

-
摘要: 针对无领航者多智能体系统(Multi-agent systems, MASs)以及领航−跟随多智能体系统执行器故障问题, 设计基于PI结构的容错控制律. 考虑到传统的比例型控制律无法消除加性干扰影响下的稳态误差, 引入积分环节, 在一致性控制律中融入状态的积分项, 用于改善多智能体系统一致性过程的稳态性能. 针对领航者输入不为零的情况, 设计非线性的一致性控制律, 并借助黎卡提方程以及Lyapunov函数, 进行多智能体系统在故障情况下的一致性分析和控制律设计. 最后, 通过一系列对比仿真, 说明了所设计控制律在改善系统稳态性能方面的优势.Abstract: In this paper, a kind of fault-tolerant controller based on PI structure is designed to deal with the fault-tolerant control problem for leaderless multi-agent systems (MASs) and leader-follower MASs, which are subject to actuator faults. Considering that the traditional proportional-type controller cannot eliminate the steady-state error under the influence of additive disturbances, this paper incorporates the integral term of the state in the consensus controller to improve the steady-state performance of the consensus process in MASs. In addition, the consensus controller is designed to be nonlinear for the case where the input of the leader is not zero. Then, the consensus of the MAS is analyzed under actuator faults and the controller is designed with the help of Riccati equation and Lyapunov function. Finally, a series of comparative simulations are provided to illustrate the advantages of the designed controller in improving the steady-state performance.
-
Key words:
- Multi-agent systems (MASs) /
- fault-tolerant consensus /
- PI control /
- actuator fault
-
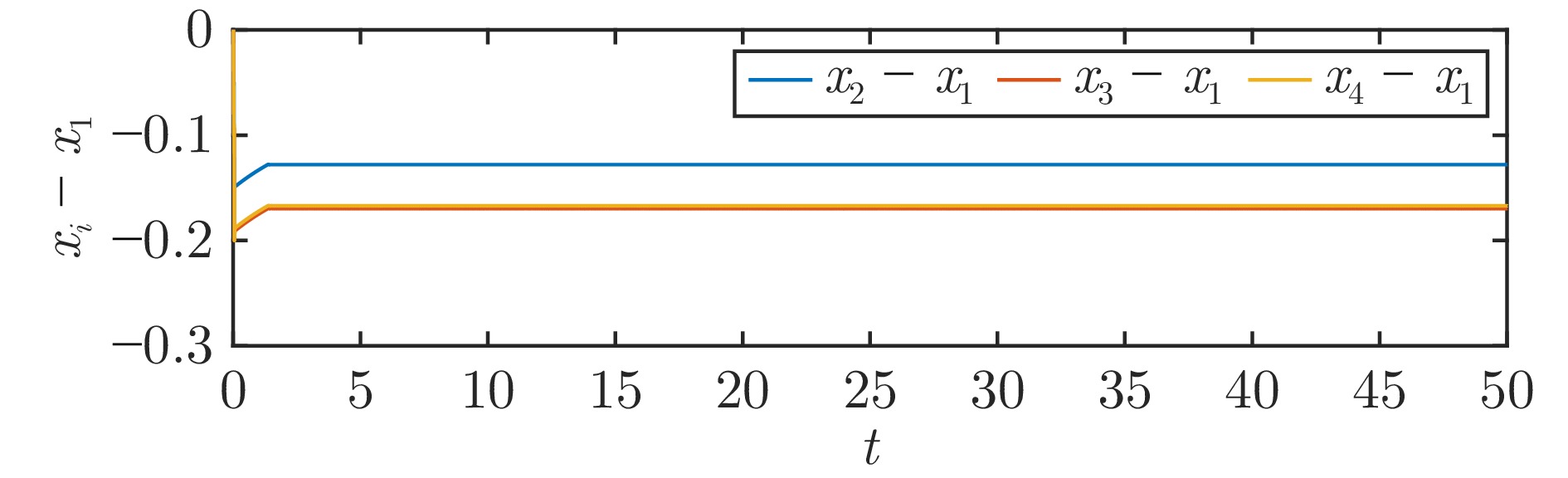
图 3 P型控制律下的一致性误差曲线图
Fig. 3 Trajectories of the consensus error with P-type controllers
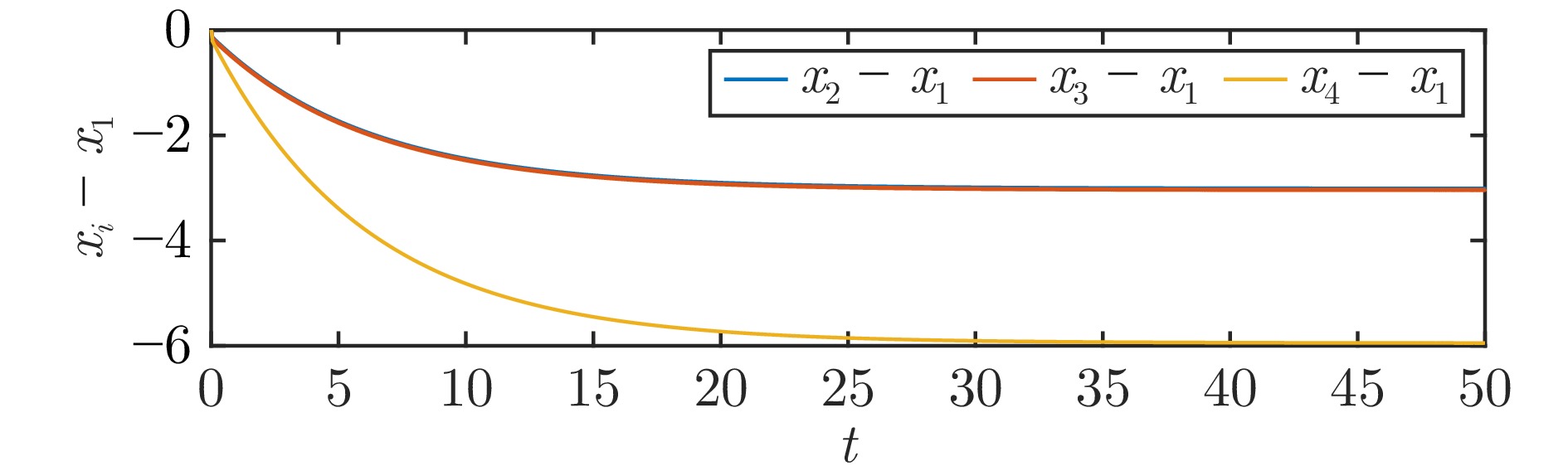
图 5 P型控制律下注入加性故障的一致性误差曲线图
Fig. 5 Trajectories of the consensus error with P-type controllers and additive faults
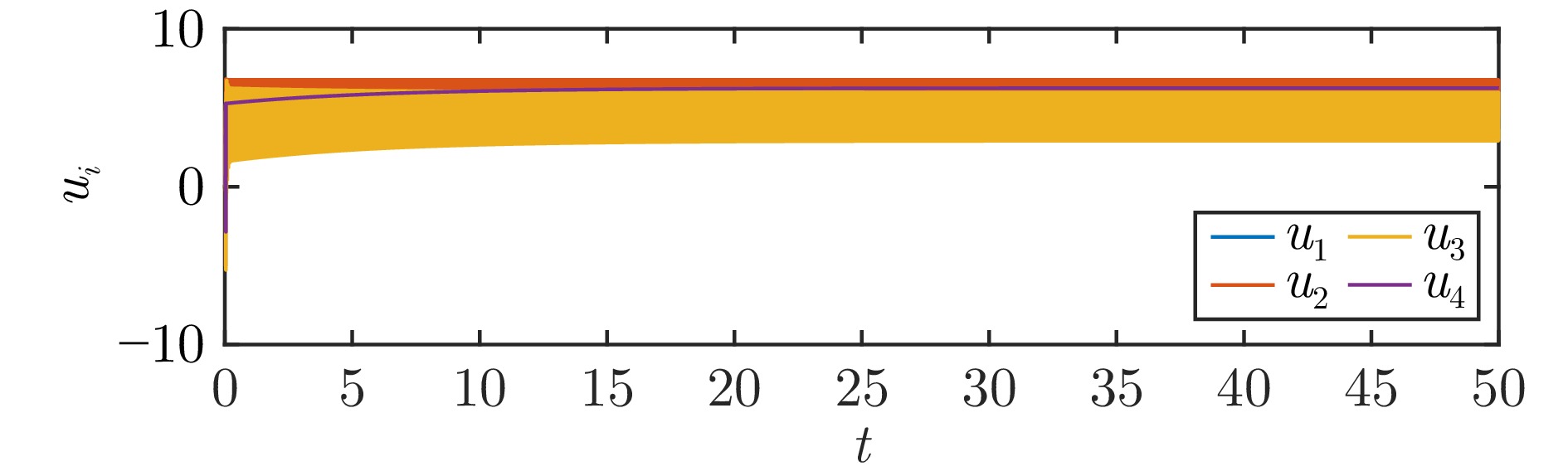
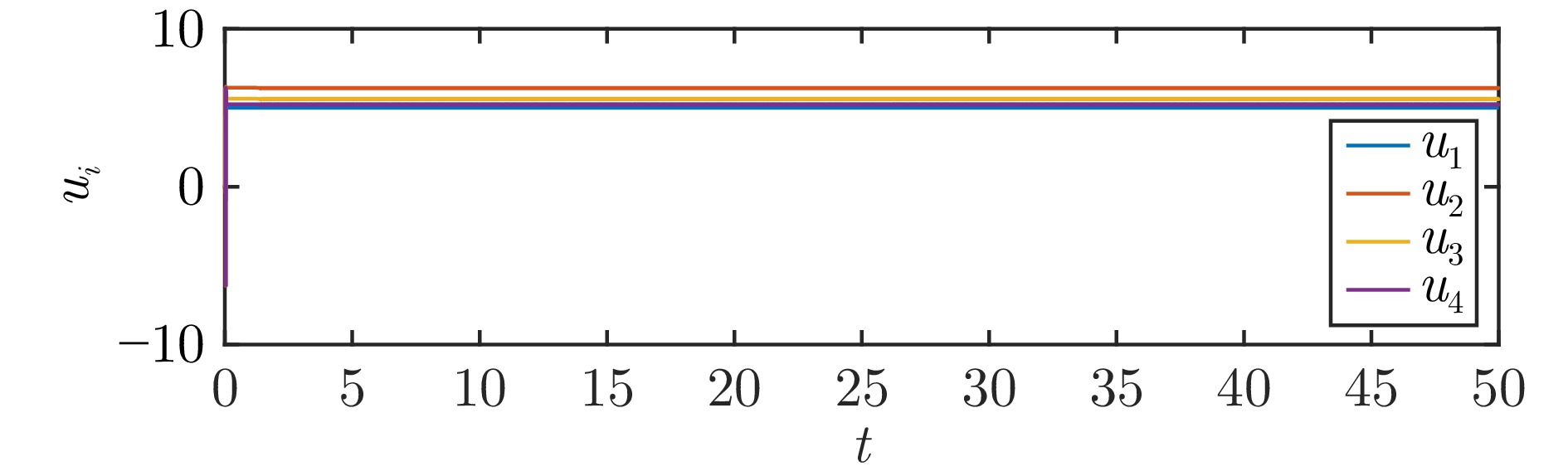
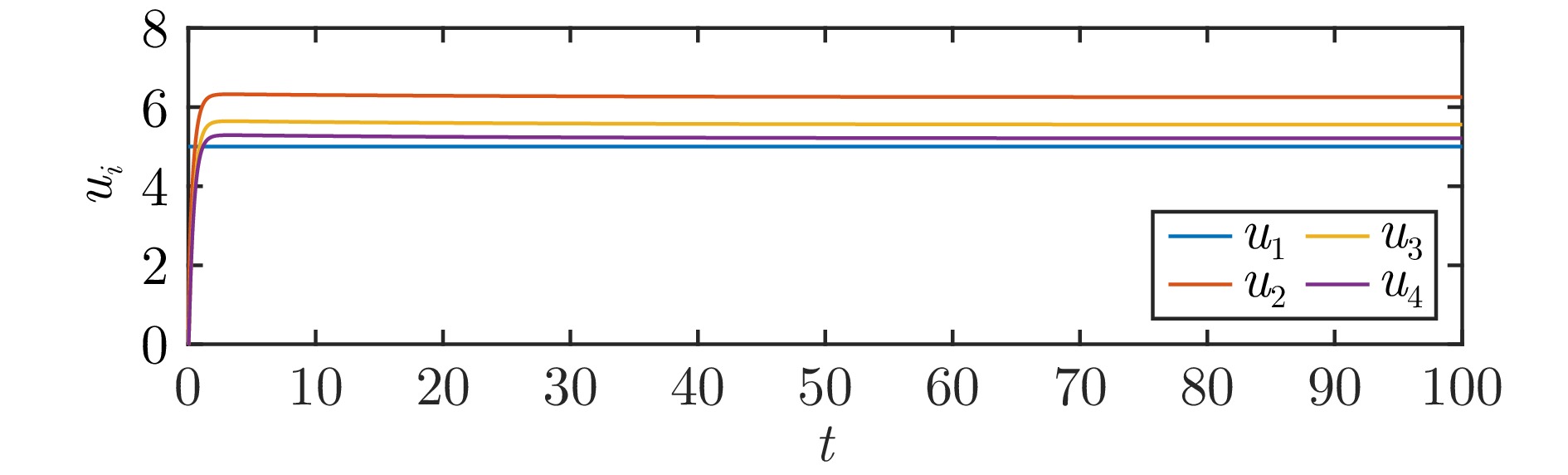
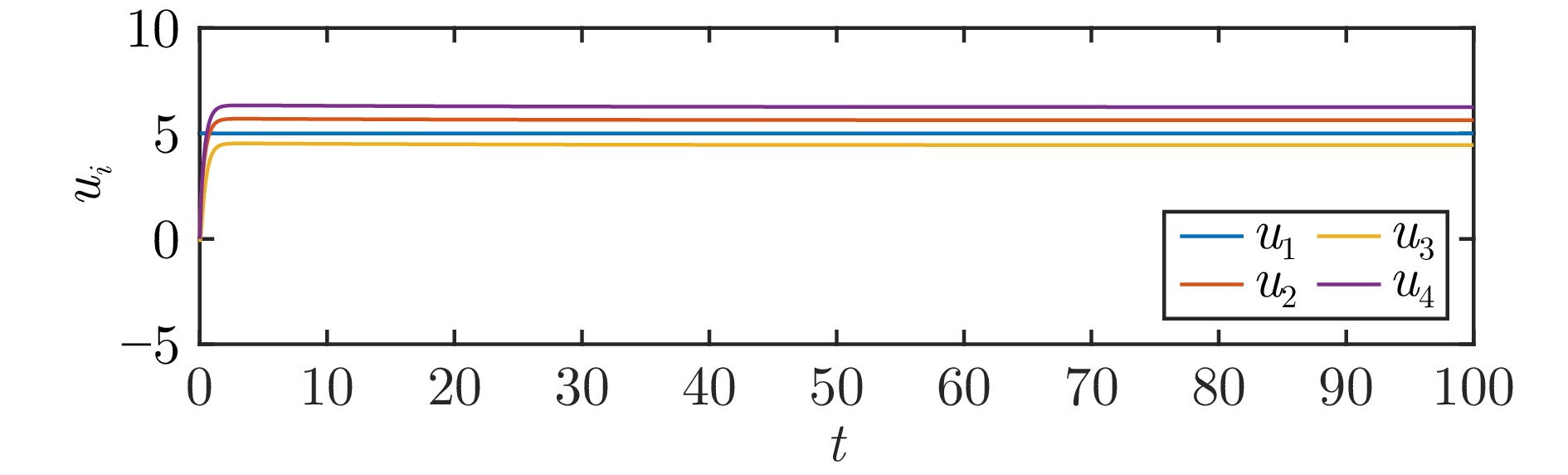
图 6 P型控制律下注入加性故障的输入量曲线图
Fig. 6 Trajectories of the input variable with P-type controllers and additive faults
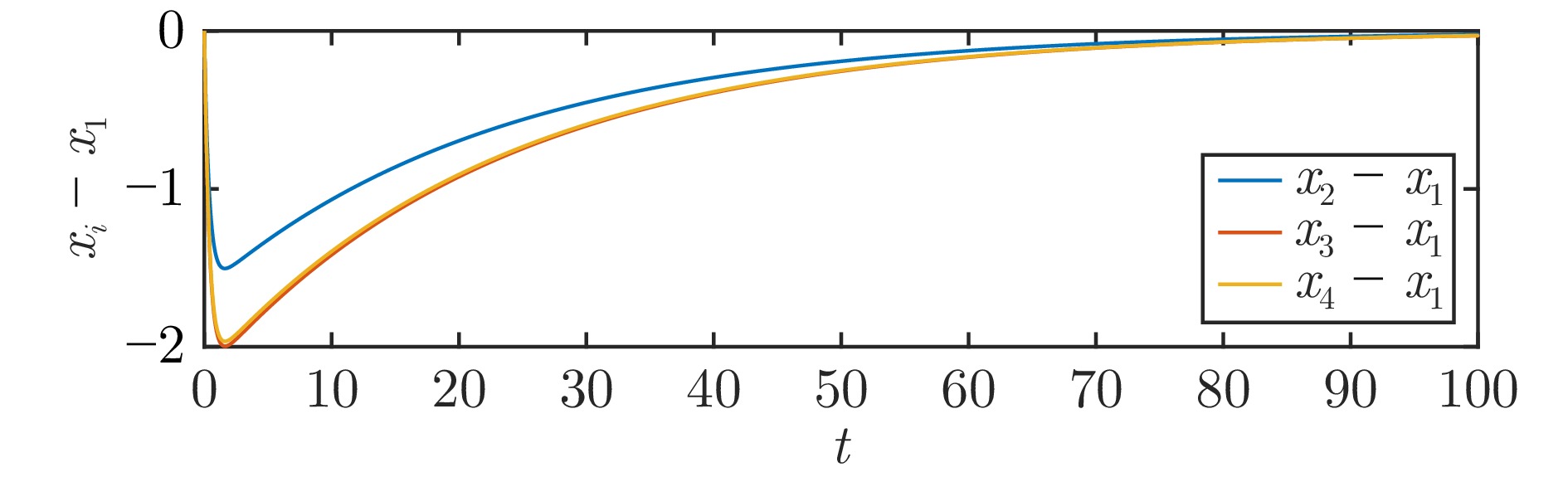
图 7 PI型控制律下的一致性误差曲线图
Fig. 7 Trajectories of the consensus error with PI-type controllers
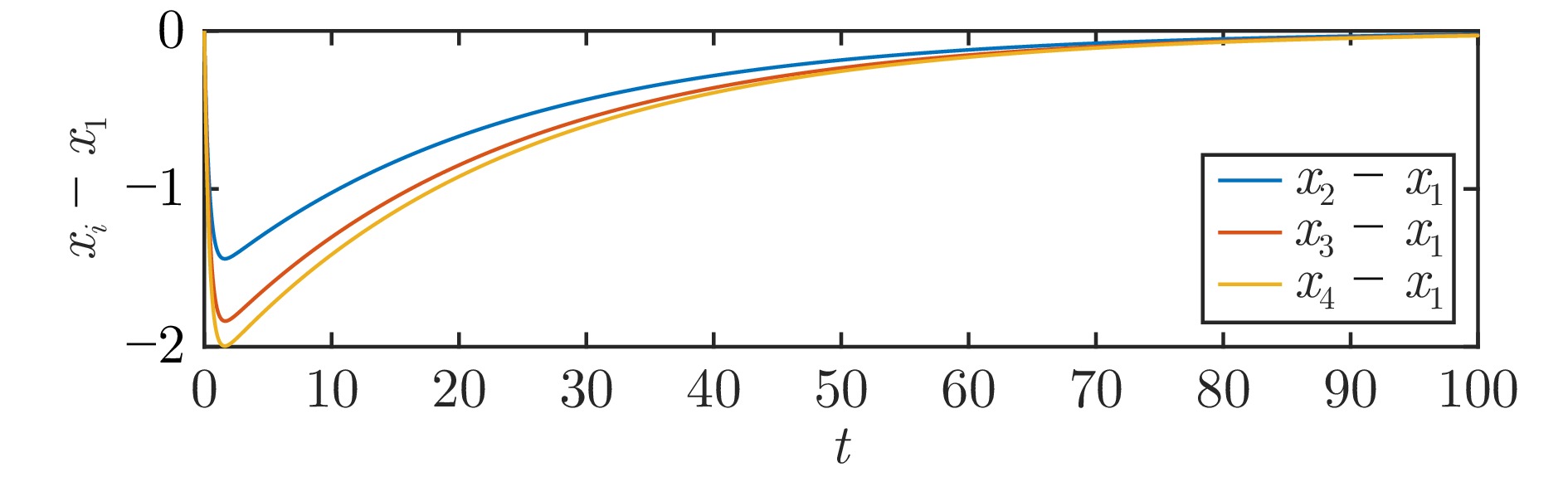
图 9 PI型控制律下注入加性故障的一致性误差曲线图
Fig. 9 Trajectories of the consensus error with PI-type controllers and additive faults
-
[1] He X, Wang Z D, Gao C, Zhou D H. Consensus control for multiagent systems under asymmetric actuator saturations with applications to mobile train lifting jack systems. IEEE Transactions on Industrial Informatics, 2023, 19(10): 10224−10232 doi: 10.1109/TII.2022.3229138 [2] Zhang S H, Ma L F, Liu H J. Encryption-decryption-based event-triggered consensus control for nonlinear MASs under DoS attacks. International Journal of Robust and Nonlinear Control, 2024, 34(1): 132−146 doi: 10.1002/rnc.6964 [3] Gao C, Wang Z D, He X, Liu Y, Yue D. Differentially private consensus control for discrete-time multiagent systems: Encoding-decoding schemes. IEEE Transactions on Automatic Control, 2024, 69(8): 5554−5561 doi: 10.1109/TAC.2024.3367803 [4] Shi T B, Zhu F L. Security time-varying formation control for multi-agent systems under denial-of-service attacks via unknown input observer. IEEE Transactions on Network Science and Engineering, 2023, 10(4): 2372−2385 doi: 10.1109/TNSE.2023.3246594 [5] Su H, Zhang B L, Zhou J, Xue J, Zheng Y S, Ma H. Collision-risk-based event-triggered optimal formation control for mobile multiagent systems under incomplete information conditions. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023, 53(8): 4888−4898 doi: 10.1109/TSMC.2023.3257024 [6] Ma Z Z, Shi L, Chen K, Shao J L, Cheng Y H. Multi-agent bipartite flocking control over cooperation-competition networks with asynchronous communications. IEEE Transactions on Signal and Information Processing Over Networks, 2024, 10: 460−472 doi: 10.1109/TSIPN.2024.3384817 [7] Chen J N, Yang Y H, Qin S T. A distributed optimization algorithm for fixed-time flocking of second-order multiagent systems. IEEE Transactions on Network Science and Engineering, 2024, 11(1): 152−162 doi: 10.1109/TNSE.2023.3292860 [8] Ying H. Theory and application of a novel fuzzy PID controller using a simplified Takagi-Sugeno rule scheme. Information Sciences, 2000, 123(3−4): 281−293 doi: 10.1016/S0020-0255(99)00133-4 [9] Carvajal J, Chen G R, Ogmen H. Fuzzy PID controller: Design, performance evaluation, and stability analysis. Information Sciences, 2000, 123(3−4): 249−270 doi: 10.1016/S0020-0255(99)00127-9 [10] Lim J S, Lee Y I. Design of discrete-time multivariable PID controllers via LMI approach. In: Proceedings of 2008 International Conference on Control, Automation and Systems. Seoul, Korea (South): IEEE, 2008. 1867−1871 [11] Wu Z Z, Iqbal A, ben Amara F. LMI-based multivariable PID controller design and its application to the control of the surface shape of magnetic fluid deformable mirrors. IEEE Transactions on Control Systems Technology, 2011, 19(4): 717−729 doi: 10.1109/TCST.2010.2055566 [12] Zhao D, Wang Z D, Ding D R, Wei G L. H∞ PID control with fading measurements: The output-feedback case. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2020, 50(6): 2170−2180 doi: 10.1109/TSMC.2018.2809489 [13] Gionfra N, Sandou G, Siguerdidjane H, Faille D, Loevenbruck P. A discrete-time PID-like consensus control: Application to the wind farm distributed control problem. In: Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics. Madrid, Spain: Springer, 2020. 106−134 [14] 杨浩, 姜斌, 周东华. 互联系统容错控制的研究回顾与展望. 自动化学报, 2017, 43(1): 9−19Yang Hao, Jiang Bin, Zhou Dong-Hua. Review and perspectives on fault tolerant control for interconnected systems. Acta Automatica Sinica, 2017, 43(1): 9−19 [15] Yang H, Han Q L, Ge X H, Ding L, Xu Y H, Jiang B, et al. Fault-tolerant cooperative control of multiagent systems: A survey of trends and methodologies. IEEE Transactions on Industrial Informatics, 2020, 16(1): 4−17 doi: 10.1109/TII.2019.2945004 [16] Liu Y S, Dong X W, Shi P F, Ren Z, Liu J W. Distributed fault-tolerant formation tracking control for multiagent systems with multiple leaders and constrained actuators. IEEE Transactions on Cybernetics, 2023, 53(6): 3738−3747 doi: 10.1109/TCYB.2022.3141734 [17] Liu Y Y, Wang Z S. Data-based output synchronization of discrete-time heterogeneous multiagent systems with sensor faults. IEEE Transactions on Cybernetics, 2024, 54(1): 265−272 doi: 10.1109/TCYB.2022.3200672 [18] Wu Y M, Wang Z S, Ding S B, Zhang H G. Leader-follower consensus of multi-agent systems in directed networks with actuator faults. Neurocomputing, 2018, 275: 1177−1185 doi: 10.1016/j.neucom.2017.09.066 [19] Wang X, Yang G H. Fault-tolerant consensus tracking control for linear multiagent systems under switching directed network. IEEE Transactions on Cybernetics, 2020, 50(5): 1921−1930 doi: 10.1109/TCYB.2019.2901542 [20] Chen J J, Chen B S, Zeng Z G. Adaptive dynamic event-triggered fault-tolerant consensus for nonlinear multiagent systems with directed/undirected networks. IEEE Transactions on Cybernetics, 2023, 53(6): 3901−3912 doi: 10.1109/TCYB.2022.3151653 [21] Sun J Y, Tan Z L, Liu S, Zhang H G, Chuo W Y. Fully distributed event-driven coordination with actuator faults. IEEE Transactions on Cybernetics, 2023, 53(10): 6456−6464 doi: 10.1109/TCYB.2022.3198499 [22] Li Z K, Ren W, Liu X D, Xie L H. Distributed consensus of linear multi-agent systems with adaptive dynamic protocols. Automatica, 2013, 49(7): 1986−1995 doi: 10.1016/j.automatica.2013.03.015 -

 下载:
下载:



计量
- 文章访问数: 1157
- HTML全文浏览量: 2402
- PDF下载量: 315
- 被引次数: 0
