

Fixed-time Formation Control of Multi-agent Systems With Collision and Isolation Avoidance Under Communication Path Loss
-
摘要: 针对多智能体系统中邻居间通信存在通信路径损耗的情况, 研究距离−变权重通信拓扑下非线性多智能体系统固定时间防碰防离编队控制问题, 充分考虑通信路径损耗所引起的拓扑变化的不确定性和距离相关性、系统中未知非线性动力学特性以及固定时间收敛的控制性能要求等. 为解决以上问题, 首先结合通信理论中的通信损耗模型和数学图论知识, 对通信路径损耗下的拓扑结构进行量化建模. 其次, 基于人工势场原理, 设计一套新的预设时间防碰防离策略, 以确保每个智能体在预设时间内离开碰撞与离群预警区, 避免碰撞与离群现象. 同时, 提出一种新的具有自适应增益的分层滑模面结构, 进一步改善系统的动态性能. 在此基础上, 结合自适应技术, 构建一套自适应分层滑模固定时间防碰防离编队控制方案. 所提方案不仅解决了系统本身以及通信路径损耗所引起的非线性动态耦合问题, 而且保证了通信路径损耗情况下多智能体系统的编队任务在固定时间内完成, 同时没有碰撞和离群现象. 最后, 给出严格的理论分析以及对比仿真结果, 证明了所提控制方法的有效性和优越性.Abstract: Addressing the issue of communication path loss in multi-agent systems where neighbors communicate, this paper investigates the fixed-time formation control problem of nonlinear multi-agent systems with collision and isolation avoidance under distance-based weight-varying communication topology, where we synthetically consider the uncertainties and distance-related aspects of topology changes caused by communication path loss, the unknown nonlinear dynamic characteristics within the system, and the control performance requirements for fixed-time convergence. To tackle these issues, firstly, a quantified modeling of the topology structure under communication path loss is conducted by integrating communication loss models from communication theory and knowledge from mathematical graph theory. Secondly, based on the principle of artificial potential fields, a novel prescribed-time collision and isolation avoidance strategy is designed to ensure that each agent leaves the collision and deviation warning area within a preset time, avoiding collisions and deviations. Concurrently, a new hierarchical sliding mode surface structure with adaptive gains is proposed to further enhance the system's dynamic performance. Building upon this, an adaptive hierarchical sliding mode fixed-time formation control scheme with collision and isolation avoidance is constructed by incorporating adaptive technique. The proposed scheme not only resolves the nonlinear dynamic coupling issues arising from the system itself and communication path loss but also ensures that the formation task of the multi-agent systems is completed within a fixed time under communication path loss conditions, with no collisions or deviations. Finally, rigorous theoretical analysis and comparative simulation results are provided to demonstrate the effectiveness and superiority of the proposed control method.
-
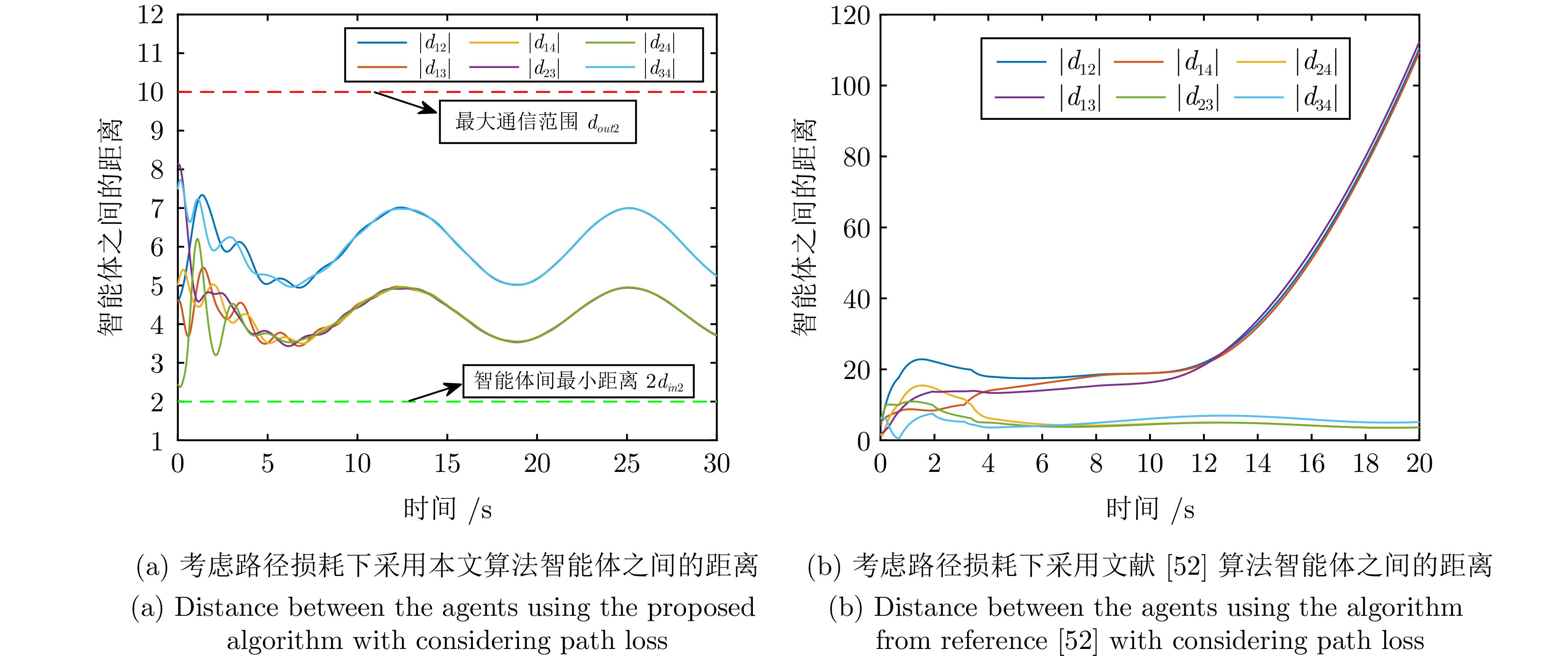
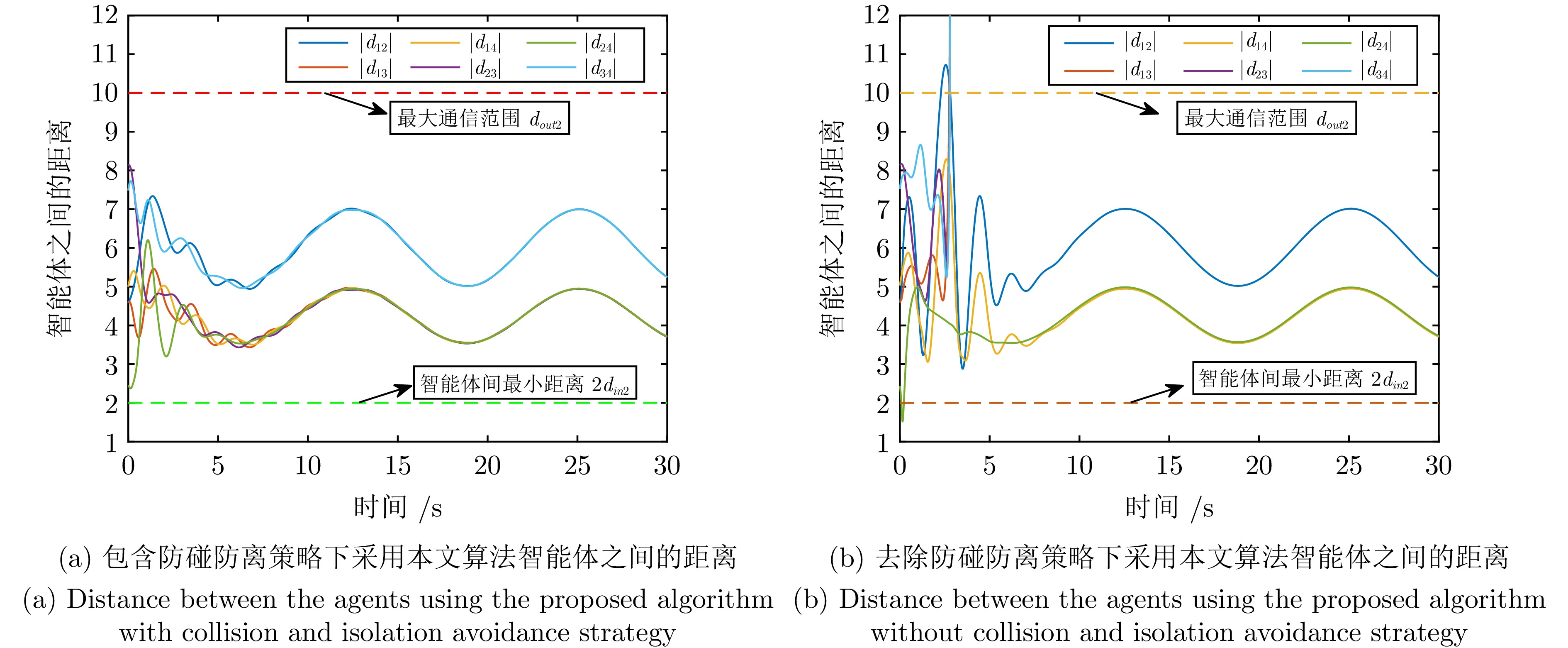
图 9 两种编队方法在考虑路径损耗时智能体之间的距离
Fig. 9 Distance between the agents for two formation methods with considering path loss
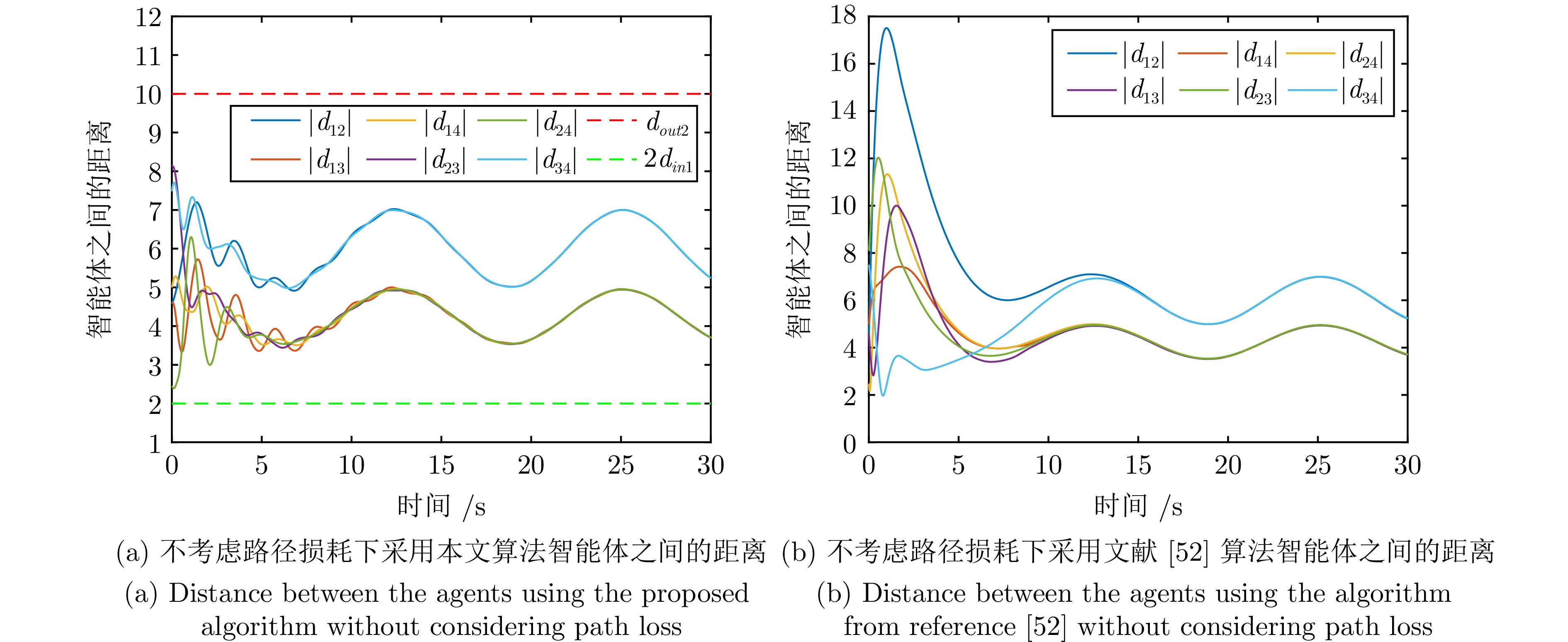
图 10 两种编队方法在不考虑路径损耗时智能体之间的距离
Fig. 10 Distance between the agents for two formation methods without considering path loss
-
[1] Liu Y X, Wu X K, Long J, Wang W. Event-triggered distributed adaptive leaderless consensus of uncertain heterogenous nonlinear multi-agent systems. IEEE Transactions on Circuits and Systems II: Express Briefs, 2024, 71(5): 2694−2698 [2] Niu B, Gao Y H, Zhang G J, Zhao X D, Wang H Q, Wang D, et al. Adaptive prescribed-time consensus tracking control scheme of nonlinear multi-agent systems under deception attacks. IEEE Transactions on Automation Science and Engineering, DOI: 10.1109/TASE.2024.3408453 [3] Che W W, Zhang L L, Deng C, Wu Z G. Cooperative tracking control for nonlinear MASs under event-triggered communication. IEEE Transactions on Cybernetics, 2024, 54(3): 1947−1959 doi: 10.1109/TCYB.2023.3303138 [4] Deng Z H, Luo J. Fully distributed algorithms for constrained nonsmooth optimization problems of general linear multiagent systems and their application. IEEE Transactions on Automatic Control, 2024, 69(2): 1377−1384 doi: 10.1109/TAC.2023.3301957 [5] Zhang T Y, Ye D, Yang G H. Ripple effect of cooperative attacks in multi-agent systems: Results on minimum attack targets. Automatica, 2024, 159: Article No. 111307 doi: 10.1016/j.automatica.2023.111307 [6] Zhang W T, Zuo Z Q, Wang Y J. Networked multiagent systems: Antagonistic interaction, constraint, and its application. IEEE Transactions on Neural Networks and Learning Systems, 2022, 33(8): 3690−3699 doi: 10.1109/TNNLS.2021.3054128 [7] Wang W C, Liu Y M, Srikant R, Ying L. 3M-RL: Multi-resolution, multi-agent, mean-field reinforcement learning for autonomous UAV routing. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 8985−8996 doi: 10.1109/TITS.2021.3089120 [8] Zhao M Z, Li H P. Distributed model predictive contouring control of unmanned surface vessels. IEEE Transactions on Industrial Electronics, 2024, 71(10): 13012−13019 doi: 10.1109/TIE.2024.3363751 [9] Han Z, Wang W, Ran M P, Wen C Y, Wang L. Switching-based distributed adaptive secure formation control for mobile robots with denial-of-service attacks. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2024, 54(7): 4126−4138 doi: 10.1109/TSMC.2024.3375353 [10] Ahmed B, Lounis A, Philippe M. Stable navigation in formation for a multi-robot system based on a constrained virtual structure. Robotics and Autonomous Systems, 2022, 62(12): 1806−1815 [11] Liu Z Q, Ge X H, Xie H, Han Q L, Zheng J C, Wang Y L. Secure leader-follower formation control of networked mobile robots under replay attacks. IEEE Transactions on Industrial Informatics, 2024, 20(3): 4149−4159 doi: 10.1109/TII.2023.3313651 [12] Loría A, Nuño E, Panteley E. Observerless output-feedback consensus-based formation control of second-order nonholonomic systems. IEEE Transactions on Automatic Control, 2022, 67(12): 6934−6939 doi: 10.1109/TAC.2021.3136140 [13] Yu J L, Dong X W, Li Q D, Lü J H, Ren Z. Adaptive practical optimal time-varying formation tracking control for disturbed high-order multi-agent systems. IEEE Transactions on Circuits and Systems I: Regular Papers, 2022, 69(6): 2567−2578 doi: 10.1109/TCSI.2022.3151464 [14] Ma C, Dong D B. Finite-time prescribed performance time-varying formation control for second-order multi-agent systems with non-strict feedback based on a neural network observer. IEEE/CAA Journal of Automatica Sinica, 2024, 11(4): 1039−1050 doi: 10.1109/JAS.2023.123615 [15] Zhao G L, Hua C C. A hybrid systems approach to event-triggered consensus of multiagent systems with packet losses. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023, 53(3): 1773−1787 doi: 10.1109/TSMC.2022.3205056 [16] Pan Z H, Sun Z Q, Deng H B, Li D F. A multilayer graph for multiagent formation and trajectory tracking control based on MPC algorithm. IEEE Transactions on Cybernetics, 2022, 52(12): 13586−13597 doi: 10.1109/TCYB.2021.3119330 [17] Shi C X, Yang G H, Li X J. Data-based fault-tolerant consensus control for uncertain multiagent systems via weighted edge dynamics. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(12): 2548−2558 doi: 10.1109/TSMC.2017.2743261 [18] 孙梦薇, 任璐, 刘剑, 孙长银. 切换拓扑下动态事件触发多智能体系统固定时间一致性. 自动化学报, 2023, 49(6): 1295−1305Sun Meng-Wei, Ren Lu, Liu Jian, Sun Chang-Yin. Dynamic event-triggered fixed-time consensus control of multi-agent systems under switching topologies. Acta Automatica Sinica, 2023, 49(6): 1295−1305 [19] Chen L Y, Wen G H, Liu H Z, Yu W W, Cao J D. Compressed gradient tracking algorithm for distributed aggregative optimization. IEEE Transactions on Automatic Control, 2024, 69(10): 6576−6591 doi: 10.1109/TAC.2024.3371876 [20] Li J X, Yi P, Duan T, Zhang Z, Hu T. Hierarchical DDPG based reinforcement learning framework for multi-agent collective motion with short communication ranges. IEEE Transactions on Machine Learning in Communications and Networking, 2024, 2: 633−644 doi: 10.1109/TMLCN.2024.3400059 [21] Chen C, Xie K, Lewis F L, Xie S L, Fierro R. Adaptive synchronization of multi-agent systems with resilience to communication link faults. Automatica, 2020, 111: Article No. 108636 doi: 10.1016/j.automatica.2019.108636 [22] An L W, Yang G H, Deng C, Wen C Y. Event-triggered reference governors for collisions-free leader-following coordination under unreliable communication topologies. IEEE Transactions on Automatic Control, 2024, 69(4): 2116−2130 doi: 10.1109/TAC.2023.3291654 [23] Hu G Z, Zhu Y H, Zhao D B, Zhao M C, Hao J Y. Event-triggered communication network with limited-bandwidth constraint for multi-agent reinforcement learning. IEEE Transactions on Neural Networks and Learning Systems, 2023, 34(8): 3966−3978 doi: 10.1109/TNNLS.2021.3121546 [24] 范泉涌, 张乃宗, 唐勇, 许斌. 基于动态事件触发通信协议的多智能体系统自适应可靠控制. 自动化学报, 2024, 50(5): 924−936Fan Quan-Yong, Zhang Nai-Zong, Tang Yong, Xu Bin. Adaptive reliable control of multi-agent systems based on dynamic event-triggered communication protocol. Acta Automatica Sinica, 2024, 50(5): 924−936 [25] Chen Y L, Ai B, Niu Y, Guan K, Han Z. Resource allocation for device-to-device communications underlaying heterogeneous cellular networks using coalitional games. IEEE Transactions on Wireless Communications, 2018, 17(6): 4163−4176 doi: 10.1109/TWC.2018.2821151 [26] Fang X, Ramzan M, Wang Q, Neumann N, Du X F, Plettemeier D. Path loss models for wireless cardiac RF communication. IEEE Antennas and Wireless Propagation Letters, 2021, 20(6): 893−897 doi: 10.1109/LAWP.2021.3066546 [27] Juang R T. Deep learning-based path loss model in urban environments using image-to-image translation. IEEE Transactions on Antennas and Propagation, 2022, 70(12): 12081−12091 doi: 10.1109/TAP.2022.3209229 [28] Kryszkiewicz P, Sroka P, Sybis M, Kliks A. Path loss and shadowing modeling for vehicle-to-vehicle communications in terrestrial TV band. IEEE Transactions on Antennas and Propagation, 2023, 71(1): 984−998 doi: 10.1109/TAP.2022.3216472 [29] Shi Q, Li T S, Li J Q, Chen C L P, Xiao Y, Shan Q H. Adaptive leader-following formation control with collision avoidance for a class of second-order nonlinear multi-agent systems. Neurocomputing, 2019, 350: 282−290 doi: 10.1016/j.neucom.2019.03.045 [30] Wang X F, Ye D. Finite-time output-feedback formation control for high-order nonlinear multiagent systems with obstacle avoidance. IEEE Transactions on Automation Science and Engineering, 2024, 21(2): 1878−1888 doi: 10.1109/TASE.2023.3244536 [31] Xiao F, Wang L, Chen T W. Connectivity preservation for multi-agent rendezvous with link failure. Automatica, 2012, 48(1): 25−35 doi: 10.1016/j.automatica.2011.09.027 [32] Yi J L, Li J, Yang C G. Adaptive fuzzy prescribed-time connectivity-preserving consensus of stochastic nonstrict-feedback switched multiagent systems. IEEE Transactions on Fuzzy Systems, 2023, 31(10): 3346−3357 doi: 10.1109/TFUZZ.2023.3252601 [33] ElHamamsy A, Aghili F, Aghdam A G. Connectivity preservation and collision avoidance in multi-agent systems using model predictive control. IEEE Transactions on Network Science and Engineering, 2023, 10(3): 1779−1791 doi: 10.1109/TNSE.2023.3234720 [34] Fang H, Wei Y, Chen J, Xin B. Flocking of second-order multiagent systems with connectivity preservation based on algebraic connectivity estimation. IEEE Transactions on Cybernetics, 2017, 47(4): 1067−1077 doi: 10.1109/TCYB.2016.2537307 [35] Sung J Y, Bong S P. Connectivity preservation and collision avoidance in networked nonholonomic multi-robot formation systems: Unified error transformation strategy. Automatica, 2019, 103: 274−281 doi: 10.1016/j.automatica.2019.02.019 [36] Dong S J, Li Y M. Adaptive fuzzy event-triggered formation control for nonholonomic multirobot systems with infinite actuator faults and range constraints. IEEE Internet of Things Journal, 2024, 11(1): 1361−1373 doi: 10.1109/JIOT.2023.3289221 [37] Dong G W, Li H Y, Ma H, Lu R Q. Finite-time formation control of under-actuated ships using nonlinear sliding mode control. IEEE Transactions on Neural Networks and Learning Systems, 2021, 32(2): 653−662 doi: 10.1109/TNNLS.2020.2978898 [38] Yang J, Zhong Q S, Wang Y, Shi K B, Zhong S M. Networked multiagent systems: Nonfragile memory-based PD-like sampled-data consensus control for nonlinear multiagent systems with time-varying communication delays. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023, 53(7): 4370−4380 doi: 10.1109/TSMC.2023.3247443 [39] 王端松, 李东禹, 梁晓玲. 干扰条件下无人艇编队有限时间同步控制. 自动化学报, 2024, 50(5): 1047−1058Wang Duan-Song, Li Dong-Yu, Liang Xiao-Ling. Finite time synchronized formation control of unmanned surface vehicles with external disturbances. Acta Automatica Sinica, 2024, 50(5): 1047−1058 [40] 高振宇, 孙振超, 郭戈. 考虑执行器非线性的固定时间全局预设性能车辆队列控制. 自动化学报, 2024, 50(2): 320−333Gao Zhen-Yu, Sun Zhen-Chao, Guo Ge. Fixed-time global prescribed performance control for vehicular platoons with actuator nonlinearities. Acta Automatica Sinica, 2024, 50(2): 320−333 [41] Liu Y, Li H Y, Lu R Q, Zuo Z Y, Li X D. An overview of finite/fixed-time control and its application in engineering systems. IEEE/CAA Journal of Automatica Sinica, 2022, 9(12): 2106−2120 doi: 10.1109/JAS.2022.105413 [42] Li Y L, Niu B, Zong G D, Zhao J F, Zhao X D. Command filter-based adaptive neural finite-time control for stochastic nonlinear systems with time-varying full-state constraints and asymmetric input saturation. International Journal of Systems Science, 2021, 53(1): 199−221 [43] Zhang H Y, Wang H Q, Niu B, Zhang L, Adil M A. Sliding-mode surface-based adaptive actor-critic optimal control for switched nonlinear systems with average dwell time. Information Sciences, 2021, 580: 756−774 doi: 10.1016/j.ins.2021.08.062 [44] Zuo Z Y, Tang J C, Ke R Q, Han Q L. Hyperbolic tangent function-based protocols for global/semi-global finite-time consensus of multi-agent systems. IEEE/CAA Journal of Automatica Sinica, 2024, 11(6): 1381−1397 doi: 10.1109/JAS.2024.124485 [45] Nie R, Du W L, Li Z M, He S P. Finite-time consensus control for MASs under hidden Markov model mechanism. IEEE Transactions on Automatic Control, 2024, 69(7): 4726−4733 doi: 10.1109/TAC.2024.3351947 [46] Zhou J L, Lv Y Z, Wen G H, Yu X H. Resilient consensus of multiagent systems under malicious attacks: Appointed-time observer-based approach. IEEE Transactions on Cybernetics, 2022, 52(10): 10187−10199 doi: 10.1109/TCYB.2021.3058094 [47] Pilloni A, Pisano A, Usai E. Semi-global fixed-time state estimation and unknown input reconstruction via first-order sliding mode observers with delay. IEEE Transactions on Automatic Control, 2024, 69(11): 7839−7846 doi: 10.1109/TAC.2024.3401269 [48] Chen C Y, Han Y Y, Zhu S, Zeng Z G. Distributed fixed-time tracking and containment control for second-order multi-agent systems: A nonsingular sliding-mode control approach. IEEE Transactions on Network Science and Engineering, 2023, 10(2): 687−697 doi: 10.1109/TNSE.2022.3217536 [49] Zhao X D, Yang H J, Zong G D. Adaptive neural hierarchical sliding mode control of nonstrict-feedback nonlinear systems and an application to electronic circuits. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017, 47(7): 1394−1404 doi: 10.1109/TSMC.2016.2613885 [50] Zhang Y, Zhang Q L, Zhang J Y, Wang Y Y. Sliding mode control for fuzzy singular systems with time delay based on vector integral sliding mode surface. IEEE Transactions on Fuzzy Systems, 2020, 28(4): 768−782 doi: 10.1109/TFUZZ.2019.2916049 [51] Li Y Y, Li Y X. Resilient distributed fixed-time tracking of heterogeneous UAVs-UGVs systems against DoS attacks. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2024, 54(9): 5780−5790 doi: 10.1109/TSMC.2024.3408410 [52] Zheng C B, Pang Z H, Wang J X, Sun J, Liu G P, Han Q L. Null-space-based time-varying formation control of uncertain nonlinear second-order multiagent systems with collision avoidance. IEEE Transactions on Industrial Electronics, 2023, 70(10): 10476−10485 doi: 10.1109/TIE.2022.3217585 -

 下载:
下载:




图(11)
计量
- 文章访问数: 869
- HTML全文浏览量: 2947
- PDF下载量: 264
- 被引次数: 0
