

-
摘要: 提出了一种新的基于集中式处理结构的有约束多传感器控制算法.该算法将多目标均方误差界作为传感器控制的代价函数.为了应用信息不等式得到该误差界, 2阶最优子模式分配测度被用于度量状态集和其估计集间的误差, 并采用δ-广义标签多伯努利滤波器执行多目标Bayes递推.混合罚函数法和复合形法被用来降低求解该有约束优化问题的计算量.仿真结果表明对于由多个不同观测性能传感器组成的带约束条件的控制系统, 本方法的跟踪精度显著优于柯西-施瓦茨散度法; 并且当传感器个数较多时, 混合罚函数和复合形法的计算时间相比穷尽搜索法显著缩短而跟踪精度损失很小.Abstract: The paper proposes a new constrained multi-sensor control algorithm based on the centralized processing architecture. In this method, a multi-target mean-square error bound is served as cost function of sensor control. In order to derive the bound by using the information inequality, the error between state set and its estimation is measured by the 2nd-order optimal sub-pattern assignment metric while the multi-target Bayes recursion is performed by using a δ-generalized labeled multi-Bernoulli filter. Mixed penalty function method and complex method are used to reduce the computation cost of solving the constrained optimization problem. Simulation results show that for the constrained multi-sensor control system with different observation performance, our method significantly outperforms the Cauchy-Schwarz divergence method in tracking precision. Besides, when the number of sensors is relatively large, the computation time of the mixed penalty function and complex methods is much shorter than that of the exhaustive search method at the expense of completely acceptable loss of tracking accuracy.
-
Key words:
- Multi-sensor control /
- labeled random finite set (RFS) /
- multi-target tracking /
- Bayesian estimation /
- error bounds
1) 本文责任编委 季海波 -
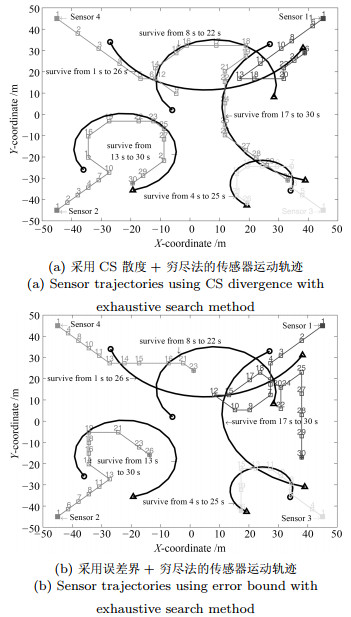
图 1 单次实验中CS散度+穷尽法和误差界+穷尽法的传感器运动轨迹(黑实线表示目标运动轨迹, $ \bigcirc $和$ \Delta $分别表示目标的起点和终点; 灰色实线表示传感器运动轨迹, $ \square $和其上方数字分别表示传感器位置和处于该位置的时刻, $ \blacksquare $和$ \boxplus $分别表示传感器的起点和终点)
Fig. 1 Sensor trajectories in a simulation by using CS divergence with exhaustive search method and error bound with exhaustive search method(The black line is the target trajectory, $ \bigcirc $ and $ \Delta $ are the target starting point and ending point; the gray line is the sensor trajectory, $ \square $ and the number above it are the sensor position and the time when the sensor is located at the position, $ \blacksquare $ and $ \boxplus $ are the sensor starting point and ending point)
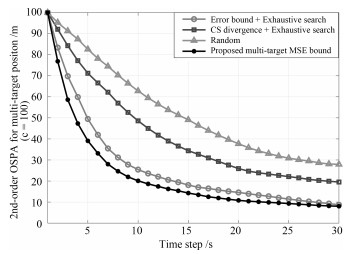
图 2 随机法、CS散度+穷尽法和误差界+穷尽法的平均OSPA误差
Fig. 2 Average OSPA error by random, CS divergence and error bound with exhaustive search
表 1 本文多目标MSE界的计算步骤
Table 1 The calculation steps of the multi-target MSE bound in this paper
步骤 计算多目标MSE界 第1步: 根据式(17)所示的多目标$ \delta $-GLMB预测密度$ {{\pi }_+}({\pmb X}) $产生$ M $个采样集$ {{\Psi}_{S}} = \left\{\tilde{{\pmb X}}_+^{(1)}, \cdots, \tilde{{\pmb X}}_+^{(M)} \right\} $; 第2步: 对于每一个$ \tilde{{\pmb X}}_+^{(j)}\in {{\Psi }_{S}} $, 根据式(7)所示的似然函数$ {{g}^{i}}\left( \cdot \left| \tilde{{\pmb X}}_+^{(j)}, {{u}^{i}} \right. \right) $, $ i = 1, \cdots, s $, 产生s个传感器的PIMS$ \tilde{Z}_{{{m}^{1:s}}}^{1:s, (j)} $; 第3步: 根据式(18)和(19)将所有的PIMS$ \left\{ \tilde{Z}_{{{m}^{1:s}}}^{1:s, (j)} \right\}_{j = 1}^{M} $分别划分到各个测量子空间$ \mathbb{Z}_{0, {{m}^{1:s}}}^{1:s}, \mathbb{Z}_{1, {{m}^{1:s}}}^{1:s}, \cdots, \mathbb{Z}_{\infty , {{m}^{1:s}}}^{1:s} $; 第4步: 给定$ \mathbb{Z}_{\hat{n}, {{m}^{1:s}}}^{1:s} $所包含的PIMS, 对式(24)和(35)应用伪MC积分法可得$ {{\varpi }_{\hat{n}, n, {{m}^{1:s}}}}\left( {{u}^{1:s}} \right) $和$ {{J}_{\hat{n}, n, {{m}^{1:s}}}}\left( {{u}^{1:s}} \right) $; 第5步: 根据式(23)、(33)和(34)计算得到$ {{\Omega }_{n, {{m}^{1:s}}}}\left( {{u}^{1:s}} \right) $, $ {{\Phi }_{\hat{n}, n, {{m}^{1:s}}}}\left( {{u}^{1:s}} \right) $和$ {{\varepsilon }_{\hat{n}, n}} $; 第6步: 将所求得的$ {{\varpi }_{\hat{n}, n, {{m}^{1:s}}}}\left( {{u}^{1:s}} \right) $, $ {{\Omega }_{n, {{m}^{1:s}}}}\left( {{u}^{1:s}} \right) $, $ {{\varepsilon }_{\hat{n}, n}} $和$ {{\Phi }_{\hat{n}, n, {{m}^{1:s}}}}\left( {{u}^{1:s}} \right) $代入式(32)可得$ {{\underline{\sigma }}^{2}}\left( {{u}^{1:s}} \right) $.  下载: 导出CSV
下载: 导出CSV
表 2 混合罚函数法
Table 2 Mixed penalty function method
步骤 混合罚函数求解过程 第1步: 选定满足不等式约束的初始点$ u_{(0)}^{1:s} $, 初始障碍因子$ r $及其缩小系数$ 0<C<1 $, 令$ i = 0 $; 第2步: 从$ j = 1 $到$ j = s $依次求$ u_{(i + 1)}^j = \arg {\mkern 1mu} \;\mathop {\min }\limits_{{u^j}} F\left( {u_{(i + 1)}^1, \cdots ,u_{(i + 1)}^{j - 1},{u^j},u_{(i)}^{j + 1}, \cdots ,u_{(i)}^s,r} \right) $, 此处只有$ {{u}^{j}} $为变量其余均为常量; 第3步: 若$ \sum\nolimits_{j = 1}^{s}{\left\| u_{(i+1)}^{j}-u_{(i)}^{j} \right\|}\le {{\varepsilon }_{2}} $, 转第4步; 否则令$ i = i+1 $, 转第2步; 第4步: 若$ \sum\nolimits_{j=1}^{s}{\left\| u_{(i+1)}^{j}-u_{(0)}^{j} \right\|}\le {{\varepsilon }_{1}} $, 输出$ u_{(i+1)}^{1:s} $为式(15)的解; 否则令$ r=Cr $, $ u_{(0)}^{1:s}=u_{(i+1)}^{1:s} $, $ i=0 $, 转第2步.
下载: 导出CSV
表 3 复合形法
Table 3 Complex method
步骤 复合形法求解过程 第1步: 选定$ {{\vec{u}}_{1}}, \cdots, {{\vec{u}}_{k}}\in{{\vec{\mathbb{U}}}_{D}} $ $ (N+2\le k\le2N) $构成初始复合形的$ k $个顶点, 为了避免降维, 要求至少有$ N+1 $个点的连线所形成的矢量有$ N $个是线性独立的; 第2步: 找出$ k $个顶点中目标函数值最大的点(最坏点)$ {{\vec{u}}_{H}} $和最小的点(最好点) $ {{\vec{u}}_{L}} $, $ {{\underline{\sigma }}^{2}} \left( {{{\vec{u}}}_{H}} \right) = \max\left\{ {{{\underline{\sigma }}}^{2}} \left( {{{\vec{u}}}_{1}}\right), \cdots, {{{\underline{\sigma }}}^{2}} \left({{{\vec{u}}}_{k}} \right) \right\} $, $ {{\underline{\sigma}}^{2}}\left( {{{\vec{u}}}_{L}} \right) = \min \left\{{{{\underline{\sigma }}}^{2}}\left( {{{\vec{u}}}_{1}}\right), \cdots, {{{\underline{\sigma }}}^{2}}\left({{{\vec{u}}}_{k}}\right) \right\} $; 第3步: 求除去$ {{\vec{u}}_{H}} $外其余$ k-1 $个顶点的中心点$ {{\vec{u}}_{0}} = \frac{1}{k-1}\left( \sum\limits_{i = 1}^{k}{{{{\vec{u}}}_{i}}}-{{{\vec{u}}}_{H}} \right) $.若$ {{\vec{u}}_{0}}\in{{\vec{\mathbb{U}}}_{D}} $, 转第4步; 否则, 转第1步, 重新选择初始顶点; 第4步: 以$ {{\vec{u}}_{0}} $为轴心求$ {{\vec{u}}_{H}} $的映射点$ {{\vec{u}}_{R}} = {{\vec{u}}_{0}}+t\left({{{\vec{u}}}_{0}}- {{{\vec{u}}}_{H}} \right) $, 其中$ t>0 $称为映射系数, 一般先取$ t = 1.3 $.若$ {{\vec{u}}_{R}}\in{{\vec{\mathbb{U}}}_{D}} $, 转第5步; 否则, 令$ t = 0.5t $, 转第4步; 第5步: 若$ {{\underline{\sigma }}^{2}}\left({{{\vec{u}}}_{R}}\right)<{{\underline{\sigma }}^{2}}\left( {{{\vec{u}}}_{H}} \right) $, 令$ {{\vec{u}}_{H}} = {{\vec{u}}_{R}} $, 转第6步; 否则, 令$ t = 0.5t $,转第4步.若$ t $已很小(如小于$ {{10}^{-5}} $)还不能满足上式, 说明由$ {{\vec{u}}_{H}} $和$ {{\vec{u}}_{0}} $形成的映射方向不利.为改变映射方向, 令$ {{\vec{u}}_{H}} = {{\vec{u}}_{SH}} $, 其中$ {{\vec{u}}_{SH}} $为次坏点, 转第3步; 第6步: 若$ {{\left( \frac{1}{k}\sum\limits_{i=1}^{k}{{{\left[ {{{\underline{\sigma }}}^{2}}\left( {{{\vec{u}}}_{0}}\right)-{{{\underline{\sigma }}}^{2}}\left( {{{\vec{u}}}_{i}}\right)\right]}^{2}}} \right)}^{\frac{1}{2}}}\le {{\varepsilon }_{1}} $或$ \mathop {\max }\limits_{1 \le i \le k} {\mkern 1mu} \left\| {{{\vec u}_i} - {{\vec u}_0}} \right\| \le {\varepsilon _2} $, 输出$ {{\vec{u}}_{L}} $为式(15)的解; 否则, 转第2步.
下载: 导出CSV
表 4 本文多传感器控制及多目标跟踪算法的执行流程
Table 4 The implementation process of multi-sensor control and multi-target tracking algorithm proposed in this paper
第1步: 对于式(15)所示的优化问题, 采用穷尽搜索、混合罚函数或复合形法三者之一计算多传感器最优控制量$ {{\left[ {{u}^{1:s}} \right]}^{*}} $; 第2步: 执行控制命令$ {{\left[ {{u}^{1:s}} \right]}^{*}} $后, 可获得真实测量集$ {{Z}^{1:s}} $; 第3步: 将$ {{Z}^{1:s}} $代入$ \delta $-GLMB滤波器的更新步, 可得多目标$ \delta $-GLMB后验密度$ \pi \left( \left.{\pmb X} \right|{{Z}^{1:s}}, {{u}^{1:s}} \right) $; 第4步: 根据假设3可得多目标状态估计集$ {{\hat{{\pmb X}}}_{{\hat{n}}}} $; 第5步: 将$ \pi \left( \left. {\pmb X} \right|{{Z}^{1:s}}, {{u}^{1:s}} \right) $代入$ \delta $-GLMB滤波器的预测步, 可得下一时刻的多目标$ \delta $-GLMB预测密度$ {{\pi }_+}({\pmb X}) $.转第1步.
下载: 导出CSV
表 5 本文多传感器控制算法与基于GCI的多传感器控制算法的比较
Table 5 A comparison between multi-sensor control algorithm proposed in this paper and multi-sensor control algorithm based on GCI
本文多传感器控制算法 基于GCI的多传感器控制算法 目标函数 多目标MSE界 CS散度或PEECS 滤波器 $ \delta $-GLMB 边缘$ \delta $-GLMB或LMB (两者均为$ \delta $-GLMB的近似) 融合结构 集中式 分布式 通讯量 需传递各个传感器的测量集 需传递各个传感器的局部后验密度 计算方式 并行处理 并行处理
下载: 导出CSV
表 6 500次MC仿真平均后的OSPA误差终值(m)和CPU耗时(s)
Table 6 500 MC run averages of final OSPA error distance (m) and CPU processing time (s)
传感器控制算法 s = 4, E = 100J s = 4, E = 100J s = 4, E = 100J s = 4, E = 100J s = 4, E = 100J CS散度+穷尽法 19.5m/22s 13.9m/153s 9.2m/1062s 5.8m/7259s 4.6m/50973s 误差界+穷尽法 8.7m/23s 6.0m/162s 4.6m/1128s 3.9m/7698s 3.6m/53168s 误差界+混合罚函数法 8.9m/20s 6.3m/91s 5.1m/204s 4.5m/365s 4.1m/578s 误差界+复合形法 9.0m/16s 6.4m/81s 5.1m/206s 4.4m/573s 4.0m/1296s 建议的多目标MSE界 8.0m 5.4m 4.1m 3.5m 3.2m
下载: 导出CSV
-
[1] Bar-Shalom Y, Li X R. Multitarget-Multisensor Tracking: Principles and Techniques. Storrs, CT: YBS Publishing, 1995. [2] Blackman S, Popoli R. Design and Analysis of Modern Tracking Systems. Norwood, MA: Artech House, 1999. [3] Tharmarasa R, Kirubarajan T, Hernandez M L, Sinha A. PCRLB-based multisensor array management for multitarget tracking. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(2): 539-555 doi: 10.1109/TAES.2007.4285352 [4] Tharmarasa R, Kirubarajan T, Sinha A, Lang T. Decentralized sensor selection for large-scale multisensor-multitarget tracking. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(2): 1307-1324 doi: 10.1109/TAES.2011.5751260 [5] Mohammadi A, Asif A. Decentralized computation of the conditional posterior Cramé r-Rao lower bound: application to adaptive sensor selection, In: Proceedings of the 38th IEEE International Conference on Acoustics, Speech, and Signal Processing, Vancouver, British Columbia, Canada: IEEE, 2013. 5278-5282 [6] Mahler R. Advances in Statistical Multisource-Multitarget Information Fusion. Norwood, MA: Artech House, 2014. [7] Vo B T, Vo B N. Labeled random finite sets and multi-object conjugate priors. IEEE Transactions on Signal Processing, 2013, 61(13): 3460-3475 doi: 10.1109/TSP.2013.2259822 [8] Vo B N, Vo B T, Phung D. Labeled random finite sets and the bayes multi-target tracking filter. IEEE Transactions on Signal Processing, 2014, 62(24): 6554-6567 doi: 10.1109/TSP.2014.2364014 [9] Reuter S, Vo B T, Vo B N, Dietmayer K. The labeled multi-bernoulli filter. IEEE Transactions on Signal Processing, 2014, 62(12): 3246-3260 doi: 10.1109/TSP.2014.2323064 [10] Papi F, Vo B N, Vo B T, Fantacci C, Beard M. Generalized labeled multi-Bernoulli approximation of multi-object densities. IEEE Transactions on Signal Processing, 2015, 63(20): 5487-5497 doi: 10.1109/TSP.2015.2454478 [11] Castanón D A, Carin L. Stochastic control theory for sensor management. In Hero Ⅲ A O, Castanón D A, Cochran D, Kastella K (Eds.), Foundations and applications of sensor management (pp. 7-32). Springler (Chapter 2), 2008. [12] Mahler R, Zajic T. Probabilistic objective functions for sensor management, In: Proceedings of the SPIE, vol.5429 Signal Processing, Sensor Fusion, and Target Recognition XⅢ, Orlando, FL, USA, April 2004, 233-244 [13] Hoang H G, Vo B T. Sensor management for multi-target tracking via multi-Bernoulli filtering, Automatica, 2014, 50(4): 1135-1142 doi: 10.1016/j.automatica.2014.02.007 [14] Gostar A K, Hoseinnezhad R, Bab-Hadiashar A. Multi-Bernoulli sensor control via minimization of expected estimation errors. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(3): 1762-1773 doi: 10.1109/TAES.2015.140211 [15] Ristic B, Vo B N. Sensor control for multi-object state-space estimation using random finite sets. Automatica, 2010, 46(11): 1812-1818 doi: 10.1016/j.automatica.2010.06.045 [16] Ristic B, Vo B N, Clark D. A note on the reward function for phd filters with sensor control. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(2): 1521-1529 doi: 10.1109/TAES.2011.5751278 [17] Beard M, Vo B T, Vo B N, Arulampalam S. Sensor control for multi-target tracking using cauchy-schwarz divergence, In: Proceedings of the 18th International Conference on Information Fusion, Washington D.C., USA: 2015, 937-944 [18] Gostar A K, Hoseinnezhad R, Rathnayake T, Wang X, Bab-Hadiashar A. Constrained sensor control for labeled multi-Bernoulli filter using Cauchy-Schwarz divergence. IEEE Signal Processing Letters, 2017, 24(9): 1313-1317 doi: 10.1109/LSP.2017.2723924 [19] Jiang M, Yi W, Kong L. Multi-sensor control for multi-target tracking using Cauchy-Schwarz divergence, In: Proceedings of the 19th International Conference on Information Fusion, Heidelberg, Germany: 2016, 2059-2066 [20] Wang X, Hoseinnezhad R, Gostar A K, Rathnayake T, Xu B, Bab-Hadiashar A. Multi-sensor control for multi-object Bayes filters. Signal Processing, 2018, 142(1): 260-270 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=21443d37af419592fe4d7fda0adb0442 [21] Mahler R. Optimal/robust distributed data fusion: a unified approach, In: Proceedings of the SPIE, vol. 4052 Signal Processing, Sensor Fusion, and Target Recognition IX, Orlando, FL, USA: 2000, 128-138 [22] Fantacci C, Vo B N, Vo B T, Battistelli G, Chisci L. Consensus labeled random finite set filtering for distributed multi-object tracking, arXiv preprint arXiv: 1501.01579, 2015. [23] Wright S J. Coordinate descent algorithms, Mathematical Programming, 2015, 151(1): 3-34 [24] Schuhmacher D, Vo B T, Vo B N. A consistent metric for performance evaluation of multi-object filters. IEEE Transactions on Signal Processing, 2008, 56(8): 3447-3457 doi: 10.1109/TSP.2008.920469 [25] Rezaeian M, Vo B N. Error bounds for joint detection and estimation of a single object with random finite set observation. IEEE Transactions on Signal Processing, 2010, 58(3): 1493-1506 doi: 10.1109/TSP.2009.2037665 [26] Zuo L, Niu R, Varshney P K. Conditional posterior Cramé r-Rao lower bounds for nonlinear sequential Bayesian estimation. IEEE Transactions on Signal Processing, 2011, 59(1): 1-14. http://dl.acm.org/citation.cfm?id=2199650 [27] Luenberger D G, Ye Y. Linear and Nonlinear Programming (4th Edition). New York: Springer, 2015. [28] Krus P, Andersson J. Optimizing optimization for design optimization, In: Proceedings of the ASME Design Automation Conference, Chicago, IL, USA: 2003, 951-960 [29] Poor V. An Introduction to Signal Detection and Estimation, New York: Springer-Verlag, 1994. https://www.springer.com/gp/book/9780387941738 [30] Davis P J, Rabinowitz P, Rheinbolt W. Methods of Numerical Integration (Second Edition). Mineola, New York: Dover Publications, 2007. [31] Mishra M, Gupta N, Dubey A, Shekhar S. Application of quasi Monte Carlo integration technique in efficient capacitance computation. Progress In Electromagnetics Research, 2009, 90: 309-322 doi: 10.2528/PIER09011310 [32] Krus P, Ölvander J. Performance index and meta optimization of a direct search optimization method. Engineering Optimization, 2013, 45(10): 1167-1185 doi: 10.1080/0305215X.2012.725052 [33] Li X R, Jilkov V P. Survey of maneuvering target tracking, Part V: multiple-model methods. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(4): 1255-1321 doi: 10.1109/TAES.2005.1561886 [34] Arulampalam S, Maskell S, Gordon N J, Clapp T. A tutorial on particle filters for on-line non-linear/non-Gaussian Bayesian tracking. IEEE Transactions on Signal Processing, 2002, 50(2): 174-188 doi: 10.1109/78.978374 [35] Poor V.An Introduction to Signal Detection and Estimation. New York: Springer-Verlag, 1994. -

 下载:
下载:

计量
- 文章访问数: 1762
- HTML全文浏览量: 337
- PDF下载量: 201
- 被引次数: 0
