

-
摘要: 主要考虑了四旋翼无人机(Unmanned aerial vehicle,UAV)吊挂飞行系统的位置控制及负载摆动抑制的设计问题.在存在欠驱动特性以及未知系统参数的约束下,本文基于能量法设计了一种非线性控制策略,实现了对无人机位置的精确控制和飞行过程中负载摆动的快速抑制.基于Lyapunov方法的稳定性分析证明了闭环系统的稳定性,位置误差的收敛及摆动的抑制.实验结果表明本文提出的控制策略取得了较好的控制效果.Abstract: In this paper, position control and load swing suppression design for a quadrotor unmanned aerial vehicle (UAV) with a slung-load are investigated. Under the constraints of underactuated feature and unknown system parameters, a nonlinear control strategy is designed based on energy method, which achieves accurate position control of the UAV as well as payload swing fast suppression during the flight. The stability of the closed-loop system, convergence of position error and payload swing suppression are proved by Lyapunov-based stability analysis method. Experimental results show that the proposed control strategy has better control performance.1) 本文责任编委 孙富春
-
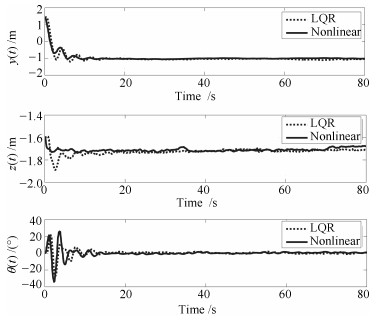
图 3 无人机位置$y(t), z(t)$及负载摆角$\theta(t)$
Fig. 3 $y(t), z(t)$ of UAV and payload swing $\theta(t)$
表 1 非线性控制器和LQR控制器调节时间对比
Table 1 Comparison of the settling time between nonlinear controller and LQR controller
调节时间 非线性控制器 LQR控制器 $t_s$$_y$ 16 s 22 s $t_s$$_z$ 4 s 15 s $t_s$$_\theta$ 6 s 14 s  下载: 导出CSV
下载: 导出CSV
表 2 非线性控制器和LQR控制器稳态误差均值对比
Table 2 Comparison of the steady-state mean error between nonlinear controller and LQR controller
稳态误差均值 非线性控制器 LQR控制器 $\bar{y}$ 0.0116 m 0.0529 m $\bar{z}$ 0.0088 m 0.0188 m $\bar{\theta}$ 0.2013 $^{\circ}$ 0.2448 $^{\circ}$
下载: 导出CSV
表 3 非线性控制器和LQR控制器稳态均方误差对比
Table 3 Comparison of the steady-state mean square error between nonlinear controller and LQR controller
稳态均方误差 非线性控制器 LQR控制器 $\sigma_y$ 3.7716$\times10^{-4}$ 4.6072$\times10^{-4}$ $\sigma_z$ 1.9433$\times10^{-4}$ 8.8264$\times10^{-5}$ $\sigma_\theta$ 0.4890 0.4570
下载: 导出CSV
表 4 非线性控制器和LQR控制器稳态最大偏差对比
Table 4 Comparison of the steady-state maximum deviation between nonlinear controller and LQR controller
稳态最大偏差 非线性控制器 LQR控制器 $e_y$$\mathrm {_m}$$\mathrm {_a}$$\mathrm {_x}$ 0.0440 m 0.1038 m $e_z$$\mathrm {_m}$$\mathrm {_a}$$\mathrm {_x}$ 0.0584 m 0.0557 m $e_\theta$$\mathrm {_m}$$\mathrm {_a}$$\mathrm {_x}$ 0.1989 $^{\circ}$ 0.9888 $^{\circ}$
下载: 导出CSV
-
[1] 沈东, 魏瑞轩, 祁晓明, 关旭宁.基于MTPM和DPM的多无人机协同广域目标搜索滚动时域决策.自动化学报, 2014, 40(7):1391-1403 http://www.aas.net.cn/CN/abstract/abstract18410.shtmlShen Dong, Wei Rui-Xuan, Qi Xiao-Ming, Guan Xu-Ning. Receding horizon decision method based on MTPM and DPM for multi-UAVs cooperative large area target search. Acta Automatica Sinica, 2014, 40(7):1391-1403 http://www.aas.net.cn/CN/abstract/abstract18410.shtml [2] Zhao B, Xian B, Zhang Y, Zhang X. Nonlinear robust adaptive tracking control of a quadrotor UAV via immersion and invariance methodology. IEEE Transactions on Industrial Electronics, 2015, 62(5):2891-2902 doi: 10.1109/TIE.2014.2364982 [3] 彭孝东, 张铁民, 李继宇, 陈瑜.基于传感器校正与融合的农用小型无人机姿态估计算法.自动化学报, 2015, 41(4):854-860 http://www.aas.net.cn/CN/abstract/abstract18659.shtmlPeng Xiao-Dong, Zhang Tie-Min, Li Ji-Yu, Chen Yu. Attitude estimation algorithm of agricultural small-UAV based on sensors fusion and calibration. Acta Automatica Sinica, 2015, 41(4):854-860 http://www.aas.net.cn/CN/abstract/abstract18659.shtml [4] Hao W, Xian B. Nonlinear adaptive fault-tolerant control for a quadrotor UAV based on immersion and invariance methodology. Nonlinear Dynamics, 2017, 90(4):2813-2826 doi: 10.1007/s11071-017-3842-1 [5] Chen H, Fang Y C, Sun N. A swing constrained time-optimal trajectory planning strategy for double pendulum crane systems. Nonlinear Dynamics, 2017, 89(2):1513-1524 doi: 10.1007/s11071-017-3531-0 [6] Chen H, Fang Y C, Sun N. A swing constraint guaranteed MPC algorithm for underactuated overhead cranes. IEEE/ASME Transactions on Mechatronics, 2016, 21(5):2543-2555 doi: 10.1109/TMECH.2016.2558202 [7] 孙宁, 方勇纯, 王鹏程, 张雪波.欠驱动三维桥式吊车系统自适应跟踪控制器设计.自动化学报, 2010, 36(9):1287-1294 http://www.aas.net.cn/CN/abstract/abstract17322.shtmlSun Ning, Fang Yong-Chun, Wang Peng-Cheng, Zhang Xue-Bo. Adaptive trajectory tracking control of underactuated 3-dimensional overhead crane systems. Acta Automatica Sinica, 2010, 36(9):1287-1294 http://www.aas.net.cn/CN/abstract/abstract17322.shtml [8] Tang S, Kumar V. Mixed integer quadratic program trajectory generation for a quadrotor with a cable-suspended payload. In: Proceedings of the 2015 IEEE International Conference on Robotics and Automation. Seattle, WA, USA: IEEE, 2015. 2216-2222 https://ieeexplore.ieee.org/document/7139492 [9] Sreenath K, Michael N, Kumar V. Trajectory generation and control of a quadrotor with a cable-suspended load-A differentially-flat hybrid system. In: Proceedings of the 2013 IEEE International Conference on Robotics and Automation. Karlsruhe, Germany: IEEE, 2013. 4888-4895 https://ieeexplore.ieee.org/document/6631275 [10] Sreenath K, Lee T, Kumar V. Geometric control and differential flatness of a quadrotor UAV with a cable-suspended load. In: Proceedings of the 2013 IEEE 52nd Annual Conference on Decision and Control. Firenze, Italy: IEEE, 2013. 2269-2274 https://ieeexplore.ieee.org/document/6760219 [11] Faust A, Palunko I, Cruz P, Fierro R, Tapia L. Learning swing-free trajectories for UAVs with a suspended load. In: Proceedings of the 2013 IEEE International Conference on Robotics and Automation. Karlsruhe, Germany: IEEE, 2013. 4902-4909 https://ieeexplore.ieee.org/document/6631277 [12] Dai S C, Lee T, Bernstein D S. Adaptive control of a quadrotor UAV transporting a cable-suspended load with unknown mass. In: Proceedings of the 2014 IEEE 53rd Annual Conference on Decision and Control. Los Angeles, USA: IEEE, 2014. 6149-6154 http://www-personal.umich.edu/~dsbaero/library/QuadrotorRCACCDC2014.pdf [13] Nicotra M M, Garone E, Naldi R, Marconi L. Nested saturation control of an UAV carrying a suspended load. In: Proceedings of the 2014 American Control Conference. Portland, USA: IEEE, 2014. 3585-3590 https://ieeexplore.ieee.org/document/6859222 [14] Rosales C, Soria C, Carelli R, Rossomando F. Adaptive dynamic control of a quadrotor for trajectory tracking. In: Proceedings of the 2017 International Conference on Unmanned Aircraft Systems. Miami, USA: IEEE, 2017. 547-553 [15] Cardoso D N, Raffo G V, Esteban S. A robust adaptive mixing control for improved forward flight of a tilt-rotor UAV. In: Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems. Rio de Janeiro, Brazil: IEEE, 2016. 1432-1437 [16] Liang X, Fang Y C, Sun N, Lin H. Nonlinear hierarchical control for unmanned quadrotor transportation systems. IEEE Transactions on Industrial Electronics, 2018, 65(4):3395-3405 doi: 10.1109/TIE.2017.2752139 [17] 鲜斌, 张旭, 杨森.无人机吊挂飞行的非线性控制方法设计.控制理论与应用, 2016, 33(3):273-279 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201603001Xian Bin, Zhang Xu, Yang Sen. Nonlinear controller design for an unmanned aerial vehicle with a slung-load. Control Theory & Application, 2016, 33(3):273-279 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201603001 [18] Sun N, Fang Y C, Chen H, He B. Adaptive nonlinear crane control with load hoisting/lowering and unknown parameters:design and experiments. IEEE/ASME Transactions on Mechatronics, 2015, 20(5):2107-2119 doi: 10.1109/TMECH.2014.2364308 [19] 方勇纯, 卢桂章.非线性系统理论.北京:清华大学出版社, 2009. 21-24Fang Yong-Chun, Lu Gui-Zhang. Nonlinear System Theory. Beijing:Tsinghua University Press, 2009. 21-24 -



计量
- 文章访问数: 2841
- HTML全文浏览量: 477
- PDF下载量: 993
- 被引次数: 0
