

Adaptive Finite Time Dynamic Positioning Control of Fully-actuated Ship With Servo System Uncertainties
-
摘要: 针对全驱动水面船舶动力定位控制问题,假设船舶模型参数摄动和外部扰动的上界已知,通过构造误差信号的非奇异终端滑模面(Non-singular terminal sliding mode,NTSM)提出了一种自适应终端滑模的控制方法.同时考虑伺服系统增益不确定问题,对未知的推力系数矩阵的倒数进行参数自适应,确保设计的控制器能使得船舶的位置及艏向角在有限时间内收敛于期望值,且能保证闭环系统实际有限时间稳定(Practical finite-time stable,PFS).利用一艘供给船进行数值仿真研究,说明了设计的船舶动力定位自适应终端滑模控制律的有效性.Abstract: In order to tackle the dynamic positioning problem of fully actuated ships, an adaptive terminal sliding mode control scheme is proposed by assuming that the upper bound of ship model's uncertainties and environmental disturbances are known and by constructing the non-singular terminal sliding manifold (NTSM) through error dynamics. Considering the servo system gain uncertainties, the unknown thrust constant matrix is transformed into reciprocal and parametric adaptive method is used to make sure that the position and yaw angle of fully actuated ships can converge to the desired values in a finite time, and the closed-loop system is practically finite-time stable (PFS). Simulation results of a supply vessel show the effectiveness of the adaptive terminal sliding mode control scheme.1) 本文责任编委 季海波
-
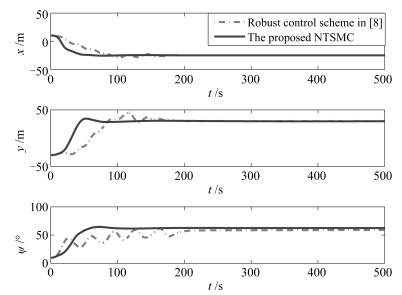
图 2 船舶的位置和艏向角$x$, $y$, $\psi$历时变化曲线
Fig. 2 Position and orientation variables $x$, $y$, $\psi $ under different control laws

图 3 船舶速度$u$, $v$, $r$历时变化曲线
Fig. 3 The kinematic variables $u$, $v$, $r$ under different control laws

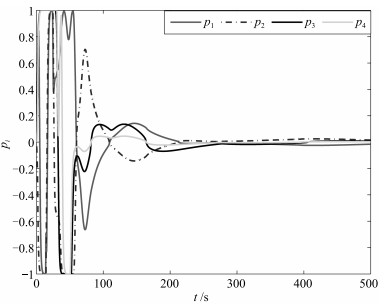
图 5 增益不确定估计参数$\hat{\lambda}_1$, $\hat{\lambda}_2$, $\hat{\lambda}_3$, $\hat{\lambda}_4$历时变化曲线
Fig. 5 Curves of estimations for gain\\ uncertainties $\hat{\lambda}_1$, $\hat{\lambda}_2$, $\hat{\lambda}_3$, $\hat{\lambda}_4$
-
[1] El-Hawary F. The Ocean Engineering Handbook. Boca Raton:CRC Press, 2001. 167-170 [2] 周利, 王磊, 陈恒.动力定位控制系统研究.船海工程, 2008, 37(2):86-91 doi: 10.3963/j.issn.1671-7953.2008.02.025Zhou Li, Wang Lei, Chen Heng. Review on the study of dynamic positioning control system for vessels. Ship and Ocean Engineering, 2008, 37(2):86-91 doi: 10.3963/j.issn.1671-7953.2008.02.025 [3] 赵大威, 边信黔, 丁福光.非线性船舶动力定位控制器设计.哈尔滨工程大学学报, 2011, 32(1):57-61 doi: 10.3969/j.issn.1006-7043.2011.01.011Zhao Da-Wei, Bian Xin-Qian, Ding Fu-Guang. Design of a nonlinear controller for dynamic ship positioning. Journal of Harbin Engineering University, 2011, 32(1):57-61 doi: 10.3969/j.issn.1006-7043.2011.01.011 [4] Ghommam J, Minf F, Derbel N. Global stabilisation and tracking control of underactuated surface vessels. IET Control Theory and Applications, 2010, 4(1):71-88 doi: 10.1049/iet-cta.2008.0131 [5] Fang M C, Lee Z Y. Portable dynamic positioning control system on a barge in short-crested waves using the neural network algorithm. China Ocean Engineering, 2013, 27(4):469-480 doi: 10.1007/s13344-013-0040-x [6] Fossen T I. Handbook of Marine Craft Hydrodynamics and Motion Control. Hoboken, NJ, USA: Wiley, 2011. 152-158 [7] Zhang G Q, Zhang X K. A novel DVS guidance principle and robust adaptive path-following control for underactuated ships using low frequency gain-learning. ISA Transactions, 2015, 56:75-85 doi: 10.1016/j.isatra.2014.12.002 [8] Do K D. Global robust and adaptive output feedback control for a marine dynamic positioning of surface ships. Journal of Marine Science and Application, 2011, 10(3):325-332 doi: 10.1007/s11804-011-1076-z [9] Du J L, Hu X, Liu H B, Chen C L P. Adaptive robust output feedback control for a marine dynamic positioning system based on a high-gain observer. IEEE Transactions on Neural Networks and Learning Systems, 2015, 26(11):2775-2786 doi: 10.1109/TNNLS.2015.2396044 [10] 王元慧, 隋玉峰, 吴静.基于非线性模型预测的船舶动力定位控制器设计.哈尔滨工程大学学报, 2013, 34(1):110-115 http://d.old.wanfangdata.com.cn/Periodical/hebgcdxxb201301018Wang Yuan-Hui, Sui Yu-Feng, Wu Jing. Marine dynamic position system based on nonlinear model predictive control. Journal of Harbin Engineering University, 2013, 34(1):110-115 http://d.old.wanfangdata.com.cn/Periodical/hebgcdxxb201301018 [11] Hassani V, Sorensen A J, Pascoal A M, Aguiar A P. Multiple model adaptive wave filtering for dynamic positioning of marine vessels. In: Proceedings of the 2012 American Control Conference (ACC). Montreal, Canada: IEEE, 2012. 6222-6228 [12] Grovlen A, Fossen T I. Nonlinear control of dynamic positioned ships using only position feedback: an observer backstepping approach. In: Proceedings of the 35th IEEE Conference on Decision and Control. Kobe, Japan: IEEE, 1996, 3: 3388-3393 [13] Feng Y, Yu X H, Man Z H. Non-singular terminal sliding mode control of rigid manipulators. Automatica, 2002, 38(12):2159-2167 doi: 10.1016/S0005-1098(02)00147-4 [14] Wang L Y, Chai T Y, Zhai L F. Neural-network-based terminal sliding-mode control of robotic manipulators including actuator dynamics. IEEE Transactions on Industrial Electronics, 2009, 56(9):3296-3304 doi: 10.1109/TIE.2008.2011350 [15] 穆朝絮, 余星火, 孙长银.非奇异终端滑模控制系统相轨迹和暂态分析.自动化学报, 2013, 39(6):902-908 http://www.aas.net.cn/CN/abstract/abstract18117.shtmlMu Chao-Xu, Yu Xing-Huo, Sun Chang-Yin. Phase trajectory and transient analysis for nonsingular terminal sliding mode control systems. Acta Automatica Sinica, 2013, 39(6):902-908 http://www.aas.net.cn/CN/abstract/abstract18117.shtml [16] Bhat S P, Bernstein D S. Finite-time stability of continuous autonomous systems. SIAM Journal on Control and Optimization, 2000, 38(3):751-766 doi: 10.1137/S0363012997321358 [17] 李世华, 丁世宏, 田玉平.一类二阶非线性系统的有限时间状态反馈镇定方法.自动化学报, 2007, 33(1):101-104 http://www.aas.net.cn/CN/abstract/abstract13811.shtmlLi Shi-Hua, Ding Shi-Hong, Tian Yu-Ping. A finite-time state feedback stabilization method for a class of second order nonlinear systems. Acta Automatica Sinica, 2007, 33(1):101-104 http://www.aas.net.cn/CN/abstract/abstract13811.shtml [18] 张瑶, 马广富, 郭延宁, 曾添一.一种多幂次滑模趋近律设计与分析.自动化学报, 2016, 42(3):466-472 http://www.aas.net.cn/CN/abstract/abstract18834.shtmlZhang Yao, Ma Guang-Fu, Guo Yan-Ning, Zeng Tian-Yi. A multi power reaching law of sliding mode control design and analysis. Acta Automatica Sinica, 2016, 42(3):466-472 http://www.aas.net.cn/CN/abstract/abstract18834.shtml [19] Chen W S, Jiao L C. Adaptive tracking for periodically time-varying and nonlinearly parameterized systems using multilayer neural networks. IEEE Transactions on Neural Networks, 2010, 21(2):345-351 doi: 10.1109/TNN.2009.2038999 [20] How B V E, Ge S S, Choo Y S. Dynamic load positioning for subsea installation via adaptive neural control. IEEE Journal of Oceanic Engineering, 2010, 35(2):366-375 doi: 10.1109/JOE.2010.2041261 [21] He W, Dong Y T, Sun C Y. Adaptive neural impedance control of a robotic manipulator with input saturation. IEEE Transactions on Systems, Man, and Cybernetics:Systems, 2016, 46(3):334-344 doi: 10.1109/TSMC.2015.2429555 -

 下载:
下载:
计量
- 文章访问数: 2065
- HTML全文浏览量: 197
- PDF下载量: 565
- 被引次数: 0
