

Coverage-based Cluster Cooperative Encirclement of High-speed and Highly Maneuverable Targets
-
摘要: 集群协同围捕技术在空天防御领域逐渐扮演愈加关键的角色, 本文基于碰撞平面等效覆盖方法, 在三维空间内基于非线性动态模型提出一种新的高速强机动目标的覆盖策略. 首先基于三维圆锥体可达域提出新的碰撞平面等效覆盖方法, 阐释加速度覆盖和位置覆盖的区别与联系, 并从几何角度分析交会角对完全覆盖的影响; 其次, 考虑实际环境下飞行器过载弱于目标的情况, 基于偏置比例导引设计协同制导律, 能够实现对目标加速度的覆盖, 并基于覆盖率和零控脱靶量提出分段覆盖动态调节与快速收敛策略, 使得多飞行器在前期能够保持高覆盖率, 后期能够降低整体的脱靶量, 实现围捕覆盖的优势; 最后, 结合数值仿真进行了可行性验证.Abstract: The cluster cooperative encirclement technology is playing an increasingly critical role in the air and space defense domain. In this paper, a new coverage strategy for high-speed, highly maneuvering targets in three-dimensional space is proposed based on the collision plane equivalent coverage method using nonlinear dynamic models. First, a new collision plane equivalent coverage method based on the three-dimensional cone of approach is proposed, explaining the differences and connections between velocity coverage and position coverage, and analyzing the influence of the intercept angle on complete coverage from a geometric perspective. Second, considering the case where the flight vehicle's overload is less than that of the target in real-world conditions, a cooperative guidance law based on the biased proportional guidance is designed to achieve velocity coverage of the target, and a dynamic adjustment and fast convergence strategy based on coverage rate and zero-control miss distance is proposed to enable the multi-vehicle to maintain a high coverage rate in the early stage and reduce the overall miss distance in the later stage, thereby achieving the advantage of encirclement coverage. Finally, the feasibility is verified through numerical simulation.
-
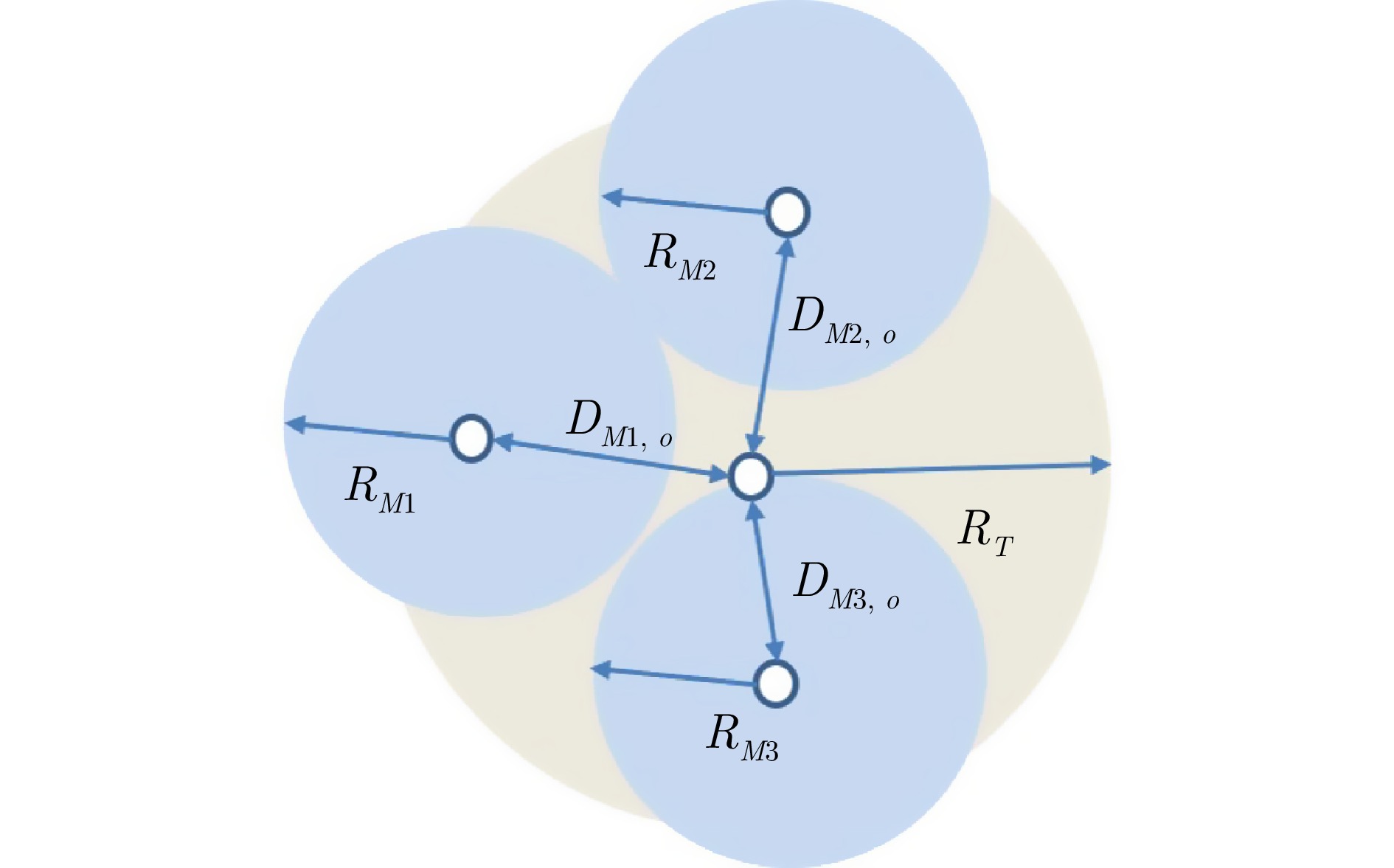
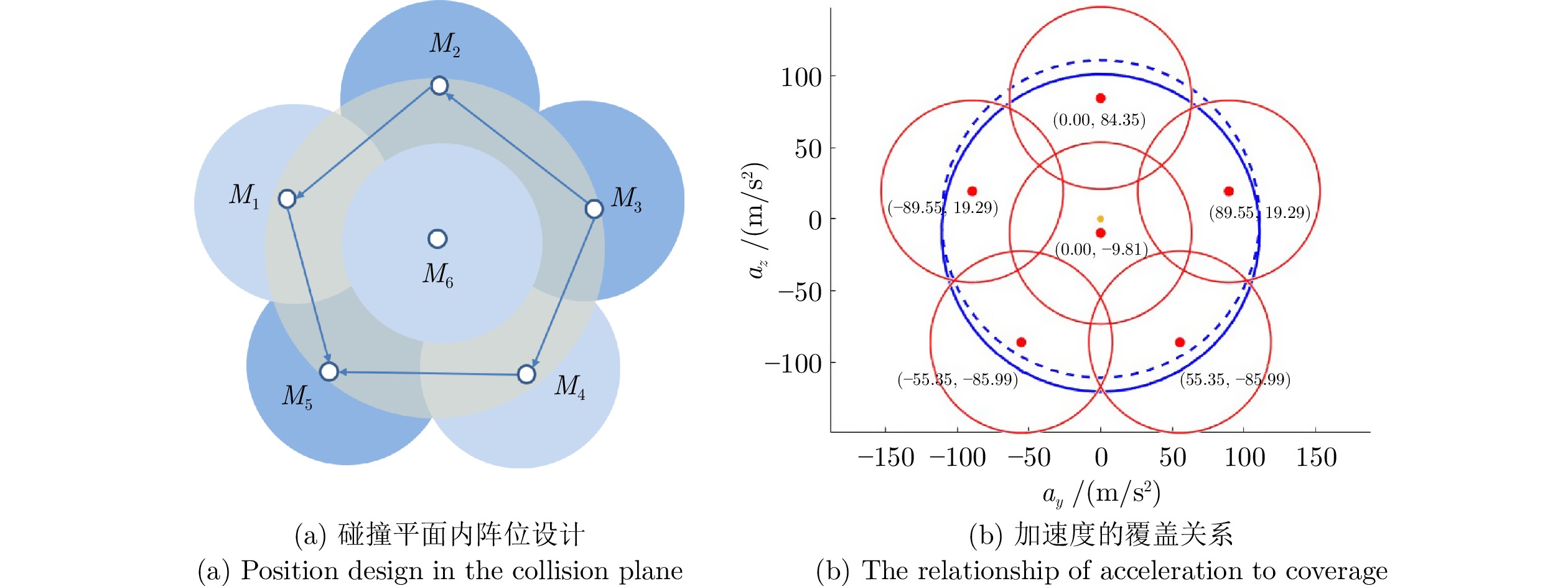
图 1 三维空间内飞行器可达域
Fig. 1 The reachable domain of an interceptor in three-dimensional space
图 10 对最大正向机动的目标的围捕覆盖
Fig. 10 The encirclement coverage of the target with the maximum positive maneuverability
图 11 对负向最大机动的目标的围捕覆盖
Fig. 11 The encirclement coverage of the target with the maximum negative maneuverability
图 12 脱靶量关于目标机动的分布
Fig. 12 Distribution of miss distance with respect to target maneuvering
图 13 目标以随机时间切换的方波机动过载
Fig. 13 Overload of target maneuvering with random time-switched square wave pattern
图 14 对目标随机时间方波机动的围捕覆盖
Fig. 14 The encirclement coverage for the random square wave maneuvering target
表 1 不同过载比下的飞行器数量
Table 1 The number of interceptors under different overload ratios
$\mu$ $[\sqrt{3}/2,\; 1)$ $[\sqrt{2}/2,\; \sqrt{3}/2)$ $[0. 609,\; \sqrt{2}/2)$ [0.555, 0.609) [0.5, 0.555) $n$ 3 4 5 6 7  下载: 导出CSV
下载: 导出CSV
表 2 初始的制导参数
Table 2 Initial guidance parameters
制导参数 ${{{M}}_{{{1}}}}$ ${{{M}}_{{{2}}}}$ ${{{M}}_{{{3}}}}$ ${{{M}}_{{{4}}}}$ ${{{M}}_{{{5}}}}$ ${{{M}}_{{{6}}}}$ $B_{y}$ 44.4938 0 − 44.4938 − 28.1938 28.1938 0 $B_{z}$ − 14.7910 − 46.5865 − 14.7910 38.0842 38.0842 0 $\eta_{My,\; 0}\; ({}^\circ)$ 9.4049 0 − 9.4049 − 5.8450 5.8450 0 $\eta_{Mz,\; 0}\; ({}^\circ)$ − 3.0309 − 9.8796 − 3.0309 7.9790 7.9790 0
下载: 导出CSV
表 3 目标以最大加速度机动的情况下的脱靶量
Table 3 Miss distance under target maximum acceleration maneuver
机动形式 调节策略 有效拦截目标的飞行器 对应脱靶量(m) 最大正向机动 预设调节 $M_3$ 1.18 动态调节 $M_2,\; M_3$ 0. 95, 1.12 最大负向机动 预设调节 $M_5$ 1.35 动态调节 $M_5$ 1.22
下载: 导出CSV
表 4 目标以随机方波机动的情况下的脱靶量
Table 4 Miss distance under target maneuvering with random square wave pattern
机动形式 调节策略 有效拦截目标的飞行器 对应脱靶量(m) 随机方
波机动预设调节 $M_6$ 0.85 动态调节 $M_2,\; M_3,\; M_6$ 0.62, 0.73, 0.80
下载: 导出CSV
-
[1] Salmon D M, Heine W. Reachable sets analysis——An efficient technique for performing missile/sensor tradeoff studies. AIAA Journal, 1973, 11(7): 927−931 doi: 10.2514/3.50543 [2] Robb M, White B A, Tsourdos A, Rulloda D. Reachability guidance: A novel concept to improve mid-course guidance. In: Proceedings of the American Control Conference. Portland, USA: IEEE, 2005. 339−345 [3] Robb M, White B, Tsourdos A. Earliest intercept line guidance: A novel concept for improving mid-course guidance in area air defence. In: Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit. San Francisco, USA: AIAA, 2005. Article No. 5971 [4] Mizukami K, Eguchi K. A geometrical approach to problems of pursuit-evasion games. Journal of the Franklin Institute, 1977, 303(4): 371−384 doi: 10.1016/0016-0032(77)90118-1 [5] Chung C F, Furukawa T, Goktogan A H. Coordinated control for capturing a highly maneuverable evader using forward reachable sets. In: Proceedings of the IEEE International Conference on Robotics and Automation. Orlando, USA: IEEE, 2006. 1336−1341 [6] Chung C F, Furukawa T. A reachability-based strategy for the time-optimal control of autonomous pursuers. Engineering Optimization, 2008, 40(1): 67−93 doi: 10.1080/03052150701593133 [7] 于大腾, 王华, 李林森, 王洪宇. 能量约束下的动能拦截弹逆轨拦截攻击区建模. 宇航学报, 2017, 38(7): 704−713 doi: 10.3873/j.issn.1000-1328.2017.07.005Yu Da-Teng, Wang Hua, Li Lin-Sen, Wang Hong-Yu. Attack area modeling of kinetic kill vehicle head-on interception with energy constraint. Journal of Astronautics, 2017, 38(7): 704−713 doi: 10.3873/j.issn.1000-1328.2017.07.005 [8] Dubins L E. On curves of minimal length with a constraint on average curvature, and with prescribed initial and terminal positions and tangents. American Journal of Mathematics, 1957, 79(3): 497−516 doi: 10.2307/2372560 [9] Meyer Y, Isaiah P, Shima T. On Dubins paths to intercept a moving target. Automatica, 2015, 53: 256−263 doi: 10.1016/j.automatica.2014.12.039 [10] Yan X, Kuang M, Zhu J, Yuan X. Reachability-based cooperative strategy for intercepting a highly maneuvering target using inferior missiles. Aerospace Science and Technology, 2020, 106: Article No. 106057 doi: 10.1016/j.ast.2020.106057 [11] Chen W, Shao L, Lei H. On-line trajectory generation of midcourse cooperative guidance for multiple interceptors. Journal of Systems Engineering and Electronics, 2022, 33(1): 197−209 doi: 10.23919/JSEE.2022.000020 [12] Isaacs R. Differential Games: A Mathematical Theory With Applications to Warfare and Pursuit, Control and Optimization. Massachusetts: Courier Corporation, 1999. 10−15 [13] Ramana M V, Kothari M. Pursuit strategy to capture high-speed evaders using multiple pursuers. Journal of Guidance, Control, and Dynamics, 2017, 40(1): 139−149 doi: 10.2514/1.G000584 [14] 符小卫, 陈子浩. 基于一致性协议的多无人机协同围捕控制方法. 系统工程与电子技术, 2021, 43(9): 2501−2507 doi: 10.12305/j.issn.1001-506X.2021.09.17Fu Xiao-Wei, Chen Zi-Hao. Cooperative capture control method for multi-UAV based on consensus protocol. Systems Engineering and Electronics, 2021, 43(9): 2501−2507 doi: 10.12305/j.issn.1001-506X.2021.09.17 [15] Liang L, Deng F, Peng Z, Li X X, Zha W Z. A differential game for cooperative target defense. Automatica, 2019, 102: 58−71 doi: 10.1016/j.automatica.2018.12.034 [16] Su W S, Shin H S, Chen L, Tsourdos A. Cooperative interception strategy for multiple inferior missiles against one highly maneuvering target. Aerospace Science and Technology, 2018, 80: 91−100 doi: 10.1016/j.ast.2018.06.026 [17] Su W S, Li K B, Chen L. Coverage-based three-dimensional cooperative guidance strategy against highly maneuvering target. Aerospace Science and Technology, 2019, 85: 556−566 doi: 10.1016/j.ast.2018.08.023 [18] 肖惟, 于江龙, 董希旺, 李清东, 任章. 过载约束下的大机动目标协同拦截. 航空学报, 2020, 41(S1): 184−194 doi: 10.7527/S1000-6893.2019.23777Xiao Wei, Yu Jiang-Long, Dong Xi-Wang, Li Qing-Dong, Ren Zhang. Cooperative interception against highly maneuvering target with acceleration constraints. Acta Aeronautica et Astronautica Sinica, 2020, 41(S1): 184−194 doi: 10.7527/S1000-6893.2019.23777 [19] Chen Z Y, Yu J L, Dong X W, Ren Z. Three-dimensional cooperative guidance strategy and guidance law for intercepting highly maneuvering target. Chinese Journal of Aeronautics, 2021, 34(5): 485−495 doi: 10.1016/j.cja.2020.12.014 [20] Song B, Yu J Q, Chen X, Niu K, Li Z Y. A multi-missile coverage interception strategy. In: Proceedings of the Aerospace Mechatronics and Control Technology: Selected Contributions From the 7th Asia Conference on Mechanical Engineering and Aerospace Engineering. Singapore: Springer Nature, 2022. 105−118 [21] Zhang B L, Zhou D, Li J L, Yao Y H. Coverage-based cooperative guidance strategy by controlling flight path angle. Journal of Guidance, Control, and Dynamics, 2022, 45(5): 972−981 doi: 10.2514/1.G006504 [22] Liu S X, Yan B B, Zhang T, Zhang X, Yan J. Coverage-based cooperative guidance law for intercepting hypersonic vehicles with overload constraint. Aerospace Science and Technology, 2022, 126: Article No. 107651 doi: 10.1016/j.ast.2022.107651 [23] Liu S, Yan B B, Zhang T, Zhang X, Yan J. Three-dimensional coverage-based cooperative guidance law with overload constraints to intercept a hypersonic vehicle. Aerospace Science and Technology, 2022, 130: Article No. 107908 doi: 10.1016/j.ast.2022.107908 [24] Zhai C, He F H, Hong Y G, Wang L, Yao Y. Coverage-based interception algorithm of multiple interceptors against the target involving decoys. Journal of Guidance, Control, and Dynamics, 2016, 39(7): 1647−1653 doi: 10.2514/1.G001535 [25] Zhai C, Zhang H T, Xiao G X. Coverage-based cooperative interception against supersonic flight vehicles. Cooperative Coverage Control of Multi-Agent Systems and Its Applications, 2021, 95−110 [26] 杜永浩, 邢立宁, 蔡昭权. 无人飞行器集群智能调度技术综述. 自动化学报, 2020, 46(2): 222−241Du Yong-Hao, Xing Li-Ning, Cao Zhao-Quan. Survey on intelligent scheduling technologies for unmanned flying craft clusters. Acta Automatica Sinica, 2020, 46(2): 222−241 -

计量
- 文章访问数: 1917
- HTML全文浏览量: 138
- PDF下载量: 133
- 被引次数: 0
