

Attitude Control of Tilt-rotor Unmanned Aerial Vehicle Based on Fixed-time Model Reference Method
-
摘要: 倾转旋翼无人机动力学特性复杂, 过渡过程中的变速变构型特性导致系统具有较大的模型不确定性, 且容易受到阵风扰动等影响, 对姿态控制律设计提出很高要求. 针对该问题, 本文建立一种扰动观测器结合终端滑模补偿器的模型参考姿态控制方法. 基于齐次系统理论设计固定时间收敛扰动观测器, 实现对倾转旋翼无人机未建模动态和外部扰动的准确估计; 基于一种新型非线性饱和函数设计固定时间收敛终端滑模控制器, 结合低通滤波实现对指令的快速高品质跟踪; 为进一步解决控制奇异性问题, 提出在纵轴附近邻域对控制器的改进策略. 仿真结果表明, 所提方法在应对倾转旋翼无人机模型不确定性和外部扰动方面具有较强的鲁棒性, 相比基于有限时间稳定性理论的模型参考姿态控制方法, 固定时间收敛控制提供了更高的控制精度和更平滑的输出.Abstract: Tilt-rotor unmanned aerial vehicles (UAVs) exhibit complex dynamic characteristics during the transition process. Their variable speed and variable configuration features result in significant model uncertainties. Meanwhile, they are easily affected by disturbances such as gusts of wind, which imposes high demands on the design of attitude control laws. To address this issue, this paper proposes a model reference attitude control method that combines a disturbance observer with a terminal sliding mode compensator. A fixed-time convergent disturbance observer is designed to accurately estimate the unmodeled dynamics and external disturbances of the tilt-rotor UAV based on homogeneous system theory. A fixed-time convergent terminal sliding mode controller is designed by using a novel nonlinear saturation function, achieving fast and high-quality tracking of the reference signal with low-pass filtering. To further address the control singularity issue, an improvement strategy is proposed for the controller in the vicinity of the longitudinal axis. Simulation results show that the proposed method exhibits strong robustness against model uncertainties and external disturbances for tilt-rotor UAVs. Compared to the model reference attitude control method based on finite-time stability theory, the fixed-time convergence control provides higher control accuracy and smoother output.
-
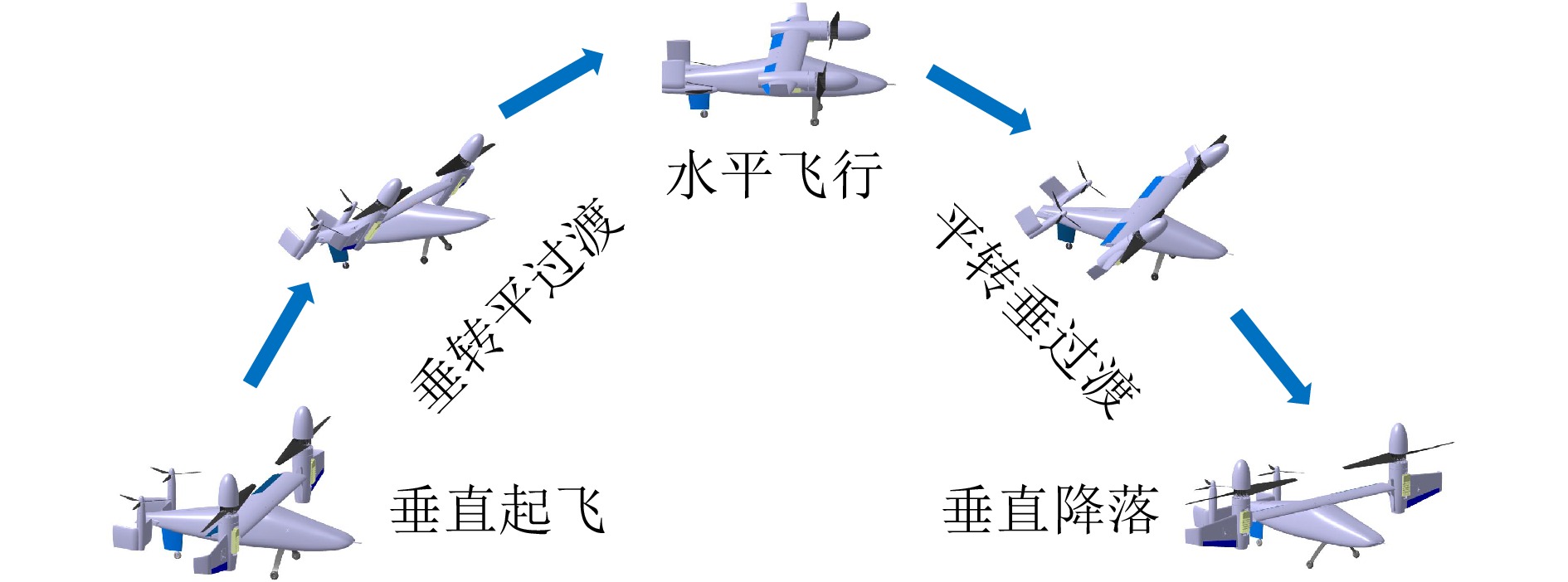
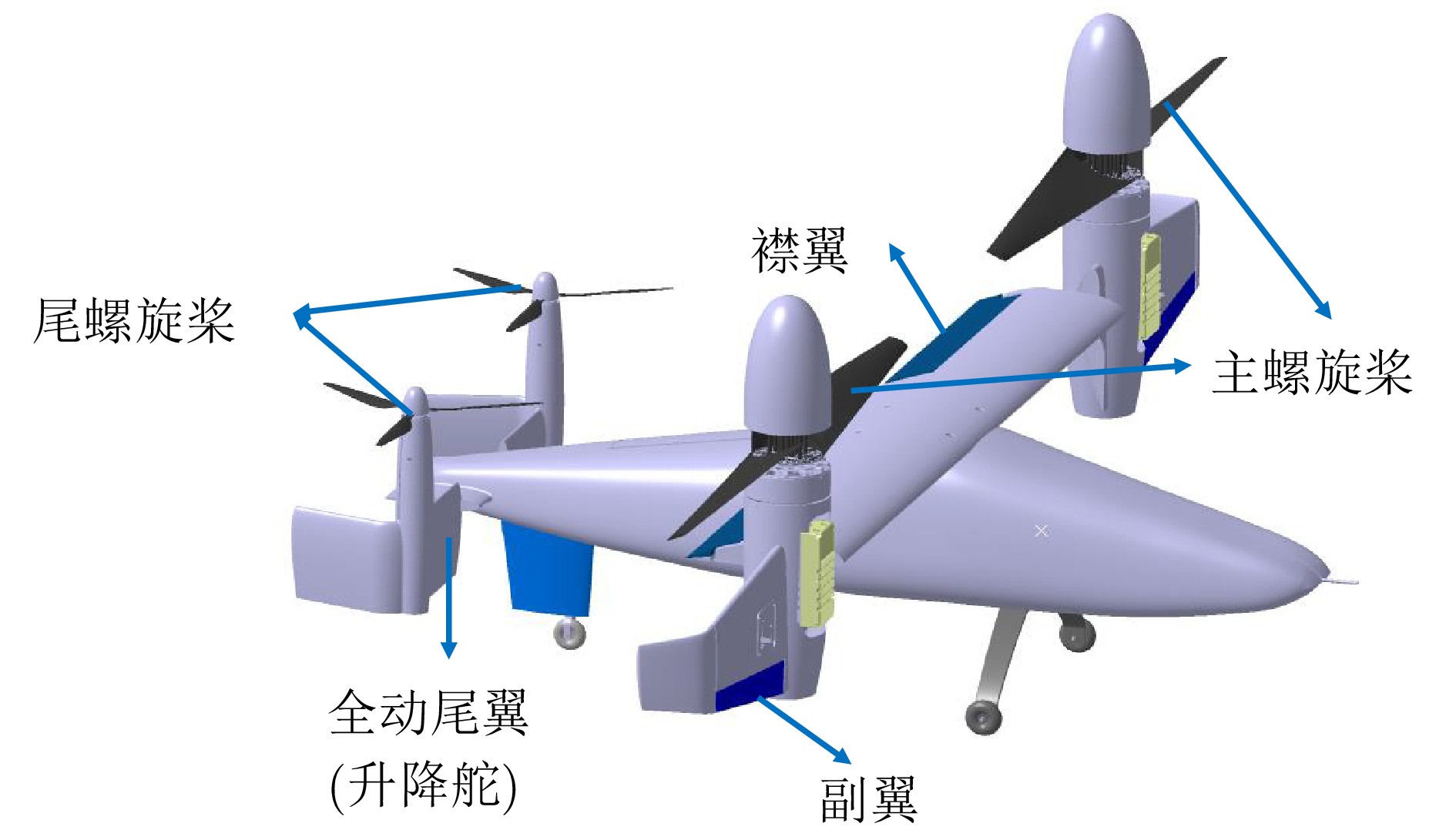
图 1 倾转旋翼无人机全包线典型飞行状态
Fig. 1 Typical flight modes of tilt-rotor unmanned aerial vehicles throughout the entire flight envelope
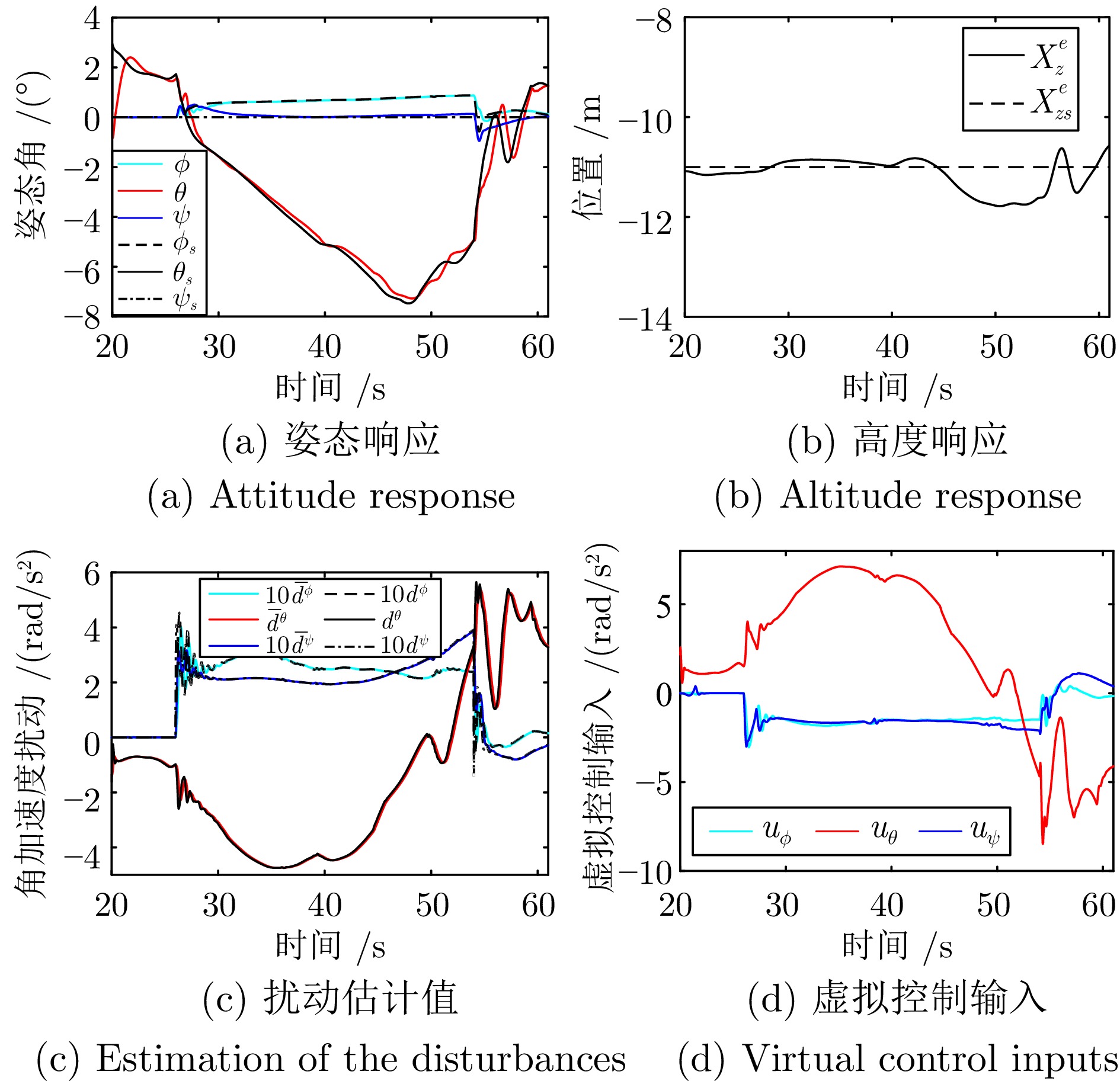
图 6 有限时间模型参考控制垂转平仿真结果
Fig. 6 Simulation results during the hover to cruise transition flight under the finite-time model reference control
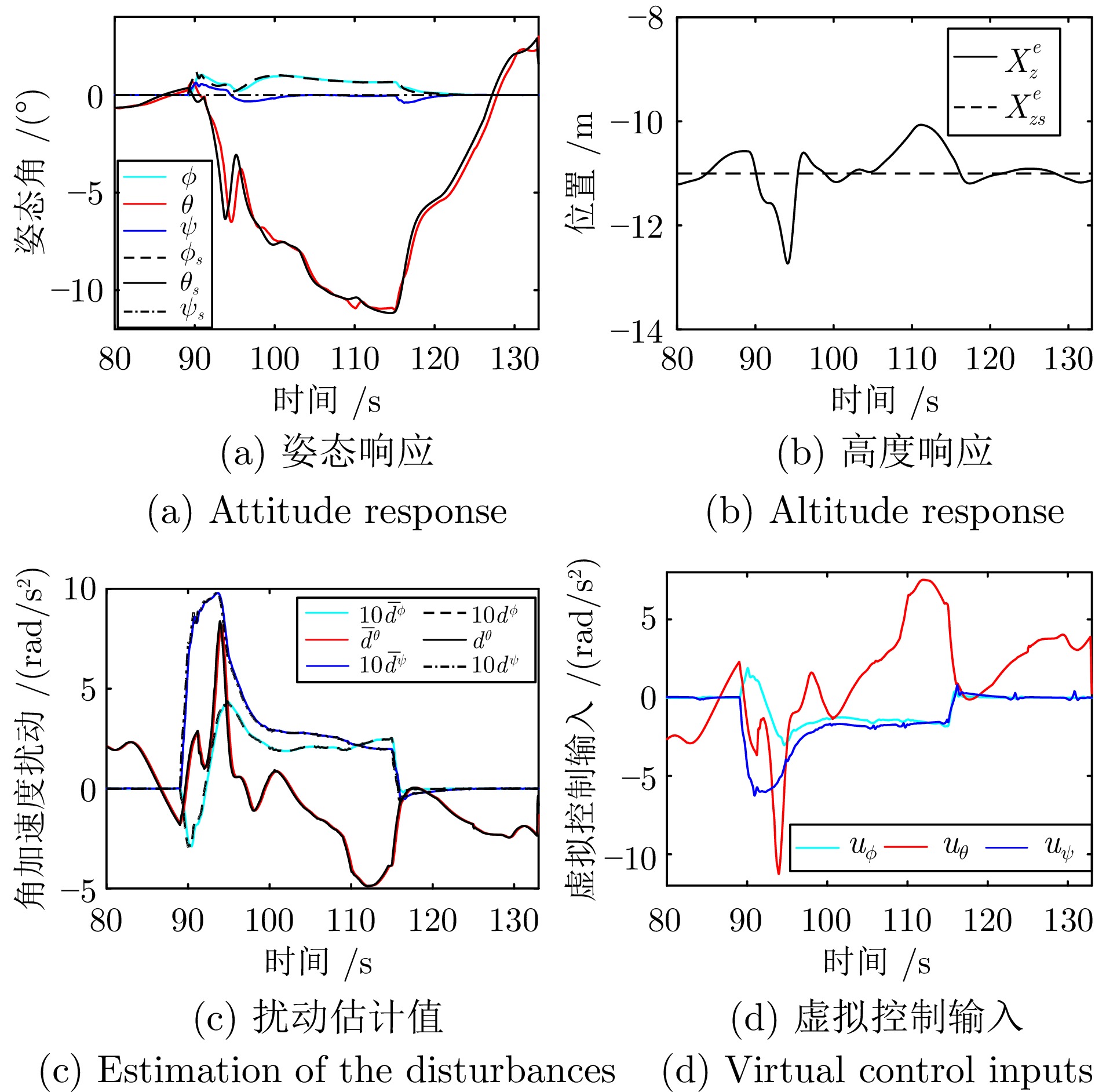
图 7 有限时间模型参考控制平转垂仿真结果
Fig. 7 Simulation results during the cruise to hover transition flight under the finite-time model reference control
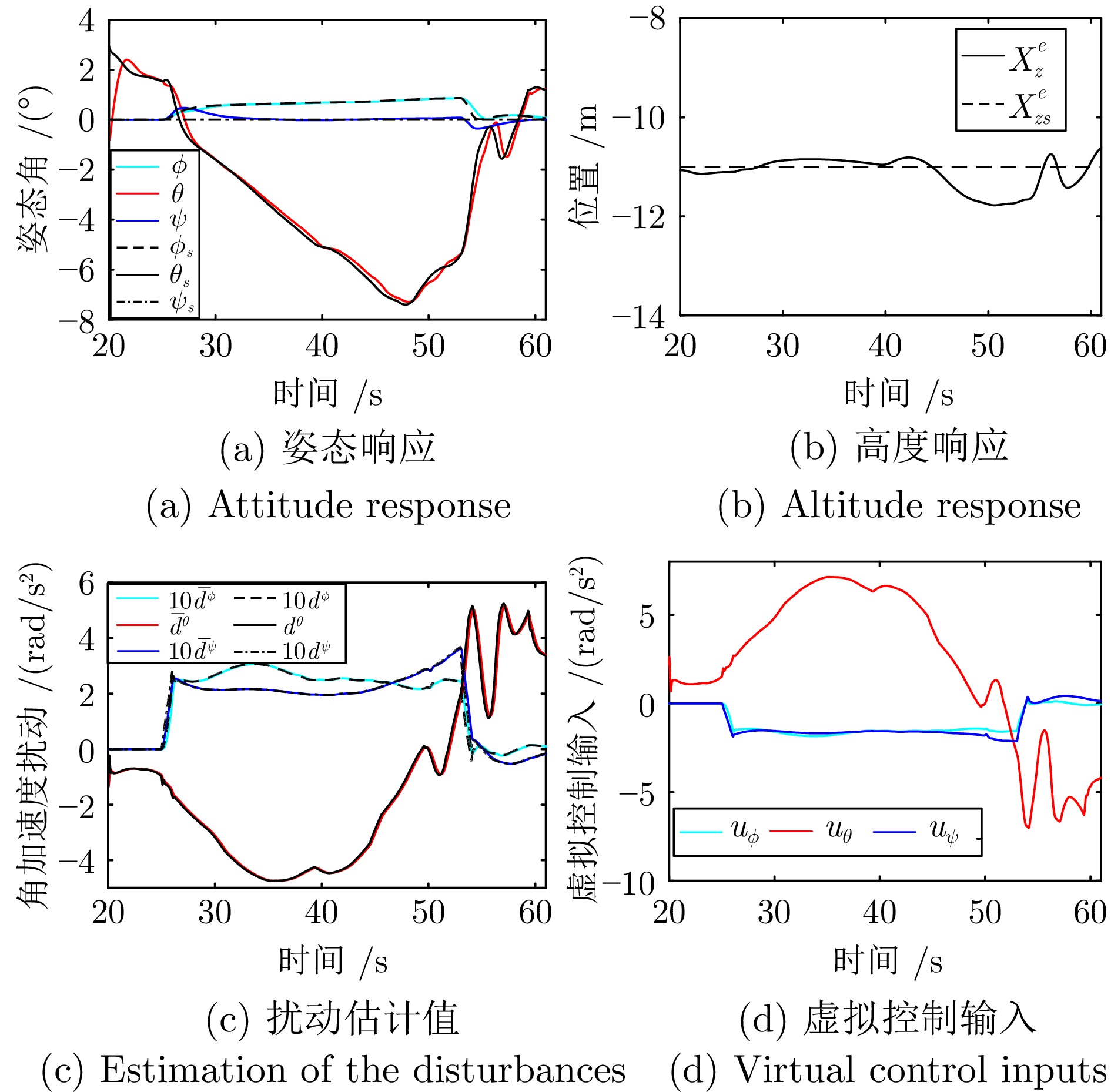
图 8 固定时间模型参考控制垂转平仿真结果
Fig. 8 Simulation results during the hover to cruise transition flight under the fixed-time model reference control
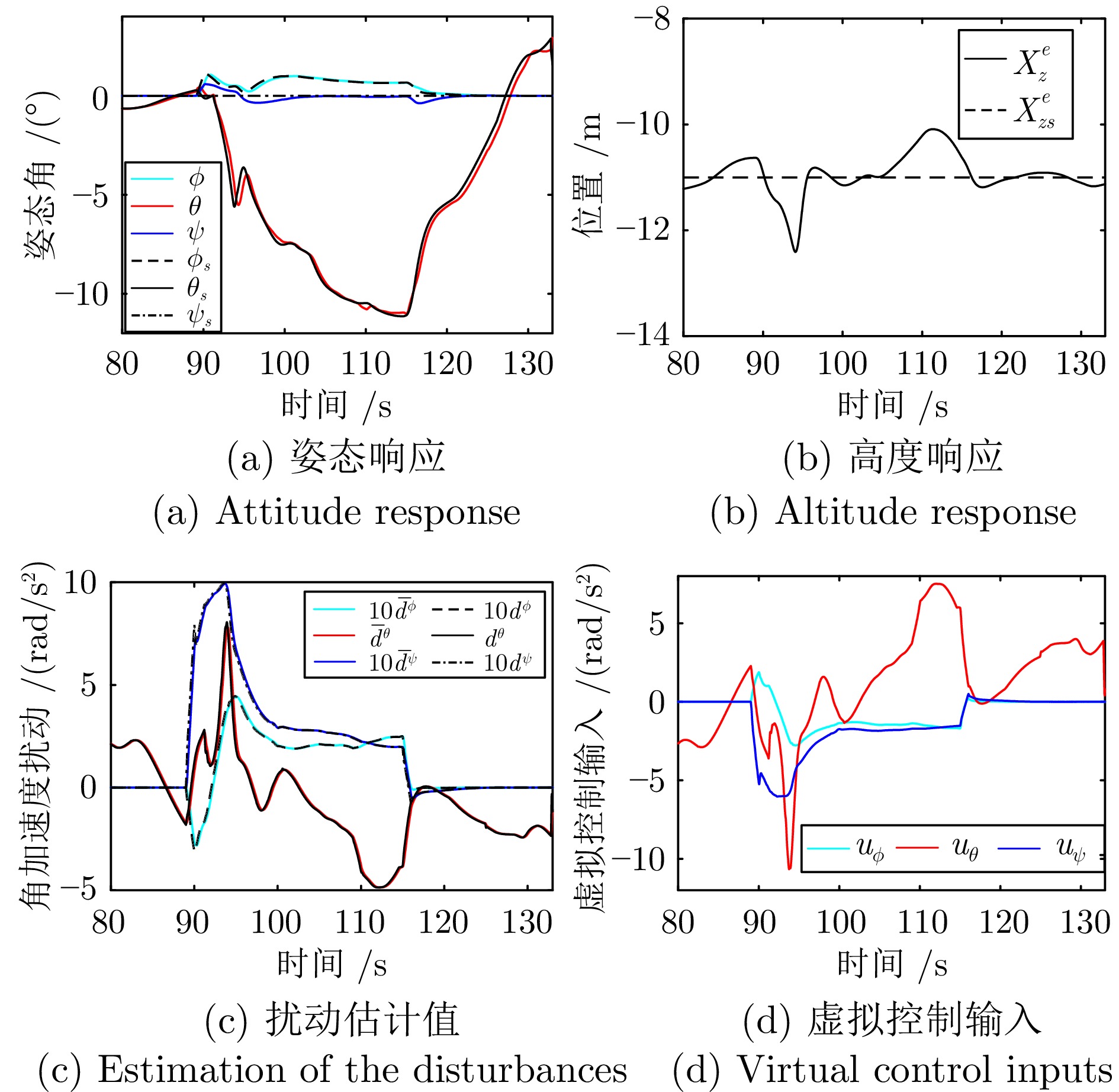
图 9 固定时间模型参考控制平转垂仿真结果
Fig. 9 Simulation results during the cruise to hover transition flight under the fixed-time model reference control
表 1 参考模型参数
Table 1 Reference model parameters
通道 $ a_{m1} $ $ a_{m2} $ 滚转 $ {\left( {1 + V_x^b/15} \right)^2} $ $ 1.8 + 0.12V_x^b $ 俯仰 $ \left( {2 + V_x^b/10} \right)^2 $ $ 3.2 + 0.16V_x^b $ 偏航 $ {\left( {1 + V_x^b/60} \right)^2} $ $ 2.0 + V_x^b/30 $  下载: 导出CSV
下载: 导出CSV
表 2 有限时间模型参考控制器参数
Table 2 Finite-time model reference controller parameters
通道 $ p $ $ \alpha $ $ p_s $ $ \alpha_s $ $ D_o $ $ \alpha_o $ $ k_1 $ $ k_2 $ 滚转 0.6 1.2 1 5/9 0.8 0.95 20 100 俯仰 0.8 1.2 1 1/3 3.0 0.95 20 100 偏航 0.3 1.2 1 5/9 0.8 0.95 20 100
下载: 导出CSV
表 3 固定时间模型参考控制器参数
Table 3 Fixed-time model reference controller parameters
通道 $ p $ $ \mu $ $ c $ $ p_s $ $ \mu_s $ $ c_s $ $ D_o $ $ \alpha_o $ $ k_1 $ $ k_2 $ $ \beta_o $ $ l_1 $ $ l_2 $ 滚转 0.5 2/9 1 1.0 3/9 2 0.5 0.94 20 100 1.06 20 100 俯仰 1.0 2/9 2 1.5 4/9 2 2.0 0.94 20 100 1.06 30 225 偏航 0.5 2/9 1 1.0 3/9 2 0.5 0.94 20 100 1.06 20 100
下载: 导出CSV
表 4 有限/固定时间模型参考控制方法性能指标对比
Table 4 Comparison of performance indexes of finite-time/fixed-time model reference control methods
设计方法 $ T_E^z $ $ T_E^{\phi} $ $ T_E^{\theta} $ $ T_E^{\psi} $ $ T_E^{o\phi} $ $ T_E^{o\theta} $ $ T_E^{o\psi} $ $ T_V^{\phi} $ $ T_V^{\theta} $ $ T_V^{\psi} $ 有限时间 26.57 0.06 0.55 0.08 0.44 11.42 0.56 125.73 598.62 147.77 固定时间 23.73 0.05 0.38 0.06 0.41 9.65 0.56 87.76 520.64 120.94
下载: 导出CSV
-
[1] Misra A, Jayachandran S, Kenche S, Katoch A, Suresh A, Gundabattini E, et al. A review on vertical take-off and landing (VTOL) tilt-rotor and tilt wing unmanned aerial vehicles (UAVs). Journal of Engineering, 2022, 2022(1): Article No. 1803638Misra A, Jayachandran S, Kenche S, Katoch A, Suresh A, Gundabattini E, et al. A review on vertical take-off and landing (VTOL) tilt-rotor and tilt wing unmanned aerial vehicles (UAVs). Journal of Engineering, 2022, 2022(1): Article No. 1803638 [2] Hegde N T, George V I, Nayak C G, Kumar K. Design, dynamic modelling and control of tilt-rotor UAVs: A review. International Journal of Intelligent Unmanned Systems, 2019, 8(3): 143−161Hegde N T, George V I, Nayak C G, Kumar K. Design, dynamic modelling and control of tilt-rotor UAVs: A review. International Journal of Intelligent Unmanned Systems, 2019, 8(3): 143−161 [3] Eskandarpour A, Mehrandezh M, Gupta K, Ramirez-Serrano A, Soltanshah M. A constrained robust switching MPC structure for tilt-rotor UAV trajectory tracking problem. Nonlinear Dynamics, 2023, 111(18): 17247−17275Eskandarpour A, Mehrandezh M, Gupta K, Ramirez-Serrano A, Soltanshah M. A constrained robust switching MPC structure for tilt-rotor UAV trajectory tracking problem. Nonlinear Dynamics, 2023, 111(18): 17247−17275 [4] Govdeli Y, bin Muzaffar S M, Raj R, Elhadidi B, Kayacan E. Unsteady aerodynamic modeling and control of pusher and tilt-rotor quadplane configurations. Aerospace Science and Technology, 2019, 94: Article No. 105421Govdeli Y, bin Muzaffar S M, Raj R, Elhadidi B, Kayacan E. Unsteady aerodynamic modeling and control of pusher and tilt-rotor quadplane configurations. Aerospace Science and Technology, 2019, 94: Article No. 105421 [5] Wang Z G, Wang Q N, Yu H R, Duan D Y, Ding Z W, Li J B. Trimming analysis method of quad tilt rotor based on aerodynamic interference model. Journal of Aircraft, 2021, 58(2): 253−265Wang Z G, Wang Q N, Yu H R, Duan D Y, Ding Z W, Li J B. Trimming analysis method of quad tilt rotor based on aerodynamic interference model. Journal of Aircraft, 2021, 58(2): 253−265 [6] Li W, Shi S, Chen M, Wu Q X. Adaptive tracking control for the conversion mode of tilt-rotor aircraft with switched fuzzy modeling. International Journal of Fuzzy Systems, 2024, 26(4): 1203−1214Li W, Shi S, Chen M, Wu Q X. Adaptive tracking control for the conversion mode of tilt-rotor aircraft with switched fuzzy modeling. International Journal of Fuzzy Systems, 2024, 26(4): 1203−1214 [7] Comer A M, Chakraborty I. Full envelope flight control system design and optimization for a tilt-wing aircraft. Journal of the American Helicopter Society, 2024, 69(3): 1−18Comer A M, Chakraborty I. Full envelope flight control system design and optimization for a tilt-wing aircraft. Journal of the American Helicopter Society, 2024, 69(3): 1−18 [8] Bauersfeld L, Spannagl L, Ducard G J J, Onder C H. MPC flight control for a tilt-rotor VTOL aircraft. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(4): 2395−2409Bauersfeld L, Spannagl L, Ducard G J J, Onder C H. MPC flight control for a tilt-rotor VTOL aircraft. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(4): 2395−2409 [9] 朱斌, 陈庆伟. 垂直/短距起降飞机的轨迹跟踪控制器设计. 自动化学报, 2019, 45(6): 1166−1176Zhu Bin, Chen Qing-Wei. Trajectory tracking controller design of vertical or short takeoff and landing aircraft. Acta Automatica Sinica, 2019, 45(6): 1166−1176 [10] Lv Z Y, Zhao Q, Sun X M, Wu Y H. Finite-time control design for a coaxial tilt-rotor UAV. IEEE Transactions on Industrial Electronics, 2024, 71(12): 16132−16142Lv Z Y, Zhao Q, Sun X M, Wu Y H. Finite-time control design for a coaxial tilt-rotor UAV. IEEE Transactions on Industrial Electronics, 2024, 71(12): 16132−16142 [11] Panza S, Lovera M, Sato M, Muraoka K. Structured μ-synthesis of robust attitude control laws for quad-tilt-wing unmanned aerial vehicle. Journal of Guidance, Control, and Dynamics, 2020, 43(12): 2258−2274Panza S, Lovera M, Sato M, Muraoka K. Structured μ-synthesis of robust attitude control laws for quad-tilt-wing unmanned aerial vehicle. Journal of Guidance, Control, and Dynamics, 2020, 43(12): 2258−2274 [12] Yu Z L, Zhang J J, Wang X Y. Thrust vectoring control of a novel tilt-rotor UAV based on backstepping sliding model method. Sensors, 2023, 23(2): Article No. 574Yu Z L, Zhang J J, Wang X Y. Thrust vectoring control of a novel tilt-rotor UAV based on backstepping sliding model method. Sensors, 2023, 23(2): Article No. 574 [13] 刘双喜, 林泽淮, 刘伟, 闫斌斌, 黄伟. 基于INDI的倾转旋翼无人机过渡模式控制方案. 航空学报, 2024, 45(17): 236−250Liu Shuang-Xi, Lin Ze-Huai, Liu Wei, Yan Bin-Bin, Huang Wei. Research on transition mode control scheme of tilt rotor UAV based on INDI. Acta Aeronautica et Astronautica Sinica, 2024, 45(17): 236−250 [14] Zhong J Y, Wang C, Zhang H. Transition control of a tail-sitter unmanned aerial vehicle with L1 neural network adaptive control. Chinese Journal of Aeronautics, 2023, 36(7): 460−475Zhong J Y, Wang C, Zhang H. Transition control of a tail-sitter unmanned aerial vehicle with L1 neural network adaptive control. Chinese Journal of Aeronautics, 2023, 36(7): 460−475 [15] Zhang D, Wei B. A review on model reference adaptive control of robotic manipulators. Annual Reviews in Control, 2017, 43: 188−198Zhang D, Wei B. A review on model reference adaptive control of robotic manipulators. Annual Reviews in Control, 2017, 43: 188−198 [16] Hou Z S, Xiong S S. On model-free adaptive control and its stability analysis. IEEE Transactions on Automatic Control, 2019, 64(11): 4555−4569Hou Z S, Xiong S S. On model-free adaptive control and its stability analysis. IEEE Transactions on Automatic Control, 2019, 64(11): 4555−4569 [17] Anderson R B, Marshall J A, L'Afflitto A. Constrained robust model reference adaptive control of a tilt-rotor quadcopter pulling an unmodeled cart. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(1): 39−54Anderson R B, Marshall J A, L'Afflitto A. Constrained robust model reference adaptive control of a tilt-rotor quadcopter pulling an unmodeled cart. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(1): 39−54 [18] Liu N J, Cai Z H, Zhao J, Wang Y X. Predictor-based model reference adaptive roll and yaw control of a quad-tiltrotor UAV. Chinese Journal of Aeronautics, 2020, 33(1): 282−295Liu N J, Cai Z H, Zhao J, Wang Y X. Predictor-based model reference adaptive roll and yaw control of a quad-tiltrotor UAV. Chinese Journal of Aeronautics, 2020, 33(1): 282−295 [19] Liu Y, Li H Y, Lu R Q, Zuo Z Y, Li X D. An overview of finite/fixed-time control and its application in engineering systems. IEEE/CAA Journal of Automatica Sinica, 2022, 9(12): 2106−2120Liu Y, Li H Y, Lu R Q, Zuo Z Y, Li X D. An overview of finite/fixed-time control and its application in engineering systems. IEEE/CAA Journal of Automatica Sinica, 2022, 9(12): 2106−2120 [20] Sun Z Y, Shao Y, Chen C C. Fast finite-time stability and its application in adaptive control of high-order nonlinear system. Automatica, 2019, 106: 339−348Sun Z Y, Shao Y, Chen C C. Fast finite-time stability and its application in adaptive control of high-order nonlinear system. Automatica, 2019, 106: 339−348 [21] Song Y D, Ye H F, Lewis F L. Prescribed-time control and its latest developments. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023, 53(7): 4102−4116Song Y D, Ye H F, Lewis F L. Prescribed-time control and its latest developments. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023, 53(7): 4102−4116 [22] Bhat S P, Bernstein D S. Lyapunov analysis of finite-time differential equations. In: Proceedings of the American Control Conference (ACC). Seattle, USA: IEEE, 1995. 1831−1832Bhat S P, Bernstein D S. Lyapunov analysis of finite-time differential equations. In: Proceedings of the American Control Conference (ACC). Seattle, USA: IEEE, 1995. 1831−1832 [23] Bhat S P, Bernstein D S. Finite-time stability of homogeneous systems. In: Proceedings of the American Control Conference (ACC). Albuquerque, USA: IEEE, 1997. 2513−2514Bhat S P, Bernstein D S. Finite-time stability of homogeneous systems. In: Proceedings of the American Control Conference (ACC). Albuquerque, USA: IEEE, 1997. 2513−2514 [24] Polyakov A, Fridman L. Stability notions and Lyapunov functions for sliding mode control systems. Journal of the Franklin Institute, 2014, 351(4): 1831−1865Polyakov A, Fridman L. Stability notions and Lyapunov functions for sliding mode control systems. Journal of the Franklin Institute, 2014, 351(4): 1831−1865 [25] Andrieu V, Praly L, Astolfi A. Homogeneous approximation, recursive observer design, and output feedback. SIAM Journal on Control and Optimization, 2008, 47(4): 1814−1850Andrieu V, Praly L, Astolfi A. Homogeneous approximation, recursive observer design, and output feedback. SIAM Journal on Control and Optimization, 2008, 47(4): 1814−1850 [26] Sun H B, Hou L L, Zong G D, Yu X H. Fixed-time attitude tracking control for spacecraft with input quantization. IEEE Transactions on Aerospace and Electronic Systems, 2019, 55(1): 124−134Sun H B, Hou L L, Zong G D, Yu X H. Fixed-time attitude tracking control for spacecraft with input quantization. IEEE Transactions on Aerospace and Electronic Systems, 2019, 55(1): 124−134 [27] Wang J H, Alattas K A, Bouteraa Y, Mofid O, Mobayen S. Adaptive finite-time backstepping control tracker for quadrotor UAV with model uncertainty and external disturbance. Aerospace Science and Technology, 2023, 133: Article No. 108088Wang J H, Alattas K A, Bouteraa Y, Mofid O, Mobayen S. Adaptive finite-time backstepping control tracker for quadrotor UAV with model uncertainty and external disturbance. Aerospace Science and Technology, 2023, 133: Article No. 108088 [28] Xiao J, Zeng Z G, Wen S P, Wu A L, Wang L M. A unified framework design for finite-time and fixed-time synchronization of discontinuous neural networks. IEEE Transactions on Cybernetics, 2021, 51(6): 3004−3016Xiao J, Zeng Z G, Wen S P, Wu A L, Wang L M. A unified framework design for finite-time and fixed-time synchronization of discontinuous neural networks. IEEE Transactions on Cybernetics, 2021, 51(6): 3004−3016 [29] Wang C Y, Dong W, Wang J N, Shan J Y, Xin M. Guidance law design with fixed-time convergent error dynamics. Journal of Guidance, Control, and Dynamics, 2021, 44(7): 1389−1398Wang C Y, Dong W, Wang J N, Shan J Y, Xin M. Guidance law design with fixed-time convergent error dynamics. Journal of Guidance, Control, and Dynamics, 2021, 44(7): 1389−1398 [30] Cheng W L, Zhang K, Jiang B. Fixed-time and prescribed-time fault-tolerant optimal tracking control for heterogeneous multiagent systems. IEEE Transactions on Automation Science and Engineering, 2024, 21(4): 7275−7286Cheng W L, Zhang K, Jiang B. Fixed-time and prescribed-time fault-tolerant optimal tracking control for heterogeneous multiagent systems. IEEE Transactions on Automation Science and Engineering, 2024, 21(4): 7275−7286 [31] Zhu J H, Yang Y J, Wang X Y, Yuan X M, Yang X. Attitude control of a novel tilt-wing UAV in hovering flight. Science China Information Sciences, 2023, 66(5): Article No. 154201Zhu J H, Yang Y J, Wang X Y, Yuan X M, Yang X. Attitude control of a novel tilt-wing UAV in hovering flight. Science China Information Sciences, 2023, 66(5): Article No. 154201 [32] Ding S H, Mei K Q, Yu X H. Adaptive second-order sliding mode control: A Lyapunov approach. IEEE Transactions on Automatic Control, 2022, 67(10): 5392−5399Ding S H, Mei K Q, Yu X H. Adaptive second-order sliding mode control: A Lyapunov approach. IEEE Transactions on Automatic Control, 2022, 67(10): 5392−5399 [33] abdul Ghaffar A F, Richardson T, Greatwood C. A combined model reference adaptive control law for multirotor UAVs. IET Control Theory & Applications, 2021, 15(11): 1474−1487abdul Ghaffar A F, Richardson T, Greatwood C. A combined model reference adaptive control law for multirotor UAVs. IET Control Theory & Applications, 2021, 15(11): 1474−1487 [34] Marshall J A, Carter G I, L'Afflitto A. Model reference adaptive control for prescribed performance and longitudinal control of a tail-sitter UAV. In: Proceedings of the AIAA SCITECH 2022 Forum. San Diego, USA: AIAA, 2022. Article No. 1380Marshall J A, Carter G I, L'Afflitto A. Model reference adaptive control for prescribed performance and longitudinal control of a tail-sitter UAV. In: Proceedings of the AIAA SCITECH 2022 Forum. San Diego, USA: AIAA, 2022. Article No. 1380 [35] Basin M, Yu P, Shtessel Y. Finite- and fixed-time differentiators utilising HOSM techniques. IET Control Theory & Applications, 2017, 11(8): 1144−1152Basin M, Yu P, Shtessel Y. Finite- and fixed-time differentiators utilising HOSM techniques. IET Control Theory & Applications, 2017, 11(8): 1144−1152 [36] Venkataraman S T, Gulati S. Control of nonlinear systems using terminal sliding modes. Journal of Dynamic Systems, Measurement, and Control, 1993, 115(3): 554−560Venkataraman S T, Gulati S. Control of nonlinear systems using terminal sliding modes. Journal of Dynamic Systems, Measurement, and Control, 1993, 115(3): 554−560 -

计量
- 文章访问数: 976
- HTML全文浏览量: 276
- PDF下载量: 108
- 被引次数: 0
