

An Optimal Attitude Control Method of the Combined Double Flywheel-single Jet for an Underactuated Spacecraft
-
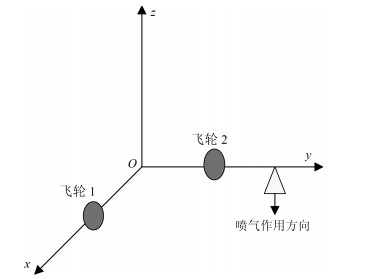
摘要: 欠驱动航天器的姿态控制能够增强航天器的可靠性.本文针对欠驱动航天器姿态控制, 从喷气姿态阻尼的角动量等效原理出发, 推导脉宽调制公式, 得到燃料消耗最小时给定姿态、非给定姿态两种情况下的喷气最优组合方案.同时, 为了实现喷气全局最优, 提出欠驱动飞轮姿态控制策略, 实现了运动航天器机动至预期姿态.进一步分析欠驱动飞轮航天器的姿态控制原理及稳定性, 提出了共面双飞轮-单喷气的配置方案, 通过双飞轮组合稳定航天器的角速度, 使得航天器到达预期姿态机动时燃料全局最省.结合绕两个旋转轴的姿态机动路径规划方法, 通过姿态机动时序关系的实时分配可实现航天器姿态机动与稳定控制.最后, 通过航天器姿态控制仿真和对比分析, 发现共面双飞轮-单喷气的欠驱动姿态阻尼及姿轨控制方案能够在较少硬件配置下实现对航天器的姿态控制, 且消耗燃料最少.Abstract: Attitude control of the underactuated spacecraft enhances the reliability of the spacecraft. In this paper, based on the angular momentum equivalent principle of jet attitude damping, the pulse width modulation formula is derived to obtain the optimal attitude of the jet in the given attitude and the non-given attitude. Meanwhile, in order to achieve the goal of the global optimal jet, the underactuated flywheel attitude control strategy is proposed to realize the maneuvering of the spacecraft to the expected attitude. The attitude control principle and stability of the underactuated flywheel spacecraft are further analyzed. The hardware configuration scheme of the coplanar double flywheel-single jet is proposed. The angular velocity of the spacecraft is stabilized by the double flywheel combination, and the most realistic expected attitude and maneuver of the fuel are achieved. The attitude maneuver path planning method based on two axis rotation can realize the spacecraft attitude maneuver and stability control through the real-time allocation of attitude maneuver timing relations. Finally, the spacecraft attitude control simulation results show that the coplanar double flywheel-single jet owes the drive attitude damping scheme, enables attitude control of the spacecraft with less hardware configuration, and consumes the least fuel.
-
Key words:
- Attitude control /
- underactuated spacecraft /
- coplanar double flywheel-single jet /
- optimal jet
1) 本文责任编委 倪茂林 -

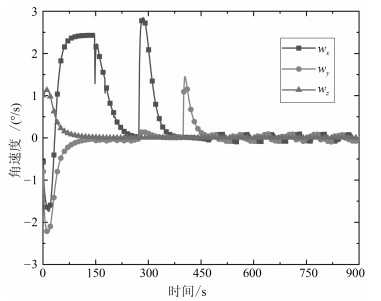
图 4 双飞轮阻尼时航天器角速度的变化
Fig. 4 The variation of spacecraft angular velocity by two flywheels' damping

图 5 双飞轮姿态机动喷气阻尼的航天器角速度变化
Fig. 5 The variation of spacecraft angular velocity by two flywheels' maneuver and jet's damping

图 6 双飞轮姿态机动喷气阻尼的航天器角动量变化
Fig. 6 The variation of spacecraft angular momentum by two flywheels' maneuver and jet's damping
-
[1] 张洪华, 关轶峰, 胡锦昌, 王泽国.分区四元数姿态控制.自动化学报, 2015, 41(7): 1341-1349 doi: 10.16383/j.aas.2015.c140624Zhang Hong-Hua, Guan Yi-Feng, Hu Jin-Chang, Wang Ze-Guo. A novel attitude control strategy based on quaternion partition. Acta Automatica Sinica, 2015, 41(7): 1341-1349 doi: 10.16383/j.aas.2015.c140624 [2] 段晨阳, 汤国建, 张世杰.单轴飞轮故障时的小卫星姿态控制方法研究.航天控制, 2007, 25(3): 48-52 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=htkz200703011Duan Chen-Yang, Tang Guo-Jian, Zhang Shi-Jie. Attitude control method of small satallite in the case of single reaction wheel failure. Aerospace Control, 2007, 25(3): 48-52 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=htkz200703011 [3] 黄静, 李传江, 马广富, 刘刚.基于广义逆的欠驱动航天器姿态机动控制.自动化学报, 2013, 39(3): 285-292 doi: 10.3724/SP.J.1004.2013.00285Huang Jing, Li Chuan-Jiang, Ma Guang-Fu, Liu Gang. Generalised inversion based maneuver attitude control for underactuated spacecraft. Acta Automatica Sinica, 2013, 39(3): 285-292 doi: 10.3724/SP.J.1004.2013.00285 [4] 李世华, 田玉平.带两控制器刚体飞行器的姿态镇定.自动化学报, 2003, 29(2): 168-174 http://www.aas.net.cn/article/id/14096Li Shi-Hua, Tian Yu-Ping. Attitude stabilization of a rigid spacecraft with two controls. Acta Automatica Sinica, 2003, 29(2): 168-174 http://www.aas.net.cn/article/id/14096 [5] 张洪华, 王芳, 胡锦昌, 王泽国.欠驱动挠性航天器的全姿态控制.宇航学报, 2015, 36(4): 419-429 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=yhxb201504008Zhang Hong-Hua, Wang Fang, Hu Jin-Chang, Wang Ze-Guo. All-attitude control for underactuated flexible spacecraft. Journal of Astronautics, 2015, 36(4): 419-429 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=yhxb201504008 [6] 张佳为, 许诺, 伍少雄.欠驱动航天器飞轮控制方法.宇航学报, 2016, 37(5): 552-561 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=yhxb201605007Zhang Jia-Wei, Xu Nuo, Wu Shao-Xiong. Control method of underactuated spacecraft using flywheels. Journal of Astronautics, 2016, 37(5): 552-561 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=yhxb201605007 [7] 段晨阳.冗余配置航天器推力动态分配方法研究[博士学位论文].哈尔滨工业大学, 2015Duan Chen-Yang. Thrust dynamic allocation of spacecraft with redundant thrusters[Ph. D. dissertation]. Harbin Institute of Technology, 2015 [8] 郭朝礼, 张笃周, 王淑一.欠驱动航天器滑模速率阻尼控制.空间控制技术与应用, 2013, 39(4): 12-17 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kjkzjsyyy201304003Guo Chao-Li, Zhang Du-Zhou, Wang Shu-Yi. Sliding model control for rate damping of underactuated spacecraft. Aerospace Control and Application, 2013, 39(4): 12-17 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kjkzjsyyy201304003 [9] 金磊, 徐世杰.带有两个飞轮的欠驱动航天器姿态稳定控制研究.中国空间科学技术, 2009, 2: 8-16 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgkjkxjs200902002Jin Lei, Xu Shi-Jie. Attitute stablization of an underactuated spacecraft with two reaction wheels. Chinese Space Science and Technology. 2009, 2: 8-16 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgkjkxjs200902002 [10] 戈新生, 胡兵.基于欧拉四元数的欠驱动航天器姿态稳定性滑模控制.北京信息科技大学学报:自然科学版, 2012, 27(1): 5-11 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=bjjxgyxyxb201201002Ge Xin-Sheng, Hu Bing. Control of attitude stabilization of underactuated spacecraft based on Euler$'$s quaternion. Journal of Beijing Information Science and Technology University, 2012, 27(1): 5-11 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=bjjxgyxyxb201201002 [11] Krishnan H, McClamroch N H, Reyhanoglu M. Attitude stabilization of a rigid spacecraft using two momentum wheel actuators, Journal of Guidance. Control, and Dynamics, 1995, 18(2): 256-263 doi: 10.2514/3.21378 [12] Horri N M, Hodgart S. Attitude stabilization of an underactuated satellite using two wheels. Aerospace Conference, Proceedings 2003 IEEE, 2003, 6: 2629-2635 [13] Horri N M, Palmer P, Hodgart S. Practical implementation of attitude-control algorithms for an underactuated satellite. Journal of Guidance, Control, and Dynamics, 2012, 35(1): 40-45 doi: 10.2514/1.54075 [14] 张洪华, 王芳.欠驱动挠性航天器的单轴指向控制.宇航学报, 2011, 32(7): 1491-1501 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=yhxb201107009Zhang Hong-Hua, Wang Fang. Single axis pointing control of underactuated flexiable spacecraft. Journal of Astronautics, 2011, 32(7): 1491-1501 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=yhxb201107009 [15] 宋道喆, 耿云海, 易涛.零角动量欠驱动航天器逆最优稳定控制律设计.宇航学报, 2016, 37(6): 729-736 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=yhxb201606013Song Dao-Zhe, Geng Yun-Hai, Yi Tao. Inverse optimal stabilization of an underactuated spacecraft in a zero angular momentum mode. Journal of Astronautics, 2016, 37(6): 729-736 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=yhxb201606013 -

 下载:
下载:


图(9)
计量
- 文章访问数: 1488
- HTML全文浏览量: 295
- PDF下载量: 217
- 被引次数: 0
