

-
摘要: 针对高超声速飞行器(HFV)在未知环境干扰与执行器故障下的跟踪控制问题, 提出一种基于Tube的复合鲁棒模型预测控制方法. 首先, 基于非线性动态逆方法将高超声速飞行器纵向运动模型输入/输出线性化, 实现高度与速度控制回路的解耦. 随后, 结合Tube不变集理论推导鲁棒收紧约束, 并显式集成HFV的控制输入及其增量约束, 设计一种复合鲁棒模型预测控制策略. 此外, 还研究了所提方法的递归可行性, 同时基于Lyapunov稳定性理论严格证明控制策略的闭环稳定性. 最后, 仿真实验验证了所提方法的有效性.Abstract: This paper addresses the tracking control problem for hypersonic flight vehicle (HFV) subject to unknown environmental disturbances and actuator faults. A composite Tube-based robust model predictive control approach is proposed. Firstly, the input/output linearization of the HFV longitudinal motion model is achieved by using the nonlinear dynamic inversion method, effectively decoupling the altitude and velocity control loops. Subsequently, robust tightened constraints are derived by incorporating Tube invariant set theory, explicitly integrating both the control input magnitude and rate constraints of the HFV. Based on these constraints, a composite robust model predictive control strategy is designed. Furthermore, the recursive feasibility of the proposed method is investigated, while the closed-loop stability of the control strategy is rigorously proven based on Lyapunov stability theory. Finally, simulation experiments demonstrate the effectiveness of the proposed method.
-
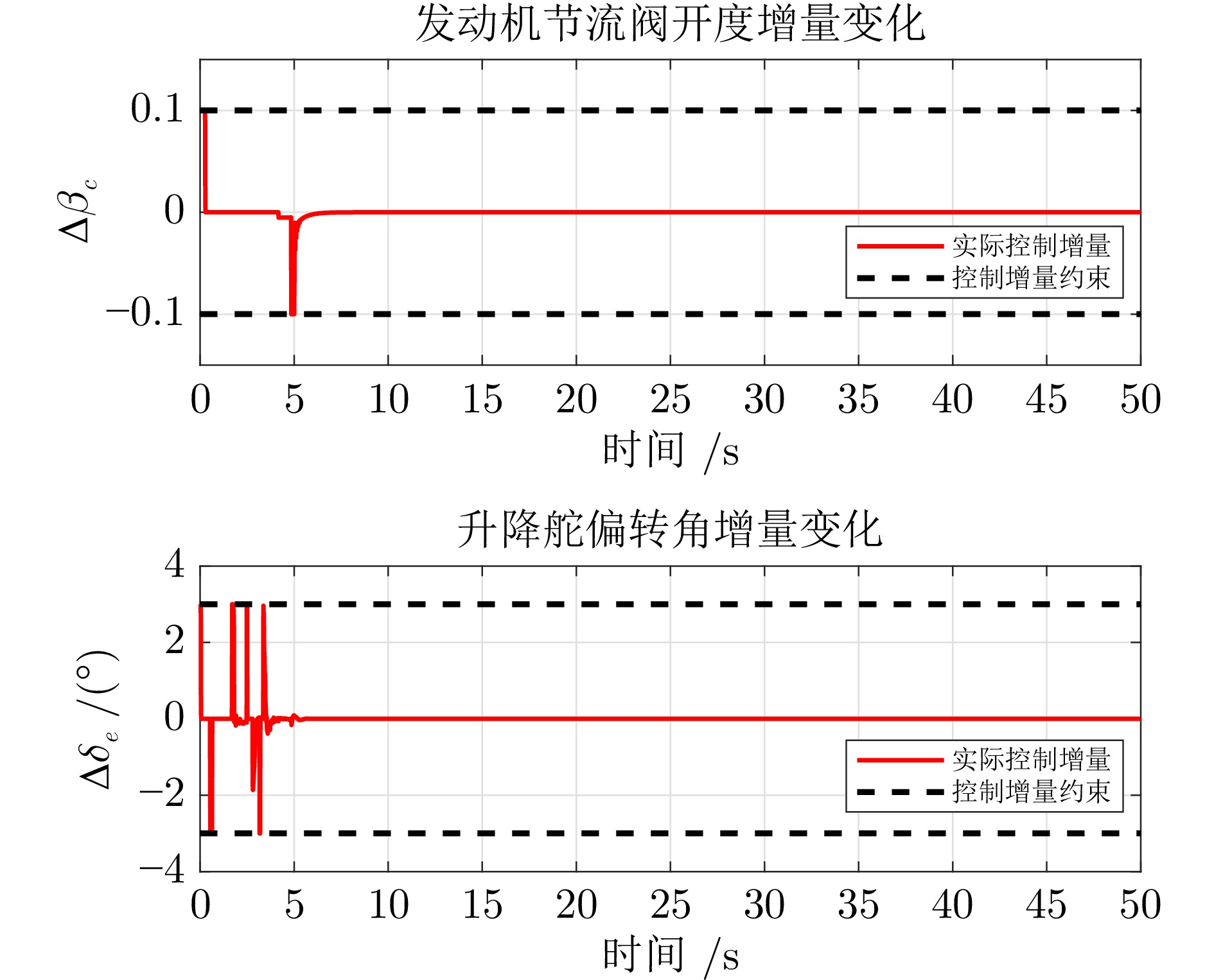
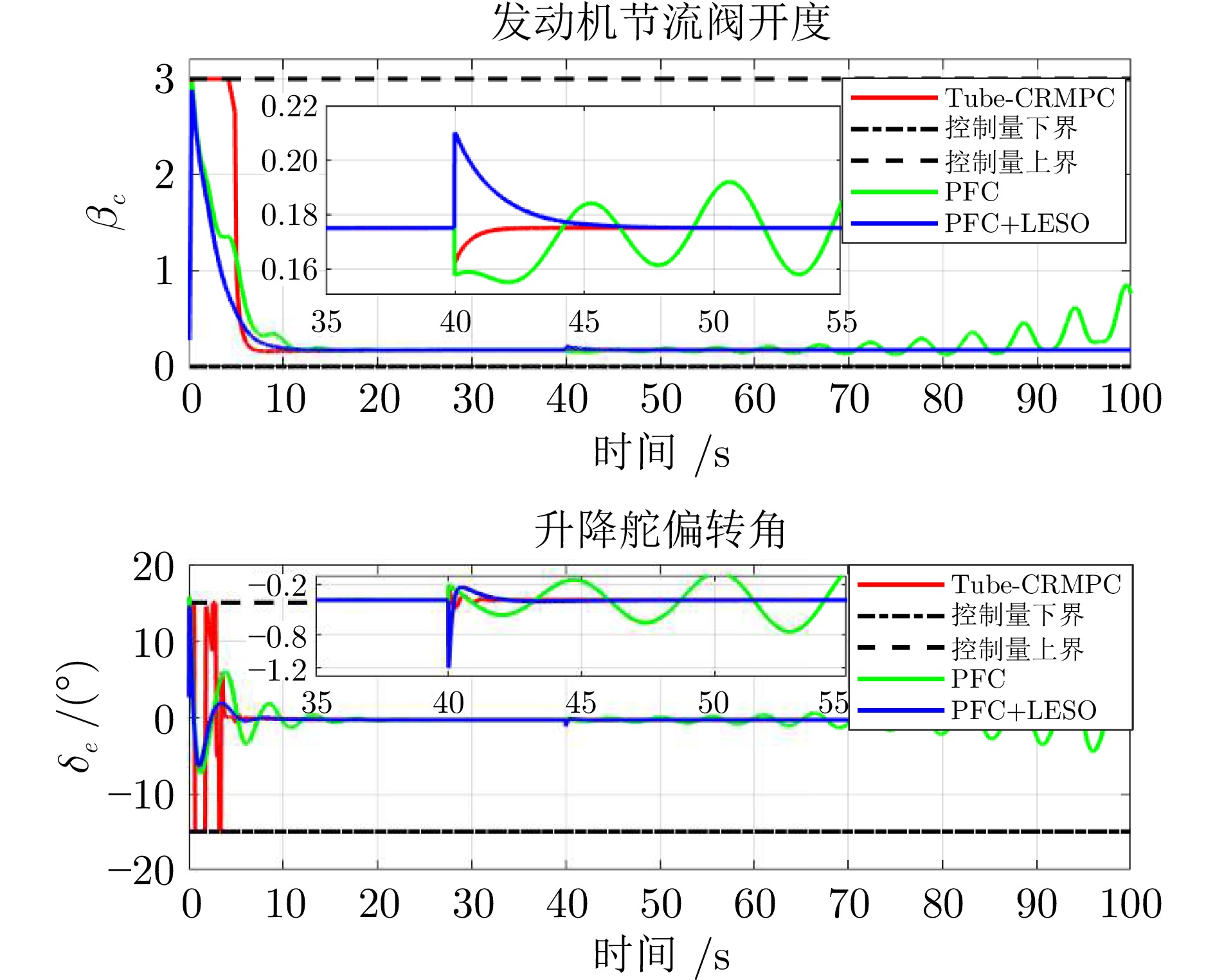
图 4 参数不确定性下的控制量增量变化
Fig. 4 Incremental changes in control variables under parameter uncertainty
-
[1] 张豪, 王鹏, 汤国建, 包为民. 高超声速变外形飞行器事件触发有限时间控制. 航空学报, 2023, 44(15): Article No. 528494Zhang Hao, Wang Peng, Tang Guo-Jian, Bao Wei-Min. Event-triggered fast finite time control for hypersonic morphing vehicles. Acta Aeronautica et Astronautica Sinica, 2023, 44(15): Article No. 528494 [2] Cao C Y, Li F B, Xie Q C, Liao Y X, Huang T W, Yang C H, et al. Integrated guidance and control of morphing flight vehicle via sliding-mode-based robust reinforcement learning. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2025, 55(5): 3350−3362 doi: 10.1109/TSMC.2025.3540262 [3] 郭雷, 王陈亮, 王雨, 朱玉凯, 乔建忠. 多源干扰下高超声速飞行器自主精细控制. 宇航学报, 2023, 44(4): 558−565Guo Lei, Wang Chen-Liang, Wang Yu, Zhu Yu-Kai, Qiao Jian-Zhong. Autonomous refined control for hypersonic flight vehicles with multiple disturbances. Journal of Astronautics, 2023, 44(4): 558−565 [4] Liang S, Xu B, Sun S S, Tao C G. Dynamic-command-limiting-based AOA constraint control of hypersonic flight vehicle. IEEE Transactions on Aerospace and Electronic Systems, 2025, 61(1): 1163−1174 doi: 10.1109/TAES.2024.3452051 [5] Tang W Q, Long W K, Gao H Y. Model predictive control of hypersonic vehicles accommodating constraints. IET Control Theory & Applications, 2017, 11(15): 2599−2606 [6] 张康康, 周彬, 蔡光斌, 侯明哲. 高超声速飞行器指定时间时变高增益反馈跟踪控制. 自动化学报, 2024, 50(6): 1151−1159Zhang Kang-Kang, Zhou Bin, Cai Guang-Bin, Hou Ming-Zhe. Prescribed-time tracking control of hypersonic vehicles by time-varying high-gain feedback. Acta Automatica Sinica, 2024, 50(6): 1151−1159 [7] Zhao S W, Wang J C, Xu H T, Wang B H. Composite observer-based optimal attitude-tracking control with reinforcement learning for hypersonic vehicles. IEEE Transactions on Cybernetics, 2023, 53(2): 913−926 doi: 10.1109/TCYB.2022.3192871 [8] Zhang H, Wang P, Tang G J, Bao W M. Fuzzy disturbance observer-based fixed-time attitude control for hypersonic morphing vehicles. IEEE Transactions on Aerospace and Electronic Systems, 2024, 60(5): 6577−6593 doi: 10.1109/TAES.2024.3404911 [9] 路遥. 一种非仿射高超声速飞行器输出反馈控制方法. 自动化学报, 2022, 48(6): 1530−1542Lu Yao. A method of output feedback control for non-affine hypersonic vehicles. Acta Automatica Sinica, 2022, 48(6): 1530−1542 [10] Yuan Y, Wang Z, Guo L, Liu H P. Barrier Lyapunov functions-based adaptive fault tolerant control for flexible hypersonic flight vehicles with full state constraints. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2020, 50(9): 3391−3400 doi: 10.1109/TSMC.2018.2837378 [11] Ding Y B, Yue X K, Li W B, Huang P X, Li N Y. Novel finite-time controller with improved auxiliary adaptive law for hypersonic vehicle subject to actuator constraints. IEEE Transactions on Intelligent Transportation Systems, 2025, 26(3): 3402−3416 doi: 10.1109/TITS.2024.3522567 [12] Ding H X, Xu B W, Yang W Q, Zhou Y F, Wu X Y. A robust control method for the trajectory tracking of hypersonic unmanned flight vehicles based on model predictive control. Drones, 2025, 9(3): Article No. 223 doi: 10.3390/drones9030223 [13] Astudillo A, Gillis J, Diehl M, Decré W, Pipeleers G, Swevers J. Position and orientation tunnel-following NMPC of robot manipulators based on symbolic linearization in sequential convex quadratic programming. IEEE Robotics and Automation Letters, 2022, 7(2): 2867−2874 doi: 10.1109/LRA.2022.3142396 [14] Cui P, Gao C S, An R M. Fault-observer-based iterative learning model predictive controller for trajectory tracking of hypersonic vehicles. Journal of Systems Engineering and Electronics, 2025, 36(3): 803−813 doi: 10.23919/JSEE.2025.000033 [15] Dai P, Yan B B, Han T, Liu S X. Barrier Lyapunov function based model predictive control of a morphing waverider with input saturation and full-state constraints. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(3): 3071−3081 doi: 10.1109/TAES.2022.3222294 [16] 曹承钰, 李繁飙, 廖宇新, 殷泽阳, 桂卫华. 高超声速变外形飞行器建模与固定时间预设性能控制. 自动化学报, 2024, 50(3): 486−504Cao Cheng-Yu, Li Fan-Biao, Liao Yu-Xin, Yin Ze-Yang, Gui Wei-Hua. Modeling and fixed-time prescribed performance control for hypersonic morphing vehicle. Acta Automatica Sinica, 2024, 50(3): 486−504 [17] Mayne D Q, Rawlings J B, Rao C V, Scokaert P O M. Constrained model predictive control: Stability and optimality. Automatica, 2000, 36(6): 789−814 doi: 10.1016/S0005-1098(99)00214-9 [18] Zhao J, Chen M. Dynamic event-triggered robust feedback model predictive tracking control of air-breathing hypersonic vehicle based on disturbance preview. IEEE Transactions on Aerospace and Electronic Systems, 2025, 61(2): 3291−3305 doi: 10.1109/TAES.2024.3492159 [19] Mirshams M, Khosrojerdi M. Attitude control of an underactuated spacecraft using tube-based MPC approach. Aerospace Science and Technology, 2016, 48: 140−145 doi: 10.1016/j.ast.2015.09.018 [20] Ma Y, Cai Y L. Scheduled composite off-line output feedback model predictive control for a constrained hypersonic vehicle using polyhedral invariant sets. Journal of Aerospace Engineering, 2018, 31(4): Article No. 115 [21] Hu X X, Karimi H R, Wu L G, Guo Y. Model predictive control-based non-linear fault tolerant control for air-breathing hypersonic vehicles. IET Control Theory & Applications, 2014, 8(13): 1147−1153 [22] Shi L, Wang X S, Cheng Y H. Safe reinforcement learning-based robust approximate optimal control for hypersonic flight vehicles. IEEE Transactions on Vehicular Technology, 2023, 72(9): 11401−11414 doi: 10.1109/TVT.2023.3264243 [23] 刘晓东. 针对一类非线性系统的多变量线性扩张状态观测器及其收敛性分析. 自动化学报, 2016, 42(11): 1758−1764Liu Xiao-Dong. Multi-variable linear extended state observer for a class of nonlinear systems and its convergence analysis. Acta Automatica Sinica, 2016, 42(11): 1758−1764 [24] Bartusiak E R, Jacobs M A, Chan M W, Comer M L, Delp E J. Predicting hypersonic glide vehicle behavior with stochastic grammars. IEEE Transactions on Aerospace and Electronic Systems, 2024, 60(1): 1208−1223 doi: 10.1109/TAES.2023.3335895 [25] 孙爽, 董华龙, 赵自庆, 李文彭, 王宇峰. 基于增量非线性动态逆的倾转旋翼eVTOL单旋翼失效控制. 推进技术, 2025, 46(9): 249−262Sun Shuang, Dong Hua-Long, Zhao Zi-Qing, Li Wen-Peng, Wang Yu-Feng. Single rotor failure control of tilt-rotor eVTOL based on incremental nonlinear dynamic inversion. Journal of Propulsion Technology, 2025, 46(9): 249−262 [26] 闫斌斌, 林泽淮, 刘双喜, 闫杰. 基于动态逆控制的高超声速飞行器飞/发一体化控制方法研究. 西北工业大学学报, 2023, 41(5): 878−886 doi: 10.1051/jnwpu/20234150878Yan Bin-Bin, Lin Ze-Huai, Liu Shuang-Xi, Yan Jie. Research on integrated aircraft-engine control method of hypersonic vehicle based on dynamic inversion control. Journal of Northwestern Polytechnical University, 2023, 41(5): 878−886 doi: 10.1051/jnwpu/20234150878 [27] Yang Y, Yao X M, Xu H Z. Disturbance-observer-based event-triggered model predictive control of nonlinear input-affine systems. Automatica, 2024, 161: Article No. 111504 doi: 10.1016/j.automatica.2023.111504 [28] Mu C X, Ni Z, Sun C Y, He H B. Air-breathing hypersonic vehicle tracking control based on adaptive dynamic programming. IEEE Transactions on Neural Networks and Learning Systems, 2017, 28(3): 584−598 doi: 10.1109/TNNLS.2016.2516948 [29] Li Y J, Liang S, Xu B, Hou M S. Predefined-time asymptotic tracking control for hypersonic flight vehicles with input quantization and faults. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(5): 2826−2837 doi: 10.1109/TAES.2021.3068442 [30] Yu X, Li P, Zhang Y M. The design of fixed-time observer and finite-time fault-tolerant control for hypersonic gliding vehicles. IEEE Transactions on Industrial Electronics, 2018, 65(5): 4135−4144 doi: 10.1109/TIE.2017.2772192 -

 下载:
下载:

图(8)
计量
- 文章访问数: 633
- HTML全文浏览量: 515
- PDF下载量: 116
- 被引次数: 0
