

-
摘要:
SEAs (Series elastic actuators)具有在确保机器人性能的基础上兼顾其安全性的特点, 因此被广泛地应用在康复机器人中. 为实现良好的康复训练效果, 机器人需根据实际要求呈现不同的阻抗特性. 本文采用μ综合技术解决了SEAs导纳控制器的设计问题. 首先, 考虑参数摄动、传感器噪声、输入干扰及控制输入限制等不确定性因素, 建立SEAs模型. 其次, 应用混合稳定性原理分析系统的交互稳定性. 由于无源环境的阻抗在高频段必然呈现小增益特性, 所以, 当端口导纳在低频段满足无源性, 高频段具有小增益时, 就能确保交互的稳定性. 然后, 将SEAs的导纳控制综合问题转化为实际端口导纳与期望导纳匹配的μ综合问题. 最后, 通过调节加权函数, 不仅让SEAs闭环系统的端口导纳逼近期望的端口导纳, 还能同时满足交互稳定性条件, 从而可以独立于环境因素来设计导纳控制器. 仿真结果表明, 基于μ综合方法设计的控制器, 能精确地逼近期望的端口导纳, 且确保交互稳定性. 另外, 通过Hankel逼近方法得到的降阶控制器也具有满意的控制效果.
Abstract:Series elastic actuators (SEAs) are an effective technique to balance robot safety and performance. Therefore, SEAs are widely used in rehabilitation robots. For the application of robots in rehabilitation training to be effective, specific requirements such as admittance-controlling are necessary. In this paper, the μ synthesis technique is used to design an admittance controller for the SEAs. Firstly, the unpredictable nature of factors like parameter perturbation, sensor noise, input disturbance and control input restriction is an essential consideration in the modeling of the SEAs. Second, the concept of mixed stability is adopted to analyze interaction stability. Since passive environments must have small-gain property in high-frequency range in reality, interaction stability is maintained as long as the port admittance displays passivity in low-frequency range and small gain in high-frequency where the small-gain theorem is satisfied. Third, the admittance control synthesis converts into the admittance matching μ synthesis problem. By selecting the appropriate weight functions, the actual port admittance is forced to approach the desired admittance while the mixed stability conditions are satisfied. Consequently, an admittance controller can be devised independently of the interacted environment. Simulation results show that the controller based on μ synthesis can not only force the SEAs system to achieve the desired admittance, but can also guarantee the interaction stability. Furthermore, the reduced controllers based on Hankel approximation displayed satisfactory control performance.
-
Key words:
- Series elastic actuators (SEAs) /
- μ-synthesis /
- admittance control /
- mixed stability
-
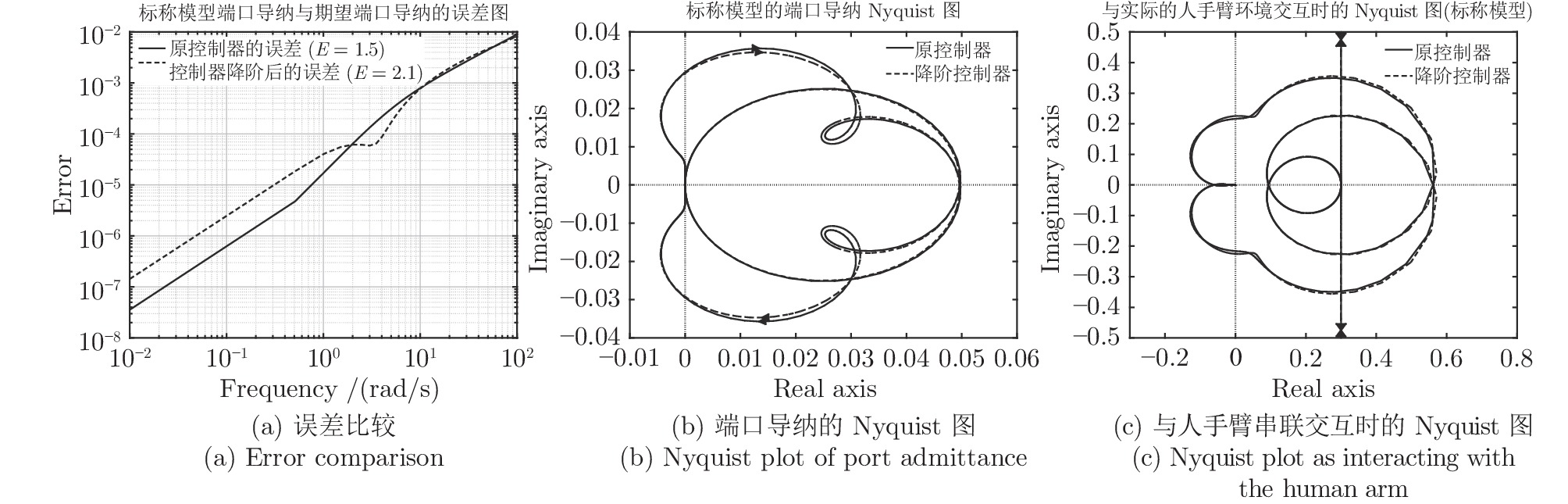
图 11 导纳模式(弹簧 − 阻尼 − 质量块并联模型)控制器降阶前后的比较
Fig. 11 Demotion of the admittance mode controller (spring-damper-mass connect in parallel)
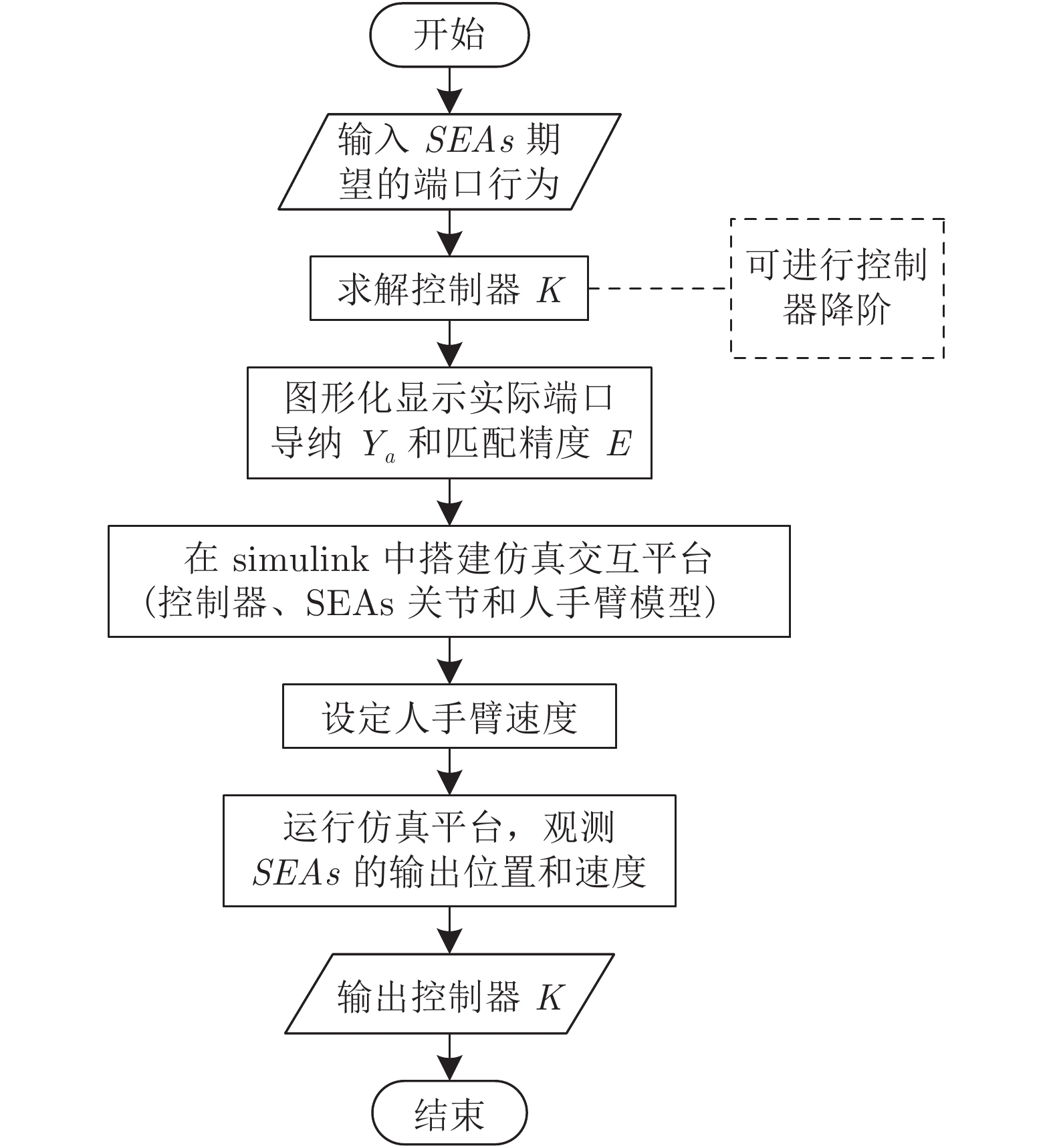
图 8 控制器求解和交互仿真验证流程图
Fig. 8 Flow chart of controller solving and interactive simulation verification

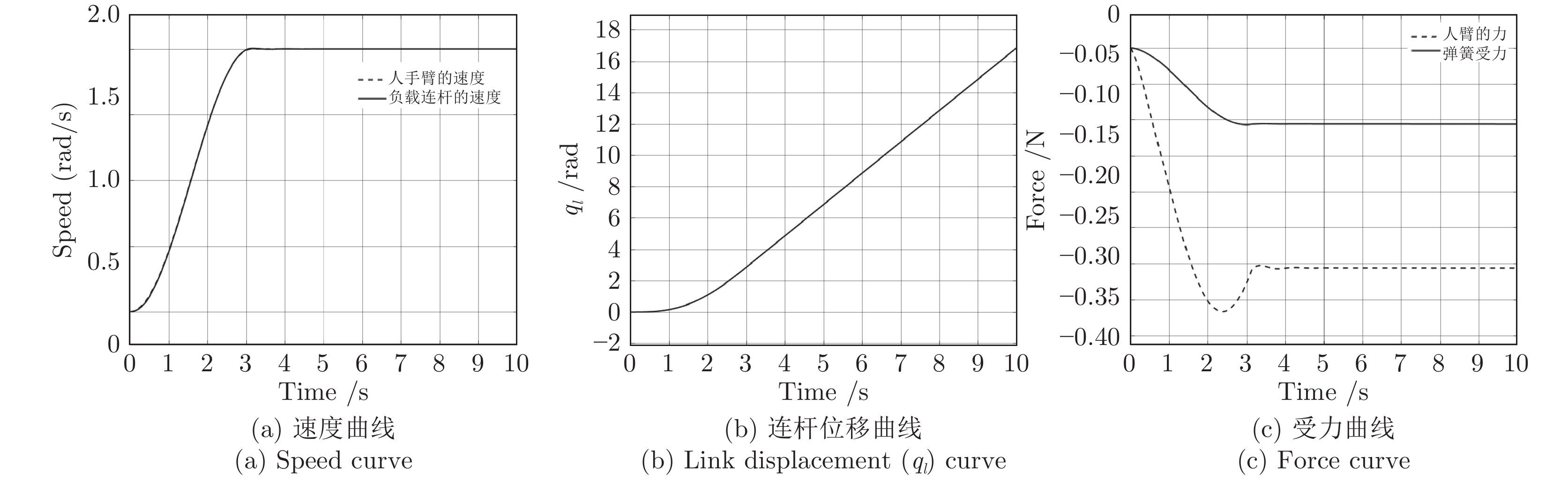
图 13 导纳模式(弹簧-阻尼-质量块并联模型)的交互仿真
Fig. 13 Interactive simulation of admittance mode (spring-damper-mass connect in parallel)
表 1 SEAs仿真参数
Table 1 The SEAs simulation parameter values
参数 值 单位 参数 值 单位 $M_{mn}$ $0.61$ ${\rm kg}\cdot {\rm m}^2$ $m_{hn}$ $0.4$ ${\rm kg}\cdot {\rm m}^2$ $\delta_{m}$ $0.06$ $—$ $m_{hd}$ $0.1$ ${\rm kg}\cdot {\rm m}^2$ $D_{mn}$ $4.9$ ${\rm N}\cdot {\rm m}\cdot {\rm s/rad}$ $b_{hn}$ $2.1$ ${\rm N}\cdot {\rm m}\cdot {\rm s/rad}$ $D_{md}$ $1.0$ ${\rm N}\cdot {\rm m}\cdot {\rm s/rad}$ $b_{hd}$ $0.5$ ${\rm N}\cdot {\rm m}\cdot {\rm s/rad}$ $k_{n}$ $696.9$ ${\rm N}\cdot {\rm m} {\rm /rad}$ $k_{hn}$ $30$ ${\rm N}\cdot {\rm m} {\rm /rad}$ $k_{d}$ $20$ ${\rm N}\cdot {\rm m} {\rm /rad}$ $k_{hd}$ $5$ ${\rm N}\cdot {\rm m} {\rm /rad}$ $M_{l}$ $0.14$ ${\rm kg}\cdot {\rm m}^2$ $D_{l}$ $0.01$ ${\rm N}\cdot {\rm m}\cdot {\rm s/rad}$  下载: 导出CSV
下载: 导出CSV
-
[1] Pratt G A, Williamson M M. Series elastic actuators. In: Proceedings of the 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems. Pittsburgh, PA, USA: IEEE, 1995. 399−406 [2] 王萌, 孙雷, 尹伟, 董帅, 刘景泰. 面向交互应用的串联弹性驱动器力矩控制方法. 自动化学报, 2017, 43(8): 1319−1328Wang Meng, Sun Lei, Yin Wei, Dong Shuai, Liu Jing-Tai. Series elastic actuator torque control approach for interaction application. Acta Automatica Sinica, 2017, 43(8): 1319−1328 [3] Wolf S, Grioli G, Eiberger O, Friedl W, Grebenstein M, Höppner H, et al. Variable stiffness actuators: review on design and components. IEEE/ASME Transactions on Mechatronics, 2016, 21(5): 2418−2430 doi: 10.1109/TMECH.2015.2501019 [4] 谭民, 王硕. 机器人技术研究进展. 自动化学报, 2013, 39(7): 963−972Tan Min, Wang Shuo. Research progress on robotics. Acta Automatica Sinica, 2013, 39(7): 963−972 [5] 胡进, 侯增广, 陈翼雄, 张峰, 王卫群. 下肢康复机器人及其交互控制方法. 自动化学报, 2014, 40(11): 2377−2390Hu Jin, Hou Zeng-Guang, Chen Yi-Xiong, Zhang Feng, Wang Wei-Qun. Lower limb rehabilitation robots and interactive control methods. Acta Automatica Sinica, 2014, 40(11): 2377−2390 [6] Ju Z, Yang C, Ma H. Kinematics modeling and experimental verification of baxter robot. In: Proceedings of the 33rd Chinese Control Conference, Nanjing, China: IEEE, 2014. 8518−8523 [7] Veneman J F, Ekkelenkamp R, Kruidhof R, van der Helm F C T, Van Der Kooij H. A series elastic and bowden-cable-based actuation system for use as torque actuator in exoskeleton-type robots. International Journal of Robotics Research, 2006, 25(3): 261−281 doi: 10.1177/0278364906063829 [8] Hogan N. Impedance control: an approach to manipulation: Part I. Theory, Part II. Implementation, Part III. Applications. Journal of Dynamic Systems and Measurement Control, 1985, 107(1): 1−24 doi: 10.1115/1.3140702 [9] Colgate J E, Hogan N. Robust control of dynamically interacting systems. International Journal of Control, 1988, 48(1): 65−88 doi: 10.1080/00207178808906161 [10] Vallery H, Ekkelenkamp R, Van Der Kooij H, Buss M. Passive and accurate torque control of series elastic actuators. In: Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Diego, CA, USA: IEEE, 2007. 3534−3538 [11] Pratt G A, Willisson P, Bolton C, Hofman A. Late motor processing in low-impedance robots: impedance control of series-elastic actuators. In: Proceedings of the 2004 American Control Conference. Boston, MA, USA: IEEE, 2004. 3245−3251 [12] Vallery H, Veneman J, Asseldonk E V, Ekkelenkamp R, Buss M, Van Der Kooij H. Compliant actuation of rehabilitation robots. IEEE Robotics and Automation Magazine, 2008, 15(3): 60−69 doi: 10.1109/MRA.2008.927689 [13] Tagliamonte N L, Accoto D. Passivity constraints for the impedance control of series elastic actuators. Proceedings of the Institution of Mechanical Engineers Part I Journal of Systems and Control Engineering, 2014, 228(3): 138−153 doi: 10.1177/0959651813511615 [14] 谢立敏, 陈力. 力矩受限的柔性关节空间机器人的鲁棒模糊滑模控制. 工程力学, 2013, 30(8): 298−304Xie Li-Min, Chen Li. Robust fuzzy sliding mode control of free-floating space robot with flexible-joints and bounded torques. Engineering Mechanics, 2013, 30(8): 298−304 [15] 党进, 倪风雷, 刘业超, 刘宏. 一种前馈补偿和模糊滑模相结合的柔性机械臂控制. 西安交通大学学报, 2011, 45(3): 75−80Dang Jin, Ni Feng-Lei, Liu Ye-Chao, Liu Hong. Control strategy for flexible manipulator based on feedforward compensation and fuzzy-sliding mode control. Journal of Xi′an Jiaotong University, 2011, 45(3): 75−80 [16] 孙雷, 孙伟超, 王萌, 刘景泰. 基于RISE反馈的串联弹性驱动器最优控制方法. 自动化学报, 2018, 44(12): 2170−2178Sun Lei, Sun Wei-Chao, Wang Meng, Liu Jing-Tai. Optimal control for series elastic actuator using RISE feedback. Acta Automatica Sinica, 2018, 44(12): 2170−2178 [17] Zhou K M, Doyle J C. Essentials of Robust Control. New Jersey: Prentice-Hall, 1999. 269−270 [18] 何朕, 姜晓明, 孟范伟, 周荻. μ综合中的D-K迭代算法. 电机与控制学报, 2010, 14(9): 31−35 doi: 10.3969/j.issn.1007-449X.2010.09.006He Zhen, Jiang Xiao-Ming, Meng Fan-Wei Zhou Di. D-K iteration algorithm for μ-synthesis. Electric Machines and Control, 2010, 14(9): 31−35 doi: 10.3969/j.issn.1007-449X.2010.09.006 [19] Namerikawa T, Matsumura F, Fujita M. Robust control of a robot manipulator using a linear parameter varying representation. In: Proceeding of the 1996 IEEE International Conference on Industrial Technology (ICIT′96). Shanghai, China: IEEE, 1996: 489−492 [20] Ishiguro T, Oshima K, Kang Z, Hayakawa Y, Fujii S. Vibration control of SCARA type robot based on μ-systhesis. Transactions of the Japan Society of Mechanical Engineers Series C, 1996, 62(595): 852−859 doi: 10.1299/kikaic.62.852 [21] Zhang S Y, Han J W, Zhao H, Huang Q T. Application of μ theory in compliant force control. Chinese Journal of Aeronautics, 2007, 19(1): 89−96 [22] Zhang H, Ahmad S, Liu G. Modeling of torsional compliance and hysteresis behaviors in harmonic drives. IEEE/ASME Transactions on Mechatronics, 2015, 20(1): 178−185 doi: 10.1109/TMECH.2014.2311382 [23] Marquez H J. Nonlinear Control Systems: Analysis and Design. IEEE Transactions on Automatic Control, 2004, 49(7): 1225−1226 doi: 10.1109/TAC.2004.831172 [24] Van Der Schaft A J. L2-gain and passivity techniques in nonlinear control. London: Springer, 2017. 123−136 [25] Griggs W M, Anderson B D O, Shorten R N. A test for determining systems with "mixed" small gain and passivity properties. Systems and Control Letters, 2011, 60(7): 479−485 doi: 10.1016/j.sysconle.2011.04.003 [26] Barros D, Fekri S, Athans M. Robust mixed-mu synthesis performance for mass-spring system with stiffness uncertainty. In: Proceedings of the 2005 IEEE International Symposium on, Mediterrean Conference on Control and Automation Intelligent Control. Limassol, Cyprus: IEEE, 2005. 743−748 [27] Control of a Spring-Mass-Damper System Using Mixed mu-Synthesis. MathWorks Inc, R2016a [28] Robust Control of an Active Suspension. MathWorks Inc, R2016a [29] Joshi S M, Kelkar A G. Passivity-based robust control of systems with redundant sensors and actuators. International Journal of Control, 2001, 74(5): 474−481 doi: 10.1080/00207170010010588 [30] Buerger S P, Hogan N. Complementary stability and loop shaping for improved human-robot interaction. IEEE Transactions on Robotics, 2007, 23(2): 232−244 doi: 10.1109/TRO.2007.892229 [31] Huang Y, Ke Y, Li F, Li S. Cascade control for SEAs and its performance analysis. In: Proceedings of the International Conference on Intelligent Robotics and Applications. Wuhan, China: Springer, 2017, 823−834 [32] Li S. Design and Control of Humanoid Rehabilitation Robot for Apoplectic Hemiplegia [Ph. D. dissertation], Beijing Institute of Technology, 2018. [33] Huang Y, Li Z, Duan X. Cascade control for compliant joint robots with redundant position sensors. In: Proceedings of the IEEE 55th Conference on Decision and Control. Las Vegas, NV, USA: IEEE, 2016, 6427−6433 [34] Stroeve S. Impedance characteristics of a neuromusculoskeletal model of the human arm I posture control. Biological Cybernetics, 1999, 81(5-6): 475−494 doi: 10.1007/s004220050577 [35] Burdet E, Osu R, Franklin D W, Yoshioka T, Milner T E, Kawato M. A method for measuring endpoint stiffness during multi-joint arm movements. Journal of Biomechanics, 2000, 33(12): 1705−1709 doi: 10.1016/S0021-9290(00)00142-1 -

 下载:
下载:





计量
- 文章访问数: 3171
- HTML全文浏览量: 1539
- PDF下载量: 156
- 被引次数: 0
