

-
摘要: 针对一类严格反馈系统的安全控制问题, 提出一种基于滤波控制障碍函数(Filtered control barrier functions, FCBF)的优化控制方法. 首先引入一阶低通滤波器, 构建滤波控制障碍函数. 然后结合控制李雅普诺夫函数(Control Lyapunov functions, CLF)及离线优化技术, 提出一种新颖的安全反推控制算法. 与现有文献相比, 所提控制算法通过运用滤波控制障碍函数, 有效克服了安全反推过程中的“计算膨胀”问题. 仿真结果验证了所提控制算法的有效性与正确性.Abstract: In this paper, an optimal control approach with filtered control barrier functions (FCBF) is proposed for the safe control problem of class of strict-feedback systems. Initially, a sequence of first-order low-pass filters is first introduced to formulate the FCBF. Subsequently, by integrating control Lyapunov functions (CLF) with an off-line optimization approach, a novel safe backstepping control algorithm is devised. In contrast to existing literature, the proposed control algorithm effectively mitigates the issue of “explosion of complexity” inherent in safety backstepping procedures through the utilization of FCBF. Simulation outcomes corroborate the efficacy and validity of the proposed algorithm.
-
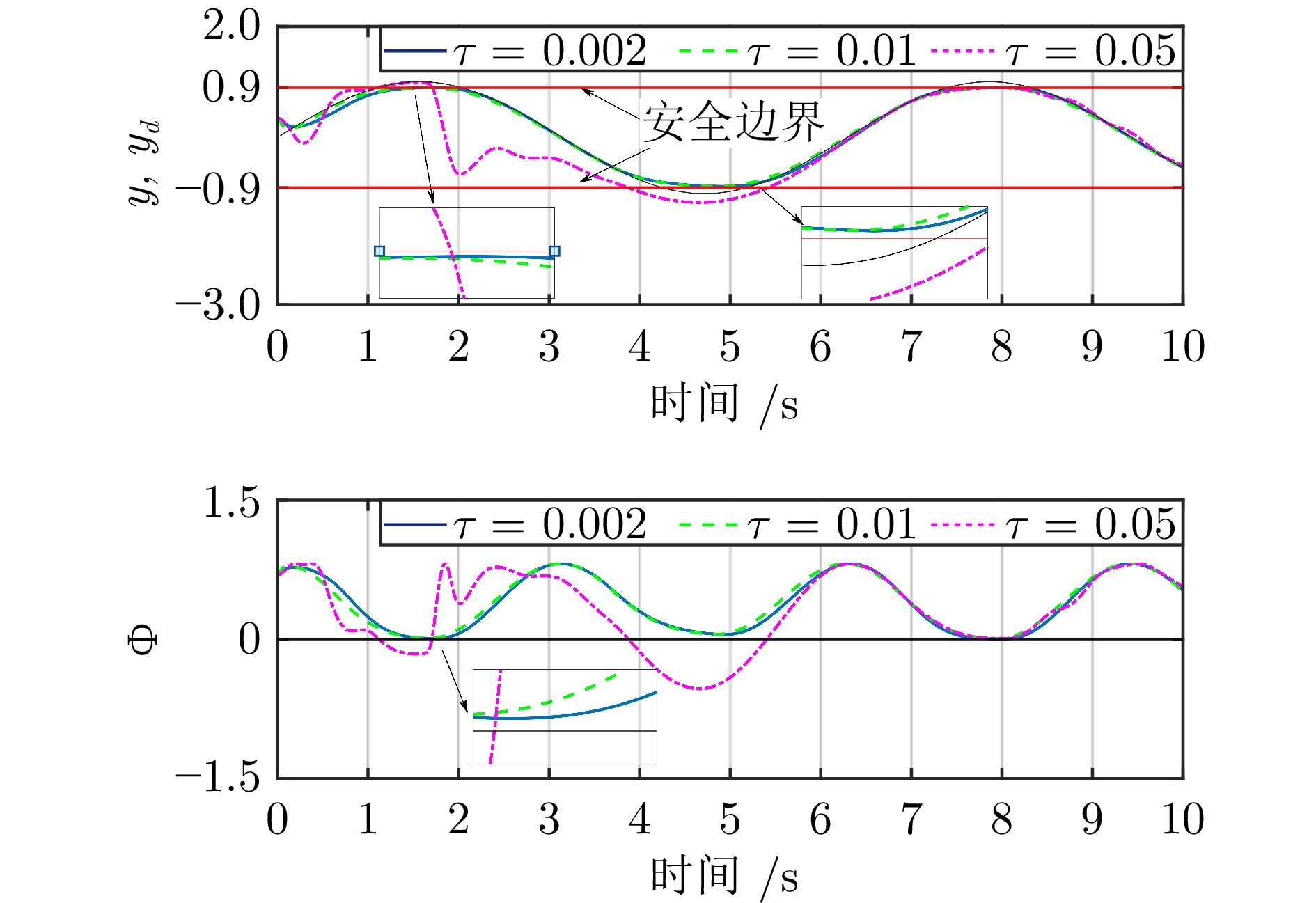
图 1 不同滤波时间常数条件下系统的安全与跟踪性能
Fig. 1 Safe and tracking performance of the system with various filter time constants
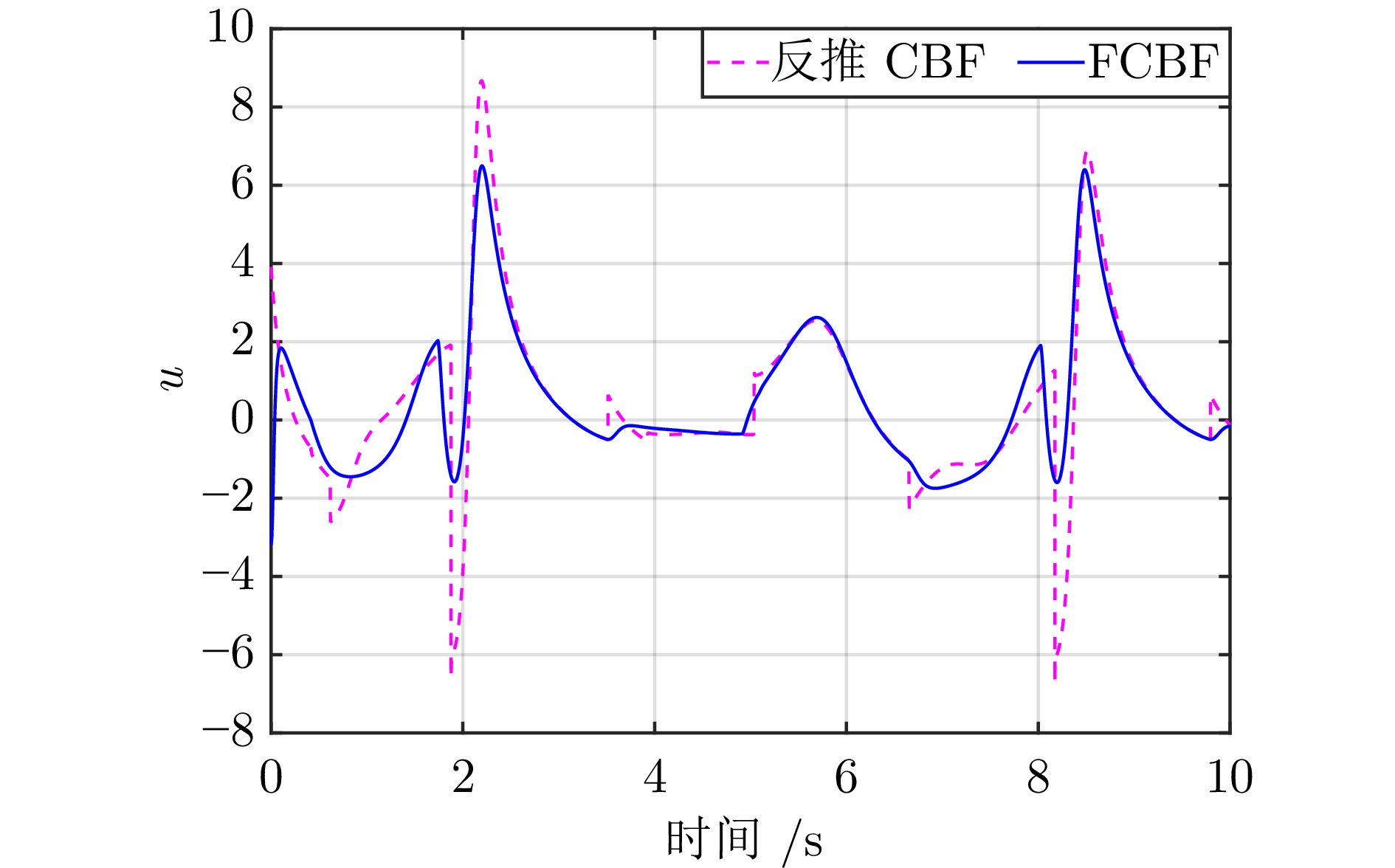
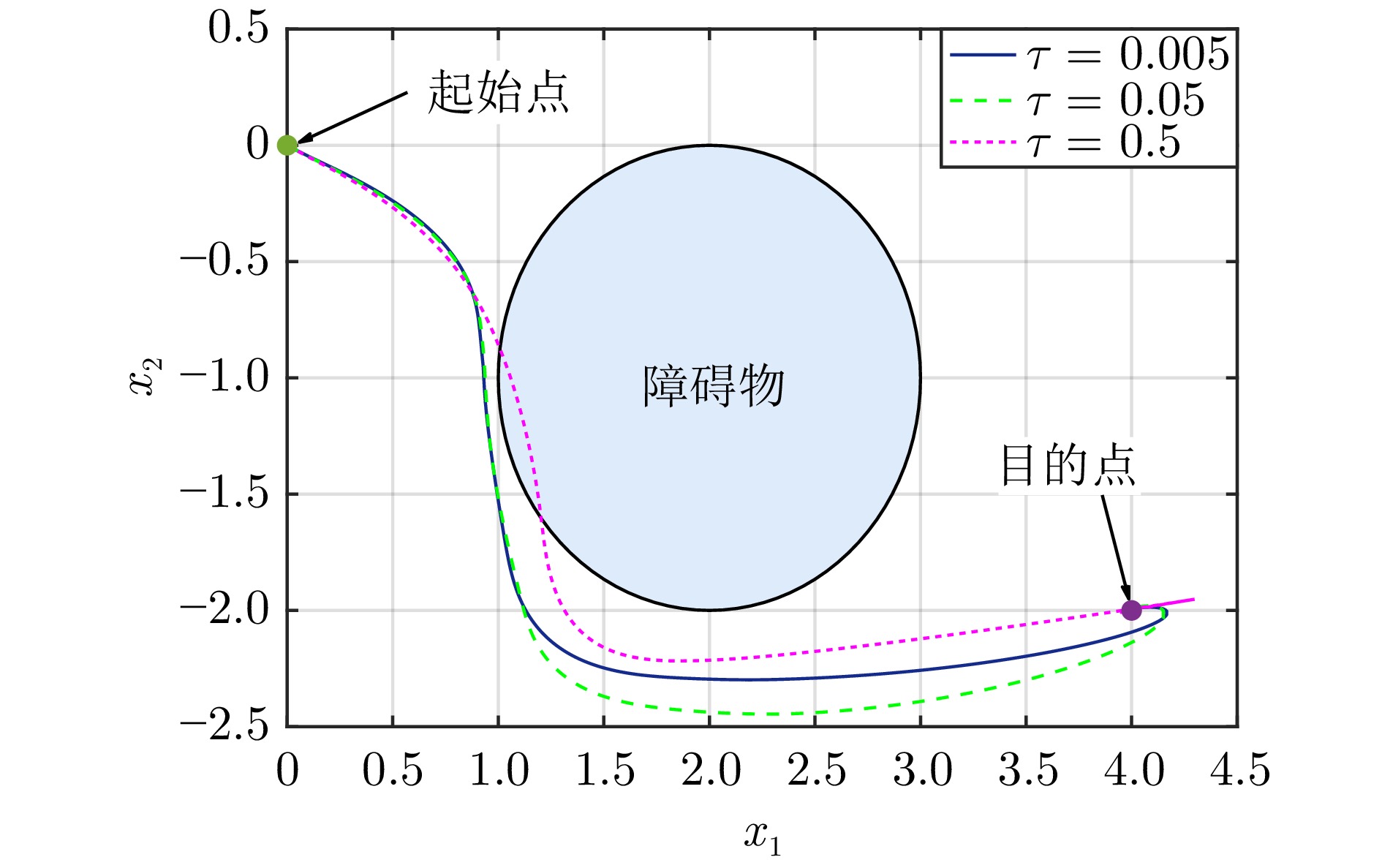
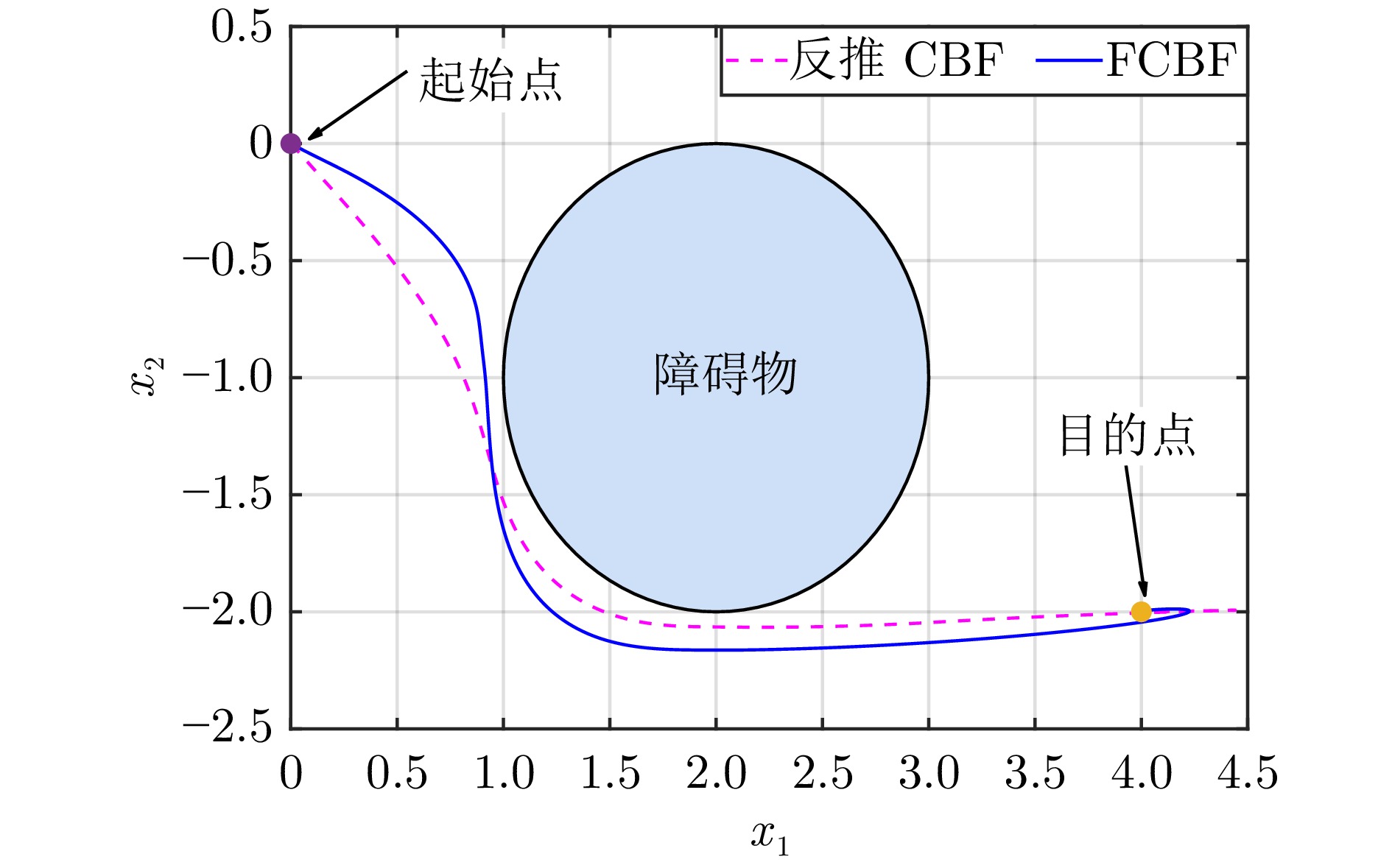
图 4 不同滤波时间常数条件下系统位置轨迹
Fig. 4 Position trajectories of the system with various filter time constants
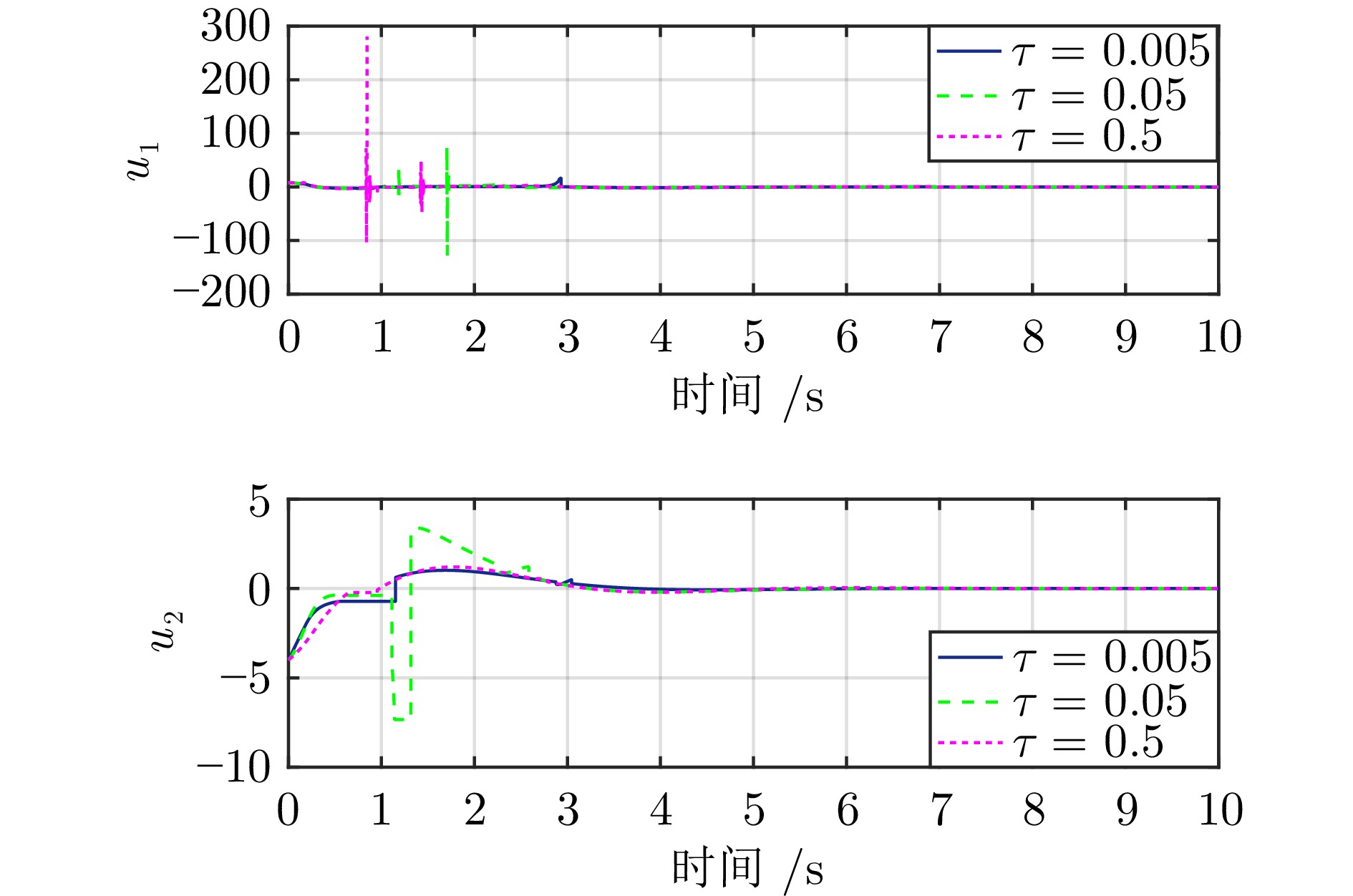
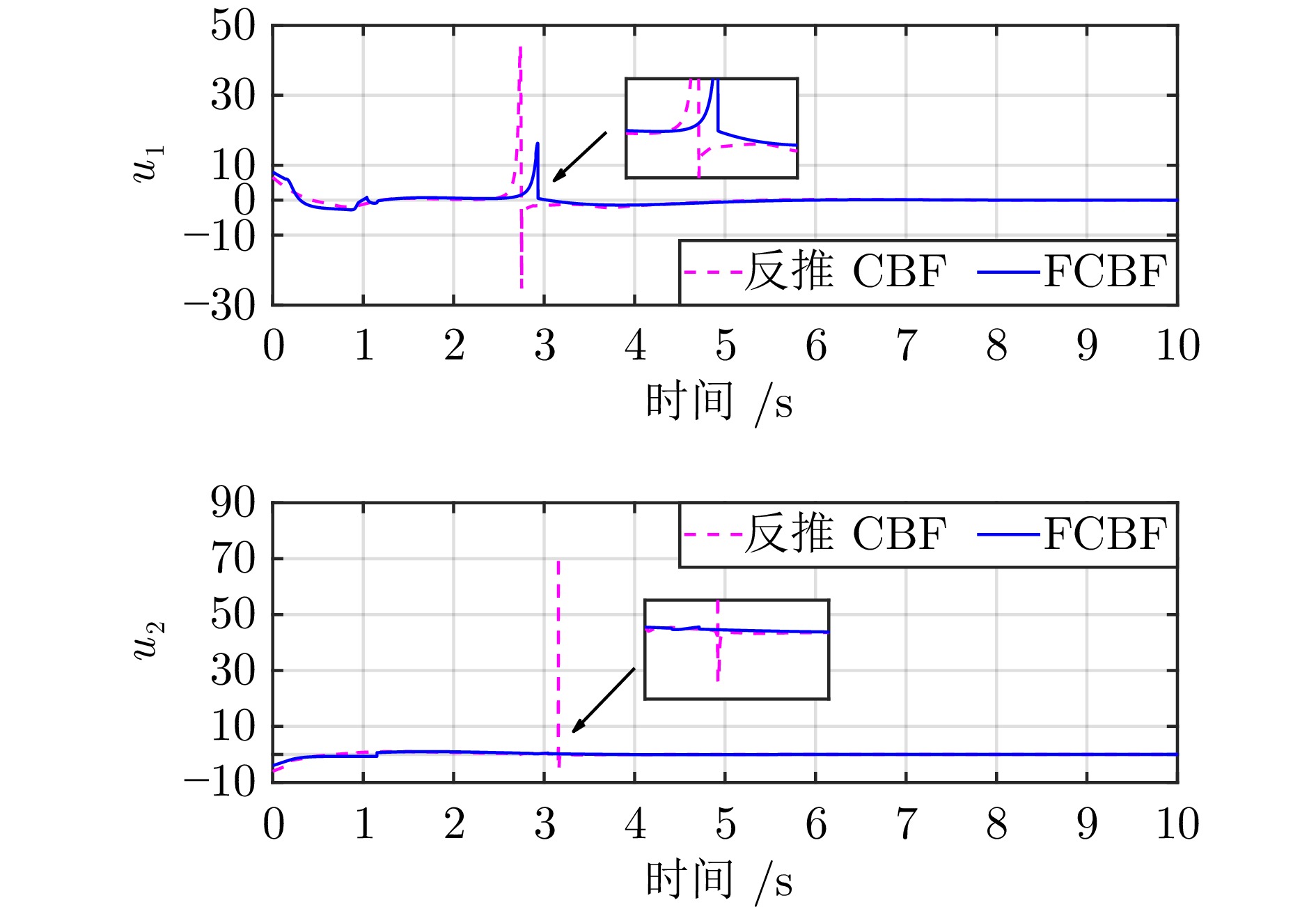
图 5 不同滤波时间常数条件下输入信号$ u_1 $和$ u_2 $
Fig. 5 Input signals $ u_1 $ and $ u_2 $ with various filter time constants
-
[1] Clarke E M, Grumberg O, Peleg D. Model Checking. Cambridge: MIT Press, 1999. [2] Tomlin C, Pappas G J, Sastry S. Conflict resolution for airtraffic management: A study in multiagent hybrid systems. IEEE Transactions on Automatic Control, 1998, 43(4): 509−521 doi: 10.1109/9.664154 [3] Gao Y, Johansson K H, Xie L. Computing probabilistic controlled invariant sets. IEEE Transactions on Automatic Control, 2021, 66(7): 3138−3151 doi: 10.1109/TAC.2020.3018438 [4] Sun J, Yang J, Zeng Z. Safety-critical control with control barrier function based on disturbance observer. IEEE Transactions on Automatic Control, 2024, 69(7): 4750−4756 doi: 10.1109/TAC.2024.3352707 [5] Cohen M H, Belta C. Safe exploration in model-based reinforcement learning using control barrier functions. Automatica, 2023, 147: Article No. 110684 doi: 10.1016/j.automatica.2022.110684 [6] 陈杰, 吕梓亮, 黄鑫源, 洪奕光. 非线性系统的安全分析与控制: 障碍函数方法. 自动化学报, 2023, 49(3): 567−579Chen Jie, Lyu Zi-Liang, Huang Xin-Yuan, Hong Yi-Guang. Safety analysis and safety-critical control of nonlinear systems: Barrier function approach. Acta Automatica Sinica, 2023, 49(3): 567−579 [7] Artstein Z. Stabilization with relaxed controls. Nonlinear Analysis: Theory, Methods and Applications, 1983, 7(11): 1163−1173 [8] Sontag E D. A ‘universal’ construction of Artstein's theorem on nonlinear stabilization. Systems and Control Letters, 1989, 13(2): 117−123 doi: 10.1016/0167-6911(89)90028-5 [9] Wieland P, Allgöwer F. Constructive safety using control barrier functions. IFAC Proceedings Volumes, 2007, 40(12): 462−467 doi: 10.3182/20070822-3-ZA-2920.00076 [10] Ames A D, Grizzle J W, Tabuada P. Control barrier function based quadratic programs with application to adaptive cruise control. In: Proceedings of the 53rd IEEE Conference on Decision and Control (CDC). Los Angeles, USA: IEEE, 2014. 6271−6278 [11] Xu X, Tabuada P, Grizzle J W, Ames A D. Robustness of control barrier functions for safety-critical control. IFAC-PapersOnLine, 2015, 48(27): 54−61 doi: 10.1016/j.ifacol.2015.11.152 [12] Ames A D, Xu X, Grizzle J W, Tabuada P. Control barrier function based quadratic programs for safety critical systems. IEEE Transactions on Automatic Control, 2017, 62(8): 3861−3876 doi: 10.1109/TAC.2016.2638961 [13] Xu Y, Sun Y, Chen Y Y, Tao H F. Safety predefined time tracking control of second-order nonlinear systems. In: Proceedings of the 12th Data Driven Control and Learning Systems Conference (DDCLS). Xiangtan, China: IEEE, 2023. 1320−1324 [14] Cortez W S, Dimarogonas D V. Correct-by-design control barrier functions for Euler-Lagrange systems with input constraints. In: Proceedings of the American Control Conference (ACC). Denver, USA: IEEE, 2020. 950−955 [15] Cortez W S, Dimarogonas D V. Safe-by-design conrtrol for Euler-Lagrange systems. Automatica, 2022, 146: Article No. 110620 doi: 10.1016/j.automatica.2022.110620 [16] Das E, Murray R M. Robust safe control synthesis with disturbance observer-based control barrier functions. In: Proceedings of the 61st Conference on Decision and Control (CDC). Cancun, Mexico: IEEE, 2022. 5566−5573 [17] Nguyen Q, Sreenath K. Exponential control barrier function for enforcing high relative-degree safety-critical constraints. In: Proceedings of the American Control Conference (ACC). Boston, USA: IEEE, 2016. 322−328 [18] Xiao W, Belta C. Control barrier functions for systems with high relative degree. In: Proceedings of the 58th IEEE Conference on Decision and Control (CDC). Nice, France: IEEE, 2019. 474−479 [19] Xiao W, Belta C. High-order control barrier functions. IEEE Transactions on Automatic Control, 2022, 67(7): 3655−3662 doi: 10.1109/TAC.2021.3105491 [20] Tan X, Cortez W S, Dimarogonas D V. High-order barrier functions: Robustness, safety, and performance-critical control. IEEE Transactions on Automatic Control, 2021, 67(6): 3021−3028 [21] Wang H, Peng J, Xu J, Zhang F, Wang Y. High-order control barrier functions based optimization control for time-varying nonlinear systems with full-state constraints: A dynamic sub-safe set approach. International Journal of Robust and Nonlinear Control, 2023, 33(8): 4490−4503 doi: 10.1002/rnc.6624 [22] Zhang D H, Van M, Mcllvanna S, Sun Y, McLoone S. Adaptive safety critical control with uncertainty estimation for human-robot collaboration. IEEE Transactions on Automation Science and Engineering, DOI: 10.1109/TASE.2023.3320873 [23] Molnar T G, Cosner R K, Singletary A W, Ubellacker W, Ames A D. Model-free safety critical control for robotic systems. IEEE Robotics and Automation Letters, 2022, 7(2): 944−951 doi: 10.1109/LRA.2021.3135569 [24] Xu J X, Gu N, Wang D, Li T S, Han B, Peng Z H. Safety critical parallel trajectory tracking control of maritime autonomous surface ships based on integral control barrier functions. IEEE Transactions on Intelligent Vehicles, 9 (5): 4979−4988, 2024 doi: 10.1109/TIV.2024.3361477 [25] Xu X. Constrained control of input-output linearizable systems using control sharing barrier funcions. Automatica, 2018, 87: 195−201 doi: 10.1016/j.automatica.2017.10.005 [26] Taylor A J, Ong P, Molnar T G, Ames A D. Safe backstepping with control barrier functions. In: Proceedings of the 61st IEEE Conference on Decision and Control (CDC). Cancun, Mexico: IEEE, 2022. 5775−5782 [27] Abel I, Steeves D, KritićM, JankovićM. Prescribed time safety design for strict-feedback nonlinear systems. IEEE Transactions on Automatic Control, 2024, 69(3): 1464−1479 doi: 10.1109/TAC.2023.3326393 [28] 马知恩, 周义仓, 李承治. 常微分方程定性与稳定性方法. 第2版. 北京: 科学出版社, 2015.Ma Zhi-En, Zhou Yi-Cang, Li Cheng-Zhi. Qualitative and Stability Theory of Ordinary Differential Equations (2nd edition). Beijing: Science Press, 2015. [29] Ames A D, Coogan S, Egerstedt M, Notomista G, Sreenath K, Tabuada P. Control barrier functions: Theory and applications. In: Proceedings of the 18th European Control Conference (ECC). Naples, Italy: IEEE, 2019. 3420−3431 [30] Li L H, Zhao K, Zhang Z Z, Song Y D. Dual-channel event-triggered robust adaptive control of strict-feedback system with flexible prescribed performance. IEEE Transactions on Automatic Control, 2024, 69(3): 1752−1759 doi: 10.1109/TAC.2023.3328167 [31] Cheng H, Huang X C, Cao H W. Asymptotic tracking control for uncertain nonlinear strict-feedback systems with unknown time-varying delays. IEEE Transactions on Neural Networks and Learning Systems, 2023, 34(12): 9821−9831 doi: 10.1109/TNNLS.2022.3160803 [32] Yip P P, Hedrick J K. Adaptive dynamic surface control: A simplified algorithm for adaptive backstepping control of nonlinear systems. International Journal of Control, 1998, 71(5): 959−979 doi: 10.1080/002071798221650 [33] Khalil H K. Nonlinear Systems. Upper Saddle River: Prentice Hall, 2002. [34] Wang H, Margellos K, Papachristodoulou A. Explicit solutions for safety problems using control barrier functions. In: Proceedings of the 61st IEEE Conference on Decision and Control (CDC). Cancun, Mexico: IEEE, 2022. 5680−5685 [35] Saviolo A, Loianno G. Learning quadrotor dynamics for precise, safe, and agile flight control. Annual Reviews in Control, 2023, 55: 45−60 doi: 10.1016/j.arcontrol.2023.03.009 [36] Yuan W, Liu Y H, Su C Y, Zhao F. Whole-body control of an autonomous mobile manipulator using model predictive control and adaptive fuzzy technique. IEEE Transactions on Fuzzy Systems, 2024, 31(3): 799−809 [37] Yuan W, Liu Y, Liu Y H, Su C Y. Differential flatness-based adaptive robust tracking control for wheeled mobile robots with slippage disturbances. ISA Transactions, 2024, 144: 482−489 doi: 10.1016/j.isatra.2023.11.008 -

 下载:
下载:

图(7)
计量
- 文章访问数: 1152
- HTML全文浏览量: 405
- PDF下载量: 271
- 被引次数: 0
