

Key Technologies of Robot Perception and Control and Its Intelligent Manufacturing Applications
-
摘要: 智能机器人在服务国家重大需求, 引领国民经济发展和保障国防安全中起到重要作用, 被誉为“制造业皇冠顶端的明珠”. 随着新一轮工业革命的到来, 世界主要工业国家都开始加快机器人技术的战略部署. 而智能机器人作为智能制造的重要载体, 在深入实施制造强国战略, 推动制造业的高端化、智能化、绿色化过程中将发挥重要作用. 本文从智能机器人的感知与控制等关键技术的视角出发, 重点阐述了机器人的三维环境感知、点云配准、位姿估计、任务规划、多机协同、柔顺控制、视觉伺服等共性关键技术的国内外发展现状. 然后, 以复杂曲面机器人三维测量、复杂部件机器人打磨、机器人力控智装配等机器人智能制造系统为例, 阐述了机器人的智能制造的应用关键技术, 并介绍了工程机械智能化无人工厂、无菌化机器人制药生产线等典型案例. 最后探讨了智能制造机器人的发展趋势和所面临的挑战.Abstract: Intelligent robots play an important role in serving the country's major demands, leading the development of the national economy and ensuring national defense security, which are known as “the top of the crown jewel in the manufacturing”. With the advent of a new round of industrial revolution, major industrial countries have begun to accelerate the deployment of robot technology. As an important carrier of intelligent manufacturing, intelligent robots can play an important role in the in-depth implementation of the manufacturing power strategy and the promotion of high-end, intelligent, and green manufacturing. From the perspective of key technologies of perception and control of intelligent robots, this paper briefly reviews the key technologies of robots such as 3D environment perception, point cloud registration, pose estimation, task planning, multi-machine collaboration, compliant control, and visual servoing. Then, the paper reviews the key technologies for the applications of robot in the intelligent manufacturing, such as robot three-dimensional measurement of complex curved surfaces, robot grinding of complex parts, and robot force-controlled intelligent assembly. Typical cases such as bacterial chemical robot pharmaceutical production line are introduced as well. Finally, the development trend and challenges of intelligent manufacturing robots are discussed.
-
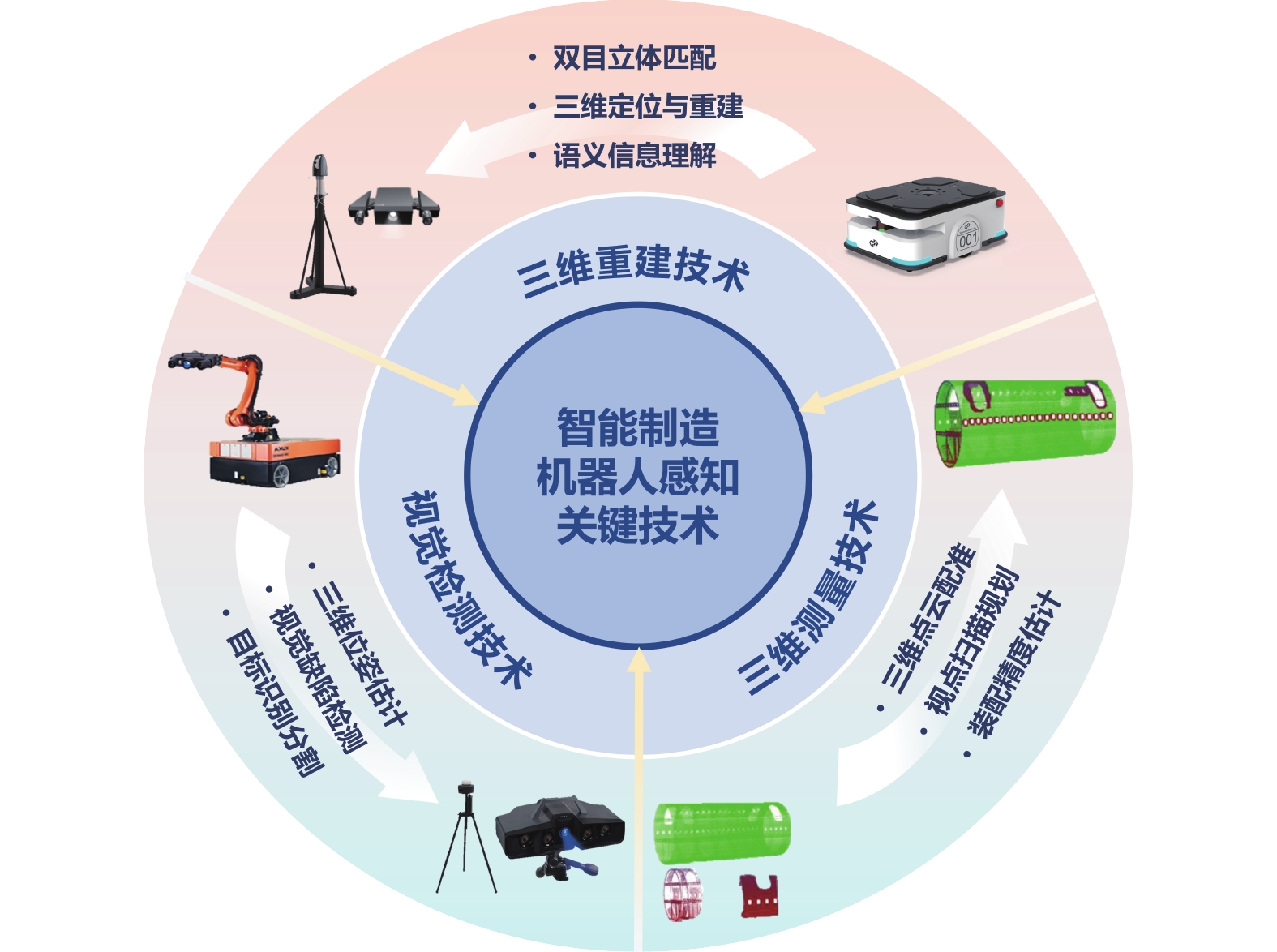
图 1 机器人智能感知关键技术及应用
Fig. 1 Key technologies and applications for robot intelligent perception
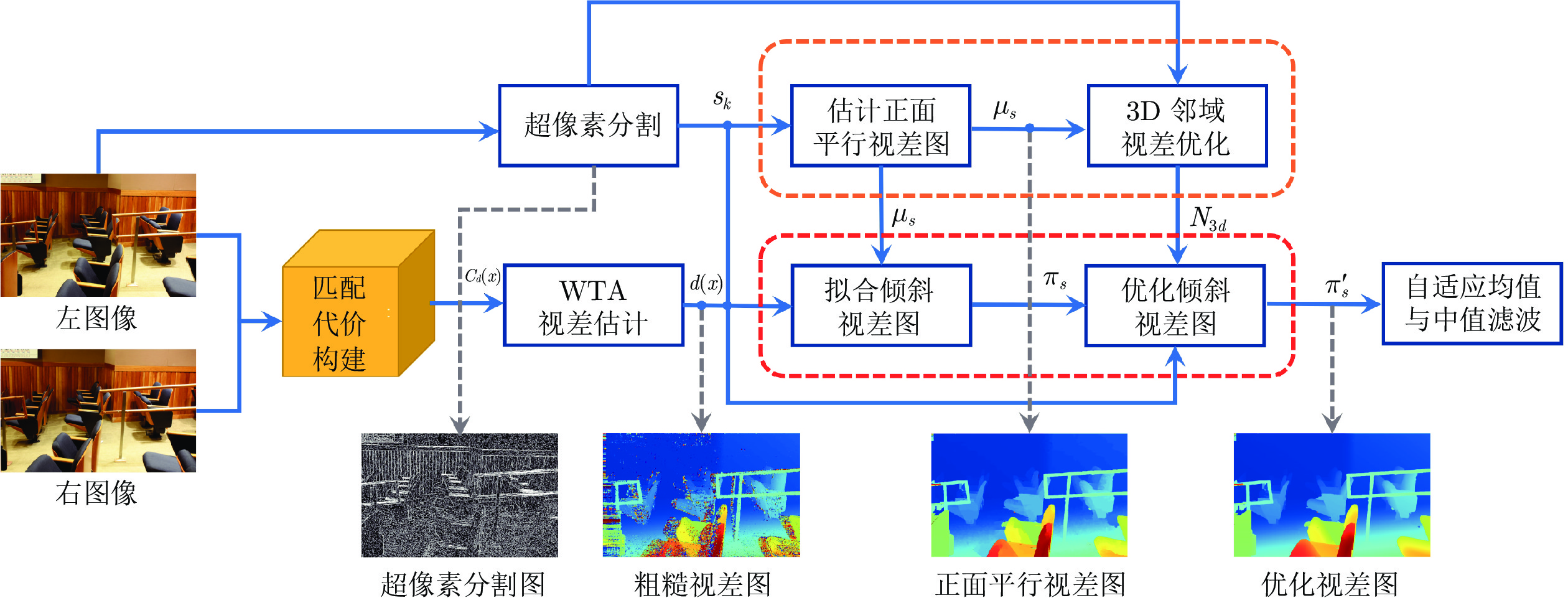
图 2 基于超像素分割的双目立体匹配方法
Fig. 2 Binocular stereo matching method based on super pixel segmentation

图 3 基于CNN网络的6D位姿估计算法PoseCNN
Fig. 3 PoseCNN a 6D pose estimation algorithm based on CNN network

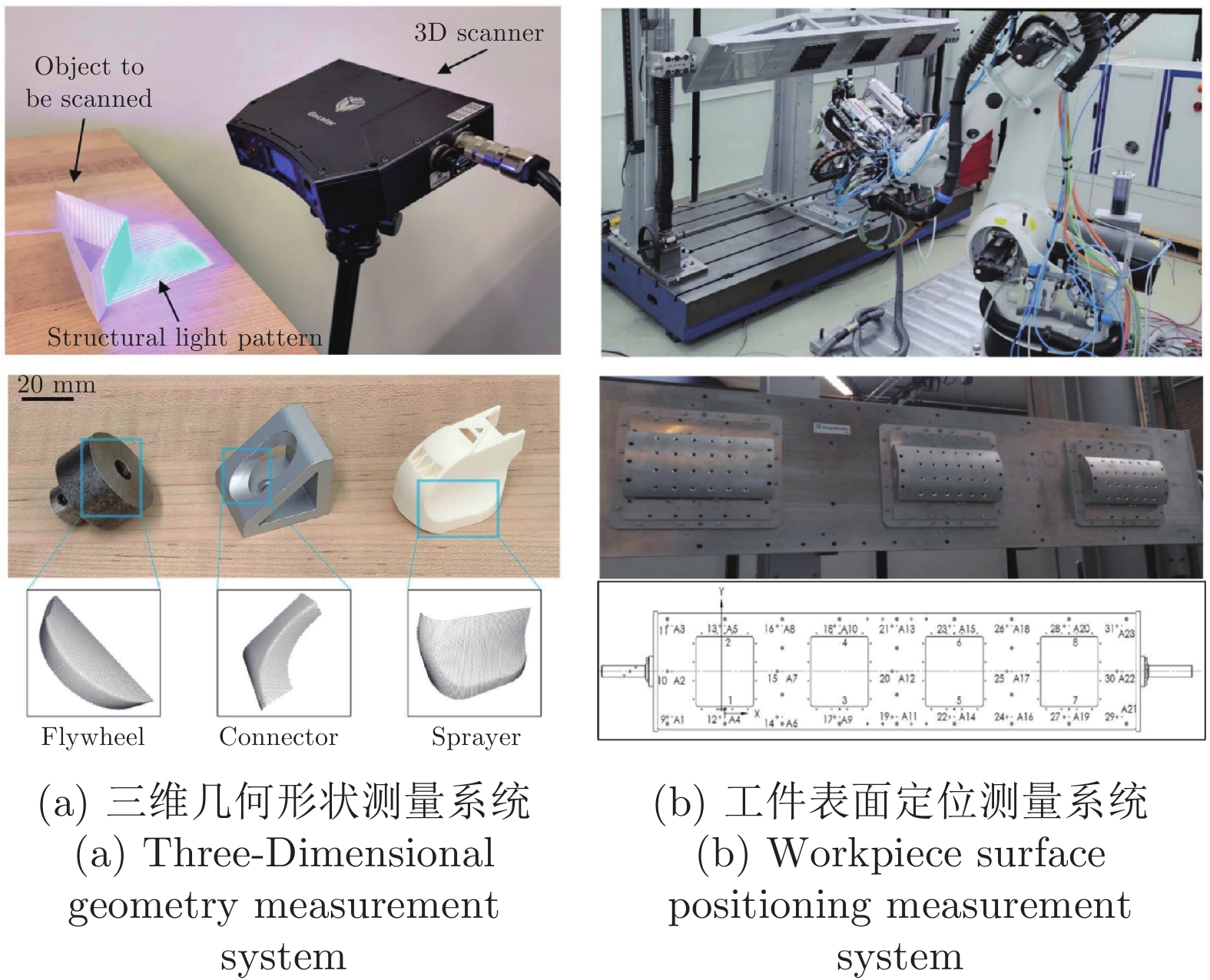
图 6 工业领域三维测量技术的发展时间轴
Fig. 6 Timeline of the development of 3D measurement technology in industry

图 9 铸件表面清理机器人现场打磨作业场景
Fig. 9 Casting surface cleaning robot field grinding operation scenery

图 10 工程机械机器人智能制造车间
Fig. 10 Construction machinery robot intelligent manufacturing laboratory
图 11 高端制药机器人视觉检测控制关键技术与装备
Fig. 11 High-end pharmaceutical robot vision inspection control key technology and equipment

图 12 “云−边−端”融合的机器人智能制造模式
Fig. 12 Intelligent robot manufacturing based on cloud-edge-device integration
-
[1] Zhou J, Li P G, Zhou Y H, Wang B C, Zang J Y, Liu M. Toward new-generation intelligent manufacturing. Engineering, 2018, 4(1): 11-20 doi: 10.1016/j.eng.2018.01.002 [2] 柴天佑. 工业过程控制系统研究现状与发展方向. 中国科学: 信息科学, 2016, 46(8): 1003-1015 doi: 10.1360/N112016-00062Chai Tian-You. Industrial process control systems: Research status and development direction. Scientia Sinica Informationis, 2016, 46(8): 1003-1015 doi: 10.1360/N112016-00062 [3] 周济. 智能制造——“中国制造2025”的主攻方向. 中国机械工程, 2015, 26(17): 2273-2284 doi: 10.3969/j.issn.1004-132X.2015.17.001Zhou Ji. Intelligent manufacturing——main direction of "Made in China 2025". China Mechanical Engineering, 2015, 26(17): 2273-2284 doi: 10.3969/j.issn.1004-132X.2015.17.001 [4] 李伯虎, 柴旭东, 侯宝存, 林廷宇, 张霖, 李潭, 等. 云制造系统3.0——一种“智能+”时代的新智能制造系统. 计算机集成制造系统, 2019, 25(12): 2997-3012Li Bo-Hu, Chai Xu-Dong, Hou Bao-Cun, Lin Ting-Yu, Zhang Lin, Li Tan, et al. Cloud manufacturing system 3.0——new intelligent manufacturing system in era of "Intelligence +". Computer Integrated Manufacturing Systems, 2019, 25(12): 2997-3012 [5] Scharstein D, Szeliski R. A taxonomy and evaluation of dense two-frame stereo correspondence algorithms. International Journal of Computer Vision, 2002, 47(1-3): 7-42 [6] Martin J, Crowley J L. Experimental comparison of correlation techniques. In: Proceedings of the IAS-4, International Conference on Intelligent Autonomous Systems. 1995. [7] Zabih R, Woodfill J. Non-parametric local transforms for computing visual correspondence. In: Proceedings of the 3rd European Conference on Computer Vision. Stockholm, Sweden: Springer, 1994. 151−158 [8] Tomasi C, Manduchi R. Bilateral filtering for gray and color images. In: Proceedings of the 6th International Conference on Computer Vision (IEEE Cat. No.98CH36271). Bombay, India: IEEE, 1998. 839−846 [9] De-Maeztu L, Villanueva A, Cabeza R. Near real-time stereo matching using geodesic diffusion. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(2): 410-416 doi: 10.1109/TPAMI.2011.192 [10] Hosni A, Rhemann C, Bleyer M, Rother C, Gelautz M. Fast cost-volume filtering for visual correspondence and beyond. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2013, 35(2): 504-511 doi: 10.1109/TPAMI.2012.156 [11] Zhang K, Lu J B, Lafruit G. Cross-based local stereo matching using orthogonal integral images. IEEE Transactions on Circuits and Systems for Video Technology, 2009, 19(7): 1073-1079 doi: 10.1109/TCSVT.2009.2020478 [12] Zureiki A, Devy M, Chatila R. Stereo matching using reduced-graph cuts. In: Proceedings of the IEEE International Conference on Image Processing. San Antonio, USA: IEEE, 2007. I-237−I-240 [13] Mozerov M G, van de Weijer J. One-view occlusion detection for stereo matching with a fully connected CRF model. IEEE Transactions on Image Processing, 2019, 28(6): 2936-2947 doi: 10.1109/TIP.2019.2892668 [14] Ahmadzadeh A, Madani H, Jafari K, Jazi F S, Daneshpajouh S, Gorgin S. Fast and adaptive BP-based multi-core implementation for stereo matching. In: Proceedings of the 11th ACM/IEEE International Conference on Formal Methods and Models for Codesign (MEMOCODE 2013). Portland, USA: IEEE, 2013. 135−138 [15] Shen R, Cheng I, Li X B, Basu A. Stereo matching using random walks. In: Proceedings of the 19th International Conference on Pattern Recognition. Tampa, USA: IEEE, 2008. 1−4 [16] da Silva Vieira G, Soares F A A M N, Laureano G T, Parreira R T, Ferreira J C. A segmented consistency check approach to disparity map refinement. Canadian Journal of Electrical and Computer Engineering, 2018, 41(4): 218-223 doi: 10.1109/CJECE.2019.2890986 [17] Sun L, Chen K, Song M L, Tao D C, Chen G, Chen C. Robust, efficient depth reconstruction with hierarchical confidence-based matching. IEEE Transactions on Image Processing, 2017, 26(7): 3331-3343 doi: 10.1109/TIP.2017.2687101 [18] Brandao M, Ferreira R, Hashimoto K, Takanishi T, Santos-Victor J. On stereo confidence measures for global methods: Evaluation, new model and integration into occupancy grids. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2016, 38(1): 116-128 doi: 10.1109/TPAMI.2015.2437381 [19] Lee Y, Kyung C M. A memory-and accuracy-aware gaussian parameter-based stereo matching using confidence measure. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2021, 43(6): 1845-1858 doi: 10.1109/TPAMI.2019.2959613 [20] Yan T M, Gan Y Z, Xia Z Y, Zhao Q F. Segment-based disparity refinement with occlusion handling for stereo matching. IEEE Transactions on Image Processing, 2019, 28(8): 3885-3897 doi: 10.1109/TIP.2019.2903318 [21] Yang L, Xu Y, Wang S R, Yuan C F, Zhang Z Q, Li B, et al. PDNet: Toward better one-stage object detection with prediction decoupling. IEEE Transactions on Image Processing, 2022, 31: 5121-5133 doi: 10.1109/TIP.2022.3193223 [22] Wang X, Ma H M, Chen X Z, You S D. Edge preserving and multi-scale contextual neural network for salient object detection. IEEE Transactions on Image Processing, 2018, 27(1): 121-134 doi: 10.1109/TIP.2017.2756825 [23] 姚安庆, 徐建明. 基于双目视觉的电动汽车充电孔识别定位系统. 传感器与微系统, 2021, 40(7): 81-84 doi: 10.13873/J.1000-9787(2021)07-0081-04Yao An-Qing, Xu Jian-Ming. Electric car charging hole identification and positioning system based on binocular vision. Transducer and Microsystem Technologies, 2021, 40(7): 81-84 doi: 10.13873/J.1000-9787(2021)07-0081-04 [24] 陈海永, 雷凤翔, 孙鹤旭, 杜晓琳. 带钢端部形状双目视觉检测系统的建模仿真. 自动化仪表, 2015, 36(1): 79-82 doi: 10.16086/j.cnki.issn1000-0380.201501022Chen Hai-Yong, Lei Feng-Xiang, Sun He-Xu, Du Xiao-Lin. Modeling and simulation of binocular visual detection system for the shape of ends of stripe steel. Process Automation Instrumentation, 2015, 36(1): 79-82 doi: 10.16086/j.cnki.issn1000-0380.201501022 [25] 马大智, 于斌超, 张彦泽, 刘巍, 乐毅, 杨继之, 等. 基于双目视觉的大型高反光构件测量系统. 应用光学, 2021, 42(4): 577-585 doi: 10.5768/JAO202142.0401002Ma Da-Zhi, Yu Bin-Chao, Zhang Yan-Ze, Liu Wei, Yue Yi, Yang Ji-Zhi, et al. Measurement system of large-scale high reflective component based on binocular vision. Journal of Applied Optics, 2021, 42(4): 577-585 doi: 10.5768/JAO202142.0401002 [26] Cai C T, Wang B Y, Liu Y, Yan Y J. Unfeatured weld positioning technology based on neural network and machine vision. In: Proceedings of the IEEE 3rd International Conference on Image, Vision and Computing (ICIVC). Chongqing, China: IEEE, 2018. 477−481 [27] Besl P J, McKay N D. A method for registration of 3-D shapes. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1992, 14(2): 239-256 doi: 10.1109/34.121791 [28] Pomerleau F, Colas F, Siegwart R, Magnenat S. Comparing ICP variants on real-world data sets. Autonomous Robots, 2013, 34(3): 133-148 doi: 10.1007/s10514-013-9327-2 [29] Menq C H, Yau H T, Lai G Y. Automated precision measurement of surface profile in CAD-directed inspection. IEEE Transactions on Robotics and Automation, 1992, 8(2): 268-278 doi: 10.1109/70.134279 [30] Golyanik V, Ali S A, Stricker D. Gravitational approach for point set registration. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Las Vegas, USA: IEEE, 2016. 5802−5810 [31] Chetverikov D, Svirko D, Stepanov D, Krsek P. The trimmed iterative closest point algorithm. In: Proceedings of the International Conference on Pattern Recognition. Quebec City, Canada: IEEE, 2002. 545−548 [32] Jauer P, Kuhlemann I, Bruder R, Schweikard A, Ernst F. Efficient registration of high-resolution feature enhanced point clouds. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2019, 41(5): 1102-1115 doi: 10.1109/TPAMI.2018.2831670 [33] Matabosch C, Fofi D, Salvi J, Batlle E. Registration of surfaces minimizing error propagation for a one-shot multi-slit hand-held scanner. Pattern Recognition, 2008, 41(6): 2055-2067 doi: 10.1016/j.patcog.2007.10.019 [34] Wang W P, Pottmann H, Liu Y. Fitting B-spline curves to point clouds by curvature-based squared distance minimization. ACM Transactions on Graphics, 2006, 25(2): 214-238 doi: 10.1145/1138450.1138453 [35] Pottmann H, Huang Q X, Yang Y L, Hu S M. Geometry and convergence analysis of algorithms for registration of 3D shapes. International Journal of Computer Vision, 2006, 67(3): 277-296 doi: 10.1007/s11263-006-5167-2 [36] Xie H, Li W L, Yin Z P, Ding H. Variance-minimization iterative matching method for free-form surfaces—Part I: Theory and method. IEEE Transactions on Automation Science and Engineering, 2019, 16(3): 1181-1191 doi: 10.1109/TASE.2018.2875154 [37] Li W L, Xie H, Zhang G, Yan S J, Yin Z P. 3-D shape matching of a blade surface in robotic grinding applications. IEEE/ASME Transactions on Mechatronics, 2016, 21(5): 2294-2306 doi: 10.1109/TMECH.2016.2574813 [38] Zhu D H, Feng X Z, Xu X H, Yang Z Y, Li W L, Yan S J, et al. Robotic grinding of complex components: A step towards efficient and intelligent machining-challenges, solutions, and applications. Robotics and Computer-Integrated Manufacturing, 2020, 65: Article No. 101908 doi: 10.1016/j.rcim.2019.101908 [39] Shah G A, Polette A, Pernot J P, Giannini F, Monti M. Simulated annealing-based fitting of CAD models to point clouds of mechanical parts' assemblies. Engineering With Computers, 2021, 37(4): 2891−2909 [40] Li L, Cao X Y, Sun J. Three-dimensional point cloud registration based on normal vector angle. Journal of the Indian Society of Remote Sensing, 2019, 47(4): 585-593 doi: 10.1007/s12524-018-0918-4 [41] Zhan X, Cai Y, He P. A three-dimensional point cloud registration based on entropy and particle swarm optimization. Advances in Mechanical Engineering, DOI: 10.1177/1687814018814330 [42] Zeng A, Song S R, Nie\betaner M, Fisher M, Xiao J X, Funkhouser T. 3DMatch: Learning local geometric descriptors from RGB-D reconstructions. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Honolulu, USA: IEEE, 2017. 199−208 [43] Gojcic Z, Zhou C F, Wegner J D, Wieser A. The perfect match: 3D point cloud matching with smoothed densities. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Long Beach, USA: IEEE, 2019. 5540−5549 [44] Deng H W, Birdal T, Ilic S. PPFNet: Global context aware local features for robust 3D point matching. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Salt Lake City, USA: IEEE, 2018. 195−205 [45] Deng H W, Birdal T, Ilic S. PPF-FoldNet: Unsupervised learning of rotation invariant 3D local descriptors. In: Proceedings of the 15th European Conference on Computer Vision (ECCV). Munich, Germany: Springer, 2018. 620−638 [46] Charles R Q, Su H, Mo K C, Guibas L J. PointNet: Deep learning on point sets for 3D classification and segmentation. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Honolulu, USA: IEEE, 2017. 77−85 [47] Choy C, Park J, Koltun V. Fully convolutional geometric features. In: Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV). Seoul, South Korea: IEEE, 2019. 8957−8965 [48] Choy C, Gwak J, Savarese S. 4D spatio-temporal ConvNets: Minkowski convolutional neural networks. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Long Beach, USA: IEEE, 2019. 3070−3079 [49] Bohg J, Morales A, Asfour T, Kragic D. Data-driven grasp synthesis-a survey. IEEE Transactions on Robotics, 2014, 30(2): 289-309 doi: 10.1109/TRO.2013.2289018 [50] Hinterstoisser S, Holzer S, Cagniart C, Ilic S, Konolige K, Navab N, et al. Multimodal templates for real-time detection of texture-less objects in heavily cluttered scenes. In: Proceedings of the International Conference on Computer Vision. Barcelona, Spain: IEEE, 2011. 858−865 [51] Lepetit V, Moreno-Noguer F, Fua P. EPnP: An accurate O(n) solution to the PnP problem. International Journal of Computer Vision, 2009, 81(2): 155-166 doi: 10.1007/s11263-008-0152-6 [52] Besl P J, McKay N D. Method for registration of 3-D shapes. In: Proceedings of SPIE 1611, Sensor Fusion IV: Control Paradigms and Data Structures. Boston, USA: SPIE, 1992. 586−606 [53] Birdal T, Ilic S. Point pair features based object detection and pose estimation revisited. In: Proceedings of the International Conference on 3D Vision. Lyon, France: IEEE, 2015. 527−535 [54] Redmon J, Divvala S, Girshick R, Farhadi A. You only look once: Unified, real-time object detection. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Las Vegas, USA: IEEE, 2016. 779−788 [55] Xiang Y, Schmidt T, Narayanan V, Fox D. PoseCNN: A convolutional neural network for 6D object pose estimation in cluttered scenes. arXiv preprint arXiv: 1711.00199, 2017. [56] Kehl W, Manhardt F, Tombari F, Ilic S, Navab N. SSD-6D: Making RGB-based 3D detection and 6D pose estimation great again. In: Proceedings of the IEEE International Conference on Computer Vision (ICCV). Venice, Italy: IEEE, 2017. 1530−1538 [57] Hu Y L, Hugonot J, Fua P, Salzmann M. Segmentation-driven 6D object pose estimation. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Long Beach, USA: IEEE, 2019. 3380−3389 [58] Wang C, Xu D F, Zhu Y K, Martín-Martín R, Lu C W, Fei-Fei L, et al. DenseFusion: 6D object pose estimation by iterative dense fusion. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Long Beach, USA: IEEE, 2019. 3338−3347 [59] He Y S, Sun W, Huang H B, Liu J R, Fan H Q, Sun J. PVN3D: A deep point-wise 3D keypoints voting network for 6DoF pose estimation. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Seattle, USA: IEEE, 2020. 11629−11638 [60] He Y S, Huang H B, Fan H Q, Chen Q F, Sun J. FFB6D: A full flow bidirectional fusion network for 6D pose estimation. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Nashville, USA: IEEE, 2021. 3002−3012 [61] Khatib O. Real-time obstacle avoidance for manipulators and mobile robots. Autonomous Robot Vehicles. New York: Springer, 1986. 396−404 [62] LAVALLE S M. Rapidly-exploring random trees: A new tool for path planning. Computer Science Dept, 1998, 98(11) [63] Karaman S, Frazzoli E. Sampling-based algorithms for optimal motion planning. The International Journal of Robotics Research, 2011, 30(7): 846-894 doi: 10.1177/0278364911406761 [64] Lai T, Ramos F, Francis G. Balancing global exploration and local-connectivity exploitation with rapidly-exploring random disjointed-trees. In: Proceedings of the International Conference on Robotics and Automation (ICRA). Montreal, Canada: IEEE, 2019. 5537−5543 [65] Naderi K, Rajamäki J, Hämäläinen P. RT-Rrt*: A real-time path planning algorithm based on RRT*. In: Proceedings of the 8th ACM SIGGRAPH Conference on Motion in Games. Paris, France: ACM, 2015. 113−118 [66] Pardi T, Maddali V, Ortenzi V, Stolkin R, Marturi N. Path planning for mobile manipulator robots under non-holonomic and task constraints. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Las Vegas, USA: IEEE, 2020. 6749−6756 [67] Prianto E, Kim M, Park J H, Bae J H, Kim J S. Path planning for multi-arm manipulators using deep reinforcement learning: Soft actor-critic with hindsight experience replay. Sensors, 2020, 20(20): Article No. 5911 doi: 10.3390/s20205911 [68] Bonilla M, Pallottino L, Bicchi A. Noninteracting constrained motion planning and control for robot manipulators. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Singapore: IEEE, 2017. 4038−4043 [69] Vannoy J, Xiao J. Real-time adaptive motion planning (RAMP) of mobile manipulators in dynamic environments with unforeseen changes. IEEE Transactions on Robotics, 2008, 24(5): 1199-1212 doi: 10.1109/TRO.2008.2003277 [70] Wagner G, Choset H. M*: A complete multirobot path planning algorithm with performance bounds. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. San Francisco, USA: IEEE, 2011. 3260−3267 [71] Sharon G, Stern R, Felner A, Sturtevant N R. Conflict-based search for optimal multi-agent pathfinding. Artificial Intelligence, 2015, 219: 40-66 doi: 10.1016/j.artint.2014.11.006 [72] Park J, Kim J, Jang I, Kim H J. Efficient multi-agent trajectory planning with feasibility guarantee using relative Bernstein polynomial. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Paris, France: IEEE, 2020. 434−440 [73] Fiorini P, Shiller Z. Motion planning in dynamic environments using velocity obstacles. The International Journal of Robotics Research, 1998, 17(7): 760-772 doi: 10.1177/027836499801700706 [74] Tordesillas J, How J P. MADER: Trajectory planner in multiagent and dynamic environments. IEEE Transactions on Robotics, 2022, 38(1): 463-476 doi: 10.1109/TRO.2021.3080235 [75] Paull S, Ghassemi P, Chowdhury S. Learning scalable policies over graphs for multi-robot task allocation using capsule attention networks. In: Proceedings of the International Conference on Robotics and Automation (ICRA). Philadelphia, USA: IEEE, 2022. 8815−8822 [76] Hu H, Jia X L, He Q X, Fu S F, Liu K. Deep reinforcement learning based AGVs real-time scheduling with mixed rule for flexible shop floor in industry 4.0. Computers & Industrial Engineering, 2020, 149: Article No. 106749 [77] Sabattini L, Digani V, Secchi C, Fantuzzi C. Optimized simultaneous conflict-free task assignment and path planning for multi-AGV systems. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Vancouver, Canada: IEEE, 2017. 1083−1088 [78] Saraiva E S, Castro R S, Salton A T, Pimentel G A. A convex optimization based solution for the robotic manipulator control design problem subject to input saturation. IFAC-PapersOnLine, 2020, 53(2): 5467-5472 doi: 10.1016/j.ifacol.2020.12.1551 [79] Liu Z, Chen C, Zhang Y. Decentralized robust fuzzy adaptive control of humanoid robot manipulation with unknown actuator backlash. IEEE Transactions on Fuzzy Systems, 2015, 23(3): 605-616 doi: 10.1109/TFUZZ.2014.2321591 [80] Han S I, Lee J M. Backstepping sliding mode control with FWNN for strict output feedback non-smooth nonlinear dynamic system. International Journal of Control, Automation and Systems, 2013, 11(2): 398-409 doi: 10.1007/s12555-012-9115-3 [81] Quynh N X, Nan W Y, Yen V T. A novel robust adaptive control using RFWNNs and backstepping for industrial robot manipulators with dead-zone. Journal of Intelligent & Robotic Systems, 2020, 98(3): 679-692 [82] Park S H, Han S I. Robust-tracking control for robot manipulator with deadzone and friction using backstepping and RFNN controller. IET Control Theory & Applications, 2011, 5(12): 1397-1417 [83] Izadbakhsh A, Khorashadizadeh S. Robust impedance control of robot manipulators using differential equations as universal approximator. International Journal of Control, 2018, 91(10): 2170-2186 doi: 10.1080/00207179.2017.1336669 [84] Yang Z Q, Peng J Z, Liu Y H. Adaptive neural network force tracking impedance control for uncertain robotic manipulator based on nonlinear velocity observer. Neurocomputing, 2019, 331: 263-280 doi: 10.1016/j.neucom.2018.11.068 [85] Hogan N. Impedance control: An approach to manipulation. In: Proceedings of the American Control Conference. San Diego, USA: IEEE, 1984. 304−313 [86] Li X, Liu Y H, Yu H Y. Iterative learning impedance control for rehabilitation robots driven by series elastic actuators. Automatica, 2018, 90: 1-7 doi: 10.1016/j.automatica.2017.12.031 [87] 徐建明, 王于玮, 董建伟, 禹鑫燚, 俞立. 基于阻抗控制的机器人砂带打磨的建模与仿真. 浙江工业大学学报, 2018, 46(2): 119-126 doi: 10.3969/j.issn.1006-4303.2018.02.001Xu Jian-Ming, Wang Yu-Wei, Dong Jian-Wei, Yu Xin-Yi, Yu Li. Modeling and simulation of robotic belt grinding based on impedance control. Journal of Zhejiang University of Technology, 2018, 46(2): 119-126 doi: 10.3969/j.issn.1006-4303.2018.02.001 [88] Zhang G J, Ni F L, Liu H, Jiang Z N, Yang G C, Li C Y. Learning impedance regulation skills for robot belt grinding from human demonstrations. Assembly Automation, 2021, 41(4): 431-440 [89] Lakshminarayanan S, Kana S, Mohan D M, Manyar O M, Then D, Campolo D. An adaptive framework for robotic polishing based on impedance control. The International Journal of Advanced Manufacturing Technology, 2021, 112(1): 401-417 [90] Chen P F, Zhao H, Yan X, Ding H. Force control polishing device based on fuzzy adaptive impedance control. In: Proceedings of the 12th International Conference on Intelligent Robotics and Applications. Shenyang, China: Springer, 2019. 181−194 [91] Li J F, Liu L, Wang Y B, Liang W Y. Adaptive hybrid impedance control of robot manipulators with robustness against environment's uncertainties. In: Proceedings of the IEEE International Conference on Mechatronics and Automation (ICMA). Beijing, China: IEEE, 2015. 1846−1851 [92] Magrini E, Flacco F, De Luca A. Control of generalized contact motion and force in physical human-robot interaction. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Seattle, USA: IEEE, 2015. 2298−2304 [93] Mason M T. Compliance and force control for computer controlled manipulators. IEEE Transactions on Systems, Man, and Cybernetics, 1981, 11(6): 418-432 doi: 10.1109/TSMC.1981.4308708 [94] Raibert M H, Craig J J. Hybrid position/force control of manipulators. Journal of Dynamic Systems, Measurement, and Control, 1981, 103(2): 126-133 doi: 10.1115/1.3139652 [95] Zhang H, Paul R. Hybrid control of robot manipulators. In: Proceedings of the IEEE International Conference on Robotics and Automation. St. Louis, USA: IEEE, 1985. 602−607 [96] Zhang H Y, Li L, Zhao J B, Zhao J C, Liu S J, Wu J J. Design and implementation of hybrid force/position control for robot automation grinding aviation blade based on fuzzy PID. The International Journal of Advanced Manufacturing Technology, 2020, 107(3): 1741-1754 [97] Johns E, Leutenegger S, Davison A J. Deep learning a grasp function for grasping under gripper pose uncertainty. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Daejeon, South Korea: IEEE, 2016. 4461−4468 [98] Lenz I, Lee H, Saxena A. Deep learning for detecting robotic grasps. The International Journal of Robotics Research, 2015, 34(4-5): 705-724 doi: 10.1177/0278364914549607 [99] Shi H B, Chen J L, Pan W, Hwang K S, Cho Y Y. Collision avoidance for redundant robots in position-based visual servoing. IEEE Systems Journal, 2019, 13(3): 3479-3489 doi: 10.1109/JSYST.2018.2865503 [100] Park D H, Kwon J H, Ha I J. Novel position-based visual servoing approach to robust global stability under field-of-view constraint. IEEE Transactions on Industrial Electronics, 2012, 59(12): 4735-4752 doi: 10.1109/TIE.2011.2179270 [101] Hutchinson S, Hager G D, Corke P I. A tutorial on visual servo control. IEEE Transactions on Robotics and Automation, 1996, 12(5): 651-670 doi: 10.1109/70.538972 [102] Bechlioulis C P, Heshmati-Alamdari S, Karras G C, Kyriakopoulos K J. Robust image-based visual servoing with prescribed performance under field of view constraints. IEEE Transactions on Robotics, 2019, 35(4): 1063-1070 doi: 10.1109/TRO.2019.2914333 [103] Oliva A A, Giordano P R, Chaumette F. A general visual-impedance framework for effectively combining vision and force sensing in feature space. IEEE Robotics and Automation Letters, 2021, 6(3): 4441-4448 doi: 10.1109/LRA.2021.3068911 [104] Malis E, Chaumette F, Boudet S. 2 1/2 D visual servoing. IEEE Transactions on Robotics and Automation, 1999, 15(2): 238-250 doi: 10.1109/70.760345 [105] Lippiello V, Cacace J, Santamaria-Navarro A, Andrade-Cetto J, Trujillo M Á, Esteves Y R R, et al. Hybrid visual servoing with hierarchical task composition for aerial manipulation. IEEE Robotics and Automation Letters, 2015, 1(1): 259-266 [106] Mekonnen G, Kumar S, Pathak P M. Wireless hybrid visual servoing of omnidirectional wheeled mobile robots. Robotics and Autonomous Systems, 2016, 75: 450-462 doi: 10.1016/j.robot.2015.08.008 [107] Feng Z, Hu G Q, Sun Y J, Soon J. An overview of collaborative robotic manipulation in multi-robot systems. Annual Reviews in Control, 2020, 49: 113-127 doi: 10.1016/j.arcontrol.2020.02.002 [108] Yan Z, Jouandeau N, Cherif A A. A survey and analysis of multi-robot coordination. International Journal of Advanced Robotic Systems, 2013, 10(12): Article No. 399 doi: 10.5772/57313 [109] Sun D, Mills J K. Adaptive synchronized control for coordination of multirobot assembly tasks. IEEE Transactions on Robotics and Automation, 2002, 18(4): 498-510 doi: 10.1109/TRA.2002.802229 [110] Yan L, Stouraitis T, Vijayakumar S. Decentralized ability-aware adaptive control for multi-robot collaborative manipulation. IEEE Robotics and Automation Letters, 2021, 6(2): 2311-2318 doi: 10.1109/LRA.2021.3060379 [111] Nuño E, Ortega R. Achieving consensus of Euler-Lagrange agents with interconnecting delays and without velocity measurements via passivity-based control. IEEE Transactions on Control Systems Technology, 2018, 26(1): 222-232 doi: 10.1109/TCST.2017.2661822 [112] Hichri B, Fauroux J C, Adouane L, Doroftei I, Mezouar Y. Design of cooperative mobile robots for co-manipulation and transportation tasks. Robotics and Computer-Integrated Manufacturing, 2019, 57: 412-421 doi: 10.1016/j.rcim.2019.01.002 [113] Marvel J A, Bostelman R, Falco J. Multi-robot assembly strategies and metrics. ACM Computing Surveys, 2019, 51(1): Article No. 14 [114] Vora H D, Sanyal S. A comprehensive review: Metrology in additive manufacturing and 3D printing technology. Progress in Additive Manufacturing, 2020, 5(4): 319-353 doi: 10.1007/s40964-020-00142-6 [115] Frommknecht A, Kuehnle J, Effenberger I, Pidan S. Multi-sensor measurement system for robotic drilling. Robotics and Computer-Integrated Manufacturing, 2017, 47: 4-10 doi: 10.1016/j.rcim.2017.01.002 [116] Ghorbani H, Khameneifar F. Accurate registration of point clouds of damaged aeroengine blades. Journal of Manufacturing Science and Engineering, 2021, 143(3): Article No. 031012 [117] Zhong K, Li Z W, Zhou X H, Li Y F, Shi Y S, Wang C J. Enhanced phase measurement profilometry for industrial 3D inspection automation. The International Journal of Advanced Manufacturing Technology, 2015, 76(9-12): 1563-1574 doi: 10.1007/s00170-014-6360-z [118] Scott W R, Roth G, Rivest J F. View planning for automated three-dimensional object reconstruction and inspection. ACM Computing Surveys, 2003, 35(1): 64-96 doi: 10.1145/641865.641868 [119] Maver J, Bajcsy R. Occlusions as a guide for planning the next view. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1993, 15(5): 417-433 doi: 10.1109/34.211463 [120] Pito R. A solution to the next best view problem for automated surface acquisition. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1999, 21(10): 1016-1030 doi: 10.1109/34.799908 [121] Chen S Y, Li Y F. Vision sensor planning for 3-D model acquisition. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2005, 35(5): 894-904 doi: 10.1109/TSMCB.2005.846907 [122] Kriegel S, Rink C, Bodenmüller T, Suppa M. Efficient next-best-scan planning for autonomous 3D surface reconstruction of unknown objects. Journal of Real-Time Image Processing, 2015, 10(4): 611-631 doi: 10.1007/s11554-013-0386-6 [123] Connolly C. The determination of next best views. In: Proceedings of the IEEE International Conference on Robotics and Automation. St. Louis, USA: IEEE, 1985. 432−435 [124] Yamauchi B. A frontier-based approach for autonomous exploration. In: Proceedings of the IEEE International Symposium on Computational Intelligence in Robotics and Automation. Monterey, USA: IEEE, 1997. 146−151 [125] Vasquez-Gomez J I, Sucar L E, Murrieta-Cid R, Herrera-Lozada J C. Tree-based search of the next best view/state for three-dimensional object reconstruction. International Journal of Advanced Robotic Systems, DOI: 10.1177/1729881418754575 [126] Vasquez-Gomez J I, Sucar L E, Murrieta-Cid R. View planning for 3D object reconstruction with a mobile manipulator robot. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Chicago, USA: IEEE, 2014. 4227−4233 [127] Vasquez-Gomez J I, Sucar L E, Murrieta-Cid R. View/state planning for three-dimensional object reconstruction under uncertainty. Autonomous Robots, 2017, 41(1): 89-109 doi: 10.1007/s10514-015-9531-3 [128] Monica R, Aleotti J. Contour-based next-best view planning from point cloud segmentation of unknown objects. Autonomous Robots, 2018, 42(2): 443-458 doi: 10.1007/s10514-017-9618-0 [129] Sanderson A C. Assemblability based on maximum likelihood configuration of tolerances. IEEE Transactions on Robotics and Automation, 1999, 15(3): 568-572 doi: 10.1109/70.768188 [130] Rupal B S, Anwer N, Secanell M, Qureshi A J. Geometric tolerance and manufacturing assemblability estimation of metal additive manufacturing (AM) processes. Materials & Design, 2020, 194: Article No. 108842 [131] Ulaş C, Temeltaş H. 3D multi-layered normal distribution transform for fast and long range scan matching. Journal of Intelligent & Robotic Systems, 2013, 71(1): 85-108 [132] Min Z, Wang J L, Meng M Q H. Joint rigid registration of multiple generalized point sets with hybrid mixture models. IEEE Transactions on Automation Science and Engineering, 2020, 17(1): 334-347 doi: 10.1109/TASE.2019.2906391 [133] Negri S P, Basile V, Valori M, Gambino B, Fassi I, Tosatti L M. A modular mobile robotic architecture for defects detection and repair in narrow tunnels of CFRP aeronautic components. Robotics and Computer-Integrated Manufacturing, 2019, 55: 109-128 doi: 10.1016/j.rcim.2018.07.011 [134] Tao Y, Zheng J Q, Lin Y C, Wang T M, Xiong H G, He G T, et al. Fuzzy PID control method of deburring industrial robots. Journal of Intelligent & Fuzzy Systems: Applications in Engineering and Technology, 2015, 29(6): 2447-2455 [135] Krishna S, Vasu S. Fuzzy PID based adaptive control on industrial robot system. Materials Today: Proceedings, 2018, 5(5): 13055-13060 doi: 10.1016/j.matpr.2018.02.292 [136] Dass A, Srivastava S. Identification and control of dynamical systems using different architectures of recurrent fuzzy system. ISA Transactions, 2019, 85: 107-118 doi: 10.1016/j.isatra.2018.09.025 [137] Liu Q, Li D Y, Ge S S, Ji R H, Ouyang Z, Tee K P. Adaptive bias RBF neural network control for a robotic manipulator. Neurocomputing, 2021, 447: 213-223 doi: 10.1016/j.neucom.2021.03.033 [138] 陶波, 赵兴炜, 丁汉. 大型复杂构件机器人移动加工技术研究. 中国科学: 技术科学, 2018, 48(12): 1302-1312 doi: 10.1360/N092018-00192Tao Bo, Zhao Xing-Wei, Ding Han. Study on robotic mobile machining techniques for large complex components. Scientia Sinica Technologica, 2018, 48(12): 1302-1312 doi: 10.1360/N092018-00192 [139] Zhao X W, Tao B, Han S B, Ding H. Accuracy analysis in mobile robot machining of large-scale workpiece. Robotics and Computer-Integrated Manufacturing, 2021, 71: Article No. 102153 doi: 10.1016/j.rcim.2021.102153 [140] Zhao X W, Tao B, Ding H. Multimobile robot cluster system for robot machining of large-scale workpieces. IEEE/ASME Transactions on Mechatronics, 2022, 27(1): 561-571 doi: 10.1109/TMECH.2021.3068259 [141] Dietrich F, Buchholz D, Wobbe F, Sowinski F, Raatz A, Schumacher W, et al. On contact models for assembly tasks: Experimental investigation beyond the peg-in-hole problem on the example of force-torque maps. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Taipei, China: IEEE, 2010. 2313−2318 [142] Liu Z, Song L B, Hou Z M, Chen K, Liu S L, Xu J. Screw insertion method in peg-in-hole assembly for axial friction reduction. IEEE Access, 2019, 7: 148313-148325 doi: 10.1109/ACCESS.2019.2946406 [143] Lefebvre T, Xiao J, Bruyninckx H, de Gersem G. Active compliant motion: A survey. Advanced Robotics, 2005, 19(5): 479-499 doi: 10.1163/156855305323383767 [144] Abdullah M W, Roth H, Weyrich M, Wahrburg J. An approach for peg-in-hole assembling using intuitive search algorithm based on human behavior and carried by sensors guided industrial robot. IFAC-PapersOnLine, 2015, 48(3): 1476-1481 doi: 10.1016/j.ifacol.2015.06.295 [145] Inoue T, de Magistris G, Munawar A, Yokoya T, Tachibana R. Deep reinforcement learning for high precision assembly tasks. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Vancouver, Canada: IEEE, 2017. 819−825 [146] Chen C, Lewis F L, Li B. Homotopic policy iteration-based learning design for unknown linear continuous-time systems. Automatica, 2022, 138: Article No. 110153 doi: 10.1016/j.automatica.2021.110153 [147] Luo J L, Solowjow E, Wen C T, Ojea J A, Agogino A M, Tamar A, et al. Reinforcement learning on variable impedance controller for high-precision robotic assembly. In: Proceedings of the International Conference on Robotics and Automation (ICRA). Montreal, Canada: IEEE, 2019. 3080−3087 [148] Scheer A W. Whitepaper-Industry 4.0: From vision to implementation. White Paper, 2015: 1–26 [149] Ge J, Xie S R, Wang Y N, Liu J, Zhang H, Zhou B W, et al. A system for automated detection of ampoule injection impurities. IEEE Transactions on Automation Science and Engineering, 2017, 14(2): 1119-1128 doi: 10.1109/TASE.2015.2490061 [150] 张辉, 易俊飞, 王耀南, 吴刘宸, 陈瑞博. 医药质量检测关键技术及其应用综述. 仪器仪表学报, 2020, 41(3): 1-17 doi: 10.19650/j.cnki.cjsi.J2006049Zhang Hui, Yi Jun-Fei, Wang Yao-Nan, Wu Liu-Chen, Chen Rui-Bo. Review on key technologies and applications of pharmaceutical quality testing. Chinese Journal of Scientific Instrument, 2020, 41(3): 1-17 doi: 10.19650/j.cnki.cjsi.J2006049 -

 下载:
下载:



计量
- 文章访问数: 10472
- HTML全文浏览量: 3889
- PDF下载量: 2204
- 被引次数: 0
