

-
摘要: 针对车辆驾驶对于共享控制系统实用性的需求, 提出了基于驾驶员转向模型的共享控制系统. 基于驾驶员的视觉预瞄特性与神经肌肉特性建立了驾驶员转向模型, 通过遗传算法辨识模型参数并分析其与车速和道路曲率之间的函数关系; 采用模糊权重分配策略合理分配驾驶权重; 本文利用基于所开发的CarMaker驾驶模拟实验平台, 对系统进行在线测试和验证, 结果表明该系统不仅能够更好地提升车辆的轨迹跟踪精度和安全性, 辅助驾驶员转向, 还能够极大地减轻驾驶员负荷.Abstract: Aiming at the practicality demand of shared control system for vehicle driving, a shared control system based on driver steering model is proposed. Firstly, a driver steering model is established based on the driver's visual preview and neuromuscular characteristics. The parameters of the model are identified by genetic algorithm and the functional relationship between the model parameters and vehicle speed and road curvature is analyzed. Secondly, fuzzy weight distribution strategy is used to assign driving weights. Finally, the system is tested and validated on-line based on CarMaker simulation platform. The results show that the system can not only help the driver to improve the steering behavior, the accuracy of trajectory tracking and the safety of driving vehicle, but also greatly reduce the driver load.
-
Key words:
- Neuromuscular system /
- driver model /
- shared control /
- parameter identification
-
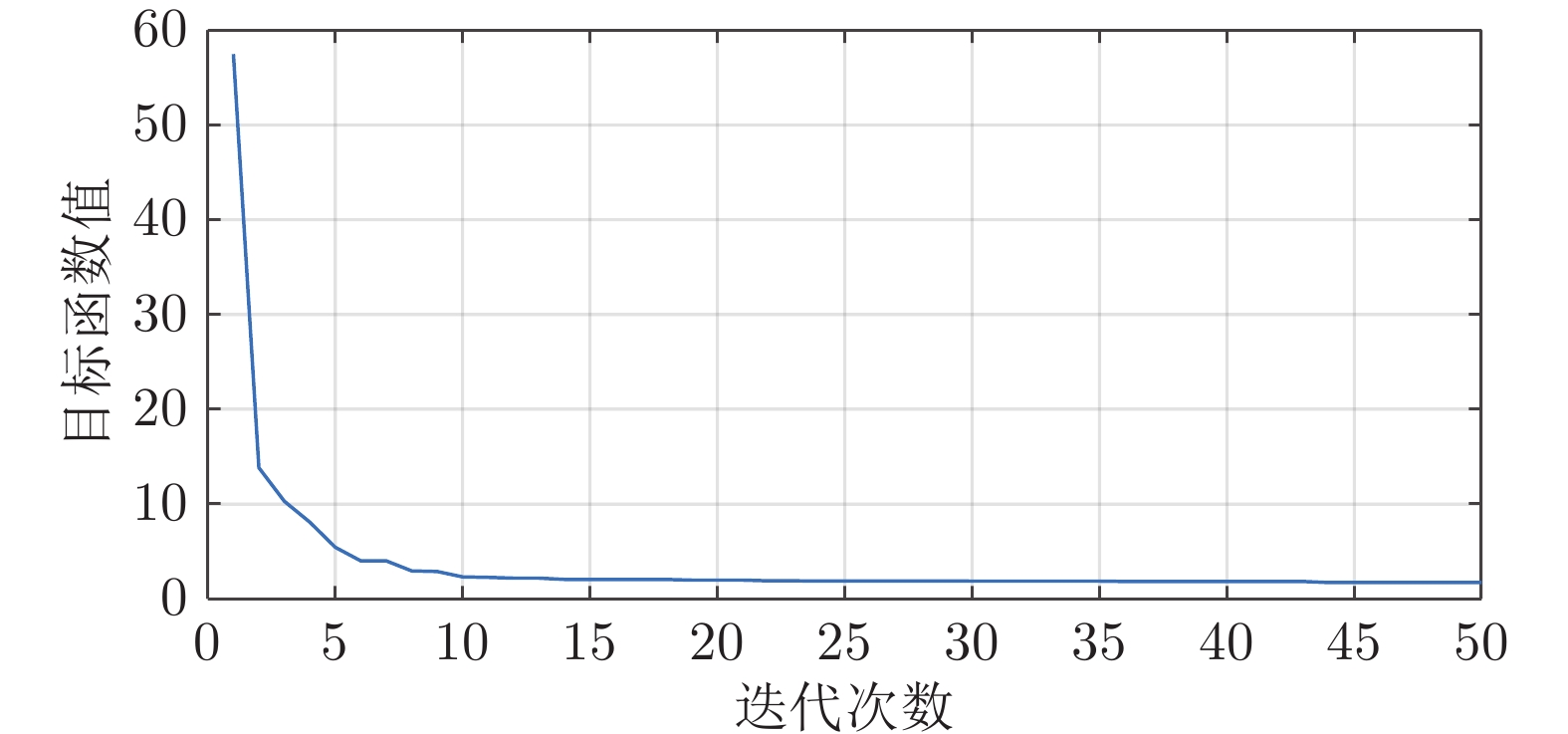
图 8 目标函数值(v = 72 km/h, R = 200 m)
Fig. 8 Value of objective function (v = 72 km/h, R = 200 m)
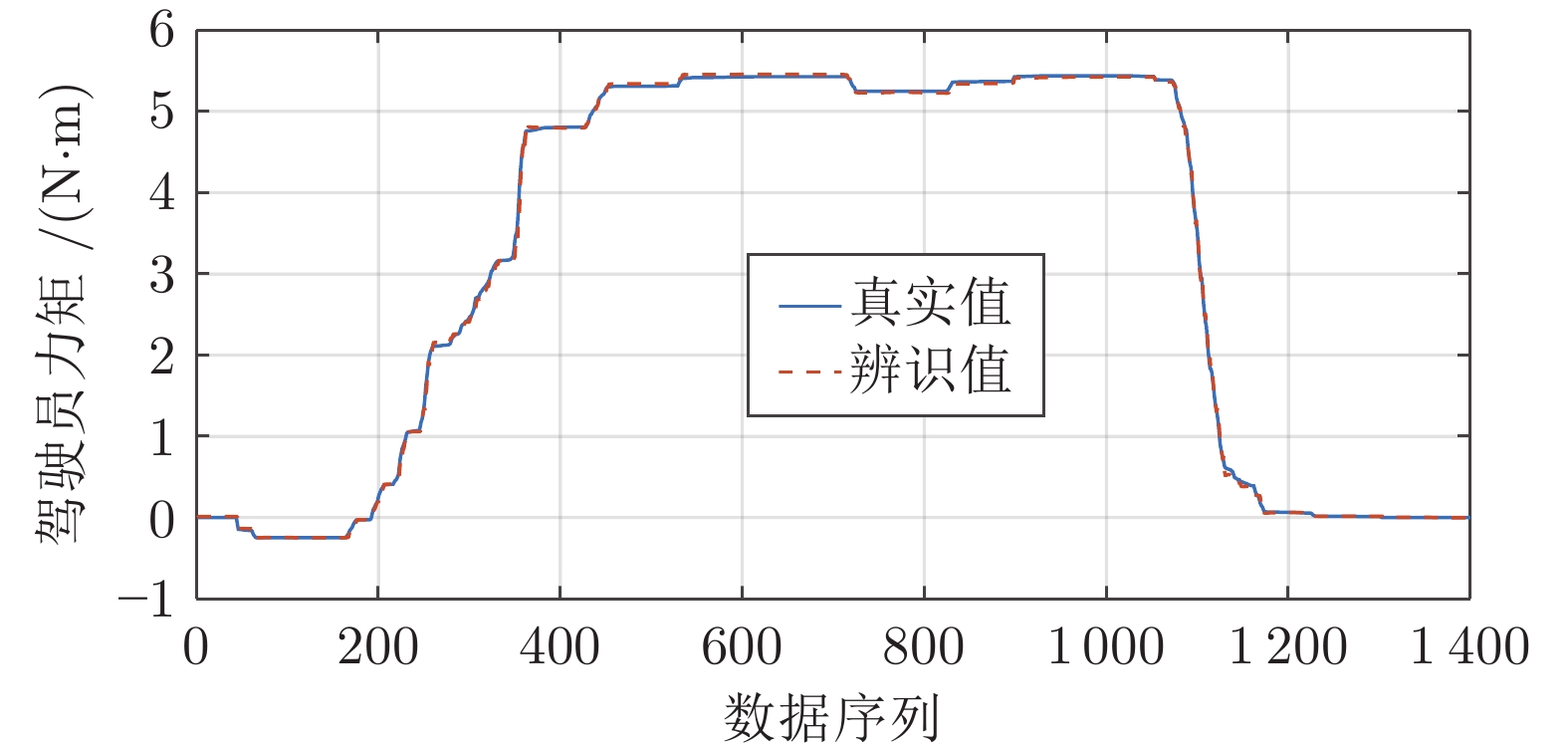
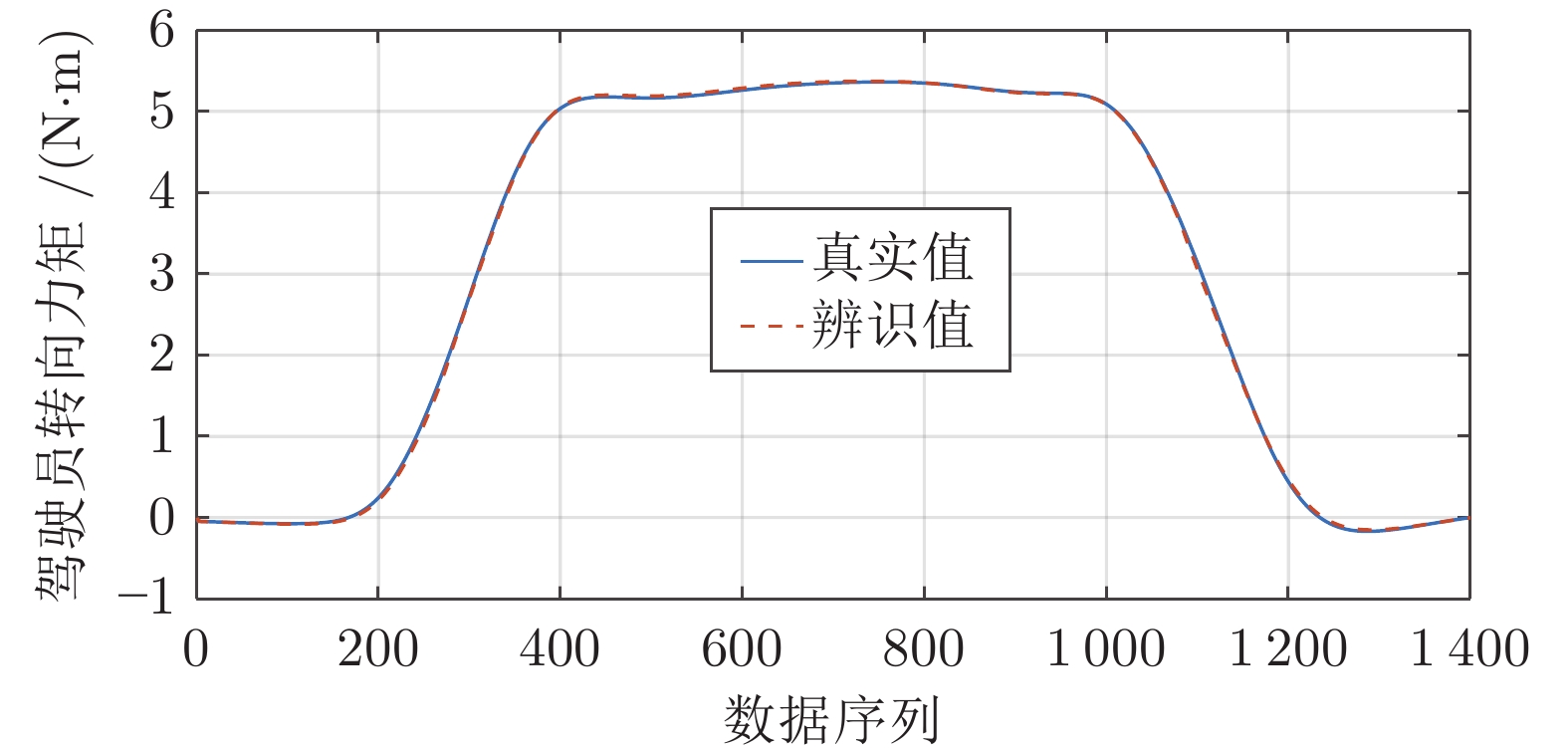
图 9 驾驶员力矩测量值与辨识值对比(v = 72 km/h, R = 200 m)
Fig. 9 Comparison of measurement and identification value (v = 72 km/h, R = 200 m)
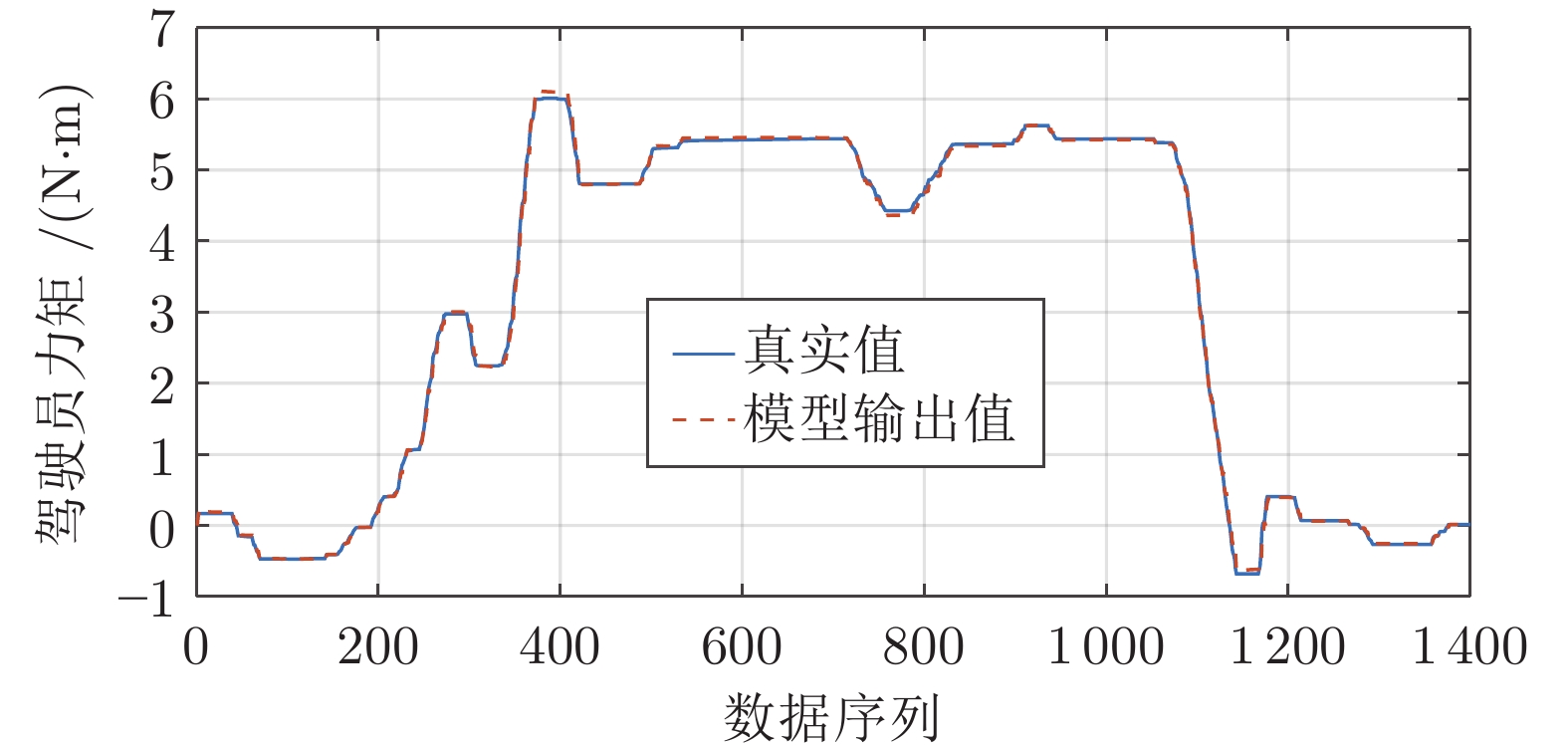
图 10 驾驶员力矩测量值与模型输出值对比
Fig. 10 Comparison of measurement and model output value of driver torque
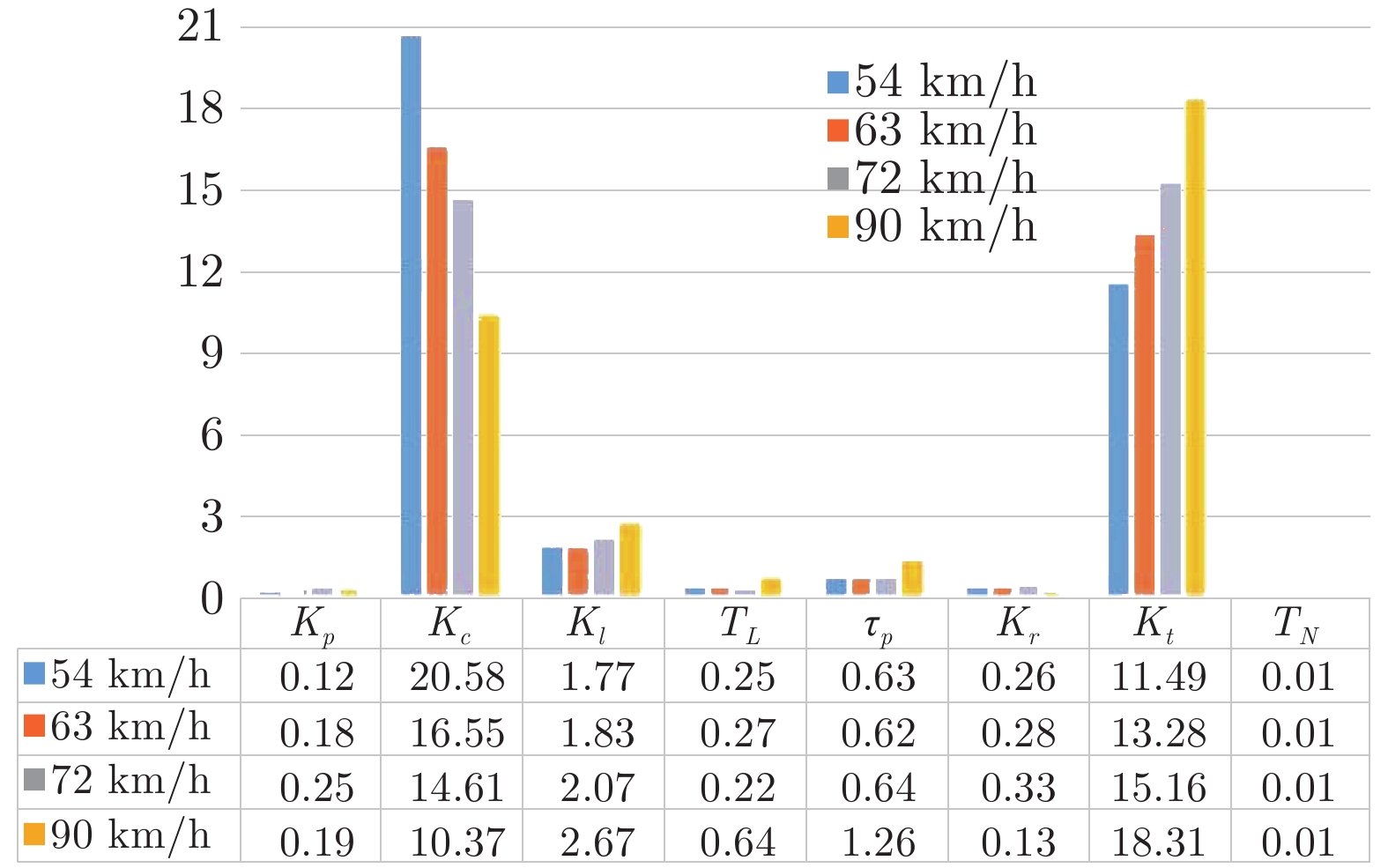
图 12 不同车速下模型参数平均值对比(R = 200 m)
Fig. 12 Comparison of mean values of model parameters at different vehicle speeds (R = 200 m)

图 13 不同车速下模型参数平均值对比(R = 300 m)
Fig. 13 Comparison of mean values of model parameters at different vehicle speeds (R = 300 m)
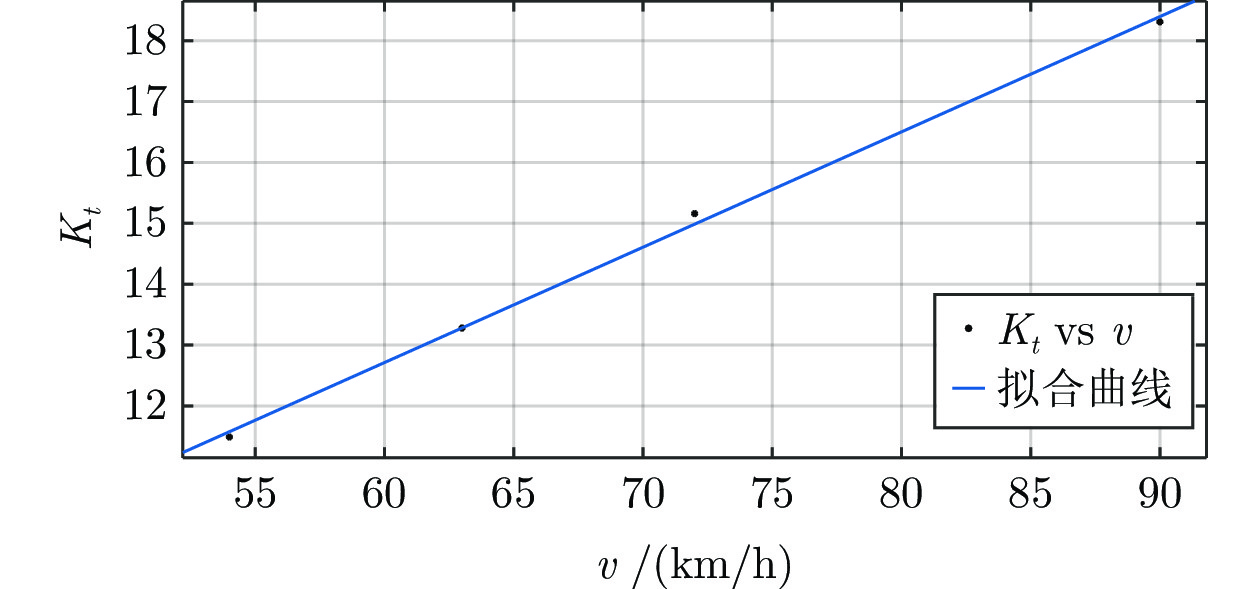
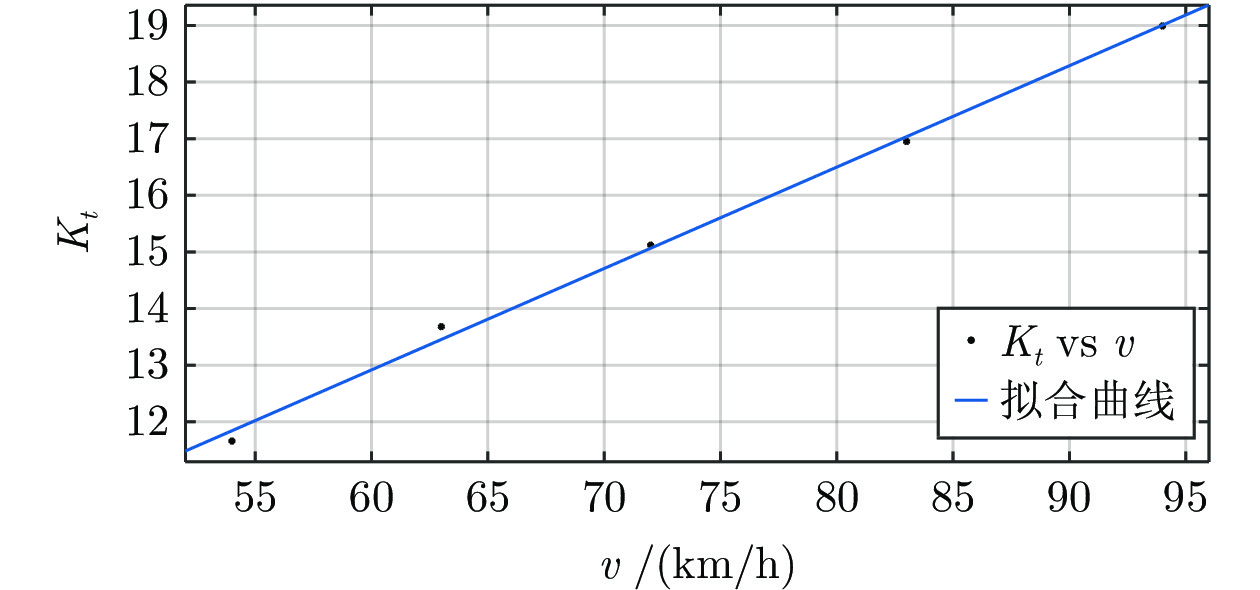
图 14 转弯半径为200 m时神经肌肉反馈刚度与车速的拟合曲线
Fig. 14 Fitting curve of
$K_{t}$ and v at turning radius of 200 m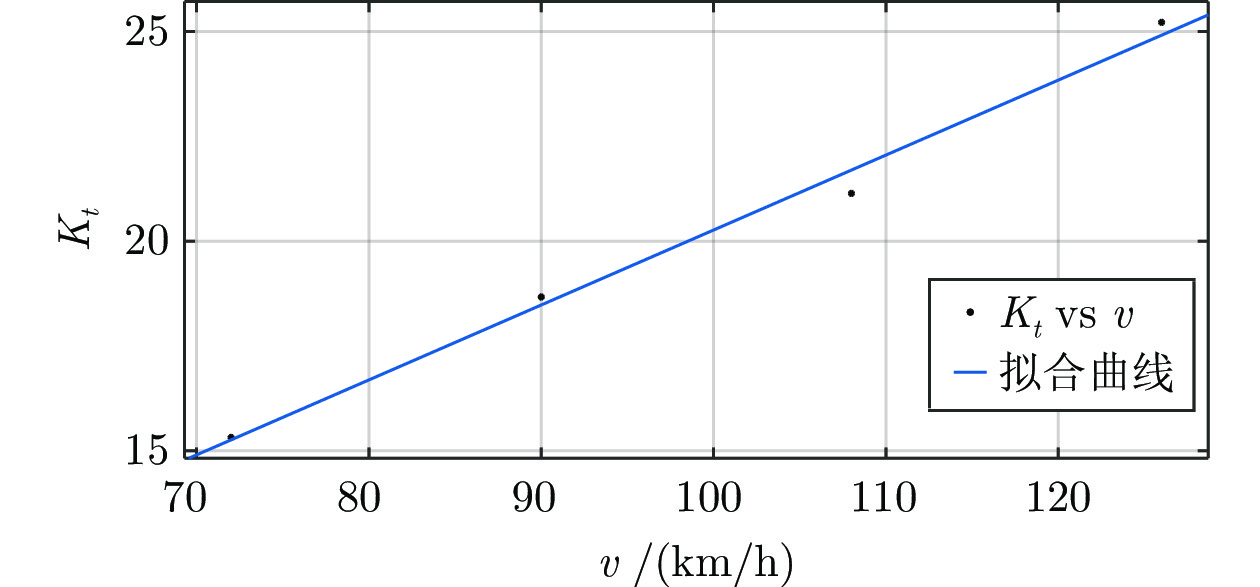
图 15 转弯半径为300 m时神经肌肉反馈刚度与车速的拟合曲线
Fig. 15 Fitting curve of
$K_{t}$ and v at turning radius of 300 m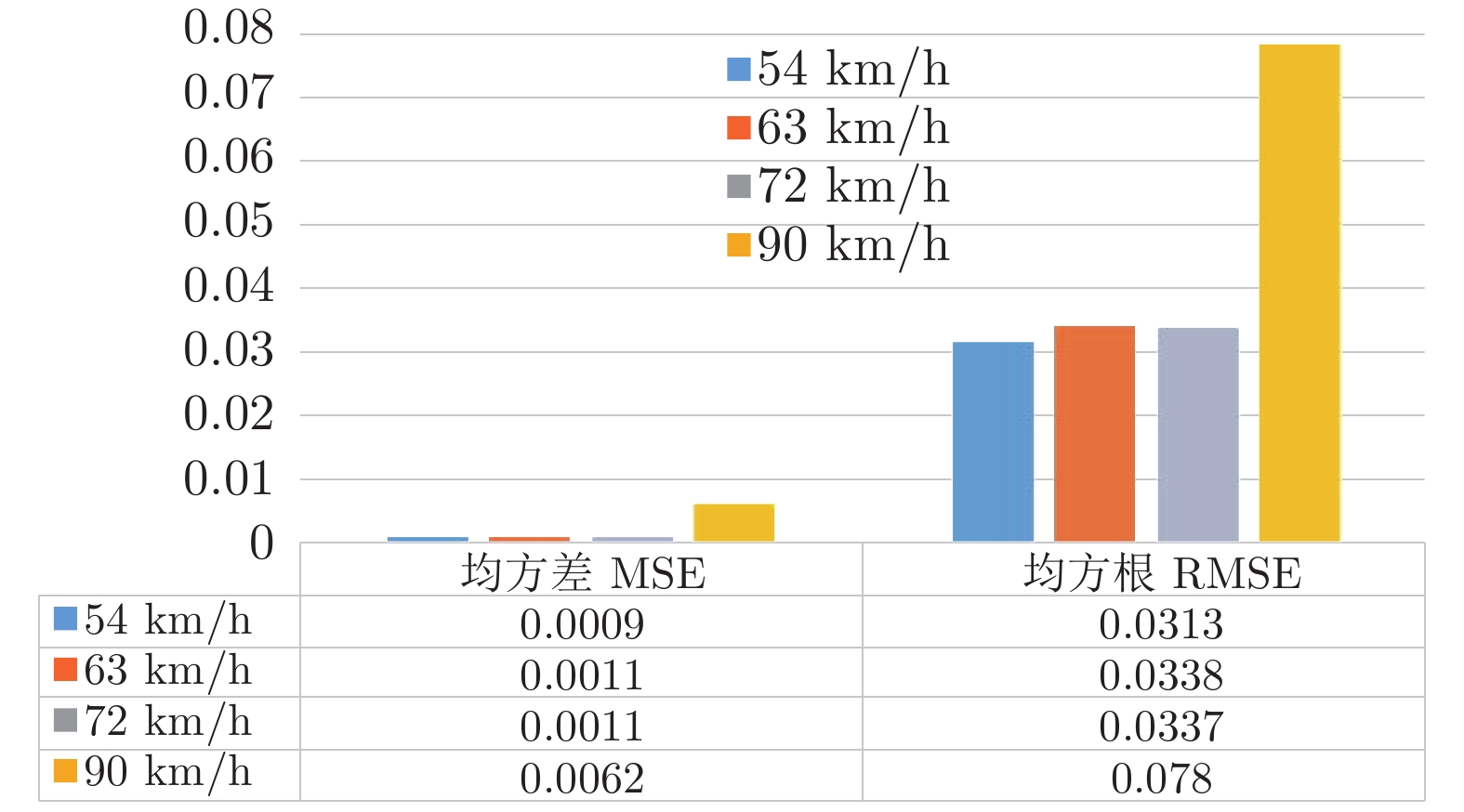
图 16 不同车速下驾驶员模型辨识误差指标对比(R = 200 m)
Fig. 16 Comparison of driver model error index at different vehicle speeds (R = 200 m)
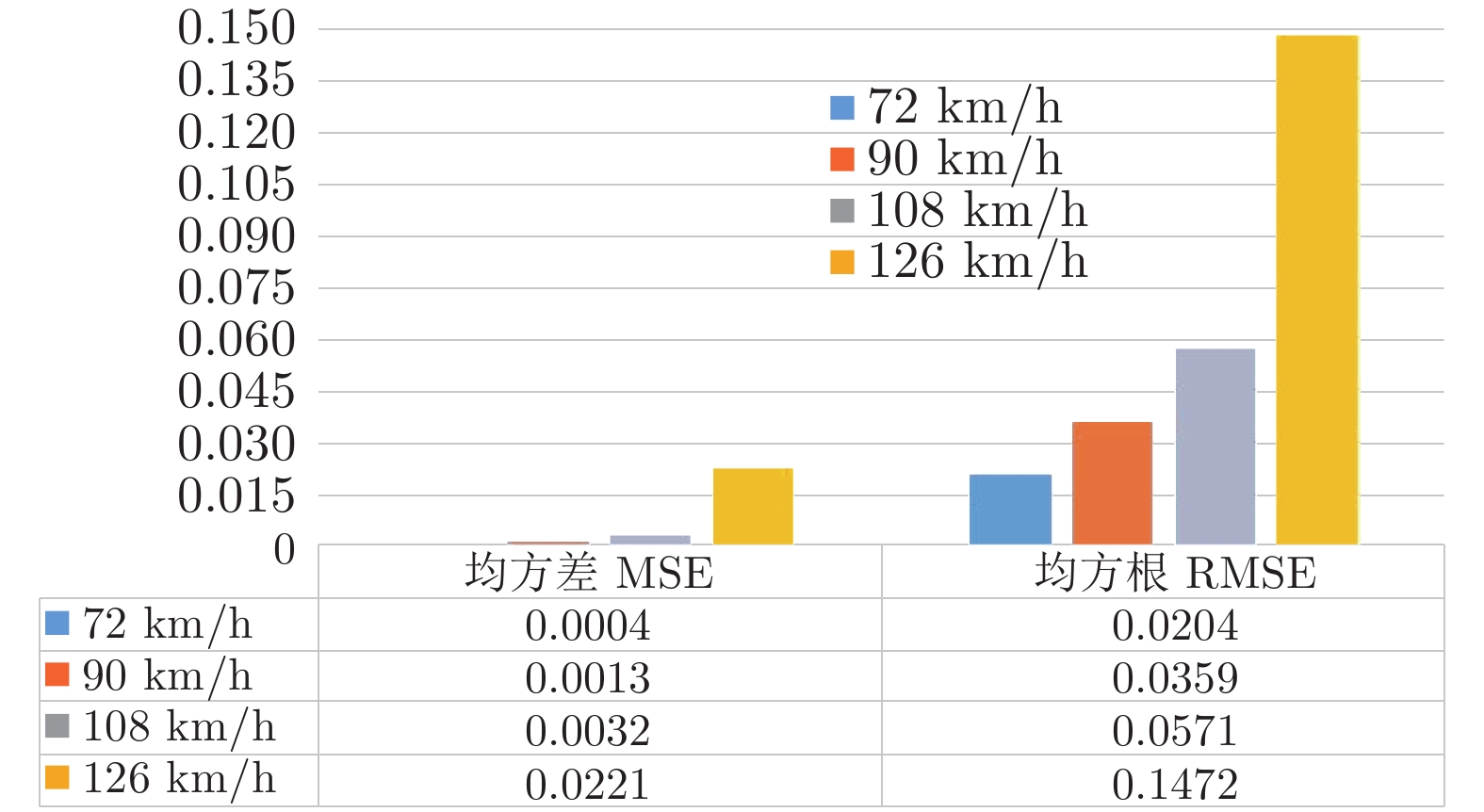
图 17 不同车速下驾驶员模型辨识误差指标对比(R = 300 m)
Fig. 17 Comparison of driver model error index at different vehicle speeds (R = 300 m)

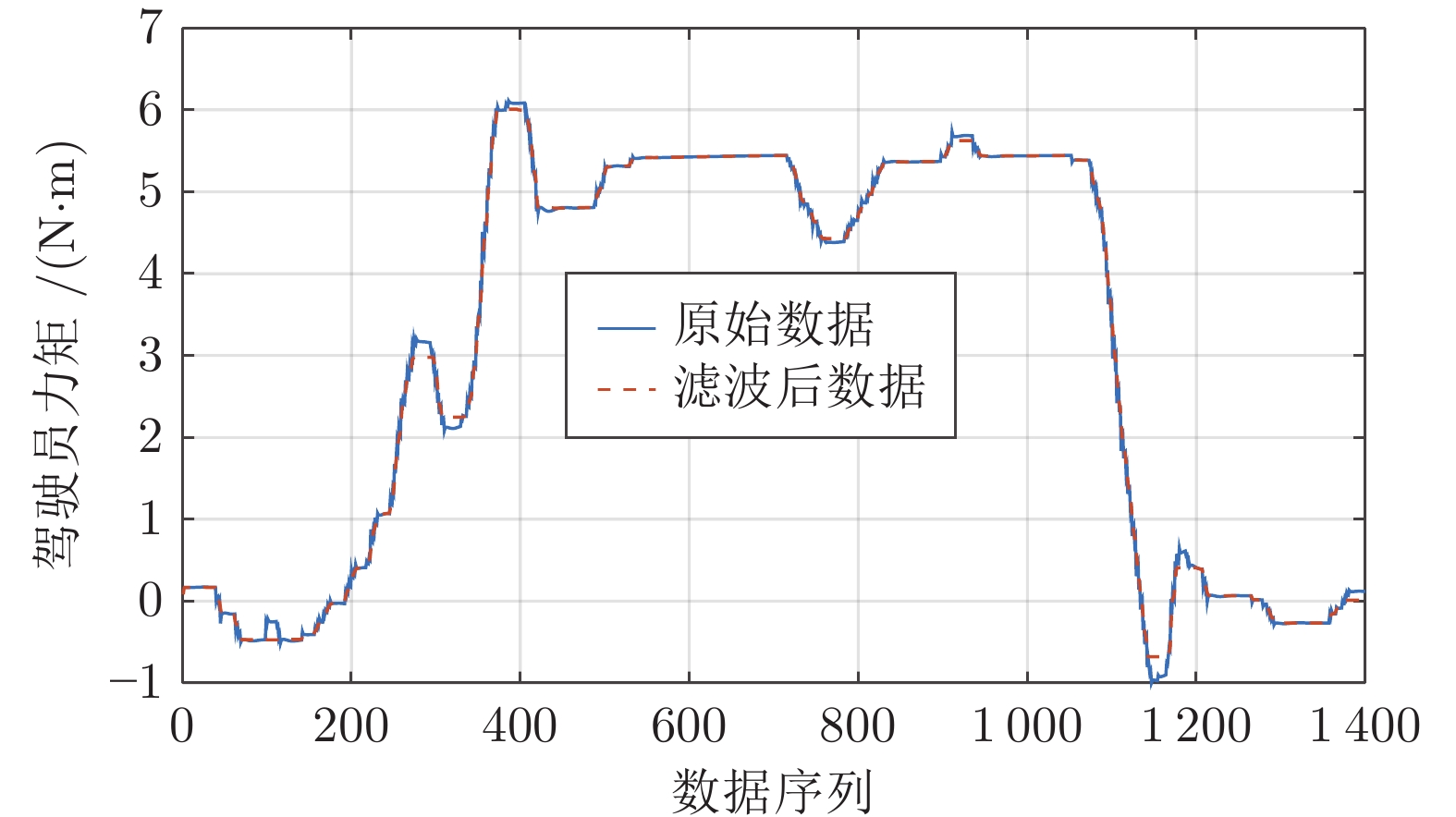
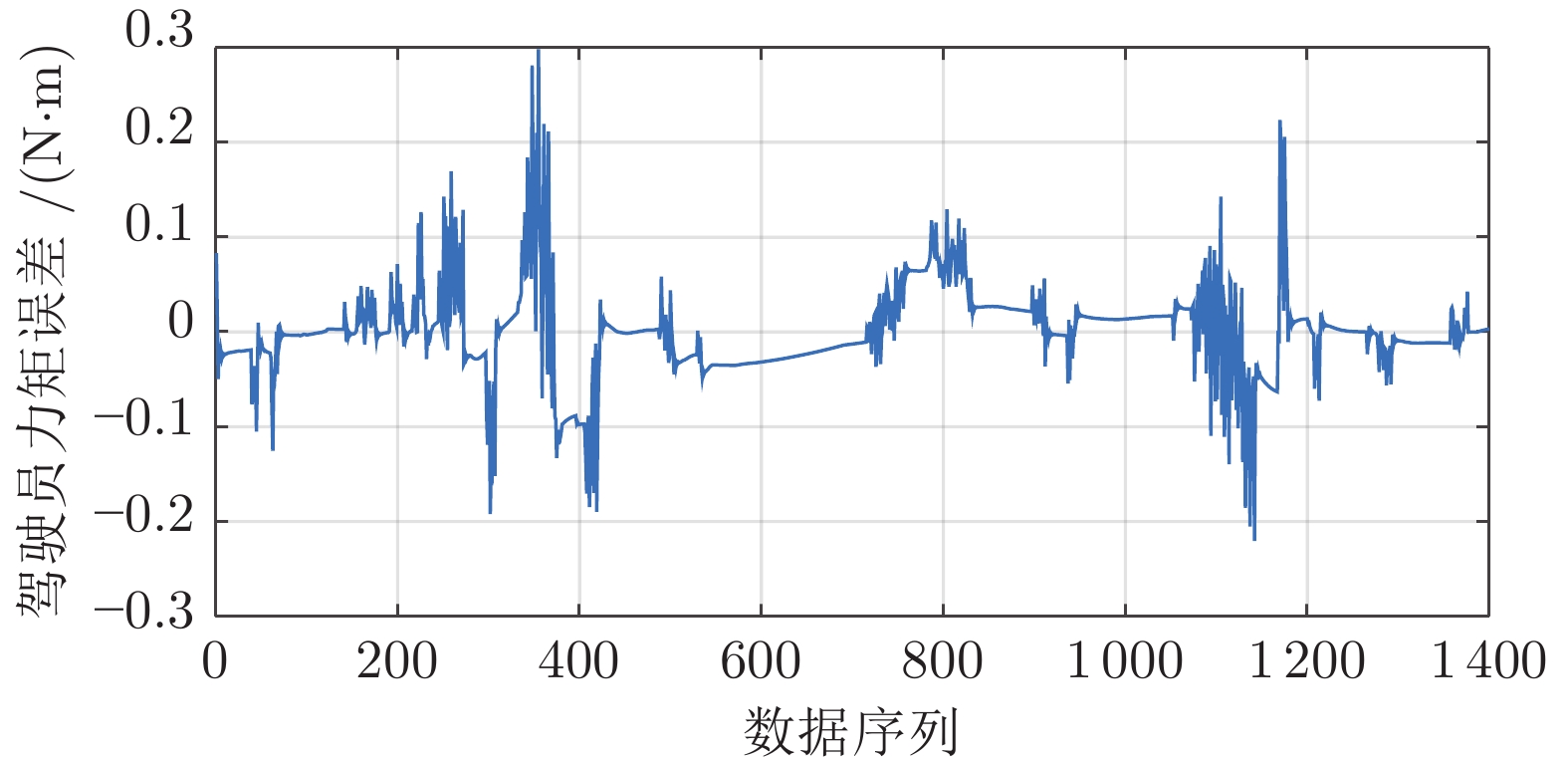
图 20 辨识模型值与真实测量值对比
Fig. 20 Comparison of identification model value and measurement value

图 21 已辨识模型的输出值与真实测量值对比
Fig. 21 Comparison of the output value of the identified model with the measured value
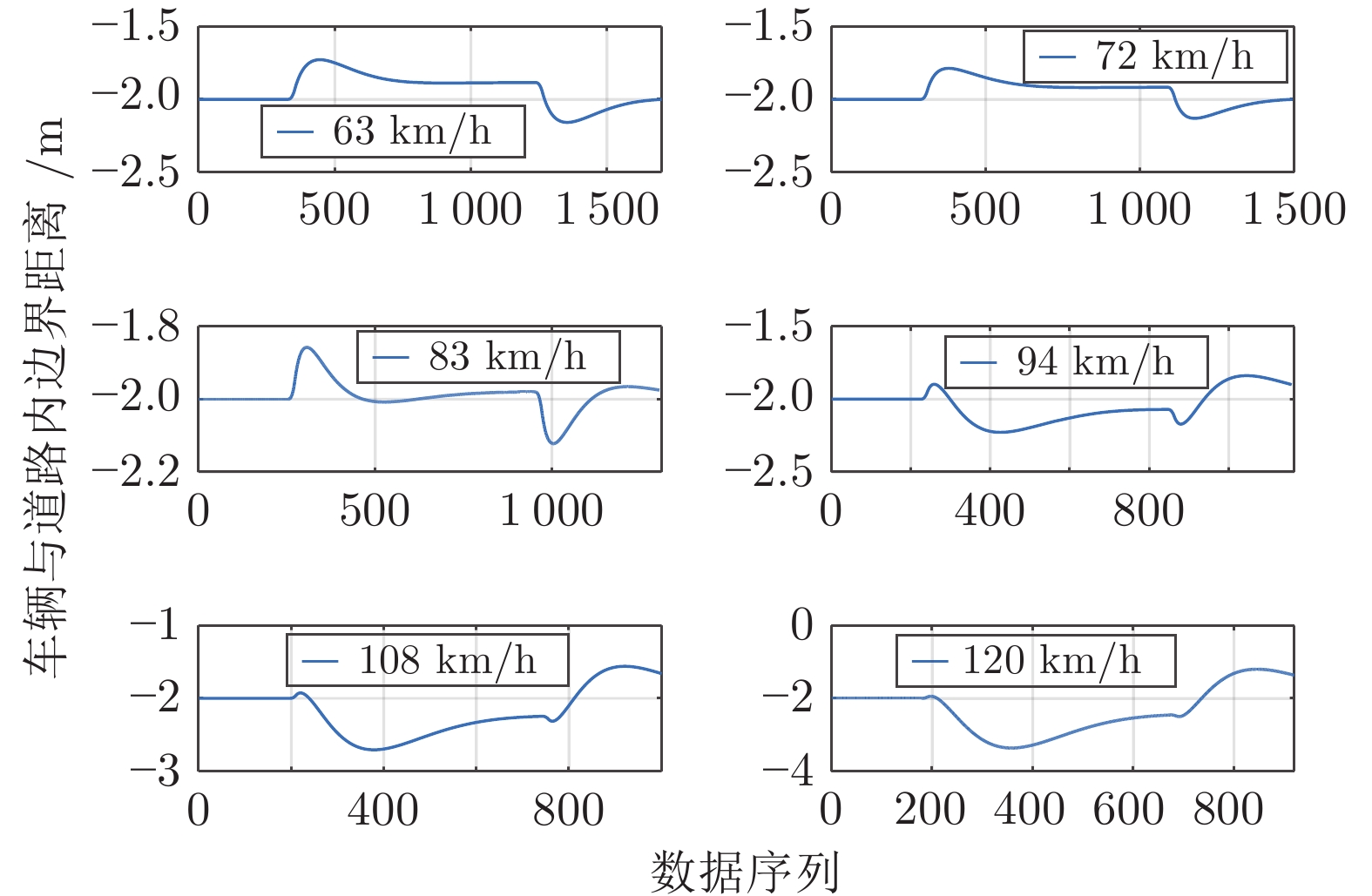
图 22 不同车速下车辆中心点与道路内边界的距离
Fig. 22 Distance between vehicle center point and road internal boundary at different vehicle speeds
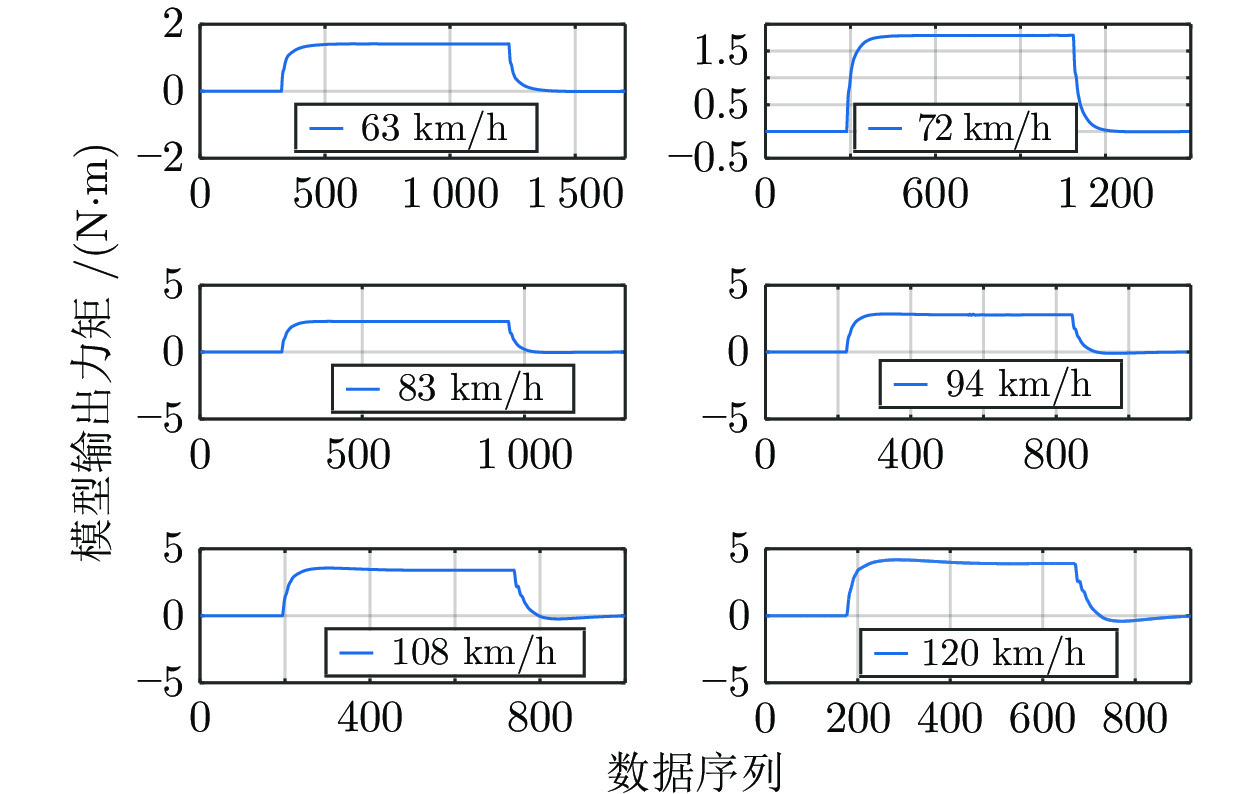
图 23 不同车速下共享控制器的输出力矩
Fig. 23 Output torque of shared controller at different vehicle speeds

图 24 不同车速下方向盘的输出转向角
Fig. 24 Output steering angle of steering wheel at different speeds

图 27 驾驶员A正常转向下驾驶员转角与权重后的输出转向角对比
Fig. 27 Contrast of driver's angle with output steering angle after weight under driver A's normal steering
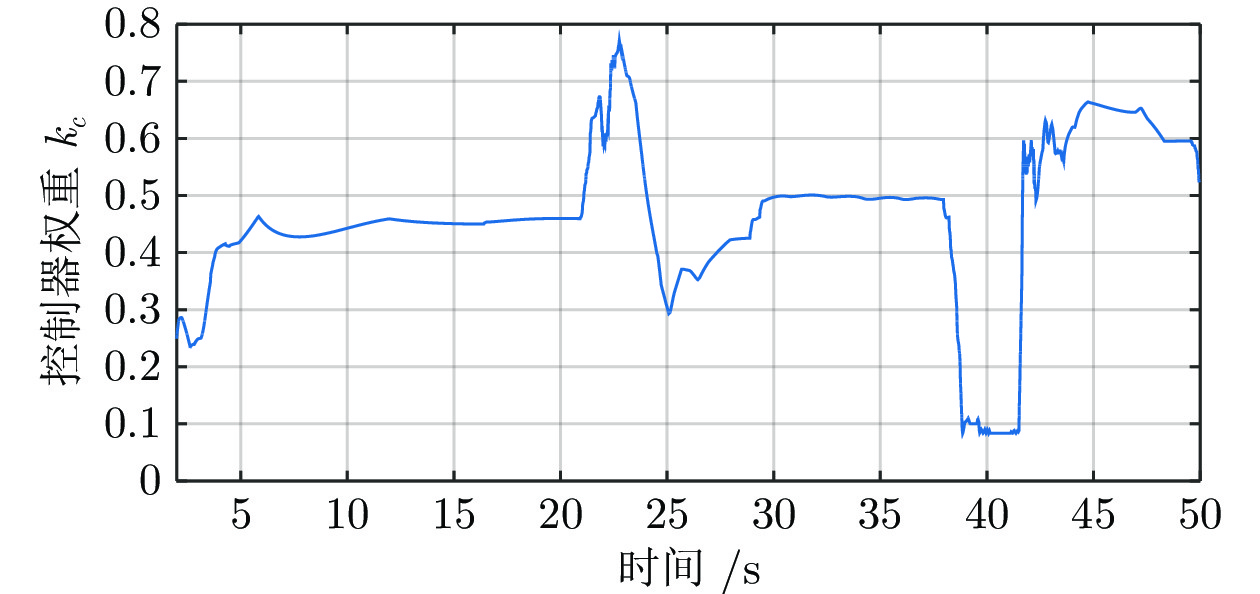
图 28 驾驶员A正常转向下控制器权重的变化
Fig. 28 Variation of controller weight under driver A's normal steering
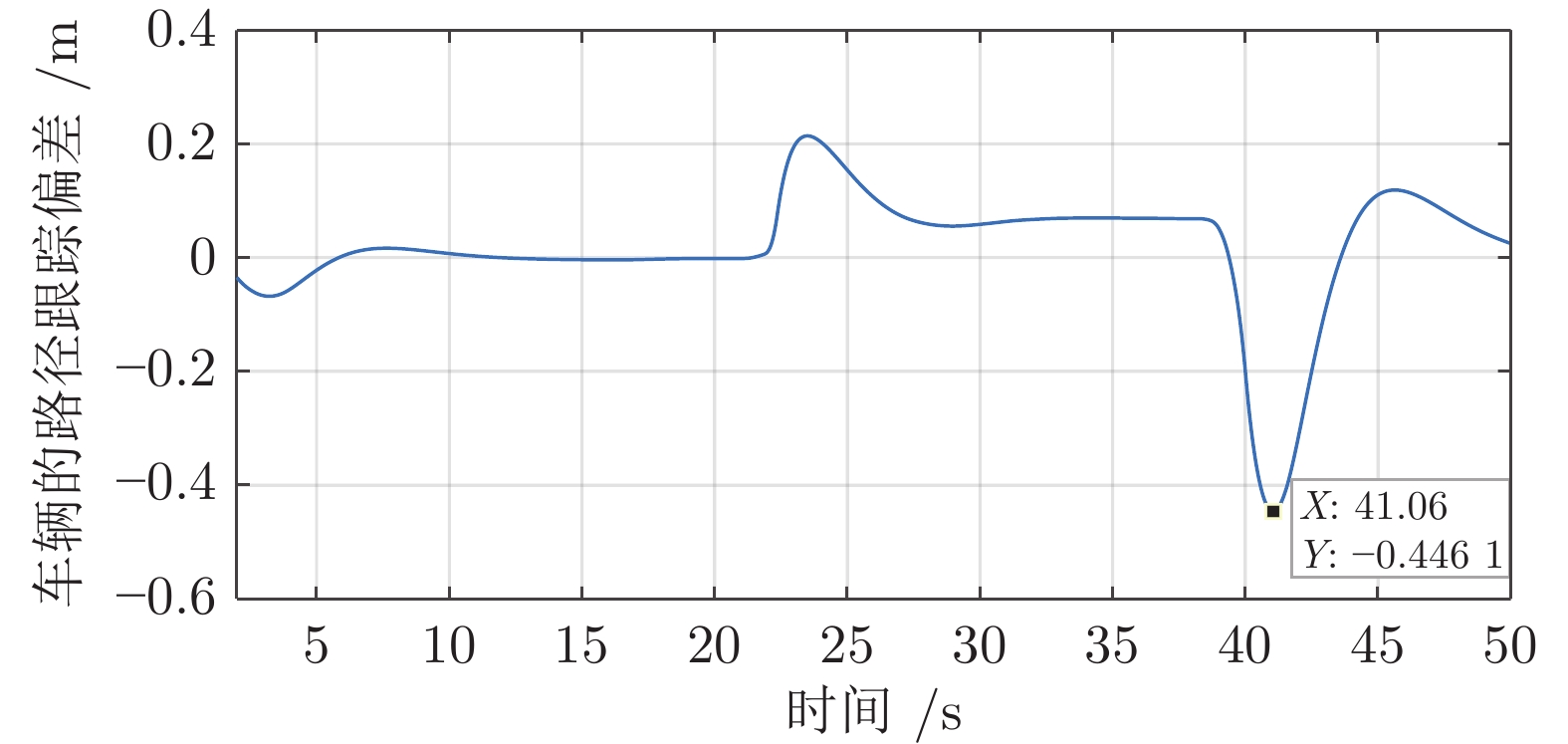
图 29 驾驶员A正常转向下车辆的路径跟踪偏差
Fig. 29 Vehicle path tracking deviation under driver A's normal steering
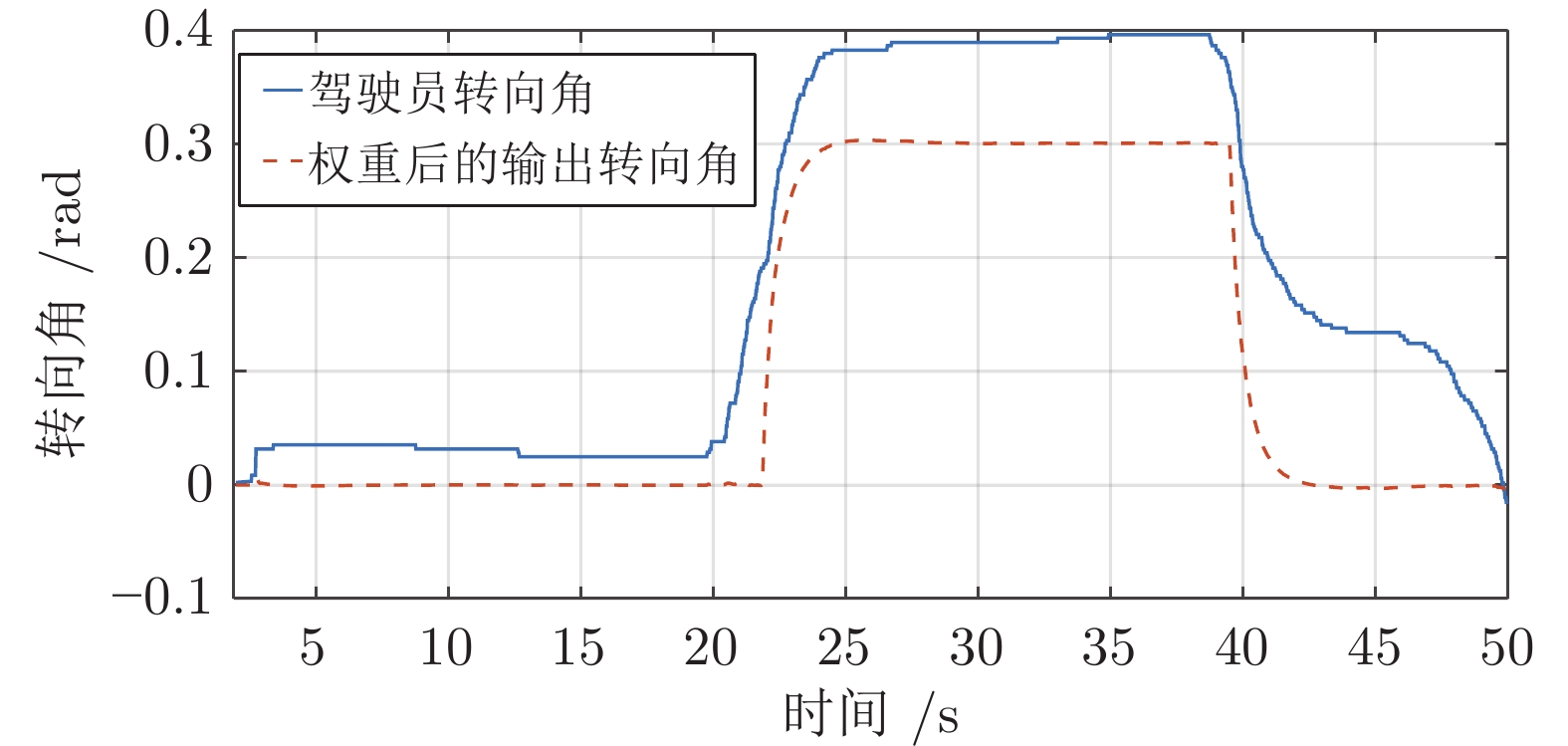
图 30 驾驶员B过度转向下驾驶员转角与权重后的输出转向角对比
Fig. 30 Contrast of driver's angle under driver B oversteering with output steering angle after weighting
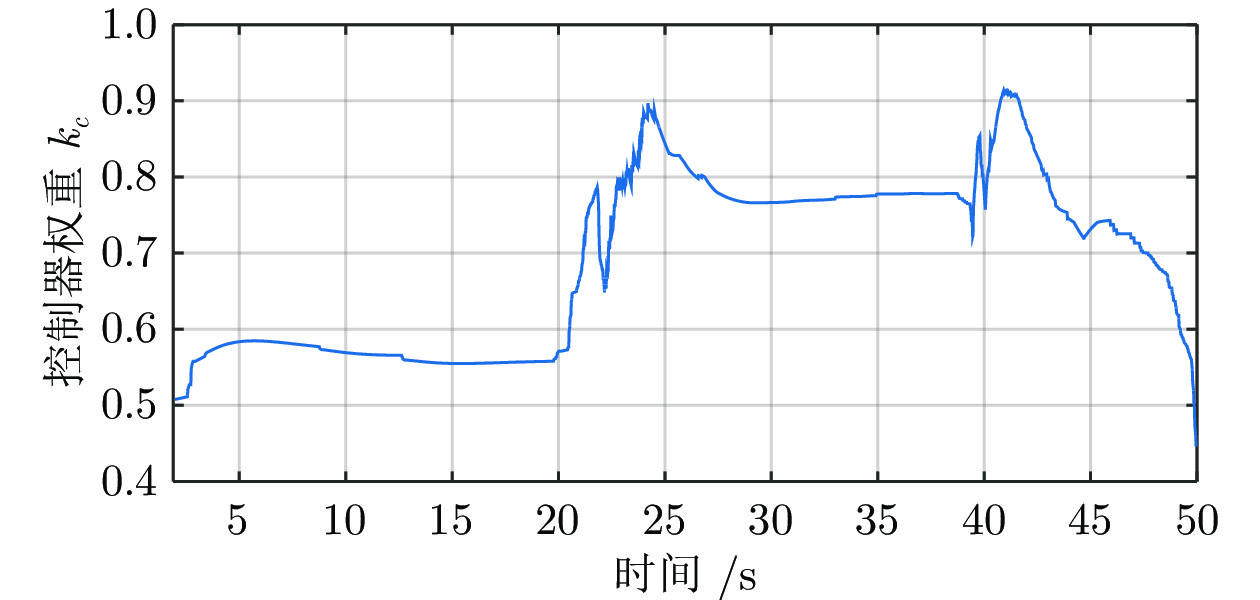
图 31 驾驶员B过度转向下控制器权重的变化
Fig. 31 Variation of controller weight under driver B's oversteering

图 32 驾驶员B过度转向下车辆的路径跟踪偏差
Fig. 32 Vehicle path tracking deviation under driver B's oversteering
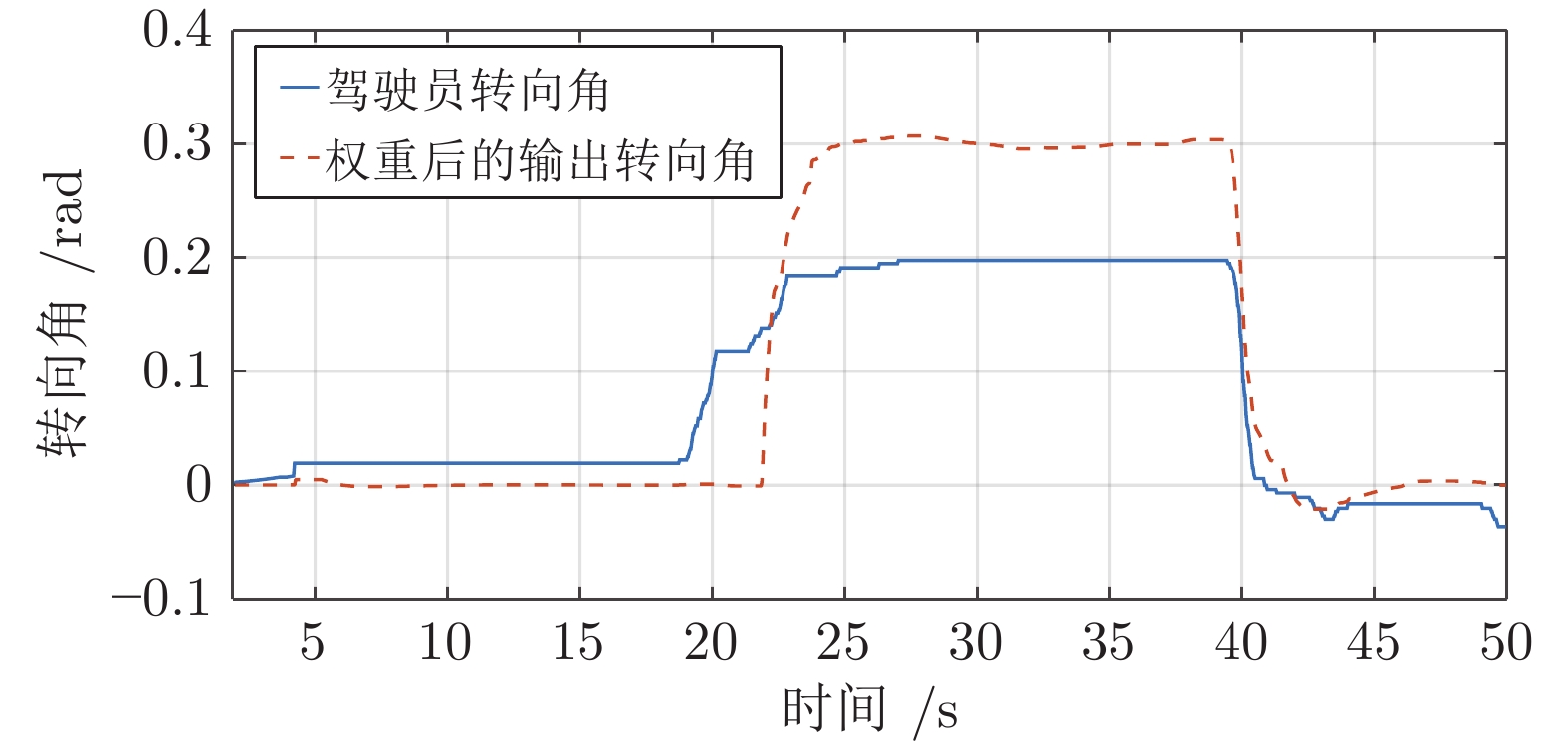
图 33 驾驶员C转向不足时驾驶员转角与权重后的输出转向角对比
Fig. 33 Contrast the driver's angle with weighted output steering angle when C is insufficient turning

图 34 驾驶员C转向不足时车辆的路径跟踪偏差
Fig. 34 Vehicle path tracking deviation when driver C steering is insufficient
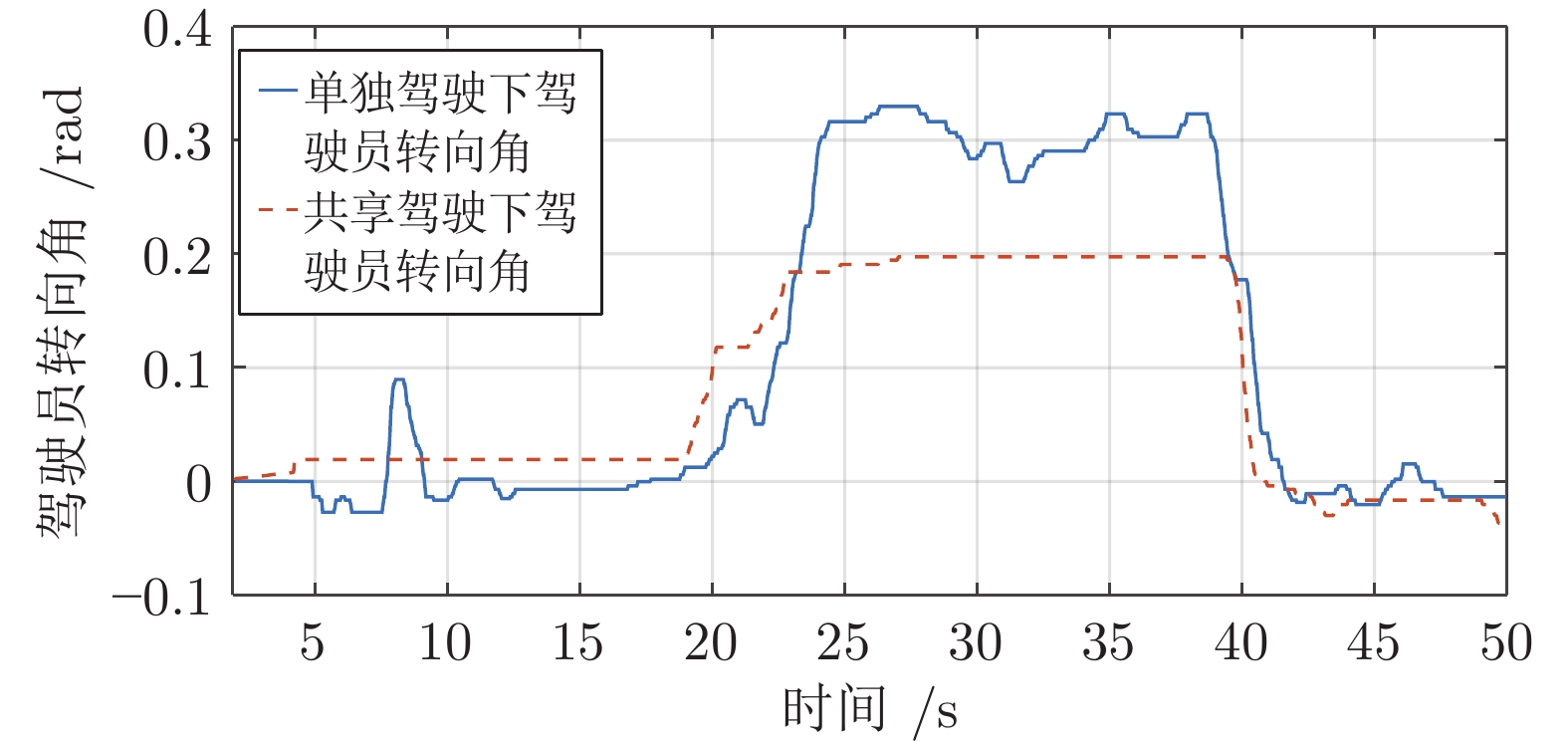
图 35 驾驶员C单独驾驶与共享驾驶下转向角对比
Fig. 35 Contrast of insufficient steering angle between driver C driving alone and shared driving

图 36 驾驶员C单独驾驶与共享驾驶下转向力矩对比
Fig. 36 Contrast of steering torque between driver C driving alone and shared driving

图 37 驾驶员C单独驾驶与共享驾驶下驾驶员各项指标对比
Fig. 37 Contrast of driver's index between driver C driving alone and shared driving
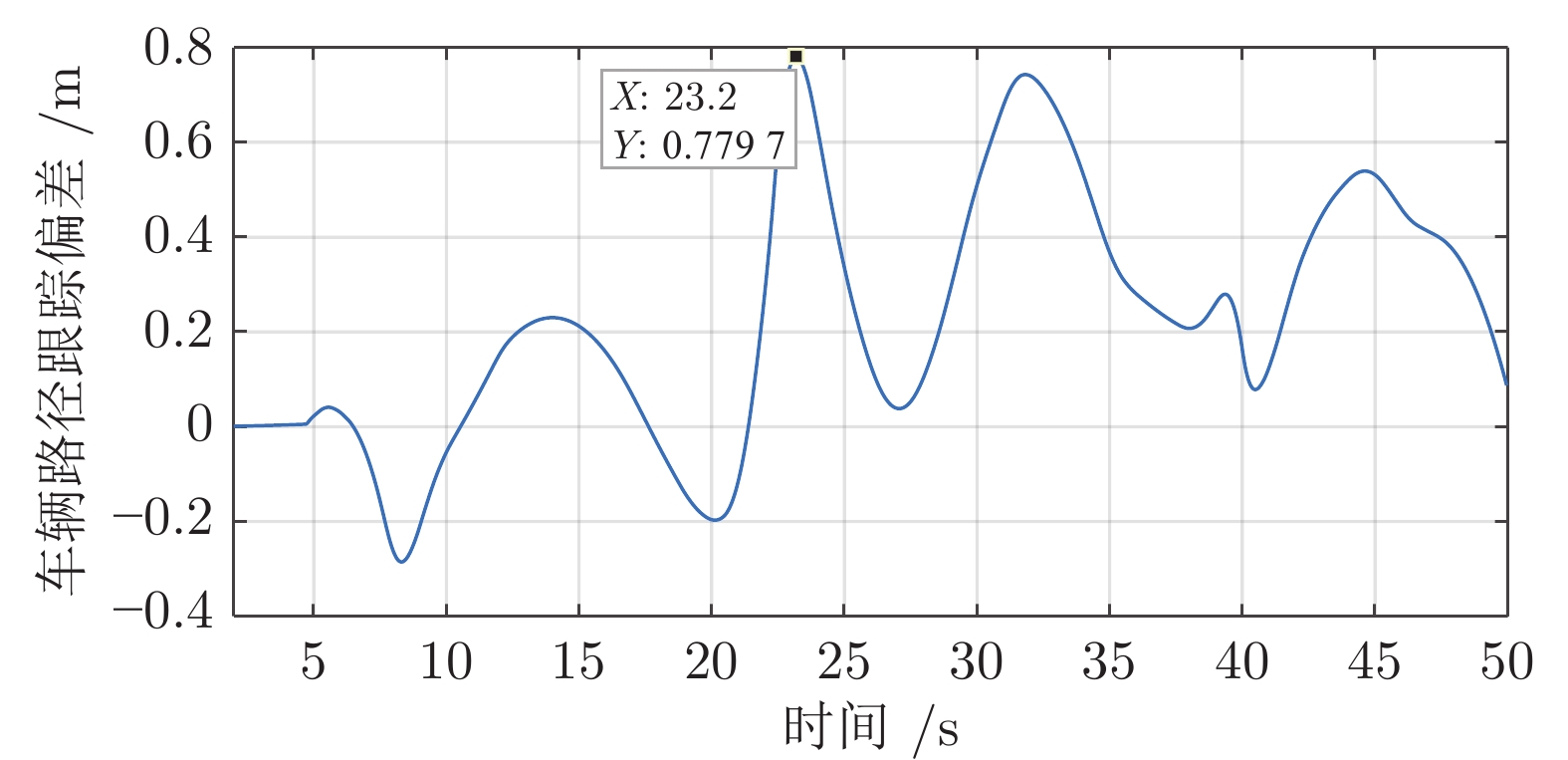
图 38 驾驶员C单独驾驶的路径跟踪偏差
Fig. 38 Vehicle path tracking deviation when driver C driving alone

图 39 驾驶员C共享驾驶下的路径跟踪偏差
Fig. 39 Vehicle path tracking deviation under shared driving for driver C
表 1 遗传算法主要参数取值
Table 1 Value of main parameters of genetic algorithm
序号 参数 取值 1 种群个数 1500 2 染色体基因数(待辨识参数个数) 8 3 交叉概率 0.8 4 变异概率 0.1 5 最大迭代次数 1000 6 选择操作的算法选取 “轮盘赌”选择法  下载: 导出CSV
下载: 导出CSV
表 2 转弯半径为200 m的驾驶员模型参数
Table 2 Driver model parameters with turning radius of 200 m
$v\;({\rm{km/h}})$ $K_{p}$ $K_{c}$ $T_{I}$ $T_{L}$ $\tau_{p}$ $K_{r}$ $K_{t}$ $T_{N}$ 54 1st 0.14 18.67 1.76 0.27 0.62 0.28 11.32 0.01 2nd 0.11 22.49 1.87 0.21 0.68 0.30 11.11 0.01 3rd 0.12 20.57 1.68 0.28 0.58 0.20 12.05 0.01 均值 0.12 20.58 1.77 0.25 0.63 0.26 11.49 0.01 63 1st 0.21 14.23 1.68 0.18 0.58 0.25 13.47 0.01 2nd 0.17 15.88 2.07 0.29 0.61 0.31 12.99 0.01 3rd 0.15 19.53 1.73 0.33 0.66 0.29 13.38 0.01 均值 0.18 16.55 1.83 0.27 0.62 0.28 13.28 0.01 72 1st 0.25 15.05 1.99 0.20 0.59 0.38 15.09 0.01 2nd 0.17 16.02 2.25 0.21 0.69 0.35 14.96 0.01 3rd 0.33 12.77 1.96 0.26 0.63 0.26 15.43 0.01 均值 0.25 14.61 2.07 0.22 0.64 0.33 15.16 0.01 90 1st 0.21 10.52 2.48 0.17 0.91 0.1 18.49 0.01 2nd 0.11 10.37 2.14 0.98 1.24 0.11 18.19 0.01 3rd 0.24 10.21 3.38 0.78 1.64 0.18 18.25 0.01 均值 0.19 10.37 2.67 0.64 1.26 0.13 18.31 0.01
下载: 导出CSV
表 3 转弯半径为300 m的驾驶员模型参数
Table 3 Driver model parameters with turning radius of 300 m
$v\;({\rm{km/h}})$ $K_{p}$ $K_{c}$ $T_{I}$ $T_{L}$ $\tau_{p}$ $K_{r}$ $K_{t}$ $T_{N}$ 72 1st 0.05 29.88 1.56 0.57 0.79 0.24 15.28 0.01 2nd 0.11 29.95 1.11 0.89 0.64 0.14 15.61 0.01 3rd 0.09 29.57 1.38 0.64 0.58 0.11 15.08 0.01 均值 0.08 29.80 1.35 0.70 0.67 0.16 15.32 0.01 90 1st 0.09 23.42 1.55 1.13 0.85 0.16 18.68 0.01 2nd 0.06 23.57 1.18 0.97 0.69 0.13 18.92 0.01 3rd 0.13 24.05 1.04 0.78 0.63 0.21 18.42 0.01 均值 0.09 23.68 1.26 0.96 0.72 0.17 18.67 0.01 108 1st 0.12 21.72 0.97 0.81 1.17 0.31 21.16 0.01 2nd 0.18 22.29 0.92 0.94 1.22 0.44 21.20 0.01 3rd 0.14 23.52 0.82 0.86 1.15 0.61 21.06 0.01 均值 0.15 22.51 0.90 0.87 1.18 0.45 21.14 0.01 126 1st 0.03 21.86 0.53 2.69 1.19 0.13 24.58 0.01 2nd 0.05 20.26 0.48 2.14 1.11 0.18 25.21 0.01 3rd 0.08 19.17 0.39 3.05 0.89 0.33 25.86 0.01 均值 0.07 20.43 0.47 2.63 1.06 0.21 25.22 0.01
下载: 导出CSV
表 4 驾驶员模型的辨识误差指标(R = 200 m)
Table 4 Identification error index of driver model (R = 200 m)
v (km/h) 和方差 SSE 均方差 MSE 均方根 RMSE 采样点个数 54 1st 1.535 0.0008 0.0292 1800 2nd 1.939 0.0011 0.0328 1800 3rd 1.865 0.0010 0.0321 1800 均值 1.779 0.0009 0.0314 1800 63 1st 1.836 0.0011 0.0338 1600 2nd 1.676 0.0010 0.0324 1600 3rd 1.978 0.0012 0.0352 1600 均值 1.830 0.0011 0.0338 1600 72 1st 1.784 0.0013 0.0356 1400 2nd 1.285 0.0009 0.0300 1400 3rd 1.768 0.0012 0.0355 1400 均值 1.612 0.0011 0.0337 1400 90 1st 6.488 0.0065 0.0805 1000 2nd 5.064 0.0051 0.0712 1000 3rd 6.780 0.0068 0.0823 1000 均值 6.111 0.0062 0.0780 1000
下载: 导出CSV
表 5 驾驶员模型的辨识误差指标(R = 300 m)
Table 5 Identification error index of driver model (R = 300 m)
v (km/h) 和方差 SSE 均方差 MSE 均方根 RMSE 采样点个数 72 1st 0.904 0.0005 0.0224 1800 2nd 0.566 0.0003 0.0177 1800 3rd 0.802 0.0004 0.0211 1800 均值 0.757 0.0004 0.0204 1800 90 1st 2.544 0.0016 0.0399 1600 2nd 1.269 0.0008 0.0282 1600 3rd 2.503 0.0016 0.0395 1600 均值 2.105 0.0013 0.0359 1600 108 1st 4.194 0.0029 0.0547 1400 2nd 5.314 0.0038 0.0616 1400 3rd 4.234 0.0030 0.0550 1400 均值 4.581 0.0032 0.0571 1400 126 1st 29.340 0.0245 0.1564 1000 2nd 33.180 0.0277 0.1663 1000 3rd 16.924 0.0141 0.1188 1000 均值 26.481 0.0221 0.1472 1000
下载: 导出CSV
表 6 不同车速下的驾驶员模型参数辨识结果
Table 6 Identification of driver model parameters at different vehicle speed
参数 54 (km/h) 63 (km/h) 72 (km/h) 83 (km/h) 94 (km/h) $K_{p}$ 0.21 0.19 0.14 0.09 0.08 $K_{c}$ 49.99 42.55 49.79 49.95 49.99 $T_{i}$ 4.31 3.48 5.11 5.2 3.72 $T_{L}$ 0.32 0.30 0.34 0.22 0.21 $\tau_{p}$ 0.67 0.67 0.72 0.78 0.68 $K_{r}$ 0.32 0.33 0.42 0.52 0.48 $K_{t}$ 11.66 13.68 15.12 16.95 18.99 $T_{N}$ 0.01 0.01 0.01 0.01 0.01 目标函数 0.093 0.16 0.43 1.53 5.06 峰值误差 0.037 0.049 0.082 0.14 0.287 和方差 (SSE) 0.374 0.32 0.86 3.05 10.14 均方差 (MSE) 0.0002 0.0002 0.0006 0.0028 0.01 均方根 (RMSE) 0.0144 0.0141 0.0248 0.053 0.1 平均误差 0.007 0.011 0.018 0.03 0.079
下载: 导出CSV
表 7 不同车速下的车辆路径跟踪偏差指标对比
Table 7 Comparison of route tracking deviation index at different vehicle speeds
类型 63 km/h 72 km/h 83 km/h 94 km/h 108 km/h 120 km/h 峰值误差 0.27 0.21 0.14 0.23 0.71 1.36 和方差 (SSE) 26.6 13.6 2.61 17.12 142.47 481.2 均方差 (MSE) 0.015 0.009 0.002 0.015 0.141 0.523 均方根 (RMSE) 0.125 0.095 0.045 0.122 0.375 0.723
下载: 导出CSV
表 8 不同驾驶模式下车辆的路径跟踪偏差指标对比
Table 8 Comparison of vehicle path tracking deviation index under different driving mode
驾驶行为 峰值误差 和方差 (SSE) 均方差 (MSE) 均方根 (RMSE) A 正常转向 0.446 28.89 0.012 0.11 B 过度转向 0.207 10.76 0.0045 0.067 C 转向不足 0.43 59.7 0.025 0.158 C 单独驾驶 0.78 277.57 0.1157 0.34
下载: 导出CSV
-
[1] 姜岩, 龚建伟, 熊光明, 陈慧岩. 基于运动微分约束的无人车辆纵横向协同规划算法的研究. 自动化学报, 2013, 39(12): 2012-2020Jiang Yan, Gong Jian-Wei, Xiong Guang-Ming, Chen Hui-Yan. Research on difierential constraints-based planning algorithm for autonomous-driving vehicles. Acta Automatica Sinica, 2013, 39(12): 2012-2020 [2] 田涛涛, 侯忠生, 刘世达, 邓志东. 基于无模型自适应控制的无人驾驶汽车横向控制方法. 自动化学报, 2017, 43(11): 1931-1940Tian Tao-Tao, Hou Zhong-Sheng, Liu Shi-Da, Deng ZhiDong. Model-free adaptive control based lateral control of self-driving car. Acta Automatica Sinica, 2017, 43(11): 1931-1940 [3] Kucukyilmaz A, Demiris Y. Learning Shared Control by Demonstration for Personalized Wheelchair Assistance. IEEE Transactions on Haptics, 2018, 11(3): 431-442 doi: 10.1109/TOH.2018.2804911 [4] Franchi A, Secchi C, Ryll M, Bulthoff, H. Shared Control: Balancing Autonomy and Human Assistance with a Group of Quadrotor UAVs. IEEE Robotics & Automation Magazine, 2012, 19(3): 57-68 [5] Nicolis D, Palumbo M, Zanchettin A M. Occlusion-Free Visual Servoing for the Shared Autonomy Teleoperation of Dual-Arm Robots. IEEE Robotics & Automation Letters, 2018, 3(2): 796-803 [6] Amin N, Mohammad J, Thorsten O. A Survey on Unmanned Aerial Vehicle Remote Control Using Brain–Computer Interface. IEEE Transactions on Human-Machine Systems, 2018, 99: 1-12 [7] Andres U, Eduardo I, Jose M. Shared control architecture based on RFID to control a robot arm using a spontaneous brain–machine interface. Robotics and Autonomous Systems, 2013, 61(8): 768-774 doi: 10.1016/j.robot.2013.04.015 [8] Zhu G D, Zhang K M, Liu S, Qian B, Zhang X C. An EEG based dynamic shared control method for online teleoperation. In: Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, China: IEEE, 2017. 1188−1193 [9] Mulder M, Abbink D A, Boer E R. Sharing control with haptics: seamless driver support from manual to automatic control. Human Factors, 2012, 54(5): 786-798 doi: 10.1177/0018720812443984 [10] Mars F, Deroo M, Hoc J M. Analysis of Human-Machine Cooperation When Driving with Different Degrees of Haptic Shared Control. IEEE Transactions on Haptics, 2014, 7(3): 324-333 doi: 10.1109/TOH.2013.2295095 [11] Van der Wiel D W J, Van Paassen M M, Mulder M, Mulder M, Abbink D A. Driver adaptation to driving speed and road width: exploring parameters for designing adaptive haptic shared control. In: Proceedings of the 2015 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Hong Kong, China: IEEE, 2015. 3060−3065 [12] Wada T, Sonoda K, Okasaka T, Saito T. Authority transfer method from automated to manual driving via haptic shared control. In: Proceedings of the 2016 IEEE International Conference on Systems, Budapest, Hungary: IEEE, 2016. 2659−2664 [13] Benloucif A M, Nguyen A T, Sentouh C, Popieul J C. Cooperative Trajectory Planning for Haptic Shared Control between Driver and Automation in Highway Driving. IEEE Transactions on Industrial Electronics, 2019, 278-288 [14] Li M, Cao H, Song X, Huang Y, Wang J, Huang Z. Shared Control Driver Assistance System Based on Driving Intention and Situation Assessment. IEEE Transactions on Industrial Informatics, 2018, 14(11): 4982-4994 doi: 10.1109/TII.2018.2865105 [15] Griffiths P, Gillespie R B. Shared control between human and machine: haptic display of automation during manual control of vehicle heading. In: Proceedings of the 12th International Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, Chicago, IL, USA: IEEE, 2004. 358−366 [16] Erlien S M, Fujita S, Gerdes J C. Shared Steering Control Using Safe Envelopes for Obstacle Avoidance and Vehicle Stability. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(2): 441-451 doi: 10.1109/TITS.2015.2453404 [17] Balachandran A, Brown M, Erlien S M, Gerdes J C. Predictive Haptic Feedback for Obstacle Avoidance Based on Model Predictive Control. IEEE Transactions on Automation Science & Engineering, 2016, 13(1): 26-31 [18] Nguyen A T, Sentouh C, Popieul J C. Sensor Reduction for Driver-Automation Shared Steering Control via an Adaptive Authority Allocation Strategy. IEEE/ASME Transactions on Mechatronics, 2018, 23(1): 5-16 doi: 10.1109/TMECH.2017.2698216 [19] Ji X, Yang K, Na X, Chen L, Yahui L. Shared Steering Torque Control for Lane Change Assistance: A Stochastic Game-Theoretic Approach. IEEE Transactions on Industrial Electronics, 2019, 66(4): 3093-3105 doi: 10.1109/TIE.2018.2844784 [20] Tian Y T, Zhao Y B, Shi Y R, Cao X H, Yu D L. The indirect shared steering control under double loop structure of driver and automation. IEEE/CAA Journal of Automatica Sinica, 2020, 7(5): 1403−1416 [21] 马爱静. 考虑NMS的新型驾驶员模型在转向控制中的应用研究 [硕士学位论文]. 南京航空航天大学, 中国. 2014.Ma Ai-Jing. The Application and Research of Steering Control of the New Driver Model Based on Neuromuscular Dynamics. [Master thesis]. Nanjing University of Aeronautics and Astronautics, China, 2014. [22] Saleh L, Chevrel P, Mars F, Lafay J F, Claveau F. Human-like cybernetic driver model for lane keeping. IFAC Proceedings Volumes, 2011, 44(1): 4368-4373 doi: 10.3182/20110828-6-IT-1002.02349 [23] Pick A, Cole D. Measurement of Driver Steering Torque Using Electromyography. Journal of Dynamic Systems Measurement & Control, 2006, 128: 960-968 [24] Blgland B., Lippold O C J. The relationships between forces, velocity and integrated electrical activity in human muscles. Journal of physiology, 1954, 123: 214-224 doi: 10.1113/jphysiol.1954.sp005044 [25] 刘亚辉, 夏甫根, 季学武. 驾驶员转向研究中的神经肌肉力学方法. 中国汽车工程学会转向技术分会2009年年会. 烟台, 中国: 中国汽车工程学会, 2009. 1−8Liu Ya-Hui, Xia Pu-Gen, Ji Xue-Wu. Neuromuscular research method in driver steering. In: Proceedings of the 2009 China Society of Automotive Engineers, Annual Meeting of Steering Technology, Yantai, China: China SAE, 2009. 1−8 [26] 包子阳, 余继周. 智能优化算法及其MATLAB实例. 电子工业出版社, 2016.Bao Zi-Yang, Yu Ji-Zhou. Intelligent Optimization Algorithm and MATLAB Examples. Electronic Industry Press, 2016. -

 下载:
下载:





计量
- 文章访问数: 1055
- HTML全文浏览量: 657
- PDF下载量: 275
- 被引次数: 0
