2025年 第51卷 第11期
2025, 51(11): 2371-2386.
doi: 10.16383/j.aas.c240793
cstr: 32138.14.j.aas.c240793
摘要:
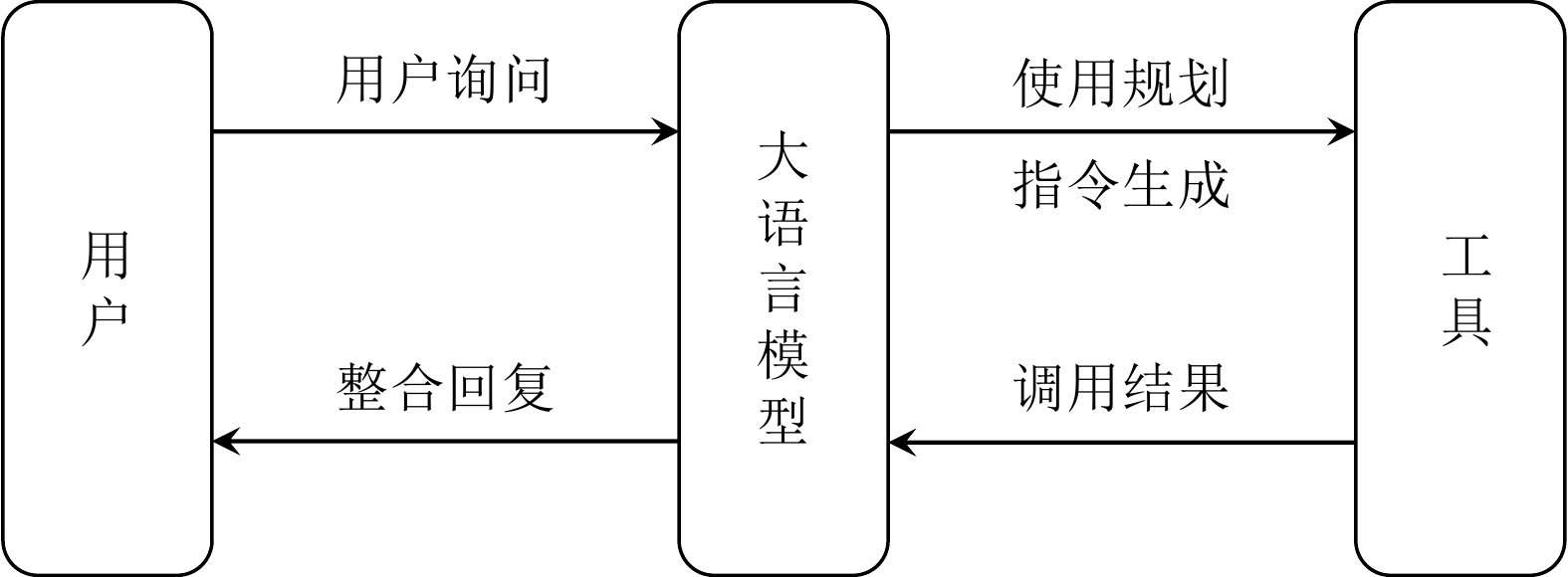
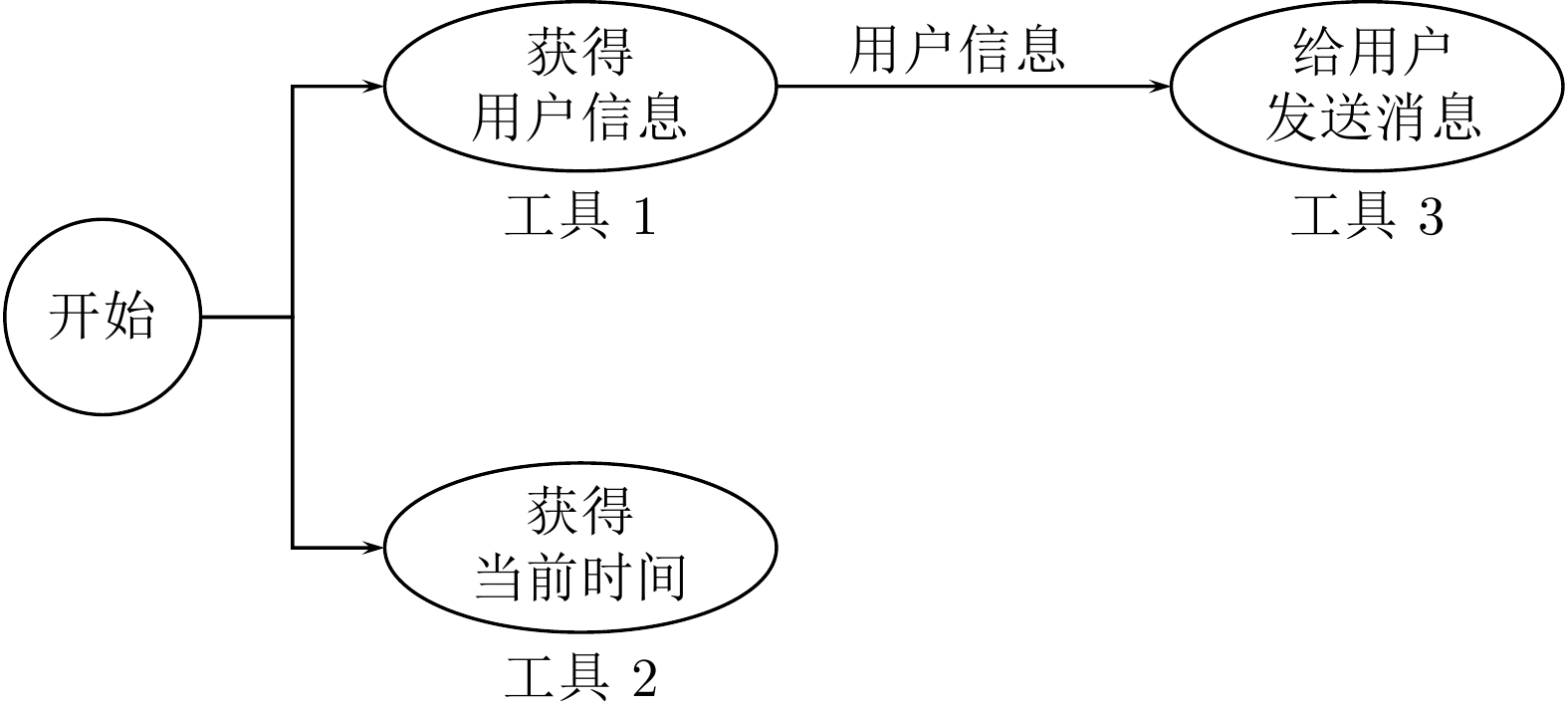
大语言模型因其强大的生成和理解能力受到广泛关注, 但在获取实时信息和执行复杂计算上仍存在局限性. 为使其更好地响应用户需求, 赋予大语言模型工具使用能力成为当下的研究热点. 首先, 明确大语言模型工具使用的基本概念, 并按照时间顺序梳理工具使用的发展脉络. 随后, 总结与工具使用相关的数据集和技术方法, 并分析其在智能体和具身智能等领域的应用. 最后, 梳理大语言模型工具使用领域未来的研究重点与发展方向.
大语言模型因其强大的生成和理解能力受到广泛关注, 但在获取实时信息和执行复杂计算上仍存在局限性. 为使其更好地响应用户需求, 赋予大语言模型工具使用能力成为当下的研究热点. 首先, 明确大语言模型工具使用的基本概念, 并按照时间顺序梳理工具使用的发展脉络. 随后, 总结与工具使用相关的数据集和技术方法, 并分析其在智能体和具身智能等领域的应用. 最后, 梳理大语言模型工具使用领域未来的研究重点与发展方向.
2025, 51(11): 2387-2411.
doi: 10.16383/j.aas.c250203
cstr: 32138.14.j.aas.c250203
摘要:
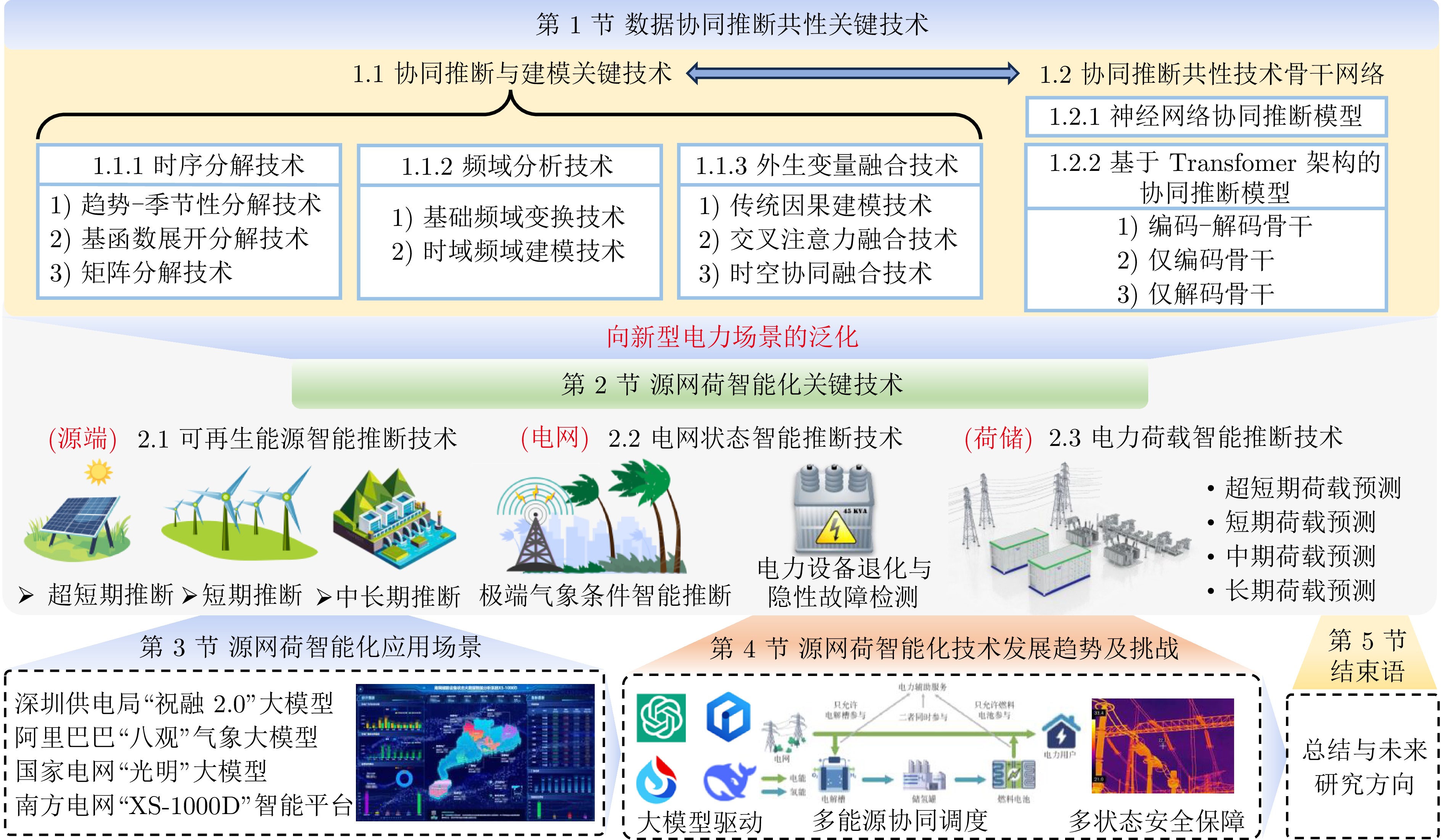
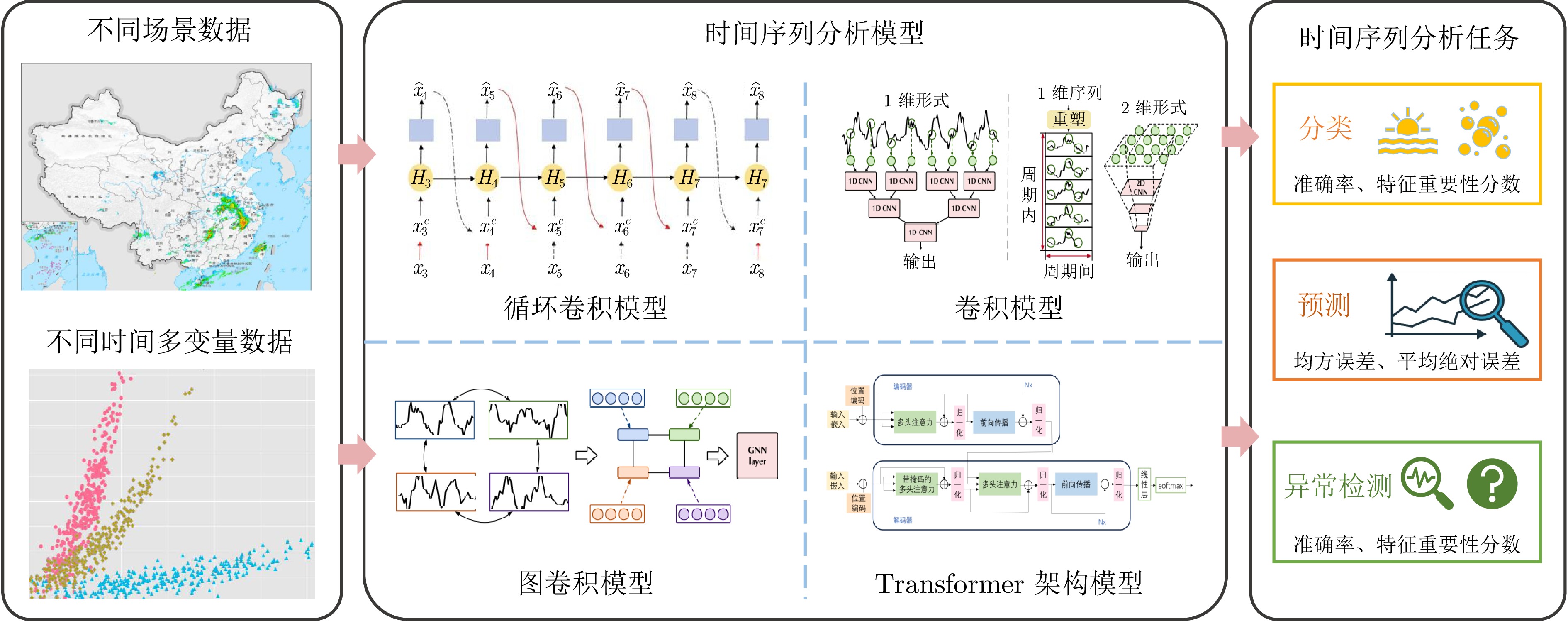
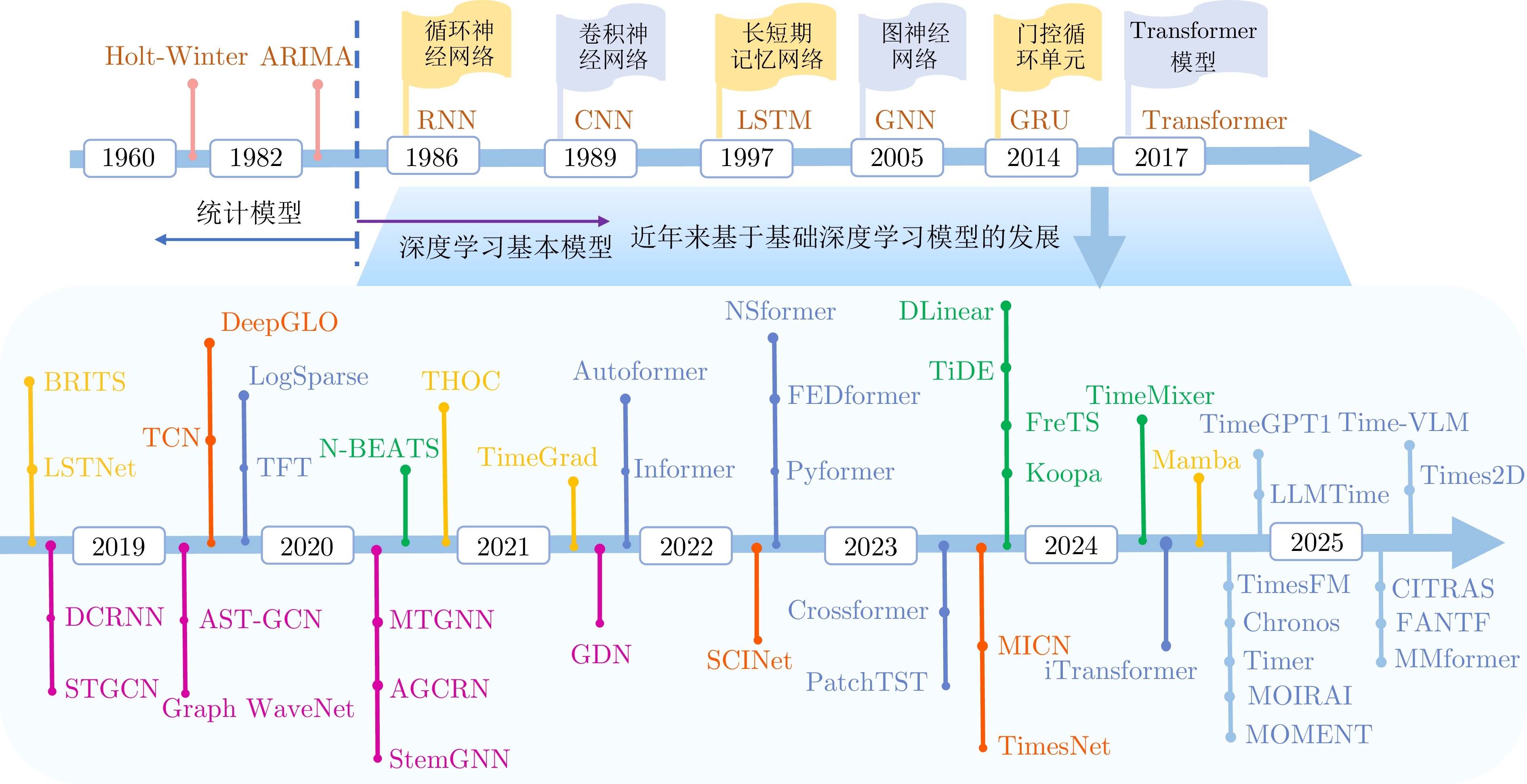
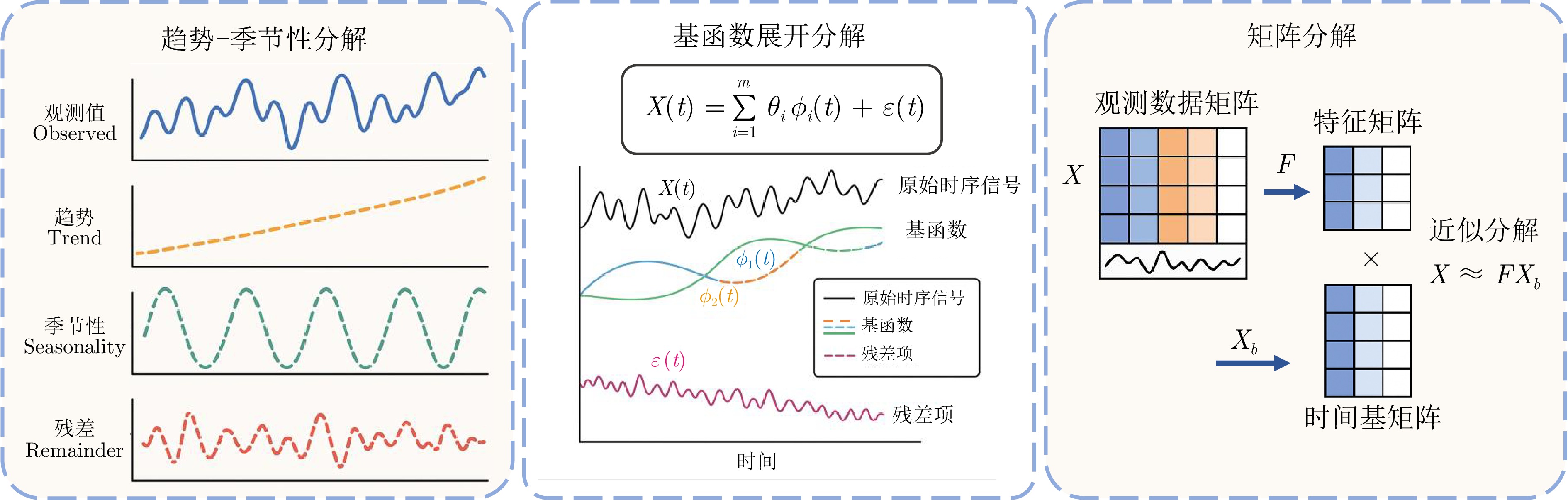
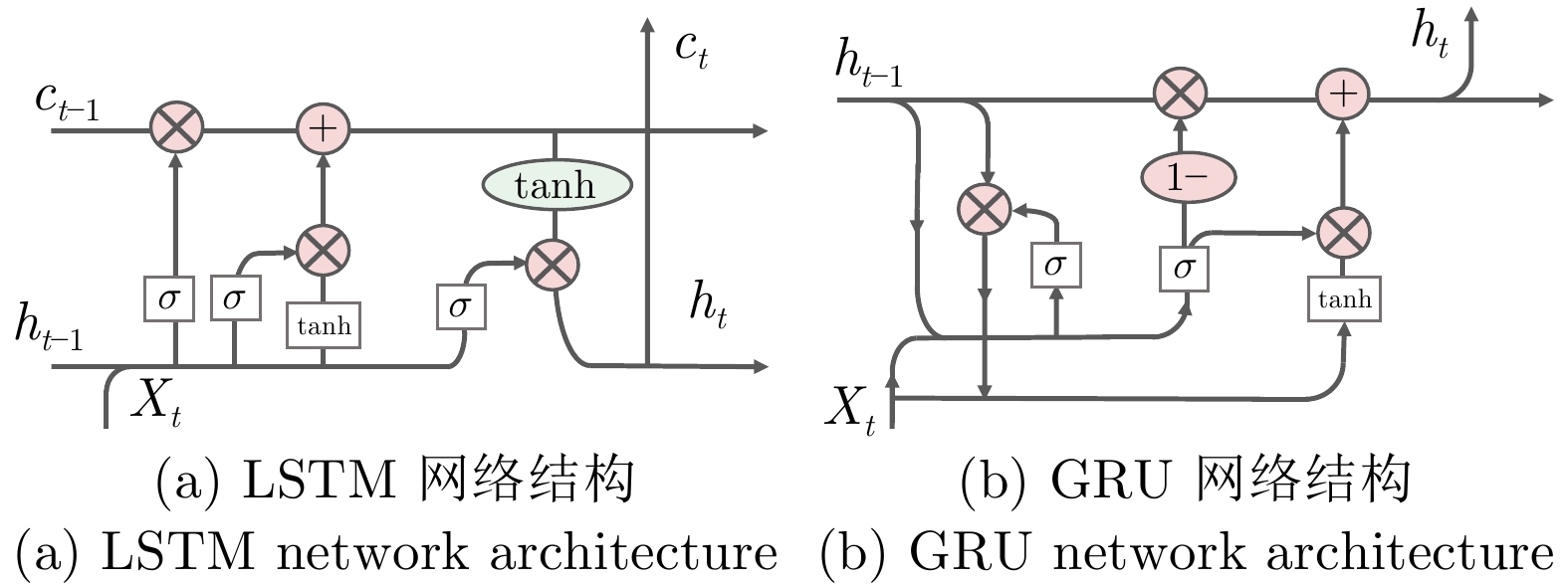
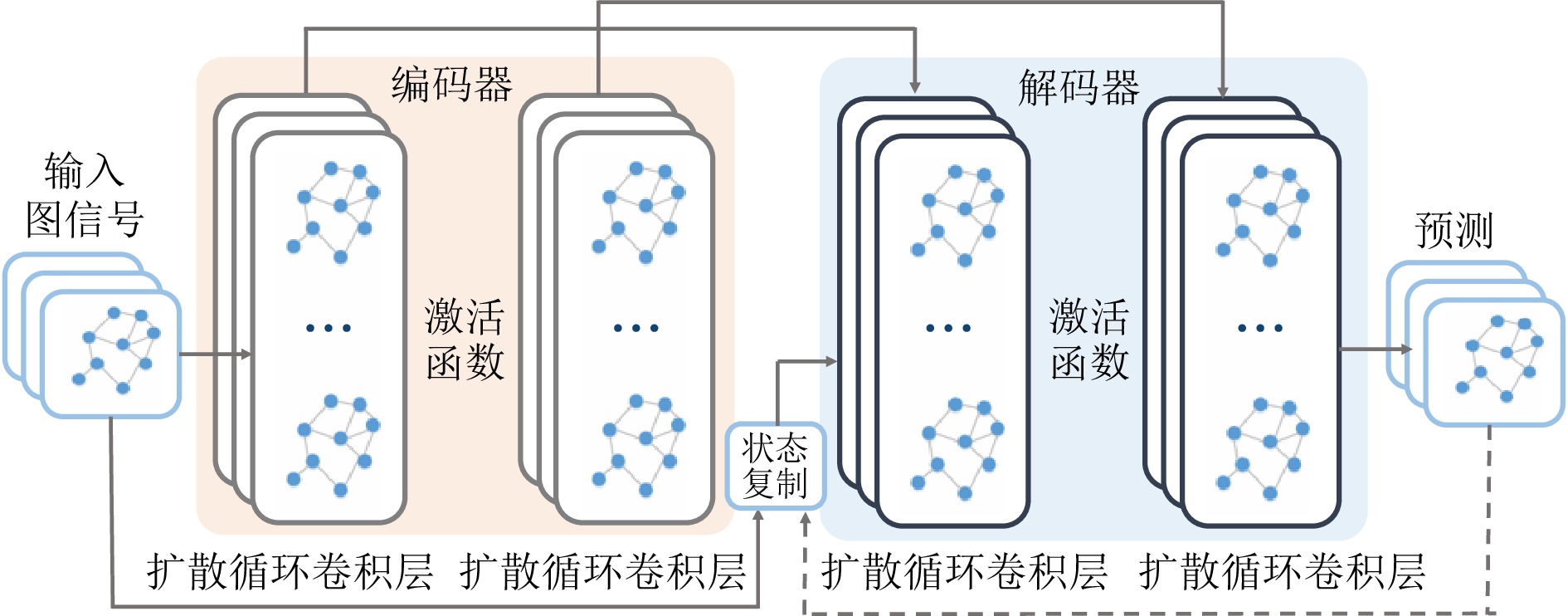
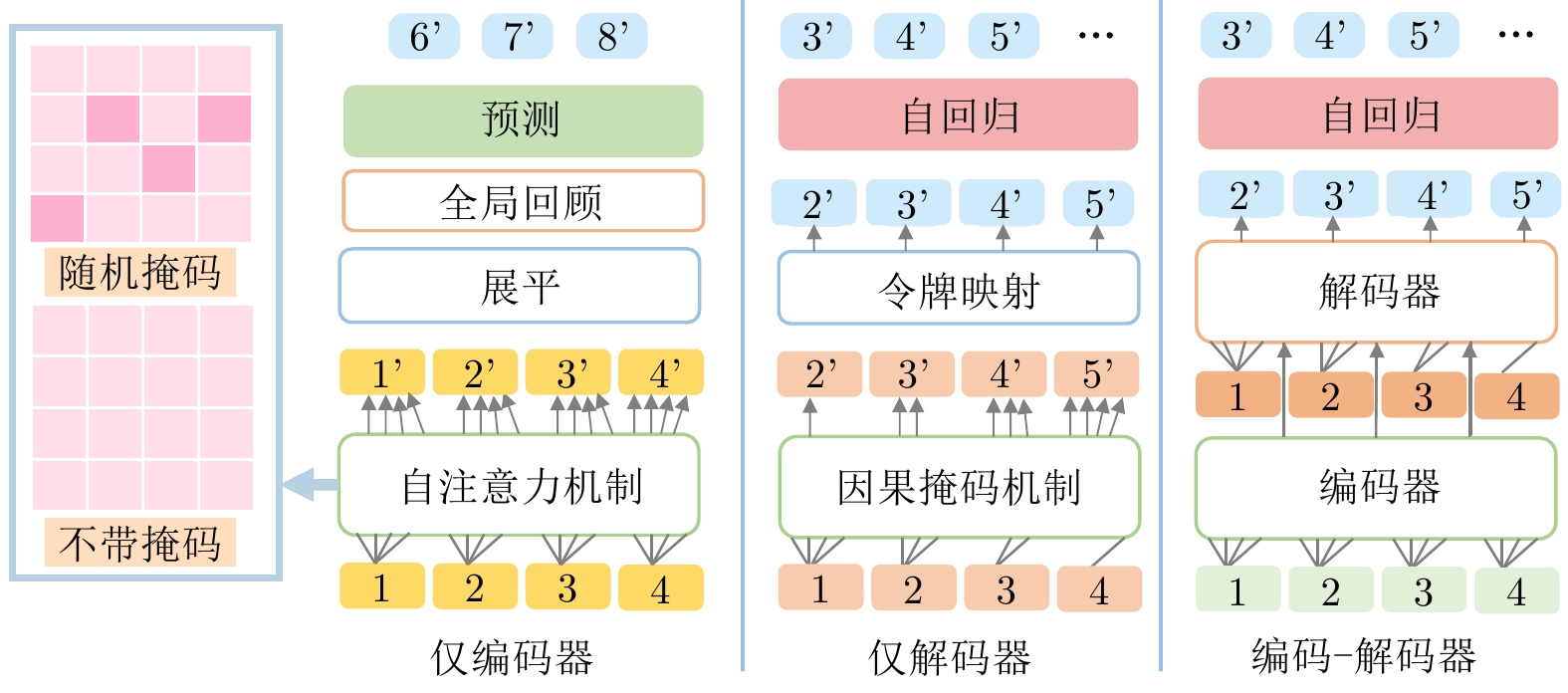
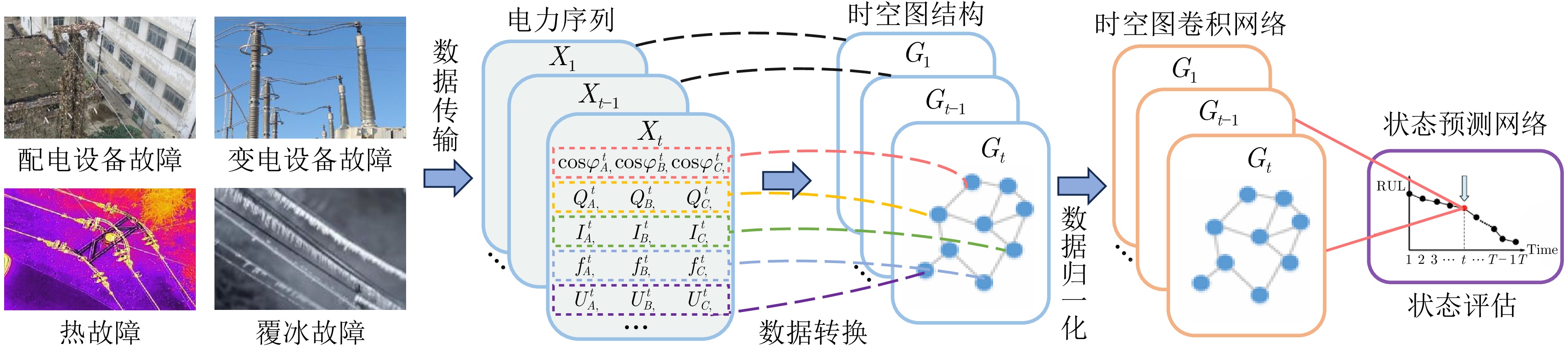
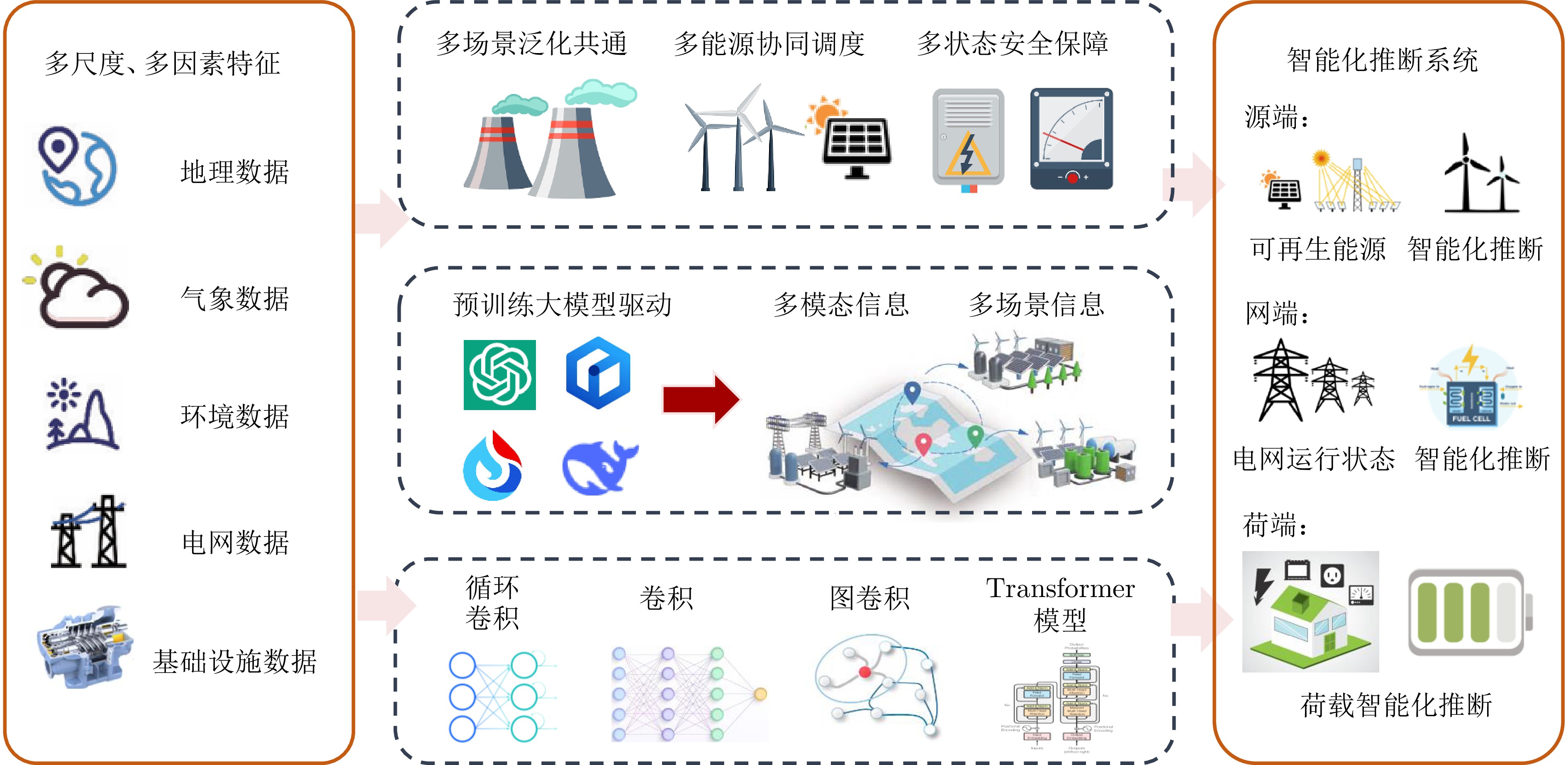
随着可再生能源并网比例的持续提升, 风电、光伏等新能源发电形式对电力系统的稳定性与调度智能化提出更高要求. 源网荷储一体化背景下, 如何高效利用多源异构电力数据实现精准预测与协同分析, 已成为关键问题. 近年来, 深度学习、大数据、大模型等技术推动智能化推断技术取得飞跃式进展. 本文首先结合深度学习技术, 对时间序列数据协同推断共性技术研究现状进行阐述, 重点分析趋势−季节性分解、频域建模、外生变量融合等关键方法, 分析基于不同架构的时间序列模型的研究现状. 其次针对源网荷智能化关键技术进行阐述, 进一步梳理源网荷系统中智能预测、状态评估与负荷调度等典型场景中的关键技术路径, 并对其具体应用场景进行分析. 最后, 结合日益复杂的电力系统背景, 对数据协同推断技术的发展方向进行展望.
随着可再生能源并网比例的持续提升, 风电、光伏等新能源发电形式对电力系统的稳定性与调度智能化提出更高要求. 源网荷储一体化背景下, 如何高效利用多源异构电力数据实现精准预测与协同分析, 已成为关键问题. 近年来, 深度学习、大数据、大模型等技术推动智能化推断技术取得飞跃式进展. 本文首先结合深度学习技术, 对时间序列数据协同推断共性技术研究现状进行阐述, 重点分析趋势−季节性分解、频域建模、外生变量融合等关键方法, 分析基于不同架构的时间序列模型的研究现状. 其次针对源网荷智能化关键技术进行阐述, 进一步梳理源网荷系统中智能预测、状态评估与负荷调度等典型场景中的关键技术路径, 并对其具体应用场景进行分析. 最后, 结合日益复杂的电力系统背景, 对数据协同推断技术的发展方向进行展望.


2025, 51(11): 2412-2426.
doi: 10.16383/j.aas.c230210
cstr: 32138.14.j.aas.c230210
摘要:
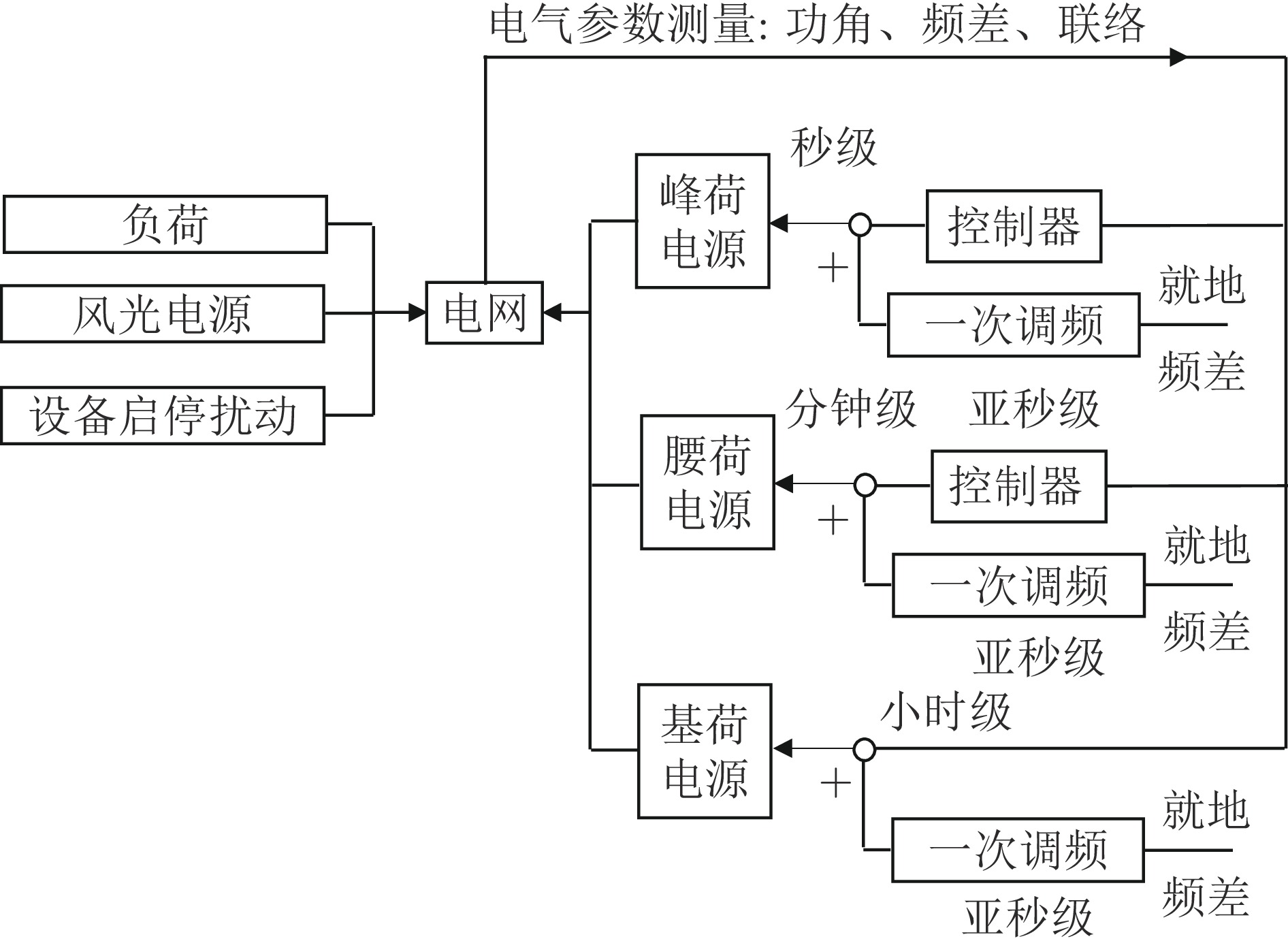
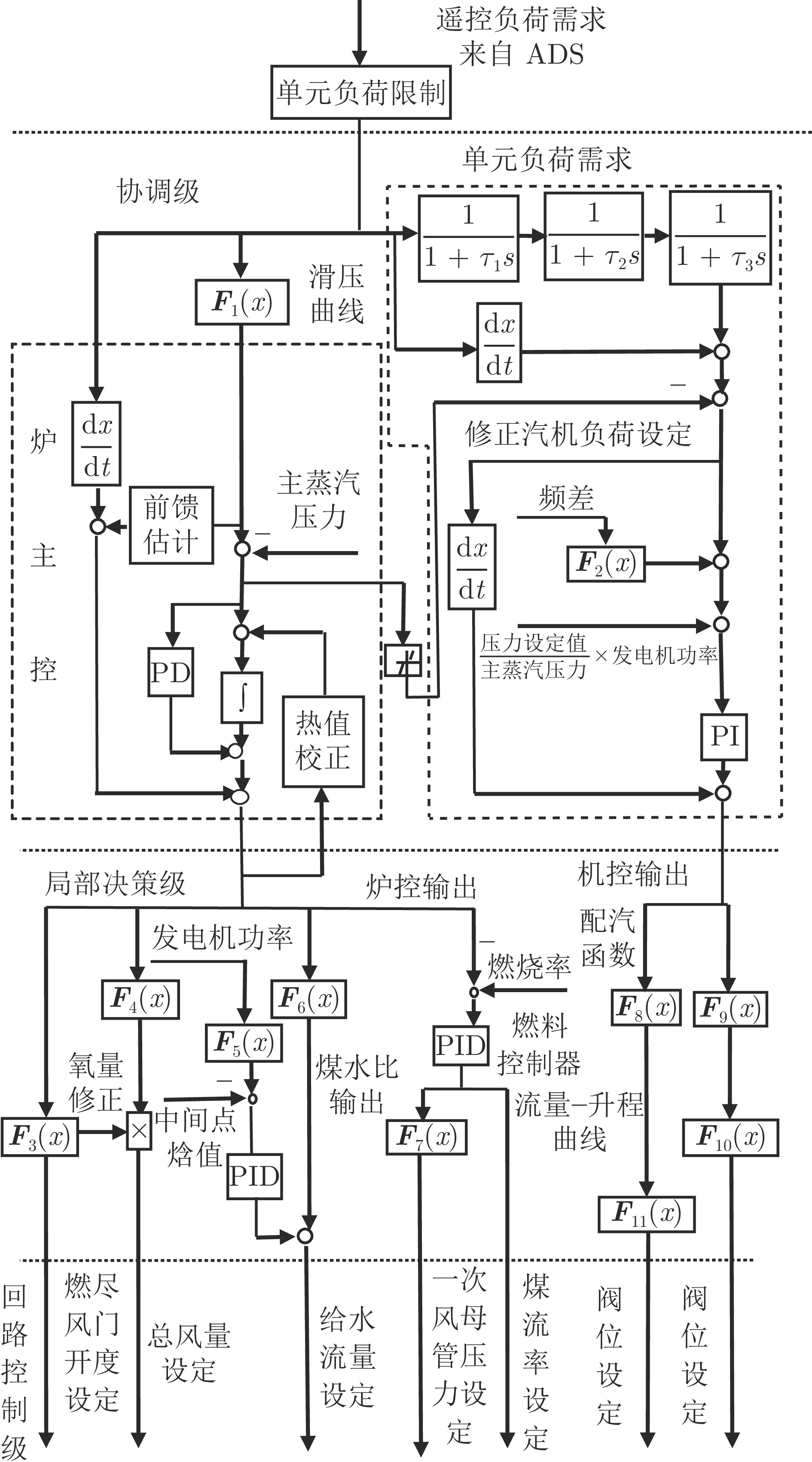
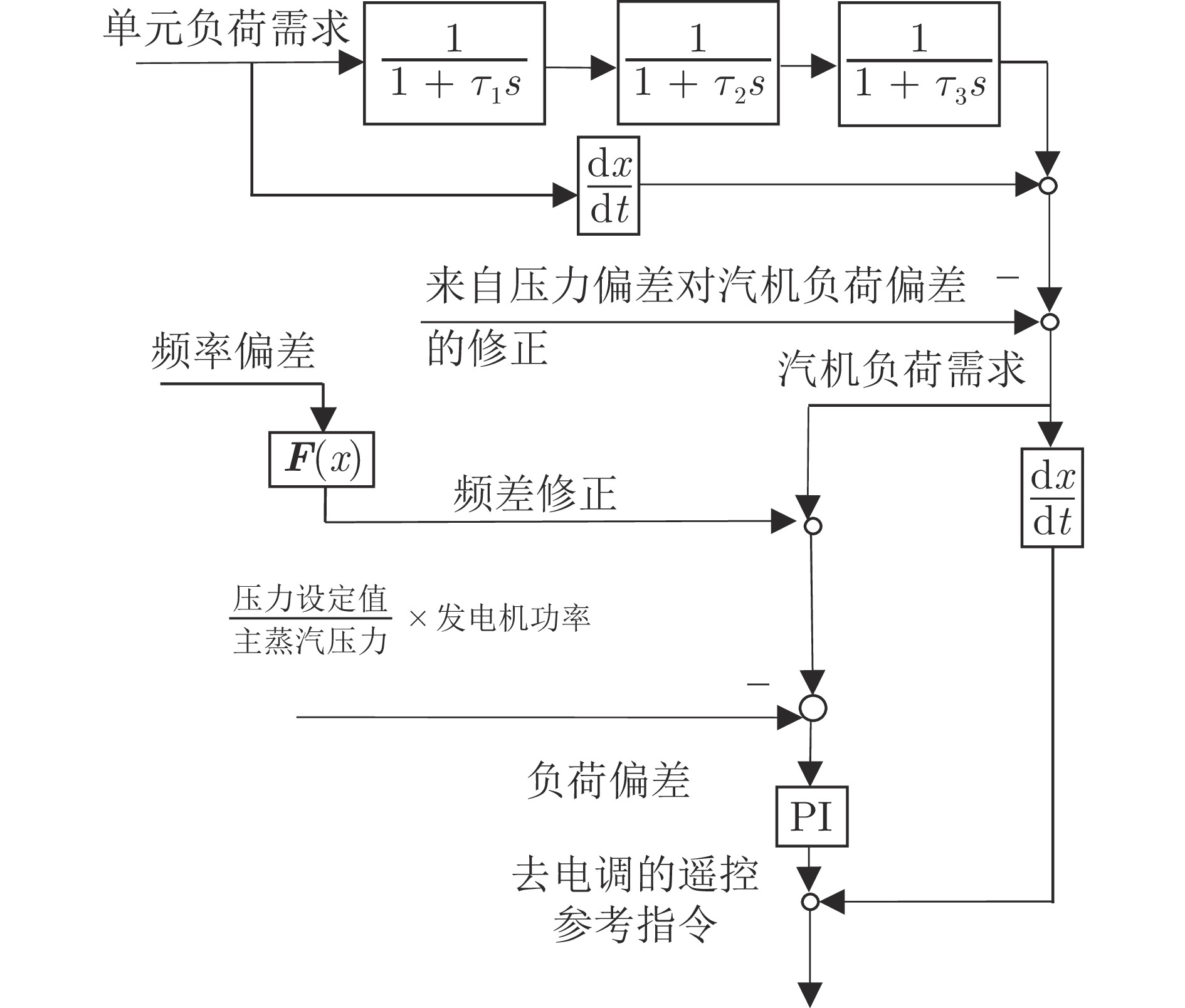
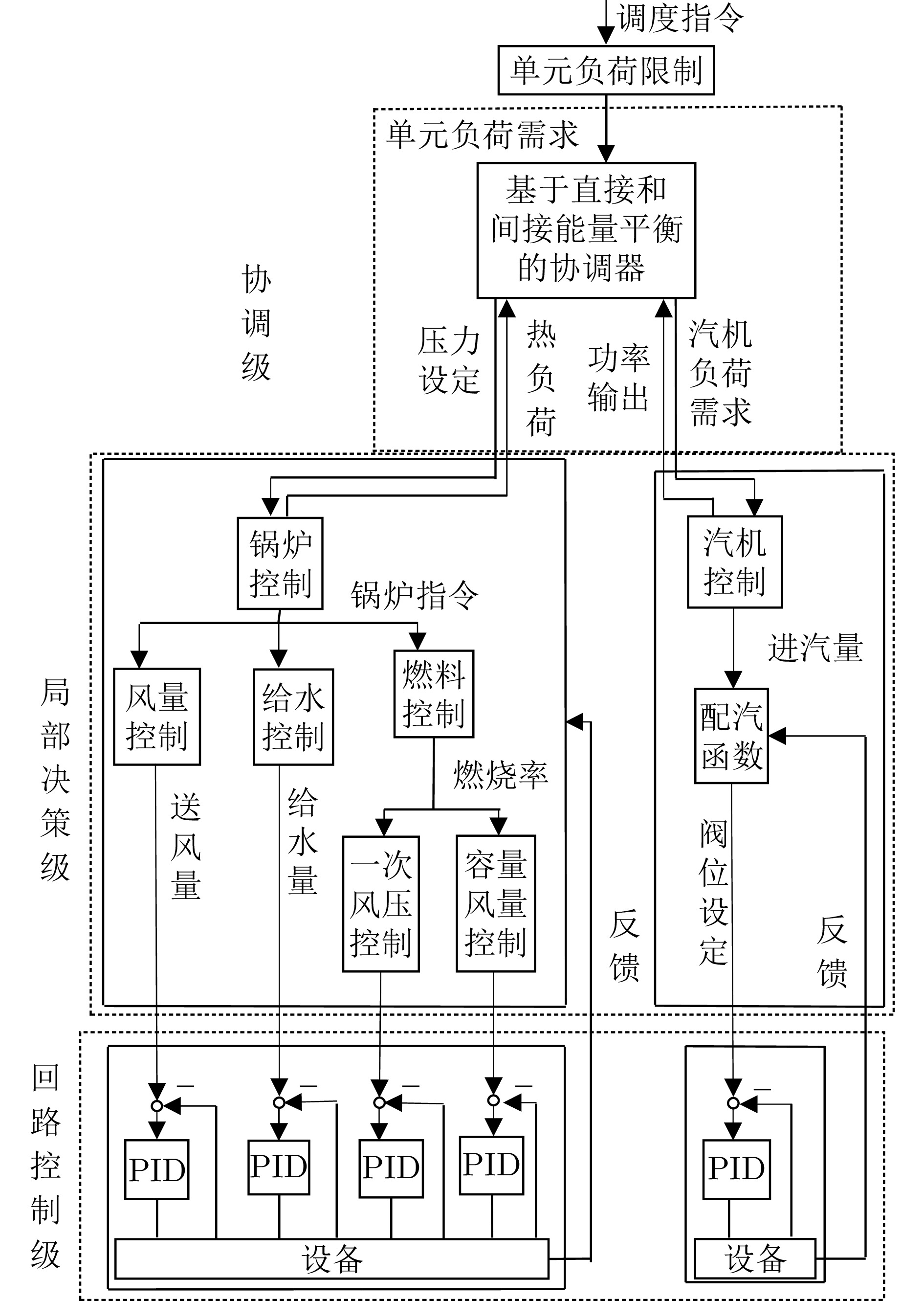
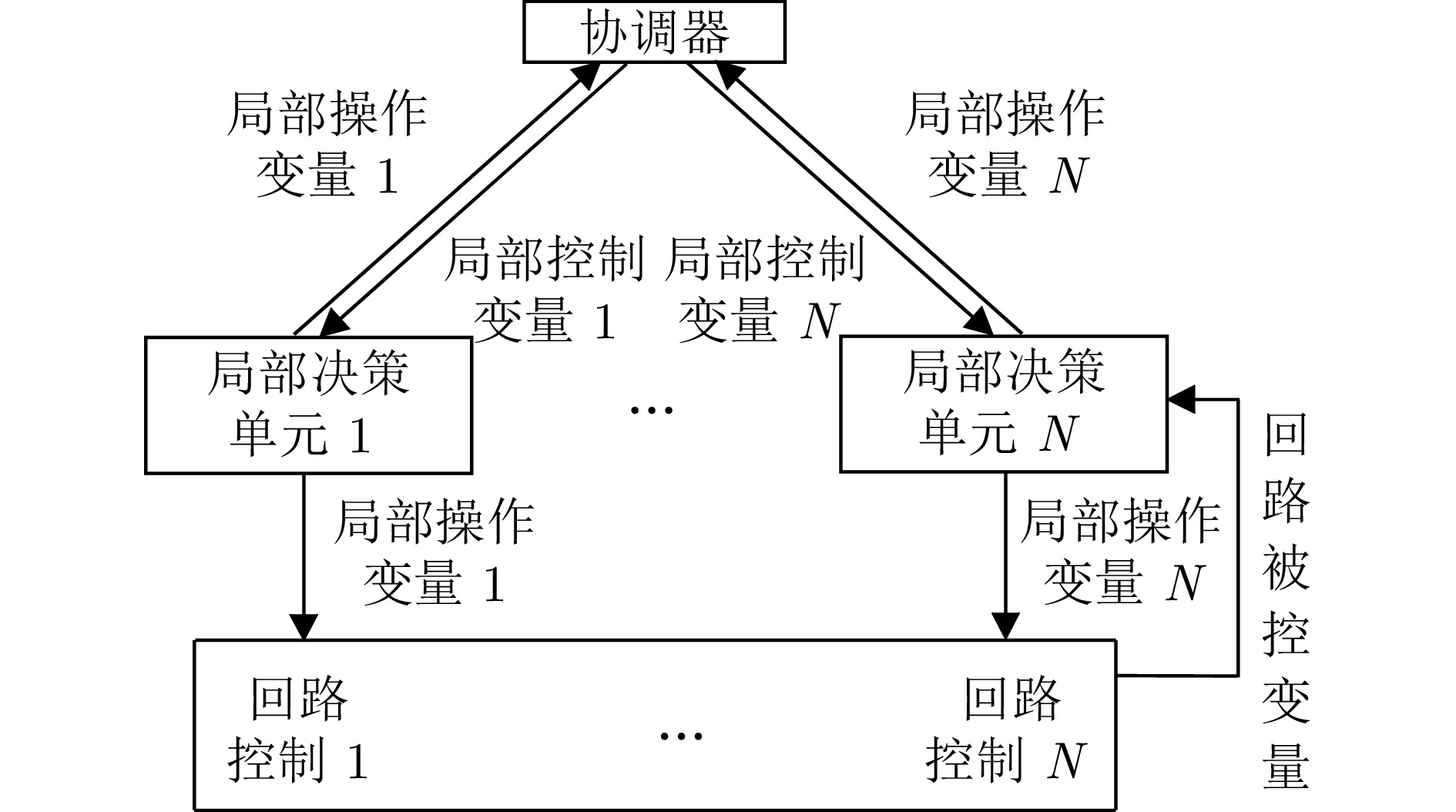
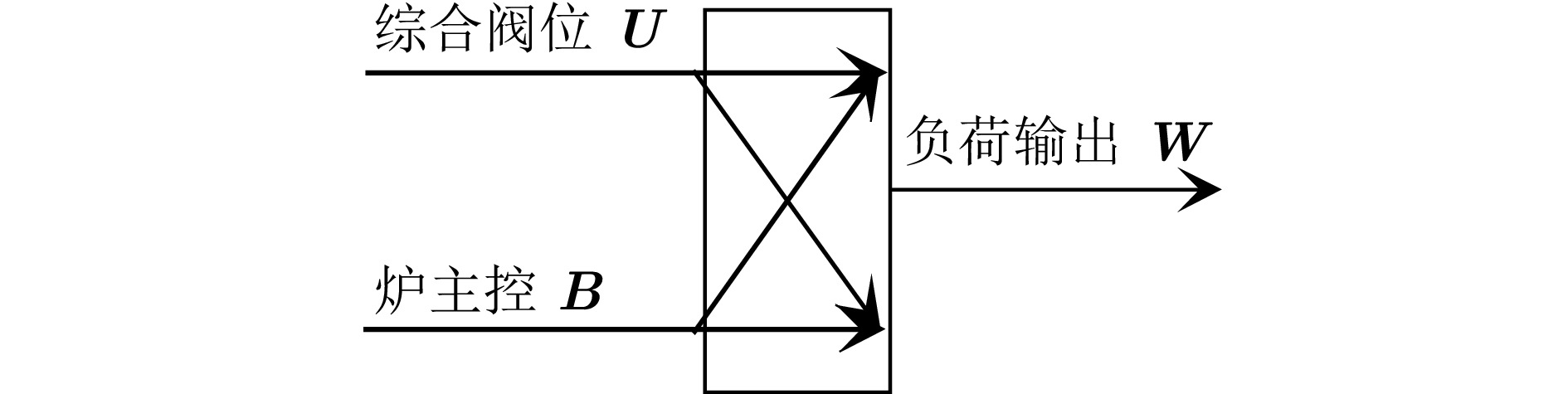
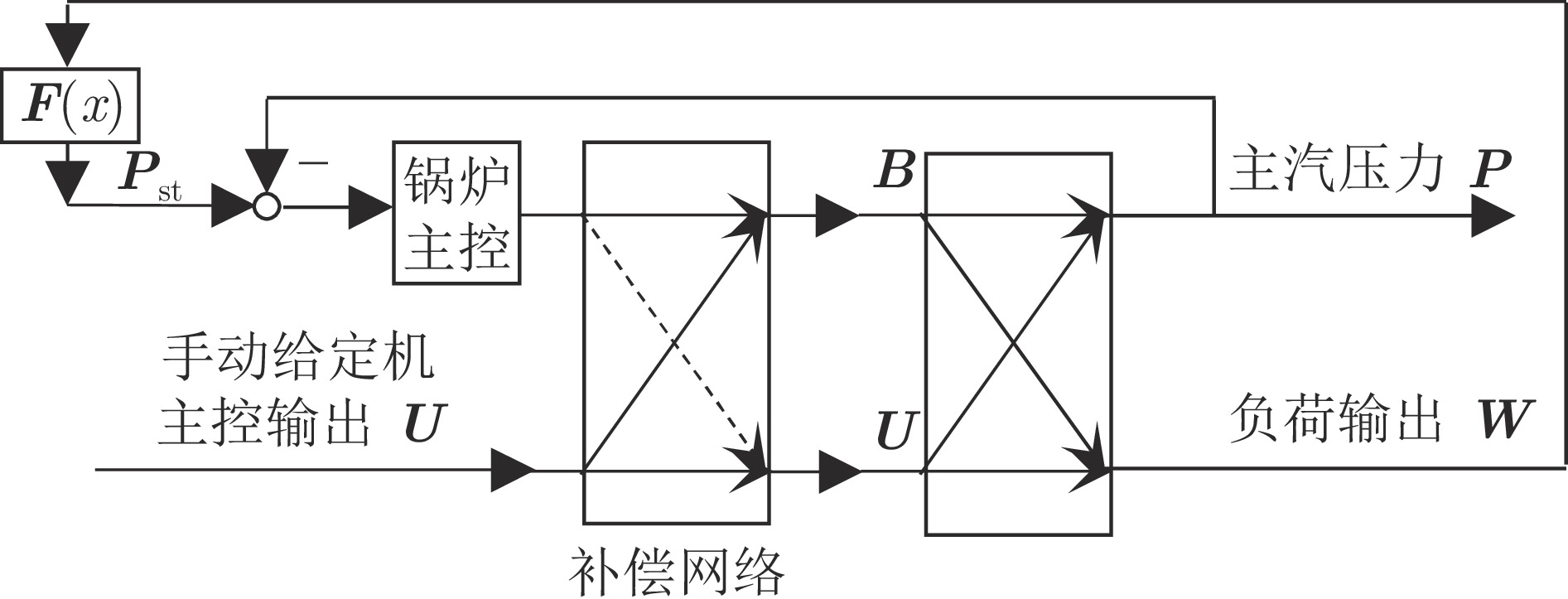
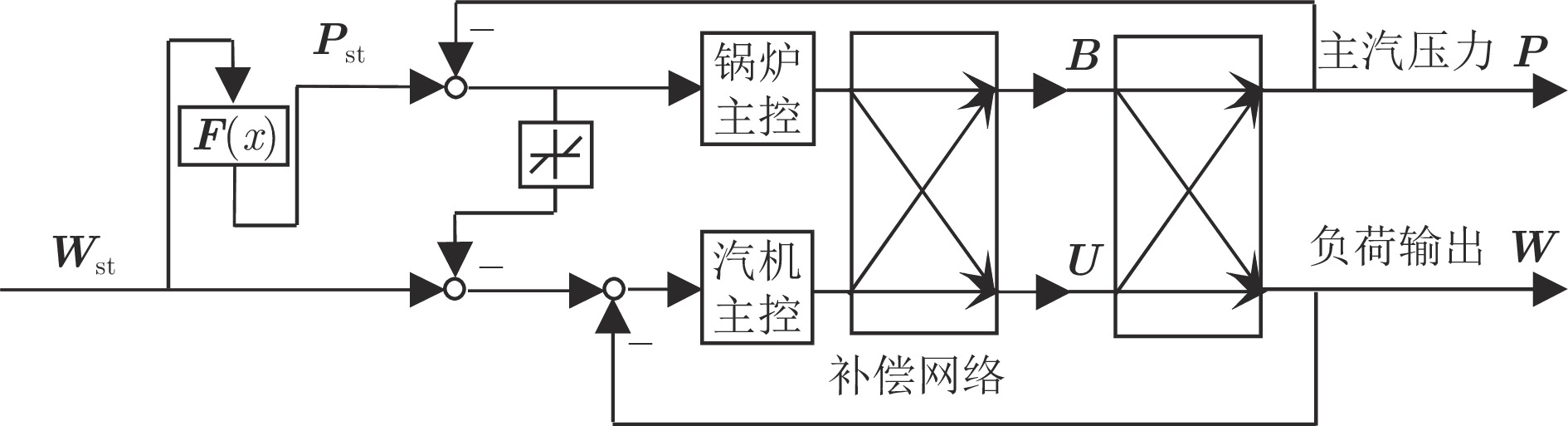
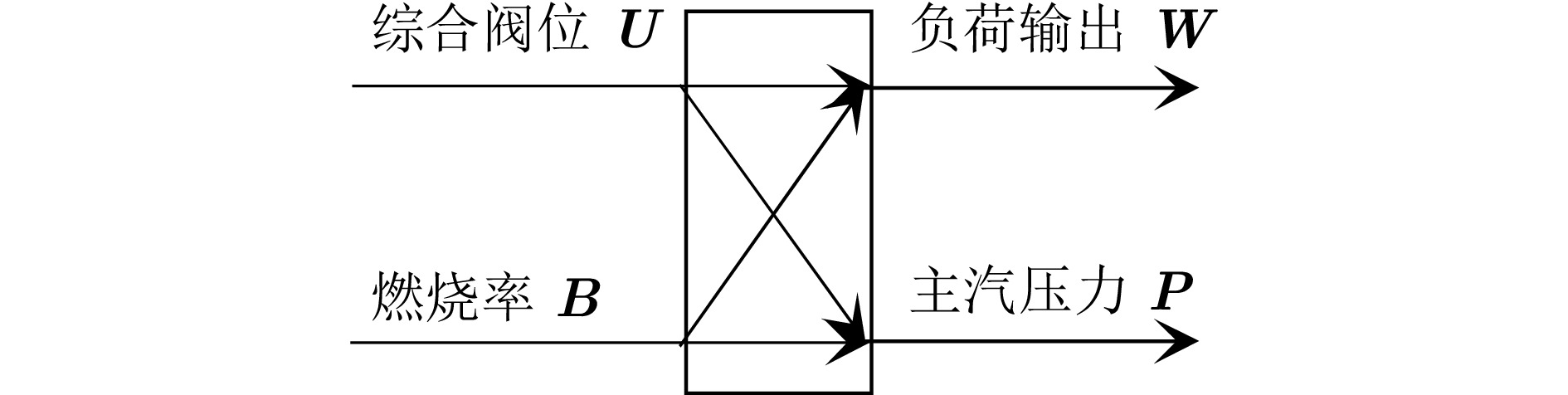
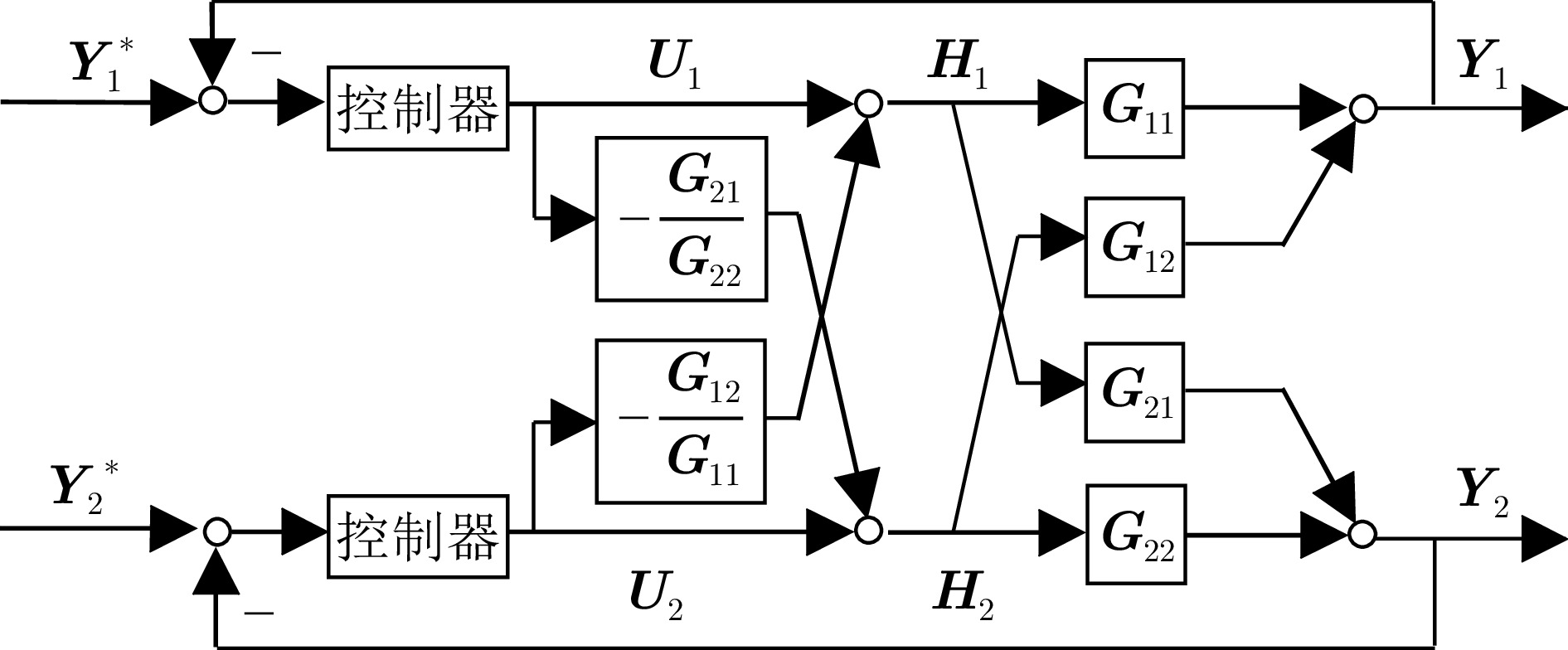
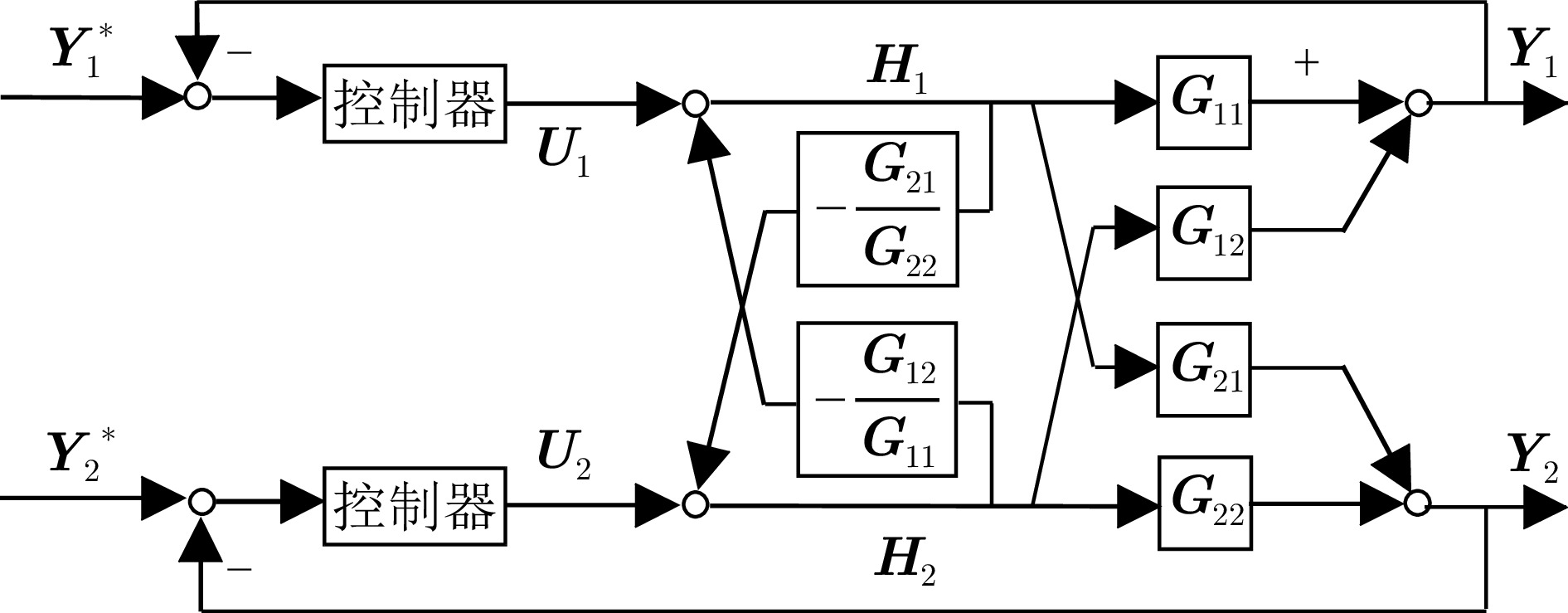
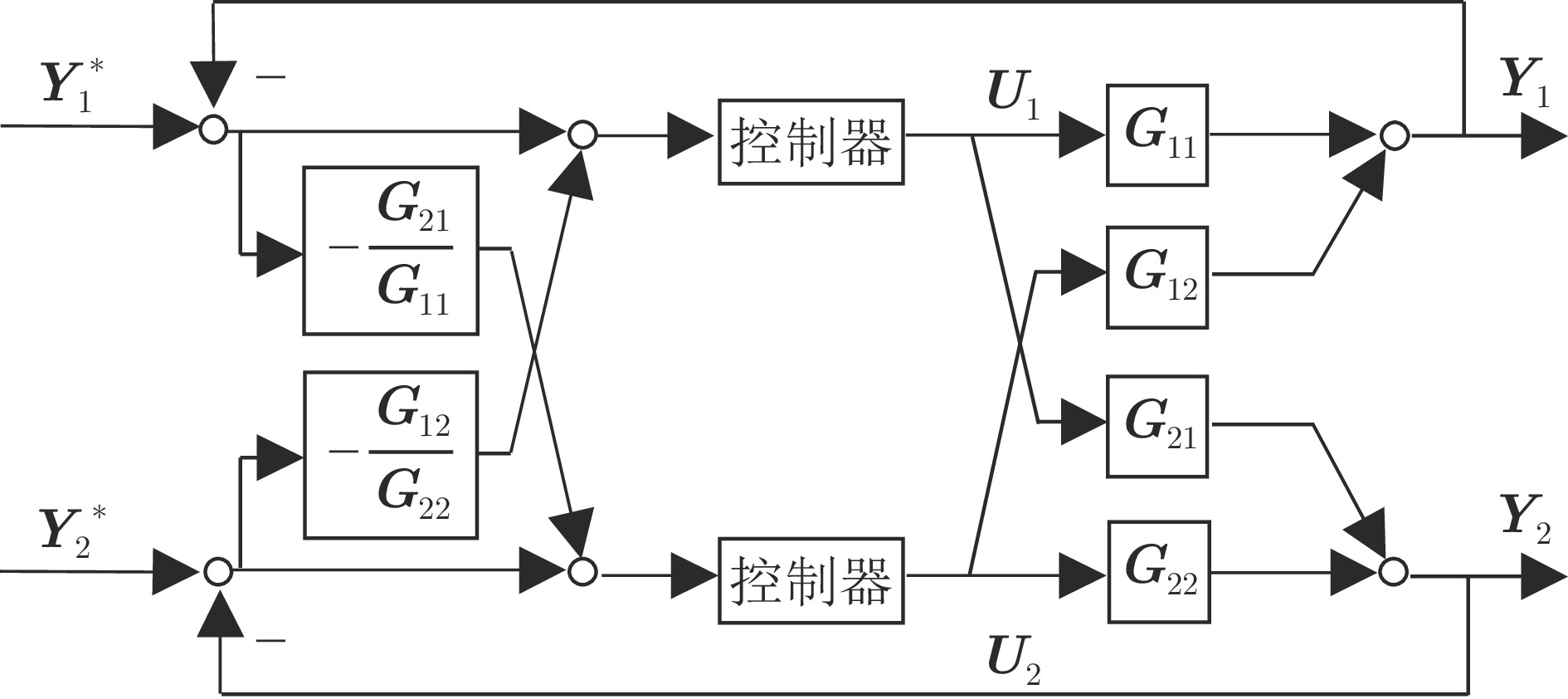
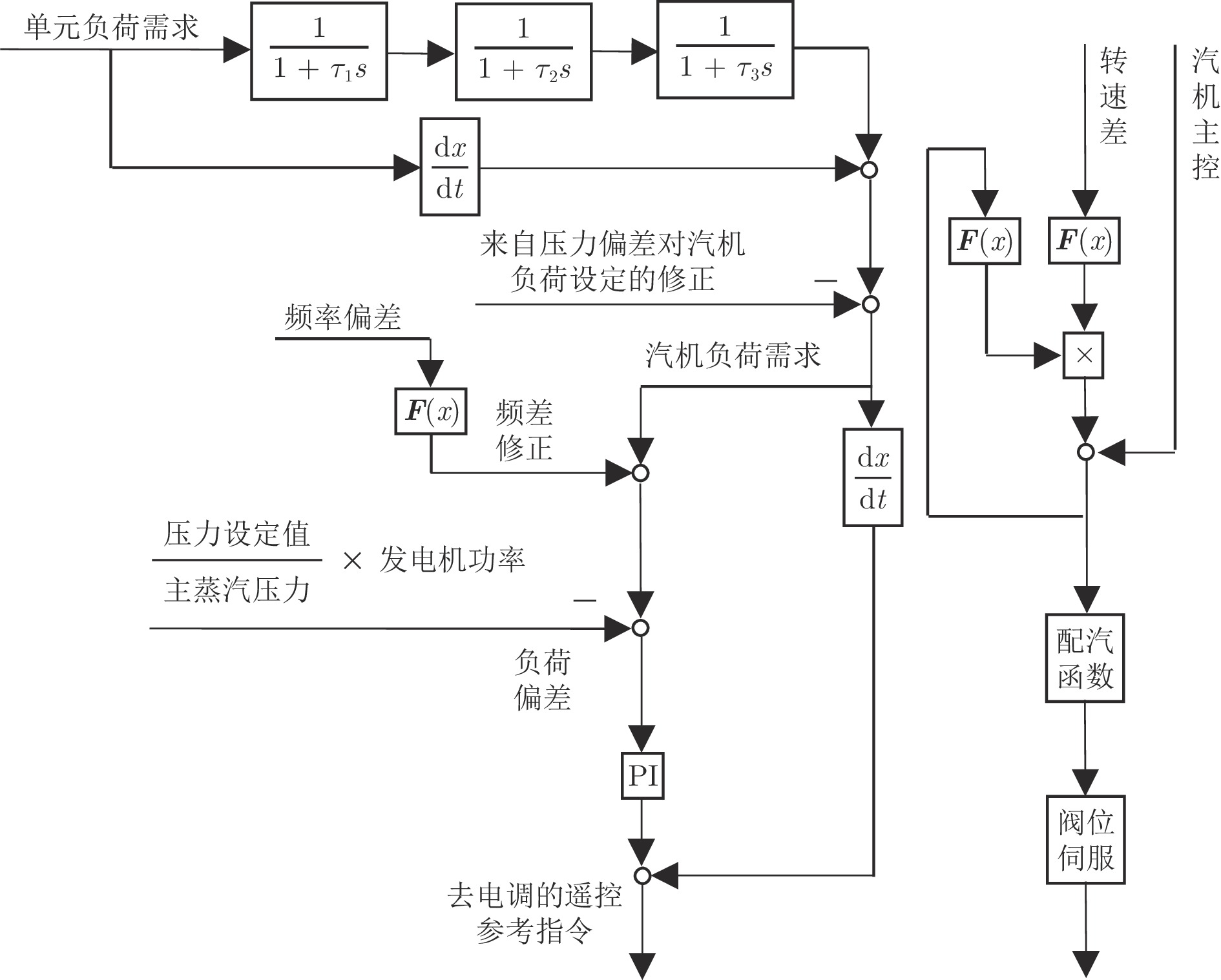
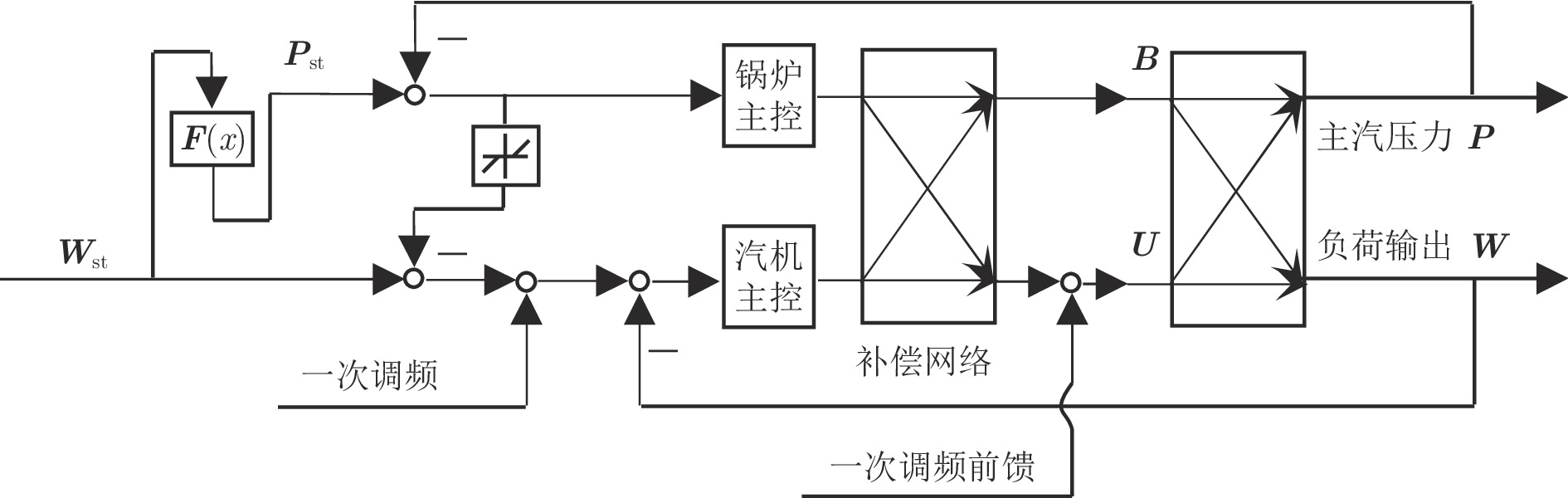
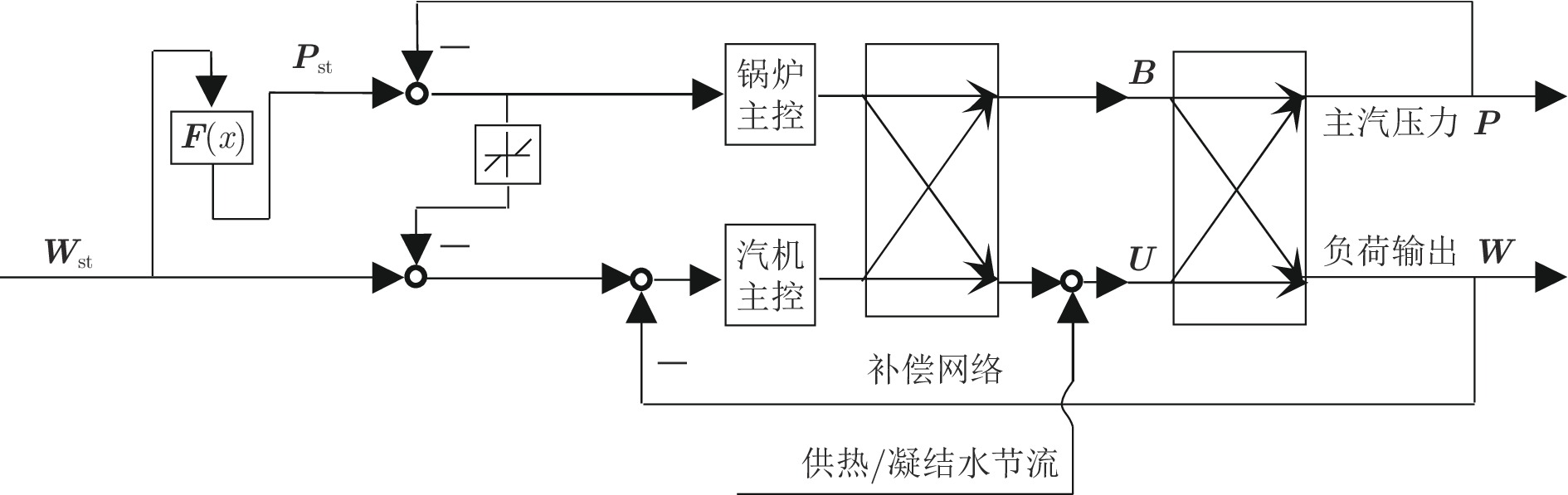
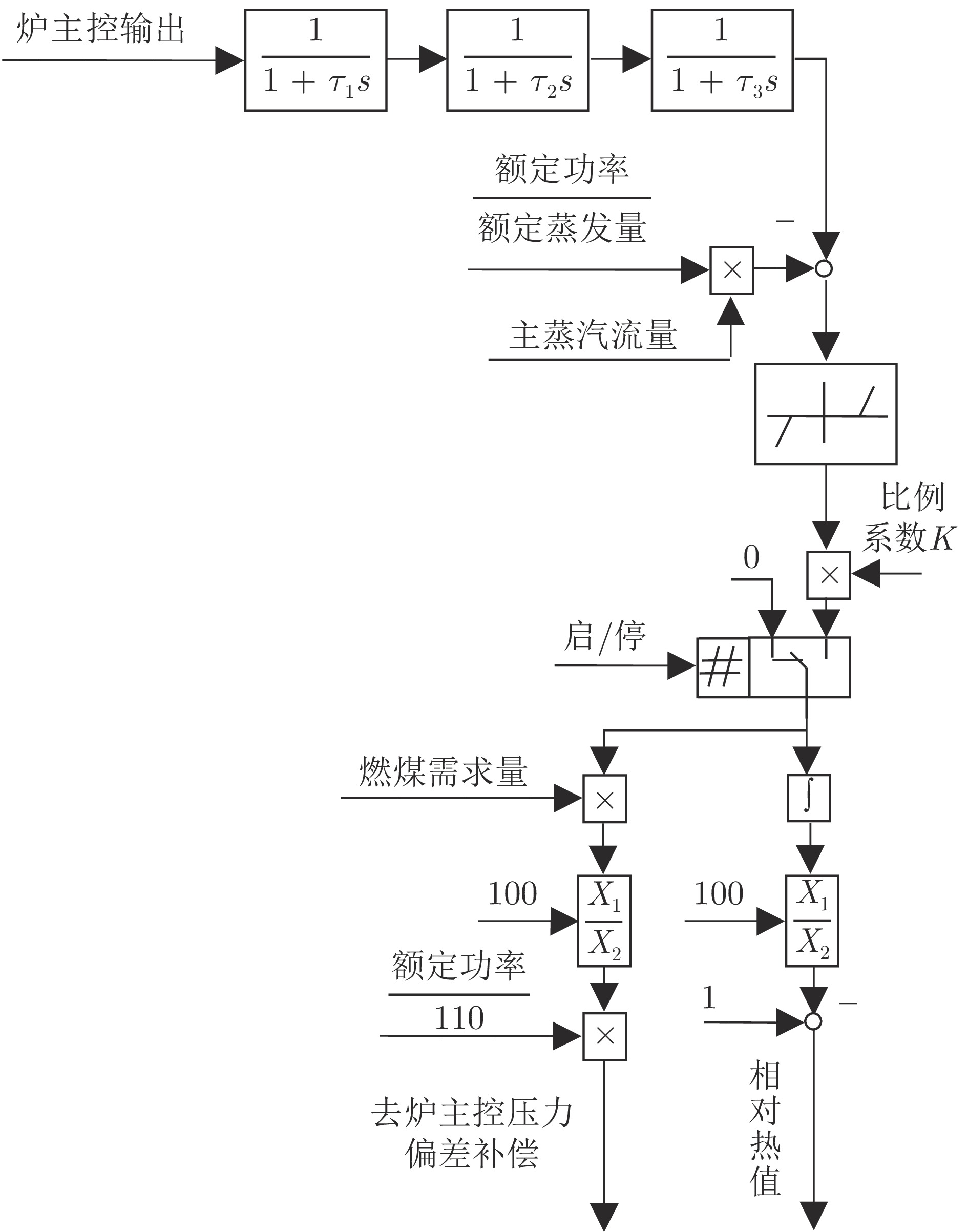
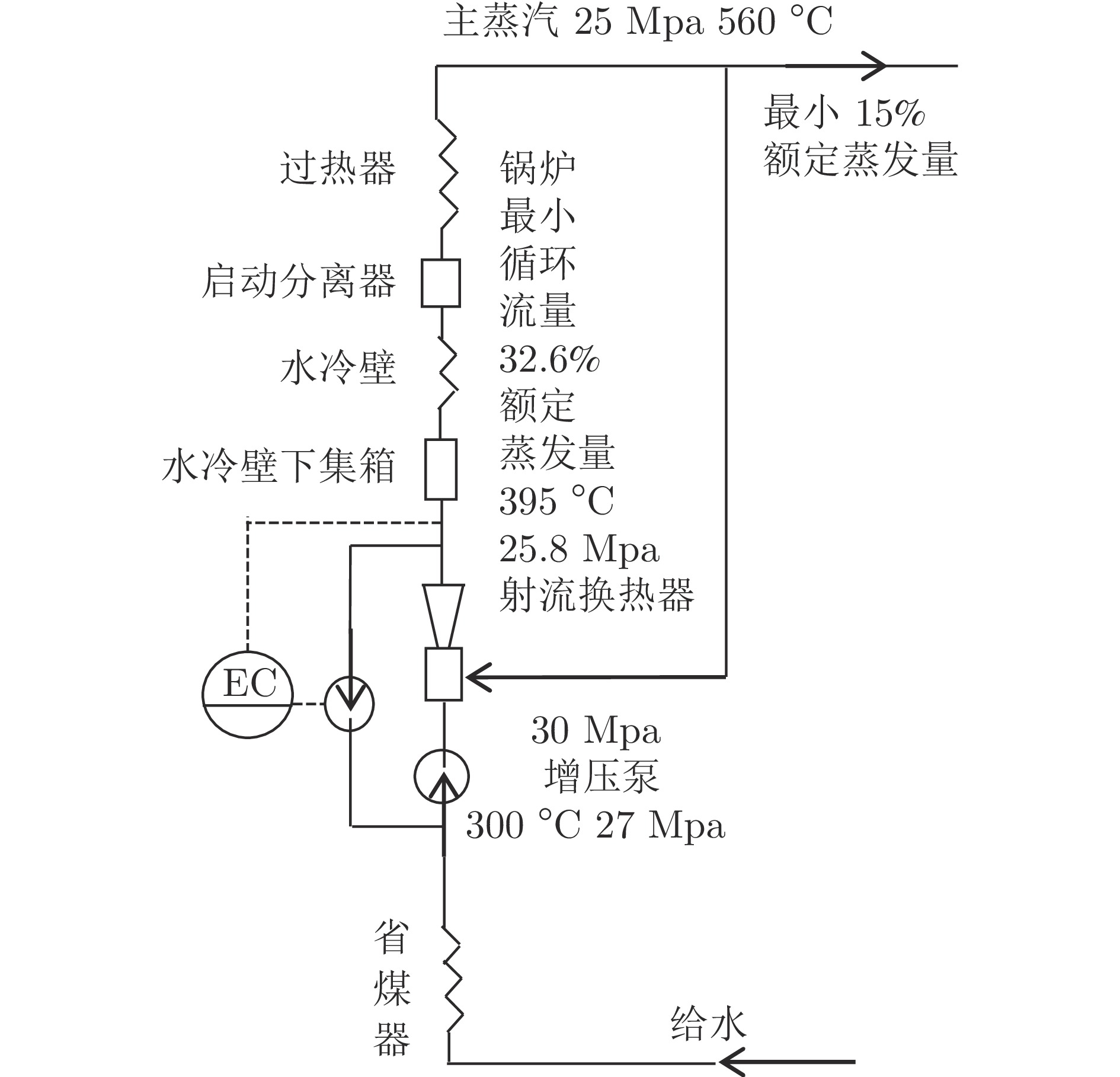
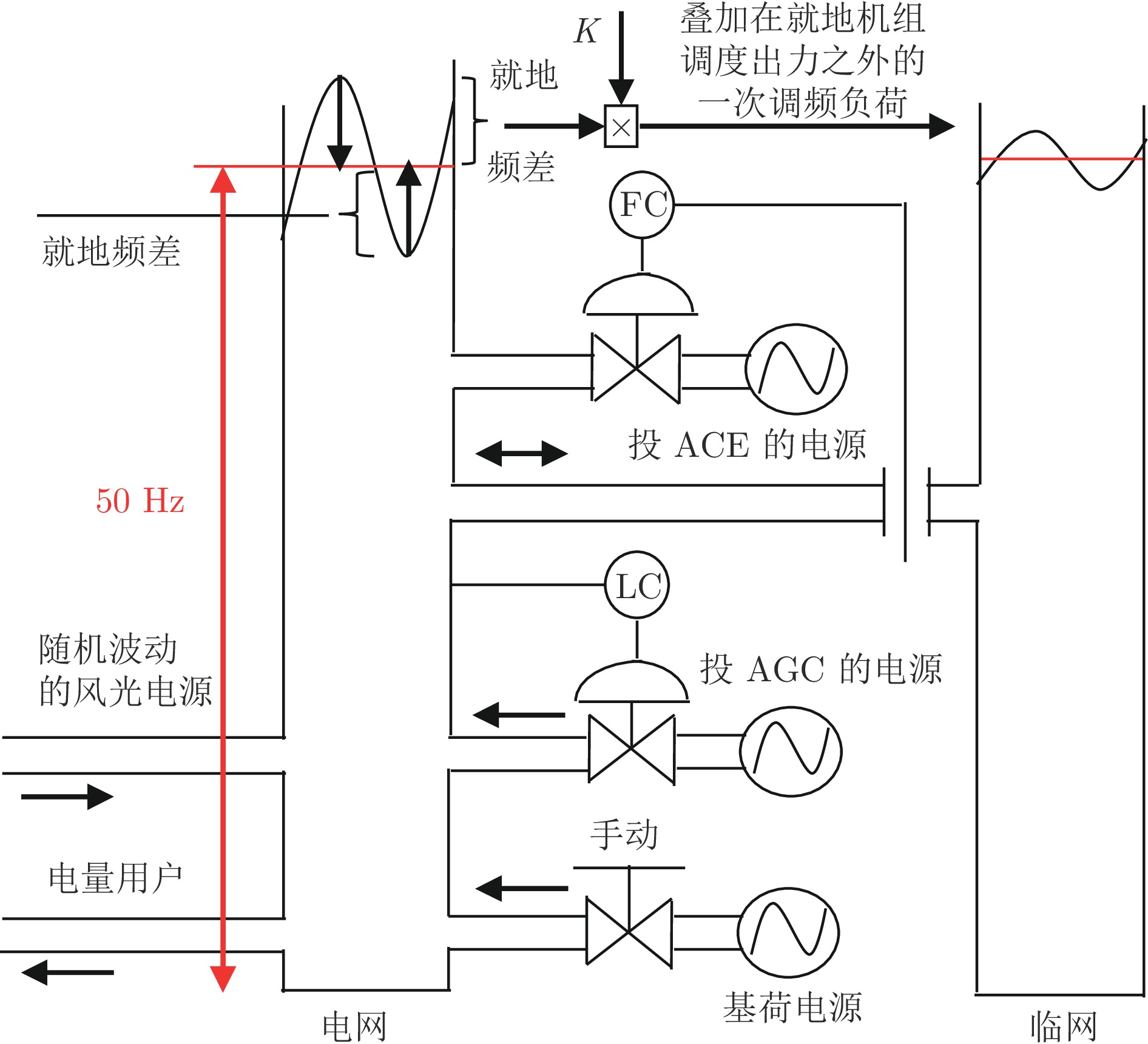
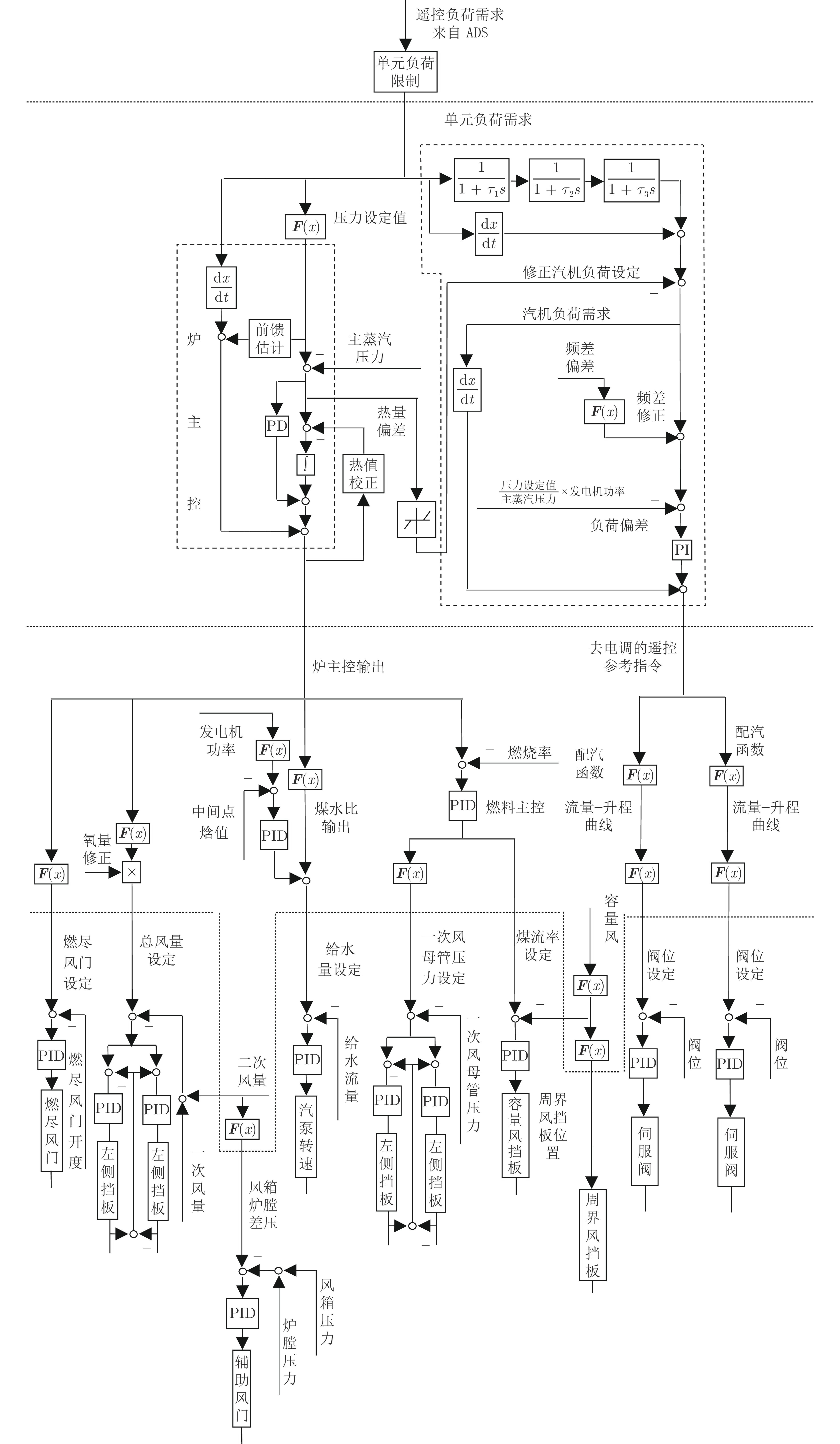
增加可再生能源在电网中的占比, 使能源结构更合理, 是加快能源转型、实现低碳可持续发展的有效途径. 电网中占主导地位的火电辅助消纳可再生能源的能力对提高可再生能源在电网中的占比起到重要作用. 为提高火电机组辅助消纳能力, 根据当前系统控制方案, 分析影响机组灵活性与调峰深度的因素, 包括机炉协调、局部反馈策略下的锅炉控制、系统稳态工作点的规划等. 详细阐述基于补偿方案的协调策略限制机组对具有随机性和间歇性的可再生能源的补偿能力, 局部反馈策略下的锅炉控制只是实现等效热效应的反馈, 以及非额定工况下的稳态工作点关系到辅助可再生能源消纳的能耗和排放指标等. 最后, 给出进一步的机炉动态协调控制和非额定工况下系统多目标优化等方面的研究内容.
增加可再生能源在电网中的占比, 使能源结构更合理, 是加快能源转型、实现低碳可持续发展的有效途径. 电网中占主导地位的火电辅助消纳可再生能源的能力对提高可再生能源在电网中的占比起到重要作用. 为提高火电机组辅助消纳能力, 根据当前系统控制方案, 分析影响机组灵活性与调峰深度的因素, 包括机炉协调、局部反馈策略下的锅炉控制、系统稳态工作点的规划等. 详细阐述基于补偿方案的协调策略限制机组对具有随机性和间歇性的可再生能源的补偿能力, 局部反馈策略下的锅炉控制只是实现等效热效应的反馈, 以及非额定工况下的稳态工作点关系到辅助可再生能源消纳的能耗和排放指标等. 最后, 给出进一步的机炉动态协调控制和非额定工况下系统多目标优化等方面的研究内容.




2025, 51(11): 2427-2440.
doi: 10.16383/j.aas.c250207
cstr: 32138.14.j.aas.c250207
摘要:
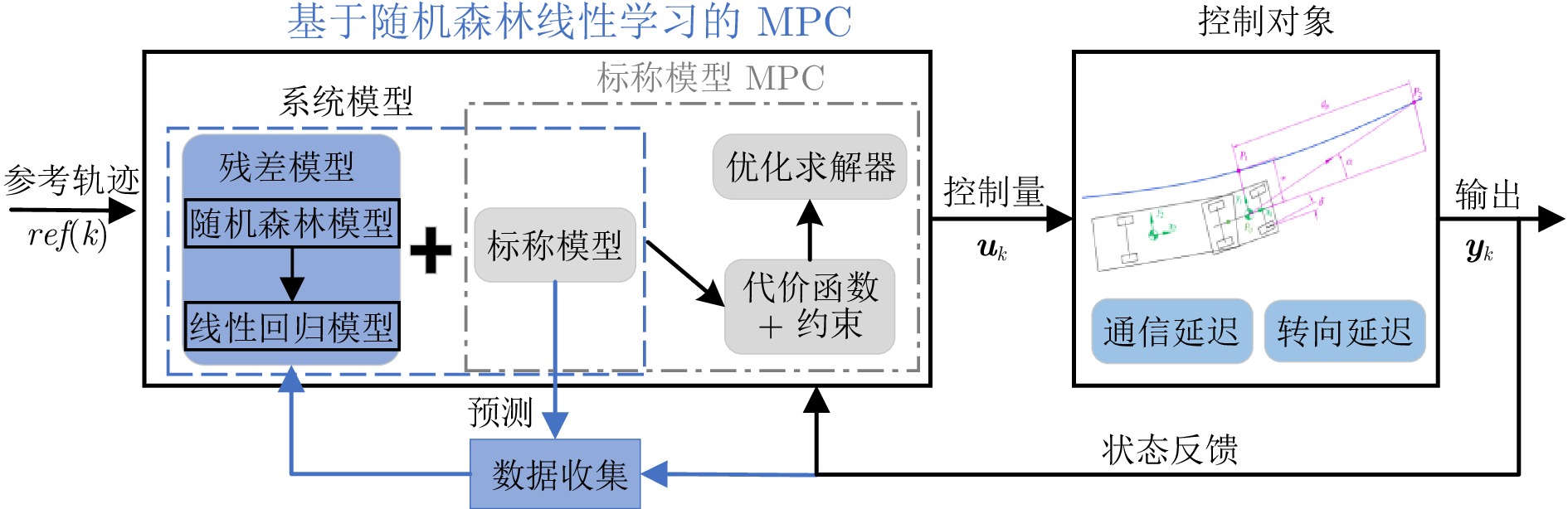
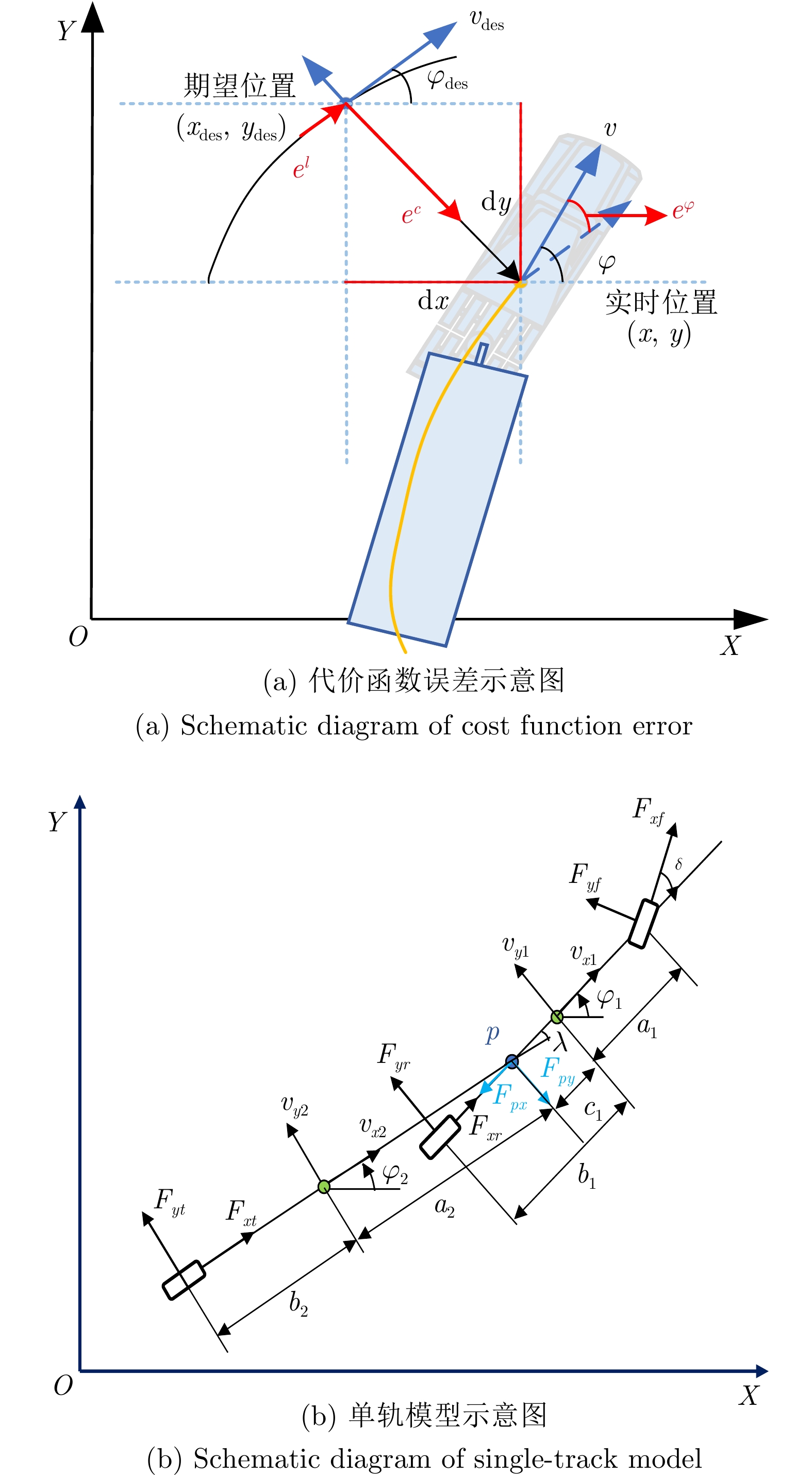
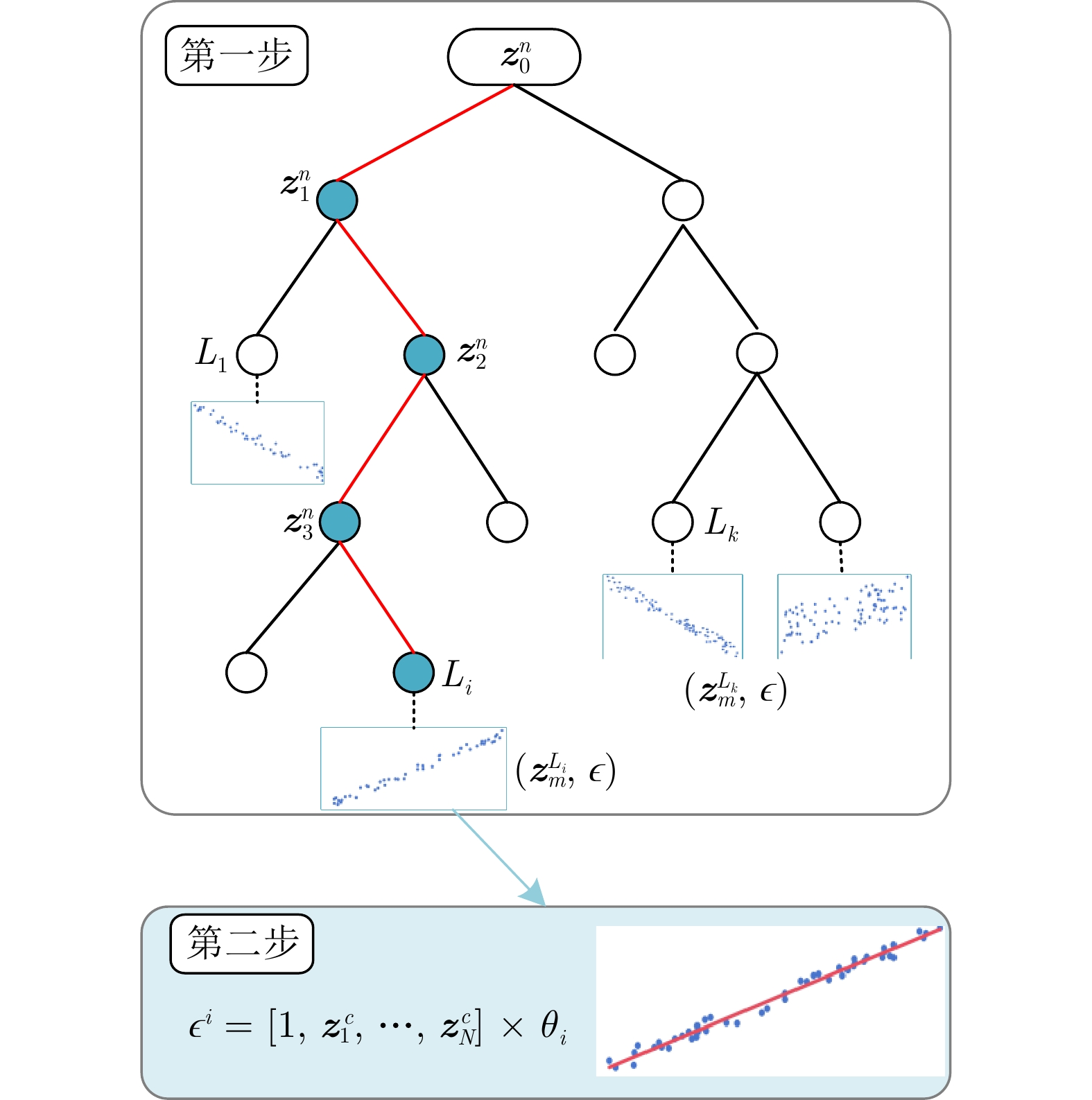
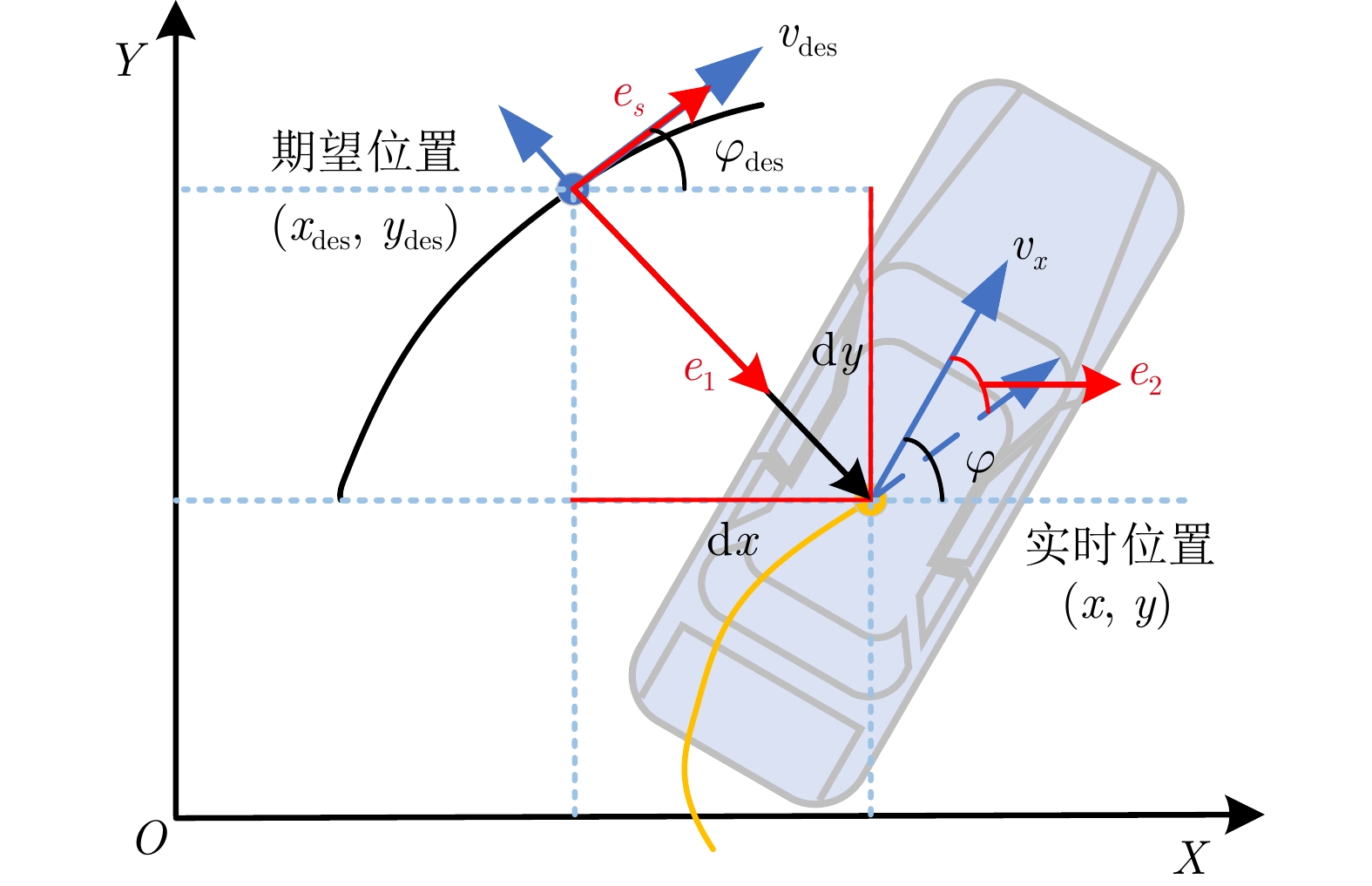
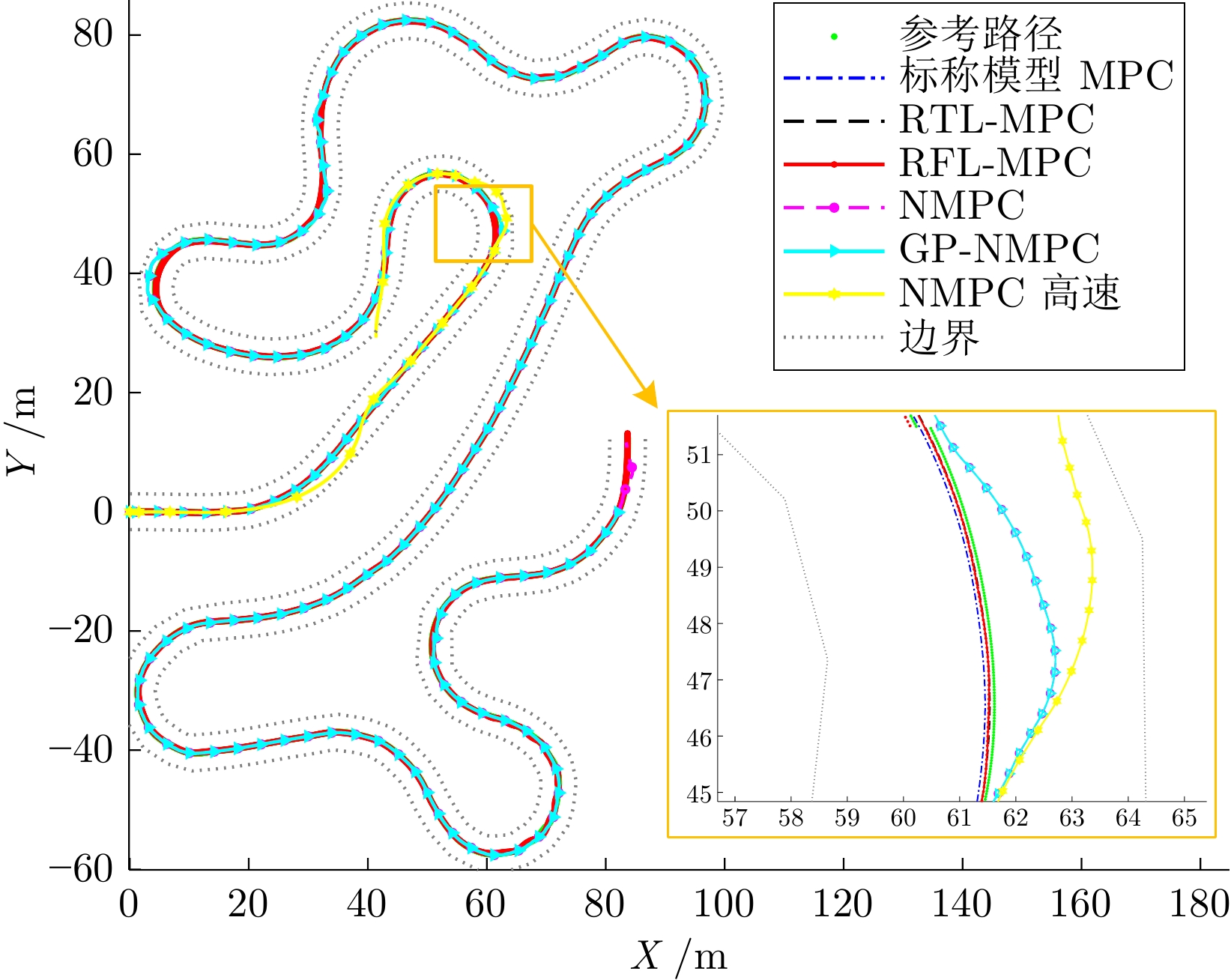
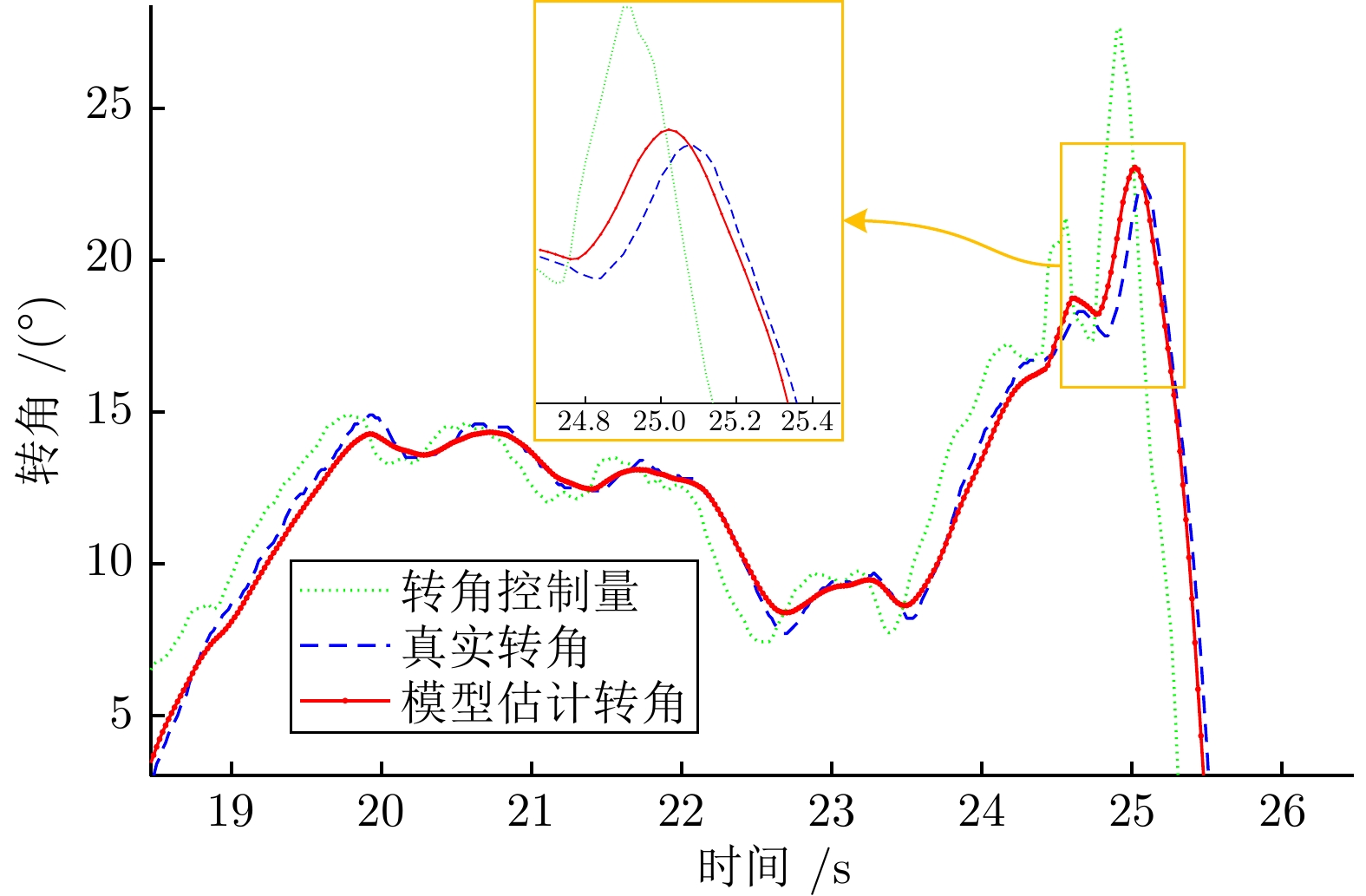
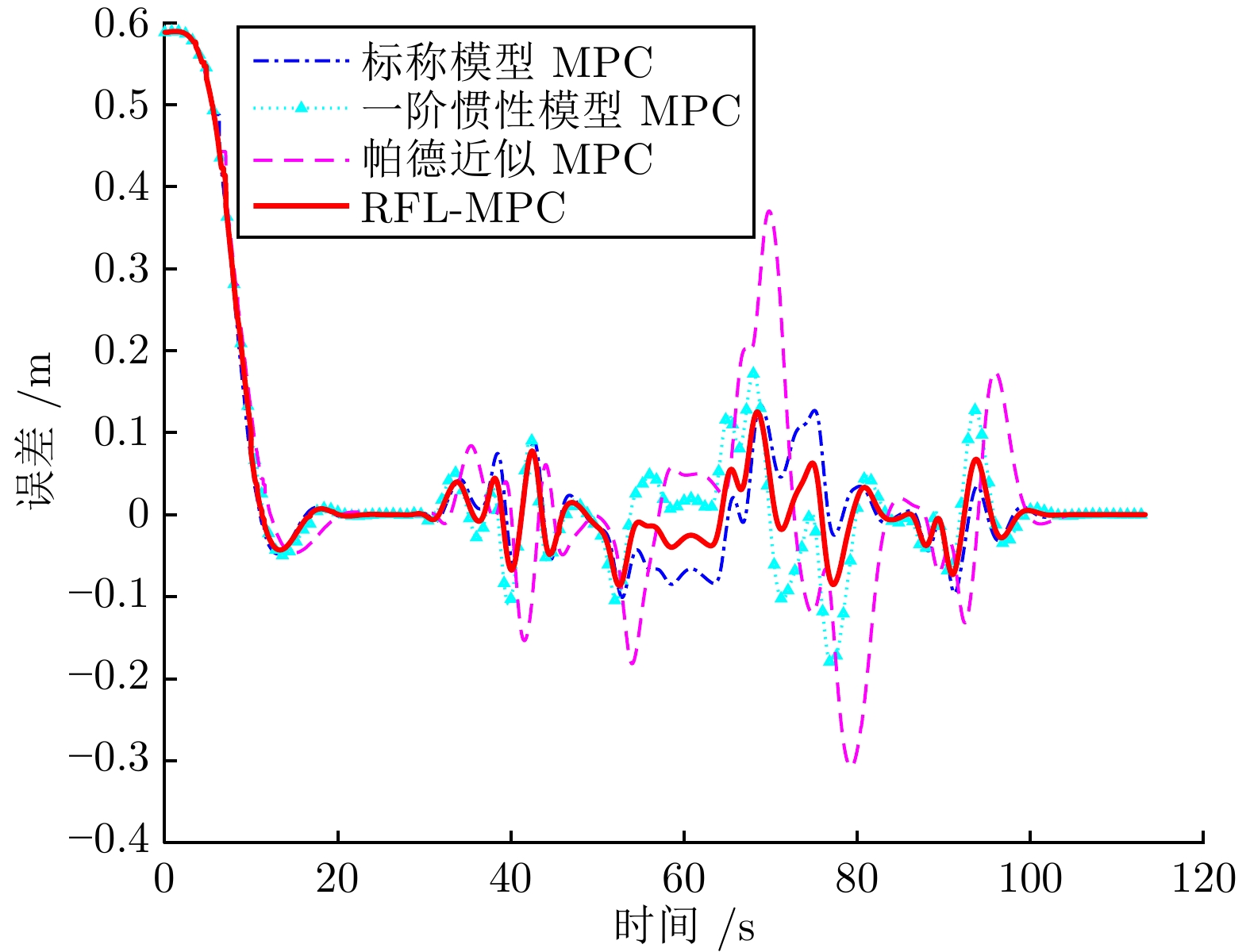
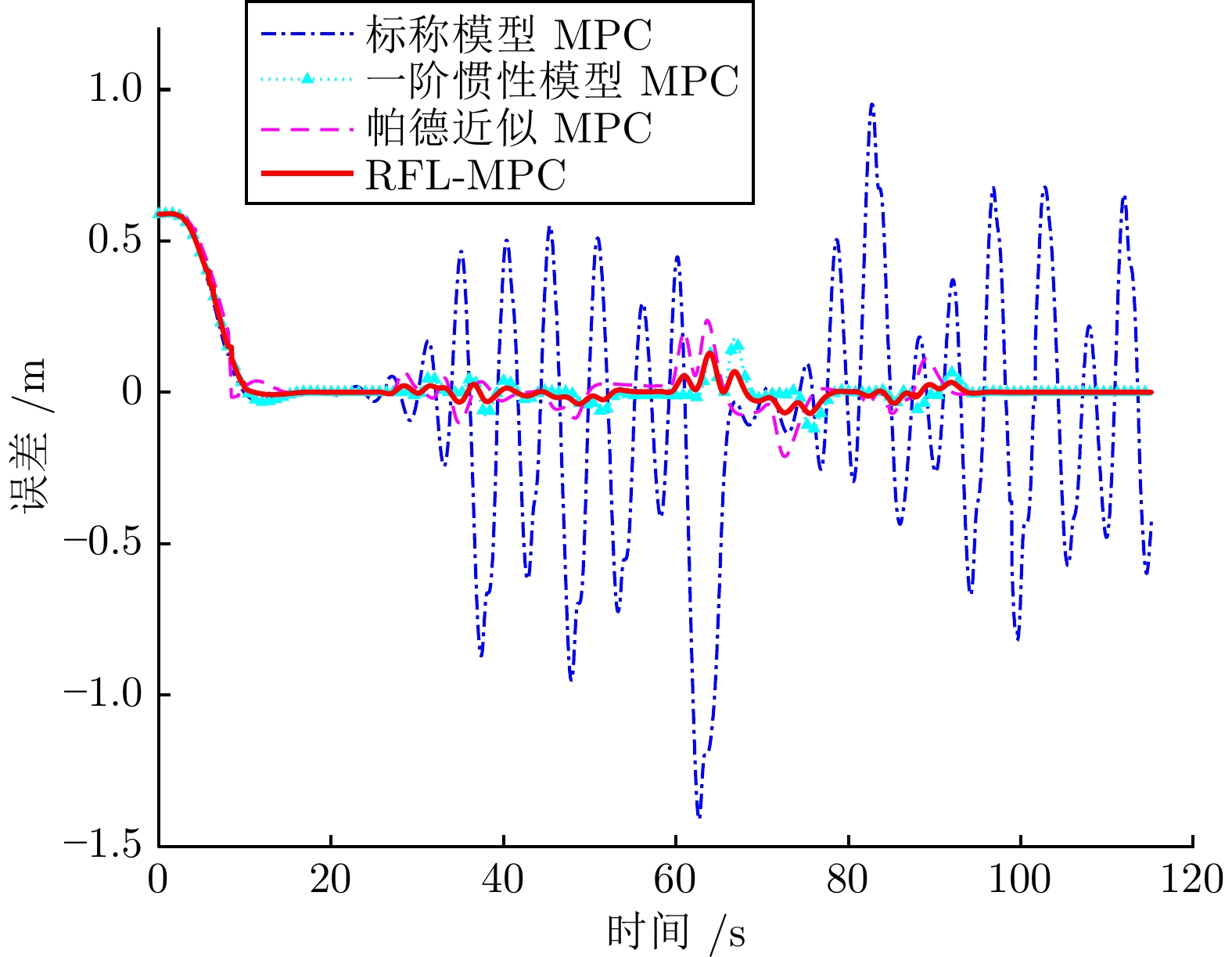
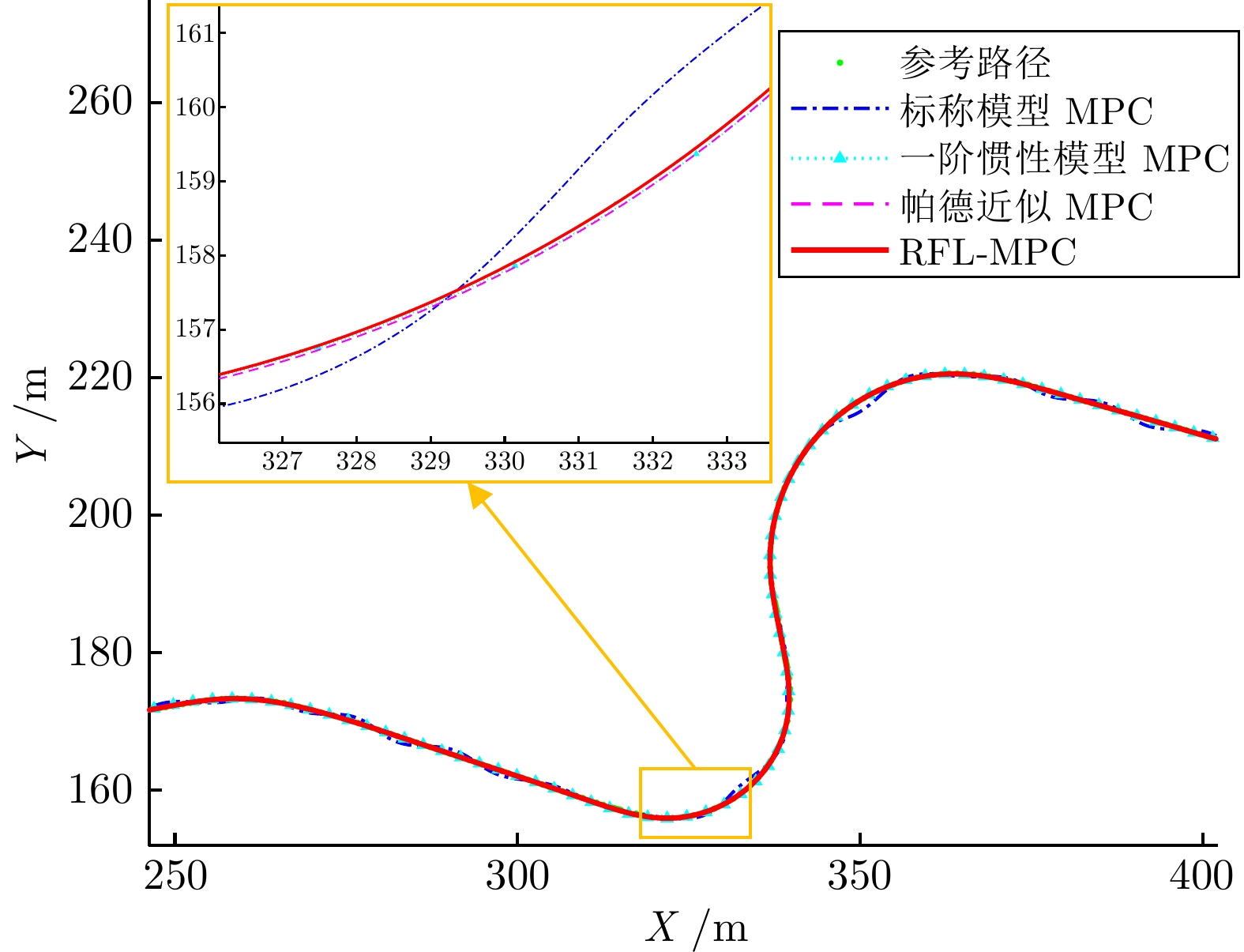
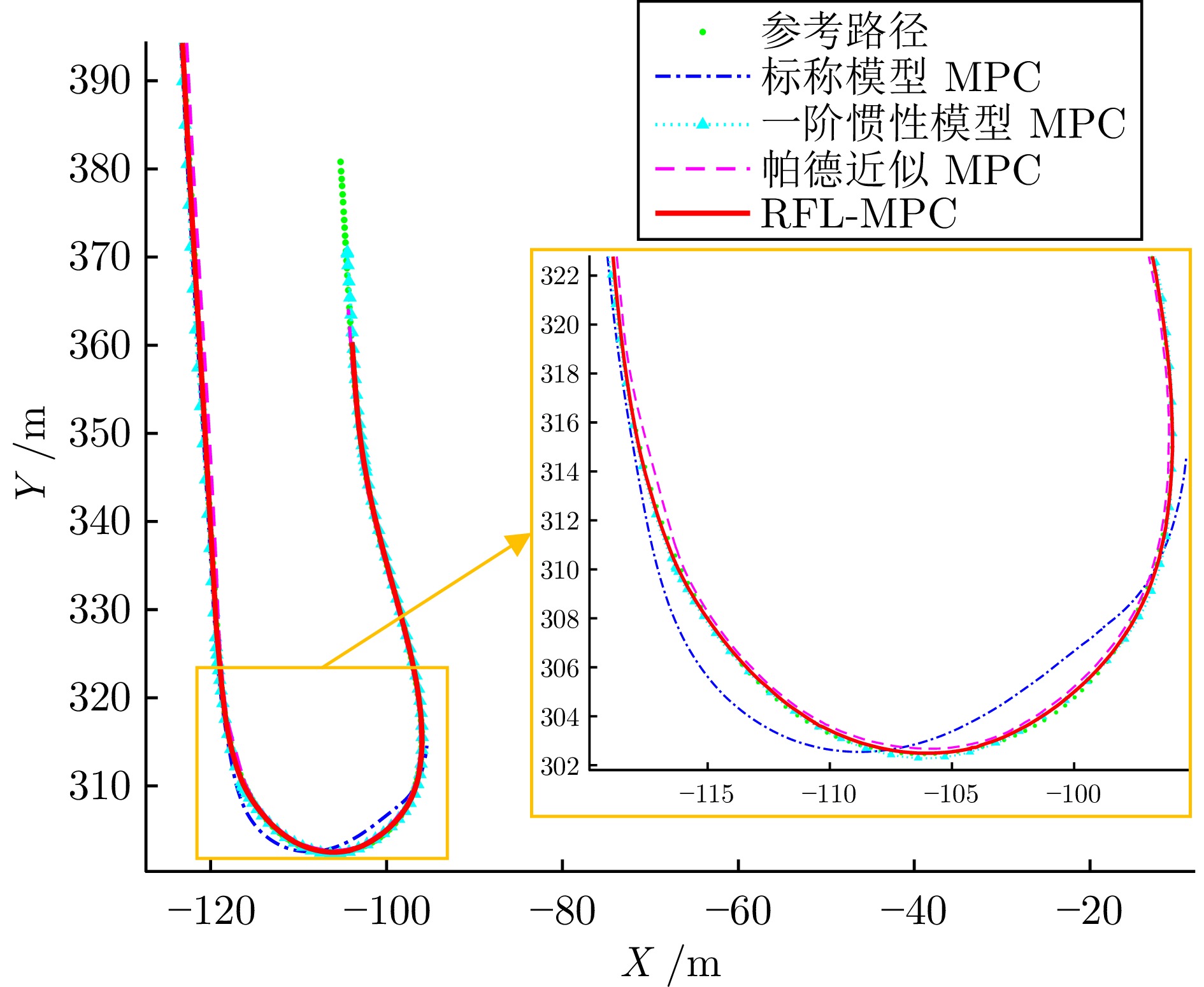
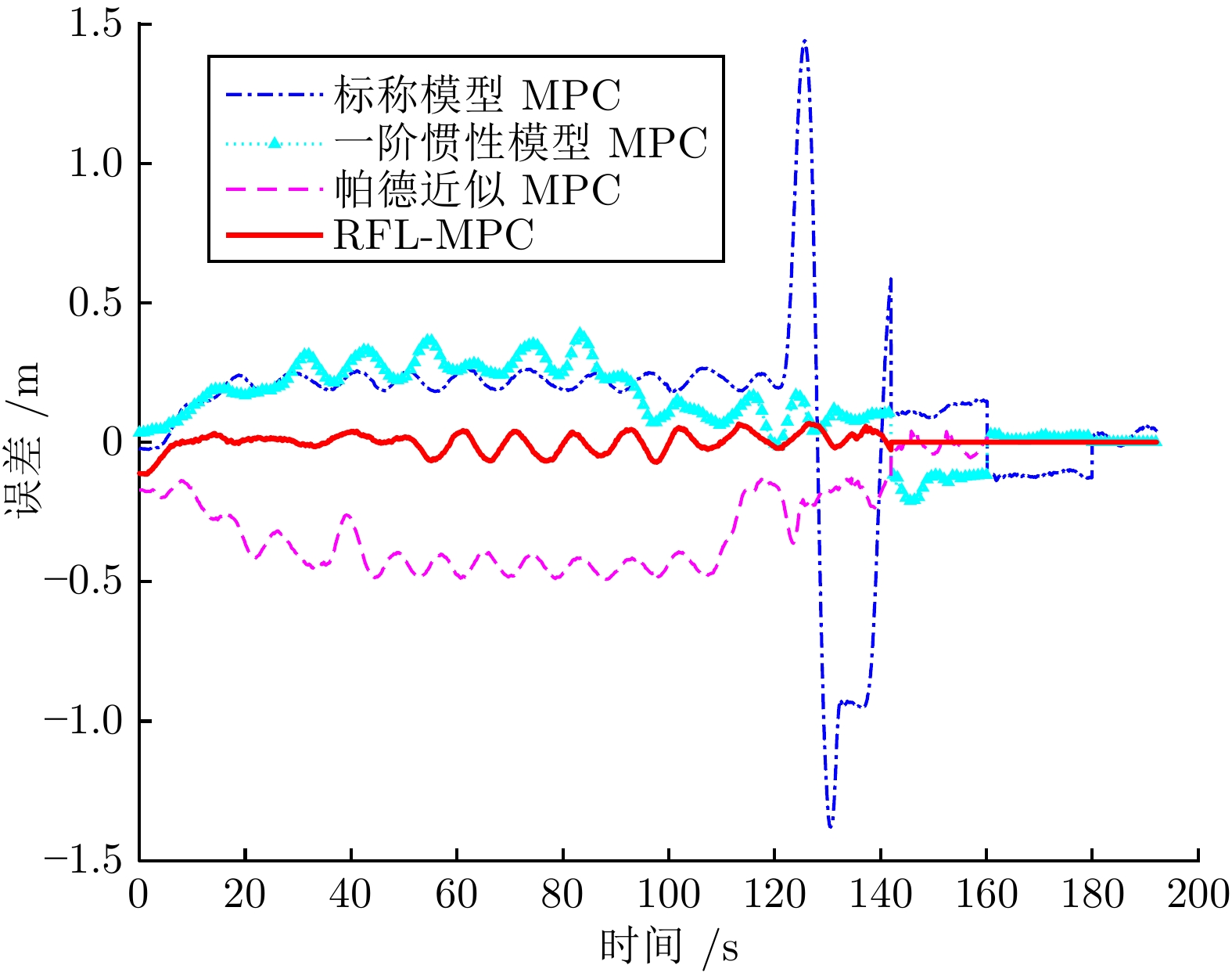
近年来, 模型预测控制(MPC)在自动驾驶领域大量应用, 但依然面临车辆动力学非线性建模、实时滚动优化等挑战. 基于数据驱动建立车辆动力学模型的MPC通过收集系统的输入输出数据, 直接学习动力学模型, 但依然需要额外处理环节解决实时滚动优化问题. 为此, 提出一种基于随机森林学习车辆动力学模型的方法. 先将车辆动力学模型分解为标称模型和残差模型, 然后利用两层随机森林学习残差模型, 上层用于切换不同线性模型, 下层拟合叶子节点的线性模型. 由于标称模型和残差模型均为线性模型, 滚动优化可直接使用二次规划求解器实时求解. 同时, 基于随机森林的残差模型使用多帧历史状态作为特征输入, 学习得到的残差模型保留动力学系统动态响应的延迟特性, 因此可有效消解延迟影响. 仿真测试和实车实验结果表明, 提出的MPC的跟踪精度和实时性均优于标称模型MPC和基于高斯过程的MPC, 并对车辆执行机构延迟具有优良的适应性.
近年来, 模型预测控制(MPC)在自动驾驶领域大量应用, 但依然面临车辆动力学非线性建模、实时滚动优化等挑战. 基于数据驱动建立车辆动力学模型的MPC通过收集系统的输入输出数据, 直接学习动力学模型, 但依然需要额外处理环节解决实时滚动优化问题. 为此, 提出一种基于随机森林学习车辆动力学模型的方法. 先将车辆动力学模型分解为标称模型和残差模型, 然后利用两层随机森林学习残差模型, 上层用于切换不同线性模型, 下层拟合叶子节点的线性模型. 由于标称模型和残差模型均为线性模型, 滚动优化可直接使用二次规划求解器实时求解. 同时, 基于随机森林的残差模型使用多帧历史状态作为特征输入, 学习得到的残差模型保留动力学系统动态响应的延迟特性, 因此可有效消解延迟影响. 仿真测试和实车实验结果表明, 提出的MPC的跟踪精度和实时性均优于标称模型MPC和基于高斯过程的MPC, 并对车辆执行机构延迟具有优良的适应性.

2025, 51(11): 2441-2453.
doi: 10.16383/j.aas.c240765
cstr: 32138.14.j.aas.c240765
摘要:
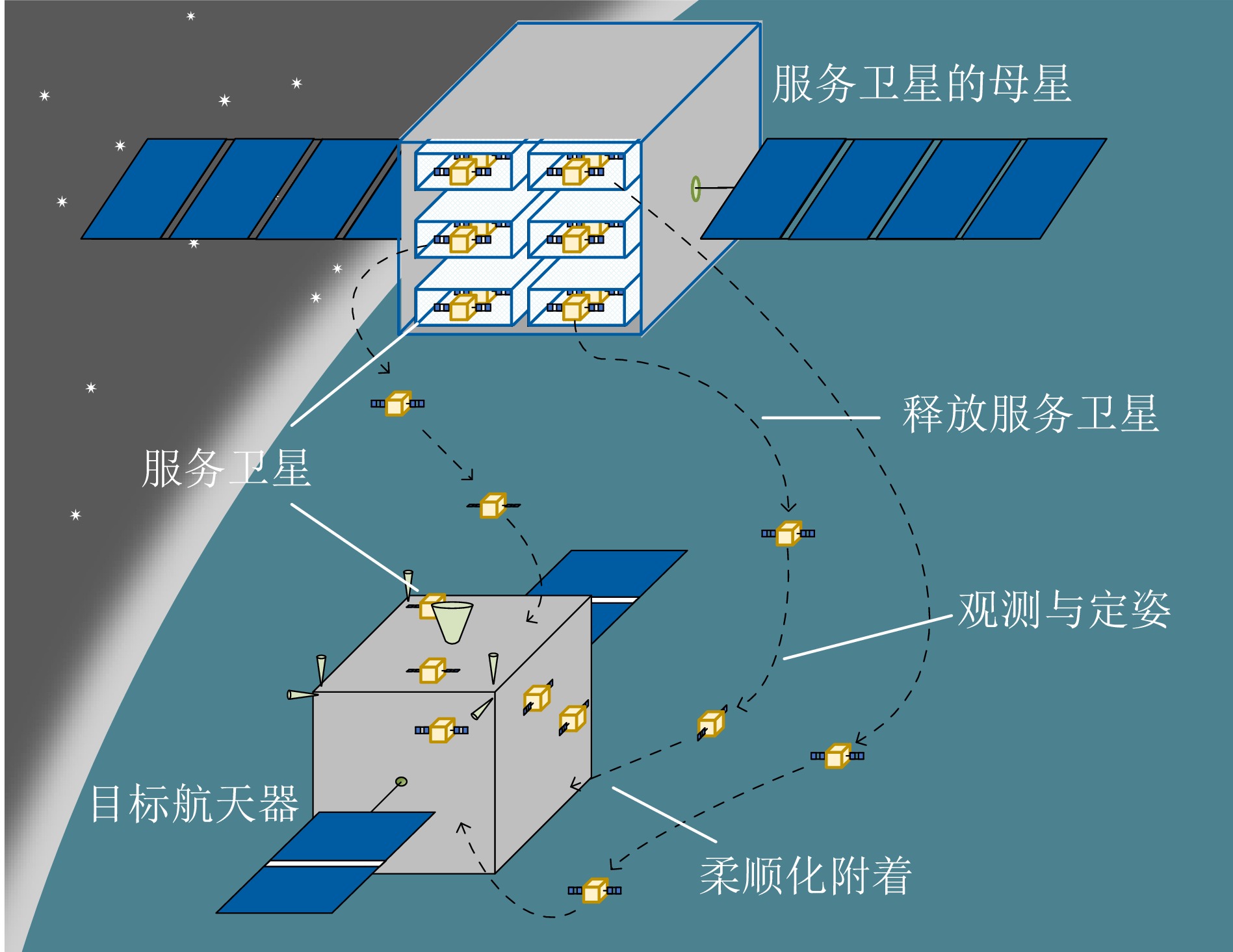
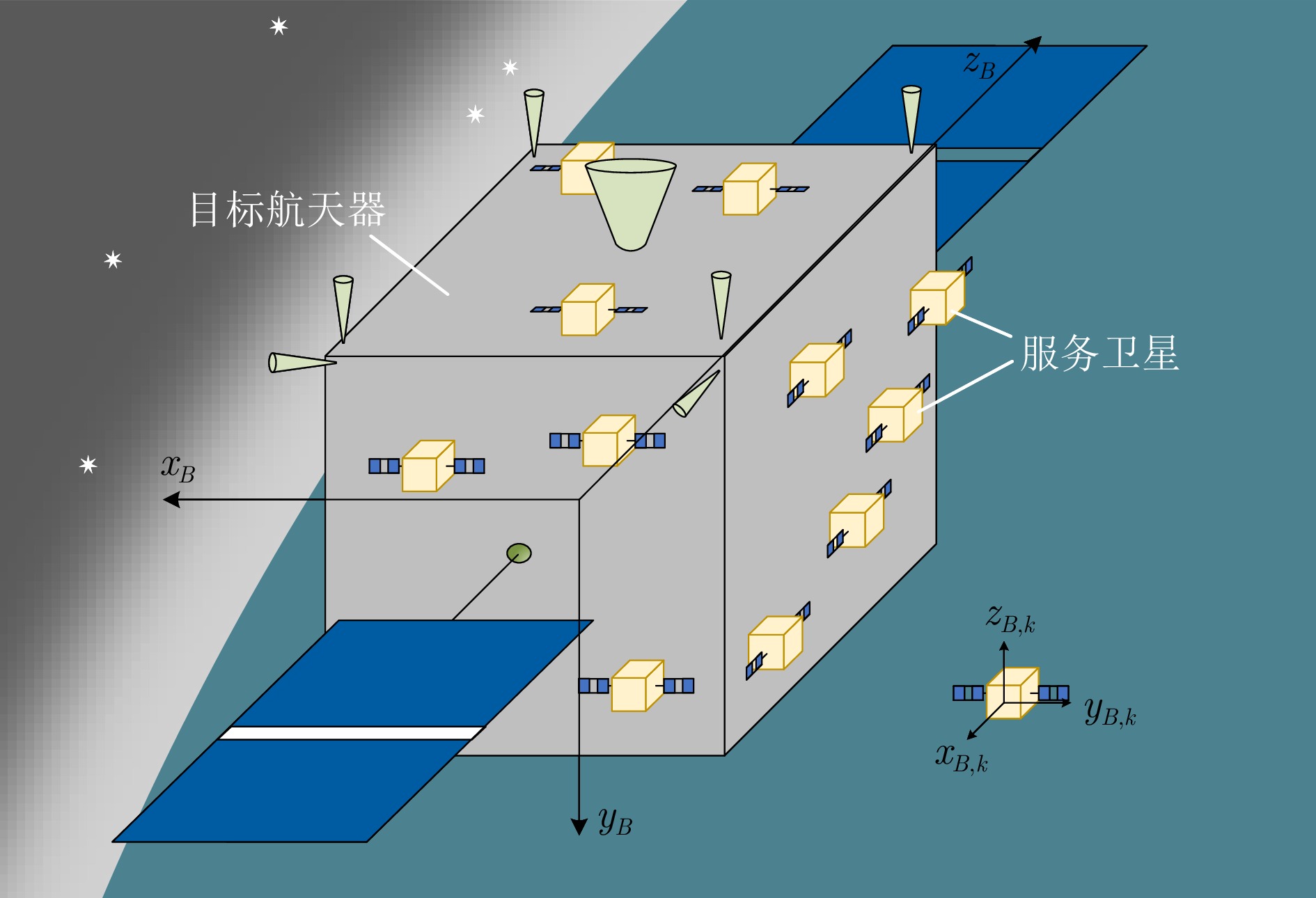
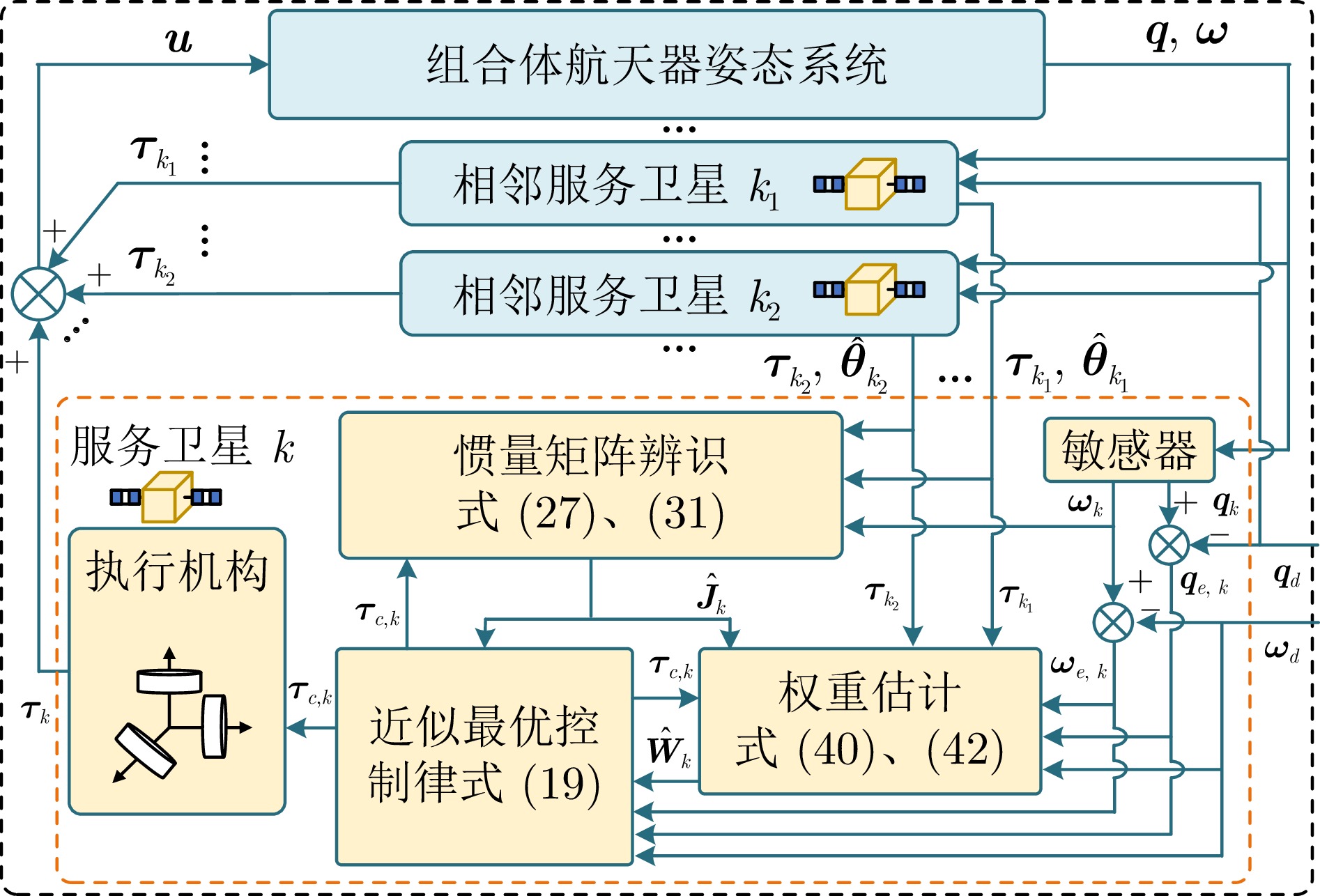
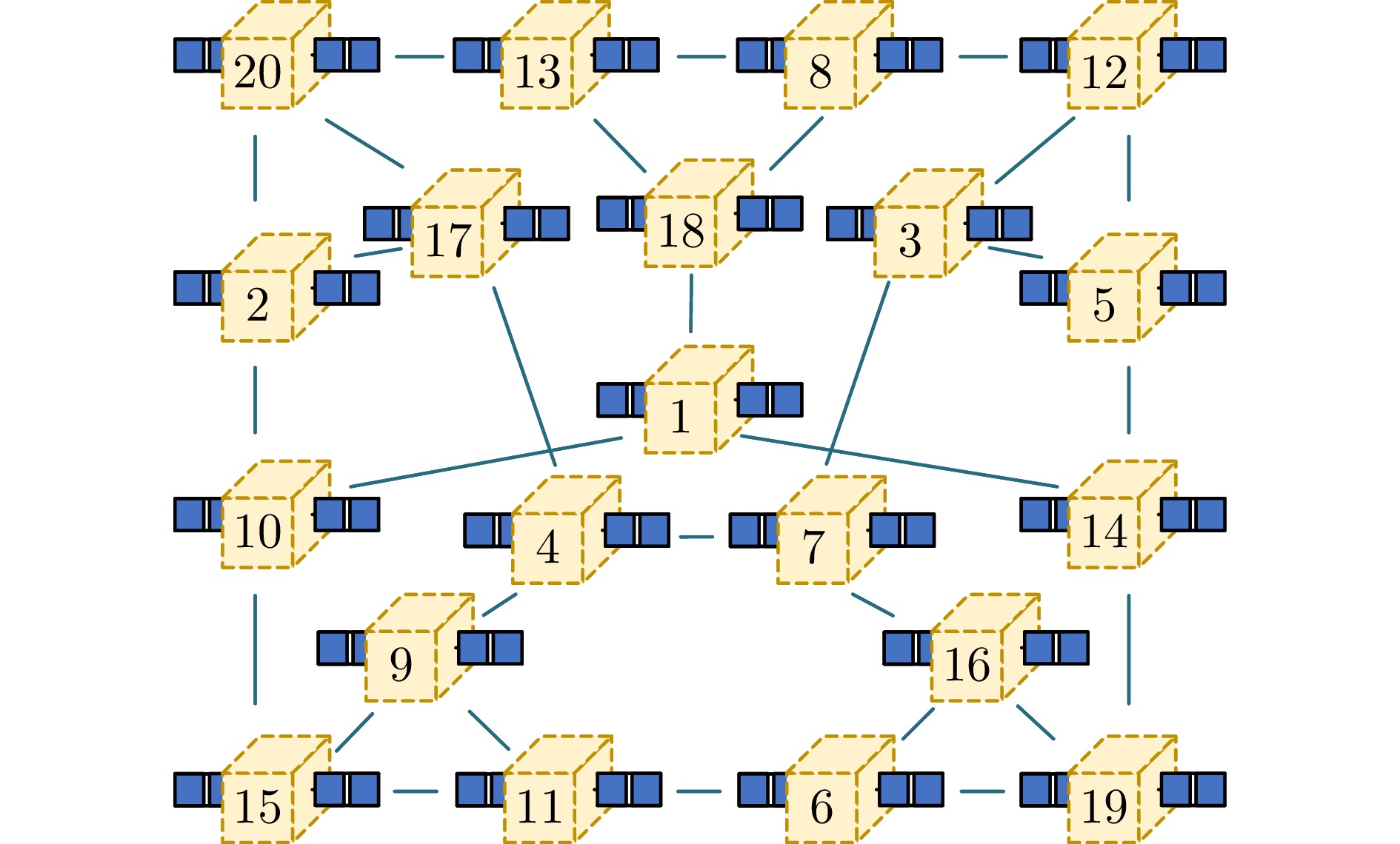
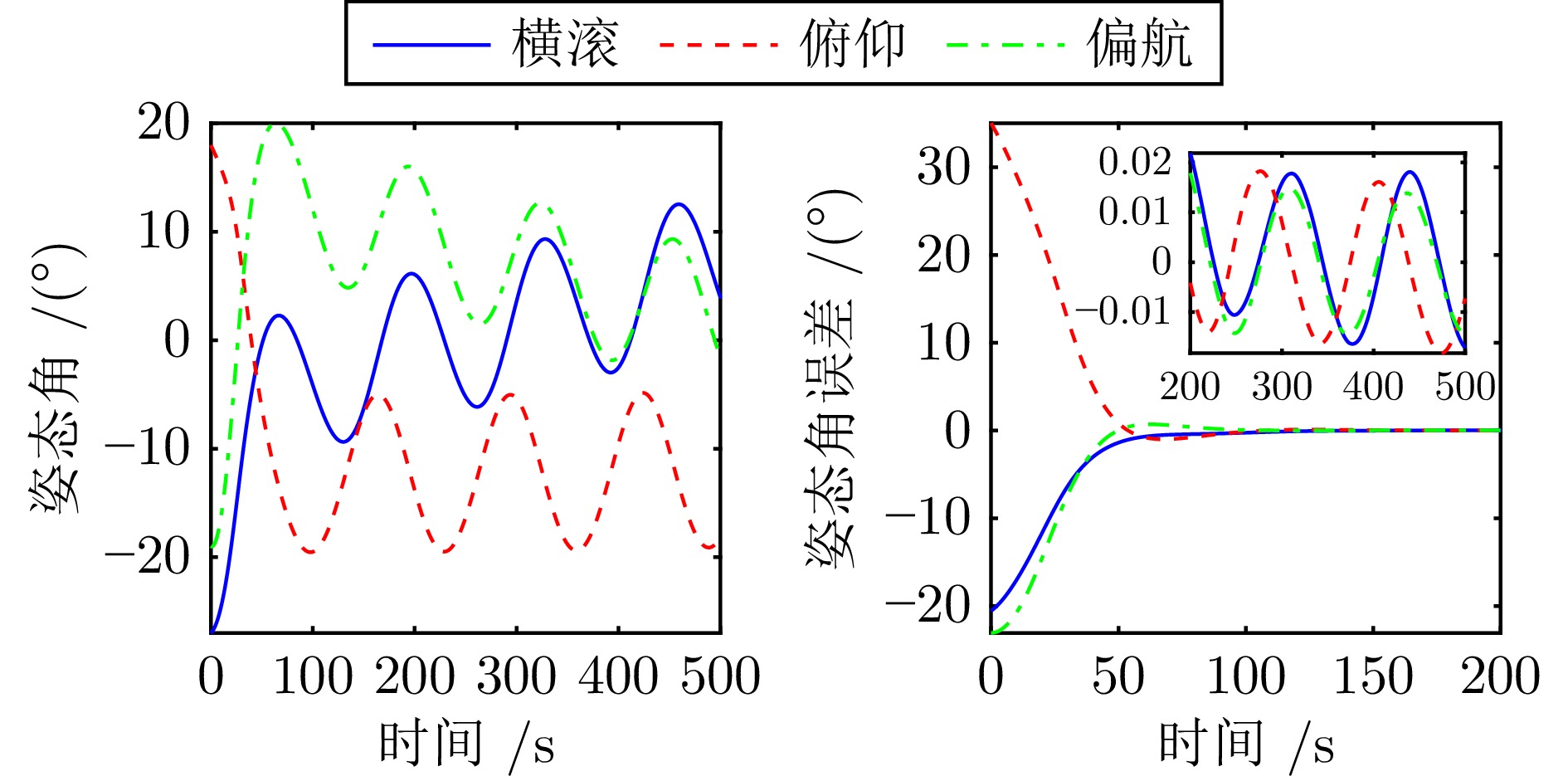
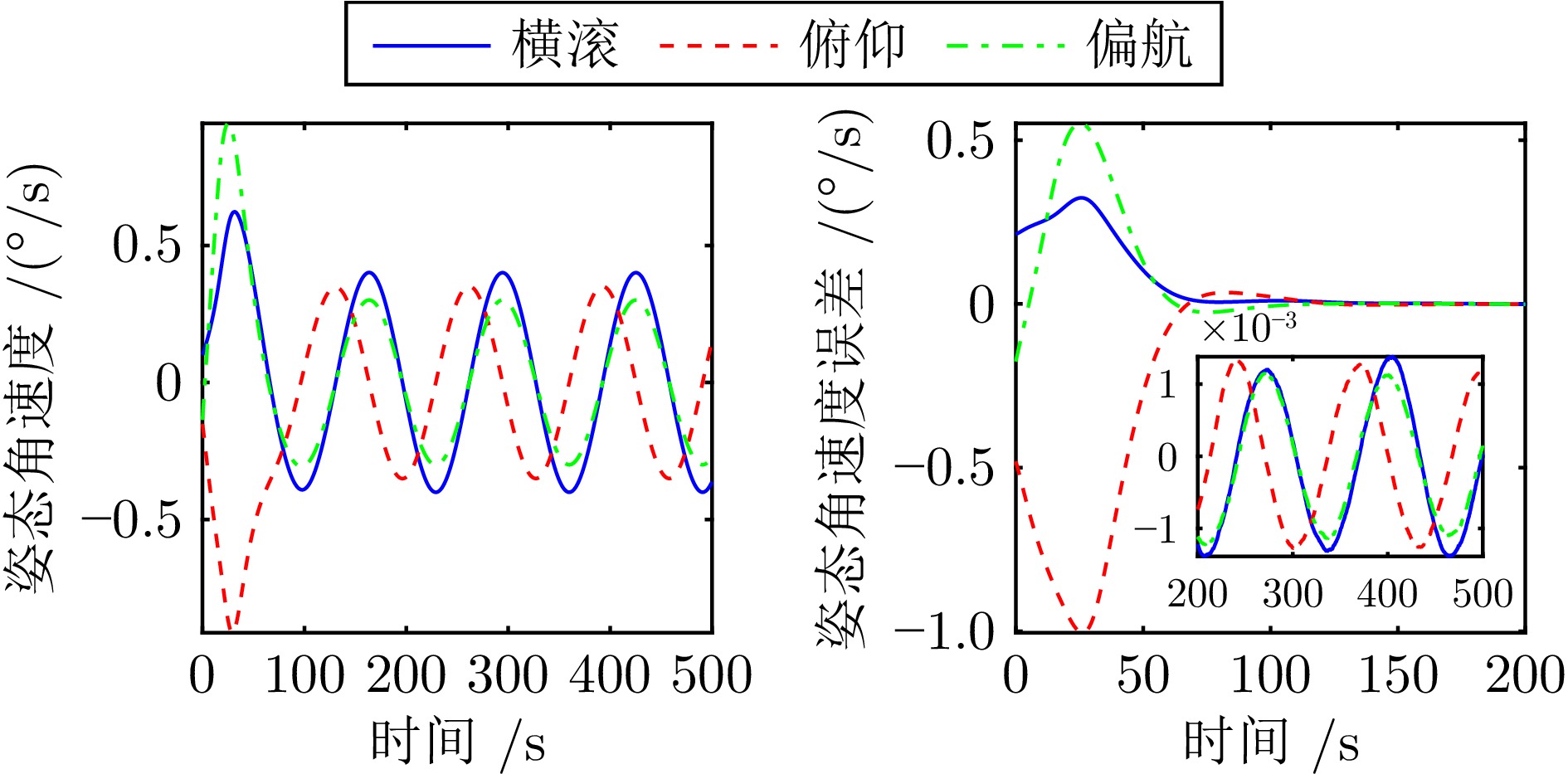
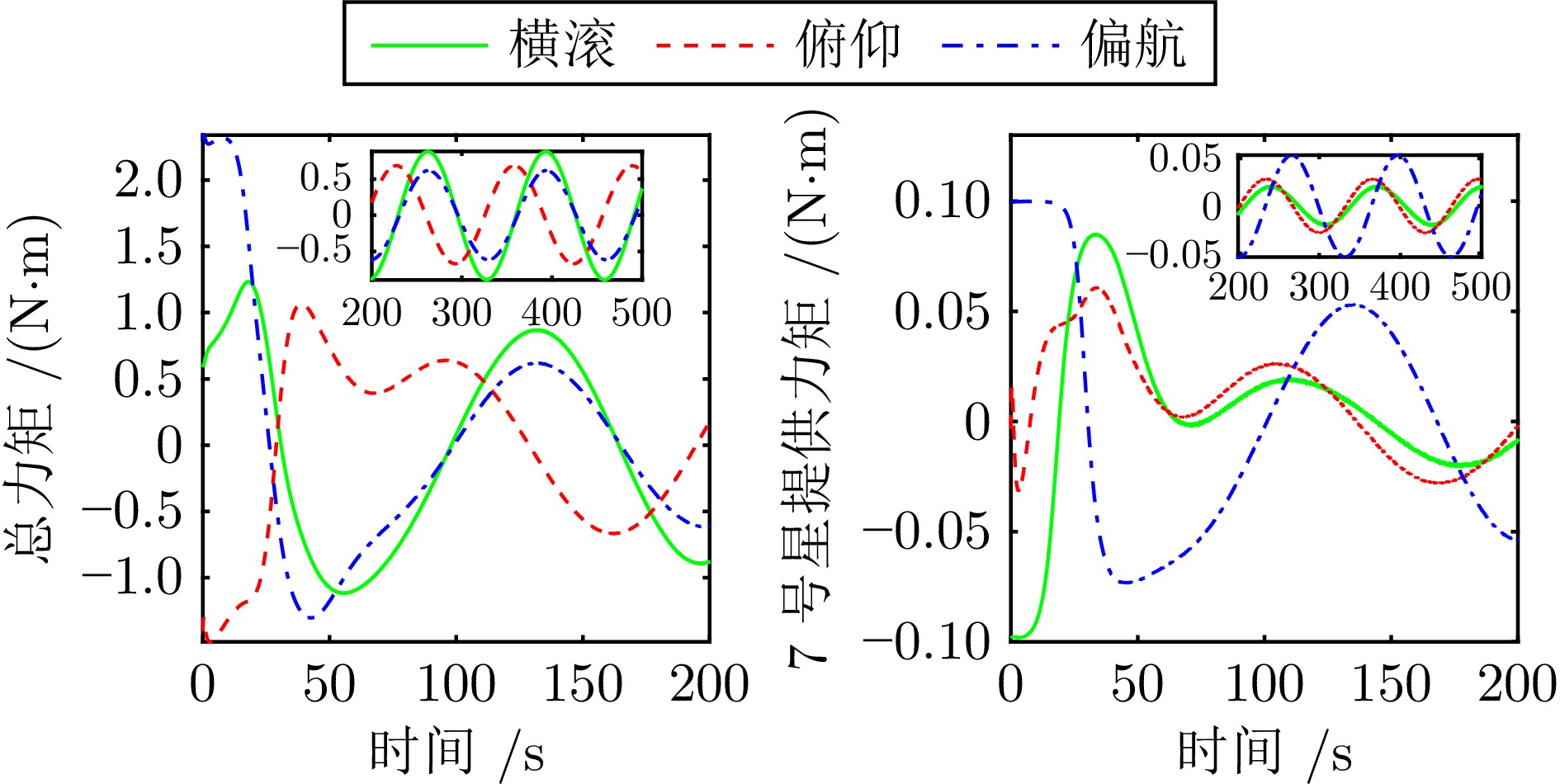
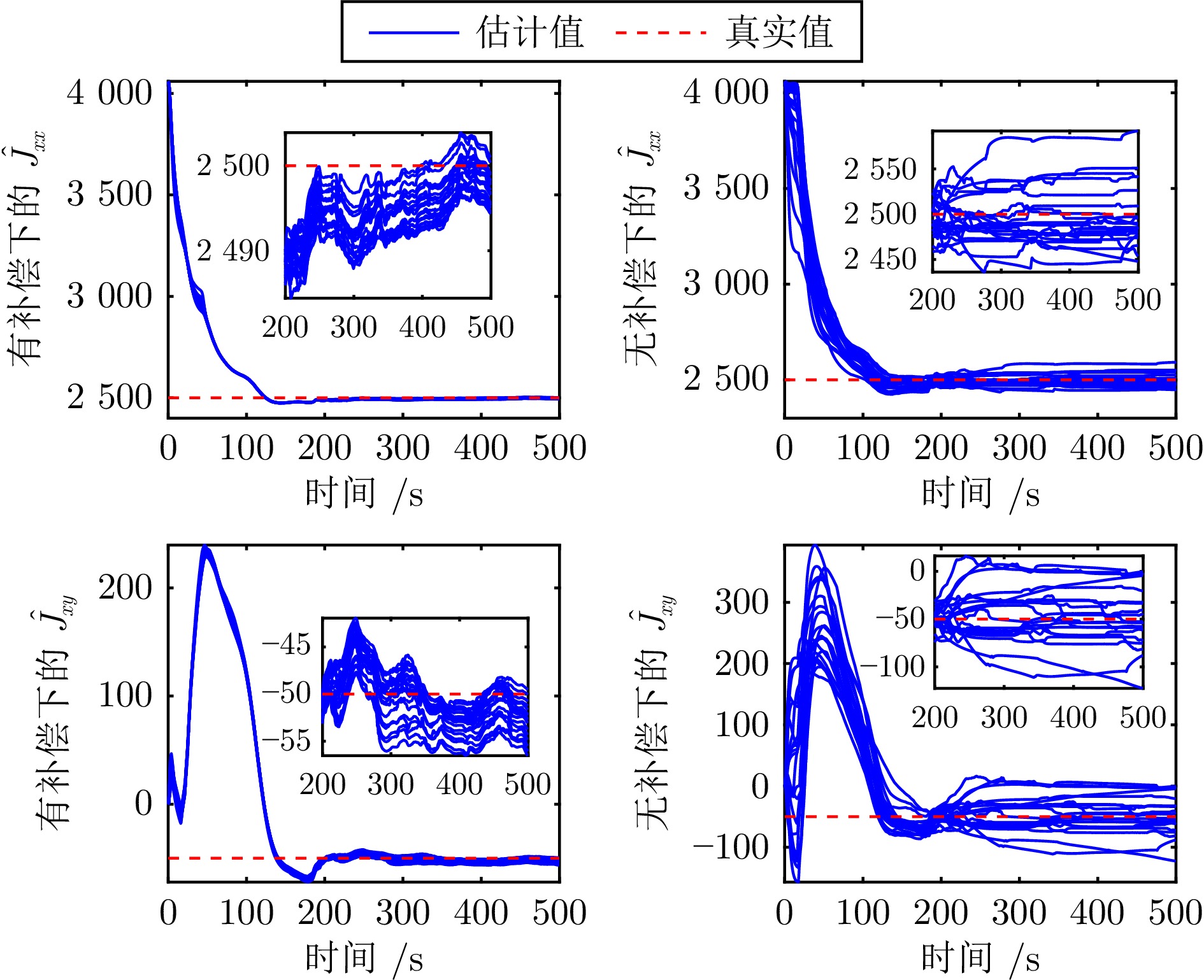
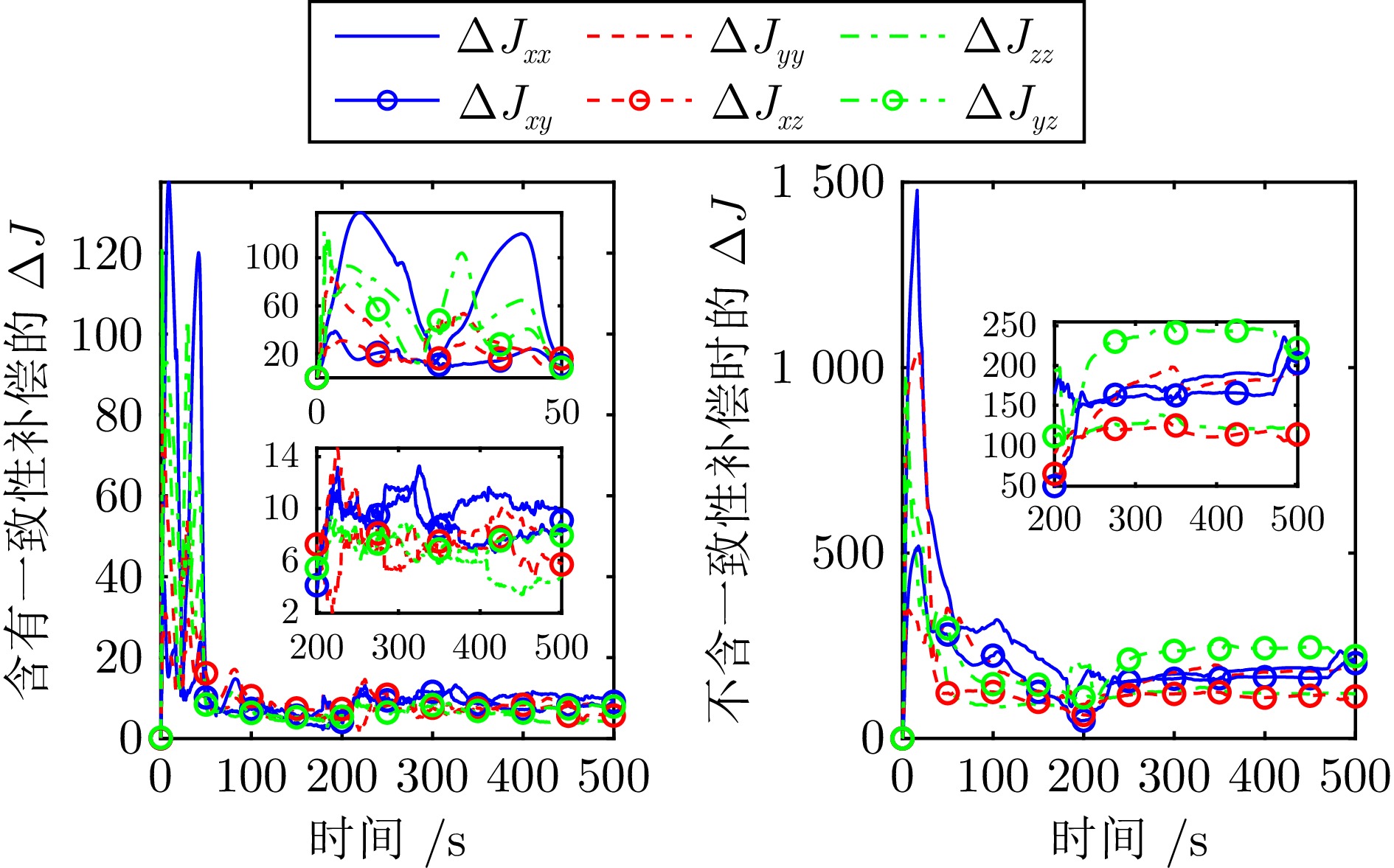
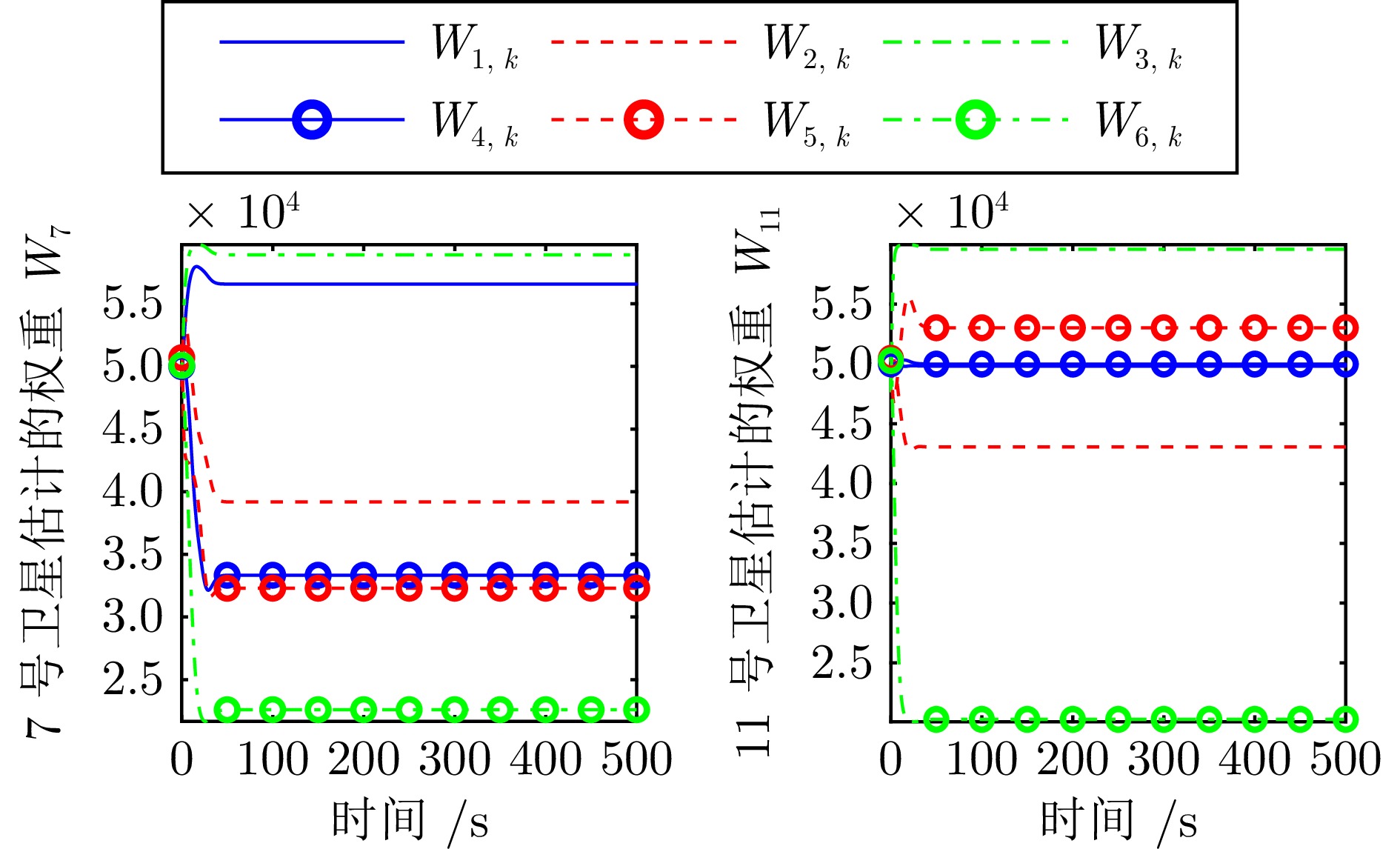
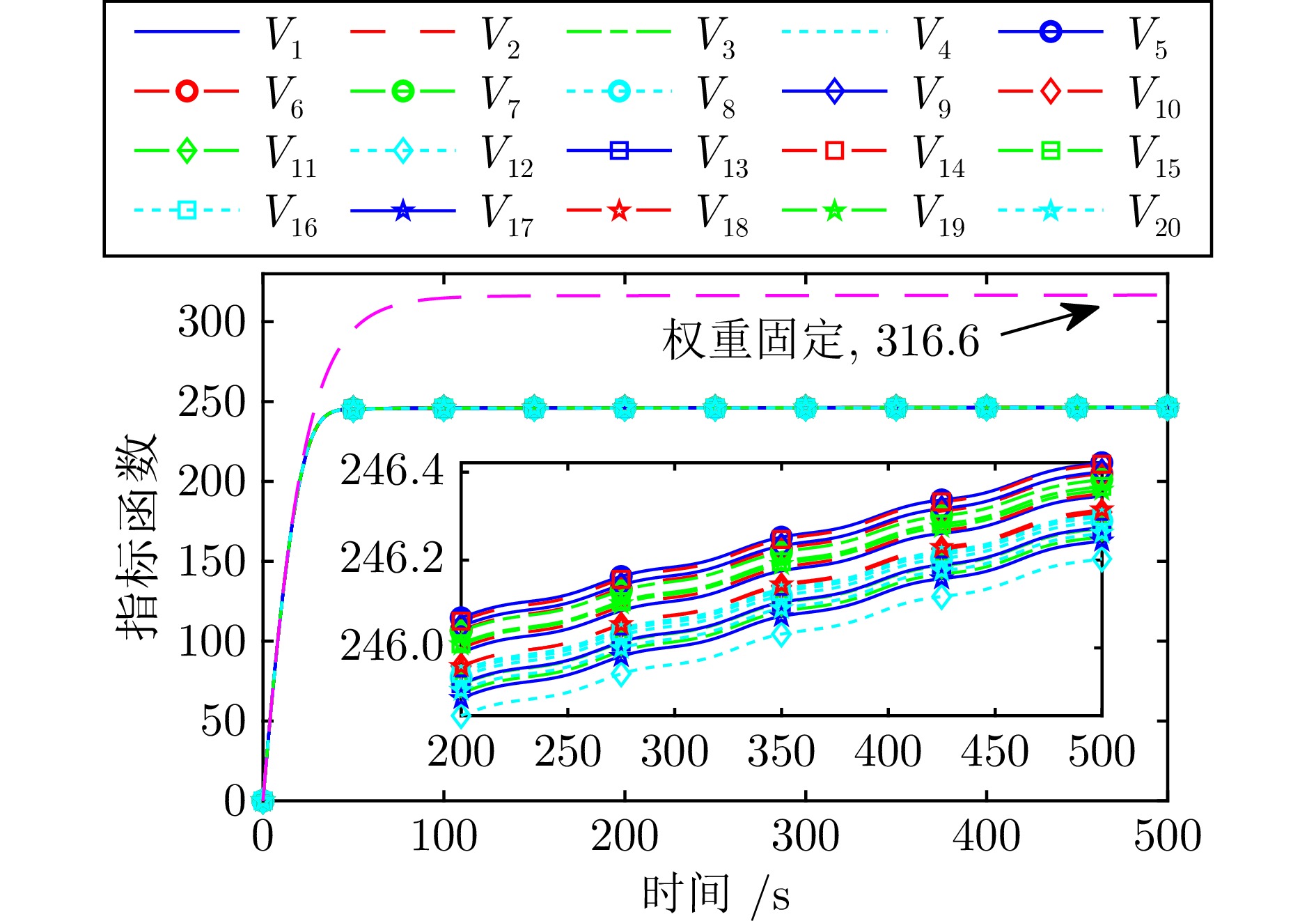
在多服务星对失效航天器进行姿态接管控制的在轨服务任务中, 考虑惯量矩阵未知和执行机构饱和的情况, 基于自适应动态规划(ADP)方法提出一种分布式姿态跟踪接管控制策略. 首先, 通过对姿态系统的建模分析, 设计一种含有力矩饱和约束和期望力矩补偿的值函数, 在ADP框架下, 用一组基函数逼近最优值函数, 并得到分布式近似最优姿态跟踪控制策略; 然后, 为避免使用角加速度信息, 分别构建关于惯量参数和权重参数的滤波形式的线性回归模型, 根据并行学习方法、参数一致性算法和离线策略轨迹, 设计惯量参数自适应辨识律和权重更新律; 接着, 使用李雅普诺夫方法证明姿态跟踪误差、惯量矩阵辨识误差和权重参数估计误差的一致最终有界; 最后, 仿真结果验证了分布式姿态跟踪控制方法在力矩饱和约束下对姿态跟踪和惯量矩阵辨识的有效性.
在多服务星对失效航天器进行姿态接管控制的在轨服务任务中, 考虑惯量矩阵未知和执行机构饱和的情况, 基于自适应动态规划(ADP)方法提出一种分布式姿态跟踪接管控制策略. 首先, 通过对姿态系统的建模分析, 设计一种含有力矩饱和约束和期望力矩补偿的值函数, 在ADP框架下, 用一组基函数逼近最优值函数, 并得到分布式近似最优姿态跟踪控制策略; 然后, 为避免使用角加速度信息, 分别构建关于惯量参数和权重参数的滤波形式的线性回归模型, 根据并行学习方法、参数一致性算法和离线策略轨迹, 设计惯量参数自适应辨识律和权重更新律; 接着, 使用李雅普诺夫方法证明姿态跟踪误差、惯量矩阵辨识误差和权重参数估计误差的一致最终有界; 最后, 仿真结果验证了分布式姿态跟踪控制方法在力矩饱和约束下对姿态跟踪和惯量矩阵辨识的有效性.
2025, 51(11): 2454-2472.
doi: 10.16383/j.aas.c250247
cstr: 32138.14.j.aas.c250247
摘要:
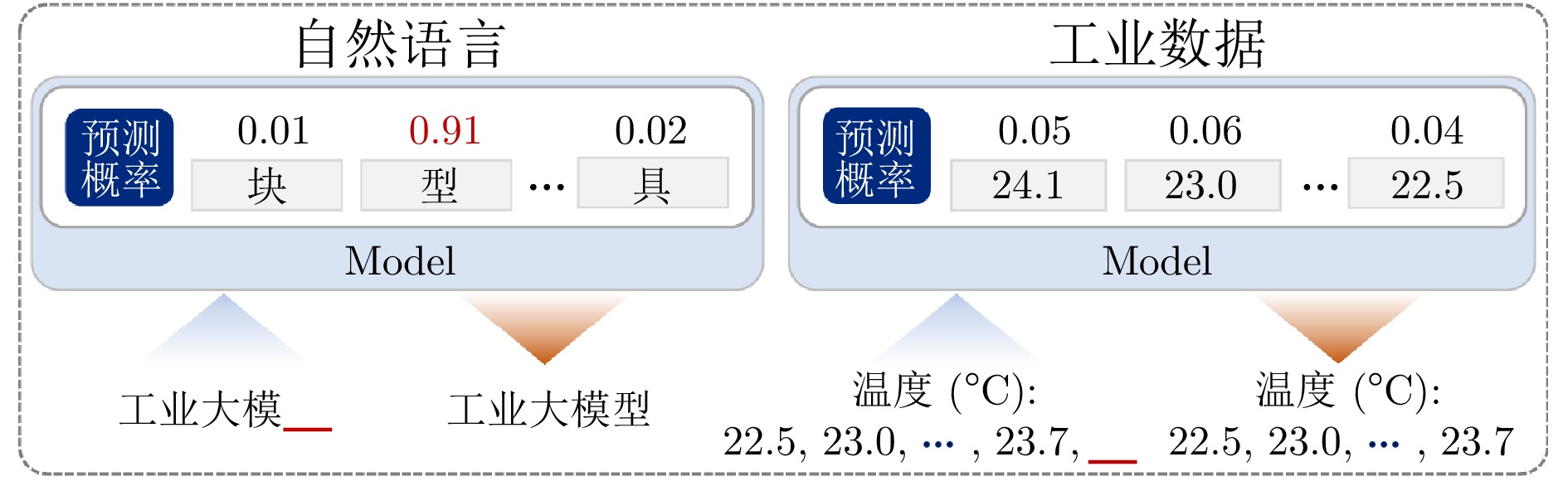
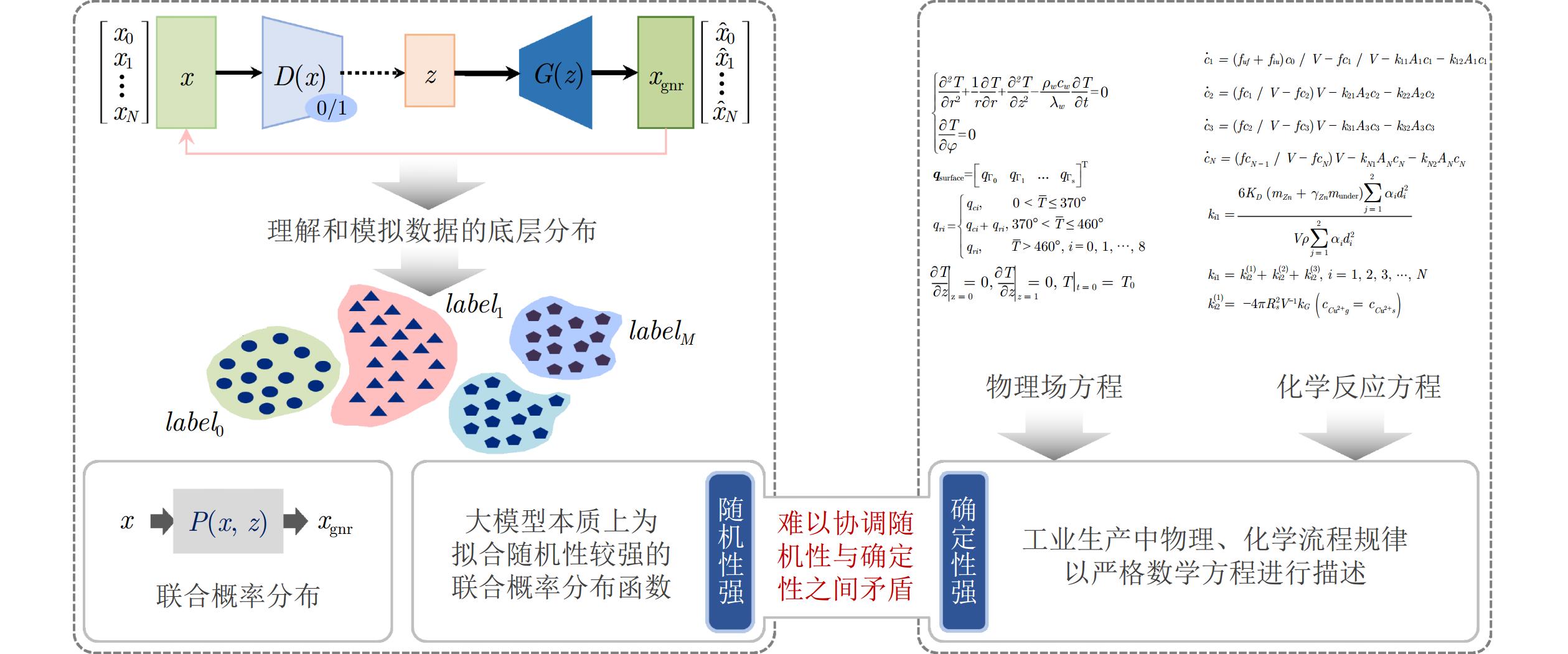
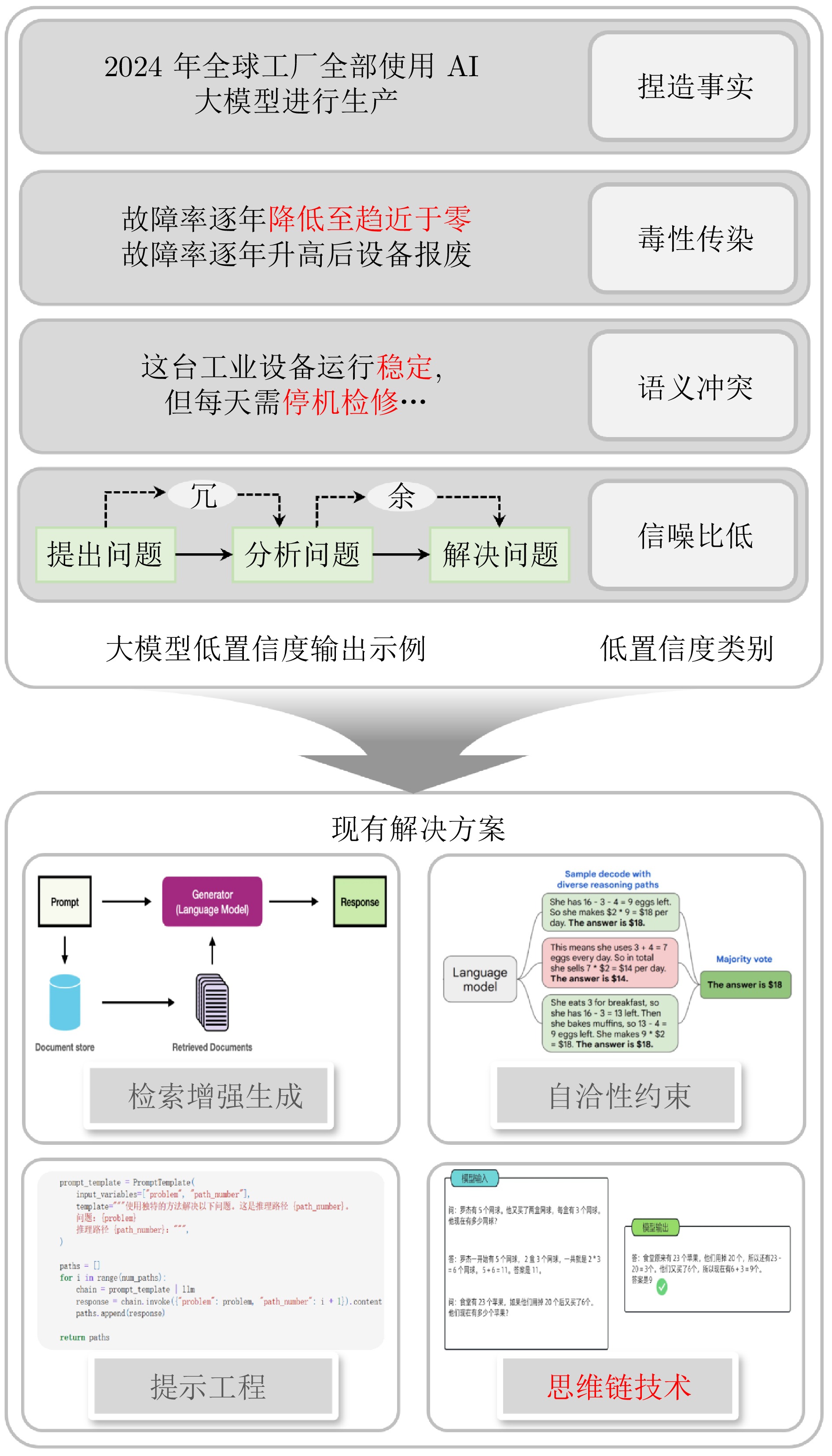
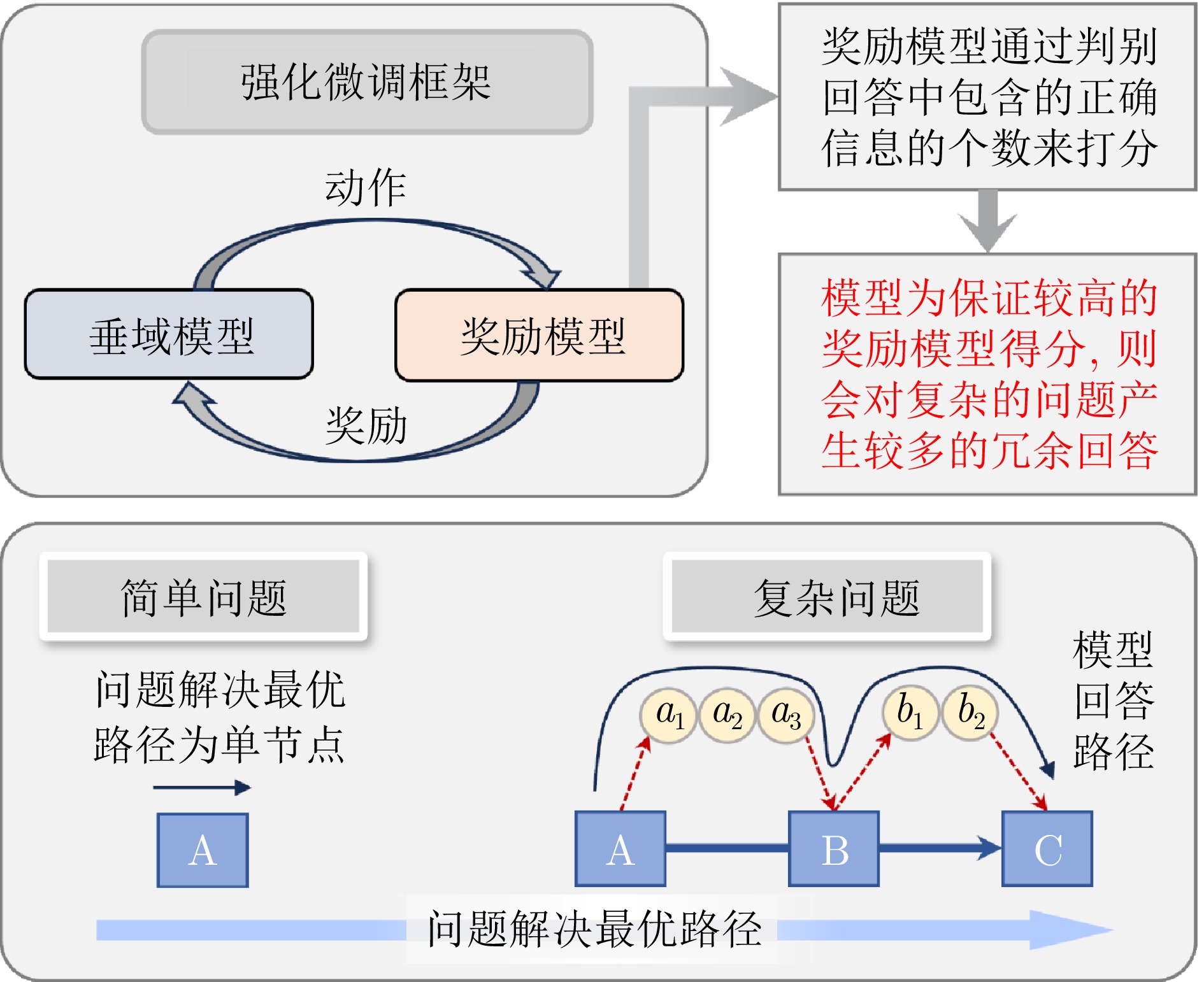
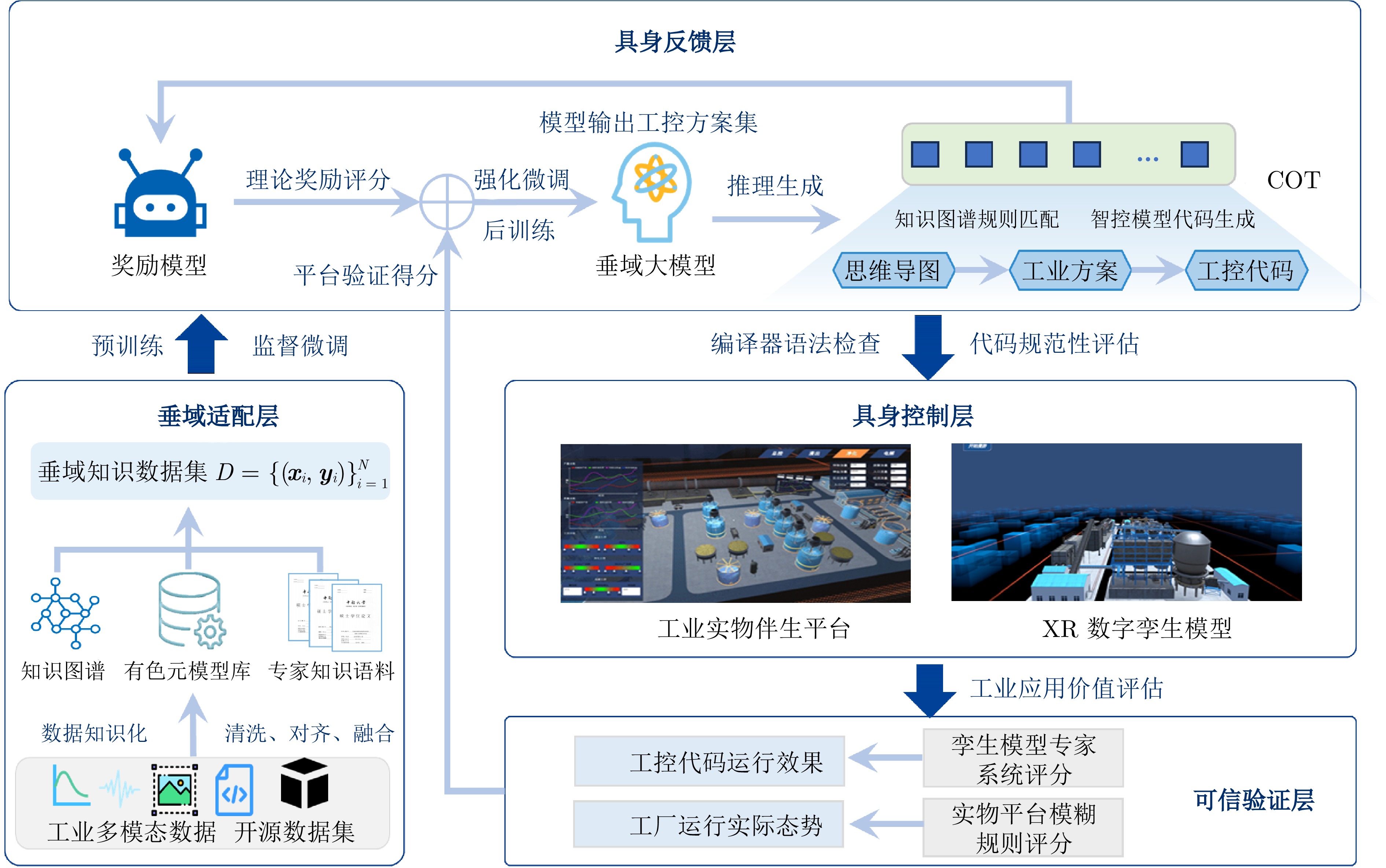
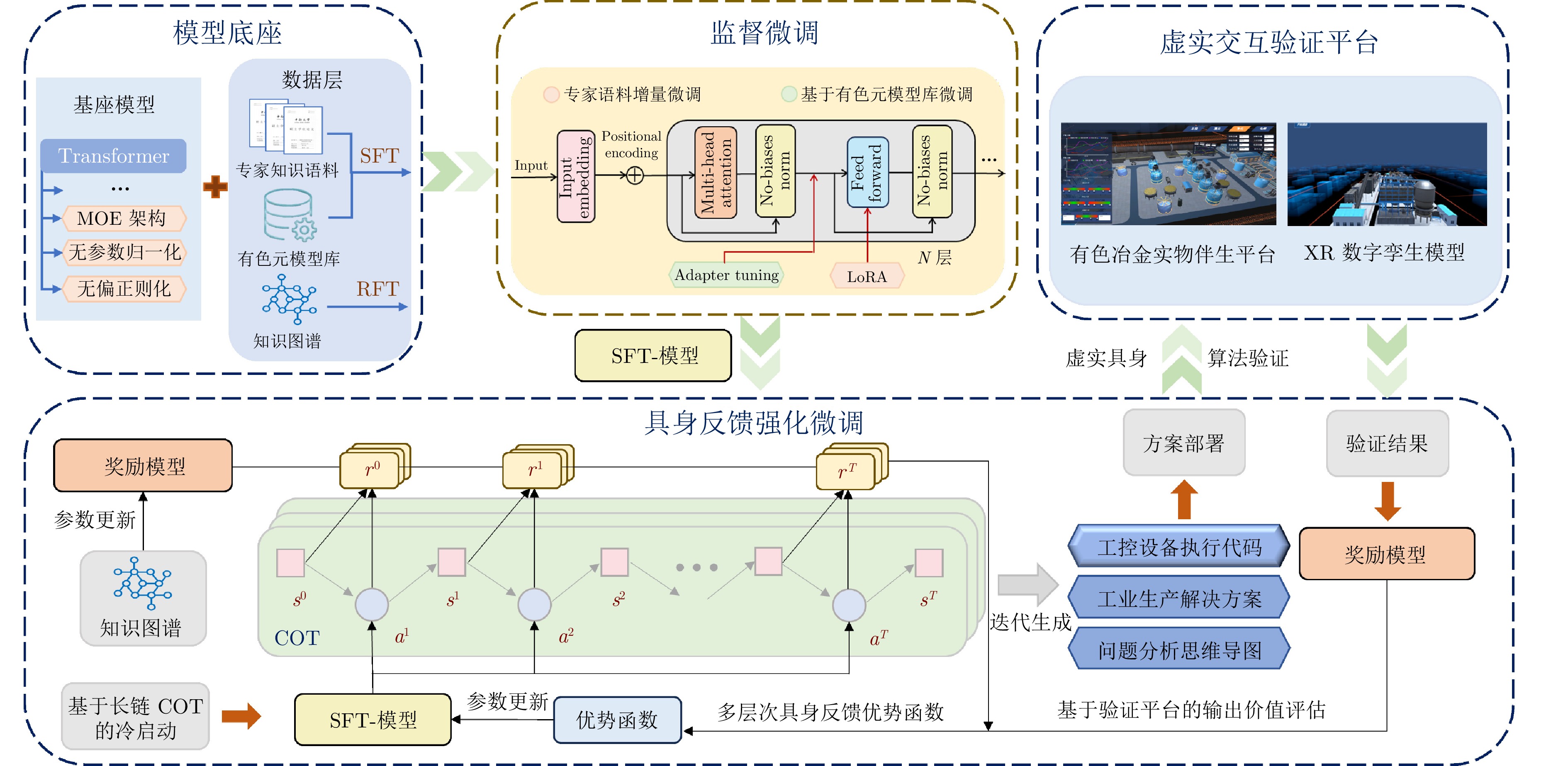
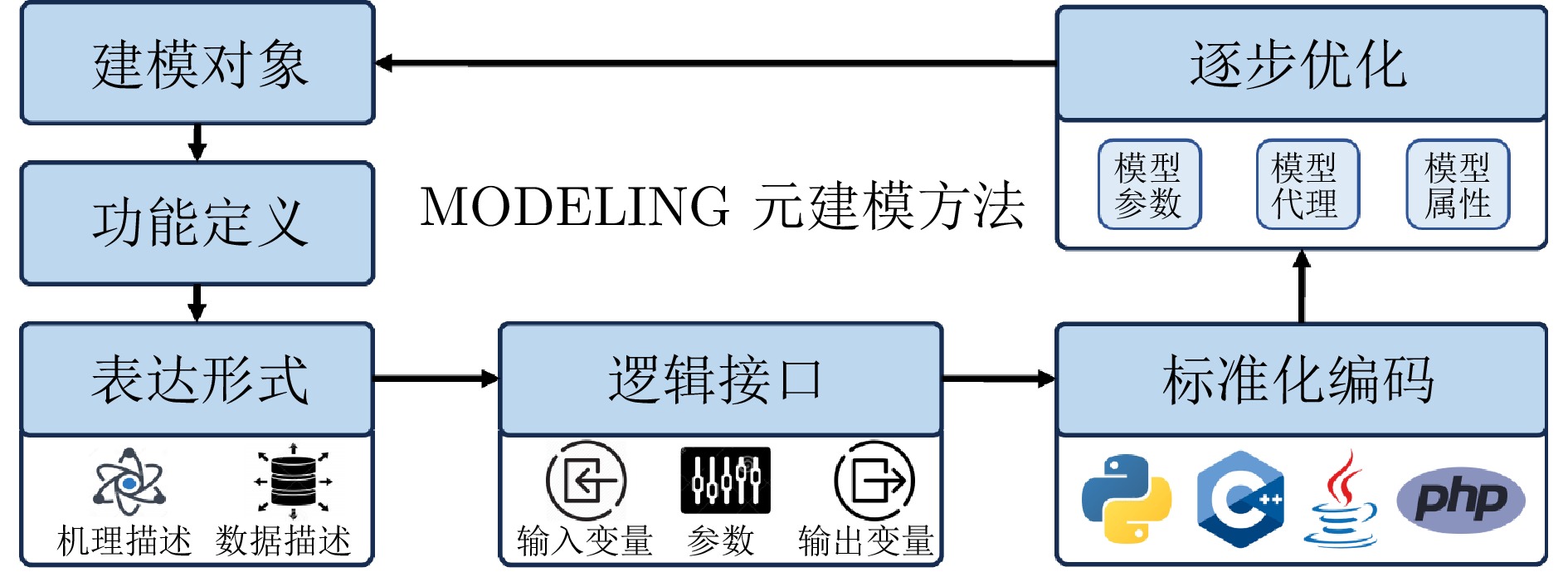
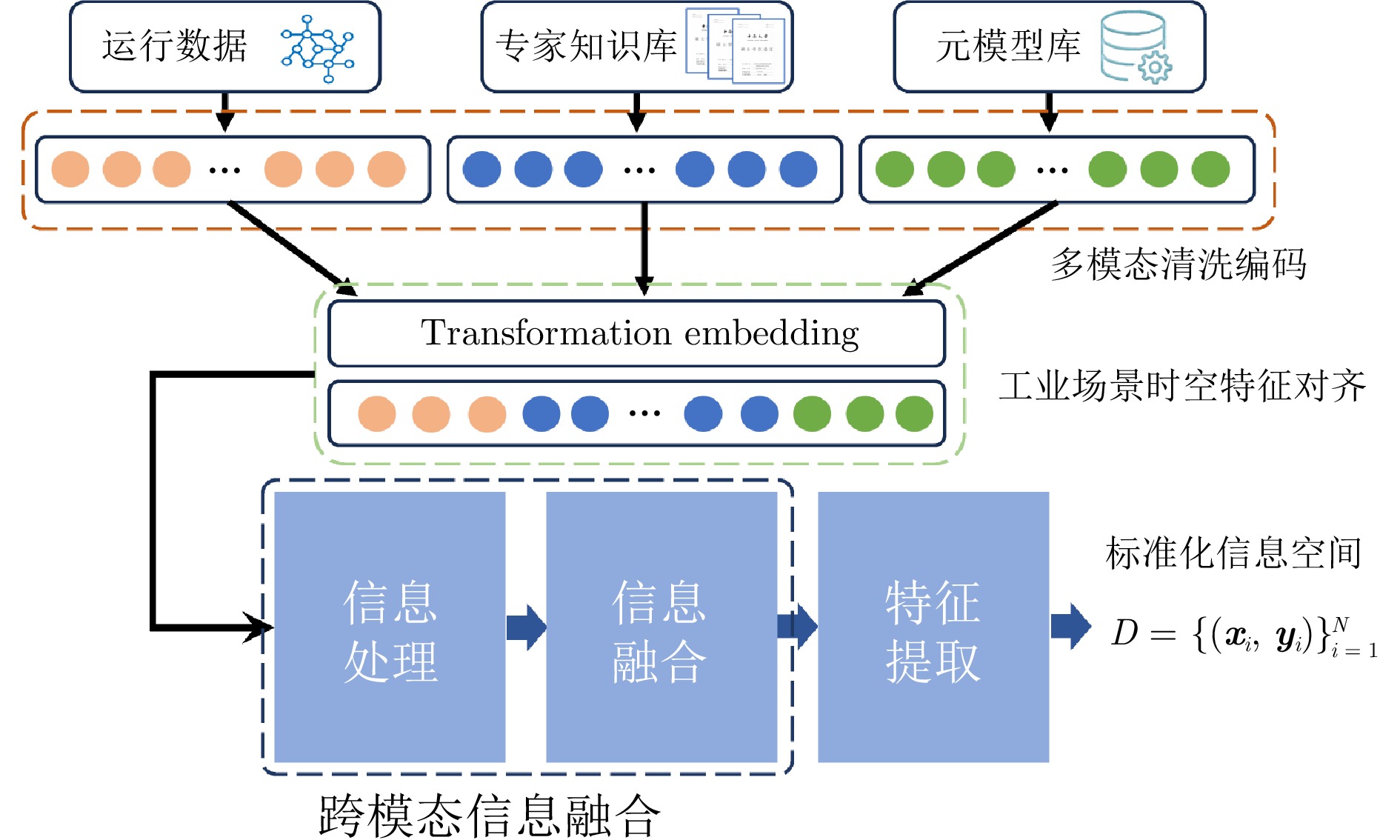
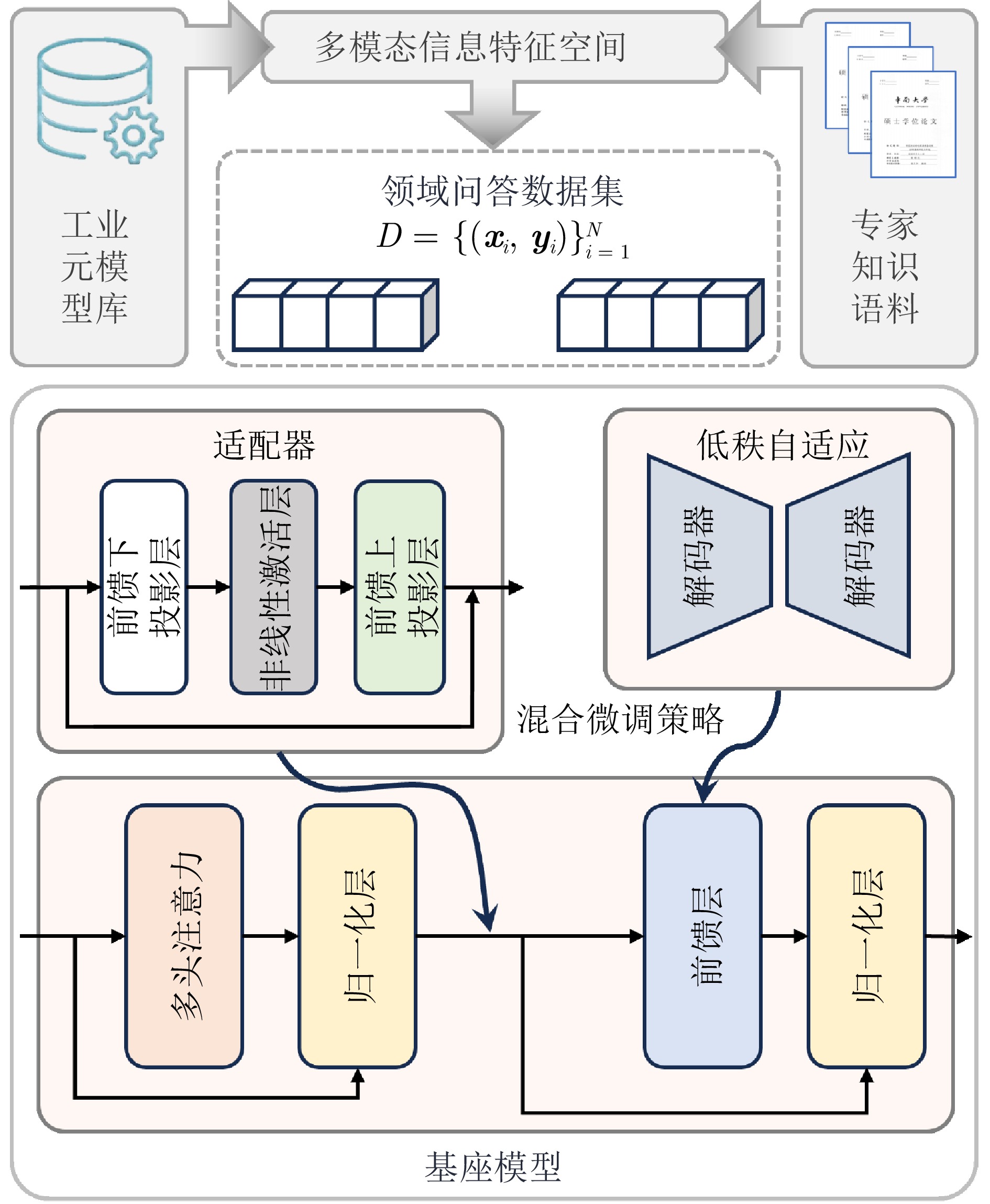
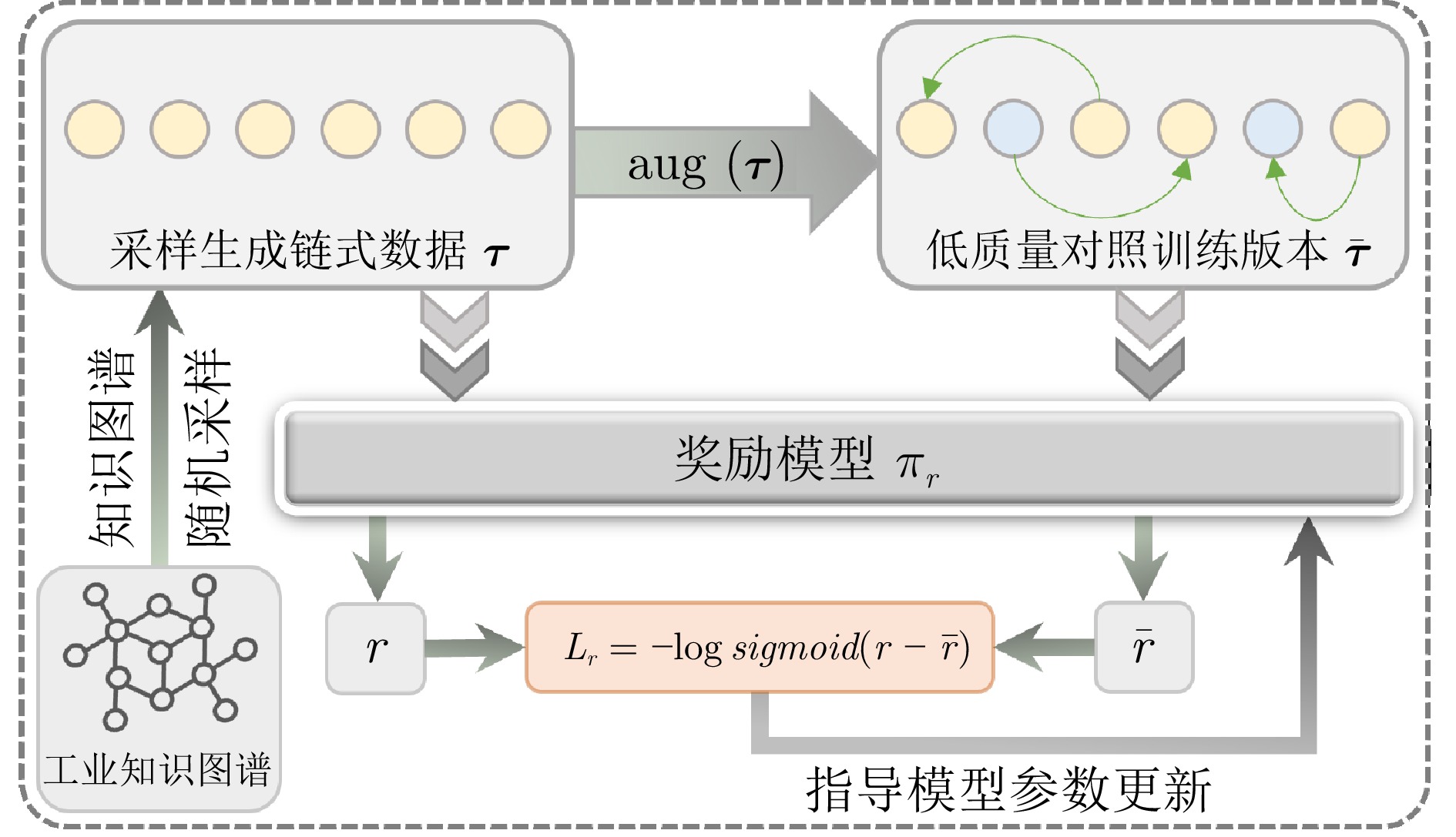
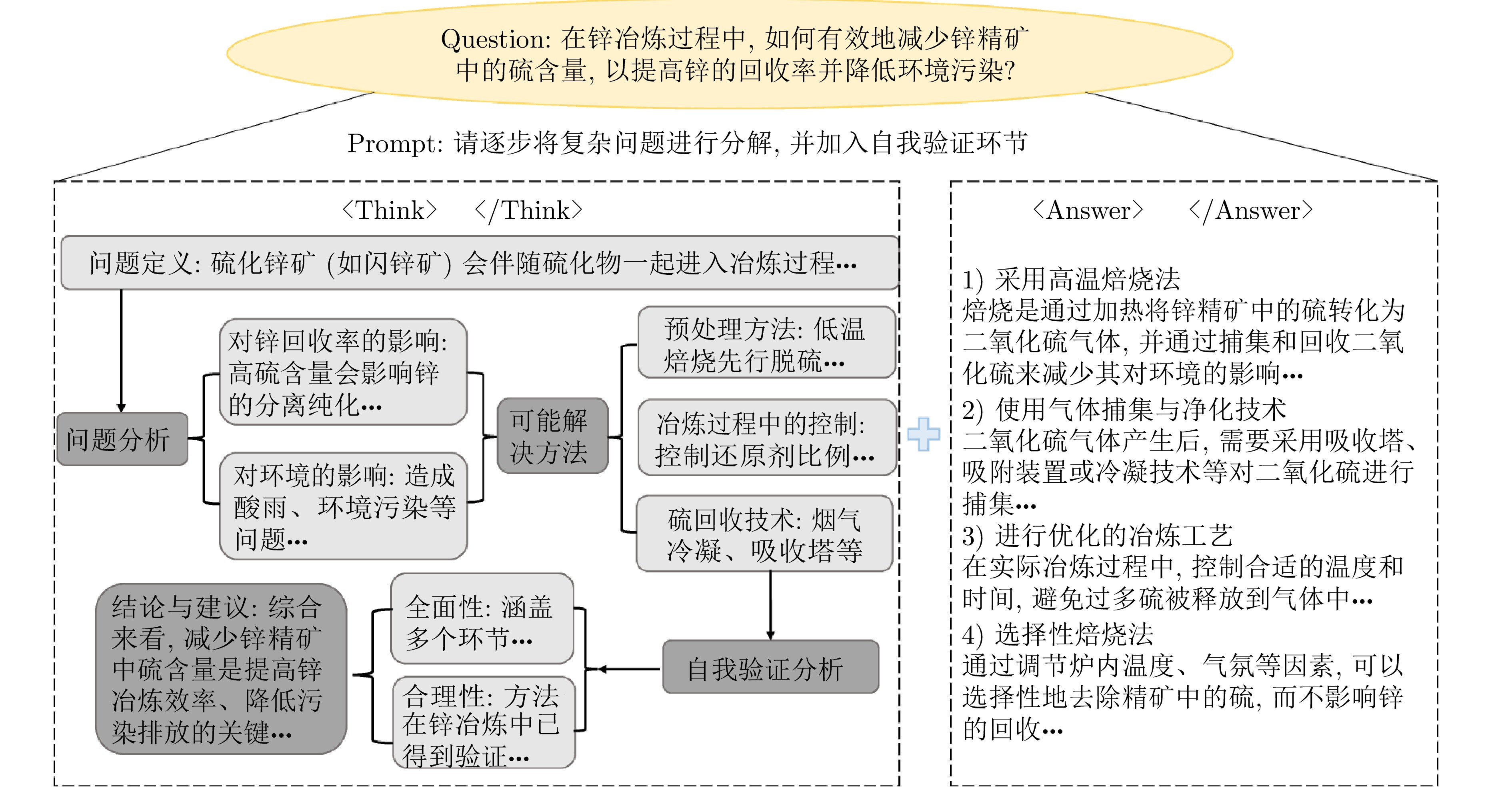
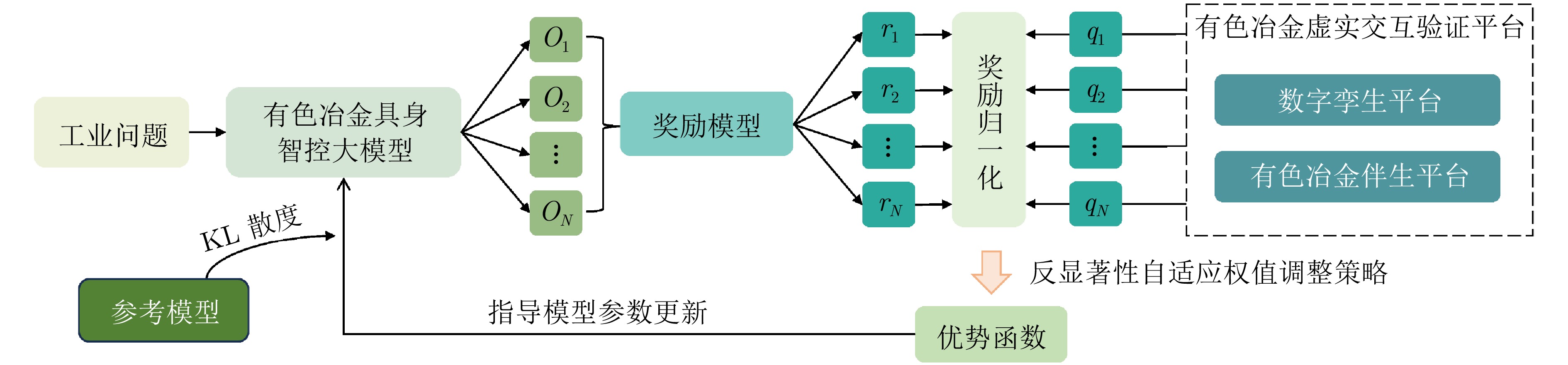
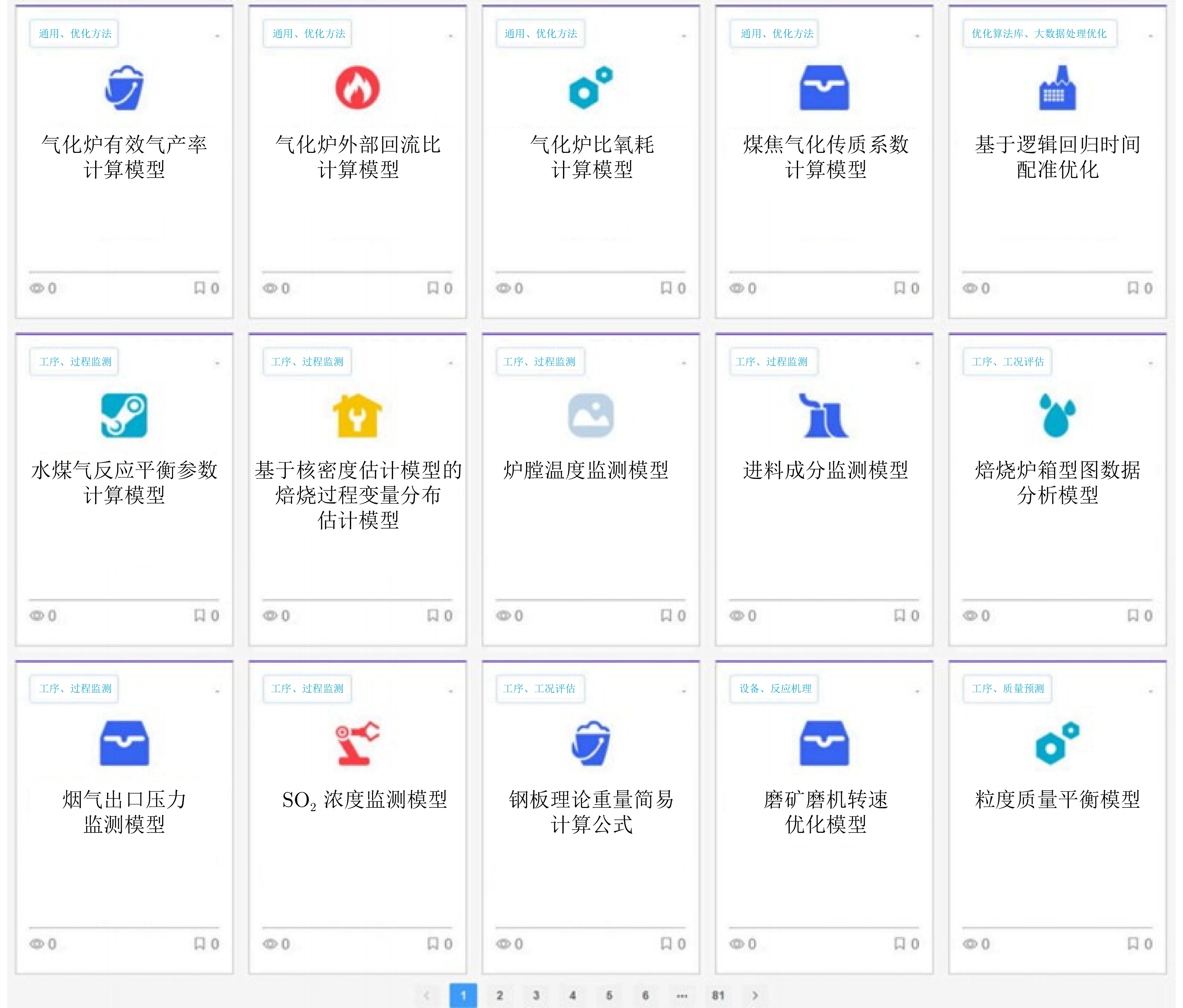
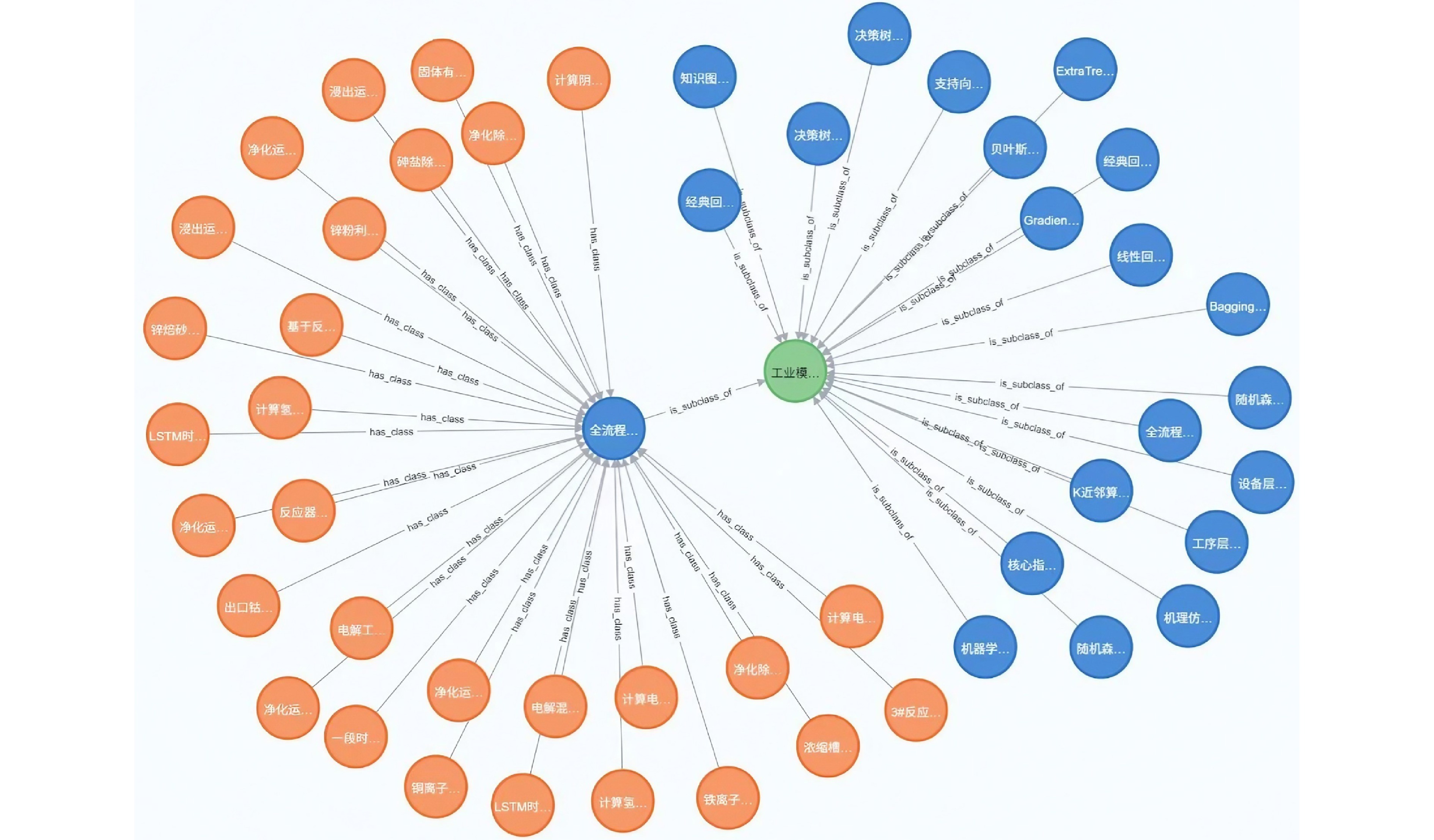
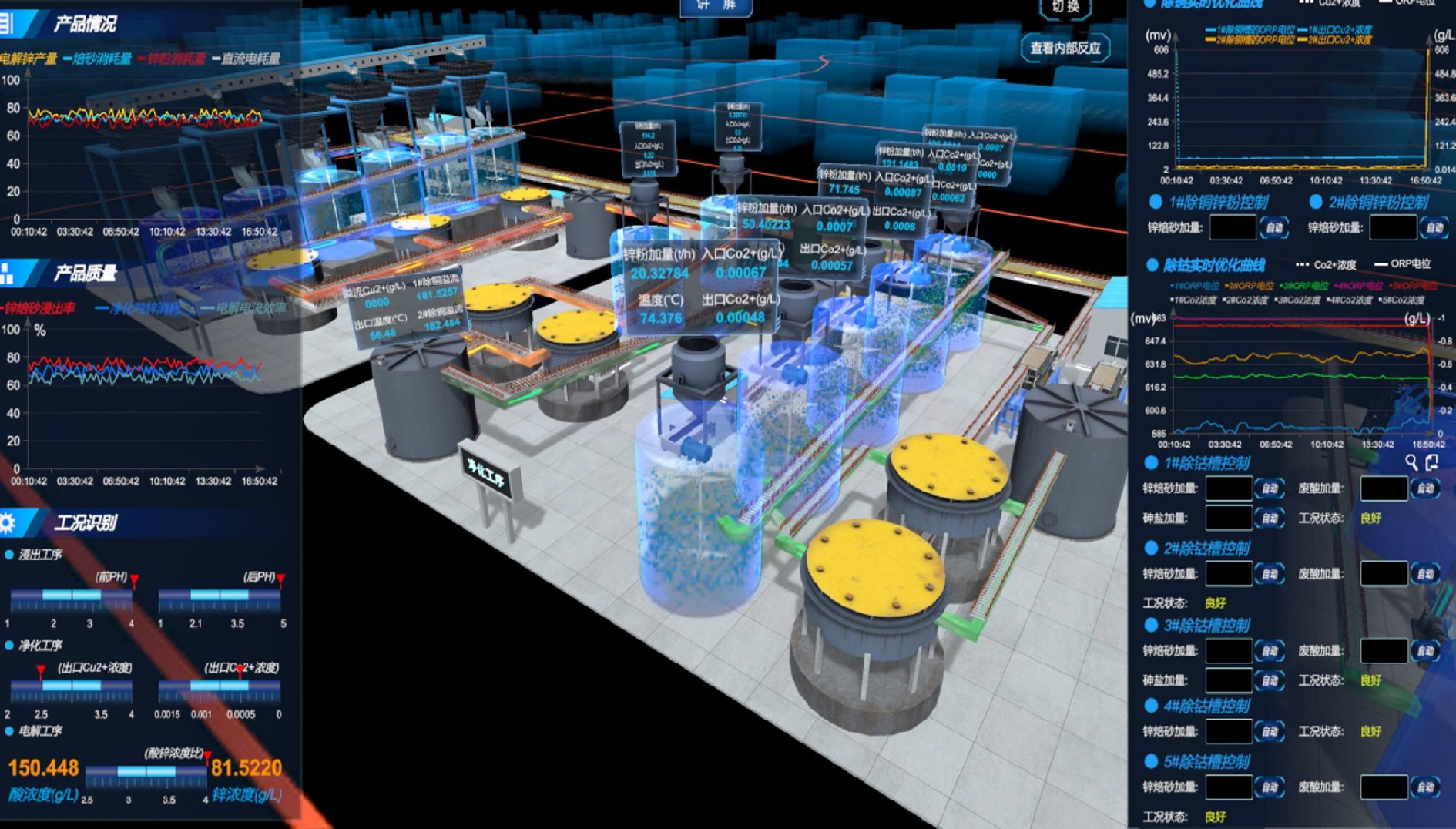
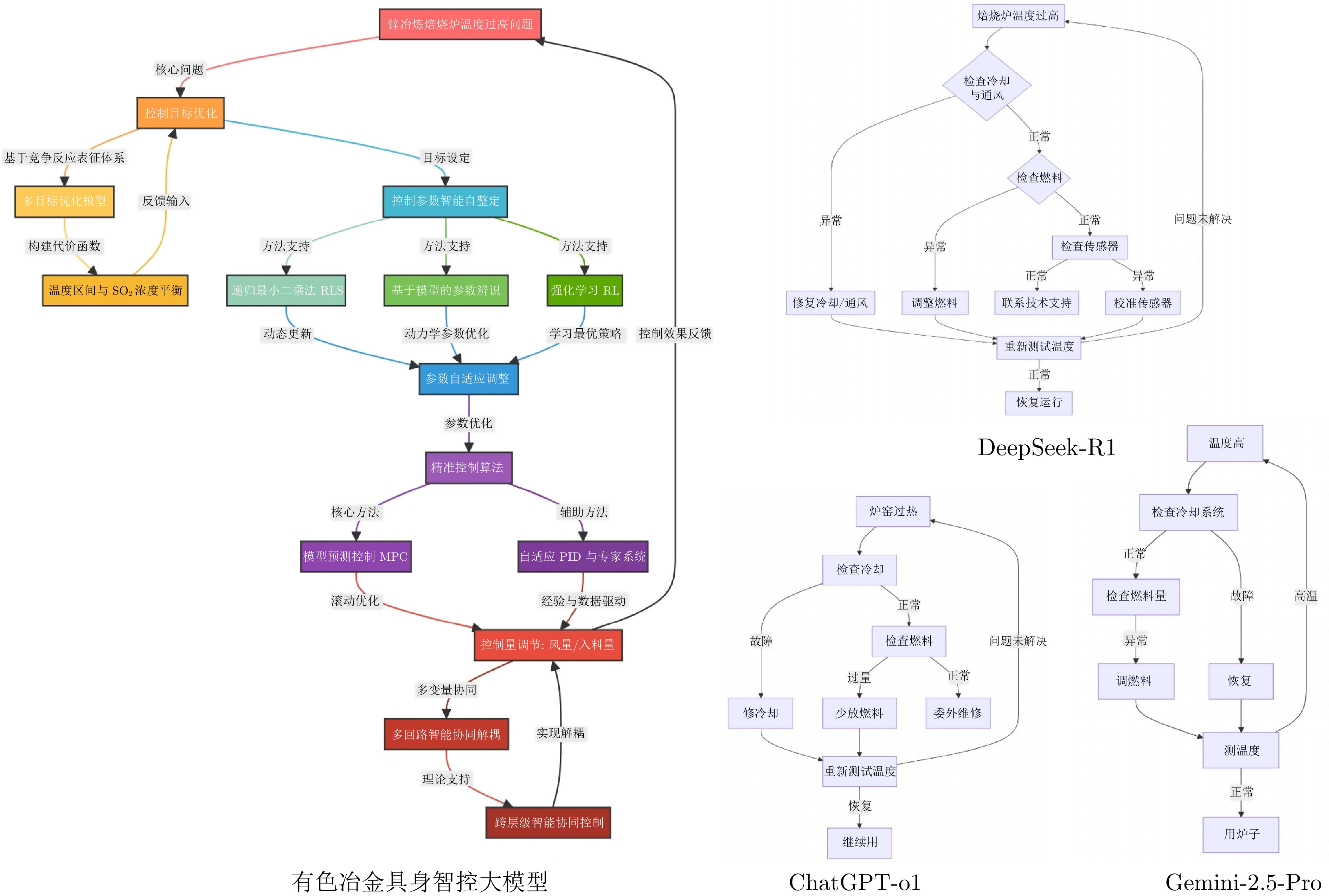
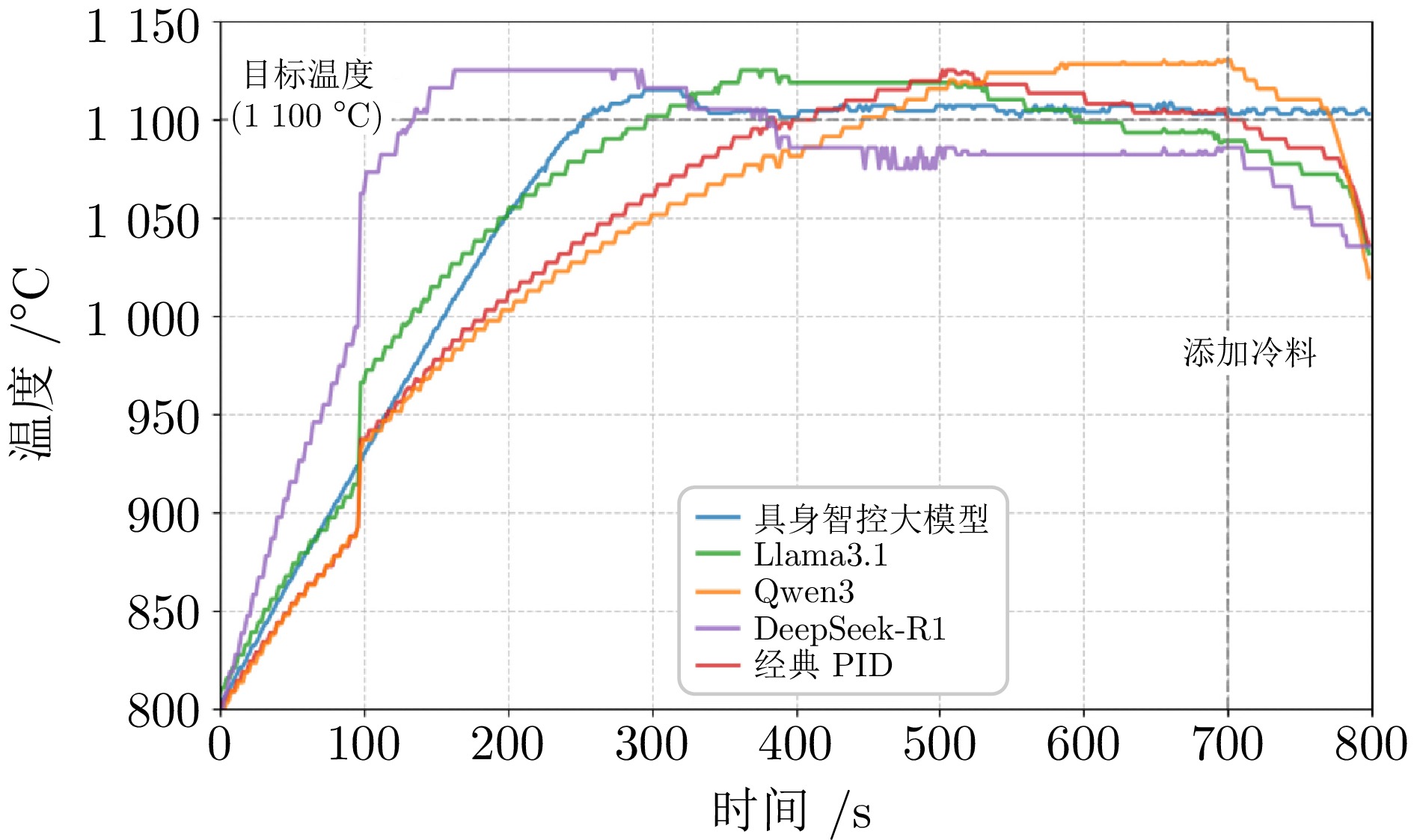
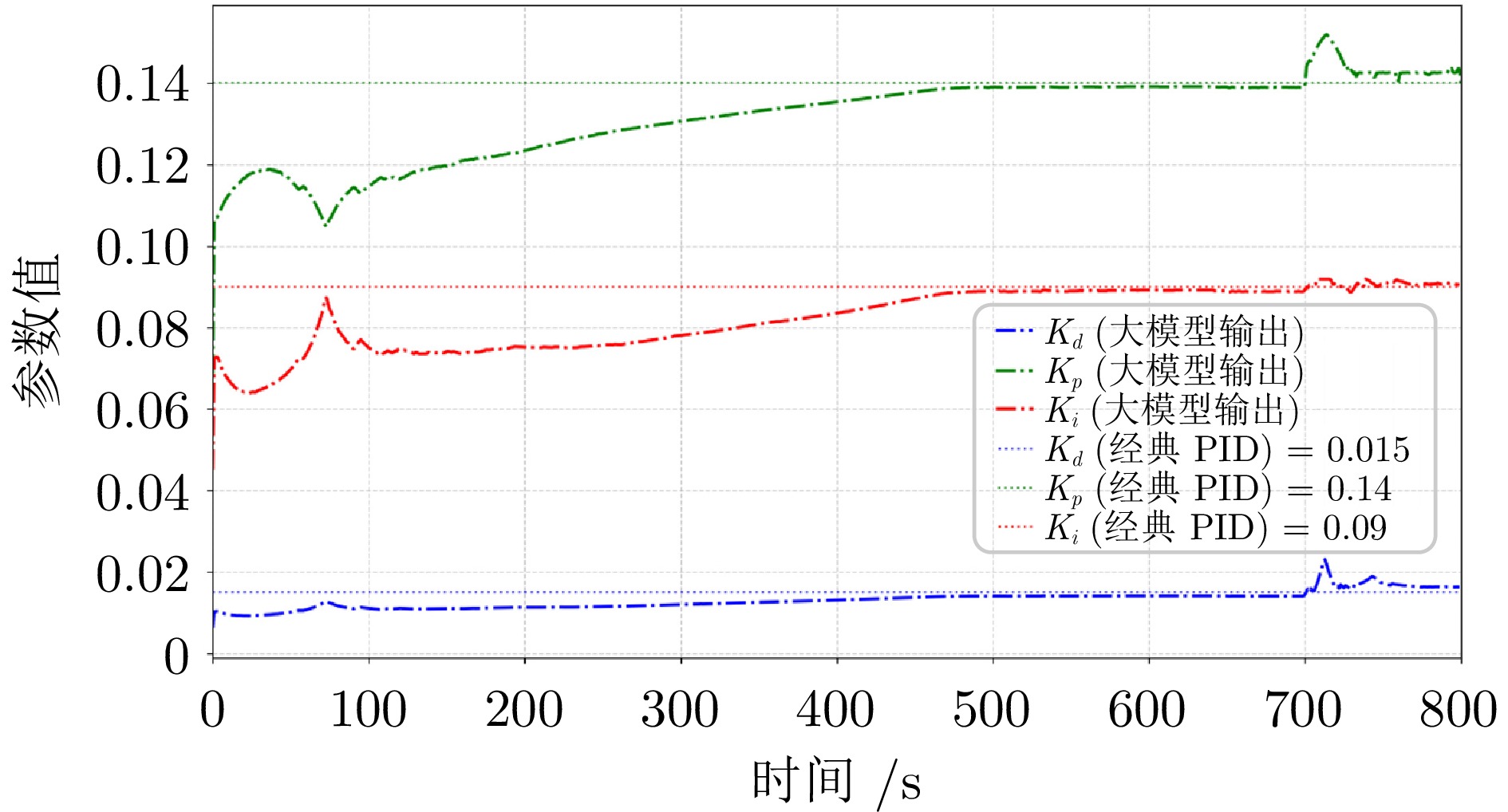
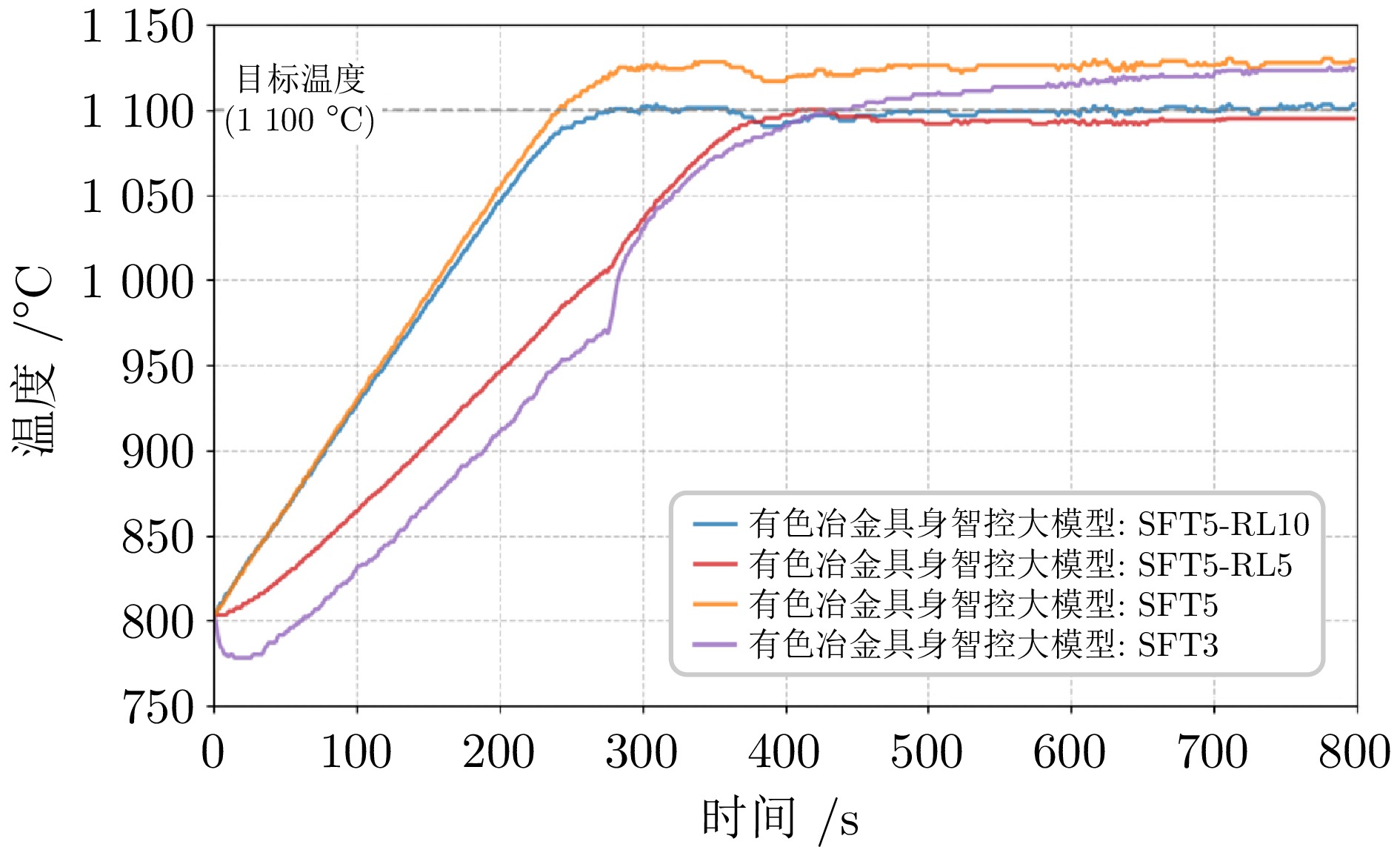
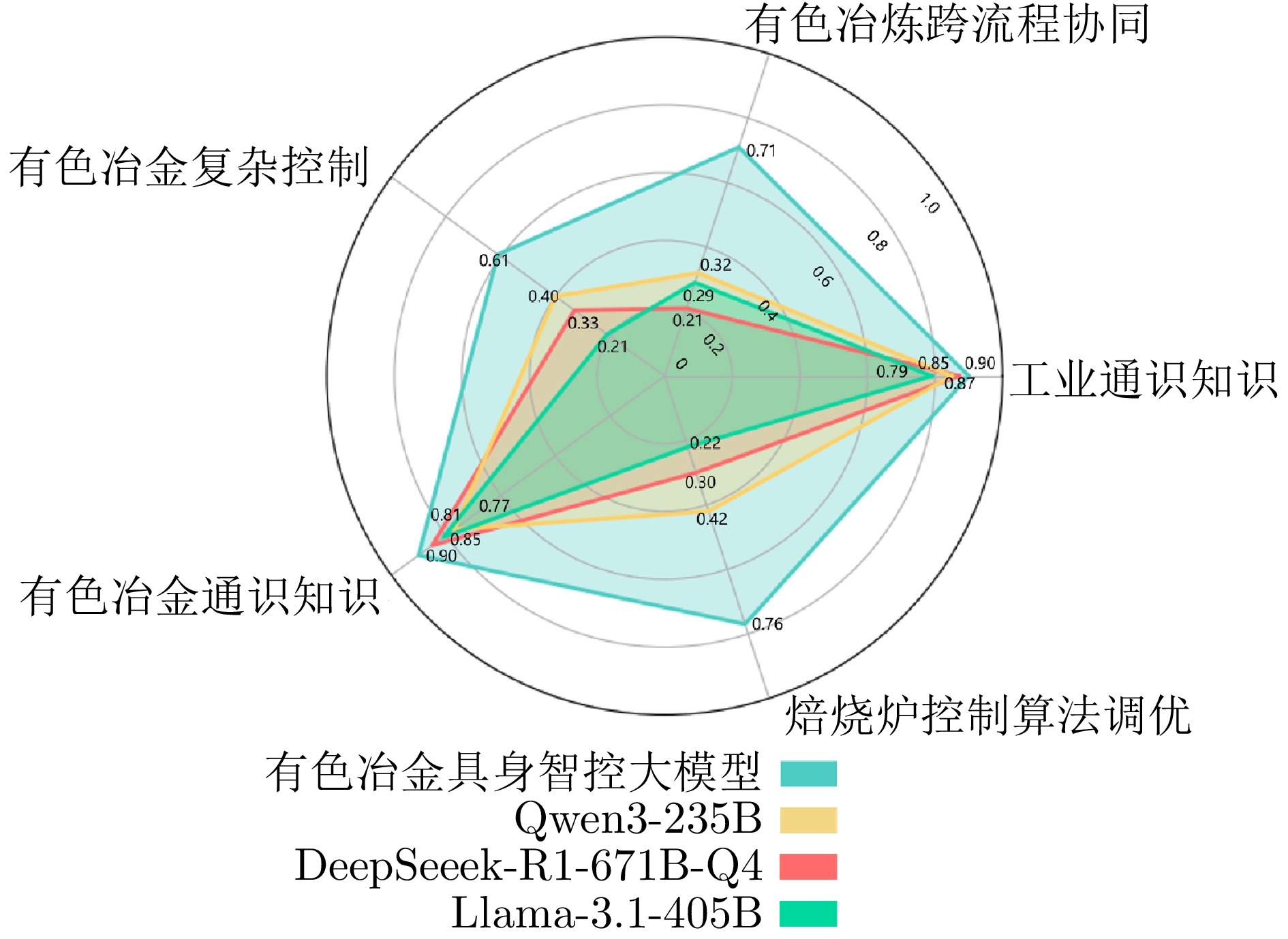
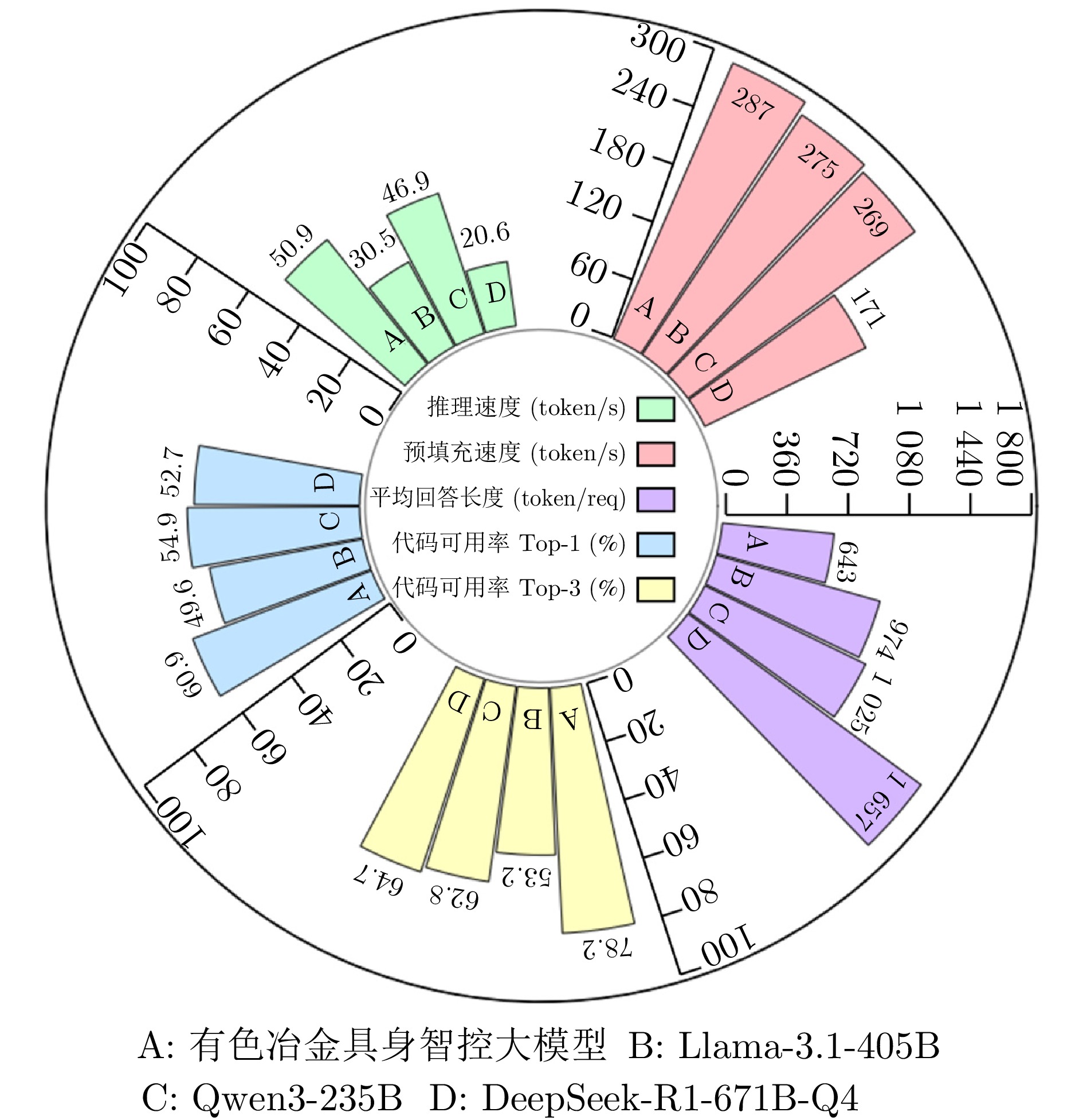
大模型工业垂域化是通用智能迈向专业化应用的必然趋势, 更是驱动工业智能化转型的核心引擎. 然而, 大模型在工业领域应用中, 面临难以洞察工业时序数据内涵、难以嵌入工业物理化学规律、难以确保模型输出可信度以及难以解决复杂工业问题等挑战. 针对上述瓶颈, 提出工业垂域具身智控大模型构建范式: 创新性引入时序数据元模型化方法, 将工业时序数据转换为代码语义, 提升大模型对时序数据的理解与推理能力; 借助元模型构建工业规律知识图谱, 并将其嵌入大模型生成过程, 以确定性科学原理抑制生成随机性; 构建数字孪生与实物伴生的双轨验证平台, 通过虚实具身反馈机制、实时强化学习, 优化模型输出的可信度; 设计融合知识图谱规则评分与虚实验证专家评分的混合奖励函数, 结合自适应学习与长度正则化策略, 克服大模型解决复杂工业问题时“趋易畏难”倾向. 最终形成一个集垂域适配、具身控制、可信验证和具身反馈于一体的四层闭环架构. 应用于有色冶金领域, 构建首个有色冶金具身智控大模型, 实验验证了该范式的有效性, 为大模型从实验室走向工业现场, 架起从技术到落地的桥梁.
大模型工业垂域化是通用智能迈向专业化应用的必然趋势, 更是驱动工业智能化转型的核心引擎. 然而, 大模型在工业领域应用中, 面临难以洞察工业时序数据内涵、难以嵌入工业物理化学规律、难以确保模型输出可信度以及难以解决复杂工业问题等挑战. 针对上述瓶颈, 提出工业垂域具身智控大模型构建范式: 创新性引入时序数据元模型化方法, 将工业时序数据转换为代码语义, 提升大模型对时序数据的理解与推理能力; 借助元模型构建工业规律知识图谱, 并将其嵌入大模型生成过程, 以确定性科学原理抑制生成随机性; 构建数字孪生与实物伴生的双轨验证平台, 通过虚实具身反馈机制、实时强化学习, 优化模型输出的可信度; 设计融合知识图谱规则评分与虚实验证专家评分的混合奖励函数, 结合自适应学习与长度正则化策略, 克服大模型解决复杂工业问题时“趋易畏难”倾向. 最终形成一个集垂域适配、具身控制、可信验证和具身反馈于一体的四层闭环架构. 应用于有色冶金领域, 构建首个有色冶金具身智控大模型, 实验验证了该范式的有效性, 为大模型从实验室走向工业现场, 架起从技术到落地的桥梁.


2025, 51(11): 2473-2485.
doi: 10.16383/j.aas.c250193
cstr: 32138.14.j.aas.c250193
摘要:
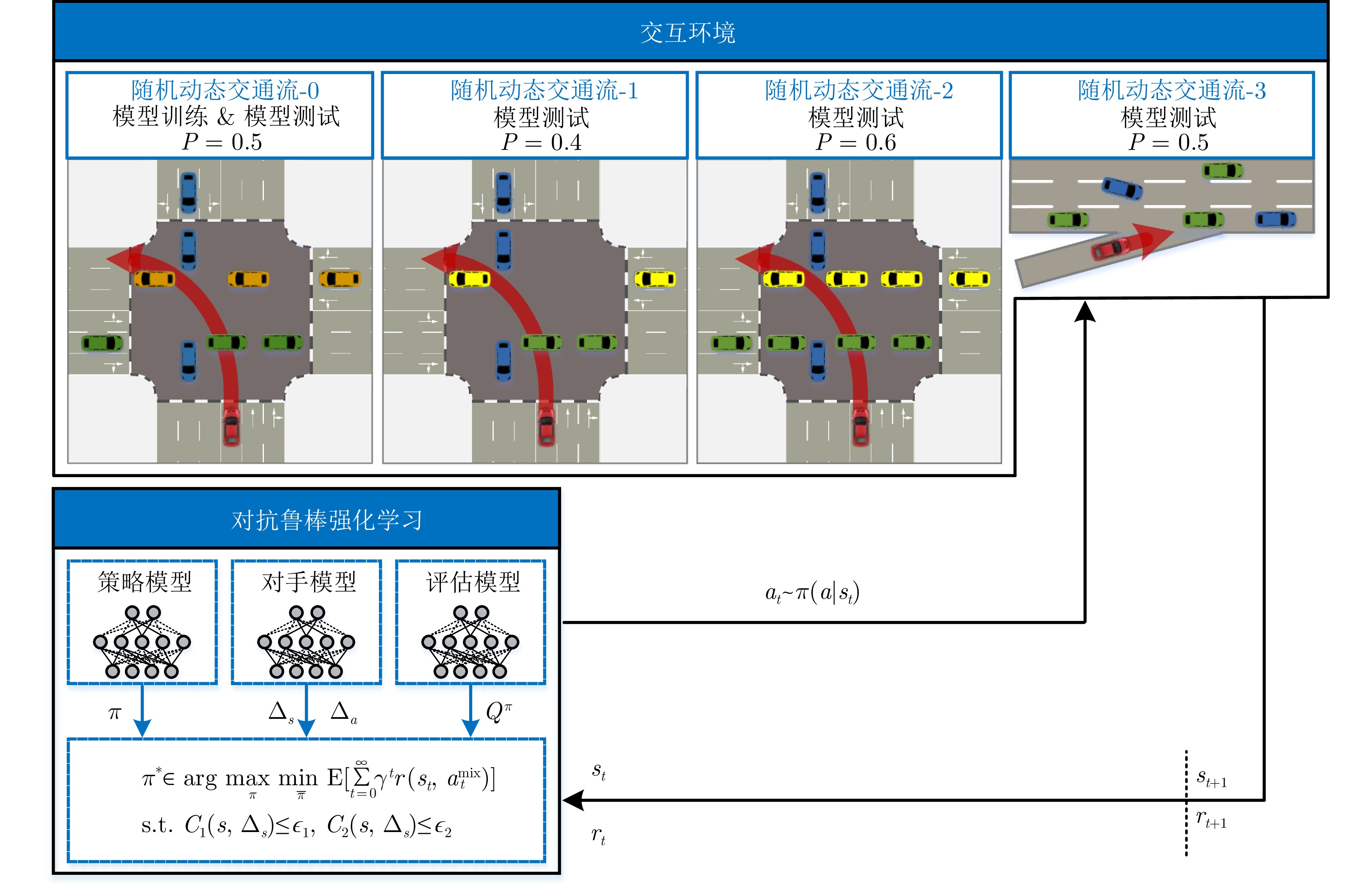
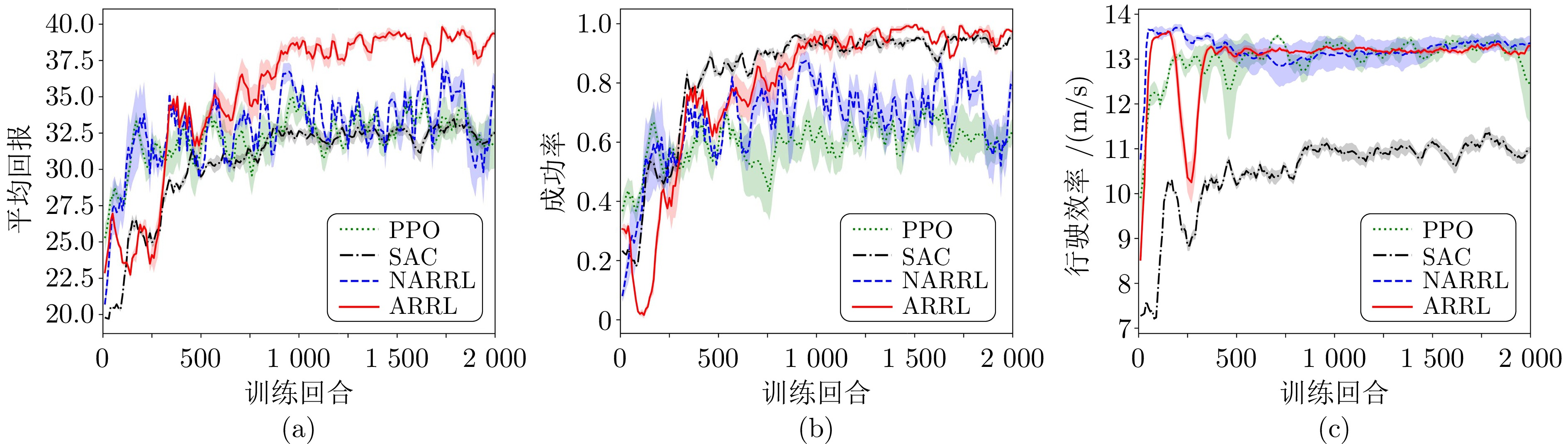
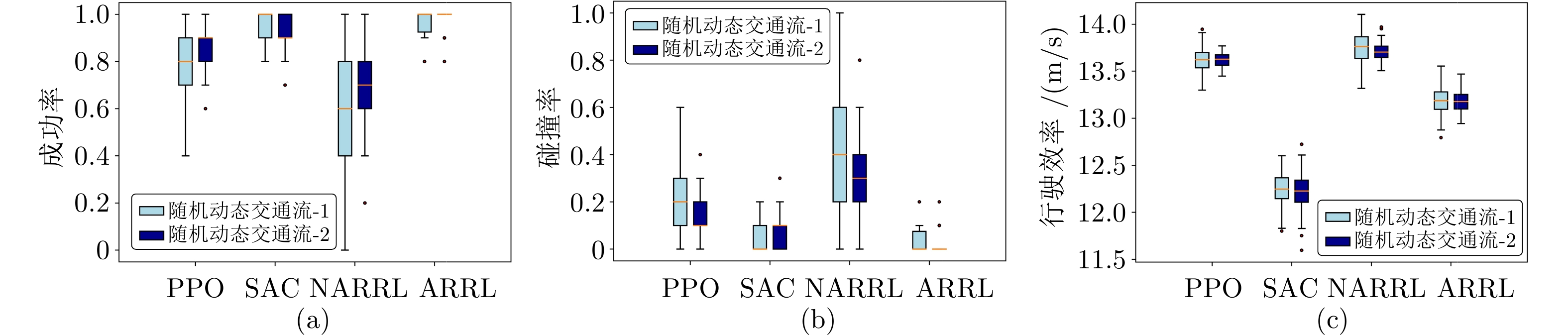
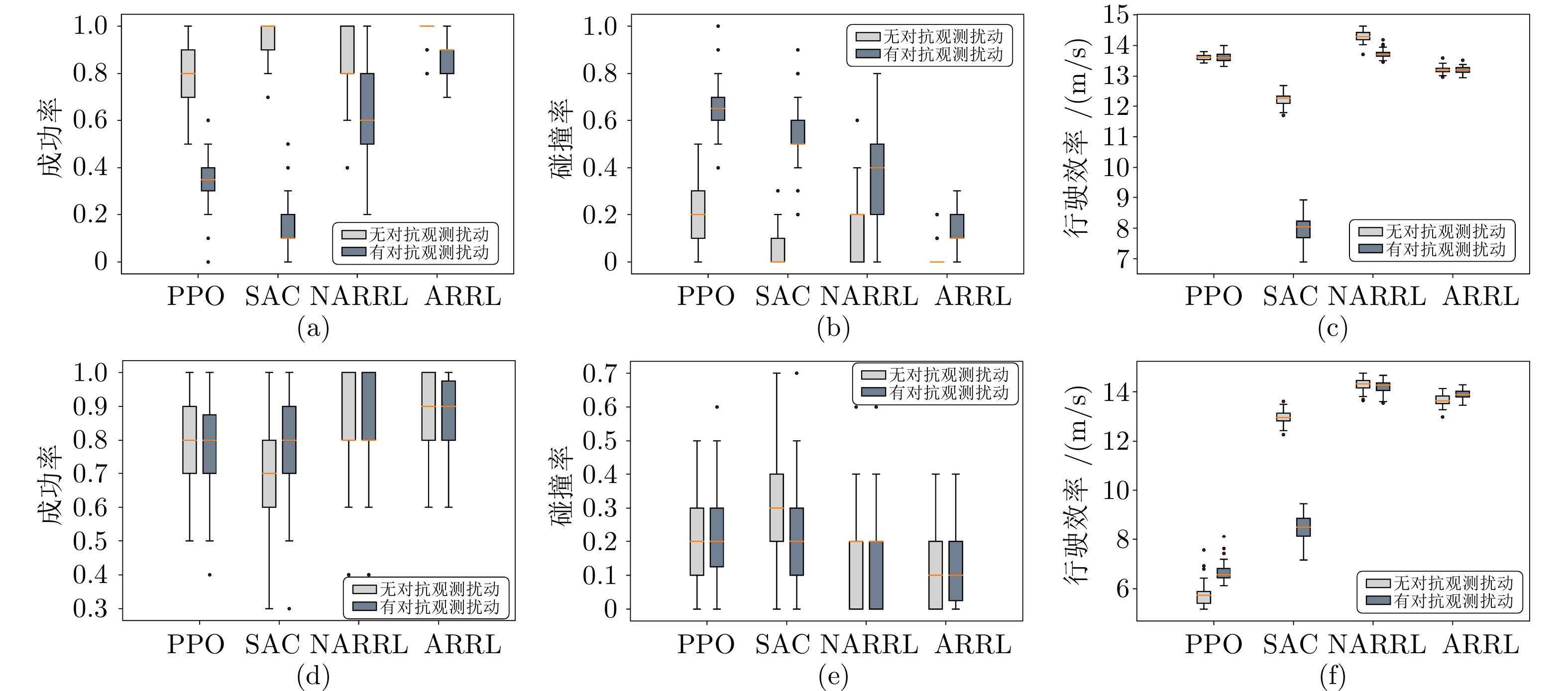
虽然强化学习近年来取得显著成功, 但策略鲁棒性仍然是其在安全攸关的自动驾驶领域部署的关键瓶颈之一. 一个根本性挑战在于, 许多现实世界中的自动驾驶任务面临难以预测的环境变化和不可避免的感知噪声, 这些不确定性因素可能导致系统执行次优的决策与控制, 甚至引发灾难性后果. 针对上述多源不确定性问题, 提出一种对抗鲁棒强化学习方法, 实现可信端到端控制策略优化. 首先, 构建一个可在线学习的对手模型, 用于同时逼近最坏情况下环境动态扰动与状态观测扰动. 其次, 基于零和博弈建模自动驾驶智能体与环境动态扰动之间的对抗性. 再次, 针对所模拟的多源不确定性, 提出鲁棒约束演员–评论家算法, 在连续动作空间下实现策略累积奖励最大化的同时, 有效约束环境动态扰动与状态观测扰动对所学端到端控制策略的影响. 最后, 将所提出的方案在不同的场景、交通流及扰动条件下进行评估, 并与三种代表性的方法进行对比分析, 验证了该方法在复杂工况和对抗环境中的有效性与鲁棒性.
虽然强化学习近年来取得显著成功, 但策略鲁棒性仍然是其在安全攸关的自动驾驶领域部署的关键瓶颈之一. 一个根本性挑战在于, 许多现实世界中的自动驾驶任务面临难以预测的环境变化和不可避免的感知噪声, 这些不确定性因素可能导致系统执行次优的决策与控制, 甚至引发灾难性后果. 针对上述多源不确定性问题, 提出一种对抗鲁棒强化学习方法, 实现可信端到端控制策略优化. 首先, 构建一个可在线学习的对手模型, 用于同时逼近最坏情况下环境动态扰动与状态观测扰动. 其次, 基于零和博弈建模自动驾驶智能体与环境动态扰动之间的对抗性. 再次, 针对所模拟的多源不确定性, 提出鲁棒约束演员–评论家算法, 在连续动作空间下实现策略累积奖励最大化的同时, 有效约束环境动态扰动与状态观测扰动对所学端到端控制策略的影响. 最后, 将所提出的方案在不同的场景、交通流及扰动条件下进行评估, 并与三种代表性的方法进行对比分析, 验证了该方法在复杂工况和对抗环境中的有效性与鲁棒性.


2025, 51(11): 2486-2497.
doi: 10.16383/j.aas.c250279
cstr: 32138.14.j.aas.c250279
摘要:
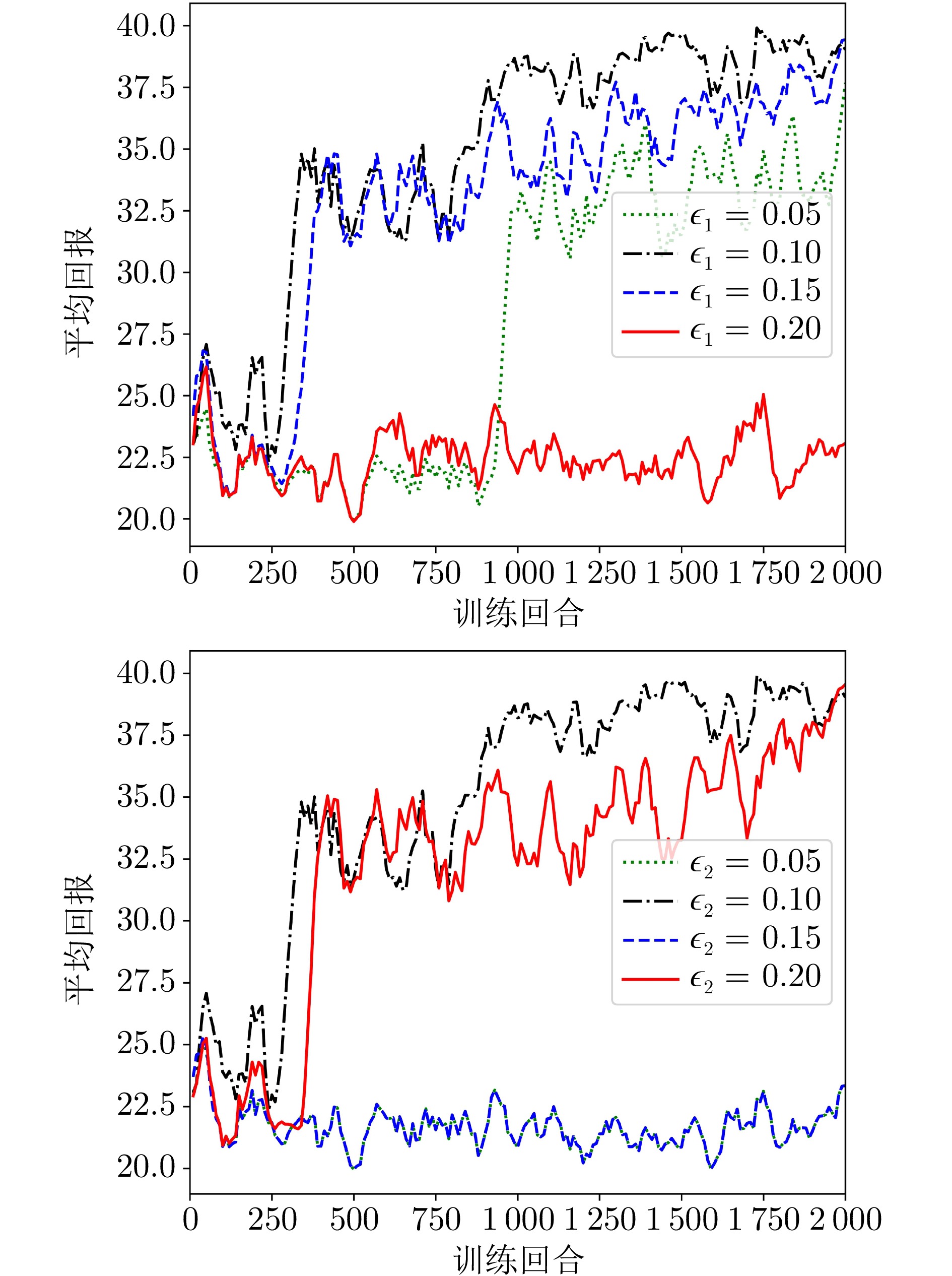
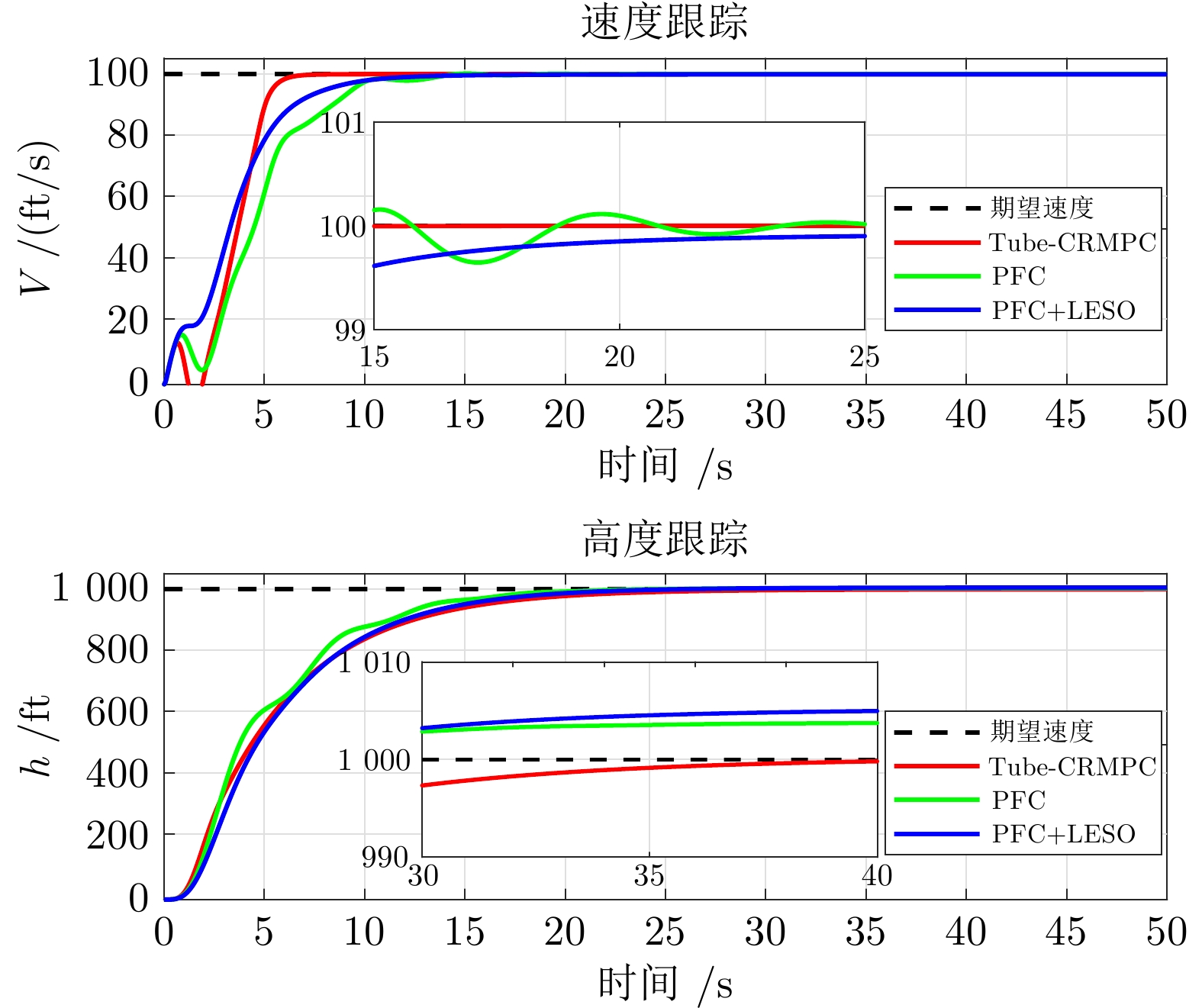
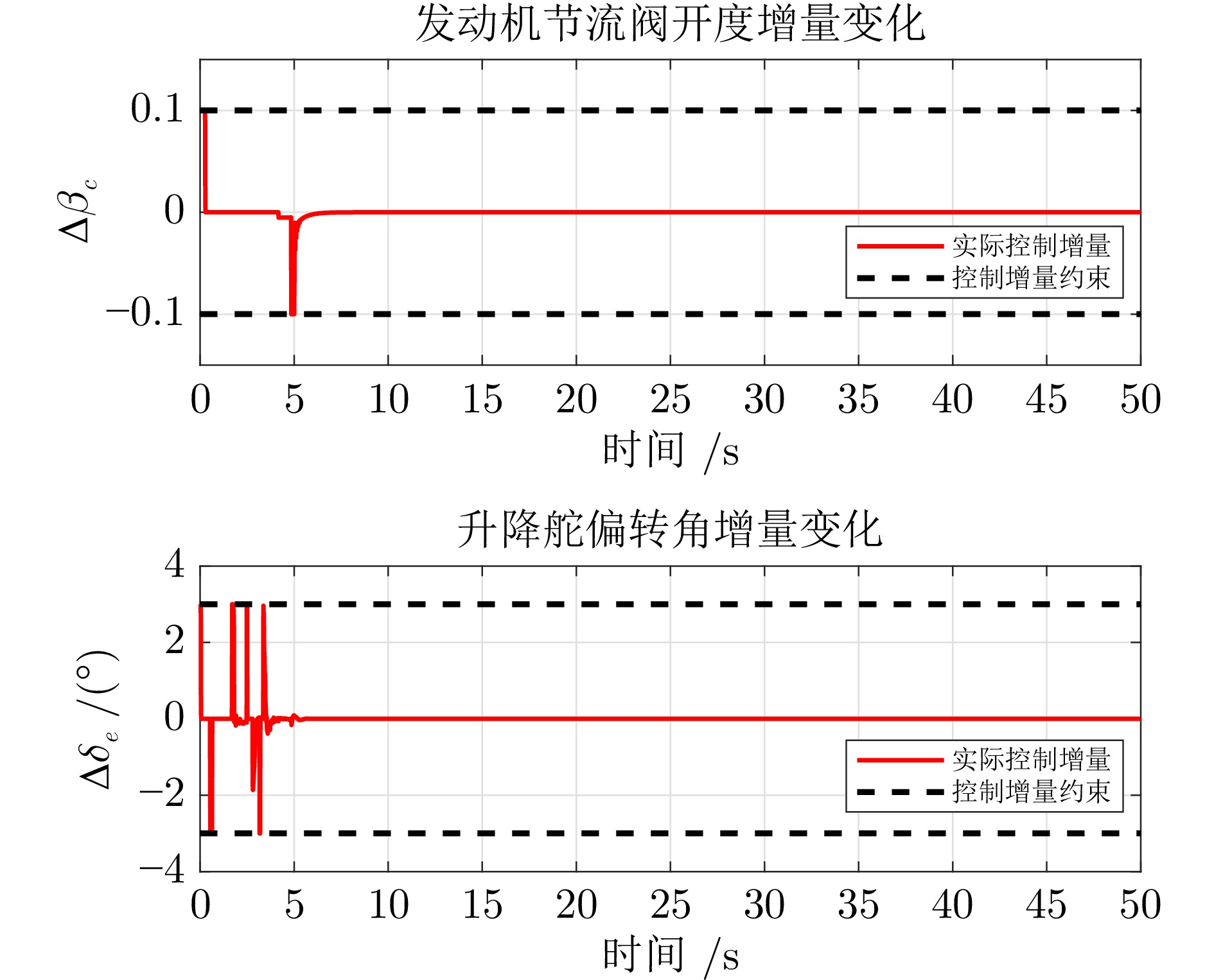
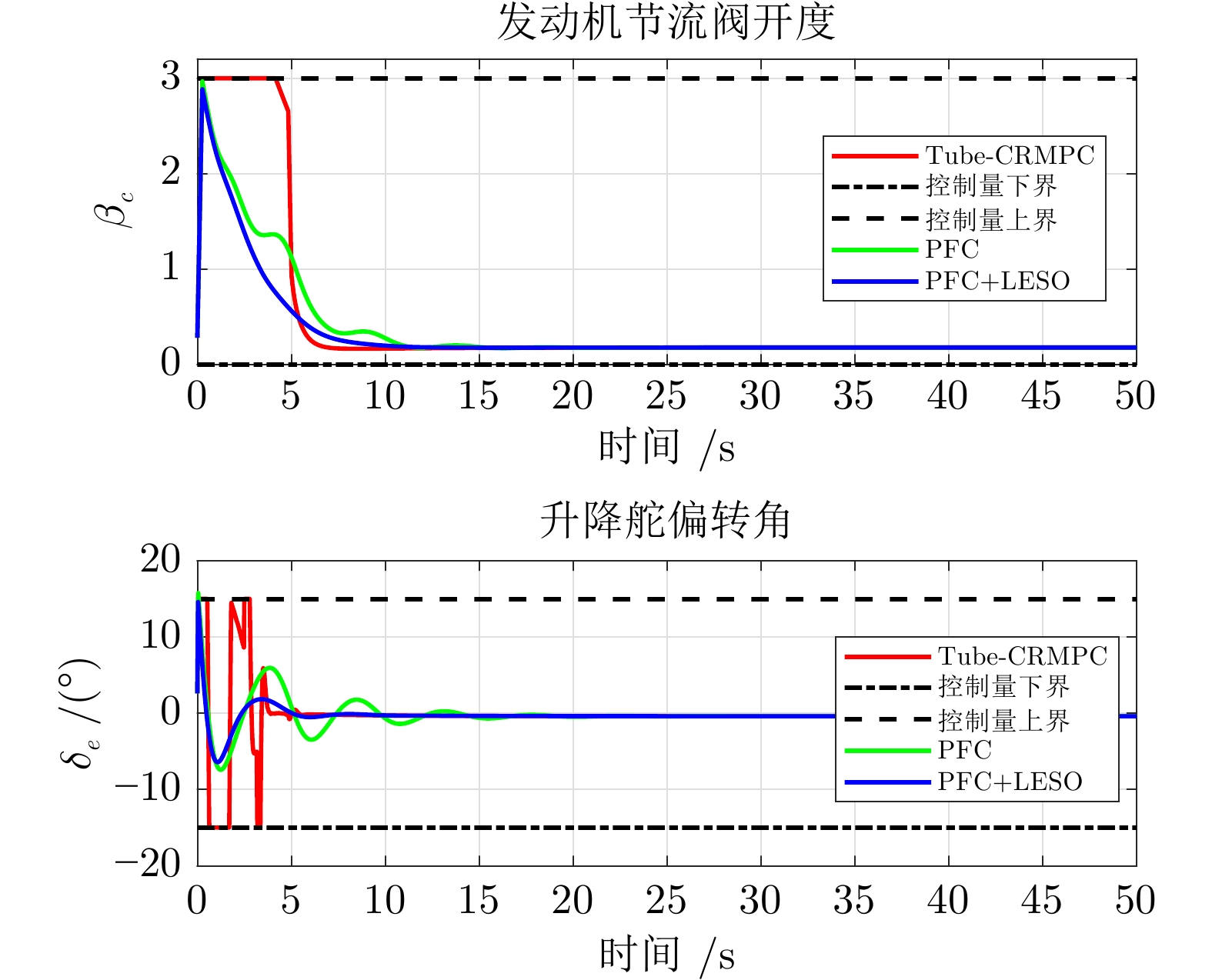
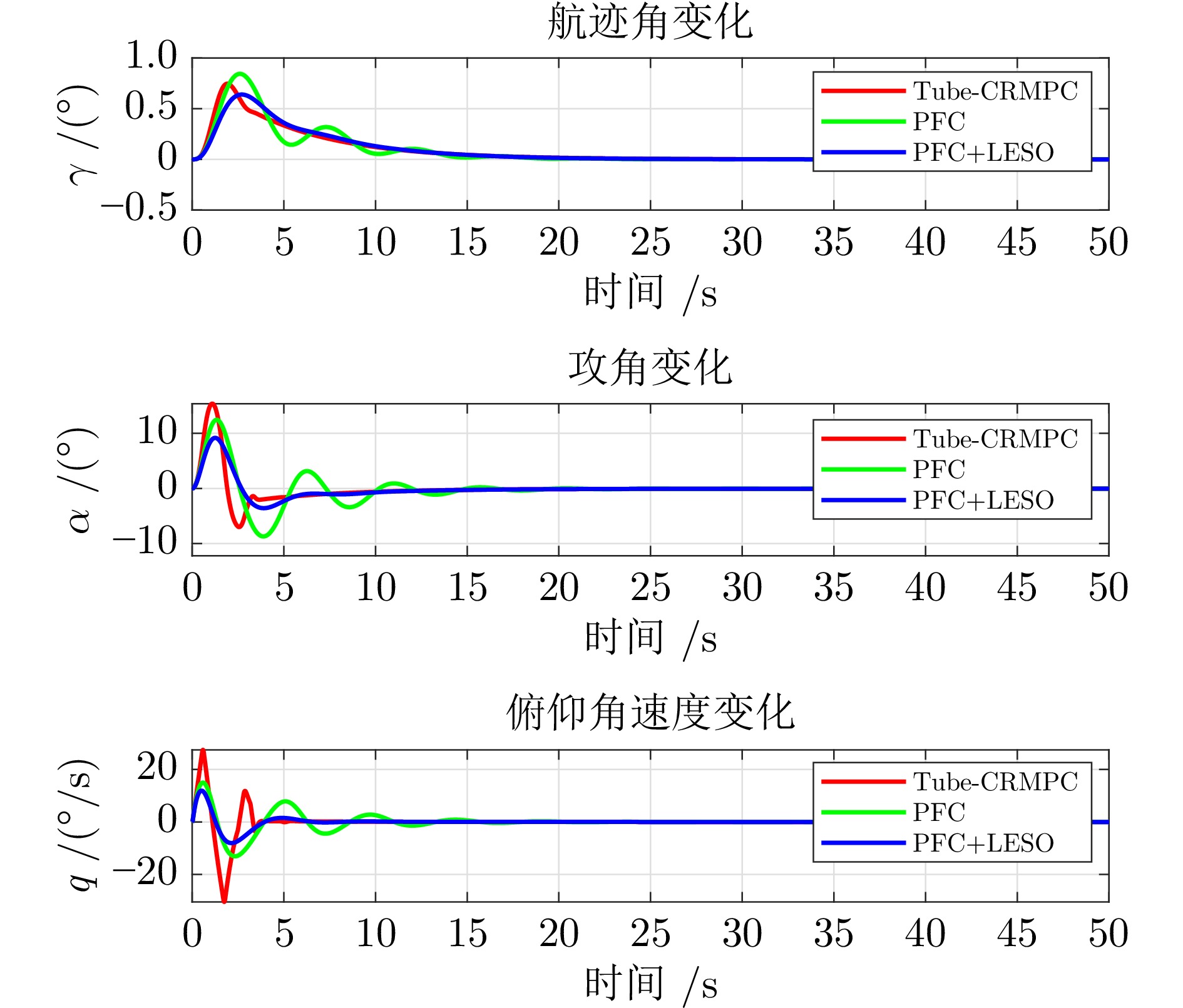
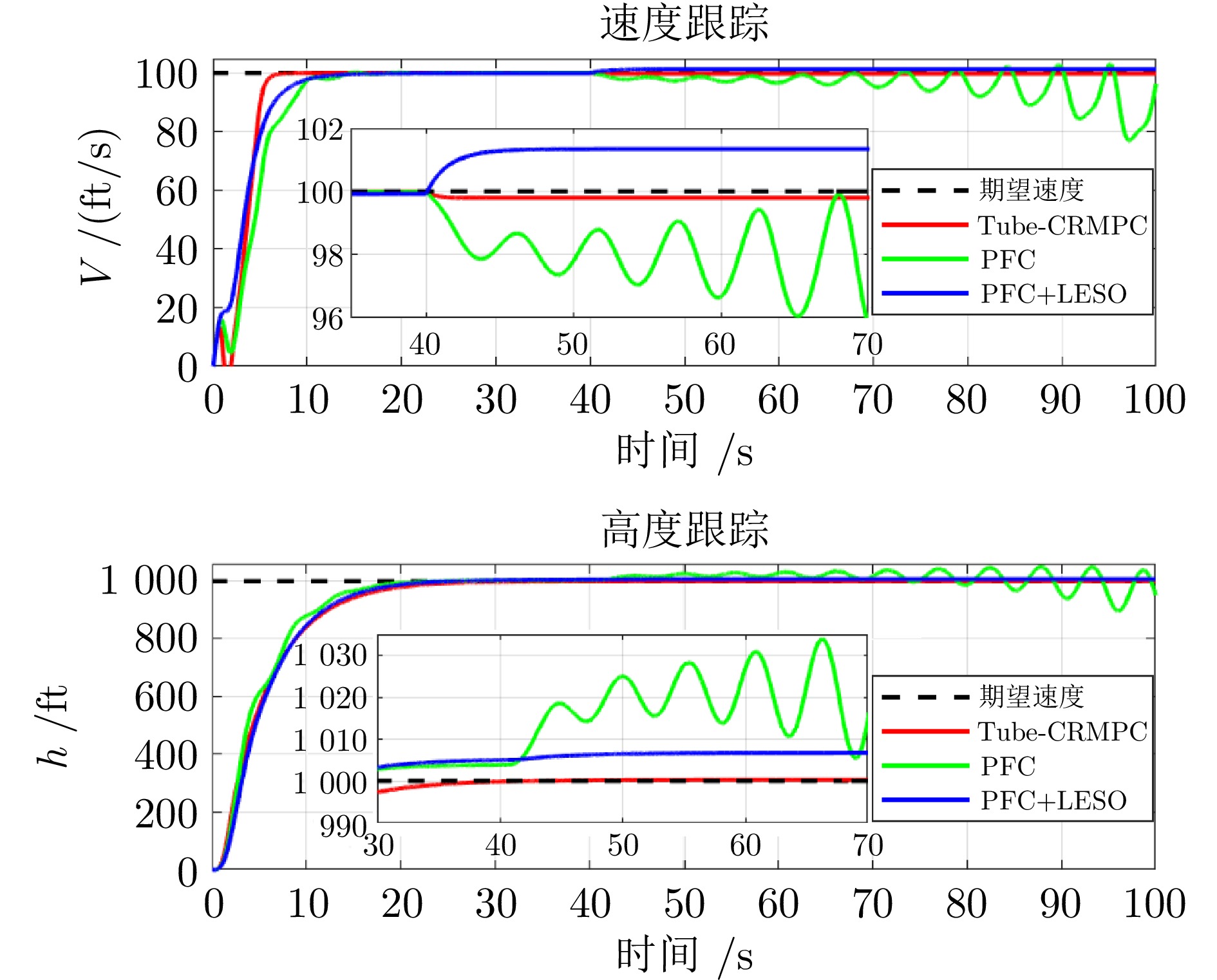
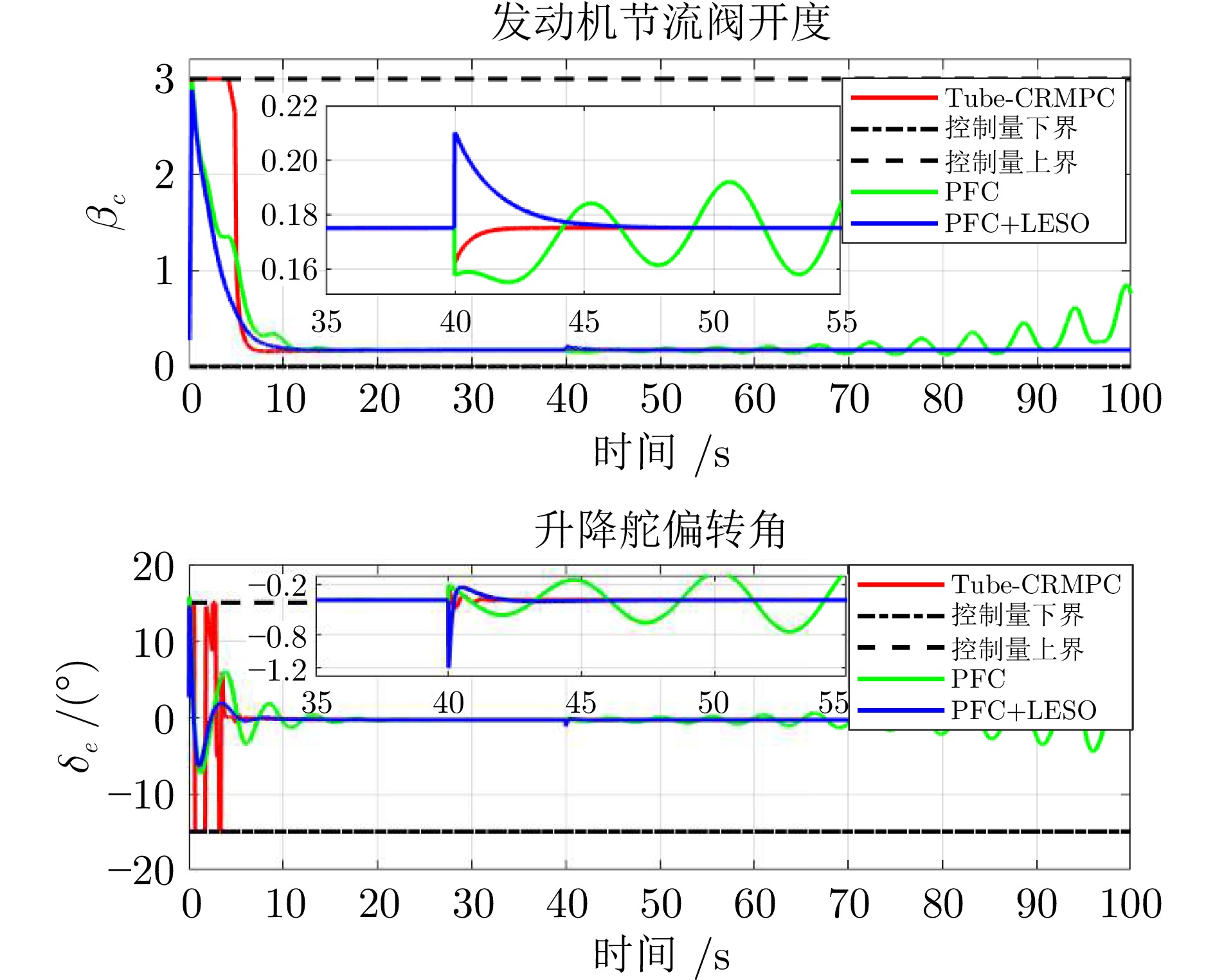
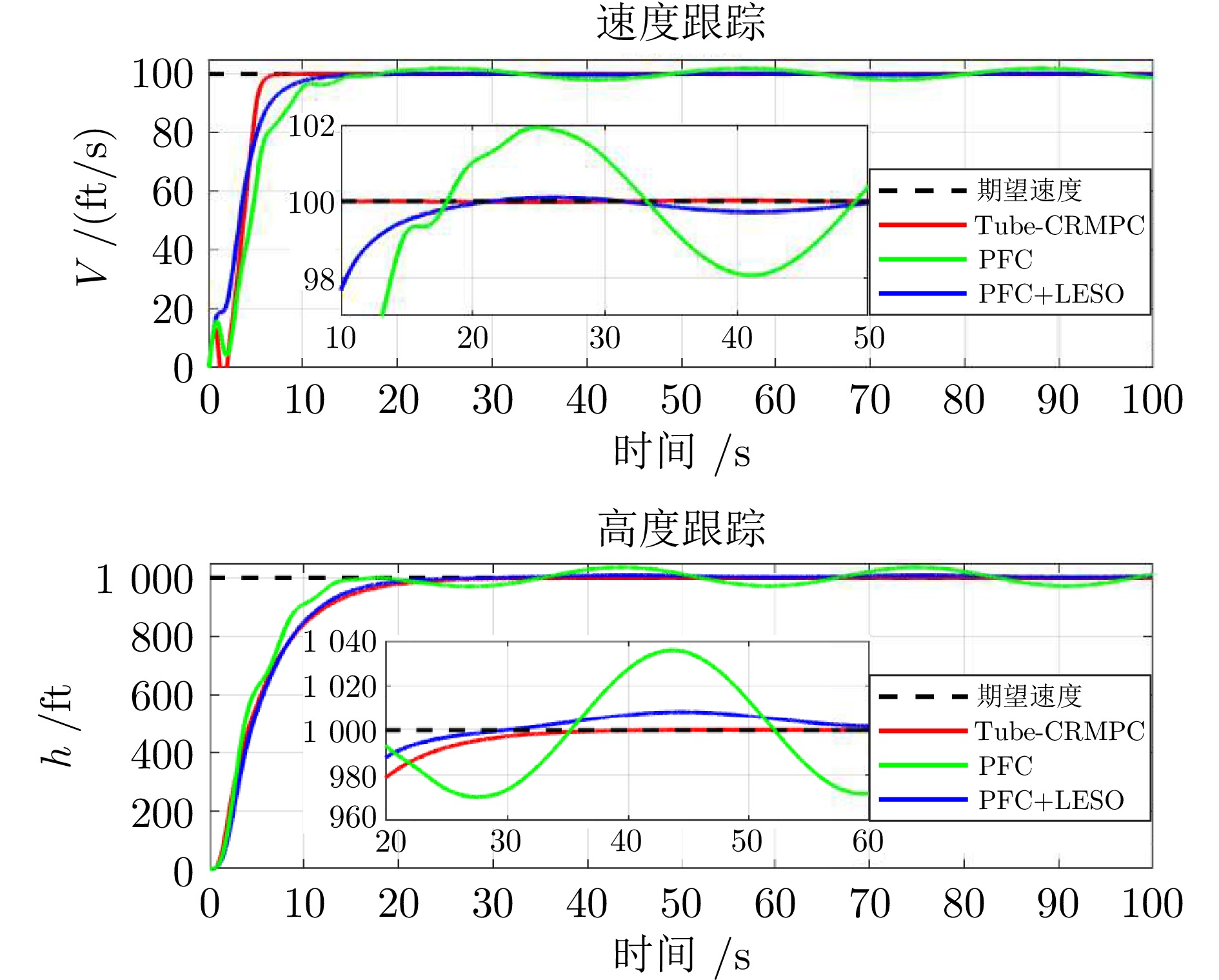
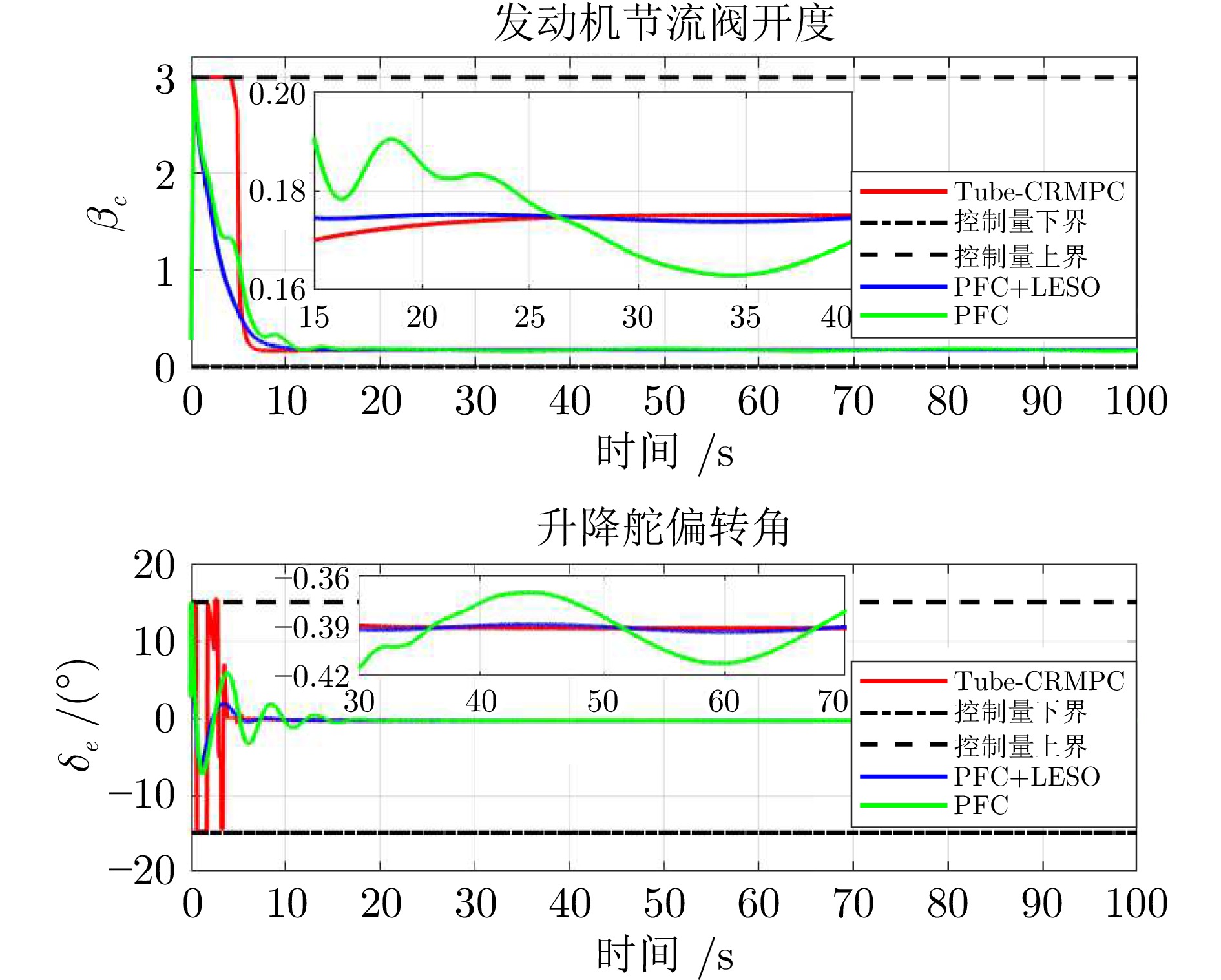
针对高超声速飞行器(HFV)在未知环境干扰与执行器故障下的跟踪控制问题, 提出一种基于Tube的复合鲁棒模型预测控制方法. 首先, 基于非线性动态逆方法将高超声速飞行器纵向运动模型输入/输出线性化, 实现高度与速度控制回路的解耦. 随后, 结合Tube不变集理论推导鲁棒收紧约束, 并显式集成HFV的控制输入及其增量约束, 设计一种复合鲁棒模型预测控制策略. 此外, 还研究了所提方法的递归可行性, 同时基于Lyapunov稳定性理论严格证明控制策略的闭环稳定性. 最后, 仿真实验验证了所提方法的有效性.
针对高超声速飞行器(HFV)在未知环境干扰与执行器故障下的跟踪控制问题, 提出一种基于Tube的复合鲁棒模型预测控制方法. 首先, 基于非线性动态逆方法将高超声速飞行器纵向运动模型输入/输出线性化, 实现高度与速度控制回路的解耦. 随后, 结合Tube不变集理论推导鲁棒收紧约束, 并显式集成HFV的控制输入及其增量约束, 设计一种复合鲁棒模型预测控制策略. 此外, 还研究了所提方法的递归可行性, 同时基于Lyapunov稳定性理论严格证明控制策略的闭环稳定性. 最后, 仿真实验验证了所提方法的有效性.
2025, 51(11): 2498-2519.
doi: 10.16383/j.aas.c250024
cstr: 32138.14.j.aas.c250024
摘要:
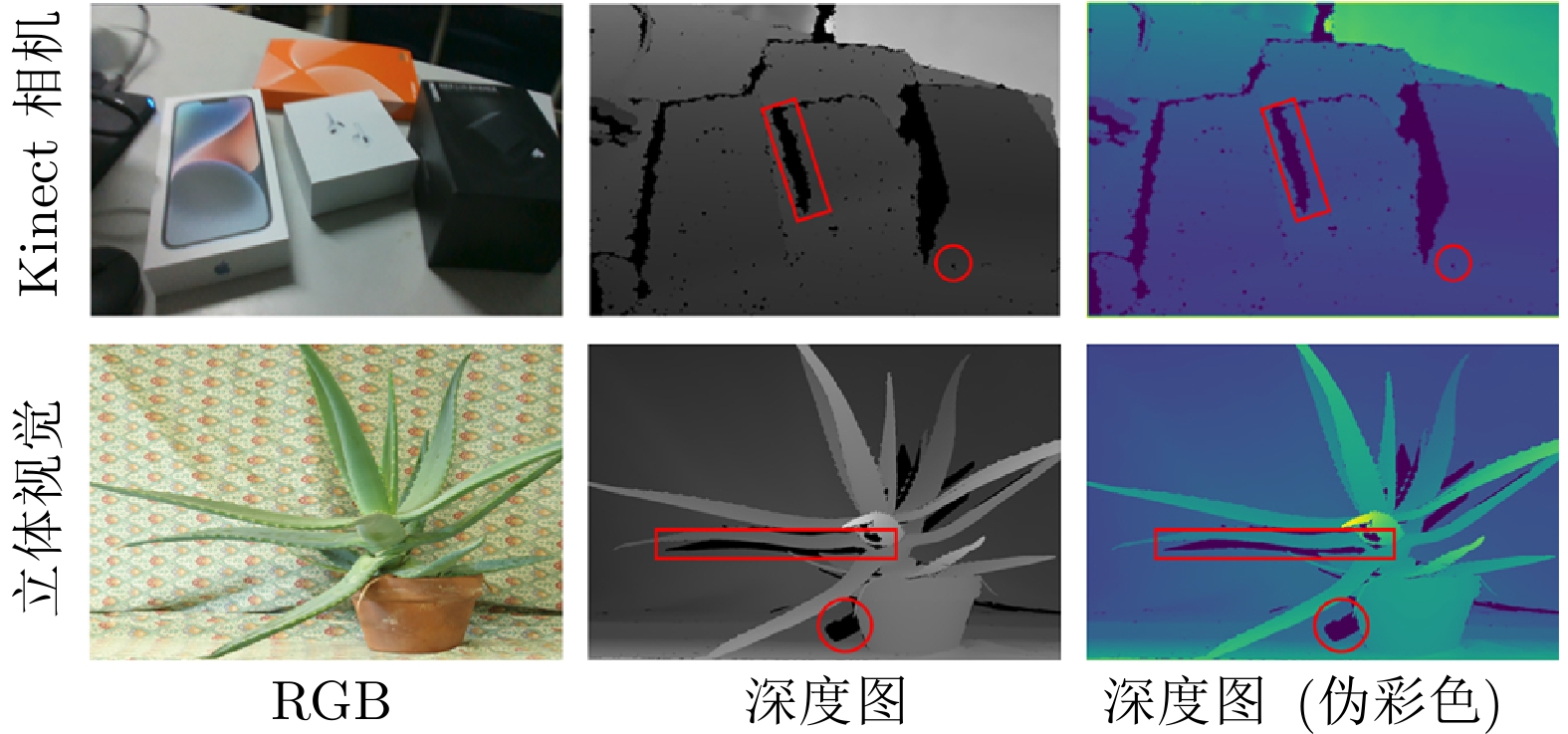
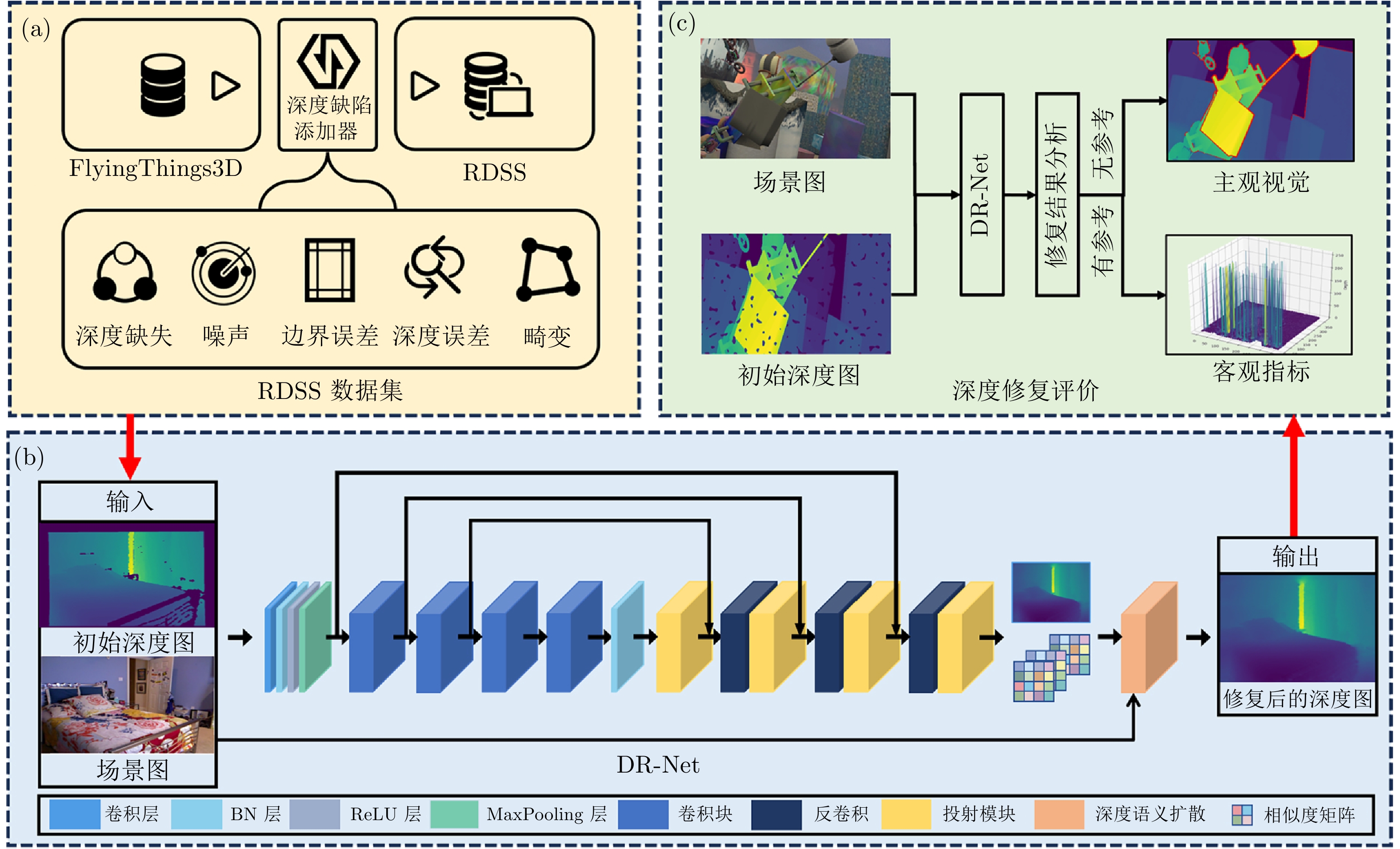
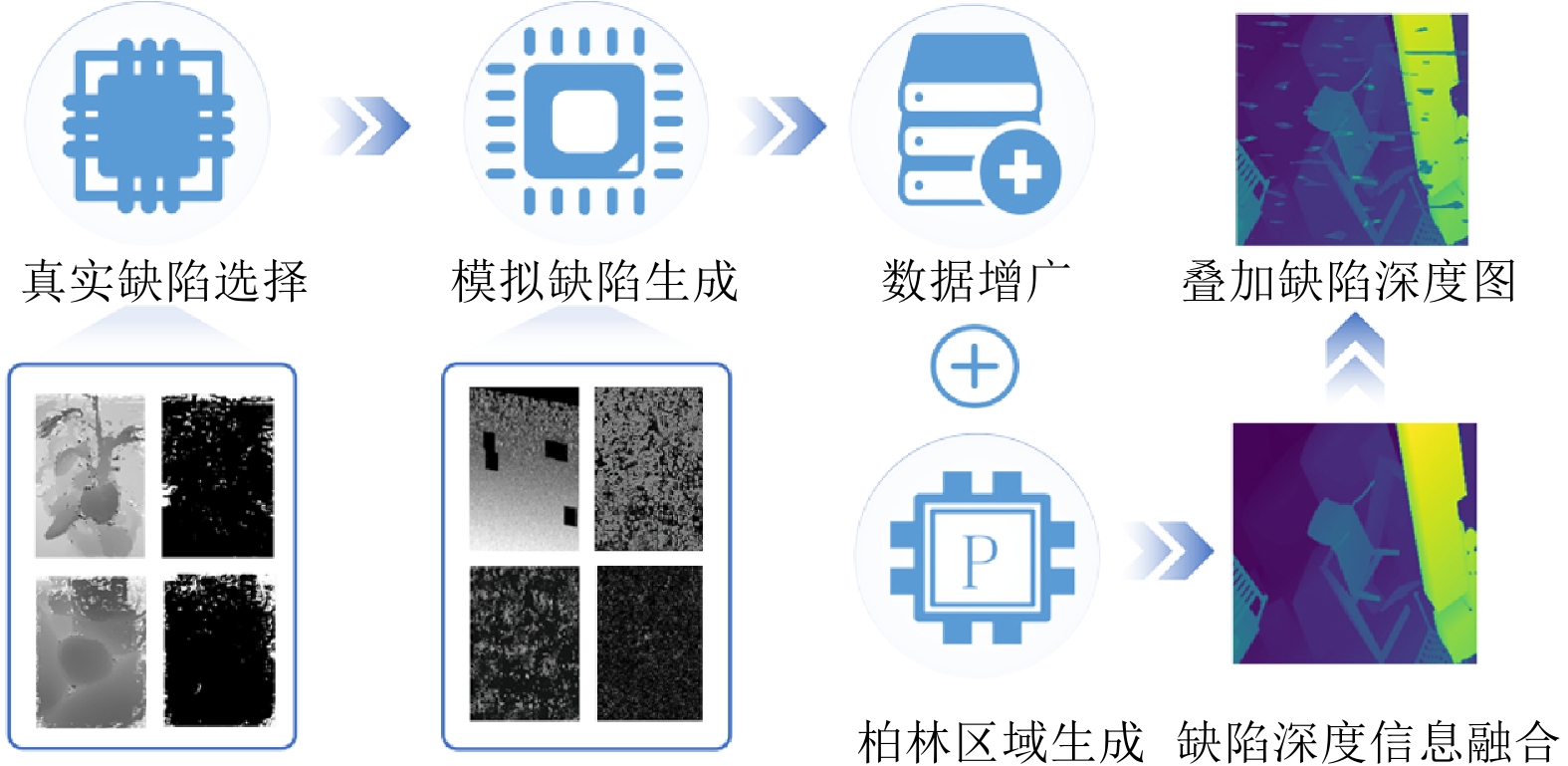
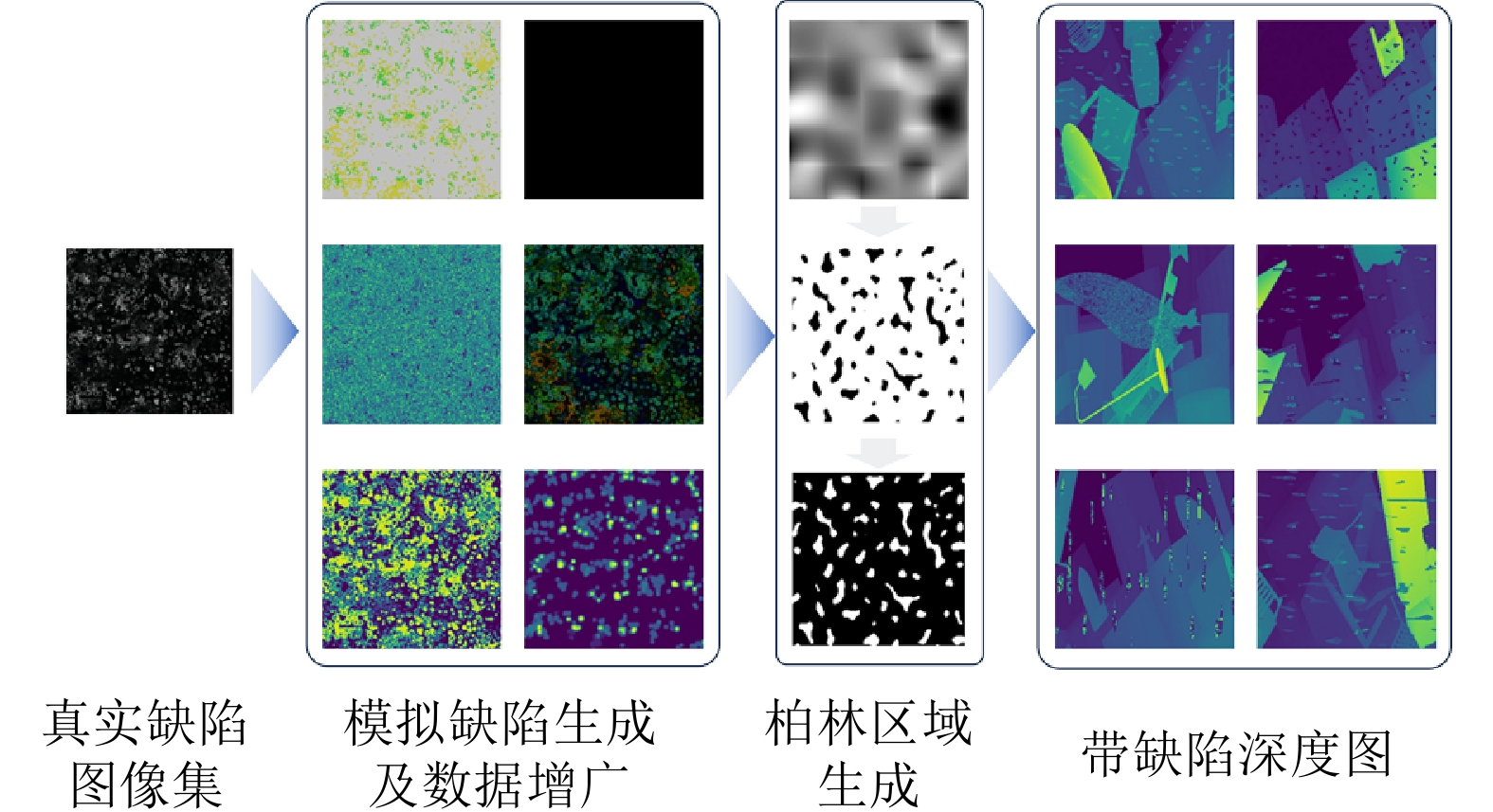
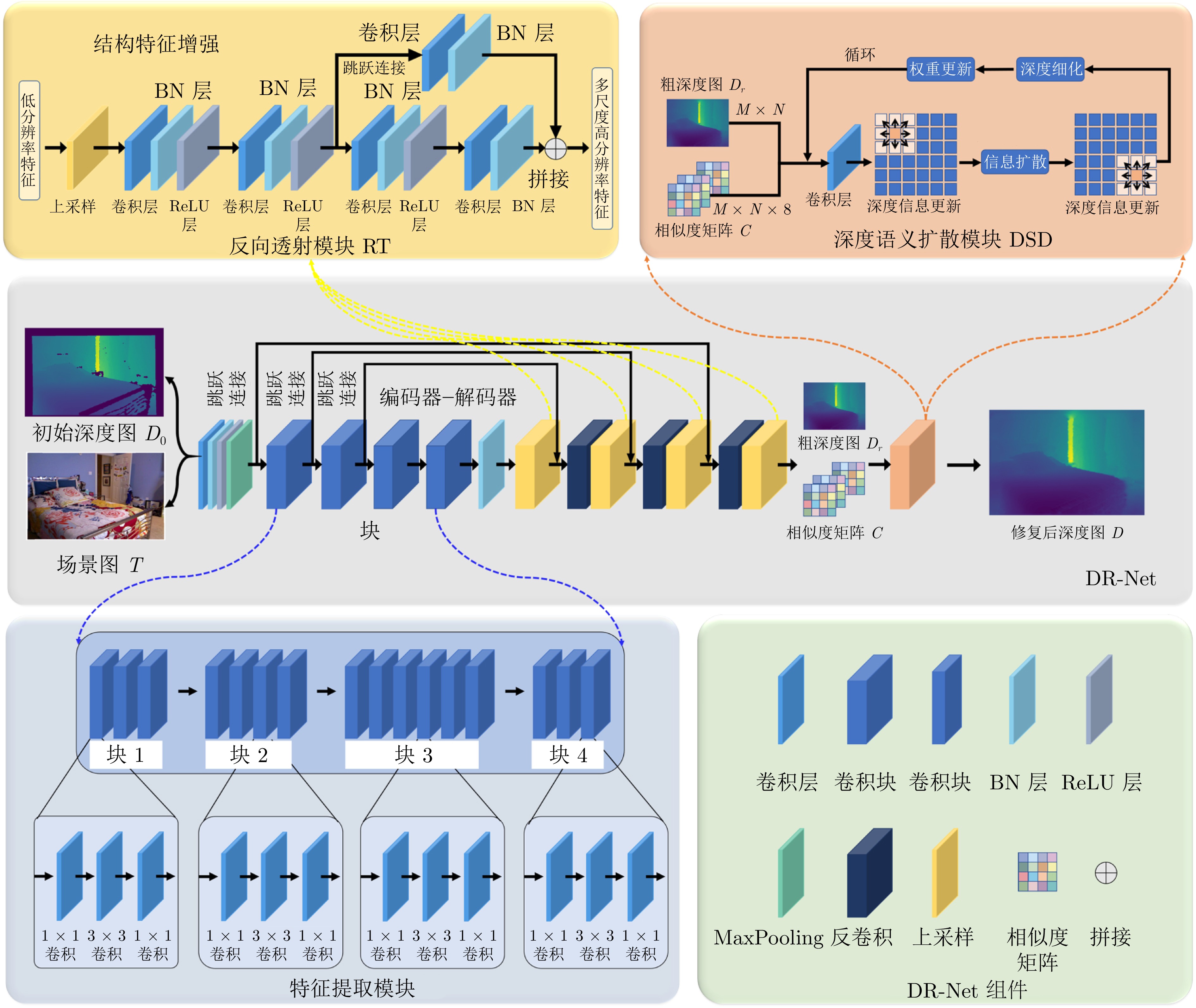
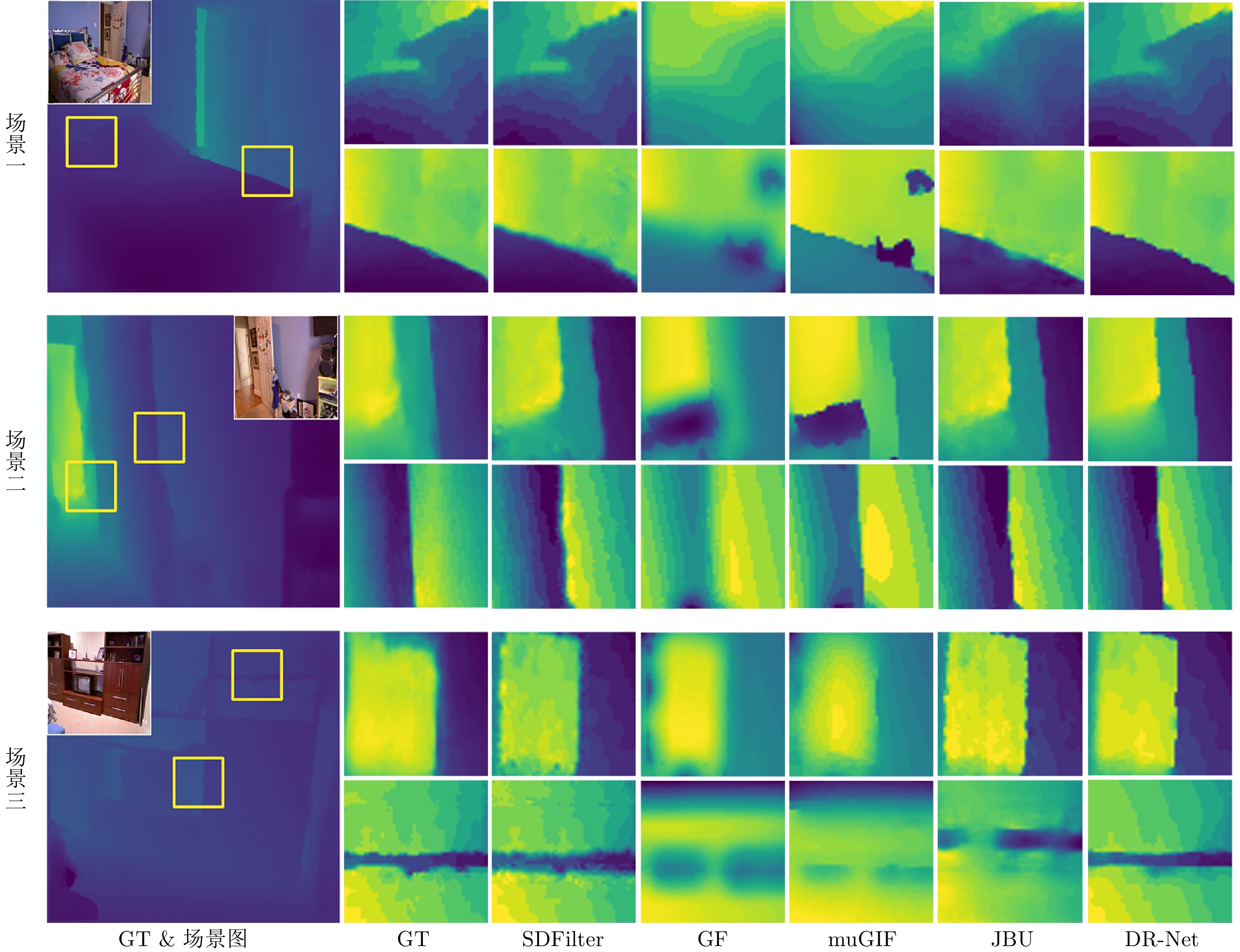
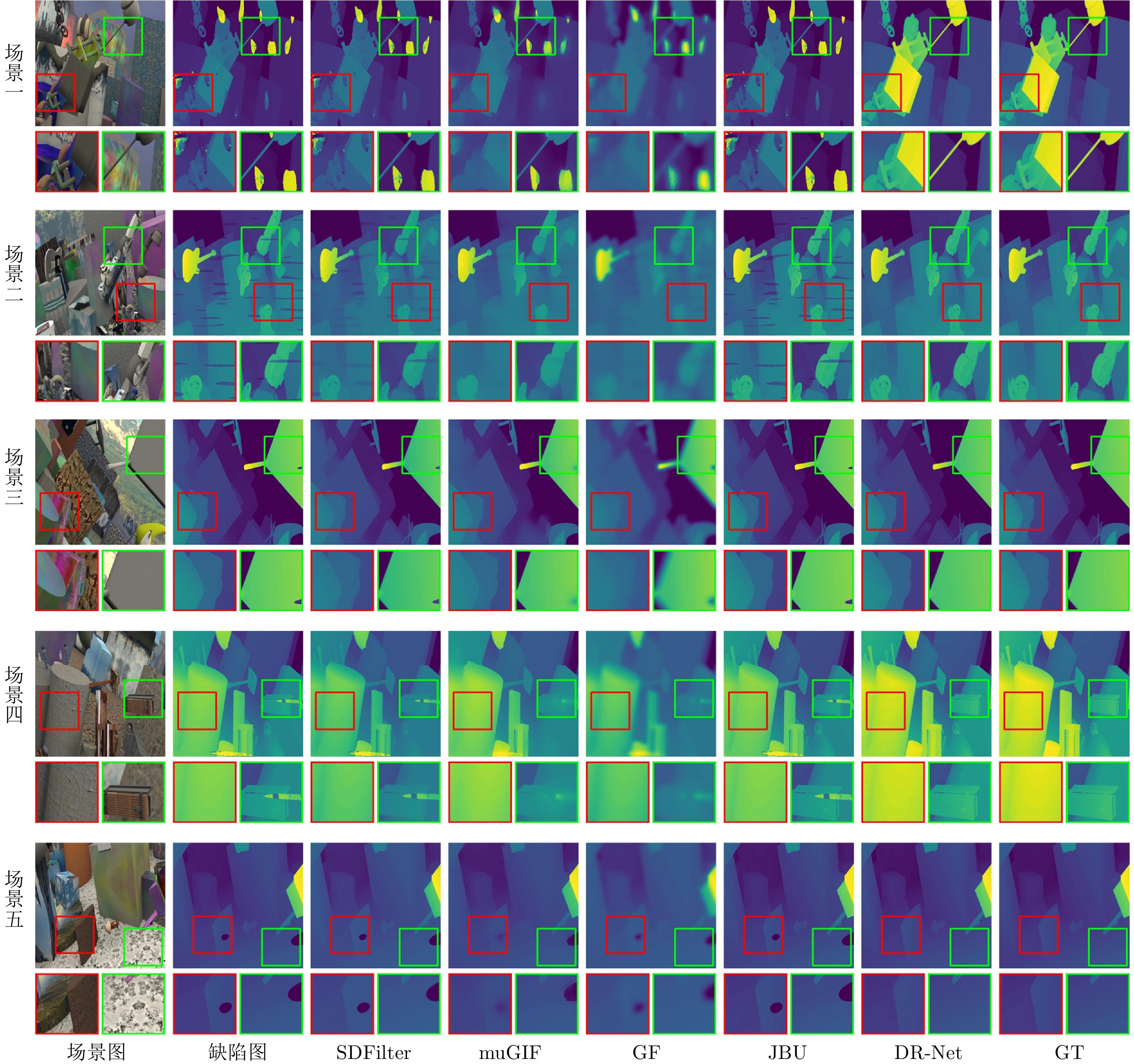
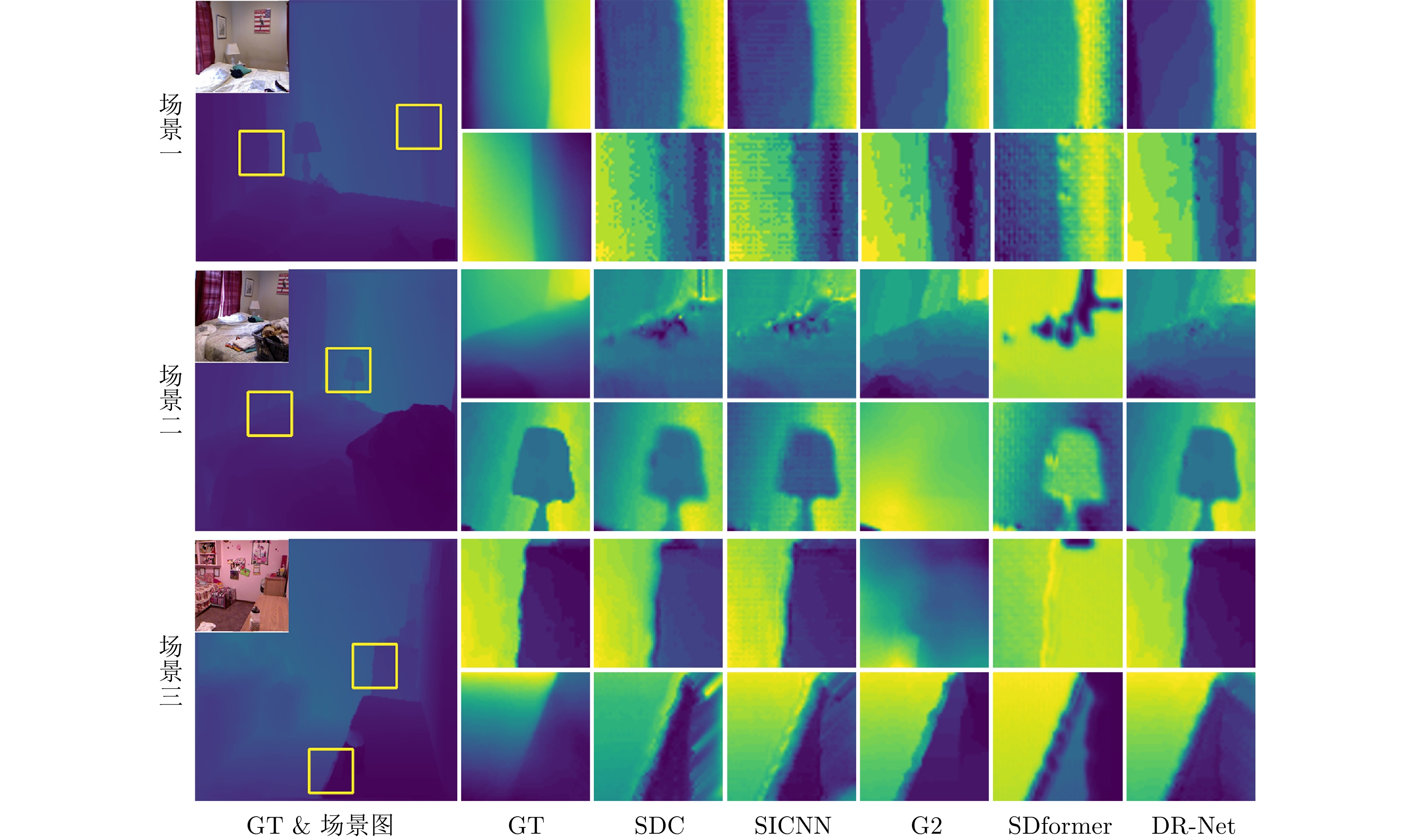
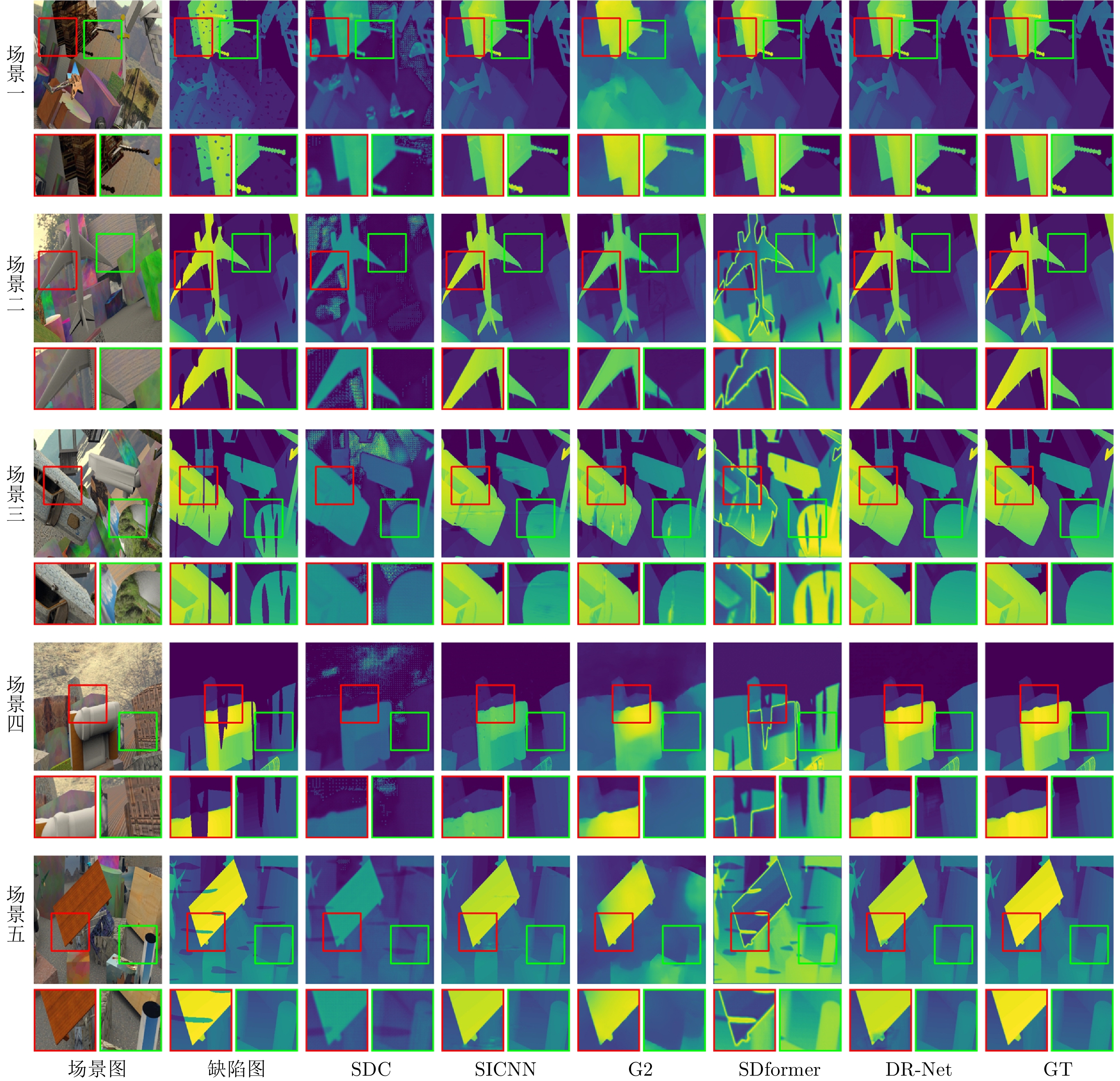
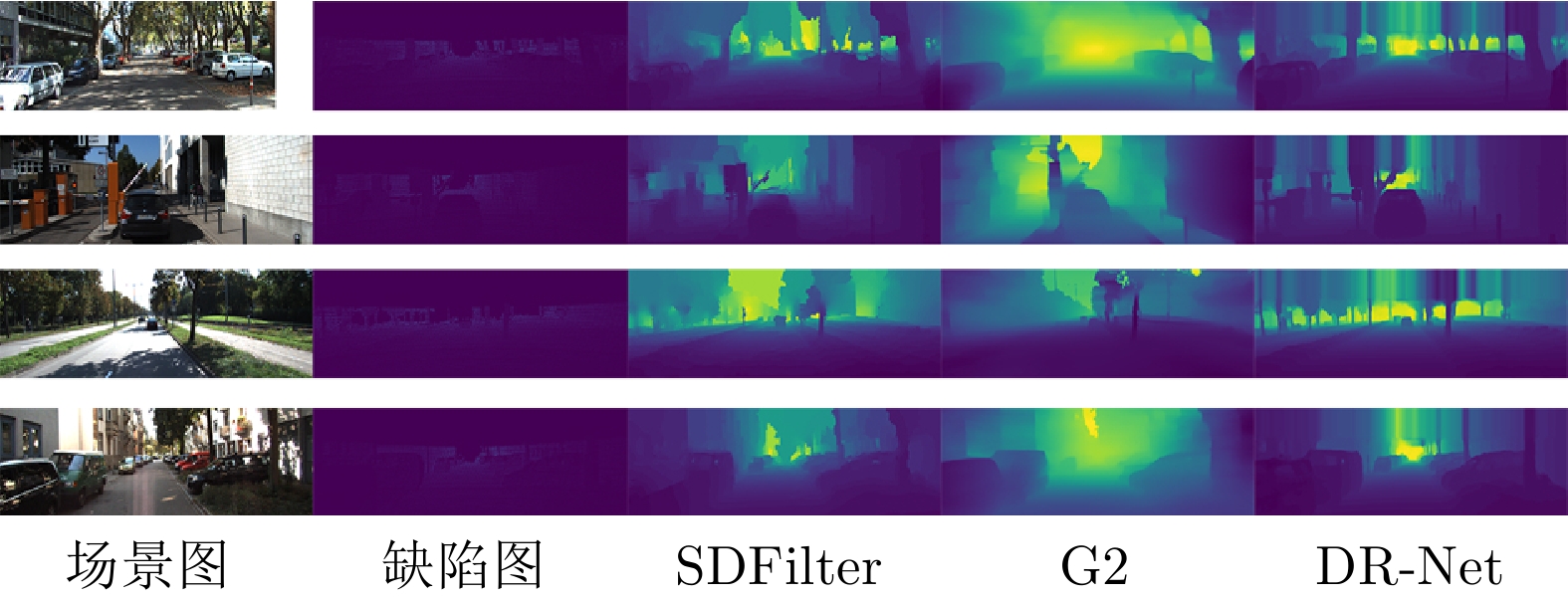
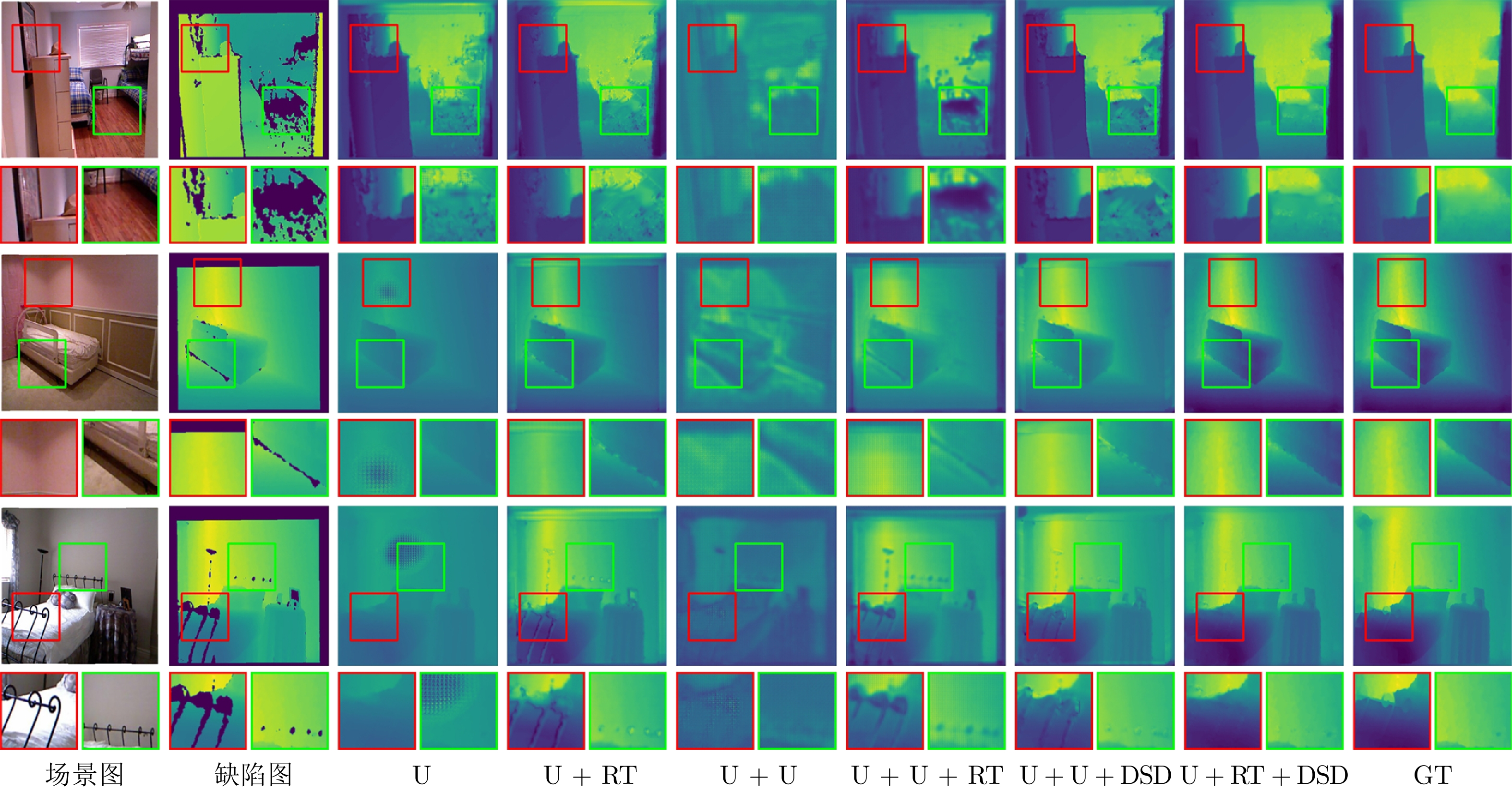
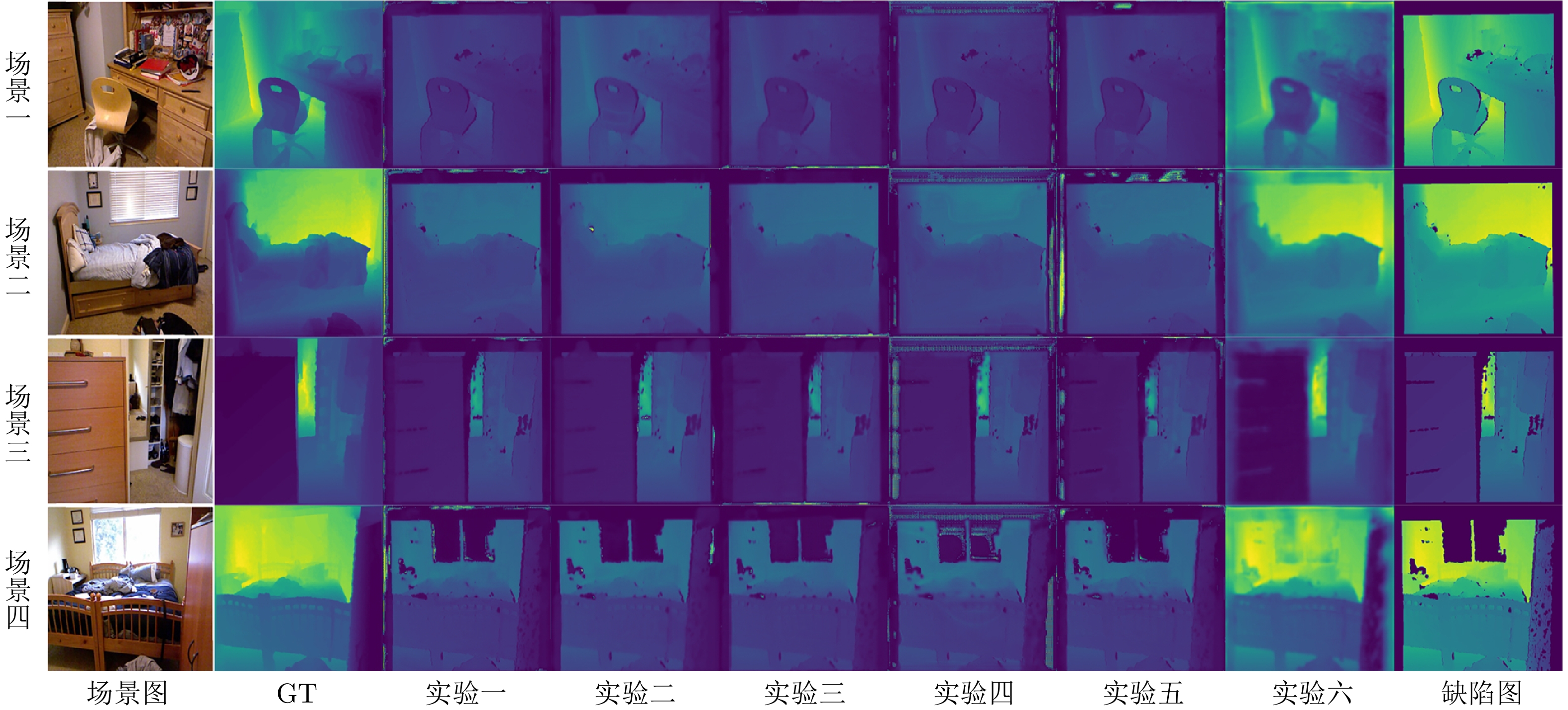
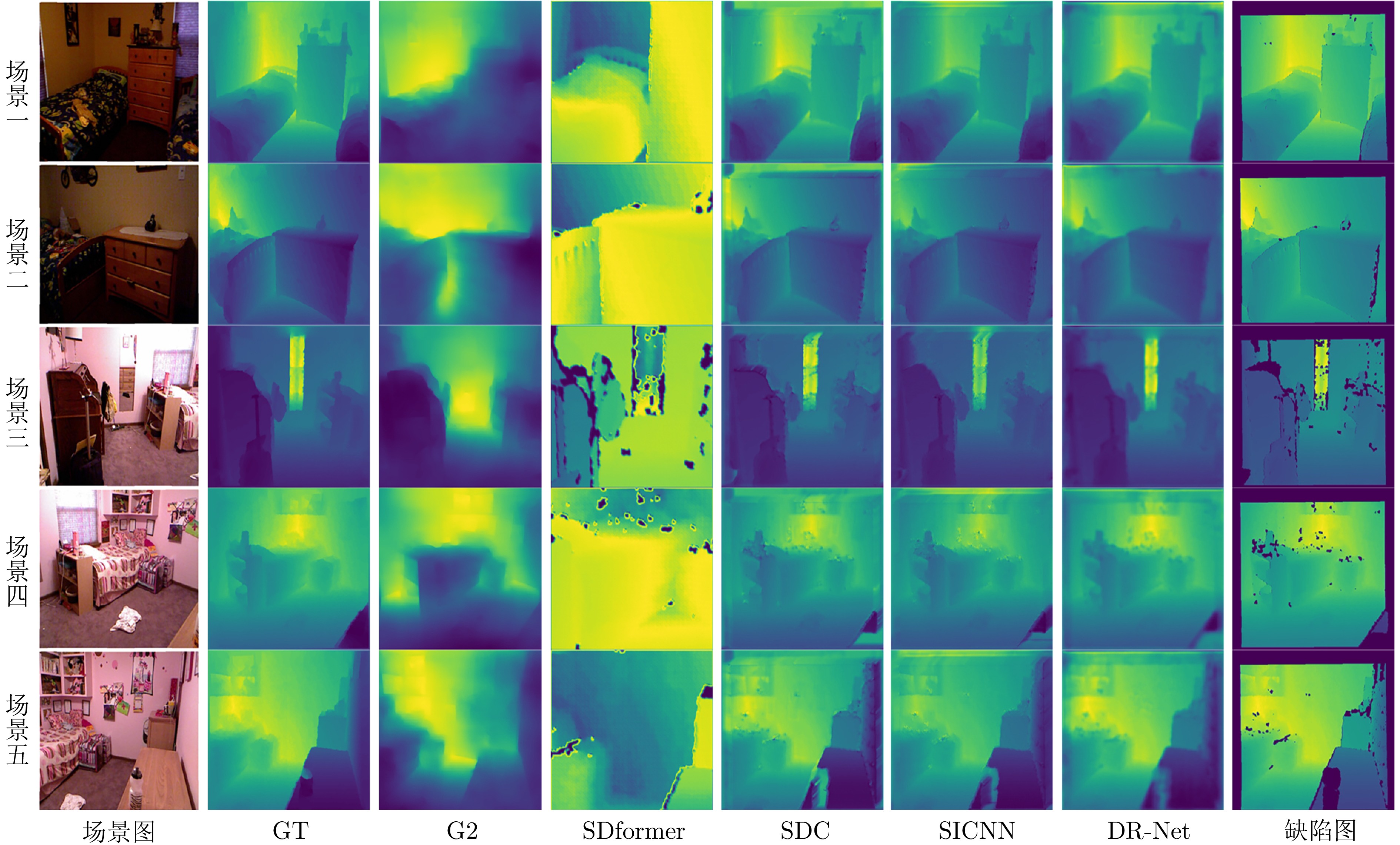
深度修复旨在解决三维重建过程中深度图的缺失、噪声和遮挡问题. 然而, 由于深度图来源的多样性和异质性, 现有的深度修复方法难以对复杂场景结构及未知类型深度缺陷实现有效修复. 针对上述问题, 不同于现有方法单纯从提升算法鲁棒性的角度进行研究, 从深度缺陷数据集构建的逆向视角出发, 构建一种真实缺陷采样仿真RDSS数据集, 并在此基础上提出一种基于深度语义扩散的深度图修复模型DR-Net. RDSS数据集通过对真实缺陷的采集与建模, 结合同质化形变拓展和异质化交叉组合, 能够对多种复杂场景中的深度缺陷进行形式化仿真, 有效提升深度缺陷的多样性和场景的覆盖性. 设计的深度图修复模型DR-Net基于U型网络结构, 利用反向透射模块实现高分辨率细节保持的同时, 通过深度语义扩散模块传播图像中的深度语义信息, 进而有效提升修复性能. 实验结果表明: 以RDSS数据集为基准训练数据集, 可实现在其他数据集中深度图的有效修复. 此外, 与最先进的模型设计类修复方法SDFilter和数据驱动类修复方法G2相比, DR-Net模型在RDSS、NYU Depth V2和KITTI三类数据集上的均方根误差指标分别平均下降24.85%和29.54%, 验证了DR-Net模型的有效性和先进性.
深度修复旨在解决三维重建过程中深度图的缺失、噪声和遮挡问题. 然而, 由于深度图来源的多样性和异质性, 现有的深度修复方法难以对复杂场景结构及未知类型深度缺陷实现有效修复. 针对上述问题, 不同于现有方法单纯从提升算法鲁棒性的角度进行研究, 从深度缺陷数据集构建的逆向视角出发, 构建一种真实缺陷采样仿真RDSS数据集, 并在此基础上提出一种基于深度语义扩散的深度图修复模型DR-Net. RDSS数据集通过对真实缺陷的采集与建模, 结合同质化形变拓展和异质化交叉组合, 能够对多种复杂场景中的深度缺陷进行形式化仿真, 有效提升深度缺陷的多样性和场景的覆盖性. 设计的深度图修复模型DR-Net基于U型网络结构, 利用反向透射模块实现高分辨率细节保持的同时, 通过深度语义扩散模块传播图像中的深度语义信息, 进而有效提升修复性能. 实验结果表明: 以RDSS数据集为基准训练数据集, 可实现在其他数据集中深度图的有效修复. 此外, 与最先进的模型设计类修复方法SDFilter和数据驱动类修复方法G2相比, DR-Net模型在RDSS、NYU Depth V2和KITTI三类数据集上的均方根误差指标分别平均下降24.85%和29.54%, 验证了DR-Net模型的有效性和先进性.
2025, 51(11): 2520-2533.
doi: 10.16383/j.aas.c250134
cstr: 32138.14.j.aas.c250134
摘要:
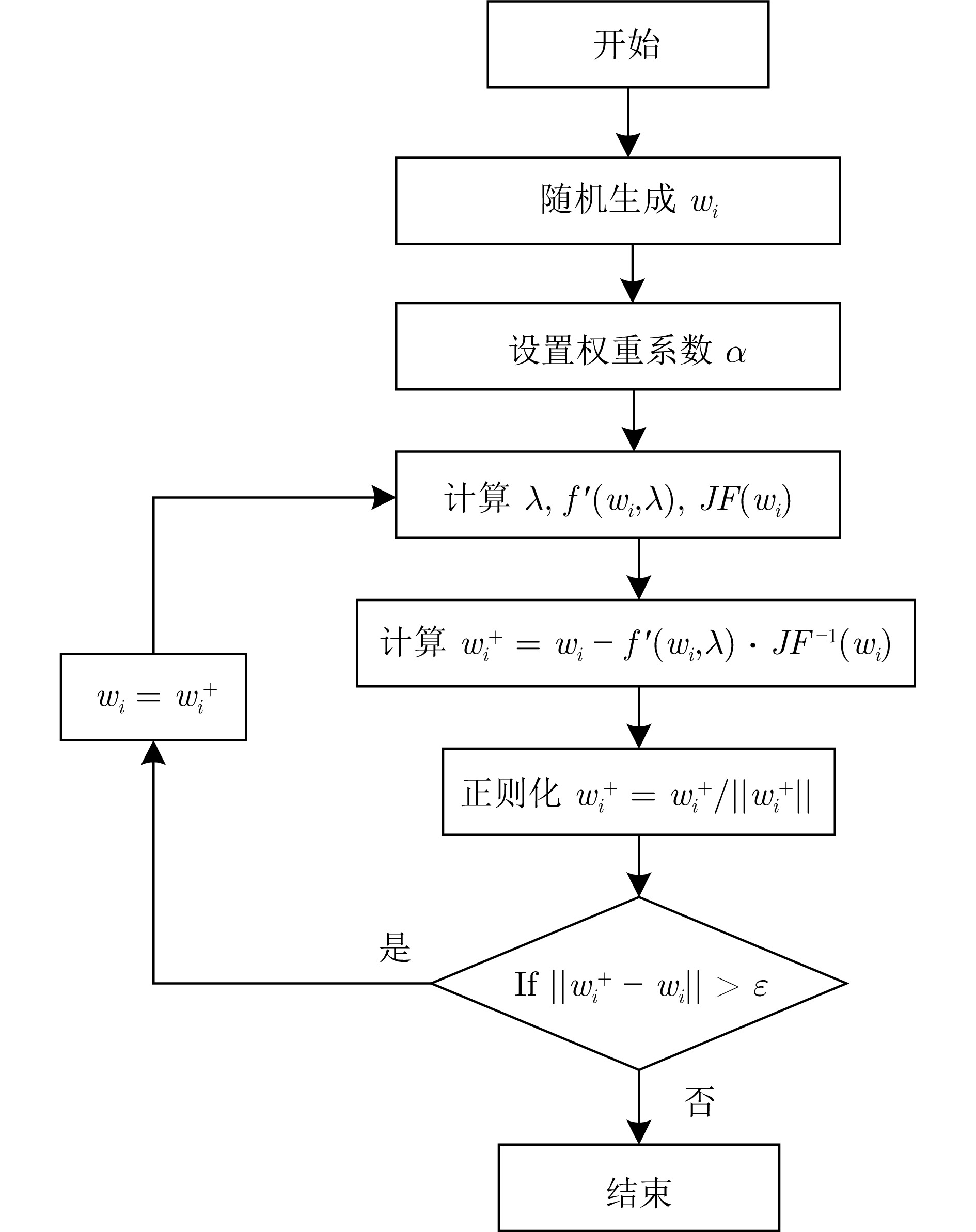
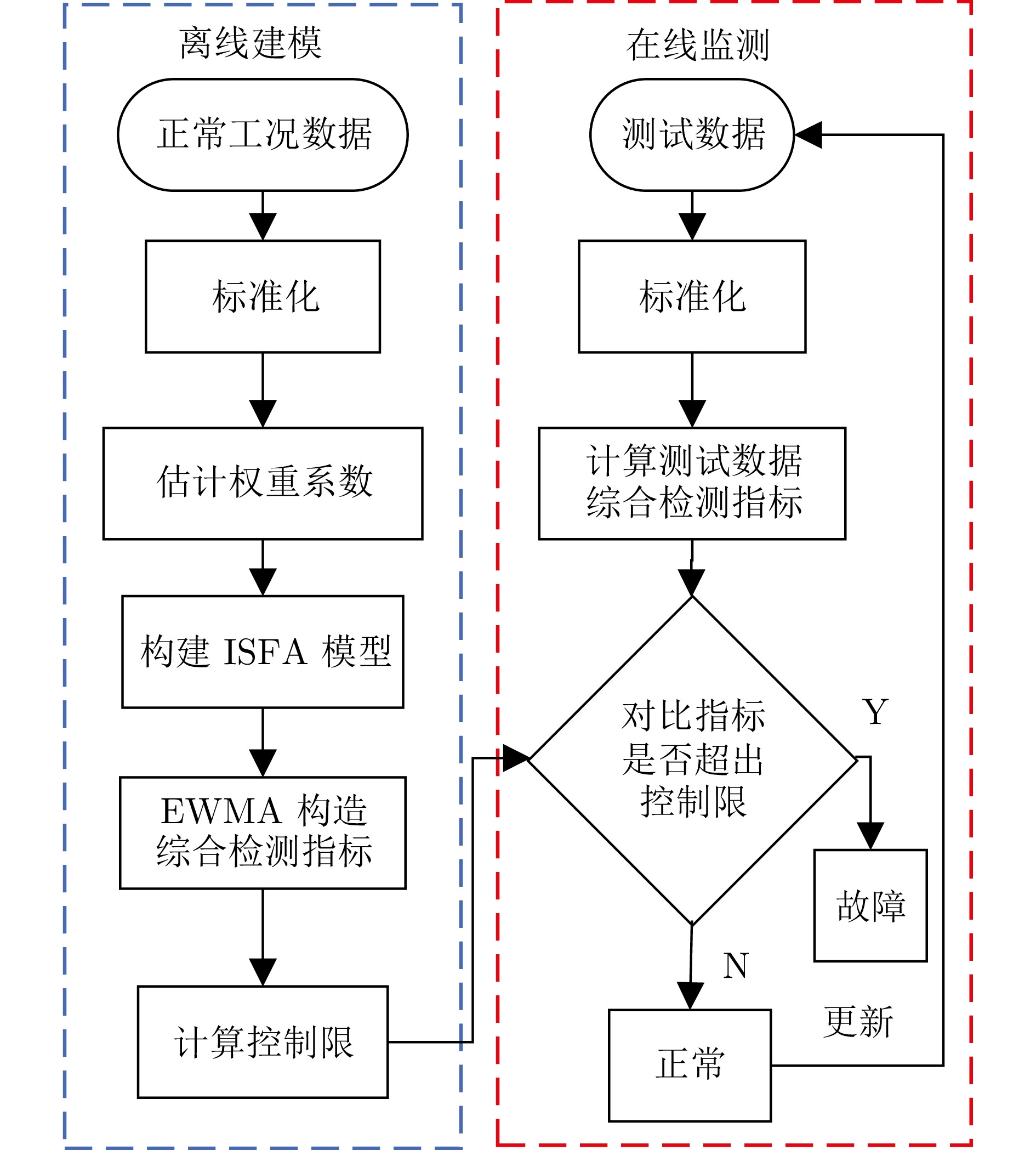
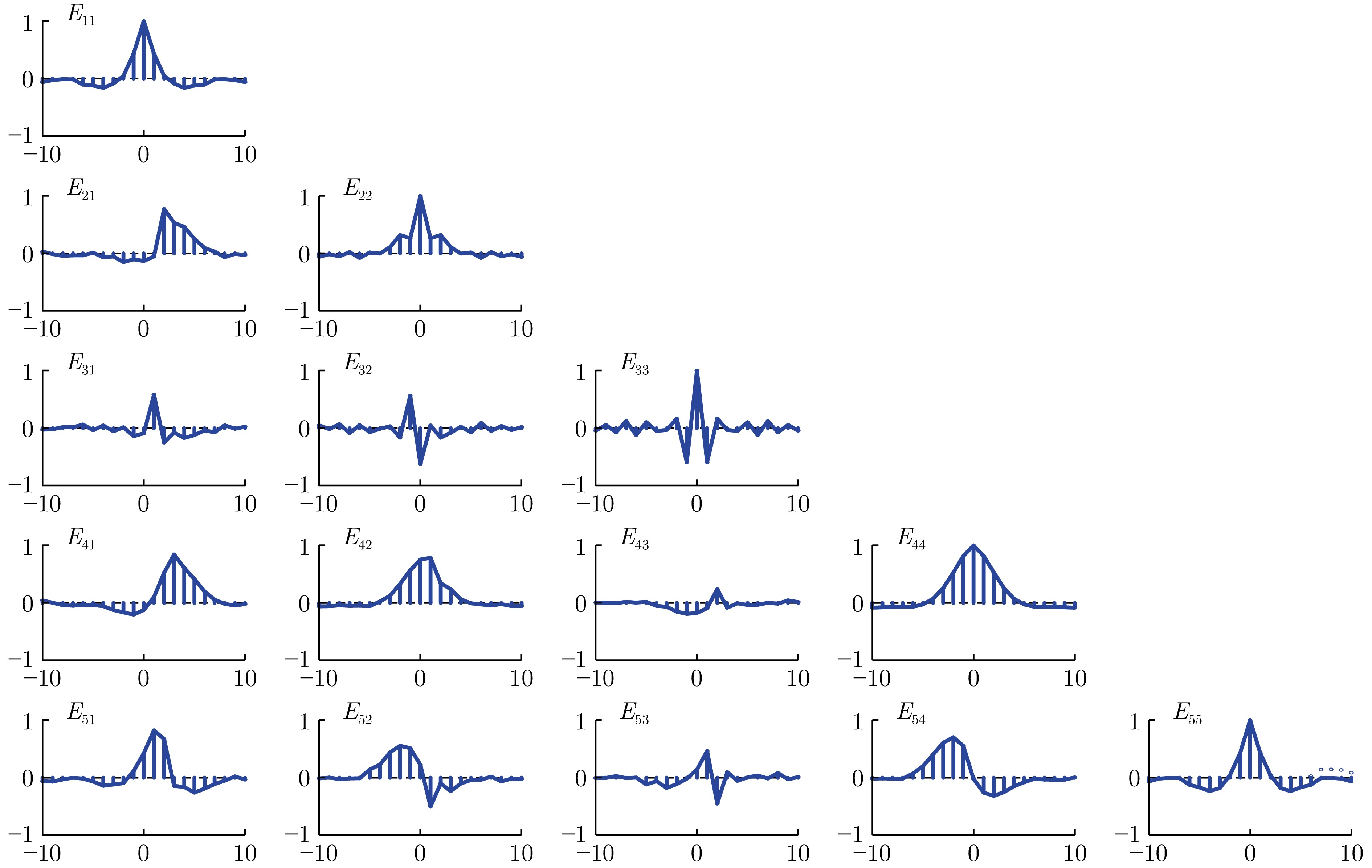
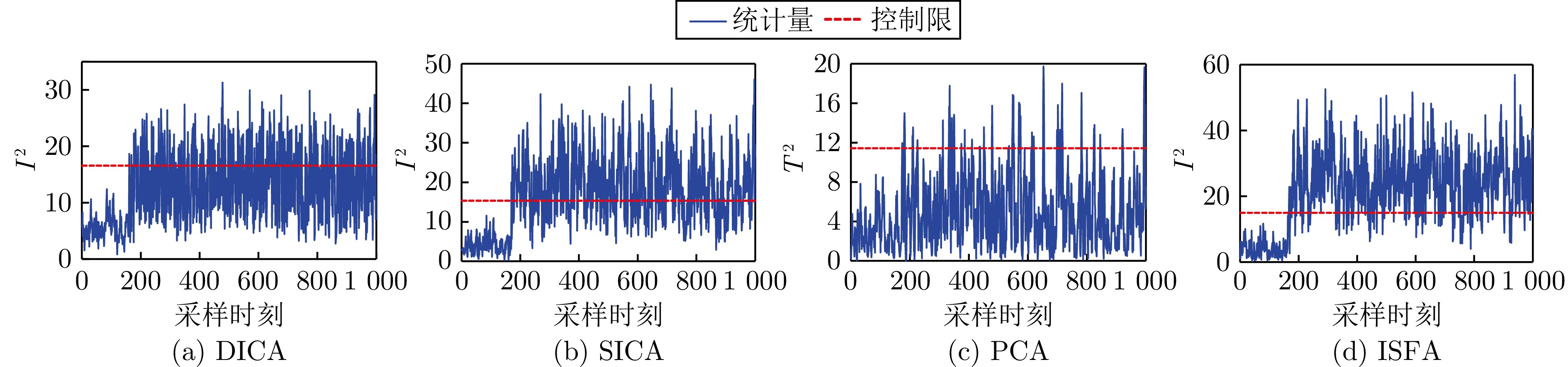
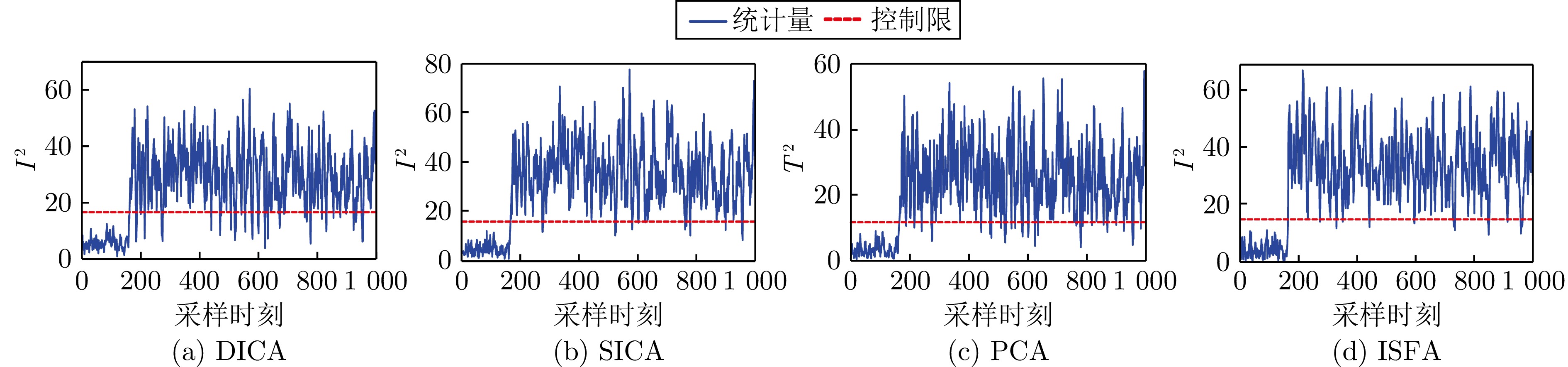
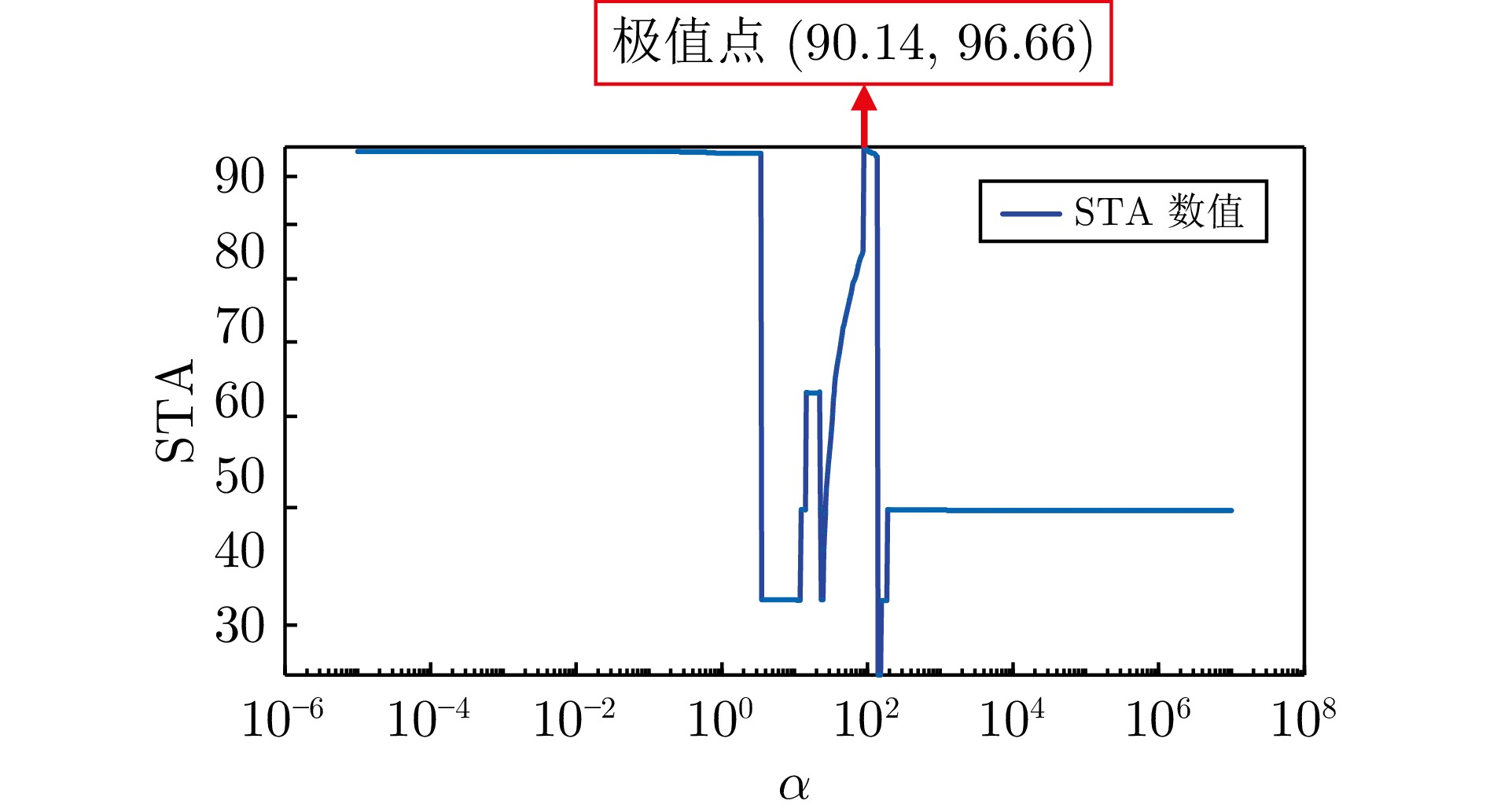
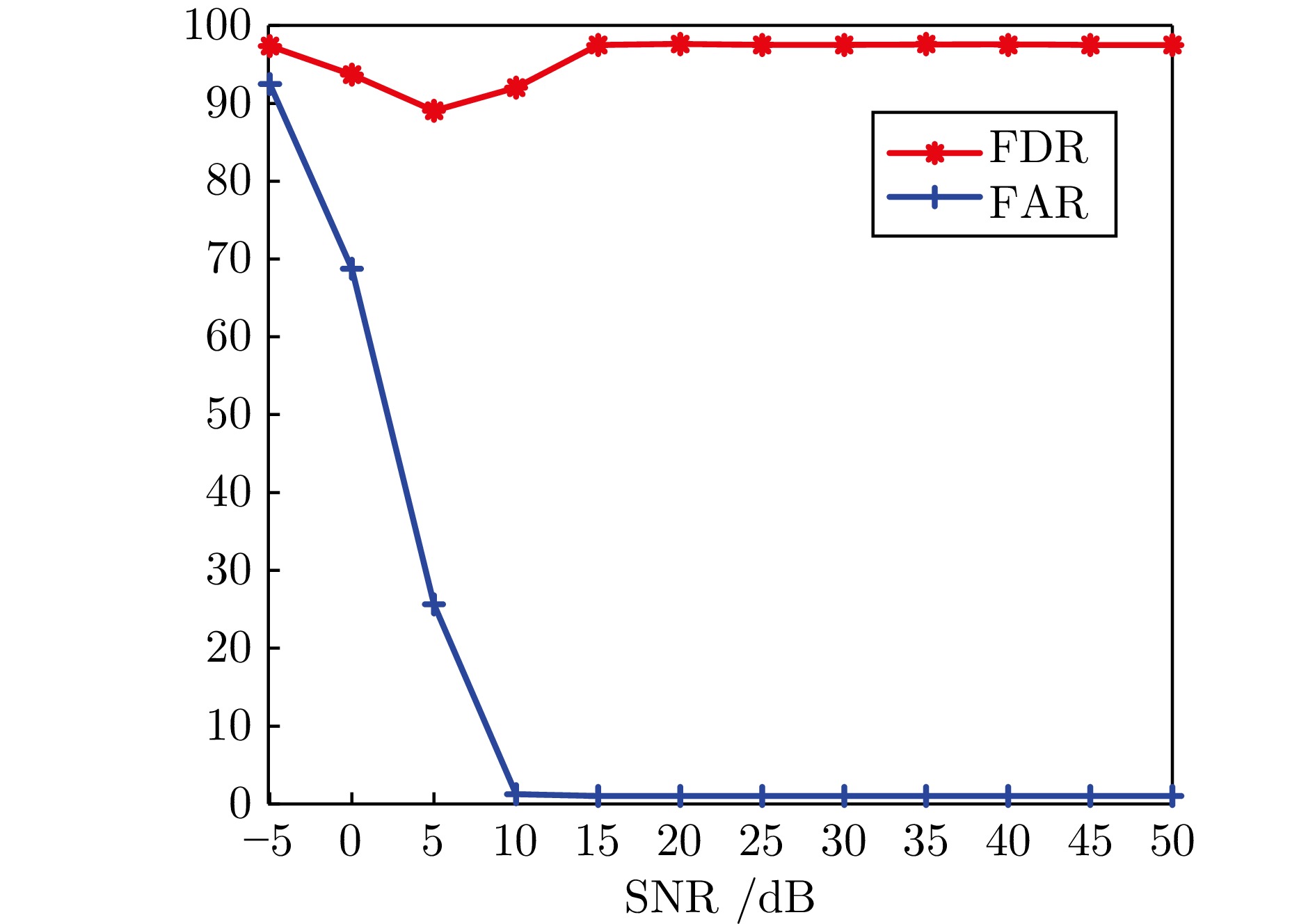
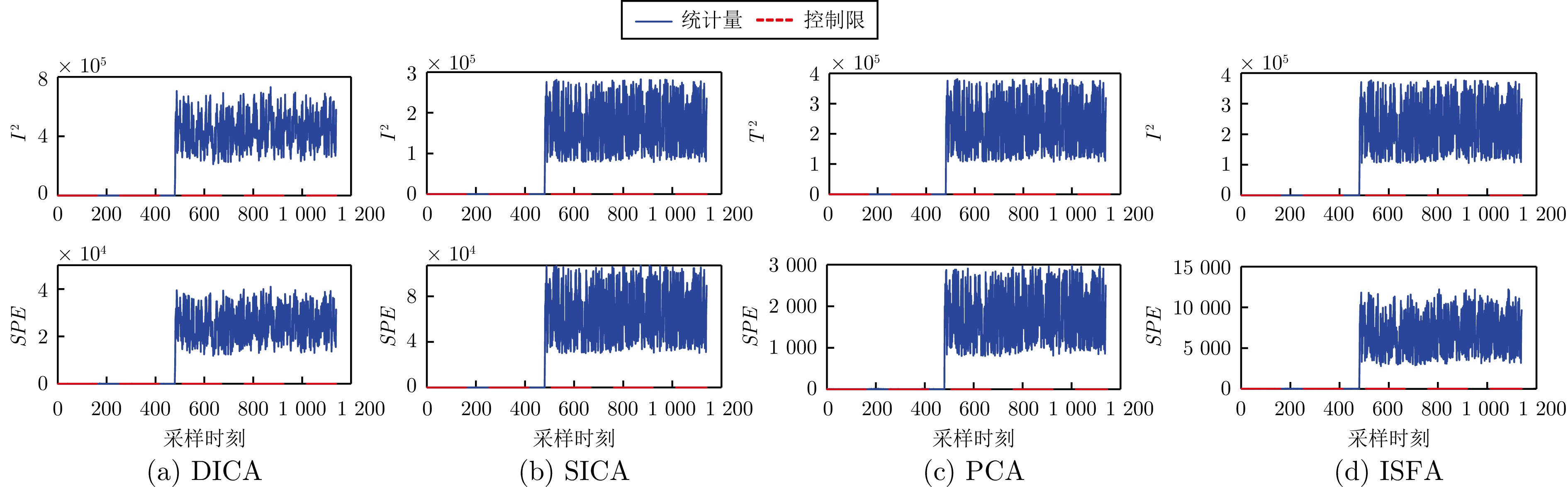
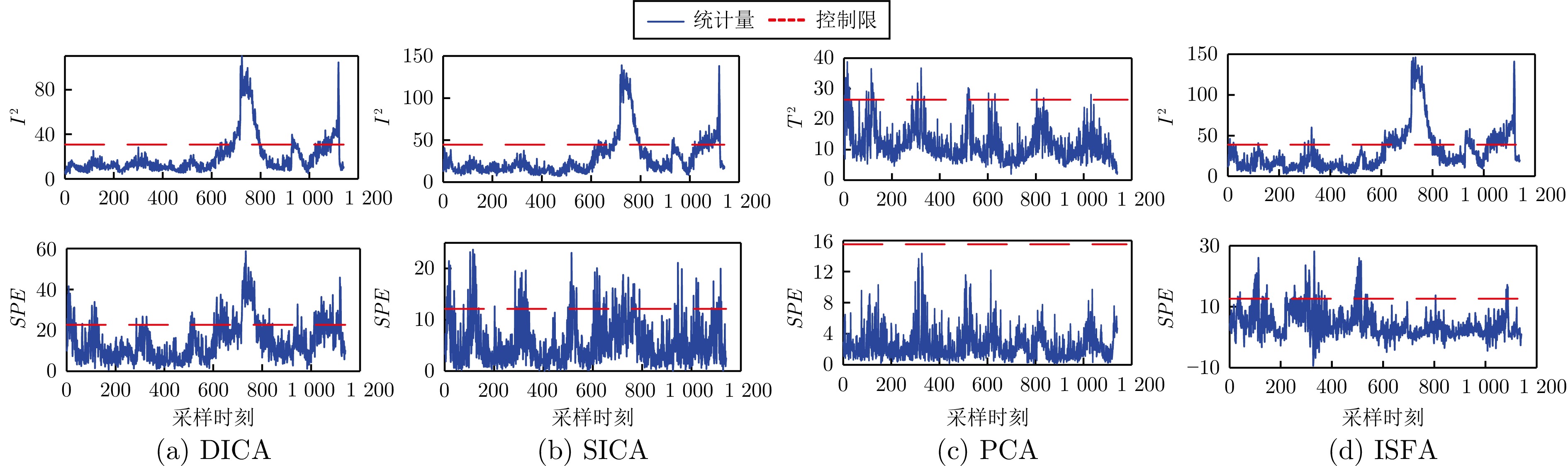
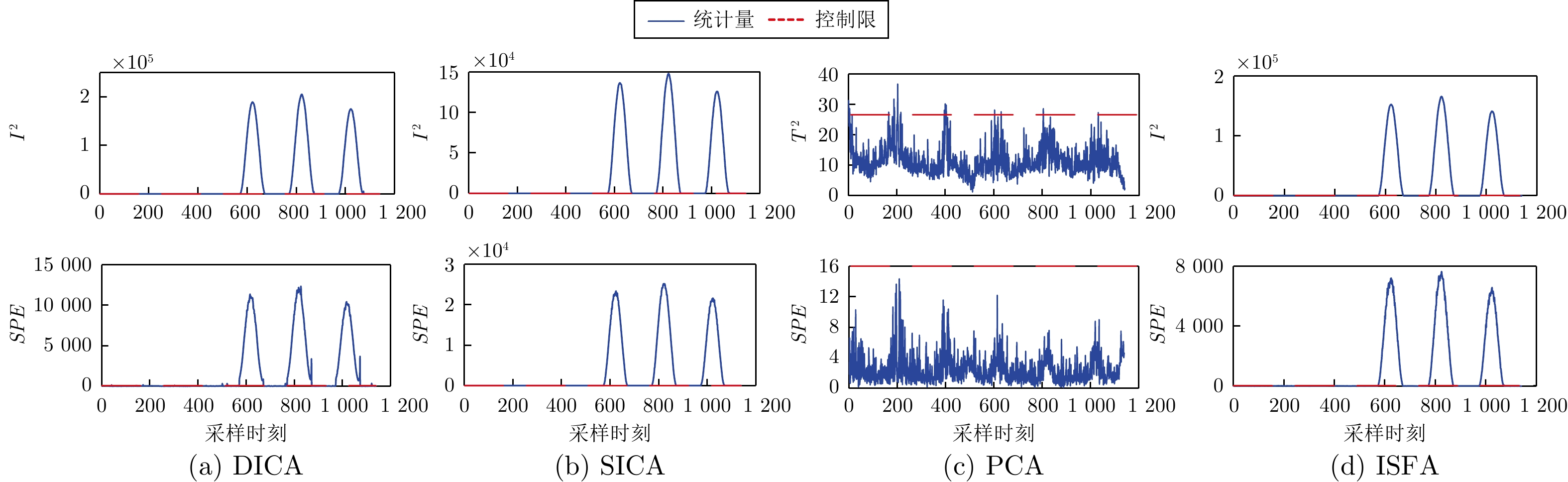
故障检测与诊断技术是保证复杂装备或工业过程正常运行的技术支撑和有效手段, 独立成分分析(ICA)作为一种典型的多元统计过程监测方法, 可充分挖掘数据的高阶统计信息. 传统ICA方法在预处理阶段采用主成分分析(PCA)进行白化和降维, 但PCA的静态性质导致ICA在动态过程监测中的效果不太理想. 为解决这一问题, 提出一种独立慢特征分析(ISFA)建模方法. ISFA以原始观测矩阵和白化矩阵为自变量构造双目标优化函数, 基于牛顿迭代法求解目标函数, 使用网格搜索优化权重系数, 利用指数加权移动平均修正统计量并构建综合检测指标. 最后, 利用数值仿真和电动伺服机构实验验证了所提方法的有效性.
故障检测与诊断技术是保证复杂装备或工业过程正常运行的技术支撑和有效手段, 独立成分分析(ICA)作为一种典型的多元统计过程监测方法, 可充分挖掘数据的高阶统计信息. 传统ICA方法在预处理阶段采用主成分分析(PCA)进行白化和降维, 但PCA的静态性质导致ICA在动态过程监测中的效果不太理想. 为解决这一问题, 提出一种独立慢特征分析(ISFA)建模方法. ISFA以原始观测矩阵和白化矩阵为自变量构造双目标优化函数, 基于牛顿迭代法求解目标函数, 使用网格搜索优化权重系数, 利用指数加权移动平均修正统计量并构建综合检测指标. 最后, 利用数值仿真和电动伺服机构实验验证了所提方法的有效性.

2025, 51(11): 2534-2542.
doi: 10.16383/j.aas.c240809
cstr: 32138.14.j.aas.c240809
摘要:
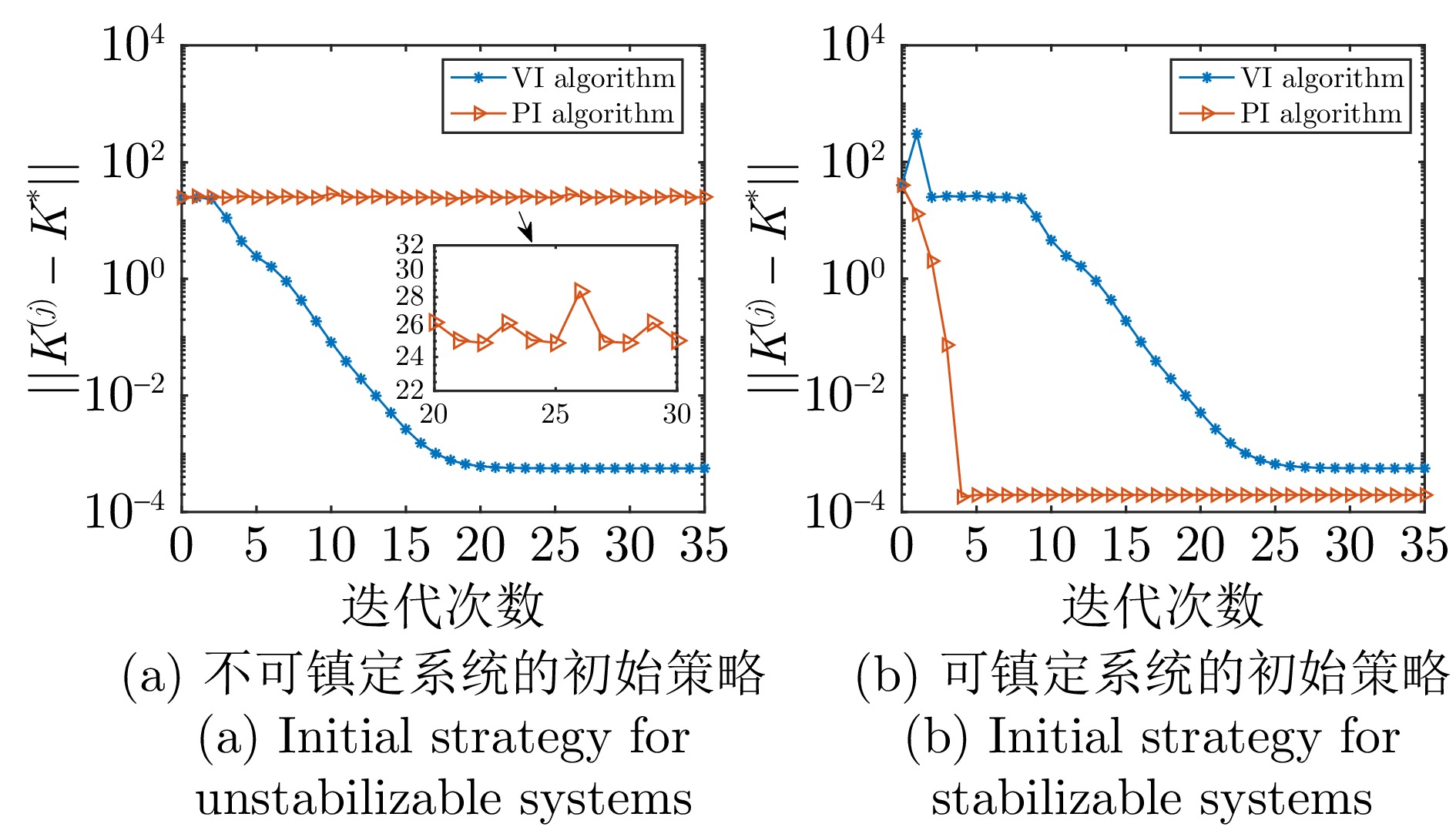
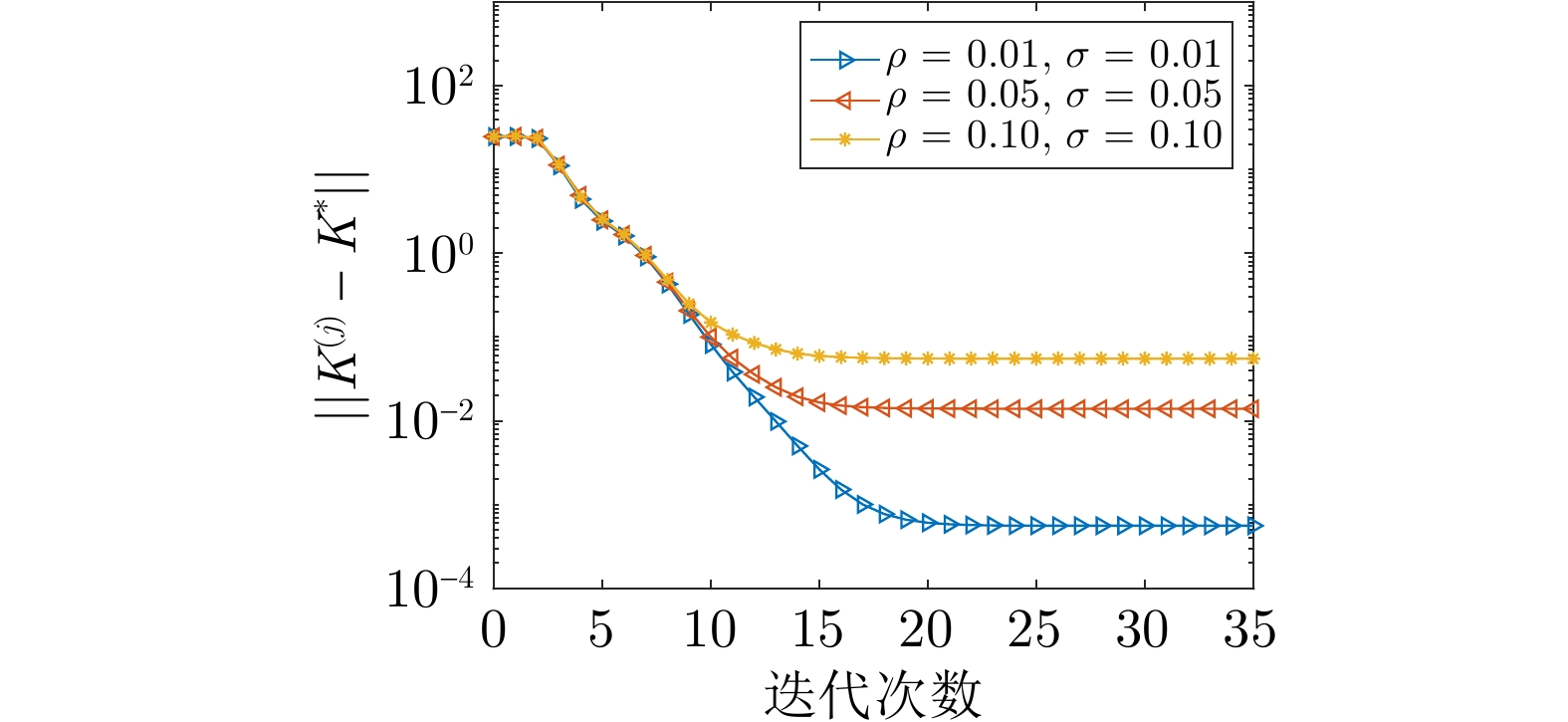
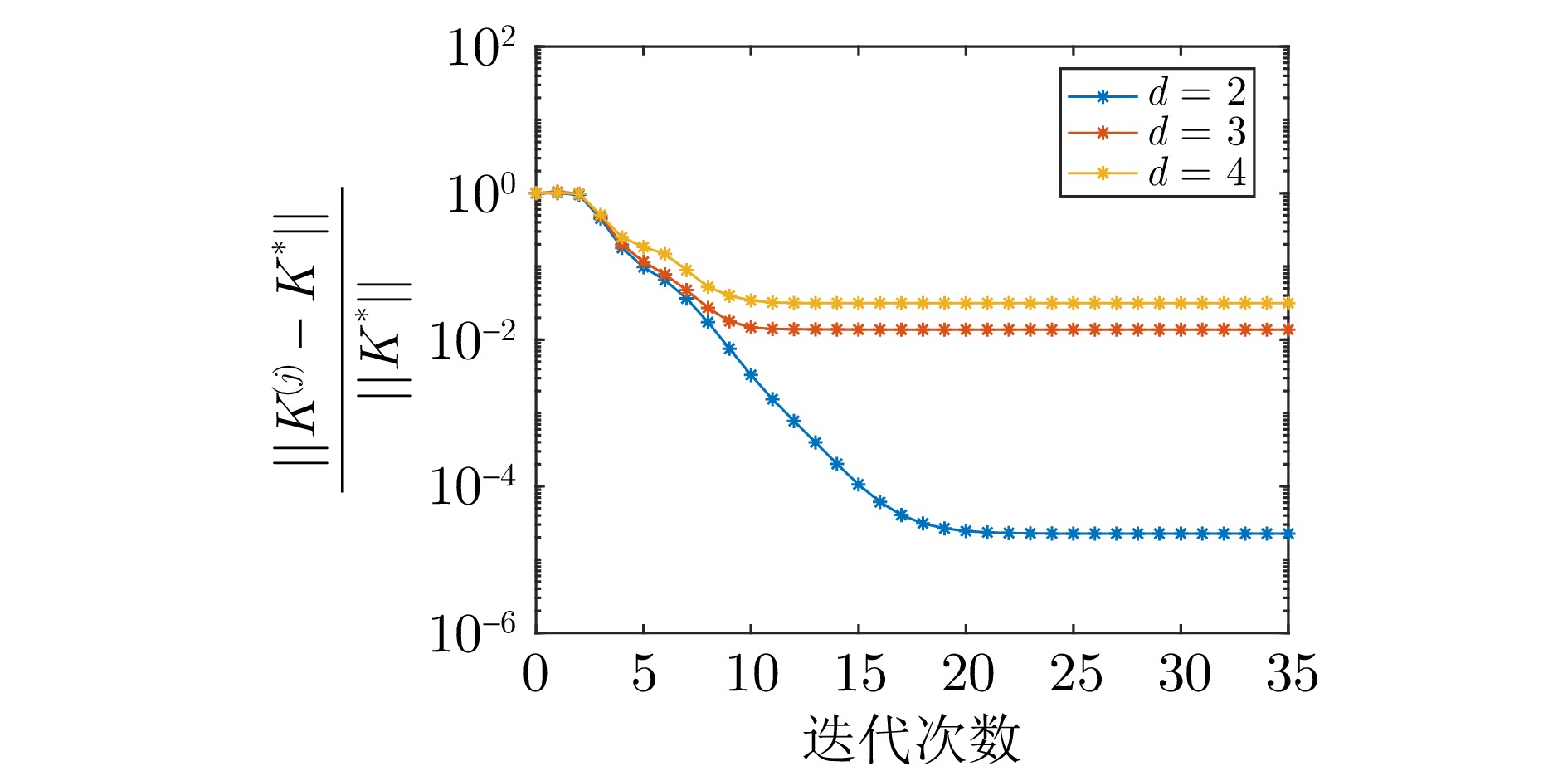
研究存在未知系统动力学和输入时滞的乘性噪声系统线性二次最优控制问题. 当系统动力学完全已知时, 可以通过离线求解Riccati-ZXL方程获得最优反馈策略. 而当系统动力学不完全已知时, 离线求解Riccati-ZXL方程不再可行. 为此, 拟设计一种值迭代算法来求解Riccati-ZXL方程, 该算法仅依赖可量测的状态和输入信息, 而不要求完全的系统动力学. 与策略迭代算法不同, 该算法消除了对初始策略稳定性的要求, 具有更强的适应性. 最后, 通过一个例子验证了所提算法的有效性.
研究存在未知系统动力学和输入时滞的乘性噪声系统线性二次最优控制问题. 当系统动力学完全已知时, 可以通过离线求解Riccati-ZXL方程获得最优反馈策略. 而当系统动力学不完全已知时, 离线求解Riccati-ZXL方程不再可行. 为此, 拟设计一种值迭代算法来求解Riccati-ZXL方程, 该算法仅依赖可量测的状态和输入信息, 而不要求完全的系统动力学. 与策略迭代算法不同, 该算法消除了对初始策略稳定性的要求, 具有更强的适应性. 最后, 通过一个例子验证了所提算法的有效性.
2025, 51(11): 2543-2552.
doi: 10.16383/j.aas.c250275
cstr: 32138.14.j.aas.c250275
摘要:
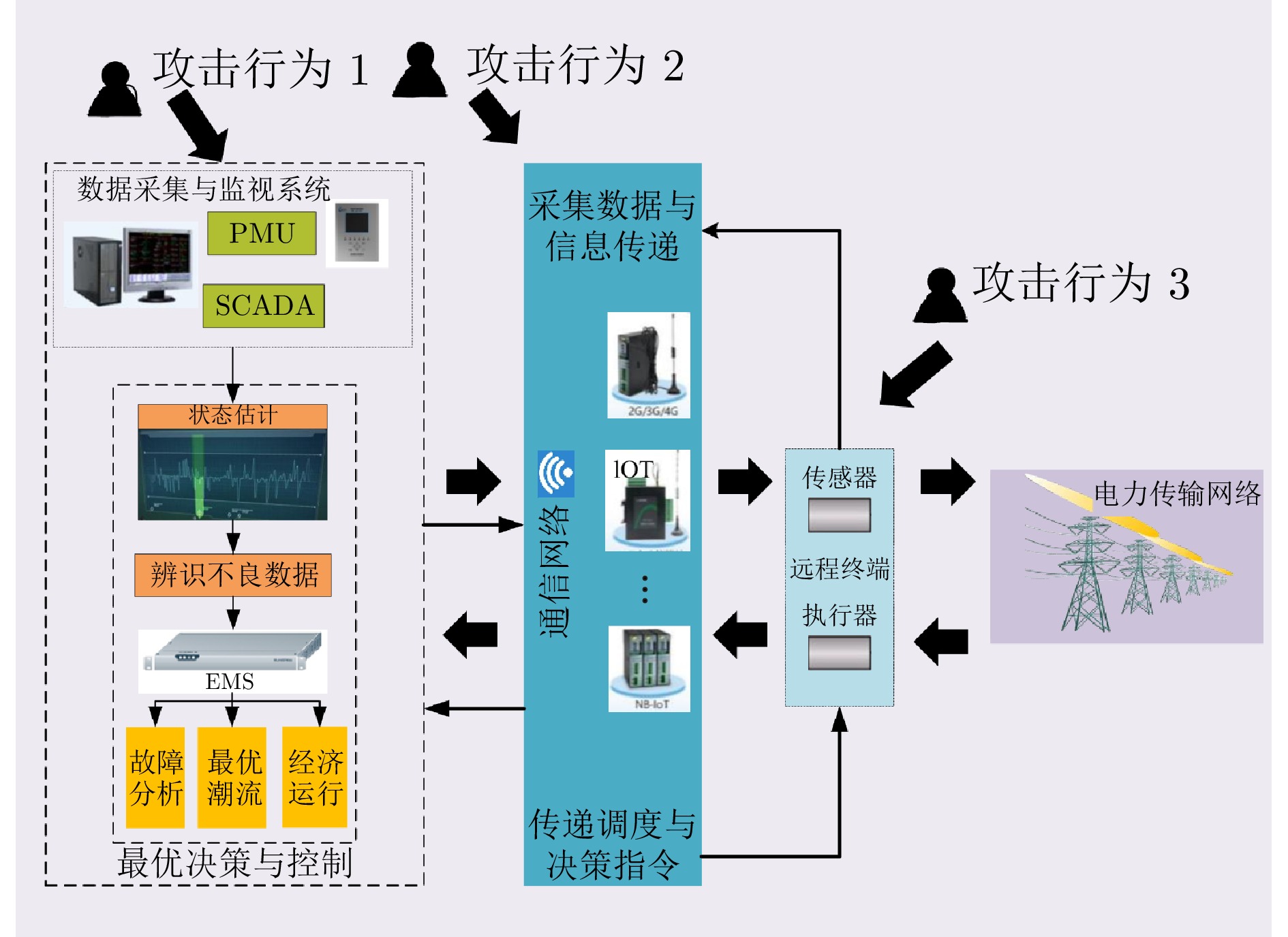
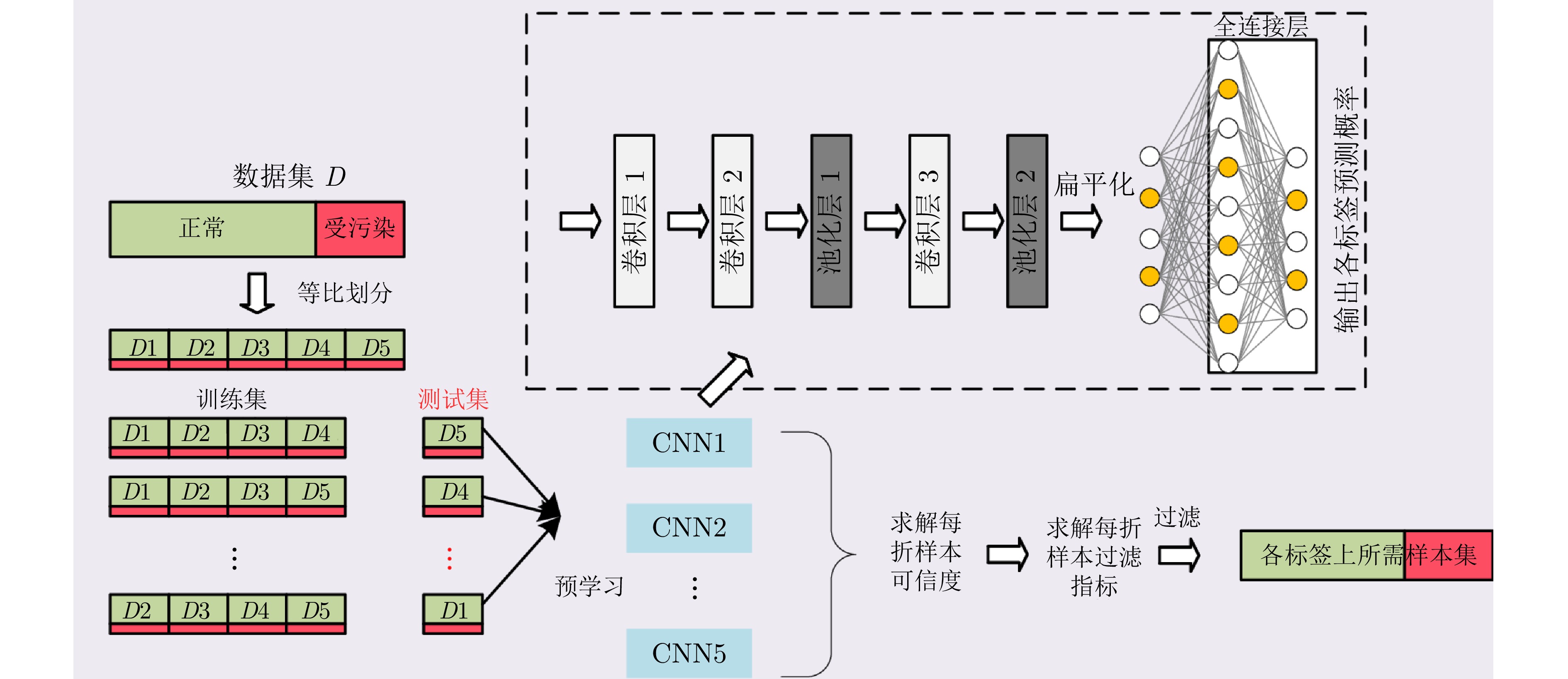
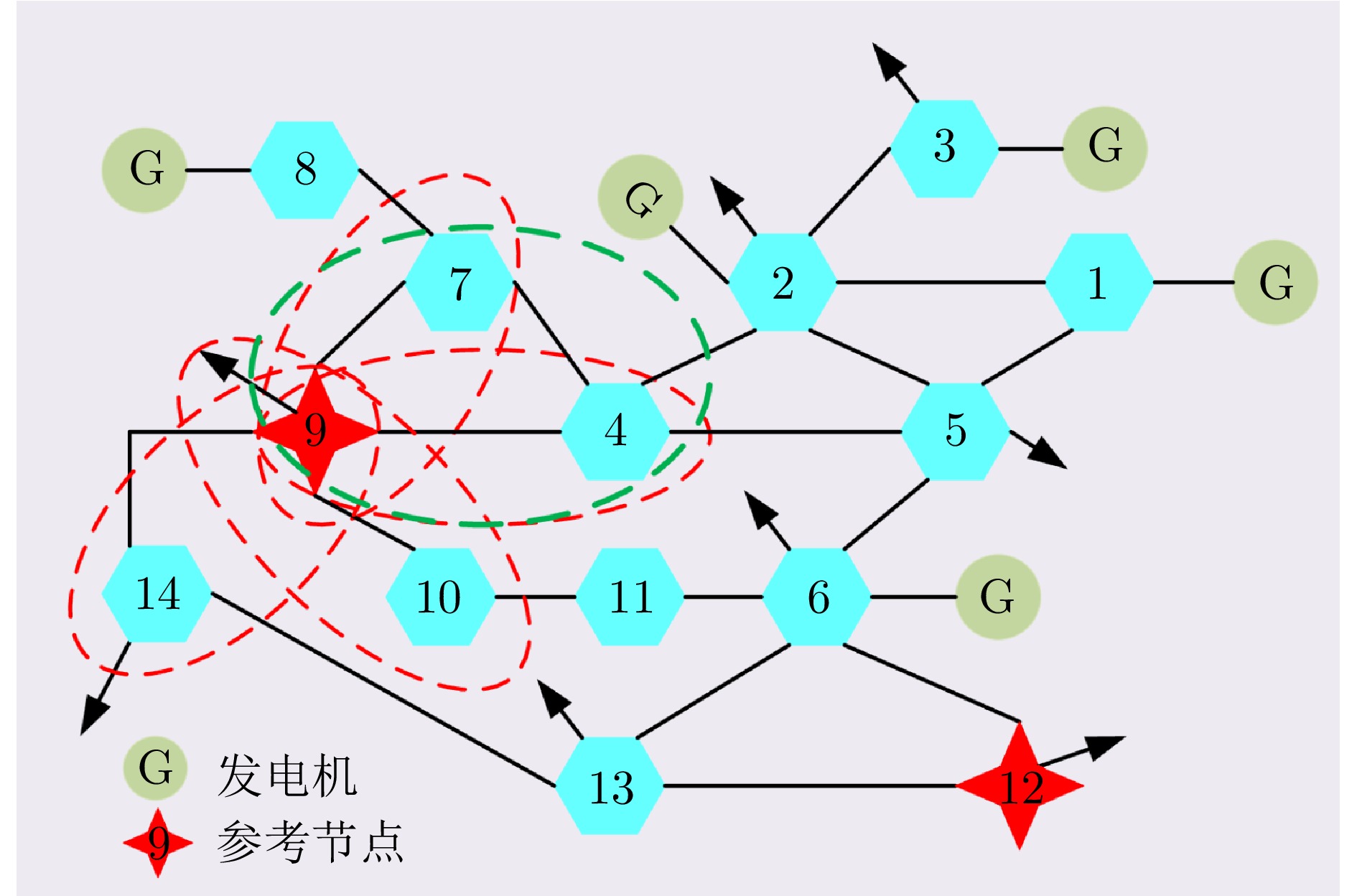
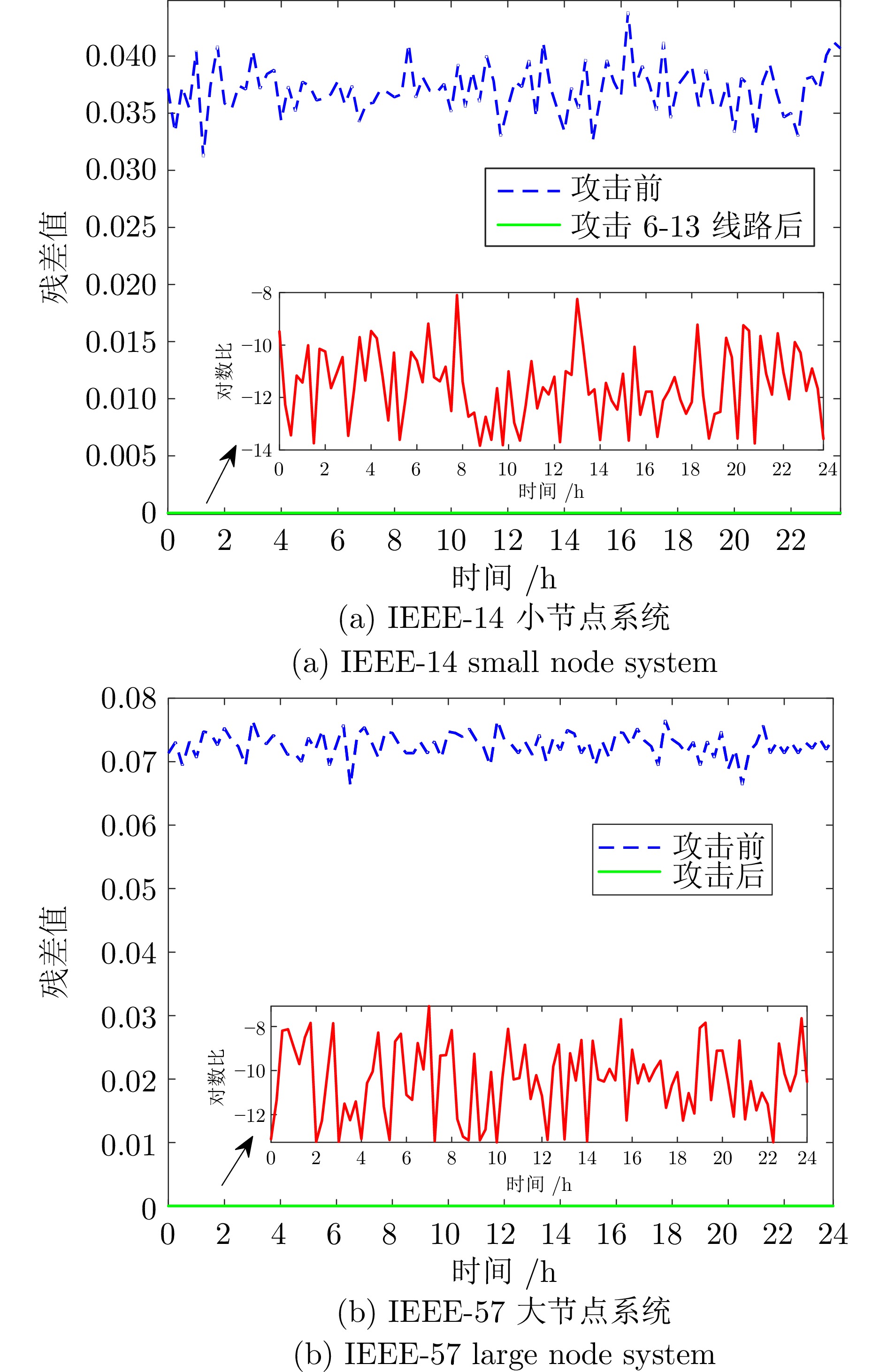
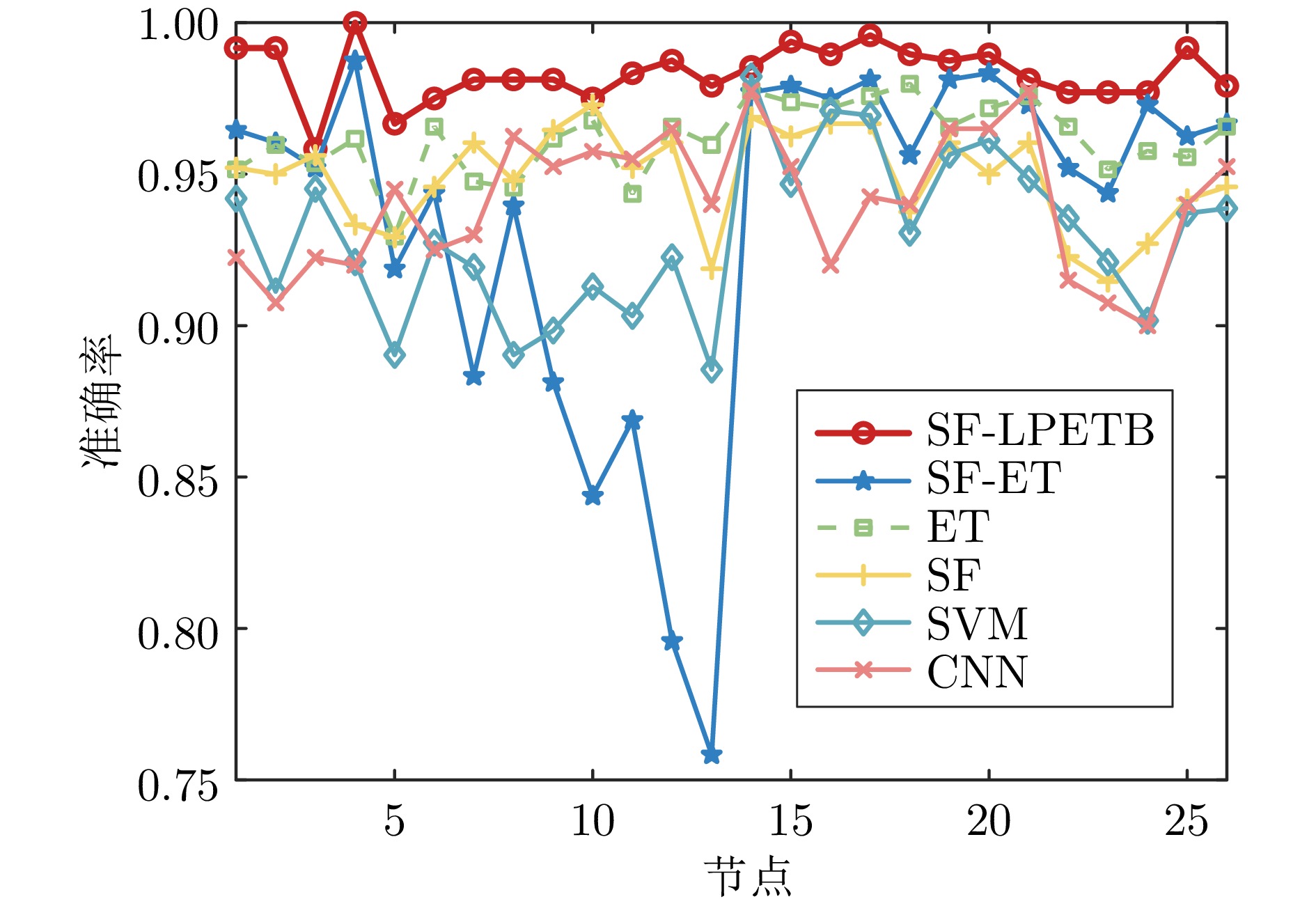
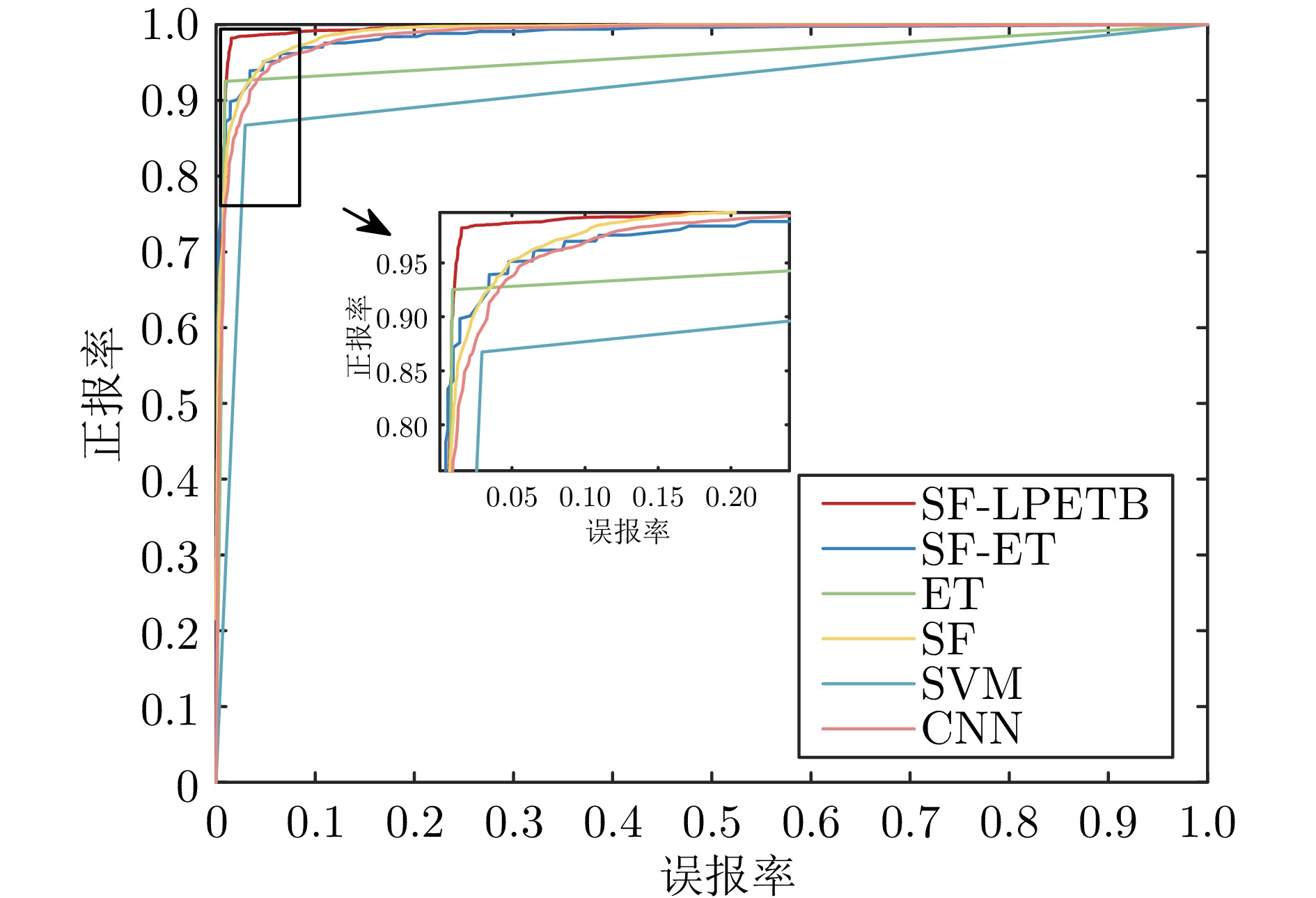
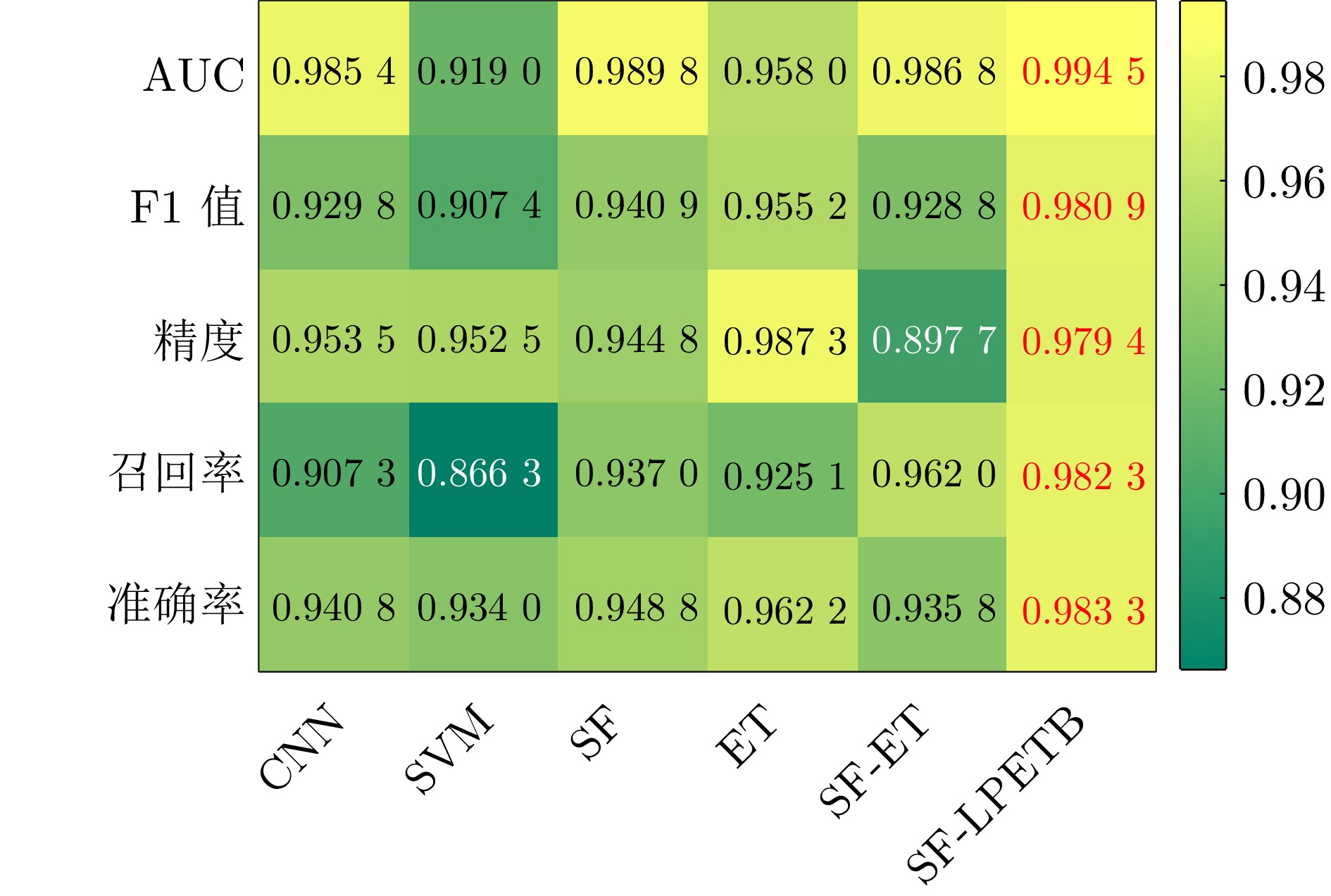
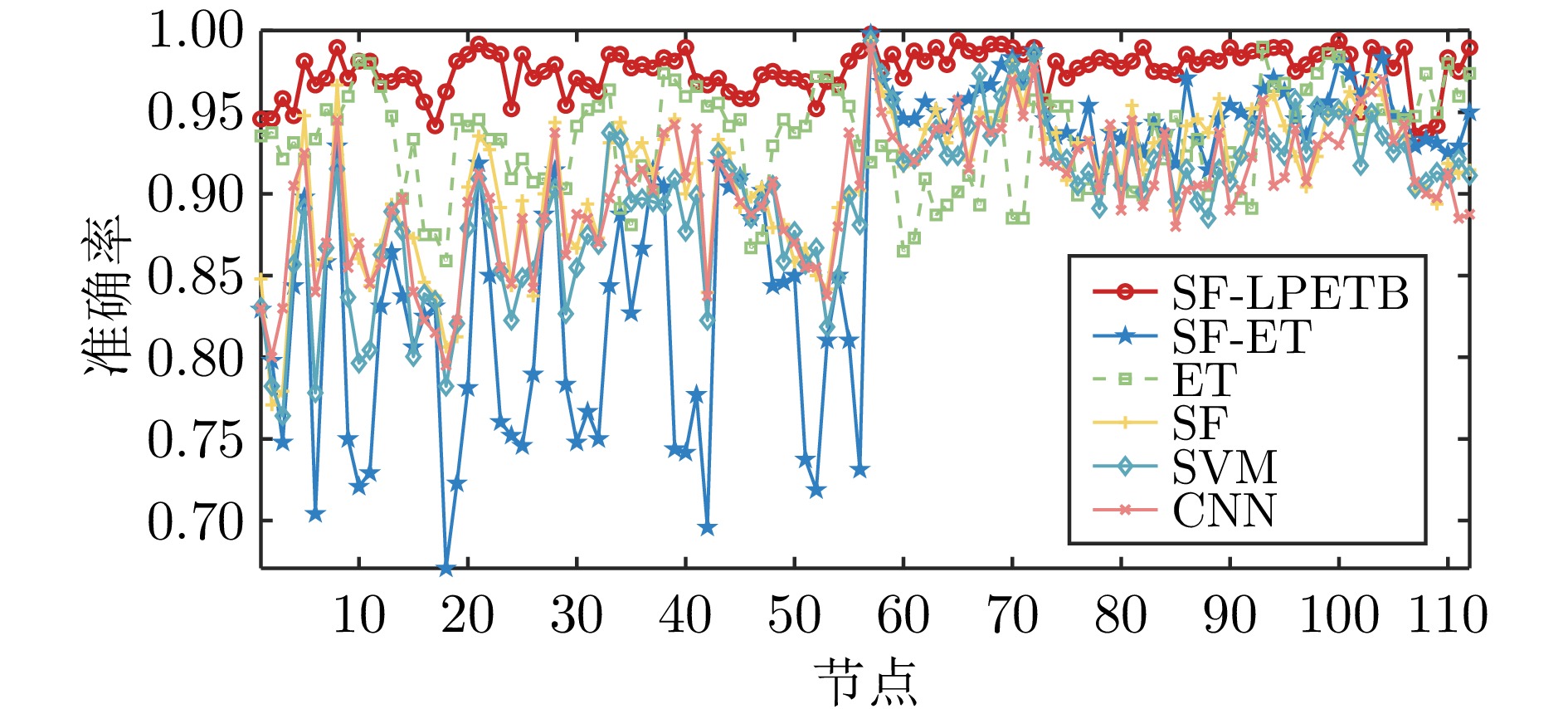
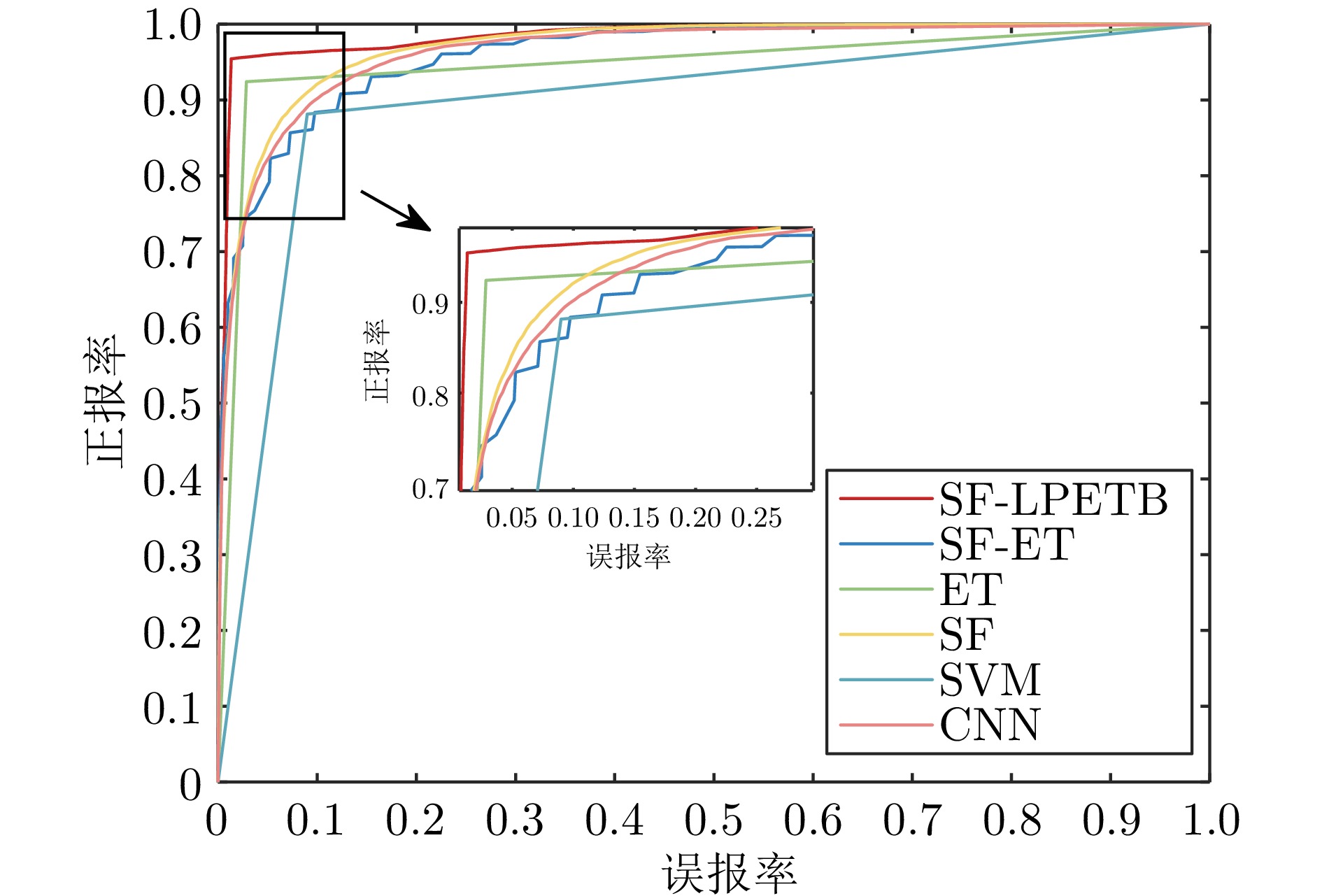
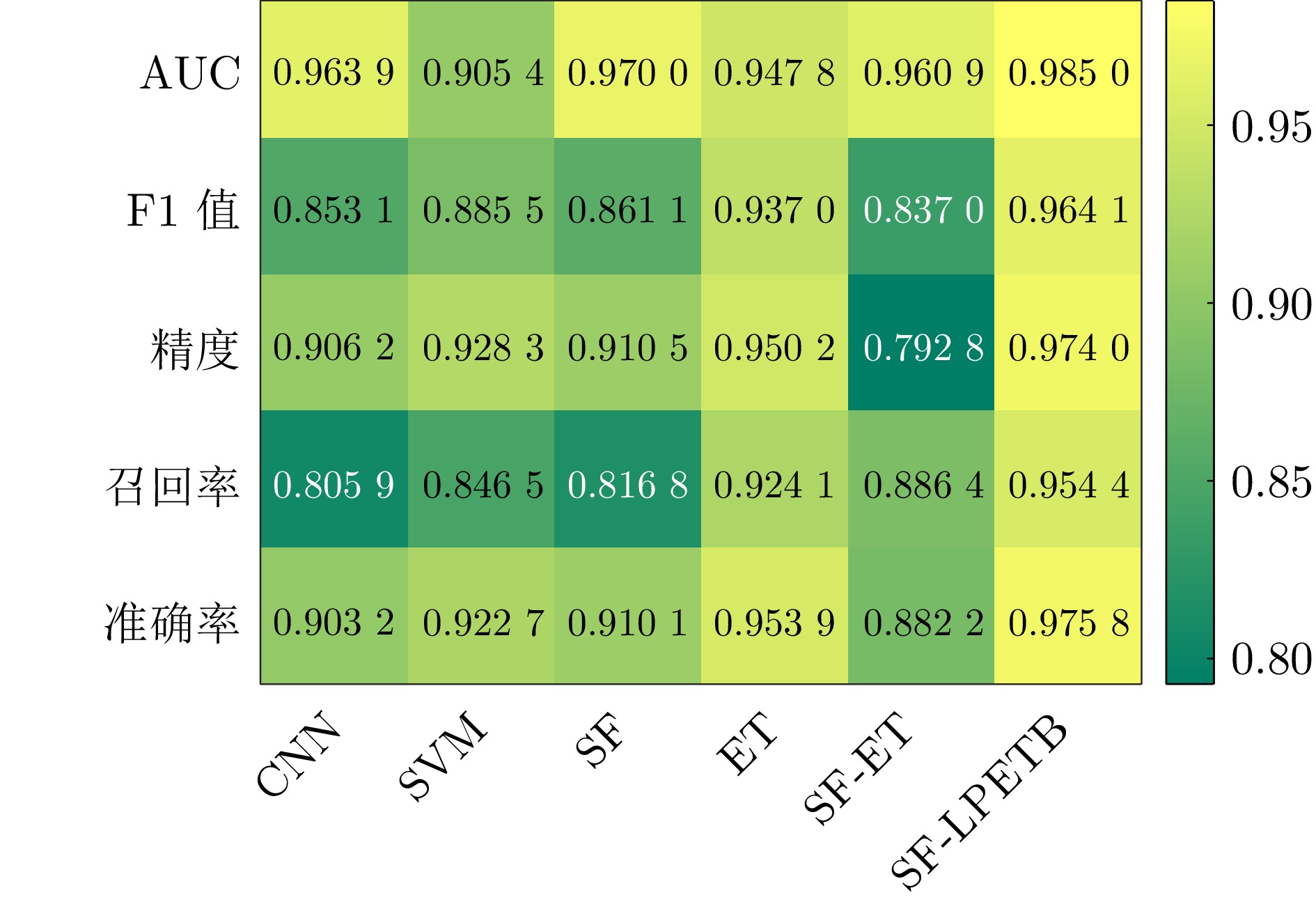
虚假数据注入攻击行为严重威胁电力信息物理系统的安稳运行. 然而, 针对虚假数据注入攻击的现有检测未充分考虑海量量测数据的不平衡性和网络拓扑的关联性, 导致检测方法广泛存在定位性能差的问题, 因此提出一种基于样本过滤−标签聚合极端树集成的电力信息物理系统虚假数据注入攻击定位检测方法. 所提方法在基于深度学习的卷积神经网络中引入交叉验证思想, 用于过滤海量量测数据中代表性弱、重复率高的不平衡样本; 通过利用标签聚合将关联的网络拓扑融入极端树中, 并在与各节点状态对应的所有极端树上进行集成, 继而加权输出得到各节点状态的最终检测概率, 以实现对受攻击位置的精确定位. 在IEEE-14、IEEE-57节点系统上进行的仿真, 验证了所提方法的有效性, 且与多种已有定位检测方法进行充分对比, 验证了其在准确率、精度、召回率、F1值和AUC值上更优.
虚假数据注入攻击行为严重威胁电力信息物理系统的安稳运行. 然而, 针对虚假数据注入攻击的现有检测未充分考虑海量量测数据的不平衡性和网络拓扑的关联性, 导致检测方法广泛存在定位性能差的问题, 因此提出一种基于样本过滤−标签聚合极端树集成的电力信息物理系统虚假数据注入攻击定位检测方法. 所提方法在基于深度学习的卷积神经网络中引入交叉验证思想, 用于过滤海量量测数据中代表性弱、重复率高的不平衡样本; 通过利用标签聚合将关联的网络拓扑融入极端树中, 并在与各节点状态对应的所有极端树上进行集成, 继而加权输出得到各节点状态的最终检测概率, 以实现对受攻击位置的精确定位. 在IEEE-14、IEEE-57节点系统上进行的仿真, 验证了所提方法的有效性, 且与多种已有定位检测方法进行充分对比, 验证了其在准确率、精度、召回率、F1值和AUC值上更优.
2025, 51(11): 2553-2568.
doi: 10.16383/j.aas.c240750
cstr: 32138.14.j.aas.c240750
摘要:
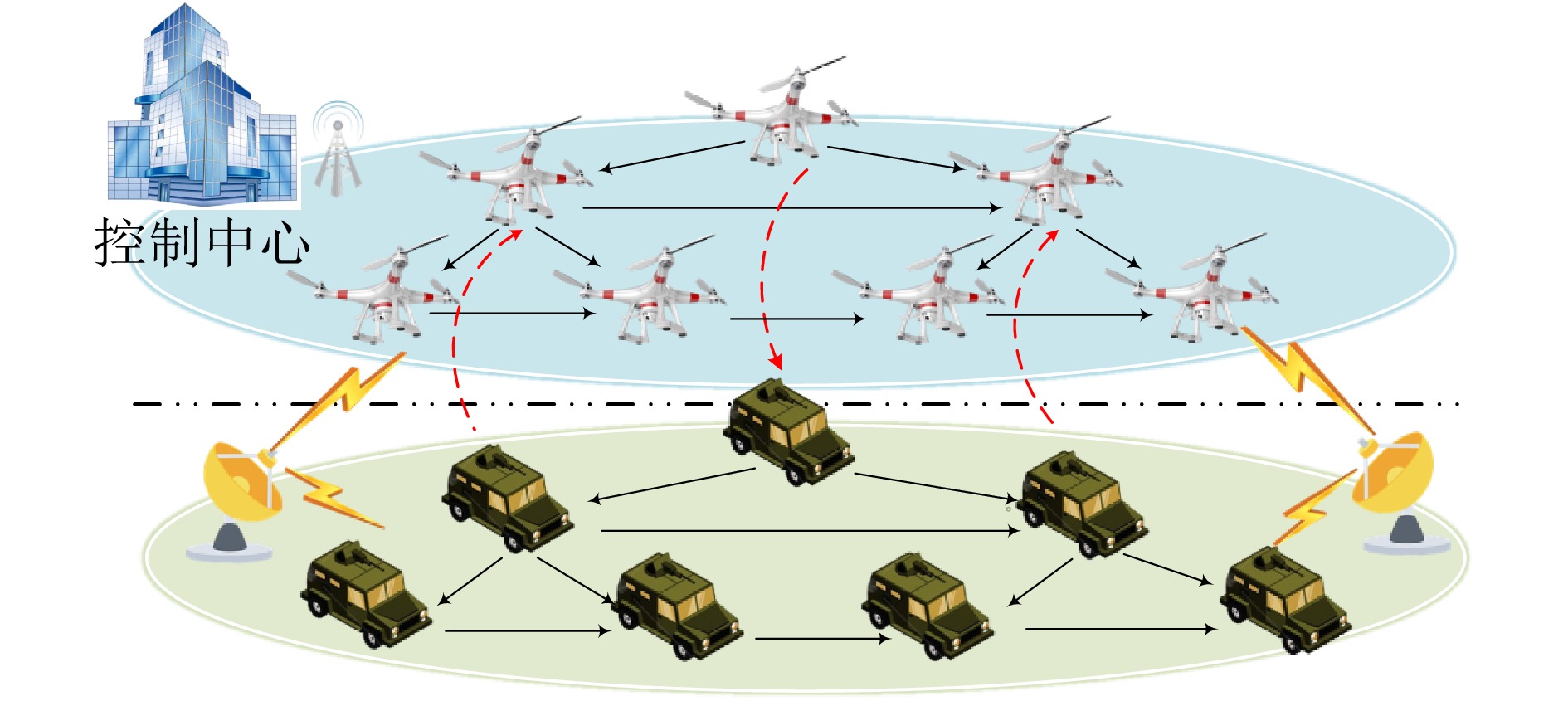
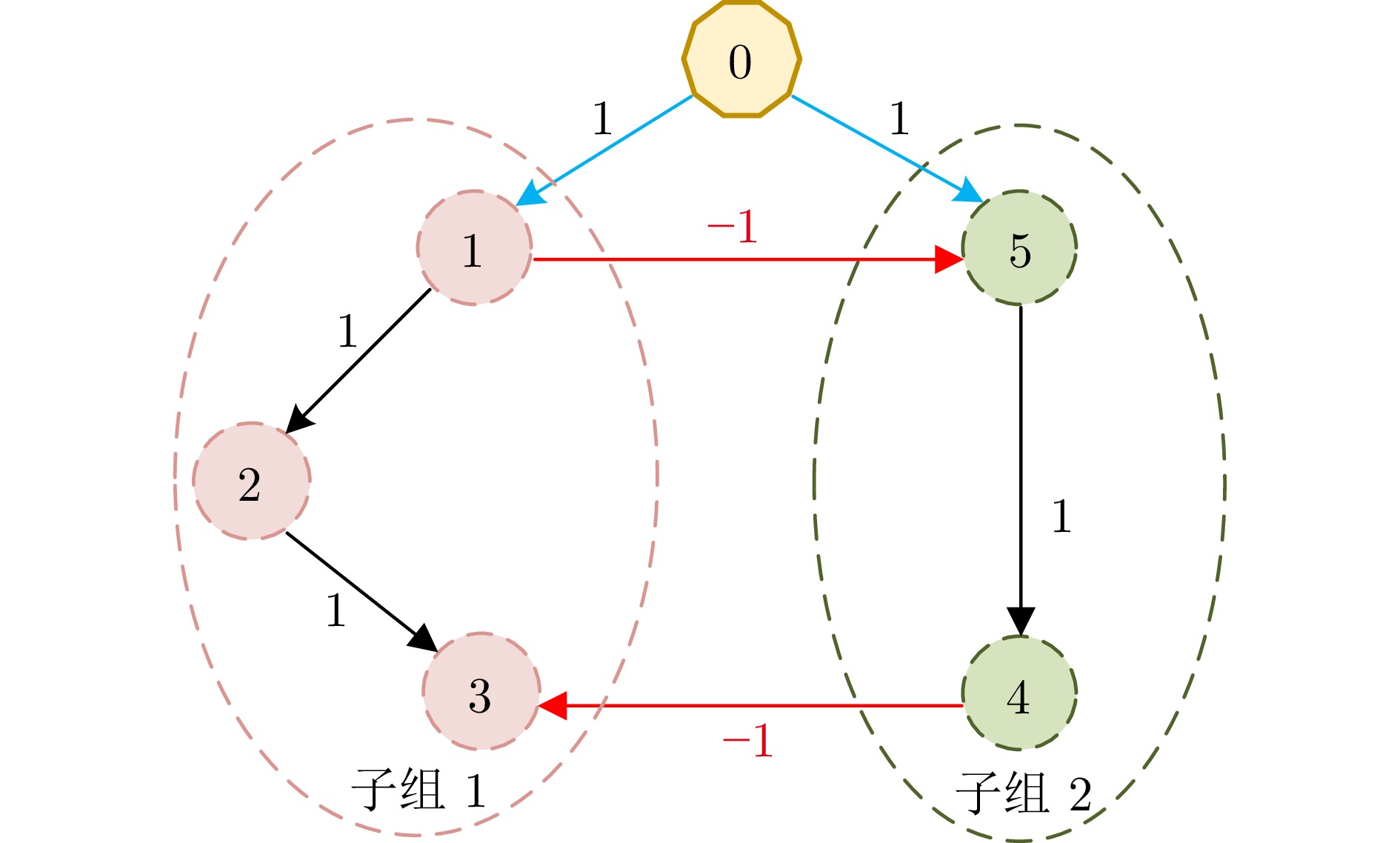
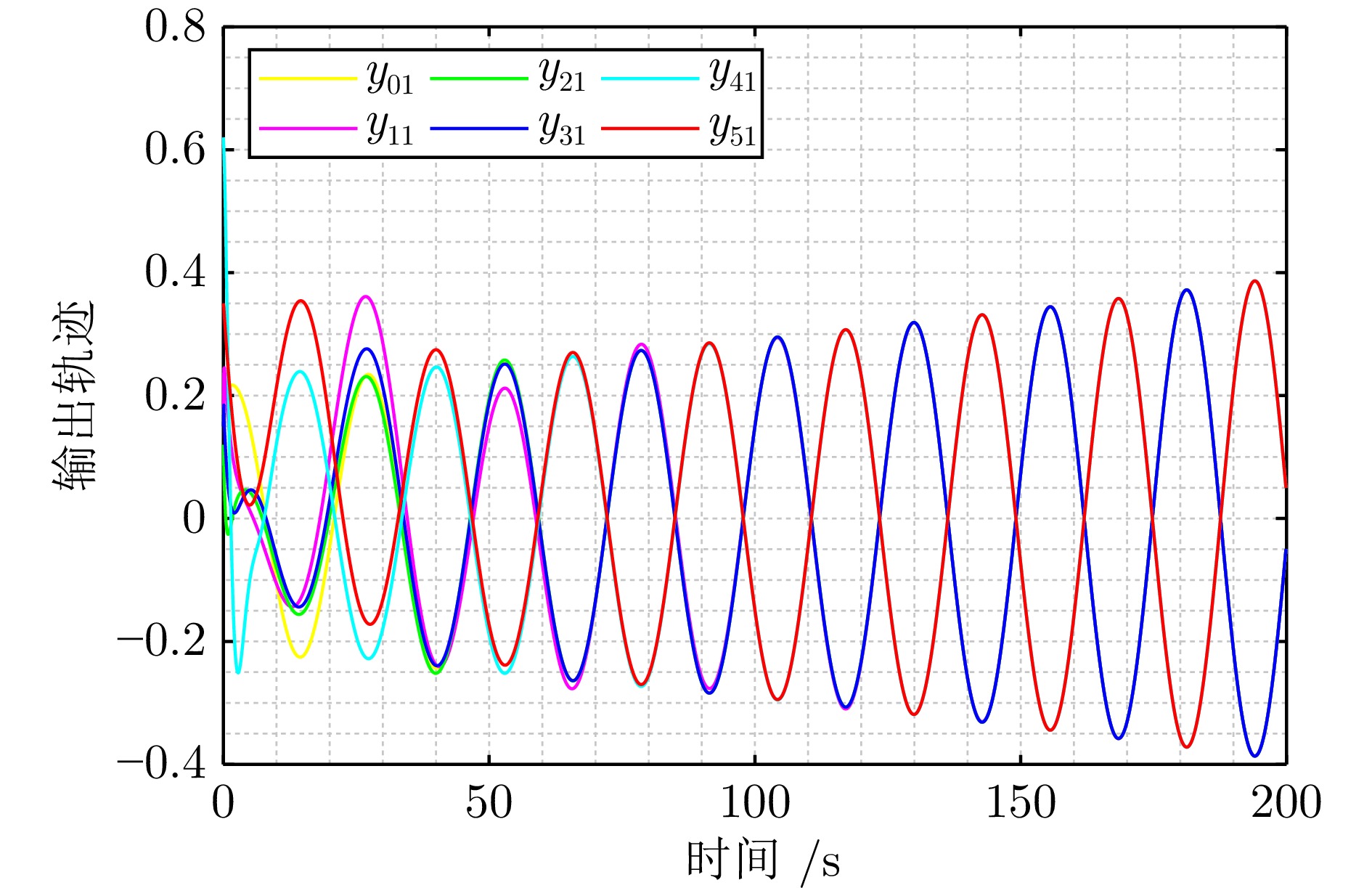
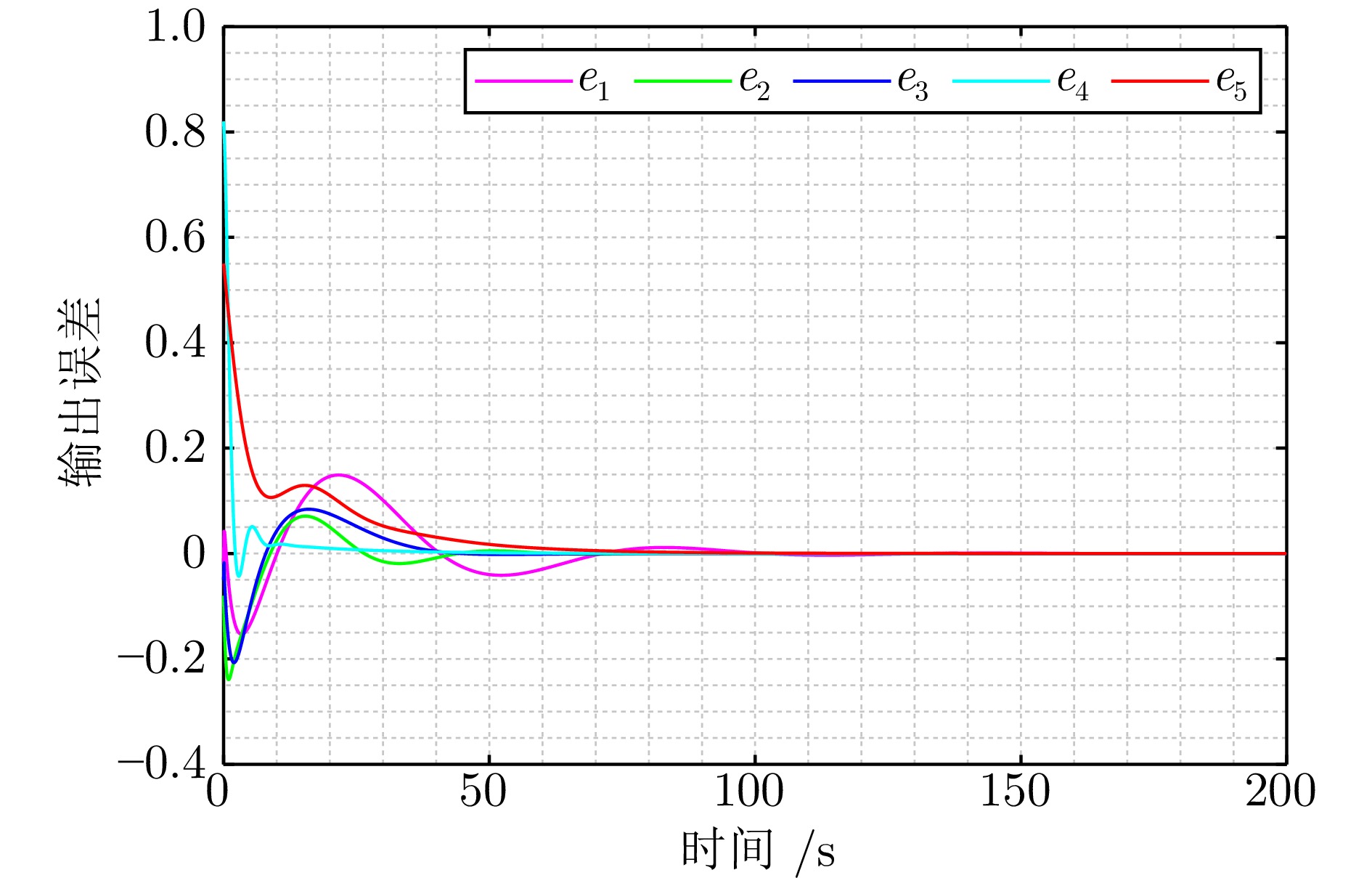
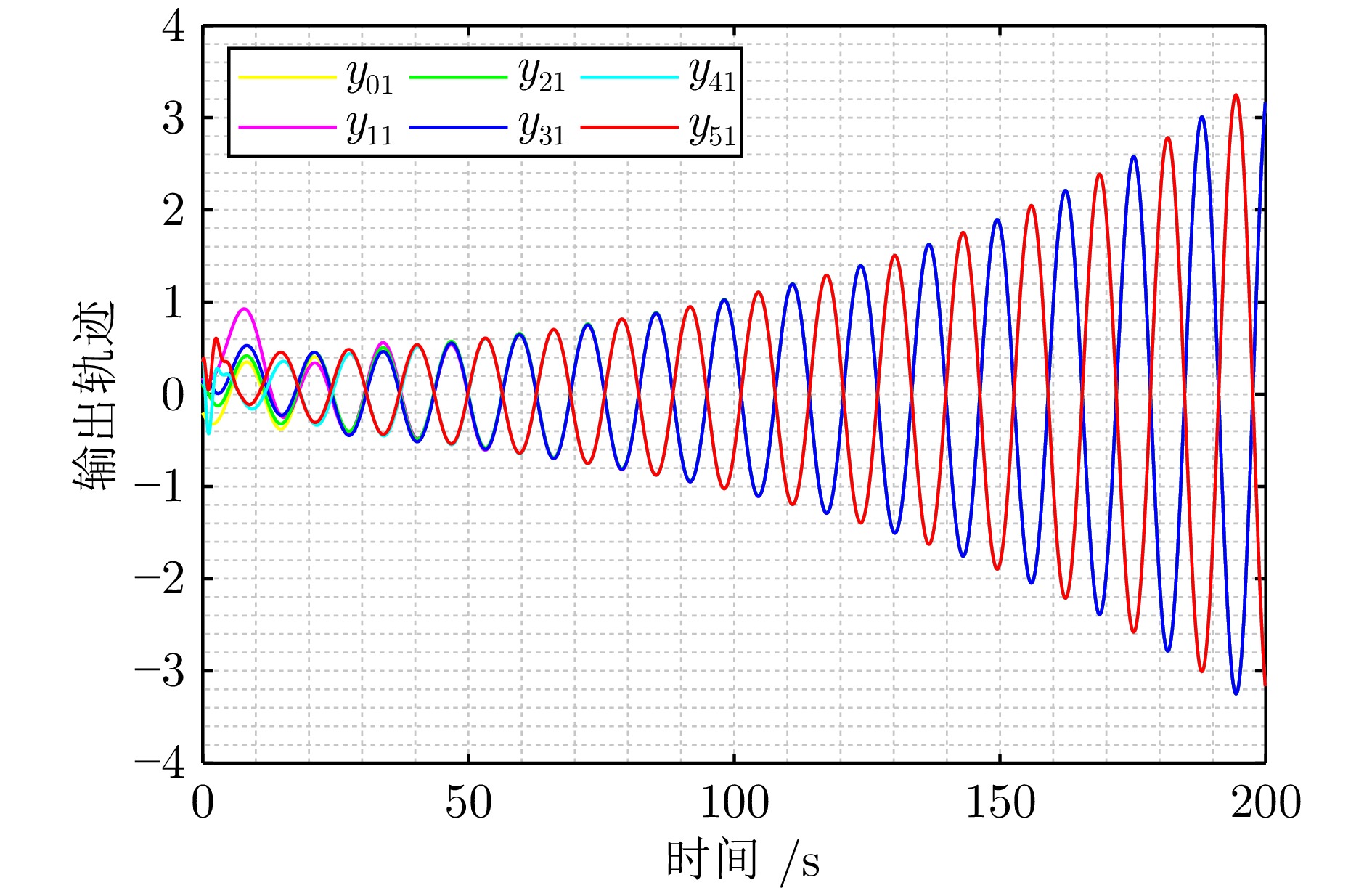
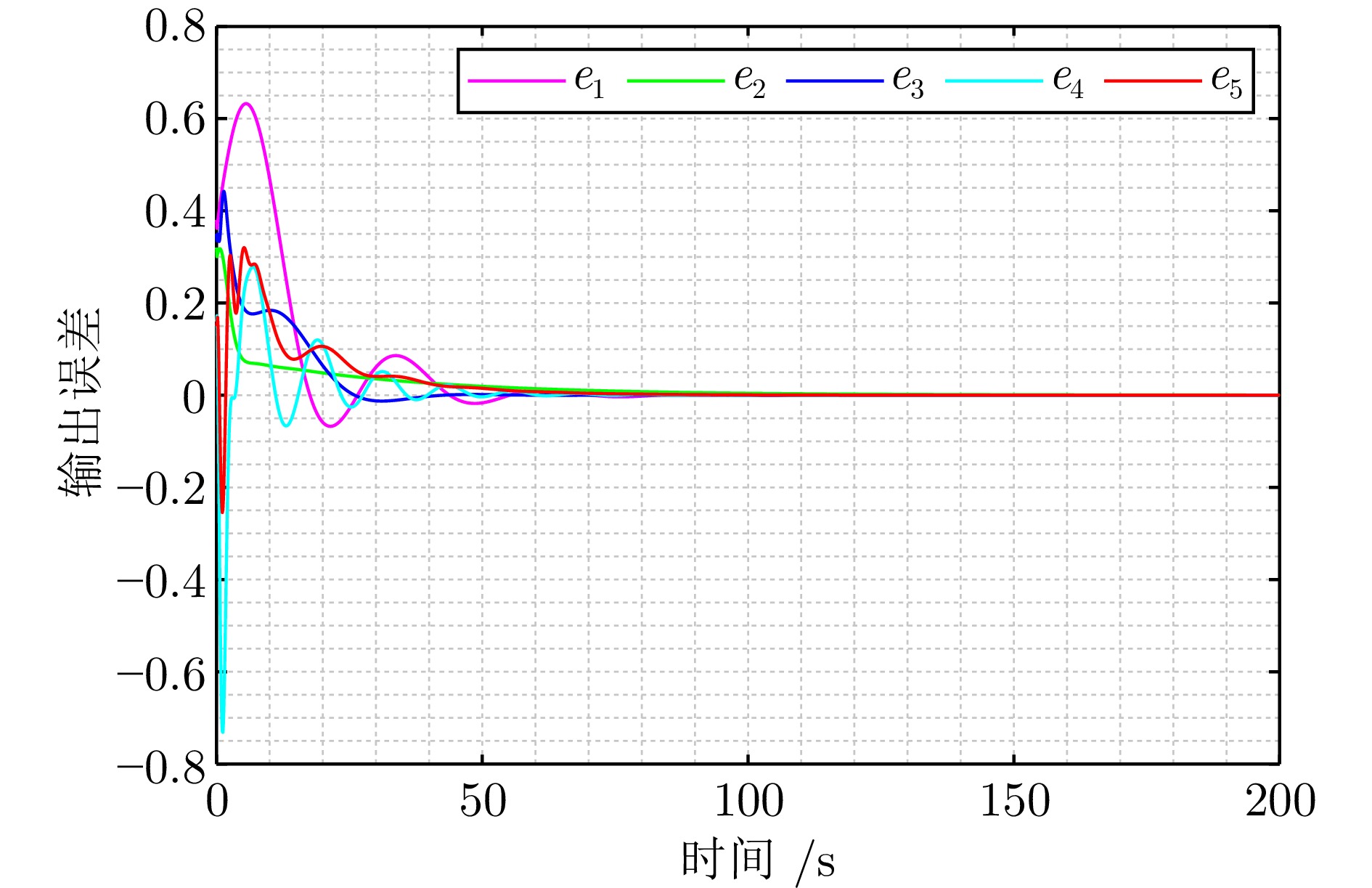
针对符号有向图下合作−竞争广义不确定异构多智能体系统的二分输出一致问题, 基于协同鲁棒输出调节原理提出新型分布式控制算法, 使得具有竞争关系和不同动态的两组智能体能够分别跟踪幅值相等、符号相反的外系统输出. 首先, 为实现对不确定系统参数的动态补偿, 引入基于外系统观测器的动态内模补偿器, 进而设计分布式状态反馈控制协议. 区别于传统协同输出调节问题, 通过将二分一致性问题转化为增广闭环广义系统的稳定性问题, 证明了在不依赖广义调节方程精确解的情况下, 提出的控制器能够实现小范围参数摄动下的二分输出跟踪. 其次, 在状态不可获知条件下, 通过重构动态内模补偿器, 设计分布式二分输出反馈控制协议. 最后, 通过仿真算例证明了所提出的分布式协同控制算法的有效性.
针对符号有向图下合作−竞争广义不确定异构多智能体系统的二分输出一致问题, 基于协同鲁棒输出调节原理提出新型分布式控制算法, 使得具有竞争关系和不同动态的两组智能体能够分别跟踪幅值相等、符号相反的外系统输出. 首先, 为实现对不确定系统参数的动态补偿, 引入基于外系统观测器的动态内模补偿器, 进而设计分布式状态反馈控制协议. 区别于传统协同输出调节问题, 通过将二分一致性问题转化为增广闭环广义系统的稳定性问题, 证明了在不依赖广义调节方程精确解的情况下, 提出的控制器能够实现小范围参数摄动下的二分输出跟踪. 其次, 在状态不可获知条件下, 通过重构动态内模补偿器, 设计分布式二分输出反馈控制协议. 最后, 通过仿真算例证明了所提出的分布式协同控制算法的有效性.