

Iterative Learning Based Intermittent Fault Estimation for a Class of Linear Uncertain Repeated Systems
-
摘要: 针对一类带有不确定参数项的线性重复系统间歇性故障估计问题, 本文提出一种基于迭代学习的故障估计算法.该算法通过设计基于迭代学习的故障估计器和状态观测器, 构造李雅普诺夫方程和优化函数证明该算法的鲁棒性和收敛性, 并通过线性矩阵不等式, 求解出算法中的观测器增益矩阵和迭代学习参数矩阵.区别于其他观测器方法, 本文中的方法利用上一次基于迭代学习观测器输出和系统实际输出产生的残差信号, 对本次的故障信号进行跟踪估计, 从而准确地估计出故障的幅值和形状.仿真结果说明了该算法的有效性和准确性.
-
关键词:
- 线性不确定性重复系统 /
- 故障估计 /
- 迭代学习算法 /
- 间歇性故障 /
- 线性矩阵不等式
Abstract: This paper presents a novel observer-based fault estimation method using the iterative leaning scheme for linear uncertain repeated systems where the parameter uncertainties are time-varying. Firstly, a state observer is constructed to monitor the system status and the Lyapunov function is utilized to ensure the stability of the system. After providing the design of a robust monotonically convergence for the error system, an optimal function is presented to ensure the iterative learning law is applicable to systems. Meanwhile, two Lemmas and a reasonable assumption are utilized to linearize the nonlinear terms in our initial results. The LMI toolbox is utilized to obtain the results of the learning gain. In addition, the theoretical results have been verified through simulation tests. It has also shown that the proposed iterative learning based approach can be applicable to more general linear uncertain repeated systems.-
Key words:
- Linear uncertain repeated systems /
- fault estimation /
- iterative learning scheme /
- intermittent fault /
- linear matrix inequality
1) 本文责任编委 王占山 -
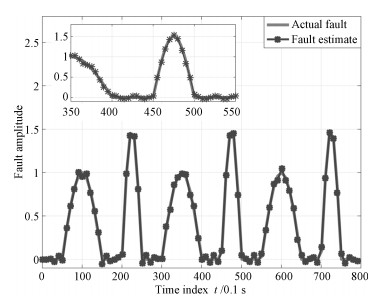
图 1 第20次迭代的系统间歇性故障信号及基于迭代学习的故障估计跟踪轨迹
Fig. 1 The tracking trajectory of intermittent fault for linear system with time-varying parameter uncertainties
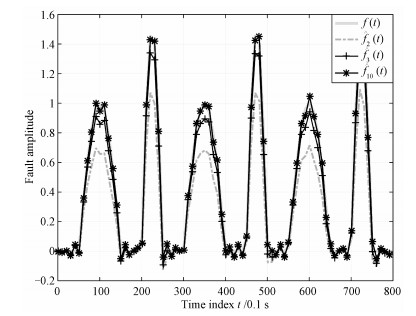
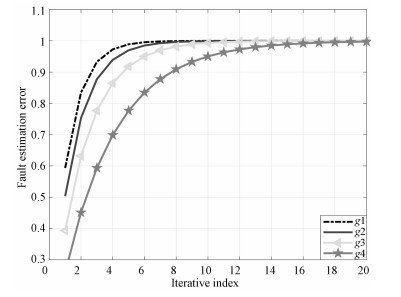
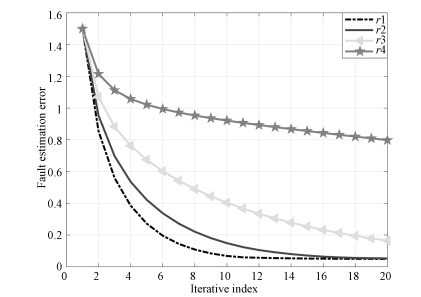
图 2 不同迭代次数系统的间歇性故障估计曲线
Fig. 2 Intermittent fault estimate result with different iterative index
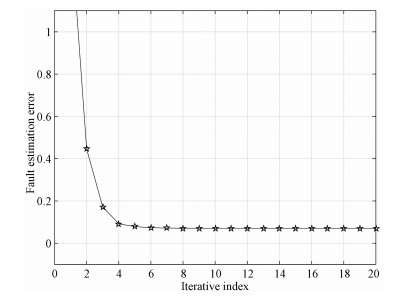
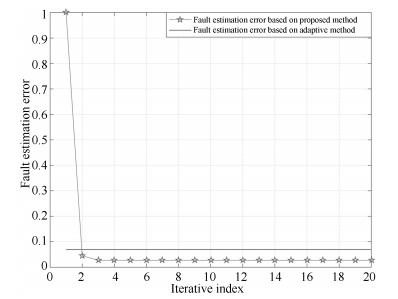
图 3 基于迭代学习的间歇性故障估计最大迭代误差
Fig. 3 The iterative error of intermittent fault for linear system with time-varying parameter uncertainties
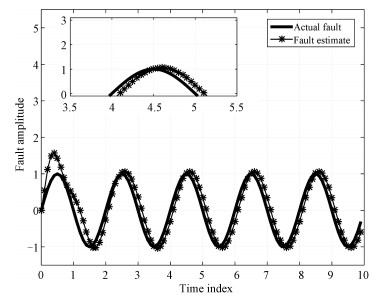
图 6 基于自适应观测器的时变故障估计
Fig. 6 The adaptive observer based time-varying fault estimating result
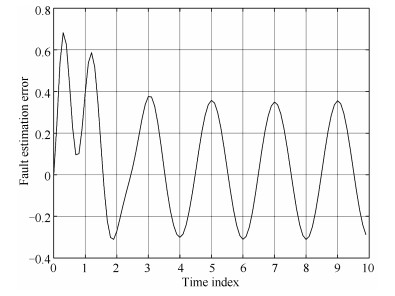
图 7 基于自适应观测器的时变故障估计误差结果
Fig. 7 The adaptive observer based time-varying fault estimation error

图 8 基于迭代学习的时变故障估计结果
Fig. 8 The iterative learning scheme based time-varying fault estimation result
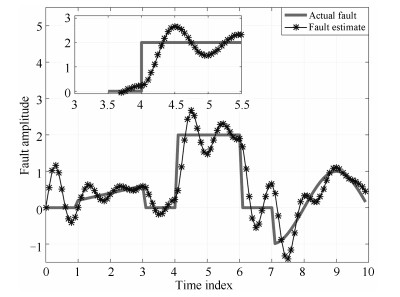
图 10 基于自适应观测器的间歇性故障估计结果
Fig. 10 The adaptive observer based intermittent fault estimation result
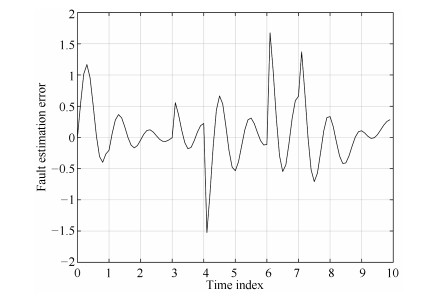
图 11 基于自适应观测器的间歇性故障估计误差结果
Fig. 11 The adaptive observer based intermittent fault estimation error

图 12 基于迭代学习的间歇性故障估计结果
Fig. 12 The iterative learning scheme based intermittent fault estimation result
-
[1] Gao Z W. Fault estimation and fault-tolerant control for discrete-time dynamic systems. IEEE Transactions on Industrial Electronics, 2015, 62(6): 3874-3884 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=c5c22f66780b426de67248bf797330c8 [2] Rotondo D, Nejjari F, Puig V, Blesa J. Model reference FTC for LPV systems using virtual actuators and set-membership fault estimation. International Journal of Robust & Nonlinear Control, 2015, 25(5): 735-760 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=f13fb3aebd70aafd394a015e18e85f8e [3] Zhao B, Liu D R, Li Y C. Observer based adaptive dynamic programming for fault tolerant control of a class of nonlinear systems. Information Sciences, 2017, 384: 21-33 doi: 10.1016/j.ins.2016.12.016 [4] Liu L, Wang Z S, Zhang H G. Adaptive fault-tolerant tracking control for MIMO discrete-time systems via reinforcement learning algorithm with less learning parameters. IEEE Transactions on Automation Science & Engineering, 2017, 14(1): 299-313 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=5f53c69f0fd1f368d9caf652106191f7 [5] Lan J L, Patton R J. A new strategy for integration of fault estimation within fault-tolerant control. Automatica, 2016, 69: 48-59 doi: 10.1016/j.automatica.2016.02.014 [6] Seron M M, De Doná J A. Robust fault estimation and compensation for LPV systems under actuator and sensor faults. Automatica, 2015, 52(52): 294-301 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=e7d39fe6fb8883cee136516ae6bc0157 [7] Chen F Y, Jiang R Q, Zhang K K, Jiang B, Tao G. Robust backstepping sliding-mode control and observer-based fault estimation for a quadrotor UAV. IEEE Transactions on Industrial Electronics, 2016, 63(8): 5044-5056 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=998f7f756d4e3624fa6b26ec025d48ea [8] Liu L, Wang Z S, Zhang H G. Data-based adaptive fault estimation and fault tolerant control for MIMO model-free systems using generalized fuzzy hyperbolic model. IEEE Transactions on Fuzzy Systems, 2018, 26(6): 3191-3205 doi: 10.1109/TFUZZ.2017.2717801 [9] Jiang B, Staroswiecki M. Adaptive observer design for robust fault estimation. International Journal of Systems Science, 2002, 33(9): 767-775 doi: 10.1080/00207720210144776 [10] Zhang K, Jiang B, Shumsky A. A new criterion of fault estimation for neutral delay systems using adaptive observer. Acta Automatica Sinica, 2009, 35(1): 85-91 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zdhxb200901013 [11] Wang Z H, Rodrigues M, Theilliol D, Shen Y. Actuator fault estimation observer design for discrete-time linear parameter-varying descriptor systems. International Journal of Adaptive Control & Signal Processing, 2015, 29(2): 242-258 [12] 秦利国, 何潇, 周东华.一种基于鲁棒残差生成器的故障估计方法.上海交通大学学报, 2015, 49(6): 768-774 http://d.old.wanfangdata.com.cn/Periodical/shjtdxxb201506006Qin Li-Guo, He Xiao, Zhou Dong-Hua. A fault estimation method based on robust residual generators. Journal of Shanghai Jiaotong University, 2015, 49(6): 768-774 http://d.old.wanfangdata.com.cn/Periodical/shjtdxxb201506006 [13] 刘帅, 钟麦英.线性离散时变系统的$H_{\infty}$故障估计.山东大学学报(工学版), 2007, 37(3): 36-40 doi: 10.3969/j.issn.1672-3961.2007.03.005Liu Shuai, Zhong Mai-Ying. The $H_{\infty}$ fault estimation for linear discrete time-varying systems. Journal of Shandong University (Engineering Science), 2007, 37(3): 36-40 doi: 10.3969/j.issn.1672-3961.2007.03.005 [14] 王占山, 张化光.一类非线性系统的鲁棒故障估计.控制与决策, 2005, 20(12): 1423-1425, 1433 doi: 10.3321/j.issn:1001-0920.2005.12.023Wang Zhan-Shan, Zhang Hua-Guang. Robust fault estimation for a class of nonlinear systems. Control and Decision, 2005, 20(12): 1423-1425, 1433 doi: 10.3321/j.issn:1001-0920.2005.12.023 [15] Han J, Zhang H G, Wang Y C, Liu X H. Robust state/fault estimation and fault tolerant control for T-S fuzzy systems with sensor and actuator faults. Journal of the Franklin Institute, 2016, 353(2): 615-641 doi: 10.1016/j.jfranklin.2015.12.009 [16] 胡正高, 赵国荣, 黄婧丽, 陈洁.基于二阶滑模观测器的连续系统故障估计.控制与决策, 2014, 29(12): 2271-2276 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201412027Hu Zheng-Gao, Zhao Guo-Rong, Huang Jing-Li, Chen Jie. Fault estimation of continuous-time systems based on second order sliding mode observation. Control and Decision, 2014, 29(12): 2271-2276 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201412027 [17] Jiang B, Staroswiecki M, Cocquempot V. Fault estimation in nonlinear uncertain systems using robust/sliding-mode observers. IEEE Proceedings-Control Theory and Applications, 2004, 151(1): 29-37 doi: 10.1049/ip-cta:20040074 [18] Haouari F A, Djemai M, Cherki B. Sliding mode observers for T-S fuzzy systems with application to sensor fault estimation. In: Proceedings of the 3rd International Conference on Control, Engineering & Information Technology. Tlemcen: IEEE, 2015. 1-5 [19] Yang J Q, Zhu F L, Wang X, Bu X H. Robust sliding-mode observer-based sensor fault estimation, actuator fault detection and isolation for uncertain nonlinear systems. International Journal of Control, Automation & Systems, 2015, 13(5): 1037-1046 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=63f350d992f2224cec409260fb5c856a [20] Mao Z H, Jiang B. Fault estimation and accommodation for networked control systems with transfer delay. Acta Automatica Sinica, 2007, 33(7): 738-743 doi: 10.1360/aas-007-0738 [21] Qiu A B, Jiang B, Wen C L, Mao Z H. Fault estimation and accommodation for networked control systems with nonuniform sampling periods. International Journal of Adaptive Control & Signal Processing, 2015, 29(4): 427-442 [22] Zhao D, Zhou D H, Wang Y Q. Sensor fault reconstruction for a class of 2-D nonlinear systems with application to fault compensation. Multidimensional Systems & Signal Processing, 2015, 26(4): 1061-1080 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=7667b381c628b902a51ad3b3799a15c4 [23] Du D S, Jiang B. Actuator fault estimation and accommodation for switched systems with time delay: discrete-time case. ISA Transactions, 2016, 62: 137-144 doi: 10.1016/j.isatra.2016.02.004 [24] Liu M, Cao X B, Shi P. Fault estimation and tolerant control for fuzzy stochastic systems. IEEE Transactions on Fuzzy Systems, 2013, 21(2): 221-229 doi: 10.1109/TFUZZ.2012.2209432 [25] Rotondo D, López-Estrada F R, Nejjari F, Ponsart J C, Theilliol D, Puig V. Actuator multiplicative fault estimation in discrete-time LPV systems using switched observers. Journal of the Franklin Institute, 2016, 353(13): 3176-3191 doi: 10.1016/j.jfranklin.2016.06.007 [26] 周东华, 史建涛, 何潇.动态系统间歇故障诊断技术综述.自动化学报, 2014, 40(2): 161-171 doi: 10.3724/SP.J.1004.2014.00161Zhou Dong-Hua, Shi Jian-Tao, He Xiao. Review of intermittent fault diagnosis techniques for dynamic systems. Acta Automatica Sinica, 2014, 40(2): 161-171 doi: 10.3724/SP.J.1004.2014.00161 [27] Steadman B, Berghout F, Olsen N, Sorensen B. Intermittent fault detection and isolation system. In: Proceedings of the 2008 IEEE AUTOTESTCON. Salt Lake City, UT, USA: IEEE, 2008. 37-40 [28] He X, Hu Y Y, Peng K X. Intermittent fault detection for uncertain networked systems. Mathematical Problems in Engineering, 2013, 2013: Article ID 282168 [29] Sedighi T, Phillips P, Foote P D. Model-based intermittent fault detection. Procedia CIRP, 2013, 11: 68-73 doi: 10.1016/j.procir.2013.07.065 [30] Owens D H, Li L M, Banks S P. Multi-periodic repetitive control system: a Lyapunov stability analysis for MIMO systems. International Journal of Control, 2004, 77(5): 504-515 doi: 10.1080/00207170410001682533 [31] Wu M, Zhou L, She J H. Design of observer-based H$_{\infty}$ robust repetitive-control system. IEEE Transactions on Automatic Control, 2011, 56(6): 1452-1457 doi: 10.1109/TAC.2011.2112473 [32] Wu M, Yu P, Chen X, She J H. Design of repetitive-control system with input dead zone based on generalized extended-state observer. Journal of Dynamic Systems, Measurement, & Control, 2017, 139(7): 071008 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=b8c1dd88041cebf486eb3df2a6df8293 [33] Almer S, Jonsson U. Dynamic phasor analysis of periodic systems. IEEE Transactions on Automatic Control, 2009, 54(8): 2007-2012 doi: 10.1109/TAC.2009.2023970 [34] Zhang P, Ding S X, Liu P. A lifting based approach to observer based fault detection of linear periodic systems. IEEE Transactions on Automatic Control, 2012, 57(2): 457-462 doi: 10.1109/TAC.2011.2166712 [35] Li J Y, Lu R Q, Xu Y, Peng H, Rao H X. Distributed state estimation for periodic systems with sensor nonlinearities and successive packet dropouts. Neurocomputing, 2017, 237: 50-58 doi: 10.1016/j.neucom.2016.08.076 [36] Shi J T, He X, Zhou D H. Iterative learning based estimation of periodically occurring faults. IET Control Theory & Applications, 2016, 10(2): 244-251 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=c0b91f5e5afa0a4ed2dafc8f4841c799 [37] 邓冠前, 邱静, 李智, 颜宁.间歇故障诊断技术研究综述.兵工自动化, 2015, 34(1): 15-20 http://d.old.wanfangdata.com.cn/Periodical/bgzdh2015010006Deng Guan-Qian, Qiu Jing, Li Zhi, Yan Ning. A survey on intermittent fault diagnosis technology. Ordnance Industry Automation, 2015, 34(1): 15-20 http://d.old.wanfangdata.com.cn/Periodical/bgzdh2015010006 [38] 鄢镕易, 何潇, 周东华.线性离散系统间歇故障的鲁棒检测方法.上海交通大学学报, 2015, 49(6): 812-818 http://d.old.wanfangdata.com.cn/Periodical/shjtdxxb201506013Yan Rong-Yi, He Xiao, Zhou Dong-Hua. Robust detection of intermittent faults of linear discrete-time stochastic systems. Journal of Shanghai Jiaotong University, 2015, 49(6): 812-818 http://d.old.wanfangdata.com.cn/Periodical/shjtdxxb201506013 [39] 高林, 刘喜梅, 顾幸生.一种新的基于迭代学习的故障检测和估计算法.控制与决策, 2010, 25(8): 1173-1177 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201008011Gao Lin, Liu Xi-Mei, Gu Xing-Sheng. New fault detection and estimation algorithm based on iterative learning. Control and Decision, 2010, 25(8): 1173-1177 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201008011 [40] 曹伟, 郭媛, 孙明.基于迭代学习的离散切换系统故障估计.物理学报, 2014, 63(18): 180202 doi: 10.7498/aps.63.180202Cao Wei, Guo Yuan, Sun Ming. Fault estimation for discrete switched system based on iterative learning. Acta Physica Sinica, 2014, 63(18): 180202 doi: 10.7498/aps.63.180202 [41] Yan B Y, Wang H F, Wang H Z. A novel approach to fault diagnosis for time-delay systems. Computers & Electrical Engineering, 2014, 40(7): 2273-2284 [42] Ding S X. Model-based Fault Diagnosis Techniques: Design Schemes, Algorithms and Tools (Second Edition). London: Springer, 2013. [43] Zhang K, Jiang B, Cocquempot V. Adaptive observer-based fast fault estimation. International Journal of Control Automation & Systems, 2008, 6(3): 320-326 http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ0210064647/ [44] Qiu J Q, Ren M F, Niu Y R, Zhao Y C, Guo Y M. Fault estimation for nonlinear dynamic systems. Circuits, Systems, & Signal Processing, 2012, 31(2): 555-564 http://d.old.wanfangdata.com.cn/Periodical/njhkhtdxxb-e201802012 [45] De Loza A F, Cieslak J, Henry D, Dávila J, Zolghadri A. Sensor fault diagnosis using a non-homogeneous high-order sliding mode observer with application to a transport aircraft. IET Control Theory & Applications, 2015, 9(4): 598-607 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ec19be9b3a774bdbf7d9552c3545123b [46] Li X J, Yang G H. Fault diagnosis for non-linear single output systems based on adaptive high-gain observer. IET Control Theory & Applications, 2013, 7(16): 1969-1977 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=00632b027cd37d21f7b971c489812144 [47] Wang, H, Daley, S. Actuator fault diagnosis: an adaptive observer-based technique. IEEE Transactions on Automatic Control, 1996, 41(7): 1073-1078 doi: 10.1109/9.508919 [48] Zhang J, Swain A K, Nguang S K. Robust $H_{\infty}$ adaptive descriptor observer design for fault estimation of uncertain nonlinear systems. Journal of the Franklin Institute, 2014, 351(11): 5162-5181 doi: 10.1016/j.jfranklin.2014.08.019 [49] Zhang K, Jiang B, Cocquempot V. Fast adaptive fault estimation and accommodation for nonlinear time-varying delay systems. Asian Journal of Control, 2009, 11(6): 643-652 doi: 10.1002/asjc.145 [50] 吴丽娜.基于模型的不确定系统鲁棒故障检测与估计方法研究[博士学位论文], 哈尔滨工业大学, 中国, 2013Wu Li-Na. Research on robust fault detection and estimation for uncertain systems based on Model[Ph. D. dissertation], Harbin Institute of Technology, China, 2013 [51] Zhu J W, Yang G H, Wang H, Wang F L. Fault estimation for a class of nonlinear systems based on intermediate estimator. IEEE Transactions on Automatic Control, 2016, 61(9): 2518-2524 doi: 10.1109/TAC.2015.2491898 -

 下载:
下载:


计量
- 文章访问数: 2780
- HTML全文浏览量: 515
- PDF下载量: 282
- 被引次数: 0
