
2024年 第50卷 第11期
2024, 50(11): 2079-2101.
doi: 10.16383/j.aas.c230184
cstr: 32138.14.j.aas.c230184
摘要:
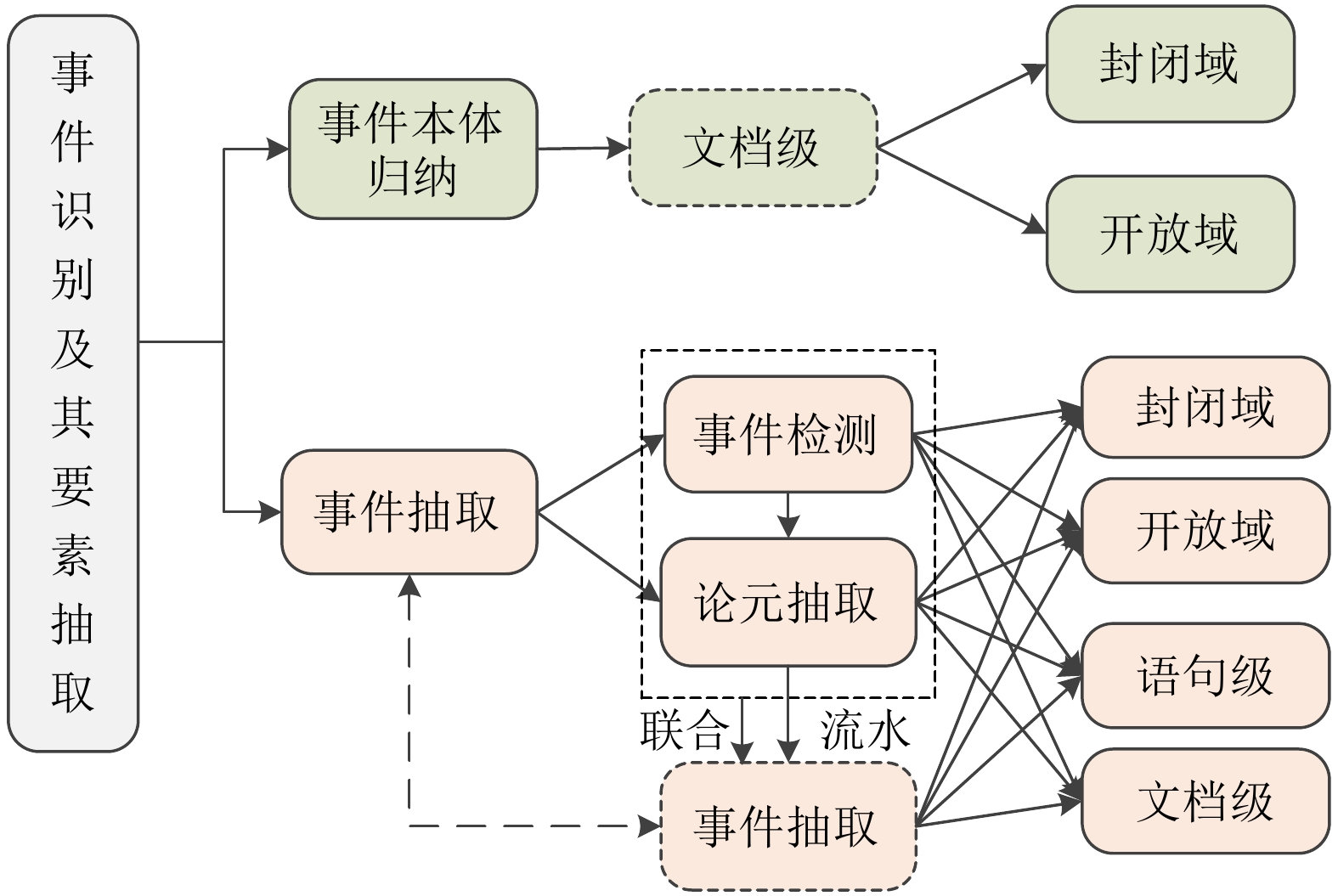
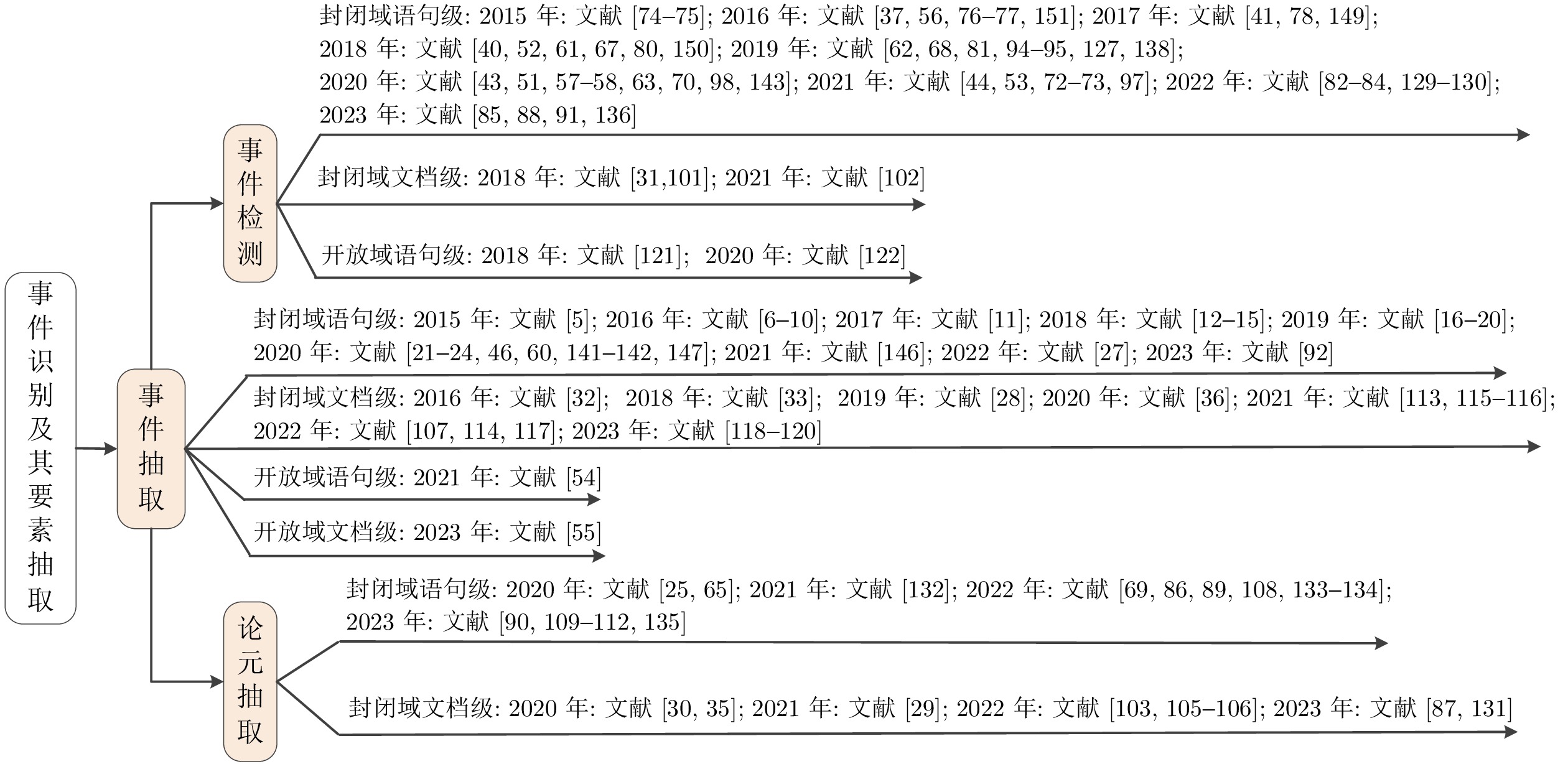
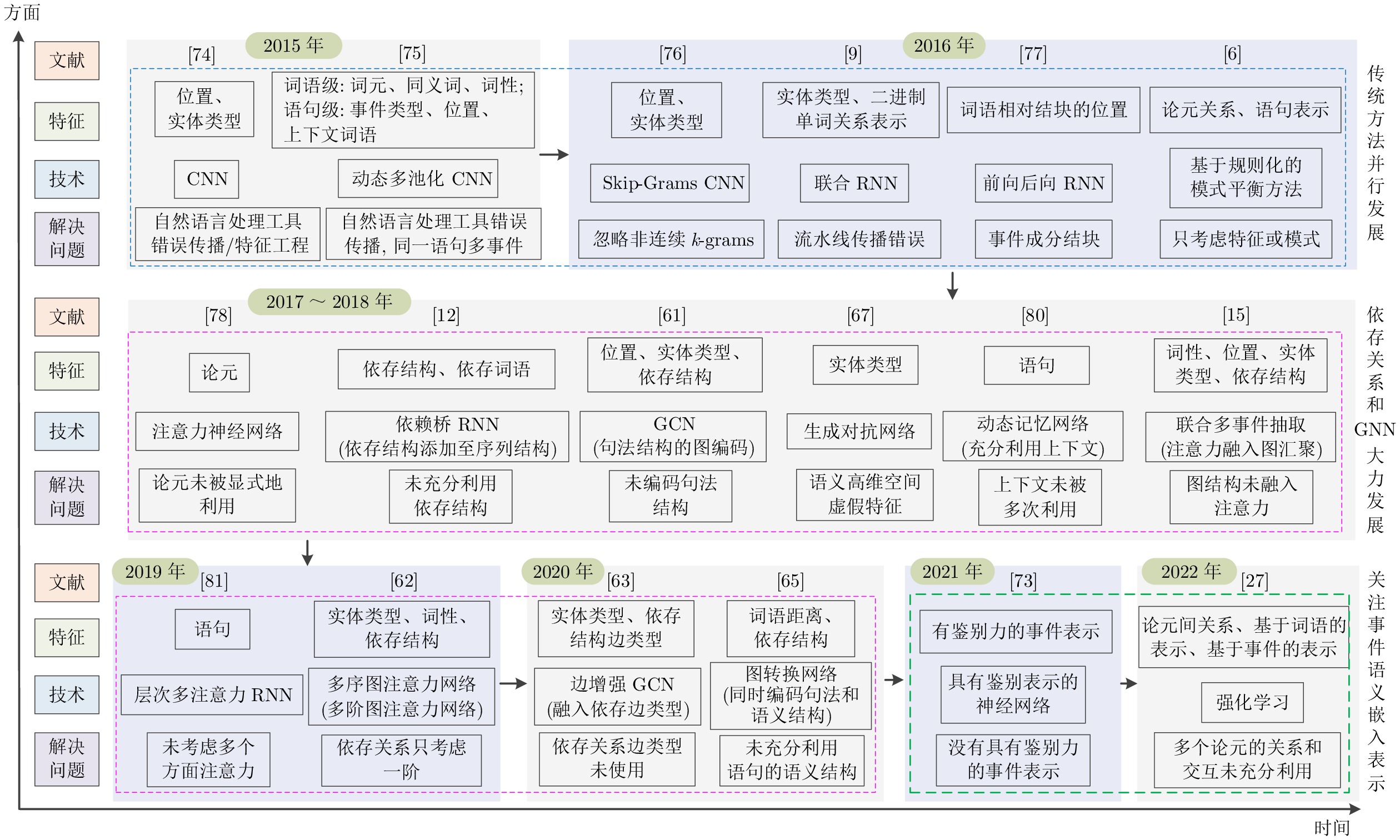
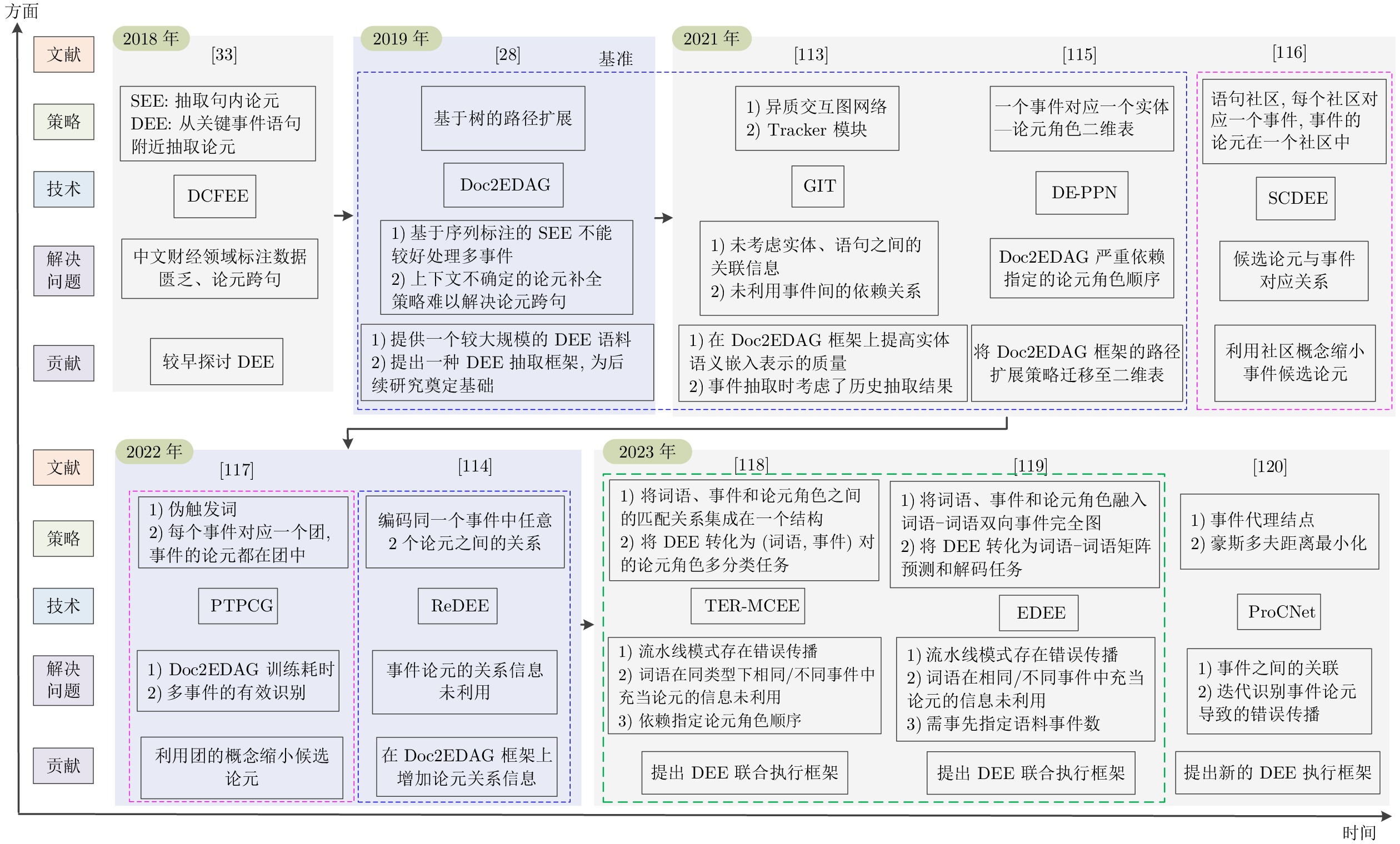
事件抽取是一个历史悠久且极具挑战的研究任务, 近年来取得了大量优异成果. 由于事件抽取涉及的研究内容较多, 它们的目标和重心各不相同, 使得读者难以全面地了解事件抽取包含的研究任务、研究问题和未来热点趋势. 为此, 面向研究问题, 对基于深度学习的事件抽取研究成果进行整理. 首先, 界定事件相关概念, 论述事件抽取的研究任务, 明确各研究任务的目标, 再总结各任务上的代表性研究成果; 接着, 总结现有事件抽取成果主要致力于解决哪些方面研究问题, 分析为什么会存在这些问题, 分析为什么需要解决这些问题; 然后, 对各方面研究问题进行技术总结, 分析各自研究方案和研究推进过程; 最后, 讨论事件抽取的发展趋势.
事件抽取是一个历史悠久且极具挑战的研究任务, 近年来取得了大量优异成果. 由于事件抽取涉及的研究内容较多, 它们的目标和重心各不相同, 使得读者难以全面地了解事件抽取包含的研究任务、研究问题和未来热点趋势. 为此, 面向研究问题, 对基于深度学习的事件抽取研究成果进行整理. 首先, 界定事件相关概念, 论述事件抽取的研究任务, 明确各研究任务的目标, 再总结各任务上的代表性研究成果; 接着, 总结现有事件抽取成果主要致力于解决哪些方面研究问题, 分析为什么会存在这些问题, 分析为什么需要解决这些问题; 然后, 对各方面研究问题进行技术总结, 分析各自研究方案和研究推进过程; 最后, 讨论事件抽取的发展趋势.
2024, 50(11): 2102-2127.
doi: 10.16383/j.aas.c220939
cstr: 32138.14.j.aas.c220939
摘要:
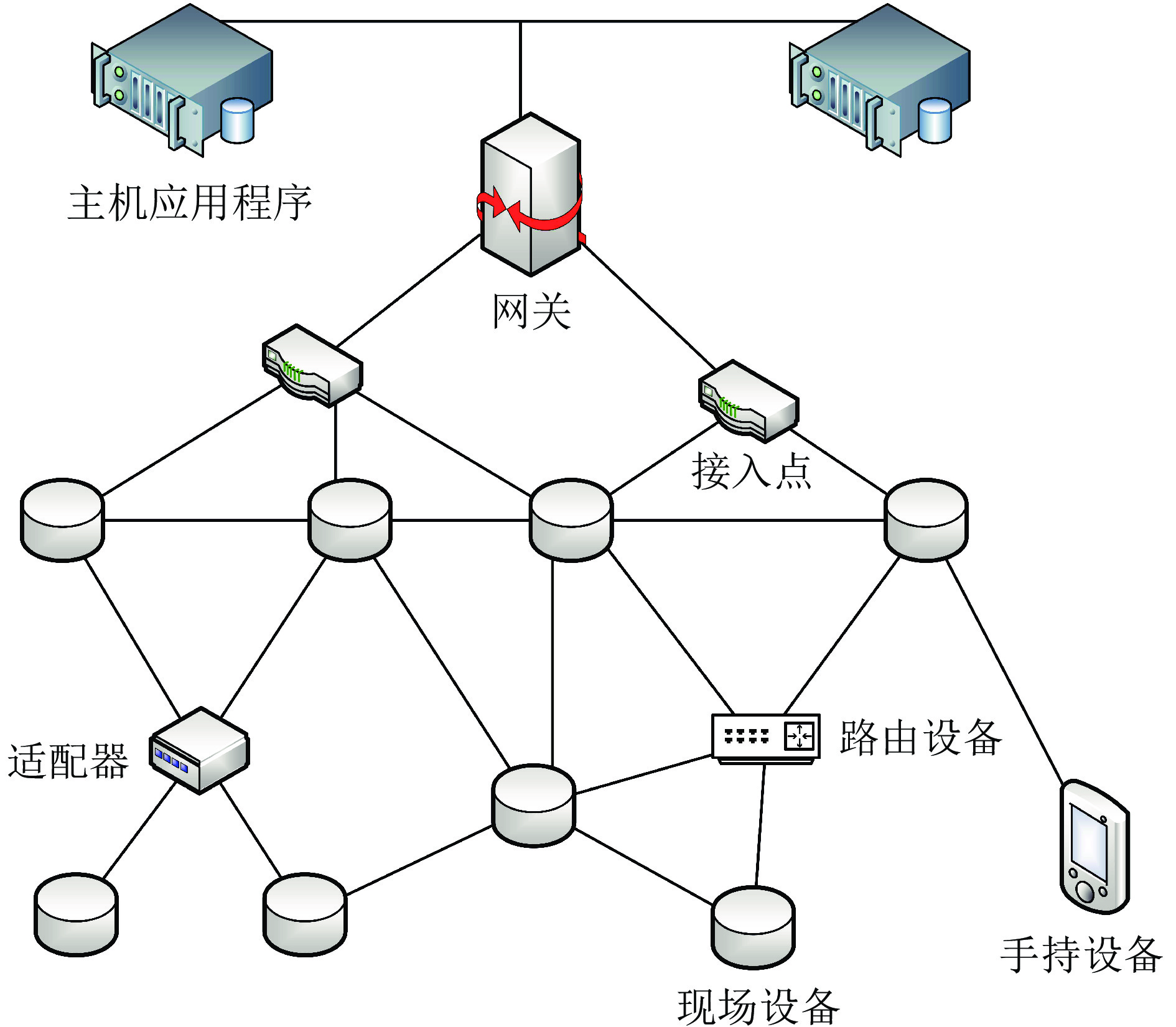
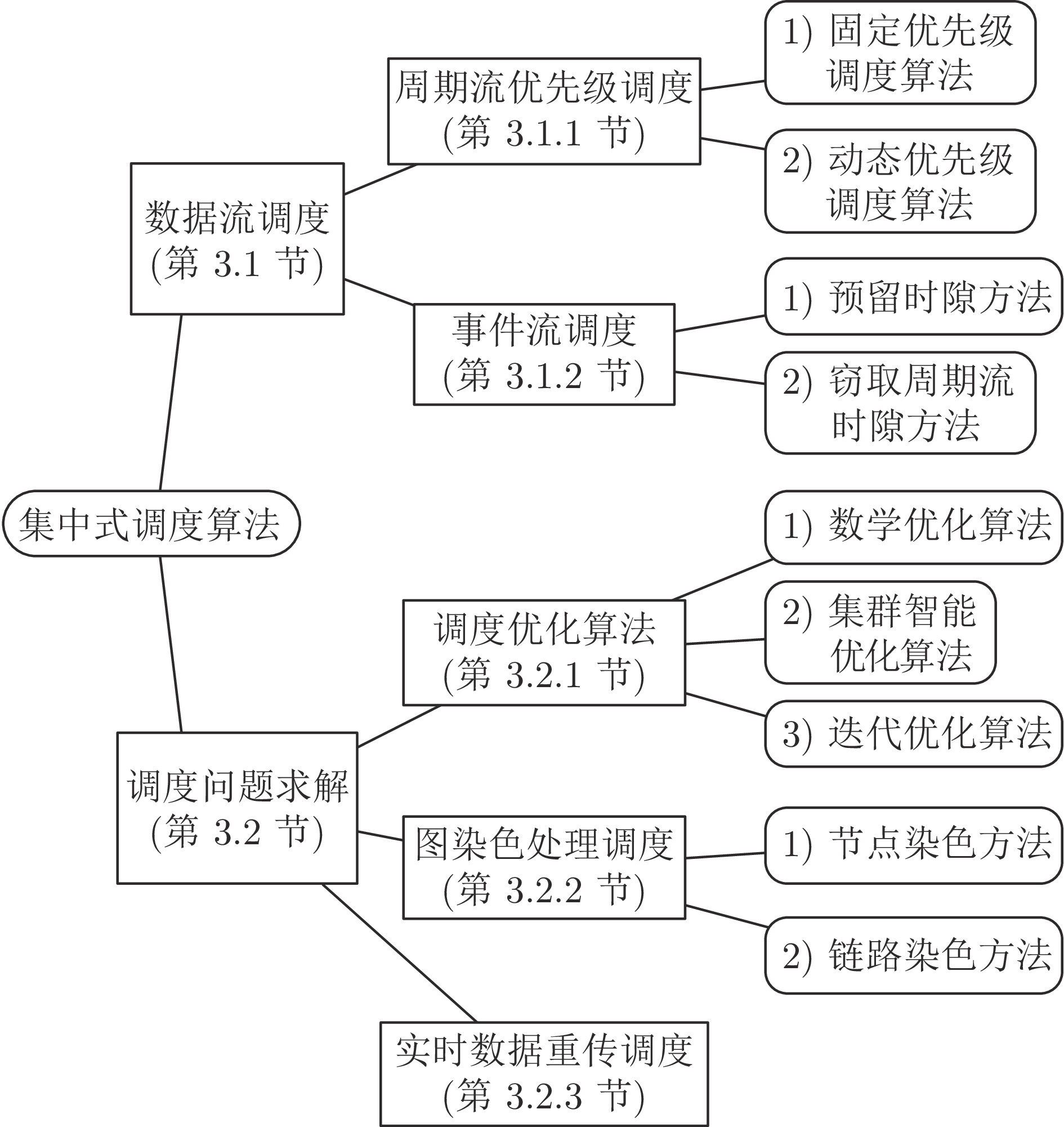
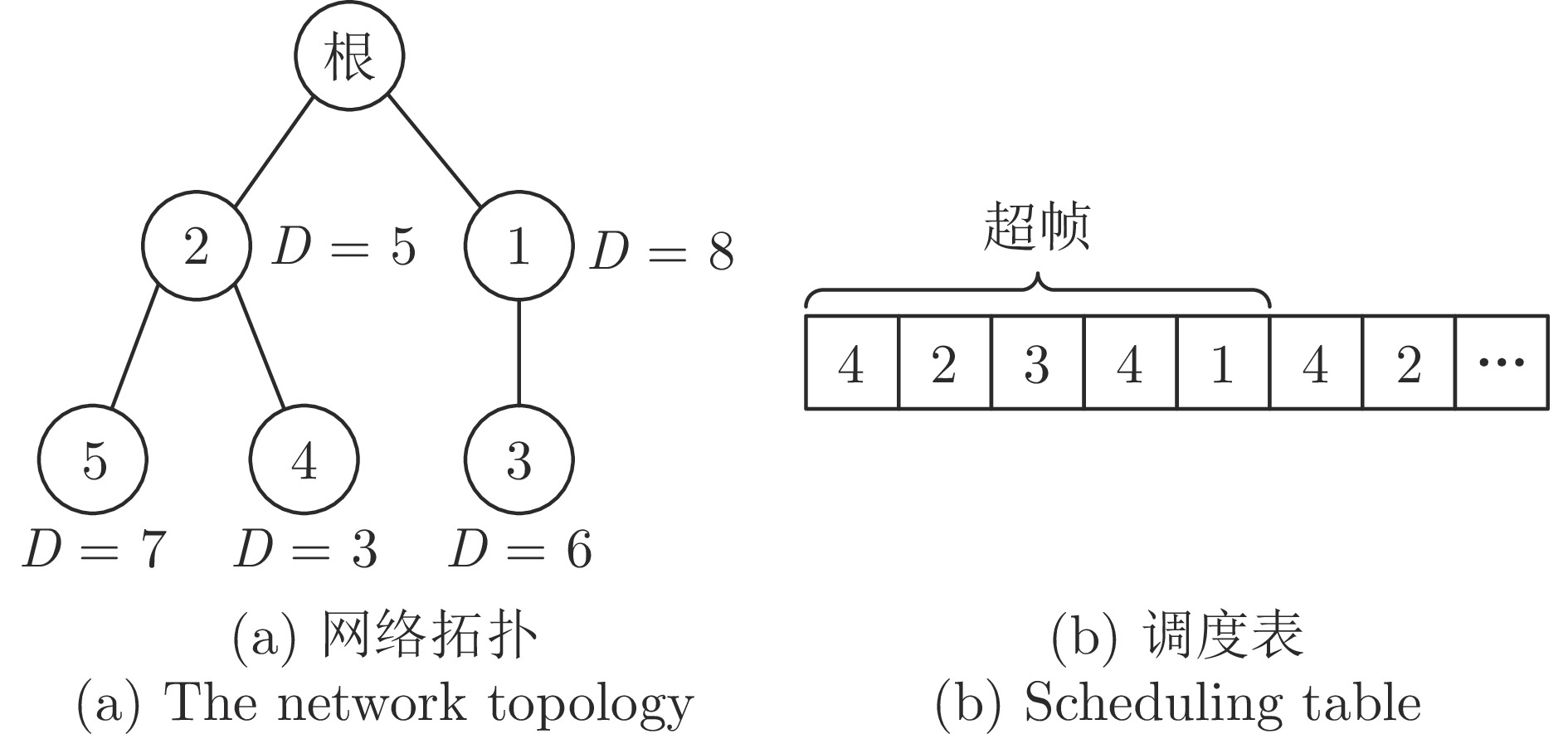
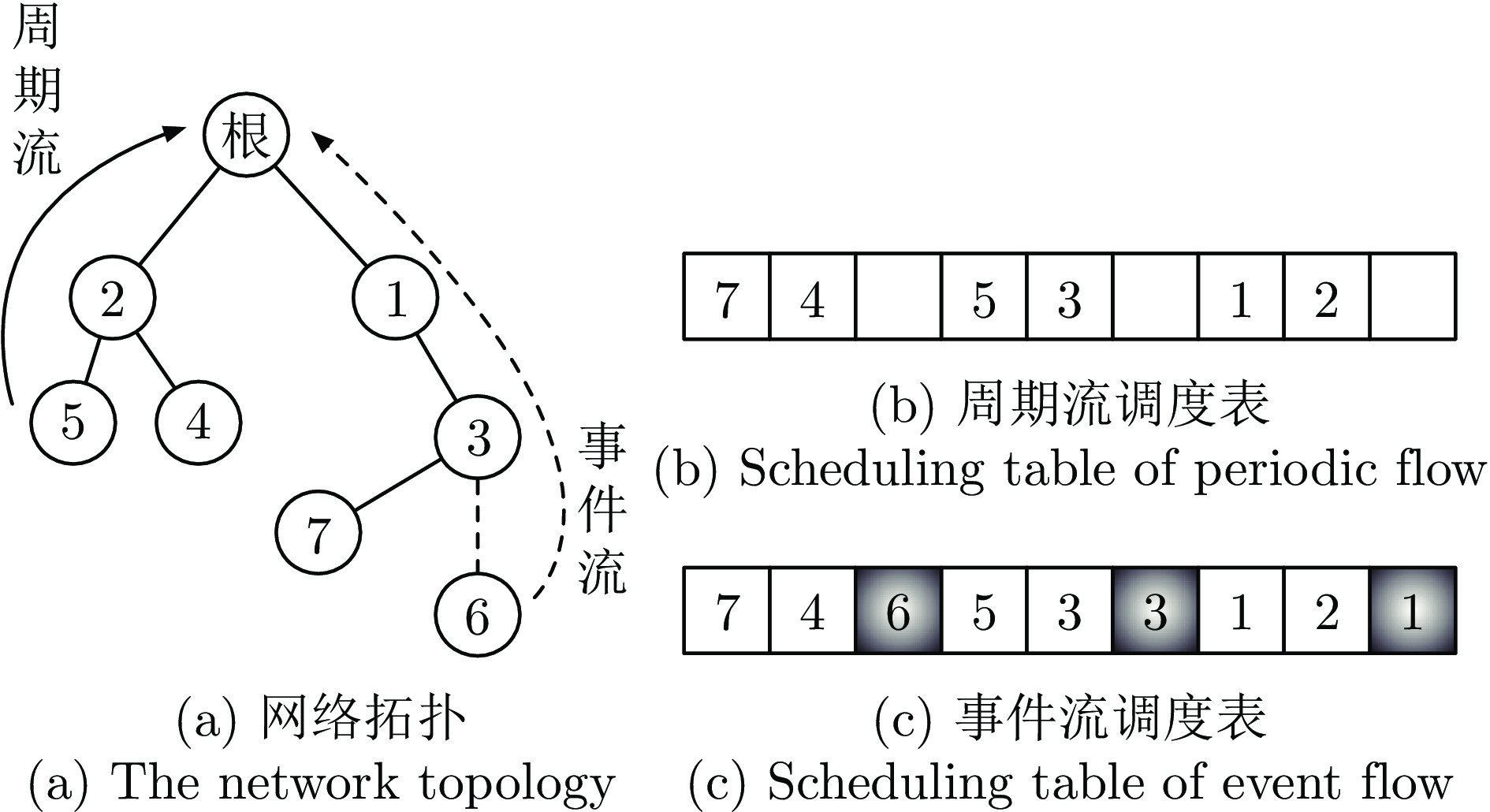
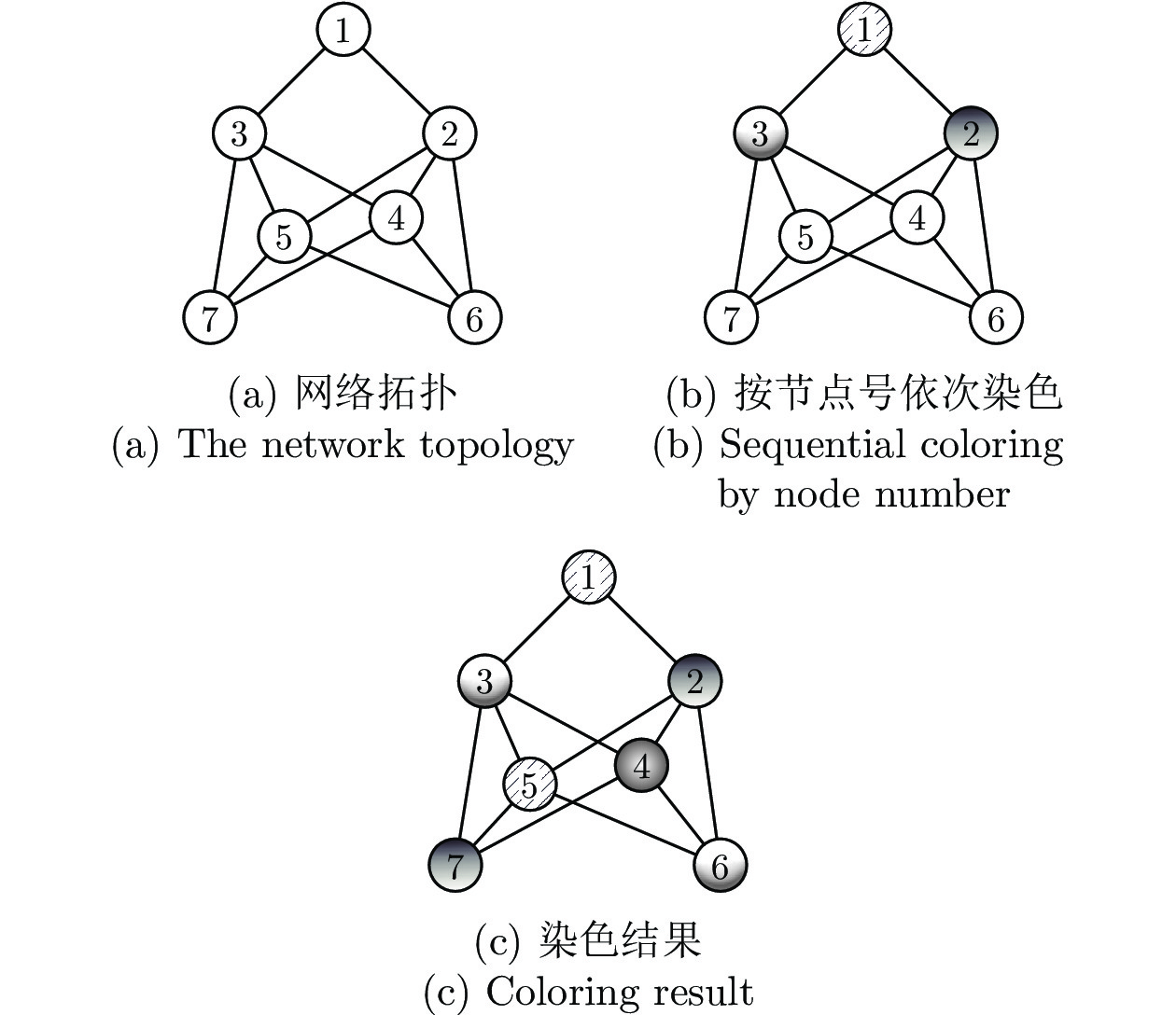
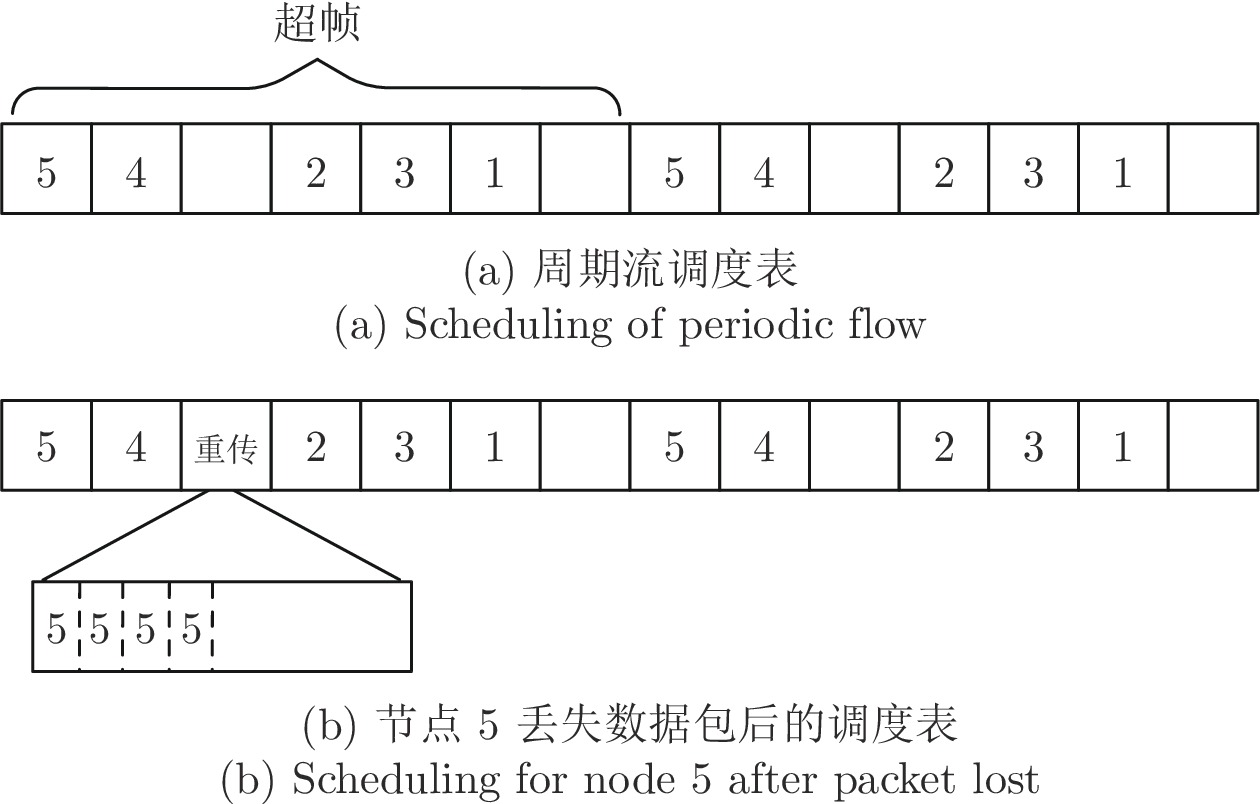
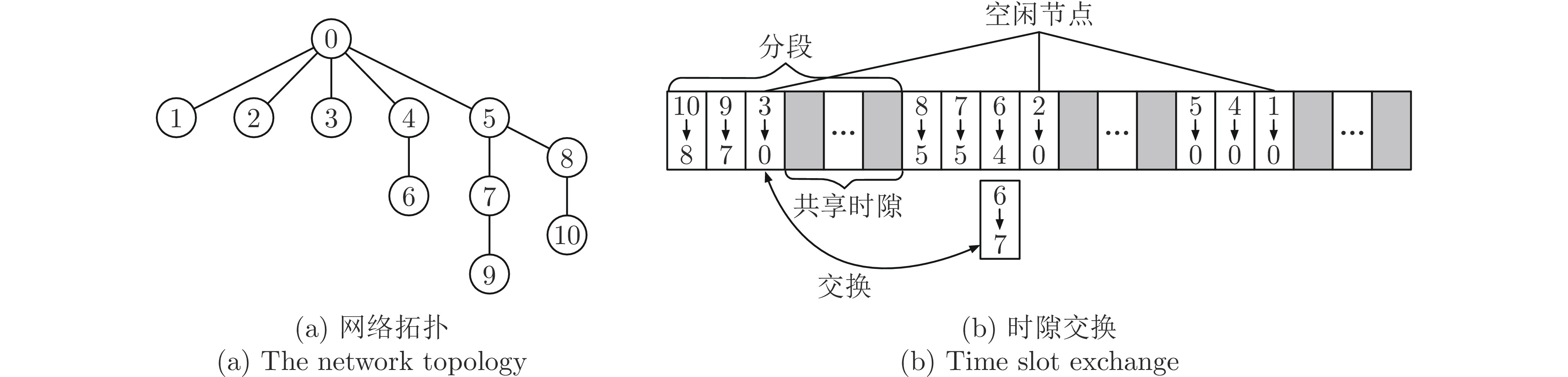
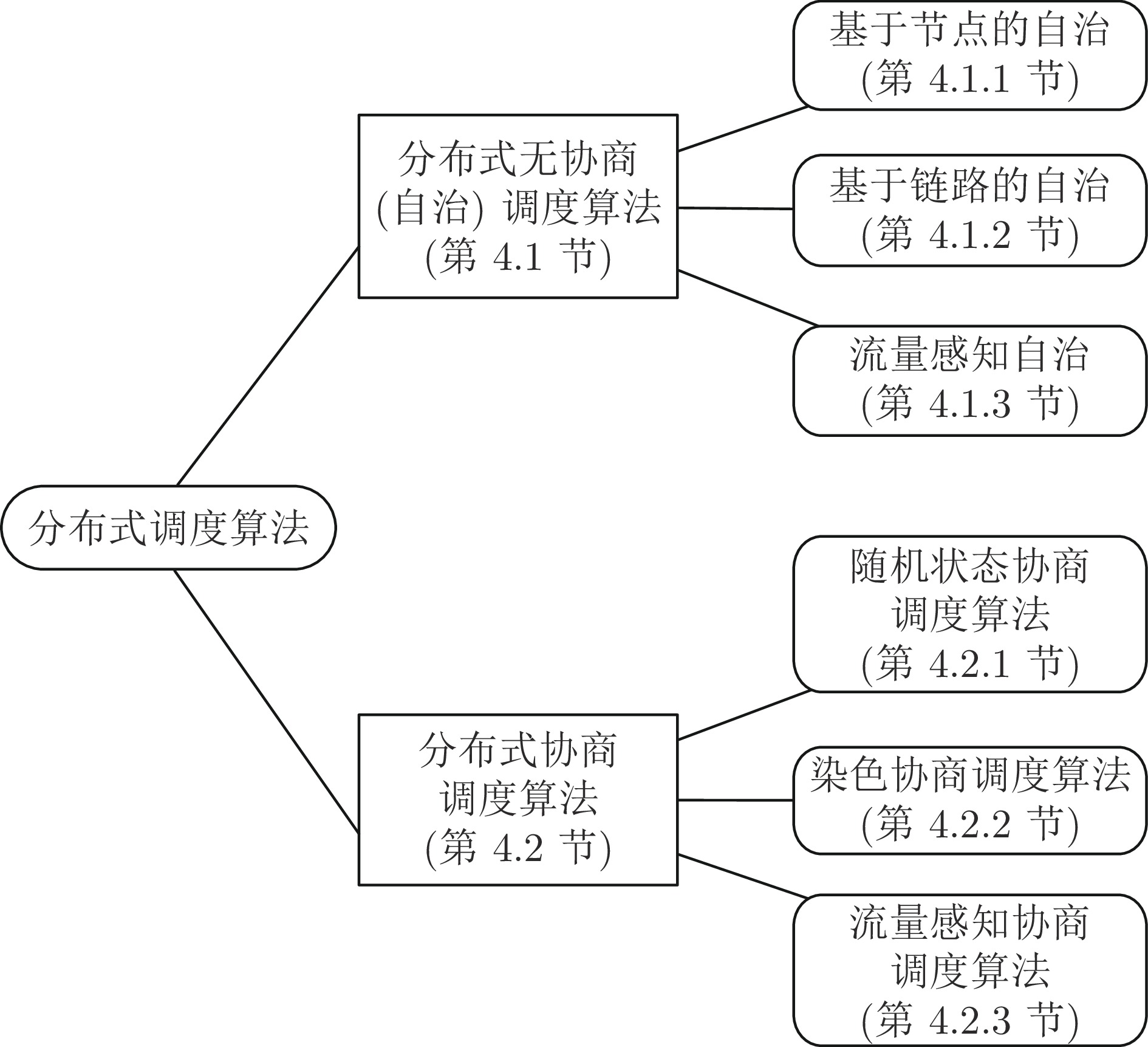
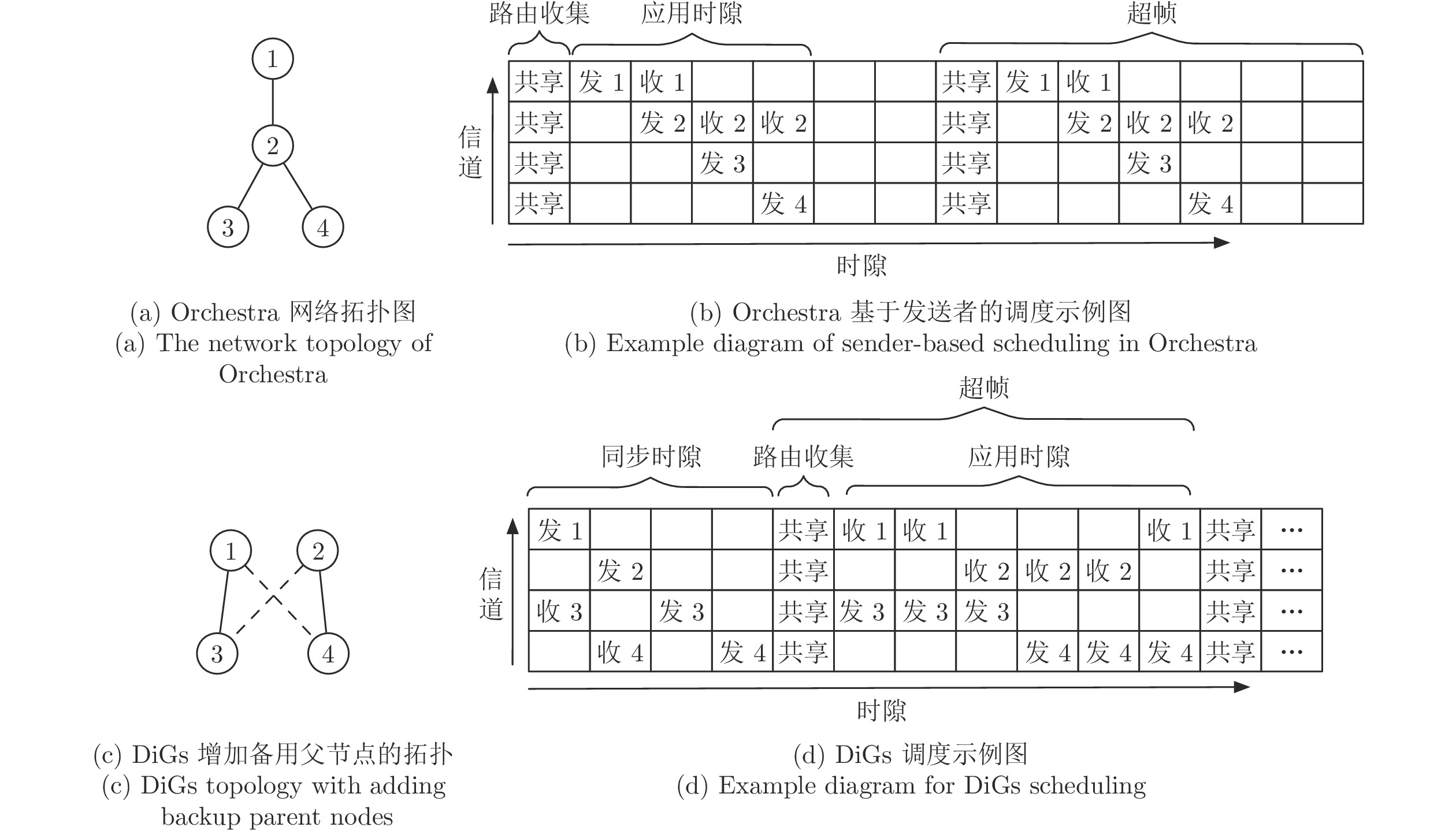
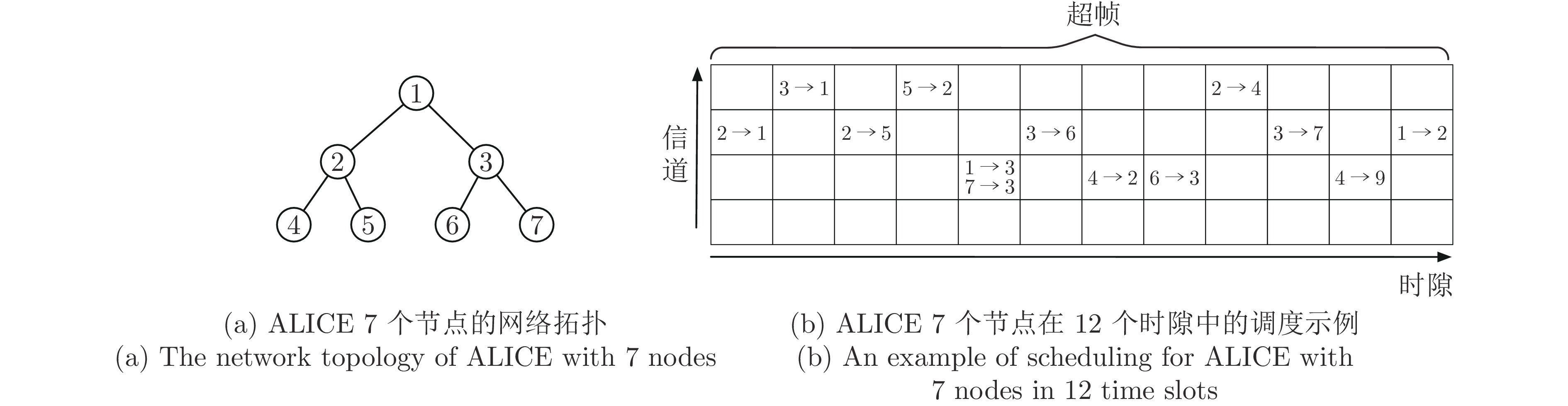
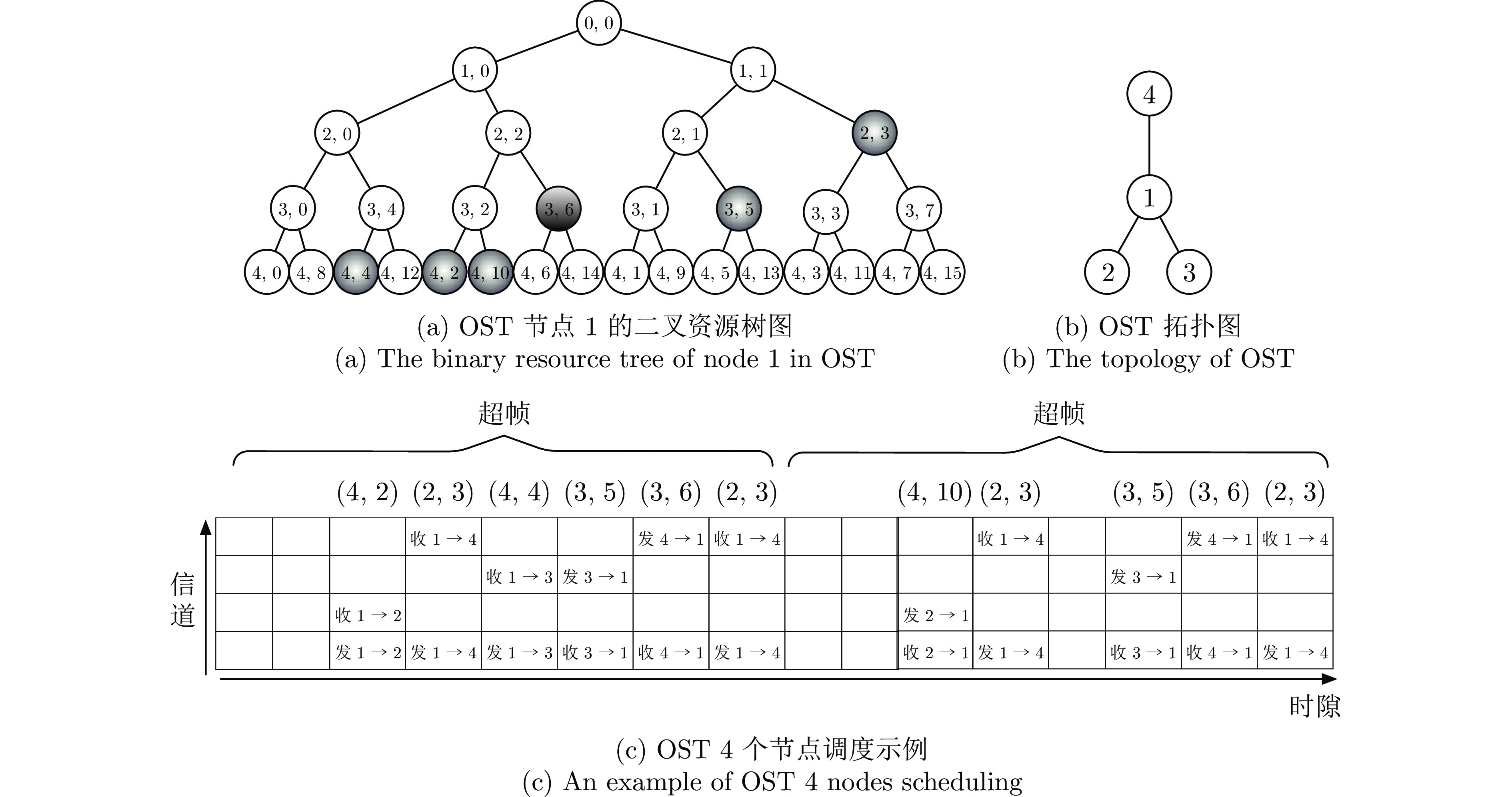
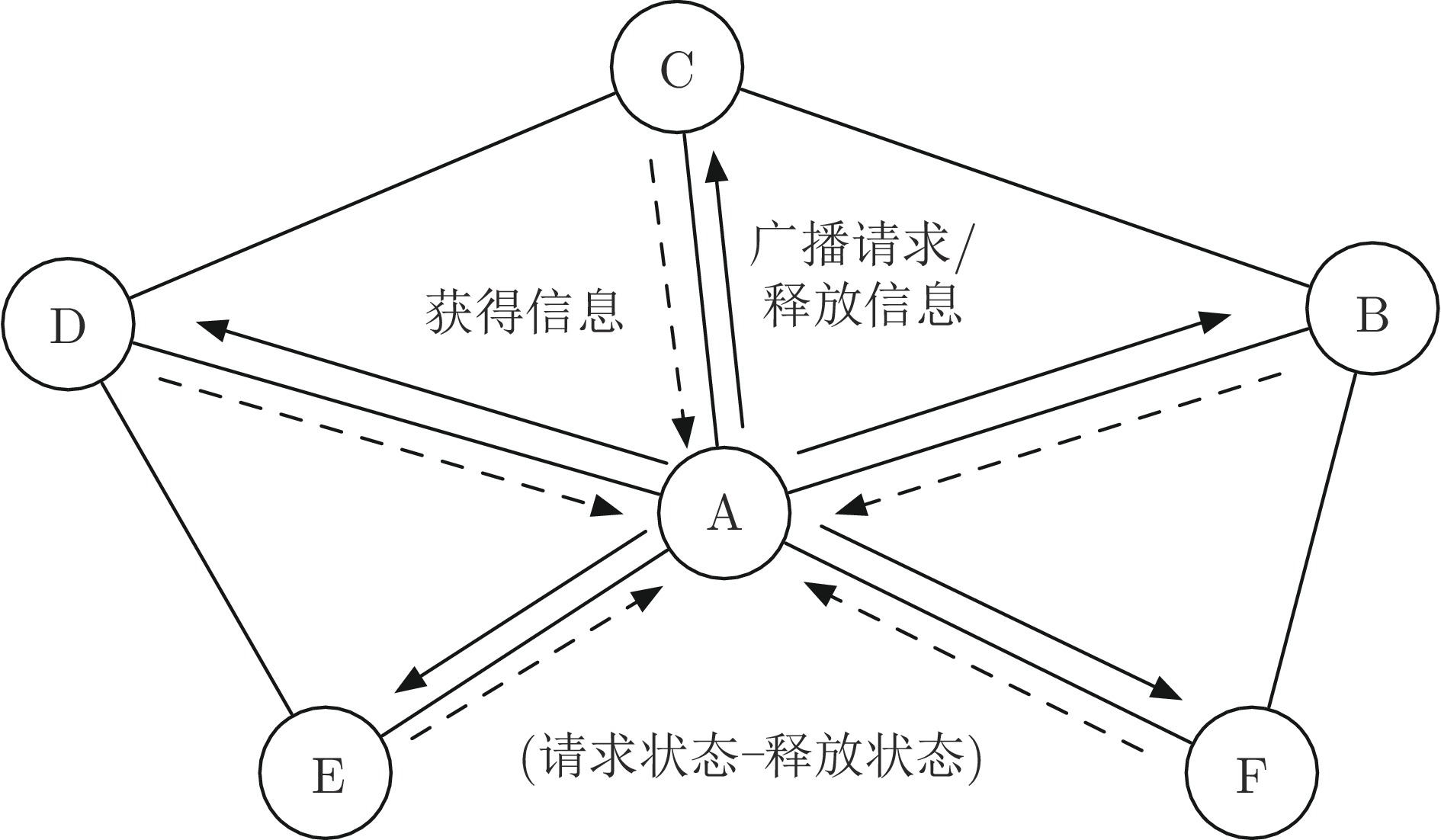
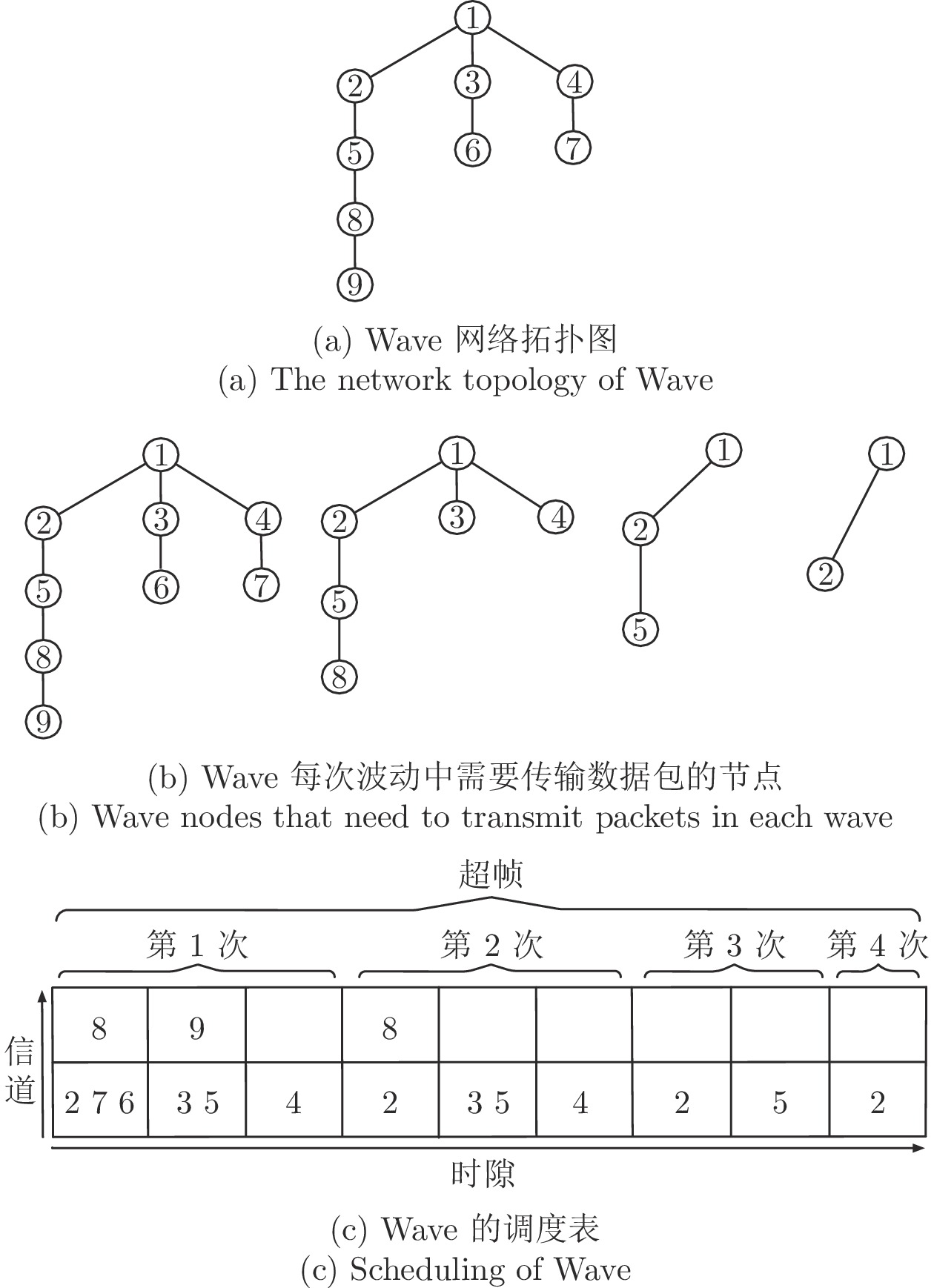
无线网络是工业物联网中一种具有良好前景的网络互联技术. 它的应用为工业现场设备部署提供了极大便利, 使设备摆脱了线缆的束缚, 从而在空间上选点更为灵活, 同时能够节省线材和人力等方面的成本. 然而, 无线通信易受环境噪声影响, 尤其是在复杂电磁干扰的工业环境中, 易导致无线传输的时延增大和数据丢失. 这些问题对于传输实时性要求较高的工业控制系统是非常不利的因素. 为了提高无线网络在工业环境中数据传输的实时性, 学者们设计了多种传输调度算法, 以提高无线通信的实时性和可靠性, 从而满足工业应用的需求. 综述了工业无线网络传输调度算法的研究现状, 对其发展历程、问题定义、评价指标、分类方法和现有标准等方面进行了全面总结, 详细阐述了具有代表性的调度算法的工作原理, 并指出了未来的研究方向.
无线网络是工业物联网中一种具有良好前景的网络互联技术. 它的应用为工业现场设备部署提供了极大便利, 使设备摆脱了线缆的束缚, 从而在空间上选点更为灵活, 同时能够节省线材和人力等方面的成本. 然而, 无线通信易受环境噪声影响, 尤其是在复杂电磁干扰的工业环境中, 易导致无线传输的时延增大和数据丢失. 这些问题对于传输实时性要求较高的工业控制系统是非常不利的因素. 为了提高无线网络在工业环境中数据传输的实时性, 学者们设计了多种传输调度算法, 以提高无线通信的实时性和可靠性, 从而满足工业应用的需求. 综述了工业无线网络传输调度算法的研究现状, 对其发展历程、问题定义、评价指标、分类方法和现有标准等方面进行了全面总结, 详细阐述了具有代表性的调度算法的工作原理, 并指出了未来的研究方向.
2024, 50(11): 2128-2139.
doi: 10.16383/j.aas.c210598
cstr: 32138.14.j.aas.c210598
摘要:
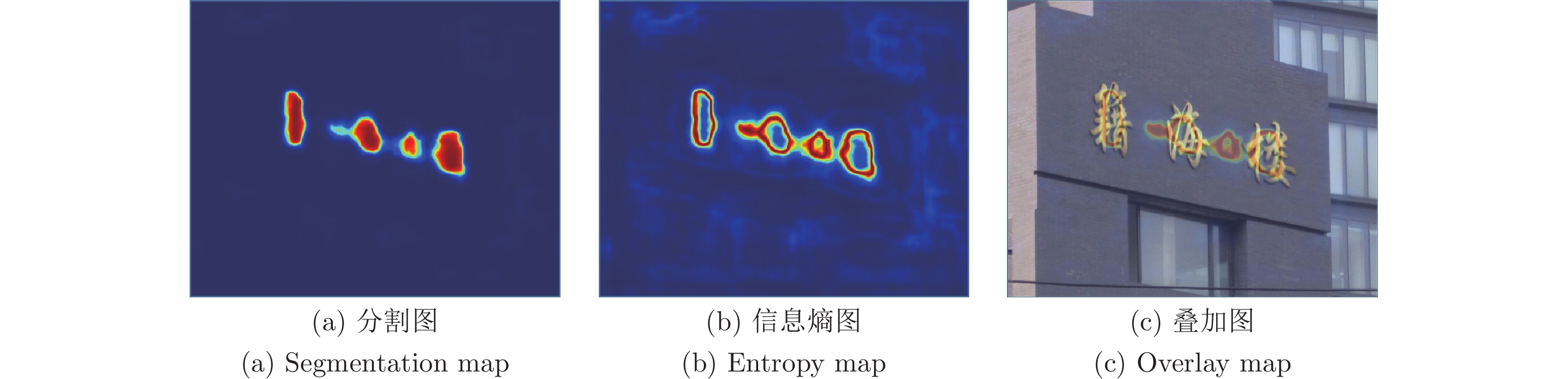
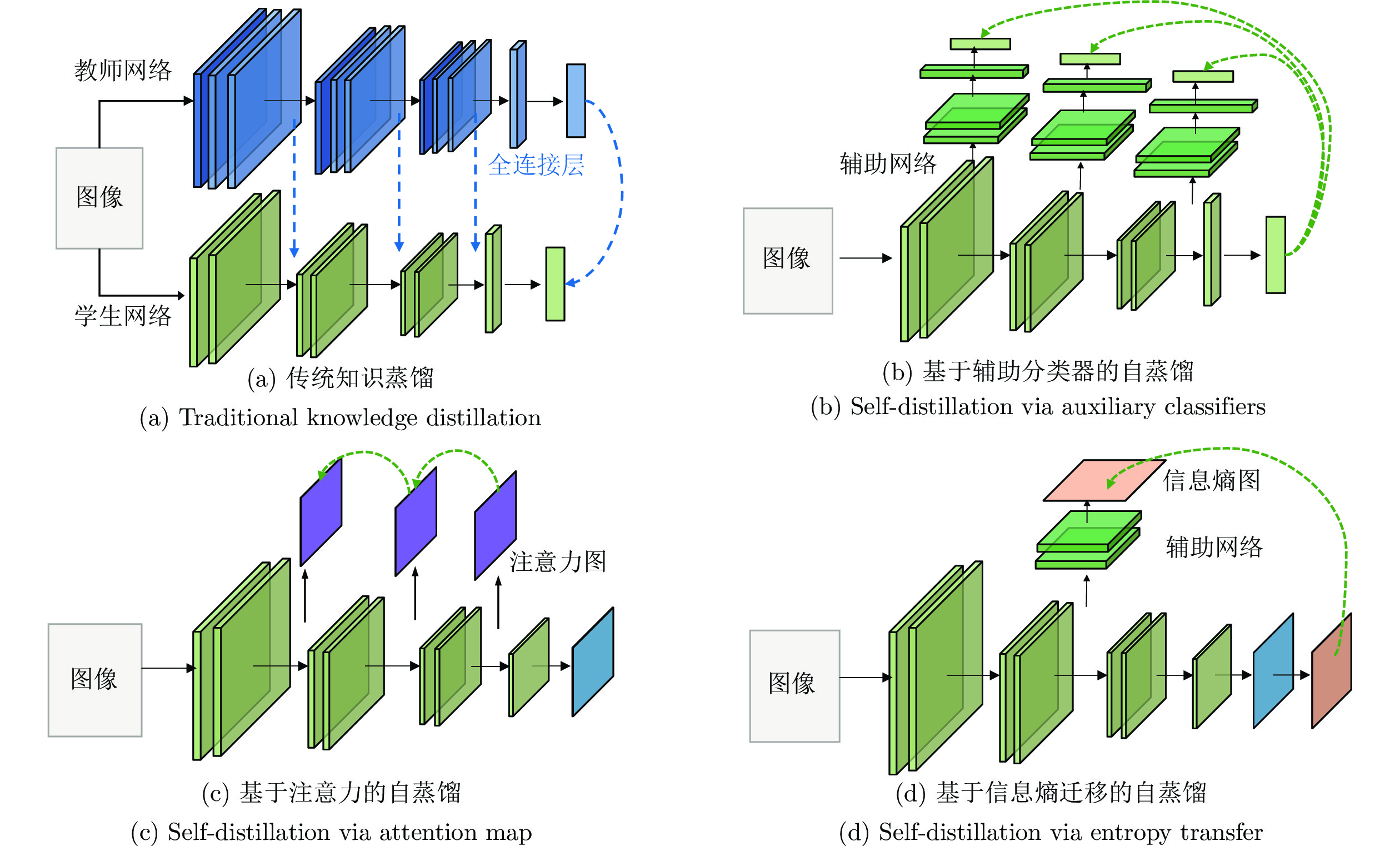
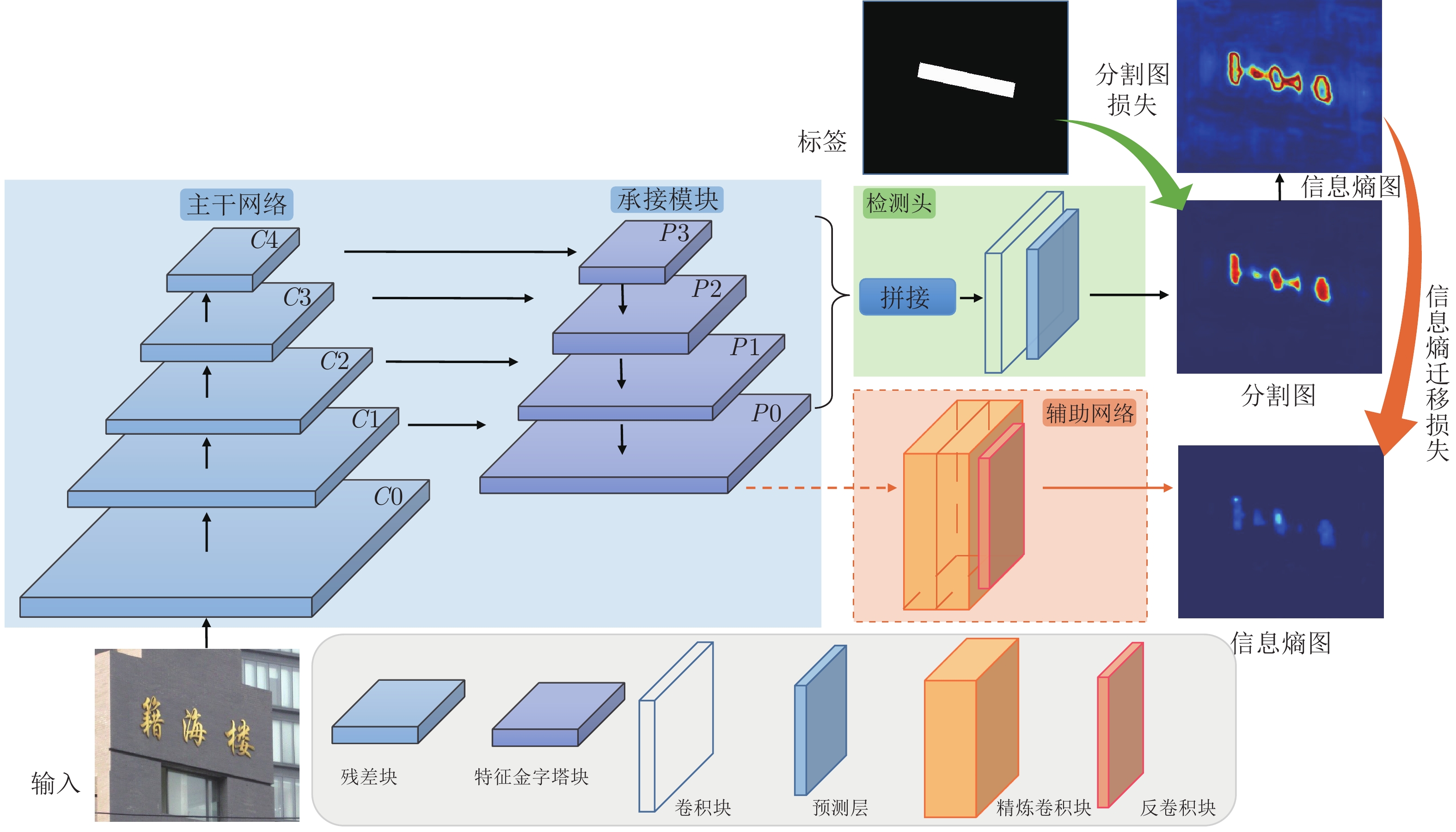
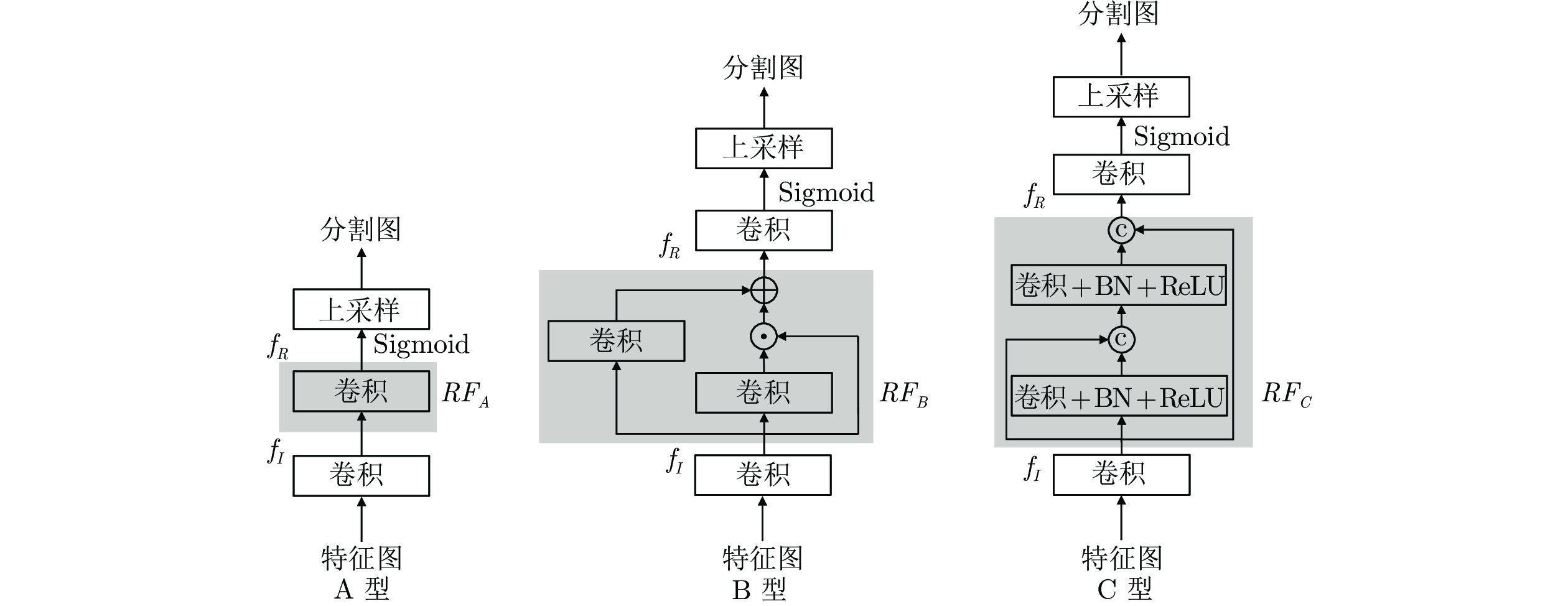
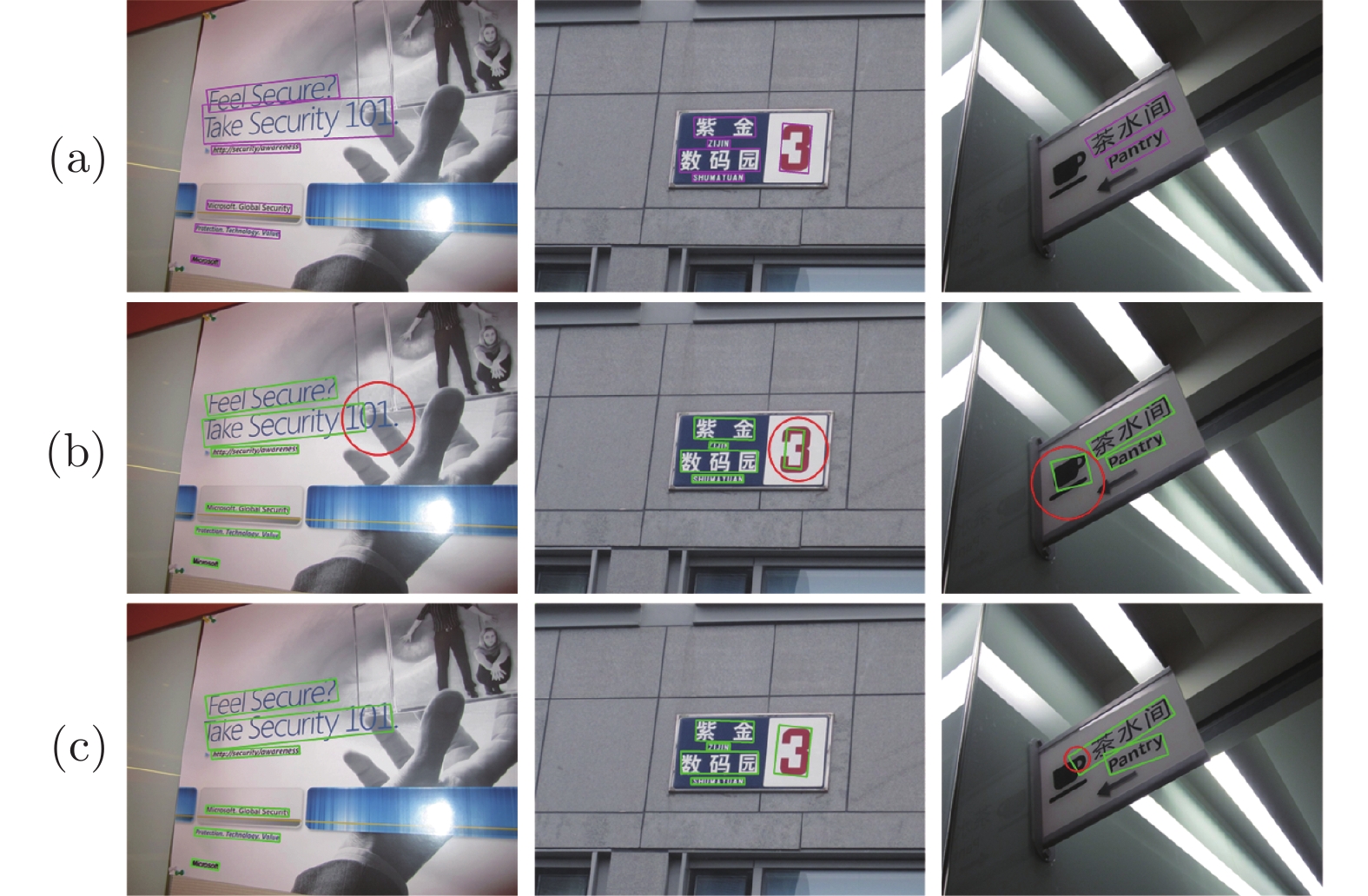
前沿的自然场景文本检测方法大多基于全卷积语义分割网络, 利用像素级分类结果有效检测任意形状的文本, 其主要缺点是模型大、推理时间长、内存占用高, 这在实际应用中限制了其部署. 提出一种基于信息熵迁移的自蒸馏训练方法(Self-distillation via entropy transfer, SDET), 利用文本检测网络深层网络输出的分割图(Segmentation map, SM)信息熵作为待迁移知识, 通过辅助网络将信息熵反馈给浅层网络. 与依赖教师网络的知识蒸馏 (Knowledge distillation, KD)不同, SDET仅在训练阶段增加一个辅助网络, 以微小的额外训练代价实现无需教师网络的自蒸馏(Self-distillation, SD). 在多个自然场景文本检测的标准数据集上的实验结果表明, SDET在基线文本检测网络的召回率和F1得分上, 能显著优于其他蒸馏方法.
前沿的自然场景文本检测方法大多基于全卷积语义分割网络, 利用像素级分类结果有效检测任意形状的文本, 其主要缺点是模型大、推理时间长、内存占用高, 这在实际应用中限制了其部署. 提出一种基于信息熵迁移的自蒸馏训练方法(Self-distillation via entropy transfer, SDET), 利用文本检测网络深层网络输出的分割图(Segmentation map, SM)信息熵作为待迁移知识, 通过辅助网络将信息熵反馈给浅层网络. 与依赖教师网络的知识蒸馏 (Knowledge distillation, KD)不同, SDET仅在训练阶段增加一个辅助网络, 以微小的额外训练代价实现无需教师网络的自蒸馏(Self-distillation, SD). 在多个自然场景文本检测的标准数据集上的实验结果表明, SDET在基线文本检测网络的召回率和F1得分上, 能显著优于其他蒸馏方法.
2024, 50(11): 2140-2153.
doi: 10.16383/j.aas.c210654
cstr: 32138.14.j.aas.c210654
摘要:
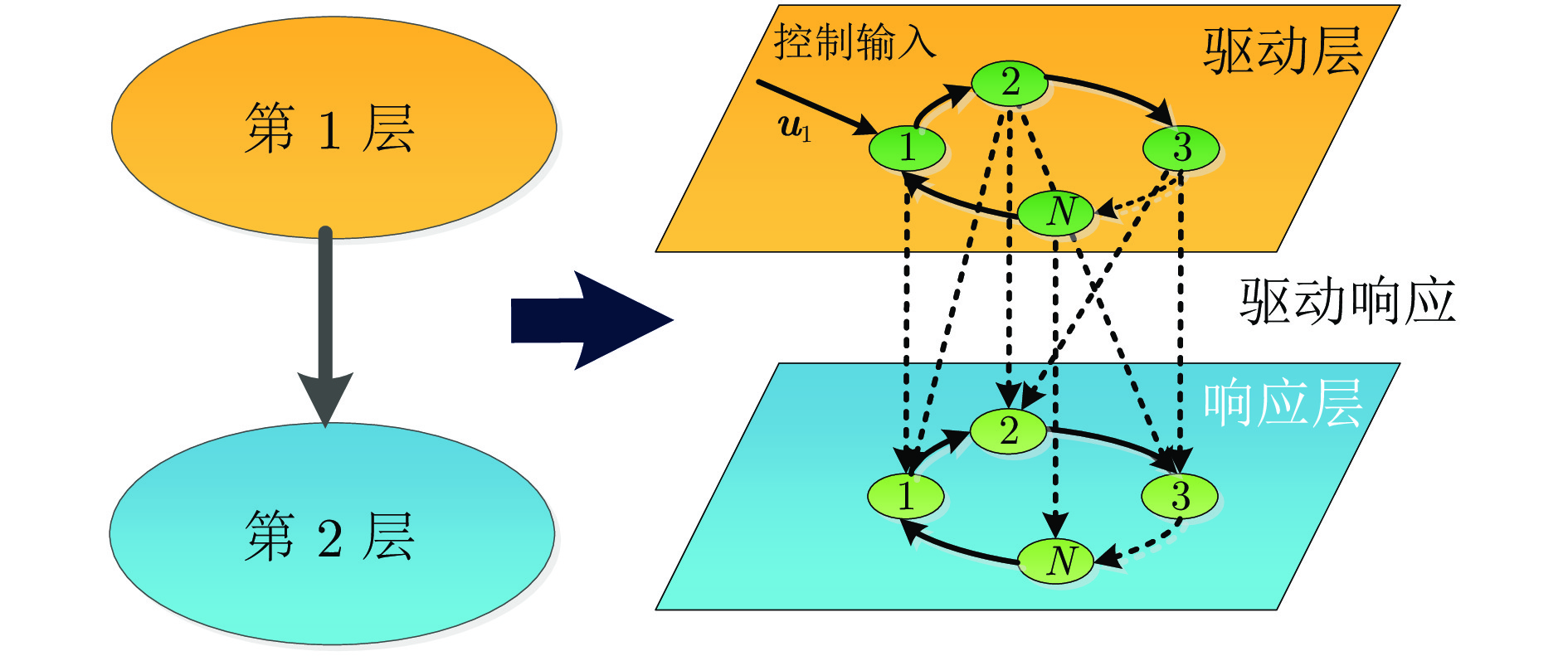
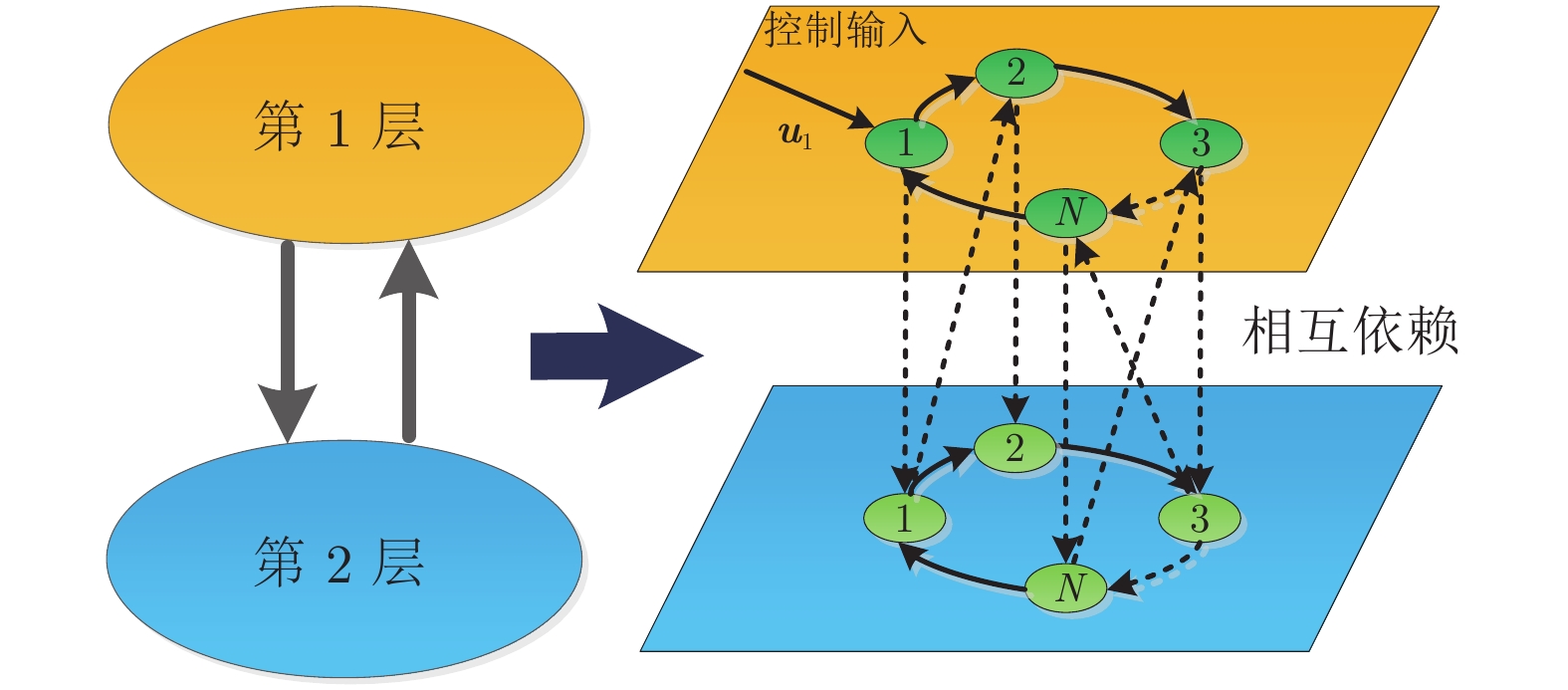
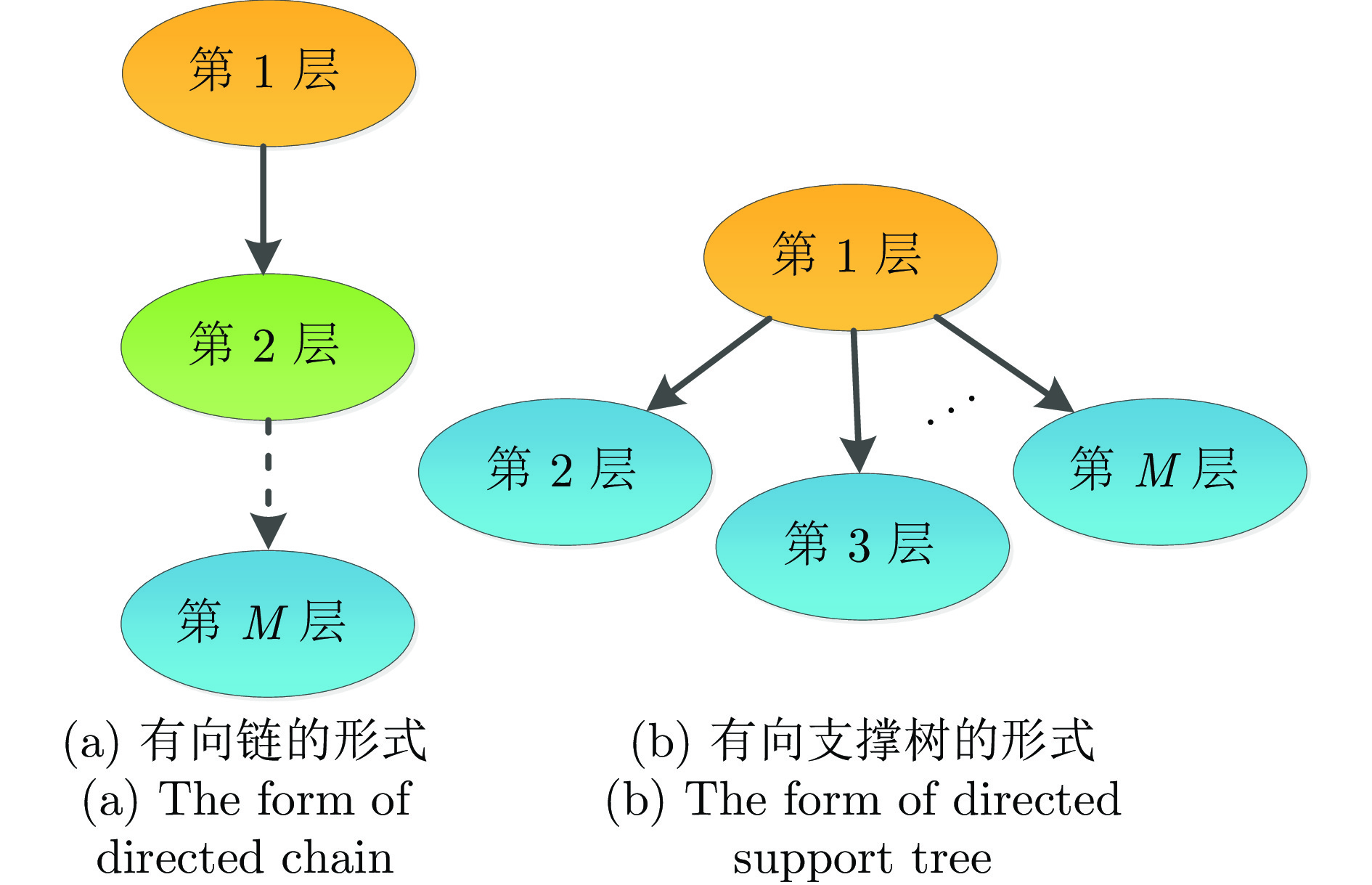
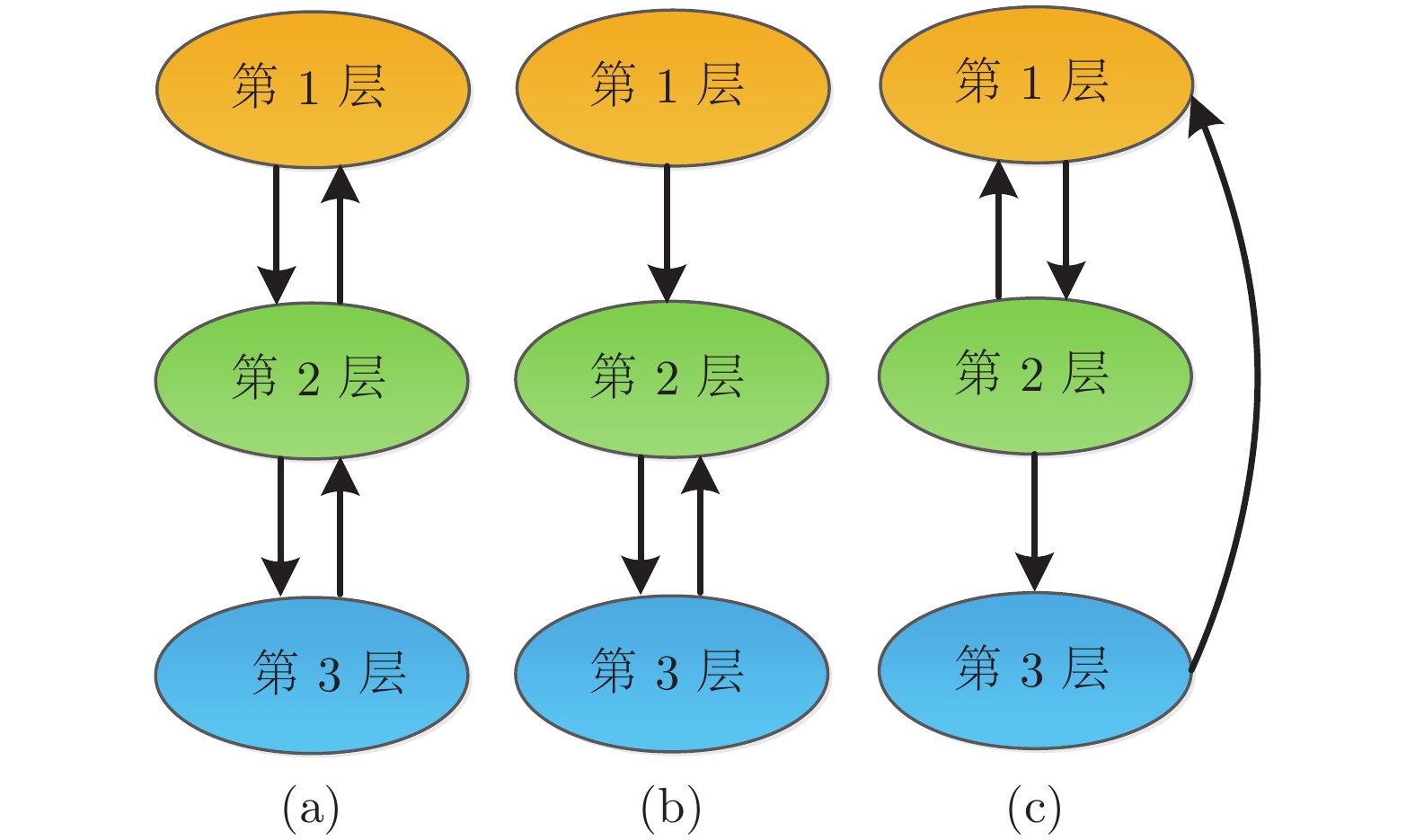
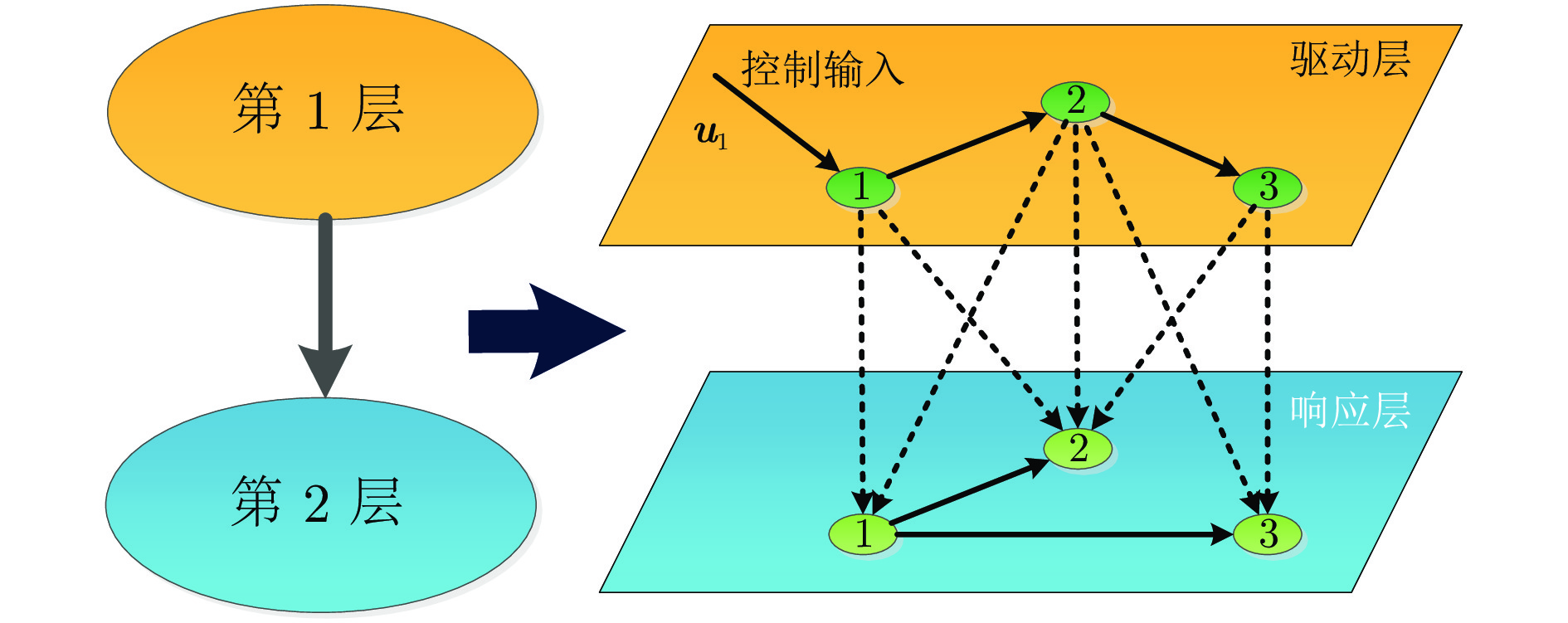
研究了节点状态为高维的多层复杂网络系统的能控性问题. 讨论了节点的异质性、层间耦合和层内耦合对网络能控性的影响. 研究发现当节点状态由同质变为异质、内耦合矩阵由相同变为不同时, 对网络能控性均有影响(网络可以由能控变为不能控, 反之亦然). 对层间耦合模式为驱动响应模式和相互依赖模式, 分别给出了网络系统能控的充分条件或必要条件. 相比于直接应用经典的能控性判据, 这些条件更易于验证, 且驱动响应模式比相互依赖模式实现系统完全能控所需的条件更弱.
研究了节点状态为高维的多层复杂网络系统的能控性问题. 讨论了节点的异质性、层间耦合和层内耦合对网络能控性的影响. 研究发现当节点状态由同质变为异质、内耦合矩阵由相同变为不同时, 对网络能控性均有影响(网络可以由能控变为不能控, 反之亦然). 对层间耦合模式为驱动响应模式和相互依赖模式, 分别给出了网络系统能控的充分条件或必要条件. 相比于直接应用经典的能控性判据, 这些条件更易于验证, 且驱动响应模式比相互依赖模式实现系统完全能控所需的条件更弱.
2024, 50(11): 2154-2176.
doi: 10.16383/j.aas.c230741
cstr: 32138.14.j.aas.c230741
摘要:
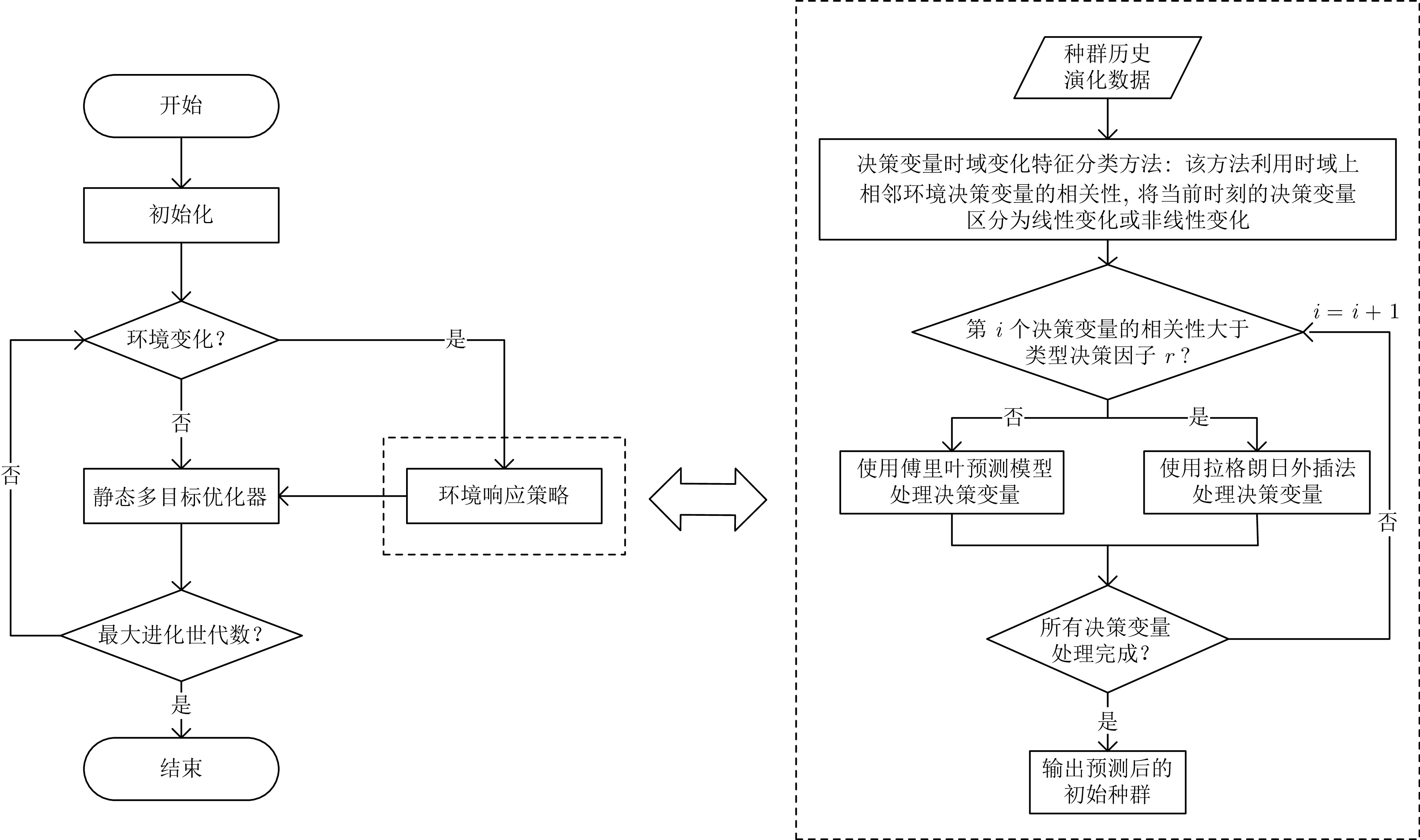
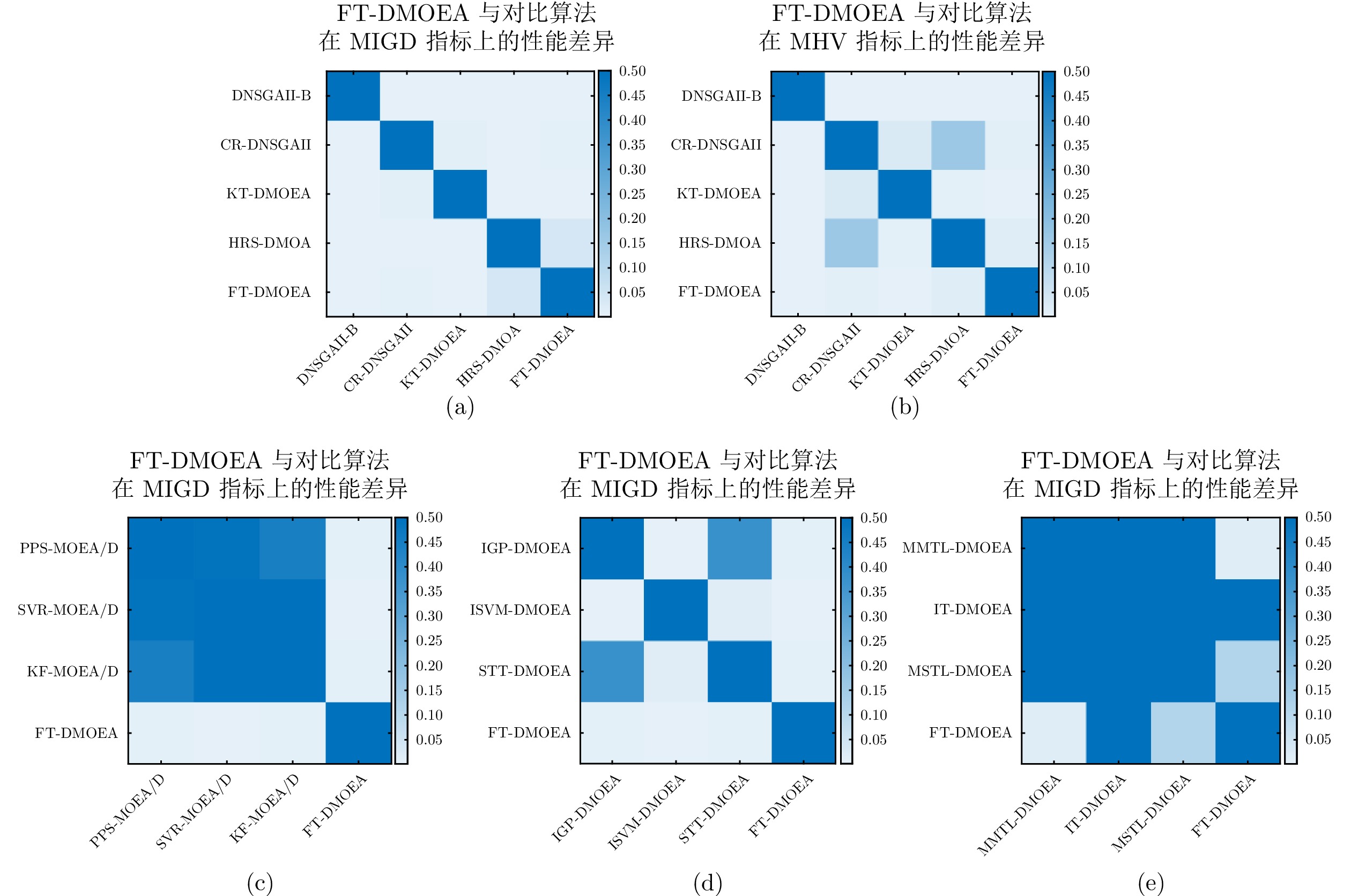
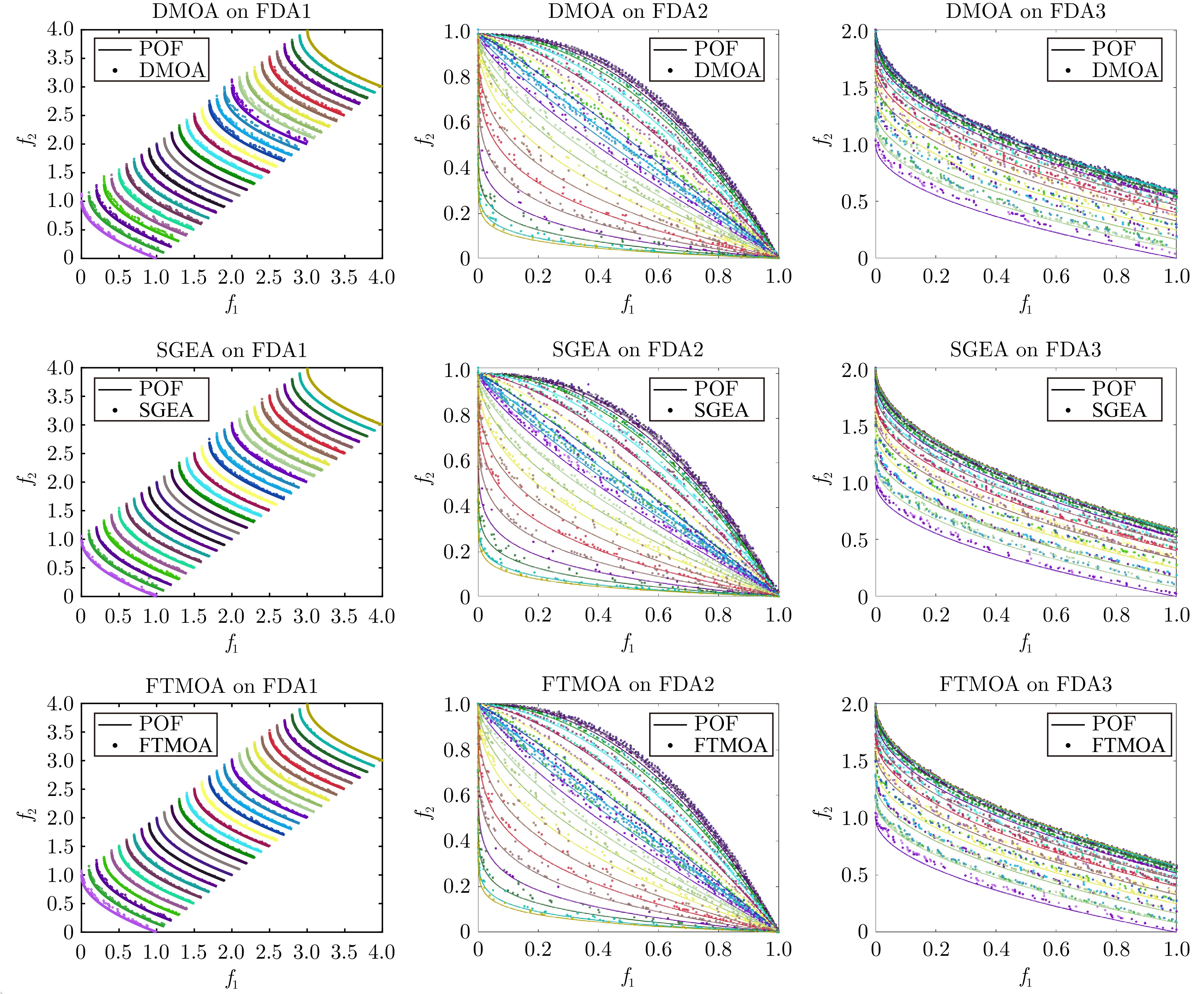
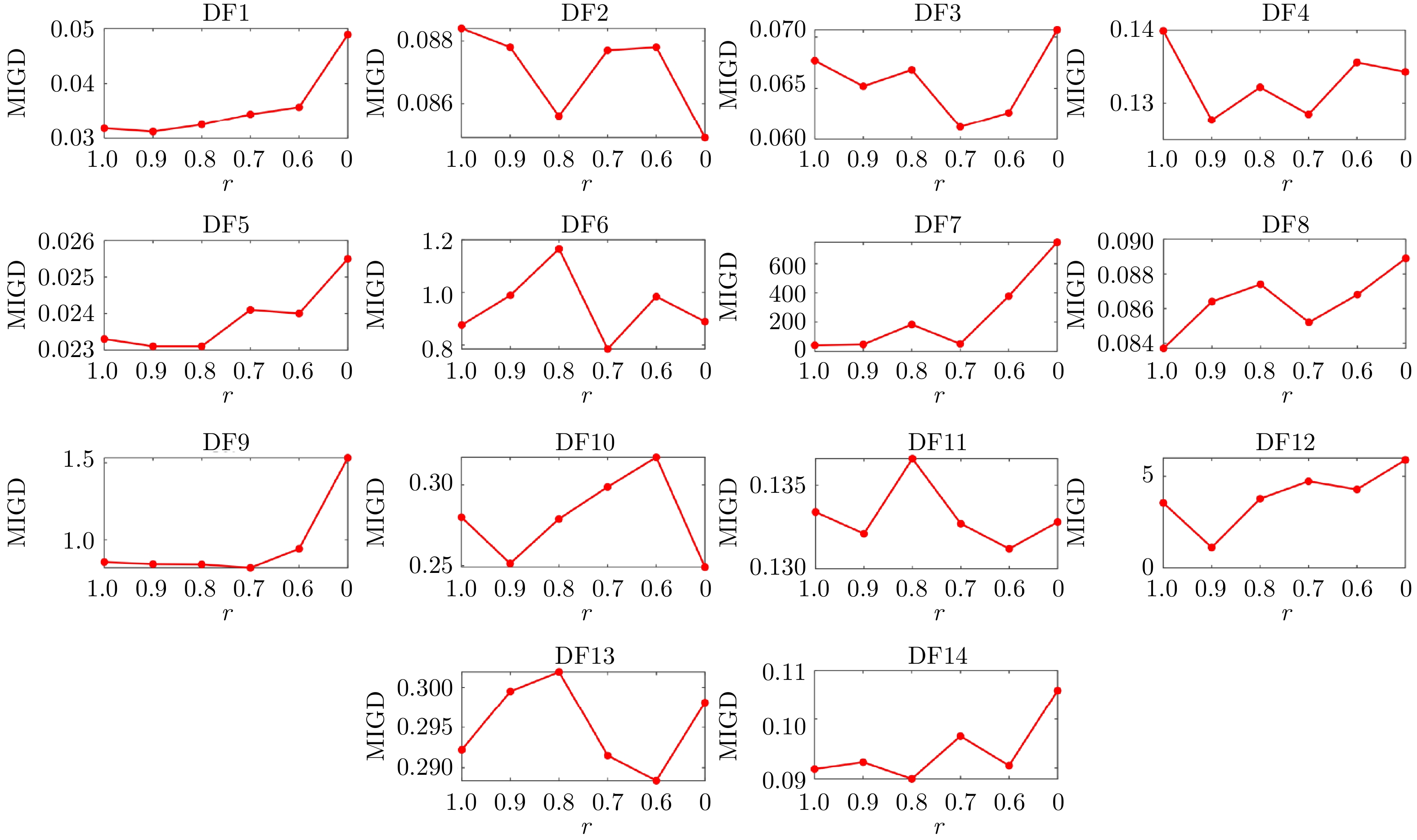
动态多目标优化问题(Dynamic multi-objective optimization problems, DMOPs) 广泛存在于科学研究和工程实践中, 其主要考虑在动态环境下同时联合优化多个冲突目标. 现有方法往往关注于目标空间的时域特征, 忽视了对单个决策变量变化特性的探索与利用, 从而在处理更复杂的问题时不能有效引导种群收敛. 为此, 提出一种基于决策变量时域变化特征分类的动态多目标进化算法(Dynamic multi-objective evolutionary algorithm based on classification of decision variable temporal change characteristics, FT-DMOEA). 所提算法在环境动态变化时, 首先基于决策变量时域变化特征分类方法将当前时刻决策变量划分为线性变化和非线性变化两种类型; 然后分别采用拉格朗日外插法和傅里叶预测模型对线性和非线性变化决策变量进行下一时刻的初始化操作. 为了更有效地识别非线性决策变量变化模式, 傅里叶预测模型通过傅里叶变换将历史种群数据从时域转换到频域, 在分析周期性频率特征后, 使用自回归模型进行频谱估计后再反变换至时域. 在多个基准数据集上和其他算法进行对比, 实验结果表明, 所提算法是有效的.
动态多目标优化问题(Dynamic multi-objective optimization problems, DMOPs) 广泛存在于科学研究和工程实践中, 其主要考虑在动态环境下同时联合优化多个冲突目标. 现有方法往往关注于目标空间的时域特征, 忽视了对单个决策变量变化特性的探索与利用, 从而在处理更复杂的问题时不能有效引导种群收敛. 为此, 提出一种基于决策变量时域变化特征分类的动态多目标进化算法(Dynamic multi-objective evolutionary algorithm based on classification of decision variable temporal change characteristics, FT-DMOEA). 所提算法在环境动态变化时, 首先基于决策变量时域变化特征分类方法将当前时刻决策变量划分为线性变化和非线性变化两种类型; 然后分别采用拉格朗日外插法和傅里叶预测模型对线性和非线性变化决策变量进行下一时刻的初始化操作. 为了更有效地识别非线性决策变量变化模式, 傅里叶预测模型通过傅里叶变换将历史种群数据从时域转换到频域, 在分析周期性频率特征后, 使用自回归模型进行频谱估计后再反变换至时域. 在多个基准数据集上和其他算法进行对比, 实验结果表明, 所提算法是有效的.

2024, 50(11): 2177-2187.
doi: 10.16383/j.aas.c230691
cstr: 32138.14.j.aas.c230691
摘要:
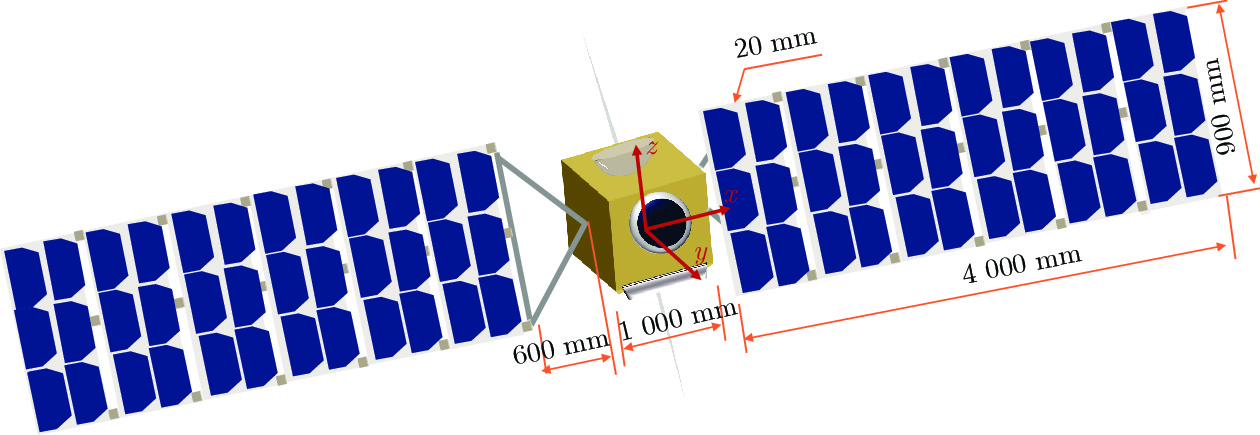
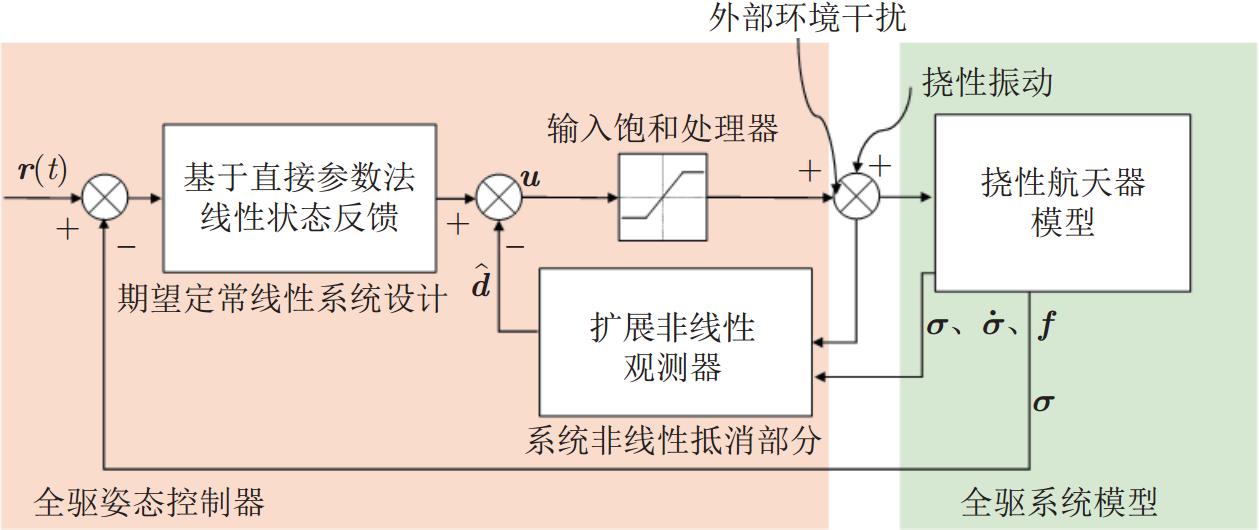
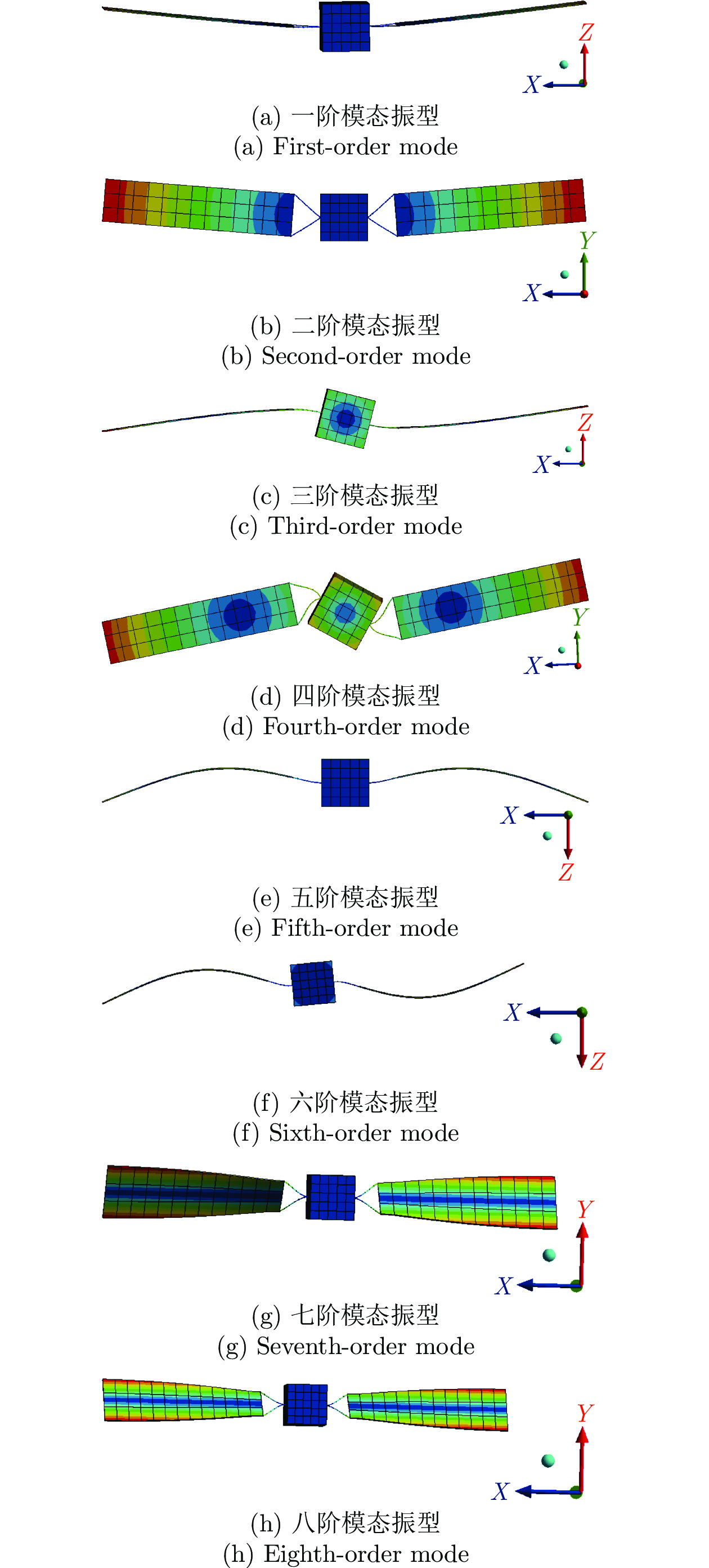
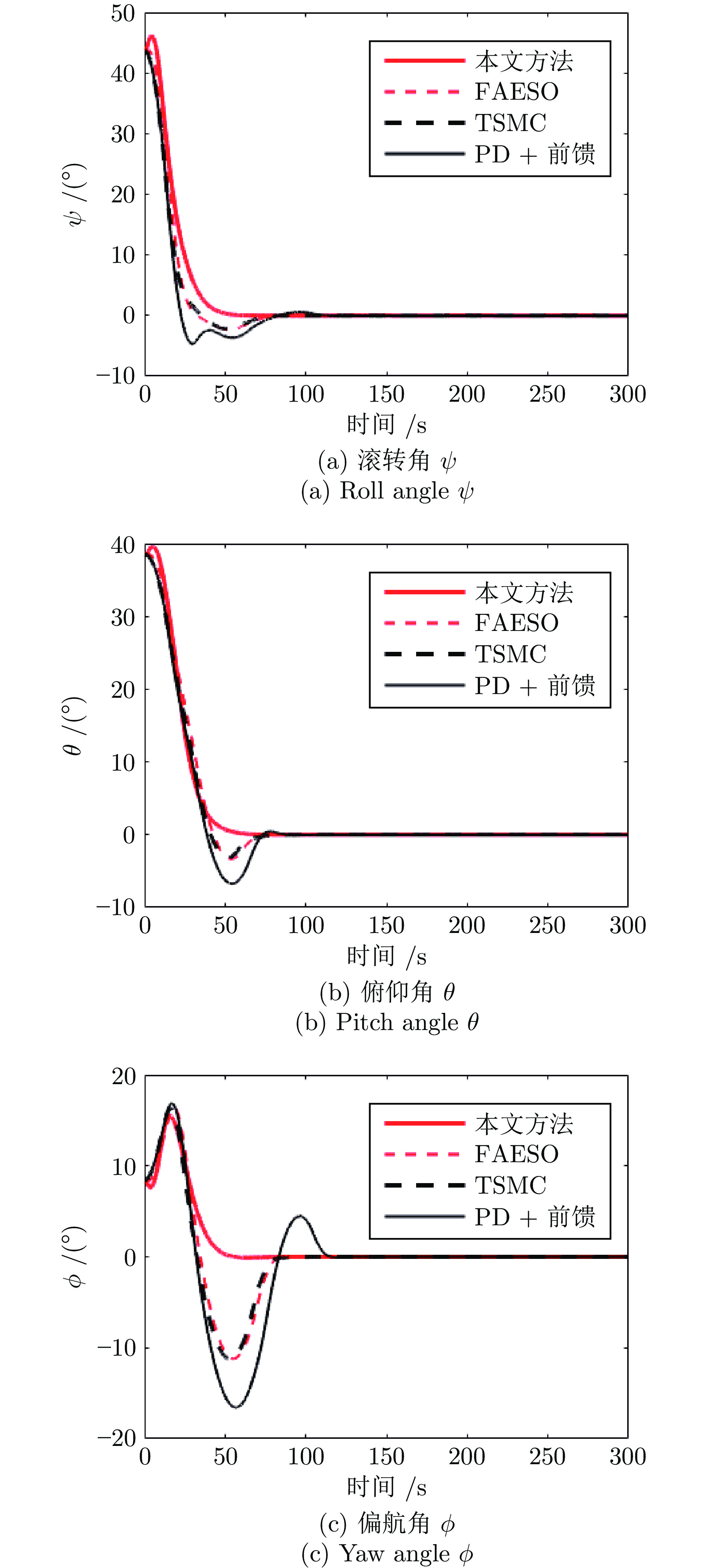
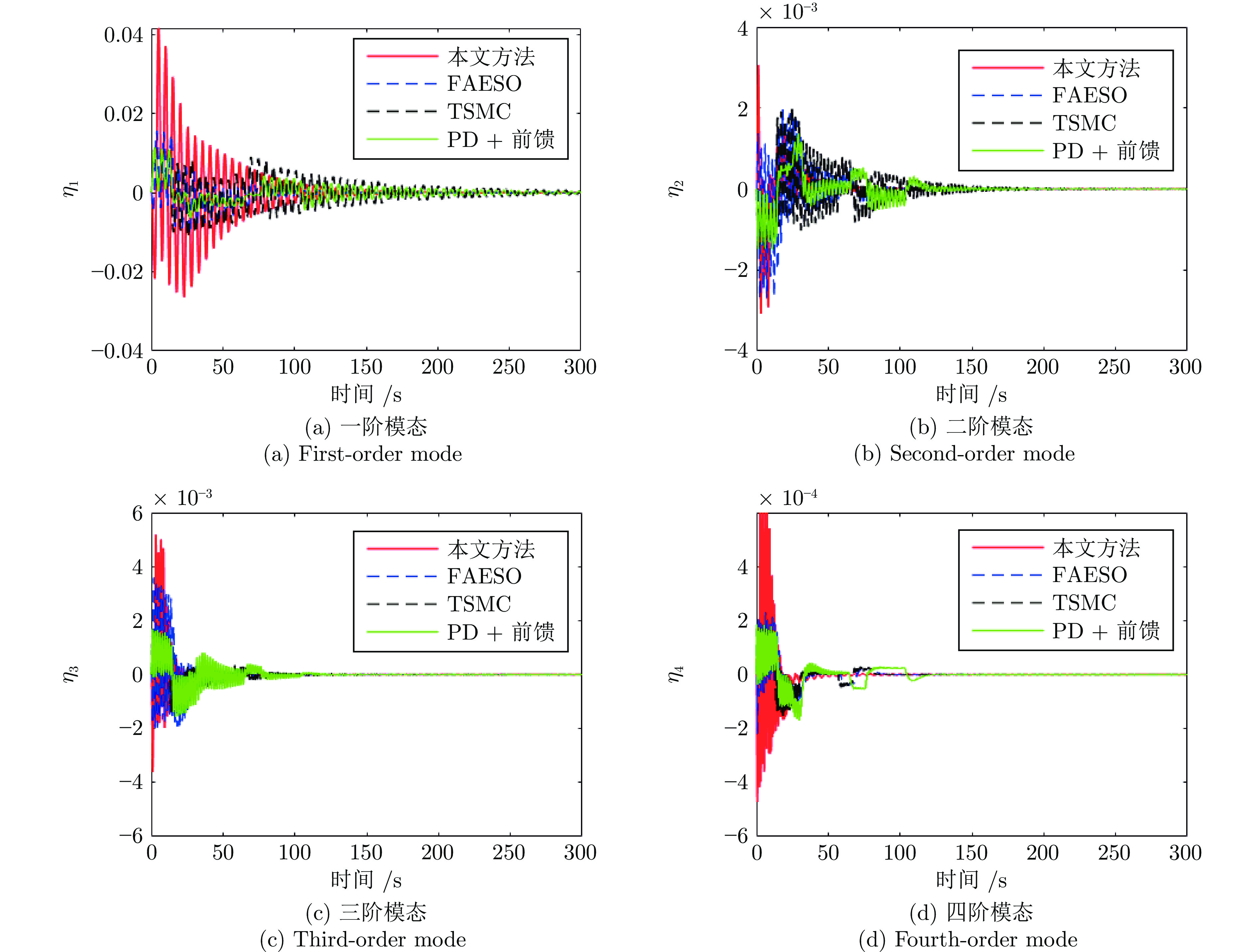
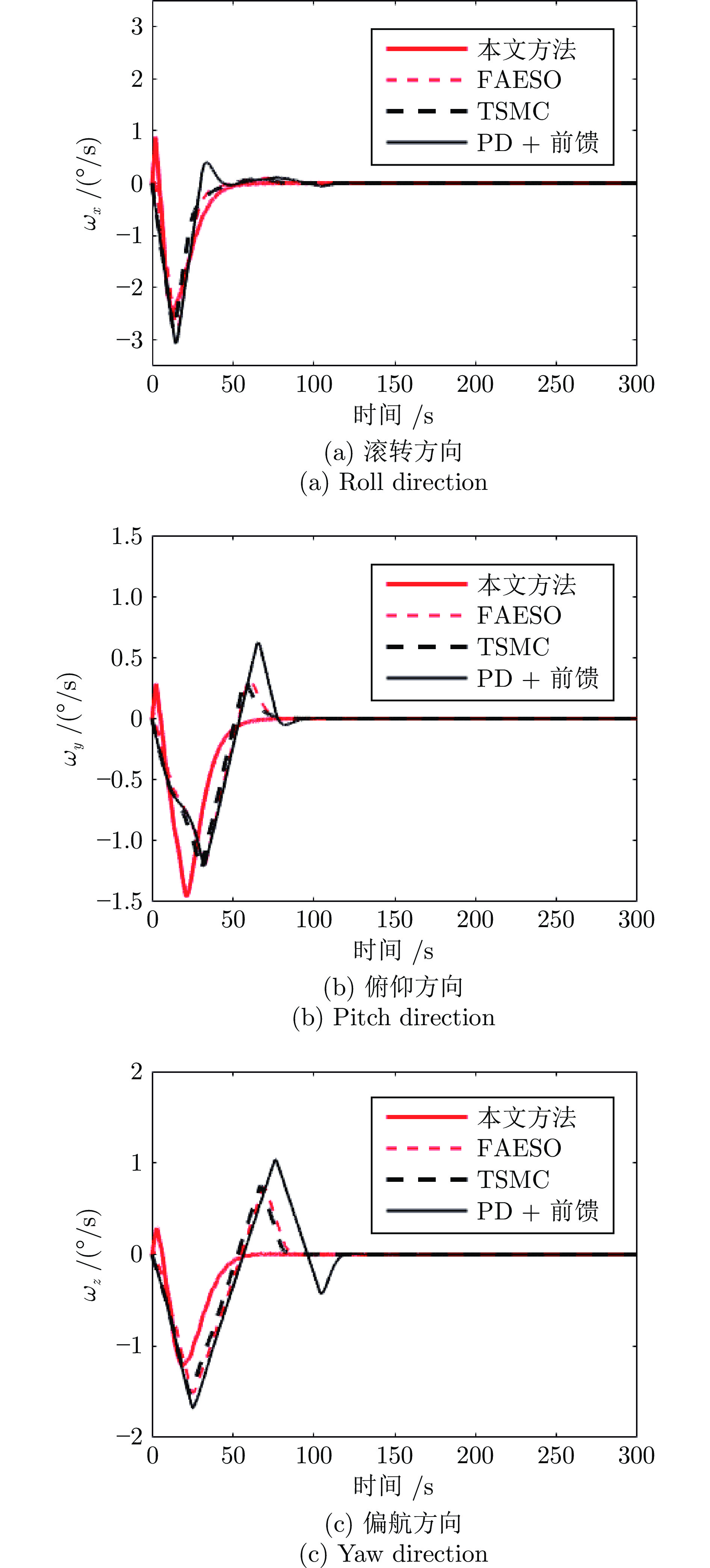
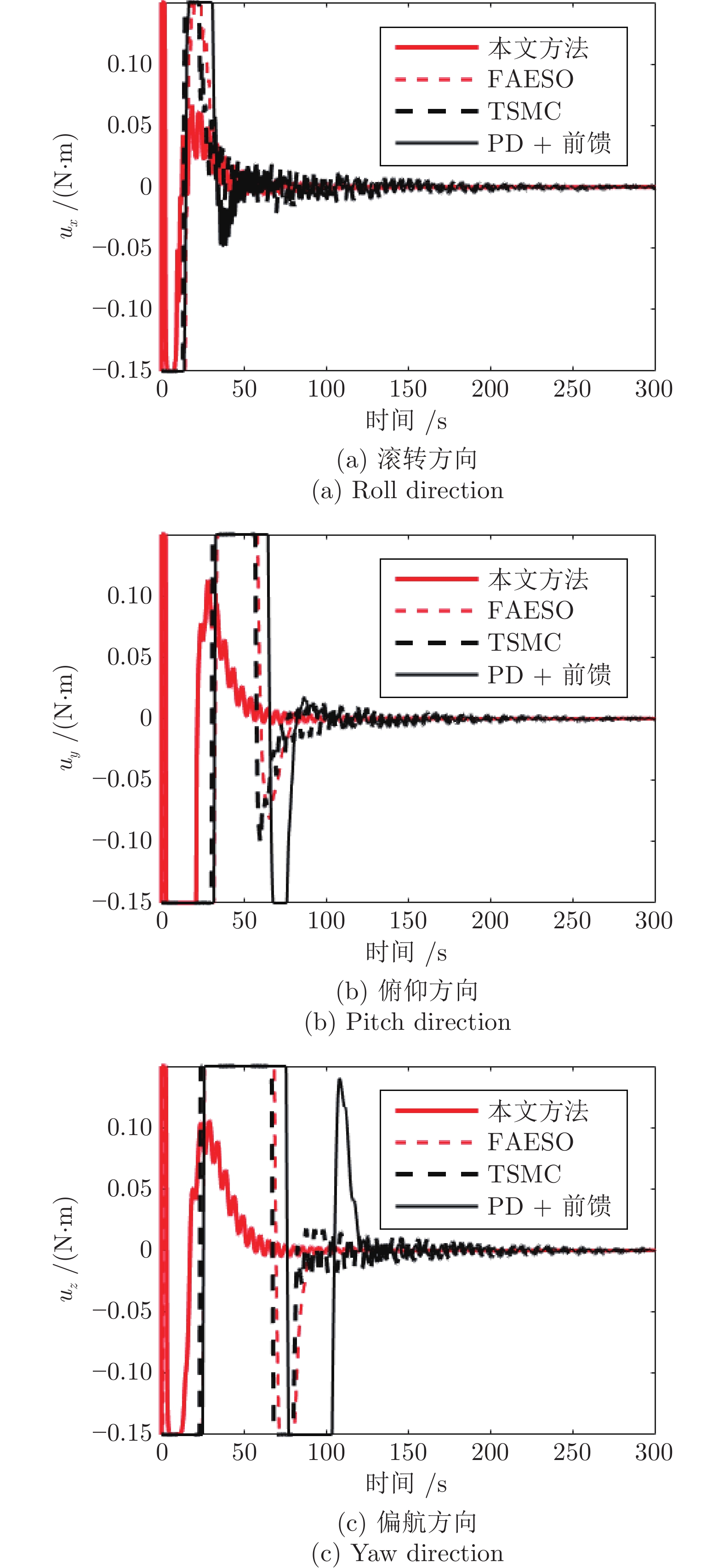
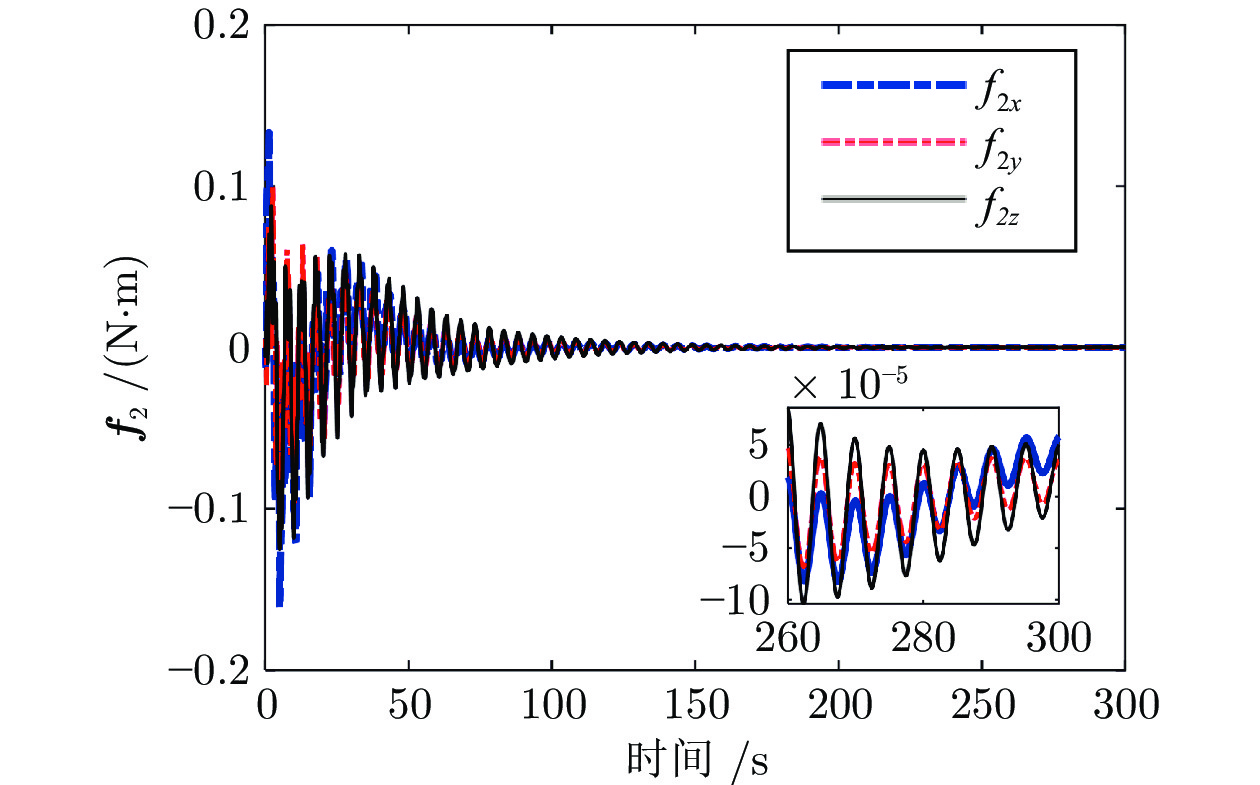
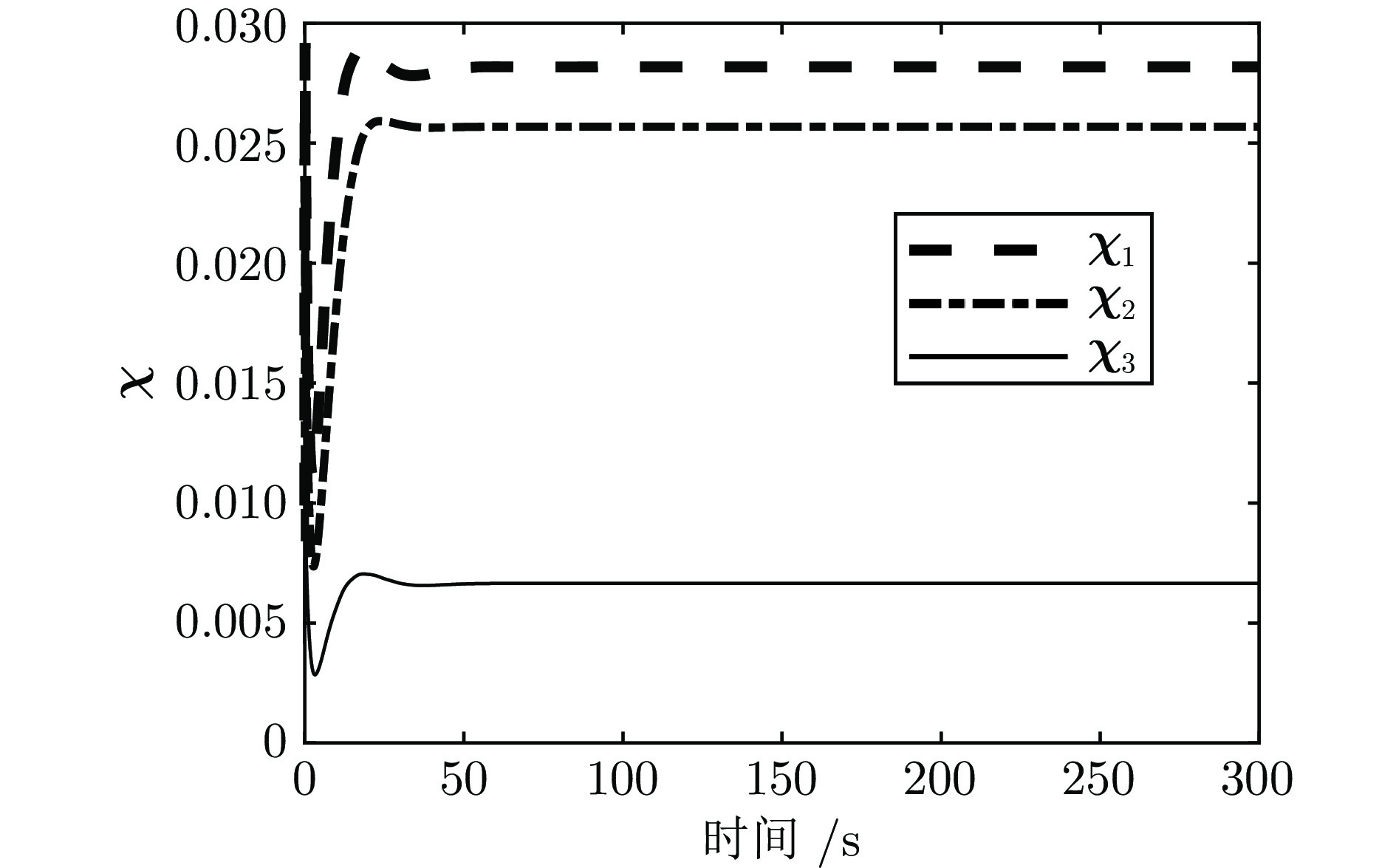
面向空间攻防等任务的航天器通常安装微波、激光等大功率对抗载荷, 未来航天器需要装备大型挠性太阳能帆板. 针对挠性航天器姿态机动过程中存在外部干扰、执行机构饱和及挠性附件振动且挠性模态不易直接测量等问题, 提出带挠性附件航天器的全驱姿态控制方法. 首先, 建立挠性航天器全驱姿态控制模型. 其次, 基于扩展非线性观测器(Extended nonlinearity observer, ENO)与努斯鲍姆增益调节设计一种抗饱和的姿态控制鲁棒算法. 将外部扰动、挠性振动和输入饱和函数饱和估计误差作为复合干扰, 采用非线性干扰观测器对其进行有效补偿. 在直接参数设计线性控制参数基础上, 扩展非线性观测器负责对挠性航天器产生的挠性振动等非线性进行实时估计和补偿, 努斯鲍姆函数辅助控制器输出力矩避免饱和, 并利用李雅普诺夫方法严格证明闭环系统的稳定性. 最后通过数学仿真验证该方法不仅能够实现执行机构饱和约束条件下的姿态控制, 还能有效抑制挠性结构的振动, 为探索未来带有大型挠性附件航天器姿态控制新的方法提供参考.
面向空间攻防等任务的航天器通常安装微波、激光等大功率对抗载荷, 未来航天器需要装备大型挠性太阳能帆板. 针对挠性航天器姿态机动过程中存在外部干扰、执行机构饱和及挠性附件振动且挠性模态不易直接测量等问题, 提出带挠性附件航天器的全驱姿态控制方法. 首先, 建立挠性航天器全驱姿态控制模型. 其次, 基于扩展非线性观测器(Extended nonlinearity observer, ENO)与努斯鲍姆增益调节设计一种抗饱和的姿态控制鲁棒算法. 将外部扰动、挠性振动和输入饱和函数饱和估计误差作为复合干扰, 采用非线性干扰观测器对其进行有效补偿. 在直接参数设计线性控制参数基础上, 扩展非线性观测器负责对挠性航天器产生的挠性振动等非线性进行实时估计和补偿, 努斯鲍姆函数辅助控制器输出力矩避免饱和, 并利用李雅普诺夫方法严格证明闭环系统的稳定性. 最后通过数学仿真验证该方法不仅能够实现执行机构饱和约束条件下的姿态控制, 还能有效抑制挠性结构的振动, 为探索未来带有大型挠性附件航天器姿态控制新的方法提供参考.
2024, 50(11): 2188-2203.
doi: 10.16383/j.aas.c220938
cstr: 32138.14.j.aas.c220938
摘要:
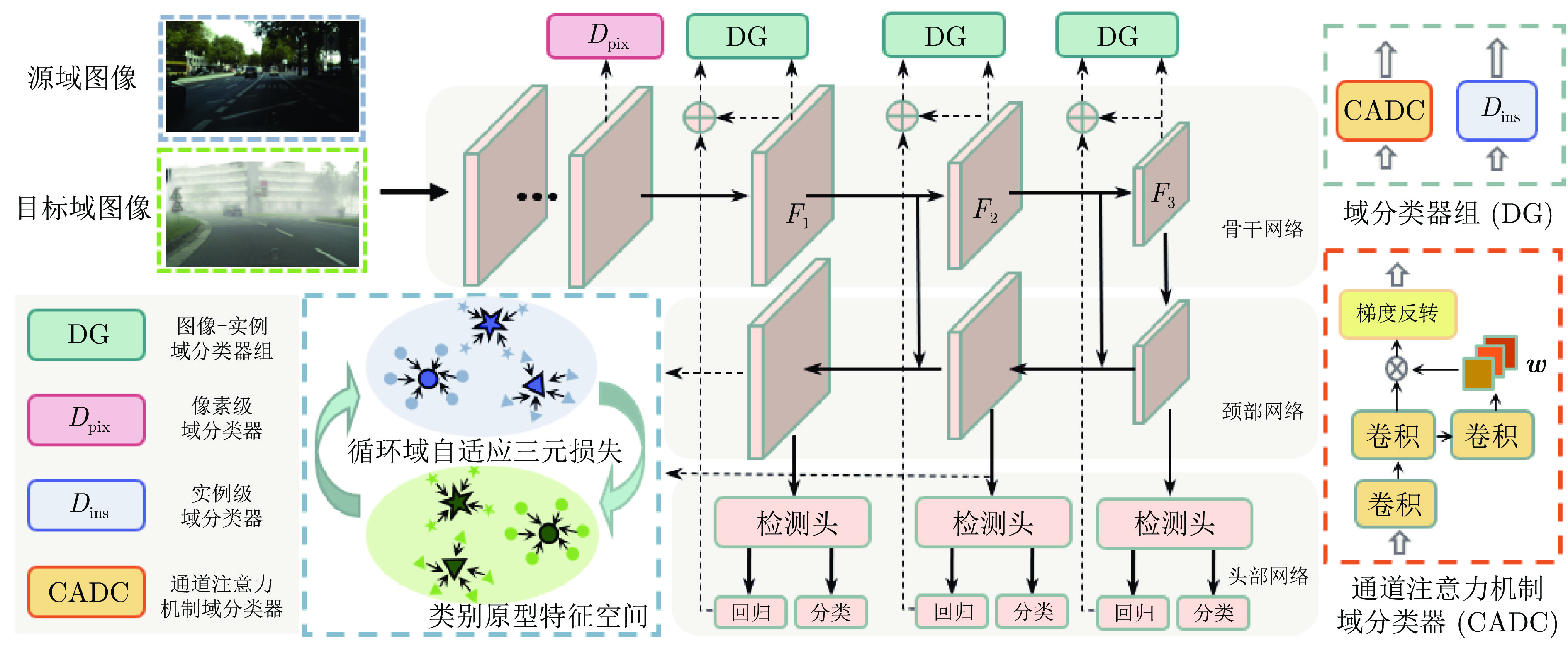
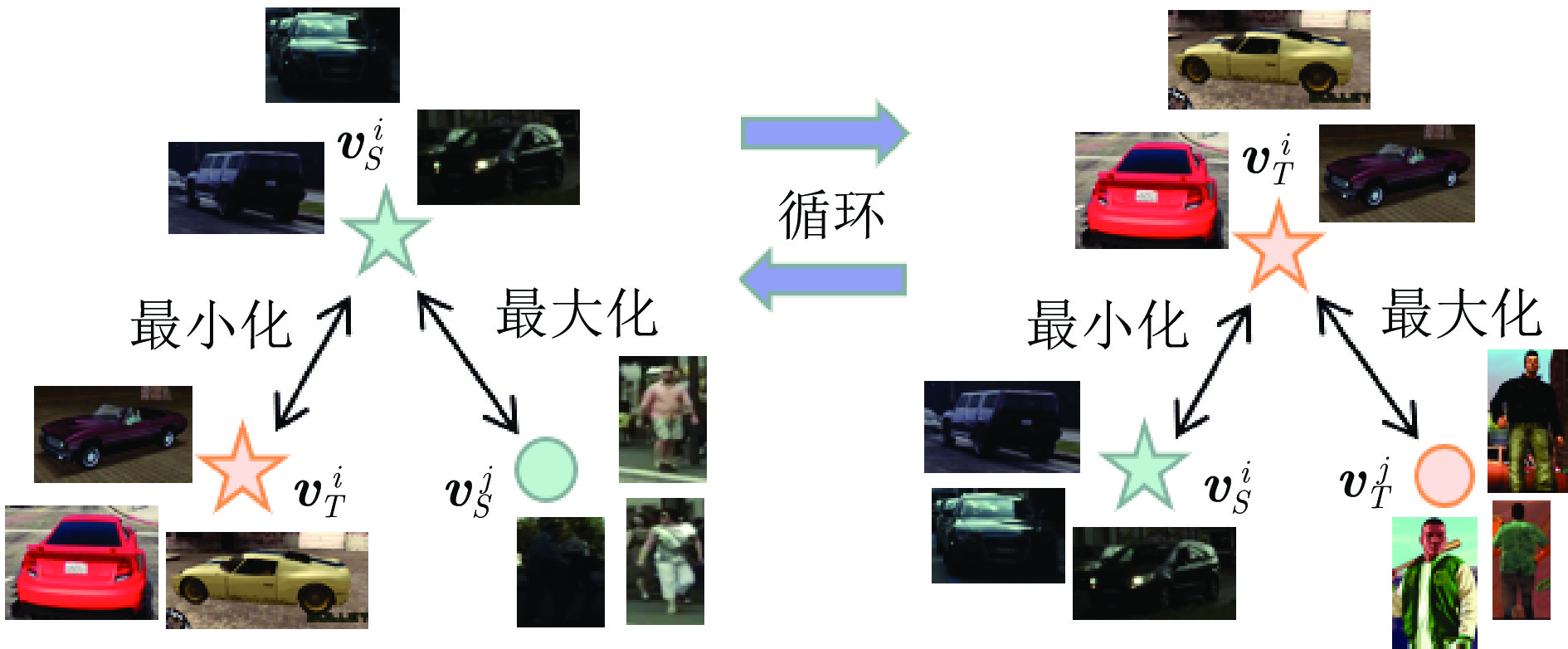
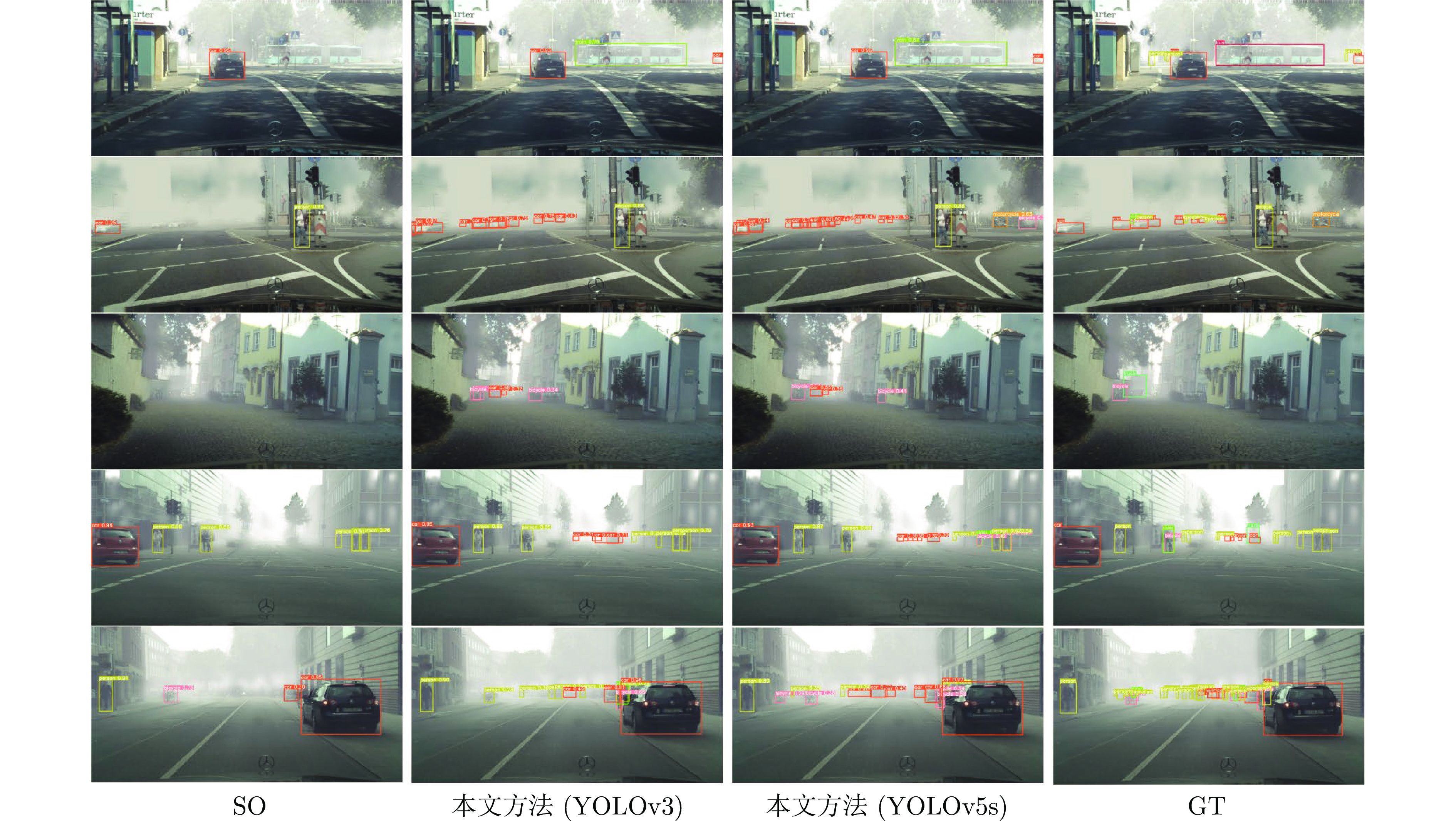
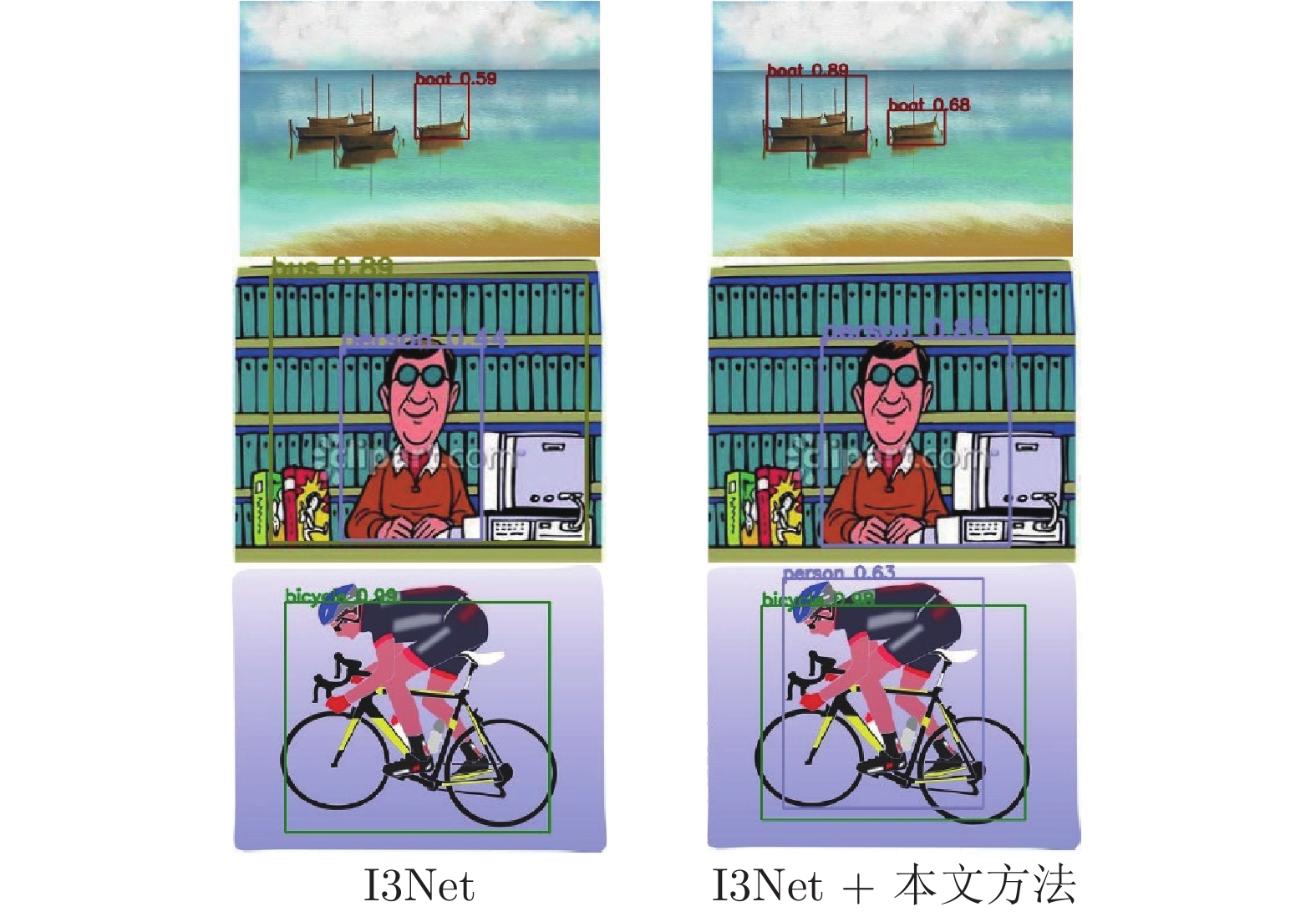
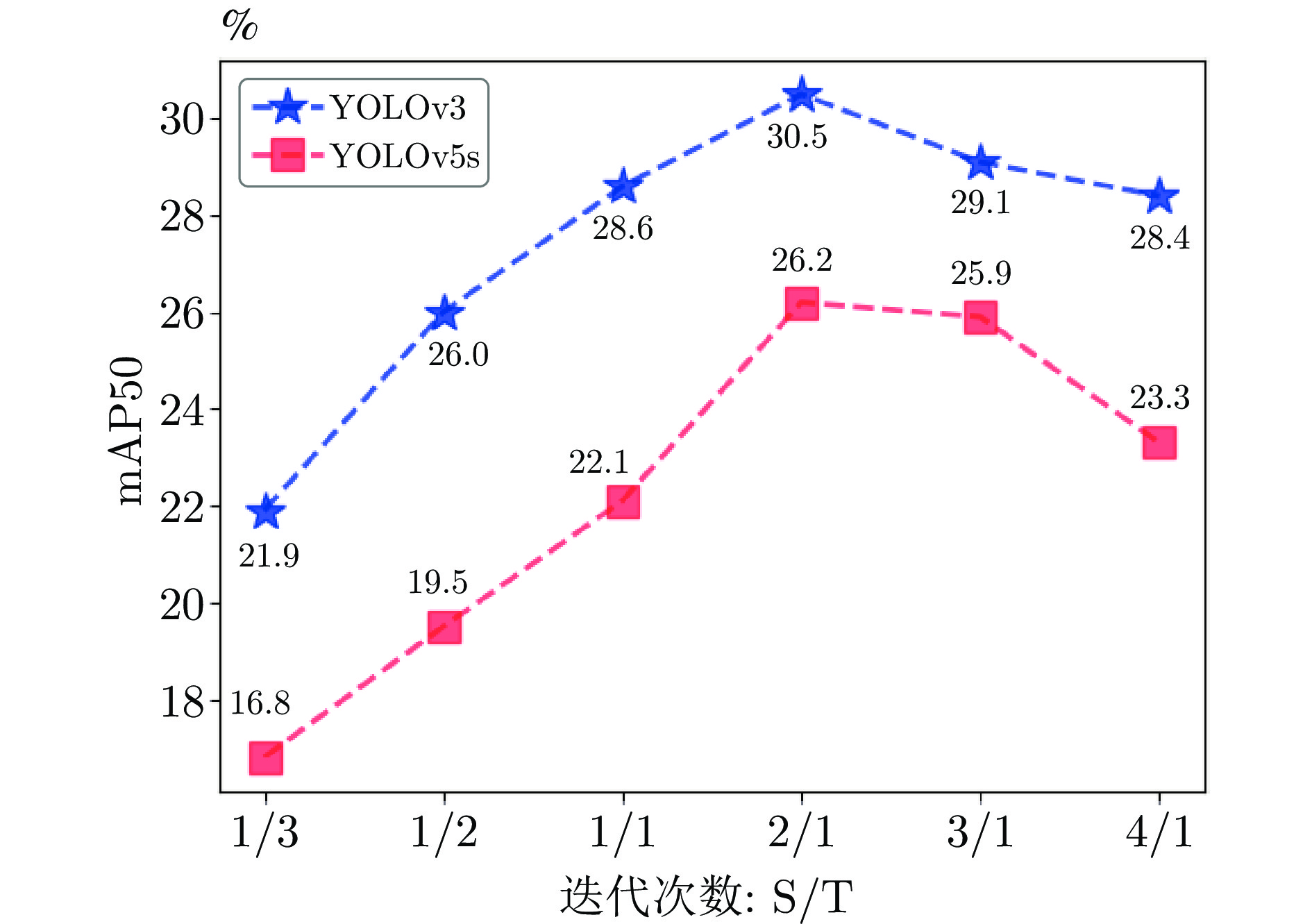
目前大多数深度学习算法都依赖于大量的标注数据并欠缺一定的泛化能力. 无监督域自适应算法能提取到已标注数据和未标注数据间隐式共同特征, 从而提高算法在未标注数据上的泛化性能. 目前域自适应目标检测算法主要为两阶段目标检测器设计. 针对单阶段检测器中无法直接进行实例级特征对齐导致一定数量域不变特征的缺失, 提出结合通道注意力机制的图像级域分类器加强域不变特征提取. 此外, 对于域自适应目标检测中存在类别特征的错误对齐引起的精度下降问题, 通过原型学习构建类别中心, 设计了一种基于原型的循环域三元损失(Cycle domain triplet loss, CDTL)函数, 从而实现原型引导的精细类别特征对齐. 以单阶段目标检测算法作为检测器, 并在多种域自适应目标检测公共数据集上进行实验. 实验结果证明该方法能有效提升原检测器在目标域的泛化能力, 达到比其他方法更高的检测精度, 并且对于单阶段目标检测网络具有一定的通用性.
目前大多数深度学习算法都依赖于大量的标注数据并欠缺一定的泛化能力. 无监督域自适应算法能提取到已标注数据和未标注数据间隐式共同特征, 从而提高算法在未标注数据上的泛化性能. 目前域自适应目标检测算法主要为两阶段目标检测器设计. 针对单阶段检测器中无法直接进行实例级特征对齐导致一定数量域不变特征的缺失, 提出结合通道注意力机制的图像级域分类器加强域不变特征提取. 此外, 对于域自适应目标检测中存在类别特征的错误对齐引起的精度下降问题, 通过原型学习构建类别中心, 设计了一种基于原型的循环域三元损失(Cycle domain triplet loss, CDTL)函数, 从而实现原型引导的精细类别特征对齐. 以单阶段目标检测算法作为检测器, 并在多种域自适应目标检测公共数据集上进行实验. 实验结果证明该方法能有效提升原检测器在目标域的泛化能力, 达到比其他方法更高的检测精度, 并且对于单阶段目标检测网络具有一定的通用性.


2024, 50(11): 2204-2218.
doi: 10.16383/j.aas.c210979
cstr: 32138.14.j.aas.c210979
摘要:
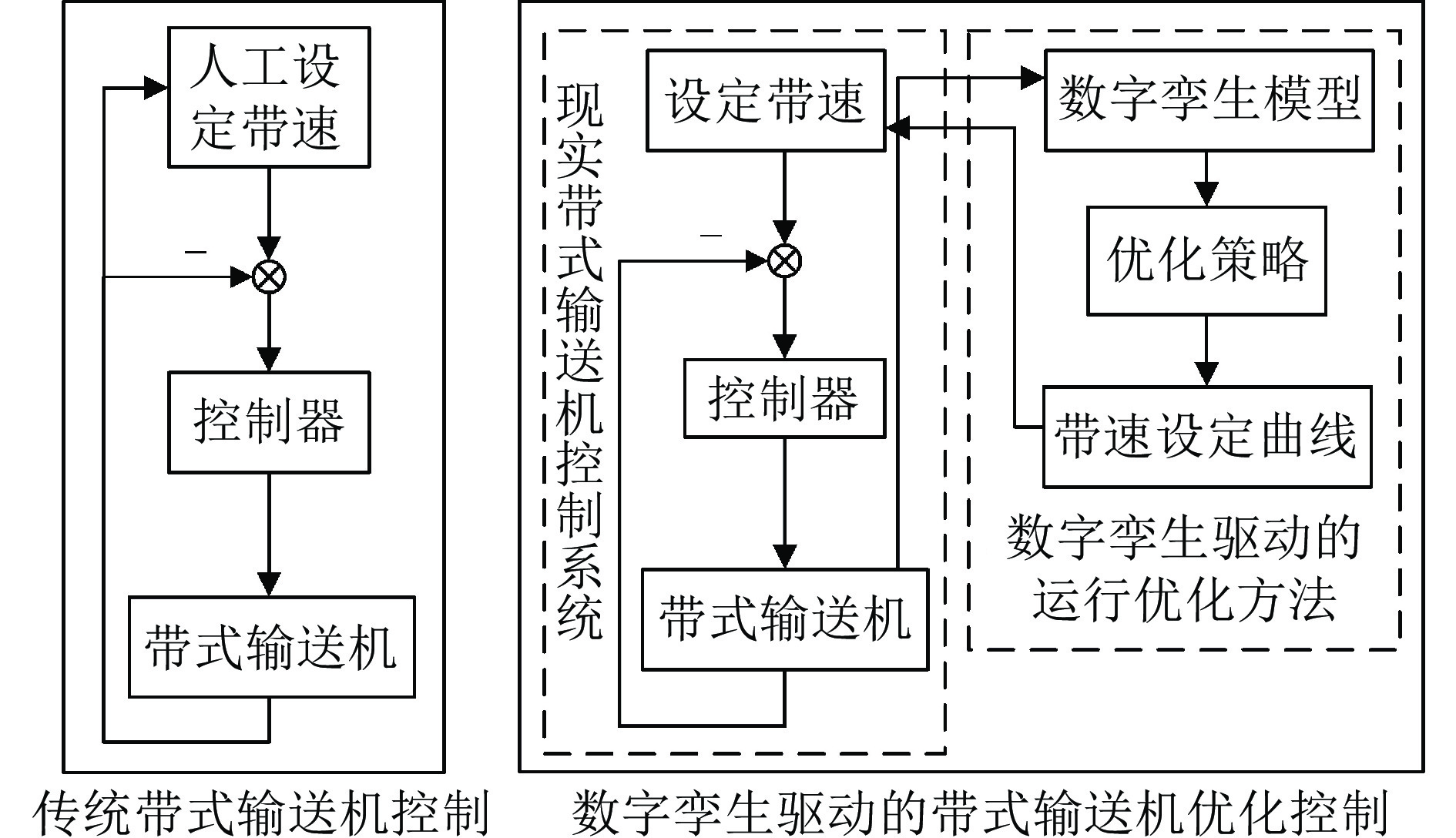
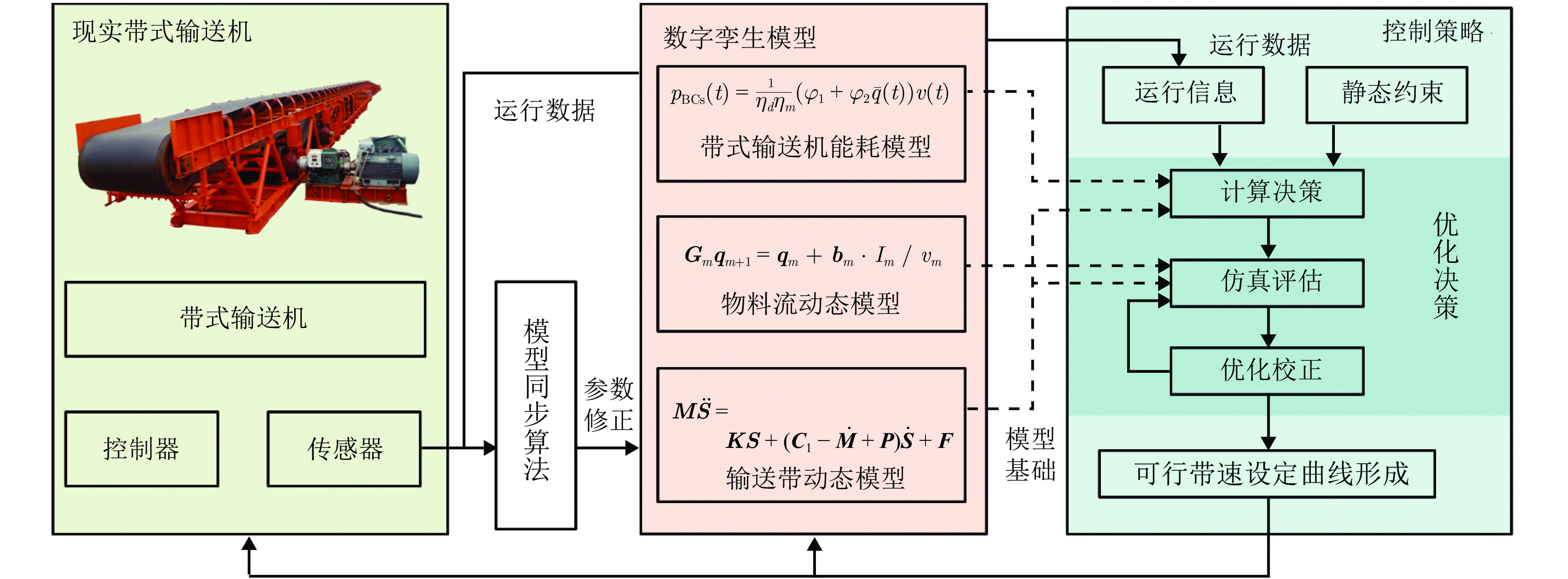
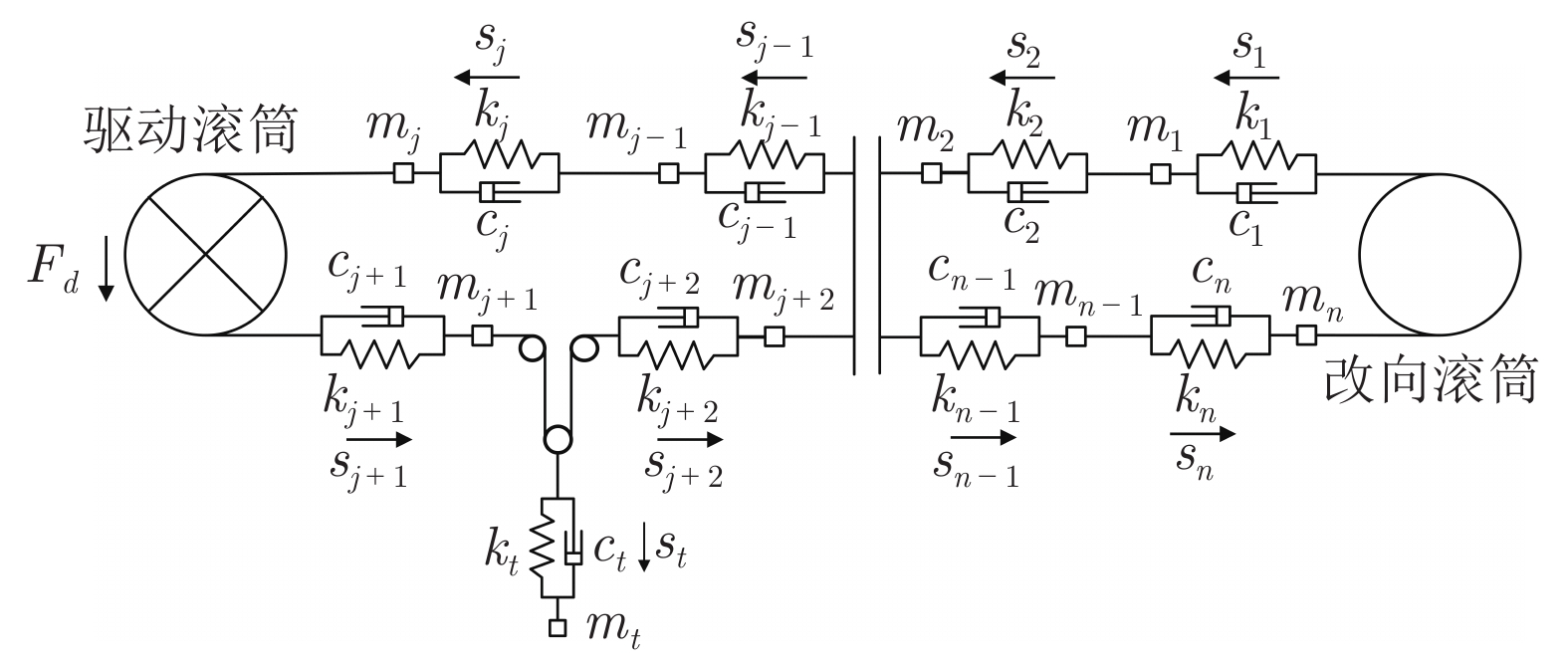
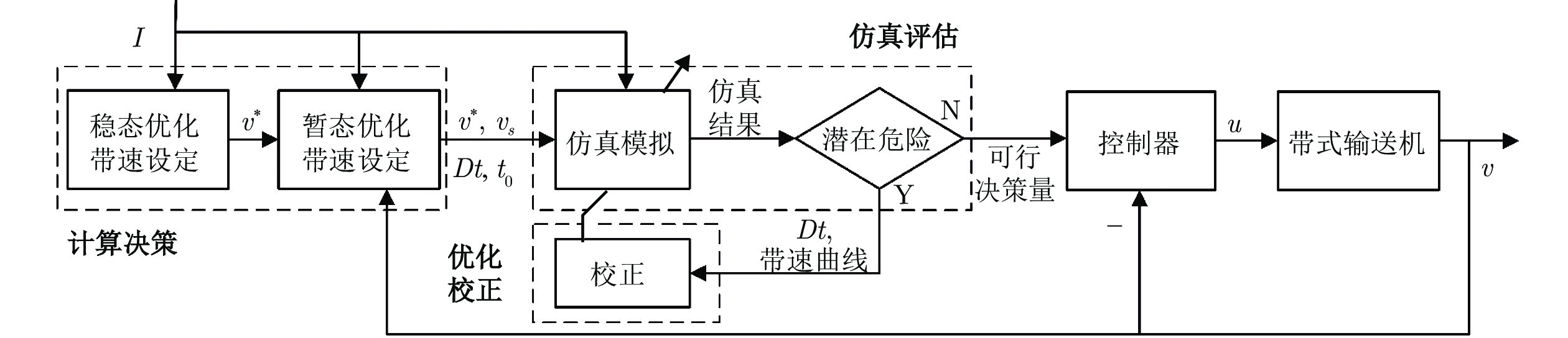
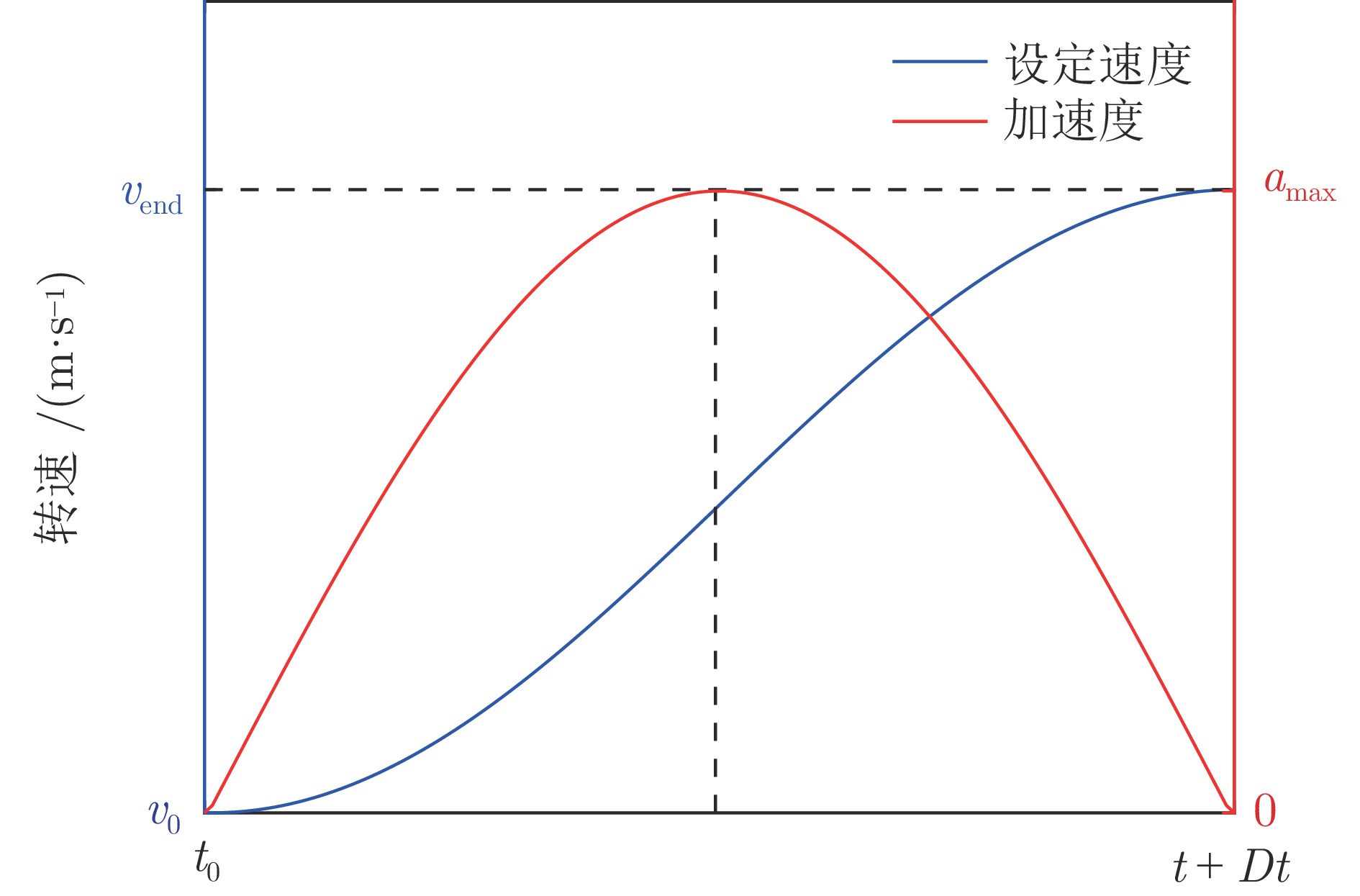
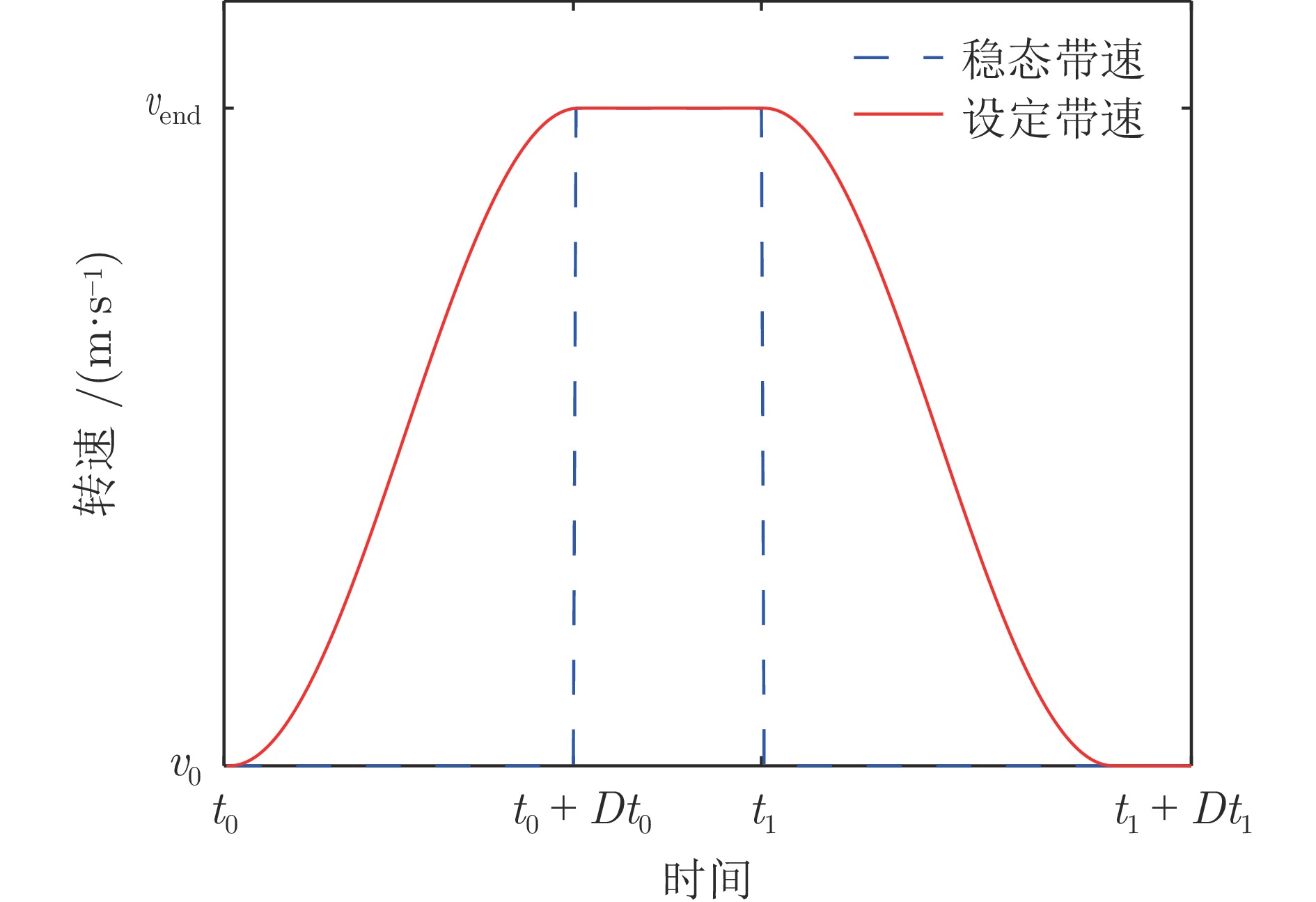
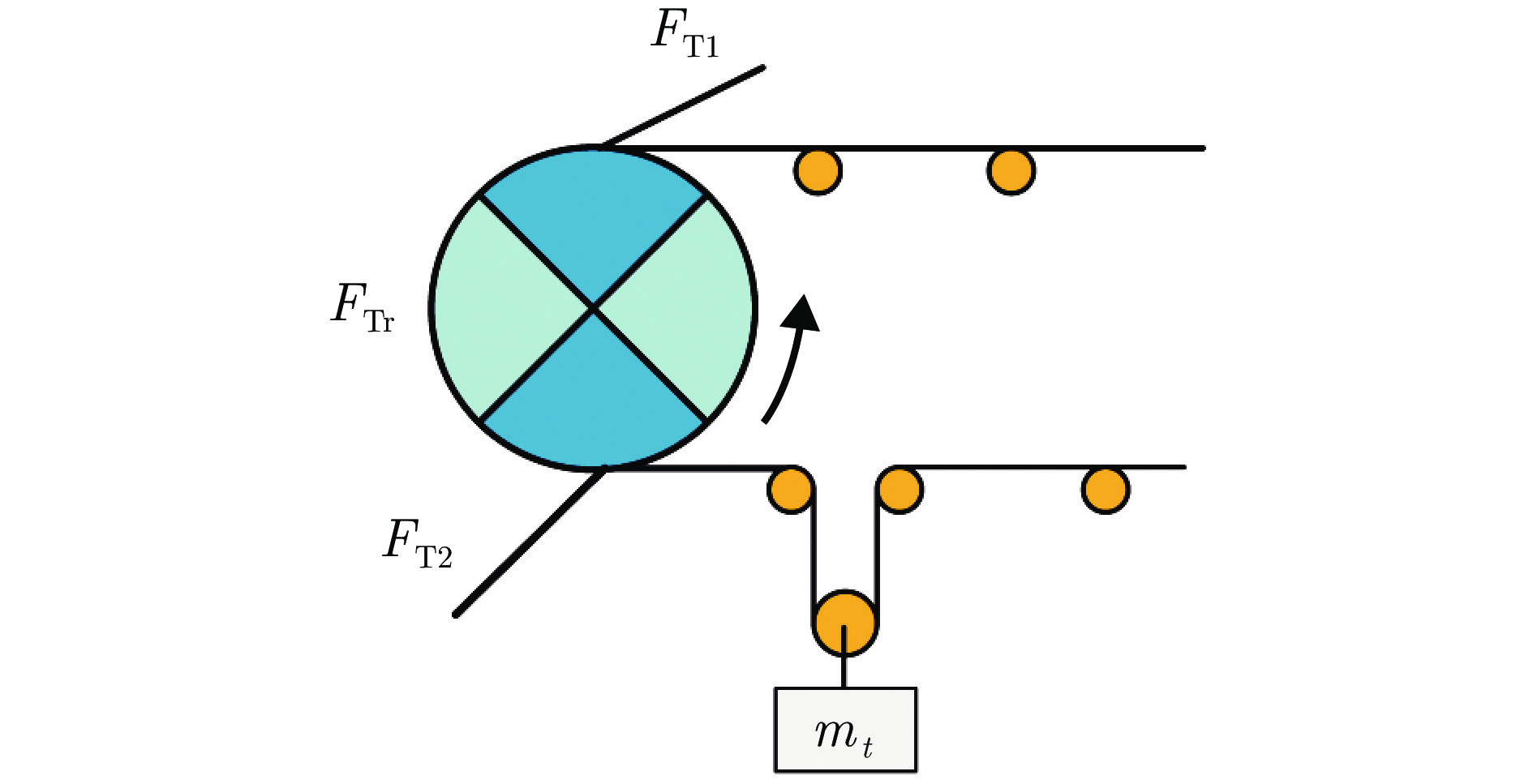
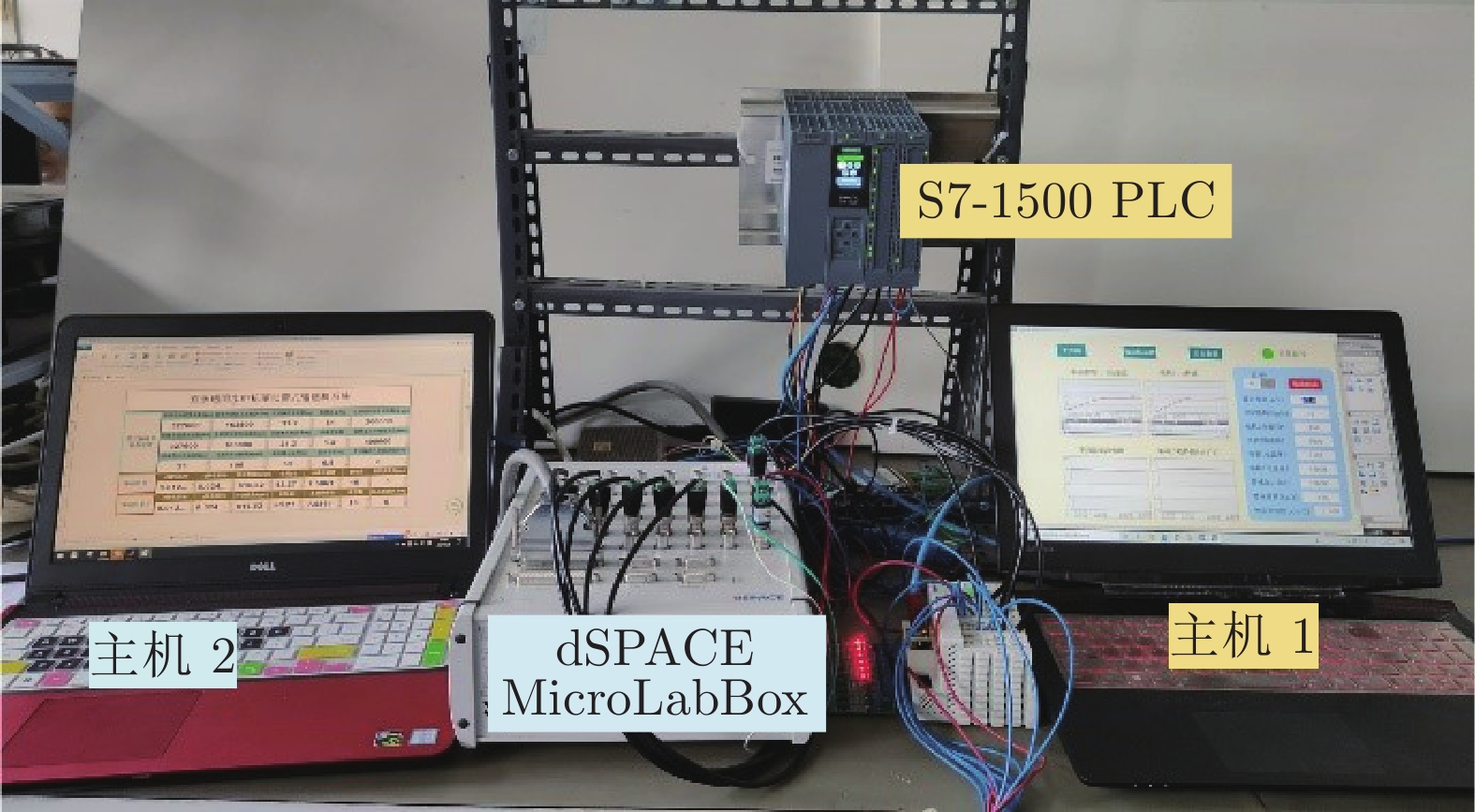
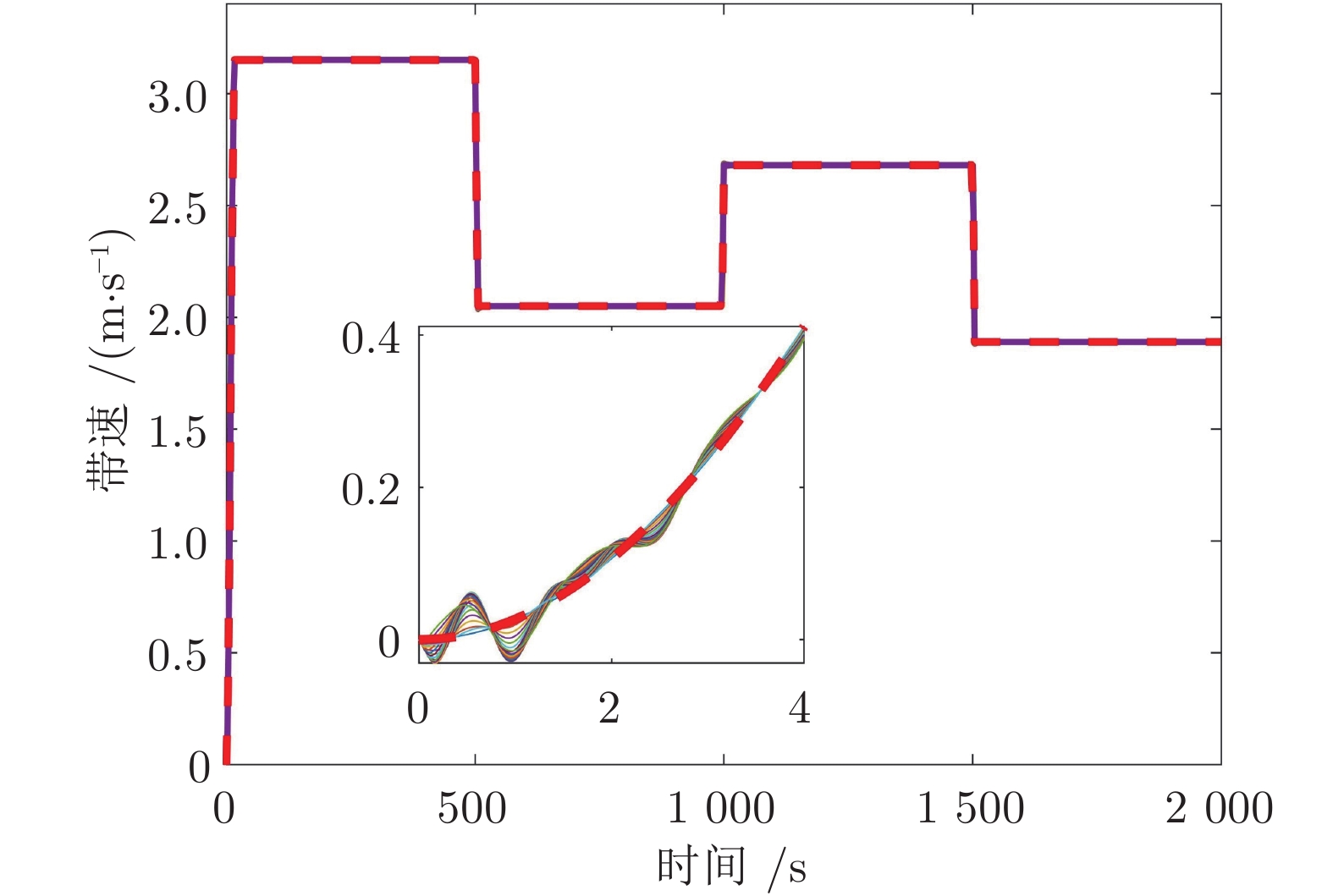
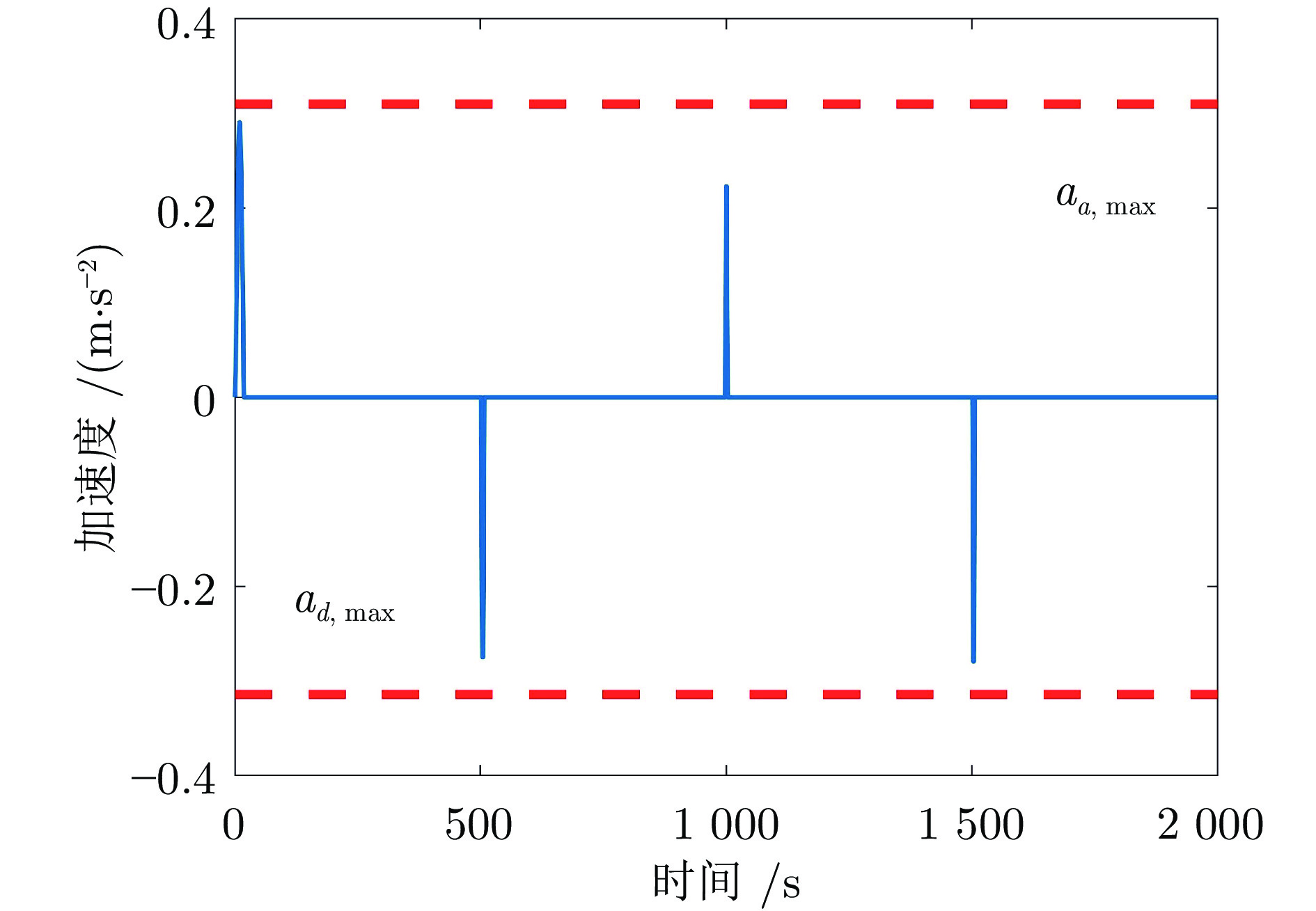
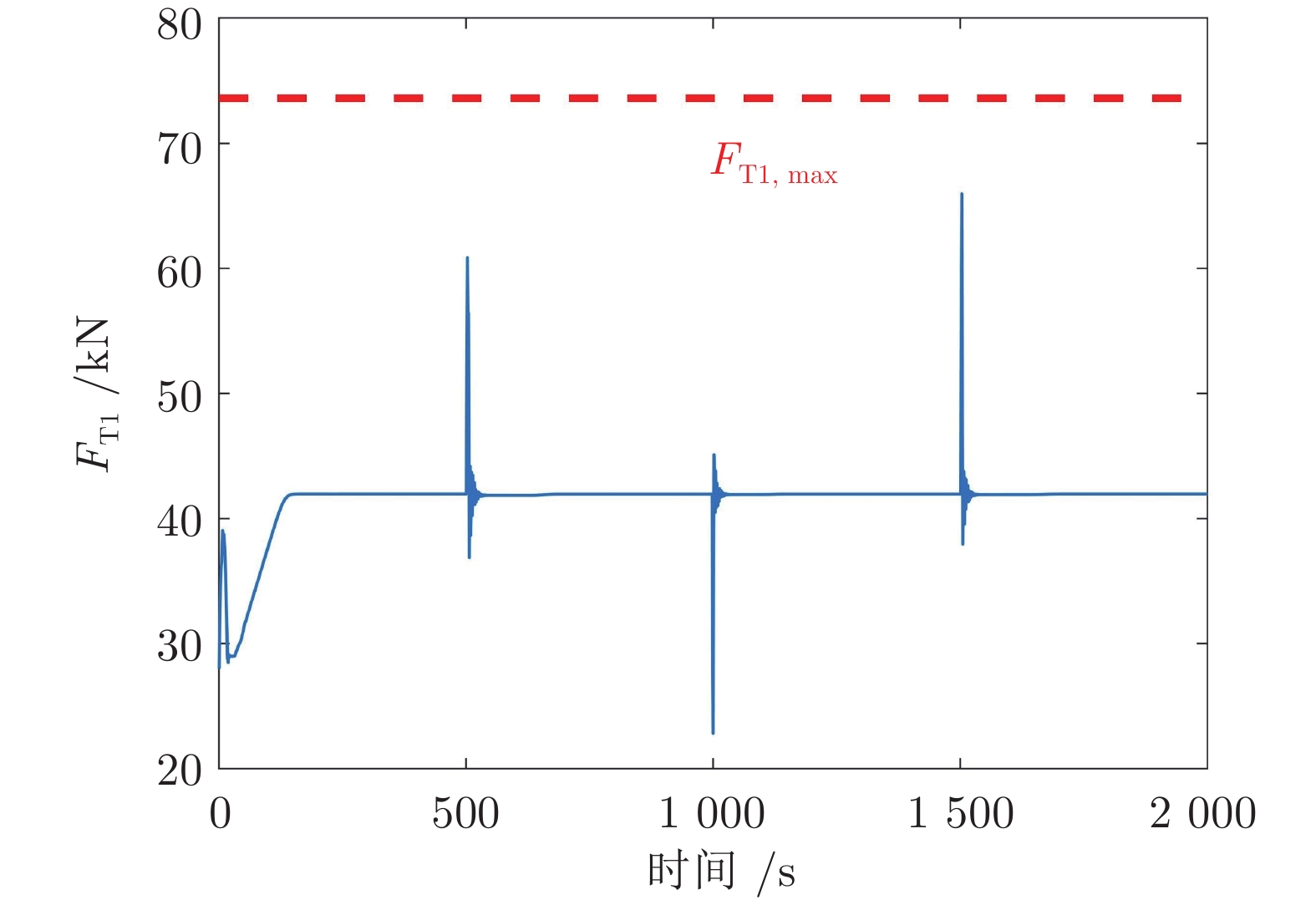
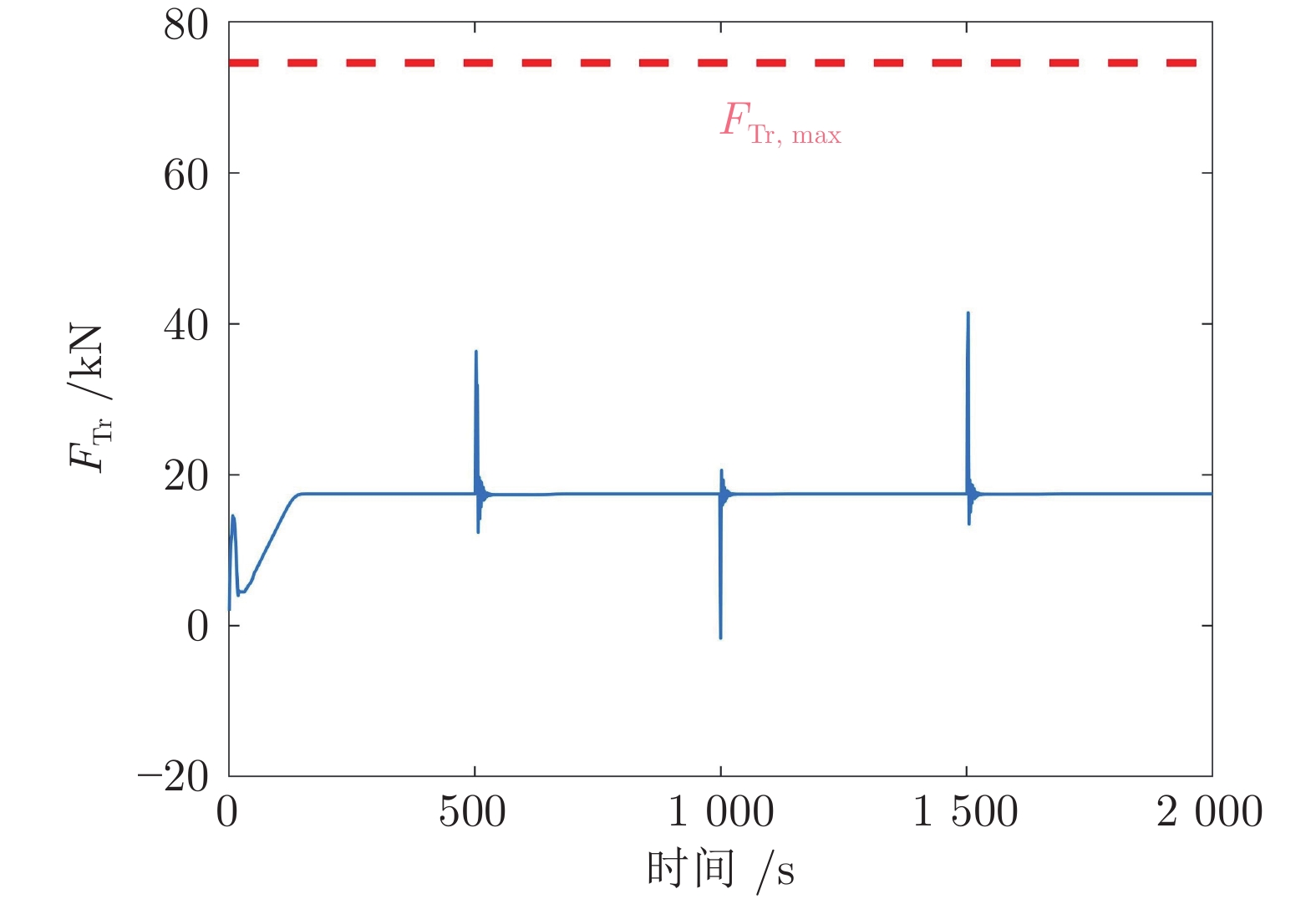
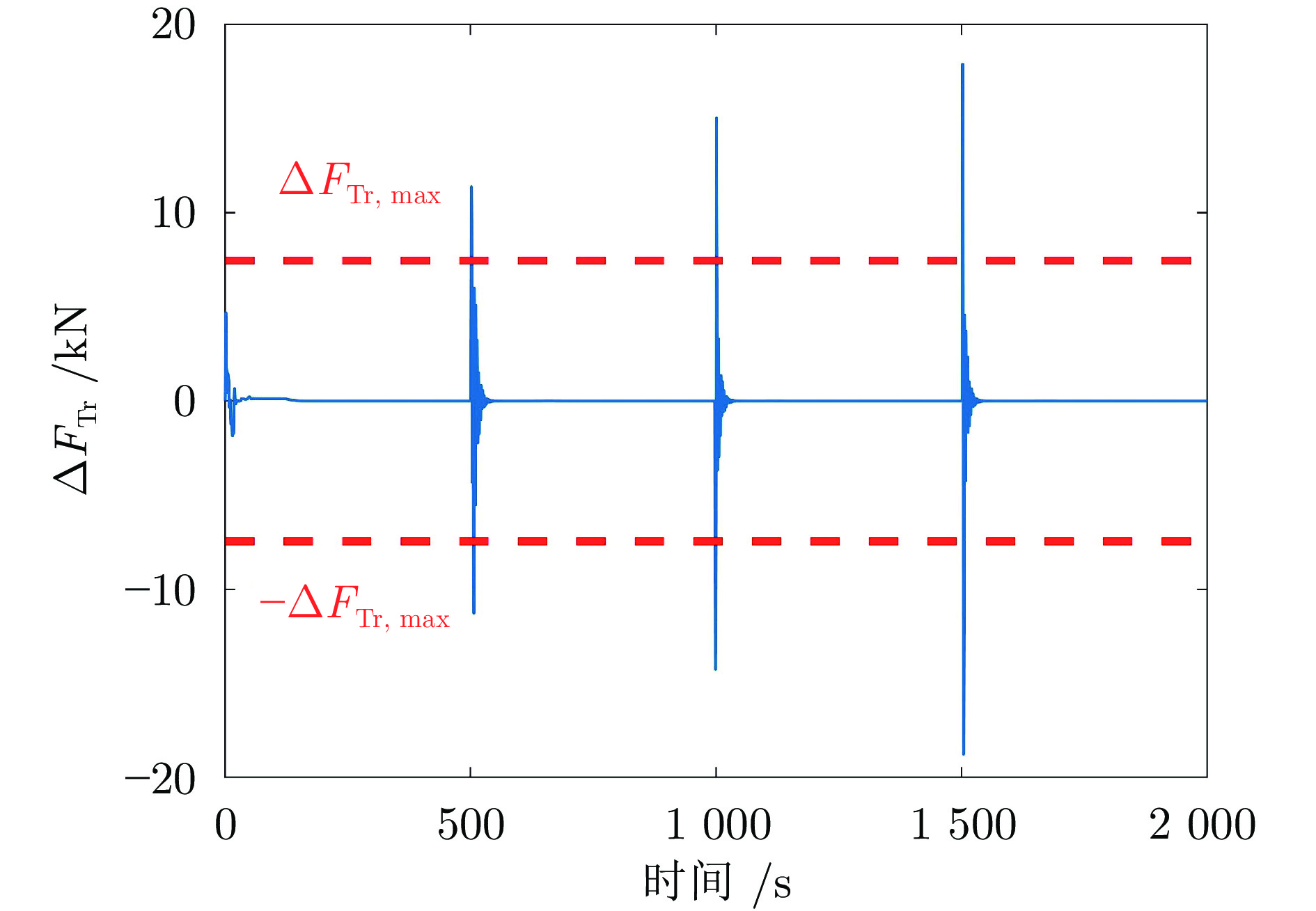
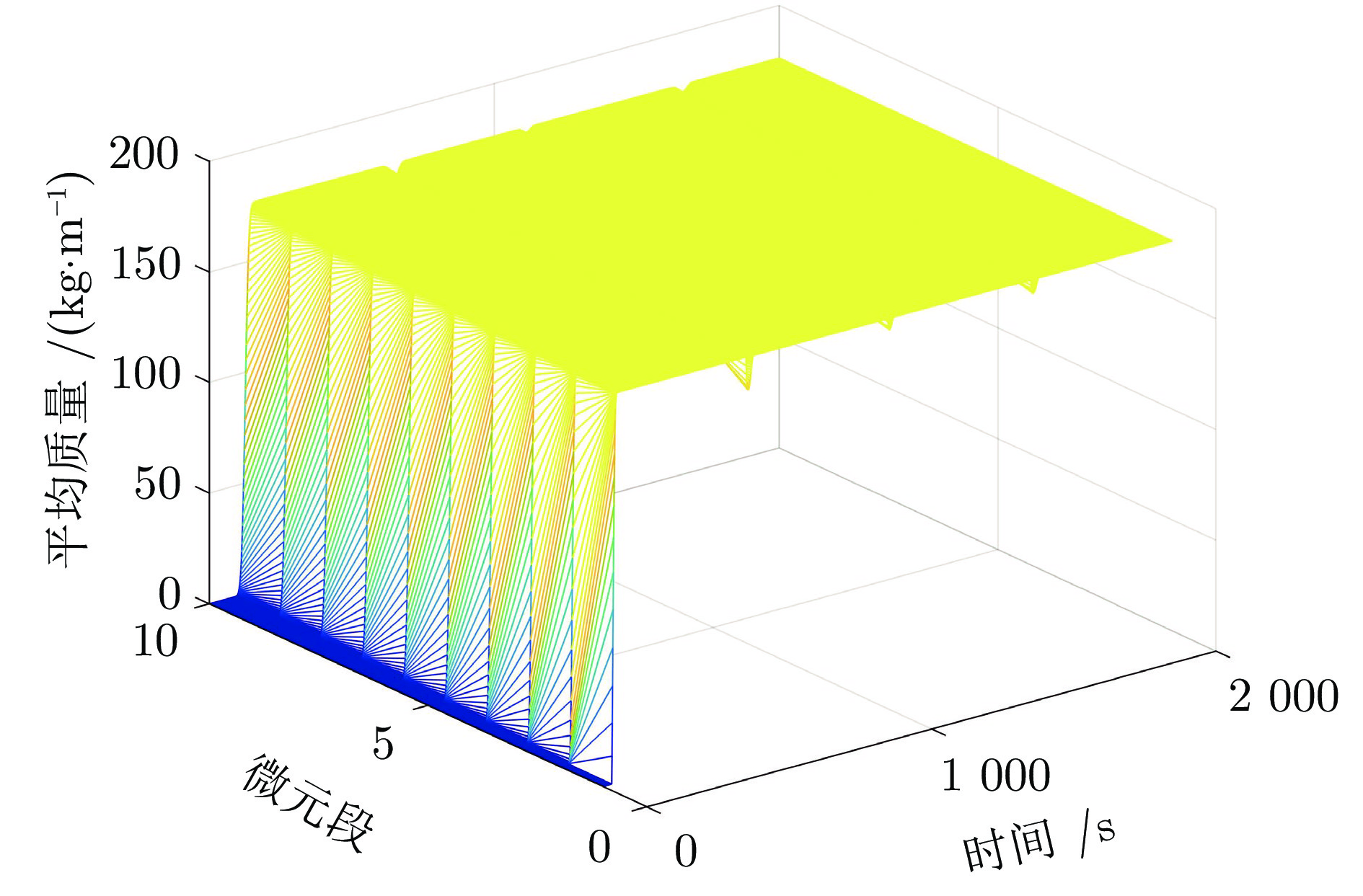
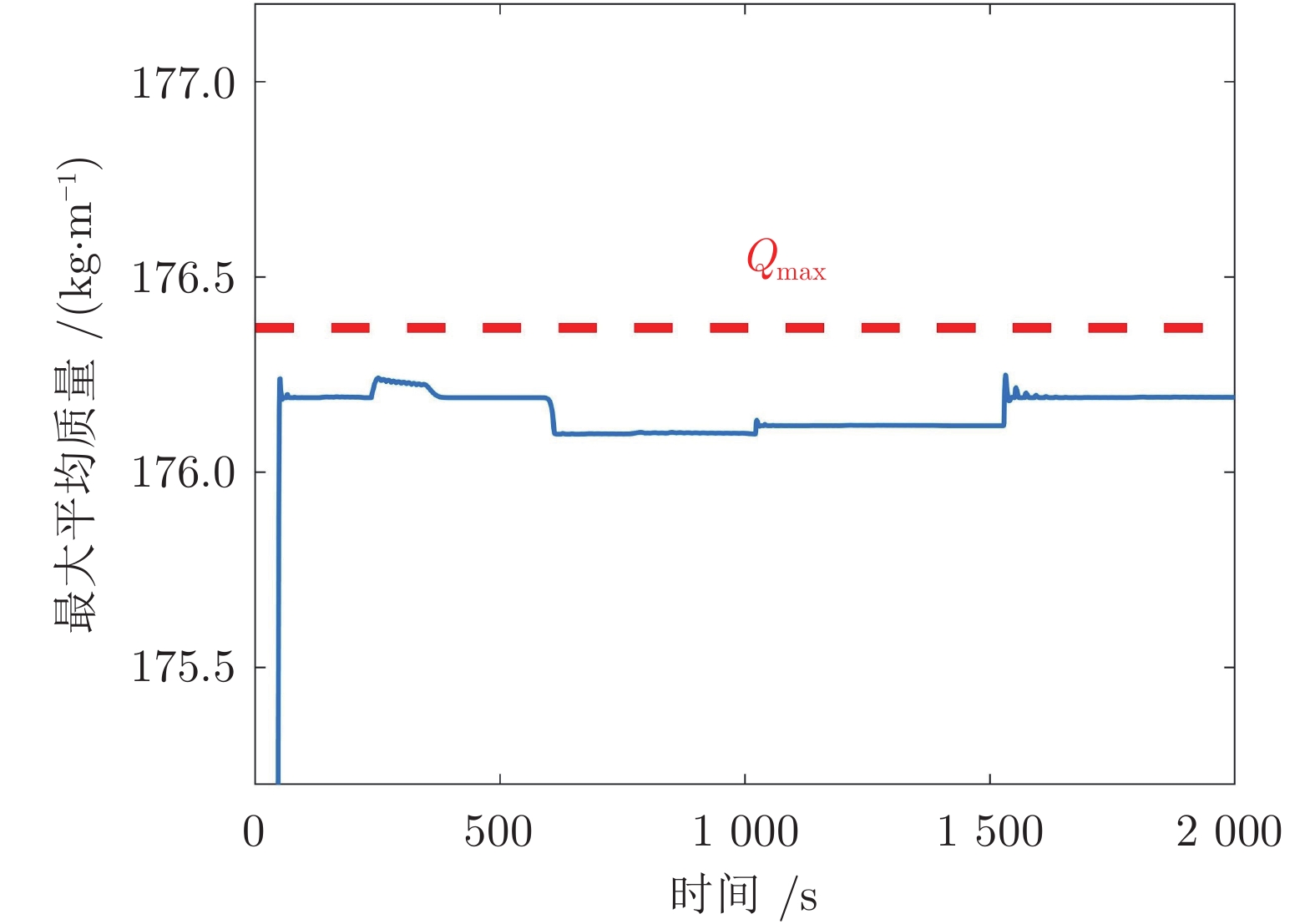
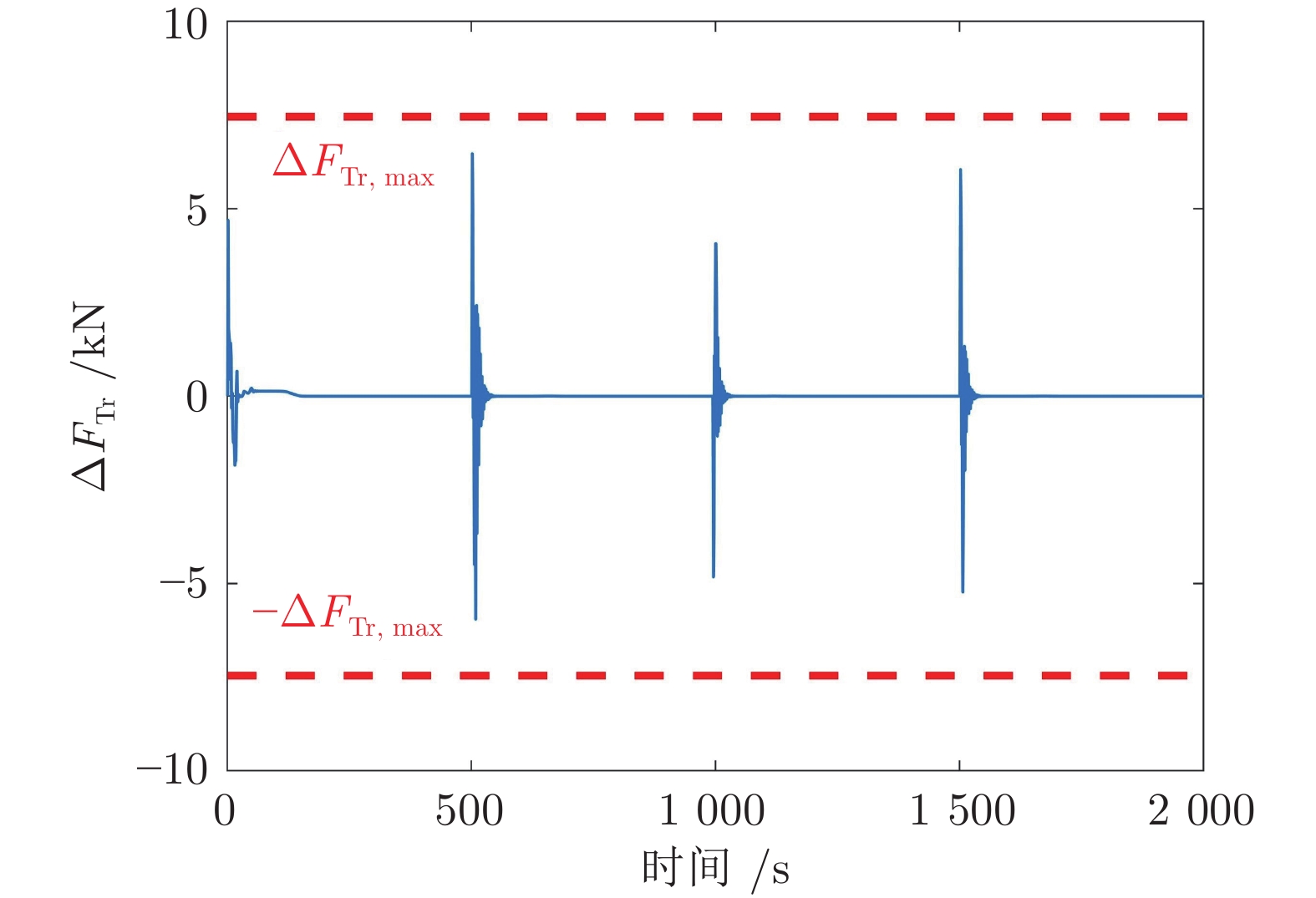
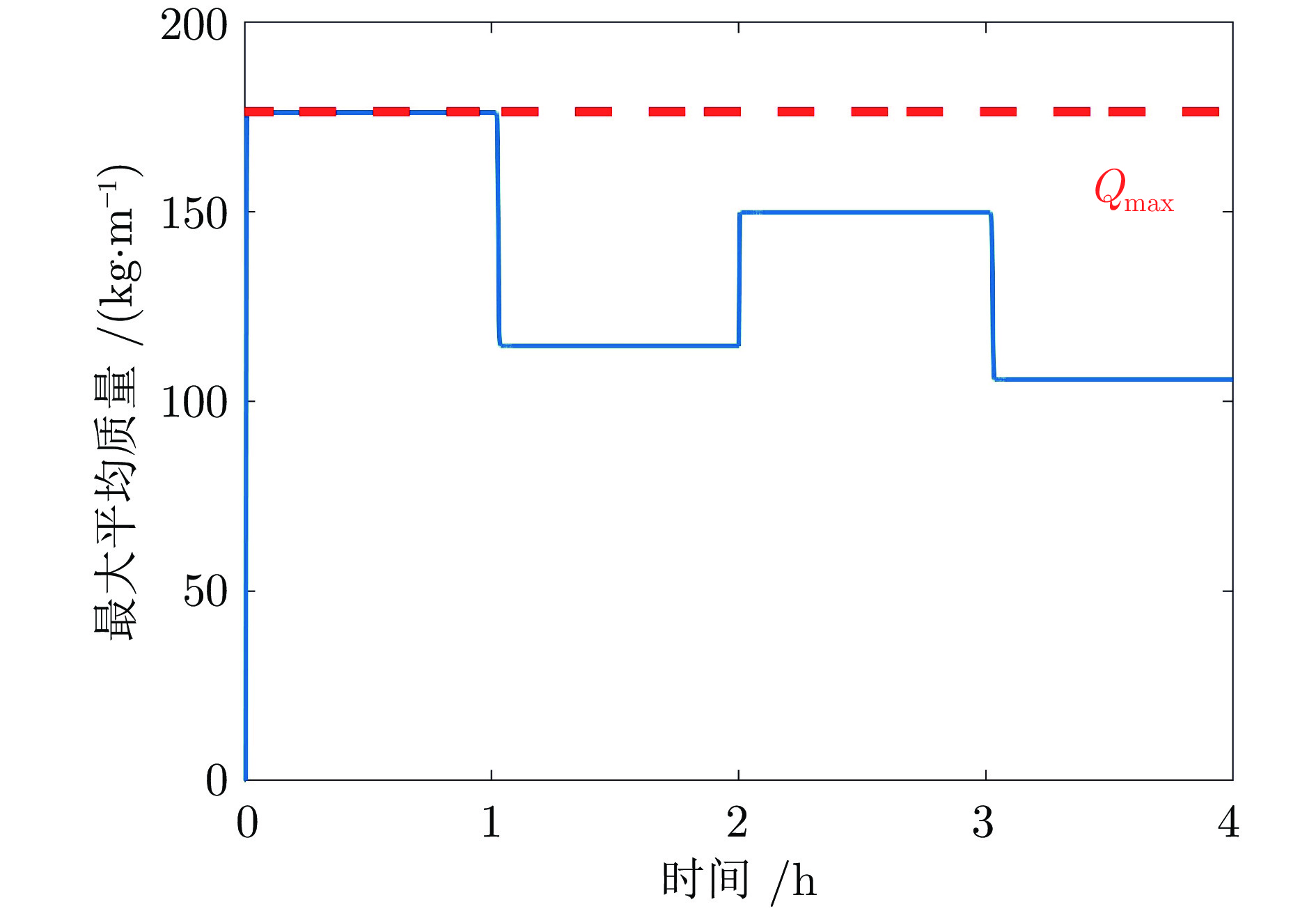
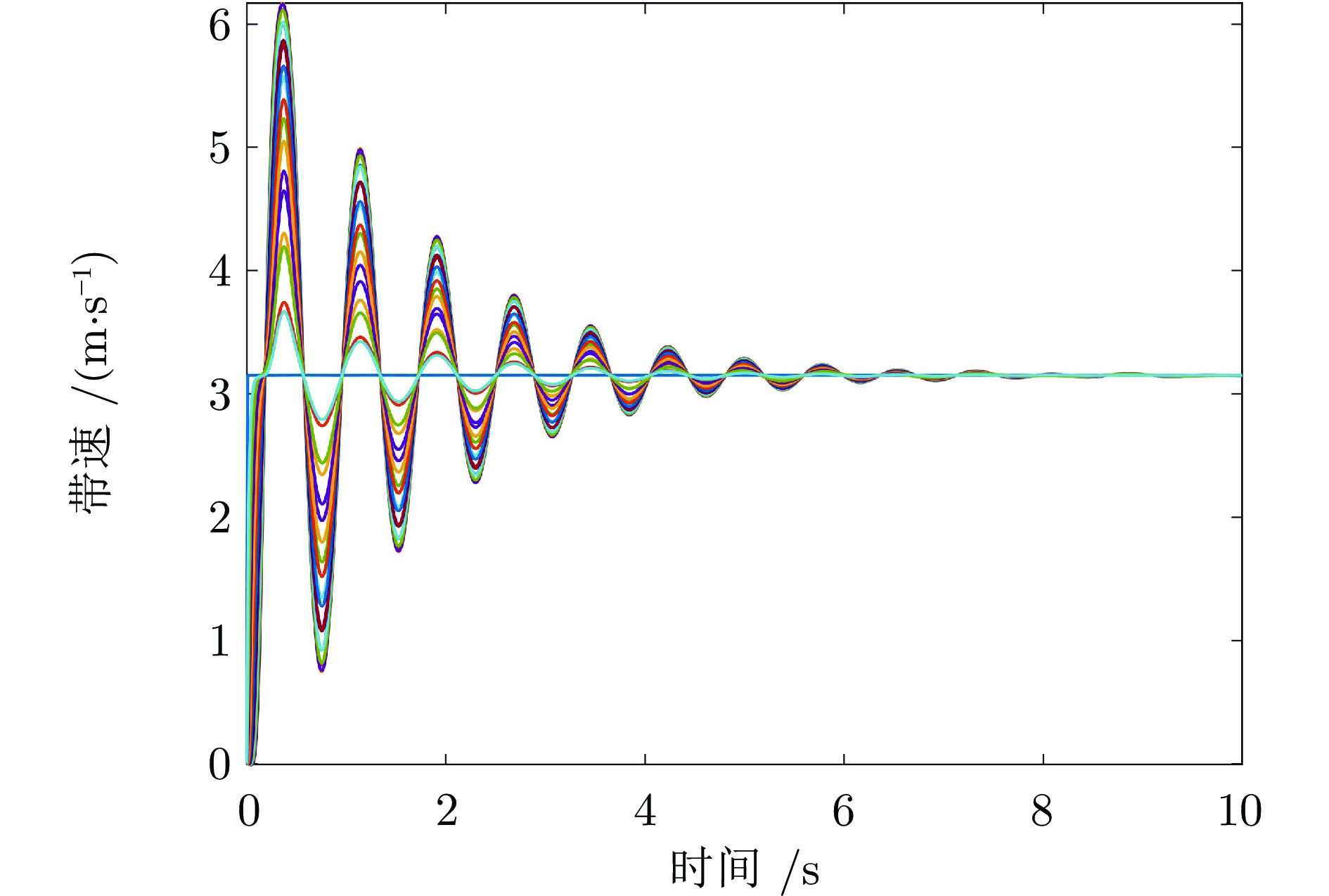
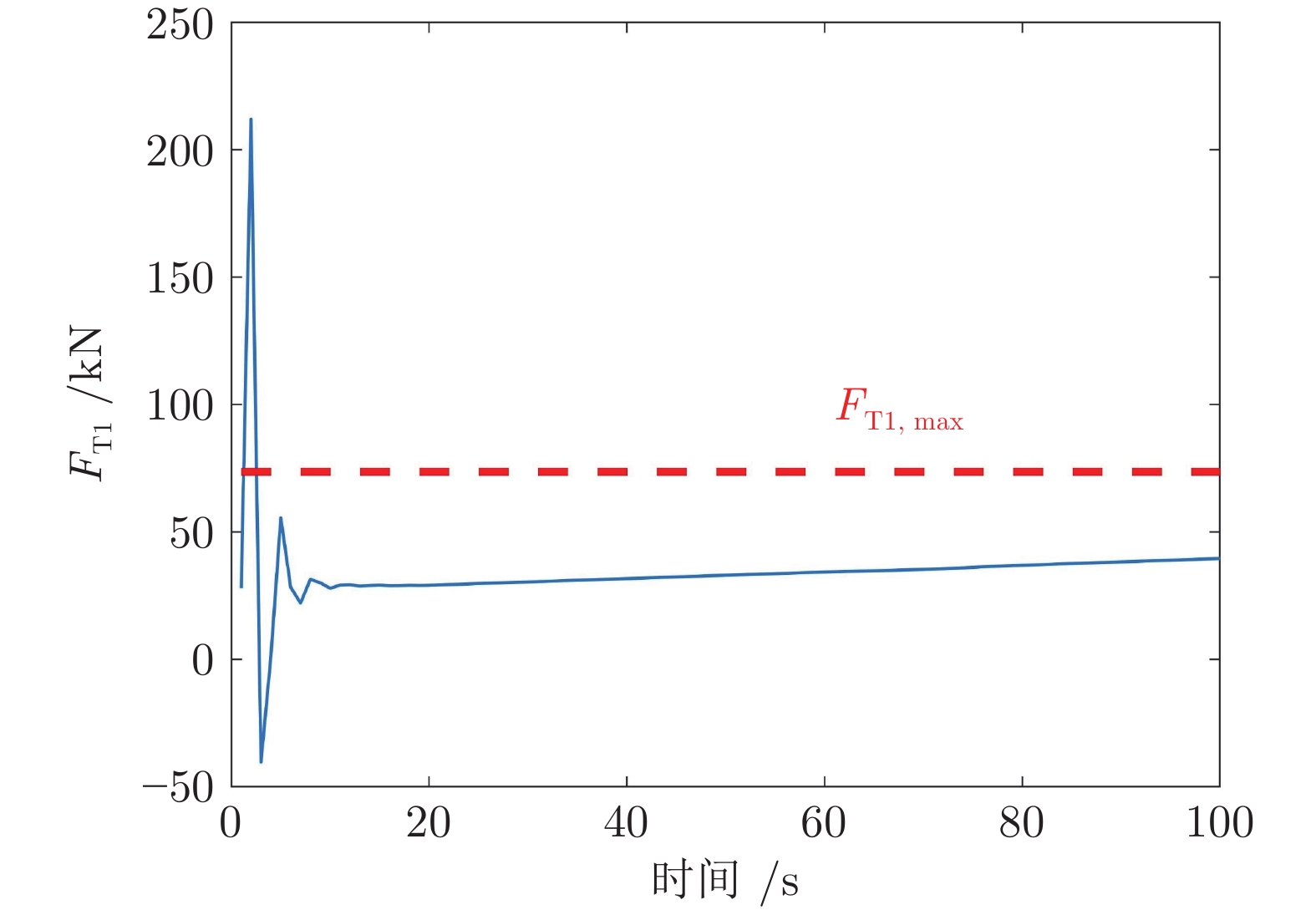
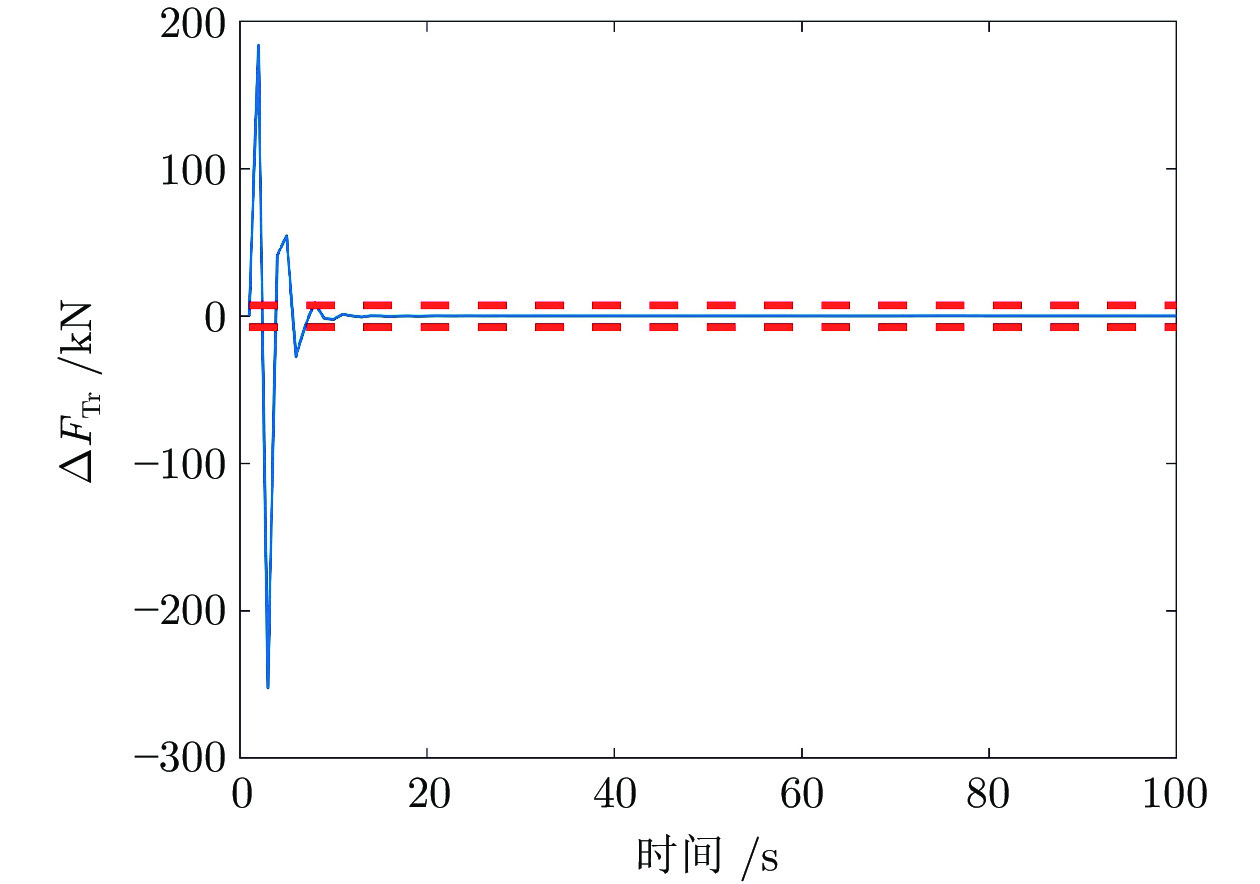
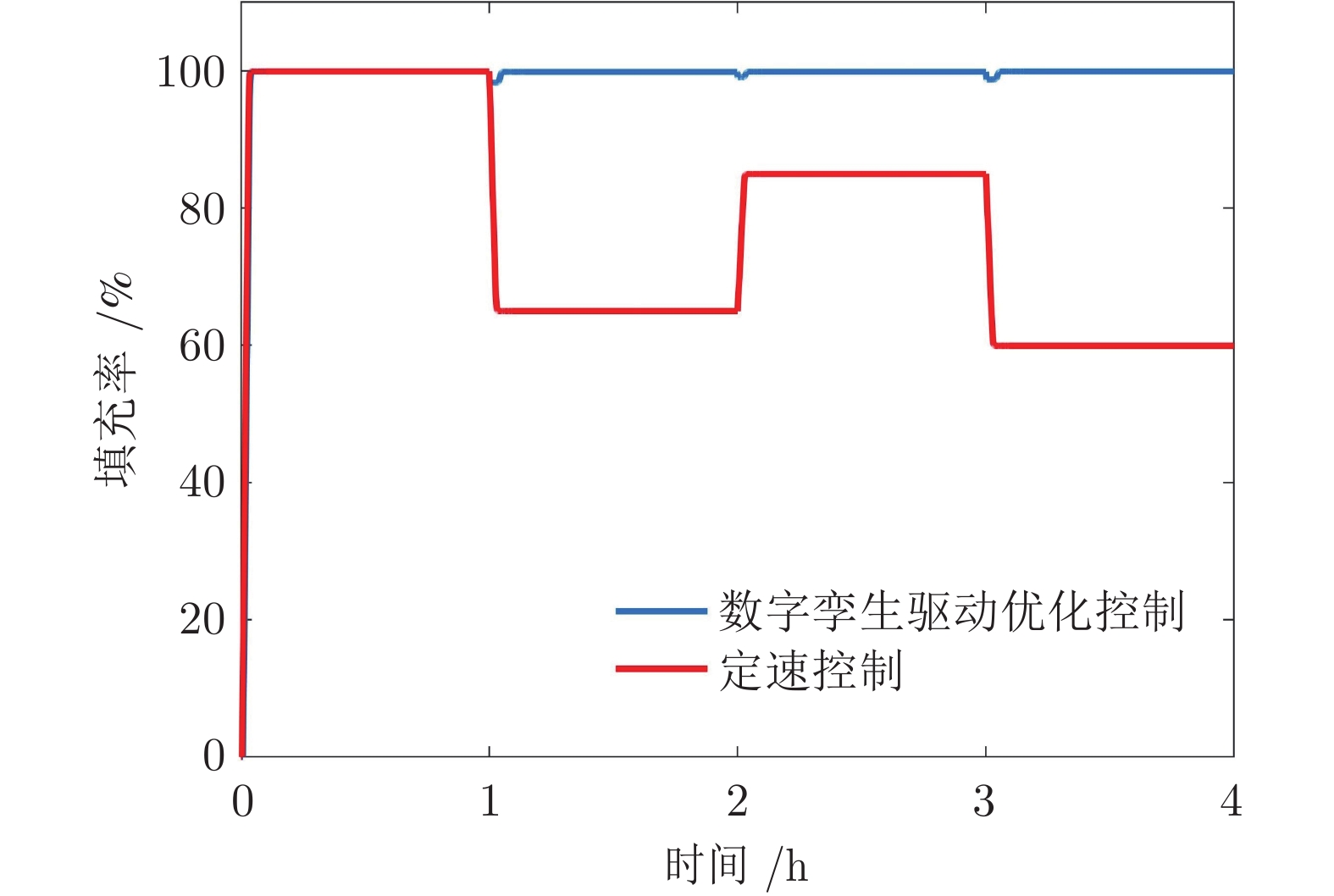
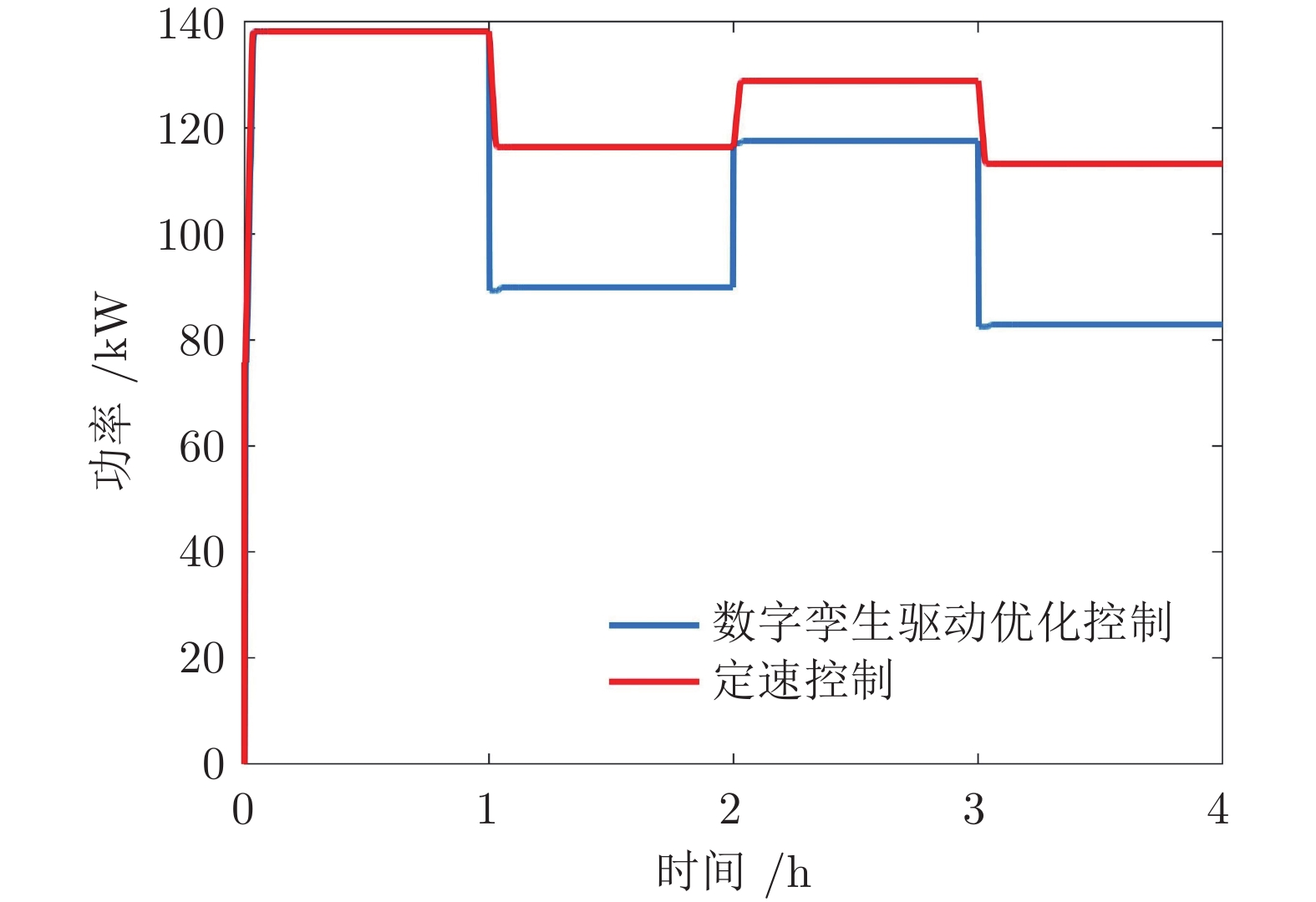
长距离带式输送机是矿山、港口等领域运输散装物料的主要工具. 针对长距离带式输送机的安全节能运行问题, 研究数字孪生驱动的运行优化方法. 首先, 构建由数字孪生模型、模型同步算法、控制策略和现实带式输送机组成的数字孪生驱动运行优化框架; 然后, 建立数字孪生模型, 包括基于变质量牛顿第二定律和有限元分析法的输送带动力学模型、物料流动态模型和动态能耗模型; 最后, 提出数字孪生驱动的计算决策−仿真评估−优化校正(Decision-simulation-correction, DSC)优化决策方法, 优化带式输送机的稳态和暂态运行带速, 形成可行带速设定曲线. 实验结果表明, 数字孪生驱动的带式输送机运行优化方法可以实现带式输送机安全节能运行. 与传统控制方法相比, 能够根据运行工况实时调速, 提高输送带填充率, 节能13.87%.
长距离带式输送机是矿山、港口等领域运输散装物料的主要工具. 针对长距离带式输送机的安全节能运行问题, 研究数字孪生驱动的运行优化方法. 首先, 构建由数字孪生模型、模型同步算法、控制策略和现实带式输送机组成的数字孪生驱动运行优化框架; 然后, 建立数字孪生模型, 包括基于变质量牛顿第二定律和有限元分析法的输送带动力学模型、物料流动态模型和动态能耗模型; 最后, 提出数字孪生驱动的计算决策−仿真评估−优化校正(Decision-simulation-correction, DSC)优化决策方法, 优化带式输送机的稳态和暂态运行带速, 形成可行带速设定曲线. 实验结果表明, 数字孪生驱动的带式输送机运行优化方法可以实现带式输送机安全节能运行. 与传统控制方法相比, 能够根据运行工况实时调速, 提高输送带填充率, 节能13.87%.
2024, 50(11): 2219-2230.
doi: 10.16383/j.aas.c230507
cstr: 32138.14.j.aas.c230507
摘要:
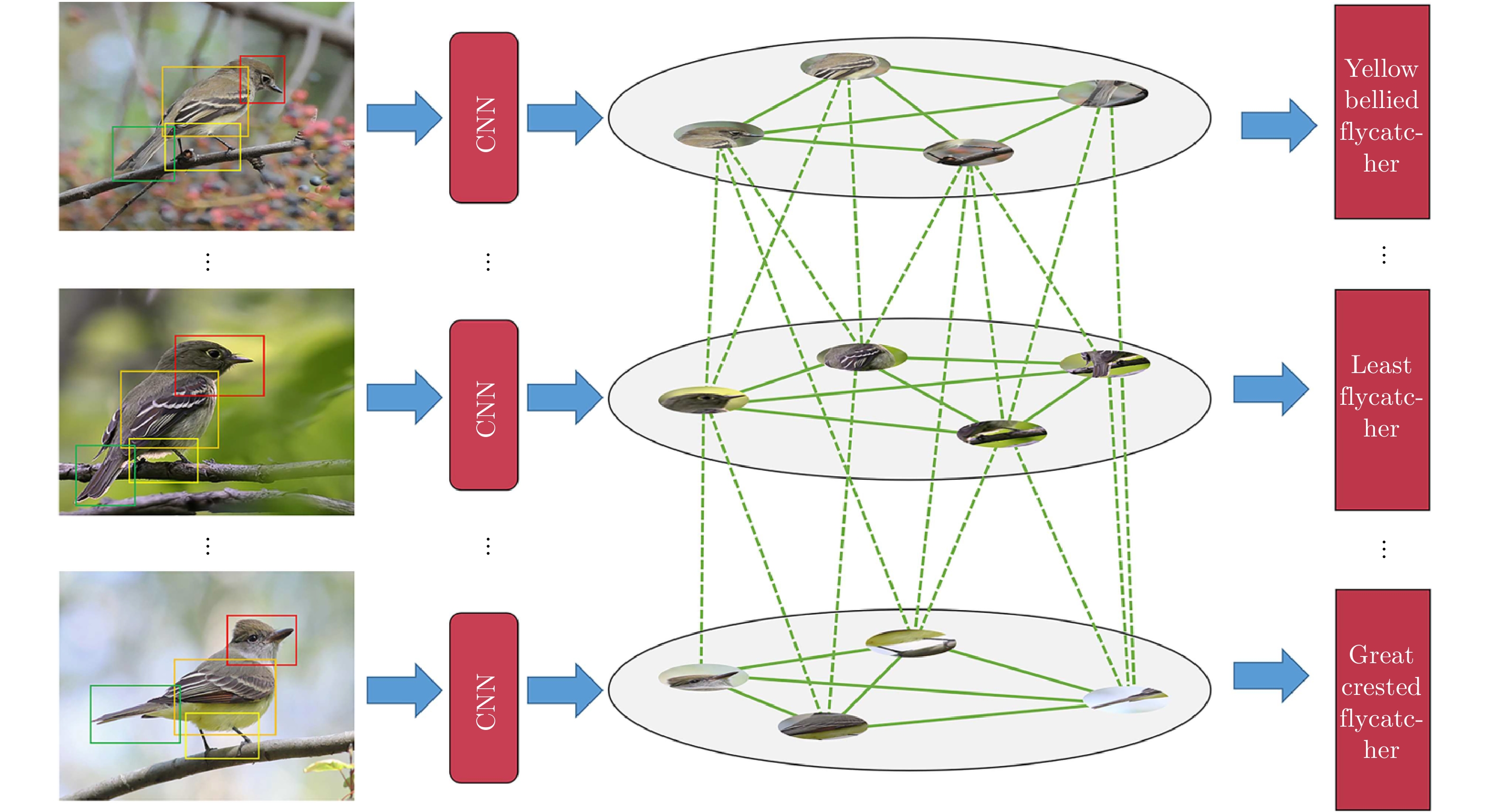
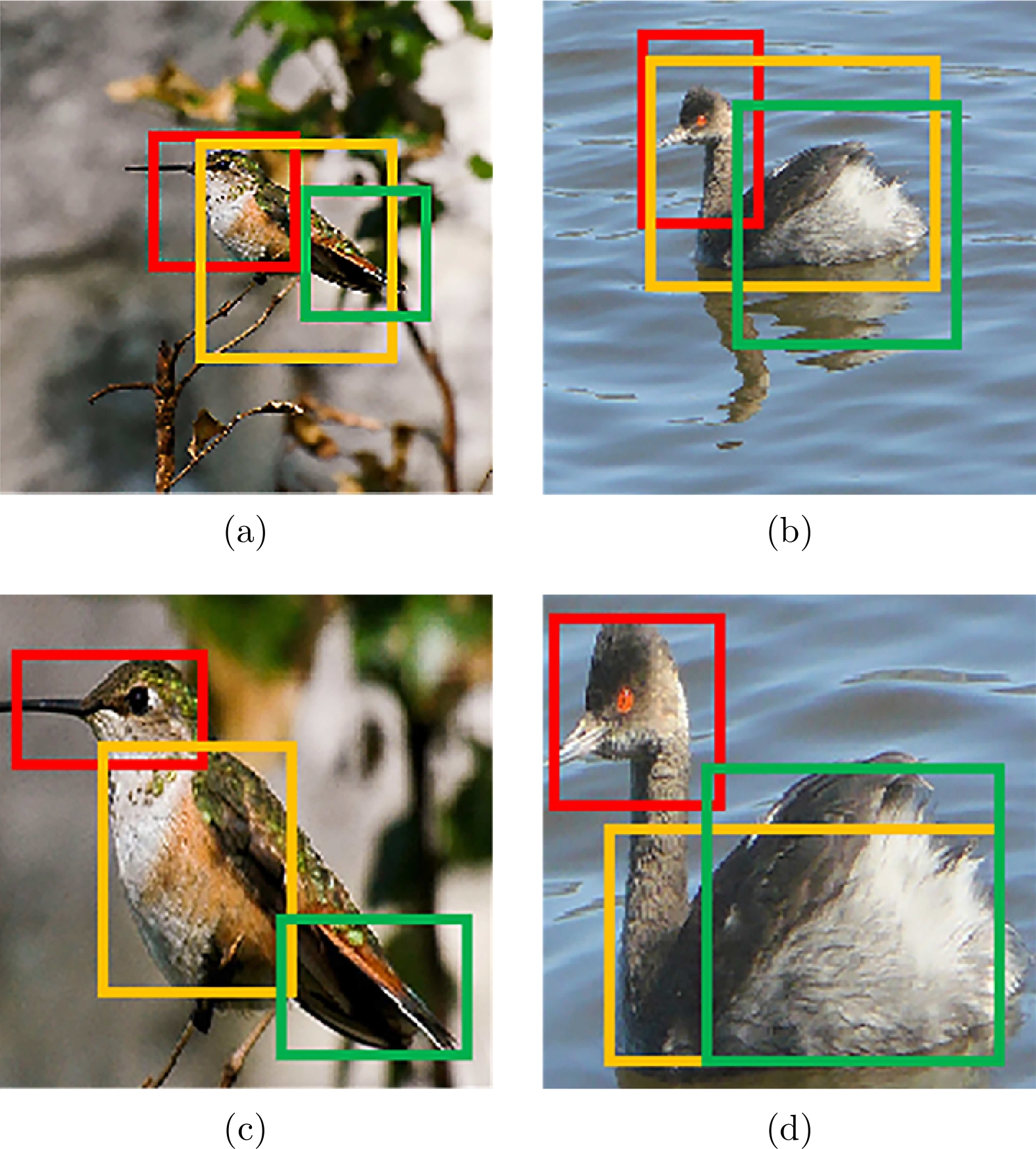
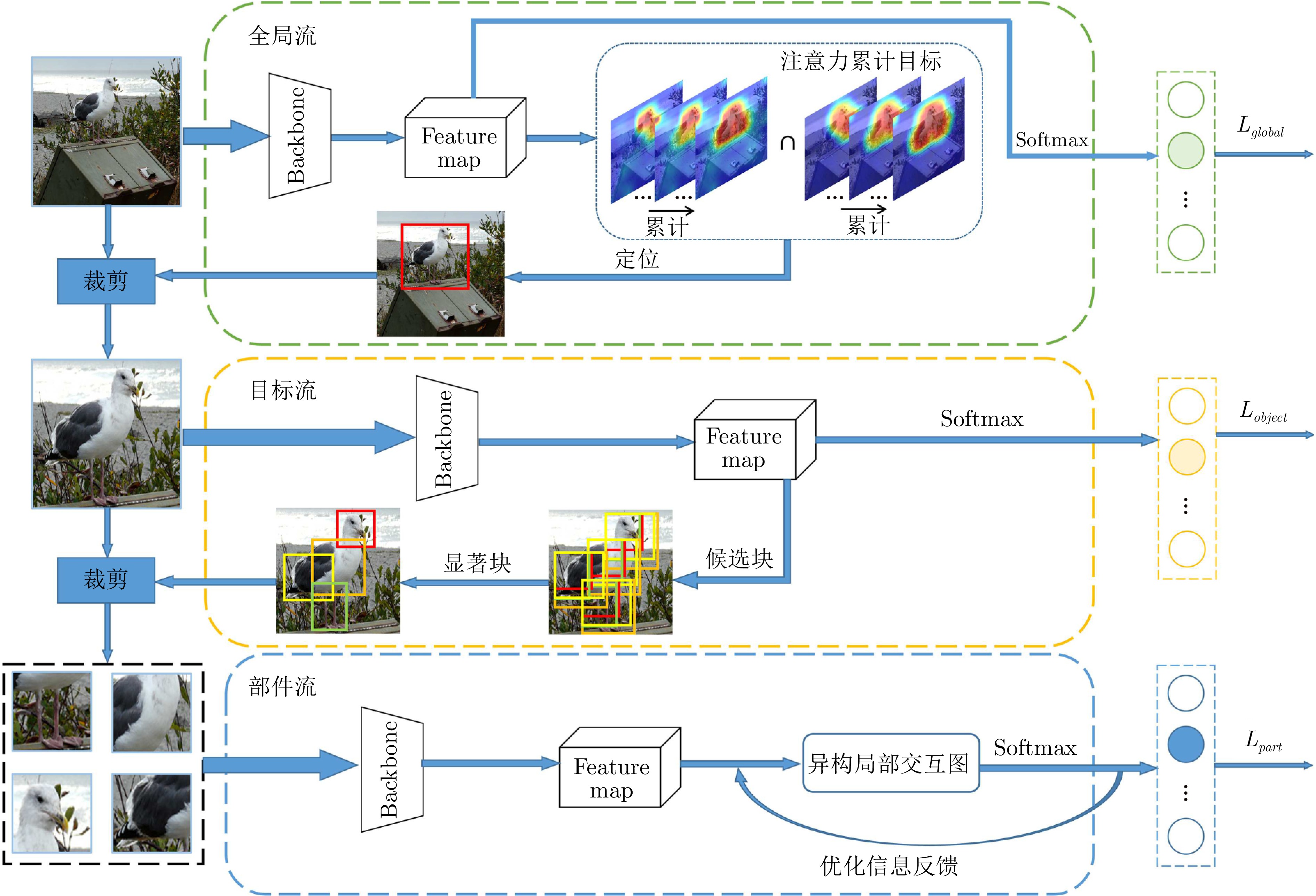
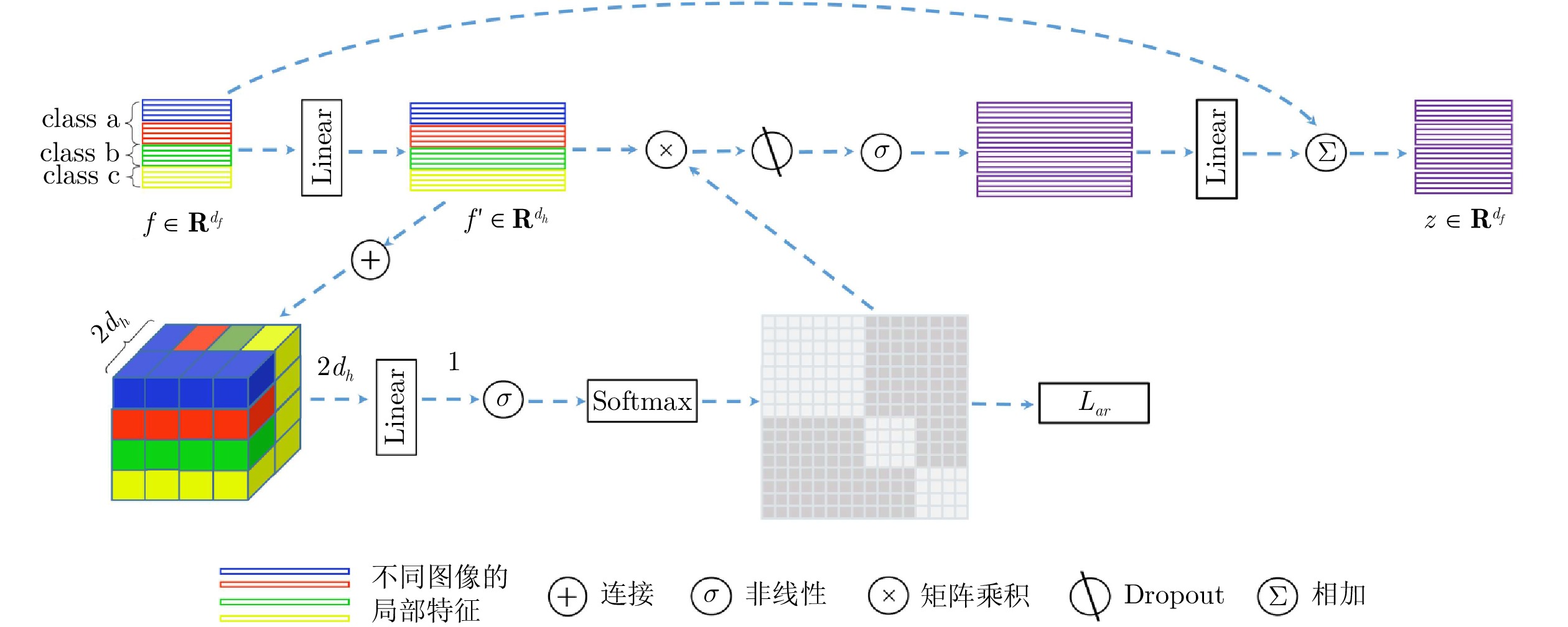
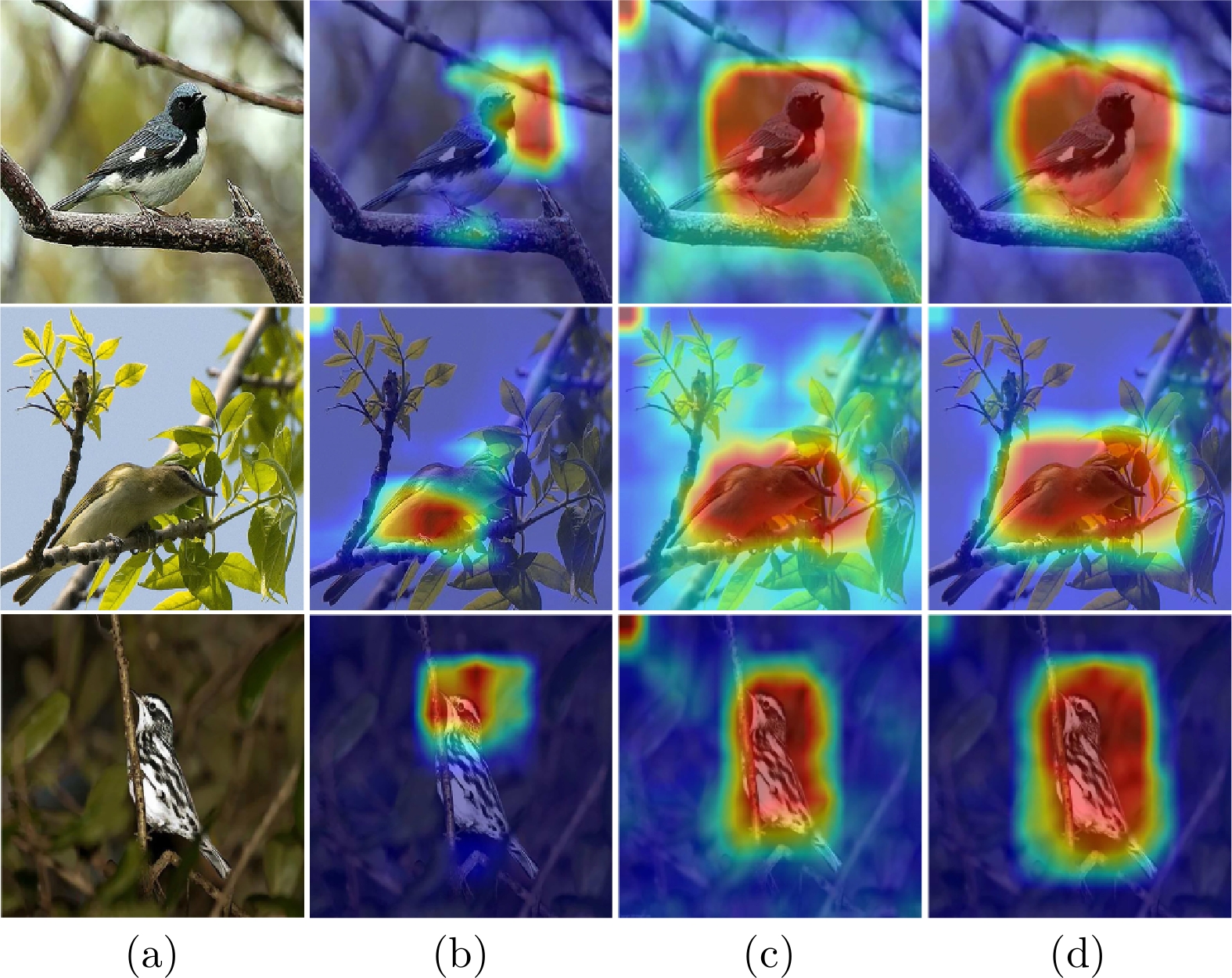
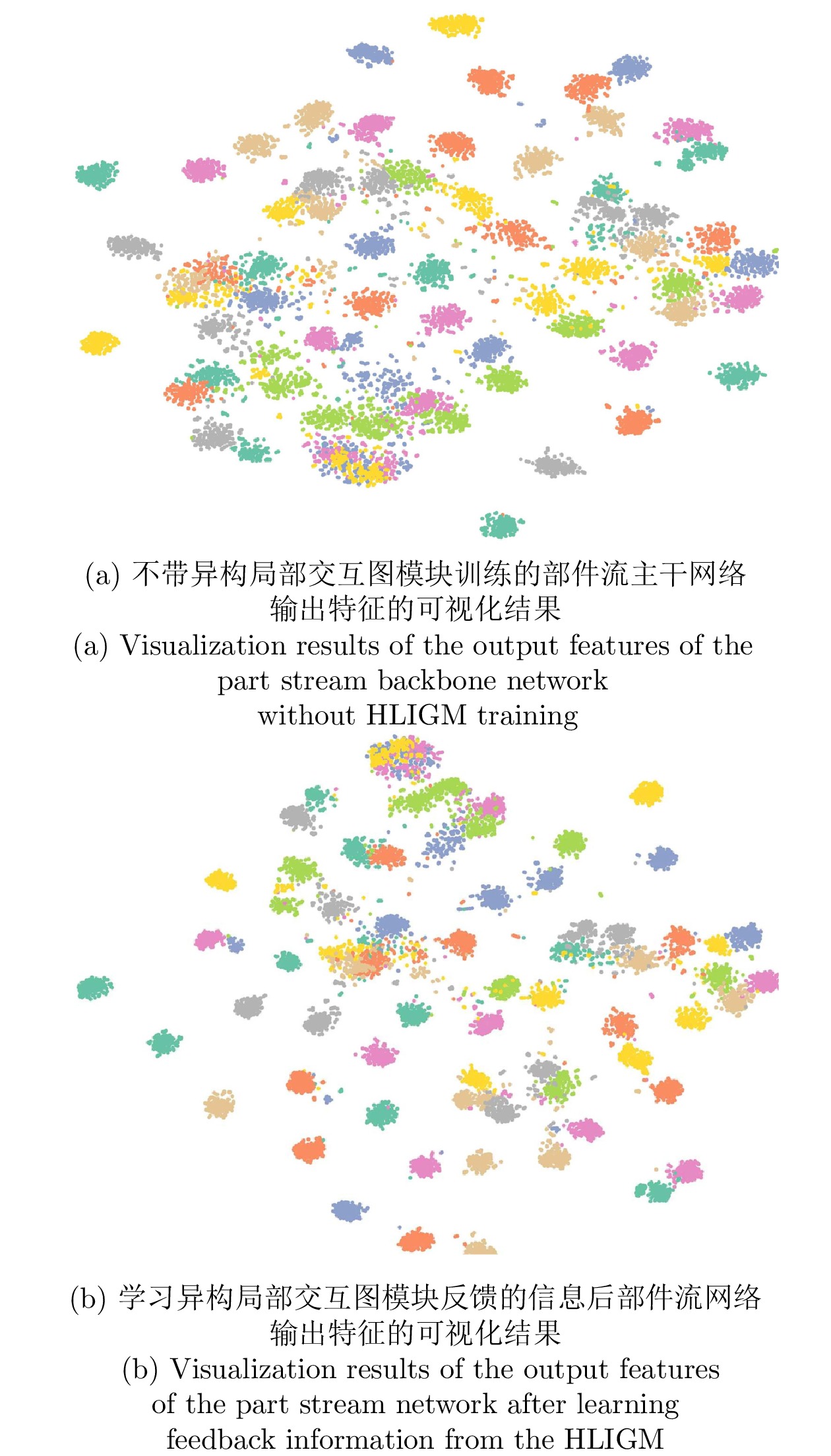
由于细粒度图像之间存在小的类间方差和大的类内差异, 现有分类算法仅仅聚焦于单张图像的显著局部特征的提取与表示学习, 忽视了多张图像之间局部的异构语义判别信息, 较难关注到区分不同类别的微小细节, 导致学习到的特征缺乏足够区分度. 本文提出了一种渐进式网络以弱监督的方式学习图像不同粒度层级的信息. 首先, 构建一个注意力累计目标定位模块(Attention accumulation object localization module, AAOLM), 在单张图像上从不同的训练轮次和特征提取阶段对注意力信息进行语义目标集成定位. 其次, 设计一个多张图像异构局部交互图模块(Heterogeneous local interactive graph module, HLIGM), 提取每张图像的显著性局部区域特征, 在类别标签引导下构建多张图像的局部区域特征之间的图网络, 聚合局部特征增强表示的判别力. 最后, 利用知识蒸馏将异构局部交互图模块产生的优化信息反馈给主干网络, 从而能够直接提取具有较强区分度的特征, 避免了在测试阶段建图的计算开销. 通过在多个数据集上进行的实验, 证明了提出方法的有效性, 能够提高细粒度分类的精度.
由于细粒度图像之间存在小的类间方差和大的类内差异, 现有分类算法仅仅聚焦于单张图像的显著局部特征的提取与表示学习, 忽视了多张图像之间局部的异构语义判别信息, 较难关注到区分不同类别的微小细节, 导致学习到的特征缺乏足够区分度. 本文提出了一种渐进式网络以弱监督的方式学习图像不同粒度层级的信息. 首先, 构建一个注意力累计目标定位模块(Attention accumulation object localization module, AAOLM), 在单张图像上从不同的训练轮次和特征提取阶段对注意力信息进行语义目标集成定位. 其次, 设计一个多张图像异构局部交互图模块(Heterogeneous local interactive graph module, HLIGM), 提取每张图像的显著性局部区域特征, 在类别标签引导下构建多张图像的局部区域特征之间的图网络, 聚合局部特征增强表示的判别力. 最后, 利用知识蒸馏将异构局部交互图模块产生的优化信息反馈给主干网络, 从而能够直接提取具有较强区分度的特征, 避免了在测试阶段建图的计算开销. 通过在多个数据集上进行的实验, 证明了提出方法的有效性, 能够提高细粒度分类的精度.
2024, 50(11): 2231-2244.
doi: 10.16383/j.aas.c210457
cstr: 32138.14.j.aas.c210457
摘要:
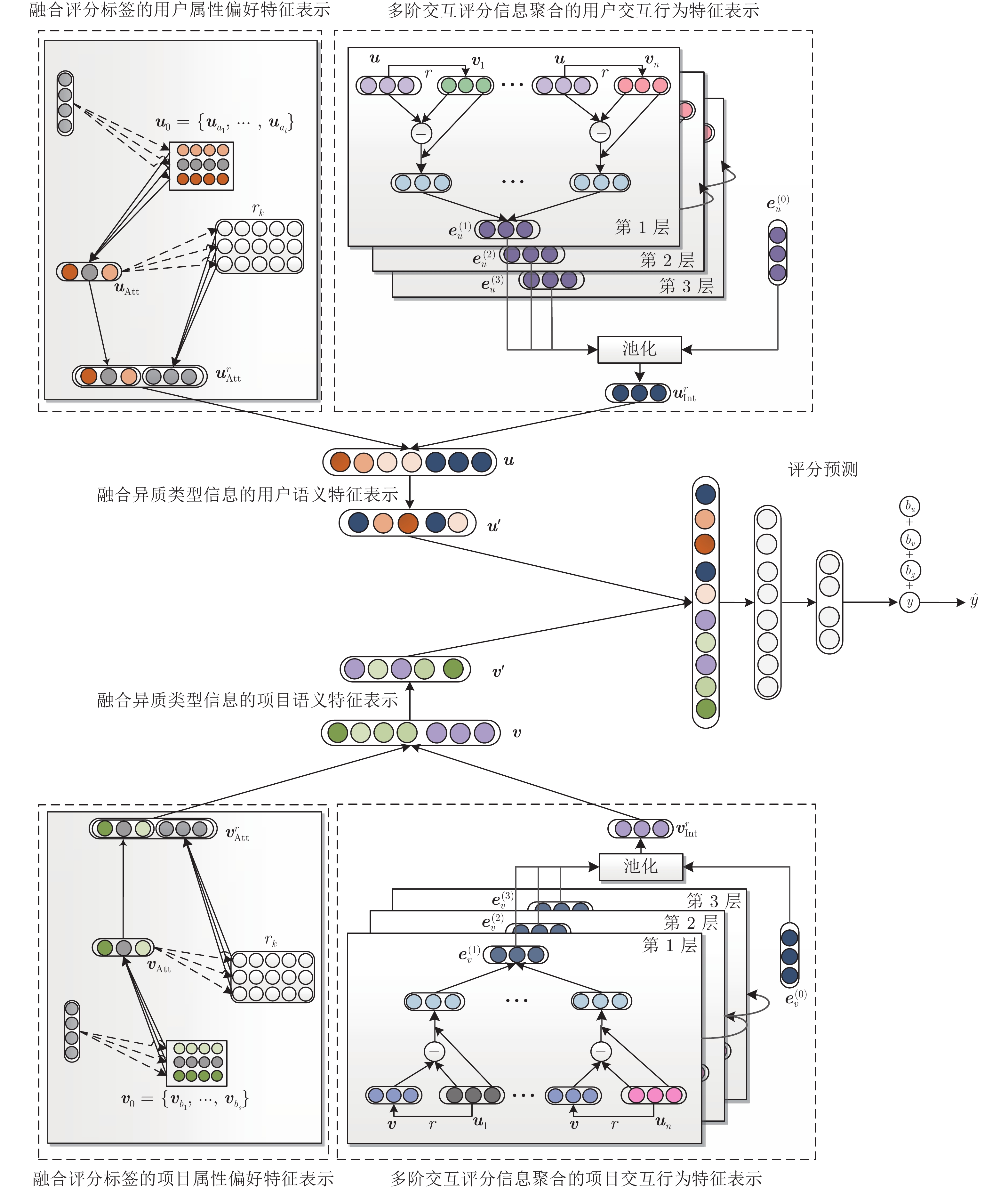
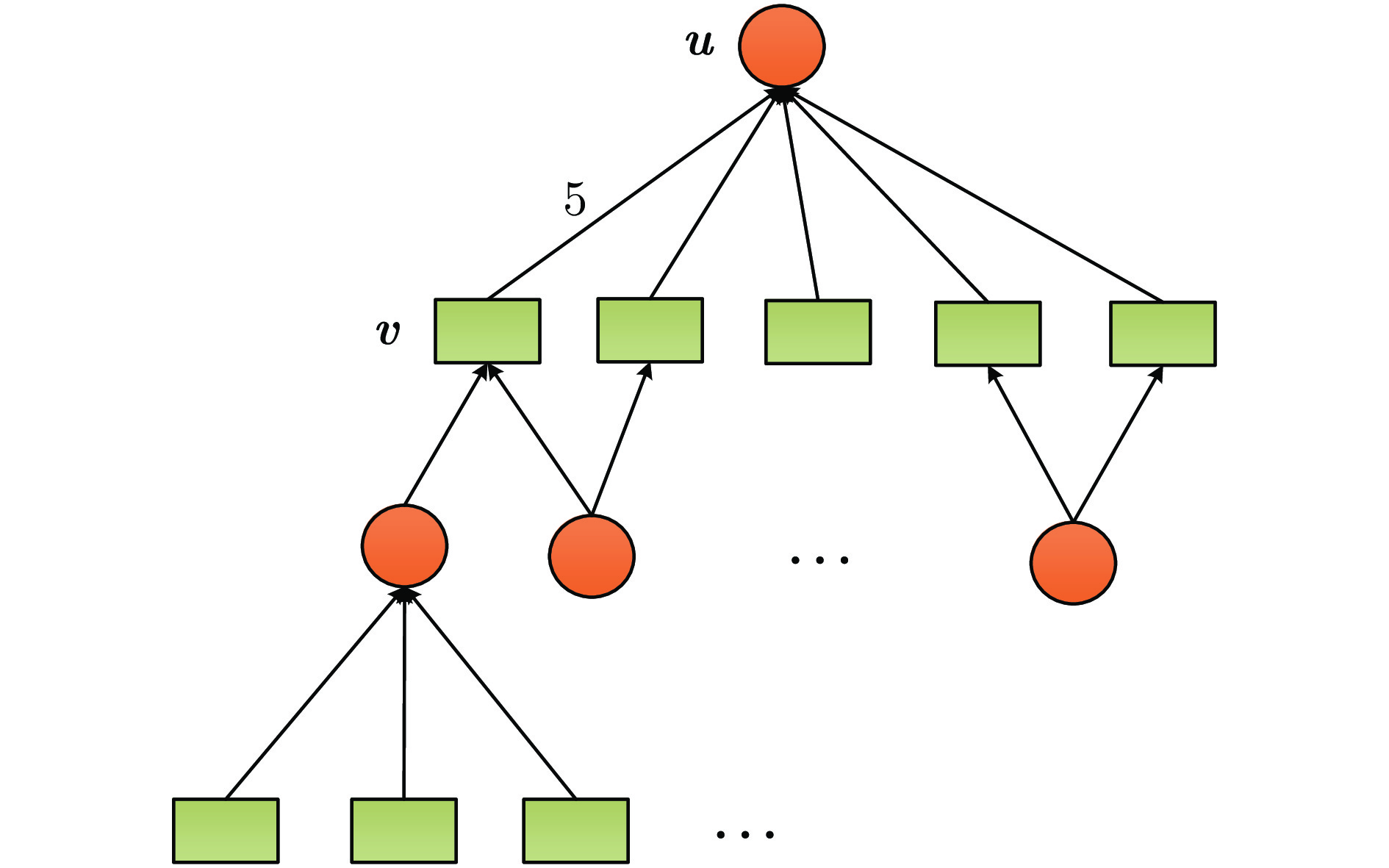
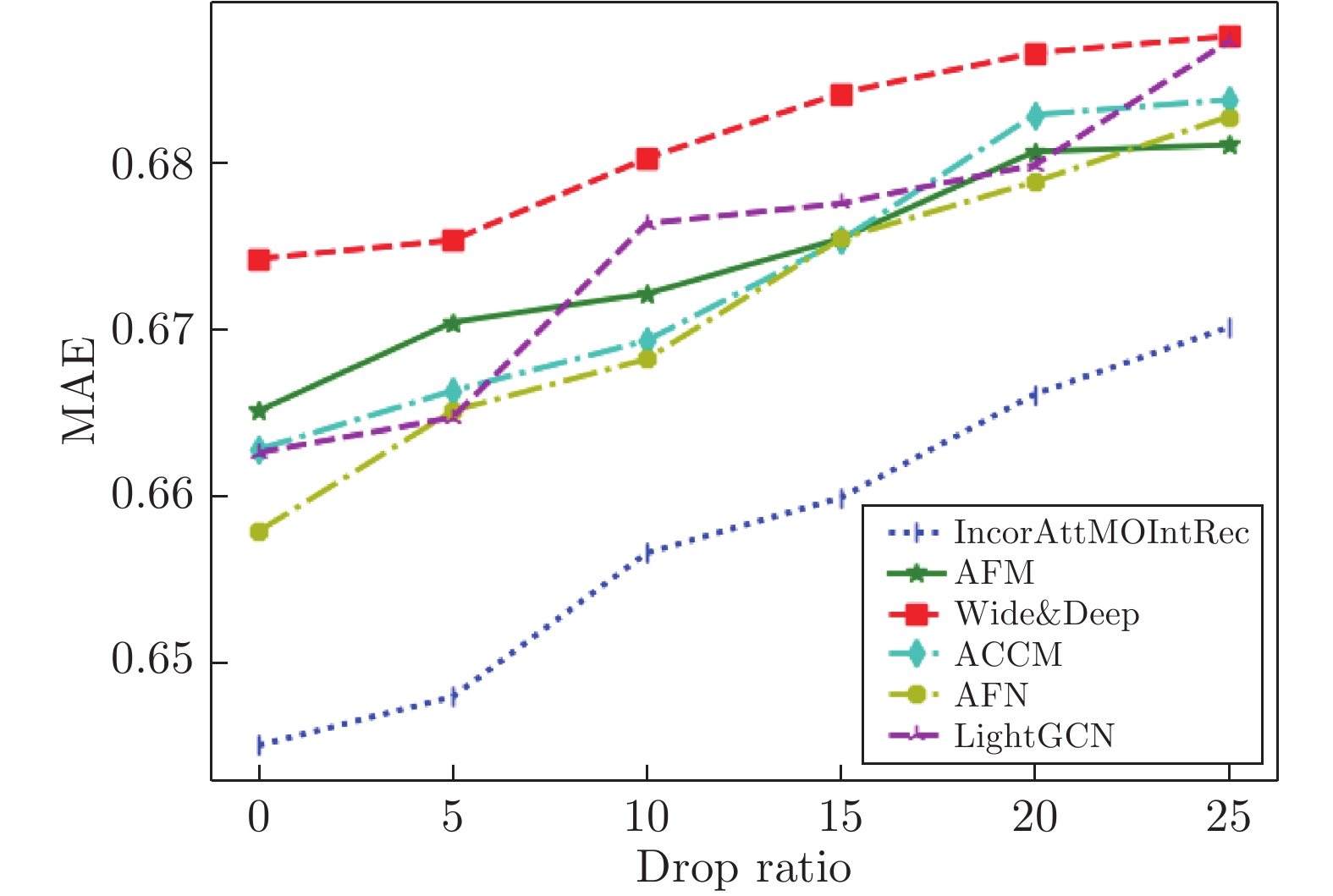
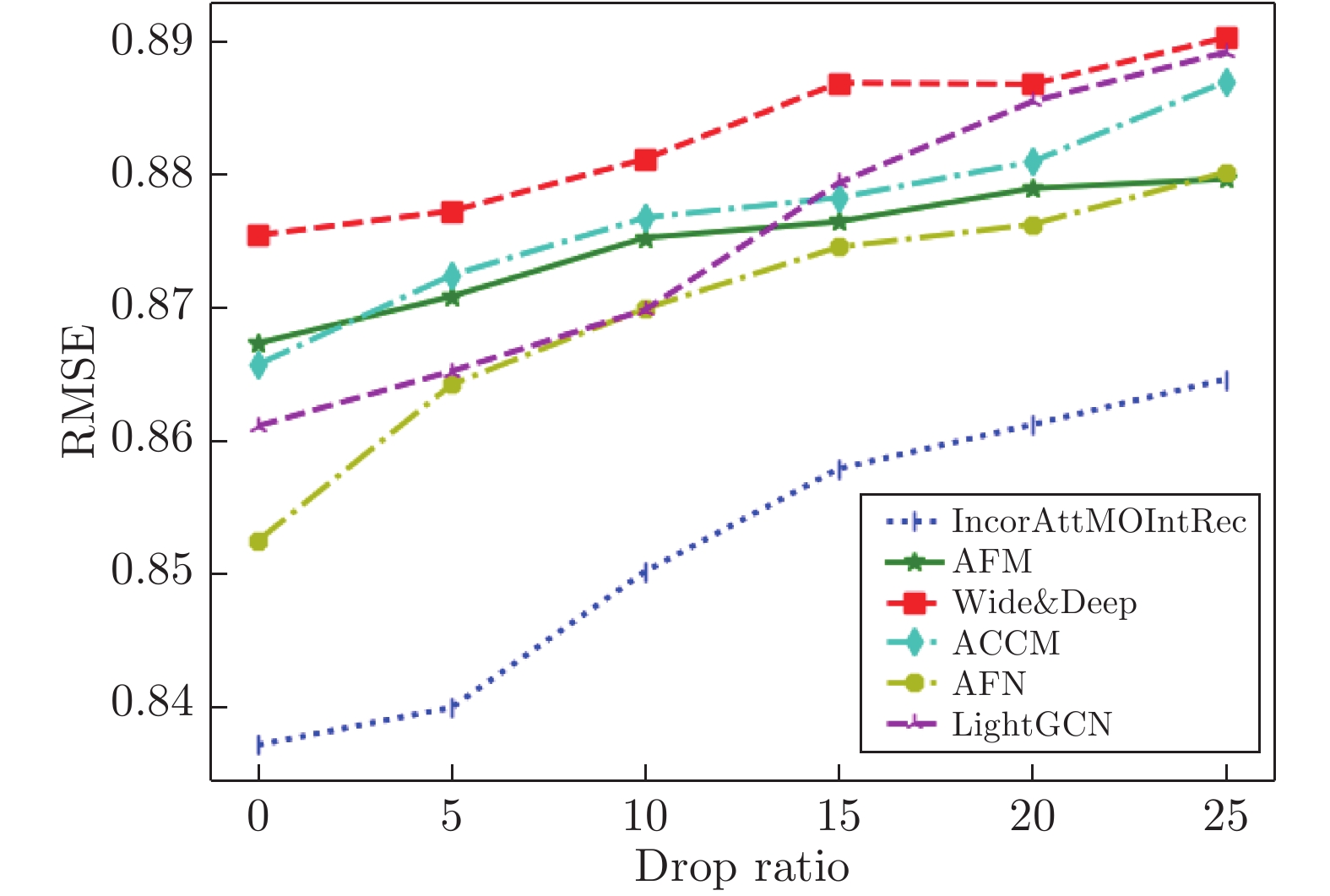
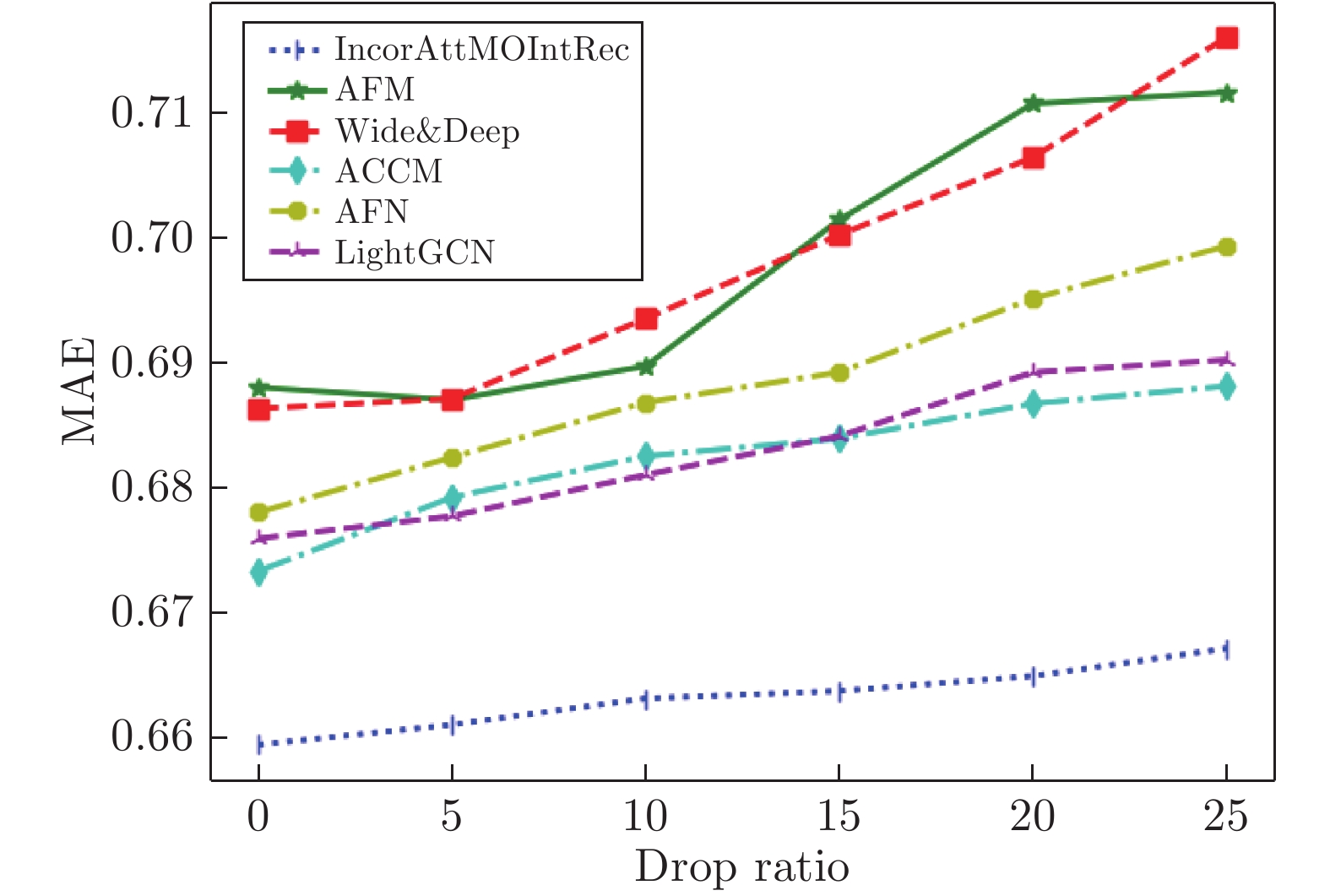
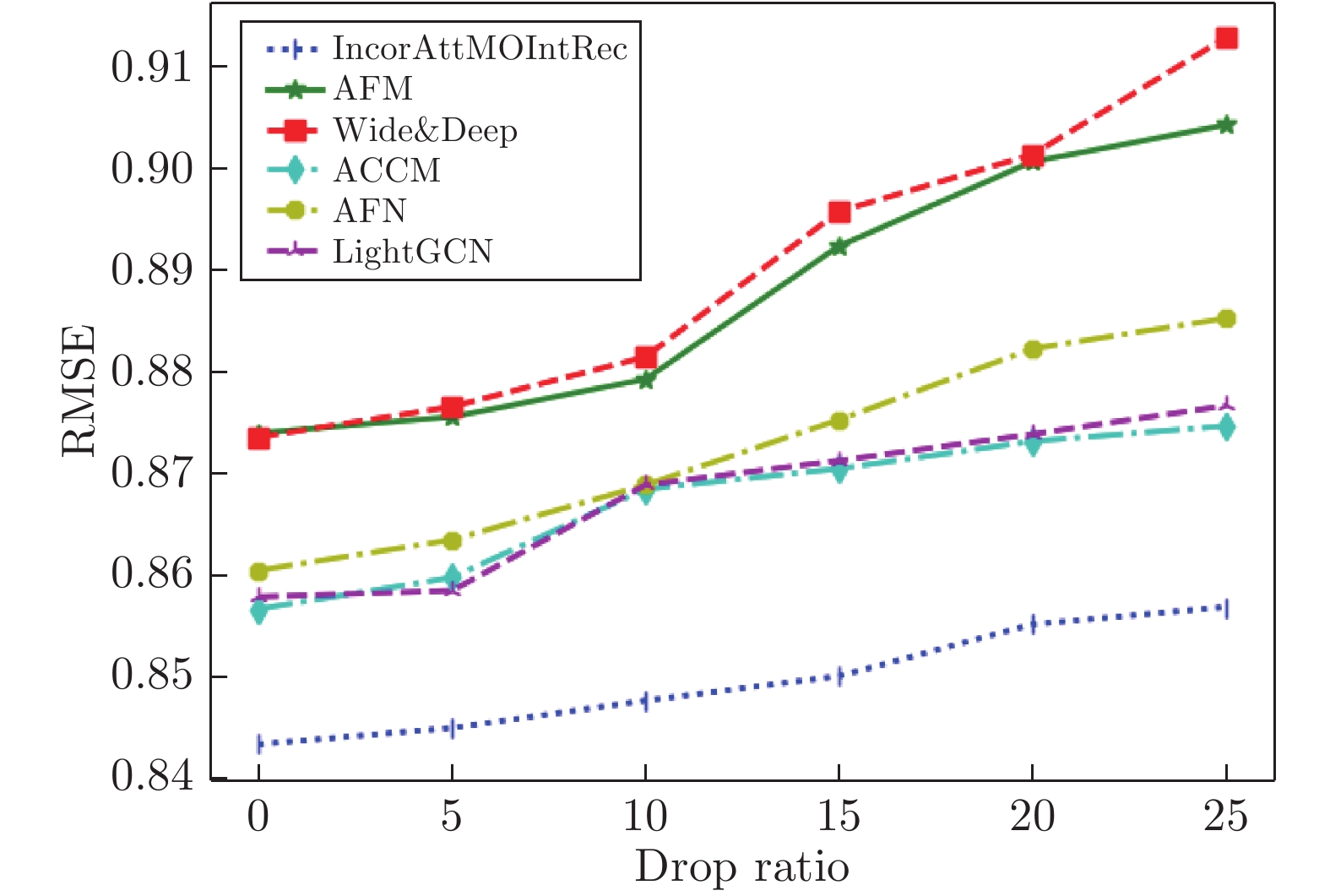
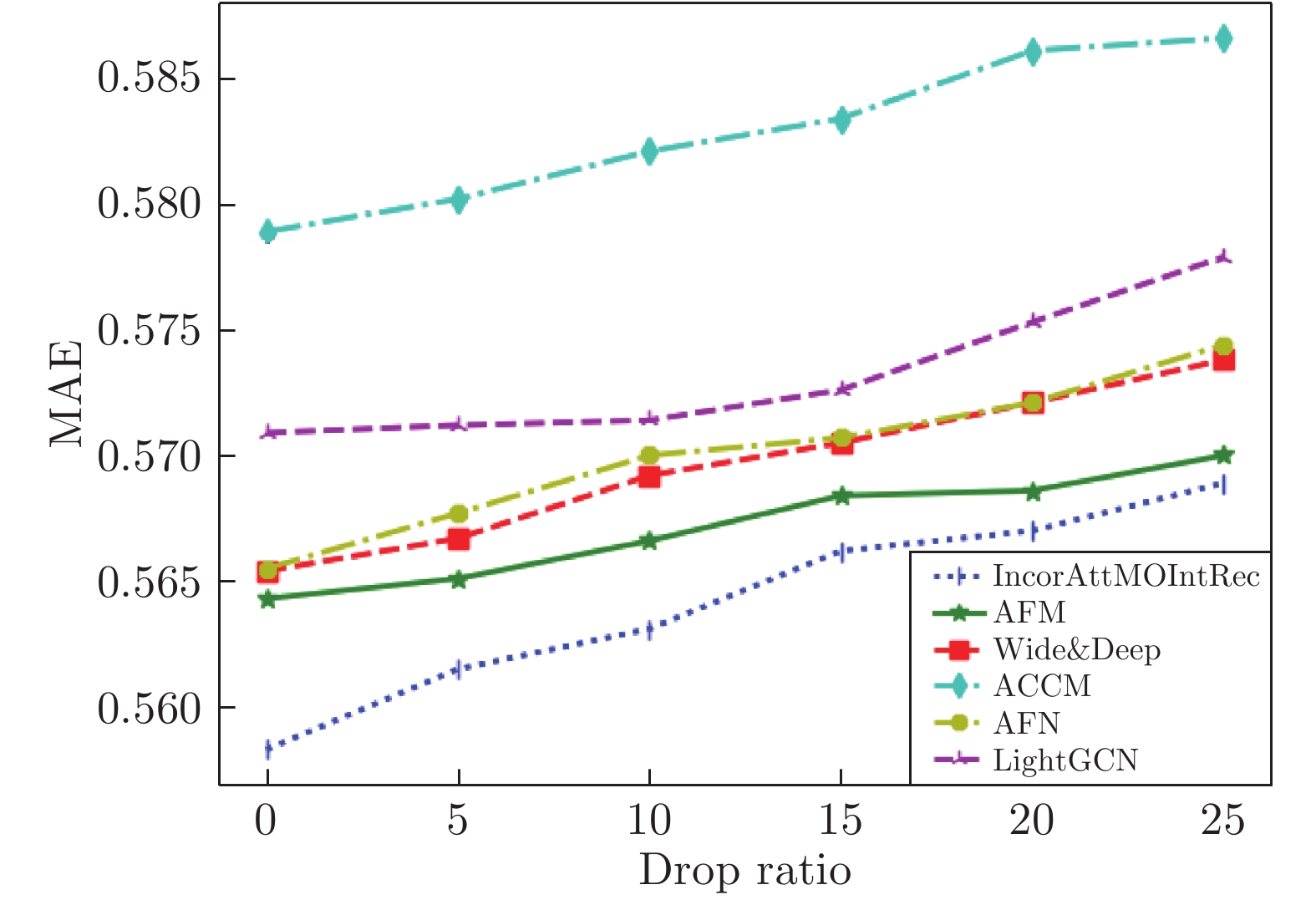
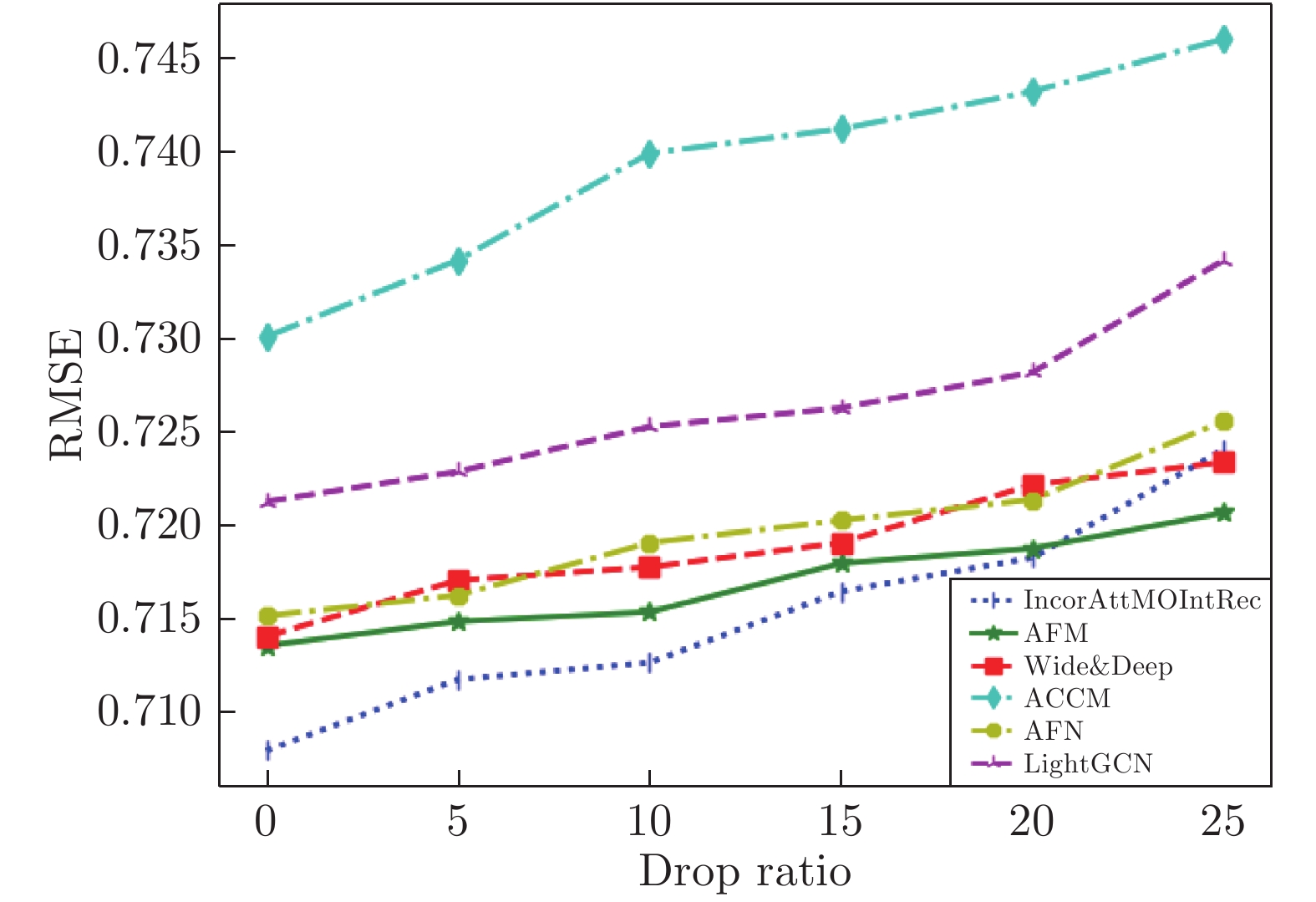
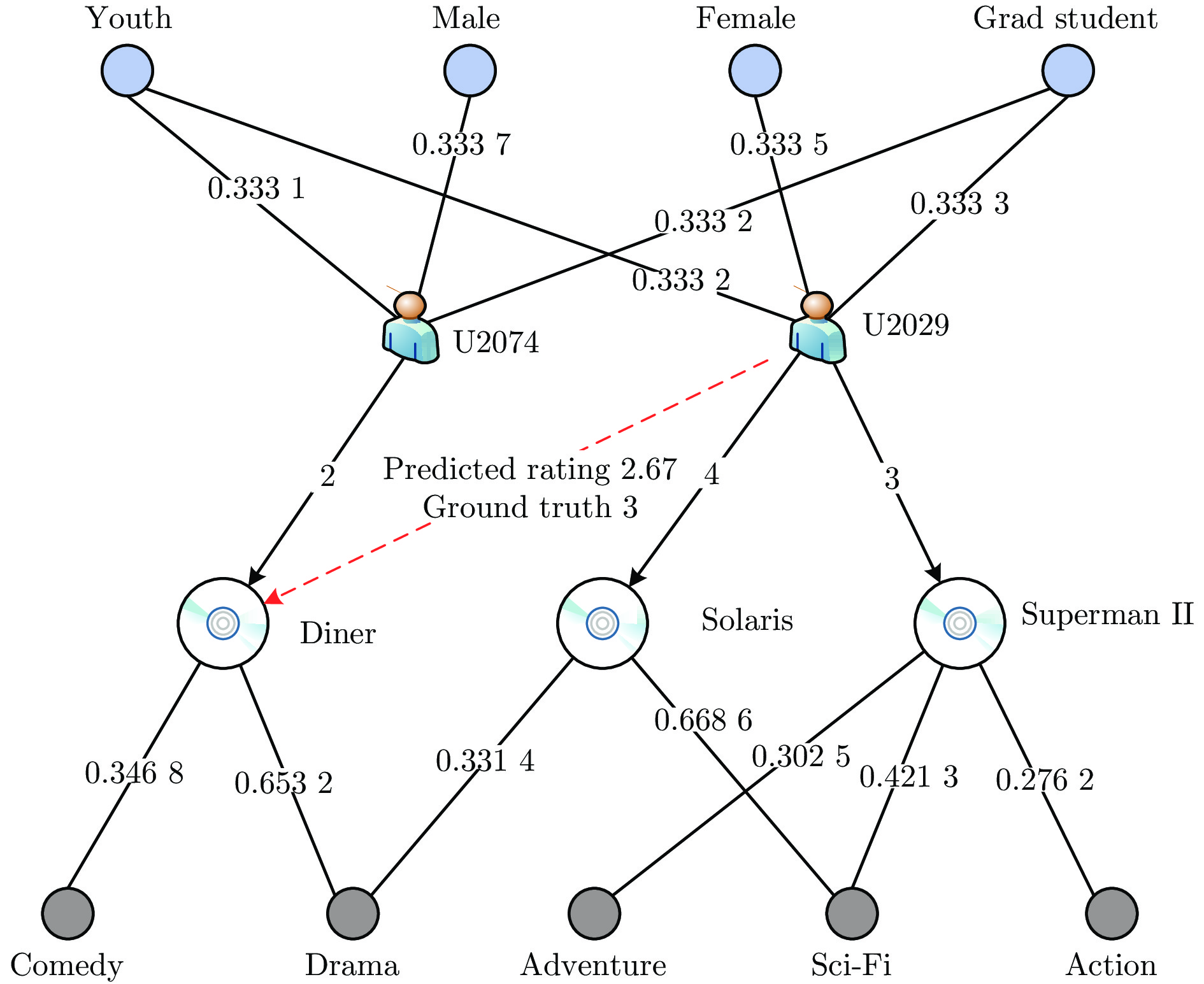
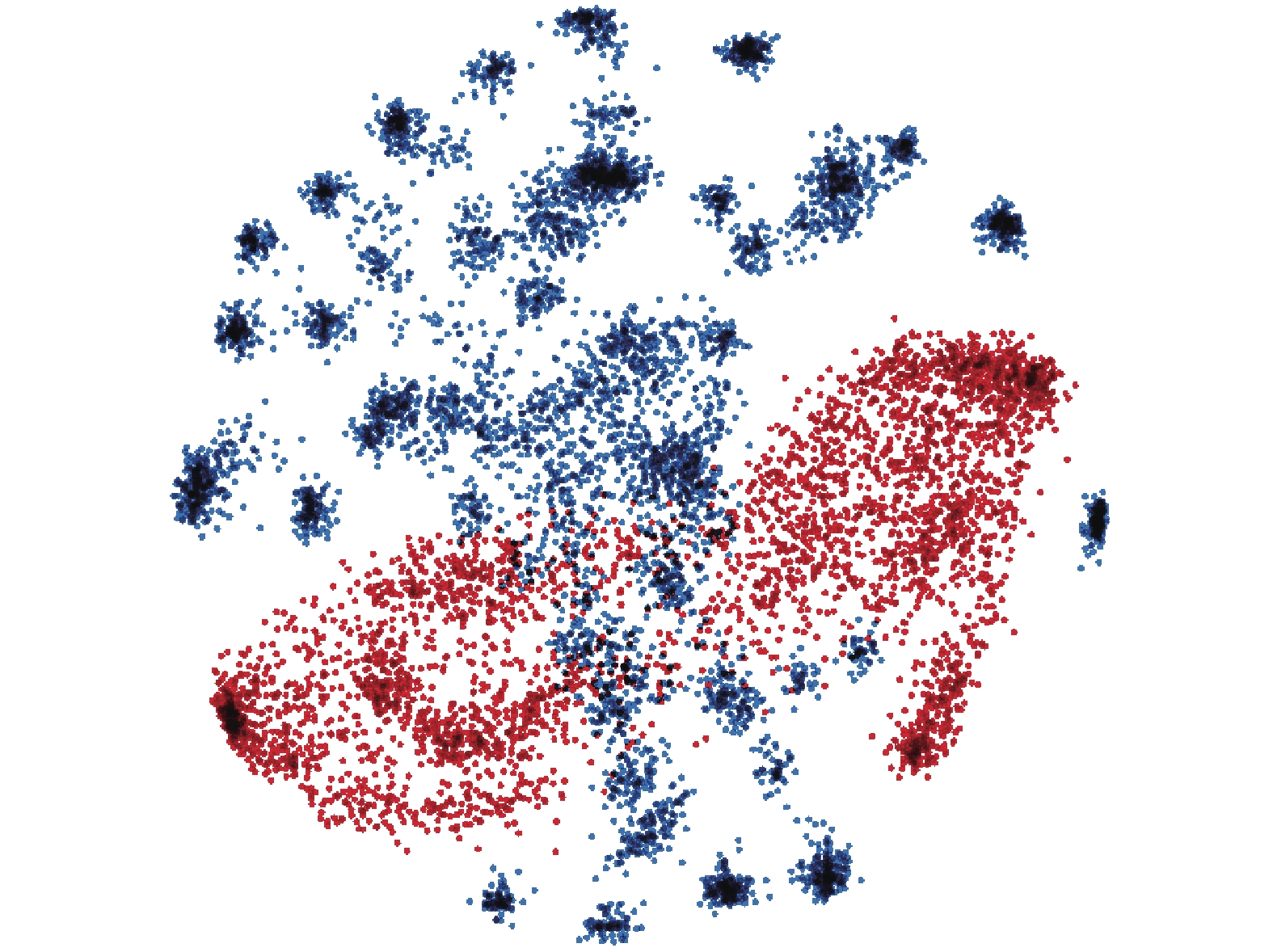
已有推荐系统主要基于用户−项目交互矩阵来学习用户和项目的向量表示, 而当交互矩阵稀疏时, 推荐系统的精度较低, 推荐的结果缺乏可解释性. 考虑到用户−项目交互行为中的评分标签信息, 提出了一种融合属性偏好和多阶交互信息的可解释评分预测方法, 并根据属性偏好对推荐结果进行解释. 首先, 基于注意力机制分析了用户和项目属性信息与评分标签的关系, 建模了节点的属性偏好特征表示; 然后, 聚合了用户−项目交互矩阵中节点自身、交互邻居和评分标签信息, 通过图神经网络学习了节点的多阶交互行为特征表示; 最后, 融合了节点的属性偏好特征和交互行为特征, 在异质类型信息空间下学习了用户和项目的语义特征表示, 利用多层感知机实现了评分预测, 并在MovieLens和Douban数据集上验证了方法的有效性. 实验结果表明, 所提方法在平均绝对误差(Mean absolute error, MAE)和均方根误差(Root mean square error, RMSE)指标上有效提高了推荐系统的精度, 缓解了数据稀疏场景下推荐模型性能较低的问题, 提升了推荐结果的可解释性.
已有推荐系统主要基于用户−项目交互矩阵来学习用户和项目的向量表示, 而当交互矩阵稀疏时, 推荐系统的精度较低, 推荐的结果缺乏可解释性. 考虑到用户−项目交互行为中的评分标签信息, 提出了一种融合属性偏好和多阶交互信息的可解释评分预测方法, 并根据属性偏好对推荐结果进行解释. 首先, 基于注意力机制分析了用户和项目属性信息与评分标签的关系, 建模了节点的属性偏好特征表示; 然后, 聚合了用户−项目交互矩阵中节点自身、交互邻居和评分标签信息, 通过图神经网络学习了节点的多阶交互行为特征表示; 最后, 融合了节点的属性偏好特征和交互行为特征, 在异质类型信息空间下学习了用户和项目的语义特征表示, 利用多层感知机实现了评分预测, 并在MovieLens和Douban数据集上验证了方法的有效性. 实验结果表明, 所提方法在平均绝对误差(Mean absolute error, MAE)和均方根误差(Root mean square error, RMSE)指标上有效提高了推荐系统的精度, 缓解了数据稀疏场景下推荐模型性能较低的问题, 提升了推荐结果的可解释性.

2024, 50(11): 2245-2258.
doi: 10.16383/j.aas.c230728
cstr: 32138.14.j.aas.c230728
摘要:
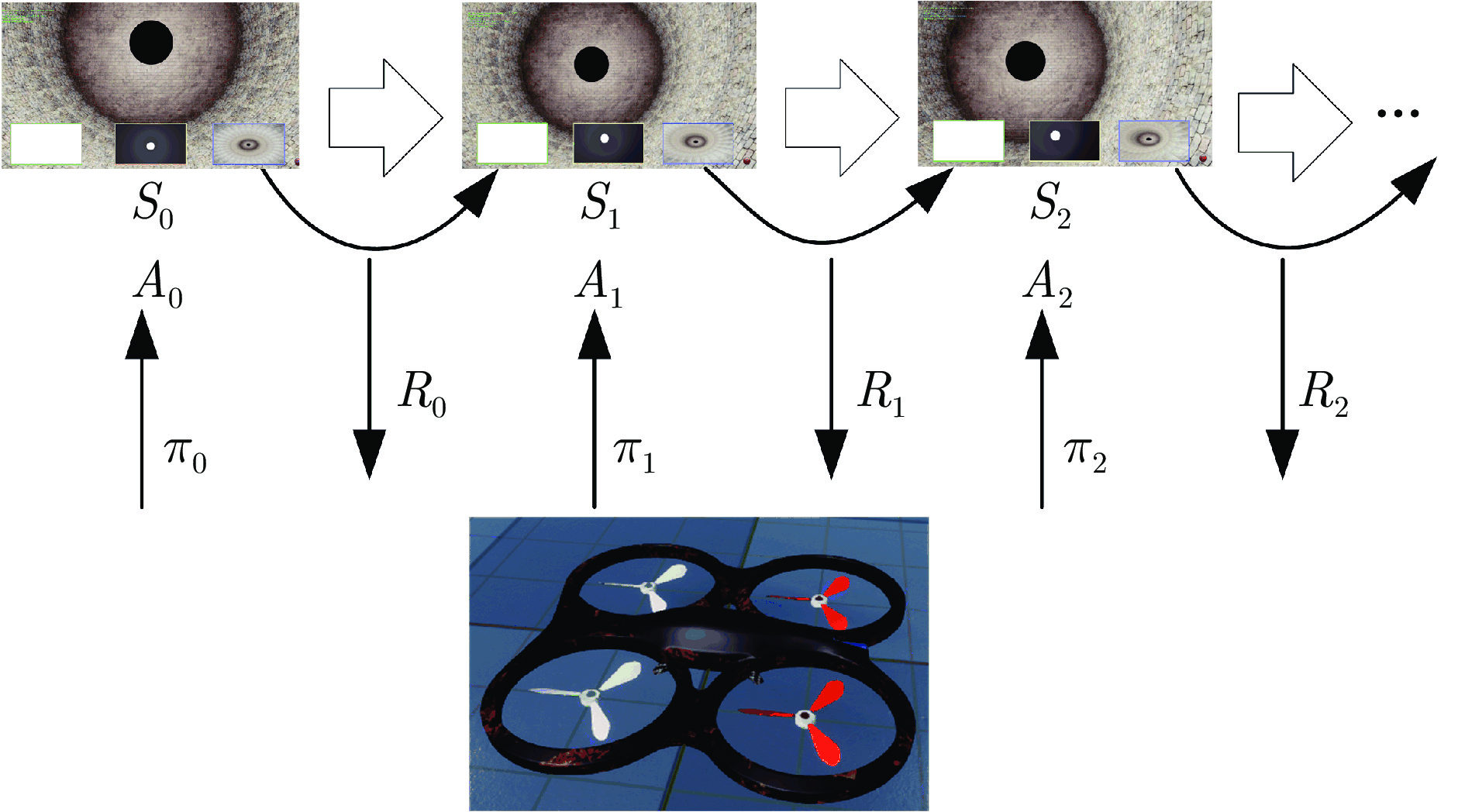
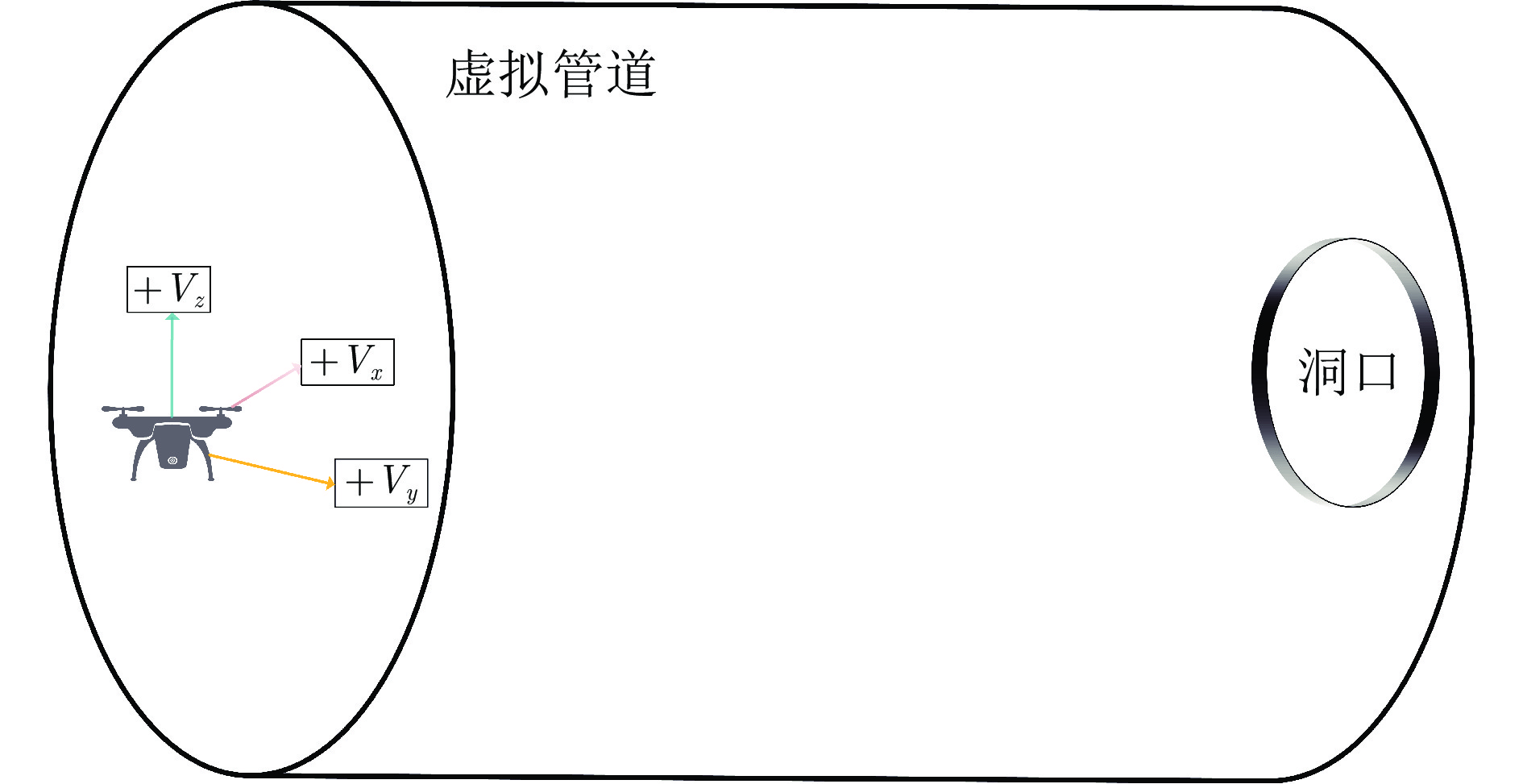
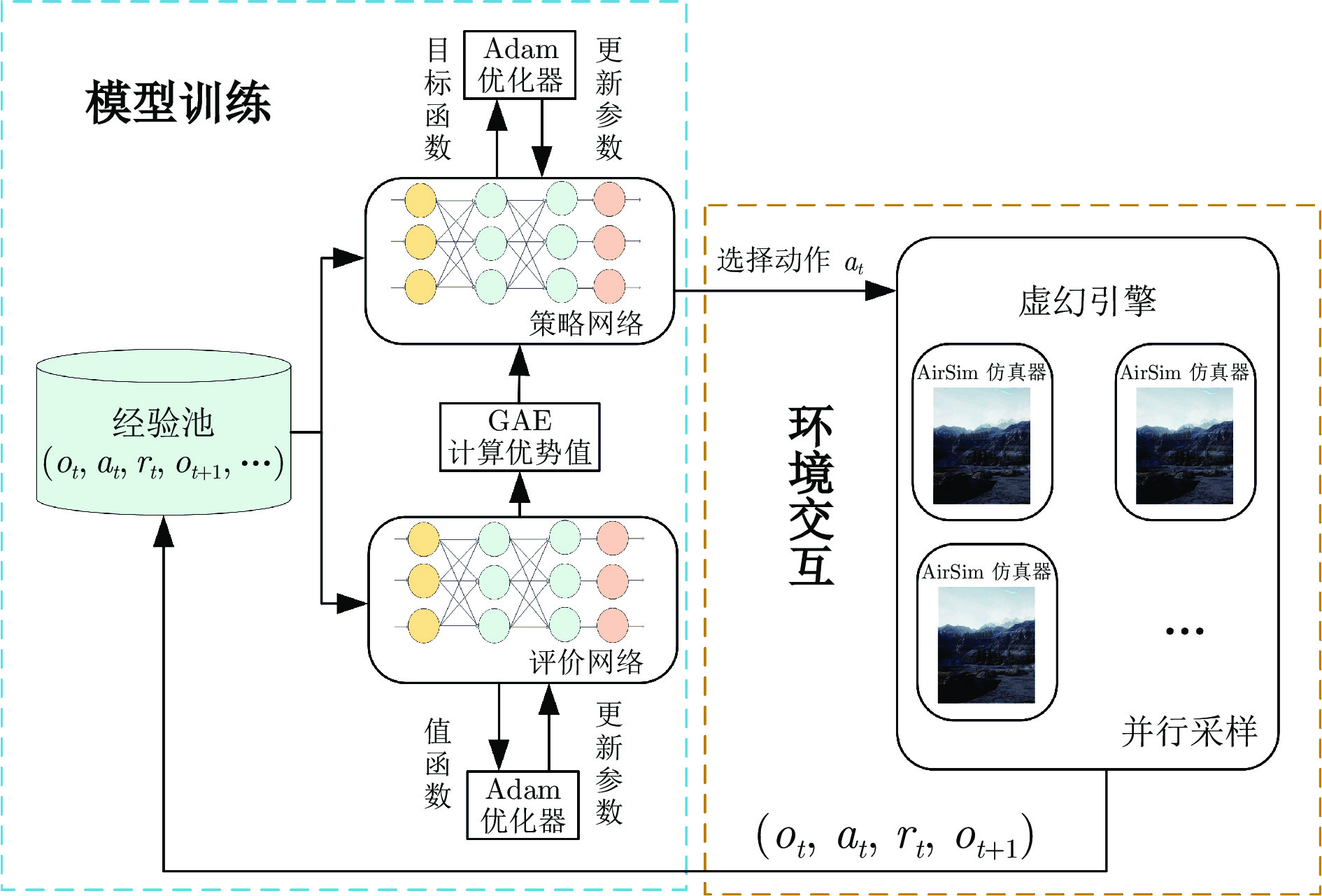
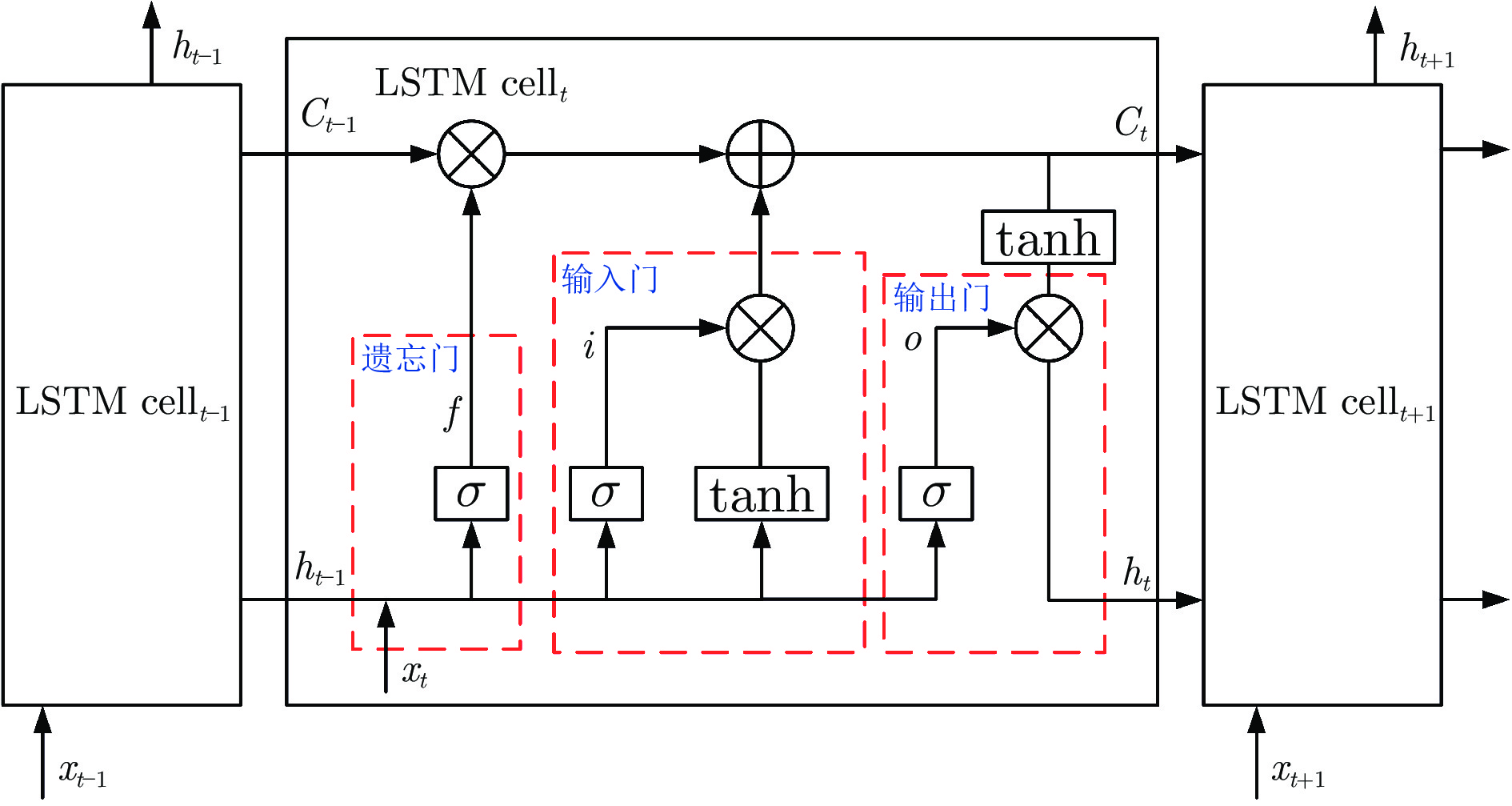
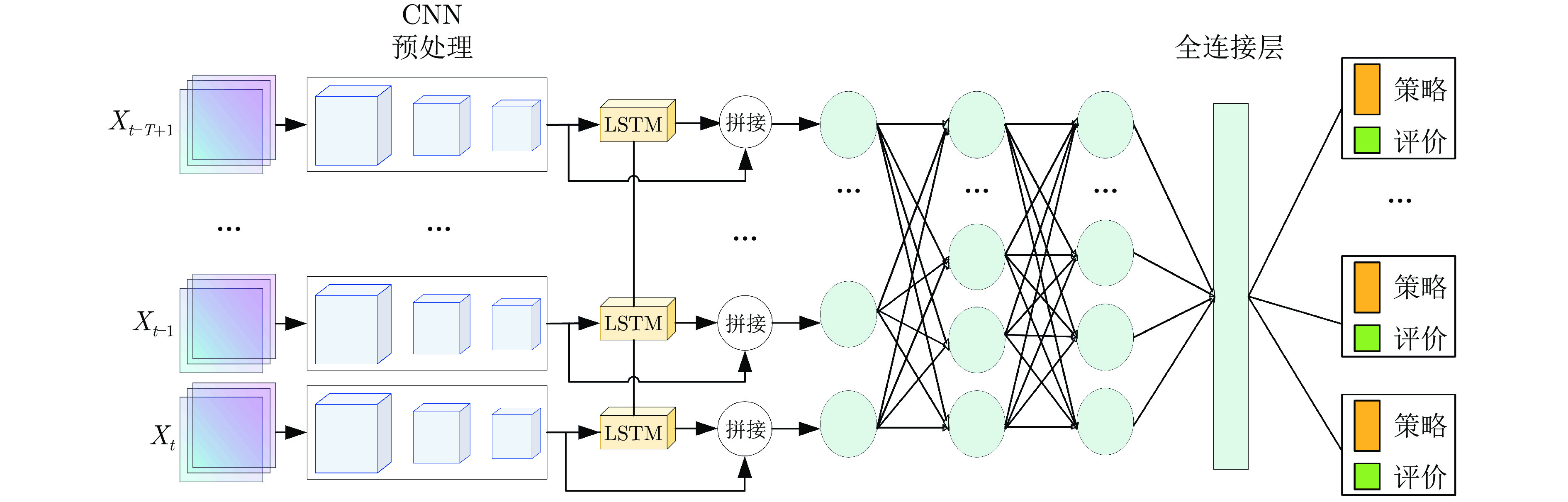
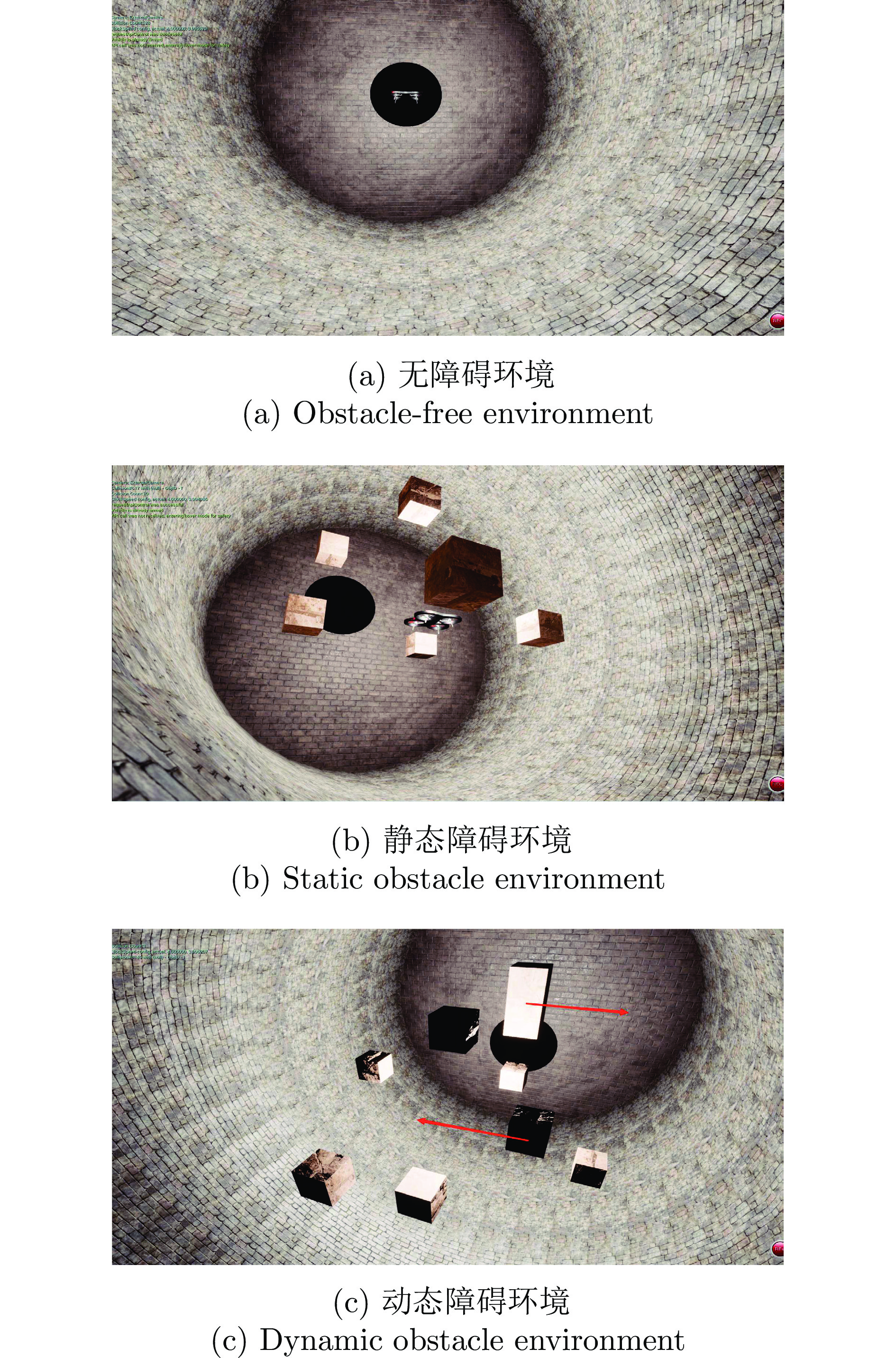
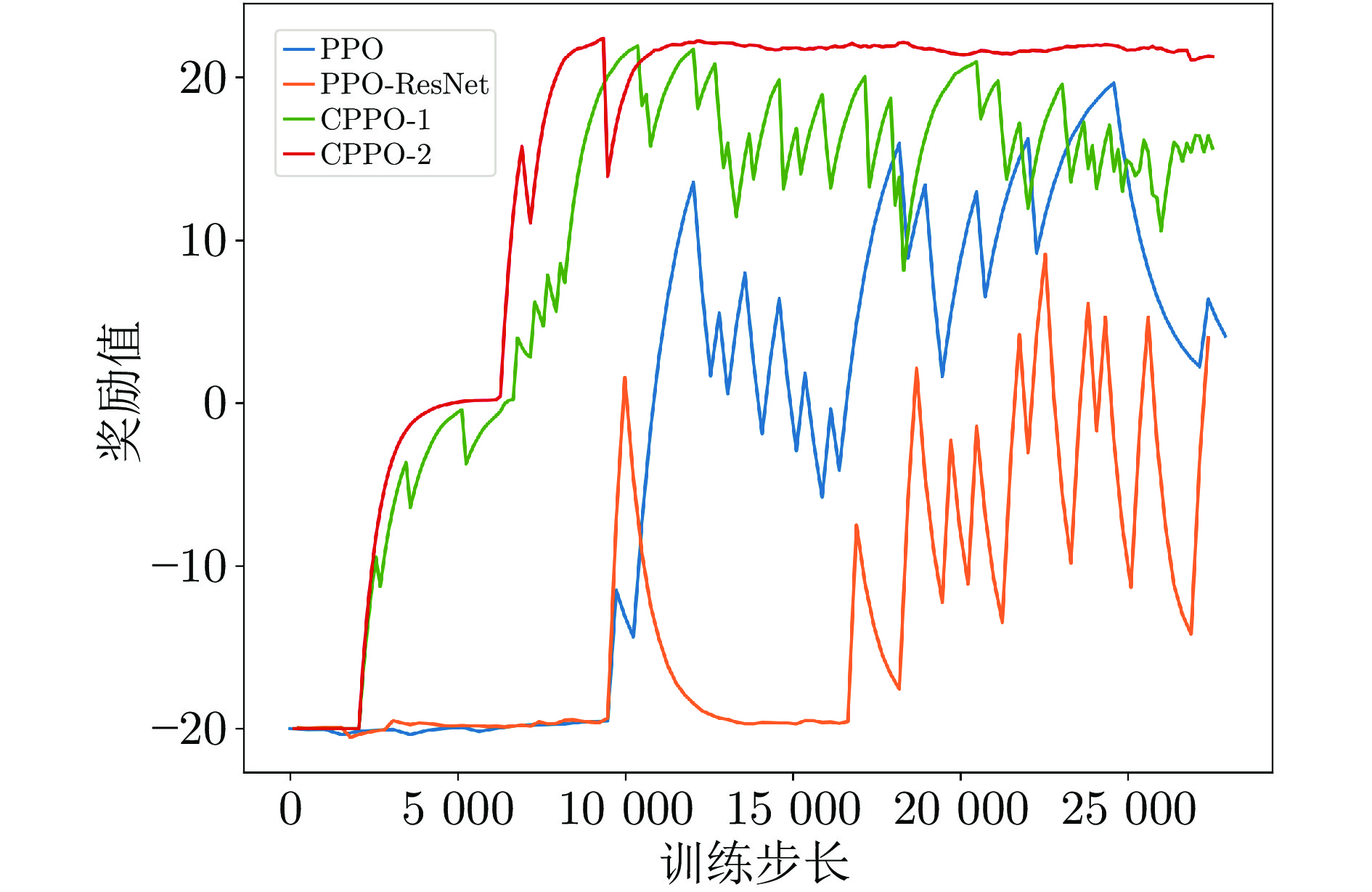
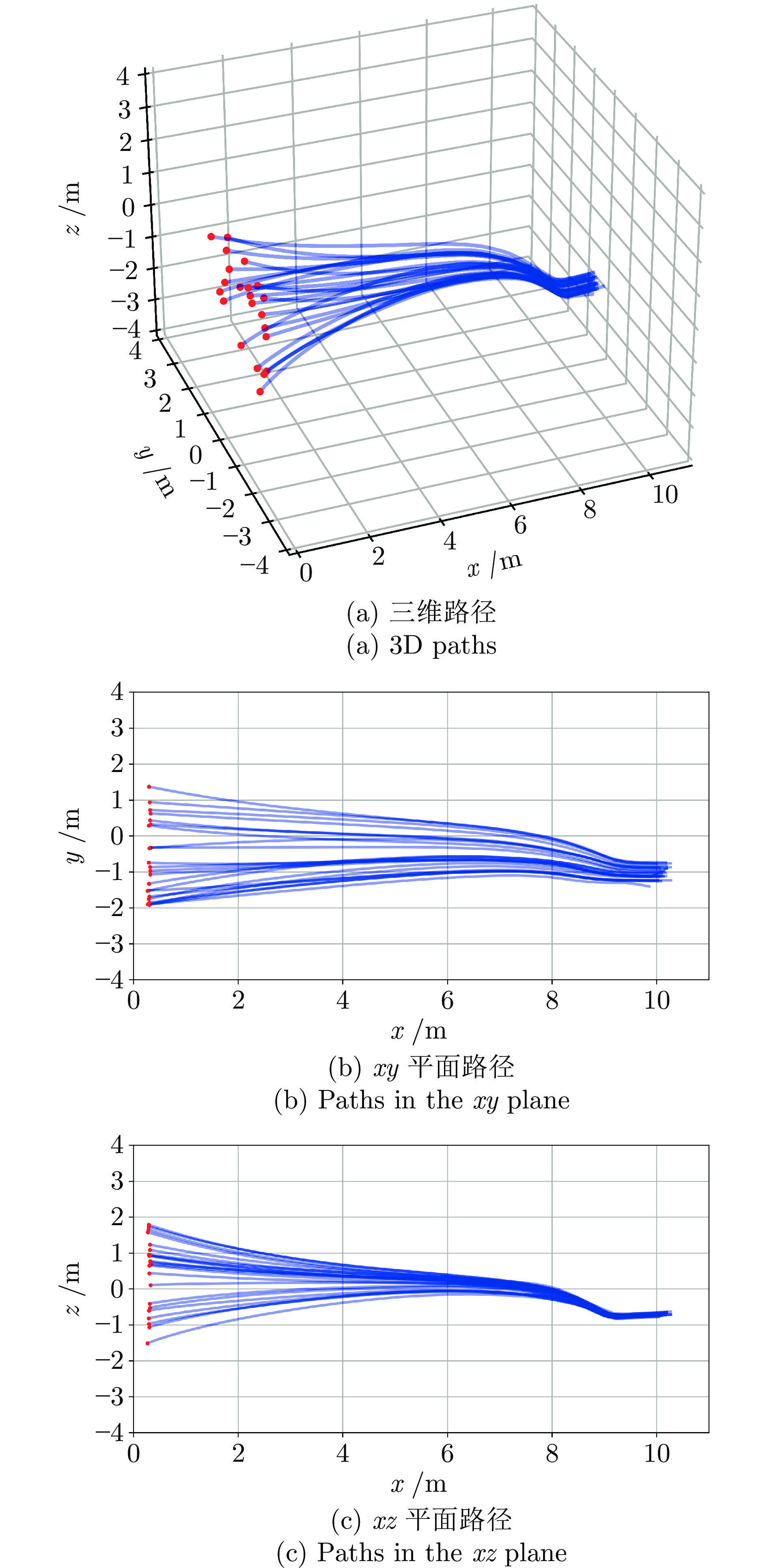
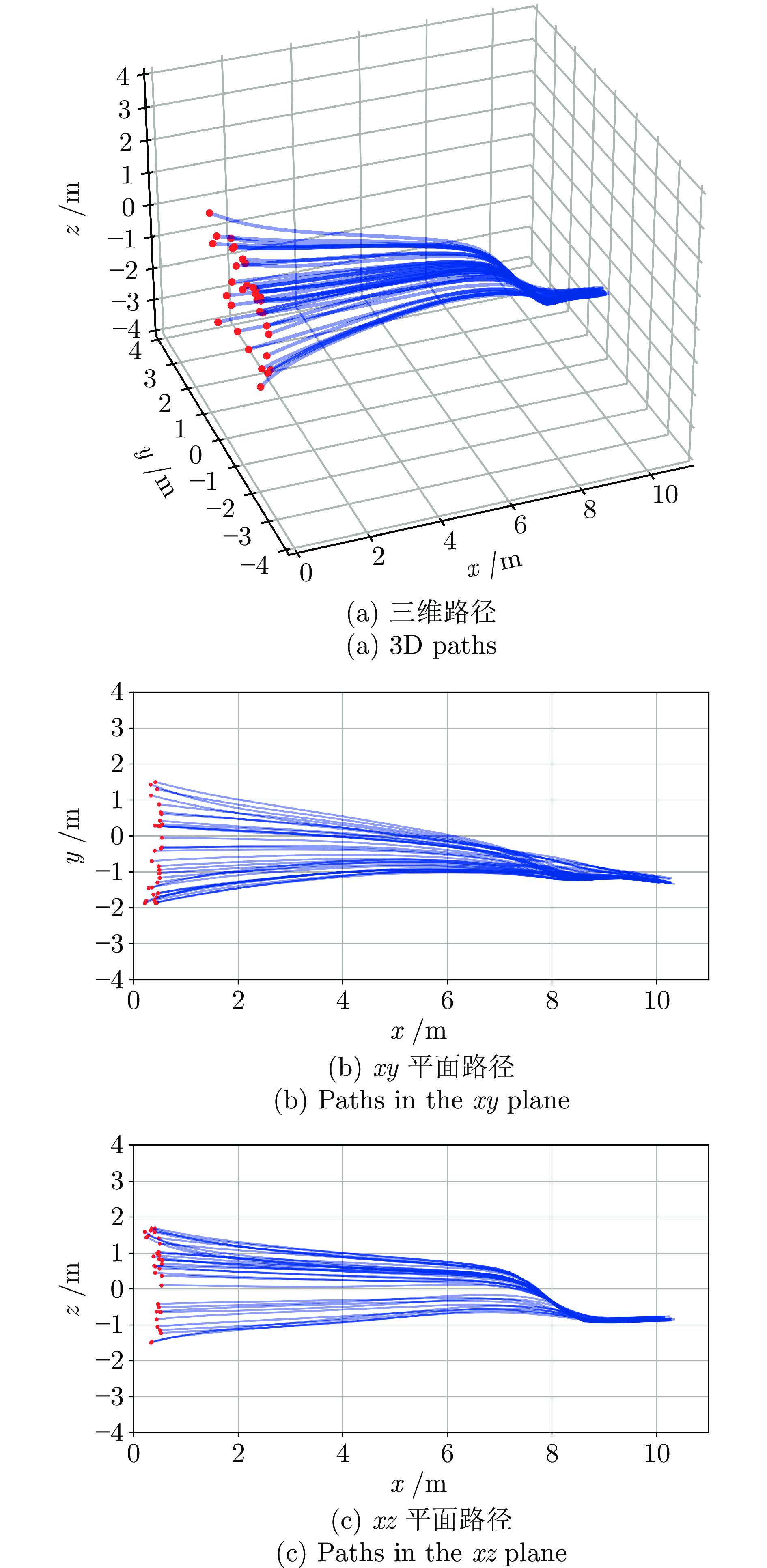
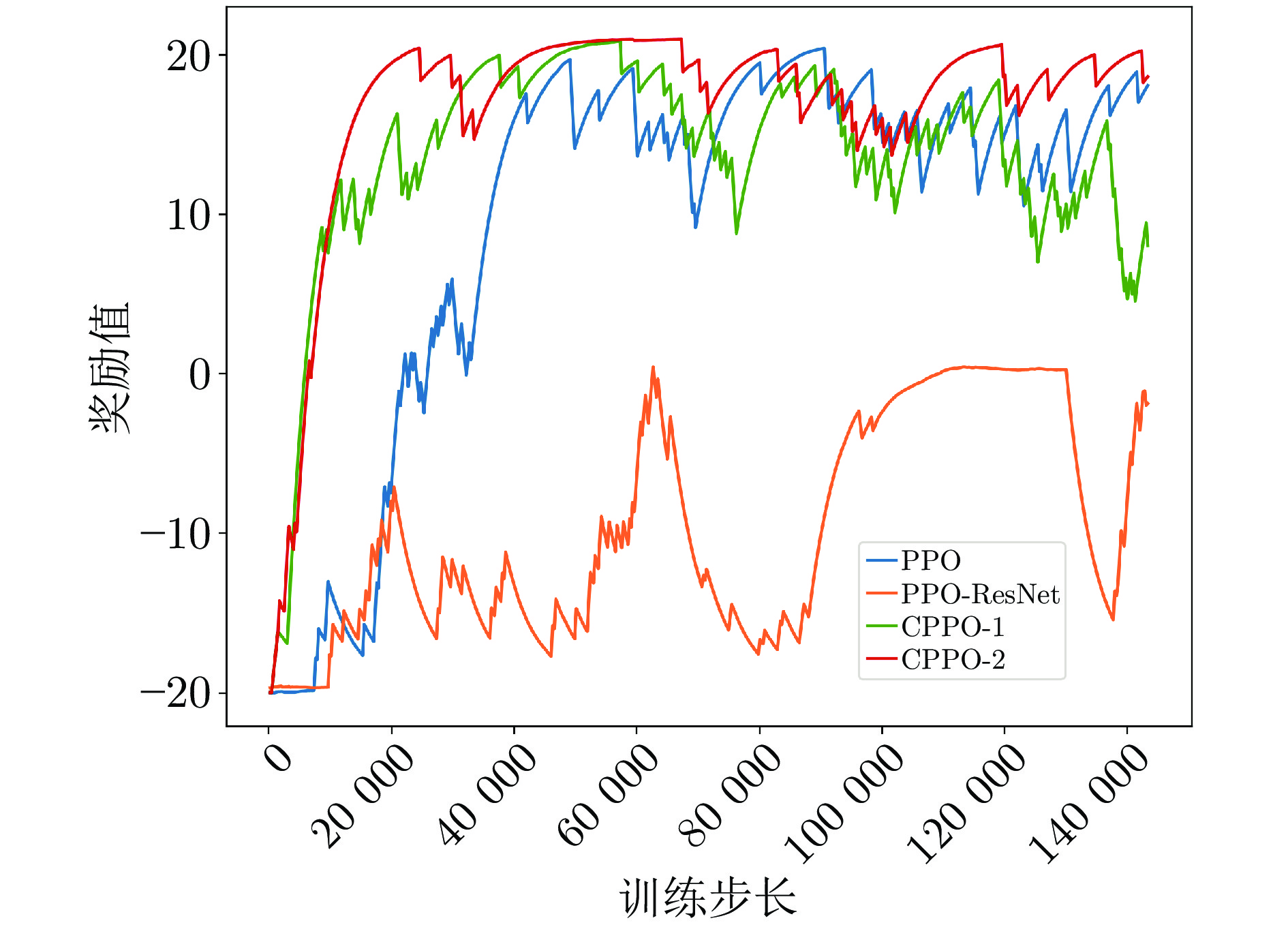
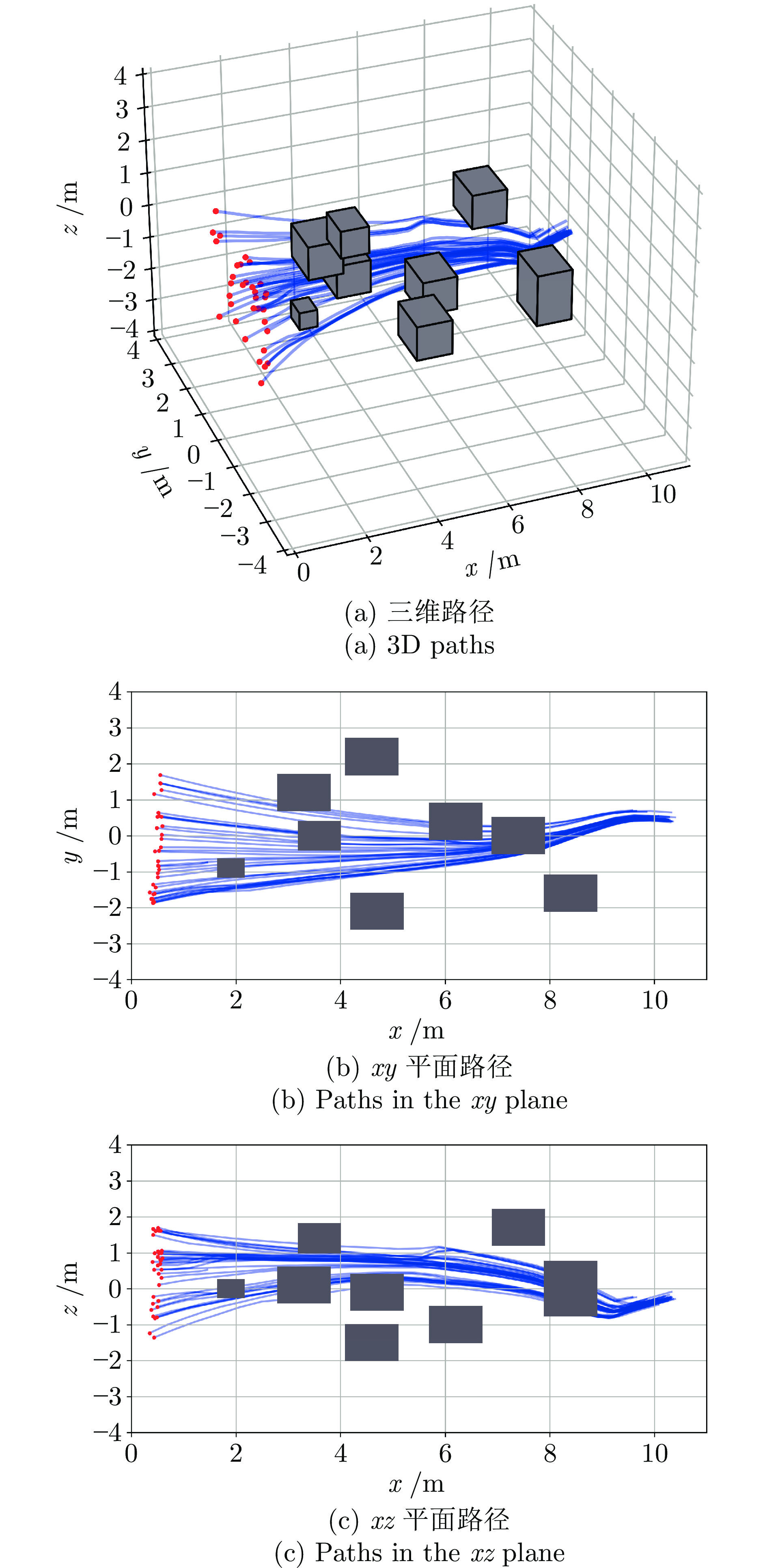
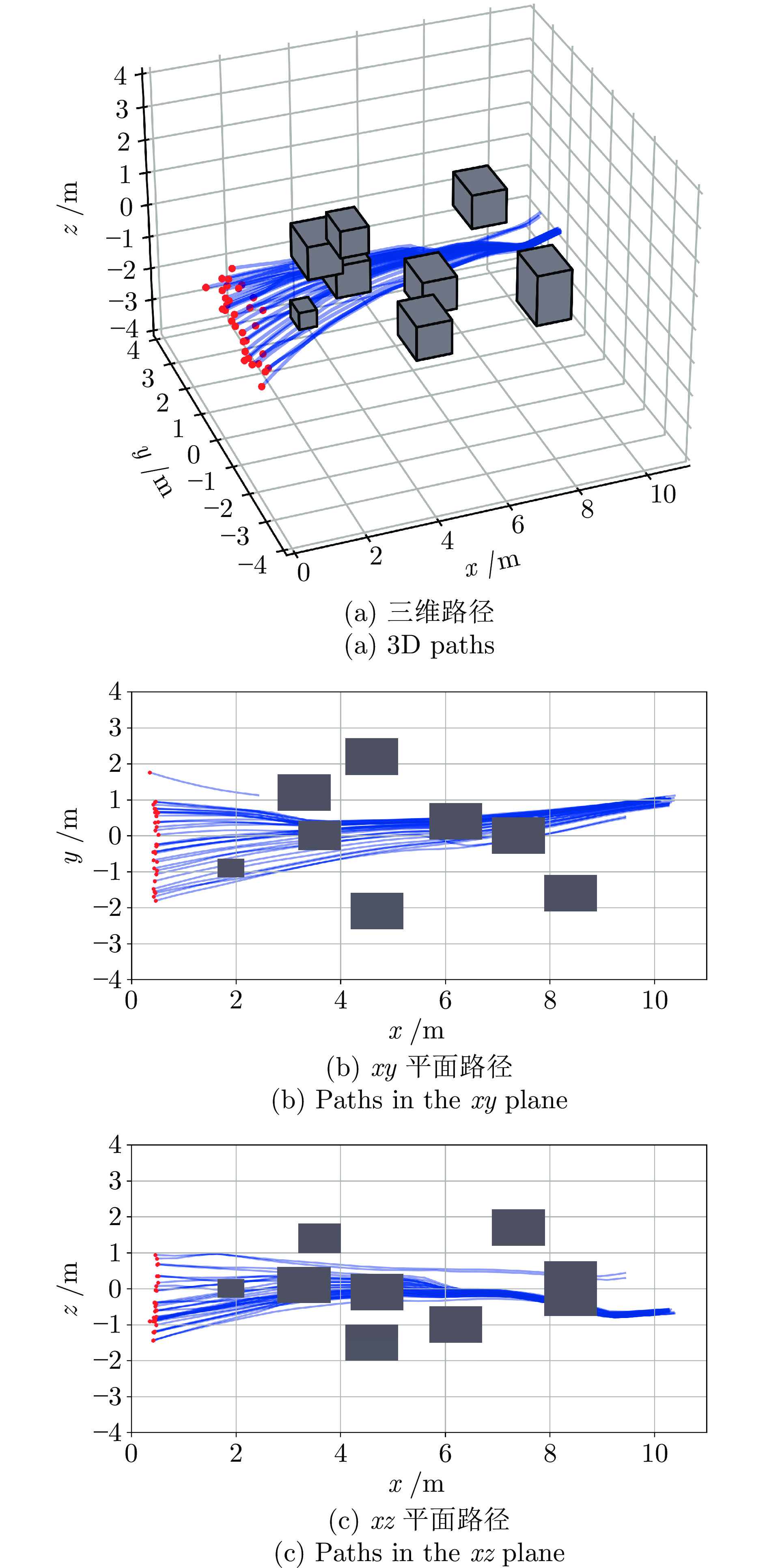
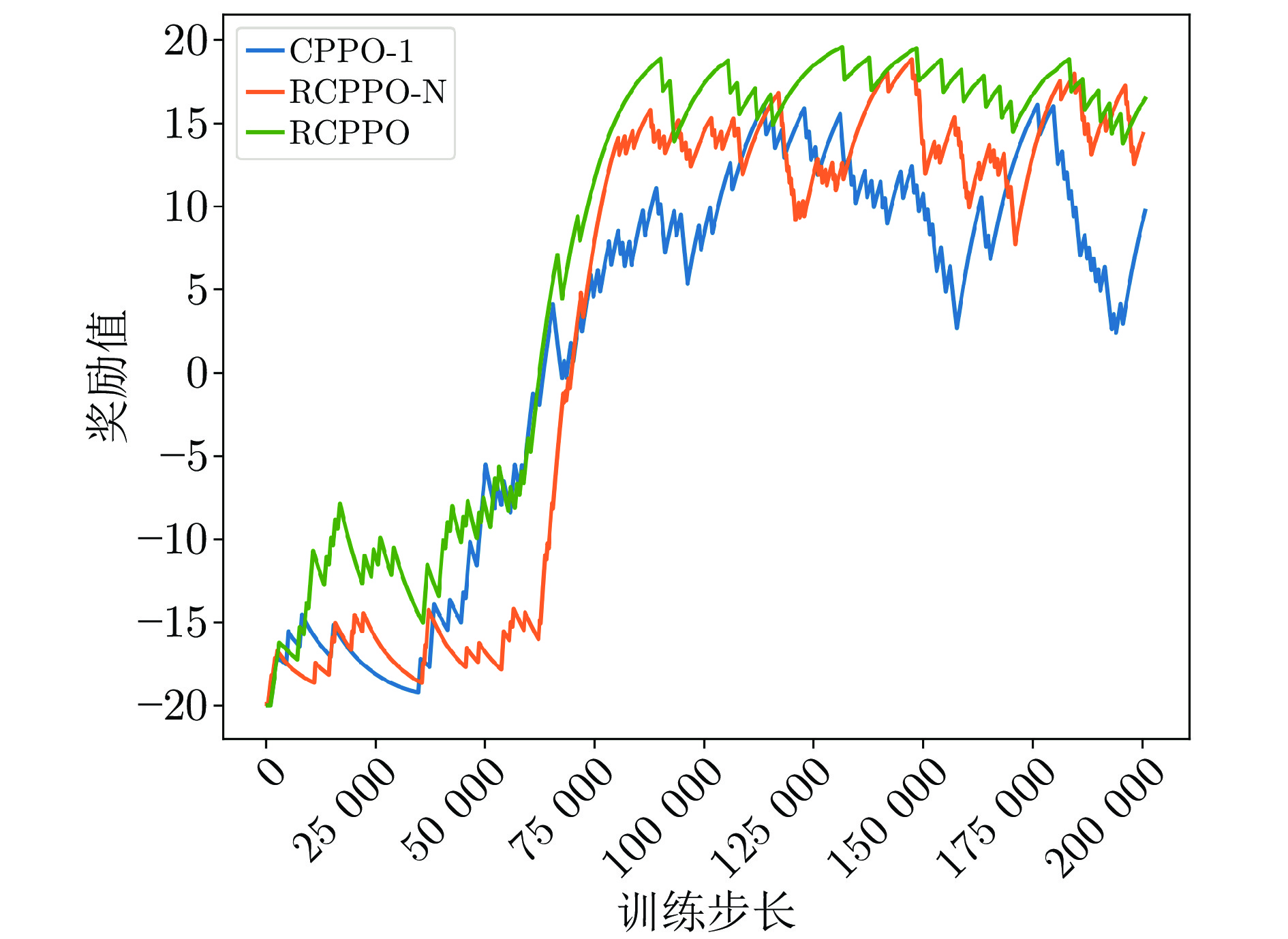
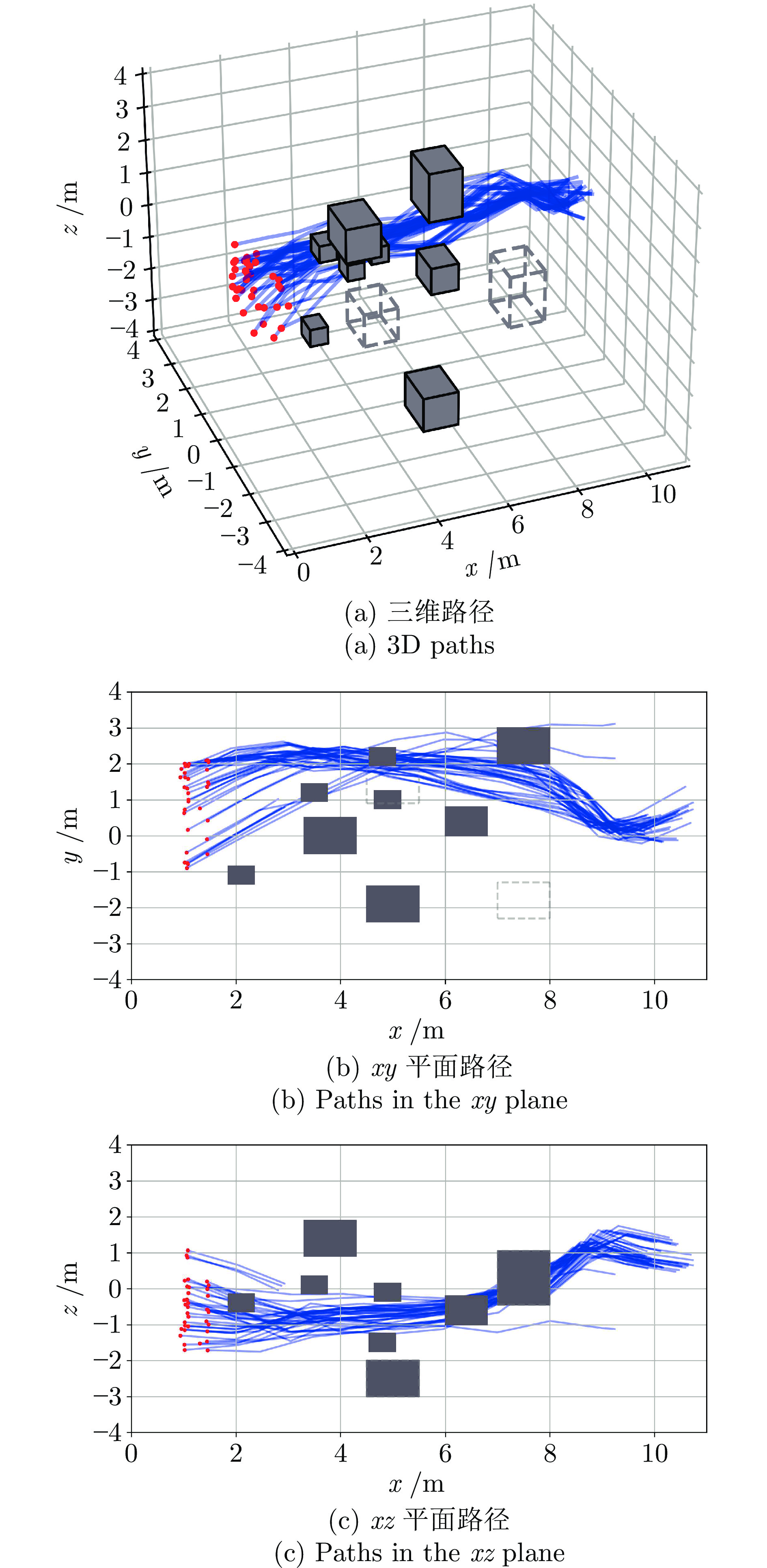
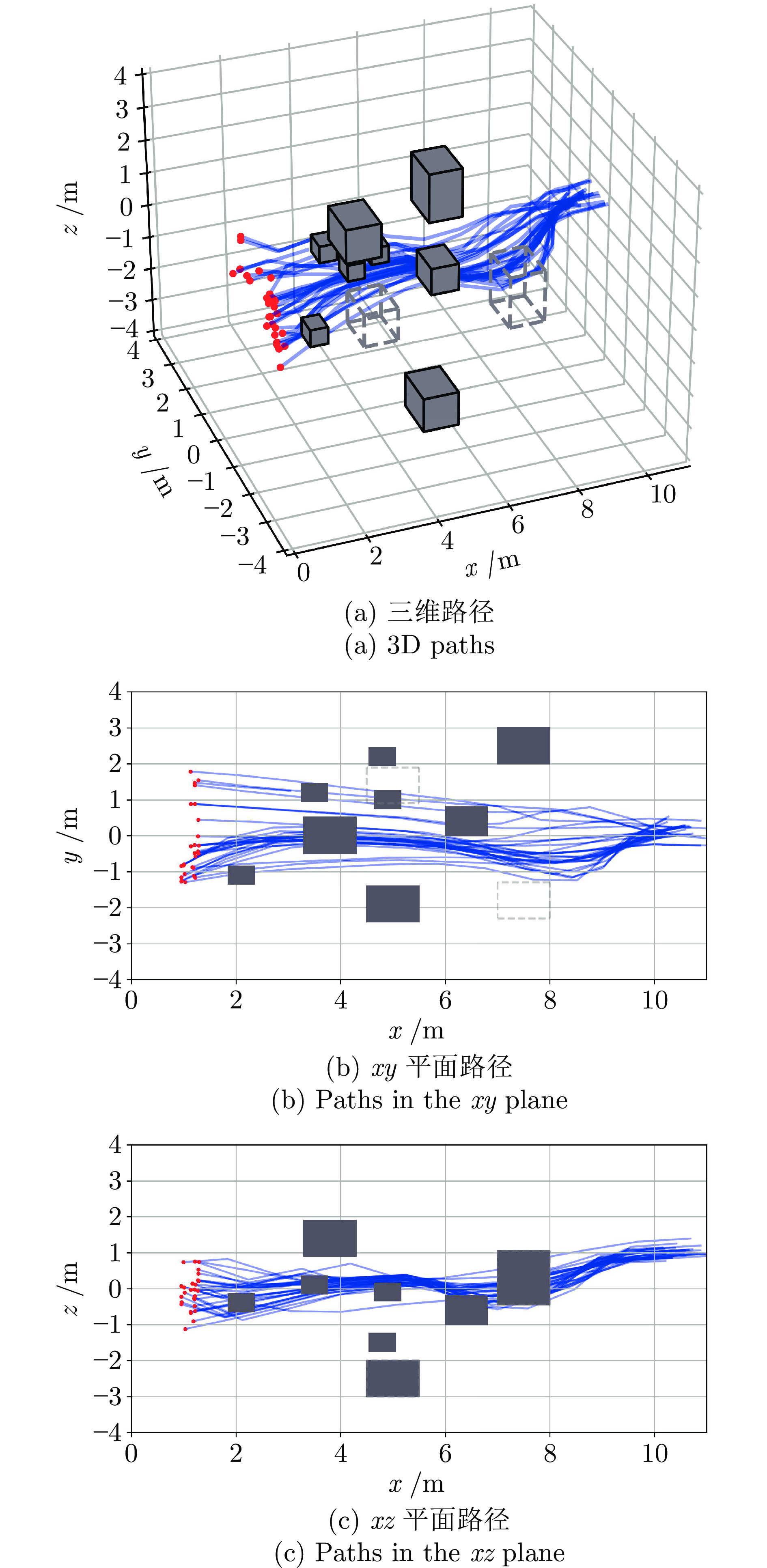
针对虚拟管道下的无人机 (Unmanned aerial vehicle, UAV)自主避障问题, 提出一种基于视觉传感器的自主学习架构. 通过引入新颖的奖励函数, 设计了一种端到端的深度强化学习(Deep reinforcement learning, DRL)控制策略. 融合卷积神经网络 (Convolutional neural network, CNN)和循环神经网络 (Recurrent neural network, RNN)的优点构建双网络, 降低了网络复杂度, 对无人机深度图像进行有效处理. 进一步通过AirSim模拟器搭建三维实验环境, 采用连续动作空间优化无人机飞行轨迹的平滑性. 仿真结果表明, 与现有的方法对比, 该模型在面对静态和动态障碍时, 训练收敛速度快, 平均奖励高, 任务完成率分别增加9.4%和19.98%, 有效实现无人机的精细化避障和自主安全导航.
针对虚拟管道下的无人机 (Unmanned aerial vehicle, UAV)自主避障问题, 提出一种基于视觉传感器的自主学习架构. 通过引入新颖的奖励函数, 设计了一种端到端的深度强化学习(Deep reinforcement learning, DRL)控制策略. 融合卷积神经网络 (Convolutional neural network, CNN)和循环神经网络 (Recurrent neural network, RNN)的优点构建双网络, 降低了网络复杂度, 对无人机深度图像进行有效处理. 进一步通过AirSim模拟器搭建三维实验环境, 采用连续动作空间优化无人机飞行轨迹的平滑性. 仿真结果表明, 与现有的方法对比, 该模型在面对静态和动态障碍时, 训练收敛速度快, 平均奖励高, 任务完成率分别增加9.4%和19.98%, 有效实现无人机的精细化避障和自主安全导航.
2024, 50(11): 2259-2270.
doi: 10.16383/j.aas.c220914
cstr: 32138.14.j.aas.c220914
摘要:
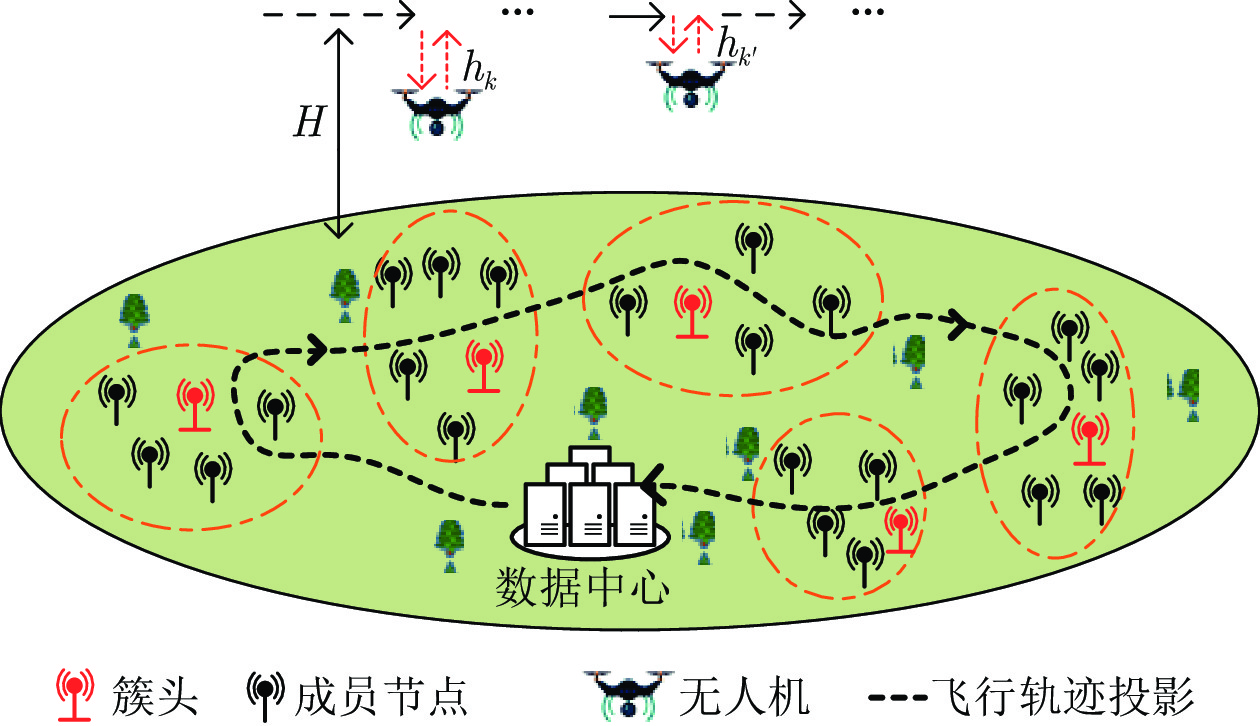
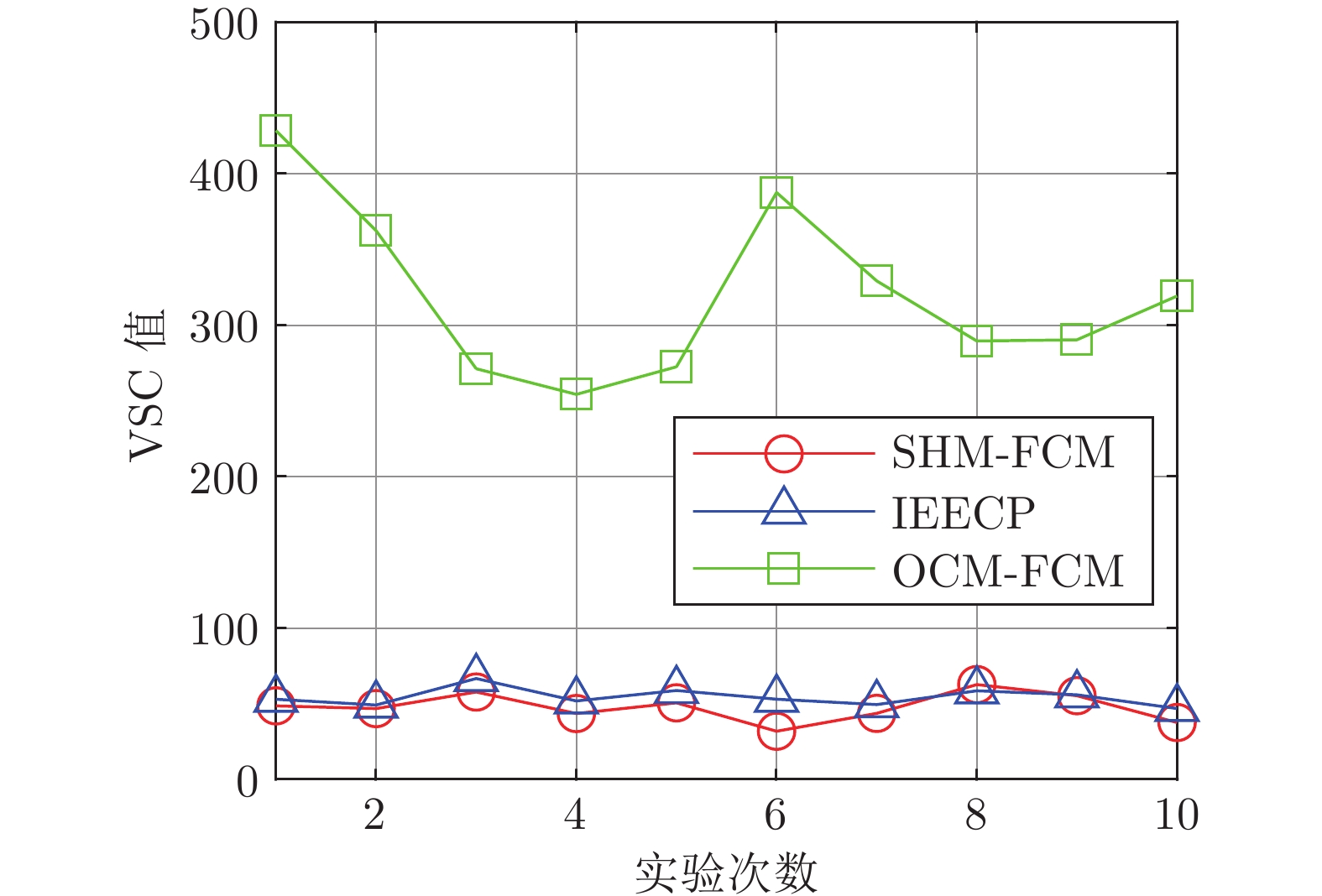
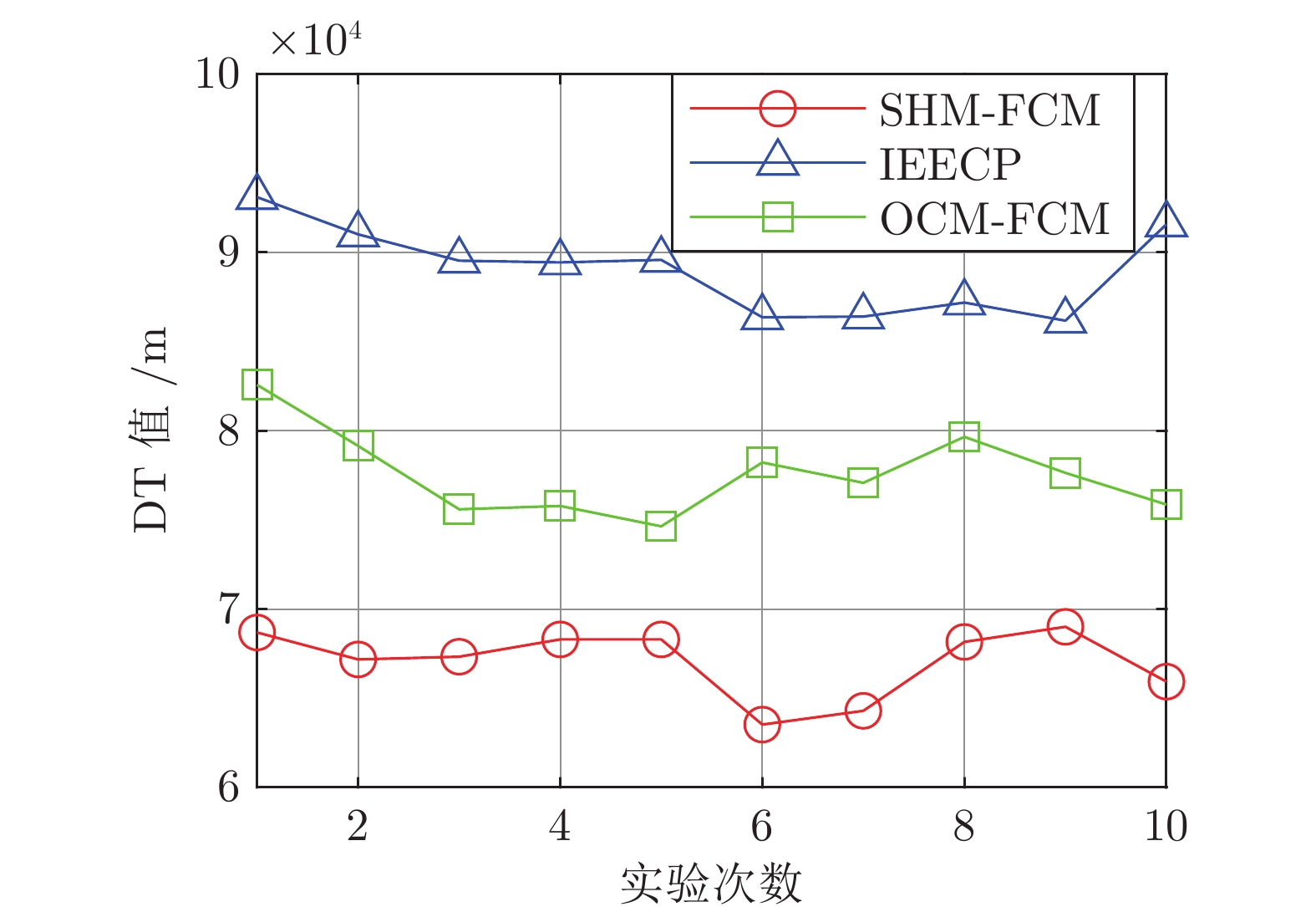
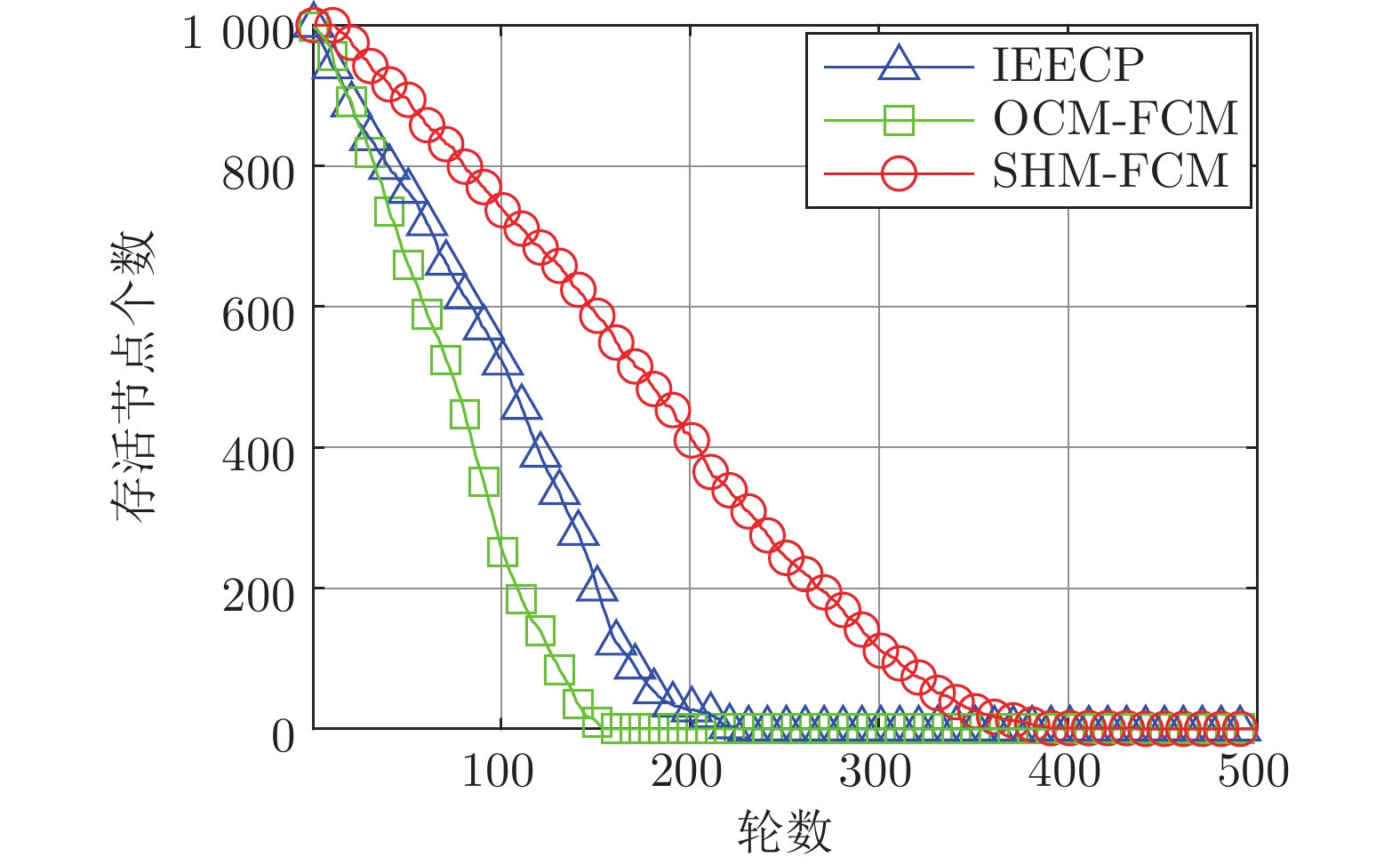
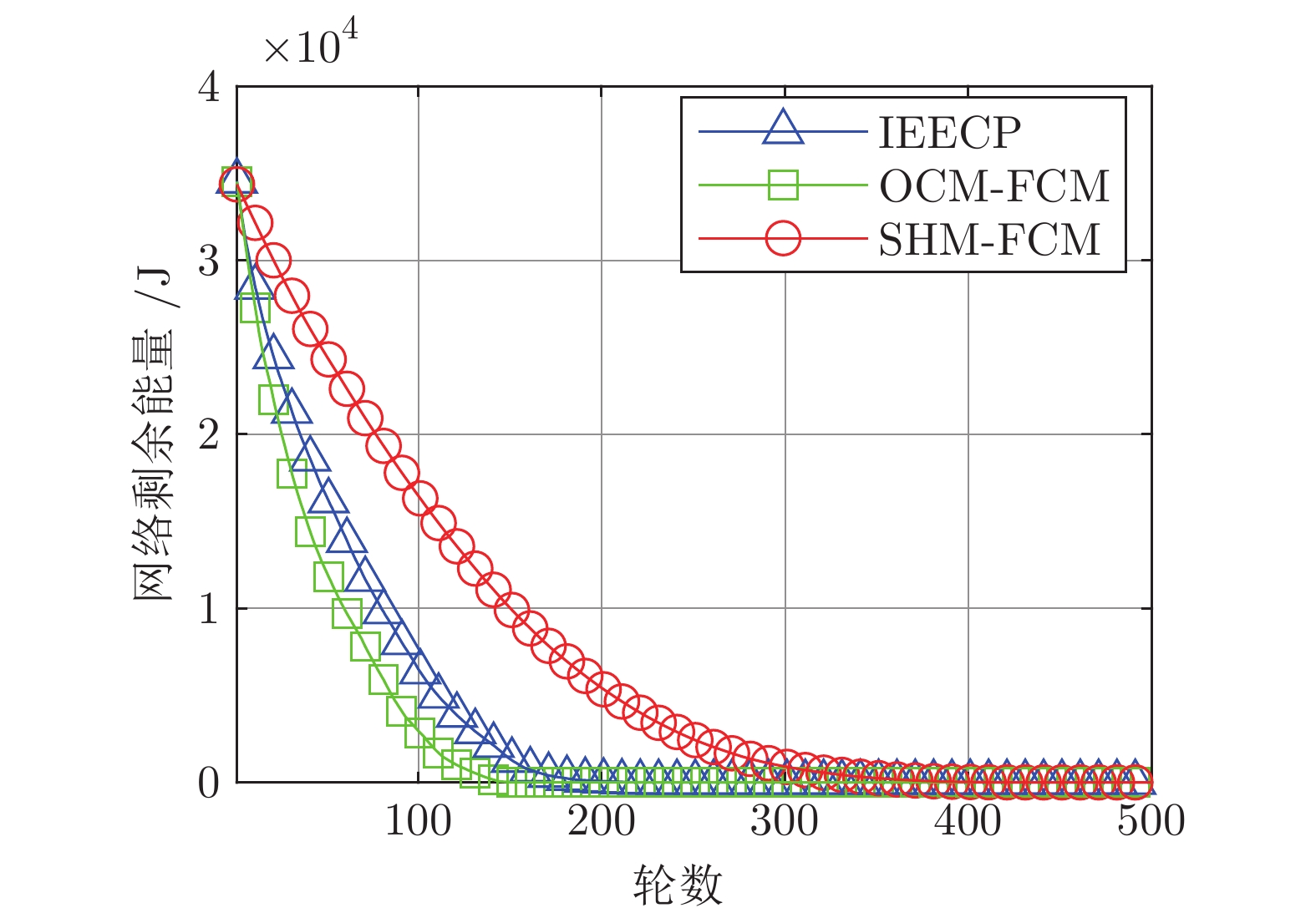
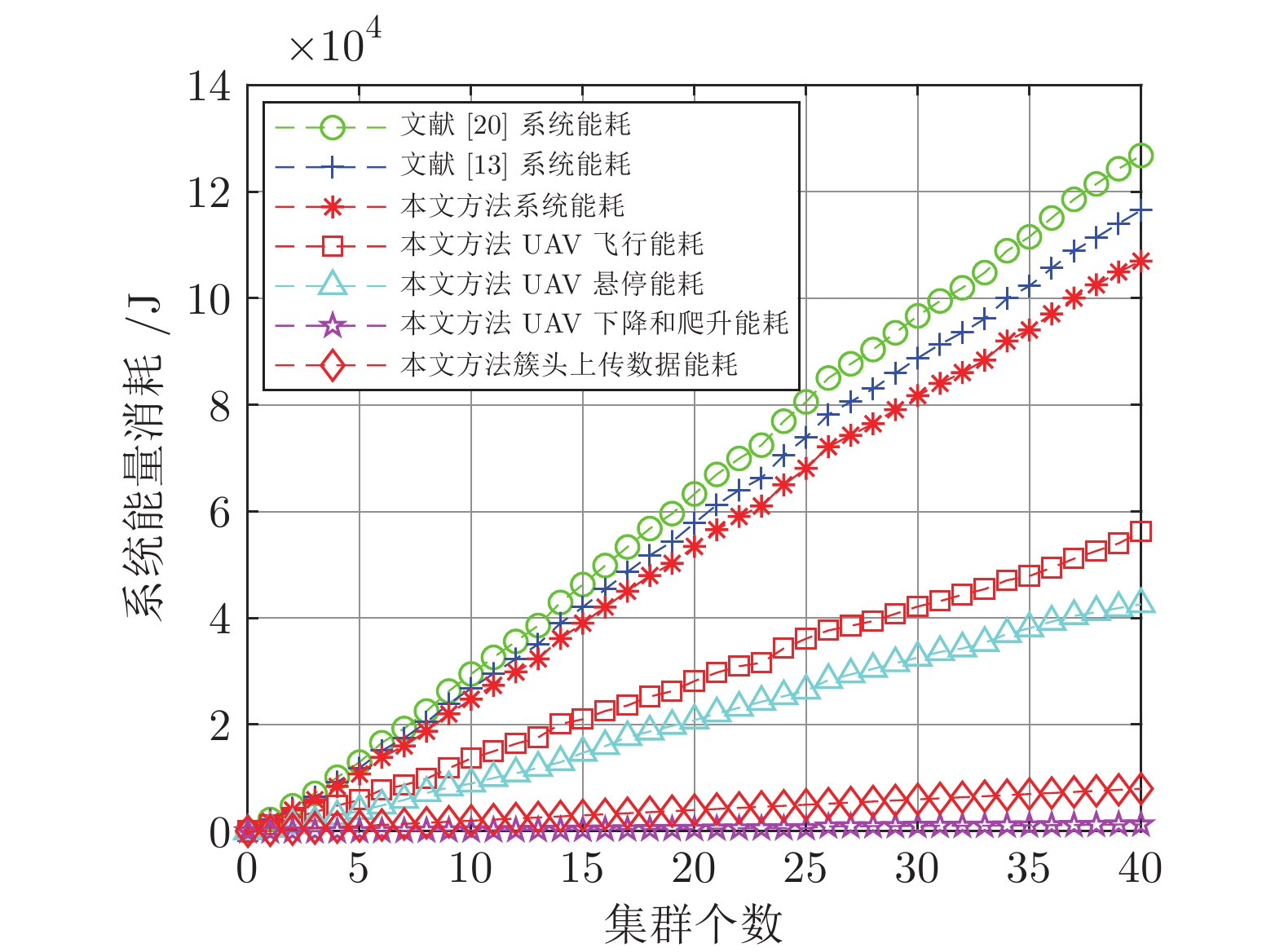
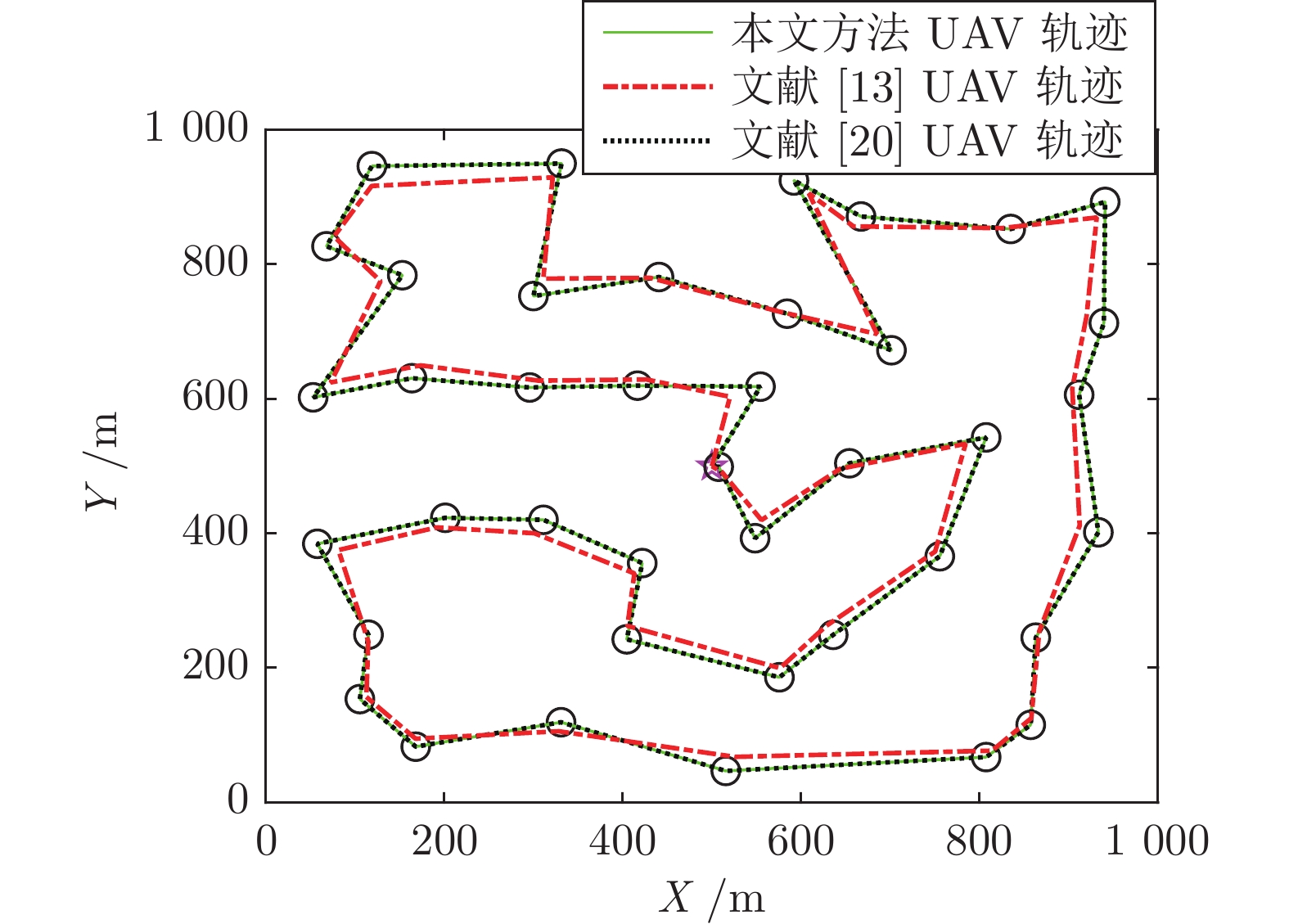
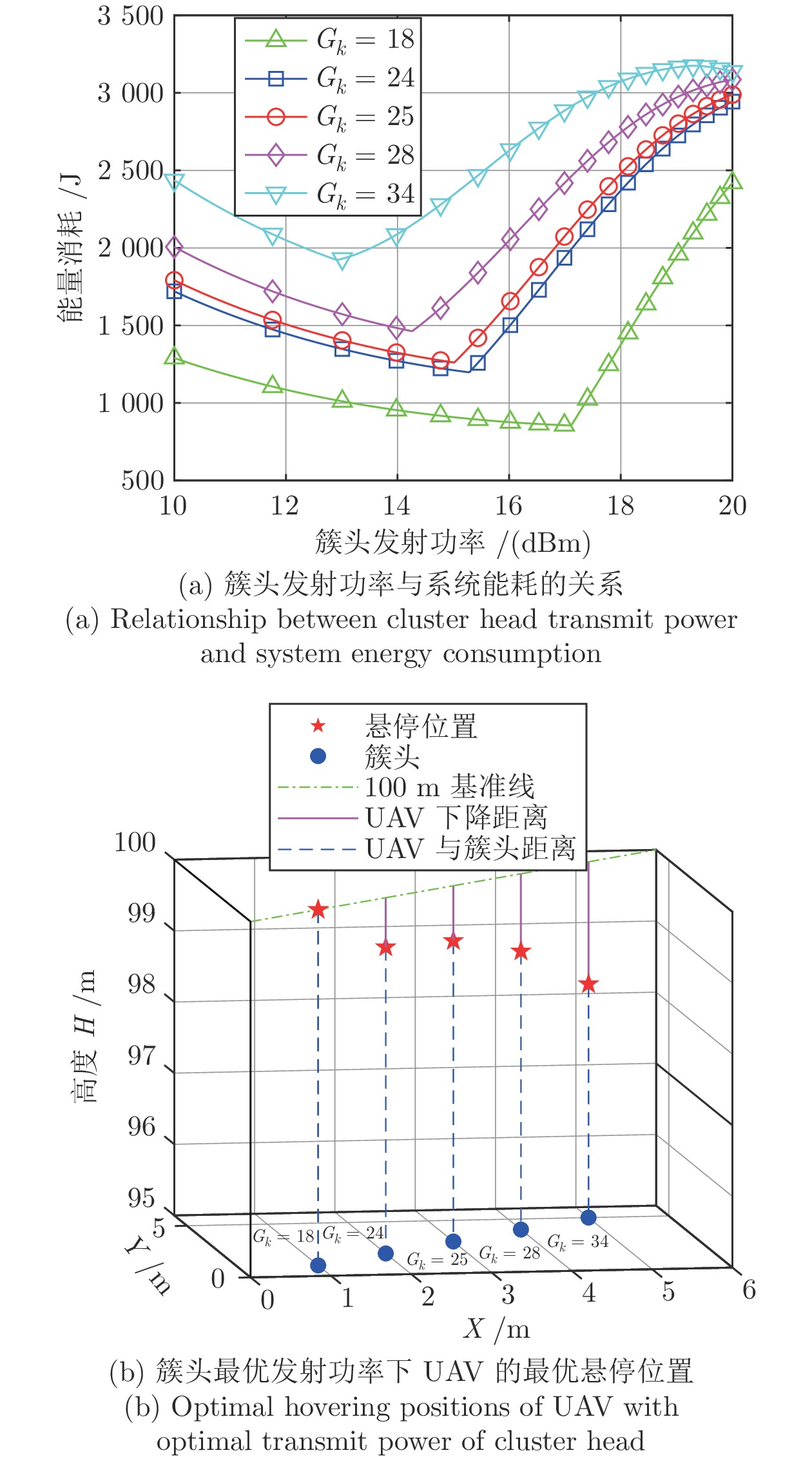
为降低无人机(Unmanned aerial vehicle, UAV)使能的无线传感网(Wireless sensor networks, WSNs)的能耗, 延长网络生命周期, 提出一种在地面节点能量预算下系统总能耗优化方法. 首先, 提出地面节点聚类方法, 利用目标函数确定最优簇数, 改进模糊C均值(Fuzzy C-mean, FCM)算法构建能量均衡的集群, 采用退避定时器机制根据隶属度和能量值选择各集群的最优簇头, 减少地面节点的能耗; 然后, 根据已选簇头位置, 利用遗传算法规划UAV飞行轨迹, 减少UAV能耗; 最后, 通过单纯形搜索算法和连续凸逼近(Successive convex approximation, SCA)算法联合优化簇头发射功率和UAV悬停位置, 减少数据采集时系统的总能耗. 仿真结果表明, 该方法优于其他方法.
为降低无人机(Unmanned aerial vehicle, UAV)使能的无线传感网(Wireless sensor networks, WSNs)的能耗, 延长网络生命周期, 提出一种在地面节点能量预算下系统总能耗优化方法. 首先, 提出地面节点聚类方法, 利用目标函数确定最优簇数, 改进模糊C均值(Fuzzy C-mean, FCM)算法构建能量均衡的集群, 采用退避定时器机制根据隶属度和能量值选择各集群的最优簇头, 减少地面节点的能耗; 然后, 根据已选簇头位置, 利用遗传算法规划UAV飞行轨迹, 减少UAV能耗; 最后, 通过单纯形搜索算法和连续凸逼近(Successive convex approximation, SCA)算法联合优化簇头发射功率和UAV悬停位置, 减少数据采集时系统的总能耗. 仿真结果表明, 该方法优于其他方法.


2024, 50(11): 2271-2285.
doi: 10.16383/j.aas.c230716
cstr: 32138.14.j.aas.c230716
摘要:
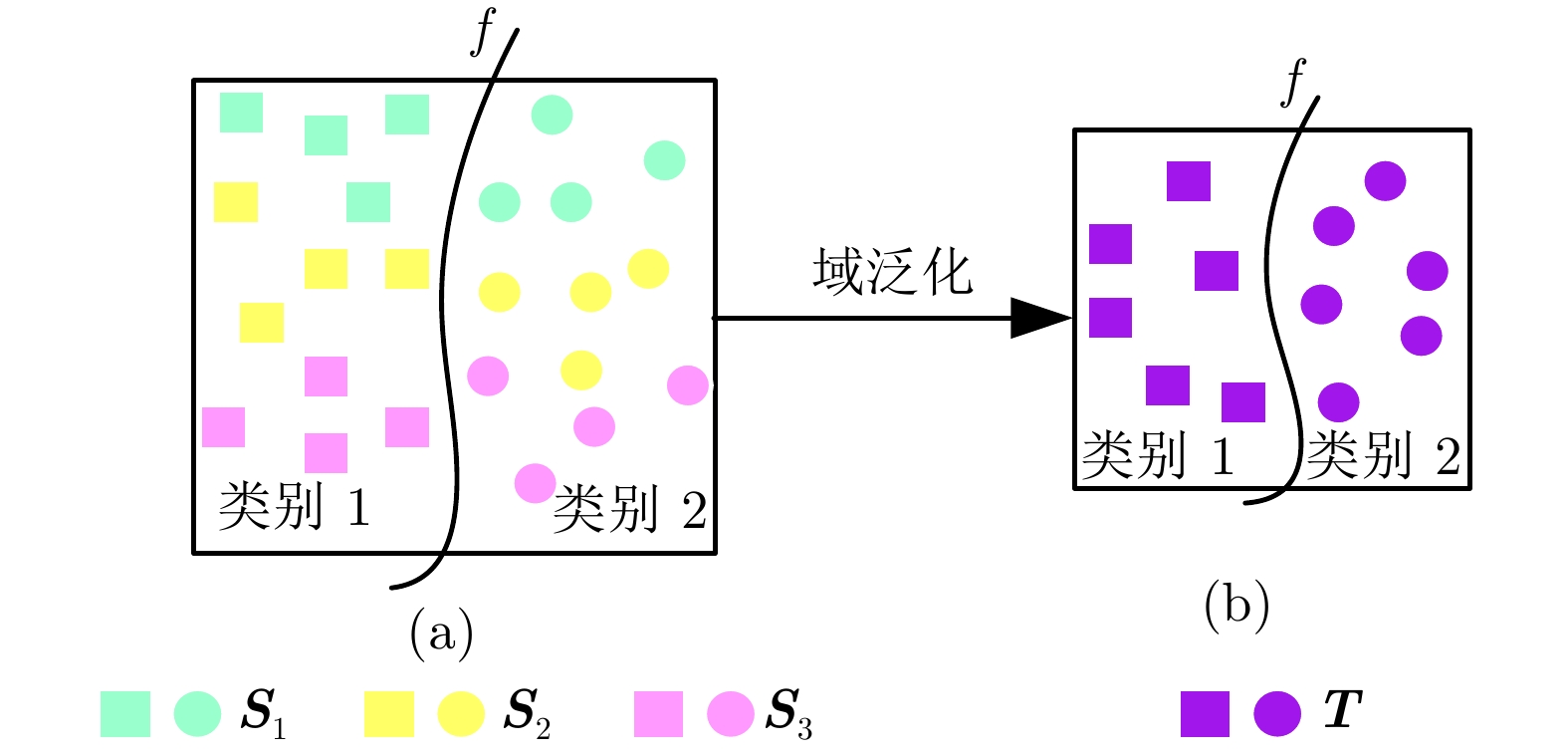
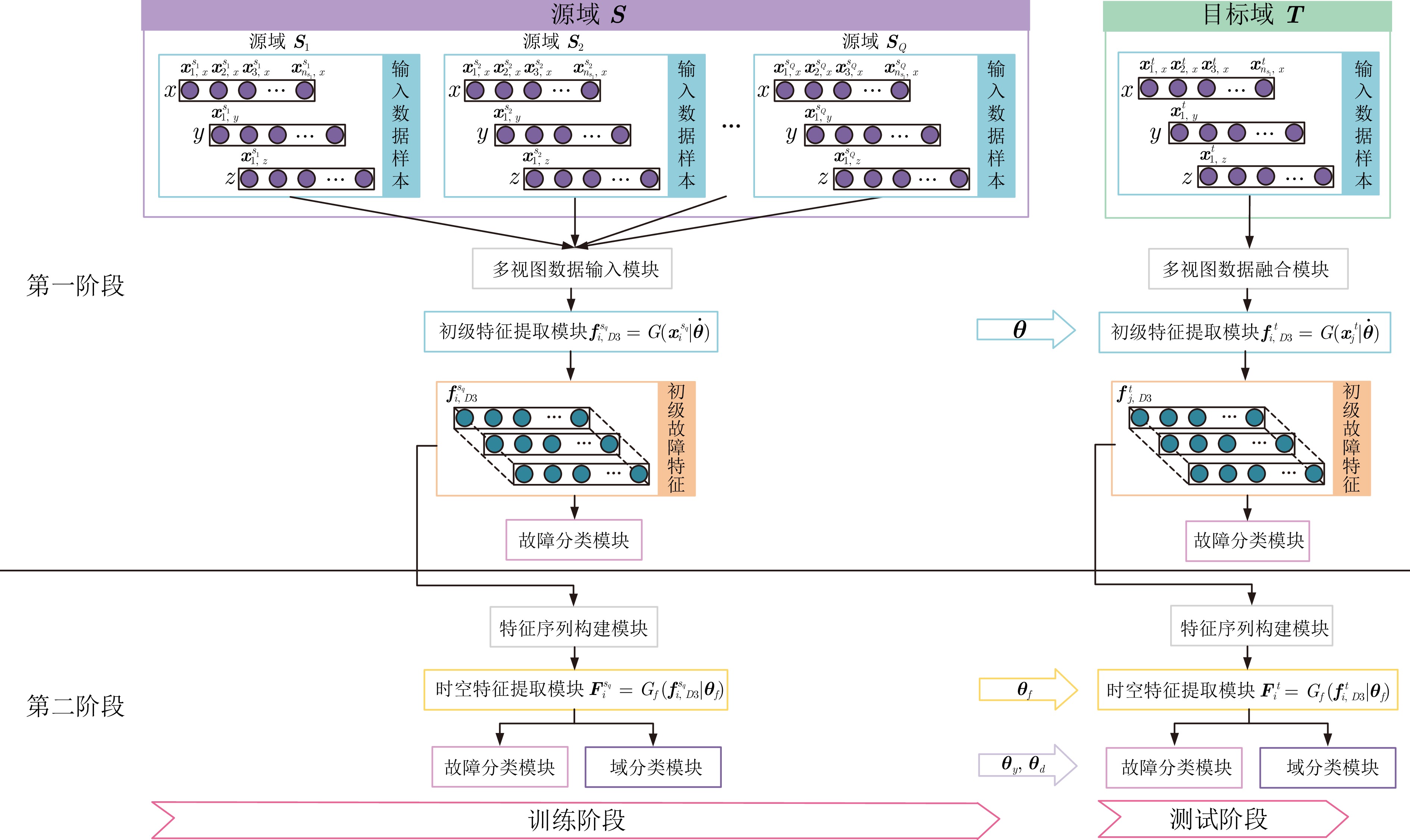
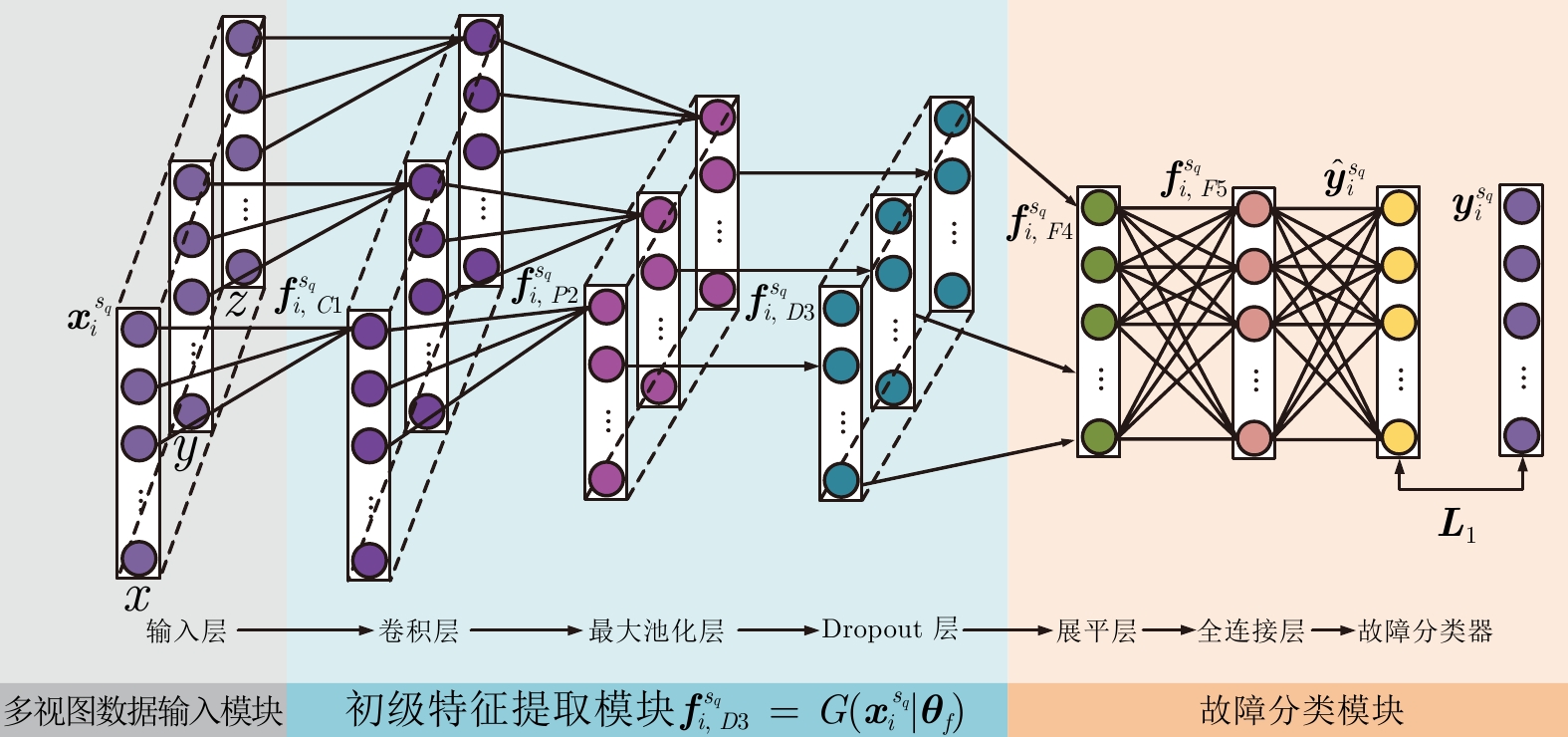
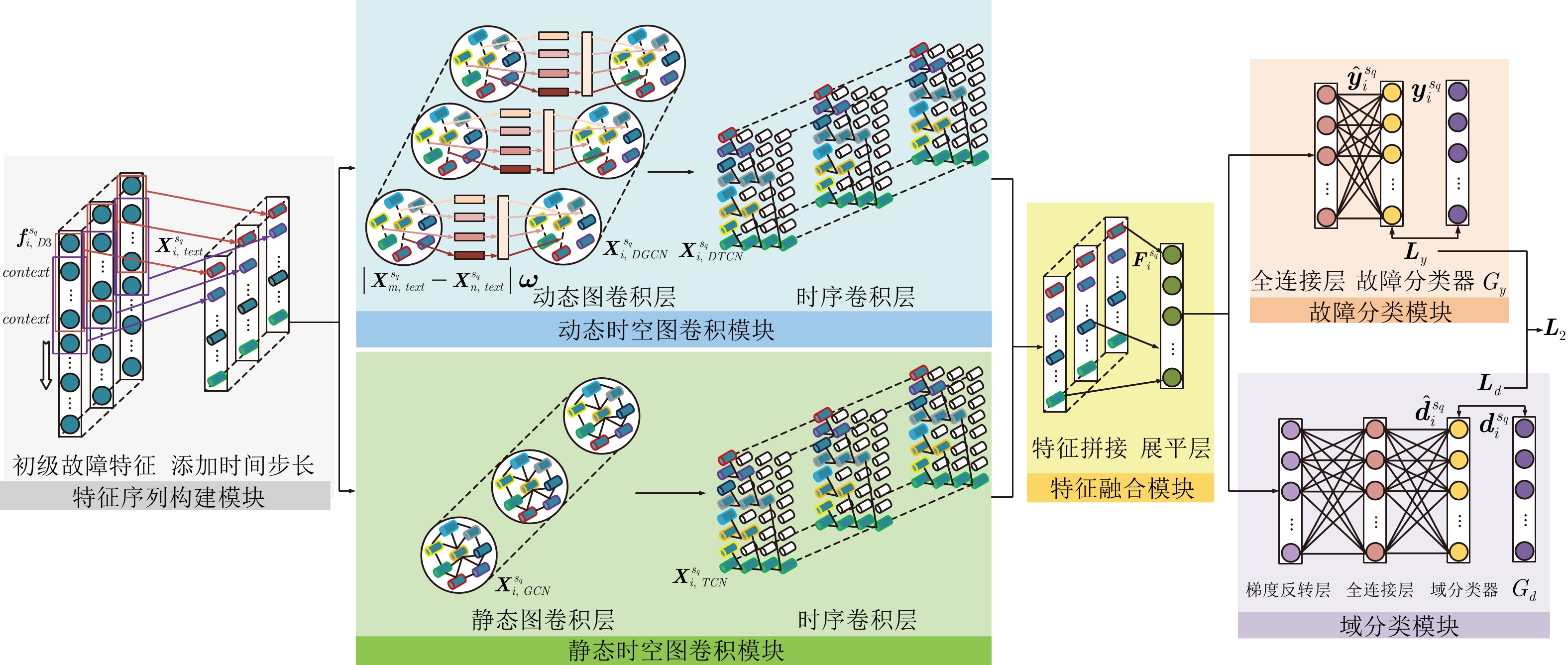
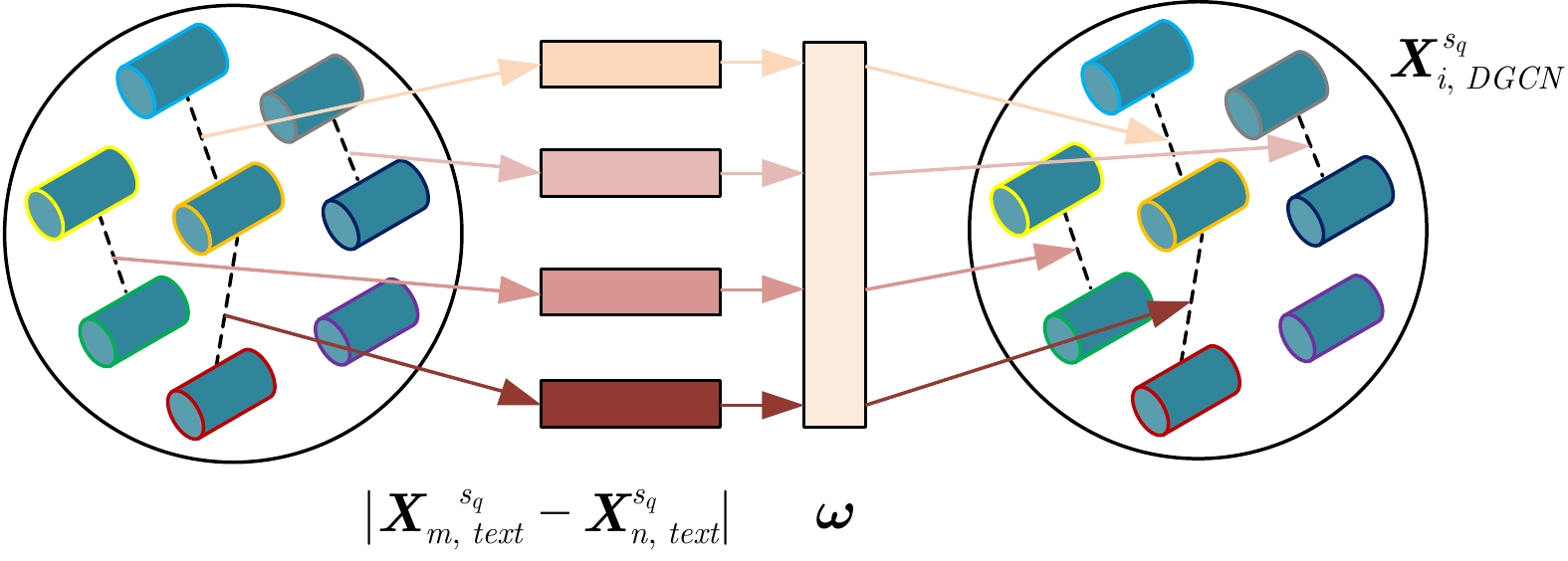
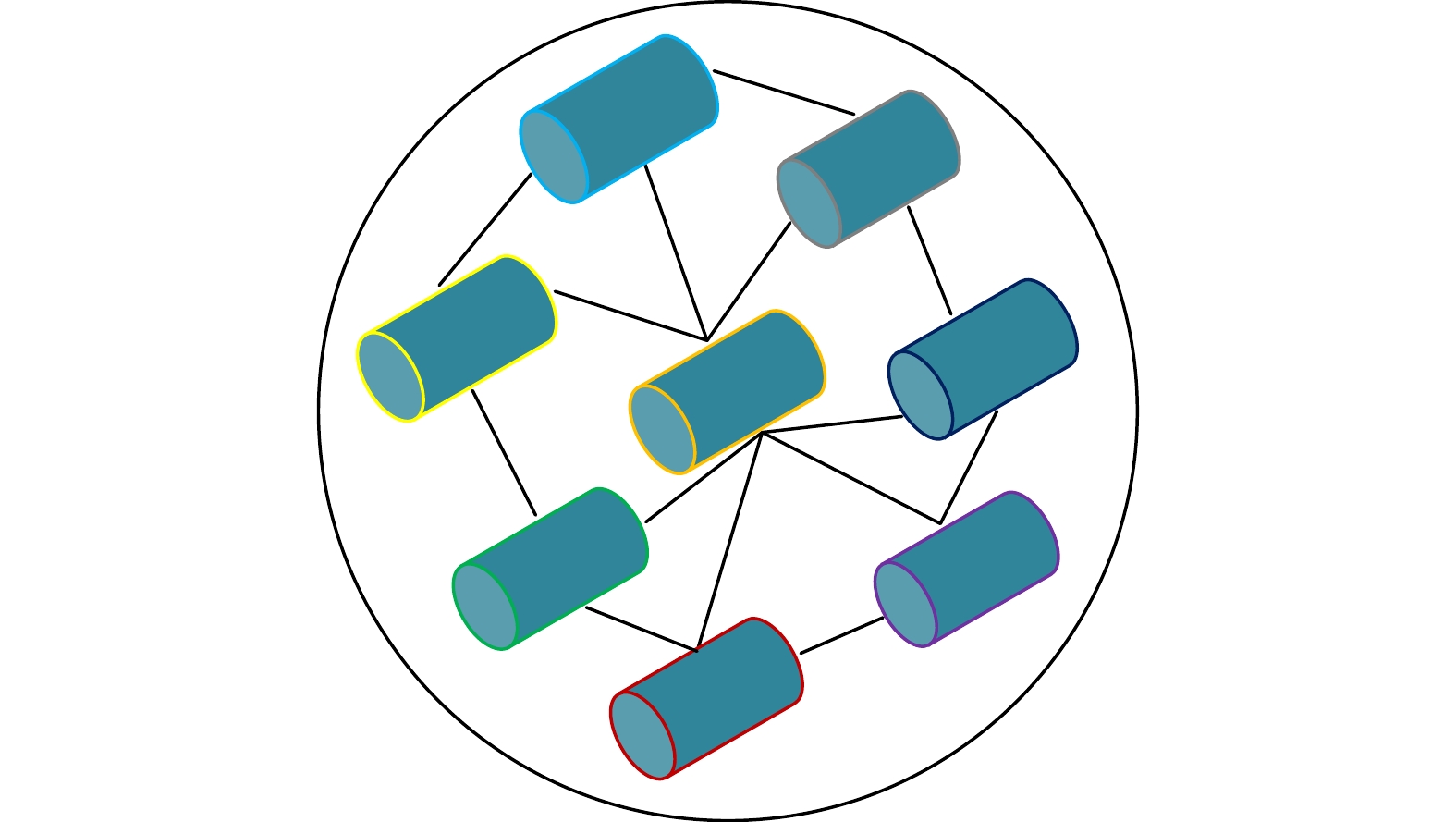
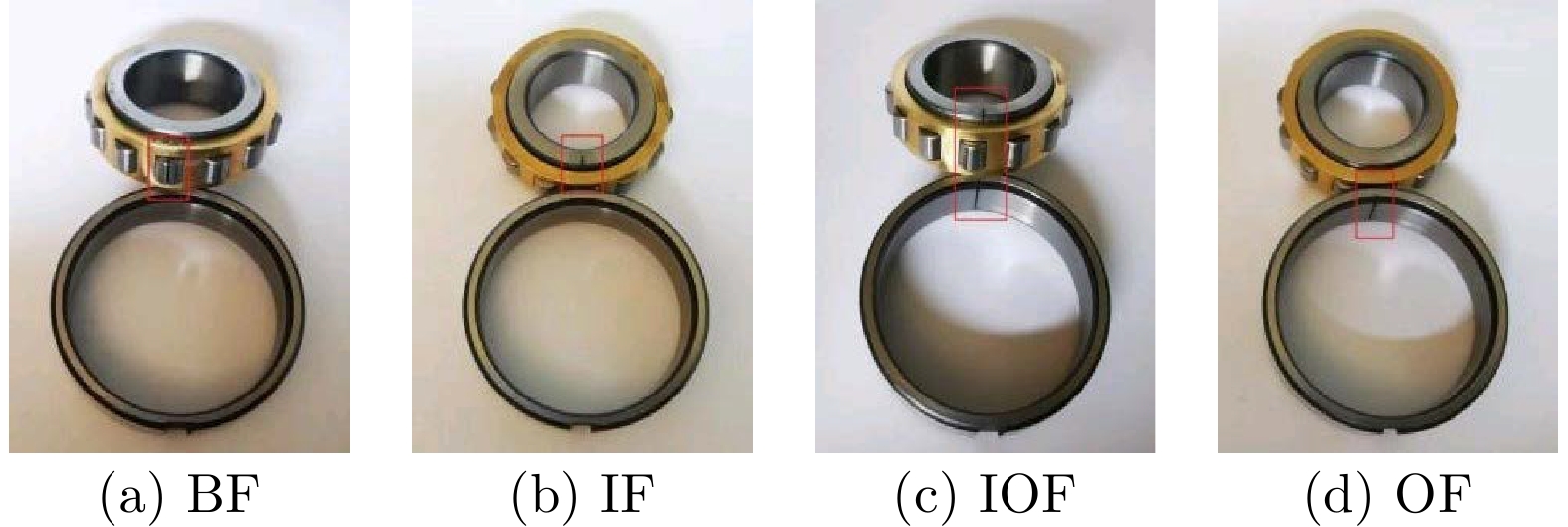
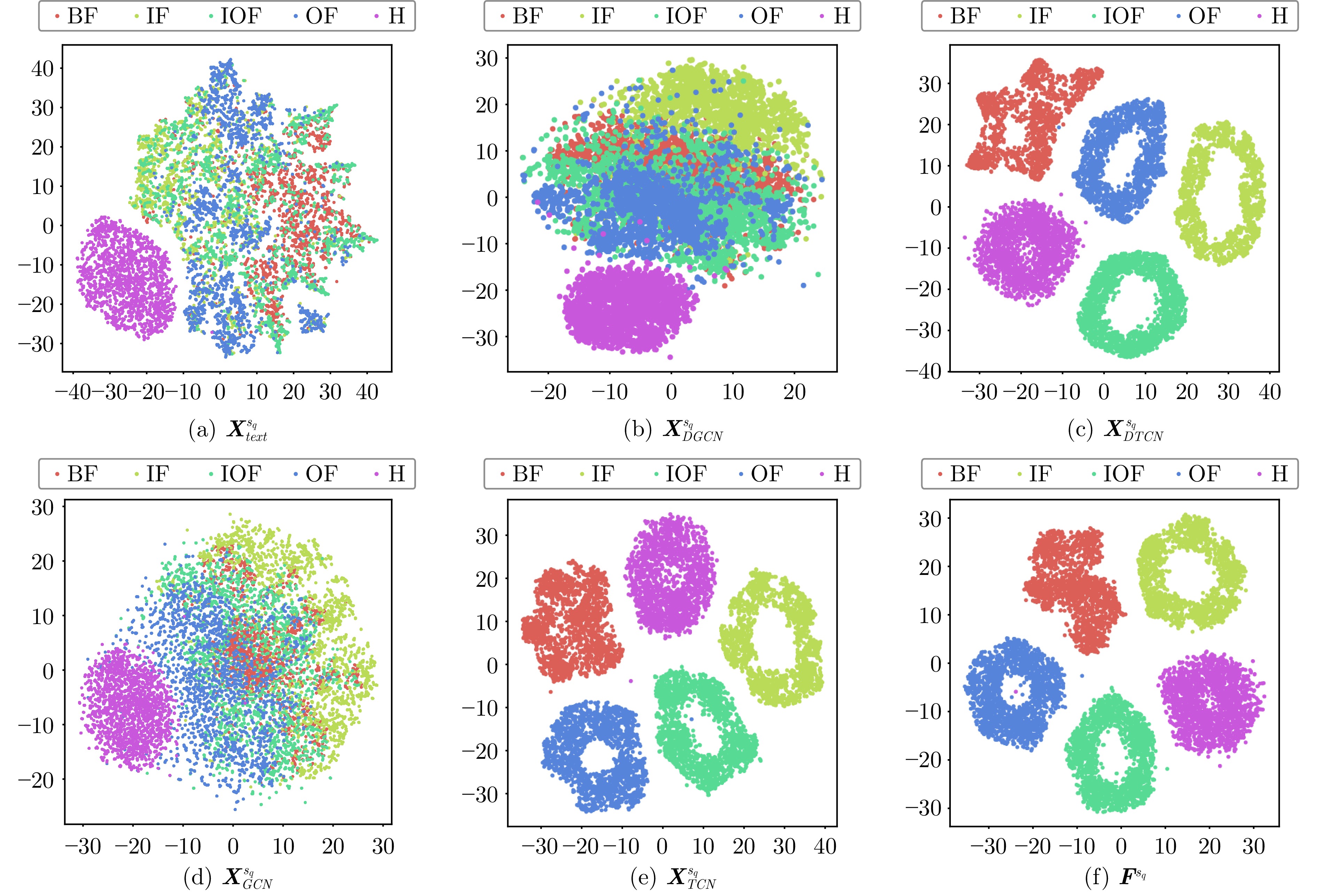
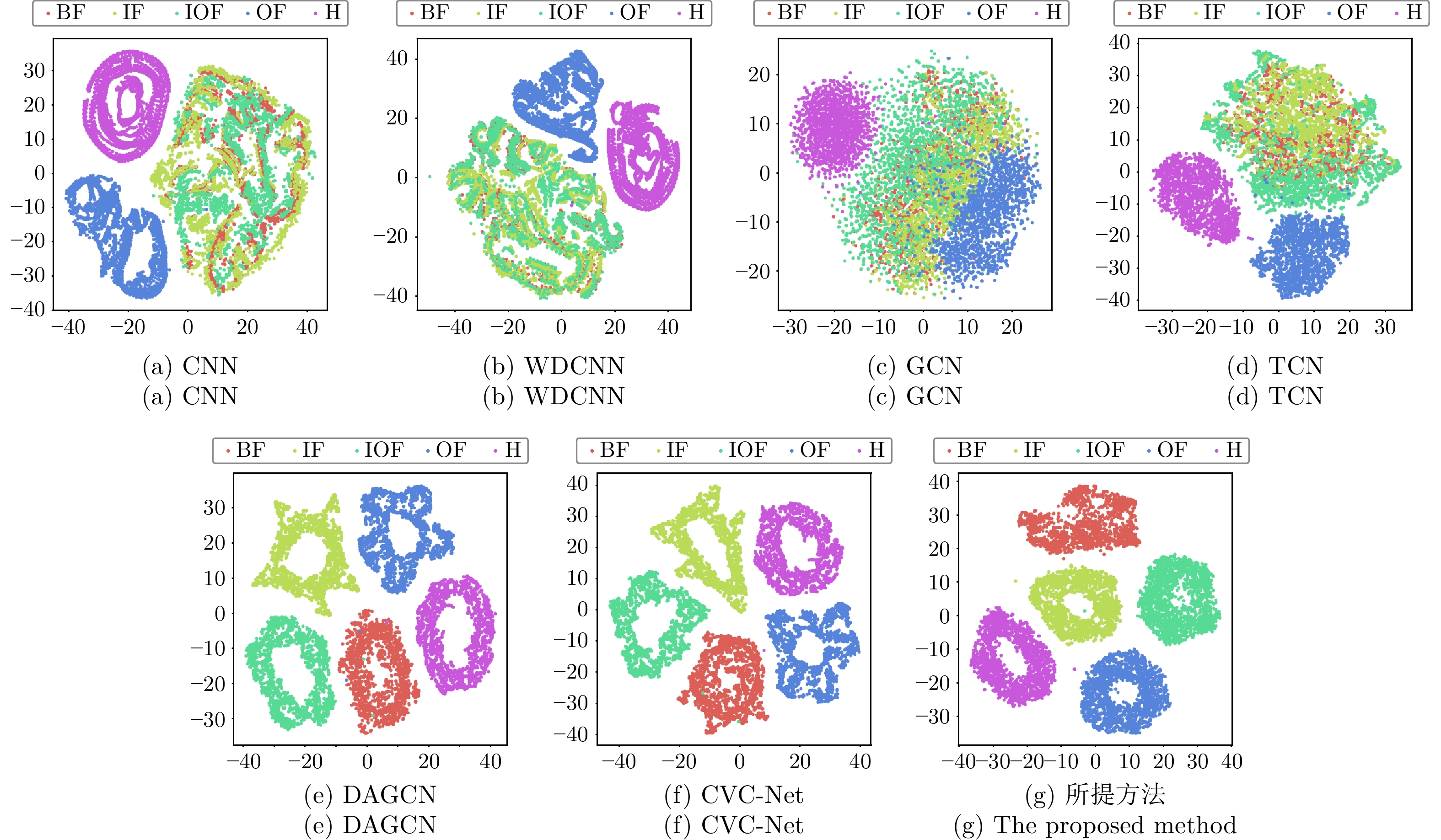
设备在实际运行过程中工况复杂多变, 导致振动信号分布存在较大差异. 现有的多数方法通过添加度量指标来约束特征提取过程, 提取源域和目标域的相似特征以解决从单一源域到目标域的诊断问题. 然而, 实际运行过程往往包含多个源域数据, 且目标域信息在不同源域中存在较大差异, 难以有效学习不同域之间的域不变特征. 针对上述问题, 提出了一种基于两阶段域泛化学习框架的轴承故障诊断方法. 在第一阶段, 利用大尺寸卷积特征提取模型对多视图振动信号进行预训练, 提取多个源域数据之间的初级故障特征. 在第二阶段, 将初级故障特征输入动静双态融合的时空图卷积模型中, 捕捉随时间变化的动态特征和全局时空特征. 通过两阶段的学习, 将多个源域的数据映射到一个共有特征空间, 提取判别性和泛化性特征. 实验结果表明, 该方法在多源域轴承故障诊断任务中具有较高的诊断精度和较强的泛化能力.
设备在实际运行过程中工况复杂多变, 导致振动信号分布存在较大差异. 现有的多数方法通过添加度量指标来约束特征提取过程, 提取源域和目标域的相似特征以解决从单一源域到目标域的诊断问题. 然而, 实际运行过程往往包含多个源域数据, 且目标域信息在不同源域中存在较大差异, 难以有效学习不同域之间的域不变特征. 针对上述问题, 提出了一种基于两阶段域泛化学习框架的轴承故障诊断方法. 在第一阶段, 利用大尺寸卷积特征提取模型对多视图振动信号进行预训练, 提取多个源域数据之间的初级故障特征. 在第二阶段, 将初级故障特征输入动静双态融合的时空图卷积模型中, 捕捉随时间变化的动态特征和全局时空特征. 通过两阶段的学习, 将多个源域的数据映射到一个共有特征空间, 提取判别性和泛化性特征. 实验结果表明, 该方法在多源域轴承故障诊断任务中具有较高的诊断精度和较强的泛化能力.

2024, 50(11): 2286-2300.
doi: 10.16383/j.aas.c220705
cstr: 32138.14.j.aas.c220705
摘要:
基于形式背景获取决策蕴涵、概念规则等知识是数据分析、机器学习的重要研究内容之一. 首先, 利用属性逻辑语义对决策蕴涵的特性进行刻画. 其次, 在经典二值逻辑框架下分析决策蕴涵、概念规则的基于全蕴涵三I推理思想及分离规则(Modus ponens, MP)和逆分离规则(Modus tonens, MT)的近似推理模式的特征, 证明决策蕴涵的MP、MT近似推理结论是决策蕴涵, 概念规则的MP、MT近似推理结论是概念规则等结论. 引进属性逻辑公式的伪距离, 在属性逻辑伪距离空间中分析推理对象范围参数变化对决策蕴涵MP、MT近似推理结论的影响. 最后, 提出若干通过MP、MT近似推理生成决策蕴涵、概念规则及拟决策蕴涵的模式和方法, 数值实验验证了所提方法的有效性.
基于形式背景获取决策蕴涵、概念规则等知识是数据分析、机器学习的重要研究内容之一. 首先, 利用属性逻辑语义对决策蕴涵的特性进行刻画. 其次, 在经典二值逻辑框架下分析决策蕴涵、概念规则的基于全蕴涵三I推理思想及分离规则(Modus ponens, MP)和逆分离规则(Modus tonens, MT)的近似推理模式的特征, 证明决策蕴涵的MP、MT近似推理结论是决策蕴涵, 概念规则的MP、MT近似推理结论是概念规则等结论. 引进属性逻辑公式的伪距离, 在属性逻辑伪距离空间中分析推理对象范围参数变化对决策蕴涵MP、MT近似推理结论的影响. 最后, 提出若干通过MP、MT近似推理生成决策蕴涵、概念规则及拟决策蕴涵的模式和方法, 数值实验验证了所提方法的有效性.









