

An Intelligent Architecture for Cognitive Autonomous Driving Based on Parallel Testing
-
摘要: 在大数据、云计算和机器学习等新一代人工智能技术的推动下, 自动驾驶的感知智能在近年来得到显著的提升与发展. 然而, 与人类驾驶过程中隐含的以自我目的实现为引导的自探索性和自主性相比, 现阶段自动驾驶技术主要以辅助驾驶功能为主, 还停留在以被动感知、规划与控制为主的初级智能自动驾驶阶段. 为实现车辆智能从数据驱动的环境感知、辅助决策、被动规划到知识驱动的场景认知、推理决策、主动规划的提升, 亟需增强车辆自身对复杂外界信息归纳提炼、推理决策、评价估计等类人能力. 首先回顾自动驾驶关键技术演化及其应用发展历程; 随后分析测试对车辆智能评估的效用; 然后基于平行测试理论, 提出自动驾驶车辆认知智能训练、测试与评估空间的构建方法, 并设计基于平行测试的认知自动驾驶智能训练框架. 该项研究工作预期能为推动自动驾驶从感知智能向认知智能的升级提供可行的技术支撑与实现路径.Abstract: Driven by the new generation of artificial intelligence technologies such as big data, cloud computing and machine learning, the perceptive intelligence of autonomous driving has been significantly improved and progressed in recent years. However, compared with the self-purpose driven human driving process, the current autonomous driving technologies are mainly focusing on the auxiliary driving functions, and still stay in a primary-intelligence stage which is dominated by passive perception, planning and control. In order to cross the “cognition gap” of vehicle intelligence, from data-driven environment perception, assisted decision making and passive planning to knowledge-driven scenario cognition, reasonable decision making and active planning, it is important to enhance the humanoid abilities of the vehicles, including but not limited to summarize and extract complex external information from the environment, reasoning, evaluation and estimation. This paper reviews the evolution and application of key technologies in autonomous driving, analyzes the effectiveness of testing on vehicle intelligence and performance evaluation. After then, based on the parallel test theory, it puts forward the space construction method for training, testing and evaluating the cognitive intelligence of autonomous vehicle, and proposes an intelligent training framework for cognitive autonomous driving. The work is expected to provide a feasible and possible path for autonomous vehicle cognitive intelligence.
-

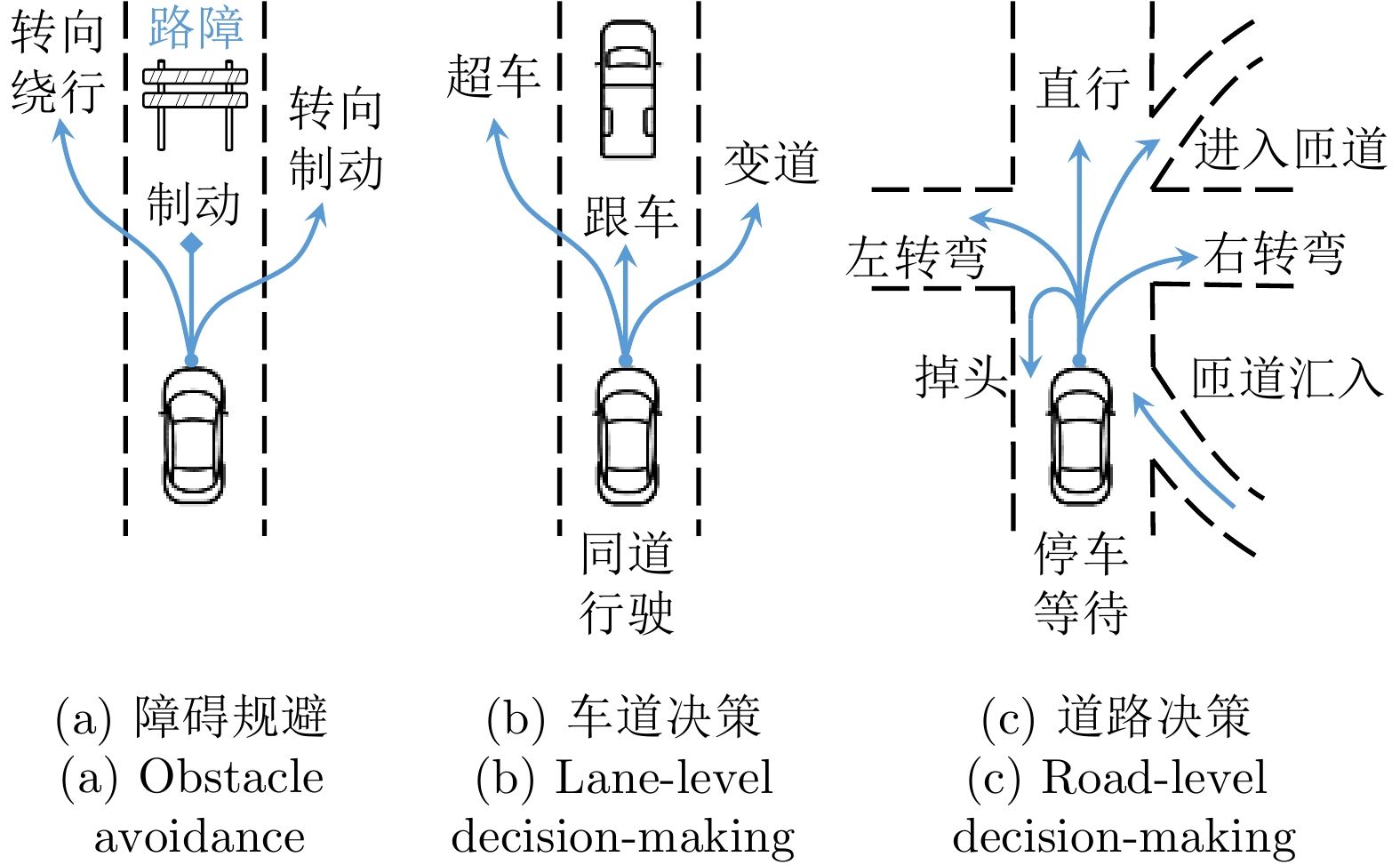
图 6 类人驾驶行为的认知与决策流程图
Fig. 6 Cognitive and decision flowchart of humanoid driving behavior
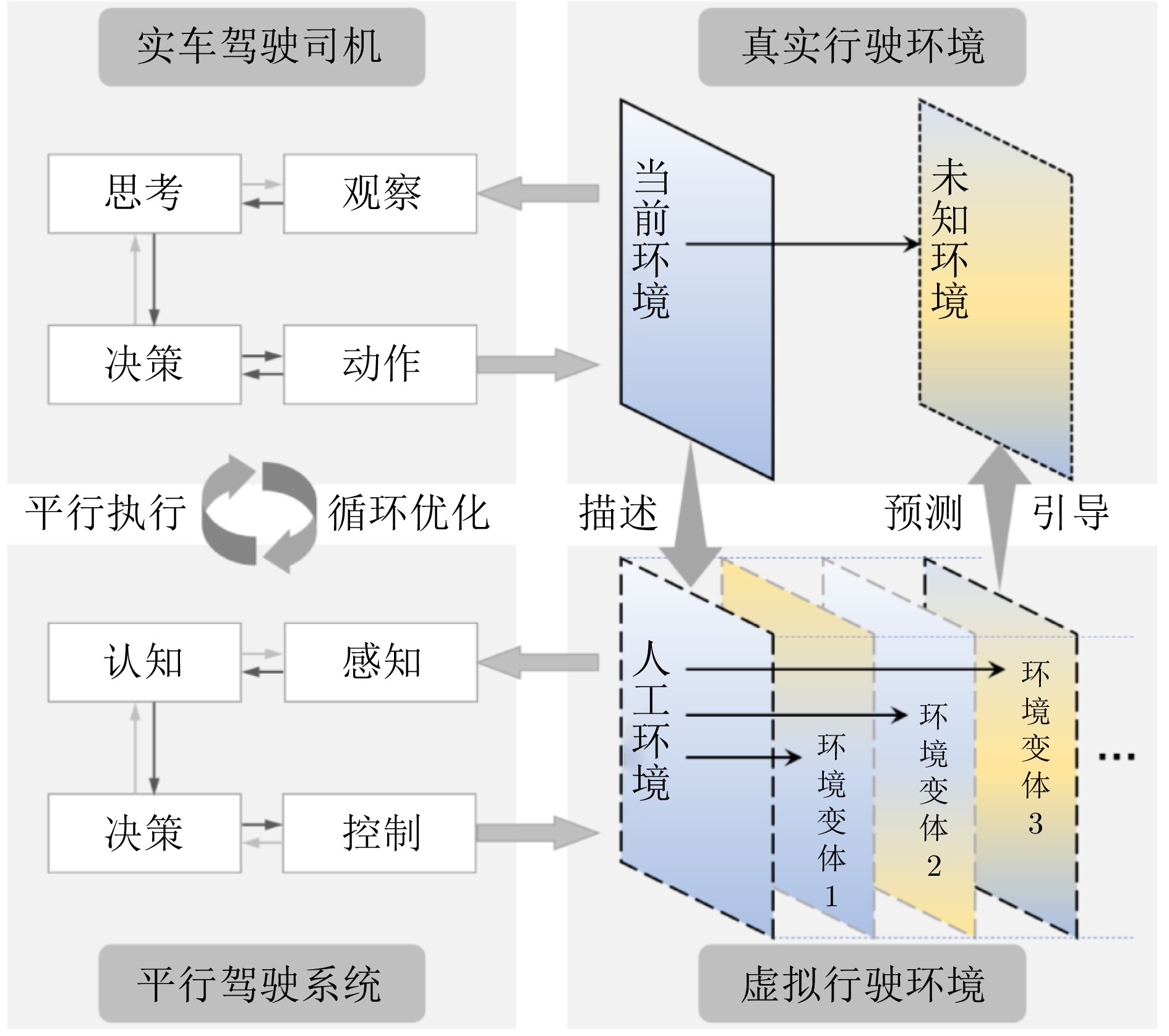
图 7 基于平行测试的认知智能训练空间
Fig. 7 Cognitive intelligence training space based on parallel testing
-
[1] Yurtsever E, Lambert J, Carballo A, Takeda K. A survey of autonomous driving: Common practices and emerging technologies. IEEE Access, 2020, 8: 58443-58469 doi: 10.1109/ACCESS.2020.2983149 [2] Li L, Wen D, Zheng N N, Shen L C. Cognitive cars: A new frontier for ADAS research. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(1): 395-407 doi: 10.1109/TITS.2011.2159493 [3] Kiran B R, Sobh I, Talpaert V, Mannion P, Sallab A A A, Yogamani S, et al. Deep reinforcement learning for autonomous driving: A survey. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(6): 4909-4926 doi: 10.1109/TITS.2021.3054625 [4] Wang F Y, Mirchandani P B, Wang Z X. The VISTA project and its applications. IEEE Intelligent Systems, 2002, 17(6): 72-75 doi: 10.1109/MIS.2002.1134364 [5] Wang F Y, Wang X J, Li L, Mirchandani P. Creating a digital-vehicle proving ground. IEEE Intelligent Systems, 2003, 18(2): 12-15 doi: 10.1109/MIS.2003.1193651 [6] Li L, Huang W L, Liu Y H, Zheng N N, Wang F Y. Intelligence testing for autonomous vehicles: A new approach. IEEE Transactions on Intelligent Vehicles, 2016, 1(2): 158-166 doi: 10.1109/TIV.2016.2608003 [7] Li L, Wang X, Wang K F, Lin Y L, Xin J M, Chen L, et al. Parallel testing of vehicle intelligence via virtual-real interaction. Science Robotics, 2019, 4(28): Article No. eaaw4106 doi: 10.1126/scirobotics.aaw4106 [8] Li L, Zheng N N, Wang F Y. A theoretical foundation of intelligence testing and its application for intelligent vehicles. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(10): 6297-6306 doi: 10.1109/TITS.2020.2991039 [9] Li L, Lin Y L, Zheng N N, Wang F Y, Liu Y H, Cao D P, et al. Artificial intelligence test: A case study of intelligent vehicles. Artificial Intelligence Review, 2018, 50(3): 441-465 doi: 10.1007/s10462-018-9631-5 [10] Wang F Y, Hu J, Lai J T. Testing intelligence: Accelerating the verification and validation of intelligent vehicles. IEEE Transactions on Intelligent Vehicles, 2023, 8(2): 1003-1016 doi: 10.1109/TIV.2023.3246701 [11] Li X S, Guo Z Z, Dai X Y, Lin Y L, Jin J C, Zhu F H, et al. Deep imitation learning for traffic signal control and operations based on graph convolutional neural networks. In: Proceedings of the 23rd International Conference on Intelligent Transportation Systems (ITSC). Rhodes, Greece: IEEE, 2020. 1−6 [12] Wang X M, Zheng X H, Chen W, Wang F Y. Visual human–computer interactions for intelligent vehicles and intelligent transportation systems: The state of the art and future directions. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(1): 253-265 doi: 10.1109/TSMC.2020.3040262 [13] Han S S, Wang X, Zhang J J, Cao D P, Wang F Y. Parallel vehicular networks: A CPSS-based approach via multimodal big data in IoV. IEEE Internet of Things Journal, 2019, 6(1): 1079-1089 doi: 10.1109/JIOT.2018.2867039 [14] Chen Y Y, Lv Y S, Wang X, Wang F Y. Traffic flow prediction with parallel data. In: Proceedings of the 21st International Conference on Intelligent Transportation Systems (ITSC). Maui, USA: IEEE, 2018. 614−619 [15] Yang L Q, Wang F Y. Driving into intelligent spaces with pervasive communications. IEEE Intelligent Systems, 2007, 22(1): 12-15 doi: 10.1109/MIS.2007.8 [16] Wang X, Yang J, Han J P, Wang W, Wang F Y. Metaverses and deMetaverses: From digital twins in CPS to parallel intelligence in CPSS. IEEE Intelligent Systems, 2022, 37(4): 97-102 doi: 10.1109/MIS.2022.3196592 [17] 杨静, 王晓, 王雨桐, 刘忠民, 李小双, 王飞跃. 平行智能与CPSS: 三十年发展的回顾与展望. 自动化学报, 2023, 49(3): 614-634Yang Jing, Wang Xiao, Wang Yu-Tong, Liu Zhong-Min, Li Xiao-Shuang, Wang Fei-Yue. Parallel intelligence and CPSS in 30 years: An ACP approach. Acta Automatica Sinica, 2023, 49(3): 614-634 [18] Bresson G, Alsayed Z, Yu L, Glaser S. Simultaneous localization and mapping: A survey of current trends in autonomous driving. IEEE Transactions on Intelligent Vehicles, 2017, 2(3): 194-220 doi: 10.1109/TIV.2017.2749181 [19] 郑南宁. 人工智能新时代. 智能科学与技术学报, 2019, 1(1): 1-3 doi: 10.11959/j.issn.2096-6652.201914Zheng Nan-Ning. The new era of artificial intelligence. Chinese Journal of Intelligent Science and Technology, 2019, 1(1): 1-3 doi: 10.11959/j.issn.2096-6652.201914 [20] 李力, 王飞跃, 郑南宁. 认知车——结合认知科学和控制理论的新研究方向. 控制理论与应用, 2011, 28(2): 137-142Li L, Wang Fei-Yue, Zheng Nan-Ning. Cognitive vehicle: A new research direction integrating cognitive science and control theory. Control Theory & Applications, 2011, 28(2): 137-142 [21] He W, Li Z J, Chen C L P. A survey of human-centered intelligent robots: Issues and challenges. IEEE/CAA Journal of Automatica Sinica, 2017, 4(4): 602-609 doi: 10.1109/JAS.2017.7510604 [22] 国家自然科学基金“十一五”发展规划. 中国科学基金, 2006, 20(5): 310−320“Eleventh Five Year Plan” development plan of national natural science foundation of China. Bulletin of National Natural Science Foundation of China, 2006, 20(5): 310−320 [23] 吴国政, 韩军伟, 邓方, 李建军, 张兆田, 辛景民, 等. “视听觉信息的认知计算”重大研究计划结题综述. 中国科学基金, 2019, 33(4): 334-341Wu Guo-Zheng, Han Jun-Wei, Deng Fang, Li Jian-Jun, Zhang Zhao-Tian, Xin Jing-Min, et al. Review of major research plan on "cognitive computing of visual and auditory information". Bulletin of National Natural Science Foundation of China, 2019, 33(4): 334-341 [24] 陈君毅, 李如冰, 邢星宇, 蒙昊蓝, 余卓平. 自动驾驶车辆智能性评价研究综述. 同济大学学报(自然科学版), 2019, 47(12): 1785-1790, 1824 doi: 10.11908/j.issn.0253-374x.2019.12.014Chen Jun-Yi, Li Ru-Bing, Xing Xing-Yu, Meng Hao-Lan, Yu Zhuo-Ping. Survey on intelligence evaluation of autonomous vehicles. Journal of Tongji University (Natural Science), 2019, 47(12): 1785-1790, 1824 doi: 10.11908/j.issn.0253-374x.2019.12.014 [25] Wang F Y, Zheng N N, Li L, Xin J M, Wang X, Xu L H, et al. China’s 12-year quest of autonomous vehicular intelligence: The intelligent vehicles future challenge program. IEEE Intelligent Transportation Systems Magazine, 2021, 13(2): 6-19 doi: 10.1109/MITS.2021.3058623 [26] Aeberhard M, Rauch S, Bahram M, Tanzmeister G, Thomas J, Pilat Y, et al. Experience, results and lessons learned from automated driving on Germany’s highways. IEEE Intelligent Transportation Systems Magazine, 2015, 7(1): 42-57 doi: 10.1109/MITS.2014.2360306 [27] Xue X, Chen F Y, Zhou D Y, Wang X, Lu M, Wang F Y. Computational experiments for complex social systems—Part I: The customization of computational model. IEEE Transactions on Computational Social Systems, 2022, 9(5): 1330-1344 doi: 10.1109/TCSS.2021.3125287 [28] Lu M, Chen S Z, Xue X, Wang X, Zhang Y F, Zhang Y F, et al. Computational experiments for complex social systems—Part II: The evaluation of computational models. IEEE Transactions on Computational Social Systems, 2022, 9(4): 1224-1236 doi: 10.1109/TCSS.2021.3121323 [29] 王飞跃, 曹东璞, 李升波, 邢阳, 郭洪艳, 吕宜生, 等. 自动驾驶技术的挑战与展望. 人工智能, 2018, (6): 111−119Wang Fei-Yue, Cao Dong-Pu, Li Sheng-Bo, Xing Yang, Guo Hong-Yan, Lv Yi-Sheng, et al. Challenges and prospects of autonomous driving technology. AI-View, 2018, (6): 111−119 [30] 王金强, 黄航, 郅朋, 申泽邦, 周庆国. 自动驾驶发展与关键技术综述. 电子技术应用, 2019, 45(6): 28-36Wang Jin-Qiang, Huang Hang, Zhi Peng, Shen Ze-Bang, Zhou Qing-Guo. Review of development and key technologies in automatic driving. Application of Electronic Technique, 2019, 45(6): 28-36 [31] Chen L, Li Y C, Huang C, Li B, Xing Y, Tian D X, et al. Milestones in autonomous driving and intelligent vehicles: Survey of surveys. IEEE Transactions on Intelligent Vehicles, 2023, 8(2): 1046-1056 doi: 10.1109/TIV.2022.3223131 [32] Fenton R E, Mayhan R J. Automated highway studies at the Ohio State University-an overview. IEEE Transactions on Vehicular Technology, 1991, 40(1): 100-113 doi: 10.1109/25.69978 [33] 张辰贝西, 黄志球. 自动导航车(AGV)发展综述. 中国制造业信息化, 2010, 39(1): 53-59Zhang Chen-Bei-Xi, Huang Zhi-Qiu. Evolution summarization of automated guided vehicles(AGV). Manufacture Information Engineering of China, 2010, 39(1): 53-59 [34] Grimes D M, Jones T O. Automotive radar: A brief review. Proceedings of the IEEE, 1974, 62(6): 804-822 doi: 10.1109/PROC.1974.9520 [35] Wenger J. Automotive radar——Atatus and perspectives. In: Proceedings of the IEEE Compound Semiconductor Integrated Circuit Symposium. Palm Springs, USA: IEEE, 2005. [36] Dissanayake M W M G, Newman P, Clark S, Durrant-Whyte H F, Csorba M. A solution to the simultaneous localization and map building (SLAM) problem. IEEE Transactions on Robotics and Automation, 2001, 17(3): 229-241 doi: 10.1109/70.938381 [37] Janai J, Güney F, Behl A, Geiger A. Computer vision for autonomous vehicles: Problems, datasets and state of the art. Foundations and Trends® in Computer Graphics and Vision, 2020, 12(1-3): 1-308 [38] Royo S, Ballesta-Garcia M. An overview of lidar imaging systems for autonomous vehicles. Applied Sciences, 2019, 9(19): Article No. 4093 doi: 10.3390/app9194093 [39] Wang H, Wang B, Liu B B, Meng X L, Yang G H. Pedestrian recognition and tracking using 3D LiDAR for autonomous vehicle. Robotics and Autonomous Systems, 2017, 88: 71-78 doi: 10.1016/j.robot.2016.11.014 [40] Moravec H P. The stanford cart and the CMU rover. Proceedings of the IEEE, 1983, 71(7): 872-884 doi: 10.1109/PROC.1983.12684 [41] Thorpe C, Hebert M H, Kanade T, Shafer S A. Vision and navigation for the carnegie-mellon navlab. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1988, 10(3): 362-373 doi: 10.1109/34.3900 [42] Thrun S, Montemerlo M, Dahlkamp H, Stavens D, Aron A, Diebel J, et al. Stanley: The robot that won the DARPA grand challenge. Journal of Field Robotics, 2006, 23(9): 661-692 doi: 10.1002/rob.20147 [43] 张兆军, 尹永生, 车强. 红旗闪亮演示无人驾驶轿车亮相. 科技日报, 2006-09-05 (001)Zhang Zhao-Jun, Yin Yong-Sheng, Che Qiang. Hongqi demonstrating autonomous car. Science and Technology Daily, September 5, 2006 (001) [44] Yeong D J, Velasco-Hernandez G, Barry J, Walsh J. Sensor and sensor fusion technology in autonomous vehicles: A review. Sensors, 2021, 21(6): Article No. 2140 doi: 10.3390/s21062140 [45] Zu C Y, Yang C, Wang J, Gao W B, Cao D P, Wang F Y. Simulation and field testing of multiple vehicles collision avoidance algorithms. IEEE/CAA Journal of Automatica Sinica, 2020, 7(4): 1045-1063 doi: 10.1109/JAS.2020.1003246 [46] Wang X, Tang K, Dai X Y, Xu J T, Xi J H, Ai R, et al. Safety-balanced driving-style aware trajectory planning in intersection scenarios with uncertain environment. IEEE Transactions on Intelligent Vehicles, 2023, 8(4): 2888-2898 doi: 10.1109/TIV.2023.3239903 [47] 陈虹, 宫洵, 胡云峰, 刘奇芳, 高炳钊, 郭洪艳. 汽车控制的研究现状与展望. 自动化学报, 2013, 39(4): 322-346 doi: 10.1016/S1874-1029(13)60033-6Chen Hong, Gong Xun, Hu Yun-Feng, Liu Qi-Fang, Gao Bing-Zhao, Guo Hong-Yan. Automotive control: The state of the art and perspective. Acta Automatica Sinica, 2013, 39(4): 322-346 doi: 10.1016/S1874-1029(13)60033-6 [48] Liu T, Tian B, Ai Y F, Wang F Y. Parallel reinforcement learning-based energy efficiency improvement for a cyber-physical system. IEEE/CAA Journal of Automatica Sinica, 2020, 7(2): 617-626 doi: 10.1109/JAS.2020.1003072 [49] 段艳杰, 吕宜生, 张杰, 赵学亮, 王飞跃. 深度学习在控制领域的研究现状与展望. 自动化学报, 2016, 42(5): 643-654Duan Yan-Jie, Lv Yi-Sheng, Zhang Jie, Zhao Xue-Liang, Wang Fei-Yue. Deep learning for control: The state of the art and prospects. Acta Automatica Sinica, 2016, 42(5): 643-654 [50] He W, Mu X X, Zhang L, Zou Y. Modeling and trajectory tracking control for flapping-wing micro aerial vehicles. IEEE/CAA Journal of Automatica Sinica, 2021, 8(1): 148-156 doi: 10.1109/JAS.2020.1003417 [51] Tan J Y, Xu C L, Li L, Wang F Y, Cao D P, Li L X. Guidance control for parallel parking tasks. IEEE/CAA Journal of Automatica Sinica, 2020, 7(1): 301-306 doi: 10.1109/JAS.2019.1911855 [52] Lu J W, Wei Q L, Wang F Y. Parallel control for optimal tracking via adaptive dynamic programming. IEEE/CAA Journal of Automatica Sinica, 2020, 7(6): 1662-1674 doi: 10.1109/JAS.2020.1003426 [53] Wei Q L, Li H Y, Wang F Y. Parallel control for continuous-time linear systems: A case study. IEEE/CAA Journal of Automatica Sinica, 2020, 7(4): 919-928 doi: 10.1109/JAS.2020.1003216 [54] Zhao C, Lv Y S, Jin J C, Tian Y L, Wang J G, Wang F Y. DeCAST in transverse for parallel intelligent transportation systems and smart cities: Three decades and beyond. IEEE Intelligent Transportation Systems Magazine, 2022, 14(6): 6-17 doi: 10.1109/MITS.2022.3199557 [55] SAE. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. SAE International Standard, J3016_201609, 2016. [56] 朱冰, 张培兴, 赵健, 陈虹, 徐志刚, 赵祥模, 等. 基于场景的自动驾驶汽车虚拟测试研究进展. 中国公路学报, 2019, 32(6): 1-19Zhu Bing, Zhang Pei-Xing, Zhao Jian, Chen Hong, Xu Zhi-Gang, Zhao Xiang-Mo, et al. Review of scenario-based virtual validation methods for automated vehicles. China Journal of Highway and Transport, 2019, 32(6): 1-19 [57] Zhang C, Liu Y H, Li L, Zheng N N, Wang F Y. Joint task difficulties estimation and testees ranking for intelligence evaluation. IEEE Transactions on Computational Social Systems, 2019, 6(2): 221-226 doi: 10.1109/TCSS.2019.2899136 [58] 李力, 林懿伦, 曹东璞, 郑南宁, 王飞跃. 平行学习—机器学习的一个新型理论框架. 自动化学报, 2017, 43(1): 1-8Li Li, Lin Yi-Lun, Cao Dong-Pu, Zheng Nan-Ning, Wang Fei-Yue. Parallel learning — a new framework for machine learning. Acta Automatica Sinica, 2017, 43(1): 1-8 [59] Li L, Lin Y L, Zheng N N, Wang F Y. Parallel learning: A perspective and a framework. IEEE/CAA Journal of Automatica Sinica, 2017, 4(3): 389-395 doi: 10.1109/JAS.2017.7510493 [60] Miao Q H, Lv Y S, Huang M, Wang X, Wang F Y. Parallel learning: Overview and perspective for computational learning across syn2Real and sim2Real. IEEE/CAA Journal of Automatica Sinica, 2023, 10(3): 603-631 doi: 10.1109/JAS.2023.123375 [61] Liu T, Yang C, Hu C Z, Wang H, Li L, Cao D P, et al. Reinforcement learning-based predictive control for autonomous electrified vehicles. In: Proceedings of the IEEE Intelligent Vehicles Symposium (IV). Changshu, China: IEEE, 2018. 185−190 [62] 杨林瑶, 李玉珂, 韩双双, 王晓. 网络实验平台与计算实验方法研究与展望. 指挥与控制学报, 2018, 4(4): 281-290 doi: 10.3969/j.issn.2096-0204.2018.04.0281Yang Lin-Yao, Li Yu-Ke, Han Shuang-Shuang, Wang Xiao. Network simulation and computational experiment platforms: The overview and prospect. Journal of Command and Control, 2018, 4(4): 281-290 doi: 10.3969/j.issn.2096-0204.2018.04.0281 [63] 刘昕, 王晓, 张卫山, 汪建基, 王飞跃. 平行数据: 从大数据到数据智能. 模式识别与人工智能, 2017, 30(8): 673-681Liu Xin, Wang Xiao, Zhang Wei-Shan, Wang Jian-Ji, Wang Fei-Yue. Parallel data: From big data to data intelligence. Pattern Recognition and Artificial Intelligence, 2017, 30(8): 673-681 [64] 王飞跃, 王艳芬, 陈薏竹, 田永林, 齐红威, 王晓, 等. 联邦生态: 从联邦数据到联邦智能. 智能科学与技术学报, 2020, 2(4): 305-311Wang Fei-Yue, Wang Yan-Fen, Chen Yi-Zhu, Tian Yong-Lin, Qi Hong-Wei, Wang Xiao, et al. Federated ecology: From federated data to federated intelligence. Chinese Journal of Intelligent Science and Technology, 2020, 2(4): 305-311 [65] 王晓, 要婷婷, 韩双双, 曹东璞, 王飞跃. 平行车联网: 基于ACP的智能车辆网联管理与控制. 自动化学报, 2018, 44(8): 1391-1404Wang Xiao, Yao Ting-Ting, Han Shuang-Shuang, Cao Dong-Pu, Wang Fei-Yue. Parallel internet of vehicles: The ACP-based networked management and control for intelligent vehicles. Acta Automatica Sinica, 2018, 44(8): 1391-1404 [66] Song Y H, He X Y, Liu Z J, He W, Sun C Y, Wang F Y. Parallel control of distributed parameter systems. IEEE Transactions on Cybernetics, 2018, 48(12): 3291-3301 doi: 10.1109/TCYB.2018.2849569 [67] Wang F Y. Parallel intelligence in metaverses: Welcome to hanoi! IEEE Intelligent Systems, 2022, 37(1): 16−20 [68] 赵志耘, 孙星恺, 王晓, 高芳, 王飞跃. 组织情报组织智能与系统情报系统智能: 从基于情景的情报到基于模型的情报. 情报学报, 2020, 39(12): 1283-1294 doi: 10.3772/j.issn.1000-0135.2020.12.005Zhao Zhi-Yun, Sun Xing-Kai, Wang Xiao, Gao Fang, Wang Fei-Yue. Systems intelligence and organizational intelligence: From scenario-based to model-based intelligence. Journal of the China Society for Scientific and Technical Information, 2020, 39(12): 1283-1294 doi: 10.3772/j.issn.1000-0135.2020.12.005 [69] 陈虹宇, 艾红, 王晓, 吕宜生, 陈圆圆, 王飞跃. 社会交通中的社会信号分析与感知. 自动化学报, 2021, 47(6): 1256-1272Chen Hong-Yu, Ai Hong, Wang Xiao, Lv Yi-Sheng, Chen Yuan-Yuan, Wang Fei-Yue. Analysis and perception of social signals in social transportation. Acta Automatica Sinica, 2021, 47(6): 1256-1272 [70] Núñez R, Allen M, Gao R, Miller Rigoli C, Relaford-Doyle J, Semenuks A. What happened to cognitive science? Nature Human Behaviour, 2019, 3(8): 782-791 doi: 10.1038/s41562-019-0626-2 [71] 陈霖. 新一代人工智能的核心基础科学问题: 认知和计算的关系. 中国科学院院刊, 2018, 33(10): 1104-1106Chen Lin. The core basic scientific problem of the new generation of artificial intelligence: The relationship between cognition and computation. Bulletin of Chinese Academy of Sciences, 2018, 33(10): 1104-1106 [72] Ye P J, Wang F Y. Parallel population and parallel human—a cyber-physical social approach. IEEE Intelligent Systems, 2022, 37(5): 19-27 doi: 10.1109/MIS.2022.3208362 [73] Ye P J, Wang X, Zheng W B, Wei Q L, Wang F Y. Parallel cognition: Hybrid intelligence for human-machine interaction and management. Frontiers of Information Technology & Electronic Engineering, 2022, 23(12): 1765-1779 [74] Chen S T, Zhang S Y, Shang J H, Chen B D, Zheng N N. Brain-inspired cognitive model with attention for self-driving cars. IEEE Transactions on Cognitive and Developmental Systems, 2019, 11(1): 13-25 doi: 10.1109/TCDS.2017.2717451 [75] 郑南宁. 认知过程的信息处理和新型人工智能系统. 中国基础科学, 2000(8): 9-18Zheng Nan-Ning. Information processing for cognition process and new artificial intelligent systems. China Basic Science, 2000(8): 9-18 [76] 戴汝为, 张雷鸣. 思维(认知)科学在中国的创新与发展. 自动化学报, 2010, 36(2): 193-198 doi: 10.3724/SP.J.1004.2010.00193Dai Ru-Wei, Zhang Lei-Ming. The creation and development of noetic (cognitive) science in China. Acta Automatica Sinica, 2010, 36(2): 193-198 doi: 10.3724/SP.J.1004.2010.00193 [77] Zheng W B, Yan L, Gou C, Wang F Y. Computational knowledge vision: Paradigmatic knowledge based prescriptive learning and reasoning for perception and vision. Artificial Intelligence Review, 2022, 55(8): 5917-5952 doi: 10.1007/s10462-022-10166-9 [78] 王飞跃. 从人工智能到智能产业: 迈向第三轴心时代的智慧世界. 无人系统技术, 2019, 2(1): 1-4Wang Fei-Yue. From artificial intelligence to intelligent industries: A smart world in the third axis age. Unmanned Systems Technology, 2019, 2(1): 1-4 [79] Wang W S, Na X X, Cao D P, Gong J W, Xi J Q, Xing Y, et al. Decision-making in driver-automation shared control: A review and perspectives. IEEE/CAA Journal of Automatica Sinica, 2020, 7(5): 1289-1307 [80] 刘腾, 要婷婷, 于会龙, 邢阳, 田滨, 陈龙, 等. 基于人机意图智能融合的平行驾驶技术. 中国计算机学会通讯, 2018, 14(8): 55-62 (查阅网上资料, 未找到对应的英文翻译, 请确认)Liu Teng, Yao Ting-Ting, Yu Hui-Long, Xing Yang, Tian Bin, Chen Long, et al. Parallel driving technology based on intelligent fusion of human-machine intention. Communications of CCF, 2018, 14(8): 55-62 [81] 李力, 王飞跃, 郑南宁, 张毅. 驾驶行为智能分析的研究与发展. 自动化学报, 2007, 33(10): 1014-1022Li Li, Wang Fei-Yue, Zheng Nan-Ning, Zhang Yi. Research and developments of intelligent driving behavior analysis. Acta Automatica Sinica, 2007, 33(10): 1014-1022 [82] Djuric N, Radosavljevic V, Cui H G, Nguyen T, Chou F C, Lin T H, et al. Uncertainty-aware short-term motion prediction of traffic actors for autonomous driving. In: Proceedings of the IEEE Winter Conference on Applications of Computer Vision (WACV). Snowmass, USA: IEEE, 2020. 2084−2093 [83] Zhu Z Y, Zhao H J. A survey of deep rl and il for autonomous driving policy learning. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(9): 14043-14065 doi: 10.1109/TITS.2021.3134702 [84] Liu T, Tian B, Ai Y F, Chen L, Liu F, Cao D P, et al. Dynamic states prediction in autonomous vehicles: Comparison of three different methods. In: Proceedings of the IEEE Intelligent Transportation Systems Conference (ITSC). Auckland, New Zealand: IEEE, 2019. 3750−3755 [85] Zhu X L, Hu W, Deng Z J, Zhang J W, Hu F Q, Zhou R, et al. Interaction-aware cut-in trajectory prediction and risk assessment in mixed traffic. IEEE/CAA Journal of Automatica Sinica, 2022, 9(10): 1752-1762 doi: 10.1109/JAS.2022.105866 [86] Xing Y, Lv C, Wang H J, Wang H, Ai Y F, Cao D P, et al. Driver lane change intention inference for intelligent vehicles: Framework, survey, and challenges. IEEE Transactions on Vehicular Technology, 2019, 68(5): 4377-4390 doi: 10.1109/TVT.2019.2903299 [87] Zhao C, Li L, Pei X, Li Z H, Wang F Y, Wu X B. A comparative study of state-of-the-art driving strategies for autonomous vehicles. Accident Analysis & Prevention, 2021, 150: Article No. 105937 [88] Wang F Y, Song R, Zhou R, Wang X, Chen L, Li L, et al. Verification and validation of intelligent vehicles: Objectives and efforts from China. IEEE Transactions on Intelligent Vehicles, 2022, 7(2): 164-169 doi: 10.1109/TIV.2022.3179104 [89] Chen L, Zhang Y Q, Tian B, Ai Y F, Cao D P, Wang F Y. Parallel driving os: A ubiquitous operating system for autonomous driving in cpss. IEEE Transactions on Intelligent Vehicles, 2022, 7(4): 886-895 doi: 10.1109/TIV.2022.3223728 [90] 林懿伦, 戴星原, 李力, 王晓, 王飞跃. 人工智能研究的新前线: 生成式对抗网络. 自动化学报, 2018, 44(5): 775-792Lin Yi-Lun, Dai Xing-Yuan, Li Li, Wang Xiao, Wang Fei-Yue. The new frontier of AI research: Generative adversarial networks. Acta Automatica Sinica, 2018, 44(5): 775-792 [91] 沈宇, 韩金朋, 李灵犀, 王飞跃. 游戏智能中的AI——从多角色博弈到平行博弈. 智能科学与技术学报, 2020, 2(3): 205-213Shen Yu, Han Jin-Peng, Li Ling-Xi, Wang Fei-Yue. AI in game intelligence—from multi-role game to parallel game. Chinese Journal of Intelligent Science and Technology, 2020, 2(3): 205-213 [92] 陈龙, 王晓, 杨健健, 艾云峰, 田滨, 李宇宸, 等. 平行矿山: 从数字孪生到矿山智能. 自动化学报, 2021, 47(7): 1633-1645Chen Long, Wang Xiao, Yang Jian-Jian, Ai Yun-Feng, Tian Bin, Li Yu-Chen, et al. Parallel mining operating systems: From digital twins to mining intelligence. Acta Automatica Sinica, 2021, 47(7): 1633-1645 [93] 刘腾, 王晓, 邢阳, 高玉, 田滨, 陈龙. 基于数字四胞胎的平行驾驶系统及应用. 智能科学与技术学报, 2019, 1(1): 40-51Liu Teng, Wang Xiao, Xing Yang, Gao Yu, Tian Bin, Chen Long. Research on digital quadruplets in cyber-physical-social space-based parallel driving. Chinese Journal of Intelligent Science and Technology, 2019, 1(1): 40-51 -

 下载:
下载:



图(8)
计量
- 文章访问数: 2325
- HTML全文浏览量: 730
- PDF下载量: 401
- 被引次数: 0
