

Distributed Adaptive Time-varying Output Formation Tracking for Heterogeneous Swarm Systems
-
摘要: 提出了一种能够解决高阶异构集群系统输出时变编队跟踪问题的控制方法. 集群系统中的智能体分为领导者和跟随者, 领导者和跟随者的动力学模型可以完全不同. 跟随者的输出在跟踪领导者输出的同时保持时变编队实现协同运动. 考虑了领导者存在已知或未知控制输入、领导者和跟随者均存在未知扰动、有向通信拓扑存在切换等多种因素并存的情况, 结合观测器理论、自适应控制理论和滑模控制理论设计了完全分布式的输出时变编队跟踪控制协议, 摆脱了对领导者控制输入上界值、与通信拓扑相关的拉普拉斯矩阵的特征值以及时变编队函数等全局信息的依赖. 利用Lyapunov理论证明了在有向拓扑切换条件下异构集群系统的闭环稳定性. 最后通过数值仿真对理论结果的有效性进行了验证.Abstract: A control method is proposed to solve time-varying output formation tracking problems of heterogeneous high-order swarm systems in this paper. The agents in swarm systems are classified into the leader and the follower. The dynamics of all agents can be different with each other. Outputs of the followers keep time-varying formation while tracking the leader' s output to realize cooperative movement. With the existence of leader' s known or unknown input, leader' s and followers' disturbances and switching directed topologies, distributed time-varying output formation tracking control protocols without any global information such as the upper boundness of the leader' s input, the eigenvalue information of the Laplacian matrix associated with the communication topologies and the time-varying formation function are designed base on the observer theory, adaptive control theory and sliding mode control theory. The closed-loop stability of heterogeneous swarm systems with switching directed topologies is proven by Lyapunov theory. Finally, the effectiveness of the obtained theoretical results is verified by numerical simulation.1) 收稿日期 2020-04-04 录用日期 2020-08-27 Manuscript received April 4, 2020; accepted August 27, 2020 国家重点研发计划课题(2018AAA0102303), 国家自然科学基金 (61922008, 61973013, 61873011, 61803014), 国防创新特区项目(18-163-00-TS-001-001-34), 国防基础科研计划资助(JCKY2019601C106), 北京市自然科学基金(4182035)资助 Supported by Science and Technology Innovation 2030-Key Project of “New Generation Artificial Intelligence” (2018AAA0102303), National Natural Science Foundation of China (61922008, 61973013, 61873011, 61803014), the Innovation Zone Project (18-163-00-TS-001-001-34), the Defense Industrial Technology Development Program (JCKY2019601C106), the Beijing Natural Science Foundation (4182035) 本文责任编委 邓方 Recommended by Associate Editor DENG Fang 1. 北京航空航天大学自动化科学与电气工程学院飞行器控制一体化技术国防科技重点实验室 北京 100191 2. 北京航空航天大学, 大数据科学与脑机智能高精尖创新中心 北京 100191 3. 北京2) 电子工程总体研究所 北京 100854 1.School of Automation Science and Electrical Engineering, Science and Technology on Aircraft Control Laboratory, Beihang University, Beijing 100191 2. Advanced Innovation Center for Big Data and Brain Computing, Beihang University, Beijing 100191 3. Beijing Institute of Electronic System Engineering, Beijing 100854
-
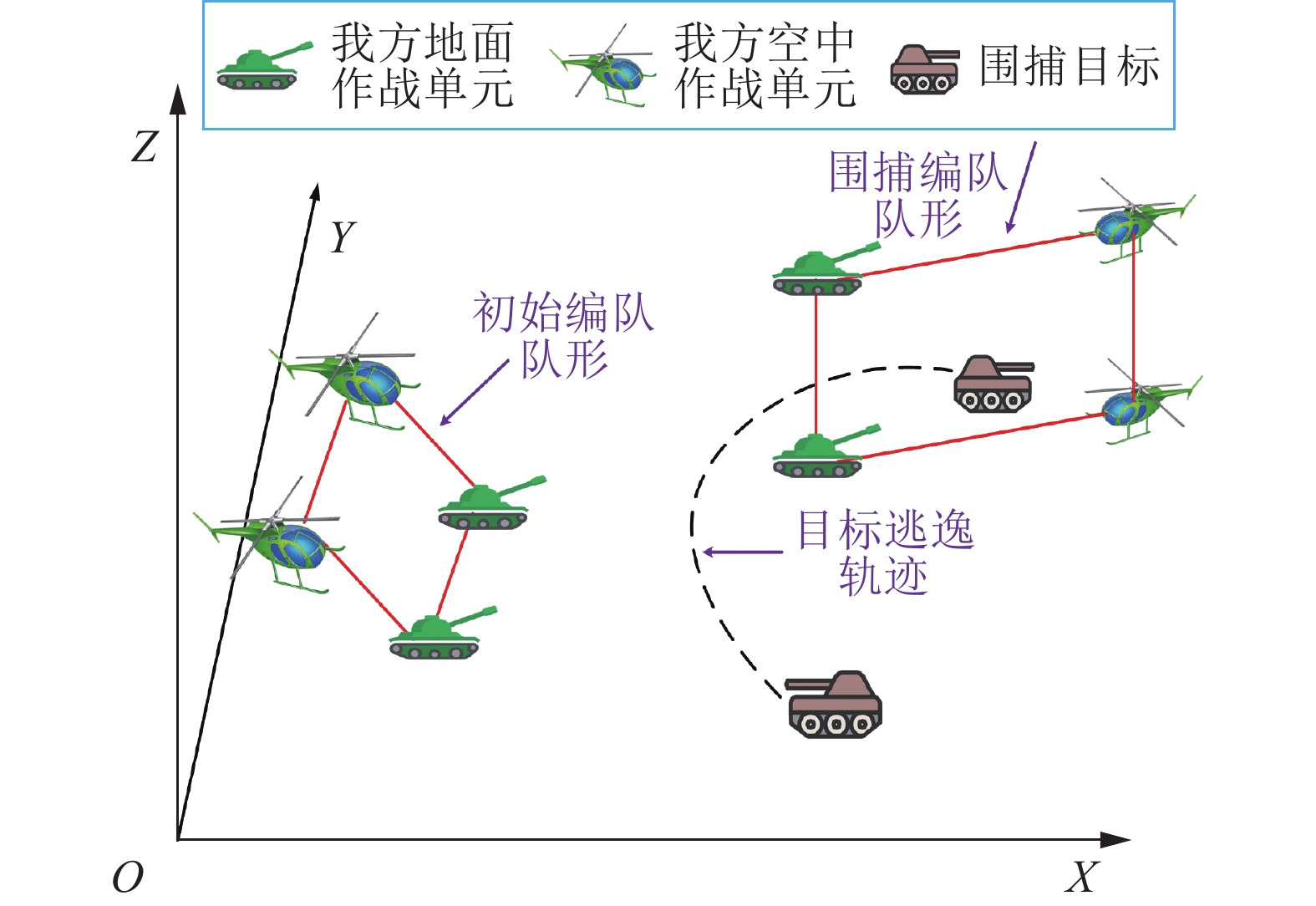
图 1 有人−无人飞行器协同飞行示意图
Fig. 1 The illustration of cooperative flight strategy for manned and unmanned aerial vehicles
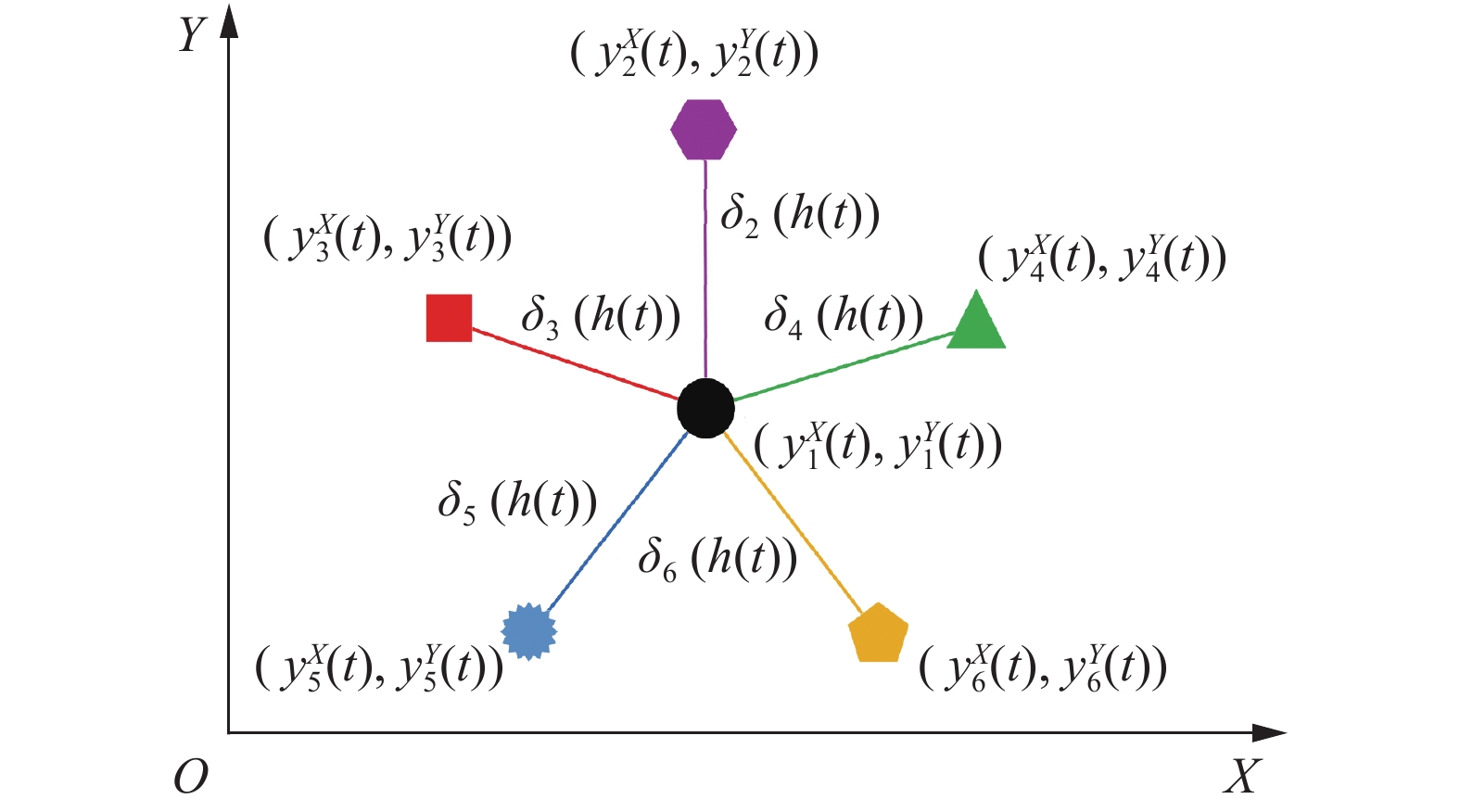
图 3 集群系统输出时变编队跟踪示意图
Fig. 3 The illustration of time-varying output formation tracking for swarm systems
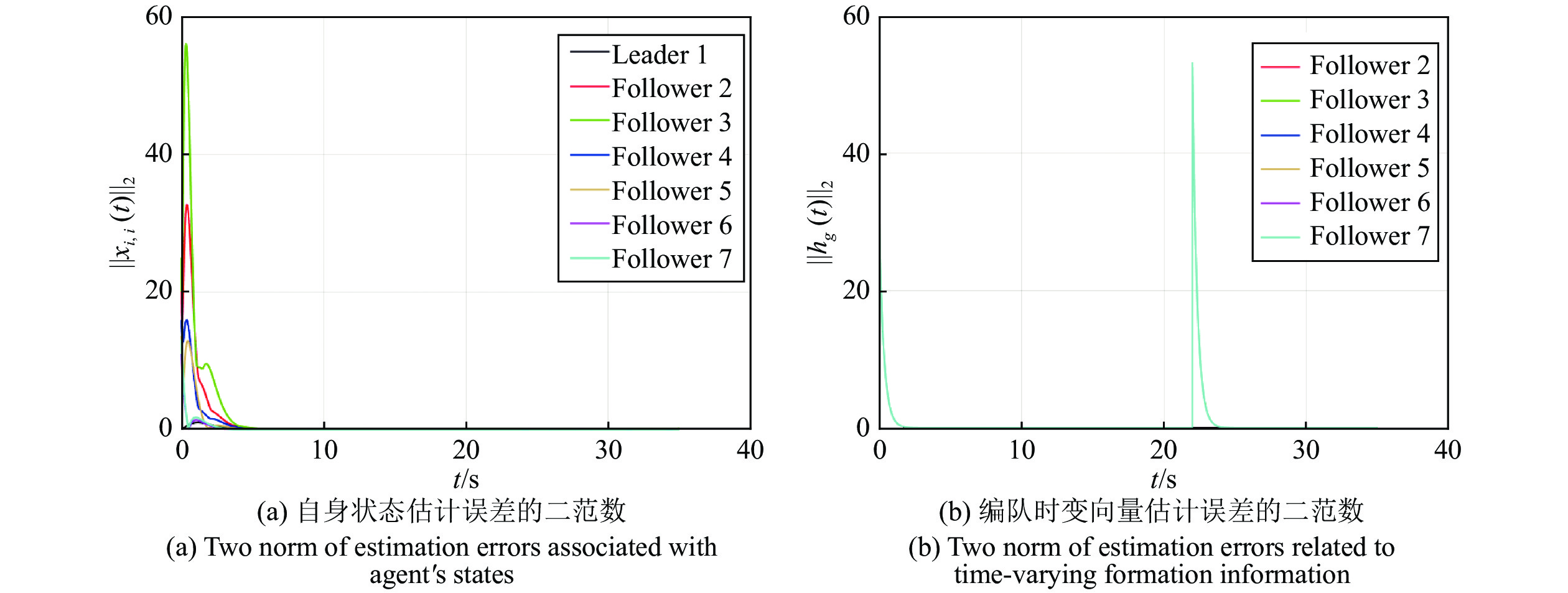
图 5 控制协议(7)和(8)中观测器的估计误差
Fig. 5 The estimation errors of observers in control protocol (7) and control protocol (8)
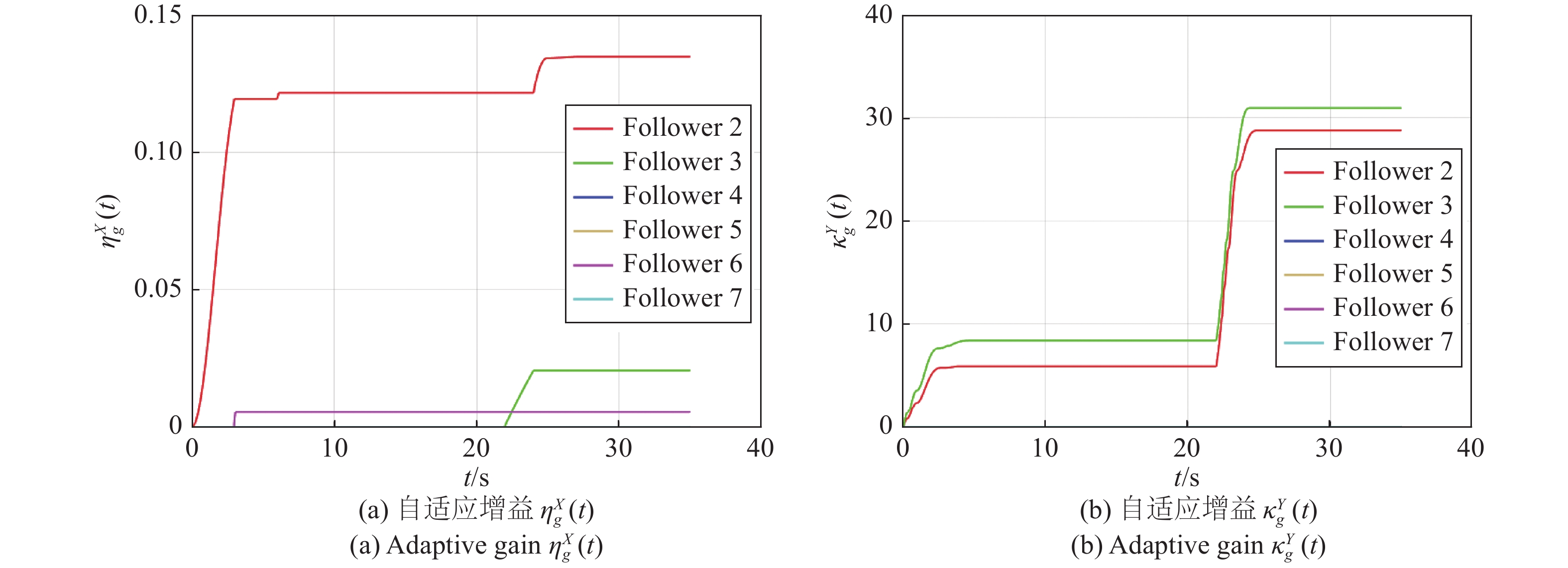
图 6 跟随者控制协议(8)中的自适应增益变化曲线
Fig. 6 The varying curve of adaptive gains in followers′ control protocol (8)

图 7 跟随者控制协议(8)中的控制输入变化曲线
Fig. 7 The varying curve of control input in followers′ control protocol (8)
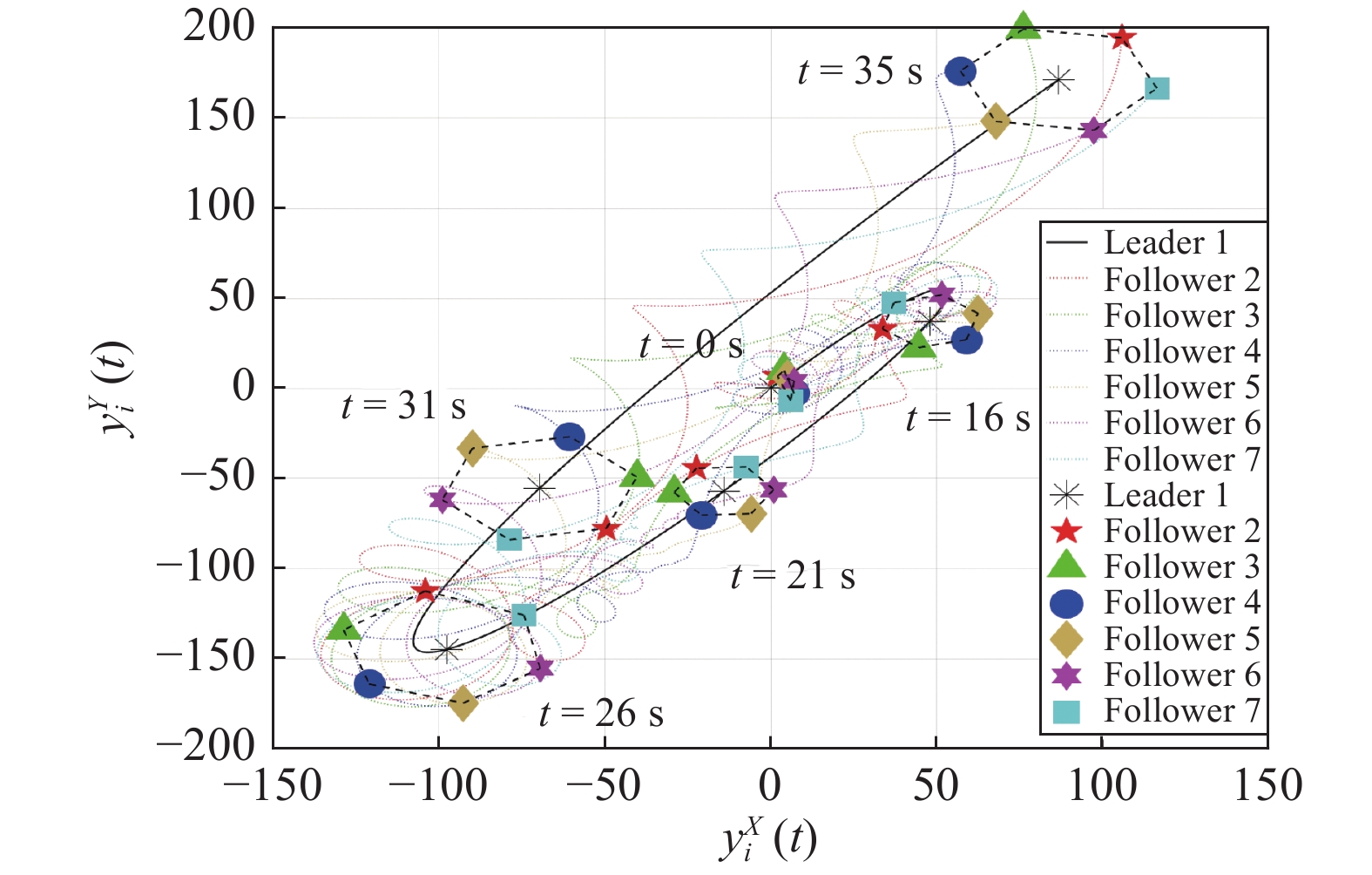
图 8 当领导者是合作目标时集群系统的输出轨迹以及部分时刻的输出信息
Fig. 8 The trajectory of output and the output information at partial moments associated with swarm systems when leader is cooperative target
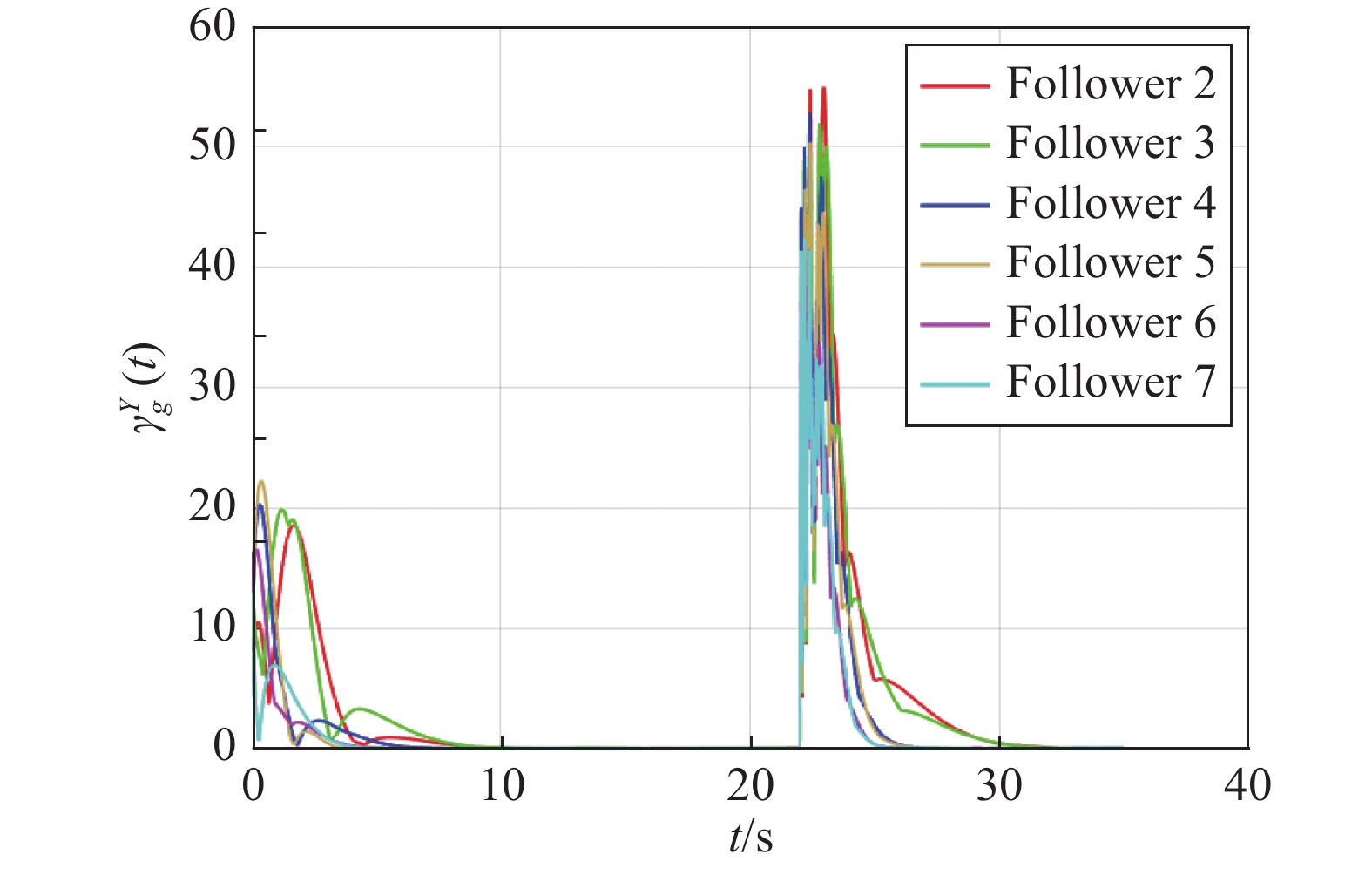
图 9 当领导者是合作目标时集群系统输出时变编队跟踪误差
Fig. 9 The error of time-varying output formation tracking related to swarm systems when leader is cooperative target
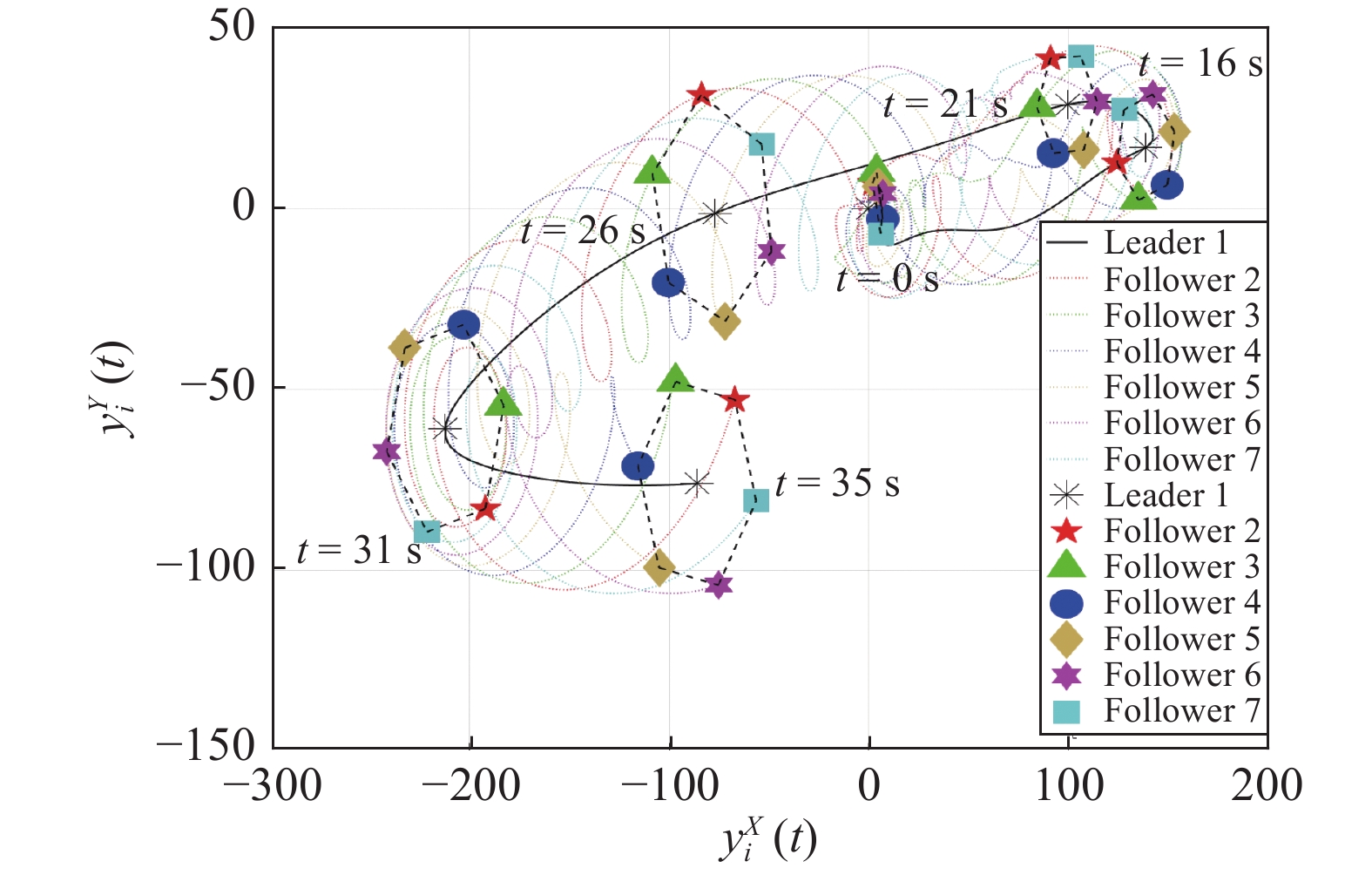
图 10 当领导者是非合作目标时集群系统的输出轨迹以及部分时刻的输出信息
Fig. 10 The trajectory of output and the output information at partial moments associated with swarm systems when leader is noncooperative target
-
[1] Ren W. Consensus strategies for cooperative control of vehicle formations. IET Control Theory & Applications, 2007, 1(2): 505-512 [2] Yang X W, Fan X P. Distributed formation control for multiagent systems in the presence of external disturbances. IEEE Access, 2019, 7: 80194-80207 doi: 10.1109/ACCESS.2019.2923852 [3] Dong X W, Hu G Q. Time-varying formation control for general linear multi-agent systems with switching directed topologies. Automatica, 2016, 73: 47-55 doi: 10.1016/j.automatica.2016.06.024 [4] Gong Y F, Wen G G, Peng Z X, Huang T W, Chen Y W. Observer-based time-varying formation control of fractional order multi-agent systems with general linear dynamics. IEEE Transactions on Circuits and Systems Ⅱ: Express Briefs, 2019. https://ieeexplore.ieee.org/doi:10.1109/TCSII.2019.2899063" target="_blank">10.1109/TCSII.2019.2899063">https://ieeexplore.ieee.org/doi:10.1109/TCSII.2019.2899063 [5] Li S B, Zhang J, Li X L, Wang F, Luo X Y, Guan X P. Formation control of heterogeneous discrete-time nonlinear multi-agent systems with uncertainties. IEEE Transactions on Industrial Electronics, 2017, 64(6): 4730-4740 doi: 10.1109/TIE.2017.2674590 [6] Wang R, Dong X W, Li Q D, Ren Z. Distributed time-varying output formation control for general linear multiagent systems with directed topology. IEEE Transactions on Control of Network Systems, 2019, 6(2): 609-620 doi: 10.1109/TCNS.2018.2863047 [7] Zuo S, Song Y D, Frank L L, Davoudi A. Adaptive output formation-tracking of heterogeneous multi-agent systems using time-varying L2-gain design. IEEE Control Systems Letters, 2018, 2(2): 236-241 doi: 10.1109/LCSYS.2018.2814071 [8] Su H S, Zhang J X, Chen X. A stochastic sampling mechanism for time-varying formation of multiagent systems with multiple leaders and communication delays. IEEE Transactions on Neural Networks and Learning Systems, 2019, https://ieeexplore.ieee.org/doi:10.1109/TNNLS.2019.2891259" target="_blank">10.1109/TNNLS.2019.2891259">https://ieeexplore.ieee.org/doi:10.1109/TNNLS.2019.2891259 [9] Wang Y J, Song Y D, Ren W. Distributed adaptive finite-time approach for formation-Containment control of networked nonlinear systems under directed topology. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(7): 3164-3175 [10] Li D Y, Zhang W, He W, Li C J, Ge S S. Two-layer distributed formation-containment control of multiple Euler-Lagrange systems by output feedback. IEEE Transactions on Cybernetics, 2019, 49(2): 675-687 doi: 10.1109/TCYB.2017.2786318 [11] Hua Y Z, Dong X W, Li Q D, Ren Z. Distributed time-varying formation robust tracking for general linear multiagent systems with parameter uncertainties and external disturbances. IEEE Transactions on Cybernetics, 2017, 47(8): 1959-1969 doi: 10.1109/TCYB.2017.2701889 [12] Yu J L, Dong X W, Li Q D, Ren Z. Practical time-varying formation tracking for second-order nonlinear multiagent systems with multiple leaders using adaptive neural networks. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(12): 6015-6025 doi: 10.1109/TNNLS.2018.2817880 [13] Yu J L, Dong X W, Han L, Li Q D, Ren Z. Practical time-varying formation tracking for high-order nonlinear strict-feedback multi-agent systems with input saturation. ISA Transactions, 2019, https://doi.org/10.1016/j.isatra.2019.08.019 [14] Wang Y, He L, Huang C Q. Adaptive time-varying formation tracking control of unmanned aerial vehicles with quantized input. ISA Transactions, 2019, 85: 76-83 doi: 10.1016/j.isatra.2018.09.013 [15] Zuo S, Song Y D, Frank L L, Davoudi A. Time-varying output formation containment of general linear homogeneous and heterogeneous multi-agent systems. IEEE Transactions on control of Networks Systems, 2019, 6(2): 537-548 doi: 10.1109/TCNS.2018.2847039 [16] Hua Y Z, Dong X W, Hu G Q, Li Q D, Ren Z. Distributed time-varying output formation tracking for heterogeneous linear multi-agent systems with a nonautonomous leader of un-known input. IEEE Transactions on Automatic Control, 2019, 64(10): 4292-4299 doi: 10.1109/TAC.2019.2893978 [17] 田磊, 王蒙一, 赵启伦, 王晓东, 宋勋, 任章. 拓扑切换的集群系统分布式分组时变编队跟踪控制. 中国科学: 信息科学, 2020, 50(3): 408-423 doi: 10.1360/SSI-2019-0171Tian Lei, Wang Meng-Yi, Zhao Qi-Lun, Wang Xiao-Dong, Song Xun, Ren Zhang. Distributed time-varying group formation tracking for cluster systems with switching interaction topologies (in Chinese). Scientia Sinica Informations, 2020, 50(3): 408-423 doi: 10.1360/SSI-2019-0171 [18] Jiang W, Wen G G, Peng Z X, Huang T W, Rahmani A. Fully distributed formation-containment control of heterogeneous linear multiagent Systems. IEEE Transactions on Automatic Control, 2019, 64(9): 3889-3896 doi: 10.1109/TAC.2018.2887409 [19] Hua Y Z, Dong X W, Wang J B, Li Q D, Ren Z. Time-varying output formation tracking for heterogeneous linear multi-agent systems with multiple leaders and switching topologies. Journal of the Franklin Institute, 2019, 356: 539-560 doi: 10.1016/j.jfranklin.2018.11.006 [20] Liu X M, Ge S S, Goh C H, Li Y N. Event-triggered coordination for formation tracking control in constrained space with limited communication. IEEE Transactions on Cybernetics, 2019, 49(3): 1000-1011 doi: 10.1109/TCYB.2018.2794139 [21] Hua Y Z, Dong X W, Han L, Li Q D, Ren Z. Finite-time time-varying formation tracking for high-order multiagent systems with mismatched disturbances. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2018. http://ieeexplore.ieee.org/doi:10.1109/TSMC.2018.2867548" target="_blank">10.1109/TSMC.2018.2867548">http://ieeexplore.ieee.org/doi:10.1109/TSMC.2018.2867548 [22] Duan J, Zhang H G, Cai Y L, Zhang K. Finite-time time-varying output formation-tracking of heterogeneous linear multi-agent systems. Journal of the Franklin Institute, 2019. https://www.sciencedirect.com/doi:10.1016/j.jfranklin.2019.10.012" target="_blank">10.1016/j.jfranklin.2019.10.012">https://www.sciencedirect.com/doi:10.1016/j.jfranklin.2019.10.012 [23] Su Y F, Huang J. Cooperative output regulation of linear multiagent systems. IEEE Transactions on Automatic Control, 2012, 57(4): 1062-1066 doi: 10.1109/TAC.2011.2169618 [24] Li Z K, Chen M Z Q, Ding Z T. Distributed adaptive controllers for cooperative output regulation of heterogeneous agents over directed graphs. Automatica, 2016, 68: 179-183 doi: 10.1016/j.automatica.2016.01.076 [25] Lu M B, Liu L. Distributed feedforward approach to cooperative output regulation subject to communication delays and switching networks. IEEE Transactions on Automatic Control, 2012, 62(4): 1999-2005 [26] Cai H, Lewis F L, Hu G Q, Huang J. The adaptive distributed observer approach to the cooperative output regulation of linear multiagent systems. Automatica, 2017, 75: 299-305 doi: 10.1016/j.automatica.2016.09.038 [27] Huang J. Nonlinear Output Regulation: Theory and Applications. Philadelphia, PA: SIAM, 2004. [28] Wheeler G, Su C Y, Stepanenko Y. A sliding mode controller with improved adaptation laws for the upper bounds on the norm of uncertainties. Automatica, 1998, 34(12): 1657-1661 doi: 10.1016/S0005-1098(98)80024-1 [29] Wu H S. Adaptive robust tracking and model following of uncertain dynamical systems with multiple time delays. IEEE Transactions on Automatic Control, 2004, 49(4): 611-616 doi: 10.1109/TAC.2004.825634 [30] 李振营, 沈毅, 胡恒章. 具有未知输入干扰的观测器设计. 航空学报, 2000, 21(5): 471-473 doi: 10.3321/j.issn:1000-6893.2000.05.023Li Zhen-Ying, Shen Yi, Hu Heng-Zhang. Design of observers for system with unknown inputs (in Chinese). Acta Aeronautica et Astronautica Sinica, 2000, 21(5): 471-473 doi: 10.3321/j.issn:1000-6893.2000.05.023 [31] Qu Z. Cooperative Control of Dynamical Systems: Applications to Autonomous Vehicles. London, U. K.: Springer-Verlag, 2009 [32] 韩冬, 朱芳来. 一类未知输入系统的降维观测器设计. 上海交通大学学报, 2012, 46(11): 1779-1785Han Dong, Zhu Fang-Lai. Reduced-order observer design for systems with unknown inputs (in Chinese). Journal of Shanghai Jiaotong University, 2012, 46(11): 1779-1785 [33] 张建成, 朱芳来. 匹配条件不满足时线性系统未知输入观测器设计. 控制理论与应用, 2017, 34(4): 441-448Zhang Jian-Chen, Zhu Fang-Lai. Linear system unknown input observer design when the observer matching condition is not satisfied (in Chinese). Control Theory & Applications, 2017, 34(4): 441-448 -

 下载:
下载:


计量
- 文章访问数: 3611
- HTML全文浏览量: 770
- PDF下载量: 857
- 被引次数: 0
