

System Design of Dove-like Flapping-wing Flying Robot Based on Highly Bionic Morphological Layout
-
摘要: 针对现有扑翼飞行机器人存在的飞行形态与实际鸟类相差较大, 以及翅膀、尾翼布局和俯仰、转向控制方式仿生度较低的问题, 提出一种形态布局与鸽子相仿的扑翼飞行机器人系统设计及实现方案. 通过设计弧面−折翼−后掠翅膀、仿鸟扇形尾翼以及尾翼挨近翅膀后缘布置的布局方式, 使扑翼机器人飞行形态更加接近真实鸟类, 提高扑翼机器人的形态仿生度. 在此基础上, 设计结合下扑角调控无需尾翼大角度上翘的俯仰控制方式, 以及不依赖于尾翼的翅膀收缩转向控制方式, 在提高仿生度的同时保证飞行控制的有效性. 在具体设计过程中, 首先参考鸽子翅膀型式选择不同类型翅膀并进行风洞测试, 确定出下扑角变化时仍能保持较优升推力性能的翅膀设计方案; 其次, 对各种尾翼型式进行分析和比较, 结合鸽子尾翼特点进行仿鸽尾翼及俯仰、转向控制机构设计, 并通过风洞测试验证; 最后, 设计飞控系统并装配整机, 进行外场飞行测试, 验证仿鸽扑翼飞行机器人平台的稳定性和可控性.Abstract: Some existing flapping-wing flying robots show significantly different flight forms compared with actual birds, and exhibit less bionic features of their wing and tail layout and their control ways of pitching and steering. In this paper, we propose a system design and implementation scheme for a flapping-wing flying robot with a morphological layout similar to that of a pigeon. By designing curved-folded-swept wings and a bird-like fan-shaped tail near the trailing edge of the wings, the flight form of the flapping-wing robot is closer to that of a bird, which improves the bionic performance of the flying robot morphologically. Upon this basis, we propose a pitching control method via regulating the downstroke angle without need of a large upper declination angle of the tail. We also propose a wing retraction control method that is independent of the tail, ensuring the effectiveness of flight control while emphasising more bionic features. In the specific design process, different types of wings according to those of pigeons are selected firstly, and wind tunnel tests are then performed to determine the design scheme that can maintain better lift-thrust performance when the downstroke angle changes. Next, by analyzing and comparing various types of tails, we make a tail for the robot with reference to the characteristics of the pigeon. Besides, we design pitching and steering control mechanisms and verify their effectiveness via wind tunnel tests. Finally, we develop a flight control system and integrate it on the robot. The stability and controllability of the designed dove-like flapping-wing flying robot is confirmed by flight tests.
-
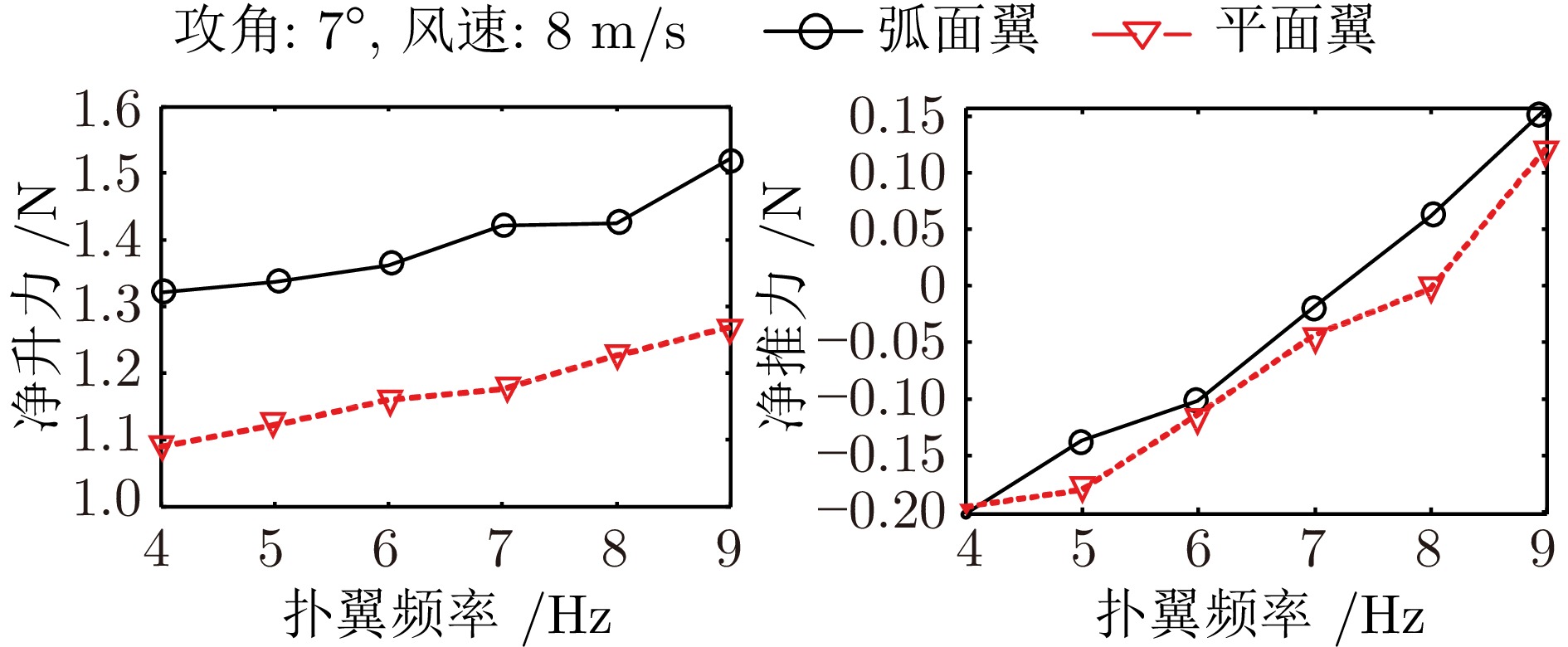
图 7 单翼平面翅膀与单翼弧面翅膀升推力性能比较
Fig. 7 Lift and thrust of the single plane wings and cambered wings
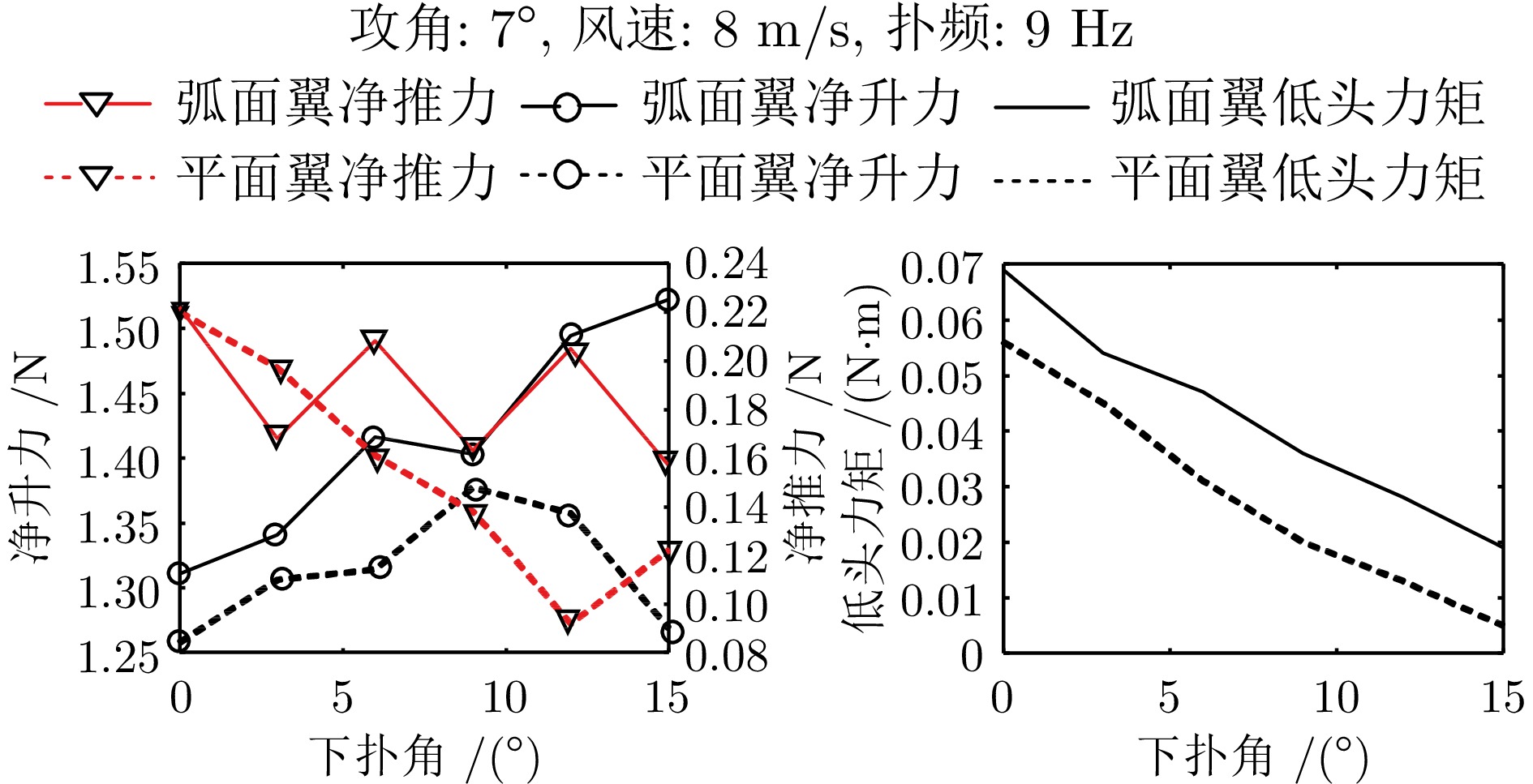
图 8 不同下扑角时单翼翅膀的升推力和俯仰力矩
Fig. 8 The lift, thrust and pitch moment with different downstroke angles

图 9 不同下扑角时折翼翅膀的升推力对比
Fig. 9 The lift and thrust of folded cambered wings with different downstroke angles
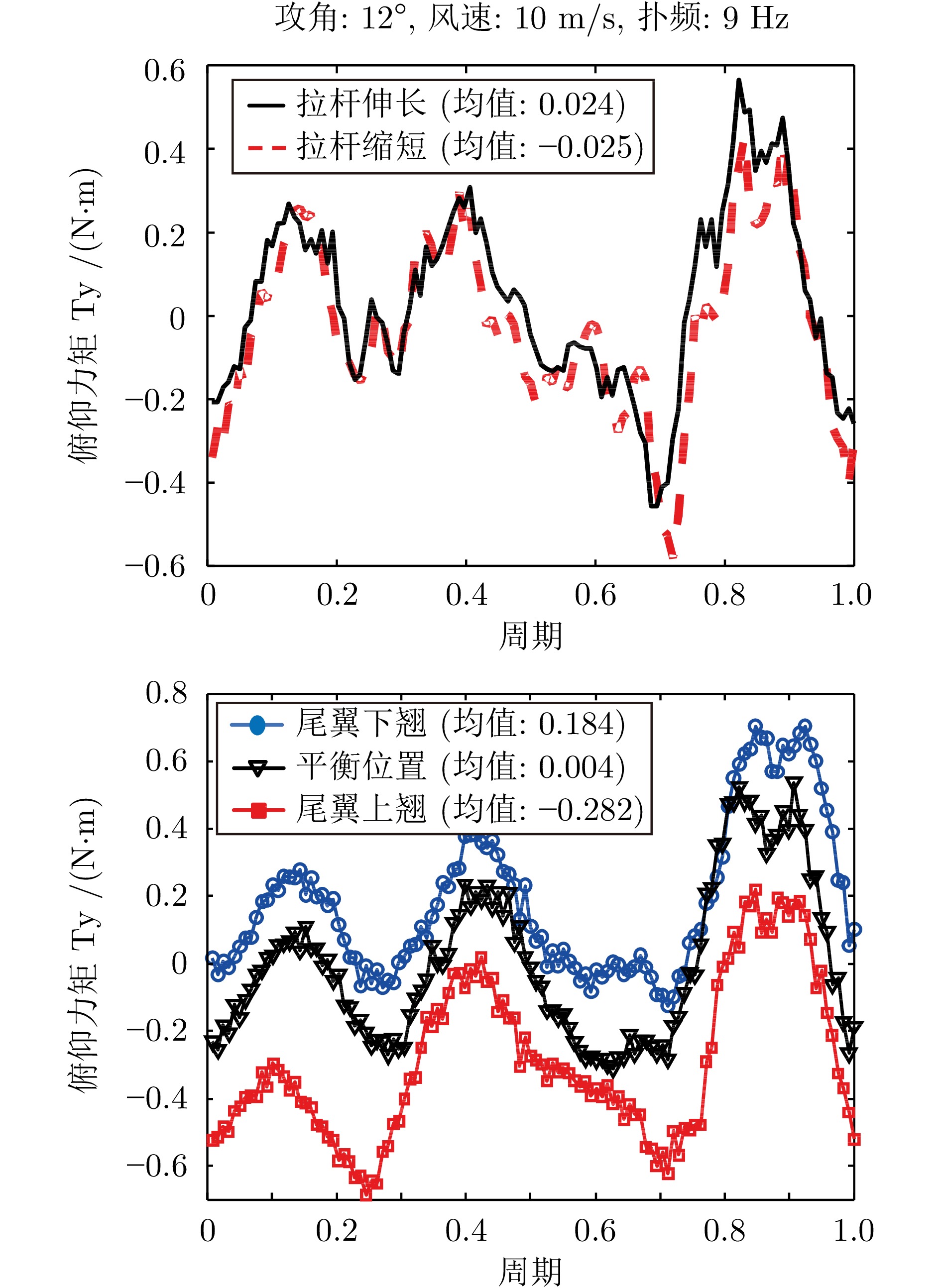
图 16 USTB-Dove球头拉杆及尾翼极限动作时的俯仰力矩
Fig. 16 Pitch moment when USTB-Dove ball head lever and tail are in extreme action
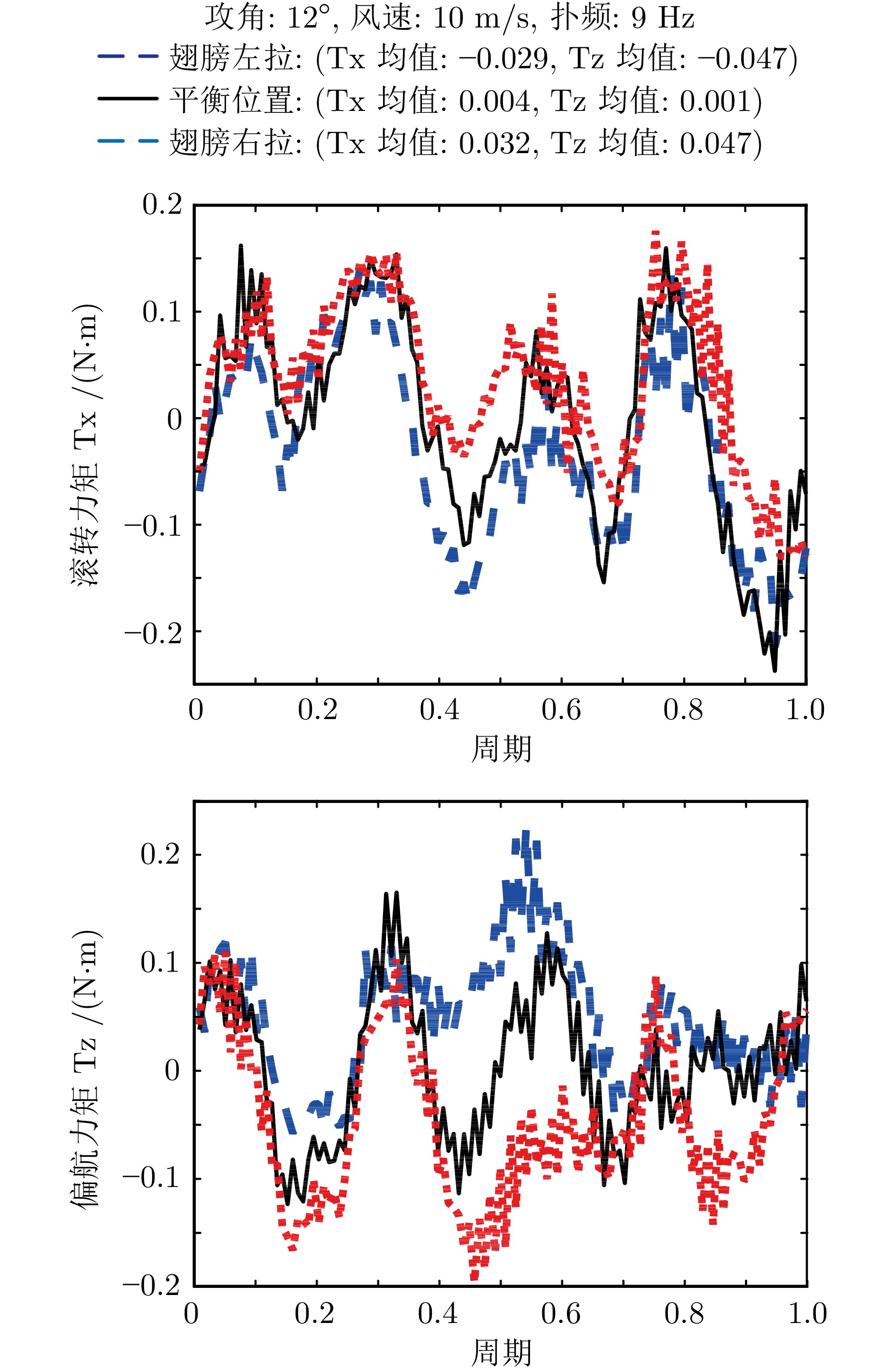
图 17 USTB-Dove转向机构动作时的滚转和偏航力矩
Fig. 17 Roll and yaw moment when USTB-Dove steering mechanism is in action

图 19 地面站信息采集显示界面
Fig. 19 Interface for the collection and display of information at the ground station
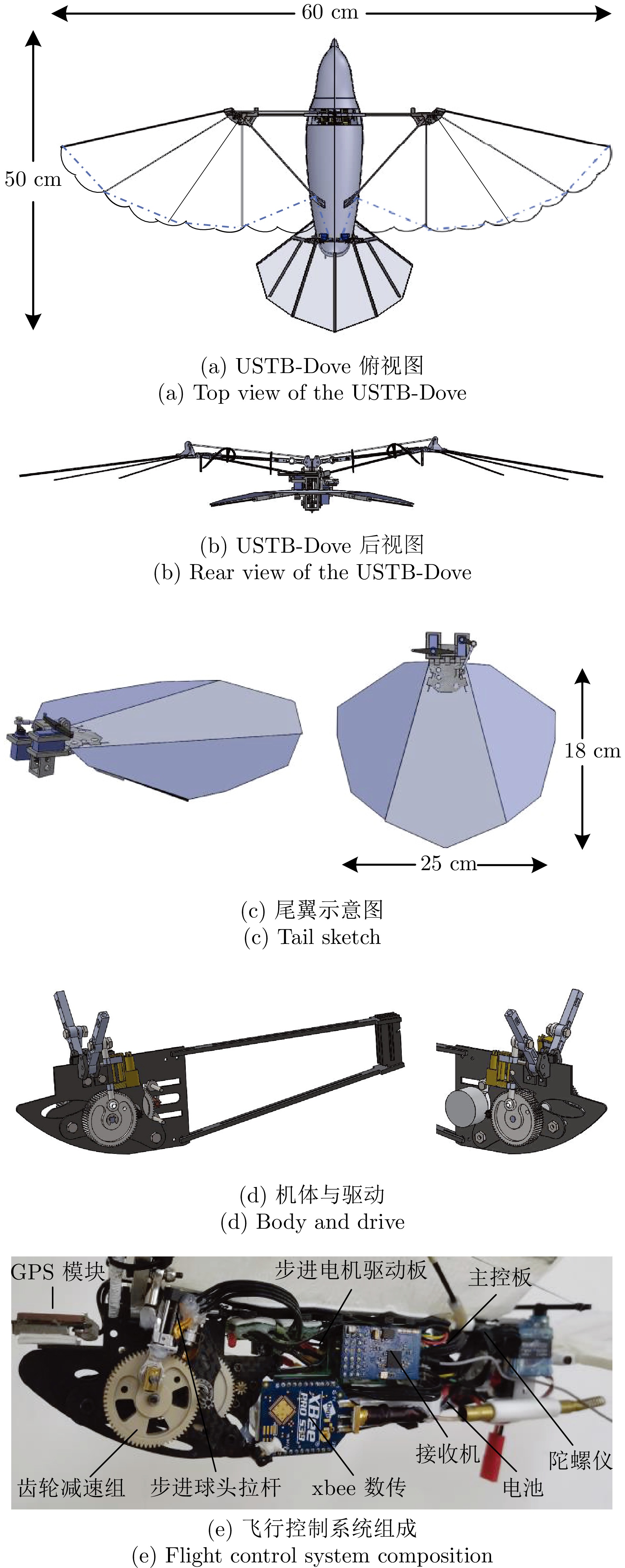
表 1 USTB-Dove质量分解
Table 1 Weight decomposition of USTB-Dove
组件 质量(g) 比重(%) 一对翅膀 32 13.1 驱动机构(含电机) 65 26.5 尾翼(含舵机) 35 14.3 机架 5 2.0 飞控系统 50 20.0 电池(1 000 mah 2 s) 48 19.6 外壳 10 4.1 总计 245 100.0  下载: 导出CSV
下载: 导出CSV
-
[1] 王国彪, 陈殿生, 陈科位, 张自强. 仿生机器人研究现状与发展趋势. 机械工程学报, 2015, 51(13): 27-44Wang Guo-Biao, Chen Dian-Sheng, Chen Ke-Wei, Zhang Zi-Qiang. The current research status and development strategy on biomimetic robot. Journal of Mechanical Engineering, 2015, 51(13):27-44 [2] 吉爱红, 戴振东, 周来水. 仿生机器人的研究进展. 机器人, 2005, 27(3): 284-288Ji Ai-Hong, Dai Zhen-Dong, Zhou Lai-Shui. Research development of bio-inspired robotics. Robot, 2005, 27(3): 284-288 [3] He W, Huang H F, Chen Y N, Xie W Z, Feng F S, Kang Y M, et al. Development of an autonomous flapping-wing aerial vehicle. Science China Information Sciences, 2017, 60(6): Article No. 063201 [4] 贺威, 丁施强, 孙长银. 扑翼飞行器的建模与控制研究进展. 自动化学报, 2017, 43(5): 685-696He Wei, Ding Shi-Qiang, Sun Chang-Yin. Research progress on modeling and control of flapping-wing air vehicles. Acta Automatica Sinica, 2017, 43(5): 685-696 [5] Floreano D, Wood R J. Science, technology and the future of small autonomous drones. Nature, 2015, 521(7553): 460-466 doi: 10.1038/nature14542 [6] 侯宇, 方宗德, 孔建益, 李公法. 仿生扑翼飞行微机器人研究现状与关键技术. 机械设计, 2008, 25(7): 1-4, 40Hou Yu, Fang Zong-De, Kong Jian-Yi, Li Gong-Fa. Current research status and key technology of bionic flapping wing flying mini-robots. Journal of Machine Design, 2008, 25(7): 1-4, 40 [7] Wang L, Song B F, Sun Z C, Yang X J. Review on ultra-lightweight flapping-wing nano air vehicles: Artificial muscles, flight control mechanism, and biomimetic wings. Chinese Journal of Aeronautics, 2023, 36(6): 63-91 doi: 10.1016/j.cja.2023.03.031 [8] Feliz E. Hummingbird Nano UAV. Avionics Magazine, 2011, 35(10): 10-11 [9] Keennon M, Klingebiel K, Won H, Andriukov A. Development of the Nano hummingbird: A tailless flapping wing micro air vehicle. In: Proceedings of the 50th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition. Nashville, Tennessee: AIAA, 2012. [10] Phan H V, Truong Q T, Park H C. Implementation of initial passive stability in insect-mimicking flapping-wing micro air vehicle. International Journal of Intelligent Unmanned Systems, 2015, 3(1): 18-38 doi: 10.1108/IJIUS-12-2014-0010 [11] Phan H V, Park H C. Mechanisms of collision recovery in flying beetles and flapping-wing robots. Science, 2020, 370(6521): 1214-1219 doi: 10.1126/science.abd3285 [12] Karásek M, Muijres F T, De Wagter C, Remes B D W, de Croon G C H E. A tailless aerial robotic flapper reveals that flies use torque coupling in rapid banked turns. Science 2018, 361(6407): 1089-1094 doi: 10.1126/science.aat0350 [13] Chin Y W, Kok J M, Zhu Y Q, Chan W L, Chahl J S, Khoo B C, et al. Efficient flapping wing drone arrests high-speed flight using post-stall soaring. Science Robotics, 2020, 5(44): Article No. eaba2386 doi: 10.1126/scirobotics.aba2386 [14] Send W, Fischer M, Jebens K, Mugrauer R, Nagarathinam A, Scharstein F. Artificial hinged-wing bird with active torsion and partially linear kinematics. In: Proceedings of 28th Congress of the International Council of the Aeronautical Sciences. Brisbane, Australia: Optimage Ltd., 2012. 1148−1157 [15] Zufferey R, Tormo-Barbero J, Guzmán M M, Maldonado F J, Sanchez-Laulhe E, Grau P, et al. Design of the high-payload flapping wing robot E-flap. IEEE Robotics and Automation Letters, 2021, 6(2): 3097-3104 doi: 10.1109/LRA.2021.3061373 [16] Yang W Q, Wang L G, Song B F. Dove: A biomimetic flapping-wing micro air vehicle. International Journal of Micro Air Vehicles, 2018, 10(1): 70-84 doi: 10.1177/1756829317734837 [17] Xue D, Song B F. Tuning the deformation of flapping wing to improve the flight efficiency of dove FWMAV. Journal of Aerospace Engineering, 2021, 34(6): Article No. 04021069 [18] Chen A, Song B F, Wang Z H, Xue D, Liu K. A novel actuation strategy for an agile bioinspired FWAV performing a morphing-coupled wingbeat pattern. IEEE Transactions on Robotics, 2023, 39(1): 452-469 doi: 10.1109/TRO.2022.3189812 [19] Pan E Z, Xu H, Yuan H, Peng J Q, Xu W F. HIT-Hawk and HIT-Phoenix: Two kinds of flapping-wing flying robotic birds with wingspans beyond 2 meters. Biomimetic Intelligence and Robotics, 2021, 1: Article No. 100002 doi: 10.1016/j.birob.2021.100002 [20] Wu X Y, He W, Wang Q, Meng T T, He X Y, Fu Q. A long-endurance flapping-wing robot based on mass distribution and energy consumption method. IEEE Transactions on Industrial Electronics, 2023, 70(8): 8215-8224 doi: 10.1109/TIE.2022.3213905 [21] Dvořák R. Aerodynamics of bird flight. EPJ Web of Conferences, 2016, 114: Article No. 01001 [22] Berg A M, Biewener A A. Wing and body kinematics of takeoff and landing flight in the pigeon (Columba livia). Journal of Experimental Biology, 2010, 213(10): 1651-1658 doi: 10.1242/jeb.038109 [23] Guidi G. A study of the wing-beats of pigeons in flight. The Aeronautical Journal, 1938, 42(336): 1104-1115 [24] Ajanic E, Paolini A, Coster C, Floreano D, Johansson C. Robotic avian wing explains aerodynamic advantages of wing folding and stroke tilting in flapping flight. Advanced Intelligent Systems, 2023, 5(2): Article No. 2200148 doi: 10.1002/aisy.202200148 [25] Ruiz C, Acosta J Á, Ollero A. Optimal elastic wing for flapping-wing robots through passive morphing. IEEE Robotics and Automation Letters, 2023, 8(2): 608-615 doi: 10.1109/LRA.2022.3226065 [26] Yang H H, Lee S G, Addo-Akoto R, Han J H. Parameter optimization of foldable flapping-wing mechanism for maximum lift. Journal of Mechanisms and Robotics, 2024, 16(3): Article No. 031002 [27] Hassanalian M, Abdelkefi A, Wei M J, Ziaei-Rad S. A novel methodology for wing sizing of bio-inspired flapping wing micro air vehicles: Theory and prototype. Acta Mechanica 2017, 228(3): 1097-1113 doi: 10.1007/s00707-016-1757-4 [28] Nian P, Song B F, Xuan J L, Yang W Q, Dong Y B. A wind tunnel experimental study on the flexible flapping wing with an attached airfoil to the root. IEEE Access, 2019, 7: 47891-47903 doi: 10.1109/ACCESS.2019.2909916 [29] 昂海松, 曾锐, 段文博, 史志伟. 柔性扑翼微型飞行器升力和推力机理的风洞试验和飞行试验. 航空动力学报, 2007, 22(11): 1838-1845Ang Hai-Song, Zeng Rui, Duan Wen-Bo, Shi Zhi-Wei. Aerodynamic experimental investigation for mechanism of lift and thrust of flexible flapping-wing MAV. Journal of Aerospace Power, 2007, 22(11): 1838-1845 [30] Maybury W J, Rayner J M V. The avian tail reduces body parasite drag by controlling flow separation and vortex shedding. Proceedings of the Royal Society B: Biological Sciences, 2001, 268(1474): 1405-1410 doi: 10.1098/rspb.2001.1635 [31] Thomas A L R. Why do birds have tails? The tail as a drag reducing flap, and trim control. Journal of Theoretical Biology, 1996, 183(3): 247-253 doi: 10.1006/jtbi.1996.0218 [32] Sadraey M H. Aircraft Design: A Systems Engineering Approach. Hoboken: Wiley, 2012. [33] Guzmán M M, Páez C R, Maldonado F J, Zufferey R, Tormo-Barbero J, Acosta J Á, et al. Design and comparison of tails for bird-scale flapping-wing robots. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Prague, Czech Republic: IEEE, 2021. 6358−6365 [34] Thomas A L R. On the aerodynamics of birds' tails. Philosophical Transactions of the Royal Society B: Biological Sciences, 1993, 340(1294): 361-380 doi: 10.1098/rstb.1993.0079 [35] Huang H F, He W, Wang J B, Zhang L, Fu Q. An all servo-driven bird-like flapping-wing aerial robot capable of autonomous flight. IEEE/ASME Transactions on Mechatronics, 2022, 27(6): 5484-5494 doi: 10.1109/TMECH.2022.3182418 [36] Usherwood J R, Cheney J A, Song J L, Windsor S P, Stevenson J P J, Dierksheide U, et al. High aerodynamic lift from the tail reduces drag in gliding raptors. Journal of Experimental Biology, 2020, 223(3): Article No. jeb214809 doi: 10.1242/jeb.214809 [37] 熊超, 宋笔锋, 袁昌盛, 邵立民, 张亚锋. 微型扑翼飞行器机翼纵向力矩特性风洞试验研究. 西北工业大学学报, 2007, 25(5): 733-736Xiong Chao, Song Bi-Feng, Yuan Chang-Sheng, Shao Li-Min, Zhang Ya-Feng. Investigating longitudinal moment characteristics of flapping-wing MAV in wind tunnel. Journal of Northwestern Polytechnical University, 2007, 25(5): 733-736 [38] Ajanic E, Feroskhan M, Mintchev S, Noca F, Floreano D. Bioinspired wing and tail morphing extends drone flight capabilities. Science Robotics, 2020, 5(47): Article No. eabc2897 doi: 10.1126/scirobotics.abc2897 -

 下载:
下载:








计量
- 文章访问数: 5448
- HTML全文浏览量: 670
- PDF下载量: 405
- 被引次数: 0
