

Phase Transition Control of UAV Swarm Based on Bird-inspired Self-propelled Mechanism
-
摘要: 针对无人机集群的运动相态转换问题, 提出一种仿鸟群自推进粒子模型的无人机集群相变控制方法. 首先, 从鸟群运动行为中获得启发, 通过设计速度保持项和势能梯度项构建仿鸟群运动模型, 并设计相变控制项模拟巢穴对鸟群的吸引, 以实现集群在不同相态之间的转换. 然后, 讨论集群在设计的相变控制律作用下的运动相态, 证明无人机集群能够实现两种稳定的运动相态并进行相互转换. 最后, 仿真验证了集群存在的两种稳定运动构型, 所提出相变控制律能够实现两种集群运动相态的互相转换.Abstract: A phase transition control method for unmanned aerial vehicle (UAV) swarms based on the bird-inspired self-propelled particle model has been proposed to address the problem of motion phase transition of UAV swarms. Firstly, inspired from bird flock behavior, a bird-like motion model is constructed by designing a velocity maintenance term and a potential gradient term, and a phase transition control term is designed to simulate the attraction of the nest to the flock to achieve transition between different phases. Subsequently, the motion modalities of the swarm under the designed phase transition control law were discussed, demonstrating that the UAV swarm is capable of achieving two stable motion phases and reversible transition between them. Ultimately, simulations proved the existence of two stable motion phases within the swarm, and the proposed phase transition control protocol was validated to enable mutual transitions between the two motion phases.
-
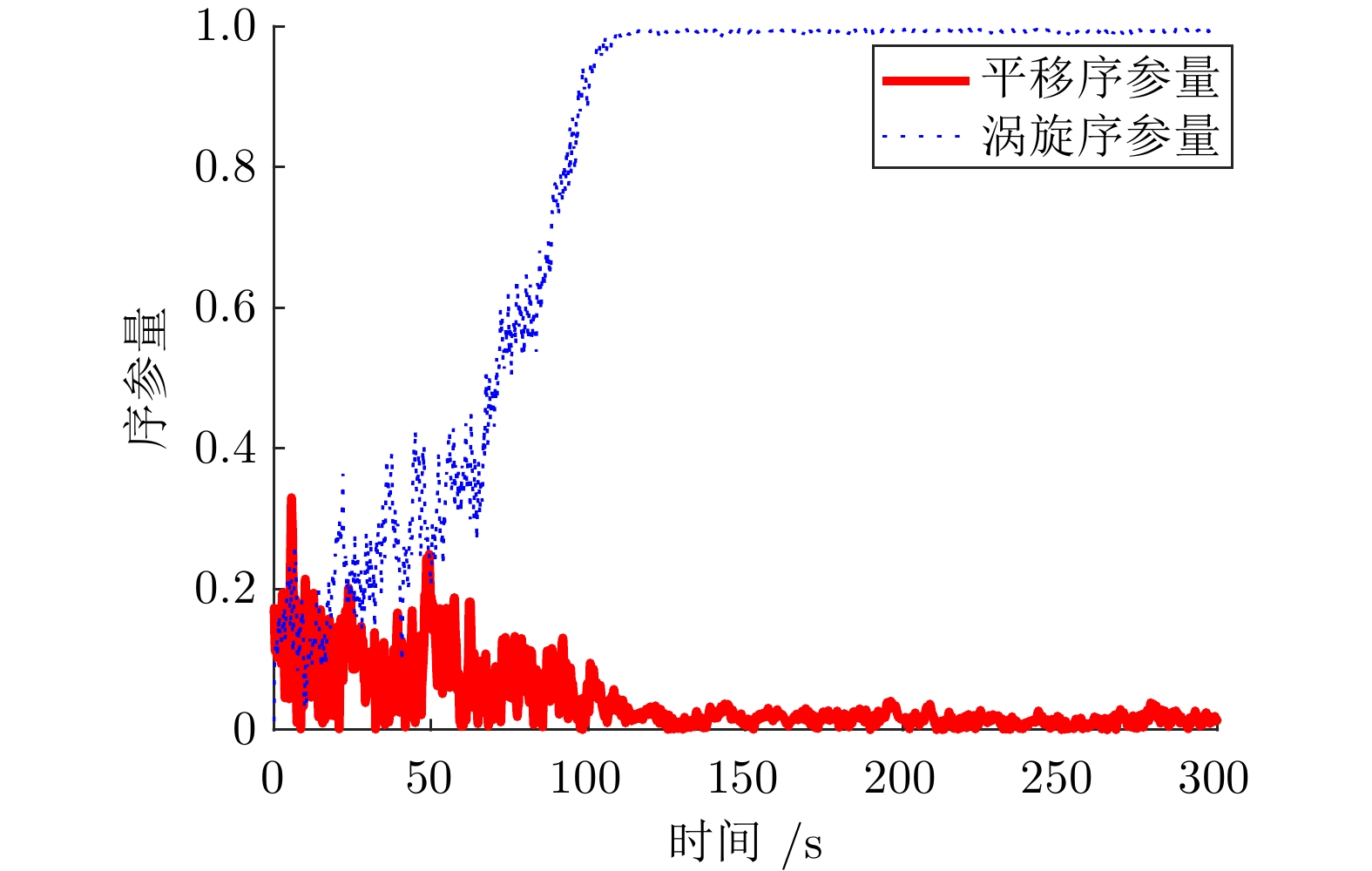
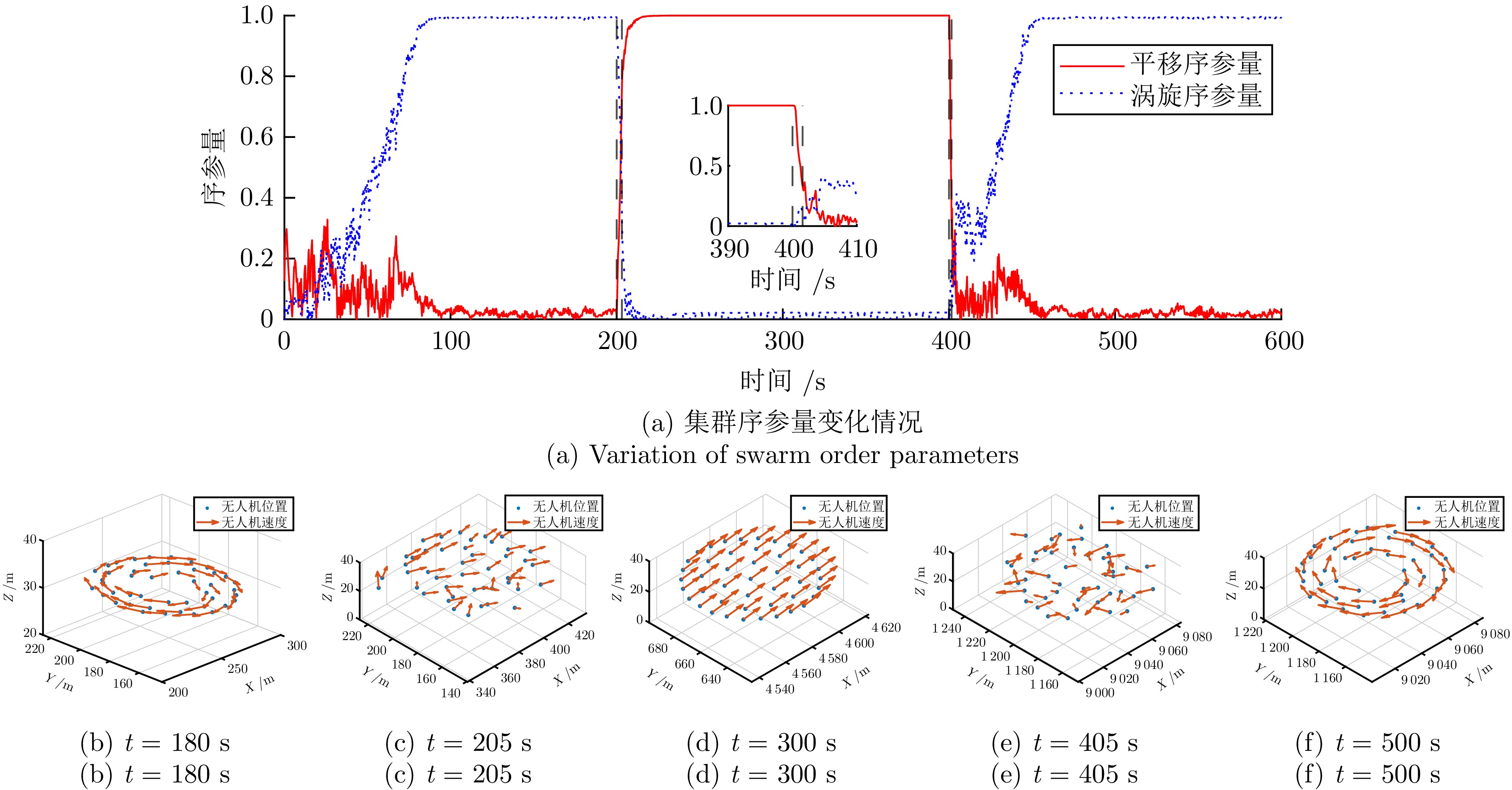
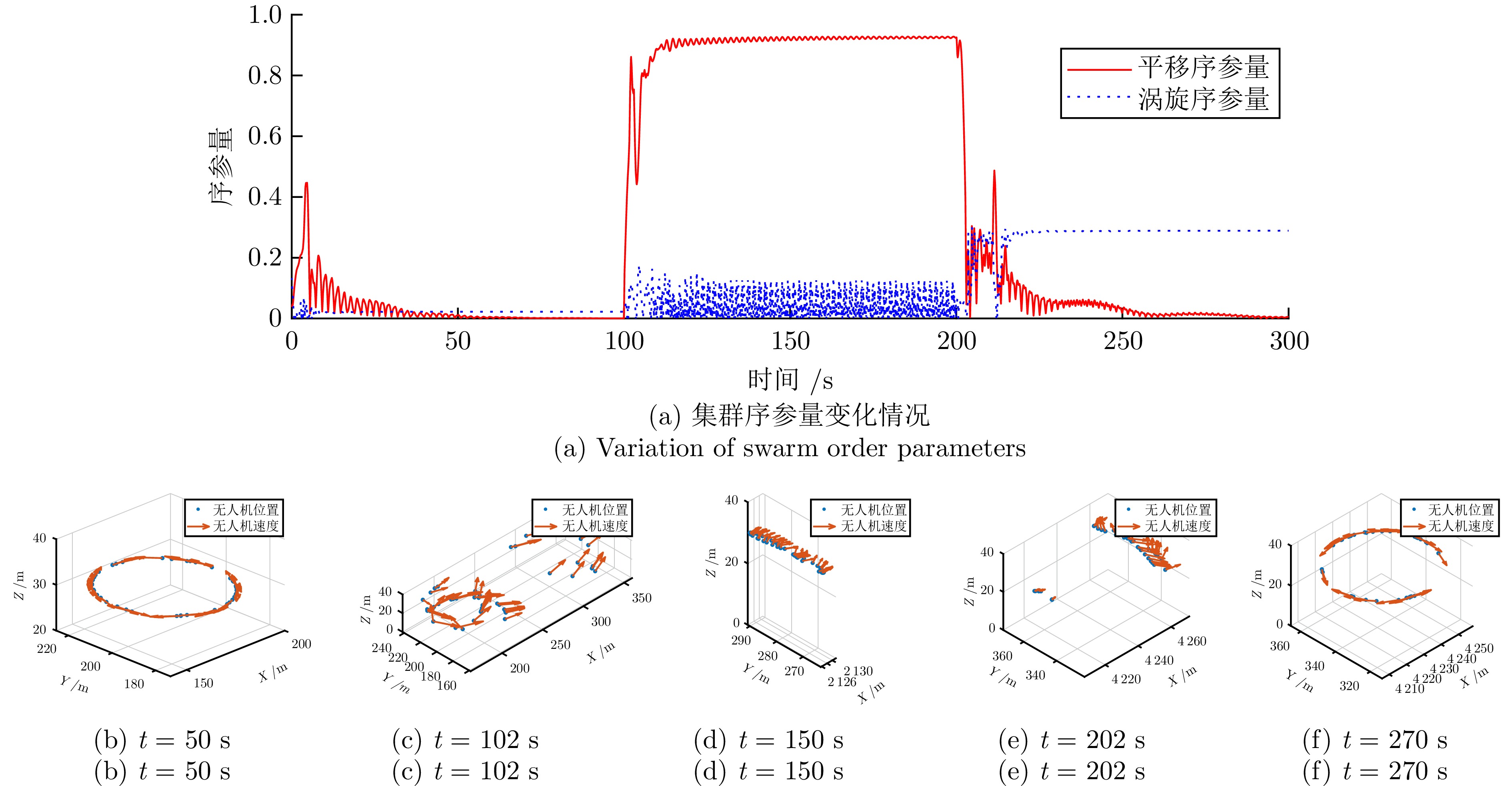
图 3 涡旋相形成过程中的序参量变化情况
Fig. 3 Variation of order parameters during milling phase formation
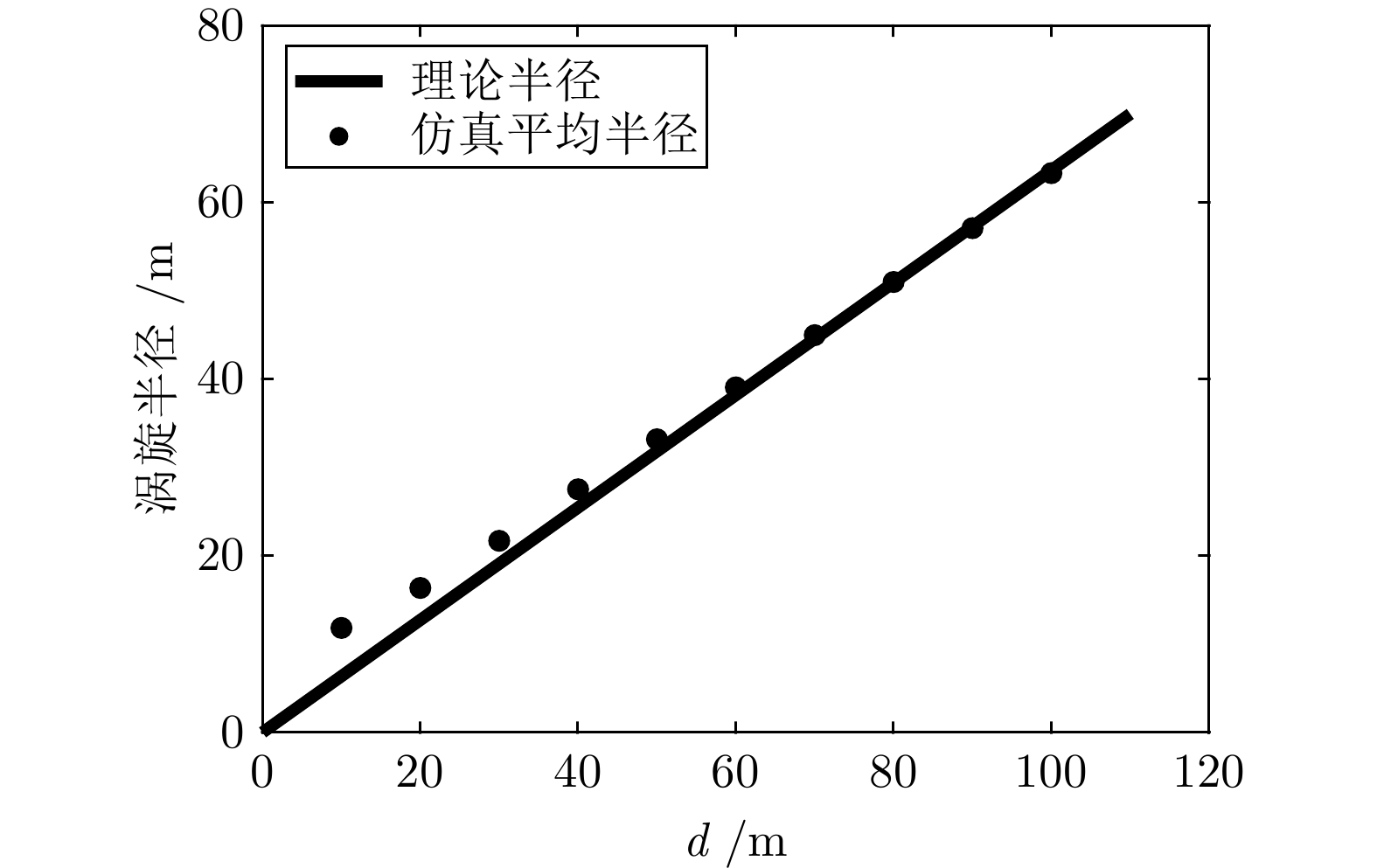
图 5 集群涡旋半径随平衡距离d的变化
Fig. 5 Variation of swarm milling radius with the equilibrium distance $d $
-
[1] 蔡运颂, 许璟, 牛玉刚. 基于自适应多尺度超螺旋算法的无人机集群姿态同步控制. 自动化学报, 2023, 49(8): 1656−1666Cai Yun-Song, Xu Jing, Niu Yu-Gang. Attitude consensus control of UAV swarm based on adaptive multi-scale super-twisting algorithm. Acta Automatica Sinica, 2023, 49(8): 1656−1666 [2] 王峰, 黄子路, 韩孟臣, 邢立宁, 王凌. 基于KnCMPSO算法的异构无人机协同多任务分配. 自动化学报, 2023, 49(2): 399−414Wang Feng, Huang Zi-Lu, Han Meng-Chen, Xing Li-Ning, Wang Ling. A knee point based coevolution multi-objective particle swarm optimization algorithm for heterogeneous UAV cooperative multi-task allocation. Acta Automatica Sinica, 2023, 49(2): 399−414 [3] Luo L B, Wang X Y, Ma J F, Ong Y S. GrpAvoid: Multigroup collision-avoidance control and optimization for UAV swarm. IEEE Transactions on Cybernetics, 2023, 53(3): 1776−1789 doi: 10.1109/TCYB.2021.3132044 [4] 韦宸越, 何明, 韩伟, 徐昕, 高宏. 无人机集群弹性评估及重构技术研究. 计算机工程与应用, 2024, 60(15): 1−10 doi: 10.3778/j.issn.1002-8331.2401-0452Wei Chen-Yue, He Ming, Han Wei, Xu Xin, Gao Hong. Research on unmanned aerial vehicle swarm resilience assessment and reconfiguration technology. Computer Engineering and Applications, 2024, 60(15): 1−10 doi: 10.3778/j.issn.1002-8331.2401-0452 [5] 何明, 陈浩天, 韩伟, 邓成, 段海滨. 无人机仿鸟群协同控制发展现状及关键技术. 航空学报, 2024, 45(20): Article No. 029946 doi: 10.7527/S1000-6893.2024.29946He Ming, Chen Hao-Tian, Han Wei, Deng Cheng, Duan Hai-Bin. Development status and key technologies of cooperative control of bird-inspired UAV swarms. Acta Aeronautica et Astronautica Sinica, 2024, 45(20): Article No. 029946 doi: 10.7527/S1000-6893.2024.29946 [6] Xue T T, Li X, Grassberger P, Chen L. Swarming transitions in hierarchical societies. Physical Review Research, 2020, 2(4): Article No. 042017 [7] Hindes J, Edwards V, Kasraie K S, Stantchev G, Schwartz I B. Swarm shedding in networks of self-propelled agents. Scientific Reports, 2021, 11(1): Article No. 13544 doi: 10.1038/s41598-021-92748-1 [8] Cheng Z, Chen Z Y, Vicsek T, Chen D X, Zhang H T. Pattern phase transitions of self-propelled particles: Gases, crystals, liquids, and mills. New Journal of Physics, 2016, 18: Article No. 103005 doi: 10.1088/1367-2630/18/10/103005 [9] Mier-y-Teran-Romero L, Forgoston E, Schwartz I B. Coherent pattern prediction in swarms of delay-coupled agents. IEEE Transactions on Robotics, 2012, 28(5): 1034−1044 doi: 10.1109/TRO.2012.2198511 [10] Duan H B, Zhang X Y. Phase transition of vortexlike self-propelled particles induced by a hostile particle. Physical Review E, 2015, 92(1): Article No. 012701 [11] Hindes J, Edwards V, Hsieh M A, Schwartz I B. Critical transition for colliding swarms. Physical Review E, 2021, 103(6): Article No. 062602 [12] Edwards V, deZonia P, Hsieh M A, Hindes J, Triandaf I, Schwartz I B. Delay induced swarm pattern bifurcations in mixed reality experiments. Chaos, 2020, 30(7): Article No. 073126 [13] Lei X K, Xiang Y L, Duan M Y, Peng X G. Exploring the criticality hypothesis using programmable swarm robots with Vicsek-like interactions. Journal of the Royal Society Interface, 2023, 20(204): Article No. 20230176 doi: 10.1098/rsif.2023.0176 [14] Xie H, Sun M M, Lin Z H, Chen W N, Wang L, Dong L X, et al. Reconfigurable magnetic microrobot swarm: Multimode transformation, locomotion, and manipulation. Science Robotics, 2019, 4(28): Article No. eaav8006 doi: 10.1126/scirobotics.aav8006 [15] Hao Z J, Mayya S, Notomista G, Hutchinson S, Egerstedt M, Ansari A. Controlling collision-induced aggregations in a swarm of micro bristle robots. IEEE Transactions on Robotics, 2023, 39(1): 590−604 doi: 10.1109/TRO.2022.3189846 [16] Guilford T, Roberts S, Biro D, Rezek I. Positional entropy during pigeon homing II: Navigational interpretation of Bayesian latent state models. Journal of Theoretical Biology, 2004, 227(1): 25−38 doi: 10.1016/j.jtbi.2003.07.003 [17] Riehl C, LaPergola J B. Inclusive fitness explains behavioral diversity in a social bird. Proceedings of the National Academy of Sciences of the United States of America, 2023, 120(21): Article No. e2305610120 [18] Vicsek T, Czirók A, Ben-Jacob E, Cohen I, Shochet O. Novel type of phase transition in a system of self-driven particles. Physical Review Letters, 1995, 75(6): 1226−1229 doi: 10.1103/PhysRevLett.75.1226 [19] Nagy M, Ákos Z, Biro D, Vicsek T. Hierarchical group dynamics in pigeon flocks. Nature, 2010, 464(7290): 890−893 doi: 10.1038/nature08891 [20] Ballerini M, Cabibbo N, Candelier R, Cavagna A, Cisbani E, Giardina I, et al. Interaction ruling animal collective behavior depends on topological rather than metric distance: Evidence from a field study. Proceedings of the National Academy of Sciences of the United States of America, 2008, 105(4): 1232−1237 [21] Cavagna A, del Castello L, Giardina I, Grigera T, Jelic A, Melillo S, et al. Flocking and turning: A new model for self-organized collective motion. Journal of Statistical Physics, 2015, 158(3): 601−627 doi: 10.1007/s10955-014-1119-3 [22] Ling H J, Mclvor G E, Westley J, van der Vaart K, Yin J, Vaughan R T, et al. Collective turns in jackdaw flocks: Kinematics and information transfer. Journal of the Royal Society Interface, 2019, 16(159): Article No. 20190450 doi: 10.1098/rsif.2019.0450 [23] D'Orsogna M R, Chuang Y L, Bertozzi A L, Chayes L S. Self-propelled particles with soft-core interactions: Patterns, stability, and collapse. Physical Review Letters, 2006, 96(10): Article No. 104302 doi: 10.1103/PhysRevLett.96.104302 [24] Wu P F, Guo W C, Ai B Q, He L. Scaling behavior of transient dynamics of vortex-like states in self-propelled particles. Physica A: Statistical Mechanics and Its Applications, 2023, 622: Article No. 128822 doi: 10.1016/j.physa.2023.128822 [25] Berlinger F, Gauci M, Nagpal R. Implicit coordination for 3D underwater collective behaviors in a fish-inspired robot swarm. Science Robotics, 2021, 6(50): Article No. eabd8668 doi: 10.1126/scirobotics.abd8668 [26] 陈琳, 郭炳晖, 段海滨, 吕卫锋. 基于群体熵度量的无人机集群目标合围控制. 中国科学: 技术科学, 2023, 53(2): 177−186 doi: 10.1360/SST-2021-0284Chen Lin, Guo Bing-Hui, Duan Hai-Bin, Lv Wei-Feng. Target enclosing control of multiple unmanned aerial vehicles based on crowd entropy. SCIENTIA SINICA Technologica, 2023, 53(2): 177−186 doi: 10.1360/SST-2021-0284 [27] Attanasi A, Cavagna A, del Castello L, Giardina I, Grigera T S, Jelić A, et al. Information transfer and behavioural inertia in starling flocks. Nature Physics, 2014, 10(9): 691−696 doi: 10.1038/nphys3035 [28] Chen D X, Sun Y Z, Shao G B, Yu W W, Zhang H T, Lin W. Coordinating directional switches in pigeon flocks: The role of nonlinear interactions. Royal Society Open Science, 2021, 8(9): Article No. 210649 doi: 10.1098/rsos.210649 [29] Reynolds C W. Flocks, herds and schools: A distributed behavioral model. In: Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques. Anaheim, USA: ACM, 1987. 25−34 [30] Couzin I D, Krause J, James R, Ruxton G D, Franks N R. Collective memory and spatial sorting in animal groups. Journal of Theoretical Biology, 2002, 218(1): 1−11 doi: 10.1006/jtbi.2002.3065 [31] Biro D, Sumpter D J T, Meade J, Guilford T. From compromise to leadership in pigeon homing. Current Biology, 2006, 16(21): 2123−2128 doi: 10.1016/j.cub.2006.08.087 [32] Chen D X, Xu B W, Zhu T, Zhou T, Zhang H T. Anisotropic interaction rules in circular motions of pigeon flocks: An empirical study based on sparse Bayesian learning. Physical Review E, 2017, 96(2): Article No. 022411 [33] 何亚琦. 基于社会力模型的集群系统的调控算法 [硕士学位论文], 华南理工大学, 中国, 2023.He Ya-Qi. Control Algorithms for Social Force Model Based Swarm Systems [Master thesis], South China University of Technology, China, 2023. -

 下载:
下载:

图(9)
计量
- 文章访问数: 2332
- HTML全文浏览量: 533
- PDF下载量: 272
- 被引次数: 0
