2021年 第47卷 第7期
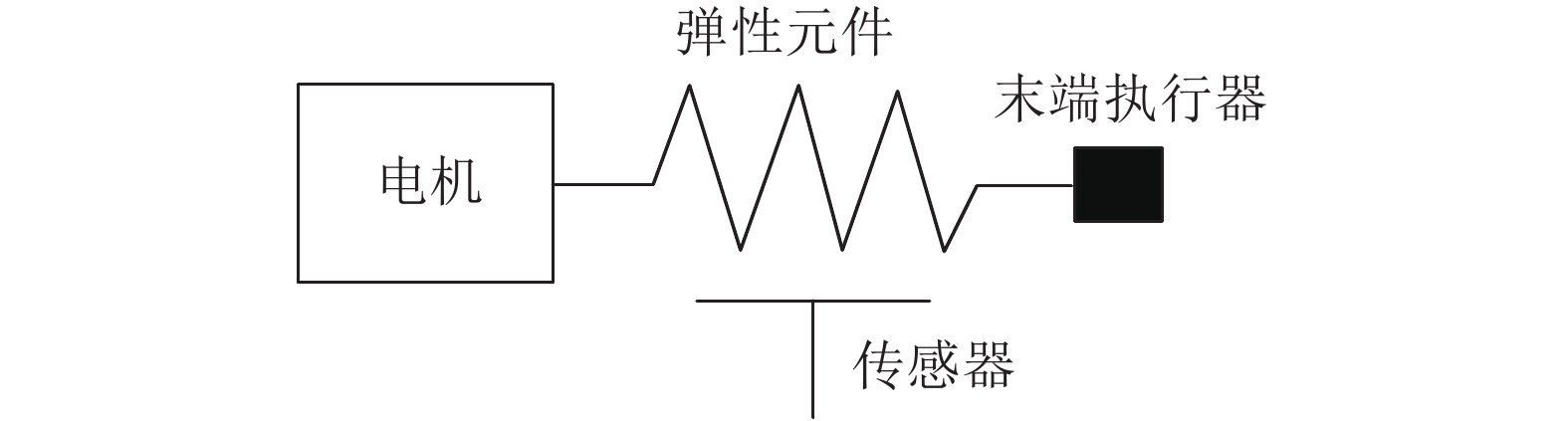
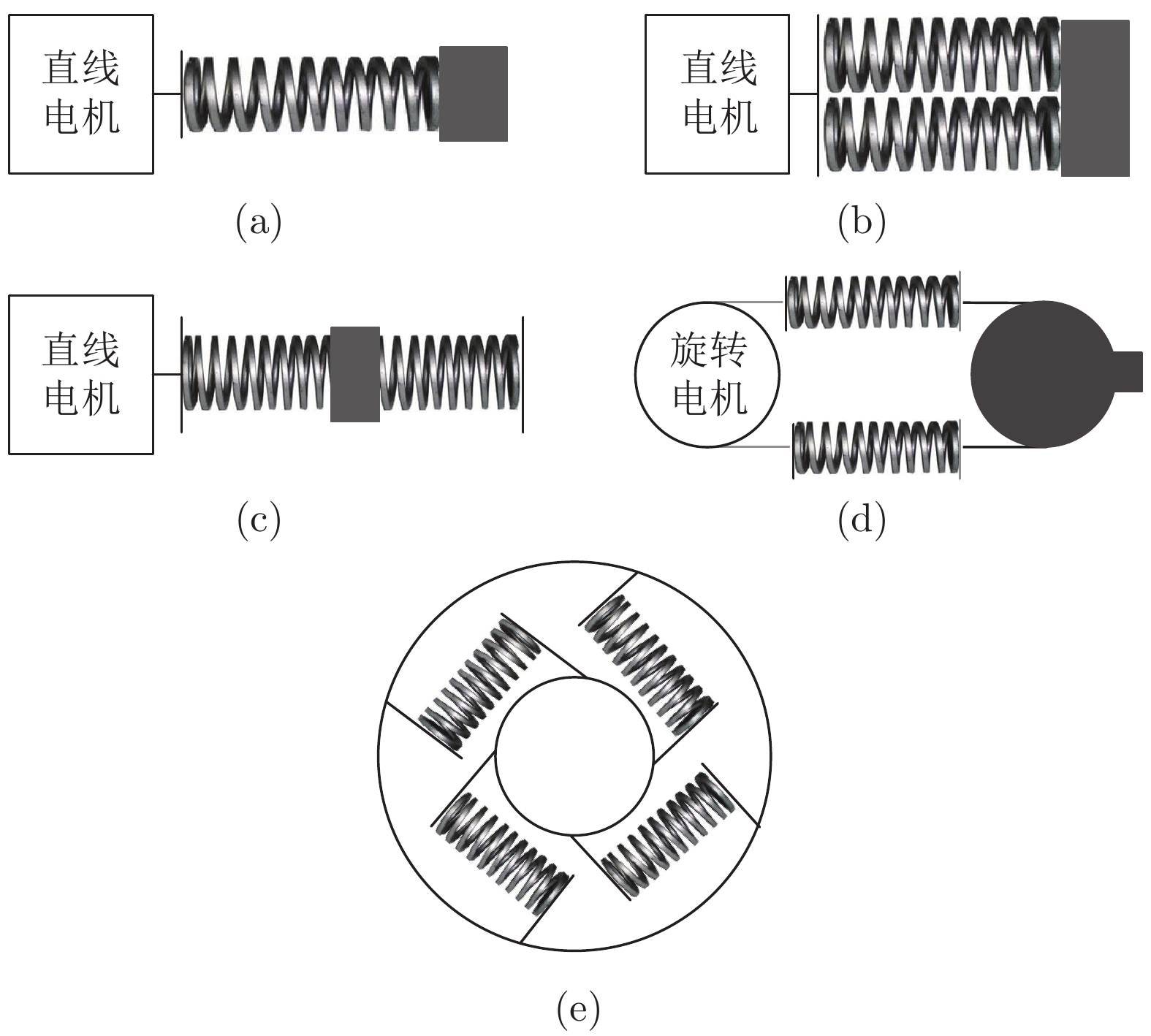
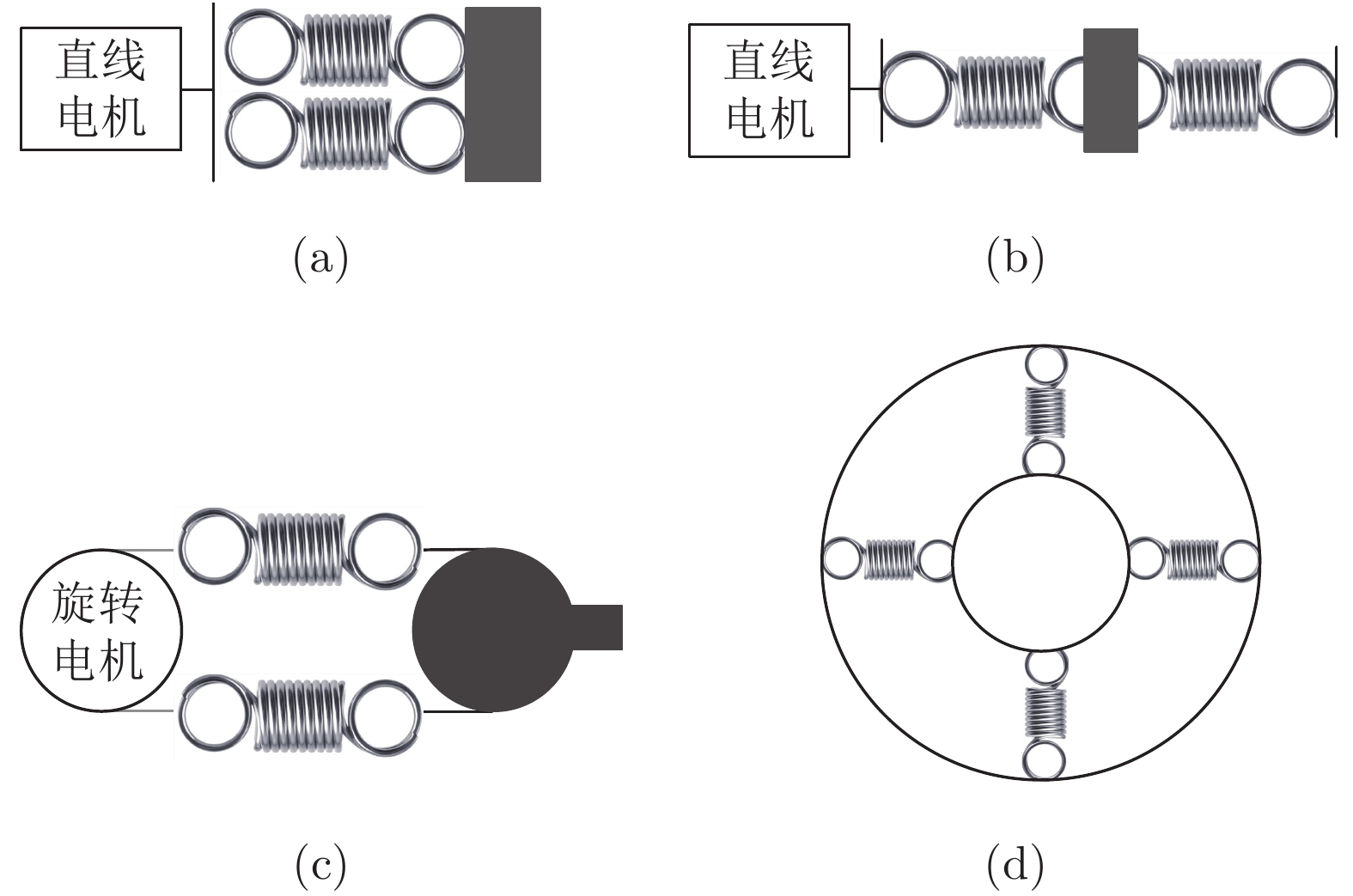
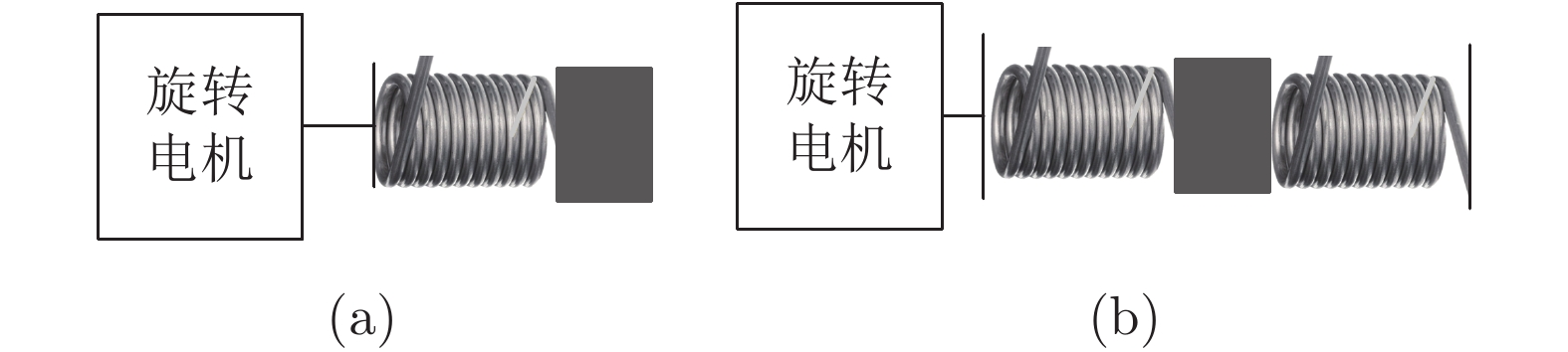
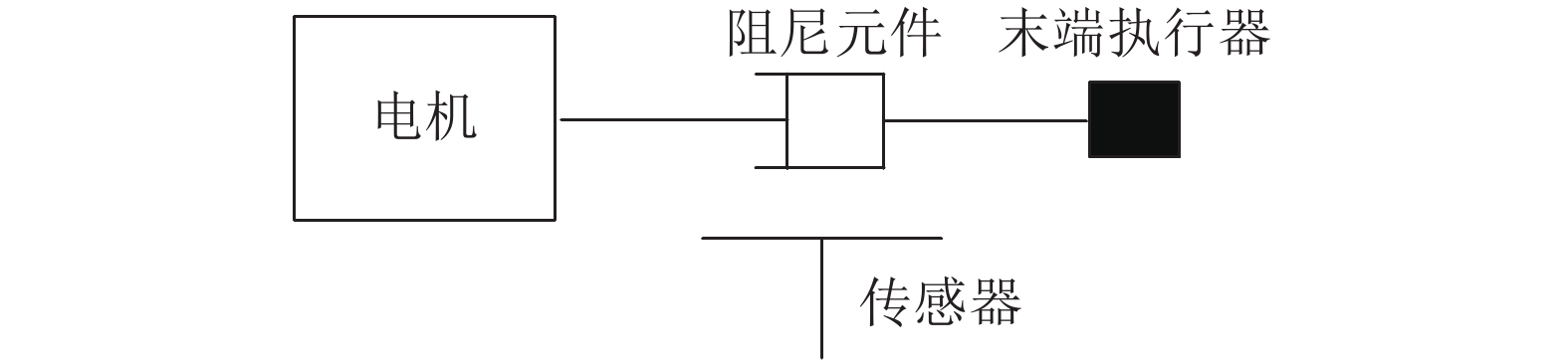
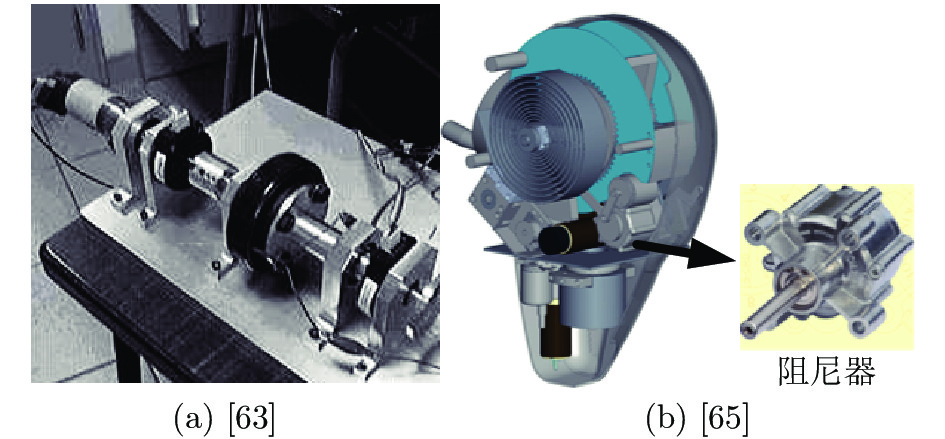
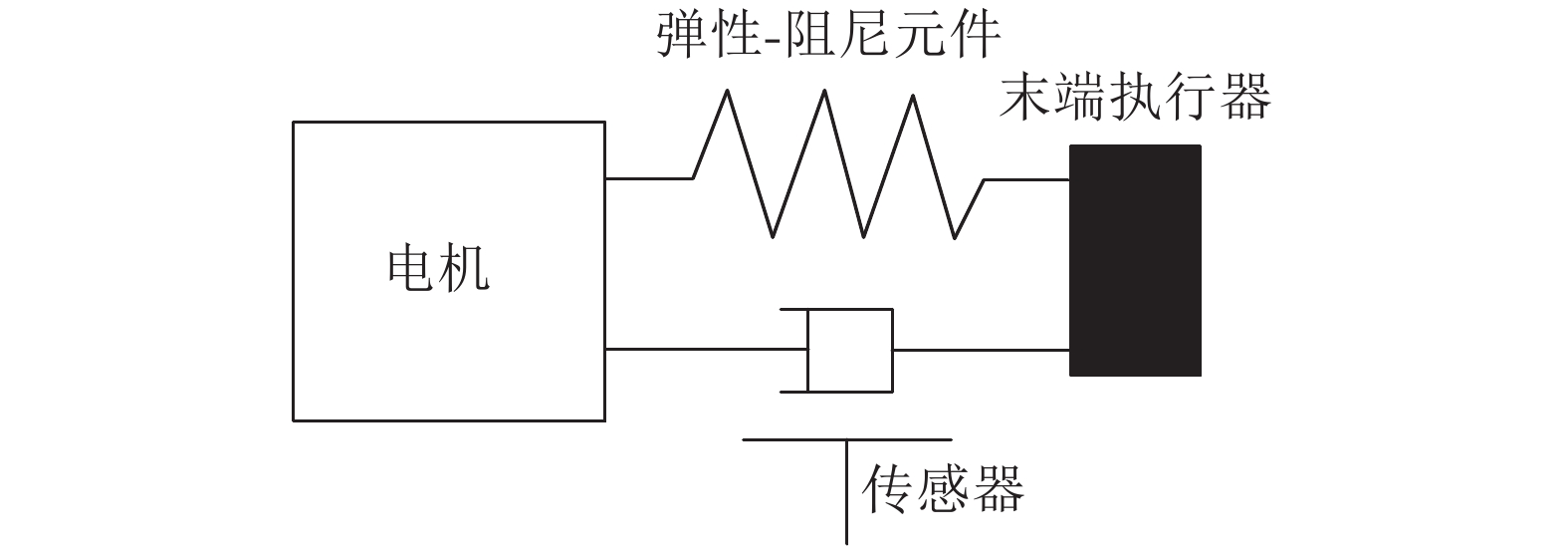
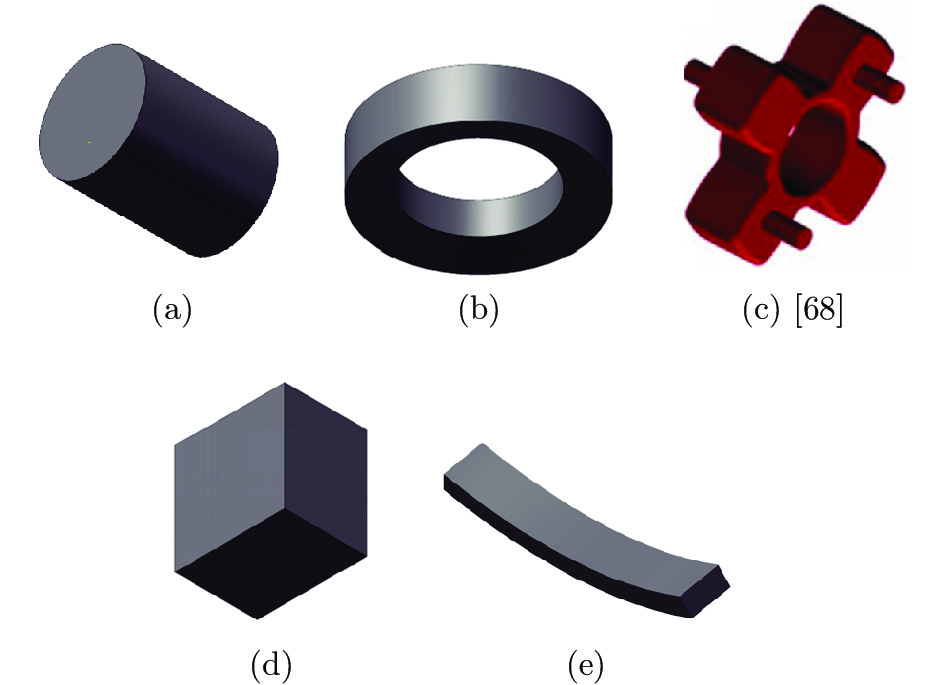
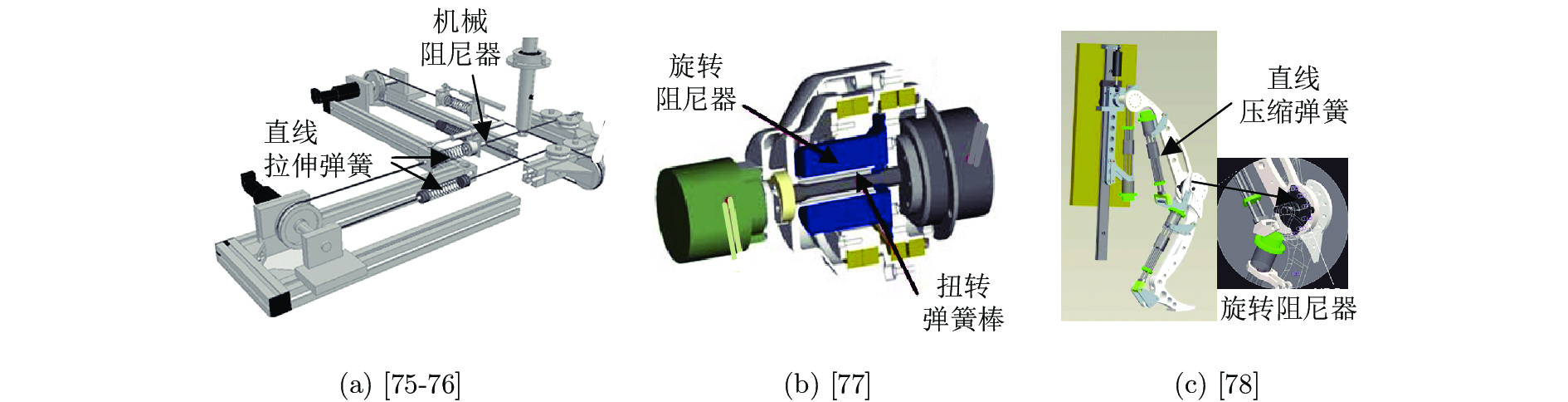
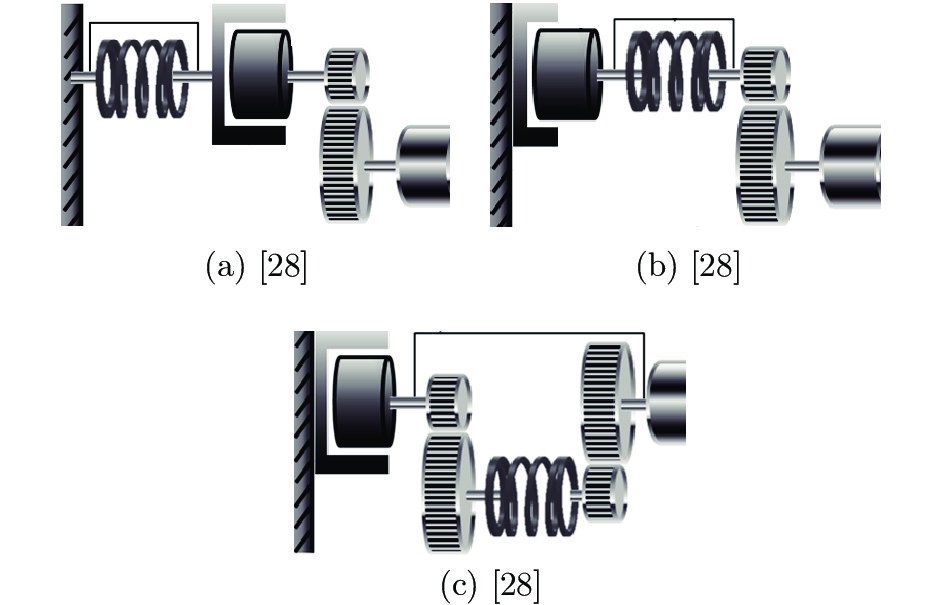
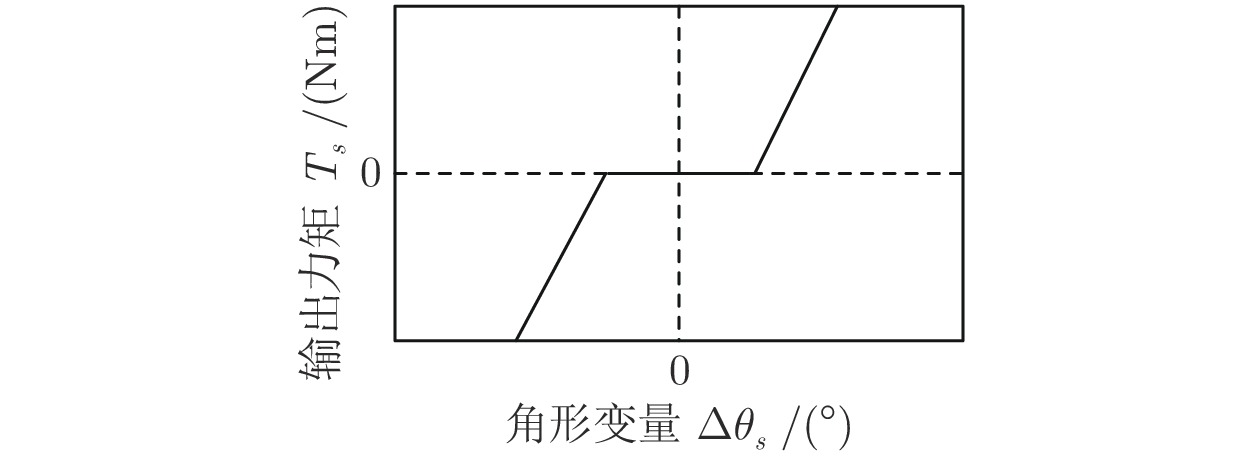
相比于传统的刚性驱动器, 串联弹性驱动器(Series elastic actuator, SEA)具有被动柔顺性、阻抗低、抗冲击、力感知等诸多优点, 因而已被广泛应用于各种机器人系统中. 首先根据弹性和阻尼特性将串联弹性驱动器分为弹性型、阻尼型和弹性−阻尼型串联弹性驱动器, 介绍不同类型串联弹性驱动器的优缺点, 并详细概述弹性和阻尼特性的机械实现方式; 然后对各类串联弹性驱动器作为力传感器的建模方法进行介绍; 接着叙述串联弹性驱动器在机器人系统中的主要应用, 如力传感器、安全保护、降低能耗; 最后展望串联弹性驱动器未来的发展方向.






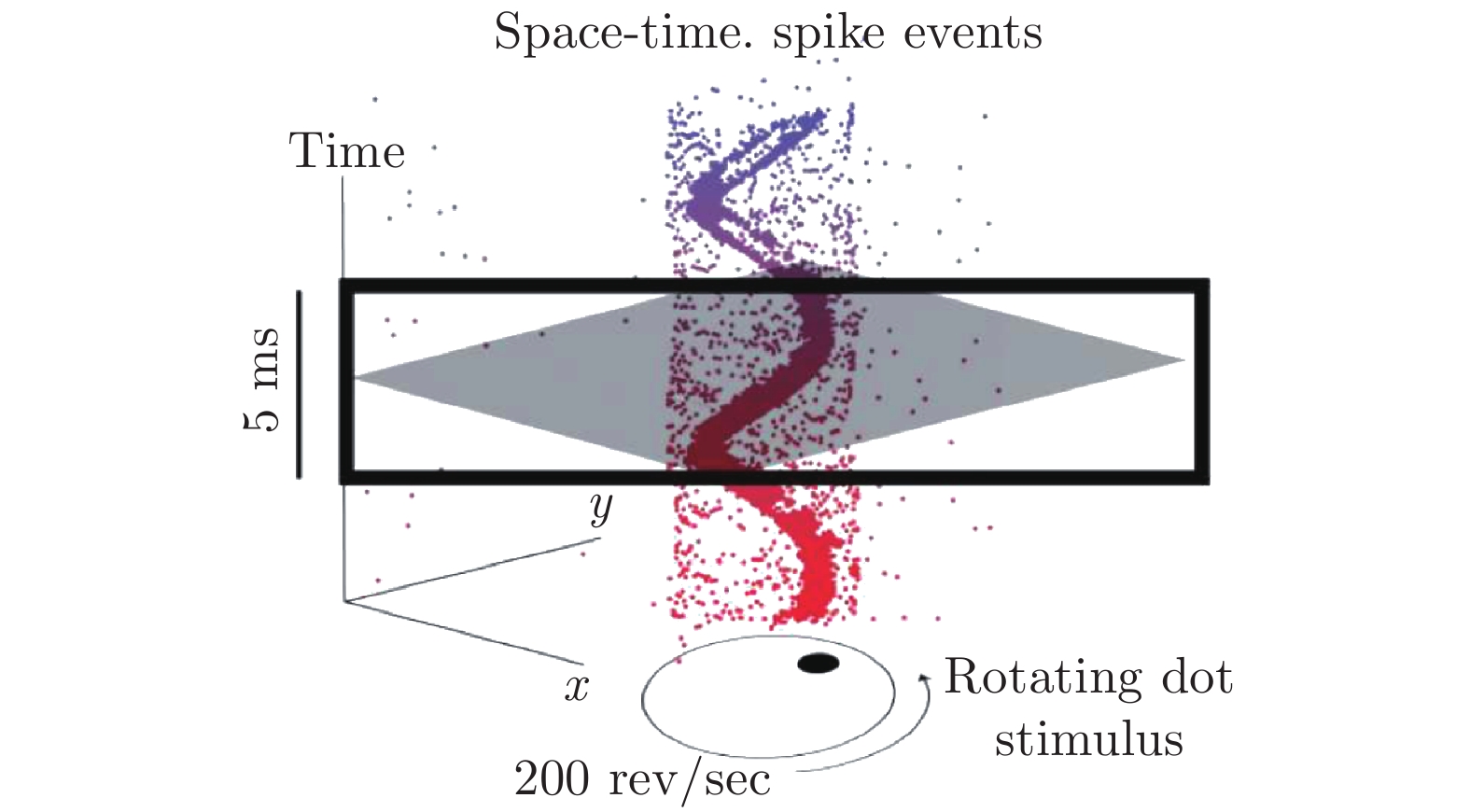
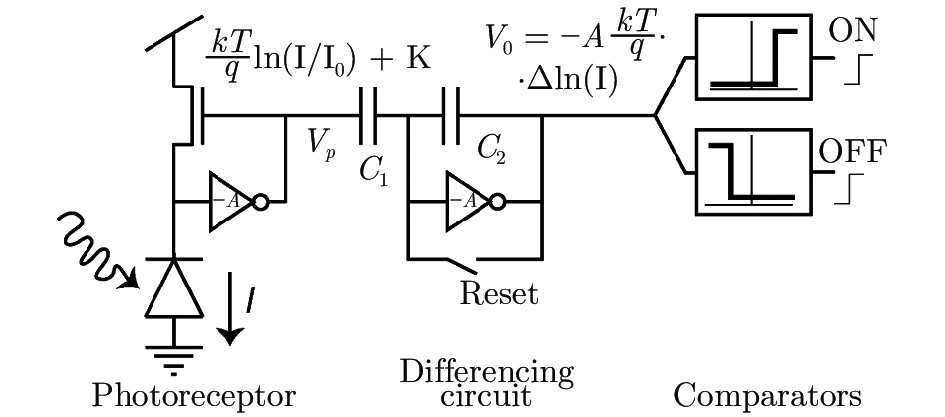
事件相机是一种新兴的视觉传感器, 通过检测单个像素点光照强度的变化来产生“事件”. 基于其工作原理, 事件相机拥有传统相机所不具备的低延迟、高动态范围等优良特性. 而如何应用事件相机来完成机器人的定位与建图则是目前视觉定位与建图领域新的研究方向. 本文从事件相机本身出发, 介绍事件相机的工作原理、现有的定位与建图算法以及事件相机相关的开源数据集. 其中, 本文着重对现有的、基于事件相机的定位与建图算法进行详细的介绍和优缺点分析.


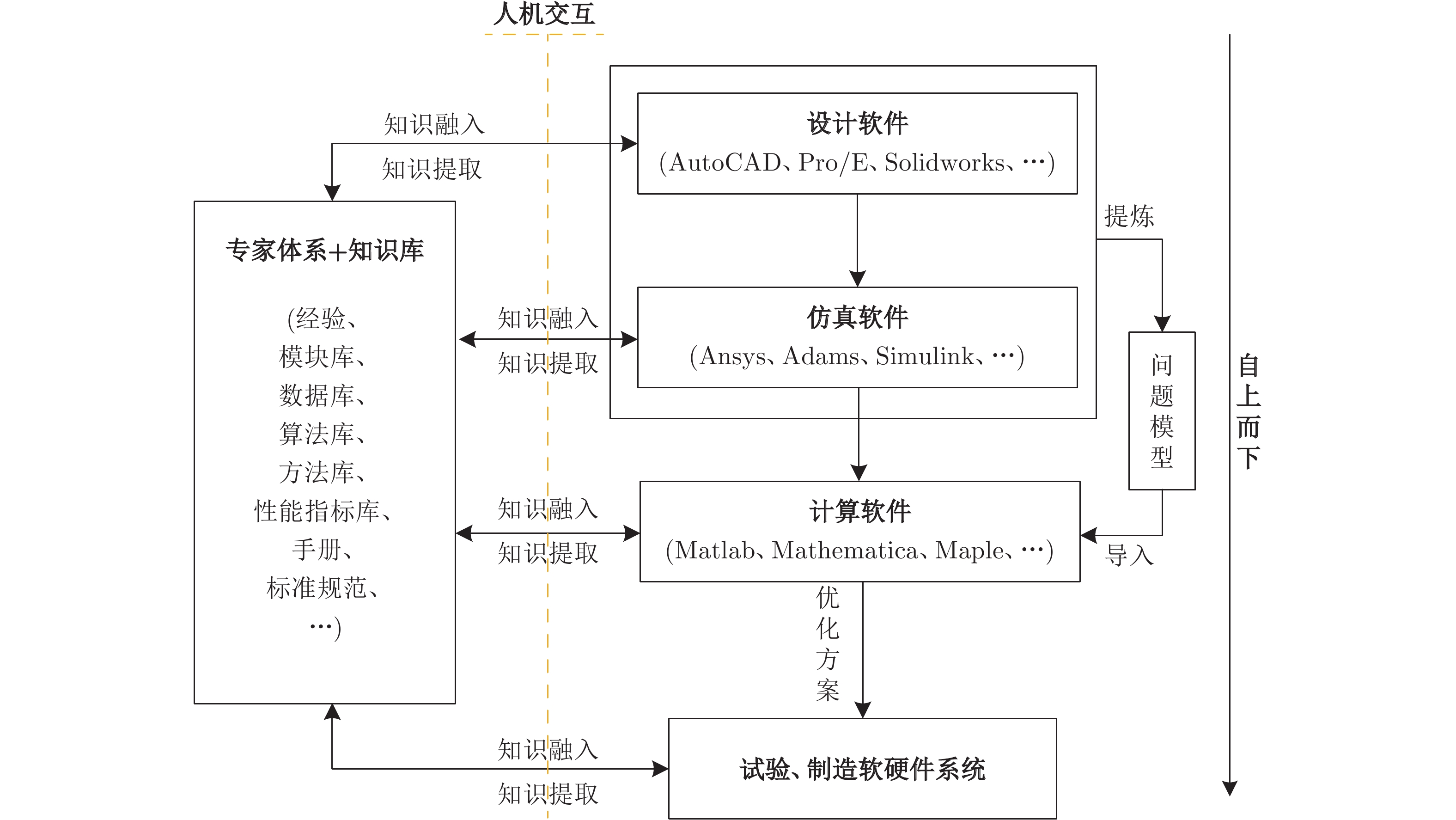
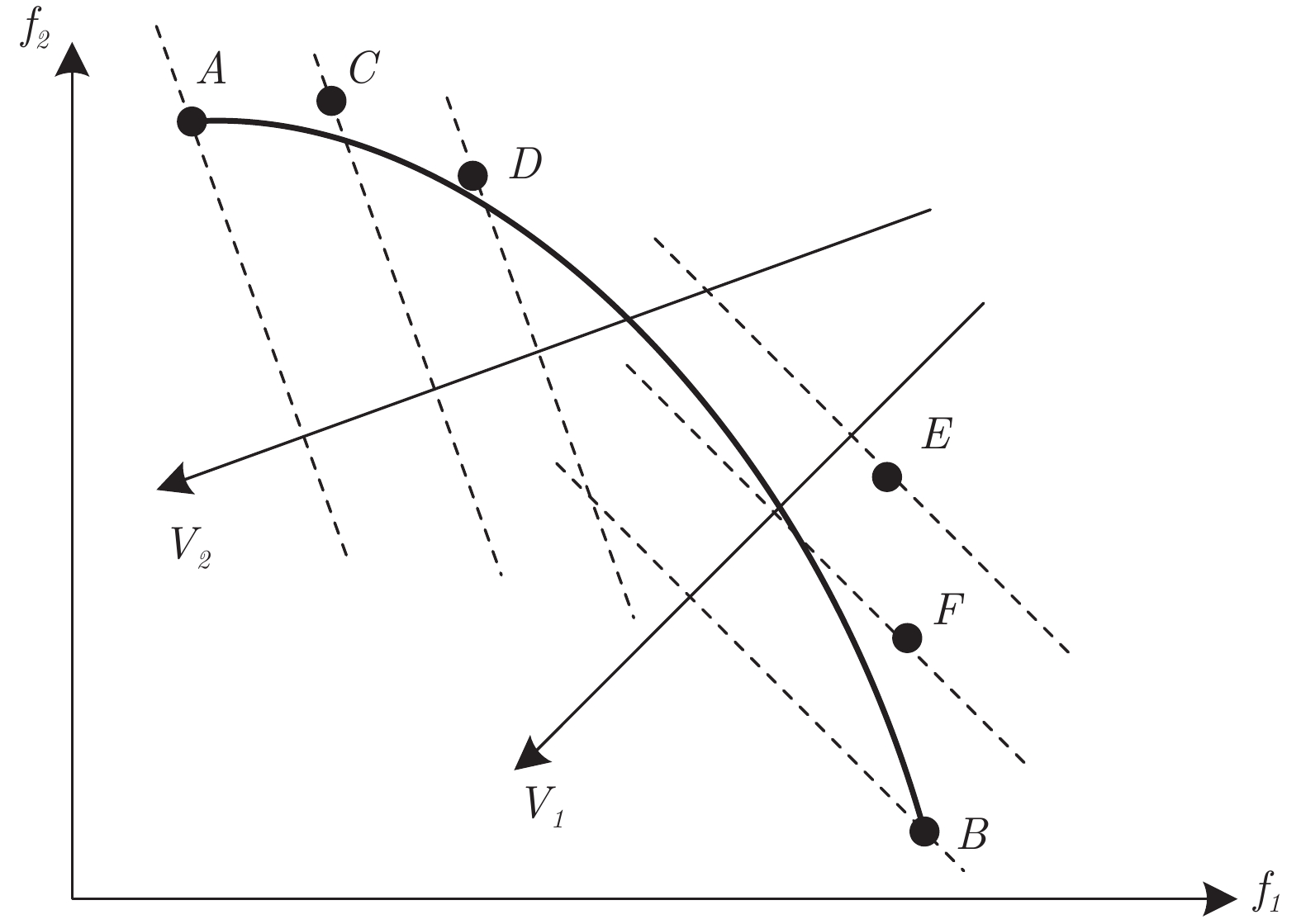
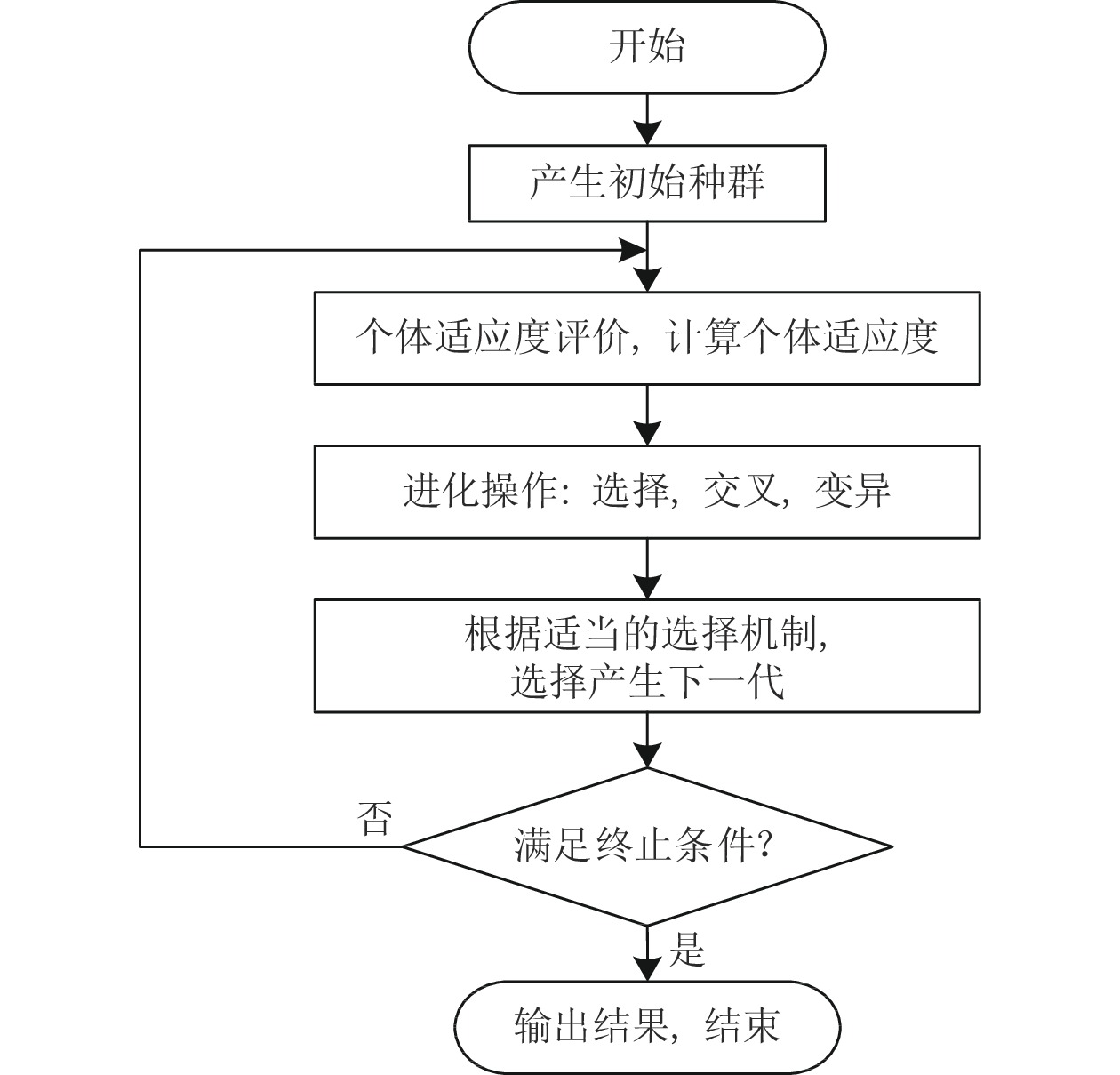
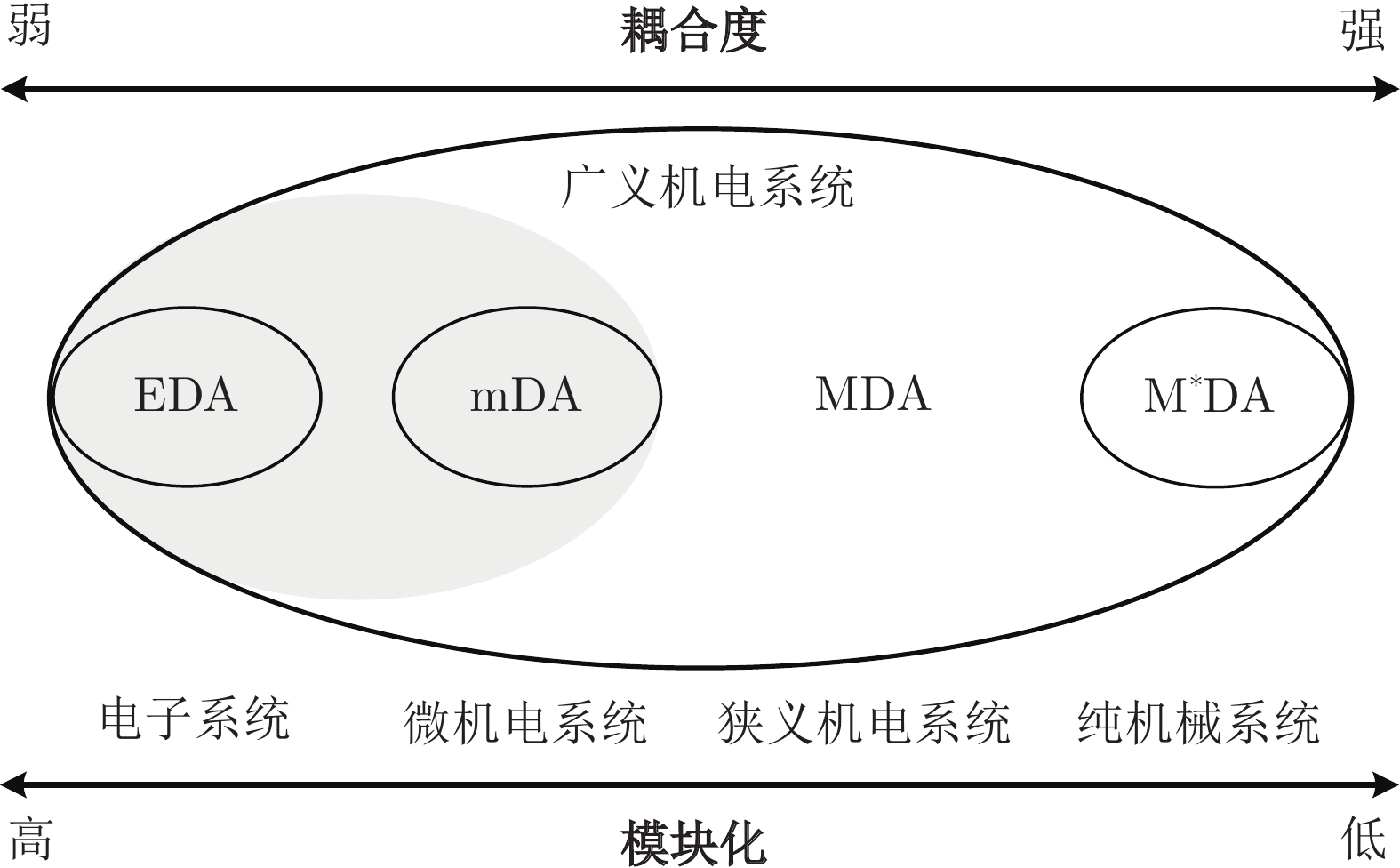
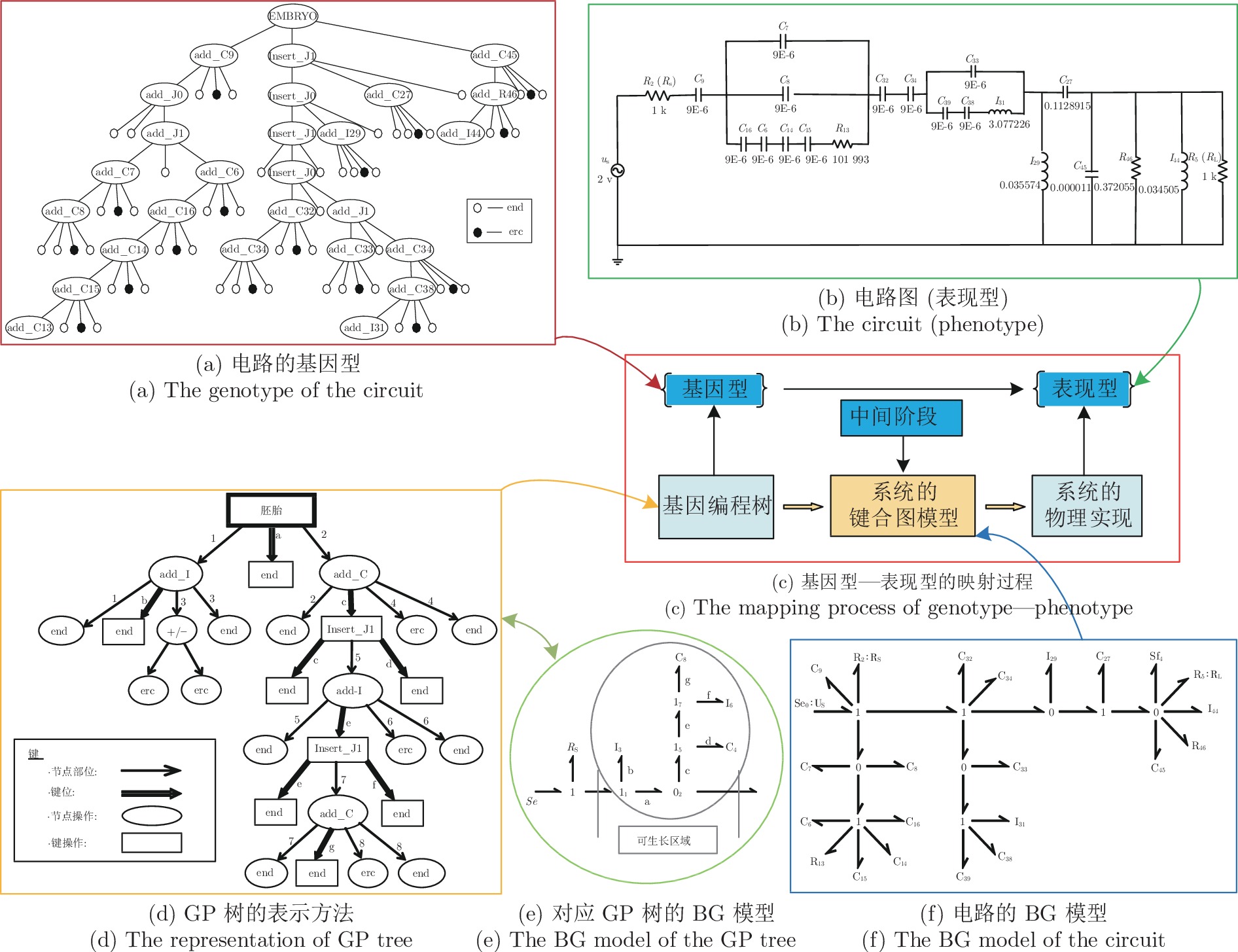
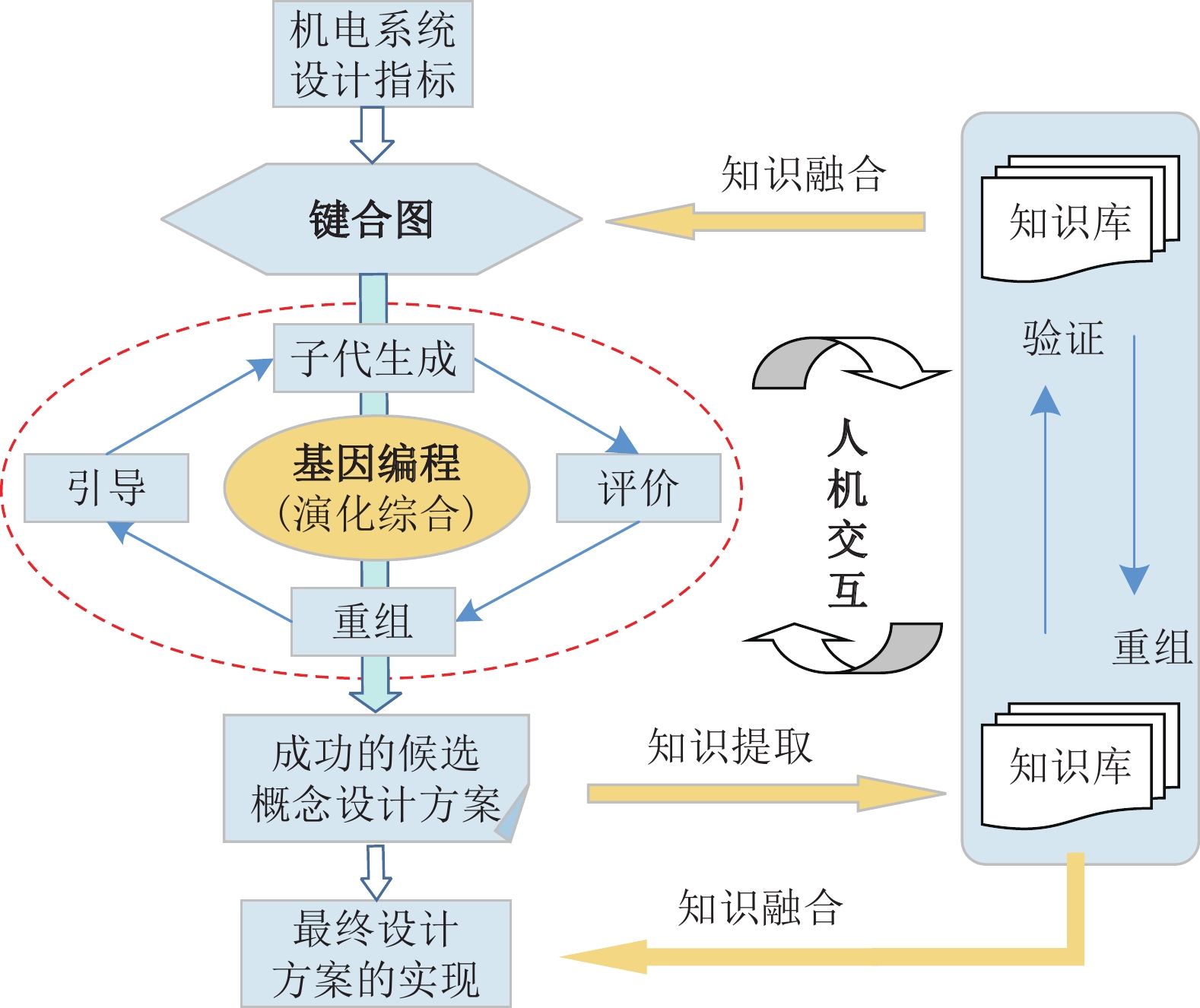
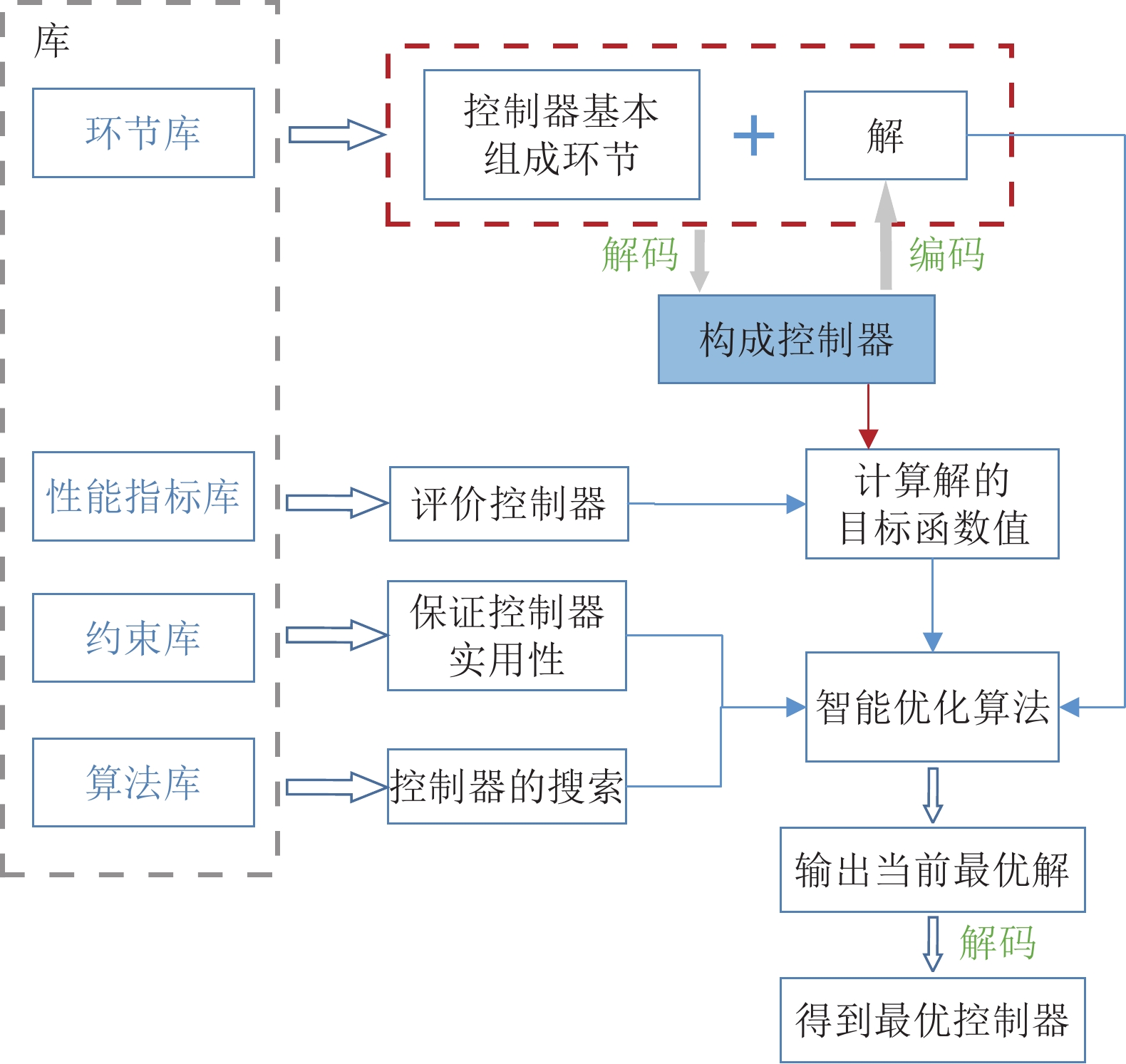
复杂机电系统设计自动化是知识自动化的一个重要分支, 在机器人系统设计、高档数控机床设计、智能装备系统设计等方面具有重要的研究意义和应用价值. 本文对进化计算在复杂机电系统设计自动化中的应用进行了综述. 首先, 介绍了几种常用进化计算方法及其优点; 其次, 对进化计算在电子系统、微机电系统和复杂机电系统三个领域的设计自动化进行了较为系统且全面的总结. 然后, 以一类典型的复杂机电系统—机器人系统的设计自动化为代表, 对进化计算在机器人系统设计自动化的研究发展进行了讨论. 最后, 针对进化计算在复杂机电系统设计自动化中存在的共性关键问题进行了讨论与展望.

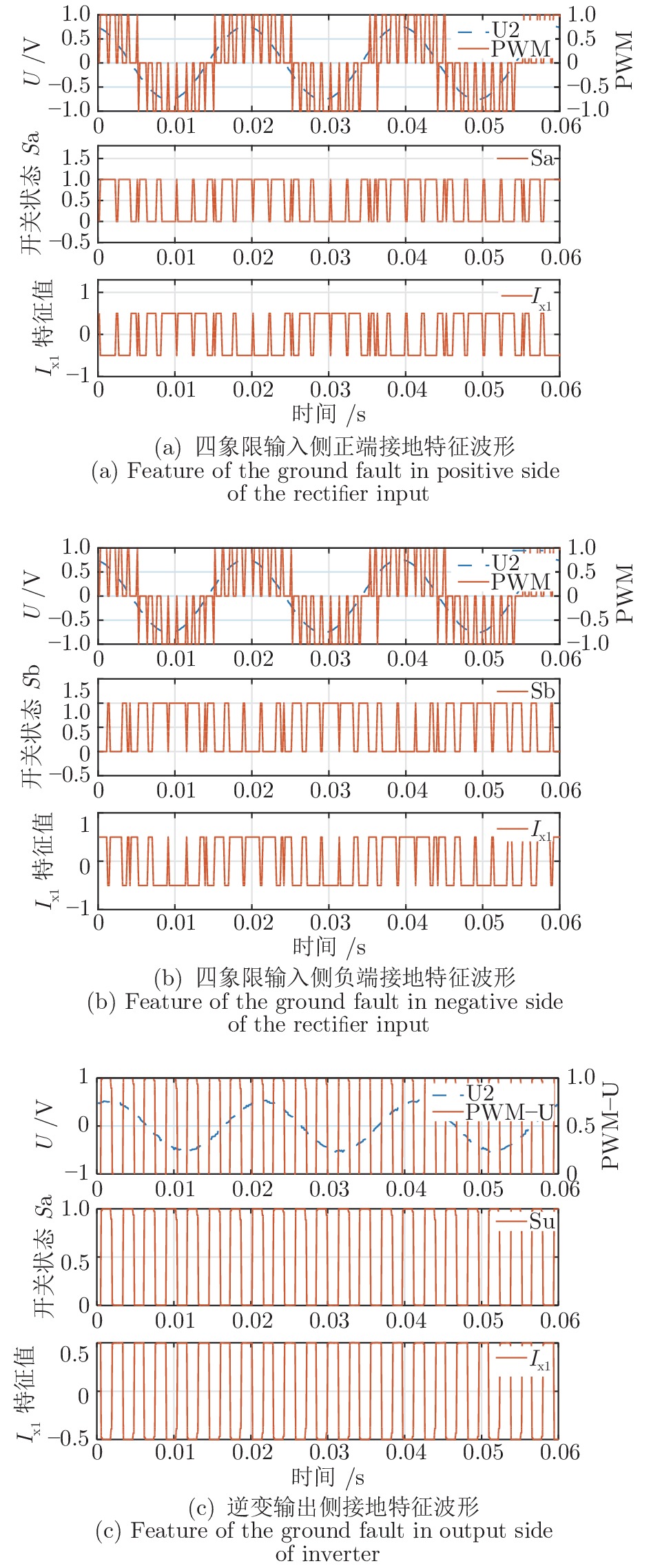
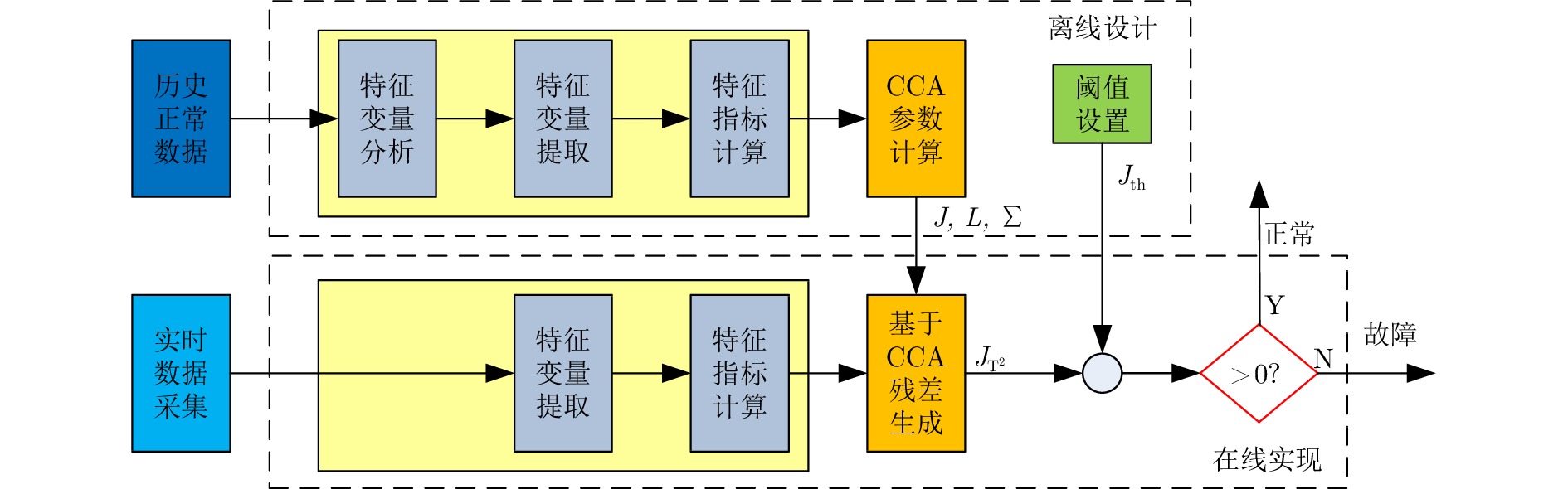
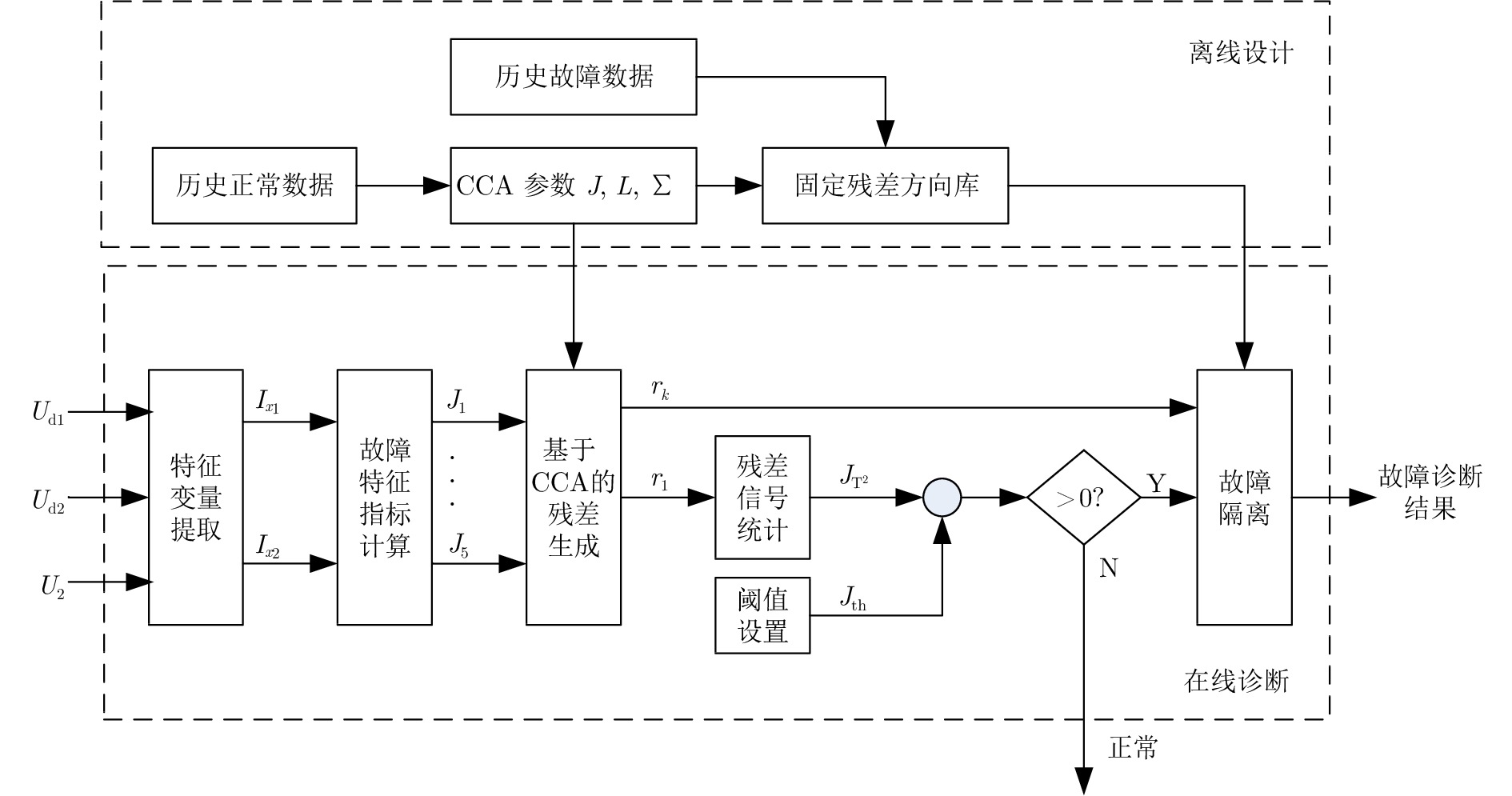
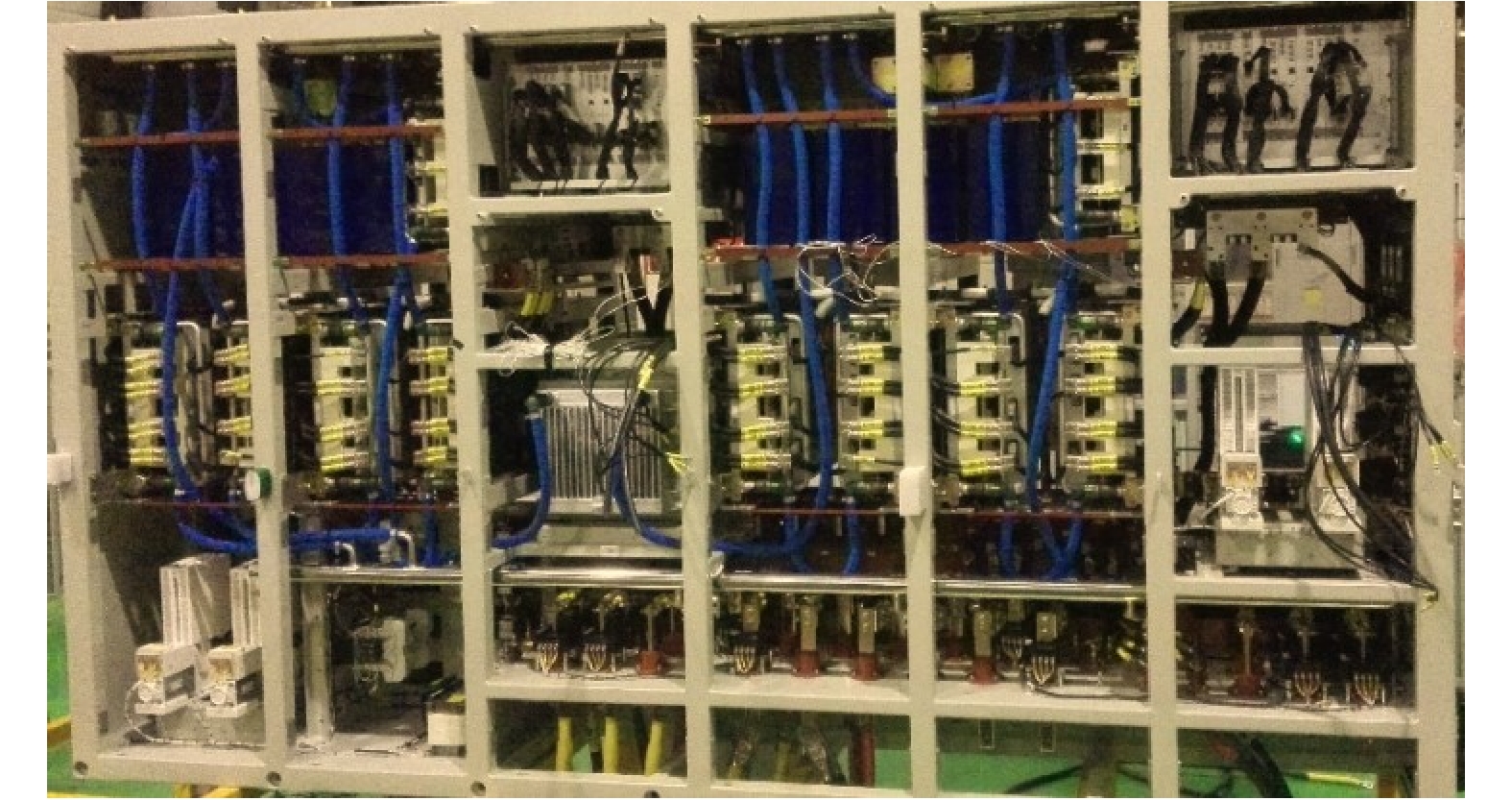
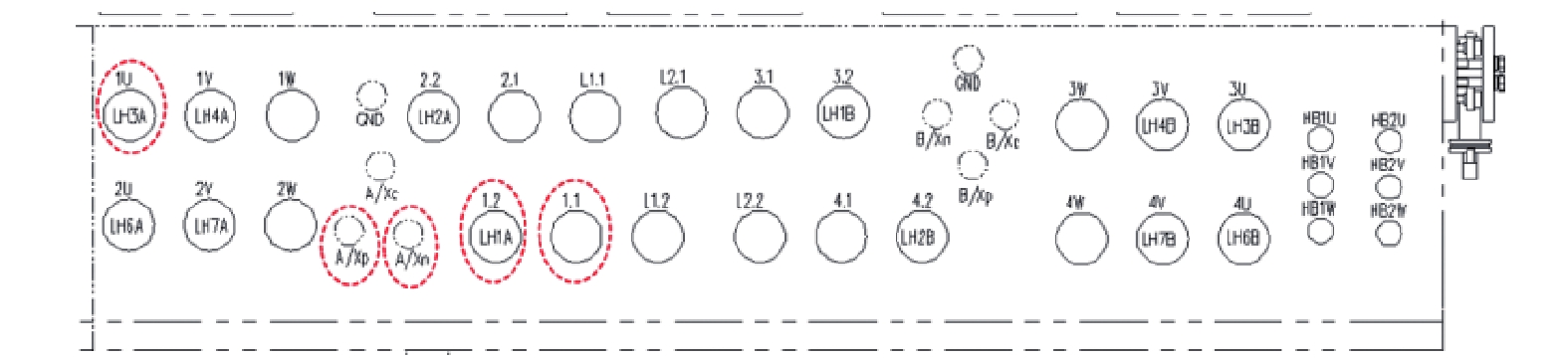
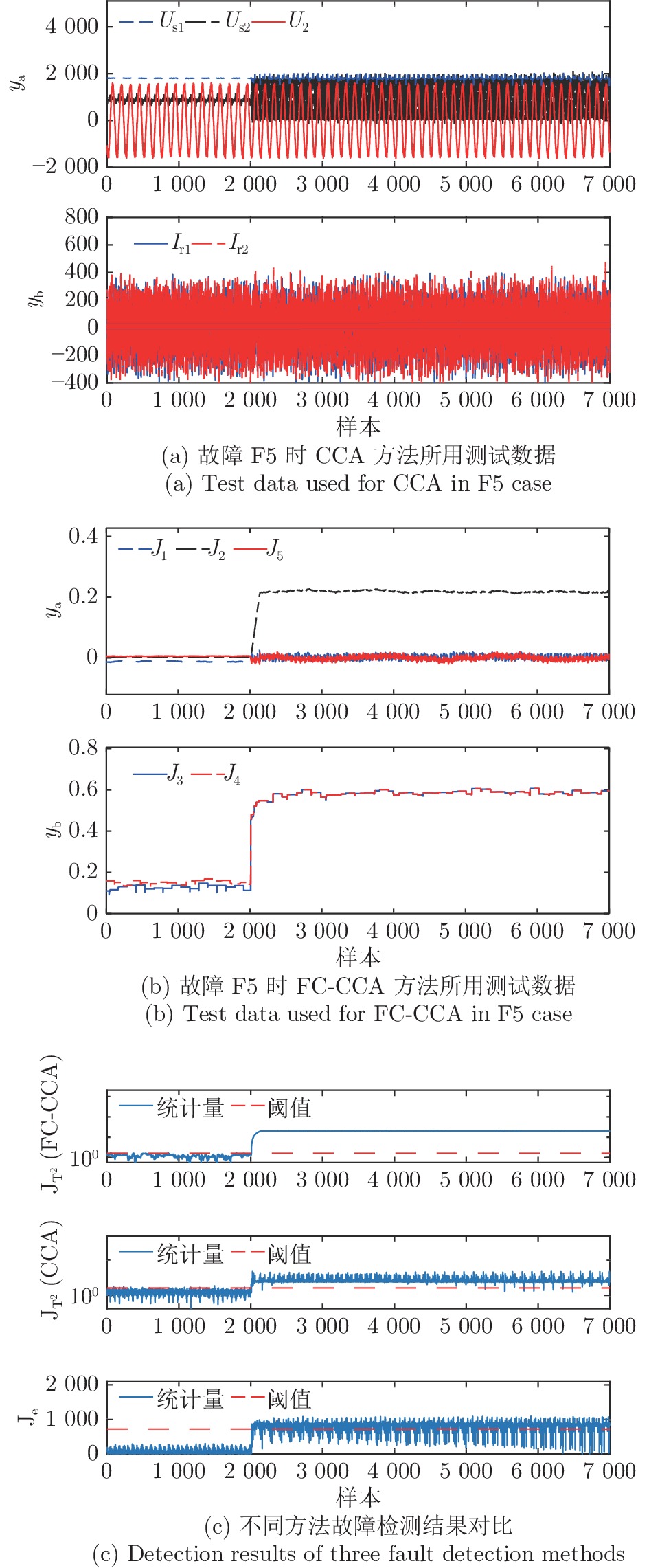
本文针对目前机车、动车牵引系统中主回路接地故障的精确定位问题, 提出了一种基于特征相关性的故障诊断方法. 该方法通过在线计算与故障关联的特征变量, 提取相关故障特征指标, 并考虑各故障特征指标间的相关性, 利用典型相关分析得到残差, 以实现快速故障检测. 进一步, 构建基于残差方向的故障隔离方法, 实现准确地故障定位. 现场实验表明, 与传统基于相关性的故障诊断方法以及实际工程应用方法相比, 在存在较大测量噪声与暂态工况变化时, 本文所提方法能实现更好的故障检测与隔离性能, 具有良好的应用价值.



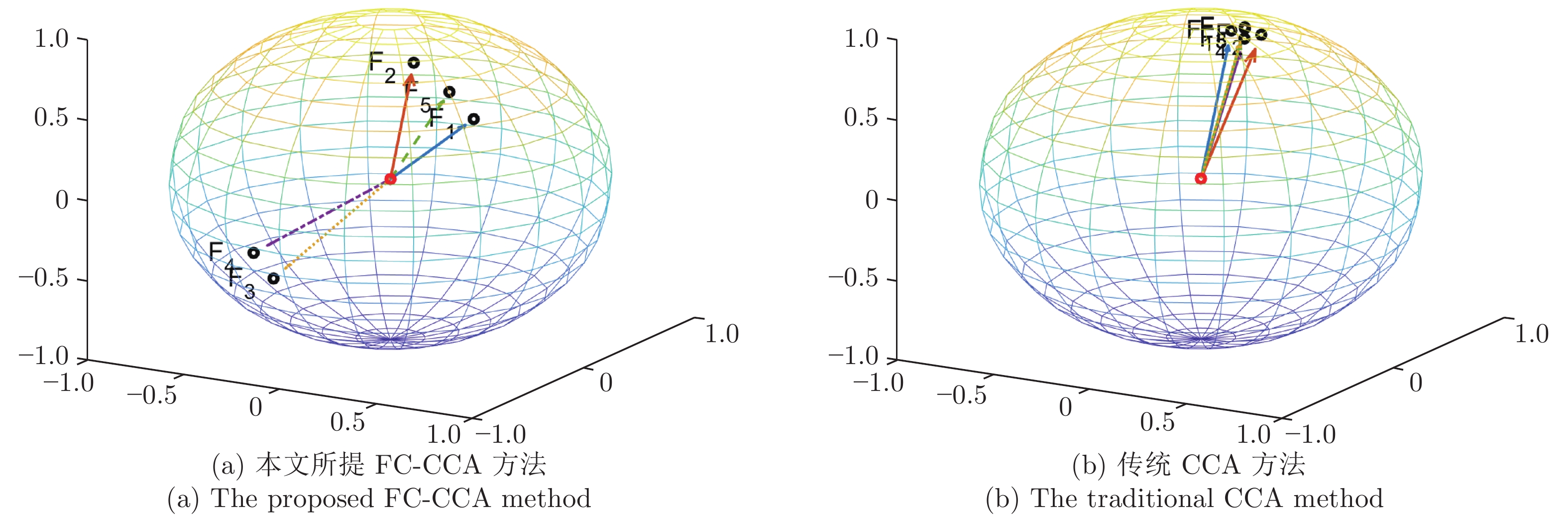
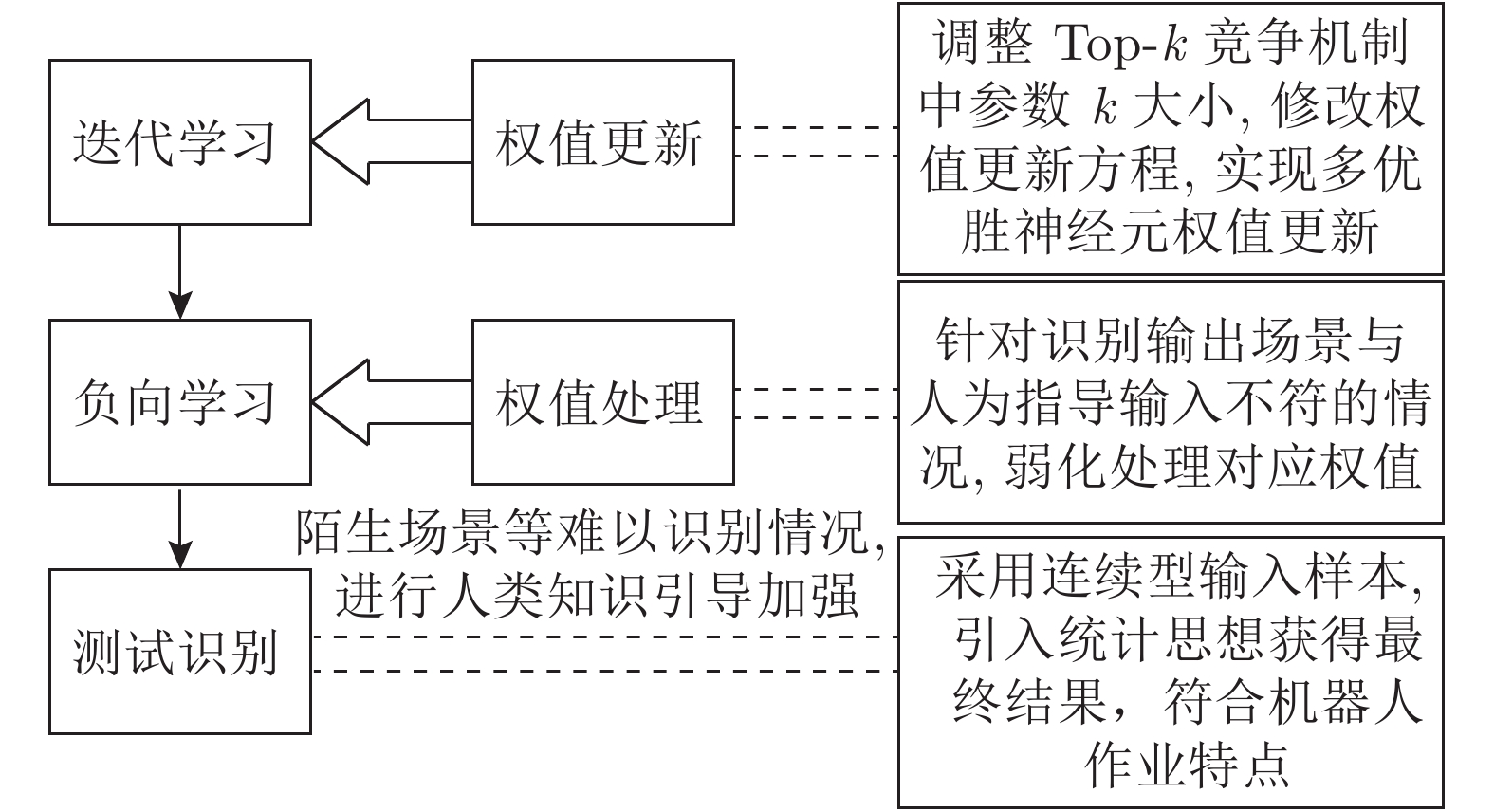
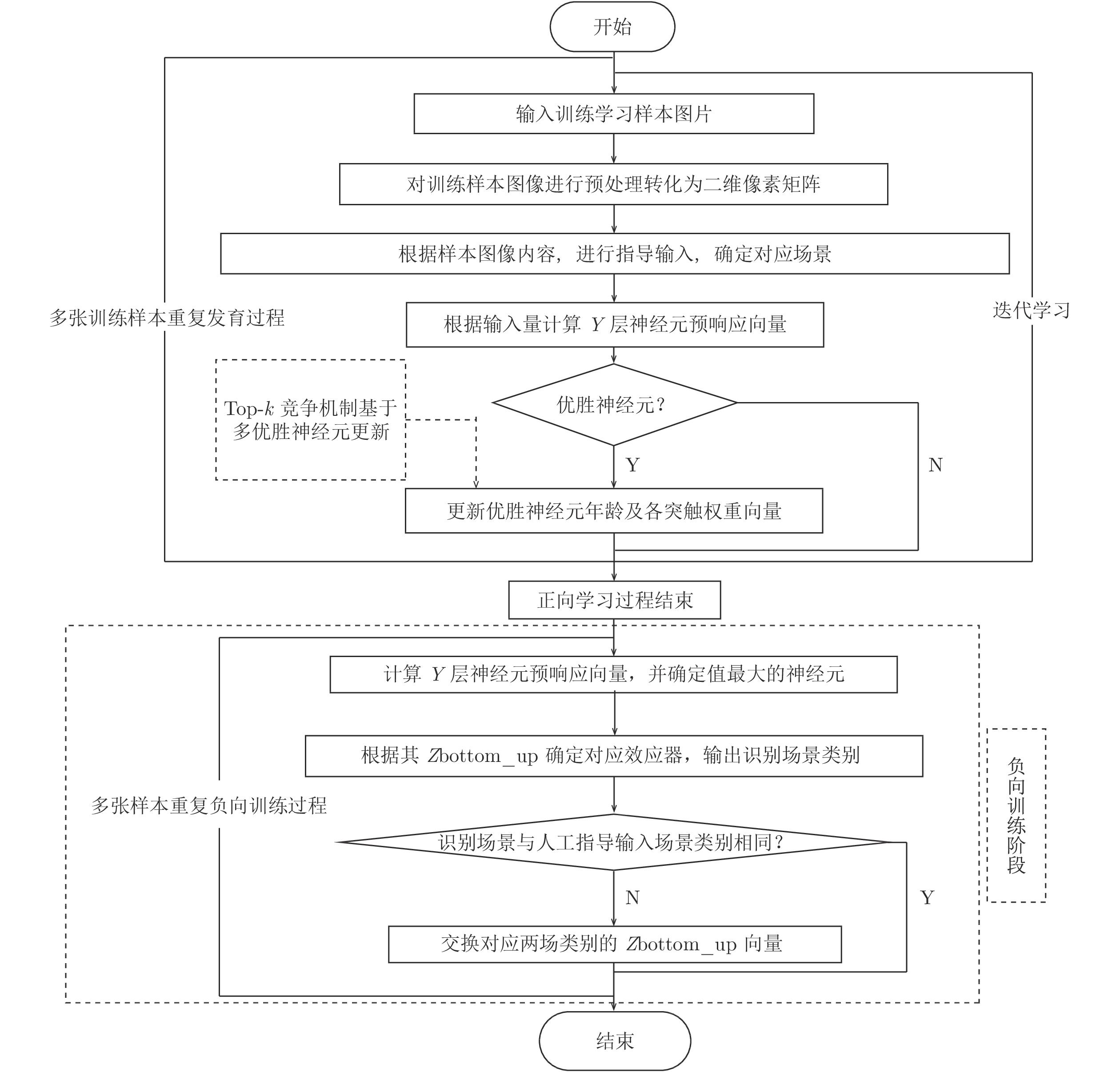
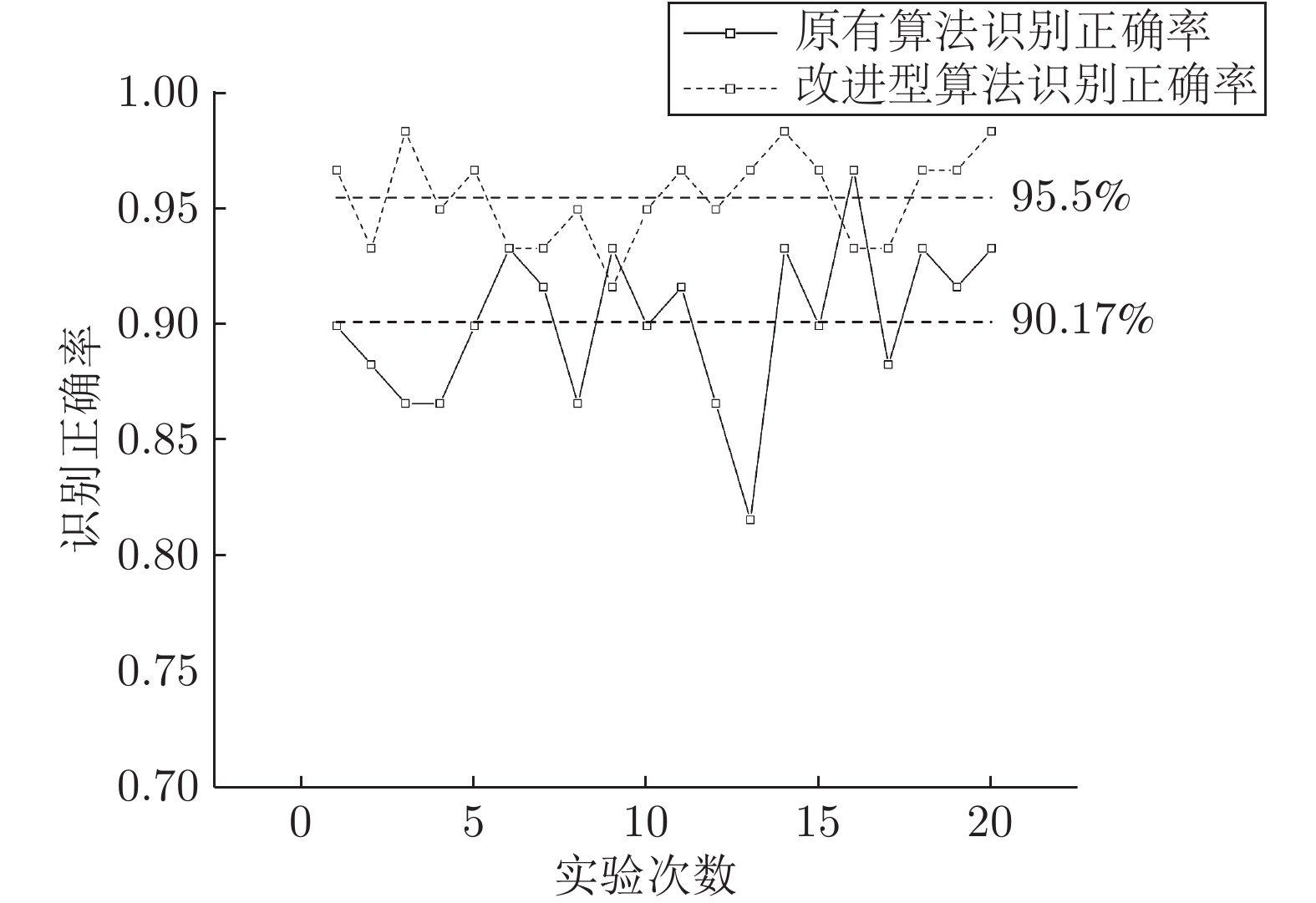
场景识别是移动机器人在陌生动态环境中完成任务的前提. 考虑到现有方法的不足, 本文提出了一种基于改进型自主发育网络的场景识别方法, 它通过引入基于多优胜神经元的Top-k竞争机制、基于负向学习的权值更新、基于连续性样本的加强型学习等步骤实现对场景的快速识别, 并使该方法具有更好的适应能力. 对于这种基于改进型自主发育网络的场景识别方法, 通过实验进行了对比测试. 结果表明, 这种改进型自主发育神经网络节点利用率高, 场景识别准确可靠, 可以较好地满足机器人作业的实际需求.





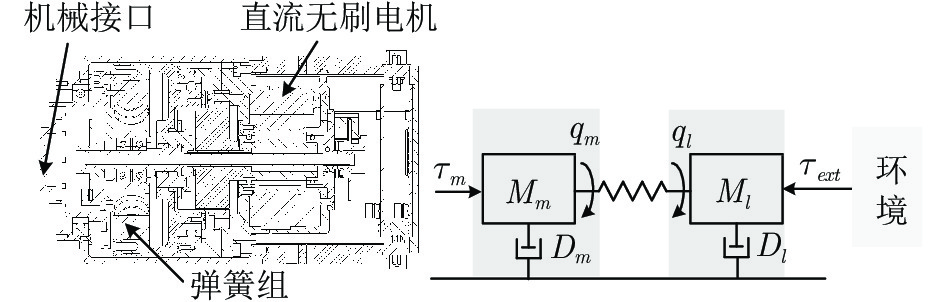
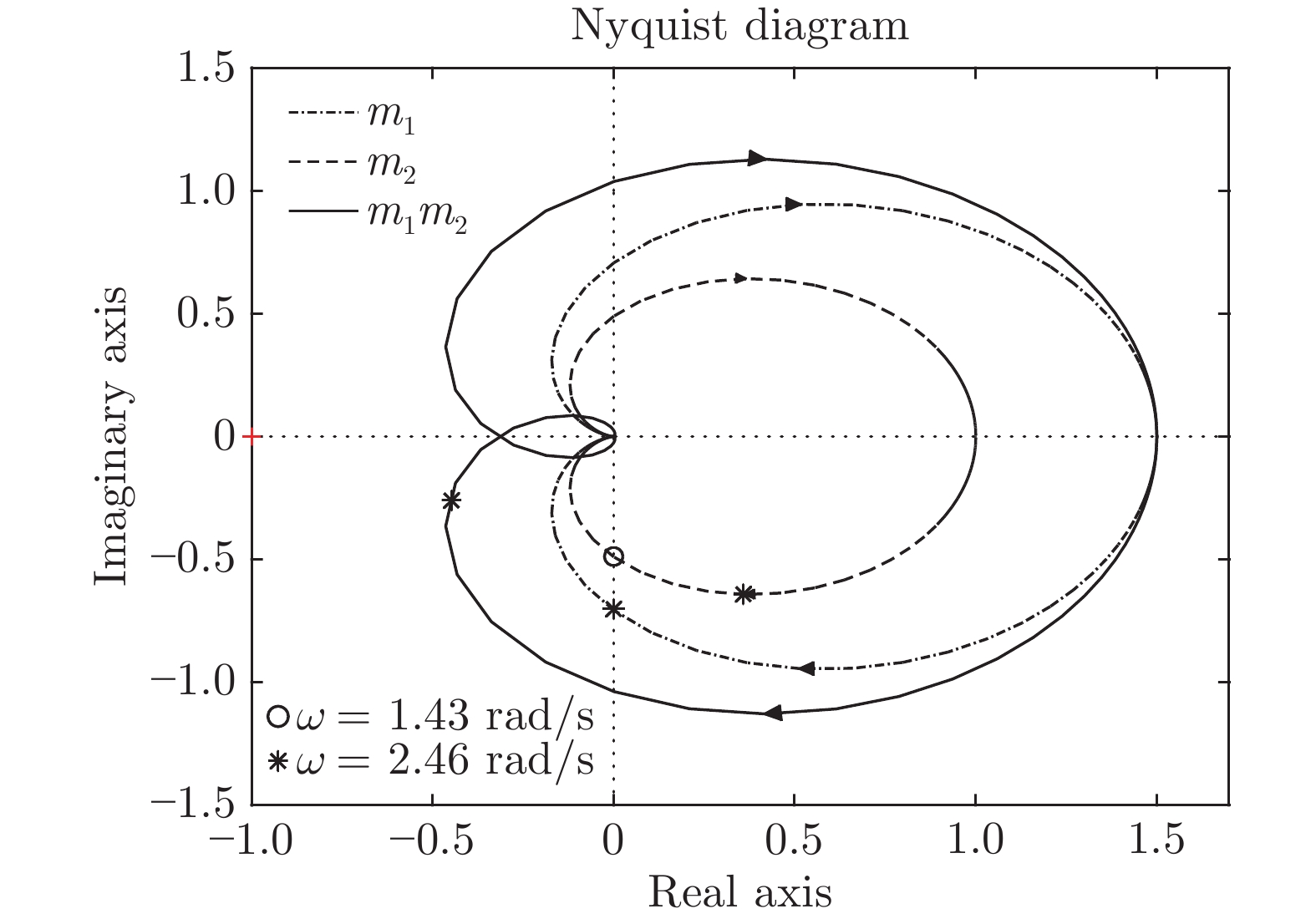
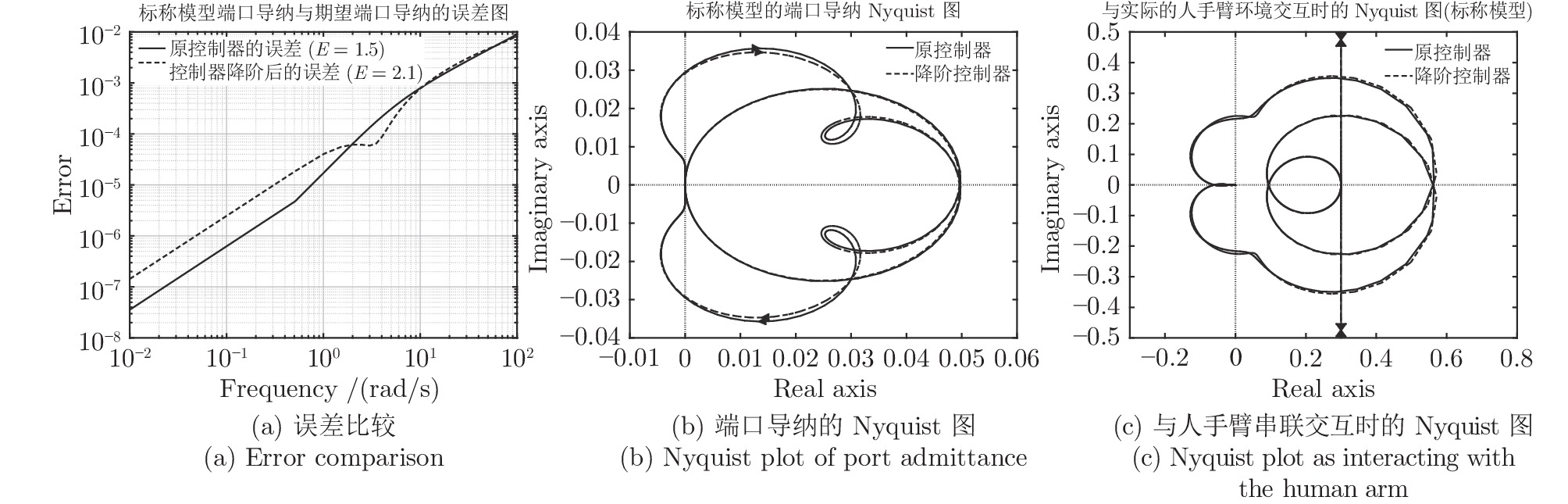
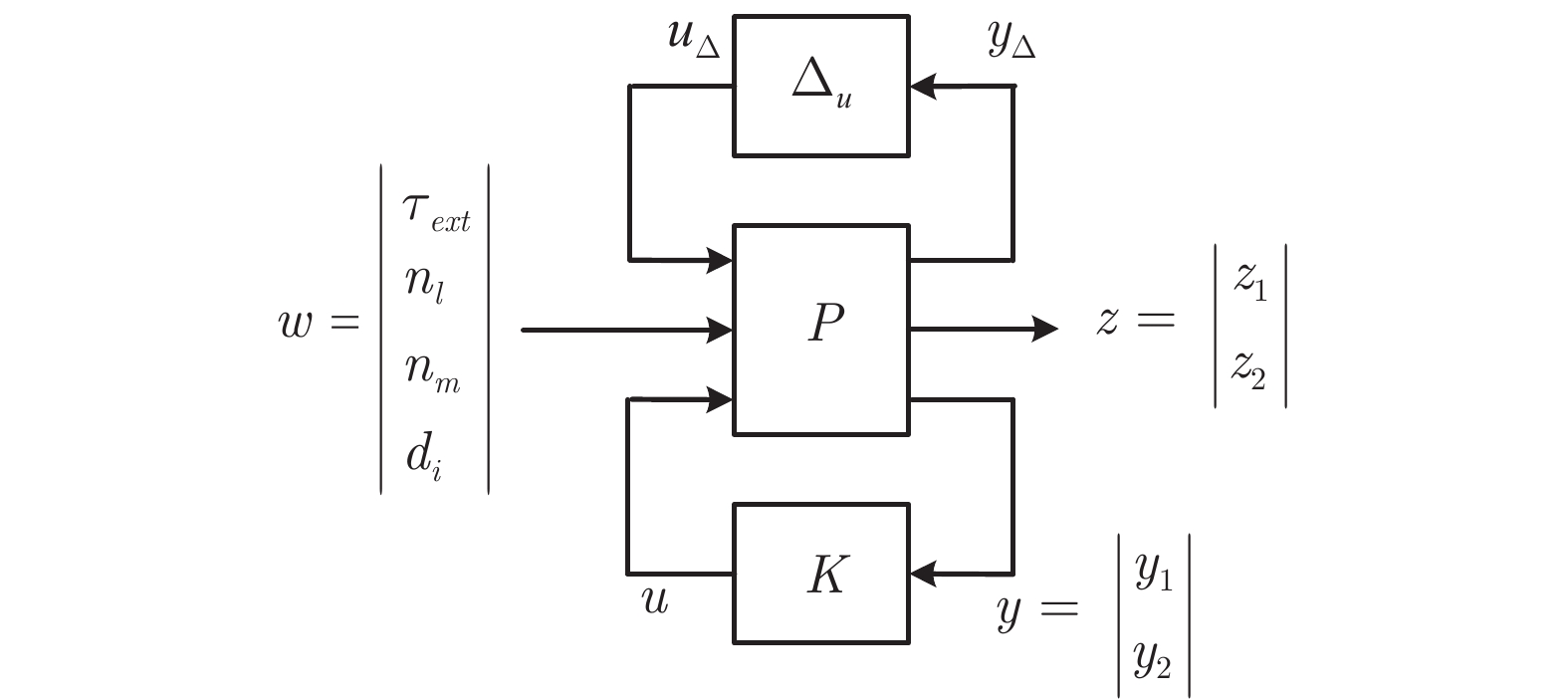
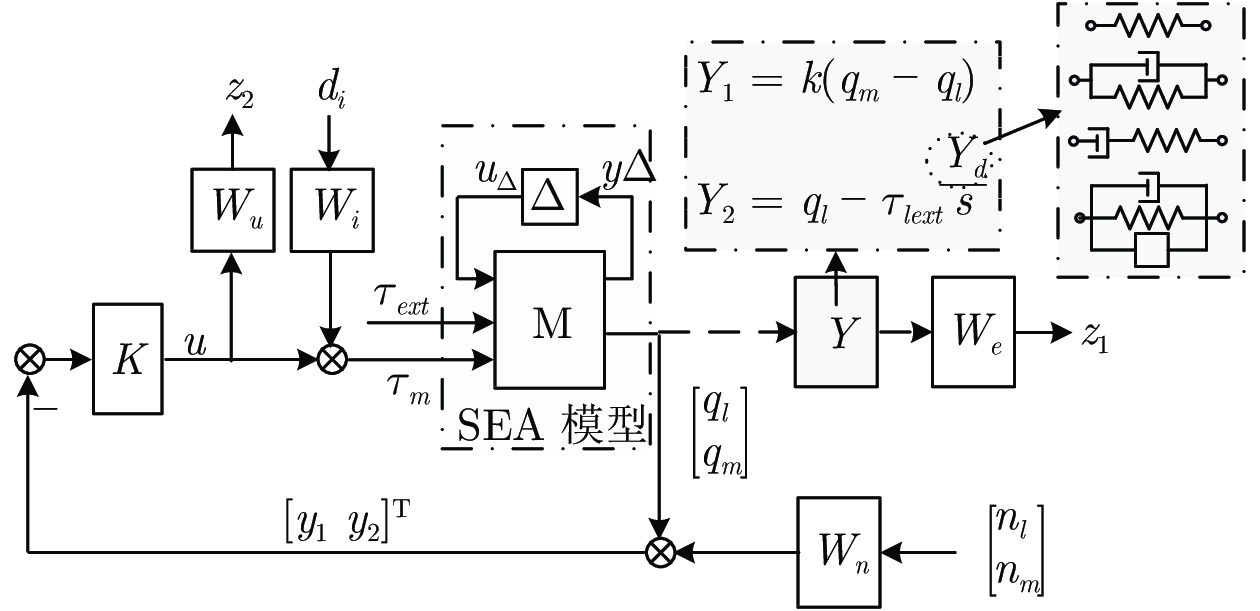
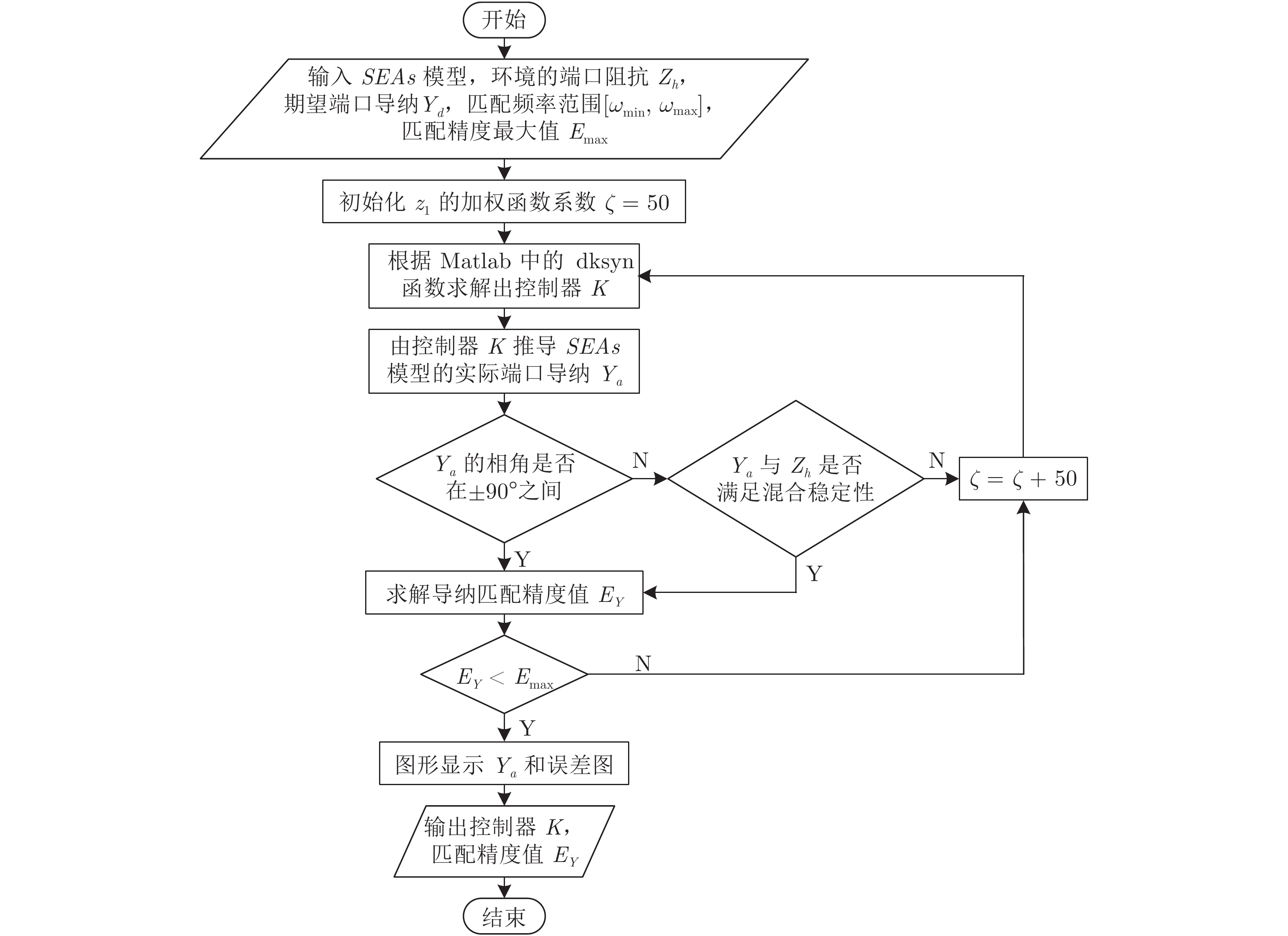
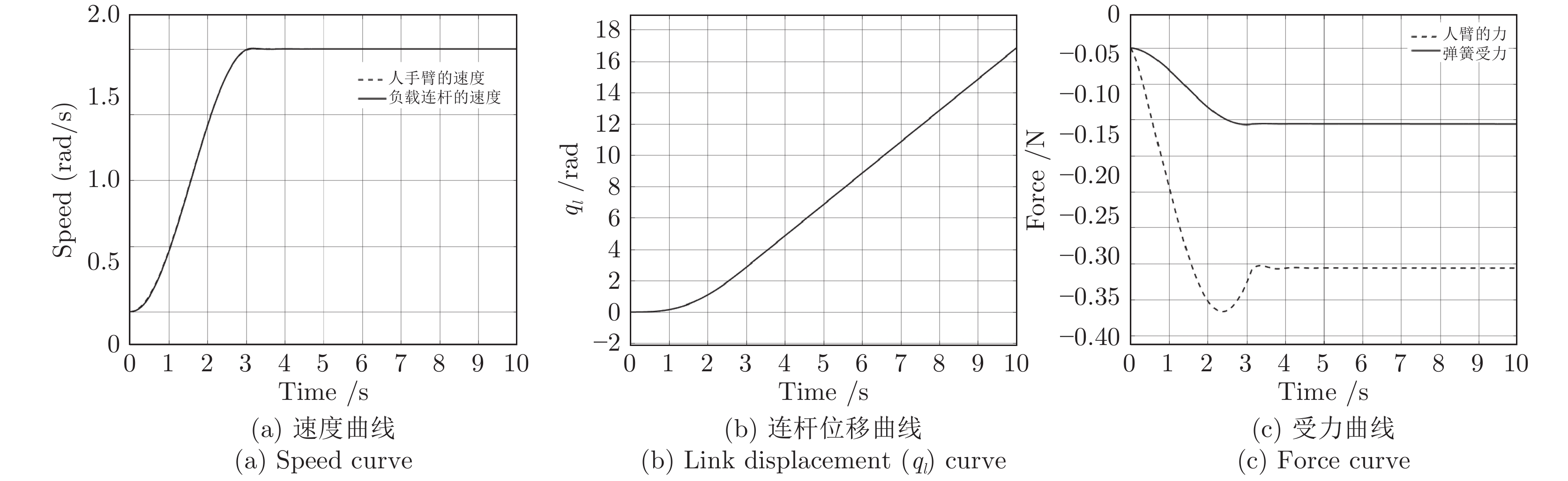
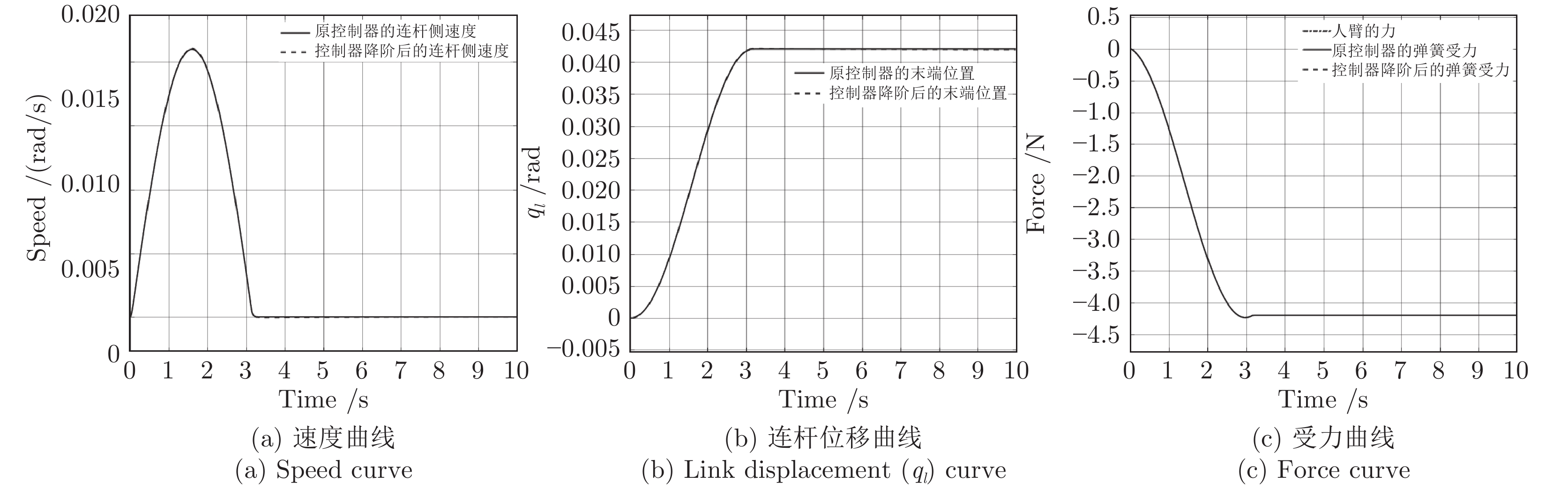
SEAs (Series elastic actuators)具有在确保机器人性能的基础上兼顾其安全性的特点, 因此被广泛地应用在康复机器人中. 为实现良好的康复训练效果, 机器人需根据实际要求呈现不同的阻抗特性. 本文采用μ综合技术解决了SEAs导纳控制器的设计问题. 首先, 考虑参数摄动、传感器噪声、输入干扰及控制输入限制等不确定性因素, 建立SEAs模型. 其次, 应用混合稳定性原理分析系统的交互稳定性. 由于无源环境的阻抗在高频段必然呈现小增益特性, 所以, 当端口导纳在低频段满足无源性, 高频段具有小增益时, 就能确保交互的稳定性. 然后, 将SEAs的导纳控制综合问题转化为实际端口导纳与期望导纳匹配的μ综合问题. 最后, 通过调节加权函数, 不仅让SEAs闭环系统的端口导纳逼近期望的端口导纳, 还能同时满足交互稳定性条件, 从而可以独立于环境因素来设计导纳控制器. 仿真结果表明, 基于μ综合方法设计的控制器, 能精确地逼近期望的端口导纳, 且确保交互稳定性. 另外, 通过Hankel逼近方法得到的降阶控制器也具有满意的控制效果.





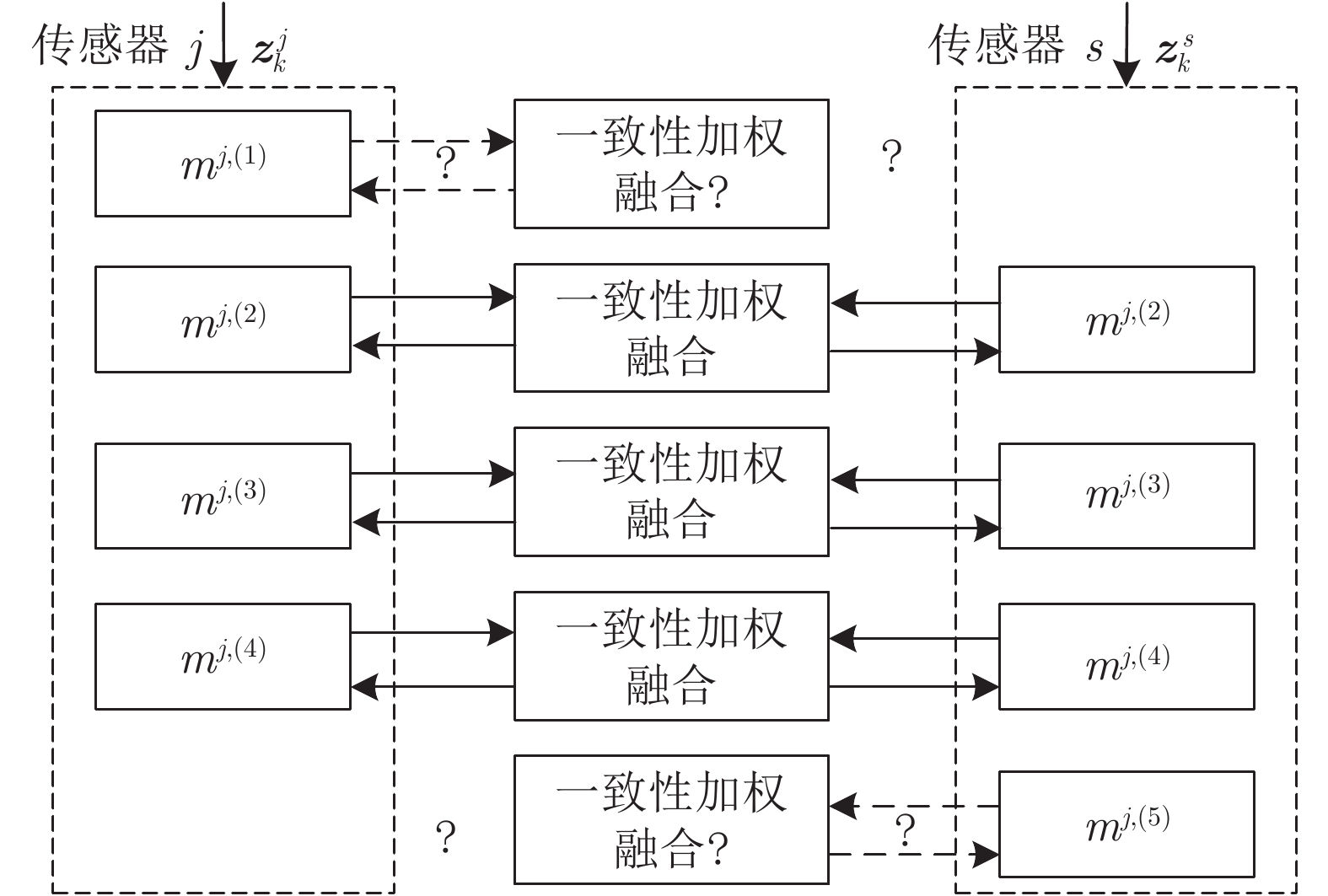
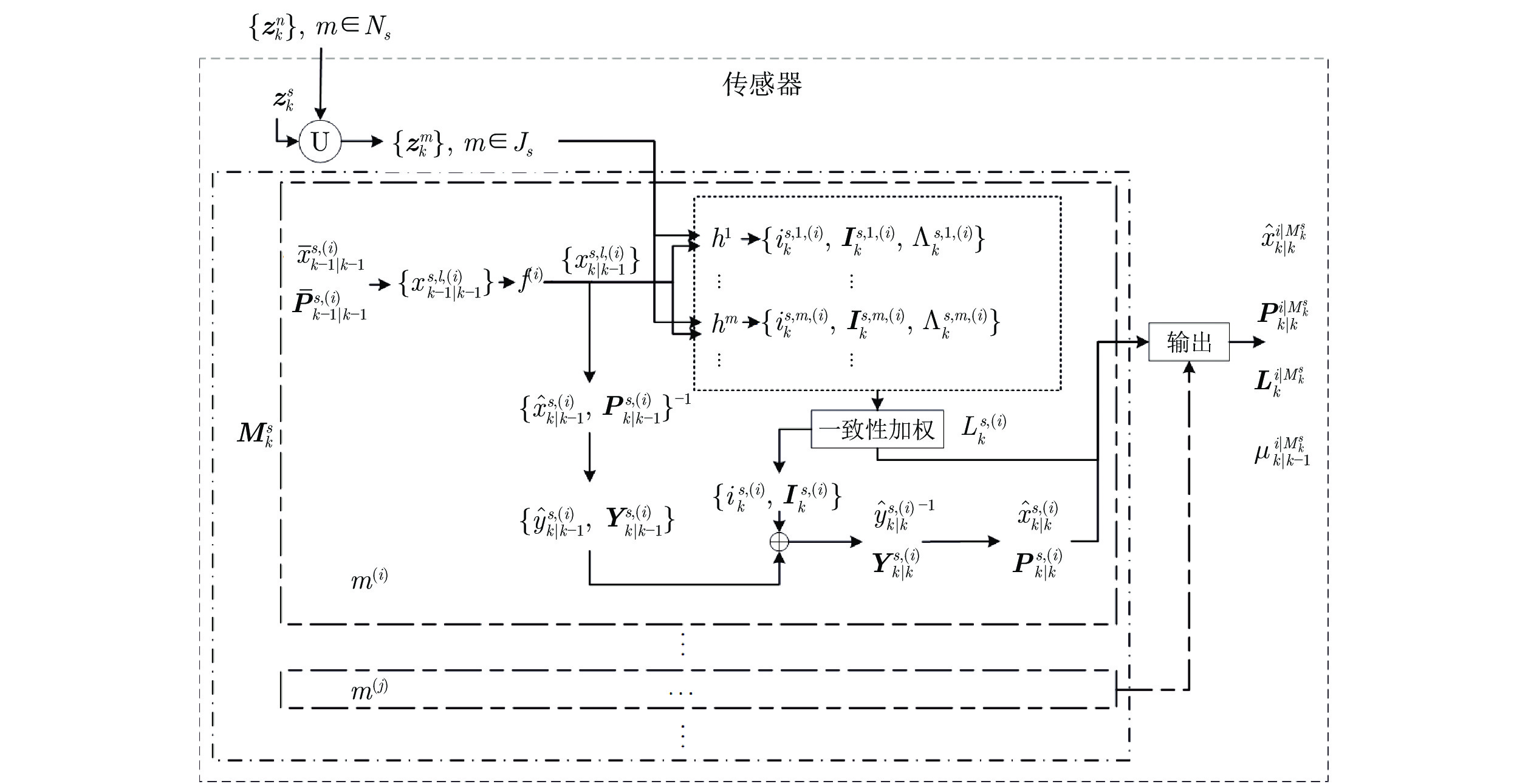
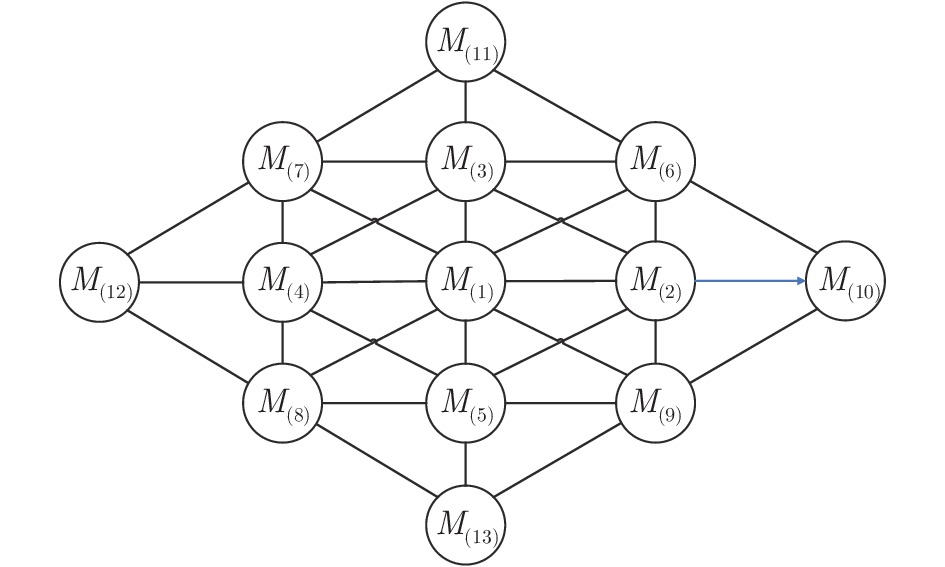
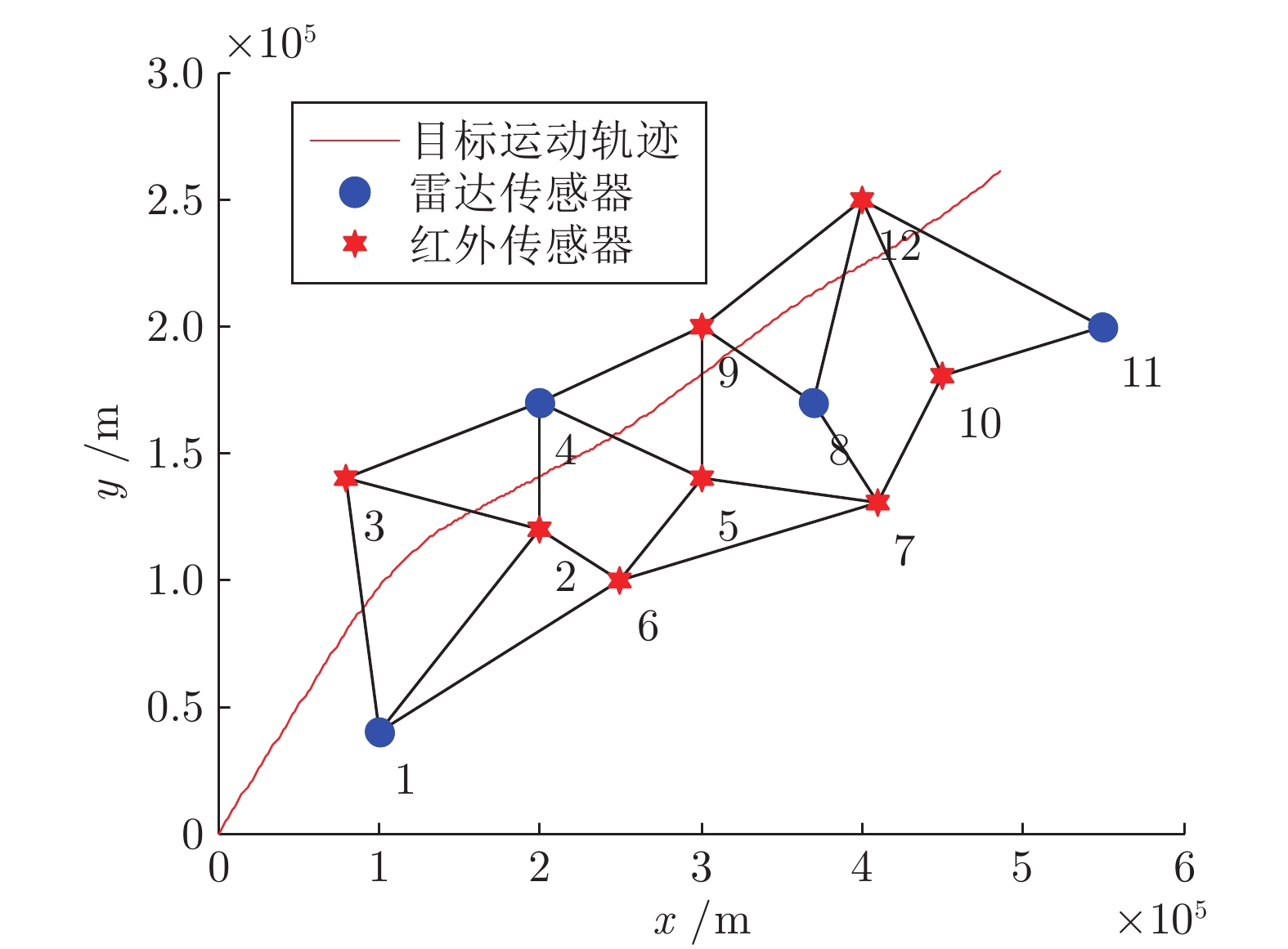
本文针对由雷达与红外组成的分布式传感器网络, 研究基于一致性的分布式变结构多模型方法(Distributed variable structure multiple model, DVSMM). 首先,使用无迹信息滤波(Unscented information filter, UIF)解决系统非线性的问题, 然后,将变结构交互式多模型(Variable structure interacting multiple model, VSMM)方法进行改进, 提出一类可应用于分布式状态估计的分布式变结构多模型DVSMM方法. 仿真实验结果验证了该方法的有效性.

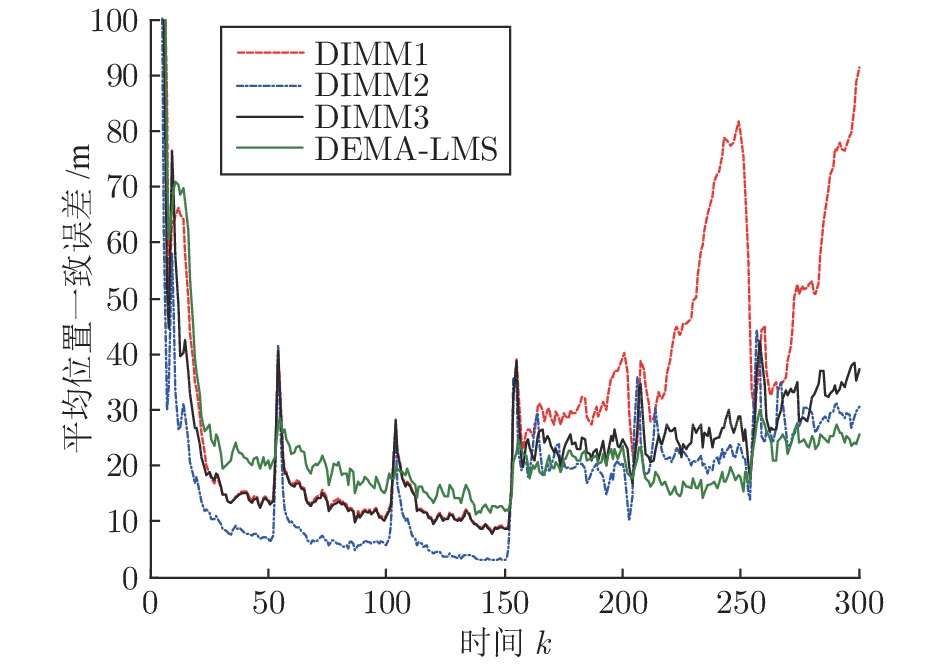
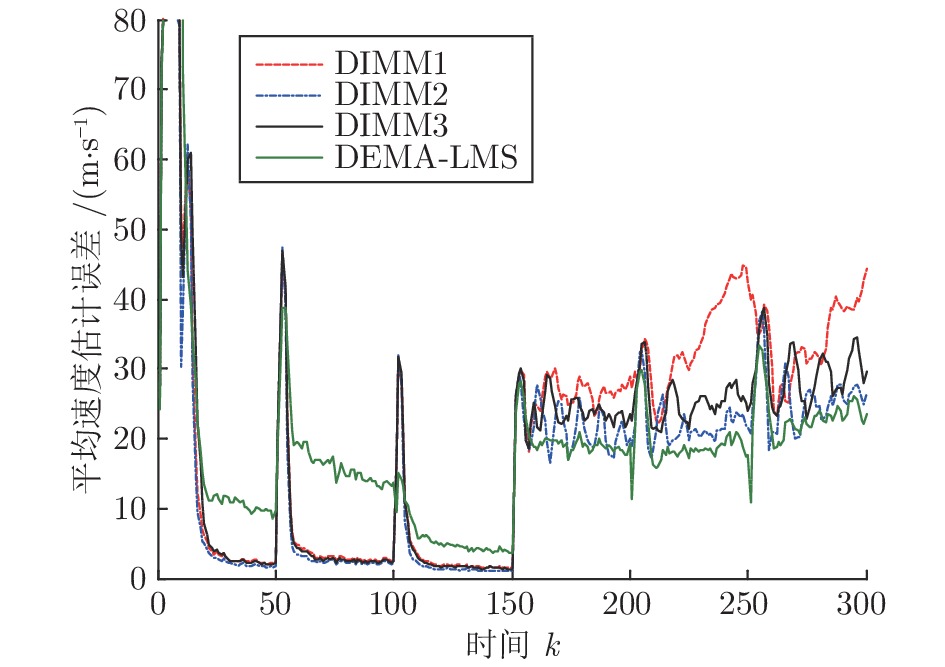
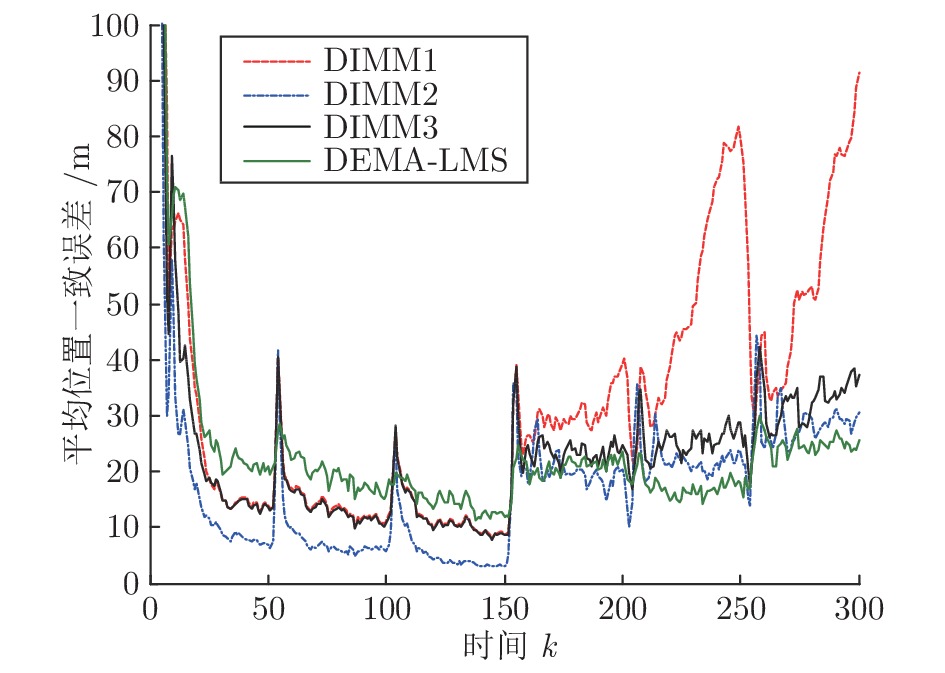
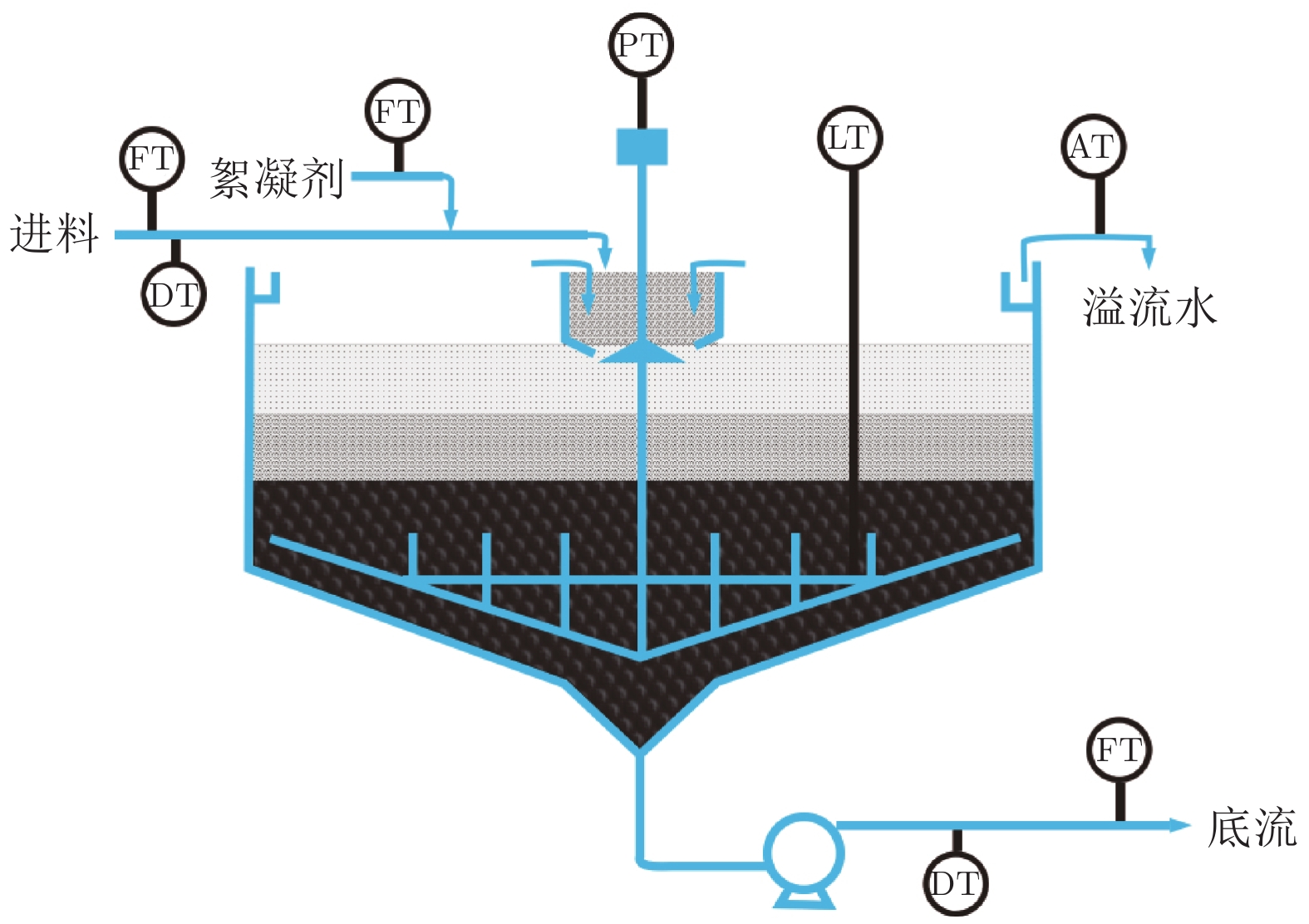
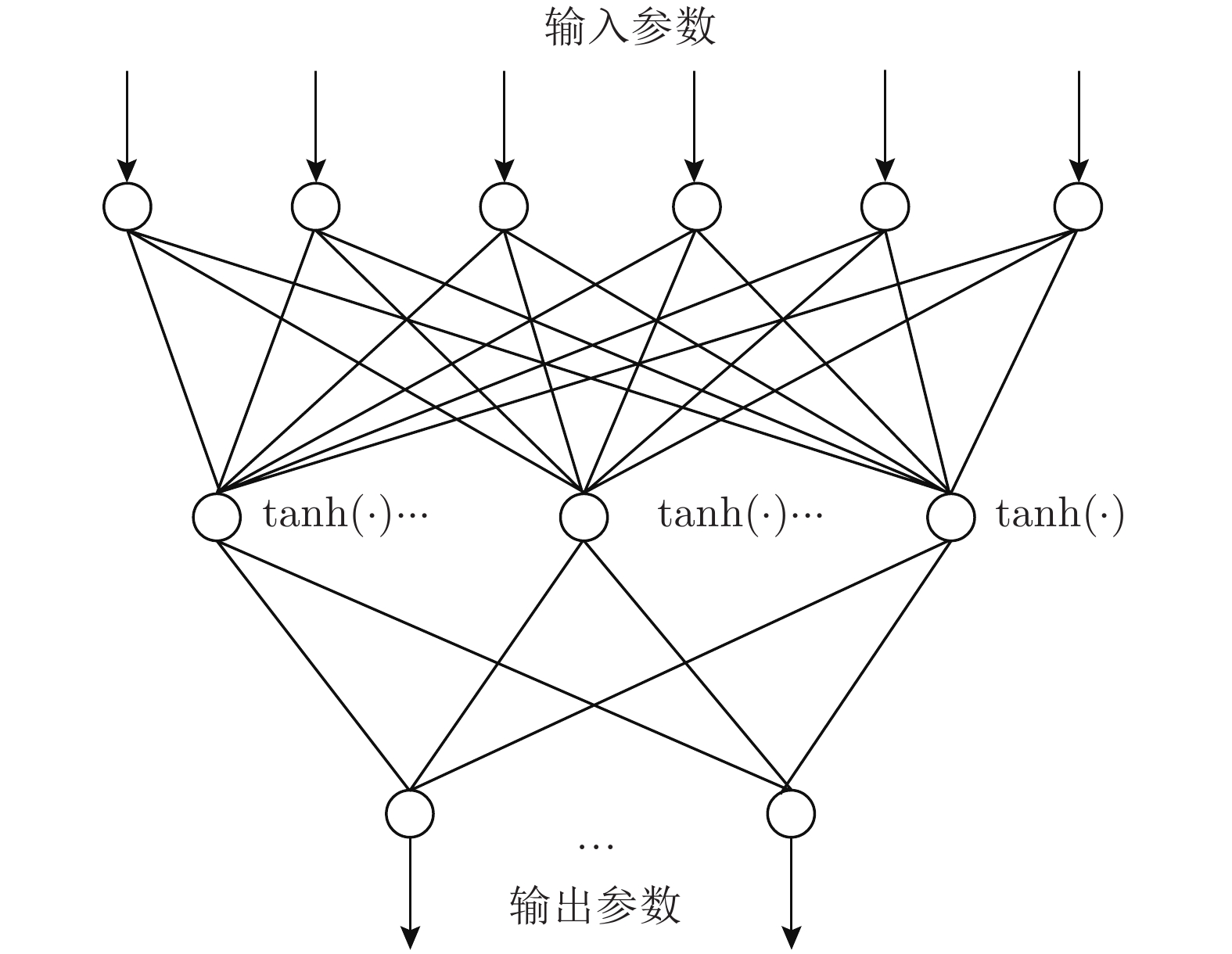
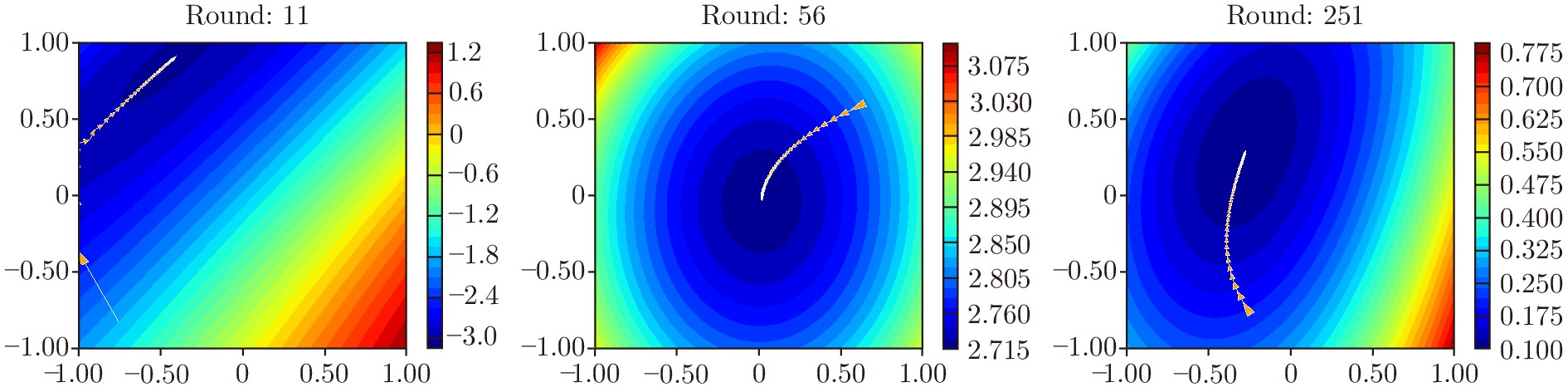
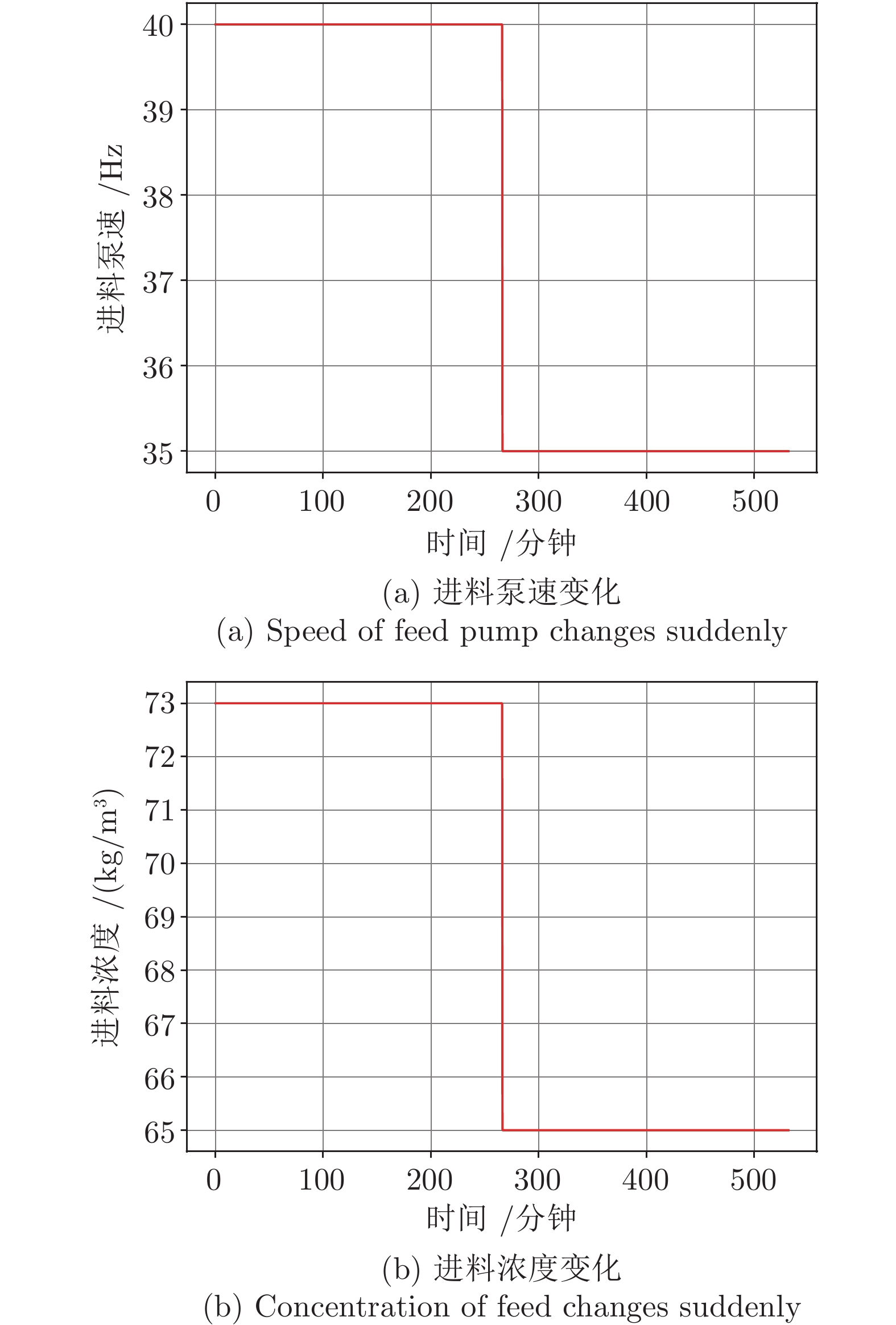
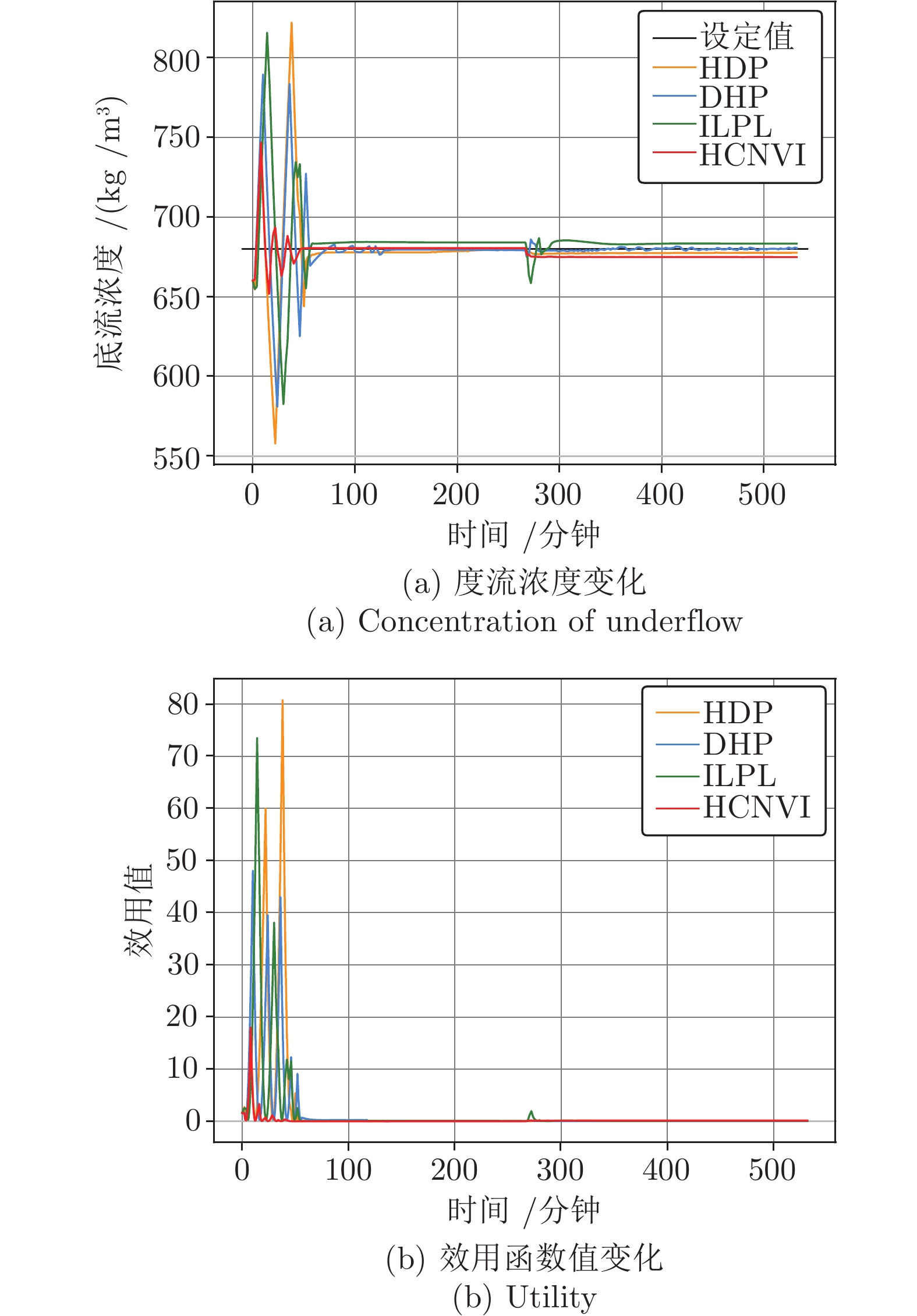
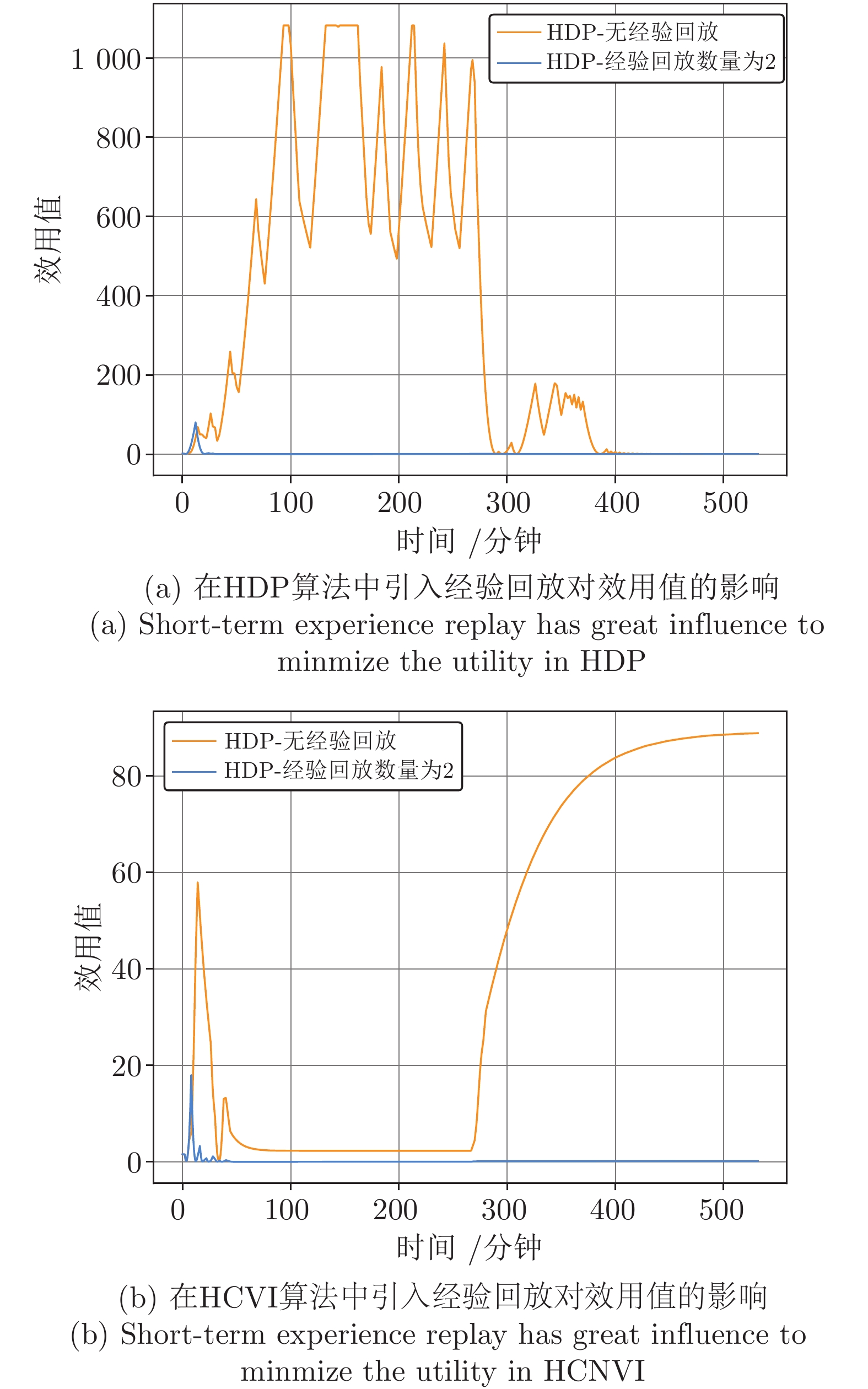
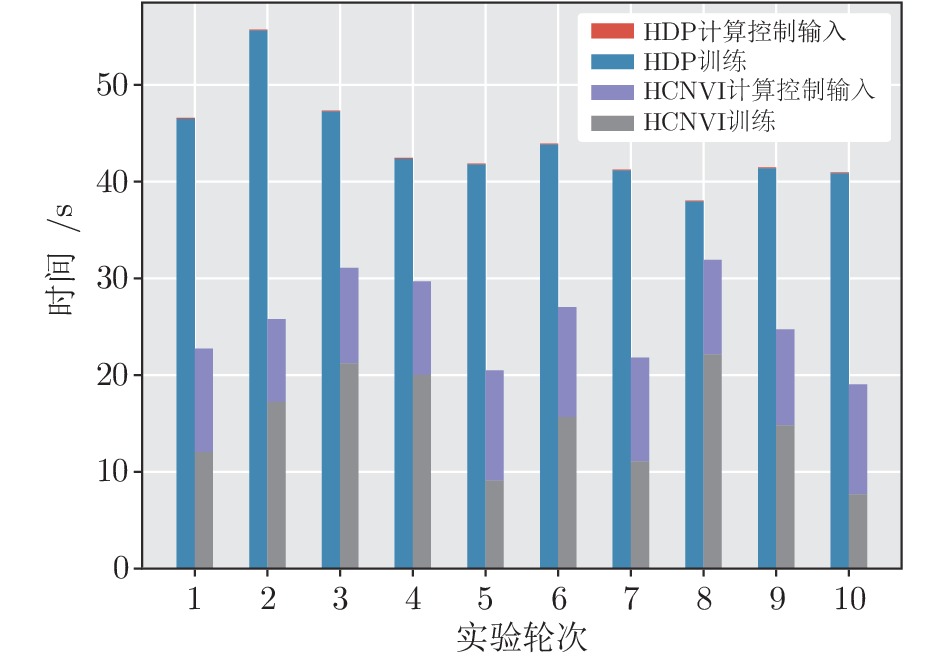
复杂过程工业控制一直是控制应用领域研究的前沿问题. 浓密机作为一种复杂大型工业设备广泛用于冶金、采矿等领域. 由于其在运行过程中具有多变量、非线性、高时滞等特点, 浓密机的底流浓度控制技术一直是学界、工业界的研究难点与热点. 本文提出了一种基于强化学习技术的浓密机在线控制算法. 该算法在传统启发式动态规划 (Heuristic dynamic programming, HDP)算法的基础上, 设计融合了评价网络与模型网络的双网结构, 并提出了基于短期经验回放的方法用于增强评价网络的训练准确性, 实现了对浓密机底流浓度的稳定控制, 并保持控制输入稳定在设定范围之内. 最后, 通过浓密机仿真实验的方式验证了算法的有效性, 实验结果表明本文提出的方法在时间消耗、控制精度上优于其他算法.






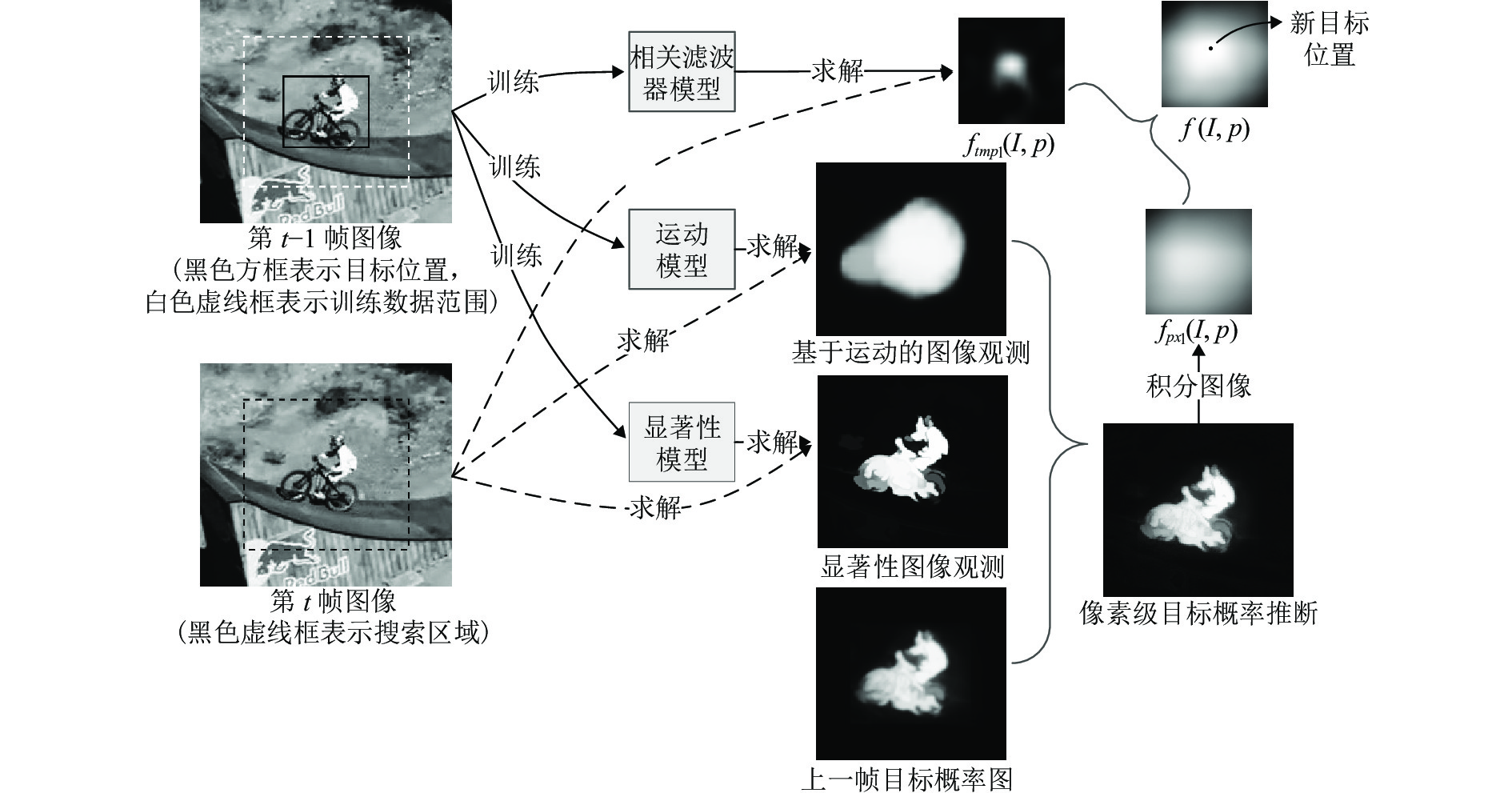
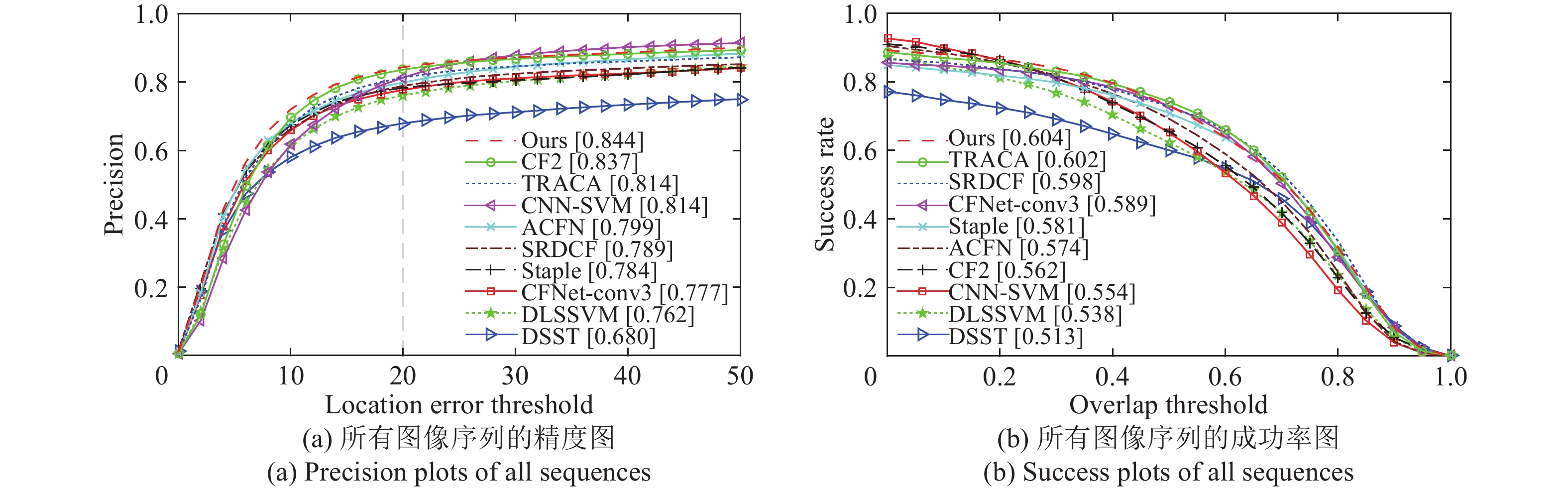
主流的目标跟踪算法以矩形模板的形式建立被跟踪物体的视觉表征, 无法有效区分目标与背景像素, 在背景复杂、目标非刚体形变、复杂运动等挑战性因素影响下容易出现模型偏移的问题, 导致跟踪失败. 与此同时, 像素级的显著性信息与运动先验信息作为人类视觉系统有效区分目标与背景、识别运动物体的重要信号, 并没有在主流目标跟踪算法中得到有效的集成利用. 针对上述问题, 提出目标的像素级概率性表征模型, 并且建立与之对应的像素级目标概率推断方法, 能够有效利用像素级的显著性与运动观测信息, 实现与主流的相关滤波跟踪算法的融合; 提出基于显著性的观测模型, 通过背景先验与提出的背景距离模型, 能够在背景复杂的情况下得到高辨识度的像素级图像观测; 利用目标与相机运动的连续性来计算目标和背景的运动模式, 并以此为基础建立基于运动估计的图像观测模型. 实验结果表明, 提出的目标表征模型与融合方法能够有效集成上述像素级图像观测信息, 提出的跟踪方法总体跟踪精度优于多种当下最先进的跟踪器, 对跟踪场景中的背景复杂、目标形变、平面内旋转等挑战性因素具有更好的鲁棒性.






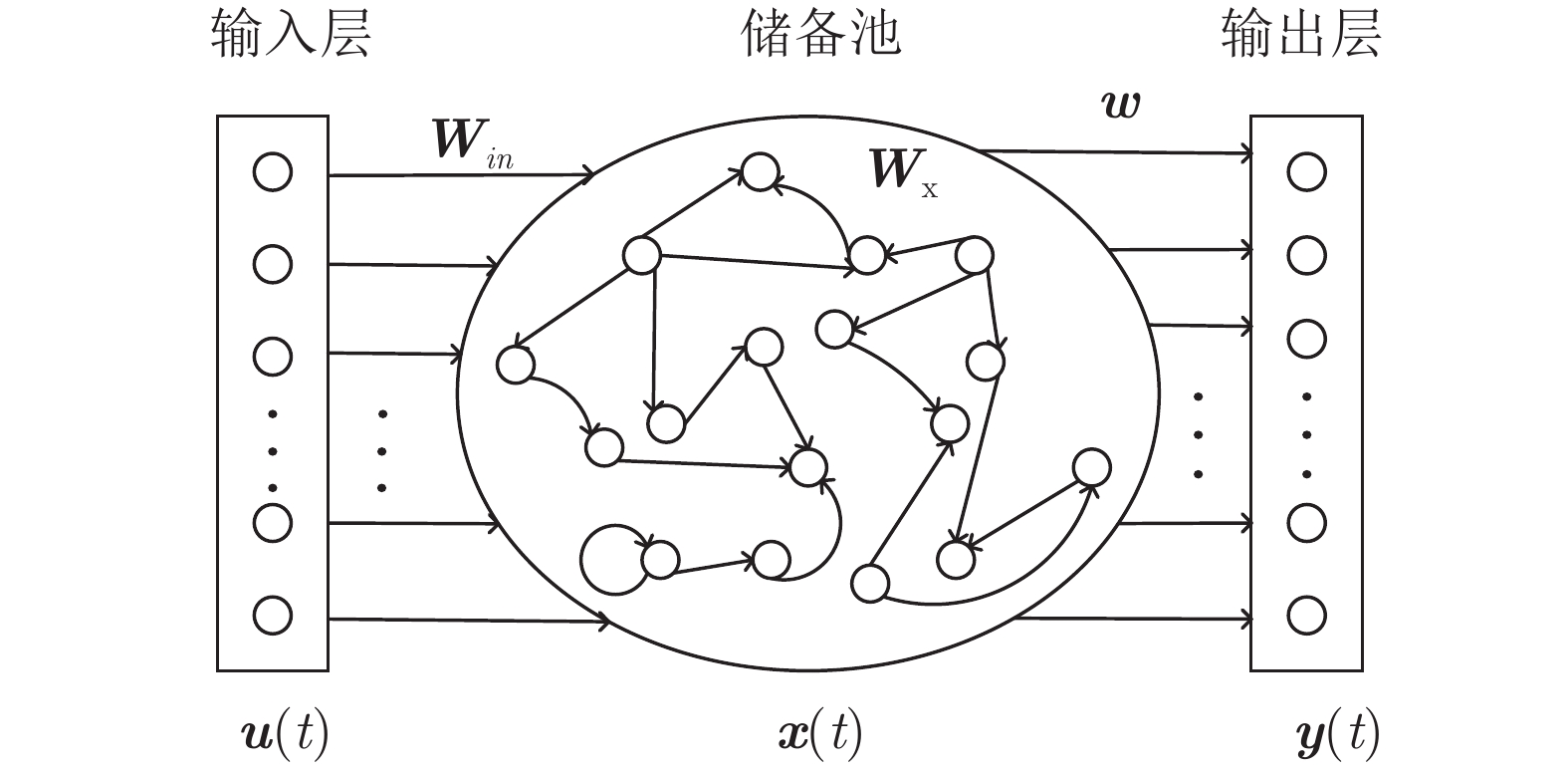
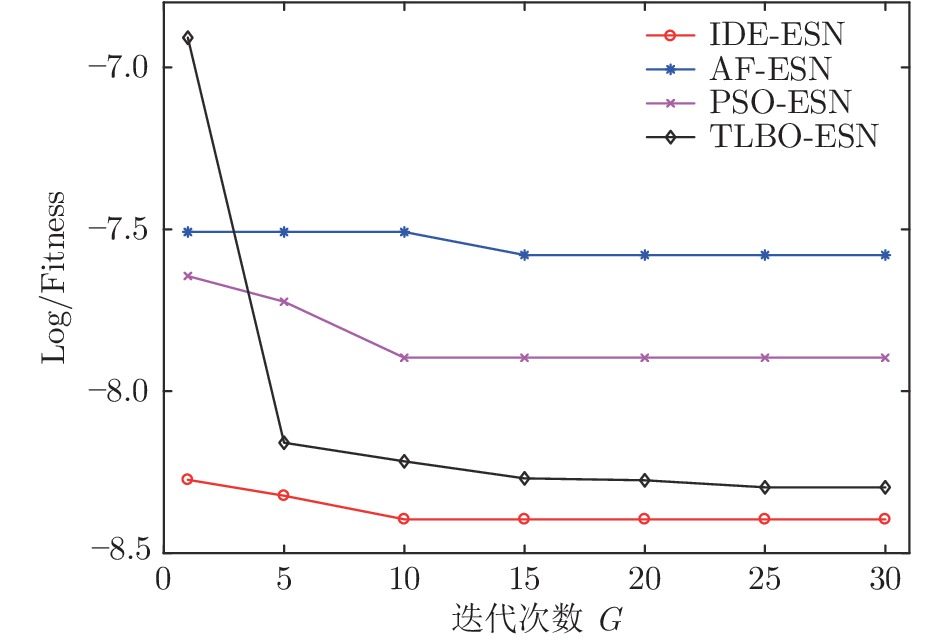
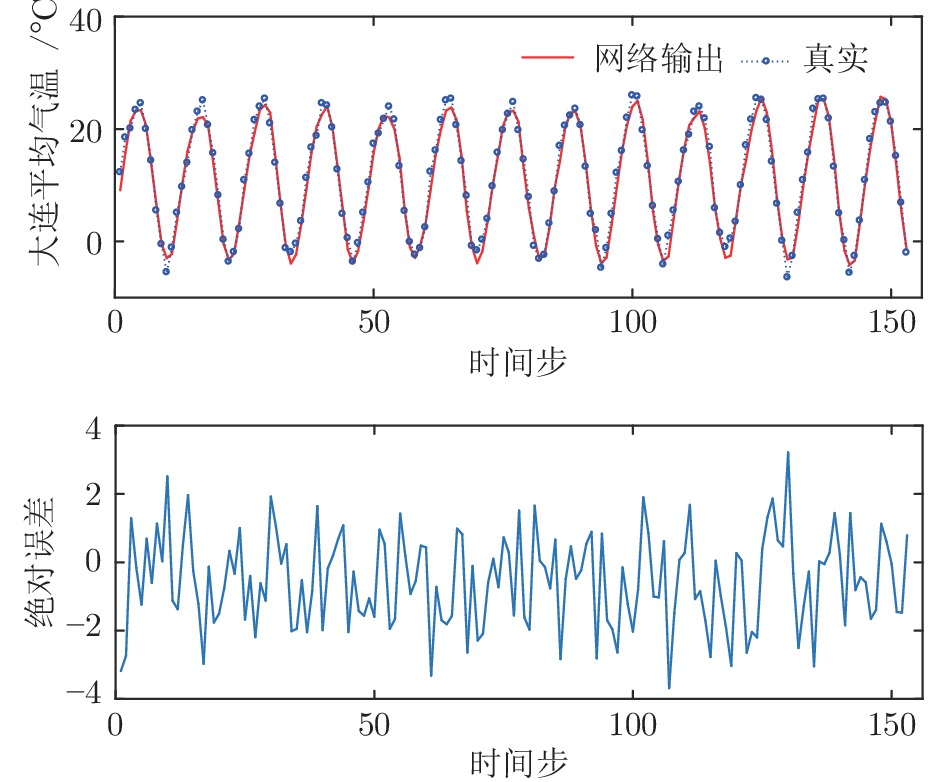
针对回声状态网络无法根据不同的时间序列有效地选择储备池参数的问题, 本文提出一种新型预测模型, 利用改进的差分进化算法来优化回声状态网络. 其中差分进化算法的缩放因子F、交叉概率CR和变异策略自适应调整, 以提高算法的寻优性能. 为验证本文方法的有效性, 对Lorenz时间序列、大连月平均气温 − 降雨量数据集进行仿真实验. 由实验结果可知, 本文提出的模型可以提高时间序列的预测精度, 且具有良好的泛化能力及实际应用价值.



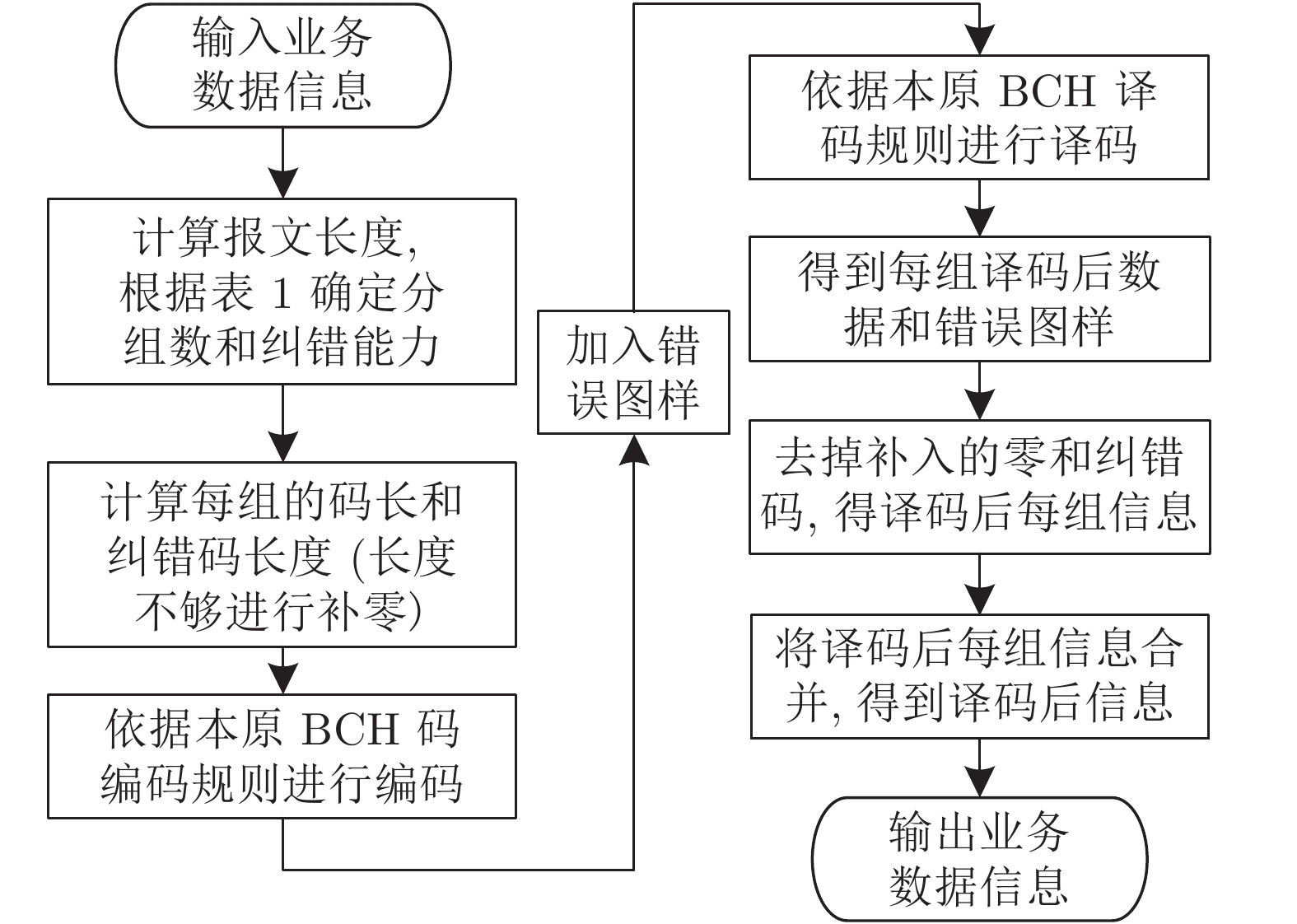
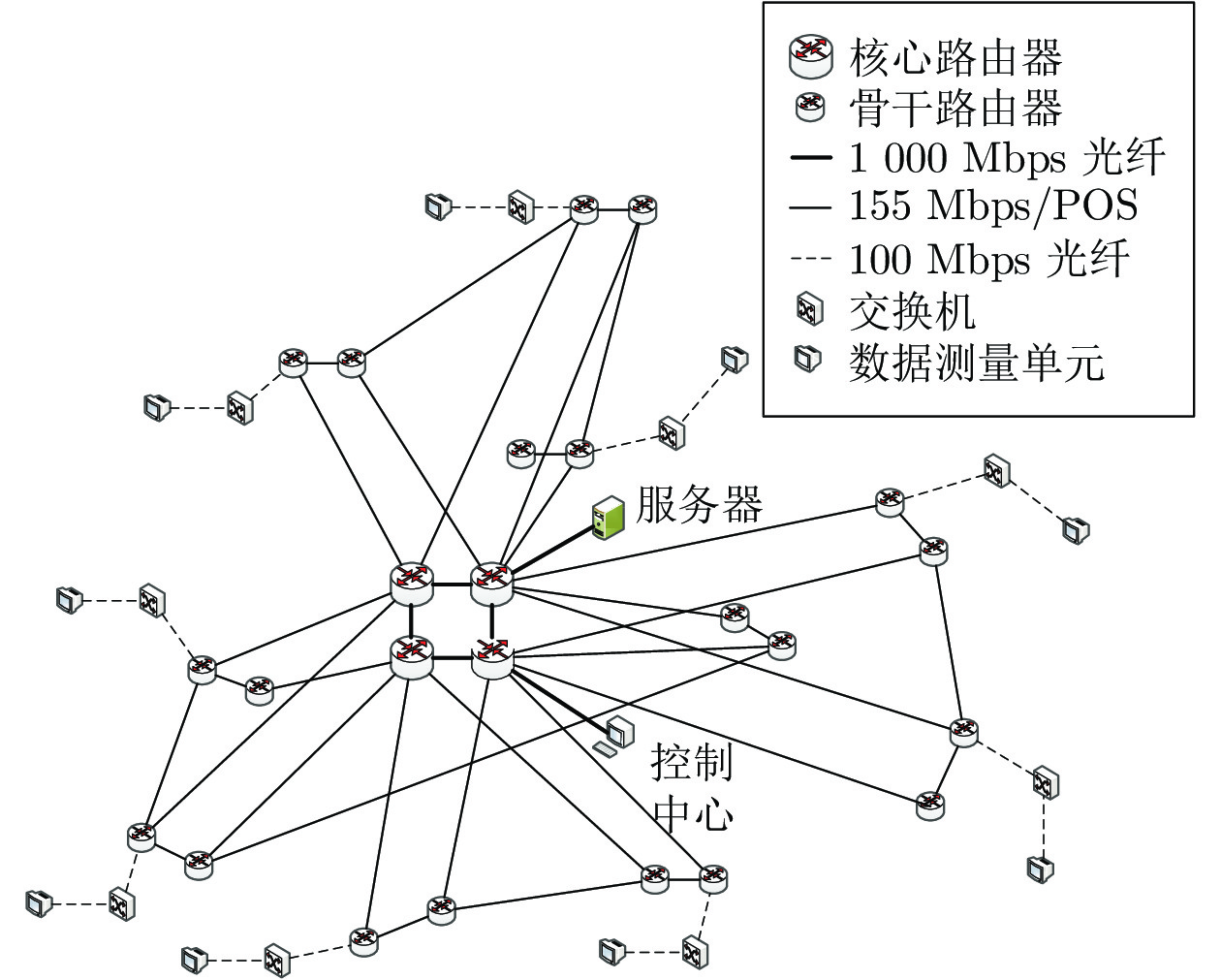
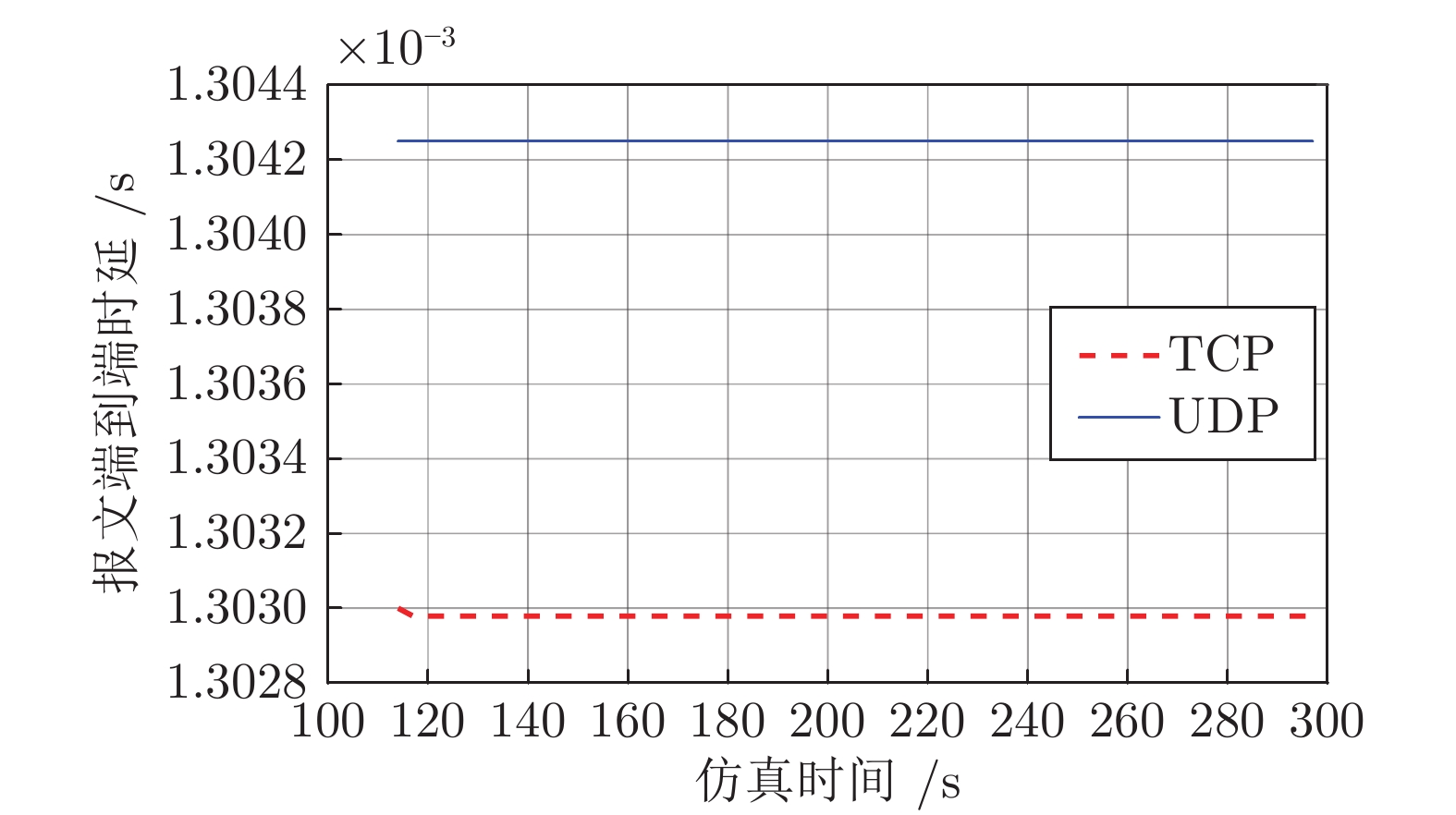
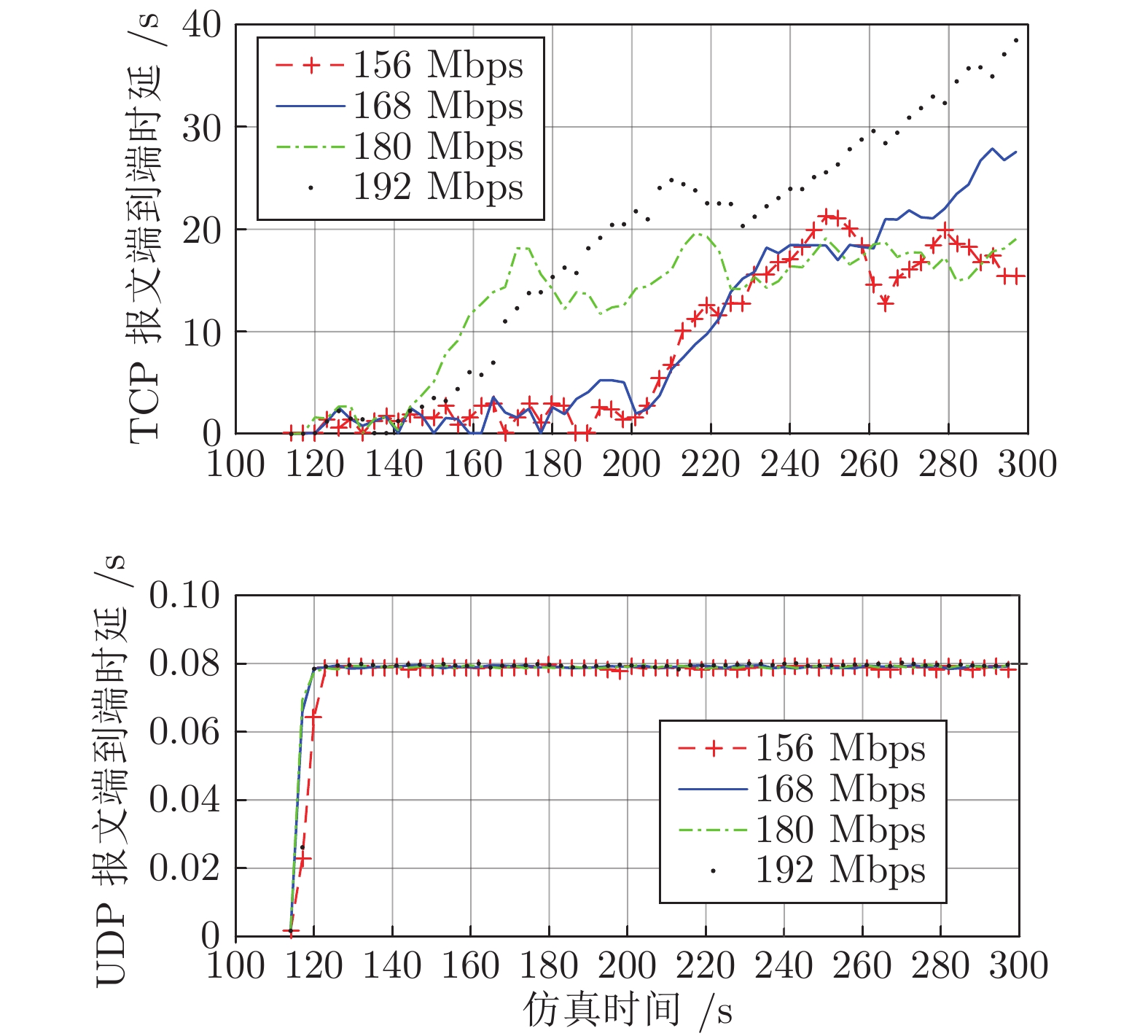
电力广域保护系统从点到点通信逐步走向网络化通信, 如何在拥塞状态下保障业务的实时性和可靠性, 成为亟待解决的问题. 针对传输控制协议(Transmission control protocol, TCP)不能保障实时性以及用户数据报协议(User datagram protocol, UDP)不能保障可靠性的问题, 本文提出一种联合应用层纠错、检错和重发机制的UDP传输方案, 在提供低时延传输服务的同时也能保障报文的可靠性. 考虑到算法的复杂性, 选择本原BCH (Bose-Chaudhuri-Hocquenghem)码作为纠错编码算法, 设计了编码分组方法, 并通过实验验证了分组方法的正确性; 对增加纠错机制后的报文实时性进行了理论分析和仿真验证; 为了解决突发误码和丢包情况下的可靠性问题, 进一步设计了应用层检错和重发机制, 并分析了时延. 分析表明, 在应用层增加本文所设计的纠错、检错和重发机制后增加的时延几乎可以忽略不计. 最后给出了所提方法的联合应用算法, 并进行了可靠性分析, 结果表明本文方案的可靠性高于其他UDP传输方案.



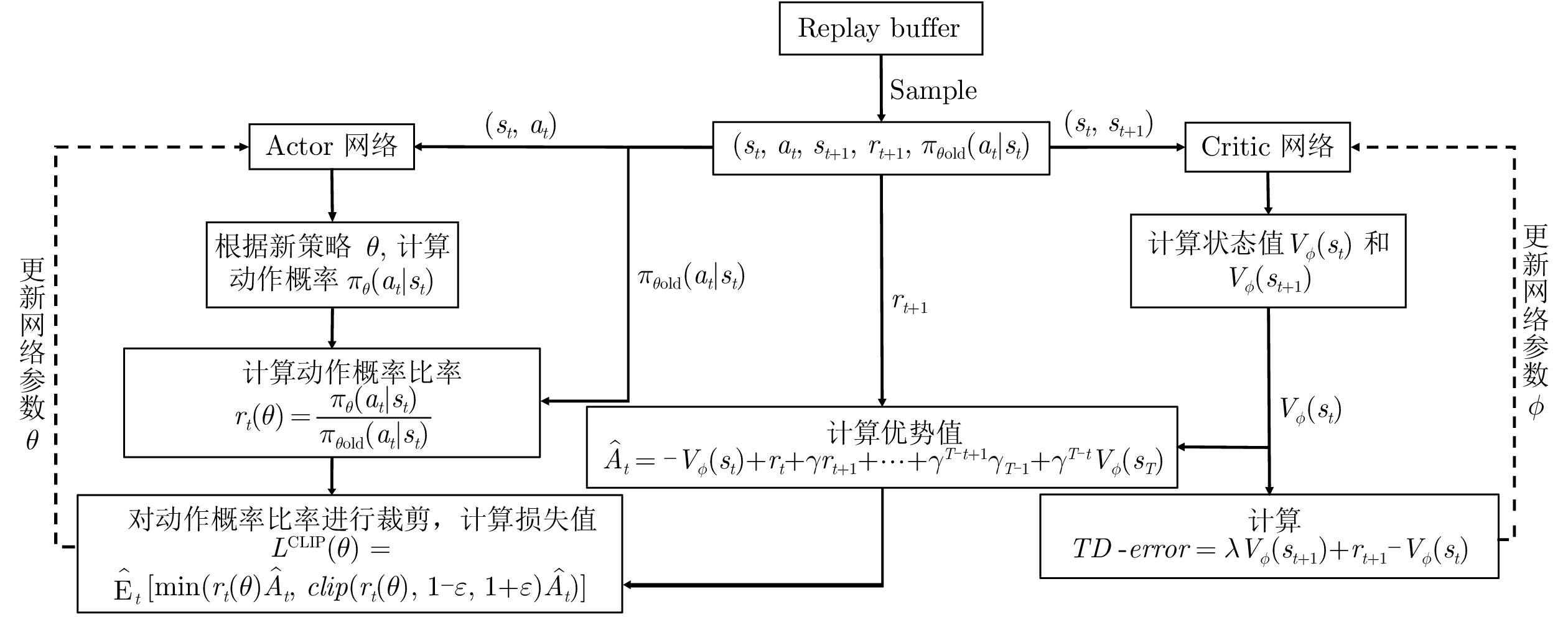
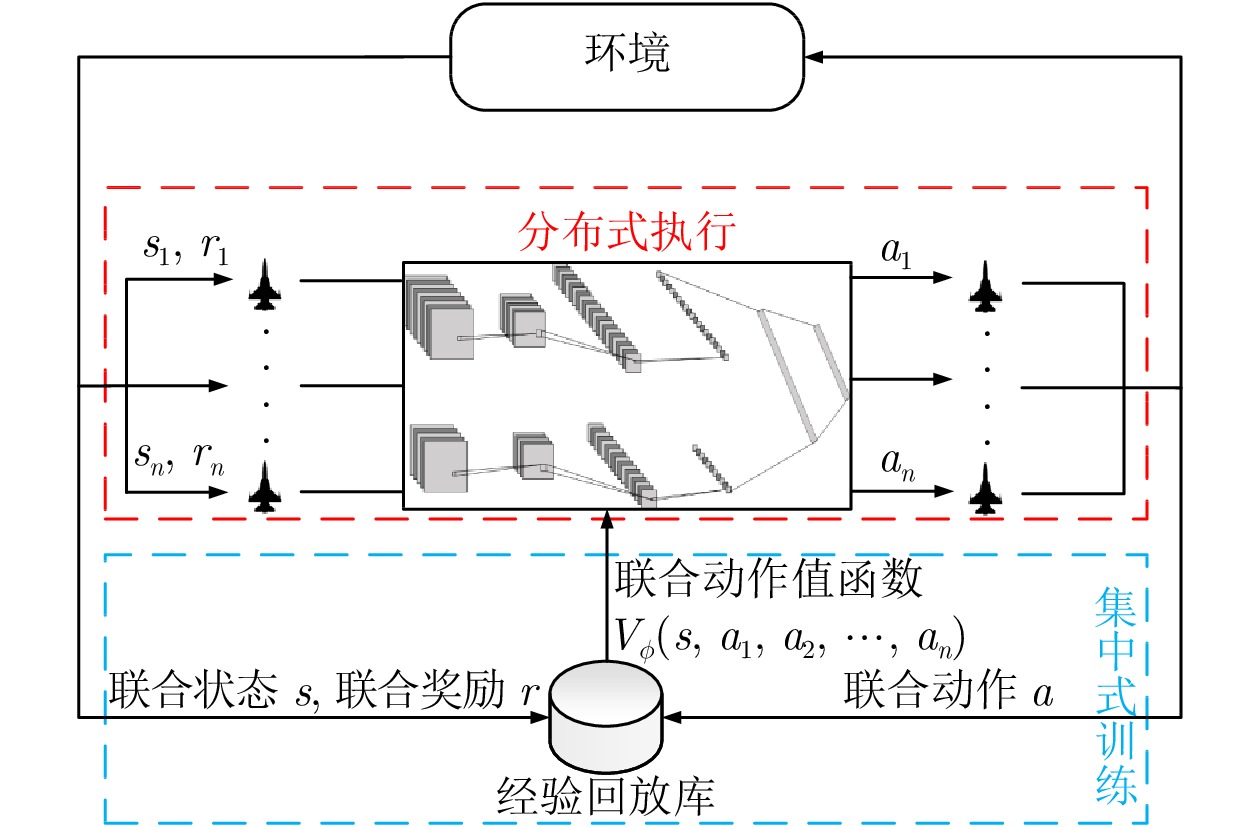
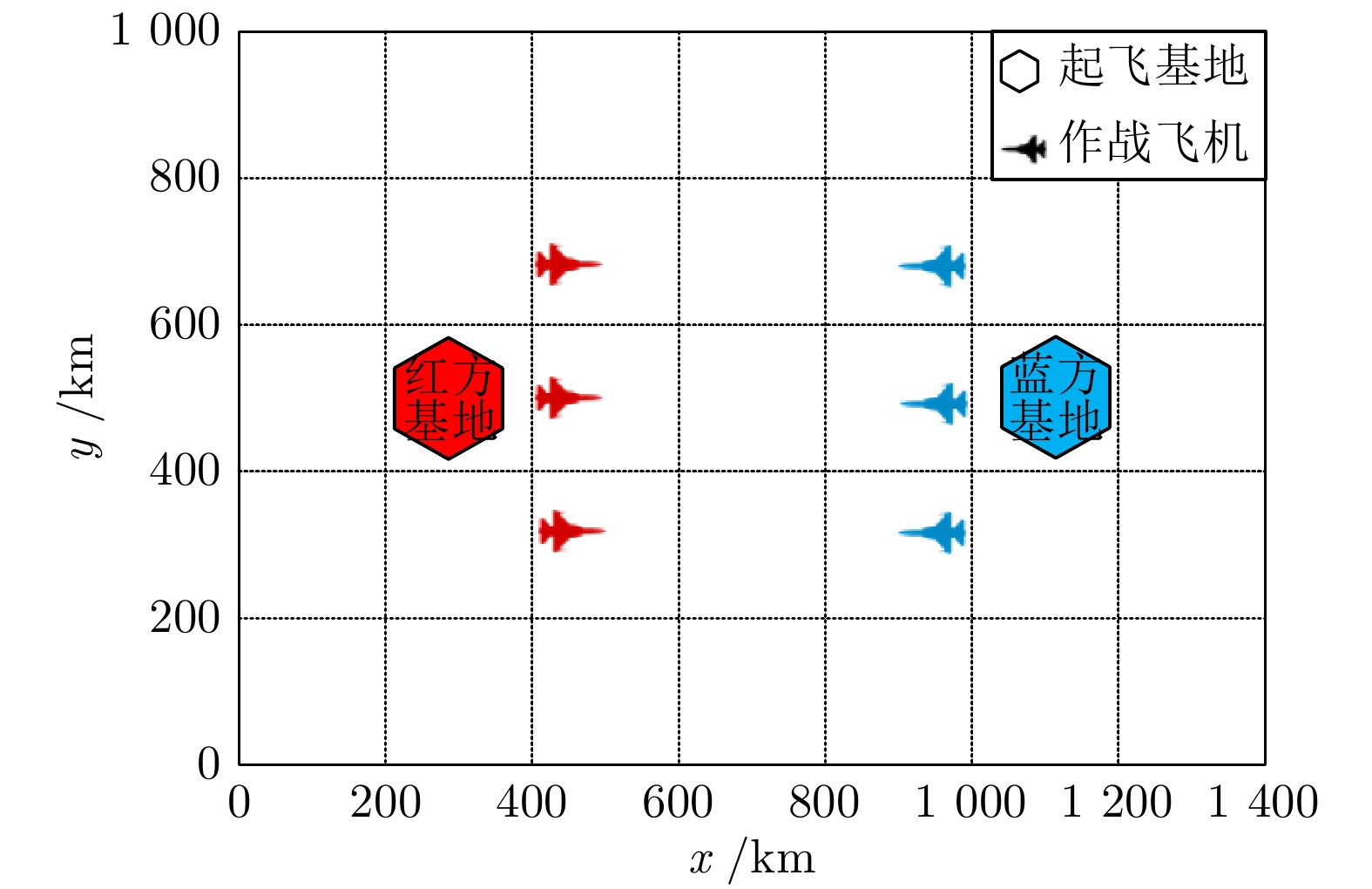
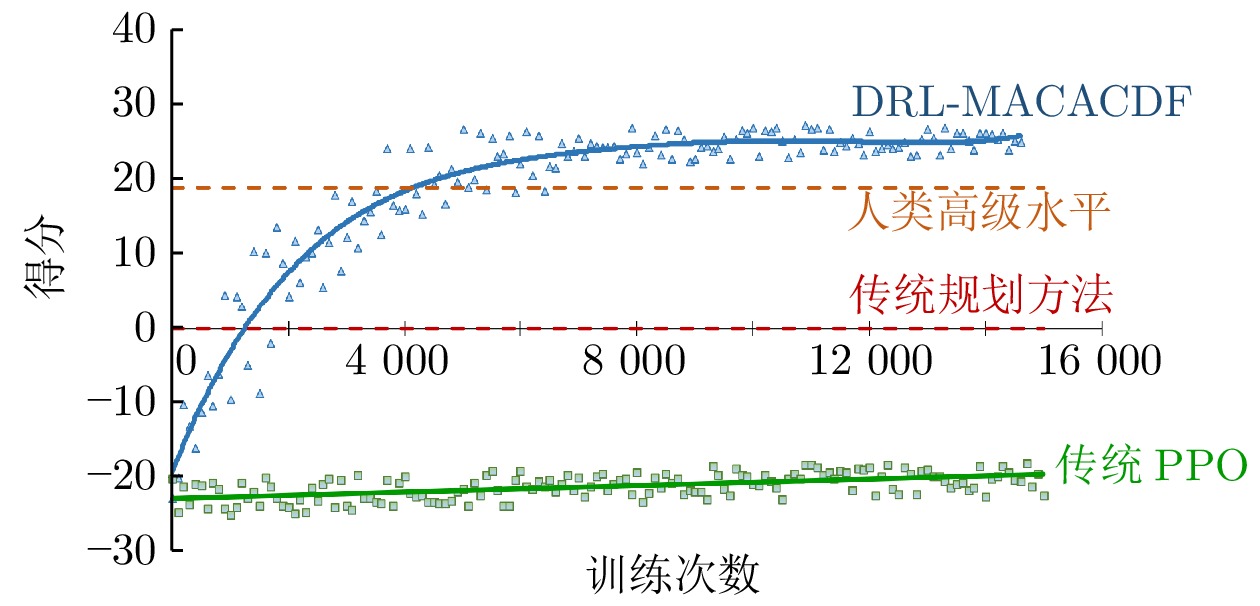
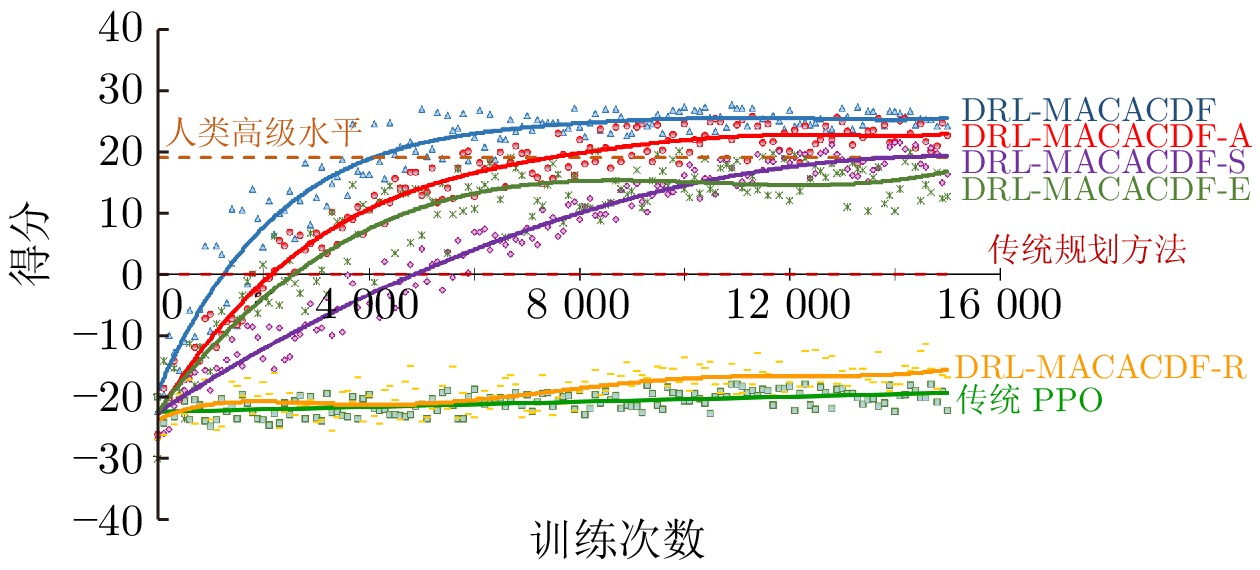
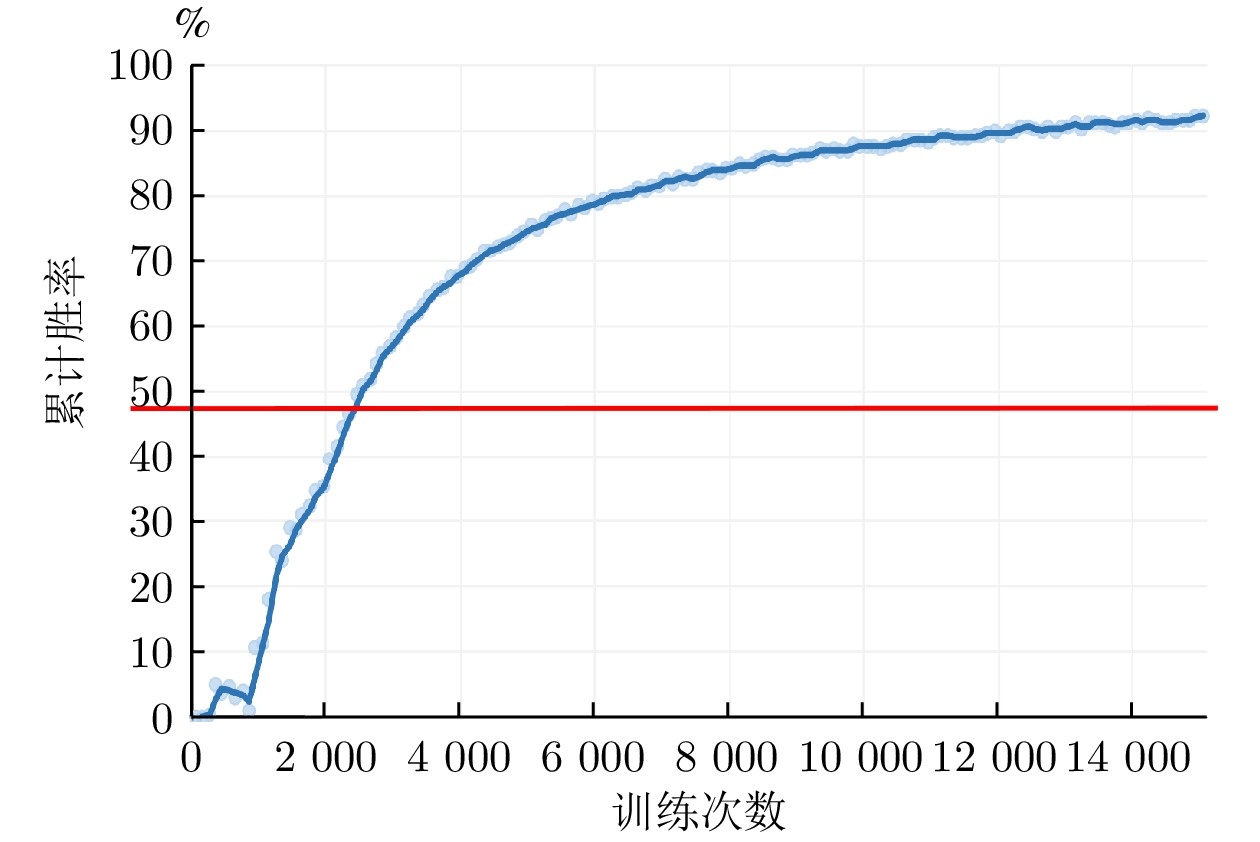
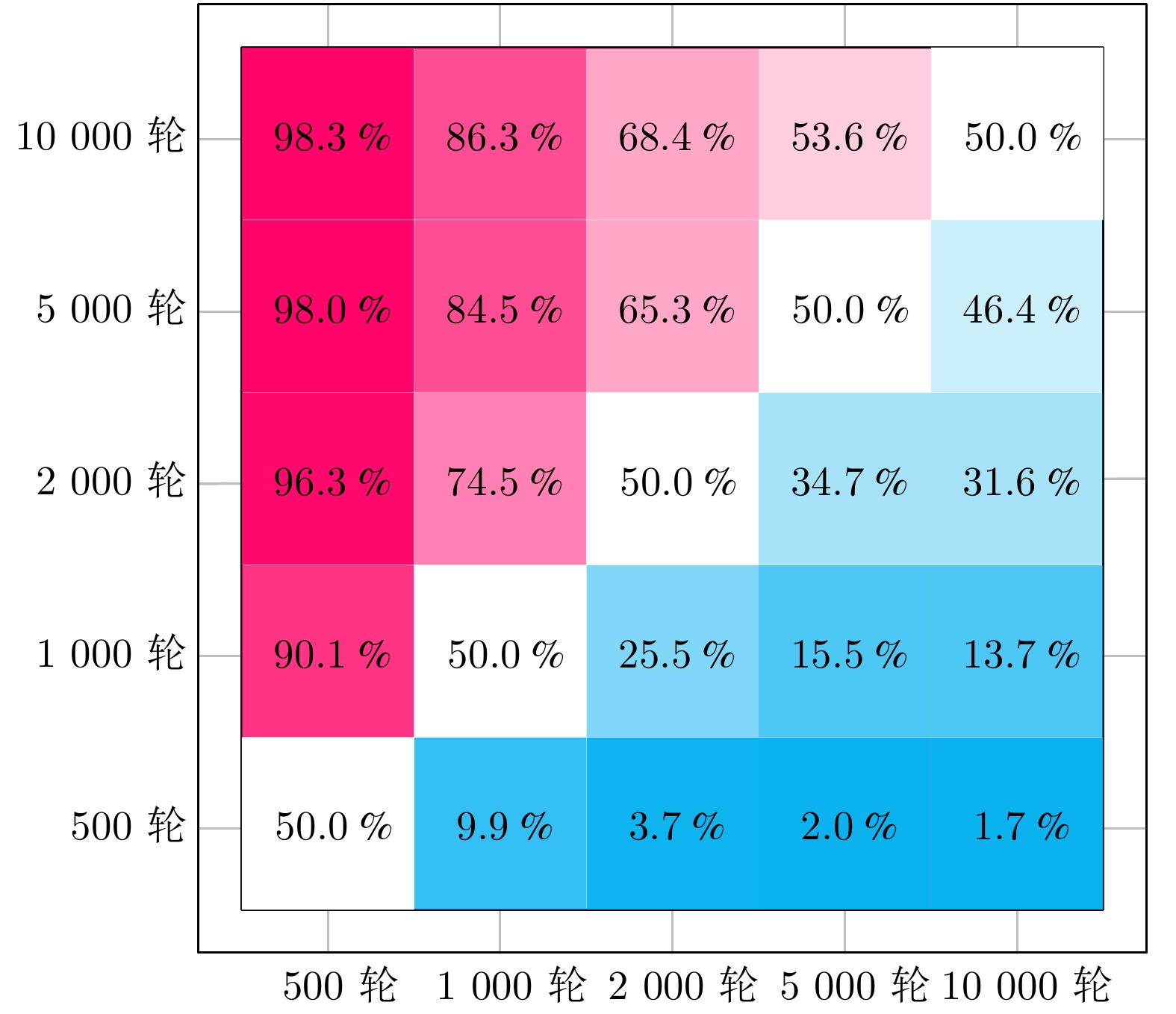
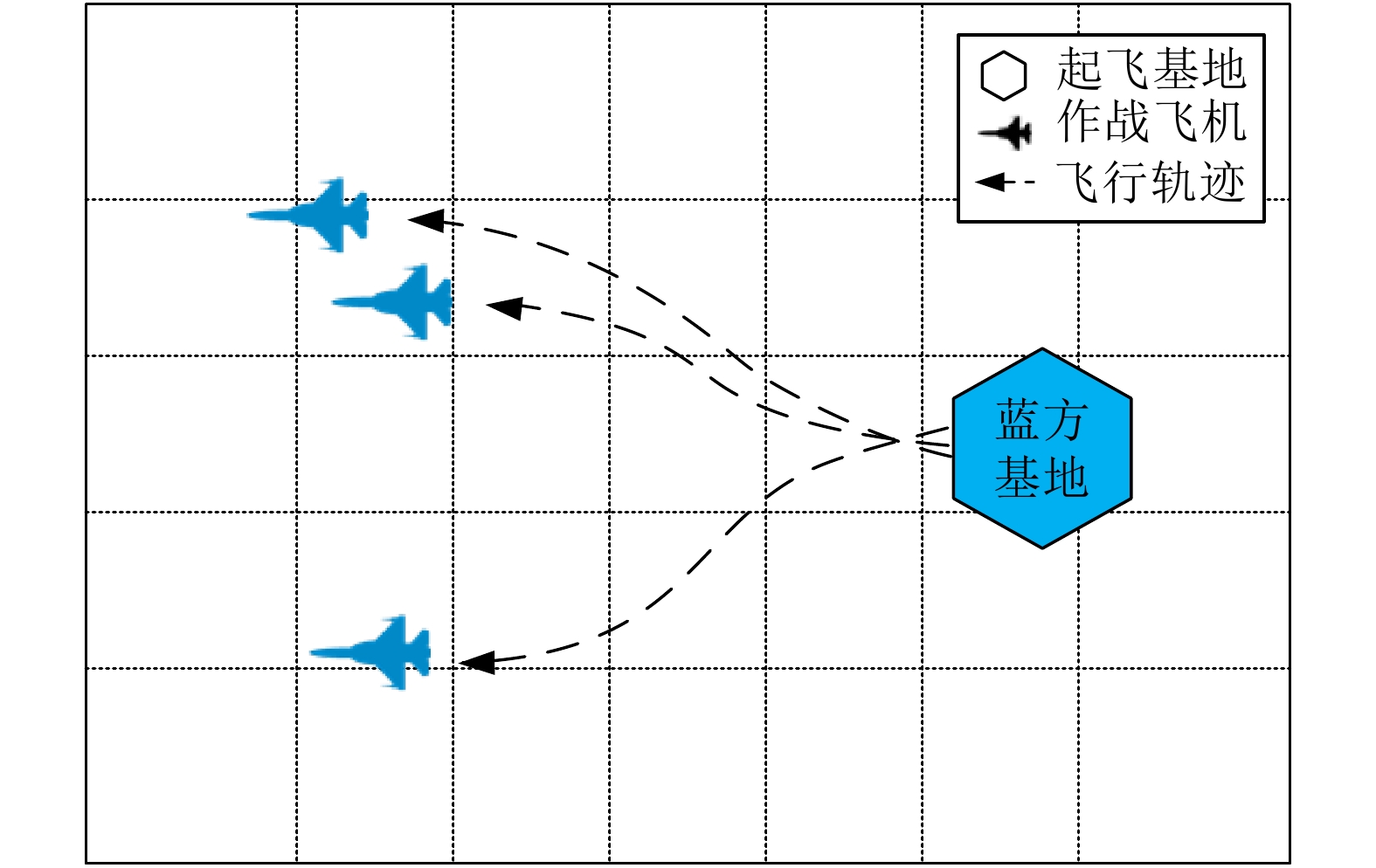
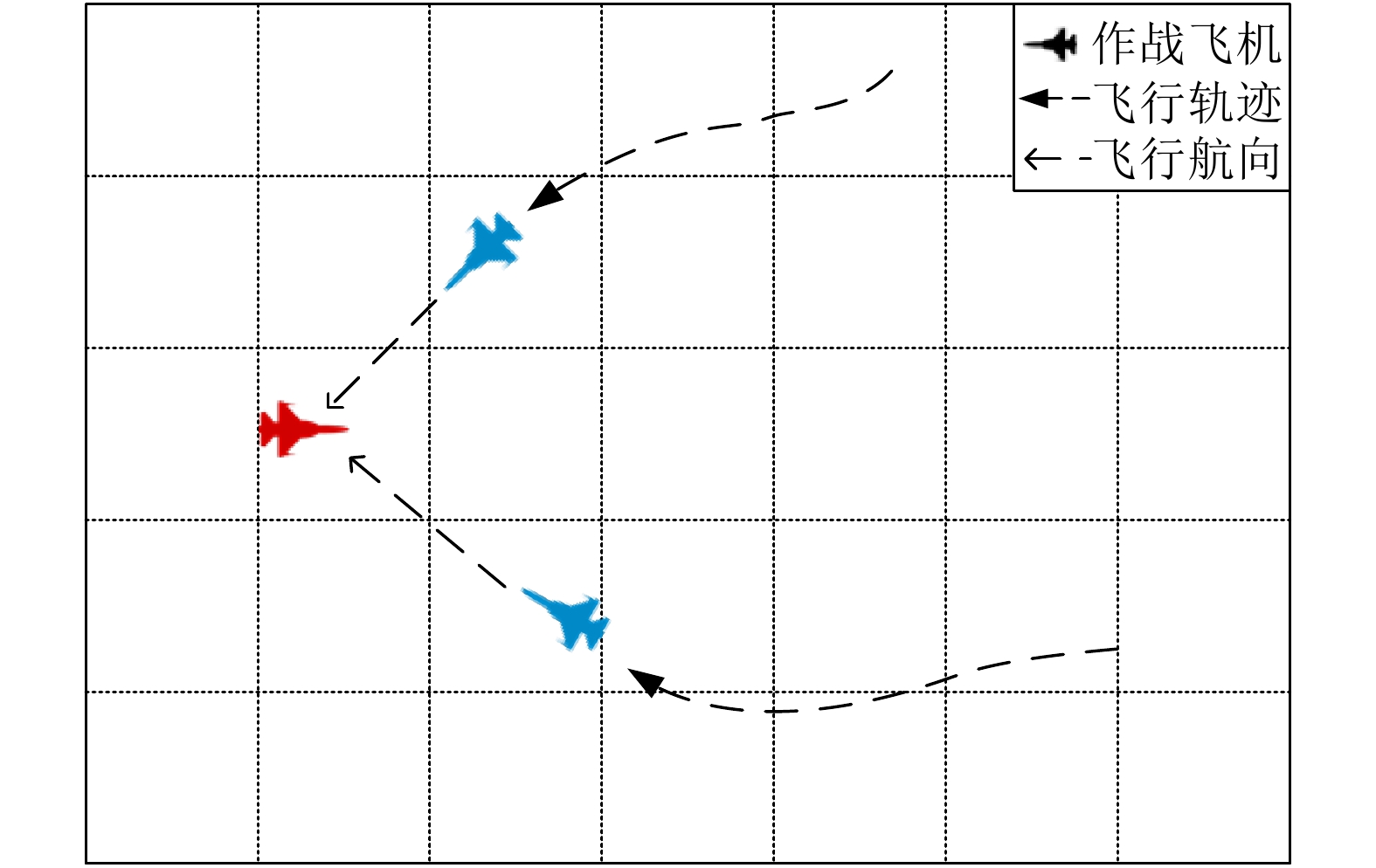
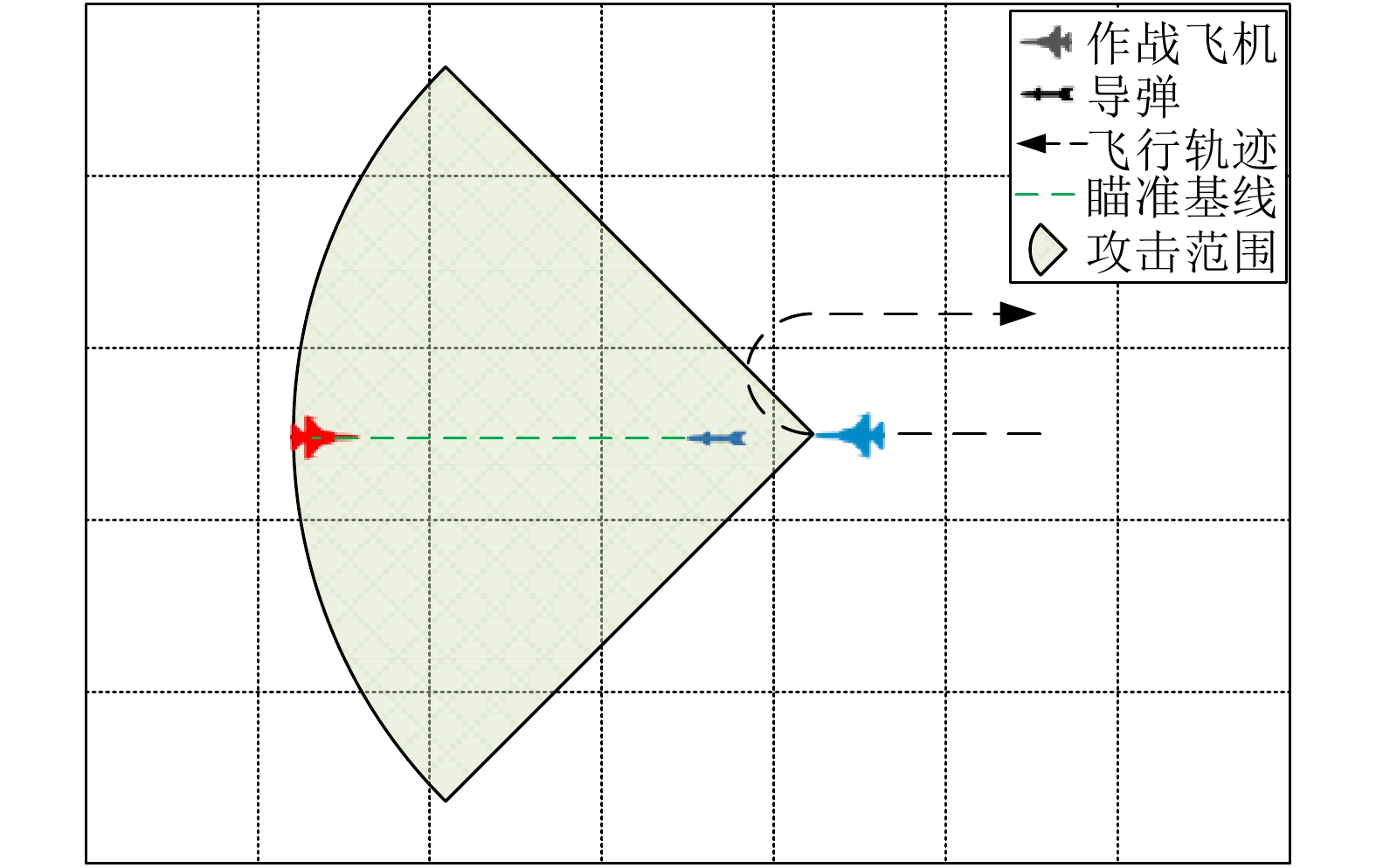
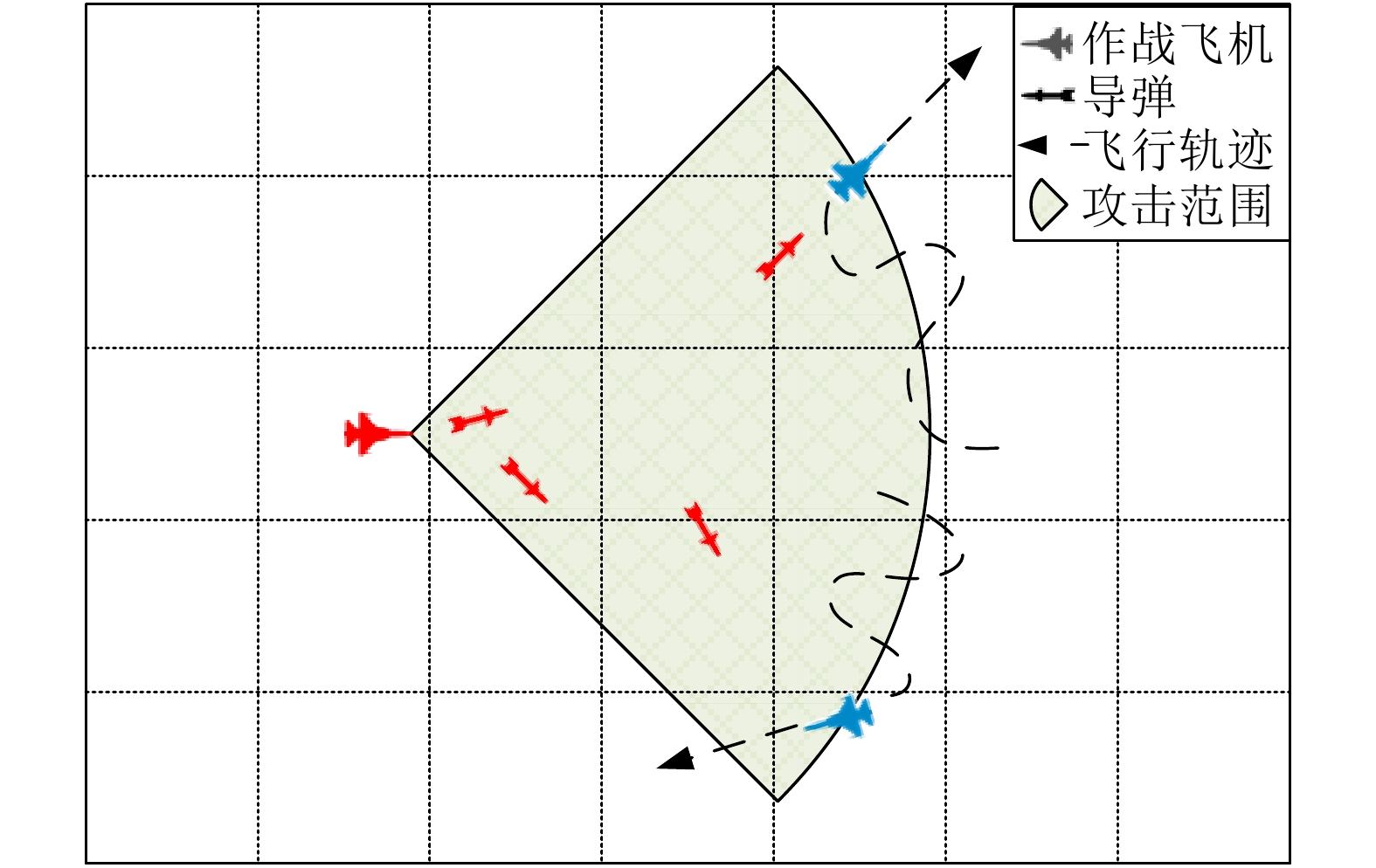
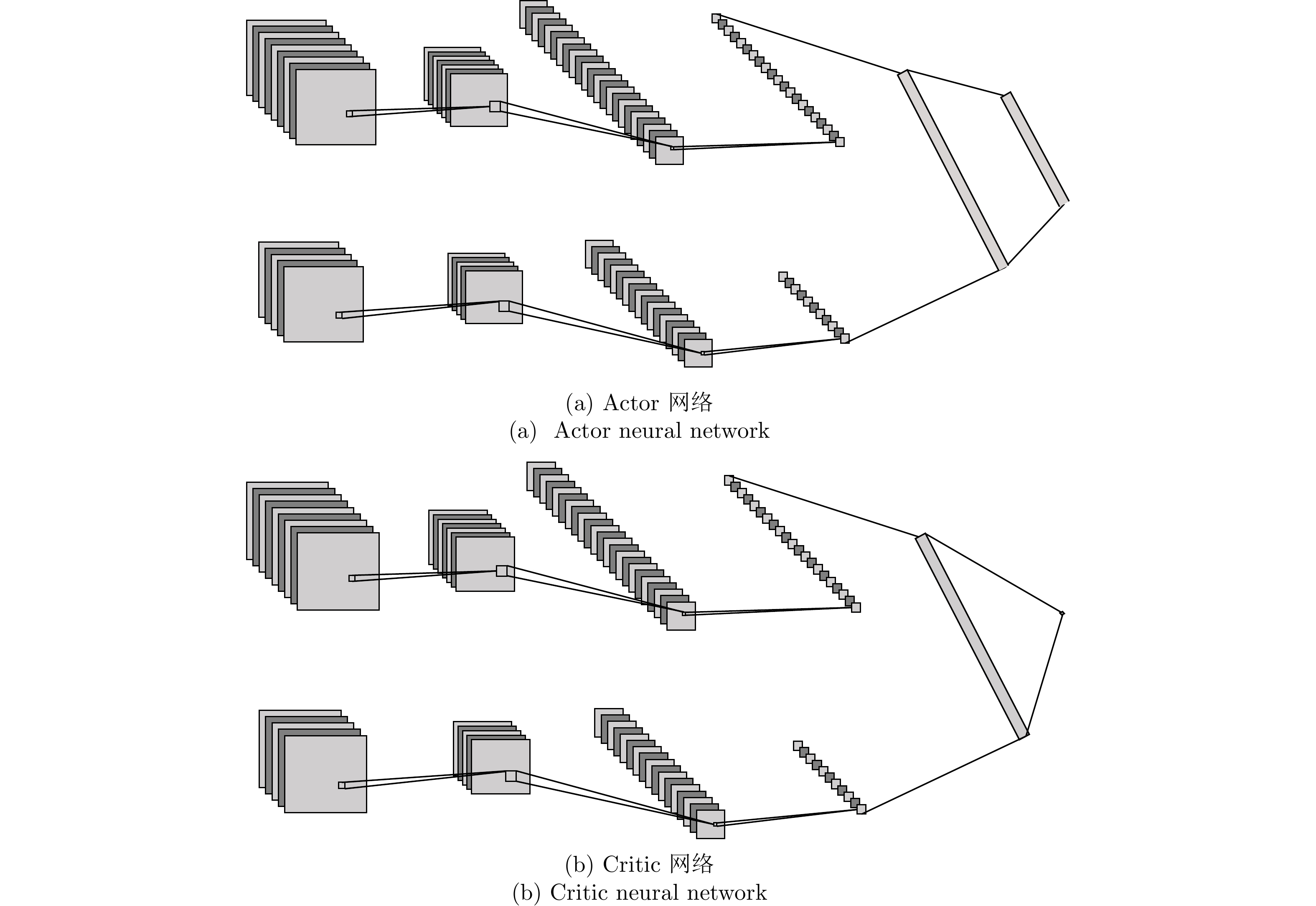
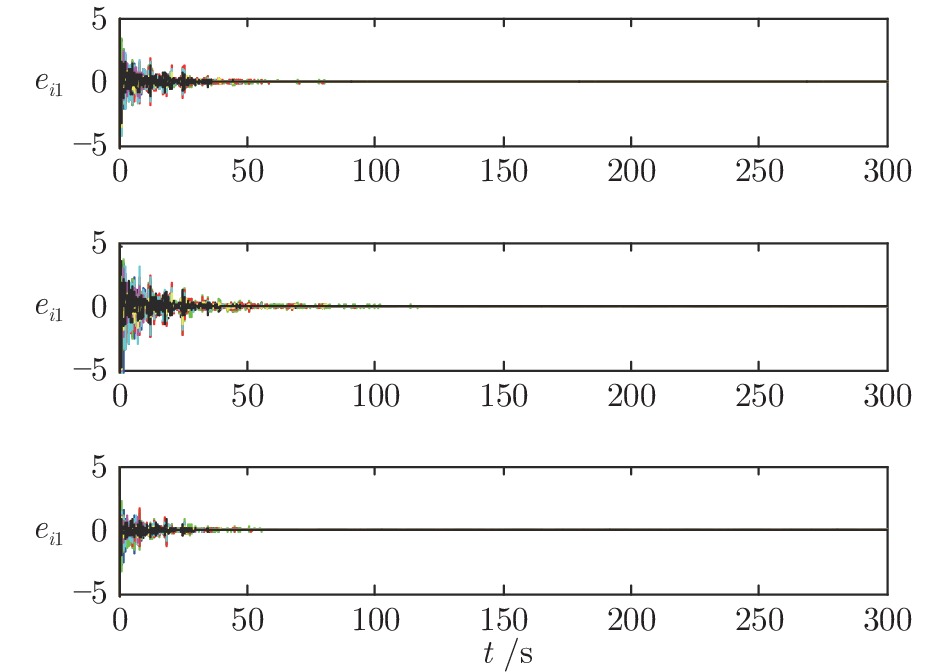
多机协同是空中作战的关键环节, 如何处理多实体间复杂的协作关系、实现多机协同空战的智能决策是亟待解决的问题. 为此, 提出基于深度强化学习的多机协同空战决策流程框架(Deep-reinforcement-learning-based multi-aircraft cooperative air combat decision framework, DRL-MACACDF), 并针对近端策略优化(Proximal policy optimization, PPO)算法, 设计4种算法增强机制, 提高多机协同对抗场景下智能体间的协同程度. 在兵棋推演平台上进行的仿真实验, 验证了该方法的可行性和实用性, 并对对抗过程数据进行了可解释性复盘分析, 研讨了强化学习与传统兵棋推演结合的交叉研究方向.



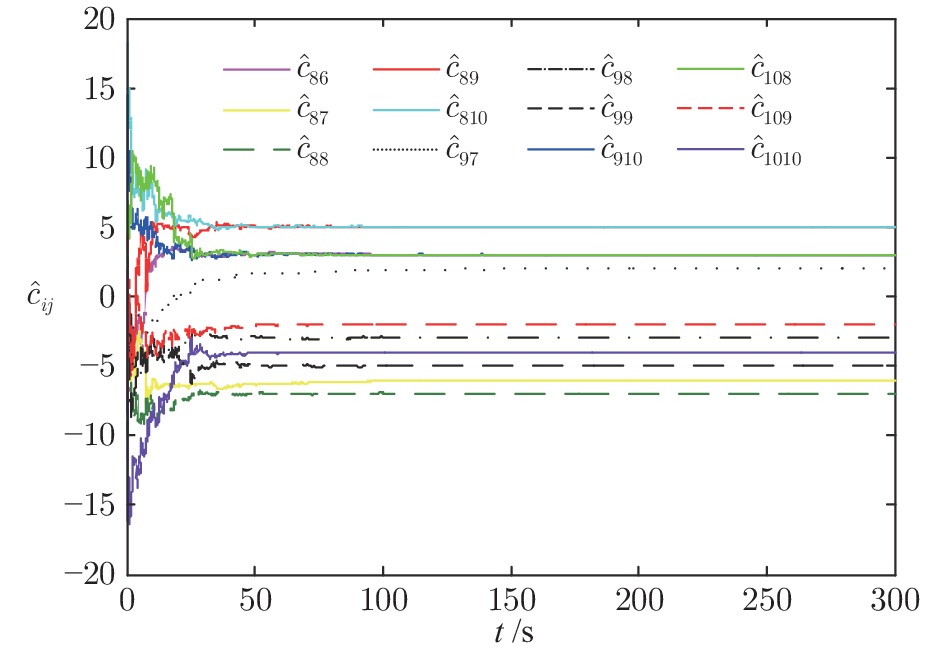
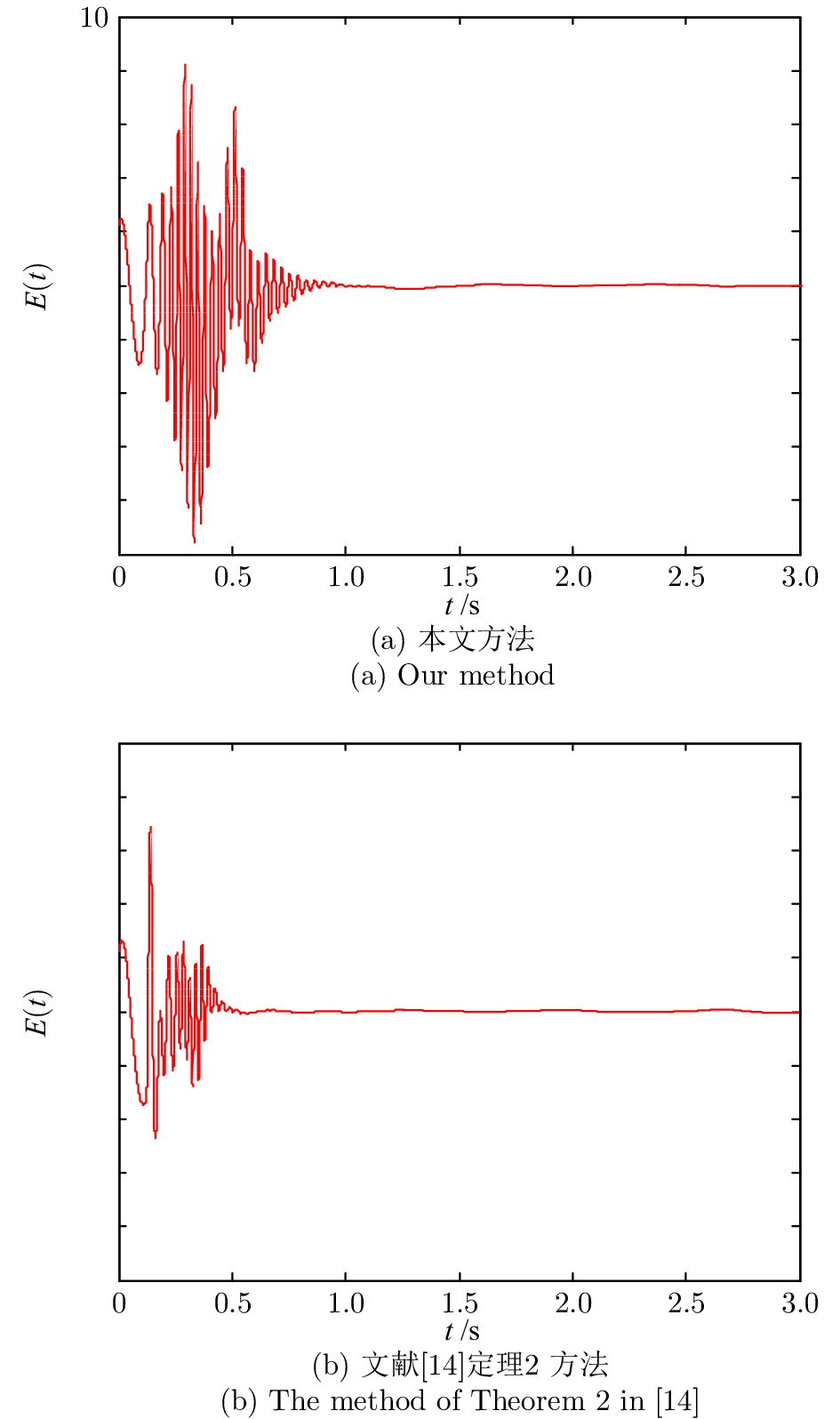
针对具有不确定性的复杂网络有限时间同步问题, 提出一种新颖的单向耦合控制方法. 构建含有未知参量及未知拓扑结构的驱动−响应复杂网络模型, 考虑两个网络具有不同的节点数, 同时受到时变耦合时滞的影响, 并且网络内部分别具有不同的节点系统. 基于有限时间稳定性理论和线性矩阵不等式变换, 通过在响应网络中引入单向耦合项, 实现两个网络间的有限时间同步, 同时准确辨识未知参量及未知拓扑结构. 仿真实验验证所提同步方法的有效性, 对比实验结果表明所提方法在减少耦合数量的同时具有更快的同步速率及更小的波动范围.


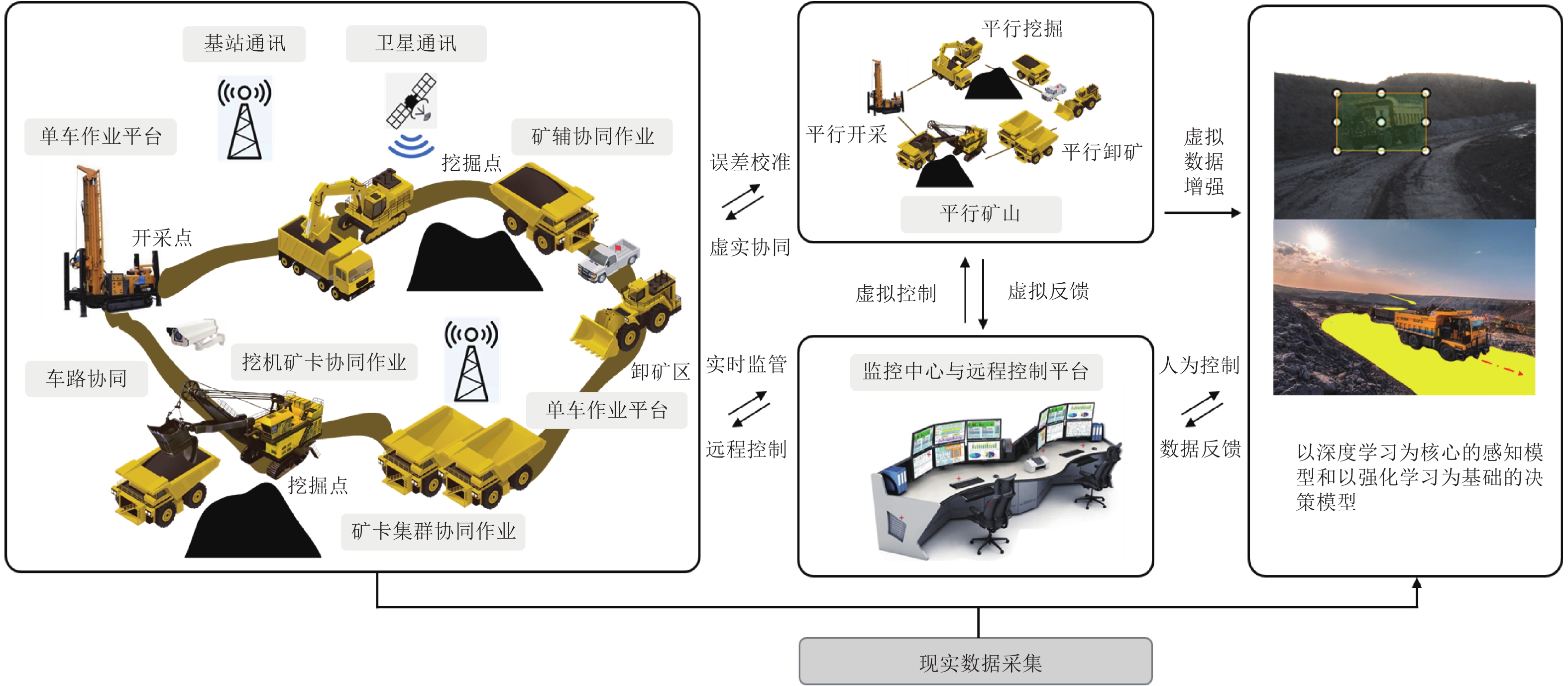
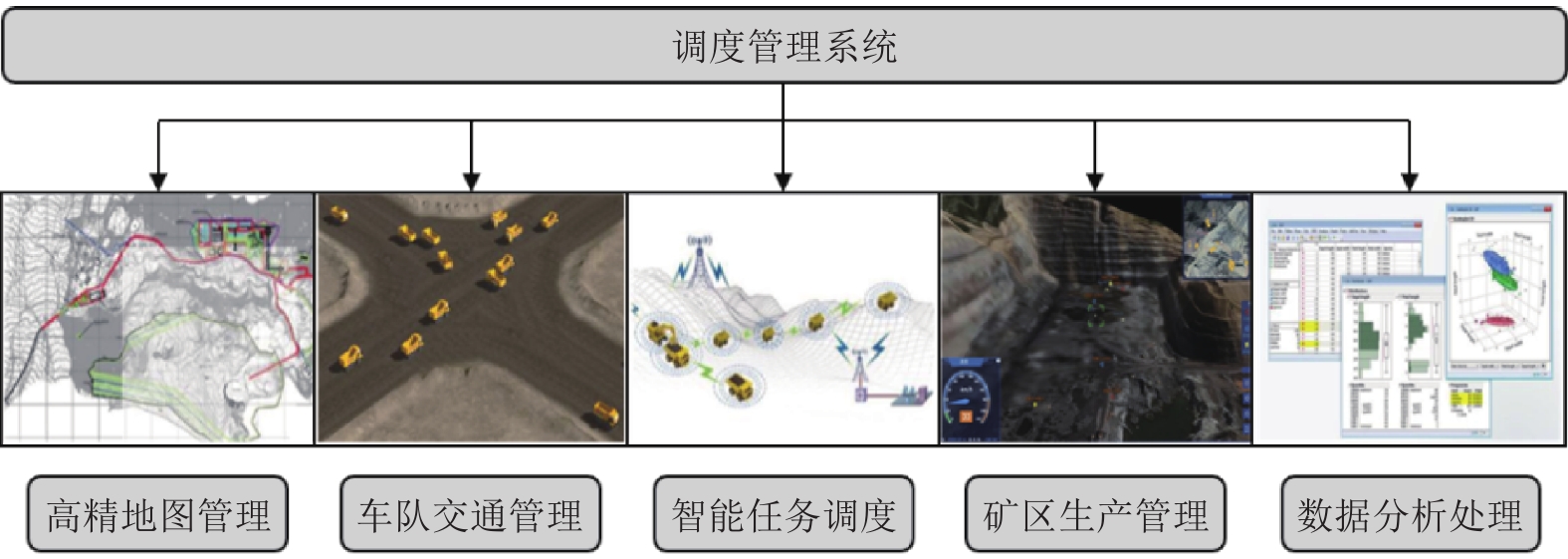
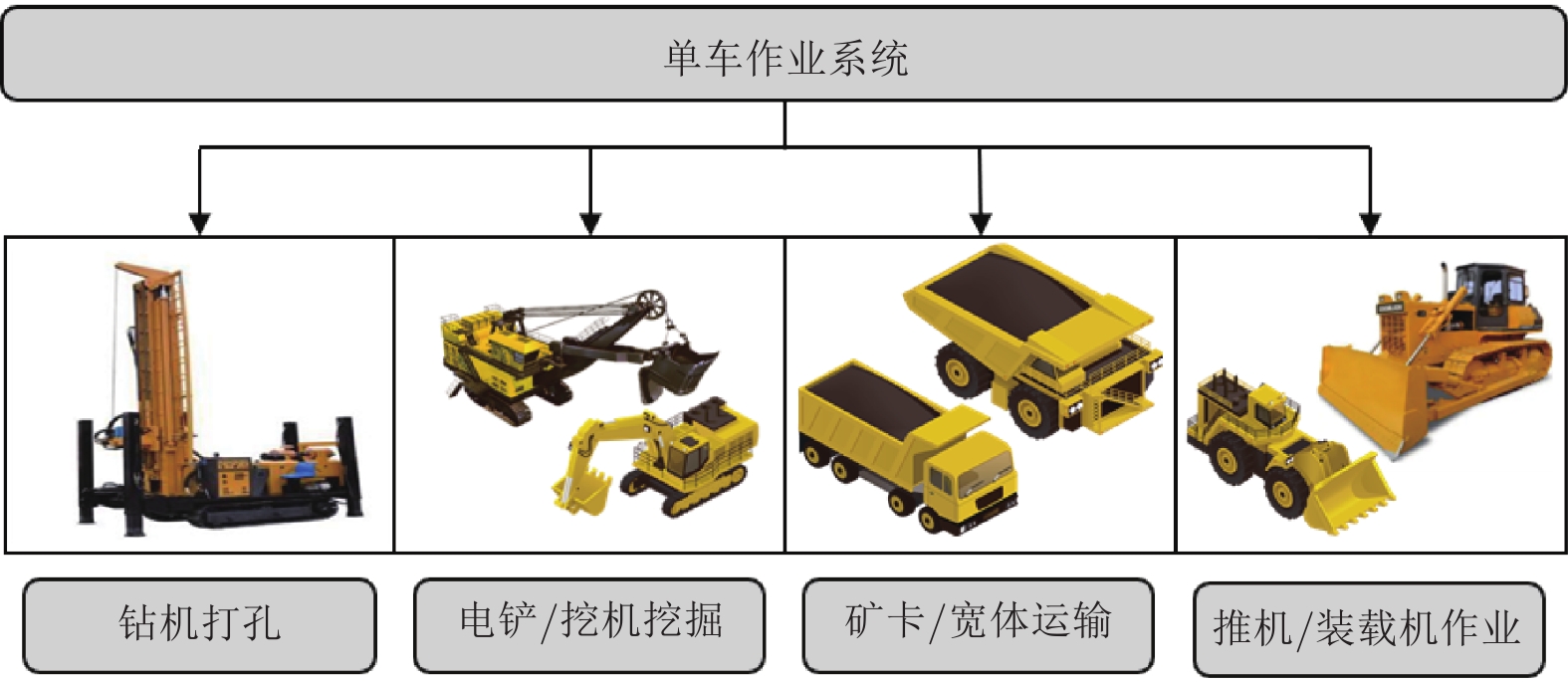
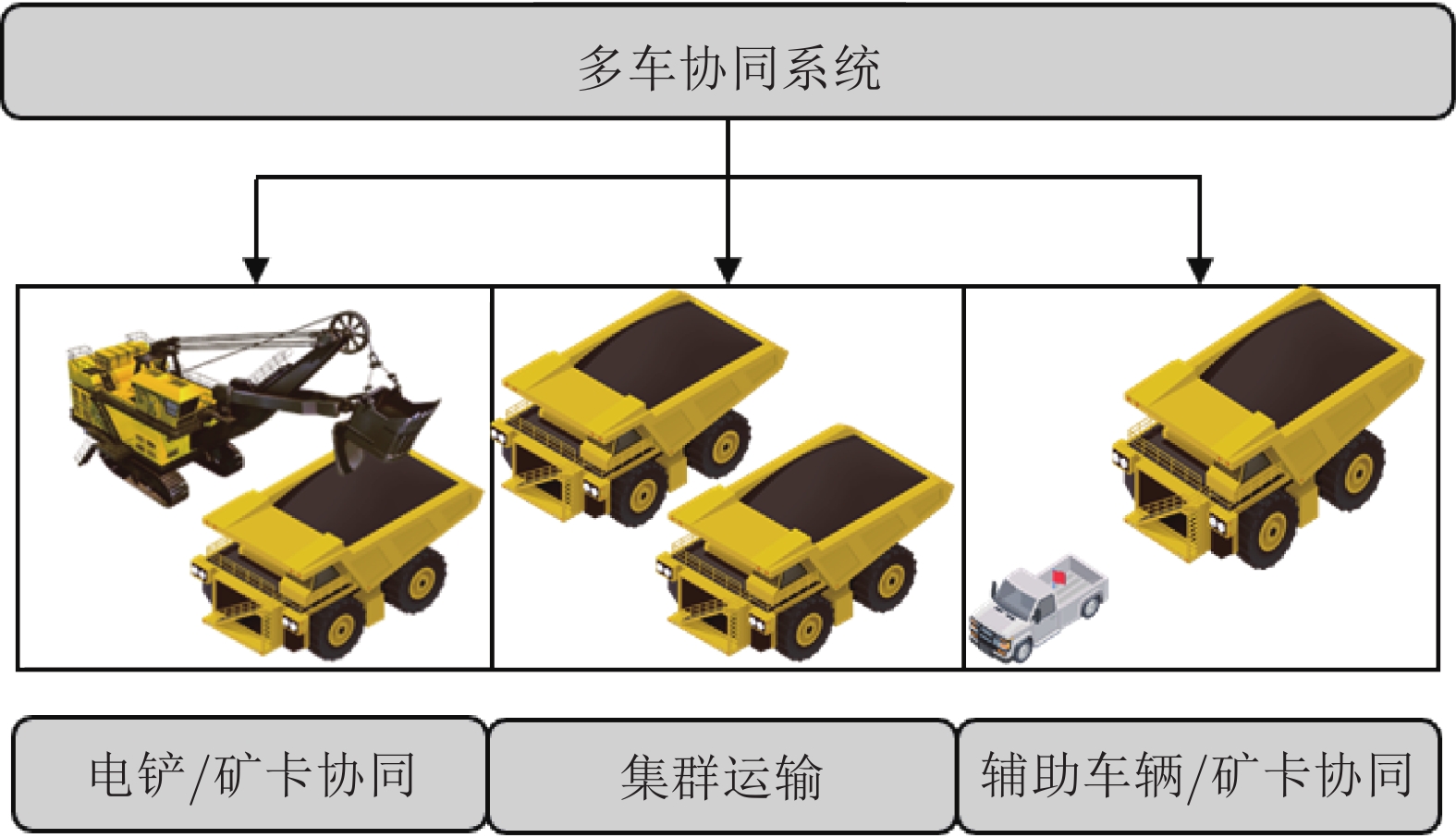
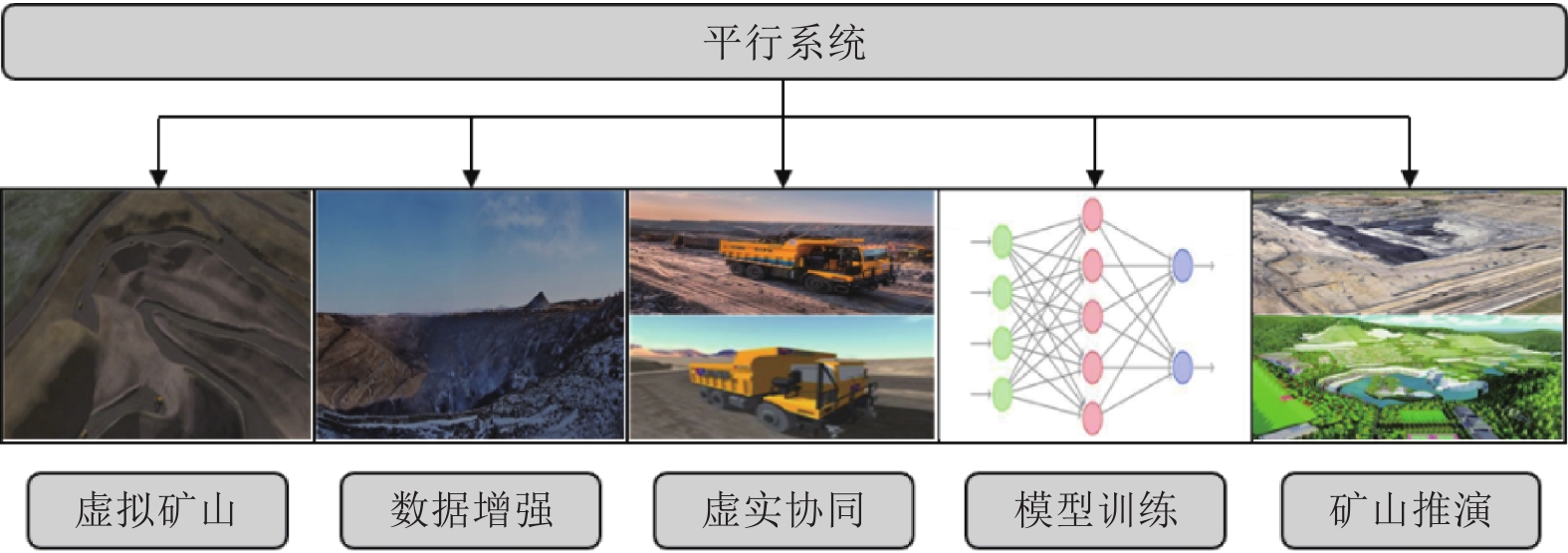
针对新时代下我国矿区智能化发展诉求与矿山无人化进程中遇到的复现难、协同难的技术问题, 本文融合智慧矿山理念、ACP (Artificial societies + computational experiments + parallel execution)平行智能理论和新一代智能技术, 设计并实现了智慧矿山操作系统 (Intelligent mine operation system, IMOS), 为平行矿山智能管理与控制一体化提出了解决方案. 本文首先分析露天煤矿产业发展趋势; 国内外露天矿山智能化发展情况; 面向露天矿山无人化与智能化需求, 深度融合数字四胞胎理论, 设计了虚实融合的IMOS架构; 详细阐述了IMOS子系统架构与功能, 包括: 单车作业系统、多车协同系统、车路协同系统、无人驾驶智能系统、调度管理系统、平行系统、监管系统、远程接管系统和通信系统; 并探讨了IMOS关键技术, 即平行矿山仿真建模技术、无人驾驶技术、矿区通信技术和协同作业技术. 该操作系统是国内首套露天矿山无人化与智能化的一体化解决方案, 并能够迁移到不同矿区不同作业场景, 推动矿区智能化无人化发展, 减少人工干预从而降低安全风险, 大幅度降低人工成本, 提高生产作业效率, 并可结合社会发展要素为实现绿色可持续发展矿区提供支撑.






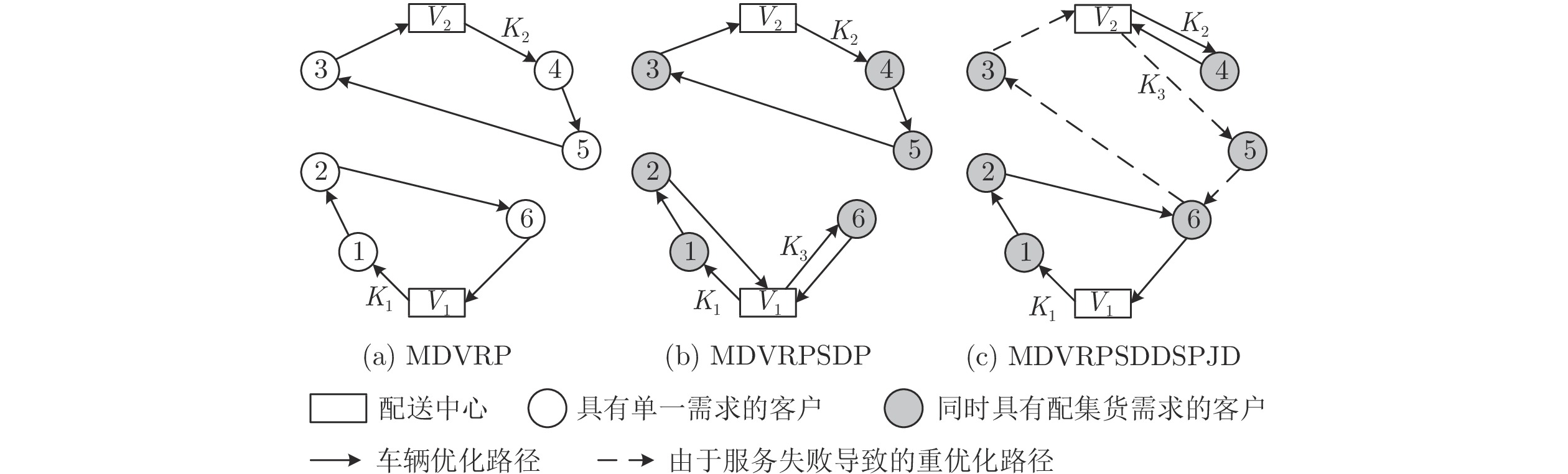
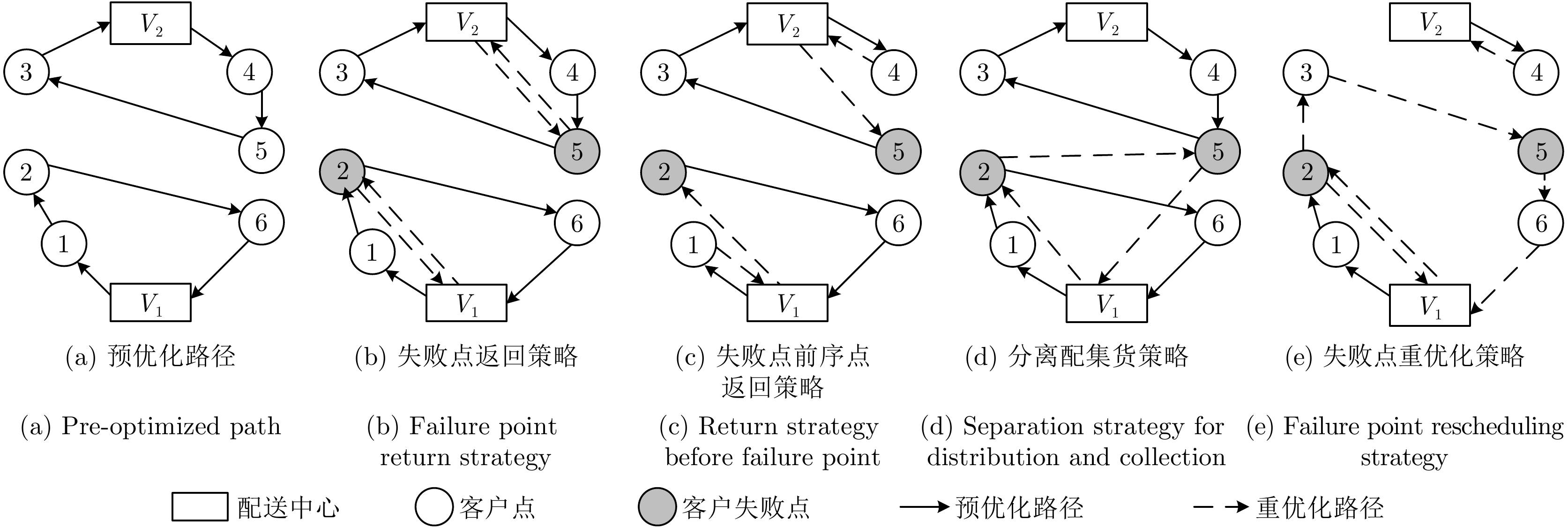
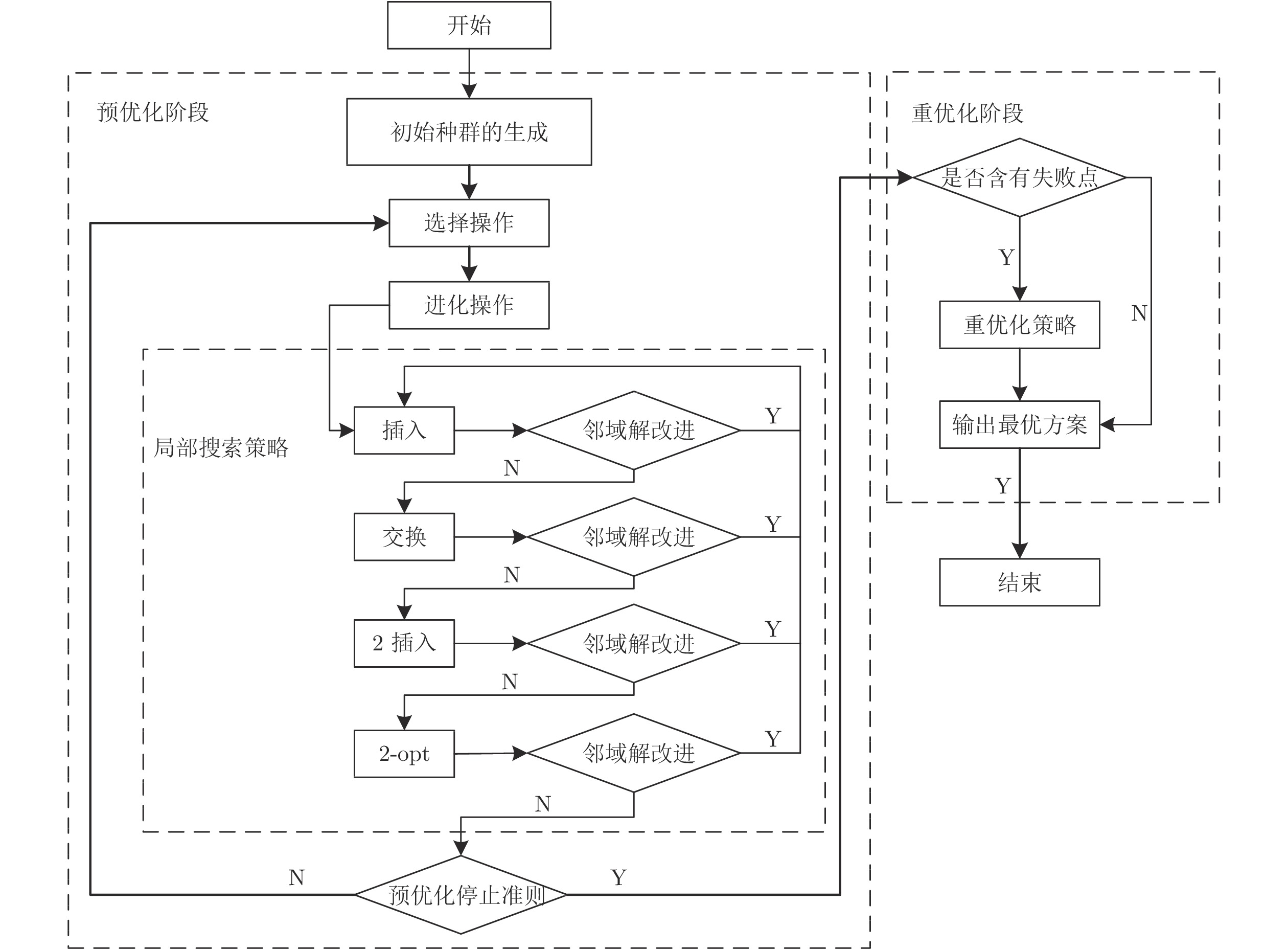
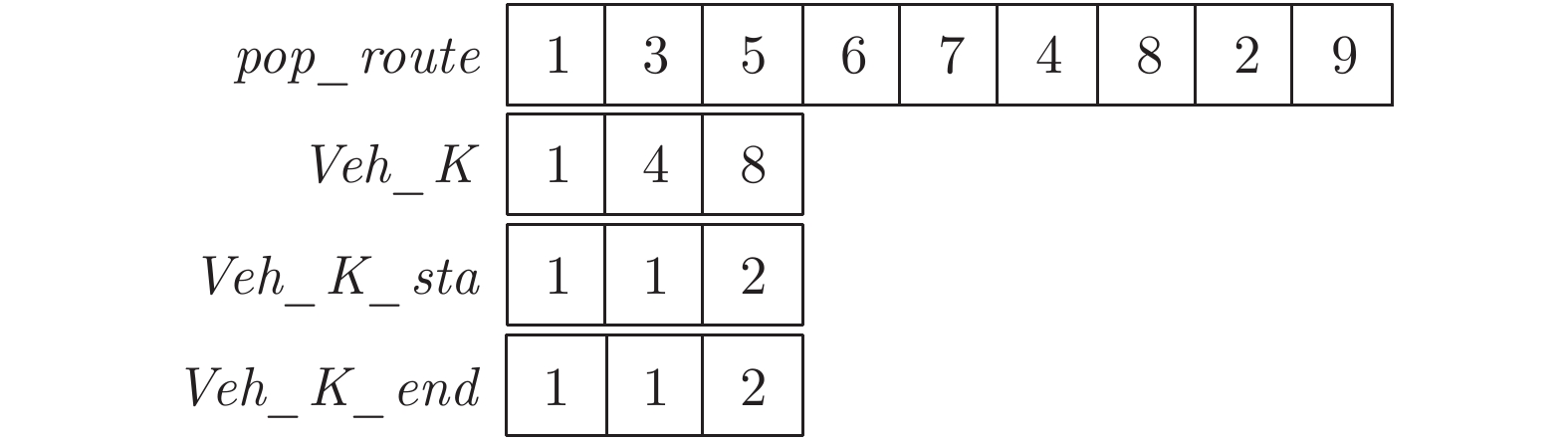
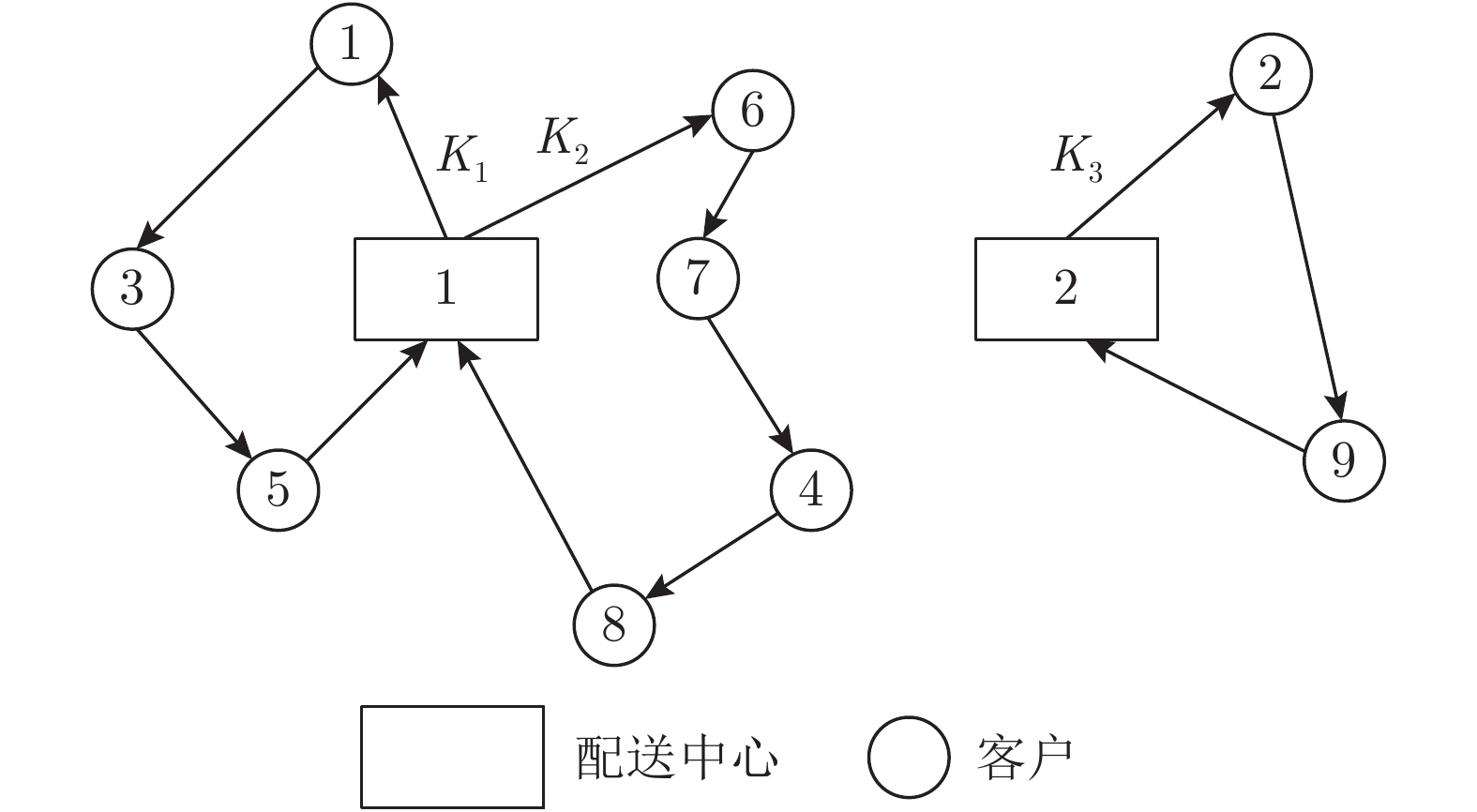
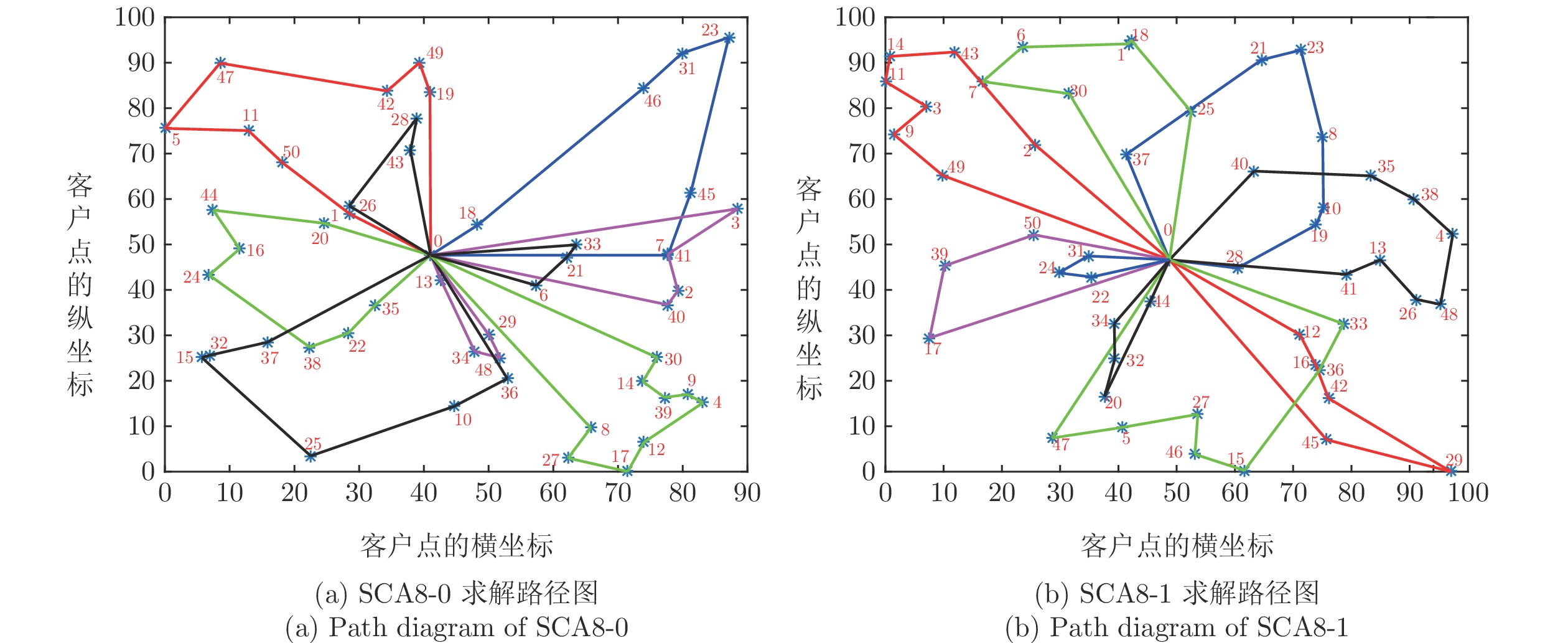
针对多中心联合配送模式下集货需求随机的同时配集货车辆路径问题(MDVRPSDDSPJD), 构建了两阶段MDVRPSDDSPJD模型. 预优化阶段基于随机机会约束机制以及车载量约束为客户分配车辆, 生成预优化方案; 重优化阶段采用失败点重优化策略对服务失败点重新规划路径. 根据问题特征, 设计了自适应变邻域文化基因算法(Adaptive memetic algorithm and variable neighborhood search, AMAVNS), 针对文化基因算法易早熟、局部搜索能力弱等缺陷, 将变邻域搜索算法的深度搜索能力运用到文化基因算法的局部搜索策略中, 增强算法的局部搜索能力; 提出自适应邻域搜索次数策略和自适应劣解接受机制平衡种群进化所需的广度和深度. 通过多组算例验证了提出模型及算法的有效性. 研究成果不仅深化和拓展了VRP (Vehicle routing problem)相关理论研究, 也为物流企业制定车辆调度计划提供一种科学合理的方法.



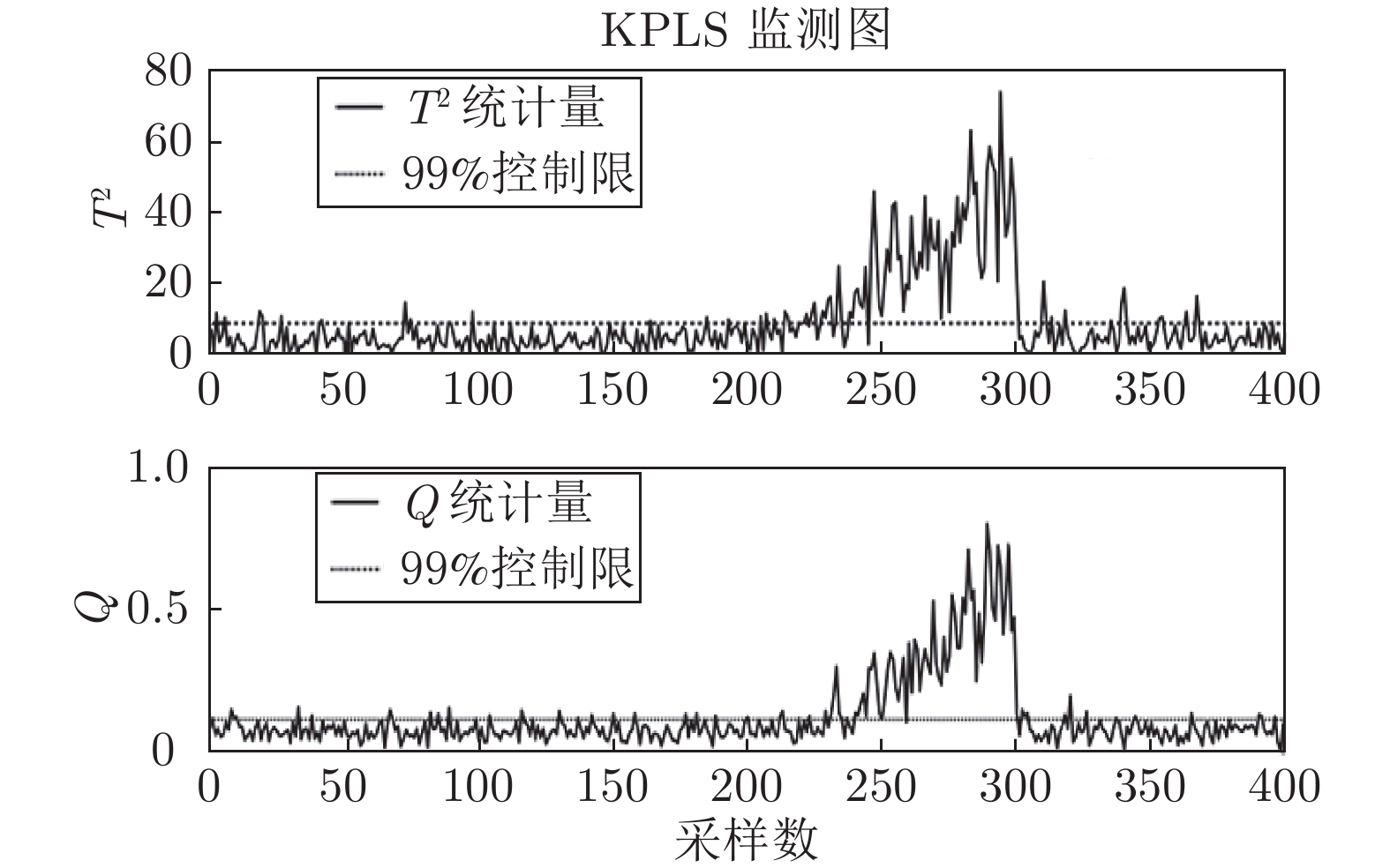
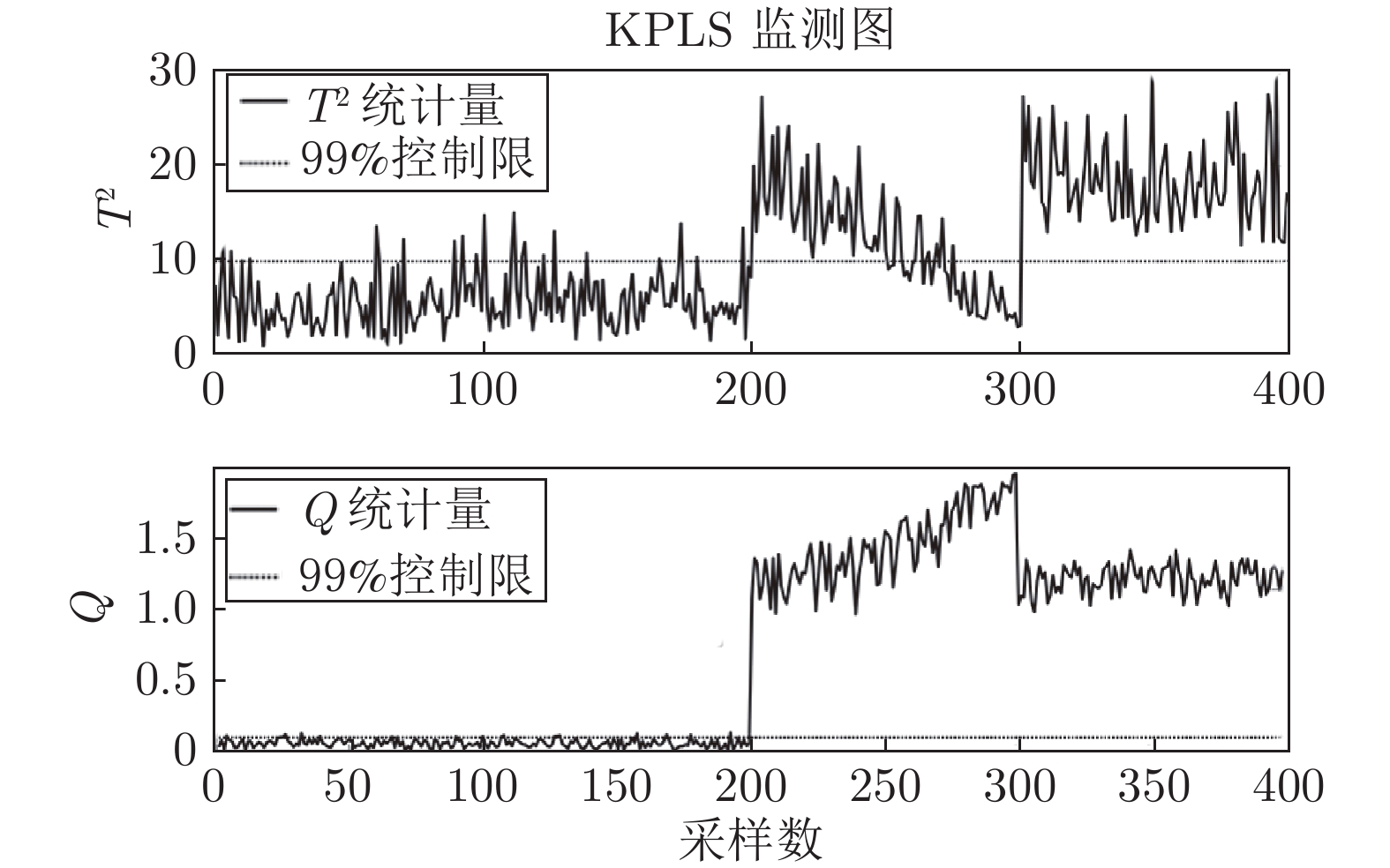
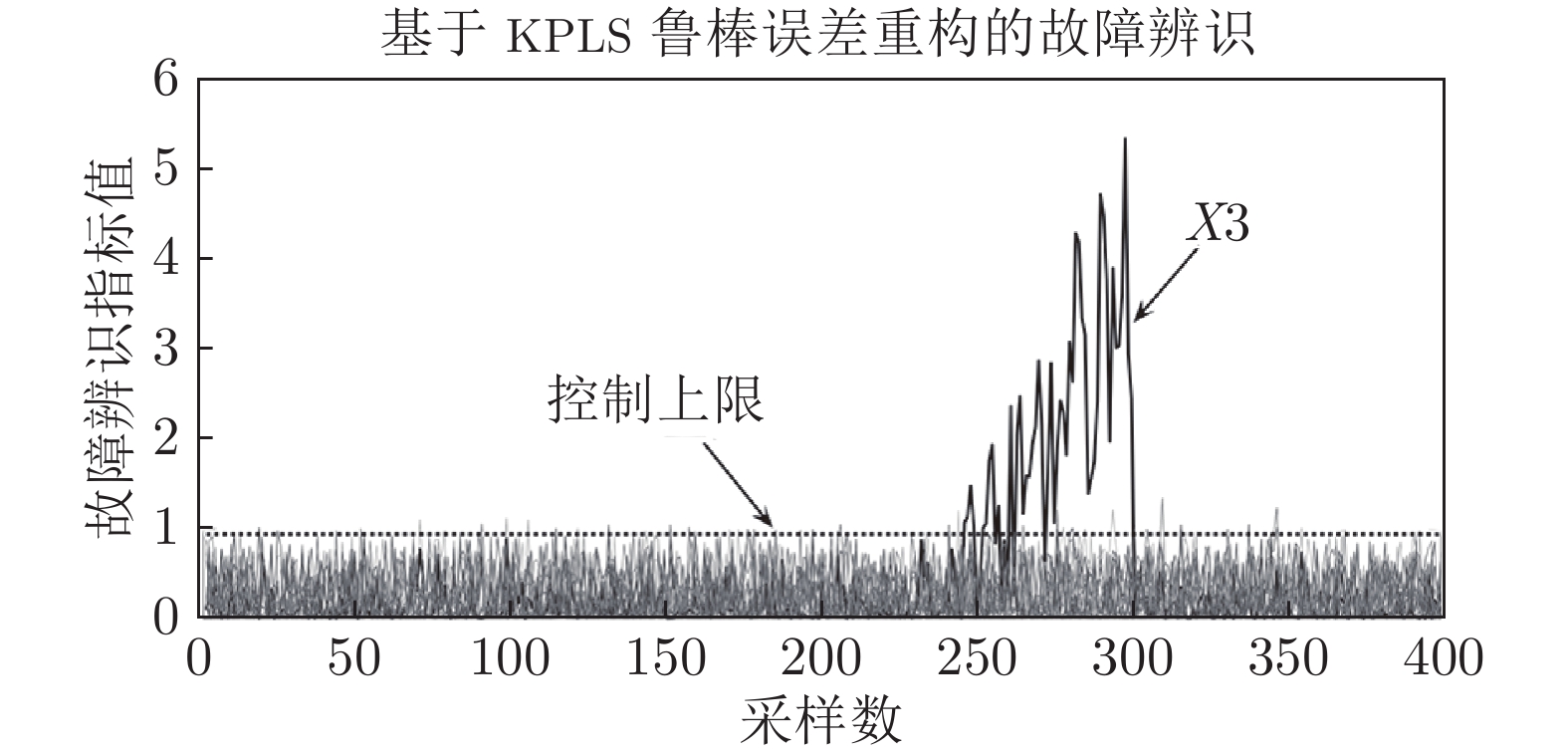
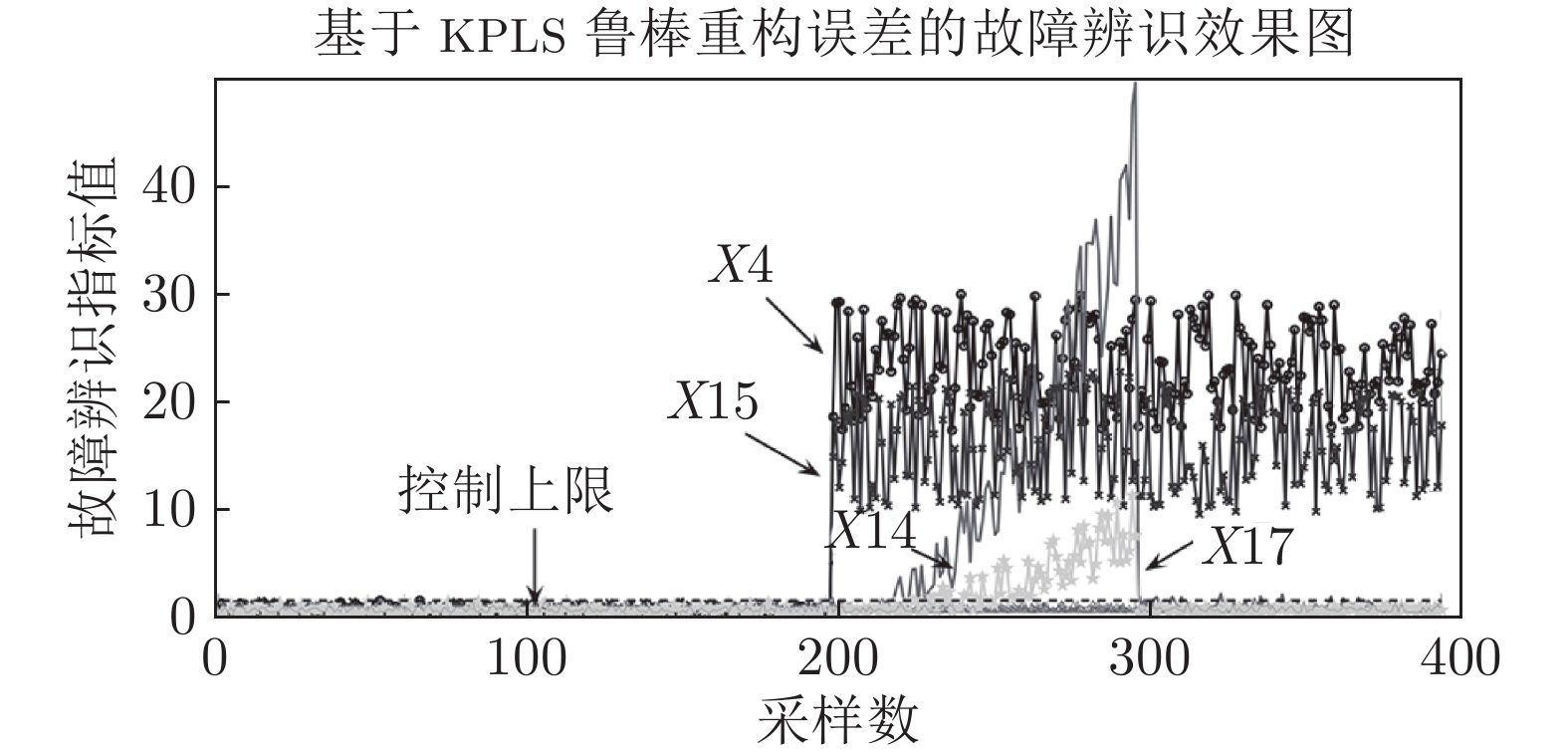
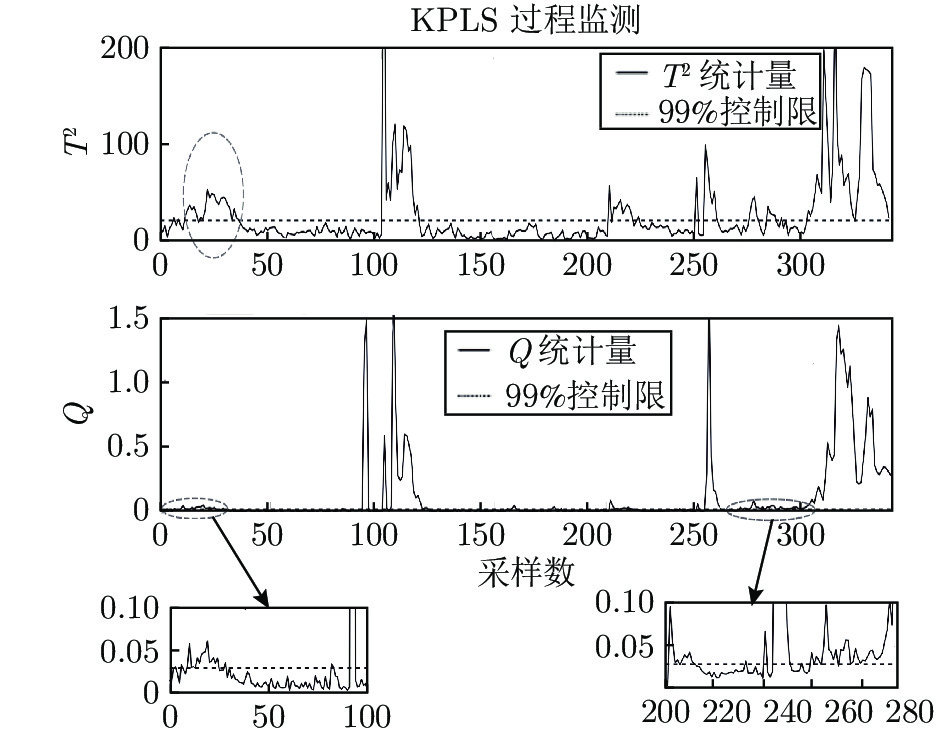
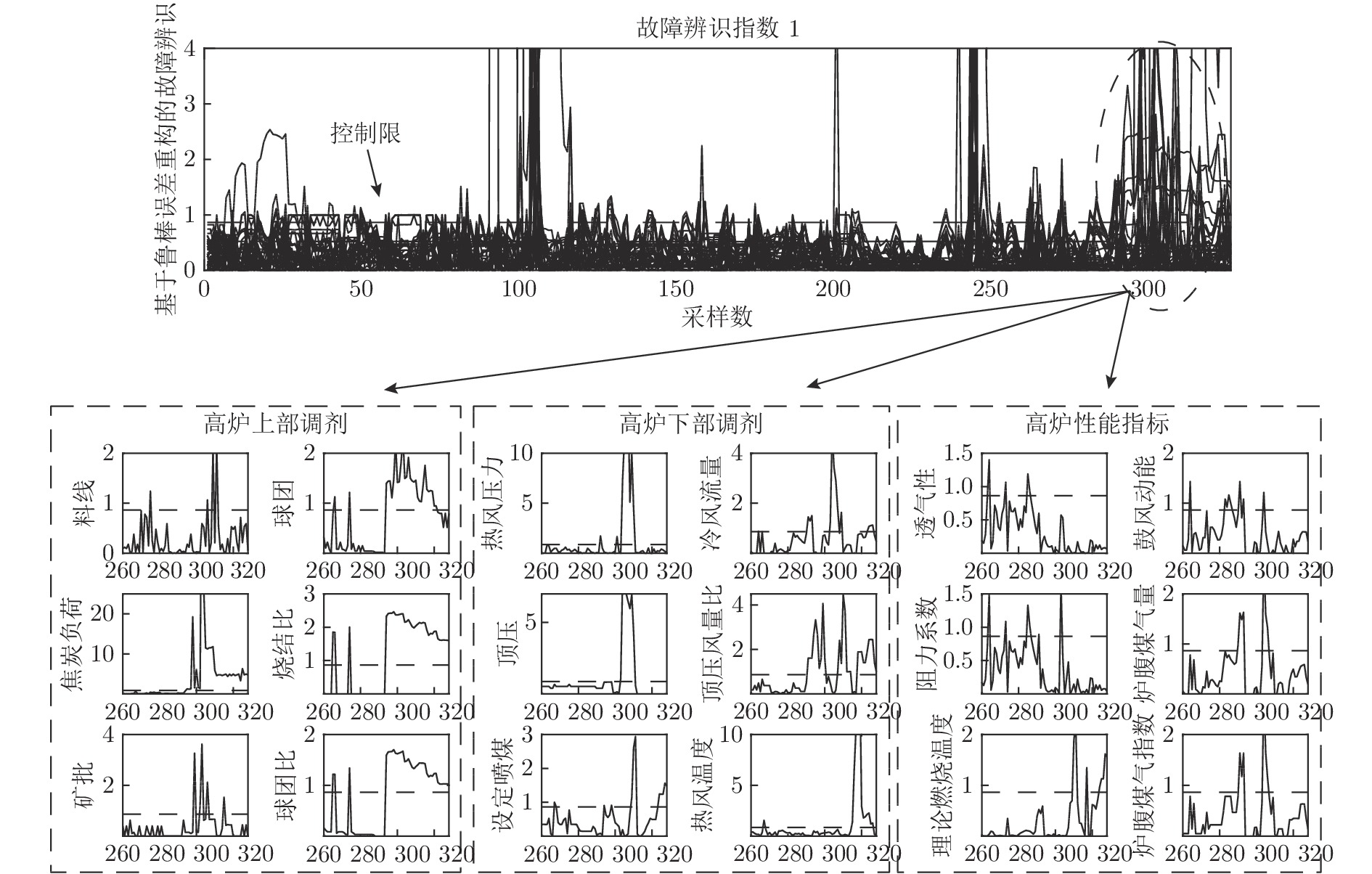
作为钢铁冶金制造的核心工序, 高炉炼铁是典型的高能耗过程, 其运行能耗约占钢铁总能耗的50%以上, 其中, 80%的能耗是焦炭和煤粉等燃料消耗. 因此, 对表征高炉燃料消耗的燃料比参数进行监测, 并尽可能早地识别影响燃料比异常波动的关键因素, 对于高炉炼铁过程的节能降耗具有重要意义. 本文针对先验故障知识少的高炉燃料比监测与异常识别难题, 提出一种基于核偏最小二乘(Kernel partial least squares, KPLS)鲁棒重构误差的故障识别方法. 该方法首先建立过程变量与监测变量的KPLS监测模型, 然后根据非线性映射空间的协方差矩阵和核空间Gram矩阵之间的关系, 反向估计原始空间变量的正常估值. 为了增强算法的鲁棒性, 采用迭代去噪算法减少异常数据对原始空间正常估值的影响. 通过利用原始空间正常估值和真实值来构造故障识别指标, 并给出故障识别指标的控制限. 基于实际工业数据的高炉数据实验表明所提方法不仅可以监测出正常工况下影响燃料比异常变化的潜在因素, 还可识别出异常工况下影响燃料比异常变化的关键因素, 具有很好的工程应用前景.






针对具有输入非线性, 不确定的气动阻力, 未知的车间力, 外部扰动以及未知的执行器故障等特征的高速列车非线性系统, 结合分数阶稳定性原理以及有限时间控制理论, 本文设计了一种分数阶有限时间控制器以实现高速列车更快速且更高精度的跟踪控制. 该控制器能够直接补偿高速列车的不确定性和非线性以及执行器故障而不需任何“试错”过程, 且稳定时间可由控制参数的不同选择来调整. 仿真研究验证了所设计控制器的有效性和优越性.


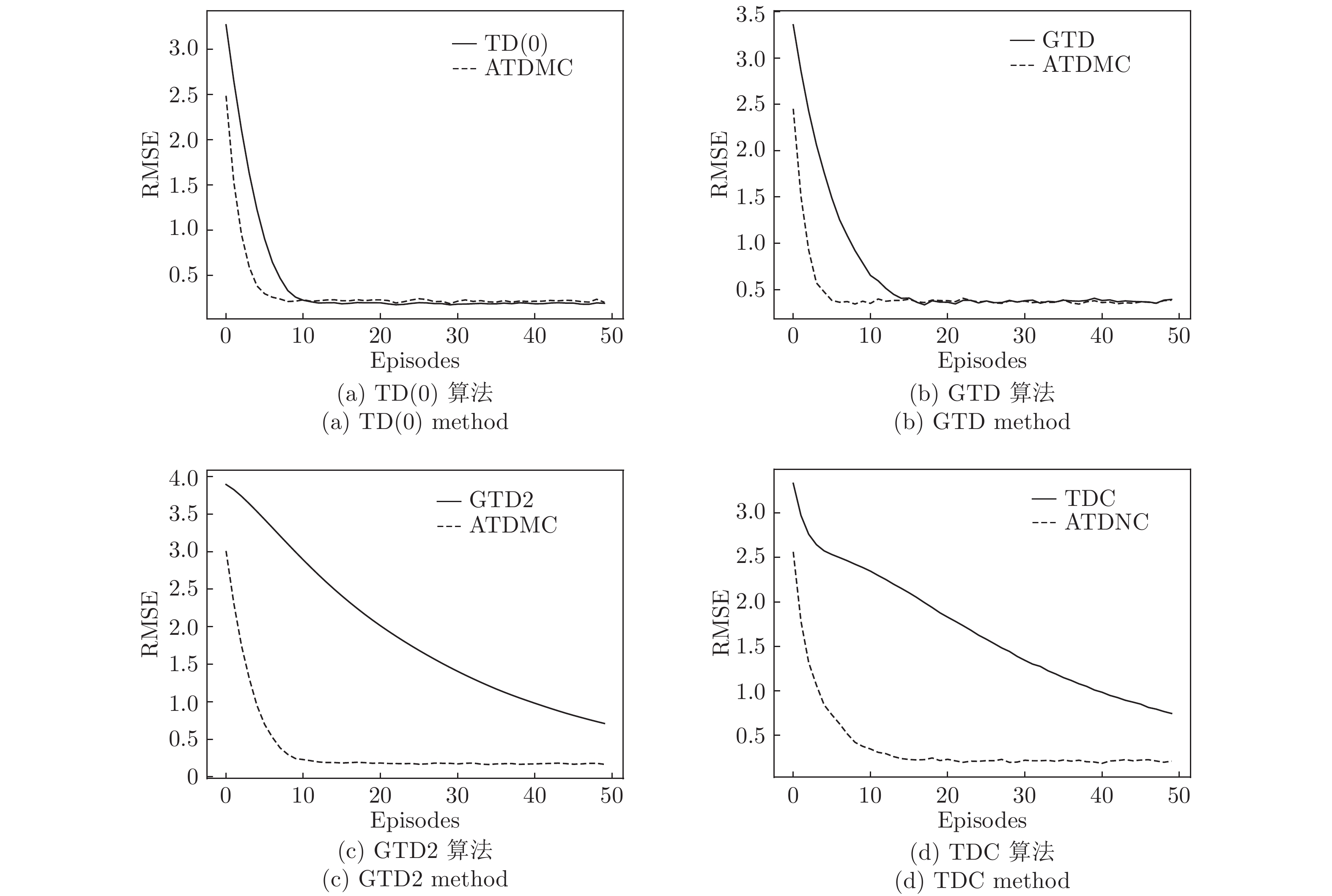
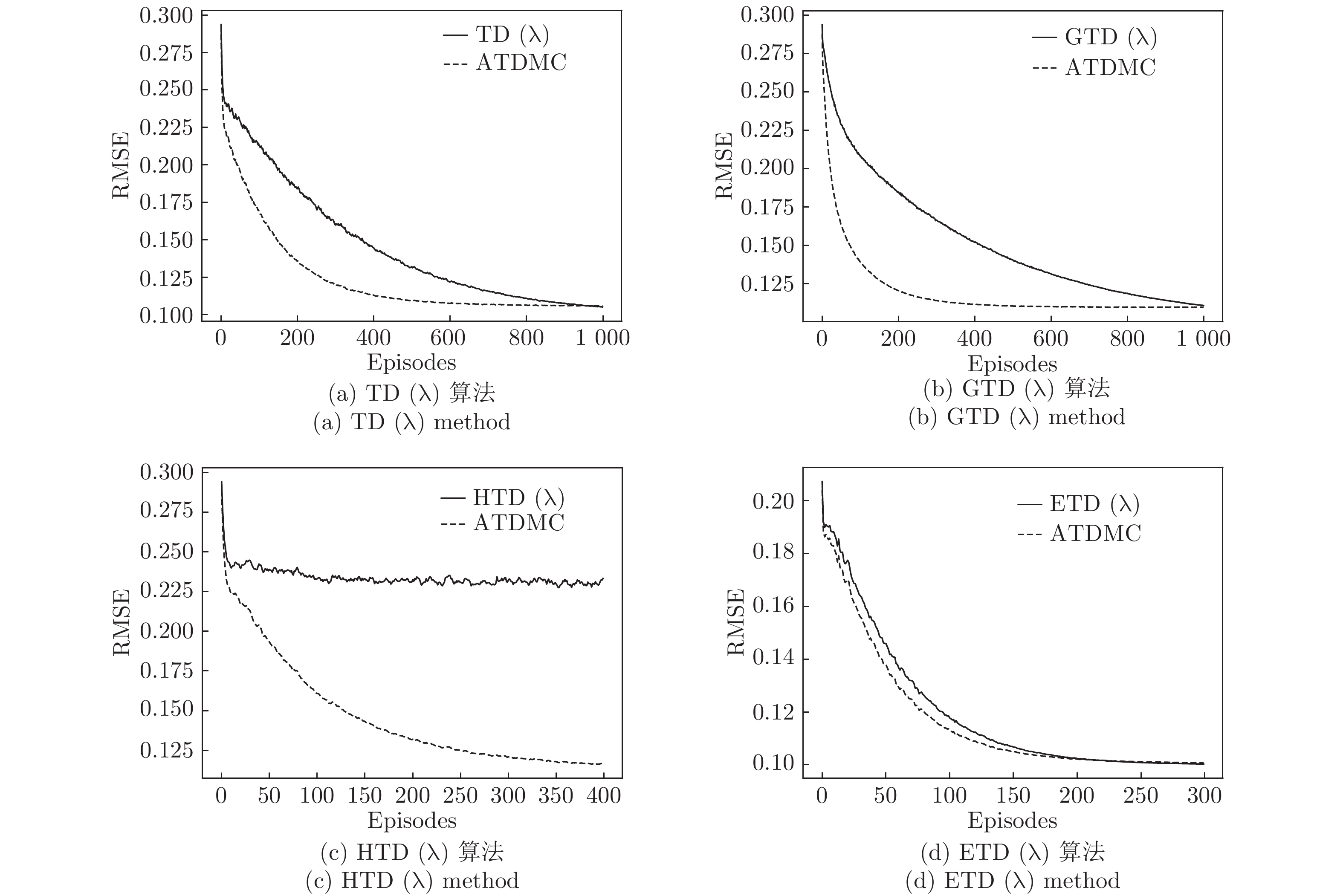
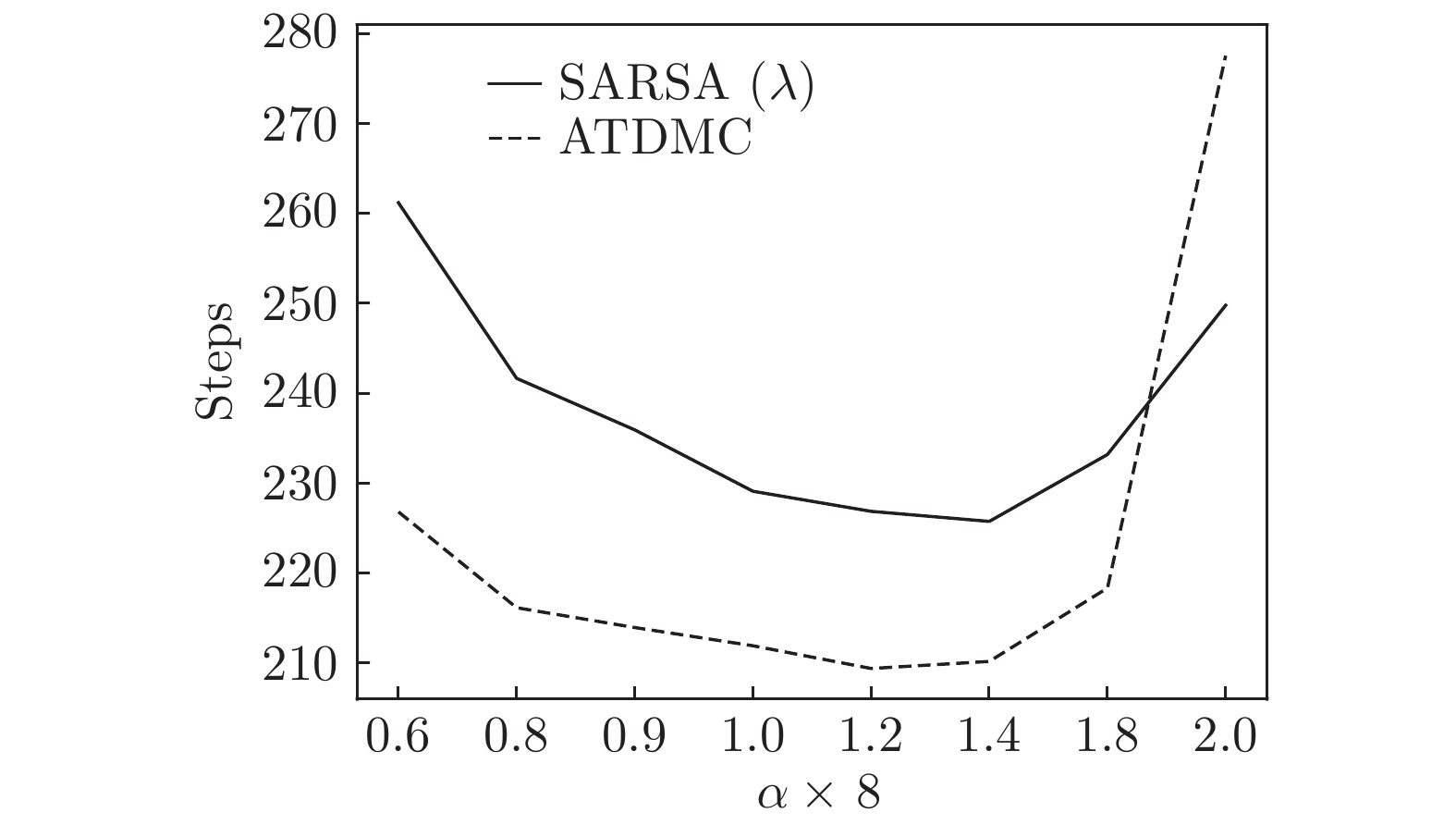
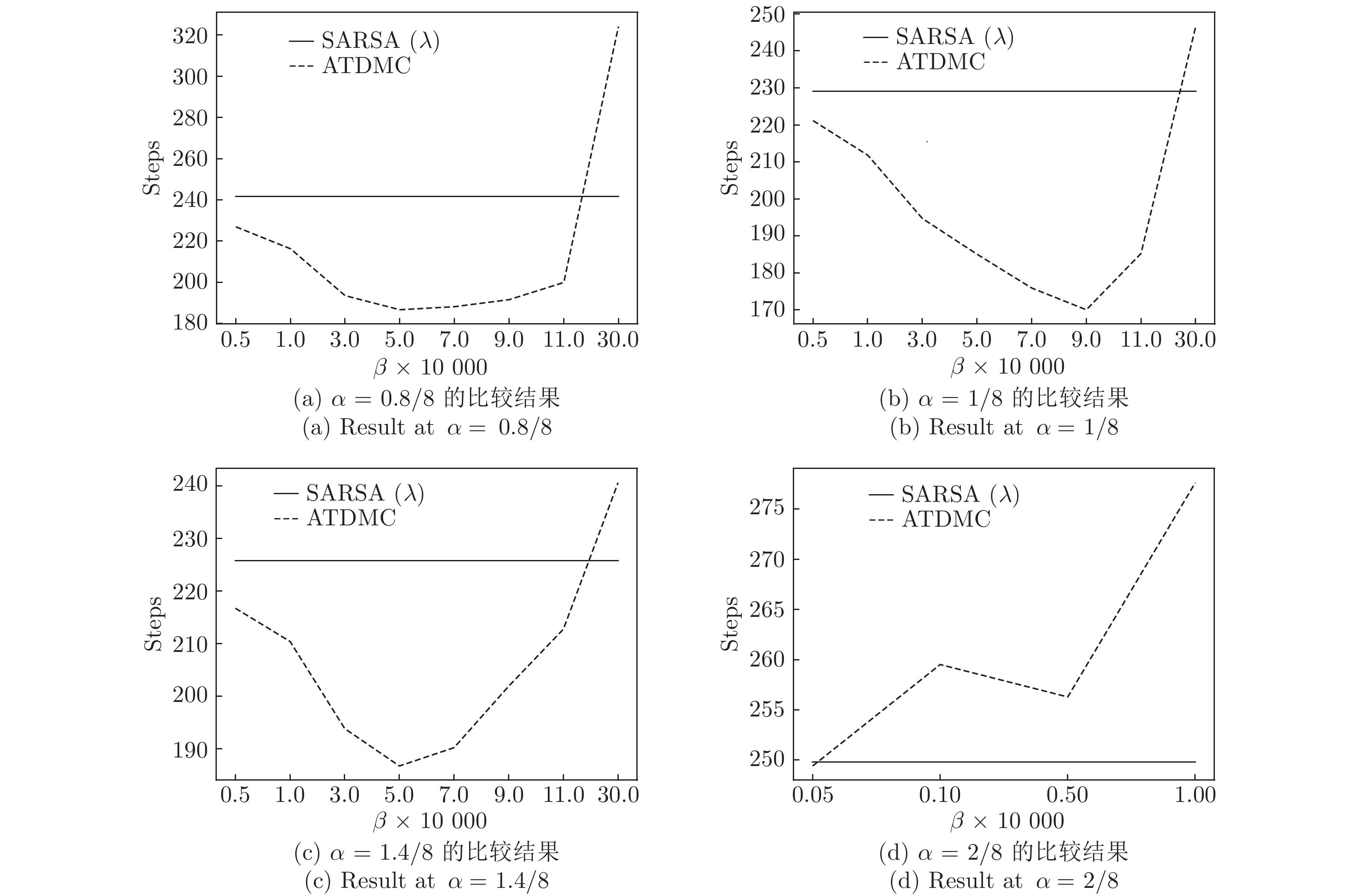
时间差分算法(Temporal difference methods, TD)是一类模型无关的强化学习算法. 该算法拥有较低的方差和可以在线(On-line)学习的优点, 得到了广泛的应用. 但对于一种给定的TD算法, 往往只能通过调整步长参数或其他超参数来加速收敛, 这也就造成了加速TD算法收敛的方法匮乏. 针对此问题提出了一种利用蒙特卡洛算法(Monte Carlo methods, MC)来加速TD算法收敛的方法(Accelerate TD by MC, ATDMC). 该方法不仅可以适用于绝大部分的TD算法, 而且不需要改变在线学习的方式. 为了证明方法的有效性, 分别在同策略(On-policy)评估、异策略(Off-policy)评估和控制(Control)三个方面进行了实验. 实验结果表明ATDMC方法可以有效地加速各类TD算法.





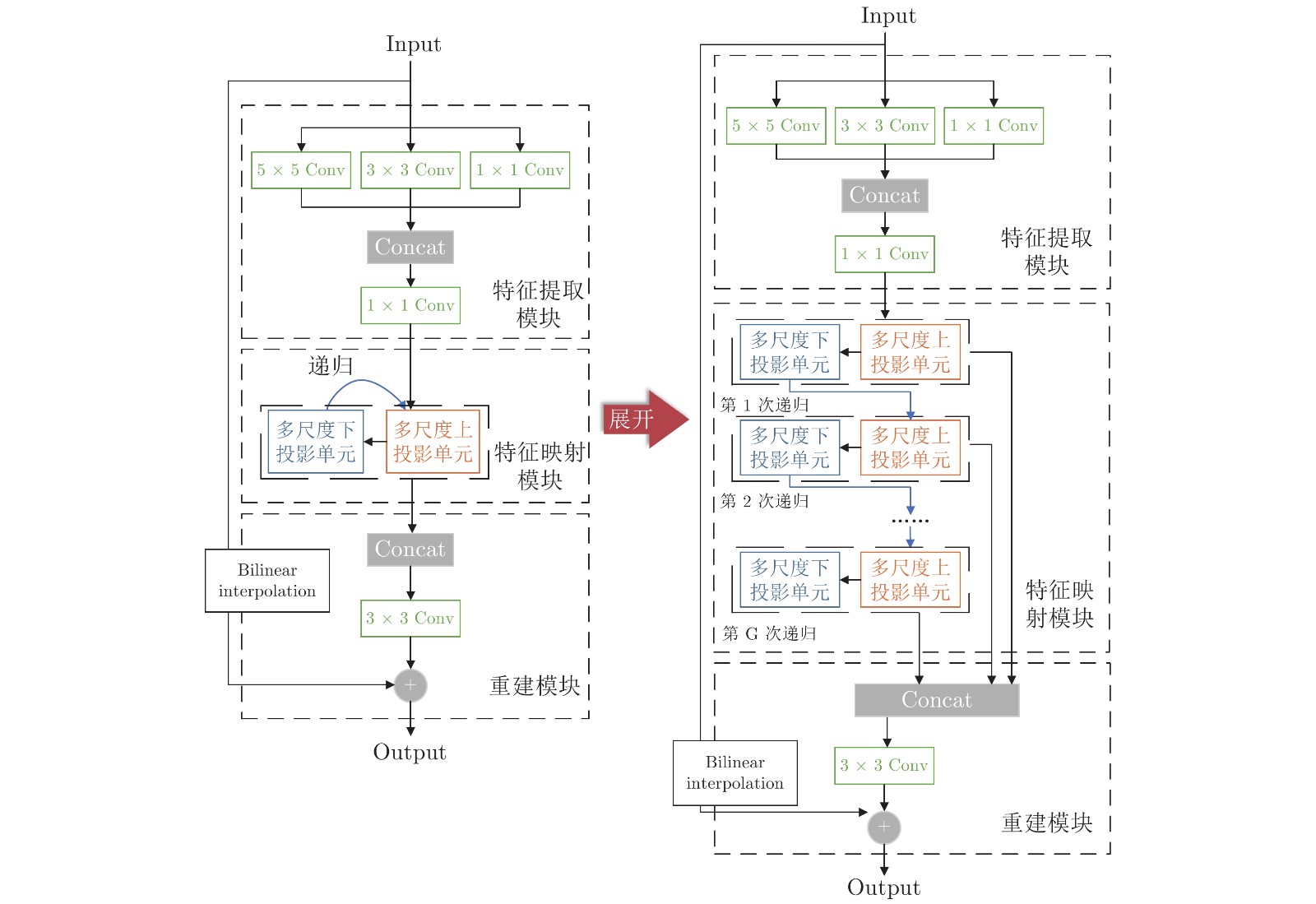
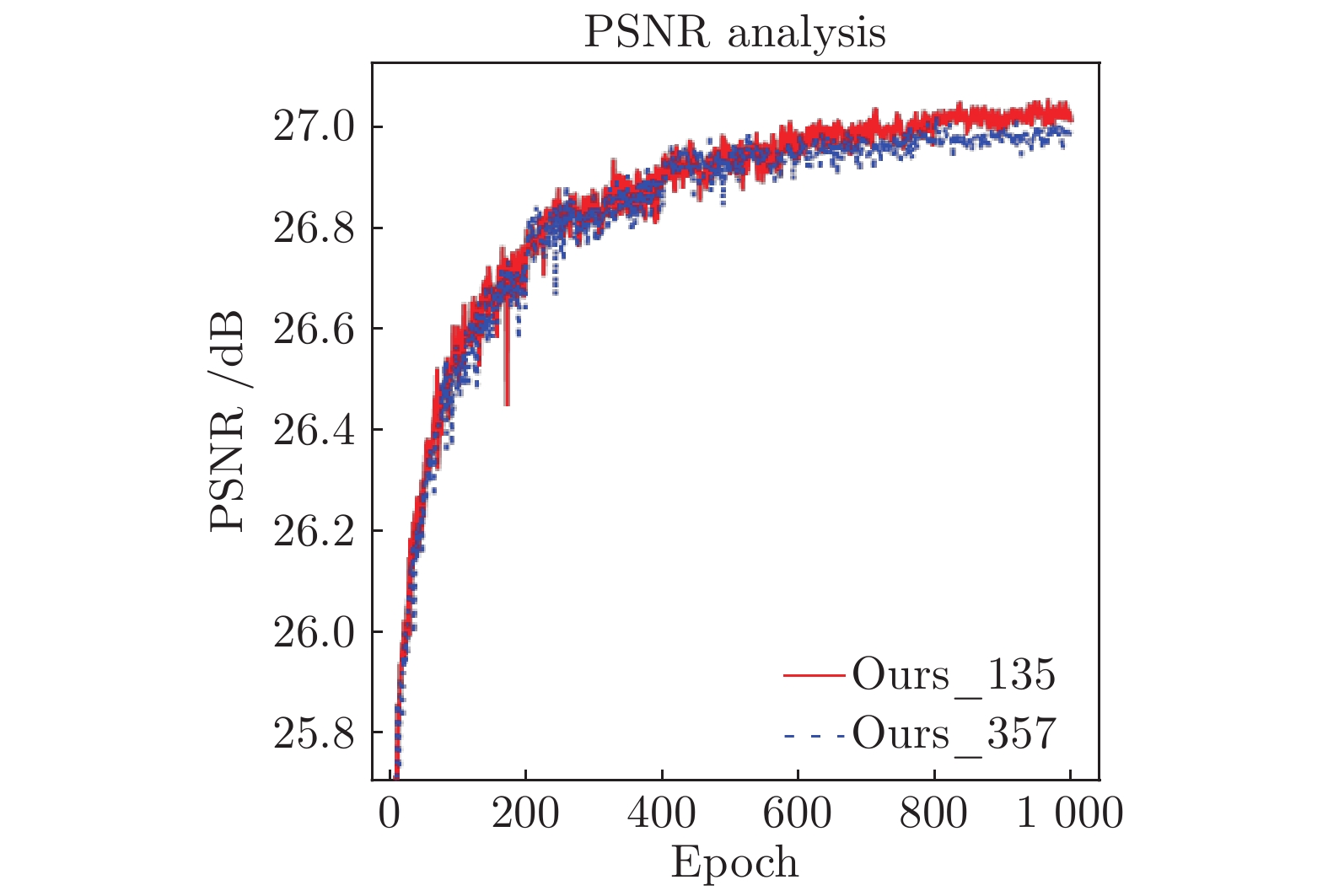
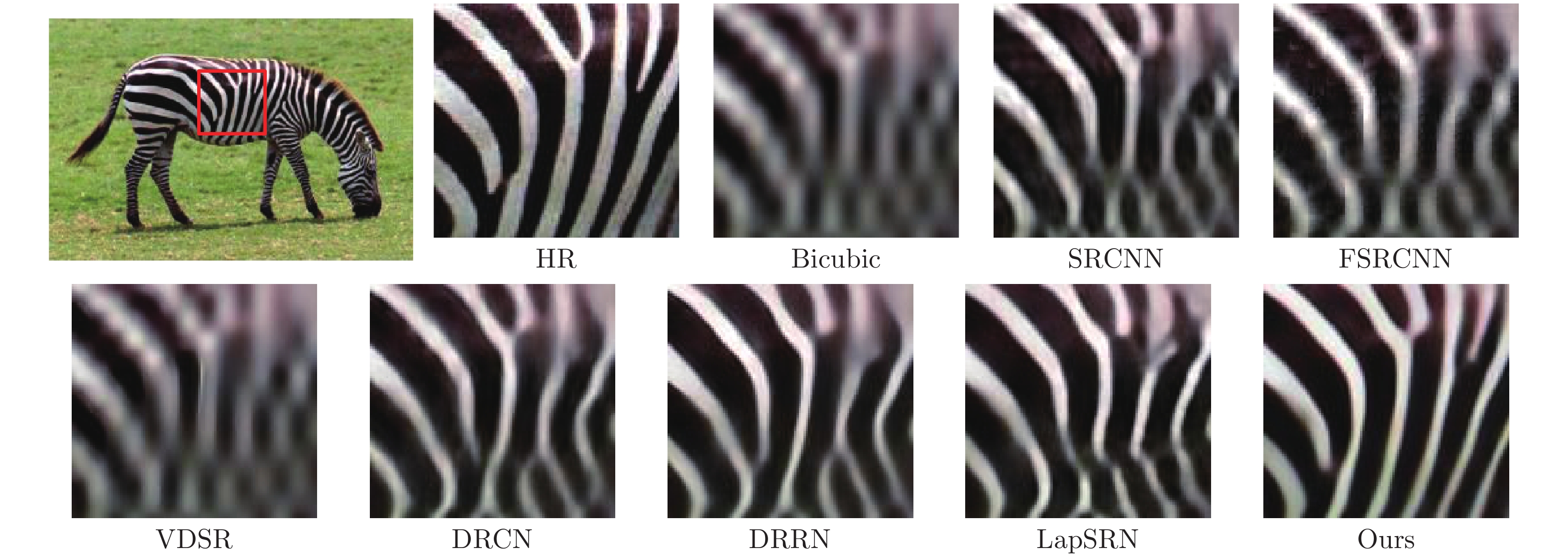
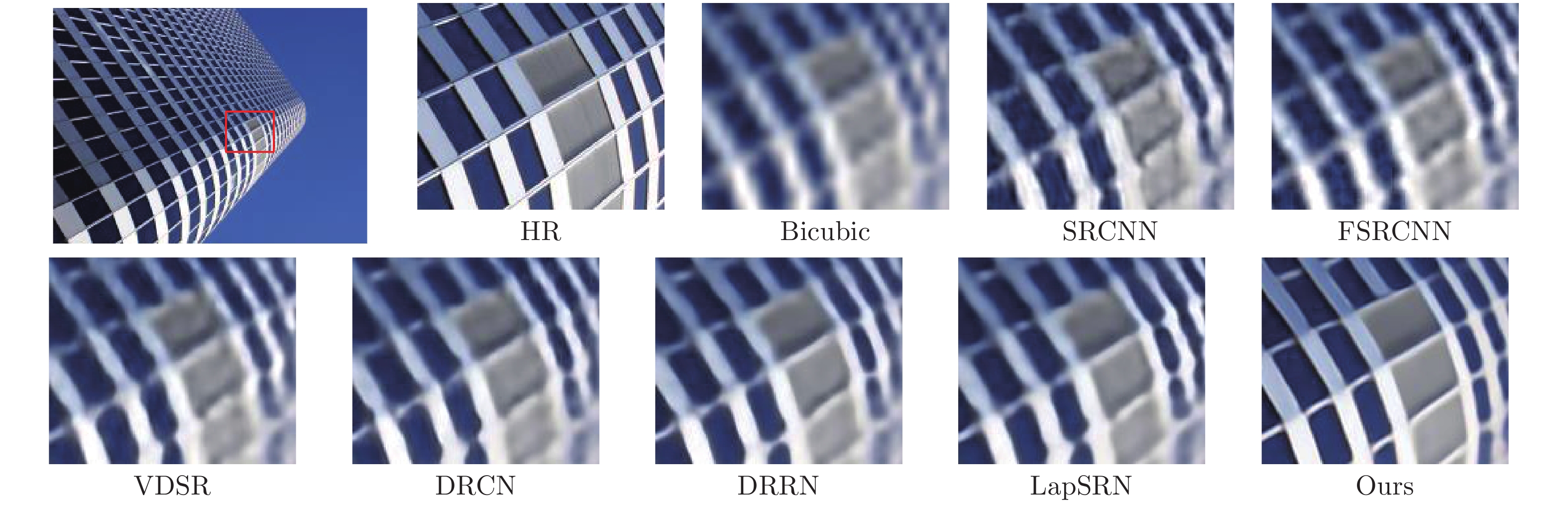
针对现有图像超分辨率重建方法恢复图像高频细节能力较弱、特征利用率不足的问题, 提出了一种多尺度特征融合反投影网络用于图像超分辨率重建. 该网络首先在浅层特征提取层使用多尺度的卷积核提取不同维度的特征信息, 增强跨通道信息融合能力; 然后,构建多尺度反投影模块通过递归学习执行特征映射, 提升网络的早期重建能力; 最后,将局部残差反馈结合全局残差学习促进特征的传播和利用, 从而融合不同深度的特征信息进行图像重建. 对图像进行×2 ~ ×8超分辨率的实验结果表明, 本方法的重建图像质量在主观感受和客观评价指标上均优于现有图像超分辨率重建方法, 超分辨率倍数大时重建性能相比更优秀.





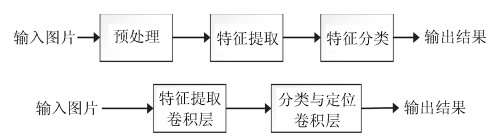
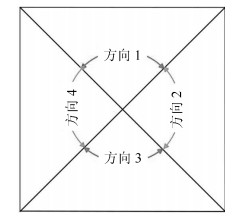
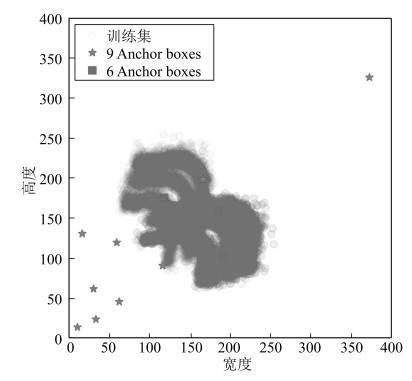
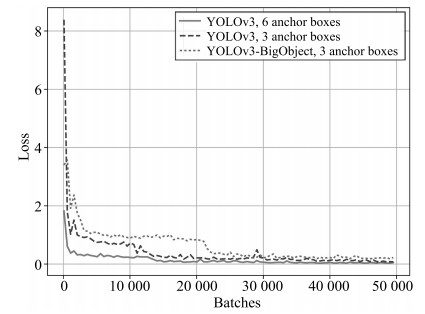
极性电子元器件的类别、方向识别、定位在工业生产、焊接和检测等领域发挥着至关重要的作用. 本文首先将极性电子元器件的方向识别问题转化为一个分类问题, 然后, 采用Faster RCNN (Region convolutional neural network) 与YOLOv3方法实现了极性电子元器件的准确分类、方向识别和精准定位. 实验取得良好的效果, 两种算法的平均准确率(Mean average precision, mAP) 分别达到97.05 %、99.22 %. 此外, 我们通过数据集目标框的长宽分布, 利用K-means算法对Faster RCNN和YOLOv3的Anchor boxes进行了改进设计, 使准确率分别提高了1.16 %、0.1 %, 并提出针对大目标检测的网络结构: YOLOv3-BigObject, 在提高准确率的同时, 将检测单张图片的时间大幅缩减为原来检测时间的一半, 并最终用焊接有元器件的电路板进行检测, 得到了很好的实验结果.









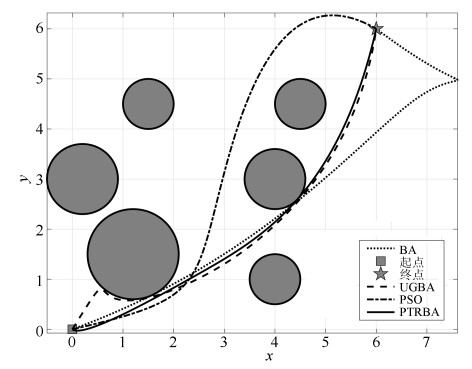
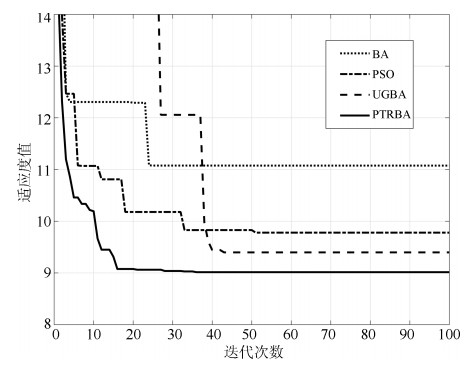
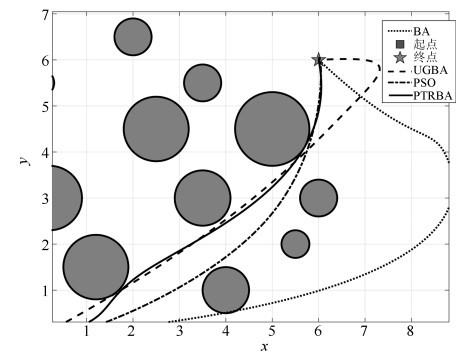
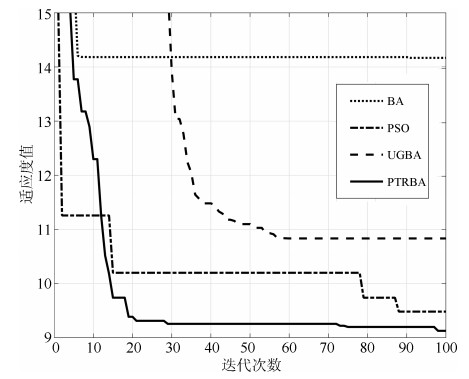
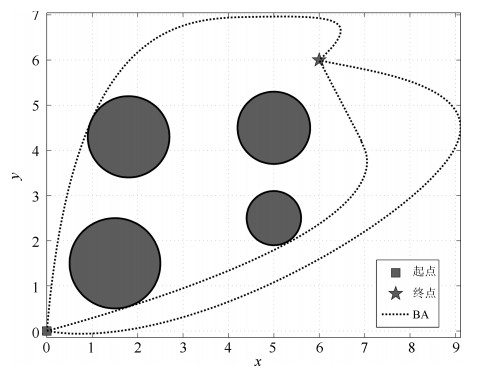
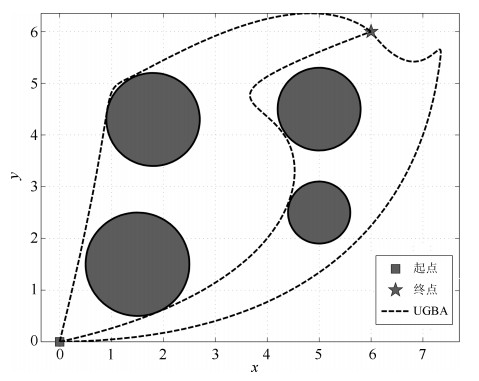
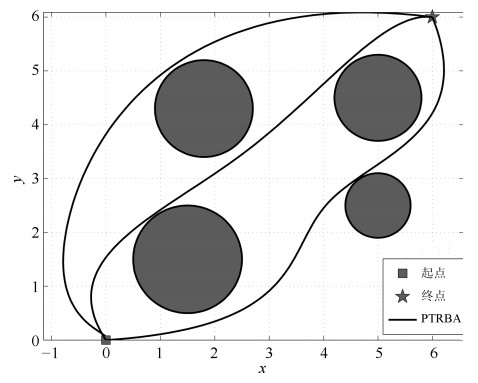
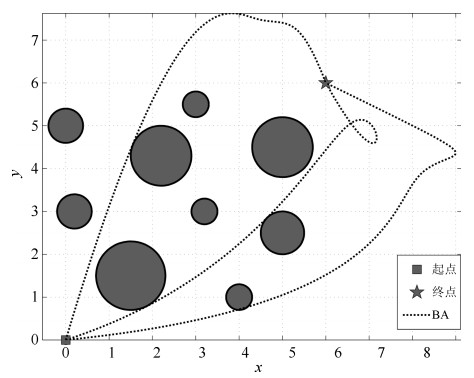
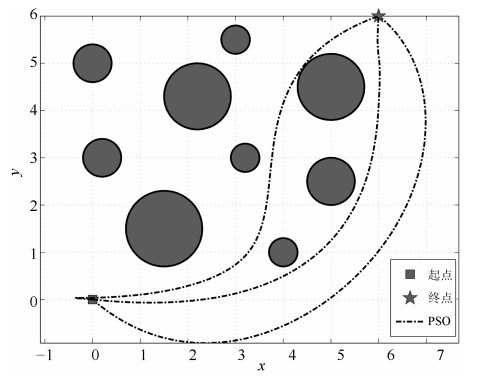
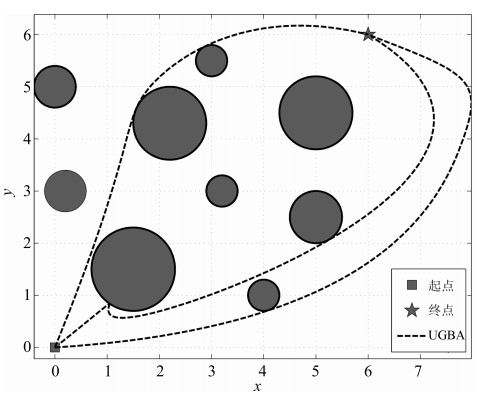
为更好地解决移动机器人路径规划问题, 改进蝙蝠算法的寻优性能, 拓展其应用领域, 提出了一种具有反向学习和正切随机探索机制的蝙蝠算法. 在全局搜索阶段的位置更新中引入动态扰动系数, 提高算法全局搜索能力; 在局部搜索阶段, 融入正切随机探索机制, 增强算法局部寻优的策略性, 避免算法陷入局部极值. 同时, 加入反向学习选择策略, 进一步平衡蝙蝠种群多样性和算法局部开采能力, 提高算法的收敛精度. 然后, 把改进算法与三次样条插值方法相结合去求解机器人全局路径规划问题, 定义了基于路径结点的编码方式, 构造了绕避障碍求解最短路径的方法和适应度函数. 最后, 在简单和复杂障碍环境下分别对单机器人和多机器人系统进行了路径规划对比实验. 实验结果表明, 改进后算法无论在最优解还是平均解方面都要优于其他几种对比算法, 对于求解机器人全局路径规划问题具有较好的可行性和有效性.


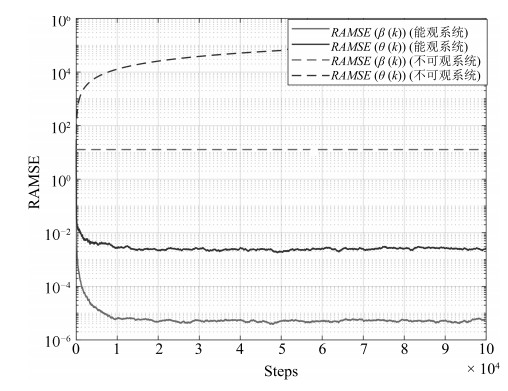
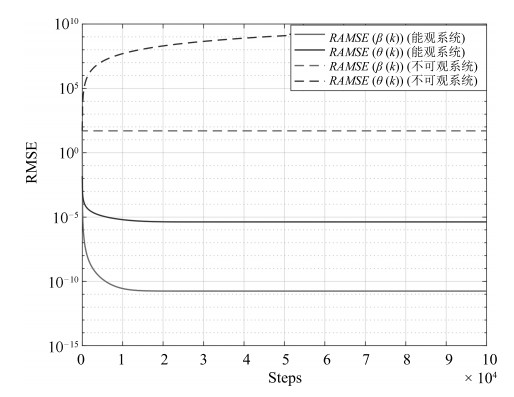
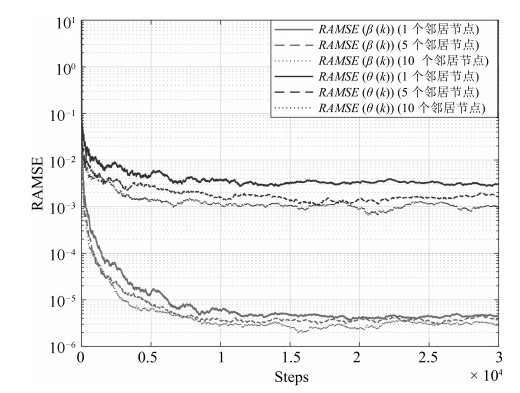
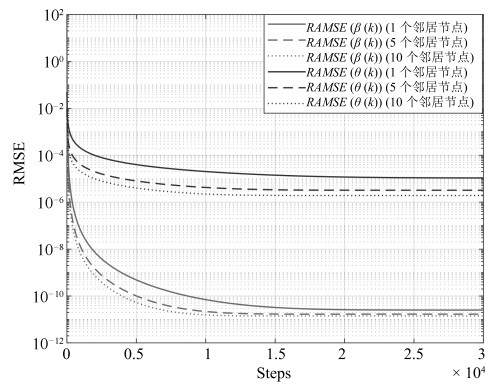
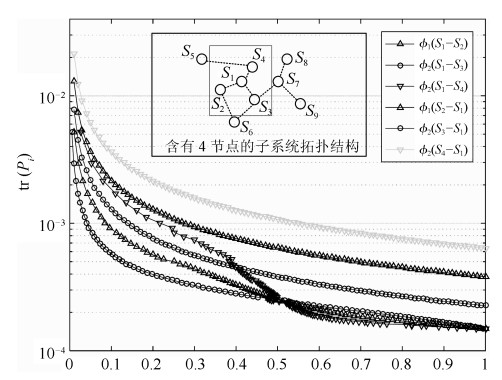
本文针对物联网中时变的时钟参数, 运用网络化控制理论观点, 通过对时钟状态建模的本质分析, 区别于"相对时钟建模", 提出了全分布规模化时钟状态追踪卡尔曼滤波(Kalman filtering). 考虑量测的丢失, 则扩展为追踪时钟参数的修正Kalman filtering算法. 我们提出了以BMU (Basic measurement unit)构建新的MMSE (Minimum mean square error)等价变换下的能观测性状态解耦量测模型, 新的量测模型能够实现MMSE量测规模化扩展, 且理论上分析了时钟同步的条件和计算了统计时钟同步误差的相应上界, 并且在时钟同步精度与潜在的通信网络质量间作出了量化均衡.


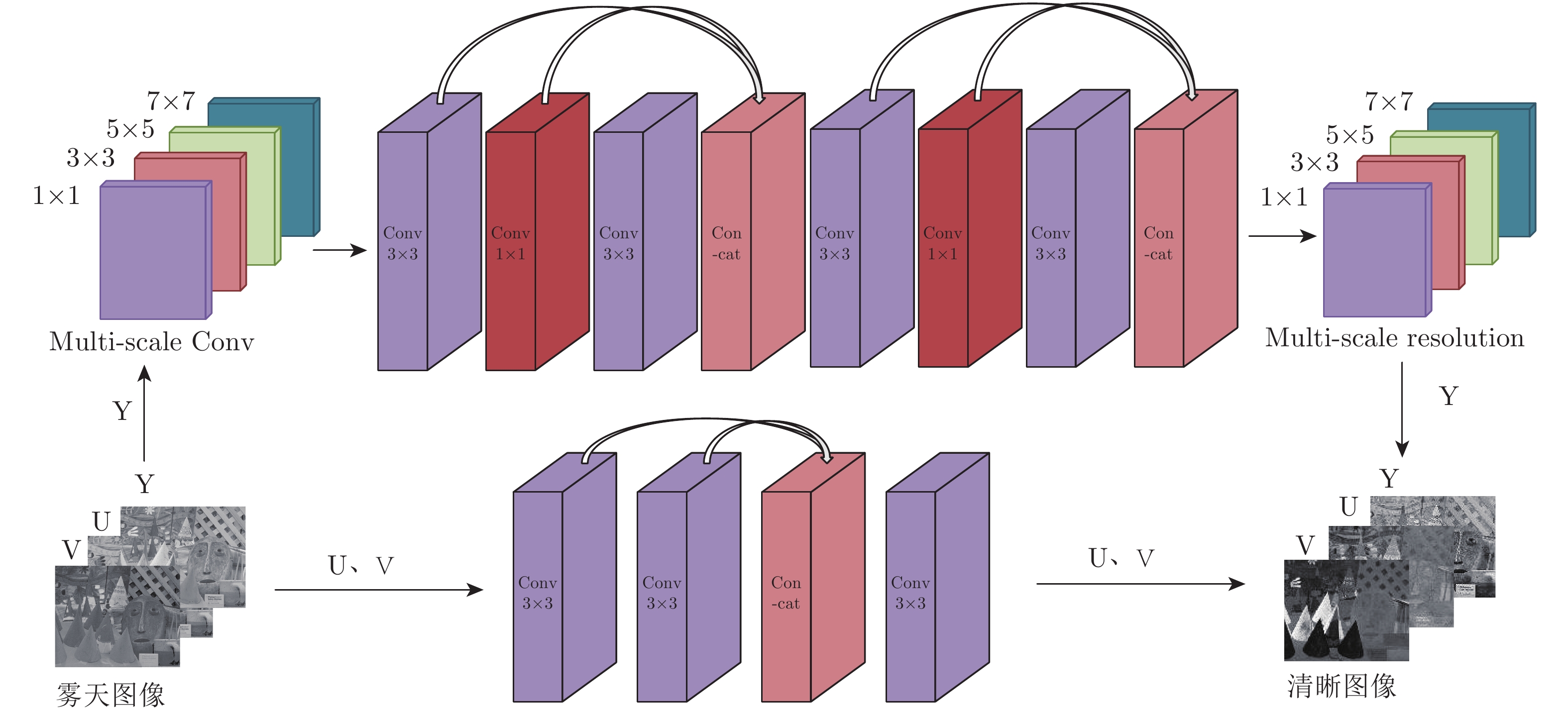
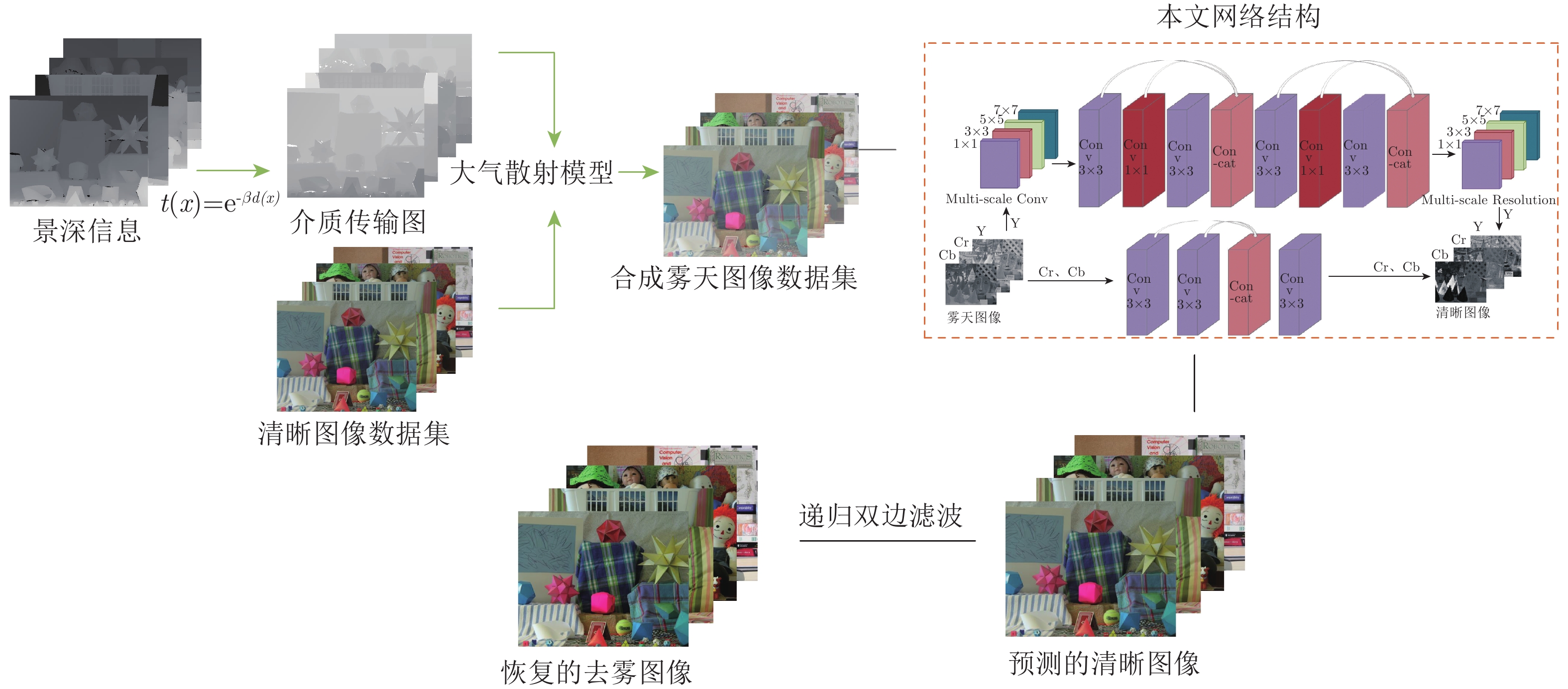
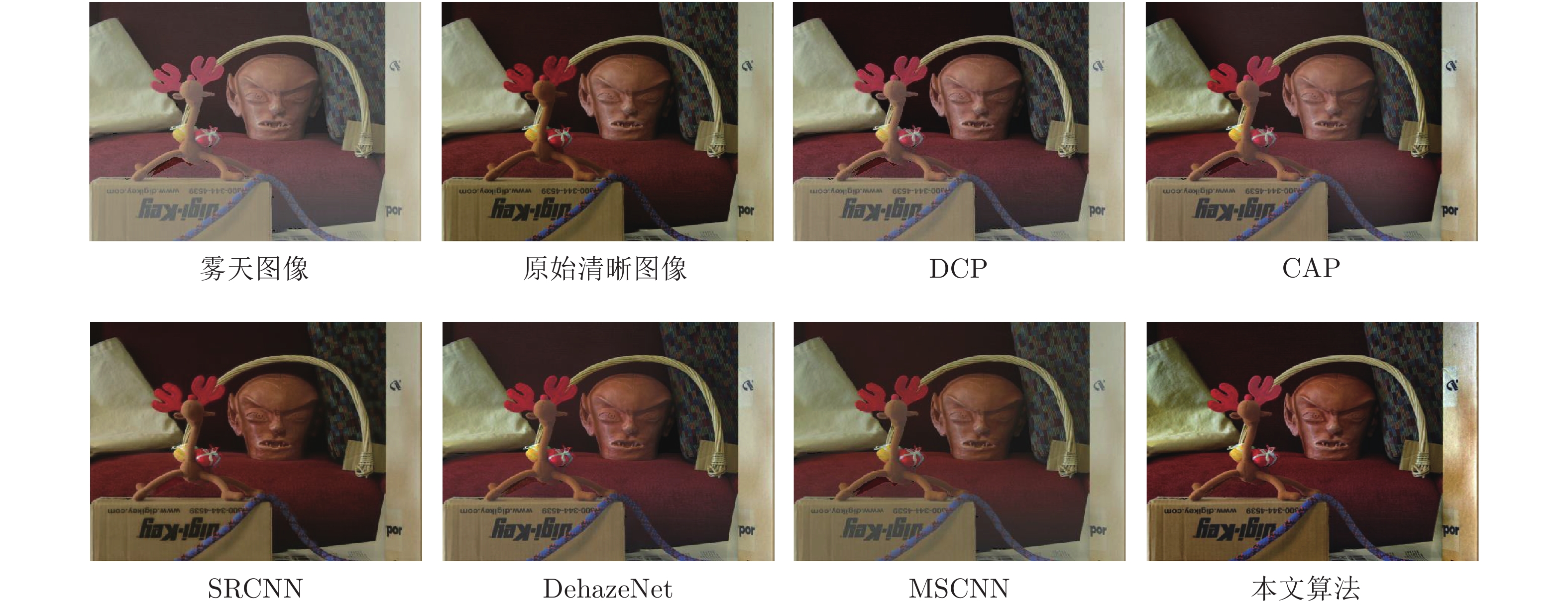
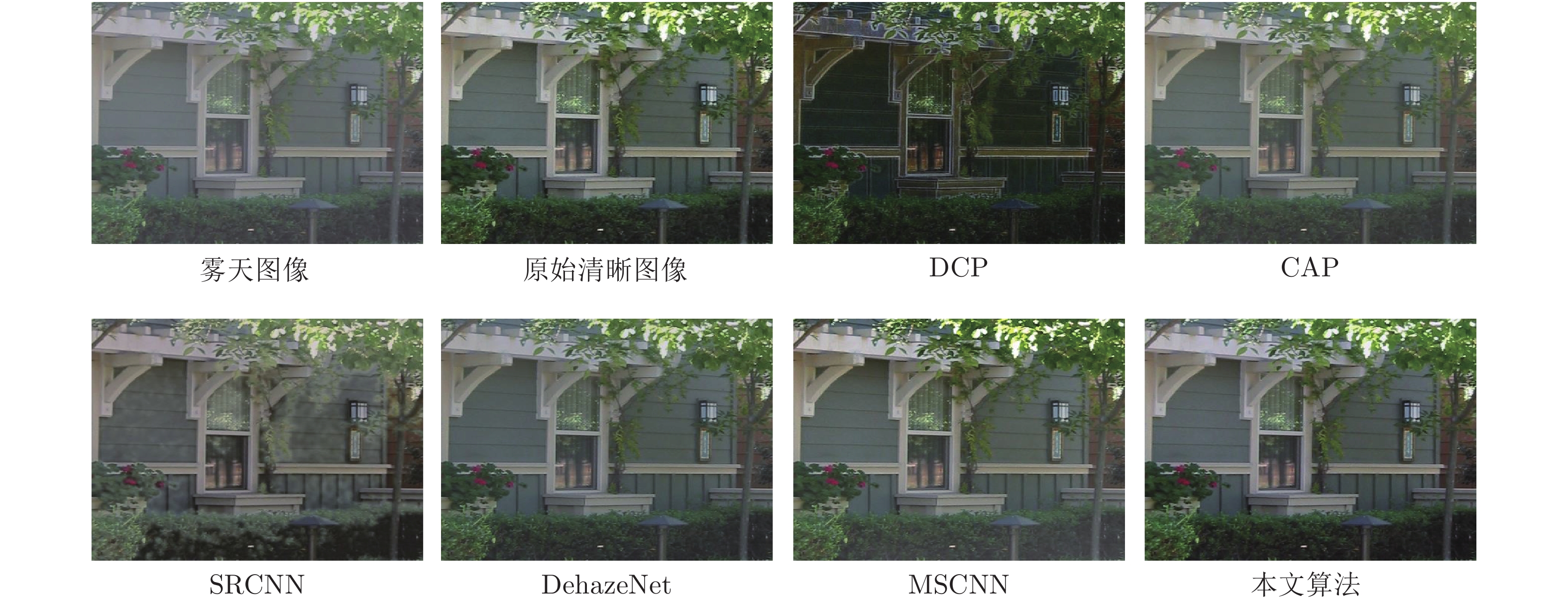
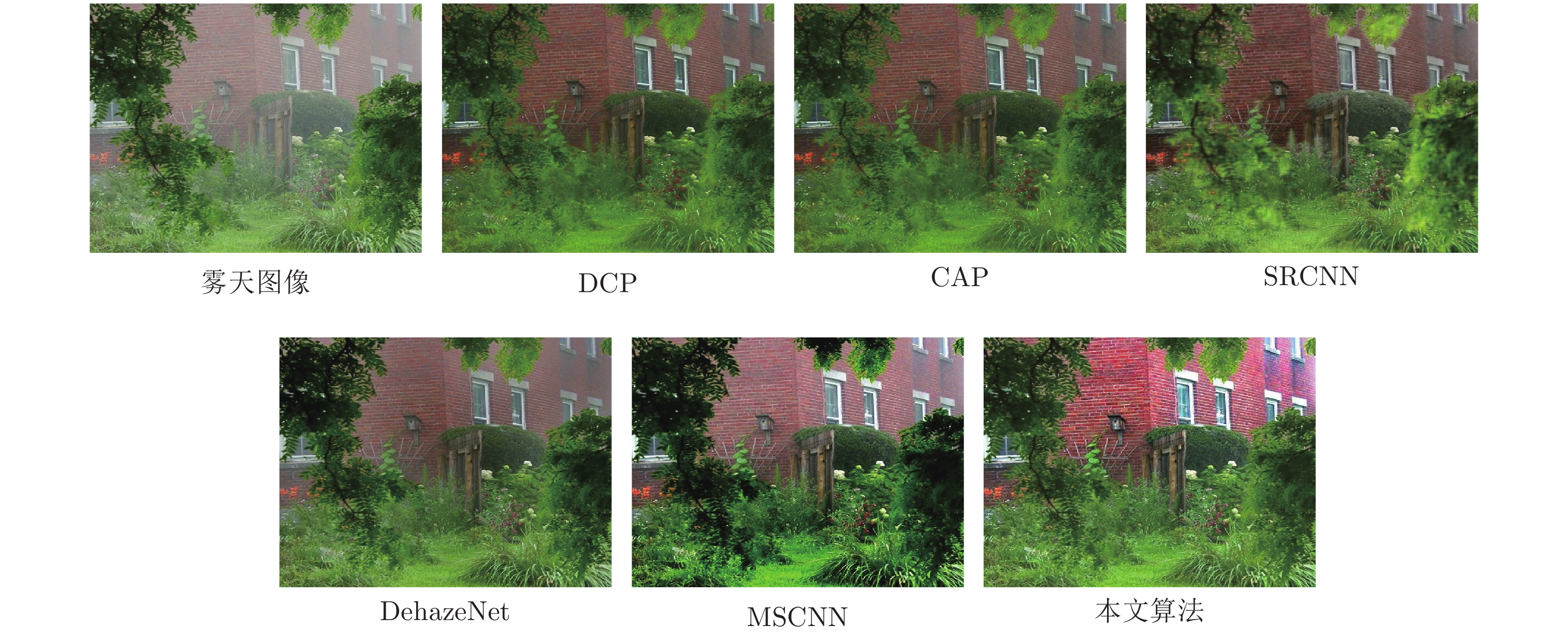
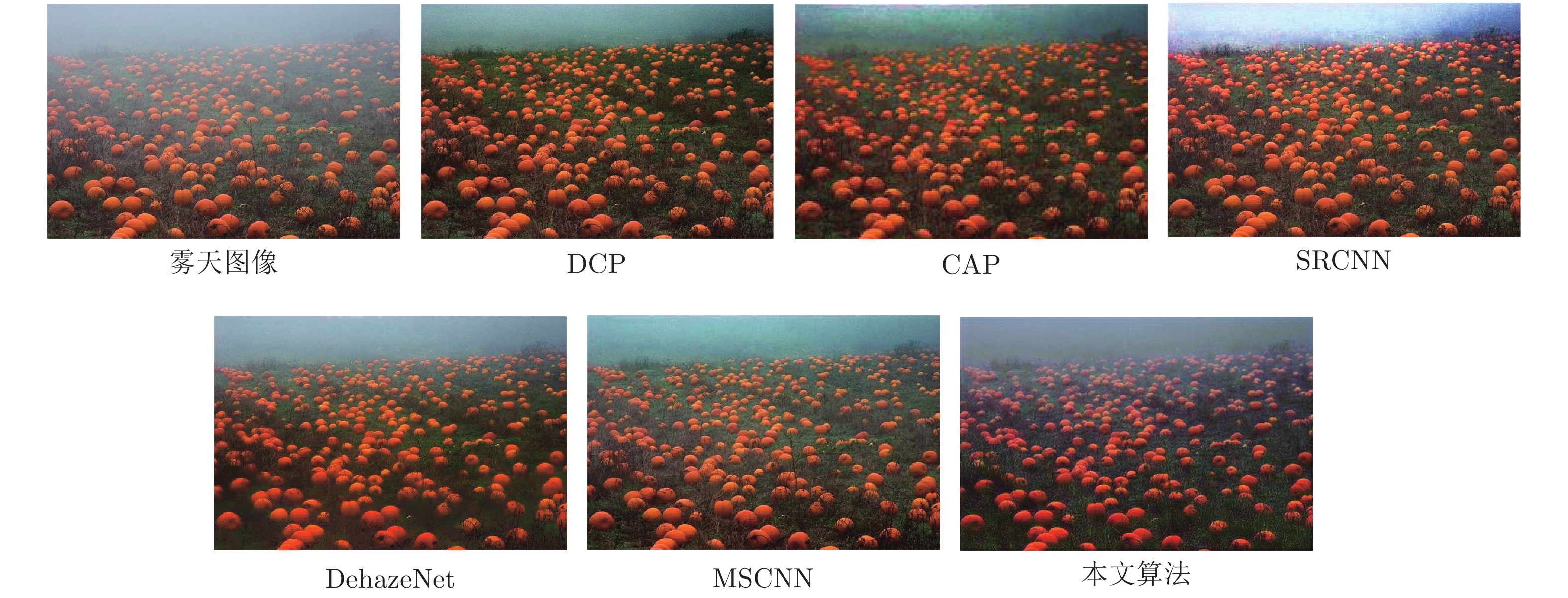
针对现有的单幅图像去雾问题, 提出了一种基于并联卷积神经网络的单幅图像去雾算法, 以端对端的方式实现图像去雾. 首先, 使用雾天RGB图像YUV变换的Y、U和V分量构建并联卷积神经网络, 自适应获得雾霾特征; 网络结构由两个子网络组成, 较深的网络预测清晰图像的亮度通道, 较浅的网络预测色度通道和饱和度通道. 最后, 采用递归双边滤波, 对去雾后的图像进行滤波, 可以得到更加清晰的无雾图像. 实验结果表明, 本文去雾算法无论是在合成雾天图像数据集还是自然雾天图像数据集上, 都具有良好的对比度与清晰度. 在主观评价和客观评价方面, 本文去雾算法都优于其他对比算法.