

-
摘要: 当前动态系统呈现大型化、复杂化的趋势, 基于贝叶斯滤波的动态系统状态估计遇到一系列新的挑战. 随着深度学习在特征提取与模式识别等方面的优势与潜力不断显现, 深度学习与传统贝叶斯滤波相结合的研究也随之兴起. 为此, 梳理了不同领域融合深度学习的贝叶斯滤波方法的应用案例, 从中剖析不同类型动态系统下贝叶斯滤波存在的局限性和共性难题. 在此基础上, 总结了当前贝叶斯滤波存在的几类不确定性问题, 以深度学习的视角将这些问题归纳为特征提取和参数辨识两大基本问题, 进而介绍深度学习为贝叶斯滤波所提供的解决方案. 其次, 归纳整理了两类深度学习与贝叶斯滤波结合的具体方法, 着重介绍了深度卡尔曼滤波和融合深度学习的自适应卡尔曼滤波. 最后, 综合考虑深度学习方法和贝叶斯滤波方法的优势, 讨论了融合深度学习的贝叶斯滤波方法的开放问题和未来研究方向.Abstract: As dynamic systems continue to exhibit a trend towards increased scale and complexity, the Bayesian filtering based state estimation for dynamic systems faces a series of new challenges. With the increasing prominence and new potential of deep learning in areas such as feature extraction and pattern recognition, research on combination of deep learning and classical Bayesian filtering is emerging. In this paper, we present a systematic review of application cases of Bayesian filtering methods that integrate deep learning in different domains, aiming to analyze the limitations and common challenges of Bayesian filtering in various types of dynamic systems. In view of this, we summarize several categories of uncertainty problems in the existing Bayesian filtering. From the perspective of deep learning, these problems are classified into two fundamental problems: Feature extraction and parameter identification. Furthermore, we introduce the solutions provided by deep learning for Bayesian filtering. Additionally, we categorize and organize two specific approaches that combine Bayesian filtering with deep learning, that is, deep Kalman filtering and adaptive Kalman filtering with deep learning. Finally, by considering the advantages of both deep learning and Bayesian filtering methods, we discuss open questions and future research directions for Bayesian filtering with deep learning.
-
Key words:
- Deep learning /
- Bayesian filtering /
- Kalman filtering /
- state estimation /
- state-space model
-
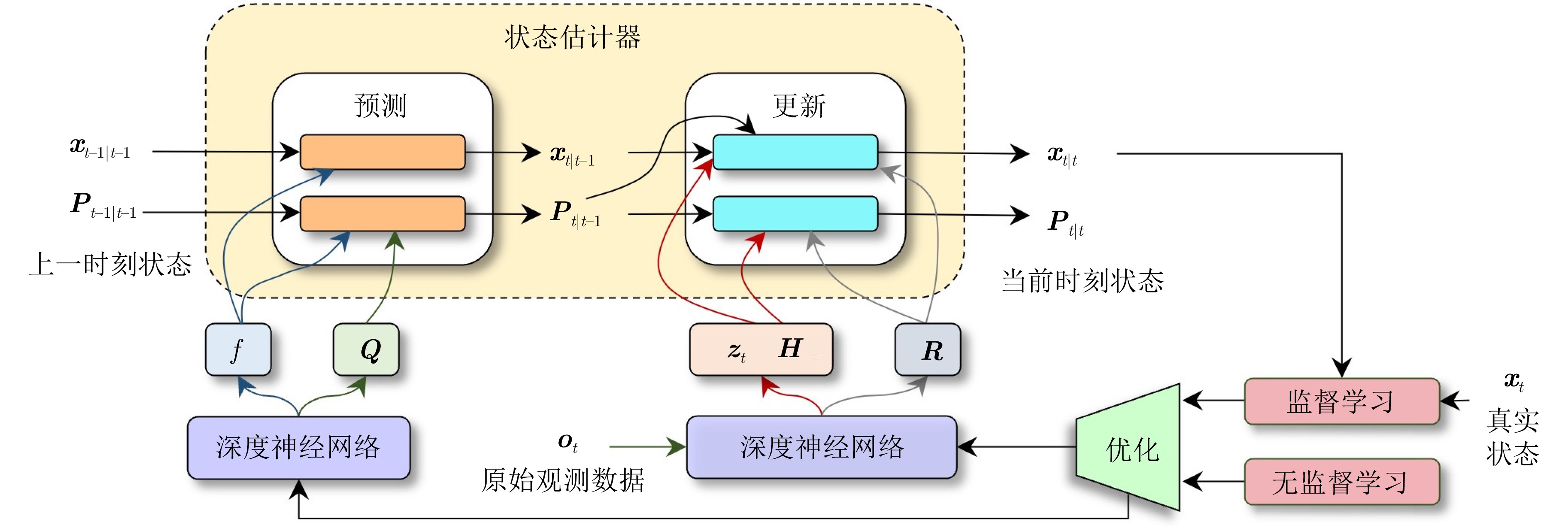
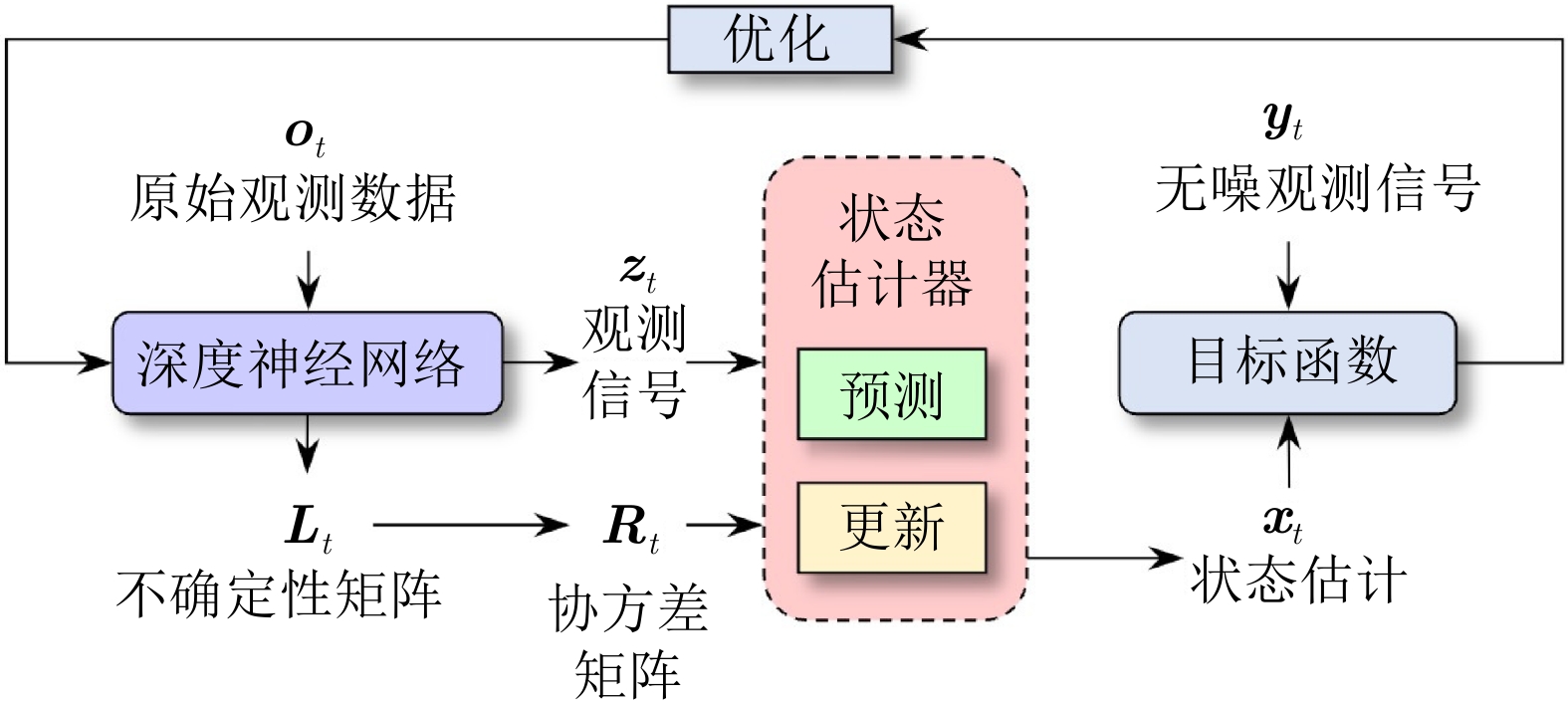
图 5 基于深度状态空间模型的卡尔曼滤波框架
Fig. 5 Framework of Kalman filtering based on deep state-space model
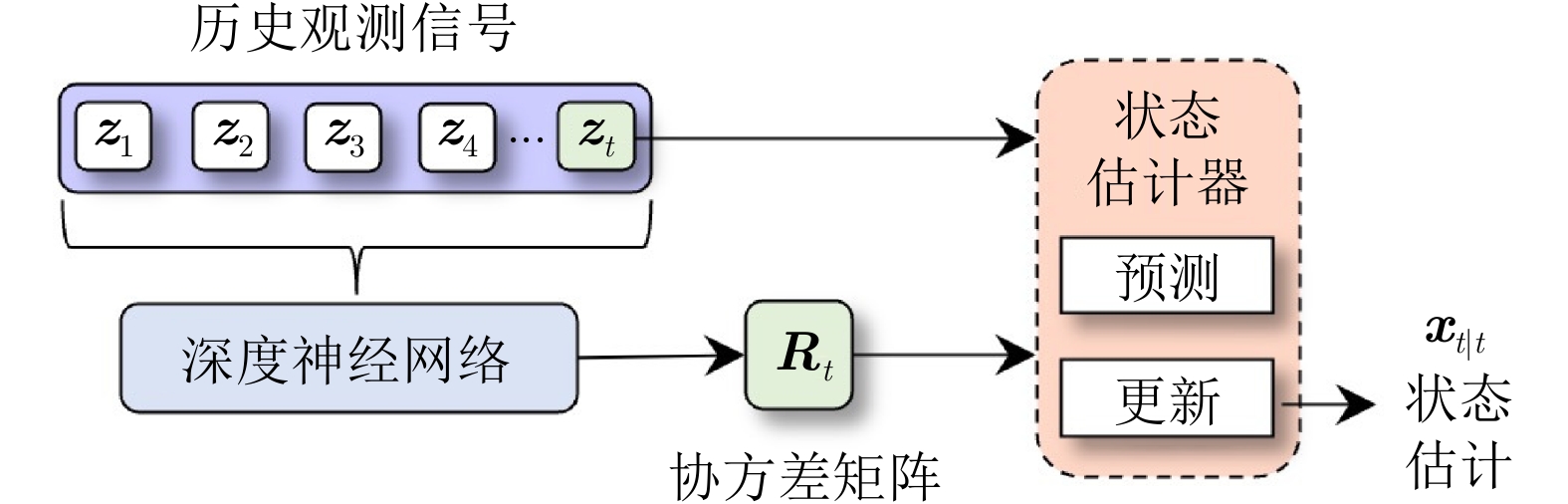
图 7 使用深度神经网络估计噪声统计特性
Fig. 7 Estimating noise statistical characteristics with deep neural networks
-
[1] 孙旭, 李晓光, 李嘉锋, 卓力. 基于深度学习的图像超分辨率复原研究进展. 自动化学报, 2017, 43(5): 697−709Sun Xu, Li Xiao-Guang, Li Jia-Feng, Zhuo Li. Review on deep learning based image super-resolution restoration algorithms. Acta Automatica Sinica, 2017, 43(5): 697−709 [2] 刘小波, 刘鹏, 蔡之华, 乔禹霖, 王凌, 汪敏. 基于深度学习的光学遥感图像目标检测研究进展. 自动化学报, 2021, 47(9): 2078−2089Liu Xiao-Bo, Liu Peng, Cai Zhi-Hua, Qiao Yu-Lin, Wang Ling, Wang Min. Research progress of optical remote sensing image object detection based on deep learning. Acta Automatica Sinica, 2021, 47(9): 2078−2089 [3] 张号逵, 李映, 姜晔楠. 深度学习在高光谱图像分类领域的研究现状与展望. 自动化学报, 2018, 44(6): 961−977Zhang Hao-Kui, Li Ying, Jiang Ye-Nan. Deep learning for hyperspectral imagery classification: The state of the art and prospects. Acta Automatica Sinica, 2018, 44(6): 961−977 [4] 刘文举, 聂帅, 梁山, 张学良. 基于深度学习语音分离技术的研究现状与进展. 自动化学报, 2016, 42(6): 819−833Liu Wen-Ju, Nie Shuai, Liang Shan, Zhang Xue-Liang. Deep learning based speech separation technology and its developments. Acta Automatica Sinica, 2016, 42(6): 819−833 [5] 袁文浩, 孙文珠, 夏斌, 欧世峰. 利用深度卷积神经网络提高未知噪声下的语音增强性能. 自动化学报, 2018, 44(4): 751−759Yuan Wen-Hao, Sun Wen-Zhu, Xia Bin, Ou Shi-Feng. Improving speech enhancement in unseen noise using deep convolutional neural network. Acta Automatica Sinica, 2018, 44(4): 751−759 [6] 鹿智, 秦世引, 李连伟, 张鼎豪. 智能人机交互中第一视角手势表达的一次性学习分类识别. 自动化学报, 2021, 47(6): 1284−1301Lu Zhi, Qin Shi-Yin, Li Lian-Wei, Zhang Ding-Hao. One-shot learning classification and recognition of gesture expression from the egocentric viewpoint in intelligent human-computer interaction. Acta Automatica Sinica, 2021, 47(6): 1284−1301 [7] 段艳杰, 吕宜生, 张杰, 赵学亮, 王飞跃. 深度学习在控制领域的研究现状与展望. 自动化学报, 2016, 42(5): 643−654Duan Yan-Jie, Lv Yi-Sheng, Zhang Jie, Zhao Xue-Liang, Wang Fei-Yue. Deep learning for control: The state of the art and prospects. Acta Automatica Sinica, 2016, 42(5): 643−654 [8] Jin Z H, Si W Y, Liu A D, Zhang W A, Yu L, Yang C G. Learning a flexible neural energy function with a unique minimum for globally stable and accurate demonstration learning. IEEE Transactions on Robotics, 2023, 39(6): 4520−4538 [9] 任浩, 屈剑锋, 柴毅, 唐秋, 叶欣. 深度学习在故障诊断领域中的研究现状与挑战. 控制与决策, 2017, 32(8): 1345−1358Ren Hao, Qu Jian-Feng, Chai Yi, Tang Qiu, Ye Xin. Deep learning for fault diagnosis: The state of the art and challenge. Control and Decision, 2017, 32(8): 1345−1358 [10] Huang D J, Zhang W A, Guo F H, Liu W J, Shi X M. Wavelet packet decomposition-based multiscale CNN for fault diagnosis of wind turbine gearbox. IEEE Transactions on Cybernetics, 2023, 53(1): 443−453 [11] 田娟秀, 刘国才, 谷珊珊, 鞠忠建, 刘劲光, 顾冬冬. 医学图像分析深度学习方法研究与挑战. 自动化学报, 2018, 44(3): 401−424Tian Juan-Xiu, Liu Guo-Cai, Gu Shan-Shan, Ju Zhong-Jian, Liu Jin-Guang, Gu Dong-Dong. Deep learning in medical image analysis and its challenges. Acta Automatica Sinica, 2018, 44(3): 401−424 [12] Jin Y Q, Wei N W, Fu M L, Liu H M, Zhang W A. Beyond learning: Back to geometric essence of visual odometry via fusion-based paradigm. IEEE Transactions on Instrumentation and Measurement, 2021, 70: Article No. 5018715 [13] Kalman R E. A new approach to linear filtering and prediction problems. Journal of Basic Engineering, 1960, 82(1): 35−45 doi: 10.1115/1.3662552 [14] Bebis G, Georgiopoulos M. Feed-forward neural networks. IEEE Potentials, 1994, 13(4): 27−31 doi: 10.1109/45.329294 [15] Elman J L. Finding structure in time. Cognitive Science, 1990, 14(2): 179−211 doi: 10.1207/s15516709cog1402_1 [16] Lecun Y, Bottou L, Bengio Y, Haffner P. Gradient-based learning applied to document recognition. Proceedings of the IEEE, 1998, 86(11): 2278−2324 doi: 10.1109/5.726791 [17] Stubberud S C, Lobbia R N, Owen M. An adaptive extended Kalman filter using artificial neural networks. In: Proceedings of the 34th IEEE Conference on Decision and Control. New Orleans, USA: IEEE, 1995. 1852−1856 [18] Choi M, Sakthivel R, Chung W K. Neural network-aided extended Kalman filter for SLAM problem. In: Proceedings of the IEEE International Conference on Robotics and Automation. Rome, Italy: IEEE, 2007. 1686−1690 [19] Owen M W, Stubberud A R. A neural extended Kalman filter multiple model tracker. In: Proceedings of the Celebrating the Past ${\cdots} $ Teaming Toward the Future (IEEE Cat. No.03CH37492). San Diego, USA: IEEE, 2003. 2111−2119 [20] Li Y, Liu J Y, Jiang Y Q, Liu Y, Lei B Y. Virtual adversarial training-based deep feature aggregation network from dynamic effective connectivity for MCI identification. IEEE Transactions on Medical Imaging, 2022, 41(1): 237−251 [21] Huang H F, Liu Q, Jiang Y Q, Yang Q Y, Zhu X F, Li Y. Deep spatio-temporal attention-based recurrent network from dynamic adaptive functional connectivity for MCI identification. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2022, 30: 2600−2612 [22] Zhao Z, Särkkä S, Rad A B. Kalman-based spectro-temporal ECG analysis using deep convolutional networks for atrial fibrillation detection. Journal of Signal Processing Systems, 2020, 92(7): 621−636 doi: 10.1007/s11265-020-01531-4 [23] Lee M H, O' Hara N, Sonoda M, Kuroda N, Juhasz C, Asano E, et al. Novel deep learning network analysis of electrical stimulation mapping-driven diffusion MRI tractography to improve preoperative evaluation of pediatric epilepsy. IEEE Transactions on Biomedical Engineering, 2020, 67(11): 3151−3162 doi: 10.1109/TBME.2020.2977531 [24] Xu K, Jiang X Y, Lin S J, Dai C Y, Chen W. Stochastic modeling based nonlinear Bayesian filtering for photoplethysmography denoising in wearable devices. IEEE Transactions on Industrial Informatics, 2020, 16(11): 7219−7230 [25] Dai C S, Shan G Q, Liu X J, Ru C H, Xin L M, Sun Y. Automated orientation control of motile deformable cells. IEEE Transactions on Automation Science and Engineering, 2023, 20(3): 2126−2134 [26] Perafan-Villota J C, Mondragon O H, Mayor-Toro W M. Fast and precise: Parallel processing of vehicle traffic videos using big data analytics. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(8): 12064−12073 [27] Maha Vishnu V C, Rajalakshmi M, Nedunchezhian R. Intelligent traffic video surveillance and accident detection system with dynamic traffic signal control. Cluster Computing, 2018, 21(1): 135−147 [28] Abdelali H A, Derrouz H, Zennayi Y, Thami R O H, Bourzeix F. Multiple hypothesis detection and tracking using deep learning for video traffic surveillance. IEEE Access, 2021, 9: 164282−164291 [29] Chen Y R, Xie X Y, Yu B, Li Y, Lin K H. Multitarget vehicle tracking and motion state estimation using a novel driving environment perception system of intelligent vehicles. Journal of Advanced Transportation, 2021, 2021: Article No. 6251399 [30] Sudha D, Priyadarshini J. An intelligent multiple vehicle detection and tracking using modified vibe algorithm and deep learning algorithm. Soft Computing, 2020, 24(22): 17417−17429 doi: 10.1007/s00500-020-05042-z [31] Zhu D, Song R, Chen H, Klette R, Xu Y Y. Moment-based multi-lane detection and tracking. Signal Processing: Image Communication, 2021, 95: Article No. 116230 [32] Van Wyk F, Wang Y Y, Khojandi A, Masoud N. Real-time sensor anomaly detection and identification in automated vehicles. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(3): 1264−1276 doi: 10.1109/TITS.2019.2906038 [33] Jin Y Q, Zhang W A, Sun H, Yu L. Learning-aided inertial odometry with nonlinear state estimator on manifold. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(9): 9792−9803 doi: 10.1109/TITS.2023.3273391 [34] Piga N A, Onyshchuk Y, Pasquale G, Pattacini U, Natale L. ROFT: Real-time optical flow-aided 6D object pose and velocity tracking. IEEE Robotics and Automation Letters, 2022, 7(1): 159−166 doi: 10.1109/LRA.2021.3119379 [35] Liu J G, Guo G. Vehicle localization during GPS outages with extended Kalman filter and deep learning. IEEE Transactions on Instrumentation and Measurement, 2021, 70: Article No. 7503410 [36] Shen C, Zhang Y, Guo X T, Chen X Y, Cao H L, Tang J, et al. Seamless GPS/inertial navigation system based on self-learning square-root cubature Kalman filter. IEEE Transactions on Industrial Electronics, 2021, 68(1): 499−508 [37] Shu X, Li G, Zhang Y J, Shen S Q, Chen Z, Liu Y G. Stage of charge estimation of lithium-ion battery packs based on improved cubature Kalman filter with long short-term memory model. IEEE Transactions on Transportation Electrification, 2021, 7(3): 1271−1284 [38] Surya S, Samanta A, Marcis V, Williamson S. Hybrid electrical circuit model and deep learning-based core temperature estimation of lithium-ion battery cell. IEEE Transactions on Transportation Electrification, 2022, 8(3): 3816−3824 [39] Zhang H F, Yue D, Dou C X, Li K, Hancke G P. Two-step wind power prediction approach with improved complementary ensemble empirical mode decomposition and reinforcement learning. IEEE Systems Journal, 2022, 16(2): 2545−2555 [40] Lee M S, Shifat T A, Hur J W. Kalman filter assisted deep feature learning for RUL prediction of hydraulic gear pump. IEEE Sensors Journal, 2022, 22(11): 11088−11097 [41] Dantas H, Warren D J, Wendelken S M, Davis T S, Clark G A, Mathews V J. Deep learning movement intent decoders trained with dataset aggregation for prosthetic limb control. IEEE Transactions on Biomedical Engineering, 2019, 66(11): 3192−3203 [42] Baek D, Seo J H, Kim J, Kwon D S. Hysteresis compensator with learning-based hybrid joint angle estimation for flexible surgery robots. IEEE Robotics and Automation Letters, 2020, 5(4): 6837−6844 [43] Rezaee K, Mousavirad S J, Khosravi M R, Moghimi M K, Heidari M. An autonomous UAV-assisted distance-aware crowd sensing platform using deep shuffleNet transfer learning. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 9404−9413 [44] Zhang K Y, Jiang C X, Li J H, Yang S, Ma T, Xu C, et al. DIDO: Deep inertial quadrotor dynamical odometry. IEEE Robotics and Automation Letters, 2022, 7(4): 9083−9090 [45] 潘泉, 于昕, 程咏梅, 张洪才. 信息融合理论的基本方法与进展. 自动化学报, 2003, 29(4): 599−615Pan Quan, Yu Xin, Cheng Yong-Mei, Zhang Hong-Cai. Essential methods and progress of information fusion theory. Acta Automatica Sinica, 2003, 29(4): 599−615 [46] 潘泉, 胡玉梅, 兰华, 孙帅, 王增福, 杨峰. 信息融合理论研究进展: 基于变分贝叶斯的联合优化. 自动化学报, 2019, 45(7): 1207−1223Pan Quan, Hu Yu-Mei, Lan Hua, Sun Shuai, Wang Zeng-Fu, Yang Feng. Information fusion progress: Joint optimization based on variational Bayesian theory. Acta Automatica Sinica, 2019, 45(7): 1207−1223 [47] Kalman R E, Bucy R S. New results in linear filtering and prediction theory. Journal of Basic Engineering, 1961, 83(1): 95−108 [48] Julier S J, Uhlmann J K. Unscented filtering and nonlinear estimation. Proceedings of the IEEE, 2004, 92(3): 401−422 [49] Yang X S, Zhang W A, Liu A D, Yu L. Linear fusion estimation for range-only target tracking with nonlinear transformation. IEEE Transactions on Industrial Informatics, 2020, 16(10): 6403−6412 [50] Gibbs R G. New Kalman filter and smoother consistency tests. Automatica, 2013, 49(10): 3141−3144 [51] 杨峰, 王永齐, 梁彦, 潘泉. 基于概率假设密度滤波方法的多目标跟踪技术综述. 自动化学报, 2013, 39(11): 1944−1956Yang Feng, Wang Yong-Qi, Liang Yan, Pan Quan. A survey of PHD filter based multi-target tracking. Acta Automatica Sinica, 2013, 39(11): 1944−1956 [52] Huang Y L, Zhang Y G, Wu Z M, Li N, Chambers J. A novel adaptive Kalman filter with inaccurate process and measurement noise covariance matrices. IEEE Transactions on Automatic Control, 2018, 63(2): 594−601 [53] Hu Y M, Wang X Z, Pan Q, Hu Z T, Moran B. Variational Bayesian Kalman filter using natural gradient. Chinese Journal of Aeronautics, 2022, 35(5): 1−10 [54] He Y, Song Q, Dong Y L, Yang J. Adaptive tracking algorithm based on modified strong tracking filter. In: Proceedings of the CIE International Conference on Radar. Shanghai, China: IEEE, 2006. 1−4 [55] Yang X S, Zhang W A, Yu L, Xing K X. Multi-rate distributed fusion estimation for sensor network-based target tracking. IEEE Sensors Journal, 2016, 16(5): 1233−1242 [56] Gordon N J, Salmond D J, Smith A F M. Novel approach to nonlinear/non-Gaussian Bayesian state estimation. IEE Proceedings F (Radar and Signal Processing), 1993, 140(2): 107−113 [57] Liu J S, Chen R. Sequential Monte Carlo methods for dynamic systems. Journal of the American Statistical Association, 1998, 93(443): 1032−1044 [58] 杨旭升, 张文安, 俞立. 适用于事件触发的分布式随机目标跟踪方法. 自动化学报, 2017, 43(8): 1393−1401Yang Xu-Sheng, Zhang Wen-An, Yu Li. Distributed tracking method for maneuvering targets with event-triggered mechanism. Acta Automatica Sinica, 2017, 43(8): 1393−1401 [59] Kingma D P, Welling M. Auto-encoding variational Bayes. In: Proceedings of the 2nd International Conference on Learning Representations. Banff, Canada: ICLR, 2014. [60] Krishnan R G, Shalit U, Sontag D. Deep Kalman filters. arXiv preprint arXiv: 1511.05121, 2015. [61] Karl M, Soelch M, Bayer J, Van Der Smagt P. Deep variational Bayes filters: Unsupervised learning of state space models from raw data. In: Proceedings of the 5th International Conference on Learning Representations. Toulon, France: ICLR, 2017. [62] Liu W, Lai Z L, Bacsa K, Chatzi E. Neural extended Kalman filters for learning and predicting dynamics of structural systems. Structural Health Monitoring, 2024, 23(2): 1037−1052 [63] Gedon D, Wahlström N, Schön T B, Ljung L. Deep state space models for nonlinear system identification. IFAC-PapersOnLine, 2021, 54(7): 481−486 [64] Li L Y, Yan J C, Yang X K, Jin Y H. Learning interpretable deep state space model for probabilistic time series forecasting. In: Proceedings of the 28th International Joint Conference on Artificial Intelligence. Macao, China: ACM, 2019. 2901−2908 [65] Zhao C, Sun L, Yan Z, Neumann G, Duckett T, Stolkin R. Learning Kalman network: A deep monocular visual odometry for on-road driving. Robotics and Autonomous Systems, 2019, 121: Article No. 103234 [66] 杨旭升, 王雪儿, 汪鹏君, 张文安. 基于渐进无迹卡尔曼滤波网络的人体肢体运动估计. 自动化学报, 2023, 49(8): 1723−1731Yang Xu-Sheng, Wang Xue-Er, Wang Peng-Jun, Zhang Wen-An. Estimation of human limb motion based on progressive unscented Kalman filter network. Acta Automatica Sinica, 2023, 49(8): 1723−1731 [67] Millidge B, Tschantz A, Seth A, Buckley C. Neural Kalman filtering. arXiv preprint arXiv: 2102.10021, 2021. [68] Rangapuram S S, Seeger M, Gasthaus J, Stella L, Wang Y Y, Januschowski T. Deep state space models for time series forecasting. In: Proceedings of the 32nd International Conference on Neural Information Processing Systems. Montréal, Canada: ACM, 2018. 7796−7805 [69] Bao T Z, Zhao Y H, Zaidi S A R, Xie S Q, Yang P F, Zhang Z Q. A deep Kalman filter network for hand kinematics estimation using sEMG. Pattern Recognition Letters, 2021, 143: 88−94 [70] Zheng X, Zaheer M, Ahmed A, Wang Y, Xing E P, Smola A J. State space LSTM models with particle MCMC inference. arXiv preprint arXiv: 711.11179, 2017. [71] Hochreiter S, Schmidhuber J. Long short-term memory. Neural Computation, 1997, 9(8): 1735−1780 [72] 尹宏鹏, 陈波, 柴毅, 刘兆栋. 基于视觉的目标检测与跟踪综述. 自动化学报, 2016, 42(10): 1466−1489Yin Hong-Peng, Chen Bo, Chai Yi, Liu Zhao-Dong. Vision-based object detection and tracking: A review. Acta Automatica Sinica, 2016, 42(10): 1466−1489 [73] 孟琭, 杨旭. 目标跟踪算法综述. 自动化学报, 2019, 45(7): 1244−1260Meng Lu, Yang Xu. A survey of object tracking algorithms. Acta Automatica Sinica, 2019, 45(7): 1244−1260 [74] Lin W Y, Ren X Y, Hu J J, He Y Z, Li Z, Tong M S. Fast, robust and accurate posture detection algorithm based on Kalman filter and SSD for AGV. Neurocomputing, 2018, 316: 306−312 [75] Ozaki R, Kuroda Y. EKF-based real-time self-attitude estimation with camera DNN learning landscape regularities. IEEE Robotics and Automation Letters, 2021, 6(2): 1737−1744 [76] Tian J P, Xiong R, Shen W X, Lu J H. State-of-charge estimation of LiFePO_4 batteries in electric vehicles: A deep-learning enabled approach. Applied Energy, 2021, 291: Article No. 116812 [77] Youn W, Lim H, Choi H S, Rhudy M B, Ryu H, Kim S, et al. State estimation for HALE UAVs with deep-learning-aided virtual AOA/SSA sensors for analytical redundancy. IEEE Robotics and Automation Letters, 2021, 6(3): 5276−5283 [78] Haarnoja T, Ajay A, Levine S, Abbeel P. Backprop KF: Learning discriminative deterministic state estimators. In: Proceedings of the 30th International Conference on Neural Information Processing Systems. Barcelona, Spain: ACM, 2016. 4383−4391 [79] Bharadwaj S, Prasad S, Almekkawy M. An upgraded siamese neural network for motion tracking in ultrasound image sequences. IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, 2021, 68(12): 3515−3527 [80] Xiao B, Xiao H R, Wang J W, Chen Y. Vision-based method for tracking workers by integrating deep learning instance segmentation in off-site construction. Automation in Construction, 2022, 136: Article No. 104148 [81] Lim H, Ryu H, Rhudy M B, Lee D, Jang D, Lee C, et al. Deep learning-aided synthetic airspeed estimation of UAVs for analytical redundancy with a temporal convolutional network. IEEE Robotics and Automation Letters, 2022, 7(1): 17−24 [82] Ju C, Wang Z, Long C, Zhang X Y, Chang D E. Interaction-aware Kalman neural networks for trajectory prediction. In: Proceedings of the IEEE Intelligent Vehicles Symposium (IV). Las Vegas, USA: IEEE, 2020. 1793−1800 [83] Yin H, Chen R J, Wang Y, Xiong R. RaLL: End-to-end radar localization on lidar map using differentiable measurement model. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 6737−6750 [84] Li Y J, Yin G D, Zhuang W C, Zhang N, Wang J X, Geng K K. Compensating delays and noises in motion control of autonomous electric vehicles by using deep learning and unscented Kalman predictor. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2020, 50(11): 4326−4338 [85] Lu G, Zhang X Y, Ouyang W L, Xu D, Chen L, Gao Z Y. Deep non-local Kalman network for video compression artifact reduction. IEEE Transactions on Image Processing, 2020, 29: 1725−1737 [86] Tariq M, Ali M, Naeem F, Poor H V. Vulnerability assessment of 6G-enabled smart grid cyber-physical systems. IEEE Internet of Things Journal, 2021, 8(7): 5468−5475 [87] Li D H, Zhou J, Liu Y Y. Recurrent-neural-network-based unscented Kalman filter for estimating and compensating the random drift of MEMS gyroscopes in real time. Mechanical Systems and Signal Processing, 2021, 147: Article No. 107057 [88] Coskun H, Achilles F, DiPietro R, Navab N, Tombari F. Long short-term memory Kalman filters: Recurrent neural estimators for pose regularization. In: Proceedings of the IEEE International Conference on Computer Vision (ICCV). Venice, Italy: IEEE, 2017. 5525−5533 [89] Chen C H, Lu C X, Wang B, Trigoni N, Markham A. DynaNet: Neural Kalman dynamical model for motion estimation and prediction. IEEE Transactions on Neural Networks and Learning Systems, 2021, 32(12): 5479−5491 [90] Cui Y Q, He Y, Tang T T, Liu Y. A new target tracking filter based on deep learning. Chinese Journal of Aeronautics, 2022, 35(5): 11−24 [91] Revach G, Shlezinger N, Ni X Y, Escoriza A L, Van Sloun R J G, Eldar Y C. KalmanNet: Neural network aided Kalman filtering for partially known dynamics. IEEE Transactions on Signal Processing, 2022, 70: 1532−1547 [92] Klein I, Revach G, Shlezinger N, Mehr J E, Van Sloun R J G, Eldar Y C. Uncertainty in data-driven Kalman filtering for partially known state-space models. In: Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). Singapore: IEEE, 2022. 3194−3198 [93] Revach G, Shlezinger N, Locher T, Ni X Y, Van Sloun R J G, Eldar Y C. Unsupervised learned Kalman filtering. In: Proceedings of the 30th European Signal Processing Conference (EUSIPCO). Belgrade, Serbia: IEEE, 2022. 1571−1575 [94] Zhang Y X, Yu M, Zhang H, Yu D, Wang D L. Neuralkalman: A learnable Kalman filter for acoustic echo cancellation. In: Proceedings of the IEEE Automatic Speech Recognition and Understanding Workshop (ASRU). Taipei, China: IEEE, 2023. 1−7 [95] Choi G, Park J, Shlezinger N, Eldar Y C, Lee N. Split-KalmanNet: A robust model-based deep learning approach for state estimation. IEEE Transactions on Vehicular Technology, 2023, 72(9): 12326−12331 [96] Deng H R, Revach G, Morgenstern H, Shlezinger N. Kalmanbot: Kalmannet-aided bollinger bands for pairs trading. In: Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). Rhodes Island, Greece: IEEE, 2023. 1−5 [97] Buchnik I, Steger D, Revach G, Van Sloun R J G, Routtenberg T, Shlezinger N. Latent-KalmanNet: Learned Kalman filtering for tracking from high-dimensional signals. IEEE Transactions on Signal Processing, 2024, 72: 352−367 [98] 郑婷婷, 杨旭升, 张文安, 俞立. 一种高斯渐进滤波框架下的目标跟踪方法. 自动化学报, 2018, 44(12): 2250−2258Zheng Ting-Ting, Yang Xu-Sheng, Zhang Wen-An, Yu Li. A target tracking method in Gaussian progressive filtering framework. Acta Automatica Sinica, 2018, 44(12): 2250−2258 [99] Yang X S, Zhang W A, Yu L, Yang F W. Sequential Gaussian approximation filter for target tracking with nonsynchronous measurements. IEEE Transactions on Aerospace and Electronic Systems, 2019, 55(1): 407−418 [100] Yuen K V, Hoi K I, Mok K M. Selection of noise parameters for Kalman filter. Earthquake Engineering and Engineering Vibration, 2007, 6(1): 49−56 [101] Yuen K V, Liang P F, Kuok S C. Online estimation of noise parameters for Kalman filter. Structural Engineering and Mechanics, 2013, 47(3): 361−381 [102] Li P, Zhang W A, Zhang J H. HMM based adaptive Kalman filter for orientation estimation. IEEE Sensors Journal, 2022, 22(17): 17065−17074 [103] Jouaber S, Bonnabel S, Velasco-Forero S, Pilté M. NNAKF: A neural network adapted Kalman filter for target tracking. In: Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). Toronto, Canada: IEEE, 2021. 4075−4079 [104] Zheng T Y, Yao Y, He F H, Zhang X R. An RNN-based learnable extended Kalman filter design and application. In: Proceedings of the 18th European Control Conference (ECC). Naples, Italy: IEEE, 2019. 3304−3309 [105] Brossard M, Barrau A, Bonnabel S. AI-IMU dead-reckoning. IEEE Transactions on Intelligent Vehicles, 2020, 5(4): 585−595 [106] Xiao Y M, Luo H Y, Zhao F, Wu F, Gao X L, Wang Q, et al. Residual attention network-based confidence estimation algorithm for non-holonomic constraint in GNSS/INS integrated navigation system. IEEE Transactions on Vehicular Technology, 2021, 70(11): 11404−11418 [107] Wu F, Luo H Y, Jia H W, Zhao F, Xiao Y M, Gao X L. Predicting the noise covariance with a multitask learning model for Kalman filter-based GNSS/INS integrated navigation. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 1−13 [108] Yang X S, Zhang W A, Chen M Z Q, Yu L. Hybrid sequential fusion estimation for asynchronous sensor network-based target tracking. IEEE Transactions on Control Systems Technology, 2017, 25(2): 669−676 [109] Blom H A P, Bar-Shalom Y. The interacting multiple model algorithm for systems with Markovian switching coefficients. IEEE Transactions on Automatic Control, 1988, 33(8): 780−783 [110] Fu Q E, Lu K L, Sun C Y. Deep learning aided state estimation for guarded semi-Markov switching systems with soft constraints. IEEE Transactions on Signal Processing, 2023, 71: 3100−3116 [111] Moon S, Youn W, Bang H. Novel deep-learning-aided multimodal target tracking. IEEE Sensors Journal, 2021, 21(18): 20730−20739 [112] Deng L C, Li D, Li R F. Improved IMM algorithm based on RNNs. Journal of Physics: Conference Series, 2020, 1518(1): Article No. 012055 [113] 崔亚奇, 熊伟, 何友. 不确定航迹自适应预测模型. 航空学报, 2019, 40(5): Article No. 322557Cui Ya-Qi, Xiong Wei, He You. Adaptive forecast model for uncertain track. Acta Aeronauticaet Astronautica Sinica, 2019, 40(5): Article No. 322557 [114] 纪守领, 李进锋, 杜天宇, 李博. 机器学习模型可解释性方法、应用与安全研究综述. 计算机研究与发展, 2019, 56(10): 2071−2096 doi: 10.7544/issn1000-1239.2019.20190540Ji Shou-Ling, Li Jin-Feng, Du Tian-Yu, Li Bo. Survey on techniques, applications and security of machine learning interpretability. Journal of Computer Research and Development, 2019, 56(10): 2071−2096 doi: 10.7544/issn1000-1239.2019.20190540 [115] 成科扬, 王宁, 师文喜, 詹永照. 深度学习可解释性研究进展. 计算机研究与发展, 2020, 57(6): 1208−1217 doi: 10.7544/issn1000-1239.2020.20190485Cheng Ke-Yang, Wang Ning, Shi Wen-Xi, Zhan Yong-Zhao. Research advances in the interpretability of deep learning. Journal of Computer Research and Development, 2020, 57(6): 1208−1217 doi: 10.7544/issn1000-1239.2020.20190485 [116] Russell R L, Reale C. Multivariate uncertainty in deep learning. IEEE Transactions on Neural Networks and Learning Systems, 2022, 33(12): 7937−7943 doi: 10.1109/TNNLS.2021.3086757 [117] 武东杰, 仲训昱, 崔晓珍, 彭侠夫, 杨功流. 可在线配置结构的多源融合位姿估计框架. 机器人, 2022, 44(6): 660−671Wu Dong-Jie, Zhong Xun-Yu, Cui Xiao-Zhen, Peng Xia-Fu, Yang Gong-Liu. Multi-source fusion pose estimation framework with online configurable structure. Robot, 2022, 44(6): 660−671 [118] Müller S, Hollmann N, Pineda-Arango S, Grabocka J, Hutter F. Transformers can do Bayesian inference. arXiv preprint arXiv: 2112.10510, 2023. [119] Xue B Y, Yu J W, Xu J H, Liu S S, Hu S K, Ye Z, et al. Bayesian transformer language models for speech recognition. In: Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). Toronto, Canada: IEEE, 2021. 7378−7382 [120] Ansari-Ram F, Ebrahimi-Moghadam A, Khademi M, Sadoghi-Yazdi H. Diffusion-based Kalman iterative thresholding for compressed sampling recovery over network. Signal Processing, 2023, 202: Article No. 108750 [121] Alcaraz J M L, Strodthoff N. Diffusion-based time series imputation and forecasting with structured state space models. Transactions on Machine Learning Research, 2023. [122] Munir A, Blasch E, Kwon J, Kong J, Aved A. Artificial intelligence and data fusion at the edge. IEEE Aerospace and Electronic Systems Magazine, 2021, 36(7): 62−78 doi: 10.1109/MAES.2020.3043072 [123] Blasch E, Pham T, Chong C Y, Koch W, Leung H, Braines D, et al. Machine learning/artificial intelligence for sensor data fusion-opportunities and challenges. IEEE Aerospace and Electronic Systems Magazine, 2021, 36(7): 80−93 [124] 张鋆豪, 何百岳, 杨旭升, 张文安. 基于可穿戴式惯性传感器的人体运动跟踪方法综述. 自动化学报, 2019, 45(8): 1439−1454Zhang Jun-Hao, He Bai-Yue, Yang Xu-Sheng, Zhang Wen-An. A review on wearable inertial sensor based human motion tracking. Acta Automatica Sinica, 2019, 45(8): 1439−1454 [125] Liu Q, Wang X, Rao N S V. Artificial neural networks for estimation and fusion in long-haul sensor networks. In: Proceedings of the 18th International Conference on Information Fusion (Fusion). Washington, USA: IEEE, 2015. 460−467 [126] Brigham K, Kumar B V K V, Rao N S V. Learning-based approaches to nonlinear multisensor fusion in target tracking. In: Proceedings of the 16th International Conference on Information Fusion. Istanbul, Turkey: IEEE, 2013. 1320−1327 [127] Chowdhury F N. A neural approach to data fusion. In: Proceedings of the American Control Conference (ACC'95). Seattle, USA: IEEE, 1995. 1693−1697 [128] Peng Z X, Li Y, Hao G. The research on distributed fusion estimation based on machine learning. IEEE Access, 2020, 8: 38174−38184 [129] Chen Y S, Yan G F. Multi-sensors data tracking fusion based on a neural network filter. In: Proceedings of the IEEE International Joint Conference on Neural Network Proceedings. Vancouver, Canada: IEEE, 2006. 981−984 [130] Yang X S, Zhang W A, Yu L. A bank of decentralized extended information filters for target tracking in event-triggered WSNs. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2020, 50(9): 3281−3289 doi: 10.1109/TSMC.2018.2883706 [131] Liu P, Wang L Z, Ranjan R, He G J, Zhao L. A survey on active deep learning: From model driven to data driven. ACM Computing Surveys, 2022, 54(10s): Article No. 221 [132] Yang X S, Zhang W A, Yu L, Shi L. Performance evaluation of distributed linear regression Kalman filtering fusion. IEEE Transactions on Automatic Control, 2021, 66(6): 2889−2896 doi: 10.1109/TAC.2020.3012638 [133] Blundell C, Cornebise J, Kavukcuoglu K, Wierstra D. Weight uncertainty in neural networks. In: Proceedings of the 32nd International Conference on Machine Learning. Lille, France: ACM, 2015. 1613−1622 [134] Kendall A, Gal Y. What uncertainties do we need in Bayesian deep learning for computer vision? In: Proceedings of the 31st International Conference on Neural Information Processing Systems. Long Beach, USA: ACM, 2017. 5580−5590 -

 下载:
下载:

图(8)
计量
- 文章访问数: 7228
- HTML全文浏览量: 2063
- PDF下载量: 761
- 被引次数: 0
