

Design and Control of An Active Gravity Offloading System for Rehabilitation Training of Gait and Balance
-
摘要: 针对患者神经损伤后发生的下肢运动障碍,减重步行训练是一种重要的康复训练方式.对于中度和轻度患者,为其提供部分身体重力支撑(Body weight support,BWS)并激励其自主行走,可以提高患者的主动参与,并有助于改善其步态和平衡控制能力,从而有望取得更好的康复效果.现有的减重技术多存在运动空间小、减重力变化大、会对患者产生前后和侧向拉力等问题.为此,本文面向步态和平衡康复训练应用,采用单绳悬吊方式,设计电机驱动的竖直拉力单元,从而构建了一种主动减重系统.在水平方向,采用桥式吊架结构,通过伺服控制消除吊绳偏摆使其保持竖直,从而避免对患者产生前后和侧向的拉力干扰.在竖直方向,只有一个控制自由度却需要完成位置随动和减重力控制两个目标,是典型的欠驱动系统.为此,采用绳牵引串联弹性驱动方法,将位置和吊绳拉力耦合起来.针对系统中存在的非线性、摩擦等不利因素,采用滑模控制方法,分别设计了吊绳偏角控制器和吊绳拉力控制器.为保证系统安全运行,进一步针对竖直拉力单元中的弹簧连接动板设计了位置控制器.最后,通过仿真实验检验了本文提出的主动减重系统和控制方案效果.由此,可为下肢运动障碍患者提供一种方便高效的康复训练手段.Abstract: Gait training with body weight support (BWS) is an effective rehabilitation therapy for patients with neural disorders and locomotion difficulties. For medium and mild patients, walking with BWS may encourage their active participations into locomotion training and balance control to improved functional recovery. However, current BWS technologies suffer from problems of limited movement space, force inaccuracy, undesired lateral force, etc. In this work, we propose an active gravity offloading system for gait and balance training. The BWS force is provided with a single rope suspension. In the horizontal X-Y plane, the servo unit moves the BWS unit to follow the motion of the patient and keeps the rope perpendicular to the ground so that no lateral force is produced to disturb the patient. In the vertical direction, since there is only one control degree of freedom for position following in Z-direction and suspension force control along the cable the BWS is designed with a cable-driven series elastic actuation structure, which couples the force and displacement along the rope. To deal with nonlinearities, friction and uncertainties in the system, the sliding mode control method is taken for the rope deflection angle controller and force controller. Further, to keep the system running inside a safety boundary, another position controller is designed for the moving plate that connects with the spring in the BWS unit. With extensive simulations experiments, feasibility and efficacy of the active gravity offloading system are validated. This system promises an effective rehabilitation platform for patients with locomotion difficulties.1) 本文责任编委 王卫群
-

图 2 基于串联弹性结构的绳索驱动拉力单元示意图
Fig. 2 Illustration of the cable actuation unit with the SEA structure

图 3 主动减重系统的机械设计图(上:系统的总体设计图; 下:竖直拉力单元的机构设计图)
Fig. 3 Mechanical design of the active gravity offloading system (Top: the overall system; Bottom: the body weight support unit)
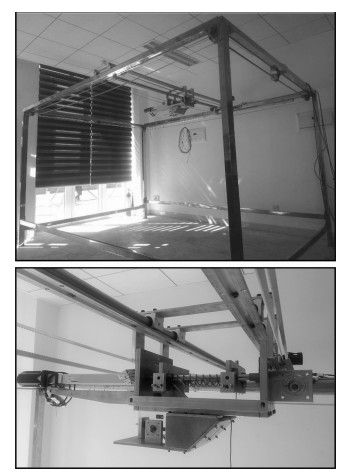
图 4 主动减重系统的实验平台集成(上:总体系统; 下:竖直拉力单元)
Fig. 4 The experimental platform for active gravity offloading (Top: the overall system; Bottom: the body weight support unit)
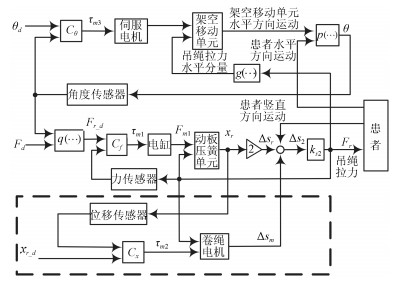
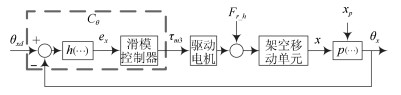
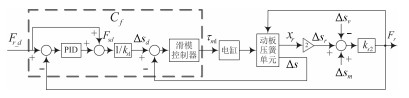
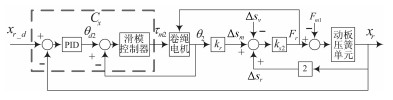
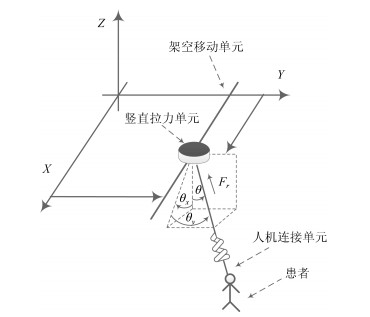
图 5 主动减重系统工作原理框图(${C_\theta }$控制吊绳竖直; ${C_f}$在跟随吊绳竖直方向运动的同时, 控制吊绳拉力; ${C_x}$在必要情况下开始工作, 控制动板位置在安全的范围内)
Fig. 5 The working diagram of the active gravity offloading system ($C_{\theta}$ controls the cable to be perpendicular to the ground; $C_{f}$ controls the cable force while following its motion; $C_x$ works in necessary conditions to control the moving plates stay within the safety range)
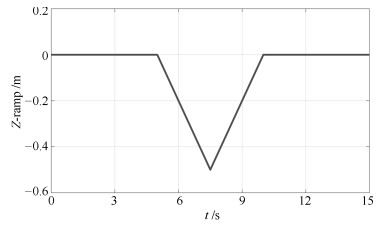
图 9 患者蹲下和站起时竖直方向位置变化曲线
Fig. 9 The vertical position of the subject when crouching and standing up
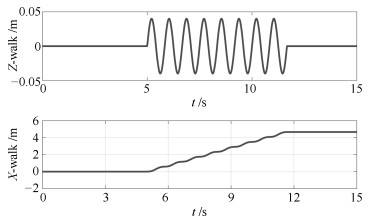
图 10 患者步行时竖直方向和水平方向位置变化曲线
Fig. 10 The horizontal and vertical position of the subject during ground walking
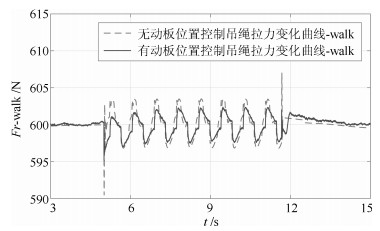
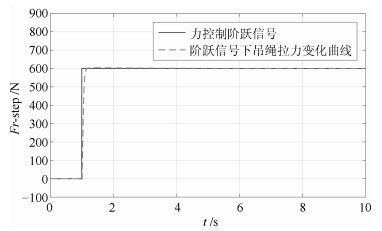
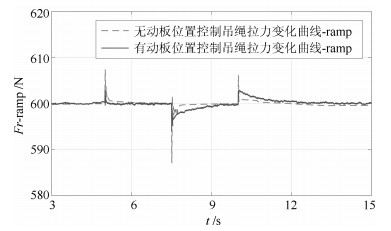
图 14 步行信号下吊绳拉力竖直方向分力变化曲线
Fig. 14 The vertical cable force during a ground walking signal
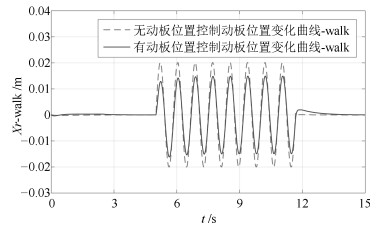
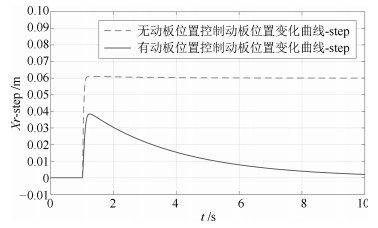
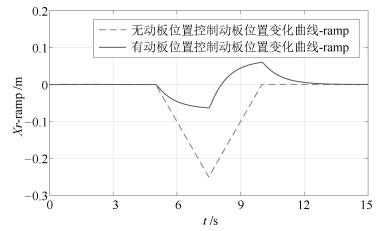
图 17 步行信号下动板2位置变化曲线
Fig. 17 The position of the moving plate 2 during a ground walking signal
表 1 仿真实验参数列表
Table 1 List of simulation parameters
物理量 符号 数值和单位 目标减重力 Fd 600 N 压簧劲度系数 Ks1 10 000 N/m 拉簧劲度系数 Ks2 5 000 N/m 吊架质量 M 20 kg 动板1质量 ml 1 kg 动板2质量 mr 1 kg  下载: 导出CSV
下载: 导出CSV
-
[1] 中华医学会神经病学分会神经康复学组, 中华医学会神经病学分会脑血管病学组, 卫生部脑卒中筛查与防治工程委员会办公室.中国脑卒中康复治疗指南.中国康复理论与实践, 2012, 18(4):301-318 http://cn.bing.com/academic/profile?id=985202343&encoded=0&v=paper_preview&mkt=zh-cnChinese Medical Association, National Health and Family Planning Commission. Stroke Screening and Prevention Engineering Committee. Guidelines for stroke rehabilitation in China. Chinese Journal of Rehabilitation Theory and Practice, 2012, 18(4):301-318 http://cn.bing.com/academic/profile?id=985202343&encoded=0&v=paper_preview&mkt=zh-cn [2] 胡进, 侯增广, 陈翼雄, 张峰, 王卫群.下肢康复机器人及其交互控制方法.自动化学报, 2014, 40(11):2377-2390 http://www.aas.net.cn/CN/abstract/abstract18514.shtmlHu Jin, Hou Zeng-Guang, Chen Yi-Xiong, Zhang Feng, Wang Wei-Qun. Lower limb rehabilitation robots and interactive control methods. Acta Automatica Sinica, 2014, 40(11):2377-2390 http://www.aas.net.cn/CN/abstract/abstract18514.shtml [3] Riener R, Lünenburger L, Maier I C, Colombo G, Dietz V. Locomotor training in subjects with sensori-motor deficits:an overview of the robotic gait orthosis lokomat. Journal of Healthcare Engineering, 2010, 1(2):197-216 doi: 10.1260/2040-2295.1.2.197 [4] Werner C, von Frankenberg S, Treig T, Konrad M, Hesse S. Treadmill training with partial body weight support and an electromechanical gait trainer for restoration of gait in subacute stroke patients:a randomized crossover study. Stroke, 2002, 33(12):2895-2901 doi: 10.1161/01.STR.0000035734.61539.F6 [5] 冯治国.步行康复训练助行腿机器人系统[博士学位论文], 上海大学, 中国, 2009 http://cdmd.cnki.com.cn/Article/CDMD-11903-2009252670.htmFeng Zhi-Guo. On Exoskeleton Robot for Gait Rehabilitation[Ph.D. dissertation], Shanghai University, China, 2009 http://cdmd.cnki.com.cn/Article/CDMD-11903-2009252670.htm [6] 饶玲军, 谢叻, 朱小标.下肢外骨骼行走康复机器人研究与设计.机械设计与研究, 2012, 28(3):24-26 http://cdmd.cnki.com.cn/Article/CDMD-10248-1012019685.htmRao Ling-Jun, Xie Le, Zhu Xiao-Biao. Research and design on lower exoskeleton rehabilitation robot. Machine Design and Research, 2012, 28(3):24-26 http://cdmd.cnki.com.cn/Article/CDMD-10248-1012019685.htm [7] Riener R, Lünenburger L, Jezernik S, Anderschitz M, Colombo G, Dietz V. Patient-cooperative strategies for robot-aided treadmill training:first experimental results. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2005, 13(3):380-394 doi: 10.1109/TNSRE.2005.848628 [8] Patton J, Small S L, Zev Rymer W. Functional restoration for the stroke survivor:informing the efforts of engineers. Topics in Stroke Rehabilitation, 2008, 15(6):521-541 doi: 10.1310/tsr1506-521 [9] Winstein C J, Kay D B. Translating the science into practice:shaping rehabilitation practice to enhance recovery after brain damage. Progress in Brain Research, 2015, 218:331-360 doi: 10.1016/bs.pbr.2015.01.004 [10] Bejarano N C, Maggioni S, De Rijcke L, Cifuentes C A, Reinkensmeyer D J. Robot-assisted rehabilitation therapy:recovery mechanisms and their implications for machine design. Emerging Therapies in Neurorehabilitation II. Berlin:Springer, 2016. 197-223 [11] Klamroth-Marganska V, Blanco J, Campen K, Curt A, Dietz V, Ettlin T, Felder M, Fellinghauer B, Guidali M, Kollmar A, Luft A, Nef T, Schuster-Amft C, Stahel W, Riener R. Three-dimensional, task-specific robot therapy of the arm after stroke:a multicentre, parallel-group randomised trial. The Lancet Neurology, 2014, 13(2):159-166 doi: 10.1016/S1474-4422(13)70305-3 [12] Wyss D, Bartenbach V, Pennycott A, Riener R, Vallery H. A body weight support system extension to control lateral forces:realization and validation. In:Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA). Hong Kong, China:IEEE, 2014. 328-332 [13] Hidler J, Brennan D, Black I, Nichols D, Brady K, Nef T. ZeroG:Overground gait and balance training system. Journal of Rehabilitation Research & Development, 2011, 48(4):287-298 http://www.rehab.research.va.gov/jour/11/484/hidler484.html [14] Vallery H, Lutz P, von Zitzewitz J, Rauter G, Fritschi M, Everarts C, Ronsse R, Curt A, Bolliger M. Multidirectional transparent support for overground gait training. In:Proceedings of the 2013 IEEE International Conference on Rehabilitation Robotics (ICORR). Seattle, WA:IEEE, 2013. 1-7 [15] 蒋磊.基于扭绳驱动的上肢外骨骼康复训练机器人设计与控制[博士学位论文], 中国矿业大学(北京), 中国, 2014 http://cdmd.cnki.com.cn/Article/CDMD-11413-1014371338.htmJiang Lei. Design and Control of An Exoskeleton Robot for Upper Limbs Using Twisted String Actuator[Ph.D. dissertation], China University of Mining and Technology, Beijing, China, 2014 http://cdmd.cnki.com.cn/Article/CDMD-11413-1014371338.htm [16] 刘攀, 张立勋, 王克义, 张今瑜.绳索牵引康复机器人的动力学建模与控制.哈尔滨工程大学学报, 2009, 30(7):811-815 http://www.cnki.com.cn/Article/CJFDTOTAL-HEBG200907015.htmLiu Pan, Zhang Li-Xun, Wang Ke-Yi, Zhang Jin-Yu. Dynamic modeling and control of a wire-driven rehabilitation robot. Journal of Harbin Engineering University, 2009, 30(7):811-815 http://www.cnki.com.cn/Article/CJFDTOTAL-HEBG200907015.htm [17] 王启申, 李继婷.手康复机器人钢丝绳--绳套传动系统中的摩擦补偿.机器人, 2014, 36(1):1-7 http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201401001.htmWang Qi-Shen, Li Ji-Ting. Friction compensation in cable-conduit transmission system of hand rehabilitation robot. Robot, 2014, 36(1):1-7 http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201401001.htm [18] 禹润田, 方跃法, 郭盛.绳驱动并联踝关节康复机构设计及运动性能分析.机器人, 2015, 37(1):53-62 http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201501007.htmYu Ren-Tian, Fang Yue-Fa, Guo Sheng. Design and kinematic performance analysis of a cable-driven parallel mechanism for ankle rehabilitation. Robot, 2015, 37(1):53-62 http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201501007.htm [19] Veneman J F, Kruidhof R, Hekman E E, Ekkelenkamp R, van Asseldonk E H, van der Kooij H. Design and evaluation of the LOPES exoskeleton robot for interactive gait rehabilitation. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2007, 15(3):379-386 doi: 10.1109/TNSRE.2007.903919 [20] 潘国新, 张秀峰, 李剑.偏瘫步行康复训练机器人减重支撑系统的研究.中国康复医学杂志, 2013, 28(11):1041-1045 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGKF201311013.htmPan Guo-Xin, Zhang Xiu-Feng, Li Jian. Research of the body weight support system for treadmill training robot in hemiplegia rehabilitation. Chinese Journal of Rehabilitation Medicine, 2013, 28(11):1041-1045 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGKF201311013.htm [21] 马关坡, 徐秀林.下肢康复训练减重支撑系统的研究现状.中国医学物理学杂志, 2014, 31(1):4694-4698 http://www.cnki.com.cn/Article/CJFDTOTAL-YXWZ201401023.htmMa Guan-Po, Xu Xiu-Lin. The research status of body weight support system of lower limbs rehabilitation training. Chinese Journal of Medical Physics, 2014, 31(1):4694-4698 http://www.cnki.com.cn/Article/CJFDTOTAL-YXWZ201401023.htm [22] Lu Q, Liang J X, Qiao B, Ma O. A new active body weight support system capable of virtually offloading partial body mass. IEEE/ASME Transactions on Mechatronics, 2013, 18(1):11-20 doi: 10.1109/TMECH.2011.2160555 [23] Veneman J F, Ekkelenkamp R, Kruidhof R, van der Helm F C T, van der Kooij H. A series elastic-and Bowden-cable-based actuation system for use as torque actuator in exoskeleton-type robots. The International Journal of Robotics Research, 2006, 25(3):261-281 doi: 10.1177/0278364906063829 [24] Vallery H, Veneman J, van Asseldonk E, Ekkelenkamp R, Buss M, van der Kooij H. Compliant actuation of rehabilitation robots. IEEE Robotics & Automation Magazine, 2008, 15(3):60-69 https://www.researchgate.net/publication/3344973_Compliant_actuation_of_rehabilitation_robots?_sg=3w1CdRP-SiYBo-QNfITGbslsyXEpBwkNXV9SUQ4is4nJvIGyUuxrVlrq-2Maxjkky1Xg9e7ITiyf9-WntZXULQ [25] Ma Bo-Jun, Fang Yong-Chun, Xiao Xiao. A sliding adaptive controller design for uncertain nonlinear system. In:Proceedings of the 2005 China Intelligent Automation Conference. Qingdao:Chinese Association of Automation, 2005. [26] 刘金琨, 孙富春.滑模变结构控制理论及其算法研究与进展.控制理论与应用, 2007, 24(3):407-418 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY200703014.htmLiu Jin-Kun, Sun Fu-Chun. Research and development on theory and algorithms of sliding mode control. Control Theory & Applications, 2007, 24(3):407-418 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY200703014.htm [27] 方彬, 沈林勇, 章亚男, 钱晋武.步行训练机器人主动减重控制方法.上海大学学报(自然科学版), 2011, 17(6):719-723 http://www.cnki.com.cn/Article/CJFDTOTAL-SDXZ201106005.htmFang Bin, Shen Lin-Yong, Zhang Ya-Nan, Qian Jin-Wu. Active control of body weight for gait training robot. Journal of Shanghai University (Natural Science), 2011, 17(6):719-723 http://www.cnki.com.cn/Article/CJFDTOTAL-SDXZ201106005.htm [28] 方勇纯, 卢桂章.非线性系统理论.北京:清华大学出版社, 2009. 82-87Fang Yong-Chun, Lu Gui-Zhang. Nonlinear System Theory. Beijing:Tsinghua University Press, 2009. 82-87 -

计量
- 文章访问数: 2435
- HTML全文浏览量: 377
- PDF下载量: 838
- 被引次数: 0
