

Autonomous Control of Unmanned Aerial Vehicle Swarms: Prescribed Performance Driven Safety Formation Control
-
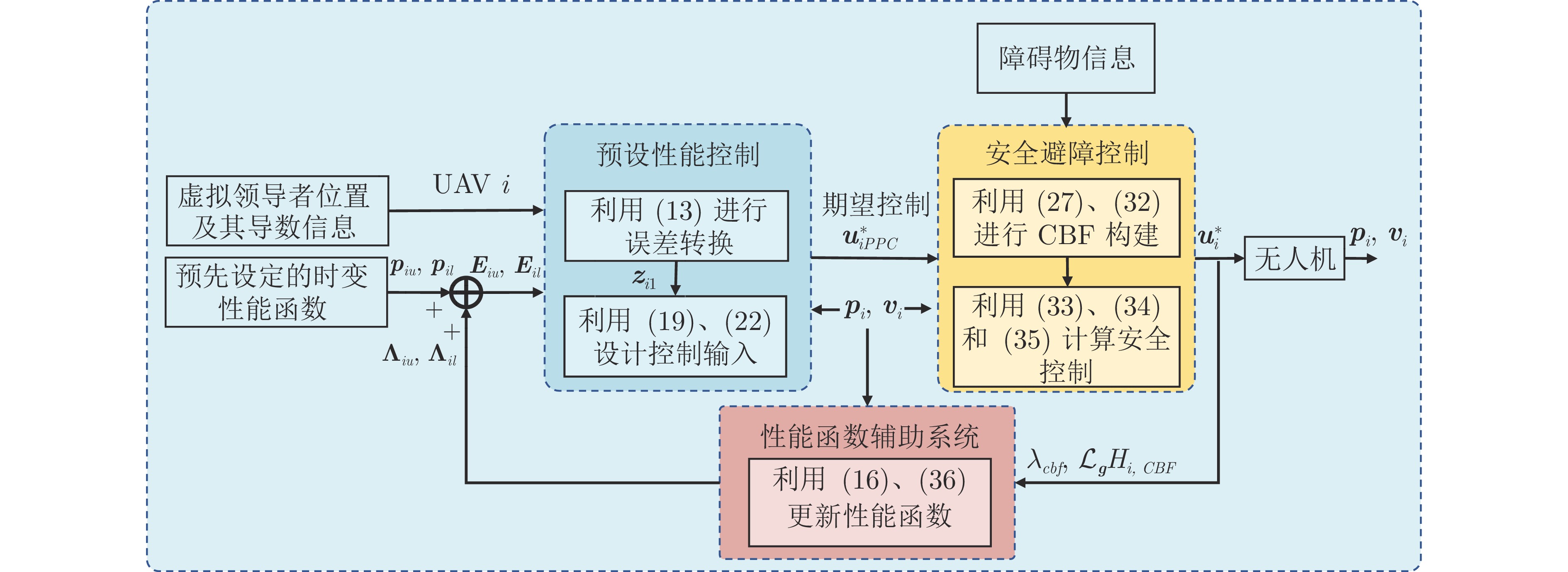
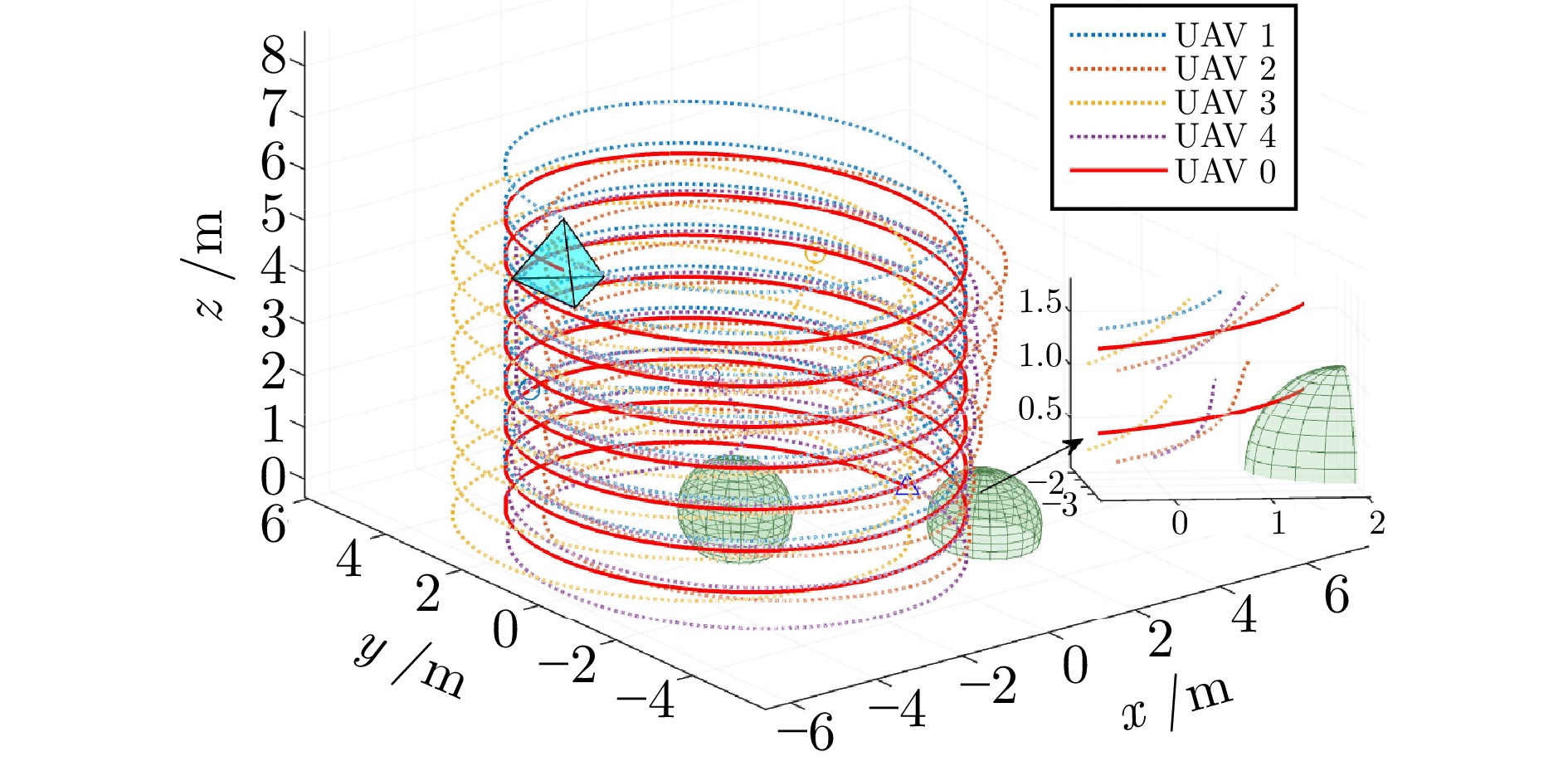
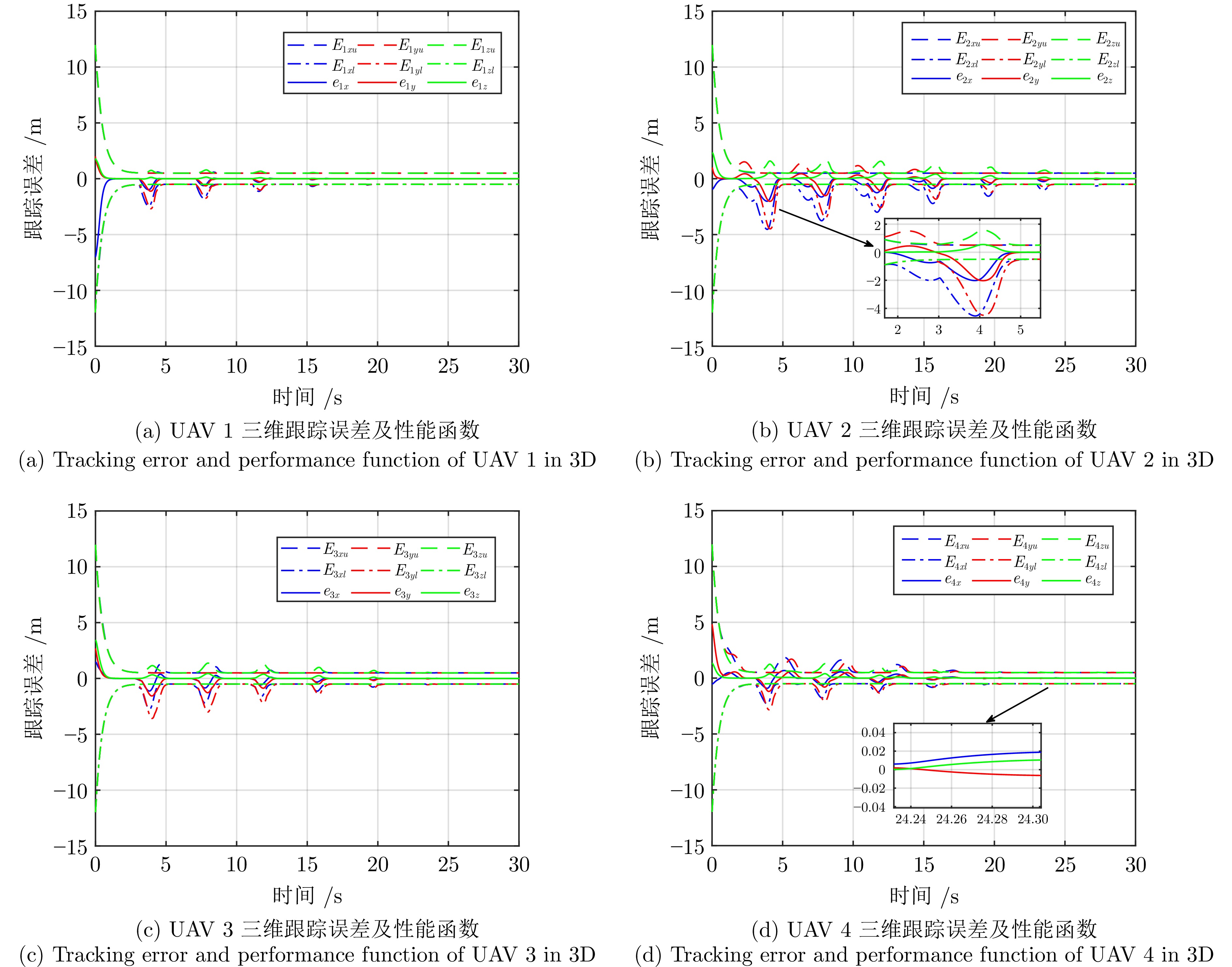
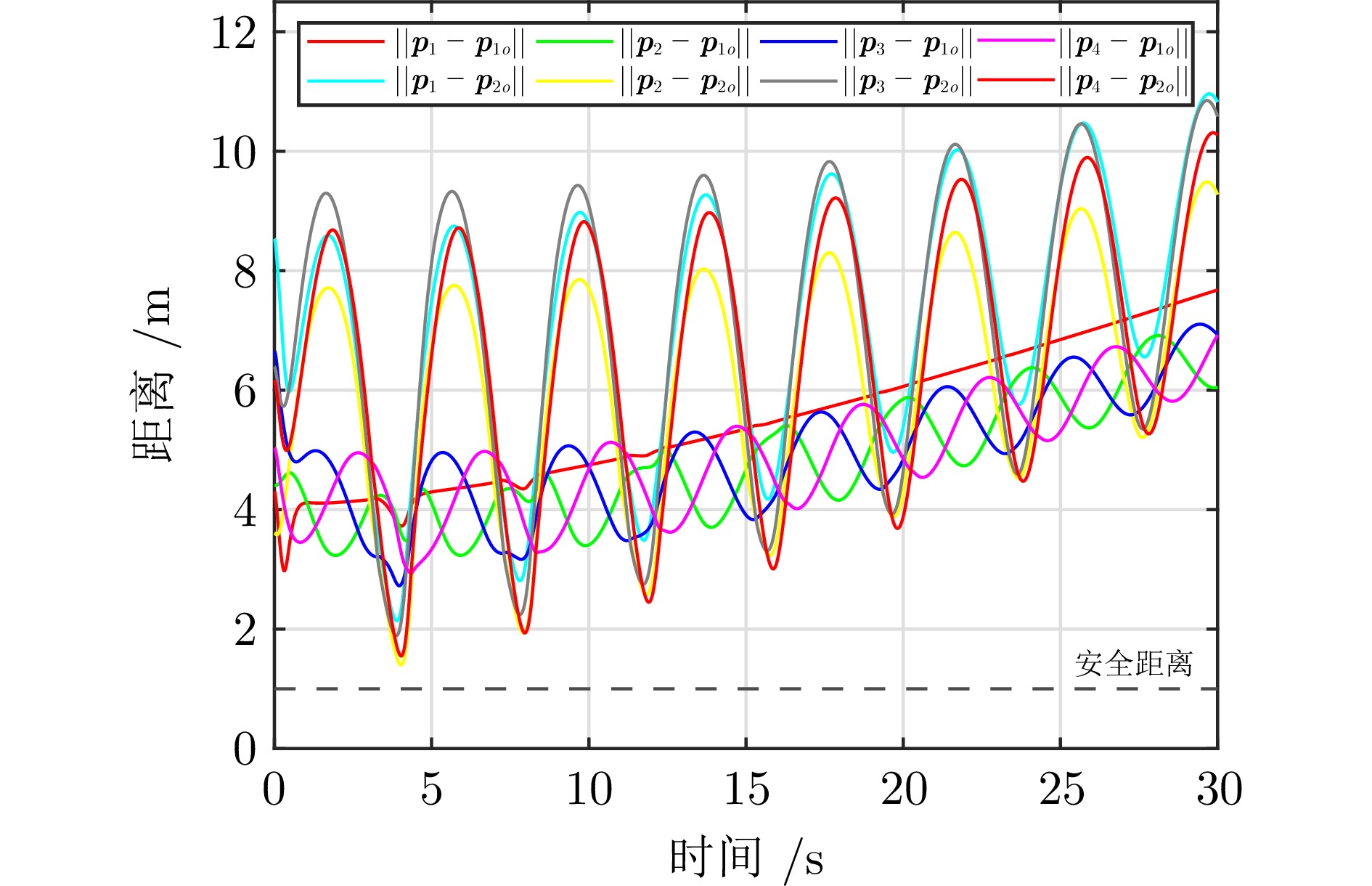
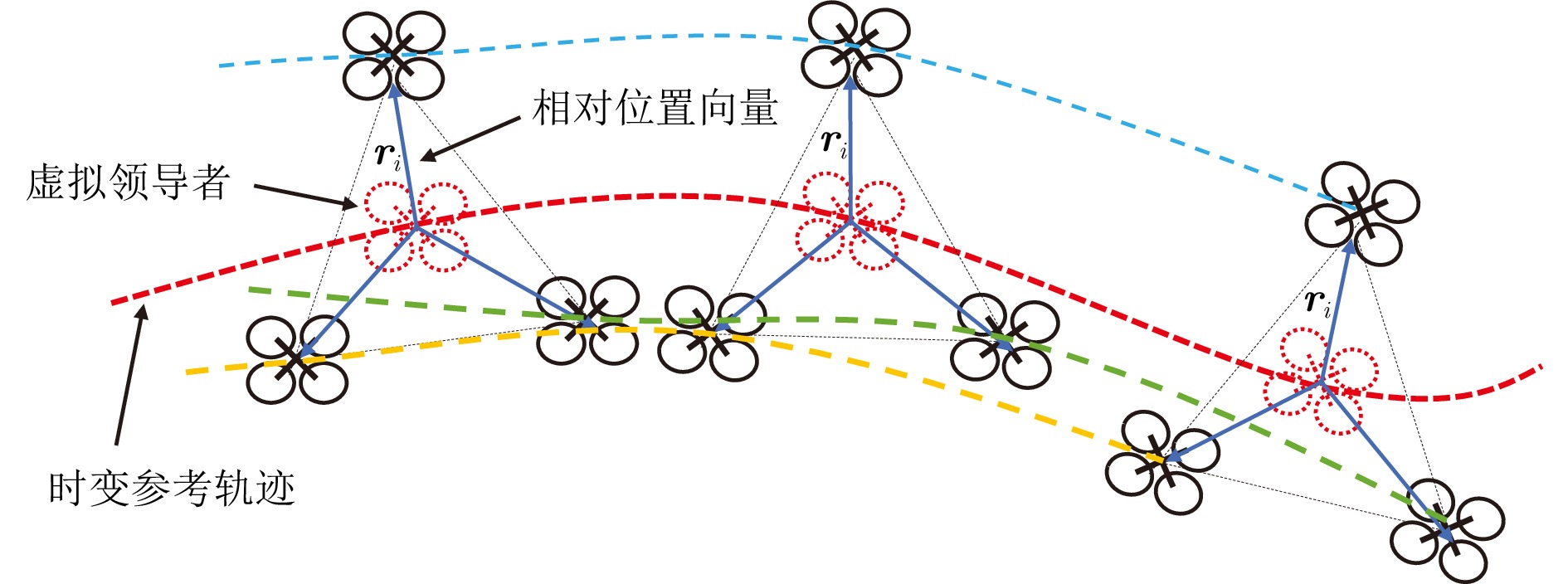
摘要: 针对障碍环境下多无人机编队跟踪问题, 提出一种兼顾编队跟踪性能与安全的控制框架. 在该框架中, 首先利用性能边界可调的预设性能控制方法生成期望控制信号, 使无人机跟踪虚拟领导者的期望轨迹, 跟踪过程中满足瞬态与稳态误差约束. 进一步, 基于控制障碍函数描述无人机的安全状态集合并建立二次规划问题, 利用Karush-Kuhn-Tucker条件得到最小干预安全控制器的闭式解. 最后, 利用安全控制的闭式解构造辅助系统, 实现性能函数的自适应更新. 理论分析表明, 该算法能够在编队跟踪与安全性冲突条件下确保系统安全, 在不发生冲突时实现性能约束下的编队跟踪. 仿真结果验证了提出算法的有效性.Abstract: A control framework that balances formation tracking performance and safety is proposed to address the problem of multiple unmanned aerial vehicles (UAVs) formation tracking within obstacle environments. In this framework, a prescribed performance control method with adjustable performance boundaries is first used to generate the desired control signals, ensuring that the UAVs track the desired trajectory generated by the virtual leader while satisfying transient and steady-state error constraints during the tracking process. Furthermore, the control barrier function is used to describe the safety state set of the UAVs, and a quadratic programming problem is formulated. The closed-form solution of the minimum intervention safety controller is obtained by using the Karush-Kuhn-Tucker conditions. Finally, an auxiliary system is constructed based on the closed-form solution of the safety control to achieve adaptive updating of the performance function. Theoretical analysis shows that this algorithm can ensure system safety under conditions of conflict between formation tracking and safety, while achieving formation tracking under performance constraints when there is no conflict. Simulation results validate the effectiveness of the proposed algorithm.1)
1 1针对系统(4), 关于其状态的连续可微标量函数$ b({\boldsymbol{x}}): {\bf{R}}^{{n}}\to{\bf{R}} $的相对度指的是沿着系统动力学求导直至出现$ {\boldsymbol{u}} $时的求导次数[31]. -
[1] Alonso-Mora J, Baker S, Rus D. Multi-robot formation control and object transport in dynamic environments via constrained optimization. The International Journal of Robotics Research, 2017, 36(9): 1000−1021 doi: 10.1177/0278364917719333 [2] Luo Q Y, Luan T H, Shi W S, Fan P Z. Edge computing enabled energy-efficient multi-UAV cooperative target search. IEEE Transactions on Vehicular Technology, 2023, 72(6): 7757−7771 doi: 10.1109/TVT.2023.3238040 [3] Funada R, Santos M, Maniwa R, Yamauchi J, Fujita M, Sampei M, et al. Distributed coverage hole prevention for visual environmental monitoring with quadcopters via nonsmooth control barrier functions. IEEE Transactions on Robotics, 2024, 40: 1546−1565 doi: 10.1109/TRO.2023.3347132 [4] Liu Y F, Liu J J, He Z P, Li Z H, Zhang Q C, Ding Z T. A survey of multi-agent systems on distributed formation control. Unmanned Systems, 2024, 12(5): 913−926 doi: 10.1142/S2301385024500274 [5] Bechlioulis C P, Rovithakis G A. Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance. IEEE Transactions on Automatic Control, 2008, 53(9): 2090−2099 doi: 10.1109/TAC.2008.929402 [6] Chen F, Dimarogonas D V. Leader-follower formation control with prescribed performance guarantees. IEEE Transactions on Control of Network Systems, 2021, 8(1): 450−461 doi: 10.1109/TCNS.2020.3029155 [7] An B H, Wang B, Fan H J, Liu L, Hu H, Wang Y J. Fully distributed prescribed performance formation control for UAVs with unknown maneuver of leader. Aerospace Science and Technology, 2022, 130: Article No. 107886 doi: 10.1016/j.ast.2022.107886 [8] Li B, Gong W Q, Yang Y S, Xiao B. Distributed fixed-time leader-following formation control for multiquadrotors with prescribed performance and collision avoidance. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(5): 7281−7294 [9] Mehdifar F, Bechlioulis C P, Hashemzadeh F, Baradarannia M. Prescribed performance distance-based formation control of multi-agent systems. Automatica, 2020, 119: Article No. 109086 doi: 10.1016/j.automatica.2020.109086 [10] Liu B J, Li A J, Guo Y, Wang C Q. Adaptive distributed finite-time formation control for multi-UAVs under input saturation without collisions. Aerospace Science and Technology, 2022, 120: Article No. 107252 doi: 10.1016/j.ast.2021.107252 [11] Miao Z Q, Zhong H, Lin J, Wang Y N, Chen Y J, Fierro R. Vision-based formation control of mobile robots with FOV constraints and unknown feature depth. IEEE Transactions on Control Systems Technology, 2021, 29(5): 2231−2238 doi: 10.1109/TCST.2020.3023415 [12] Zhao K, Song Y D, Chen C L P, Chen L. Control of nonlinear systems under dynamic constraints: A unified barrier function-based approach. Automatica, 2020, 119: Article No. 109102 doi: 10.1016/j.automatica.2020.109102 [13] Zhao X Y, Tian B L, You M, Ma L. Adaptive distributed sliding mode control for multiple unmanned aerial vehicles with prescribed performance. IEEE Transactions on Vehicular Technology, 2022, 71(11): 11480−11490 doi: 10.1109/TVT.2022.3192350 [14] Huang Y, Meng Z Y, Dimarogonas D V. Prescribed performance formation control for second-order multi-agent systems with connectivity and collision constraints. Automatica, 2024, 160: Article No. 111412 doi: 10.1016/j.automatica.2023.111412 [15] Ames A D, Xu X R, Grizzle J W, Tabuada P. Control barrier function based quadratic programs for safety critical systems. IEEE Transactions on Automatic Control, 2017, 62(8): 3861−3876 doi: 10.1109/TAC.2016.2638961 [16] Ames A D, Coogan S, Egerstedt M, Notomista G, Sreenath K, Tabuada P. Control barrier functions: Theory and applications. In: Proceedings of the 18th European Control Conference (ECC). Naples, Italy: IEEE, 2019. 3420−3431 [17] 陈杰, 吕梓亮, 黄鑫源, 洪奕光. 非线性系统的安全分析与控制: 障碍函数方法. 自动化学报, 2023, 49(3): 567−579Chen Jie, Lv Zi-Liang, Huang Xin-Yuan, Hong Yi-Guang. Safety analysis and safety-critical control of nonlinear systems: Barrier function approach. Acta Automatica Sinica, 2023, 49(3): 567−579 [18] Guerrero-Bonilla L, Kumar V. Realization of γ-robust formations in the plane using control barrier functions. IEEE Control Systems Letters, 2020, 4(2): 343−348 doi: 10.1109/LCSYS.2019.2924460 [19] Zhao X Y, Yang Q K, Liu Q, Yin Y H, Wei Y, Fang H. Minimally persistent graph generation and formation control for multi-robot systems under sensing constraints. Electronics, 2023, 12(2): Article No. 317 doi: 10.3390/electronics12020317 [20] Fu J J, Wen G H, Yu X H, Wu Z G. Distributed formation navigation of constrained second-order multiagent systems with collision avoidance and connectivity maintenance. IEEE Transactions on Cybernetics, 2022, 52(4): 2149−2162 doi: 10.1109/TCYB.2020.3000264 [21] Fu J J, Wen G H, Yu X H, Huang T W. Robust collision-avoidance formation navigation of velocity and input-constrained multirobot systems. IEEE Transactions on Cybernetics, 2024, 54(3): 1734−1746 doi: 10.1109/TCYB.2023.3248125 [22] Fu J J, Wen G H, Yu X H. Safe consensus tracking with guaranteed full state and input constraints: A control barrier function-based approach. IEEE Transactions on Automatic Control, 2023, 68(12): 8075−8081 doi: 10.1109/TAC.2023.3283697 [23] Pierpaoli P, Li A Q, Srinivasan M, Cai X Y, Coogan S, Egerstedt M. A sequential composition framework for coordinating multirobot behaviors. IEEE Transactions on Robotics, 2021, 37(3): 864−876 doi: 10.1109/TRO.2020.3036628 [24] Dong Y, Wang X Y, Hong Y G. Safety critical control design for nonlinear system with tracking and safety objectives. Automatica, 2024, 159: Article No. 111365 doi: 10.1016/j.automatica.2023.111365 [25] Wang P, Liang X L, Peng X H, Lu Y, Ge S S. Control barrier performance function-based cooperative formation with parallel dynamic event-triggering strategy. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2024, 54(7): 4552−4564 doi: 10.1109/TSMC.2024.3385365 [26] Yong K N, Chen M, Shi Y, Wu Q X. Flexible performance-based robust control for a class of nonlinear systems with input saturation. Automatica, 2020, 122: Article No. 109268 doi: 10.1016/j.automatica.2020.109268 [27] Bu X W. Prescribed performance control approaches, applications and challenges: A comprehensive survey. Asian Journal of Control, 2023, 25(1): 241−261 doi: 10.1002/asjc.2765 [28] Rabiee P, Hoagg J B. Composition of control barrier functions with differing relative degrees for safety under input constraints. In: Proceedings of the American Control Conference (ACC). Toronto, Canada: IEEE, 2024. 3692−3697 [29] Taylor A J, Ong P, Molnar T G, Ames A D. Safe backstepping with control barrier functions. In: Proceedings of the 61st Conference on Decision and Control (CDC). Cancun, Mexico: IEEE, 2022. 5775−5782 [30] Cohen M H, Molnar T G, Ames A D. Safety-critical control for autonomous systems: Control barrier functions via reduced-order models. Annual Reviews in Control, 2024, 57: Article No. 100947 doi: 10.1016/j.arcontrol.2024.100947 [31] Xiao W, Belta C. Control barrier functions for systems with high relative degree. In: Proceedings of the 58th Conference on Decision and Control (CDC). Nice, France: IEEE, 2019. 474−479 [32] Cohen M H, Ong P, Bahati G, Ames A D. Characterizing smooth safety filters via the implicit function theorem. IEEE Control Systems Letters, 2023, 7: 3890−3895 doi: 10.1109/LCSYS.2023.3341345 -

 下载:
下载:
图(5)
计量
- 文章访问数: 1556
- HTML全文浏览量: 323
- PDF下载量: 257
- 被引次数: 0
