murali V, Nieto-Granda C, Hsieh M A, et al. Air-ground collaboration for language-specified missions in unknown environments. IEEE Transactions on Field Robotics, 2025, 2: 626−642 doi: 10.1109/TFR.2025.3584019 [147] Guo H, Liu Z Q, Tang C Q, Zhang X D. An interactive framework for personalized navigation based on metacosmic cultural tourism and large model fine-tuning. IEEE Access, 2025, 13: 81450−81461 doi: 10.1109/ACCESS.2025.3565359 [148] 陈晓阳, 高飞, 韩翔宇, 马卫华. 大模型代码生成技术及航天领域潜在应用. 航天控制, 2025, 43(1): 8−16Chen Xiao-Yang, Gao Fei, Han Xiang-Yu, Ma Wei-Hua. Large model code generation technology and its potential applications to aerospace. Aerospace Control, 2025, 43(1): 8−16 [149] Wen Y N, Chen K W. Autonomous detection and assessment of indoor building defects using multimodal learning and GPT. In: Proceedings of the Construction Research Congress 2024. American Society of Civil Engineers, 2024. 1001−1009Wen Y N, Chen K W. Autonomous detection and assessment of indoor building defects using multimodal learning and GPT. In: Proceedings of the Construction Research Congress 2024. American Society of Civil Engineers, 2024. 1001−1009 [150] Chen Y J, Zhu K X, Chen Z D, Feng C, Zhuang Z J. Intelligent multi-agent systems for UAV-robot path optimization via reflective evolution. In: Proceedings of the 25th International Conference on Parallel and Distributed Computing, Applications and Technologies (PDCAT). Hong Kong, China: Springer, 2024. 566−577 [151] Fan J M, Chen X, Liang X. UAV trajectory planning based on bi-directional APF-RRT* algorithm with goal-biased. Expert Systems With Applications, 2023, 213: Article No. 119137 doi: 10.1016/j.eswa.2022.119137 [152] Guevara B S, Recalde L F, Varela-Aldás J, Andaluz V H, Gandolfo D C, Toibero J M. A comparative study between NMPC and baseline feedback controllers for UAV trajectory tracking. Drones, 2023, 7(2): Article No. 144 doi: 10.3390/drones7020144 [153] Fitrikananda B P, Jenie Y I, Sasongko R A, Muhammad H. Risk assessment method for UAV's sense and avoid system based on multi-parameter quantification and Monte Carlo simulation. Aerospace, 2023, 10(9): Article No. 781 doi: 10.3390/aerospace10090781 [154] Telli K, Kraa O, Himeur Y, Ouamane A, Boumehraz M, Atalla S, et al. A comprehensive review of recent research trends on unmanned aerial vehicles (UAVs). Systems, 2023, 11(8): Article No. 400 doi: 10.3390/systems11080400 [155] Sultan L, Anjum M, Rehman M, Murawwat S, Kosar H. Communication among heterogeneous unmanned aerial vehicles (UAVs): Classification, trends, and analysis. IEEE Access, 2021, 9: 118815−118836 doi: 10.1109/ACCESS.2021.3107479 [156] Aljalaud F, Kurdi H, Youcef-Toumi K. Bio-inspired multi-UAV path planning heuristics: A review. Mathematics, 2023, 11(10): Article No. 2356 doi: 10.3390/math11102356 [157] Li X, Wang L, Wang H, Tao L F, Wang X W. A warm-started trajectory planner for fixed-wing unmanned aerial vehicle formation. Applied Mathematical Modelling, 2023, 122: 200−219 doi: 10.1016/j.apm.2023.05.035 -

 下载:
下载:

计量
- 文章访问数: 3097
- HTML全文浏览量: 827
- PDF下载量: 310
- 被引次数: 0
