2024年 第50卷 第1期
2024, 50(1): 1-20.
doi: 10.16383/j.aas.c220632
摘要:
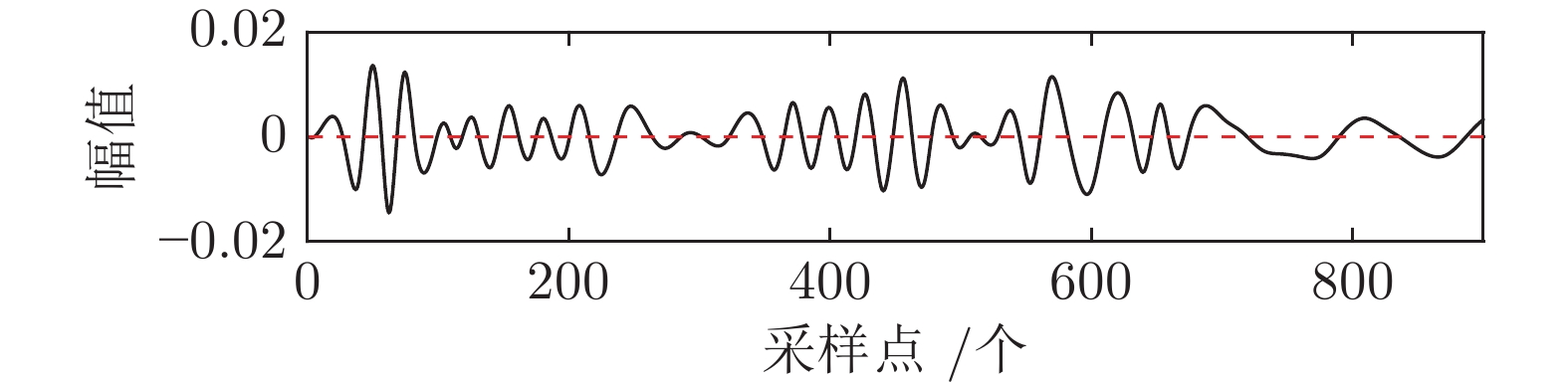
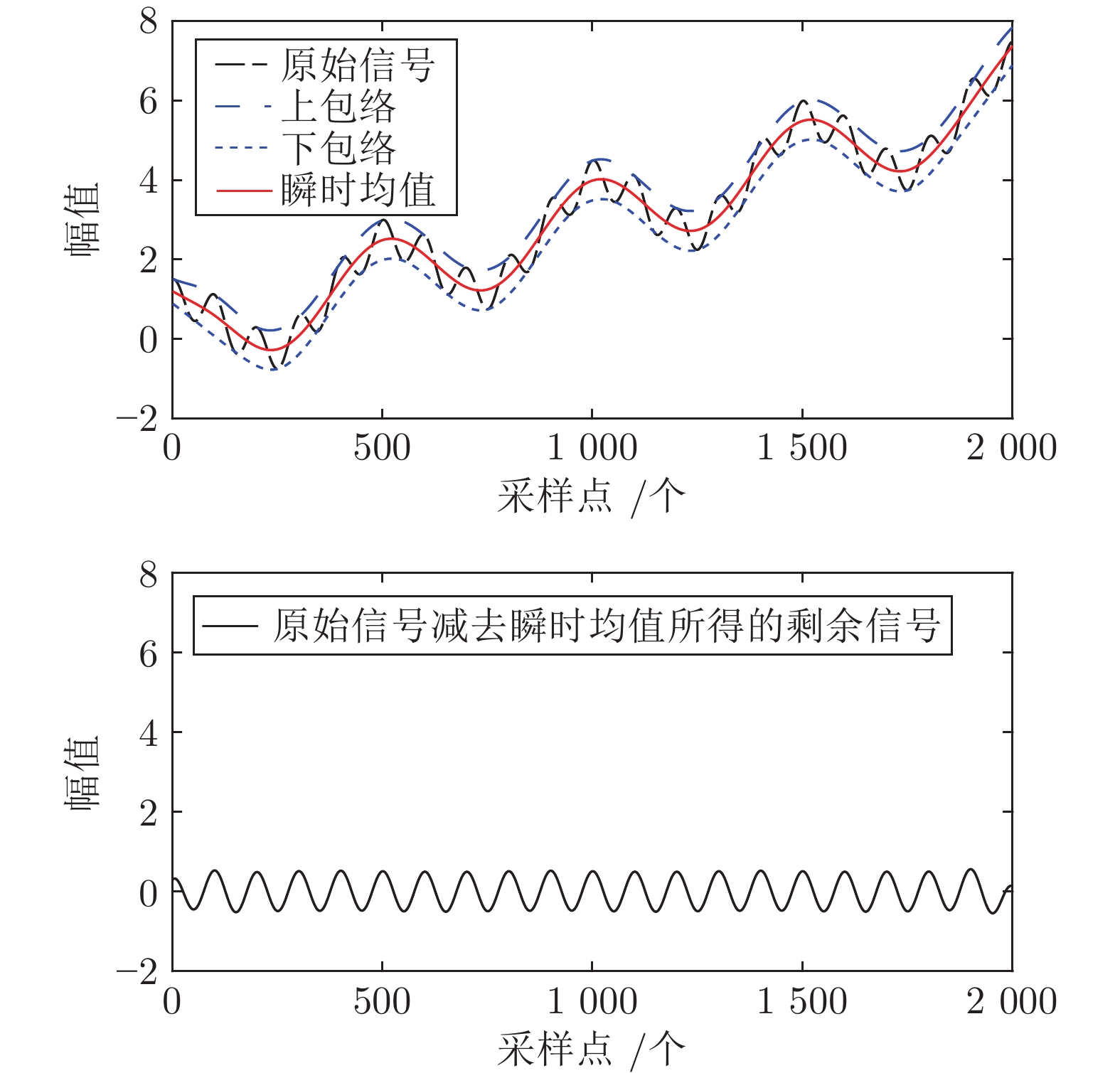
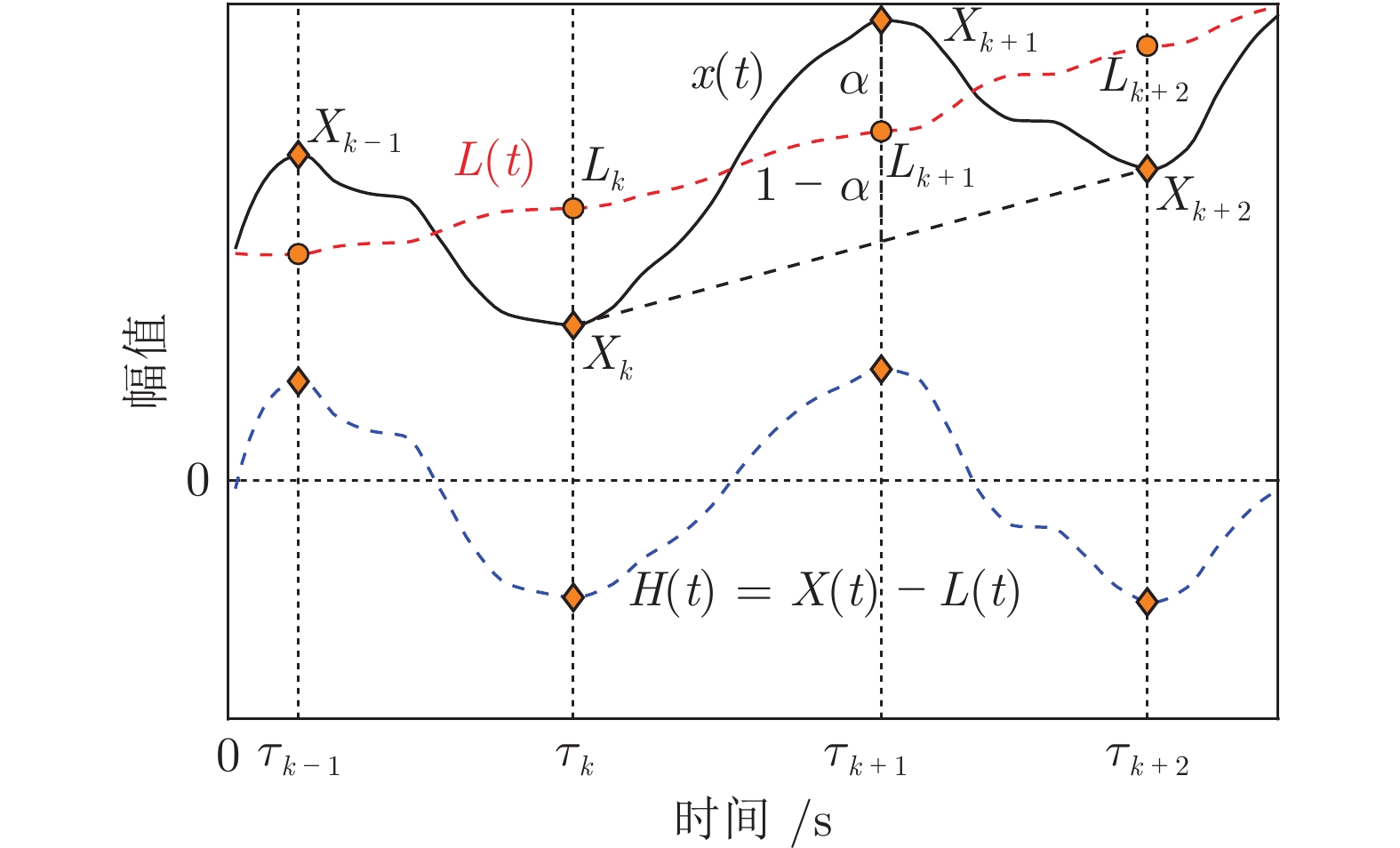
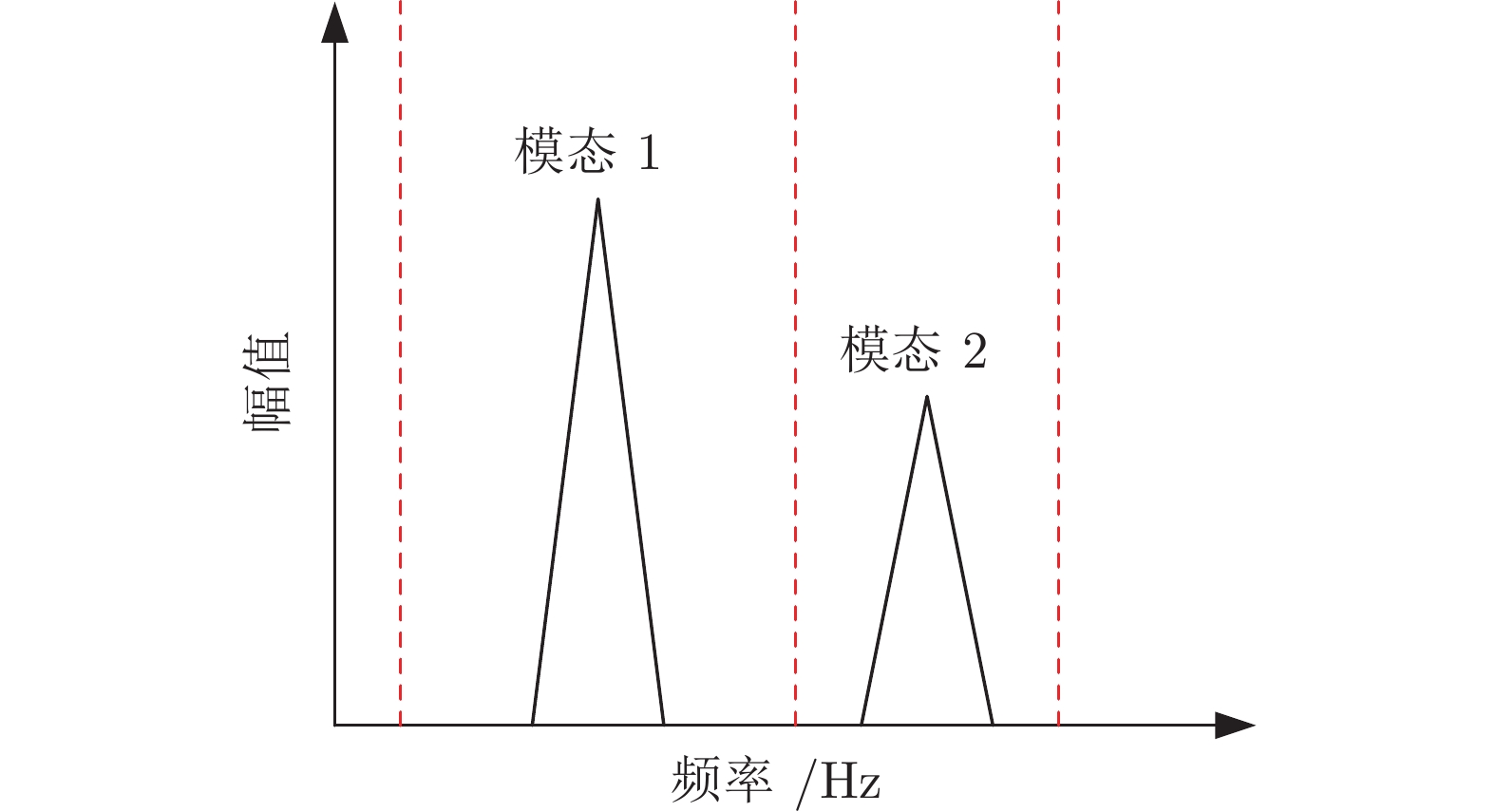
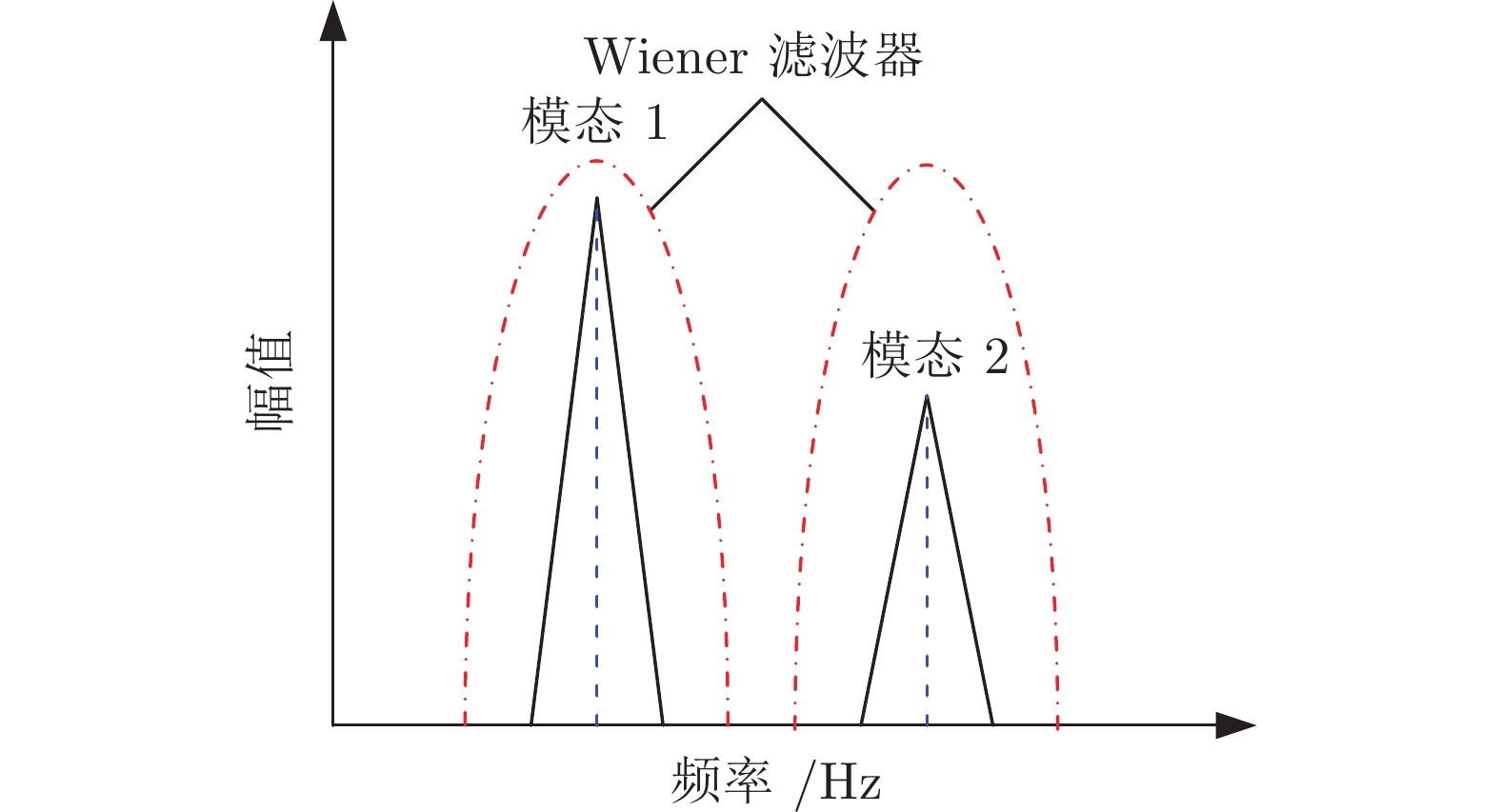
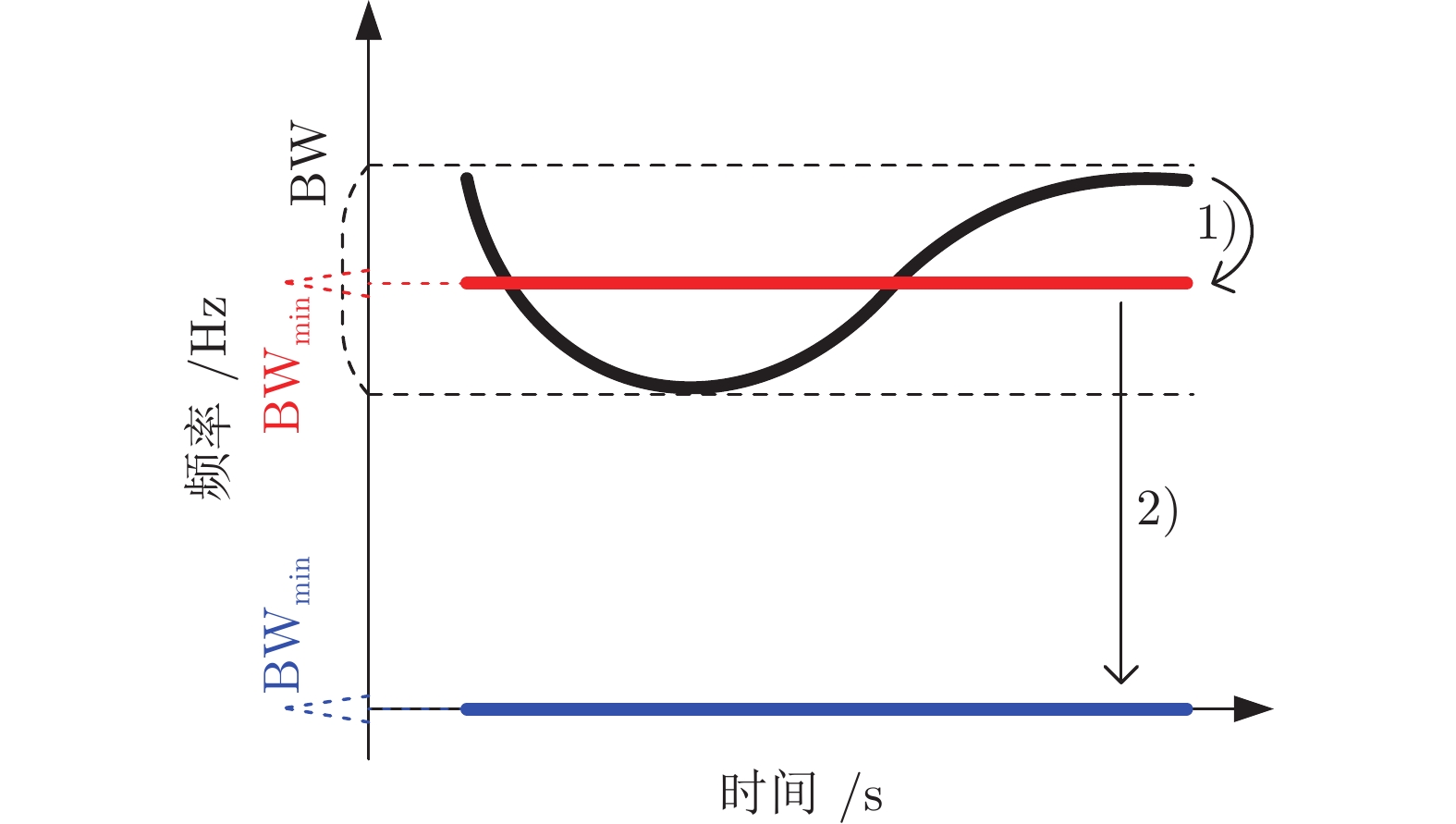
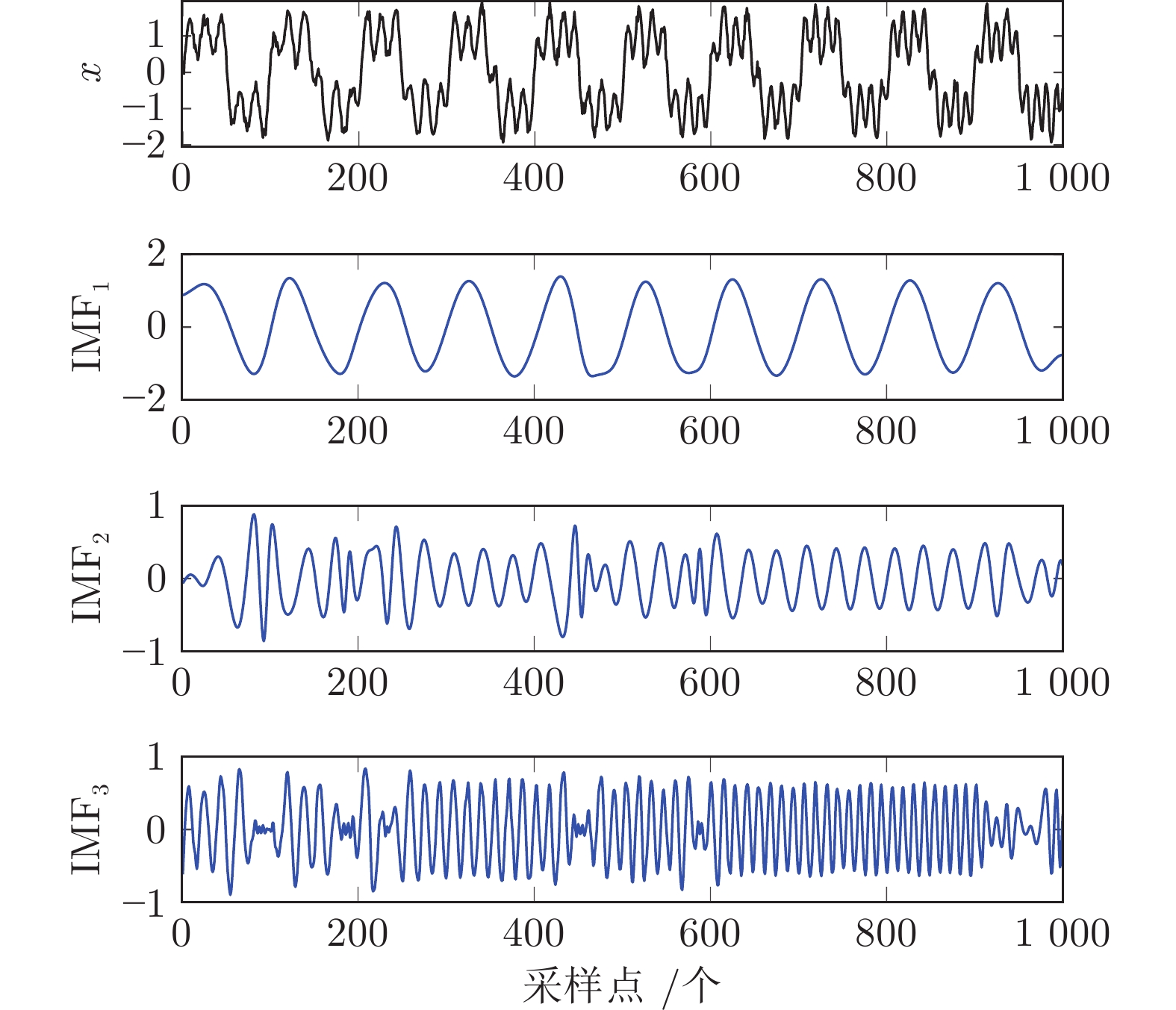
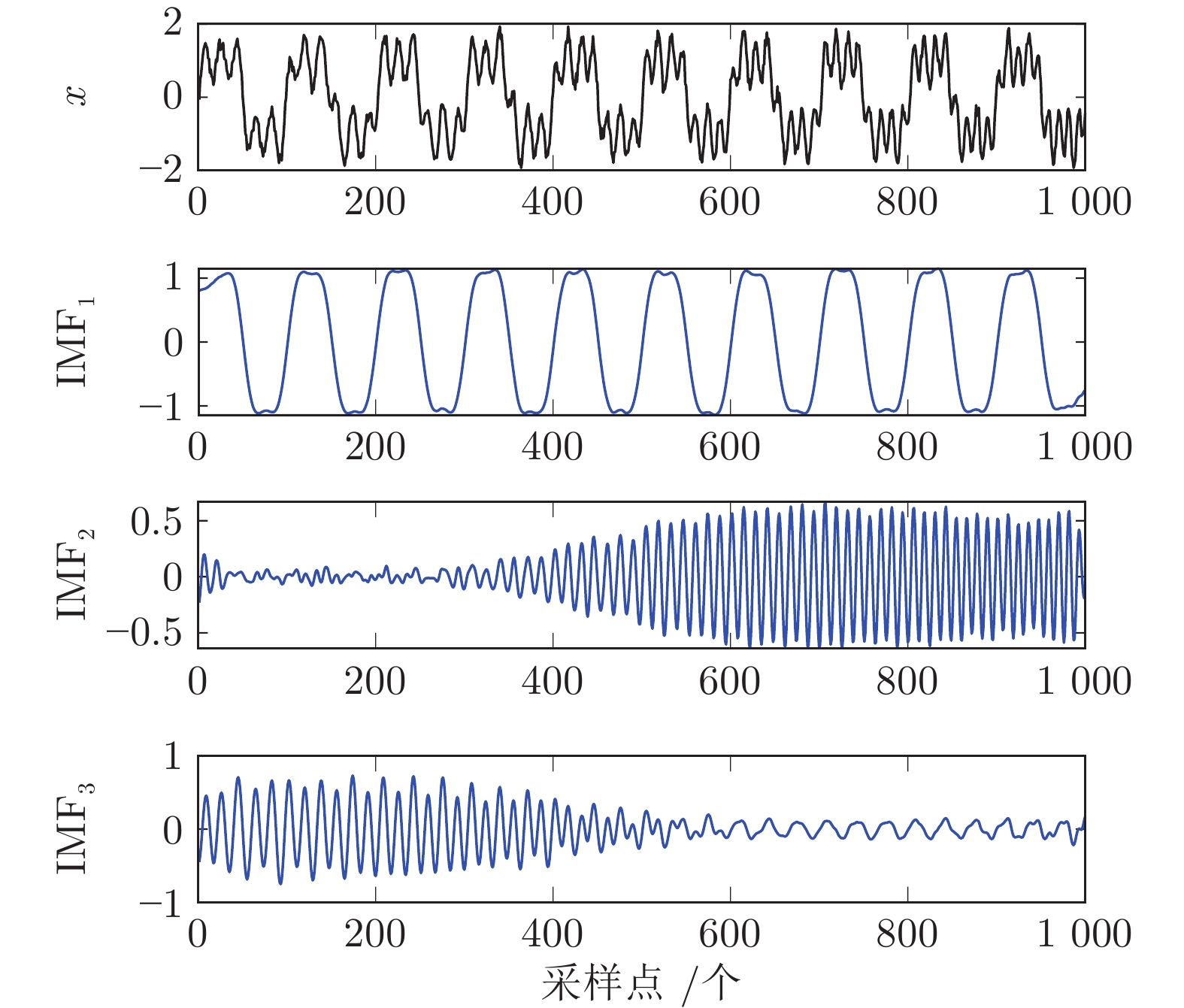
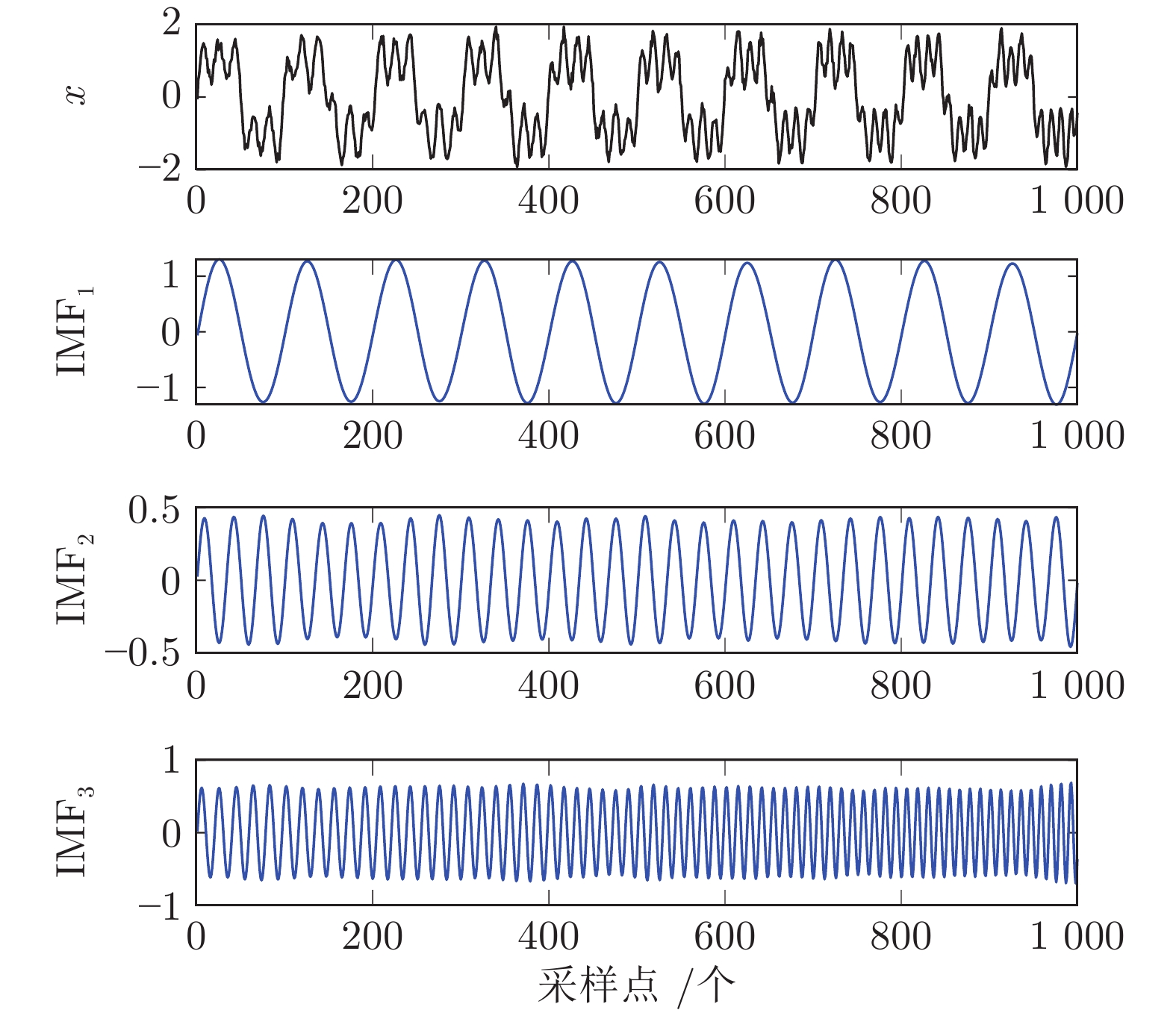
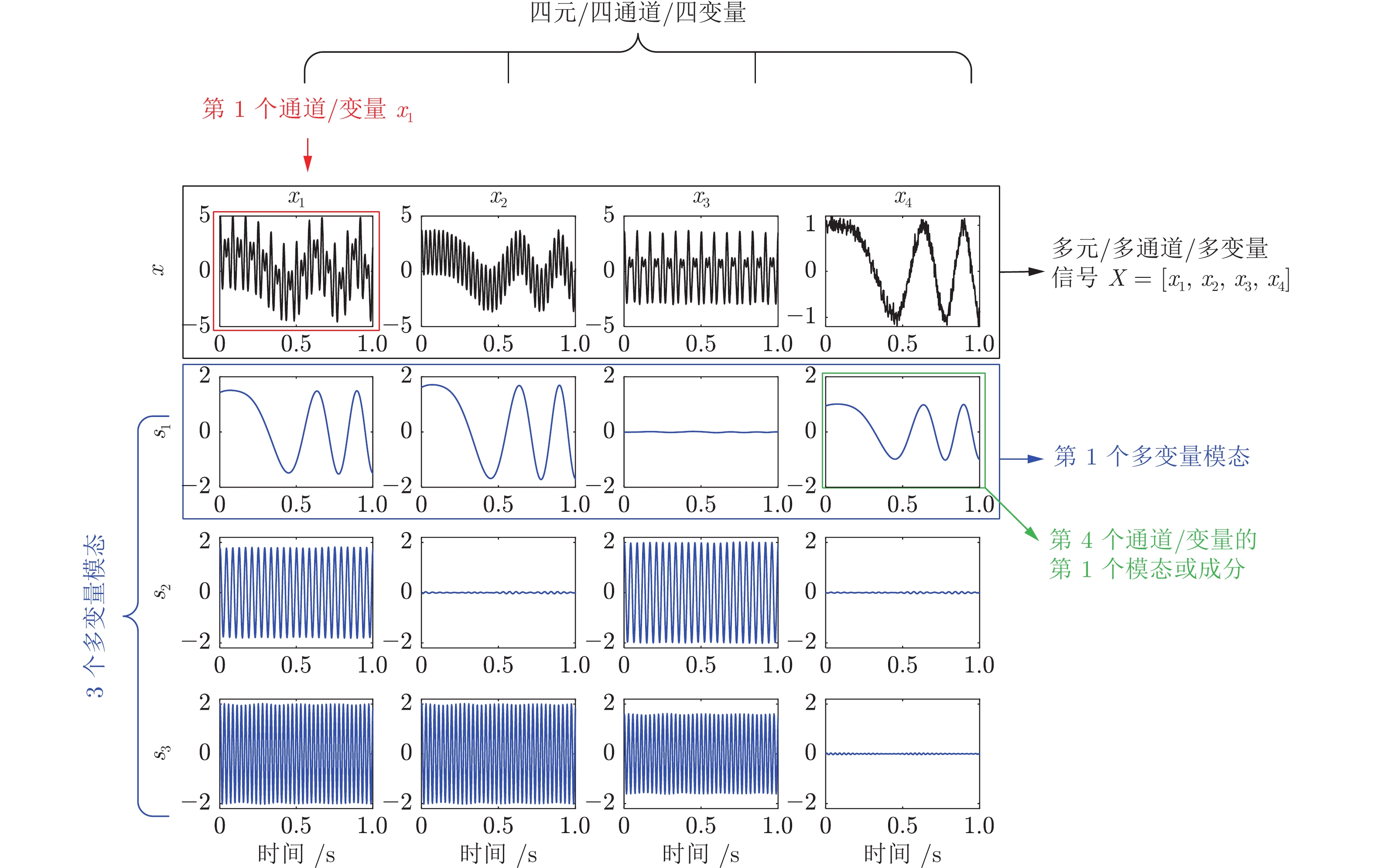
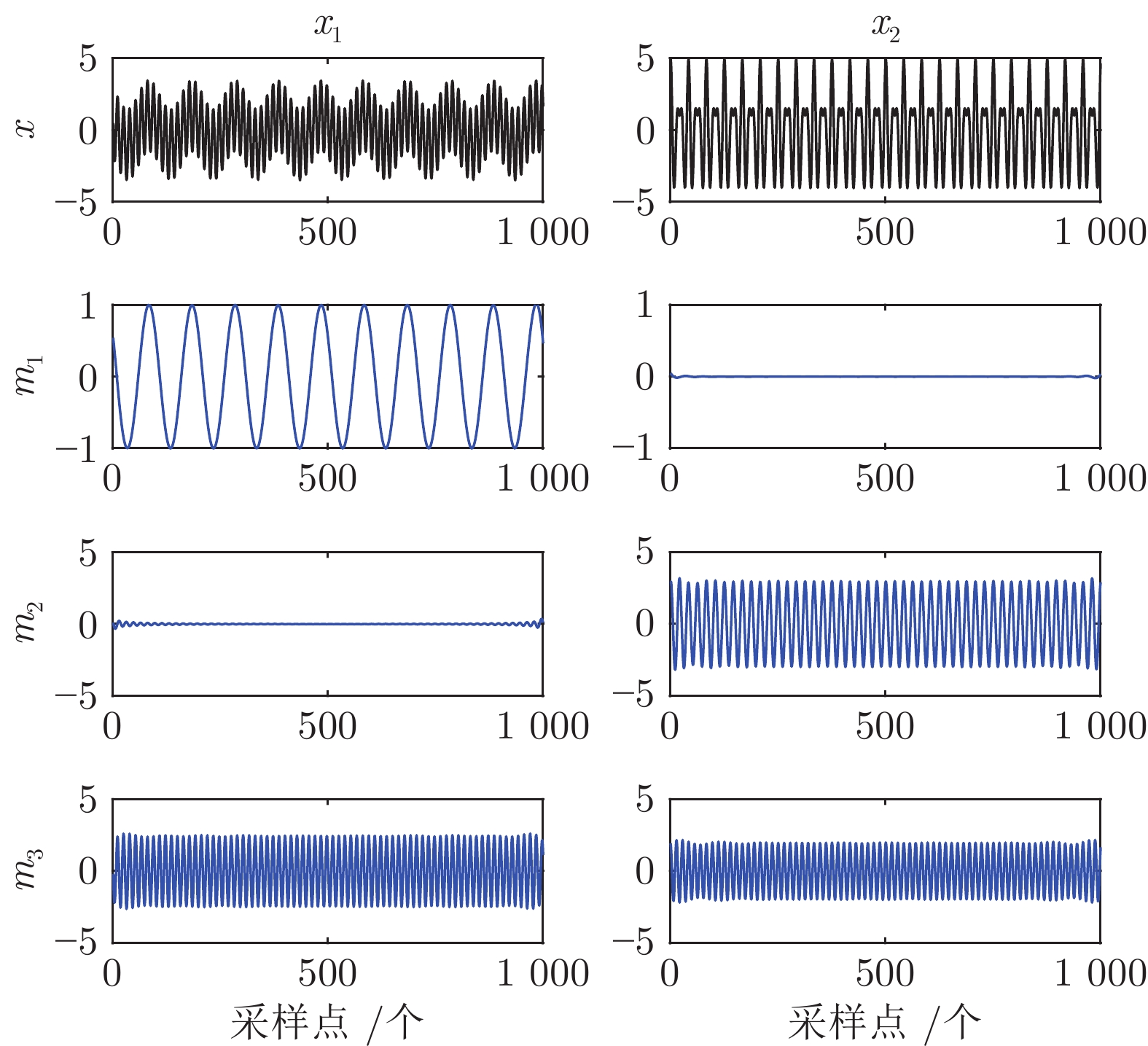
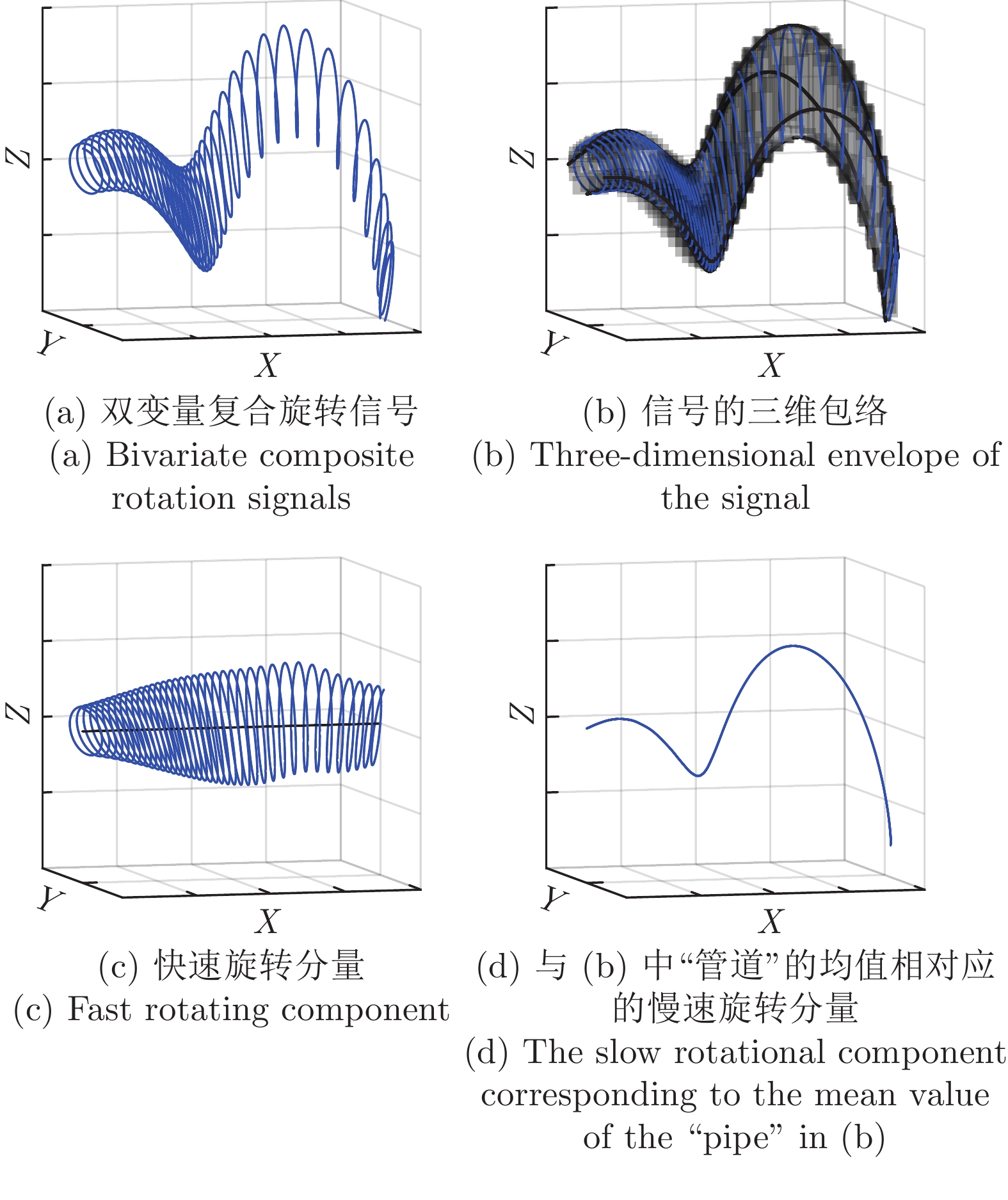
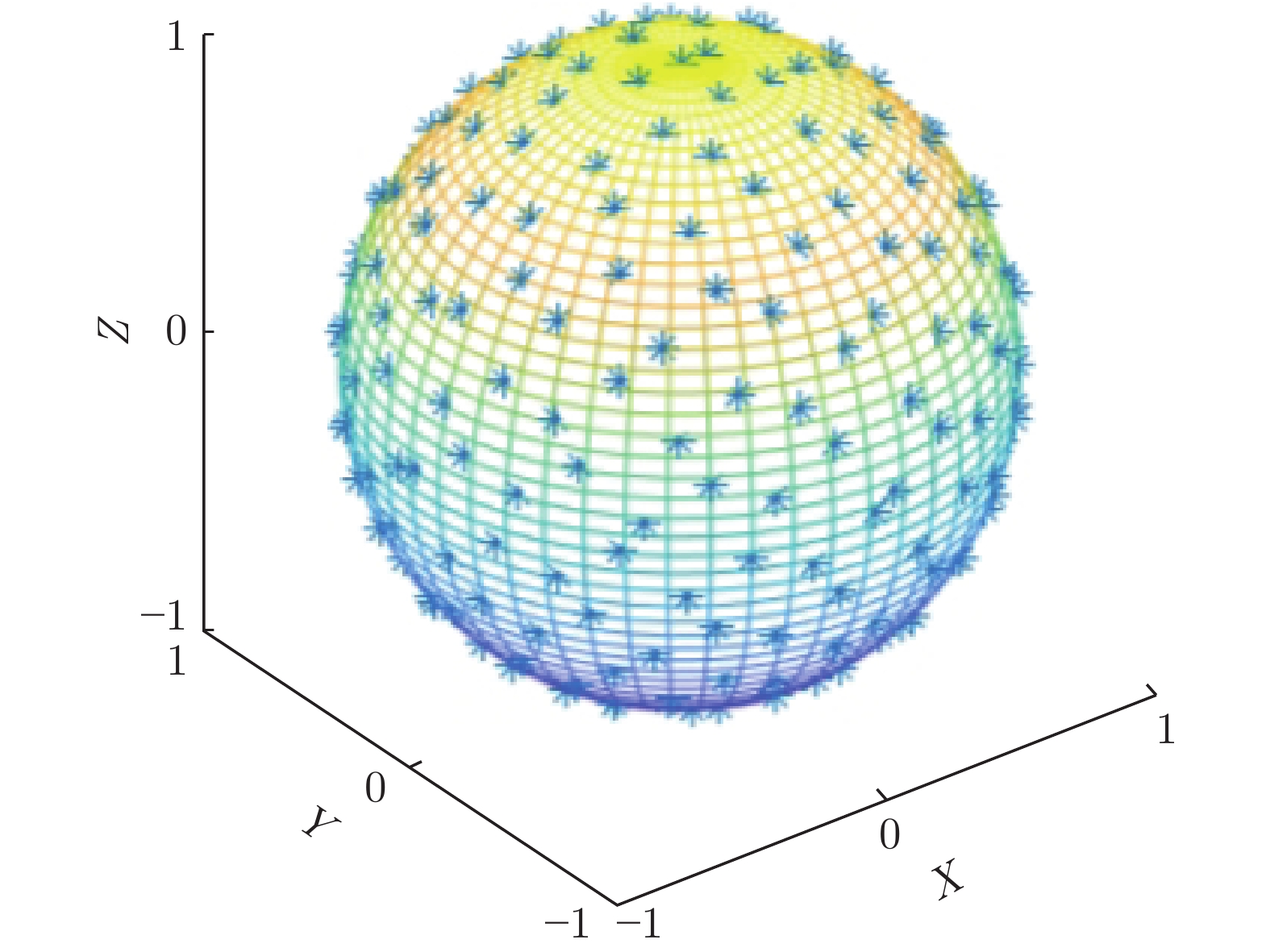
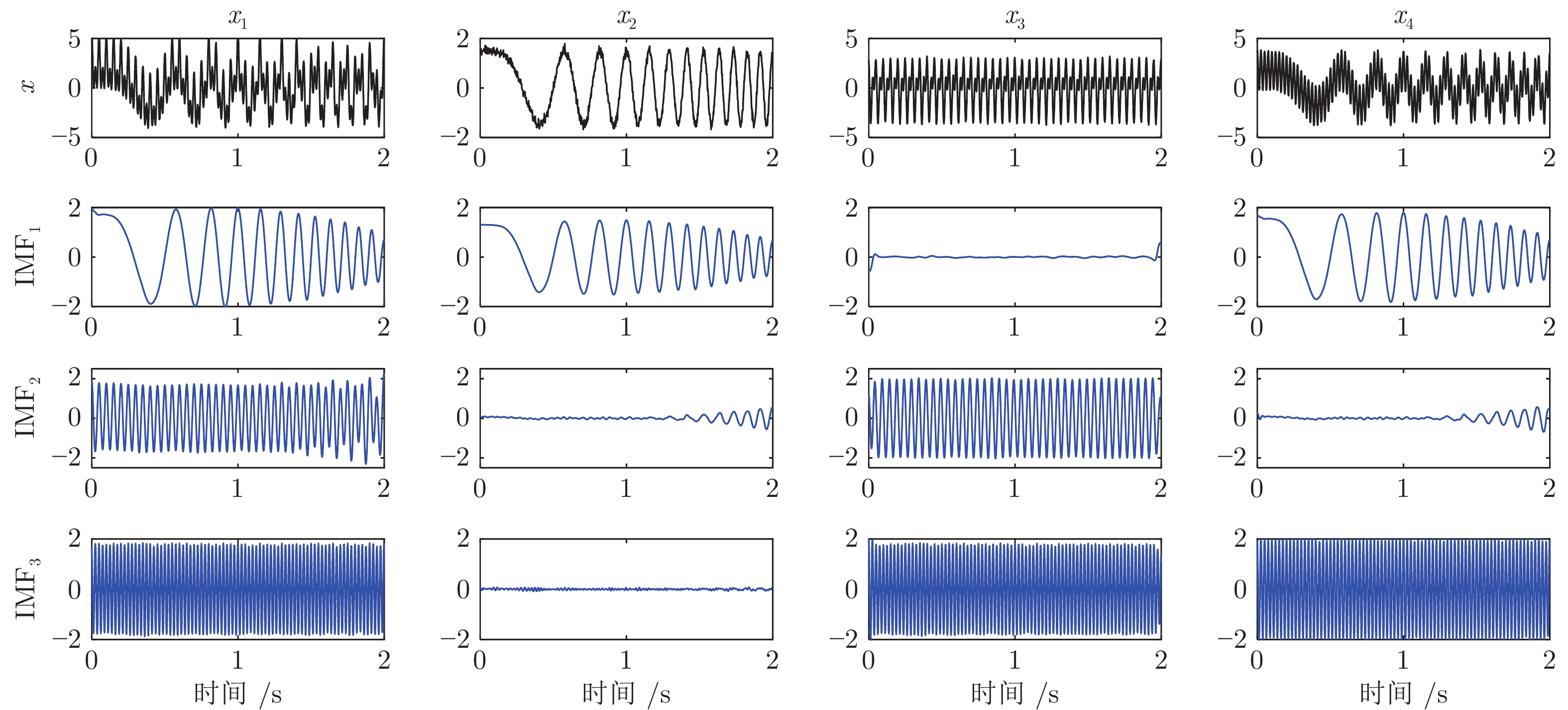
现实世界中, 所获得的信号大部分都是非平稳和非线性的, 将此类复杂信号分解为多个简单的子信号是重要的信号处理方法. 1998年, 提出希尔伯特–黄变换(Hilbert-Huang transform, HHT)以来, 历经20余年的发展, 信号分解已经成为信号处理领域相对独立又具有创新性的重要内容. 特别是近10年, 多元/多变量/多通道信号分解理论方法方兴未艾, 在诸多领域得到了成功应用, 但目前尚未见到相关综述报道. 为填补这个空缺, 从单变量和多变量两个方面系统综述了国内/外学者对主要信号分解方法的研究现状, 对这些方法的时频表达性能进行分析和比较, 指出这些分解方法的优势和存在的问题. 最后, 对信号分解研究进行总结和展望.
现实世界中, 所获得的信号大部分都是非平稳和非线性的, 将此类复杂信号分解为多个简单的子信号是重要的信号处理方法. 1998年, 提出希尔伯特–黄变换(Hilbert-Huang transform, HHT)以来, 历经20余年的发展, 信号分解已经成为信号处理领域相对独立又具有创新性的重要内容. 特别是近10年, 多元/多变量/多通道信号分解理论方法方兴未艾, 在诸多领域得到了成功应用, 但目前尚未见到相关综述报道. 为填补这个空缺, 从单变量和多变量两个方面系统综述了国内/外学者对主要信号分解方法的研究现状, 对这些方法的时频表达性能进行分析和比较, 指出这些分解方法的优势和存在的问题. 最后, 对信号分解研究进行总结和展望.




2024, 50(1): 21-41.
doi: 10.16383/j.aas.c220957
摘要:
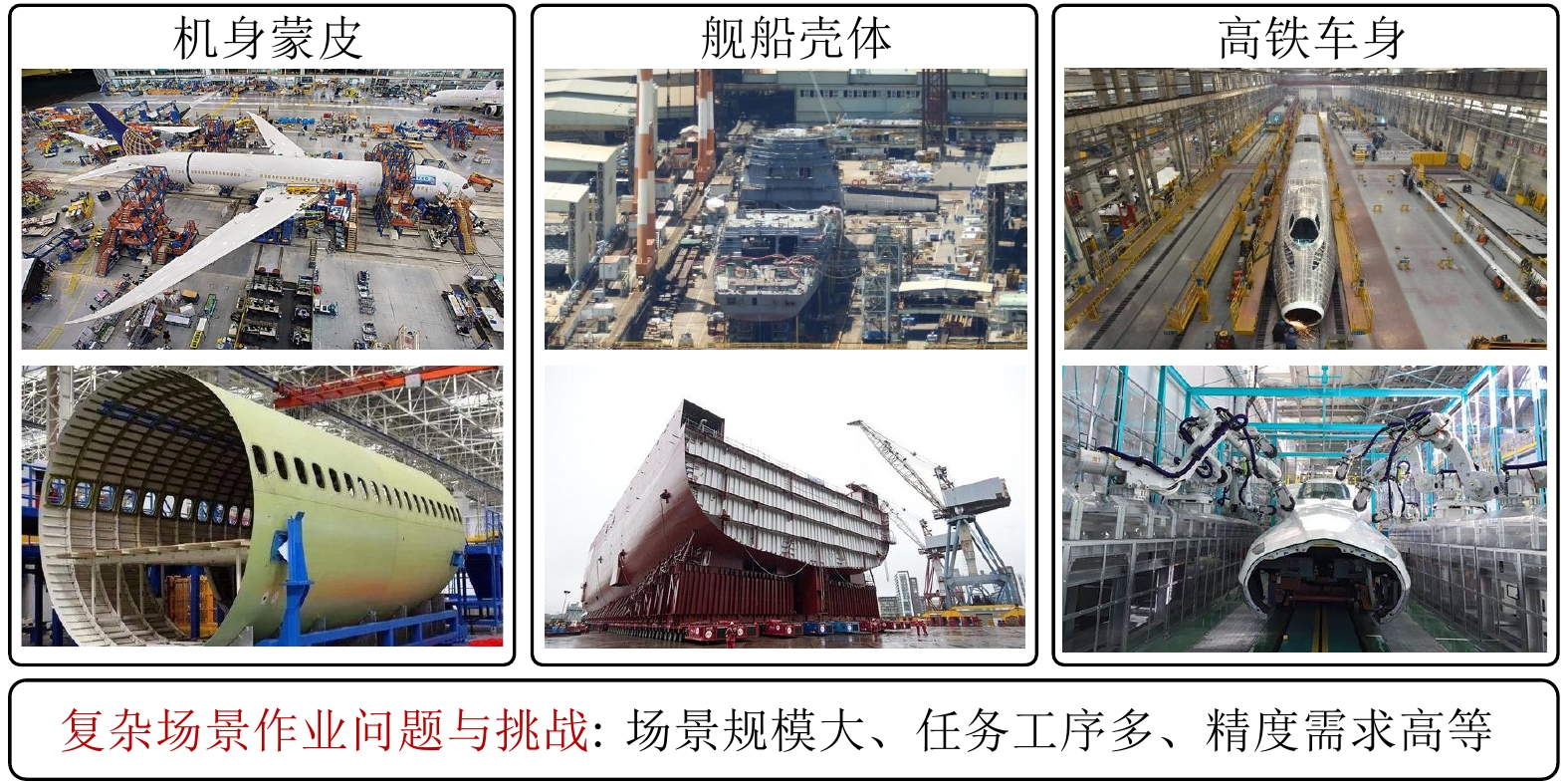
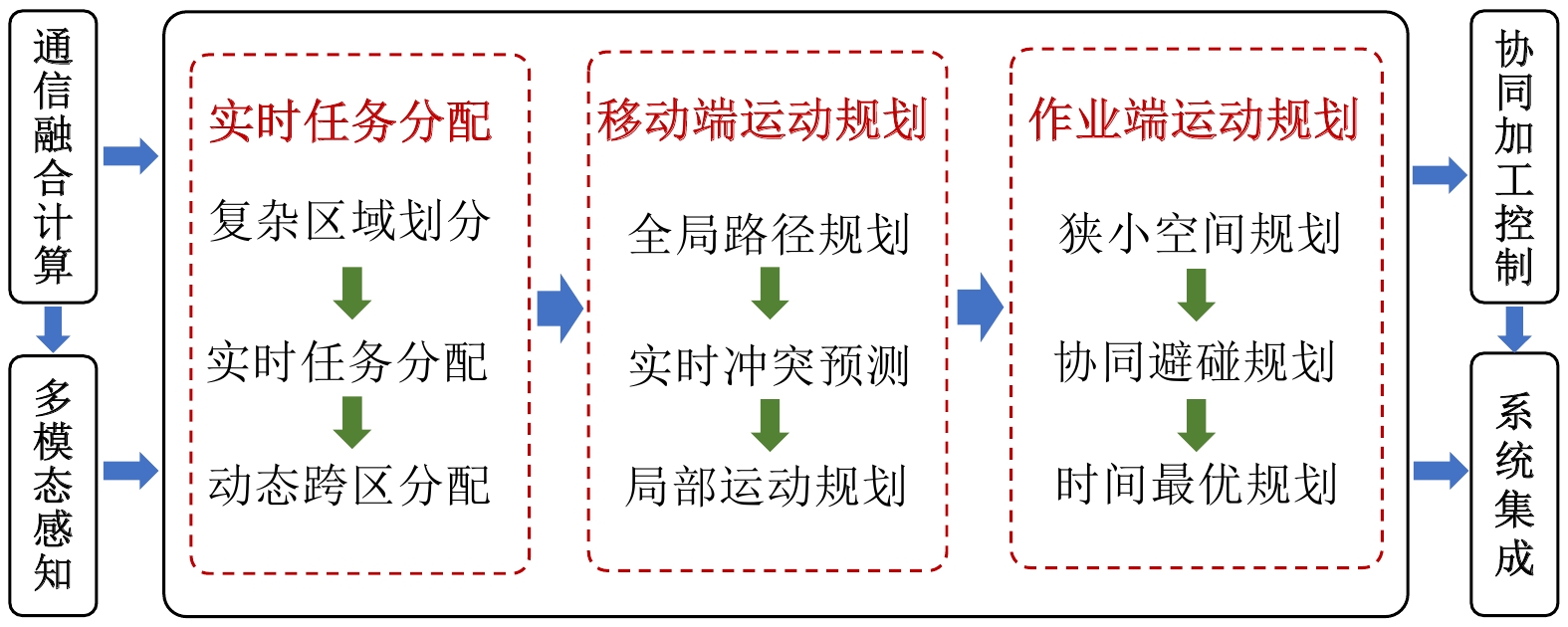
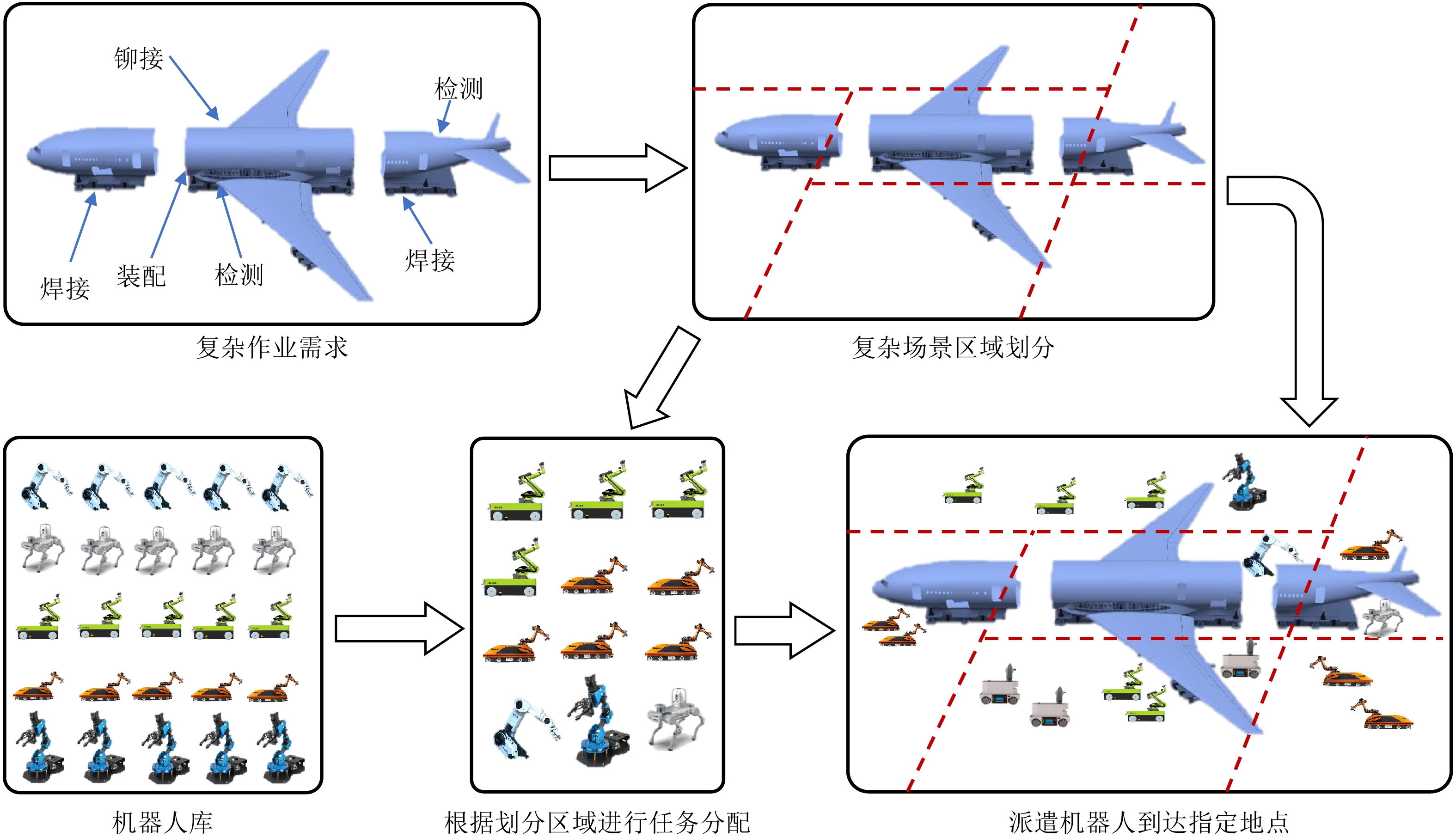
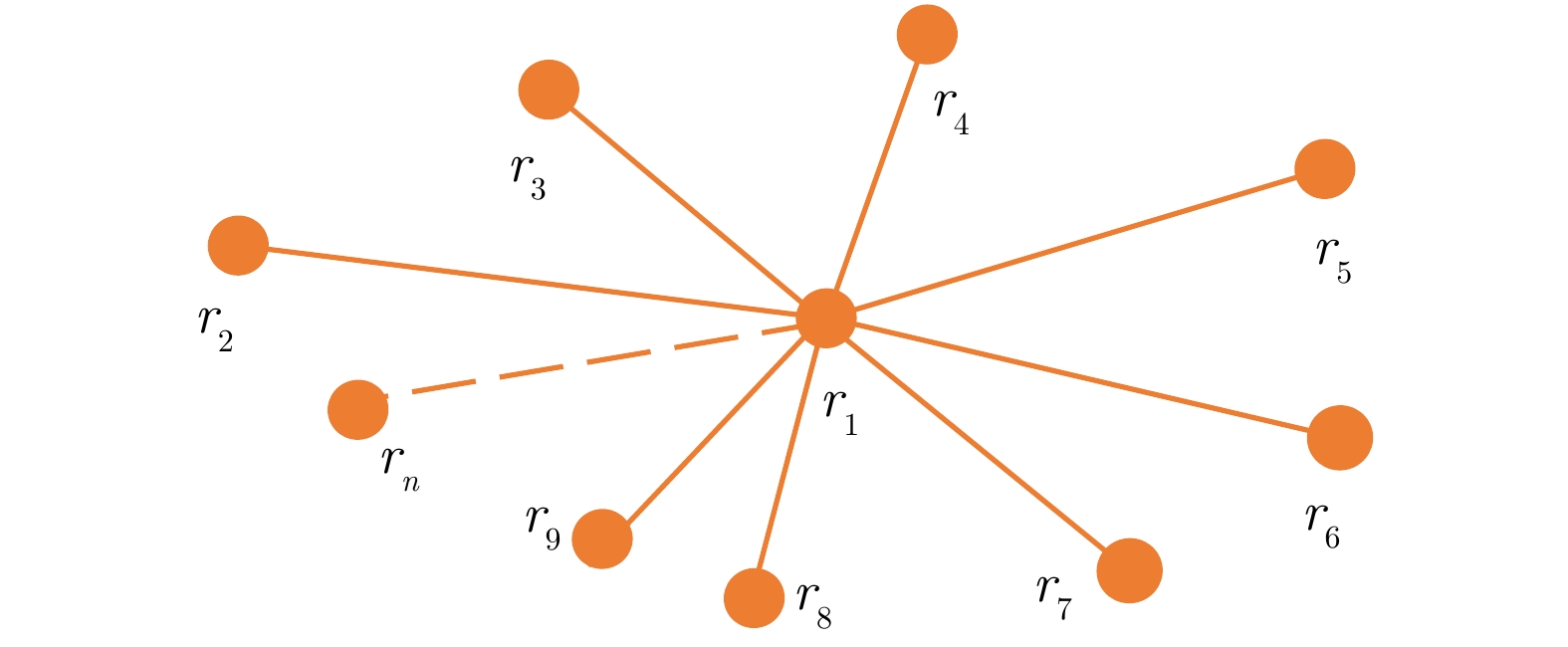
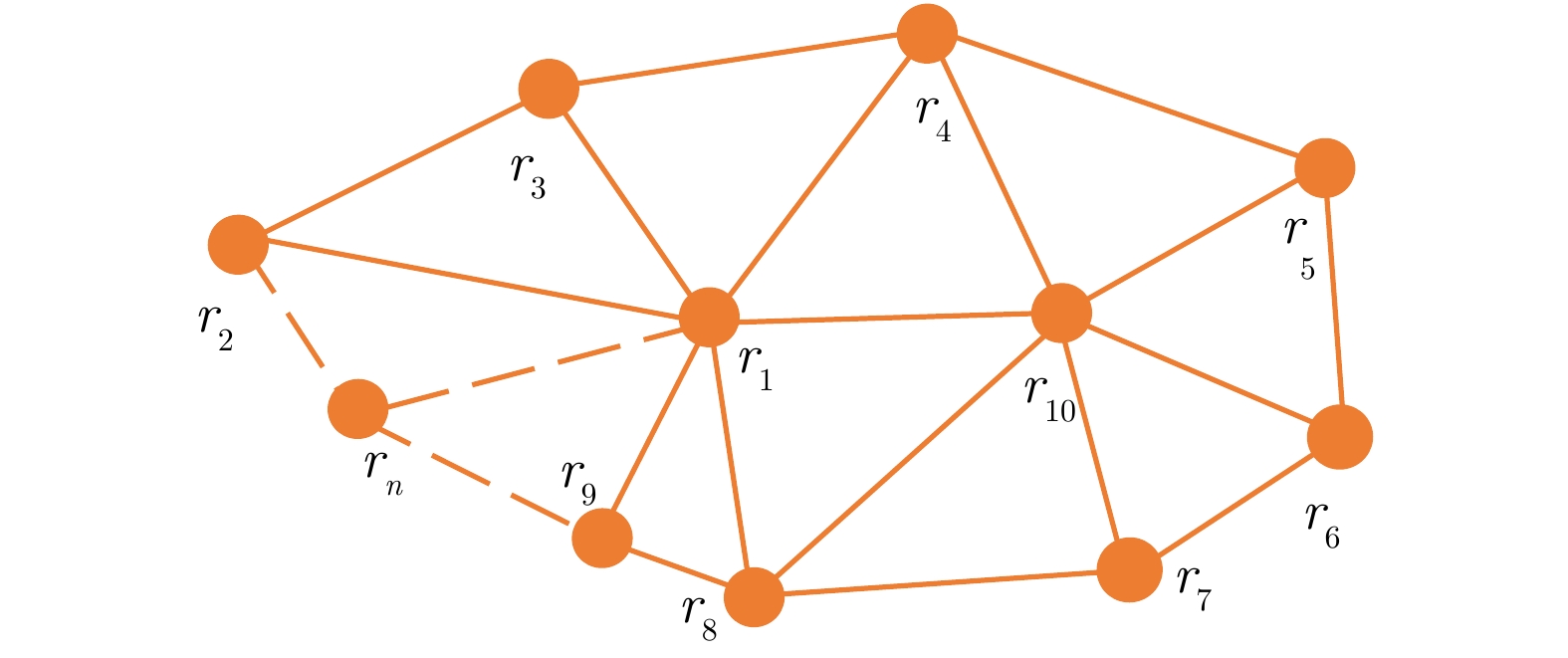
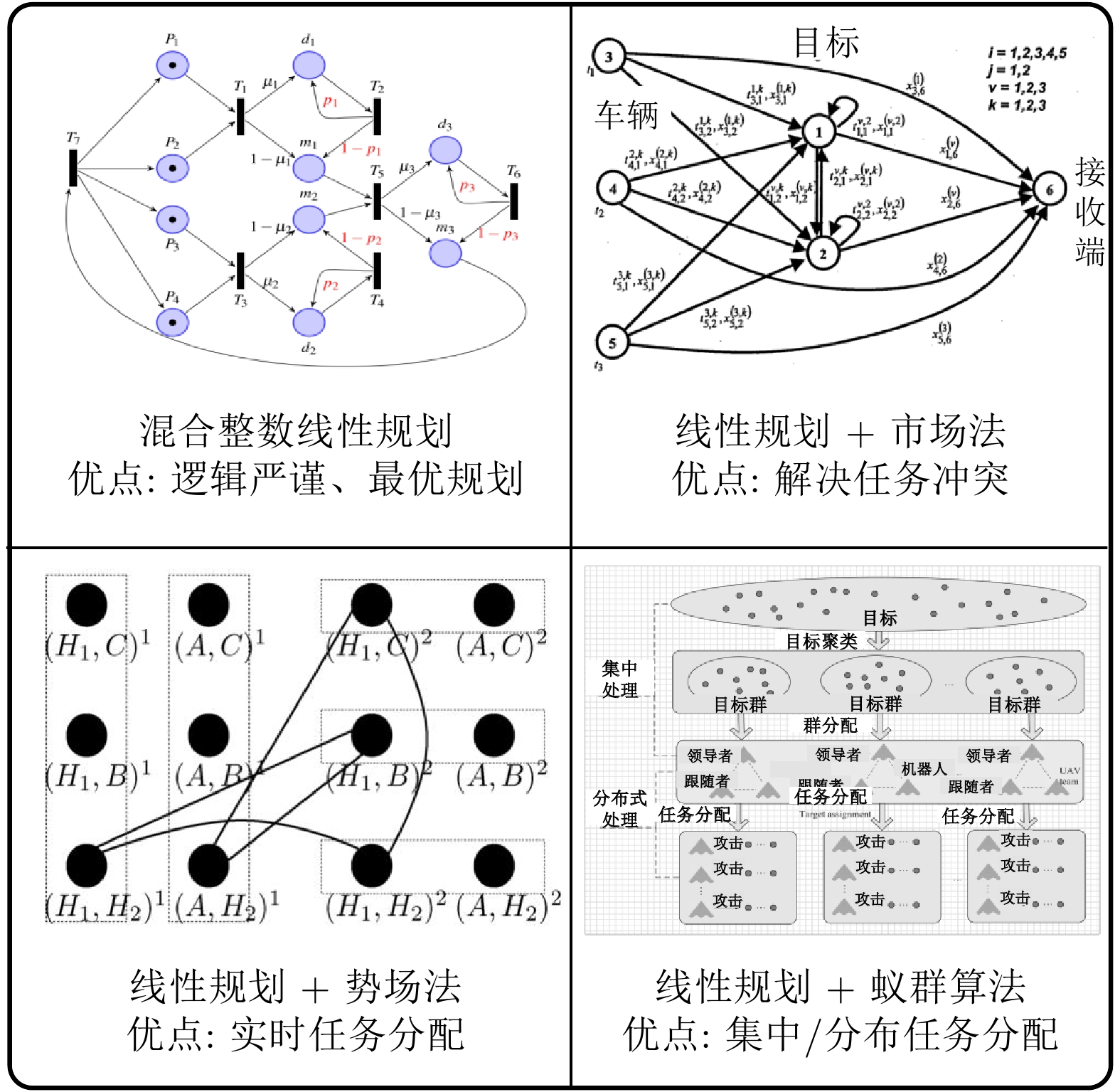
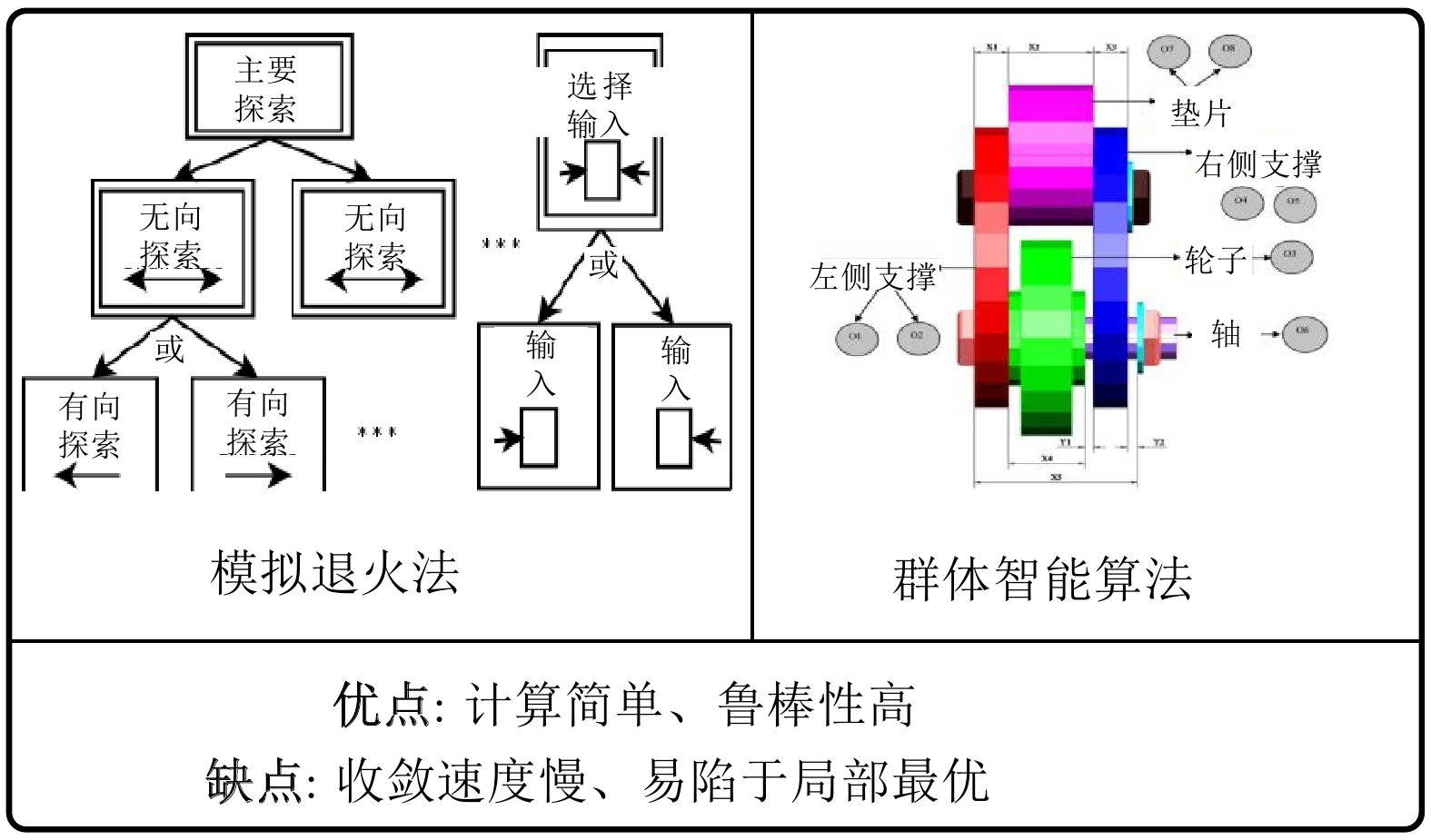
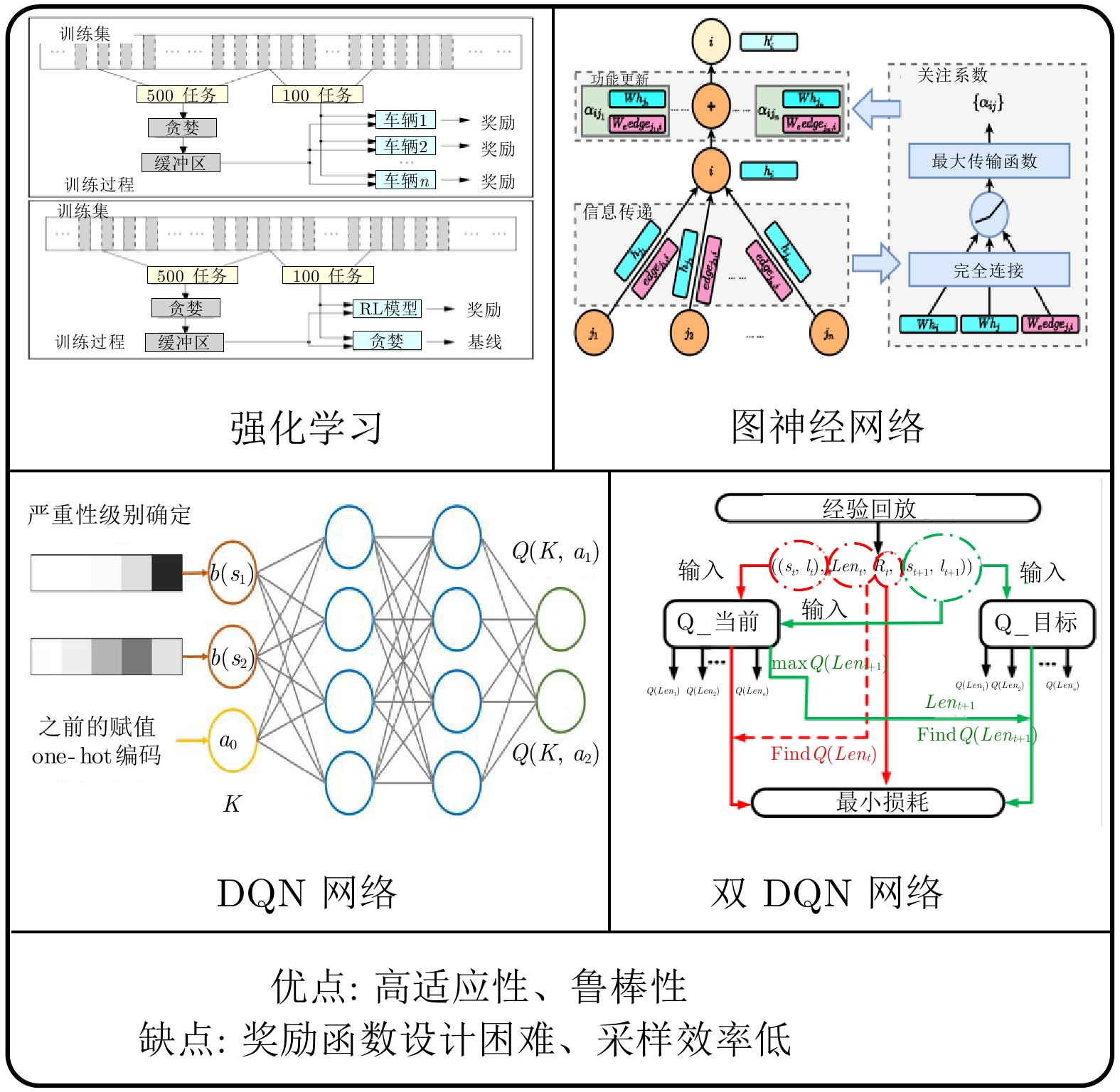
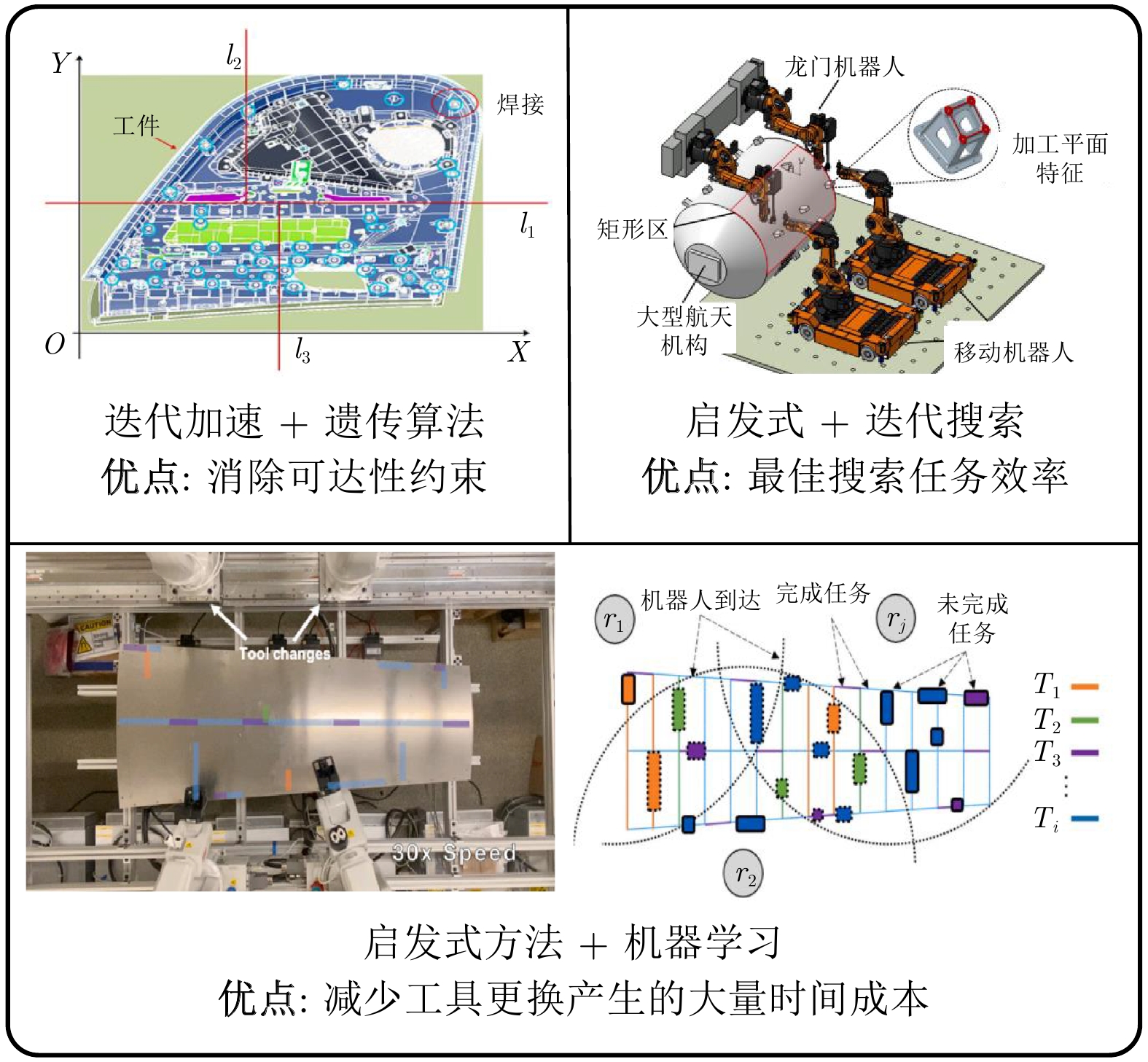
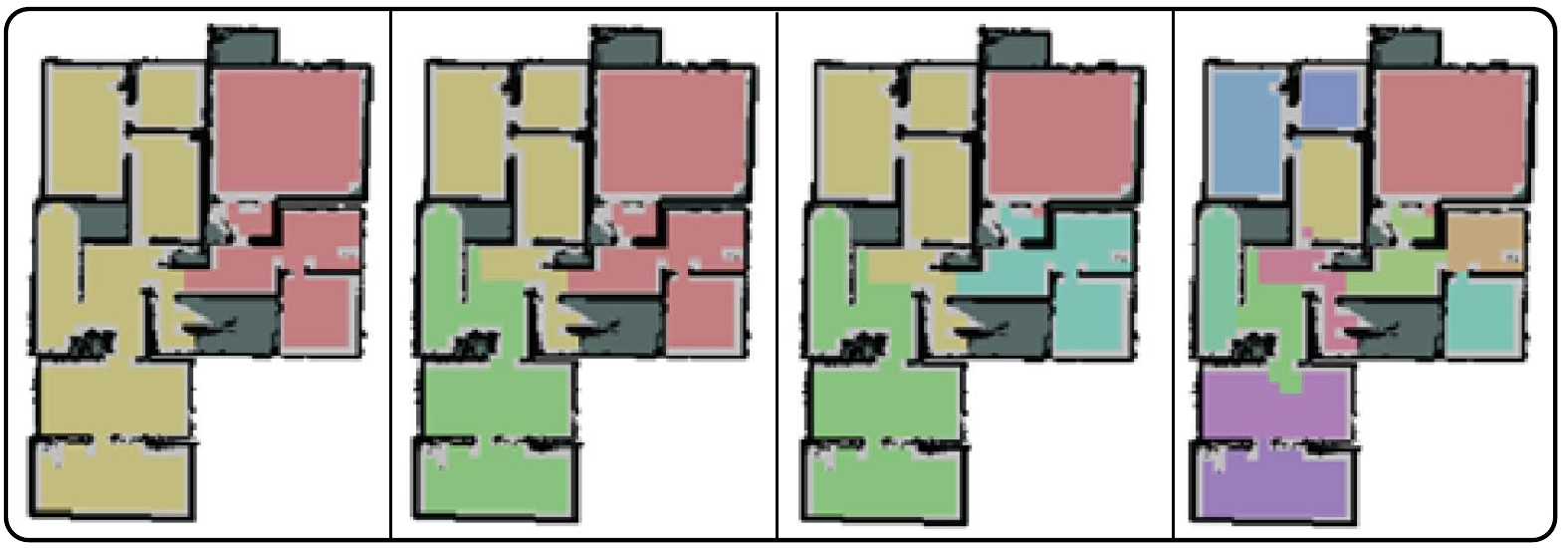
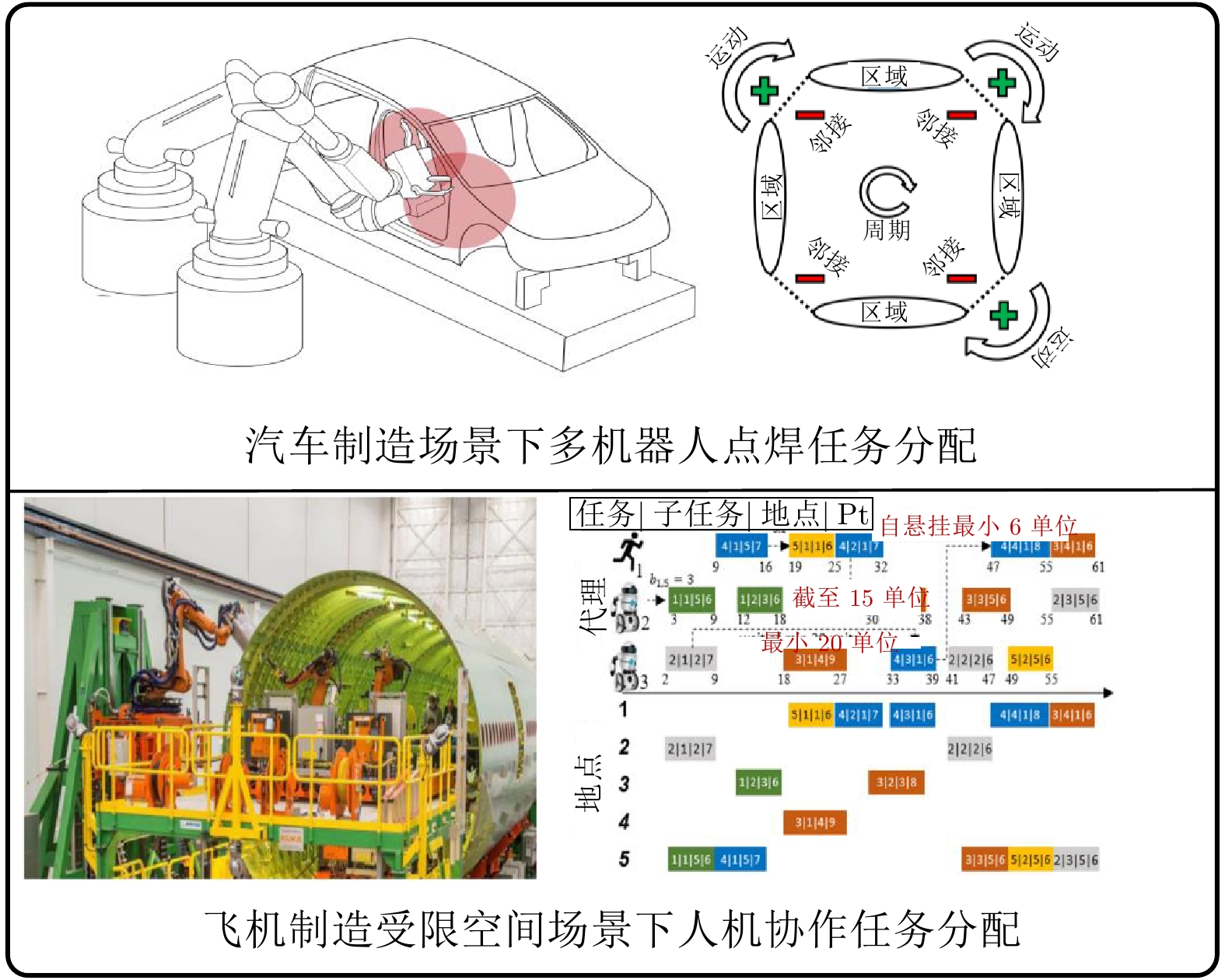
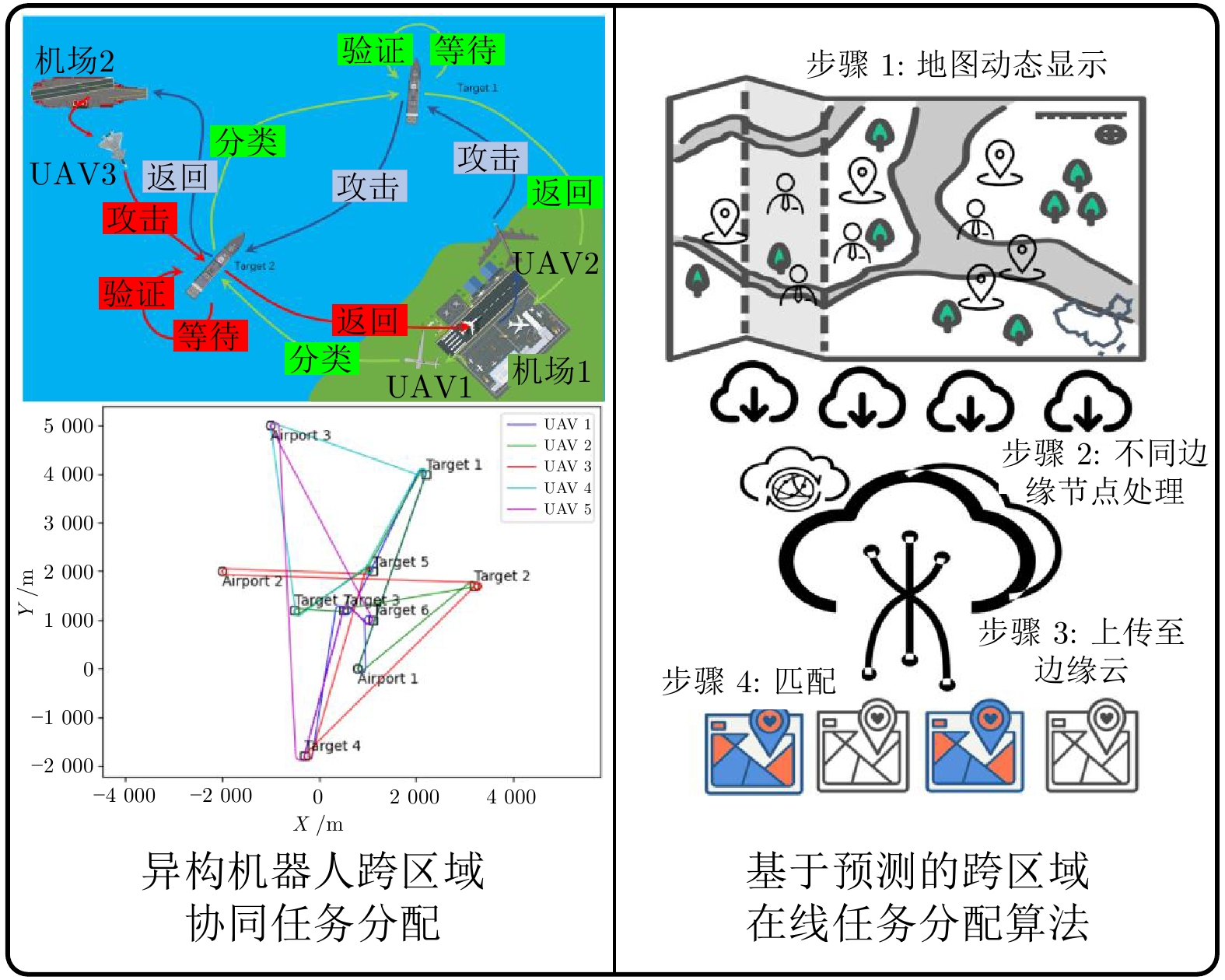
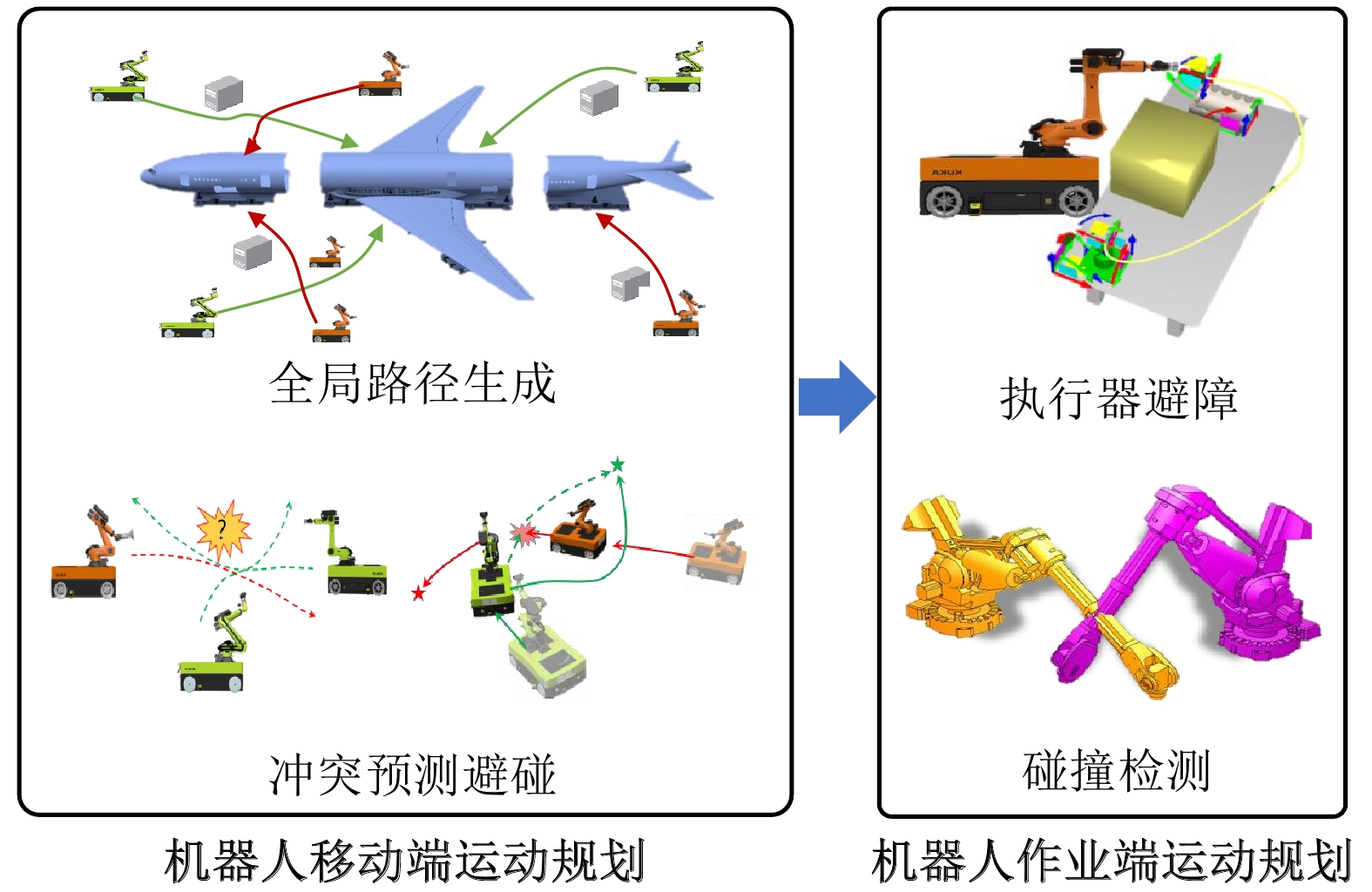
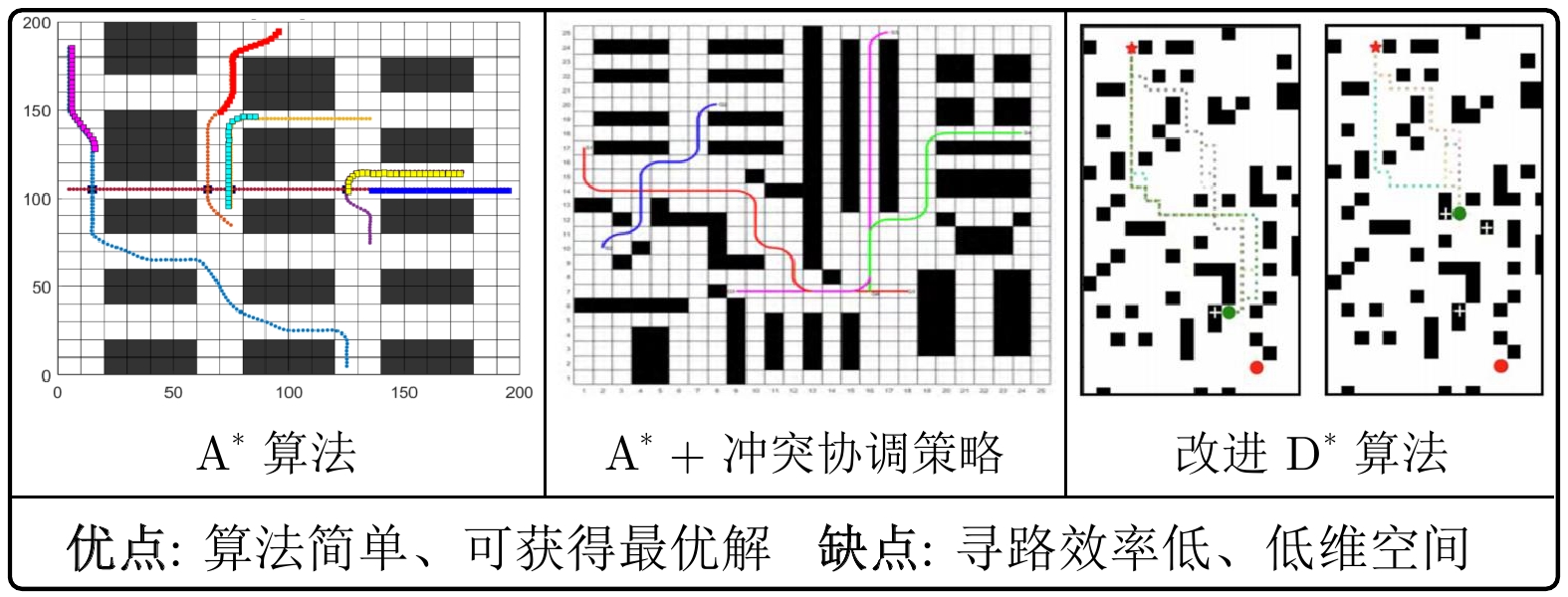
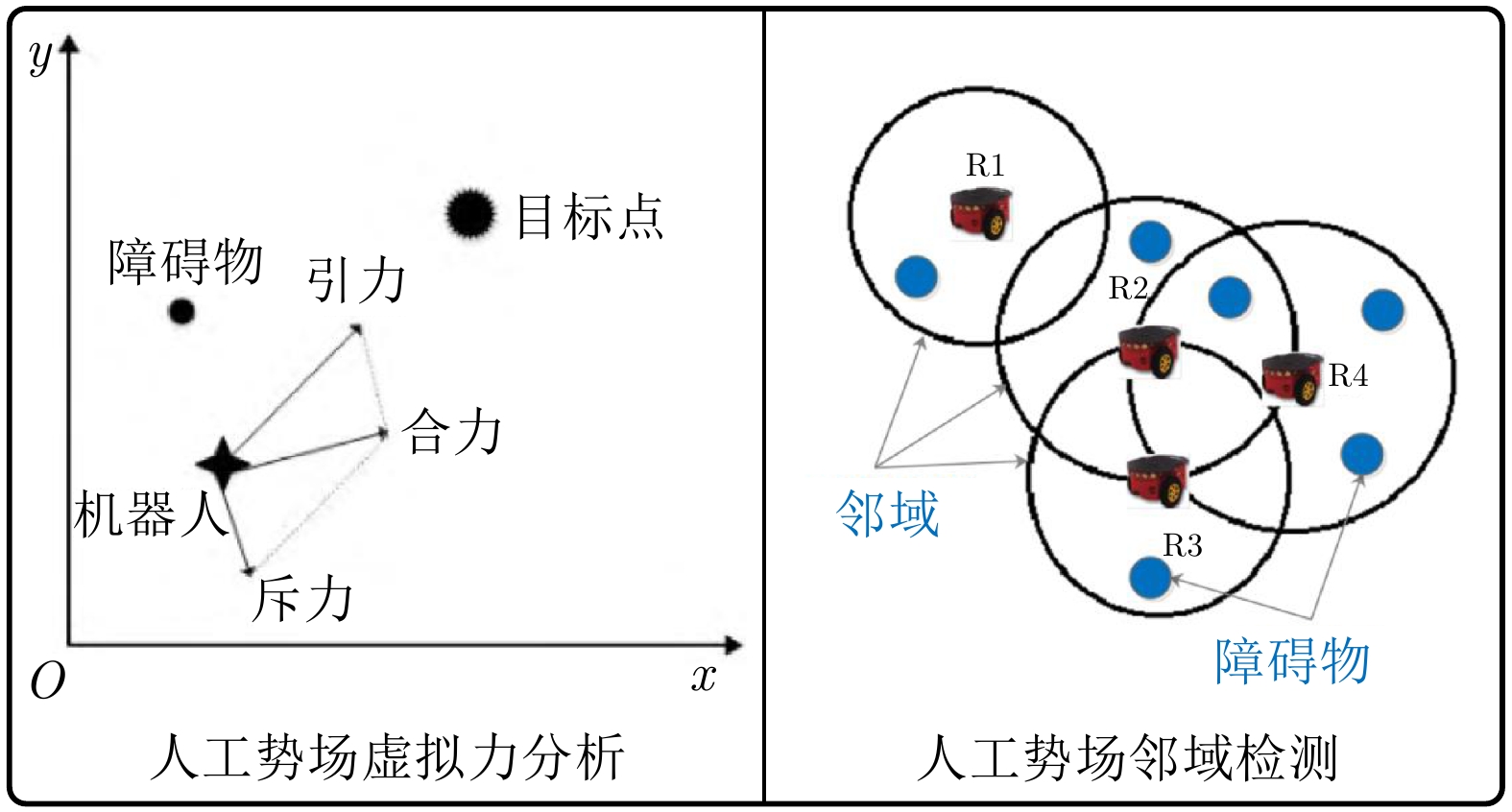
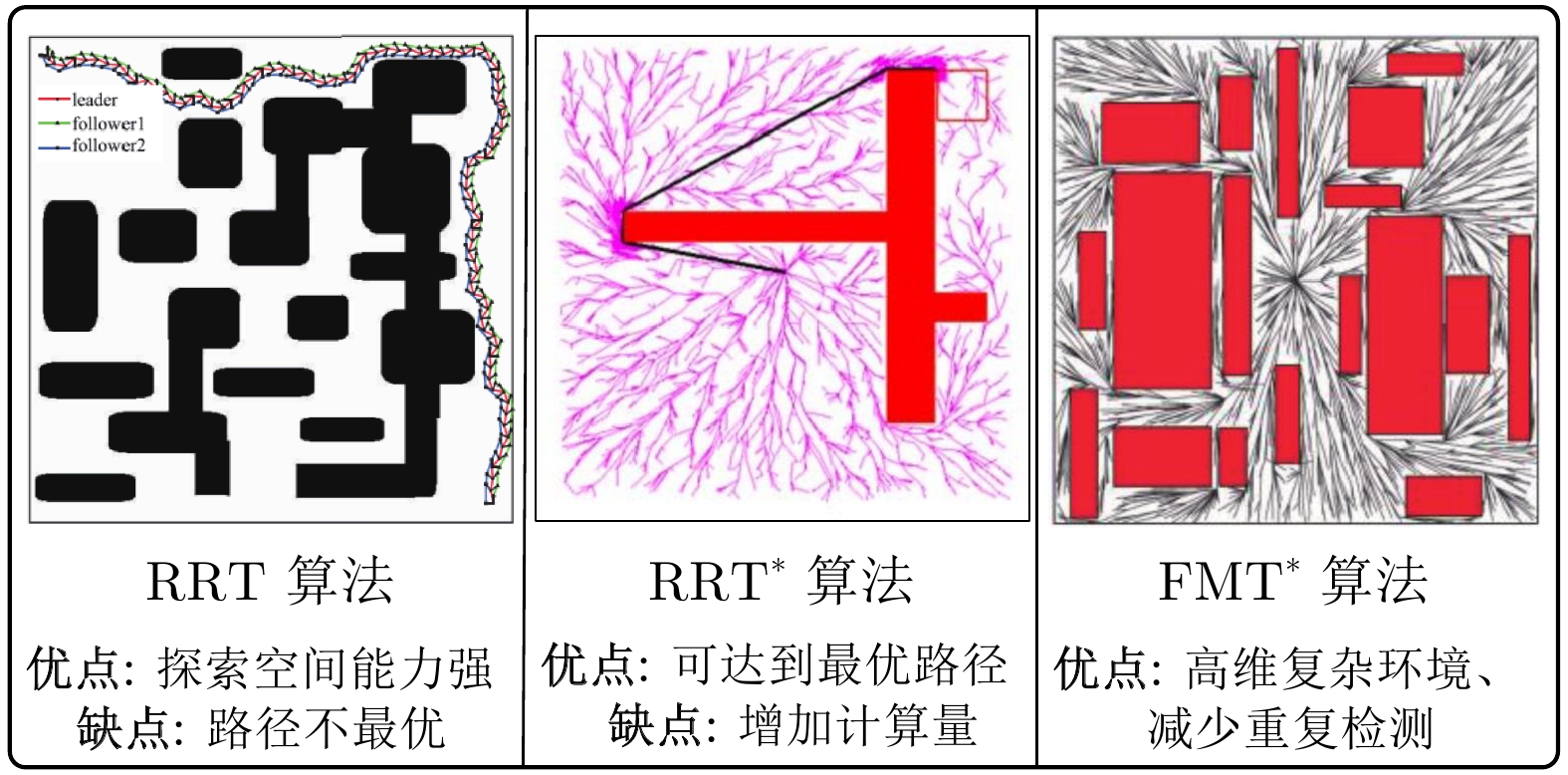
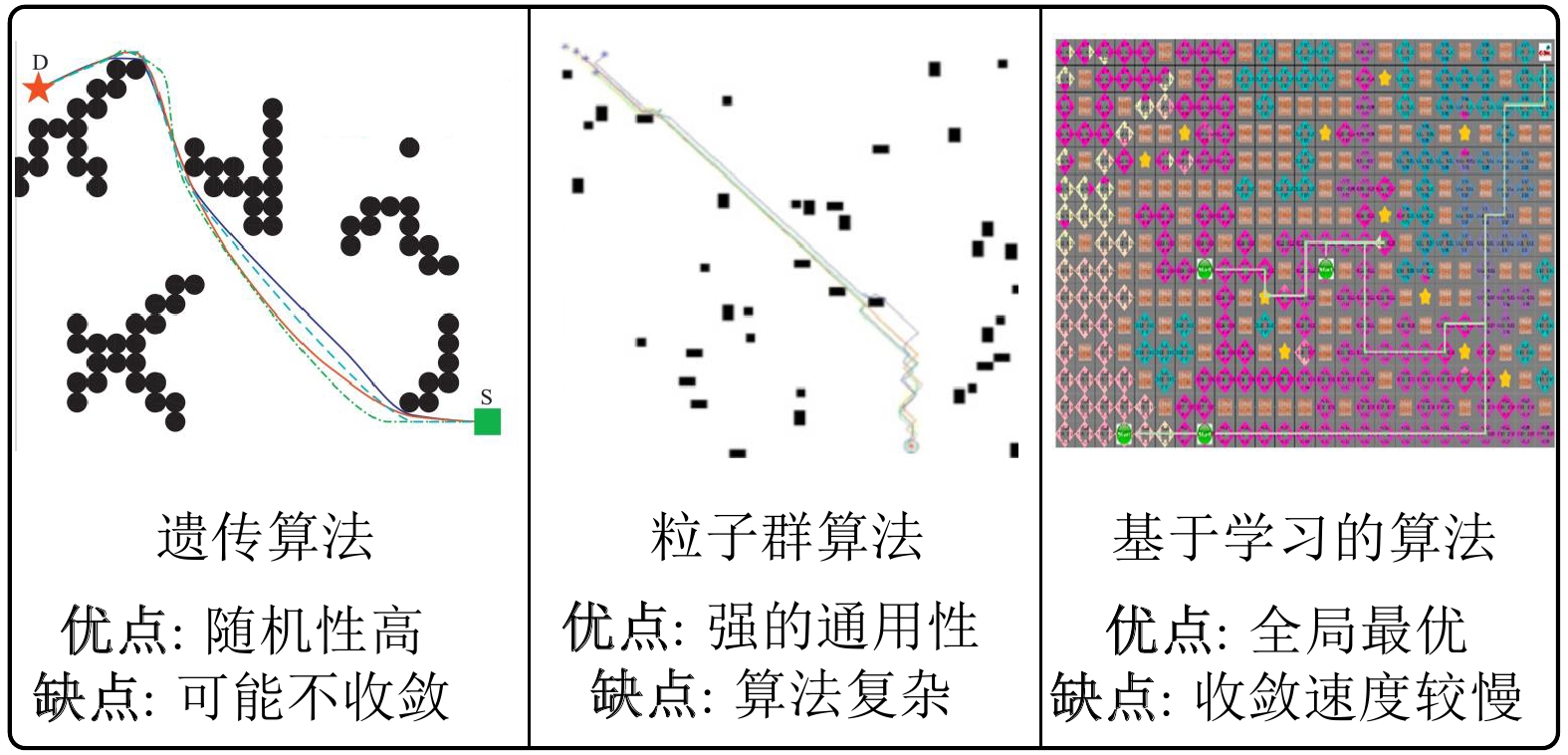
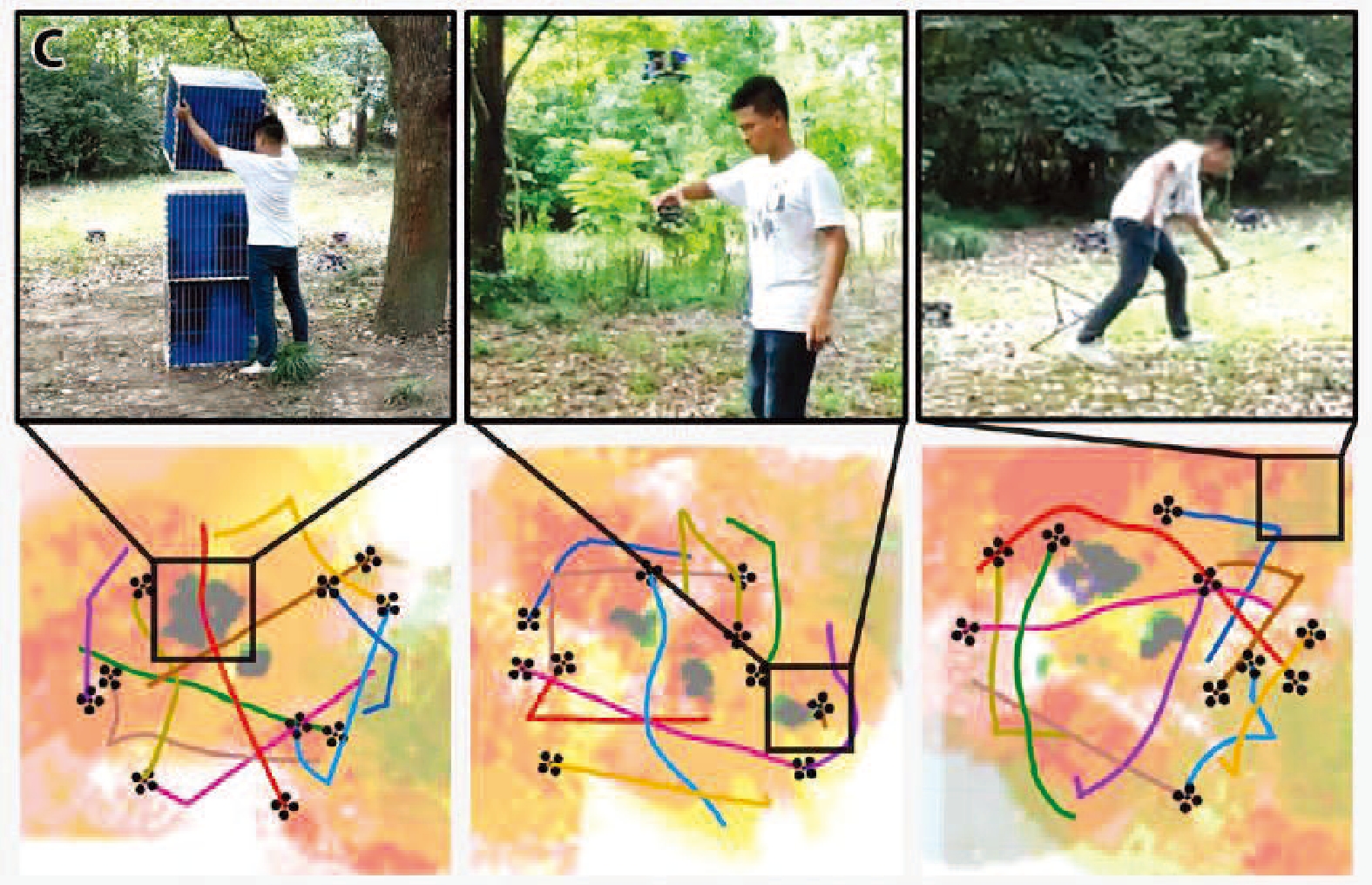
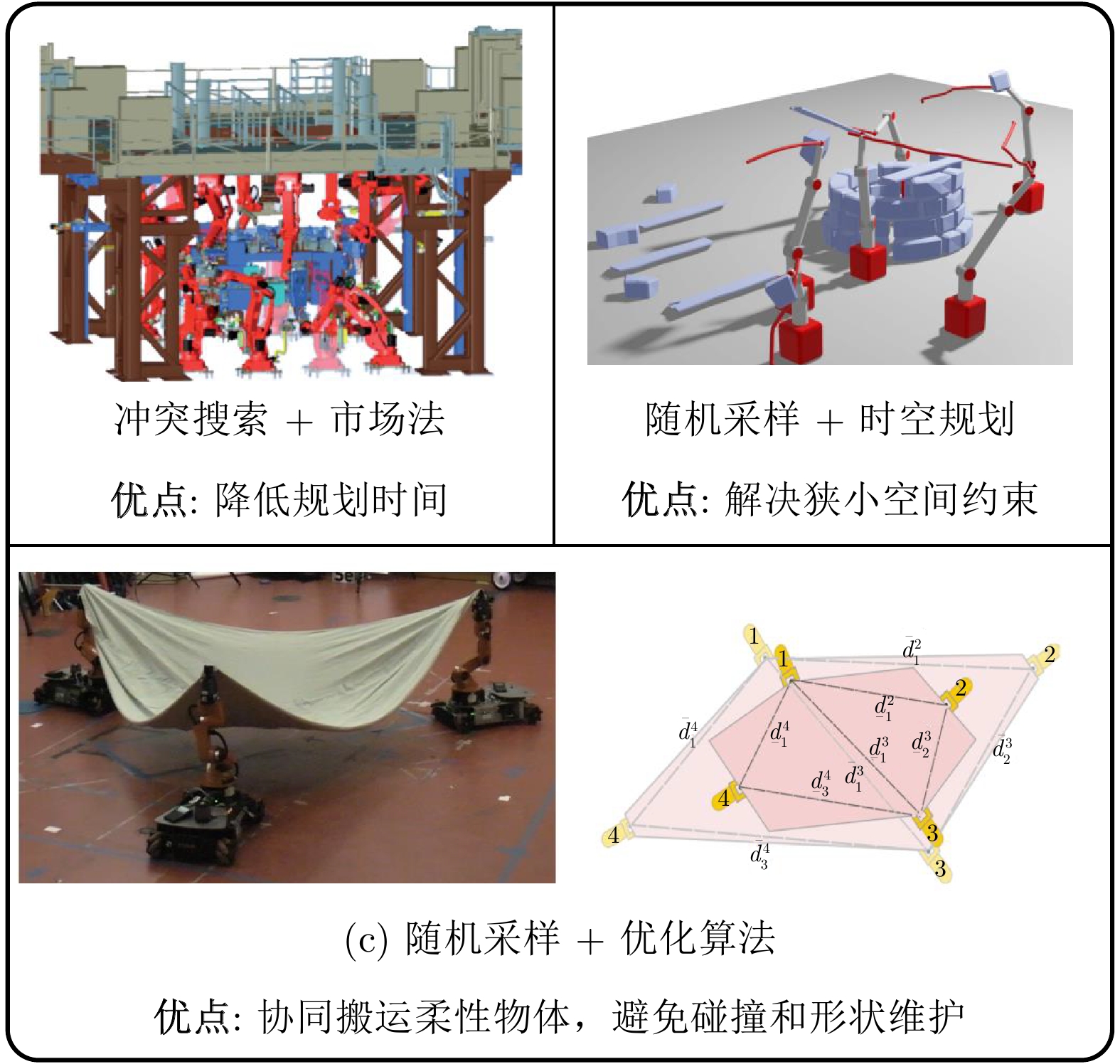
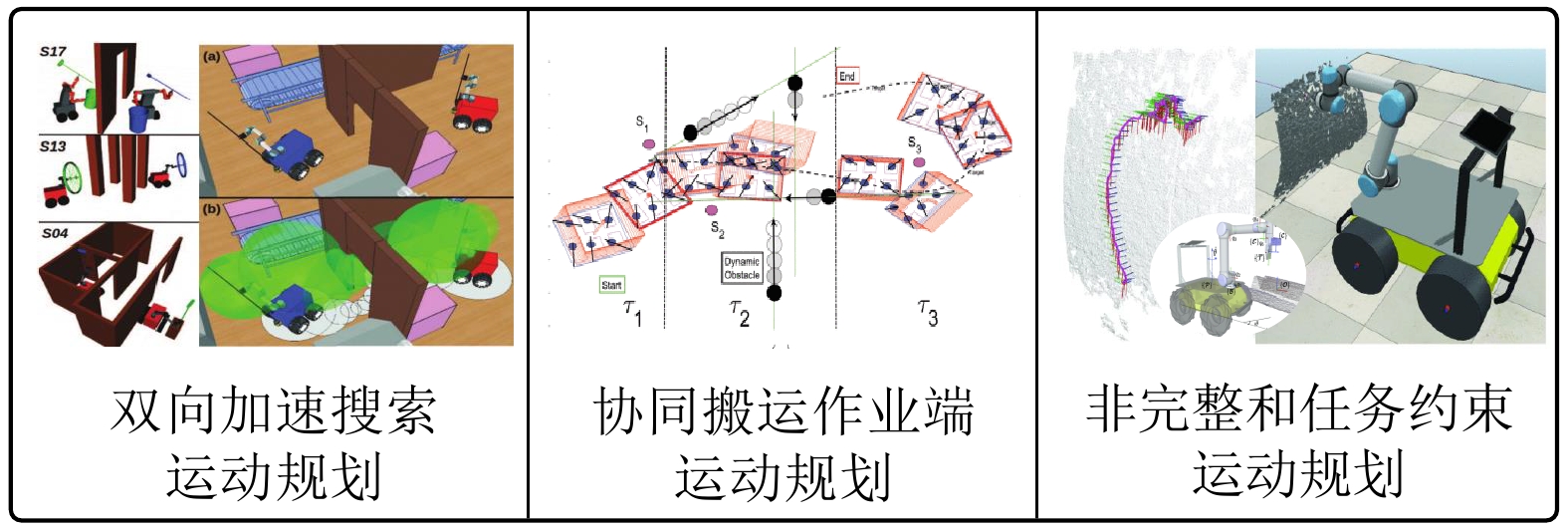
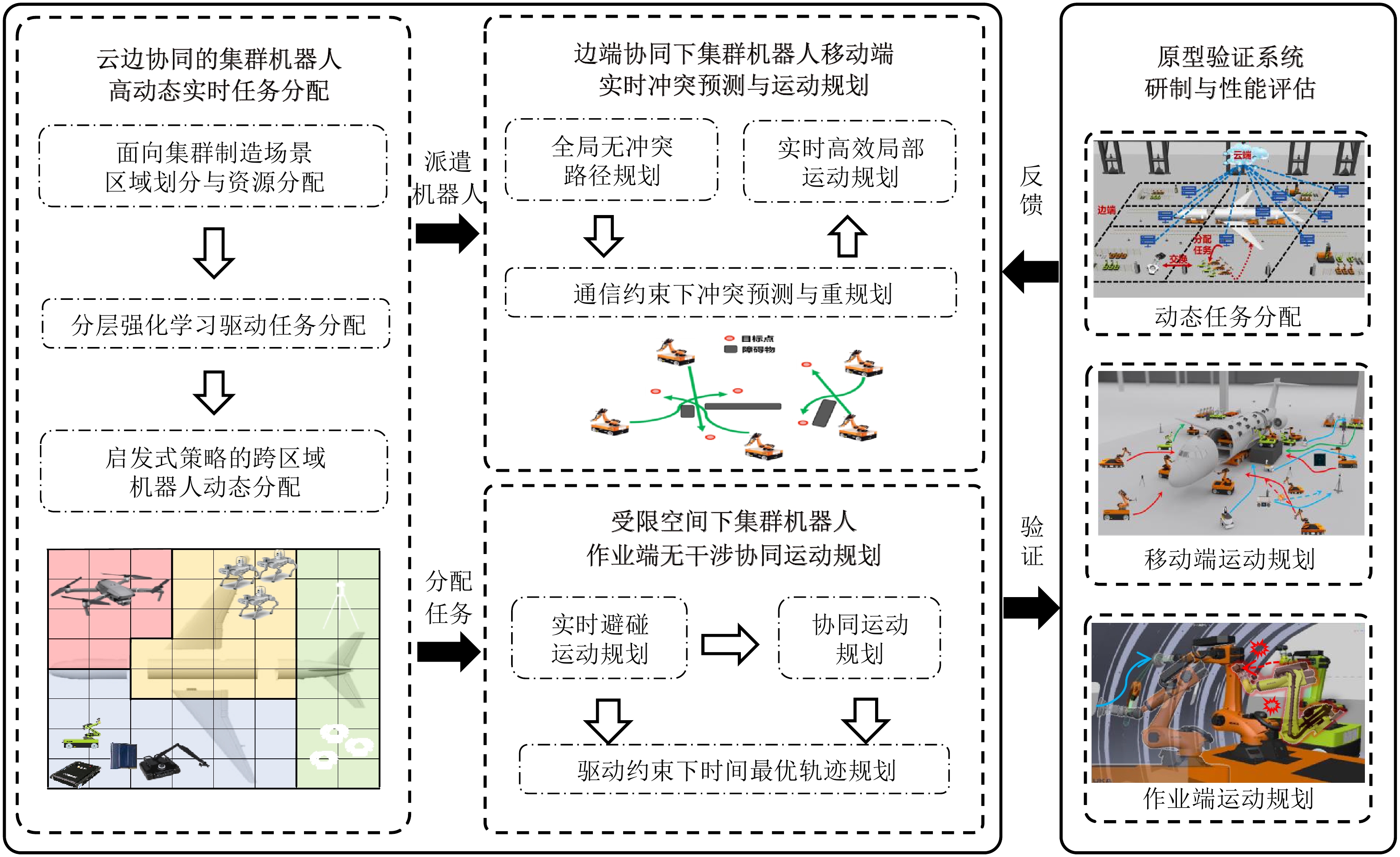
飞机蒙皮、船舶舱体、高铁车身等大型复杂部件高效高品质制造是航空航天、海洋舰船、轨道交通等领域重大装备发展的根基. 大型复杂部件具有尺寸超大、型面复杂等特点, 传统的人工、单机制造面临着效率低、一致性差、空间有限等问题, 多机器人具有高鲁棒性、高效性等优点, 为大型复杂部件制造提供了良好的制造基础. 任务分配与运动规划是多机器人制造系统的决策中枢, 其性能影响整个系统的运行效率. 考虑到重大装备部件制造任务分配与运动规划过程中任务工序多、冲突干涉多、精度需求高等挑战, 本文首先对复杂环境下多机器人任务分配与运动规划的重要性进行了说明; 然后阐述了目前主要的任务分配与运动规划方法, 包括其在智能制造领域下的应用; 在此基础上, 对现阶段复杂场景下任务分配和运动规划存在的问题进行了分析, 并使用强化学习与混合优化算法等方法提出了解决思路; 最后对重大装备大型复杂部件制造过程多机器人任务分配和动态规划技术及应用的发展进行了总结与展望.
飞机蒙皮、船舶舱体、高铁车身等大型复杂部件高效高品质制造是航空航天、海洋舰船、轨道交通等领域重大装备发展的根基. 大型复杂部件具有尺寸超大、型面复杂等特点, 传统的人工、单机制造面临着效率低、一致性差、空间有限等问题, 多机器人具有高鲁棒性、高效性等优点, 为大型复杂部件制造提供了良好的制造基础. 任务分配与运动规划是多机器人制造系统的决策中枢, 其性能影响整个系统的运行效率. 考虑到重大装备部件制造任务分配与运动规划过程中任务工序多、冲突干涉多、精度需求高等挑战, 本文首先对复杂环境下多机器人任务分配与运动规划的重要性进行了说明; 然后阐述了目前主要的任务分配与运动规划方法, 包括其在智能制造领域下的应用; 在此基础上, 对现阶段复杂场景下任务分配和运动规划存在的问题进行了分析, 并使用强化学习与混合优化算法等方法提出了解决思路; 最后对重大装备大型复杂部件制造过程多机器人任务分配和动态规划技术及应用的发展进行了总结与展望.
2024, 50(1): 42-53.
doi: 10.16383/j.aas.c210916
摘要:
研究了\begin{document}$n $\end{document} \begin{document}$n $\end{document}
研究了
2024, 50(1): 54-65.
doi: 10.16383/j.aas.c230409
摘要:
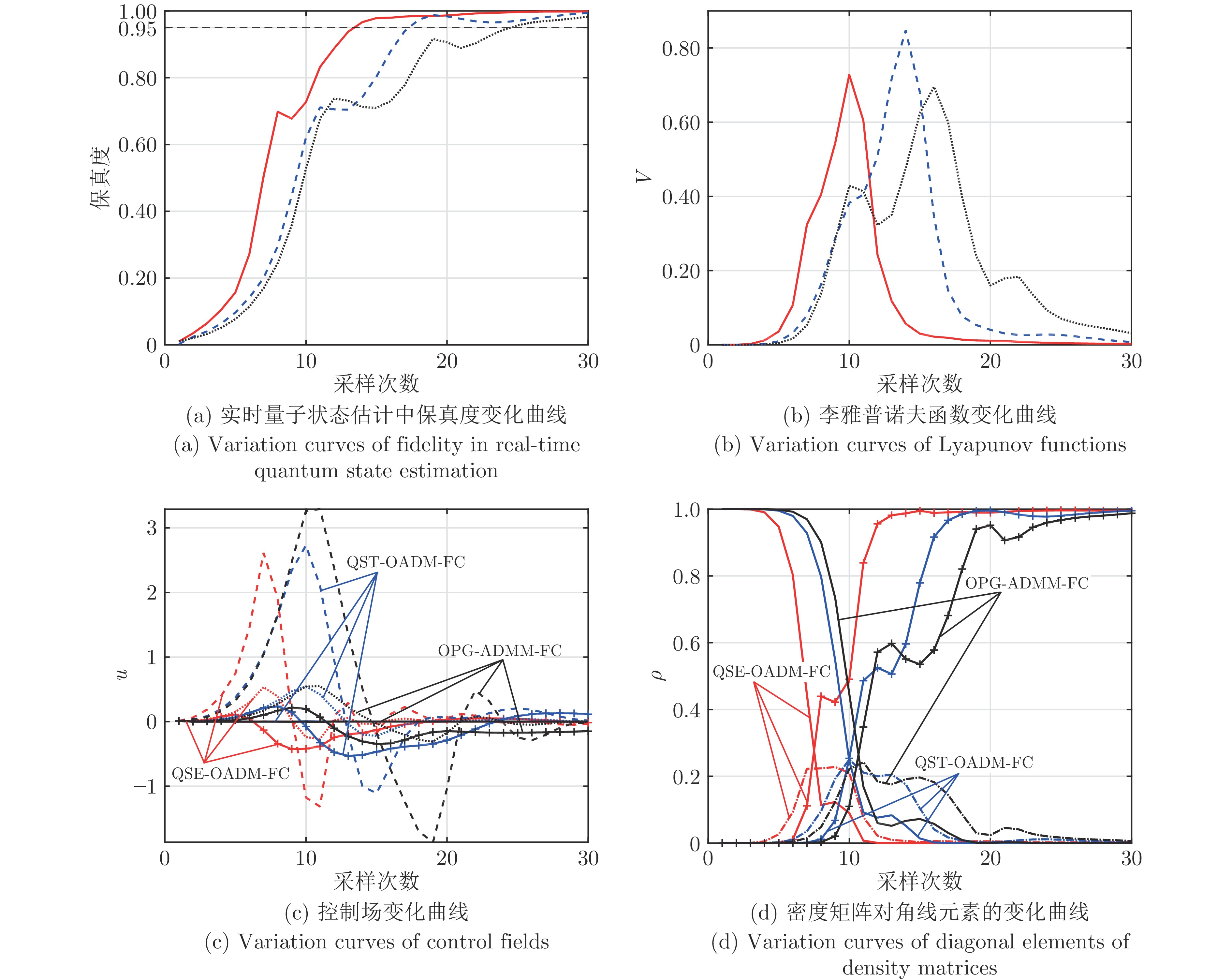
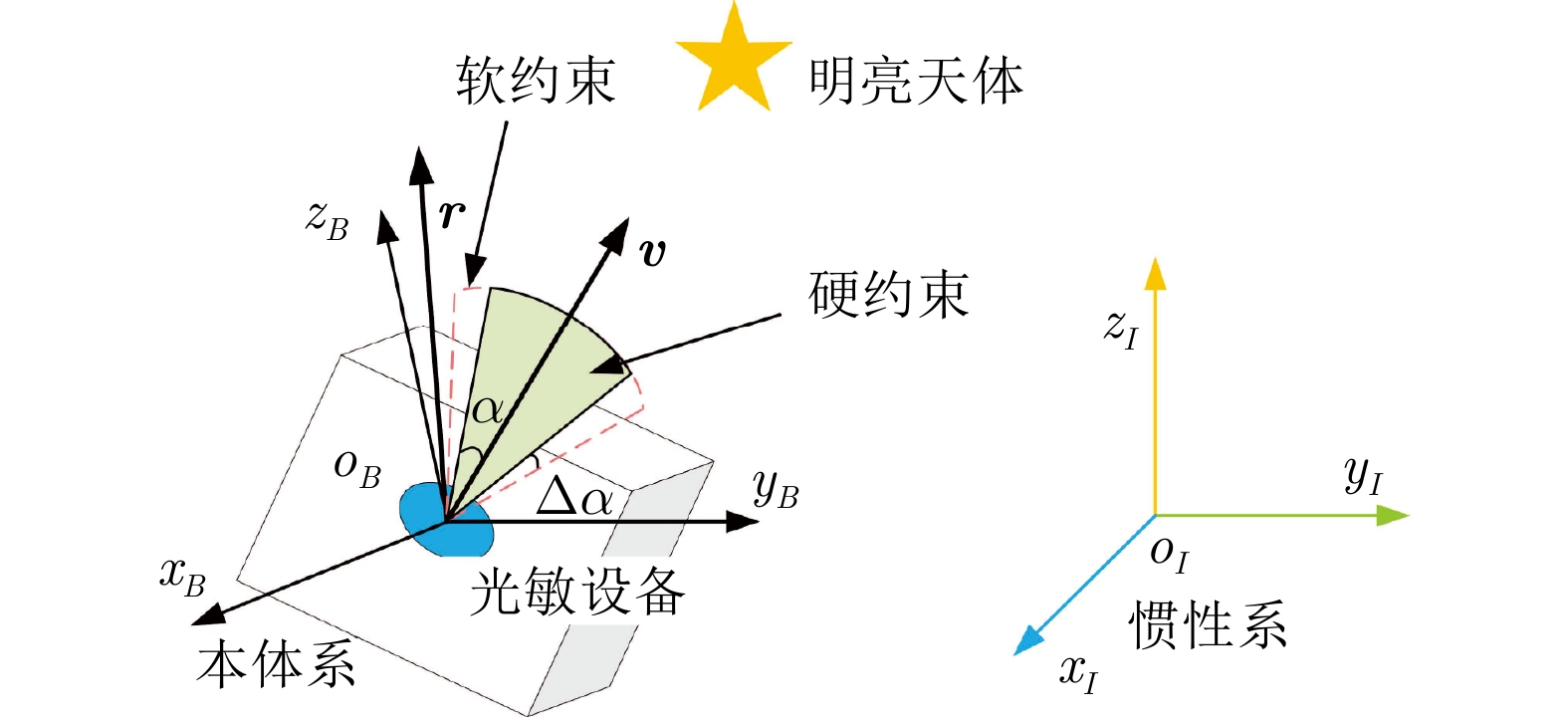
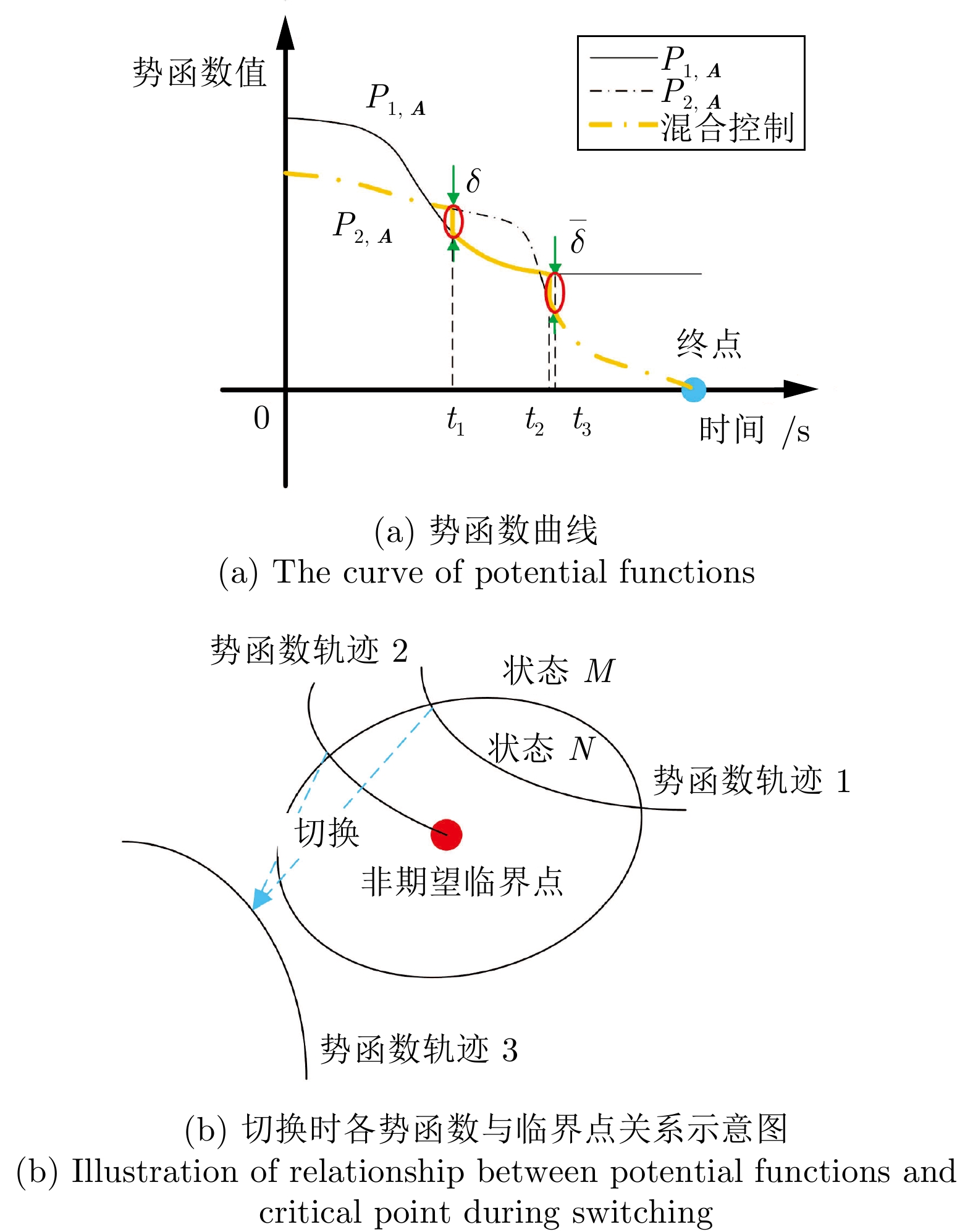
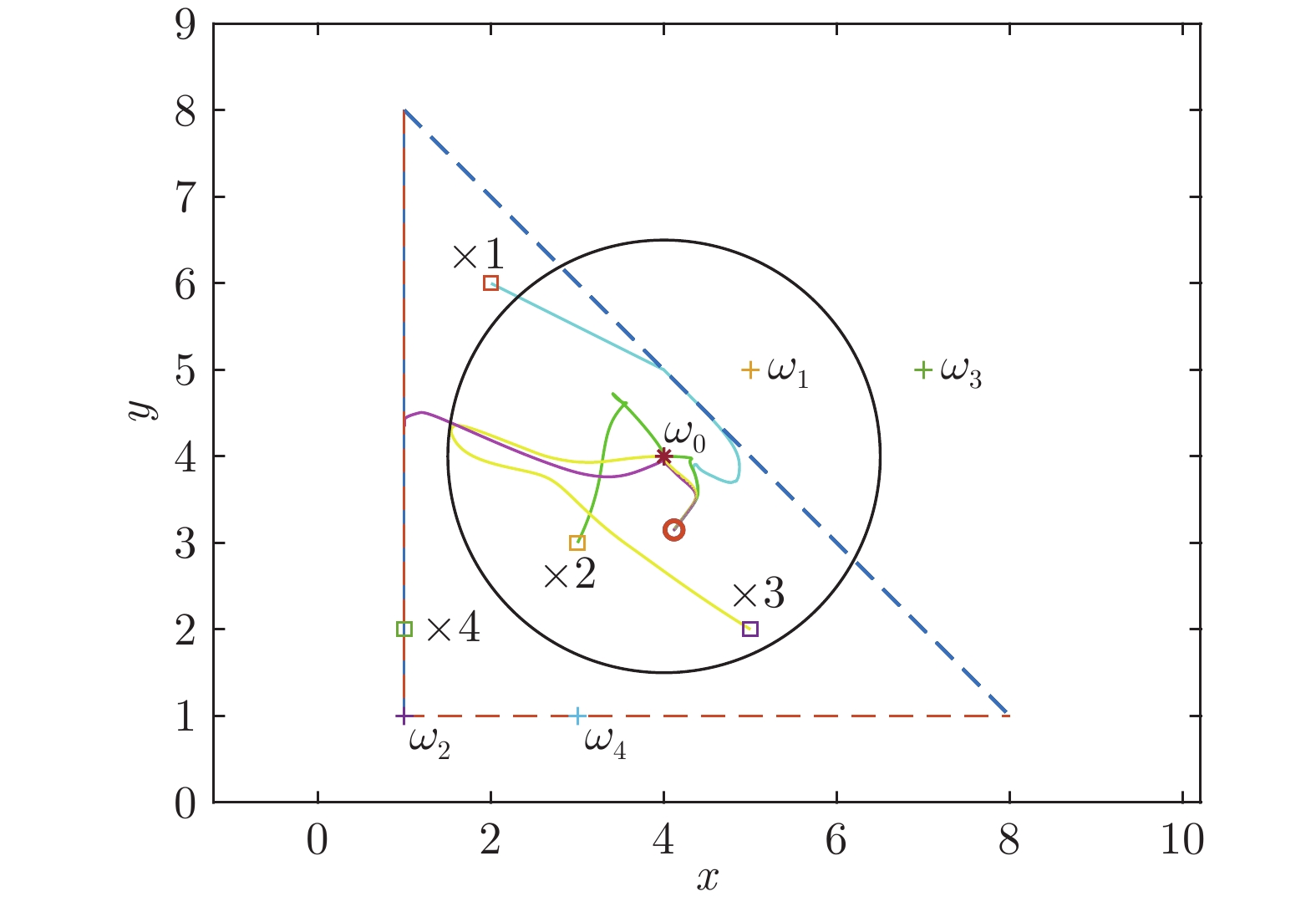
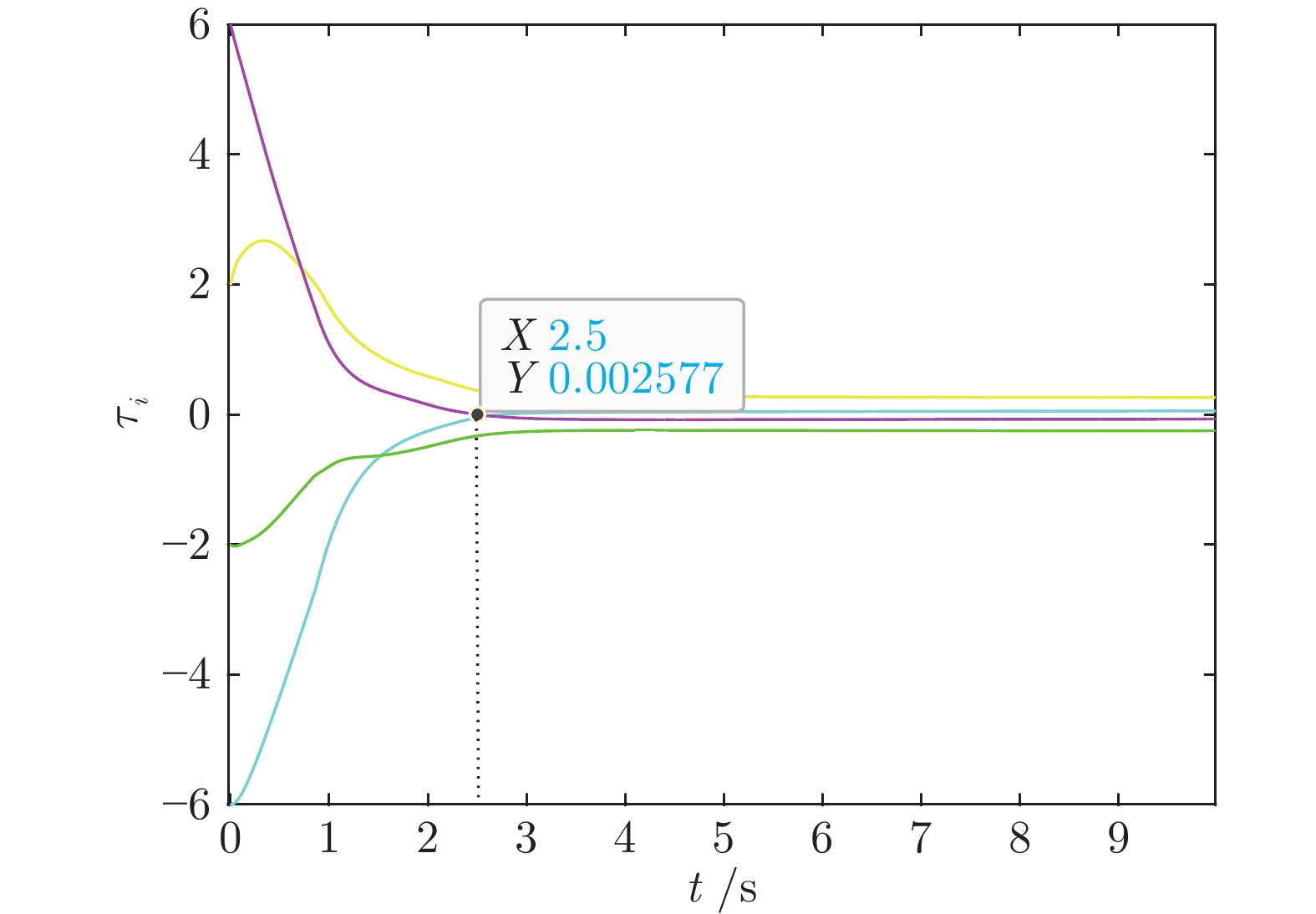
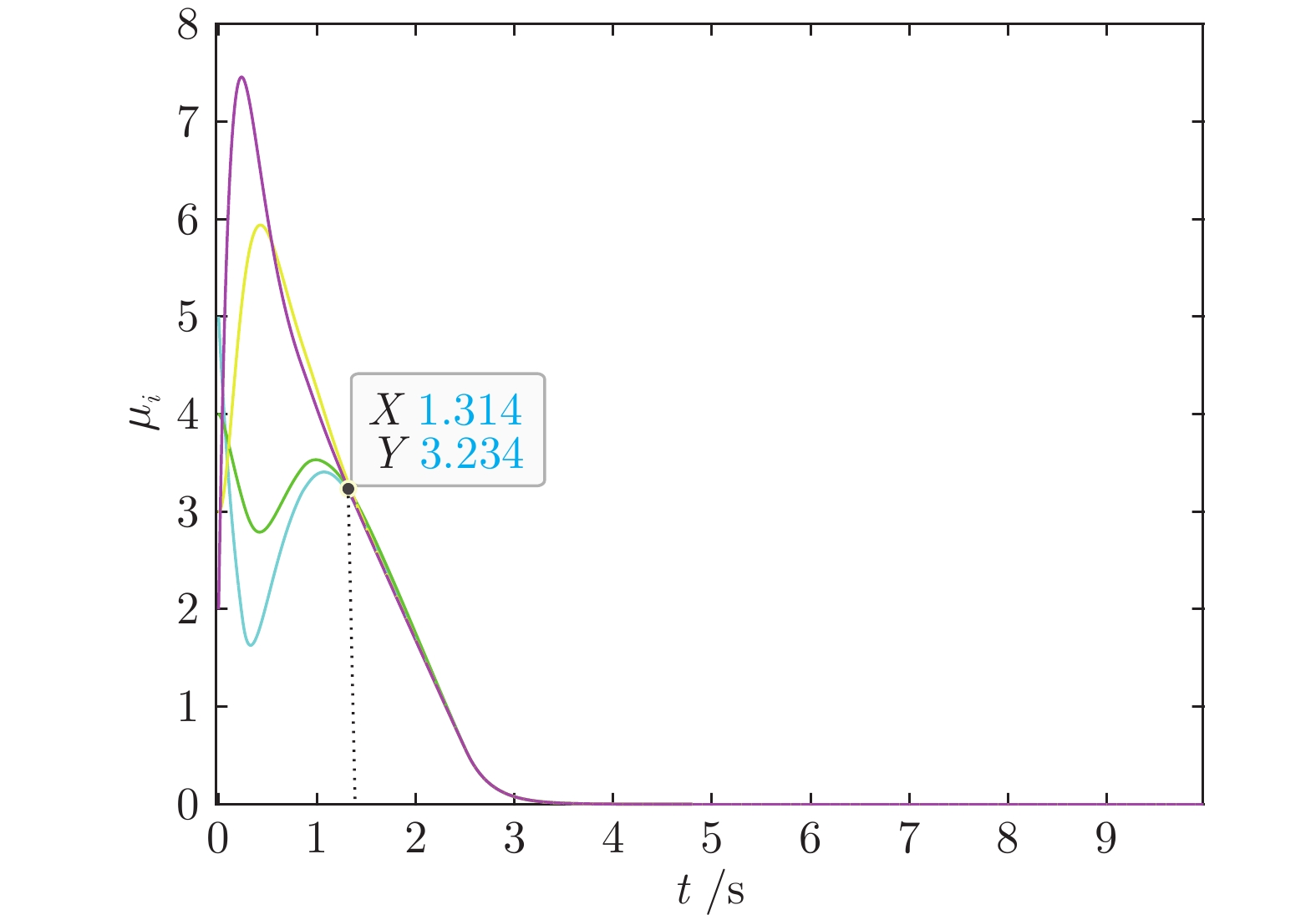
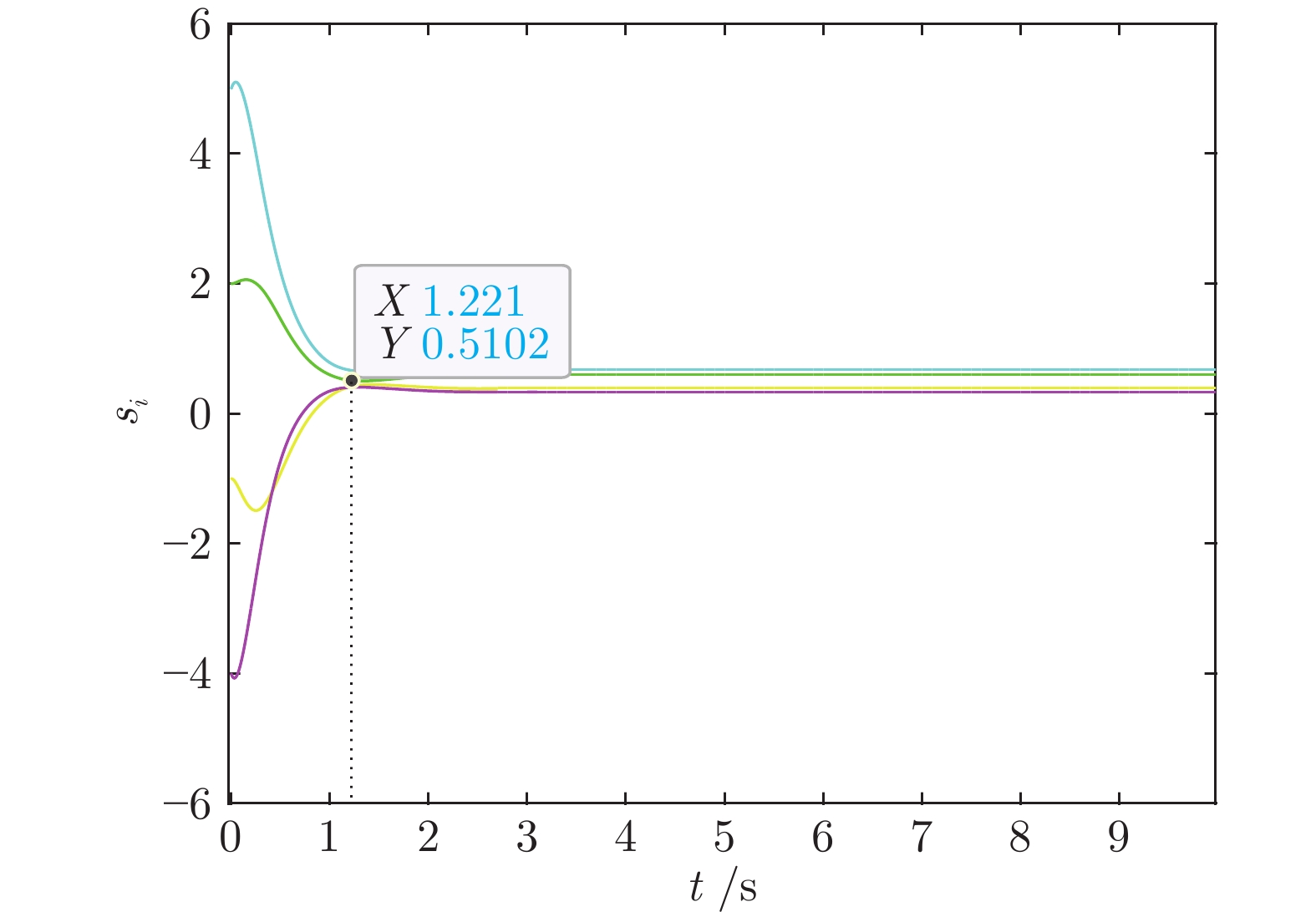
提出一种考虑航天器姿态约束的协同势函数设计方法, 在姿态全局收敛的同时, 保证姿态在机动过程中始终满足姿态约束. 首先, 建立航天器姿态指向约束模型, 并针对每一个指向约束设计软约束区域; 然后, 基于“角度扰动”方法设计协同势函数族; 接着, 通过设计协同势函数族内函数切换规律, 在软约束区域内构建满足姿态约束的势函数, 并给出区域内势函数临界点分布的调整方法; 最后, 将所得的势函数用于航天器的避障控制, 以比例−微分控制为例, 通过数值仿真, 验证该方法的有效性.
提出一种考虑航天器姿态约束的协同势函数设计方法, 在姿态全局收敛的同时, 保证姿态在机动过程中始终满足姿态约束. 首先, 建立航天器姿态指向约束模型, 并针对每一个指向约束设计软约束区域; 然后, 基于“角度扰动”方法设计协同势函数族; 接着, 通过设计协同势函数族内函数切换规律, 在软约束区域内构建满足姿态约束的势函数, 并给出区域内势函数临界点分布的调整方法; 最后, 将所得的势函数用于航天器的避障控制, 以比例−微分控制为例, 通过数值仿真, 验证该方法的有效性.


2024, 50(1): 66-75.
doi: 10.16383/j.aas.c210808
摘要:
研究一类分布式优化问题, 其目标是在满足耦合不等式约束和局部可行集约束的情况下使非光滑全局代价函数值最小. 首先, 对原有的分布式连续时间投影算法进行拓展, 结合线性代数理论分析, 设计一个适用于强连通加权平衡有向通信网络拓扑图的算法. 其次, 在局部代价函数和耦合不等式约束函数是非光滑凸函数的假设条件下, 利用Moreau-Yosida函数正则化使目标函数和约束函数近似光滑可微. 然后, 根据强连通加权平衡有向图的分布式连续时间投影算法构造李雅普诺夫函数, 证明该算法下的平衡解是分布式优化问题最优解, 并对算法进行收敛性分析. 最后, 通过数值仿真验证算法的有效性.
研究一类分布式优化问题, 其目标是在满足耦合不等式约束和局部可行集约束的情况下使非光滑全局代价函数值最小. 首先, 对原有的分布式连续时间投影算法进行拓展, 结合线性代数理论分析, 设计一个适用于强连通加权平衡有向通信网络拓扑图的算法. 其次, 在局部代价函数和耦合不等式约束函数是非光滑凸函数的假设条件下, 利用Moreau-Yosida函数正则化使目标函数和约束函数近似光滑可微. 然后, 根据强连通加权平衡有向图的分布式连续时间投影算法构造李雅普诺夫函数, 证明该算法下的平衡解是分布式优化问题最优解, 并对算法进行收敛性分析. 最后, 通过数值仿真验证算法的有效性.
2024, 50(1): 76-88.
doi: 10.16383/j.aas.c230014
摘要:
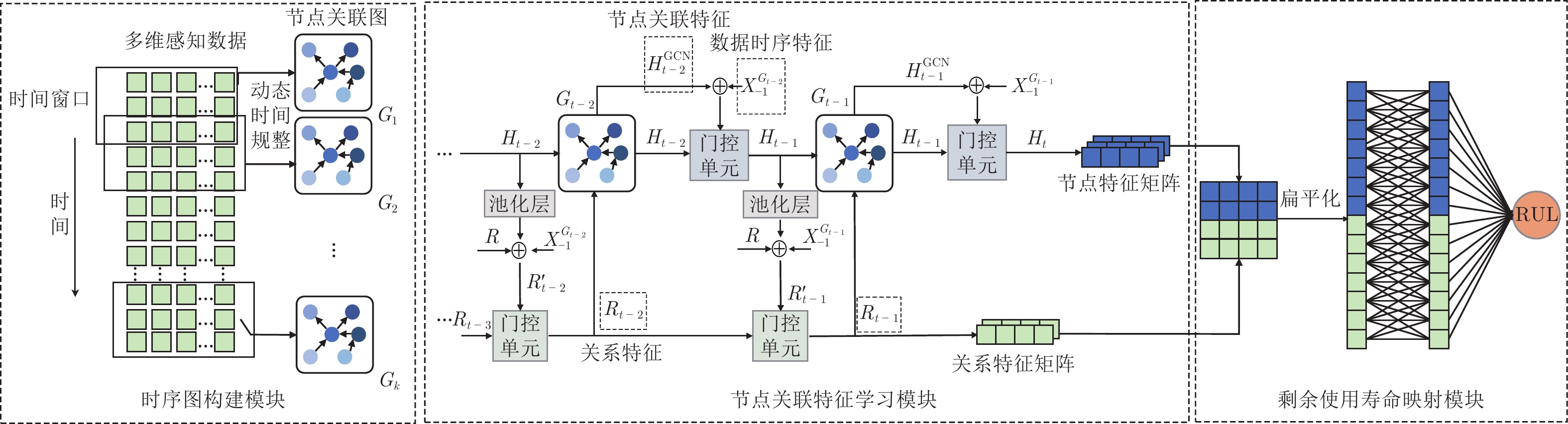
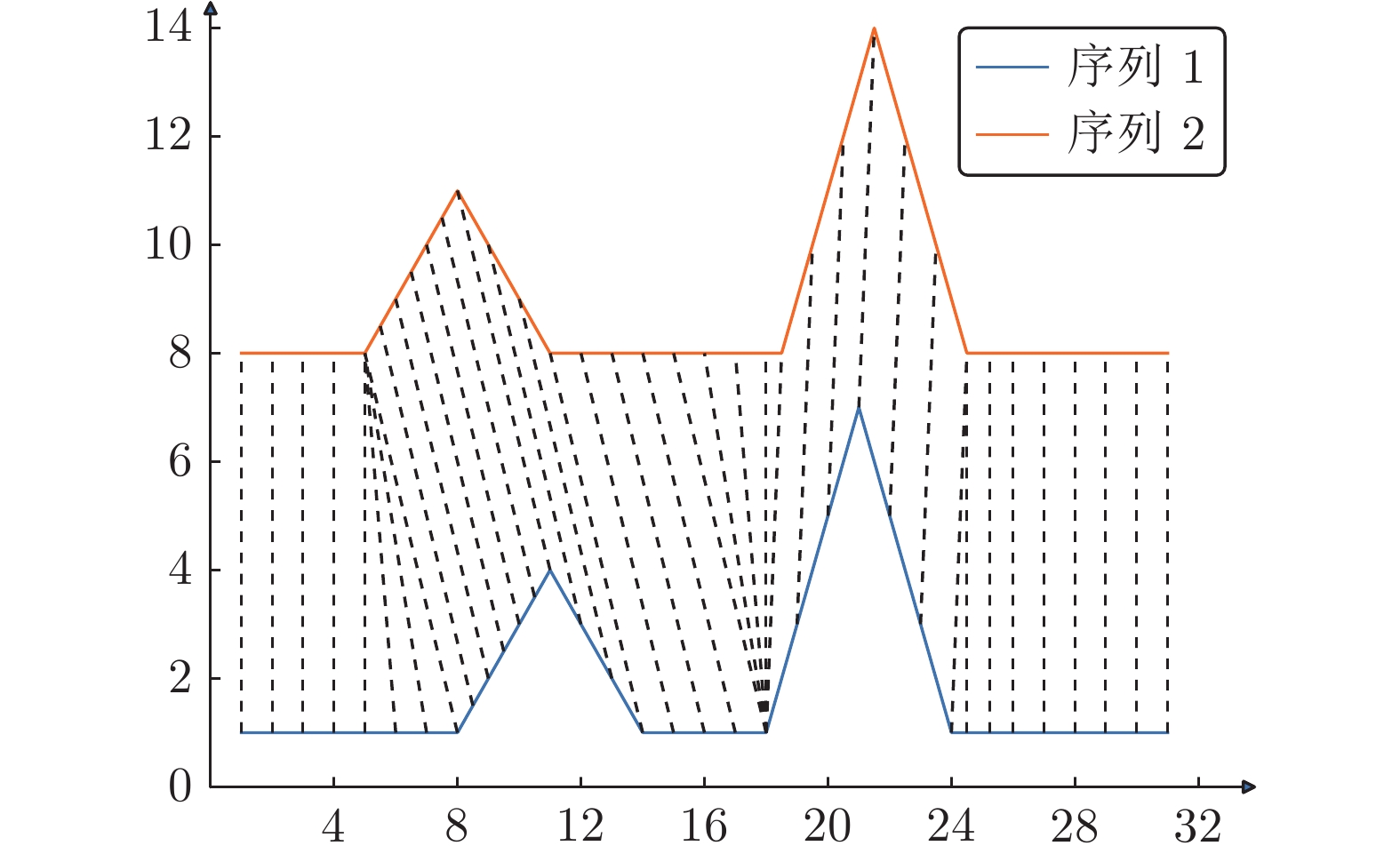
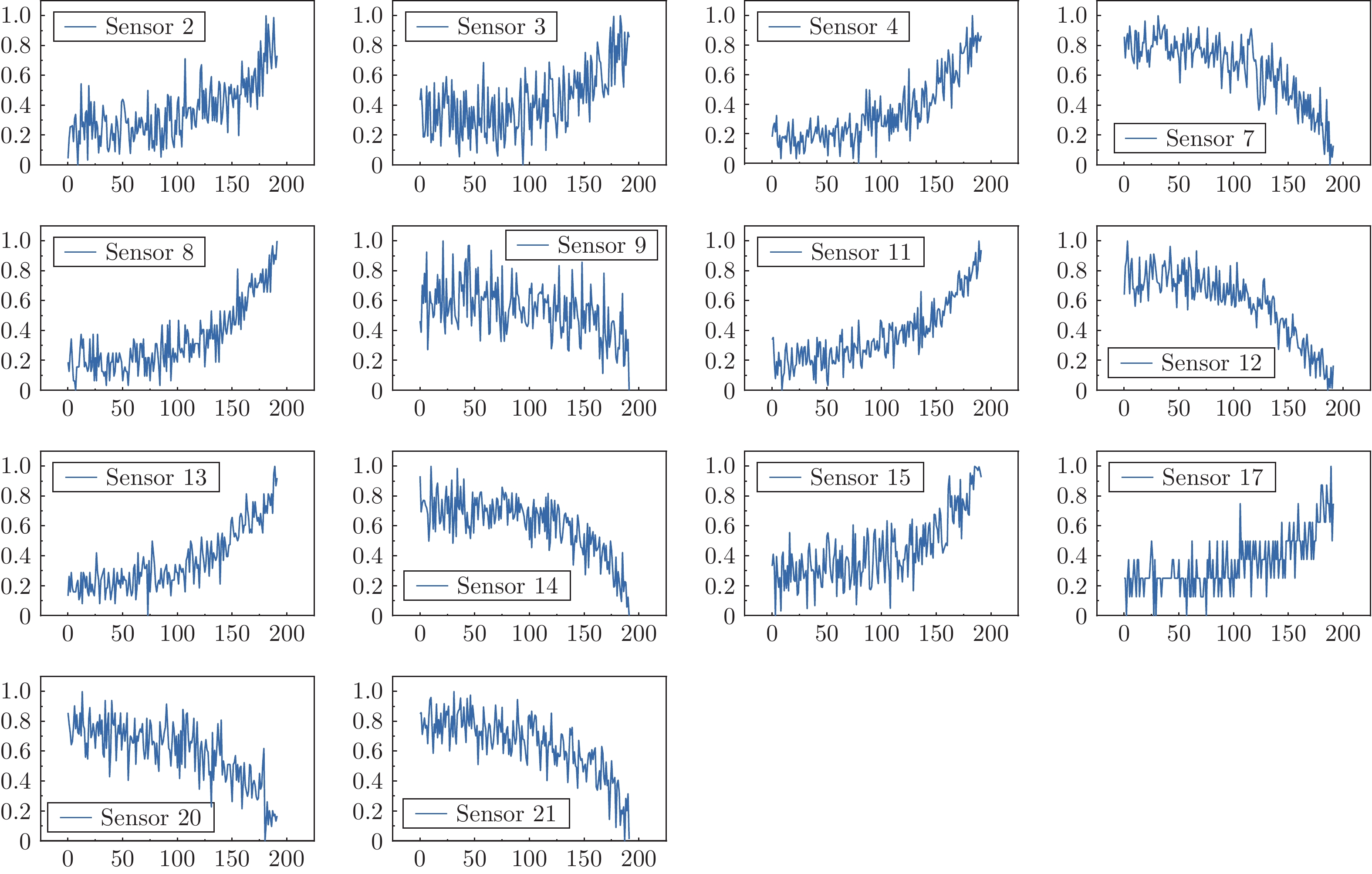
剩余使用寿命(Remaining useful life, RUL)预测是大型设备故障预测与健康管理(Prognostics and health management, PHM)的重要环节, 对于降低设备维修成本和避免灾难性故障具有重要意义. 针对RUL预测, 首次提出一种基于多变量分析的时序图推理模型(Multivariate similarity temporal knowledge graph, MSTKG), 通过捕捉设备各部件的运行状态耦合关系及其变化趋势, 挖掘其中蕴含的设备性能退化信息, 为寿命预测提供有效依据. 首先, 设计时序图结构, 形式化表达各部件不同工作周期的关联关系. 其次, 提出联合图卷积神经网络(Convolutional neural network, CNN)和门控循环单元 (Gated recurrent unit, GRU)的深度推理网络, 建模并学习设备各部件工作状态的时空演化过程, 并结合回归分析, 得到剩余使用寿命预测结果. 最后, 与现有预测方法相比, 所提方法能够显式建模并利用设备部件耦合关系的变化信息, 仿真实验结果验证了该方法的优越性.
剩余使用寿命(Remaining useful life, RUL)预测是大型设备故障预测与健康管理(Prognostics and health management, PHM)的重要环节, 对于降低设备维修成本和避免灾难性故障具有重要意义. 针对RUL预测, 首次提出一种基于多变量分析的时序图推理模型(Multivariate similarity temporal knowledge graph, MSTKG), 通过捕捉设备各部件的运行状态耦合关系及其变化趋势, 挖掘其中蕴含的设备性能退化信息, 为寿命预测提供有效依据. 首先, 设计时序图结构, 形式化表达各部件不同工作周期的关联关系. 其次, 提出联合图卷积神经网络(Convolutional neural network, CNN)和门控循环单元 (Gated recurrent unit, GRU)的深度推理网络, 建模并学习设备各部件工作状态的时空演化过程, 并结合回归分析, 得到剩余使用寿命预测结果. 最后, 与现有预测方法相比, 所提方法能够显式建模并利用设备部件耦合关系的变化信息, 仿真实验结果验证了该方法的优越性.



2024, 50(1): 89-102.
doi: 10.16383/j.aas.c230156
摘要:
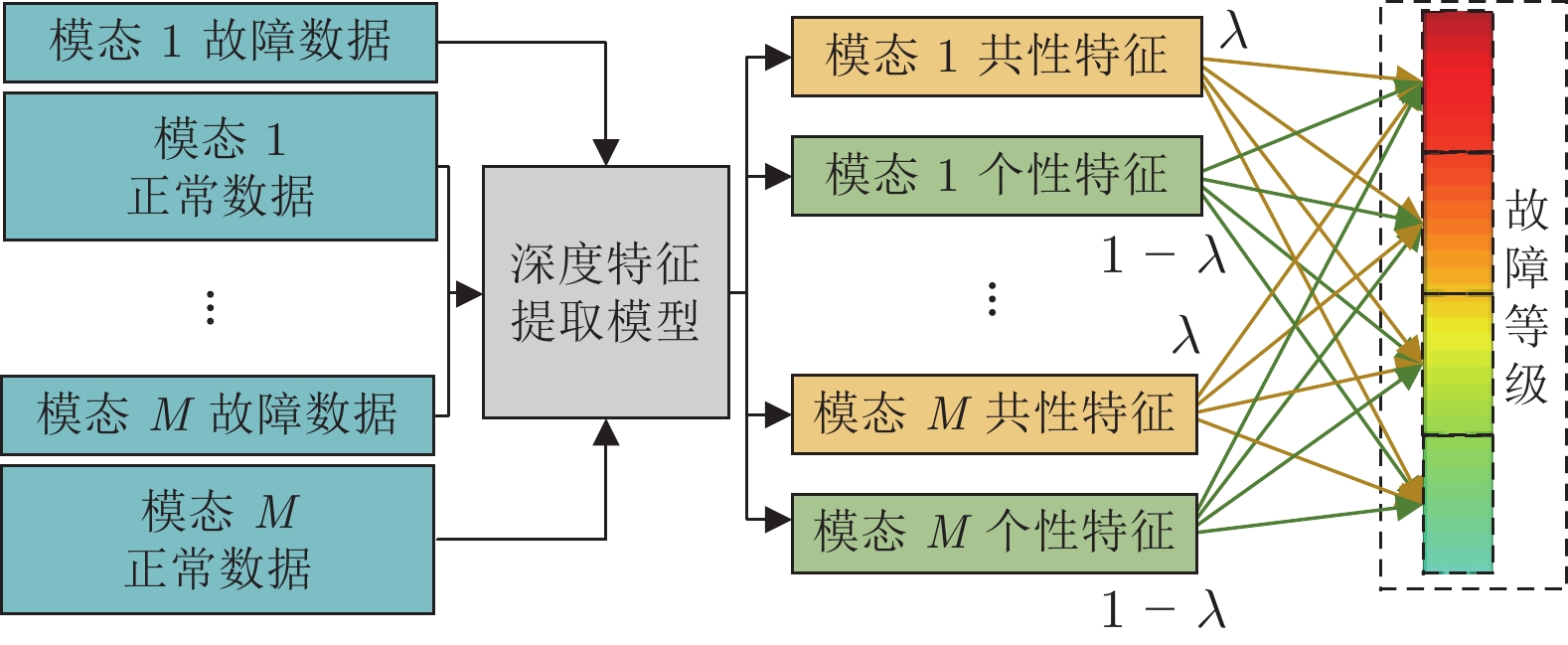
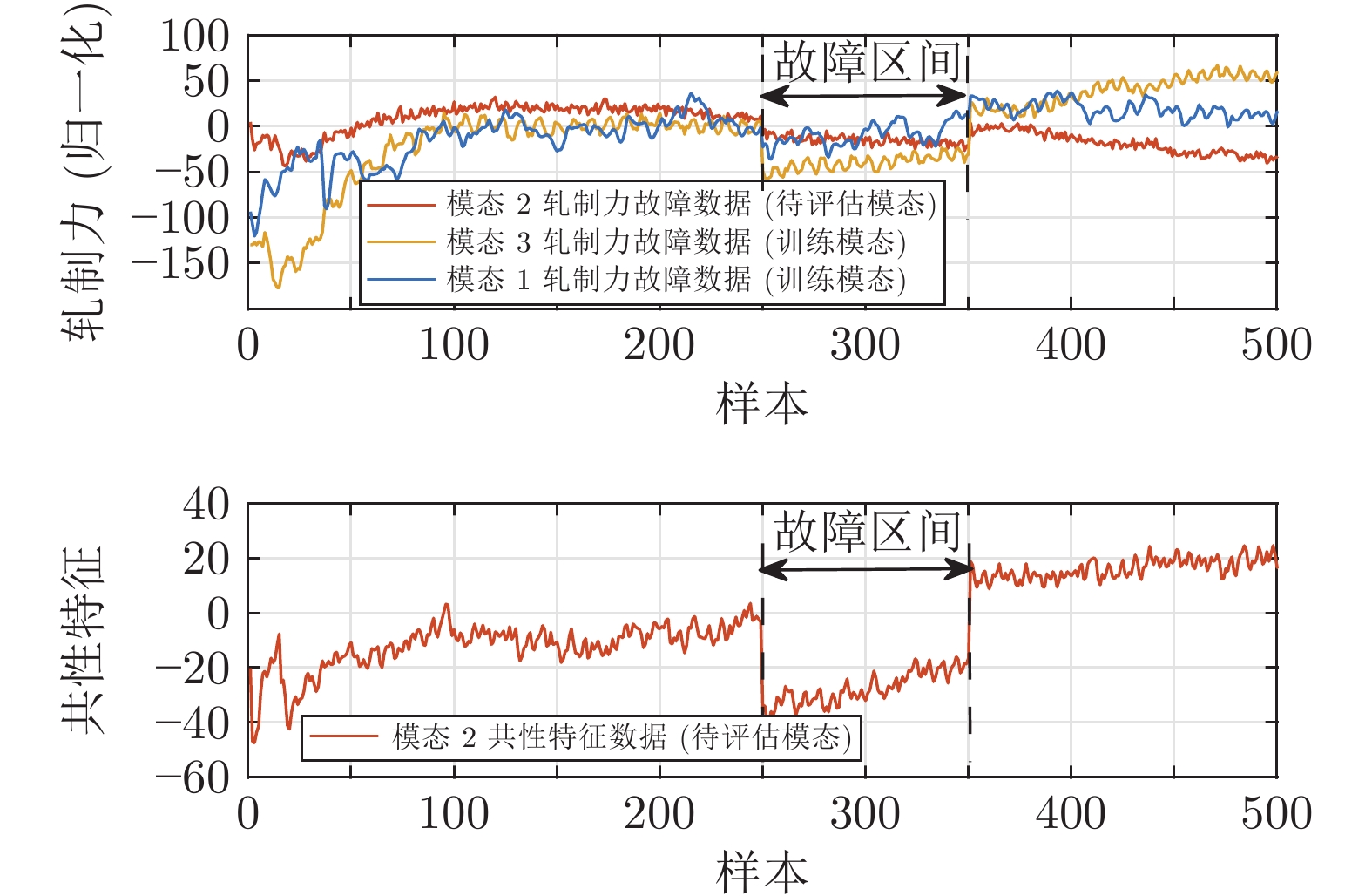
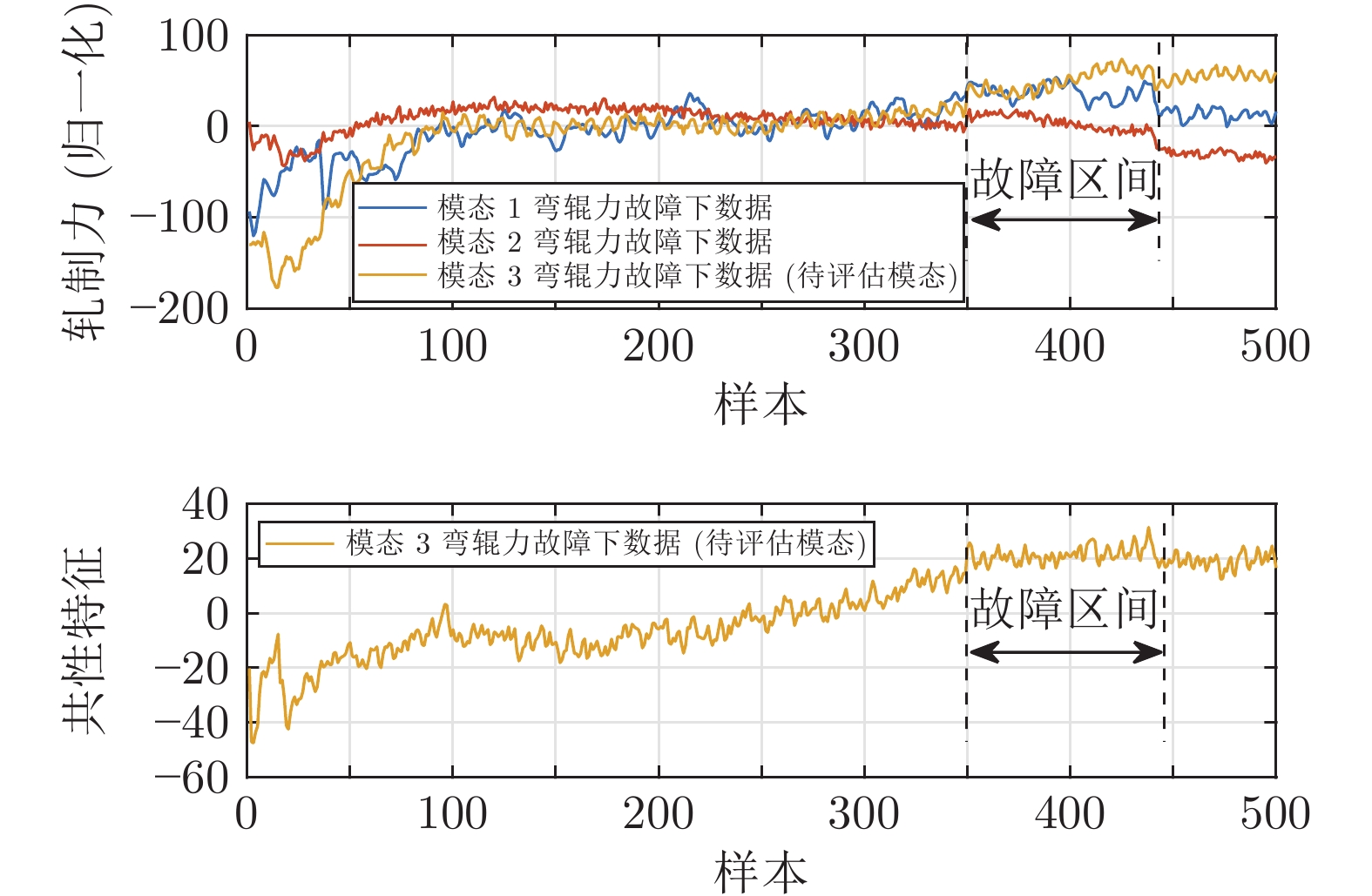
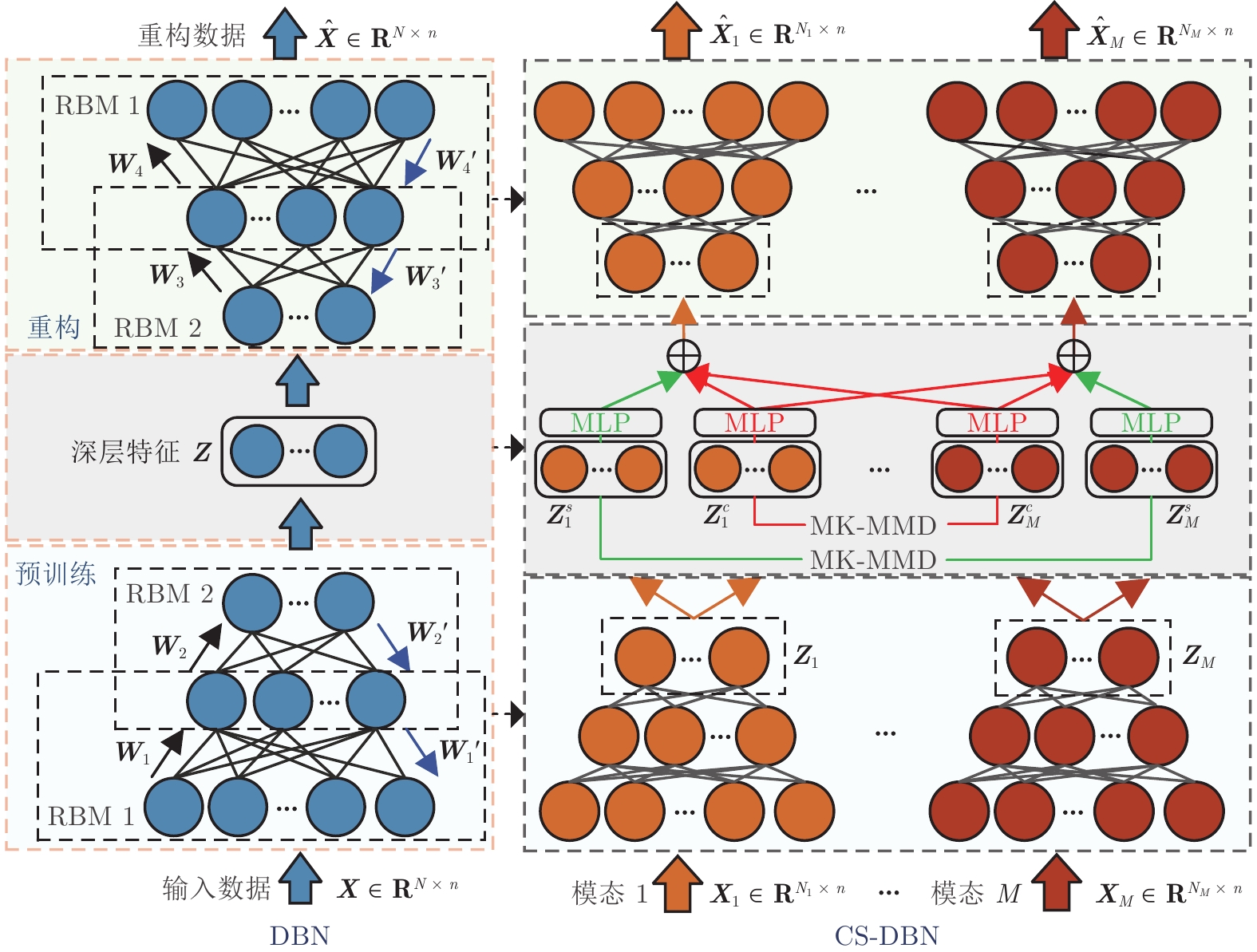
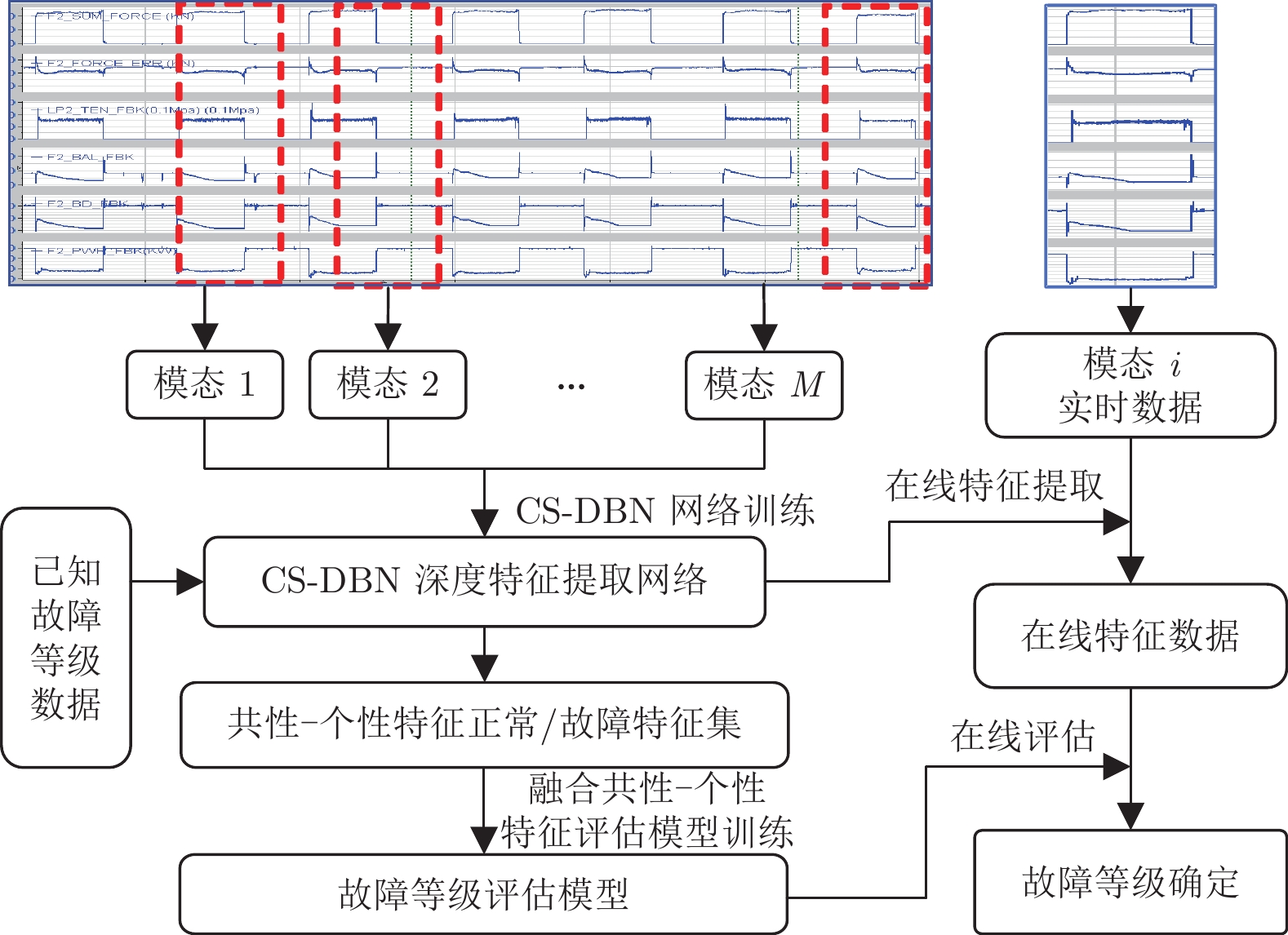
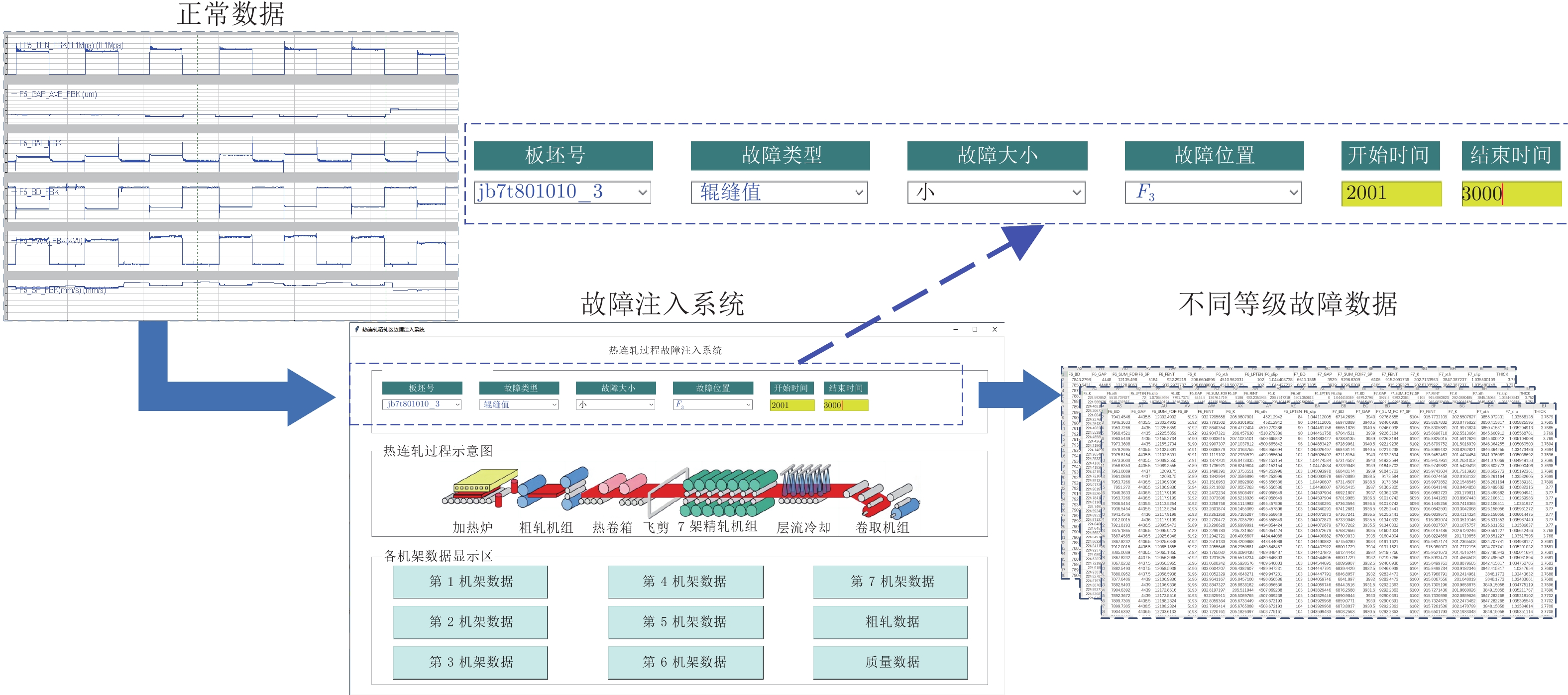
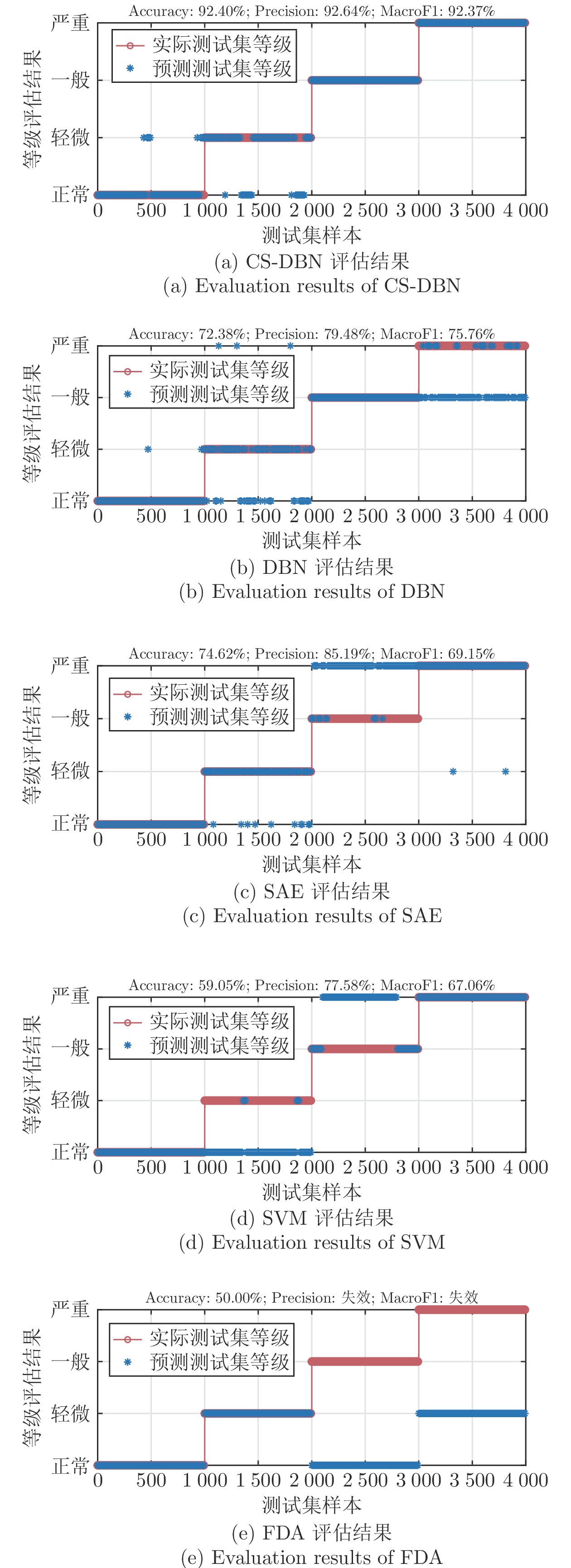
传统的多模态过程故障等级评估方法对模态之间的共性特征考虑较少, 导致当被评估模态故障信息不充分时, 评估的准确性较低. 针对此问题, 首先, 提出一种共性–个性深度置信网络 (Common and specific deep belief network, CS-DBN), 该网络充分利用深度置信网络 (Deep belief network, DBN) 的深度分层特征提取能力, 通过度量多模态数据间分布的相似性和差异性, 进一步得到能够反映多模态过程共有信息的共性特征以及反映每个模态独有信息的个性特征; 其次, 基于CS-DBN, 利用多模态过程的已知故障等级数据生成多模态共性–个性特征集, 通过加权逻辑回归构建故障等级评估模型; 最后, 将所提方法应用于带钢热连轧生产过程的故障等级评估中. 应用结果表明, 随着多模态故障等级数据的增加, 所提方法的评估准确率逐渐增加, 当故障信息充足时, 评估准确率可达98.75%; 故障信息不足时, 与传统方法相比, 评估准确率提升近10%.
传统的多模态过程故障等级评估方法对模态之间的共性特征考虑较少, 导致当被评估模态故障信息不充分时, 评估的准确性较低. 针对此问题, 首先, 提出一种共性–个性深度置信网络 (Common and specific deep belief network, CS-DBN), 该网络充分利用深度置信网络 (Deep belief network, DBN) 的深度分层特征提取能力, 通过度量多模态数据间分布的相似性和差异性, 进一步得到能够反映多模态过程共有信息的共性特征以及反映每个模态独有信息的个性特征; 其次, 基于CS-DBN, 利用多模态过程的已知故障等级数据生成多模态共性–个性特征集, 通过加权逻辑回归构建故障等级评估模型; 最后, 将所提方法应用于带钢热连轧生产过程的故障等级评估中. 应用结果表明, 随着多模态故障等级数据的增加, 所提方法的评估准确率逐渐增加, 当故障信息充足时, 评估准确率可达98.75%; 故障信息不足时, 与传统方法相比, 评估准确率提升近10%.





2024, 50(1): 103-120.
doi: 10.16383/j.aas.c230344
摘要:
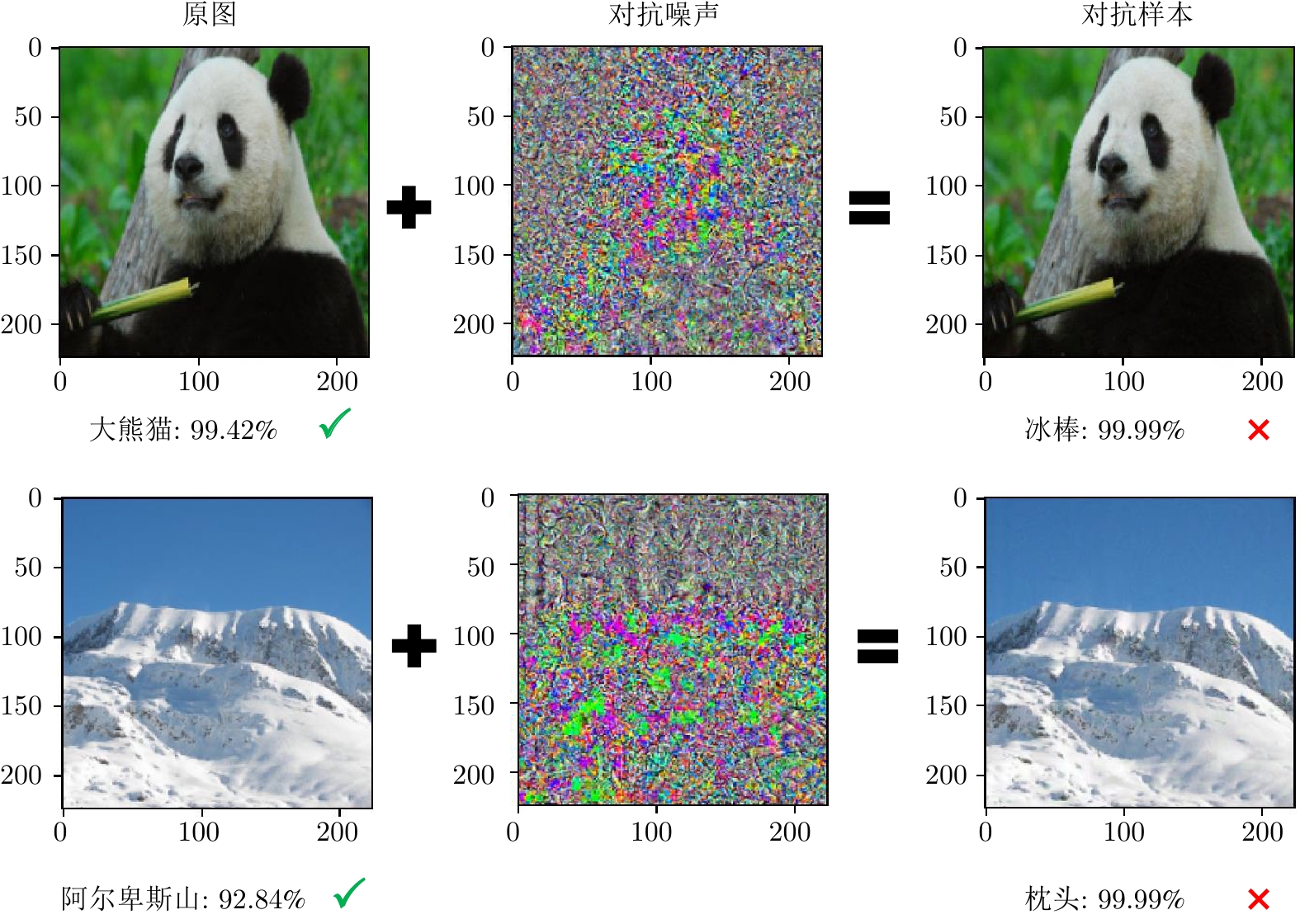
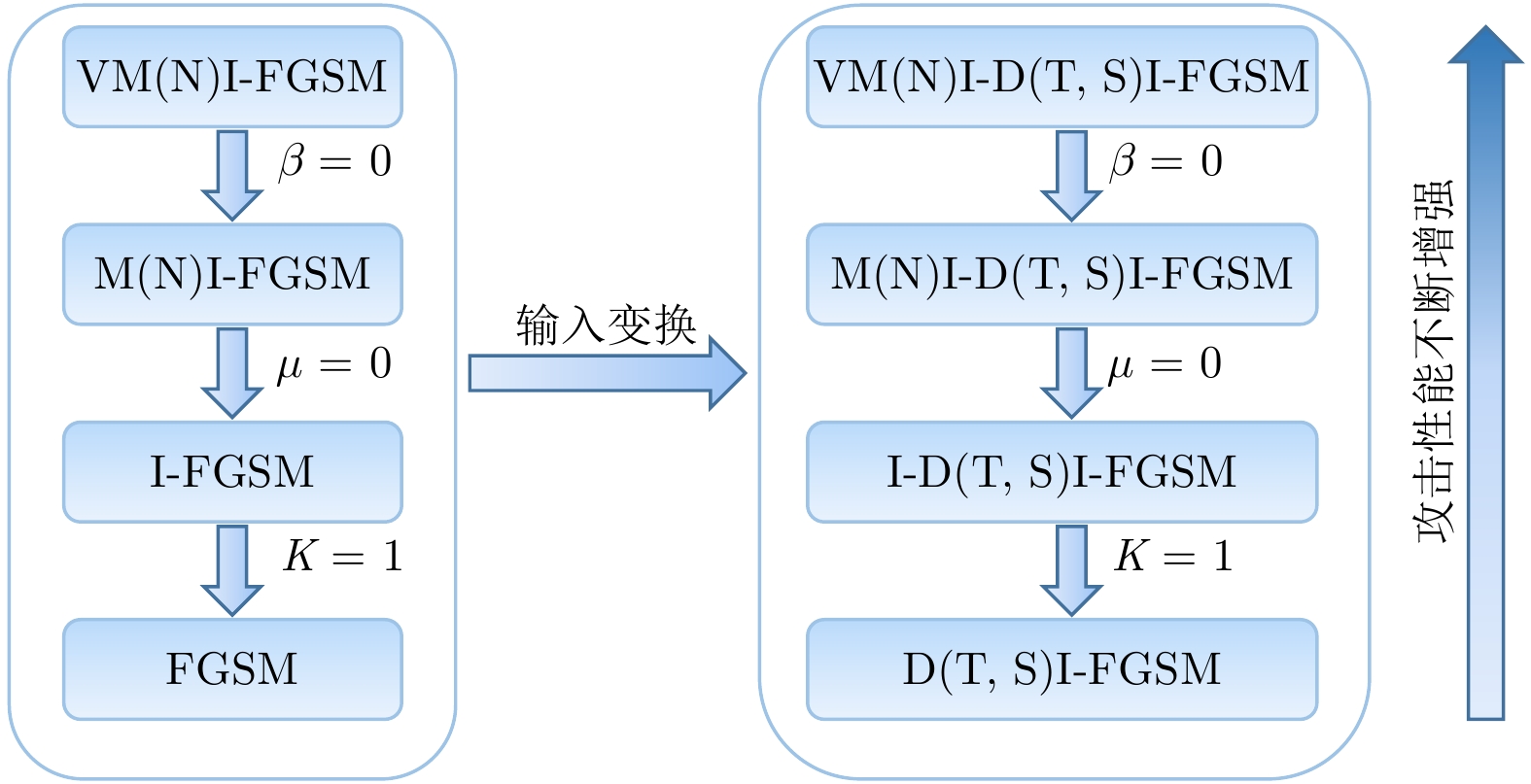
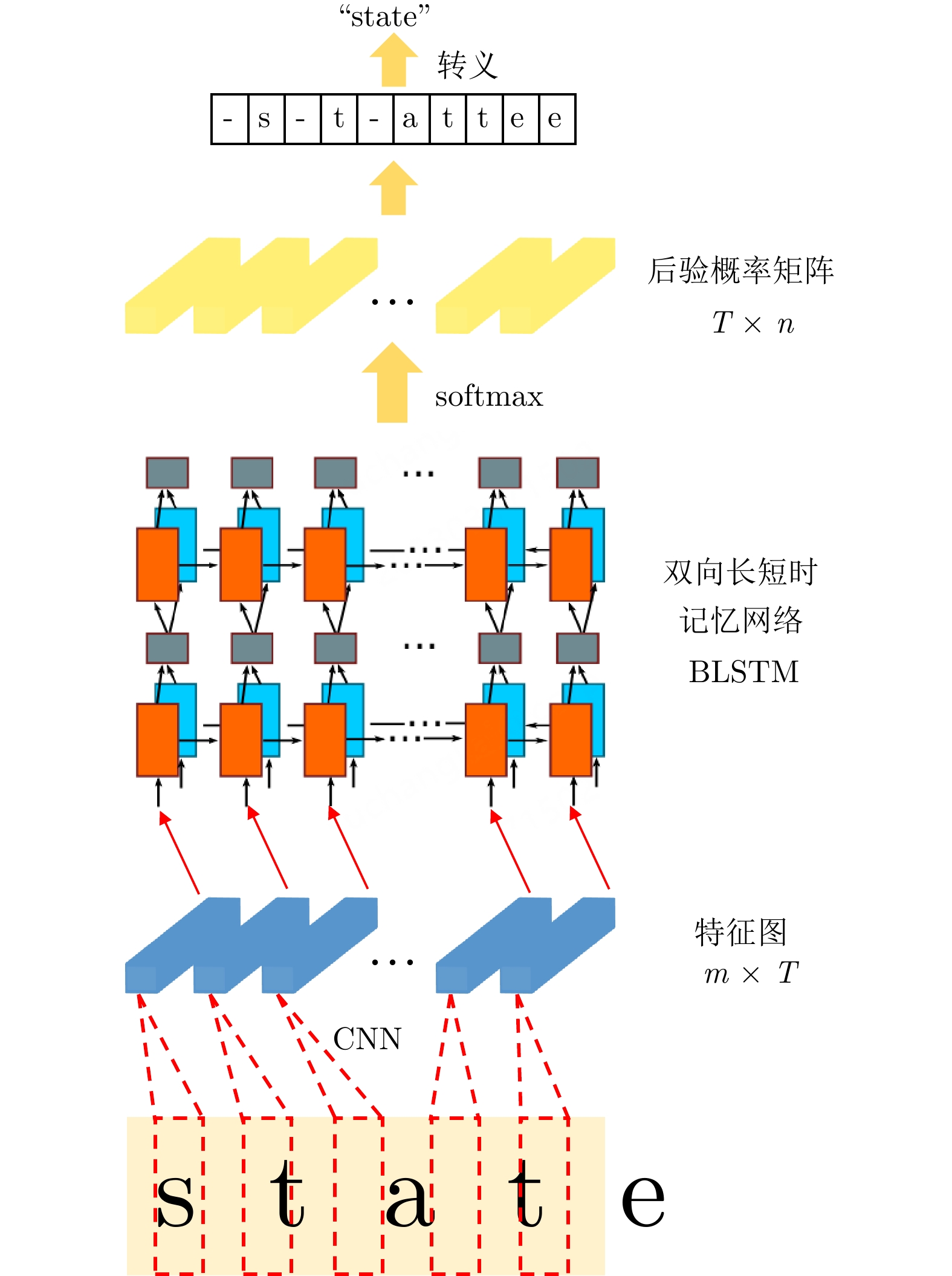
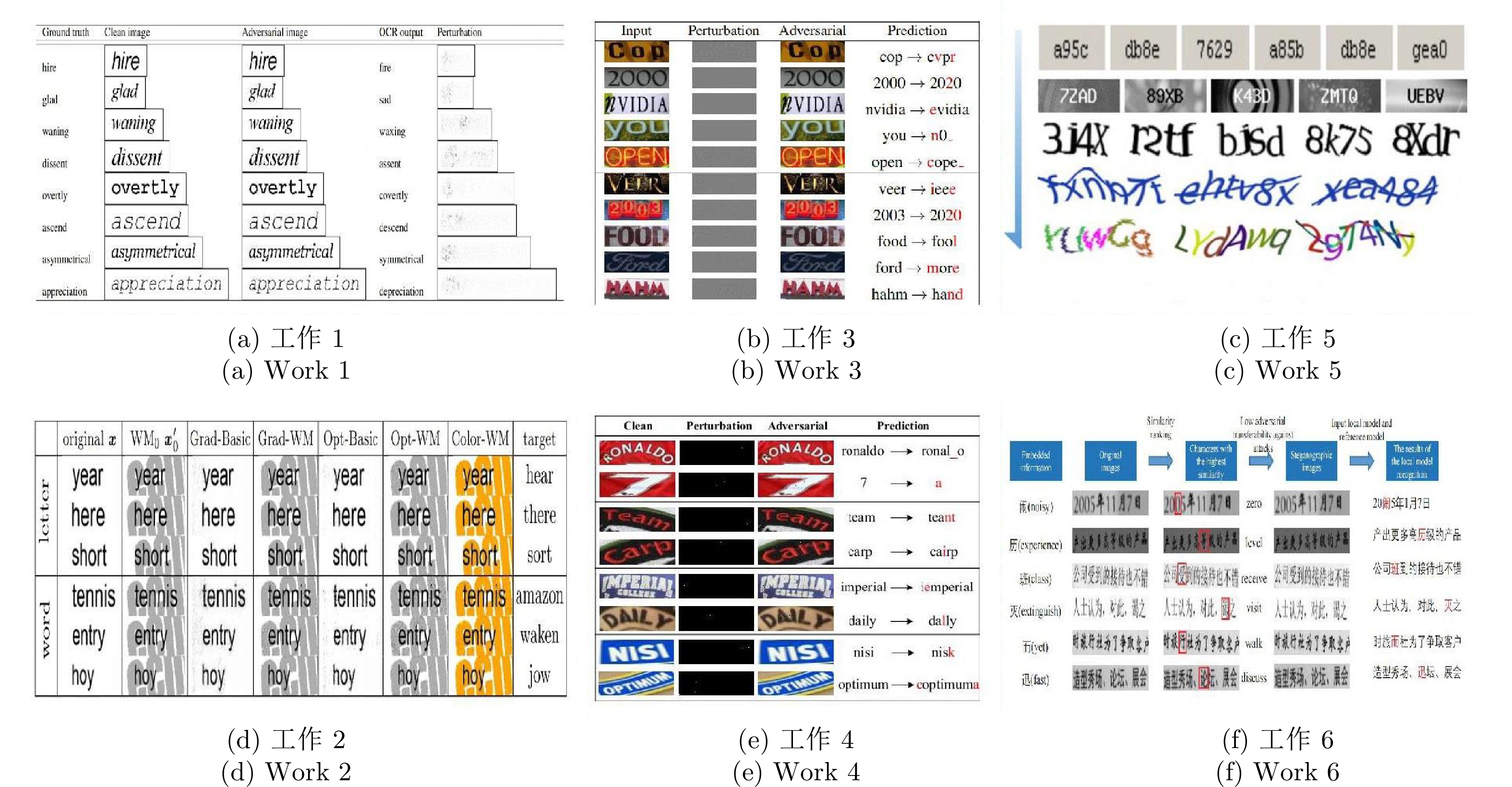
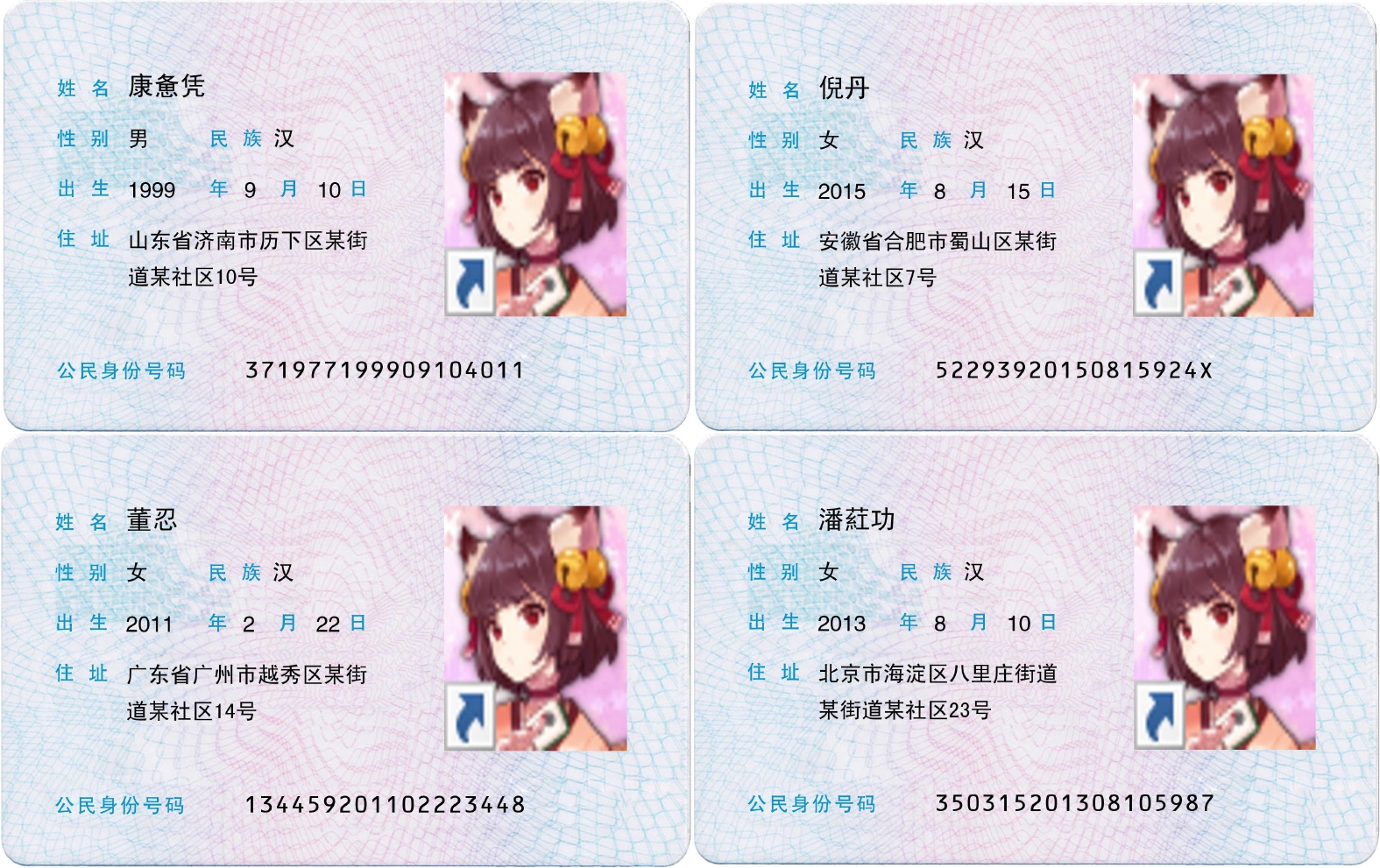
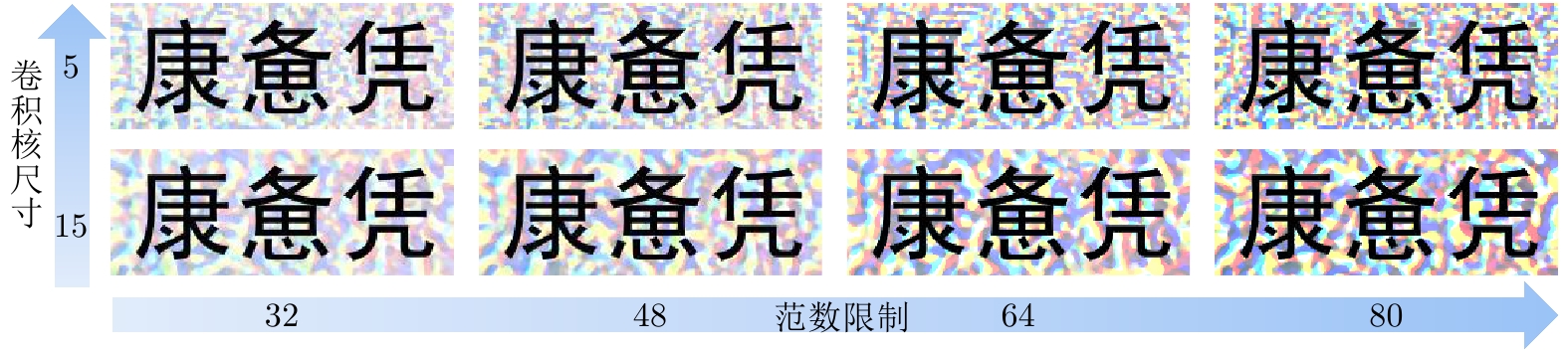
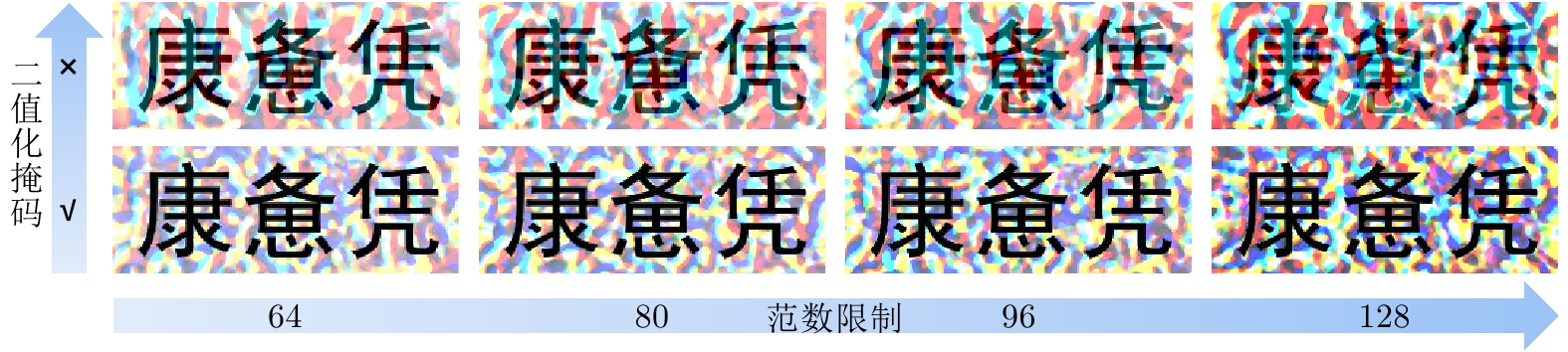
身份证认证场景多采用文本识别模型对身份证图片的字段进行提取、识别和身份认证, 存在很大的隐私泄露隐患. 并且, 当前基于文本识别模型的对抗攻击算法大多只考虑简单背景的数据(如印刷体)和白盒条件, 很难在物理世界达到理想的攻击效果, 不适用于复杂背景、数据及黑盒条件. 为缓解上述问题, 本文提出针对身份证文本识别模型的黑盒攻击算法, 考虑较为复杂的图像背景、更严苛的黑盒条件以及物理世界的攻击效果. 本算法在基于迁移的黑盒攻击算法的基础上引入二值化掩码和空间变换, 在保证攻击成功率的前提下提升了对抗样本的视觉效果和物理世界中的鲁棒性. 通过探索不同范数限制下基于迁移的黑盒攻击算法的性能上限和关键超参数的影响, 本算法在百度身份证识别模型上实现了100%的攻击成功率. 身份证数据集后续将开源.
身份证认证场景多采用文本识别模型对身份证图片的字段进行提取、识别和身份认证, 存在很大的隐私泄露隐患. 并且, 当前基于文本识别模型的对抗攻击算法大多只考虑简单背景的数据(如印刷体)和白盒条件, 很难在物理世界达到理想的攻击效果, 不适用于复杂背景、数据及黑盒条件. 为缓解上述问题, 本文提出针对身份证文本识别模型的黑盒攻击算法, 考虑较为复杂的图像背景、更严苛的黑盒条件以及物理世界的攻击效果. 本算法在基于迁移的黑盒攻击算法的基础上引入二值化掩码和空间变换, 在保证攻击成功率的前提下提升了对抗样本的视觉效果和物理世界中的鲁棒性. 通过探索不同范数限制下基于迁移的黑盒攻击算法的性能上限和关键超参数的影响, 本算法在百度身份证识别模型上实现了100%的攻击成功率. 身份证数据集后续将开源.





2024, 50(1): 121-131.
doi: 10.16383/j.aas.c230042
摘要:
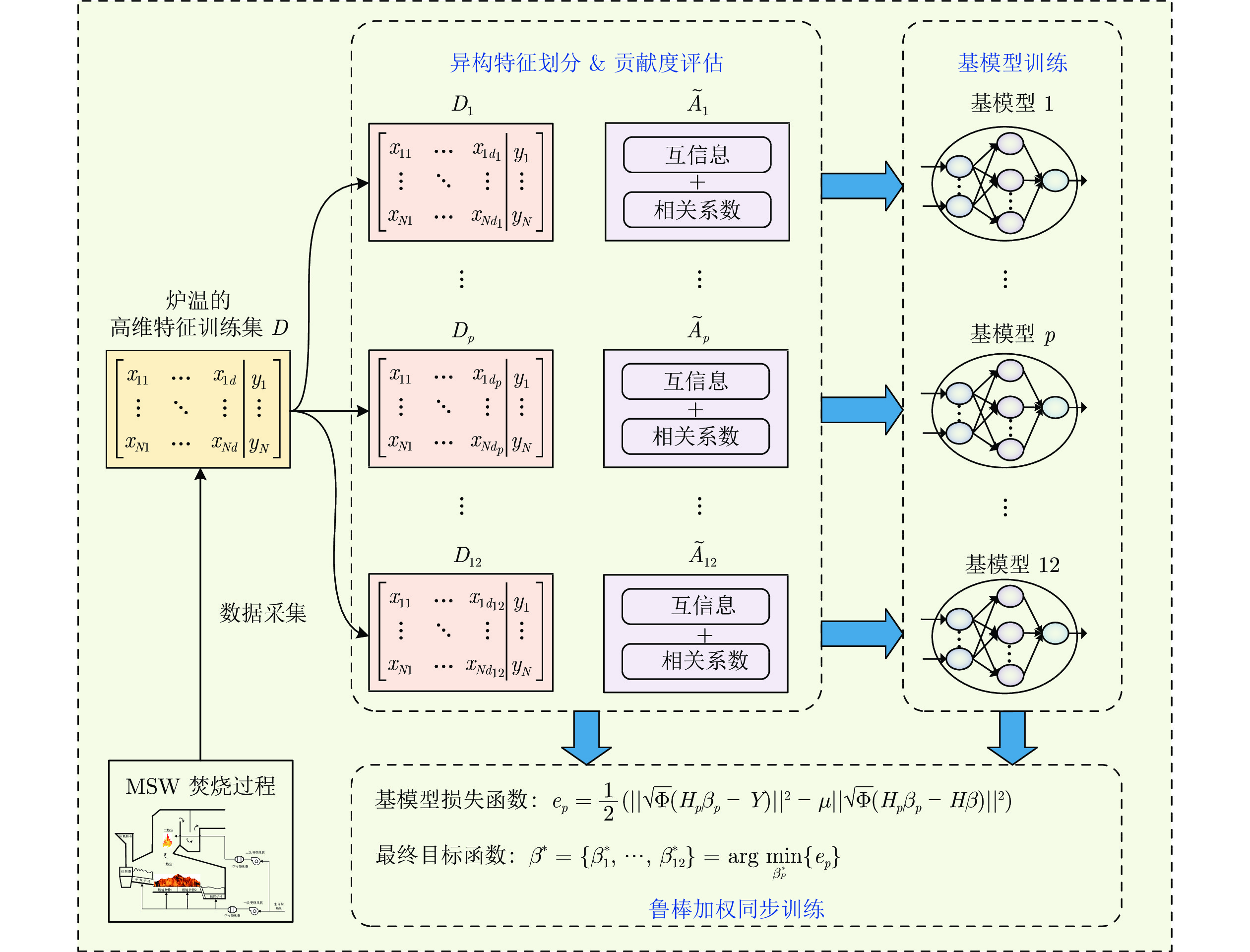
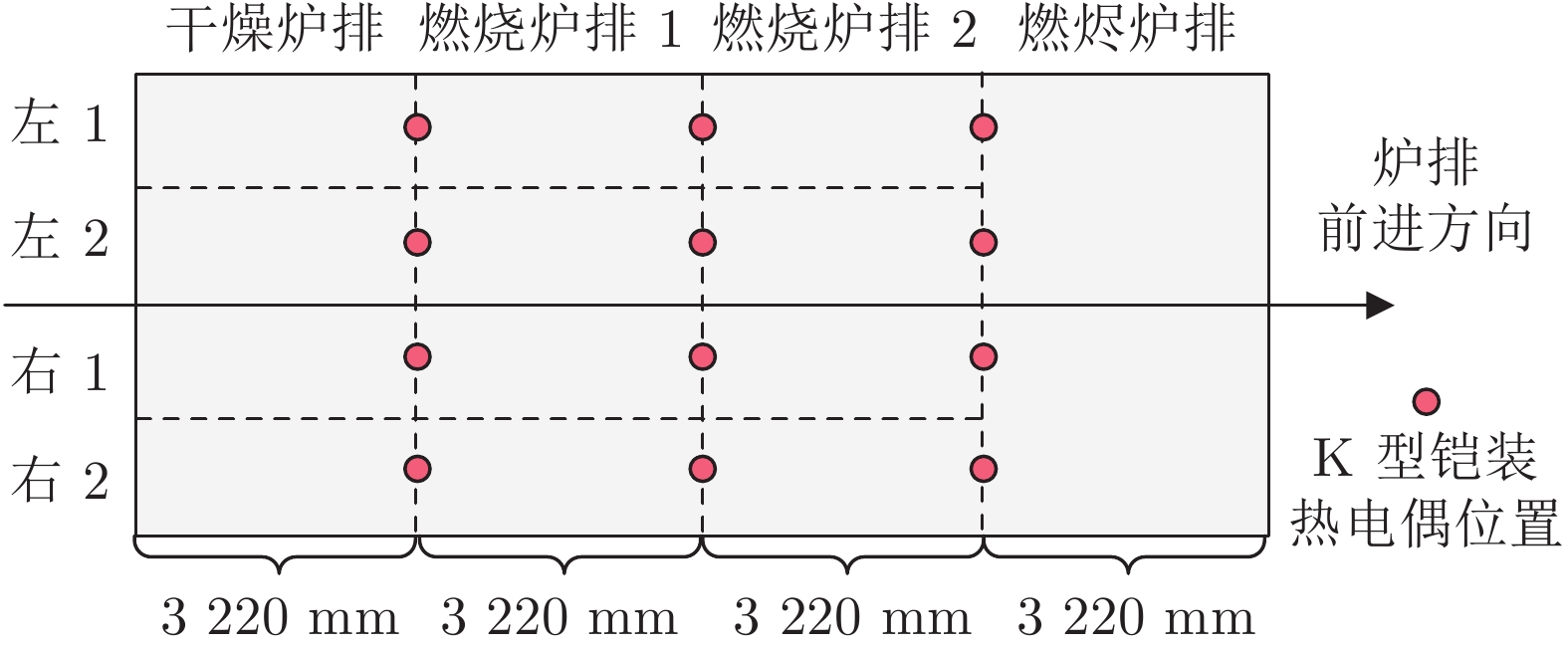
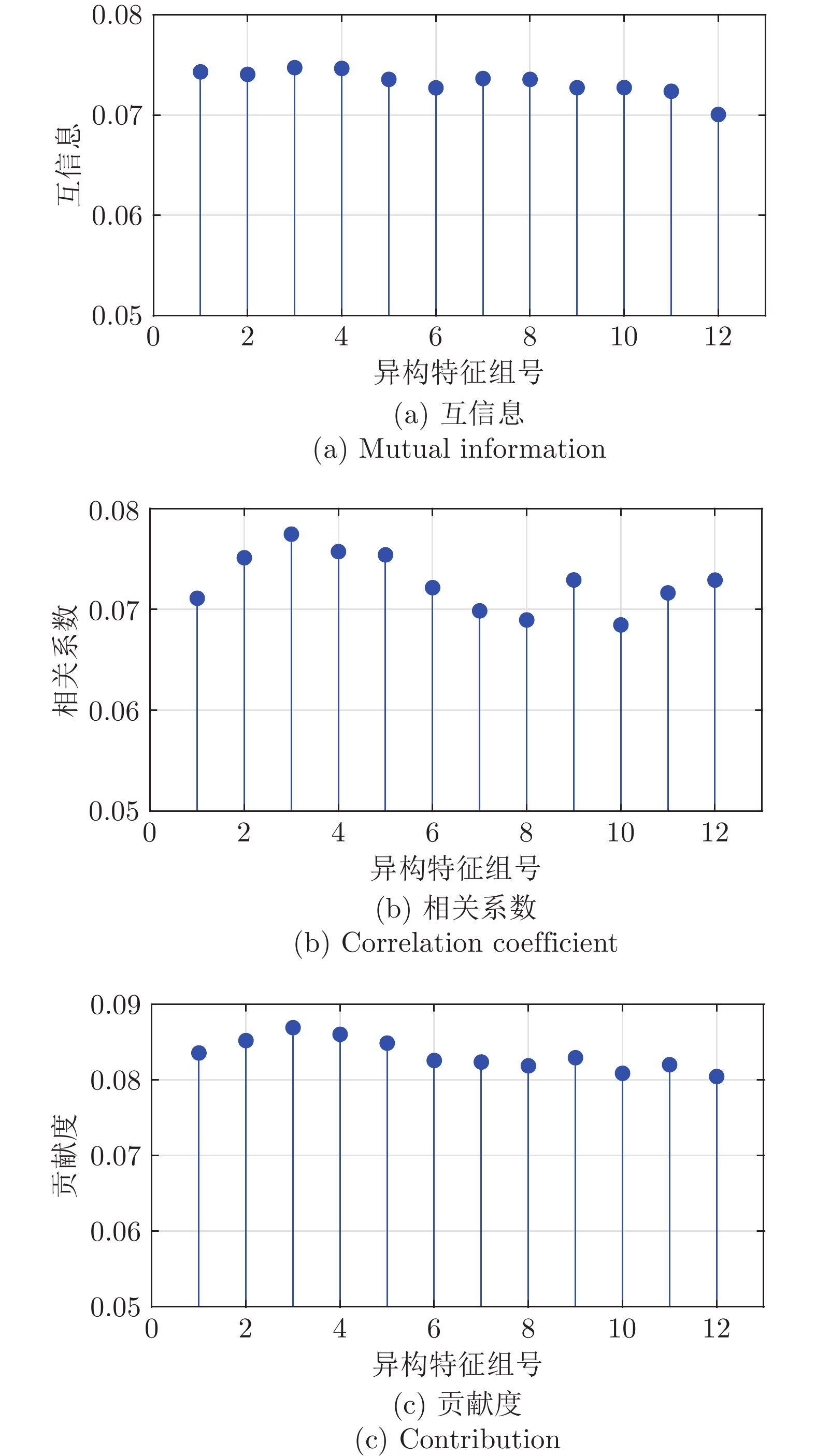
针对城市固体废物(Municipal solid waste, MSW)焚烧过程, 数据具有异常值和特征变量维度高时, 炉温预测模型的准确性和泛化能力欠缺的挑战性问题, 提出一种鲁棒加权异构特征集成建模方法, 用于建立城市固体废物焚烧过程炉温预测模型. 首先, 依据焚烧过程机理将高维特征变量划分为异构特征集合, 并采用互信息和相关系数综合评估每组异构特征集合的贡献度; 其次, 采用基于混合t分布的鲁棒随机配置网络(Stochastic configuration network, SCN)构建基模型, 同时确定训练样本的惩罚权重; 最后, 设计一种鲁棒加权负相关学习(Negative correlation learning, NCL)策略, 实现基模型的鲁棒同步训练. 使用国内某城市固体废物焚烧厂的炉温历史数据, 对该方法进行测试. 测试结果表明, 该方法建立的炉温预测模型在准确性和泛化能力方面具有优势.
针对城市固体废物(Municipal solid waste, MSW)焚烧过程, 数据具有异常值和特征变量维度高时, 炉温预测模型的准确性和泛化能力欠缺的挑战性问题, 提出一种鲁棒加权异构特征集成建模方法, 用于建立城市固体废物焚烧过程炉温预测模型. 首先, 依据焚烧过程机理将高维特征变量划分为异构特征集合, 并采用互信息和相关系数综合评估每组异构特征集合的贡献度; 其次, 采用基于混合t分布的鲁棒随机配置网络(Stochastic configuration network, SCN)构建基模型, 同时确定训练样本的惩罚权重; 最后, 设计一种鲁棒加权负相关学习(Negative correlation learning, NCL)策略, 实现基模型的鲁棒同步训练. 使用国内某城市固体废物焚烧厂的炉温历史数据, 对该方法进行测试. 测试结果表明, 该方法建立的炉温预测模型在准确性和泛化能力方面具有优势.



2024, 50(1): 132-142.
doi: 10.16383/j.aas.c230333
摘要:
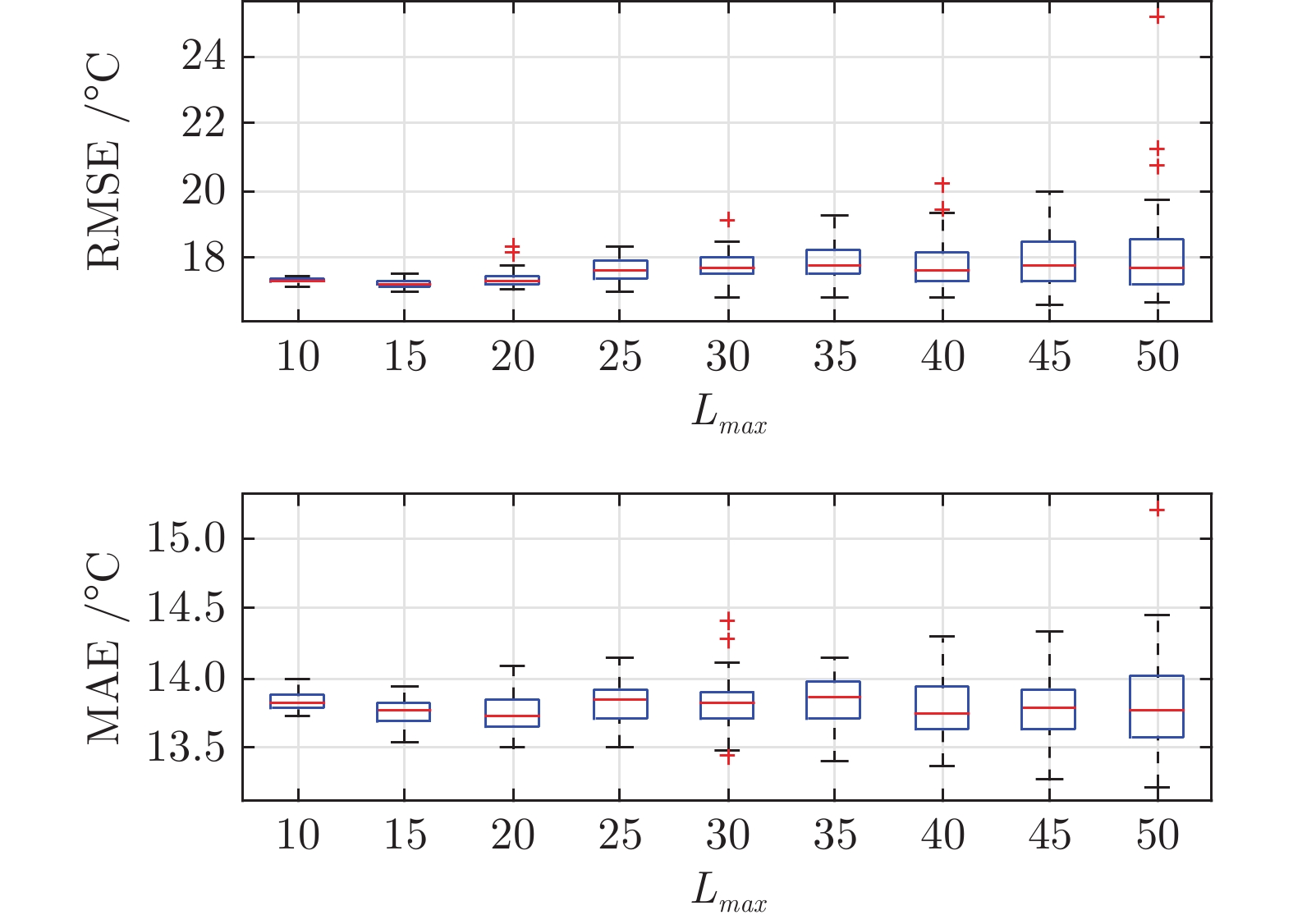
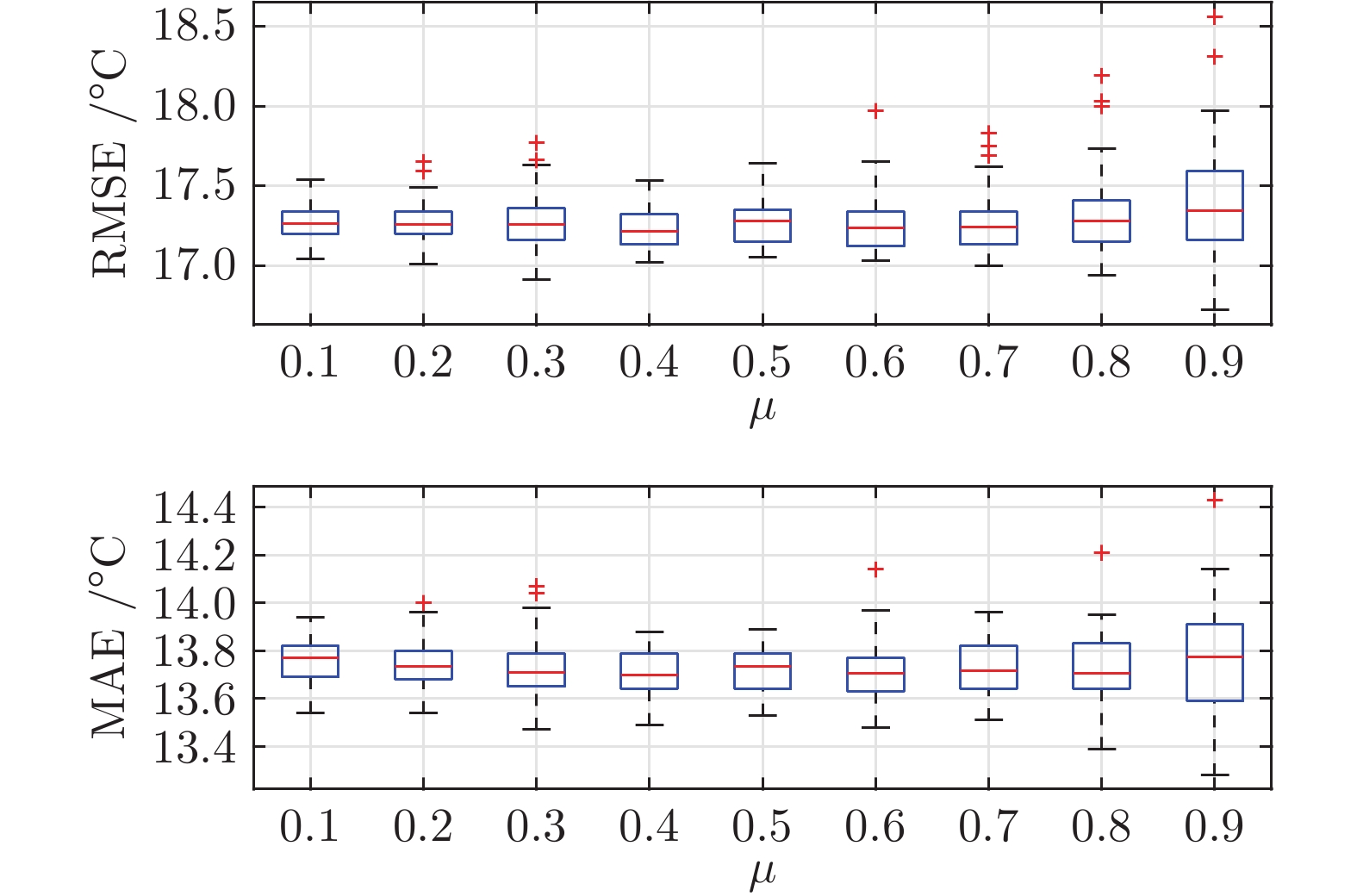
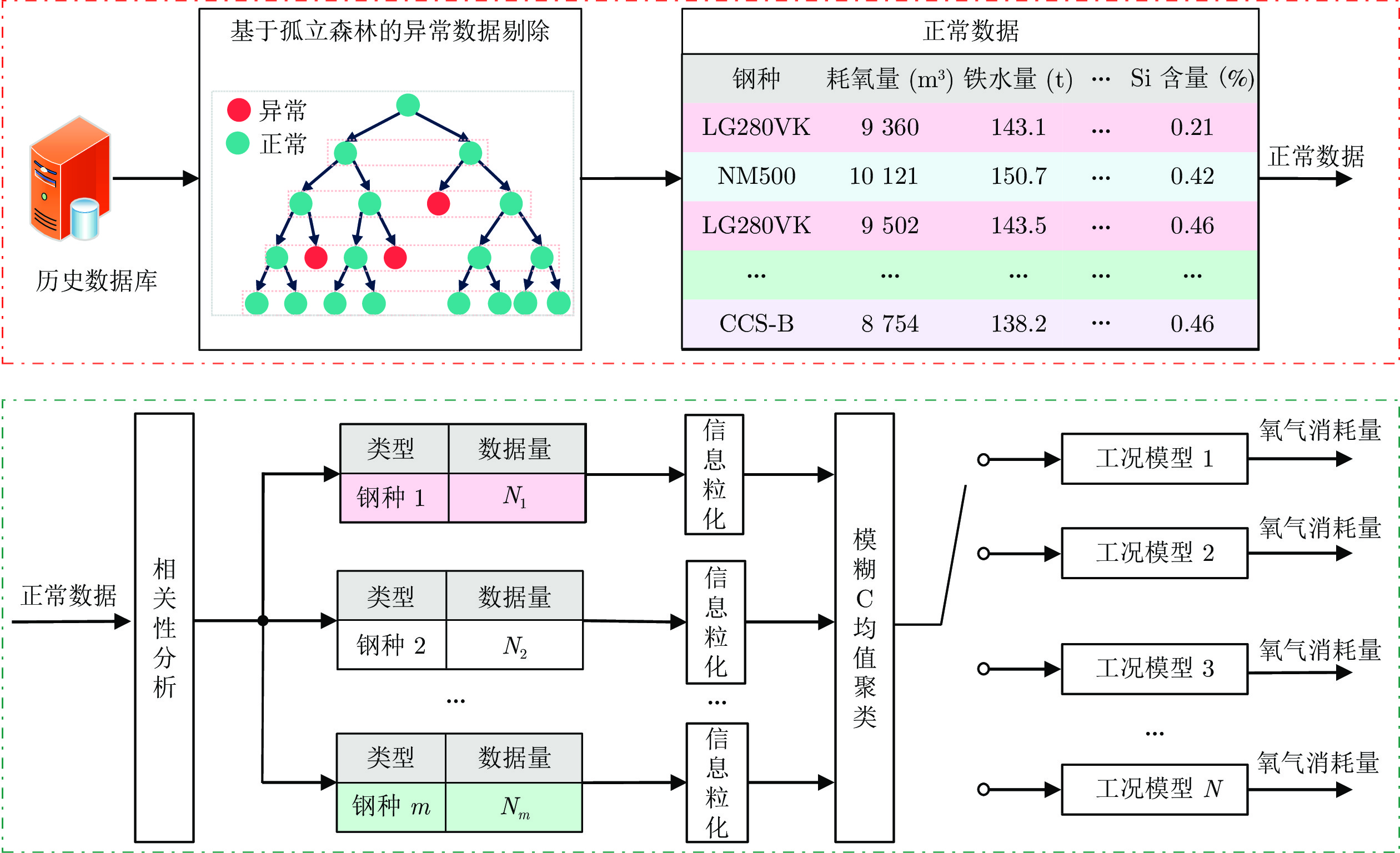
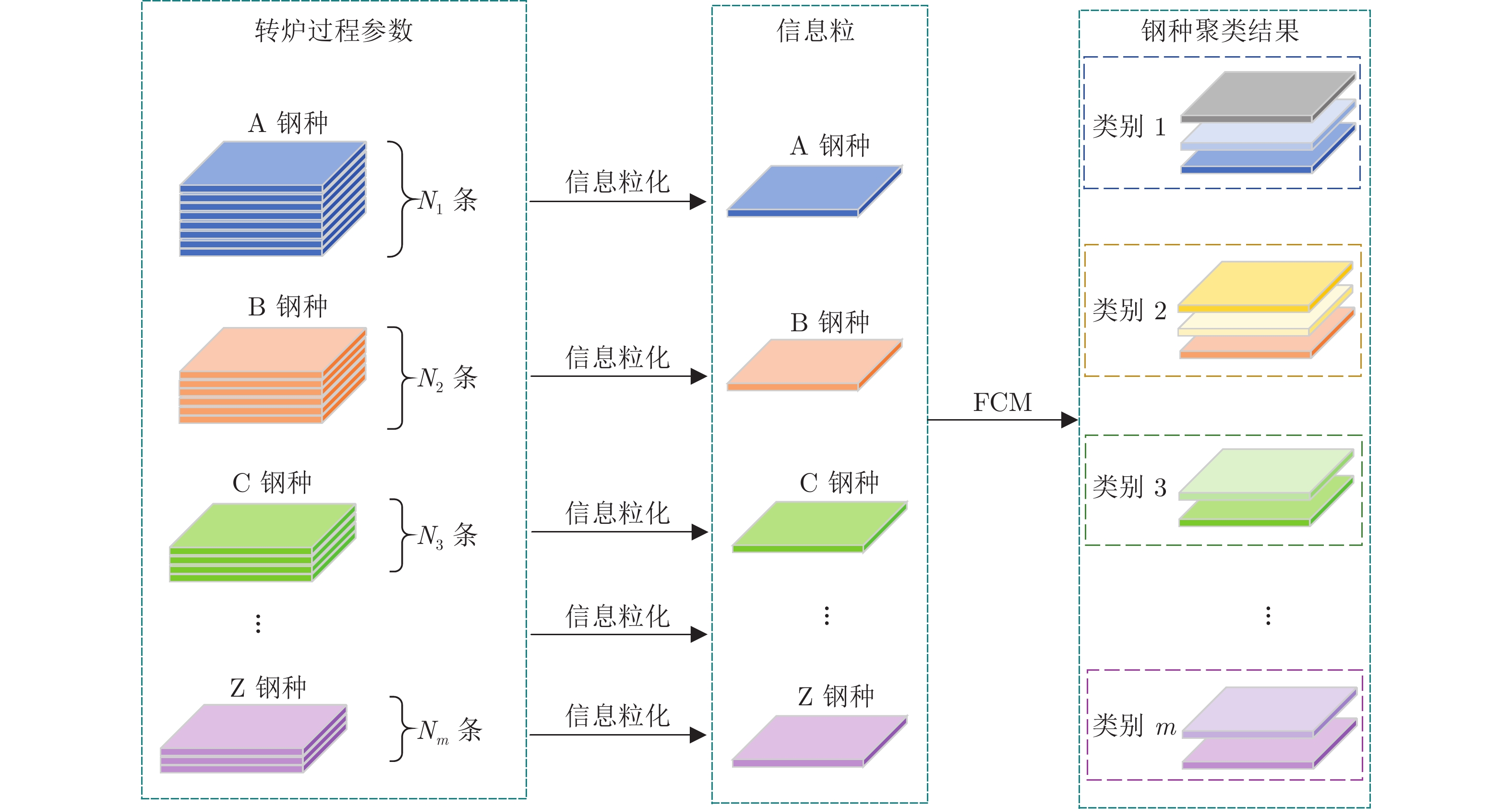
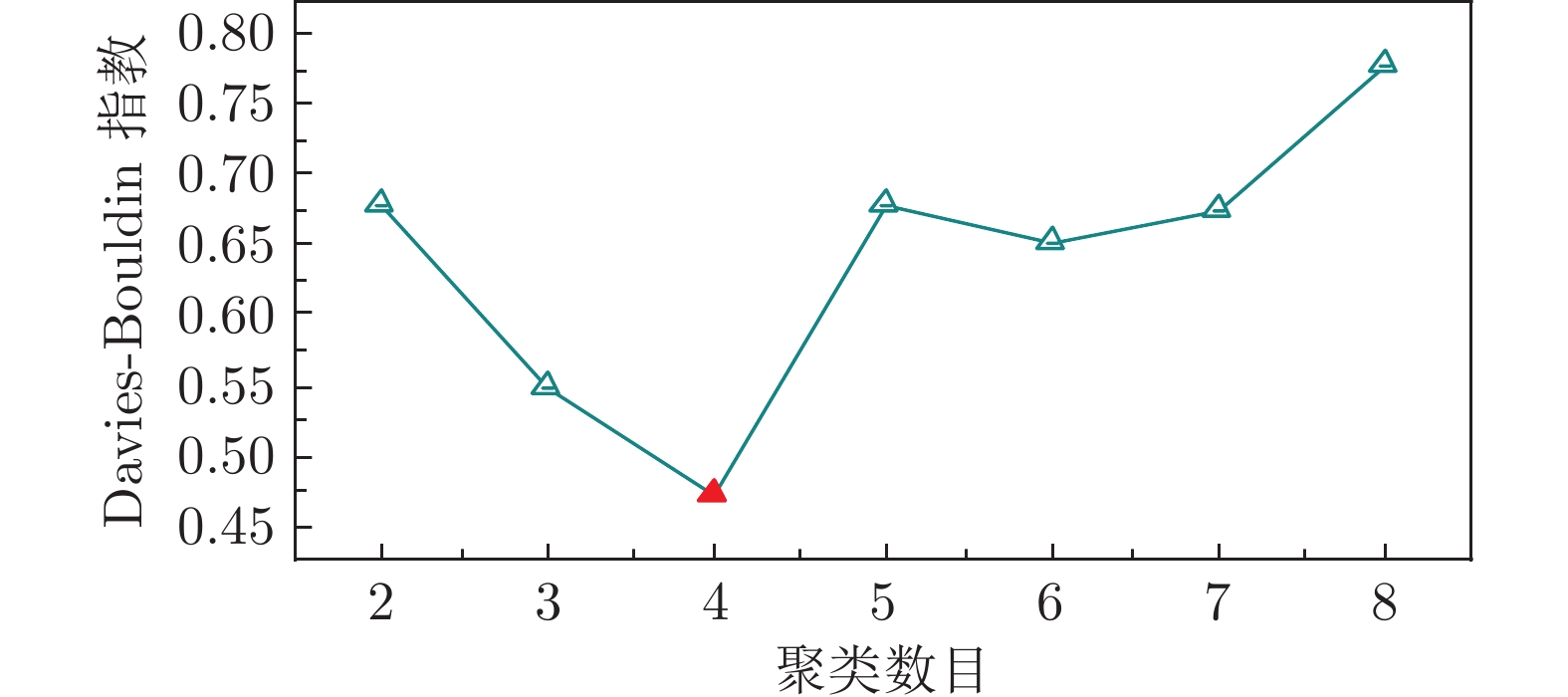
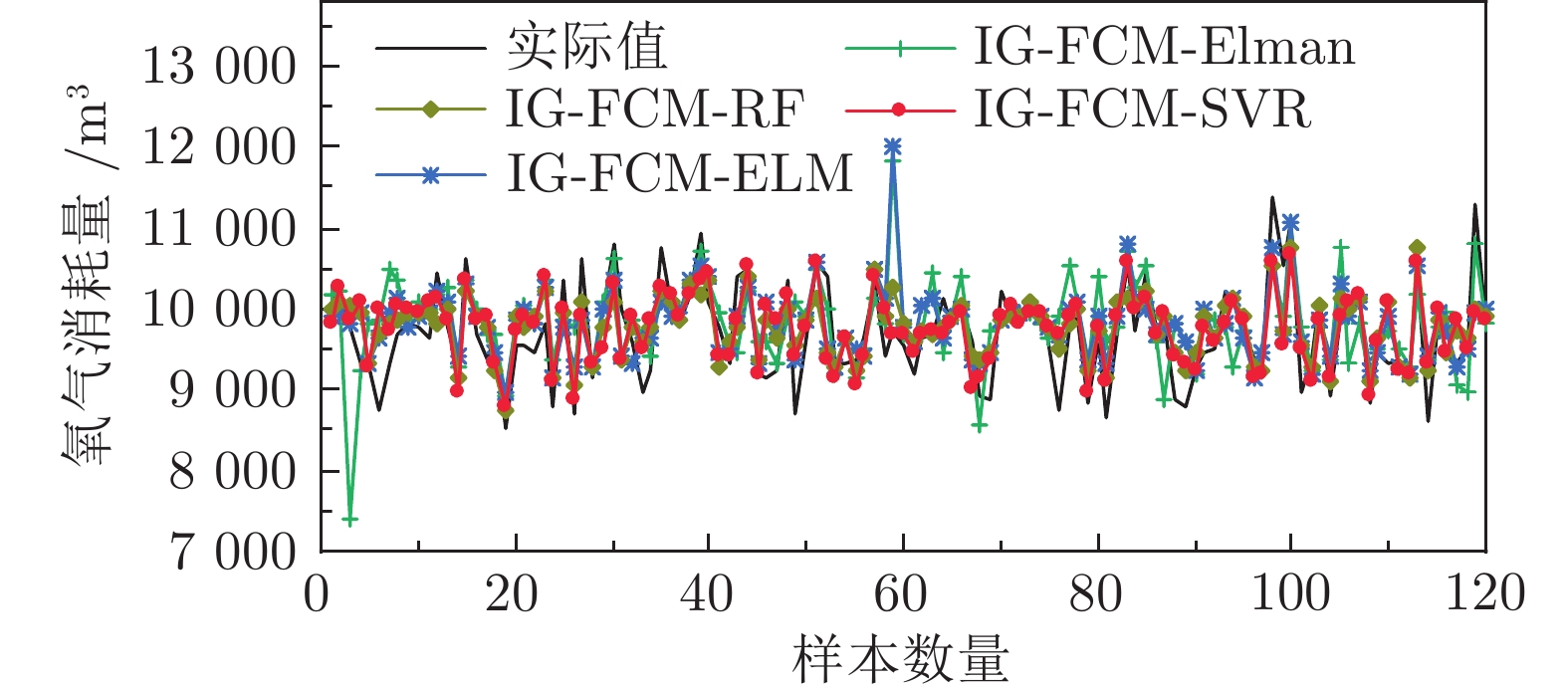
转炉炼钢是钢铁企业的主要耗氧工序, 预测转炉炼钢的氧气消耗量对氧气系统合理调度、保证生产安全具有重要意义. 考虑到转炉冶炼工况多、钢种数据粒度不统一, 提出一种基于粒度聚类的转炉炼钢氧气消耗量预测方法. 首先, 利用孤立森林异常检测法剔除历史数据库中的异常数据; 接着, 采用皮尔逊相关性分析和互信息相关系数选取相关影响因子, 对不同钢种数据进行信息粒化, 实现数据特征提取和维度统一, 使用模糊C均值(Fuzzy C-means, FCM) 划分工况并建立不同工况下的氧气消耗量预测子模型; 最后, 利用企业的实际生产数据进行实验, 验证所提方法的准确性和有效性.
转炉炼钢是钢铁企业的主要耗氧工序, 预测转炉炼钢的氧气消耗量对氧气系统合理调度、保证生产安全具有重要意义. 考虑到转炉冶炼工况多、钢种数据粒度不统一, 提出一种基于粒度聚类的转炉炼钢氧气消耗量预测方法. 首先, 利用孤立森林异常检测法剔除历史数据库中的异常数据; 接着, 采用皮尔逊相关性分析和互信息相关系数选取相关影响因子, 对不同钢种数据进行信息粒化, 实现数据特征提取和维度统一, 使用模糊C均值(Fuzzy C-means, FCM) 划分工况并建立不同工况下的氧气消耗量预测子模型; 最后, 利用企业的实际生产数据进行实验, 验证所提方法的准确性和有效性.




2024, 50(1): 143-153.
doi: 10.16383/j.aas.c230019
摘要:
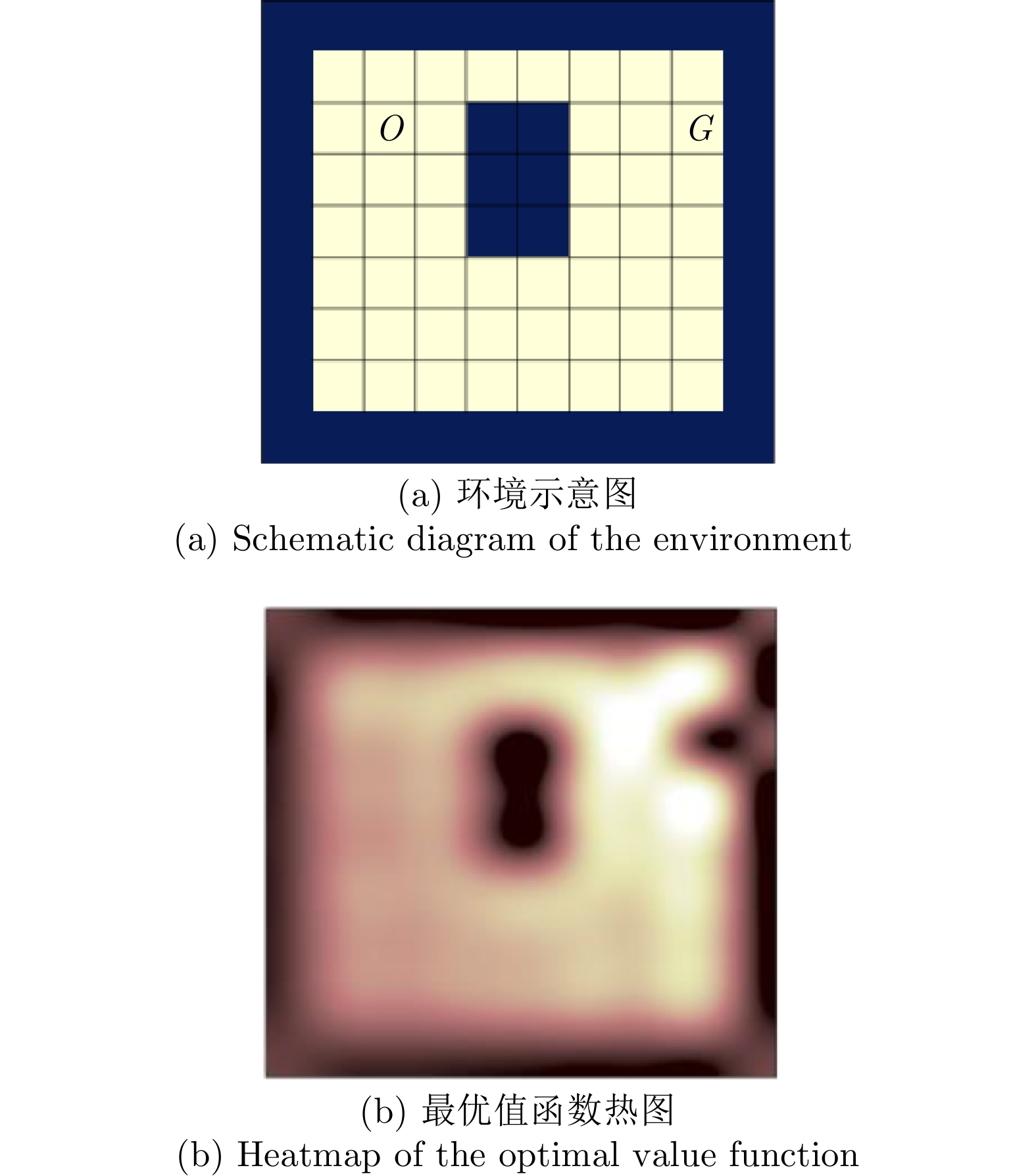
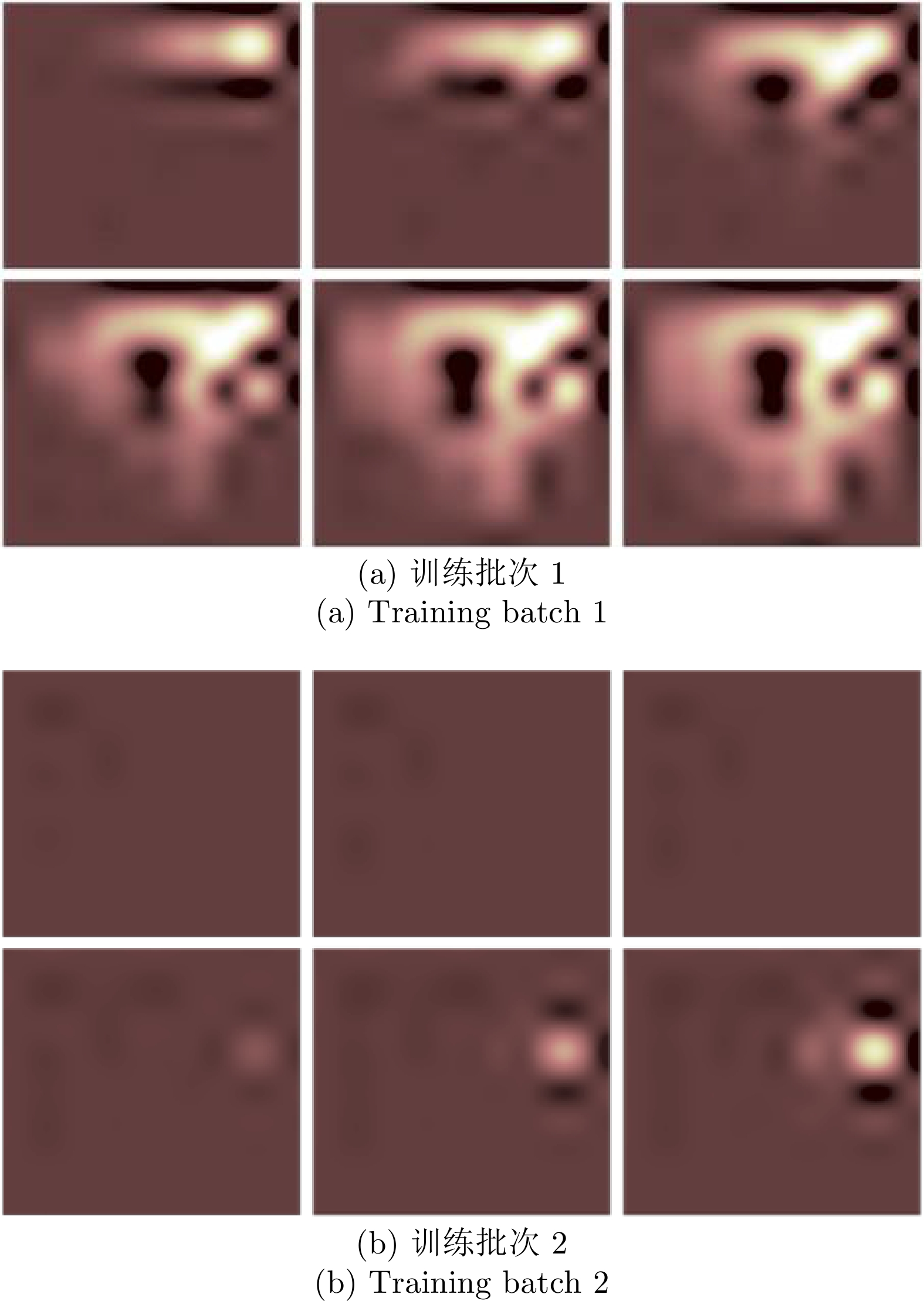
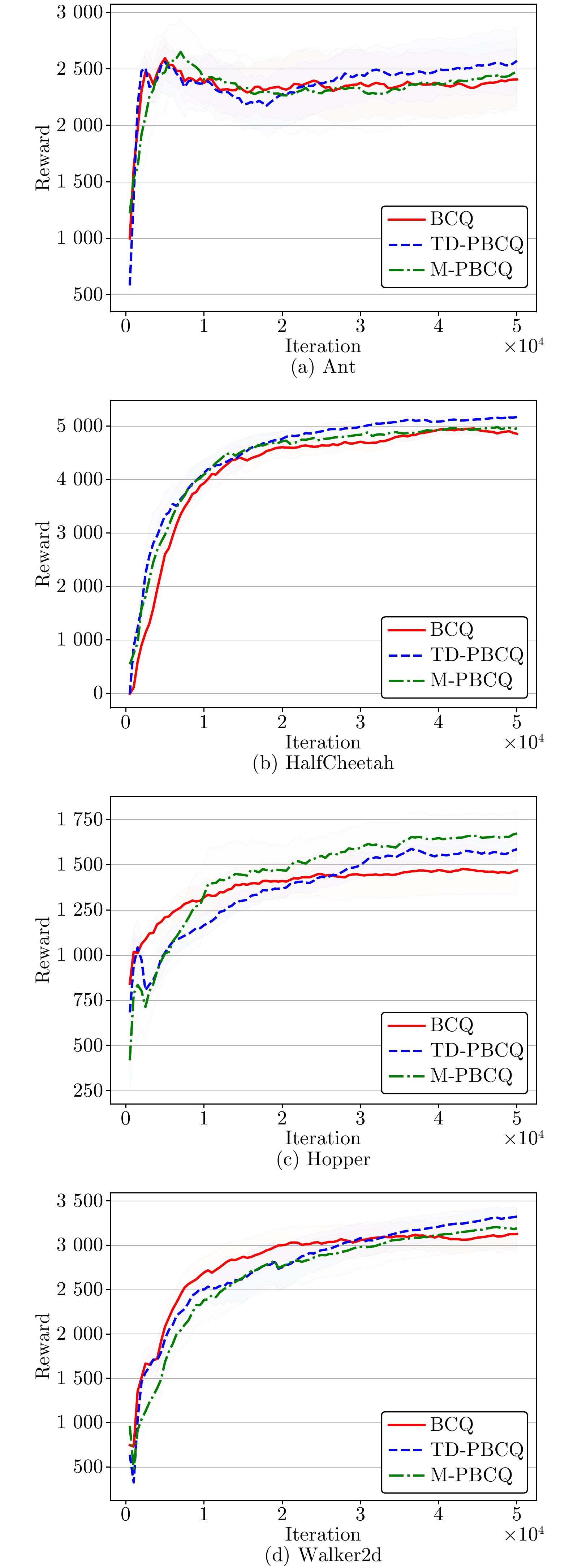
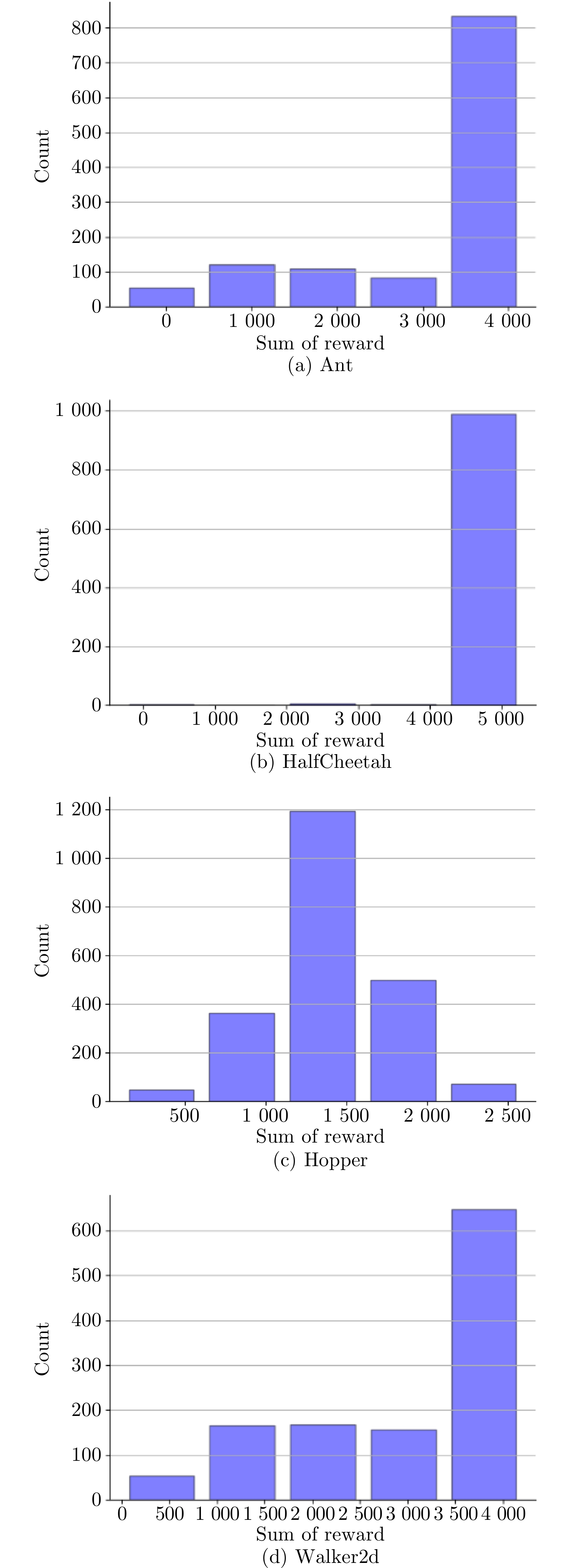
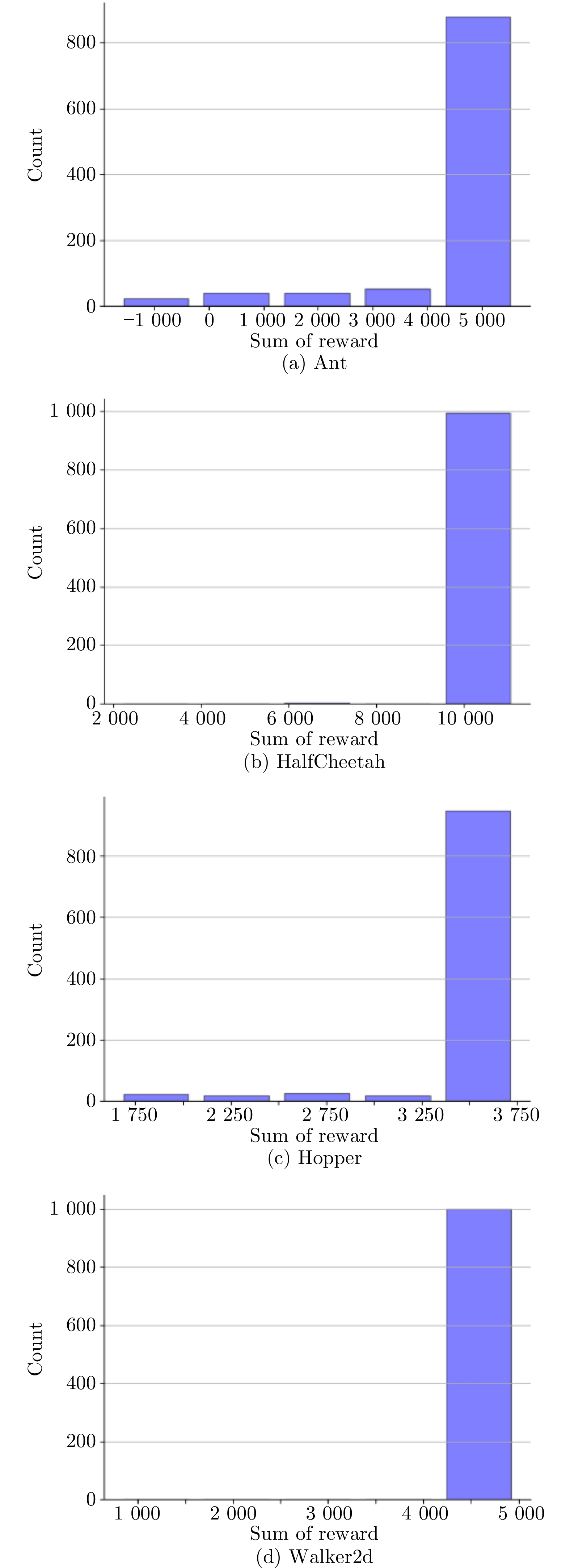
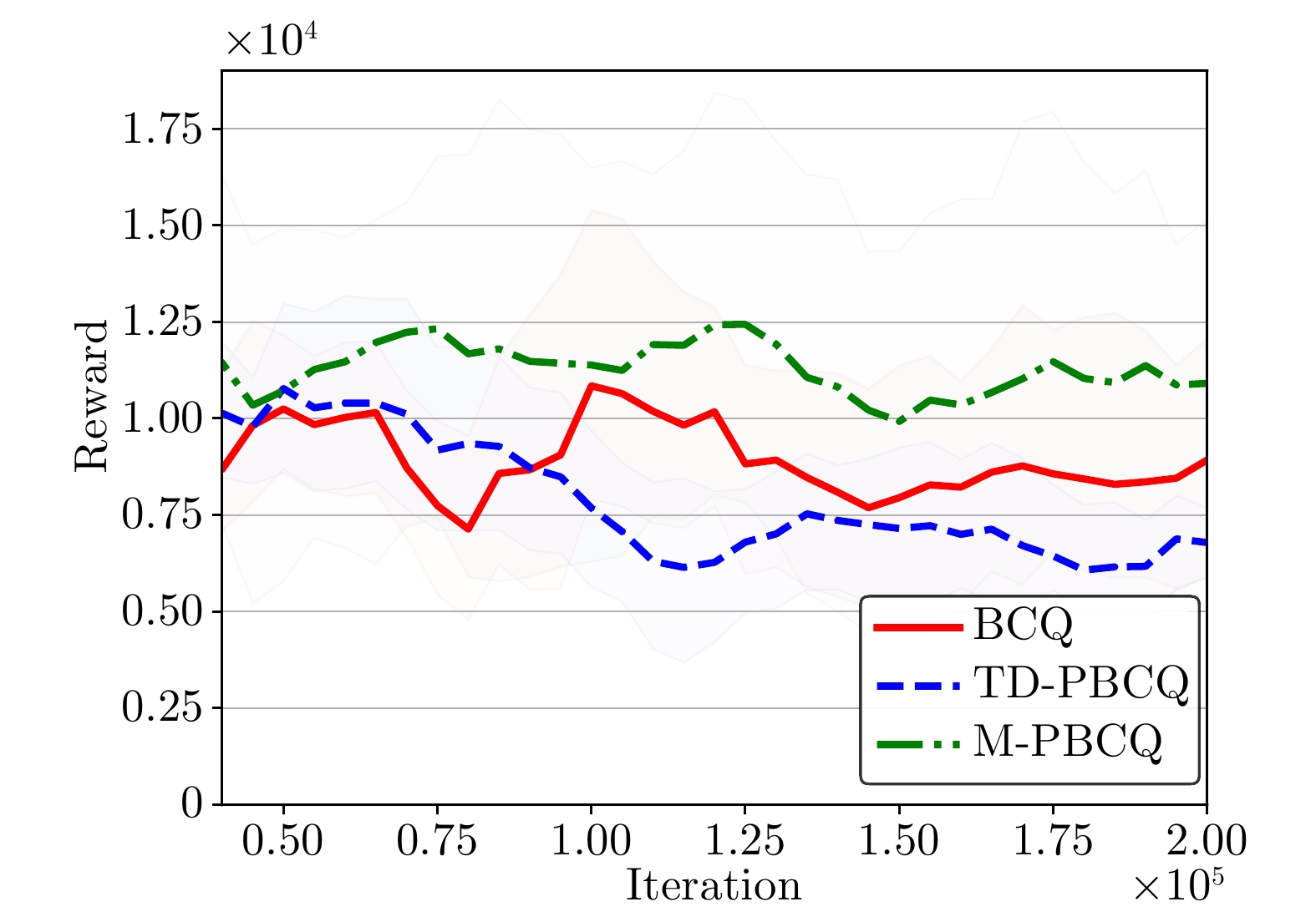
离线强化学习通过减小分布偏移实现了习得策略向行为策略的逼近, 但离线经验缓存的数据分布往往会直接影响习得策略的质量. 通过优化采样模型来改善强化学习智能体的训练效果, 提出两种离线优先采样模型: 基于时序差分误差的采样模型和基于鞅的采样模型. 基于时序差分误差的采样模型可以使智能体更多地学习值估计不准确的经验数据, 通过估计更准确的值函数来应对可能出现的分布外状态. 基于鞅的采样模型可以使智能体更多地学习对策略优化有利的正样本, 减少负样本对值函数迭代的影响. 进一步, 将所提离线优先采样模型分别与批约束深度Q学习(Batch-constrained deep Q-learning, BCQ)相结合, 提出基于时序差分误差的优先BCQ和基于鞅的优先BCQ. D4RL和Torcs数据集上的实验结果表明: 所提离线优先采样模型可以有针对性地选择有利于值函数估计或策略优化的经验数据, 获得更高的回报.
离线强化学习通过减小分布偏移实现了习得策略向行为策略的逼近, 但离线经验缓存的数据分布往往会直接影响习得策略的质量. 通过优化采样模型来改善强化学习智能体的训练效果, 提出两种离线优先采样模型: 基于时序差分误差的采样模型和基于鞅的采样模型. 基于时序差分误差的采样模型可以使智能体更多地学习值估计不准确的经验数据, 通过估计更准确的值函数来应对可能出现的分布外状态. 基于鞅的采样模型可以使智能体更多地学习对策略优化有利的正样本, 减少负样本对值函数迭代的影响. 进一步, 将所提离线优先采样模型分别与批约束深度Q学习(Batch-constrained deep Q-learning, BCQ)相结合, 提出基于时序差分误差的优先BCQ和基于鞅的优先BCQ. D4RL和Torcs数据集上的实验结果表明: 所提离线优先采样模型可以有针对性地选择有利于值函数估计或策略优化的经验数据, 获得更高的回报.

2024, 50(1): 154-168.
doi: 10.16383/j.aas.c230117
摘要:
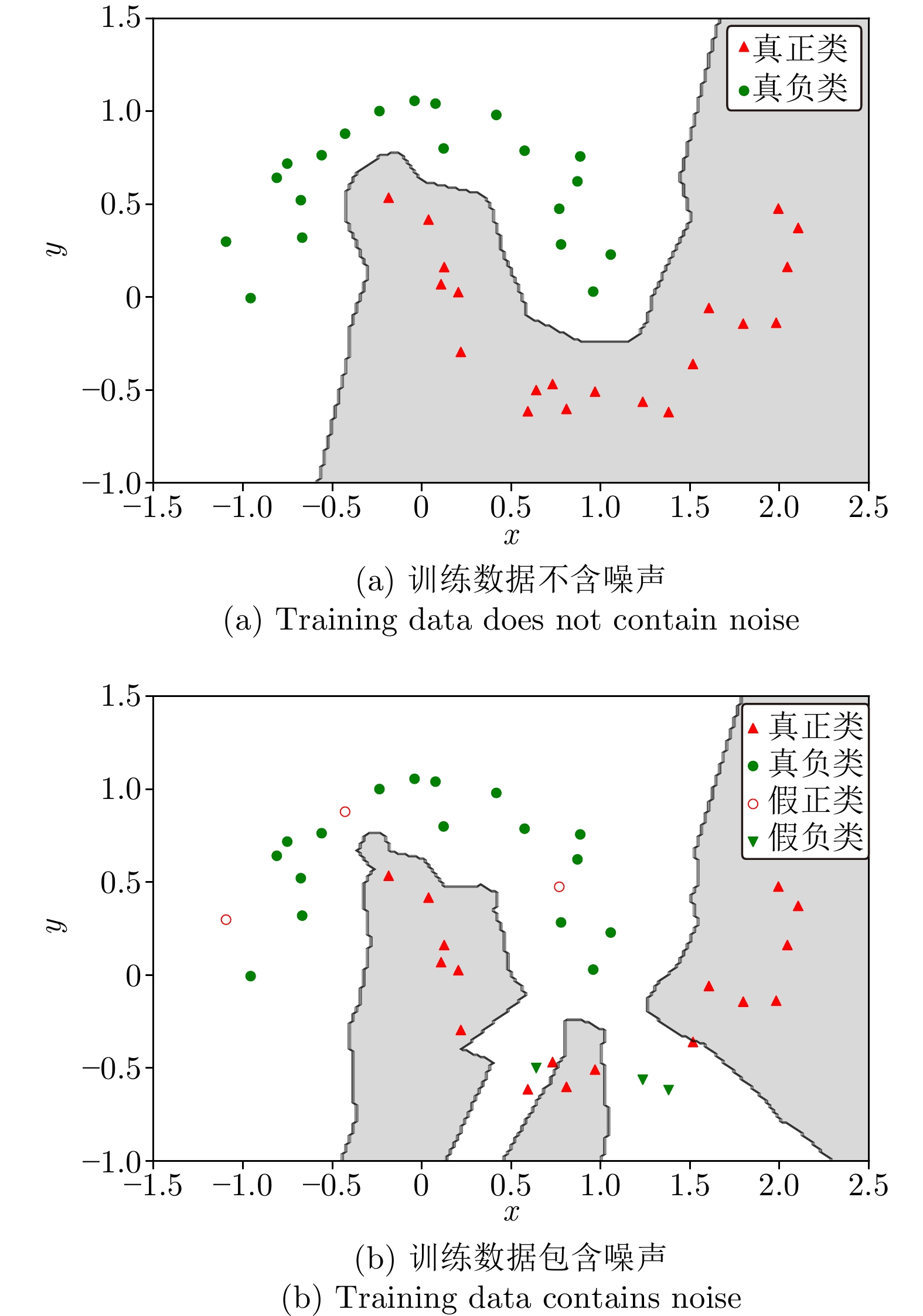
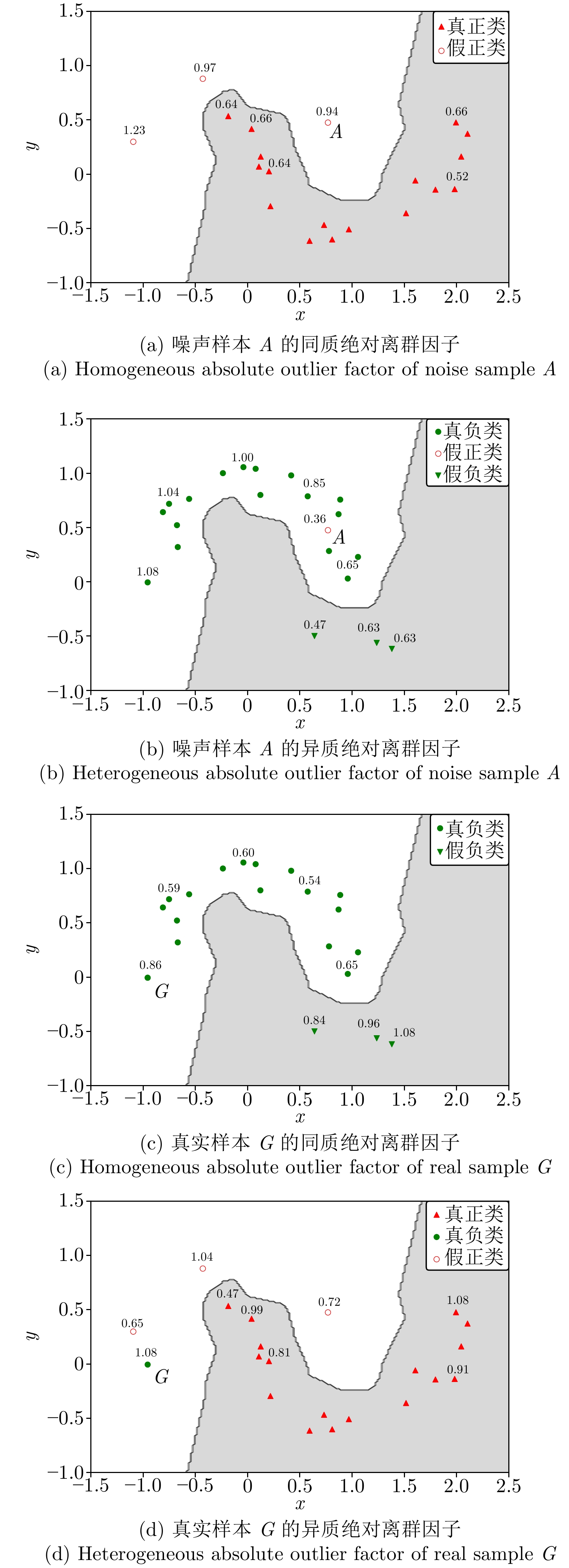
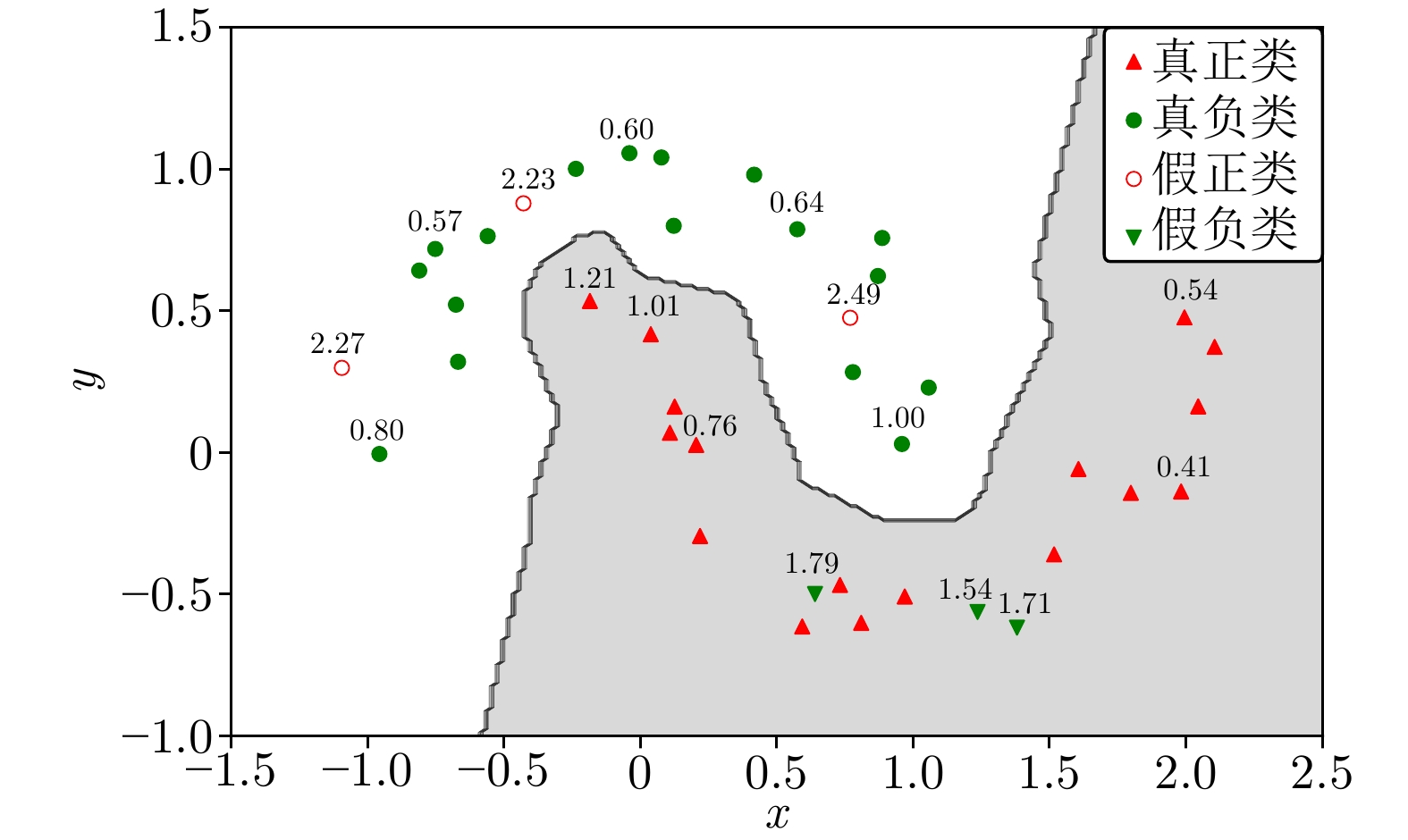
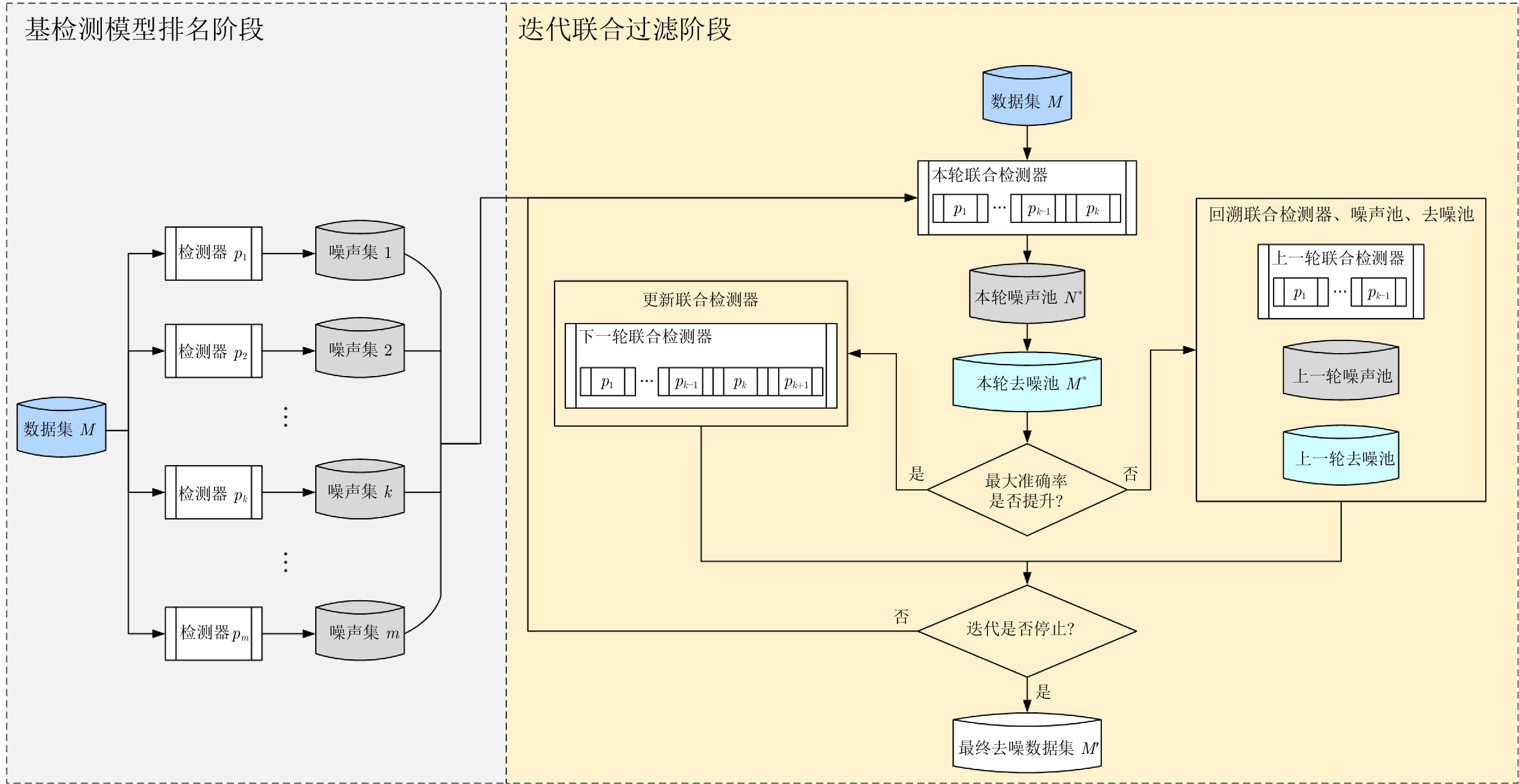
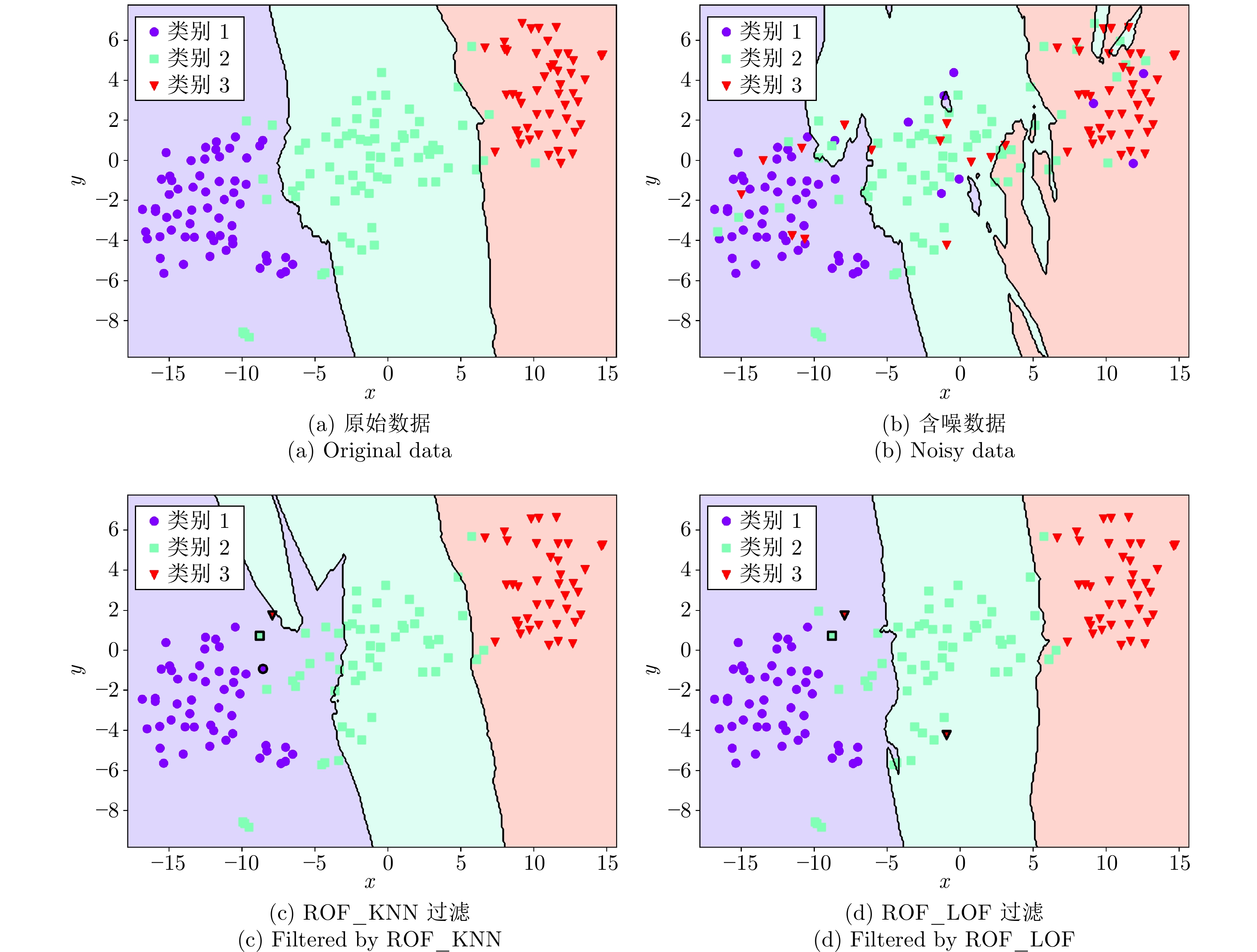
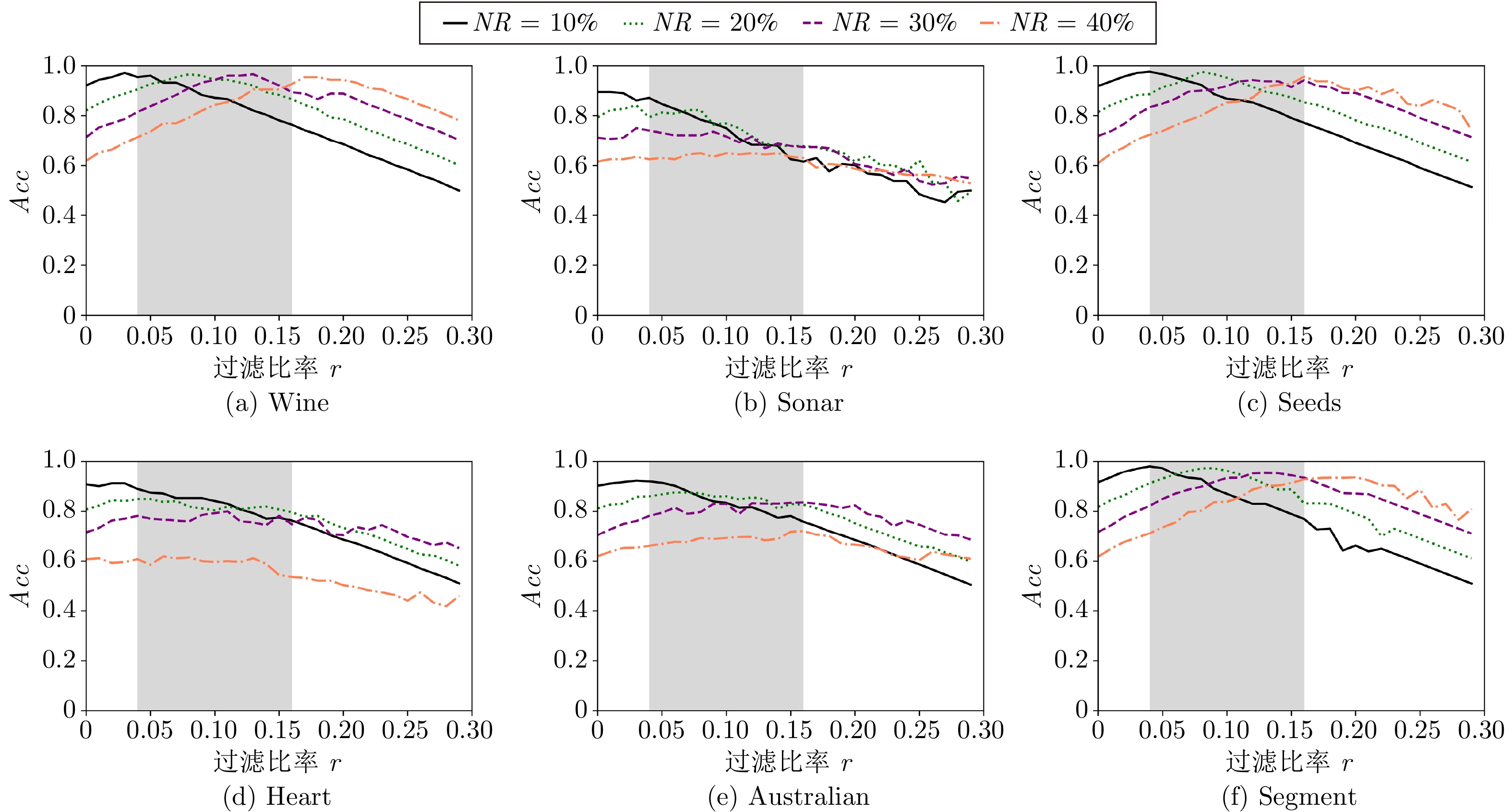
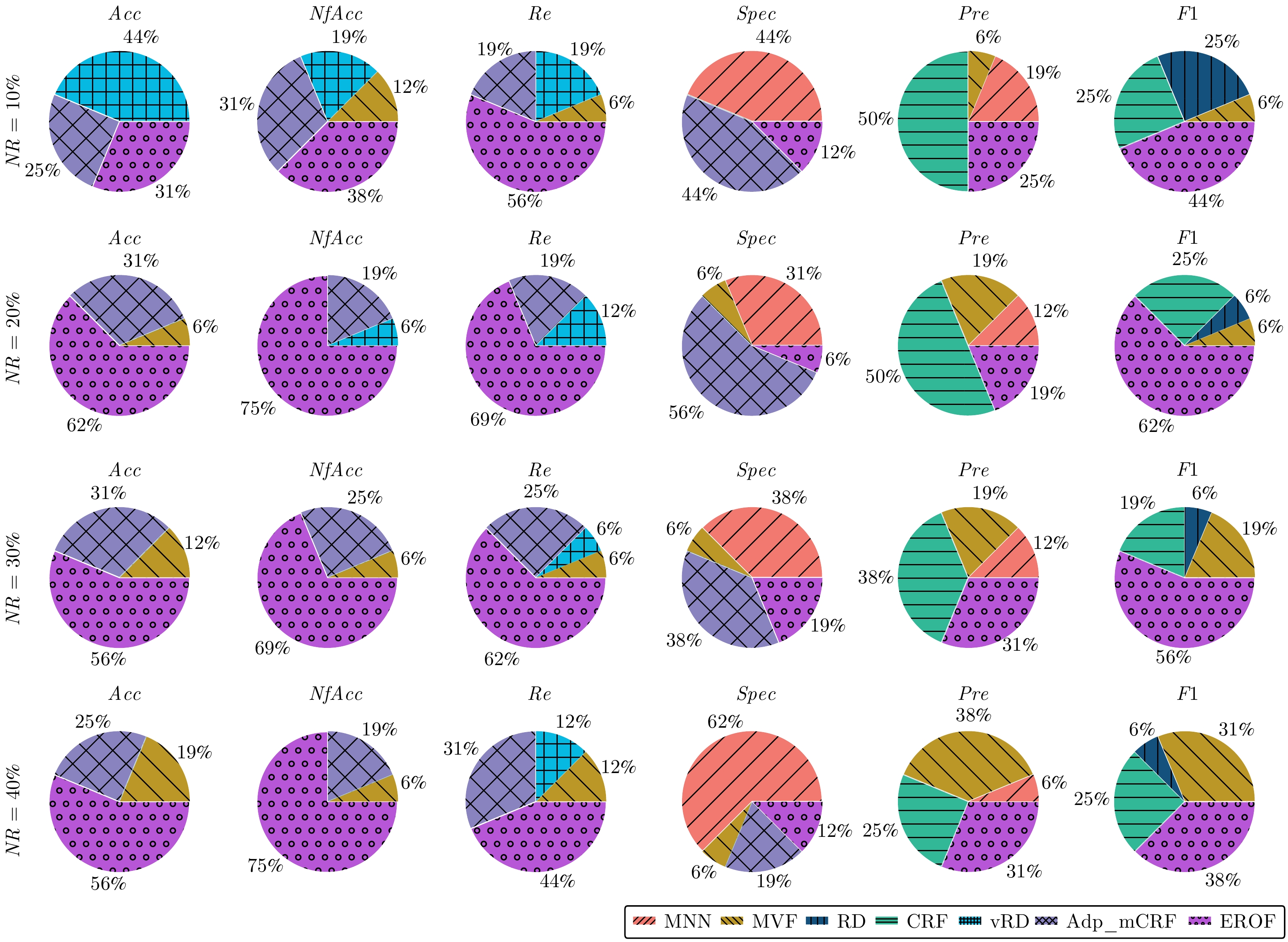
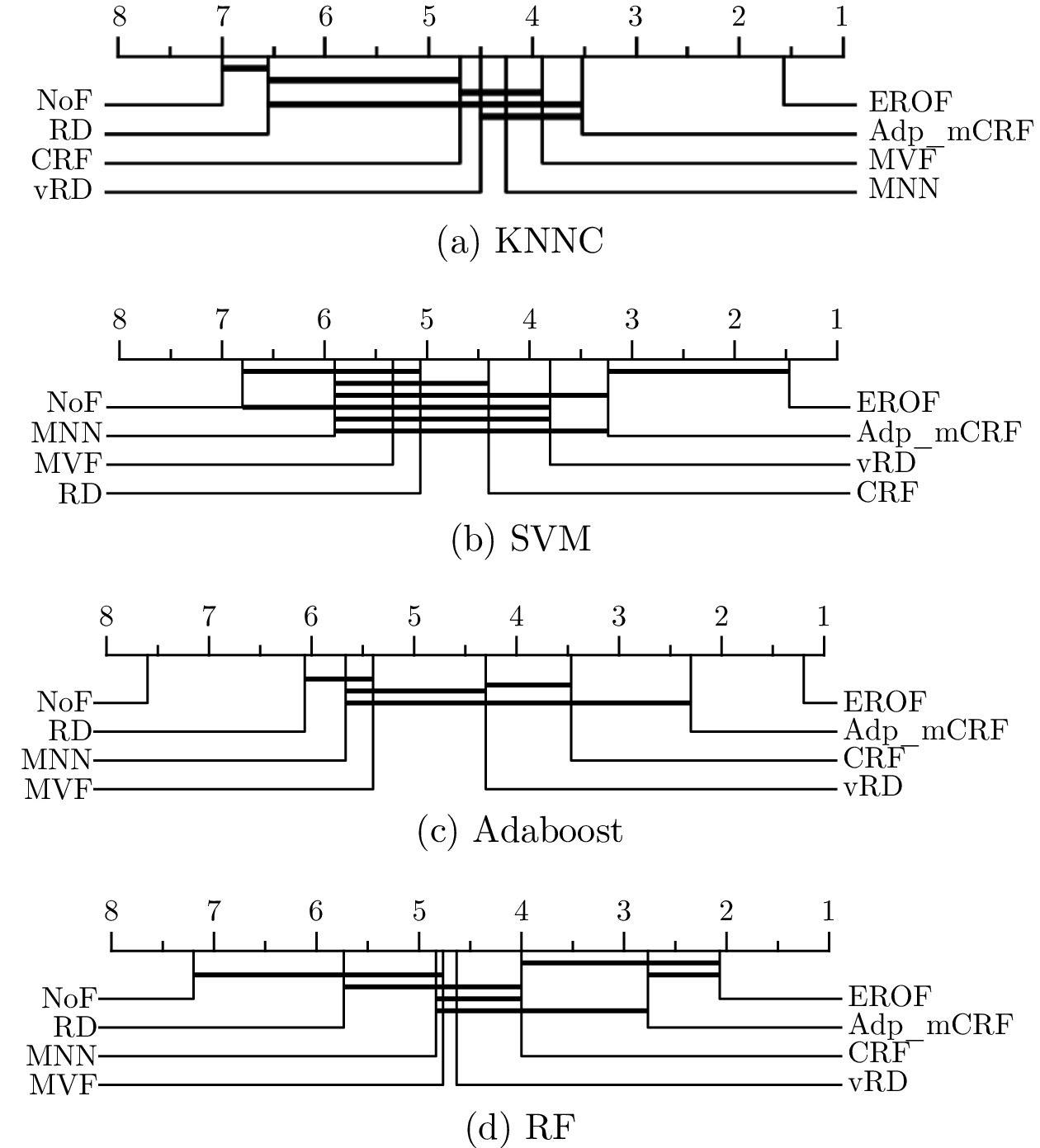
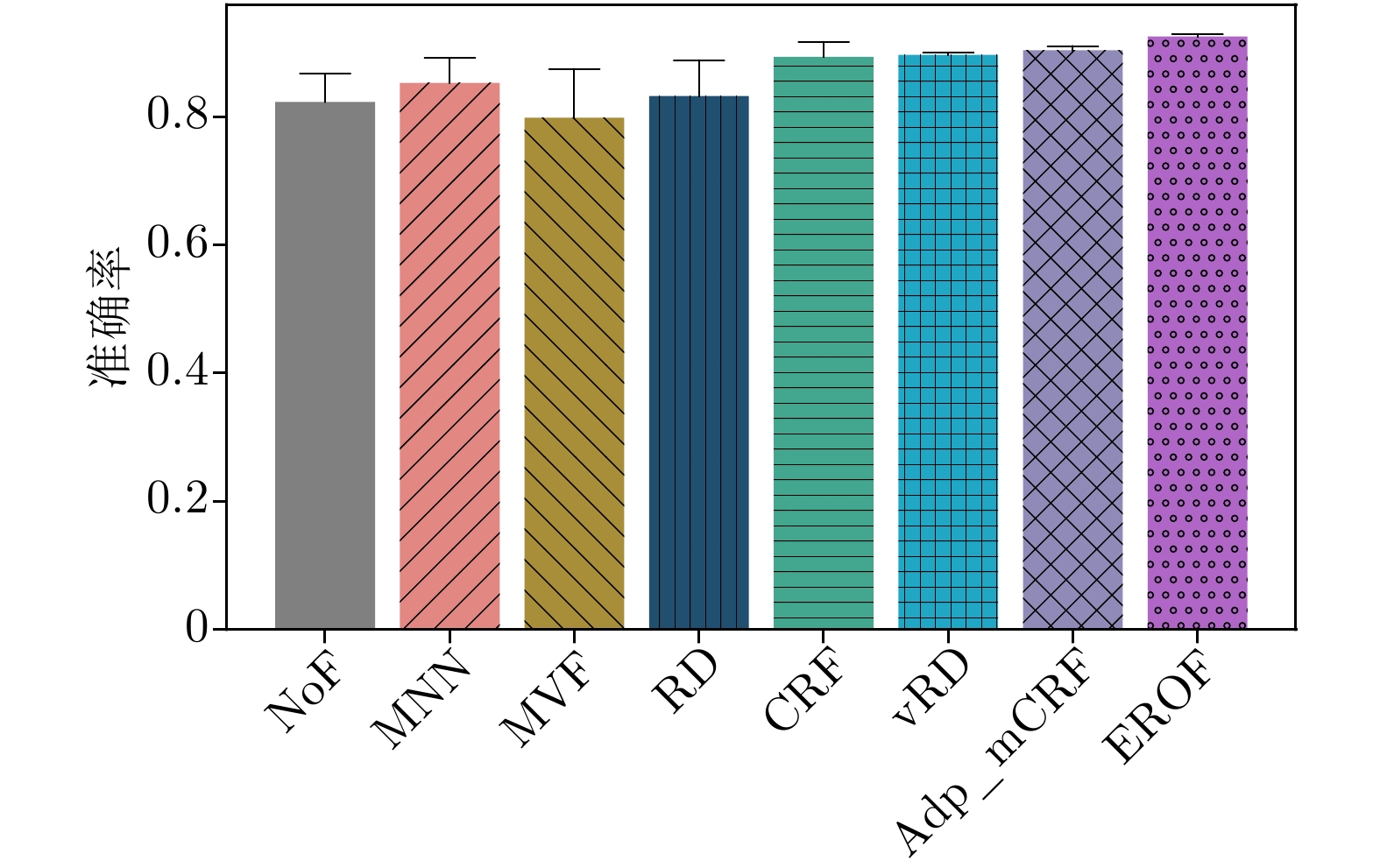
分类任务中含有类别型标签噪声是传统数据挖掘中的常见问题, 目前还缺少针对性方法来专门检测类别型标签噪声. 离群点检测技术能用于噪声的识别与过滤, 但由于离群点与类别型标签噪声并不具有一致性, 使得离群点检测算法无法精确检测分类数据集中的标签噪声. 针对这些问题, 提出一种基于离群点检测技术、适用于过滤类别型标签噪声的方法 —— 基于相对离群因子(Relative outlier factor, ROF)的集成过滤方法(Label noise ensemble filtering method based on relative outlier factor, EROF). 首先, 通过相对离群因子对样本进行噪声概率估计; 然后, 再迭代联合多种离群点检测算法, 实现集成过滤. 实验结果表明, 该方法在大多数含有标签噪声的数据集上, 都能保持优秀的噪声识别能力, 并显著提升各种分类模型的泛化能力.
分类任务中含有类别型标签噪声是传统数据挖掘中的常见问题, 目前还缺少针对性方法来专门检测类别型标签噪声. 离群点检测技术能用于噪声的识别与过滤, 但由于离群点与类别型标签噪声并不具有一致性, 使得离群点检测算法无法精确检测分类数据集中的标签噪声. 针对这些问题, 提出一种基于离群点检测技术、适用于过滤类别型标签噪声的方法 —— 基于相对离群因子(Relative outlier factor, ROF)的集成过滤方法(Label noise ensemble filtering method based on relative outlier factor, EROF). 首先, 通过相对离群因子对样本进行噪声概率估计; 然后, 再迭代联合多种离群点检测算法, 实现集成过滤. 实验结果表明, 该方法在大多数含有标签噪声的数据集上, 都能保持优秀的噪声识别能力, 并显著提升各种分类模型的泛化能力.




2024, 50(1): 169-180.
doi: 10.16383/j.aas.c230326
摘要:
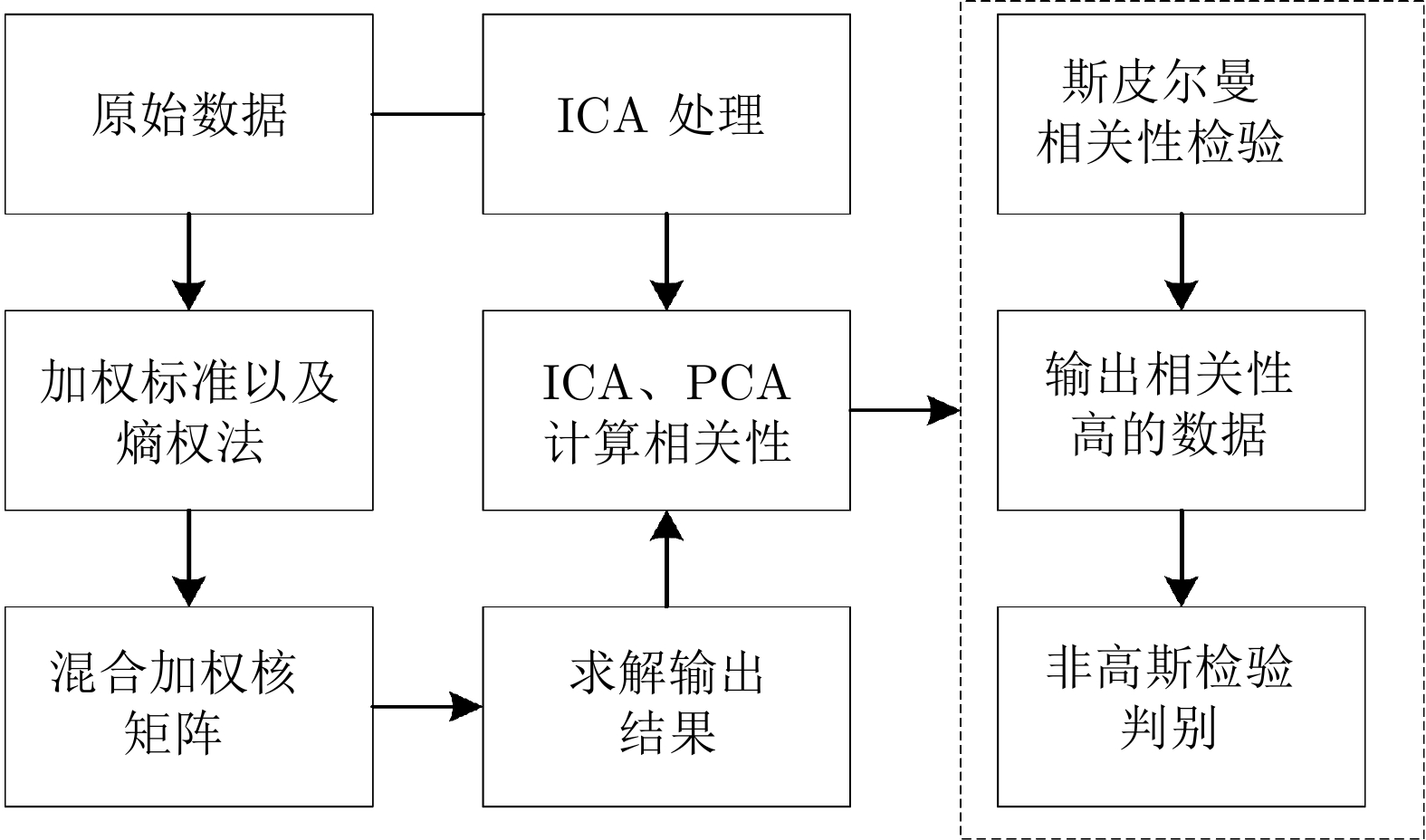
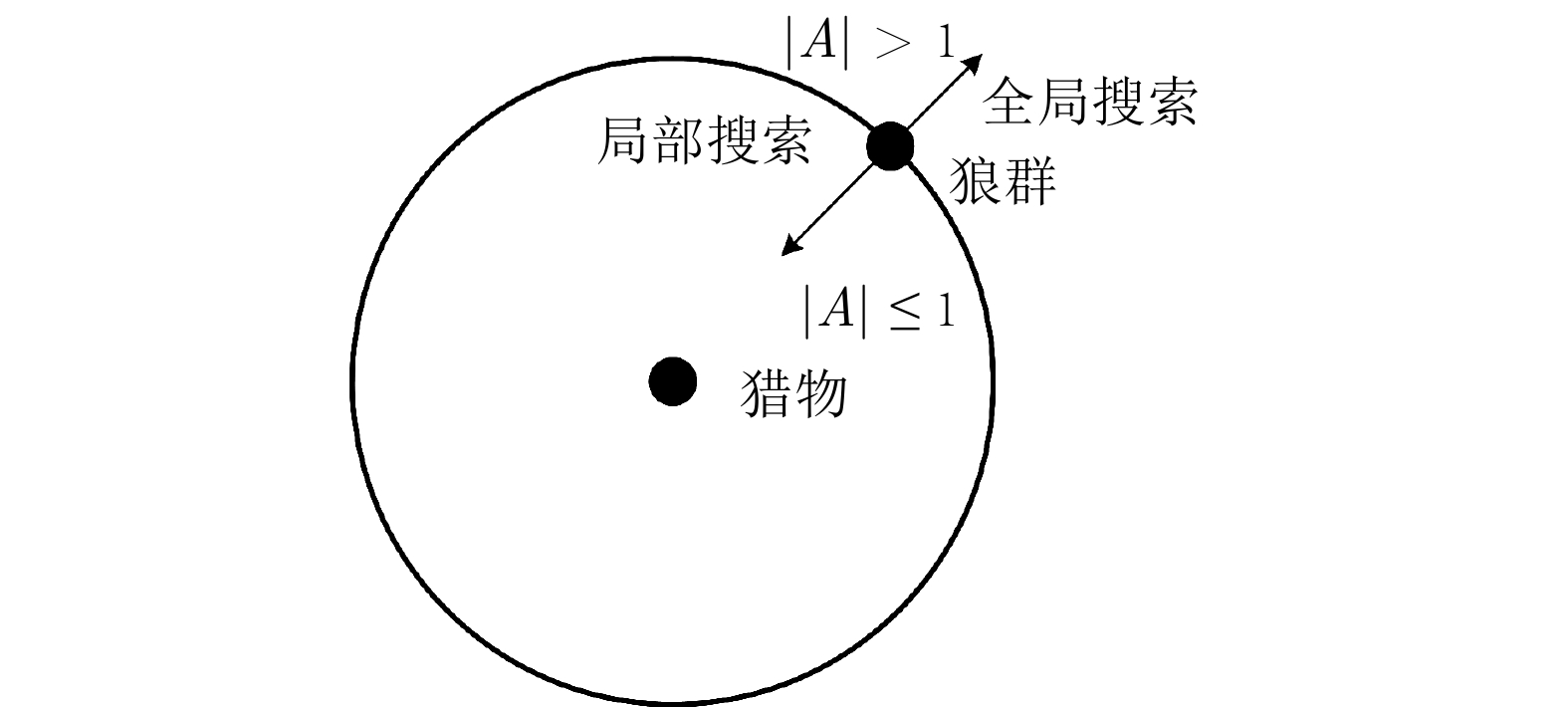
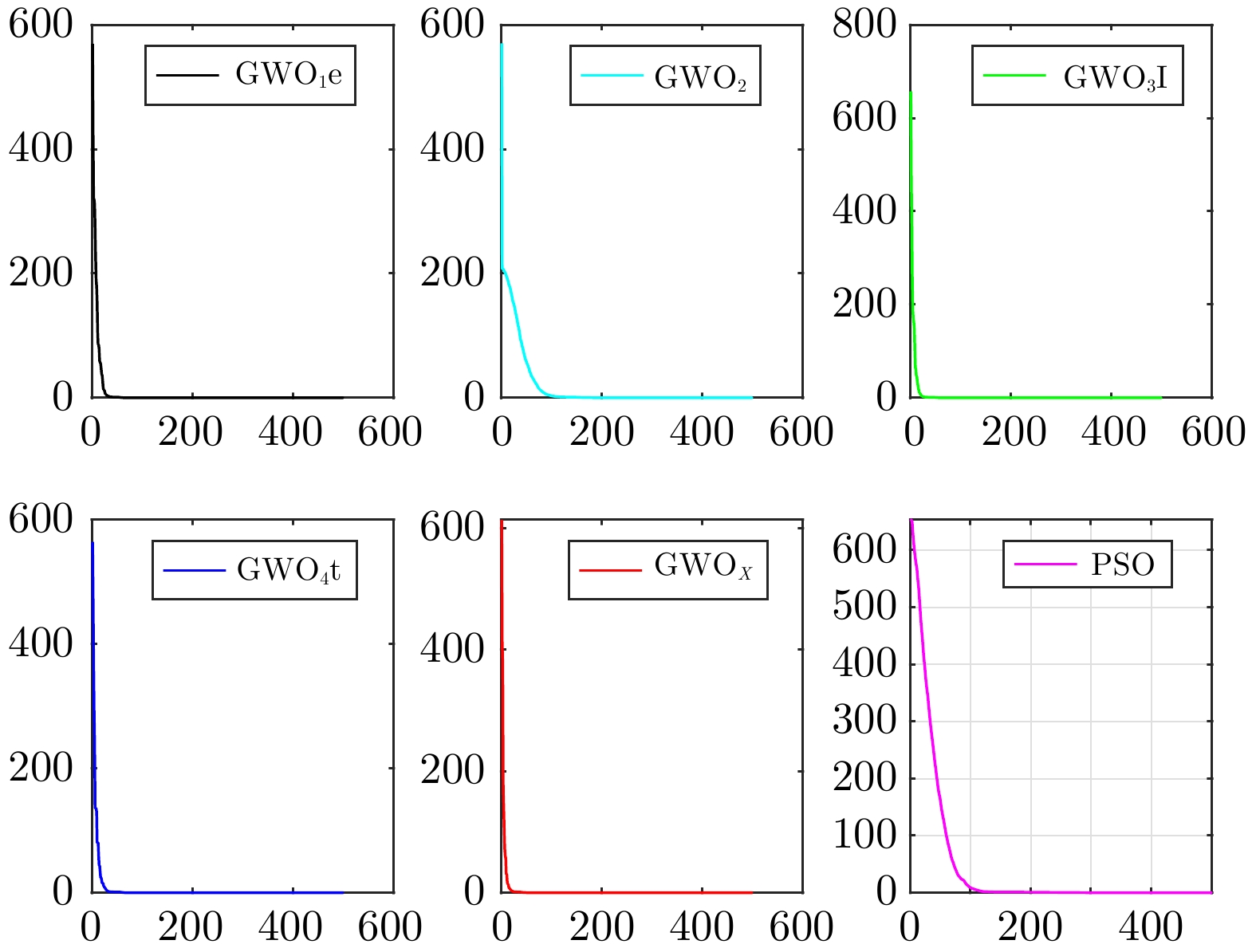
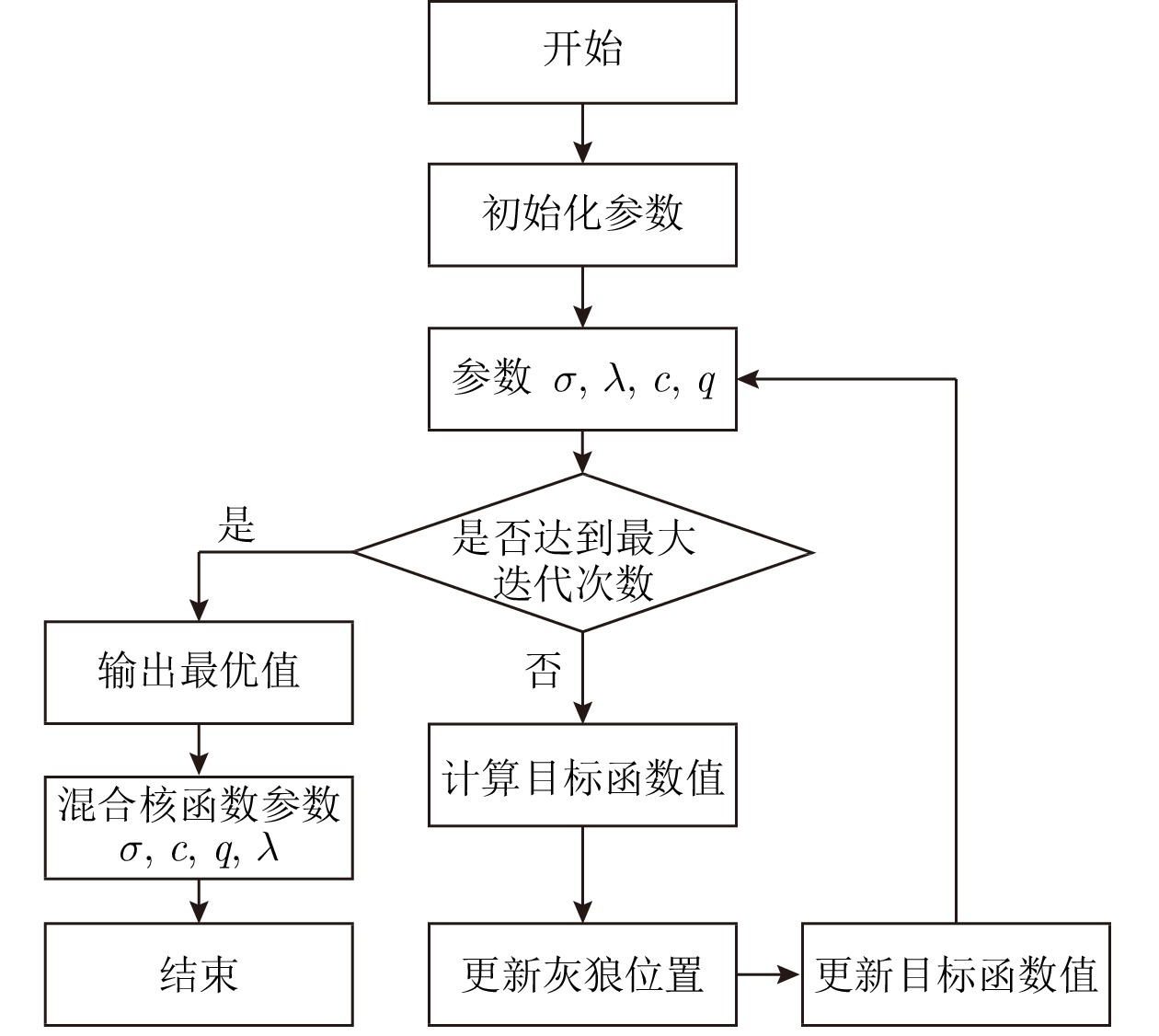
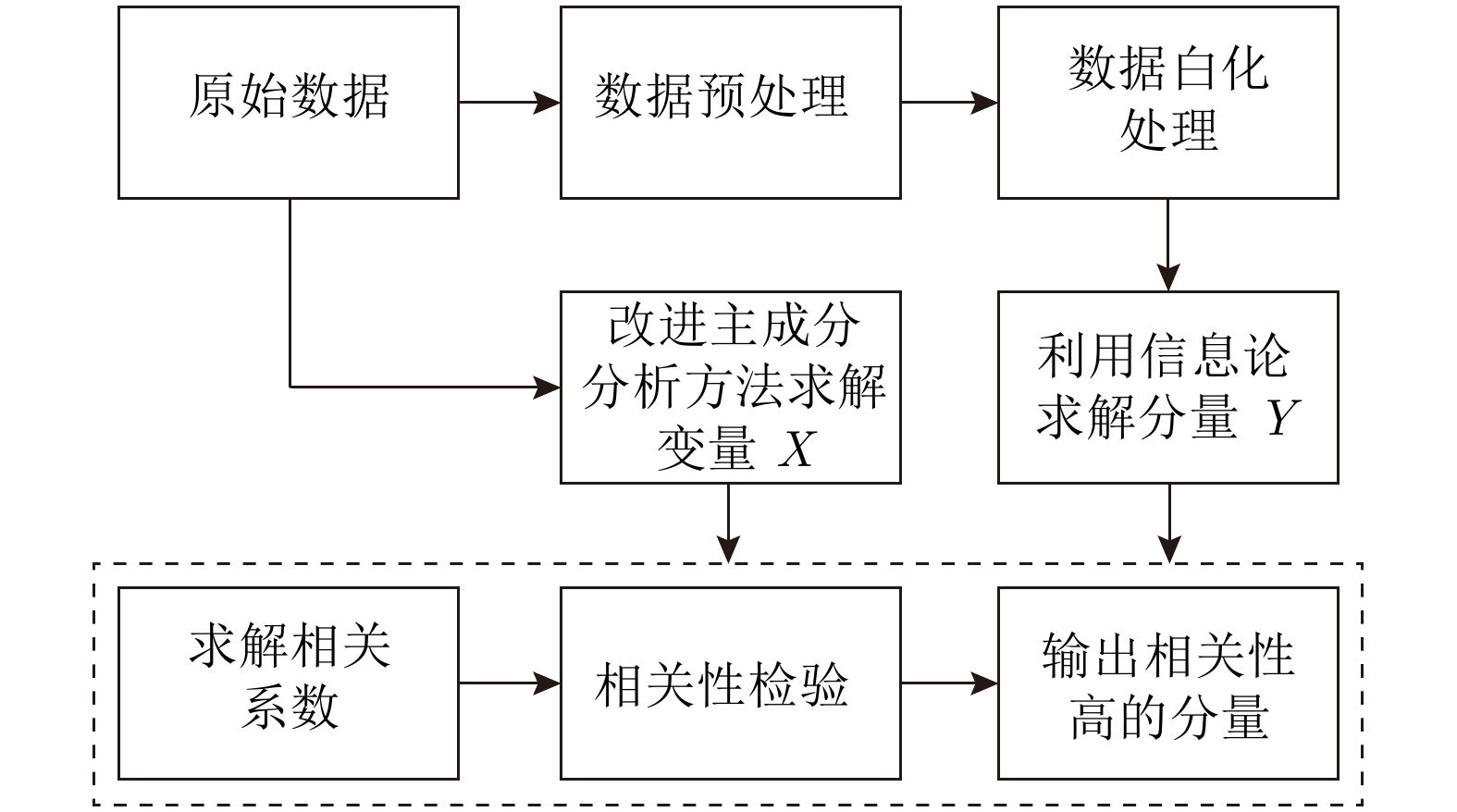
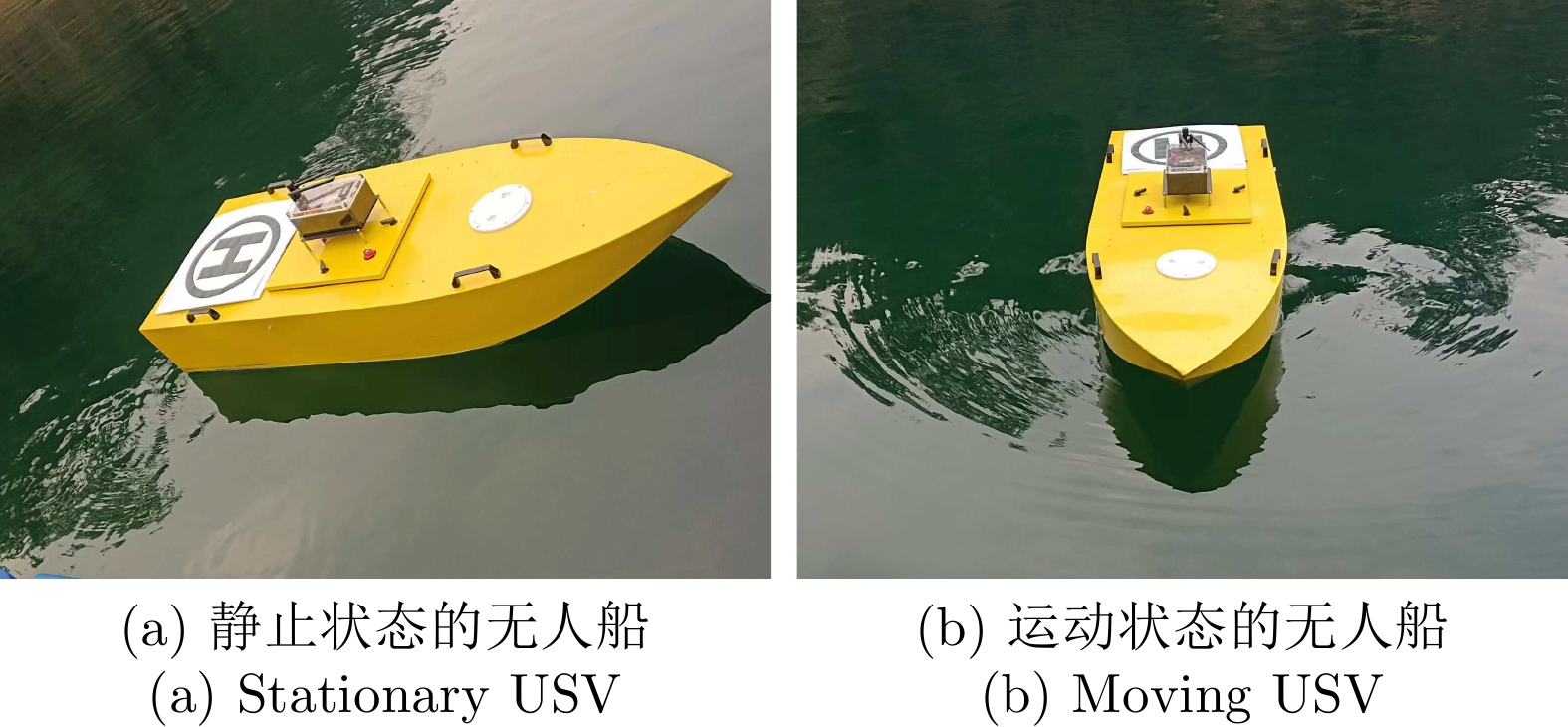
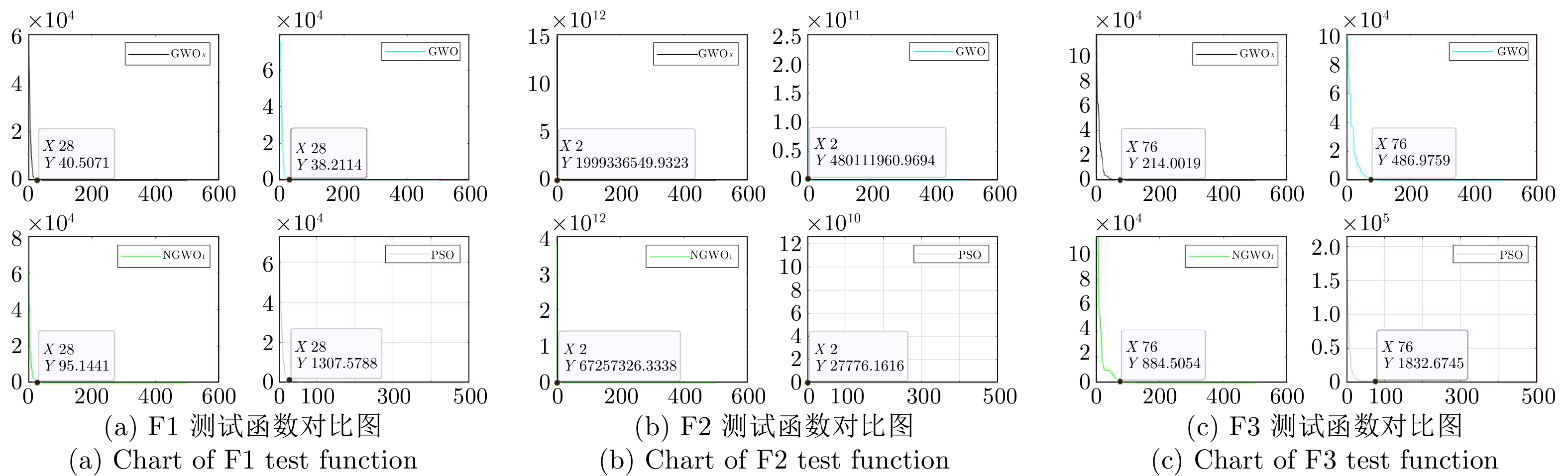
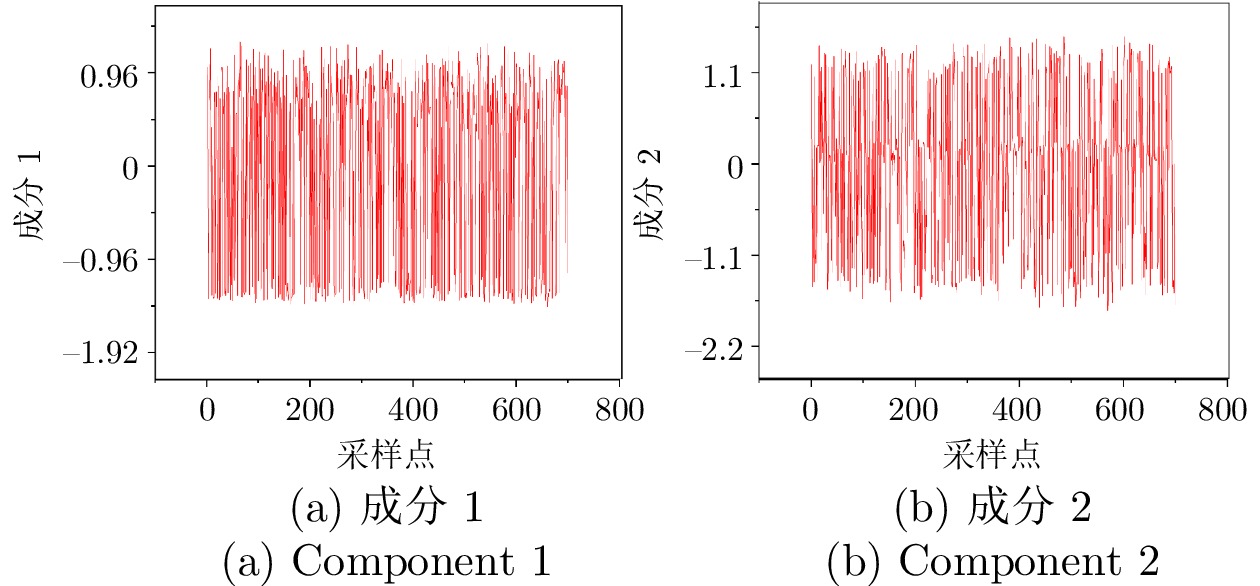
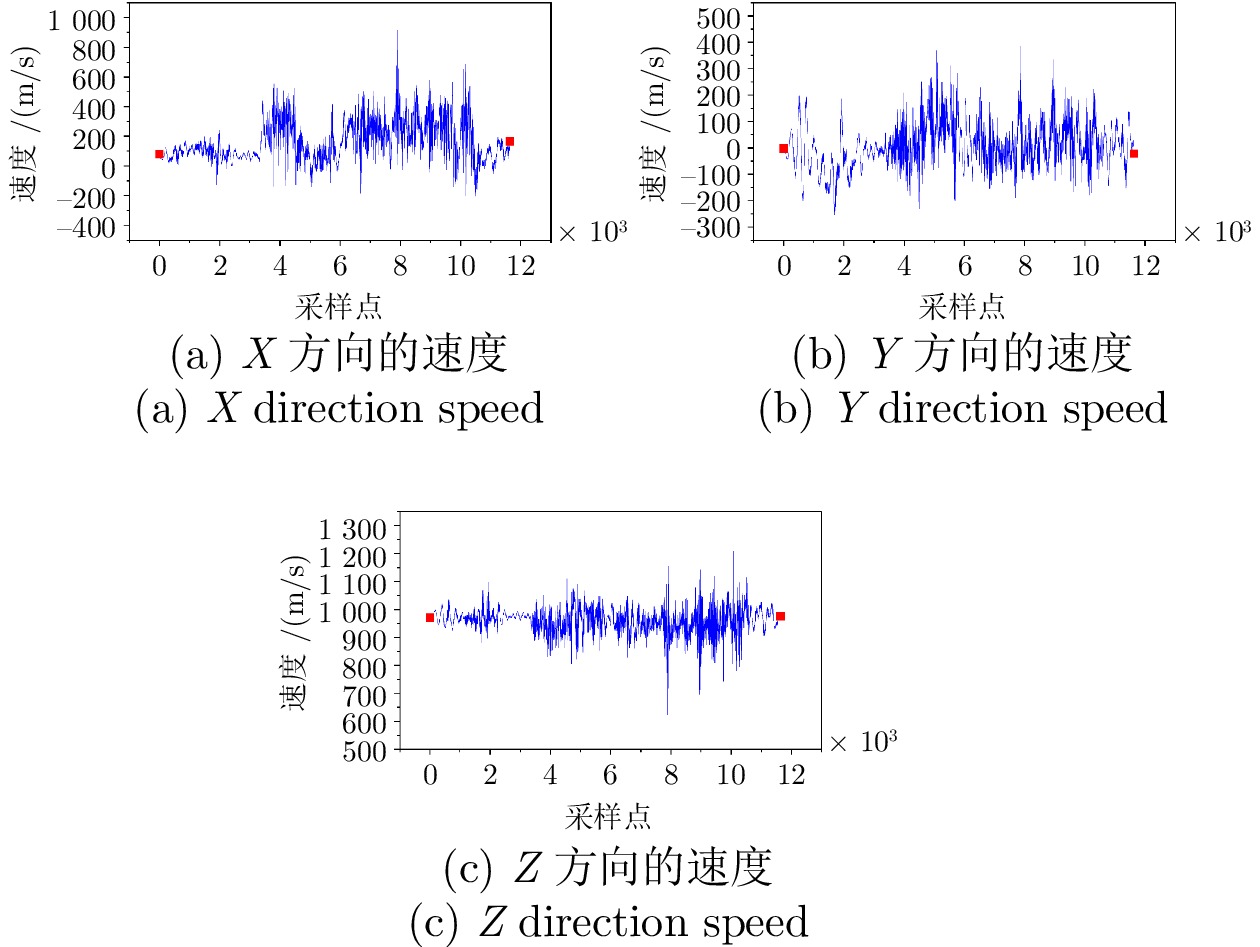
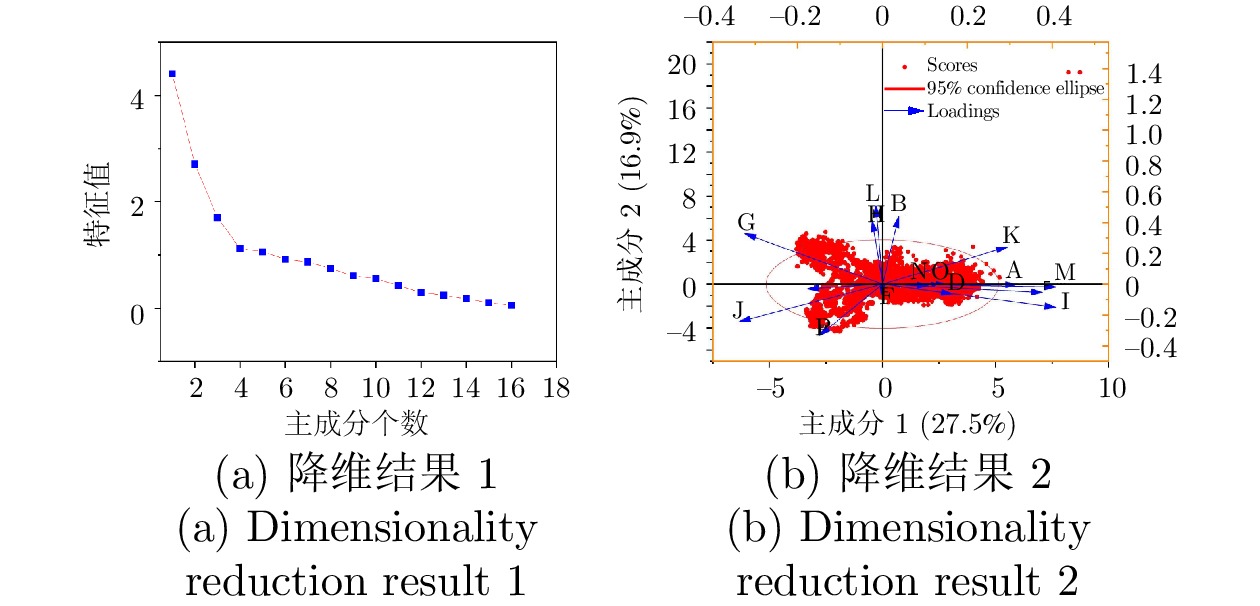
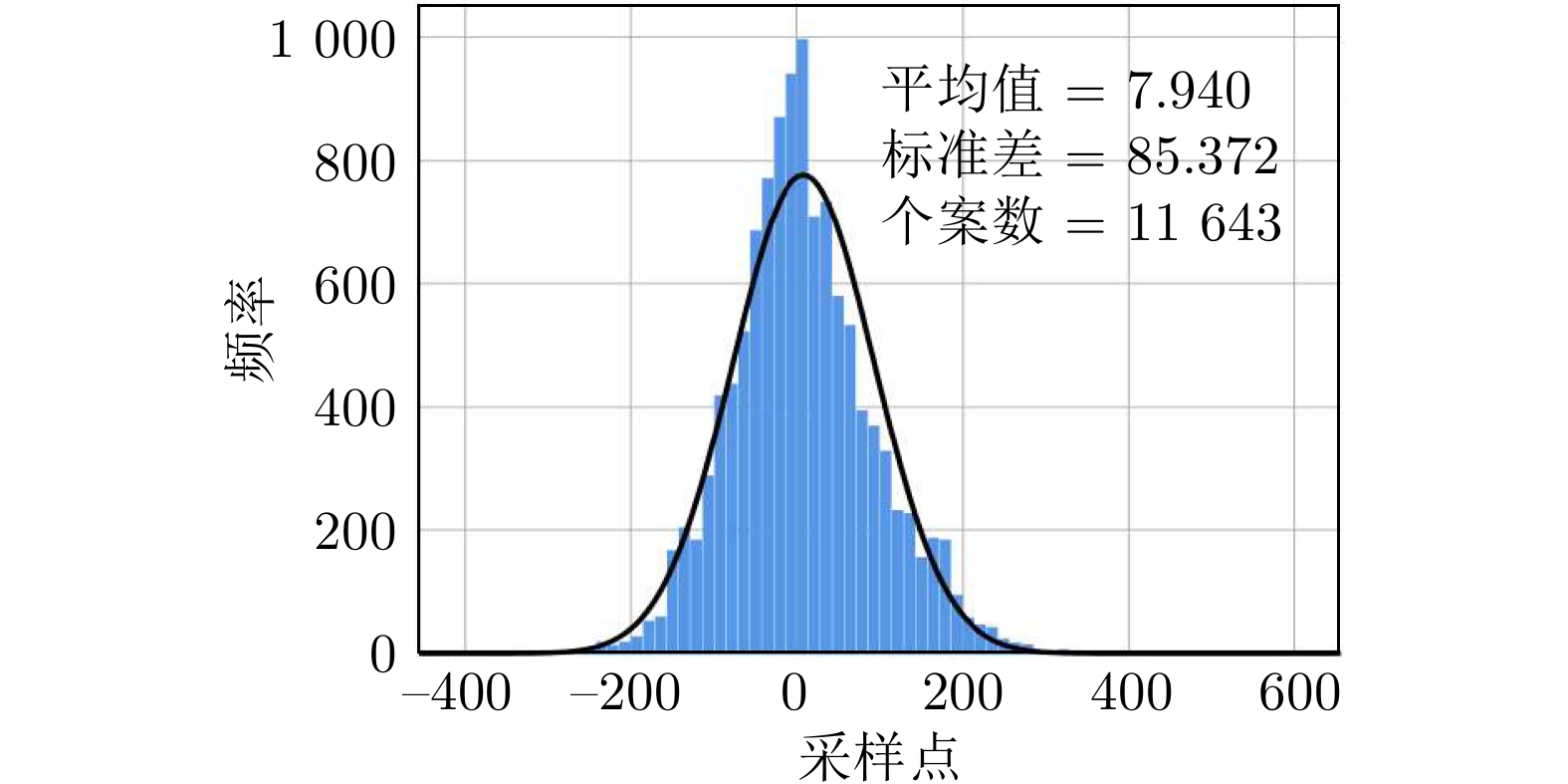
针对无人船(Unmanned surface vehicle, USV)航行位姿观测数据的非高斯性/高斯性判别问题, 提出一种基于主成分分析(Principal component analysis, PCA)和独立成分分析(Independent component analysis, ICA) 模式融合的非高斯特征检测识别方法. 首先, 采用基于标准化加权平均和信息熵的数据预处理方法. 其次, 引入混合加权核函数并使用灰狼优化(Grey wolf optimization, GWO)算法进行参数优化, 以提高PCA方法的准确性. 同时, 该算法采用一种新的非线性控制因子策略, 提高全局和局部搜索能力. 最后, 建立了一种基于ICA和PCA联合的相关性分析方法来实现多维数据的降维, 在降维数据的基础上综合T型多维偏度峰度检验法和KS (Kolmogorov-Smirnov)检验法进行非高斯性/高斯性特征检测识别. 该方法考虑了非线性非高斯的噪声对降维结果精确度的影响, 有效降低了多维数据非高斯检测的复杂度, 同时也为后续在实际USV位姿估计等应用中提供了保障. 实验表明, 该方法具有较高的准确性和稳定性, 可为 USV 航行位姿观测数据处理提供支持.
针对无人船(Unmanned surface vehicle, USV)航行位姿观测数据的非高斯性/高斯性判别问题, 提出一种基于主成分分析(Principal component analysis, PCA)和独立成分分析(Independent component analysis, ICA) 模式融合的非高斯特征检测识别方法. 首先, 采用基于标准化加权平均和信息熵的数据预处理方法. 其次, 引入混合加权核函数并使用灰狼优化(Grey wolf optimization, GWO)算法进行参数优化, 以提高PCA方法的准确性. 同时, 该算法采用一种新的非线性控制因子策略, 提高全局和局部搜索能力. 最后, 建立了一种基于ICA和PCA联合的相关性分析方法来实现多维数据的降维, 在降维数据的基础上综合T型多维偏度峰度检验法和KS (Kolmogorov-Smirnov)检验法进行非高斯性/高斯性特征检测识别. 该方法考虑了非线性非高斯的噪声对降维结果精确度的影响, 有效降低了多维数据非高斯检测的复杂度, 同时也为后续在实际USV位姿估计等应用中提供了保障. 实验表明, 该方法具有较高的准确性和稳定性, 可为 USV 航行位姿观测数据处理提供支持.


2024, 50(1): 181-193.
doi: 10.16383/j.aas.c230395
摘要:
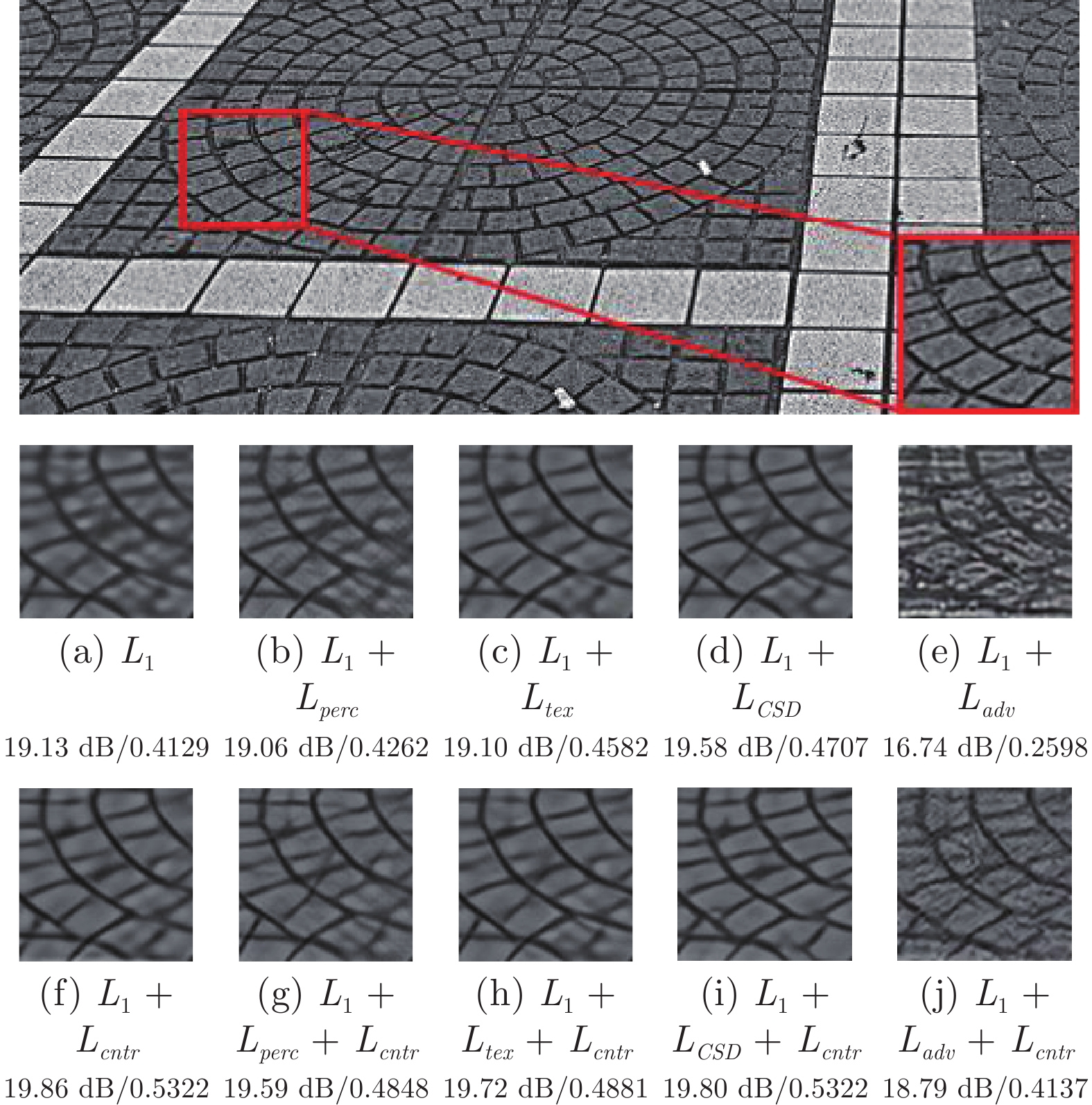
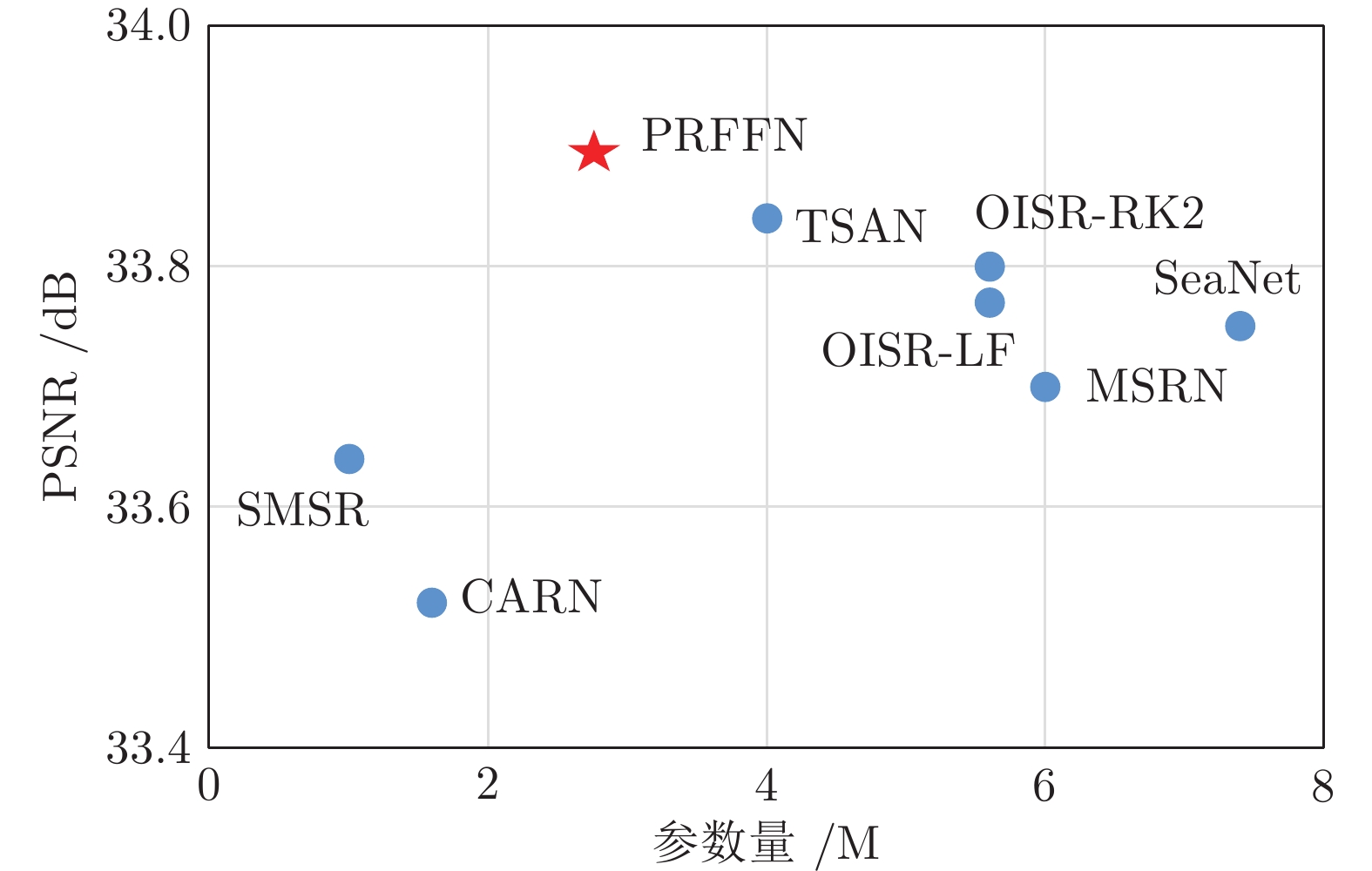
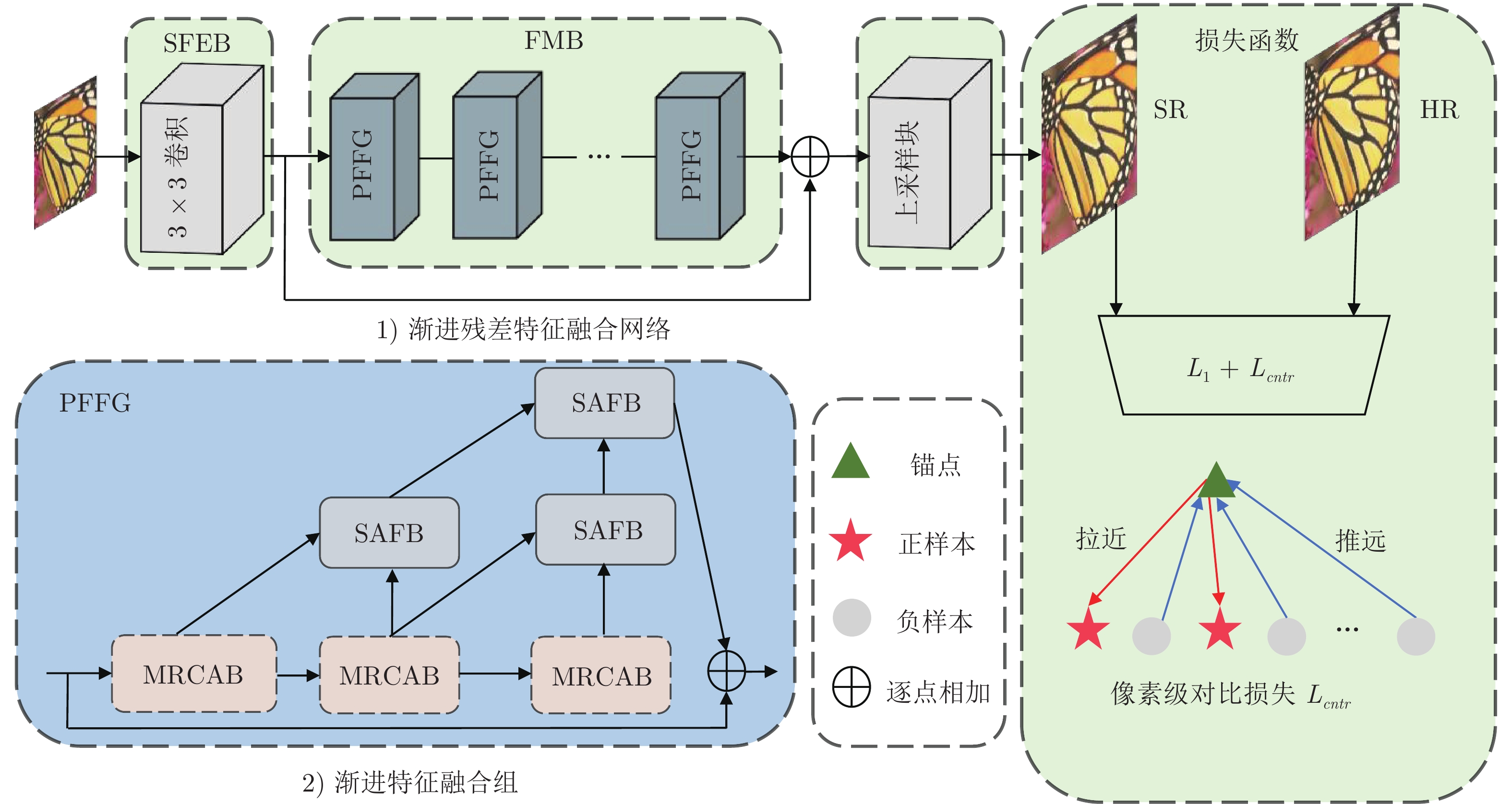
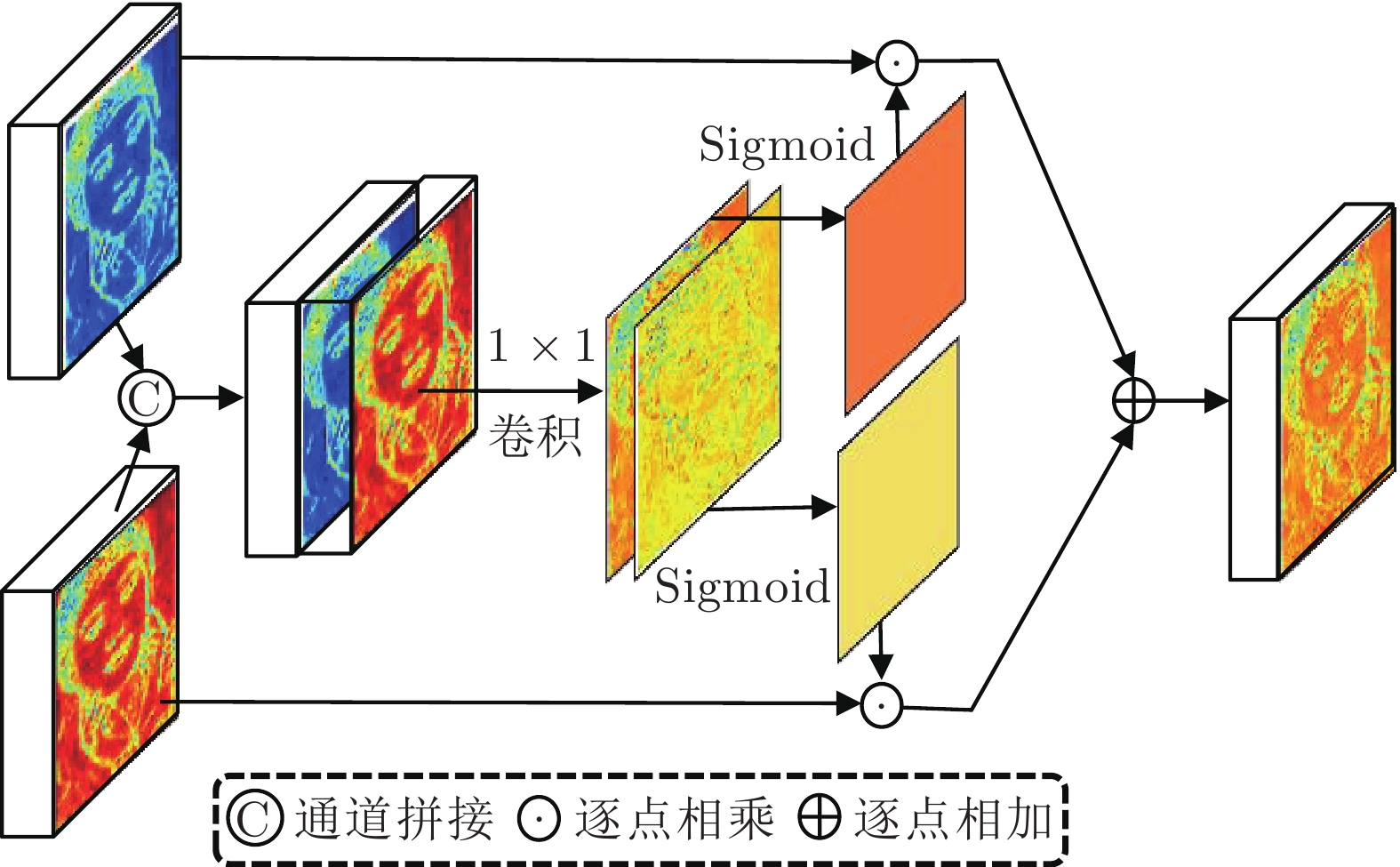
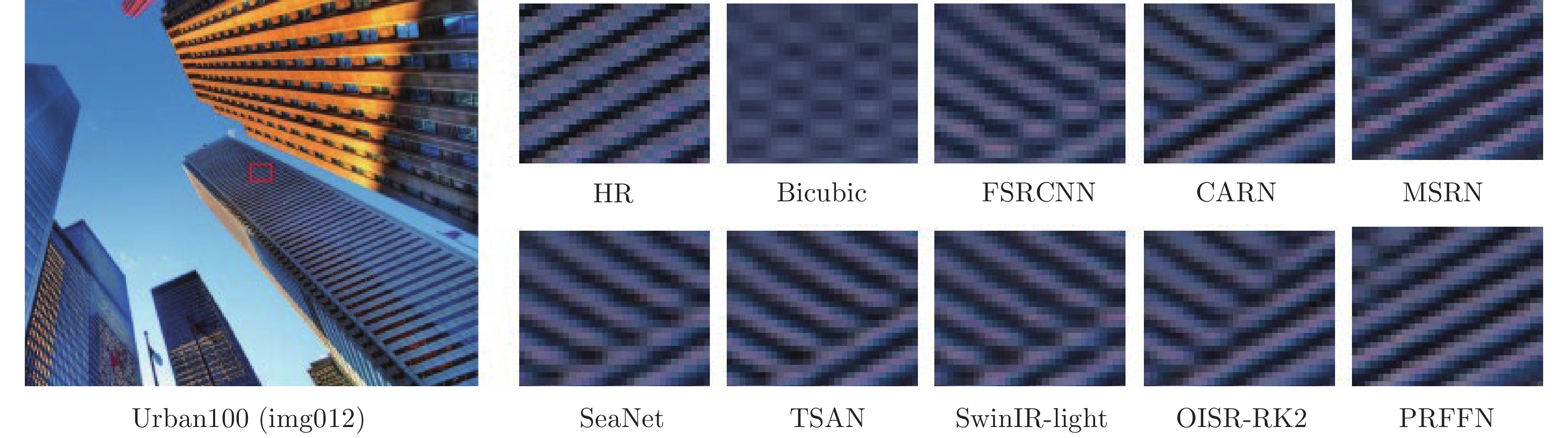
目前, 深度卷积神经网络(Convolutional neural network, CNN)已主导了单图像超分辨率(Single image super-resolution, SISR)技术的研究, 并取得了很大进展. 但是, SISR仍是一个开放性问题, 重建的超分辨率(Super-resolution, SR)图像往往会出现模糊、纹理细节丢失和失真等问题. 提出一个新的逐像素对比损失, 在一个局部区域中, 使SR图像的像素尽可能靠近对应的原高分辨率(High-resolution, HR)图像的像素, 并远离局部区域中的其他像素, 可改进SR图像的保真度和视觉质量. 提出一个组合对比损失的渐进残差特征融合网络(Progressive residual feature fusion network, PRFFN). 主要贡献有: 1)提出一个通用的基于对比学习的逐像素损失函数, 能够改进SR图像的保真度和视觉质量; 2)提出一个轻量的多尺度残差通道注意力块(Multi-scale residual channel attention block, MRCAB), 可以更好地提取和利用多尺度特征信息; 3)提出一个空间注意力融合块(Spatial attention fuse block, SAFB), 可以更好地利用邻近空间特征的相关性. 实验结果表明, PRFFN显著优于其他代表性方法.
目前, 深度卷积神经网络(Convolutional neural network, CNN)已主导了单图像超分辨率(Single image super-resolution, SISR)技术的研究, 并取得了很大进展. 但是, SISR仍是一个开放性问题, 重建的超分辨率(Super-resolution, SR)图像往往会出现模糊、纹理细节丢失和失真等问题. 提出一个新的逐像素对比损失, 在一个局部区域中, 使SR图像的像素尽可能靠近对应的原高分辨率(High-resolution, HR)图像的像素, 并远离局部区域中的其他像素, 可改进SR图像的保真度和视觉质量. 提出一个组合对比损失的渐进残差特征融合网络(Progressive residual feature fusion network, PRFFN). 主要贡献有: 1)提出一个通用的基于对比学习的逐像素损失函数, 能够改进SR图像的保真度和视觉质量; 2)提出一个轻量的多尺度残差通道注意力块(Multi-scale residual channel attention block, MRCAB), 可以更好地提取和利用多尺度特征信息; 3)提出一个空间注意力融合块(Spatial attention fuse block, SAFB), 可以更好地利用邻近空间特征的相关性. 实验结果表明, PRFFN显著优于其他代表性方法.





2024, 50(1): 194-210.
doi: 10.16383/j.aas.c230074
摘要:
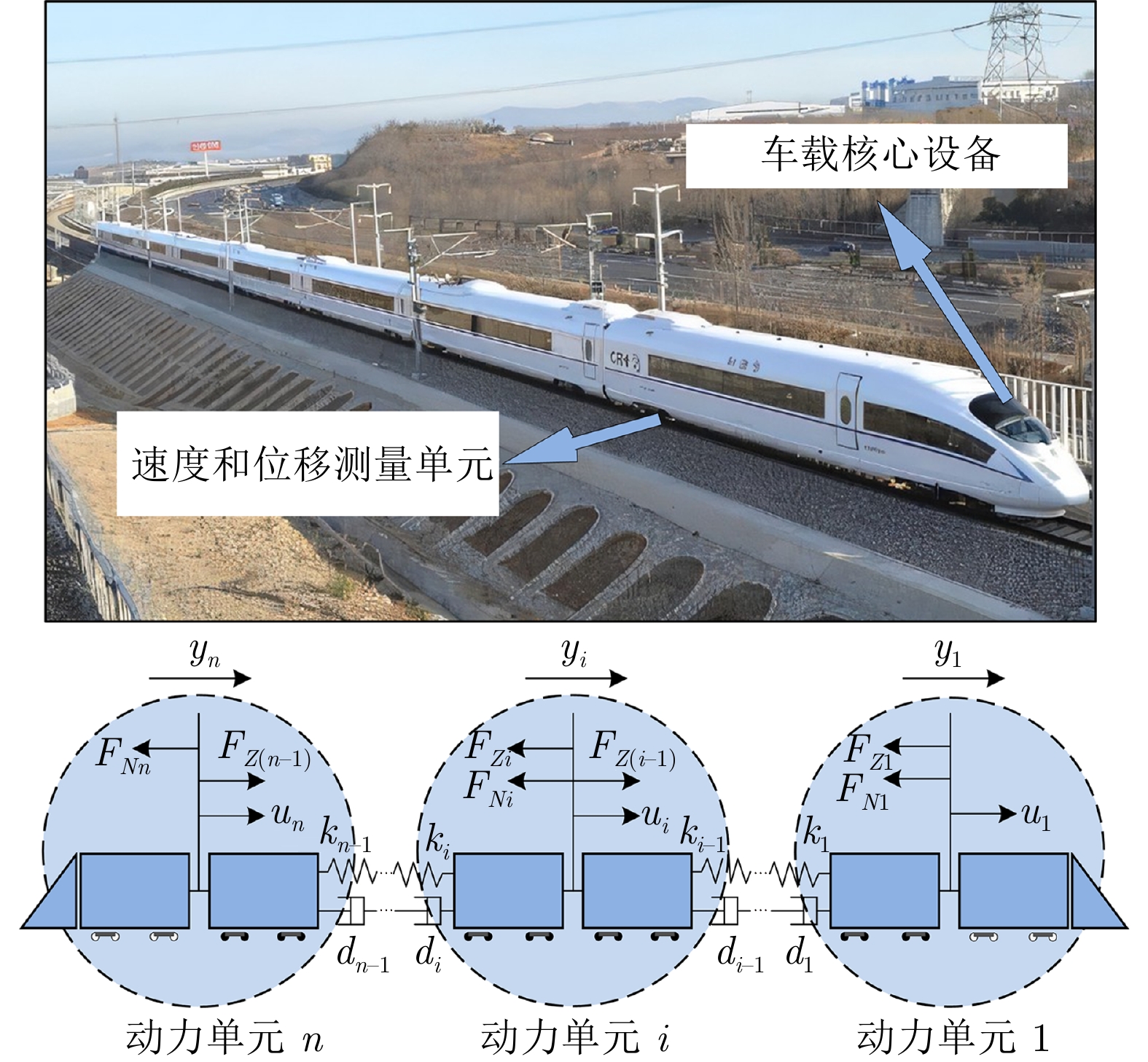
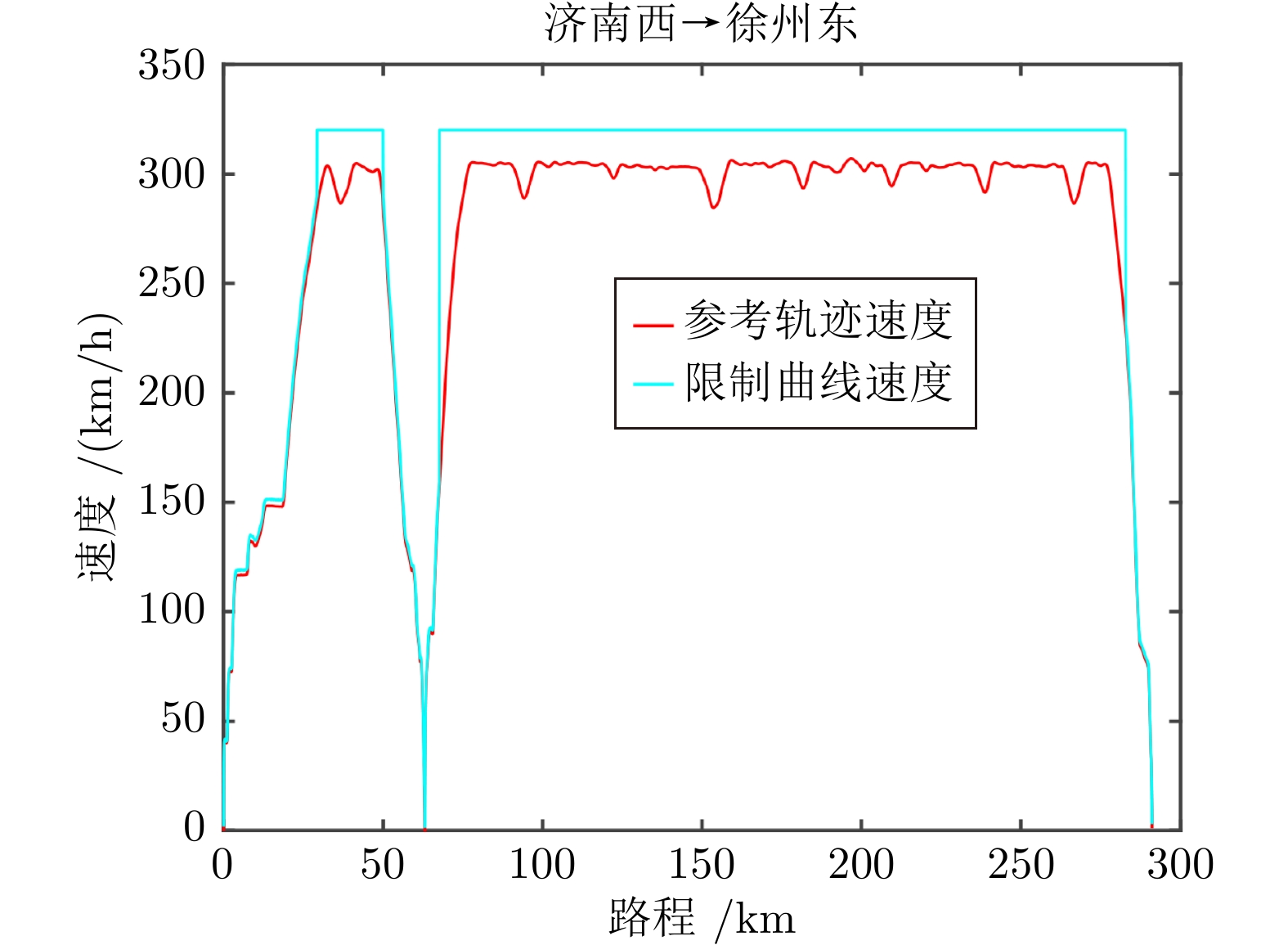
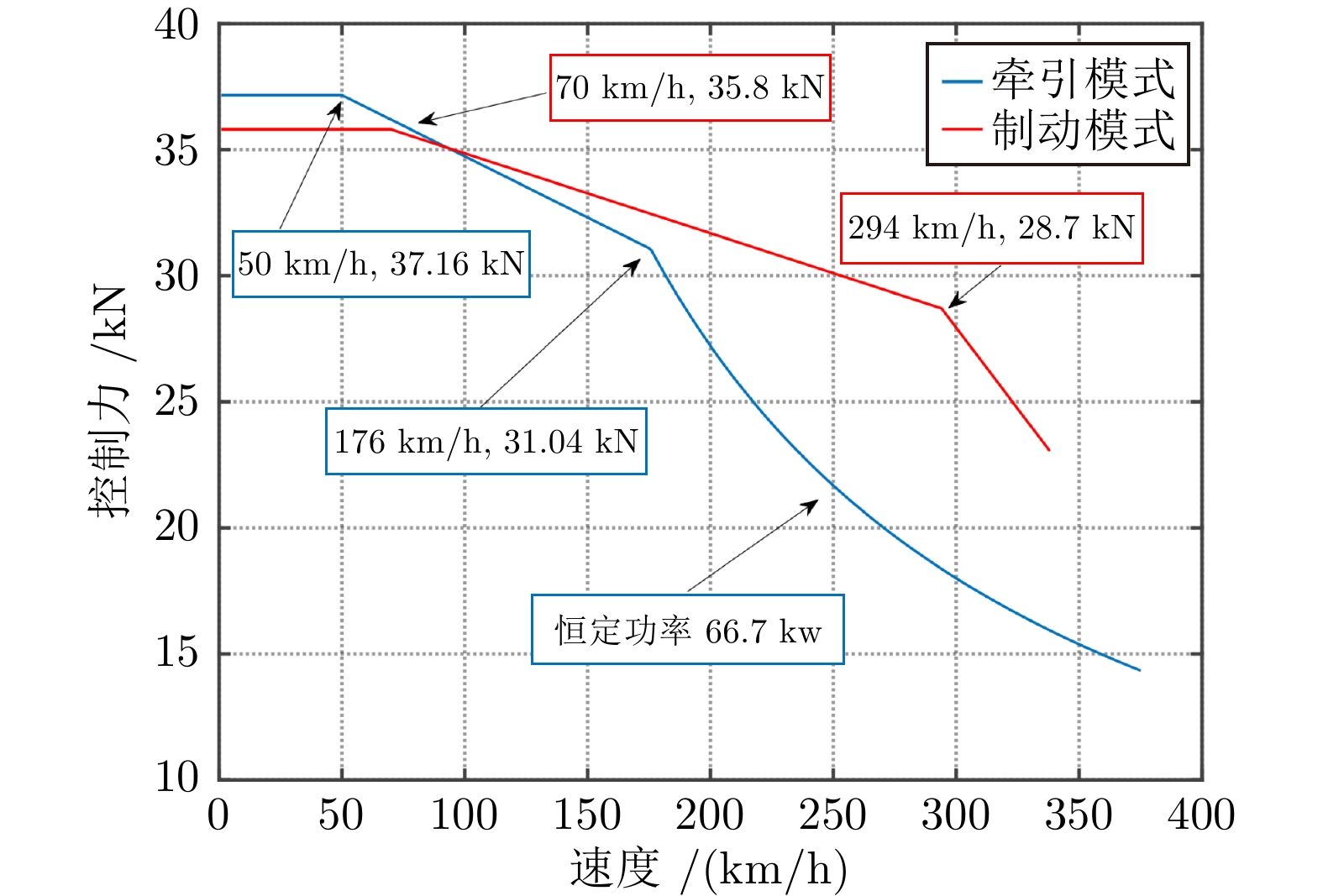
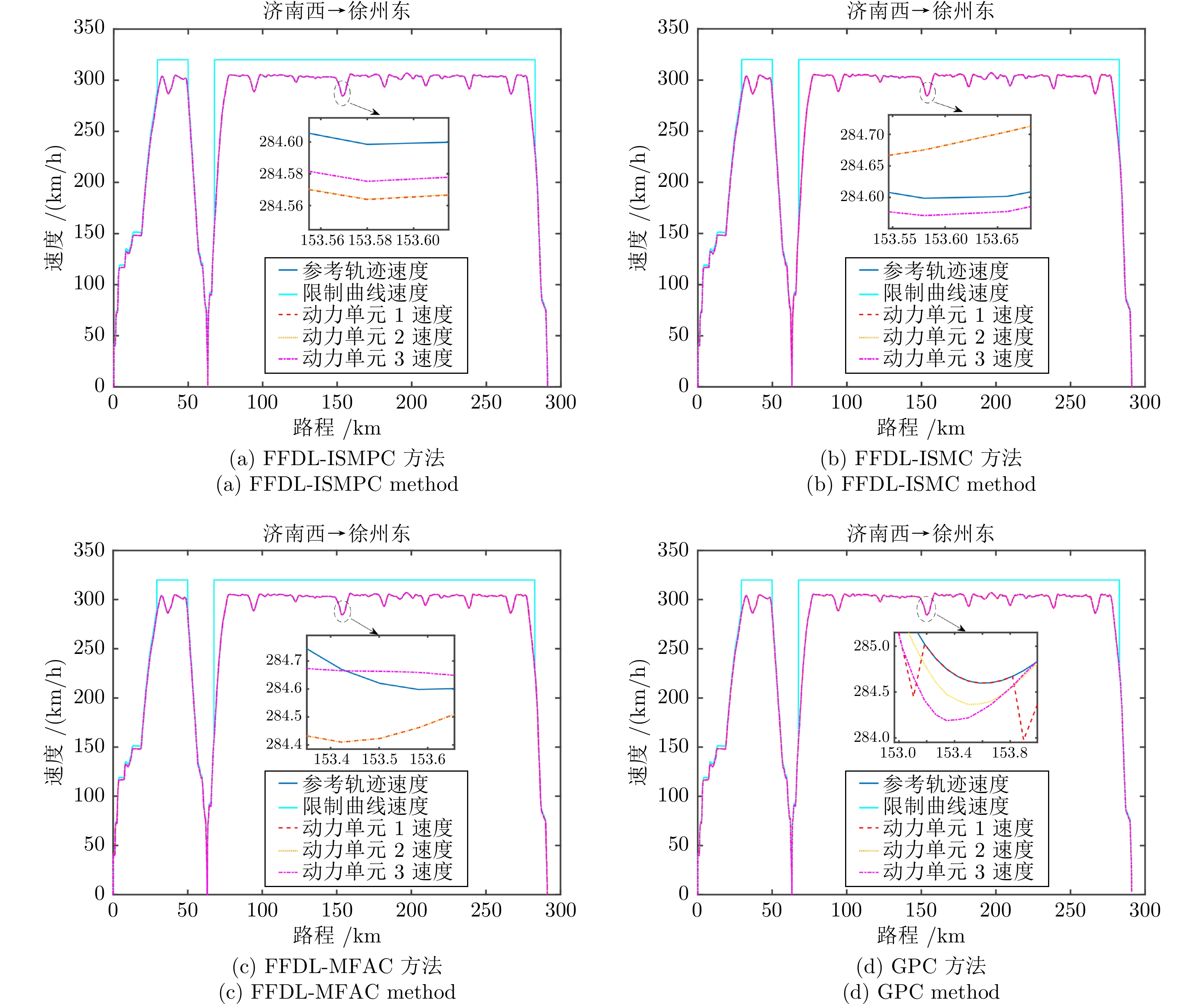
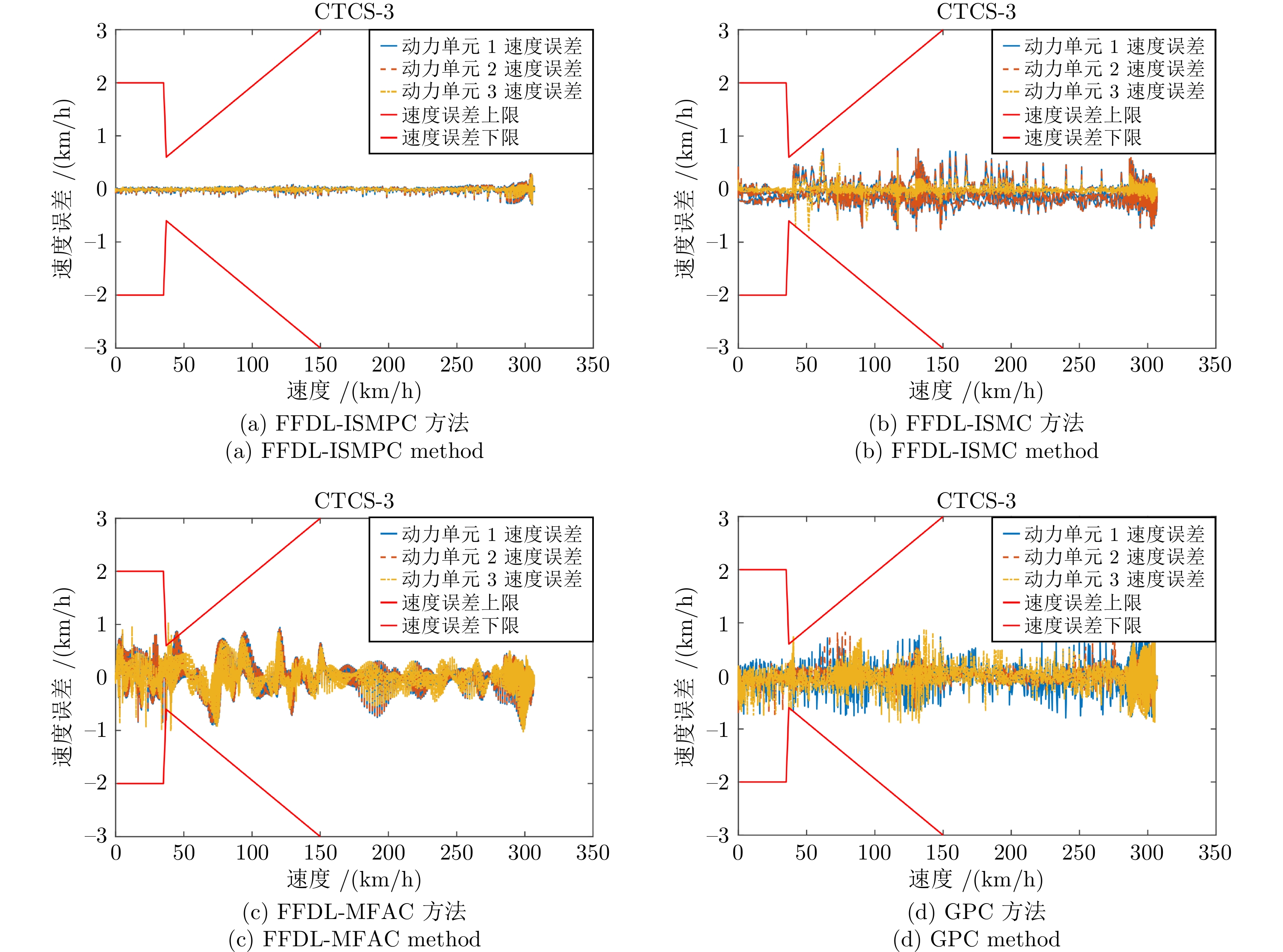
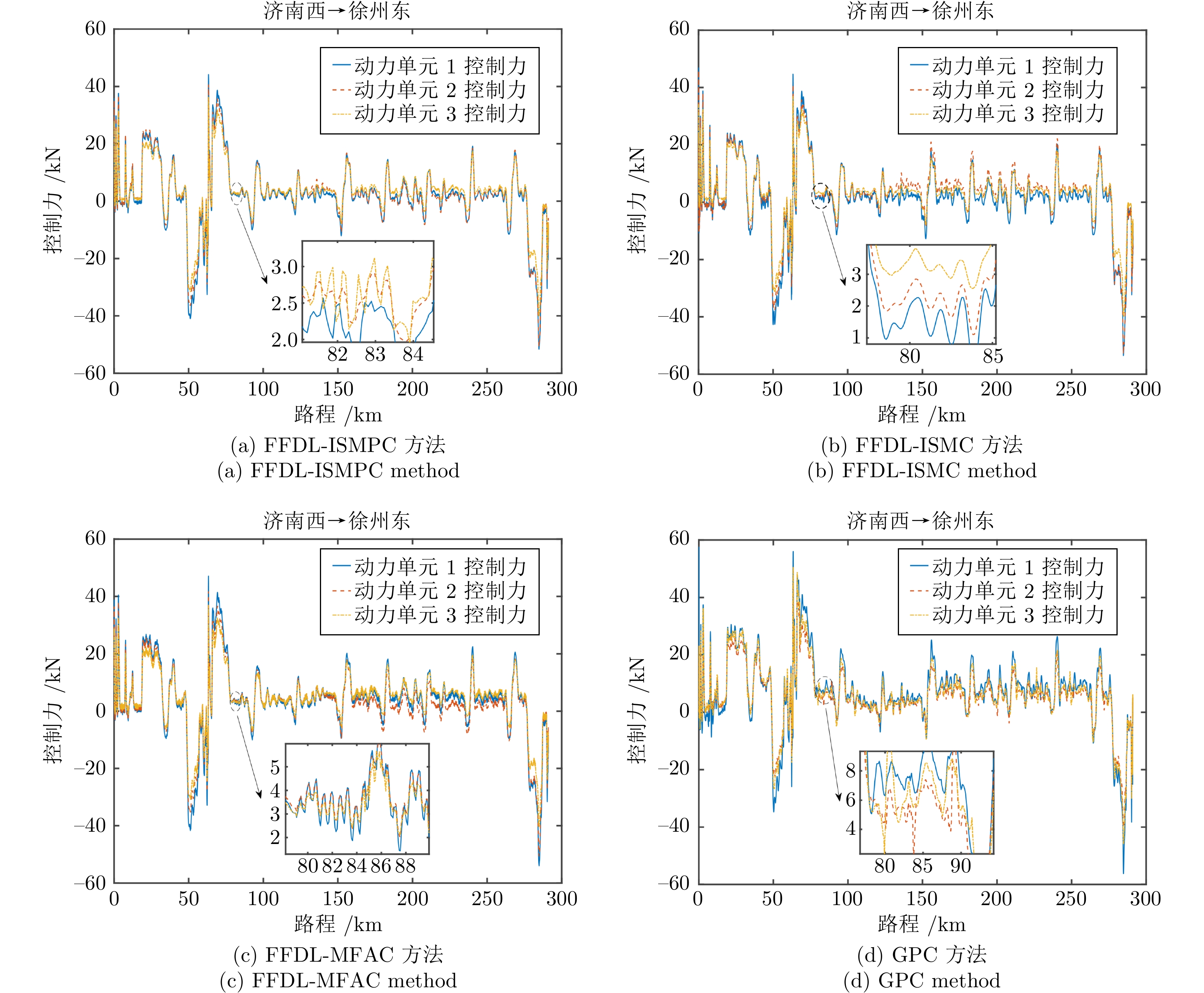
同许多复杂系统一样, 动车组(Electric multiple unit, EMU) 运行过程也具有多变量、强耦合以及非线性等特性, 这严重影响着列控系统的性能. 针对包含外部扰动的动车组自动驾驶系统, 提出一种新型的多输入多输出(Multi-input-multi-output, MIMO) 数据驱动积分滑模预测控制(Integral sliding mode predictive control, ISMPC)算法. 首先, 该算法基于与动车组运行过程等效的全格式动态线性化(Full format dynamic linearization, FFDL)数据模型, 设计一种离散积分滑模控制(Integral sliding mode control, ISMC) 律. 为了使系统能够获得更高的输出跟踪误差精度, 利用模型预测控制(Model predictive control, MPC) 代替ISMC的切换控制, 进一步推导出ISMPC算法. 同时, 通过对FFDL 数据模型的未知扰动、参数误差等不确定项进行延时估计, 提升了算法的控制性能和对系统的等价描述程度. 在提供两种算法的稳定性证明分析之后, 以实验室配备的 CRH380A 型动车组仿真实验台对提出的ISMC和ISMPC算法进行仿真测试, 并与其他方法进行对比, 仿真结果表明ISMPC算法控制性能较好, 动车组各动力单元速度跟踪误差均在 ±0.132 km/h 以内, 满足列车的跟踪精度需求; 控制力和加速度分别在[−52 kN, 42 kN] 和 ±0.9249 m/s2 以内且变化平稳.
同许多复杂系统一样, 动车组(Electric multiple unit, EMU) 运行过程也具有多变量、强耦合以及非线性等特性, 这严重影响着列控系统的性能. 针对包含外部扰动的动车组自动驾驶系统, 提出一种新型的多输入多输出(Multi-input-multi-output, MIMO) 数据驱动积分滑模预测控制(Integral sliding mode predictive control, ISMPC)算法. 首先, 该算法基于与动车组运行过程等效的全格式动态线性化(Full format dynamic linearization, FFDL)数据模型, 设计一种离散积分滑模控制(Integral sliding mode control, ISMC) 律. 为了使系统能够获得更高的输出跟踪误差精度, 利用模型预测控制(Model predictive control, MPC) 代替ISMC的切换控制, 进一步推导出ISMPC算法. 同时, 通过对FFDL 数据模型的未知扰动、参数误差等不确定项进行延时估计, 提升了算法的控制性能和对系统的等价描述程度. 在提供两种算法的稳定性证明分析之后, 以实验室配备的 CRH380A 型动车组仿真实验台对提出的ISMC和ISMPC算法进行仿真测试, 并与其他方法进行对比, 仿真结果表明ISMPC算法控制性能较好, 动车组各动力单元速度跟踪误差均在 ±0.132 km/h 以内, 满足列车的跟踪精度需求; 控制力和加速度分别在[−52 kN, 42 kN] 和 ±0.9249 m/s2 以内且变化平稳.