

Sliding Mode Control Design of Aircraft Electric Brake System Based on Nonlinear Disturbance Observer
-
摘要: 飞机防滑刹车具有典型的强非线性、强耦合和参数时变等特点, 并且跑道环境的干扰容易对飞机的地面滑跑性能造成不利影响. 本文提出了一种基于非线性干扰观测器的飞机全电防滑刹车系统滑模控制设计方法. 首先, 考虑了实际刹车不确定性干扰条件下的防滑刹车动力学建模问题, 通过对高阶非线性刹车系统进行反馈线性化处理, 简化了基于严格反馈的模型. 其次, 基于对主轮打滑原因的深入分析, 设计了非线性干扰观测器对干扰进行在线估计, 并在控制律设计中引入补偿部分. 通过构造递归结构的快速终端滑模控制器来跟踪实时变化的最佳滑移率并建立稳定性条件, 实现了飞机全电防滑刹车系统的有限时间快速稳定并有效抑制了主轮锁定打滑. 通过在不同跑道状态下进行模拟仿真, 验证了本文提出的飞机防滑刹车控制策略可以有效地提高刹车效率.Abstract: Aircraft antiskid braking has typical characteristics of strong nonlinearity, strong coupling and time-varying parameters, and the disturbance of runway environment is easy to adversely affect the ground running performance of the aircraft. In this paper, a nonlinear disturbance observer-based sliding mode control design method is proposed for the aircraft electric antiskid braking system. Firstly, the dynamic modeling problem of antiskid braking under the disturbance of actual braking uncertainty is considered. The model based on strict feedback is simplified in the light of feedback linearization of the high-order nonlinear braking system. Secondly, based on the in-depth analysis of the main wheel slip, a nonlinear disturbance observer is designed to estimate the disturbance online, and the compensation part is introduced into the control law design process. A fast terminal sliding mode controller with recursive structure is constructed to track the optimal sliding rate changing in real time and the stability conditions have been established. The finite-time stability of the aircraft all-electric antiskid braking system is realized and the locking slip of the main wheel is effectively suppressed. Simulation results show that the antiskid braking control strategy proposed in this paper can effectively improve braking efficiency.
-
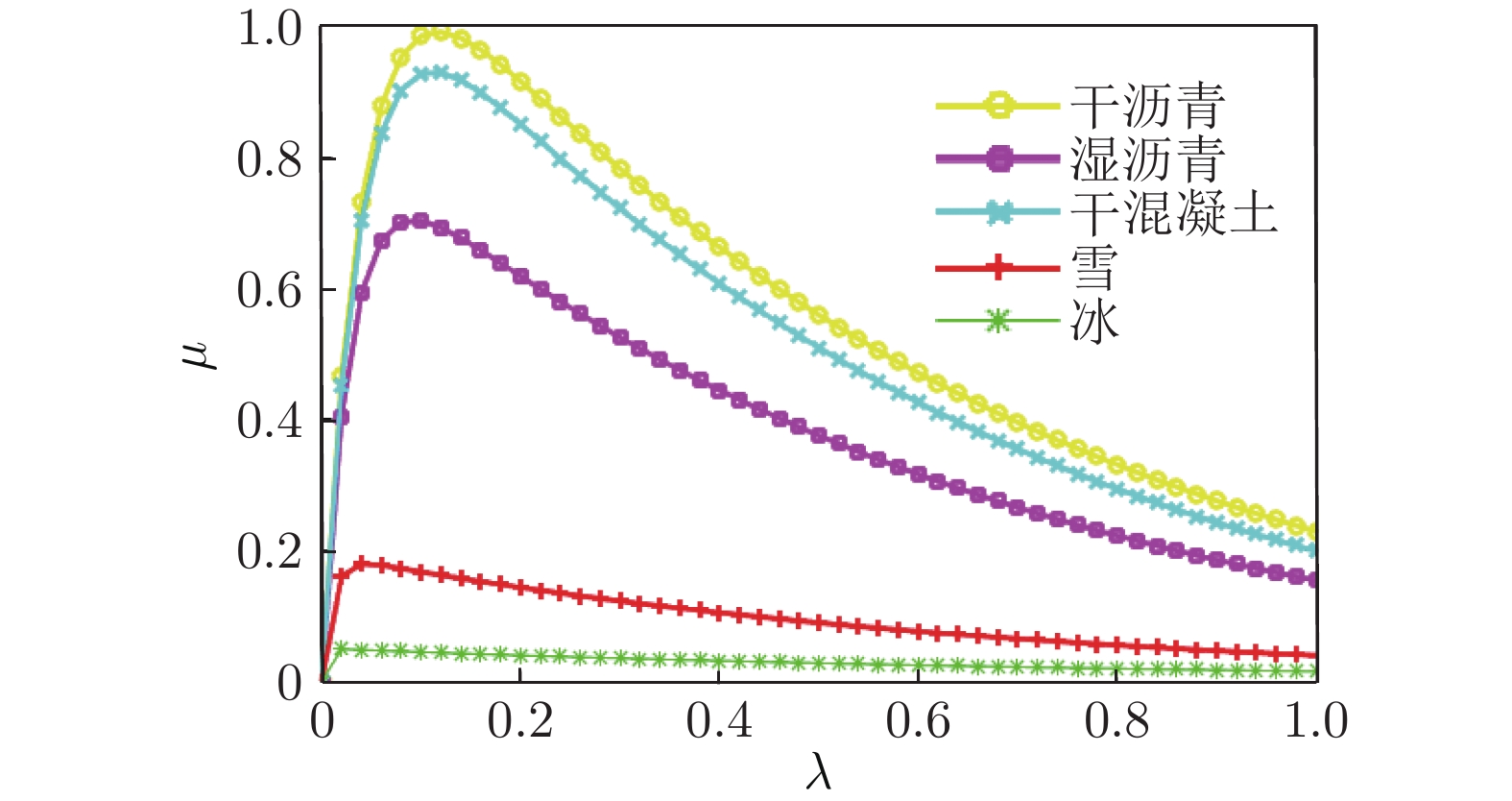
图 4
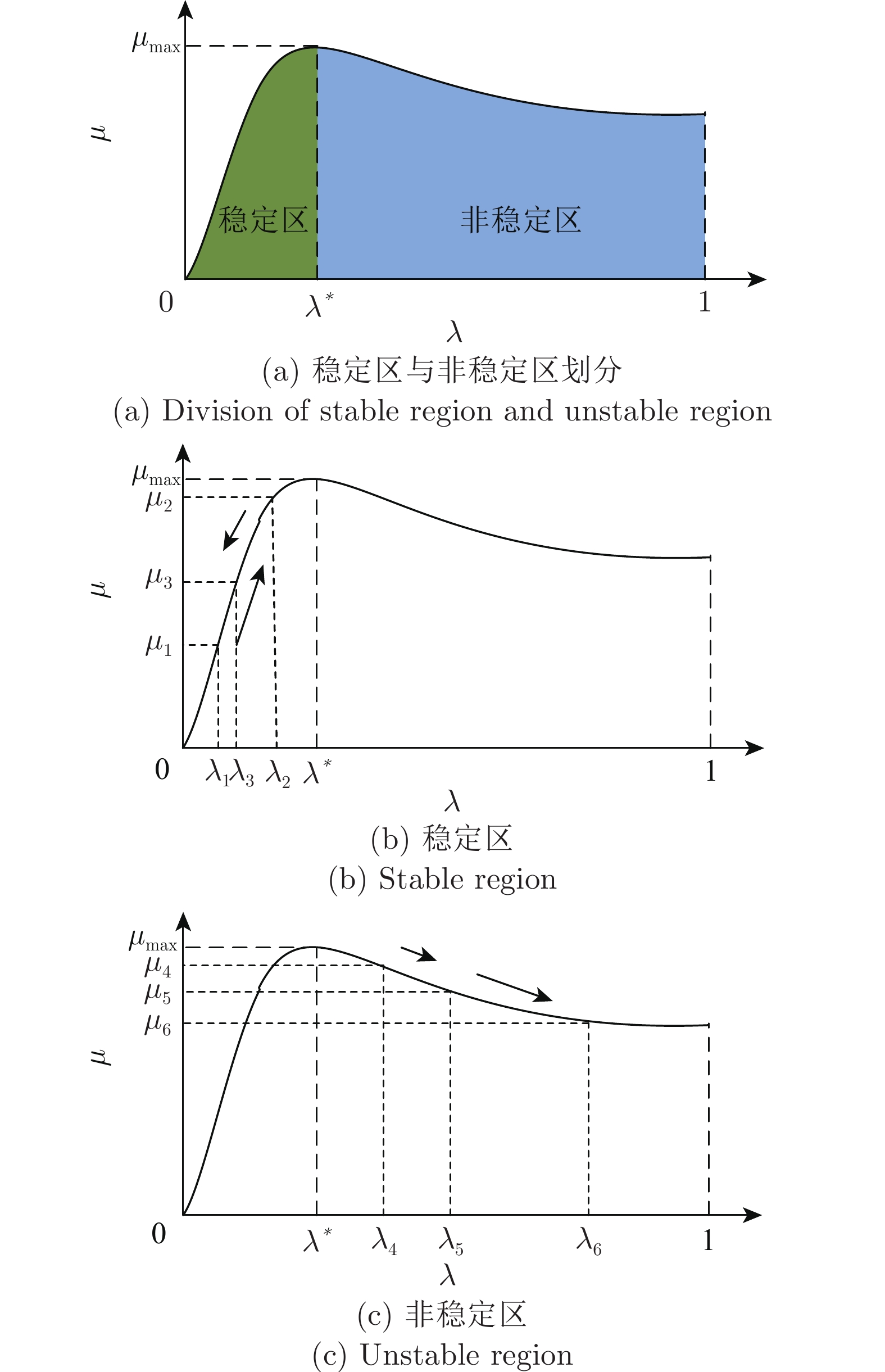
${v_x}$ = 30 m/s不同跑道状态$\mu $ -$\lambda $ 曲线Fig. 4 Curve of
$\mu $ -$\lambda $ on the different runway conditions with${v_x}$ = 30 m/s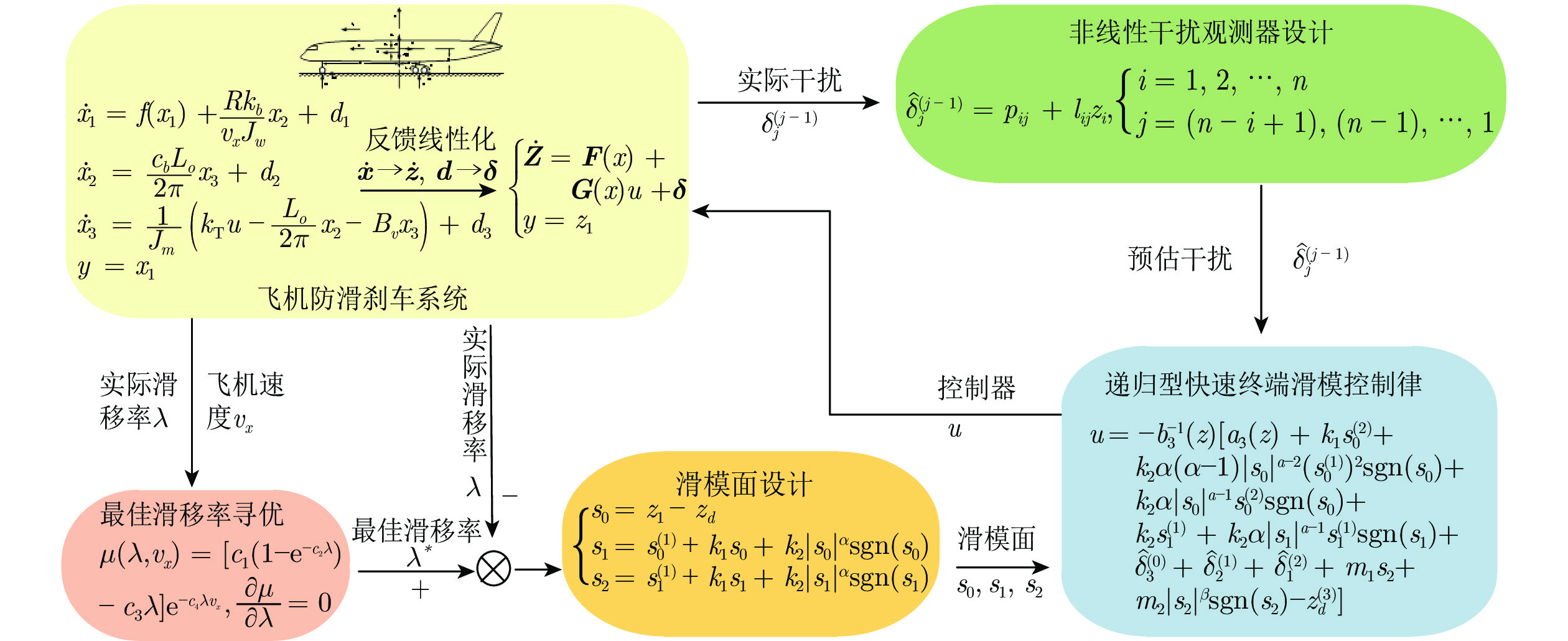
图 6 飞机防滑刹车闭环控制总框图
Fig. 6 General block diagram of aircraft antiskid brake closed-loop control
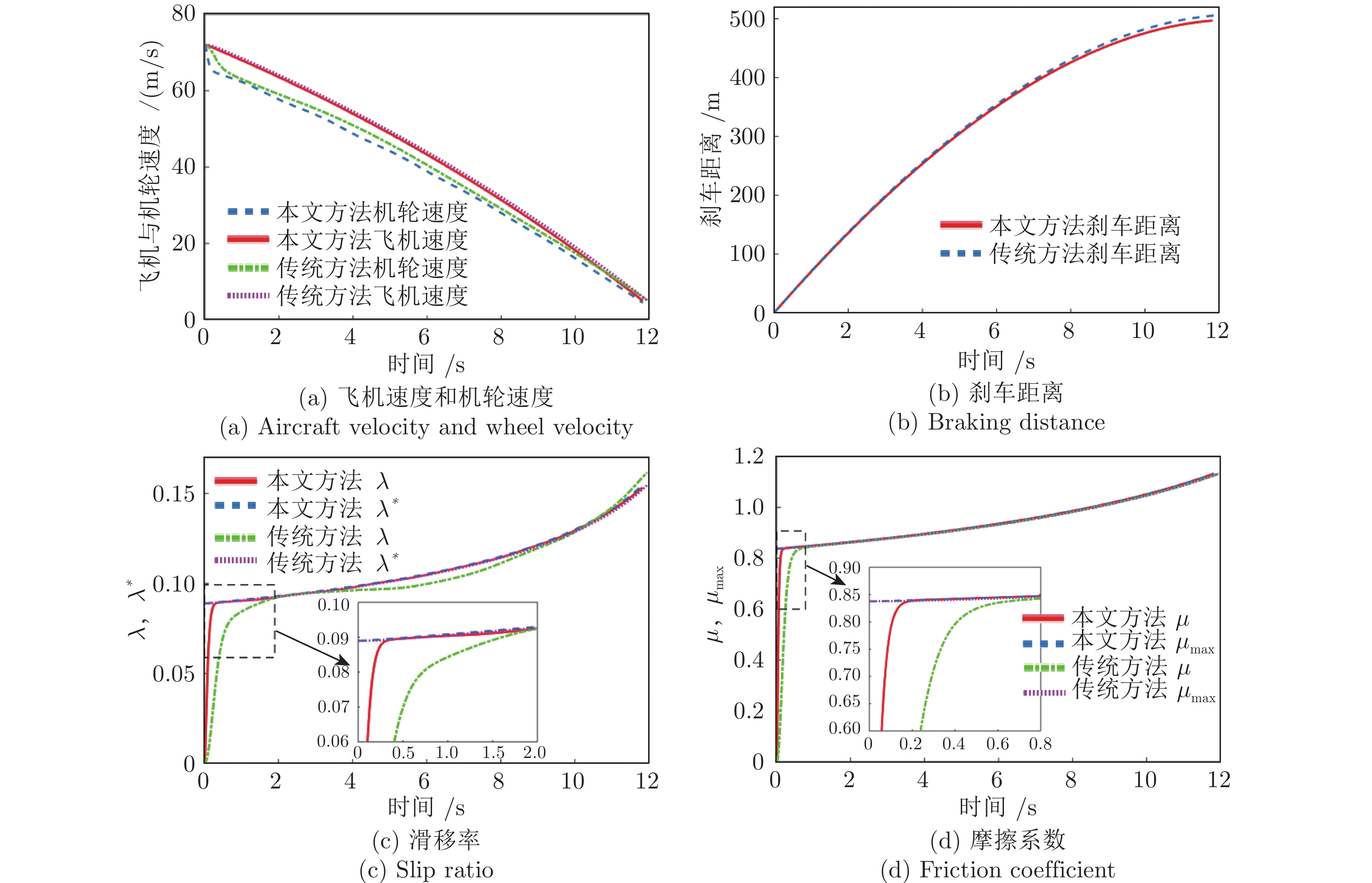
图 8 干沥青跑道状态下两种控制方法的飞机防滑刹车控制仿真结果
Fig. 8 Simulation results of aircraft antiskid brake control with two control methods under dry asphalt runway condition
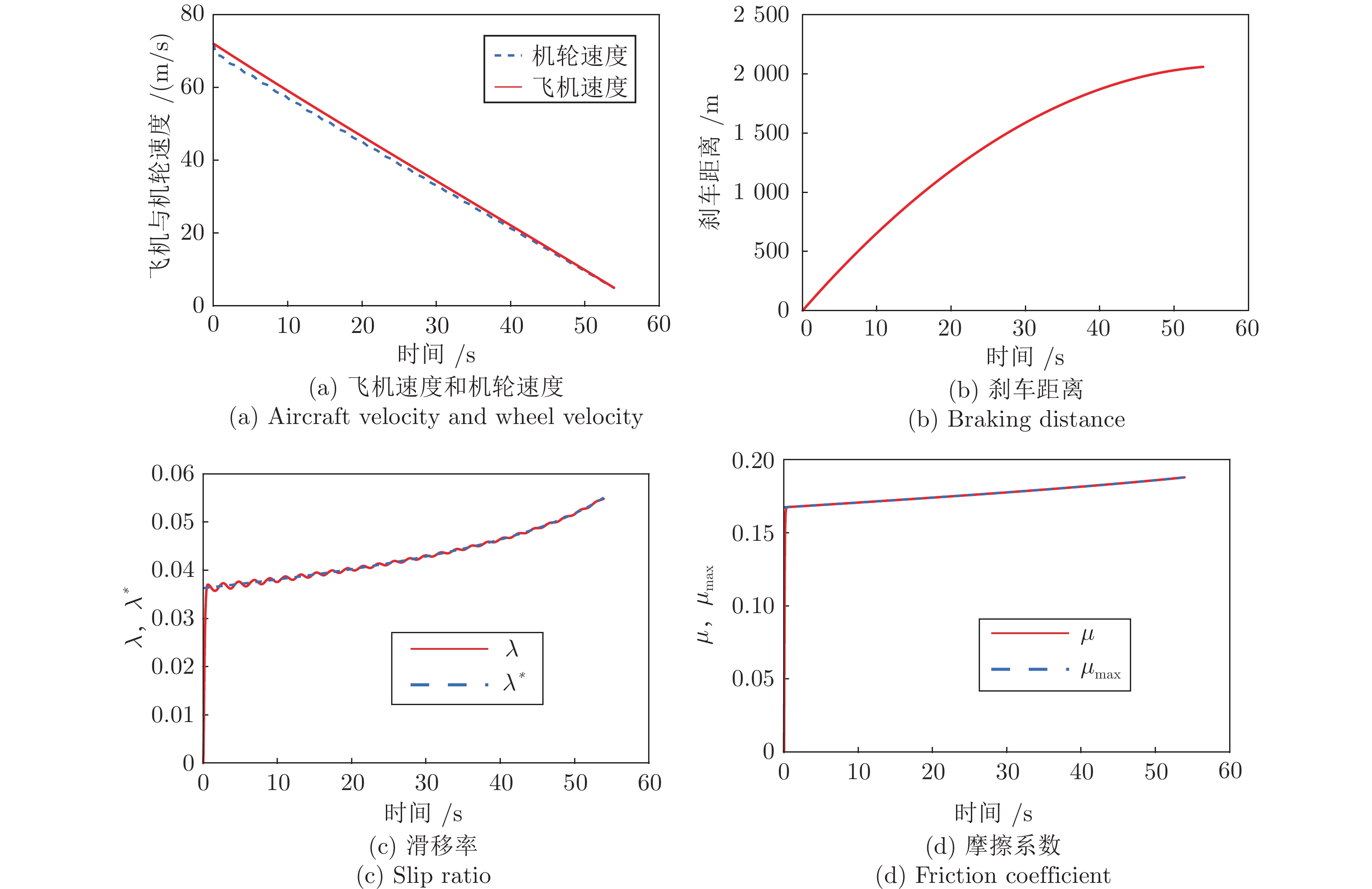
图 9 雪跑道状态下飞机防滑刹车控制仿真结果
Fig. 9 Simulation results of aircraft antiskid brake control under snow runway condition
表 1 飞机防滑刹车系统参数
Table 1 Parameters of antiskid braking system
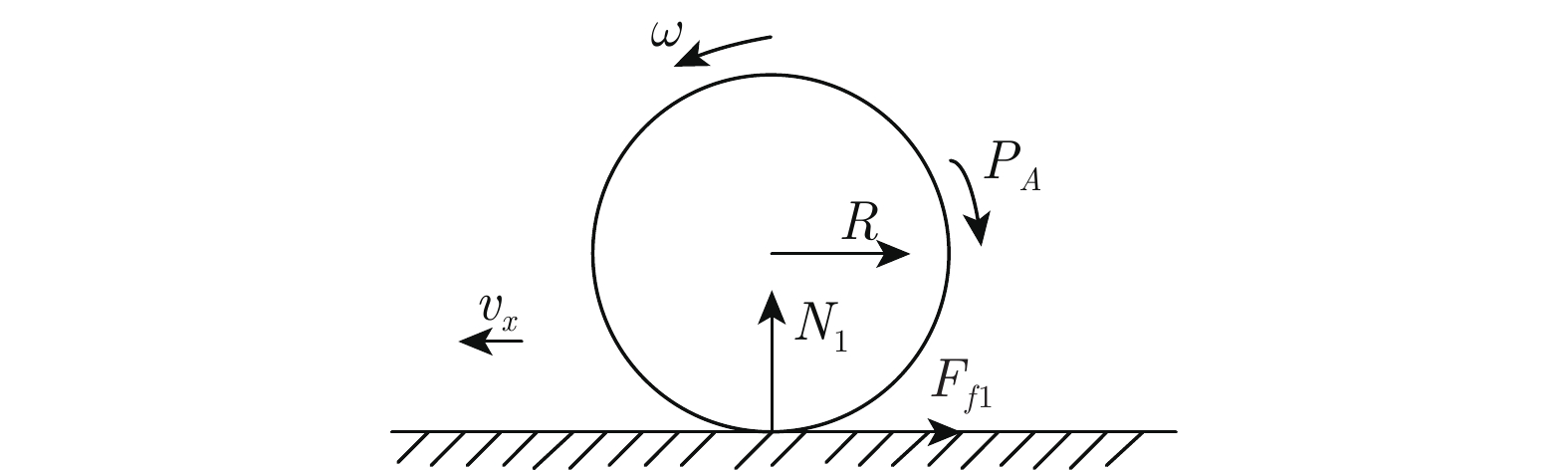
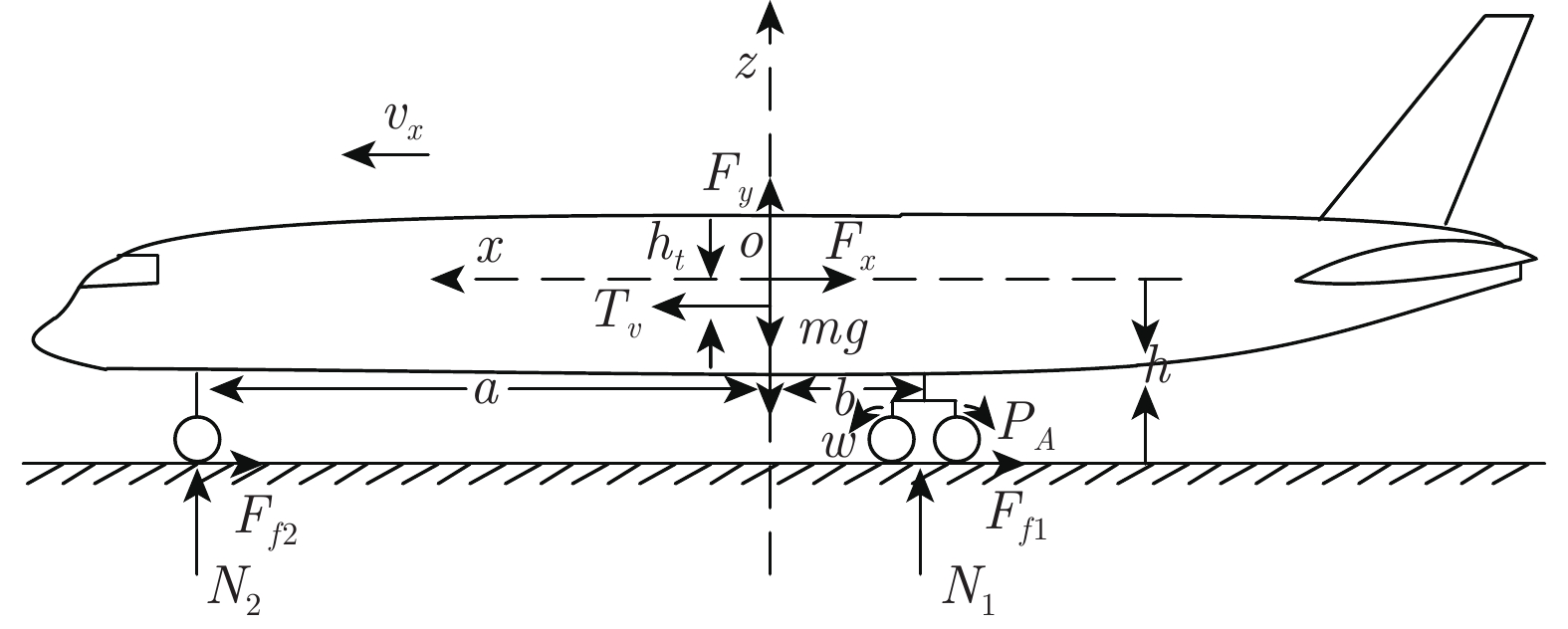
参数 具体描述 $m$ 飞机质量 ${v_x}$ 飞机纵向滑跑速度 ${F_x}$ 迎风阻力 ${F_y}$ 飞机升力 ${F_{f1}}$ 单个主轮与地面间摩擦力 ${F_{f2}}$ 单个前轮与地面间摩擦力 ${n_1}$ 受刹主轮个数 ${n_2}$ 前轮个数 ${T_v}$ 发动机推力 ${N_1}$ 单个主轮垂直载荷 ${N_2}$ 单个前轮垂直载荷 $g$ 重力加速度 $a$ 前轮中心与飞机重心的水平距离 $b$ 主轮中心与飞机重心的水平距离 $h$ 飞机重心与地面的垂直高度 ${h_t}$ 发动机推力点与飞机重心的垂直高度 ${T_{{\rm{int}} }}$ 发动机剩余推力 ${k_x}$ 纵向空气阻力系数 ${k_y}$ 横向空气阻力系数 $\rho $ 空气密度 ${C_d}$ 飞机气动阻力系数 ${C_L}$ 飞机滑跑时的升力系数 ${S_w}$ 机翼总面积  下载: 导出CSV
下载: 导出CSV
表 2 摩擦系数模型参数
Table 2 Parameters of friction coefficient model
跑道状态 ${c_1}$ ${c_2}$ ${c_3}$ ${c_4}$ 干沥青 1.2801 23.99 0.52 0.04 干混凝土 1.1973 25.168 0.5373 0.04 湿沥青 0.857 33.822 0.347 0.04 雪 0.1946 94.129 0.0646 0.04 冰 0.05 306.39 0 0.04
下载: 导出CSV
表 3 飞机防滑刹车性能指标
Table 3 Aircraft antiskid brake performance index
性能指标 干沥青 雪 刹车距离 (m) 496.807 2060.411 刹车时间 (s) 11.82 53.92 跟踪效率 (%) 99.43 98.95 制动效率 (%) 99.66 99.17
下载: 导出CSV
表 4 两种控制方法性能对比
Table 4 Performance comparison of the two control methods
对比项目 递归型 传统型 机轮仅工作在稳定区 是 否 最佳滑移率和最大摩擦系数的稳态误差 无 有 暂态至稳态的快速性 较快 较慢 鲁棒性 较强 较弱
下载: 导出CSV
-
[1] Huang C, Jiao Z-X, Shang Y-X, Yao J-Y. Antiskid braking control with on/off valves for aircraft applications. Journal of Aircraft, 2013, 50(6): 1869-1879 doi: 10.2514/1.C032242 [2] Kebairi A, Becherif M, Bagdouri M E. Modelling, simulation and identification of an engine air path electromechanical actuator. Control Engineering Practice, 2015, 34: 88-97 doi: 10.1016/j.conengprac.2014.07.009 [3] Yin Q-Z, Wei X-H, Nie H, Deng J. Study on modal characteristics and vibration reduction of an aircraft rotor-stator brake-induced squeal system. Acta Mechanica Sinica, 2020, 36(6): 1350-1359 doi: 10.1007/s10409-020-01003-9 [4] Dai Y-Q, Yu L-Y, Song J, Abi L, Zheng S. Aircraft ground braking assistant control based on pilot control model. IEEE Access, 2020, 8: 88643-88650 doi: 10.1109/ACCESS.2020.2993173 [5] Yazici H, Sever M. Observer based optimal vibration control of a full aircraft system having active landing gears and biodynamic pilot model. Shock and Vibration, 2016, 7: 1-20 [6] Jiao Z-X, Sun D, Shang Y-X, Liu X-C, Wu S. A high efficiency aircraft anti-skid brake control with runway identification. Aerospace Science and Technology, 2019, 91: 82-95 doi: 10.1016/j.ast.2019.05.001 [7] Jiao Z-X, Zhang H, Shang Y-X, Liu X-C, Wu S. A power-by-wire aircraft brake system based on high-speed on-off valves. Aerospace ence and Technology, 2020, 106: 106177 doi: 10.1016/j.ast.2020.106177 [8] Han K, Lee B, Choi S. Development of an antilock brake system for electric vehicles without wheel slip and road friction information. IEEE Transactions on Vehicular Technology, 2019, 68(6): 5506-5517 doi: 10.1109/TVT.2019.2911687 [9] Liang B, Zhu Y-Q, Li Y-R, He P-J, Li W-L. Adaptive nonsingular fast terminal sliding mode control for braking systems with electro-mechanical actuators based on radial basis function. Energies, 2017, 10(10): 1637 doi: 10.3390/en10101637 [10] Zhang X, Lin H. Backstepping adaptive neural network control for electric braking systems of aircrafts. Algorithms, 2019, 12(10): 215 doi: 10.3390/a12100215 [11] Zhang Z H, Li Y R. Modeling and simulation of switched reluctance machine based aircraft electric brake system by BP neural network. In: Proceedings of the 9th IEEE Conference on Industrial Electronics and Applications (ICIEA). Hangzhou China: IEEE, 2014. 338−341 [12] Jiao Z-X, Bai N, Sun D, Liu X-C, Wu S. A novel aircraft brake disturbance recognition model. Aerospace Science and Technology, 2020, 107(2): 106337 [13] Peng Z-H, Jiang Y, Wang J. Event-triggered dynamic surface control of an underactuated autonomous surface vehicle for target Enclosing. IEEE Transactions on Industrial Electronics, 2021, 68(4): 3402-3412 doi: 10.1109/TIE.2020.2978713 [14] 于欣波, 贺威, 薛程谦, 孙永坤, 孙长银. 基于扰动观测器的机器人自适应神经网络跟踪控制研究. 自动化学报, 2019, 45(07): 1307-1324Yu Xin-Bo, He Wei, Xue Cheng-Qian, Sun Yong-Kun, Sun Chang-Yin. Disturbance observer-based adaptive neural network tracking control for robots. Acta Automatica Sinica, 2019, 45(07): 1307-1324 [15] 李杰, 齐晓慧, 夏元清, 高志强. 线性/非线性自抗扰切换控制方法研究. 自动化学报, 2016, 42(02): 202-212Li Jie, Qi Xiao-Hui, Xia Yuan-Qing, Gao Zhi-Qiang. On linear/nonlinear active disturbance rejection switching control, Acta Automatica Sinica, 2016, 42(02): 202-212 [16] Wang L-J, Li H-Y, Zhou Q, Lu R-Q. Adaptive fuzzy control for nonstrict feedback systems with unmodeled dynamics and fuzzy dead zone via output feedback. IEEE Transactions on Cybernetics, 2017, 47(9): 2400-2412 doi: 10.1109/TCYB.2017.2684131 [17] 王东委, 富月. 基于高阶观测器和干扰补偿控制的模型预测控制方法. 自动化学报, 2020, 46(06): 1220-1228Wang Dong-Wei, Fu Yue. Model predict control method based on higher-order observer and disturbance compensation control, Acta Automatica Sinica, 2020, 46(06): 1220-1228 [18] Li F-B, Du C-L, Yang C-H, Gui W-H. Passivity-based asynchronous sliding mode control for delayed singular Markovian jump systems. IEEE Transactions on Automatic Control, 2017, 63(8): 2715-2721 [19] Dinçmen E, Güvenç B A, Acarman T. Extremum-seeking control of ABS braking in road vehicles with lateral force improvement. IEEE Transactions on Control Systems Technology, 2012, 22(1): 230-237 [20] Jiao Z-X, Liu X-C, Shang Y-X, Huang C. An integrated self-energized brake system for aircrafts based on a switching valve control. Aerospace Science and Technology, 2017, 60: 20-30 doi: 10.1016/j.ast.2016.10.021 [21] Chen M-Q, Liu W-S, Ma Y-Z, Wang J, Xu F-R, Wang Y-J. Mixed slip-deceleration PID control of aircraft wheel braking system. IFAC-PapersOnLine, 2018, 51(4): 160-165 doi: 10.1016/j.ifacol.2018.06.059 [22] Qiu Y-N, Liang X-G, Dai Z-Y. Backstepping dynamic surface control for an anti-skid braking system. Control Engineering Practice, 2015, 42: 140-152 doi: 10.1016/j.conengprac.2015.05.013 [23] Sun D, Jiao Z-X, Shang Y-X, Wu S, Liu X-C. High-efficiency aircraft antiskid brake control algorithm via runway condition identification based on an on-off valve array. Chinese Journal of Aeronautics, 2019, 32(11): 2538-2556 doi: 10.1016/j.cja.2019.08.020 [24] 李丰羽, 焦宗夏. 基于结合力模型的自适应飞机防滑刹车控制. 北京航空航天大学学报, 2013, 39(04): 447-452Li Feng-Yu, Jiao Zong-Xia. Adaptive control for aircraft antiskid braking system based on friction force model. Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(04): 447-452 [25] Chen M-Q, Xu F-R, Liang X-L, Liu W-S. MSD-based NMPC aircraft anti-skid brake control method considering runway variation. IEEE Access, 2021, 9: 51793-51804 doi: 10.1109/ACCESS.2021.3070066 [26] Liu C, Liu G, Fang J-C. Feedback linearization and extended state observer-based control for rotor-AMBs system with mismatched uncertainties. IEEE Transactions on Industrial Electronics, 2016, 64(2): 1313-1322 [27] Wu Y-Q, Isidori A, Lu R-Q, Khalil H K. Performance recovery of dynamic feedback-linearization methods for multivariable nonlinear systems. IEEE Transactions on Automatic Control, 2020, 65(4): 1365-1380 doi: 10.1109/TAC.2019.2924176 [28] Ginoya D, Shendge P D, Phadke S B. Sliding mode control for mismatched uncertain systems using an extended disturbance observer. IEEE Transactions on Industrial Electronics, 2013, 61(4): 1983-1992 [29] Bhat S P, Bernstein D S. Finite-time stability of continuous autonomous systems. SIAM Journal on Control and Optimization, 2000, 38(3): 751-766 doi: 10.1137/S0363012997321358 [30] Zhou H-B, Song S-M, Song J-H. Design of sliding mode guidance law with dynamic delay and impact angle constraint. International Journal of Control, Automation and Systems, 2017, 15(1): 239-247 doi: 10.1007/s12555-015-0186-9 [31] Hu Y-H, Wang H, He S, Zheng J-C, Ping Z-W, Shao K, Cao Z-W, Man Z-H. Adaptive tracking control of an electronic throttle valve based on recursive terminal sliding mode. IEEE Transactions on Vehicular Technology, 2020, 1(1): 1-11 [32] Chen X-L, Dai Z-Y, Lin H, Qiu Y-N, Liang X-G. Asymmetric barrier Lyapunov function-based wheel slip control for antilock braking system. International Journal of Aerospace Engineering, 2015, 2015: 1-10 -













计量
- 文章访问数: 2324
- HTML全文浏览量: 633
- PDF下载量: 600
- 被引次数: 0
