2018年 第44卷 第10期
2018, 44(10): 1729-1746.
doi: 10.16383/j.aas.2018.c170715
摘要:
视觉伺服是机器人视觉领域的研究热点之一,具有十分广泛的应用前景.本文针对单目视觉系统,从视觉伺服的运动映射关系、误差表征、控制律设计、关键影响因素等多个层面,对视觉伺服的研究现状进行了论述,并分析了不同视觉伺服方法的特点,给出了视觉伺服在不同领域的典型应用.最后,指出了视觉伺服未来的主要发展方向.
视觉伺服是机器人视觉领域的研究热点之一,具有十分广泛的应用前景.本文针对单目视觉系统,从视觉伺服的运动映射关系、误差表征、控制律设计、关键影响因素等多个层面,对视觉伺服的研究现状进行了论述,并分析了不同视觉伺服方法的特点,给出了视觉伺服在不同领域的典型应用.最后,指出了视觉伺服未来的主要发展方向.
2018, 44(10): 1747-1763.
doi: 10.16383/j.aas.2018.c170209
摘要:
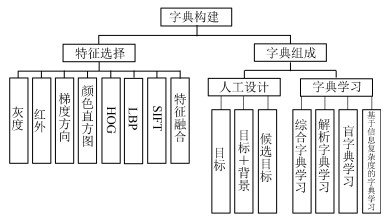
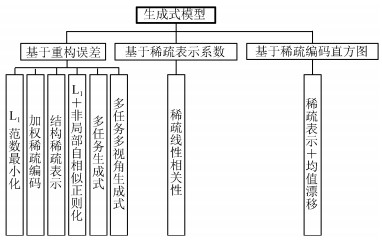
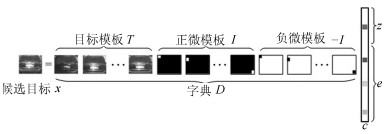
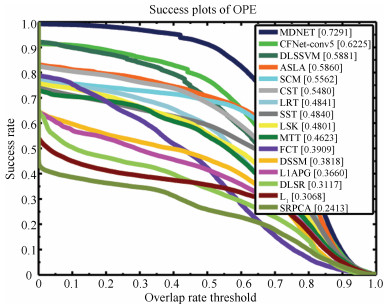
视频目标跟踪在计算机视觉领域有着广泛应用,由于目标自身和外界环境变化的复杂性和难以预知性,使得复杂场景下鲁棒实时目标跟踪成为一项亟待解决的关键问题.由于视觉信息可以用少量神经元进行稀疏表示,因此稀疏表示已经广泛应用于人脸识别、目标检测和目标跟踪等计算机视觉领域.本文旨在对基于稀疏表示的视频目标跟踪算法进行综述.首先,介绍了基于稀疏表示的视频目标跟踪算法中的字典组成;其次,介绍了稀疏模型的构建及求解算法和模型更新,并对算法复杂度进行了简要分析;然后,对现有公开代码的稀疏表示跟踪算法在测试数据上进行了实验分析,结合算法模型和实验结果对其进行了分析;最后,对基于稀疏表示的视频跟踪算法存在问题进行了讨论,并对未来的研究趋势进行了展望.
视频目标跟踪在计算机视觉领域有着广泛应用,由于目标自身和外界环境变化的复杂性和难以预知性,使得复杂场景下鲁棒实时目标跟踪成为一项亟待解决的关键问题.由于视觉信息可以用少量神经元进行稀疏表示,因此稀疏表示已经广泛应用于人脸识别、目标检测和目标跟踪等计算机视觉领域.本文旨在对基于稀疏表示的视频目标跟踪算法进行综述.首先,介绍了基于稀疏表示的视频目标跟踪算法中的字典组成;其次,介绍了稀疏模型的构建及求解算法和模型更新,并对算法复杂度进行了简要分析;然后,对现有公开代码的稀疏表示跟踪算法在测试数据上进行了实验分析,结合算法模型和实验结果对其进行了分析;最后,对基于稀疏表示的视频跟踪算法存在问题进行了讨论,并对未来的研究趋势进行了展望.

2018, 44(10): 1764-1770.
doi: 10.16383/j.aas.2018.c180502
摘要:
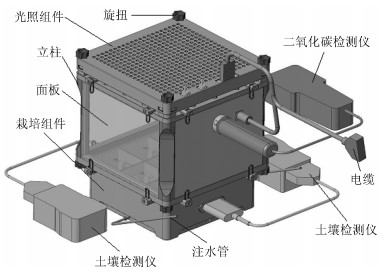
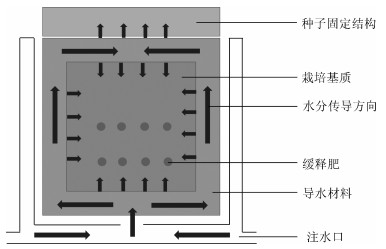
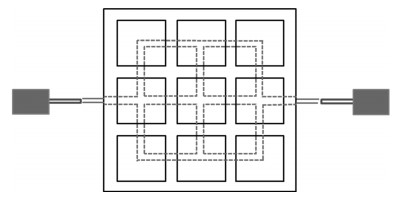
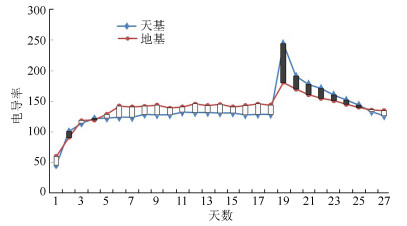
通过"天宫2号"空间实验室搭载的空间植物栽培装置,研究了微重力下植物栽培水分养分控制技术.针对空间微重力特点,设计了植物栽培水分养分传导结构,并验证了其可行性和合理性.生菜在空间实验室微重力环境下的顺利萌发、生长发育,证明了水分养分传导结构的合理性和可行性,为后续开展更大规模的空间植物栽培奠定了基础.通过实验,了解了空间微重力下水分养分的传导和分布规律,为研究空间植物栽培水分养分供应方法和测试方法提供了依据.
通过"天宫2号"空间实验室搭载的空间植物栽培装置,研究了微重力下植物栽培水分养分控制技术.针对空间微重力特点,设计了植物栽培水分养分传导结构,并验证了其可行性和合理性.生菜在空间实验室微重力环境下的顺利萌发、生长发育,证明了水分养分传导结构的合理性和可行性,为后续开展更大规模的空间植物栽培奠定了基础.通过实验,了解了空间微重力下水分养分的传导和分布规律,为研究空间植物栽培水分养分供应方法和测试方法提供了依据.


2018, 44(10): 1771-1780.
doi: 10.16383/j.aas.2018.c170413
摘要:
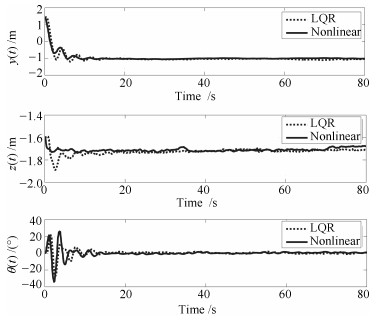
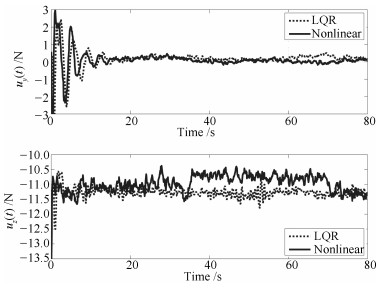
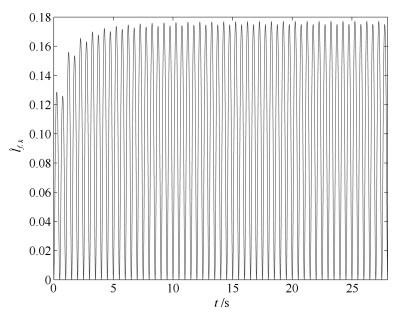
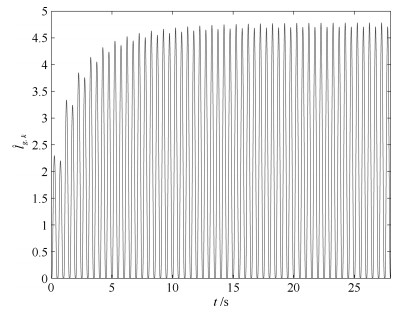
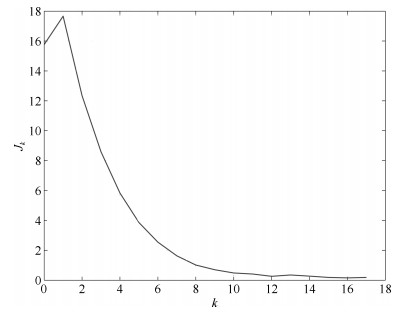
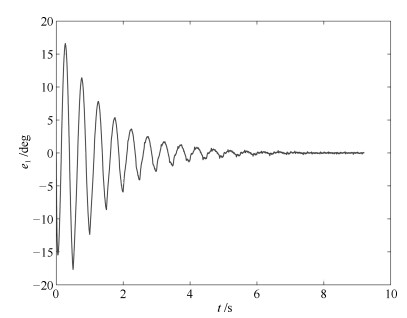
主要考虑了四旋翼无人机(Unmanned aerial vehicle,UAV)吊挂飞行系统的位置控制及负载摆动抑制的设计问题.在存在欠驱动特性以及未知系统参数的约束下,本文基于能量法设计了一种非线性控制策略,实现了对无人机位置的精确控制和飞行过程中负载摆动的快速抑制.基于Lyapunov方法的稳定性分析证明了闭环系统的稳定性,位置误差的收敛及摆动的抑制.实验结果表明本文提出的控制策略取得了较好的控制效果.
主要考虑了四旋翼无人机(Unmanned aerial vehicle,UAV)吊挂飞行系统的位置控制及负载摆动抑制的设计问题.在存在欠驱动特性以及未知系统参数的约束下,本文基于能量法设计了一种非线性控制策略,实现了对无人机位置的精确控制和飞行过程中负载摆动的快速抑制.基于Lyapunov方法的稳定性分析证明了闭环系统的稳定性,位置误差的收敛及摆动的抑制.实验结果表明本文提出的控制策略取得了较好的控制效果.



2018, 44(10): 1781-1789.
doi: 10.16383/j.aas.2017.c170213
摘要:
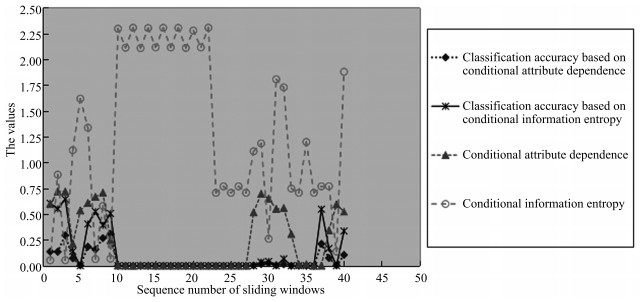
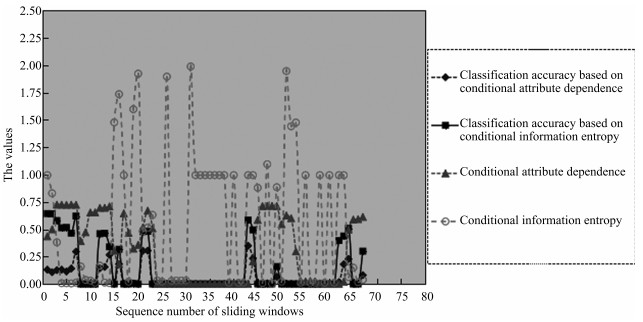
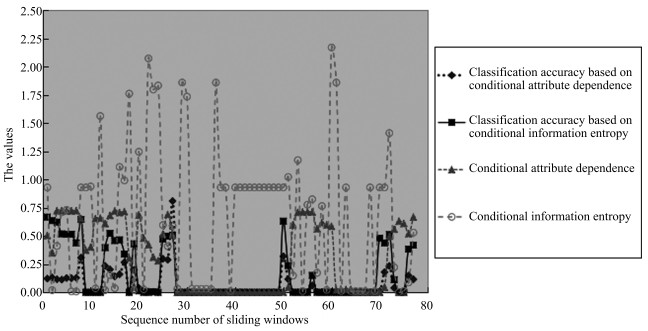
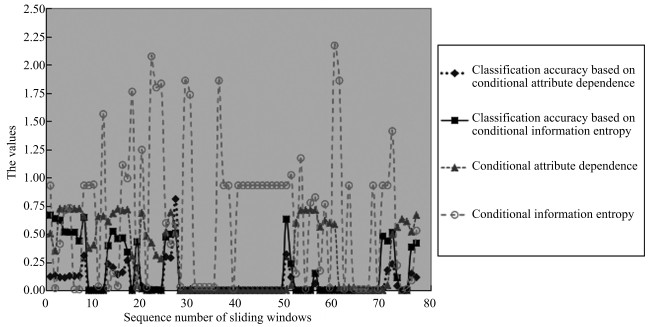
概念漂移探测是数据流挖掘具有挑战意义的研究难点,属性约简是粗糙集理论的研究核心.从概念漂移的角度研究了粗糙集理论的属性约简,从粗糙集属性约简的角度研究了概念漂移,将概念漂移和属性约简进行分析比较,指出了它们之间的区别和联系.提出了基于属性依赖度和条件熵的概念漂移探测准则,并将两种常用的概念漂移探测准则与属性依赖度、条件熵探测准则进行了比较.属性依赖度和条件熵兼具分类准确率的可实验检验和联合概率分布可进行理论分析的优点,还可以进行属性约简(或特征选择).实验结果显示,属性依赖度、条件熵和分类准确率都能有效地探测概念漂移,但是,与分类准确率相比,属性依赖度和条件熵在探测概念漂移时可以增加可重用性,减少工作量.属性约简和概念漂移之间关系的研究为属性约简、概念漂移的研究提供了新方法,为粗糙集、粒计算进一步融入大数据时代潮流提供了新思路.
概念漂移探测是数据流挖掘具有挑战意义的研究难点,属性约简是粗糙集理论的研究核心.从概念漂移的角度研究了粗糙集理论的属性约简,从粗糙集属性约简的角度研究了概念漂移,将概念漂移和属性约简进行分析比较,指出了它们之间的区别和联系.提出了基于属性依赖度和条件熵的概念漂移探测准则,并将两种常用的概念漂移探测准则与属性依赖度、条件熵探测准则进行了比较.属性依赖度和条件熵兼具分类准确率的可实验检验和联合概率分布可进行理论分析的优点,还可以进行属性约简(或特征选择).实验结果显示,属性依赖度、条件熵和分类准确率都能有效地探测概念漂移,但是,与分类准确率相比,属性依赖度和条件熵在探测概念漂移时可以增加可重用性,减少工作量.属性约简和概念漂移之间关系的研究为属性约简、概念漂移的研究提供了新方法,为粗糙集、粒计算进一步融入大数据时代潮流提供了新思路.
2018, 44(10): 1790-1798.
doi: 10.16383/j.aas.2017.c170026
摘要:
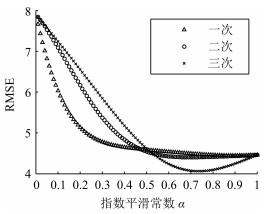
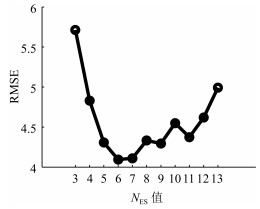
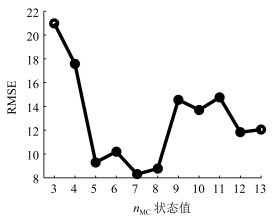
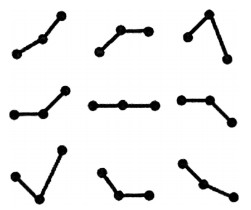
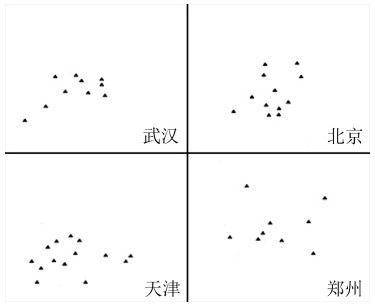
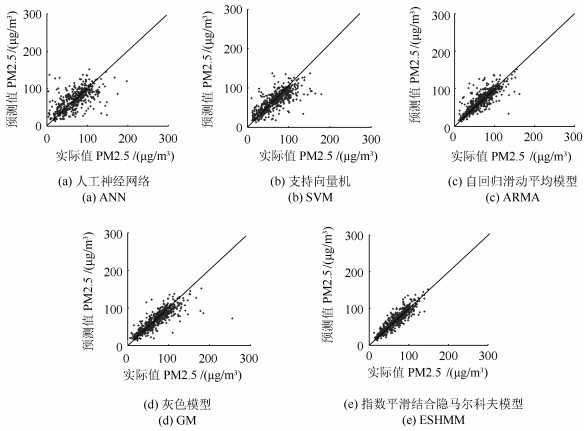
针对细颗粒物PM2.5的浓度预测,本文提出了基于单时间序列数据的动态调整模型.在动态指数平滑算法中,指数平滑次数与参数基于样本数据并借助二分查找进行调整.在动态马尔科夫模型中,马尔科夫链的残差状态数、隐马尔科夫模型的隐状态数、连续样本数和阈值参数都通过训练数据加以调整.动态调整模型将指数平滑法和马尔科夫模型有效结合起来,指数平滑法得到的预测值由马尔科夫模型进行校正,从而提高预测准确度.基于大量实际PM2.5数据进行测试,验证了算法的有效性.并与其他现有的灰色模型、人工神经网络、自回归滑动平均模型、支持向量机等方法进行了对比,表明所提模型能够得到精度更高的预测结果.本文模型不局限于PM2.5数据,还可应用于其他类型的数据预测.
针对细颗粒物PM2.5的浓度预测,本文提出了基于单时间序列数据的动态调整模型.在动态指数平滑算法中,指数平滑次数与参数基于样本数据并借助二分查找进行调整.在动态马尔科夫模型中,马尔科夫链的残差状态数、隐马尔科夫模型的隐状态数、连续样本数和阈值参数都通过训练数据加以调整.动态调整模型将指数平滑法和马尔科夫模型有效结合起来,指数平滑法得到的预测值由马尔科夫模型进行校正,从而提高预测准确度.基于大量实际PM2.5数据进行测试,验证了算法的有效性.并与其他现有的灰色模型、人工神经网络、自回归滑动平均模型、支持向量机等方法进行了对比,表明所提模型能够得到精度更高的预测结果.本文模型不局限于PM2.5数据,还可应用于其他类型的数据预测.




2018, 44(10): 1799-1811.
doi: 10.16383/j.aas.2018.c170299
摘要:
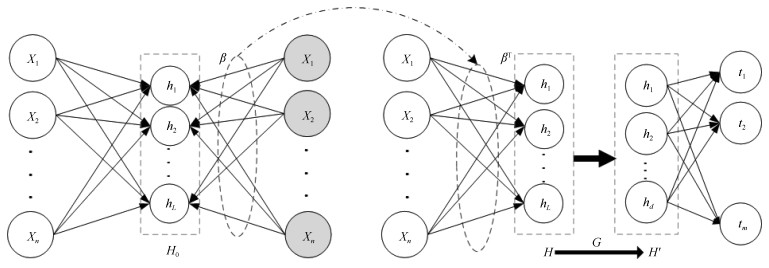
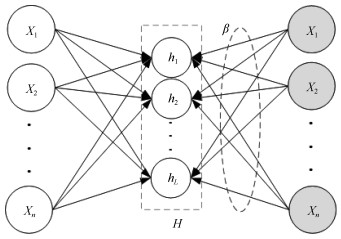
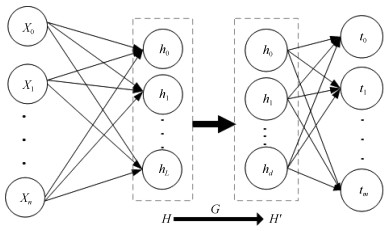
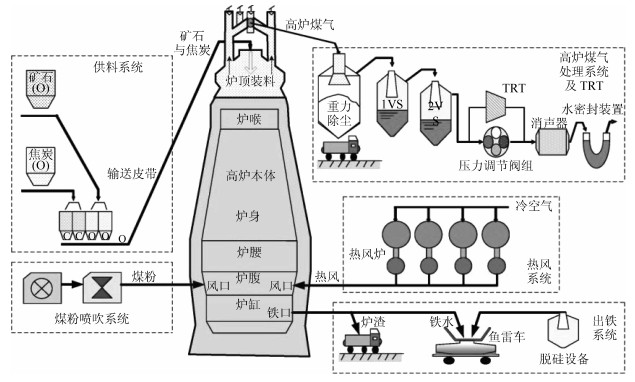
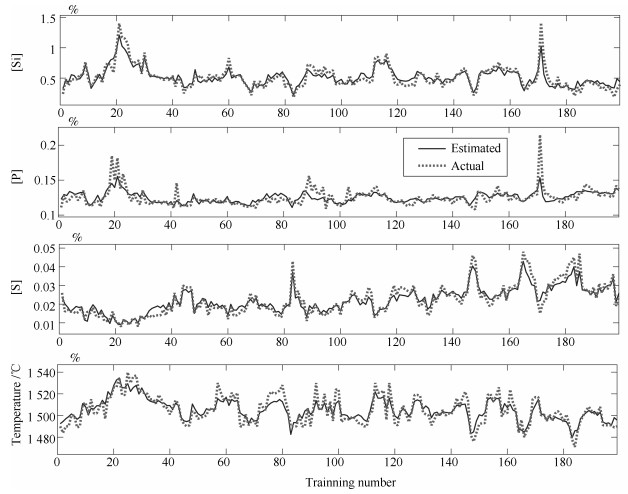
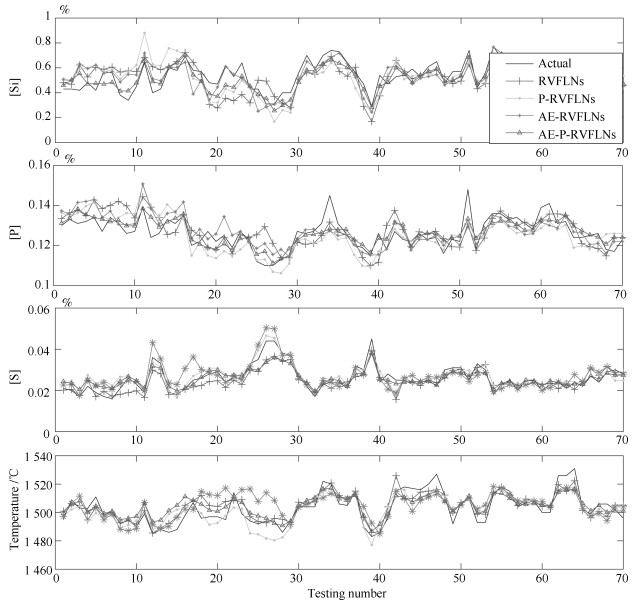
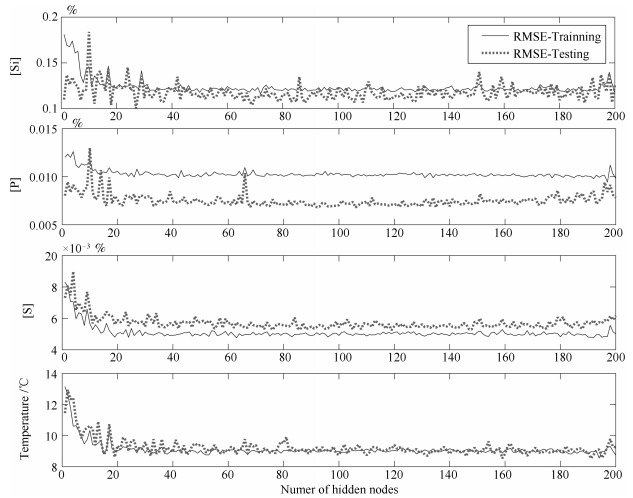
针对随机权神经网络(Random vector functional-link networks,RVFLNs)建模存在的过拟合和泛化能力差的问题,集成自编码(Autoencoder)和主成分分析(Principal component analysis,PCA)技术,提出一种新型的改进RVFLNs算法,即AE-P-RVFLNs算法,用于建立高炉多元铁水质量在线估计的NARX(Nonlinear autoregressive exogenous)模型.首先,为了尽可能挖掘实际复杂工业数据中的有用信息和充分揭示输入数据之间的内在关系,采用Autoencoder前馈随机网络技术训练建模输入数据,并将训练得到的输出权值作为后续RVFLNs的输入权值;然后,引入PCA技术对RVFLNs的高维隐层输出矩阵进行降维,避免隐层输出矩阵多重共线性问题,从而解决由于隐层节点过多导致模型过拟合的问题;最后,基于所提AE-P-RVFLNs算法建立某大型高炉多元铁水质量在线估计的NARX模型.工业实验和比较分析表明:采用本文算法建立的多元铁水质量在线估计模型可有效提高运算效率和估计精度,尤其是避免常规RVFLNs建模存在的过拟合问题.
针对随机权神经网络(Random vector functional-link networks,RVFLNs)建模存在的过拟合和泛化能力差的问题,集成自编码(Autoencoder)和主成分分析(Principal component analysis,PCA)技术,提出一种新型的改进RVFLNs算法,即AE-P-RVFLNs算法,用于建立高炉多元铁水质量在线估计的NARX(Nonlinear autoregressive exogenous)模型.首先,为了尽可能挖掘实际复杂工业数据中的有用信息和充分揭示输入数据之间的内在关系,采用Autoencoder前馈随机网络技术训练建模输入数据,并将训练得到的输出权值作为后续RVFLNs的输入权值;然后,引入PCA技术对RVFLNs的高维隐层输出矩阵进行降维,避免隐层输出矩阵多重共线性问题,从而解决由于隐层节点过多导致模型过拟合的问题;最后,基于所提AE-P-RVFLNs算法建立某大型高炉多元铁水质量在线估计的NARX模型.工业实验和比较分析表明:采用本文算法建立的多元铁水质量在线估计模型可有效提高运算效率和估计精度,尤其是避免常规RVFLNs建模存在的过拟合问题.

2018, 44(10): 1812-1823.
doi: 10.16383/j.aas.2017.c160736
摘要:
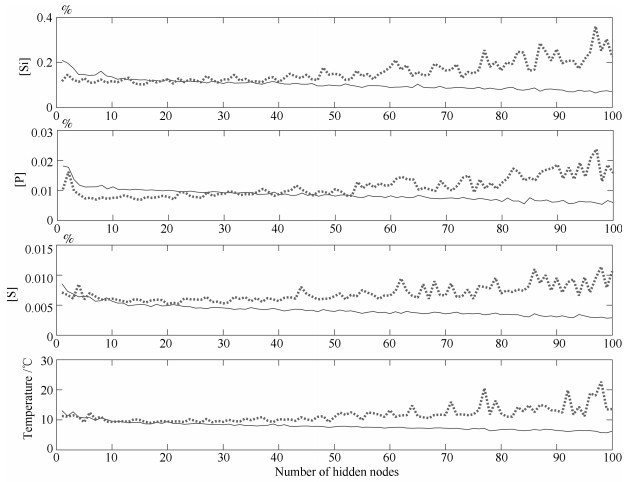
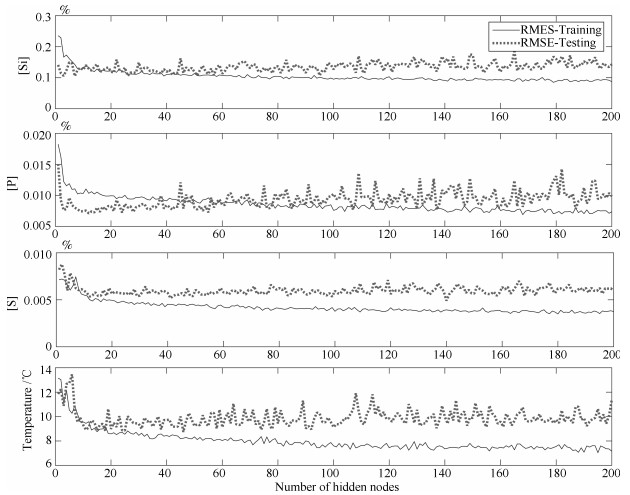
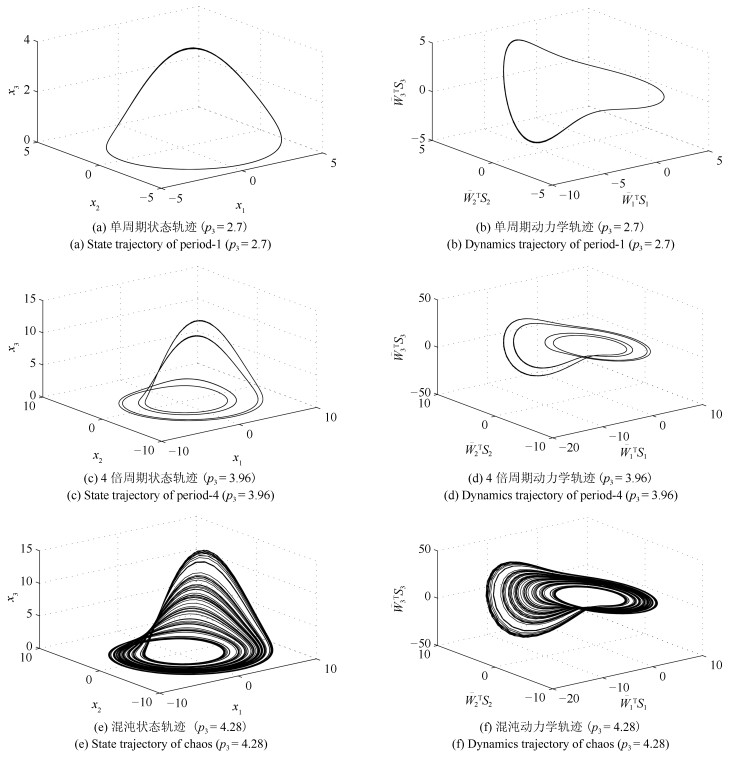
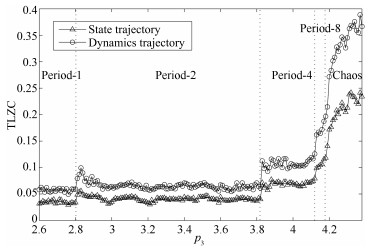
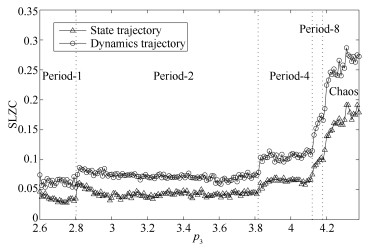
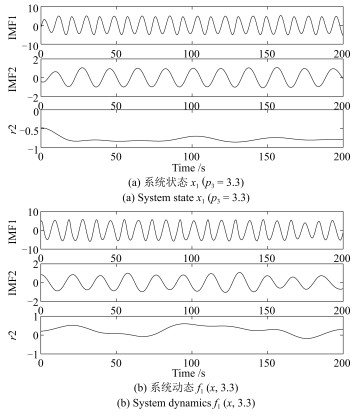
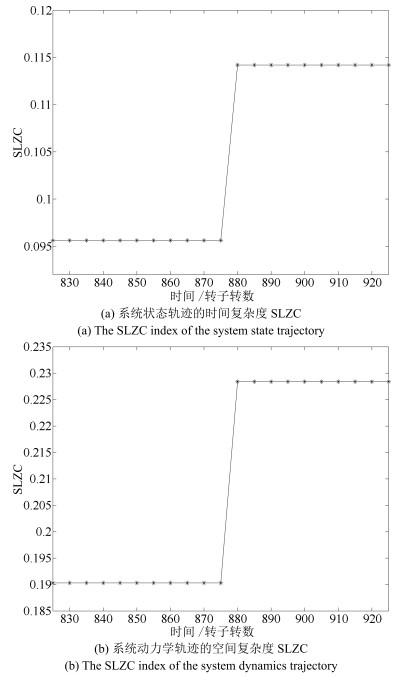
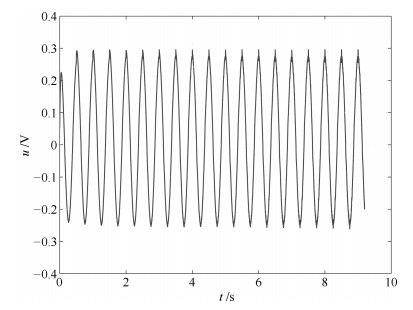
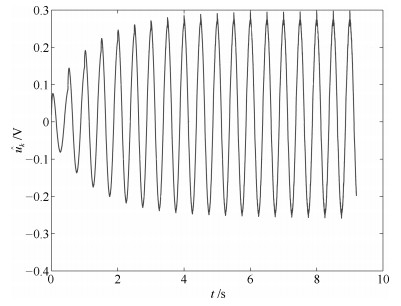
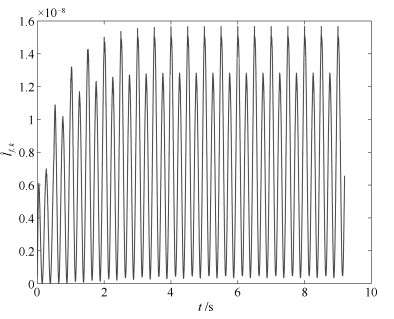
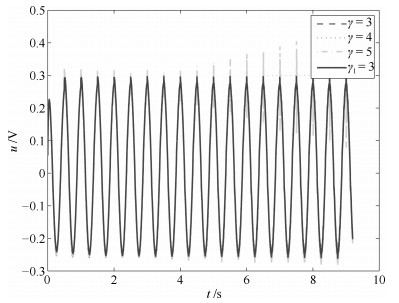
对非线性系统产生的非线性非平稳信号进行有效的特征表达是特征提取领域重要且困难的问题.本文基于确定学习理论和Lempel-Ziv复杂度(LZ复杂度)提出一种新的非线性系统动态特征提取方法.新方法将从系统的动力学轨迹中提取特征.通过确定学习理论对产生回归轨迹的非线性动力学系统的未知系统动态进行局部准确建模/辨识,1)使用LZ复杂度对辨识得到的动力学轨迹进行特征表达,并提出时间复杂度和空间复杂度两个指标组成时空LZ复杂度,从时间域和空间域的角度刻画系统动力学轨迹的复杂程度.2)对提出的动态特征提取方法进行敏感度分析,定量评价系统的动态特征指标相对于系统从周期轨迹到混沌轨迹的参数变化敏感程度.3)通过数值仿真和实验分析以验证动态特征提取的有效性.与从系统状态轨迹中提取特征相比,本文提出的动态特征提取方法可以从系统内在动态的角度对原系统进行更好的表达.
对非线性系统产生的非线性非平稳信号进行有效的特征表达是特征提取领域重要且困难的问题.本文基于确定学习理论和Lempel-Ziv复杂度(LZ复杂度)提出一种新的非线性系统动态特征提取方法.新方法将从系统的动力学轨迹中提取特征.通过确定学习理论对产生回归轨迹的非线性动力学系统的未知系统动态进行局部准确建模/辨识,1)使用LZ复杂度对辨识得到的动力学轨迹进行特征表达,并提出时间复杂度和空间复杂度两个指标组成时空LZ复杂度,从时间域和空间域的角度刻画系统动力学轨迹的复杂程度.2)对提出的动态特征提取方法进行敏感度分析,定量评价系统的动态特征指标相对于系统从周期轨迹到混沌轨迹的参数变化敏感程度.3)通过数值仿真和实验分析以验证动态特征提取的有效性.与从系统状态轨迹中提取特征相比,本文提出的动态特征提取方法可以从系统内在动态的角度对原系统进行更好的表达.






2018, 44(10): 1824-1832.
doi: 10.16383/j.aas.2018.c170251
摘要:
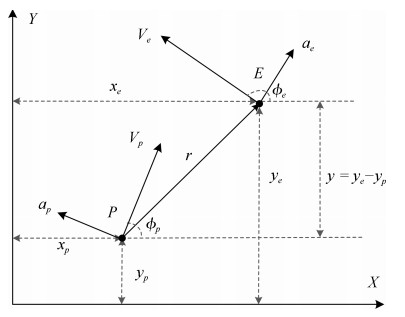
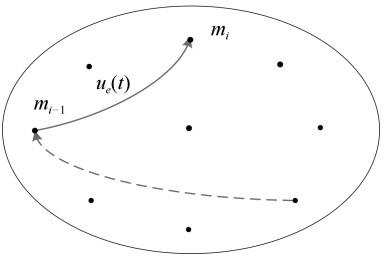
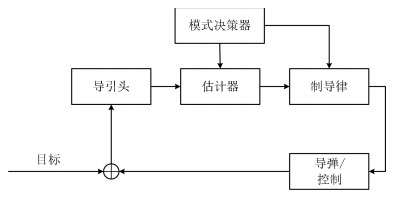
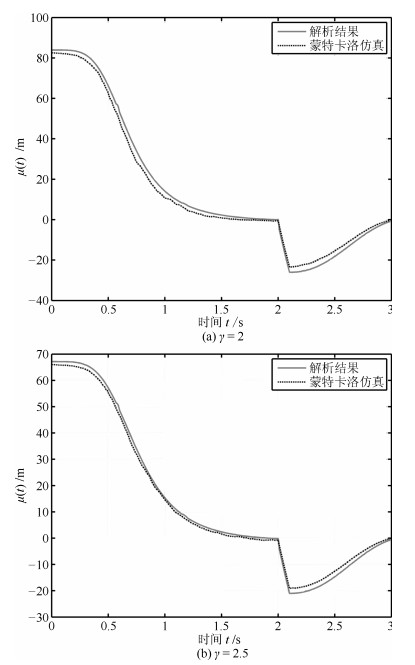
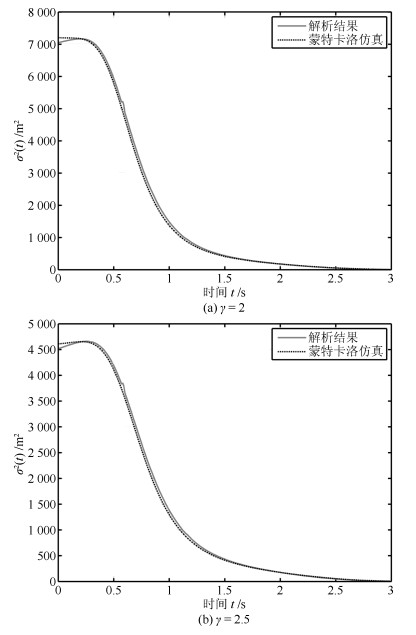
针对大机动目标拦截中零控脱靶量(Zero-effort miss distance,ZEM)估计误差分布的求解问题,在线性估计器与独立模式辨识器的配置下,提出了一种解析求解方法.在存在固定的模式辨识延迟下,ZEM的估计误差服从有偏的高斯分布.最后,通过与蒙特卡洛仿真的比较,验证了本文方法的正确性.
针对大机动目标拦截中零控脱靶量(Zero-effort miss distance,ZEM)估计误差分布的求解问题,在线性估计器与独立模式辨识器的配置下,提出了一种解析求解方法.在存在固定的模式辨识延迟下,ZEM的估计误差服从有偏的高斯分布.最后,通过与蒙特卡洛仿真的比较,验证了本文方法的正确性.

2018, 44(10): 1833-1841.
doi: 10.16383/j.aas.2017.c170198
摘要:
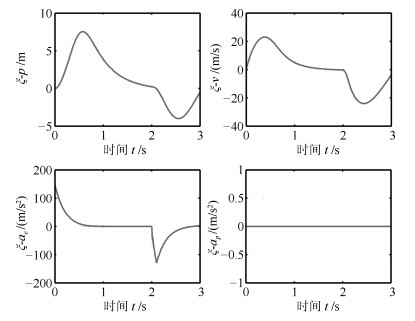
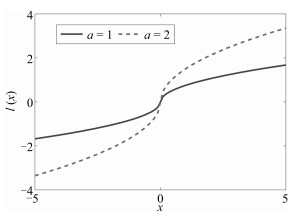
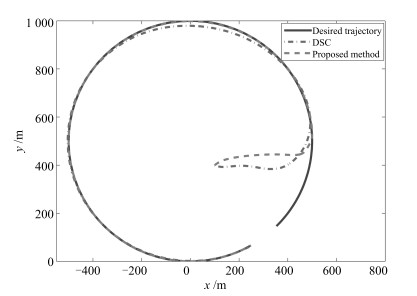
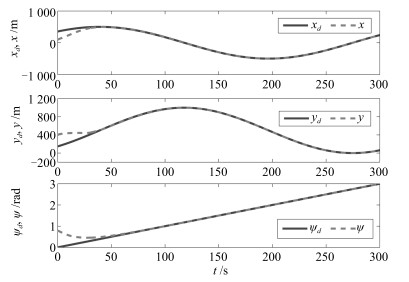
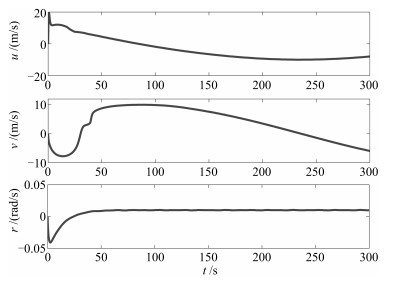
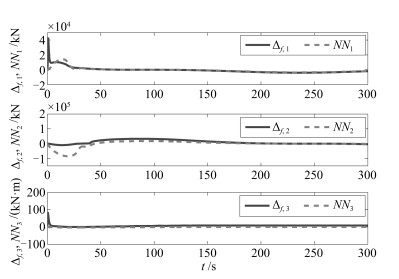
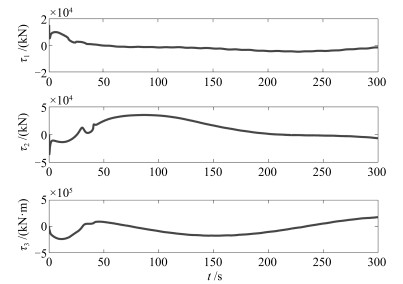
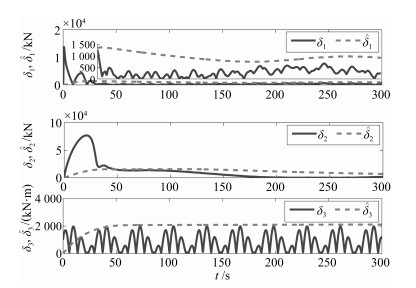
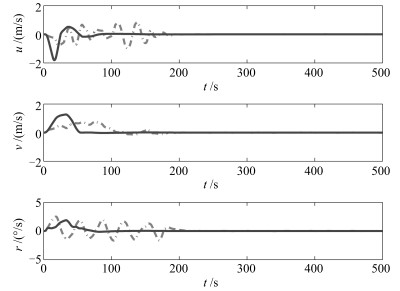
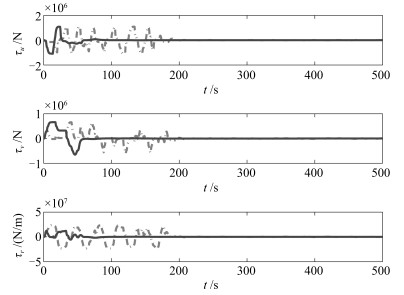
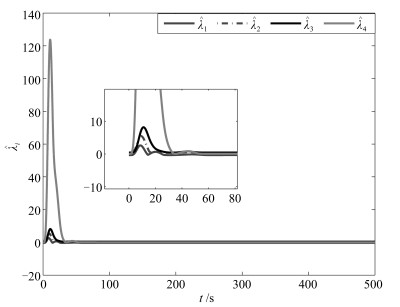
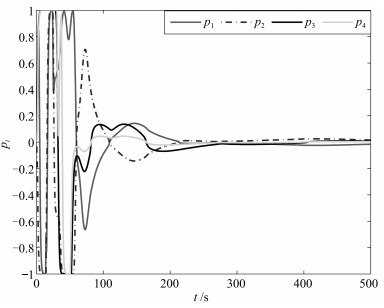
针对三自由度全驱动船舶存在模型不确定和未知外部环境扰动的情况,设计出一种基于非线性增益递归滑模的船舶轨迹跟踪动态面自适应神经网络控制方法.该方法综合考虑船舶位置和速度误差之间关系设计递归滑模面,引入神经网络对船舶模型不确定部分进行逼近,设计带σ-修正泄露项的自适应律对神经网络逼近误差与外界环境扰动总和的界进行估计,并应用一种非线性增益函数构造动态面控制律,选取李雅普诺夫函数证明了该控制律能够保证轨迹跟踪闭环系统内所有信号的一致最终有界性.最后,基于一艘供给船进行仿真验证,结果表明,船舶轨迹跟踪响应速度快、精度高,所设计控制器对系统模型参数摄动及外界扰动具有较强的鲁棒性.
针对三自由度全驱动船舶存在模型不确定和未知外部环境扰动的情况,设计出一种基于非线性增益递归滑模的船舶轨迹跟踪动态面自适应神经网络控制方法.该方法综合考虑船舶位置和速度误差之间关系设计递归滑模面,引入神经网络对船舶模型不确定部分进行逼近,设计带σ-修正泄露项的自适应律对神经网络逼近误差与外界环境扰动总和的界进行估计,并应用一种非线性增益函数构造动态面控制律,选取李雅普诺夫函数证明了该控制律能够保证轨迹跟踪闭环系统内所有信号的一致最终有界性.最后,基于一艘供给船进行仿真验证,结果表明,船舶轨迹跟踪响应速度快、精度高,所设计控制器对系统模型参数摄动及外界扰动具有较强的鲁棒性.
2018, 44(10): 1842-1853.
doi: 10.16383/j.aas.2017.c160814
摘要:
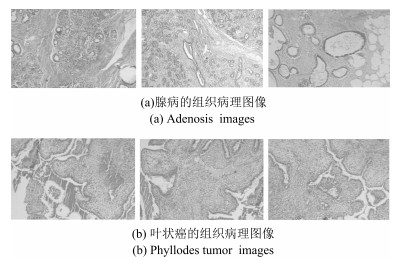
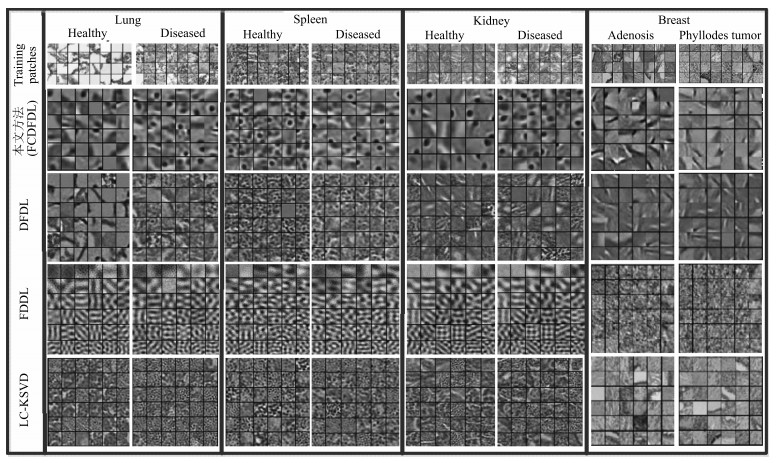
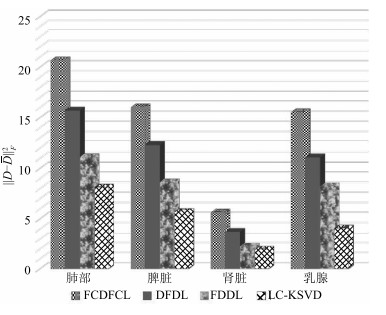
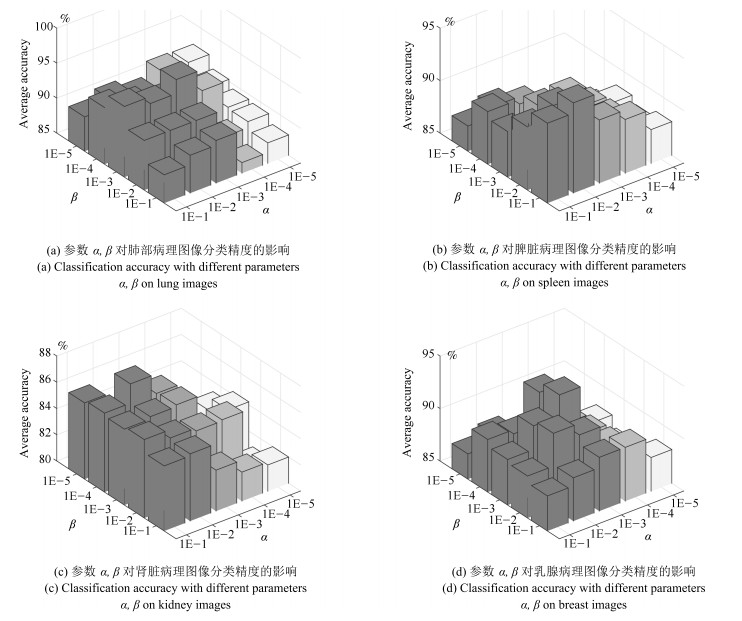
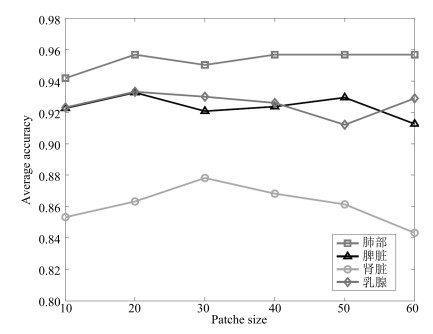
针对当前面向组织病理图像特征提取的字典学习方法中存在着学习的无病字典与有病字典相似程度高,判别性弱的问题,本文提出一种新的面向判别性特征字典学习方法(Discriminative feature-oriented dictionary learning based on Fisher criterion,FCDFDL).该方法基于Fisher准则构造目标函数的惩罚项,最小化学习字典的类内距离与最大化学习字典的类间距离,大大降低无病字典与有病字典间的相似性.同时,优化学习字典对同类样本的重构性能,并约束学习字典对非同类样本的重构性能.然后,利用本文学习的无病与有病字典对测试样本进行稀疏表示,采用重构误差向量的统计量构造分类器.最后,分别在ADL数据集与BreaKHis数据集上验证了本文方法的有效性.实验结果表明,本文学习字典的判别性更强,获得了更优的分类性能.
针对当前面向组织病理图像特征提取的字典学习方法中存在着学习的无病字典与有病字典相似程度高,判别性弱的问题,本文提出一种新的面向判别性特征字典学习方法(Discriminative feature-oriented dictionary learning based on Fisher criterion,FCDFDL).该方法基于Fisher准则构造目标函数的惩罚项,最小化学习字典的类内距离与最大化学习字典的类间距离,大大降低无病字典与有病字典间的相似性.同时,优化学习字典对同类样本的重构性能,并约束学习字典对非同类样本的重构性能.然后,利用本文学习的无病与有病字典对测试样本进行稀疏表示,采用重构误差向量的统计量构造分类器.最后,分别在ADL数据集与BreaKHis数据集上验证了本文方法的有效性.实验结果表明,本文学习字典的判别性更强,获得了更优的分类性能.

2018, 44(10): 1854-1863.
doi: 10.16383/j.aas.2018.c160799
摘要:
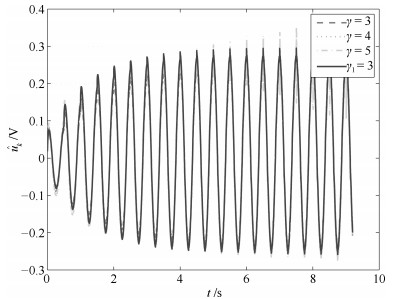
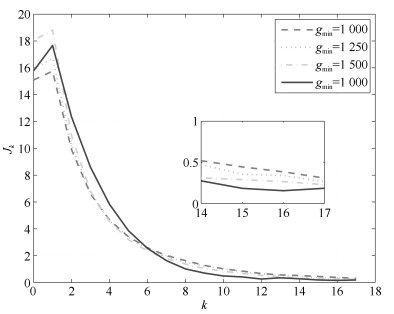
针对一类在有限时间区间上重复作业的不确定非线性系统,本文提出一种重复学习控制方法,用于解决非参数不确定性问题.该方法采用死区修正学习律对期望控制输入与界函数进行估计,以避免参数的正向累加导致系统发散,并使该控制算法较少地依赖于系统信息,更方便于控制器的实现.基于Lyapunov方法所设计的控制器,保证了闭环系统所有信号的有界性,并使得跟踪误差收敛于死区界定的邻域.通过仿真算例及电机实验结果验证所提学习控制算法的有效性.
针对一类在有限时间区间上重复作业的不确定非线性系统,本文提出一种重复学习控制方法,用于解决非参数不确定性问题.该方法采用死区修正学习律对期望控制输入与界函数进行估计,以避免参数的正向累加导致系统发散,并使该控制算法较少地依赖于系统信息,更方便于控制器的实现.基于Lyapunov方法所设计的控制器,保证了闭环系统所有信号的有界性,并使得跟踪误差收敛于死区界定的邻域.通过仿真算例及电机实验结果验证所提学习控制算法的有效性.





2018, 44(10): 1864-1875.
doi: 10.16383/j.aas.2017.c170109
摘要:
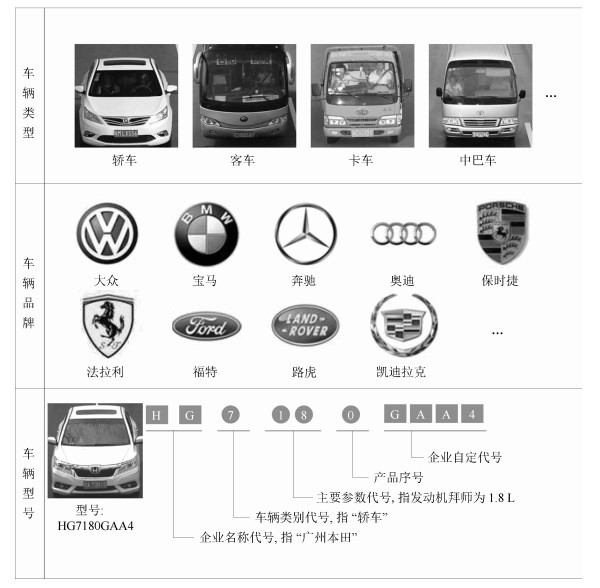
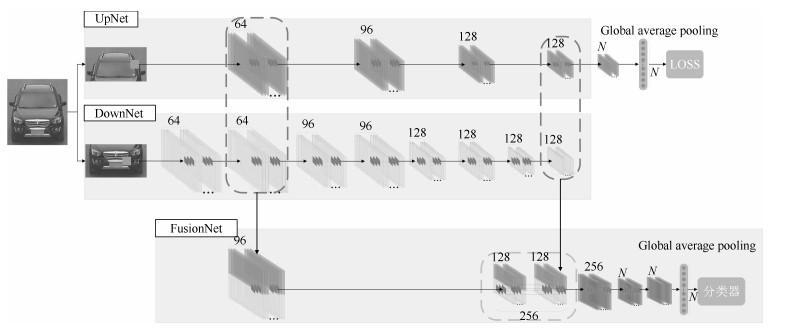
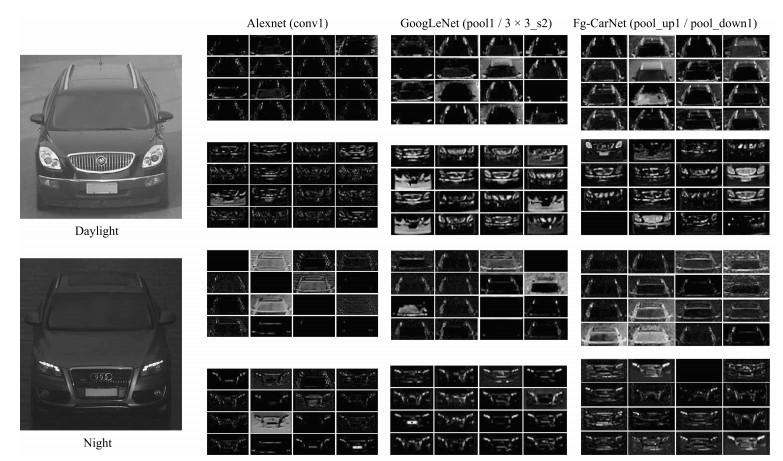
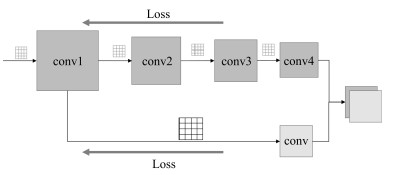
车辆型号识别在智能交通系统、涉车刑侦案件侦破等方面具有十分重要的应用前景.针对车辆型号种类繁多、部分型号区分度小等带来的车辆型号精细分类困难的问题,采用车辆正脸图像为数据源,提出一种多分支多维度特征融合的卷积神经网络模型Fg-CarNet(Convolutional neural networks for car fine-grained classification,Fg-CarNet).该模型根据车正脸图像特征分布特点,将其分为上下两部分并行进行特征提取,并对网络中间层产生的特征进行两个维度的融合,以提取有区分度的特征,提高特征表达能力,通过使用小卷积核以及全局均值池化,使在网络分类准确度提高的同时降低了网络模型参数大小.在CompCars数据集上进行验证,实验结果表明,Fg-CarNet提取的车辆特征在保证网络模型参数最小的同时,车辆型号识别率达到最高,实现了最好的分类效果.
车辆型号识别在智能交通系统、涉车刑侦案件侦破等方面具有十分重要的应用前景.针对车辆型号种类繁多、部分型号区分度小等带来的车辆型号精细分类困难的问题,采用车辆正脸图像为数据源,提出一种多分支多维度特征融合的卷积神经网络模型Fg-CarNet(Convolutional neural networks for car fine-grained classification,Fg-CarNet).该模型根据车正脸图像特征分布特点,将其分为上下两部分并行进行特征提取,并对网络中间层产生的特征进行两个维度的融合,以提取有区分度的特征,提高特征表达能力,通过使用小卷积核以及全局均值池化,使在网络分类准确度提高的同时降低了网络模型参数大小.在CompCars数据集上进行验证,实验结果表明,Fg-CarNet提取的车辆特征在保证网络模型参数最小的同时,车辆型号识别率达到最高,实现了最好的分类效果.



2018, 44(10): 1888-1895.
doi: 10.16383/j.aas.2017.c170051
摘要:
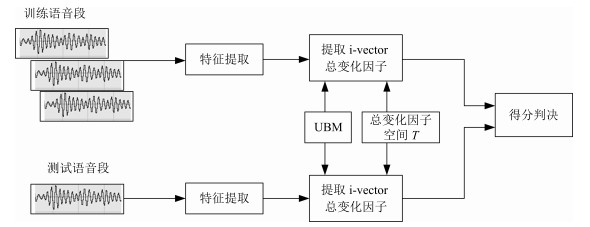
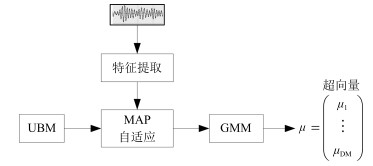
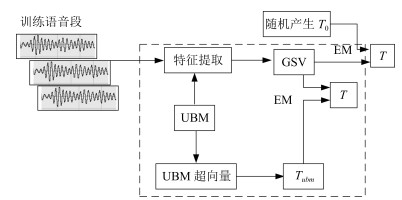
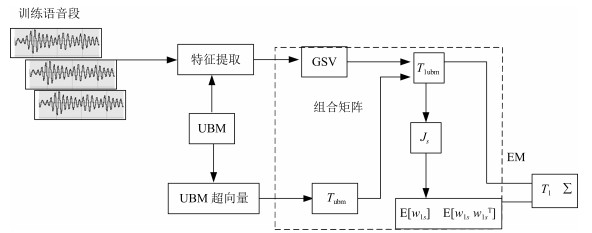
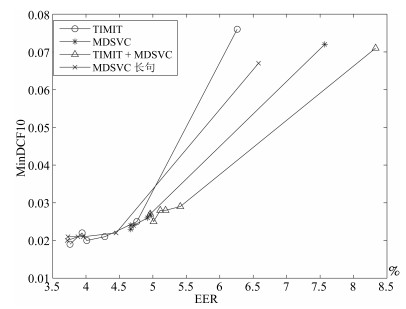
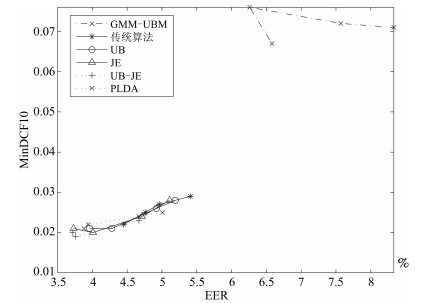
在说话人识别中,有效的识别方法是核心.近年来,基于总变化因子分析(i-vector)方法成为了说话人识别领域的主流,其中总变化因子空间的估计是整个算法的关键.本文结合常规的因子分析方法提出一种新的总变化因子空间估计算法,即通用背景—联合估计(Universal background-joint estimation algorithm,UB-JE)算法.首先,根据高斯混合—通用背景模型(Gaussian mixture model-universal background model,GMM-UBM)思想提出总变化矩阵通用背景(UB)算法;其次,根据因子分析理论结合相关文献提出了一种总变化矩阵联合估计(JE)算法;最后,将两种算法相结合得到通用背景—联合估计(UB-JE)算法.采用TIMIT和MDSVC语音数据库,结合i-vector方法将所提的算法与传统算法进行对比实验.结果显示,等错误率(Equal error rate,EER)和最小检测代价函数(Minimum detection cost function,MinDCF)分别提升了8.3%与6.9%,所提方法能够提升i-vector方法的性能.
在说话人识别中,有效的识别方法是核心.近年来,基于总变化因子分析(i-vector)方法成为了说话人识别领域的主流,其中总变化因子空间的估计是整个算法的关键.本文结合常规的因子分析方法提出一种新的总变化因子空间估计算法,即通用背景—联合估计(Universal background-joint estimation algorithm,UB-JE)算法.首先,根据高斯混合—通用背景模型(Gaussian mixture model-universal background model,GMM-UBM)思想提出总变化矩阵通用背景(UB)算法;其次,根据因子分析理论结合相关文献提出了一种总变化矩阵联合估计(JE)算法;最后,将两种算法相结合得到通用背景—联合估计(UB-JE)算法.采用TIMIT和MDSVC语音数据库,结合i-vector方法将所提的算法与传统算法进行对比实验.结果显示,等错误率(Equal error rate,EER)和最小检测代价函数(Minimum detection cost function,MinDCF)分别提升了8.3%与6.9%,所提方法能够提升i-vector方法的性能.
2018, 44(10): 1896-1906.
doi: 10.16383/j.aas.2018.c160142
摘要:
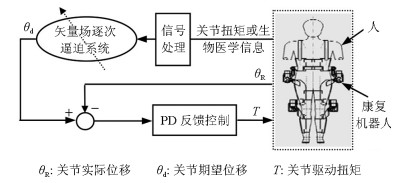
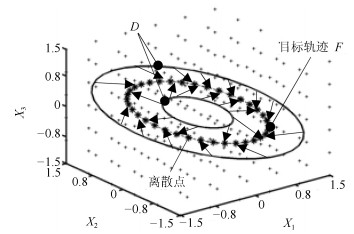
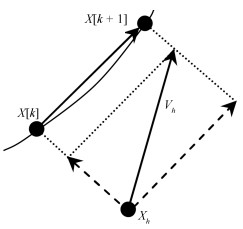
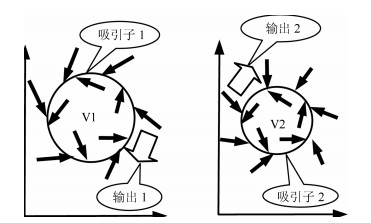
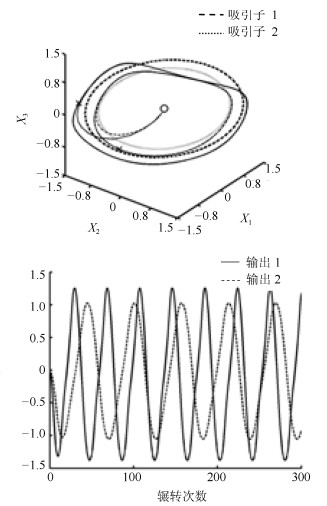
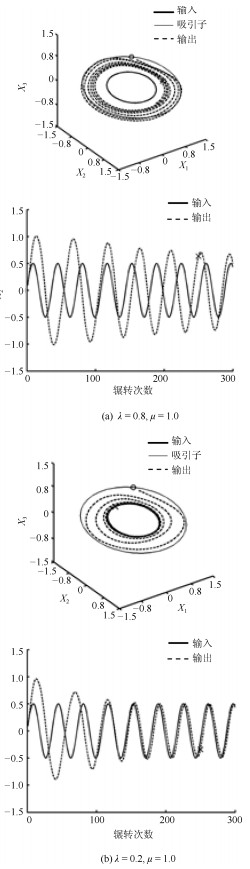
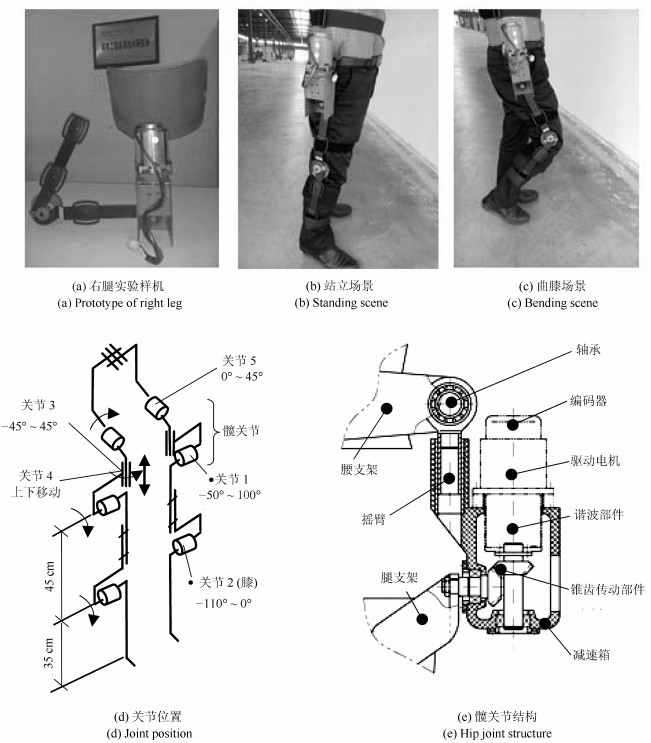
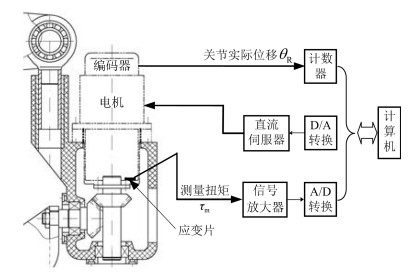
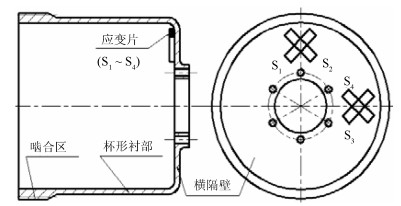
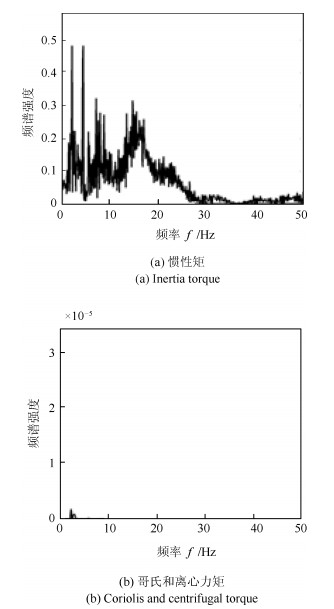
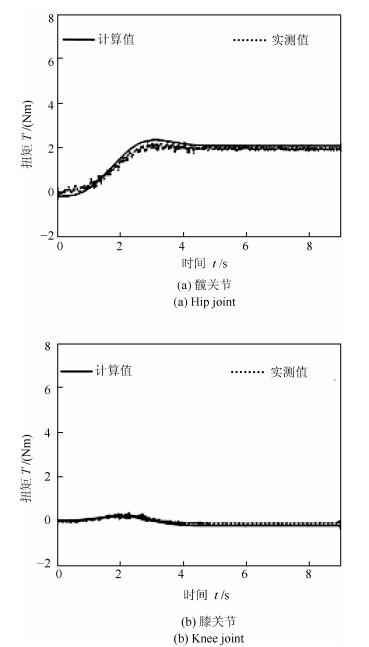
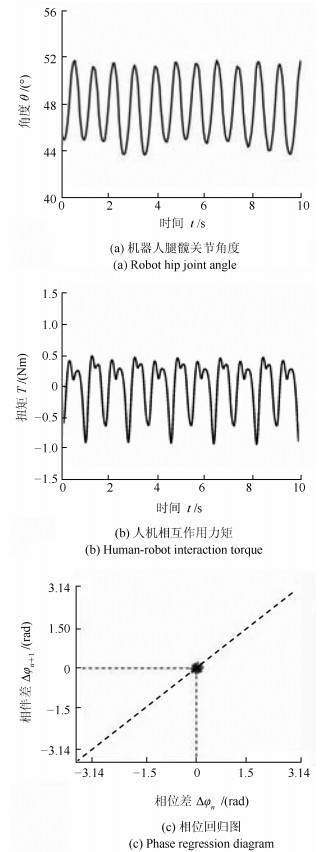
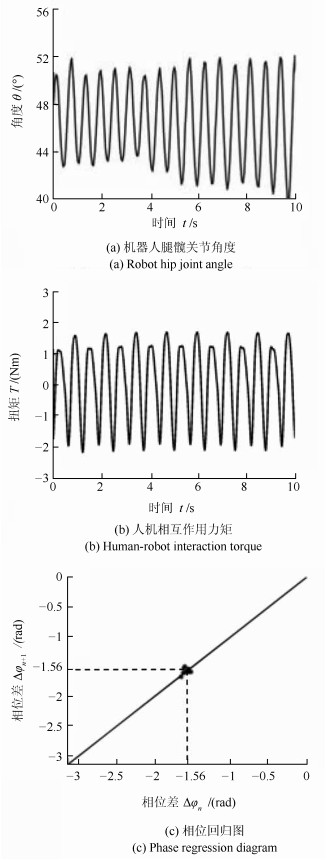
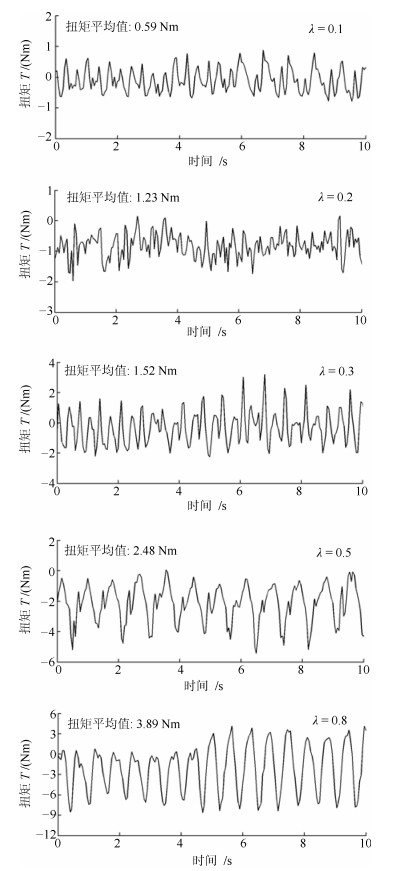
为了实现康复机器人的主动柔顺交互,提出了一种基于矢量场逐次逼近的控制模型;设计了矢量场逐次逼近系统,可输出机器人关节期望位移,该输出能与输入的扭矩、表面肌电及脑电等信号在振幅、频率和相位上保持同步,且通过调节遗忘因子参数值,可改变主动柔顺交互的积极性;利用自行设计的穿着型下肢康复机器人样机进行柔顺辅助实验,以验证所提出控制模型的有效性;通过FFT(Fast Fourier transformation)频谱对机器人关节扭矩的组成成分进行了分析,并采用基于最小二乘法的参数辨识方法实施了重力补偿,以便康复机器人实时控制.实验结果表明,该控制模型对于实现康复机器人与人之间的柔顺交互是有效的.
为了实现康复机器人的主动柔顺交互,提出了一种基于矢量场逐次逼近的控制模型;设计了矢量场逐次逼近系统,可输出机器人关节期望位移,该输出能与输入的扭矩、表面肌电及脑电等信号在振幅、频率和相位上保持同步,且通过调节遗忘因子参数值,可改变主动柔顺交互的积极性;利用自行设计的穿着型下肢康复机器人样机进行柔顺辅助实验,以验证所提出控制模型的有效性;通过FFT(Fast Fourier transformation)频谱对机器人关节扭矩的组成成分进行了分析,并采用基于最小二乘法的参数辨识方法实施了重力补偿,以便康复机器人实时控制.实验结果表明,该控制模型对于实现康复机器人与人之间的柔顺交互是有效的.
2018, 44(10): 1907-1912.
doi: 10.16383/j.aas.2017.c170111
摘要:
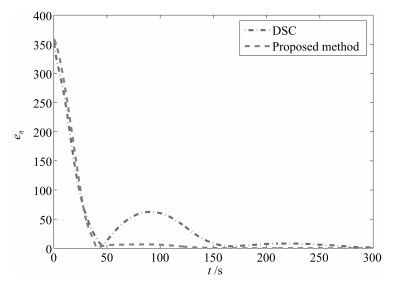
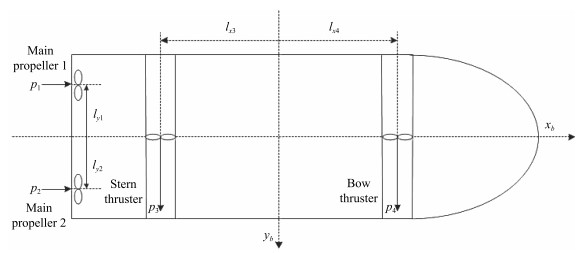
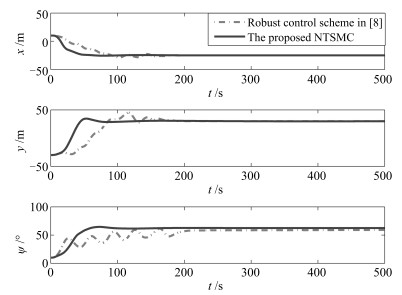
针对全驱动水面船舶动力定位控制问题,假设船舶模型参数摄动和外部扰动的上界已知,通过构造误差信号的非奇异终端滑模面(Non-singular terminal sliding mode,NTSM)提出了一种自适应终端滑模的控制方法.同时考虑伺服系统增益不确定问题,对未知的推力系数矩阵的倒数进行参数自适应,确保设计的控制器能使得船舶的位置及艏向角在有限时间内收敛于期望值,且能保证闭环系统实际有限时间稳定(Practical finite-time stable,PFS).利用一艘供给船进行数值仿真研究,说明了设计的船舶动力定位自适应终端滑模控制律的有效性.
针对全驱动水面船舶动力定位控制问题,假设船舶模型参数摄动和外部扰动的上界已知,通过构造误差信号的非奇异终端滑模面(Non-singular terminal sliding mode,NTSM)提出了一种自适应终端滑模的控制方法.同时考虑伺服系统增益不确定问题,对未知的推力系数矩阵的倒数进行参数自适应,确保设计的控制器能使得船舶的位置及艏向角在有限时间内收敛于期望值,且能保证闭环系统实际有限时间稳定(Practical finite-time stable,PFS).利用一艘供给船进行数值仿真研究,说明了设计的船舶动力定位自适应终端滑模控制律的有效性.
2018, 44(10): 1913-1920.
doi: 10.16383/j.aas.2018.c170417
摘要:
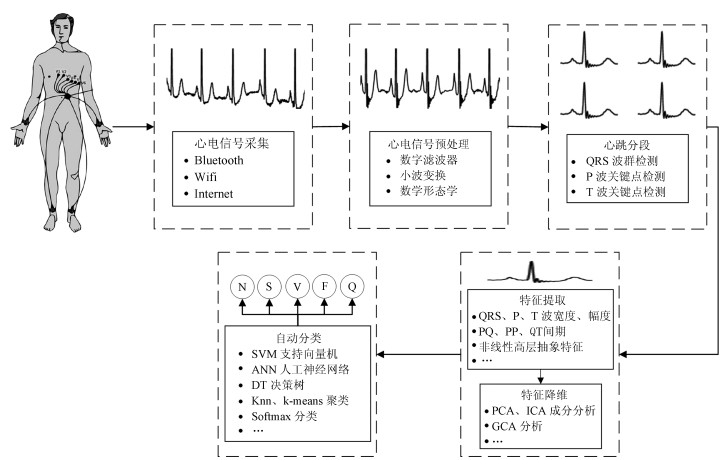
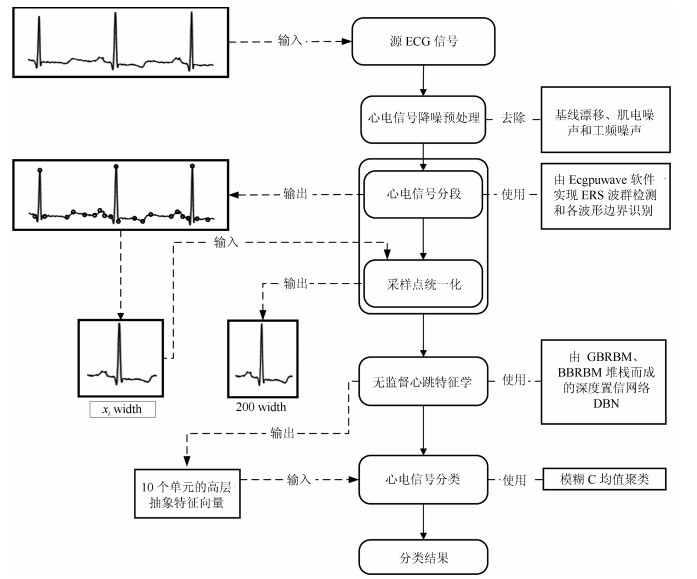
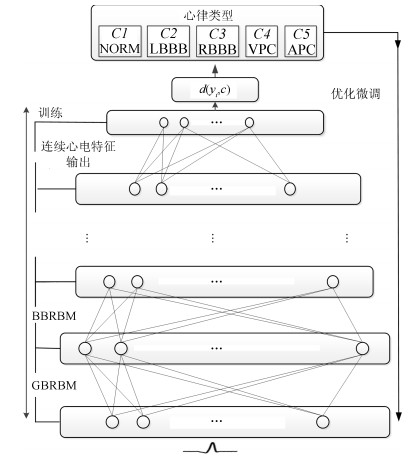
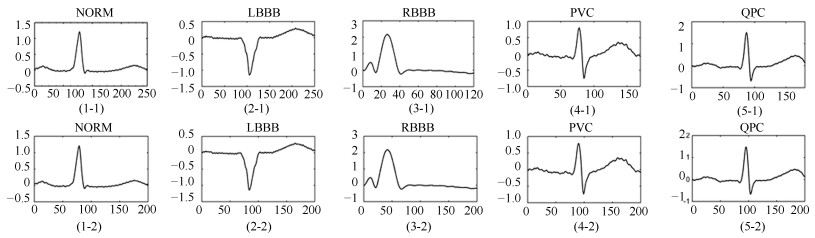
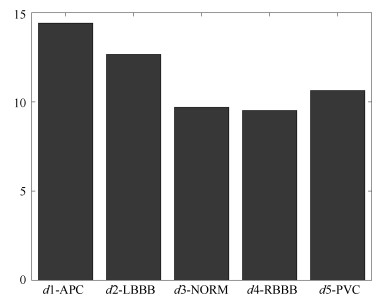
针对长时海量心电信号自动分类系统中,心电专家诊断费时、费力和成本高,心电信号形态复杂导致特征提取困难,异常诊断模型适应性差、准确度低等问题,本文提出一种基于深度学习和模糊C均值的心电信号分类方法.该方法主要包括心电信号降噪预处理、心电信号分段和采样点统一化、无监督心跳特征学习、模糊C均值分类4个步骤,给出了模糊C均值深度信念网络FCMDBN模型结构和学习分类算法.仿真实验基于MIT-BIH心率异常数据库表明,与基于传统心电特征人工设计的分类方法相比,本文提出的信号诊断方法具有较高的适应性和准确度.
针对长时海量心电信号自动分类系统中,心电专家诊断费时、费力和成本高,心电信号形态复杂导致特征提取困难,异常诊断模型适应性差、准确度低等问题,本文提出一种基于深度学习和模糊C均值的心电信号分类方法.该方法主要包括心电信号降噪预处理、心电信号分段和采样点统一化、无监督心跳特征学习、模糊C均值分类4个步骤,给出了模糊C均值深度信念网络FCMDBN模型结构和学习分类算法.仿真实验基于MIT-BIH心率异常数据库表明,与基于传统心电特征人工设计的分类方法相比,本文提出的信号诊断方法具有较高的适应性和准确度.