

-
摘要: 本文研究了分布式控制策略下直流微电网的负荷分配和电压平衡问题. 给出一种新的基于分布式策略的下垂控制器设计方法, 能够在统一的框架下实现直流微电网负载共享和电压平衡. 首先,将直流微电网的负载共享和电压平衡问题转化为多目标优化问题, 其性能指标与微源的容量密切相关. 然后, 通过求解多目标优化问题获得实现负载共享和电压平衡的集中式控制策略, 并给出下垂控制器的设计方法. 为了降低系统的通信负担, 给出一种新的只需与邻居节点交换信息的分布式控制策略, 通过理论分析可知该分布式控制策略能够收敛到多目标优化问题的最优解. 最后, 通过对新能源汽车充换电站系统的仿真验证了本文提出的方法的有效性.Abstract: This paper is concerned with the issue of load sharing and voltage balance of DC microgrid under distributed control strategy. A new design method of droop controller based on distributed strategy is presented, which can realize load sharing and voltage balance under a uniform framework. Firstly, the problems of the load sharing and voltage balance of DC microgrid are transformed into multi-objective optimization problems which performance index is closely related to the capacity of distributed generations. Then, the centralized control strategy achieving load sharing and voltage balance is obtained by solving the multi-objective optimization problem, and the design method of droop controller is given. In order to reduce the communication burden of the system, a new distributed control strategy which only needs to exchange information with neighbor nodes is proposed. The theoretical analysis shows that the distributed control strategy can converge to the optimal solution of multi-objective optimization problem. Finally, the effectiveness of the proposed method is verified by the simulation of the new energy vehicle charging and changing station system.
-
Key words:
- Distributed control /
- multi-objective optimization /
- voltage balance /
- load sharing /
- droop control
-
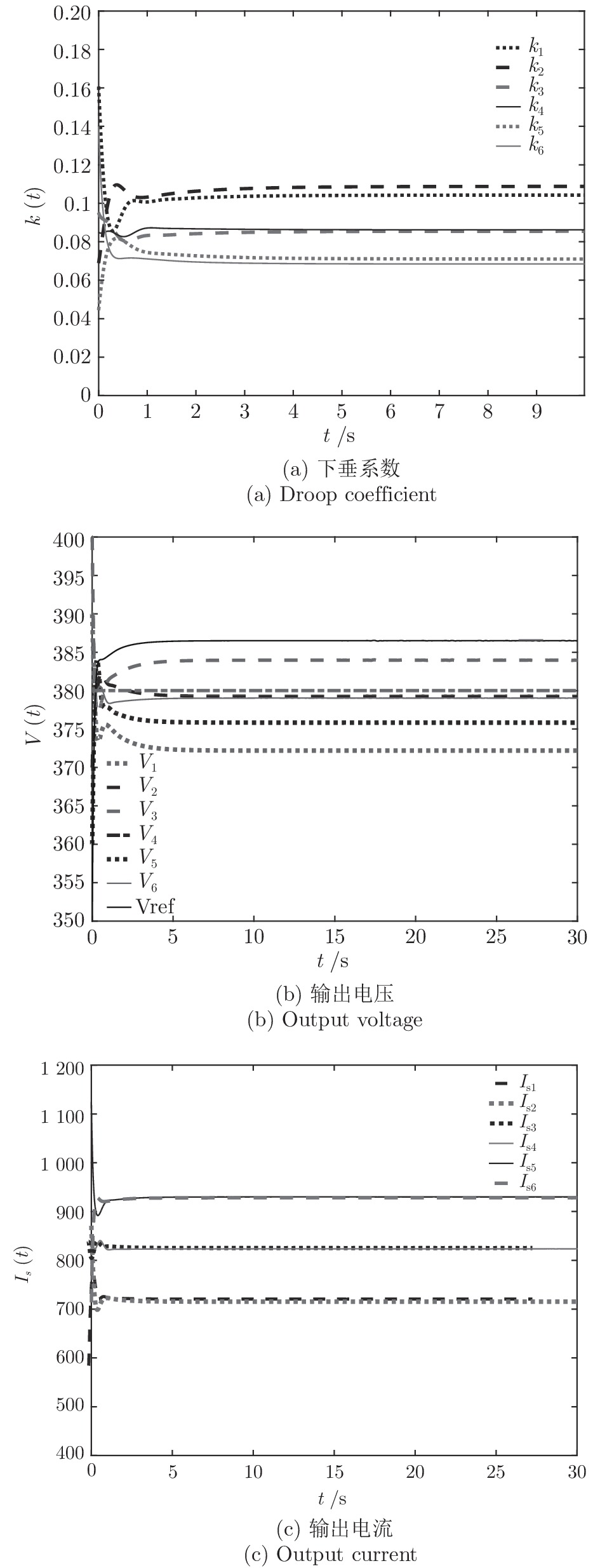
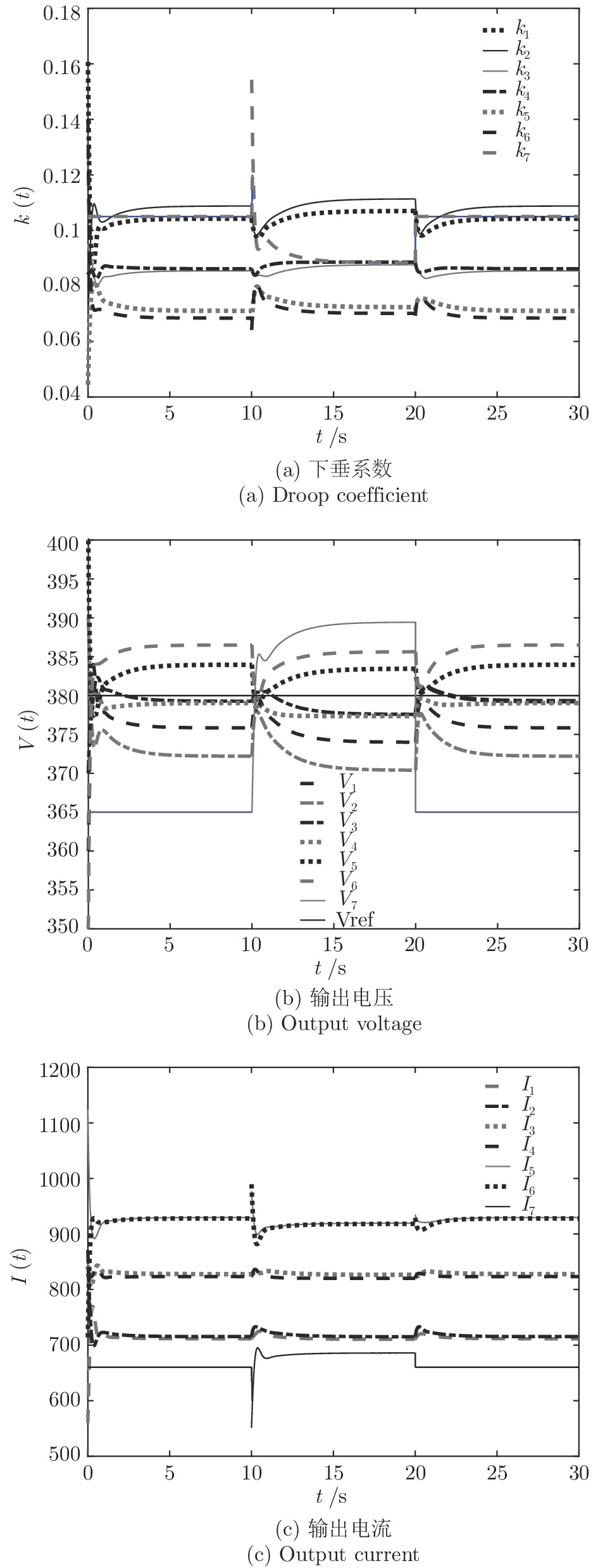
图 7 基于分布式方案的
$k, V, I_s $ 的演化曲线$a = 0.5$ Fig. 7 When
$a = 0.5$ , the evolution curve of$k, V, I_s $ based on the distributed scheme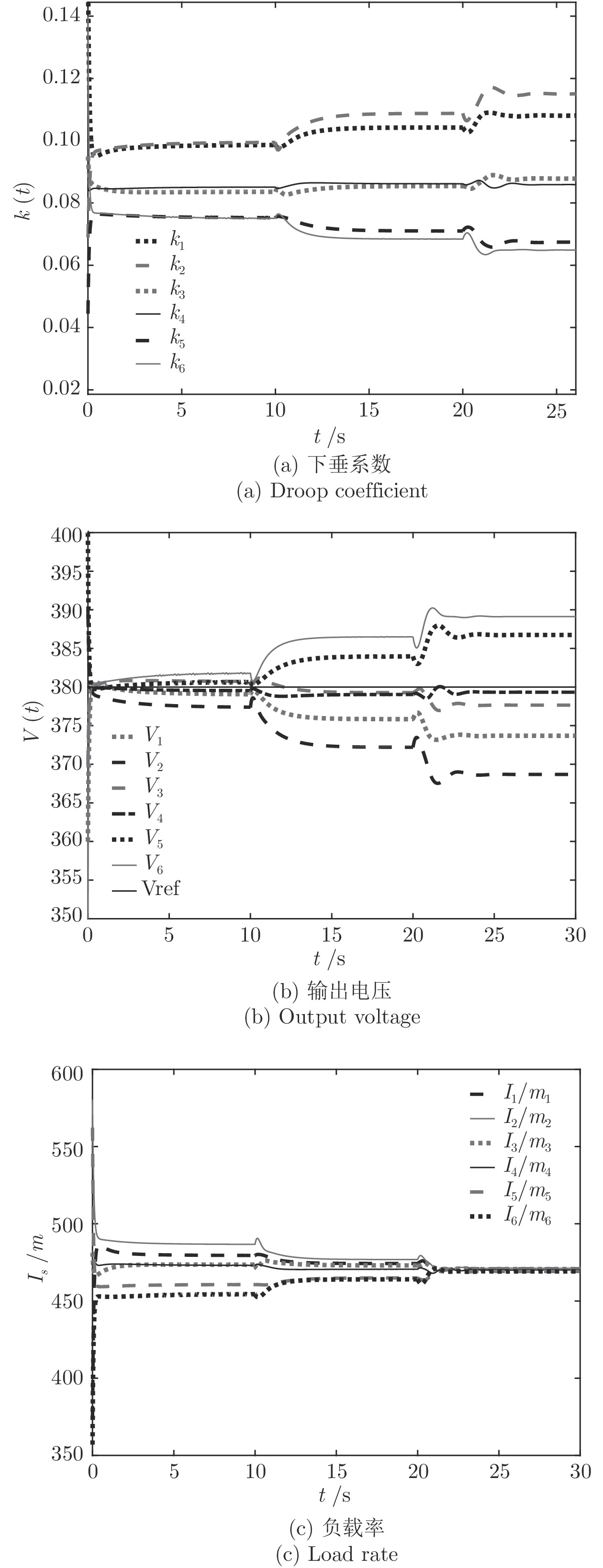
图 8
$a = 0.1, 0.5, 0.9$ 的$k, V, I_s/m$ 的演化曲线Fig. 8 When
$a = 0.1, 0.5, 0.9$ , the evolution curve of$k, V, I_s/m$ 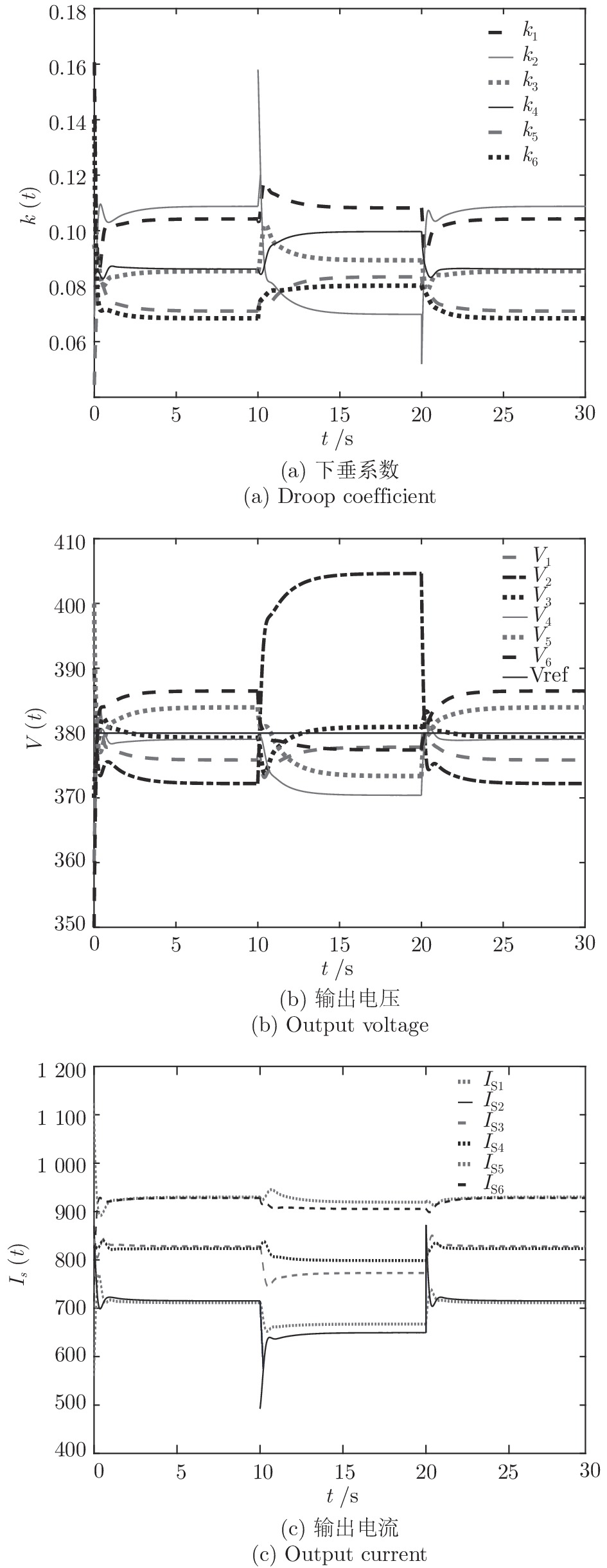
图 9 负载变化对
$k, V, I_s $ 的影响$a = 0.5$ Fig. 9 When
$a = 0.5$ , effect of load change on$k, V, I_s $ -
[1] Dong J, Feng T, Sun H X, Cai H X, Li R, Yang Y. Clean distributed generation in China: policy options and international experience. Renewable and Sustainable Energy Reviews, 2016, 57: 753-764 doi: 10.1016/j.rser.2015.12.171 [2] 王盼宝, 王卫, 孟尼娜, 吴炎. 直流微电网离网与并网运行统一控制策略. 中国电机工程学报, 2015, 35(17): 4388-4396Wang Pan-Bao, Wang Wei, Meng Ni-Na, Wu Yan. Unified control strategy of island and drid-connected operations for dc microgrid. Proceedings of the CSEE, 2011, 35(17): 4388-4396 [3] 吴卫民, 何远彬, 耿攀, 钱照明, 汪槱生. 直流微网研究中的关键技术. 电工技术学报, 2012, 27(1): 98-113Wu Wei-Min, He Yuan-Bin, Geng Ban, Qian Zhao-Ming, Wang You-Sheng. Key technolog-ies for dc microgrids. Transaction of China Electrotechnical Society, 2012, 27(1): 98-113 [4] De Persis C, Monshizadeh N. Bregman storage functions for microgrid control. IEEE Transations Automatic Control, 2018, 63(1): 53-68 doi: 10.1109/TAC.2017.2709246 [5] Ding L, Han Q, Wang L Y, Sindi E. Distributed cooperative optimal control of dc microgrids with communication delays. IEEE Transactions on Industrial Informatics, 2018, 14(9): 3924-3935 doi: 10.1109/TII.2018.2799239 [6] Zhao J, Dörfler F. Distributed control and optimization in DC microgrids. Automatica, 2015, 61: 18-26 doi: 10.1016/j.automatica.2015.07.015 [7] Augustine S, Mishra M K,Lakshminarasamma N. Adaptive droop control strategy for load sharing and circulating current minimization in low-voltage standalone DC microgrid. IEEE Transactions on Sustainable Energy, 2015, 6(1): 132-141 doi: 10.1109/TSTE.2014.2360628 [8] Tah A, Das D. An enhanced droop control method for accurate load sharing and voltage improvement of isolated and interconnected dc microgrids. IEEE Transactions on Sustainable Energy, 2016, 7(3): 1194-1204 doi: 10.1109/TSTE.2016.2535264 [9] Trip S, Cucuzzella M, Cheng X D, Scherpen J. Distributed averaging control for voltage regulation and current sharing in dc microgrids: Modeling and Experimental Validation. IEEE Control Systems Letters, 2019, 3(1): 174-179 doi: 10.1109/LCSYS.2018.2857559 [10] Tucci M, Riverso S, Vasquez J C, GuerreroJ M, Ferrari-Trecate G. A decentralized scalable approach to voltage control of dc islanded microgrids. IEEE Transactions on Control Systems Technology, 2015, 24(6): 1965-1979 [11] Byeon G, Yoon T, Oh S, Jang G. Energy managem-ent strategy of the DC distribution system in buildings using the EV service Model. IEEE transactions on power Electronics, 2013, 28(4): 1544-1554 doi: 10.1109/TPEL.2012.2210911 [12] Guerrero J M, Vasquez J C, Matas J, Vicuna L G de, Castilla M. Hierarchical control of droop-controlled ac and dc microgrids—A general approach toward standardization. IEEE Transations on Industrial Electronics, 2011,58(1), 158-172 doi: 10.1109/TIE.2010.2066534 [13] Dragicevic, Tomislav, Guerrero J, Vasquez, Juan C, skrlec, Davor. Supervisory control of an adaptive-droop regulated dc microgrid with battery management capability. IEEE Transaction on Power Electronics, 2014, 29(6): 695-706 [14] Jyothish M R, Jasmin E A. Load sharing control and circulating current minimization of parallel DC-DC converters based on droop index. In: Proceedings of 2018 International CET Conference on Control Communication and Computing, Thiruvananthapura, India: IEEE, 2018. 84−88 [15] Nasirian V, Davoudi A, Lewis F L, Guerrero J M. Distributed adaptive droop control for DC distribution systems. IEEE Transactions on Energy Conversion, 2014, 29(4): 944-956 doi: 10.1109/TEC.2014.2350458 [16] Lu X, Guerrero J M, Sun K, Vasquez J C. An improved droop control method for dc microgrids based on low bandwidth communication with dc bus voltage restoration and enhanced current sharing accuracy. IEEE Transactions on Power Electronics, 2014, 29(4): 1800-1812 doi: 10.1109/TPEL.2013.2266419 [17] Wang P B, Lu X,Yang X, Wang W, Xu D G. An improved distributed secondary control method for dc microgrids with enhanced dynamic current sharing performance. IEEE Transactions on Power Electronics, 2016, 31(9): 6658-6673 doi: 10.1109/TPEL.2015.2499310 [18] Ingle A A, shyan A B, sahoo S R, Anand S. Quality index based distributed secondary controller for low voltage dc microgrid. IEEE Transactions on Industrial Electronics, 2018, 65(9): 7004-7014 doi: 10.1109/TIE.2018.2795524 [19] Cucuzzella M, Trip S, De Persis C, Cheng X, Ferrara A, Arjan V D S. A robust consensus algorithm for current sharing and voltage regulation in dc microgrids. IEEE Transactions on Control Systems Technology, 2019, 27(4): 1583-1595 doi: 10.1109/TCST.2018.2834878 [20] Gu Y, Xiang X, Li W, He X. Mode-adaptive decentralized control for renewable dc microgrid with enhanced reliability and flexibility. IEEE Transactions on Power Electronics, 2014, 29(9): 5072-5080 doi: 10.1109/TPEL.2013.2294204 [21] Zhang D, Jiang J C, Wang L Y, Zhang W G. Robust and scalable management of power networks in dual-source trolleybus systems:A consensus control framework. IEEE Transaction on Intelligent Transportation System, 2016, 17 (4): 1029-1038 doi: 10.1109/TITS.2015.2492564 -

 下载:
下载:



















图(10)
计量
- 文章访问数: 3922
- HTML全文浏览量: 4156
- PDF下载量: 353
- 被引次数: 0
