

-
摘要: 针对视觉遮挡引起的人体姿态估计(Human pose estimation, HPE)性能下降问题, 提出基于渐进高斯滤波(Progressive Gaussian filtering, PGF)融合的人体姿态估计方法. 首先, 设计分层性能评估方法对多视觉量测进行分类处理, 以适应视觉遮挡引起的量测不确定性问题. 其次, 构建分布式渐进贝叶斯滤波融合框架, 以及设计一种分层分类融合估计方法来提升复杂量测融合的鲁棒性和准确性. 特别地, 针对量测统计特性变化问题, 利用局部估计间的交互信息来引导渐进量测更新, 从而隐式地补偿量测不确定性. 最后, 仿真与实验结果表明, 相比于现有的方法, 所提的人体姿态估计方法具有更高的准确性和鲁棒性.Abstract: A human pose estimation (HPE) method based on progressive Gaussian filtering (PGF) fusion is proposed to address the performance degradation issue caused by visual occlusion. Firstly, a hierarchical performance evaluation method is designed to classify and handle multiple visual measurements, in order to adapt to the uncertainty problem caused by visual occlusion. Secondly, a distributed progressive Bayesian filtering fusion framework is constructed, and a hierarchical classification fusion estimation method is designed to improve the robustness and accuracy of complex measurement fusion. Specifically, to address the issue of measurement statistical characteristic variation, the interactive information among local estimators is utilized to guide the progressive measurement update, thereby implicitly compensating for measurement uncertainty. Finally, from simulation and experimental results, it demonstrates that compared with existing methods, the proposed human pose estimation method achieves higher accuracy and robustness.
-
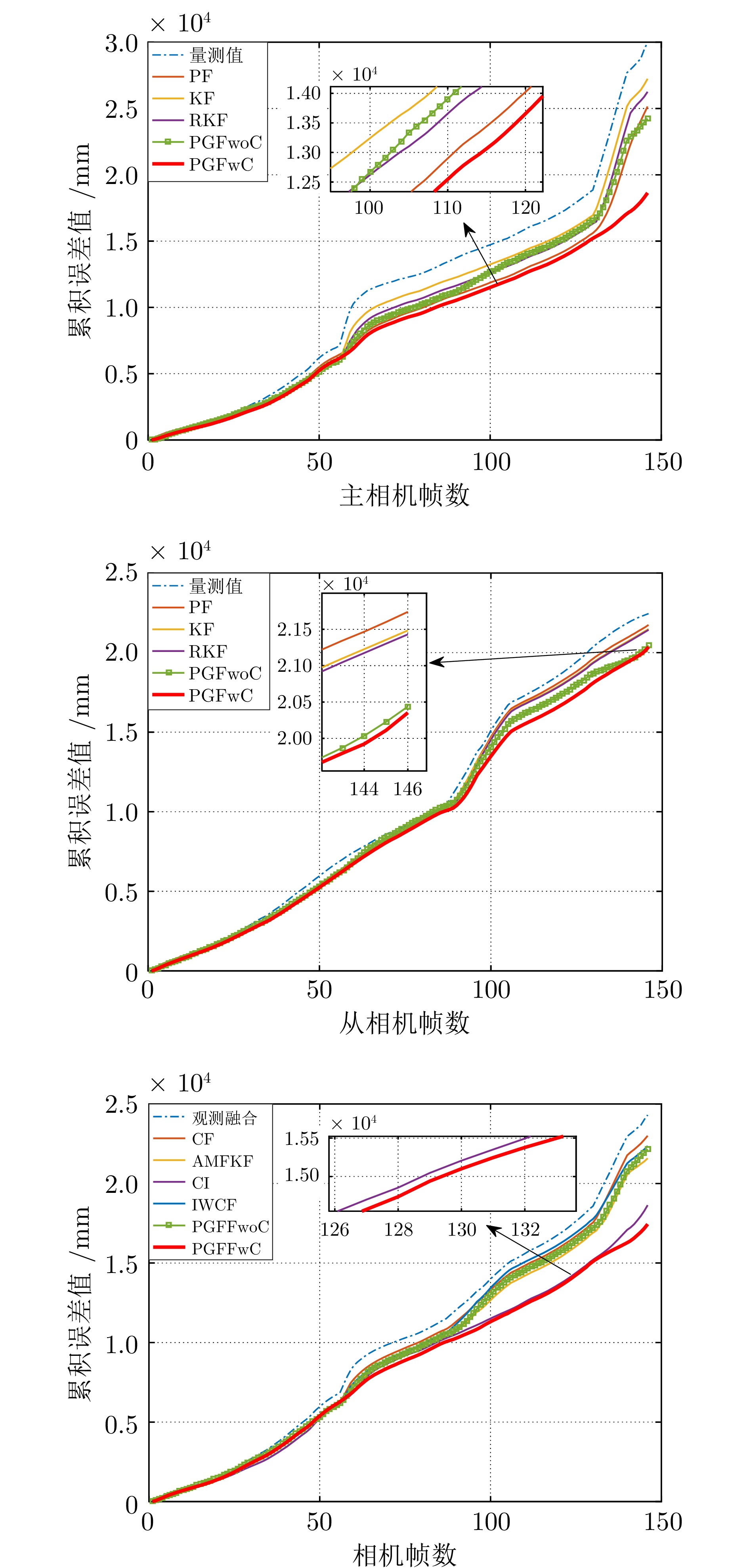
图 6 不同滤波融合方法下的累积位置误差
Fig. 6 Cumulative position error under different filtering fusion methods
表 1 累积误差均值统计(mm)
Table 1 Cumulative error mean statistics (mm)
实验方法 腕关节 肘关节 肩关节 观测融合 166.44 124.44 96.56 CF 157.55 118.00 95.00 AMFKF 147.81 113.85 93.08 CI 127.63 117.85 99.62 IWCF 153.12 113.21 92.53 PGFFwoC 151.77 114.12 92.83 PGFFwC 119.47 108.98 84.11  下载: 导出CSV
下载: 导出CSV
-
[1] Desmarais Y, Mottet D, Slangen P, Montesinos P. A review of 3D human pose estimation algorithms for markerless motion capture. Computer Vision and Image Understanding, 2021, 212: Article No. 103275 doi: 10.1016/j.cviu.2021.103275 [2] Yang X, Yin S, Zhang W A, Hu F, Yu L, Asynchronous Gaussian filtering fusion for human motion estimation based on RGB-D cameras. IEEE Sensors Journal, 2023, 23(22): 28044-28054 doi: 10.1109/JSEN.2023.3323869 [3] 杜惠斌, 赵忆文, 韩建达, 赵新刚, 王争, 宋国立. 基于集员滤波的双Kinect人体关节点数据融合. 自动化学报, 2016, 42(12): 1886-1898Du Hui-bin, Zhao Yi-wen, Han Jian-da, Zhao Xin-Gang, Wang Zheng, Song Guo-Li. Data fusion of dual Kinect human body joints based on ensemble filtering. Acta Automatica Sinica, 2022, 42(9): 2830-2837 [4] Wang J, Tan S, Zhen X, Xu S, Zheng F, He Z, et al. Deep 3D human pose estimation: a review. Computer Vision and Image Understanding, 2021, 210: Article No. 103225 doi: 10.1016/j.cviu.2021.103225 [5] 蔡兴泉, 霍宇晴, 李发建, 孙海燕. 面向太极拳学习的人体姿态估计及相似度计算. 图学学报, 2022, 43(4): 695-706Cai Xing-Quan, Huo Yu-Qing, Li Fa-Jian, Sun Hai-Yan. Human posture estimation and similarity calculation for Taijiquan learning. Journal of Graphics, 2022, 43(4): 695-706 [6] 张鋆豪, 何百岳, 杨旭升, 张文安. 基于可穿戴式惯性传感器的人体运动跟踪方法综述. 自动化学报, 2019, 45(8): 1439-1454Zhang Jun-Hao, He Bai-Yue, Yang Xu-Sheng, Zhang Wen-An. A review of human motion tracking methods based on wearable inertial sensors. Acta Automatica Sinica, 2019, 45(8): 1439-1454 [7] Casalino A, Guzman S, Maria Zanchettin A, Rocco P. Human pose estimation in presence of occlusion using depth camera sensors, in human-robot coexistence scenarios. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Madrid, Spain: IEEE, 2018. 1−7 [8] Moon S, Park Y, Ko D W, Suh I H. Multiple Kinect sensor fusion for human skeleton tracking using Kalman filtering. International Journal of Advanced Robotic Systems, 2016, 13(2): 315-323 [9] Liu G, Tian G, Li J, Zhu X, Wang Z. Human action recognition using a distributed RGB-depth camera network. IEEE Sensors Journal, 2018, 18(18): 7570-7576 doi: 10.1109/JSEN.2018.2859268 [10] He H, Liu G, Zhu X, He L, Tian G. Interacting multiple model-based human pose estimation using a distributed 3D camera network. IEEE Sensors Journal, 2019, 19(22): 10584-10590 doi: 10.1109/JSEN.2019.2931603 [11] Ahmed F, Hossain Bari A S M, Sieu B, Sadeghi J, Scholten J, Gavrilova M L. Kalman filter-based noise reduction framework for posture estimation using depth sensor. In: Proceedings of the 18th IEEE International Conference on Cognitive Informatics and Cognitive Computing. Milan, Italy: IEEE, 2019. 150−158 [12] Yeung K Y, Kwok T H, Wang C C L. Improved skeleton tracking by duplex Kinects: a practical approach for real-time applications. Journal of Computing and Information Science in Engineering, 2013, 13(4): Article No. 041007 [13] Olfati-Saber R, Fax J A, Murray R M. Consensus and cooperation in networked multi-agent systems. Proceedings of the IEEE, 2007, 95(1): 215-233 doi: 10.1109/JPROC.2006.887293 [14] Kalman R E, Bucy R S. New results in linear filtering and prediction theory. Journal of Basic Engineering, 1961, 83(1): 95-108 doi: 10.1115/1.3658902 [15] 杨旭升, 张文安, 俞立. 适用于事件触发的分布式随机目标跟踪方法. 自动化学报, 2017, 43(8): 1393-1401Yang Xu-Sheng, Zhang Wen-An, Yu Li. Distributed random target tracking method suitable for event triggering. Acta Automatica Sinica, 2017, 43(8): 1393-1401 [16] Yang X, Zhang W A, Chen M Z Q, Yu L. Hybrid sequential fusion estimation for asynchronous sensor network-based target tracking. IEEE Transactions on Control Systems Technology, 2017, 25(2): 669-676 doi: 10.1109/TCST.2016.2558632 [17] Yang X, Zhang W A, Yu L, Yang F. Sequential Gaussian approximation filter for target tracking with nonsynchronous measurements. IEEE Transactions on Aerospace and Electronic Systems, 2019, 55(1): 407-418 doi: 10.1109/TAES.2018.2852398 [18] Coskun H, Achilles F, DiPietro R, Navab N, Tombari F. Long short-term memory Kalman filters: Recurrent neural estimators for pose regularization. In: Proceedings of the IEEE International Conference on Computer Vision. Venice, Italy: IEEE, 2017. 5525−5533 [19] Pathirana P N, Li S, Trinh H M, Seneviratne A. Robust real-time bio-kinematic movement tracking using multiple Kinects for tele-rehabilitation. IEEE Transactions on Industrial Electronics, 2016, 63(3): 1822-1833 doi: 10.1109/TIE.2015.2497662 [20] 贾晓凌, 张文安, 杨旭升. 视觉遮挡下的人体姿态鲁棒估计. 高技术通讯, 2021, 31(11): 1210-1218 doi: 10.3772/j.issn.1002-0470.2021.11.011Jia Xiao-Ling, Zhang Wen-An, Yang Xu-Sheng. Robust estimation of human posture under visual occlusion. High Technology Communications, 2021, 31(11): 1210-1218 doi: 10.3772/j.issn.1002-0470.2021.11.011 [21] 郑婷婷, 杨旭升, 张文安, 俞立. 一种高斯渐进滤波框架下的目标跟踪方法. 自动化学报, 2018, 44(12): 2250-2258Zheng Ting-Ting, Yang Xu-Sheng, Zhang Wen-An, Yu Li. A target tracking method in Gaussian progressive filtering framework. Acta Automatica Sinica, 2018, 44(12): 2250-2258 [22] Yang X, Zhao C, Chen B. Progressive Gaussian approximation filter with adaptive measurement update. Measurement, 2019, 148: Article No. 106898 doi: 10.1016/j.measurement.2019.106898 [23] Zhang J, Yang X, Zhang W A. A progressive Bayesian filtering framework for nonlinear systems with heavy-tailed noises. IEEE Transactions on Automatic Control, 2023, 68(3): 1918-1925 doi: 10.1109/TAC.2022.3172165 [24] Ivorra E, Ortega Pérez M, Alcaniz Raya M L. Azure Kinect body tracking under review for the specific case of upper limb exercises. MM Science Journal (Online), 2021, 2021: 4333-4341 doi: 10.17973/MMSJ.2021_6_2021012 [25] Yang X, Zhang W A, Liu A, Yu L. Linear fusion estimation for range-only target tracking with nonlinear transformation. IEEE Transactions on Industrial Informatics, 2020, 16(10): 6403-6412 doi: 10.1109/TII.2019.2955931 [26] Romeo L, Marani R, Malosio M, Perri A G, D'Orazio T. Performance analysis of body tracking with the Microsoft Azure Kinect. In: Proceedings of the 29th Mediterranean Conference on Control and Automation. Puglia, Italy: IEEE, 2021. 572−577 [27] Antico M, Balletti N, Laudato G, Lazich A, Notarantonio M, Oliveto R, et al. Postural control assessment via Microsoft Azure Kinect DK: an evaluation study. Computer Methods and Programs in Biomedicine, 2021, 209: Article No. 106324 doi: 10.1016/j.cmpb.2021.106324 [28] Nagymáté G, M Kiss R. Application of OptiTrack motion capture systems in human movement analysis. Recent Innovations in Mechatronics, 2018, 5(1): 1-9 -

 下载:
下载:


图(6) / 表(1)
计量
- 文章访问数: 830
- HTML全文浏览量: 539
- PDF下载量: 249
- 被引次数: 0
