2016年 第42卷 第1期
2016, 42(1): 1-12.
doi: 10.16383/j.aas.2016.c150541
摘要:
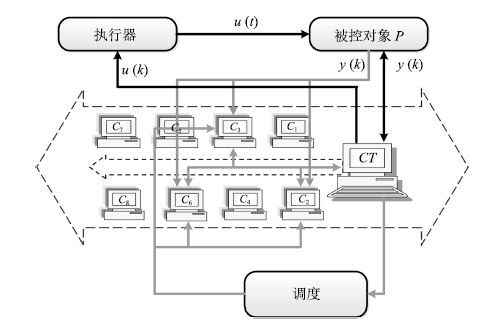
本文提出的云控制系统(Cloud control systems, CCSs)是对之前的网络化控制系统(Networked control systems, NCSs)的进一步扩展.目前,物联网(Internet of things, IOT)已经成功应用于实际中,网络化控制技术在其中发挥了关键作用.与此同时,云计算的迅速发展为大数据存储与处理、控制器设计和控制系统性能优化提供了一个完美的平台.可以预见,虽然当前云控制技术的研究和应用还存在许多挑战,但在不久的将来,云控制系统的深入研究将对控制理论的发展和各种实际应用起到积极推动作用.
本文提出的云控制系统(Cloud control systems, CCSs)是对之前的网络化控制系统(Networked control systems, NCSs)的进一步扩展.目前,物联网(Internet of things, IOT)已经成功应用于实际中,网络化控制技术在其中发挥了关键作用.与此同时,云计算的迅速发展为大数据存储与处理、控制器设计和控制系统性能优化提供了一个完美的平台.可以预见,虽然当前云控制技术的研究和应用还存在许多挑战,但在不久的将来,云控制系统的深入研究将对控制理论的发展和各种实际应用起到积极推动作用.








2016, 42(1): 13-25.
doi: 10.16383/j.aas.2016.c140563
摘要:
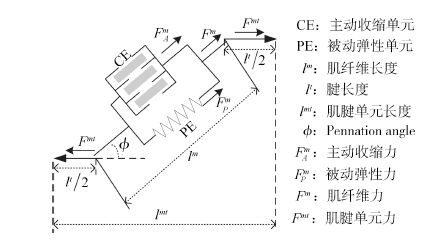
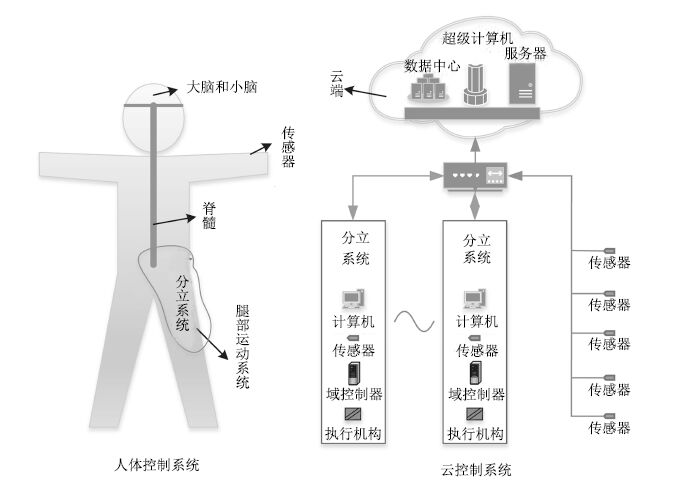
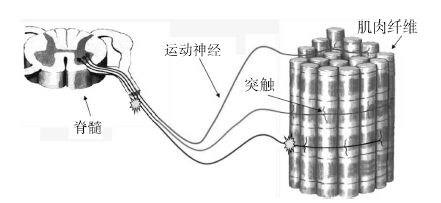
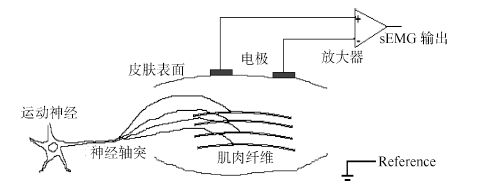
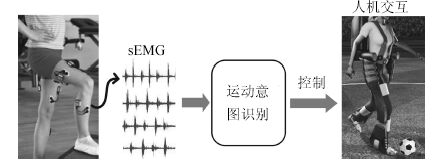
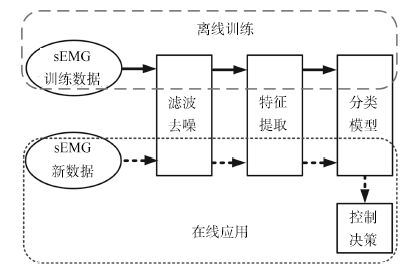
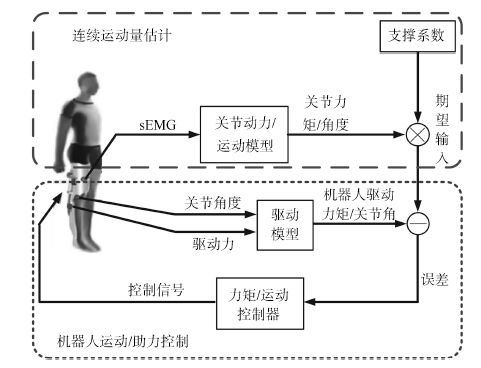
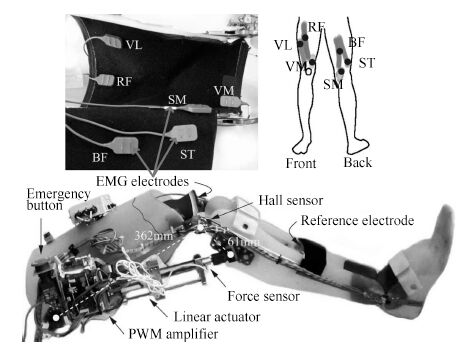
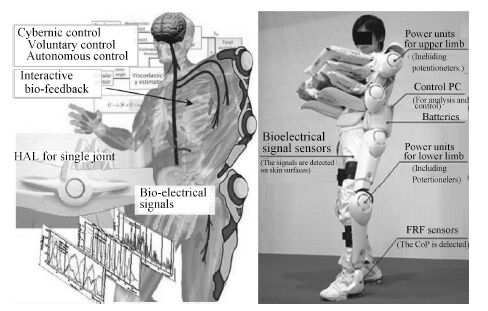
表面肌电信号 (Surface electromyography, sEMG) 是人体自身的资源, 蕴含着关联人体运动的丰富信息, 用它作为交互媒介以构建人机交互 (Human-robot interaction, HRI) 系统有天然的优势.通过肌电信号实现人机自然交互的关键是由肌电信号识别出人体运动意图, 通常包括离散动作模态分类、关节连续运动量估计及关节刚度/阻抗估计等三方面内容.本文详细归纳基于表面肌电的运动识别方法研究成果, 总结当前研究的特点; 随后, 介绍基于表面肌电的运动识别技术的应用现状, 并探讨制约其推广的主要问题; 最后, 展望该技术的未来发展.
表面肌电信号 (Surface electromyography, sEMG) 是人体自身的资源, 蕴含着关联人体运动的丰富信息, 用它作为交互媒介以构建人机交互 (Human-robot interaction, HRI) 系统有天然的优势.通过肌电信号实现人机自然交互的关键是由肌电信号识别出人体运动意图, 通常包括离散动作模态分类、关节连续运动量估计及关节刚度/阻抗估计等三方面内容.本文详细归纳基于表面肌电的运动识别方法研究成果, 总结当前研究的特点; 随后, 介绍基于表面肌电的运动识别技术的应用现状, 并探讨制约其推广的主要问题; 最后, 展望该技术的未来发展.





2016, 42(1): 26-36.
doi: 10.16383/j.aas.2016.c150182
摘要:
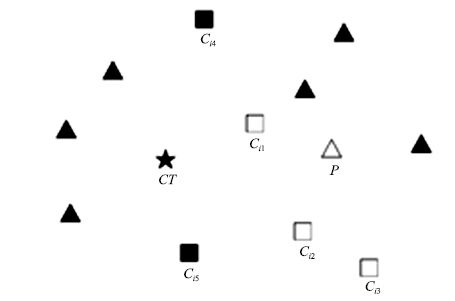
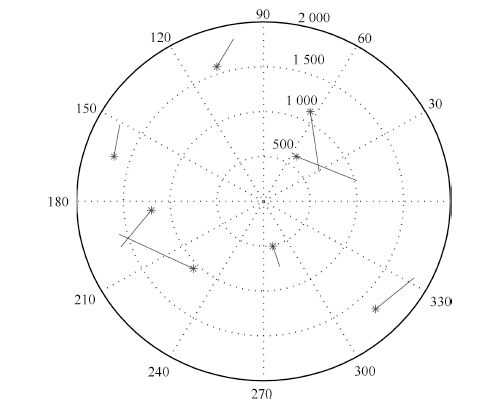
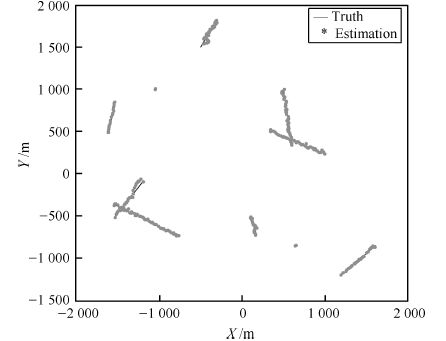
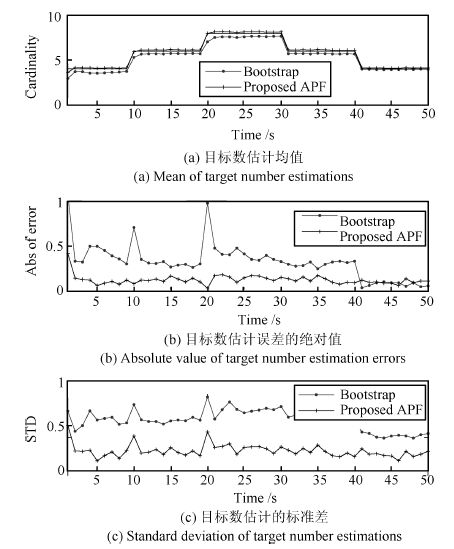
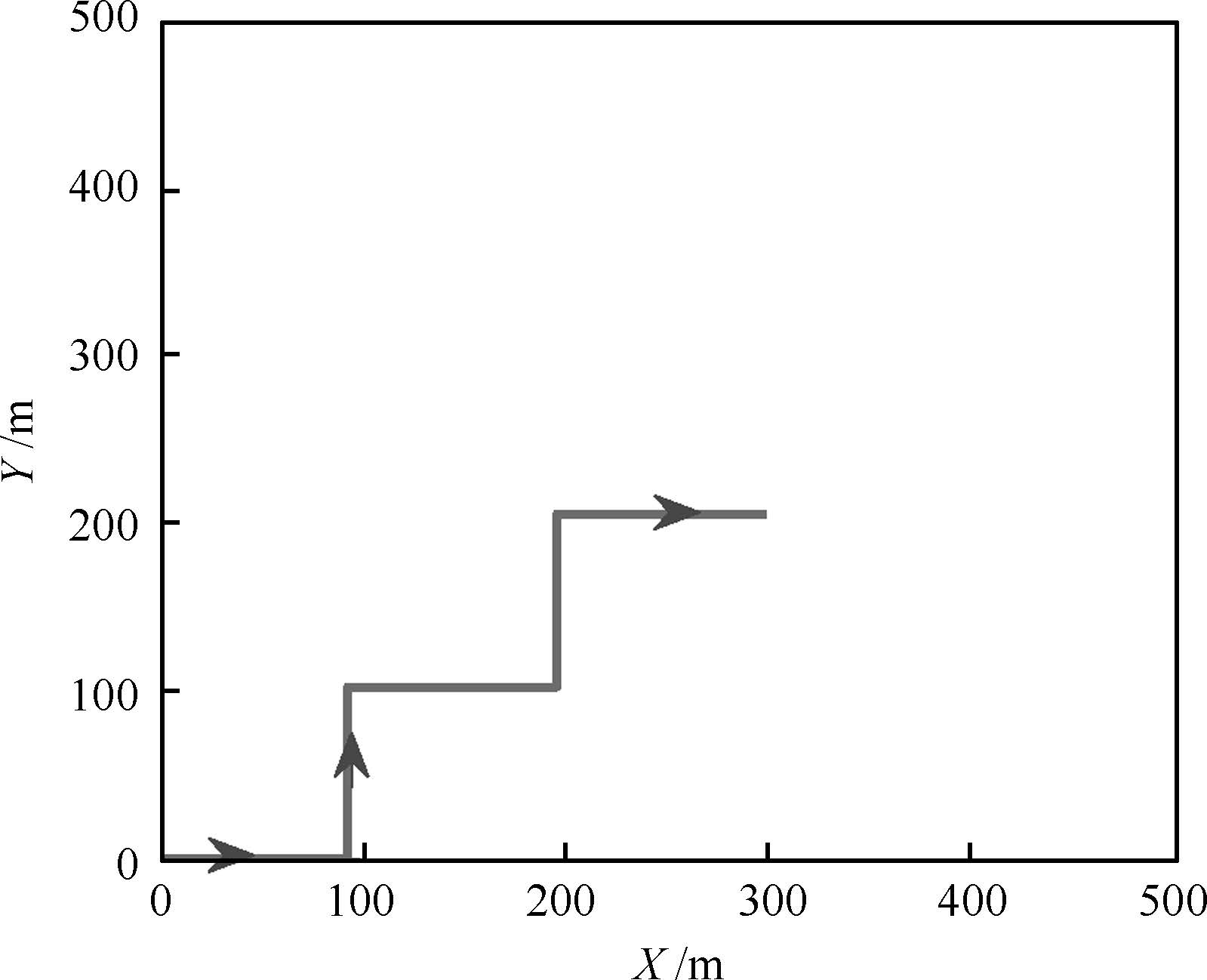
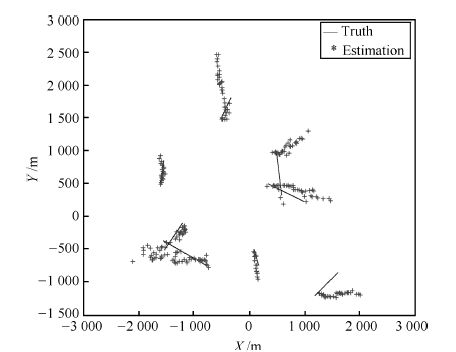
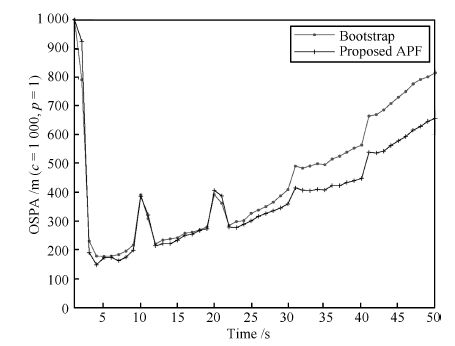
为提升多伯努利滤波器序贯蒙特卡罗(Sequential Monte Carlo, SMC)实现中粒子采样的有效性,提出一种CBMeMBer辅助粒子滤波(Auxiliary particle filter, APF)实现的新方法.首先,利用多伯努利后验概率密度选择适合于CBMeMBer滤波器的辅助变量去重新定义采样问题.分别选择量测和先验密度分量作为辅助变量,确保最终的状态粒子能够集中在真实目标量测对应航迹的伯努利概率密度上进行采样,以使粒子向似然函数的峰值区移动,得到更为精确的多目标多伯努利(Multi-target multi-Bernoulli, MeMBer)后验概率密度的估计.同时,文中深入研究并给出了在量测更新和漏检情况下辅助变量以及多目标状态采样分布函数的设计,并研究利用渐近更新(Progressive correction, PC)算法对先验密度分量的量测更新进行迭代逼近计算,以提高最终分布函数求解的准确度.最后,针对两个典型非线性多目标跟踪问题的应用验证了算法的有效性.
为提升多伯努利滤波器序贯蒙特卡罗(Sequential Monte Carlo, SMC)实现中粒子采样的有效性,提出一种CBMeMBer辅助粒子滤波(Auxiliary particle filter, APF)实现的新方法.首先,利用多伯努利后验概率密度选择适合于CBMeMBer滤波器的辅助变量去重新定义采样问题.分别选择量测和先验密度分量作为辅助变量,确保最终的状态粒子能够集中在真实目标量测对应航迹的伯努利概率密度上进行采样,以使粒子向似然函数的峰值区移动,得到更为精确的多目标多伯努利(Multi-target multi-Bernoulli, MeMBer)后验概率密度的估计.同时,文中深入研究并给出了在量测更新和漏检情况下辅助变量以及多目标状态采样分布函数的设计,并研究利用渐近更新(Progressive correction, PC)算法对先验密度分量的量测更新进行迭代逼近计算,以提高最终分布函数求解的准确度.最后,针对两个典型非线性多目标跟踪问题的应用验证了算法的有效性.




2016, 42(1): 37-46.
doi: 10.16383/j.aas.2016.c150057
摘要:
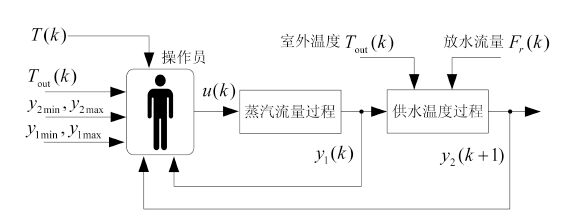
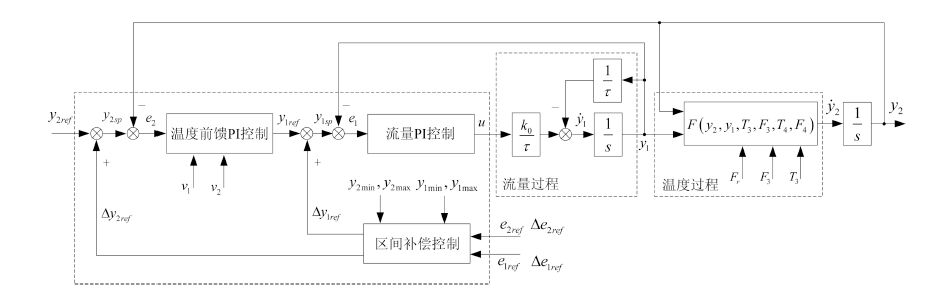
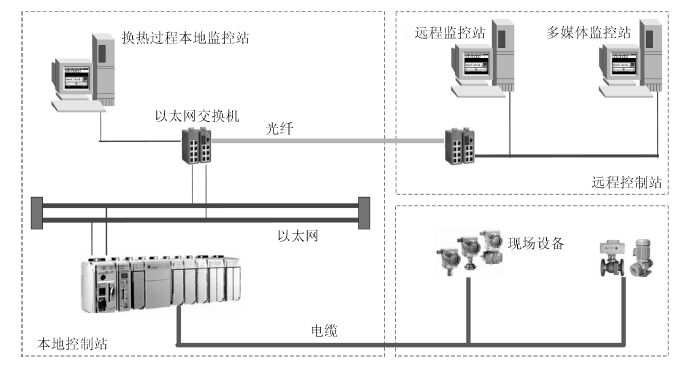
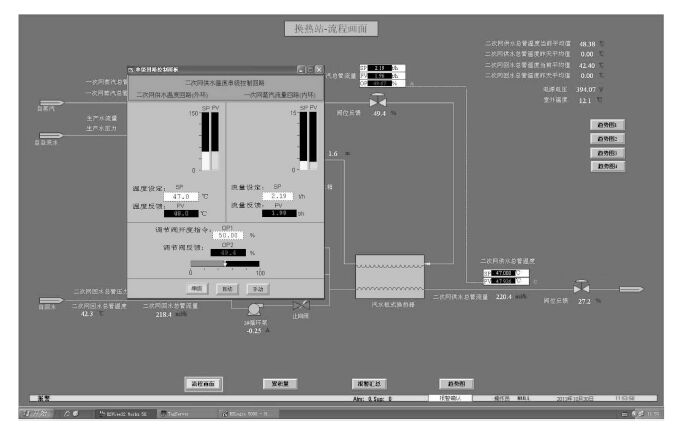
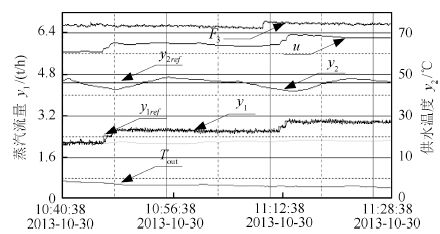
汽水板式换热过程是以蒸汽阀门开度为输入,以蒸汽流量为内环输出,以供水温度为外环输出的强非线性串级工业过程,受到室外温度和厂区热用户放水的随机干扰,导致供水温度和蒸汽流量大范围波动.本文针对处于干扰环境下的具有不确定性和强非线性串级工业过程,将前馈补偿、串级PI控制和规则推理区间补偿控制相结合,提出了由外环供水温度前馈PI控制、内环蒸汽流量PI控制的串级控制与规则推理的内外环设定值区间补偿控制组成的区间串级智能控制方法,并成功应用于某选矿厂的汽水板式换热过程,工业应用结果表明所提出的方法在室外温度和热用户放水的随机干扰下,可以将供水温度和蒸汽流量同时控制在工艺要求的范围内.
汽水板式换热过程是以蒸汽阀门开度为输入,以蒸汽流量为内环输出,以供水温度为外环输出的强非线性串级工业过程,受到室外温度和厂区热用户放水的随机干扰,导致供水温度和蒸汽流量大范围波动.本文针对处于干扰环境下的具有不确定性和强非线性串级工业过程,将前馈补偿、串级PI控制和规则推理区间补偿控制相结合,提出了由外环供水温度前馈PI控制、内环蒸汽流量PI控制的串级控制与规则推理的内外环设定值区间补偿控制组成的区间串级智能控制方法,并成功应用于某选矿厂的汽水板式换热过程,工业应用结果表明所提出的方法在室外温度和热用户放水的随机干扰下,可以将供水温度和蒸汽流量同时控制在工艺要求的范围内.





2016, 42(1): 47-59.
doi: 10.16383/j.aas.2016.c150311
摘要:
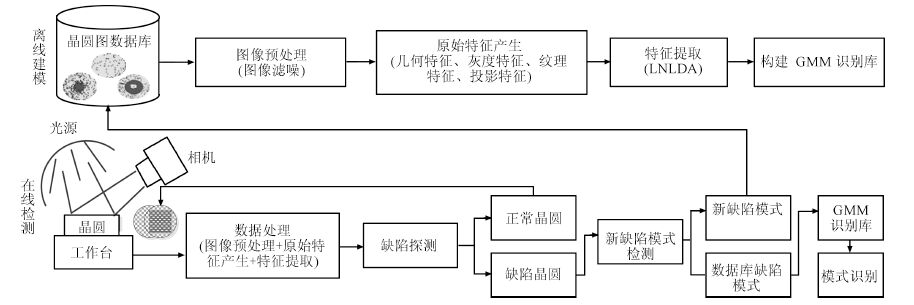
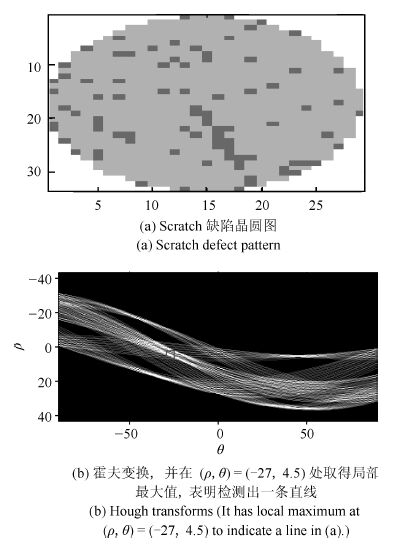
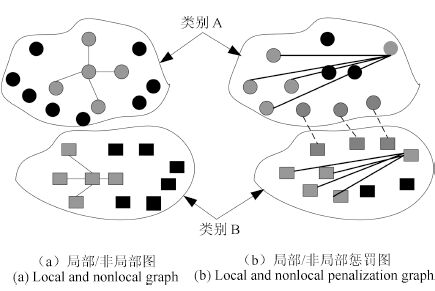
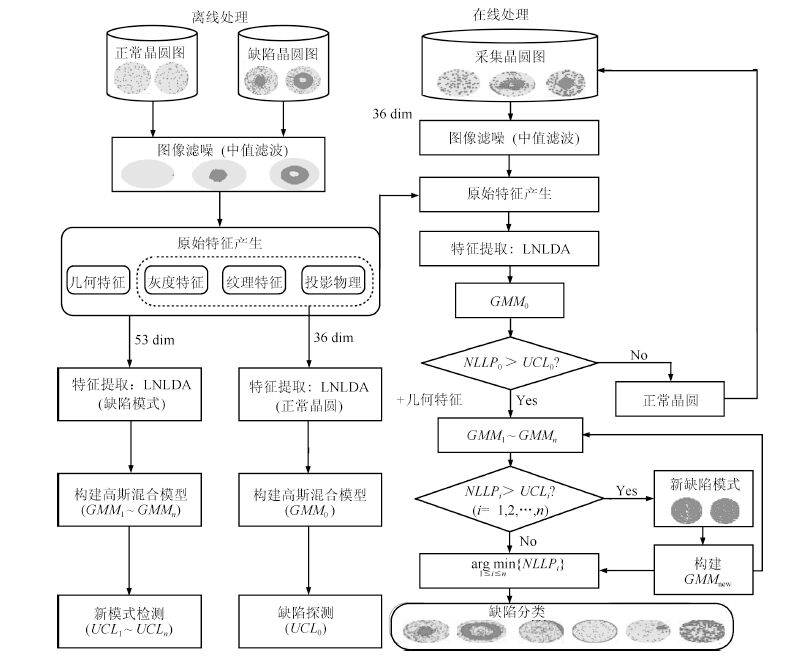
在复杂的半导体制造过程中,晶圆生产经过薄膜沉积、蚀刻、抛光等多项复杂的工序,制造过程中的异常波动都可能导致晶圆缺陷产生.晶圆表面的缺陷模式通常反映了半导体制造过程的各种异常问题,生产线上通过探测和识别晶圆表面缺陷,可及时判断制造过程故障源并进行在线调整,降低晶圆成品率损失.本文提出了基于一种流形学习算法与高斯混合模型动态集成的晶圆表面缺陷在线探测与识别模型.首先该模型开发了一种新型流形学习算法——局部与非局部线性判别分析法(Local and nonlocal linear discriminant analysis, LNLDA),通过融合数据局部/非局部信息以及局部/非局部惩罚信息,有效地提取高维晶圆特征数据的内在流形结构信息,以最大化数据不同簇样本的低维映射距离,保持特征数据中相同簇的低维几何结构.针对线上晶圆缺陷产生的随机性和复杂性,该模型对每种晶圆缺陷模式构建相应的高斯混合模型(Gaussian mixture model, GMM),提出了基于高斯混合模型动态集成的晶圆缺陷在线探测与识别方法.本文提出的模型成功地应用到实际半导体制造过程的晶圆表面缺陷在线探测与识别,在WM-811K晶圆数据库的实验结果验证了该模型的有效性与实用性.
在复杂的半导体制造过程中,晶圆生产经过薄膜沉积、蚀刻、抛光等多项复杂的工序,制造过程中的异常波动都可能导致晶圆缺陷产生.晶圆表面的缺陷模式通常反映了半导体制造过程的各种异常问题,生产线上通过探测和识别晶圆表面缺陷,可及时判断制造过程故障源并进行在线调整,降低晶圆成品率损失.本文提出了基于一种流形学习算法与高斯混合模型动态集成的晶圆表面缺陷在线探测与识别模型.首先该模型开发了一种新型流形学习算法——局部与非局部线性判别分析法(Local and nonlocal linear discriminant analysis, LNLDA),通过融合数据局部/非局部信息以及局部/非局部惩罚信息,有效地提取高维晶圆特征数据的内在流形结构信息,以最大化数据不同簇样本的低维映射距离,保持特征数据中相同簇的低维几何结构.针对线上晶圆缺陷产生的随机性和复杂性,该模型对每种晶圆缺陷模式构建相应的高斯混合模型(Gaussian mixture model, GMM),提出了基于高斯混合模型动态集成的晶圆缺陷在线探测与识别方法.本文提出的模型成功地应用到实际半导体制造过程的晶圆表面缺陷在线探测与识别,在WM-811K晶圆数据库的实验结果验证了该模型的有效性与实用性.







2016, 42(1): 60-80.
doi: 10.16383/j.aas.2016.c150048
摘要:
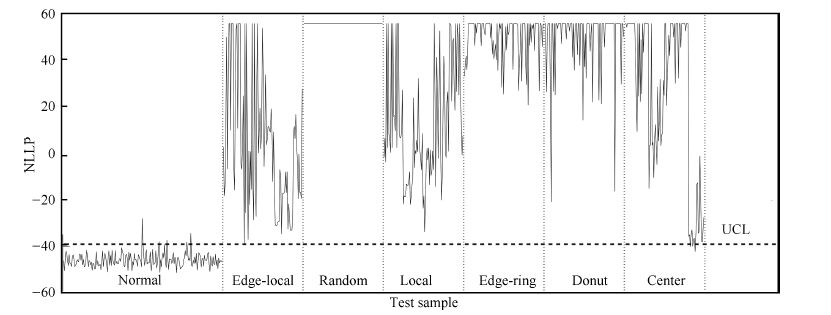
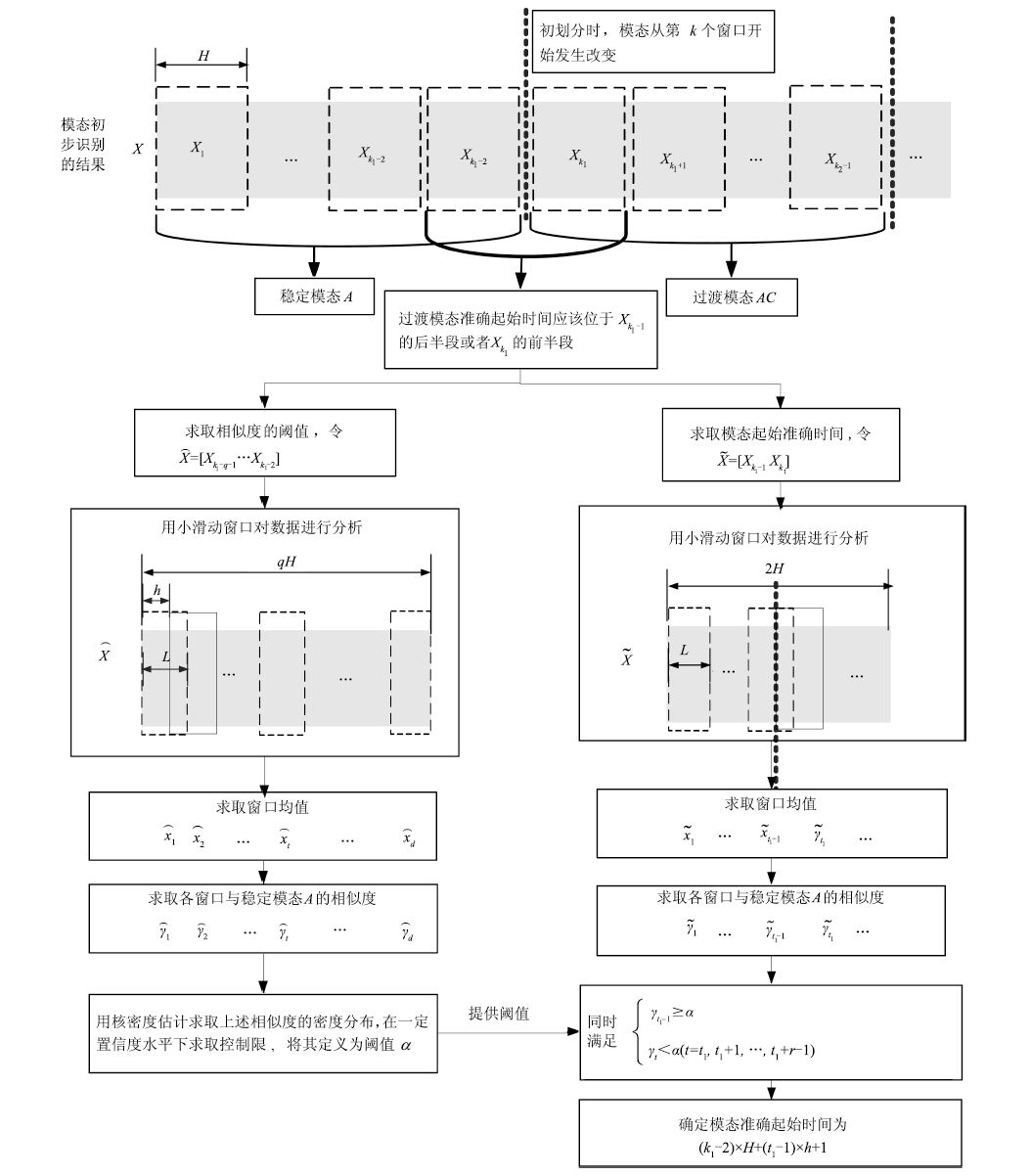
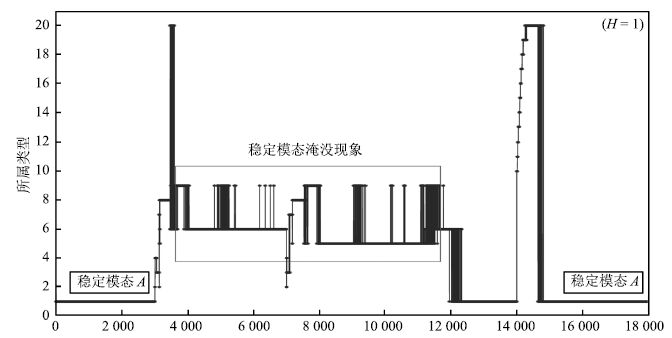
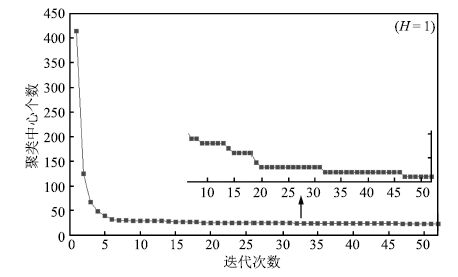
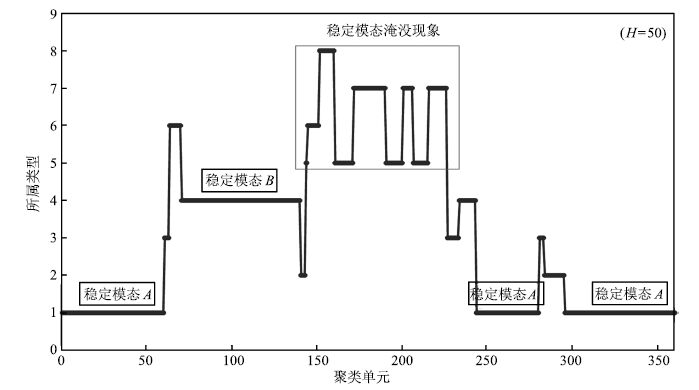
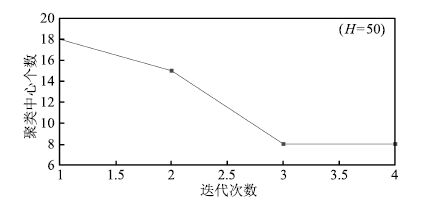
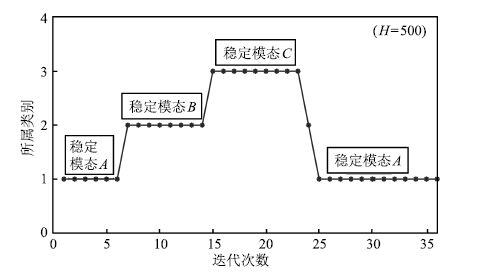
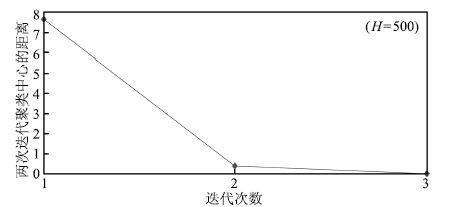
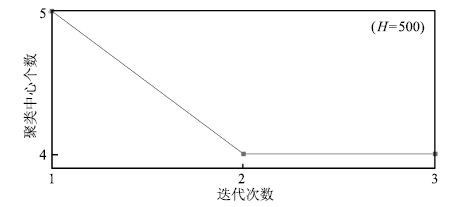
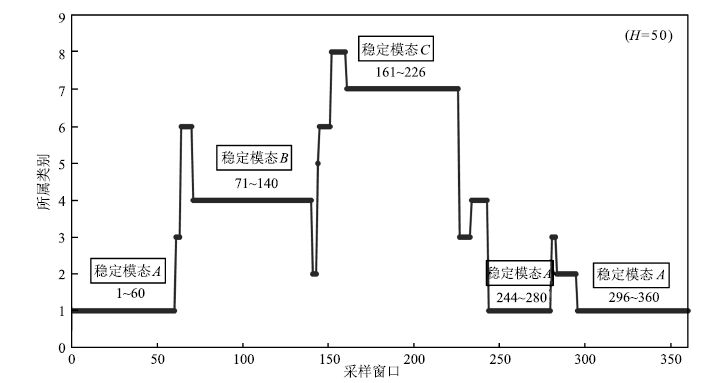
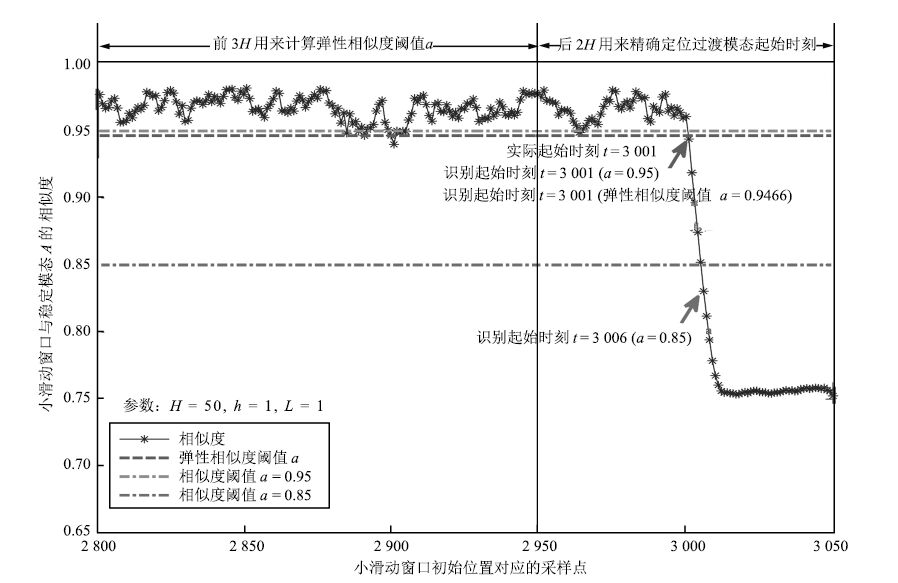
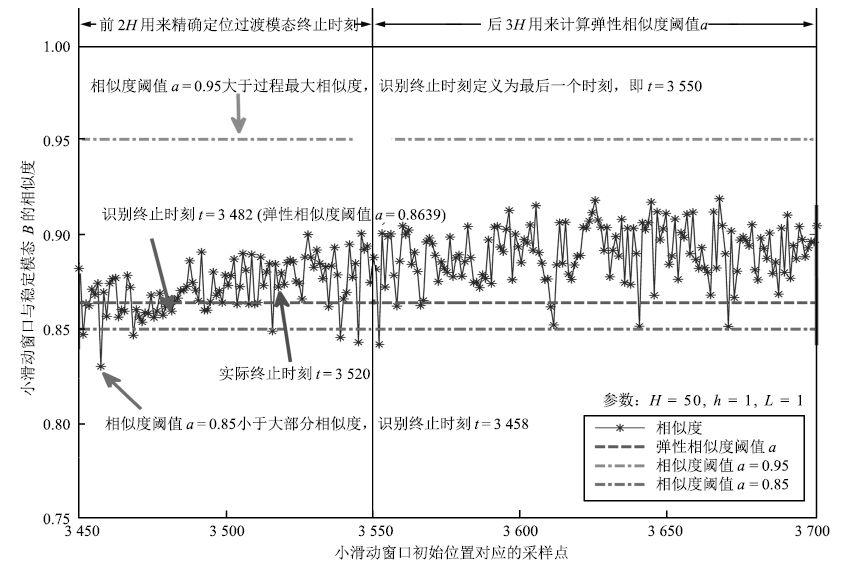
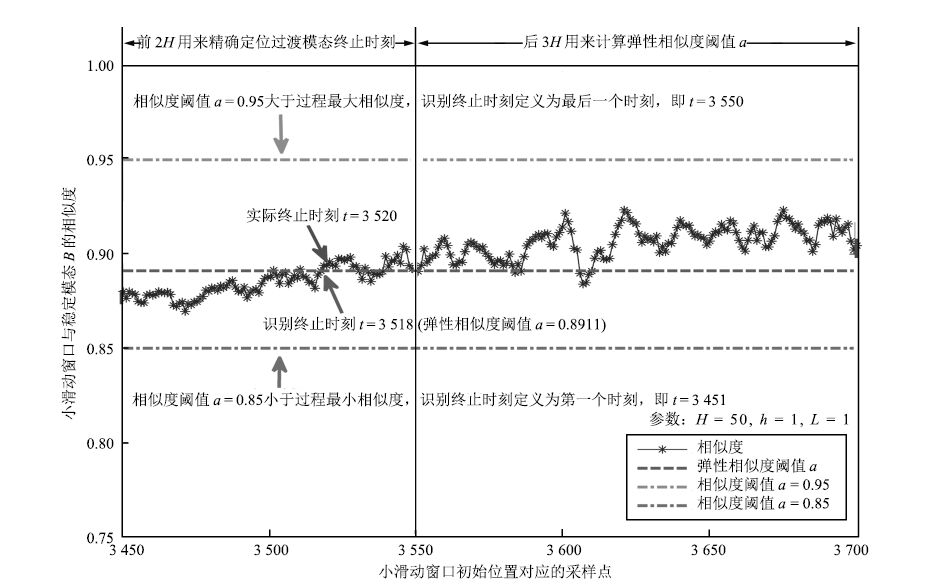
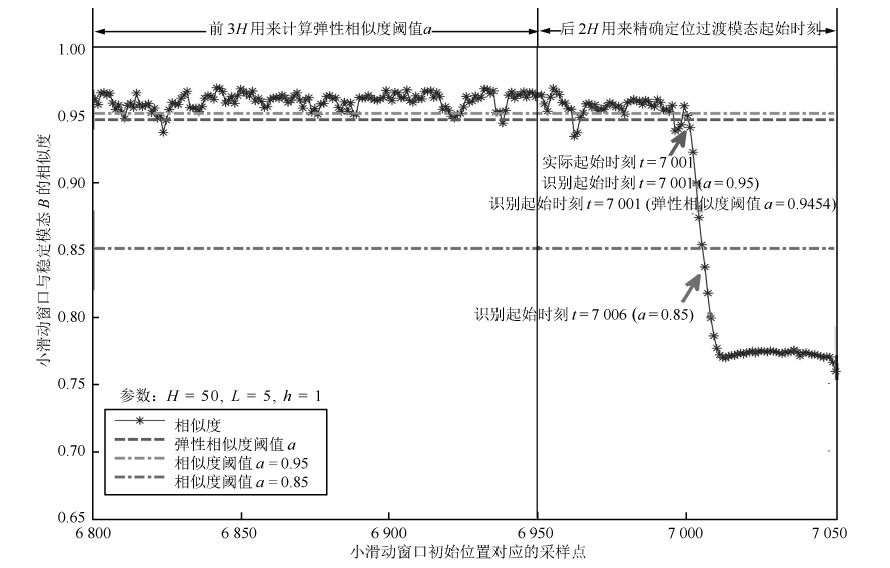
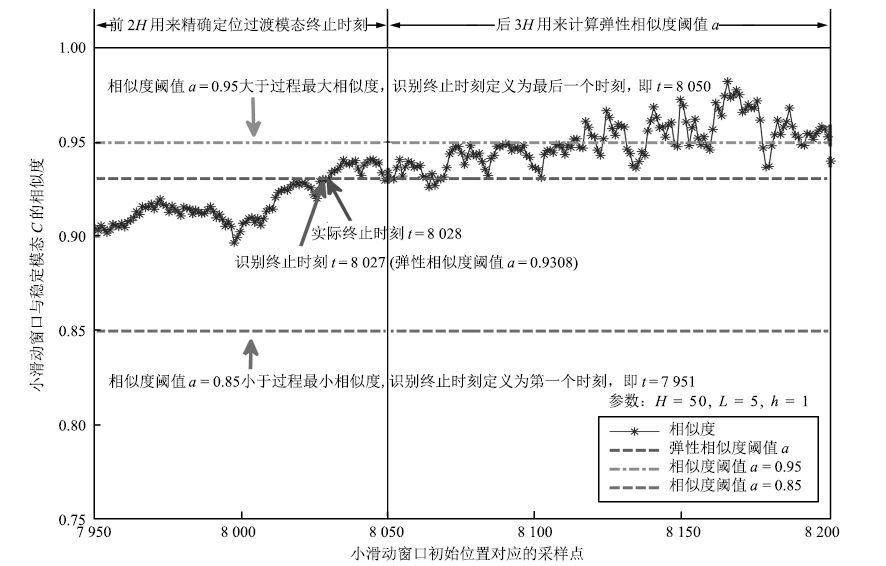
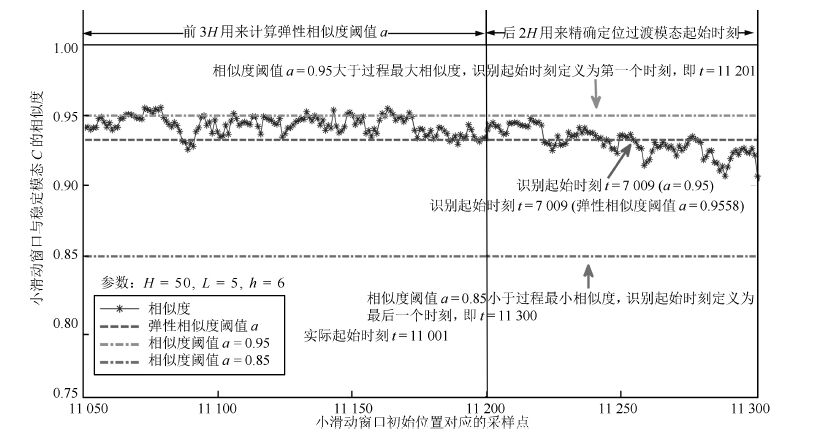
多模态是复杂工业生产过程的普遍特性.不同模态具有不同的过程特性,需要建立不同的模型,因此离线建模数据的模态划分与识别是整个多模态过程建模的关键问题之一.目前,常用的聚类算法需要对其结果进行人工分析和后续处理,无法真正实现多模态过程的全自动模态识别.因此,本文提出一种全自动的多模态过程离线模态识别方法.首先通过宽度为H的大切割窗口对数据进行切割,利用改进的K-means聚类算法对窗口单元进行聚类;根据聚类结果,对稳定模态淹没现象进行处理,得到模态的初步划分结果;最终,利用小滑动窗口L,对稳定模态及过渡模态交接区域进行细划分,准确定位稳定模态与过渡模态的分割点.算法实现了多模态过程的全自动离线识别,并给出合理有效的识别结果.仿真分析表明此方法能够实现模态的自动识别,且识别结果准确.
多模态是复杂工业生产过程的普遍特性.不同模态具有不同的过程特性,需要建立不同的模型,因此离线建模数据的模态划分与识别是整个多模态过程建模的关键问题之一.目前,常用的聚类算法需要对其结果进行人工分析和后续处理,无法真正实现多模态过程的全自动模态识别.因此,本文提出一种全自动的多模态过程离线模态识别方法.首先通过宽度为H的大切割窗口对数据进行切割,利用改进的K-means聚类算法对窗口单元进行聚类;根据聚类结果,对稳定模态淹没现象进行处理,得到模态的初步划分结果;最终,利用小滑动窗口L,对稳定模态及过渡模态交接区域进行细划分,准确定位稳定模态与过渡模态的分割点.算法实现了多模态过程的全自动离线识别,并给出合理有效的识别结果.仿真分析表明此方法能够实现模态的自动识别,且识别结果准确.










2016, 42(1): 81-88.
doi: 10.16383/j.aas.2016.c140142
摘要:
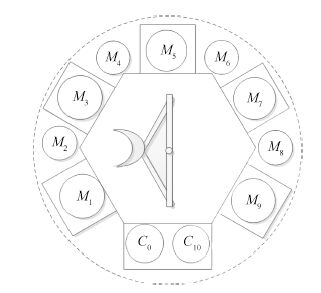
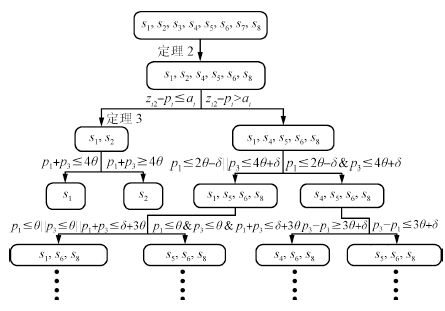
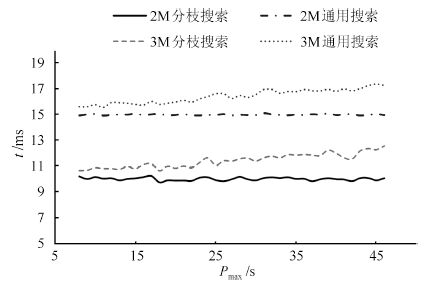
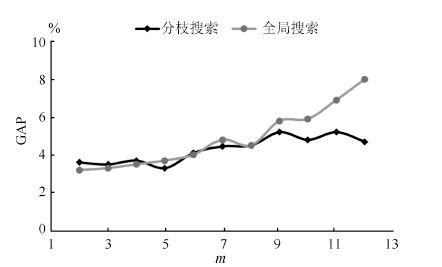
针对带缓冲与驻留约束的集束型设备调度问题,本文提出了一种基于分枝的搜索调度方法.首先,构造问题域的数学模型,在此基础上提出了一种全局搜索算法;然后,通过数学分析证明引出必要的引理,提出一个基于分枝搜索的算法;最后,进行了仿真实验和分析,结果表明本文提出的算法是有效且可行的,同时还表明了带缓冲模块的集束型设备在一定程度上能提高集束型设备的产能.
针对带缓冲与驻留约束的集束型设备调度问题,本文提出了一种基于分枝的搜索调度方法.首先,构造问题域的数学模型,在此基础上提出了一种全局搜索算法;然后,通过数学分析证明引出必要的引理,提出一个基于分枝搜索的算法;最后,进行了仿真实验和分析,结果表明本文提出的算法是有效且可行的,同时还表明了带缓冲模块的集束型设备在一定程度上能提高集束型设备的产能.


2016, 42(1): 89-97.
doi: 10.16383/j.aas.2016.c150221
摘要:
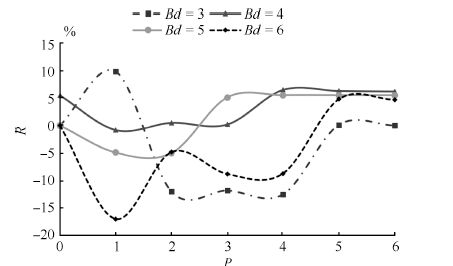
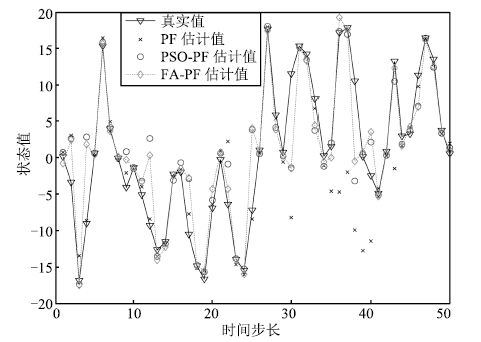
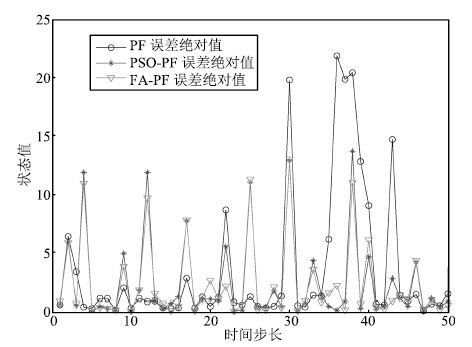
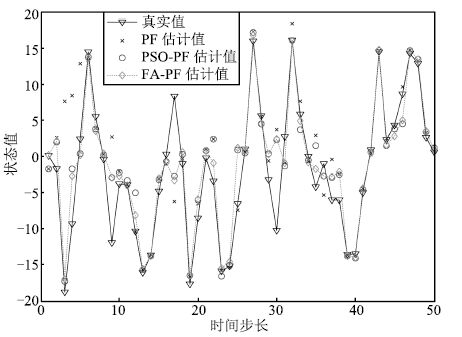
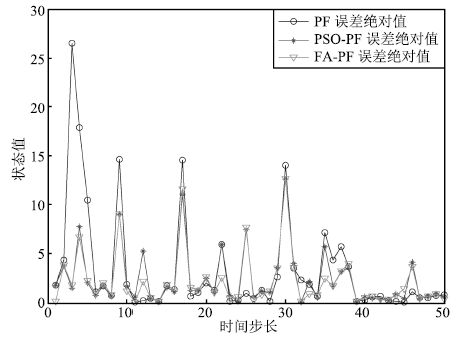
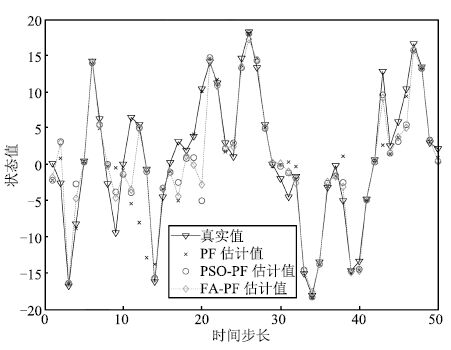
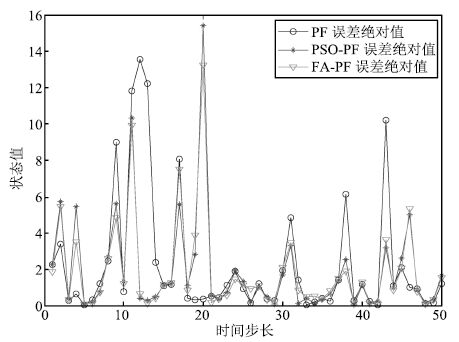
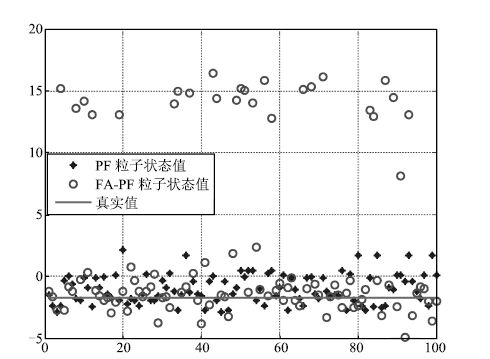
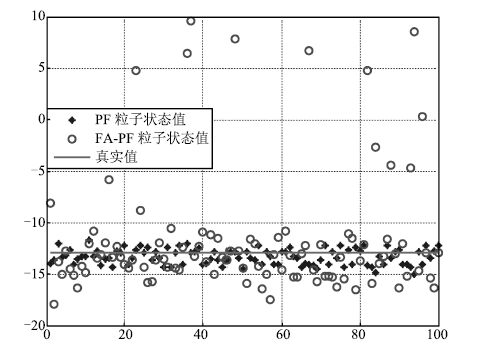
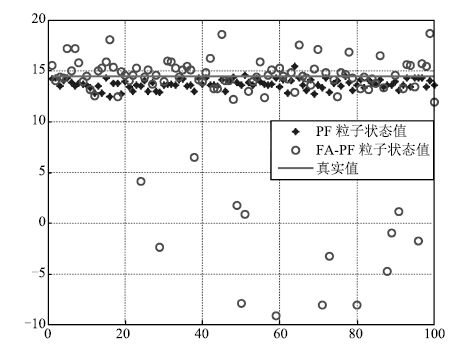
针对粒子滤波(Particle filter, PF)重采样导致的粒子贫化以及需要大量粒子才能进行状态估计的问题,本文结合粒子滤波的运行机制,对萤火虫算法的寻优方式进行修正,设计了新的萤火虫位置更新公式和荧光亮度计算公式,并在此基础上提出了萤火虫算法智能优化粒子滤波.该方法引入了萤火虫群体的优胜劣汰机制以及萤火虫个体的吸引和移动的行为,使粒子群智能地向高似然区域移动,提高了粒子群的整体质量.实验表明该方法提高了粒子滤波的预测精度,同时大大降低了状态值预测所需的粒子数量.
针对粒子滤波(Particle filter, PF)重采样导致的粒子贫化以及需要大量粒子才能进行状态估计的问题,本文结合粒子滤波的运行机制,对萤火虫算法的寻优方式进行修正,设计了新的萤火虫位置更新公式和荧光亮度计算公式,并在此基础上提出了萤火虫算法智能优化粒子滤波.该方法引入了萤火虫群体的优胜劣汰机制以及萤火虫个体的吸引和移动的行为,使粒子群智能地向高似然区域移动,提高了粒子群的整体质量.实验表明该方法提高了粒子滤波的预测精度,同时大大降低了状态值预测所需的粒子数量.
2016, 42(1): 98-106.
doi: 10.16383/j.aas.2016.c150231
摘要:
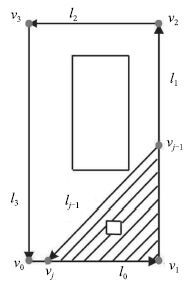
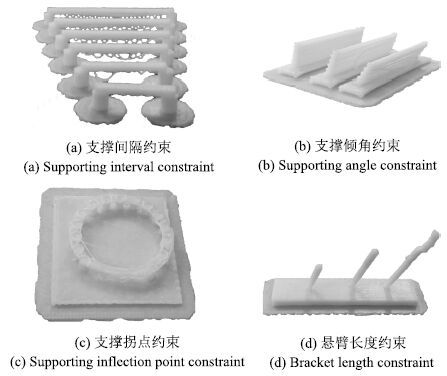
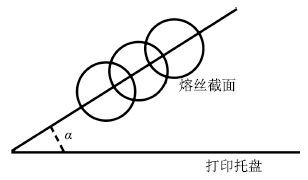
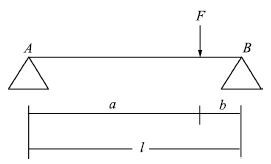
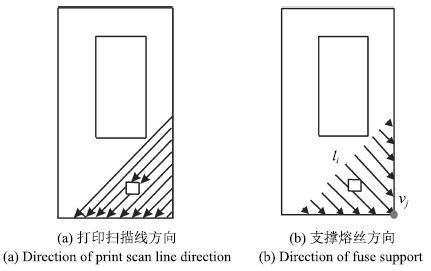
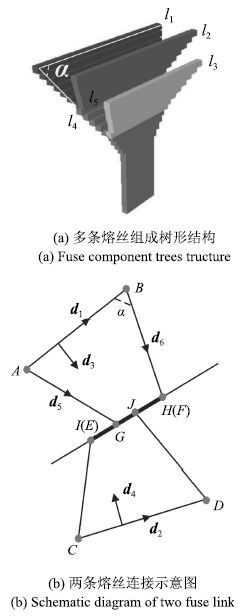
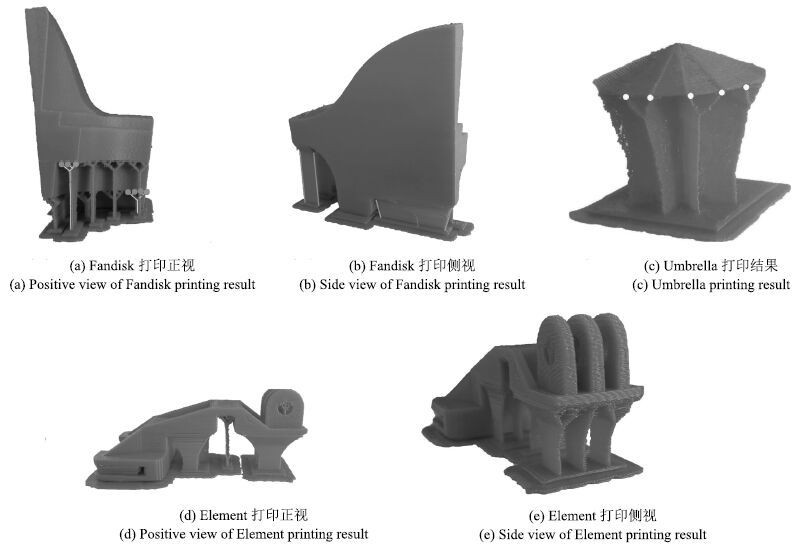
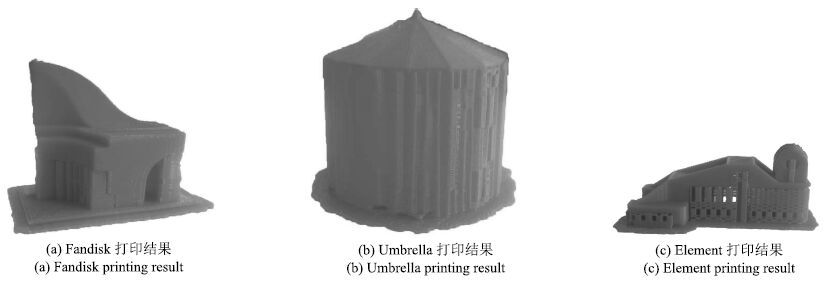
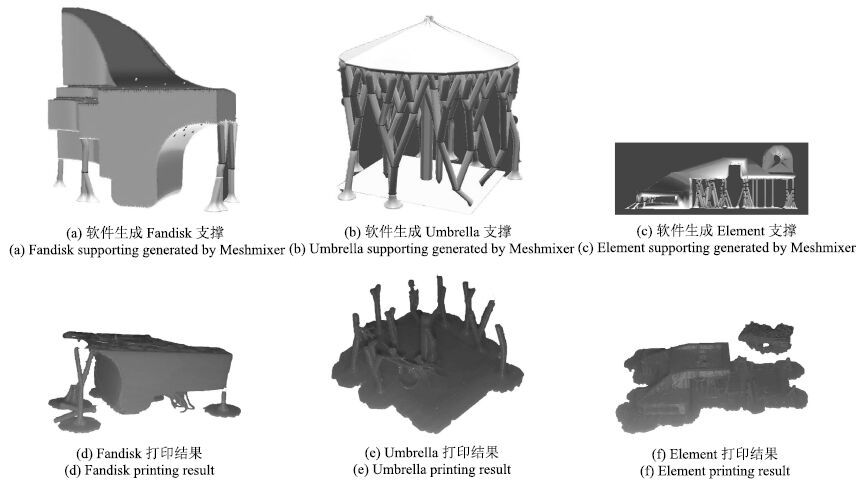
熔丝沉积制造(Fused deposition modeling, FDM)是利用熔融塑料丝的一种3D打印技术,热塑料由喷嘴喷出逐层堆积完成打印.由于熔丝只能沉积在已存在物体的上层,因此需要构造支撑结构以支撑悬空部分.针对现有支撑结构生成算法中存在的或结构不稳固或耗材多的缺陷,提出一种以熔丝为支撑单位的树形稀疏支撑结构.与传统算法计算模型表面支撑区域不同,本算法计算每段熔丝需要支撑的区域,使支撑结构更契合熔丝沉积特点.算法还将支撑结构分为三类,将多约束优化问题分解,降低算法复杂度.实验结果表明,本文算法生成的支撑结构算法耗材少、支撑稳定.
熔丝沉积制造(Fused deposition modeling, FDM)是利用熔融塑料丝的一种3D打印技术,热塑料由喷嘴喷出逐层堆积完成打印.由于熔丝只能沉积在已存在物体的上层,因此需要构造支撑结构以支撑悬空部分.针对现有支撑结构生成算法中存在的或结构不稳固或耗材多的缺陷,提出一种以熔丝为支撑单位的树形稀疏支撑结构.与传统算法计算模型表面支撑区域不同,本算法计算每段熔丝需要支撑的区域,使支撑结构更契合熔丝沉积特点.算法还将支撑结构分为三类,将多约束优化问题分解,降低算法复杂度.实验结果表明,本文算法生成的支撑结构算法耗材少、支撑稳定.



2016, 42(1): 107-121.
doi: 10.16383/j.aas.2016.c150403
摘要:
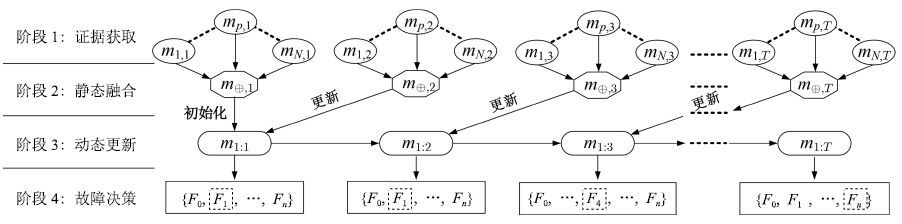
提出一种将诊断证据静态融合与动态更新相结合的故障诊断方法.在静态融合阶段,利用Dempster组合规则融合每个时刻的多条局部诊断证据,获取静态融合证据,并给出基于证据距离的故障信度静态收敛指标;在动态更新阶段,基于条件化的线性组合更新规则,利用当前时刻静态融合证据更新历史证据,获取更新后的全局性诊断证据,并给出基于S函数的故障信度动态收敛指标.在两个阶段中,基于静态和动态信度收敛性指标函数,分别给出相应的优化学习方法,获取静态融合中局部诊断证据的静态折扣系数、动态更新中历史与当前证据的更新权重系数等参数的最优值.在最大信度原则下,利用更新后获取的诊断证据做出诊断决策.最后,通过在电机柔性转子实验台上的诊断实验,将所提方法与已有的典型融合诊断方法进行了对比分析,说明所提出的融合诊断方法及其性能指标函数和参数优化方法的有效性.
提出一种将诊断证据静态融合与动态更新相结合的故障诊断方法.在静态融合阶段,利用Dempster组合规则融合每个时刻的多条局部诊断证据,获取静态融合证据,并给出基于证据距离的故障信度静态收敛指标;在动态更新阶段,基于条件化的线性组合更新规则,利用当前时刻静态融合证据更新历史证据,获取更新后的全局性诊断证据,并给出基于S函数的故障信度动态收敛指标.在两个阶段中,基于静态和动态信度收敛性指标函数,分别给出相应的优化学习方法,获取静态融合中局部诊断证据的静态折扣系数、动态更新中历史与当前证据的更新权重系数等参数的最优值.在最大信度原则下,利用更新后获取的诊断证据做出诊断决策.最后,通过在电机柔性转子实验台上的诊断实验,将所提方法与已有的典型融合诊断方法进行了对比分析,说明所提出的融合诊断方法及其性能指标函数和参数优化方法的有效性.


2016, 42(1): 122-130.
doi: 10.16383/j.aas.2016.c150240
摘要:
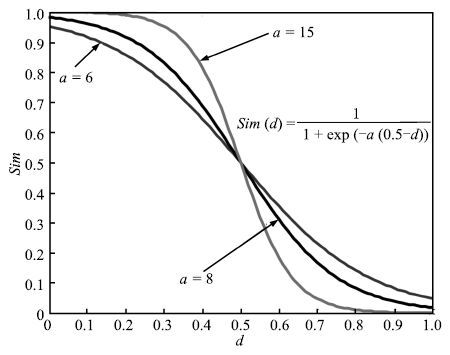
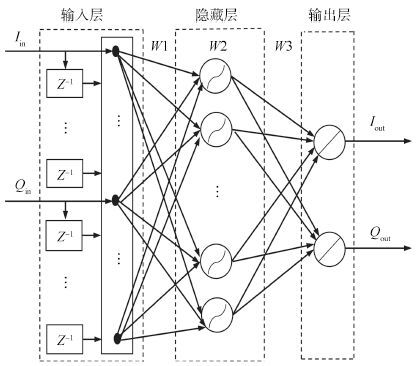
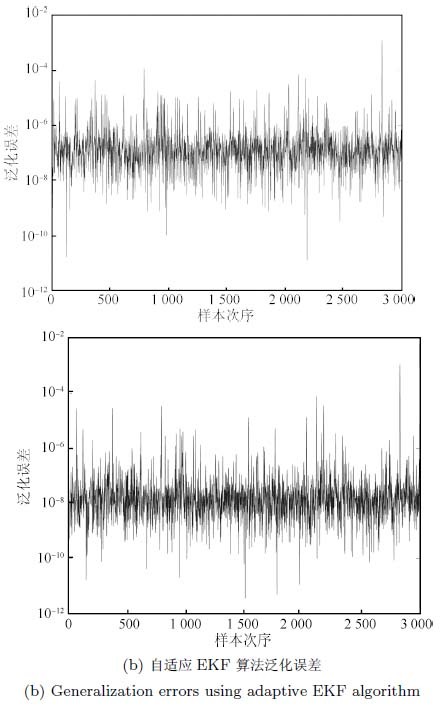
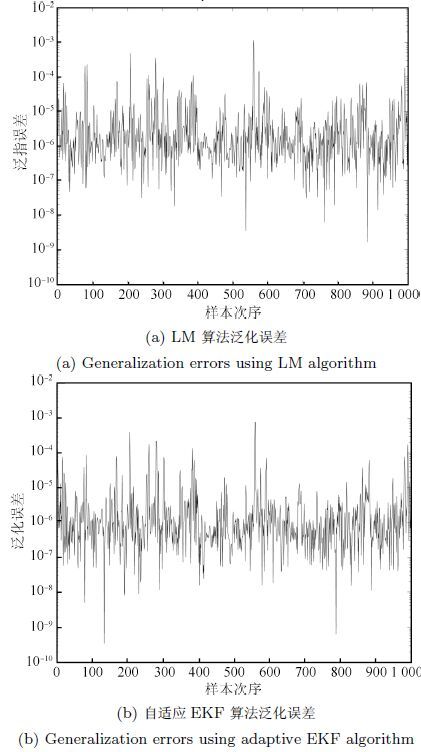
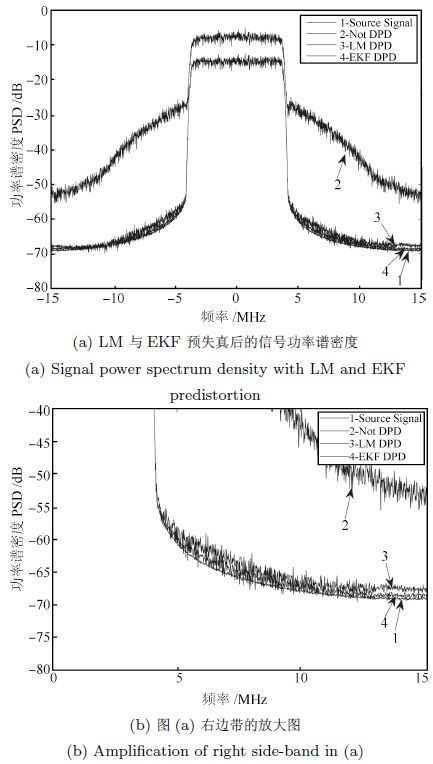
针对强记忆功放的非线性问题,提出一种基于自适应扩展卡尔曼滤波与神经网络的高功放(High power amplifier, HPA)预失真算法.采用实数固定延时神经网络(Real-valued focused time-delay neural network, RVFTDNN)对间接学习结构预失真系统中的预失真器和逆估计器进行建模,扩展卡尔曼滤波(Extended Kalman filter, EKF)算法训练神经网络,从理论上指出Levenberg-Marquardt(LM)算法是EKF算法的特殊情况,并用李亚普诺夫稳定性理论分析EKF算法的稳定收敛条件,推导出测量误差矩阵的自适应迭代公式.结果表明:自适应EKF算法的训练误差和泛化误差均比LM算法更低,预失真后的邻道功率比(Adjacent channel power ratio, ACPR)比LM算法改善了2dB.
针对强记忆功放的非线性问题,提出一种基于自适应扩展卡尔曼滤波与神经网络的高功放(High power amplifier, HPA)预失真算法.采用实数固定延时神经网络(Real-valued focused time-delay neural network, RVFTDNN)对间接学习结构预失真系统中的预失真器和逆估计器进行建模,扩展卡尔曼滤波(Extended Kalman filter, EKF)算法训练神经网络,从理论上指出Levenberg-Marquardt(LM)算法是EKF算法的特殊情况,并用李亚普诺夫稳定性理论分析EKF算法的稳定收敛条件,推导出测量误差矩阵的自适应迭代公式.结果表明:自适应EKF算法的训练误差和泛化误差均比LM算法更低,预失真后的邻道功率比(Adjacent channel power ratio, ACPR)比LM算法改善了2dB.


2016, 42(1): 131-139.
doi: 10.16383/j.aas.2016.c150441
摘要:
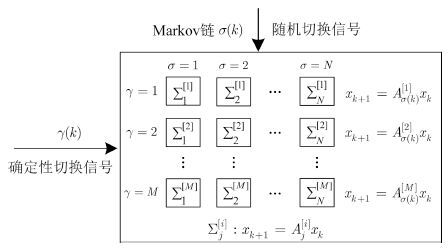
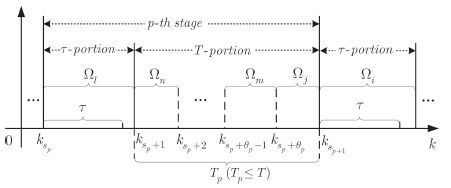
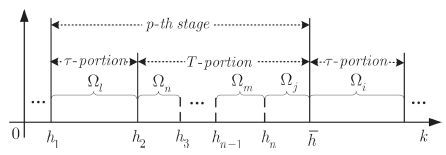
提出了一种新类型的切换系统——两层切换系统(Two-level switched systems, TSSs),其顶层切换是确定的,底层切换为随机的且由多个Markov链支配.基于持续驻留时间(Persistent dwell-time, PDT)方法,研究了TSS存在参数不确定性情况下的鲁棒指数几乎处处(Exponential almost sure, EAS)稳定性,以线性矩阵不等式(Linear matrix inequality, LMI)形式给出了一个充分条件.最后通过数值仿真例子验证了本文方法的有效性.
提出了一种新类型的切换系统——两层切换系统(Two-level switched systems, TSSs),其顶层切换是确定的,底层切换为随机的且由多个Markov链支配.基于持续驻留时间(Persistent dwell-time, PDT)方法,研究了TSS存在参数不确定性情况下的鲁棒指数几乎处处(Exponential almost sure, EAS)稳定性,以线性矩阵不等式(Linear matrix inequality, LMI)形式给出了一个充分条件.最后通过数值仿真例子验证了本文方法的有效性.

2016, 42(1): 140-144.
doi: 10.16383/j.aas.2016.c150394
摘要:
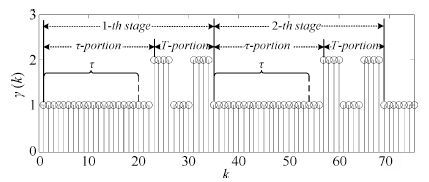
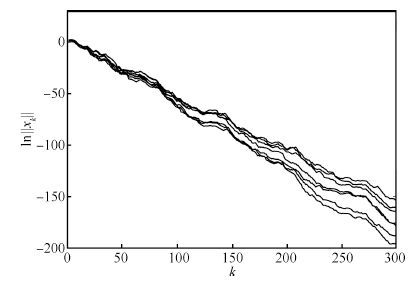
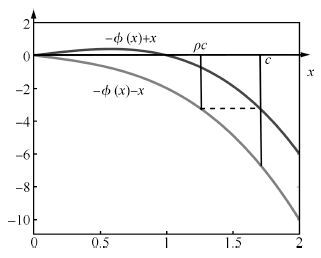
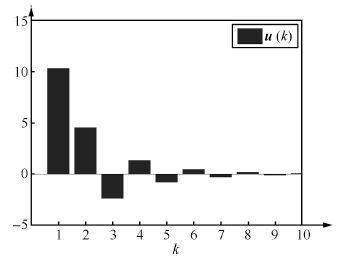
研究了一类非线性离散系统的量化反馈控制.对于一类满足齐次性质的非线性系统,针对有界的初始状态,我们设计了具有可数个固定控制输入的控制方式,实现了用"可数"去镇定"不可数"这一控制问题.值得指出的是,我们的结论可以直接应用到线性的情形,并与已有的关于线性系统的结论保持一致.同时,给出了例子验证了结论的有效性.
研究了一类非线性离散系统的量化反馈控制.对于一类满足齐次性质的非线性系统,针对有界的初始状态,我们设计了具有可数个固定控制输入的控制方式,实现了用"可数"去镇定"不可数"这一控制问题.值得指出的是,我们的结论可以直接应用到线性的情形,并与已有的关于线性系统的结论保持一致.同时,给出了例子验证了结论的有效性.

2016, 42(1): 145-153.
doi: 10.16383/j.aas.2016.c150150
摘要:
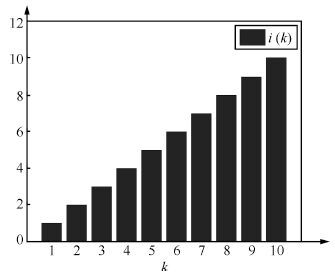
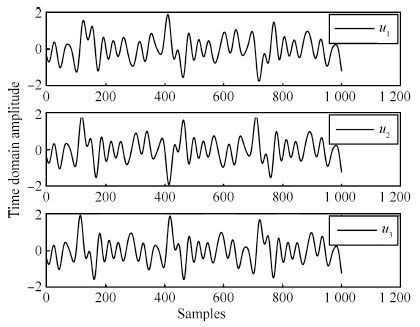
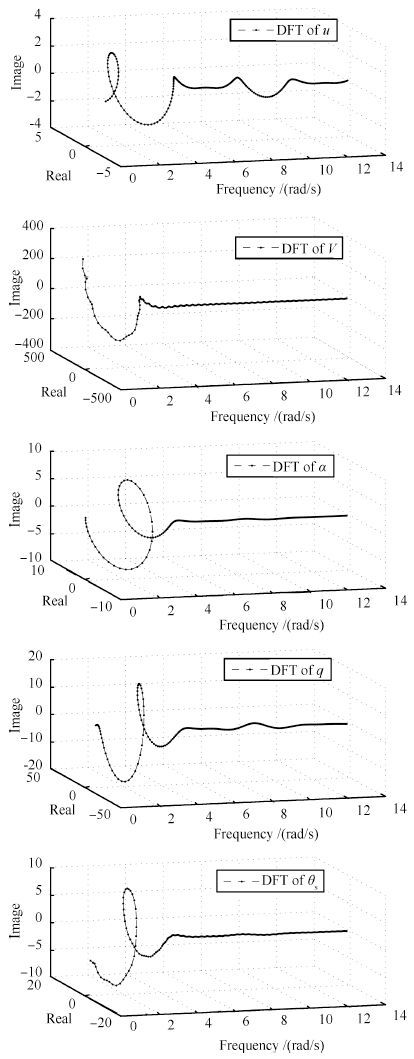
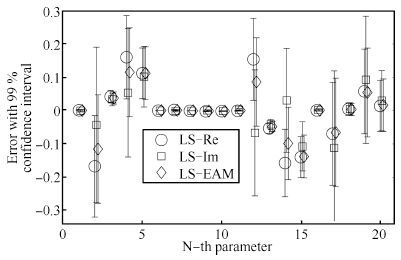
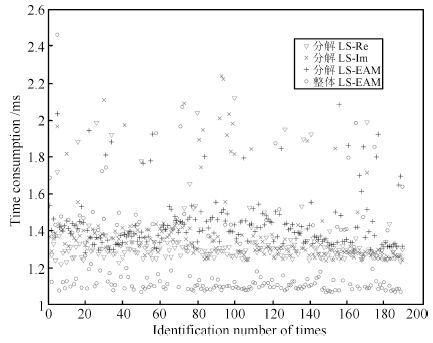
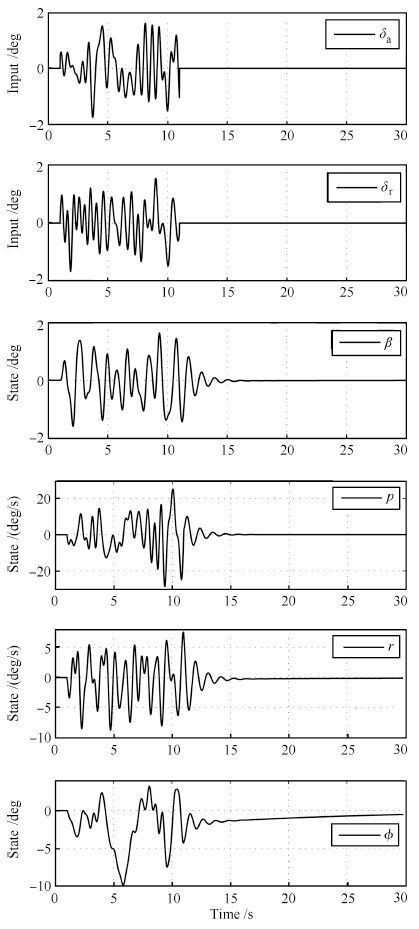
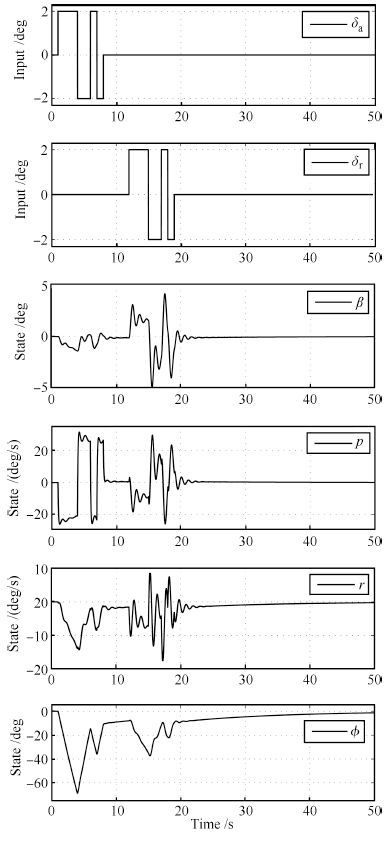
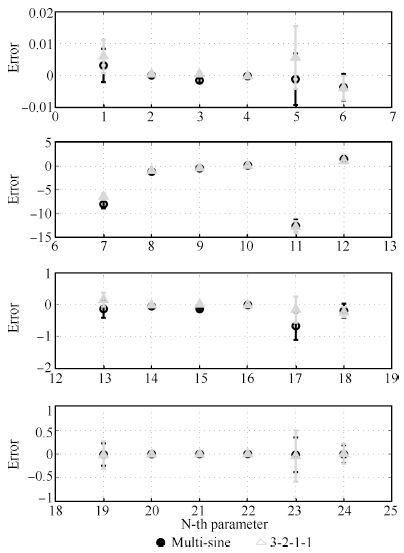
在连续时间状态空间模型的参数辨识中,针对系统状态微分项获取困难这一问题,对输入、状态及输出序列应用离散傅里叶变换,得到复数域线性回归方程,并给出了不同形式的最小二乘解估计式.以飞行器多输入多输出(Multiple-input multiple-output, MIMO)状态空间模型为例,设计正交多正弦信号对系统进行多通道同时激励,在一次激励的情况下就可以辨识出所有模型参数,从而提高辨识实验效率.仿真实验证明了方法的有效性和结果的准确性.
在连续时间状态空间模型的参数辨识中,针对系统状态微分项获取困难这一问题,对输入、状态及输出序列应用离散傅里叶变换,得到复数域线性回归方程,并给出了不同形式的最小二乘解估计式.以飞行器多输入多输出(Multiple-input multiple-output, MIMO)状态空间模型为例,设计正交多正弦信号对系统进行多通道同时激励,在一次激励的情况下就可以辨识出所有模型参数,从而提高辨识实验效率.仿真实验证明了方法的有效性和结果的准确性.


2016, 42(1): 153-160.
doi: 10.16383/j.aas.2016.c150307
摘要:
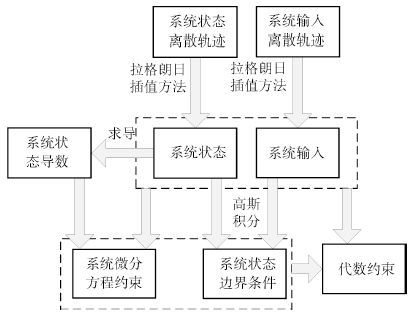
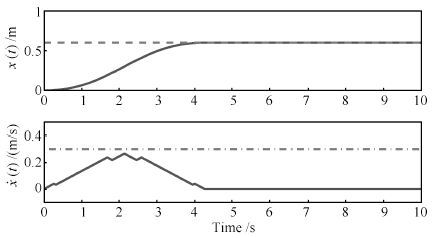
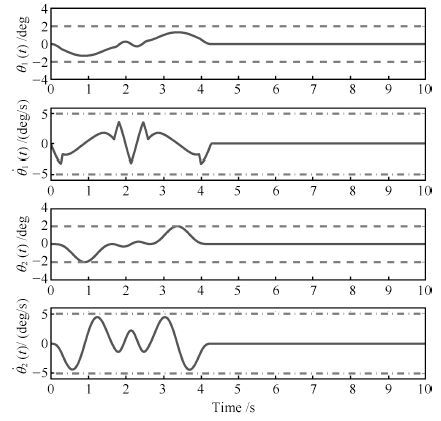
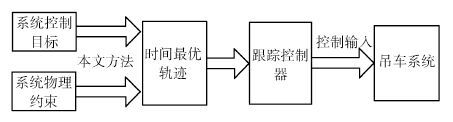
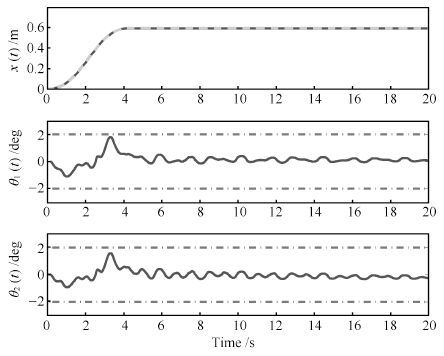
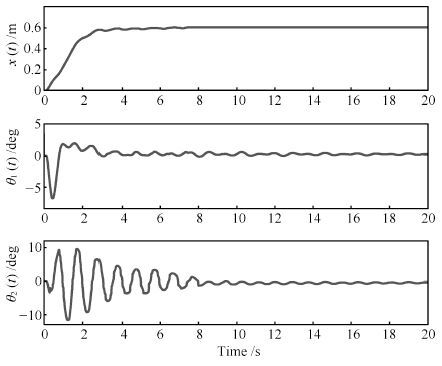
在工业生产过程中,桥式吊车系统经常会体现出双摆系统的特性,导致更多欠驱动状态量的出现,增大控制难度.基于此,论文提出了一种针对双摆桥式吊车系统的时间最优轨迹规划方法,可以得到全局时间最优且具有消摆能力的轨迹.具体而言,为方便地构造以时间为代价函数的优化问题,首先对系统运动学模型进行相应的变换;在此基础上,考虑包括两级摆角及台车速度和加速度上限值在内的多种约束,构造出相应的优化问题;然后,利用高斯伪谱法(Gauss-pseudospectral method, GPM)将该带约束的优化问题转化为更易于求解的非线性规划问题,且在转化过程中,可以非常方便地考虑轨迹约束.求解该非线性规划问题,即可得到时间最优的台车轨迹.不同于已有的大多数方法,该方法可获得全局时间最优的结果.最后,通过仿真与实验结果验证了这种时间最优轨迹规划方法具有满意的控制性能.
在工业生产过程中,桥式吊车系统经常会体现出双摆系统的特性,导致更多欠驱动状态量的出现,增大控制难度.基于此,论文提出了一种针对双摆桥式吊车系统的时间最优轨迹规划方法,可以得到全局时间最优且具有消摆能力的轨迹.具体而言,为方便地构造以时间为代价函数的优化问题,首先对系统运动学模型进行相应的变换;在此基础上,考虑包括两级摆角及台车速度和加速度上限值在内的多种约束,构造出相应的优化问题;然后,利用高斯伪谱法(Gauss-pseudospectral method, GPM)将该带约束的优化问题转化为更易于求解的非线性规划问题,且在转化过程中,可以非常方便地考虑轨迹约束.求解该非线性规划问题,即可得到时间最优的台车轨迹.不同于已有的大多数方法,该方法可获得全局时间最优的结果.最后,通过仿真与实验结果验证了这种时间最优轨迹规划方法具有满意的控制性能.