2021年 第47卷 第6期
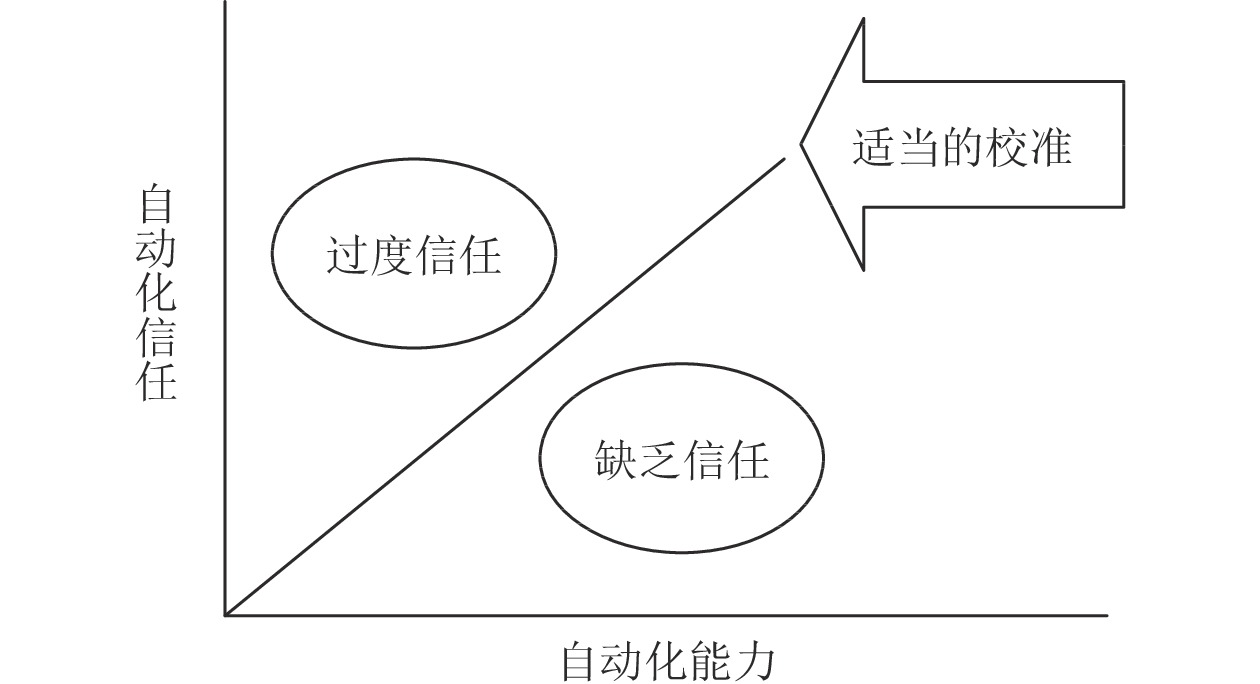
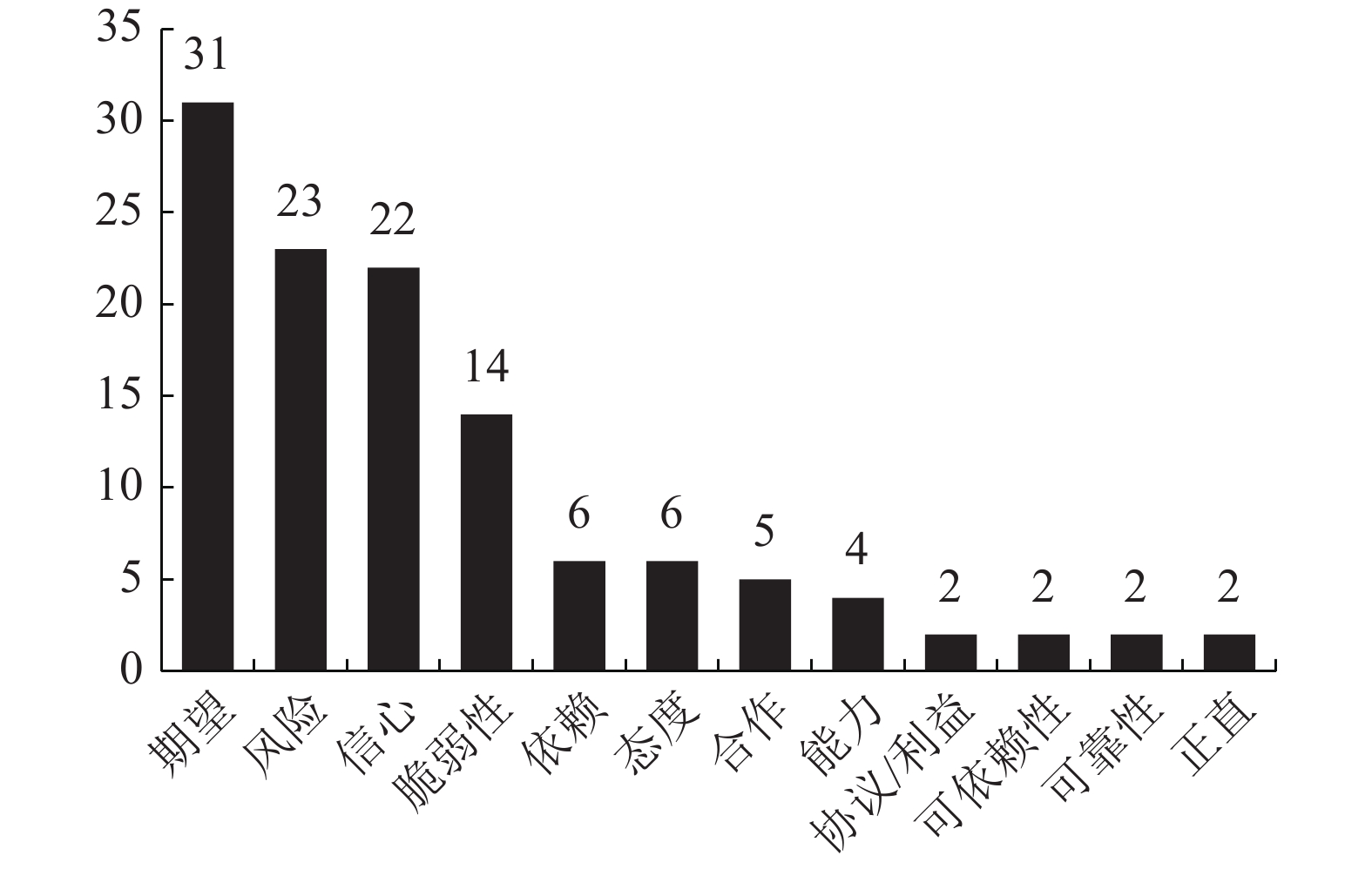
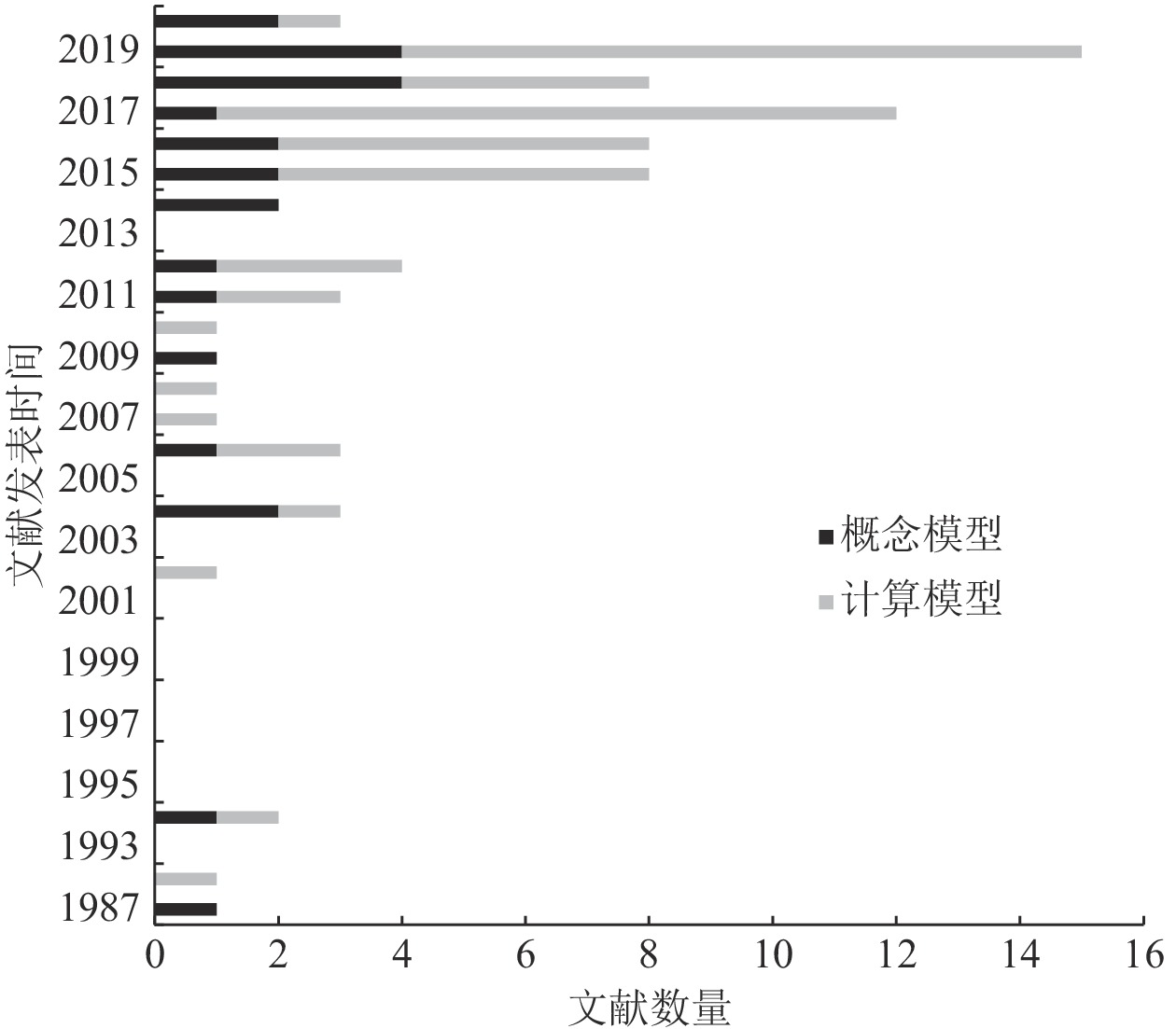
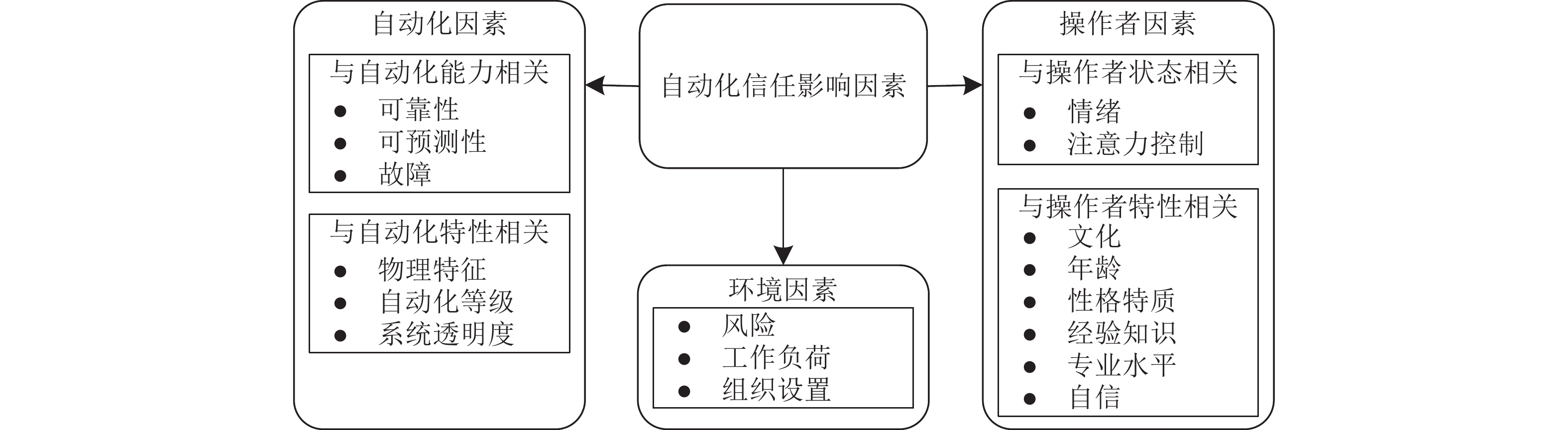
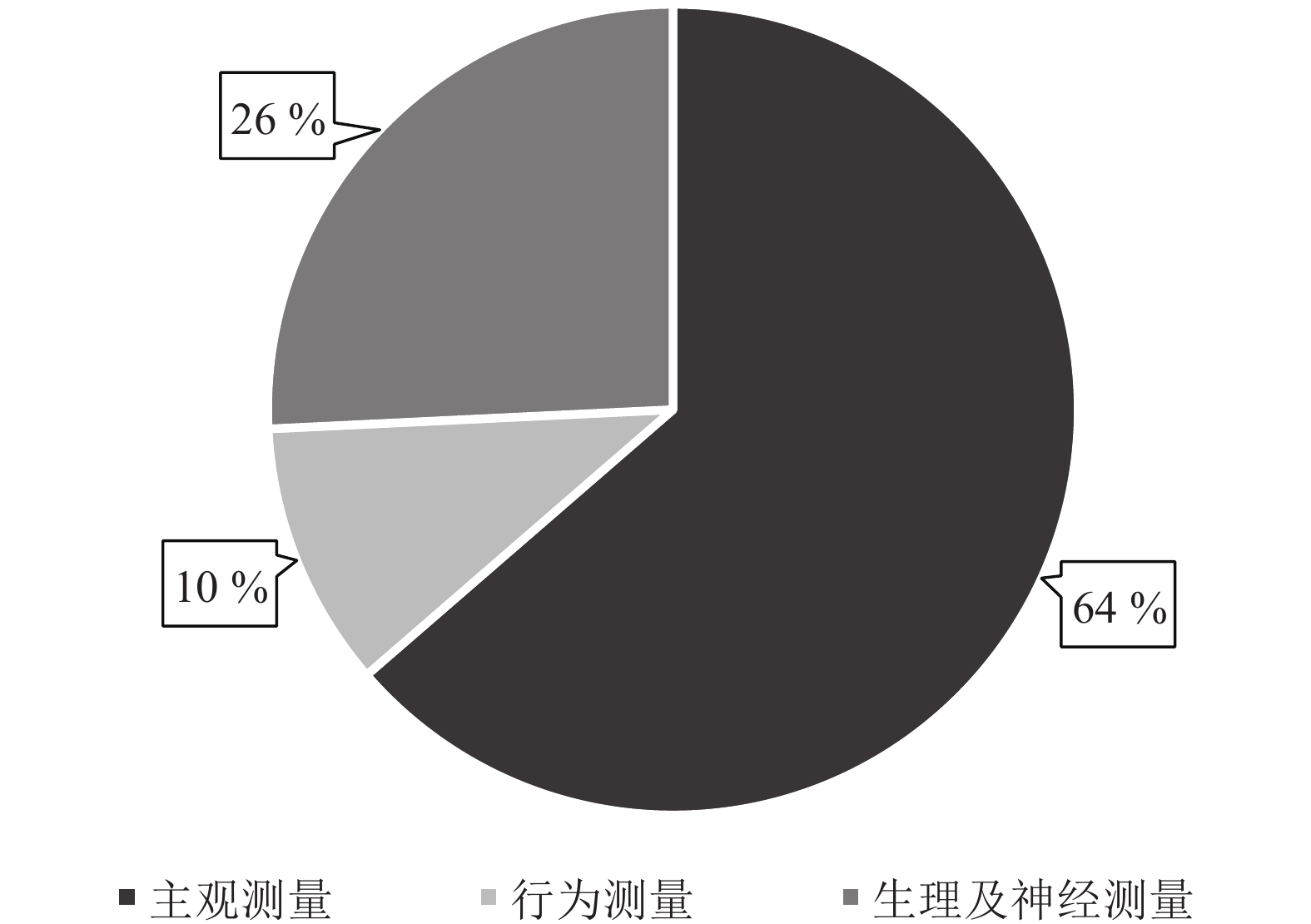
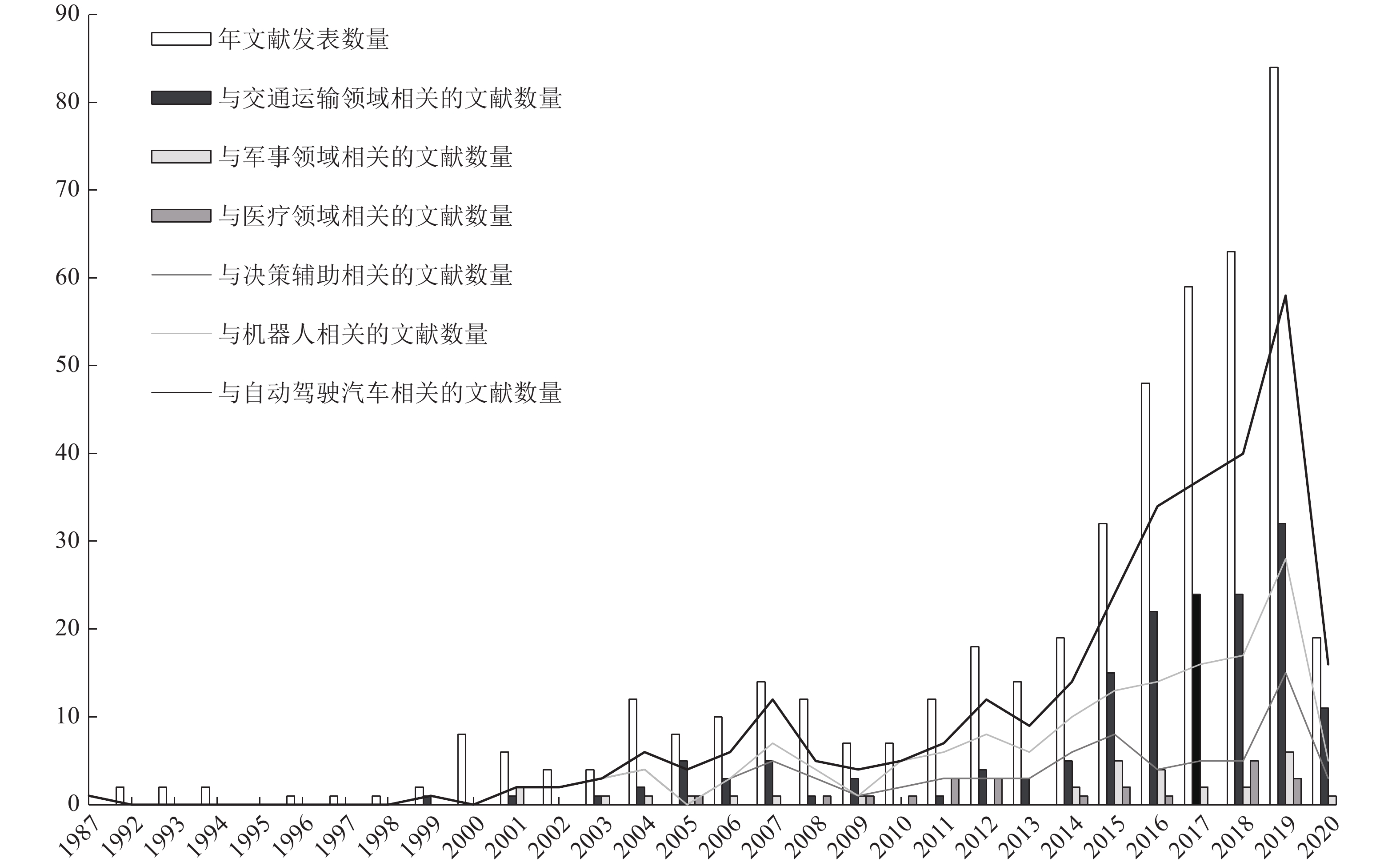
随着自动化能力的快速提升, 人机关系发生深刻变化, 人的角色逐渐从自动化的主要控制者转变为与其共享控制的合作者. 为了实现绩效和安全目标, 人机协同控制需要操作人员适当地校准他们对自动化机器的信任, 自动化信任问题已经成为实现安全有效的人机协同控制所面临的最大挑战之一. 本文回顾了自动化信任相关文献, 围绕自动化信任概念、模型、影响因素及测量方法, 对迄今为止该领域的主要理论和实证工作进行了详细总结. 最后, 本文在研究综述和相关文献分析的基础上提出了现有自动化信任研究工作中存在的局限性, 并从人机系统设计的角度为未来的自动化信任研究提供一些建议.
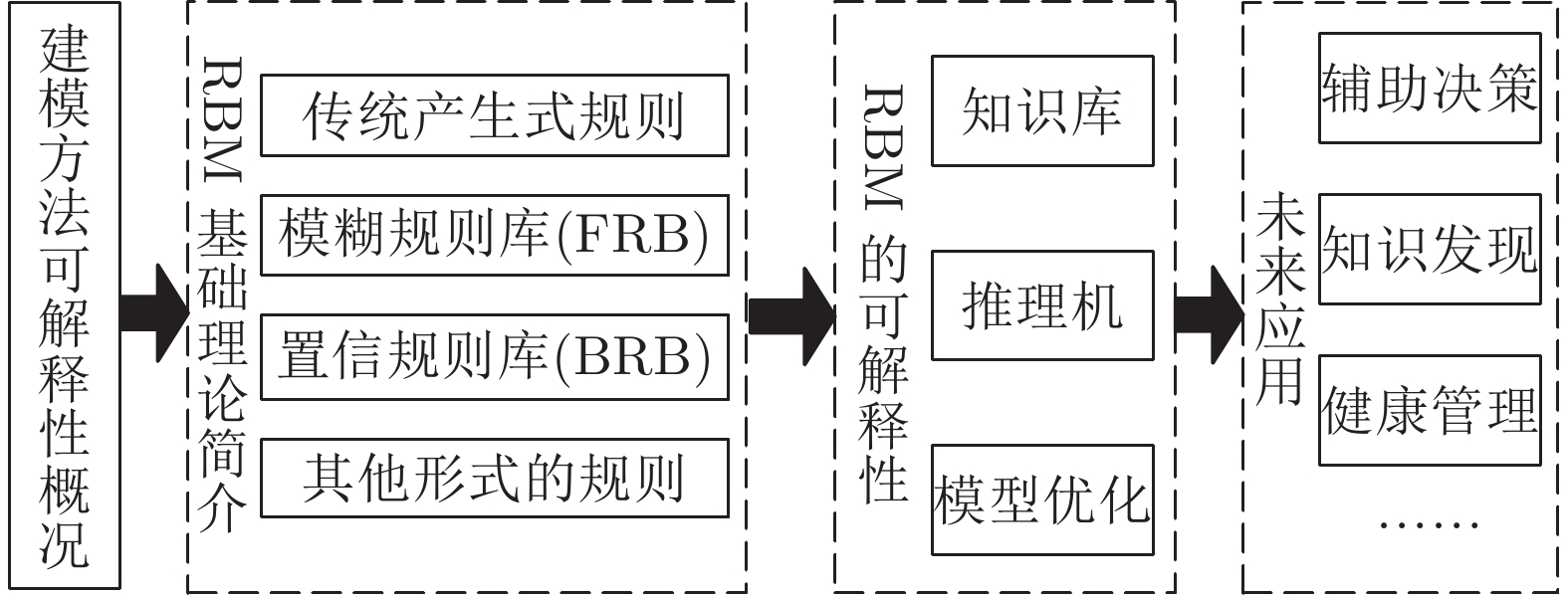
建模方法的可解释性指其以可理解的方式表达实际系统行为的能力. 随着实践中对可靠性需求的不断提高, 建立出可靠且可解释的模型以增强人对实际系统的认知成为了建模的重要目标. 基于规则的建模方法可更直观地描述系统机理, 并能有效融合定量信息和定性知识实现不确定信息的灵活处理, 具有较强的建模性能. 本文从基于规则的建模方法出发, 围绕知识库、推理机和模型优化梳理了其在可解释性方面的研究, 最后进行了简要的评述和展望.



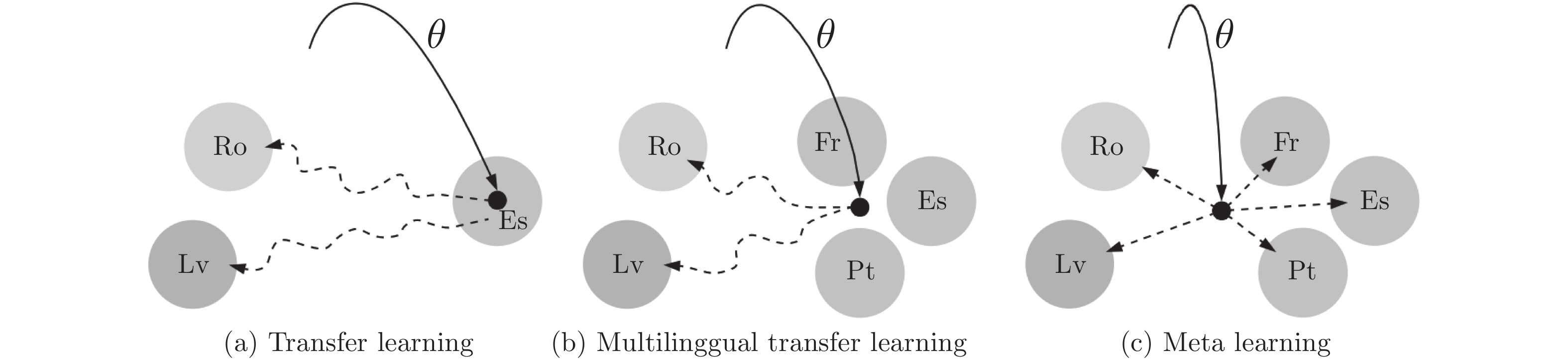
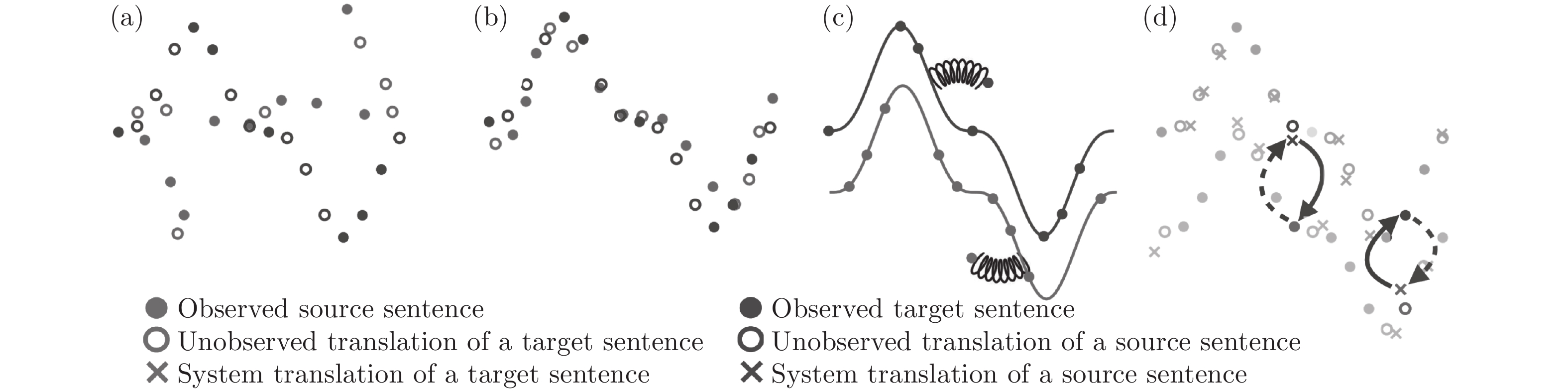
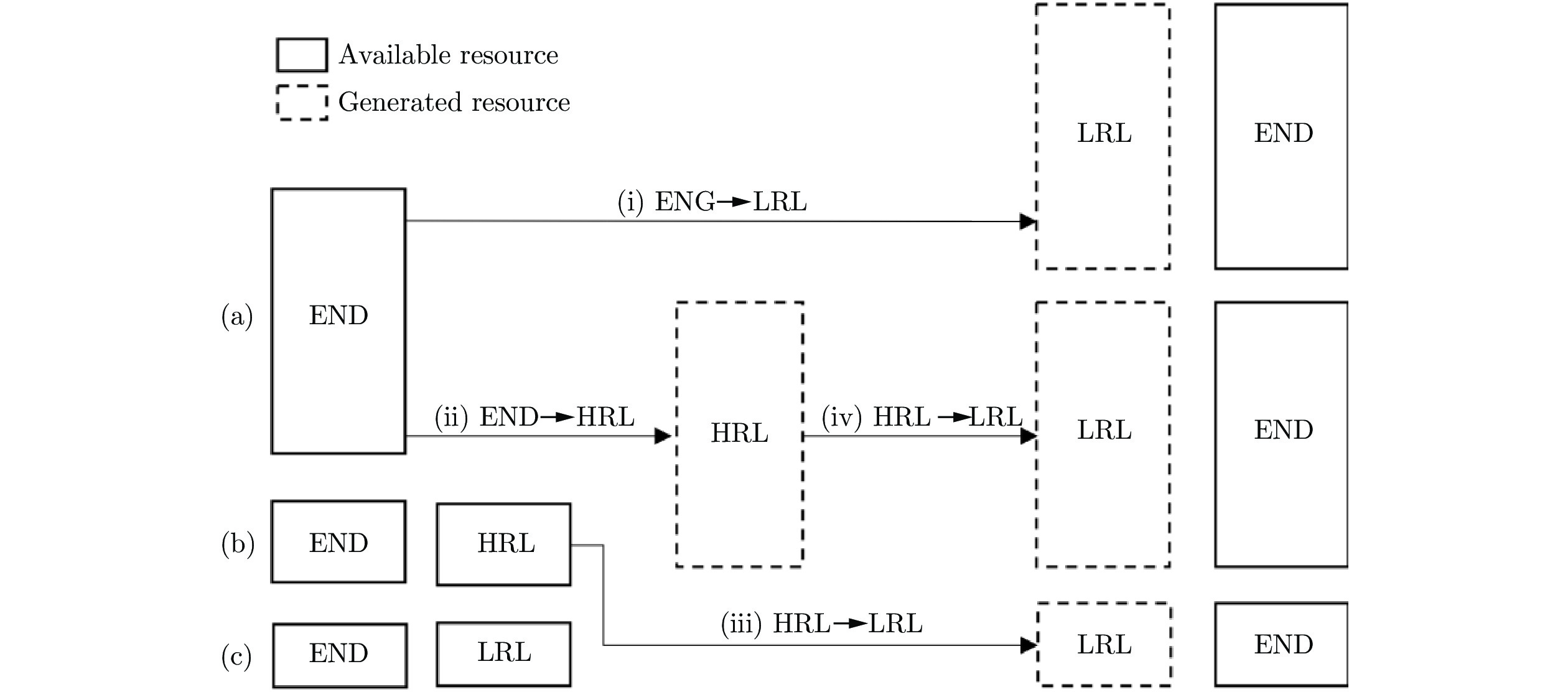
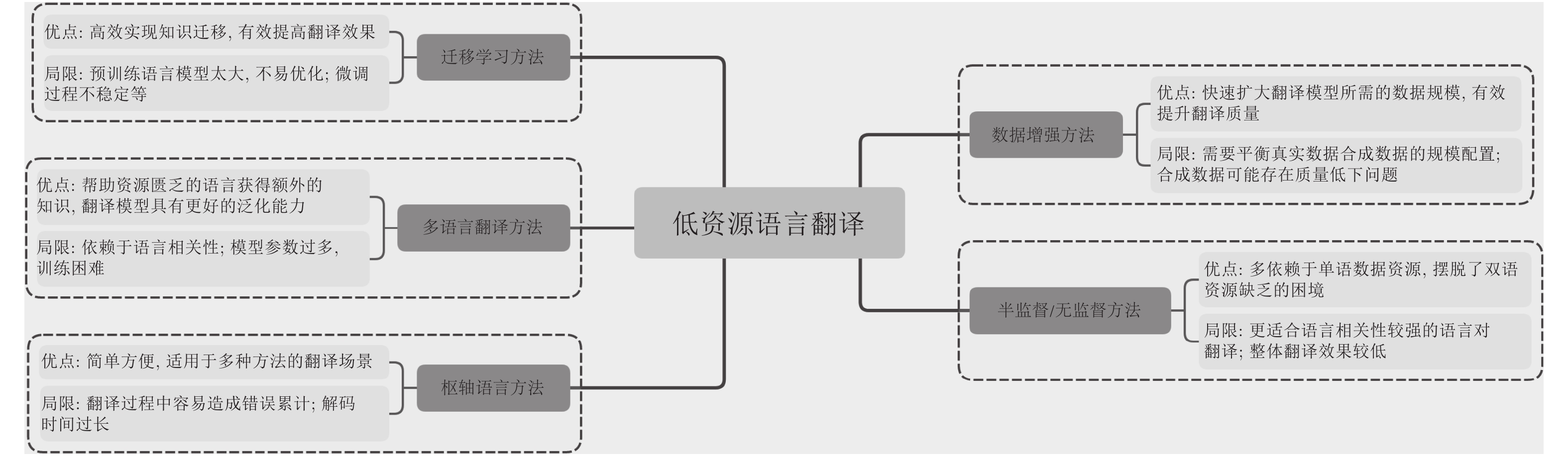
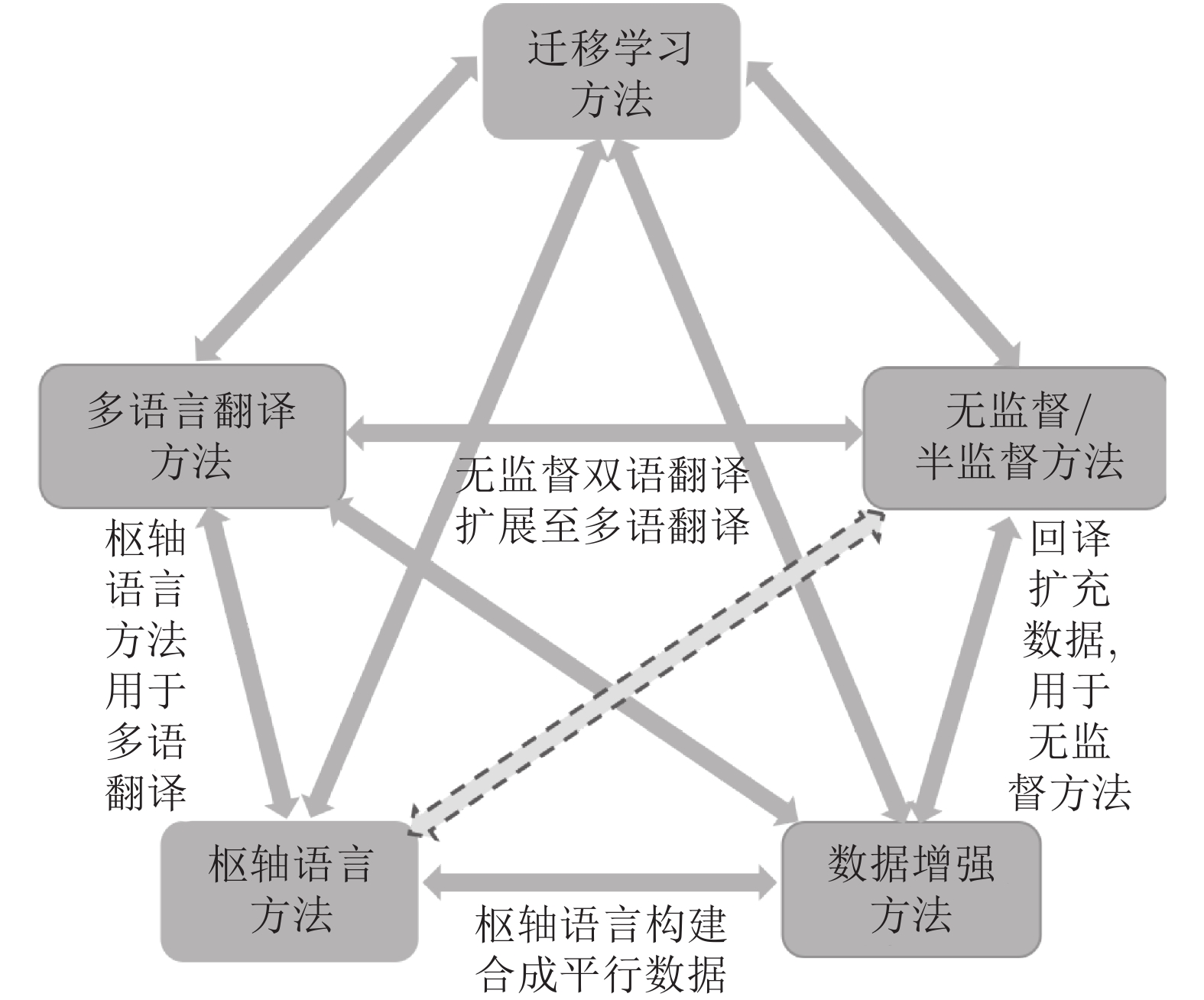
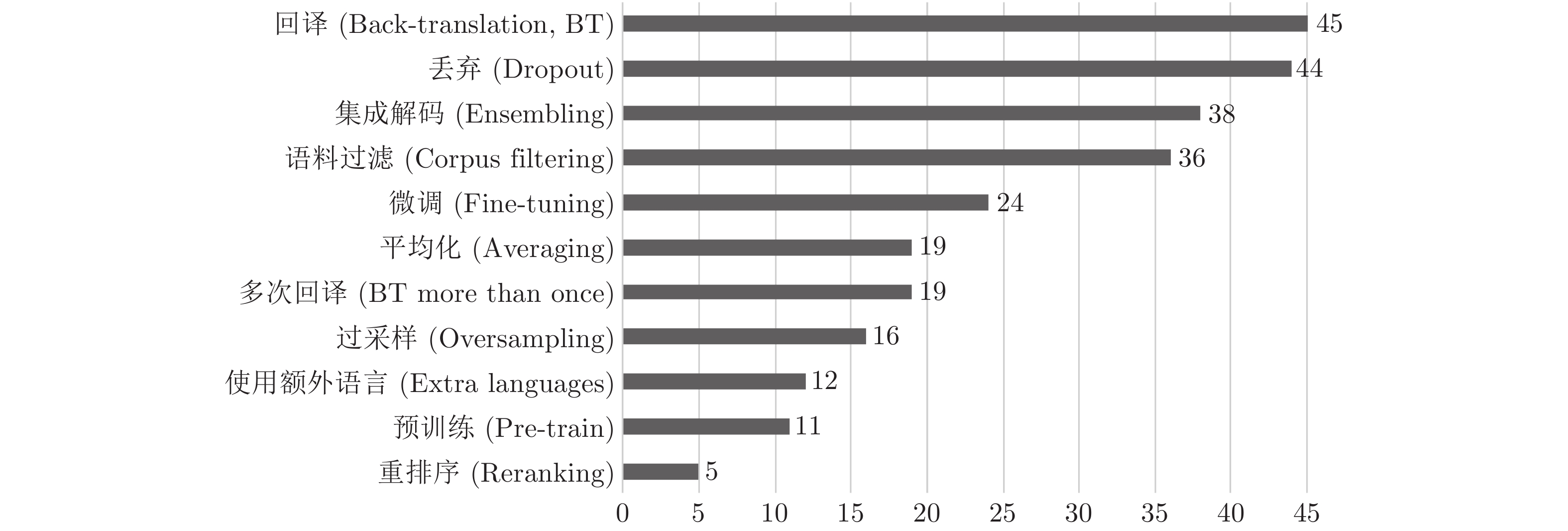
作为目前主流翻译方法的神经网络机器翻译已经取得了很大突破, 在很多具有丰富数据资源的语言上的翻译质量也不断得到改善, 但对于稀缺资源语言的翻译效果却仍然并不理想. 稀缺资源语言机器翻译是目前机器翻译领域的重要研究热点之一, 近几年来吸引了国内外的广泛关注. 本文对稀缺资源语言机器翻译的研究进行比较全面的回顾, 首先简要介绍了与稀缺资源语言翻译相关的学术活动和数据集, 然后重点梳理了目前主要的研究方法和一些研究结论, 总结了每类方法的特点, 在此基础上总结了不同方法之间的关系并分析了目前的研究现状. 最后, 对稀缺资源语言机器翻译未来可能的研究趋势和发展方向进行了展望,并给出了相关建议.

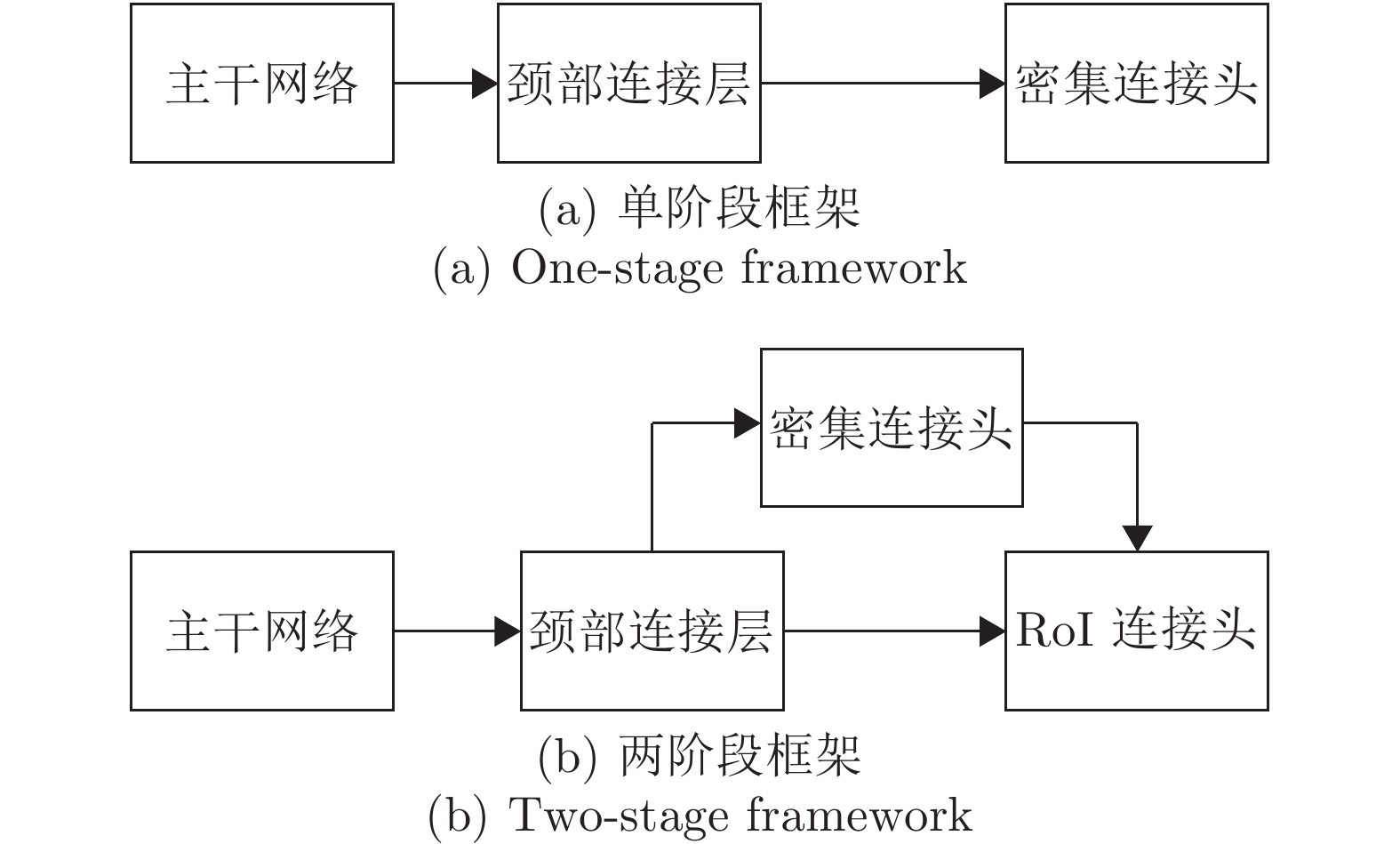
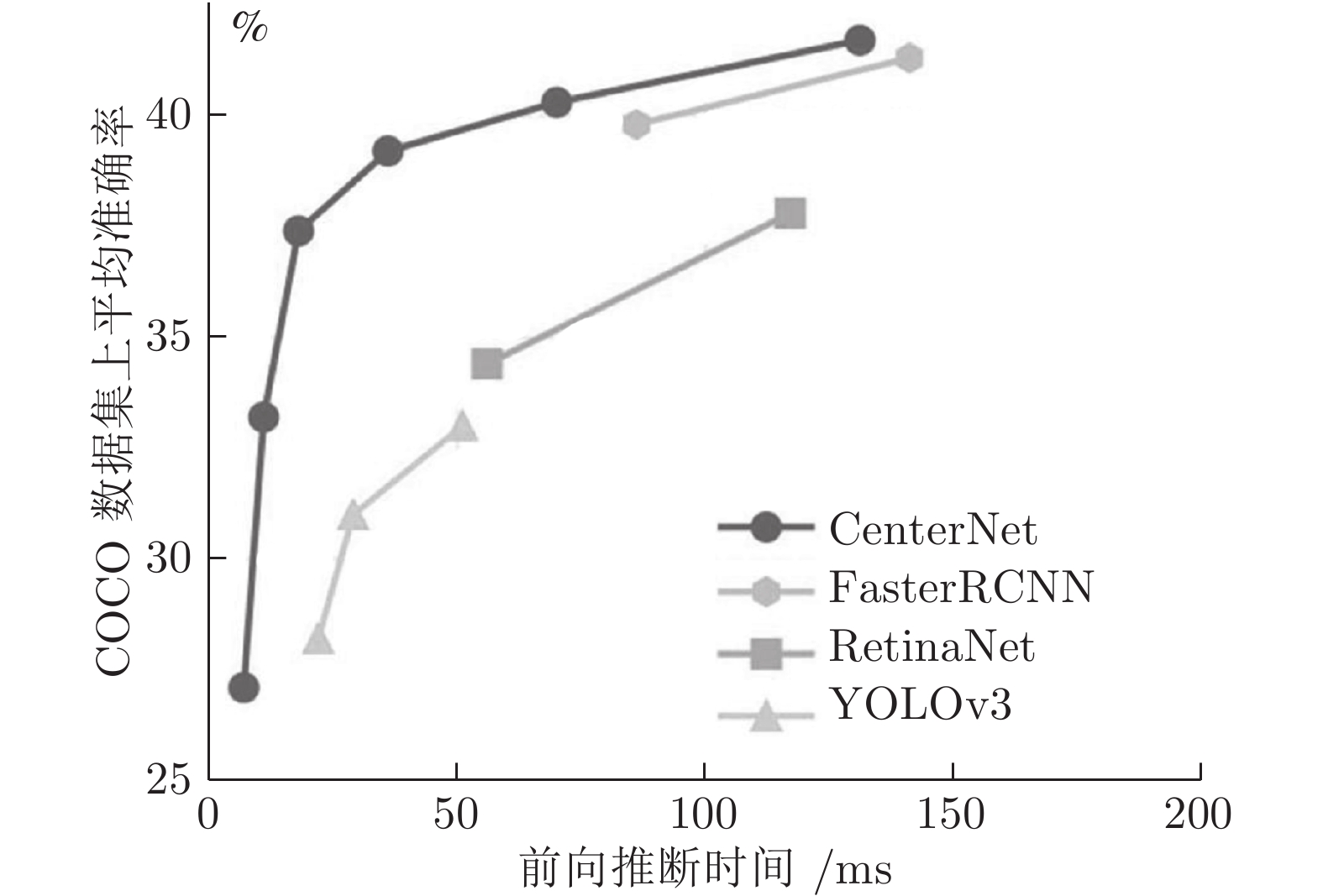
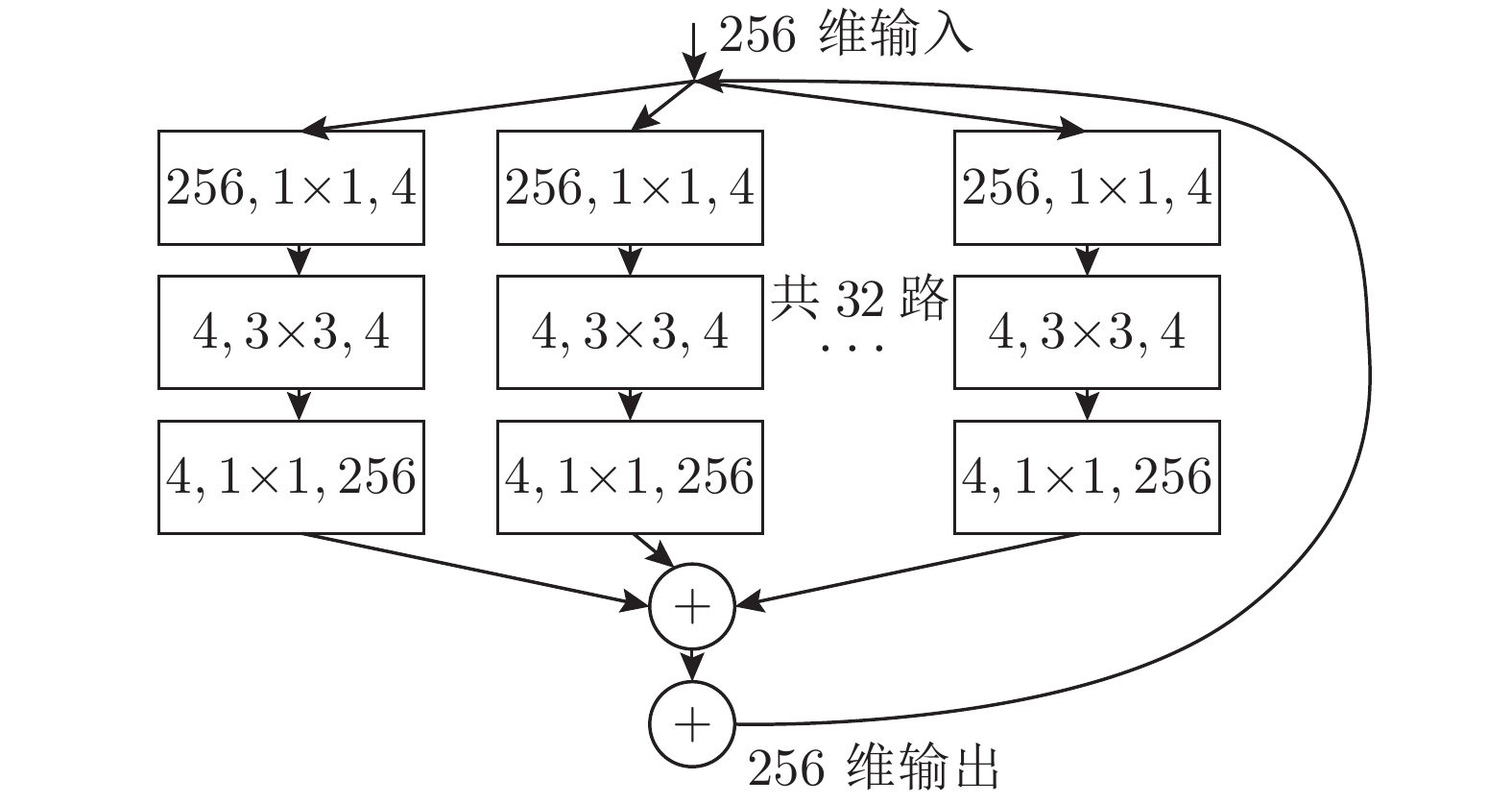
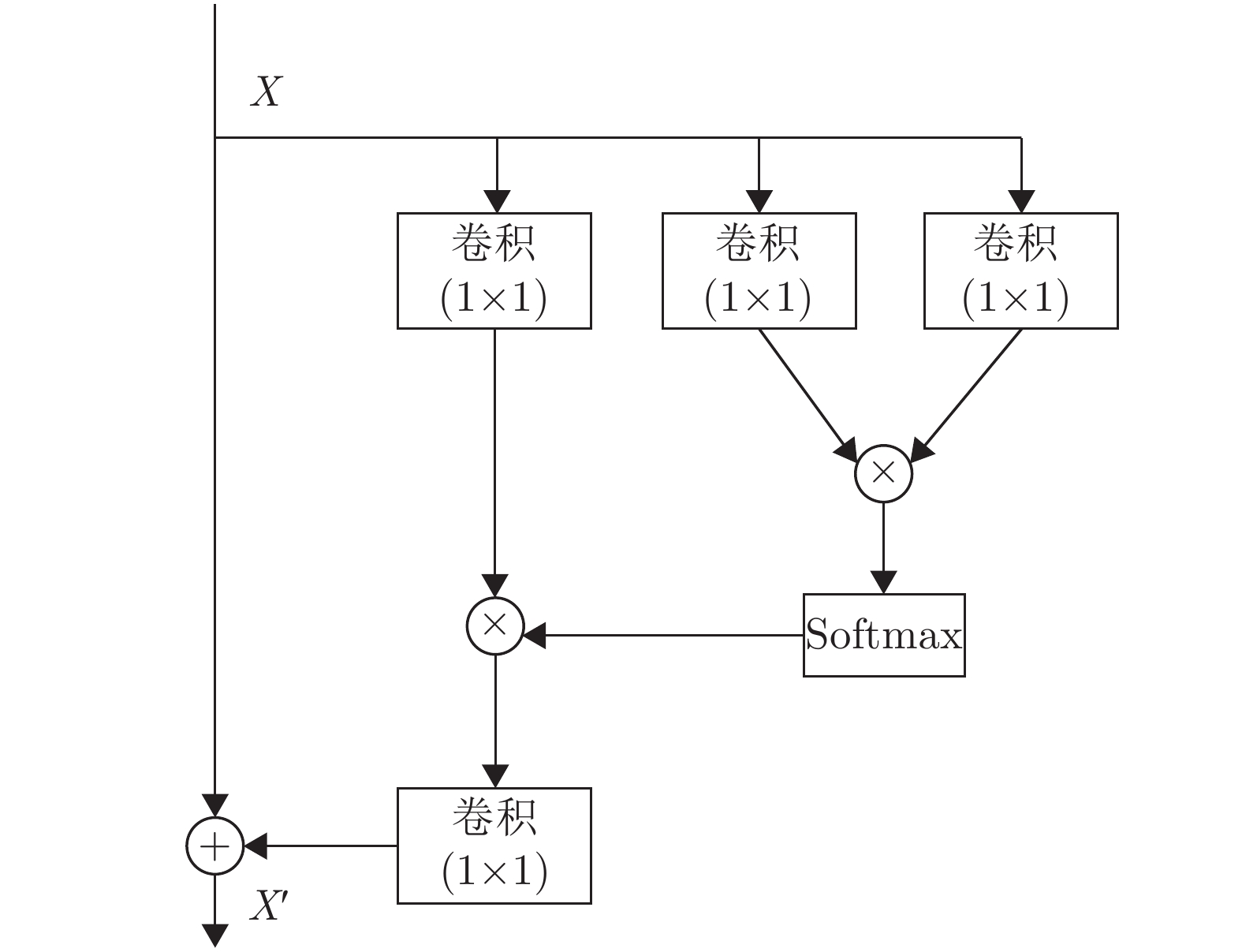
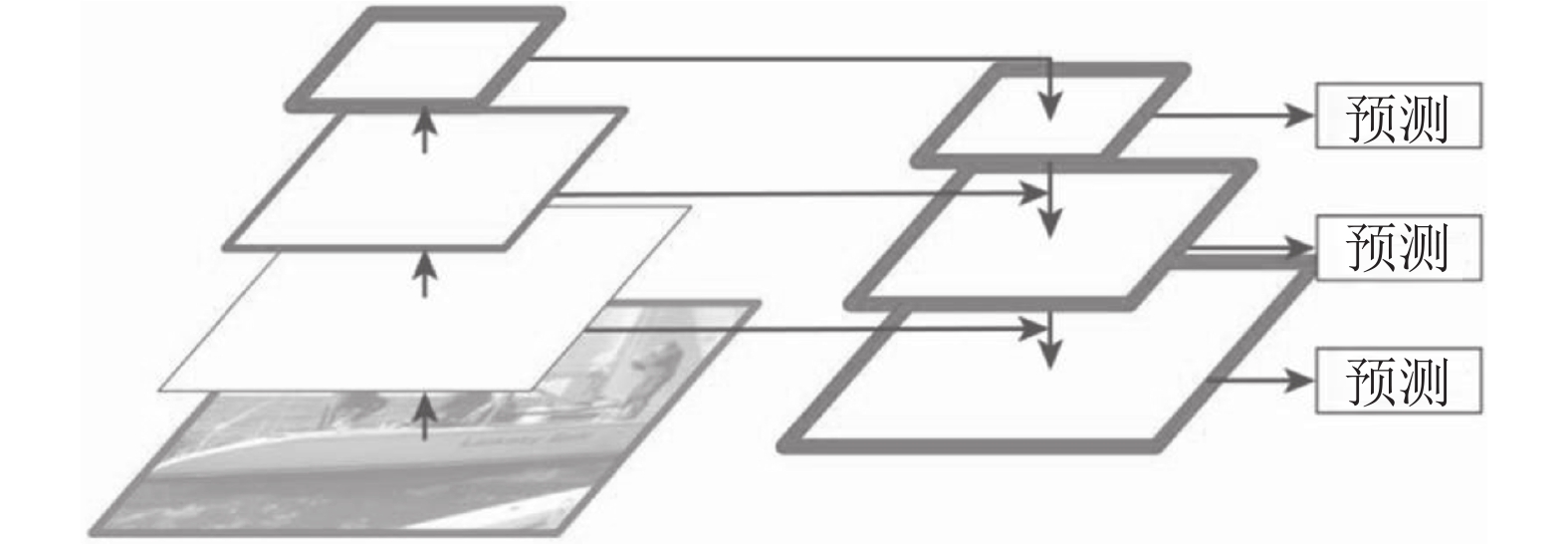
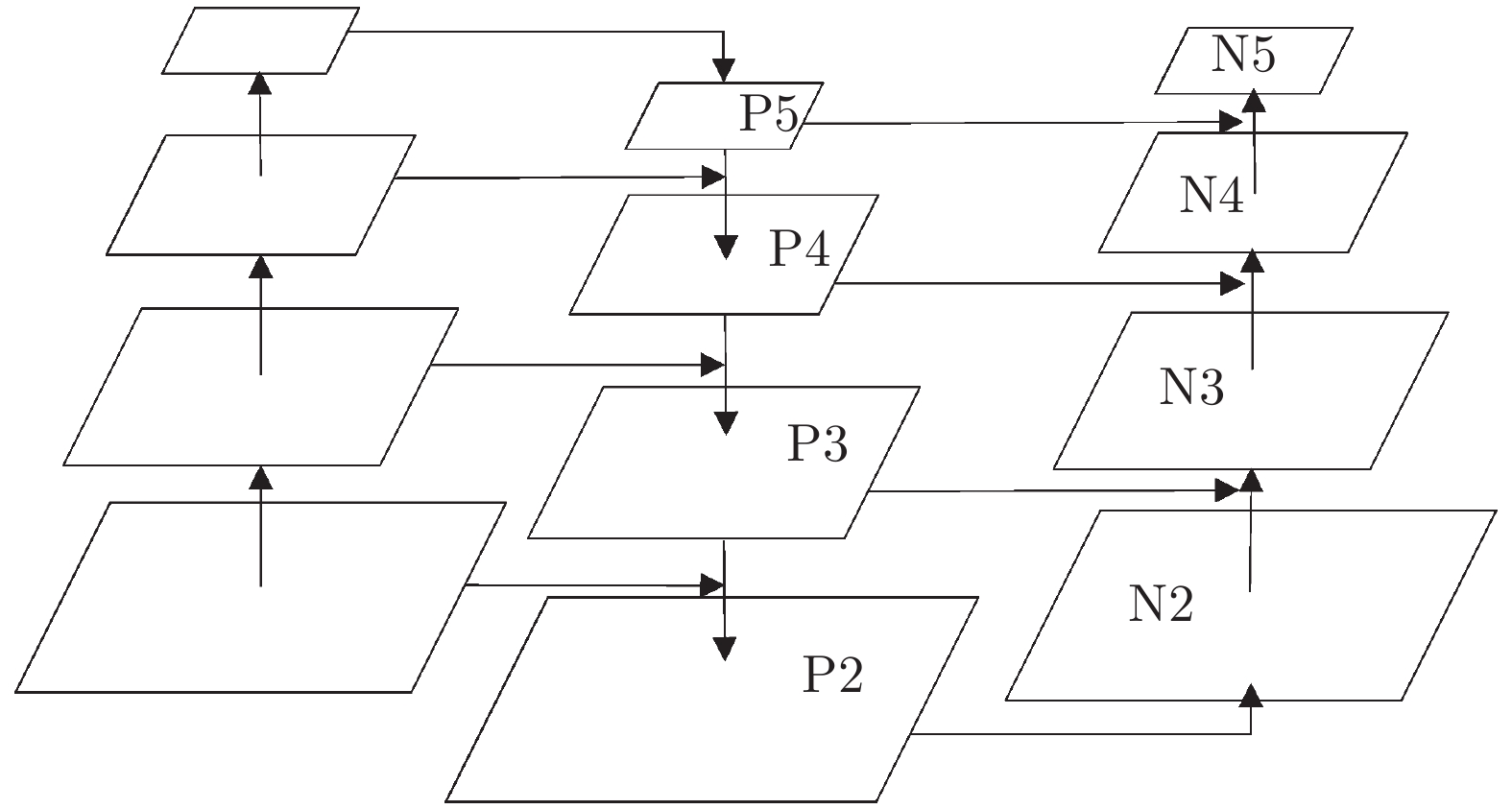
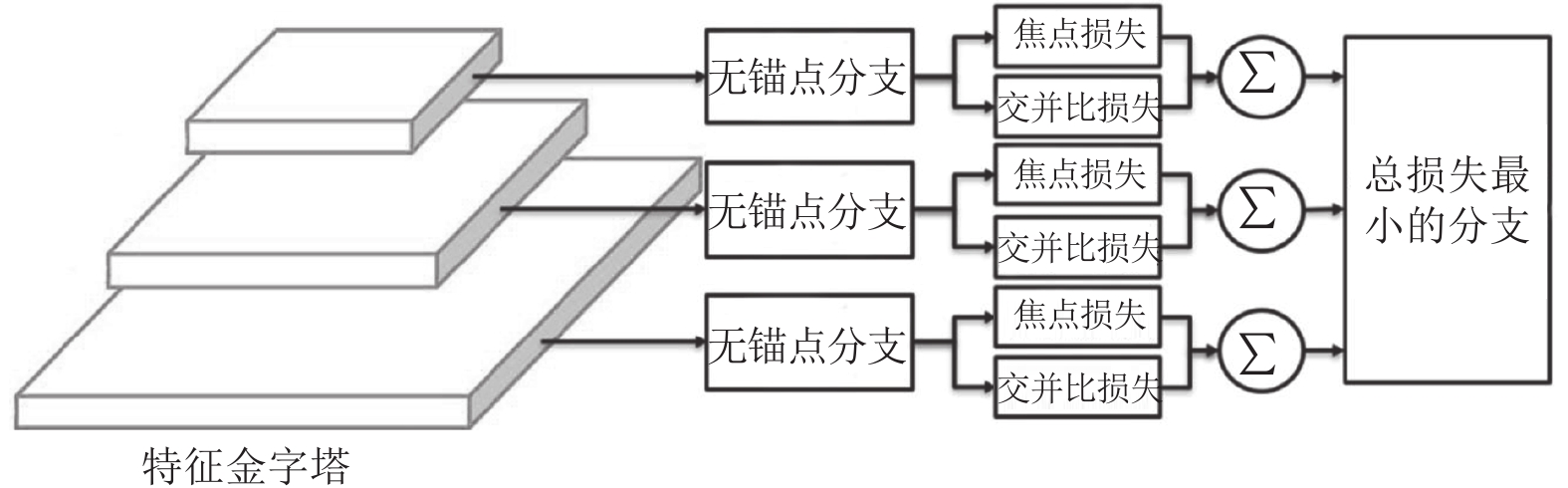
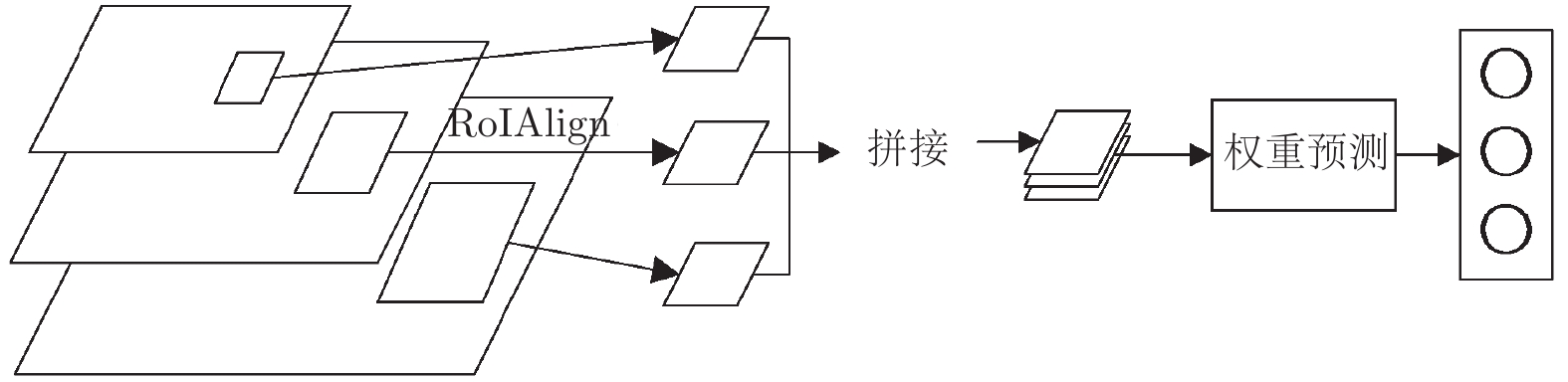
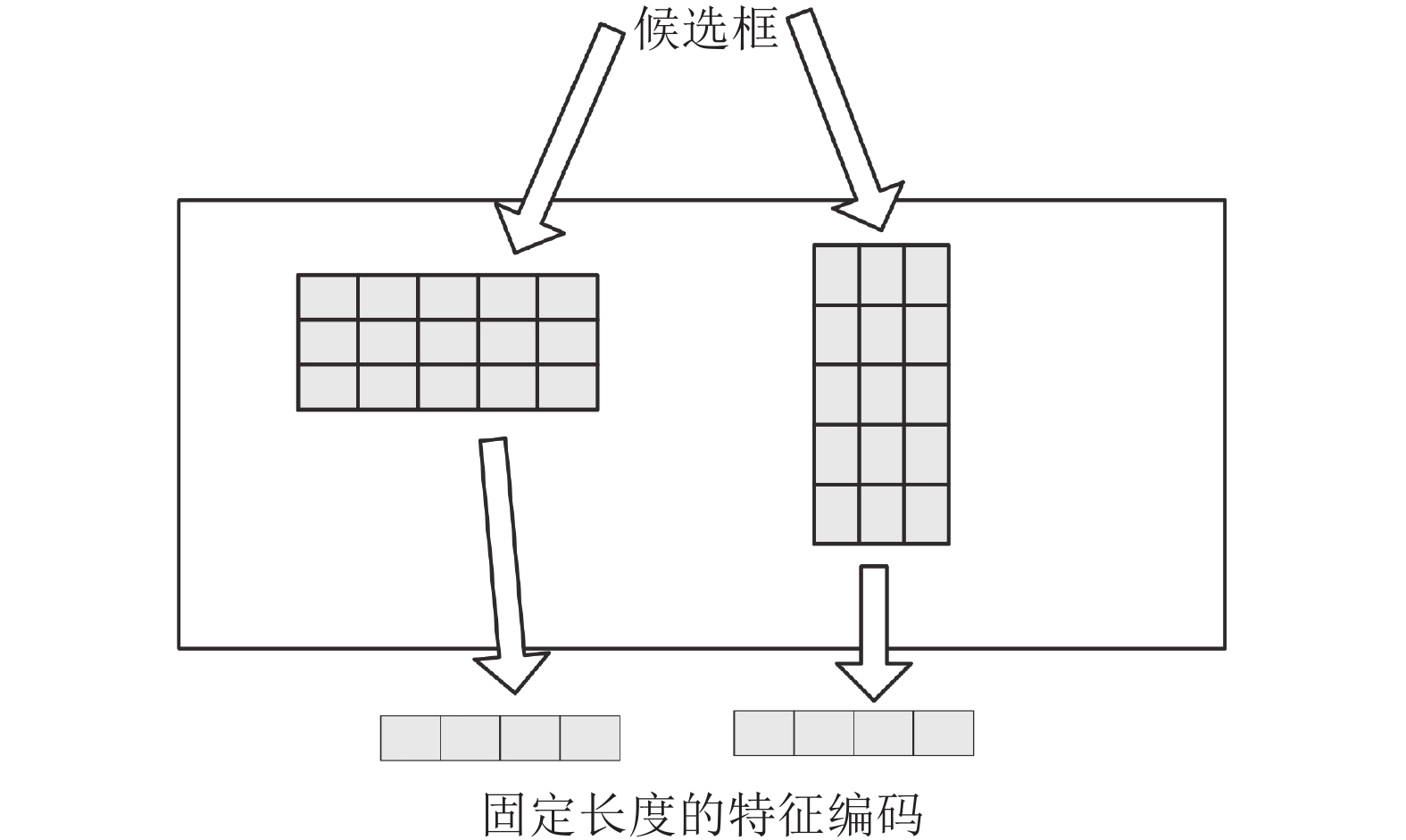
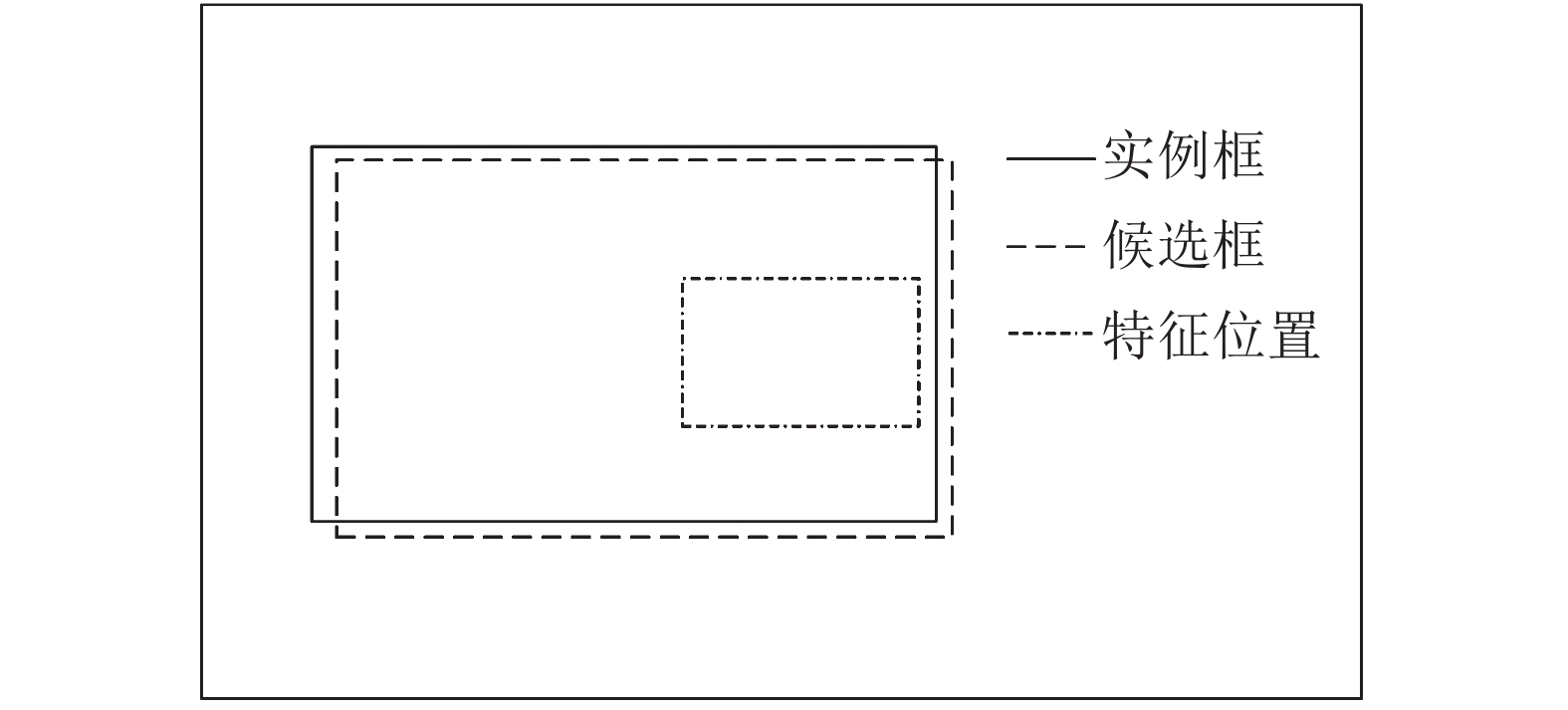
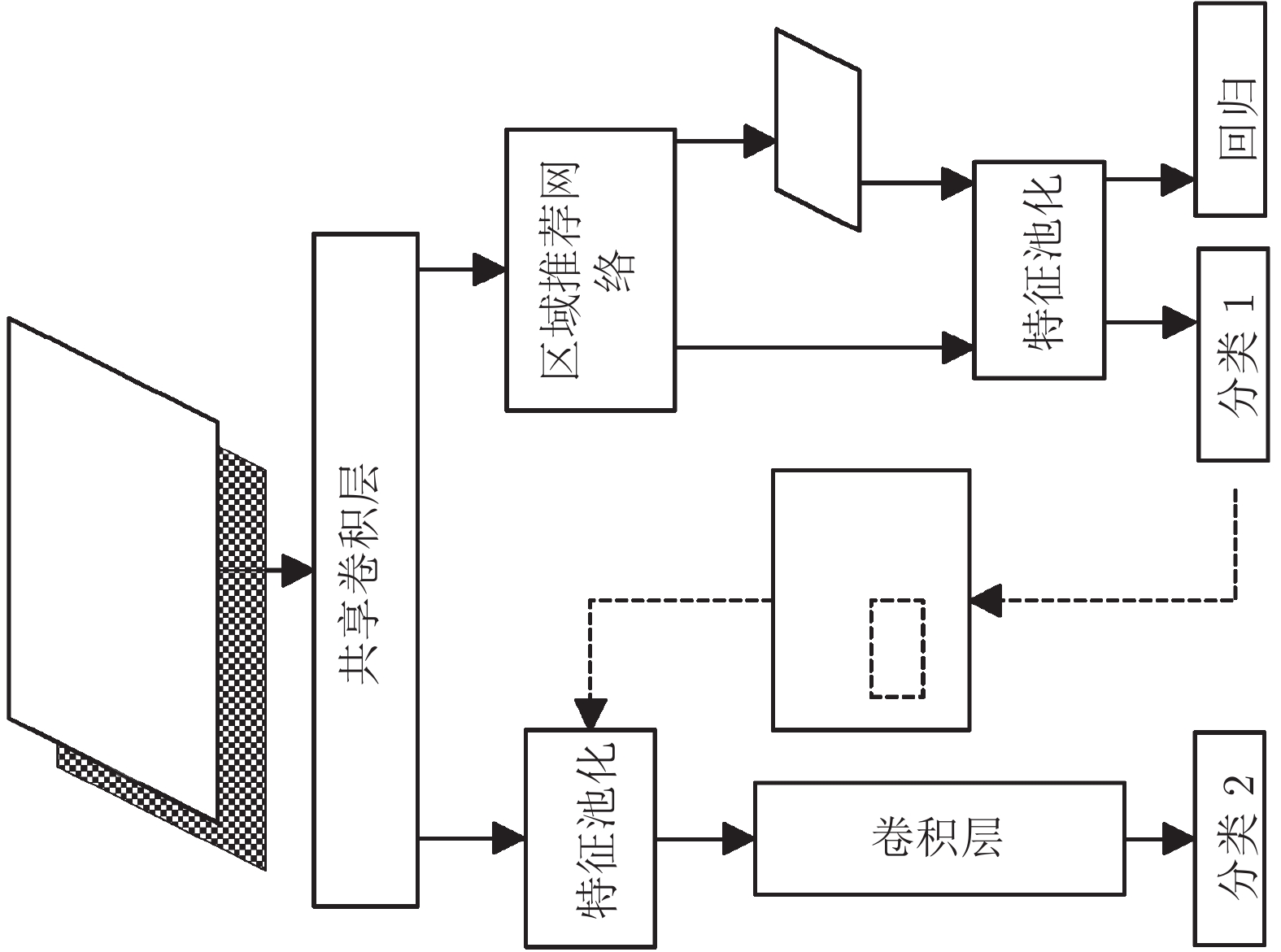
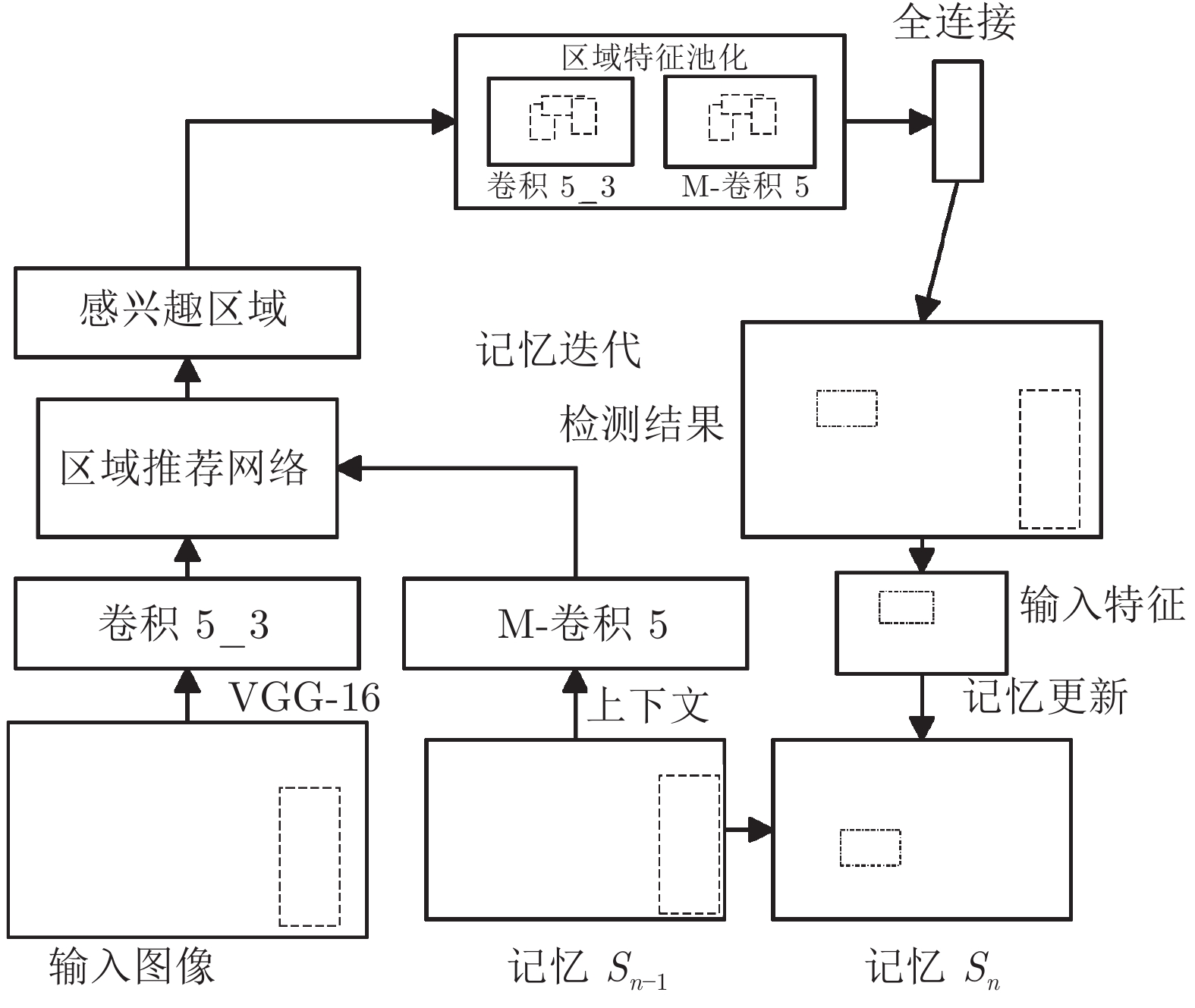
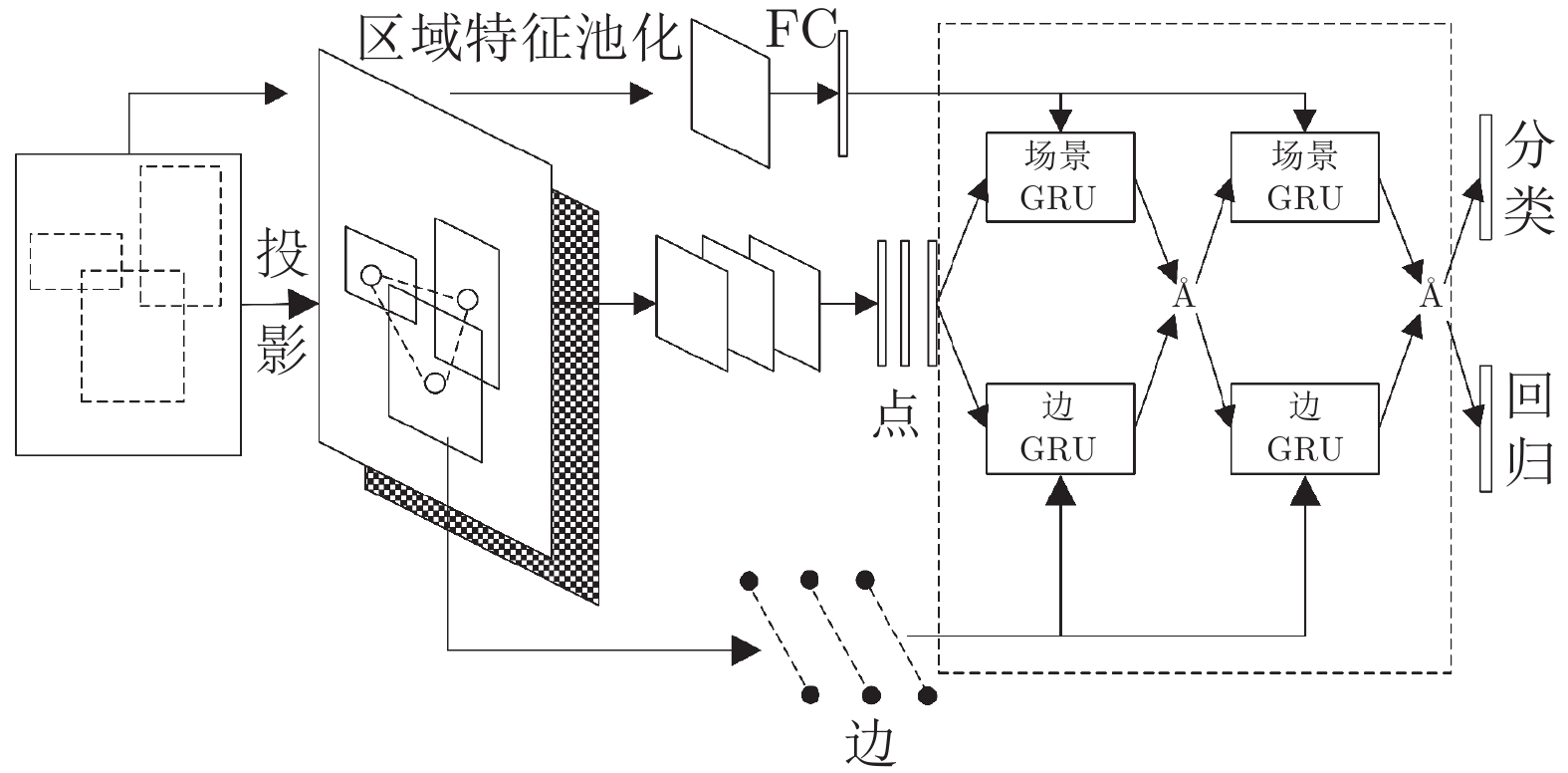
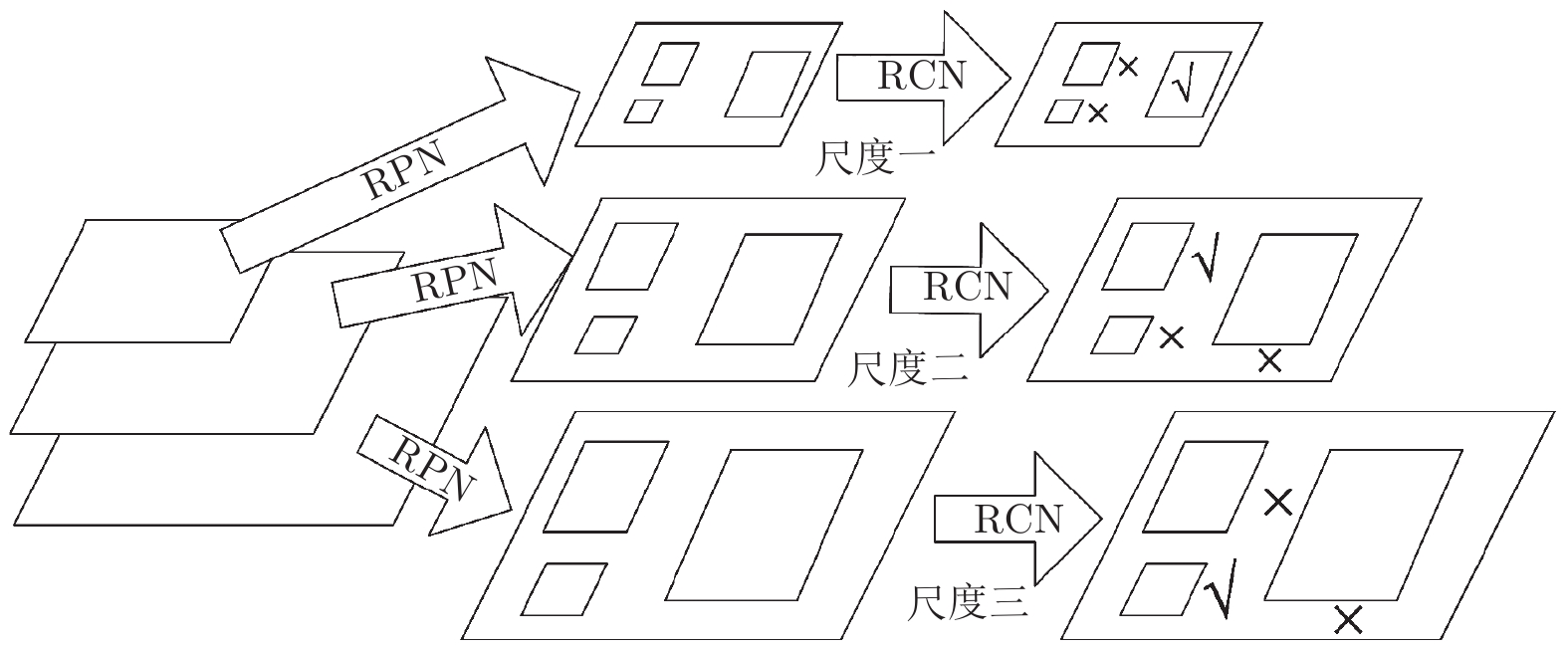
近年来, 基于卷积神经网络的目标检测研究发展十分迅速, 各种检测模型的改进方法层出不穷. 本文主要对近几年内目标检测领域中一些具有借鉴价值的研究工作进行了整理归纳. 首先, 对基于卷积神经网络的主要目标检测框架进行了梳理和对比. 其次, 对目标检测框架中主干网络、颈部连接层、锚点等子模块的设计优化方法进行归纳, 给出了各个模块设计优化的基本原则和思路. 接着, 在COCO数据集上对各类目标检测模型进行测试对比, 并根据测试结果分析总结了不同子模块对模型检测性能的影响. 最后, 对目标检测领域未来的研究方向进行了展望.










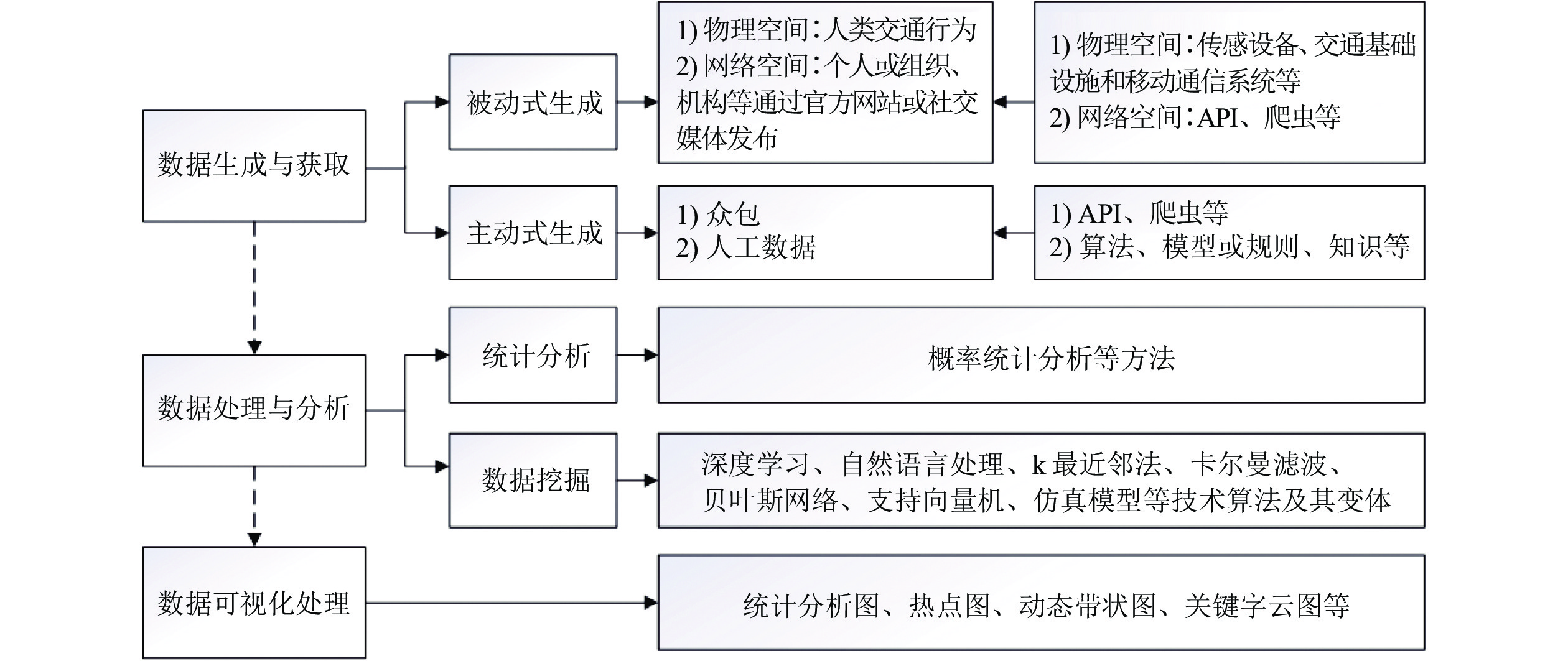
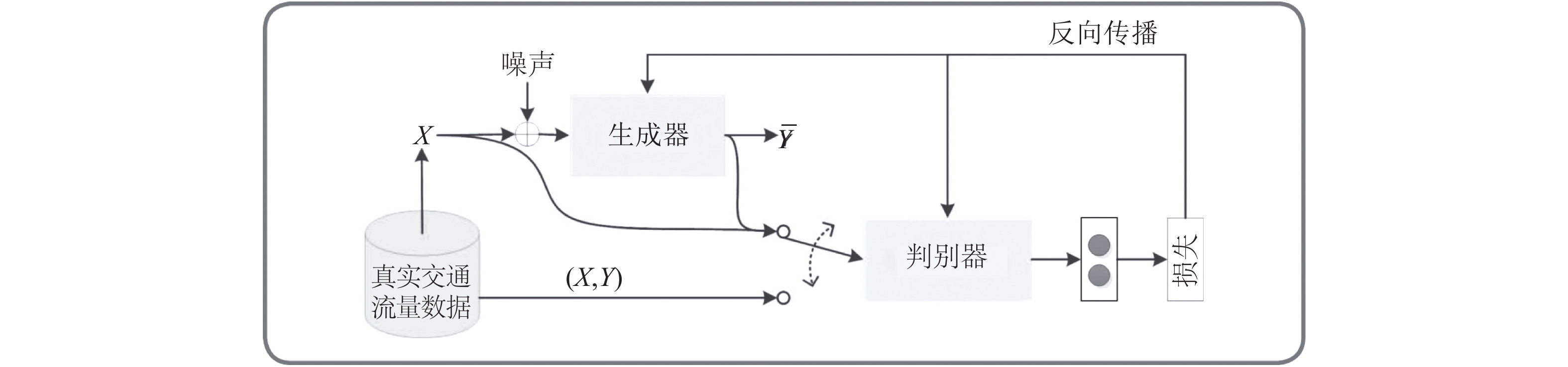
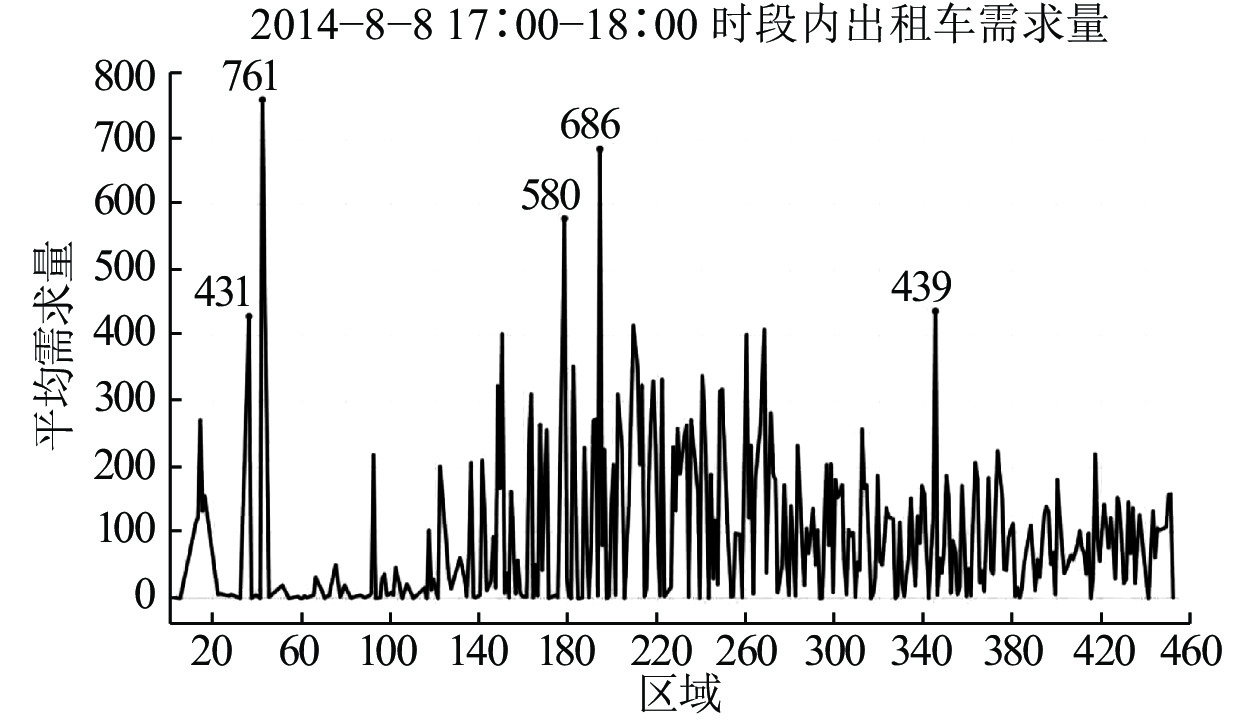
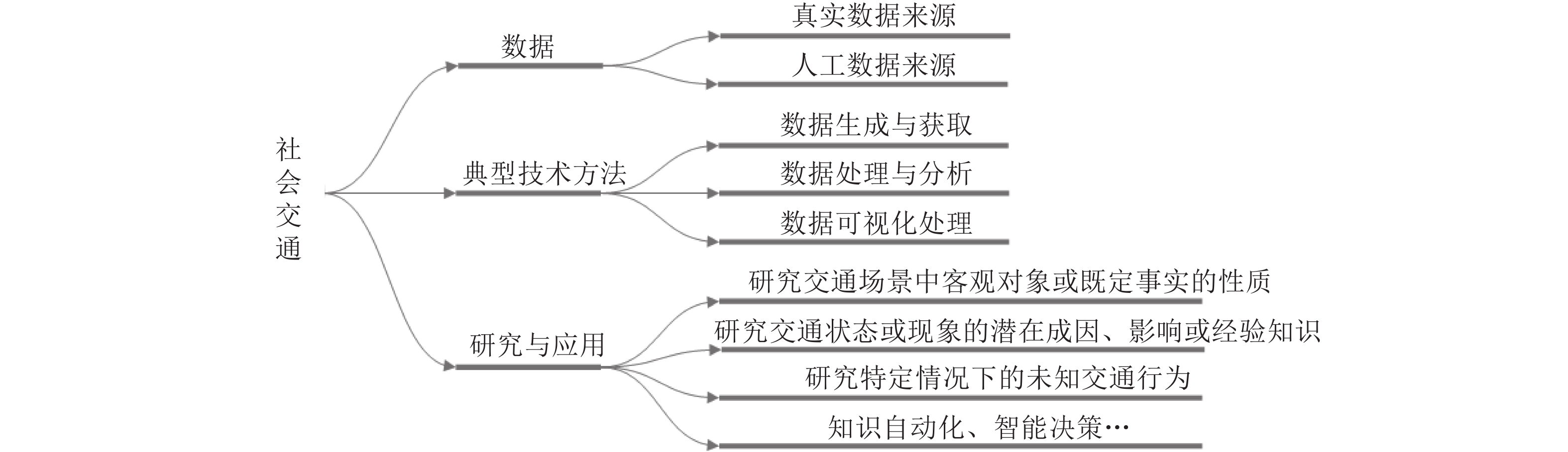
近年来, 智能便携设备和移动互联网的迅速发展促使网络空间中积累了海量的数据信息, 从而影响了众多领域的研究与发展. 本文针对在以社会信号为主的数据对交通领域的影响下产生的跨学科领域−社会交通, 从数据及相应技术方法和研究应用方面对物理和网络空间信息的感知、挖掘、分析与利用的研究成果进行综述, 并分析、总结与展望该领域的未来研究趋势.



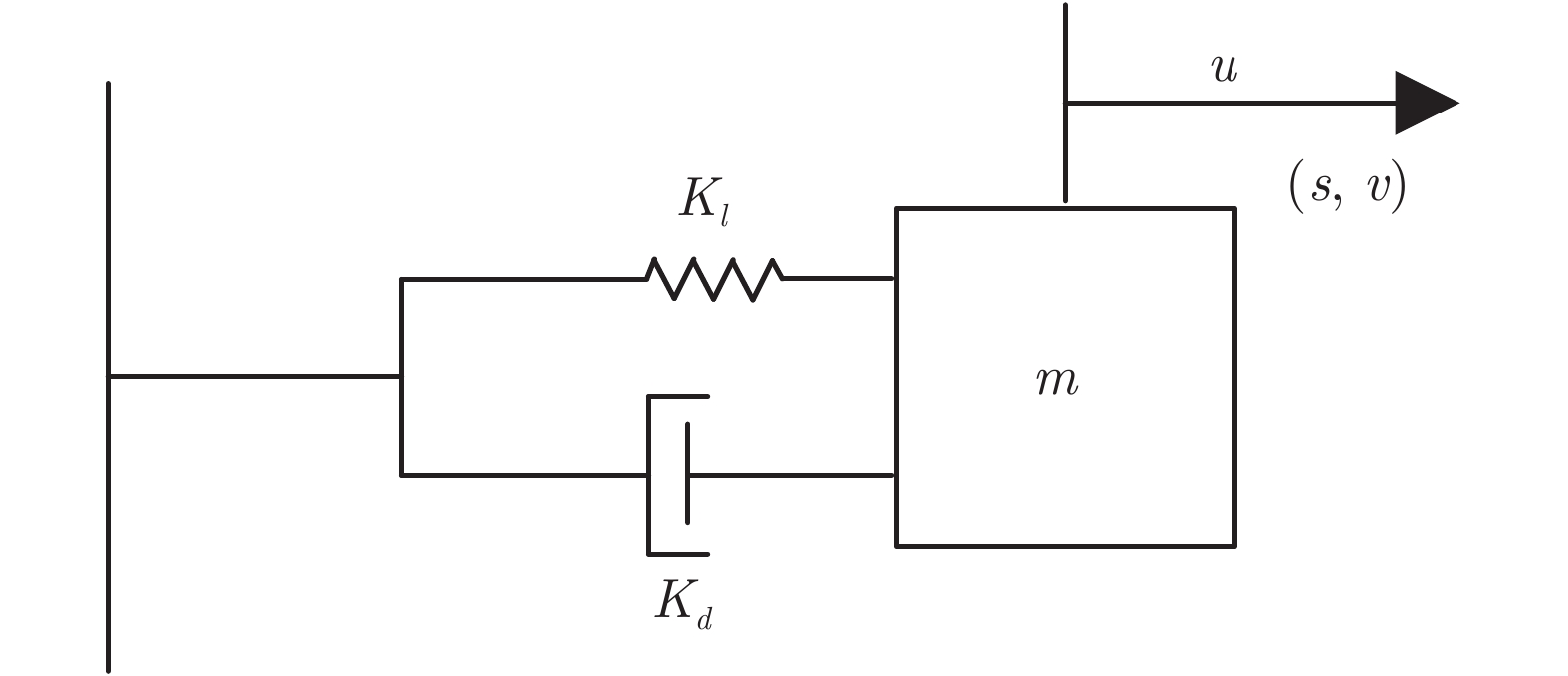
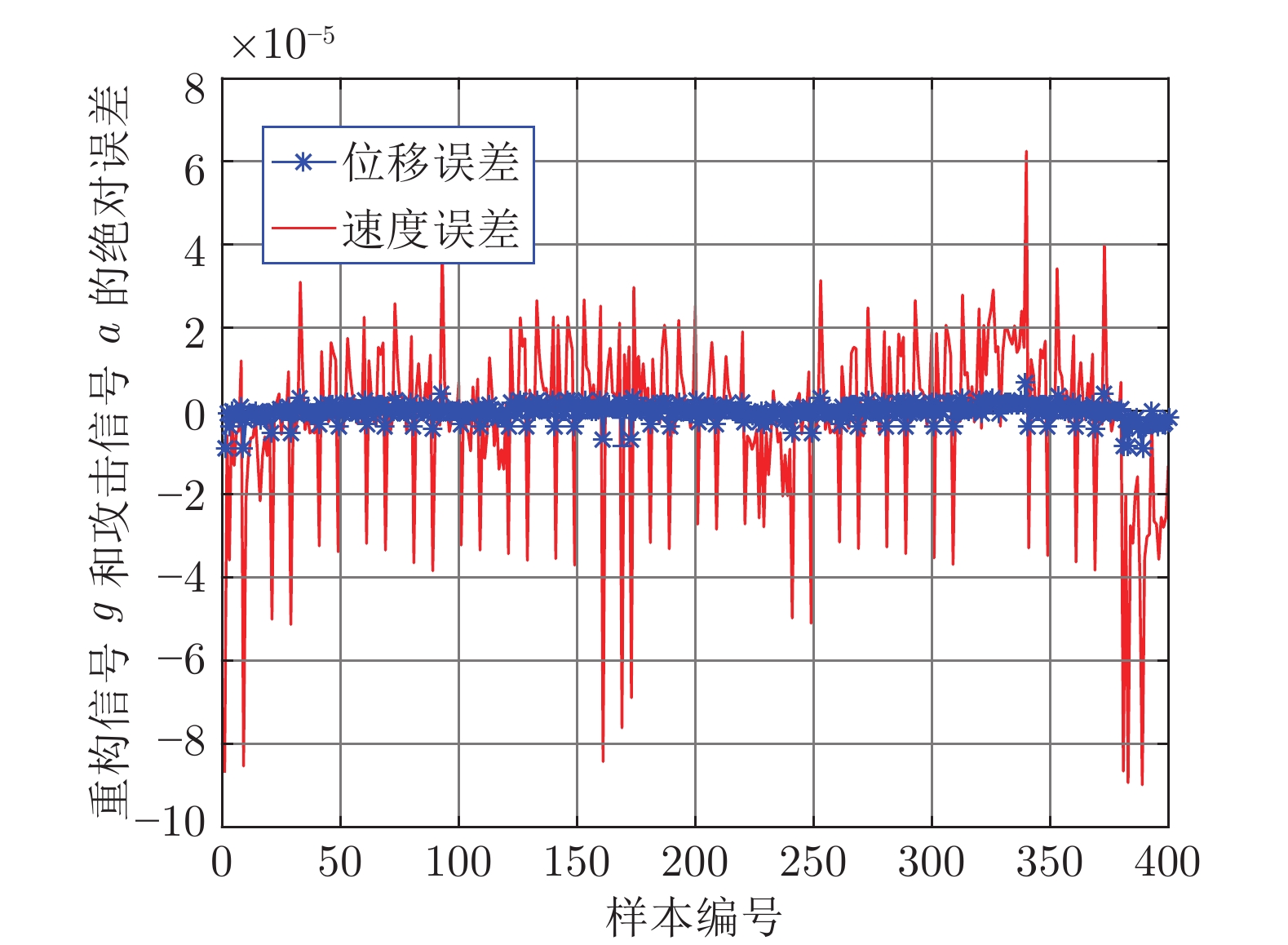
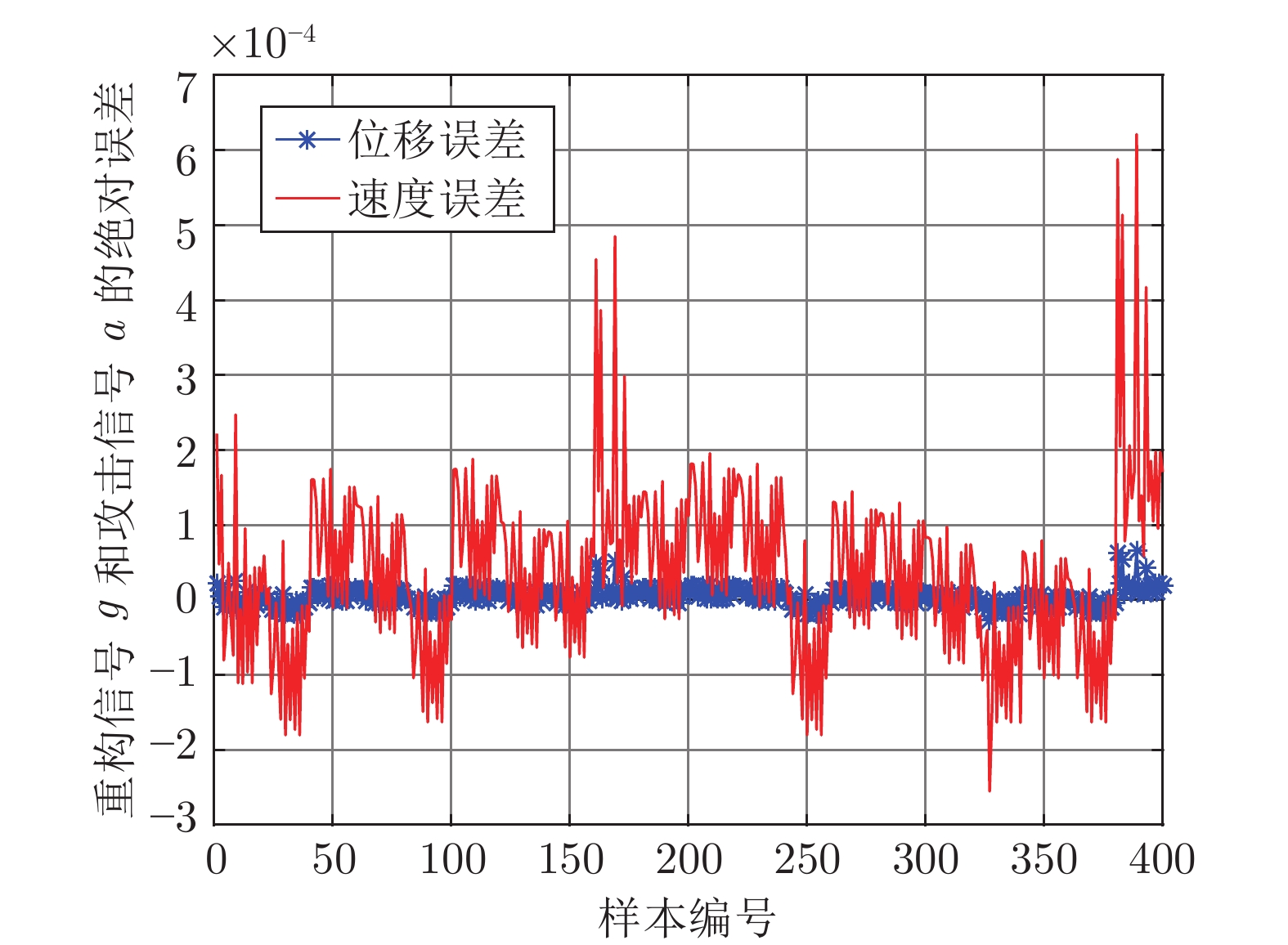
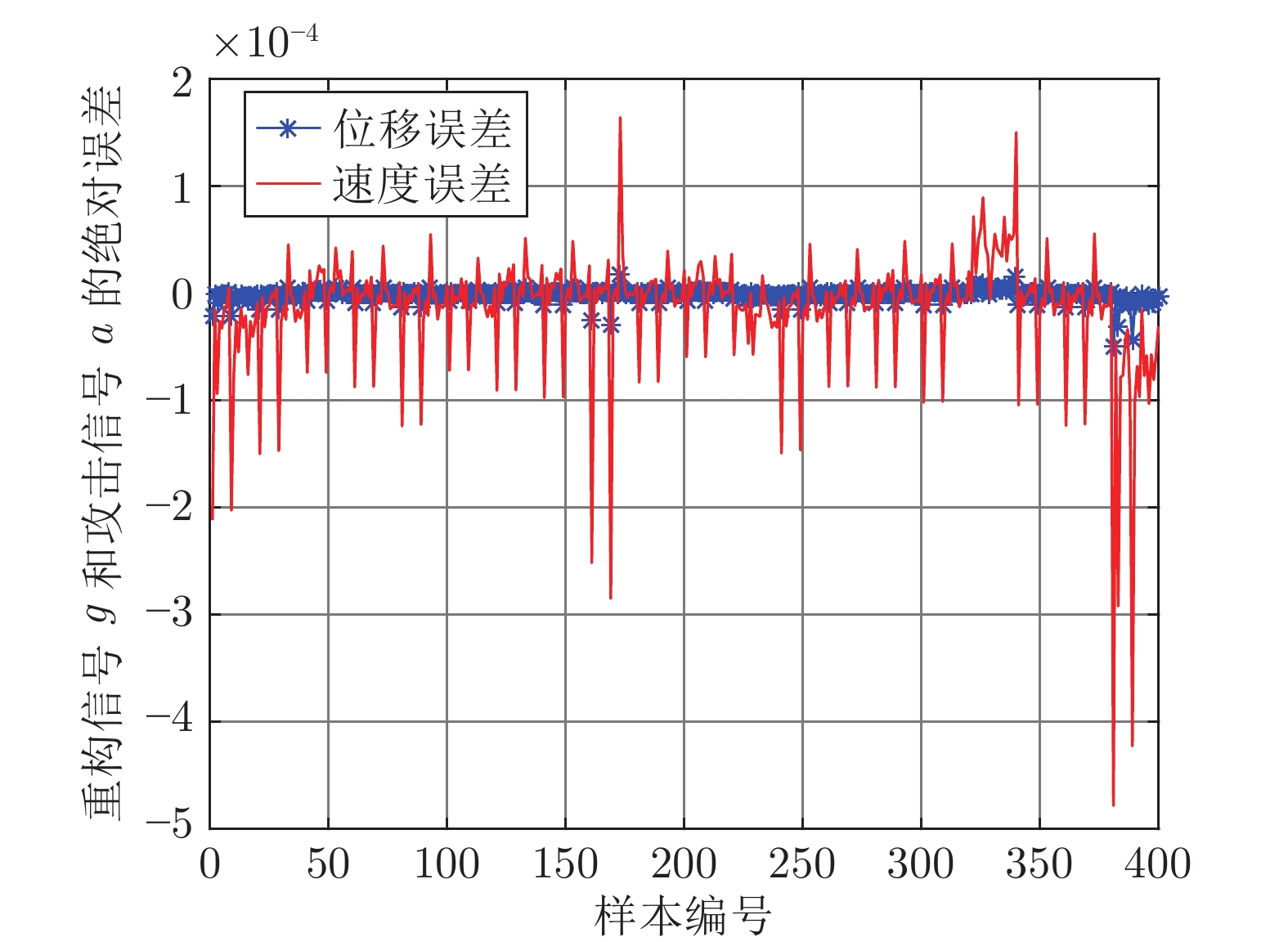
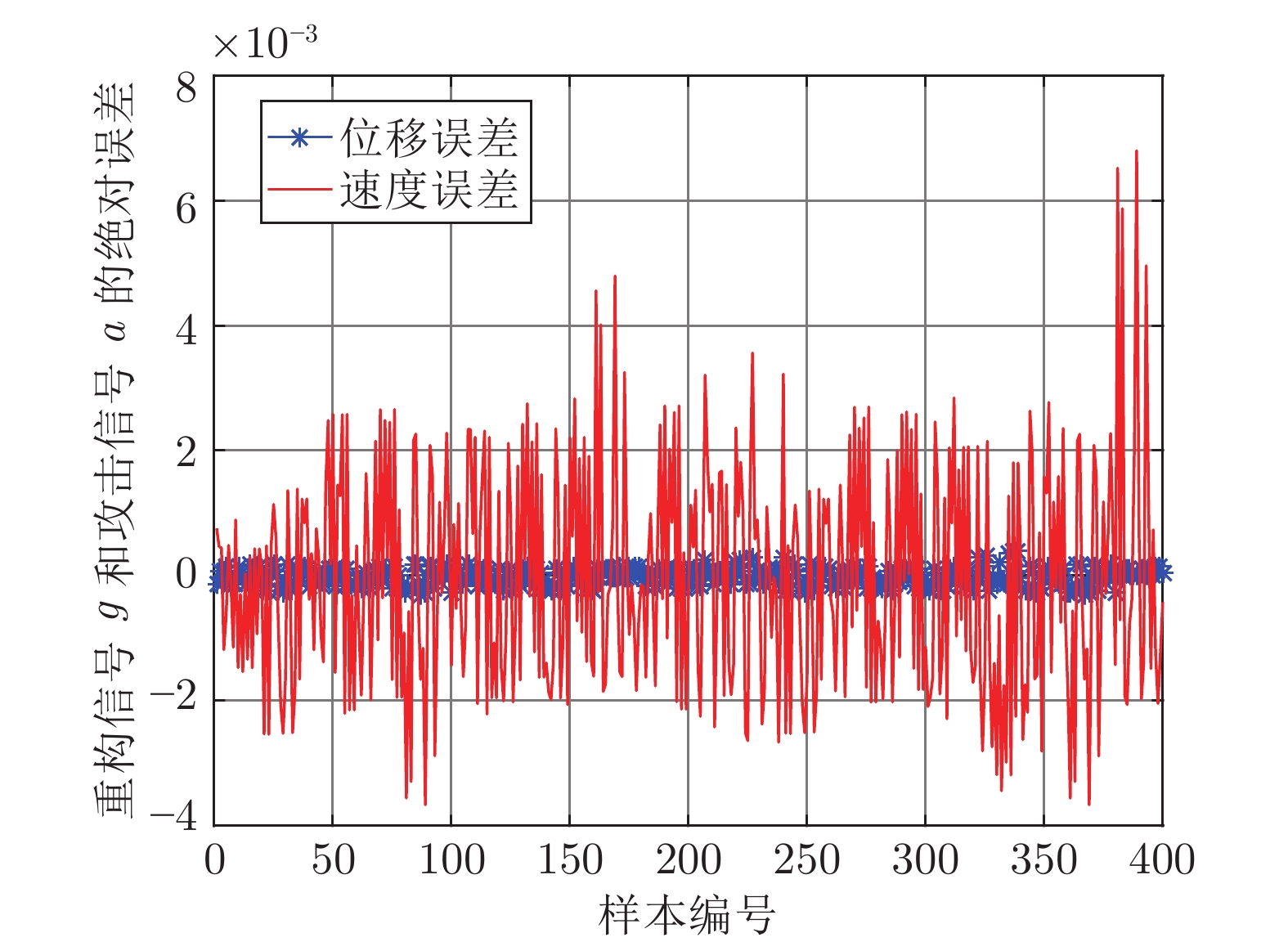
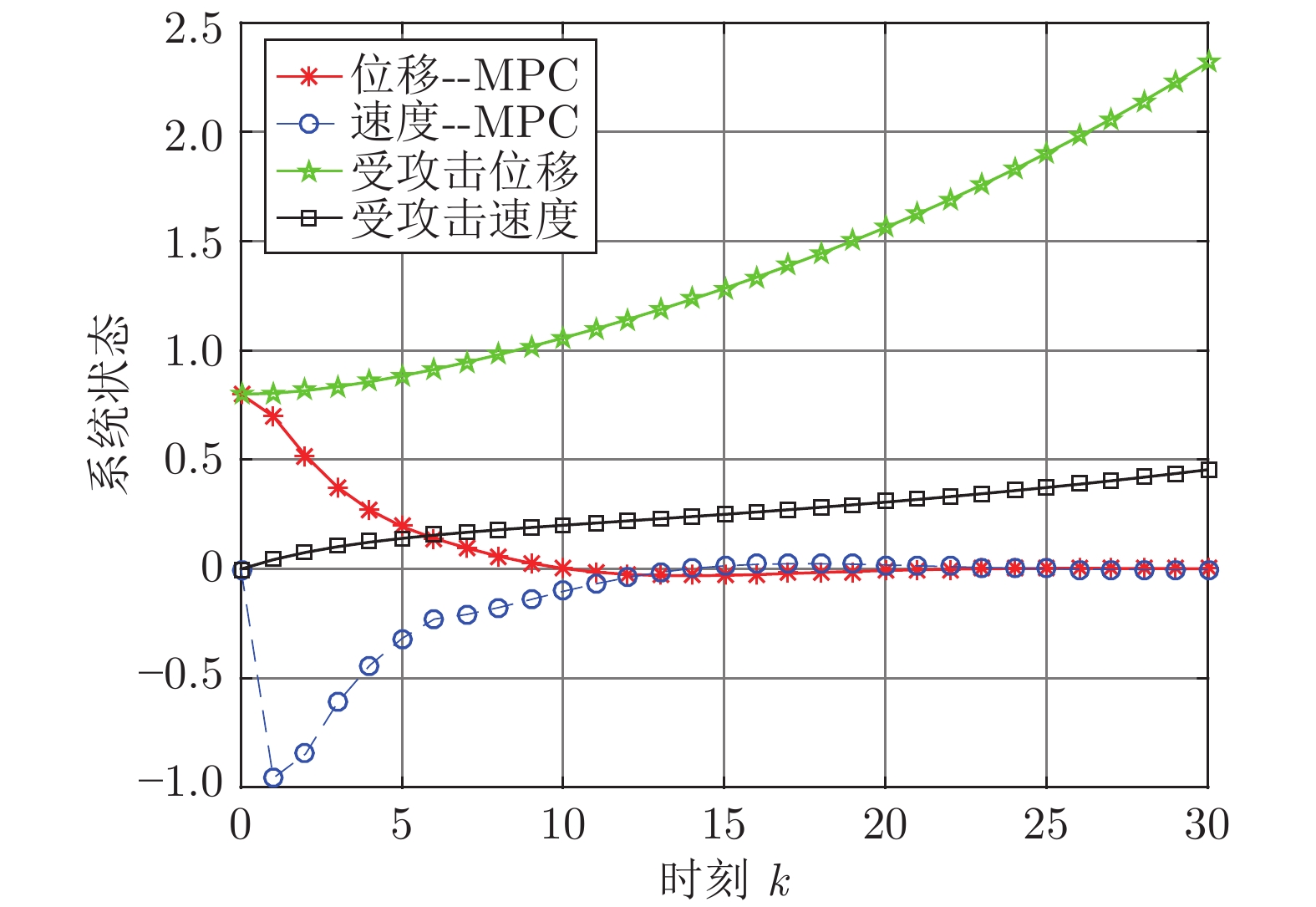
研究了控制信号被恶意篡改的信息物理系统的安全控制问题. 首先, 提出一种改进果蝇优化核极限学习机算法(Kernel extreme learning machine with improved fruit fly optimization algorithm, IFOA-KELM)对攻击信号进行重构. 然后, 将所得重构信号作为系统扰动加以补偿, 进而设计模型预测控制策略, 并给出了使被控系统是输入到状态稳定的条件. 另外, 本文从攻击者角度建立优化模型得到最优攻击策略用以生成足够的受攻击数据, 基于此数据, 来训练改进果蝇优化核极限学习机算法. 最后, 使用弹簧−质量−阻尼系统进行仿真, 验证了改进果蝇优化极限学习机算法和所提安全控制策略的有效性.






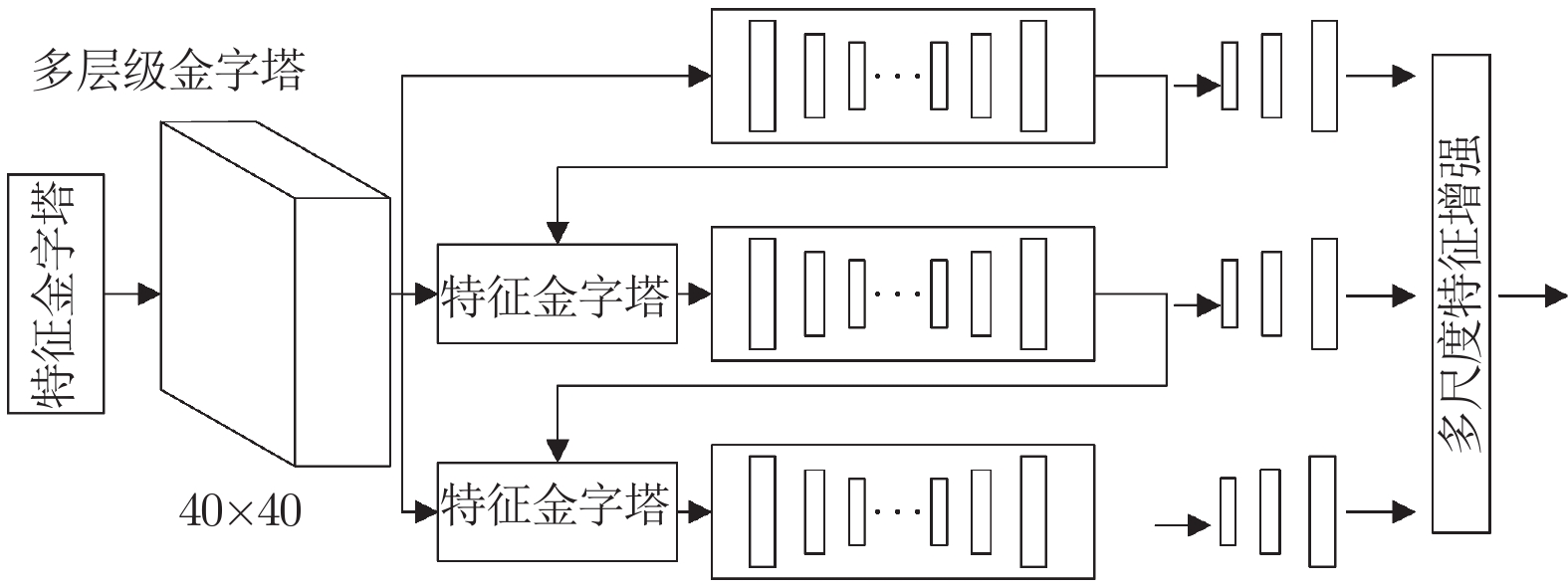
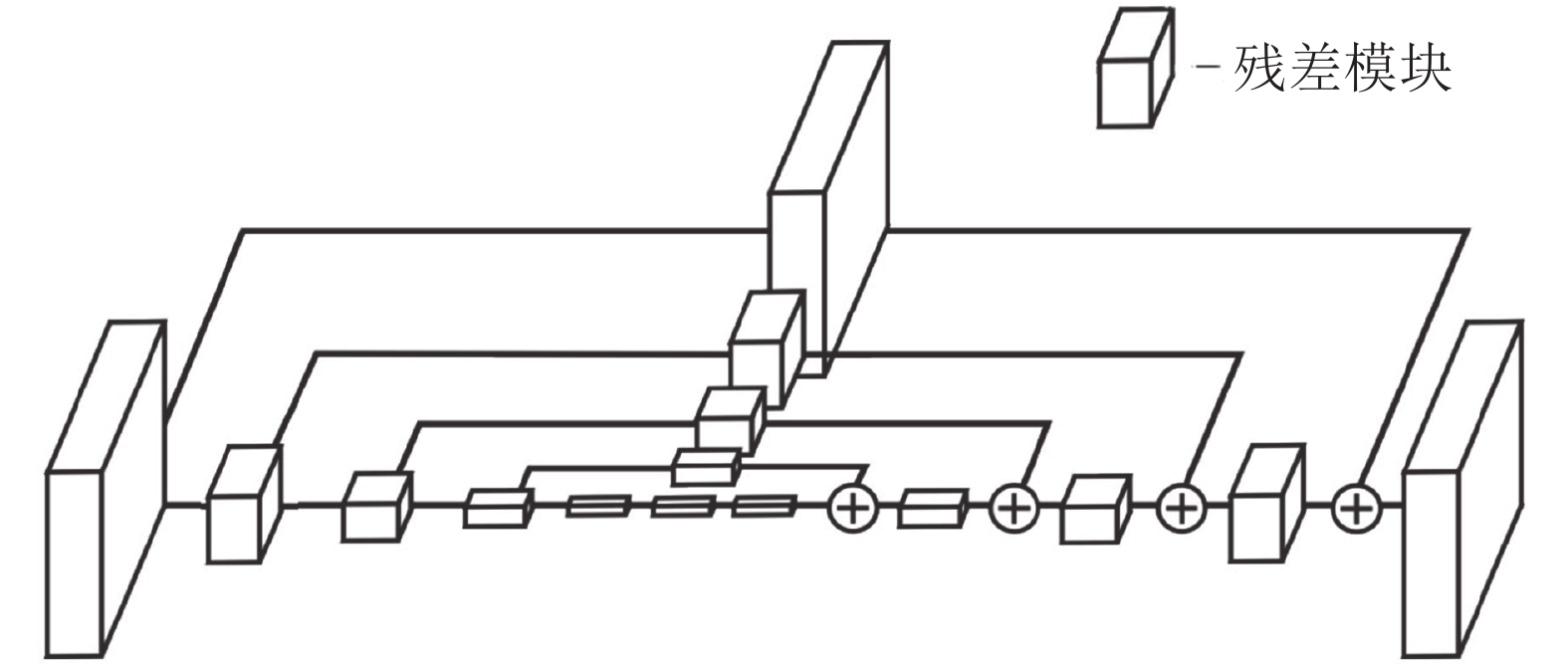
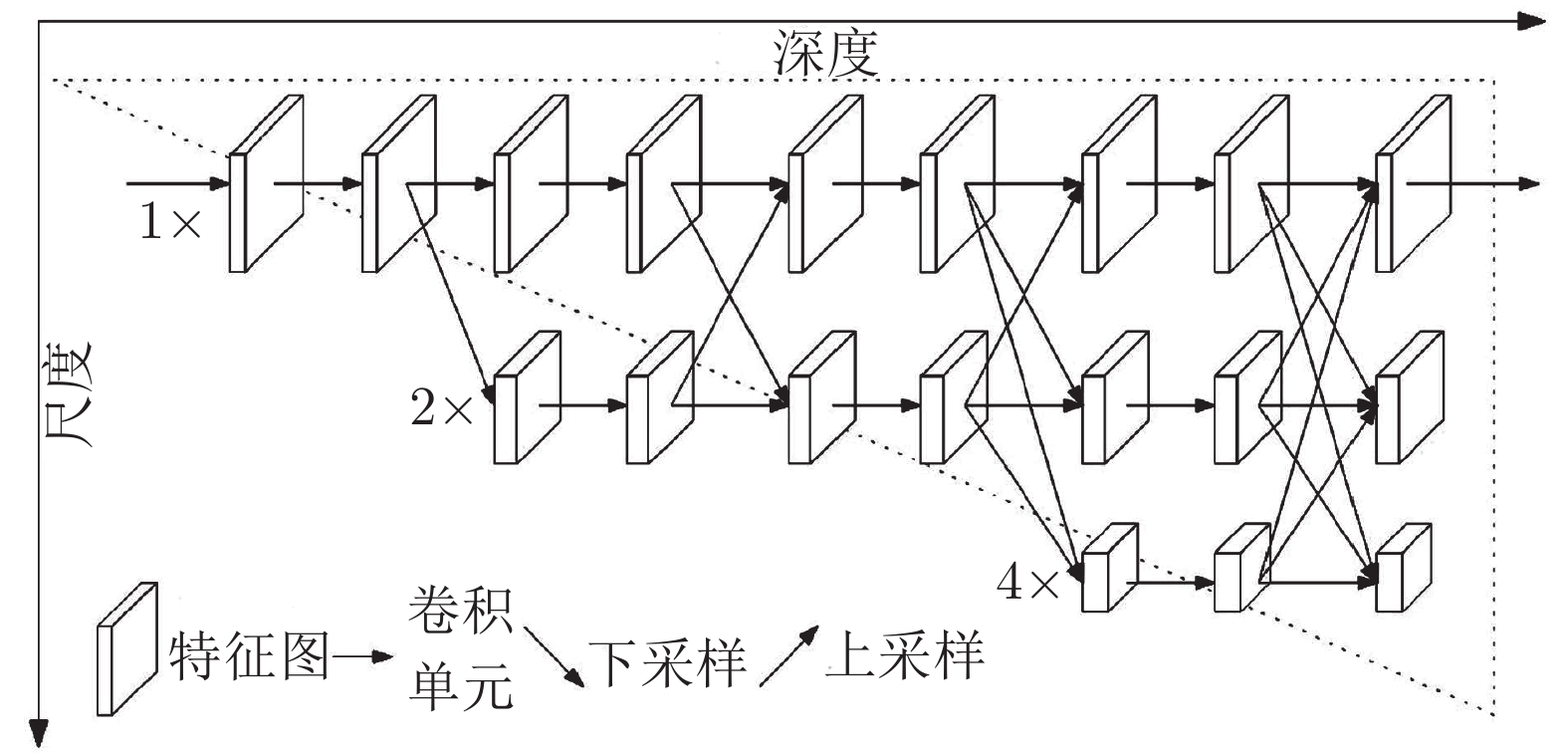
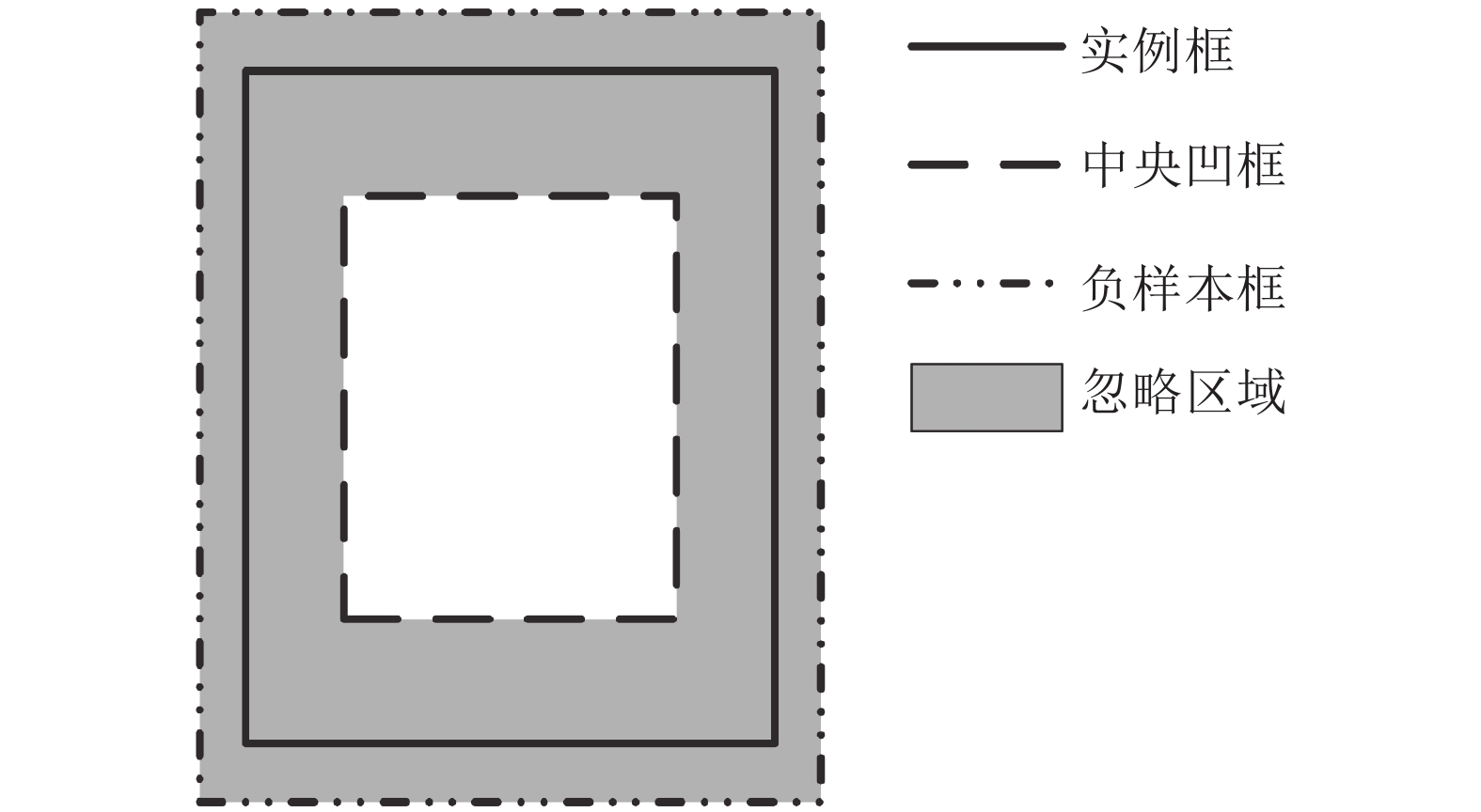
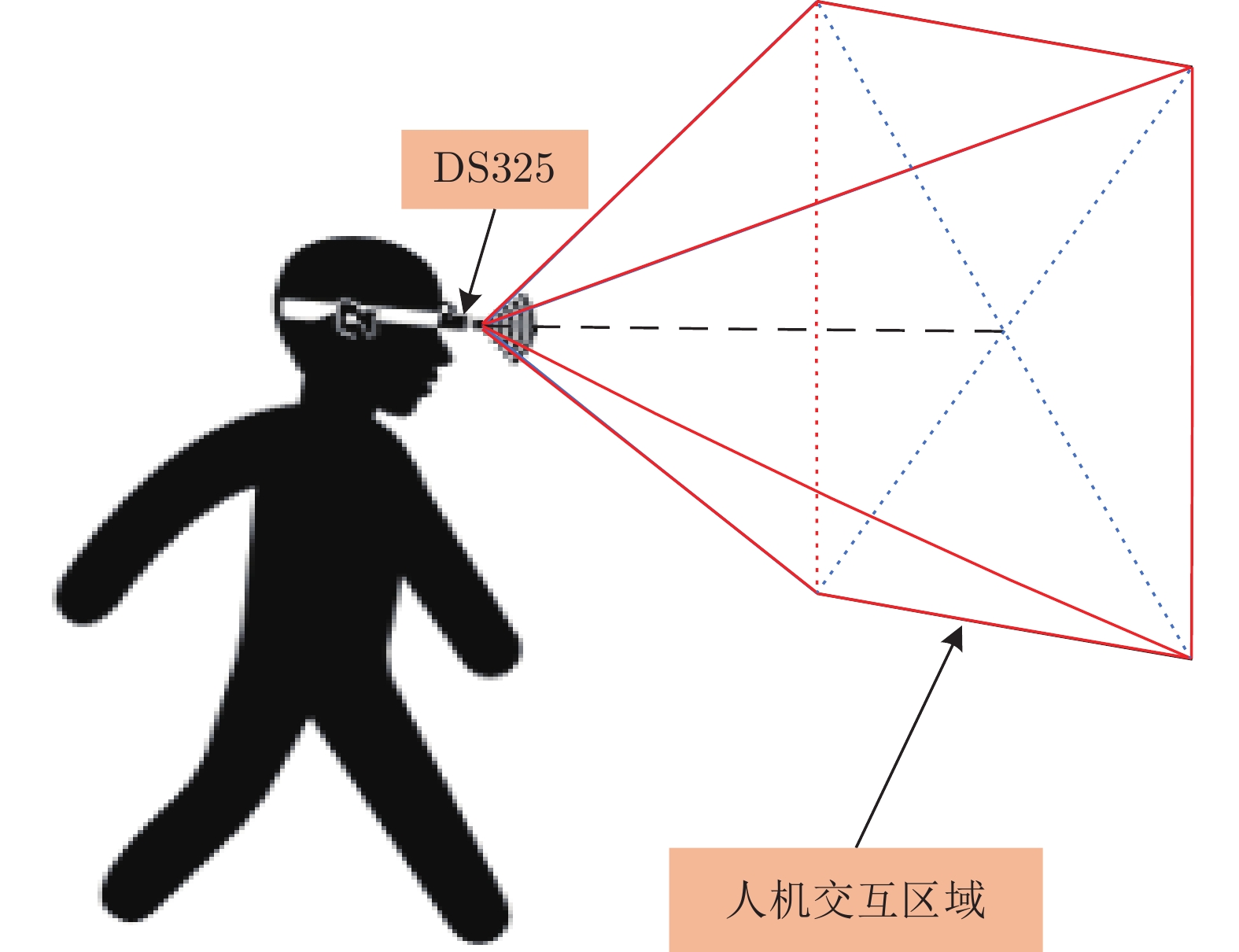
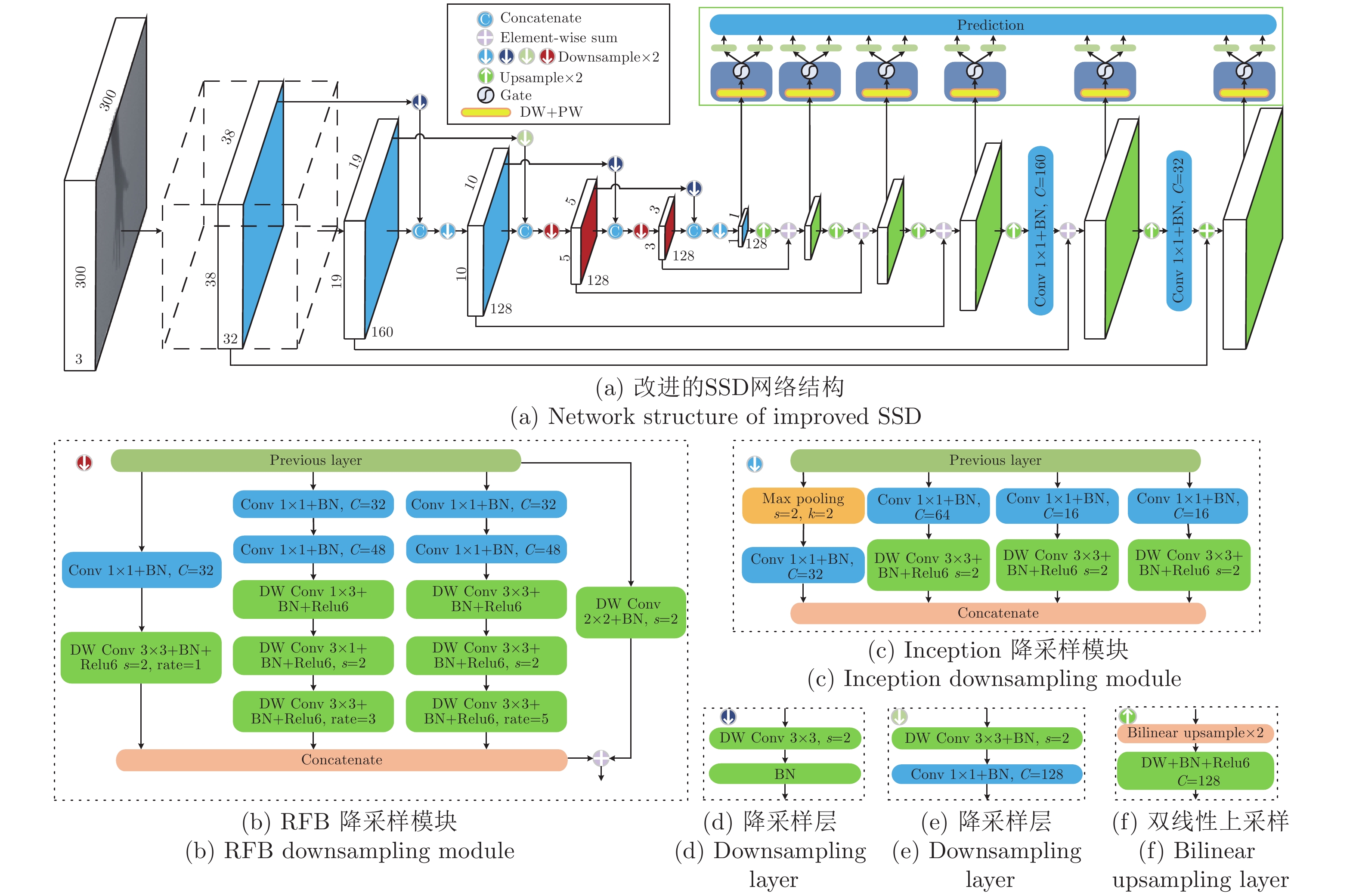
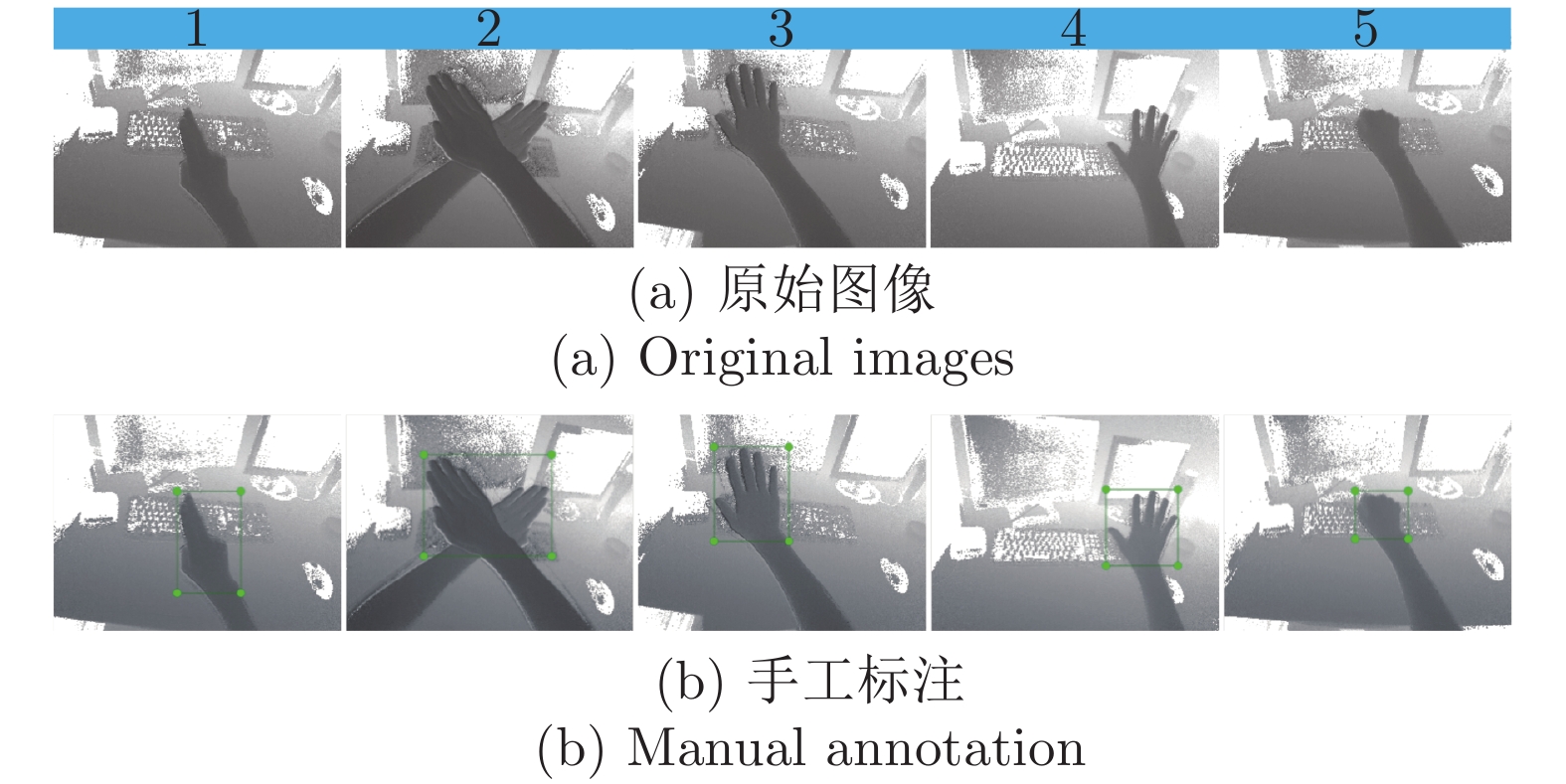
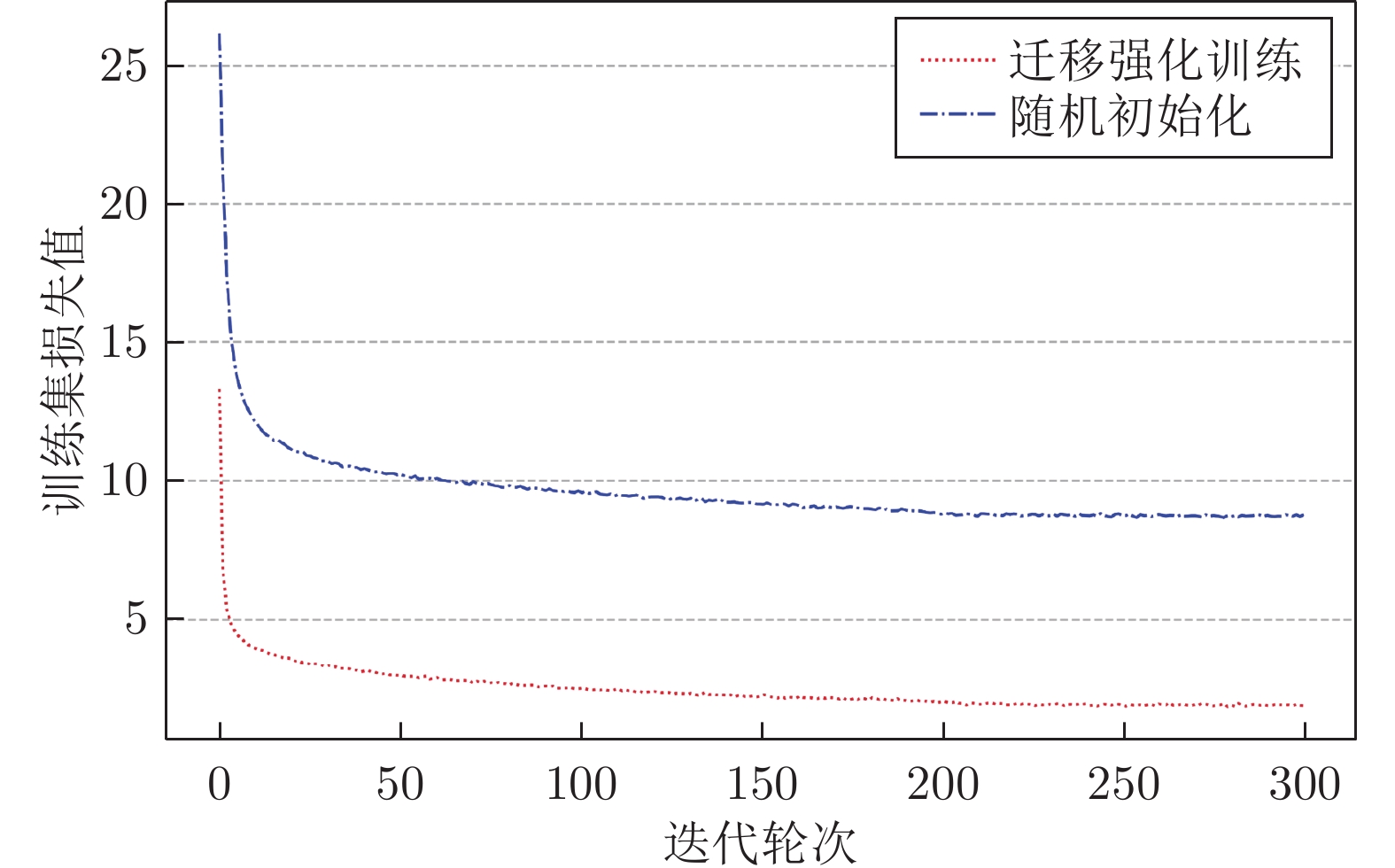
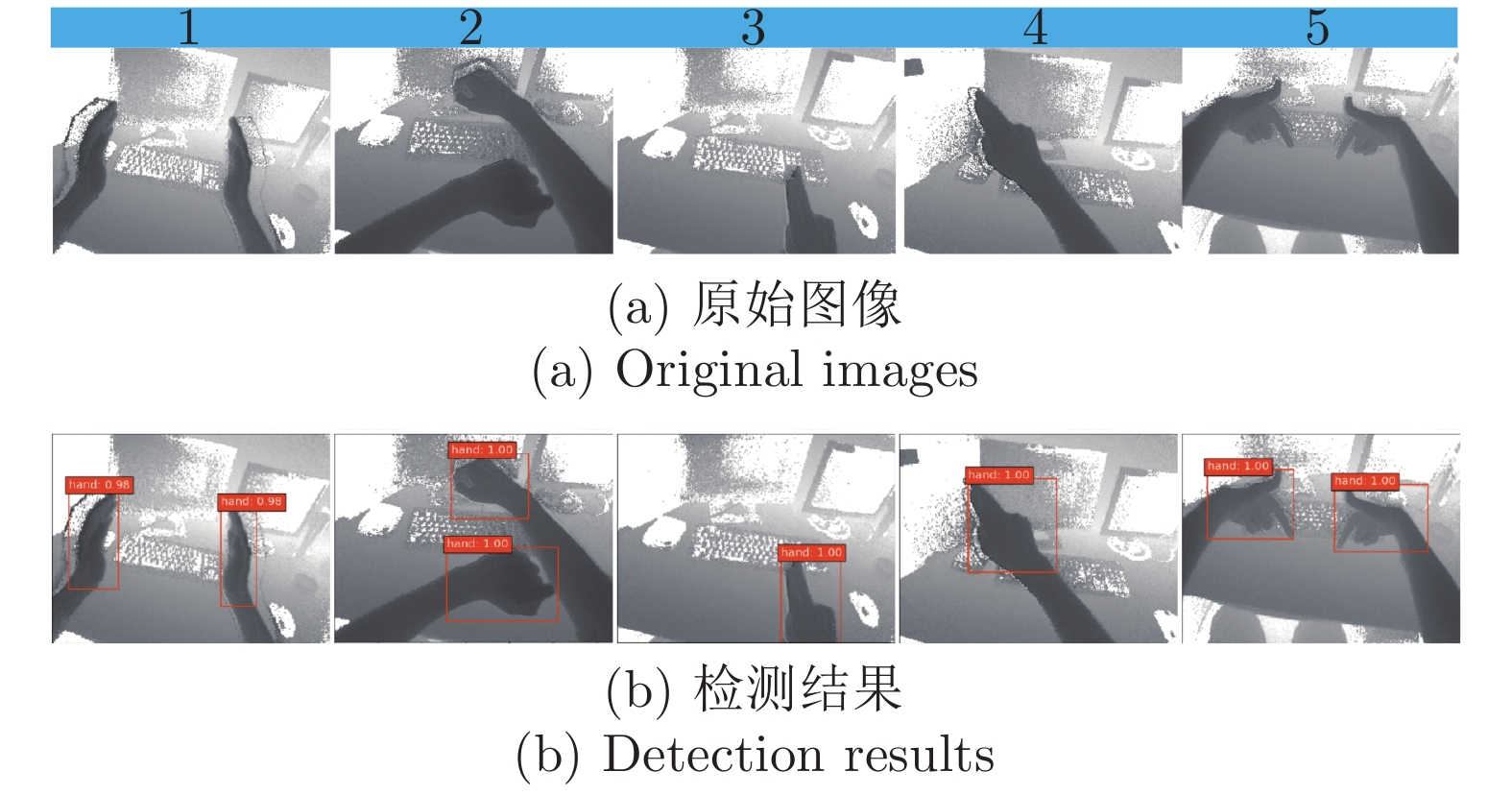
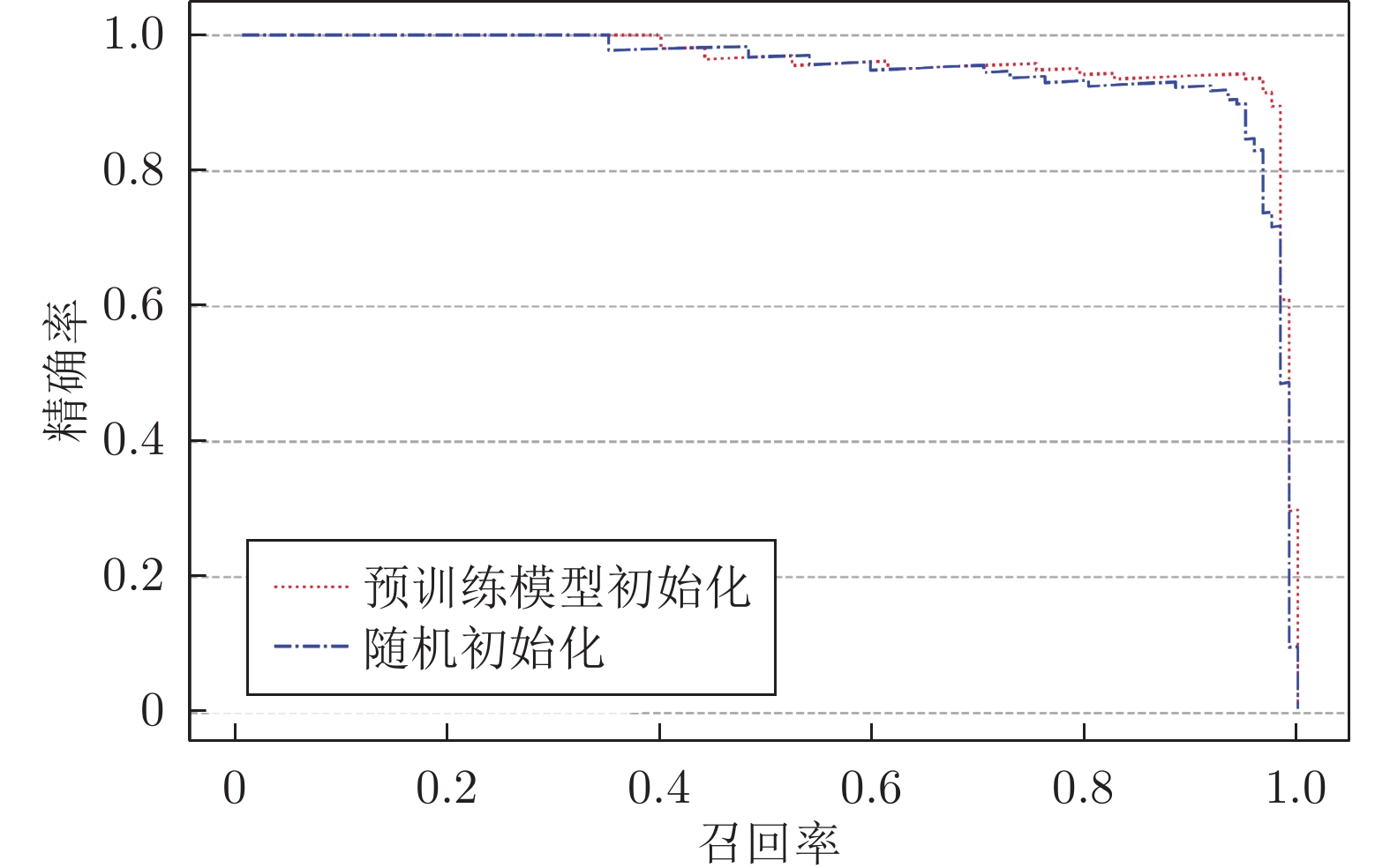
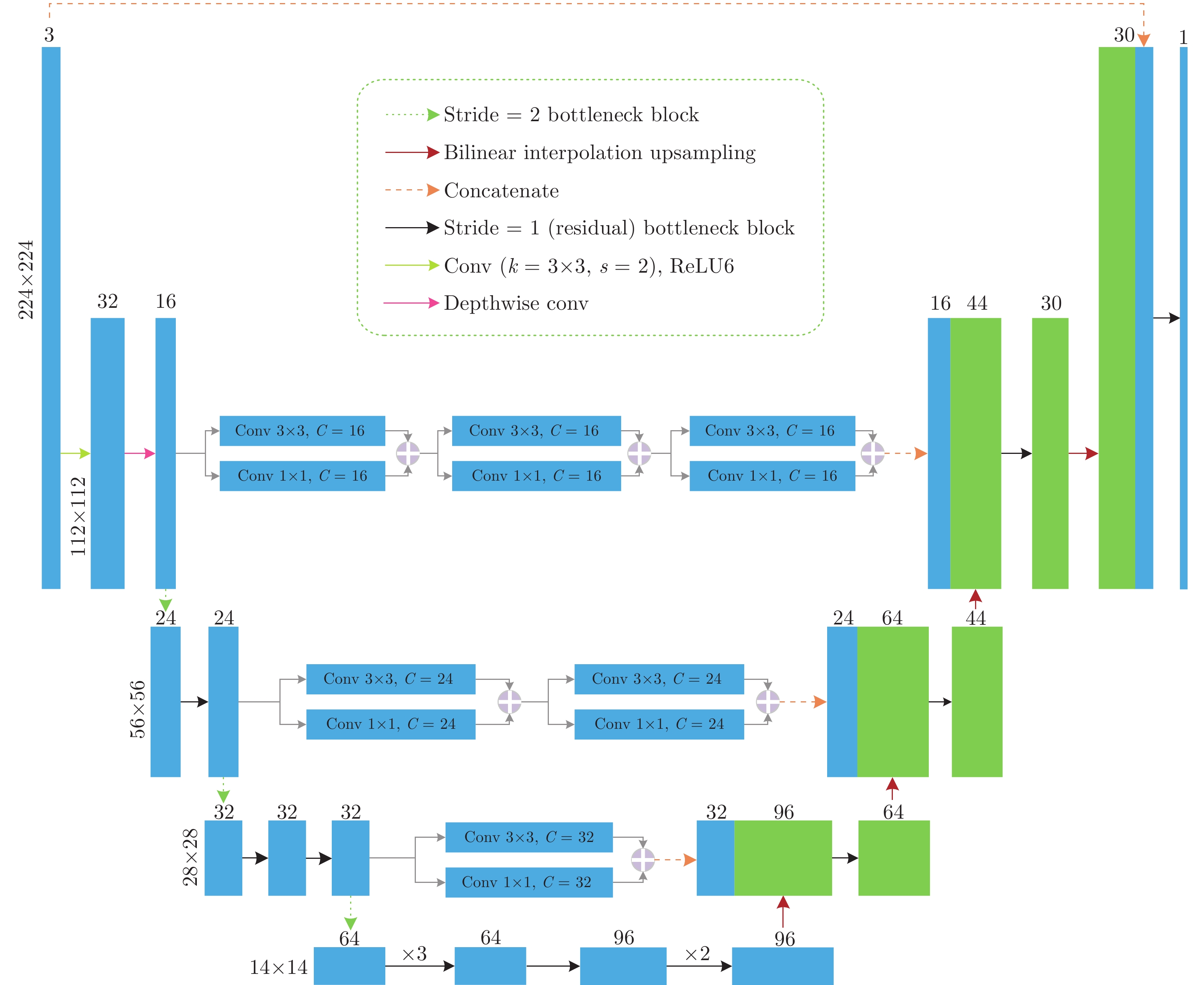
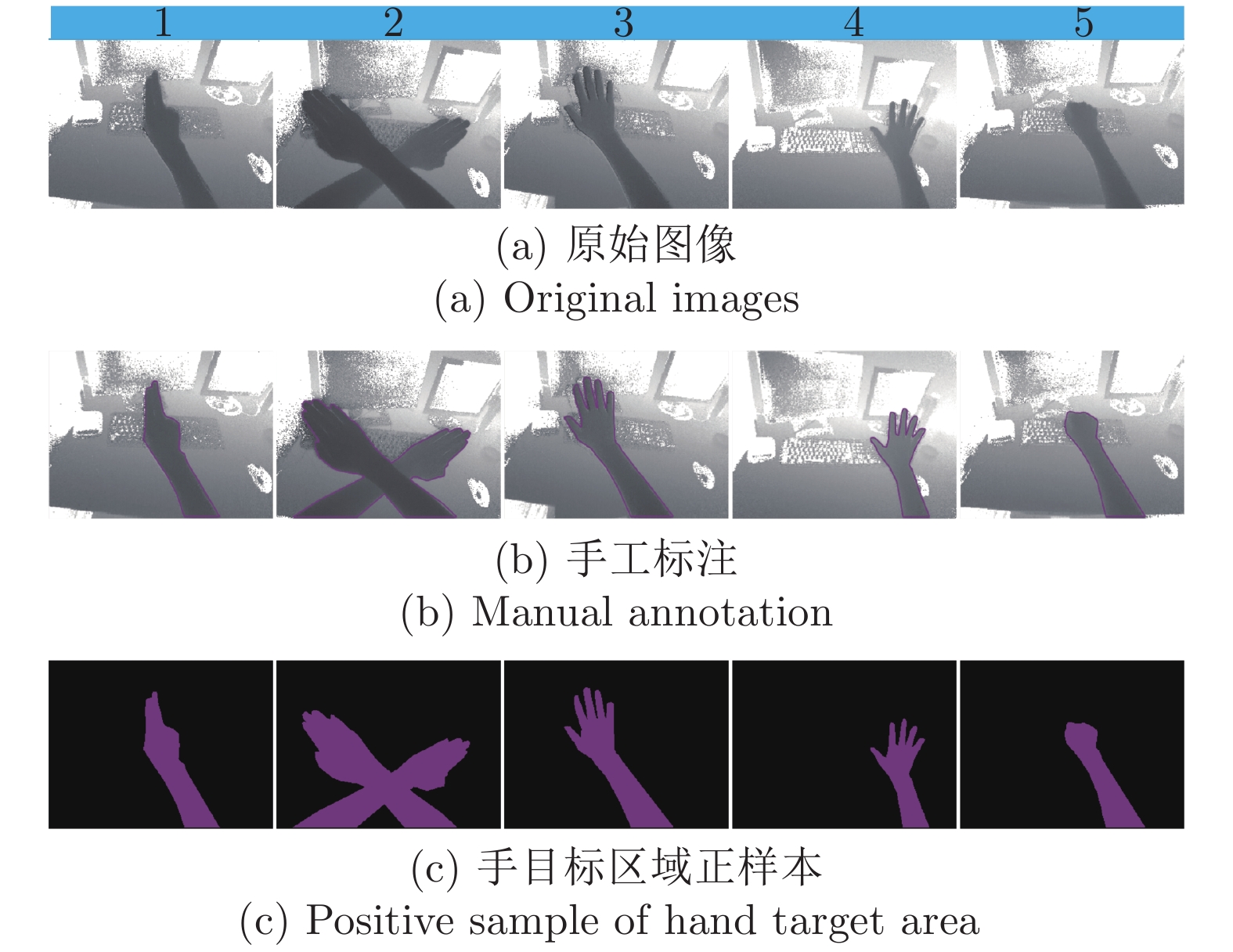
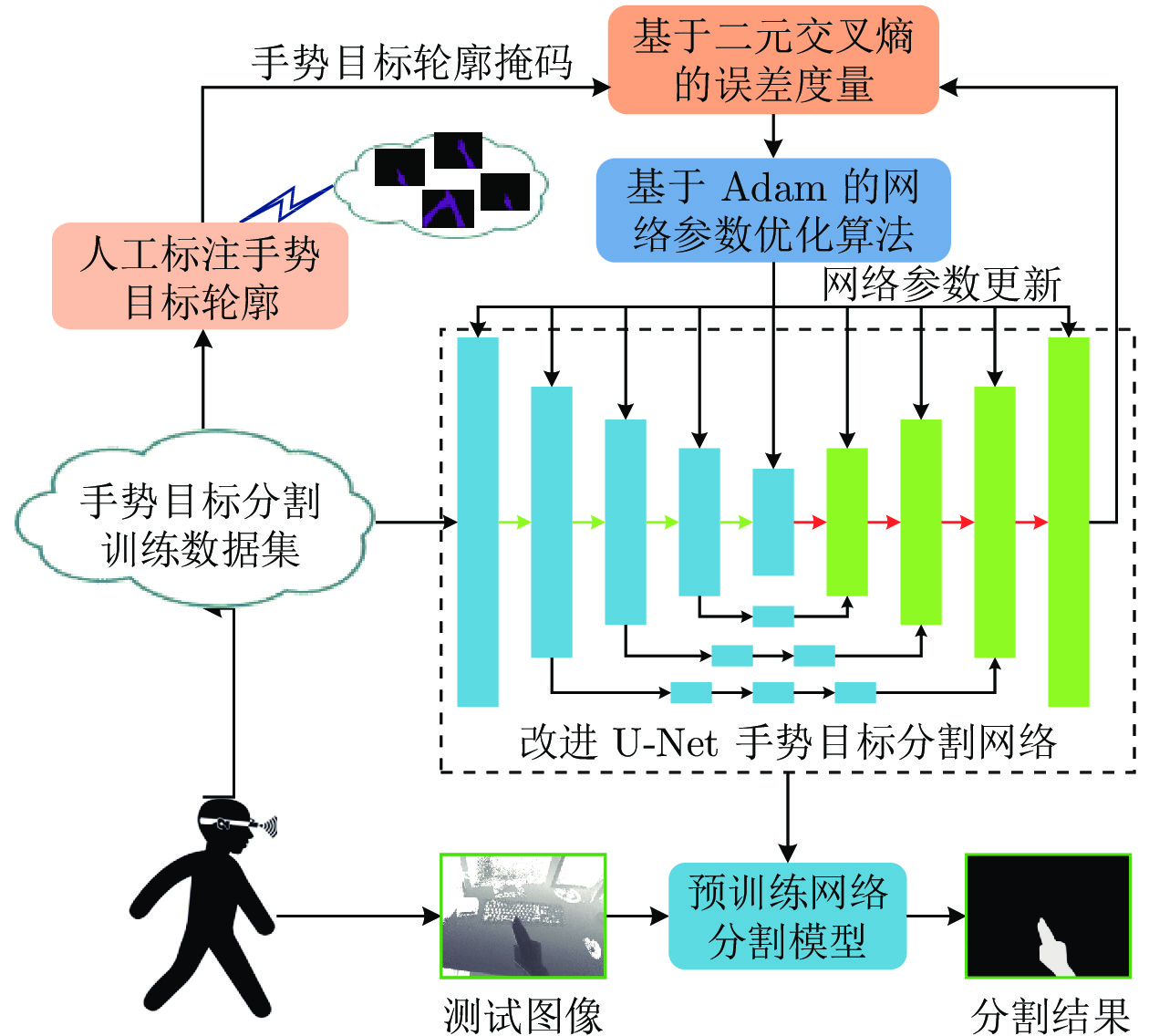
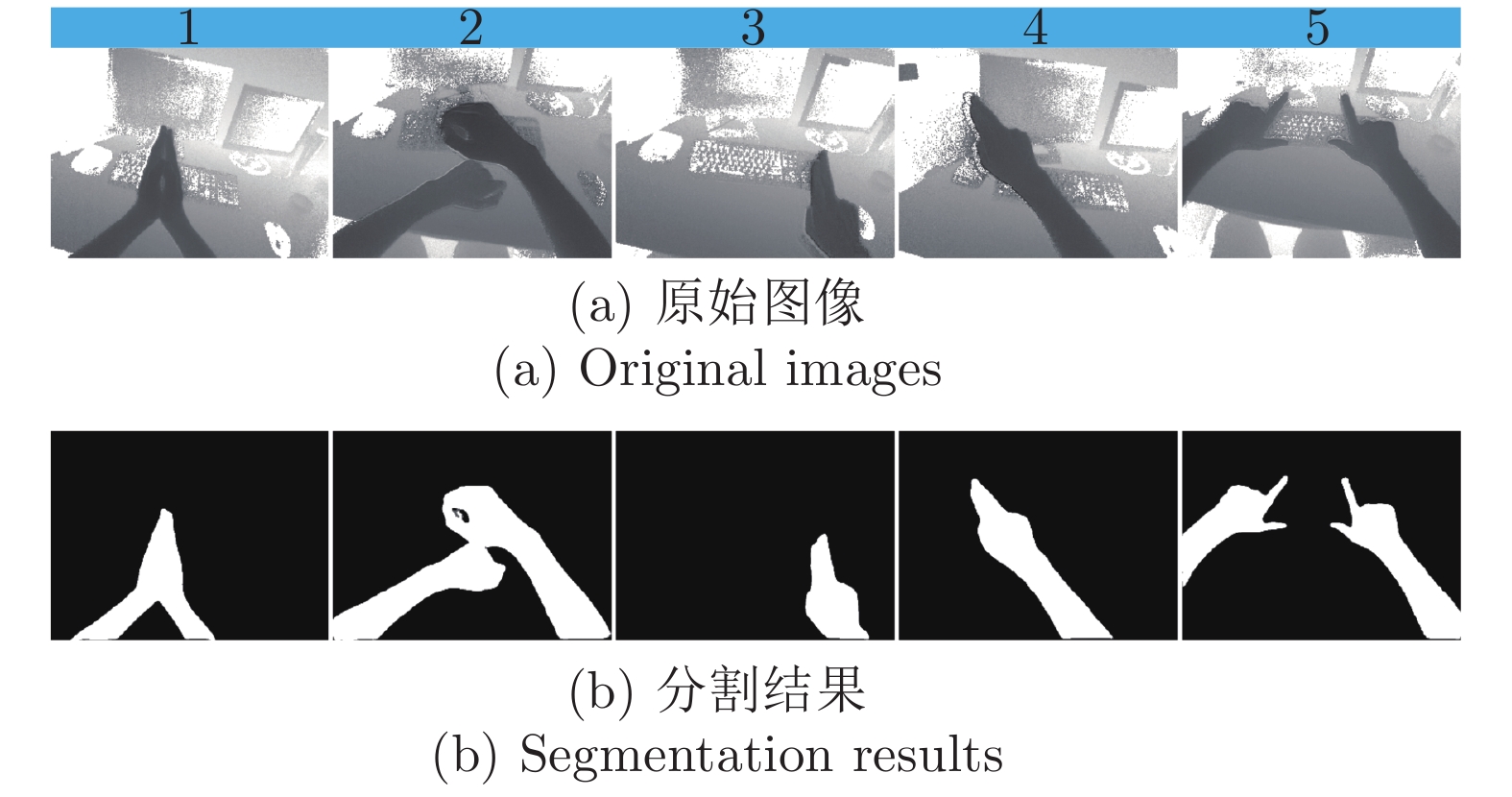
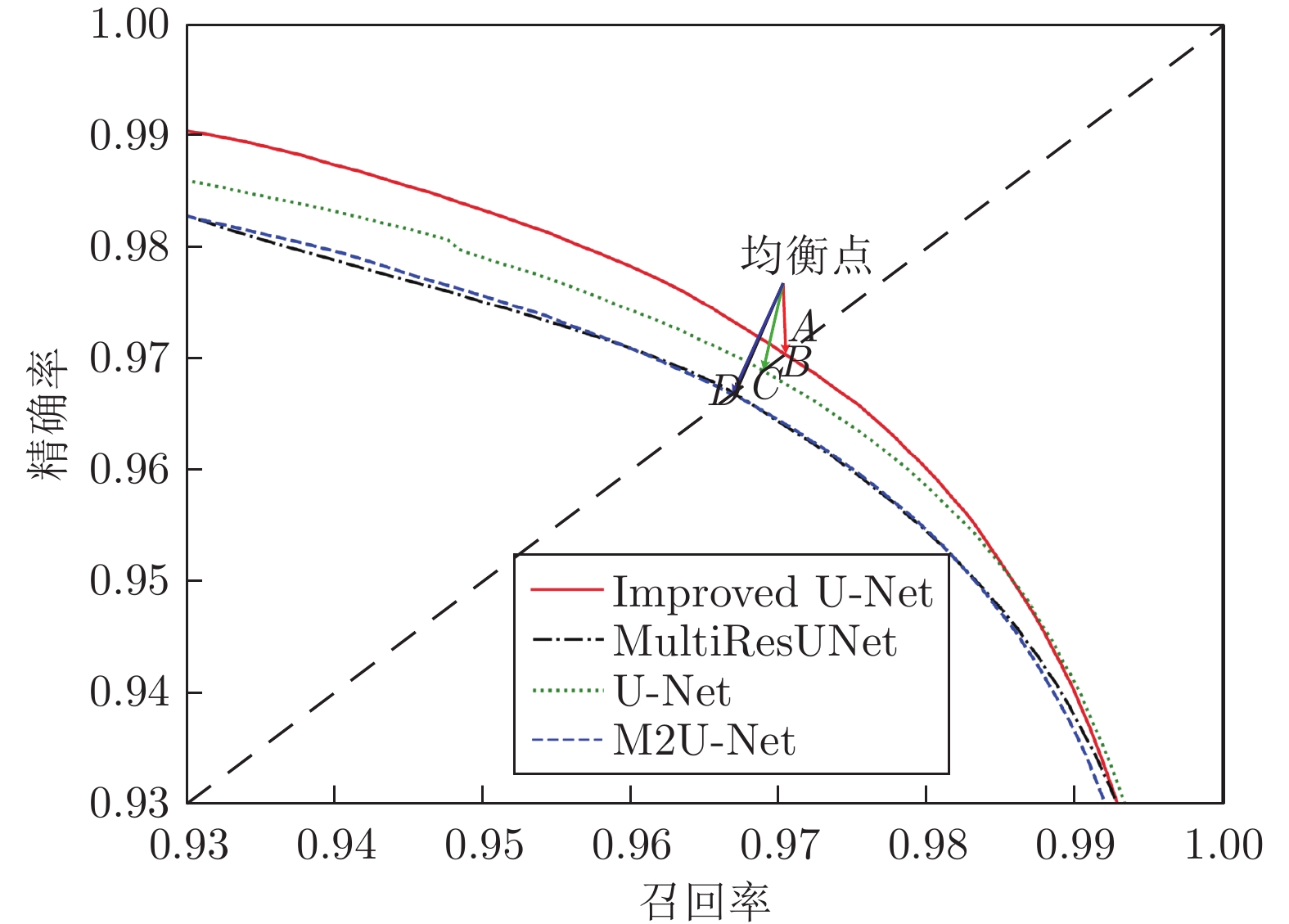
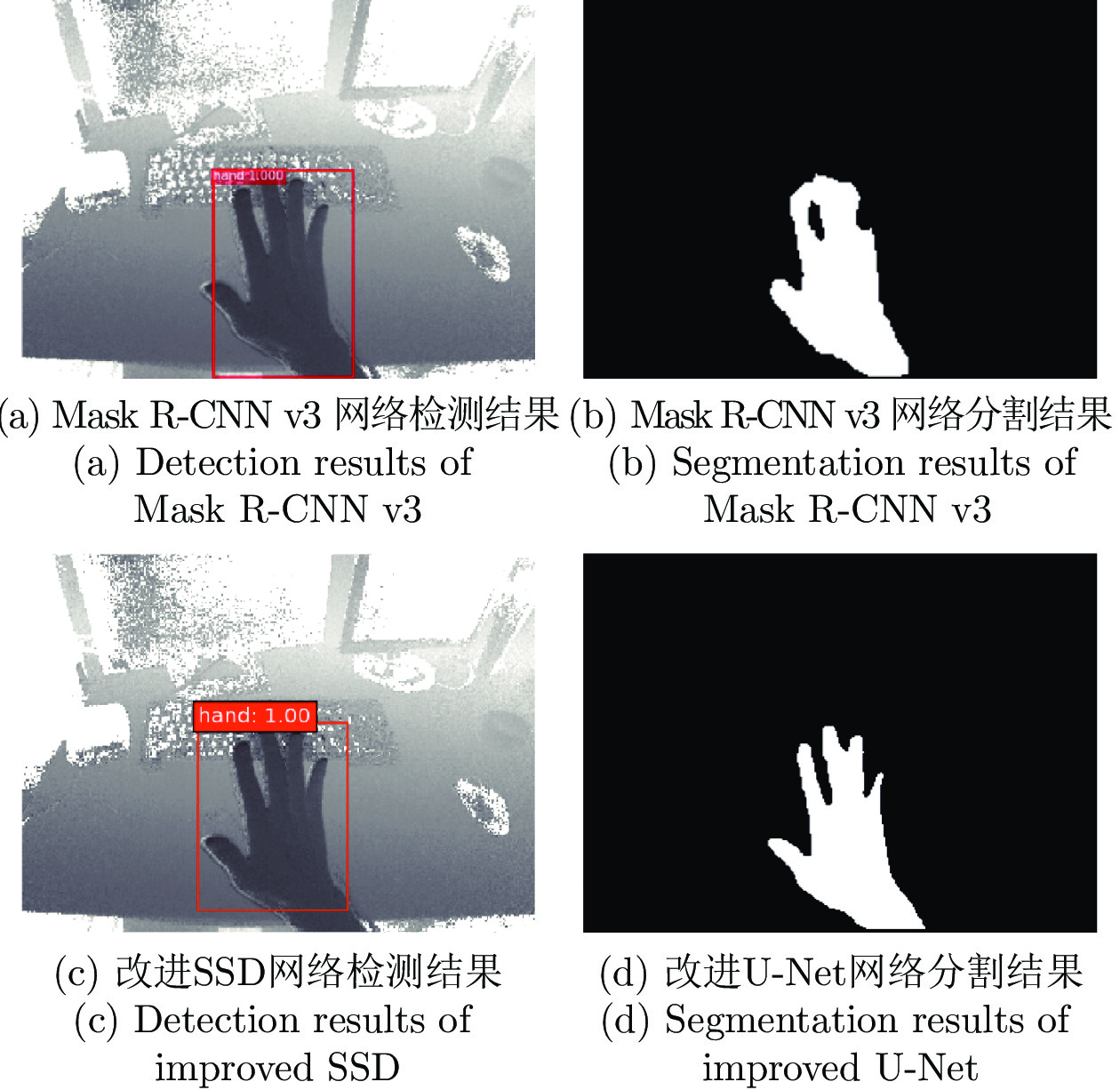
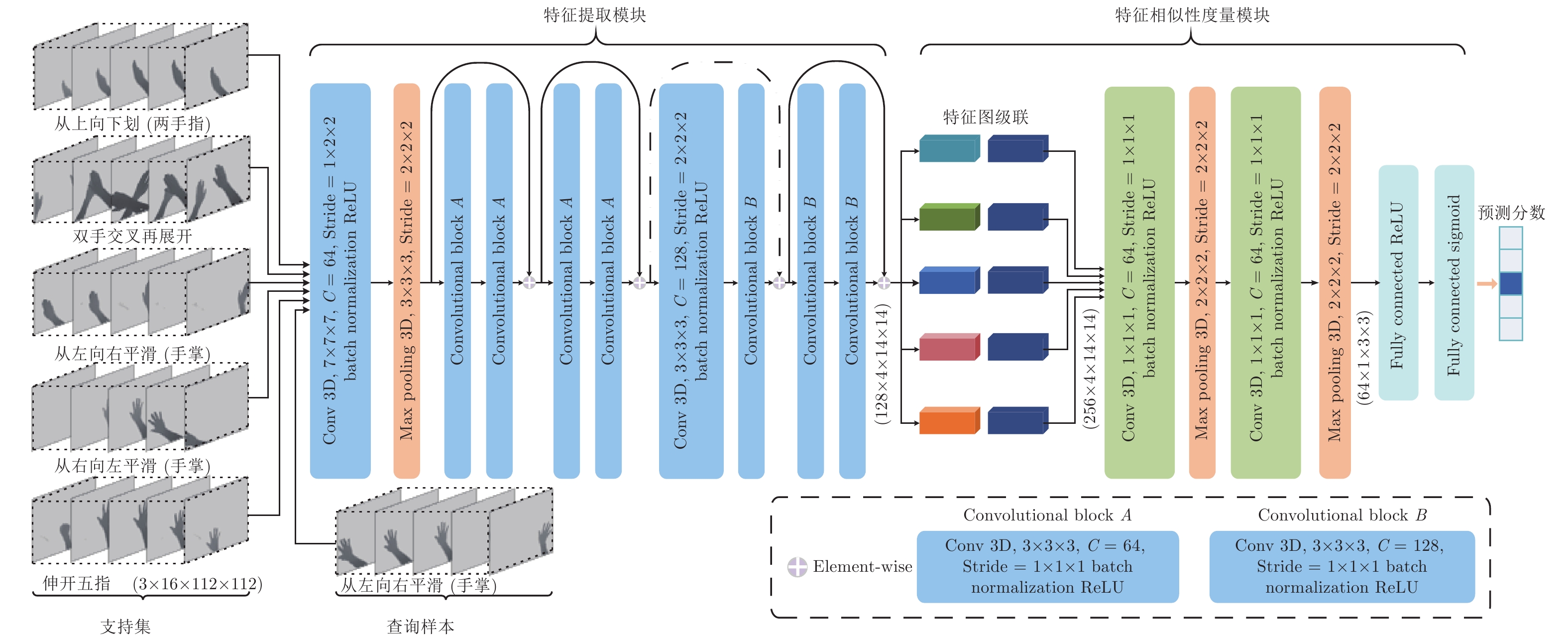
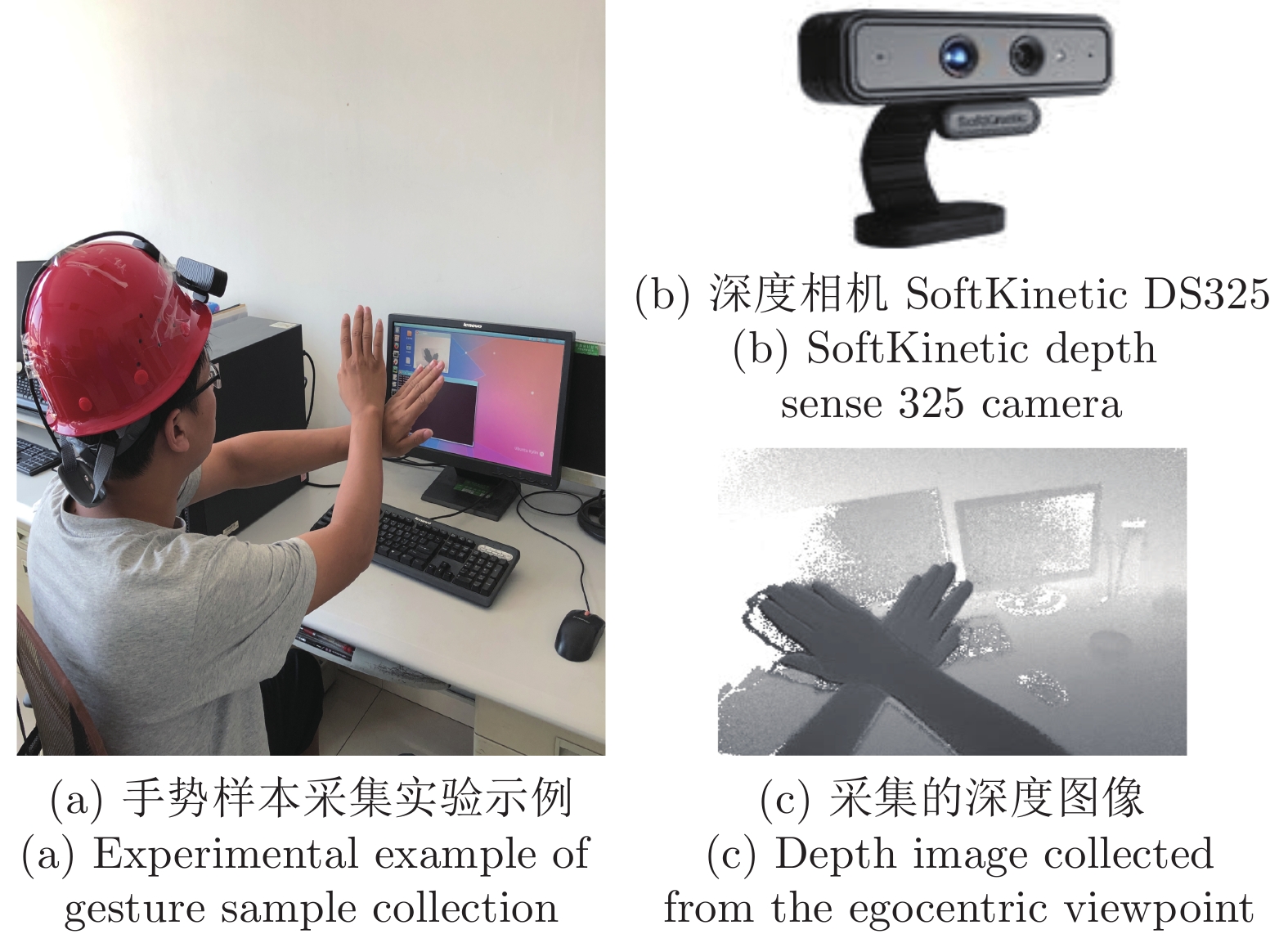
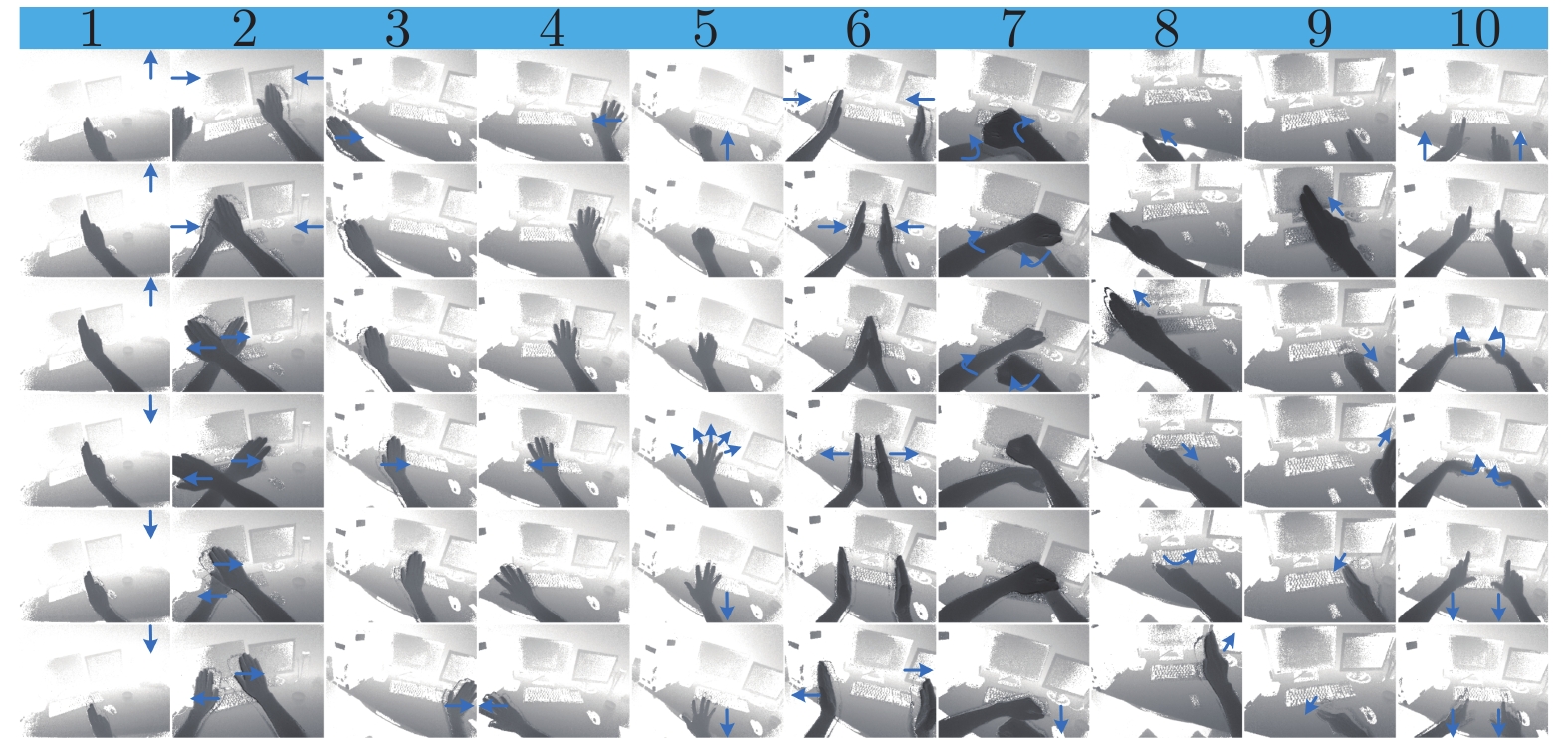
在智能人机交互中, 以交互人的视角为第一视角的手势表达发挥着重要作用, 而面向第一视角的手势识别则成为最重要的技术环节. 本文通过深度卷积神经网络的级联组合, 研究复杂应用场景中第一视角下的一次性学习手势识别(One-shot learning hand gesture recognition, OSLHGR)算法. 考虑到实际应用的便捷性和适用性, 运用改进的轻量级SSD (Single shot multibox detector)目标检测网络实现第一视角下手势目标的快速精确检测; 进而, 以改进的轻量级U-Net网络为主要工具进行复杂背景下手势目标的像素级高效精准分割. 在此基础上, 以组合式3D深度神经网络为工具, 研究提出了一种第一视角下的一次性学习手势动作识别的网络化算法. 在Pascal VOC 2012数据集和SoftKinetic DS325采集的手势数据集上进行的一系列实验测试结果表明, 本文所提出的网络化算法在手势目标检测与分割精度、分类识别准确率和实时性等方面都有显著的优势, 可为在复杂应用环境下实现便捷式高性能智能人机交互提供可靠的技术支持.

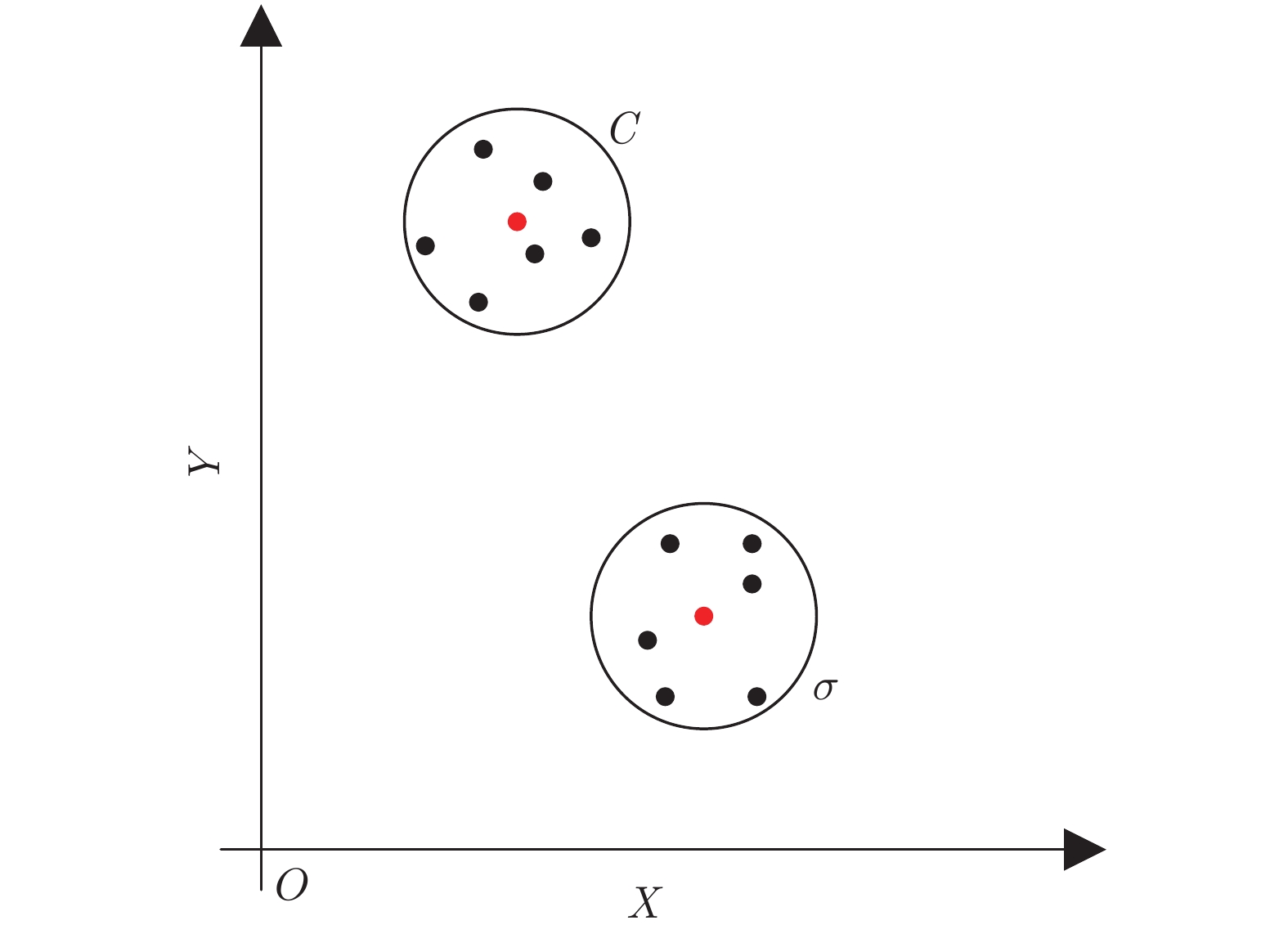
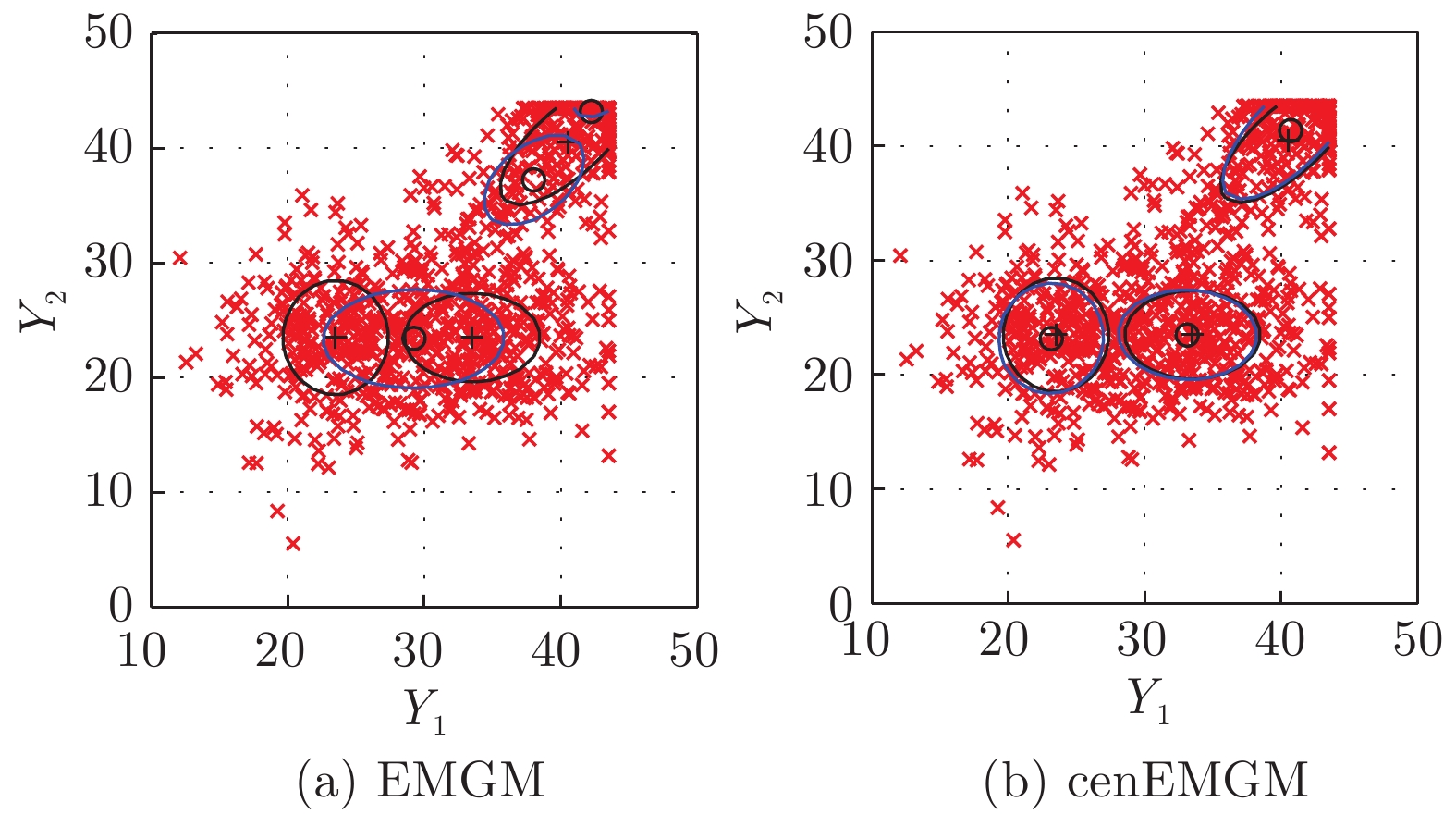
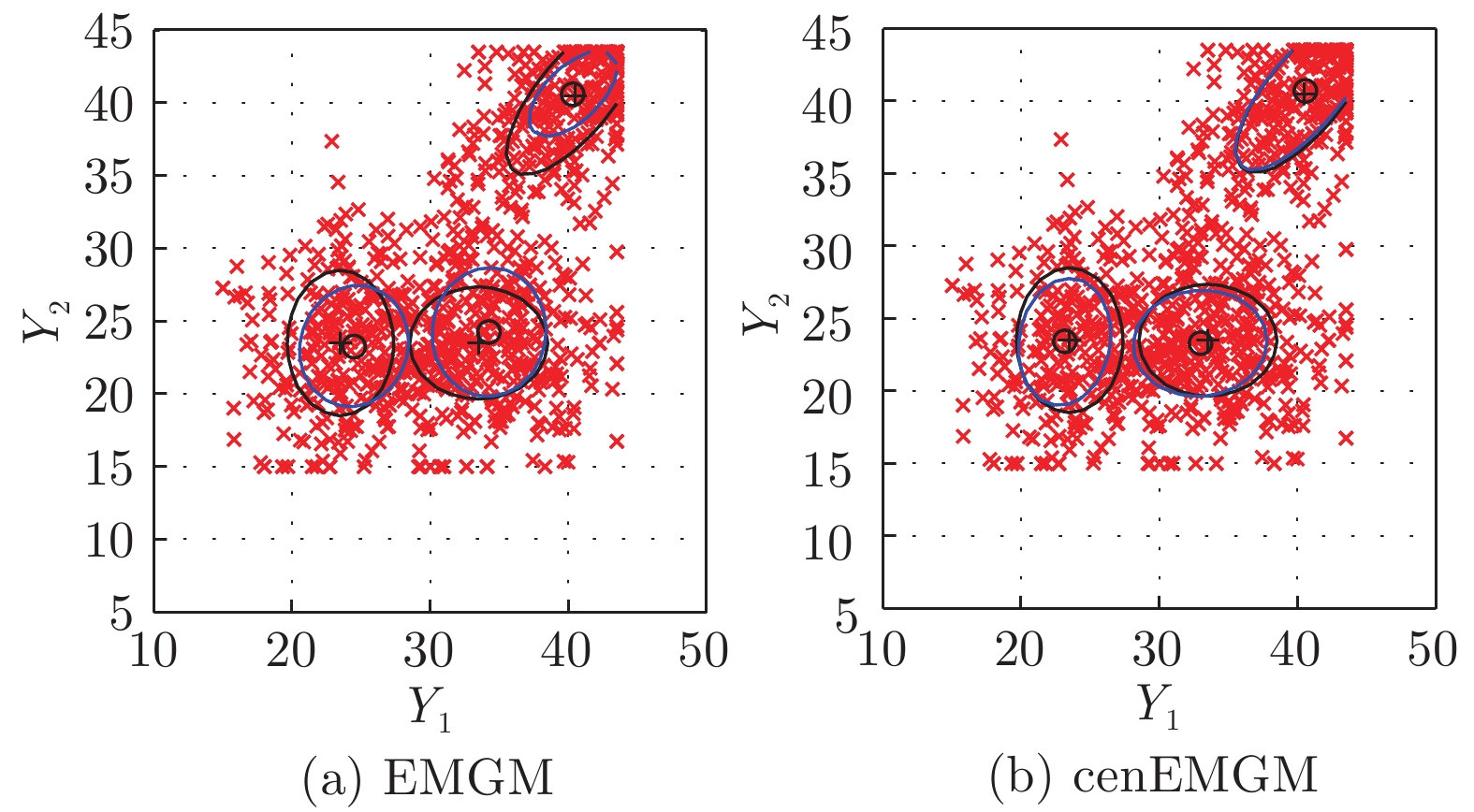
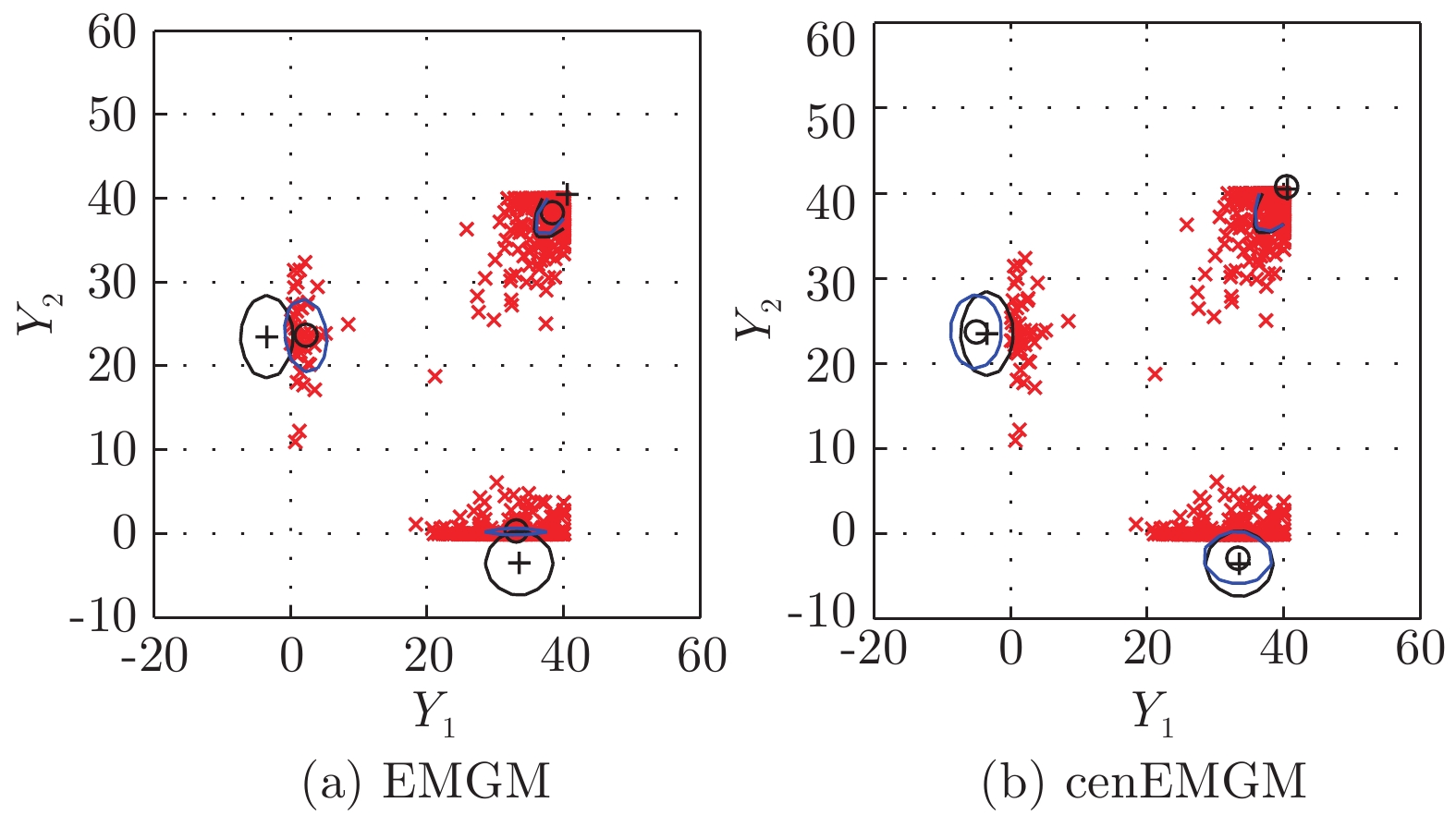
针对聚类问题中的非随机性缺失数据, 本文基于高斯混合聚类模型, 分析了删失型数据期望最大化算法的有效性, 并揭示了删失数据似然函数对模型算法的作用机制. 从赤池弘次信息准则、信息散度等指标, 比较了所提出方法与标准的期望最大化算法的优劣性. 通过删失数据划分及指示变量, 推导了聚类模型参数后验概率及似然函数, 调整了参数截尾正态函数的一阶和二阶估计量. 并根据估计算法的有效性理论, 通过关于得分向量期望的方程得出算法估计的最优参数. 对于同一删失数据集, 所提出的聚类算法对数据聚类中心估计更精准. 实验结果证实了所提出算法在高斯混合聚类的性能上优于标准的随机性缺失数据期望最大化算法.


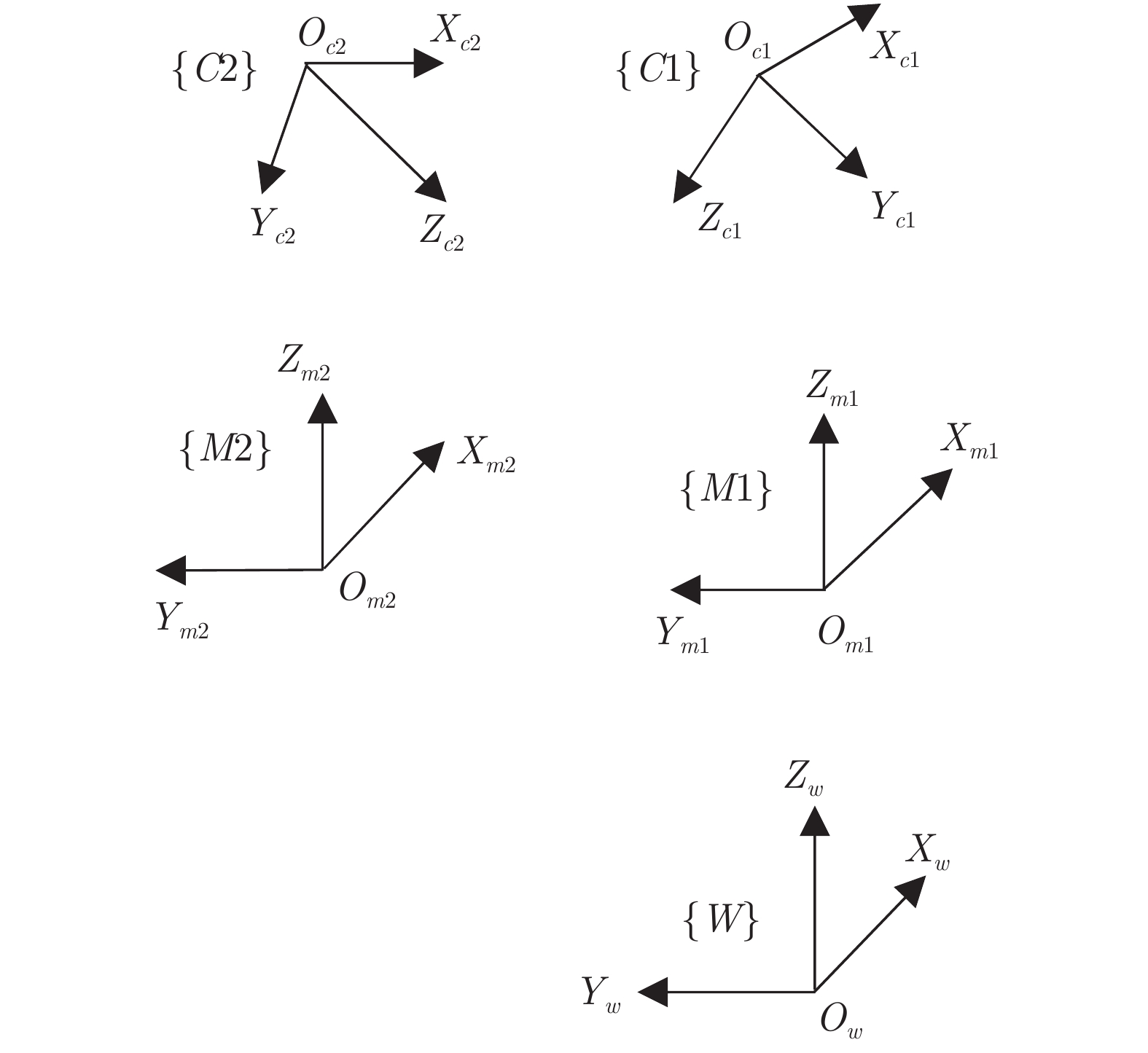
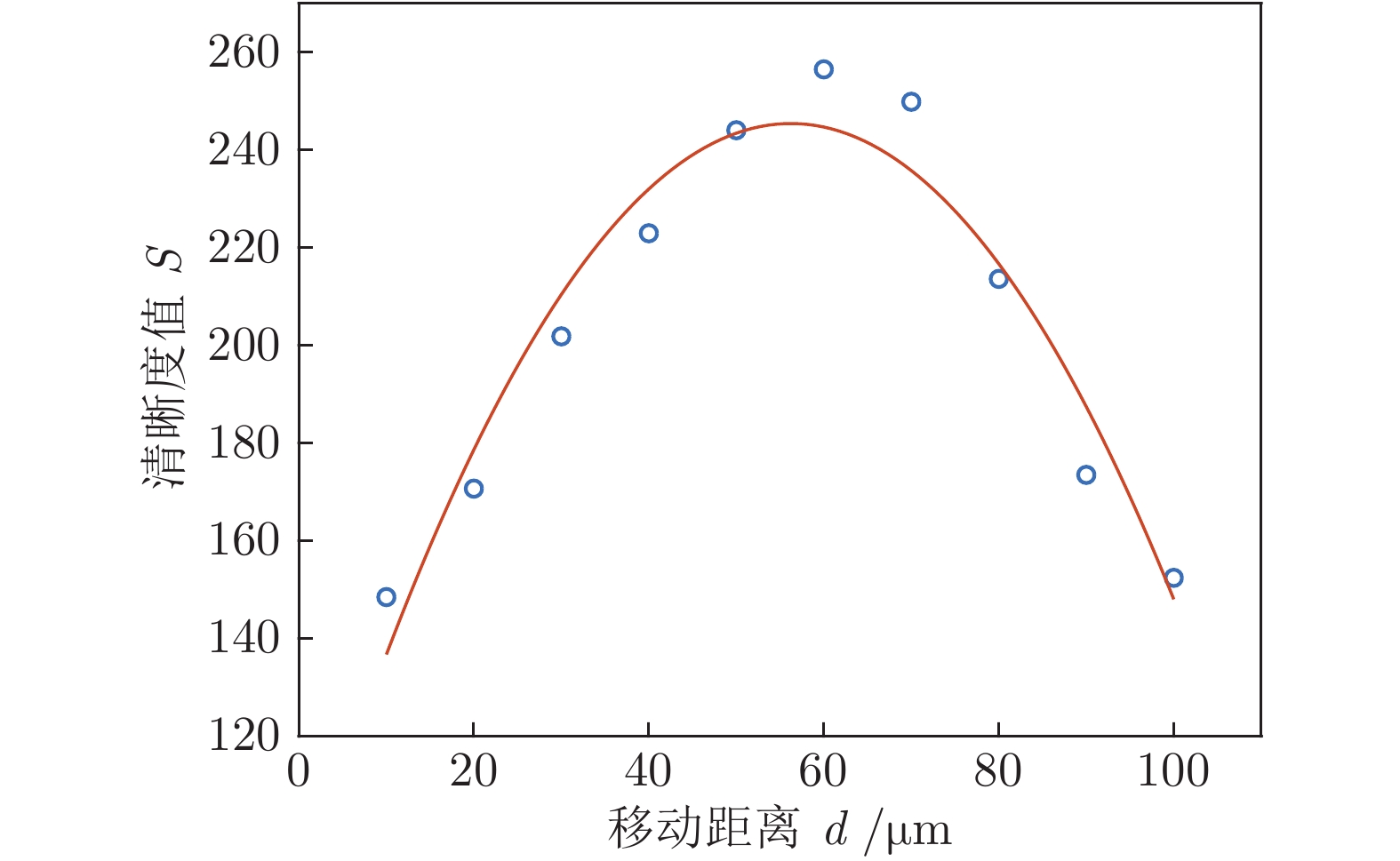
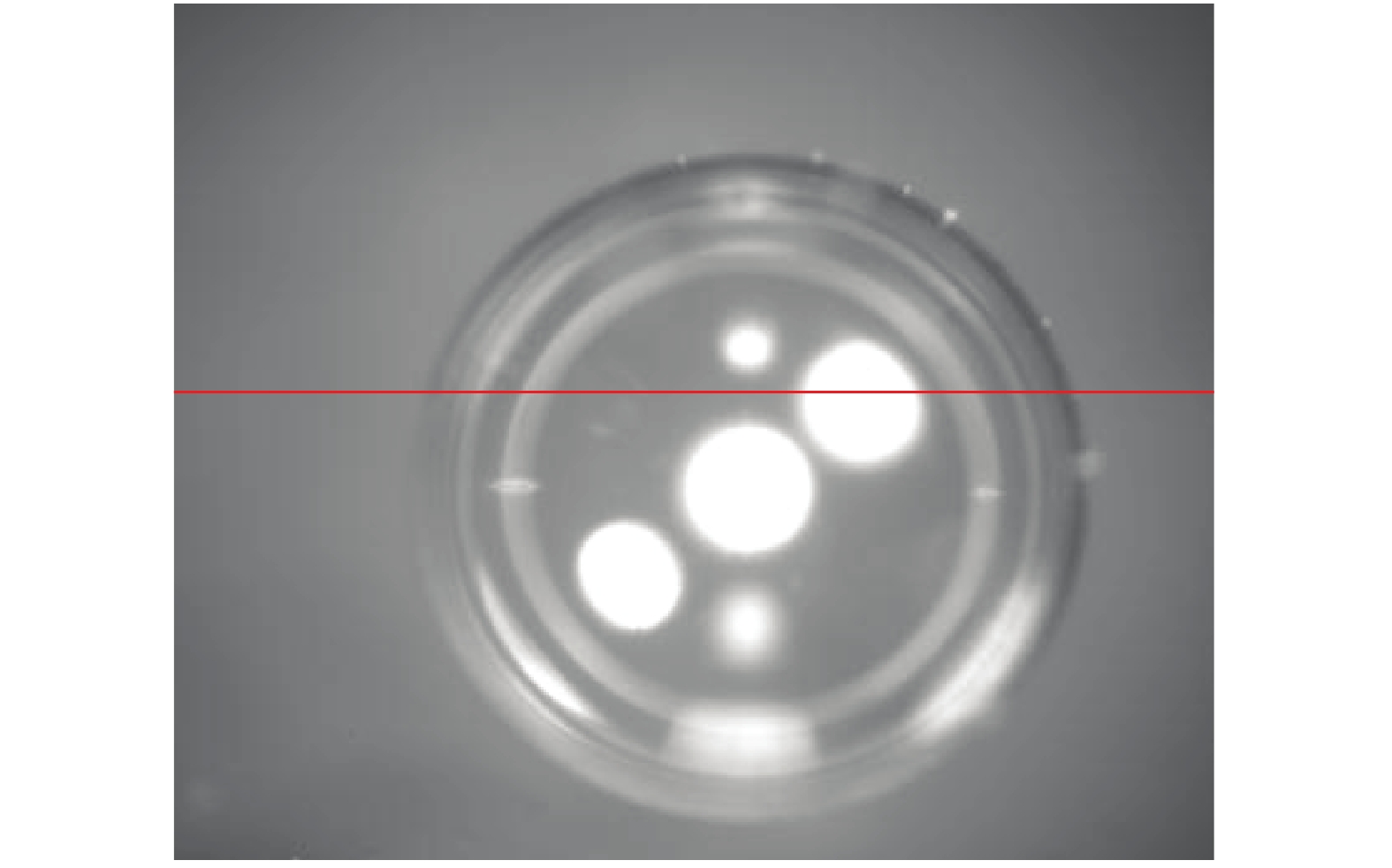
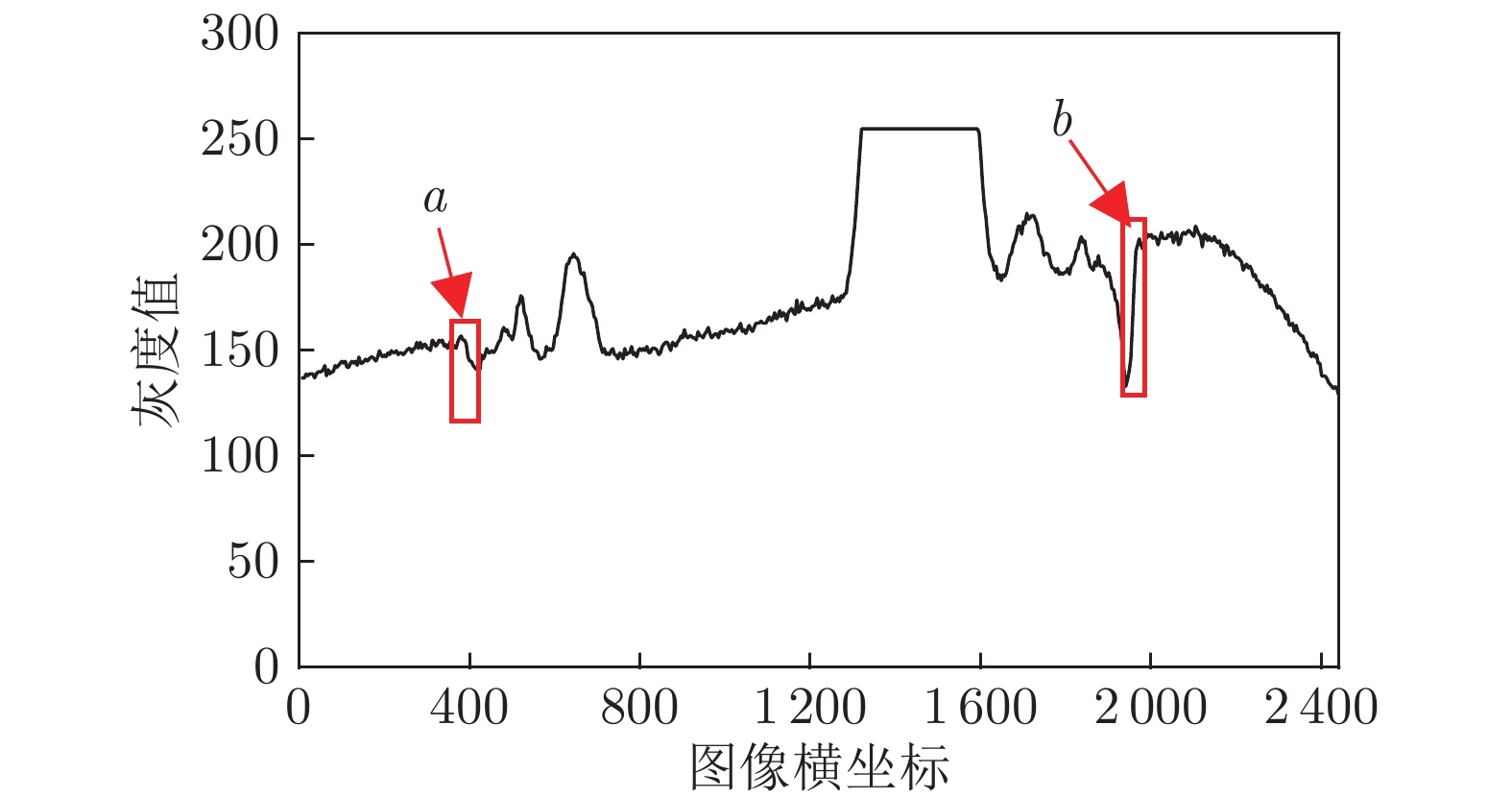
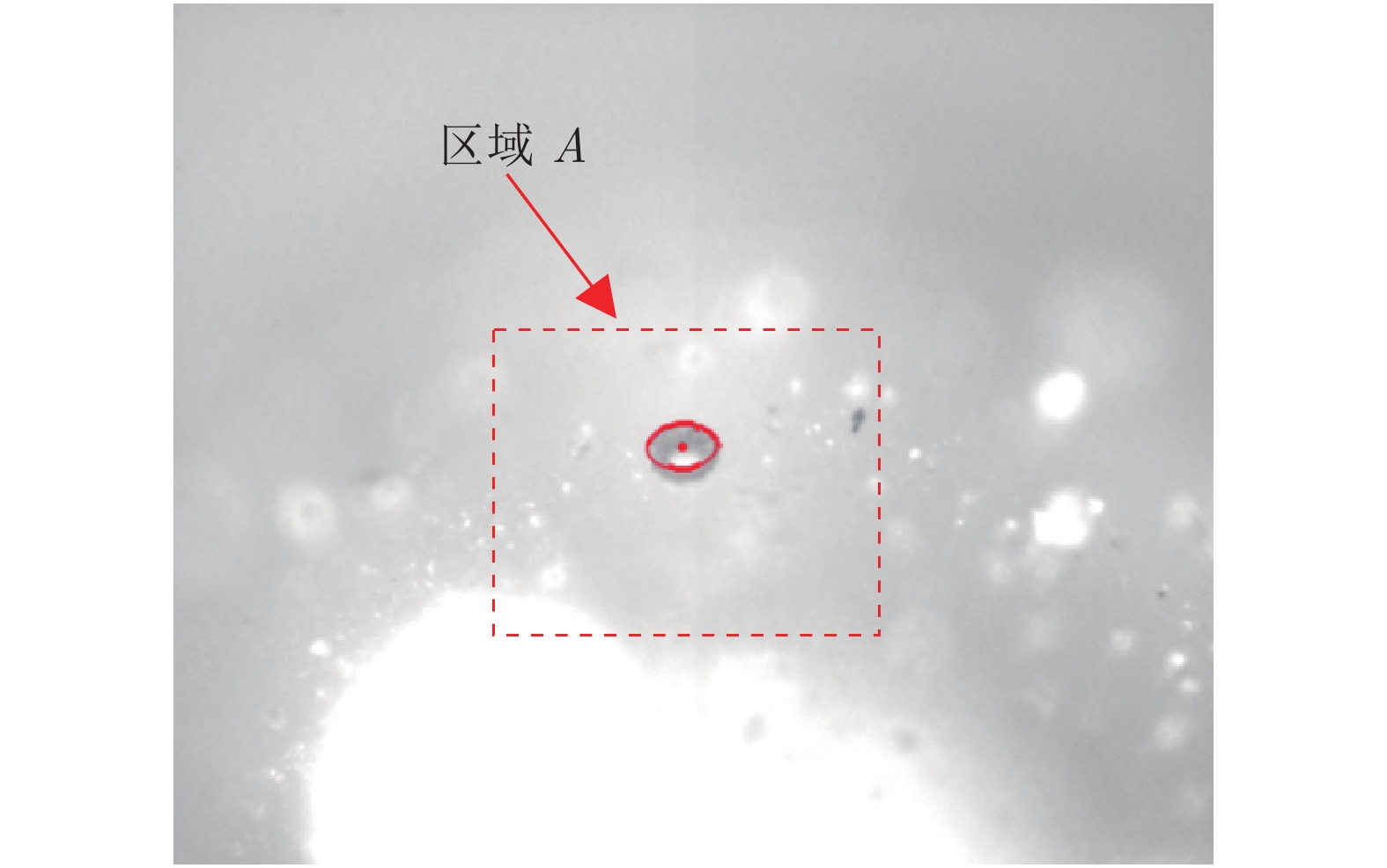
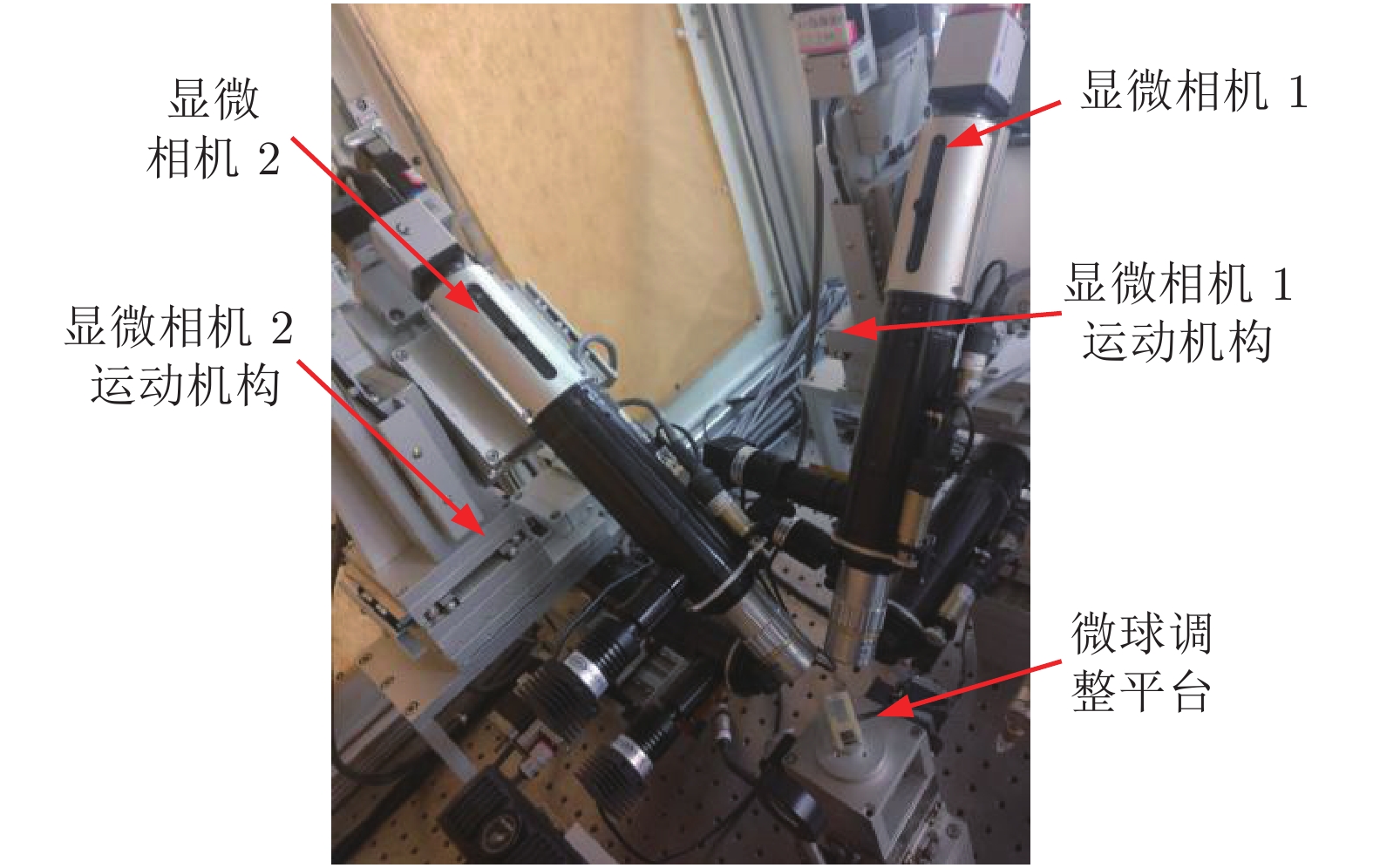
在一些微装配任务中, 对微器件姿态的测量是至关重要的一步. 带有微孔的球形微器件, 特征较少, 姿态测量困难. 为此, 本文提出一种基于双目显微视觉的微球孔姿态高精度测量方法. 设计了微球/微孔边缘提取方法, 实现了微球球心和微孔孔心的精确定位. 通过对两路显微相机聚焦轴方向的标定, 弥补了由相机聚焦轴运动引入的测量误差, 提高了微球孔姿态的测量精度. 通过两路倾斜正交的显微相机的主动运动, 计算出微球孔姿态向量在相机运动坐标系中的分解角. 根据相机运动坐标系与微球调整平台坐标系间的角度转换矩阵, 将相机运动坐标系中的分解角转换为微球调整平台坐标系中的旋转角, 从而计算出精确的微球孔姿态向量. 实验结果表明, 微球孔姿态测量的最大误差为0.08°, 验证了本文方法的有效性.






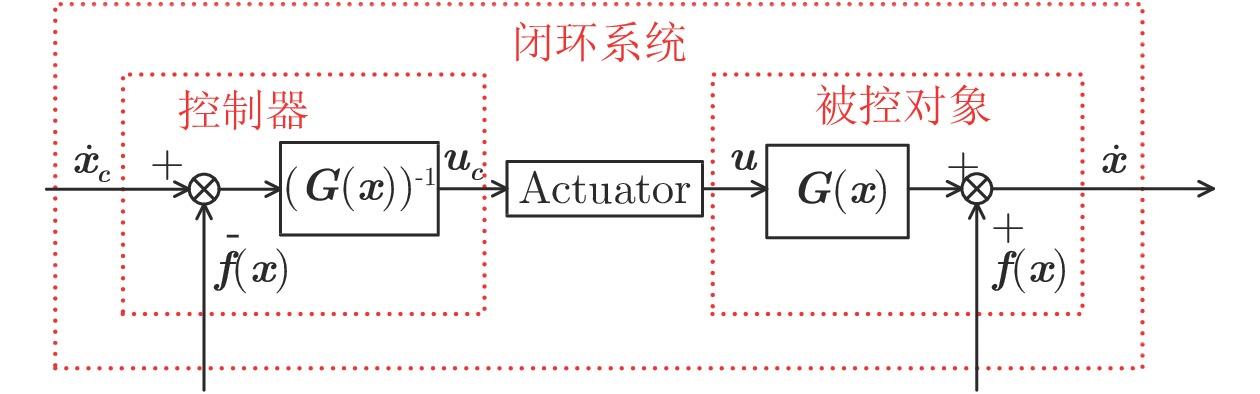
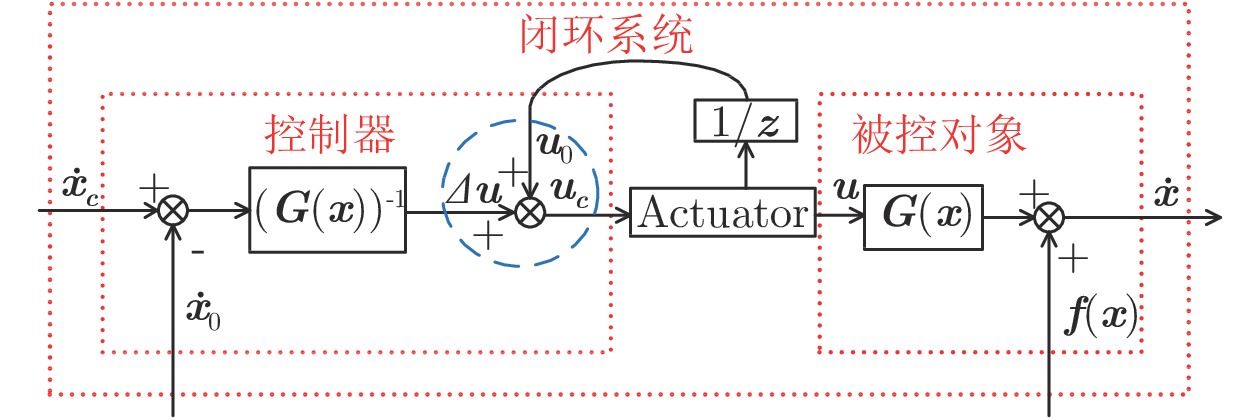
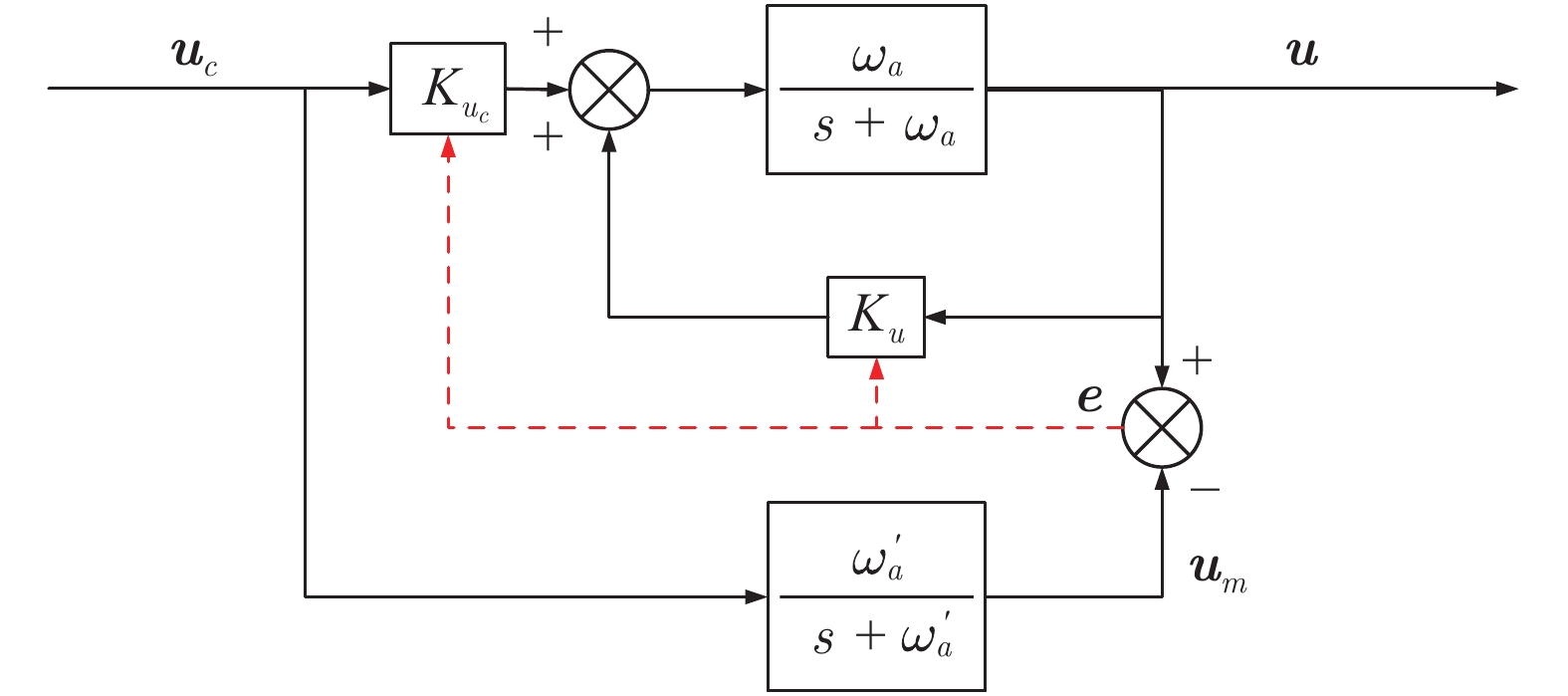
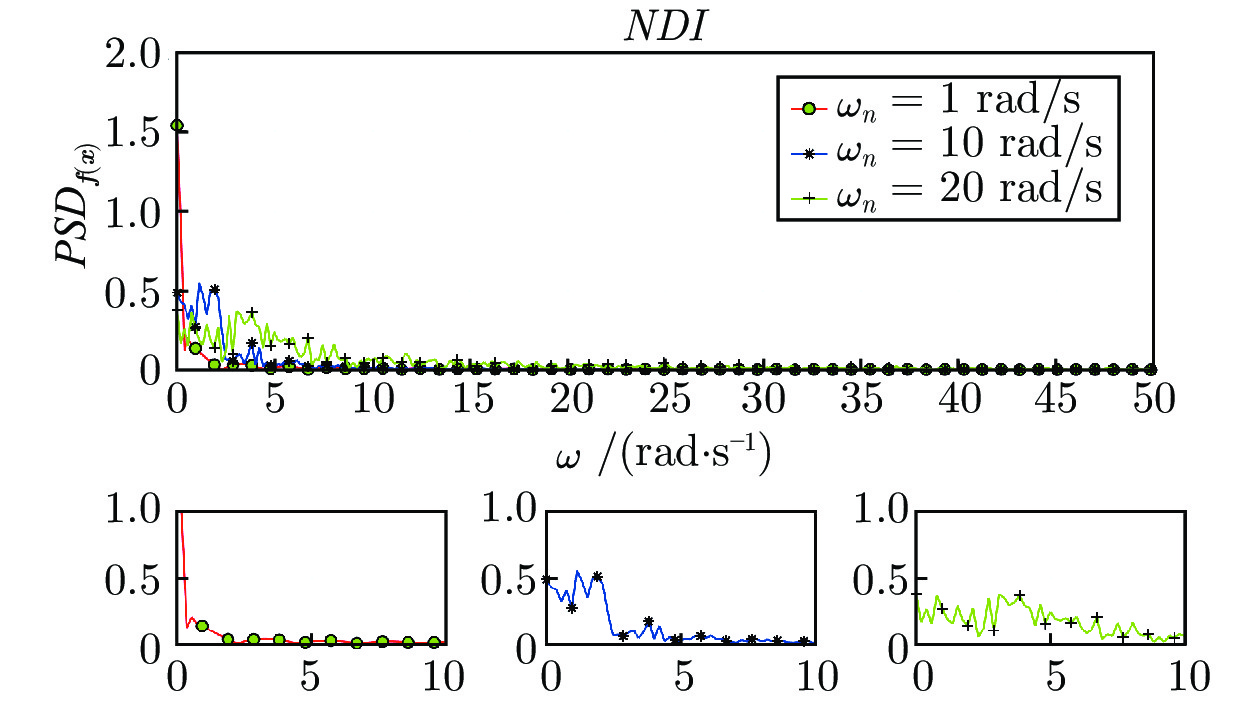
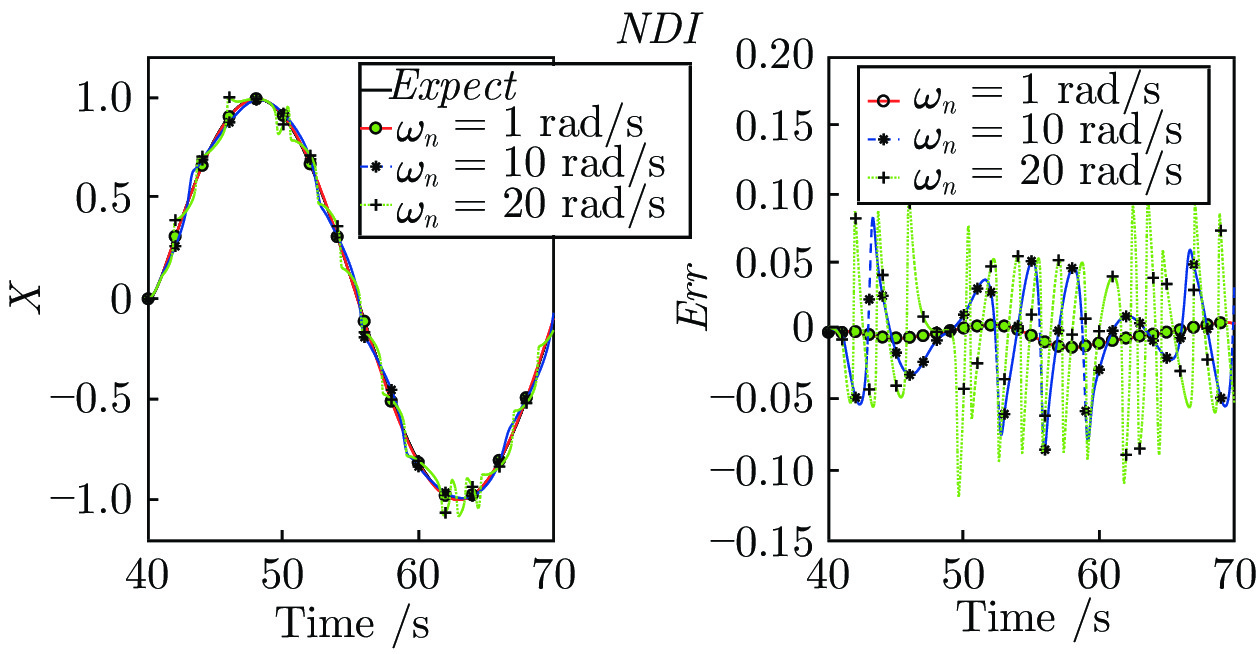
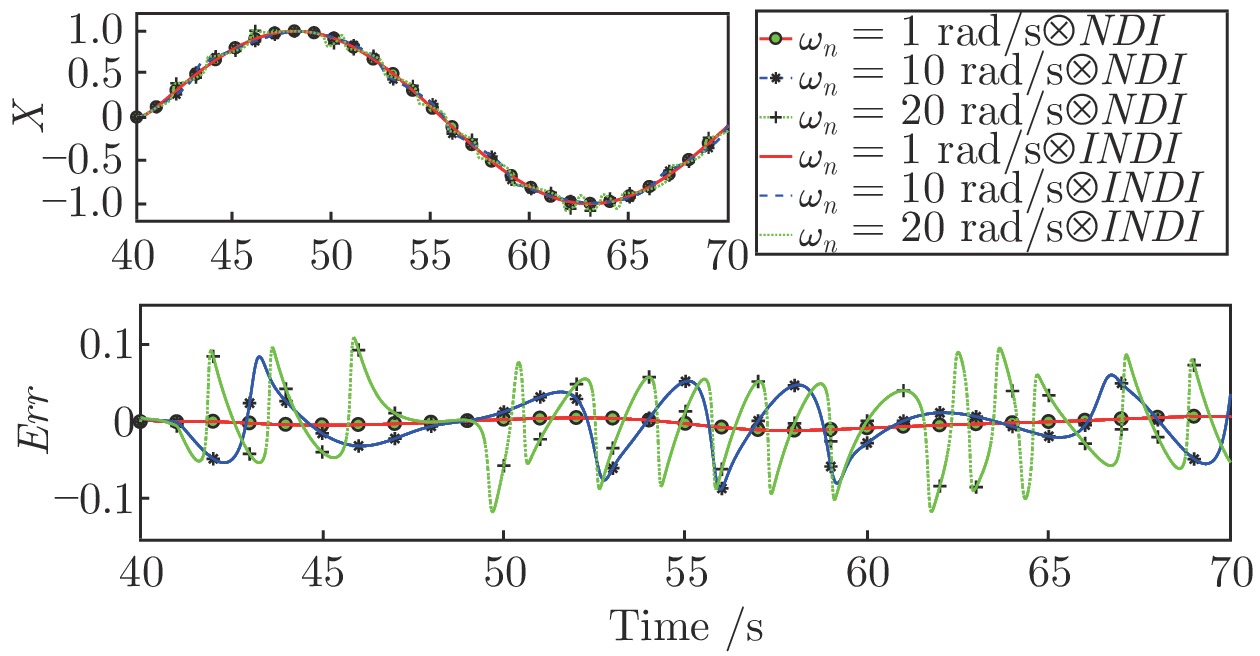
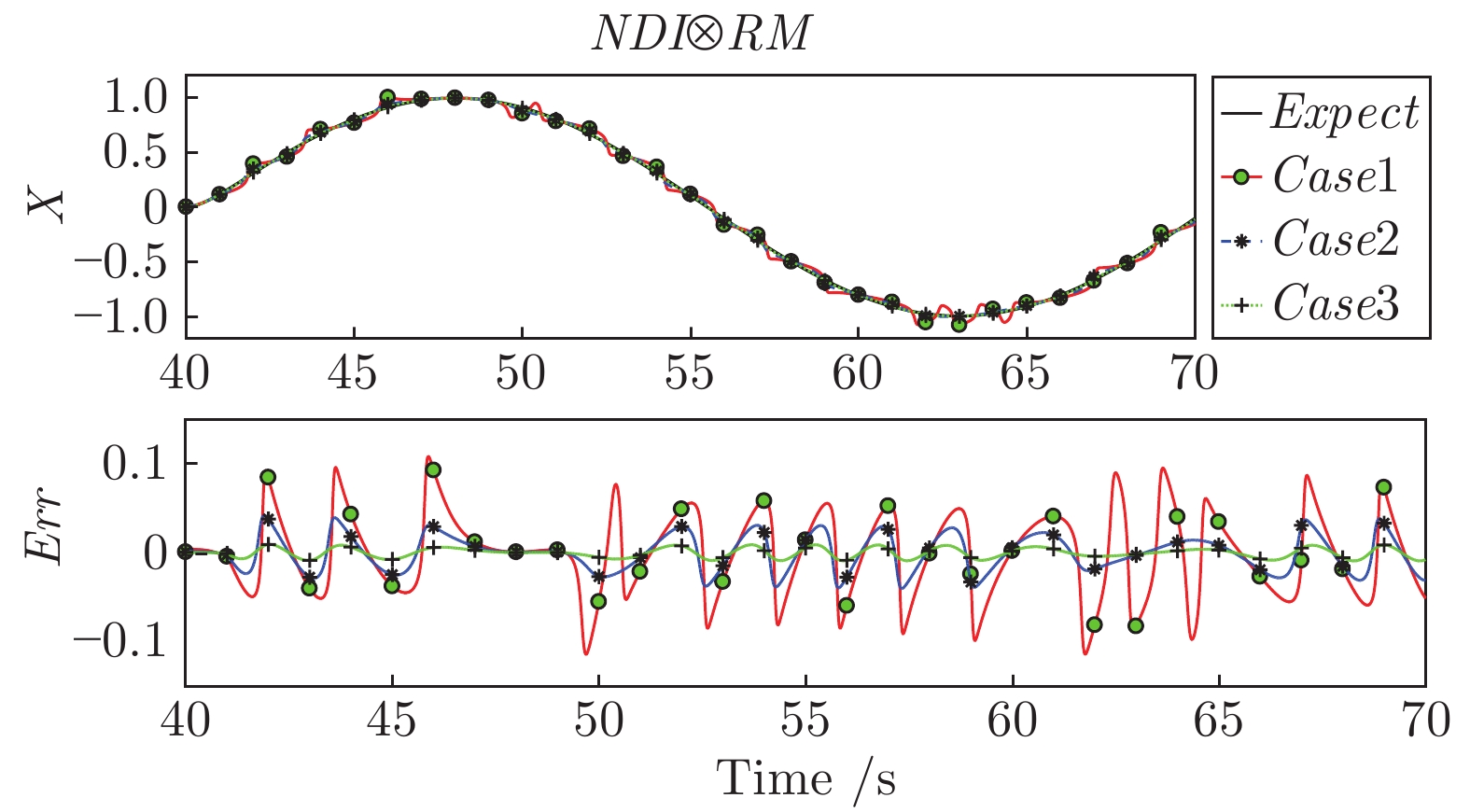
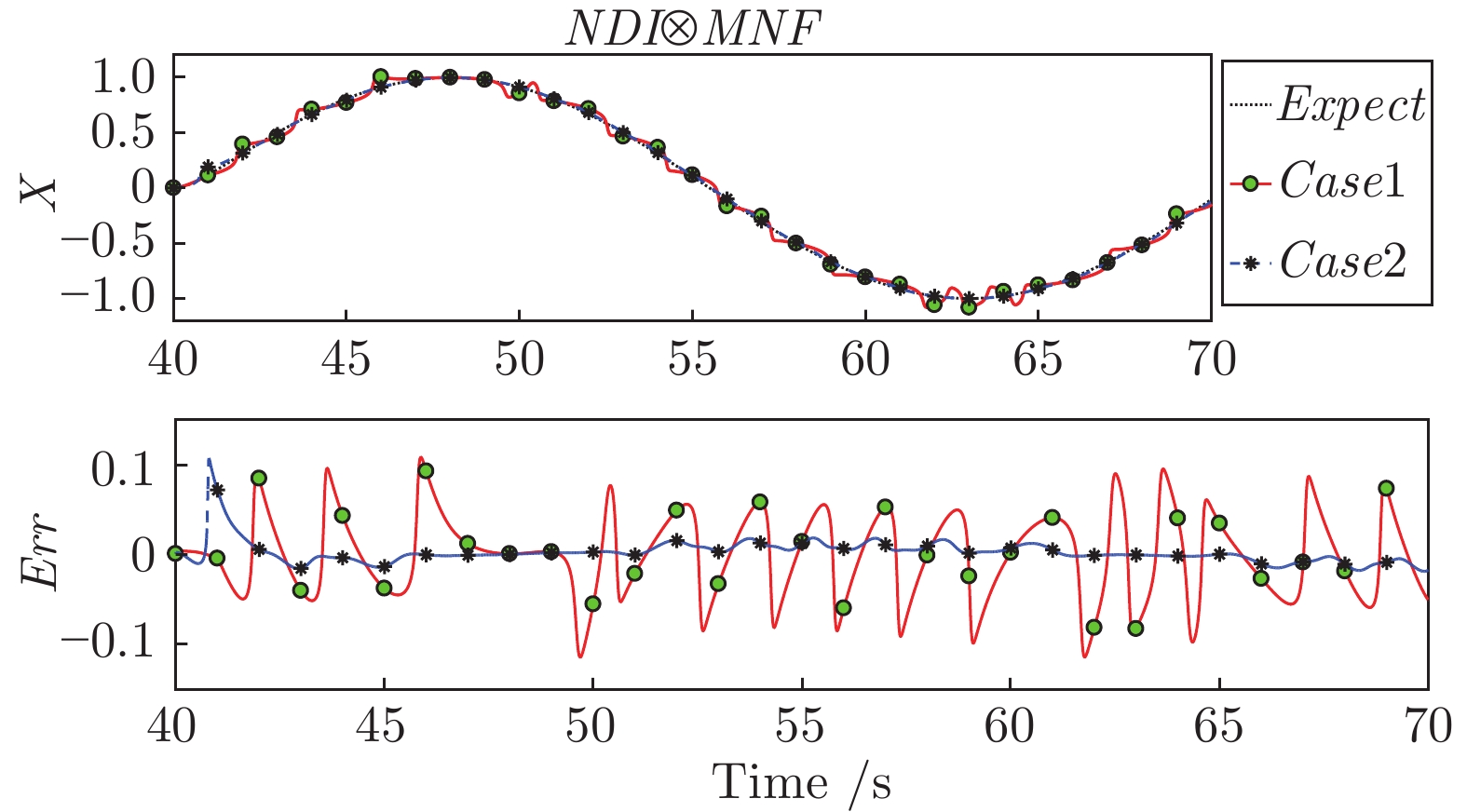
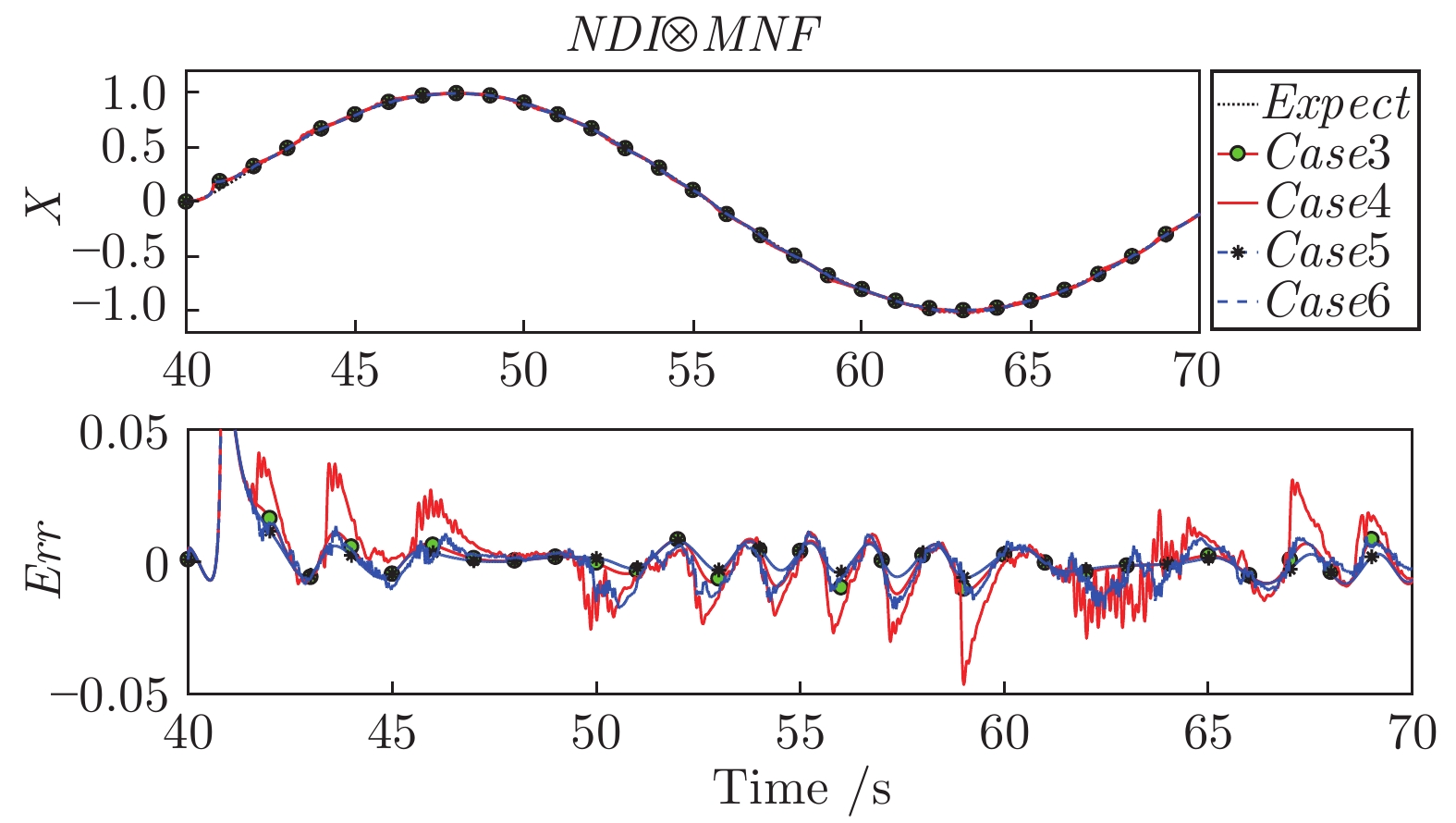
本文从理论上分析了执行机构带宽对动态逆闭环控制系统动态特性影响, 发现较低的执行机构带宽会在伪线性系统中引入一个非线性干扰项, 为此提出了两种方法来消除这个非线性干扰项, 一个是采用参考模型的思想设计补偿器提高执行机构子系统的等效带宽, 另一个思路则是直接在非线性反馈项中引入补偿直接对消非线性干扰项. 仿真结果表明, 两类方法都能较好地消除非线性干扰项, 直接补偿方法能精确消除干扰项, 但需要准确动力学模型, 提高等效带宽的方法虽然是近似的, 但能方便地引入自适应算法, 可以抑制执行机构模型参数不确定的影响.

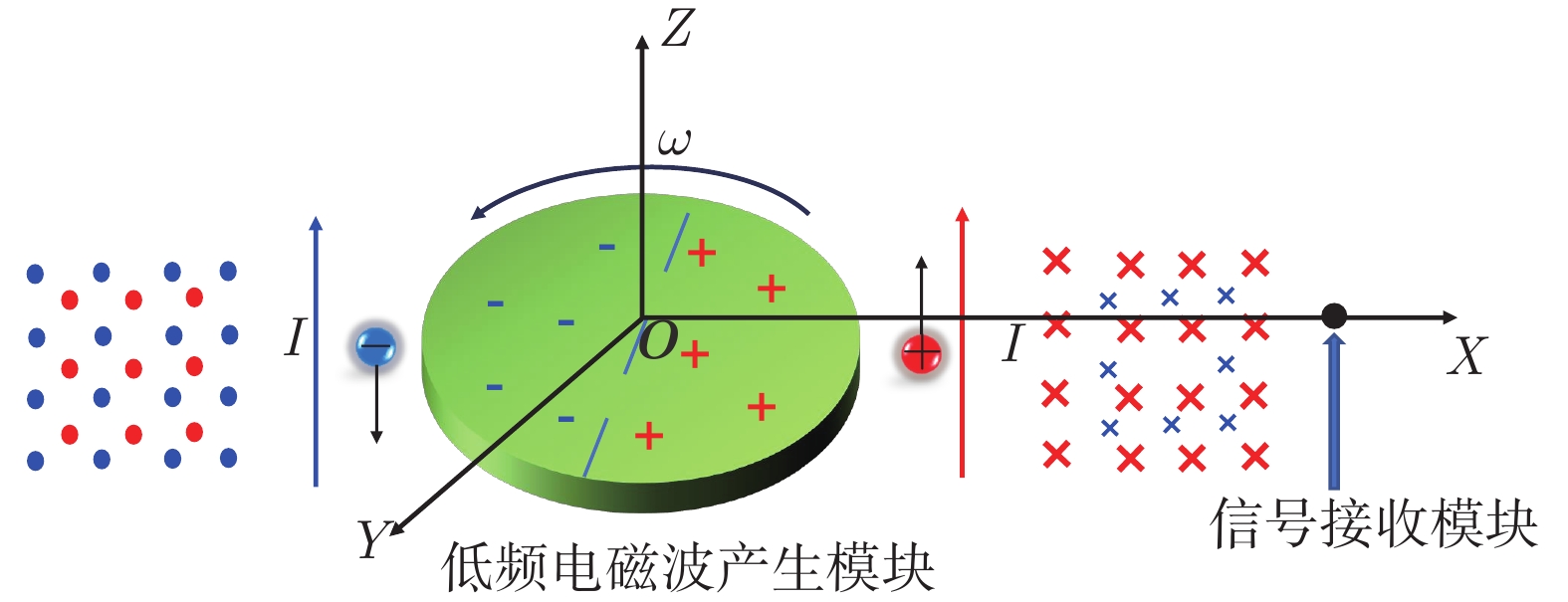
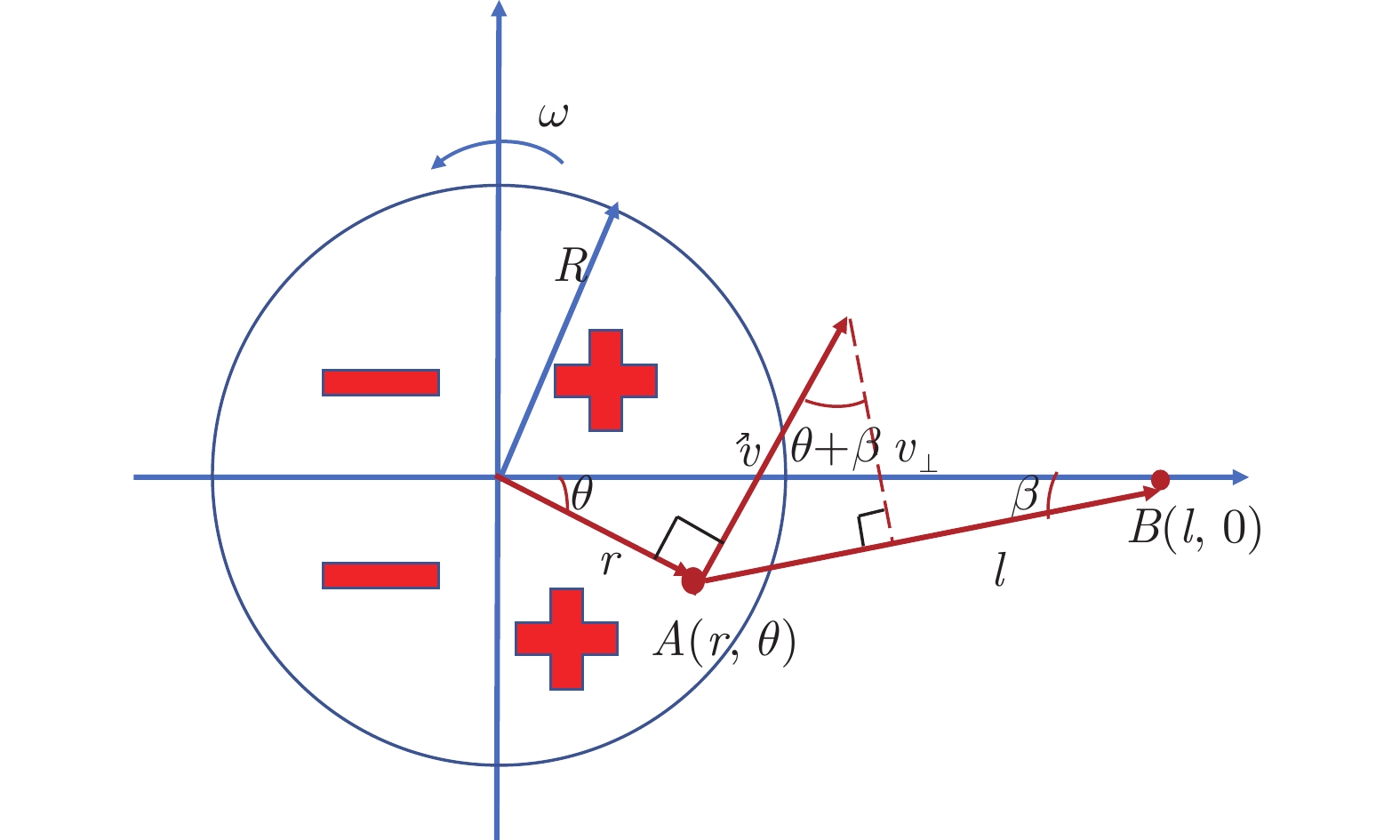
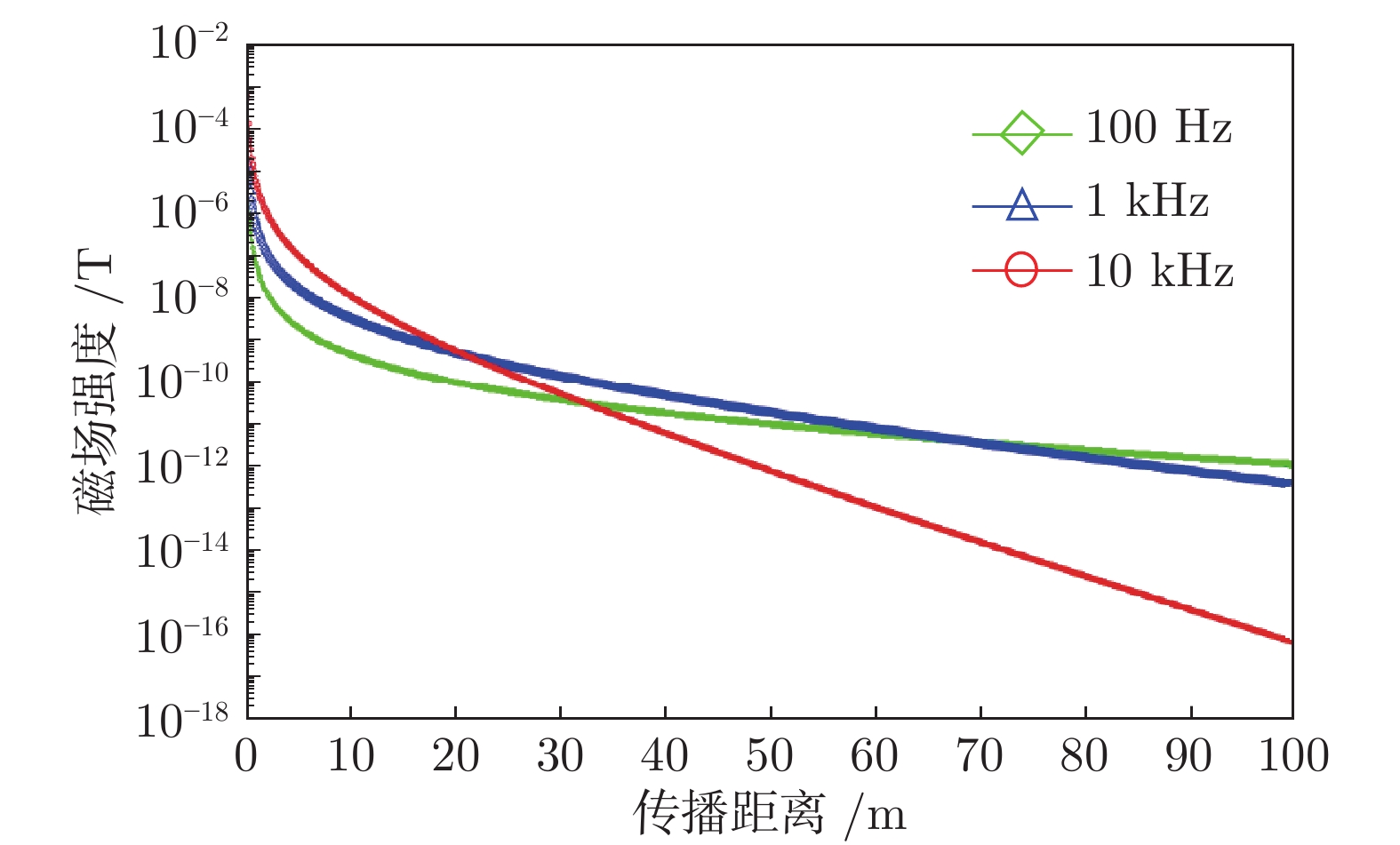
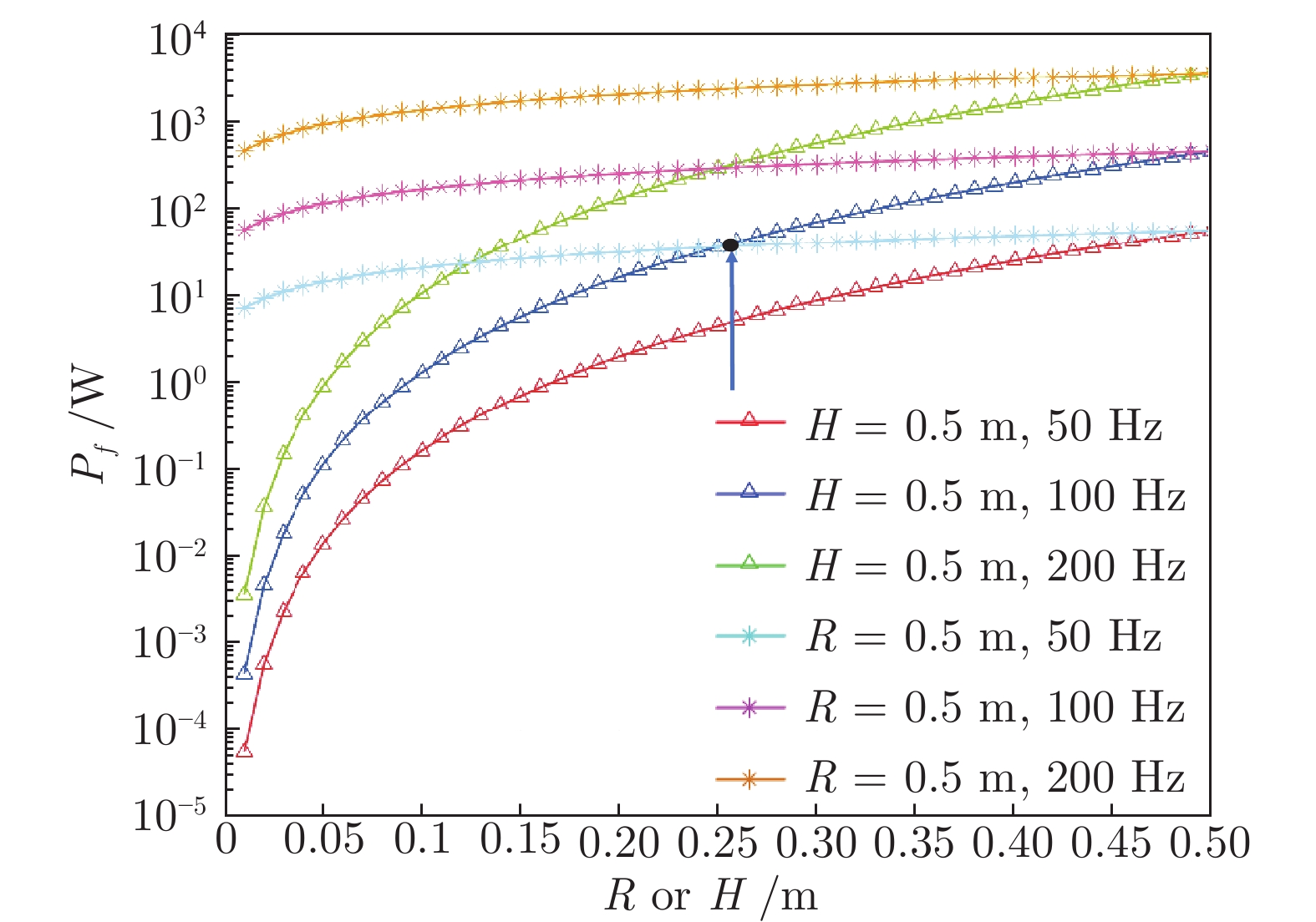
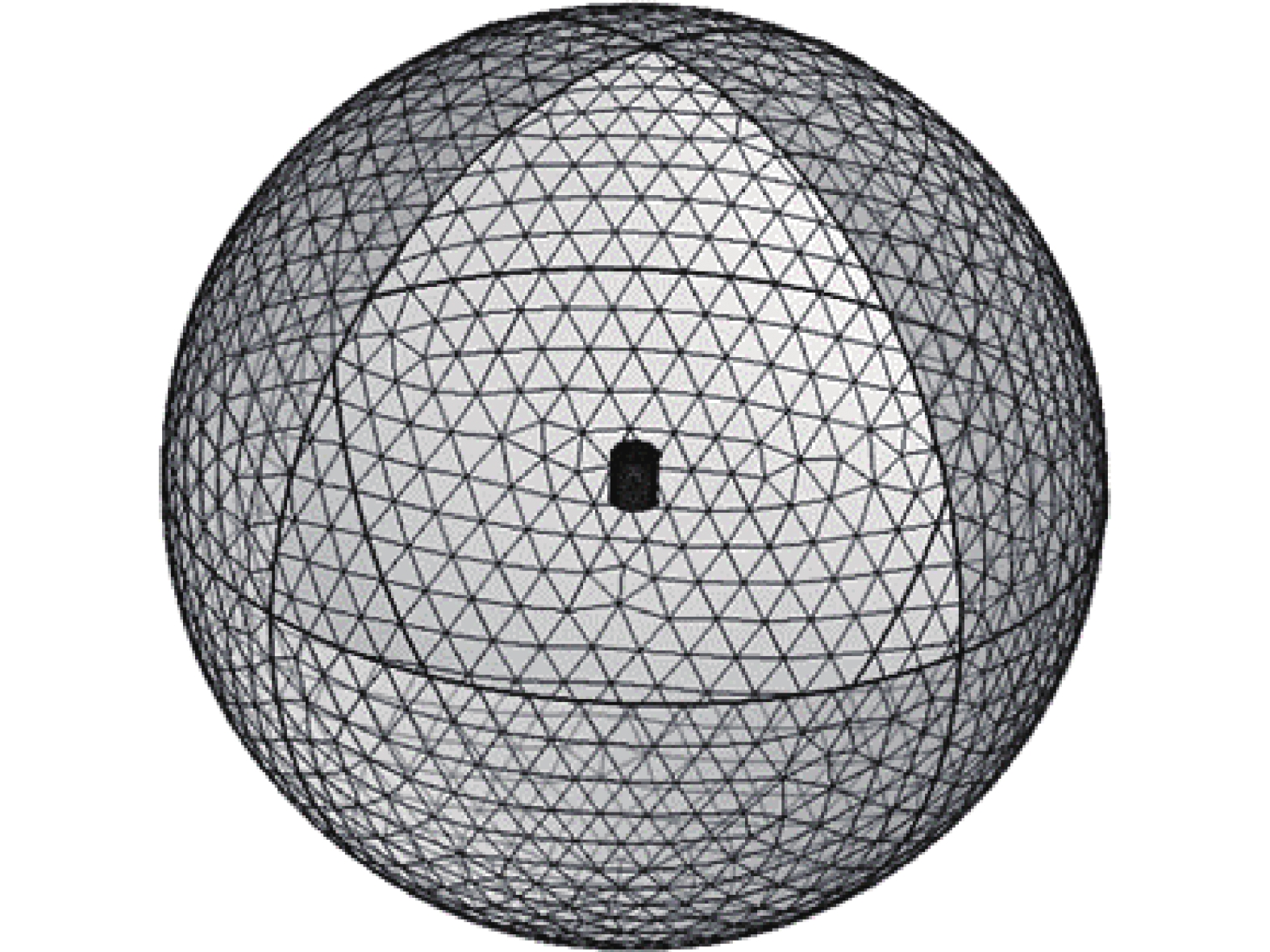
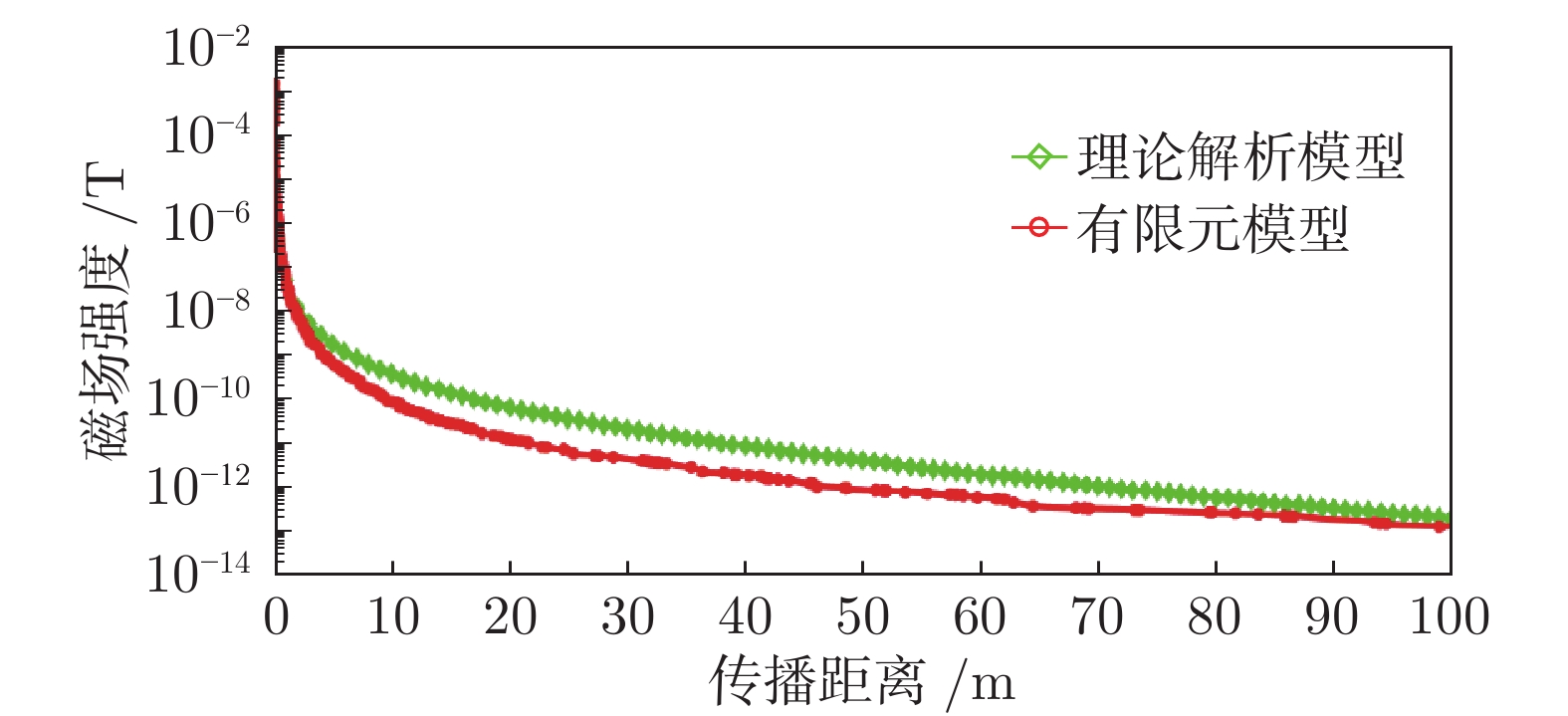
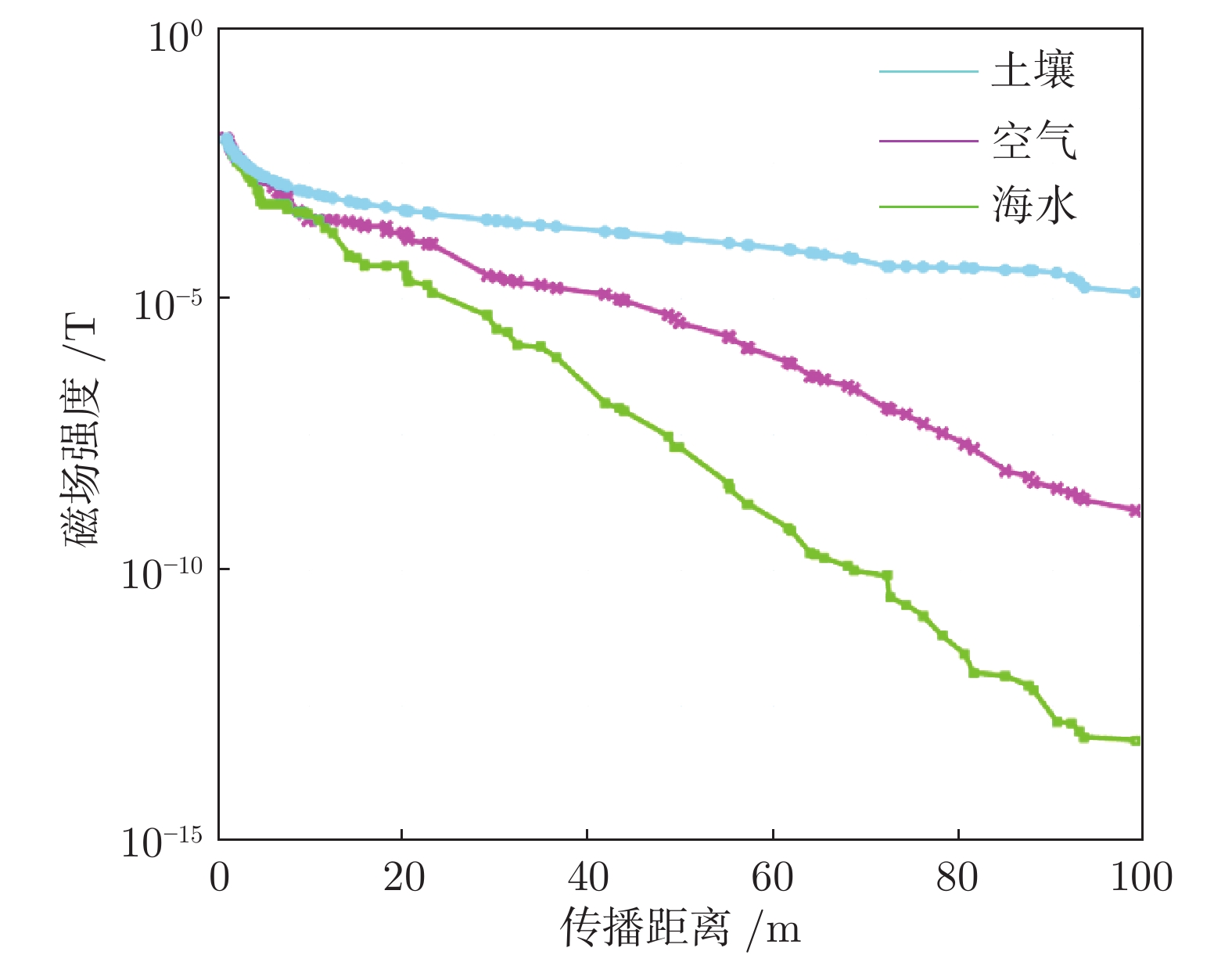
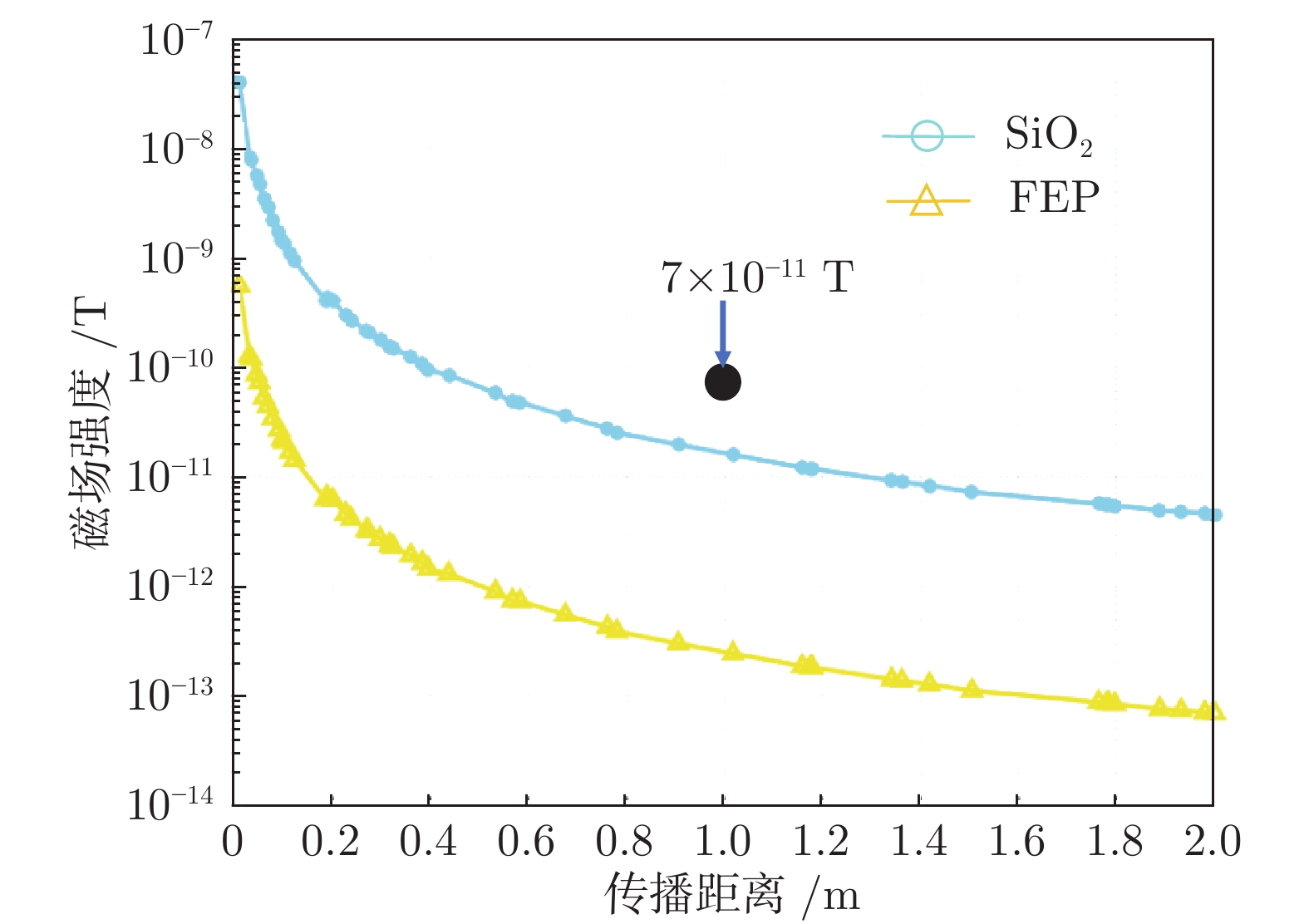
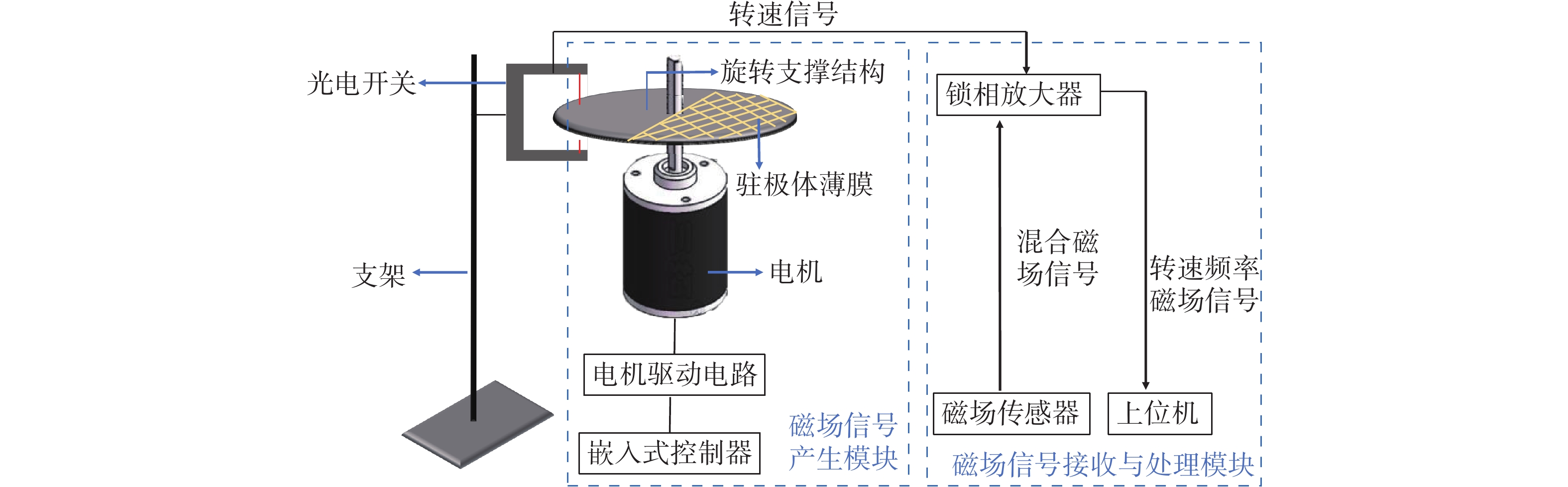
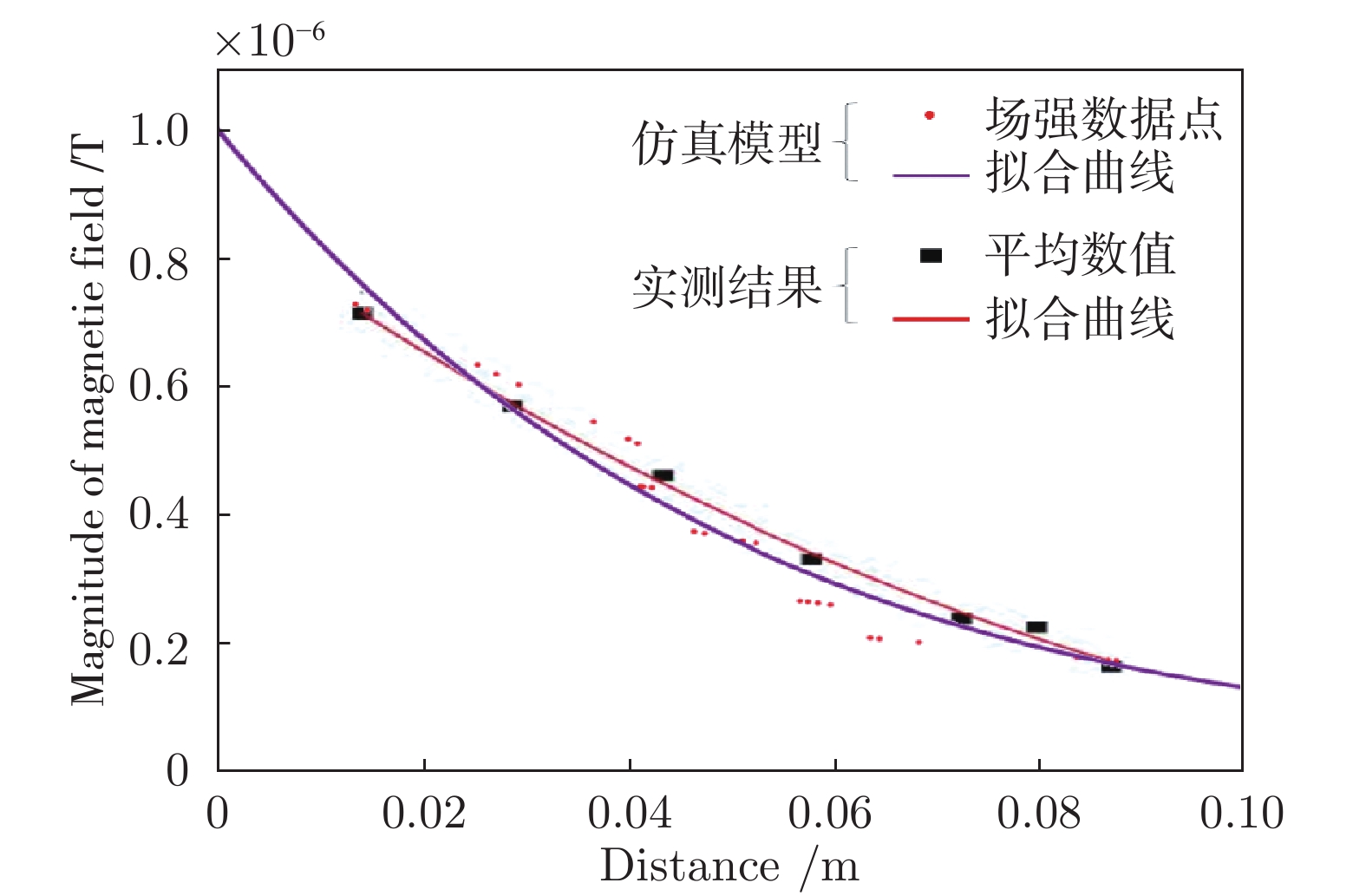
在海洋信息网络体系日益重要的现在, 水下航行器越来越得到世界各国的重视, 无论是在民用还是在军用上, 都扮演着重要的角色. 与水下航行器的通信主要采用的是能以较小的损耗深入海水的低频通信技术, 而目前已有的低频通信系统发射台规模庞大, 天线占地广、天线暴露、目标明显、战时生存能力差, 极易被摧毁且难于短期修复, 且所需功耗巨大. 鉴于此, 本文提出了一种基于复合聚合物驻极体纳米材料的机械天线式低频通信方法, 从理论上研究了其产生的低频通信信号及计算公式, 定量分析了其在正常工作时的功率损耗和在不同介质中的衰减, 且在有限元分析软件中建立了相关模型进行仿真研究, 并通过理论解析模型和多物理场有限元模型的双重仿真结果的一致性, 以及仿真计算结果与机械天线样机的实测结果的对比, 验证了所提方法的可行性.
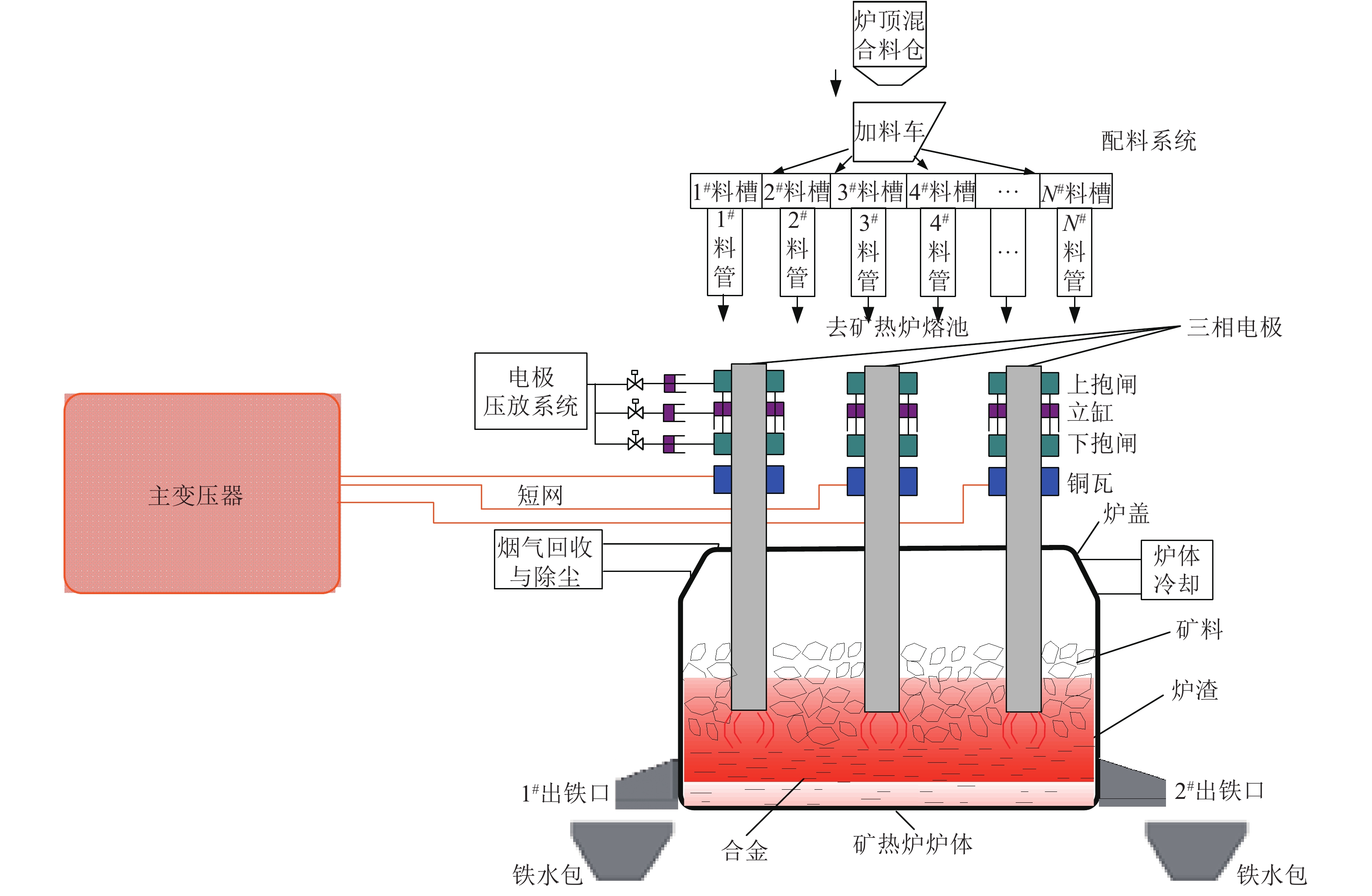
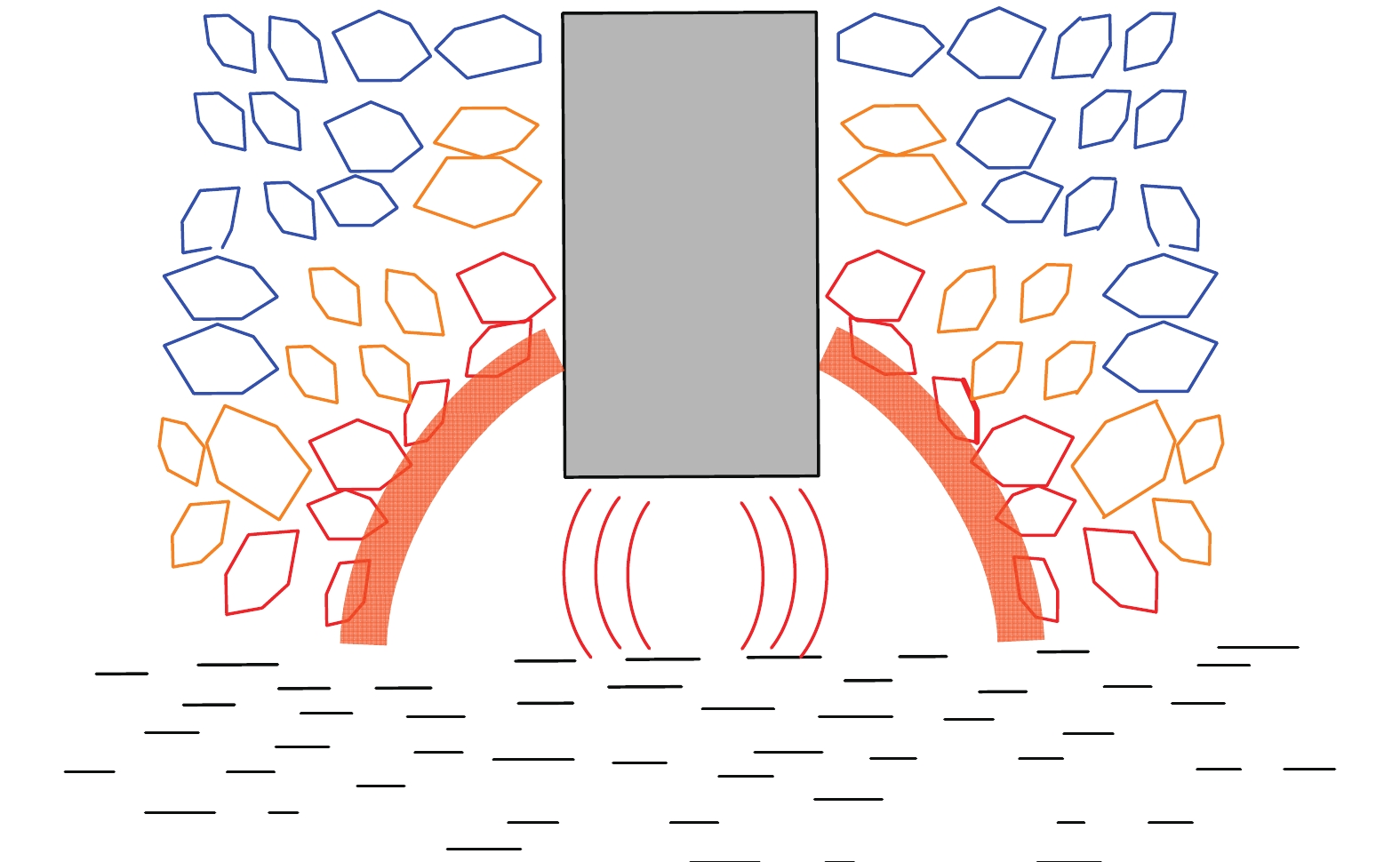
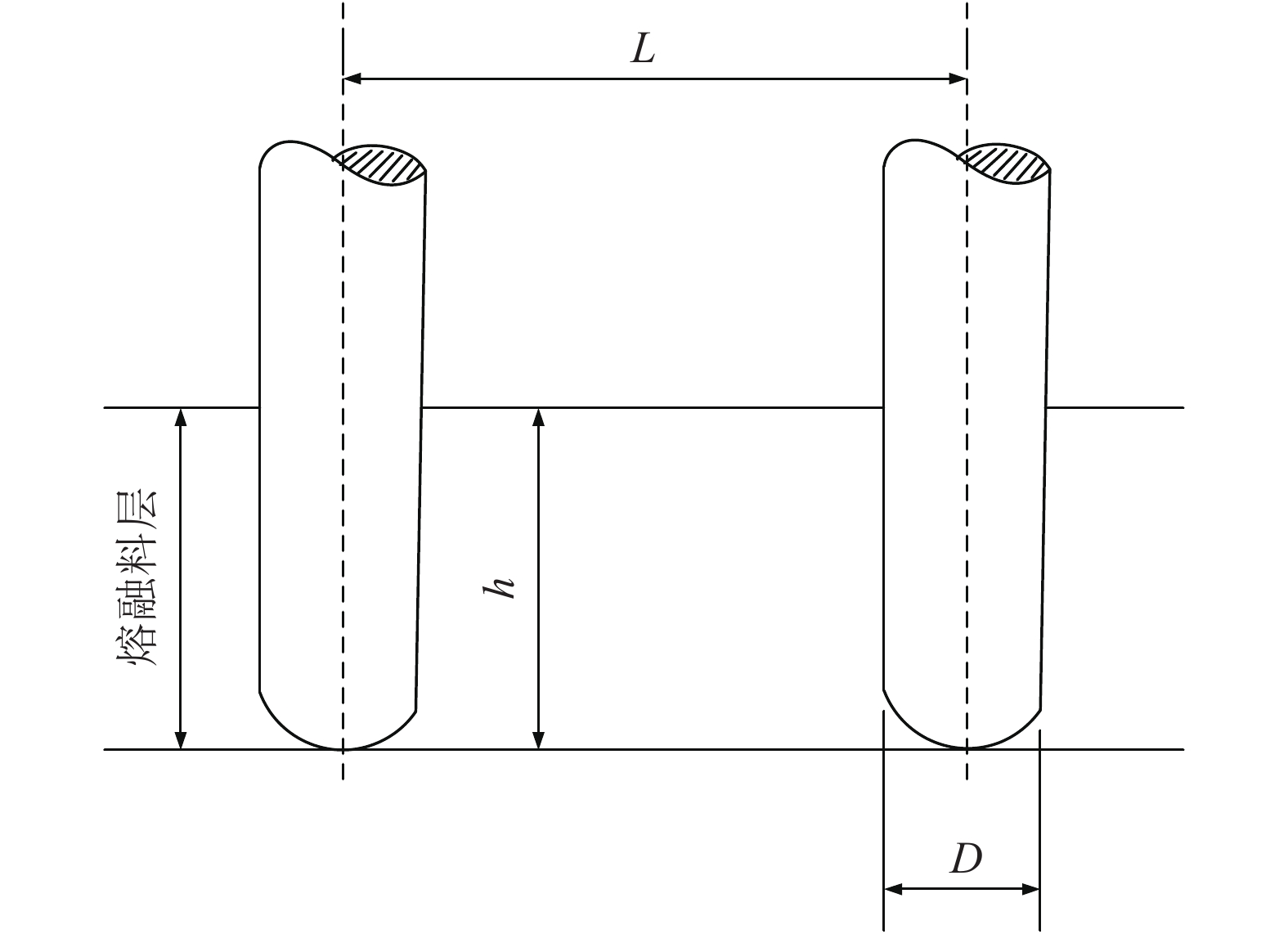
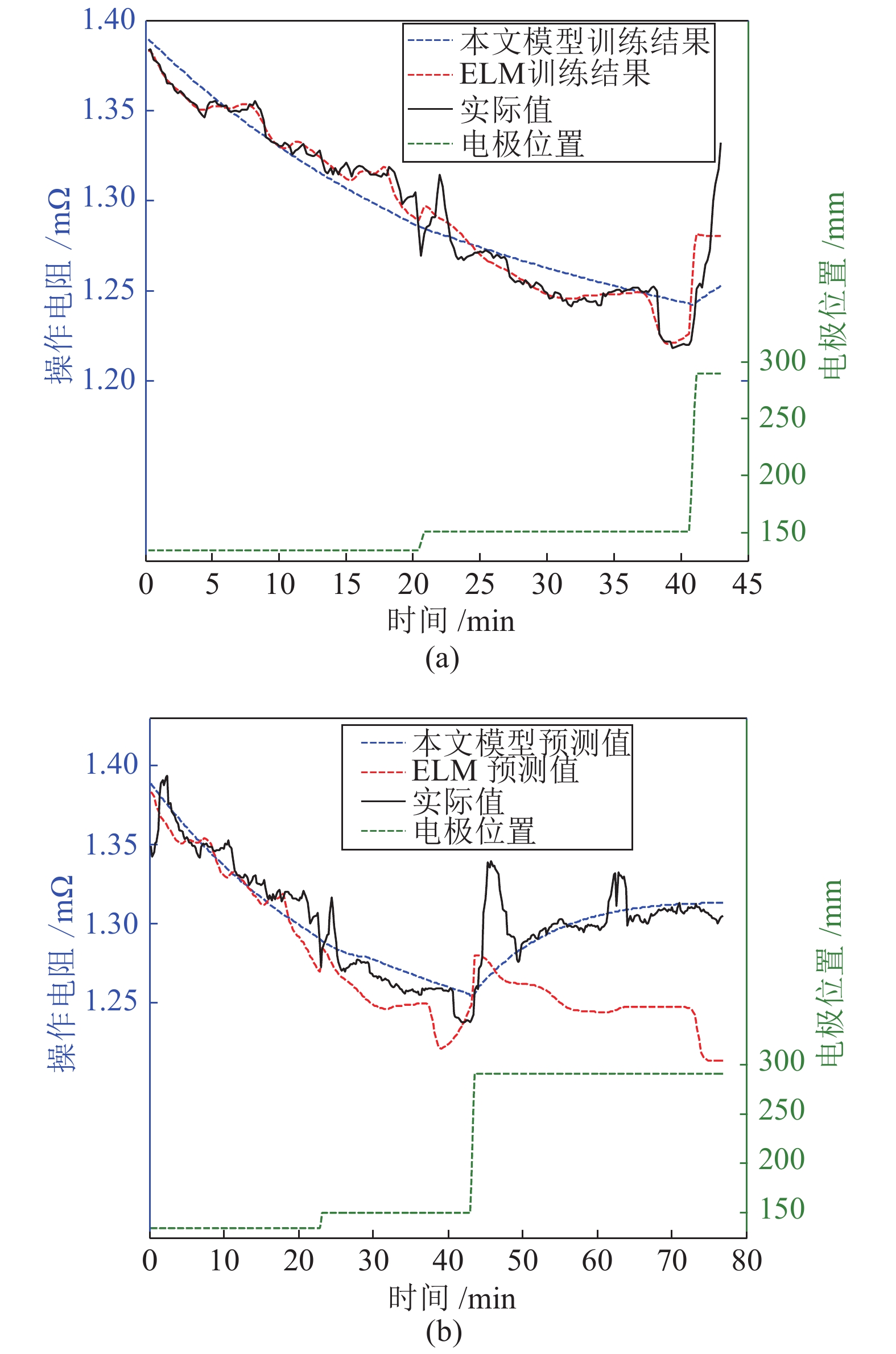
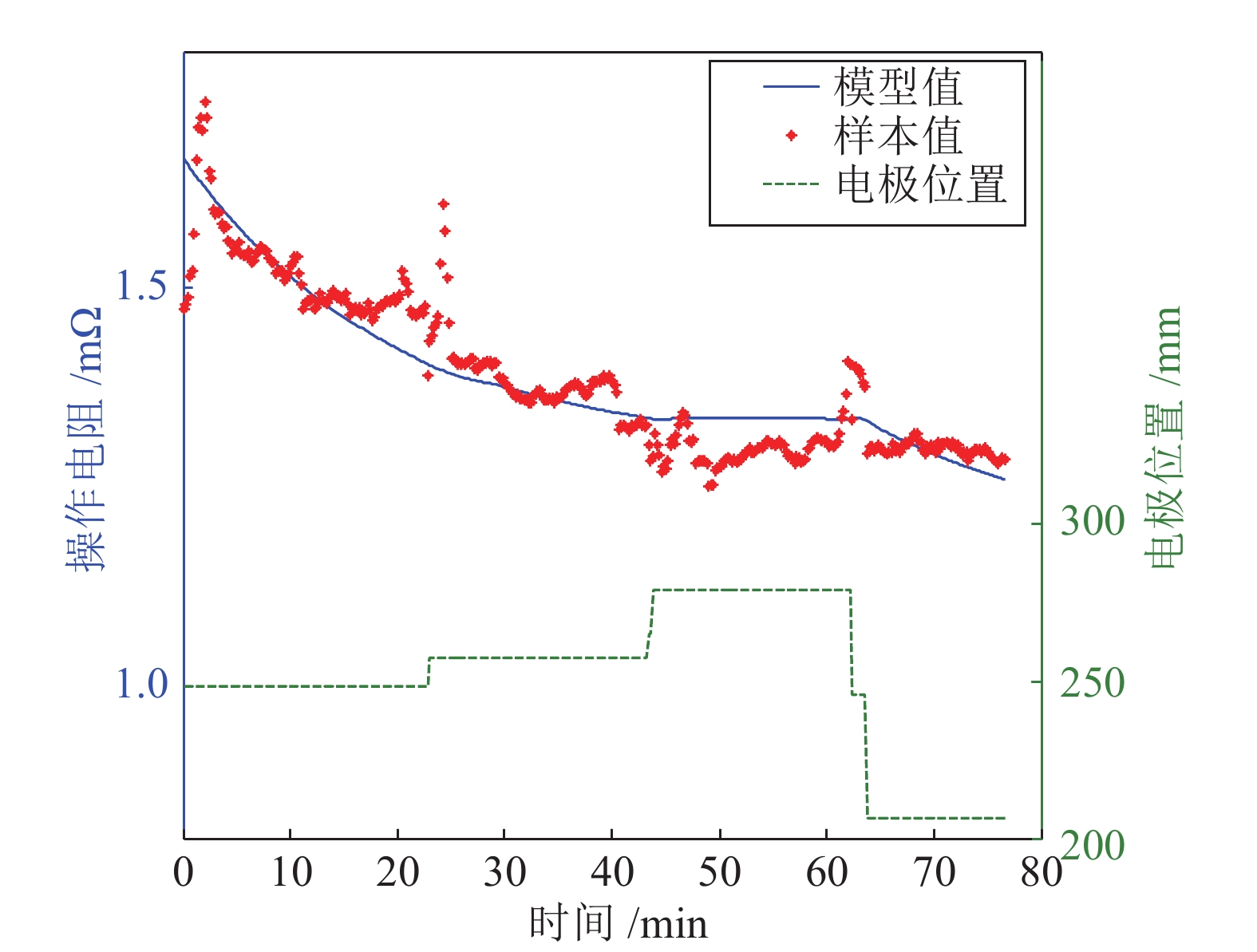
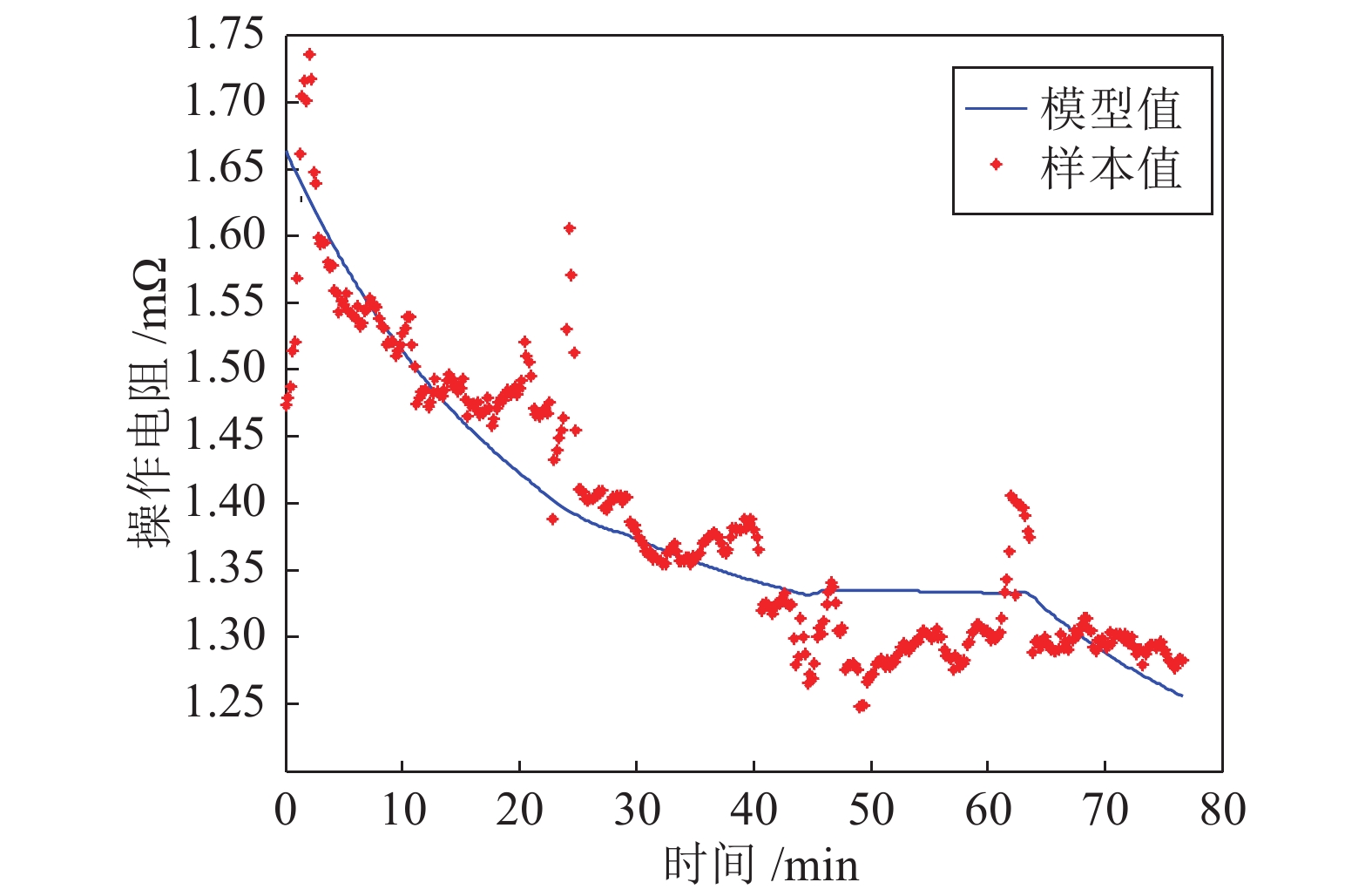
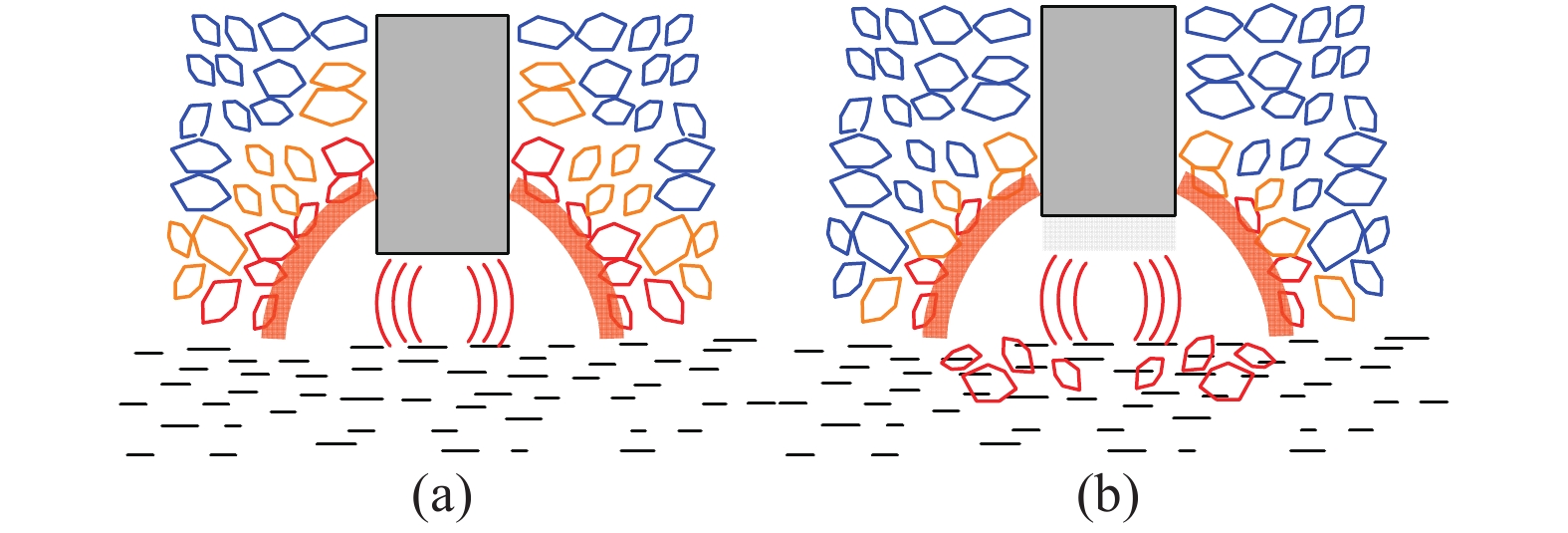
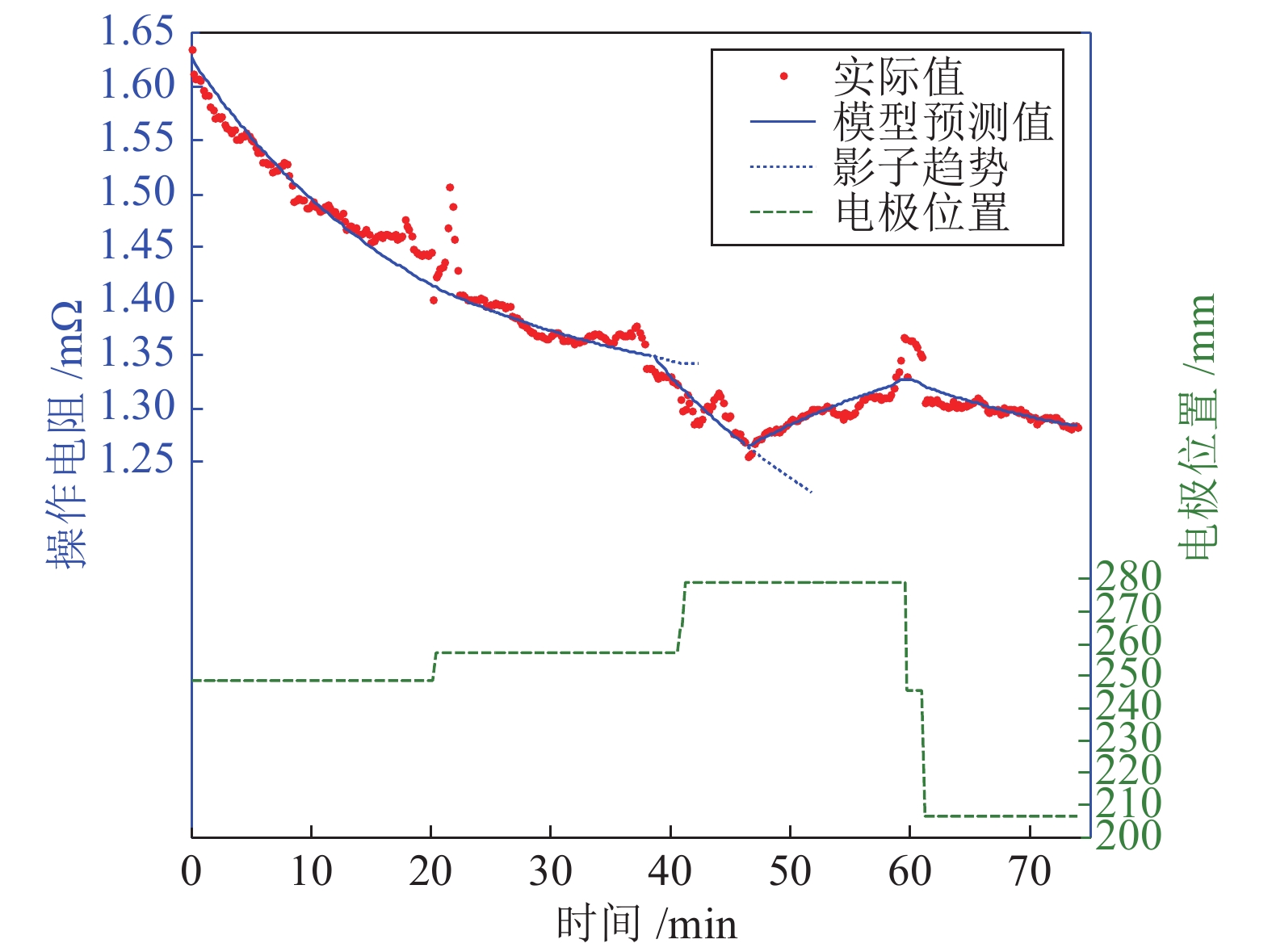
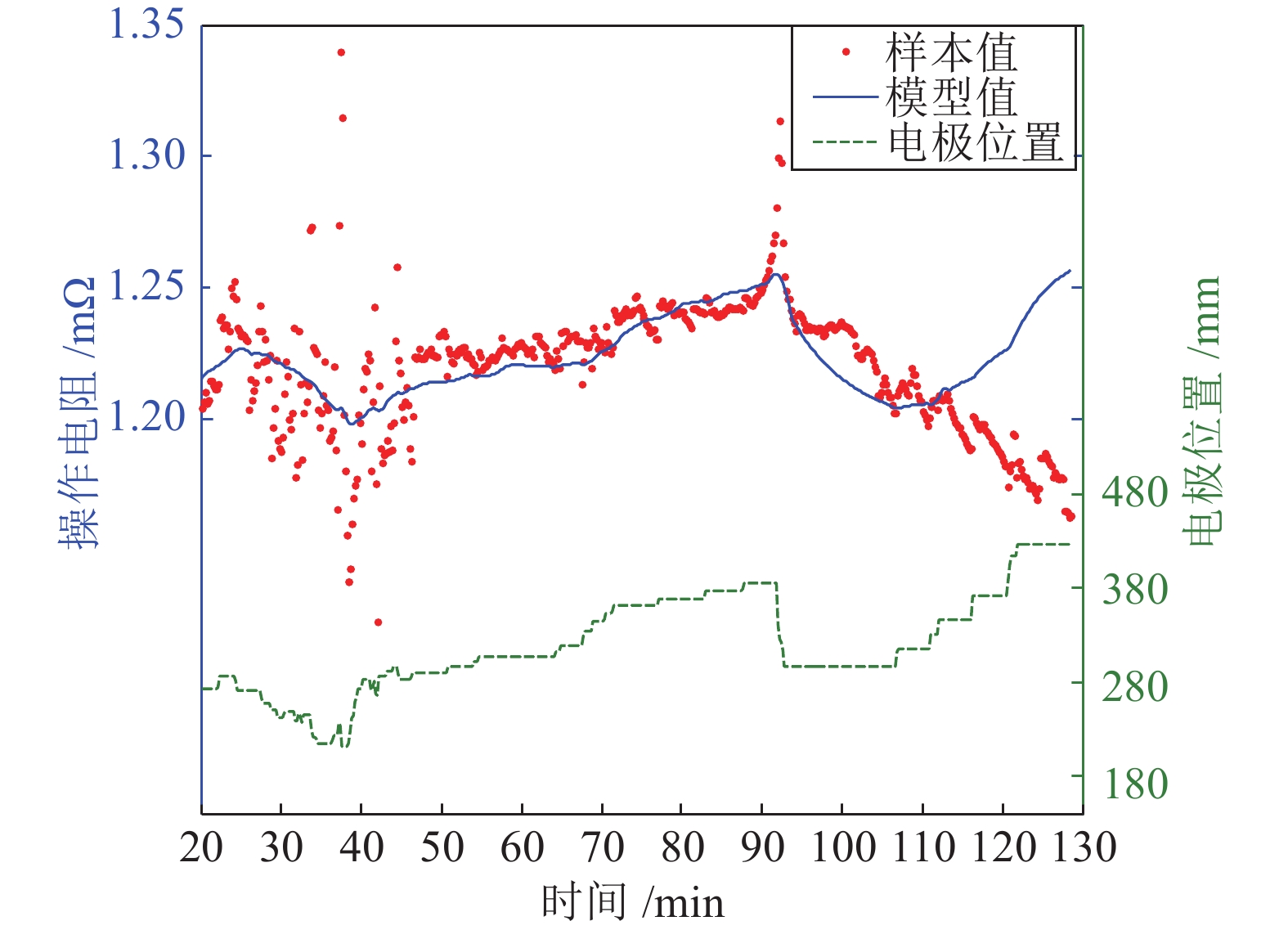
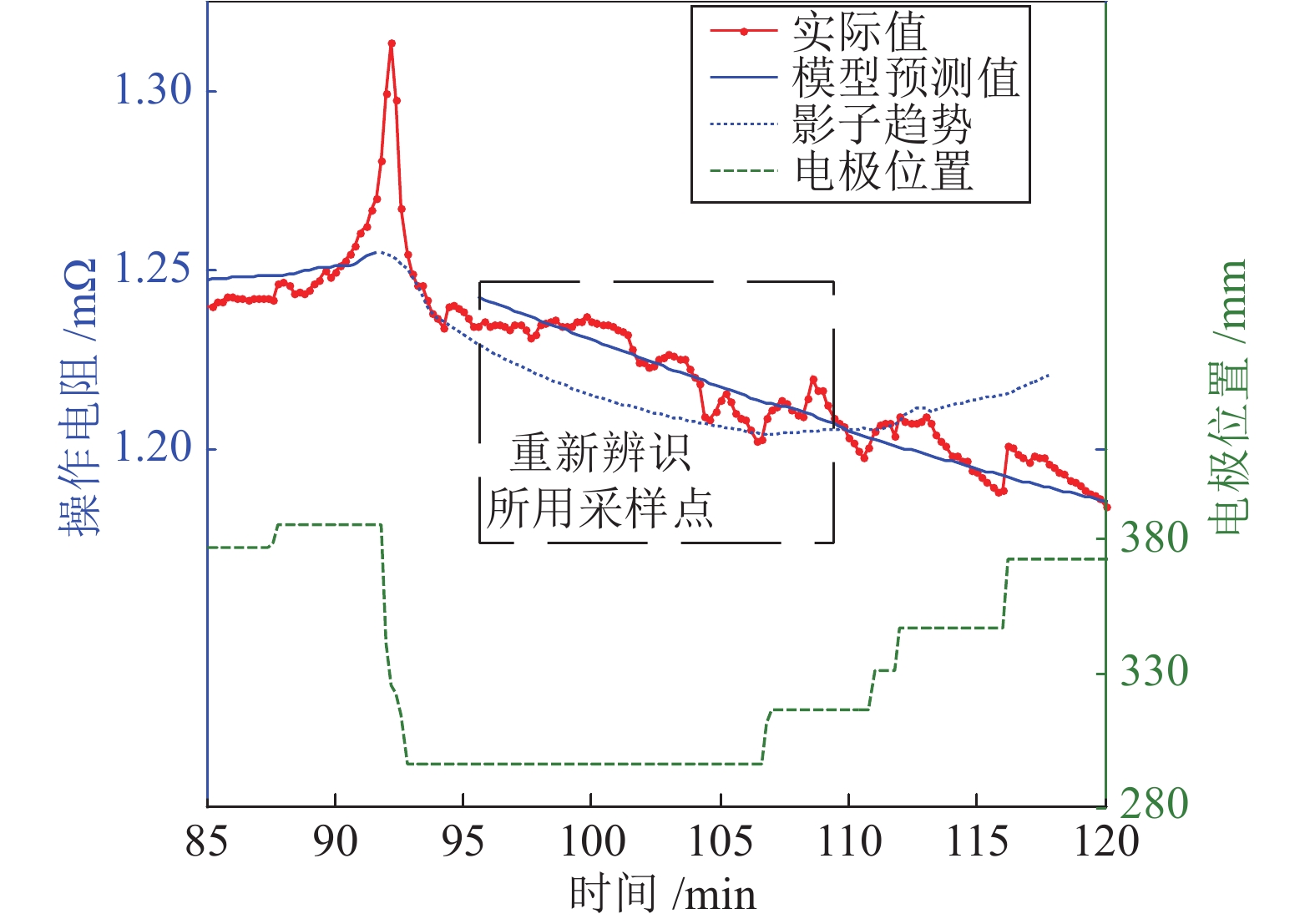
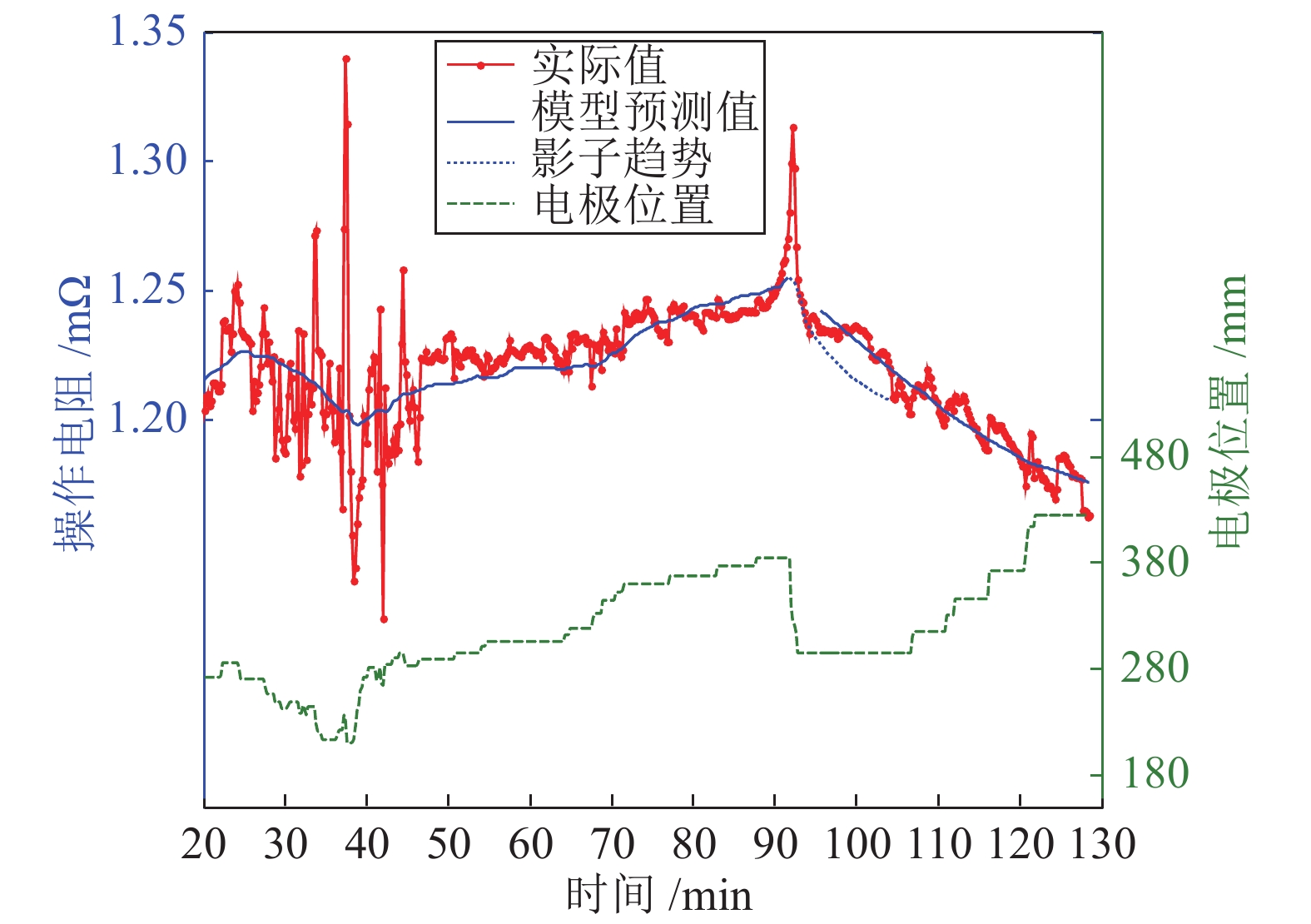
矿热炉埋弧冶炼炉况影响因素复杂且偶发迁移和跃变, 炉况发展趋势难以把握, 给冶炼过程控制带来挑战. 对此, 本文在深入分析埋弧冶炼机理的基础上, 建立了可表征反应区内电弧热与电阻热交互耦合关系的反应区操作电阻模型, 实现炉况发展趋势的在线跟踪. 当炉况发生迁移或跃变时, 利用前序炉况下所得模型生成影子趋势信息, 并综合考虑冶炼工艺及电弧电阻与料层电阻的动态特性差异, 辨析炉况变化的成因, 形成规则化的待辨识参数在线选取方法, 解决了炉况变化前后采样点少, 传统辨识方法无法适用的问题. 工业现场验证表明, 所提出方法可在复杂条件下对冶炼炉况进行准确跟踪, 并给出可靠的炉况发展趋势预测, 为冶炼过程的精细化生产奠定了基础.








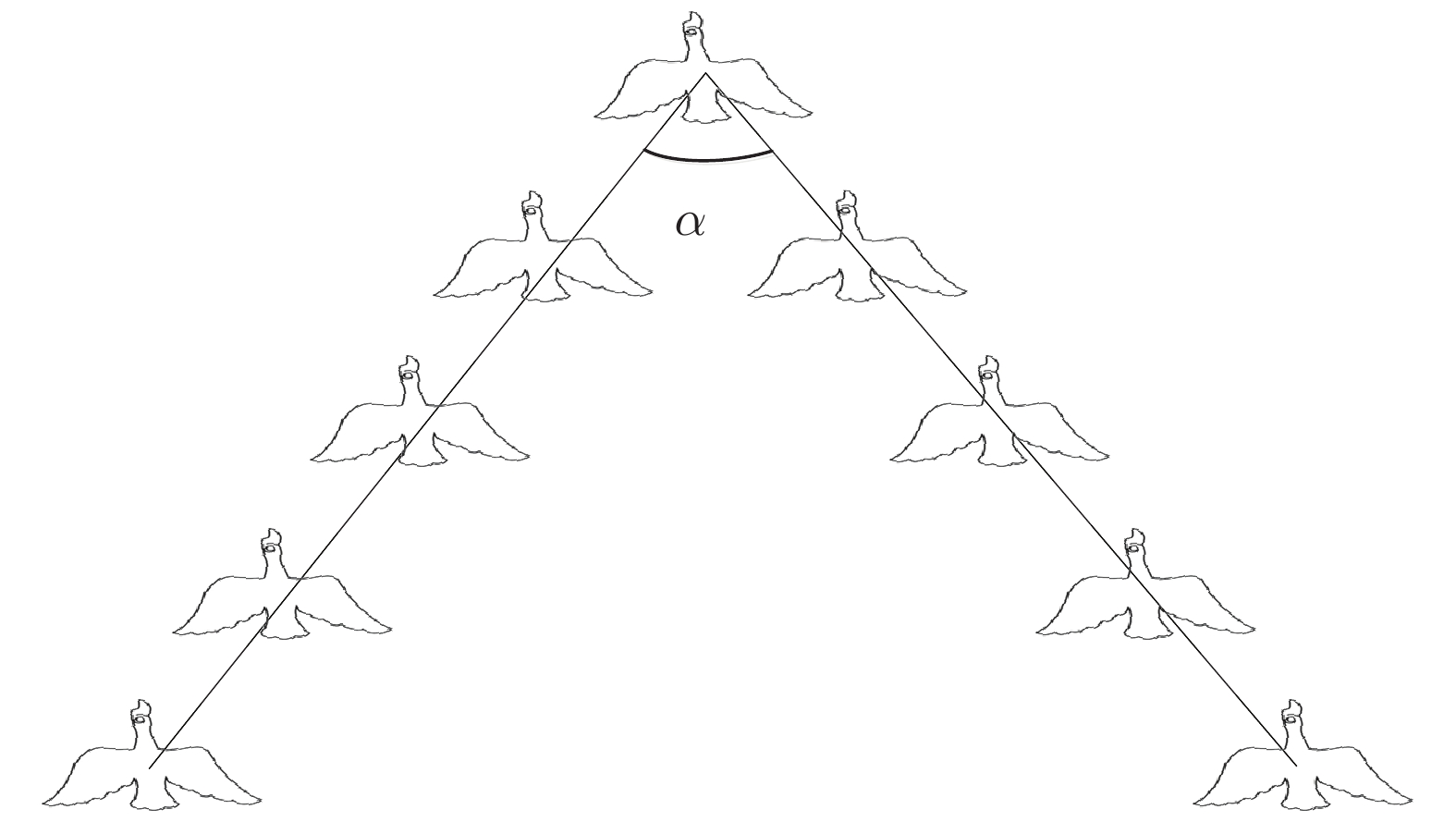
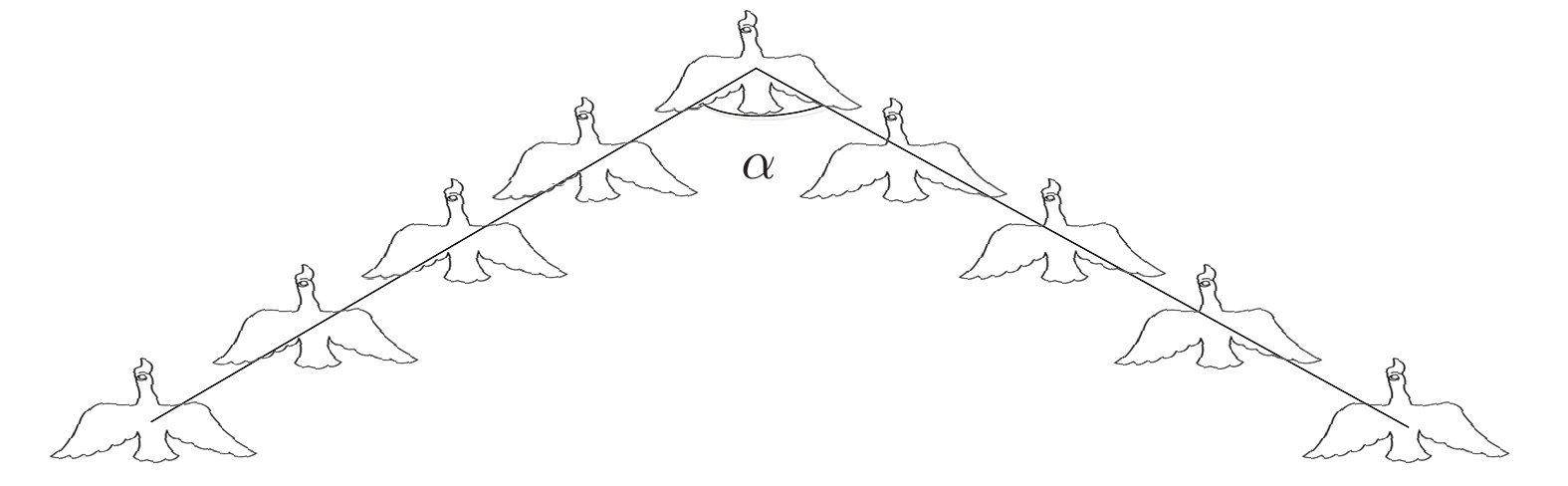
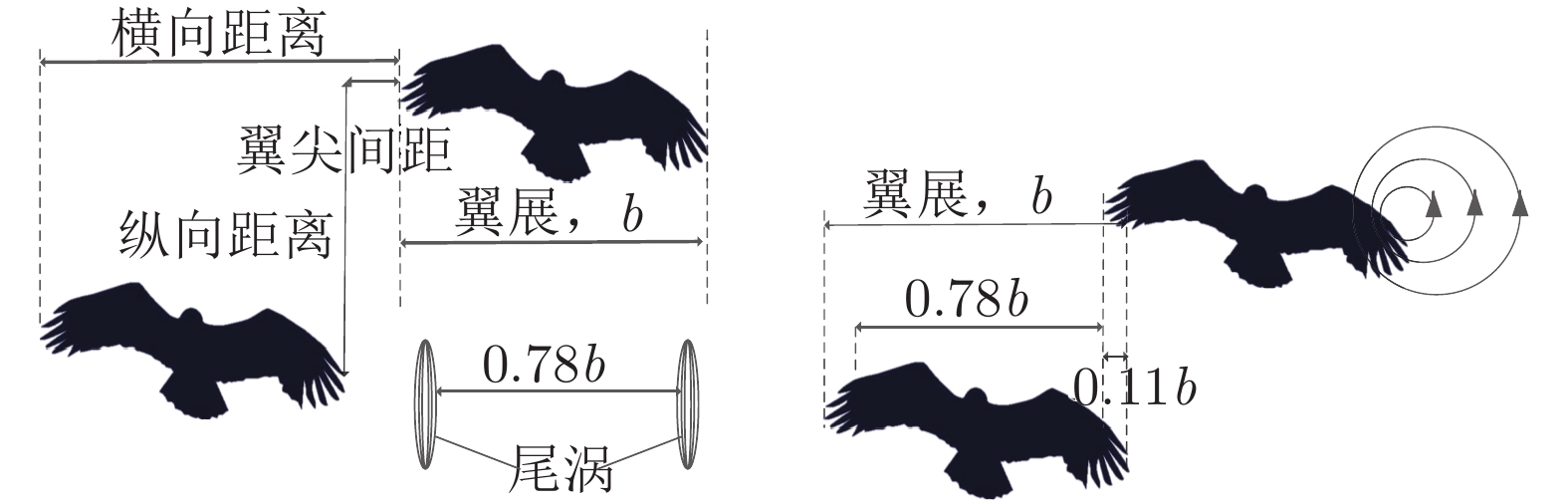
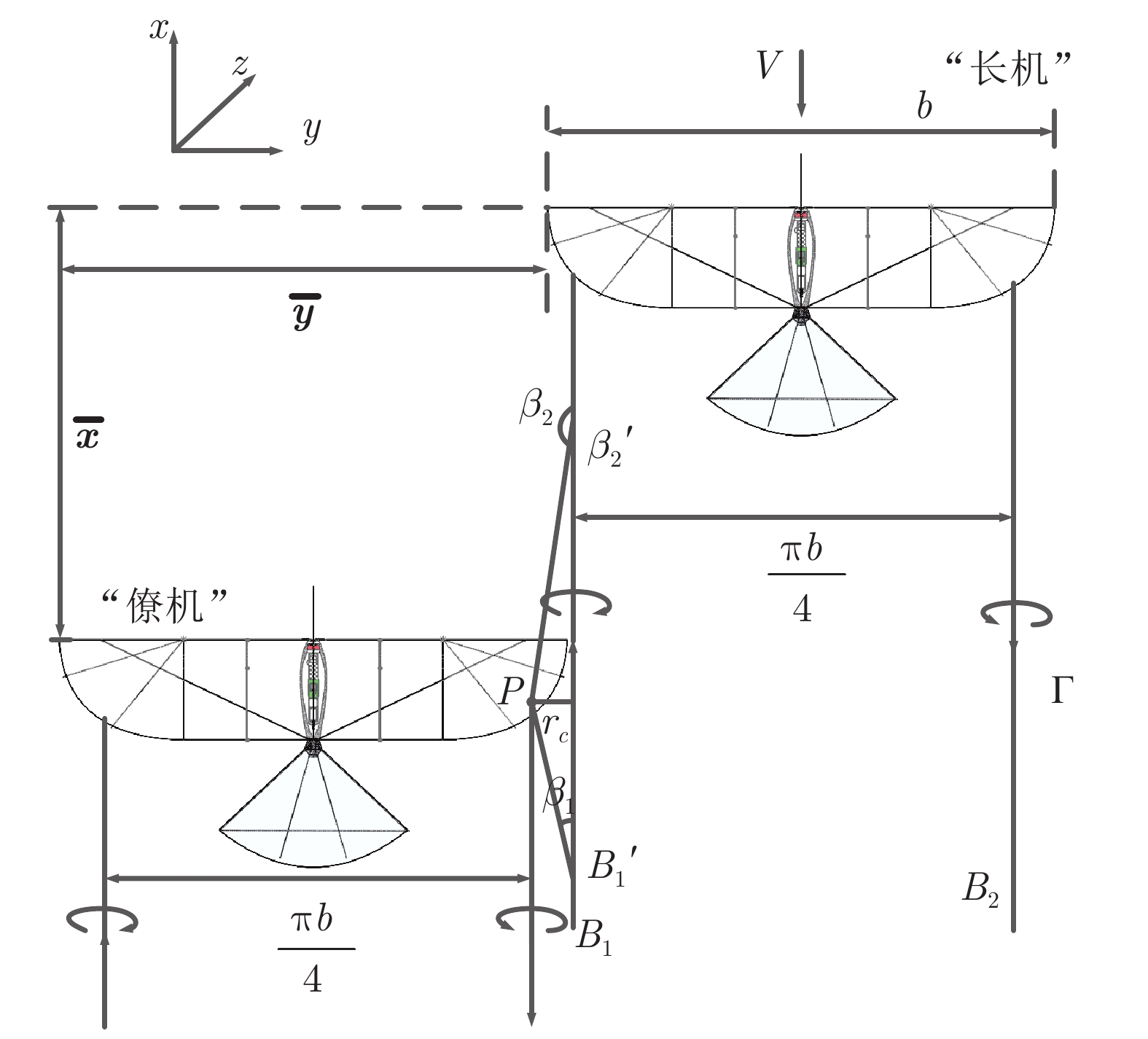
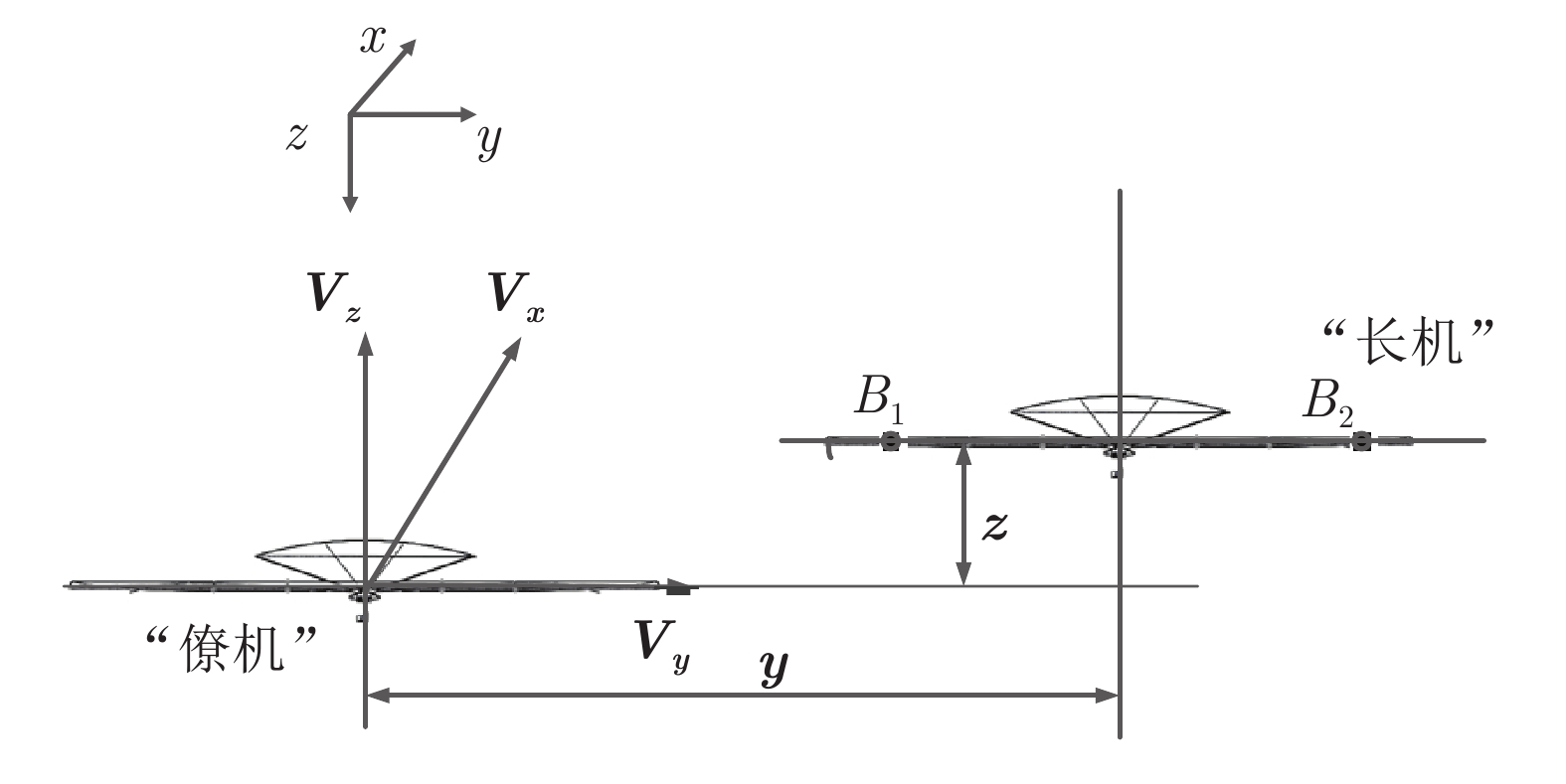
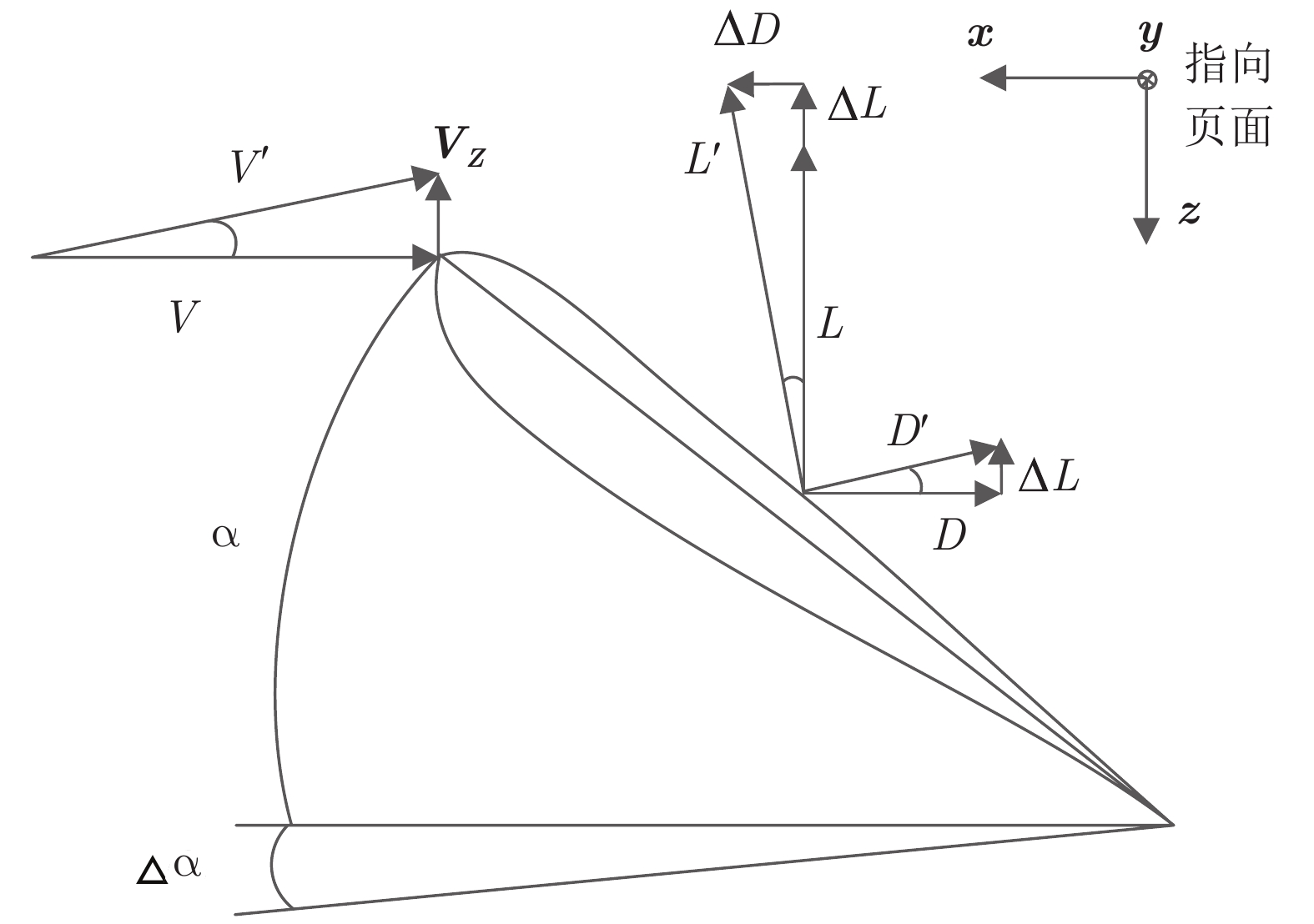
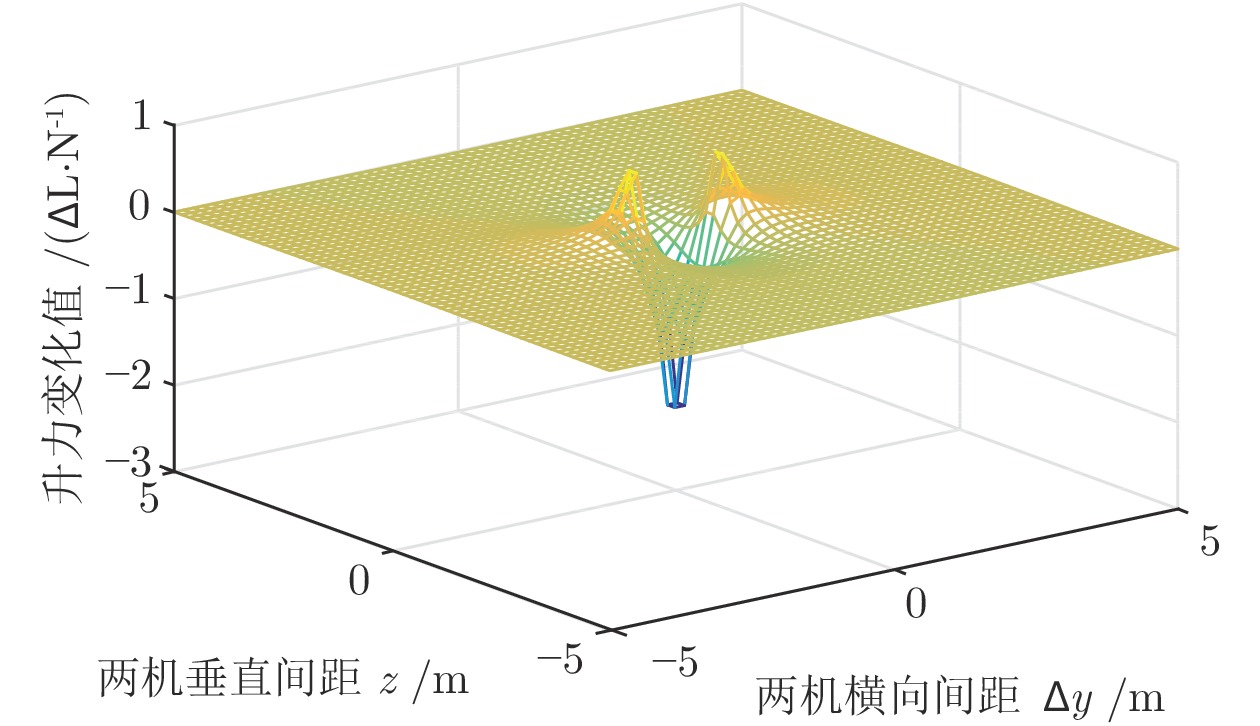
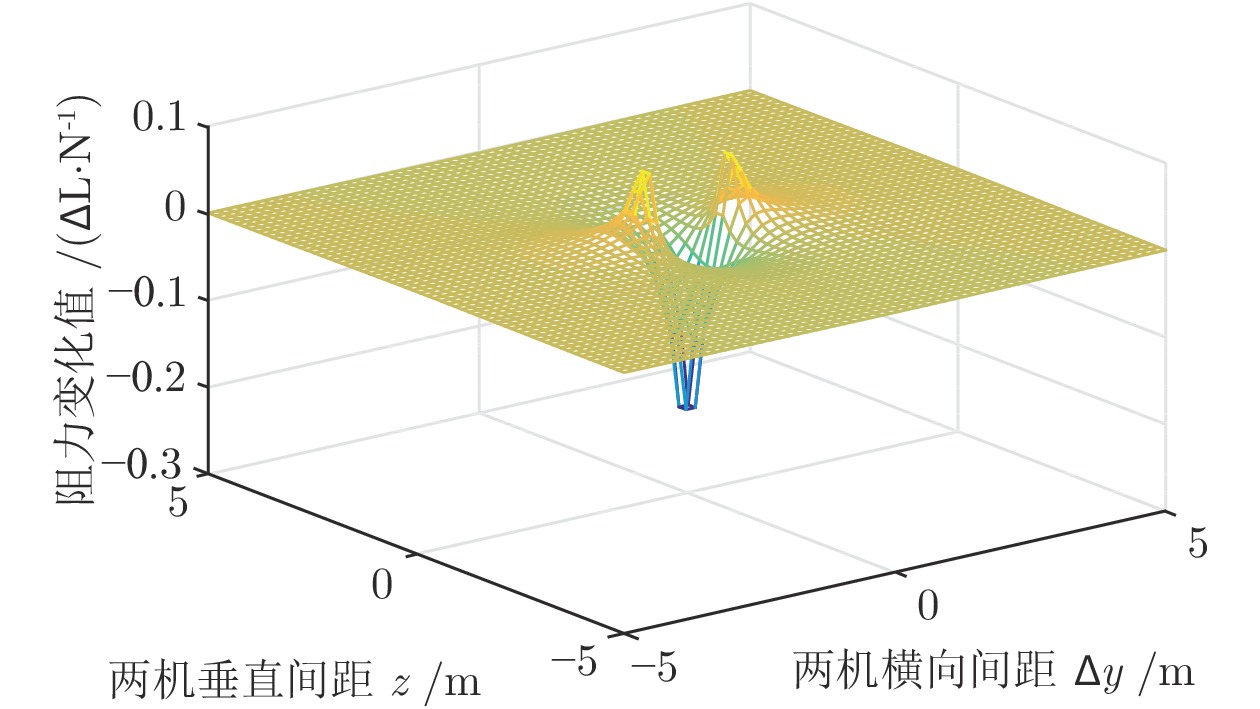
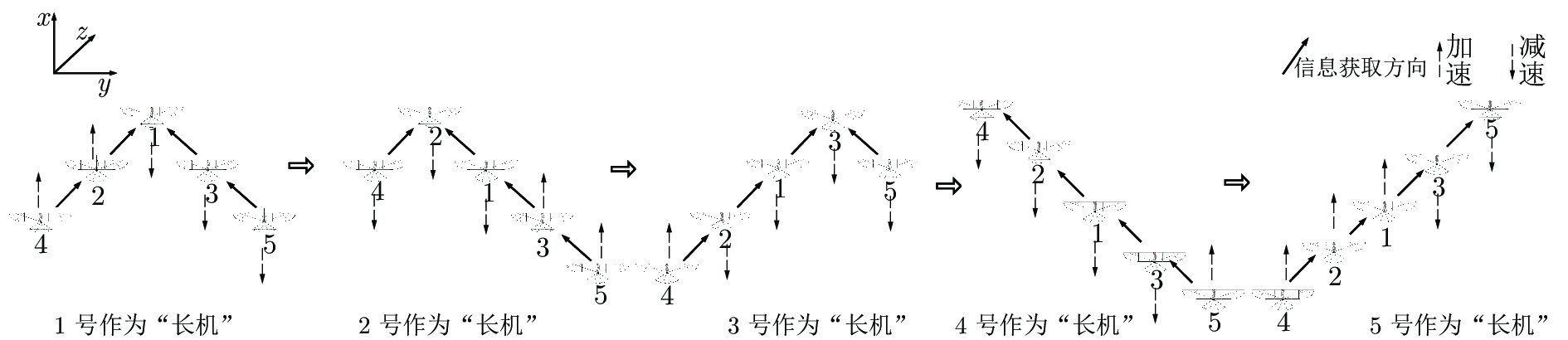
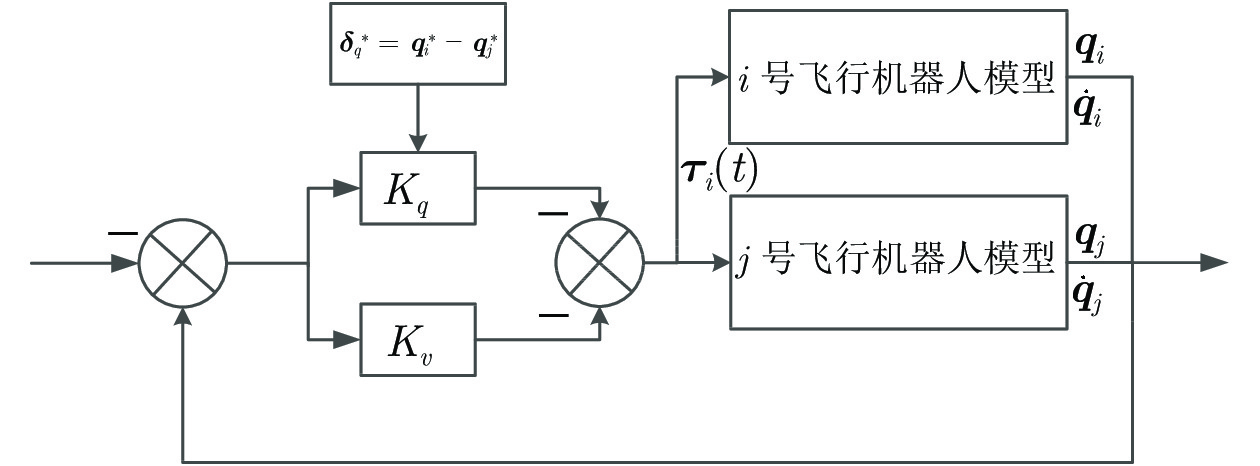
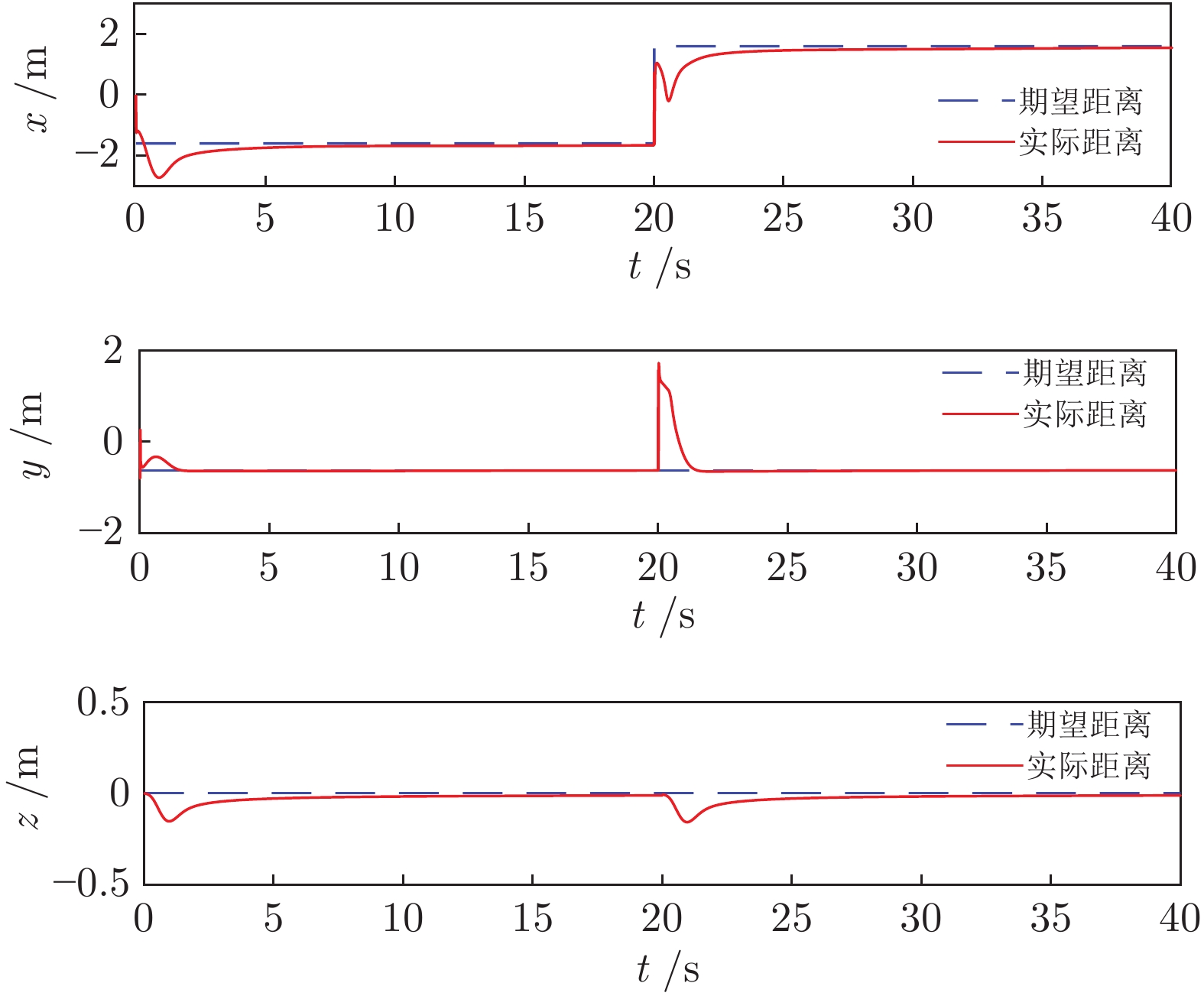
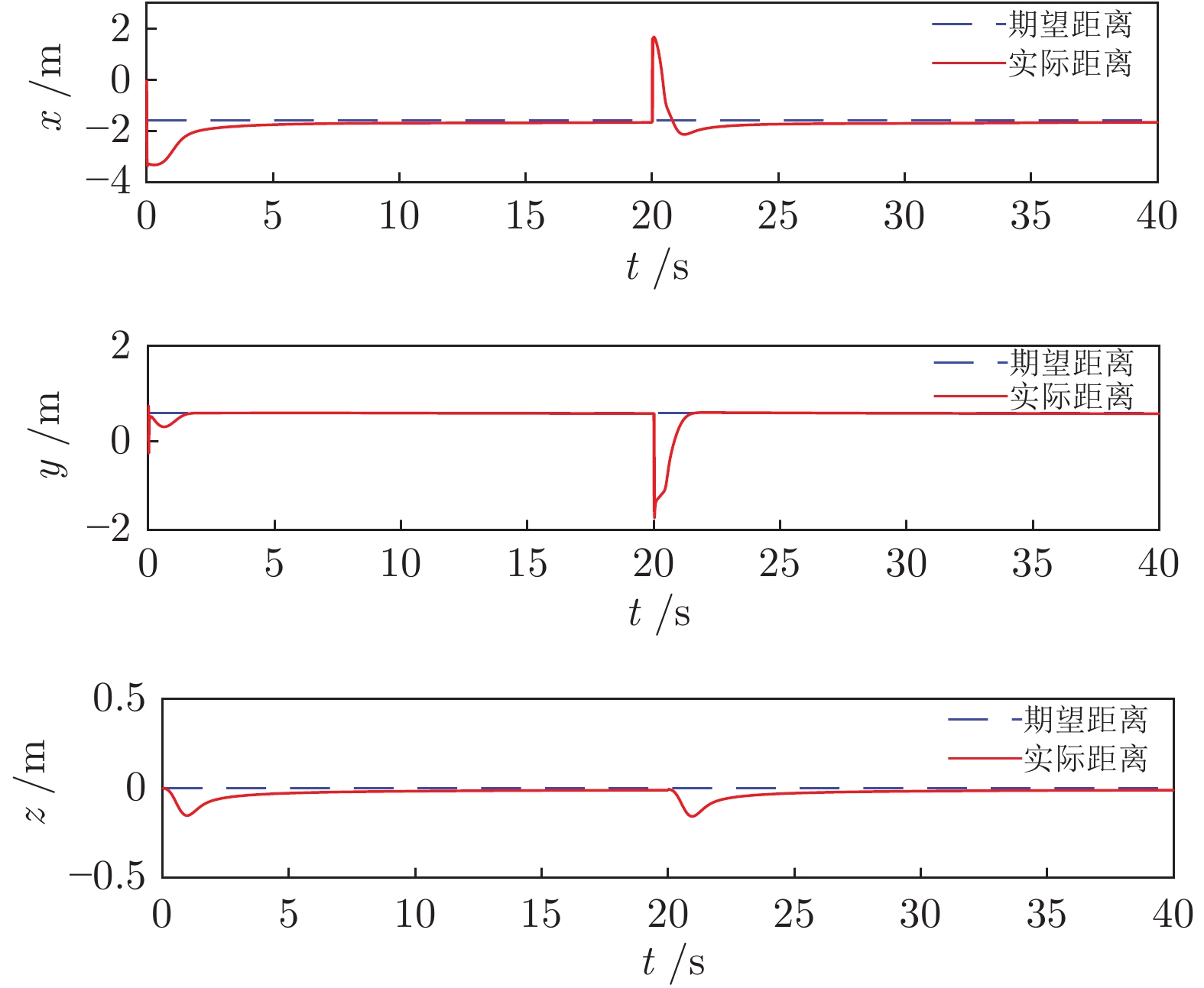
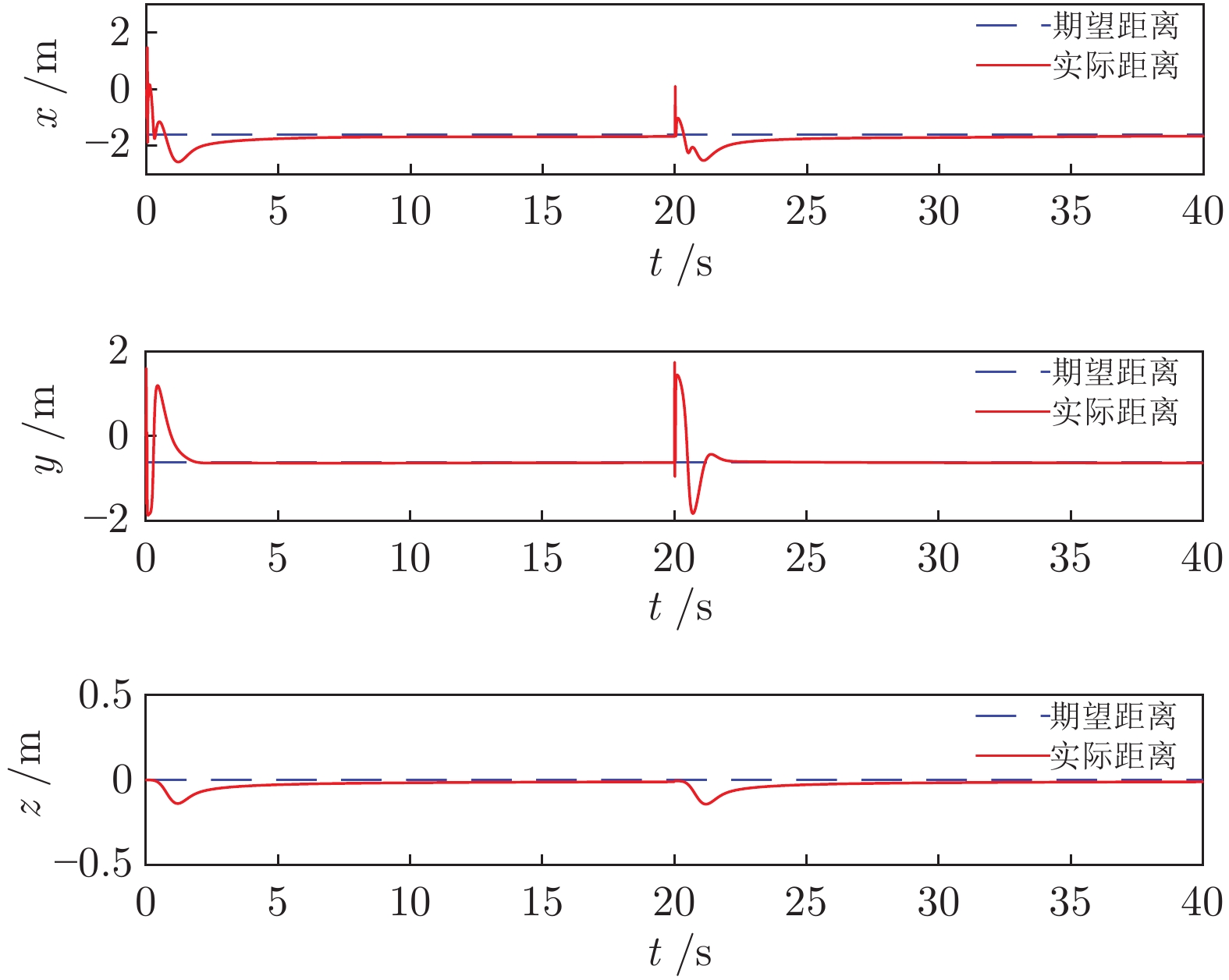
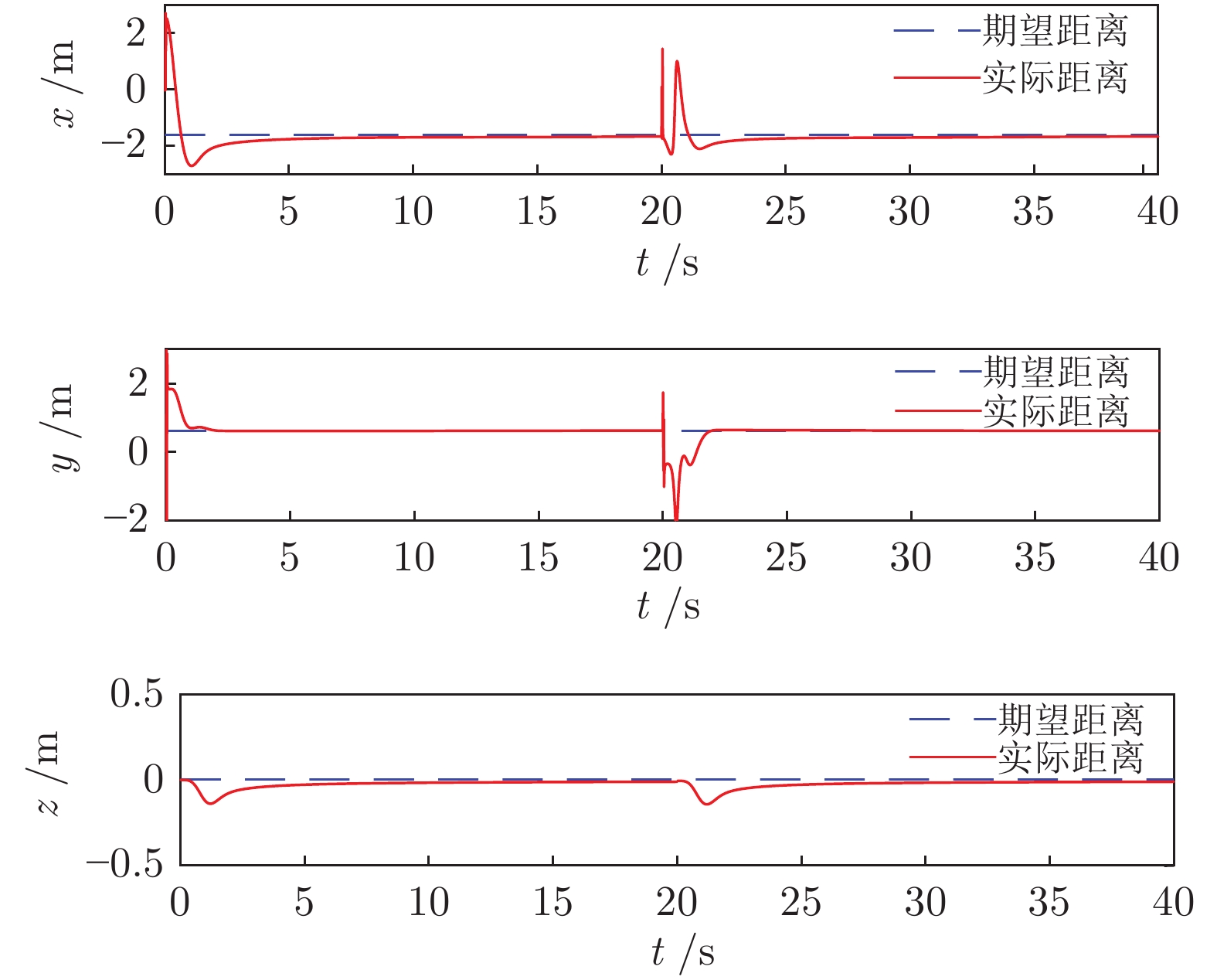
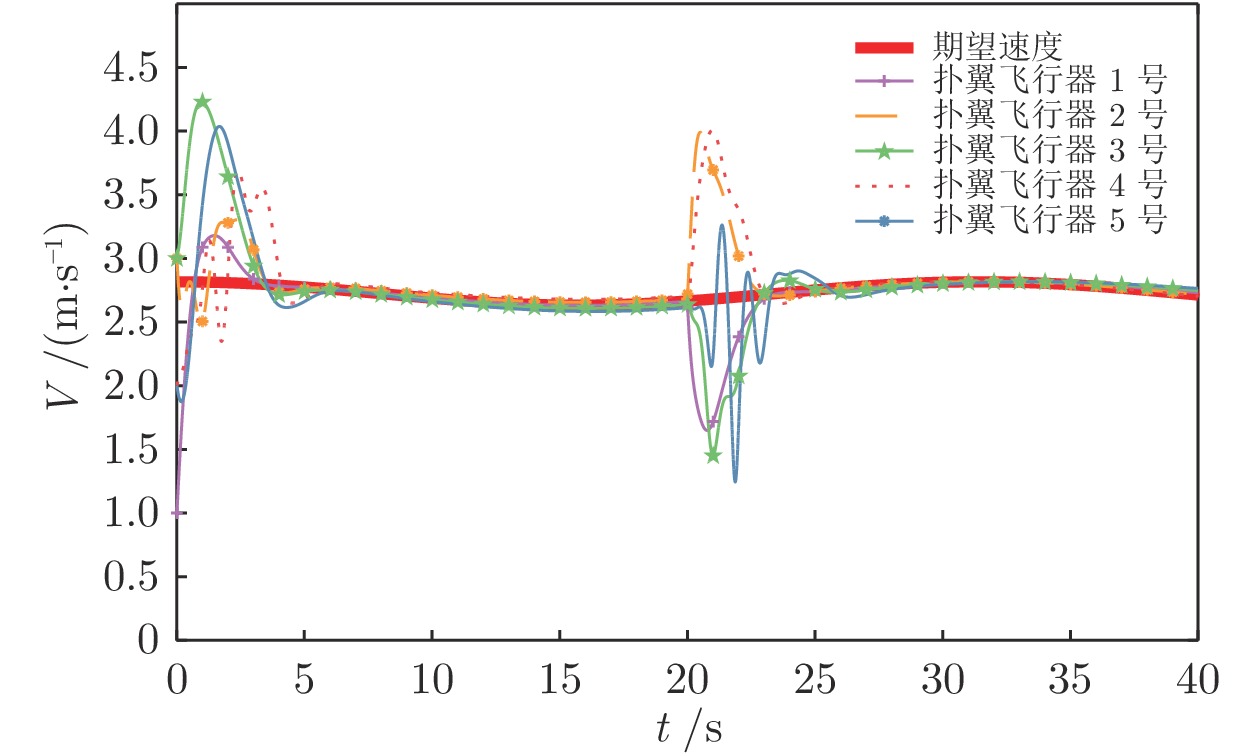
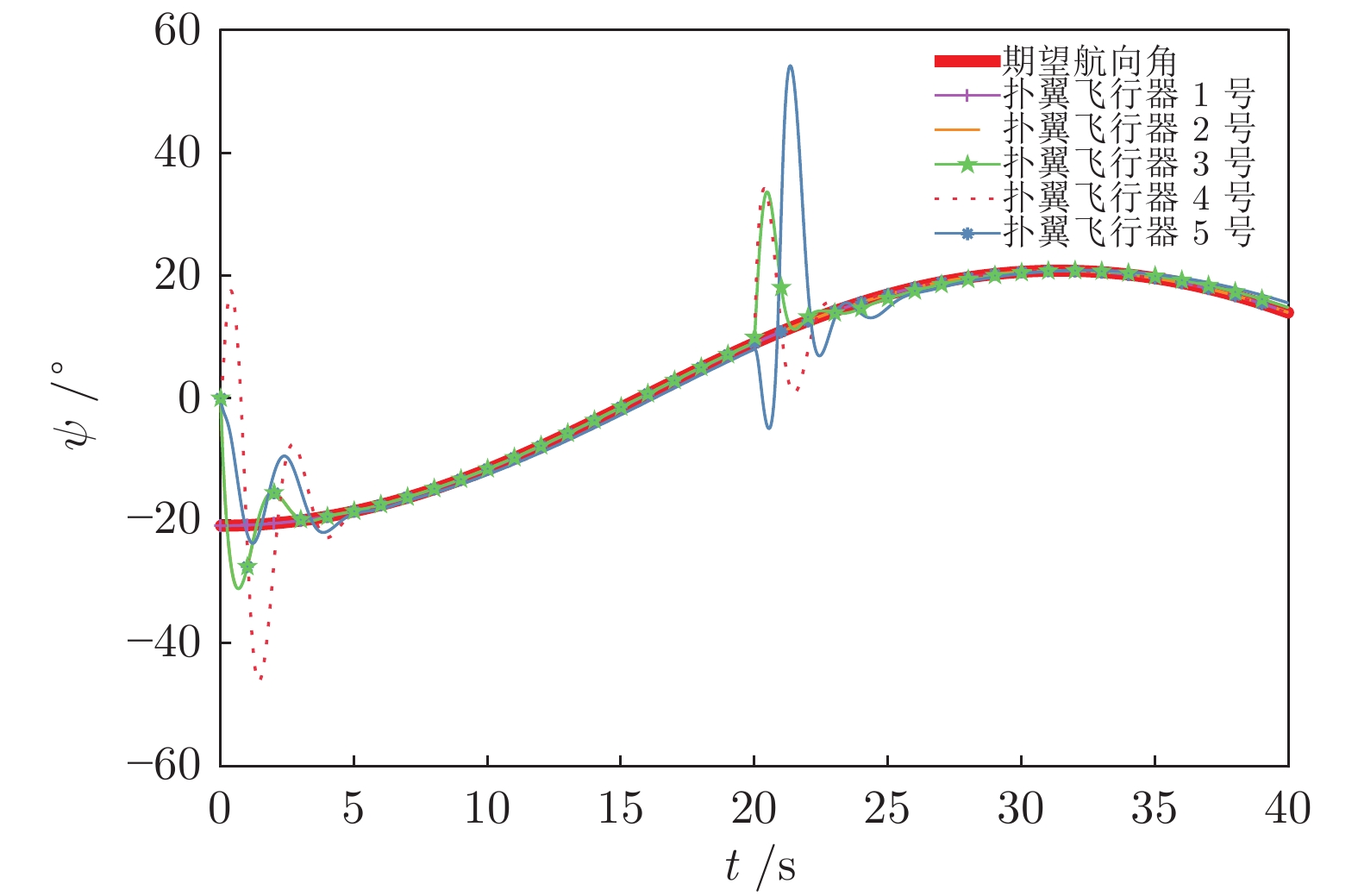
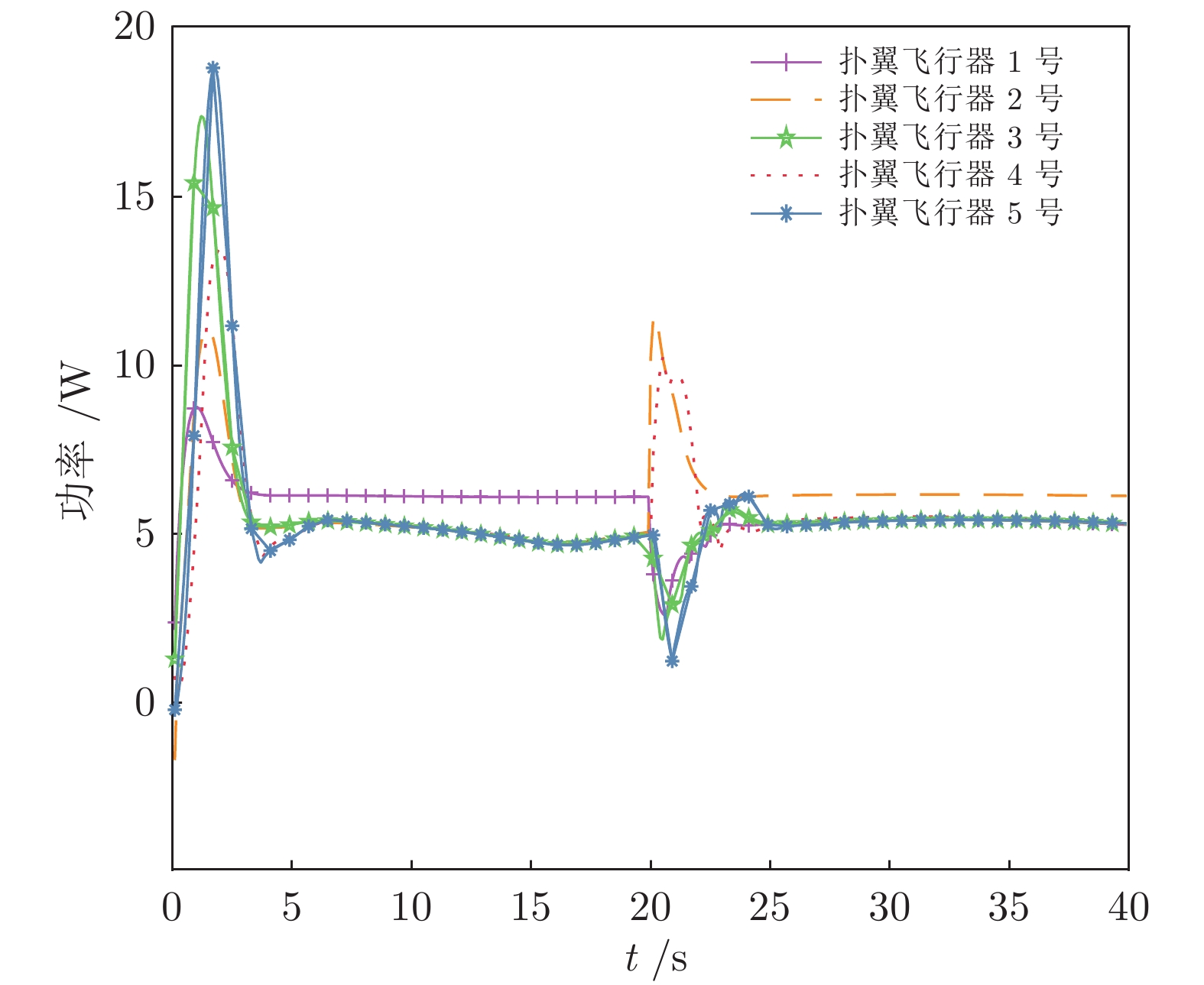
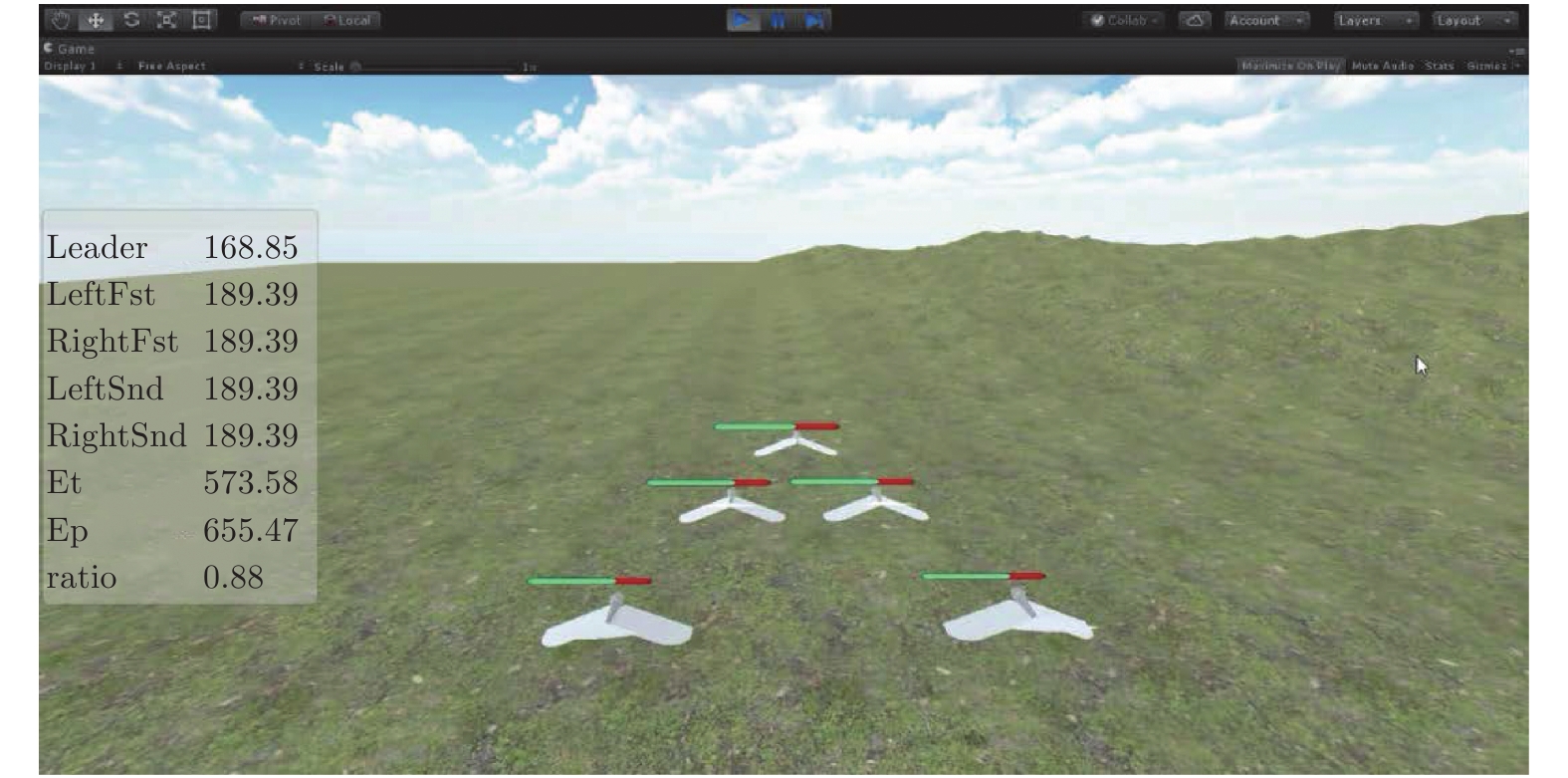
本文借鉴“雁阵效应”, 研究了扑翼飞行机器人高效集群编队飞行问题. 通过对“V”字雁阵的分析得知, 当前排大雁(简称头雁)和后排大雁(简称从雁)保持某一合适的相对位置偏移时, 后排大雁可有效利用前排大雁挥翅产生的上洗涡流, 从而节省体能; 并且, 雁阵通过阵型的变换, 可以实现能量整体消耗的均衡性, 确保长航时飞行. 仿照该“雁阵效应”, 分析得出耗能最少的扑翼飞行机器人集群阵型排布方式, 并设计了阵型变换机制, 实现集群能量整体消耗的最优性和均衡性. 在此基础上, 参考雁群的交互方式, 设计了一种使用局部信息的控制方法, 保证最优阵型的稳定维持以及阵型间的灵活变换. 最后, 仿真结果验证了所提理论结果的有效性.



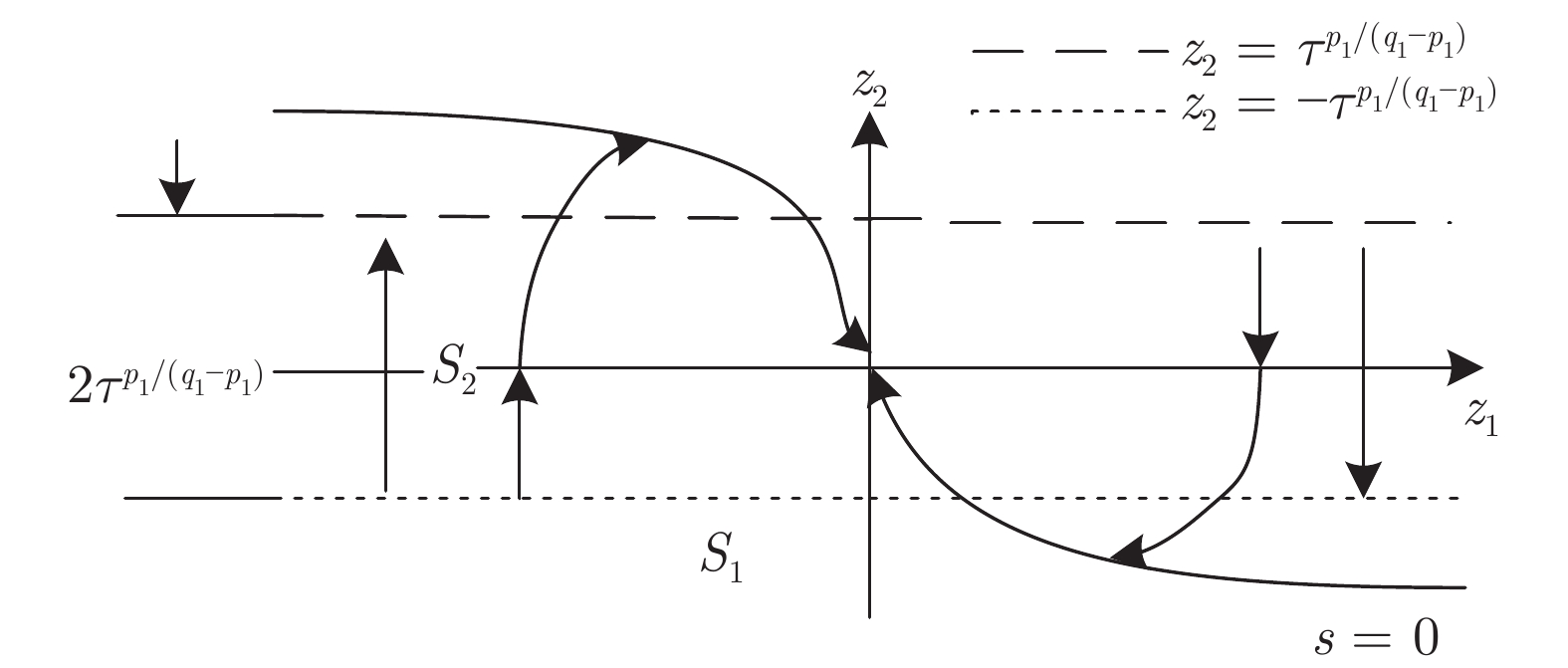
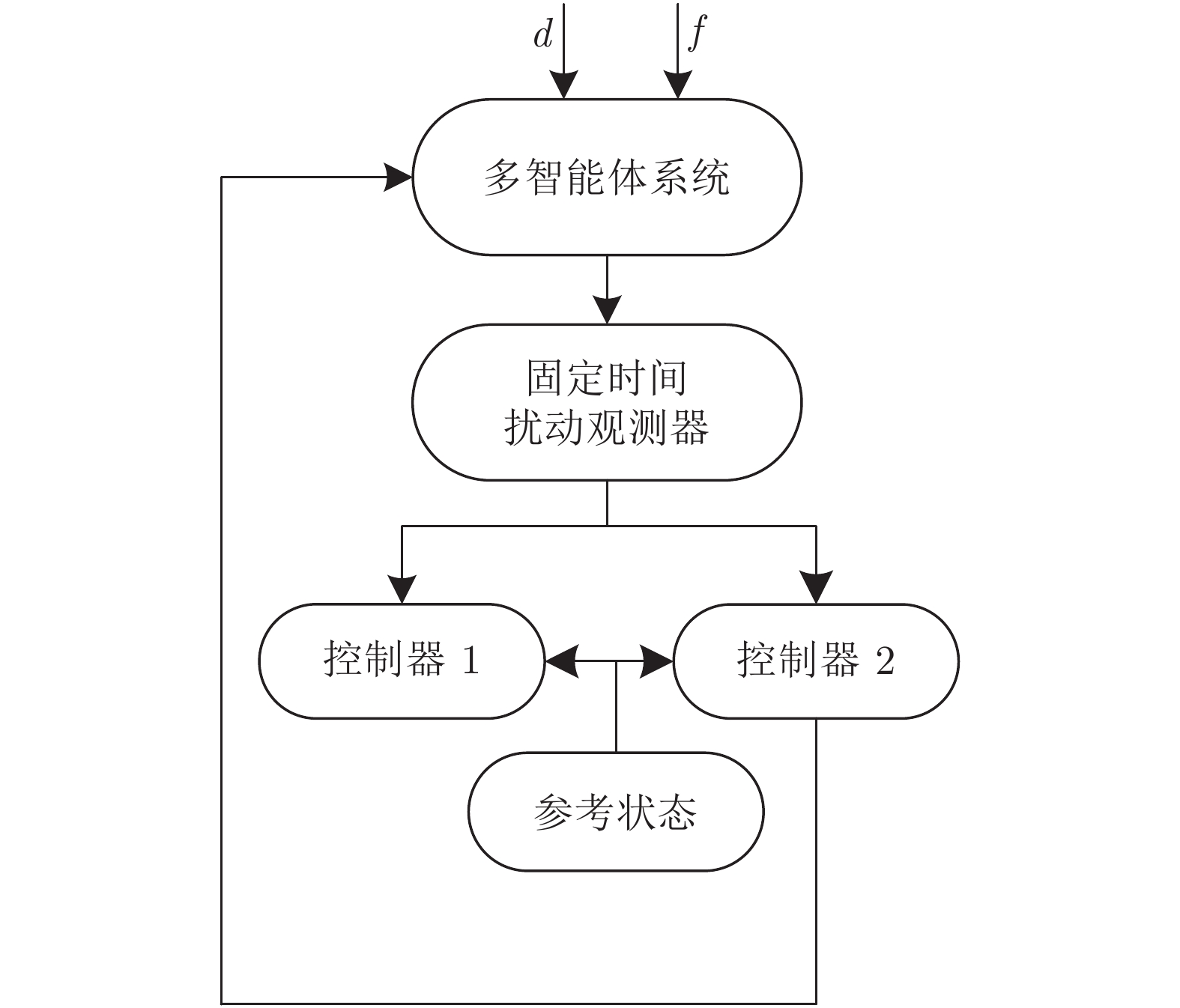
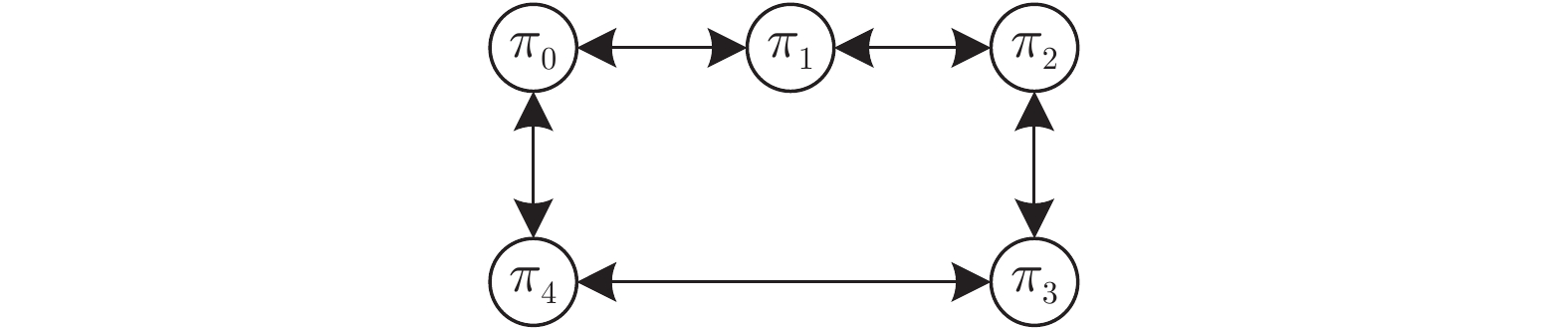
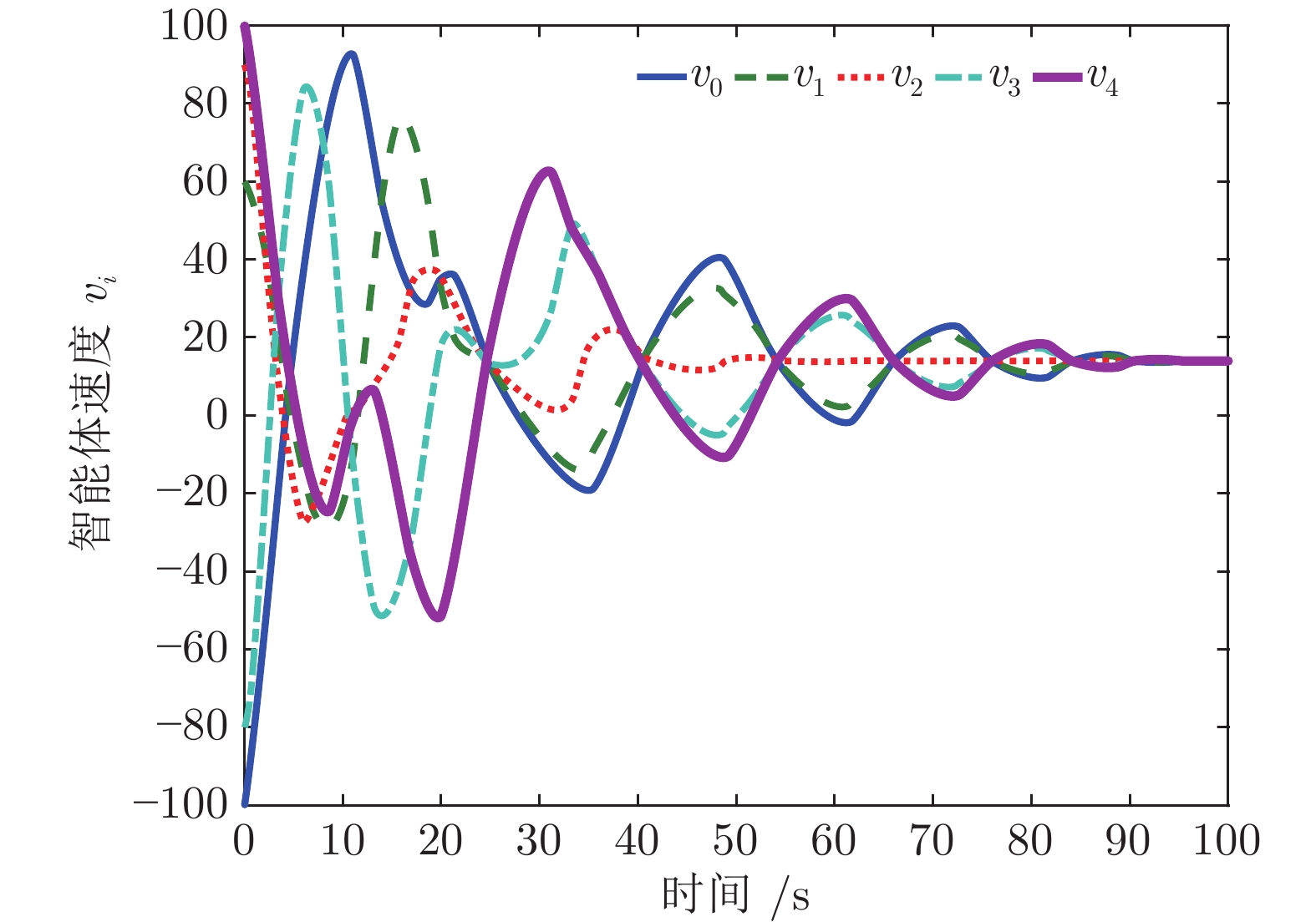
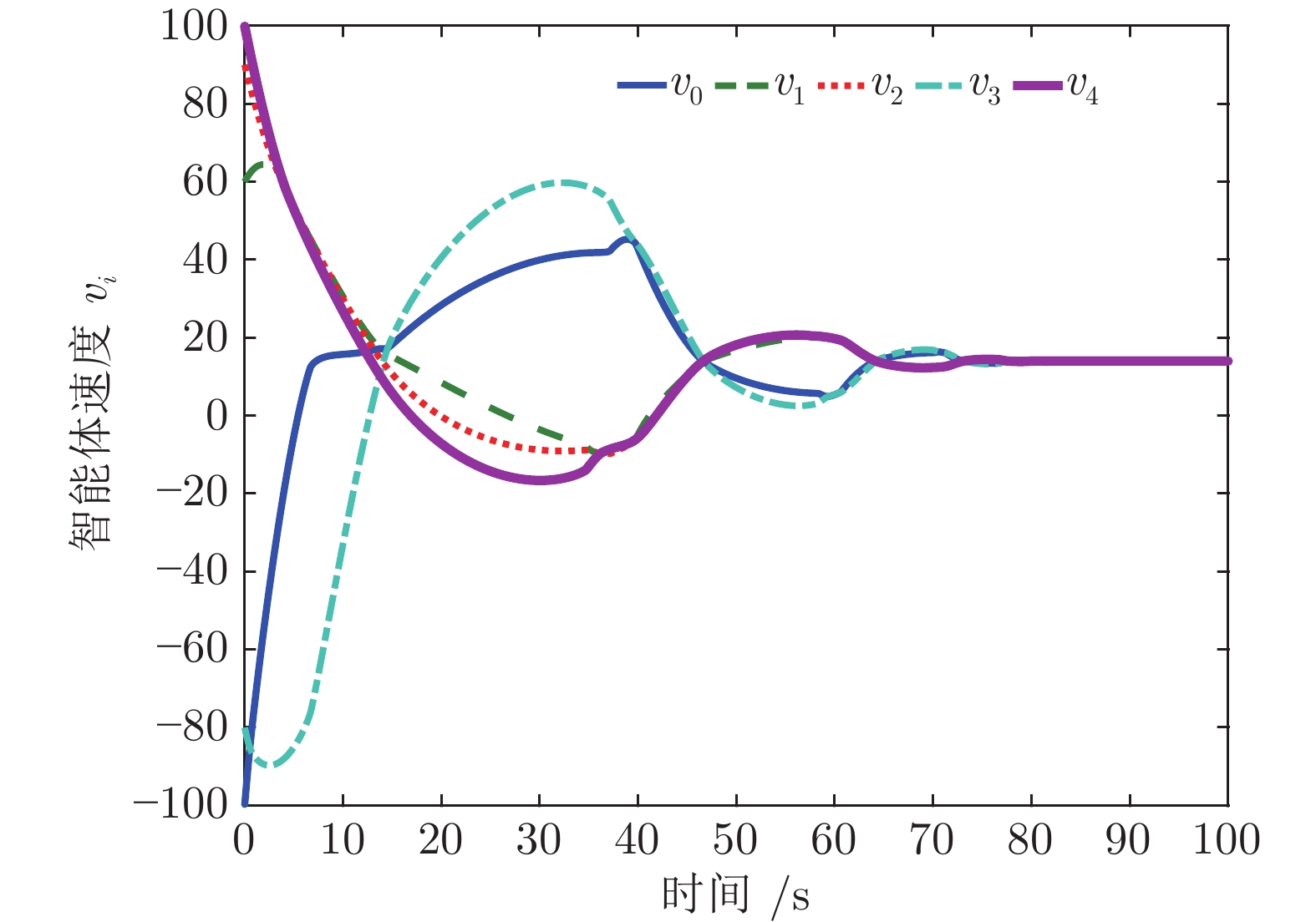
本文研究了有向拓扑网络中具有非匹配扰动的二阶多智能体系统固定时间一致跟踪问题. 基于固定时间扰动观测器, 估计系统匹配扰动, 其次引入正弦补偿函数设计非奇异分布协议, 在避免系统奇异性的同时克服了非匹配扰动, 使多智能体系统实现固定时间一致跟踪. 最后通过仿真验证了算法的有效性.


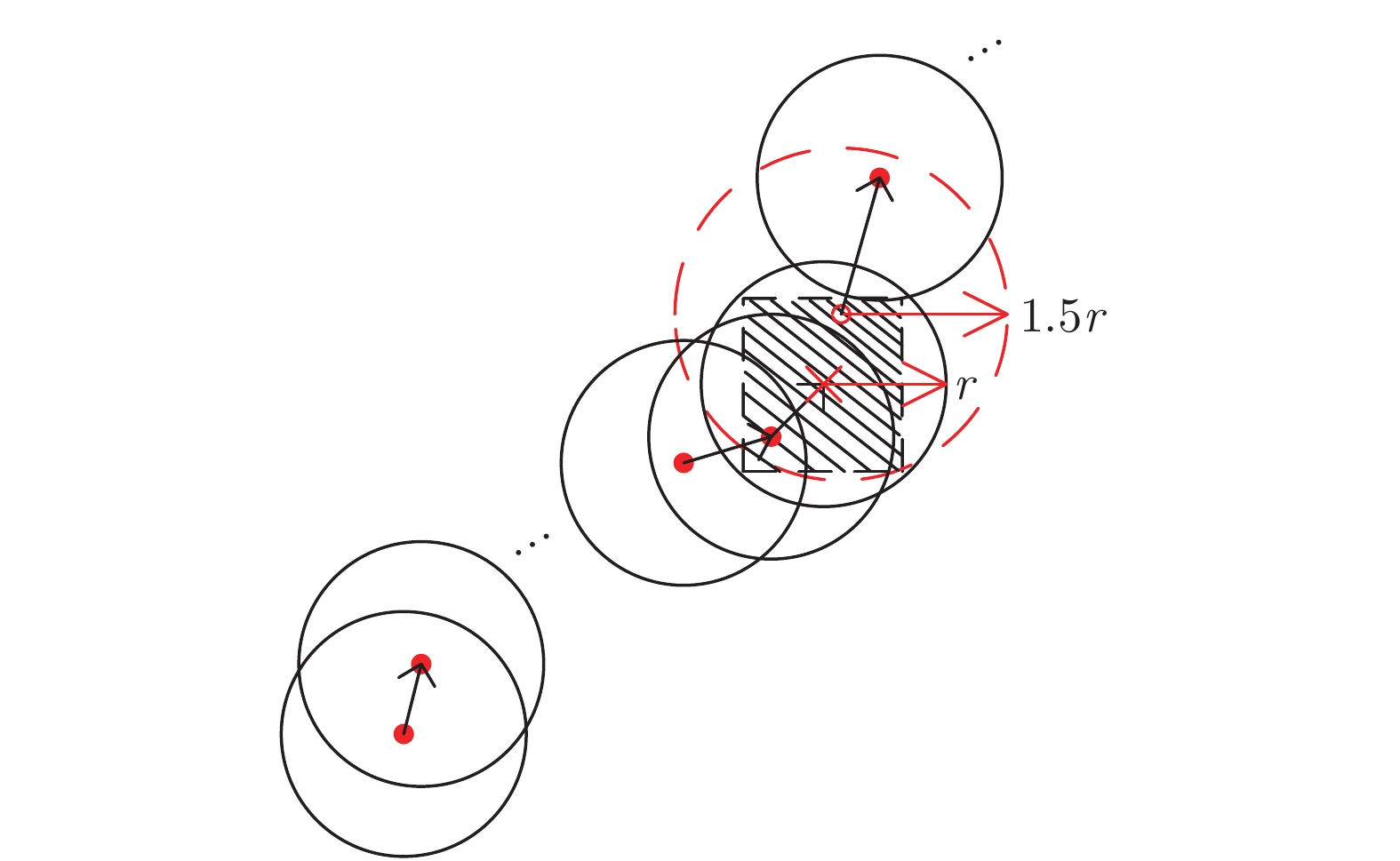
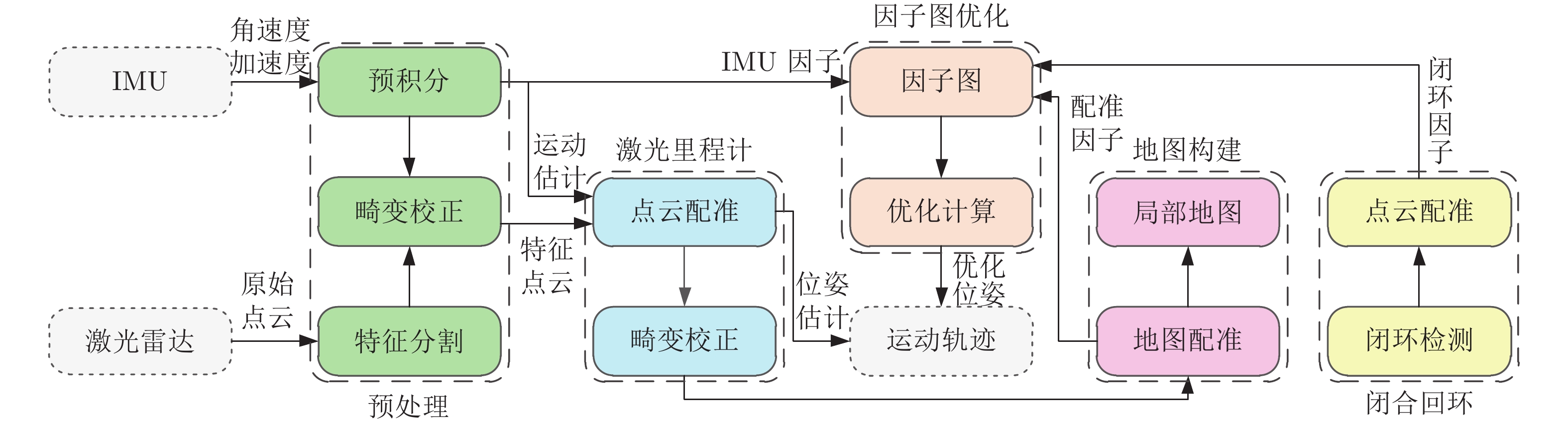
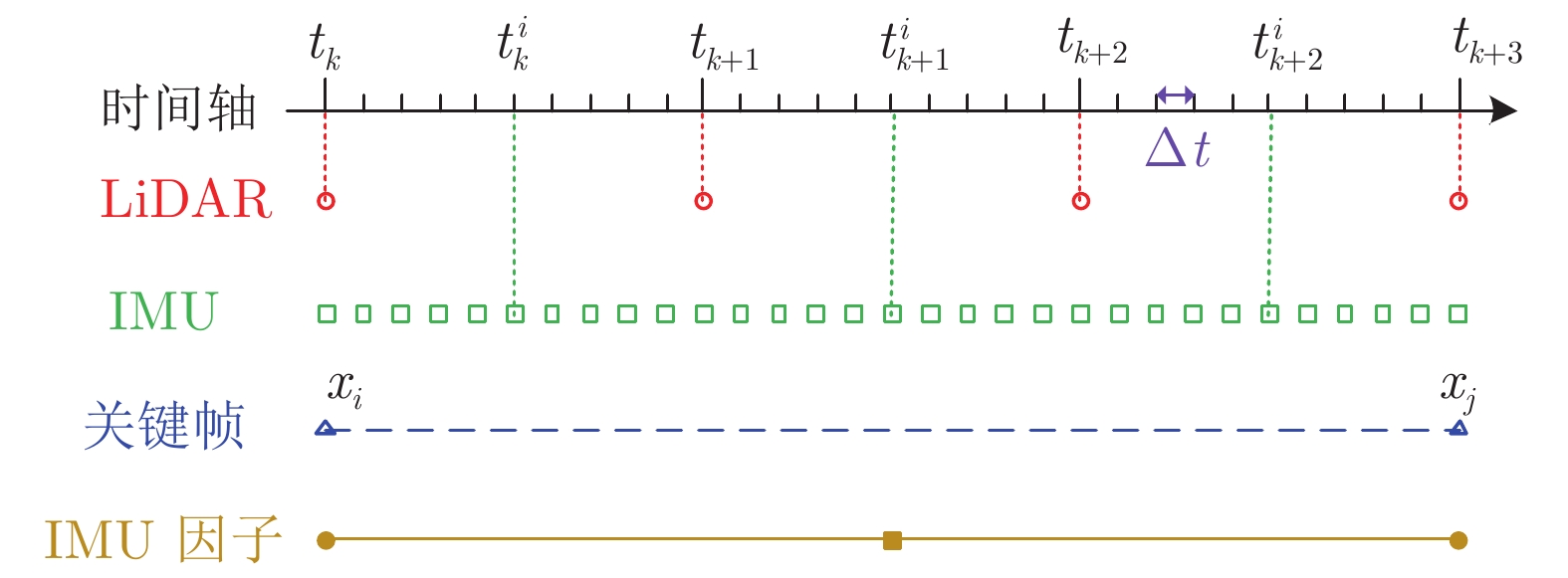
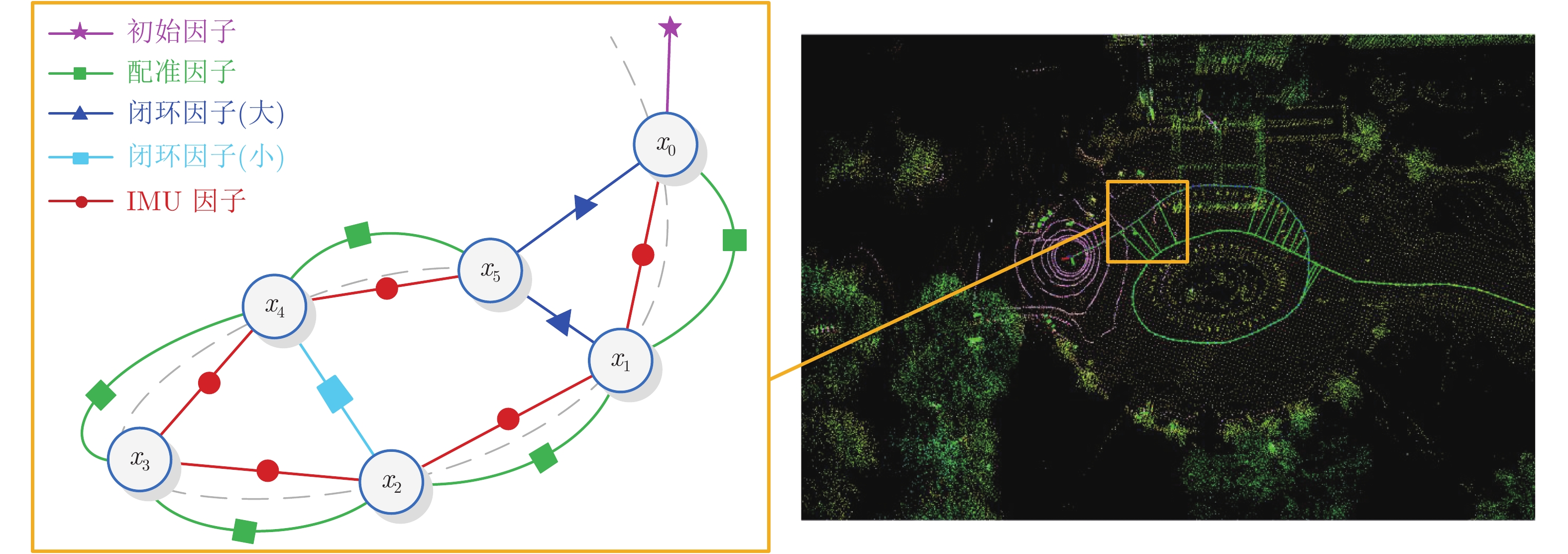
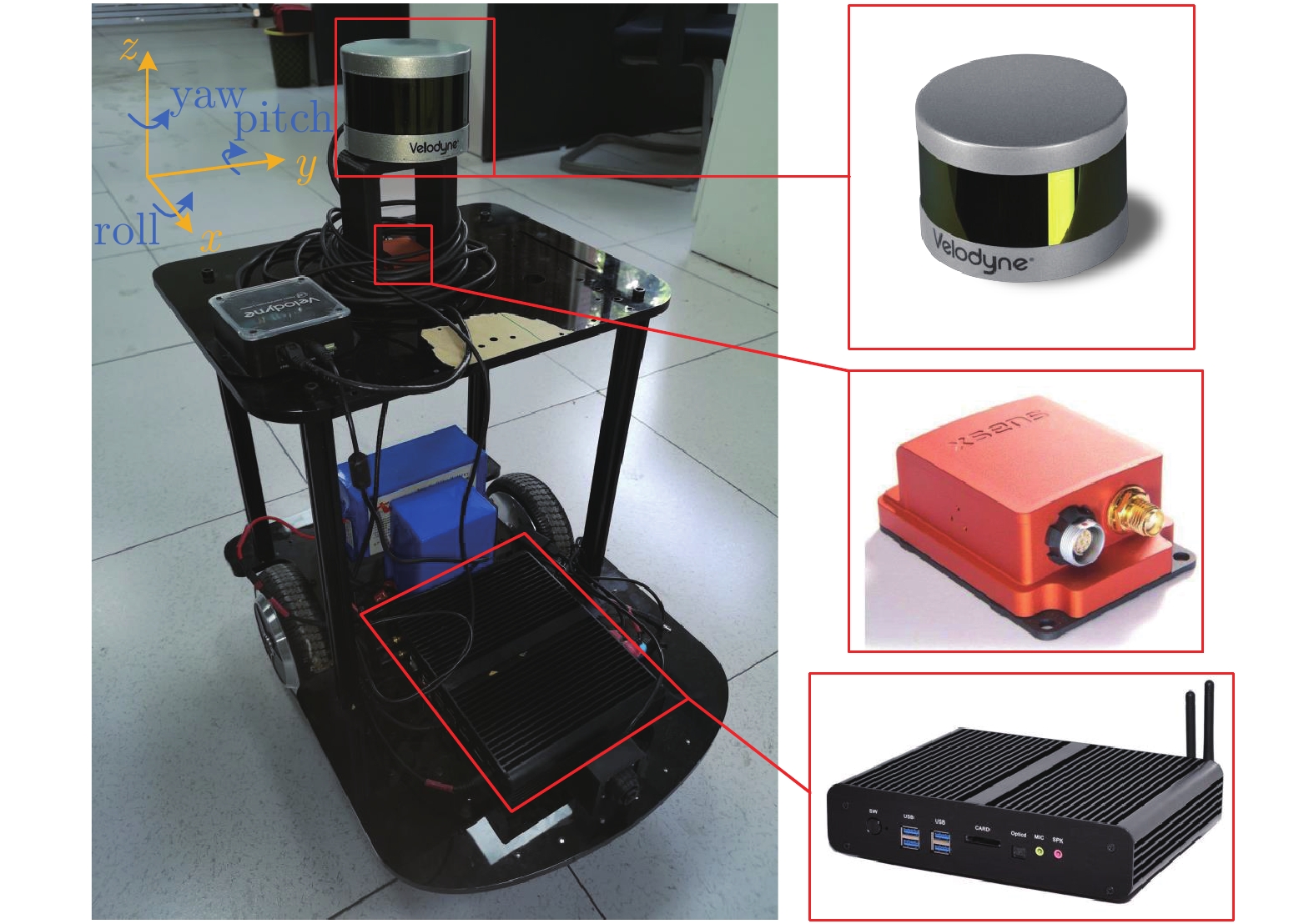
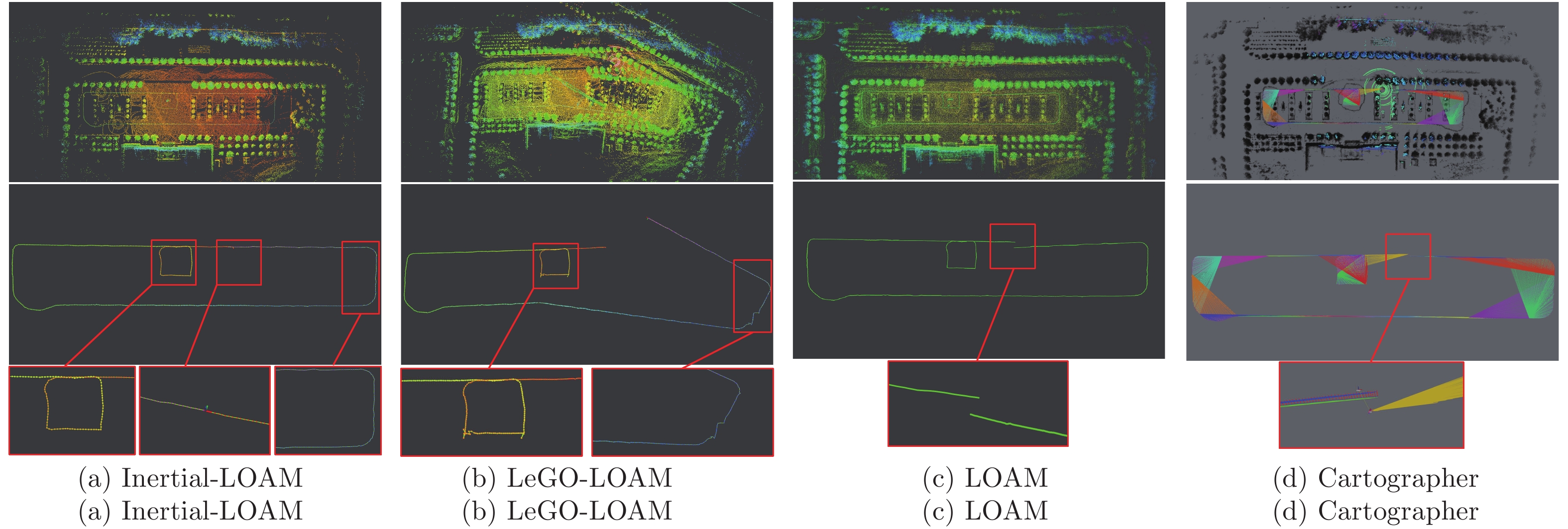
本文以实现移动小型智能化系统的实时自主定位为目标, 针对激光里程计误差累计大, 旋转估计不稳定, 以及观测信息利用不充分等问题, 提出一种LiDAR/IMU紧耦合的实时定位方法 — Inertial-LOAM. 数据预处理部分, 对IMU数据预积分, 降低优化变量维度, 并为点云畸变校正提供参考. 提出一种基于角度图像的快速点云分割方法, 筛选结构性显著的点作为特征点, 降低点云规模, 保证激光里程计的效率; 针对地图构建部分存在的地图匹配点搜索效率低和离散点云地图的不完整性问题, 提出传感器中心的多尺度地图模型, 利用环形容器保持地图点恒定, 并结合多尺度格网保证地图模型中点的均匀分布. 数据融合部分, 提出LiDAR/IMU紧耦合的优化方法, 将IMU和LiDAR构成的预积分因子、配准因子、闭环因子插入全局因子图中, 采用基于贝叶斯树的因子图优化算法对变量节点进行增量式优化估计, 实现数据融合. 最后, 采用实测数据评估Inertial-LOAM的性能并与LeGO-LOAM, LOAM和Cartographer对比. 结果表明, Inertial-LOAM在不明显增加运算负担的前提下大幅降低连续配准误差造成的误差累计, 具有良好的实时性; 在结构性特征明显的室内环境, 定位精度达厘米级, 与对比方法持平; 在开阔的室外环境, 定位精度达分米级, 而对比方法均存在不同程度的漂移.





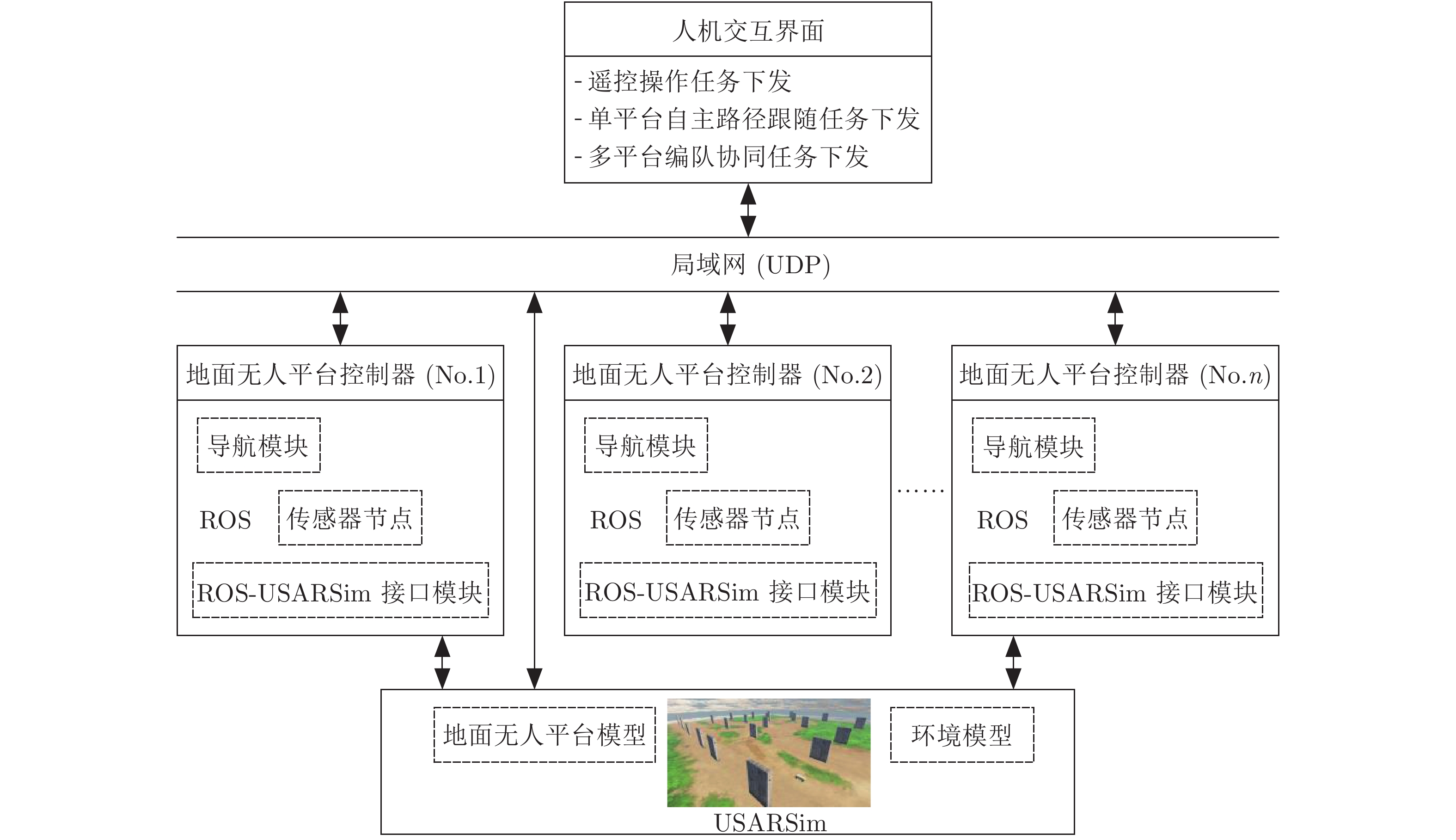
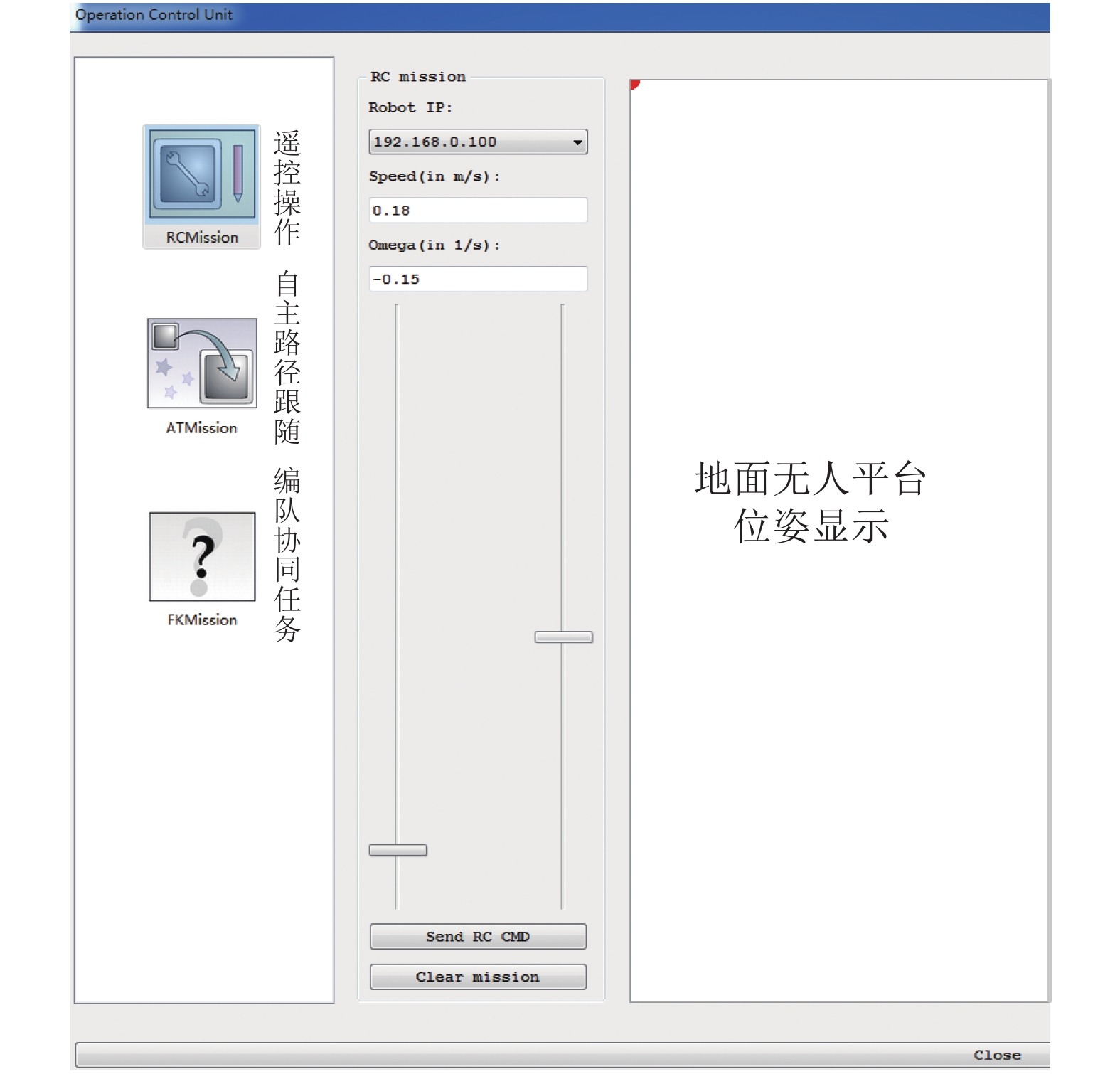
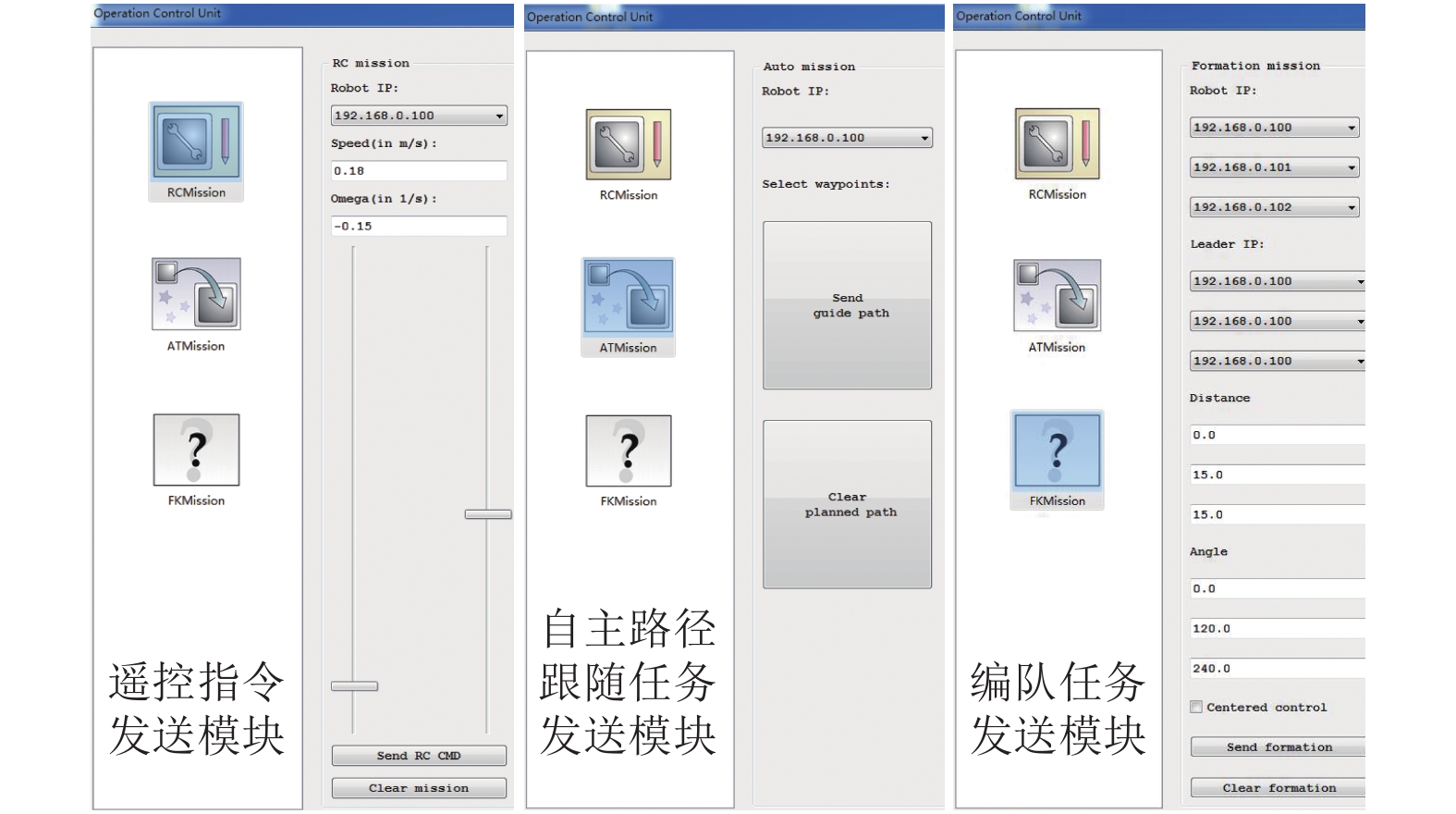
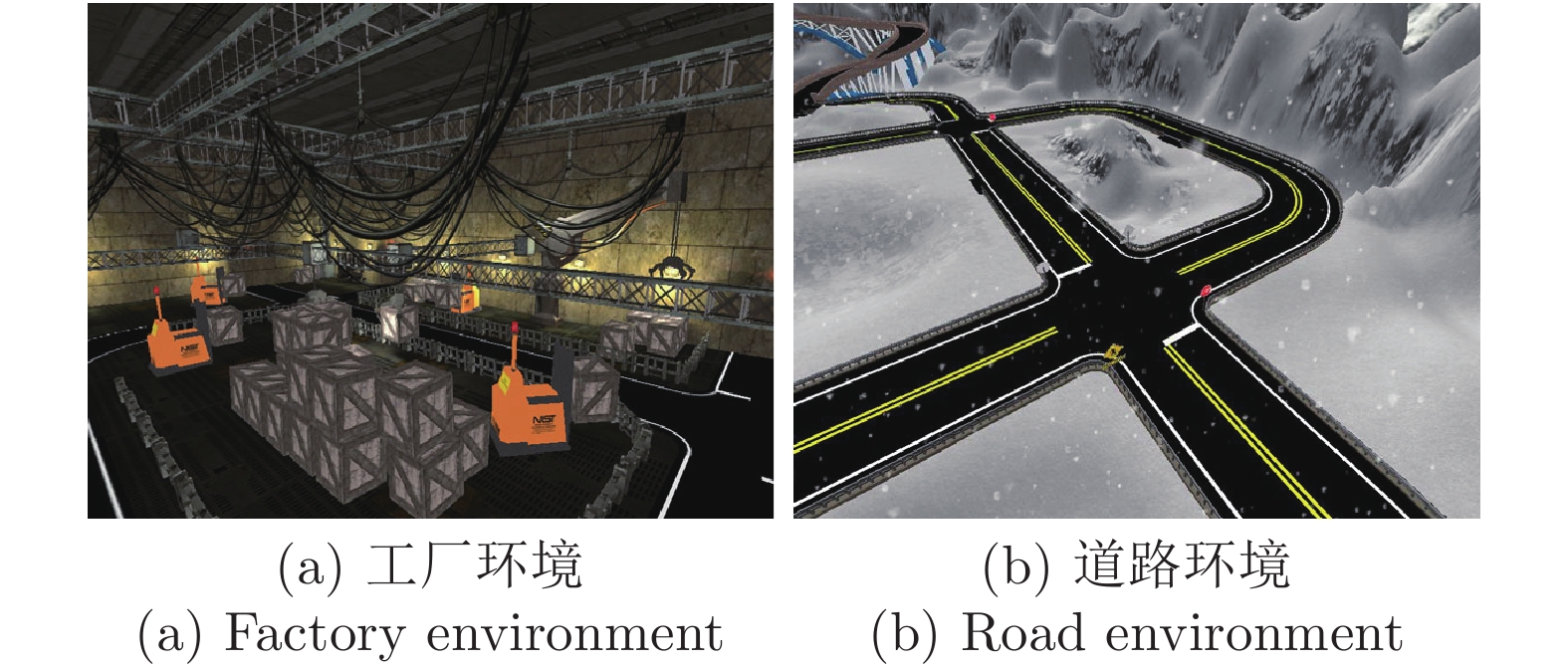
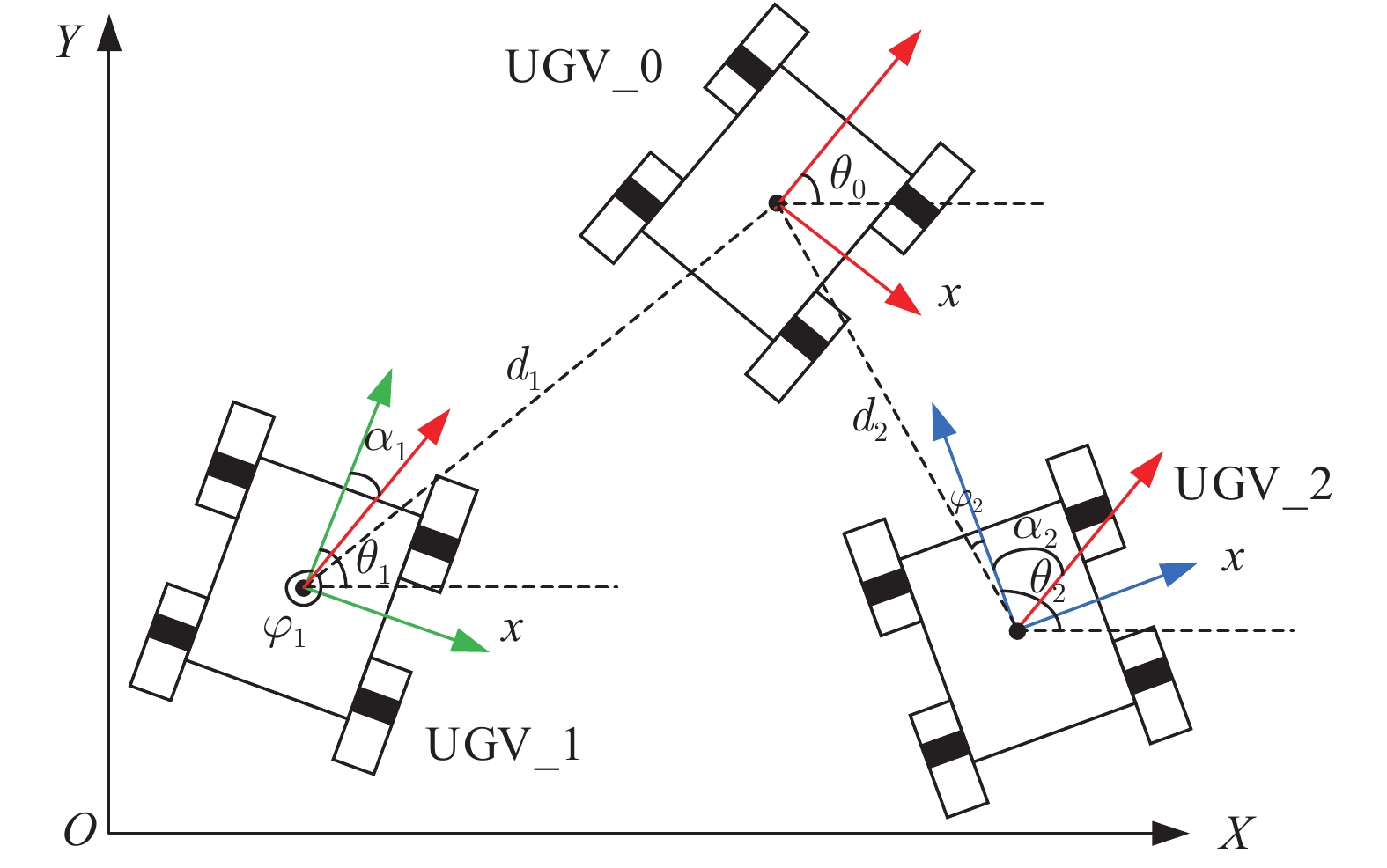
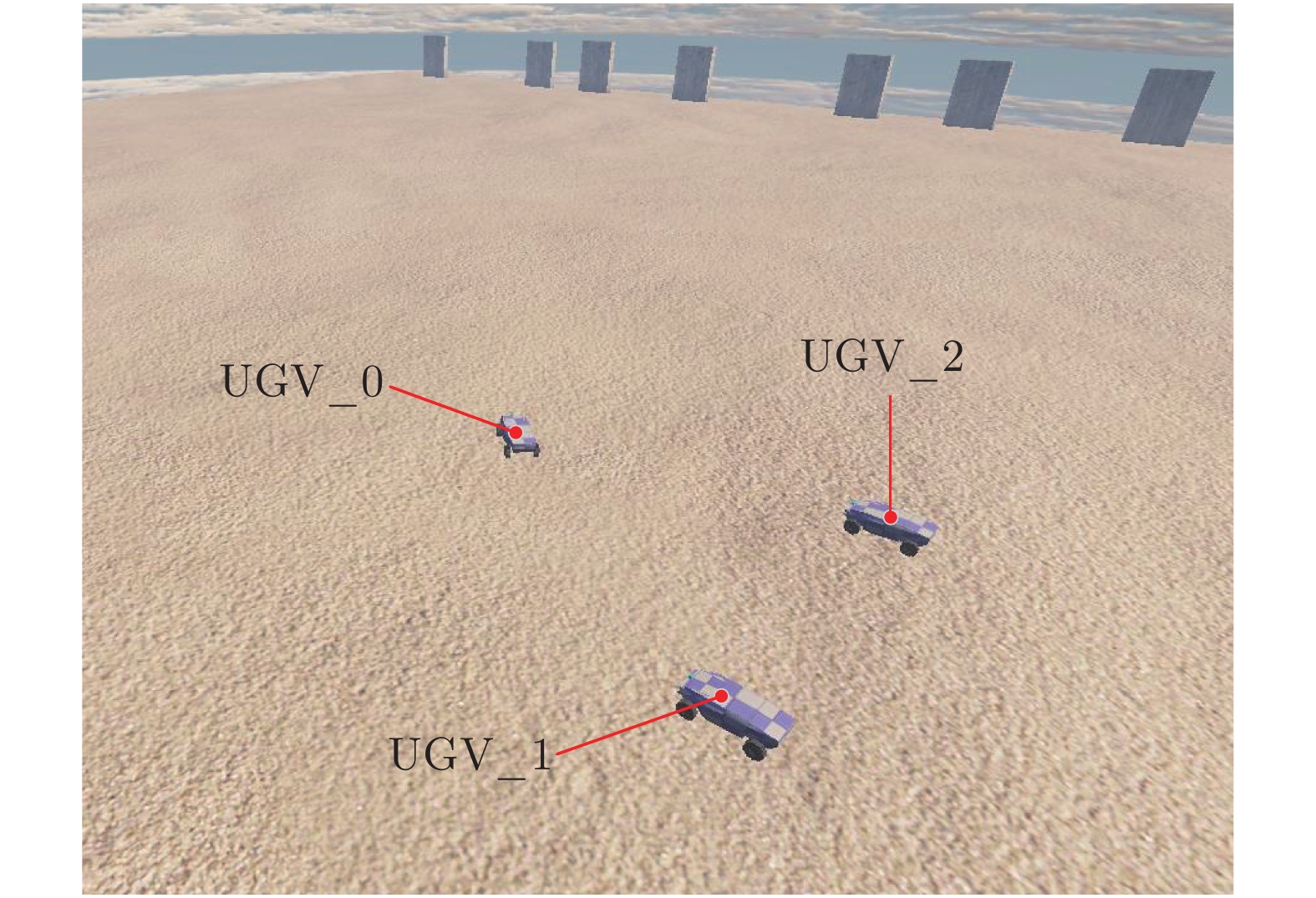
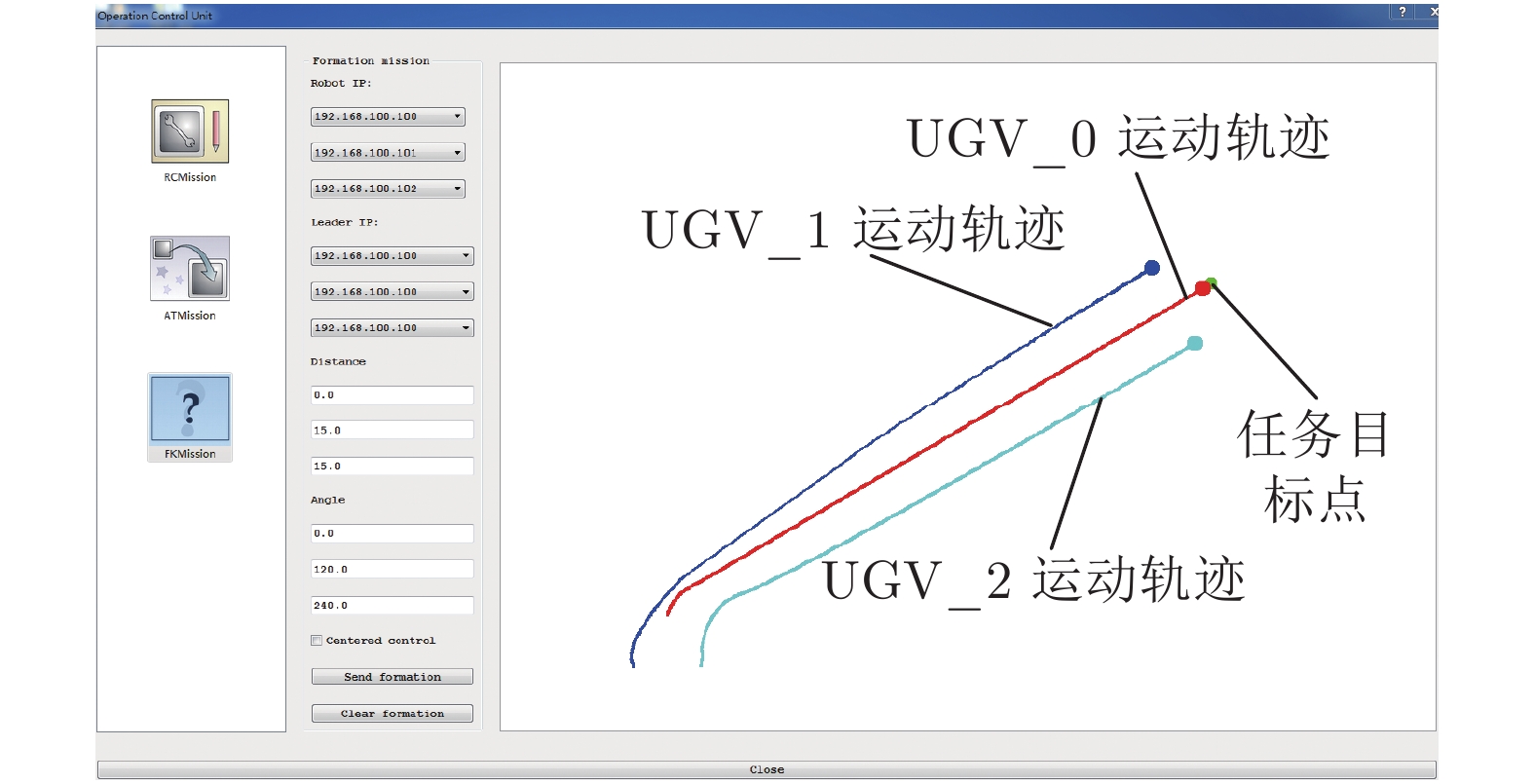
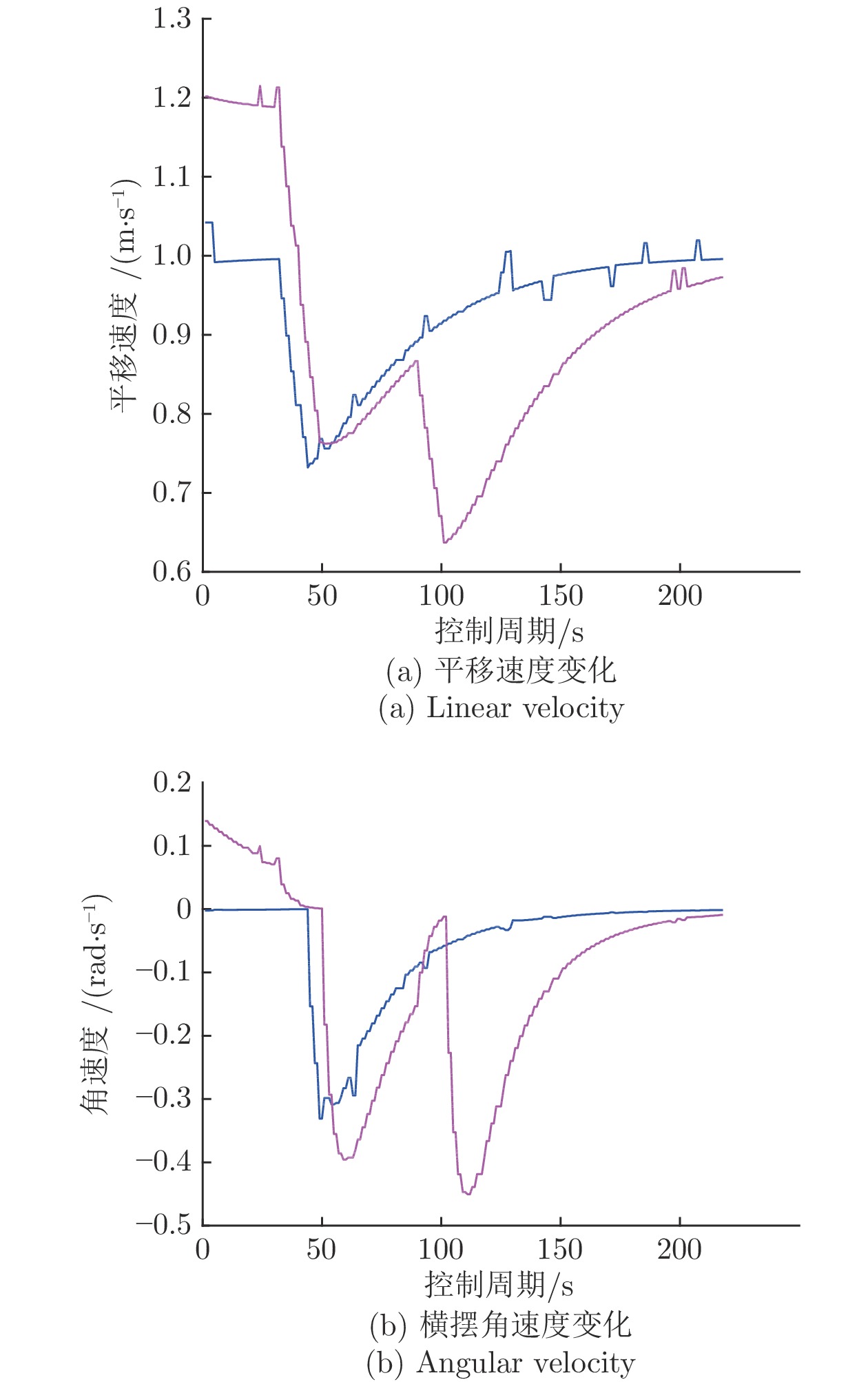
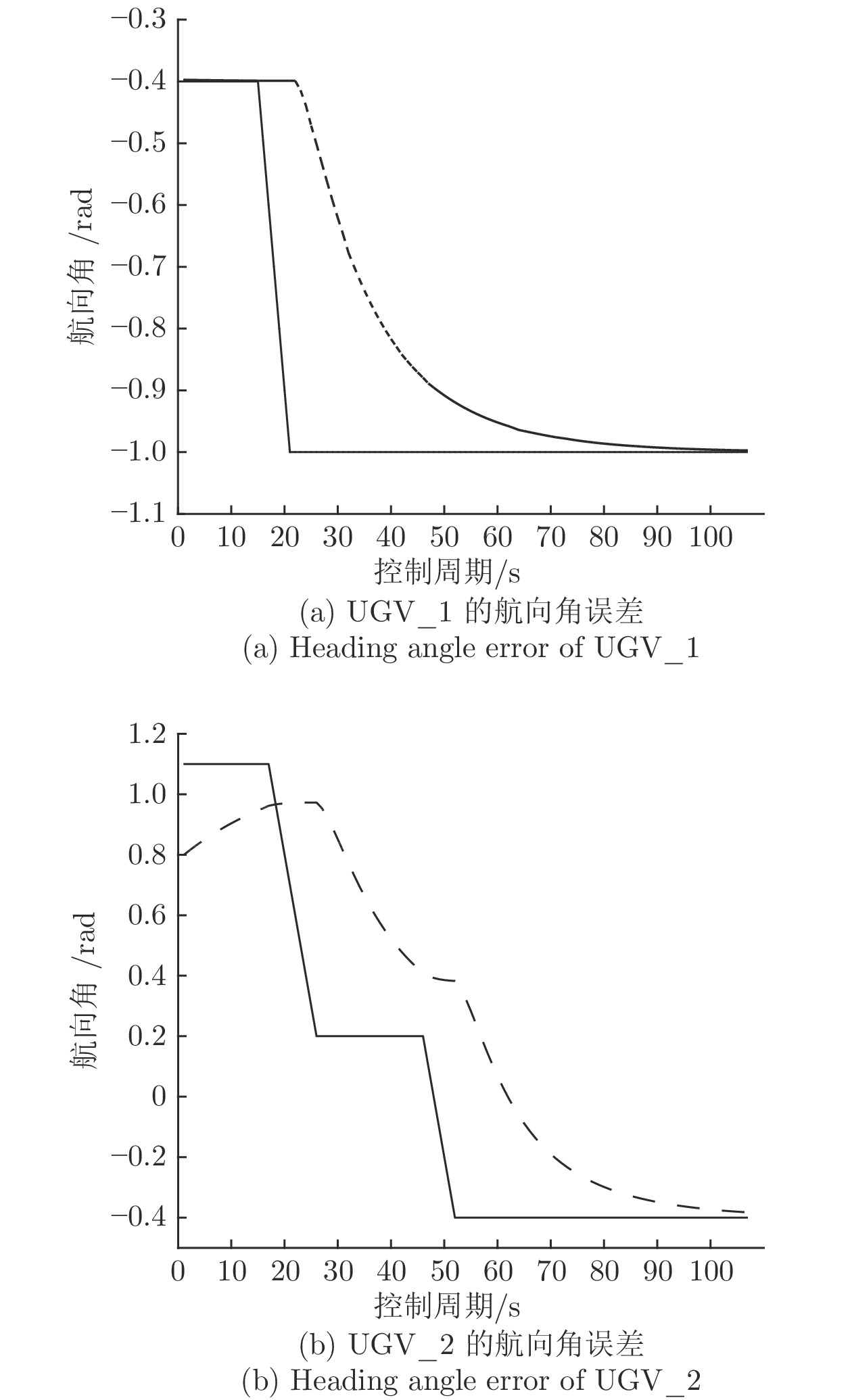
针对越野非结构化环境下的地面无人平台(Unmanned ground vehicle, UGV)编队仿真系统存在功能模块不完善及算法集成测试困难等问题, 为便于有效测试地面无人平台编队协同控制方法性能及其适用的任务场景, 降低编队协同系统的开发成本, 本文提出了一种基于USARSim (Unified System for Automation and Robotics Simulator)和ROS (Robot Operating System)的地面无人平台编队协同仿真系统. 该仿真系统由人机交互界面、基于ROS架构的地面无人平台控制系统和基于USARSim的虚拟仿真场景三个部分组成, 其测试对象为地面无人平台编队协同控制算法. 通过充分利用ROS中集成的开源导航算法和USARSim中丰富的机器人及环境模型, 该系统为研究地面无人平台编队协同控制算法提供了新的思路和快速验证工具. 以领航者−跟随者编队控制方法为例进行该仿真系统的性能测试, 实验结果表明, 该仿真系统能够在外界条件一致的情况下完成对编队协同控制方法的性能测试, 系统稳定可靠.




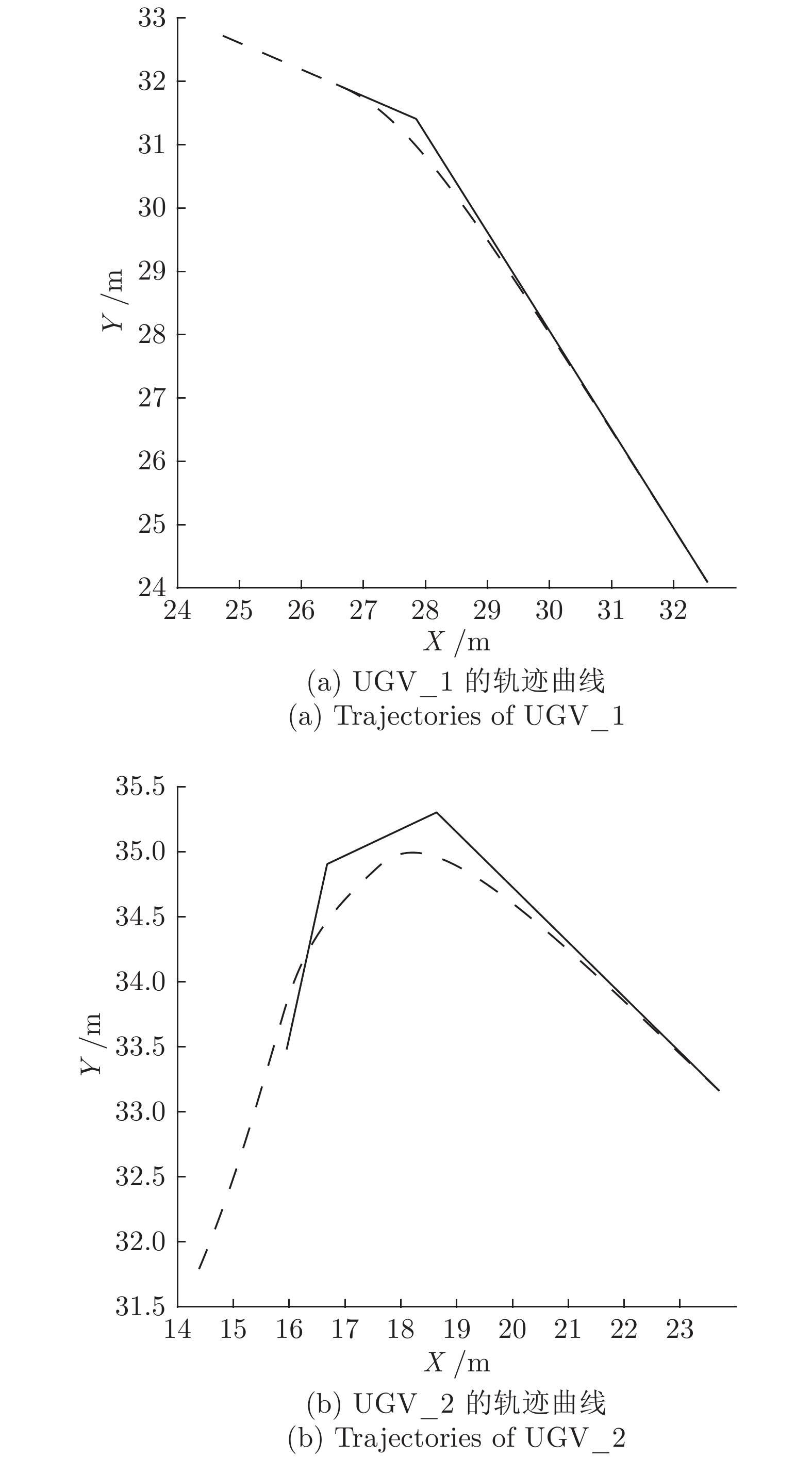
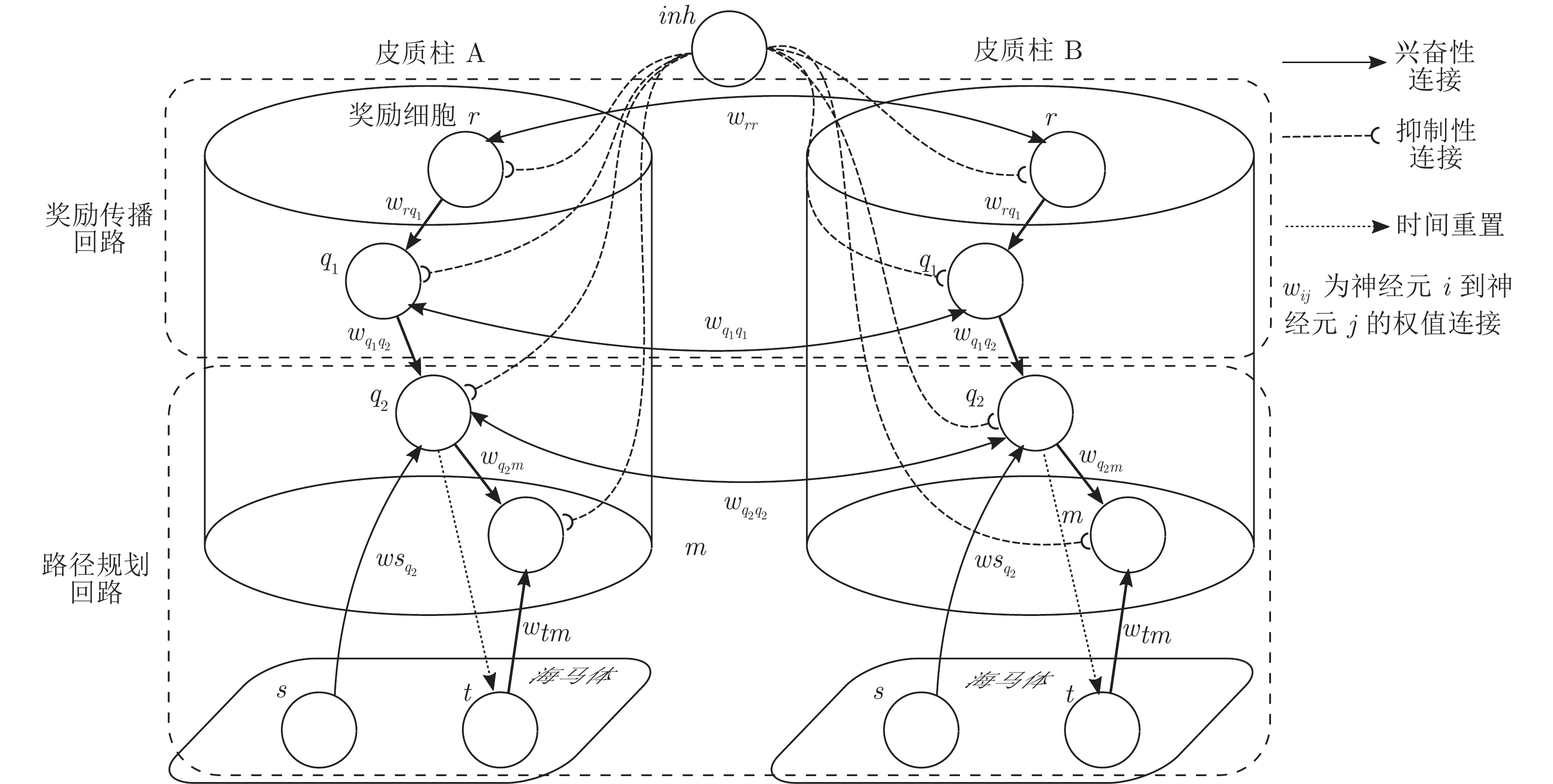
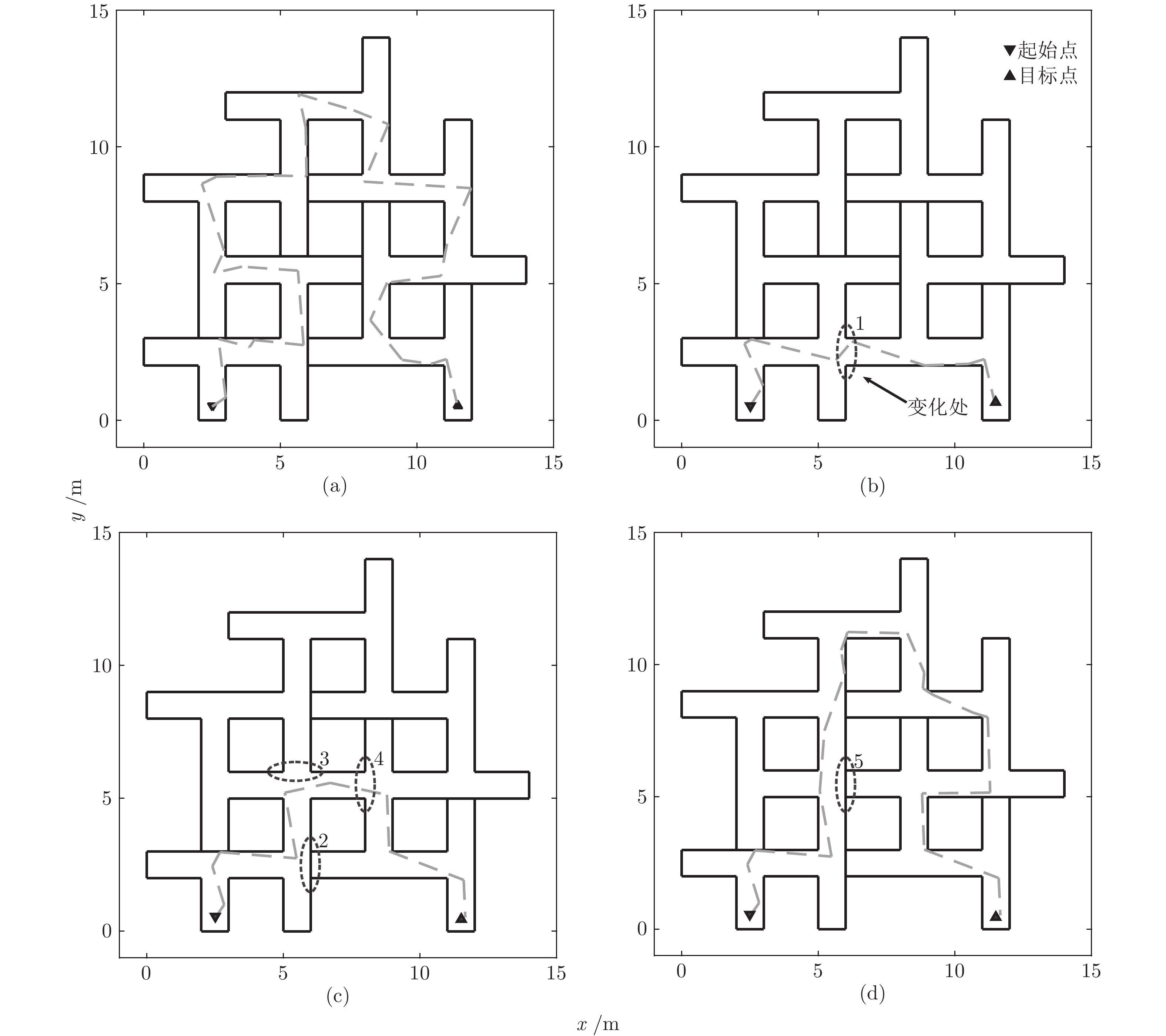
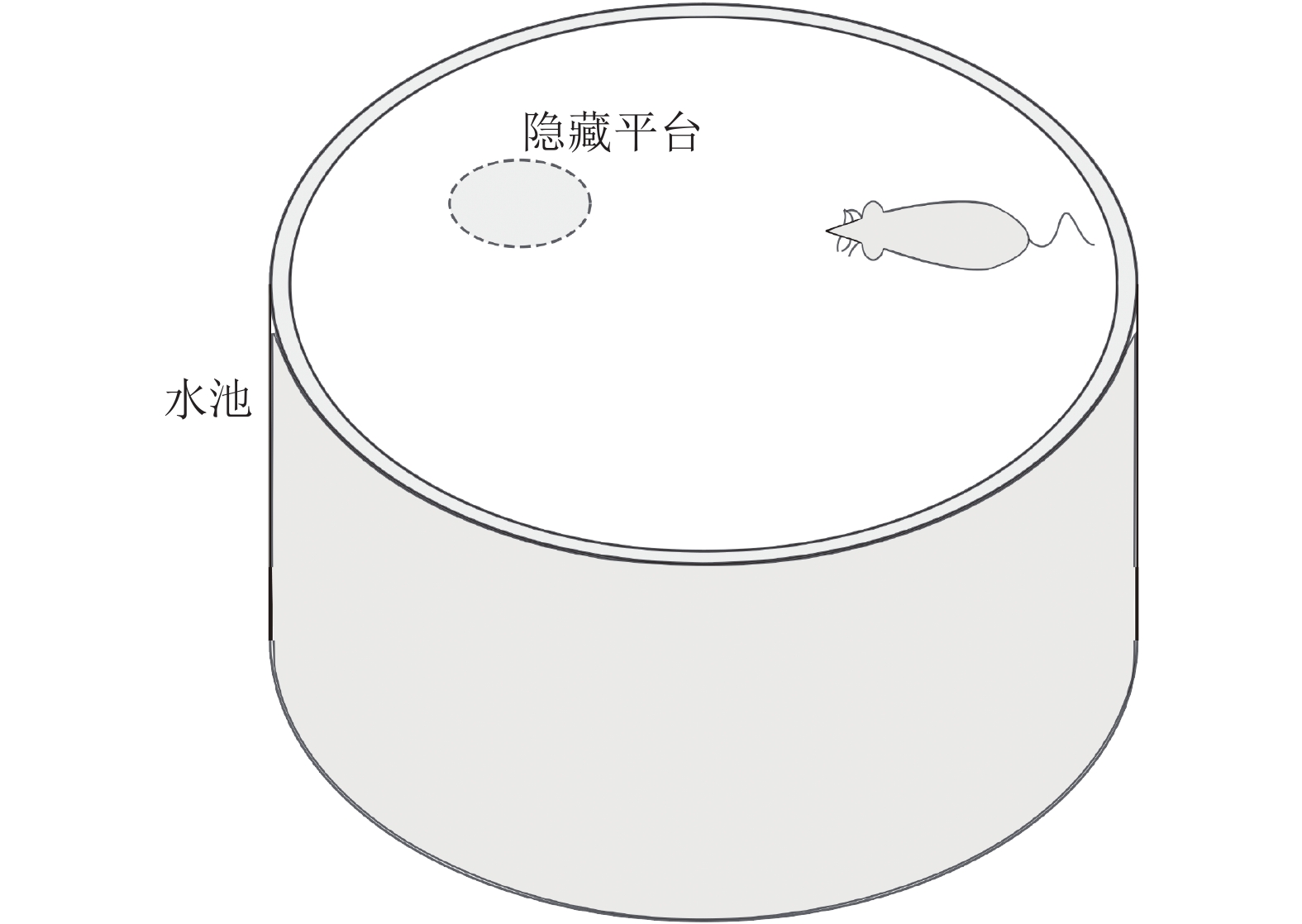
前额皮层是哺乳动物环境认知能力的重要神经生理基础, 许多研究基于皮层网络结构对前额皮层进行计算建模, 使机器人能够完成环境认知与导航任务. 但是, 对皮层网络模型神经元噪声(一种干扰神经元规律放电的内部电信号)鲁棒性方面的研究不多, 传统模型采用的奖励扩散方法存在着导航性能随噪声增大而下降过快的问题, 同时其路径规划方法效果不好, 无法规划出全局最短路径. 针对上述问题, 本文在皮层网络的基础上引入波前传播算法, 结合全局抑制神经元来设计奖励传播回路, 同时将时间细胞和位置偏好细胞引入模型的路径规划回路以改善路径规划效果. 为了验证模型的有效性, 本文复现了心理学上两个经典的环境认知实验. 实验结果表明, 本模型与其他皮层网络模型相比表现出更强的神经元噪声鲁棒性. 同时, 模型保持了较好的路径规划效果, 与传统路径规划算法相比具有较高的效率.




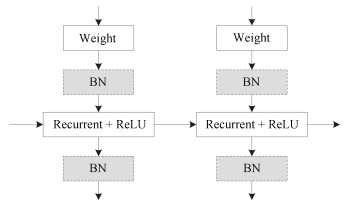
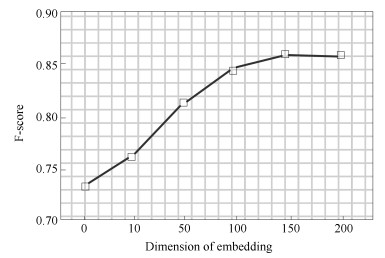
针对深度神经网络模型学习照应语和候选先行语的语义信息忽略了每一个词在句中重要程度, 且无法关注词序列连续性关联和依赖关系等问题, 提出一种结合语境多注意力独立循环神经网络(Contextual multi-attention independently recurrent neural network, CMAIR) 的维吾尔语人称代词指代消解方法. 相比于仅依赖照应语和候选先行语语义信息的深度神经网络, 该方法可以分析上下文语境, 挖掘词序列依赖关系, 提高特征表达能力. 同时, 该方法结合多注意力机制, 关注待消解对多层面语义特征, 弥补了仅依赖内容层面特征的不足, 有效识别人称代词与实体指代关系. 该模型在维吾尔语人称代词指代消解任务中的准确率为90.79 %, 召回率为83.25 %, F值为86.86 %. 实验结果表明, CMAIR模型能显著提升维吾尔语指代消解性能.

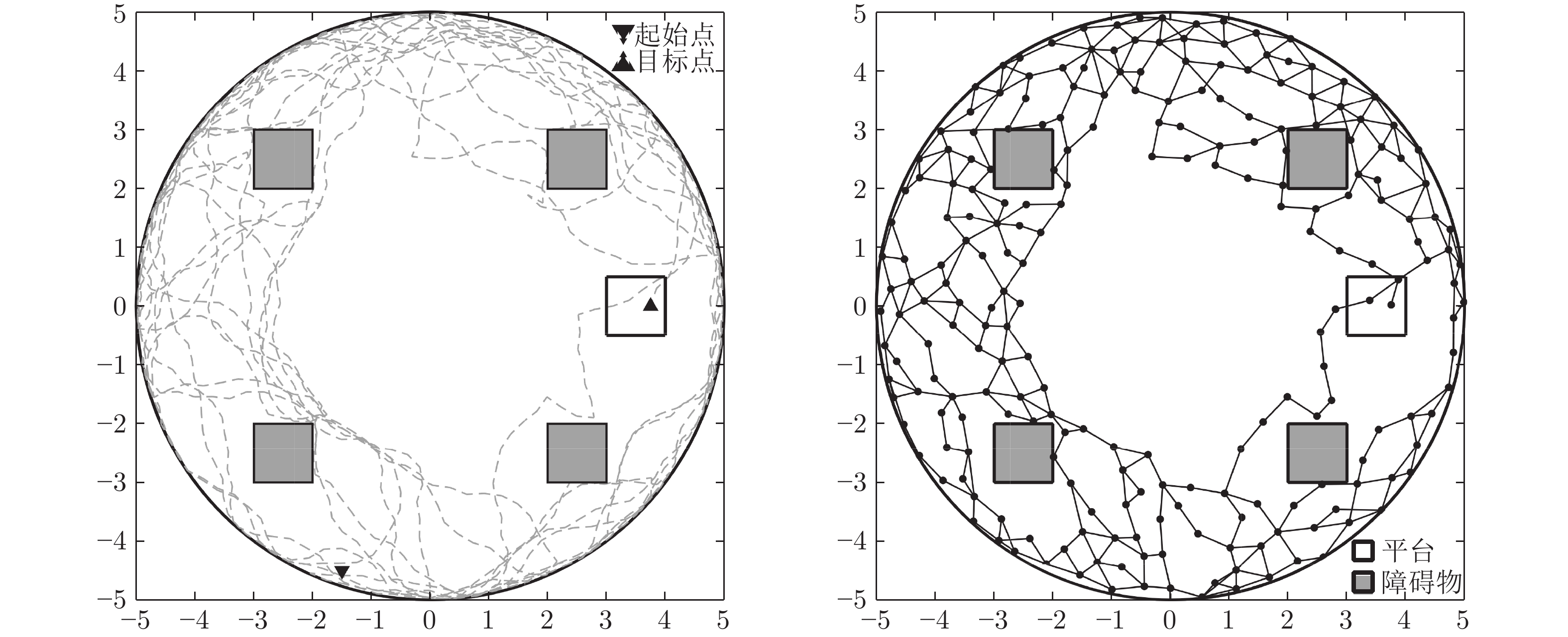
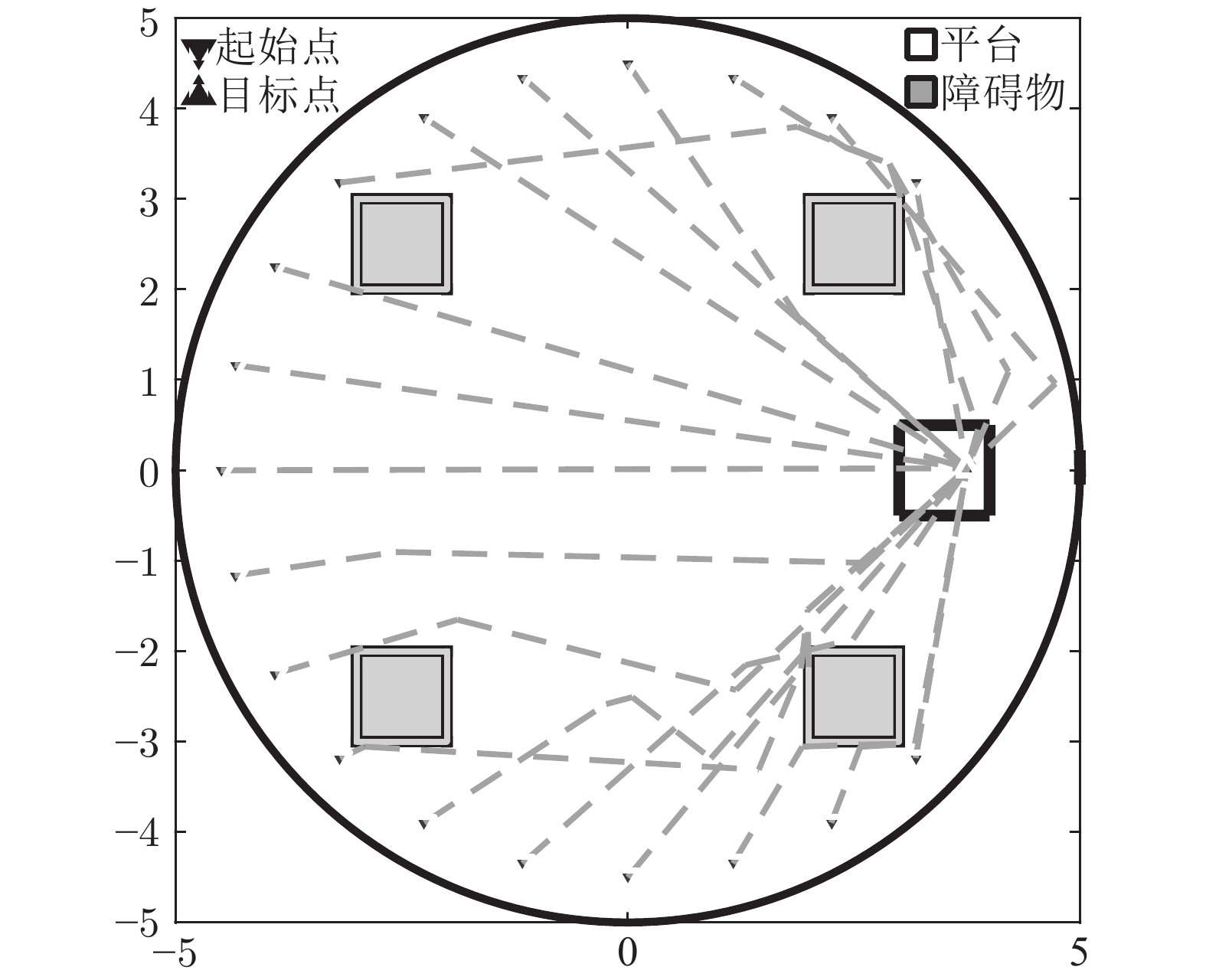
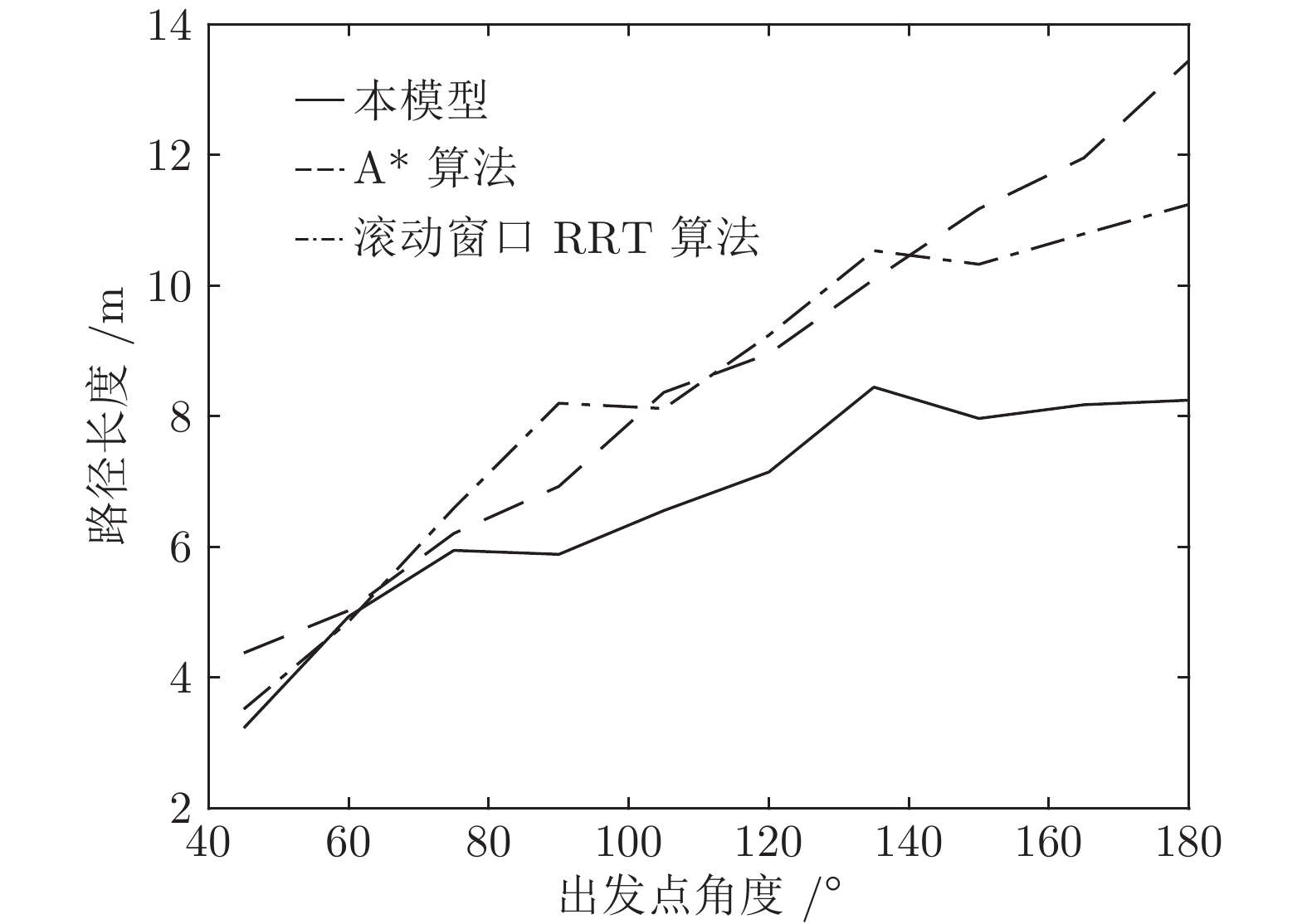
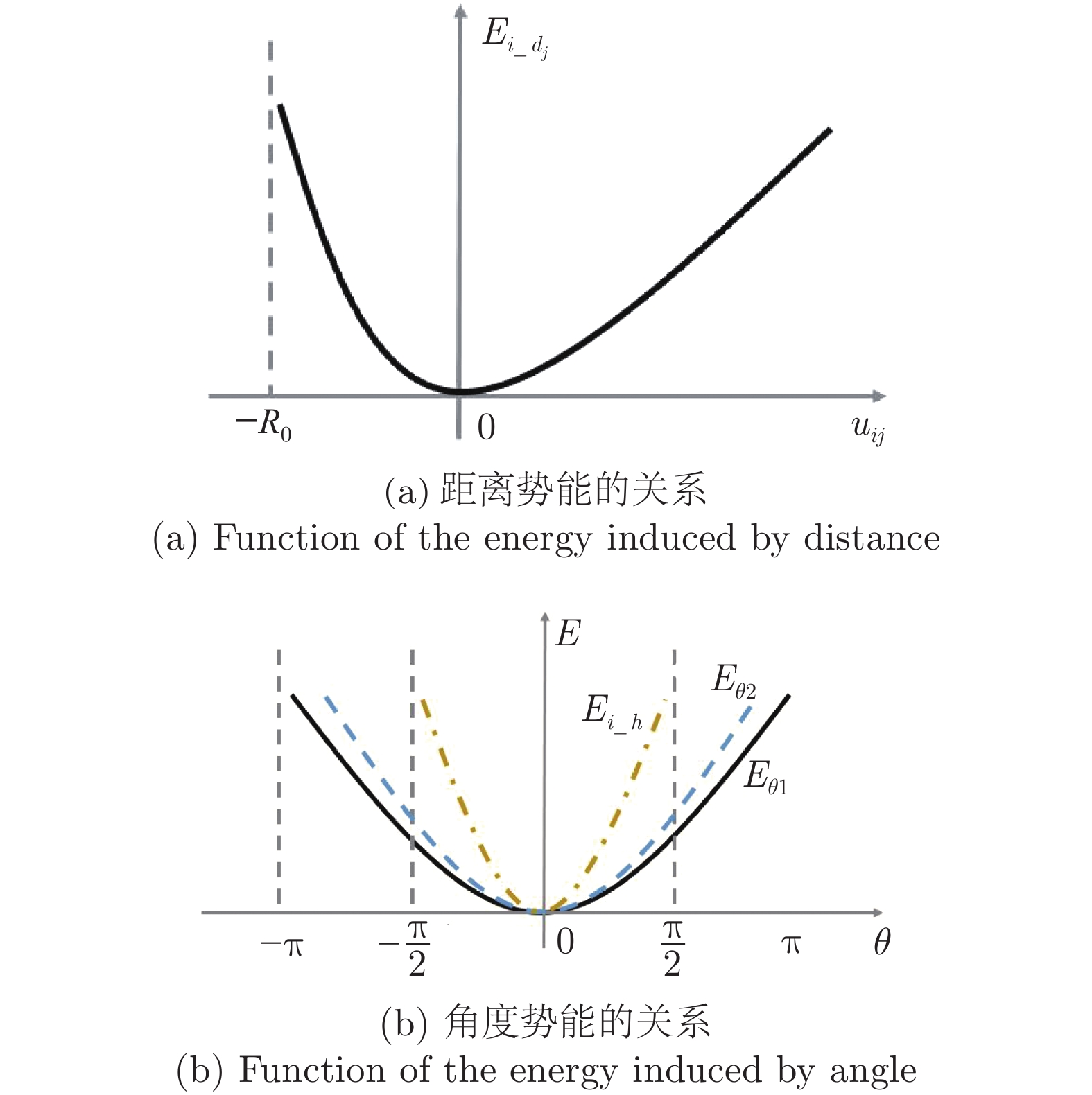
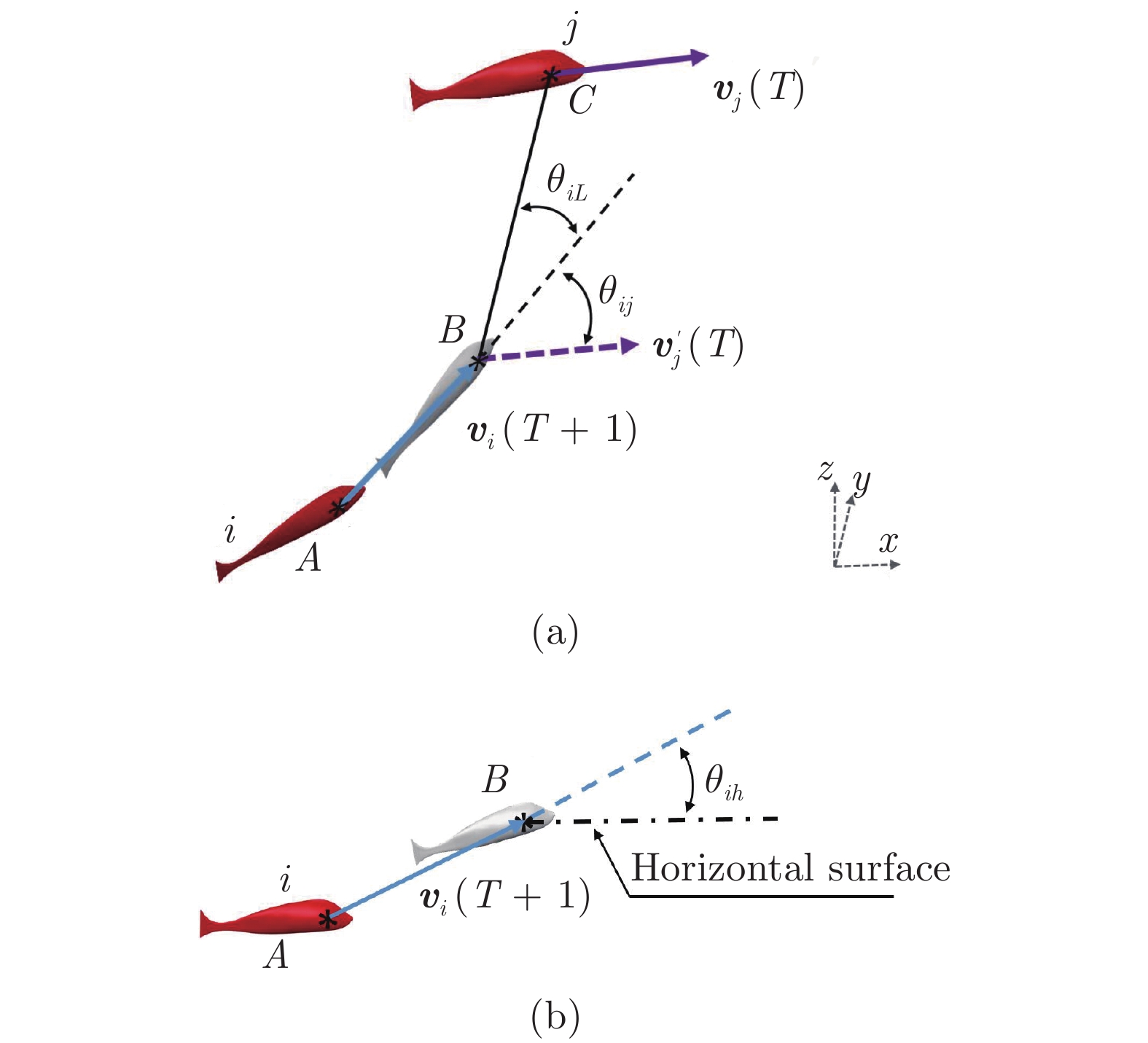
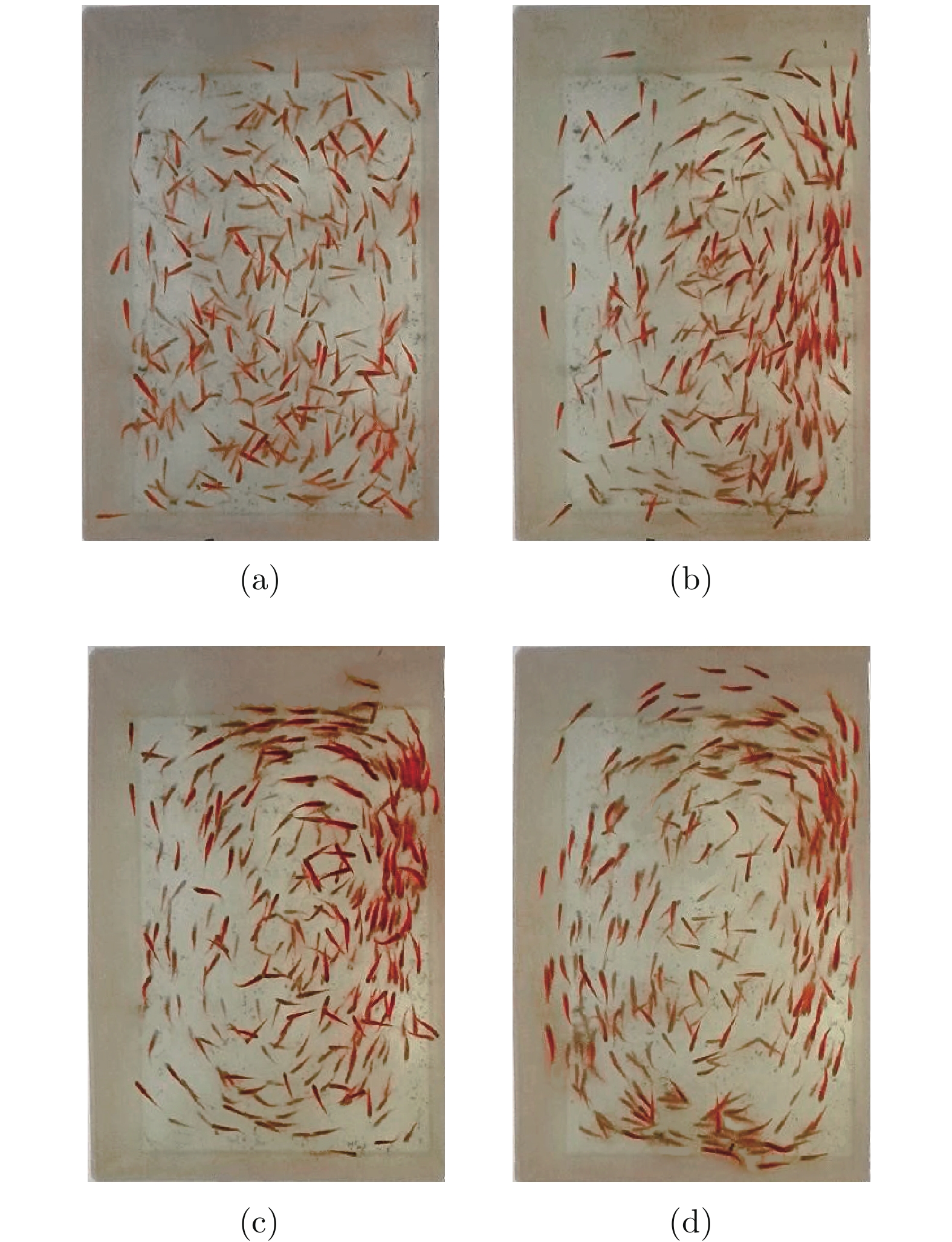
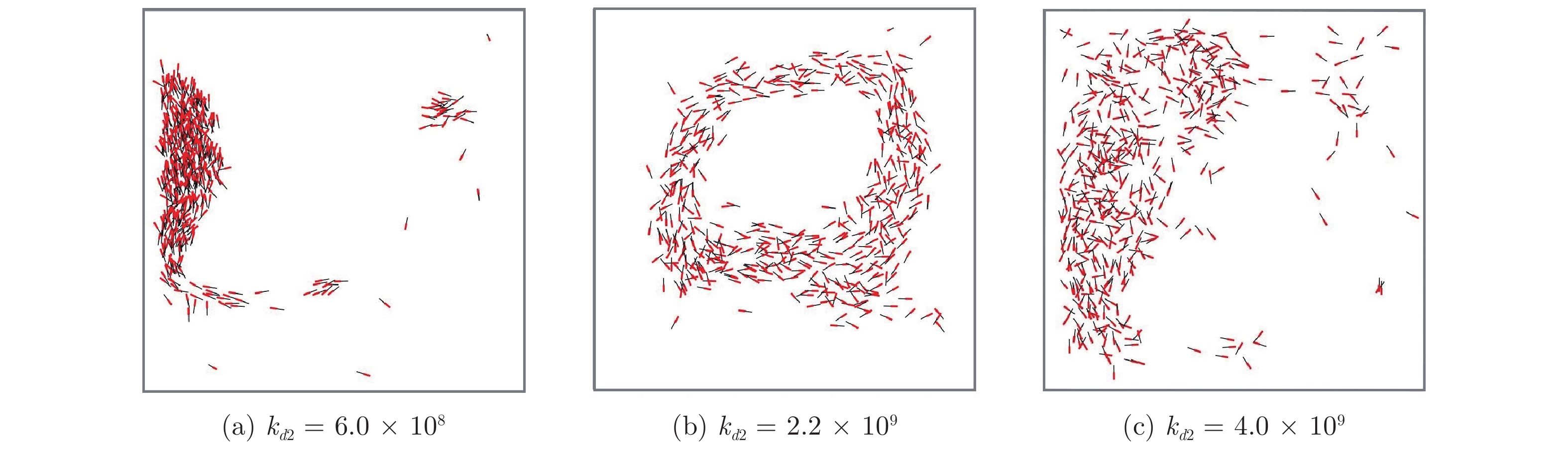
群体运动是自然界中一种常见的生物行为. 在一定的环境条件下, 社会有机体会表现出不同的集体运动形态. 其中, 旋转是鱼群中常见的群体运动. 但是, 虽然研究人员对鱼群的运动进行过一系列的研究, 这种旋转行为的机理尚不清楚. 本研究假定鱼群的运动模式受势能的支配, 相应提出了鱼类个体运动的势函数并将之融合到元胞自动机中以模拟鱼群的运动. 数值模拟表明, 有限空间内鱼群运动时会形成多种形状, 但当此生物系统按照能量最小原则发展时, 其运动形态最终可能演化成为一个漩涡. 数值模拟与针对红斑马鱼的观察之间的比较验证了本模型的合理性. 能量最小原理是自然界的基本定律之一, 而势能函数的建立定义了鱼类个体与环境之间的关系. 因此, 本研究为深入理解群体运动规律提供了新视角, 表明从流体力学上进一步探究鱼群运动的物理机理是一个具有潜力的研究方向.


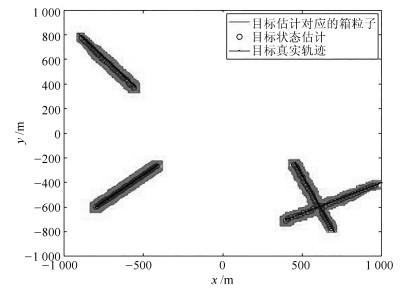
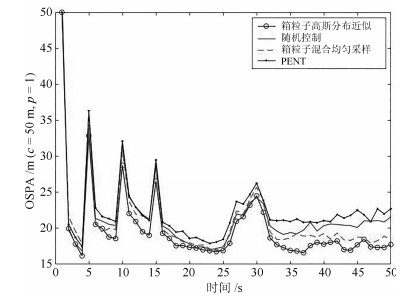
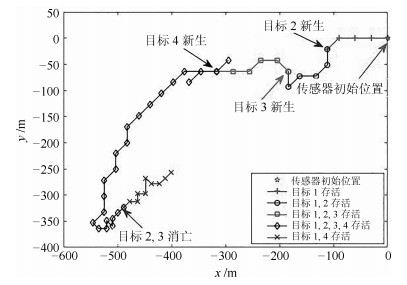
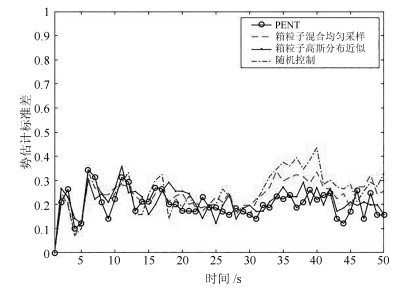
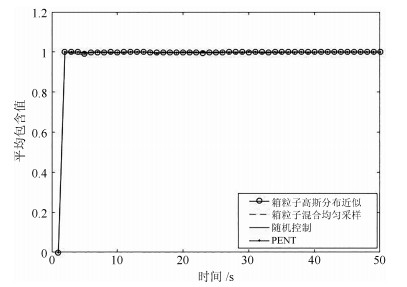
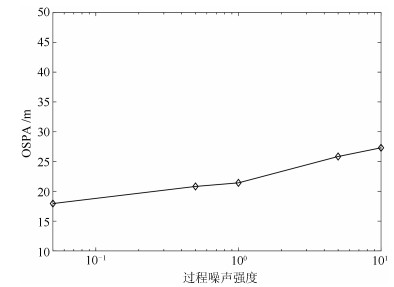
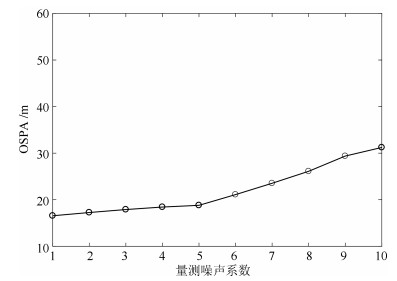
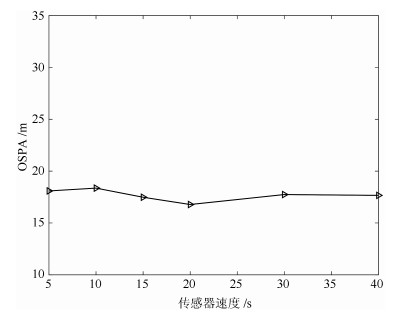
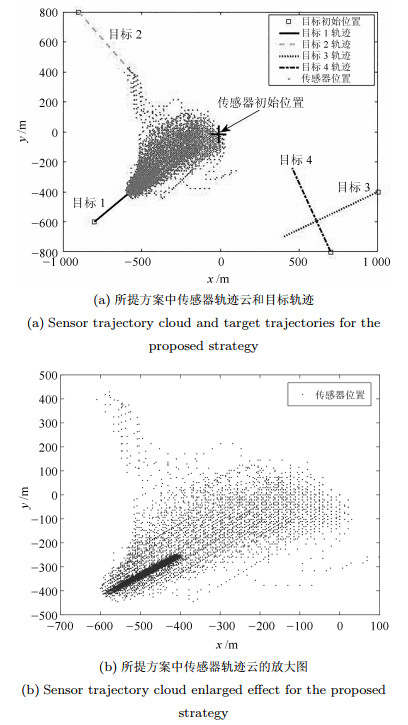
多目标跟踪中的传感器控制本质上是一个最优非线性控制问题, 其在理论分析和计算上极具挑战性. 本文基于区间不确定性推理, 利用箱粒子多伯努利滤波器提出了一种基于信息测度的传感器控制策略. 首先, 本文利用箱粒子实现多伯努利滤波器, 并通过一组带有权值的箱粒子来表征多目标后验概率密度函数. 其次, 利用箱粒子的高斯分布假设, 将多伯努利密度近似为高斯混合. 随后, 选择柯西施瓦兹(Cauchy-Schwarz, CS) 散度作为评价函数, 并详细推导了两个高斯混合之间的CS散度的求解公式, 以此为基础提出相应的传感器控制策略. 此外, 作为一种对比方案, 利用蒙特卡罗方法, 本文还给出了通过对箱粒子进行混合均匀采样, 进而通过点粒子求解CS散度的递推公式, 并提出了相应的控制策略. 最后, 仿真实验验证了所提算法的有效性.


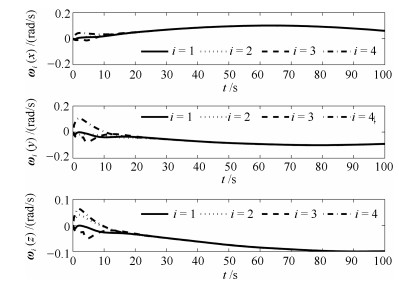
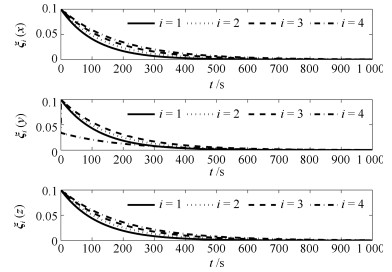
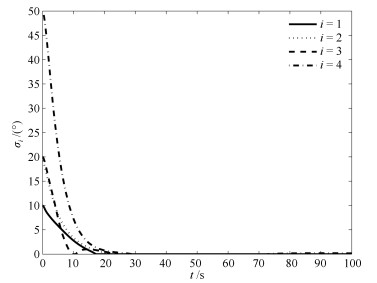
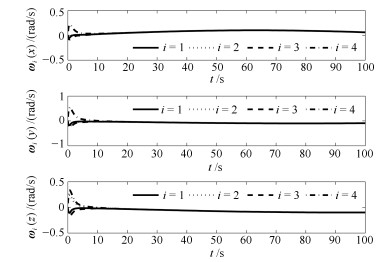
提出了基于有向图的航天器姿态协同控制算法, 并且系统的角速度和控制输入满足有界性的约束. 当外部扰动存在时, 设计了自适应算法估计扰动的上界, 采用滤波器补偿的方法处理控制输入饱和问题, 并且设计了新的自适应姿态协同控制算法. 对于所设计的控制算法, 给出了稳定性分析, 证明了系统具有几乎全局渐近稳定性. 进一步把控制算法推广到时变通信时滞情况, 当控制器参数满足一定条件时, 仍然能够保证编队系统的几乎全局渐近稳定性. 通过数值仿真, 验证了所提出的控制方案的有效性.



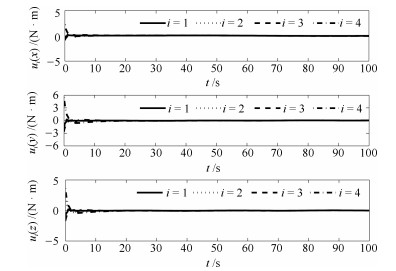
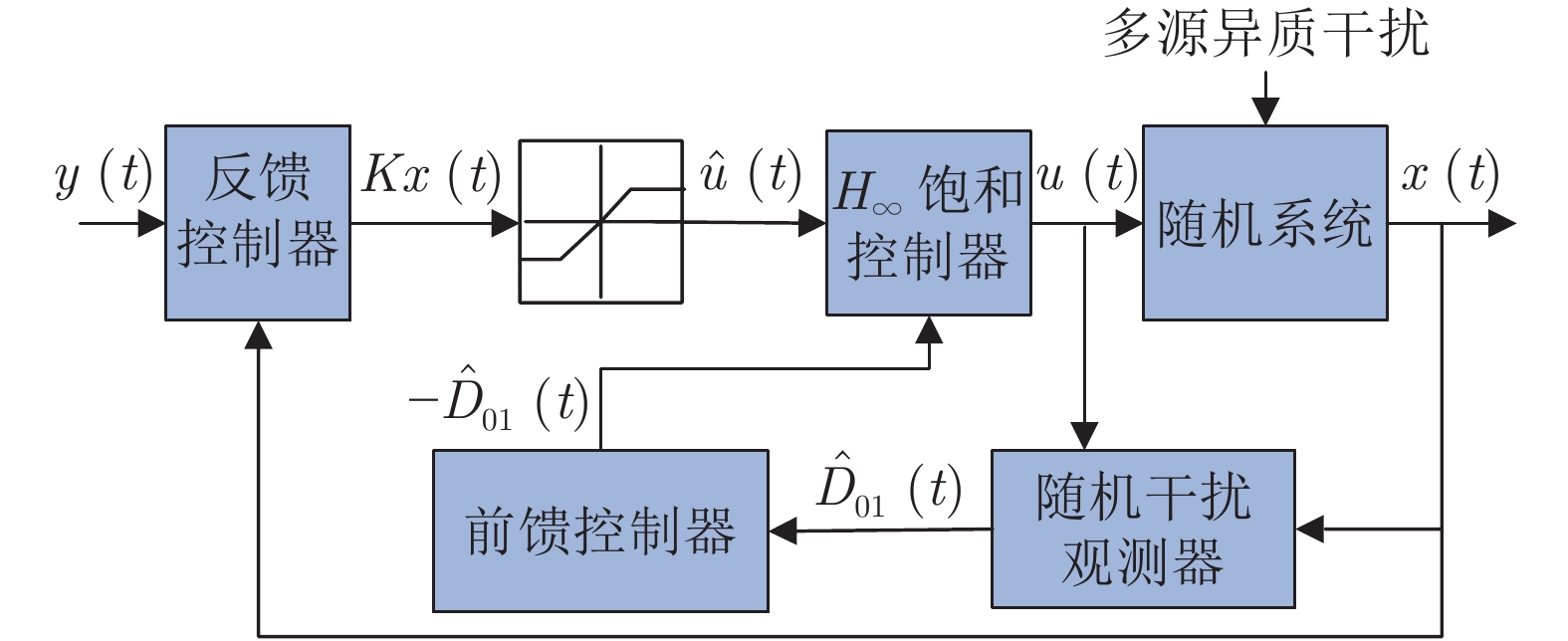
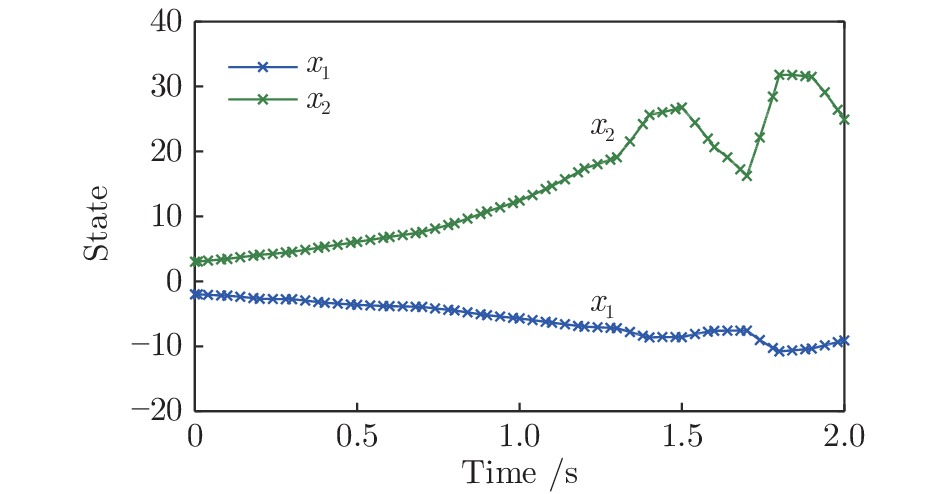
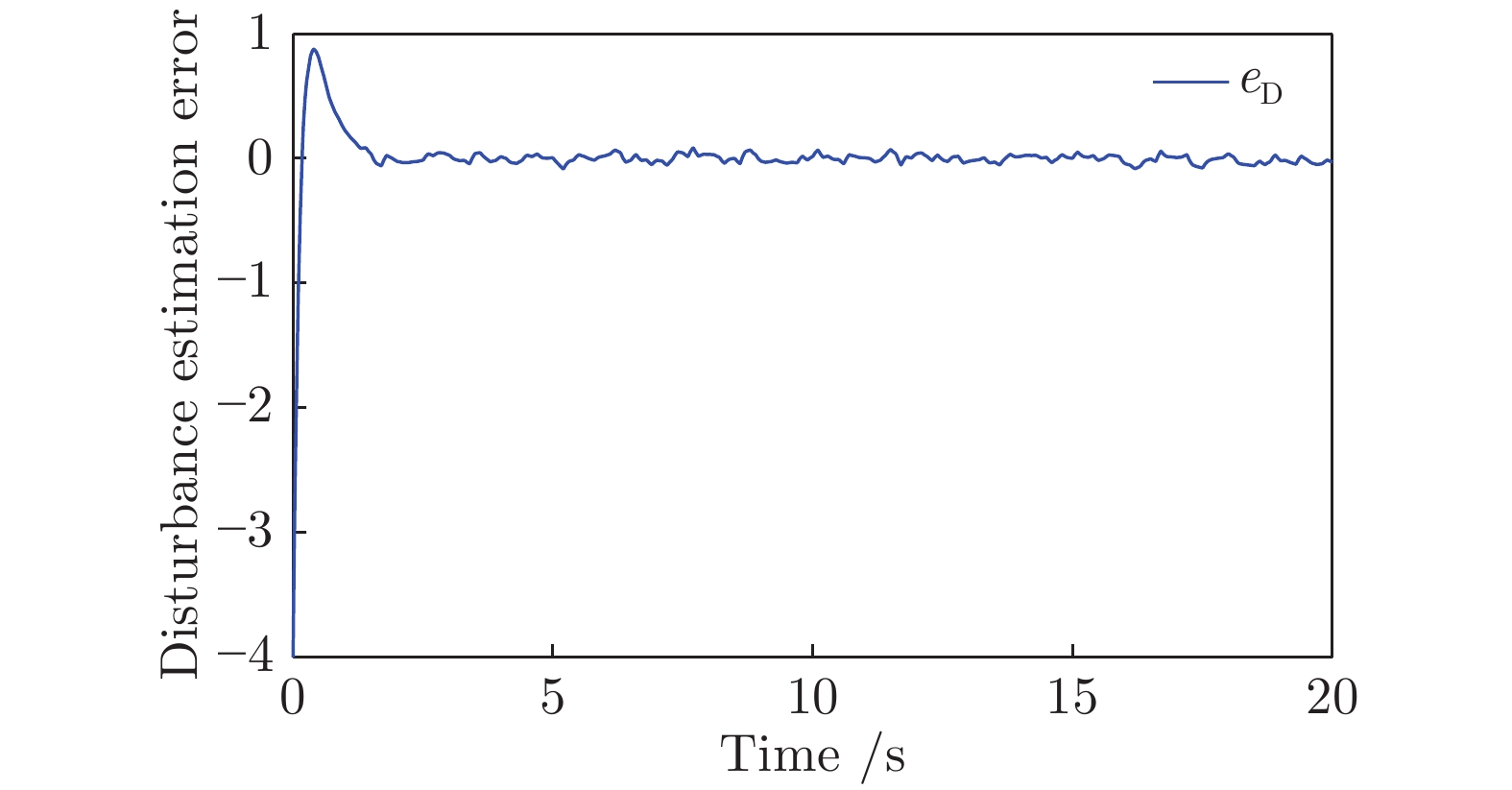
针对一类带有多源异质干扰和输入饱和的随机系统, 研究了其精细抗干扰控制问题. 系统中的多源异质干扰同时包含白噪声,
范数有界干扰以及外源系统生成的带有状态与干扰耦合的部分信息已知干扰. 针对部分信息已知的干扰, 构建随机干扰观测器对其进行估计. 基于干扰估计, 结合
控制方法, 提出基于干扰观测器的精细抗干扰控制策略, 从而实现高精度抗干扰控制. 最后, 仿真结果验证了所提策略的正确性与有效性.

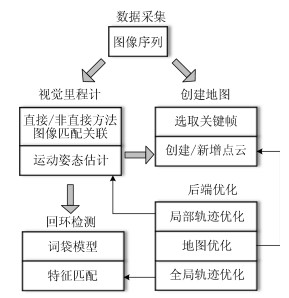
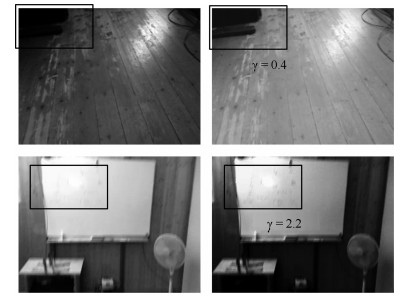
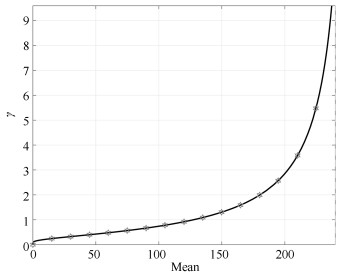
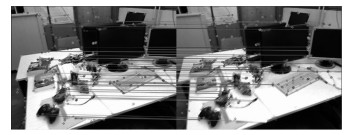
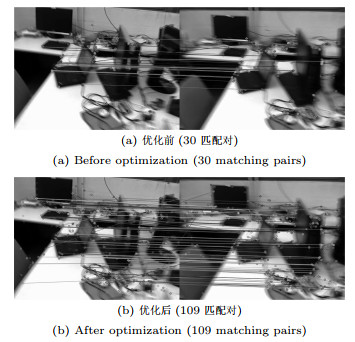
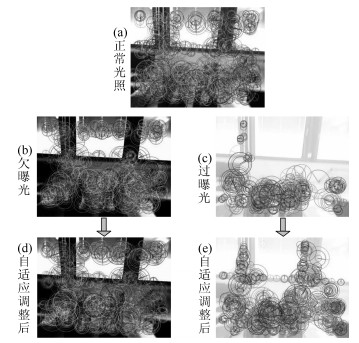
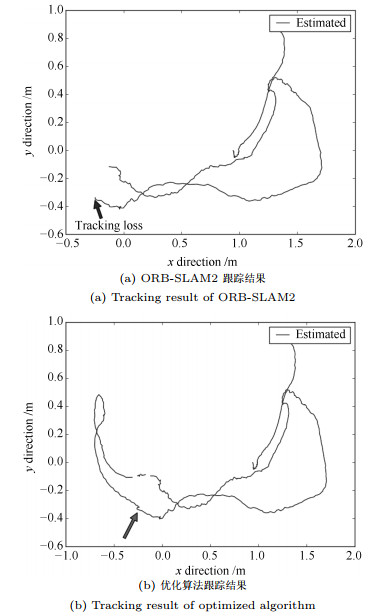
针对移动机器人视觉同步定位与地图创建中由于相机大角度转动造成的帧间匹配失败以及跟踪丢失等问题, 提出了一种基于局部图像熵的细节增强视觉里程计优化算法. 建立图像金字塔, 划分图像块进行均匀化特征提取, 根据图像块的信息熵判断其信息量大小, 将对比度低以及梯度变化小的图像块进行删除, 减小图像特征点计算量. 对保留的图像块进行亮度自适应调整, 增强局部图像细节, 尽可能多地提取能够表征图像信息的局部特征点作为相邻帧匹配以及关键帧匹配的关联依据. 结合姿态图优化方法对位姿累计误差进行局部和全局优化, 进一步提高移动机器人系统性能. 采用TUM数据集测试验证, 由于提取了更能反映物体纹理以及形状的特征属性, 本文算法的运动跟踪成功率最高可提升至60 % 以上, 并且测量的轨迹误差、平移误差以及转动误差都有所降低. 与目前ORB-SLAM2系统相比, 本文提出的算法不但提高了移动机器人视觉定位精度, 而且满足实时SLAM的应用需要.