

-
摘要: 随着飞行器技术的快速发展, 以无人机和卫星为代表的无人飞行器在集群任务中得到广泛应用, 但日益增长的多样化任务需求和不平衡、不充足的任务资源也对无人飞行器集群调度技术提出新的挑战.针对无人飞行器任务类型特点, 分别从无人机群和多星两个角度出发, 介绍了无人机群访问、打击和察打一体化任务调度技术进展, 阐述了多星成像、数传与天地一体化任务调度研究成果.同时, 梳理了无人机群和多星任务调度问题的主要约束与收益指标, 综述了无人机群和多星任务调度常用的智能优化算法.最后, 面向未来无人飞行器技术应用需求, 指出了无人飞行器集群智能调度技术进一步的研究方向.Abstract: With the rapid development of flying craft technologies, unmanned flying craft, including unmanned aerial vehicles and satellites, have been widely applied. However, the increasing demands for diversified missions, as well as the unbalanced and insufficient resources, put great challenges to intelligent scheduling technologies for unmanned flying craft clusters. Considering the characteristics of unmanned flying craft clusters, this paper classifies the mission scheduling into unmanned aerial vehicles scheduling and multi-satellites scheduling. The research progresses on the visit, the attack and the integrated mission scheduling of unmanned aerial vehicles are introduced, and the advances on the observation, the transmission and the integrated mission scheduling of multi-satellites are illustrated. The major constraints and frequently-used intelligent optimization algorithms applied to the unmanned aerial vehicles and multi-satellites scheduling are also reviewed. Finally, several future research priorities about the intelligent scheduling technologies for unmanned flying craft clusters are proposed.
-
Key words:
- Unmanned aerial vehicles /
- multi-satellites /
- mission scheduling /
- constraint condition /
- intelligent optimization algorithm
1) 本文责任编委 孙富春 -

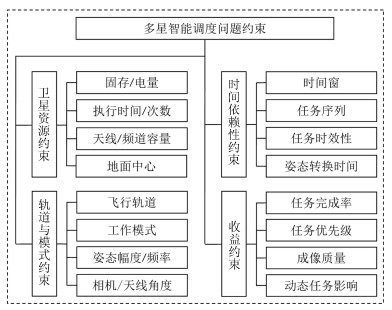
图 3 无人机群智能调度问题常见约束
Fig. 3 Common constraints in intelligent scheduling for unmanned aerial vehicles
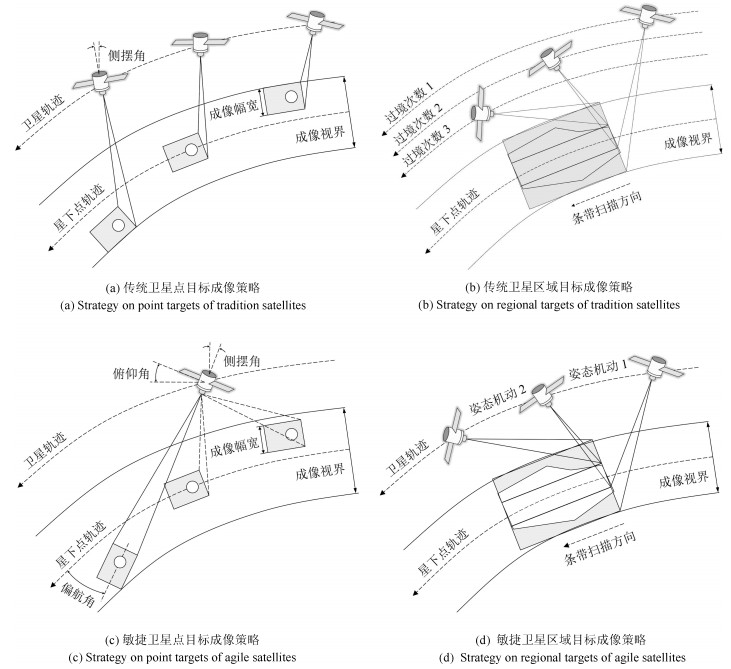
图 4 敏捷卫星与传统卫星成像策略对比
Fig. 4 Comparison on observation strategies between agile satellites and traditional satellites
-
[1] Luo C, Yu L J, Ren P. A vision-aided approach to perching a bioinspired unmanned aerial vehicle. IEEE Transactions on Industrial Electronics, 2018, 65(5): 3976-3984 doi: 10.1109/TIE.2017.2764849 [2] De Castro A I, Torres-Sánchez J T, Peña J M, Jiménez-Brenes F M, Csillik O, López-Granados F. An automatic random forest-OBIA algorithm for early weed mapping between and within crop rows using UAV imagery. Remote Sensing, 2018, 10(2): Article No. 285 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=remotesensing-10-00285 [3] Kim B O, Yun K H, Chang T S, Bahk J J, Kim S P. A preliminary study on UAV photogrammetry for the hyanho coast near the military reservation zone, eastern coast of Korea. Ocean and Polar Research, 2017, 39(2): 159-168 doi: 10.4217/OPR.2017.39.2.159 [4] 王宁, 王永.基于模糊不确定观测器的四旋翼飞行器自适应动态面轨迹跟踪控制.自动化学报, 2018, 44(4): 685-695 doi: 10.16383/j.aas.2017.c160481Wang Ning, Wang Yong. Fuzzy uncertainty observer based adaptive dynamic surface control for trajectory tracking of a quadrotor. Acta Automatica Sinica, 2018, 44(4): 685-695 doi: 10.16383/j.aas.2017.c160481 [5] 罗木生, 姜青山, 侯学隆.直升机使用吊声应召反潜兵力需求仿真.系统仿真学报, 2012, 24(6): 1277-1281, 1286 http://d.old.wanfangdata.com.cn/Periodical/xtfzxb201206025Luo Mu-Sheng, Jiang Qing-Shan, Hou Xue-Long. Simulation of optimum helicopter force in definite second time submarine search by dipping sonar. Journal of System Simulation, 2012, 24(6): 1277-1281, 1286 http://d.old.wanfangdata.com.cn/Periodical/xtfzxb201206025 [6] Lee T K, Baek S H, Choi Y H, Oh S Y. Smooth coverage path planning and control of mobile robots based on high-resolution grid map representation. Robotics and Autonomous Systems, 2011, 59(10): 801-812 doi: 10.1016/j.robot.2011.06.002 [7] 陈海, 王新民, 焦裕松, 李俨.一种凸多边形区域的无人机覆盖航迹规划算法.航空学报, 2010, 31(9): 1082-1088 http://d.old.wanfangdata.com.cn/Periodical/hkxb201009015Chen Hai, Wang Xin-Min, Jiao Yu-Song, Li Yan. An algorithm of coverage flight path planning for UAVs in convex polygon areas. Acta Aeronautica et Astronautica Sinica, 2010, 31(9): 1082-1088 http://d.old.wanfangdata.com.cn/Periodical/hkxb201009015 [8] Kolling A, Kleiner A. Multi-UAV motion planning for guaranteed search. In: Proceedings of the 12th International Conference on Autonomous Agents and Multi-agent Systems. St. Paul, USA: IFAAMS, 2013. 79-86 [9] Barrientos A, Colorado J, del Cerro J, Martinez A, Rossi C, Sanz D, et al. Aerial remote sensing in agriculture: a practical approach to area coverage and path planning for fleets of mini aerial robots. Journal of Field Robotics, 2011, 28(5): 667-689 doi: 10.1002/rob.20403 [10] 晋一宁, 吴炎烜, 范宁军.群无人机动态环境分布式持续覆盖算法.北京理工大学学报, 2016, 36(6): 588-592 http://d.old.wanfangdata.com.cn/Periodical/bjlgdxxb201606007Jin Yi-Ning, Wu Yan-Xuan, Fan Ning-Jun. Distributed cooperative control of swarm UAVs for dynamic environment persistent coverage. Transactions of Beijing Institute of Technology, 2016, 36(6): 588-592 http://d.old.wanfangdata.com.cn/Periodical/bjlgdxxb201606007 [11] Varela G, Caamaño P, Orjales F, Deibe Á, López-Peña F, Duro R J. Autonomous UAV based search operations using Constrained Sampling Evolutionary Algorithms. Neurocomputing, 2014, 132: 54-67 doi: 10.1016/j.neucom.2013.03.060 [12] Lanillos P, Gan S K, Besada-Portas E, Pajares G, Sukkarieh S. Multi-UAV target search using decentralized gradient-based negotiation with expected observation. Information Sciences, 2014, 282: 92-110 doi: 10.1016/j.ins.2014.05.054 [13] Wang J J, Zhang Y F, Geng L, Fuh J Y H, Teo S H. Mission planning for heterogeneous tasks with heterogeneous UAVs. In: Proceedings of the 13th International Conference on Control Automation Robotics & Vision (ICARCV). Singapore: IEEE, 2014. 1484-1489 [14] 符小卫, 魏广伟, 高晓光.不确定环境下多无人机协同区域搜索算法.系统工程与电子技术, 2016, 38(4): 821-827 http://d.old.wanfangdata.com.cn/Periodical/xtgcydzjs201604015Fu Xiao-Wei, Wei Guang-Wei, Gao Xiao-Guang. Cooperative area search algorithm for multi-UAVs in uncertainty environment. Systems Engineering and Electronics, 2016, 38(4): 821-827 http://d.old.wanfangdata.com.cn/Periodical/xtgcydzjs201604015 [15] Ru C J, Qi X M, Guan X N. Distributed cooperative search control method of multiple UAVs for moving target. International Journal of Aerospace Engineering, 2015, 2015: Article No. 317953 [16] 马纯超, 尹栋, 朱华勇.网络化战场环境下多无人机调度问题.火力与控制指挥, 2015, 40(10): 31-36 http://d.old.wanfangdata.com.cn/Periodical/hlyzhkz201510008Ma Chun-Chao, Yin Dong, Zhu Hua-Yong. A study on multi-UAVs scheduling in networked battlefield. Fire Control & Command Control, 2015, 40(10): 31-36 http://d.old.wanfangdata.com.cn/Periodical/hlyzhkz201510008 [17] 倪谣, 周德云, 马云红, 贺宝财.基于MILP模型的多无人机对地攻击任务分配.火力与指挥控制, 2008, 33(11): 62-65 doi: 10.3969/j.issn.1002-0640.2008.11.018Ni Yao, Zhou De-Yun, Ma Yun-Hong, He Bao-Cai. The air-to-ground tasks assignment for multi-UAV based mixed integer linear programming. Fire Control & Command Control, 2008, 33(11): 62-65 doi: 10.3969/j.issn.1002-0640.2008.11.018 [18] 周小程, 严建钢, 谢宇鹏, 翟鸿君.多无人机对地攻击任务分配算法.海军航空工程学院学报, 2012, 27(3): 308-312 http://d.old.wanfangdata.com.cn/Periodical/hjhkgcxyxb201203003Zhou Xiao-Cheng, Yan Jian-Gang, Xie Yu-Peng, Zhai Hong-Jun. Task distributed algorithmic for multi-UAV based on auction mechanism. Journal of Naval Aeronautical and Astronautical University, 2012, 27(3): 308-312 http://d.old.wanfangdata.com.cn/Periodical/hjhkgcxyxb201203003 [19] Weinstein A L, Schumacher C. UAV scheduling via the vehicle routing problem with time windows. In: Proceedings of the AIAA Infotech@Aerospace 2007 Conference and Exhibit. Rohnert Park: AIAA, 2007. [20] Zhen Z Y, Xing D J, Gao C. Cooperative search-attack mission planning for multi-UAV based on intelligent self-organized algorithm. Aerospace Science and Technology, 2018, 76: 402-411 doi: 10.1016/j.ast.2018.01.035 [21] 常一哲, 李战武, 杨海燕, 罗卫平, 徐安.未来中远距协同空战多目标攻击决策研究.火力与指挥控制, 2015, 40(6): 36-40 doi: 10.3969/j.issn.1002-0640.2015.06.009Chang Yi-Zhe, Li Zhan-Wu, Yang Hai-Yan, Luo Wei-Ping, Xu An. A decision-making for multiple target attack based on characteristic of future long-range cooperative air combat. Fire Control & Command Control, 2015, 40(6): 36-40 doi: 10.3969/j.issn.1002-0640.2015.06.009 [22] 陈洁钰, 姚佩阳, 唐剑, 贾方超.多无人机分布式协同动态目标分配方法.空军工程大学学报(自然科学版), 2014, 15(6): 11-16 doi: 10.3969/j.issn.1009-3516.2014.06.003Chen Jie-Yu, Yao Pei-Yang, Tang Jian, Jia Fang-Chao. Multi-UAV decentralized coopertative dynamic target assignment method. Journal of Air Force Engineering University (Natural Science Edition), 2014, 15(6): 11-16 doi: 10.3969/j.issn.1009-3516.2014.06.003 [23] 刘重, 高晓光, 符小卫, 牟之英.未知环境下异构多无人机协同搜索打击中的联盟组建.兵工学报, 2015, 36(12): 2284-2297 doi: 10.3969/j.issn.1000-1093.2015.12.011Liu Chong, Gao Xiao-Guang, Fu Xiao-Wei, Mu Zhi-Ying. Coalition formation of multiple heterogeneous unmanned aerial vehicles in cooperative search and attack in unknown environment. Acta Armamentarii, 2015, 36(12): 2284-2297 doi: 10.3969/j.issn.1000-1093.2015.12.011 [24] Deng Q B, Yu J Q, Wang N F. Cooperative task assignment of multiple heterogeneous unmanned aerial vehicles using a modified genetic algorithm with multi-type genes. Chinese Journal of Aeronautics, 2013, 26(5): 1238-1250 doi: 10.1016/j.cja.2013.07.009 [25] 吴蔚楠, 关英姿, 郭继峰, 崔乃刚.基于SEAD任务特性约束的协同任务分配方法.控制与决策, 2017, 32(9): 1574-1582 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201709005Wu Wei-Nan, Guan Ying-Zi, Guo Ji-Feng, Cui Nai-Gang. Research on cooperative task assignment method used to the mission SEAD with real constraints. Control and Decision, 2017, 32(9): 1574-1582 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201709005 [26] 戚泽旸, 王强, 黄英杰.多无人机侦察打击任务分配建模仿真.计算机仿真, 2015, 32(9): 142-146, 188 doi: 10.3969/j.issn.1006-9348.2015.09.031Qi Ze-Yang, Wang Qiang, Huang Ying-Jie. Task assignment modeling and simulation for cooperative surveillance and strike of multiple unmanned aerial vehicle. Computer Simulation, 2015, 32(9): 142-146, 188 doi: 10.3969/j.issn.1006-9348.2015.09.031 [27] Zeng J, Yang X K, Yang L Y, Shen G Z. Modeling for UAV resource scheduling under mission synchronization. Journal of Systems Engineering and Electronics, 2010, 21(5): 821-826 doi: 10.3969/j.issn.1004-4132.2010.05.016 [28] Di Franco C, Buttazzo G. Coverage path planning for UAVs photogrammetry with energy and resolution constraints. Journal of Intelligent & Robotic Systems, 2016, 83(3-4): 445-462 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ccaa7b190871ef35e766f3826444f298 [29] 李炜, 张伟.基于粒子群算法的多无人机任务分配方法.控制与决策, 2010, 25(9): 1359-1363, 1368 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201009016Li Wei, Zhang Wei. Method of tasks allocation of multi-UAVs based on particles swarm optimization. Control and Decision, 2010, 25(9): 1359-1363, 1368 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201009016 [30] Kim J, Morrison J R. On the concerted design and scheduling of multiple resources for persistent UAV operations. Journal of Intelligent & Robotic Systems, 2014, 74(1-2), 479-498 [31] 罗德林, 吴顺祥, 段海滨, 李茂青.无人机协同多目标攻击空战决策研究.系统仿真学报, 2008, 20(24): 6778-6782Luo De-Lin, Wu Shun-Xiang, Duan Hai-Bin, Li Mao-Qing. Air-combat decision-making for UAVs cooperatively attacking multiple targets. Journal of Systems Simulation, 2008, 20(24): 6778-6782 [32] Kim M H, Baik H, Lee S. Resource welfare based task allocation for UAV team with resource constraints. Journal of Intelligent & Robotic Systems, 2015, 77(3-4): 611-627 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=9ab4b76628dd4d0c1274bd4c2e67054a [33] 张民强, 宋建梅, 薛瑞彬.通信距离受限下多无人机分布式协同搜索.系统工程理论与实践, 2015, 35(11): 2980-2986 doi: 10.12011/1000-6788(2015)11-2980Zhang Min-Qiang, Song Jian-Mei, Xue Rui-Bin. Multiple UAVs cooperative search under limited communication range. Systems Engineering-Theory & Practice, 2015, 35(11): 2980-2986 doi: 10.12011/1000-6788(2015)11-2980 [34] Sujit P B, Sousa J B. Multi-UAV task allocation with communication faults. In: Proceedings of the 2012 American Control Conference. Montreal, Canada: IEEE, 2012. 3724-3729 [35] Mirzaei M, Gordon B W. Cooperative multi-UAV search problem with communication delay. In: Proceedings of the 2010 AIAA Guidance, Navigation, and Control Conference. Toronto, Canada: AIAA, 2010. 519-524 [36] Ahmadzadeh A, Sayyar-Roudsari B, Homaifar A. A hybrid projected gradient-evolutionary search algorithm for capacitated multi-source multiuavs scheduling with time windows. Recent Developments in Cooperative Control and Optimization. Boston, USA: Springer, 2004. 1-21 [37] 伍思远.无人机安保任务的调度研究---以杨浦区为例.科技风, 2016, (9): 143 doi: 10.3969/j.issn.1671-7341.2016.09.127 [38] Ramirez-Atencia C, Bello-Orgaz G, R-Moreno M D, Camacho D. A hybrid MOGA-CSP for multi-UAV mission planning. In: Proceedings of the 2015 Companion Publication of the the 2015 Annual Conference on Genetic and Evolutionary Computation. Madrid, Spain: ACM, 2015. 1205-1208 [39] 曹文静, 杨林.多无人机自主协同方法协同性能研究.飞航导弹, 2017, (5): 43-49 http://d.old.wanfangdata.com.cn/Periodical/fhdd201705010 [40] Shima T, Schumacher C. Assignment of cooperating UAVs to simultaneous tasks using genetic algorithms. In: Proceedings of the 2005 Guidance, Navigation, and Control Conference and Exhibit. San Francisco, USA: AIAA, 2005. 1-14 [41] 仲筱艳, 黄大庆.一种典型任务的多无人机协同任务分配算法研究.自动化技术与应用, 2016, 35(8): 7-12, 22 http://d.old.wanfangdata.com.cn/Periodical/hljzdhjsyyy201608002Zhong Xiao-Yan, Huang Da-Qing. Research of cooperation task allocation algorithm for a kind of typical mission. Techniques of Automation and Applications, 2016, 35(8): 7-12, 22 http://d.old.wanfangdata.com.cn/Periodical/hljzdhjsyyy201608002 [42] Khosiawan Y, Park Y, Moon I, Nilakantan J M, Nielsen I. Task scheduling system for UAV operations in indoor environment. Neural Computing and Applications, 2019, 31(9): 5431-5459 doi: 10.1007/s00521-018-3373-9 [43] 赵明, 苏小红, 马培军, 赵玲玲.复杂多约束UAVs协同目标分配的一种统一建模方法.自动化学报, 2012, 38(12): 2038-2048 doi: 10.3724/SP.J.1004.2012.02038Zhao Ming, Su Xiao-Hong, Ma Pei-Jun, Zhao Ling-Ling. A unified modeling method of UAVs cooperative target assignment by complex multi-constraint conditions. Acta Automatica Sinica, 2012, 38(12): 2038-2048 doi: 10.3724/SP.J.1004.2012.02038 [44] Wang Z, Liu L, Long T, Wen Y L. Multi-UAV reconnaissance task allocation for heterogeneous targets using an opposition-based genetic algorithm with double-chromosome encoding. Chinese Journal of Aeronautics, 2018, 31(2): 339-350 doi: 10.1016/j.cja.2017.09.005 [45] 尹高扬, 周绍磊, 莫骏超, 曹明川, 康宇航.基于多目标粒子群优化的无人机协同多任务分配.计算机与现代化, 2016, (8): 7-11 doi: 10.3969/j.issn.1006-2475.2016.08.002Yin Gao-Yang, Zhou Shao-Lei, Mo Jun-Chao, Cao Ming-Chuan, Kang Yu-Hang. Multiple task assignment for cooperating unmanned aerial vehicles using multi-objective particle swarm optimization. Computer and Modernization, 2016, (8): 7-11 doi: 10.3969/j.issn.1006-2475.2016.08.002 [46] Oh G, Kim Y, Ahn J, Choi H L. Task allocation of multiple UAVs for cooperative parcel delivery. Advances in Aerospace Guidance, Navigation and Control. Cham, Germany: Springer, 2018. 443-454 [47] Oh G, Kim Y, Ahn J, Choi H L. PSO-based Optimal task allocation for cooperative timing missions. IFAC-PapersOnLine, 2016, 49(17): 314-319 doi: 10.1016/j.ifacol.2016.09.054 [48] 赵宏伟, 许锦州.一种基于在线仿真的多无人机任务调度方法研究.见: 2009年中国高校通信类院系学术研讨会论文集.北京, 中国: 电子工业出版社, 2009. 54-59 [49] Zhang J X, Zhu Q, Shen F Q, Miao S X, Cao Z Y, Weng Q Q. Hierarchical scheduling method of UAV resources for emergency surveying. In: Proceedings of the 2015 the International Conference on Intelligent Earth Observing and Applications. Guilin, China: SPIE, 2015. Article No. 98083B [50] 郑晓辉.无人机协同作战的目标分配算法研究.兵工自动化, 2014, 33(3): 16-18, 31 http://d.old.wanfangdata.com.cn/Periodical/bgzdh201403005Zheng Xiao-Hui. Research on target assignment algorithm for multi-UAV cooperative combat. Ordnance Industry Automation, 2014, 33(3): 16-18, 31 http://d.old.wanfangdata.com.cn/Periodical/bgzdh201403005 [51] 刘毅, 李为民, 邢清华, 徐小来.基于双层规划的攻击无人机协同目标分配优化.系统工程与电子技术, 2010, 32(3): 579-583 http://d.old.wanfangdata.com.cn/Periodical/xtgcydzjs201003031Li Yi, Li Wei-Min, Xing Qing-Hua, Xu Xiao-Lai. Cooperative mission assignment optimization of unmanned combat aerial vehicles based on bilevel programming. Systems Engineering and Electronics, 2010, 32(3): 579-583 http://d.old.wanfangdata.com.cn/Periodical/xtgcydzjs201003031 [52] Wu H S, Li H, Xiao R B, Liu J. Modeling and simulation of dynamic ant colony$'$s labor division for task allocation of UAV swarm. Physica A: Statistical Mechanics and Its Applications, 2018, 491: 127-141 doi: 10.1016/j.physa.2017.08.094 [53] Perez-Carabaza S, Besada-Portas E, Lopez-Orozco J A, de la Cruz J M. Ant colony optimization for multi-UAV minimum time search in uncertain domains. Applied Soft Computing, 2018, 62: 789-806 doi: 10.1016/j.asoc.2017.09.009 [54] Gao C, Zhen Z Y, Gong H J. A self-organized search and attack algorithm for multiple unmanned aerial vehicles. Aerospace Science and Technology, 2016, 54: 229-240 doi: 10.1016/j.ast.2016.03.022 [55] Cekmez U, Ozsiginan M, Sahingoz O K. A UAV path planning with parallel ACO algorithm on CUDA platform. In: Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS). Orlando, USA: IEEE, 2014. 347-354 [56] 陆志强, 刘欣仪.考虑资源转移时间的资源受限项目调度问题的算法.自动化学报, 2018, 44(6): 1028-1036 doi: 10.16383/j.aas.2017.c160834Lu Zhi-Qiang, Liu Xin-Yi. Algorithm for resource-constrained project scheduling problem with resource transfer time. Acta Automatica Sinica, 2018, 44(6): 1028-1036 doi: 10.16383/j.aas.2017.c160834 [57] Ramirez-Atencia C, Bello-Orgaz G, R-Moreno M D, Camacho D. A simple CSP-based model for unmanned air vehicle mission planning. In: Proceedings of the 2014 International Symposium on Innovations in Intelligent Systems and Applications. Alberobello, Italy: IEEE, 2014. 146-153 [58] Turker T, Yilmaz G, Sahingoz O K. GPU-accelerated flight route planning for multi-UAV systems using simulated annealing. In: Proceedings of the 17th International Conference on Artificial Intelligence: Methodology, Systems, and Applications. Varna, Bulgaria: Springer, 2016. 279-288 [59] Darrah M A, Niland W, Stolarik B. Multiple UAV Task Allocation for an Electronic Warfare Mission Comparing Genetic Algorithms and Simulated Annealing (Preprint), Technical Report AFRL-VA-WP-TP-2006-340, Air Force Research Laboratory, USA, 2006 [60] 施蓉花, 吴庆宪, 姜长生.无人机协同攻击的混合粒子群算法.火力与指挥控制, 2009, 34(9): 10-13 doi: 10.3969/j.issn.1002-0640.2009.09.003Shi Rong-Hua, Wu Qing-Xian, Jiang Chang-Sheng. Heuristic particle swarm optimization algorithm of multi-UAV cooperative attacking logic. Fire Control & Command, 2009, 34(9): 10-13 doi: 10.3969/j.issn.1002-0640.2009.09.003 [61] Zhang Y Z, Li J W, Hu B, Zhang J D. An improved PSO algorithm for solving multi-UAV cooperative reconnaissance task decision-making problem. In: Proceedings of the 2016 International Conference on Aircraft Utility Systems (AUS). Beijing, China: IEEE, 2016. 434-437 [62] Cao L, Tan H S, Peng H, Pan M C. Multiple UAVs hierarchical dynamic task allocation based on PSO-FSA and decentralized auction. In: Proceedings of the 2014 International Conference on Robotics and Biomimetics (ROBIO 2014). Bali, Indonesia: IEEE, 2014. 2368-2373 [63] 石岭.基于改进的模拟退火PSO无人机资源分配[硕士学位论文], 南京航空航天大学, 中国, 2015Shi Ling. UAVs Resource Allocation based on Improved SA-PSO [Master dissertation], Nanjing University of Aeronautics and Astronautics, China, 2015 [64] 梁国强, 康宇航, 邢志川, 尹高扬.基于离散粒子群优化的无人机协同多任务分配.计算机仿真, 2018, 35(2): 22-28 doi: 10.3969/j.issn.1006-9348.2018.02.005Liang Guo-Qiang, Kang Yu-Hang, Xing Zhi-Chuan, Yin Gao-Yang. UAV cooperative multi-task assignment based on discrete particle swarm optimization algorithm. Computer Simulation, 2018, 35(2): 22-28 doi: 10.3969/j.issn.1006-9348.2018.02.005 [65] 曹攀峰, 崔升.考虑信息延迟的无人机分布式协同搜索算法.电光与控制, 2010, 17(3): 27-29, 34 doi: 10.3969/j.issn.1671-637X.2010.03.007Cao Pan-Feng, Cui Sheng. An cooperative search algorithm for multi-UAV with time-delays. Electronics Optics & Control, 2010, 17(3): 27-29, 34 doi: 10.3969/j.issn.1671-637X.2010.03.007 [66] Kingston D B, Beard R W, Holt R S. Decentralized perimeter surveillance using a team of UAVs. IEEE Transactions on Robotics, 2008, 24(6): 1394-1404 [67] Li W J, Bi Y Z, Zhu X F, Yuan C A, Zhang X B. Hybrid swarm intelligent parallel algorithm research based on multi-core clusters. Microprocessors and Microsystems, 2016, 47: 151-160 doi: 10.1016/j.micpro.2016.05.009 [68] Yao P, Wang H L, Ji H X. Multi-UAVs tracking target in urban environment by model predictive control and Improved Grey Wolf Optimizer. Aerospace Science and Technology, 2016, 55: 131-143 doi: 10.1016/j.ast.2016.05.016 [69] 马焱, 赵捍东, 张玮, 陈白禹, 邵先锋, 张晓东, 等.基于自适应烟花算法的多无人机任务分配.电光与控制, 2018, 25(1): 37-43Ma Yan, Zhao Han-Dong, Zhang Wei, Chen Bai-Yu, Shao Xian-Feng, Zhang Xiao-Dong, et al. Task allocation for multi-UAVs based on adaptive fireworks algorithm. Electronics Optics & Control, 2018, 25(1): 37-43 [70] 刘跃峰, 张安.有人机/无人机编队协同任务分配方法.系统工程与电子技术, 2010, 32(3): 584-588 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xtgcydzjs201003032Liu Yue-Feng, Zhang An. Cooperative task assignment method of manned/unmanned aerial vehicle formation. Systems Engineering and Electronics, 2010, 32(3): 584-588 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xtgcydzjs201003032 [71] 刘洋, 陈英武, 谭跃进.一种有新任务到达的多卫星动态调度模型与方法.系统工程理论与实践, 2005, 25(4): 35-41 doi: 10.3321/j.issn:1000-6788.2005.04.006Liu Yang, Chen Ying-Wu, Tan Yue-Jin. A modeling and algorithm for the new tasks$'$ arriving in multi-satellites dynamic scheduling. Systems Engineering-Theory & Practice, 2005, 25(4): 35-41 doi: 10.3321/j.issn:1000-6788.2005.04.006 [72] Qiu D S, He C, Liu J, Ma M H. A dynamic scheduling method of earth-observing satellites by employing rolling horizon strategy. The Scientific World Journal, 2013, 2013: Article No. 304047 [73] Niu X N, Zhai X J, Tang H, Wu L X. Multi-satellite scheduling approach for dynamic areal tasks triggered by emergent disasters. In: Proceedings of the 2016 International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. Prague, Czech Republic: ISPRS, 2016. 475-481 [74] Skobelev P O, Simonova E V, Zhilyaev A A, Travin V S. Application of multi-agent technology in the scheduling system of swarm of Earth remote sensing satellites. Procedia Computer Science, 2017, 103: 396-402 doi: 10.1016/j.procs.2017.01.127 [75] Lemaȋtre M, Verfaillie G, Jouhaud F, Lachiver J M, Bataille N. Selecting and scheduling observations of agile satellites. Aerospace Science and Technology, 2002, 6(5): 367-381 doi: 10.1016/S1270-9638(02)01173-2 [76] Tangpattanakul P, Jozefowiez N, Lopez P. A multi-objective local search heuristic for scheduling Earth observations taken by an agile satellite. European Journal of Operational Research, 2015, 245(2): 542-554 doi: 10.1016/j.ejor.2015.03.011 [77] 章登义, 郭雷, 王骞, 邹华.一种面向区域目标的敏捷成像卫星单轨调度方法.武汉大学学报$\cdot$信息科学版, 2014, 39(8): 901-905, 922 http://d.old.wanfangdata.com.cn/Periodical/whchkjdxxb201408004Zhang Deng-Yi, Guo Lei, Wang Qian, Zou Hua. An improved single-orbit scheduling method for agile imaging satellite towards area target. Geomatics and Information Science of Wuhan University, 2014, 39(8): 901-905, 922 http://d.old.wanfangdata.com.cn/Periodical/whchkjdxxb201408004 [78] Sarkheyli A, Bagheri A, Ghorbani-Vaghei B, Askari-Moghadam R. Using an effective tabu search in interactive resources scheduling problem for LEO satellites missions. Aerospace Science and Technology, 2013, 29(1): 287-295 doi: 10.1016/j.ast.2013.04.001 [79] Liu X L, Laporte G, Chen Y W, He R J. An adaptive large neighborhood search metaheuristic for agile satellite scheduling with time-dependent transition time. Computers & Operations Research, 2017, 86: 41-53 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=1176d7c33ea3f15f8326d945dd22d54b [80] He L, Liu X L, Laporte G, Chen Y W, Chen Y G. An improved adaptive large neighborhood search algorithm for multiple agile satellites scheduling. Computers & Operations Research, 2018, 100: 12-25 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=f04b55028114ff3001cd437b6bde8ebe [81] Parish D A. A Genetic Algorithm Approach to Automating Satellite Range Scheduling [Master dissertation], Air Force Institute of Technology, USA, 1994. [82] 朱小满, 王钧, 李军, 景宁. SAR卫星成像任务规划的DHIP方法.计算机工程与科学, 2011, 33(9): 179-183 doi: 10.3969/j.issn.1007-130X.2011.09.032Zhu Xiao-Man, Wang Jun, Li Jun, Jing Ning. A DHIP algorithm for SAR satellite imaging planning. Computer Engineering and Science, 2011, 33(9): 179-183 doi: 10.3969/j.issn.1007-130X.2011.09.032 [83] 王沛.基于分支定价的多星多站集成调度方法研究[博士学位论文], 国防科学技术大学, 中国, 2011Wang Pei. Research on Branch-and-Price based Multi-satellite Multi-station Integrated Scheduling Method [Ph. D. dissertation], National University of Defense Technology, China, 2011 [84] Marinelli F, Nocella S, Rossi F, Smriglio S. A Lagrangian heuristic for satellite range scheduling with resource constraints. Computers & Operations Research, 2011, 38(11): 1572-1583 [85] Pemberton J C, Galiber Ⅲ F. A constraint-based approach to satellite scheduling. In: Proceedings of the 2001 Constraint Programming and Large Scale Discrete Optimization. Piscataway, USA: American Mathematical Society, 2001. 101-114 [86] 李云峰, 武小悦.基于多星联合侦察的卫星数传调度问题模型.北京航空航天大学学报, 2008, 34(8): 948-951, 960 http://d.old.wanfangdata.com.cn/Periodical/bjhkhtdxxb200808020Li Yun-Feng, Wu Xiao-Yue. Model of satellite data transmission scheduling problem based on multi-satellite combined reconnaissance. Journal of Beijing University of Aeronautics and Astronautics, 2008, 34(8): 948-951, 960 http://d.old.wanfangdata.com.cn/Periodical/bjhkhtdxxb200808020 [87] Bianchessi N, Righini G. Planning and scheduling algorithms for the COSMO-SkyMed constellation. Aerospace Science and Technology, 2008, 12(7): 535-544 doi: 10.1016/j.ast.2008.01.001 [88] Xu B, Wang D H, Liu W X, Sun G F. A hybrid navigation constellation inter-satellite link assignment algorithm for the integrated optimization of the inter-satellite observing and communication performance. In: Proceedings of the 2015 China Satellite Navigation Conference. Berlin, Germany: Springer, 2015. 283-296 [89] 陈祥国, 武小悦.基于解构造图的卫星数传调度ACO算法.系统工程与电子技术, 2010, 32(3): 592-597 http://d.old.wanfangdata.com.cn/Periodical/xtgcydzjs201003034Chen Xiang-Guo, Wu Xiao-Yue. ACO algorithm of satellite data transmission scheduling based on solution construction graph. Systems Engineering and Electronics, 2010, 32(3): 592-597 http://d.old.wanfangdata.com.cn/Periodical/xtgcydzjs201003034 [90] Corrao G, Falone R, Gambi E, Spinsante S. Ground station activity planning through a multi-algorithm optimisation approach. In: Proceedings of the 2012 AESS European Conference on Satellite Telecommunications (ESTEL). Rome, Italy: IEEE, 2012. 1-6 [91] Skobelev P, Simonova E V, Ivanov A, Mayorov I, Travin V, Zhilyaev A. Real time scheduling of data transmission sessions in a microsatellites swarm and ground stations network based on multi-agent technology. In: Proceedings of the 2014 International Conference on Evolutionary Computation Theory and Applications. Rome, Italy: SciTePress, 2014. 153-159 [92] 王远振, 赵坚, 聂成.多卫星--地面站系统的Petri网模型研究.空军工程大学学报(自然科学版), 2003, 4(2): 7-11 doi: 10.3969/j.issn.1009-3516.2003.02.002Wang Yuan-Zhen, Zhao Jian, Nie Cheng. Study on Petri net model for multi-satellites-ground station system. Journal of Air Force Engineering University (Natural Science Edition), 2003, 4(2): 7-11 doi: 10.3969/j.issn.1009-3516.2003.02.002 [93] Wang P, Reinelt G, Gao P, Tan Y J. A model, a heuristic and a decision support system to solve the scheduling problem of an earth observing satellite constellation. Computers & Industrial Engineering, 2011, 61(2): 322-335 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=1b9f4075623677a059762396113dd878 [94] Li Z X, Li J, Mu W T. Space-ground TT&C resources integrated scheduling based on the hybrid ant colony optimization. In: Proceedings of the 28th Conference of Spacecraft TT&C Technology. Singapore: Springer, 2016. 179-196. [95] Chen H, Wu J J, Shi W Y, Li J, Zhong Z N. Coordinate scheduling approach for EDS observation tasks and data transmission jobs. Journal of Systems Engineering and Electronics, 2016, 27(4): 822-835 doi: 10.21629/JSEE.2016.04.11 [96] Sun K, Yang Z Y, Wang P, Chen Y W. Mission planning and action planning for agile earth-observing satellite with genetic algorithm. Journal of Harbin Institute of Technology, 2013, 20(5): 51-56 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hebgydxxb-e201305010 [97] Zhu W M, Hu X X, Xia W, Jin P. A two-phase genetic annealing method for integrated Earth observation satellite scheduling problems. Soft Computing, 2019, 23(1): 181-196 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=67afc6f1ee6311f76d89bca4f1610710 [98] Dilkina B, Havens B. Agile Satellite Scheduling via Permutation Search with Constraint Propagation. Actenum Corporation: Vancouver Canada, 2005: 1-20 [99] Xu R, Chen H P, Liang X L, Wang H M. Priority-based constructive algorithms for scheduling agile earth observation satellites with total priority maximization. Expert Systems with Applications, 2016, 51: 195-206 doi: 10.1016/j.eswa.2015.12.039 [100] Zhu K J, Li J F, Baoyin H X. Satellite scheduling considering maximum observation coverage time and minimum orbital transfer fuel cost. Acta Astronautica, 2010, 66(1-2): 220-229 doi: 10.1016/j.actaastro.2009.05.029 [101] 邱涤珊, 郭浩, 贺川, 伍国华.敏捷成像卫星多星密集任务调度方法.航空学报, 2013, 34(4): 882-889 http://d.old.wanfangdata.com.cn/Periodical/hkxb201304019Qiu Di-Shan, Guo Hao, He Chuan, Wu Guo-Hua. Intensive task scheduling method for multi-agile imaging satellites. Acta Aeronautica et Astronautica Sinica, 2013, 34(4): 882-889 http://d.old.wanfangdata.com.cn/Periodical/hkxb201304019 [102] 范国伟, 常琳, 杨秀彬, 王旻, 王绍举.面向新颖成像模式敏捷卫星的联合执行机构控制方法.自动化学报, 2017, 43(10): 1858-1868 doi: 10.16383/j.aas.2017.c160579Fan Guo-Wei, Chang Lin, Yang Xiu-Bin, Wang Min, Wang Shao-Ju. Control strategy of hybrid actuator for novel imaging modes of agile satellites. Acta Automatica Sinica, 2017, 43(10): 1858-1868 doi: 10.16383/j.aas.2017.c160579 [103] 赵琳, 王硕, 郝勇, 刘源, 柴毅.基于地面任务-空间姿态映射的敏捷卫星任务规划.航空学报, 2018, 39(10): Article No. 322066 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hkxb201810014Zhao Lin, Wang Shuo, Hao Yong, Liu Yuan, Chai Yi. Mission planning for agile satellite based on the mapping relationship between ground missions and spatial attitudes. Acta Aeronautica et Astronautica Sinica, 2018, 39(10): Article No. 322066 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hkxb201810014 [104] 经飞, 王钧, 李军, 景宁.考虑多数传模式组合的卫星数传调度方法.系统工程学报, 2012, 27(2): 160-168 doi: 10.3969/j.issn.1000-5781.2012.02.003Jing Fei, Wang Jun, Li Jun, Jing Ning. Approach considers multiform data transmission mode for satellite data transmission scheduling problem. Journal of Systems Engineering, 2012, 27(2): 160-168 doi: 10.3969/j.issn.1000-5781.2012.02.003 [105] Chen H, Li L M, Zhong Z N, Li J. Approach for earth observation satellite real-time and playback data transmission scheduling. Journal of Systems Engineering and Electronics, 2015, 26(5): 982-992 doi: 10.1109/JSEE.2015.00107 [106] Kim H, Chang Y K. Mission scheduling optimization of SAR satellite constellation for minimizing system response time. Aerospace Science and Technology, 2015, 40: 17-32 doi: 10.1016/j.ast.2014.10.006 [107] Zhang Z J, Zhang N, Feng Z R. Multi-satellite control resource scheduling based on ant colony optimization. Expert Systems with Applications, 2014, 41(6): 2816-2823 doi: 10.1016/j.eswa.2013.10.014 [108] Verfaillie G, Lemaȋtre M, Bataille N, Lachiver J M. Management of the Mission of Earth Observation Satellites Challenge Description, Technical Report, Centre National d$'$Etudes Spatiales, France, 2002 [109] Li J, Li J, Chen H, Jing N. A data transmission scheduling algorithm for rapid-response earth-observing operations. Chinese Journal of Aeronautics, 2014, 27(2): 349-364 doi: 10.1016/j.cja.2014.02.014 [110] Wu G H, Ma M H, Zhu J H, Qiu D S. Multi-satellite observation integrated scheduling method oriented to emergency tasks and common tasks. Journal of Systems Engineering and Electronics, 2012, 23(5): 723-733 doi: 10.1109/JSEE.2012.00089 [111] 姜维, 庞秀丽.提高卫星服务寿命的任务规划方法研究.自动化学报, 2014, 40(5): 909-920 doi: 10.3724/SP.J.1004.2014.00909Jiang Wei, Peng Xiu-Li. The task scheduling model and algorithm for imaging satellites with optimizing satellite service life. Acta Automatica Sinica, 2014, 40(5): 909-920 doi: 10.3724/SP.J.1004.2014.00909 [112] Karapetyan D, Minic S M, Malladi K T, Punnen A P. Satellite downlink scheduling problem: a case study. Omega, 2015, 53: 115-123 doi: 10.1016/j.omega.2015.01.001 [113] 严珍珍, 陈英武, 邢立宁.基于改进蚁群算法设计的敏捷卫星调度方法.系统工程理论与实践, 2014, 34(3): 793-801 http://d.old.wanfangdata.com.cn/Periodical/xtgcllysj201403028Yan Zhen-Zhen, Chen Ying-Wu, Xing Li-Ning. Agile satellite scheduling based on improved ant colony algorithm. Systems Engineering-Theory & Practice, 2014, 34(3): 793-801 http://d.old.wanfangdata.com.cn/Periodical/xtgcllysj201403028 [114] 陈宇宁, 邢立宁, 陈英武.基于蚁群算法的灵巧卫星调度.科学技术与工程, 2011, 11(3): 484-489, 502 doi: 10.3969/j.issn.1671-1815.2011.03.012Chen Yu-Ning, Xing Li-Ning, Chen Ying-Wu. Scheduling of agile satellites based on ant colony algorithm. Science Technology and Engineering, 2011, 11(3): 484-489, 502 doi: 10.3969/j.issn.1671-1815.2011.03.012 [115] 朱新新, 谭跃进, 邓宏钟, 邢立宁.求解成像卫星调度问题的改进蚁群算法.科学技术与工程, 2012, 12(31): 8322-8326 doi: 10.3969/j.issn.1671-1815.2012.31.037Zhu Xin-Xin, Tan Yue-Jin, Deng Hong-Zhong, Xing Li-Ning. The improved ant colony algorithm solving the scheduling problem of imaging satellites. Science Technology and Engineering, 2012, 12(31): 8322-8326 doi: 10.3969/j.issn.1671-1815.2012.31.037 [116] Gao K B, Wu G H, Zhu J H. Multi-satellite observation scheduling based on a hybrid ant colony optimization. In: Proceedings of the 2nd International Symposium on Computer, Communication, Control and Automation. Paris, France: Atlantis Press, 2013. 675-678 [117] Zhang N, Feng Z R. Cooperative ant colony optimization for multisatellite resource scheduling problem. In: Proceedings of the 2007 Congress on Evolutionary Computation. Singapore: IEEE, 2007. 2822-2828 [118] 邢立宁, 陈英武.基于混合蚁群优化的卫星地面站系统任务调度方法.自动化学报, 2008, 34(4): 414-418 doi: 10.3724/SP.J.1004.2008.00414Xing Li-Ning, Chen Ying-Wu. Mission planning of satellite ground station system based on the hybrid ant colony optimization. Acta Automatica Sinica, 2008, 34(4): 414-418 doi: 10.3724/SP.J.1004.2008.00414 [119] 姚锋, 邢立宁.求解卫星地面站调度问题的演化学习型蚁群算法.系统工程与电子技术, 2012, 34(11): 2270-2274 doi: 10.3969/j.issn.1001-506X.2012.11.14Yao Feng, Xing Li-Ning. Learnable ant colony optimization algorithm for solving satellite ground station scheduling problems. Systems Engineering and Electronics, 2012, 34(11): 2270-2274 doi: 10.3969/j.issn.1001-506X.2012.11.14 [120] Hosseinabadi S, Ranjbar M, Ramyar S, Amel-Monirian M. Scheduling a constellation of agile earth observation satellites with preemption. Journal of Quality Engineering and Production Optimization, 2017, 2(1): 47-64 [121] 孙凯, 邢立宁, 陈英武.基于分解优化策略的多敏捷卫星联合对地观测调度.计算机集成制造系统, 2013, 19(1): 127-136 http://d.old.wanfangdata.com.cn/Conference/9007689Sun Kai, Xing Li-Ning, Chen Ying-Wu. Agile earth observing satellites mission scheduling based on decomposition optimization algorithm. Computer Integrated Manufacturing Systems, 2013, 19(1): 127-136 http://d.old.wanfangdata.com.cn/Conference/9007689 [122] Niu X N, Tang H, Wu L X. Satellite scheduling of large areal tasks for rapid response to natural disaster using a multi-objective genetic algorithm. International Journal of Disaster Risk Reduction, 2018, 28: 813-825 doi: 10.1016/j.ijdrr.2018.02.013 [123] Xhafa F, Herrero X, Barolli A, Takizawa M. A comparison study on meta-heuristics for ground station scheduling problem. In: Proceedings of the 17th International Conference on Network-Based Information Systems. Salerno, Italy: IEEE, 2015. 172-179 [124] 周毅荣, 陈浩, 李龙梅, 陈荦, 景宁.一种基于免疫遗传的卫星数传调度方法.小型微型计算机系统, 2015, 36(12): 2725-2729 doi: 10.3969/j.issn.1000-1220.2015.12.020Zhou Yi-Rong, Chen Hao, Li Long-Mei, Chen Luo, Jing Ning. Immune genetic algorithm for satellite data transmission scheduling. Journal of Chinese Computer Systems, 2015, 36(12): 2725-2729 doi: 10.3969/j.issn.1000-1220.2015.12.020 [125] Chen H, Zhou Y R, Du C, Li J. A satellite cluster data transmission scheduling method based on genetic algorithm with rote learning operator. In: Proceedings of the 2016 Congress on Evolutionary Computation. Vancouver, Canada: IEEE, 2016. 5076-5083. [126] 贺仁杰, 高鹏, 白保存, 李菊芳, 姚锋, 邢立宁.成像卫星任务规划模型、算法及其应用.系统工程理论与实践, 2011, 31(3): 411-422 http://d.old.wanfangdata.com.cn/Periodical/xtgcllysj201103004He Ren-Jie, Gao Peng, Bao Bai-Cun, Li Ju-Fang, Yao Feng, Xing Li-Ning. Models, algorithms and applications to the mission planning system of imaging satellites. Systems Engineering-Theory & Practice, 2011, 31(3): 411-422 http://d.old.wanfangdata.com.cn/Periodical/xtgcllysj201103004 [127] 黄瀚, 张晓倩.基于图论模型的成像卫星任务规划方法研究.桂林航天工业学院学报, 2016, 21(2): 155-158 doi: 10.3969/j.issn.1009-1033.2016.02.005 [128] Xhafa F, Herrero X, Barolli A, Takizawa M. A simulated annealing algorithm for ground station scheduling problem. In: Proceedings of the 16th International Conference on Network-based Information Systems. Gwangju, South Korea: IEEE, 2013. 24-30 [129] Xhafa F, Herrero X, Barolli A, Takizawa M. A tabu search algorithm for ground station scheduling problem. In: Proceedings of the 28th International Conference on Advanced Information Networking and Applications. Victoria, Canada: IEEE, 2014. 1033-1040 [130] 张超, 李艳斌.多敏捷卫星协同任务规划调度方法.科学技术与工程, 2017, 17(22): 271-277 doi: 10.3969/j.issn.1671-1815.2017.22.044Zhang Chao, Li Yan-Bin. Planning and scheduling method for multi agile satellite coordinated mission. Science Technology and Engineering, 2017, 17(22): 271-277 doi: 10.3969/j.issn.1671-1815.2017.22.044 [131] Chen Y, Zhang D Y, Zhou M Q, Zou H. Multi-satellite observation scheduling algorithm based on hybrid genetic particle swarm optimization. Advances in Information Technology and Industry Applications. Berlin, Germany: Springer, 2012. 441-448 [132] 汤绍勋, 易先清, 罗雪山.面向预警卫星调度问题的改进粒子群算法.系统工程, 2012, 30(1): 116-121 doi: 10.3969/j.issn.1001-2362.2012.01.059Tang Shao-Xun, Yi Xian-Qing, Luo Xue-Shan. An improved particle swarm optimization algorithm for early warning satellites scheduling problems. Systems Engineering, 2012, 30(1): 116-121 doi: 10.3969/j.issn.1001-2362.2012.01.059 [133] 常飞, 武小悦.基于改进粒子群算法的卫星数传任务调度.系统工程与电子技术, 2009, 31(10): 2404-2408 doi: 10.3321/j.issn:1001-506X.2009.10.028Chang Fei, Wu Xiao-Yue. Satellite data transmission task scheduling based on advanced particle swarm optimization. Systems Engineering and Electronics, 2009, 31(10): 2404-2408 doi: 10.3321/j.issn:1001-506X.2009.10.028 [134] 国晓博, 刘金灿, 周红彬.分布式卫星系统数传调度研究.无线电通信技术, 2016, 42(4): 29-32 doi: 10.3969/j.issn.1003-3114.2016.04.08Guo Xiao-Bo, Liu Jin-Can, Zhou Hong-Bin. Research on transmission task scheduling for distributed satellite systems. Radio Communications Technology, 2016, 42(4): 29-32 doi: 10.3969/j.issn.1003-3114.2016.04.08 [135] Zhang T J, Ke L J, Li J S, Li J, Li Z X, Huang J Q. Fireworks algorithm for the satellite link scheduling problem in the navigation constellation. In: Proceedings of the 2016 Congress on Evolutionary Computation (CEC). Victoria, Canada: IEEE, 2016. 4029-4037 [136] 经飞, 王钧, 李军, 陈浩, 景宁.基于吱呀轮优化的多卫星数传调度问题求解方法.宇航学报, 2011, 32(4): 863-870 doi: 10.3873/j.issn.1000-1328.2011.04.024Jing Fei, Wang Jun, Li Jun, Chen Hao, Jing Ning. A new scheduling method for multi-satellite data transmission based on squeaky-wheel optimization. Journal of Astronautics, 2011, 32(4): 863-870 doi: 10.3873/j.issn.1000-1328.2011.04.024 [137] 李志亮, 李小将, 张东来.基于改进DE算法的敏捷成像卫星前摄式调度.系统工程与电子技术, 2018, 40(2): 353-359 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xtgcydzjs201802017Li Zhi-Liang, Li Xiao-Jiang, Zhang Dong-Lai. Proactive scheduling of agile imaging satellite based on improved differential evolution algorithm. Systems Engineering and Electronic, 2018, 40(2): 353-359 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xtgcydzjs201802017 -

 下载:
下载:

图(5)
计量
- 文章访问数: 6454
- HTML全文浏览量: 2633
- PDF下载量: 1382
- 被引次数: 0
