2019年 第45卷 第7期
2019, 45(7): 1207-1223.
doi: 10.16383/j.aas.c180029
摘要:
通过梳理近年信息融合理论的发展,分析了复杂目标跟踪系统中存在的非线性、多模式、深耦合、网络化、高维数和未知扰动输入等问题,指出现阶段目标跟踪系统中联合优化的必要性.继而,讨论了解决联合优化问题的主要方法,包括联合检测与估计,联合聚类与估计,联合关联与估计及联合决策与估计等.同时,着重介绍了变分贝叶斯辨识、估计和优化的统一框架和以其为基础的目标跟踪联合一体优化方法,并以天波超视距雷达为应用背景,给出在多路径多模式多目标跟踪场景下算法的一般性描述.最后,讨论了变分贝叶斯理论在目标跟踪领域的开放问题和未来研究方向.
通过梳理近年信息融合理论的发展,分析了复杂目标跟踪系统中存在的非线性、多模式、深耦合、网络化、高维数和未知扰动输入等问题,指出现阶段目标跟踪系统中联合优化的必要性.继而,讨论了解决联合优化问题的主要方法,包括联合检测与估计,联合聚类与估计,联合关联与估计及联合决策与估计等.同时,着重介绍了变分贝叶斯辨识、估计和优化的统一框架和以其为基础的目标跟踪联合一体优化方法,并以天波超视距雷达为应用背景,给出在多路径多模式多目标跟踪场景下算法的一般性描述.最后,讨论了变分贝叶斯理论在目标跟踪领域的开放问题和未来研究方向.








2019, 45(7): 1224-1243.
doi: 10.16383/j.aas.c180093
摘要:
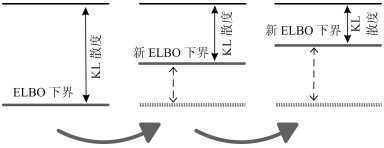
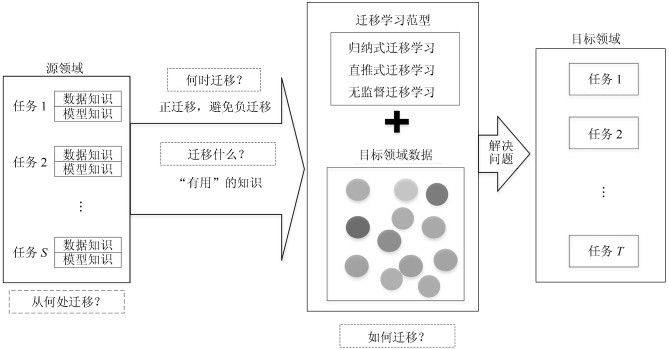
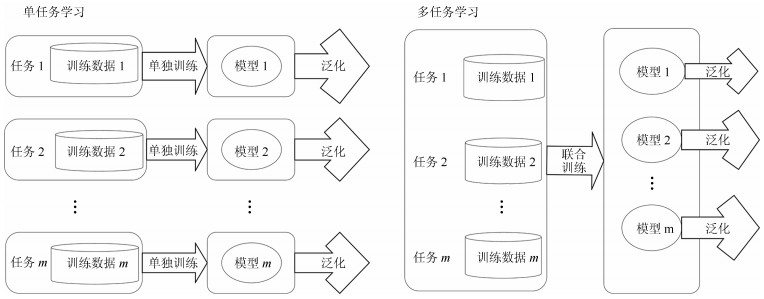
类别级物体识别与检测属于计算机视觉领域的一个基础性问题,主要研究在图像或视频流中识别和定位出其中感兴趣的物体.在基于小规模数据集的类别级物体识别与检测应用中,模型过拟合、类不平衡和跨领域时特征分布变化等关键问题与挑战交织在一起.本文介绍了迁移学习理论的研究现状,对迁移学习理论解决基于小规模数据集的物体识别与检测中遇到的主要问题的研究思路和前沿技术进行了着重论述和分析.最后对该领域的研究重点和技术发展趋势进行了探讨.
类别级物体识别与检测属于计算机视觉领域的一个基础性问题,主要研究在图像或视频流中识别和定位出其中感兴趣的物体.在基于小规模数据集的类别级物体识别与检测应用中,模型过拟合、类不平衡和跨领域时特征分布变化等关键问题与挑战交织在一起.本文介绍了迁移学习理论的研究现状,对迁移学习理论解决基于小规模数据集的物体识别与检测中遇到的主要问题的研究思路和前沿技术进行了着重论述和分析.最后对该领域的研究重点和技术发展趋势进行了探讨.
2019, 45(7): 1244-1260.
doi: 10.16383/j.aas.c180277
摘要:
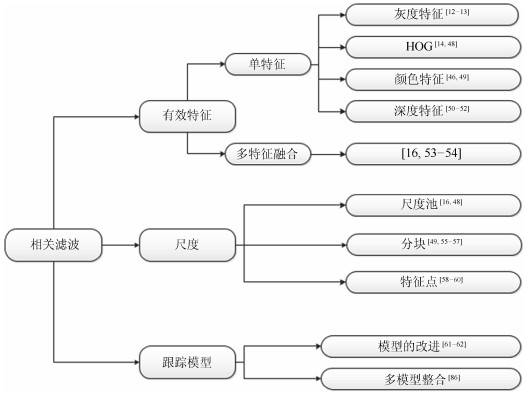
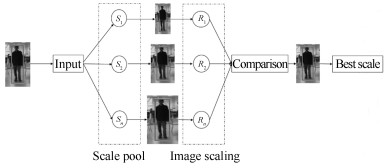
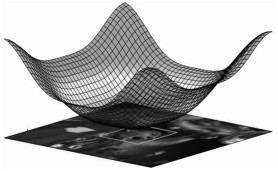
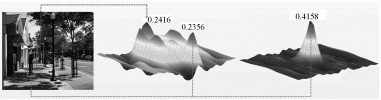
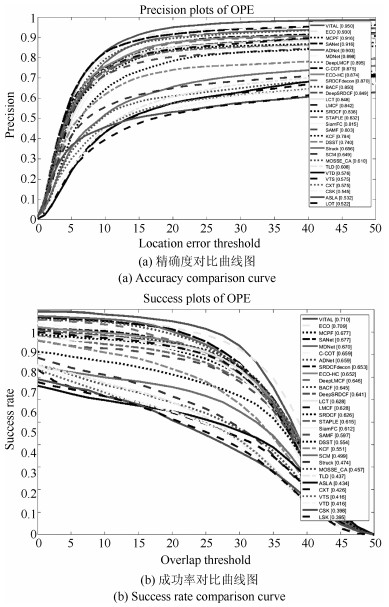
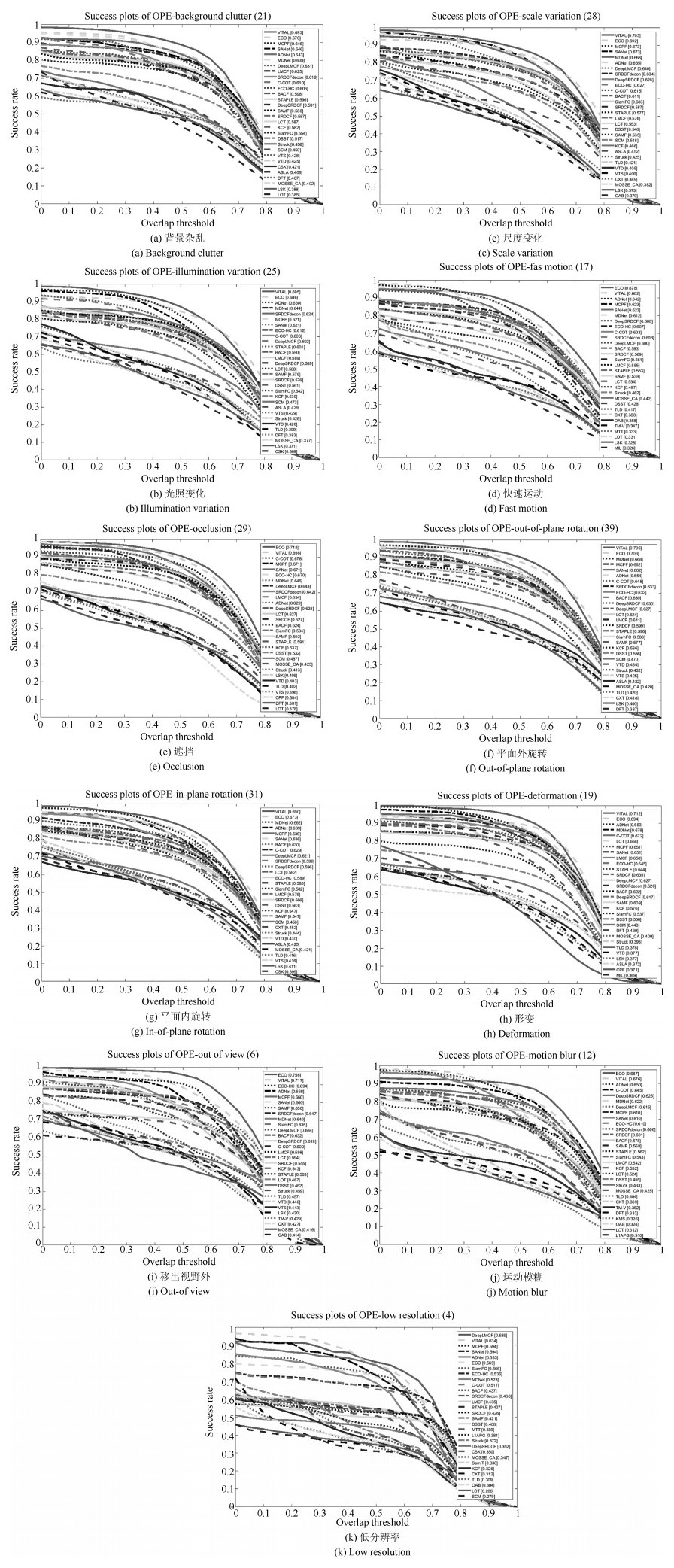
目标跟踪一直以来都是计算机视觉领域的关键问题,最近随着人工智能技术的飞速发展,运动目标跟踪问题得到了越来越多的关注.本文对主流目标跟踪算法进行了综述,首先,介绍了目标跟踪中常见的问题,并由时间顺序对目标跟踪算法进行了分类:早期的经典跟踪算法、基于核相关滤波的跟踪算法以及基于深度学习的跟踪算法.接下来,对每一类中经典的跟踪算法的原始版本和各种改进版本做了介绍、分析以及比较.最后,使用OTB-2013数据集对目标跟踪算法进行测试,并对结果进行分析,得出了以下结论:1)相比于光流法、Kalman、Meanshift等传统算法,相关滤波类算法跟踪速度更快,深度学习类方法精度高.2)具有多特征融合以及深度特征的追踪器在跟踪精度方面的效果更好.3)使用强大的分类器是实现良好跟踪的基础.4)尺度的自适应以及模型的更新机制也影响着跟踪的精度.
目标跟踪一直以来都是计算机视觉领域的关键问题,最近随着人工智能技术的飞速发展,运动目标跟踪问题得到了越来越多的关注.本文对主流目标跟踪算法进行了综述,首先,介绍了目标跟踪中常见的问题,并由时间顺序对目标跟踪算法进行了分类:早期的经典跟踪算法、基于核相关滤波的跟踪算法以及基于深度学习的跟踪算法.接下来,对每一类中经典的跟踪算法的原始版本和各种改进版本做了介绍、分析以及比较.最后,使用OTB-2013数据集对目标跟踪算法进行测试,并对结果进行分析,得出了以下结论:1)相比于光流法、Kalman、Meanshift等传统算法,相关滤波类算法跟踪速度更快,深度学习类方法精度高.2)具有多特征融合以及深度特征的追踪器在跟踪精度方面的效果更好.3)使用强大的分类器是实现良好跟踪的基础.4)尺度的自适应以及模型的更新机制也影响着跟踪的精度.



2019, 45(7): 1261-1280.
doi: 10.16383/j.aas.c180136
摘要:
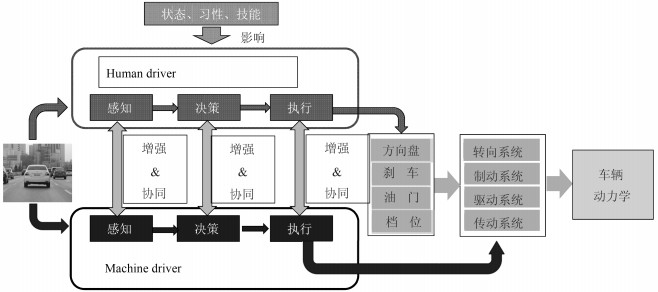
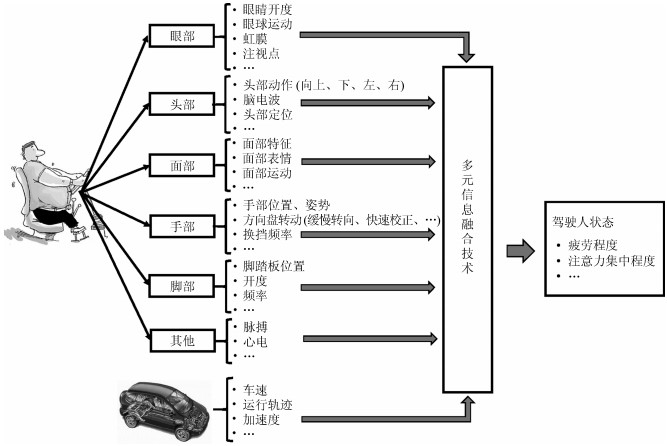
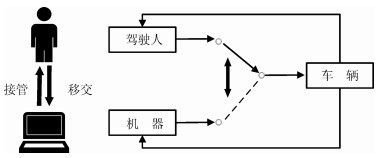
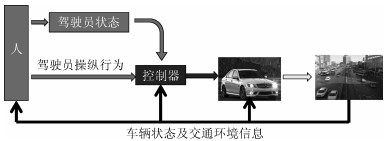
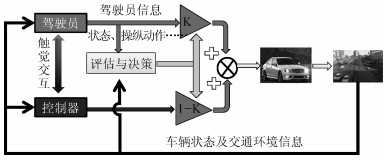
随着人工智能、互联网技术、通信技术、计算机技术的快速发展,以电动化、智能化及网联化为基础的智能汽车成为汽车行业发展的一大趋势.按照汽车智能化、自动化的发展进程,美国汽车工程师协会将智能汽车的发展分为手动驾驶、驾驶辅助、部分自动化、有条件自动化、高度自动化和完全自动化6个级别,虽然不同层次、不同功能的汽车智能化技术正迅猛发展,但是真正意义上的全工况自动驾驶在短期内很难实现.因此,在未来很长一段时期内,智能汽车必然面对人机协同控制的局面,本文详细介绍了智能汽车人机协同控制中驾驶员建模及人机驾驶权动态优化控制的国内外研究现状,同时简要介绍了智能汽车测试与评价的国内外研究现状,提炼了共性问题,并对人机协同控制的发展趋势给出了一些观点.
随着人工智能、互联网技术、通信技术、计算机技术的快速发展,以电动化、智能化及网联化为基础的智能汽车成为汽车行业发展的一大趋势.按照汽车智能化、自动化的发展进程,美国汽车工程师协会将智能汽车的发展分为手动驾驶、驾驶辅助、部分自动化、有条件自动化、高度自动化和完全自动化6个级别,虽然不同层次、不同功能的汽车智能化技术正迅猛发展,但是真正意义上的全工况自动驾驶在短期内很难实现.因此,在未来很长一段时期内,智能汽车必然面对人机协同控制的局面,本文详细介绍了智能汽车人机协同控制中驾驶员建模及人机驾驶权动态优化控制的国内外研究现状,同时简要介绍了智能汽车测试与评价的国内外研究现状,提炼了共性问题,并对人机协同控制的发展趋势给出了一些观点.



2019, 45(7): 1281-1289.
doi: 10.16383/j.aas.2018.c180009
摘要:
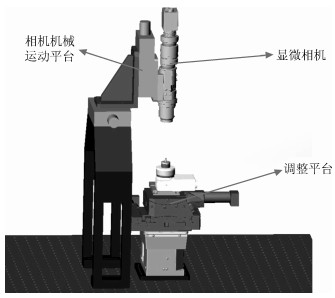
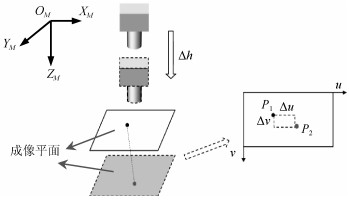
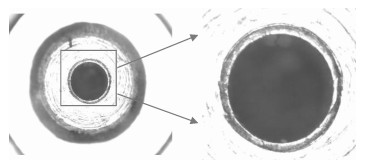
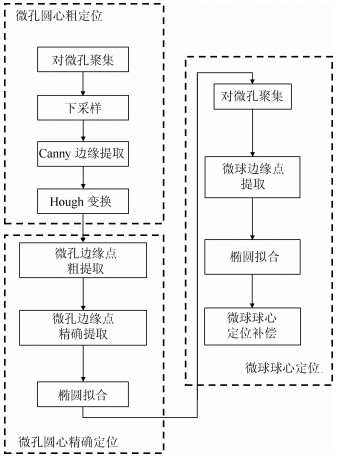
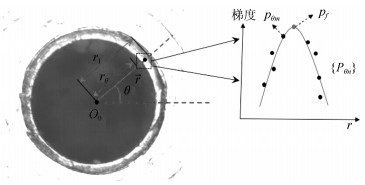
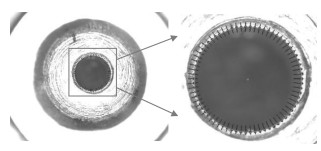
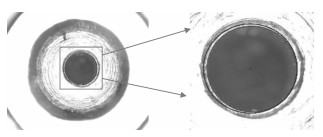
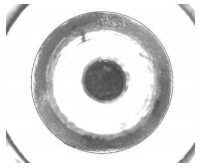
微零件的姿态测量对微装配具有重要的作用.但对于微球零件,其姿态的精确测量存在困难,影响了装配精度.针对带有微孔的微球,本文提出了一种基于单目显微视觉的微球姿态高精度测量方法.设计了一种由粗到精的微孔检测算法,实现了高精度的微孔定位.通过对相机光轴方向的标定,在相机运动后对微球图像坐标进行补偿,提高了在相机坐标系下的微球定位精度.通过对微球和微孔的精确定位,计算出微球球心与微孔圆心的空间相对位置,实现了相机坐标系下高精度的微球姿态测量.同时,根据标定出的相机坐标系与调整平台坐标系之间的旋转关系,将微球姿态转换到调整平台坐标系.实验结果表明,最大姿态测量误差0.3度,验证了本文方法的有效性.
微零件的姿态测量对微装配具有重要的作用.但对于微球零件,其姿态的精确测量存在困难,影响了装配精度.针对带有微孔的微球,本文提出了一种基于单目显微视觉的微球姿态高精度测量方法.设计了一种由粗到精的微孔检测算法,实现了高精度的微孔定位.通过对相机光轴方向的标定,在相机运动后对微球图像坐标进行补偿,提高了在相机坐标系下的微球定位精度.通过对微球和微孔的精确定位,计算出微球球心与微孔圆心的空间相对位置,实现了相机坐标系下高精度的微球姿态测量.同时,根据标定出的相机坐标系与调整平台坐标系之间的旋转关系,将微球姿态转换到调整平台坐标系.实验结果表明,最大姿态测量误差0.3度,验证了本文方法的有效性.



2019, 45(7): 1290-1297.
doi: 10.16383/j.aas.c180703
摘要:
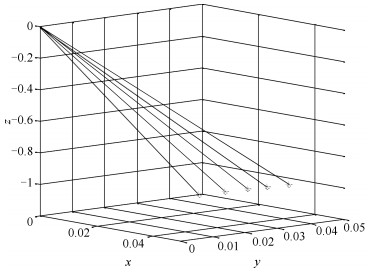
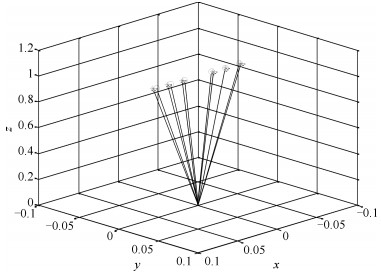
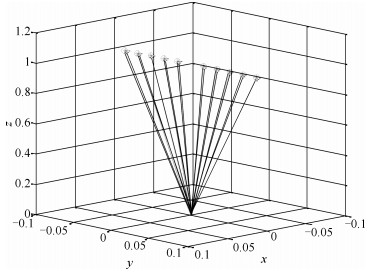
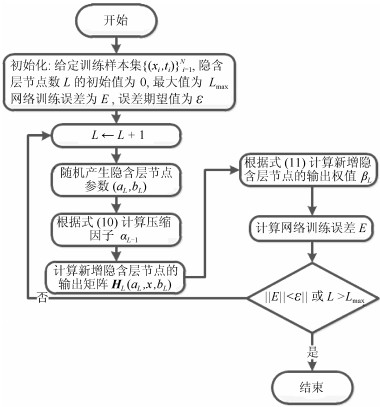
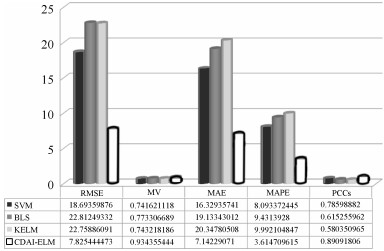
在基于基础设施即服务(Infrastructure as a service,IaaS)的云服务模式下,精准的虚拟机能耗预测,对于在众多物理服务器之间进行虚拟机调度策略的制定具有十分重要的意义.针对基于传统的增量型极限学习机(Incremental extreme learning machine,I-ELM)的预测模型存在许多降低虚拟机能耗预测准确性和效率的冗余节点,在现有I-ELM模型中加入压缩动量项将网络训练误差反馈到隐含层的输出中使预测结果更逼近输出样本,能够减少I-ELM的冗余隐含层节点,从而加快I-ELM的网络收敛速度,提高I-ELM的泛化性能.
在基于基础设施即服务(Infrastructure as a service,IaaS)的云服务模式下,精准的虚拟机能耗预测,对于在众多物理服务器之间进行虚拟机调度策略的制定具有十分重要的意义.针对基于传统的增量型极限学习机(Incremental extreme learning machine,I-ELM)的预测模型存在许多降低虚拟机能耗预测准确性和效率的冗余节点,在现有I-ELM模型中加入压缩动量项将网络训练误差反馈到隐含层的输出中使预测结果更逼近输出样本,能够减少I-ELM的冗余隐含层节点,从而加快I-ELM的网络收敛速度,提高I-ELM的泛化性能.


2019, 45(7): 1298-1306.
doi: 10.16383/j.aas.c180701
摘要:
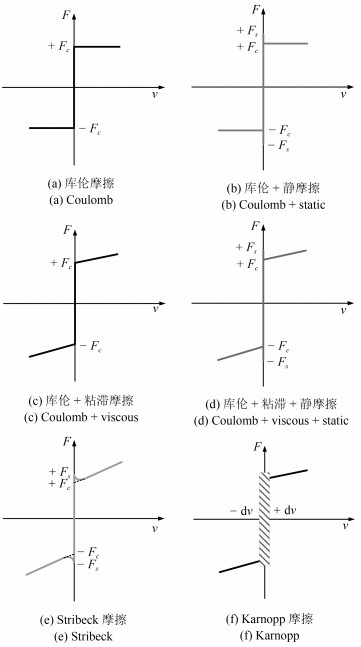
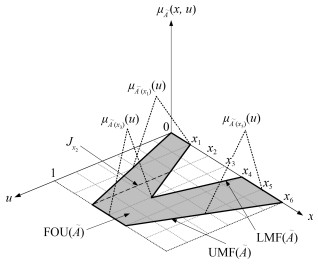
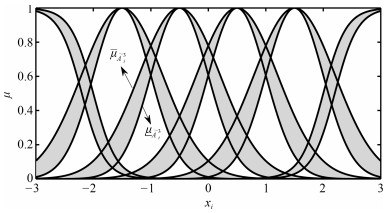
针对不确定机械系统中普遍存在的摩擦力,由于其非线性和不确定性,传统基于摩擦模型的补偿控制方法难以达到满意的系统性能要求.本文提出基于自适应区间二型(Type-2)模糊逻辑系统对系统摩擦进行补偿建模,并在该摩擦补偿方法的基础上设计出鲁棒自适应控制器,保证系统输出精度,且对摩擦环境的变化具有较强自适应性.区间二型模糊逻辑系统相对于传统一型模糊逻辑系统具有较强的处理不确定性问题的能力,在本文中使用自适应区间二型模糊逻辑系统不断逼近摩擦力,根据李雅普诺夫稳定性理论求出自适应律并证明系统跟踪误差的有界性.在不同摩擦环境下的仿真结果验证了本文所提摩擦建模方法与控制策略的有效性与实用性.
针对不确定机械系统中普遍存在的摩擦力,由于其非线性和不确定性,传统基于摩擦模型的补偿控制方法难以达到满意的系统性能要求.本文提出基于自适应区间二型(Type-2)模糊逻辑系统对系统摩擦进行补偿建模,并在该摩擦补偿方法的基础上设计出鲁棒自适应控制器,保证系统输出精度,且对摩擦环境的变化具有较强自适应性.区间二型模糊逻辑系统相对于传统一型模糊逻辑系统具有较强的处理不确定性问题的能力,在本文中使用自适应区间二型模糊逻辑系统不断逼近摩擦力,根据李雅普诺夫稳定性理论求出自适应律并证明系统跟踪误差的有界性.在不同摩擦环境下的仿真结果验证了本文所提摩擦建模方法与控制策略的有效性与实用性.


2019, 45(7): 1307-1324.
doi: 10.16383/j.aas.c180222
摘要:
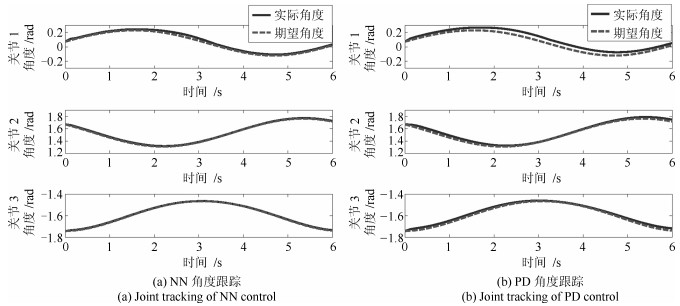
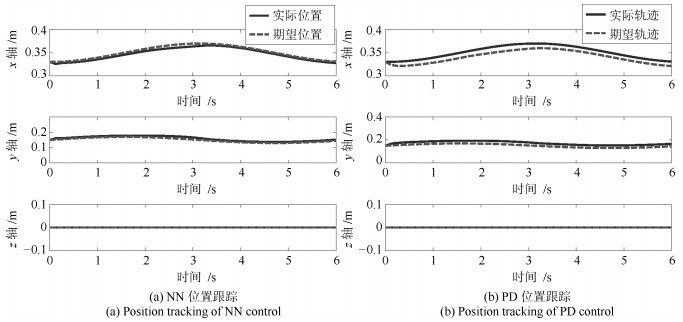
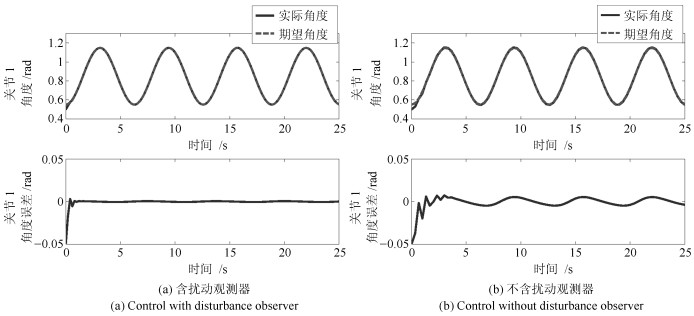
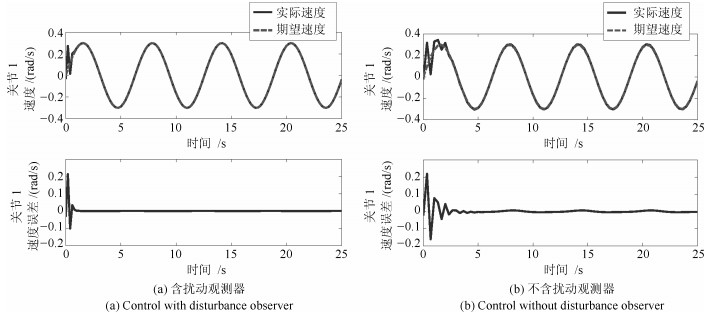
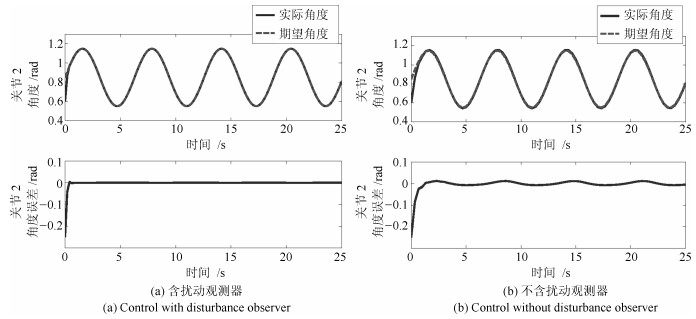
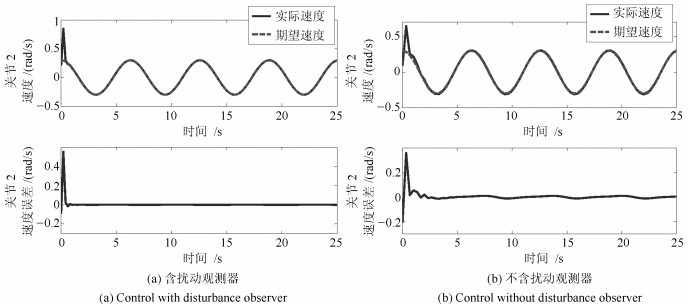
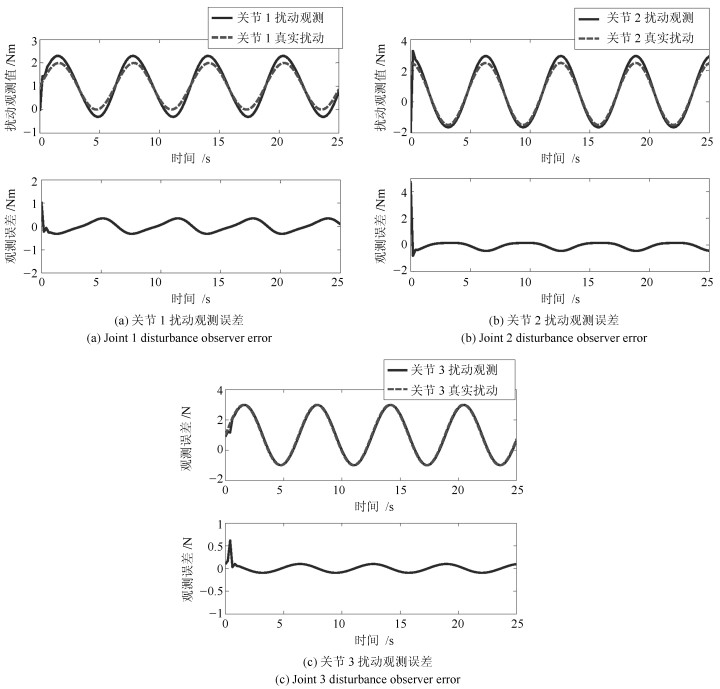
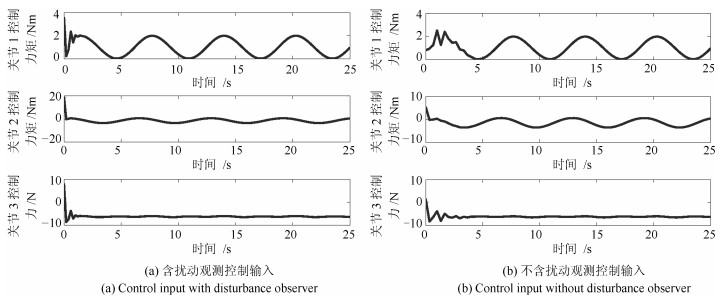
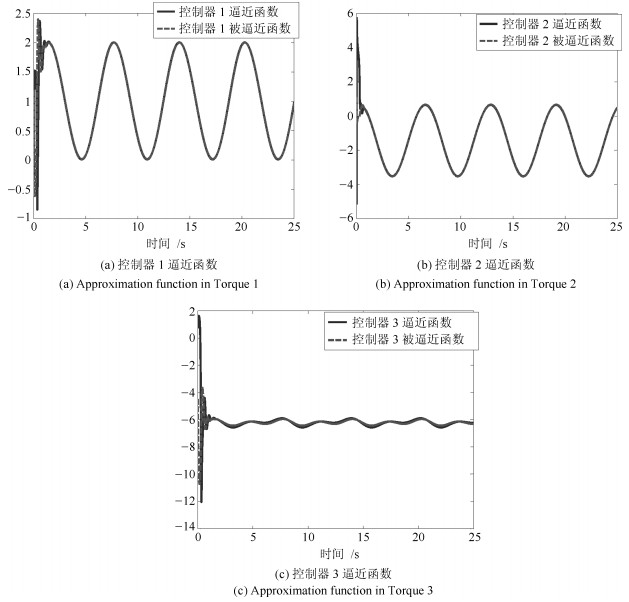
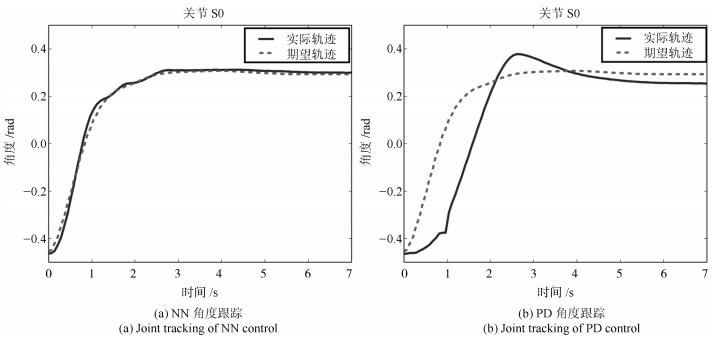
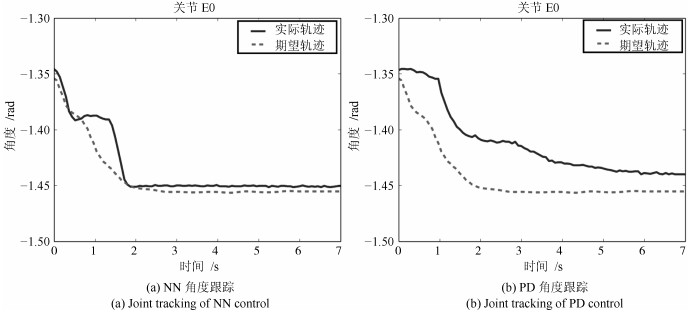
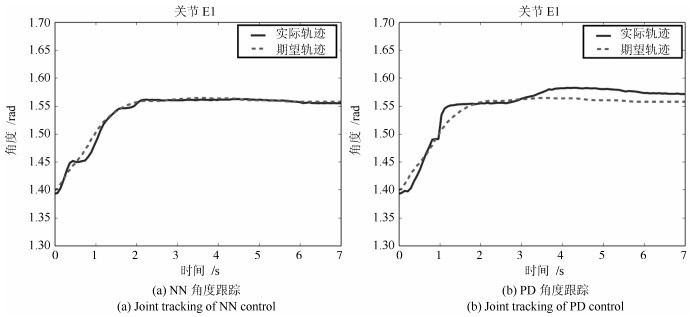
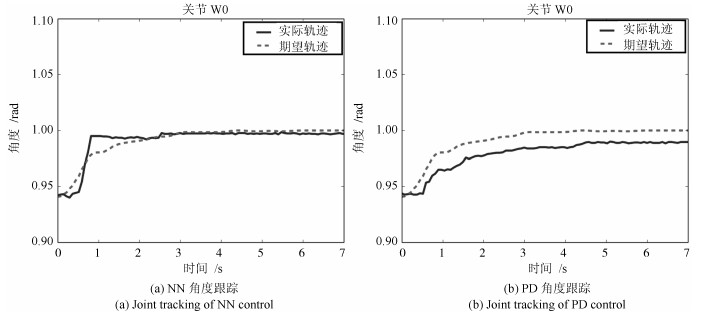
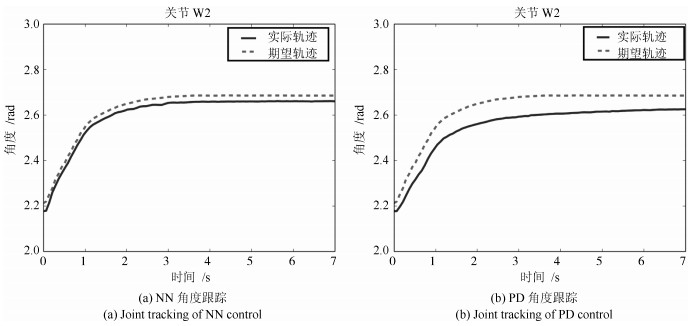
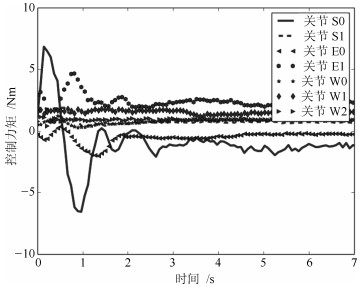
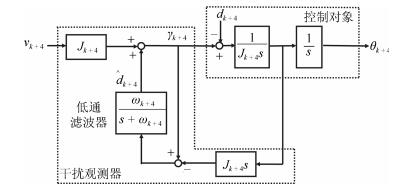
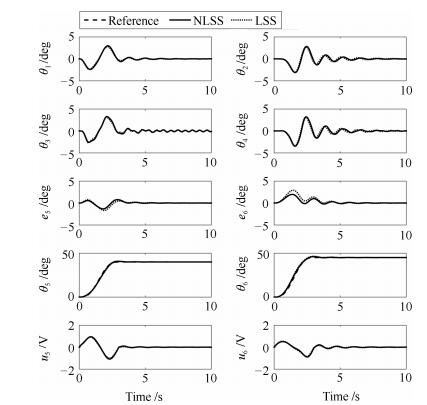
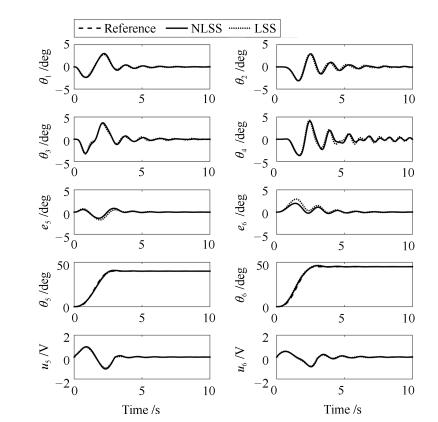
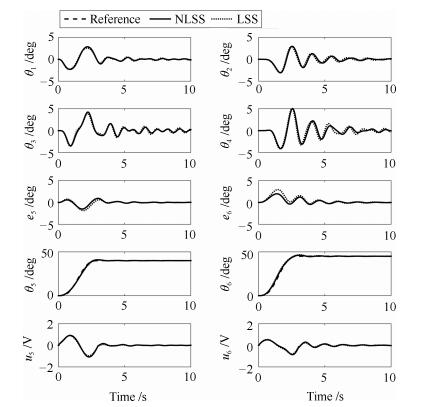
为解决机器人动力学模型未知问题并提升系统鲁棒性,本文基于扰动观测器,考虑动力学模型未知的情况,设计了一种自适应神经网络(Neural network,NN)跟踪控制器.首先分析了机器人运动学和动力学模型,针对模型已知的情况,提出了刚体机械臂通用模型跟踪控制策略;在考虑动力学模型未知的情况下,利用径向基函数(Radial basis function,RBF)神经网络设计基于全状态反馈的自适应神经网络跟踪控制器,并通过设计扰动观测器补偿系统中的未知扰动.利用李雅普诺夫理论证明所提出的控制策略可以使闭环系统误差信号半全局一致有界(Semi-globally uniformly bounded,SGUB),并通过选择合适的增益参数可以将跟踪误差收敛到零域.仿真结果证明所提出算法的有效性并且所提出的控制器在Baxter机器人平台上得到了实验验证.
为解决机器人动力学模型未知问题并提升系统鲁棒性,本文基于扰动观测器,考虑动力学模型未知的情况,设计了一种自适应神经网络(Neural network,NN)跟踪控制器.首先分析了机器人运动学和动力学模型,针对模型已知的情况,提出了刚体机械臂通用模型跟踪控制策略;在考虑动力学模型未知的情况下,利用径向基函数(Radial basis function,RBF)神经网络设计基于全状态反馈的自适应神经网络跟踪控制器,并通过设计扰动观测器补偿系统中的未知扰动.利用李雅普诺夫理论证明所提出的控制策略可以使闭环系统误差信号半全局一致有界(Semi-globally uniformly bounded,SGUB),并通过选择合适的增益参数可以将跟踪误差收敛到零域.仿真结果证明所提出算法的有效性并且所提出的控制器在Baxter机器人平台上得到了实验验证.










2019, 45(7): 1325-1334.
doi: 10.16383/j.aas.c180085
摘要:
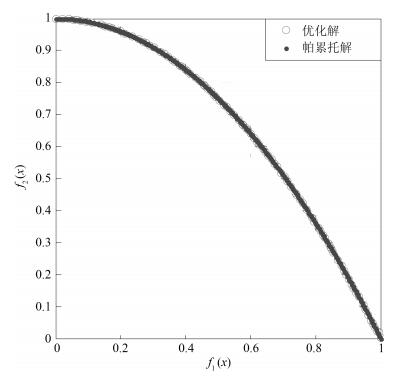
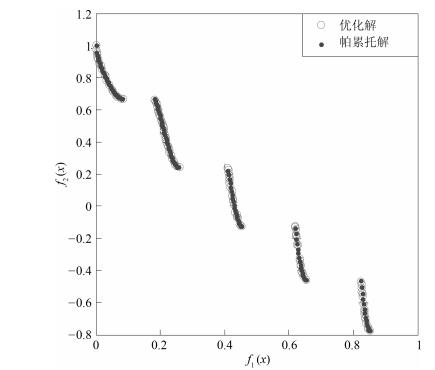
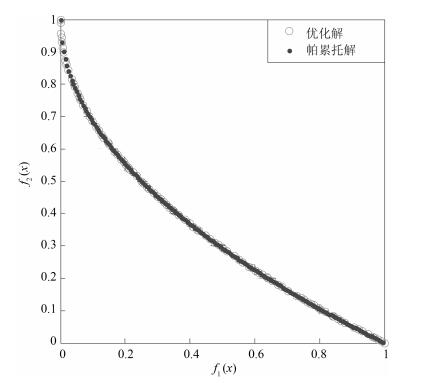
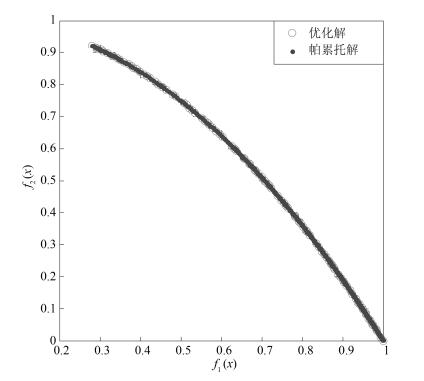
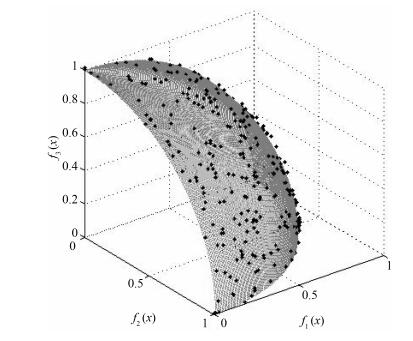
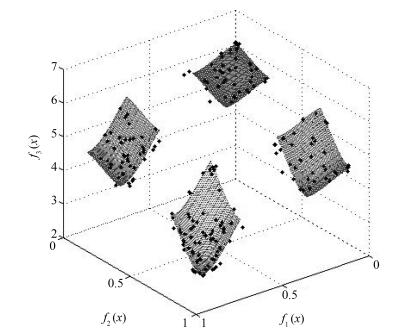
针对局部搜索类改进型非劣分类遗传算法(Nondominated sorting genetic algorithm Ⅱ,NSGAⅡ)计算过程中种群分布不均的问题,提出一种基于均匀分布的NSGAⅡ(NSGAⅡ based on uniform distribution,NSGAⅡ-UID)多目标优化算法.首先,该算法将种群映射到目标函数对应的超平面,并在该平面上进行聚类以增加解的多样性.其次,为了提高解的分布性,将映射平面进行均匀分区.当分段区间不满足分布性条件时,需要激活分布性加强模块.与此同时在计算过程中分段区间可能会出现种群数量不足或无解的状况,为了保证每个区间所选个体数目相同.最后,采用将最优个体进行极限优化变异的方法来获得缺失个体.实验结果显示该算法可以保证种群跳出局部最优且提高收敛速度,并且在解的分布性和收敛性方面均优于文中其他多目标优化算法.
针对局部搜索类改进型非劣分类遗传算法(Nondominated sorting genetic algorithm Ⅱ,NSGAⅡ)计算过程中种群分布不均的问题,提出一种基于均匀分布的NSGAⅡ(NSGAⅡ based on uniform distribution,NSGAⅡ-UID)多目标优化算法.首先,该算法将种群映射到目标函数对应的超平面,并在该平面上进行聚类以增加解的多样性.其次,为了提高解的分布性,将映射平面进行均匀分区.当分段区间不满足分布性条件时,需要激活分布性加强模块.与此同时在计算过程中分段区间可能会出现种群数量不足或无解的状况,为了保证每个区间所选个体数目相同.最后,采用将最优个体进行极限优化变异的方法来获得缺失个体.实验结果显示该算法可以保证种群跳出局部最优且提高收敛速度,并且在解的分布性和收敛性方面均优于文中其他多目标优化算法.

2019, 45(7): 1335-1343.
doi: 10.16383/j.aas.c190080
摘要:
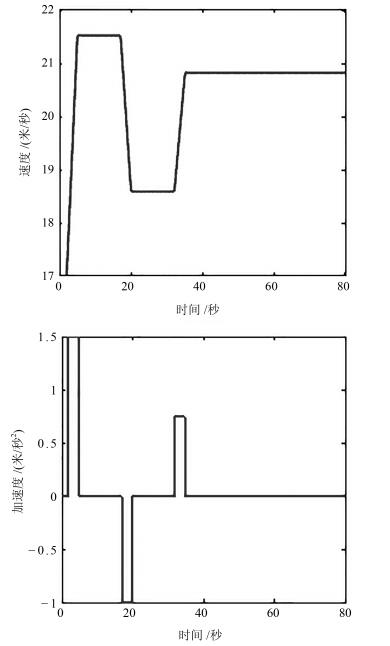
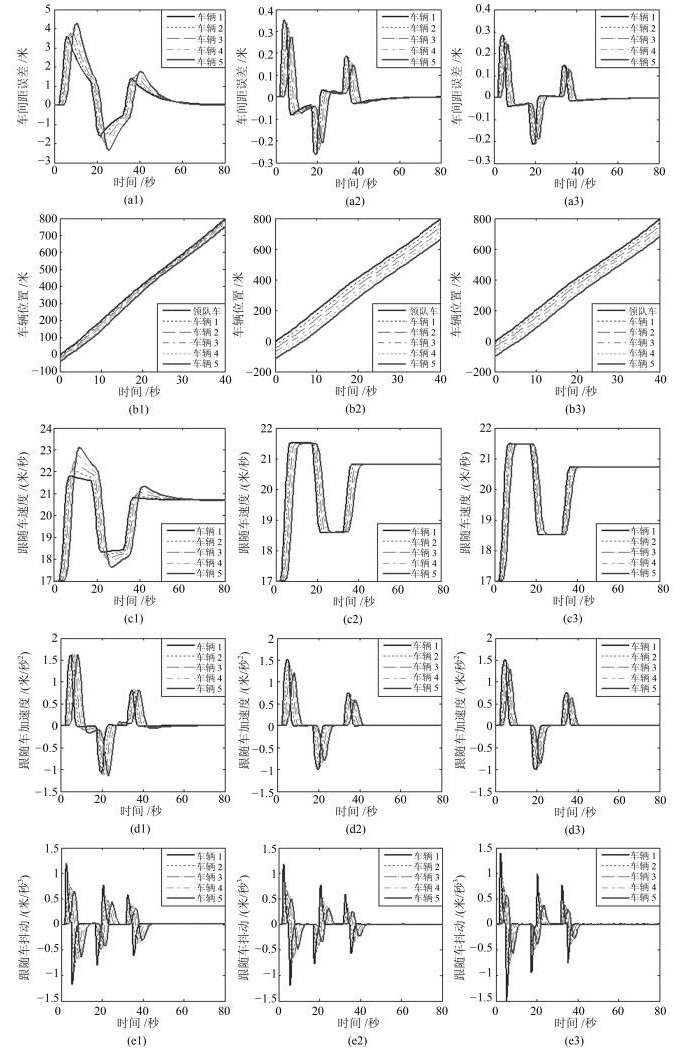
针对当前交通拥堵现状,考虑车辆间通信受限或故障条件下,基于现有路侧设施以及邻车相对位置、相对速度提出一种车队控制的通用可变时距策略(Variable time headway policy,VTHP).通过选择可变行驶时间距离参数,建立形式统一的车间距策略及其误差模型,并根据单车、队列以及交通流稳定性分析,综合设计控制器,同时将分析方法推广到固定间距策略(Constant spacing policy,CSP)与固定时距策略(Constant time headway policy,CTHP)中.依据上述稳定性结果给出一种物理意义明确的可变行驶时距计算方法,并得到该时距的变化界限,从而更准确快速地控制车距安全.仿真结果表明,本文提出的通用可变时距策略及相关计算方法,不但可实现车队与交通流的稳定控制,而且可改善车队综合性能.
针对当前交通拥堵现状,考虑车辆间通信受限或故障条件下,基于现有路侧设施以及邻车相对位置、相对速度提出一种车队控制的通用可变时距策略(Variable time headway policy,VTHP).通过选择可变行驶时间距离参数,建立形式统一的车间距策略及其误差模型,并根据单车、队列以及交通流稳定性分析,综合设计控制器,同时将分析方法推广到固定间距策略(Constant spacing policy,CSP)与固定时距策略(Constant time headway policy,CTHP)中.依据上述稳定性结果给出一种物理意义明确的可变行驶时距计算方法,并得到该时距的变化界限,从而更准确快速地控制车距安全.仿真结果表明,本文提出的通用可变时距策略及相关计算方法,不但可实现车队与交通流的稳定控制,而且可改善车队综合性能.

2019, 45(7): 1344-1353.
doi: 10.16383/j.aas.c180452
摘要:
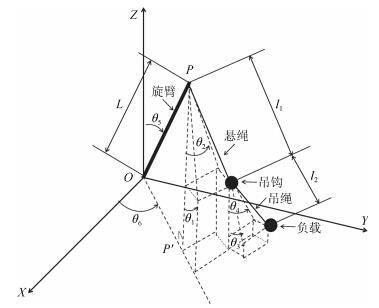
本文针对旋转起重机系统中旋臂定位和两级摆动抑制问题,提出一种含有非线性滑模面的滑模控制算法.不同于传统的线性滑模面,非线性滑模面可以使闭环系统的阻尼比从开始的较小值变化为最终的较大值.较小的阻尼比可以为系统提供较快的响应速度而较大的阻尼比则可减小超调量从而使得旋臂更加精确地跟踪给定轨迹.通过李雅普诺夫定理验证系统稳定性.比较仿真结果表明,该方法在实现摆角抑制的同时,起伏角和旋转角的跟踪误差分别降低了大约40%和52%.
本文针对旋转起重机系统中旋臂定位和两级摆动抑制问题,提出一种含有非线性滑模面的滑模控制算法.不同于传统的线性滑模面,非线性滑模面可以使闭环系统的阻尼比从开始的较小值变化为最终的较大值.较小的阻尼比可以为系统提供较快的响应速度而较大的阻尼比则可减小超调量从而使得旋臂更加精确地跟踪给定轨迹.通过李雅普诺夫定理验证系统稳定性.比较仿真结果表明,该方法在实现摆角抑制的同时,起伏角和旋转角的跟踪误差分别降低了大约40%和52%.
2019, 45(7): 1354-1365.
doi: 10.16383/j.aas.2018.c180387
摘要:
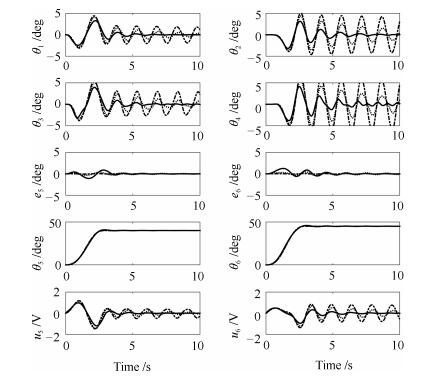
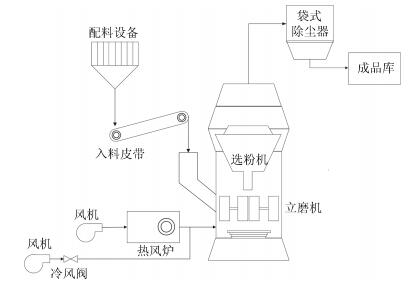
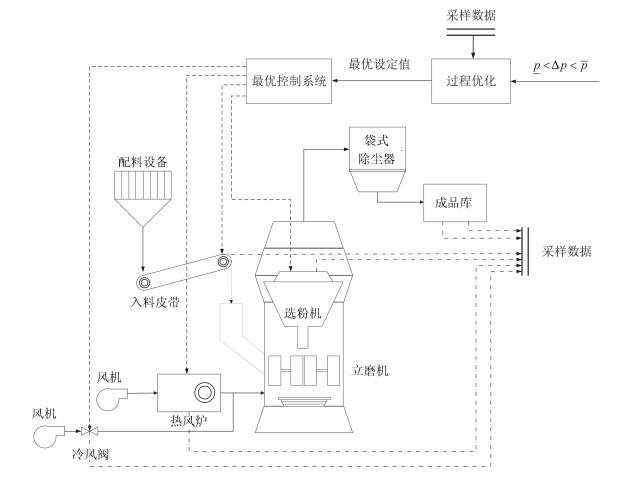
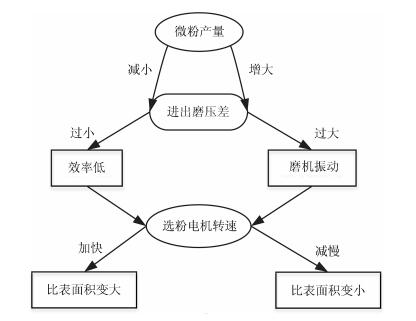
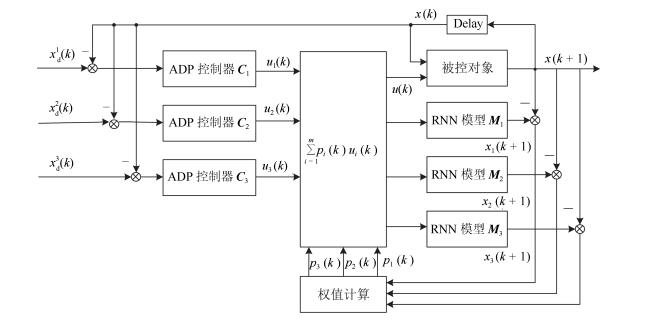
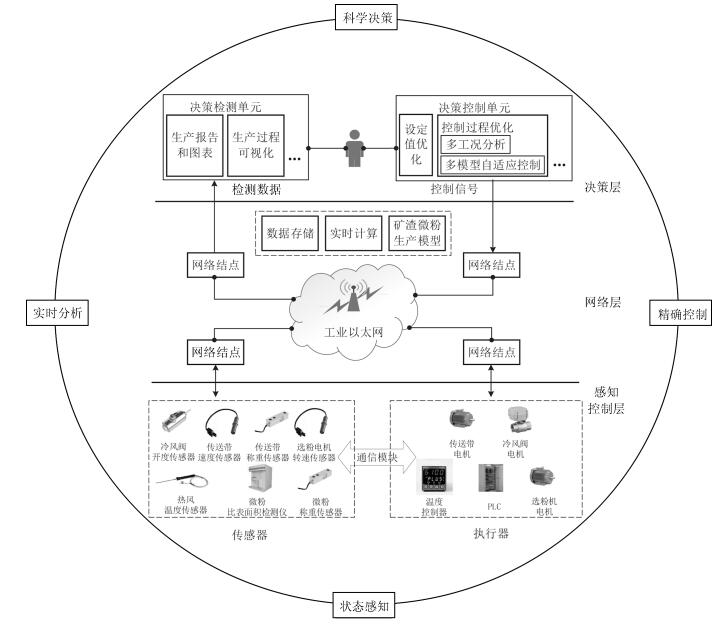
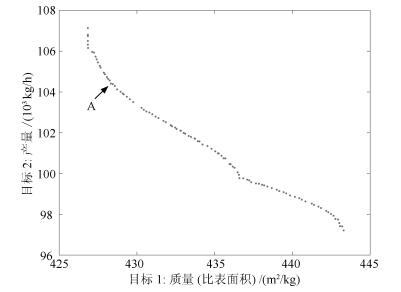
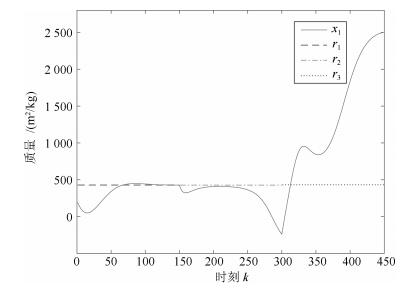
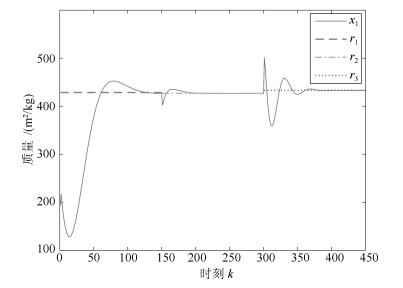
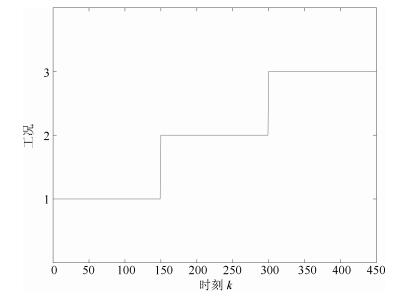
针对矿渣微粉(Ground granulated blast-furnace slag,GGBS)生产这一多变量、强耦合、多工况的复杂非线性过程,本文根据大量生产数据,提炼出矿渣微粉生产过程的三个典型工况.求解多工况多目标优化问题以求得最优设定值.建立多工况下的递归神经网数据驱动模型,并采用自适应动态规划方法,建立多个控制器,结合加权多模型控制,实现矿渣微粉生产过程在多工况切换情况下的自适应控制.通过过程运行优化、跟踪控制优化、通讯、工业以太网等信息资源与矿渣微粉生产物理资源之间的融合,构建基于信息物理系统(Cyber-physical system,CPS)的矿渣微粉生产优化控制系统.实验分析表明,本文提出的基于CPS的多模型自适应控制器,能够有效实现多工况条件下矿渣微粉生产过程的自适应控制,减小超调量,提高控制品质.
针对矿渣微粉(Ground granulated blast-furnace slag,GGBS)生产这一多变量、强耦合、多工况的复杂非线性过程,本文根据大量生产数据,提炼出矿渣微粉生产过程的三个典型工况.求解多工况多目标优化问题以求得最优设定值.建立多工况下的递归神经网数据驱动模型,并采用自适应动态规划方法,建立多个控制器,结合加权多模型控制,实现矿渣微粉生产过程在多工况切换情况下的自适应控制.通过过程运行优化、跟踪控制优化、通讯、工业以太网等信息资源与矿渣微粉生产物理资源之间的融合,构建基于信息物理系统(Cyber-physical system,CPS)的矿渣微粉生产优化控制系统.实验分析表明,本文提出的基于CPS的多模型自适应控制器,能够有效实现多工况条件下矿渣微粉生产过程的自适应控制,减小超调量,提高控制品质.




2019, 45(7): 1366-1372.
doi: 10.16383/j.aas.2017.c170406
摘要:
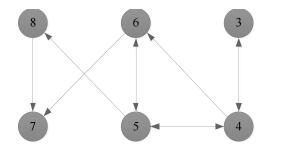
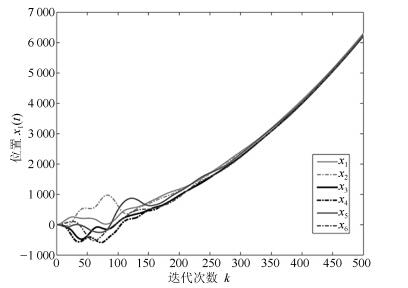
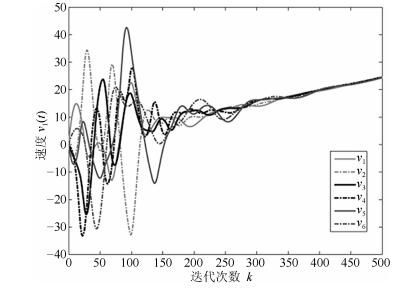
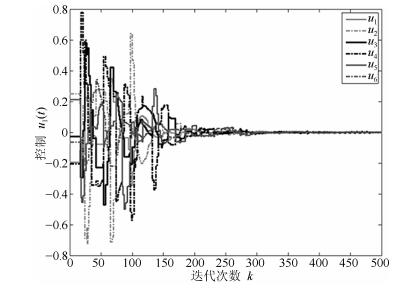
研究了基于事件触发控制的三阶离散多智能体系统的一致性问题.首先,基于位置、速度和加速度三者的测量误差,设计了一个新颖的事件触发控制机制.然后,利用不等式技巧,得到了使离散多智能体系统达到一致的充分条件.所得到的条件揭示了系统的通信拓扑的Laplacian矩阵特征值和耦合强度对于系统一致性的影响.此外,还给出了事件触发控制器排除类Zeno行为的确定条件,这意味着事件触发控制器不会每个迭代时刻都更新.最后,通过仿真实验验证了所获得理论结果的正确性和可用性
研究了基于事件触发控制的三阶离散多智能体系统的一致性问题.首先,基于位置、速度和加速度三者的测量误差,设计了一个新颖的事件触发控制机制.然后,利用不等式技巧,得到了使离散多智能体系统达到一致的充分条件.所得到的条件揭示了系统的通信拓扑的Laplacian矩阵特征值和耦合强度对于系统一致性的影响.此外,还给出了事件触发控制器排除类Zeno行为的确定条件,这意味着事件触发控制器不会每个迭代时刻都更新.最后,通过仿真实验验证了所获得理论结果的正确性和可用性


2019, 45(7): 1373-1385.
doi: 10.16383/j.aas.2018.c170284
摘要:
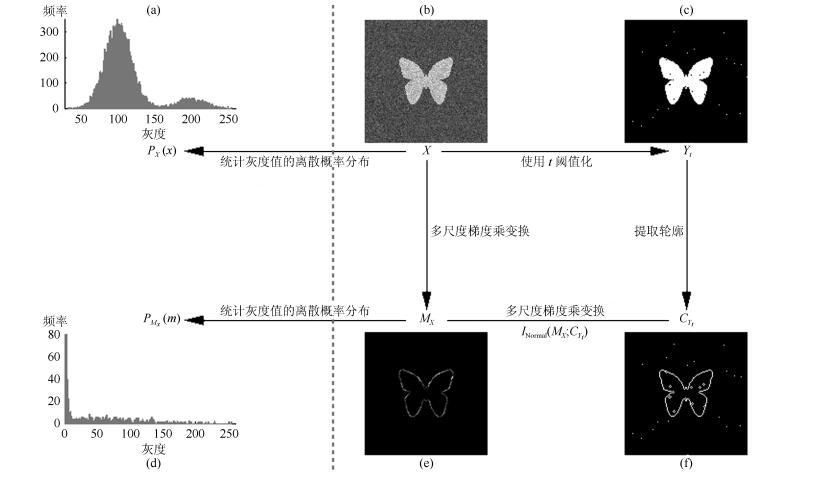
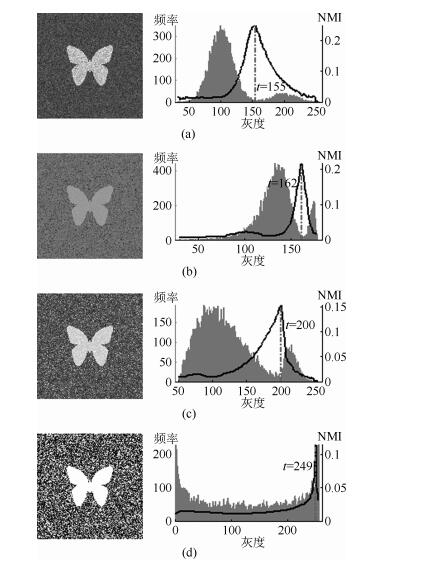
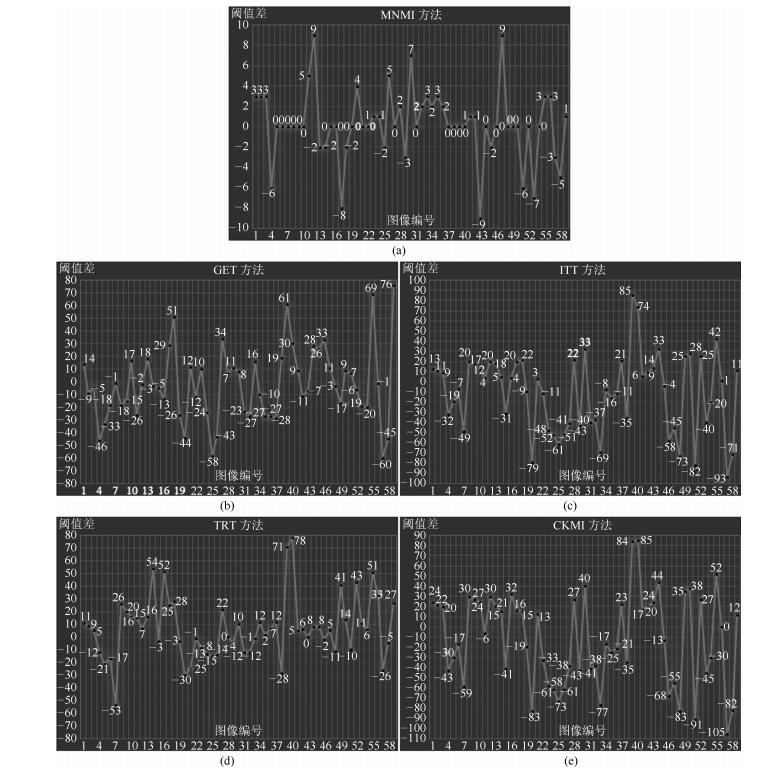
当前景或背景的灰度分布呈现为非正态分布特征时,比如极值、瑞利、贝塔或均匀分布,将所选阈值与最优阈值之差控制在10个灰度级内并非易事.为了在统一框架内处理不同灰度分布情形下的阈值选择问题,提出了一种归一化互信息量最大化导向的自动阈值选择方法.该方法先采用多尺度梯度乘变换规范化输入图像,获得具有单峰长拖尾灰度分布的规范图像;然后对不同阈值对应的二值图像进行轮廓提取,获得不同的轮廓图像;最后计算规范图像和不同轮廓图像之间的归一化互信息量,并以最大值对应的阈值作为最终阈值.在具有不同灰度分布模式的9幅合成图像和59幅真实世界图像上,将提出的方法和1种人工阈值方法及4种自动阈值方法进行了比较.实验结果表明,提出的方法虽然在计算效率方面不优于4个自动方法,但在分割的适应性和精确度方面优势明显:对前述不同灰度分布情形,其所选阈值与最优阈值之差都在9个灰度级内.
当前景或背景的灰度分布呈现为非正态分布特征时,比如极值、瑞利、贝塔或均匀分布,将所选阈值与最优阈值之差控制在10个灰度级内并非易事.为了在统一框架内处理不同灰度分布情形下的阈值选择问题,提出了一种归一化互信息量最大化导向的自动阈值选择方法.该方法先采用多尺度梯度乘变换规范化输入图像,获得具有单峰长拖尾灰度分布的规范图像;然后对不同阈值对应的二值图像进行轮廓提取,获得不同的轮廓图像;最后计算规范图像和不同轮廓图像之间的归一化互信息量,并以最大值对应的阈值作为最终阈值.在具有不同灰度分布模式的9幅合成图像和59幅真实世界图像上,将提出的方法和1种人工阈值方法及4种自动阈值方法进行了比较.实验结果表明,提出的方法虽然在计算效率方面不优于4个自动方法,但在分割的适应性和精确度方面优势明显:对前述不同灰度分布情形,其所选阈值与最优阈值之差都在9个灰度级内.




2019, 45(7): 1386-1391.
doi: 10.16383/j.aas.c180349
摘要:
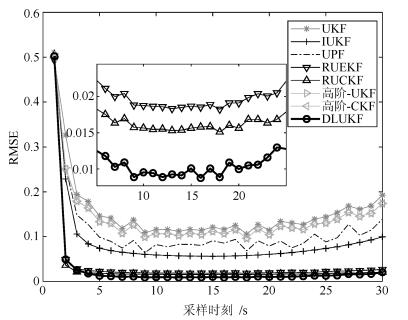
针对无迹卡尔曼滤波(Unscented Kalman fllter,UKF)在强非线性系统中估计效果差的问题,提出了双层无迹卡尔曼滤波(Double layer unscented Kalman filter,DLUKF)算法,该算法用带权值的采样点表征先验分布,而后用内层UKF算法对每个采样点进行更新,最后引入外层UKF算法的更新机制得到估计值和估计协方差.仿真结果表明,相比于传统算法,所提的DLUKF算法可以在较低计算负载下获得较高滤波估计精度.
针对无迹卡尔曼滤波(Unscented Kalman fllter,UKF)在强非线性系统中估计效果差的问题,提出了双层无迹卡尔曼滤波(Double layer unscented Kalman filter,DLUKF)算法,该算法用带权值的采样点表征先验分布,而后用内层UKF算法对每个采样点进行更新,最后引入外层UKF算法的更新机制得到估计值和估计协方差.仿真结果表明,相比于传统算法,所提的DLUKF算法可以在较低计算负载下获得较高滤波估计精度.


2019, 45(7): 1392-1400.
doi: 10.16383/j.aas.2018.c170348
摘要:
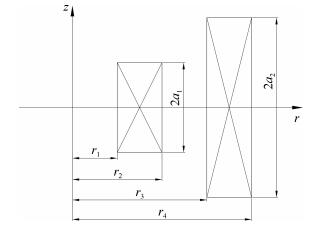
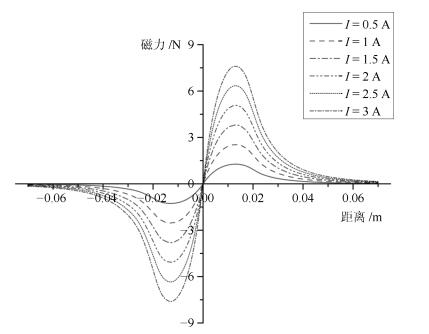
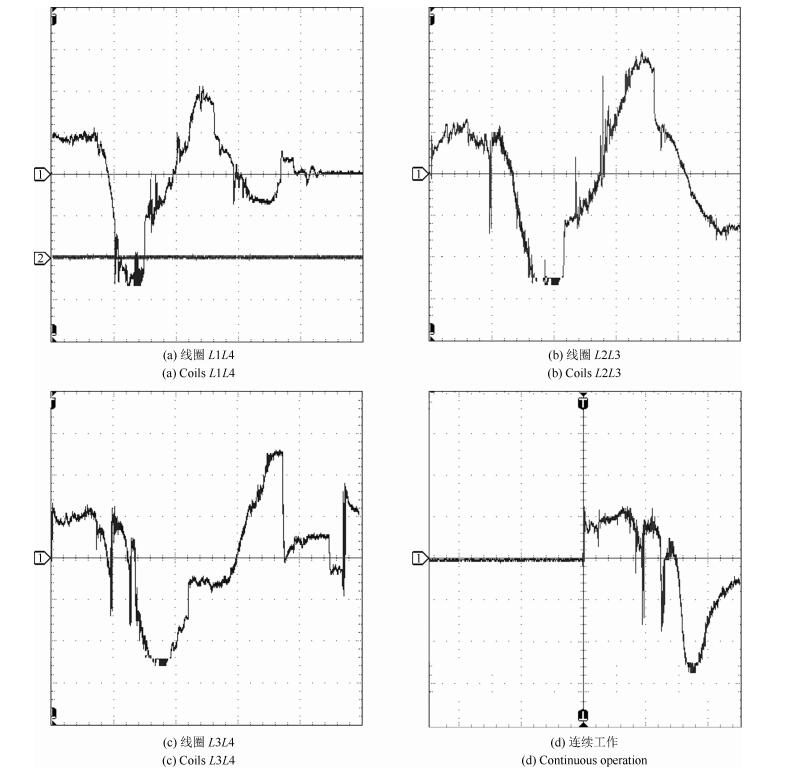
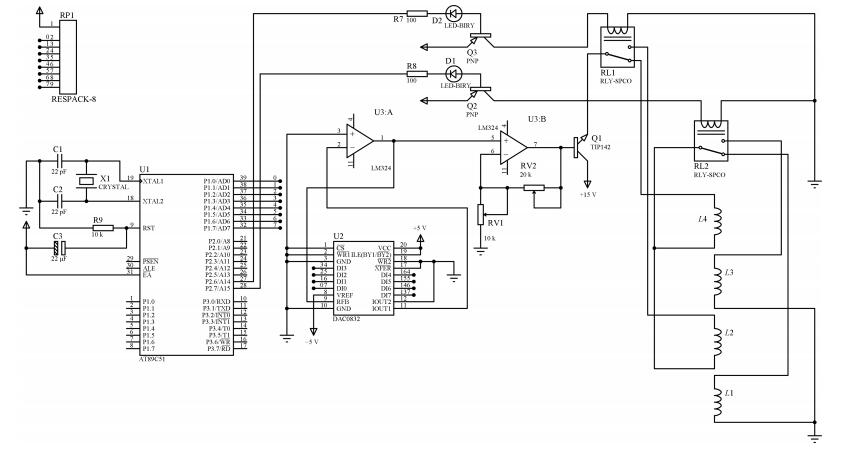
本文旨在提出一种搏动式电磁血泵电控系统,使其能够保证血泵工作的稳定性和动力的充足性.论文首先根据电磁血泵的结构设计建立原理模型,计算模型结构的磁力以及泵血的驱动力等参数.通过理论计算确定电流大小与磁力的正比关系,结合由人体血压正常值确定的合力为1.383N,确定工作电流大小为1.5A.其次利用Proteus软件设计单片机控制电路,利用控制电路、加速度传感器和示波器等设备搭建实验台,并进行空载状态下的实验去确定磁体在血泵磁场中受力与运动的状况,以及磁体的加速度波形与通断电的关系.通过依次确定线圈L1、L4,线圈L2、L3,线圈L3、L4的工作时间分别为0.1s,0.03s,0.01s,得到磁体单向运动时间,根据运动的对称性确定运动周期从而达到设计目的.该血泵具有重要的应用前景,尤其对替代目前临床ECMO(Extracorporeal membrane oxygenation)设备的血泵装置意义重大.
本文旨在提出一种搏动式电磁血泵电控系统,使其能够保证血泵工作的稳定性和动力的充足性.论文首先根据电磁血泵的结构设计建立原理模型,计算模型结构的磁力以及泵血的驱动力等参数.通过理论计算确定电流大小与磁力的正比关系,结合由人体血压正常值确定的合力为1.383N,确定工作电流大小为1.5A.其次利用Proteus软件设计单片机控制电路,利用控制电路、加速度传感器和示波器等设备搭建实验台,并进行空载状态下的实验去确定磁体在血泵磁场中受力与运动的状况,以及磁体的加速度波形与通断电的关系.通过依次确定线圈L1、L4,线圈L2、L3,线圈L3、L4的工作时间分别为0.1s,0.03s,0.01s,得到磁体单向运动时间,根据运动的对称性确定运动周期从而达到设计目的.该血泵具有重要的应用前景,尤其对替代目前临床ECMO(Extracorporeal membrane oxygenation)设备的血泵装置意义重大.