

Dynamic Feedback Mean Square Consensus Control Based on Linear Transformation for Leader-follower Multi-agent Systems
-
摘要: 研究了基于半马尔科夫(Markov)跳变的领导−跟随多智能体系统(Multi-agent system, MAS)的均方一致性控制问题. 首先, 针对多智能体系统同时存在通信时滞和执行器故障的问题, 提出基于线性变换的动态反馈控制策略. 其次, 将实现领导−跟随多智能体系统的均方一致性问题转化为多智能体误差系统的稳定性控制问题. 再次, 设计动态反馈控制器, 利用李亚谱诺夫(Lyapunov)函数抑制系统的非线性特性, 解决由控制器未知增益矩阵产生的非线性问题. 使领导−跟随多智能体系统达到均方一致, 并给出系统的
$ {H_{\infty} }$ 性能指标分析系统的鲁棒性. 最后, 仿真结果表明基于线性变换设计的动态反馈控制策略具有良好的控制性能, 并且能够提高领导−跟随多智能体系统的动态特性.-
关键词:
- 半Markov跳变系统 /
- 多智能体系统 /
- 动态反馈 /
- 线性变换 /
- 一致性控制
Abstract: This paper investigates the mean square consensus control for a class of multi-agent system (MAS) based on semi-Markov process. Firstly, a dynamic feedback control strategy based on the linear transformation is proposed to solve the problem of communication delay and actuator failure in the multi-agent system. Secondly, the mean square consensus control for the leader-follower multi-agent system is transformed into the stability control problem of the error system via the linear transformation. Thirdly, the dynamic feedback controller is designed to restrain the nonlinear characteristics of the multi-agent systems via Lyapunov functional, such that nonlinear problem caused by the unknown gain matrices is solved. Then, the dynamic feedback mean square consensus control of the leader-follower multi-agent system is achieved and the${H_{\infty} }$ performance index is proposed to analyze the robustness of the system. From the simulations, it can be seen that the dynamic feedback mean square consensus control based on linear transformation has better control performance, and the dynamic characteristics of the leader-follower multi-agent system is improved. -
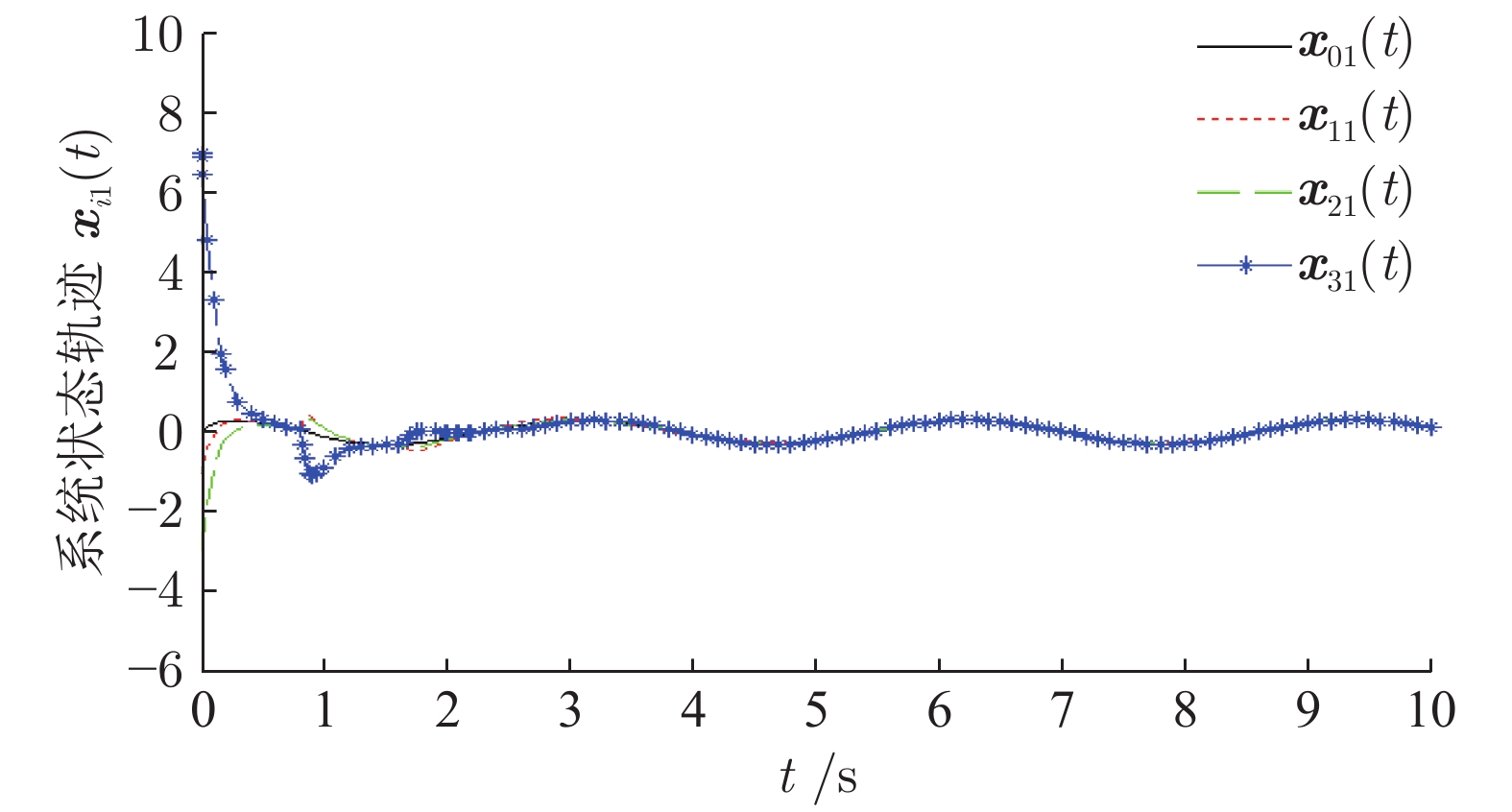
图 2 状态变量
${{\boldsymbol{x}}_{i1}}( t )$ 响应曲线Fig. 2 The response of state variable
${{\boldsymbol{x}}_{i1}}( t )$ 
图 3 状态变量
${{\boldsymbol{x}}_{i2}}( t )$ 响应曲线Fig. 3 The response of state variable
${{\boldsymbol{x}}_{i2}}\left( t \right)$ 
图 4 系统误差
${\boldsymbol{e}}( t )$ 响应曲线Fig. 4 The response of system error
${\boldsymbol{e}}( t )$ 
图 7 状态变量
${{\boldsymbol{x}}_{i1}}\left( t \right)$ 响应曲线Fig. 7 The response of state variable
${{\boldsymbol{x}}_{i1}}\left( t \right)$ 
图 8 状态变量
${{\boldsymbol{x}}_{i2}}\left( t \right)$ 响应曲线Fig. 8 The response of state variable
${{\boldsymbol{x}}_{i2}}\left( t \right)$ 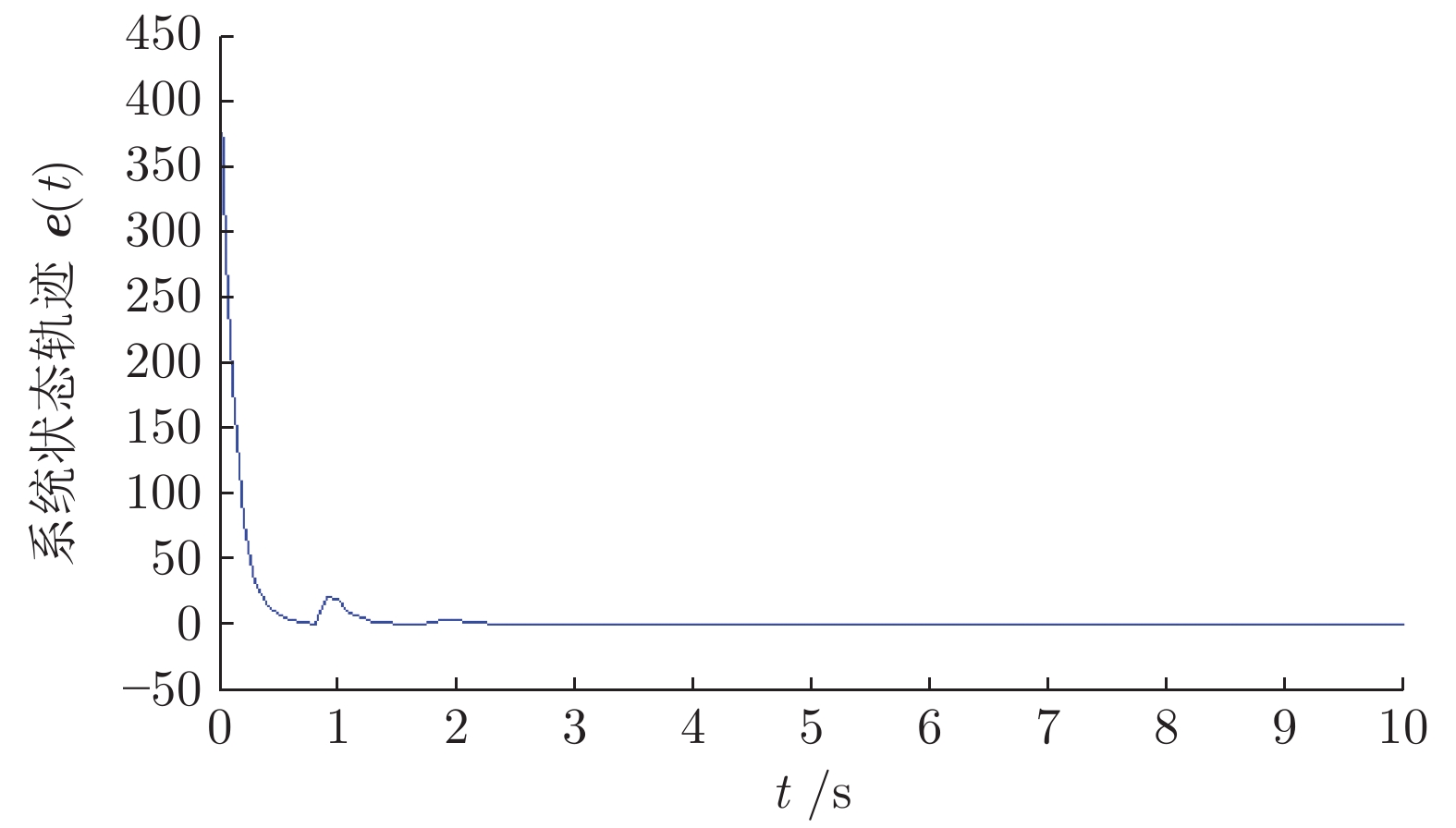
图 9 系统误差
${\boldsymbol{e}}\left( t \right)$ 响应曲线Fig. 9 The response of system error
${\boldsymbol{e}}\left( t \right)$ 表 1
${\tau _M}$ 取不同值时$\gamma $ 对比结果Table 1 Comparison results of
$\gamma $ with different${\tau _M}$ 方法 ${\tau _M}$ 0.40 0.45 0.50 0.55 0.60 0.65 0.70 0.75 0.80 0.85 文献 [37] 0.5247 0.5470 0.5624 0.5885 0.6075 0.6276 0.6472 0.6603 0.6818 0.7022 定理 2 0.5050 0.5234 0.5475 0.5669 0.5849 0.6006 0.6254 0.6419 0.6657 0.6895  下载: 导出CSV
下载: 导出CSV
-
[1] 孙小童, 郭戈, 张鹏飞. 非匹配扰动下的多智能体系统固定时间一致跟踪. 自动化学报, 2020, 12(9): 1-9Sun Xiao-Tong, Guo Ge, Zhang Peng-Fei. Fixed-time consensus tracking of multi-agent systems under unmatched disturbances. Acta Automatica Sinica, 2020, 12(9): 1-9 [2] 高振宇, 郭戈. 基于扰动观测器的AUVs固定时间编队控制. 自动化学报, 2019, 45(6): 1094-1102Gao Zhen-Yu, Guo Ge. Fixed-time formation control of AUVS based on a disturbance observer. Acta Automatica Sinica, 2019, 45(6): 1094-1102 [3] 陈世明, 管俊杰, 高彦丽, 裴惠琴, 邱昀. 组合连通拓扑下基于事件触发的多智能体快速一致性算法. 自动化学报, 2018, 44(12): 2269-2277Chen Shi-Ming Guan Jun-Jie, Gao Yan-Li, Pei Hui-Qin, Qiu Jun. Event-triggered fast consensus algorithm for multi-agent systems under jointly-connected topology. Acta Automatica Sinica, 2018, 44(12): 2269-2277 [4] 刘娟, 张皓, 王祝萍. 基于自触发的异构多智能体协同输出调节. 自动化学报, 2019, 45(10): 1893-1902Liu Juan, Zhang Hao, Wang Zhu-Ping. Cooperative output regulation of heterogeneous multi-agent systems by self-triggered. Acta Automatica Sinica, 2019, 45(10): 1893-1902 [5] 刘凡, 杨洪勇, 杨怡泽, 李玉玲, 刘远山. 带有不匹配干扰的多智能体系统有限时间积分滑模控制. 自动化学报, 2019, 45(4): 749-758Liu Fan, Yang Hong-Yong, Yang Yi-Ze, Li Yu-Ling, Liu Yuan-Shan. Finite-time integral sliding-mode control for multi-agent systems with mismatched disturbances. Acta Automatica Sinica, 2019, 45(4): 749-758 [6] 徐君, 张国良, 曾静, 孙巧, 羊帆. 具有时延和切换拓扑的高阶离散时间多智能体系统鲁棒保性能一致性. 自动化学报, 2019, 45(2): 360-373Xu Jun, Zhang Guo-Liang, Zeng Jing, Sun Qiao, Yang Fan. Robust guaranteed cost consensus for high-order discrete-time multi-agent systems with switching topologies and time delays. Acta Automatica Sinica, 2019, 45(2): 360-373 [7] Chen J X, Li J M. Globally fuzzy leader-follower consensus of mixed-order nonlinear multi-agent systems with partially unknown direction control. Information Sciences, 2020, 523: 184-196 doi: 10.1016/j.ins.2020.03.015 [8] Li G P, Wang X Y, Li S H. Finite-time consensus algorithms of leader-follower higher-order multi-agent systems with uncertain nonlinearities. Journal of the Franklin Institute, 2020, 357(16): 11939-11952 doi: 10.1016/j.jfranklin.2019.12.044 [9] Yang N N, Li J M. New distributed adaptive protocols for uncertain nonlinear leader-follower multi-agent systems via a repetitive learning control approach. Journal of the Franklin Institute, 2019, 356: 6571-6590 doi: 10.1016/j.jfranklin.2019.01.052 [10] Zhang D, Xu Z H, Wang Q W, Zhao W B. Leader-follower H∞ consensus of linear multi-agent systems with aperiodic sampling and switching connected topologies. ISA Transactions, 2017, 68: 150-159 doi: 10.1016/j.isatra.2017.01.001 [11] Wang A J, Liao X F, Dong T. Fractional-order follower observer design for tracking consensus in second-order leader multi-agent systems: periodic sampled-based event-triggered control. Journal of the Franklin Institute, 2018, 355: 4618-4628 doi: 10.1016/j.jfranklin.2018.01.036 [12] He W L, Xu C R, Han Q L, Qian F, Lang Z Q. Finite-time L2 leader-follower consensus of networked Euler-Lagrange systems with external disturbances. IEEE Transactions on Systems, Man and Cybernetics: Systems, 2018, 48(11): 1920-1928 doi: 10.1109/TSMC.2017.2774251 [13] Huang X, Dong J X. Reliable leader-to-follower formation control of multiagent systems under communication quantization and attacks. IEEE Transactions on Systems, Man and Cybernetics: Systems, 2020, 50(1): 89-99 doi: 10.1109/TSMC.2019.2894946 [14] Wang S M, Huang J. Adaptive leader-following consensus for multiple Euler-Lagrange systems with an uncertain leader system. IEEE Transactions on Neural Networks and Learning Systems, 2019, 30(7): 2188-2196 doi: 10.1109/TNNLS.2018.2878463 [15] Wang X Y, Li S H, Yu X H, Yang J. Distributed active anti-disturbance consensus for leader-follower higher-order multi-agent systems with mismatched disturbances. IEEE Transactions on Automatic Control, 2017, 62(11): 5795-5801 doi: 10.1109/TAC.2016.2638966 [16] Zhang D, Xu Z H, Srinivasan D, Yu L. Leader-follower consensus of multiagent systems with energy constraints: a markovian system approach. IEEE Transactions on Systems, Man and Cybernetics: Systems, 2017, 47(7): 1727-1736 doi: 10.1109/TSMC.2017.2677471 [17] Zuo Z Y, Han Q L, Ning B D, Ge X H, Zhang X M. An overview of recent advances in fixed-time cooperative control of multiagent systems. IEEE Transactions on Industrial Informatics, 2018, 14(6): 2322-2334 doi: 10.1109/TII.2018.2817248 [18] Ma H W, Wang Z, Wang D, Liu D R, Yan P F, Wei Q L. Neural-network-based distributed adaptive robust control for a class of nonlinear multiagent systems with time delays and external noises. IEEE Transactions on Systems, Man and Cybernetics: Systems, 2016, 46(6): 750-758 doi: 10.1109/TSMC.2015.2470635 [19] Peng C, Zhang J, Han Q L. Consensus of multiagent systems with nonlinear dynamics using an integrated sampled-data-based event-triggered communication scheme. IEEE Transactions on Systems, Man and Cybernetics: Systems, 2019, 49(3): 589-599 doi: 10.1109/TSMC.2018.2814572 [20] Liu H Y, Cheng L, Tan M, Hou Z G. Exponential finite-time consensus of fractional-order multiagent systems. IEEE Transactions on Systems, Man and Cybernetics: Systems, 2020, 50(4): 1549-1558 doi: 10.1109/TSMC.2018.2816060 [21] Bu X H, Yu Q X, Hou Z S, Qian W. Model free adaptive iterative learning consensus tracking control for a class of nonlinear multiagent systems. IEEE Transactions on Systems, Man and Cybernetics: Systems, 2019, 49(4): 677-686 doi: 10.1109/TSMC.2017.2734799 [22] Jia Q, Han Z Y, Tang W K S. Synchronization of multi-agent systems with time-varying control and delayed communications. IEEE Transactions on Circuits and Systems-I: Regular Papers, 2019, 66(11): 4429-4438 doi: 10.1109/TCSI.2019.2928040 [23] 陈世明, 邵赛. 基于事件触发非线性多智能体系统的固定时间一致性. 控制理论与应用, 2019, 36(10): 1606-1614 doi: 10.7641/CTA.2019.80742Chen Shi-Ming, Shao Sai. Distributed event-triggered fixed-time consensus control for multi-agent systems with nonlinear uncertainties. Control Theory and Applications, 2019, 36(10): 1606-1614 doi: 10.7641/CTA.2019.80742 [24] 马丹, 张宝峰, 王璐瑶. 多智能体系统一致性问题的控制器与拓扑协同优化设计. 控制理论与应用, 2019, 36(5): 720-727 doi: 10.7641/CTA.2018.70950Ma Dan, Zhang Bao-Feng, Wang Lu-Yao. Controller and topology co-optimization for consensus of multi-agent systems. Control Theory and Applications, 2019, 36(5): 720-727 doi: 10.7641/CTA.2018.70950 [25] 陈世明, 王明雨. 带扰动混杂多智能体系统领导-跟随一致性. 控制理论与应用, 2020, 37(7): 1583-1588 doi: 10.7641/CTA.2020.90447Chen Shi-Ming, Wang Ming-Yu. Leader-follower consensus of hybrid multi-agent systems with disturbances. Control Theory and Applications, 2020, 37(7): 1583-1588 doi: 10.7641/CTA.2020.90447 [26] 闫实, 吴修振, 王帅磊, 李瑞涛. 有向切换拓扑下非线性MAS的一致性控制. 航空学报, 2020, 41(S2): 171-180Yan Shi, Wu Xiu-Zhen, Wang Shuai-Lei, Li Rui-Tao Consensus of nonlinear multi-agent systems with directed switching topologies. Astronautica Sinica, 2020, 41(S2): 171-180 [27] Chen Z, Pan Y J, Gu J. Adaptive robust control of bilateral teleoperation systems with unmeasurable environmental force and arbitrary time delays. IET Control Theory and Applications, 2014, 8(15): 1456-1464 doi: 10.1049/iet-cta.2014.0179 [28] Shen H H, Pan Y J. Improving tracking performance of nonlinear uncertain bilateral teleoperation systems with time-varying delays and disturbances. IEEE/ASME Transactions on Mechatronics, 2020, 25(3): 1171-1181 doi: 10.1109/TMECH.2019.2962663 [29] Ge X, Han Q L. Distributed formation control of networked multi-agent systems using a dynamic event-triggered communication mechanism. IEEE Transactions on Industrial Electronics, 2017, 64(10): 8118-8127 doi: 10.1109/TIE.2017.2701778 [30] Yi X, Liu K, Dimarogonas D V, Johansson K H. Dynamic event-triggered and self-triggered control for multi-agent systems. IEEE Transactions on Automatic Control, 2019, 64(8); 3300-3307 doi: 10.1109/TAC.2018.2874703 [31] Yi X, Yang T, Wu J, Johansson K H. Distributed eventtriggered control for global consensus of multi-agent systems with input saturation. Automatica, 2019, 100(6): 1-9 [32] Wang H, Wen G H, Yu W W, Yu X H. Designing event-triggered observers for distributed tracking consensus of higher-order multiagent systems. IEEE Transactions on Cybernetics, 2022, 52(5): 3302−3313 [33] Wen G H, Duan Z S, Chen G R, Yu W W. Consensus tracking of multi-agent systems with Lipschitz-type node dynamics and switching topologies. IEEE Transactions on Circuits and Systems I: Regular Papers, 2014, 61(2): 499-511 doi: 10.1109/TCSI.2013.2268091 [34] Fu J J, Wen G H, Yu W W, Huang T W, Cao J D. Exponential consensus of multiagent systems with Lipschitz nonlinearities using sampled-data information. IEEE Transactions on Circuits and Systems I: Regular Papers, 2018, 65(12): 4363-4375 doi: 10.1109/TCSI.2018.2833166 [35] 胡寿松. 自动控制原理. 第六版, 北京: 科学出版社, 2017.Hu Shou-Song. Automatic Control Theory. 6th Edition, Beijing: Science Press, 2017. [36] 曾诚. 关于矩阵Schur补的若干矩阵不等式. 电子世界, 2014, 18(6): 359-370Zeng C. Some matrix inequalities relating to Schur complement of matrices. Electronics World, 2014, 18(6): 369-370 [37] 周绍磊, 赵学远, 祁亚辉, 王帅磊. 有向切换拓扑条件下考虑暂态响应的多智能体 ${H_{\infty} }$ 一致性控制. 兵工学报, 2019, 41(02): 356-365Zhou Shao-Lei, Zhao Xue-Yuan, Qi Ya-Hui, Wang Shuai-Lei.${H_{\infty} }$ consensus control of multi-agent systems with transient response under directed switching topology. ACTA Armamentarii, 2019, 41(02): 356-365 -



 下载:
下载:




















计量
- 文章访问数: 2447
- HTML全文浏览量: 645
- PDF下载量: 406
- 被引次数: 0
