

Human-machine Cooperative Control of Intelligent Vehicle: Recent Developments and Future Perspectives
-
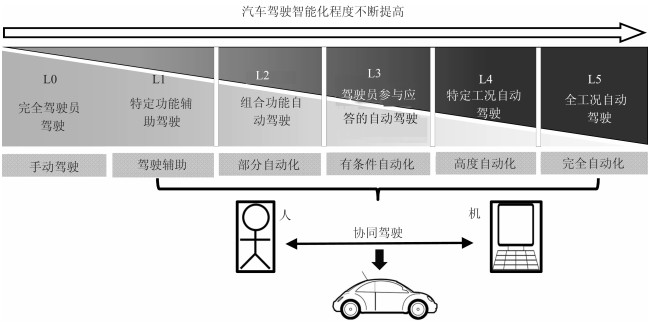
摘要: 随着人工智能、互联网技术、通信技术、计算机技术的快速发展,以电动化、智能化及网联化为基础的智能汽车成为汽车行业发展的一大趋势.按照汽车智能化、自动化的发展进程,美国汽车工程师协会将智能汽车的发展分为手动驾驶、驾驶辅助、部分自动化、有条件自动化、高度自动化和完全自动化6个级别,虽然不同层次、不同功能的汽车智能化技术正迅猛发展,但是真正意义上的全工况自动驾驶在短期内很难实现.因此,在未来很长一段时期内,智能汽车必然面对人机协同控制的局面,本文详细介绍了智能汽车人机协同控制中驾驶员建模及人机驾驶权动态优化控制的国内外研究现状,同时简要介绍了智能汽车测试与评价的国内外研究现状,提炼了共性问题,并对人机协同控制的发展趋势给出了一些观点.Abstract: With the rapid development of artificial intelligence, information and communication technology, intelligent vehicle oriented toward electrical, intelligence and network techniques becomes one of the major trends in the automotive industry. The society of automotive engineers (SAE) divides intelligent and autonomous vehicle technologies into six levels:manual driving, driving assistance, partial automation, conditional automation, highly automation and fully automation. Although intelligent and autonomous vehicle technologies at different levels and different functions are developed rapidly, it is very difficult to implement automatic driving in the near future. Therefore, intelligent and autonomous vehicle has to face the situation of human-machine coordinated control in a long period of time. This paper focuses on the research status and future perspectives of driver modeling, cooperative control strategy and test and evaluation of intelligent vehicle, in which the common problems are extracted and some views on the development trends of human-machine cooperative control are given.1) 本文责任编委 李力
-
[1] 李克强, 戴一凡, 李升波, 边明远.智能网联汽车(ICV)技术的发展现状及趋势.汽车安全与节能学报, 2017, 8(1): 1-14 doi: 10.3969/j.issn.1674-8484.2017.01.001Li Ke-Qiang, Dai Yi-Fan, Li Sheng-Bo, Bian Ming-Yuan. State-of-the-art and technical trends of intelligent and connected vehicles. Journal of Automotive Safety and Energy, 2017, 8(1): 1-14 doi: 10.3969/j.issn.1674-8484.2017.01.001 [2] 李力, 王飞跃, 郑南宁, 张毅.驾驶行为智能分析的研究与发展.自动化学报, 2007, 33(10): 1014-1022 http://www.aas.net.cn/CN/abstract/abstract17279.shtmlLi Li, Wang Fei-Yue, Zheng Nan-Ning, Zhang Yi. Research and developments of intelligent Driving behavior analysis. Acta Automatica Sinica, 2007, 33(10): 1014-1022 http://www.aas.net.cn/CN/abstract/abstract17279.shtml [3] Zhu Z W, Ji Q. Real time and non-intrusive driver fatigue monitoring. In: Proceedings of the 7th International IEEE Conference on Intelligent Transportation Systems. Washington, USA: IEEE, 2004. 657-662 [4] He J, Roberson S, Fields B, Peng J, Cielocha S, Coltea J. Fatigue detection using smartphones. Journal of Ergonomics, 2013, 3: Article No. 3 [5] Jia D Y, Zou S X. Driver fatigue monitoring based on head and facial features using hierarchical Bayesian method. Applied Mechanics and Materials, 2014, 548-549: 1093-1097 doi: 10.4028/www.scientific.net/AMM.548-549 [6] Lee B G, Chung W Y. Driver alertness monitoring using fusion of facial features and bio-signals. IEEE Sensors Journal, 2012, 12(7): 2416-2422 doi: 10.1109/JSEN.2012.2190505 [7] Li X, Tan N L, Wang T L, Su S Q. Detecting driver fatigue based on nonlinear speech processing and fuzzy SVM. In: Proceedings of the 12th International Conference on Signal Processing (ICSP). Hangzhou, China: IEEE, 2014. 510-515 [8] Liang Y L, Reyes M L, Lee J D. Real-time detection of driver cognitive distraction using support vector machines. IEEE Transactions on Intelligent Transportation Systems, 2007, 8(2): 340-350 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ef1c6be27cb9f2a298c5c2da73fc5115 [9] Torkkola K, Massey N, Wood C. Driver inattention detection through intelligent analysis of readily available sensors. In: Proceedings of the 7th International IEEE Conference on Intelligent Transportation Systems. Washington, USA: IEEE, 2004. 326-331 [10] Barkana Y, Zadok D, Morad Y, Avni I. Visual field attention is reduced by concomitant hands-free conversation on a cellular telephone. American Journal of Ophthalmology, 2004, 138(3): 347-353 doi: 10.1016/j.ajo.2004.04.016 [11] Yang G S, Lin Y Z, Bhattacharya P. A driver fatigue recognition model based on information fusion and dynamic Bayesian network. Information Sciences, 2010, 180(10): 1942-1954 doi: 10.1016/j.ins.2010.01.011 [12] Nickel P, Nachreiner F. Sensitivity and diagnosticity of the 0.1-Hz component of heart rate variability as an indicator of mental workload. Human Factors, 2003, 45(4): 575-590 doi: 10.1518/hfes.45.4.575.27094 [13] Mehler B, Reimer B, Coughlin J, Dusek J. Impact of incremental increases in cognitive workload on physiological arousal and performance in young adult drivers. Transportation Research Record: Journal of the Transportation Research Board, No. 2138, 2009, 2138: 6-12 [14] Mao Z, Yan X P, Wu C Z. Driving fatigue identification method based on physiological signals. In: Proceedings of the 7th International Conference of Chinese Transportation Professionals Congress (ICCTP). Shanghai, China: ASCE, 2007. 341-352 [15] Takei Y, Furukawa Y. Estimate of driver's fatigue through steering motion. In: Proceedings of the 2005 IEEE International Conference on Systems, Man and Cybernetics. Waikoloa, USA: IEEE, 2005. 1765-1770 [16] Sayed R, Eskandarian A. Unobtrusive drowsiness detection by neural network learning of driver steering. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2001, 215(9): 969-975 doi: 10.1243/0954407011528536 [17] Zhong Y J, Du L P, Zhang K, Sun X H. Localized energy study for analyzing driver fatigue state based on wavelet analysis. In: Proceedings of the 2007 International Conference on Wavelet Analysis and Pattern Recognition. Beijing, China: IEEE, 2007. 1843-1846 [18] Pilutti T, Ulsoy A G. Identification of driver state for lane-keeping tasks. IEEE Transactions on Systems, Man, and Cybernetics-Part A: Systems and Humans, 1999, 29(5): 486-502 doi: 10.1109/3468.784175 [19] Tokuda S, Obinata G, Palmer E, Chaparro A. Estimation of mental workload using saccadic eye movements in a free-viewing task. In: Proceedings of the 2011 Annual International Conference of the IEEE on Engineering in Medicine and Biology Society. Boston, USA: IEEE, 2011. 4523-4529 [20] Lansdown T C. Individual differences during driver secondary task performance: verbal protocol and visual allocation findings. Accident Analysis & Prevention, 2002, 34(5): 655-662 http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ024643291/ [21] Doshi A, Trivedi M. A comparative exploration of eye gaze and head motion cues for lane change intent prediction. In: Proceedings of the 2008 Intelligent Vehicles Symposium. Eindhoven, Netherlands: IEEE, 2008. 49-54 [22] Ohashi L, Yamaguchi T, Tamai I. Humane automotive system using driver intention recognition. In: Proceedings of the 2004 SICE Annual Conference. Sapporo, Japan: IEEE, 2004. 1164-1167 [23] Wu H R, Li Y, Wu C Z, Ma Z, Zhou H Y. A longitudinal minimum safety distance model based on driving intention and fuzzy reasoning. In: Proceedings of the 4th International Conference on Transportation Information and Safety (ICTIS). Banff, Canada: IEEE, 2017. 158-162 [24] Takano W, Matsushita A, Iwao K, Nakamura Y. Recognition of human driving behaviors based on stochastic symbolization of time series signal. In: Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems. Nice, France: IEEE, 2008. 167-172 [25] Zou X, Levinson D M. Modeling intersection driving behaviors: a hidden Markov model approach. Transportation Research Record: Journal of the Transportation Research Board, No. 1980, 2006. [26] 吕岸, 胡振程, 陈慧.基于高斯混合隐马尔科夫模型的高速公路超车行为辨识与分析.汽车工程, 2010, 32(7): 630-634 http://d.old.wanfangdata.com.cn/Periodical/qcgc201007017Lv An, Hu Zhen-Cheng, Chen Hui. Recognition and analysis on highway overtaking behavior based on Gaussian mixture-hidden Markov model. Automotive Engineering, 2010, 32(7): 630-634 http://d.old.wanfangdata.com.cn/Periodical/qcgc201007017 [27] Qin G H, Lei Y L, Niu M K, Ge A L, Dai Y S. Estimation of road situations and driver's intention in automotive electronic control system. In: Proceedings of the 1999 IEEE International Vehicle Electronics Conference (IVEC'99). Changchun, China: IEEE, 1999. 199-201 [28] Kuge N, Kimura T. Driving Intention Estimation System, Driver Assisting System, and Vehicle with the System, U. S. Patent 7809506, October 2010. [29] McRuer D T, Jex H R. A review of quasi-linear pilot models. IEEE Transactions on Human Factors in Electronics, 1967, HFE-8(3): 231-249 doi: 10.1109/THFE.1967.234304 [30] Reddy R N, Ellis J R. Contribution to the simulation of driver-vehicle-road system. In: Proceedings of the 1981 SAE International Congress and Exposition. Warrendale, PA, USA: SAE, 1981. [31] Iguchi M. A study of manual control. Journal of Mechanic Society of Japan, 1959, 62(481): 1053-1059 http://d.old.wanfangdata.com.cn/OAPaper/oai_pubmedcentral.nih.gov_3112433 [32] Mcruer D, Weir D H. Theory of manual vehicular control. Ergonomics, 1969, 12(4): 599-633 doi: 10.1080/00140136908931082 [33] MacAdam C C. Application of an optimal preview control for simulation of closed-loop automobile driving. IEEE Transactions on Systems, Man, and Cybernetics, 1981, 11(6): 393-399 doi: 10.1109/TSMC.1981.4308705 [34] Sharp R S, Valtetsiotis V, Lugner P. Optimal preview car steering control. Vehicle System Dynamics, 2001, 35(S1): 101-117 http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ0210306452/ [35] Qu T, Chen H, Cao D P, Guo H Y, Gao B Z. Switching-based stochastic model predictive control approach for modeling driver steering skill. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(1): 365-375 doi: 10.1109/TITS.2014.2334623 [36] Qu T, Chen H, Ji Y, Guo H Y, Xu Y T. A stochastic model predictive control approach for modelling human driver steering control. International Journal of Vehicle Design, 2016, 70(3): 249-277 doi: 10.1504/IJVD.2016.075770 [37] Keen S D, Cole D J. Application of time-variant predictive control to modelling driver steering skill. Vehicle System Dynamics, 2011, 49(4): 527-559 doi: 10.1080/00423110903551626 [38] Keen S D, Cole D J. Bias-free identification of a linear model-predictive steering controller from measured driver steering behavior. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2012, 42(2): 434-443 doi: 10.1109/TSMCB.2011.2167509 [39] Li R J, Li S B, Gao H B, Li K Q, Cheng B, Li D Y. Effects of Human Adaptation and Trust on Shared Control for Driver-Automation Cooperative Driving, SAE Technical Paper 2017-01-1987, 2017. [40] Li R J, Li Y N, Li S E, Burdet E, Cheng B. Indirect Shared Control of Highly Automated Vehicles for Cooperative Driving between Driver and Automation. arXiv preprint arXiv: 1704.00866, 2017. [41] Sentouh C, Chevrel P, Mars F, Claveau F. A sensorimotor driver model for steering control. In: Proceedings of the 2009 IEEE International Conference on Systems, Man and Cybernetics. San Antonio, USA: IEEE, 2009. 2462-2467 [42] Li Y N, Tee K P, Chan W L, Yan R, Chua Y W, Limbu D K. Role adaptation of human and robot in collaborative tasks. In: Proceedings of the 2015 IEEE International Conference on Robotics and Automation. Washington, USA: IEEE, 2015. 5602-5607 [43] Na X X, Cole D J. Application of open-loop stackelberg equilibrium to modeling a driver's interaction with vehicle active steering control in obstacle avoidance. IEEE Transactions on Human-Machine Systems, 2017, 47(5): 673-685 doi: 10.1109/THMS.2017.2700541 [44] Knipling R R. IVHS technologies applied to collision avoidance: perspectives on six target crash types and countermeasures. In: Proceedings of the 1993 Annual Meeting of IVHS America: Surface Transportation: Mobility, Technology, and Society. Washington, USA: IEEE, 1993. 249-259 [45] Burgett A L, Carter A, Miller R J, Najm W G, Smith D L. A collision warning algorithm for rear-end collisions. In: Proceedings of the 16th International Technical Conference on Enhanced Safety of Vehicles (ESV). Windsor, Canada: National Highway Traffic Safety Administration, 1998. 566-587 [46] Cheok K C, Smid G E, McCune D J. A multisensor-based collision avoidance system with application to a military HMMWV. In: Proceedings of the 2000 Intelligent Transportation Systems. Dearborn, USA: IEEE, 2000. 288-292 [47] Dagan E, Mano O, Stein G P, Shashua A. Forward collision warning with a single camera. In: Proceedings of the 2004 Intelligent Vehicles Symposium. Parma, Italy: IEEE, 2004. 37-42 [48] Tan H S, Huang J H. DGPS-based vehicle-to-vehicle cooperative collision warning: engineering feasibility viewpoints. IEEE Transactions on Intelligent Transportation Systems, 2006, 7(4): 415-428 doi: 10.1109/TITS.2006.883938 [49] Zhang Y Z, Antonsson E K, Grote K. A new threat assessment measure for collision avoidance systems. In: Proceedings of the 2006 Intelligent Transportation Systems Conference. California, USA: IEEE, 2006. 968-975 [50] Coelingh E, Eidehall A, Bengtsson M. Collision warning with full auto brake and pedestrian detection — a practical example of automatic emergency braking. In: Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems. Funchal, Portugal: IEEE, 2010. 155-160 [51] 肖献强, 王其东, 潘盛辉.基于视觉及TLC概念的车辆跑偏检测方法研究.汽车工程, 2010, 32(1): 77-80 http://d.old.wanfangdata.com.cn/Periodical/qcgc201001018Xiao Xian-Qiang, Wang Qi-Dong, Pan Sheng-Hui. A study on lane departure detection method based on vision and TLC concept. Automotive Engineering, 2010, 32(1): 77-80 http://d.old.wanfangdata.com.cn/Periodical/qcgc201001018 [52] Hsiao P Y, Yeh C W, Huang S S, Fu L C. A portable vision-based real-time lane departure warning system: day and night. IEEE Transactions on Vehicular Technology, 2009, 58(4): 2089-2094 doi: 10.1109/TVT.2008.2006618 [53] Angkititrakul P, Terashima R, Wakita T. On the use of stochastic driver behavior model in lane departure warning. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(1): 174-183 doi: 10.1109/TITS.2010.2072502 [54] Ruder M, Enkelmann W, Garnitz R. Highway lane change assistant. In: Proceedings of the 2002 Intelligent Vehicle Symposium. Versailles, France: IEEE, 2002. 240-244 [55] Fujii Y. Vehicle speed control system, U. S. Patent 5315295, May 1994. [56] Chen B C, Peng H. Differential-braking-based rollover prevention for sport utility vehicles with human-in-the-loop evaluations. Vehicle System Dynamics, 2001, 36(4-5): 359-389 doi: 10.1076/vesd.36.4.359.3546 [57] Biglarbegia M, Zu J W. Tractor-semitrailer model for vehicles carrying liquids. Vehicle System Dynamics, 2006, 44(11): 871-885 doi: 10.1080/00423110600737072 [58] Li L, Wen D, Zheng N N, Shen L C. Cognitive cars: a new frontier for ADAS research. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(1): 395-407 doi: 10.1109/TITS.2011.2159493 [59] Goodrich M A, Boer E R. Multiple mental models, automation strategies, and intelligent vehicle systems. In: Proceedings of the 1999 IEEE/IEEJ/JSAI International Conference on Intelligent Transportation Systems. Tokyo, Japan: IEEE, 1999. 859-864 [60] Jamson A H, Merat N, Carsten O M J, Lai F C H. Behavioural changes in drivers experiencing highly-automated vehicle control in varying traffic conditions. Transportation Research Part C: Emerging Technologies, 2013, 30: 116-125 doi: 10.1016/j.trc.2013.02.008 [61] De Winter J C F, Happee R, Martens M H, Stanton N A. Effects of adaptive cruise control and highly automated driving on workload and situation awareness: a review of the empirical evidence. Transportation Research Part F: Traffic Psychology and Behaviour, 2014, 27: 196-217 doi: 10.1016/j.trf.2014.06.016 [62] Merat N, Jamson A H, Lai F C H, Carsten O. Highly automated driving, secondary task performance, and driver state. Human Factors, 2012, 54(5): 762-771 doi: 10.1177/0018720812442087 [63] Naujoks F, Purucker C, Neukum A, Wolter S, Steiger R. Controllability of partially automated driving functions — Does it matter whether drivers are allowed to take their hands off the steering wheel? Transportation Research Part F: Traffic Psychology and Behaviour, 2015, 35: 185-198 doi: 10.1016/j.trf.2015.10.022 [64] Gold C, Damböck D, Lorenz L, Bengler K. "Take over! How long does it take to get the driver back into the loop?" Proceedings of 2013 Human Factors and Ergonomics Society Annual Meeting, 2013, 57(1): 1938-1942 [65] Langlois S, Soualmi B. Augmented reality versus classical HUD to take over from automated driving: an aid to smooth reactions and to anticipate maneuvers. In: Proceedings of the 19th International Conference on Intelligent Transportation Systems. Rio de Janeiro, Brazil: IEEE, 2016. 1571-1578 [66] Louw T, Markkula G, Boer E, Madigan R, Carsten O, Merat N. Coming back into the loop: drivers. perceptual-motor performance in critical events after automated driving. Accident Analysis & Prevention, 2017, 108: 9-18 [67] Strand N, Nilsson J, Karlsson I C, Nilsson L. Semi-automated versus highly automated driving in critical situations caused by automation failures. Transportation Research Part F: Traffic Psychology and Behaviour, 2014, 27: 218-228 doi: 10.1016/j.trf.2014.04.005 [68] Lv C, Liu Y H, Hu X S, Guo H Y, Cao D P, Wang F Y. Simultaneous observation of hybrid states for cyber-physical systems: a case study of electric vehicle powertrain. IEEE Transactions on Cybernetics, 2017, 48(8): 2357-2367 [69] de Waard D, van der Hulst M, Hoedemaeker M, Brookhuis K A. Driver behavior in an emergency situation in the Automated Highway System. Transportation Human Factors, 1999, 1(1): 67-82 doi: 10.1207/sthf0101_7 [70] Banks V A, Eriksson A, O'Donoghue J, Stanton N A. Is partially automated driving a bad idea? Observations from an on-road study. Applied Ergonomics, 2018, 68: 138-145 doi: 10.1016/j.apergo.2017.11.010 [71] Kaber D B, Wright M C, Sheik-Nainar M A. Investigation of multi-modal interface features for adaptive automation of a human-robot system. International Journal of Human-Computer Studies, 2006, 64(6): 527-540 doi: 10.1016/j.ijhcs.2005.11.003 [72] Miller D, Sun A, Ju W. Situation awareness with different levels of automation. In: Proceedings of the 2014 IEEE International Conference on Systems, Man, and Cybernetics (SMC). San Diego, CA, USA: IEEE, 2014. 688-693 [73] Zeeb K, Buchner A, Schrauf M. What determines the take-over time? An integrated model approach of driver take-over after automated driving. Accident Analysis & Prevention, 2015, 78: 212-221 [74] Bueno M, Dogan E, Selem F H, Monacelli E, Boverie S, Guillaume A. How different mental workload levels affect the take-over control after automated driving. In: Proceedings of the 19th International Conference on Intelligent Transportation Systems. Rio de Janeiro, Brazil: IEEE, 2016. 2040-2045 [75] Lu Z J, Coster X, de Winter J. How much time do drivers need to obtain situation awareness? A laboratory-based study of automated driving. Applied Ergonomics, 2017, 60: 293-304 doi: 10.1016/j.apergo.2016.12.003 [76] Lee J D, McGehee D V, Brown T L, Marshall D. Effects of adaptive cruise control and alert modality on driver performance. Transportation Research Record: Journal of the Transportation Research Board, 2006, 1980(1): 49-56 doi: 10.1177/0361198106198000108 [77] Forster Y, Naujoks F, Neukum A, Huestegge L. Driver compliance to take-over requests with different auditory outputs in conditional automation. Accident Analysis & Prevention, 2017, 109: 18-28 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=72a55b12e587b0c4f48f0e34cfb8a699 [78] Wright T J, Agrawal R, Samuel S, Wang Y, Zilberstein S, Fisher D L. Effective cues for accelerating young drivers' time to transfer control following a period of conditional automation. Accident; Analysis and Prevention, 2017, 116: 14-20 [79] Petermeijer S, Bazilinskyy P, Bengler K, de Winter J. Take-over again: investigating multimodal and directional TORs to get the driver back into the loop. Applied Ergonomics, 2017, 62: 204-215 doi: 10.1016/j.apergo.2017.02.023 [80] Flemisch F, Schieben A, Kelsch J, Löper C. Automation spectrum, inner/outer compatibility and other potentially useful human factors concepts for assistance and automation. In: Proceedings of the Human Factors for Assistance and Automation. Braunschweig, Germany: Shaker Publishing, 2008. [81] Flemisch F O, Bengler K, Bubb H, Winner H, Bruder R. Towards cooperative guidance and control of highly automated vehicles: H-Mode and Conduct-by-Wire. Ergonomics, 2014, 57(3): 343-360 doi: 10.1080/00140139.2013.869355 [82] Enache N M, Mammar S, Netto M, Lusetti B. Driver steering assistance for lane-departure avoidance based on hybrid automata and composite Lyapunov function. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(1): 28-39 doi: 10.1109/TITS.2009.2026451 [83] Willemsen D M C, Stuiver A, Hogema J, Kroon L, Sukumar P. Towards guidelines for transition of control. In: FISITA World Automotive Congress. Maastricht, Netherlands: FISITA, 2014. 1023-1034 [84] Nilsson J, Falcone P, Vinter J. Safe transitions from automated to manual driving using driver controllability estimation. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(4): 1806-1816 doi: 10.1109/TITS.2014.2376877 [85] Nishimura R, Wada T, Sugiyama S. Haptic shared control in steering operation based on cooperative status between a driver and a driver assistance system. International Journal of Human Robot Interaction, 2015, 4(3): 19-37 doi: 10.5898/4.3.Nishimura [86] Bahram M, Aeberhard M, Wollherr D. Please take over! An analysis and strategy for a driver take over request during autonomous driving. In: Proceedings of the 2015 IEEE Intelligent Vehicles Symposium. Seoul, South Korea: IEEE, 2015. 913-919 [87] Na X X, Cole D J. Game-theoretic modeling of the steering interaction between a human driver and a vehicle collision avoidance controller. IEEE Transactions on Human-Machine Systems, 2015, 45(1): 25-38 doi: 10.1109/THMS.2014.2363124 [88] Lu Z J, Happee R, Cabrall C D D, Kyriakidis M, de Winter J C F. Human factors of transitions in automated driving: a general framework and literature survey. Transportation Research Part F: Traffic Psychology and Behaviour, 2016, 43: 183-198 doi: 10.1016/j.trf.2016.10.007 [89] Wada T, Sonoda K, Okasaka T, Saito T. Authority transfer method from automated to manual driving via haptic shared control. In: Proceedings of the 2016 IEEE International Conference on Systems, Man, and Cybernetics (SMC). Budapest, Hungary: IEEE, 2016. 002659-002664 [90] Sheehan B, Murphy F, Ryan C, Mullins M, Liu H Y. Semi-autonomous vehicle motor insurance: a Bayesian network risk transfer approach. Transportation Research Part C: Emerging Technologies, 2017, 82: 124-137 doi: 10.1016/j.trc.2017.06.015 [91] Abbink D A, Mulder M. Neuromuscular analysis as a guideline in designing shared control. Advances in Haptics. Vukovar, Croatia: InTech, 2010. 499-516 [92] Brandt T, Sattel T, Bohm M. Combining haptic human-machine interaction with predictive path planning for lane-keeping and collision avoidance systems. In: Proceedings of the 2007 IEEE Intelligent Vehicles Symposium. Istanbul, Turkey: IEEE, 2007. 582-587 [93] Mulder M, Abbink D A, Boer E R. Sharing control with haptics: seamless driver support from manual to automatic control. Human Factors, 2012, 54(5): 786-798 doi: 10.1177/0018720812443984 [94] Switkes J P, Rossetter E J, Coe I A, Gerdes J C. Handwheel force feedback for lanekeeping assistance: combined dynamics and stability. Journal of Dynamic Systems, Measurement, and Control, 2006, 128(3): 532-542 doi: 10.1115/1.2229256 [95] Soualmi B, Sentouh C, Popieul J C, Debernard S. Fuzzy Takagi-Sugeno LQ controller for a shared control of vehicle. In: Proceedings of the 14th International IEEE Conference on Intelligent Transportation Systems. Washington, USA: IEEE, 2011. 956-961 [96] Zhong M E, Wu P D, Peng J Q. Internet based shared control of vehicle steering when driver is under situation of tendency to accidents. Materials Science Forum, 2011, 704-705: 650-656 doi: 10.4028/www.scientific.net/MSF.704-705 [97] Gray A, Ali M, Gao Y Q, Hedrick J K, Borrellli F. Semi-autonomous vehicle control for road departure and obstacle avoidance. In: Proceedings of the 2012 IFAC Symposium on Control in Transportation Systems. Sofia: IFAC, 2012. [98] Gray A, Gao Y Q, Hedrick J K, Borrelli F. Robust predictive control for semi-autonomous vehicles with an uncertain driver model. In: Proceedings of the 2013 IEEE Intelligent Vehicles Symposium (Ⅳ). Gold Coast, Australia, 2013. 208-213 [99] Flemisch F, Heesen M, Hesse T, Kelsch J, Schieben A, Beller J. Towards a dynamic balance between humans and automation: authority, ability, responsibility and control in shared and cooperative control situations. Cognition, Technology & Work, 2012, 14(1): 3-18 [100] Petermeijer S M, Abbink D A, de Winter J C F. Should drivers be operating within an automation-free bandwidth? Evaluating haptic steering support systems with different levels of authority. Human Factors, 2015, 57(1): 5-20 [101] Jiang J J, Astolfi A. Shared-control for the kinematic model of a rear-wheel drive car. In: Proceedings of the 2015 American Control Conference (ACC). Chicago, USA: IEEE, 2015. 1155-1160 [102] Bi L Z, Wang M T, Lu Y, Genetu F A. A shared controller for brain-controlled assistive vehicles. In: Proceedings of the 2016 IEEE International Conference on Advanced Intelligent Mechatronics. Banff, AB, Canada: IEEE, 2016. 125-129 [103] Li R J, Li Y N, Li S E, Burdet E, Cheng B. Indirect Shared Control of Highly Automated Vehicles for Cooperative Driving between Driver and Automation. arXiv preprint arXiv: 1704.00866, 2017. [104] de Winter J C F, Dodou D. Preparing drivers for dangerous situations: a critical reflection on continuous shared control. In: Proceedings of the 2011 IEEE International Conference on Systems, Man, and Cybernetics (SMC). Anchorage, USA: IEEE, 2011. 1050-1056 [105] Anderson S J, Peters S C, Pilutti T E, Iagnemma K. An optimal-control-based framework for trajectory planning, threat assessment, and semi-autonomous control of passenger vehicles in hazard avoidance scenarios. International Journal of Vehicle Autonomous Systems, 2010, 8(2-3-4): 190-216 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=3e7d1a187cab8063618dfe78257632ef [106] Gray A, Ali M, Gao Y Q, Hedrick J K, Borrelli F. A unified approach to threat assessment and control for automotive active safety. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(3): 1490-1499 doi: 10.1109/TITS.2013.2262097 [107] Massera F C, Wolf D F. Driver assistance controller for tire saturation avoidance up to the limits of handling. In: Proceedings of the 12th Latin American Robotics Symposium and 3rd Brazilian Symposium on Robotics (LARS-SBR). IEEE, 2015. 181-186 [108] Erlien S M, Fujita S, Gerdes J C. Shared steering control using safe envelopes for obstacle avoidance and vehicle stability. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(2): 441-451 doi: 10.1109/TITS.2015.2453404 [109] Saito Y, Raksincharoensak P. Risk predictive shared deceleration control: its functionality and effectiveness of an early intervention support. In: Proceedings of the 2016 Intelligent Vehicles Symposium (Ⅳ). Gothenburg, Sweden: IEEE, 2016. 49-54 [110] Erlien S M, Funke J, Gerdes J C. Incorporating non-linear tire dynamics into a convex approach to shared steering control. In: Proceedings of the 2014 American Control Conference. Portland, USA: IEEE, 2014. 3468-3473 [111] Griffiths P G, Gillespie R B. Sharing control between humans and automation using haptic interface: primary and secondary task performance benefits. Human Factors, 2005, 47(3): 574-590 doi: 10.1518/001872005774859944 [112] Forsyth B A C, Maclean K E. Predictive haptic guidance: intelligent user assistance for the control of dynamic tasks. IEEE Transactions on Visualization and Computer Graphics, 2006, 12(1): 103-113 doi: 10.1109/TVCG.2006.11 [113] Mulder M, Abbink D A, Boer E R. The effect of haptic guidance on curve negotiation behavior of young, experienced drivers. In: Proceedings of the 2008 IEEE International Conference on Systems, Man and Cybernetics. Singapore, Singapore: IEEE, 2008. 804-809 [114] Sentouh C, Soualmi B, Popieul J C, Debernard S. The H2-optimal preview controller for a shared lateral control. In: Proceedings of the 14th International IEEE Conference on Intelligent Transportation Systems (ITSC). Washington, USA: IEEE, 2011. 1452-1458 [115] Saleh L, Chevrel P, Claveau F, Lafay J F, Mars F. Shared steering control between a driver and an automation: stability in the presence of driver behavior uncertainty. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(2): 974-983 doi: 10.1109/TITS.2013.2248363 [116] Anderson S J, Walker J M, Iagnemma K. Experimental performance analysis of a homotopy-based shared autonomy framework. IEEE Transactions on Human-Machine Systems, 2014, 44(2): 190-199 doi: 10.1109/TSMC.2014.2298383 [117] Merah A, Hartani K, Draou A. A new shared control for lane keeping and road departure prevention. Vehicle System Dynamics, 2016, 54(1): 86-101 doi: 10.1080/00423114.2015.1115882 [118] Inoue S, Ozawa T, Inoue H, Raksincharoensak P, Nagai M. Cooperative lateral control between driver and ADAS by haptic shared control using steering torque assistance combined with direct yaw moment control. In: Proceedings of the 19th International Conference on Intelligent Transportation Systems (ITSC). Rio de Janeiro, Brazil: IEEE, 2016. 316-321 [119] Saito Y, Mitsumoto T, Raksincharoensak P. Effectiveness of a risk predictive shared steering control based on potential risk prediction of collision with vulnerable road users. IFAC-PapersOnLine, 2016, 49(19): 84-89 doi: 10.1016/j.ifacol.2016.10.466 [120] Abbink D A, Cleij D, Mulder M, van Paassen M M. The importance of including knowledge of neuromuscular behaviour in haptic shared control. In: Proceedings of the 2012 IEEE International Conference on Systems, Man, and Cybernetics (SMC). Seoul, Korea (South): IEEE, 2012. 3350-3355 [121] Iwano K, Raksincharoensak P, Nagai M. A study on shared control between the driver and an active steering control system in emergency obstacle avoidance situations. IFAC Proceedings Volumes, 2014, 47(3): 6338-6343 doi: 10.3182/20140824-6-ZA-1003.01015 [122] Boink R, van Paassen M M, Mulder M, Abbink D A. Understanding and reducing conflicts between driver and haptic shared control. In: Proceedings of the 2014 IEEE International Conference on Systems, Man, and Cybernetics (SMC). San Diego, UAS: IEEE, 2014. 1510-1515 [123] Iwano K, Raksincharoensak P, Nagai M. A study on shared control between the driver and an active steering control system in emergency obstacle avoidance situations. In: Proceedings of the 19th IFAC World Congress. Cape Town, South Africa: IFAC, 2014. 102-113 [124] Mars F, Deroo M, Hoc J M. Analysis of human-machine cooperation when driving with different degrees of haptic shared control. IEEE Transactions on Haptics, 2014, 7(3): 324-333 doi: 10.1109/TOH.2013.2295095 [125] Van der Wiel D W J, van Paassen M M, Mulder M, Mulder M, Abbink D A. Driver adaptation to driving speed and road width: exploring parameters for designing adaptive haptic shared control. In: Proceedings of the 2015 IEEE International Conference on Systems, Man, and Cybernetics (SMC). Kowloon, China: IEEE, 2015. 3060-3065 [126] Boehm P, Ghasemi A H, O.Modhrain S, Jayakumar P, Gillespie R B. Architectures for shared control of vehicle steering. IFAC-PapersOnLine, 2016, 49(19): 639-644 doi: 10.1016/j.ifacol.2016.10.637 [127] Kaustubh M, Willemsen D, Mazo M. The modeling of transfer of steering between automated vehicle and human driver using hybrid control framework. In: Proceedings of the 2016 Intelligent Vehicles Symposium (Ⅳ). Gothenburg, Sweden: IEEE, 2016. [128] Sentouh C, Soualmi B, Popieul J C, Debernard S. Cooperative steering assist control system. In: Proceedings of the 2013 IEEE International Conference on Systems, Man, and Cybernetics. Manchester, UK: IEEE, 2013. 941-946 [129] Zafeiropoulos S, Tsiotras P. Design of a lane-tracking driver steering assist system and its interaction with a two-point visual driver model. In: Proceedings of the 2014 American Control Conference. Portland, USA: IEEE, 2014. 3911-3917 [130] Soualmi B, Sentouh C, Popieul J C, Debernard S. Automation-driver cooperative driving in presence of undetected obstacles. Control Engineering Practice, 2014, 24: 106-119 doi: 10.1016/j.conengprac.2013.11.015 [131] Nguyen A T, Sentouh C, Popieul J C. Online adaptation of the authority level for shared lateral control of driver steering assist system using dynamic output feedback controller. In: Proceedings of the 41st Annual Conference of the IEEE Industrial Electronics Society (IECON). Yokohama, Japan: IEEE, 2015. 3767-3772 [132] Flad M, Otten J, Schwab S, Hohmann S. Steering driver assistance system: a systematic cooperative shared control design approach. In: Proceedings of the 2014 IEEE International Conference on Systems, Man, and Cybernetics (SMC). San Diego, UAS: IEEE, 2014. 3585-3592 [133] Flad M, Fröhlich L, Hohmann S. Cooperative shared control driver assistance systems based on motion primitives and differential games. IEEE Transactions on Human-Machine Systems, 2017, 47(5): 711-722 doi: 10.1109/THMS.2017.2700435 [134] Mars F, Deroo M, Charron C. Driver adaptation to haptic shared control of the steering wheel. In: Proceedings of the 2014 IEEE International Conference on Systems, Man, and Cybernetics (SMC). San Diego, USA: IEEE, 2014. 1505-1509 [135] Petermeijer S M, Abbink D A, Mulder M, de Winter J C F. The effect of haptic support systems on driver performance: a literature survey. IEEE Transactions on Haptics, 2015, 8(4): 467-479 doi: 10.1109/TOH.2015.2437871 [136] Wada T, Sonoda K, Tada S. Simultaneous achievement of supporting human drivers and improving driving skills by shared and cooperative control. IFAC-PapersOnLine, 2016, 49(19): 90-95 doi: 10.1016/j.ifacol.2016.10.467 [137] Nguyen A T, Sentouh C, Popieul J C. Driver-automation cooperative approach for shared steering control under multiple system constraints: design and experiments. IEEE Transactions on Industrial Electronics, 2017, 64(5): 3819-3830 doi: 10.1109/TIE.2016.2645146 [138] Ercan Z, Carvalho A, Gokasan M, Borrelli F. Modeling, identification, and predictive control of a driver steering assistance system. IEEE Transactions on Human-Machine Systems, 2017, 47(5): 700-710 doi: 10.1109/THMS.2017.2717881 [139] You C X, Lu J B, Tsiotras P. Nonlinear driver parameter estimation and driver steering behavior analysis for ADAS using field test data. IEEE Transactions on Human-Machine Systems, 2017, 47(5): 686-699 doi: 10.1109/THMS.2017.2727547 [140] 郭孔辉.汽车操纵动力学原理.南京:江苏科学技术出版社, 2011.Guo Kong-Hui. Principle of Vehicle Handling Dynamics. Nanjing: Science and Technology Press of Jiangsu, 2011. [141] Thomas F. General introduction to PEGASUS & Opening of the exhibition. In: PEGASUS Symposium. Federal MINISTRY for Economic Affairs and Energy, 2017. https://www.pegasusprojekt.de/files/tmpl/Symposium-Vortraege/05_General%20introduction%20to%20PEGA-SUS_Form.pdf [142] Deng W W, Lee Y H, Zhao A. Hardware-in-the-loop simulation for autonomous driving. In: Proceedings of the 34th Annual Conference of IEEE Industrial Electronics. Orlando, FL, USA: IEEE, 2008. 1742-1747 [143] Xu Z G, Wang M L, Zhang F Z, Jin S, Zhang J, Zhao X M. PaTAVTT: a hardware-in-the-loop scaled platform for testing autonomous vehicle trajectory tracking. Journal of Advanced Transportation, 2017, 2017: Article No. 9203251 [144] Gietelink O J, Ploeg J, De Schutter B, Verhaegen M. Development of a driver information and warning system with vehicle hardware-in-the-loop simulations. Mechatronics, 2009, 19(7): 1091-1104 doi: 10.1016/j.mechatronics.2009.04.012 [145] Zulkefli M A M, Mukherjee P, Sun Z X, Zheng J F, Liu H X, Huang P. Hardware-in-the-loop testbed for evaluating connected vehicle applications. Transportation Research Part C: Emerging Technologies, 2017, 78: 50-62 doi: 10.1016/j.trc.2017.02.019 [146] Zhao D, Lam H, Peng H, Bao S, LeBlanc D J, Nobukawa K, Pan C S. Accelerated evaluation of automated vehicles safety in lane-change scenarios based on importance sampling techniques. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(3): 595-607 doi: 10.1109/TITS.2016.2582208 [147] Zhao D, Huang X N, Peng H, Lam H, LeBlanc D J. Accelerated evaluation of automated vehicles in car-following maneuvers. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(3): 733-744 doi: 10.1109/TITS.2017.2701846 [148] Huang H M. Autonomy levels for unmanned systems (ALFUS) framework: safety and application issues. In: Proceedings of the 2007 Workshop on Performance Metrics for Intelligent Systems. Washington, USA: ACM, 2007. 48-53 [149] Rösener C, Sauerbier J, Zlocki A, Fahrenkrog F, Wang L, Várhelyi A, de Gelder E, Breunig S, Mejuto P, Tango F, Lanati J. A comprehensive evaluation approach for highly automated driving. In: Proceedings of the 25th International Technical Conference on the Enhanced Safety of Vehicles. Detroit Michigan, USA: National Highway Traffic Safety Administration, 2017. [150] Li L, Huang W L, Liu Y H, Zheng N N, Wang F Y. Intelligence testing for autonomous vehicles: a new approach. IEEE Transactions on Intelligent Vehicles, 2016, 1(2): 158-166 doi: 10.1109/TIV.2016.2608003 [151] Intelligent transport systems-Lane keeping assistance systems (LKAS)-Performance requirements and test procedures, ISO 11270: 2014, 2014. [152] Intelligent transport systems-Forward vehicle collision warning systems-performance requirements and test procedures, ISO 15623: 2013, 2013. [153] U.S. Department of Transportation, National Highway Traffic Safety Administration. Automated Driving Systems 2.0: A Vision for Safety. Washington, USA: U.S. Department of Transportation, National Highway Traffic Safety Administration, 2017. [154] 国家车联网产业标准体系建设指南(智能网联汽车), 工信部联科〔2017〕332号, 2017. -

 下载:
下载:


图(8)
计量
- 文章访问数: 5369
- HTML全文浏览量: 1959
- PDF下载量: 2042
- 被引次数: 0
