

Time-varying Output Constraint Control of High-order Strict-feedback Systems Based on Fully Actuated System Approach
-
摘要: 针对输出受不对称时变约束的不确定高阶严反馈系统, 提出一种基于全驱系统方法的高阶自适应动态面输出约束控制方法. 所研究的高阶严反馈系统, 每个子系统都是高阶形式, 通过非线性转换函数将原输出约束系统转换为新的无约束系统, 从而将原系统输出约束问题转化为新系统输出有界的问题. 进一步结合全驱系统方法和自适应动态面控制, 直接将每个高阶子系统作为一个整体进行控制器设计, 而不需要将其转化为一阶系统形式, 有效简化了设计步骤; 同时通过引入一系列低通滤波器来获得虚拟控制律的高阶导数, 以代替复杂的微分运算. 基于Lyapunov稳定性理论证明闭环系统所有信号是一致最终有界的, 系统输出在满足约束的条件下能有效跟踪期望的参考信号, 且可通过调整参数使得系统跟踪误差收敛到零附近的足够小的邻域内. 最后, 通过对柔性关节机械臂系统进行仿真, 验证了所提出控制方法的有效性.Abstract: A high-order adaptive dynamic surface output constraint control method based on fully actuated system approach is proposed for uncertain high-order strict-feedback systems with asymmetric time-varying output constraints. The high-order strict-feedback system studied in this paper, each subsystem is a high-order form. The original output constraint system is transformed into a new unconstrained system by nonlinear transformation function, so that the original system output constraint problem is transformed into the new system output bounded problem. Furthermore, combined with the fully actuated system approach and the adaptive dynamic surface control method, the controller is designed directly for each high-order subsystem as a whole without converting it into a first-order system form, which effectively reduces the design steps. At the same time, a series of low-pass filters are introduced to obtain the high-order derivative of the virtual control law to replace the complex differential operation. Based on Lyapunov theory, it is proved that all signals of the closed-loop system are uniformly ultimately bounded. The system output can effectively track the desired reference signal without violating the constraints, and the system tracking error can be converged to any small neighborhood of the origin by adjusting the parameters. Finally, the effectiveness of the control method is verified by simulating the flexible joint manipulator system.
-

图 5 参数估计${\hat{\theta} _1}(h)$, ${\hat{\theta} _1}(f1)$, ${\hat{\theta} _1}(f2)$(情况1)
Fig. 5 Parameter estimation ${\hat{\theta} _1}(h)$, ${\hat{\theta} _1}(f1)$, and ${\hat{\theta} _1}(f2)$(Case 1)
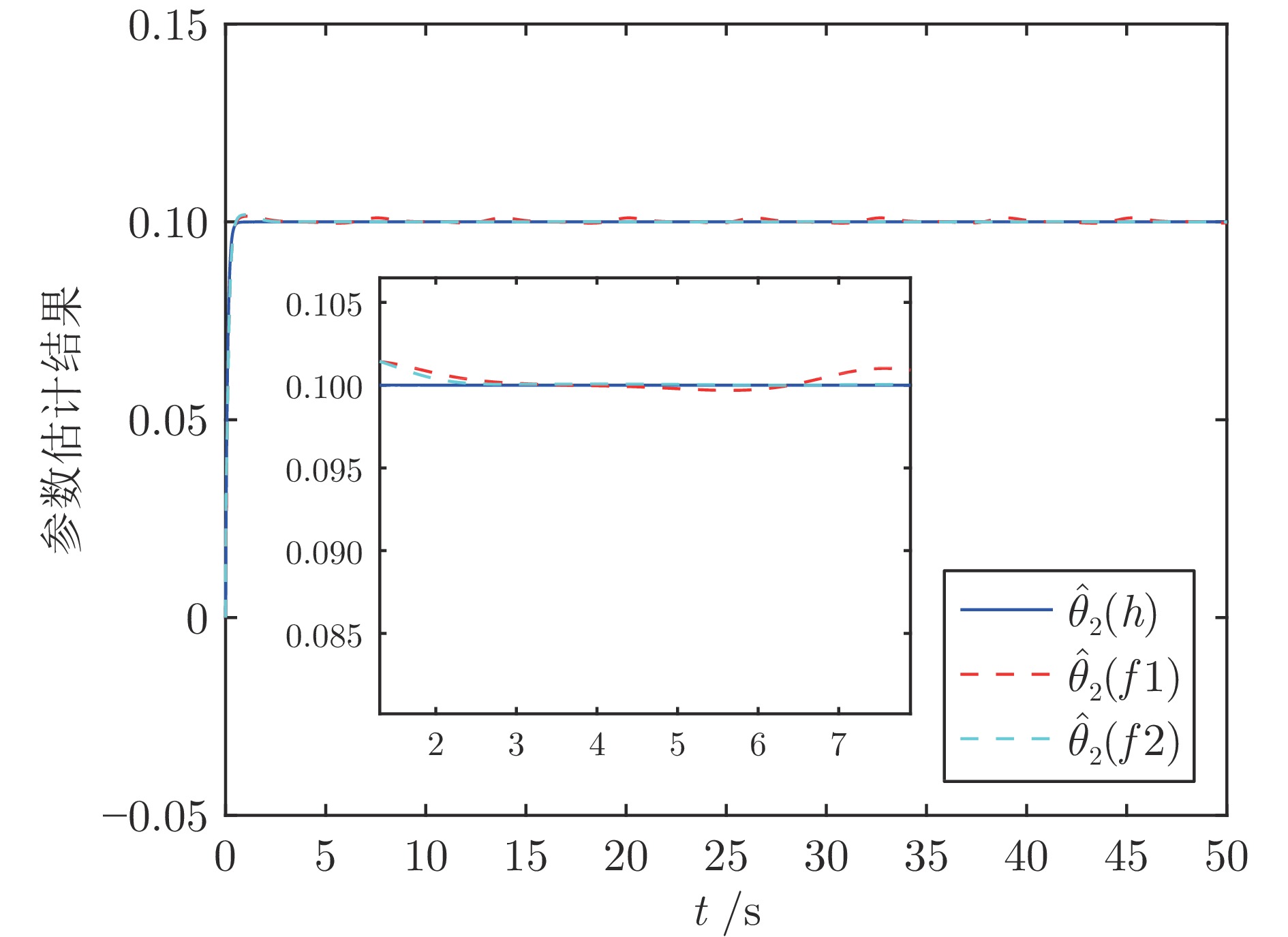
图 6 参数估计${\hat{\theta} _2}(h)$, ${\hat{\theta} _2}(f1)$, ${\hat{\theta} _2}(f2)$(情况1)
Fig. 6 Parameter estimation ${\hat{\theta} _2}(h)$, ${\hat{\theta} _2}(f1)$, and ${\hat{\theta} _2}(f2)$(Case 1)
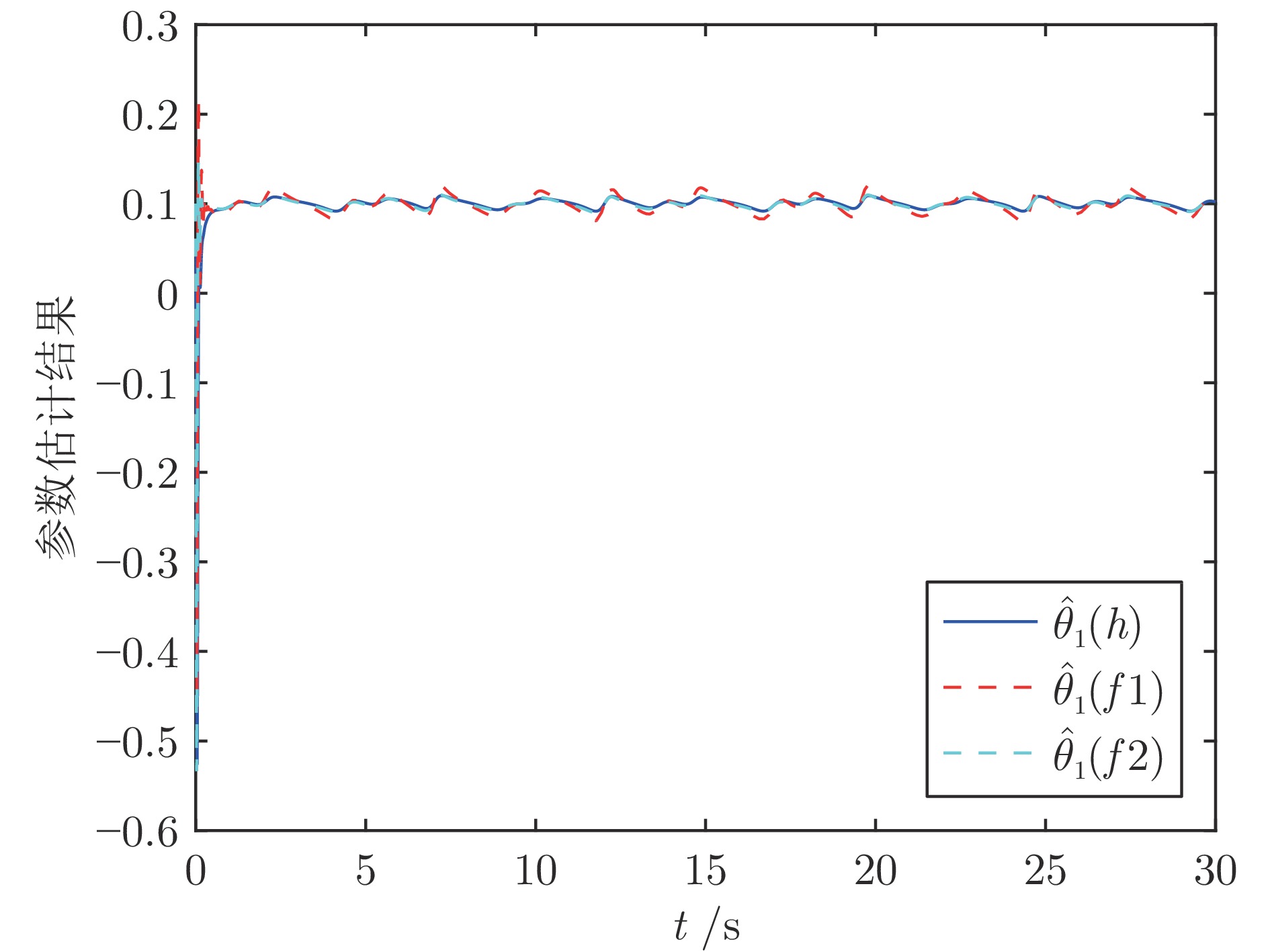
图 10 参数估计${\hat{\theta} _1}(h)$, ${\hat{\theta} _1}(f1)$, ${\hat{\theta} _1}(f2)$(情况2)
Fig. 10 Parameter estimation ${\hat{\theta} _1}(h)$, ${\hat{\theta} _1}(f1)$, and ${\hat{\theta} _1}(f2)$(Case 2)

图 11 参数估计${\hat{\theta} _2}(h)$, ${\hat{\theta} _2}(f1)$, ${\hat{\theta} _2}(f2)$(情况2)
Fig. 11 Parameter estimation ${\hat{\theta} _2}(h)$, ${\hat{\theta} _2}(f1)$, and ${\hat{\theta} _2}(f2)$(Case 2)
表 1 三种算法运算时间对比(s)
Table 1 Comparison of operation time of three algorithms (s)
本文方法 一阶BLF方法 一阶NM方法 情况1 44.380383 58.879631 49.213382 情况2 35.173545 47.965324 41.693068  下载: 导出CSV
下载: 导出CSV
-
[1] Limon D, Alvarado I, Alamo T, Camacho E F. MPC for tracking piecewise constant references for constrained linear systems. Automatica, 2008, 44(9): 2382-2387. doi: 10.1016/j.automatica.2008.01.023 [2] Kogiso K, Hirata K. Reference governor for constrained systems with time-varying references. Robotics and Autonomous Systems, 2009, 57(3): 289-295. doi: 10.1016/j.robot.2008.10.015 [3] Hatanaka T, Takaba K. Computations of probabilistic output admissible set for uncertain constrained systems. Automatica, 2008, 44(2): 479-487. doi: 10.1016/j.automatica.2007.03.031 [4] Tee K P, Ge S S, Tay E H. Barrier Lyapunov functions for the control of output-constrained nonlinear systems. Automatica, 2009, 45(4): 918-927. doi: 10.1016/j.automatica.2008.11.017 [5] Tee K P, Ren B, Ge S S. Control of nonlinear systems with time-varying output constraints. Automatica, 2011, 47(11): 2511-2516. doi: 10.1016/j.automatica.2011.08.044 [6] Ouyang Y, Dong L, Xue L, Sun C. Adaptive control based on neural networks for an uncertain 2-DOF helicopter system with input deadzone and output constraints. IEEE/CAA Journal of Automatica Sinica, 2019, 6(3): 807-815. doi: 10.1109/JAS.2019.1911495 [7] Sun L. Saturated adaptive output-constrained control of cooperative spacecraft rendezvous and docking. IEEE/CAA Journal of Automatica Sinica, 2019, 6(6): 1462-1470. [8] 郭涛, 王丁磊, 王爱民. 基于非线性映射的约束系统自适应反推控制. 自动化学报, 2013, 39(9): 1558-1563.Guo T, Wang D L, Wang A M. Adaptive backstepping control for constrained systems using nonlinear mapping. Acta Automatica Sinica, 2013, 39(9): 1558-1563. [9] Zhao K, Song Y D. Removing the feasibility conditions imposed on tracking control designs for state-constrained strict-feedback systems. IEEE Transactions on Automatic Control, 2018, 64(3): 1265-1272. [10] Ling S, Wang H, Liu P X. Adaptive tracking control of high-order nonlinear systems under asymmetric output constraint. Automatica, 2020, 122: 109281. doi: 10.1016/j.automatica.2020.109281 [11] Liu Y L, Ma H J, Ma H. Adaptive fuzzy fault-tolerant control for uncertain nonlinear switched stochastic systems with time-varying output constraints. IEEE Transactions on Fuzzy Systems, 2018, 26(5): 2487-2498. doi: 10.1109/TFUZZ.2018.2814596 [12] Cui R H, Xie X J. Output feedback stabilization of stochastic planar nonlinear systems with output constraint. Automatica, 2022, 143: 110471. doi: 10.1016/j.automatica.2022.110471 [13] Zhao K, Song Y D, Meng W C, Philip C L, Chen L. Low-cost approximation-based adaptive tracking control of output-constrained nonlinear systems. IEEE Transactions on Neural Networks and Learning Systems, 2020, 32(11): 4890-4900. [14] Kong L H, He W, Liu Z J, Yu X B, Silvestre C. Adaptive tracking control with global performance for output-constrained MIMO nonlinear systems. IEEE Transactions on Automatic Control, 2023, 68(6): 3760-3767. doi: 10.1109/TAC.2022.3201258 [15] Zhao Z J, Zhang J, Liu Z J, Mu C X, Hong K S. Adaptive neural network control of an uncertain 2-DOF helicopter with unknown backlash-like hysteresis and output constraints. IEEE Transactions on Neural Networks and Learning Systems, 2023, 34(12): 10018-10027. doi: 10.1109/TNNLS.2022.3163572 [16] 陈正升, 程玉虎, 王雪松. 考虑输出约束的冗余驱动绳索并联机器人预设性能控制. 自动化学报, 2022, 48(7): 1704-1717.Chen Z S, Cheng Y H, Wang X S. Prescribed performance control of redundantly-actuated cable driving parallel robots subjected to output constraint. Acta Automatica Sinica, 2022, 48(7): 1704-1717. [17] 段广仁. 高阶系统方法——I. 全驱系统与参数化设计. 自动化学报, 2020, 46(7): 1333-1345.Duan G R. High-order system approaches: I. Fully-actuated systems and parametric designs. Acta Automatica Sinica, 2020, 46(7): 1333-1345. [18] 段广仁. 高阶系统方法——Ⅱ. 能控性与全驱性. 自动化学报, 2020, 46(8): 1571-1581.Duan G R. High-order system approaches: II. Controllability and full-actuation. Acta Automatica Sinica, 2020, 46(8): 1571-1581. [19] 段广仁. 高阶系统方法——Ⅲ. 能观性与观测器设计. 自动化学报, 2020, 46(9): 1885-1895.Duan G R. High-order system approaches: III. Observability and observer design. Acta Automatica Sinica, 2020, 46(9): 1885-1895. [20] Duan G R. High-order fully actuated system approaches: Part I. Models and basic procedure. International Journal of Systems Science, 2021, 52(2): 422-435. doi: 10.1080/00207721.2020.1829167 [21] Hou M Z, Shi W R, Fang L Y, Duan G R. Adaptive dynamic surface control of high-order strict feedback nonlinear systems with parameter estimations. Science China Information Sciences, 2023, 66(5): 159203. doi: 10.1007/s11432-021-3488-6 [22] Liu W Z, Duan G R, Hou M Z. High-order command filtered adaptive backstepping control for second-and high-order fully actuated strict-feedback systems. Journal of the Franklin Institute, 2023, 360(6): 3989-4015. doi: 10.1016/j.jfranklin.2023.01.014 [23] Duan G R. High-order fully actuated system approaches: part VIII. Optimal control with application in spacecraft attitude stabilisation. International Journal of Systems Science, 2021, 53(1): 54-73. [24] Zhang D W, Liu G P, Cao L. Constrained cooperative control for high-order fully actuated multiagent systems with application to airbearing spacecraft simulators. IEEE/ASME Transactions on Mechatronics, 2023, 28(3): 1570-1581. doi: 10.1109/TMECH.2022.3223927 [25] Wang X B, Duan G R. High-order fully actuated system approaches: Model predictive control with applications to under-actuated systems. Journal of the Franklin Institute, 2023, 360(10): 6953-6975. doi: 10.1016/j.jfranklin.2023.05.009 [26] Cai M, He X, Zhou D H. An active fault tolerance framework for uncertain nonlinear high-order fully-actuated systems. Automatica, 2023, 152: 110969. doi: 10.1016/j.automatica.2023.110969 [27] Duan G R. Sub-stability and sub-stabilization: Control of sub-fully actuated systems. IEEE Transactions on Cybernetics, 2023, 53(11): 7309-7322. doi: 10.1109/TCYB.2023.3242277 [28] Chen S W, Wang W, Fan J F, Ji Y. Impact angle constraint guidance law using fully-actuated system approach. Aerospace Science and Technology, 2023, 136: 108220. doi: 10.1016/j.ast.2023.108220 [29] 刘明, 范睿超, 邱实, 曹喜滨. 基于全驱系统理论的航天器姿轨预设性能控制. 航空学报, DOI: 10.7527/S1000-6893.2023.28313Liu Ming, Fan Rui-Chao, Qiu Shi, Cao Xi-Bin. Spacecraft attitude-orbit prescribed performance control based on fully actuated system approach. Acta Aeronautica et Astronautica Sinica, DOI: 10.7527/S1000-6893.2023.28313 [30] 张宏岩, 王伟, 陈仕伟, 纪毅, 刘佳琪. 基于全驱系统方法的制导控制一体化设计. 航空学报, DOI: 10.7527/S1000-6893.2023.28891Zhang Hong-Yan, Wang Wei, Chen Shi-Wei, Ji Yi, Liu Jia-qi. Integrated guidance and control design based on fully actuated system method. Acta Aeronautica et Astronautica Sinica, DOI: 10.7527/S1000-6893.2023.28891 [31] Duan G R. High-order fully actuated system approaches: Part II. Generalized strict-feedback systems. International Journal of Systems Science, 2021, 52(3): 437-454. doi: 10.1080/00207721.2020.1829168 [32] Duan G R. High-order fully actuated system approaches: Part III. Robust control and high-order backstepping. International Journal of Systems Science, 2021, 52(5): 952-971. doi: 10.1080/00207721.2020.1849863 [33] Duan G R. High-order fully actuated system approaches: Part IV. Adaptive control and high-order backstepping. International Journal of Systems Science, 2021, 52(5): 972-989. doi: 10.1080/00207721.2020.1849864 [34] Liu W Z, Duan G R, Hou M Z. Concurrent learning adaptive command filtered backstepping control for high-order strict-feedback systems. IEEE Transactions on Circuits and Systems I: Regular Papers, 2023, 70(4): 1696-1709. doi: 10.1109/TCSI.2023.3234573 [35] Xiao Y Q, Cai G B, Duan G R. High-order adaptive dynamic surface control for output constrained nonlinear systems based on fully actuated system approach. International Journal of Systems Science, 2024, 55(3): 482-498. doi: 10.1080/00207721.2023.2277708 [36] Khalil H K. Nonlinear Systems 3rd Edition. Upper Saddle River: Prentice Hall, 2002. [37] 陈强, 丁科新, 南余荣. 带有输出约束的柔性关节机械臂预设性能自适应控制. 控制与决策, 2021, 36(2): 387-394.Chen Q, Ding K X, Nan Y R. Prescribed performance adaptive control of flexible-joint manipulators with output constraints. Control and Decision, 2021, 36(2): 387-394. [38] Liu X, Yang C G, Chen Z G, Wang M, Su C Y. Neuro-adaptive observer based control of flexible joint robot. Neuro Computing, 2018, 275: 73-82. [39] 顾玮. 不确定柔性关节机器人自适应跟踪控制方法研究. 自动化应用, 2016, 8: 87-89. doi: 10.3969/j.issn.1674-778X.2016.06.043Gu W. Research on adaptive tracking control method of uncertain flexible joint robot. Automation Applications, 2016, 8: 87-89. doi: 10.3969/j.issn.1674-778X.2016.06.043 -

 下载:
下载:




计量
- 文章访问数: 1628
- HTML全文浏览量: 595
- PDF下载量: 334
- 被引次数: 0
