

-
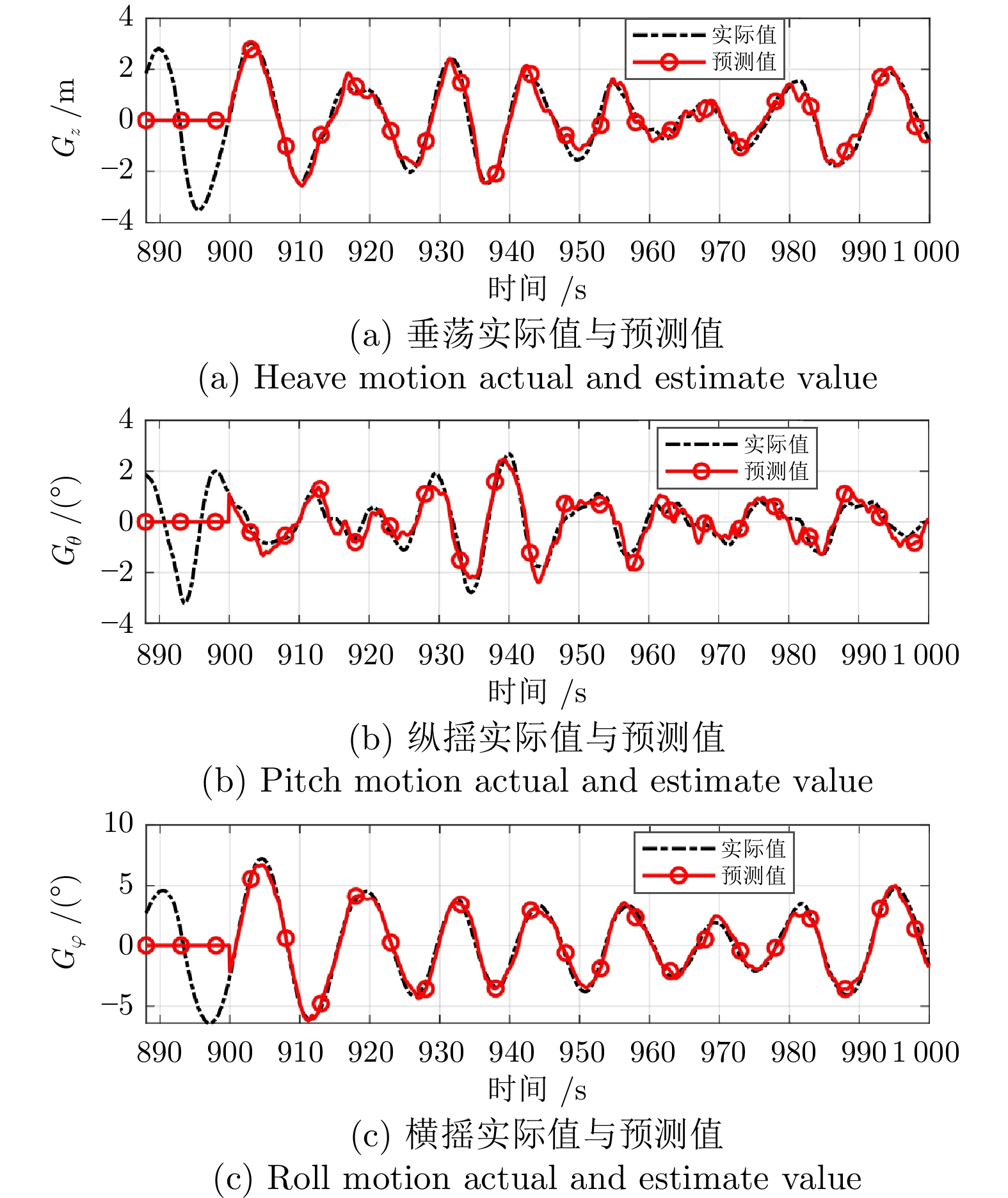
摘要: 考虑甲板运动和舰尾流等扰动影响下的舰载机着舰轨迹跟踪问题, 提出一种基于预定义时间的自适应抗干扰控制策略. 建立着舰轨迹生成、引导、控制和进近动力补偿等子系统, 将轨迹跟踪问题转换为子系统的稳定问题. 针对舰尾流引起的时变扰动和甲板运动对理想着舰点的变化影响, 采用长短期记忆神经网络进行甲板运动预估并在引导指令中予以修正, 借助非线性扰动观测器估计未知干扰对模型集总外界扰动进行前馈补偿. 为提升着舰轨迹跟踪与姿态控制的精确性和快速性, 设计基于反步架构的预定义时间控制策略, 通过李雅普诺夫稳定性分析证明系统能够在设定的时间内收敛. 数字和半实物仿真结果表明, 在甲板运动和舰尾流扰动影响下所设计的控制策略能够满足着舰轨迹的快速准确跟踪, 实现预定义时间稳定.Abstract: Considering the landing trajectory tracking of carrier-based aircraft under the influence of deck motion and ship wake, an adaptive robust control strategy based on predefined-time is proposed. The subsystems for ship trajectory generation, guidance, control, and approach power compensation are established, transforming the trajectory tracking problem into a stability problem for these subsystems. To address the influence of time-varying disturbances caused by ship wake and deck motion on the ideal landing point, a long short-term memory neural network is utilized for deck motion estimation and correct it in the guiding commands, and a nonlinear disturbance observer is designed to estimate unknown disturbances so that the feedforward compensation is performed on the aggregate external disturbance of the model set. To enhance the accuracy and speed of landing trajectory tracking and attitude control, a predefined-time control strategy based on backstepping architecture has been developed. Lyapunov stability analysis demonstrates that the system can converge within the set time. The numerical and hardware-in-loop simulation results indicate that the control strategy designed to account for deck motion and ship wake disturbances can meet the requirements for fast and accurate tracking of landing trajectories while achieving predefined-time stability.
-
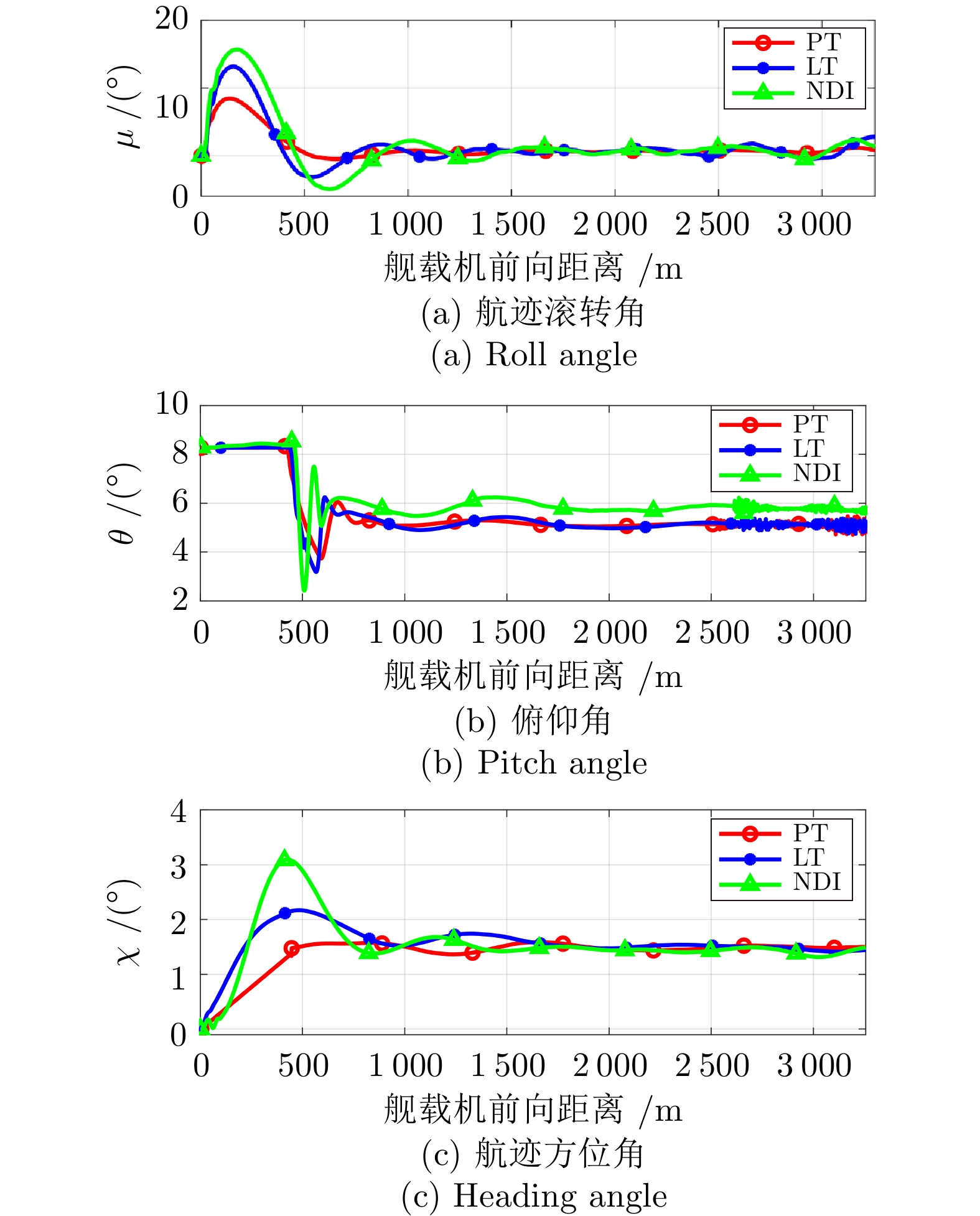
图 8 不同方法的航迹滚转角、俯仰角与航迹方位角
Fig. 8 Track roll angle, pitch angle and track azimuth angle of different methods
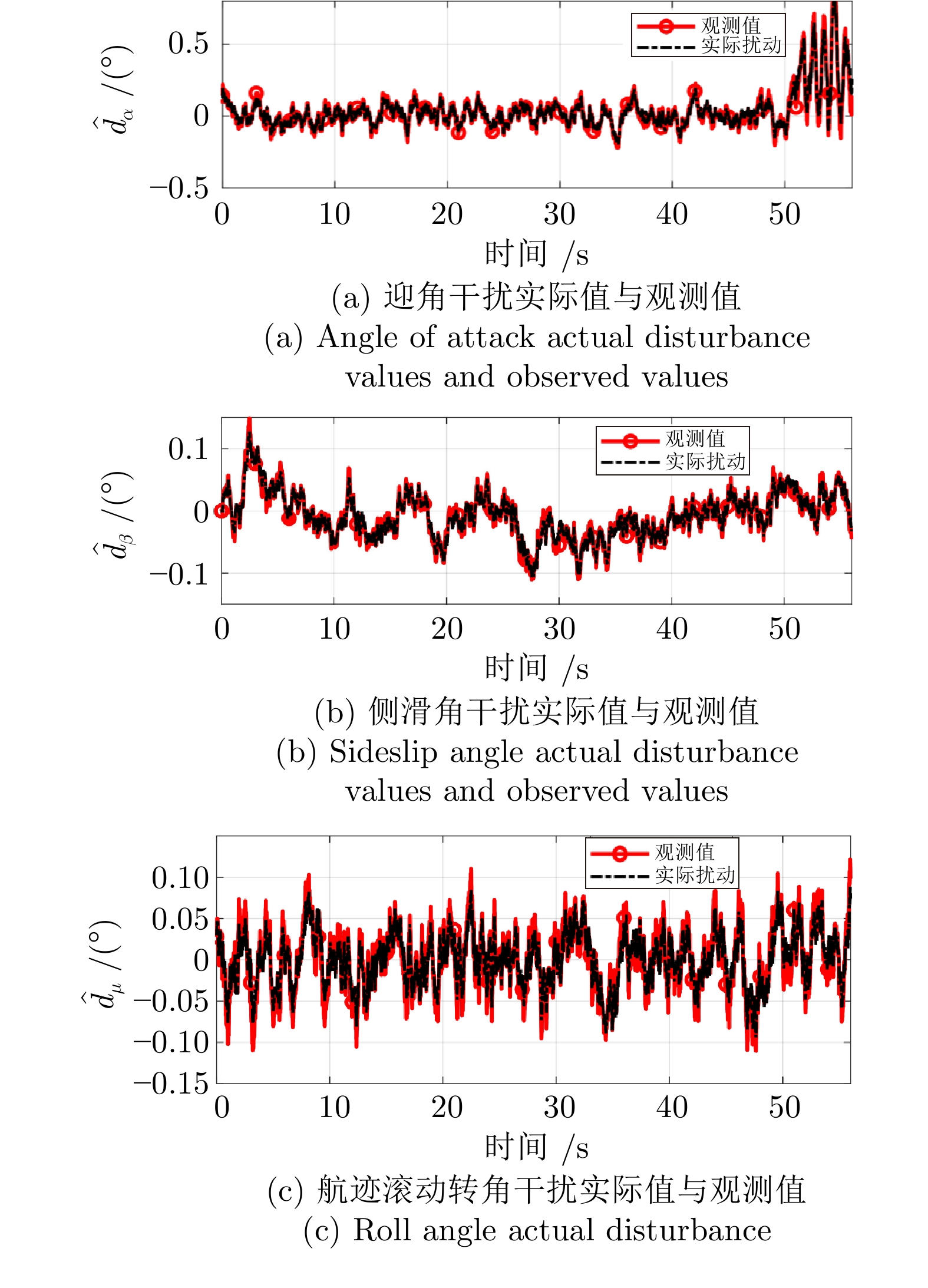
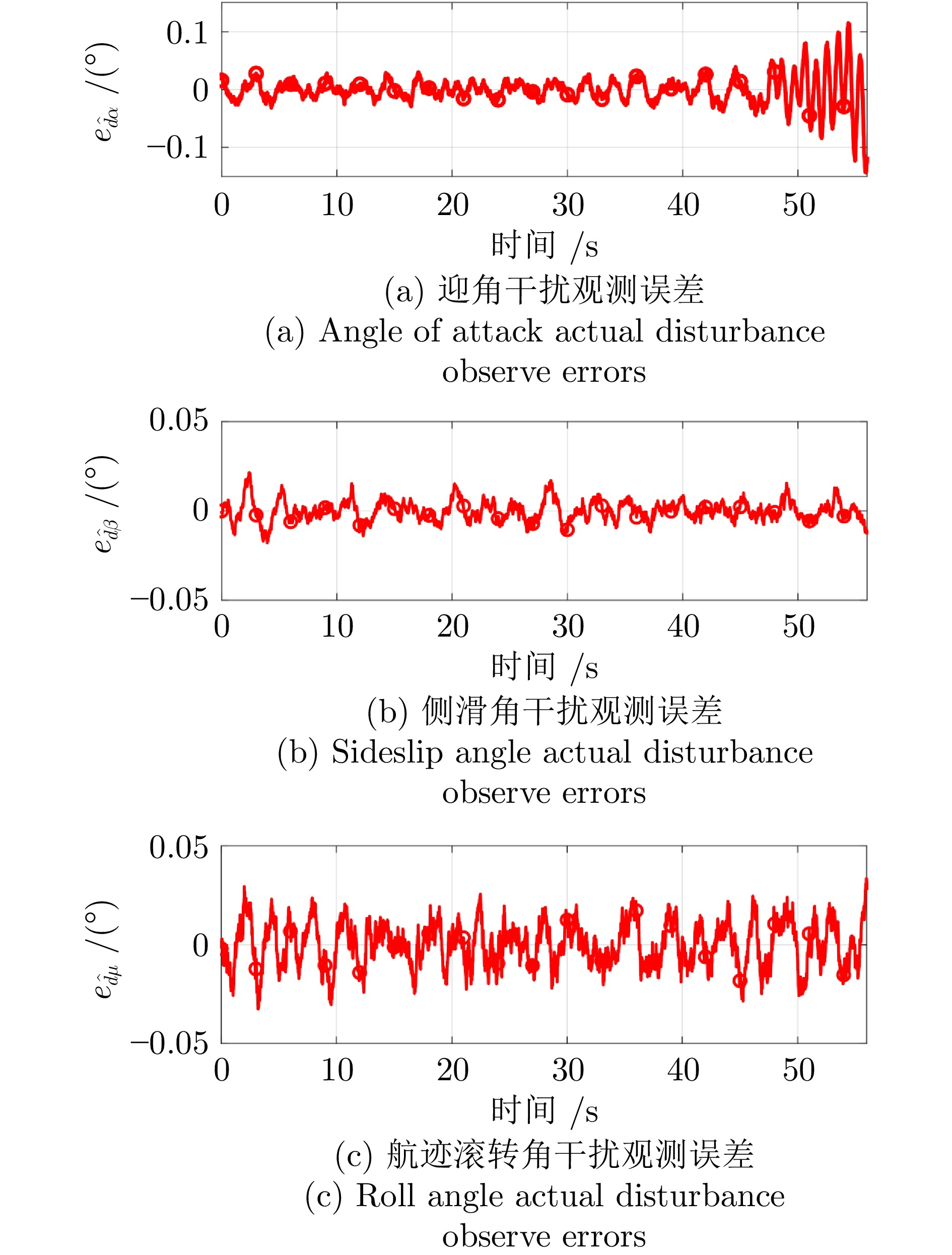
图 10 不同状态扰动实际值与干扰观测器观测值对比
Fig. 10 Different states actual disturbance values and disturbance observer
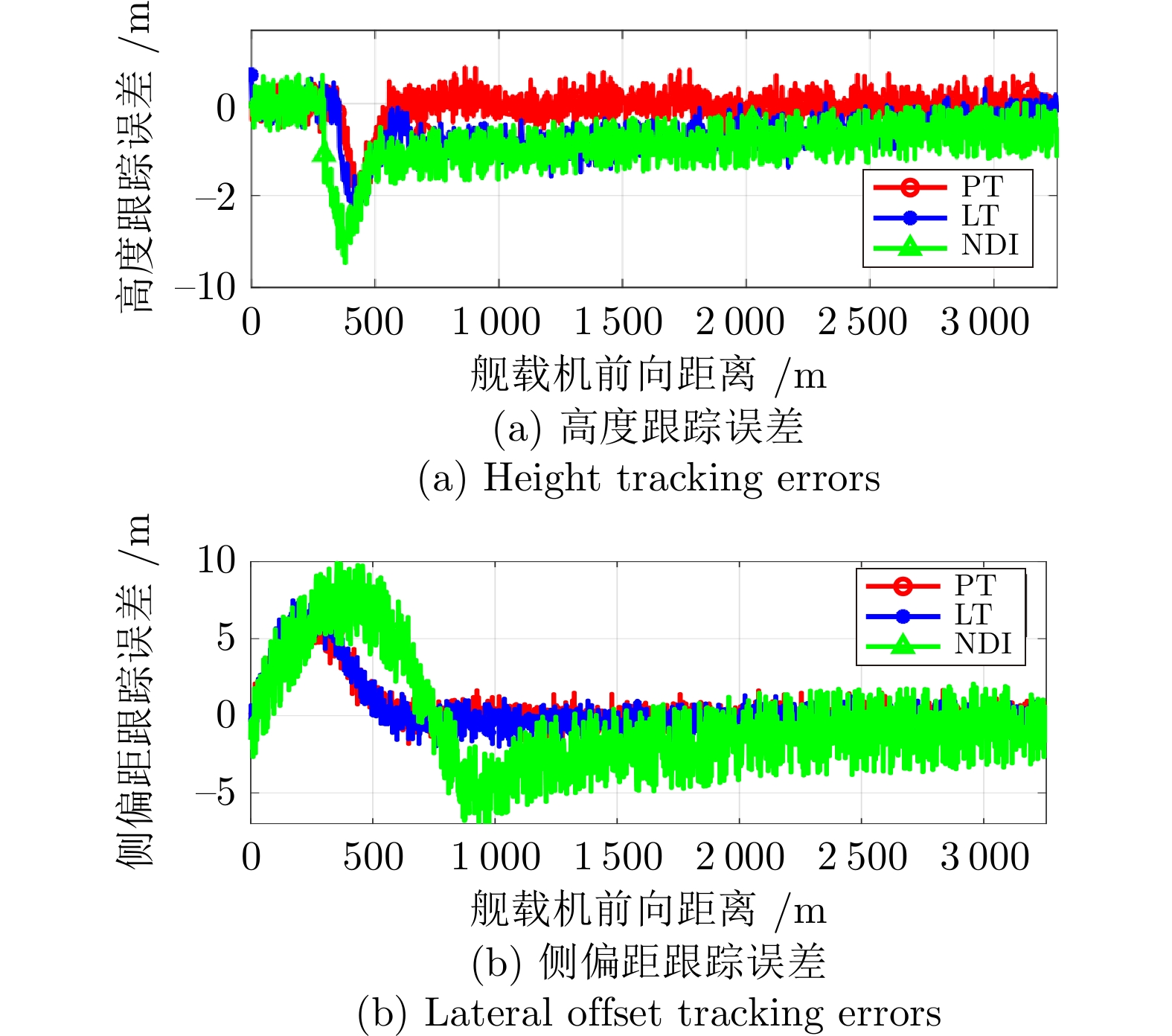
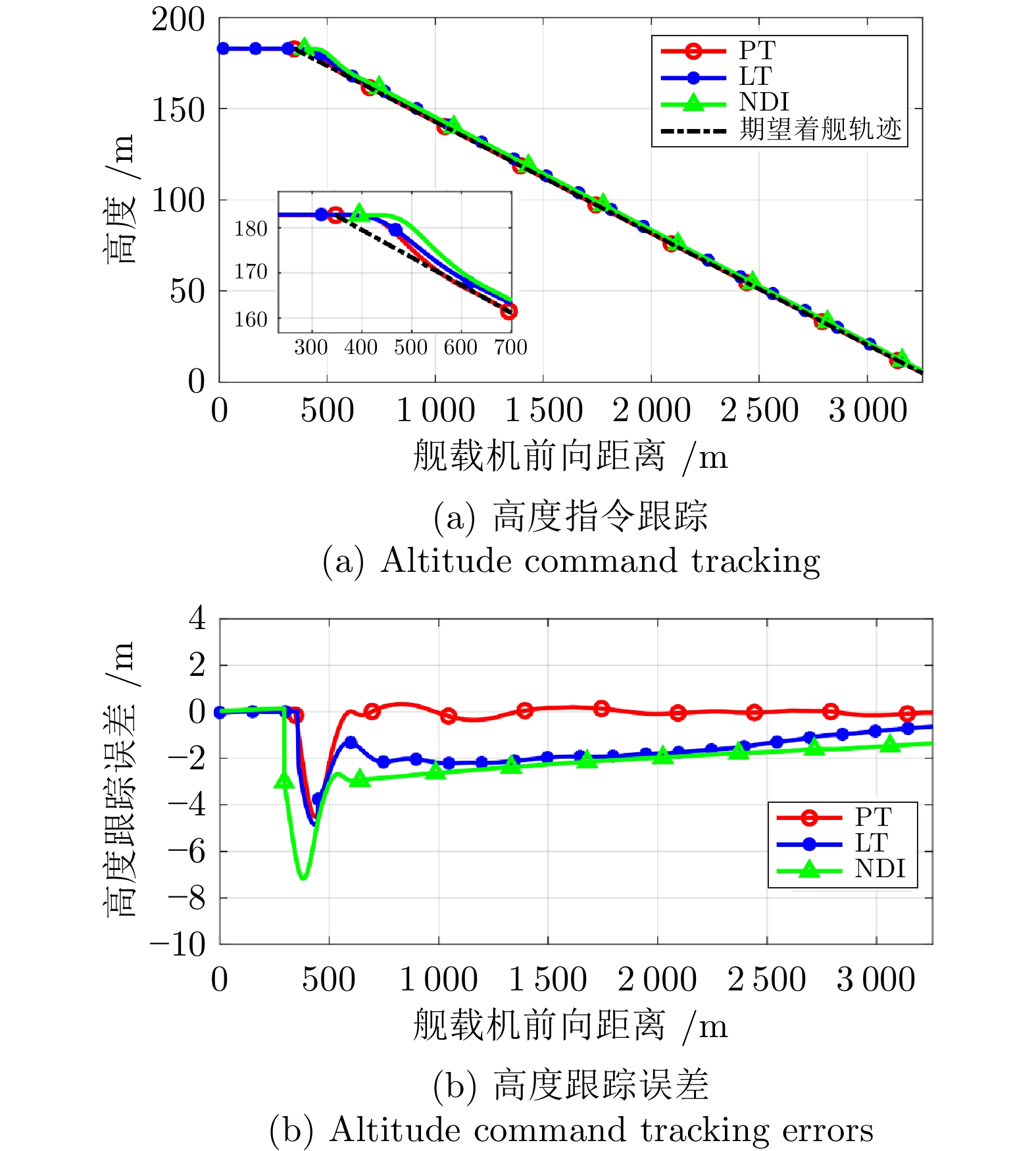
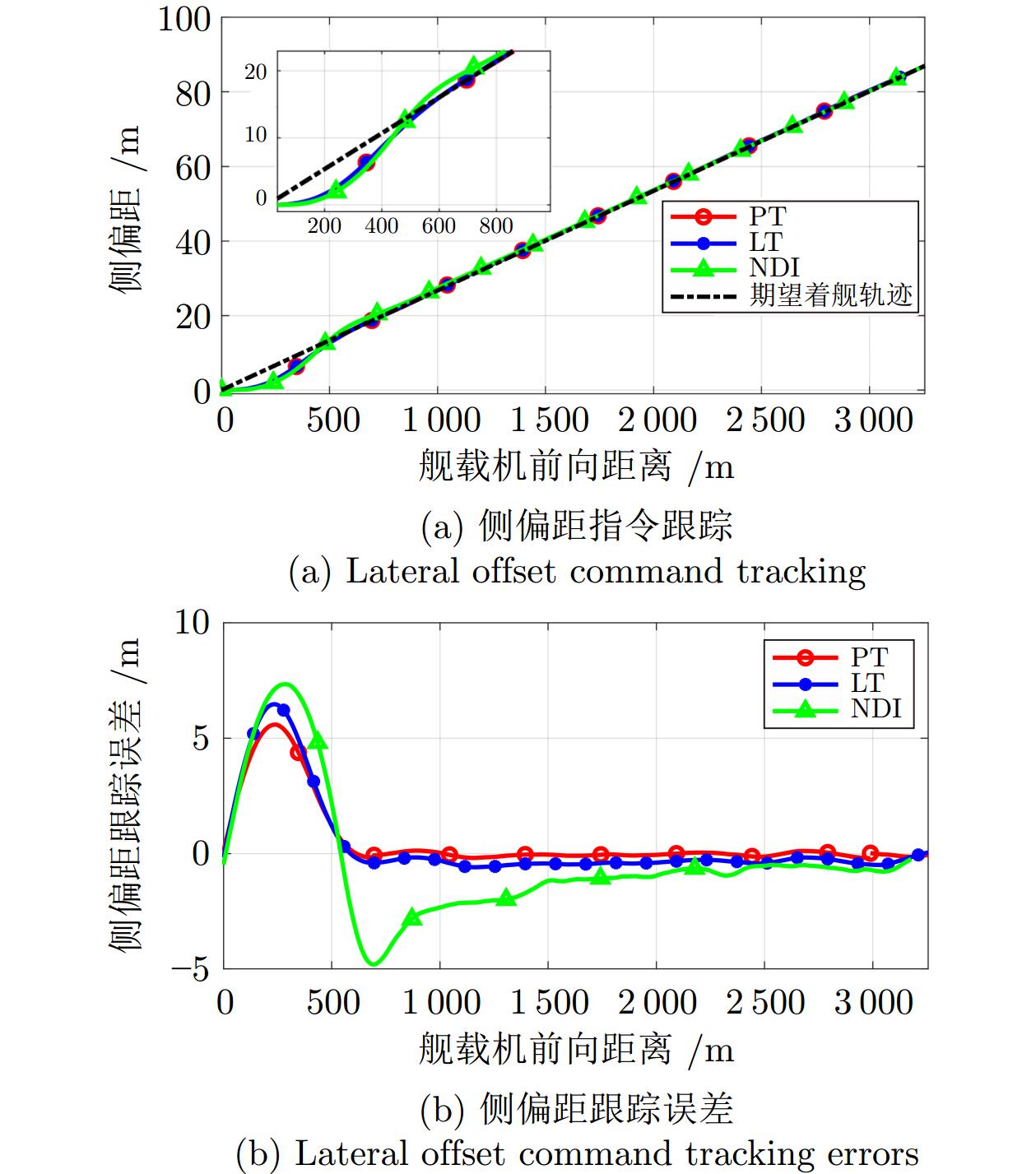
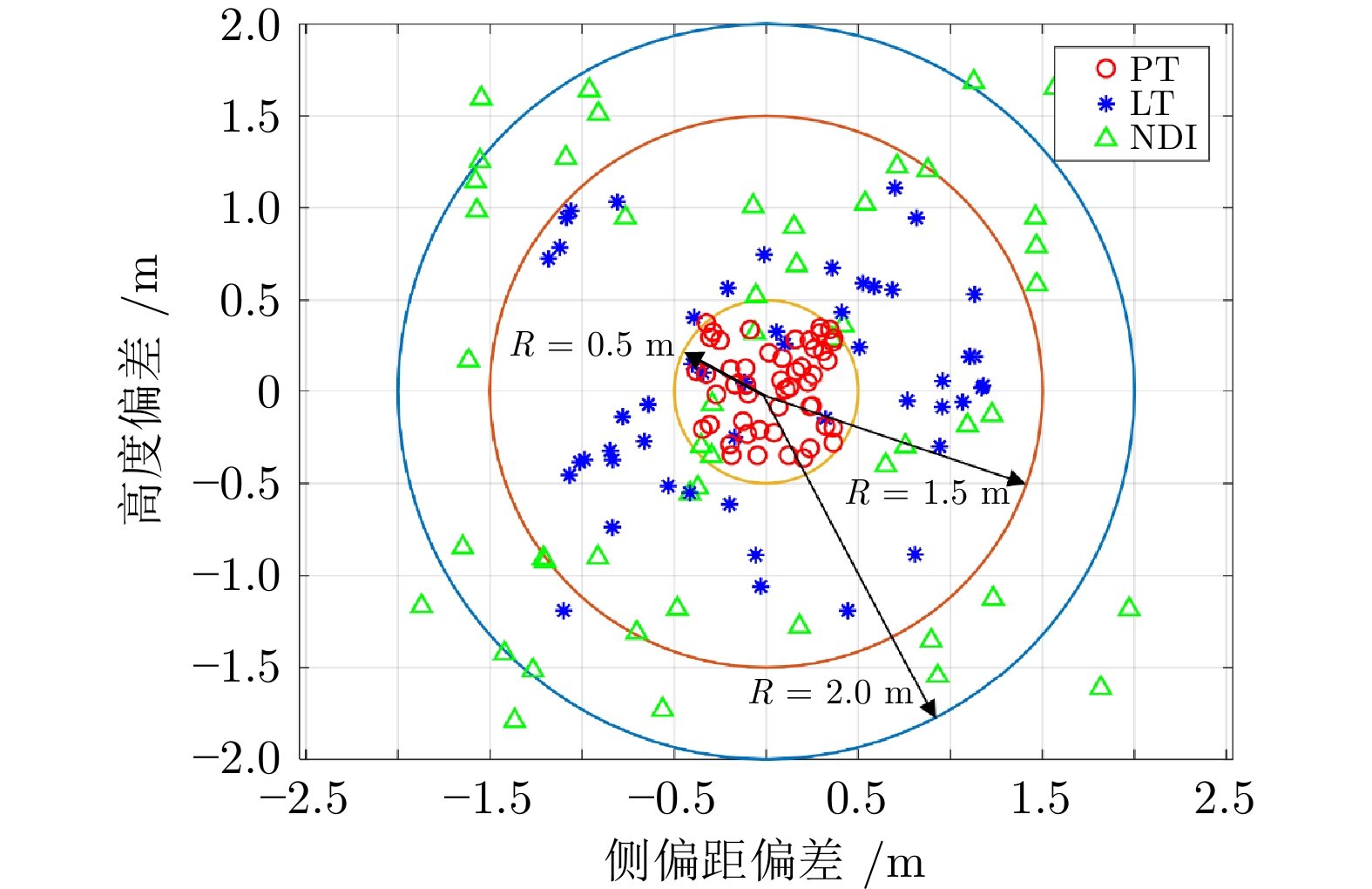
图 14 半实物仿真实验下高度和侧偏距跟踪偏差
Fig. 14 Height and lateral offset tracking errors under hardware-in-loop simulation
-
[1] 刘东, 吴家仁, 周一舟, 刘振祥, 李瑜, 王铭泽. 舰载机综合保障技术实践及发展展望. 航空学报, 2021, 42(8): 106−123Liu Dong, Wu Jia-Ren, Zhou Yi-Zhou, Liu Zhen-Xiang, Li Yu, Wang Ming-Ze. Practice and prospects of comprehensive support technologies of carrier-based aircraft. Acta Aeronautica et Astronautica Sinica, 2021, 42(8): 106−123 [2] 甄子洋, 王新华, 江驹, 杨一栋. 舰载机自动着舰引导与控制研究进展. 航空学报, 2017, 38(2): 127−148Zhen Zi-Yang, Wang Xin-Hua, Jiang Ju, Yang Yi-Dong. Research progress in guidance and control of automatic carrierlanding of carrier-based aircraft. Acta Aeronautica et Astronautica Sinica, 2017, 38(2): 127−148 [3] 张志冰, 甄子洋, 江驹, 薛艺璇. 舰载机自动着舰引导与控制综述. 南京航空航天大学学报, 2018, 50(6): 734−744Zhang Zhi-Bing, Zhen Zi-Yang, Jiang Ju, Xue Yi-Xuan. Review on development in guidance and control of automatic carrier landing of carrier-based aircraft. Journal of Nanjing University of Aeronautics and Astronautics, 2018, 50(6): 734−744 [4] 汪节, 韩维, 尹大伟, 潘子双, 李常久. MAGIC CARPET着舰的舰尾流抑制. 电光与控制, 2024, 31(10): 58−63 doi: 10.3969/j.issn.1671-637X.2024.10.010Wang Jie, Han Wei, Yin Da-Wei, Pan Zi-Shuang, Li Chang-Jiu. Suppression of the carrier air wake with MAGIC CARPET carrier landing. Electronics Optics and Control, 2024, 31(10): 58−63 doi: 10.3969/j.issn.1671-637X.2024.10.010 [5] Lungu M, Dinu D A, Chen M, Flores G. Inverse optimal control for autonomous carrier landing with disturbances. Aerospace Science and Technology, 2023, 139: 1−20 [6] Yuan Y, Duan H, Zeng Z. Automatic carrier landing control with external disturbance and input constraint. IEEE Transactions on Aerospace and Electronic Systems, 2022, 59(2): 1426−1438 [7] 段海滨, 袁洋, 张秀林. 干扰和执行器故障下的舰载机着舰容错控制系统. 南京航空航天大学学报, 2022, 54(5): 949−957Duan Hai-Bin, Yuan Yang, Zhang Xiu-Lin. Design of a carrier-based aircraft landing fault-tolerant control system with disturbances and actuator faults. Journal of Nanjing University of Aeronautics and Astronautics, 2022, 54(5): 949−957 [8] 刘建伟, 宋志妍. 循环神经网络研究综述. 控制与决策, 2022, 37(11): 2753−2768Liu Jian-Wei, Song Zhi-Yan. Overview of recurrent neural networks. Control and Decision, 2022, 37(11): 2753−2768 [9] Zhen Z, Jiang S, Jiang J. Preview control and particle filtering for automatic carrier landing. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(6): 2662−2674 doi: 10.1109/TAES.2018.2826398 [10] 赵所, 林立, 李震, 侯中喜. 基于BP神经网络的甲板运动预报与补偿技术. 北京航空航天大学学报, 2024, 50(9): 2772−2780Zhao Suo, Lin Li, Li Zhen, Hou Zhong-Xi. Research on deck motion prediction and compensation technology based on BP neural network. Jounal of Beijing University of Aeronautics and Astronautics, 2024, 50(9): 2772−2780 [11] Geng X, Li Y, Sun Q. A novel short-term ship motion prediction algorithm based on EMD and adaptive PSO-LSTM with the sliding window approach. Journal of Marine Science and Engineering, 2023, 11(3): Article No. 466 doi: 10.3390/jmse11030466 [12] 王可, 徐明亮, 李亚飞, 姜晓恒, 鲁爱国, 李鉴. 一种面向航空母舰甲板运动状态预估的鲁棒学习模型. 自动化学报, 2024, 50(9): 1785−1793Wang Ke, Xu Ming-Liang, Li Ya-Fei, Jiang Xiao-Heng, Lu Ai-Guo, Li Jian. A robust learning model for deck motion prediction of aircraft carrier. Acta Automatica Sinica, 2024, 50(9): 1785−1793 [13] 王志刚, 王业光, 杨宁, 米禹丰, 曲晓雷. 基于LSTM的飞行数据挖掘模型构建方法. 航空学报, 2021, 42(8): 262−271Wang Zhi-Gang, Wang Ye-Guang, Yang Ning, Mi Yu-Feng, Qu Xiao-Lei. Construction method of flight data mining model based on LSTM. Acta Aeronautica et Astronautica Sinica, 2021, 42(8): 262−271 [14] 赵琦, 许志远, 葛佳薇, 董婕. 基于SW-BiConvLSTM的船舶轨迹预测. 船海工程, 2024, 53(4): 36−42Zhao Qi, Xu Zhi-Yuan, Ge Jia-Wei, Dong Jie. Ship trajectory prediction based on SW-BiConvLSTM. Ship and Ocean Engineering, 2024, 53(4): 36−42 [15] 陈占阳, 占正勇, 常绍平, 徐绍峰, 刘兴云. 长短期记忆神经网络在船舶迎浪运动多时间尺度实时预测中的应用研究. 船舶力学, 2024, 28(12): 1803−1819 doi: 10.3969/j.issn.1007-7294.2024.12.001Chen Zhan-Yang, Zhan Zheng-Yong, Chang Shao-Ping, Xu Shao-Feng, Liu Xing-Yun. A framework of LSTM neural network model in multi-time scale real-time prediction of ship motions in head waves. Journal of Ship Mechanics, 2024, 28(12): 1803−1819 doi: 10.3969/j.issn.1007-7294.2024.12.001 [16] Guan Z, Ma Y, Zheng Z. Moving path following with prescribed performance and its application on automatic carrier landing. IEEE Transactions on Aerospace and Electronic Systems, 2019, 56(4): 2576−2590 [17] Guan Z, Ma Y, Zheng Z. Prescribed performance control for automatic carrier landing with disturbance. Nonlinear Dynamics, 2018, 94: 1335−1349 doi: 10.1007/s11071-018-4427-3 [18] Wu Q, Zhu Q, Han S. Elman neural network-based direct lift automatic carrier landing nonsingular terminal sliding mode fault-tolerant control system design. Computational Intelligence and Neuroscience, 2023(1): Article No. 3560441 [19] 张志冰, 张秀林, 王家兴, 史静平. 一种基于多操纵面控制分配的IDLC人工着舰精确控制方法. 航空学报, 2021, 42(8): 142−157 doi: 10.7527/S1000-6893.2021.25840Zhang Zhi-Bing, Zhang Xiu-Lin, Wang Jia-Xing, Shi Jing-Ping. An IDLC landing control method of carrier-based aircraft based on control allocation of multiple control surfaces. Acta Aeronautica et Astronautica Sinica, 2021, 42(8): 142−157 doi: 10.7527/S1000-6893.2021.25840 [20] 罗飞, 张军红, 王博, 唐瑞琳, 唐炜. 基于直接升力与动态逆的舰尾流抑制方法. 航空学报, 2021, 42(12): 193−208Luo Fei, Zhang Jun-Hong, Wang Bo, Tang Rui-Lin, Tang Wei. Air wake suppression method based on direct lift and-nonlinear dynamic inversion control. Acta Aeronautica et Astronautica Sinica, 2021, 42(12): 193−208 [21] 柳仁地, 江驹, 张哲, 刘翔. 基于强化学习的舰载机着舰直接升力控制技术. 北京航空航天大学学报, DOI: 10.13700/j.bh.1001-5965.2023.0403Liu Ren-Di, Jiang Ju, Zhang Zhe, Liu Xiang. Direct lift control technology of carrier aircraft landing based on reinforcement learning. Jounal of Beijing University of Aeronautics and Astronautics, DOI: 10.13700/j.bh.1001-5965.2023.0403 [22] Zhang S, Nan Y, Li Z. Moving path following with adaptive neural network finite-time recursive sliding mode control for carrier landing with uncertain dynamics and saturation. Aerospace Science and Technology, 2024, 17: Article No. 109220 [23] Xue Y, Zhen Z, Zhang Z, Cao T, Wan T. Automatic carrier landing for UAV based on integrated disturbance observer and fault-tolerant control. Aircraft Engineering and Aerospace Technology, 2023, 95(8): 1247−1256 doi: 10.1108/AEAT-02-2023-0047 [24] Duan H, Yuan Y, Zeng Z. Automatic carrier landing system with fixed time control. IEEE Transactions on Aerospace and Electronic Systems, 2022, 58(4): 3586−3600 doi: 10.1109/TAES.2022.3156070 [25] Zhou D, Zheng Z, Guan Z, Ma Y, Ma L. Barrier Lyapunov function based fixed-time control for automatic carrier landing with disturbances. In: Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2023, 37(1): 177−190 [26] Sánchez-Torres J D, Defoort M, Muñoz-Vázquez A J. Predefined-time stabilisation of a class of nonholonomic systems. International Journal of Control, 2020, 93(12): 2941−2948 [27] Wu C, Yan J, Shen J, Wu X, Xiao B. Predefined-time attitude stabilization of receiver aircraft in aerial refueling. IEEE Transactions on Circuits and Systems II: Express Briefs, 2021, 68(10): 3321−3325 [28] Pan Y, Ji W, Liang H. Adaptive predefined-time control for Lü chaotic systems via backstepping approach. IEEE Transactions on Circuits and Systems II: Express Briefs, 2022, 69(12): 5064−5068 [29] Ferrara A, Incremona G P. Predefined-time output stabilization with second order sliding mode generation. IEEE Transactions on Automatic Control, 2020, 66(3): 1445−1451 [30] Pan Y, Ji W, Lam H K, Cao L. An improved predefined-time adaptive neural control approach for nonlinear multiagent systems. IEEE Transactions on Automation Science and Engineering, 2024, 21(4): 6311−6320 [31] Muñoz-Vázquez A J, Sánchez-Torres J D, Jiménez-Rodríguez E, Loukianov A G. Predefined-time robust stabilization of robotic manipulators. IEEE/ASME Transactions on Mechatronics, 2019, 24(3): 1033−1040 doi: 10.1109/TMECH.2019.2906289 [32] Muñoz-Vázquez A J, Sánchez-Torres J D, Gutiérrez-Alcalá S, Jiménez-Rodríguez E, Loukianov A G. Predefined-time robust contour tracking of robotic manipulators. Journal of the Franklin Institute, 2019, 356(5): 2709−2722 doi: 10.1016/j.jfranklin.2019.01.041 [33] 吴慈航, 闫建国, 钱先云, 郭一鸣, 屈耀红. 受油机指定时间姿态稳定控制. 航空学报, 2022, 43(2): 373−381 doi: 10.7527/j.issn.1000-6893.2022.2.hkxb202202030Wu Ci-Hang, Yan Jian-Guo, Qian Xian-Yun, Guo Yi-Ming, Qu Yao-Hong. Predefined-time attitude stabilization control of receiver aircraft. Acta Aeronautica et Astronautica Sinica, 2022, 43(2): 373−381 doi: 10.7527/j.issn.1000-6893.2022.2.hkxb202202030 [34] Chakraborty A, Seiler P, Balas G J. Susceptibility of F/A-18 flight controllers to the falling-leaf mode: Nonlinear analysis. Journal of Guidance, Control, and Dynamics, 2011, 34(1): 73−85 doi: 10.2514/1.50675 [35] Han J. From PID to active disturbance rejection control. IEEE transactions on Industrial Electronics, 2009, 56(3): 900−906 doi: 10.1109/TIE.2008.2011621 [36] Chakraborty A, Seiler P, Balas G J. Susceptibility of F/A-18 flight controllers to the falling-leaf mode: Linear analysis. Journal of Guidance, Control, and Dynamics, 2011, 34(1): 57−72 doi: 10.2514/1.50674 [37] Yue L, Liu G, Hong G. Design and simulation of F/A-18A automatic carrier landing guidance controller. In AIAA Modeling and Simulation Technologies Conference, 2016, 3527: 1−11 [38] Guo Y, Xu B. Finite-time deterministic learning command filtered control for hypersonic flight vehicle. IEEE Transactions on Aerospace and Electronic Systems, 2022, 58(5): 4214−4225 doi: 10.1109/TAES.2022.3160687 -

 下载:
下载:


图(15)
计量
- 文章访问数: 215
- HTML全文浏览量: 185
- PDF下载量: 37
- 被引次数: 0
