

Simulation and Analysis of Mechanical Antenna Low Frequency Communication System Based on Electret Material
-
摘要: 在海洋信息网络体系日益重要的现在, 水下航行器越来越得到世界各国的重视, 无论是在民用还是在军用上, 都扮演着重要的角色. 与水下航行器的通信主要采用的是能以较小的损耗深入海水的低频通信技术, 而目前已有的低频通信系统发射台规模庞大, 天线占地广、天线暴露、目标明显、战时生存能力差, 极易被摧毁且难于短期修复, 且所需功耗巨大. 鉴于此, 本文提出了一种基于复合聚合物驻极体纳米材料的机械天线式低频通信方法, 从理论上研究了其产生的低频通信信号及计算公式, 定量分析了其在正常工作时的功率损耗和在不同介质中的衰减, 且在有限元分析软件中建立了相关模型进行仿真研究, 并通过理论解析模型和多物理场有限元模型的双重仿真结果的一致性, 以及仿真计算结果与机械天线样机的实测结果的对比, 验证了所提方法的可行性.Abstract: Nowadays, the marine information network system is becoming more and more important. Underwater vehicles are getting more and more attention from all over the world, which plays an important role in civil and military applications. Communication with underwater vehicles mainly uses low-frequency communication technology to penetrate seawater with less loss. At present, the low-frequency communication system has several disadvantages such as large scale, wide antenna coverage, exposed and obvious target, poor survivability in wartime, which is easy to be destroyed and difficult to repair in a short time, and requires huge power consumption. In view of this, a mechanical antenna low-frequency communication method is proposed based on composite polymer electret nanomaterials, analysis of the low-frequency communication signal and its calculation formula is made in theory, and the power loss and attenuation in different media are analyzed quantitatively. Finally, the relevant model is established in the finite element analysis software to carry out the simulation. The feasibility of the proposed method is verified by the consistency of the simulation results of the theoretical analysis model and the multi physical field finite element model, and the comparison between the simulation results and the measured results of the mechanical antenna prototype.
-
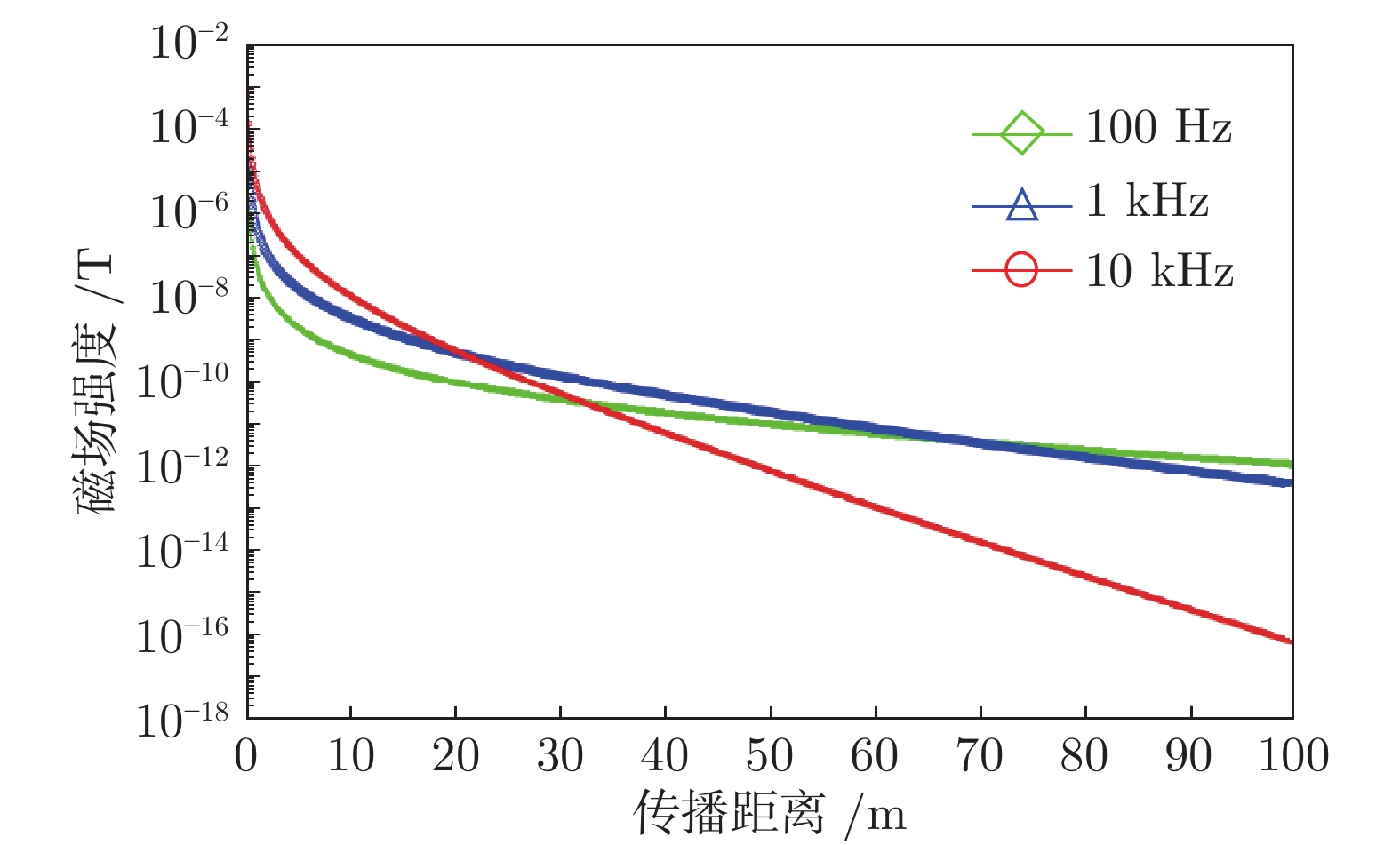
图 3 海水中不同频率电磁波传播示意图
Fig. 3 Schematic diagram of electromagnetic wave propagation at different frequencies in seawater
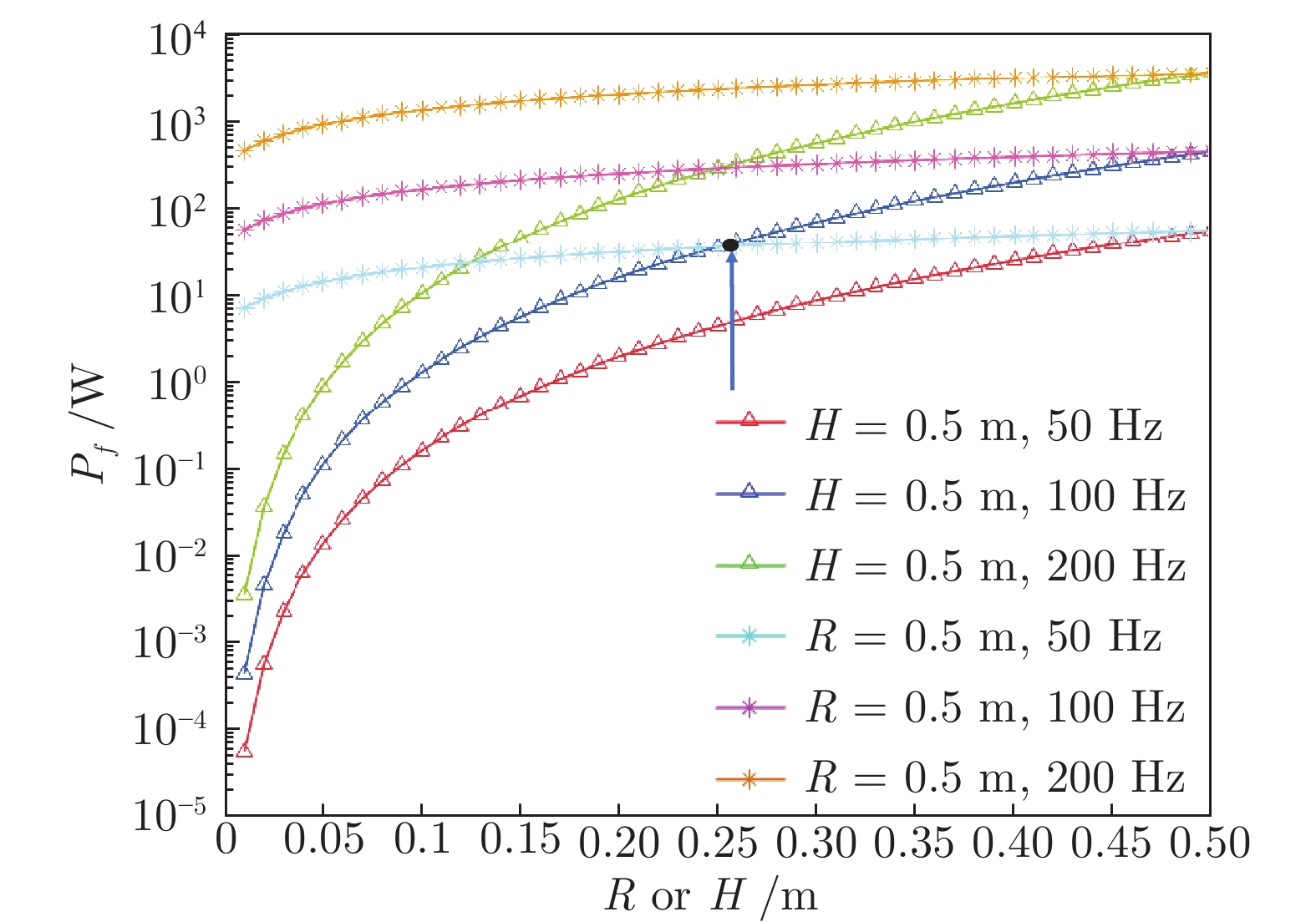
图 4 各参数对克服摩擦阻力所消耗功率的影响
Fig. 4 The influence of various parameters on the power consumption to overcome friction resistance
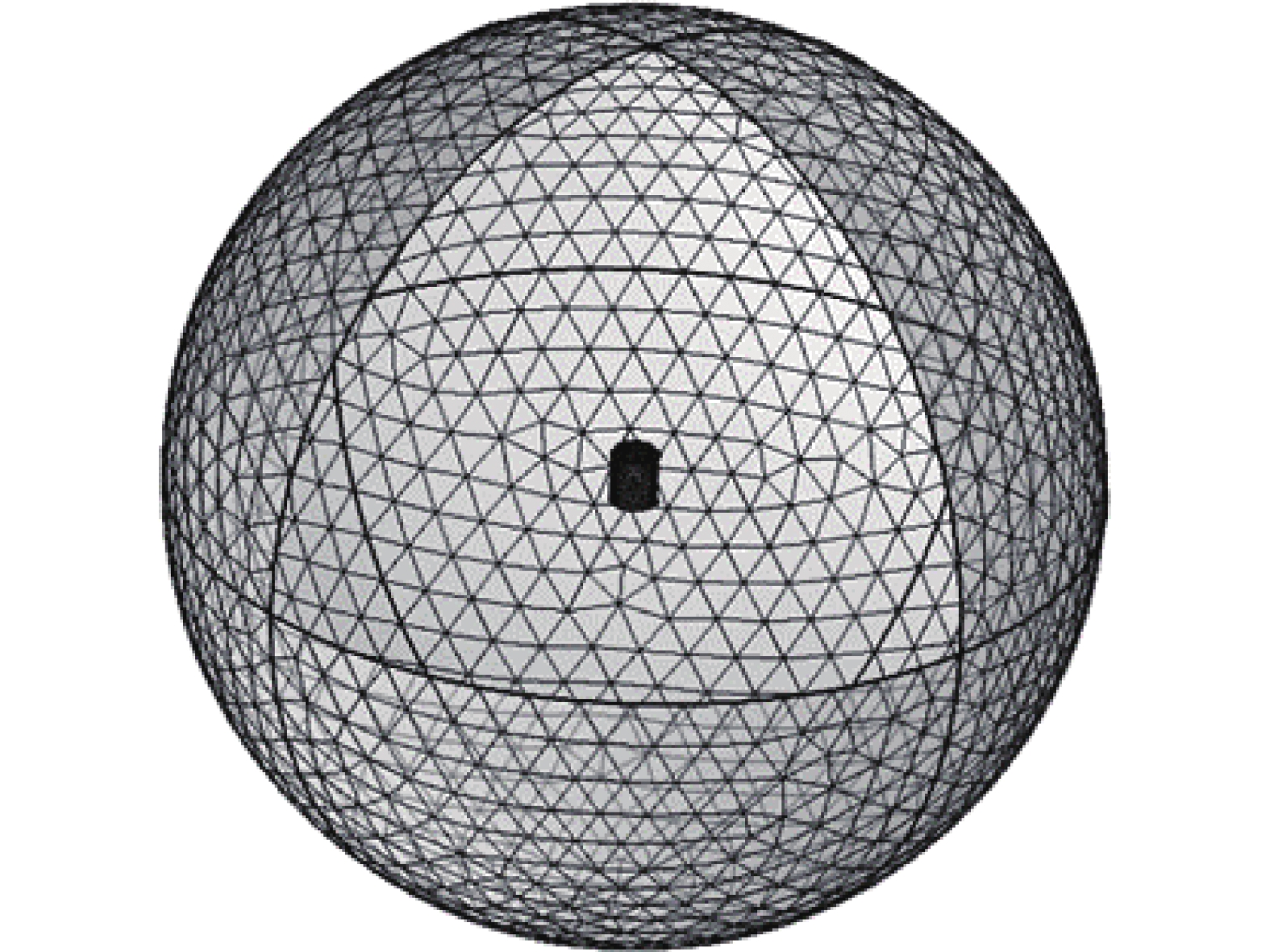
图 5 机械天线三维模型网格剖分图
Fig. 5 Mesh generation of three-dimensional model of mechanical antenna
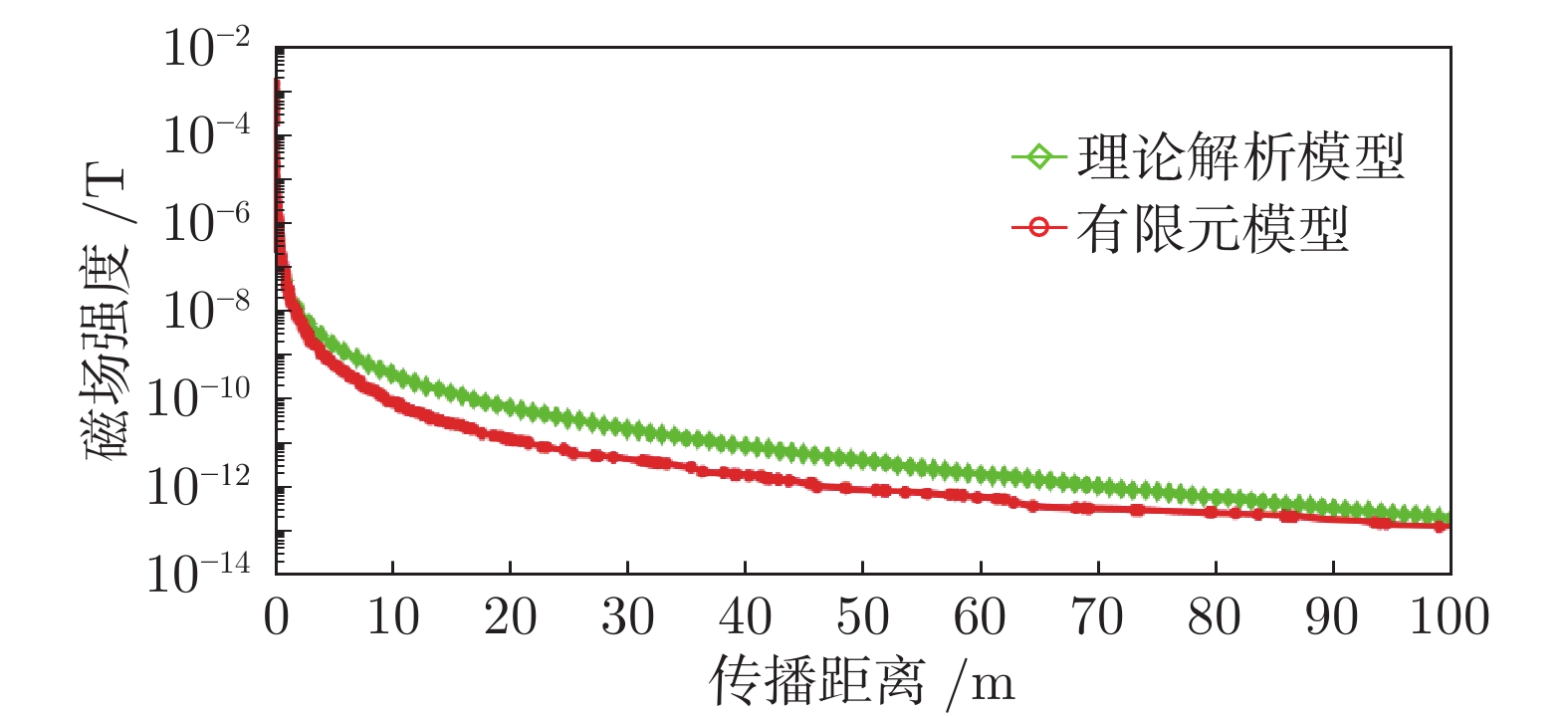
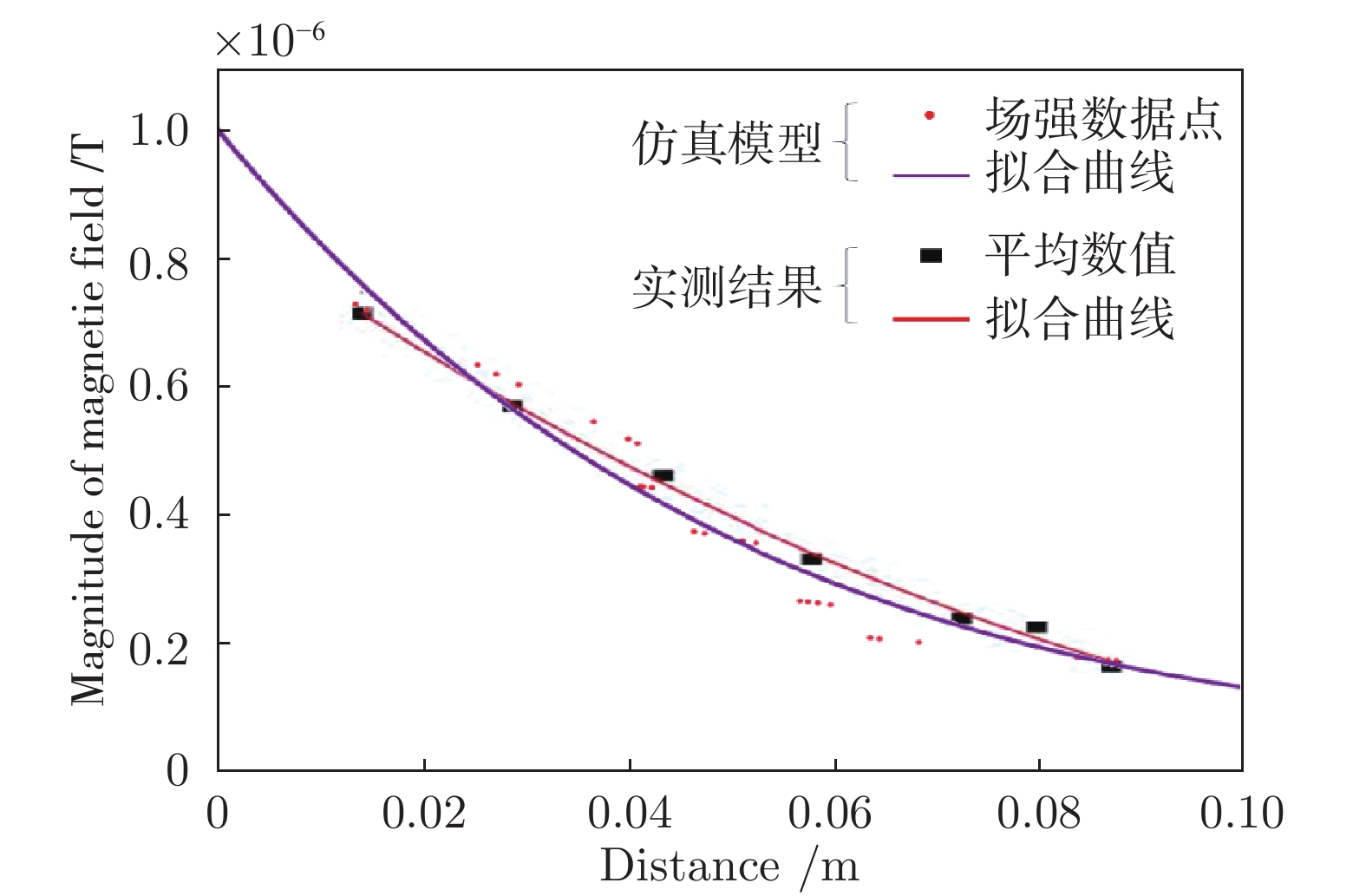
图 6 有限元模型与理论解析模型的结果对比图
Fig. 6 Comparisons of results between finite element model and theoretical analytical model
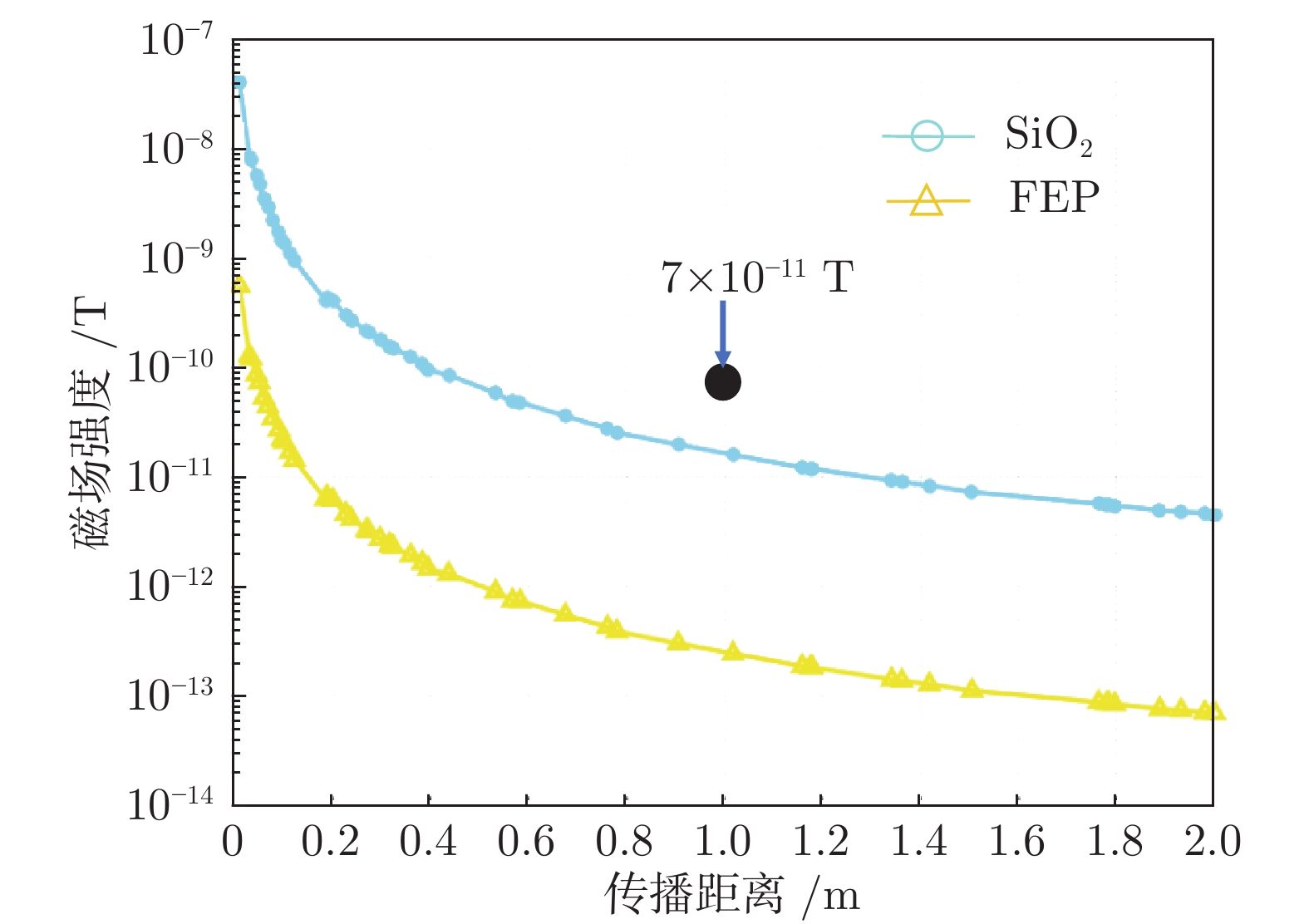
图 8 两种机械天线仿真结果比较图
Fig. 8 Comparison of simulation results of two kinds of mechanical antennas
-
[1] 闫敬, 张立, 罗小元, 濮彬, 关新平. 异步时钟下基于信息物理融合的水下潜器协同定位算法. 自动化学报, 2019, 45(4): 739−748Yan Jing, Zhang Li, Luo Xiao-Yuan, Pu Bin, Guan Xin-Ping. Cooperative positioning algorithm of underwater vehicle based on information physical fusion under asynchronous clock. Acta Automatica Sinica, 2019, 45(4): 739−748 [2] 赵涛, 刘明雍, 周良荣. 自主水下航行器的研究现状与挑战. 火力与指挥控制, 2010, 35(6): 1−6 doi: 10.3969/j.issn.1002-0640.2010.06.001Zhao Tao, Liu Ming-Yong, Zhou Liang-Rong. Research status and challenges of autonomous underwater vehicles. Fire Control and Command Control, 2010, 35(6): 1−6 doi: 10.3969/j.issn.1002-0640.2010.06.001 [3] 陶雯, 陈鼎鼎, 何宁宁. 国外海军潜艇通信技术与装备发展. 通信技术, 2015, 48(4): 375−381 doi: 10.3969/j.issn.1002-0802.2015.04.001Tao Wen, Chen Ding-Ding, He Ning-Ning. Development of communication technology and equipment for naval submarines abroad. Communication Technology, 2015, 48(4): 375−381 doi: 10.3969/j.issn.1002-0802.2015.04.001 [4] 陆建勋. 抗干扰高频通信系统若干问题的探讨. 现代军事通信, 2002, 10(1): 28−30Lu Jian-Xun. Discussions on some problems of anti-jamming high frequency communication system. Modern Military Communication, 2002, 10(1): 28−30 [5] Feng L Y, Leung K W. Dual-frequency folded-parallel-plate antenna with large frequency ratio. IEEE Transactions on Antennas and Propagation, 2016, 64(1): 340−345 doi: 10.1109/TAP.2015.2500607 [6] Kemp M A, Franzi M, Haase A, et al. A high Q piezoelectric resonator as a portable VLF transmitter. Nature communications, 2019, 10(1): 1715 doi: 10.1038/s41467-019-09680-2 [7] 丁春全, 宋海洋. 机械天线运动电荷和磁偶极子辐射研究. 舰船电子工程, 2019, 39(2): 171−175 doi: 10.3969/j.issn.1672-9730.2019.02.042Ding Chun-Quan, Song Hai-Yang. Research on the motion charge and magnetic dipole radiation of mechanical antenna. Ship Electronics Engineering, 2019, 39(2): 171−175 doi: 10.3969/j.issn.1672-9730.2019.02.042 [8] Prasad M N S, Huang Y, Wang Y E. Going beyond Chu harrington limit: ULF radiation with a spinning magnet array. In: Proceedings of XXXIInd General Assembly and Scientific Symposium of the International Union of Radio Science (URSI GASS). Montreal, Canada: IEEE, 2017. 1−3 [9] Prasad M N S, Selvin S, Tok R U, et al. Directly modulated spinning magnet arrays for ULF communications. In: Proceedings of the 2018 IEEE Radio and Wireless Symposium (RWS). Anaheim, USA: IEEE, 2018. 171−173 [10] Bickford J A. Mechanical Antenna, U. S. Patent 10177452, January 2019 [11] Beihang University. A Low Frequency Communication System for Rotating Electret Mechanical Antenna, China Patent CN109004948A, December 2018 [12] Wuhan Institute of Ship Communication. A Low Frequency Antenna, China Patent CN108346851A, July 2018 [13] Xi'an University of Electronic Science and Technology. Miniaturized LF/VLF transmitting antenna based on acoustic standing wave resonant structure, China Patent CN108736157A, November 2018 [14] Chu Y, Zhong J, Liu H, et al. Human pulse diagnosis for medical assessments using a wearable piezoelectret sensing system. Advanced Functional Materials, 2018, 28(40): 1803413 doi: 10.1002/adfm.201803413 [15] Erhard D P, Lovera D, von Salis-Soglio C, et al. Recent advances in the improvement of polymer electret films. Complex Macromolecular Systems II. Berlin Germang: Springer, 2010.155−207 [16] Pasku V, De Angelis A, Dionigi M, et al. A positioning system based on low-frequency magnetic fields. IEEE Transactions on Industrial Electronics, 2015, 63(4): 2457−2468 [17] Reis S, Castro N, Silva M P, et al. Fabrication and characterization of high-performance polymer-based magnetoelectric DC magnetic field sensors devices. IEEE Transactions on Industrial Electronics, 2017, 64(6): 4928−4934 doi: 10.1109/TIE.2017.2668989 [18] Gautam P R, Kumar S, Verma A, et al. Energy-efficient localization of sensor nodes in wsns using beacons from rotating directional antenna. IEEE Transactions on Industrial Informatics, 2019, 15(11): 5827−5836 doi: 10.1109/TII.2019.2908437 [19] Madanayake A, Choi S, Tarek M, et al. Energy-efficient ULF/VLF transmitters based on mechanically-rotating dipoles. In: Proceedings of the 2017 Moratuwa Engineering Research Conference (MERCon). Sri Lanka: IEEE, 2017. 230−235 [20] 王沫楠. 基于血液供给条件和力学环境的骨折愈合仿真. 自动化学报, 2018, 44(2): 240−250Wang Mo-Nan. Fracture healing simulation based on blood supply conditions and mechanical environment. Acta Automatica Sinica, 2018, 44(2): 240−250 [21] Liang B, Cui Y, Song X, Li L, Wang C. Multi-block electret-based mechanical antenna model for low frequency communication. International Journal of Modeling, Simulation, and Scientific Computing, 2019, 10(5): 1950036 doi: 10.1142/S1793962319500363 [22] 张多佳. 超低频率机械天线机理及调制方法研究 . 西安理工大学,中国, 2019.Zhang Duo-Jia. Research on Mechanism and Modulation Method of Ultra-low Frequency Mechanical Antenna [Master thesis], Xi' an University of Technology, China, 2019. -

 下载:
下载:


计量
- 文章访问数: 5376
- HTML全文浏览量: 2129
- PDF下载量: 244
- 被引次数: 0
